
非接触動作検出装置
【課題】人との距離を高精度に求めることが可能な非接触動作検出装置を提供する。
【解決手段】本発明の一実施形態に係る非接触動作検出装置1は、人の動作に起因して生じる電気信号を非接触で検出する電極部10a〜10lと、電極部10a〜10lによって検出された電気信号の振幅及び周期に基づいて、人との距離を求める距離演算部25とを備える。人の動作に起因して生じる電気信号は、足が離地する際に大きくなるパルス状をなしており、その周期は人の動作速度を示すこととなる。したがって、電気信号の振幅に加えて、電気信号の周期に基づいて人との距離を求めることによって、人の動作速度が変動して検出電気信号の振幅が変動しても、人との距離を高精度に求めることができる。
【解決手段】本発明の一実施形態に係る非接触動作検出装置1は、人の動作に起因して生じる電気信号を非接触で検出する電極部10a〜10lと、電極部10a〜10lによって検出された電気信号の振幅及び周期に基づいて、人との距離を求める距離演算部25とを備える。人の動作に起因して生じる電気信号は、足が離地する際に大きくなるパルス状をなしており、その周期は人の動作速度を示すこととなる。したがって、電気信号の振幅に加えて、電気信号の周期に基づいて人との距離を求めることによって、人の動作速度が変動して検出電気信号の振幅が変動しても、人との距離を高精度に求めることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人の動作を非接触で検出する装置に関するものである。
【背景技術】
【0002】
ユーザへのお出迎え(おもてなし機能)や、不審者への対応(防犯機能)を目的として、駐車中の車両周辺の人物を検知する技術が知られている。特に、防犯機能として、悪意を持った人物が車両に対して接触した後、又は、車両に対して危害を加えた後にアラームを鳴らしたり、外部に通報を行ったりする技術が知られている。しかしながら、車両に対して接触する前に、悪意を持った人物を判断し対策を行う未然防犯技術はまだ開発途上であり、早急な開発が求められている。
【0003】
未然防犯技術としては、カメラなどで車両周辺を監視し周辺人物の行動を判断することが考えられるが、カメラを設置し、画像解析するにあたり、コストが大幅に増加してしまうことが予想される。また、常時撮影が必要となり、バッテリの消費電力が増加してしまうことが予想される。
【0004】
これらの点に関し、特許文献1には、カメラを用いることなく、人の歩行状態を非接触で検出する非接触歩行検出方法が開示されている。この非接触歩行検出方法では、人の歩行路に近接して電極を設け、人の歩行に起因して変化する電極の浮遊容量、すなわち電気信号を検出し、この電気信号から人の歩行状態を検出する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−110072号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、未然防犯技術では、車両周辺の人物との距離や人物の位置を検知することが求められている。しかしながら、特許文献1に記載の非接触歩行検出方法では、人の歩行速度が変動すると、電極で検出される電気信号の大きさが変動してしまう。そのため、検出電気信号の大きさに基づくと、人と電極との間の距離を正確に検知することができないという問題があった。具体的には、歩行速度が速い場合には検出電気信号の大きさが実際よりも大きく検出されてしまい、反対に、歩行速度が遅い場合には実際よりも検出電気信号の大きさが小さく検出されてしまう傾向がある。そのため、未然防犯技術に適用すると、誤検知したり、未然に検知できなかったりする虞がある。
