
非接触アクチュエータ、非接触アクチュエータ装置、及び非接触アクチュエータの制御方法
【課題】簡易な構造にもかかわらず、被駆動体の移動を高精度に制御することができる非接触アクチュエータ及びその制御方法を提供することを目的とする。
【解決手段】被駆動体30を移動させるための第1非接触リニアアクチュエータ10であって、環状をなし、その一端と他端との距離が増減するように伸縮する第1ベローズ11と、第1ベローズ11の一端を気密的に閉塞する第1天壁部12と、第1ベローズ11の他端を気密的に閉塞する第1底壁部13と、第1ベローズ11を伸縮させるため、第1ベローズ11と第1天壁部12と第1底壁部13とで封止される気密空間14b内に流体を供給且つ気密空間14b内から流体を排出する第1導入導出部14aと、被駆動体30に面して第1天壁部12に形成され、被駆動体30を非接触で支持する第1静圧軸受15とを備える。
【解決手段】被駆動体30を移動させるための第1非接触リニアアクチュエータ10であって、環状をなし、その一端と他端との距離が増減するように伸縮する第1ベローズ11と、第1ベローズ11の一端を気密的に閉塞する第1天壁部12と、第1ベローズ11の他端を気密的に閉塞する第1底壁部13と、第1ベローズ11を伸縮させるため、第1ベローズ11と第1天壁部12と第1底壁部13とで封止される気密空間14b内に流体を供給且つ気密空間14b内から流体を排出する第1導入導出部14aと、被駆動体30に面して第1天壁部12に形成され、被駆動体30を非接触で支持する第1静圧軸受15とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被駆動体を移動させるアクチュエータ及びその制御方法に関し、特に、被駆動体を静圧軸受で支持して移動させる非接触アクチュエータ及びその制御方法に関する。
【背景技術】
【0002】
被駆動体を鉛直方向に移動させるアクチュエータとして、従来、シリンダと、そのシリンダ内に収容されるピストンと、そのピストンに連結されて被駆動体を支持する支持部とから構成される空気圧シリンダ機構が知られている(特許文献1)。この空気圧シリンダ機構では、シリンダ内のピストンの上部及び下部にそれぞれ気密な空間(上室及び下室)を設け、その空間に空気を供給または排出することによってピストンを上下動させている。そして、その上下動により、支持部で直接支持された被駆動体を移動させるようにしている。また、この空気圧シリンダ機構を構成するシリンダとピストンは鉛直方向へのガイド機能を有し、被駆動体と支持部との接触点に加わる摩擦抵抗やモーメントなどによる水平方向への移動ズレを防止し、鉛直方向への移動を精度良く制御しようとしている。
【特許文献1】特開2001−12604号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記した従来のアクチュエータでは、被駆動体と支持部との間に物理的な接触点が存在しており、シリンダなどによる鉛直方向へのガイドを行ったとしても、接触点での摩擦抵抗やモーメントなどによる水平方向への移動ズレが発生し、被駆動体の移動を精度良く制御することが困難な場合があった。また、上記した従来のアクチュエータでは、水平方向への移動ズレを防止するためのガイド機構を別途設けており、構造が複雑となっていた。
【0004】
本発明は、上記した事情に鑑みて為されたものであり、簡易な構造にもかかわらず、被駆動体の移動を高精度に制御することができる非接触アクチュエータ及びその制御方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る非接触アクチュエータは、被駆動体を移動させるための非接触アクチュエータであって、環状をなし、その一端と他端との距離が増減するように伸縮する側壁部と、側壁部の一端を気密的に閉塞する天壁部と、側壁部の他端を気密的に閉塞する底壁部と、側壁部を伸縮させるため、側壁部と天壁部と底壁部とで封止される気密空間内に流体を供給且つ気密空間内から流体を排出する導入導出部と、被駆動体に面して天壁部に形成され、被駆動体を非接触で支持する静圧軸受とを備えることを特徴としている。
【0006】
この構成の非接触アクチュエータは、被駆動体に面して天壁部に形成され、被駆動体を非接触で支持する静圧軸受を備えている。このような構成により、被駆動体と天壁部との支持点における摩擦抵抗やモーメントによる水平方向の移動ズレを排除でき、被駆動体の移動を高精度に制御することができる。また、このような構成によれば、被駆動体と天壁部との支持点の磨耗により引き起こされる駆動力の伝達ロスを防止することができ、被駆動体の移動を継続的に高精度に制御することができる。更に、このような構成によれば、被駆動体と天壁部との支持点の磨耗によるコンタミの発生を防止することができ、本構成に係る非接触アクチュエータが組み込まれる製造装置で加工される被加工物へのコンタミの付着を低減させることができる。
【0007】
また、この構成の非接触アクチュエータでは、非接触支持により、被駆動体と天壁部との支持点における摩擦抵抗やモーメントの影響を排除できるため、天壁部の移動を鉛直方向にガイドする専用のガイド機構を省略できる。このため、本発明に係る非接触アクチュエータは、簡易な構造とすることができ、部品点数及び製造コストの削減が可能となる。しかも、複雑なガイド機構が不要なので、ガイド機構の故障を主因とするアクチュエータの故障を低減させることができる。
【0008】
本発明に係る非接触アクチュエータにおいて、側壁部は蛇腹構造を有していることが好ましい。このようにすれば、側壁部の伸縮を簡易な構成で実現することができる。
【0009】
本発明に係る非接触アクチュエータにおいて、静圧軸受は、天壁部に形成され、被駆動体を非接触で支持する軸受面を有する多孔質体からなることが好ましい。このようにすれば、被駆動体に対して流体を平均化して供給することができ、被駆動体を安定支持できる。
