
非接触三次元計測装置及び非接触三次元計測方法
【課題】表面に特徴のない物体についても高速な計測を可能にする非接触三次元計測装置及び非接触三次元計測方法を提供する。
【解決手段】被計測物1を撮影する第1のカメラ2a及び第2のカメラ2bと、被計測物1にラインレーザ12を照射するラインレーザ4と、第1のカメラ2a及び第2のカメラ2bの、互いの位置関係に関する外部標定を行う標定部6と、ラインレーザ12が照射された被計測物1を第1のカメラ2aで撮影した第1の画像と、第2のカメラ2bで撮影した第2の画像とを画像処理する画像処理部8と、を備え、画像処理部8は、第1の画像上のラインレーザ12が照射された第1線分データの中の一つの点を特徴点として選択し、第2の画像上において、ラインレーザ12が照射された第2線分データとエピポーラ線との交点を、第1の画像上で選択した特徴点と対応する対応点として決定し、被計測物1上の該当点の三次元座標を算出する。
【解決手段】被計測物1を撮影する第1のカメラ2a及び第2のカメラ2bと、被計測物1にラインレーザ12を照射するラインレーザ4と、第1のカメラ2a及び第2のカメラ2bの、互いの位置関係に関する外部標定を行う標定部6と、ラインレーザ12が照射された被計測物1を第1のカメラ2aで撮影した第1の画像と、第2のカメラ2bで撮影した第2の画像とを画像処理する画像処理部8と、を備え、画像処理部8は、第1の画像上のラインレーザ12が照射された第1線分データの中の一つの点を特徴点として選択し、第2の画像上において、ラインレーザ12が照射された第2線分データとエピポーラ線との交点を、第1の画像上で選択した特徴点と対応する対応点として決定し、被計測物1上の該当点の三次元座標を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被計測物の形状を非接触で計測する非接触三次元計測装置及び非接触三次元計測方法に関する。
【背景技術】
【0002】
被計測物を計測する三次元計測の方法には、パッシブ法(受動型計測法)とアクティブ法(能動型計測法)とがある。パッシブ法としては、対象となる物体に対して、計測の補助となる特定の光や電波等を照射することなく計測を行う方法である。パッシブ法には、例えば写真計測法がある。アクティブ法は、三次元計測を行うために光、電波、音波などを対象となる物体に照射して、得られる情報を利用して計測を行う方法である。アクティブ法には、例えば光切断法がある。
【0003】
パッシブ法の一つである写真計測は、撮影された2枚以上の画像より外部標定(2台のカメラの位置関係を求めること)を行い、画像間の特徴点に対し、同一場所を対応付けることで三次元点を求めていた(例えば、特許文献1参照。)。このため、写真に写るサイズであれば、被計測物の大きさは自由であり、大きな物から、小さな物まで計測することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3924576号
【非特許文献】
【0005】
【非特許文献1】徐剛著,「写真から作る3次元CG」,近代科学社,2001年1月 P.31〜P.86
【非特許文献2】吉澤徹編,「光三次元計測」,新技術コミュニケーションズ,1993年3月 P.28〜P.37
【発明の概要】
【発明が解決しようとする課題】
【0006】
写真測量において、2台のカメラでそれぞれ撮影された2枚の写真内の対応付けは、2枚の写真内に共通して写っており、同一箇所と認定できる特徴点を利用して行われる。そのため、被計測物の表面上に同一箇所と認定できる何らかの特徴点がなければ、2枚の写真内の対応付けは困難であった。たとえば、プラスチック成型品の表面は滑らかで特徴がないため、写真測量による特徴点の対応付けを利用する三次元計測はできなかった。
【0007】
上述のように、パッシブ法である写真計測では、滑らかな表面等の何ら特徴のない形状は計測することは困難であった。また、アクティブ法である光切断法は、被計測物のサイズが装置によって限定されてしまうという欠点を持っている
【0008】
本発明の目的は、表面に何ら特徴のない物体についても高速に非接触で三次元形状計測を可能にする非接触三次元計測装置及び非接触三次元計測方法を提供することである。
【課題を解決するための手段】
【0009】
本発明に係る非接触三次元計測装置は、互いに距離をおいて配置され、被計測物を撮影する第1のカメラ及び第2のカメラと、
前記被計測物にラインレーザを照射するラインレーザと、
前記第1のカメラ及び前記第2のカメラについて、互いの距離を計測するための外部標定を行う標定部と、
前記ラインレーザが照射された被計測物を前記第1のカメラで撮影した第1の画像と、前記第2のカメラで撮影した第2の画像とを画像処理する画像処理部と、
を備え、
前記画像処理部は、
前記第1の画像上の前記ラインレーザが照射された第1線分データの中の一つの点を特徴点として選択し、
前記第1の画像上で選択した前記特徴点に対応するエピポーラ線を前記第2の画像上に表示して、
前記第2の画像上において、前記ラインレーザが照射された第2線分データと前記エピポーラ線との交点を、前記第1の画像上で選択した前記特徴点と対応する対応点として決定し、
前記第1の画像における前記特徴点と、前記第2の画像における前記対応点とを用いて、前記特徴点及び前記対応点に該当する前記被計測物上の該当点の三次元座標を算出する。
【0010】
また、前記ラインレーザは、前記被計測物の全体にわたってラインレーザを走査できるものであってもよい。
【0011】
さらに、前記ラインレーザは、照射方向の所定の軸について回転してラインレーザを前記被照射できるものであってもよい。
【0012】
本発明に係る非接触三次元計測方法は、
(a)互いに距離をおいて配置され、被計測物を撮影する第1のカメラ及び第2のカメラについて、互いの距離を計測するための外部標定を行う外部標定ステップと、
(b)前記被計測物にラインレーザを照射するラインレーザ照射ステップと、
(c)前記ラインレーザが照射された被計測物を前記第1のカメラ及び前記第2のカメラでそれぞれ撮影して、前記第1のカメラによる第1の画像と、前記第2のカメラによる第2の画像とを得る画像撮影ステップと、
(d)前記第1の画像において、前記ラインレーザが照射された部分を第1線分データとして抽出する第1線分データ抽出ステップと、
(e)前記第2の画像において、前記ラインレーザが照射された部分を第2線分データとして抽出する第2線分データ抽出ステップと、
(f)前記第1の画像から抽出された前記第1線分データの中の一つの点を特徴点として選択する特徴点選択ステップと、
(g)前記第1のカメラのレンズ中心から前記特徴点を通って延びるエピポーラ線を前記第2の画像上に表示するエピポーラ線表示ステップと、
(h)前記第2の画像から抽出された前記第2線分データと前記エピポーラ線との交点を、前記第1の画像上で選択した前記特徴点と対応する対応点として決定する対応点決定ステップと、
(i)前記第1の画像における前記特徴点と、前記第2の画像における前記対応点とを用いて、前記特徴点及び前記対応点に該当する前記被計測物上の該当点の三次元座標を算出する三次元座標算出ステップと、
を含む。
【0013】
さらに、(j)前記第1画像から抽出された前記第1線分上の点すべてに対して、前記ステップ(f)〜前記ステップ(i)を繰り返して、前記ラインレーザに照射されたライン部分に対して三次元座標を算出する三次元座標算出ステップを含んでもよい。
【0014】