【0007】
そこで、本発明は、人との距離を高精度に求めることが可能な非接触動作検出装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
本発明の非接触動作検出装置は、人の動作を非接触で検出する非接触動作検出装置において、人の動作に起因して生じる電気信号を非接触で検出する電極部と、電極部によって検出された電気信号の振幅及び周期に基づいて、人との距離を求める距離演算部と、を備える。
【0009】
人の動作に起因して生じる電気信号は、足が離地する際に大きくなるパルス状をなしている。したがって、このパルス状の電気信号の周期は、人の動作速度を示すこととなる。
【0010】
本発明によれば、電気信号の振幅に加えて、電気信号の周期、すなわち人の動作速度に基づいて人との距離を求めるので、人の動作速度が変動して検出電気信号の振幅が変動しても、電気信号の周期に基づいて補正することによって、人との距離を高精度に求めることができる。
【0011】
上記した電極部は、少なくとも2つの第1及び第2の電極を有し、上記した距離演算部は、第1及び第2の電極それぞれに対して人との距離を求め、距離演算部によって求められた第1の電極と人との距離、及び、第2の電極と人との距離から、人の位置を求める位置演算部を更に備えることが好ましい。
【0012】
このように、少なくとも2つの電極に対する人との距離を満たす任意の1点を求めることによって、人の位置の特定を行うことができる。また、距離演算部によって求められた高精度な距離に基づくので、人の位置を高精度に求めることができる。
【0013】
また、上記した電極部は、少なくとも4つの第1〜第4の電極を有し、第1〜第4の電極それぞれによって検出された電気信号の位相関係から、人の位置を求める位置演算部を更に備えてもよい。例えば、位置演算部は、第1及び第2の電極それぞれによって検出された電気信号の位相差を満たす第1の直線と、第3及び第4の電極それぞれによって検出された電気信号の位相差を満たす第2の直線とを求め、第1の直線と第2の直線との交点を、人の位置として求める。
【0014】
このように、少なくとも4つの電極からの電気信号の位相関係を満たす任意の1点を求めることによって、人の位置の特定を行うことができる。また、電気信号の位相は人の動作速度の変動に依存しないので、人の位置を高精度に求めることができる。
【0015】
また、上記した電極部は、少なくとも4つの第1〜第4の電極を有し、第1〜第4の電極それぞれによって検出された電気信号の振幅比関係から、人の位置を求める位置演算部を更に備えてもよい。例えば、位置演算部は、第1及び第2の電極それぞれによって検出された電気信号の振幅比を満たす第1の直線と、第3及び第4の電極それぞれによって検出された電気信号の振幅比を満たす第2の直線とを求め、第1の直線と第2の直線との交点を、人の位置として求める。
【0016】