【0010】
本発明に係る非接触アクチュエータにおいて、側壁部は、その中心軸線に沿った方向に伸縮することが好ましい。このようにすれば、被駆動体の移動を一層、高精度に制御することができる。
【0011】
本発明に係る非接触アクチュエータ装置は、第1非接触アクチュエータと第2非接触アクチュエータとを備える非接触アクチュエータ装置である。第1非接触アクチュエータは、環状をなし、その一端と他端との距離が増減するように伸縮する第1側壁部と、第1側壁部の一端を気密的に閉塞する第1天壁部と、第1側壁部の他端を気密的に閉塞する第1底壁部と、第1側壁部を伸縮させるため、第1側壁部と第1天壁部と第1底壁部とで封止される気密空間内に流体を供給且つ気密空間内から流体を排出する第1導入導出部と、被駆動体に面して第1天壁部に形成され、被駆動体を非接触で支持する第1静圧軸受とを備え、第2非接触アクチュエータは、環状をなし、その一端と他端との距離が増減するように伸縮する第2側壁部と、第2側壁部の一端を気密的に閉塞する第2天壁部と、第2側壁部の他端を気密的に閉塞する第2底壁部と、第2側壁部を伸縮させるため、第2側壁部と第2天壁部と第2底壁部とで封止される気密空間内に流体を供給且つ気密空間内から流体を排出する第2導入導出部と、被駆動体に面して第2天壁部に形成され、被駆動体を非接触で支持する第2静圧軸受とを備える。そして、この非接触アクチュエータ装置では、第1静圧軸受の軸受面と第2静圧軸受の軸受面とが被駆動体を挟んで対向するように第1非接触アクチュエータと第2非接触アクチュエータとを配置することが好ましい。
【0012】
この構成の非接触アクチュエータ装置では、第1静圧軸受の軸受面と第2静圧軸受の軸受面とが被駆動体を挟んで対向するように第1非接触アクチュエータと第2非接触アクチュエータとを配置している。これにより、被駆動体とそれぞれの静圧軸受との間における摩擦抵抗やモーメントによる水平方向の位置ズレを更に排除して、被駆動体の往復移動を高精度に制御できる。
【0013】
本発明に係る非接触アクチュエータの制御方法は、環状をなし、その一端と他端との距離が増減するように伸縮する側壁部と、側壁部の一端を気密的に閉塞する天壁部と、側壁部の他端を気密的に閉塞する底壁部と、側壁部を伸縮させるため、側壁部と天壁部と底壁部とで封止される気密空間内に流体を供給または気密空間内から流体を排出する導入導出部と、被駆動体に面して天壁部に形成され、被駆動体を非接触で支持する静圧軸受とを備える非接触アクチュエータの制御方法であって、静圧軸受を駆動させて、被駆動体を静圧軸受により非接触で支持することを開始する支持開始工程と、支持開始工程が実行された後、気密空間内に流体を供給または気密空間内から流体を排出して、天壁部を移動させる移動工程とを備えたことを特徴としている。
【0014】
この非接触アクチュエータの制御方法では、支持開始工程が実行された後、気密空間内に流体を供給または気密空間内から流体を排出して、天壁部を移動させる移動工程を実行するようにしている。このため、被駆動体による摩擦抵抗やモーメントが天壁部や側壁部へ伝達されない非接触支持にしてから、天壁部を移動させるようにしているので、簡易な構成にもかかわらず、天壁部の移動を高精度に制御することができる。
【発明の効果】
【0015】
本発明によれば、簡易な構造にもかかわらず、被駆動体の移動を高精度に制御することができる非接触アクチュエータ及びその制御方法を提供することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しつつ本発明の好適な実施形態について詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。
【0017】
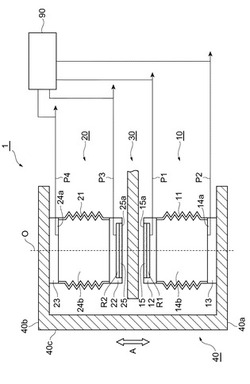
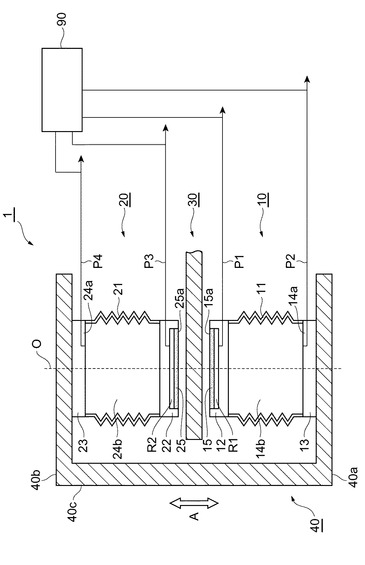
図1は、本実施形態に係る非接触リニアアクチュエータ装置の構成を示す断面図である。図1に示すように、非接触リニアアクチュエータ装置(非接触アクチュエータ装置)1は、第1非接触リニアアクチュエータ(非接触アクチュエータ)10と第2非接触リニアアクチュエータ(非接触アクチュエータ)20とを備えている。また、第1非接触リニアアクチュエータ10と第2非接触リニアアクチュエータ20との間には、被駆動体30が延出して配置され、両非接触リニアアクチュエータ10,20に挟み込まれている。また、非接触リニアアクチュエータ装置1は、第1非接触リニアアクチュエータ10と第2非接触リニアアクチュエータ20に供給される空気等を制御する制御装置90を備えている。
【0018】
第1非接触リニアアクチュエータ10は、第1ベローズ(第1側壁部)11と、第1天壁部12と、第1底壁部13と、第1導入導出部14aと、第1静圧軸受15とを備え、被駆動体30の図示下方に配置されると共に固定部40の下板40a上に固定されている。
【0019】
第1ベローズ11は、金属製であって略円環形状からなる蛇腹構造といった簡易な構成を有する側壁部であって、その一端と他端との距離が増減するように円環の中心軸線Oに沿った図示上下方向Aへ伸縮可能となっている。
【0020】
第1天壁部12は、円板形状を有し、第1ベローズ11の一端を気密的に閉塞している。この第1天壁部12の上面には、被駆動体30の下面に対向するように、後述する第1静圧軸受15が設けられている。また、第1静圧軸受15へ圧縮空気を供給するため、第1天壁部12は、パイプP1を介して図示省略する外部の空気源に接続されている。
【0021】
第1底壁部13は、円板形状を有し、第1ベローズ11の他端を気密的に閉塞している。この第1底壁部13の下面は固定部40の下板40aに接合されている。また、第1底壁部13には、第1導入導出部14aが設けられている。
【0022】
