
非侵襲性診断システム
体組織への損傷を診断するための方法およびシステムを提供する。本発明の方法は、一実施形態において、患者固有の骨の三次元モデルを作成する段階と、患者の実際の骨を患者固有の骨モデルと位置合わせする段階と、所定範囲の運動を行う患者の骨の運動を追跡する段階と、損傷を診断するために患者の骨の運動を骨運動データを有するデータベースと比較する段階とを有する。上記データベースは、検証済みの診断データと組み合わせた骨運動データを有する。

【発明の詳細な説明】
【技術分野】
【0001】
関連出願の相互参照
本出願は、2009年2月2日に出願した「NONINVASIVE DIAGNOSTIC SYSTEM」と題された米国特許出願第12/364,267号の優先権を主張するものであり、その開示の全体が参照により本明細書に組み込まれている。
【0002】
本発明は、身体の異常の診断に関するものであり、より具体的には、身体の関節などの体組織の生理学的状態を評価し、異常が存在するかどうか、および異常があるとすれば異常の程度を識別するためのデバイスおよび方法に関するものである。本明細書で開示されている例示的な実施形態は、人間の膝関節に関して利用され、説明されているが、他の間節および体組織も同様に診断できることを理解されたい。
【背景技術】
【0003】
人間では、膝関節は、3つの固有の種類の力が支配する機械システムによって機能的に制御され、これらの力は、(1)筋肉の収縮または弛緩の結果生じる力などの、運動の結果生じる能動的な力、(2)靱帯が緊張する結果生じる力などの、運動を制約する制約力、および(3)骨に作用する力などの、運動に抵抗する相互作用力である。これらの3種類の力に加えて、膝関節複合体(例えば、軟骨および半月板)内の軟組織が、膝関節に作用する圧縮荷重を分散させる減衰効果を生み出す。
【0004】
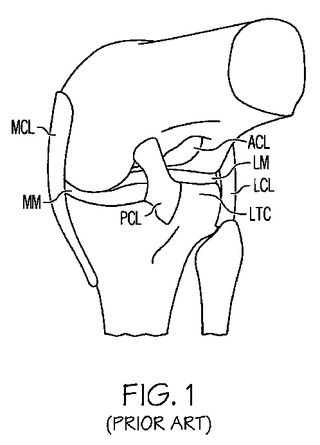
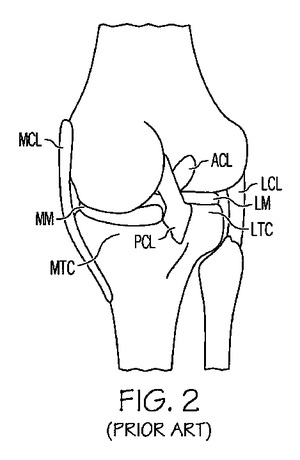
膝関節運動は、もっぱら4つの靱帯によって安定化され、これらの靱帯は大腿骨、脛骨、および膝蓋骨の間の相対的運動を制限し、調節する。これらの靱帯は、図1および2に示されているように、前十字靱帯(ACL)、後十字靱帯(PCL)、内側側副靱帯(MCL)、外側側副靱帯(LCL)、および膝蓋靱帯である。これらの靱帯または他の軟組織構造のどれかが損傷すると、膝の運動様式に検出可能な変化が生じ、膝関節損傷の種類および損傷の重篤度を表す検出可能な振動が発生しうる。これらの視覚的変化(膝の運動様式)および聴覚的変化(振動)は、歪んだ運動学的パターンで移動しているときに骨によって引き起こされるが、これらは、一定範囲の運動を通じて適切な均衡を保つ膝関節の移動の様子および音と著しく異なる。
【発明の概要】
【課題を解決するための手段】
【0005】
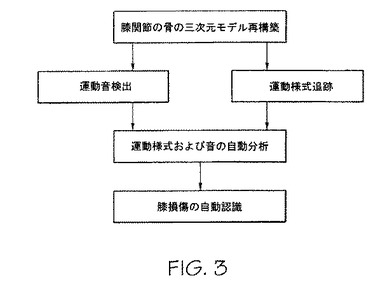
本開示の例示的な実施態様は、患者固有の運動学的データおよび音データを使用して、もしあればどのような種類の損傷が存在しているか、またそのような損傷の程度を判定するための哺乳類の身体用の診断システムを含む。特に、例示的な方法および実施態様は、膝関節の患者固有の運動学的データを収集し、分析し、またそれとともに、患者の膝関節の移動によって発生する音(つまり、振動)のパターンおよび空間分布を収集し、分析することによって、損傷が存在しているかどうか、どのような損傷であるか(つまり、診断)、ならびに、靱帯、筋肉、骨、半月板、および軟骨が損傷の影響を受ける程度を自動的に判断するための膝関節診断システムを対象とする。この例示的な方法に対する低レベルの例示的なプロセスフロー図は、図3に示されている。
【0006】
本開示の例示的な方法は、注目している身体領域(例えば、膝関節の骨)の患者固有の三次元組織モデルを生成する段階、身体領域が所定範囲の運動を行うときに患者固有の運動学的データおよび音データを収集する段階と、最終的に運動学的データおよび音データを分析して、損傷が存在しているかどうか、および存在していれば損傷の程度を識別する段階とを有する。例示的な態様では、大腿骨遠位部、脛骨近位部、および膝蓋骨の患者固有の三次元組織モデルは、コンピュータ断層撮影(CT)スキャン、蛍光透視、核磁気共鳴映像(MRI)スキャン、X線、および同様のものなどの従来の撮像技術を使用して構築される。あるいは、本開示の例示的な実施態様は、Aモード超音波エコーモーフィング技術(A-mode ultrasound echo morphing technology)を使用して、三次元組織モデルを構築するために必要なデータを生成することにより、従来の撮像技術の代替的手段となる。患者固有の三次元組織モデルが生成された後、患者固有の運動学的データを収集し、大腿骨、脛骨、および膝蓋骨の運動に関して評価する。例えば、この運動学的データは、患者固有の三次元組織モデルを構成するために必要なデータを生成するのに利用されているのと同じAモード超音波技術を使用して取得することができる。それに加えて、加速度計を使用し、負荷がかかっている現実世界の状態で所定範囲の運動を膝関節が行っている間に膝関節を監視することで、患者固有の音データを生成する。最後に、運動学的データおよび音データを分析して、損傷が存在しているかどうか、およびそのような損傷の程度を含む、最も正確な診断を下す。例示的な態様では、正しい診断に相関する実際の運動学的データおよび音データを持つニューラルネットワークによって、運動学的データおよび音データを分析する。ニューラルネットワークは、運動学的データおよび音データが取得され、正しい診断がin vivo評価によって検証された場合について新しいデータで常時更新される。したがって、ニューラルネットワークがさらに多くのデータを集めて成長するにつれ、それに呼応して診断の精度が上がる。
【0007】
例示的な態様では、音データおよび運動学的データは、単一のデータ収集デバイスを使用して同時に取得することができる。さらに、音データおよび運動学的データは、注目している身体領域が所定範囲の運動を行っているときにリアルタイムで取得される。さらなる例示的な実施形態では、音データおよび運動学的データが診療所で収集される場合、データを分割画面モニタ上にリアルタイムで表示することができる。しかし、データが医院の外部で収集される場合には、データを時間同期方式で記録するために記録デバイスおよびメモリを利用することができる。さらに他の例示的な実施態様では、患者に、患者が特定の疼痛または激痛を経験した一般的な時間枠を記憶し、患者が経験した疼痛と正確に、または一般的に、同じ時間に発生する運動学的データおよび音データとを相関させる診断を下せるように動作可能なアクチュエータを与えることができる。
【0008】
上述のように、学習ニューラルネットワークによって患者固有の基準に基づいて生成される運動学的データおよび音データを分析し、損傷の存在、損傷の種類、および損傷の重篤度に関する出力を自動的に行う。ニューラルネットワークは、インターネット経由でアクセス可能であるか、または医師のローカルコンピュータ上に置くこともできる。それに加えて、またはその代わりに、医師は患者固有の音データおよび運動学的データを分析して、ニューラルネットワークの助けを借りて、または借りずに、診断を行ったり、または診断を検証したりすることができる。
【0009】
医師は、本明細書で開示されているような例示的な方法およびデバイスを使用すれば、実験的手術を必要とすることなく、またはX線もしくは蛍光透視などの任意の形態の放射線の患者への照射を必要とすることなく、身体の損傷を診断することができる。それに加えて、それぞれの患者に関して取ったデータは、所定範囲の運動の間中連続しており、これはかなりの範囲にわたって運動ギャップがある明確に区別される点における画像を生成するX線写真撮影様式とは対照的である。それに加えて、本明細書で開示されている例示的な方法およびデバイスに従って取ったデータは、核磁気共鳴映像装置によって取ったデータとも対照的であるが、これは、取ったデータがその所定範囲の運動にそって連続しているだけでなく、評価される身体部分が動的環境内の荷重状態の下で活動しているからである。
【図面の簡単な説明】
【0010】
【図1】屈曲位にある人の膝関節の後面図である。
【図2】伸展位にある人の膝関節の後面図である。
【図3】本発明の範囲内の例示的な方法を使用する例示的なプロセスフロー図である。
【図4】例示的な診断システムのモジュールの略図である。
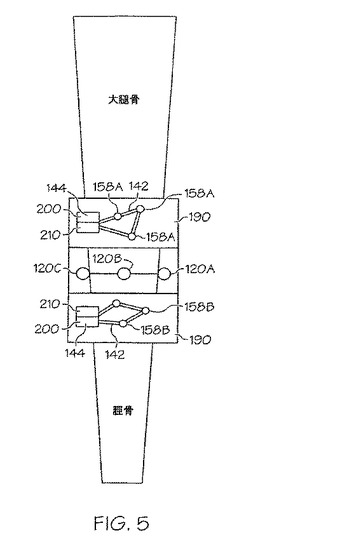
【図5】人の膝関節の近くに装着される本開示による膝装具の正面図である。
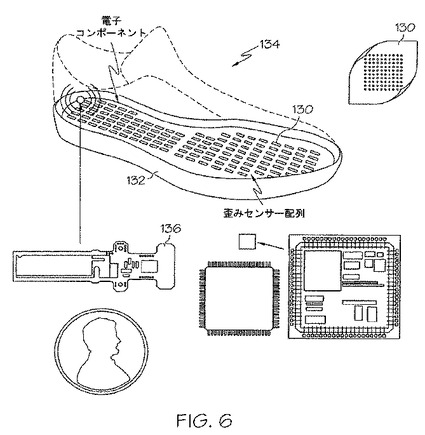
【図6】荷重状態下で人の足によって加えられる圧力による力を検出するように動作可能である靴の中敷きにセンサー配列を配置した例示的な靴のグラフィックで示した図である。
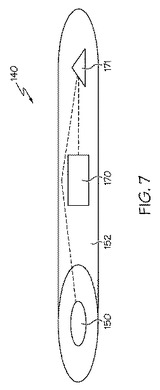
【図7】本発明とともに使用する例示的な超音波トランスデューサワンド(ultrasound transducer wand)の図である。
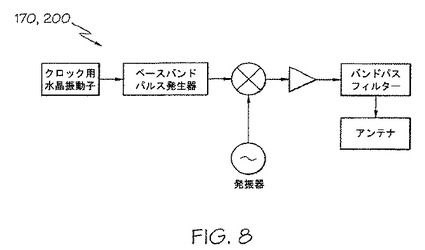
【図8】ベースバンドパルスがアップコンバートされ、増幅され、フィルター処理され、全方向性アンテナを介して伝送される、超広帯域送信機の略図である。
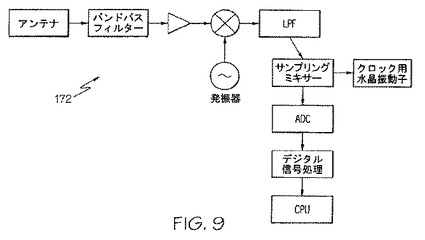
【図9】信号がバンドパスフィルター処理され、増幅され、ダウンコンバートされ、ローパスフィルター処理され、サブサンプリングされ、デジタル信号に変換される、超広帯域受信機の略図である。立ち上がりエッジ検出がフィールドプログラマブルゲートアレイ(FPGA)によって実行され、最終的な到来時間差(TDOA)の計算がコンピュータ上で実行される。
【図10】そのような三次元座標系内の超広帯域送信機の位置がどのように決定されるかを示す三次元座標表現である。
【図11】GPS受信機および衛星で全地球測位を行う動作の仕方と比較した、超広帯域受信機および送信機を三次元測位に使用する場合の類似点を示す図である。
【図12】1000個のデータ点を収集し、光学基準系と比較したx、y、およびz軸の位置における誤差を示している間の三次元動的誤差グラフである。
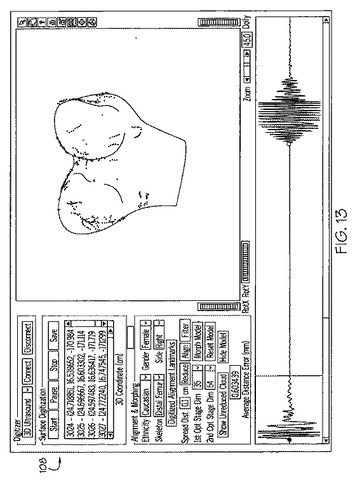
【図13】患者の骨の取り出された三次元基準点を既定の骨モデルに適用し、これにより患者固有の骨モデルを作成する、コンピュータのユーザーインターフェイスを示すスクリーンショットである。
【図14】大腿骨遠位部、脛骨近位部、および膝蓋骨を組み込んだ例示的な患者固有の骨モデルの三次元表現である。
【図15】本開示による例示的な膝装具の正面断面図である。
【図16】全体的な分類システムの略流れ図である。
【図17】例示的なニューラルネットワーク分類器の略表現である。
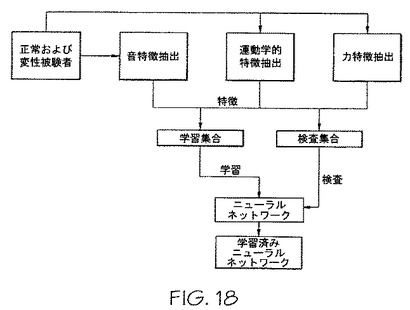
【図18】例示的なニューラルネットワークを学習するための例示的なプロセスフロー図である。
【図19】学習したニューラルネットワークを使用して膝の不具合の診断を行う例示的なプロセスフロー図である。
【発明を実施するための形態】
【0011】
本開示の例示的な実施形態は、身体の異常の診断、より具体的には、体組織(関節など)の生理学的状態を評価し、異常が存在するかどうか、および異常があるとすれば異常の程度を識別するためのデバイスおよび方法を包含するものとして以下で説明され、例示されている。もちろん、当業者にとっては、以下で説明する例示的な実施形態は例に過ぎず、本開示の範囲および精神から逸脱することなく、再構成されうることは明白であろう。しかし、わかりやすくし、正確に述べるために、以下で説明されるような例示的な実施形態は、当業者が本発明の範囲内に収まる必要条件でないと認識するオプションのステップ、方法、および特徴を含みうる。例えば、本明細書で開示されている例示的な実施形態は、膝関節の損傷の診断に関して説明されている。しかしながら、膝関節は開示されている実施形態の理解を高めるために単に例として挙げているに過ぎないので、例示的な実施形態を利用して、他の体組織の損傷(例えば、股関節の損傷または骨折など)を診断することができる。
【0012】
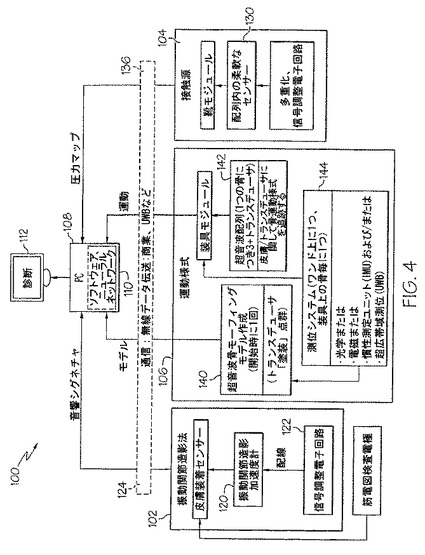
図4を参照すると、第1の例示的な診断システム100は、ニューラルネットワーク110を使ったデータ処理のためコンピュータ108にデータを出力する複数のモジュール102、104、106を備えていることがわかる。データ処理では、以下でさらに詳しく説明するように、画像表示ディスプレイ112を使って視覚的出力、聴覚的出力、および診断を行う。ここでもまた、以下で説明するように、診断は、損傷の検出だけでなく、損傷の重篤度に関連する情報も含む。しかし、システム100からの出力を完全に説明する前に、まず、モジュール102、104、106およびそれぞれの機能について説明する。
【0013】
図4および5を参照すると、システム100は、音、特に膝関節の運動の結果生じる振動を検出するために利用される複数の加速度計120を備える振動関節造影モジュール(VM)102を具備する。この例示的なVM 102では、骨および軟組織の相互作用を検出するために加速度計が患者の皮膚または外部組織表面に直接装着される。加速度計120と患者の外部組織表面との間に介在する接着剤を使用して、加速度計を固定位置に固定する。
【0014】
膝関節の背景状況において、例示的なVMモジュールは、3つの加速度計120を備え、1つの加速度計120Aは膝関節の内側に装着され、第2の加速度計120Bは膝関節の外側に装着され、第3の加速度計120Cは膝蓋骨の近くの膝関節の前側に装着される。この例示的な実施形態では、加速度計120は、それぞれが共通平面にそって置かれるように患者に装着されるが、それぞれ共通平面にそわないように装着することも可能である。しかし、3つよりも多い加速度計、および3つよりも少ない加速度計を利用して、互いに対する組織の動的相互作用によって発生する音を検出することができる。
【0015】
加速度計120のそれぞれは、運動様式モジュール104に付随する信号調整回路122と通信する。加速度計120は、音、特に振動を検出し、測定単位をヘルツとする周波数データの形態で検出された音を調整回路に出力するように動作可能である。この周波数データは、調整回路122によって処理され、デジタル周波数データとしてコンピュータ108に伝送される。加速度計120が周波数データを生成するのと同時に、調整回路122は、生成された周波数データにタイムスタンプを付けるクロックを備えることができる。以下でさらに詳しく説明するように、周波数データと時間との相関関係を求めることで、検出されたデータのすべてが相対的スケールで比較対照することができる定数が得られる。
【0016】
以下でさらに詳しく説明するように、動的環境内の体組織(例えば、軟骨に対する骨、骨に対する骨)間の相互作用は、関節の健康状況または状態を示す特定の振動を発生する。最も健康で最も若い関節であっても、何らかの種類の振動を発生する。しかし、劣化を示す関節は、健康な関節に比べてかなり顕著な、増幅された振動を示す。本開示の例示的な実施形態では、一定範囲の運動において関節が示す、振動などの音を利用して、侵襲的手技を要求することなく、または患者を放射線に曝すことなく、関節の状態を診断する。
【0017】
この例示的な実施形態では、第1の加速度計120Aは、膝関節の内側に装着され、大腿骨の内側顆と脛骨の内側部の上の内側軟骨との間の相互作用によって発生する振動を検出するように動作可能である。同様に、第2の加速度計120Bは、膝関節の外側に装着され、大腿骨の外側顆と脛骨の外側部の上の外側軟骨との間の相互作用によって発生する振動を検出するように動作可能である。最後に、第3の加速度計120Cは、膝蓋骨の近くの、膝関節の前側に装着され、大腿骨と膝蓋骨との間の相互作用によって発生する振動を検出するように動作可能である。加速度計120によって出力される結果のデータは、超広帯域送信機などの、無線送信機124を介してコンピュータ108に無線伝送される。次いで、コンピュータに無線伝送される加速度計120からのデータは、適切な診断を確実にするために他のモジュールからのデータと組み合わせて利用される。
【0018】
図4を再び参照すると、システム100は、膝関節が荷重状態の下で一定範囲の運動を通じて移動する場合に足の裏に生じる圧力または接触による力を検出するために使用される複数の圧力センサー130を備える接触力モジュール(CFM)104を具備することがわかる。言い換えると、患者が歩いたり、ゆっくりと走ったり、駆け足になったりすると、CFMモジュール104は、足が部分的にまたは完全に地面と接触したときに足の裏の圧力データを検出するということである。例示的な形態では、圧力センサー130は、患者の足の一般的形状に適合する靴の中敷き内に組み込まれる。人間の足のサイズは異なるので、例示的なシステムは、足のサイズが異なる人に対応するように、または特定の活動に必要な靴(またはその欠如)に対応するように、徐々にサイズを変えられる中敷きを備える。
【0019】