このように、少なくとも4つの電極の振幅比関係を満たす任意の1点を求めることによって、人の位相の特定を行うことができる。また、電気信号の振幅比を用いることによって、人の動作速度の変動に起因する電気信号の振幅の変動を打ち消すことができるので、人の位置を高精度に求めることができる。
【0017】
また、上記した電極部は車両に設けられていることが好ましい。これによれば、車両への人の接近を検出することができる。
【0018】
また、上記した電極部は車両のボディパネルや、ボディパネルパーツであることが好ましい。ボディパネルパーツとしては、ドアパネル、ボンネットパネル、及び、トランクパネル等が考えられる。これによれば、別途電極を設ける必要がない。
【発明の効果】
【0019】
本発明によれば、非接触動作検出装置において、人との距離を高精度で求めることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1の実施形態に係る非接触動作検出装置を示す図である。
【図2】第1の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図3】第1の実施形態の非接触動作検出装置における記録部に記録された電圧信号の波形を示す図である。
【図4】本発明の第2の実施形態に係る非接触動作検出装置を示す図である。
【図5】第2の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図6】本発明の第3の実施形態に係る非接触動作検出装置を示す図である。
【図7】第3の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図8】本発明の第4の実施形態に係る非接触動作検出装置を示す図である。
【図9】第4の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図10】第4の実施形態の非接触動作検出装置による人の位置を求める概念図である。
【図11】本発明の第5の実施形態に係る非接触動作検出装置を示す図である。
【図12】第5の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図13】本発明の第6の実施形態に係る非接触動作検出装置を示す図である。
【発明を実施するための形態】
【0021】
以下、図面を参照して本発明の好適な実施形態について詳細に説明する。なお、各図面において同一又は相当の部分に対しては同一の符号を附すこととする。
[第1の実施形態]
【0022】
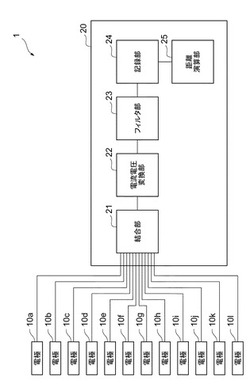
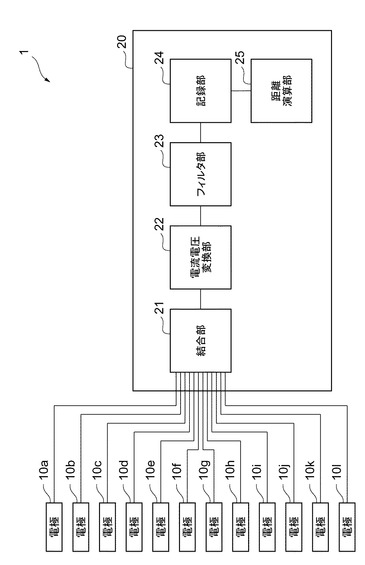
図1は、本発明の第1の実施形態に係る非接触動作検出装置を示す図である。図1に示す非接触動作検出装置1は、12個の電極(電極部)10a〜10lと、ECU(Electronic Control Unit)20とを備えている。
【0023】
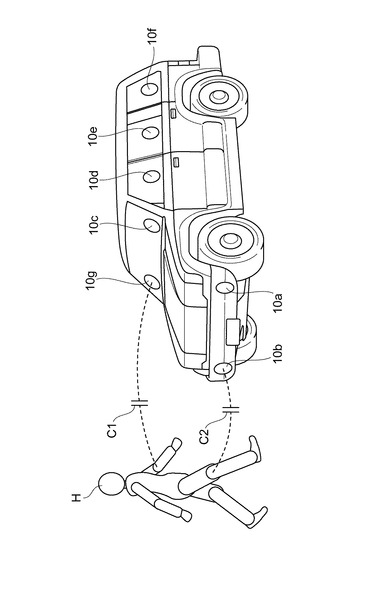
12個の電極10a〜10lは、例えば、フィルム状の透明電極であり、車両における窓ガラスやバンパー等の絶縁体部分の表面又は内面に配置されている。図2に、車両に対する電極の配置の一例を示す。
【0024】