第1導入導出部14aは、第1ベローズ11と第1天壁部12と第1底壁部13とで封止される気密空間14b内へ空気を供給且つ気密空間14bから空気を排出するための貫通孔である。また、第1導入導出部14aは、パイプP2を介して、図示省略する外部の空気源に接続されている。気密空間14b内にパイプP2と第1導入導出部14aを介して空気を供給すると、内圧が上昇して第1ベローズ11が伸長し、中心軸線Oに沿って図示上方向に第1天壁部12を移動させるようになっている。また、気密空間内14b内からパイプP2と第1導入導出部14aを介して空気を排出すると内圧が下降して、被駆動体30の自重または後述する第2非接触リニアアクチュエータ20の下降などにより第1ベローズ11が縮小し、中心軸線Oに沿って図示下方向に第1天壁部12を移動させるようになっている。
【0023】
第1静圧軸受15は、被駆動体30を非接触で支持する略円形状の軸受面15aを有する多孔質体を第1天壁部12に埋設して、第1天壁部12の上面に形成されている。多孔質体の下面には、空間R1が設けられ、この空間R1によりパイプP1から供給された圧縮空気が拡散し多孔質体の全面に均一に行き渡るようにされている。第1静圧軸受15が被駆動体30を非接触で支持しているので、第1静圧軸受15を上部に形成している第1天壁部12が上下動すると、それに併せて、被駆動体30も上下動されるようになっている。
【0024】
第2非接触リニアアクチュエータ20は、第1非接触リニアアクチュエータ10と同様の構造を有しており、第2ベローズ(第2側壁部)21と、第2天壁部22と、第2底壁部23と、第2導入導出部24aと、第2静圧軸受25とを備え、被駆動体30の図示上方に第1非接触リニアアクチュエータ10と対向するように配置され、第2天壁部22の下面が被駆動体30の上面に対向すると共に、第2底壁部23の上面が固定部40の上板40bに接合されている。
【0025】
第2ベローズ21、第2天壁部22、第2底壁部23、第2導入導出部24a、第2静圧軸受25はそれぞれ、第1ベローズ11、第1天壁部12、第1底壁部13、第1導入導出部14a、第1静圧軸受15と同様の構造を有しており、第2天壁部22にはパイプP3及び空間R2を介して図示省略する外部の空気源が接続され、第2導入導出部24aにはパイプP4を介して図示省略する外部の空気源が接続されている。また、第2ベローズ21と第2天壁部22と第2底壁部23とで封止される気密空間24bが形成される。なお、空間R2は、空間R1と同様の拡散効果を奏する。
【0026】
この気密空間24b内にパイプP4と第2導入導出部24aを介して空気を供給すると、内圧が上昇して第2ベローズ21が伸長し、中心軸線Oに沿って図示下方向に第2天壁部22を移動させるようになっている。また、気密空間内24b内からパイプP4と第2導入導出部24aを介して空気を排出すると、内圧が下降して第2ベローズ21が縮小し、被駆動体30の図示上方向の移動を妨げないようになっている。
【0027】
固定部40は、下板40aと、上板40bと、下板40aと上板40bを連結する連結部40cとを有し、略コ字形状から構成されている。そして、固定部40は、第1静圧軸受15の軸受面15aと第2静圧軸受25の軸受面25aとが、被駆動体30を挟んで対面するように、第1非接触リニアアクチュエータ10と第2非接触リニアアクチュエータ20とを配置して固定している。なお、第1静圧軸受15に供給される圧縮空気と、第2静圧軸受25に供給される圧縮空気の圧力が略等しければ、被駆動体30は、第1静圧軸受15と第2静圧軸受25との略中央に非接触で支持されることになる。
【0028】
制御装置90は、第1静圧軸受15へ空気を供給するパイプP1、気密空間14bへ空気を供給またはその気密空間14bから空気を排出するパイプP2、第2静圧軸受25へ空気を供給するパイプP3、気密空間24bへ空気を供給またはその気密空間24bから空気を排出するパイプP4を調整する制御を行う。
【0029】
次に、上記の構成を有する非接触リニアアクチュエータ装置1の動作について図2を参照して説明する。
【0030】
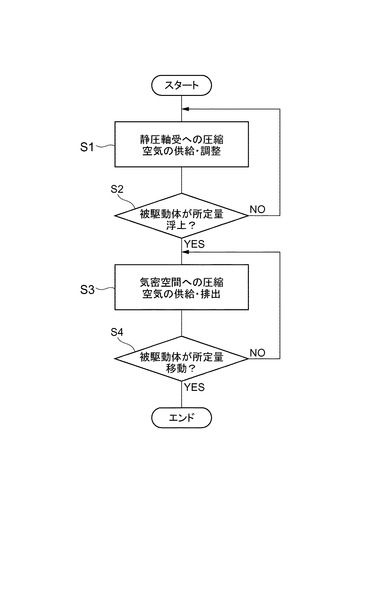
まず、パイプP1とパイプP3を介して第1静圧軸受15と第2静圧軸受25へ圧縮空気を供給して両静圧軸受を駆動し、被駆動体30を両静圧軸受の間に非接触状態で支持する(ステップS1)。このステップS1における第1静圧軸受15と第2静圧軸受25とから供給される圧縮空気の圧力を同等となるように制御装置90で制御する。
【0031】
次に、第1静圧軸受15の軸受面15aと被駆動体30の下面との距離を図示省略した距離センサで求め、所定の浮上量を確保しているか否かを判断する(ステップS2)。また、第2静圧軸受25の軸受面25aと被駆動体30の上面との距離を図示省略した距離センサで求め、所定の浮上量を確保しているか否かを判断する(ステップS2)。その結果、所定の浮上量を確保していなければ、ステップS1に戻り、パイプP1またはパイプP3に供給する圧縮空気の圧力を制御装置90で調整する。
【0032】
一方、両静圧軸受ともに所定の浮上量を確保できていれば、ステップS3に進む。ステップS3では、被駆動体30を中心軸線Oに沿って上昇させる場合、パイプP2に空気を供給して気密空間14b内の圧力を上昇させると共に、パイプP4からは空気を排出して気密空間24b内の圧力を下降させる。この圧力変動に伴い、第1天壁部12と第2天壁部22とが上方へ移動し、被駆動体30を上方へ移動させる。逆に、被駆動体30を中心軸線Oに沿って下降させる場合、パイプP4に空気を供給して気密空間24b内の圧力を上昇させると共に、パイプP2から空気を排出して気密空間14b内の圧力を下降させる。この圧力変動に伴い、第1天壁部12と第2天壁部22とが下方へ移動し、被駆動体30を下方へ移動させる。
【0033】