また、前記ラインレーザ照射ステップ(b)において、前記ラインレーザを前記被計測物にわたって走査するラインレーザ走査ステップをさらに含み、前記ラインレーザを照射するごとに、前記ステップ(c)〜前記ステップ(j)を繰り返して、前記被計測物の全体を走査してもよい。
【0015】
さらに、前記ラインレーザ照射ステップ(b)において、前記ラインレーザを照射方向の所定の軸について回転させて前記被計測物に照射するラインレーザ走査ステップをさらに含み、前記ラインレーザを回転させて前記被計測物に照射するごとに、前記ステップ(c)〜前記ステップ(j)を繰り返してもよい。
【0016】
またさらに、前記対応点決定ステップ(i)において、前記エピポーラ線と前記第2線分データとの交点が2つ以上存在する場合、前記ラインレーザを前記第1の画像上の前記特徴点に該当する前記被計測物上の該当点への照射方向の軸について回転させて照射して、前記第2の画像上で前記エピポーラ線と前記第2線分データとの単一の交点を前記特徴点と対応する対応点として決定してもよい。
【発明の効果】
【0017】
本発明に係る非接触三次元計測装置及び非接触三次元計測方法によれば、被計測物にラインレーザを照射することで、被計測物が凹凸を有する形状であってもラインがぼけることがない。
【0018】
また、この非接触三次元計測装置及び非接触三次元計測方法では、ラインレーザが照射された被計測物を2つのカメラで撮影した2枚の画像のうち一方の画像上でラインレーザが照射された部分である第1線分データの一つの点を特徴点として選択している。この場合に、もう一つの画像上でエピポーラ線を表示して、ラインレーザが照射された部分である第2線分データとの交点を上記特徴点と対応する対応点として特定することができる。これまで被計測物上に照射したパターンとの相関関係で対応点を特定していた場合に比べて曖昧さを含むことなく対応点を明確に決めることができ、三次元計測の精度を向上させることができる。
【図面の簡単な説明】
【0019】
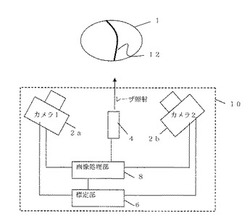
【図1】本発明の実施の形態1に係る非接触三次元計測装置の構成を示すブロック図である。
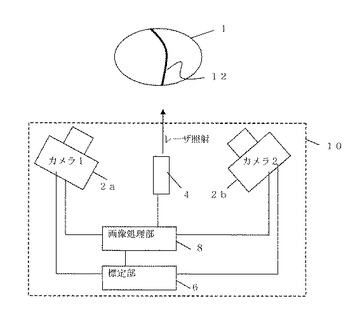
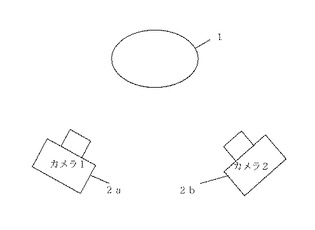
【図2】被計測物と2つのカメラとの配置を示す概略図である。
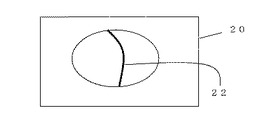
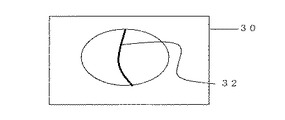
【図3】第1のカメラによって撮影された第1の画像を示す概略図である。
【図4】第2のカメラによって撮影された第2の画像を示す概略図である。
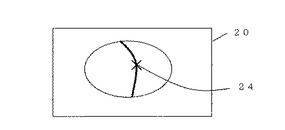
【図5】図3の第1の画像について、第1線分データ中の一つの点を特徴点として選択する場合の概略図である。
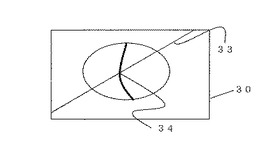
【図6】図4の第2の画像において、第1の画像上の特徴点に該当するエピポーラ線が表示された第2の画像を示す概略図である。
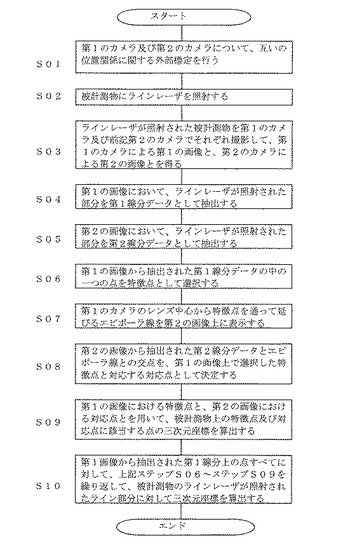
【図7】本発明の実施の形態1に係る非接触三次元計測方法のフローチャートである。
【図8】本発明の実施の形態1に係る非接触三次元計測方法の特徴を説明するための概念図である。
【図9】本発明の実施の形態1の変形例に係る非接触三次元計測方法のフローチャートである。
【図10】本発明の実施の形態2に係る非接触三次元計測方法のフローチャートである。
【図11】本発明の実施の形態3に係る非接触三次元計測方法のフローチャートである。
【発明を実施するための形態】
【0020】
本発明に係る非接触三次元計測装置及び計測方法について、添付図面を用いて以下に説明する。なお、図面において実質的に同一の部材については同一の符号を付している。
【0021】
(実施の形態1)
図1は、実施の形態1に係る非接触三次元計測装置10の構成を示す概略図である。
この非接触三次元計測装置10は、距離を置いて設置された2台のカメラ2a、2bと、被計測物1にラインレーザを照射するラインレーザ4と、2台のカメラ2a、2bの位置関係を含む外部標定を行う標定部6と、ラインレーザが照射された被計測物1を第1のカメラ2aで撮影した第1の画像20と、第2のカメラ2bで撮影した第2の画像30とを画像処理する画像処理部8と、を含む。それぞれのカメラ2a、2bは、レンズ中心や焦点距離、歪補正係数などの内部標定(内部パラメータ)が予め算出されていることが望ましい。さらに、撮影された画像は、内部評定データを利用して歪補正された画像が望ましいが、必須ではない。また、ラインレーザ4は、被計測物1の表面全体にわたって走査できる。また、標定部6は、第1のカメラ2a及び第2のカメラ2bについて、互いの位置関係に関する外部標定を行う。画像処理部8は、第1の画像20上のラインレーザが照射された第1線分データ22の中の一つの点を特徴点24として選択し、その特徴点24に該当するエピポーラ線33を第2の画像30上に表示して、第2の画像30上において、ラインレーザが照射された第2線分データ32とエピポーラ線33との交点を、第1の画像20上で選択した特徴点24と対応する対応点34として決定し、第1の画像20における特徴点24と、第2の画像30における対応点34とを用いて、特徴点及び対応点に該当する被計測物1上の該当点14の三次元座標を算出する。
【0022】
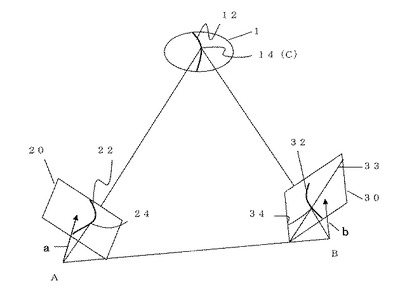
図8は、実施の形態1に係る非接触三次元計測装置10の特徴を説明する概念図である。なお、図8は、図2の非接触三次元計測装置10の構成のうち、写真測量に関係する位置関係を詳細に示したものである。
<2つのカメラ及び画像について>
2つのカメラ(第1のカメラ2a、第2のカメラ2b)のそれぞれのレンズ中心を点A及び点Bとして表している。
第1のカメラ2aによる第1の画像20において、被計測物1に照射されたラインレーザの部分である第1線分データ22と、選択された一つの特徴点24を示している。第1のカメラ2aのレンズ中心、焦点距離、歪補正係数等は内部標定によって得られる。
また、第2のカメラによる第2の画像30において、被計測物1に照射されたラインレーザの部分である第2線分データ32と、第1線分データから選択された特徴点24に対応するエピポーラ線33と、両者の交点である対応点34と、を示している。第2のカメラ2bのレンズ中心、焦点距離、歪補正係数等は内部標定によって得られる。
<被計測物について>
また、被計測物1に照射されたラインレーザの部分12と、特徴点24及び対応点34とに該当する被計測物1上の該当点14を示している。この該当点14は点Cとしても示している。
【0023】
<写真測量について>
a)第1のカメラ2aのレンズ中心Aと、第2のカメラ2bのレンズ中心Bとの間の位置関係及び、各カメラの方向は外部標定によって求められる。
b)また、第1のカメラ2a及び第2のカメラ2bのレンズ中心、焦点距離、歪補正係数等は内部標定を利用することによって求められる。
c)次に、被計測物1上の該当点14の点Cは、第1のカメラ2aのレンズ中心Aから第1の画像20上の特徴点24に向かって延長したライン上に存在すると共に、第2のカメラ2bのレンズ中心Bから第2の画像30上の対応点34に向かって延長したライン上に存在する。そのため、写真測量の原理によって、これらの交点として点Cが得られる。