図2に示すように、例えば、電極10aはフロントバンパーの車体左側に貼り付けられており、電極10bはフロントバンパーの車体右側に貼り付けられており、電極10cはフロント窓ガラスの車体左側に貼り付けられており、電極10dは車体左側のフロントドアの窓ガラスに貼り付けられており、電極10eは車体左側のリアドアの窓ガラスに貼り付けられており、電極10fはラゲッジルームの車体左側の窓ガラスに貼り付けられている。
【0025】
また、図2では一部省略されているが、電極10gはフロント窓ガラスの車体右側に貼り付けられており、電極10hは車体右側のフロントドアの窓ガラスに貼り付けられており、電極10iは車体右側のリアドアの窓ガラスに貼り付けられており、電極10jはラゲッジルームの車体右側の窓ガラスに貼り付けられており、電極10kはリアバンパーの車体右側に貼り付けられており、電極10lはリアバンパーの車体左側に貼り付けられている。
【0026】
なお、電極10e,10jは、それぞれ、リア窓ガラスの車体左側、右側に貼り付けられていてもよい。また、電極10a〜10lは、車両における導体部分にフィルム状の絶縁体を貼り付け、この絶縁体の上に貼り付けられてもよい。この場合、電極10a〜10lは、金属電極などであってもよい。
【0027】
これらの電極10a〜10lは、それぞれ、人Hの動作に伴う電位の変動、例えば静電容量C1やC2などの変動を検出し、それに応じた電気信号、すなわち電流信号をECU20へ送信する。
【0028】
ECU20は、演算を行うCPU(Central Processing Unit)、CPUに各処理を実行させるためのプログラム等を記憶するROM(ReadOnly Memory)、演算結果などの各種データを記憶するRAM(Random Access Memory)などから構成されている。このような構成により、ECU20には、結合部21、電流電圧変換部22、フィルタ部23、記録部24、及び、距離演算部25が構築されている。
【0029】
結合部21は、12個の電極10a〜10lから電流信号を受け、これらの電流信号をまとめて出力する。一般に、単一の電極からの電流信号はpA程度の微弱な電流値であるので、単一の電極からの電流信号をそのまま用いると、ノイズの影響が大きかったり、検出エリアが制限されたりしてしまう虞がある。そこで、本発明では、結合部21によって複数の電極からの電気信号をまとめることにより、ノイズの影響を低減し、広範囲の検出を可能にする。
【0030】
電流電圧変換部22は、結合部21からの電流信号を電圧信号に変換する。
【0031】
フィルタ部23は、例えば、カットオフ周波数20Hzのローパスフィルタであり、電流電圧変換部22からの電圧信号における商用周波数成分(50Hz又は60Hz成分)を除去する。これによって、商用電力に起因するノイズ成分が除去され、約20Hz以下の人間の動作により生じる電圧信号のみを抽出することとなる。
【0032】
記録部24は、A/Dコンバータを含んでおり、フィルタ部23からの電圧信号をディジタル化した後、逐次に記録する。
【0033】
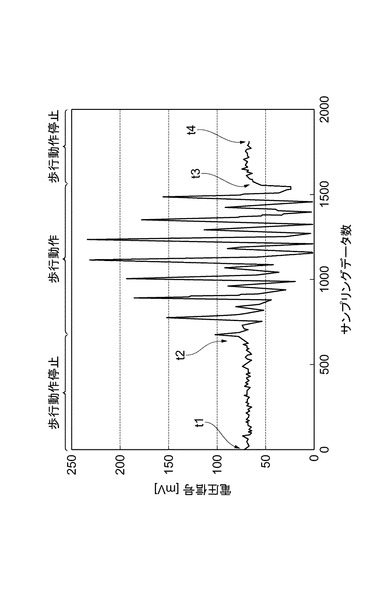
距離演算部25は、記録部24に記録された電圧信号に基づいて、電極10a〜10l、すなわち車両に対する人との距離を求める。図3に、記録部24に記録された電圧信号、すなわち、車両周りでの人の歩行動作を検出した電圧信号の波形を示す。図3における横軸はサンプリングデータ数、すなわち時間を示す。図3では、時点t1〜t2において被験者は直立で停止しており、時点t2で歩行を初め、時点t3で歩行を停止し、再び時点t4まで直立で停止した。ここで、時点t2〜t3において被験者は約8歩の歩行動作を行った。