次に、被駆動体30の移動距離を図示省略した別のセンサで求め、被駆動体30が、所定量移動したか否かを判断する(ステップS4)。被駆動体30が所定量移動していなければ、ステップS3に戻り、再度、気密空間14b内の圧力と気密空間24b内の圧力を変動させて、被駆動体30を移動させる。一方、被駆動体30が所定量移動していれば、気密空間14b内の圧力と気密空間24b内の圧力を変動させずに一定に保つ。なお、上述した制御方法では、第1静圧軸受15と第2静圧軸受25とを先に駆動して、被駆動体30を第1静圧軸受15と第2静圧軸受25とにより非接触で支持した後に、気密空間14b内の圧力と気密空間24b内の圧力を変動させて、第1天壁部12と第2天壁部22とを移動させるようにしている。このため、被駆動体30による摩擦抵抗やモーメントが第1天壁部12、第2天壁部22、第1ベローズ11、第2ベローズ21などへ伝達されないようになっている。その結果、専用のガイド機構を有しない簡易な構成にもかかわらず、第1天壁部12と第2天壁部22の中心軸線Oに沿った方向への移動を高精度に制御することができる。
【0034】
以上、本発明の好適な実施形態について説明したが、本発明は上記した実施形態に限定されることなく、種々の変形が可能である。例えば、本実施形態では、金属からなるベローズを用いているが、伸縮性を有するプラスチック等からなるベローズを用いてもよい。また、上下方向への移動手段として、空気圧の変動によりアクチュエータ等を駆動する構成としたが、これらを油圧など他の流体を使った移動手段から構成されるようにしてもよい。
【図面の簡単な説明】
【0035】
【図1】本実施形態に係る非接触リニアアクチュエータ装置の断面図である。
【図2】被駆動体を移動させるときの非接触リニアアクチュエータ装置の制御方法を示すフローチャートである。
【符号の説明】
【0036】
1…非接触リニアアクチュエータ装置(非接触アクチュエータ装置)、10…第1非接触リニアアクチュエータ(非接触アクチュエータ)、11…第1ベローズ(第1側壁部)、12…第1天壁部、13…第1底壁部、14a…第1導入導出部、14b,24b…気密空間、15…第1静圧軸受、15a,25a…軸受面、20…第2非接触リニアアクチュエータ(非接触アクチュエータ)、21…第2ベローズ(第2側壁部)、22…第2天壁部、23…第2底壁部、24a…第2導入導出部、25…第2静圧軸受、30…被駆動体、O…中心軸線、P1,P2,P3,P4…パイプ。
【技術分野】
【0001】
本発明は、被駆動体を移動させるアクチュエータ及びその制御方法に関し、特に、被駆動体を静圧軸受で支持して移動させる非接触アクチュエータ及びその制御方法に関する。
【背景技術】
【0002】
被駆動体を鉛直方向に移動させるアクチュエータとして、従来、シリンダと、そのシリンダ内に収容されるピストンと、そのピストンに連結されて被駆動体を支持する支持部とから構成される空気圧シリンダ機構が知られている(特許文献1)。この空気圧シリンダ機構では、シリンダ内のピストンの上部及び下部にそれぞれ気密な空間(上室及び下室)を設け、その空間に空気を供給または排出することによってピストンを上下動させている。そして、その上下動により、支持部で直接支持された被駆動体を移動させるようにしている。また、この空気圧シリンダ機構を構成するシリンダとピストンは鉛直方向へのガイド機能を有し、被駆動体と支持部との接触点に加わる摩擦抵抗やモーメントなどによる水平方向への移動ズレを防止し、鉛直方向への移動を精度良く制御しようとしている。
【特許文献1】特開2001−12604号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記した従来のアクチュエータでは、被駆動体と支持部との間に物理的な接触点が存在しており、シリンダなどによる鉛直方向へのガイドを行ったとしても、接触点での摩擦抵抗やモーメントなどによる水平方向への移動ズレが発生し、被駆動体の移動を精度良く制御することが困難な場合があった。また、上記した従来のアクチュエータでは、水平方向への移動ズレを防止するためのガイド機構を別途設けており、構造が複雑となっていた。
【0004】
本発明は、上記した事情に鑑みて為されたものであり、簡易な構造にもかかわらず、被駆動体の移動を高精度に制御することができる非接触アクチュエータ及びその制御方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る非接触アクチュエータは、被駆動体を移動させるための非接触アクチュエータであって、環状をなし、その一端と他端との距離が増減するように伸縮する側壁部と、側壁部の一端を気密的に閉塞する天壁部と、側壁部の他端を気密的に閉塞する底壁部と、側壁部を伸縮させるため、側壁部と天壁部と底壁部とで封止される気密空間内に流体を供給且つ気密空間内から流体を排出する導入導出部と、被駆動体に面して天壁部に形成され、被駆動体を非接触で支持する静圧軸受とを備えることを特徴としている。
【0006】
この構成の非接触アクチュエータは、被駆動体に面して天壁部に形成され、被駆動体を非接触で支持する静圧軸受を備えている。このような構成により、被駆動体と天壁部との支持点における摩擦抵抗やモーメントによる水平方向の移動ズレを排除でき、被駆動体の移動を高精度に制御することができる。また、このような構成によれば、被駆動体と天壁部との支持点の磨耗により引き起こされる駆動力の伝達ロスを防止することができ、被駆動体の移動を継続的に高精度に制御することができる。更に、このような構成によれば、被駆動体と天壁部との支持点の磨耗によるコンタミの発生を防止することができ、本構成に係る非接触アクチュエータが組み込まれる製造装置で加工される被加工物へのコンタミの付着を低減させることができる。
【0007】