以上によって、被計測物1上の該当点14(C)を三次元計測することができる。
【0024】
本発明の実施の形態1に係る非接触三次元計測装置10によれば、被計測物1にラインレーザを照射することで、被計測物1が凹凸を有する形状であってもラインがぼけることがない。このため、対応点の抽出精度が高くなり、必然的に三次元計測点の精度も高まる。
【0025】
また、この非接触三次元計測装置10では、ラインレーザが照射された被計測物を2つのカメラ2a、2bで撮影した2枚の画像のうち一方の画像20上でラインレーザが照射された部分である第1線分データ22の一つの点を特徴点24として選択している。この場合に、もう一つの画像30上でエピポーラ線33を表示して、ラインレーザが照射された部分である第2線分データ32との交点を上記特徴点24と対応する対応点34として特定することができる。これまで被計測物1上に照射したパターンとの相関関係で対応点を特定していた場合に比べて曖昧さを含むことなく対応点を明確に決めることができ、三次元計測の精度を向上させることができる。
【0026】
図7は、本発明の非接触三次元計測方法のフローチャートである。この非接触三次元計測方法は、以下のようにして実行される。
(a)被計測物1が写る範囲に、被計測物1を撮影する2台のカメラ(第1のカメラ2a及び第2のカメラ2b)を、互いに距離をおいて配置する(図1)。それぞれのカメラ2a、2bは、レンズ中心、焦点距離、歪補正係数などの内部標定(内部パラメータ)が予め算出されていることが望ましい。なお、カメラの内部標定が行われていない場合には例えば、非特許文献1に挙げられる算出方法によって求めることができる。
(b)第1のカメラ2a及び第2のカメラ2bについて、互いの位置関係に関する外部標定を行う(S01)。
この外部標定によって、複数のカメラの位置関係を知ることができる。例えば、非特許文献1に挙げられる方法として、被計測物1の周りのあらかじめ知られた対応点を8点以上抽出することによって外部標定を実施することができる。
【0027】
(c)被計測物1にラインレーザ4からラインレーザを照射する(S02)(図2)。ラインレーザを用いることによって、非計測物1が凹凸の大きい形状であっても照射されるラインがぼけることがない。
(d)ラインレーザが照射された被計測物1を第1のカメラ2a及び第2のカメラ2bでそれぞれ撮影して、第1のカメラ2aによる第1の画像(図3)と、第2のカメラ2bによる第2の画像(図4)とを得る(S03)。
(e)第1の画像20において、ラインレーザが照射された部分を第1線分データ22として抽出する(S04)(図3)。
(f)第2の画像30において、前記ラインレーザが照射された部分を第2線分データ32として抽出する(S05)(図4)。
【0028】
(g)第1の画像20から抽出された第1線分データ22の中の一つの点を特徴点24として選択する(S06)(図5)。なお、特徴点24を、第1線分データ22の全体にわたって順に選択して、特徴点24を選択するごとに、後の(h)から(j)を繰り返すことによって、第1線分22の全体について三次元計測を行うことができる。
(h)特徴点24に対応するエピポーラ線33を第2の画像上に表示する(S07)(図6)。なお、エピポーラ線とは、第1のカメラ2aのレンズ中心と、第1の画像20上の特徴点24に該当する被計測物1上の点とを結ぶ仮想的な線が第2のカメラに投影された線分である。第2の画像30上でエピポーラ線33がどのように表示されるかは、第1のカメラ2a及び第2のカメラ2bの内部標定と、第1のカメラ2a及び第2のカメラ2bの外部標定とによって決定できる。第2の画像30上で表示されるエピポーラ線33上のどこかに特徴点24と対応する対応点が存在する。
(i)第2の画像30から抽出された第2線分データ32とエピポーラ線33との交点を第1の画像20上で選択した特徴点24と対応する対応点34として決定する(S08)(図6)。
(j)第1の画像20における特徴点24と、第2の画像30における対応点34とを用いて、特徴点及び対応点に該当する被計測物1上の該当点14の三次元座標を算出する(S09)。
(k)第1画像から抽出された第1線分上の点すべてに対して、上記ステップ(g)〜ステップ(j)を繰り返して、被計測物のラインレーザが照射されたライン部分に対して三次元座標を算出する(S10)。
以上の各ステップによって、特徴点及び対応点に該当する被計測物1の該当点14の三次元座標を得ることができる。
【0029】
本発明の実施の形態1に係る非接触三次元計測方法によれば、被計測物1にラインレーザを照射することで、被計測物1が凹凸を有する形状であってもラインはぼけることがない。このため、対応点の抽出精度が高くなり、必然的に三次元計測点の精度も高まる。
【0030】
また、この被接触三次元計測方法では、ラインレーザが照射された被計測物を2つのカメラ2a、2bで撮影した2枚の画像のうち一方の画像20上でラインレーザが照射された部分である第1線分データ22の一つの点を特徴点24として選択している。この場合に、もう一つの画像30上でエピポーラ線33を表示して、ラインレーザが照射された部分である第2線分データ32との交点を上記特徴点24と対応する対応点34として特定することができる。このように、これまで被計測物1上に照射したパターンとの相関関係で対応点を特定していた場合に比べて曖昧さを含むことなく対応点を明確に決めることができ、三次元計測の精度を向上させることができる。
【0031】
(変形例)
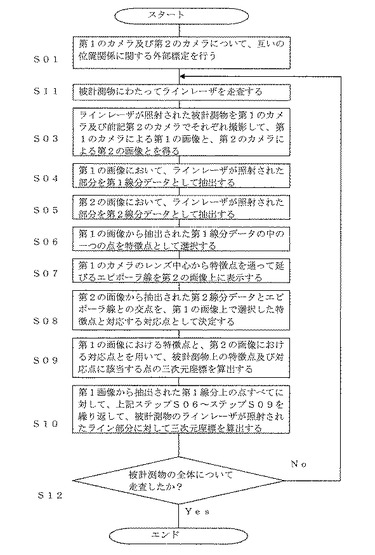
図9は、実施の形態1の変形例に係る非接触三次元計測方法のフローチャートである。この変形例の非接触三次元計測方法では、図8の実施の形態1に係る非接触三次元計測方法と対比すると、ラインレーザを被計測物の全体にわたって走査する点で相違する。
(a)及び(b)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(c)被計測物1にわたってラインレーザを走査する(S11)。ここでは、ラインレーザ4をラインとは角度をなす方向に沿って走査することで、被計測物1の全体にわたって順に走査していくことを表している。
(d)から(k)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(l)被計測物1の全体について走査したか確認する(S12)。被計測物1の全体について走査していない場合には、(c)から(k)を繰り返して、被計測物1の全体について三次元計測を行う。
以上の各ステップによって、被計測物1の全体にわたって三次元計測を行うことができる。
【0032】
(実施の形態2)
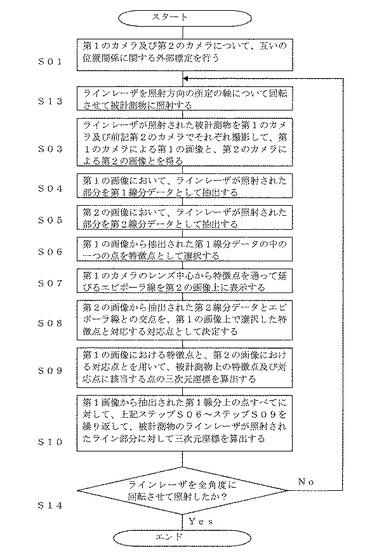
図10は、実施の形態2に係る非接触三次元計測方法のフローチャートである。この変形例の非接触三次元計測方法では、図8の実施の形態1に係る非接触三次元計測方法と対比すると、ラインレーザ4を照射方向の所定の軸について回転させて被計測物1に照射する点で相違する。
(a)及び(b)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(c)ラインレーザを照射方向の所定の軸について回転させて被計測物1に照射する(S13)。実施の形態1の変形例では、ラインレーザをラインと角度をなす方向に走査して被計測物1の全体にわたって走査していたが、ラインレーザ4を回転させることによっても被計測物1の全体について照射することができる。