図6を参照すると、例示的なCFM 104は、靴134の中敷き132上の格子内に配列された圧力センサー130を備える。例示的な形態では、この格子は、行と列に構成される一連の圧力センサーを備え、これらのセンサーは中敷きを介して足によって靴に加えられる接触力を測定できるように、さらには力が加えられた場所を知ることができるように、患者の足の下側に露出している。以下でさらに詳しく説明するように、圧力の位置と圧力の相対的な大きさから、損傷の診断に関連する情報が得られる。例えば、膝関節の損傷によって足を引きずるようになってしまった患者は、健全な足関節を有し、正常な歩行能力または運動様式を有する患者と同じようには(同じ量または位置で)靴の中敷きに圧力を加えることはしない。
【0020】
静電容量センサー130のそれぞれは、その名が示すように、変形可能な誘電体媒質が2枚の平行板を分離するという原理に基づいて動作するコンデンサを備える。その平行板に加えられる圧力が変化すると、誘電体媒質内に歪み(変形)が生じる。すると、センサーに加えられた圧力によって、その平行板の間の間隔が変化し、それらの間で測定される静電容量も変化する。センサー130は、配列のさまざまな位置における歪みに対応する離散静電容量データ点を与えるように圧力測定領域上に配列される。これらの歪みは、応力、したがって、力を求めるために使用され、これにより、単位面積当たりの力に時間を掛けた単位(つまり、N/m2秒)を持つ圧力データの出力を計算する。
【0021】
この例示的な実施形態では、センサー130は、他のセンサーに関する複数のセンサーのうちのそれぞれのセンサーの位置が知られるように格子状に配列される。圧力センサー130同士の間の二次元配向および間隔を含む、このデータは、コンピュータ108上に格納されるか、またはセンサーのローカル上に格納される。この例示的な実施形態では、センサー130に対する配向および間隔データはコンピュータ108上に格納される。センサー130によって出力される結果のデータは、超広帯域送信機などの、無線送信機136を介してコンピュータ108に無線伝送される。コンピュータ108上に格納されているセンサー130に対する配向および間隔データを、センサー圧力データを受信するコンピュータと組み合わせて使用すると、コンピュータは、圧力を位置に、特に一方の圧力センサーの他方の圧力センサーに関する位置に結び付けるデータを生成するように動作可能である。
【0022】
力に位置を結び付けることによって、システム100は、どのような場所にどのような圧力を加えるかを正確に反映するデータを含む。それに加えて、コンピュータ108は、圧力センサー130によって生成された圧力データに時間も関連付ける内部クロックを備える。したがって、システム100は、どのくらいの圧力が加えられたか、また圧力が加えられた場所を知るだけでなく、加えられた圧力の持続時間を示す時間データも有する。ここでもまた、圧力センサー130によって生成された圧力データを時間に結び付けることによって、時間スケールを共通スケールとして使用するVMモジュール102によって生成された音データに圧力データを相関させることができる。その結果、システムは、足の裏のところに現れる圧力の時間の関数としての変化を、その同じ期間における振動データの変化とともに評価することができる。
【0023】
再び図4を参照すると、システム100は、1つまたは複数のAモード超音波トランスデューサを備える複数のサブモジュール140、142、144からなる運動様式モジュール(KM)106も具備する。サブモジュールは、超音波発生および測位サブモジュール140、超音波位置合わせサブモジュール142、および超音波動的移動サブモジュール144を備える。特に、サブモジュールは、音を発生し、注目している組織の構造、位置、および音響インピーダンスを表す、跳ね返ってくる音を検出するAモード超音波トランスデューサを備える。例示的な実施形態とともに使用する市販のトランスデューサは、限定することなく、Olympus液浸非焦点(immersion unfocused)3.5MHzトランスデューサを備える。当業者は、音のパルスを発生し、軟組織内の、異なる音響インピーダンスを有する組織と組織との間の界面のところで跳ね返る音を検出するように動作する、一般に超音波トランスデューサ、およびAモード超音波トランスデューサの動作を熟知している。跳ね返る音の大きさおよび音が超音波トランスデューサに跳ね返るのにかかる時間を利用して、超音波トランスデューサと異なる音響インピーダンスを有する材料間の界面との間の距離を決定する。
【0024】
この例示的な実施形態では、トランスデューサは、骨表面の位置を決定できるように骨と周辺組織との間の界面を検出するために利用される。超音波トランスデューサおよびAモード超音波トランスデューサの動作は、当業者によく知られているため、一般的に超音波トランスデューサ、および特にAモード超音波トランスデューサの動作の詳細な説明は、簡潔にすることのみを目的として省かれている。
【0025】
図7を参照すると、超音波発生および測位サブモジュール140は、少なくとも1つの測位デバイス170にも取り付けられているワンド152に取り付けられ固定されている1つまたは複数のAモード超音波トランスデューサ150を備える。この例示的な実施形態では、超音波発生および測位サブモジュール140は、超音波位置合わせサブモジュール142および超音波動的移動サブモジュール144から物理的に分離しており、これらはそれ自体が剛性のある膝装具190(図5を参照)に取り付けられている。この方法により、超音波発生および測位サブモジュール140は、剛性のある膝装具190に関して再配置可能であり、Aモード超音波トランスデューサ150のうちの1つまたは複数を膝関節の近くの患者の表皮に接触させるように適合されている。しかし、膝装具190は、いくつかのコンポーネントの間のリンケージと別に剛性を有している必要はないことに留意されたい。さらに、装具を身につける前に超音波ワンド152で膝をスキャンすべきである。
【0026】
超音波発生および測位サブモジュール140の機能の1つは、ワンド152が膝関節の近くの患者の表皮上へ移動されるときにトランスデューサ150によって検出される超音波を表す電気信号を発生することである。超音波トランスデューサ150は、音が骨に到達し跳ね返る結果としてトランスデューサに跳ね返る超音波の大きさに基づく電気信号パルスを受信する。前述のように、電気信号の大きさおよび超音波トランスデューサ150が超音波を発生してから超音波トランスデューサが跳ね返った超音波を検出するまでの遅延時間は、トランスデューサの下の骨の深さを示す。しかし、この深さデータだけだと、三次元座標系を与える測位デバイス170がなければ特に有用であるわけではない。
【0027】
超音波発生および測位サブモジュール140の測位デバイス170は、ワンド152に固定して取り付けられ、多数のデバイスをいくつでも備えることができる。例えば、ワンド152は、光のパルスを発生するか、または検出するか、または反射するように動作可能である光学デバイス170を備えることができ、対応する検出器または発光装置と相互作用して固定位置または基準位置に関してワンドの三次元位置を識別する。このようなデバイスの1つは、位置が知られている発光体から放射される光のパルスを検出するように動作可能である光検出器を備える。光検出器は、光を検出し、代表的信号を制御回路に送信するが、これは時間と位置に応じて光パルスが放射された時点も認識する。この点で、制御回路は、三次元座標系内のワンドの位置を決定するように動作可能である。Aモード超音波トランスデューサ150および光学デバイス170は、ワンド152に固定して取り付けられるため、光学デバイス170の位置に関する超音波トランスデューサ150の位置は知られている。同様に、超音波トランスデューサ150は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、光学デバイス170に関するトランスデューサ150の位置が知られているので、光学デバイス170に関する骨の位置は、容易に計算で求められる。言い換えると、ワンド152の位置が変更されると、光学デバイス170は、光学デバイスの相対的位置が三次元座標系内で変化してしまっていることを反映するデータを生成するということである。光学デバイス170の三次元位置のこのような変化は、三次元における骨の位置に容易に相関させることができるが、それは、超音波トランスデューサに関する光学デバイスの位置と同様に、超音波トランスデューサに関する骨の位置が知られているからである。したがって、光学デバイスの三次元位置データは、骨の表面上の複数の明確に区別できる点を表す複数の三次元点を構成するために使用される複合データを生成するために超音波トランスデューサから受信した信号に応答して生成される距離データと組み合わせて超音波トランスデューサ150に対する固定位置データ(光学デバイスに関する超音波トランスデューサの位置に対する距離データ)と組み合わせて使用される。以下でさらに詳しく説明するように、これらの三次元点を既定の骨モデルとともに利用して、患者の骨の仮想三次元表現を生成する。
【0028】
あるいは、測位デバイス170は、1つまたは複数の慣性計測ユニット(IMU)を備えることができる。IMUは、当業者に知られており、加速度計、ジャイロスコープ、および磁力計を備え、これらは連携して、三次元座標系内のIMUの位置を決定する。Aモード超音波トランスデューサ150およびIMU 170は、ワンド152に固定して取り付けられるため、IMU 170の位置に関する超音波トランスデューサ150の位置は知られている。同様に、超音波トランスデューサ150は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、IMU 170に関するトランスデューサ150の位置が知られているので、IMU 170に関する骨の位置は、容易に計算で求められる。言い換えると、ワンド152の位置が変更されると、IMU 170は、IMUの相対的位置が三次元座標系内で変化してしまっていることを示すデータを生成するということである。IMU 170の三次元位置のこのような変化は、三次元における骨の位置に容易に相関させることができるが、それは、超音波トランスデューサに関するIMUの位置と同様に、超音波トランスデューサに関する骨の位置が知られているからである。したがって、IMUの三次元位置データは、骨の表面上の複数の明確に区別できる点を表す複数の三次元点を構成するために使用される複合データを生成するために超音波トランスデューサから受信した信号に応答して生成される距離データと組み合わせて超音波トランスデューサ150に対する固定位置データ(IMUに関する超音波トランスデューサの位置に対する距離データ)と組み合わせて使用される。以下でさらに詳しく説明するように、これらの三次元点を既定の骨モデルとともに利用して、患者の骨の仮想三次元表現を生成する。
【0029】
図8〜10を参照すると、測位デバイス170は、代替えとして、1つまたは複数の超広帯域(UWB)送信機を備えることができることがわかる。UWB送信機は、当業者に知られているが、ミリメートル精度の三次元測位用のUWB送信機および受信機は新規のものである。1つまたは複数のUWB送信機170は、ワンド152に固定して取り付けられ、連続するUWB信号を3つ以上のUWB受信機(三次元座標内に知られている位置を有する)に伝送するように動作可能である。UWB測位システムは、UWB受信機172によって追跡される能動的タグまたは送信機170からなる。UWB送信機170のシステムアーキテクチャは図8に示されており、低ノイズシステムクロック(クロッククリスタル)がベースバンドUWBパルス発生器(例えば、ステップリカバリダイオード(SRD)パルス発生器)をトリガーする。ベースバンドパルスは、ダブルバランスド広帯域ミキサーを介して局部発振器(LO)によってアップコンバートされる。アップコンバートされた信号は、増幅され、フィルター処理される。最後に、この信号は全方向性アンテナを介して伝送される。UWB信号は、著しいマルチパスおよびパスロス効果が顕著な信号劣化を引き起こす室内チャネルを通過する。
【0030】
図9を参照すると、UWB受信機172のアーキテクチャが示されており、そこでは、信号は、指向性UWBアンテナを介して受信され、そしてフィルター処理され、増幅され、ダウンコンバートされ、ローパスフィルター処理される。次に、第2の低ノイズシステムクロックによってトリガーされるサブサンプリングミキサーを使用して、パルスの時間を1000〜100,000倍に引き延ばす。これにより、UWBパルスの帯域幅が効果的に低減され、従来のアナログ/デジタルコンバータ(ADC)によるサンプリングが可能になる。
【0031】
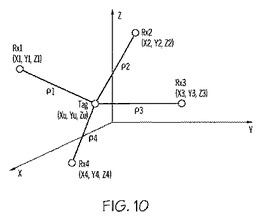
それぞれのUWB送信機170は、UWB受信機172と同様に、コンピュータ108と通信する。したがって、コンピュータ108は、UWB送信機がUWB信号を伝送する毎回のタイミング、さらにはUWB送信機がUWB信号を伝送するタイミングを認識する。同様に、コンピュータ108は、三次元座標系内のUWB受信機のそれぞれの位置、さらにはUWB受信機のそれぞれがUWB送信機からUWB信号を受信するタイミングを認識する。それぞれのUWB受信機の位置、それぞれのUWB受信機がUWB送信機からUWB信号を受信するタイミングおよびUWB送信機がUWB信号を送信したタイミングを知ることによって、コンピュータ108は、カスタムデジタル信号処理アルゴリズムを使用してサブサンプリング分解能の正確さで受信したUWBパルスの立ち上がりエッジを特定する。最終的な到来時間差(TDOA)の計算(図10)、さらにはデータの追加のフィルター処理および平均処理も、コンピュータ108によって実行される。
【0032】
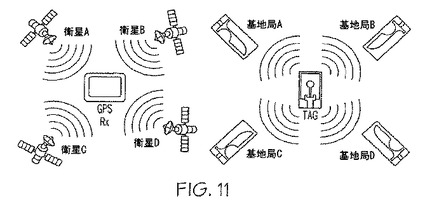
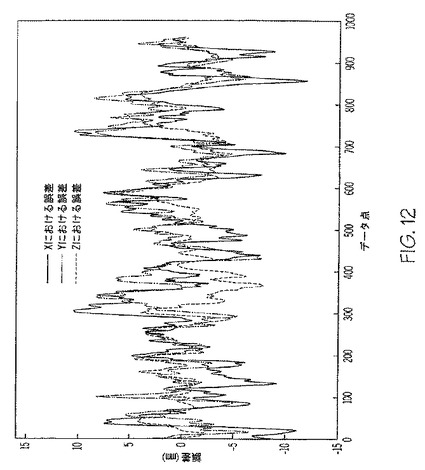
UWB送信機170の三次元位置を突き止めるためには、少なくとも4つの基地局(受信機)172が必要である。受信機172の幾何学的形状は、幾何学的位置精度低下率(PDOP)と呼ばれるものを通じて達成可能な三次元精度に対し重大な影響を有する。新規性のあるフィルター処理技術、高サンプルレート、マルチパス干渉に対するロバスト性、正確なデジタル測距アルゴリズム、低位相ノイズ局部発振器、および高信頼性マイクロ波ハードウェアを組み合わせたものが、メートル範囲の精度(例えば、5〜7mmの三次元リアルタイム)を達成するために必要である。UWB測位システムとGPSシステムの類似点が図11に示されている。最後に、図12は、送信機が指定された視体積内で自由に移動している間にUWB送信機170の三次元位置を1000サンプルにわたってリアルタイムで検出するためのx,y,z座標における実際の実験誤差を示している。
【0033】
Aモード超音波トランスデューサ150およびUWB送信機170は、ワンド152に固定して取り付けられるため、UWB送信機170の位置に関する超音波トランスデューサ150の位置は知られている。同様に、超音波トランスデューサ150は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、UWB送信機170に関するトランスデューサ150の位置が知られているので、UWB送信機170に関する骨の位置は、容易に計算で求められる。言い換えると、ワンド152の位置が変更されると、UWB送信機170は、UWB信号を送信し、これらのUWB信号は、それに対応してUWB受信機によって受信される。この情報は、UWB送信機の相対的位置が三次元座標系内で変化したかどうか、さらにはそのような変化の程度を識別するために、コンピュータ108によって処理される。UWB送信機170の三次元位置のこのような変化は、三次元における骨の位置に容易に相関させることができるが、それは、超音波トランスデューサに関するUWB送信機の位置と同様に、超音波トランスデューサに関する骨の位置が知られているからである。したがって、UWB送信機の三次元位置データは、骨の表面上の複数の明確に区別できる点を表す複数の三次元点を構成するために使用される複合データを生成するために超音波トランスデューサから受信した信号に応答して生成される距離データと組み合わせて超音波トランスデューサ150に対する固定位置データ(UWB送信機に関する超音波トランスデューサの位置に対する距離データ)と組み合わせて使用される。以下でさらに詳しく説明するように、これらの三次元点を既定の骨モデルとともに利用して、患者の骨の仮想三次元表現を生成する。
【0034】
超音波発生および測位サブモジュール140とともに使用される測位デバイス170とは無関係に、膝関節の3つの骨(大腿骨遠位部、脛骨近位部、および膝蓋骨)を個別に、かつ連続的にマッピングする(患者の骨の表面上の点に対応する三次元点を作成する)ために膝関節が曲げられている間に膝関節の近くの患者の皮膚上でワンド152の位置を変更する。ワンド152の位置が変更されるときに、トランスデューサ150からのデータが、ワンド152に取り付けられている無線送信機171に伝送される。無線送信機がトランスデューサ150からデータを受信すると、送信機は、無線リンクを介してデータをコンピュータ108に伝送する。
【0035】
ワンド152搭載のデバイスに給電するために、内部電源(図示せず)が備えられている。例示的な形態では、内部電源は、1つまたは複数の充電式バッテリを備える。
【0036】