【0034】
図3によれば、歩行動作停止状態では電圧信号がほぼ平坦であるが、歩行動作が始まるとパルス状の電圧信号が観測されている。このパルス状の電圧信号は、足が離地する際に発生したものである。
【0035】
このように、歩行動作中に観測されるパルス状の電気信号のピーク値、すなわち振幅は、最初は小さいが、次第に大きくなり、停止の直前になって再び減少している。この振幅の大きさは、足の離地の際の速度と対応し、足の離地の速度が歩行始めと歩行停止直前とでは遅くなることにより小さく検出されている。換言すれば、検出電気信号の振幅の大きさは、歩行速度が速いと大きくなり、歩行速度が遅いと小さくなる。
【0036】
また、パルス状の電気信号の数をカウントすることにより、被験者の歩数を検出することができると共に、パルス状の電気信号の周期を求めることにより、被験者の歩行速度を検出することができる。
【0037】
距離演算部25は、パルス状の電気信号の振幅の大きさと周期とに基づいて、人との距離を求める。具体的には、距離演算部25は、パルス状の電気信号の周期によって振幅の大きさを補正し、この補正した振幅の大きさに基づいて、人との距離を求める。
【0038】
このように、第1の実施形態の非接触動作検出装置1は、人の動作に起因して生じる電気信号を検出し、この電気信号の振幅に加えて電気信号の周期、すなわち人の動作速度に基づいて人との距離を求めるので、人の動作速度が変動して検出電気信号の振幅が変動しても、電気信号の周期に基づいて振幅の大きさを補正することによって、人との距離を高精度に求めることができる。
【0039】
従来、人の動作に起因して生じる電気信号を検出する手法としては、人の動作に伴う電位変化を計測する方法と、人の動作に伴う静電容量の変化を計測する方法とが知られている。
【0040】
人の動作に伴う電位変化を検出する従来法1では、基準となるアースが必要であった。このため、被験者はアースに接地した電極の上に貼り付けた絶縁シート上を歩行する必要があり、計測条件が制限されていた。一方、第1の実施形態の非接触動作検出装置1では、電位ではなく、電流(人の動作に起因する静電誘導電流)を検出するので、計測条件の制限がない。
【0041】
また、従来法1では、電位検出の際、一般にアース電位にノイズ成分が多かった。そこで、第1の実施形態の非接触動作検出装置1では、電極10a〜10lをフローティングにすることによって、ノイズの影響を低減している。
【0042】
また、従来法1では、人の電位変化を検出するためにワイヤ状の電極を用いていた。これは、人間の動作範囲が大きい場合には、アスペクト比の大きい細長い電極やワイヤ状の電極を用いることが好ましかったことによる。しかしながら、この従来法1では、ワイヤ電極がアンテナとなり、電磁波を検出するので、ノイズの影響を強く受けることとなり、計測適用範囲が制限されていた。どこで、第1の実施形態の非接触動作検出装置1では、
アスペクト比が小さい電極10a〜10lを用いて、適切な間隔で複数配置することによって、ノイズの影響を低減している。
【0043】