(d)から(k)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(l)ラインレーザを全角度に回転させて照射したか確認する(S14)。被計測物1の全体について走査していない場合には、(c)から(k)を繰り返して、被計測物1の全体について三次元計測を行う。
以上の各ステップによって、被計測物1の全体にわたって三次元計測を行うことができる。
【0033】
(実施の形態3)
図11は、実施の形態3に係る非接触三次元計測方法のフローチャートである。この変形例の非接触三次元計測方法では、図8の実施の形態1に係る非接触三次元計測方法と対比すると、(i)で第2線分データ32とエピポーラ線33との交点が単一ではなく2つ以上の交点が存在する場合に、ラインレーザを特徴点24に該当する被計測物1上の該当点14への軸について回転させて照射する点で相違する。
(a)から(h)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(i)の前に、第2の画像30上において、エピポーラ線33と第2線分32との交点は単一か、確認する(S15)。交点が一つの場合には、実施の形態1に係る非接触三次元計測方法の(i)から(k)を行って、特徴点及び対応点に該当する被計測物1の該当点14の三次元座標を得ることができる。
【0034】
一方、交点が複数の場合、例えば、ラインレーザが照射された部分である第2線分データ32とエピポーラ線33とが同一方向に沿って延在するような場合に交点が複数存在する場合が生じる。この場合には、ラインレーザ4を特徴点24に該当する被計測物1上の該当点14への軸について回転させて照射する(S16)。この場合に、エピポーラ線33とラインレーザのライン方向とが角度をなすようにラインレーザ4を回転させることが好ましい。より好ましくは、エピポーラ線33とラインレーザのライン方向とが互いに直交するようにラインレーザ4を回転させることである。また、特徴点24を保持するように、特徴点24に該当する被計測物1の該当点14について回転させる。その後、(d)から(h)を繰り返して、エピポーラ線33と第2線分32との交点が単一となるようにすることができる。
【0035】
これによって、エピポーラ線33と第2線分データ32とが平行になる等の原因で対応点34が一つに特定できない場合でも、ラインレーザ4を回転させて、エピポーラ線33と第2線分データ32とが交差する交点として単一の対応点34が得られ、明確に対応点を特定でき、三次元計測の精度を向上させることができる。
【0036】
なお、エピポーラ線33と第2線分データ32との交点が一つも得られない場合には、第1の画像20上で選択した特徴点24に対応する被計測物1上の該当点14が第2の画像30上には現れていないことを意味している。この場合には、第1のカメラ2aからの第1の画像20で表示される被計測物1の範囲と、第2のカメラ2bからの第2の画像30で表示される被計測物1の範囲とで共通して表示される範囲が少ないか又は存在しないと考えられる。そこで、第1のカメラ2aと第2のカメラ2bとの距離を縮めて第1の画像20と第2の画像30で共通する被計測物1の範囲が得られるようにすることが好ましい。
【産業上の利用可能性】
【0037】
本発明に係る非接触三次元計測装置及び非接触三次元計測方法によれば、表面に特徴がない物体を被計測物とする場合であっても、2つの画像上で、一方の画像で選択した特徴点について、もう一方の画像上における対応点を明確に特定できる。そこで、本発明に係る非接触三次元計測装置及び非接触三次元計測方法は、表面に特徴がない物体を被計測物とする非接触三次元計測に有用である。
【符号の説明】
【0038】
1 被計測物
2a 第1のカメラ
2b 第2のカメラ
4 ラインレーザ
6 標定部
8 画像処理部
10 非接触三次元計測装置
12 照射されたラインレーザ
14 該当点
20 第1の画像
22 第1線分データ
24 特徴点
30 第2の画像
32 第2線分データ
33 エピポーラ線
34 対応点
【技術分野】
【0001】
本発明は、被計測物の形状を非接触で計測する非接触三次元計測装置及び非接触三次元計測方法に関する。
【背景技術】
【0002】
被計測物を計測する三次元計測の方法には、パッシブ法(受動型計測法)とアクティブ法(能動型計測法)とがある。パッシブ法としては、対象となる物体に対して、計測の補助となる特定の光や電波等を照射することなく計測を行う方法である。パッシブ法には、例えば写真計測法がある。アクティブ法は、三次元計測を行うために光、電波、音波などを対象となる物体に照射して、得られる情報を利用して計測を行う方法である。アクティブ法には、例えば光切断法がある。
【0003】
パッシブ法の一つである写真計測は、撮影された2枚以上の画像より外部標定(2台のカメラの位置関係を求めること)を行い、画像間の特徴点に対し、同一場所を対応付けることで三次元点を求めていた(例えば、特許文献1参照。)。このため、写真に写るサイズであれば、被計測物の大きさは自由であり、大きな物から、小さな物まで計測することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3924576号
【非特許文献】
【0005】
【非特許文献1】徐剛著,「写真から作る3次元CG」,近代科学社,2001年1月 P.31〜P.86
【非特許文献2】吉澤徹編,「光三次元計測」,新技術コミュニケーションズ,1993年3月 P.28〜P.37
【発明の概要】
【発明が解決しようとする課題】
【0006】
写真測量において、2台のカメラでそれぞれ撮影された2枚の写真内の対応付けは、2枚の写真内に共通して写っており、同一箇所と認定できる特徴点を利用して行われる。そのため、被計測物の表面上に同一箇所と認定できる何らかの特徴点がなければ、2枚の写真内の対応付けは困難であった。たとえば、プラスチック成型品の表面は滑らかで特徴がないため、写真測量による特徴点の対応付けを利用する三次元計測はできなかった。
【0007】
上述のように、パッシブ法である写真計測では、滑らかな表面等の何ら特徴のない形状は計測することは困難であった。また、アクティブ法である光切断法は、被計測物のサイズが装置によって限定されてしまうという欠点を持っている
【0008】
本発明の目的は、表面に何ら特徴のない物体についても高速に非接触で三次元形状計測を可能にする非接触三次元計測装置及び非接触三次元計測方法を提供することである。
【課題を解決するための手段】
【0009】
本発明に係る非接触三次元計測装置は、互いに距離をおいて配置され、被計測物を撮影する第1のカメラ及び第2のカメラと、
前記被計測物にラインレーザを照射するラインレーザと、
前記第1のカメラ及び前記第2のカメラについて、互いの距離を計測するための外部標定を行う標定部と、
前記ラインレーザが照射された被計測物を前記第1のカメラで撮影した第1の画像と、前記第2のカメラで撮影した第2の画像とを画像処理する画像処理部と、
を備え、
前記画像処理部は、
前記第1の画像上の前記ラインレーザが照射された第1線分データの中の一つの点を特徴点として選択し、
前記第1の画像上で選択した前記特徴点に対応するエピポーラ線を前記第2の画像上に表示して、
前記第2の画像上において、前記ラインレーザが照射された第2線分データと前記エピポーラ線との交点を、前記第1の画像上で選択した前記特徴点と対応する対応点として決定し、