図13を参照すると、患者データを取る前に、コンピュータ108のソフトウェアが、機器固有のデバイスとモデル化されている特定の骨にシステムを適合させるための一連の入力を要求する。例えば、ユーザーは、ユーザーインターフェイス上のドロップダウンメニュー上で、限定はしないが超音波を含んでいてもよい、利用するデジタイザの種類を正確に入力することができる。デジタイザの種類を選択した後、ユーザーは、デジタイザに接続するか、またはデジタイザから切断するボタンを作動させることができる。超音波トランスデューサのデータの取得前、取得中、または取得後に、ソフトウェアはさまざまなドロップダウンメニューを用意し、これによりそのソフトウェアで患者の骨とおおよそ同じ形状の骨モデルをロードすることができる。
【0037】
コンピュータ108が超音波トランスデューサ150のデータを受信した後、コンピュータ108は、Aモード超音波トランスデューサデータを解釈し、注目している骨の表面上の点に対応する離散三次元点を有する三次元マップを構築するように動作可能であるソフトウェアを備える。その結果、離散点が骨の表面凹凸形状をよく表すように骨(大腿骨遠位部、膝蓋骨、脛骨近位部)上でワンド152(図7を参照)の位置が約30秒間変更される。その結果、さらに長い時間にわたって注目する骨の上でワンド152の位置を変えると、さらに多くの三次元点がコンピュータ108によって生成され、これにより、結果として、図14に示されているような、より正確な患者固有の骨モデルを確実に構成できるようになる。関節上でワンド152の位置を変更している間の膝関節の運動の部分範囲は、運動位置の他の範囲において他の骨によって隠されてしまっている可能性のある新しい三次元点に対する注目する骨の新しい部分をワンドで見る助けとなりうる。
【0038】
骨のそれぞれがマッピングされた後、コンピュータ108は、既定の骨モデルを、最終的な患者固有の仮想骨モデルの構築の出発点として使用する。既定の骨モデルは、モーフィングアルゴリズムが非常に正確なモデルに対する骨の広範なデータベースポピュレーション(wide database population)の統計的な知識を利用するので、一般化された平均となりうる。しかし、計算の高速化のため、出発点として、例えば患者の性別、人種、身長、年齢に基づいて、より一般化された既定の骨モデルを選択することができる。例えば、患者が53歳、白人男性、身長6フィートである、大腿骨の患者固有のモデルを生成する場合、既定の大腿骨モデルは、年齢50〜60歳、身長5'10"から6'2"の白人男性の分類に基づいて選択される。このようにして、既定の骨モデルを適切に選択することで、患者の実際の骨(骨点の三次元マップによって表される)と既定の骨モデルとの間の反復が減るため、正確な患者固有の仮想骨モデルがより迅速に構成される。適切な既定の骨モデルが選択された後、コンピュータは、実際の骨点の三次元マップを既定の骨モデル上に重ね合わせ、その後、骨モデルがワンド操作中に検出された実際の骨点を示すように変形プロセスを実行する。この変形プロセスでは、広いポピュレーションの基準骨に基づく骨形状に関する統計的知識も利用する。変形プロセスが実行された後、その結果得られる骨モデルは、患者の実際の骨の患者固有の仮想三次元モデルである。前記のプロセスは、膝関節の3つの骨のそれぞれについて実行され、これにより、患者の脛骨近位部、大腿骨遠位部、および膝蓋骨の患者固有の仮想三次元モデルが作成される。
【0039】
図4、5、および15を再び参照すると、超音波位置合わせサブモジュール142および超音波動的移動サブモジュール144が、膝装具190に装着されていることがわかる。これらのサブモジュール142、144から出力されるデータを利用して、一定範囲の運動に曝される患者の自骨の動的三次元モデルを生成する。言い換えると、コンピュータ108に付随する表示端末に、患者の自骨の同じ移動とマッチする三次元空間内で移動する患者の仮想自骨モデルを表示することができるということである。後で説明するように、一定範囲の運動に曝されるこの動的三次元モデルは、損傷が存在するかどうか、またその損傷の程度を判定するために分析されるニューラルネットワークの一部である。
【0040】
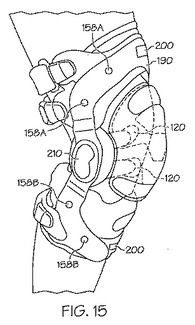
例示的な形態では、超音波位置合わせサブモジュール142は、膝装具190に固定して取り付けられている複数のAモード超音波トランスデューサ158を備える。特に、膝関節の背景状況では、脛骨および大腿骨の追跡のために膝装具190に固定して取り付けられている少なくとも2つのAモード超音波トランスデューサ158(つまり、トランスデューサグループ)がある。言い換えると、膝装具190は、膝関節の2つの一次骨を追跡するために少なくとも6つの超音波トランスデューサを備えるということである。それぞれのトランスデューサグループ158は、トランスデューサ158、測位デバイス200、および剛性がある、または剛性のない膝装具190の接続部を連結する剛性のある機械的接続部を備える。それぞれのトランスデューサグループ158は、トランスデューサ158、測位デバイス200、および膝装具190を連結する剛性のある機械的接続部を備える。このようにして、互いに関するトランスデューサの相対的位置は変化しない。例示的な形態では、第1のトランスデューサグループ158Aは、大腿骨遠位部を少なくとも部分的に囲み、その一方で第2のトランスデューサグループ158Bは、脛骨近位部を少なくとも部分的に囲み、その一方でオプションの第3のトランスデューサグループ(図示せず)は、膝蓋骨運動様式が追跡される場合に膝蓋骨の上に載る。超音波位置合わせサブモジュール142は、骨が一定範囲の運動で移動するときにそれぞれの骨に対して複数の静的基準点を与えるようにしかるべく動作可能である。
【0041】
図4を再び参照すると、超音波動的移動サブモジュール144は、超音波位置合わせサブモジュール142のそれぞれのトランスデューサグループ158A、158Bの三次元位置に関する情報をコンピュータ108に供給するように動作可能な複数の測位デバイス200を備えることがわかる。例示的な形態では、測位デバイス200は、位置が知られている発光体から放射される光のパルスを検出するように動作可能である光検出器を備えることができる。光検出器200は、光を検出して、代表的信号を膝装具190に関連する制御回路に送信する。膝装具190は、この情報をコンピュータ108(図4を参照)に伝送するが、これは時間と位置に応じて光パルスが放射された時点も認識する。このようにして、コンピュータは、三次元座標系内のトランスデューサ158の位置を決定することができる。Aモード超音波トランスデューサ158および光学デバイス200は、膝装具190に固定して取り付けられるため、光学デバイス200の位置に関する超音波トランスデューサ158の位置は知られている。同様に、超音波トランスデューサ158は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、光学デバイス200に関するトランスデューサ158の位置が知られているので、光学デバイス200に関する骨の位置は、容易に計算で求められる。言い換えると、膝の位置が変更され、それに応じて膝装具190の位置も変更されると、光学デバイス200は、光学デバイスの相対的位置が三次元座標系内で変化してしまっていることを反映するデータを生成するということである。光学デバイス200の三次元位置のこのような変化は、三次元における注目する骨(大腿骨、膝蓋骨、または脛骨)の位置に容易に相関させることができるが、それは、超音波トランスデューサグループ158A、158Bに関する光学デバイスの位置と同様に、超音波トランスデューサグループに関する骨の位置が知られているからである。したがって、光学デバイスは、注目している骨の動的移動マップを作成するために使用される複合データを生成するために超音波トランスデューサから受信した信号に応答して生成される距離データと組み合わせて超音波トランスデューサ158に対する固定位置データ(光学デバイスに関する超音波トランスデューサの位置に対する距離データ)と組み合わせて使用されるデータを生成する。例えば、トランスデューサ158は、測位デバイス200に関して起動しないため、空間内でトランスデューサ158が移動すれば、測位デバイス200が三次元空間内で移動したことになり、それぞれのトランスデューサ158によって供給される距離データを追跡し続けることによって、注目している骨の移動はそれに応じて追跡できる。
【0042】
あるいは、測位デバイス200は、1つまたは複数の慣性計測ユニット(IMU)を備えることができる。IMUは、当業者に知られており、加速度計、ジャイロスコープ、および磁力計を組み合わせたものを備え、これらは連携して、三次元座標系内のIMUの位置を決定する。IMUは、当業者に知られており、加速度計、ジャイロスコープ、および磁力計を備え、これらは連携して、三次元座標系内のIMUの位置を決定する。Aモード超音波トランスデューサ158は、IMU 200に固定して取り付けられるため、IMU 200の位置に関する超音波トランスデューサ158の位置は知られている。同様に、超音波トランスデューサ158は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、IMU 200に関するトランスデューサ158の位置が知られているので、IMU 200に関する骨の位置は、容易に計算で求められる。言い換えると、膝装具190の位置が変更されると、IMU 200は、IMUの相対的位置が三次元座標系内で変化してしまっていることを示すデータを生成するということである。IMU 200の三次元位置のこのような変化は、三次元における骨の位置に容易に相関させることができるが、それは、超音波トランスデューサに関するIMUの位置と同様に、超音波トランスデューサに関する骨の位置が知られているからである。例えば、トランスデューサ158は、膝装具190に関して起動しないため、空間内でトランスデューサ158が移動すれば、膝装具が三次元空間内で移動したことになり、それぞれのトランスデューサ158によって供給される距離データを追跡し続けることによって、注目している骨の移動はそれに応じて追跡できる。このようなIMU 200を使用することで、骨の移動の相対的追跡が可能になり、知られている初期位置(立っているなど)を持つ複数のIMUユニット間の静的位置合わせを必要とする。したがって、IMUを使用することで、対応する超音波トランスデューサ配列データ158とIMU 200データとを介して異なる骨の間の相対的運動を測定することができる。IMU 200は、単独で、または段落0041(原文0059)および0043(原文0061)で説明されているような他の測位デバイス200とともに使用することができる。IMU 200は、段落0042(原文0060)および0044(原文0062)で説明されているような他の測位デバイス200とともに使用することもできる。このシナリオでは、IMU 200の位置は、最小誤差に対する基準として他の測位システム200からの絶対位置を用いて特定の時間間隔で更新され、したがって2つの測位システム200は、1つの測位システム200として一緒に動作する。
【0043】
図8〜10を参照すると、測位デバイス200は、代替えとして、1つまたは複数の超広帯域(UWB)送信機を備えることができることがわかる。UWB送信機は、当業者に知られているが、三次元測位用のUWB送信機および受信機は新規のものである。1つまたは複数のUWB送信機200は、膝装具190に固定して取り付けられ、連続するUWB信号を3つ以上のUWB受信機(三次元座標内に知られている位置を有する)に伝送するように動作可能である。それぞれのUWB送信機200は、複数のUWB受信機202と同様に、コンピュータ108と通信する。したがって、コンピュータ108は、UWB送信機がUWB信号を伝送する毎回のタイミング、さらにはUWB送信機がUWB信号を伝送するタイミングを認識する。同様に、コンピュータ108は、三次元座標系内のUWB受信機のそれぞれの位置、さらにはUWB受信機のそれぞれがUWB送信機からUWB信号を受信するタイミングを認識する。それぞれのUWB受信機の位置、それぞれのUWB受信機がUWB送信機からUWB信号を受信するタイミングおよびUWB送信機がUWB信号を送信したタイミングを知ることによって、コンピュータ108は、カスタムデジタル信号処理アルゴリズムを使用してサブサンプリング分解能の正確さで受信したUWBパルスの立ち上がりエッジを特定する。最終的な到来時間差(TDOA)の計算(図10を参照)、さらにはデータの追加のフィルター処理および平均処理も、コンピュータ108によって実行される。ここでもまた、トランスデューサ158は膝装具190に関して移動しないため、トランスデューサ158が空間内を移動すると、膝装具は三次元空間内で移動したことになる。それでも、膝装具の移動は、コンピュータ108をUWB送信機およびUWB受信機と組み合わせて使用することで追跡される。同様に、UWB送信機および超音波トランスデューサ158の配向が固定されているため、それに応じてUWB送信機200の三次元座標系内の位置の変化を使用して注目している骨の移動を追跡することができる。
【0044】
サブモジュール142、144から情報をコンピュータ108に伝達するために、膝装具190は、超音波トランスデューサ158と通信する超広帯域(UWB)送信機210を備え、コンピュータ108へのデータの無線通信が円滑に行われる。UWB送信機が測位デバイス200として利用される場合には、UWB送信機200が無線リンク上で超音波センサーデータを直接コンピュータ108に送信するように機能することが可能であるため専用UWB送信機は不要であることに留意されたい。
【0045】
無線送信機およびフィールドプログラマブルゲートアレイ設計の使用により、計算をリアルタイムで実行し、最終的な処理および表示をコンピュータ108上で実行できることは理解されるであろう。無線送信機、およびフィールドプログラマブルゲートアレイ設計を組み込んだコンピュータ108の使用により、計算をリアルタイムで実行できることは理解されるであろう。例えば、ワンド152が、膝関節を覆う表皮を横断するために利用されると、超音波トランスデューサのデータはコンピュータに即座に伝送され、三次元座標系内の骨の位置をリアルタイムで計算し、同様に、表示端末上にここでもリアルタイムで三次元点を表示する。同様に、膝装具190が使用される場合、超音波トランスデューサのデータおよび測位デバイスのデータがコンピュータに伝送され、すでに生成されている静的な三次元の患者固有の骨モデルを構成するためにリアルタイムで評価される。ここでもまた、コンピュータが表示端末を備えている場合、三次元の患者固有の骨モデルに与えられる動的運動が患者の骨の実際の運動をリアルタイムで追跡する。
【0046】
上述のように、例示的な膝装具190は、骨の表面の経皮的検出のための複数のAモード超音波トランスデューサ158および超音波トランスデューサ158の運動を追跡し、延いては膝関節の骨の運動を追跡するための測位デバイス200を備える。膝装具190は、患者の実際の膝関節の移動を時間同期的になぞる患者固有の三次元の骨モデルの移動を示す計算および視覚化をリアルタイムで動作可能なコンピュータ108に無線で接続される。例示的な膝装具190は、複数の測位デバイス200が取り付けられている剛体の、または半剛体の本体部を備える。さらなる代替的測位デバイス200は、複数の加速度計、この場合には4つの加速度計を備える。加速度計の基準座標フレームと世界座標フレームとの間の同次変換
(1) v(n+1)=v(n)+a(n)dt
(2) s(n+1)=s(n)+v(n)dt-0.5a(n)dt2
が4つの加速度計の位置を使用して計算され、
式中、s(n+1)は現在状態の位置であり、s(n)は前の状態からの位置であり、v(n+1)は現在状態の瞬間速度であり、v(n)は前の状態からの速度であり、a(n)は加速度計からの加速度であり、dtはサンプリング時間間隔である。前の式は、三次元ユークリッド空間内の1つの点の動的運動および測位を記述したものである。三次元物体の配向および運動を記述するためには、さらに情報が必要である。
【0047】
トランスデューサの配向は、重力ベースの加速度計(例えば、ADXL-330、アナログデバイス)を使用し、直交軸のそれぞれの対から傾斜情報を抽出することによって記述することができる。x、y、z上の加速度出力は、重力が式Ai=(Voutx-Voft)/Sに等しいことによるものであり、Aiはx、y、またはz軸における加速度であり、Voutxはx、y、またはz軸からの電圧出力であり、Voffはオフセット電圧であり、Sは加速度計の感度である。ヨー、ピッチ、およびロールは、式
【0048】
【数1】
【0049】
に示されているように計算することができ、ただし、式中、ρは地面に関してx軸であるピッチであり、φは地面に関してy軸であるロールであり、θは地面に関してz軸であるロールである。加速度計は重力ベースであるため、センサーの較正が済んだ後は、配向に、前の状態からの情報は必要とされない。静的較正は、1g(海水位の地表面における重力による公称加速度、正確には9.80665m/s2(約32.174ft/s2)と定義される)に等しい3本の軸からの加速度の結果として得られる総和を必要とする。あるいは、注目している体組織のヨー、ピッチ、およびロールの情報を与える配向センサーも、市販されており(例えば、Invensenseから販売されているIDG-300)利用できる。次いで、トランスデューサの配向が、直接的なコサイン行列変換
【0050】
【数2】
【0051】
を使用することによって解決することができ、ただし、式中、Cはコサインを表し、Sはサインを表す。
【0052】