一方、人の動作に伴う静電容量の変化を検出する従来法2では、上記したように、一般に単一の電極からの電流信号がpA程度の微弱な電流値であるので、単一の電極からの電流信号をそのまま用いると、ノイズの影響が大きかったり、検出エリアが制限されたりしていた。一方、第1の実施形態の非接触動作検出装置1では、複数の電極10a〜10lからの電流信号を結合部21によりまとめることにより、ノイズの影響を低減し、広範囲の検出を可能にしている。
【0044】
ところで、人物による未然防犯機能として重要な点は、人物と単なる障害物とを区別して検出可能なことである。第1の実施形態の非接触動作検出装置1によれば、人の動作に起因して生じる電気信号を検出するので、障害物と区別して人のみの動作を検出することができる。
【0045】
また、車両搭載用の未然防犯機能として重要な点は、搭載コストやバッテリ消費電力が低いことである。第1の実施形態の非接触動作検出装置1によれば、カメラなどの能動的な検出手段を用いず、電極やアンテナ等の受動的な検出手段を用いているので、搭載コストやバッテリ消費電力の増加を低減することができる。
[第2の実施形態]
【0046】
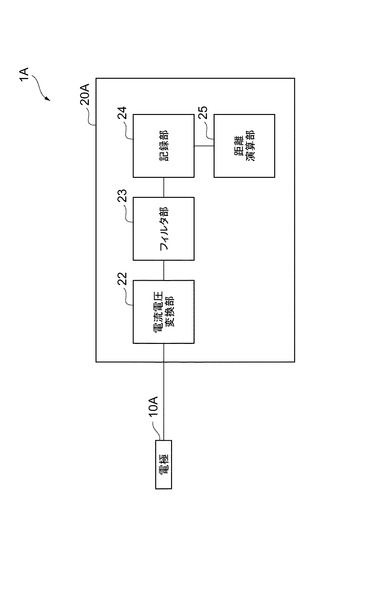
図4は、本発明の第2の実施形態に係る非接触動作検出装置を示す図である。図4に示す非接触動作検出装置1Aは、非接触動作検出装置1において12個の電極10a〜10lに代えて1個の電極10Aを備え、ECU20に代えてECU20Aを備えている点で第1の実施形態と異なっている。
【0047】
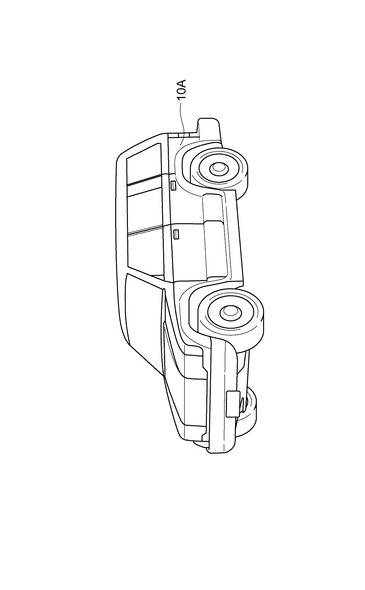
電極10Aは、図5に示すように、車両における金属ボディパネルそのものである。この場合、車両における金属ボディパネルは、接地電位や、他の電位に対してフローティングされていることが重要である。
【0048】
ECU20Aは、ECU20において結合部21を備えていない点でECU20と異なっている。ECU20Aのその他の構成はECU20と同一である。
【0049】
この第2の実施形態の非接触動作検出装置1Aでも、第1の実施形態の非接触動作検出装置1と同様の利点を得ることができる。
【0050】
また、第2の実施形態の非接触動作検出装置1Aによれば、車両の金属ボディパネルそのものを電極10Aとして用いているので、人に起因する静電容量を検出するための電極を別途設ける必要がないという利点を有する。
[第3の実施形態]
【0051】
第2の実施形態では、車両の金属ボディパネル全体を電極として用いたが、車両における個々の金属ボディパネルパーツを電極として用いてもよい。以下に、その一例を示す。
【0052】
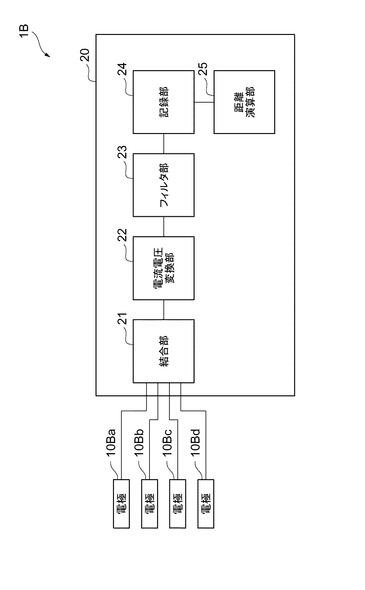
図6は、本発明の第3の実施形態に係る非接触動作検出装置を示す図である。図6に示す非接触動作検出装置1Bは、非接触動作検出装置1Aにおいて電極10Aに代えて4個の電極10Ba〜10Bdを備えており、ECU20Aに代えて第1の実施形態におけるECU20を備えている点で第2の実施形態と異なっている。
【0053】
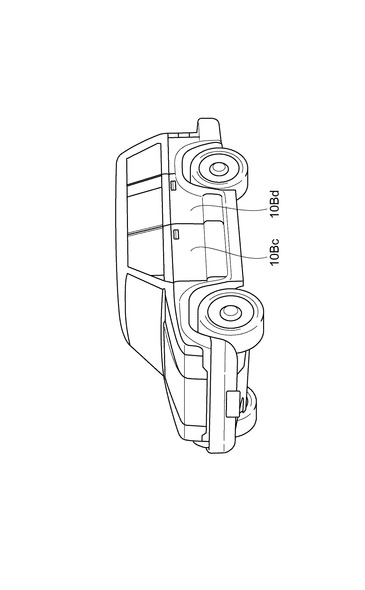