前記第1の画像における前記特徴点と、前記第2の画像における前記対応点とを用いて、前記特徴点及び前記対応点に該当する前記被計測物上の該当点の三次元座標を算出する。
【0010】
また、前記ラインレーザは、前記被計測物の全体にわたってラインレーザを走査できるものであってもよい。
【0011】
さらに、前記ラインレーザは、照射方向の所定の軸について回転してラインレーザを前記被照射できるものであってもよい。
【0012】
本発明に係る非接触三次元計測方法は、
(a)互いに距離をおいて配置され、被計測物を撮影する第1のカメラ及び第2のカメラについて、互いの距離を計測するための外部標定を行う外部標定ステップと、
(b)前記被計測物にラインレーザを照射するラインレーザ照射ステップと、
(c)前記ラインレーザが照射された被計測物を前記第1のカメラ及び前記第2のカメラでそれぞれ撮影して、前記第1のカメラによる第1の画像と、前記第2のカメラによる第2の画像とを得る画像撮影ステップと、
(d)前記第1の画像において、前記ラインレーザが照射された部分を第1線分データとして抽出する第1線分データ抽出ステップと、
(e)前記第2の画像において、前記ラインレーザが照射された部分を第2線分データとして抽出する第2線分データ抽出ステップと、
(f)前記第1の画像から抽出された前記第1線分データの中の一つの点を特徴点として選択する特徴点選択ステップと、
(g)前記第1のカメラのレンズ中心から前記特徴点を通って延びるエピポーラ線を前記第2の画像上に表示するエピポーラ線表示ステップと、
(h)前記第2の画像から抽出された前記第2線分データと前記エピポーラ線との交点を、前記第1の画像上で選択した前記特徴点と対応する対応点として決定する対応点決定ステップと、
(i)前記第1の画像における前記特徴点と、前記第2の画像における前記対応点とを用いて、前記特徴点及び前記対応点に該当する前記被計測物上の該当点の三次元座標を算出する三次元座標算出ステップと、
を含む。
【0013】
さらに、(j)前記第1画像から抽出された前記第1線分上の点すべてに対して、前記ステップ(f)〜前記ステップ(i)を繰り返して、前記ラインレーザに照射されたライン部分に対して三次元座標を算出する三次元座標算出ステップを含んでもよい。
【0014】
また、前記ラインレーザ照射ステップ(b)において、前記ラインレーザを前記被計測物にわたって走査するラインレーザ走査ステップをさらに含み、前記ラインレーザを照射するごとに、前記ステップ(c)〜前記ステップ(j)を繰り返して、前記被計測物の全体を走査してもよい。
【0015】
さらに、前記ラインレーザ照射ステップ(b)において、前記ラインレーザを照射方向の所定の軸について回転させて前記被計測物に照射するラインレーザ走査ステップをさらに含み、前記ラインレーザを回転させて前記被計測物に照射するごとに、前記ステップ(c)〜前記ステップ(j)を繰り返してもよい。
【0016】
またさらに、前記対応点決定ステップ(i)において、前記エピポーラ線と前記第2線分データとの交点が2つ以上存在する場合、前記ラインレーザを前記第1の画像上の前記特徴点に該当する前記被計測物上の該当点への照射方向の軸について回転させて照射して、前記第2の画像上で前記エピポーラ線と前記第2線分データとの単一の交点を前記特徴点と対応する対応点として決定してもよい。
【発明の効果】
【0017】
本発明に係る非接触三次元計測装置及び非接触三次元計測方法によれば、被計測物にラインレーザを照射することで、被計測物が凹凸を有する形状であってもラインがぼけることがない。
【0018】
また、この非接触三次元計測装置及び非接触三次元計測方法では、ラインレーザが照射された被計測物を2つのカメラで撮影した2枚の画像のうち一方の画像上でラインレーザが照射された部分である第1線分データの一つの点を特徴点として選択している。この場合に、もう一つの画像上でエピポーラ線を表示して、ラインレーザが照射された部分である第2線分データとの交点を上記特徴点と対応する対応点として特定することができる。これまで被計測物上に照射したパターンとの相関関係で対応点を特定していた場合に比べて曖昧さを含むことなく対応点を明確に決めることができ、三次元計測の精度を向上させることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施の形態1に係る非接触三次元計測装置の構成を示すブロック図である。
【図2】被計測物と2つのカメラとの配置を示す概略図である。
【図3】第1のカメラによって撮影された第1の画像を示す概略図である。
【図4】第2のカメラによって撮影された第2の画像を示す概略図である。
【図5】図3の第1の画像について、第1線分データ中の一つの点を特徴点として選択する場合の概略図である。
【図6】図4の第2の画像において、第1の画像上の特徴点に該当するエピポーラ線が表示された第2の画像を示す概略図である。
【図7】本発明の実施の形態1に係る非接触三次元計測方法のフローチャートである。
【図8】本発明の実施の形態1に係る非接触三次元計測方法の特徴を説明するための概念図である。
【図9】本発明の実施の形態1の変形例に係る非接触三次元計測方法のフローチャートである。
【図10】本発明の実施の形態2に係る非接触三次元計測方法のフローチャートである。
【図11】本発明の実施の形態3に係る非接触三次元計測方法のフローチャートである。
【発明を実施するための形態】
【0020】
本発明に係る非接触三次元計測装置及び計測方法について、添付図面を用いて以下に説明する。なお、図面において実質的に同一の部材については同一の符号を付している。
【0021】
(実施の形態1)
図1は、実施の形態1に係る非接触三次元計測装置10の構成を示す概略図である。
この非接触三次元計測装置10は、距離を置いて設置された2台のカメラ2a、2bと、被計測物1にラインレーザを照射するラインレーザ4と、2台のカメラ2a、2bの位置関係を含む外部標定を行う標定部6と、ラインレーザが照射された被計測物1を第1のカメラ2aで撮影した第1の画像20と、第2のカメラ2bで撮影した第2の画像30とを画像処理する画像処理部8と、を含む。それぞれのカメラ2a、2bは、レンズ中心や焦点距離、歪補正係数などの内部標定(内部パラメータ)が予め算出されていることが望ましい。さらに、撮影された画像は、内部評定データを利用して歪補正された画像が望ましいが、必須ではない。また、ラインレーザ4は、被計測物1の表面全体にわたって走査できる。また、標定部6は、第1のカメラ2a及び第2のカメラ2bについて、互いの位置関係に関する外部標定を行う。画像処理部8は、第1の画像20上のラインレーザが照射された第1線分データ22の中の一つの点を特徴点24として選択し、その特徴点24に該当するエピポーラ線33を第2の画像30上に表示して、第2の画像30上において、ラインレーザが照射された第2線分データ32とエピポーラ線33との交点を、第1の画像20上で選択した特徴点24と対応する対応点34として決定し、第1の画像20における特徴点24と、第2の画像30における対応点34とを用いて、特徴点及び対応点に該当する被計測物1上の該当点14の三次元座標を算出する。
【0022】
図8は、実施の形態1に係る非接触三次元計測装置10の特徴を説明する概念図である。なお、図8は、図2の非接触三次元計測装置10の構成のうち、写真測量に関係する位置関係を詳細に示したものである。
<2つのカメラ及び画像について>
2つのカメラ(第1のカメラ2a、第2のカメラ2b)のそれぞれのレンズ中心を点A及び点Bとして表している。