振動および運動様式データの解釈は、データ収集、学習データ集合、および信号分析、さらには機械システムの特性に関する深い理解を必要とする厄介な作業である。インプラントコンポーネント、骨、および/または軟組織の相互作用を通じて発生する振動は、動的応答を引き起こす駆動力によって誘発される強制振動の結果である。駆動力は、膝靱帯の不安定さ、骨の特性、および状態に従う影響に関連するものとしてよい。正常な、無傷の膝は、明確に区別される振動特性と一体となった、明確に区別される運動パターンを有する。劣化または損傷が膝関節に生じた後、運動学的パターンと振動特性の両方が変化する。この変化は、損傷もしくは変性の種類毎に、運動学的判定と振動判定の両方を使用して捕捉できる明確に区別できる変化をもたらす。
【0053】
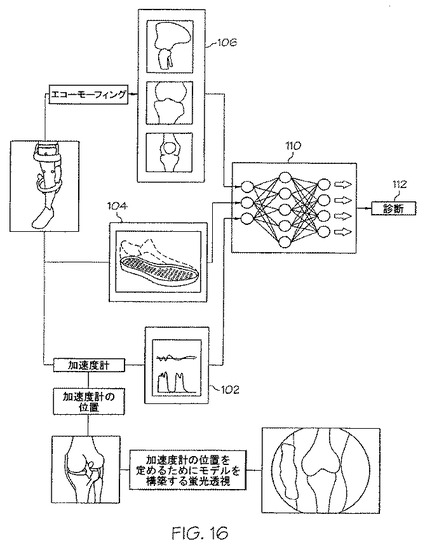
図16〜19を参照すると、例示的な診断システム100は、靱帯、他の軟組織、および骨損傷を診断するように動作可能なインテリジェント型診断モジュール110を備える。以前の研究成果により、通常の前十字靱帯欠損(ACLD)膝被験者は、膝を徐々に屈曲するときに大腿骨後部平行移動の類似のパターンを示すが、被験者は、30°の膝屈曲の異なる軸回転パターンを示すことがわかっている。したがって、診断モジュール110は、(1)データ収集および分析を伴う第1段階、(2)データをニューラルネットワークに送ることによる損傷の検出、および(3)検出された損傷の重篤度を分類または決定するニューラルネットワークの別の段階の3つの段階を含む。
【0054】
この第1の段階は、患者が一定範囲の運動で注目している関節を移動している間に患者から取った複数の生理学的測定結果を使用して運動学的特徴ベクトルを取得することを含む。例示的な測定としては、限定はしないが、内側顆前後運動(MAP)および外側顆前後運動(LAP)が挙げられるが、後者は脛骨の幾何学的中心に関する内側および外側顆点の前後A/P距離に関係する。他の例示的な測定としては、LSI(外側大腿顆と外側脛骨プラトーとの間の距離)およびMSI(内側大腿顆と内側脛骨プラトーとの間の距離)が挙げられ、これらは外側および内側顆点から脛骨平面までのS/I(優/劣)距離である。さらなる例示的な測定としては、顆分離距離が挙げられ、これは、2つの最小顆点から脛骨までの間の水平(x-y平面)距離である。特徴ベクトルは、3つのオイラー角および振動信号に追加する3つの平行移動コンポーネントによって画成される脛骨および力データに関する大腿骨位置も含む。
【0055】
図16を参照すると、運動学的および振動分析から抽出された運動特徴ベクトルが、損傷した靱帯を決定するために多層逆伝搬ニューラルネットワークに出力されることがわかる。
【0056】
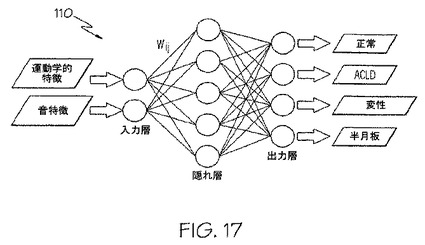
図17を参照すると、例示的なニューラルネットワーク分類器は、複数の二進出力を有することがわかる。それぞれの出力は、1または0のいずれかであり、1はyesに対応し、0はnoに対応する。この例示的なニューラルネットワーク分類器では、それぞれの出力は、特定の損傷の種類へのニューラルネットワークの応答を表し、例えば、1つの出力は、前十字靱帯欠損(ACLD)の応答を表し、その状態は、ACL損傷が検出された場合に1となり、そうでない場合に0となる。明らかに、ニューラルネットワークは、注目している関節の基礎モデルに応じて、著しく高度であるか、またはそれほど高度でない。
【0057】
図18を参照すると、例示的なニューラルネットワークの構築は、正常な膝関節および損傷した膝関節に対応する運動学的および振動データの学習集合を使用して教師付き分類器を形成する段階を含むことがわかる。NNは、ベクトルの集合を用いて学習される。それぞれのベクトルは、1つの関節から収集されたデータ(運動様式、振動、および力)からなる。蛍光透視データを使用して、運動様式を計算することができる。NNの学習が済んだ後、これを使用して、新しい症例を分類し、それらの運動様式、振動、および力のデータを使用して損傷の種類をカテゴリ化することができる。当業者であれば、ニューラルネットワークが対応することが望まれている種類および分類は、必ず、それらのまさしく種類および分類に基づいてニューラルネットワークを学習する段階を含むことを容易に理解するであろう。哺乳類の膝関節の損傷の例示的な種類および分類は、限定はしないが、変形性関節症、軟組織損傷、および成長異常を含む。同様に、ニューラルネットワークは、正常な膝機能の指標に関して学習する必要もある。このようにして、ニューラルネットワークの学習後、これは、正常な膝状態と異常な膝状態に関する診断データを区別し、出力する機能を有する。
【0058】
図19を参照すると、人の膝関節の振動、運動様式、力、および他の特徴を編集して、学習済みニューラルネットワークに供給する。次いで、学習済みニューラルネットワークは、患者の膝関節の状態を診断して、種類および重篤度で変性を識別する。
【0059】
例示的な実施形態は、臨床現場の外でデータを収集するように適合されうる。例えば、例示的な一実施形態は、通常活動を続けながら長期間にわたって患者が着用することができる。例えば、患者は、疼痛または症状を誘発する、オフィスでは再現しえない活動(例えば、ウェイトリフティング、ラケットボールなど)において振動センサーおよび/または運動様式追跡装具を着用することができる。いくつかの実施形態では、患者が活動の直前にデバイスをオンにし、および/または患者がそれの発生の際の事象をマークすることができる。これにより、マークされた時間の数秒前にデータを分析し、どのような異常な音または関節運動様式が生じているかを確認することができる。データは、ポータブルハードドライブ(または他のポータブルストレージデバイス)に格納しておき、その後、分析のため例示的なシステムにダウンロードすることができる。データは、無線でコンピュータに伝送し、そのコンピュータに格納することができる。また、現場データが欲しい場合に小型メモリドライブに格納することもできる。疼痛の発生がランダムであった場合、例示的なデバイスを使うことで、データの収集を連続的に行うことができる。いくつかの実施形態では、患者側で事象をマークすることができる。連続監視を行うことができるデバイスは、大容量の記憶域を必要とする場合がある。
【0060】
電磁気的追跡を測位デバイス170、200の代替手段の1つとして使用することが可能であることにも留意されたい。
【0061】
コンピュータ108およびニューラルネットワーク110に対するデータ入力としてEMG電極も使用することができる。このようにして、1つまたは複数のEMG電極を膝関節に隣接する筋肉の付近の皮膚の表面に装着し、筋肉に伝えられる電気信号を監視し、筋肉の損傷または疾患の関連データを供給する。
【0062】
本明細書では膝関節に関して例示的な実施形態を説明したが、当業者であれば上述の実施形態が哺乳類の他の関節にも容易に適合できることを直ちに理解すると思われる。例えば、実施形態は、臀部、足首、爪先、背骨、肩、肘、手首、指、および顎関節で使用するように適合されうる。
【0063】
上述の説明および発明の要約に続いて、本明細書で説明されている方法および装置は、本発明の例示的な実施形態を構成するが、本明細書に含まれる発明は、この正確な実施形態に限定されることはないこと、また請求項に定められているような本発明の範囲から逸脱することなくそのような実施形態に変更を加えられることも、当業者には明らかなことであろう。それに加えて、本発明は請求項によって定められると理解され、本明細書に記載されている例示的な実施形態を記述する制限または要素が、そのような制限または要素が明示的に述べられていない限り請求要素の解釈に組み込まれることは意図されていない。同様に、本発明は請求項によって定められ、また本発明の固有のおよび/または予見されない利点が本明細書で明示的に説明されていない可能性があるとしても存在しうるため、請求項の範囲内に収まるように本明細書で開示されている発明の識別されている利点もしくは目的のどれか、もしくはすべてを満たす必要はないことは理解されるであろう。
【符号の説明】
【0064】
100 第1の例示的な診断システム
102 振動関節造影モジュール(VM)
104 運動様式モジュール
104 接触力モジュール(CFM)
106 運動様式モジュール(KM)
108 コンピュータ
110 ニューラルネットワーク
112 画像表示ディスプレイ
102 振動関節造影モジュール(VM)
120 加速度計
120A 加速度計
120B 第2の加速度計
120C 第3の加速度計
122 信号調整回路
124 無線送信機
130 圧力センサー
132 中敷き
134 靴
140 超音波発生および測位サブモジュール
142 超音波位置合わせサブモジュール
144 超音波動的移動サブモジュール
150 Aモード超音波トランスデューサ
152 超音波ワンド
158 Aモード超音波トランスデューサ
158A,158B トランスデューサグループ
170 測位デバイス
170 送信機
171 無線送信機
172 UWB受信機
190 膝装具
200 測位デバイス
202 UWB受信機
210 超広帯域(UWB)送信機
【技術分野】
【0001】
関連出願の相互参照
本出願は、2009年2月2日に出願した「NONINVASIVE DIAGNOSTIC SYSTEM」と題された米国特許出願第12/364,267号の優先権を主張するものであり、その開示の全体が参照により本明細書に組み込まれている。
【0002】
本発明は、身体の異常の診断に関するものであり、より具体的には、身体の関節などの体組織の生理学的状態を評価し、異常が存在するかどうか、および異常があるとすれば異常の程度を識別するためのデバイスおよび方法に関するものである。本明細書で開示されている例示的な実施形態は、人間の膝関節に関して利用され、説明されているが、他の間節および体組織も同様に診断できることを理解されたい。
【背景技術】
【0003】
人間では、膝関節は、3つの固有の種類の力が支配する機械システムによって機能的に制御され、これらの力は、(1)筋肉の収縮または弛緩の結果生じる力などの、運動の結果生じる能動的な力、(2)靱帯が緊張する結果生じる力などの、運動を制約する制約力、および(3)骨に作用する力などの、運動に抵抗する相互作用力である。これらの3種類の力に加えて、膝関節複合体(例えば、軟骨および半月板)内の軟組織が、膝関節に作用する圧縮荷重を分散させる減衰効果を生み出す。
【0004】
膝関節運動は、もっぱら4つの靱帯によって安定化され、これらの靱帯は大腿骨、脛骨、および膝蓋骨の間の相対的運動を制限し、調節する。これらの靱帯は、図1および2に示されているように、前十字靱帯(ACL)、後十字靱帯(PCL)、内側側副靱帯(MCL)、外側側副靱帯(LCL)、および膝蓋靱帯である。これらの靱帯または他の軟組織構造のどれかが損傷すると、膝の運動様式に検出可能な変化が生じ、膝関節損傷の種類および損傷の重篤度を表す検出可能な振動が発生しうる。これらの視覚的変化(膝の運動様式)および聴覚的変化(振動)は、歪んだ運動学的パターンで移動しているときに骨によって引き起こされるが、これらは、一定範囲の運動を通じて適切な均衡を保つ膝関節の移動の様子および音と著しく異なる。
【発明の概要】
【課題を解決するための手段】
【0005】
本開示の例示的な実施態様は、患者固有の運動学的データおよび音データを使用して、もしあればどのような種類の損傷が存在しているか、またそのような損傷の程度を判定するための哺乳類の身体用の診断システムを含む。特に、例示的な方法および実施態様は、膝関節の患者固有の運動学的データを収集し、分析し、またそれとともに、患者の膝関節の移動によって発生する音(つまり、振動)のパターンおよび空間分布を収集し、分析することによって、損傷が存在しているかどうか、どのような損傷であるか(つまり、診断)、ならびに、靱帯、筋肉、骨、半月板、および軟骨が損傷の影響を受ける程度を自動的に判断するための膝関節診断システムを対象とする。この例示的な方法に対する低レベルの例示的なプロセスフロー図は、図3に示されている。
【0006】
本開示の例示的な方法は、注目している身体領域(例えば、膝関節の骨)の患者固有の三次元組織モデルを生成する段階、身体領域が所定範囲の運動を行うときに患者固有の運動学的データおよび音データを収集する段階と、最終的に運動学的データおよび音データを分析して、損傷が存在しているかどうか、および存在していれば損傷の程度を識別する段階とを有する。例示的な態様では、大腿骨遠位部、脛骨近位部、および膝蓋骨の患者固有の三次元組織モデルは、コンピュータ断層撮影(CT)スキャン、蛍光透視、核磁気共鳴映像(MRI)スキャン、X線、および同様のものなどの従来の撮像技術を使用して構築される。あるいは、本開示の例示的な実施態様は、Aモード超音波エコーモーフィング技術(A-mode ultrasound echo morphing technology)を使用して、三次元組織モデルを構築するために必要なデータを生成することにより、従来の撮像技術の代替的手段となる。患者固有の三次元組織モデルが生成された後、患者固有の運動学的データを収集し、大腿骨、脛骨、および膝蓋骨の運動に関して評価する。例えば、この運動学的データは、患者固有の三次元組織モデルを構成するために必要なデータを生成するのに利用されているのと同じAモード超音波技術を使用して取得することができる。それに加えて、加速度計を使用し、負荷がかかっている現実世界の状態で所定範囲の運動を膝関節が行っている間に膝関節を監視することで、患者固有の音データを生成する。最後に、運動学的データおよび音データを分析して、損傷が存在しているかどうか、およびそのような損傷の程度を含む、最も正確な診断を下す。例示的な態様では、正しい診断に相関する実際の運動学的データおよび音データを持つニューラルネットワークによって、運動学的データおよび音データを分析する。ニューラルネットワークは、運動学的データおよび音データが取得され、正しい診断がin vivo評価によって検証された場合について新しいデータで常時更新される。したがって、ニューラルネットワークがさらに多くのデータを集めて成長するにつれ、それに呼応して診断の精度が上がる。
【0007】
例示的な態様では、音データおよび運動学的データは、単一のデータ収集デバイスを使用して同時に取得することができる。さらに、音データおよび運動学的データは、注目している身体領域が所定範囲の運動を行っているときにリアルタイムで取得される。さらなる例示的な実施形態では、音データおよび運動学的データが診療所で収集される場合、データを分割画面モニタ上にリアルタイムで表示することができる。しかし、データが医院の外部で収集される場合には、データを時間同期方式で記録するために記録デバイスおよびメモリを利用することができる。さらに他の例示的な実施態様では、患者に、患者が特定の疼痛または激痛を経験した一般的な時間枠を記憶し、患者が経験した疼痛と正確に、または一般的に、同じ時間に発生する運動学的データおよび音データとを相関させる診断を下せるように動作可能なアクチュエータを与えることができる。
【0008】
上述のように、学習ニューラルネットワークによって患者固有の基準に基づいて生成される運動学的データおよび音データを分析し、損傷の存在、損傷の種類、および損傷の重篤度に関する出力を自動的に行う。ニューラルネットワークは、インターネット経由でアクセス可能であるか、または医師のローカルコンピュータ上に置くこともできる。それに加えて、またはその代わりに、医師は患者固有の音データおよび運動学的データを分析して、ニューラルネットワークの助けを借りて、または借りずに、診断を行ったり、または診断を検証したりすることができる。
【0009】
医師は、本明細書で開示されているような例示的な方法およびデバイスを使用すれば、実験的手術を必要とすることなく、またはX線もしくは蛍光透視などの任意の形態の放射線の患者への照射を必要とすることなく、身体の損傷を診断することができる。それに加えて、それぞれの患者に関して取ったデータは、所定範囲の運動の間中連続しており、これはかなりの範囲にわたって運動ギャップがある明確に区別される点における画像を生成するX線写真撮影様式とは対照的である。それに加えて、本明細書で開示されている例示的な方法およびデバイスに従って取ったデータは、核磁気共鳴映像装置によって取ったデータとも対照的であるが、これは、取ったデータがその所定範囲の運動にそって連続しているだけでなく、評価される身体部分が動的環境内の荷重状態の下で活動しているからである。
【図面の簡単な説明】
【0010】
【図1】屈曲位にある人の膝関節の後面図である。
【図2】伸展位にある人の膝関節の後面図である。
【図3】本発明の範囲内の例示的な方法を使用する例示的なプロセスフロー図である。
【図4】例示的な診断システムのモジュールの略図である。
【図5】人の膝関節の近くに装着される本開示による膝装具の正面図である。
【図6】荷重状態下で人の足によって加えられる圧力による力を検出するように動作可能である靴の中敷きにセンサー配列を配置した例示的な靴のグラフィックで示した図である。
【図7】本発明とともに使用する例示的な超音波トランスデューサワンド(ultrasound transducer wand)の図である。
【図8】ベースバンドパルスがアップコンバートされ、増幅され、フィルター処理され、全方向性アンテナを介して伝送される、超広帯域送信機の略図である。
【図9】信号がバンドパスフィルター処理され、増幅され、ダウンコンバートされ、ローパスフィルター処理され、サブサンプリングされ、デジタル信号に変換される、超広帯域受信機の略図である。立ち上がりエッジ検出がフィールドプログラマブルゲートアレイ(FPGA)によって実行され、最終的な到来時間差(TDOA)の計算がコンピュータ上で実行される。