また、この構成の非接触アクチュエータでは、非接触支持により、被駆動体と天壁部との支持点における摩擦抵抗やモーメントの影響を排除できるため、天壁部の移動を鉛直方向にガイドする専用のガイド機構を省略できる。このため、本発明に係る非接触アクチュエータは、簡易な構造とすることができ、部品点数及び製造コストの削減が可能となる。しかも、複雑なガイド機構が不要なので、ガイド機構の故障を主因とするアクチュエータの故障を低減させることができる。
【0008】
本発明に係る非接触アクチュエータにおいて、側壁部は蛇腹構造を有していることが好ましい。このようにすれば、側壁部の伸縮を簡易な構成で実現することができる。
【0009】
本発明に係る非接触アクチュエータにおいて、静圧軸受は、天壁部に形成され、被駆動体を非接触で支持する軸受面を有する多孔質体からなることが好ましい。このようにすれば、被駆動体に対して流体を平均化して供給することができ、被駆動体を安定支持できる。
【0010】
本発明に係る非接触アクチュエータにおいて、側壁部は、その中心軸線に沿った方向に伸縮することが好ましい。このようにすれば、被駆動体の移動を一層、高精度に制御することができる。
【0011】
本発明に係る非接触アクチュエータ装置は、第1非接触アクチュエータと第2非接触アクチュエータとを備える非接触アクチュエータ装置である。第1非接触アクチュエータは、環状をなし、その一端と他端との距離が増減するように伸縮する第1側壁部と、第1側壁部の一端を気密的に閉塞する第1天壁部と、第1側壁部の他端を気密的に閉塞する第1底壁部と、第1側壁部を伸縮させるため、第1側壁部と第1天壁部と第1底壁部とで封止される気密空間内に流体を供給且つ気密空間内から流体を排出する第1導入導出部と、被駆動体に面して第1天壁部に形成され、被駆動体を非接触で支持する第1静圧軸受とを備え、第2非接触アクチュエータは、環状をなし、その一端と他端との距離が増減するように伸縮する第2側壁部と、第2側壁部の一端を気密的に閉塞する第2天壁部と、第2側壁部の他端を気密的に閉塞する第2底壁部と、第2側壁部を伸縮させるため、第2側壁部と第2天壁部と第2底壁部とで封止される気密空間内に流体を供給且つ気密空間内から流体を排出する第2導入導出部と、被駆動体に面して第2天壁部に形成され、被駆動体を非接触で支持する第2静圧軸受とを備える。そして、この非接触アクチュエータ装置では、第1静圧軸受の軸受面と第2静圧軸受の軸受面とが被駆動体を挟んで対向するように第1非接触アクチュエータと第2非接触アクチュエータとを配置することが好ましい。
【0012】
この構成の非接触アクチュエータ装置では、第1静圧軸受の軸受面と第2静圧軸受の軸受面とが被駆動体を挟んで対向するように第1非接触アクチュエータと第2非接触アクチュエータとを配置している。これにより、被駆動体とそれぞれの静圧軸受との間における摩擦抵抗やモーメントによる水平方向の位置ズレを更に排除して、被駆動体の往復移動を高精度に制御できる。
【0013】
本発明に係る非接触アクチュエータの制御方法は、環状をなし、その一端と他端との距離が増減するように伸縮する側壁部と、側壁部の一端を気密的に閉塞する天壁部と、側壁部の他端を気密的に閉塞する底壁部と、側壁部を伸縮させるため、側壁部と天壁部と底壁部とで封止される気密空間内に流体を供給または気密空間内から流体を排出する導入導出部と、被駆動体に面して天壁部に形成され、被駆動体を非接触で支持する静圧軸受とを備える非接触アクチュエータの制御方法であって、静圧軸受を駆動させて、被駆動体を静圧軸受により非接触で支持することを開始する支持開始工程と、支持開始工程が実行された後、気密空間内に流体を供給または気密空間内から流体を排出して、天壁部を移動させる移動工程とを備えたことを特徴としている。
【0014】
この非接触アクチュエータの制御方法では、支持開始工程が実行された後、気密空間内に流体を供給または気密空間内から流体を排出して、天壁部を移動させる移動工程を実行するようにしている。このため、被駆動体による摩擦抵抗やモーメントが天壁部や側壁部へ伝達されない非接触支持にしてから、天壁部を移動させるようにしているので、簡易な構成にもかかわらず、天壁部の移動を高精度に制御することができる。
【発明の効果】
【0015】
本発明によれば、簡易な構造にもかかわらず、被駆動体の移動を高精度に制御することができる非接触アクチュエータ及びその制御方法を提供することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しつつ本発明の好適な実施形態について詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。
【0017】
図1は、本実施形態に係る非接触リニアアクチュエータ装置の構成を示す断面図である。図1に示すように、非接触リニアアクチュエータ装置(非接触アクチュエータ装置)1は、第1非接触リニアアクチュエータ(非接触アクチュエータ)10と第2非接触リニアアクチュエータ(非接触アクチュエータ)20とを備えている。また、第1非接触リニアアクチュエータ10と第2非接触リニアアクチュエータ20との間には、被駆動体30が延出して配置され、両非接触リニアアクチュエータ10,20に挟み込まれている。また、非接触リニアアクチュエータ装置1は、第1非接触リニアアクチュエータ10と第2非接触リニアアクチュエータ20に供給される空気等を制御する制御装置90を備えている。
【0018】
第1非接触リニアアクチュエータ10は、第1ベローズ(第1側壁部)11と、第1天壁部12と、第1底壁部13と、第1導入導出部14aと、第1静圧軸受15とを備え、被駆動体30の図示下方に配置されると共に固定部40の下板40a上に固定されている。
【0019】
第1ベローズ11は、金属製であって略円環形状からなる蛇腹構造といった簡易な構成を有する側壁部であって、その一端と他端との距離が増減するように円環の中心軸線Oに沿った図示上下方向Aへ伸縮可能となっている。
【0020】