第1のカメラ2aによる第1の画像20において、被計測物1に照射されたラインレーザの部分である第1線分データ22と、選択された一つの特徴点24を示している。第1のカメラ2aのレンズ中心、焦点距離、歪補正係数等は内部標定によって得られる。
また、第2のカメラによる第2の画像30において、被計測物1に照射されたラインレーザの部分である第2線分データ32と、第1線分データから選択された特徴点24に対応するエピポーラ線33と、両者の交点である対応点34と、を示している。第2のカメラ2bのレンズ中心、焦点距離、歪補正係数等は内部標定によって得られる。
<被計測物について>
また、被計測物1に照射されたラインレーザの部分12と、特徴点24及び対応点34とに該当する被計測物1上の該当点14を示している。この該当点14は点Cとしても示している。
【0023】
<写真測量について>
a)第1のカメラ2aのレンズ中心Aと、第2のカメラ2bのレンズ中心Bとの間の位置関係及び、各カメラの方向は外部標定によって求められる。
b)また、第1のカメラ2a及び第2のカメラ2bのレンズ中心、焦点距離、歪補正係数等は内部標定を利用することによって求められる。
c)次に、被計測物1上の該当点14の点Cは、第1のカメラ2aのレンズ中心Aから第1の画像20上の特徴点24に向かって延長したライン上に存在すると共に、第2のカメラ2bのレンズ中心Bから第2の画像30上の対応点34に向かって延長したライン上に存在する。そのため、写真測量の原理によって、これらの交点として点Cが得られる。
以上によって、被計測物1上の該当点14(C)を三次元計測することができる。
【0024】
本発明の実施の形態1に係る非接触三次元計測装置10によれば、被計測物1にラインレーザを照射することで、被計測物1が凹凸を有する形状であってもラインがぼけることがない。このため、対応点の抽出精度が高くなり、必然的に三次元計測点の精度も高まる。
【0025】
また、この非接触三次元計測装置10では、ラインレーザが照射された被計測物を2つのカメラ2a、2bで撮影した2枚の画像のうち一方の画像20上でラインレーザが照射された部分である第1線分データ22の一つの点を特徴点24として選択している。この場合に、もう一つの画像30上でエピポーラ線33を表示して、ラインレーザが照射された部分である第2線分データ32との交点を上記特徴点24と対応する対応点34として特定することができる。これまで被計測物1上に照射したパターンとの相関関係で対応点を特定していた場合に比べて曖昧さを含むことなく対応点を明確に決めることができ、三次元計測の精度を向上させることができる。
【0026】
図7は、本発明の非接触三次元計測方法のフローチャートである。この非接触三次元計測方法は、以下のようにして実行される。
(a)被計測物1が写る範囲に、被計測物1を撮影する2台のカメラ(第1のカメラ2a及び第2のカメラ2b)を、互いに距離をおいて配置する(図1)。それぞれのカメラ2a、2bは、レンズ中心、焦点距離、歪補正係数などの内部標定(内部パラメータ)が予め算出されていることが望ましい。なお、カメラの内部標定が行われていない場合には例えば、非特許文献1に挙げられる算出方法によって求めることができる。
(b)第1のカメラ2a及び第2のカメラ2bについて、互いの位置関係に関する外部標定を行う(S01)。
この外部標定によって、複数のカメラの位置関係を知ることができる。例えば、非特許文献1に挙げられる方法として、被計測物1の周りのあらかじめ知られた対応点を8点以上抽出することによって外部標定を実施することができる。
【0027】
(c)被計測物1にラインレーザ4からラインレーザを照射する(S02)(図2)。ラインレーザを用いることによって、非計測物1が凹凸の大きい形状であっても照射されるラインがぼけることがない。
(d)ラインレーザが照射された被計測物1を第1のカメラ2a及び第2のカメラ2bでそれぞれ撮影して、第1のカメラ2aによる第1の画像(図3)と、第2のカメラ2bによる第2の画像(図4)とを得る(S03)。
(e)第1の画像20において、ラインレーザが照射された部分を第1線分データ22として抽出する(S04)(図3)。
(f)第2の画像30において、前記ラインレーザが照射された部分を第2線分データ32として抽出する(S05)(図4)。
【0028】
(g)第1の画像20から抽出された第1線分データ22の中の一つの点を特徴点24として選択する(S06)(図5)。なお、特徴点24を、第1線分データ22の全体にわたって順に選択して、特徴点24を選択するごとに、後の(h)から(j)を繰り返すことによって、第1線分22の全体について三次元計測を行うことができる。
(h)特徴点24に対応するエピポーラ線33を第2の画像上に表示する(S07)(図6)。なお、エピポーラ線とは、第1のカメラ2aのレンズ中心と、第1の画像20上の特徴点24に該当する被計測物1上の点とを結ぶ仮想的な線が第2のカメラに投影された線分である。第2の画像30上でエピポーラ線33がどのように表示されるかは、第1のカメラ2a及び第2のカメラ2bの内部標定と、第1のカメラ2a及び第2のカメラ2bの外部標定とによって決定できる。第2の画像30上で表示されるエピポーラ線33上のどこかに特徴点24と対応する対応点が存在する。
(i)第2の画像30から抽出された第2線分データ32とエピポーラ線33との交点を第1の画像20上で選択した特徴点24と対応する対応点34として決定する(S08)(図6)。
(j)第1の画像20における特徴点24と、第2の画像30における対応点34とを用いて、特徴点及び対応点に該当する被計測物1上の該当点14の三次元座標を算出する(S09)。
(k)第1画像から抽出された第1線分上の点すべてに対して、上記ステップ(g)〜ステップ(j)を繰り返して、被計測物のラインレーザが照射されたライン部分に対して三次元座標を算出する(S10)。
以上の各ステップによって、特徴点及び対応点に該当する被計測物1の該当点14の三次元座標を得ることができる。
【0029】
本発明の実施の形態1に係る非接触三次元計測方法によれば、被計測物1にラインレーザを照射することで、被計測物1が凹凸を有する形状であってもラインはぼけることがない。このため、対応点の抽出精度が高くなり、必然的に三次元計測点の精度も高まる。
【0030】
また、この被接触三次元計測方法では、ラインレーザが照射された被計測物を2つのカメラ2a、2bで撮影した2枚の画像のうち一方の画像20上でラインレーザが照射された部分である第1線分データ22の一つの点を特徴点24として選択している。この場合に、もう一つの画像30上でエピポーラ線33を表示して、ラインレーザが照射された部分である第2線分データ32との交点を上記特徴点24と対応する対応点34として特定することができる。このように、これまで被計測物1上に照射したパターンとの相関関係で対応点を特定していた場合に比べて曖昧さを含むことなく対応点を明確に決めることができ、三次元計測の精度を向上させることができる。
【0031】
(変形例)
図9は、実施の形態1の変形例に係る非接触三次元計測方法のフローチャートである。この変形例の非接触三次元計測方法では、図8の実施の形態1に係る非接触三次元計測方法と対比すると、ラインレーザを被計測物の全体にわたって走査する点で相違する。