電極10Ba〜10Bdは、図7に示すように(一部省略)、それぞれ、車両のドアパネルにおける金属ボディパネルそのものである。具体的には、電極10Baは車体右側におけるフロントドアの金属ボディパネルそのものであり、電極10Bbは車体右側におけるリアドアの金属ボディパネルそのものであり、電極10Bcは車体左側におけるフロントドアの金属ボディパネルそのものであり、電極10Bdは車体左側におけるリアドアの金属ボディパネルそのものである。この場合、車両のドアパネルにおける金属ボディパネルは、接地電位や、他の電位に対してフローティングされていることが重要である。なお、金属ボディパネルパーツとしては、絶縁したボンネットパネルやトランクパネルなどが用いられてもよい。
【0054】
この第3の実施形態の非接触動作検出装置1Bでも、第2の実施形態の非接触動作検出装置1Aと同様の利点を得ることができる。
[第4の実施形態]
【0055】
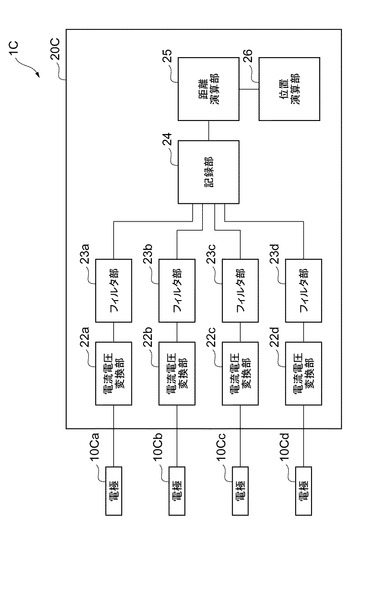
図8は、本発明の第4の実施形態に係る非接触動作検出装置を示す図である。図8に示す非接触動作検出装置1Cは、非接触動作検出装置1Aにおいて電極10Aに代えて4個の電極10Ca〜10Cdを備えており、ECU20Aに代えてECU20Cを備えている点で第2の実施形態と異なっている。
【0056】
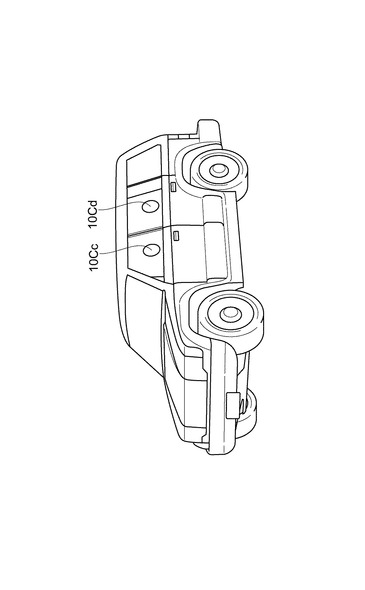
電極10Ca〜10Cdは、それぞれ、第1の実施形態における電極10h、10i、10d、10eと同様である。すなわち、電極10Ca〜10Cdは、例えば、フィルム状の透明電極である。そして、図9に示すように(一部省略)、電極10Caは車体右側のフロントドアの窓ガラスに貼り付けられており、電極10Cbは車体右側のリアドアの窓ガラスに貼り付けられており、電極10Ccは車体左側のフロントドアの窓ガラスに貼り付けられており、電極10Cdは車体左側のリアドアの窓ガラスに貼り付けられている。
【0057】
ECU20Cは、ECU20Aにおいて電流電圧変換部22及びフィルタ部23に代えて、4個の電流電圧変換部22a〜22d、4個のフィルタ部23a〜23dを備えており、更に位置演算部26を備えている点で第3の実施形態と異なっている。ECU20Cのその他の構成はECU20Aと同一である。
【0058】
電流電圧変換部22a〜22dは、それぞれ、電流電圧変換部22と同一の構成であり、電極10Ca〜10Cdそれぞれからの電流信号を受け、電圧信号に変換する。
【0059】
フィルタ部23a〜23dは、それぞれ、フィルタ部23と同一の構成であり、電流電圧変換部22a〜22dそれぞれからの電圧信号における商用周波数成分を除去する。
【0060】
記録部24は、フィルタ部23a〜23dからの電圧信号をディジタル化した後、それぞれを逐次に記録する。
【0061】
距離演算部25は、記録部24に記録された電圧信号の振幅の大きさと周期とに基づいて、電極10Ca〜10Cdそれぞれに対して人との距離を求める。
【0062】
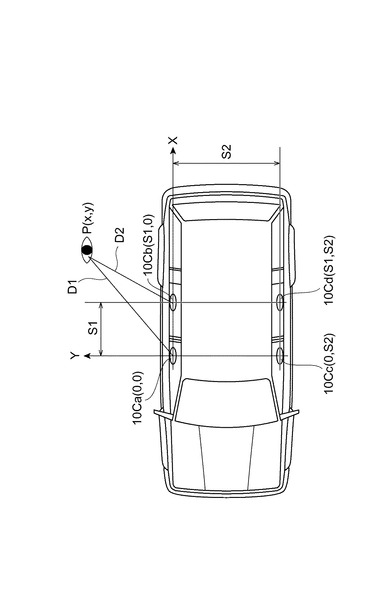
位置演算部26は、4個の電極10Ca〜10Cdの位置関係10Ca(0,0)、10Cb(S1,0)、10Cc(0,S2)、10Cd(S1,S2)、及び、距離演算部25によって求めた人と各電極10Ca〜10Cdとの距離から、人の位置を求める。例えば、図10に示すように、2つの電極10Ca,10Cbに対し、電極10Caと人との距離D1と、電極10Cbと人との距離D2とを共に満足する位置P(x,y)を求める。なお、位置演算部26は、検出電気信号の大きさが人との距離に比例して人との距離が近いほど大きいことを利用するものである。