第1天壁部12は、円板形状を有し、第1ベローズ11の一端を気密的に閉塞している。この第1天壁部12の上面には、被駆動体30の下面に対向するように、後述する第1静圧軸受15が設けられている。また、第1静圧軸受15へ圧縮空気を供給するため、第1天壁部12は、パイプP1を介して図示省略する外部の空気源に接続されている。
【0021】
第1底壁部13は、円板形状を有し、第1ベローズ11の他端を気密的に閉塞している。この第1底壁部13の下面は固定部40の下板40aに接合されている。また、第1底壁部13には、第1導入導出部14aが設けられている。
【0022】
第1導入導出部14aは、第1ベローズ11と第1天壁部12と第1底壁部13とで封止される気密空間14b内へ空気を供給且つ気密空間14bから空気を排出するための貫通孔である。また、第1導入導出部14aは、パイプP2を介して、図示省略する外部の空気源に接続されている。気密空間14b内にパイプP2と第1導入導出部14aを介して空気を供給すると、内圧が上昇して第1ベローズ11が伸長し、中心軸線Oに沿って図示上方向に第1天壁部12を移動させるようになっている。また、気密空間内14b内からパイプP2と第1導入導出部14aを介して空気を排出すると内圧が下降して、被駆動体30の自重または後述する第2非接触リニアアクチュエータ20の下降などにより第1ベローズ11が縮小し、中心軸線Oに沿って図示下方向に第1天壁部12を移動させるようになっている。
【0023】
第1静圧軸受15は、被駆動体30を非接触で支持する略円形状の軸受面15aを有する多孔質体を第1天壁部12に埋設して、第1天壁部12の上面に形成されている。多孔質体の下面には、空間R1が設けられ、この空間R1によりパイプP1から供給された圧縮空気が拡散し多孔質体の全面に均一に行き渡るようにされている。第1静圧軸受15が被駆動体30を非接触で支持しているので、第1静圧軸受15を上部に形成している第1天壁部12が上下動すると、それに併せて、被駆動体30も上下動されるようになっている。
【0024】
第2非接触リニアアクチュエータ20は、第1非接触リニアアクチュエータ10と同様の構造を有しており、第2ベローズ(第2側壁部)21と、第2天壁部22と、第2底壁部23と、第2導入導出部24aと、第2静圧軸受25とを備え、被駆動体30の図示上方に第1非接触リニアアクチュエータ10と対向するように配置され、第2天壁部22の下面が被駆動体30の上面に対向すると共に、第2底壁部23の上面が固定部40の上板40bに接合されている。
【0025】
第2ベローズ21、第2天壁部22、第2底壁部23、第2導入導出部24a、第2静圧軸受25はそれぞれ、第1ベローズ11、第1天壁部12、第1底壁部13、第1導入導出部14a、第1静圧軸受15と同様の構造を有しており、第2天壁部22にはパイプP3及び空間R2を介して図示省略する外部の空気源が接続され、第2導入導出部24aにはパイプP4を介して図示省略する外部の空気源が接続されている。また、第2ベローズ21と第2天壁部22と第2底壁部23とで封止される気密空間24bが形成される。なお、空間R2は、空間R1と同様の拡散効果を奏する。
【0026】
この気密空間24b内にパイプP4と第2導入導出部24aを介して空気を供給すると、内圧が上昇して第2ベローズ21が伸長し、中心軸線Oに沿って図示下方向に第2天壁部22を移動させるようになっている。また、気密空間内24b内からパイプP4と第2導入導出部24aを介して空気を排出すると、内圧が下降して第2ベローズ21が縮小し、被駆動体30の図示上方向の移動を妨げないようになっている。
【0027】
固定部40は、下板40aと、上板40bと、下板40aと上板40bを連結する連結部40cとを有し、略コ字形状から構成されている。そして、固定部40は、第1静圧軸受15の軸受面15aと第2静圧軸受25の軸受面25aとが、被駆動体30を挟んで対面するように、第1非接触リニアアクチュエータ10と第2非接触リニアアクチュエータ20とを配置して固定している。なお、第1静圧軸受15に供給される圧縮空気と、第2静圧軸受25に供給される圧縮空気の圧力が略等しければ、被駆動体30は、第1静圧軸受15と第2静圧軸受25との略中央に非接触で支持されることになる。
【0028】
制御装置90は、第1静圧軸受15へ空気を供給するパイプP1、気密空間14bへ空気を供給またはその気密空間14bから空気を排出するパイプP2、第2静圧軸受25へ空気を供給するパイプP3、気密空間24bへ空気を供給またはその気密空間24bから空気を排出するパイプP4を調整する制御を行う。
【0029】
次に、上記の構成を有する非接触リニアアクチュエータ装置1の動作について図2を参照して説明する。
【0030】
まず、パイプP1とパイプP3を介して第1静圧軸受15と第2静圧軸受25へ圧縮空気を供給して両静圧軸受を駆動し、被駆動体30を両静圧軸受の間に非接触状態で支持する(ステップS1)。このステップS1における第1静圧軸受15と第2静圧軸受25とから供給される圧縮空気の圧力を同等となるように制御装置90で制御する。
【0031】
次に、第1静圧軸受15の軸受面15aと被駆動体30の下面との距離を図示省略した距離センサで求め、所定の浮上量を確保しているか否かを判断する(ステップS2)。また、第2静圧軸受25の軸受面25aと被駆動体30の上面との距離を図示省略した距離センサで求め、所定の浮上量を確保しているか否かを判断する(ステップS2)。その結果、所定の浮上量を確保していなければ、ステップS1に戻り、パイプP1またはパイプP3に供給する圧縮空気の圧力を制御装置90で調整する。
【0032】