(a)及び(b)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(c)被計測物1にわたってラインレーザを走査する(S11)。ここでは、ラインレーザ4をラインとは角度をなす方向に沿って走査することで、被計測物1の全体にわたって順に走査していくことを表している。
(d)から(k)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(l)被計測物1の全体について走査したか確認する(S12)。被計測物1の全体について走査していない場合には、(c)から(k)を繰り返して、被計測物1の全体について三次元計測を行う。
以上の各ステップによって、被計測物1の全体にわたって三次元計測を行うことができる。
【0032】
(実施の形態2)
図10は、実施の形態2に係る非接触三次元計測方法のフローチャートである。この変形例の非接触三次元計測方法では、図8の実施の形態1に係る非接触三次元計測方法と対比すると、ラインレーザ4を照射方向の所定の軸について回転させて被計測物1に照射する点で相違する。
(a)及び(b)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(c)ラインレーザを照射方向の所定の軸について回転させて被計測物1に照射する(S13)。実施の形態1の変形例では、ラインレーザをラインと角度をなす方向に走査して被計測物1の全体にわたって走査していたが、ラインレーザ4を回転させることによっても被計測物1の全体について照射することができる。
(d)から(k)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(l)ラインレーザを全角度に回転させて照射したか確認する(S14)。被計測物1の全体について走査していない場合には、(c)から(k)を繰り返して、被計測物1の全体について三次元計測を行う。
以上の各ステップによって、被計測物1の全体にわたって三次元計測を行うことができる。
【0033】
(実施の形態3)
図11は、実施の形態3に係る非接触三次元計測方法のフローチャートである。この変形例の非接触三次元計測方法では、図8の実施の形態1に係る非接触三次元計測方法と対比すると、(i)で第2線分データ32とエピポーラ線33との交点が単一ではなく2つ以上の交点が存在する場合に、ラインレーザを特徴点24に該当する被計測物1上の該当点14への軸について回転させて照射する点で相違する。
(a)から(h)は、実施の形態1に係る非接触三次元計測方法と同じであるので説明を省略する。
(i)の前に、第2の画像30上において、エピポーラ線33と第2線分32との交点は単一か、確認する(S15)。交点が一つの場合には、実施の形態1に係る非接触三次元計測方法の(i)から(k)を行って、特徴点及び対応点に該当する被計測物1の該当点14の三次元座標を得ることができる。
【0034】
一方、交点が複数の場合、例えば、ラインレーザが照射された部分である第2線分データ32とエピポーラ線33とが同一方向に沿って延在するような場合に交点が複数存在する場合が生じる。この場合には、ラインレーザ4を特徴点24に該当する被計測物1上の該当点14への軸について回転させて照射する(S16)。この場合に、エピポーラ線33とラインレーザのライン方向とが角度をなすようにラインレーザ4を回転させることが好ましい。より好ましくは、エピポーラ線33とラインレーザのライン方向とが互いに直交するようにラインレーザ4を回転させることである。また、特徴点24を保持するように、特徴点24に該当する被計測物1の該当点14について回転させる。その後、(d)から(h)を繰り返して、エピポーラ線33と第2線分32との交点が単一となるようにすることができる。
【0035】
これによって、エピポーラ線33と第2線分データ32とが平行になる等の原因で対応点34が一つに特定できない場合でも、ラインレーザ4を回転させて、エピポーラ線33と第2線分データ32とが交差する交点として単一の対応点34が得られ、明確に対応点を特定でき、三次元計測の精度を向上させることができる。
【0036】
なお、エピポーラ線33と第2線分データ32との交点が一つも得られない場合には、第1の画像20上で選択した特徴点24に対応する被計測物1上の該当点14が第2の画像30上には現れていないことを意味している。この場合には、第1のカメラ2aからの第1の画像20で表示される被計測物1の範囲と、第2のカメラ2bからの第2の画像30で表示される被計測物1の範囲とで共通して表示される範囲が少ないか又は存在しないと考えられる。そこで、第1のカメラ2aと第2のカメラ2bとの距離を縮めて第1の画像20と第2の画像30で共通する被計測物1の範囲が得られるようにすることが好ましい。
【産業上の利用可能性】
【0037】
本発明に係る非接触三次元計測装置及び非接触三次元計測方法によれば、表面に特徴がない物体を被計測物とする場合であっても、2つの画像上で、一方の画像で選択した特徴点について、もう一方の画像上における対応点を明確に特定できる。そこで、本発明に係る非接触三次元計測装置及び非接触三次元計測方法は、表面に特徴がない物体を被計測物とする非接触三次元計測に有用である。
【符号の説明】
【0038】
1 被計測物
2a 第1のカメラ
2b 第2のカメラ
4 ラインレーザ
6 標定部
8 画像処理部
10 非接触三次元計測装置
12 照射されたラインレーザ
14 該当点
20 第1の画像
22 第1線分データ
24 特徴点
30 第2の画像
32 第2線分データ
33 エピポーラ線
34 対応点
【特許請求の範囲】
【請求項1】
互いに距離をおいて配置され、被計測物を撮影する第1のカメラ及び第2のカメラと、
前記被計測物にラインレーザを照射するラインレーザと、
前記第1のカメラ及び前記第2のカメラについて、互いの位置関係に関する外部標定を行う標定部と、
前記ラインレーザが照射された被計測物を前記第1のカメラで撮影した第1の画像と、前記第2のカメラで撮影した第2の画像とを画像処理する画像処理部と、
を備え、
前記画像処理部は、
前記第1の画像上の前記ラインレーザが照射された第1線分データの中の一つの点を特徴点として選択し、
前記第1の画像上で選択した前記特徴点に対応するエピポーラ線を前記第2の画像上に表示して、
前記第2の画像上において、前記ラインレーザが照射された第2線分データと前記エピポーラ線との交点を、前記第1の画像上で選択した前記特徴点と対応する対応点として決定し、
前記第1の画像における前記特徴点と、前記第2の画像における前記対応点とを用いて、前記特徴点及び前記対応点に該当する前記被計測物上の該当点の三次元座標を算出する、
非接触三次元計測装置。
【請求項2】
前記ラインレーザは、前記被計測物の全体にわたってラインレーザを走査できる、請求項1に記載の非接触三次元計測装置。
【請求項3】
前記ラインレーザは、照射方向の所定の軸について回転してラインレーザを前記被照射できる、請求項1に記載の非接触三次元計測装置。
【請求項4】
(a)互いに距離をおいて配置され、被計測物を撮影する第1のカメラ及び第2のカメラについて、互いの位置関係に関する外部標定を行う外部標定ステップと、
(b)前記被計測物にラインレーザを照射するラインレーザ照射ステップと、
(c)前記ラインレーザが照射された被計測物を前記第1のカメラ及び前記第2のカメラでそれぞれ撮影して、前記第1のカメラによる第1の画像と、前記第2のカメラによる第2の画像とを得る画像撮影ステップと、
(d)前記第1の画像において、前記ラインレーザが照射された部分を第1線分データとして抽出する第1線分データ抽出ステップと、