【図10】そのような三次元座標系内の超広帯域送信機の位置がどのように決定されるかを示す三次元座標表現である。
【図11】GPS受信機および衛星で全地球測位を行う動作の仕方と比較した、超広帯域受信機および送信機を三次元測位に使用する場合の類似点を示す図である。
【図12】1000個のデータ点を収集し、光学基準系と比較したx、y、およびz軸の位置における誤差を示している間の三次元動的誤差グラフである。
【図13】患者の骨の取り出された三次元基準点を既定の骨モデルに適用し、これにより患者固有の骨モデルを作成する、コンピュータのユーザーインターフェイスを示すスクリーンショットである。
【図14】大腿骨遠位部、脛骨近位部、および膝蓋骨を組み込んだ例示的な患者固有の骨モデルの三次元表現である。
【図15】本開示による例示的な膝装具の正面断面図である。
【図16】全体的な分類システムの略流れ図である。
【図17】例示的なニューラルネットワーク分類器の略表現である。
【図18】例示的なニューラルネットワークを学習するための例示的なプロセスフロー図である。
【図19】学習したニューラルネットワークを使用して膝の不具合の診断を行う例示的なプロセスフロー図である。
【発明を実施するための形態】
【0011】
本開示の例示的な実施形態は、身体の異常の診断、より具体的には、体組織(関節など)の生理学的状態を評価し、異常が存在するかどうか、および異常があるとすれば異常の程度を識別するためのデバイスおよび方法を包含するものとして以下で説明され、例示されている。もちろん、当業者にとっては、以下で説明する例示的な実施形態は例に過ぎず、本開示の範囲および精神から逸脱することなく、再構成されうることは明白であろう。しかし、わかりやすくし、正確に述べるために、以下で説明されるような例示的な実施形態は、当業者が本発明の範囲内に収まる必要条件でないと認識するオプションのステップ、方法、および特徴を含みうる。例えば、本明細書で開示されている例示的な実施形態は、膝関節の損傷の診断に関して説明されている。しかしながら、膝関節は開示されている実施形態の理解を高めるために単に例として挙げているに過ぎないので、例示的な実施形態を利用して、他の体組織の損傷(例えば、股関節の損傷または骨折など)を診断することができる。
【0012】
図4を参照すると、第1の例示的な診断システム100は、ニューラルネットワーク110を使ったデータ処理のためコンピュータ108にデータを出力する複数のモジュール102、104、106を備えていることがわかる。データ処理では、以下でさらに詳しく説明するように、画像表示ディスプレイ112を使って視覚的出力、聴覚的出力、および診断を行う。ここでもまた、以下で説明するように、診断は、損傷の検出だけでなく、損傷の重篤度に関連する情報も含む。しかし、システム100からの出力を完全に説明する前に、まず、モジュール102、104、106およびそれぞれの機能について説明する。
【0013】
図4および5を参照すると、システム100は、音、特に膝関節の運動の結果生じる振動を検出するために利用される複数の加速度計120を備える振動関節造影モジュール(VM)102を具備する。この例示的なVM 102では、骨および軟組織の相互作用を検出するために加速度計が患者の皮膚または外部組織表面に直接装着される。加速度計120と患者の外部組織表面との間に介在する接着剤を使用して、加速度計を固定位置に固定する。
【0014】
膝関節の背景状況において、例示的なVMモジュールは、3つの加速度計120を備え、1つの加速度計120Aは膝関節の内側に装着され、第2の加速度計120Bは膝関節の外側に装着され、第3の加速度計120Cは膝蓋骨の近くの膝関節の前側に装着される。この例示的な実施形態では、加速度計120は、それぞれが共通平面にそって置かれるように患者に装着されるが、それぞれ共通平面にそわないように装着することも可能である。しかし、3つよりも多い加速度計、および3つよりも少ない加速度計を利用して、互いに対する組織の動的相互作用によって発生する音を検出することができる。
【0015】
加速度計120のそれぞれは、運動様式モジュール104に付随する信号調整回路122と通信する。加速度計120は、音、特に振動を検出し、測定単位をヘルツとする周波数データの形態で検出された音を調整回路に出力するように動作可能である。この周波数データは、調整回路122によって処理され、デジタル周波数データとしてコンピュータ108に伝送される。加速度計120が周波数データを生成するのと同時に、調整回路122は、生成された周波数データにタイムスタンプを付けるクロックを備えることができる。以下でさらに詳しく説明するように、周波数データと時間との相関関係を求めることで、検出されたデータのすべてが相対的スケールで比較対照することができる定数が得られる。
【0016】
以下でさらに詳しく説明するように、動的環境内の体組織(例えば、軟骨に対する骨、骨に対する骨)間の相互作用は、関節の健康状況または状態を示す特定の振動を発生する。最も健康で最も若い関節であっても、何らかの種類の振動を発生する。しかし、劣化を示す関節は、健康な関節に比べてかなり顕著な、増幅された振動を示す。本開示の例示的な実施形態では、一定範囲の運動において関節が示す、振動などの音を利用して、侵襲的手技を要求することなく、または患者を放射線に曝すことなく、関節の状態を診断する。
【0017】
この例示的な実施形態では、第1の加速度計120Aは、膝関節の内側に装着され、大腿骨の内側顆と脛骨の内側部の上の内側軟骨との間の相互作用によって発生する振動を検出するように動作可能である。同様に、第2の加速度計120Bは、膝関節の外側に装着され、大腿骨の外側顆と脛骨の外側部の上の外側軟骨との間の相互作用によって発生する振動を検出するように動作可能である。最後に、第3の加速度計120Cは、膝蓋骨の近くの、膝関節の前側に装着され、大腿骨と膝蓋骨との間の相互作用によって発生する振動を検出するように動作可能である。加速度計120によって出力される結果のデータは、超広帯域送信機などの、無線送信機124を介してコンピュータ108に無線伝送される。次いで、コンピュータに無線伝送される加速度計120からのデータは、適切な診断を確実にするために他のモジュールからのデータと組み合わせて利用される。
【0018】
図4を再び参照すると、システム100は、膝関節が荷重状態の下で一定範囲の運動を通じて移動する場合に足の裏に生じる圧力または接触による力を検出するために使用される複数の圧力センサー130を備える接触力モジュール(CFM)104を具備することがわかる。言い換えると、患者が歩いたり、ゆっくりと走ったり、駆け足になったりすると、CFMモジュール104は、足が部分的にまたは完全に地面と接触したときに足の裏の圧力データを検出するということである。例示的な形態では、圧力センサー130は、患者の足の一般的形状に適合する靴の中敷き内に組み込まれる。人間の足のサイズは異なるので、例示的なシステムは、足のサイズが異なる人に対応するように、または特定の活動に必要な靴(またはその欠如)に対応するように、徐々にサイズを変えられる中敷きを備える。
【0019】
図6を参照すると、例示的なCFM 104は、靴134の中敷き132上の格子内に配列された圧力センサー130を備える。例示的な形態では、この格子は、行と列に構成される一連の圧力センサーを備え、これらのセンサーは中敷きを介して足によって靴に加えられる接触力を測定できるように、さらには力が加えられた場所を知ることができるように、患者の足の下側に露出している。以下でさらに詳しく説明するように、圧力の位置と圧力の相対的な大きさから、損傷の診断に関連する情報が得られる。例えば、膝関節の損傷によって足を引きずるようになってしまった患者は、健全な足関節を有し、正常な歩行能力または運動様式を有する患者と同じようには(同じ量または位置で)靴の中敷きに圧力を加えることはしない。
【0020】
静電容量センサー130のそれぞれは、その名が示すように、変形可能な誘電体媒質が2枚の平行板を分離するという原理に基づいて動作するコンデンサを備える。その平行板に加えられる圧力が変化すると、誘電体媒質内に歪み(変形)が生じる。すると、センサーに加えられた圧力によって、その平行板の間の間隔が変化し、それらの間で測定される静電容量も変化する。センサー130は、配列のさまざまな位置における歪みに対応する離散静電容量データ点を与えるように圧力測定領域上に配列される。これらの歪みは、応力、したがって、力を求めるために使用され、これにより、単位面積当たりの力に時間を掛けた単位(つまり、N/m2秒)を持つ圧力データの出力を計算する。
【0021】
この例示的な実施形態では、センサー130は、他のセンサーに関する複数のセンサーのうちのそれぞれのセンサーの位置が知られるように格子状に配列される。圧力センサー130同士の間の二次元配向および間隔を含む、このデータは、コンピュータ108上に格納されるか、またはセンサーのローカル上に格納される。この例示的な実施形態では、センサー130に対する配向および間隔データはコンピュータ108上に格納される。センサー130によって出力される結果のデータは、超広帯域送信機などの、無線送信機136を介してコンピュータ108に無線伝送される。コンピュータ108上に格納されているセンサー130に対する配向および間隔データを、センサー圧力データを受信するコンピュータと組み合わせて使用すると、コンピュータは、圧力を位置に、特に一方の圧力センサーの他方の圧力センサーに関する位置に結び付けるデータを生成するように動作可能である。
【0022】
力に位置を結び付けることによって、システム100は、どのような場所にどのような圧力を加えるかを正確に反映するデータを含む。それに加えて、コンピュータ108は、圧力センサー130によって生成された圧力データに時間も関連付ける内部クロックを備える。したがって、システム100は、どのくらいの圧力が加えられたか、また圧力が加えられた場所を知るだけでなく、加えられた圧力の持続時間を示す時間データも有する。ここでもまた、圧力センサー130によって生成された圧力データを時間に結び付けることによって、時間スケールを共通スケールとして使用するVMモジュール102によって生成された音データに圧力データを相関させることができる。その結果、システムは、足の裏のところに現れる圧力の時間の関数としての変化を、その同じ期間における振動データの変化とともに評価することができる。
【0023】
再び図4を参照すると、システム100は、1つまたは複数のAモード超音波トランスデューサを備える複数のサブモジュール140、142、144からなる運動様式モジュール(KM)106も具備する。サブモジュールは、超音波発生および測位サブモジュール140、超音波位置合わせサブモジュール142、および超音波動的移動サブモジュール144を備える。特に、サブモジュールは、音を発生し、注目している組織の構造、位置、および音響インピーダンスを表す、跳ね返ってくる音を検出するAモード超音波トランスデューサを備える。例示的な実施形態とともに使用する市販のトランスデューサは、限定することなく、Olympus液浸非焦点(immersion unfocused)3.5MHzトランスデューサを備える。当業者は、音のパルスを発生し、軟組織内の、異なる音響インピーダンスを有する組織と組織との間の界面のところで跳ね返る音を検出するように動作する、一般に超音波トランスデューサ、およびAモード超音波トランスデューサの動作を熟知している。跳ね返る音の大きさおよび音が超音波トランスデューサに跳ね返るのにかかる時間を利用して、超音波トランスデューサと異なる音響インピーダンスを有する材料間の界面との間の距離を決定する。
【0024】
この例示的な実施形態では、トランスデューサは、骨表面の位置を決定できるように骨と周辺組織との間の界面を検出するために利用される。超音波トランスデューサおよびAモード超音波トランスデューサの動作は、当業者によく知られているため、一般的に超音波トランスデューサ、および特にAモード超音波トランスデューサの動作の詳細な説明は、簡潔にすることのみを目的として省かれている。
【0025】
図7を参照すると、超音波発生および測位サブモジュール140は、少なくとも1つの測位デバイス170にも取り付けられているワンド152に取り付けられ固定されている1つまたは複数のAモード超音波トランスデューサ150を備える。この例示的な実施形態では、超音波発生および測位サブモジュール140は、超音波位置合わせサブモジュール142および超音波動的移動サブモジュール144から物理的に分離しており、これらはそれ自体が剛性のある膝装具190(図5を参照)に取り付けられている。この方法により、超音波発生および測位サブモジュール140は、剛性のある膝装具190に関して再配置可能であり、Aモード超音波トランスデューサ150のうちの1つまたは複数を膝関節の近くの患者の表皮に接触させるように適合されている。しかし、膝装具190は、いくつかのコンポーネントの間のリンケージと別に剛性を有している必要はないことに留意されたい。さらに、装具を身につける前に超音波ワンド152で膝をスキャンすべきである。
【0026】
超音波発生および測位サブモジュール140の機能の1つは、ワンド152が膝関節の近くの患者の表皮上へ移動されるときにトランスデューサ150によって検出される超音波を表す電気信号を発生することである。超音波トランスデューサ150は、音が骨に到達し跳ね返る結果としてトランスデューサに跳ね返る超音波の大きさに基づく電気信号パルスを受信する。前述のように、電気信号の大きさおよび超音波トランスデューサ150が超音波を発生してから超音波トランスデューサが跳ね返った超音波を検出するまでの遅延時間は、トランスデューサの下の骨の深さを示す。しかし、この深さデータだけだと、三次元座標系を与える測位デバイス170がなければ特に有用であるわけではない。
【0027】
超音波発生および測位サブモジュール140の測位デバイス170は、ワンド152に固定して取り付けられ、多数のデバイスをいくつでも備えることができる。例えば、ワンド152は、光のパルスを発生するか、または検出するか、または反射するように動作可能である光学デバイス170を備えることができ、対応する検出器または発光装置と相互作用して固定位置または基準位置に関してワンドの三次元位置を識別する。このようなデバイスの1つは、位置が知られている発光体から放射される光のパルスを検出するように動作可能である光検出器を備える。光検出器は、光を検出し、代表的信号を制御回路に送信するが、これは時間と位置に応じて光パルスが放射された時点も認識する。この点で、制御回路は、三次元座標系内のワンドの位置を決定するように動作可能である。Aモード超音波トランスデューサ150および光学デバイス170は、ワンド152に固定して取り付けられるため、光学デバイス170の位置に関する超音波トランスデューサ150の位置は知られている。同様に、超音波トランスデューサ150は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、光学デバイス170に関するトランスデューサ150の位置が知られているので、光学デバイス170に関する骨の位置は、容易に計算で求められる。言い換えると、ワンド152の位置が変更されると、光学デバイス170は、光学デバイスの相対的位置が三次元座標系内で変化してしまっていることを反映するデータを生成するということである。光学デバイス170の三次元位置のこのような変化は、三次元における骨の位置に容易に相関させることができるが、それは、超音波トランスデューサに関する光学デバイスの位置と同様に、超音波トランスデューサに関する骨の位置が知られているからである。したがって、光学デバイスの三次元位置データは、骨の表面上の複数の明確に区別できる点を表す複数の三次元点を構成するために使用される複合データを生成するために超音波トランスデューサから受信した信号に応答して生成される距離データと組み合わせて超音波トランスデューサ150に対する固定位置データ(光学デバイスに関する超音波トランスデューサの位置に対する距離データ)と組み合わせて使用される。以下でさらに詳しく説明するように、これらの三次元点を既定の骨モデルとともに利用して、患者の骨の仮想三次元表現を生成する。
【0028】
あるいは、測位デバイス170は、1つまたは複数の慣性計測ユニット(IMU)を備えることができる。IMUは、当業者に知られており、加速度計、ジャイロスコープ、および磁力計を備え、これらは連携して、三次元座標系内のIMUの位置を決定する。Aモード超音波トランスデューサ150およびIMU 170は、ワンド152に固定して取り付けられるため、IMU 170の位置に関する超音波トランスデューサ150の位置は知られている。同様に、超音波トランスデューサ150は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、IMU 170に関するトランスデューサ150の位置が知られているので、IMU 170に関する骨の位置は、容易に計算で求められる。言い換えると、ワンド152の位置が変更されると、IMU 170は、IMUの相対的位置が三次元座標系内で変化してしまっていることを示すデータを生成するということである。IMU 170の三次元位置のこのような変化は、三次元における骨の位置に容易に相関させることができるが、それは、超音波トランスデューサに関するIMUの位置と同様に、超音波トランスデューサに関する骨の位置が知られているからである。したがって、IMUの三次元位置データは、骨の表面上の複数の明確に区別できる点を表す複数の三次元点を構成するために使用される複合データを生成するために超音波トランスデューサから受信した信号に応答して生成される距離データと組み合わせて超音波トランスデューサ150に対する固定位置データ(IMUに関する超音波トランスデューサの位置に対する距離データ)と組み合わせて使用される。以下でさらに詳しく説明するように、これらの三次元点を既定の骨モデルとともに利用して、患者の骨の仮想三次元表現を生成する。