一方、両静圧軸受ともに所定の浮上量を確保できていれば、ステップS3に進む。ステップS3では、被駆動体30を中心軸線Oに沿って上昇させる場合、パイプP2に空気を供給して気密空間14b内の圧力を上昇させると共に、パイプP4からは空気を排出して気密空間24b内の圧力を下降させる。この圧力変動に伴い、第1天壁部12と第2天壁部22とが上方へ移動し、被駆動体30を上方へ移動させる。逆に、被駆動体30を中心軸線Oに沿って下降させる場合、パイプP4に空気を供給して気密空間24b内の圧力を上昇させると共に、パイプP2から空気を排出して気密空間14b内の圧力を下降させる。この圧力変動に伴い、第1天壁部12と第2天壁部22とが下方へ移動し、被駆動体30を下方へ移動させる。
【0033】
次に、被駆動体30の移動距離を図示省略した別のセンサで求め、被駆動体30が、所定量移動したか否かを判断する(ステップS4)。被駆動体30が所定量移動していなければ、ステップS3に戻り、再度、気密空間14b内の圧力と気密空間24b内の圧力を変動させて、被駆動体30を移動させる。一方、被駆動体30が所定量移動していれば、気密空間14b内の圧力と気密空間24b内の圧力を変動させずに一定に保つ。なお、上述した制御方法では、第1静圧軸受15と第2静圧軸受25とを先に駆動して、被駆動体30を第1静圧軸受15と第2静圧軸受25とにより非接触で支持した後に、気密空間14b内の圧力と気密空間24b内の圧力を変動させて、第1天壁部12と第2天壁部22とを移動させるようにしている。このため、被駆動体30による摩擦抵抗やモーメントが第1天壁部12、第2天壁部22、第1ベローズ11、第2ベローズ21などへ伝達されないようになっている。その結果、専用のガイド機構を有しない簡易な構成にもかかわらず、第1天壁部12と第2天壁部22の中心軸線Oに沿った方向への移動を高精度に制御することができる。
【0034】
以上、本発明の好適な実施形態について説明したが、本発明は上記した実施形態に限定されることなく、種々の変形が可能である。例えば、本実施形態では、金属からなるベローズを用いているが、伸縮性を有するプラスチック等からなるベローズを用いてもよい。また、上下方向への移動手段として、空気圧の変動によりアクチュエータ等を駆動する構成としたが、これらを油圧など他の流体を使った移動手段から構成されるようにしてもよい。
【図面の簡単な説明】
【0035】
【図1】本実施形態に係る非接触リニアアクチュエータ装置の断面図である。
【図2】被駆動体を移動させるときの非接触リニアアクチュエータ装置の制御方法を示すフローチャートである。
【符号の説明】
【0036】
1…非接触リニアアクチュエータ装置(非接触アクチュエータ装置)、10…第1非接触リニアアクチュエータ(非接触アクチュエータ)、11…第1ベローズ(第1側壁部)、12…第1天壁部、13…第1底壁部、14a…第1導入導出部、14b,24b…気密空間、15…第1静圧軸受、15a,25a…軸受面、20…第2非接触リニアアクチュエータ(非接触アクチュエータ)、21…第2ベローズ(第2側壁部)、22…第2天壁部、23…第2底壁部、24a…第2導入導出部、25…第2静圧軸受、30…被駆動体、O…中心軸線、P1,P2,P3,P4…パイプ。
【特許請求の範囲】
【請求項1】
被駆動体を移動させるための非接触アクチュエータであって、
環状をなし、その一端と他端との距離が増減するように伸縮する側壁部と、
前記側壁部の前記一端を気密的に閉塞する天壁部と、
前記側壁部の前記他端を気密的に閉塞する底壁部と、
前記側壁部を伸縮させるため、前記側壁部と前記天壁部と前記底壁部とで封止される気密空間内に流体を供給且つ前記気密空間内から流体を排出する導入導出部と、
前記被駆動体に面して前記天壁部に形成され、前記被駆動体を非接触で支持する静圧軸受と、
を備えることを特徴とする非接触アクチュエータ。
【請求項2】
前記側壁部は、蛇腹構造を有していることを特徴とする請求項1に記載の非接触アクチュエータ。
【請求項3】
前記静圧軸受は、前記天壁部に形成され、前記被駆動体を非接触で支持する軸受面を有する多孔質体からなることを特徴とする請求項1または2に記載の非接触アクチュエータ。
【請求項4】
前記側壁部は、その中心軸線に沿った方向に伸縮することを特徴とする請求項1乃至3のいずれか一項に記載の非接触アクチュエータ。
【請求項5】
第1非接触アクチュエータと第2非接触アクチュエータとを備える非接触アクチュエータ装置であって、
前記第1非接触アクチュエータは、
環状をなし、その一端と他端との距離が増減するように伸縮する第1側壁部と、
前記第1側壁部の前記一端を気密的に閉塞する第1天壁部と、
前記第1側壁部の前記他端を気密的に閉塞する第1底壁部と、
前記第1側壁部を伸縮させるため、前記第1側壁部と前記第1天壁部と前記第1底壁部とで封止される気密空間内に流体を供給且つ前記気密空間内から流体を排出する第1導入導出部と、
前記被駆動体に面して前記第1天壁部に形成され、前記被駆動体を非接触で支持する第1静圧軸受とを備え、
前記第2非接触アクチュエータは、
環状をなし、その一端と他端との距離が増減するように伸縮する第2側壁部と、
前記第2側壁部の前記一端を気密的に閉塞する第2天壁部と、
前記第2側壁部の前記他端を気密的に閉塞する第2底壁部と、
前記第2側壁部を伸縮させるため、前記第2側壁部と前記第2天壁部と前記第2底壁部とで封止される気密空間内に流体を供給且つ前記気密空間内から流体を排出する第2導入導出部と、
前記被駆動体に面して前記第2天壁部に形成され、前記被駆動体を非接触で支持する第2静圧軸受とを備え、
前記第1静圧軸受の軸受面と前記第2静圧軸受の軸受面とが前記被駆動体を挟んで対向するように前記第1非接触アクチュエータと前記第2非接触アクチュエータとを配置することを特徴とする非接触アクチュエータ装置。
【請求項6】
前記第1側壁部及び前記第2側壁部は、それぞれ蛇腹構造を有していることを特徴とする請求項5に記載の非接触アクチュエータ装置。
【請求項7】
前記第1静圧軸受は前記第1天壁部に形成され、前記第2静圧軸受は前記第2天壁部に形成され、前記第1静圧軸受及び前記第2静圧軸受は、それぞれ前記被駆動体を非接触で支持する軸受面を有する多孔質体からなることを特徴とする請求項5または6に記載の非接触アクチュエータ装置。