(e)前記第2の画像において、前記ラインレーザが照射された部分を第2線分データとして抽出する第2線分データ抽出ステップと、
(f)前記第1の画像から抽出された前記第1線分データの中の一つの点を特徴点として選択する特徴点選択ステップと、
(g)前記第1の第1の画像上で選択した前記特徴点に対応するエピポーラ線を前記第2の画像上に表示するエピポーラ線表示ステップと、
(h)前記第2の画像から抽出された前記第2線分データと前記エピポーラ線との交点を、前記第1の画像上で選択した前記特徴点と対応する対応点として決定する対応点決定ステップと、
(i)前記第1の画像における前記特徴点と、前記第2の画像における前記対応点とを用いて、前記特徴点及び前記対応点に該当する前記被計測物上の該当点の三次元座標を算出する三次元座標算出ステップと、
を含む、非接触三次元計測方法。
【請求項5】
さらに、
(j)前記第1画像から抽出された前記第1線分上の点すべてに対して、前記ステップ(f)〜前記ステップ(i)を繰り返して、前記被計測物の前記ラインレーザが照射されたライン部分に対して三次元座標を算出する三次元座標算出ステップ
を含む、請求項4に記載の非接触三次元計測方法。
【請求項6】
前記ラインレーザ照射ステップ(b)において、前記ラインレーザを前記被計測物にわたって走査するラインレーザ走査ステップをさらに含み、前記ラインレーザを照射するごとに、前記ステップ(c)〜前記ステップ(j)を繰り返して、前記被計測物の全体を走査する、請求項5に記載の非接触三次元計測方法。
【請求項7】
前記ラインレーザ照射ステップ(b)において、前記ラインレーザを照射方向の所定の軸について回転させて前記被計測物に照射するラインレーザ走査ステップをさらに含み、前記ラインレーザを回転させて前記被計測物に照射するごとに、前記ステップ(c)〜前記ステップ(j)を繰り返す、請求項5に記載の非接触三次元計測方法。
【請求項8】
前記対応点決定ステップ(h)において、前記エピポーラ線と前記第2線分データとの交点が2つ以上存在する場合、前記ラインレーザを前記第1の画像上の前記特徴点に該当する前記被計測物上の該当点への照射方向の軸について回転させて照射して、前記第2の画像上で前記エピポーラ線と前記第2線分データとの単一の交点を前記特徴点と対応する対応点として決定する、請求項4に記載の非接触三次元計測方法。
【請求項1】
互いに距離をおいて配置され、被計測物を撮影する第1のカメラ及び第2のカメラと、
前記被計測物にラインレーザを照射するラインレーザと、
前記第1のカメラ及び前記第2のカメラについて、互いの位置関係に関する外部標定を行う標定部と、
前記ラインレーザが照射された被計測物を前記第1のカメラで撮影した第1の画像と、前記第2のカメラで撮影した第2の画像とを画像処理する画像処理部と、
を備え、
前記画像処理部は、
前記第1の画像上の前記ラインレーザが照射された第1線分データの中の一つの点を特徴点として選択し、
前記第1の画像上で選択した前記特徴点に対応するエピポーラ線を前記第2の画像上に表示して、
前記第2の画像上において、前記ラインレーザが照射された第2線分データと前記エピポーラ線との交点を、前記第1の画像上で選択した前記特徴点と対応する対応点として決定し、
前記第1の画像における前記特徴点と、前記第2の画像における前記対応点とを用いて、前記特徴点及び前記対応点に該当する前記被計測物上の該当点の三次元座標を算出する、
非接触三次元計測装置。
【請求項2】
前記ラインレーザは、前記被計測物の全体にわたってラインレーザを走査できる、請求項1に記載の非接触三次元計測装置。
【請求項3】
前記ラインレーザは、照射方向の所定の軸について回転してラインレーザを前記被照射できる、請求項1に記載の非接触三次元計測装置。
【請求項4】
(a)互いに距離をおいて配置され、被計測物を撮影する第1のカメラ及び第2のカメラについて、互いの位置関係に関する外部標定を行う外部標定ステップと、
(b)前記被計測物にラインレーザを照射するラインレーザ照射ステップと、
(c)前記ラインレーザが照射された被計測物を前記第1のカメラ及び前記第2のカメラでそれぞれ撮影して、前記第1のカメラによる第1の画像と、前記第2のカメラによる第2の画像とを得る画像撮影ステップと、
(d)前記第1の画像において、前記ラインレーザが照射された部分を第1線分データとして抽出する第1線分データ抽出ステップと、
(e)前記第2の画像において、前記ラインレーザが照射された部分を第2線分データとして抽出する第2線分データ抽出ステップと、
(f)前記第1の画像から抽出された前記第1線分データの中の一つの点を特徴点として選択する特徴点選択ステップと、
(g)前記第1の第1の画像上で選択した前記特徴点に対応するエピポーラ線を前記第2の画像上に表示するエピポーラ線表示ステップと、
(h)前記第2の画像から抽出された前記第2線分データと前記エピポーラ線との交点を、前記第1の画像上で選択した前記特徴点と対応する対応点として決定する対応点決定ステップと、
(i)前記第1の画像における前記特徴点と、前記第2の画像における前記対応点とを用いて、前記特徴点及び前記対応点に該当する前記被計測物上の該当点の三次元座標を算出する三次元座標算出ステップと、
を含む、非接触三次元計測方法。
【請求項5】
さらに、
(j)前記第1画像から抽出された前記第1線分上の点すべてに対して、前記ステップ(f)〜前記ステップ(i)を繰り返して、前記被計測物の前記ラインレーザが照射されたライン部分に対して三次元座標を算出する三次元座標算出ステップ
を含む、請求項4に記載の非接触三次元計測方法。
【請求項6】
前記ラインレーザ照射ステップ(b)において、前記ラインレーザを前記被計測物にわたって走査するラインレーザ走査ステップをさらに含み、前記ラインレーザを照射するごとに、前記ステップ(c)〜前記ステップ(j)を繰り返して、前記被計測物の全体を走査する、請求項5に記載の非接触三次元計測方法。
【請求項7】
前記ラインレーザ照射ステップ(b)において、前記ラインレーザを照射方向の所定の軸について回転させて前記被計測物に照射するラインレーザ走査ステップをさらに含み、前記ラインレーザを回転させて前記被計測物に照射するごとに、前記ステップ(c)〜前記ステップ(j)を繰り返す、請求項5に記載の非接触三次元計測方法。
【請求項8】
前記対応点決定ステップ(h)において、前記エピポーラ線と前記第2線分データとの交点が2つ以上存在する場合、前記ラインレーザを前記第1の画像上の前記特徴点に該当する前記被計測物上の該当点への照射方向の軸について回転させて照射して、前記第2の画像上で前記エピポーラ線と前記第2線分データとの単一の交点を前記特徴点と対応する対応点として決定する、請求項4に記載の非接触三次元計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−158386(P2011−158386A)
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願番号】特願2010−21318(P2010−21318)
【出願日】平成22年2月2日(2010.2.2)
【出願人】(000001096)倉敷紡績株式会社 (296)
【Fターム(参考)】
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願日】平成22年2月2日(2010.2.2)
【出願人】(000001096)倉敷紡績株式会社 (296)
【Fターム(参考)】
[ Back to top ]