【0029】
図8〜10を参照すると、測位デバイス170は、代替えとして、1つまたは複数の超広帯域(UWB)送信機を備えることができることがわかる。UWB送信機は、当業者に知られているが、ミリメートル精度の三次元測位用のUWB送信機および受信機は新規のものである。1つまたは複数のUWB送信機170は、ワンド152に固定して取り付けられ、連続するUWB信号を3つ以上のUWB受信機(三次元座標内に知られている位置を有する)に伝送するように動作可能である。UWB測位システムは、UWB受信機172によって追跡される能動的タグまたは送信機170からなる。UWB送信機170のシステムアーキテクチャは図8に示されており、低ノイズシステムクロック(クロッククリスタル)がベースバンドUWBパルス発生器(例えば、ステップリカバリダイオード(SRD)パルス発生器)をトリガーする。ベースバンドパルスは、ダブルバランスド広帯域ミキサーを介して局部発振器(LO)によってアップコンバートされる。アップコンバートされた信号は、増幅され、フィルター処理される。最後に、この信号は全方向性アンテナを介して伝送される。UWB信号は、著しいマルチパスおよびパスロス効果が顕著な信号劣化を引き起こす室内チャネルを通過する。
【0030】
図9を参照すると、UWB受信機172のアーキテクチャが示されており、そこでは、信号は、指向性UWBアンテナを介して受信され、そしてフィルター処理され、増幅され、ダウンコンバートされ、ローパスフィルター処理される。次に、第2の低ノイズシステムクロックによってトリガーされるサブサンプリングミキサーを使用して、パルスの時間を1000〜100,000倍に引き延ばす。これにより、UWBパルスの帯域幅が効果的に低減され、従来のアナログ/デジタルコンバータ(ADC)によるサンプリングが可能になる。
【0031】
それぞれのUWB送信機170は、UWB受信機172と同様に、コンピュータ108と通信する。したがって、コンピュータ108は、UWB送信機がUWB信号を伝送する毎回のタイミング、さらにはUWB送信機がUWB信号を伝送するタイミングを認識する。同様に、コンピュータ108は、三次元座標系内のUWB受信機のそれぞれの位置、さらにはUWB受信機のそれぞれがUWB送信機からUWB信号を受信するタイミングを認識する。それぞれのUWB受信機の位置、それぞれのUWB受信機がUWB送信機からUWB信号を受信するタイミングおよびUWB送信機がUWB信号を送信したタイミングを知ることによって、コンピュータ108は、カスタムデジタル信号処理アルゴリズムを使用してサブサンプリング分解能の正確さで受信したUWBパルスの立ち上がりエッジを特定する。最終的な到来時間差(TDOA)の計算(図10)、さらにはデータの追加のフィルター処理および平均処理も、コンピュータ108によって実行される。
【0032】
UWB送信機170の三次元位置を突き止めるためには、少なくとも4つの基地局(受信機)172が必要である。受信機172の幾何学的形状は、幾何学的位置精度低下率(PDOP)と呼ばれるものを通じて達成可能な三次元精度に対し重大な影響を有する。新規性のあるフィルター処理技術、高サンプルレート、マルチパス干渉に対するロバスト性、正確なデジタル測距アルゴリズム、低位相ノイズ局部発振器、および高信頼性マイクロ波ハードウェアを組み合わせたものが、メートル範囲の精度(例えば、5〜7mmの三次元リアルタイム)を達成するために必要である。UWB測位システムとGPSシステムの類似点が図11に示されている。最後に、図12は、送信機が指定された視体積内で自由に移動している間にUWB送信機170の三次元位置を1000サンプルにわたってリアルタイムで検出するためのx,y,z座標における実際の実験誤差を示している。
【0033】
Aモード超音波トランスデューサ150およびUWB送信機170は、ワンド152に固定して取り付けられるため、UWB送信機170の位置に関する超音波トランスデューサ150の位置は知られている。同様に、超音波トランスデューサ150は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、UWB送信機170に関するトランスデューサ150の位置が知られているので、UWB送信機170に関する骨の位置は、容易に計算で求められる。言い換えると、ワンド152の位置が変更されると、UWB送信機170は、UWB信号を送信し、これらのUWB信号は、それに対応してUWB受信機によって受信される。この情報は、UWB送信機の相対的位置が三次元座標系内で変化したかどうか、さらにはそのような変化の程度を識別するために、コンピュータ108によって処理される。UWB送信機170の三次元位置のこのような変化は、三次元における骨の位置に容易に相関させることができるが、それは、超音波トランスデューサに関するUWB送信機の位置と同様に、超音波トランスデューサに関する骨の位置が知られているからである。したがって、UWB送信機の三次元位置データは、骨の表面上の複数の明確に区別できる点を表す複数の三次元点を構成するために使用される複合データを生成するために超音波トランスデューサから受信した信号に応答して生成される距離データと組み合わせて超音波トランスデューサ150に対する固定位置データ(UWB送信機に関する超音波トランスデューサの位置に対する距離データ)と組み合わせて使用される。以下でさらに詳しく説明するように、これらの三次元点を既定の骨モデルとともに利用して、患者の骨の仮想三次元表現を生成する。
【0034】
超音波発生および測位サブモジュール140とともに使用される測位デバイス170とは無関係に、膝関節の3つの骨(大腿骨遠位部、脛骨近位部、および膝蓋骨)を個別に、かつ連続的にマッピングする(患者の骨の表面上の点に対応する三次元点を作成する)ために膝関節が曲げられている間に膝関節の近くの患者の皮膚上でワンド152の位置を変更する。ワンド152の位置が変更されるときに、トランスデューサ150からのデータが、ワンド152に取り付けられている無線送信機171に伝送される。無線送信機がトランスデューサ150からデータを受信すると、送信機は、無線リンクを介してデータをコンピュータ108に伝送する。
【0035】
ワンド152搭載のデバイスに給電するために、内部電源(図示せず)が備えられている。例示的な形態では、内部電源は、1つまたは複数の充電式バッテリを備える。
【0036】
図13を参照すると、患者データを取る前に、コンピュータ108のソフトウェアが、機器固有のデバイスとモデル化されている特定の骨にシステムを適合させるための一連の入力を要求する。例えば、ユーザーは、ユーザーインターフェイス上のドロップダウンメニュー上で、限定はしないが超音波を含んでいてもよい、利用するデジタイザの種類を正確に入力することができる。デジタイザの種類を選択した後、ユーザーは、デジタイザに接続するか、またはデジタイザから切断するボタンを作動させることができる。超音波トランスデューサのデータの取得前、取得中、または取得後に、ソフトウェアはさまざまなドロップダウンメニューを用意し、これによりそのソフトウェアで患者の骨とおおよそ同じ形状の骨モデルをロードすることができる。
【0037】
コンピュータ108が超音波トランスデューサ150のデータを受信した後、コンピュータ108は、Aモード超音波トランスデューサデータを解釈し、注目している骨の表面上の点に対応する離散三次元点を有する三次元マップを構築するように動作可能であるソフトウェアを備える。その結果、離散点が骨の表面凹凸形状をよく表すように骨(大腿骨遠位部、膝蓋骨、脛骨近位部)上でワンド152(図7を参照)の位置が約30秒間変更される。その結果、さらに長い時間にわたって注目する骨の上でワンド152の位置を変えると、さらに多くの三次元点がコンピュータ108によって生成され、これにより、結果として、図14に示されているような、より正確な患者固有の骨モデルを確実に構成できるようになる。関節上でワンド152の位置を変更している間の膝関節の運動の部分範囲は、運動位置の他の範囲において他の骨によって隠されてしまっている可能性のある新しい三次元点に対する注目する骨の新しい部分をワンドで見る助けとなりうる。
【0038】
骨のそれぞれがマッピングされた後、コンピュータ108は、既定の骨モデルを、最終的な患者固有の仮想骨モデルの構築の出発点として使用する。既定の骨モデルは、モーフィングアルゴリズムが非常に正確なモデルに対する骨の広範なデータベースポピュレーション(wide database population)の統計的な知識を利用するので、一般化された平均となりうる。しかし、計算の高速化のため、出発点として、例えば患者の性別、人種、身長、年齢に基づいて、より一般化された既定の骨モデルを選択することができる。例えば、患者が53歳、白人男性、身長6フィートである、大腿骨の患者固有のモデルを生成する場合、既定の大腿骨モデルは、年齢50〜60歳、身長5'10"から6'2"の白人男性の分類に基づいて選択される。このようにして、既定の骨モデルを適切に選択することで、患者の実際の骨(骨点の三次元マップによって表される)と既定の骨モデルとの間の反復が減るため、正確な患者固有の仮想骨モデルがより迅速に構成される。適切な既定の骨モデルが選択された後、コンピュータは、実際の骨点の三次元マップを既定の骨モデル上に重ね合わせ、その後、骨モデルがワンド操作中に検出された実際の骨点を示すように変形プロセスを実行する。この変形プロセスでは、広いポピュレーションの基準骨に基づく骨形状に関する統計的知識も利用する。変形プロセスが実行された後、その結果得られる骨モデルは、患者の実際の骨の患者固有の仮想三次元モデルである。前記のプロセスは、膝関節の3つの骨のそれぞれについて実行され、これにより、患者の脛骨近位部、大腿骨遠位部、および膝蓋骨の患者固有の仮想三次元モデルが作成される。
【0039】
図4、5、および15を再び参照すると、超音波位置合わせサブモジュール142および超音波動的移動サブモジュール144が、膝装具190に装着されていることがわかる。これらのサブモジュール142、144から出力されるデータを利用して、一定範囲の運動に曝される患者の自骨の動的三次元モデルを生成する。言い換えると、コンピュータ108に付随する表示端末に、患者の自骨の同じ移動とマッチする三次元空間内で移動する患者の仮想自骨モデルを表示することができるということである。後で説明するように、一定範囲の運動に曝されるこの動的三次元モデルは、損傷が存在するかどうか、またその損傷の程度を判定するために分析されるニューラルネットワークの一部である。
【0040】
例示的な形態では、超音波位置合わせサブモジュール142は、膝装具190に固定して取り付けられている複数のAモード超音波トランスデューサ158を備える。特に、膝関節の背景状況では、脛骨および大腿骨の追跡のために膝装具190に固定して取り付けられている少なくとも2つのAモード超音波トランスデューサ158(つまり、トランスデューサグループ)がある。言い換えると、膝装具190は、膝関節の2つの一次骨を追跡するために少なくとも6つの超音波トランスデューサを備えるということである。それぞれのトランスデューサグループ158は、トランスデューサ158、測位デバイス200、および剛性がある、または剛性のない膝装具190の接続部を連結する剛性のある機械的接続部を備える。それぞれのトランスデューサグループ158は、トランスデューサ158、測位デバイス200、および膝装具190を連結する剛性のある機械的接続部を備える。このようにして、互いに関するトランスデューサの相対的位置は変化しない。例示的な形態では、第1のトランスデューサグループ158Aは、大腿骨遠位部を少なくとも部分的に囲み、その一方で第2のトランスデューサグループ158Bは、脛骨近位部を少なくとも部分的に囲み、その一方でオプションの第3のトランスデューサグループ(図示せず)は、膝蓋骨運動様式が追跡される場合に膝蓋骨の上に載る。超音波位置合わせサブモジュール142は、骨が一定範囲の運動で移動するときにそれぞれの骨に対して複数の静的基準点を与えるようにしかるべく動作可能である。
【0041】
図4を再び参照すると、超音波動的移動サブモジュール144は、超音波位置合わせサブモジュール142のそれぞれのトランスデューサグループ158A、158Bの三次元位置に関する情報をコンピュータ108に供給するように動作可能な複数の測位デバイス200を備えることがわかる。例示的な形態では、測位デバイス200は、位置が知られている発光体から放射される光のパルスを検出するように動作可能である光検出器を備えることができる。光検出器200は、光を検出して、代表的信号を膝装具190に関連する制御回路に送信する。膝装具190は、この情報をコンピュータ108(図4を参照)に伝送するが、これは時間と位置に応じて光パルスが放射された時点も認識する。このようにして、コンピュータは、三次元座標系内のトランスデューサ158の位置を決定することができる。Aモード超音波トランスデューサ158および光学デバイス200は、膝装具190に固定して取り付けられるため、光学デバイス200の位置に関する超音波トランスデューサ158の位置は知られている。同様に、超音波トランスデューサ158は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、光学デバイス200に関するトランスデューサ158の位置が知られているので、光学デバイス200に関する骨の位置は、容易に計算で求められる。言い換えると、膝の位置が変更され、それに応じて膝装具190の位置も変更されると、光学デバイス200は、光学デバイスの相対的位置が三次元座標系内で変化してしまっていることを反映するデータを生成するということである。光学デバイス200の三次元位置のこのような変化は、三次元における注目する骨(大腿骨、膝蓋骨、または脛骨)の位置に容易に相関させることができるが、それは、超音波トランスデューサグループ158A、158Bに関する光学デバイスの位置と同様に、超音波トランスデューサグループに関する骨の位置が知られているからである。したがって、光学デバイスは、注目している骨の動的移動マップを作成するために使用される複合データを生成するために超音波トランスデューサから受信した信号に応答して生成される距離データと組み合わせて超音波トランスデューサ158に対する固定位置データ(光学デバイスに関する超音波トランスデューサの位置に対する距離データ)と組み合わせて使用されるデータを生成する。例えば、トランスデューサ158は、測位デバイス200に関して起動しないため、空間内でトランスデューサ158が移動すれば、測位デバイス200が三次元空間内で移動したことになり、それぞれのトランスデューサ158によって供給される距離データを追跡し続けることによって、注目している骨の移動はそれに応じて追跡できる。
【0042】
あるいは、測位デバイス200は、1つまたは複数の慣性計測ユニット(IMU)を備えることができる。IMUは、当業者に知られており、加速度計、ジャイロスコープ、および磁力計を組み合わせたものを備え、これらは連携して、三次元座標系内のIMUの位置を決定する。IMUは、当業者に知られており、加速度計、ジャイロスコープ、および磁力計を備え、これらは連携して、三次元座標系内のIMUの位置を決定する。Aモード超音波トランスデューサ158は、IMU 200に固定して取り付けられるため、IMU 200の位置に関する超音波トランスデューサ158の位置は知られている。同様に、超音波トランスデューサ158は、トランスデューサから骨の表面までの直線距離を表す信号を発生しており、IMU 200に関するトランスデューサ158の位置が知られているので、IMU 200に関する骨の位置は、容易に計算で求められる。言い換えると、膝装具190の位置が変更されると、IMU 200は、IMUの相対的位置が三次元座標系内で変化してしまっていることを示すデータを生成するということである。IMU 200の三次元位置のこのような変化は、三次元における骨の位置に容易に相関させることができるが、それは、超音波トランスデューサに関するIMUの位置と同様に、超音波トランスデューサに関する骨の位置が知られているからである。例えば、トランスデューサ158は、膝装具190に関して起動しないため、空間内でトランスデューサ158が移動すれば、膝装具が三次元空間内で移動したことになり、それぞれのトランスデューサ158によって供給される距離データを追跡し続けることによって、注目している骨の移動はそれに応じて追跡できる。このようなIMU 200を使用することで、骨の移動の相対的追跡が可能になり、知られている初期位置(立っているなど)を持つ複数のIMUユニット間の静的位置合わせを必要とする。したがって、IMUを使用することで、対応する超音波トランスデューサ配列データ158とIMU 200データとを介して異なる骨の間の相対的運動を測定することができる。IMU 200は、単独で、または段落0041(原文0059)および0043(原文0061)で説明されているような他の測位デバイス200とともに使用することができる。IMU 200は、段落0042(原文0060)および0044(原文0062)で説明されているような他の測位デバイス200とともに使用することもできる。このシナリオでは、IMU 200の位置は、最小誤差に対する基準として他の測位システム200からの絶対位置を用いて特定の時間間隔で更新され、したがって2つの測位システム200は、1つの測位システム200として一緒に動作する。