【請求項8】
前記第1側壁部及び前記第2側壁部は、それぞれの中心軸線に沿った方向に伸縮することを特徴とする請求項5乃至7のいずれか一項に記載の非接触アクチュエータ装置。
【請求項9】
環状をなし、その一端と他端との距離が増減するように伸縮する側壁部と、前記側壁部の前記一端を気密的に閉塞する天壁部と、前記側壁部の前記他端を気密的に閉塞する底壁部と、前記側壁部を伸縮させるため、前記側壁部と前記天壁部と前記底壁部とで封止される気密空間内に流体を供給または前記気密空間内から流体を排出する導入導出部と、被駆動体に面して前記天壁部に形成され、前記被駆動体を非接触で支持する静圧軸受とを備える非接触アクチュエータの制御方法であって、
前記静圧軸受を駆動させて、前記被駆動体を前記静圧軸受により非接触で支持することを開始する支持開始工程と、
前記支持開始工程が実行された後、前記気密空間内に流体を供給または前記気密空間内から流体を排出して、前記天壁部を移動させる移動工程と、
を備えたことを特徴とする非接触アクチュエータの制御方法。
【請求項1】
被駆動体を移動させるための非接触アクチュエータであって、
環状をなし、その一端と他端との距離が増減するように伸縮する側壁部と、
前記側壁部の前記一端を気密的に閉塞する天壁部と、
前記側壁部の前記他端を気密的に閉塞する底壁部と、
前記側壁部を伸縮させるため、前記側壁部と前記天壁部と前記底壁部とで封止される気密空間内に流体を供給且つ前記気密空間内から流体を排出する導入導出部と、
前記被駆動体に面して前記天壁部に形成され、前記被駆動体を非接触で支持する静圧軸受と、
を備えることを特徴とする非接触アクチュエータ。
【請求項2】
前記側壁部は、蛇腹構造を有していることを特徴とする請求項1に記載の非接触アクチュエータ。
【請求項3】
前記静圧軸受は、前記天壁部に形成され、前記被駆動体を非接触で支持する軸受面を有する多孔質体からなることを特徴とする請求項1または2に記載の非接触アクチュエータ。
【請求項4】
前記側壁部は、その中心軸線に沿った方向に伸縮することを特徴とする請求項1乃至3のいずれか一項に記載の非接触アクチュエータ。
【請求項5】
第1非接触アクチュエータと第2非接触アクチュエータとを備える非接触アクチュエータ装置であって、
前記第1非接触アクチュエータは、
環状をなし、その一端と他端との距離が増減するように伸縮する第1側壁部と、
前記第1側壁部の前記一端を気密的に閉塞する第1天壁部と、
前記第1側壁部の前記他端を気密的に閉塞する第1底壁部と、
前記第1側壁部を伸縮させるため、前記第1側壁部と前記第1天壁部と前記第1底壁部とで封止される気密空間内に流体を供給且つ前記気密空間内から流体を排出する第1導入導出部と、
前記被駆動体に面して前記第1天壁部に形成され、前記被駆動体を非接触で支持する第1静圧軸受とを備え、
前記第2非接触アクチュエータは、
環状をなし、その一端と他端との距離が増減するように伸縮する第2側壁部と、
前記第2側壁部の前記一端を気密的に閉塞する第2天壁部と、
前記第2側壁部の前記他端を気密的に閉塞する第2底壁部と、
前記第2側壁部を伸縮させるため、前記第2側壁部と前記第2天壁部と前記第2底壁部とで封止される気密空間内に流体を供給且つ前記気密空間内から流体を排出する第2導入導出部と、
前記被駆動体に面して前記第2天壁部に形成され、前記被駆動体を非接触で支持する第2静圧軸受とを備え、
前記第1静圧軸受の軸受面と前記第2静圧軸受の軸受面とが前記被駆動体を挟んで対向するように前記第1非接触アクチュエータと前記第2非接触アクチュエータとを配置することを特徴とする非接触アクチュエータ装置。
【請求項6】
前記第1側壁部及び前記第2側壁部は、それぞれ蛇腹構造を有していることを特徴とする請求項5に記載の非接触アクチュエータ装置。
【請求項7】
前記第1静圧軸受は前記第1天壁部に形成され、前記第2静圧軸受は前記第2天壁部に形成され、前記第1静圧軸受及び前記第2静圧軸受は、それぞれ前記被駆動体を非接触で支持する軸受面を有する多孔質体からなることを特徴とする請求項5または6に記載の非接触アクチュエータ装置。
【請求項8】
前記第1側壁部及び前記第2側壁部は、それぞれの中心軸線に沿った方向に伸縮することを特徴とする請求項5乃至7のいずれか一項に記載の非接触アクチュエータ装置。
【請求項9】
環状をなし、その一端と他端との距離が増減するように伸縮する側壁部と、前記側壁部の前記一端を気密的に閉塞する天壁部と、前記側壁部の前記他端を気密的に閉塞する底壁部と、前記側壁部を伸縮させるため、前記側壁部と前記天壁部と前記底壁部とで封止される気密空間内に流体を供給または前記気密空間内から流体を排出する導入導出部と、被駆動体に面して前記天壁部に形成され、前記被駆動体を非接触で支持する静圧軸受とを備える非接触アクチュエータの制御方法であって、
前記静圧軸受を駆動させて、前記被駆動体を前記静圧軸受により非接触で支持することを開始する支持開始工程と、
前記支持開始工程が実行された後、前記気密空間内に流体を供給または前記気密空間内から流体を排出して、前記天壁部を移動させる移動工程と、
を備えたことを特徴とする非接触アクチュエータの制御方法。
【図1】


【図2】
【図2】
【公開番号】特開2009−250424(P2009−250424A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−102839(P2008−102839)
【出願日】平成20年4月10日(2008.4.10)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月10日(2008.4.10)
【出願人】(000002107)住友重機械工業株式会社 (2,241)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]