【0043】
図8〜10を参照すると、測位デバイス200は、代替えとして、1つまたは複数の超広帯域(UWB)送信機を備えることができることがわかる。UWB送信機は、当業者に知られているが、三次元測位用のUWB送信機および受信機は新規のものである。1つまたは複数のUWB送信機200は、膝装具190に固定して取り付けられ、連続するUWB信号を3つ以上のUWB受信機(三次元座標内に知られている位置を有する)に伝送するように動作可能である。それぞれのUWB送信機200は、複数のUWB受信機202と同様に、コンピュータ108と通信する。したがって、コンピュータ108は、UWB送信機がUWB信号を伝送する毎回のタイミング、さらにはUWB送信機がUWB信号を伝送するタイミングを認識する。同様に、コンピュータ108は、三次元座標系内のUWB受信機のそれぞれの位置、さらにはUWB受信機のそれぞれがUWB送信機からUWB信号を受信するタイミングを認識する。それぞれのUWB受信機の位置、それぞれのUWB受信機がUWB送信機からUWB信号を受信するタイミングおよびUWB送信機がUWB信号を送信したタイミングを知ることによって、コンピュータ108は、カスタムデジタル信号処理アルゴリズムを使用してサブサンプリング分解能の正確さで受信したUWBパルスの立ち上がりエッジを特定する。最終的な到来時間差(TDOA)の計算(図10を参照)、さらにはデータの追加のフィルター処理および平均処理も、コンピュータ108によって実行される。ここでもまた、トランスデューサ158は膝装具190に関して移動しないため、トランスデューサ158が空間内を移動すると、膝装具は三次元空間内で移動したことになる。それでも、膝装具の移動は、コンピュータ108をUWB送信機およびUWB受信機と組み合わせて使用することで追跡される。同様に、UWB送信機および超音波トランスデューサ158の配向が固定されているため、それに応じてUWB送信機200の三次元座標系内の位置の変化を使用して注目している骨の移動を追跡することができる。
【0044】
サブモジュール142、144から情報をコンピュータ108に伝達するために、膝装具190は、超音波トランスデューサ158と通信する超広帯域(UWB)送信機210を備え、コンピュータ108へのデータの無線通信が円滑に行われる。UWB送信機が測位デバイス200として利用される場合には、UWB送信機200が無線リンク上で超音波センサーデータを直接コンピュータ108に送信するように機能することが可能であるため専用UWB送信機は不要であることに留意されたい。
【0045】
無線送信機およびフィールドプログラマブルゲートアレイ設計の使用により、計算をリアルタイムで実行し、最終的な処理および表示をコンピュータ108上で実行できることは理解されるであろう。無線送信機、およびフィールドプログラマブルゲートアレイ設計を組み込んだコンピュータ108の使用により、計算をリアルタイムで実行できることは理解されるであろう。例えば、ワンド152が、膝関節を覆う表皮を横断するために利用されると、超音波トランスデューサのデータはコンピュータに即座に伝送され、三次元座標系内の骨の位置をリアルタイムで計算し、同様に、表示端末上にここでもリアルタイムで三次元点を表示する。同様に、膝装具190が使用される場合、超音波トランスデューサのデータおよび測位デバイスのデータがコンピュータに伝送され、すでに生成されている静的な三次元の患者固有の骨モデルを構成するためにリアルタイムで評価される。ここでもまた、コンピュータが表示端末を備えている場合、三次元の患者固有の骨モデルに与えられる動的運動が患者の骨の実際の運動をリアルタイムで追跡する。
【0046】
上述のように、例示的な膝装具190は、骨の表面の経皮的検出のための複数のAモード超音波トランスデューサ158および超音波トランスデューサ158の運動を追跡し、延いては膝関節の骨の運動を追跡するための測位デバイス200を備える。膝装具190は、患者の実際の膝関節の移動を時間同期的になぞる患者固有の三次元の骨モデルの移動を示す計算および視覚化をリアルタイムで動作可能なコンピュータ108に無線で接続される。例示的な膝装具190は、複数の測位デバイス200が取り付けられている剛体の、または半剛体の本体部を備える。さらなる代替的測位デバイス200は、複数の加速度計、この場合には4つの加速度計を備える。加速度計の基準座標フレームと世界座標フレームとの間の同次変換
(1) v(n+1)=v(n)+a(n)dt
(2) s(n+1)=s(n)+v(n)dt-0.5a(n)dt2
が4つの加速度計の位置を使用して計算され、
式中、s(n+1)は現在状態の位置であり、s(n)は前の状態からの位置であり、v(n+1)は現在状態の瞬間速度であり、v(n)は前の状態からの速度であり、a(n)は加速度計からの加速度であり、dtはサンプリング時間間隔である。前の式は、三次元ユークリッド空間内の1つの点の動的運動および測位を記述したものである。三次元物体の配向および運動を記述するためには、さらに情報が必要である。
【0047】
トランスデューサの配向は、重力ベースの加速度計(例えば、ADXL-330、アナログデバイス)を使用し、直交軸のそれぞれの対から傾斜情報を抽出することによって記述することができる。x、y、z上の加速度出力は、重力が式Ai=(Voutx-Voft)/Sに等しいことによるものであり、Aiはx、y、またはz軸における加速度であり、Voutxはx、y、またはz軸からの電圧出力であり、Voffはオフセット電圧であり、Sは加速度計の感度である。ヨー、ピッチ、およびロールは、式
【0048】
【数1】
【0049】
に示されているように計算することができ、ただし、式中、ρは地面に関してx軸であるピッチであり、φは地面に関してy軸であるロールであり、θは地面に関してz軸であるロールである。加速度計は重力ベースであるため、センサーの較正が済んだ後は、配向に、前の状態からの情報は必要とされない。静的較正は、1g(海水位の地表面における重力による公称加速度、正確には9.80665m/s2(約32.174ft/s2)と定義される)に等しい3本の軸からの加速度の結果として得られる総和を必要とする。あるいは、注目している体組織のヨー、ピッチ、およびロールの情報を与える配向センサーも、市販されており(例えば、Invensenseから販売されているIDG-300)利用できる。次いで、トランスデューサの配向が、直接的なコサイン行列変換
【0050】
【数2】
【0051】
を使用することによって解決することができ、ただし、式中、Cはコサインを表し、Sはサインを表す。
【0052】
振動および運動様式データの解釈は、データ収集、学習データ集合、および信号分析、さらには機械システムの特性に関する深い理解を必要とする厄介な作業である。インプラントコンポーネント、骨、および/または軟組織の相互作用を通じて発生する振動は、動的応答を引き起こす駆動力によって誘発される強制振動の結果である。駆動力は、膝靱帯の不安定さ、骨の特性、および状態に従う影響に関連するものとしてよい。正常な、無傷の膝は、明確に区別される振動特性と一体となった、明確に区別される運動パターンを有する。劣化または損傷が膝関節に生じた後、運動学的パターンと振動特性の両方が変化する。この変化は、損傷もしくは変性の種類毎に、運動学的判定と振動判定の両方を使用して捕捉できる明確に区別できる変化をもたらす。
【0053】
図16〜19を参照すると、例示的な診断システム100は、靱帯、他の軟組織、および骨損傷を診断するように動作可能なインテリジェント型診断モジュール110を備える。以前の研究成果により、通常の前十字靱帯欠損(ACLD)膝被験者は、膝を徐々に屈曲するときに大腿骨後部平行移動の類似のパターンを示すが、被験者は、30°の膝屈曲の異なる軸回転パターンを示すことがわかっている。したがって、診断モジュール110は、(1)データ収集および分析を伴う第1段階、(2)データをニューラルネットワークに送ることによる損傷の検出、および(3)検出された損傷の重篤度を分類または決定するニューラルネットワークの別の段階の3つの段階を含む。
【0054】
この第1の段階は、患者が一定範囲の運動で注目している関節を移動している間に患者から取った複数の生理学的測定結果を使用して運動学的特徴ベクトルを取得することを含む。例示的な測定としては、限定はしないが、内側顆前後運動(MAP)および外側顆前後運動(LAP)が挙げられるが、後者は脛骨の幾何学的中心に関する内側および外側顆点の前後A/P距離に関係する。他の例示的な測定としては、LSI(外側大腿顆と外側脛骨プラトーとの間の距離)およびMSI(内側大腿顆と内側脛骨プラトーとの間の距離)が挙げられ、これらは外側および内側顆点から脛骨平面までのS/I(優/劣)距離である。さらなる例示的な測定としては、顆分離距離が挙げられ、これは、2つの最小顆点から脛骨までの間の水平(x-y平面)距離である。特徴ベクトルは、3つのオイラー角および振動信号に追加する3つの平行移動コンポーネントによって画成される脛骨および力データに関する大腿骨位置も含む。
【0055】
図16を参照すると、運動学的および振動分析から抽出された運動特徴ベクトルが、損傷した靱帯を決定するために多層逆伝搬ニューラルネットワークに出力されることがわかる。
【0056】
図17を参照すると、例示的なニューラルネットワーク分類器は、複数の二進出力を有することがわかる。それぞれの出力は、1または0のいずれかであり、1はyesに対応し、0はnoに対応する。この例示的なニューラルネットワーク分類器では、それぞれの出力は、特定の損傷の種類へのニューラルネットワークの応答を表し、例えば、1つの出力は、前十字靱帯欠損(ACLD)の応答を表し、その状態は、ACL損傷が検出された場合に1となり、そうでない場合に0となる。明らかに、ニューラルネットワークは、注目している関節の基礎モデルに応じて、著しく高度であるか、またはそれほど高度でない。
【0057】
図18を参照すると、例示的なニューラルネットワークの構築は、正常な膝関節および損傷した膝関節に対応する運動学的および振動データの学習集合を使用して教師付き分類器を形成する段階を含むことがわかる。NNは、ベクトルの集合を用いて学習される。それぞれのベクトルは、1つの関節から収集されたデータ(運動様式、振動、および力)からなる。蛍光透視データを使用して、運動様式を計算することができる。NNの学習が済んだ後、これを使用して、新しい症例を分類し、それらの運動様式、振動、および力のデータを使用して損傷の種類をカテゴリ化することができる。当業者であれば、ニューラルネットワークが対応することが望まれている種類および分類は、必ず、それらのまさしく種類および分類に基づいてニューラルネットワークを学習する段階を含むことを容易に理解するであろう。哺乳類の膝関節の損傷の例示的な種類および分類は、限定はしないが、変形性関節症、軟組織損傷、および成長異常を含む。同様に、ニューラルネットワークは、正常な膝機能の指標に関して学習する必要もある。このようにして、ニューラルネットワークの学習後、これは、正常な膝状態と異常な膝状態に関する診断データを区別し、出力する機能を有する。
【0058】
図19を参照すると、人の膝関節の振動、運動様式、力、および他の特徴を編集して、学習済みニューラルネットワークに供給する。次いで、学習済みニューラルネットワークは、患者の膝関節の状態を診断して、種類および重篤度で変性を識別する。
【0059】
例示的な実施形態は、臨床現場の外でデータを収集するように適合されうる。例えば、例示的な一実施形態は、通常活動を続けながら長期間にわたって患者が着用することができる。例えば、患者は、疼痛または症状を誘発する、オフィスでは再現しえない活動(例えば、ウェイトリフティング、ラケットボールなど)において振動センサーおよび/または運動様式追跡装具を着用することができる。いくつかの実施形態では、患者が活動の直前にデバイスをオンにし、および/または患者がそれの発生の際の事象をマークすることができる。これにより、マークされた時間の数秒前にデータを分析し、どのような異常な音または関節運動様式が生じているかを確認することができる。データは、ポータブルハードドライブ(または他のポータブルストレージデバイス)に格納しておき、その後、分析のため例示的なシステムにダウンロードすることができる。データは、無線でコンピュータに伝送し、そのコンピュータに格納することができる。また、現場データが欲しい場合に小型メモリドライブに格納することもできる。疼痛の発生がランダムであった場合、例示的なデバイスを使うことで、データの収集を連続的に行うことができる。いくつかの実施形態では、患者側で事象をマークすることができる。連続監視を行うことができるデバイスは、大容量の記憶域を必要とする場合がある。
【0060】
電磁気的追跡を測位デバイス170、200の代替手段の1つとして使用することが可能であることにも留意されたい。
【0061】
コンピュータ108およびニューラルネットワーク110に対するデータ入力としてEMG電極も使用することができる。このようにして、1つまたは複数のEMG電極を膝関節に隣接する筋肉の付近の皮膚の表面に装着し、筋肉に伝えられる電気信号を監視し、筋肉の損傷または疾患の関連データを供給する。
【0062】
本明細書では膝関節に関して例示的な実施形態を説明したが、当業者であれば上述の実施形態が哺乳類の他の関節にも容易に適合できることを直ちに理解すると思われる。例えば、実施形態は、臀部、足首、爪先、背骨、肩、肘、手首、指、および顎関節で使用するように適合されうる。
【0063】
上述の説明および発明の要約に続いて、本明細書で説明されている方法および装置は、本発明の例示的な実施形態を構成するが、本明細書に含まれる発明は、この正確な実施形態に限定されることはないこと、また請求項に定められているような本発明の範囲から逸脱することなくそのような実施形態に変更を加えられることも、当業者には明らかなことであろう。それに加えて、本発明は請求項によって定められると理解され、本明細書に記載されている例示的な実施形態を記述する制限または要素が、そのような制限または要素が明示的に述べられていない限り請求要素の解釈に組み込まれることは意図されていない。同様に、本発明は請求項によって定められ、また本発明の固有のおよび/または予見されない利点が本明細書で明示的に説明されていない可能性があるとしても存在しうるため、請求項の範囲内に収まるように本明細書で開示されている発明の識別されている利点もしくは目的のどれか、もしくはすべてを満たす必要はないことは理解されるであろう。
【符号の説明】
【0064】
100 第1の例示的な診断システム
102 振動関節造影モジュール(VM)
104 運動様式モジュール
104 接触力モジュール(CFM)
106 運動様式モジュール(KM)
108 コンピュータ
110 ニューラルネットワーク
112 画像表示ディスプレイ
102 振動関節造影モジュール(VM)
120 加速度計
120A 加速度計
120B 第2の加速度計
120C 第3の加速度計
122 信号調整回路
124 無線送信機
130 圧力センサー
132 中敷き
134 靴
140 超音波発生および測位サブモジュール
142 超音波位置合わせサブモジュール
144 超音波動的移動サブモジュール
150 Aモード超音波トランスデューサ
152 超音波ワンド
158 Aモード超音波トランスデューサ
158A,158B トランスデューサグループ
170 測位デバイス
170 送信機
171 無線送信機
172 UWB受信機
190 膝装具
200 測位デバイス
202 UWB受信機
210 超広帯域(UWB)送信機
【特許請求の範囲】
【請求項1】
患者固有の骨モデルを作成する方法であって、
超音波を利用して、患者の骨の表面上の点を表す三次元点群を捕捉する段階と、
前記三次元点群を組み込むように適合可能な三次元骨モデルを操作し、仮想的な三次元の患者固有の骨を形成する段階と
を有することを特徴とする方法。
【請求項2】
患者の骨の運動を追跡し、動的運動を含む前記患者の骨の三次元モデルを表示する方法であって、
三次元の患者固有の骨モデルを作成する段階と、
前記実際の患者の骨と前記骨モデルとの位置合わせを行う段階と、
所定範囲の運動を行う前記患者の実際の骨の運動を追跡する段階と、
前記三次元の患者固有の骨モデルを前記患者の実際の骨の運動と組み合わせて動的画像を生成する段階と、
前記動的画像を画像処理装置上に表示する段階と
を有することを特徴とする方法。
【請求項3】
骨の三次元モデルを生成し、前記骨から運動および振動データを収集するためにデータを収集するためのデバイスであって、
半柔軟性ハウジングと、
前記ハウジング内に格納された複数の超音波トランスデューサと、
前記ハウジング内に格納された複数の加速度ベースローカライザと、
前記ハウジング内に格納された無線伝送システムと
を具備し、
前記無線伝送システムは、前記トランスデューサおよび前記ローカライザからCPUに振動、位置、および画像処理に関するデータを伝送することを特徴とするデバイス。
【請求項4】
骨の三次元モデルを生成し、前記骨から運動および振動データを収集するためにデータを収集するためのデバイス。
【請求項5】
患者固有の骨の運動をデータベースと比較する方法であって、
前記患者固有の骨の三次元モデルを作成する段階と、
前記患者の骨と前記骨モデルとの位置合わせを行う段階と、
所定範囲の運動を行う前記患者固有の骨の運動を追跡する段階と、
所定範囲の運動を行う複数の実際の骨の運動の経験的数学的記述を含むデータベースを選択する段階と、
前記患者固有の骨の運動を前記データベースと比較する段階と
を有することを特徴とする方法。
【請求項6】
診断を目的として患者の関節内の骨および軟組織の相対的運動時の振動データを使用する方法であって、
少なくとも3つの慣性ベースセンサーを患者の関節の付近に取り付ける段階と、
前記患者の関節を所定範囲の運動を介して動かす段階と、
前記患者の関節が所定範囲の運動を介して動かしている間に振動データを収集する段階と、
診断を目的として患者の関節内の骨の相対的運動に対する前記振動データを経験的振動データのデータベースと比較する段階と
を有することを特徴とする方法。
【請求項7】
患者固有の骨モデルを作成する方法であって、
a.複数の骨モデルのうちの1つを選択する段階と、
b.患者の骨を測定して患者固有の測定値を得る段階と、
c.前記患者固有の測定値を前記骨モデルに課す段階と
を有することを特徴とする方法。
【請求項8】
前記複数の骨モデルのうちの1つを選択する前記段階が、前記患者の少なくとも1つの人口学的特性を考慮する段階を含むことを特徴とする請求項7に記載の方法。
【請求項9】
前記患者の骨を測定する前記段階が、超音波画像処理を実行する段階を含むことを特徴とする請求項7に記載の方法。
【請求項10】
前記超音波画像処理が、Aモード超音波画像処理を含むことを特徴とする請求項9に記載の方法。
【請求項11】
前記骨モデルに対し前記患者固有の測定値を課す前記段階が、前記骨モデルの骨を前記画像処理データに適合させる段階を含むことを特徴とする請求項7に記載の方法。
【請求項12】
関節疾患を診断する方法であって、
関節の三次元モデルを作成する段階と、
センサーを前記関節の近くに取り付ける段階と、
前記関節が関節動作している間に前記センサーを使用してデータを取得する段階と、
ニューラルネットワークを使用して前記データを分析する段階と、
前記関節に関連する状態を診断する段階と
を有することを特徴とする方法。
【請求項13】
前記センサーを関節に取り付ける前記段階が、超音波トランスデューサおよび慣性センサーを前記関節の近くに取り付ける段階を含み、
前記センサーを使用してデータを取得する前記段階が、
前記超音波トランスデューサを使用して運動様式データを収集する段階と、
前記慣性センサーを使用して超音波トランスデューサ位置データを収集する段階と
を含むことを特徴とする請求項12に記載の方法。
【請求項14】
超音波トランスデューサおよび慣性センサーを関節の近くに取り付ける前記段階が、前記関節の近くに骨追跡装具を取り外し可能なように結合する段階を含み、
前記骨追跡装具は、前記超音波トランスデューサおよび前記慣性センサーを備えることを特徴とする請求項13に記載の方法。
【請求項15】
前記センサーを使用してデータを取得する前記段階は、前記センサーによって取得されたデータを無線で受信ユニットに伝送する段階を含むことを特徴とする請求項12に記載の方法。
【請求項16】
関節を監視する方法であって、
慣性センサーを関節の近くに配置する段階と、
前記関節を所定範囲の運動を介して動かしている間に前記慣性センサーを使用して音データを収集する段階と
を有することを特徴とする方法。
【請求項17】
音データを収集する段階と同時に、前記関節に関係する運動様式データを収集する段階をさらに有することを特徴とする請求項16に記載の方法。
【請求項18】
前記音データは、前記運動様式データと時間同期していることを特徴とする請求項17に記載の方法。
【請求項19】
ニューラルネットワークを使用して前記音データを分析する段階をさらに有することを特徴とする請求項16に記載の方法。
【請求項20】
前記音データを分析する段階の前に、前記ニューラルネットワークの学習を行う段階をさらに有することを特徴とする請求項19に記載の方法。
【請求項21】
前記ニューラルネットワークを使用して前記音データを分析する前記段階が、関節状態の存在および重篤度のうちの少なくとも一方を診断する段階を含むことを特徴とする請求項19に記載の方法。
【請求項22】
ニューラルネットワークを使用して前記音データを分析する前記段階が、
ネットワーク上で前記音データを伝送する段階と、
前記ネットワークを介して前記関節状態に関係するデータを受信する段階と
を含むことを特徴とする請求項19に記載の方法。
【請求項23】
骨追跡装具であって、
関節の付近に取り付けられるように構成されたフレームと、
前記フレームに装着され、前記関節の少なくとも1つの骨の位置を感知するように動作する機能を有した少なくとも1つの超音波トランスデューサと、
前記フレームに装着され、前記関節から発せられる音を検出するように動作する機能を有した少なくとも1つの慣性センサーと
を具備することを特徴とする骨追跡装具。
【請求項24】
前記フレームが、柔軟なフレームおよび剛性のあるフレームのうちの少なくとも一方であることを特徴とする請求項23に記載の骨追跡装具。
【請求項25】
前記超音波トランスデューサが、Aモード超音波トランスデューサであることを特徴とする請求項23に記載の骨追跡装具。
【請求項26】
前記超音波トランスデューサから超音波データを受信し、前記慣性センサーから音データを受信するように動作可能に接続された無線送信機をさらに具備することを特徴とする請求項23に記載の骨追跡装具。
【請求項27】
関節状態を診断する方法であって、
関節のモデルを作成する段階と、
前記関節を所定範囲の運動を介して動かしている間に音データおよび運動様式データを取得する段階と、
前記運動様式データを前記関節の前記モデルに相関させて前記関節の運動のモデルを生成する段階と、
前記音データと前記関節の運動の前記モデルとを分析して、関節状態の存在および重篤度のうちの少なくとも一方を診断する段階と
を有することを特徴とする方法。
【請求項28】
前記関節の前記モデルを作成する前記段階が、前記関節の複数の骨の三次元モデルを作成する段階を含むことを特徴とする請求項27に記載の方法。
【請求項29】
前記関節の前記複数の骨の前記三次元モデルを作成する前記段階が、測定データを使用して骨の少なくとも1つのモデルを適合させる段階を含むことを特徴とする請求項27に記載の方法。
【請求項30】
前記測定データが、超音波画像処理データであることを特徴とする請求項29に記載の方法。
【請求項31】
音データおよび運動様式データを取得する前記段階が、時間同期した音データおよび運動様式データを取得する段階を含むことを特徴とする請求項27に記載の方法。
【請求項32】
音データおよび運動様式データを取得する前記段階が、フレームを前記関節の近くに取り付ける段階を含み、
前記フレームは、少なくとも1つの慣性センサーおよび少なくとも1つの超音波トランスデューサを備えることを特徴とする請求項31に記載の方法。
【請求項33】
前記音データを分析する前記段階が、ニューラルネットワークを使用して実行されることを特徴とする請求項27に記載の方法。
【請求項34】
前記ニューラルネットワークの学習を行う段階をさらに有することを特徴とする請求項33に記載の方法。
【請求項1】
患者固有の骨モデルを作成する方法であって、
超音波を利用して、患者の骨の表面上の点を表す三次元点群を捕捉する段階と、
前記三次元点群を組み込むように適合可能な三次元骨モデルを操作し、仮想的な三次元の患者固有の骨を形成する段階と
を有することを特徴とする方法。
【請求項2】
患者の骨の運動を追跡し、動的運動を含む前記患者の骨の三次元モデルを表示する方法であって、
三次元の患者固有の骨モデルを作成する段階と、
前記実際の患者の骨と前記骨モデルとの位置合わせを行う段階と、
所定範囲の運動を行う前記患者の実際の骨の運動を追跡する段階と、
前記三次元の患者固有の骨モデルを前記患者の実際の骨の運動と組み合わせて動的画像を生成する段階と、
前記動的画像を画像処理装置上に表示する段階と
を有することを特徴とする方法。
【請求項3】
骨の三次元モデルを生成し、前記骨から運動および振動データを収集するためにデータを収集するためのデバイスであって、
半柔軟性ハウジングと、
前記ハウジング内に格納された複数の超音波トランスデューサと、
前記ハウジング内に格納された複数の加速度ベースローカライザと、
前記ハウジング内に格納された無線伝送システムと
を具備し、
前記無線伝送システムは、前記トランスデューサおよび前記ローカライザからCPUに振動、位置、および画像処理に関するデータを伝送することを特徴とするデバイス。
【請求項4】
骨の三次元モデルを生成し、前記骨から運動および振動データを収集するためにデータを収集するためのデバイス。
【請求項5】
患者固有の骨の運動をデータベースと比較する方法であって、
前記患者固有の骨の三次元モデルを作成する段階と、
前記患者の骨と前記骨モデルとの位置合わせを行う段階と、
所定範囲の運動を行う前記患者固有の骨の運動を追跡する段階と、
所定範囲の運動を行う複数の実際の骨の運動の経験的数学的記述を含むデータベースを選択する段階と、
前記患者固有の骨の運動を前記データベースと比較する段階と
を有することを特徴とする方法。
【請求項6】
診断を目的として患者の関節内の骨および軟組織の相対的運動時の振動データを使用する方法であって、
少なくとも3つの慣性ベースセンサーを患者の関節の付近に取り付ける段階と、
前記患者の関節を所定範囲の運動を介して動かす段階と、
前記患者の関節が所定範囲の運動を介して動かしている間に振動データを収集する段階と、
診断を目的として患者の関節内の骨の相対的運動に対する前記振動データを経験的振動データのデータベースと比較する段階と
を有することを特徴とする方法。
【請求項7】
患者固有の骨モデルを作成する方法であって、
a.複数の骨モデルのうちの1つを選択する段階と、
b.患者の骨を測定して患者固有の測定値を得る段階と、
c.前記患者固有の測定値を前記骨モデルに課す段階と
を有することを特徴とする方法。
【請求項8】
前記複数の骨モデルのうちの1つを選択する前記段階が、前記患者の少なくとも1つの人口学的特性を考慮する段階を含むことを特徴とする請求項7に記載の方法。
【請求項9】
前記患者の骨を測定する前記段階が、超音波画像処理を実行する段階を含むことを特徴とする請求項7に記載の方法。
【請求項10】
前記超音波画像処理が、Aモード超音波画像処理を含むことを特徴とする請求項9に記載の方法。
【請求項11】
前記骨モデルに対し前記患者固有の測定値を課す前記段階が、前記骨モデルの骨を前記画像処理データに適合させる段階を含むことを特徴とする請求項7に記載の方法。
【請求項12】
関節疾患を診断する方法であって、
関節の三次元モデルを作成する段階と、
センサーを前記関節の近くに取り付ける段階と、
前記関節が関節動作している間に前記センサーを使用してデータを取得する段階と、
ニューラルネットワークを使用して前記データを分析する段階と、
前記関節に関連する状態を診断する段階と
を有することを特徴とする方法。
【請求項13】
前記センサーを関節に取り付ける前記段階が、超音波トランスデューサおよび慣性センサーを前記関節の近くに取り付ける段階を含み、
前記センサーを使用してデータを取得する前記段階が、
前記超音波トランスデューサを使用して運動様式データを収集する段階と、
前記慣性センサーを使用して超音波トランスデューサ位置データを収集する段階と
を含むことを特徴とする請求項12に記載の方法。
【請求項14】
超音波トランスデューサおよび慣性センサーを関節の近くに取り付ける前記段階が、前記関節の近くに骨追跡装具を取り外し可能なように結合する段階を含み、
前記骨追跡装具は、前記超音波トランスデューサおよび前記慣性センサーを備えることを特徴とする請求項13に記載の方法。
【請求項15】
前記センサーを使用してデータを取得する前記段階は、前記センサーによって取得されたデータを無線で受信ユニットに伝送する段階を含むことを特徴とする請求項12に記載の方法。
【請求項16】
関節を監視する方法であって、
慣性センサーを関節の近くに配置する段階と、
前記関節を所定範囲の運動を介して動かしている間に前記慣性センサーを使用して音データを収集する段階と
を有することを特徴とする方法。
【請求項17】
音データを収集する段階と同時に、前記関節に関係する運動様式データを収集する段階をさらに有することを特徴とする請求項16に記載の方法。
【請求項18】
前記音データは、前記運動様式データと時間同期していることを特徴とする請求項17に記載の方法。
【請求項19】
ニューラルネットワークを使用して前記音データを分析する段階をさらに有することを特徴とする請求項16に記載の方法。
【請求項20】
前記音データを分析する段階の前に、前記ニューラルネットワークの学習を行う段階をさらに有することを特徴とする請求項19に記載の方法。
【請求項21】
前記ニューラルネットワークを使用して前記音データを分析する前記段階が、関節状態の存在および重篤度のうちの少なくとも一方を診断する段階を含むことを特徴とする請求項19に記載の方法。
【請求項22】
ニューラルネットワークを使用して前記音データを分析する前記段階が、
ネットワーク上で前記音データを伝送する段階と、
前記ネットワークを介して前記関節状態に関係するデータを受信する段階と
を含むことを特徴とする請求項19に記載の方法。
【請求項23】
骨追跡装具であって、
関節の付近に取り付けられるように構成されたフレームと、
前記フレームに装着され、前記関節の少なくとも1つの骨の位置を感知するように動作する機能を有した少なくとも1つの超音波トランスデューサと、
前記フレームに装着され、前記関節から発せられる音を検出するように動作する機能を有した少なくとも1つの慣性センサーと
を具備することを特徴とする骨追跡装具。
【請求項24】
前記フレームが、柔軟なフレームおよび剛性のあるフレームのうちの少なくとも一方であることを特徴とする請求項23に記載の骨追跡装具。
【請求項25】
前記超音波トランスデューサが、Aモード超音波トランスデューサであることを特徴とする請求項23に記載の骨追跡装具。
【請求項26】
前記超音波トランスデューサから超音波データを受信し、前記慣性センサーから音データを受信するように動作可能に接続された無線送信機をさらに具備することを特徴とする請求項23に記載の骨追跡装具。
【請求項27】
関節状態を診断する方法であって、
関節のモデルを作成する段階と、
前記関節を所定範囲の運動を介して動かしている間に音データおよび運動様式データを取得する段階と、
前記運動様式データを前記関節の前記モデルに相関させて前記関節の運動のモデルを生成する段階と、
前記音データと前記関節の運動の前記モデルとを分析して、関節状態の存在および重篤度のうちの少なくとも一方を診断する段階と
を有することを特徴とする方法。
【請求項28】
前記関節の前記モデルを作成する前記段階が、前記関節の複数の骨の三次元モデルを作成する段階を含むことを特徴とする請求項27に記載の方法。
【請求項29】
前記関節の前記複数の骨の前記三次元モデルを作成する前記段階が、測定データを使用して骨の少なくとも1つのモデルを適合させる段階を含むことを特徴とする請求項27に記載の方法。
【請求項30】
前記測定データが、超音波画像処理データであることを特徴とする請求項29に記載の方法。
【請求項31】
音データおよび運動様式データを取得する前記段階が、時間同期した音データおよび運動様式データを取得する段階を含むことを特徴とする請求項27に記載の方法。
【請求項32】
音データおよび運動様式データを取得する前記段階が、フレームを前記関節の近くに取り付ける段階を含み、
前記フレームは、少なくとも1つの慣性センサーおよび少なくとも1つの超音波トランスデューサを備えることを特徴とする請求項31に記載の方法。
【請求項33】
前記音データを分析する前記段階が、ニューラルネットワークを使用して実行されることを特徴とする請求項27に記載の方法。
【請求項34】
前記ニューラルネットワークの学習を行う段階をさらに有することを特徴とする請求項33に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】
【図17】
【図18】
【図19】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公表番号】特表2012−516719(P2012−516719A)
【公表日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2011−548412(P2011−548412)
【出願日】平成22年2月2日(2010.2.2)
【国際出願番号】PCT/US2010/022939
【国際公開番号】WO2010/088696
【国際公開日】平成22年8月5日(2010.8.5)
【出願人】(511187041)ジョイントヴュー・エルエルシー (1)
【Fターム(参考)】
【公表日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年2月2日(2010.2.2)
【国際出願番号】PCT/US2010/022939
【国際公開番号】WO2010/088696
【国際公開日】平成22年8月5日(2010.8.5)
【出願人】(511187041)ジョイントヴュー・エルエルシー (1)
【Fターム(参考)】
[ Back to top ]