【0063】
この第4の実施形態の非接触動作検出装置1Cでも、距離演算部25を備えているので、第3の実施形態の非接触動作検出装置1Bと同様の利点を得ることができる。
【0064】
更に、第4の実施形態の非接触動作検出装置1Cによれば、位置演算部26によって、少なくとも2つの電極に対する人との距離を満たす任意の1点を求めることによって、人の位置の特定を行うことができる。また、位置演算部26は、距離演算部25によって求めた高精度な距離に基づくので、人の位置を高精度に求めることができる。
【0065】
また、第4の実施形態の非接触動作検出装置1Cでは、人の位置、及び、動作速度(歩行速度)に加え、進行方向をも検出することができる。例えば、人の位置を定期的に求めることによって進行方向を検出することができる。
[第5の実施形態]
【0066】
第4の実施形態では、距離演算部25によって求めた距離に基づいて人の位置を求めたが、距離演算部25によって求めた距離を用いずとも、少なくとも4個の電極を用いれば、人の位置を精度よく検出することが可能である。
【0067】
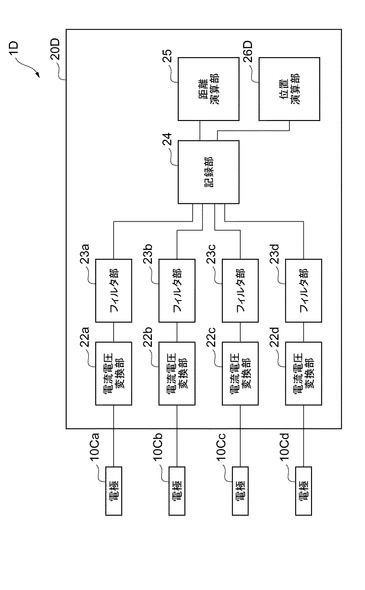
図11は、本発明の第5の実施形態に係る非接触動作検出装置を示す図である。図11に示す非接触動作検出装置1Dは、非接触動作検出装置1CにおいてECU20Cに代えてECU20Dを備えている点で第4の実施形態と異なっている。
【0068】
ECU20Dは、ECU20Cにおいて位置演算部26に代えて位置演算部26Dを備えている点でECU20Cと異なっている。ECU20Dのその他の構成はECU20Cと同一である。
【0069】
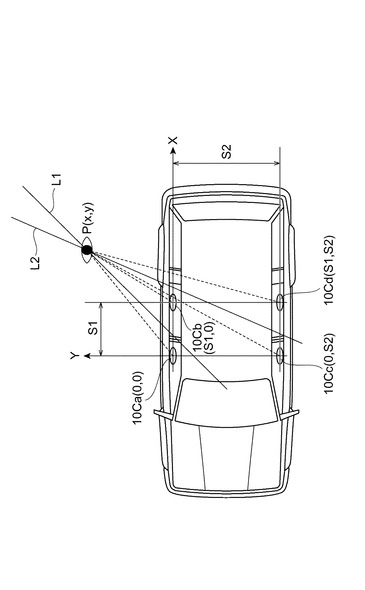
位置演算部26Dは、4個の電極10Ca〜10Cdの位置関係10Ca(0,0)、10Cb(S1,0)、10Cc(0,S2)、10Cd(S1,S2)、及び、4個の電極10Ca〜10Cdからの電気信号の位相関係から、人の位置を求める。具体的には、図12に示すように、位置演算部26Dは、電極10Ca及び電極10Cbからの電気信号の位相差を満足する直線L1を求める。同様に、位置演算部26Dは、電極10Cc及び電極10Cdからの電気信号の位相差を満足する直線L2を求める。そして、位置演算部26Dは、これらの直線L1と直線L2との交点を、人の位置P(x,y)として求める。なお、位置演算部26Dは、検出電気信号の位相が人との距離に比例して人との距離が遠いほど遅れることを利用するものである。
【0070】
この第5の実施形態の非接触動作検出装置1Dでも、距離演算部25及び位置演算部26Dを備えているので、第4の実施形態の非接触動作検出装置1Cと同様の利点を得ることができる。
【0071】
特に、位置演算部26Dによって、少なくとも4つの電極からの電気信号の位相関係を満たす任意の1点を求めることによって、人の位置の特定を行うことができる。また、電気信号の位相は人の動作速度の変動に依存しないものであるので、人の位置を高精度に求めることができる。
【0072】
なお、第5の実施形態の非接触動作検出装置1Dでは、電気信号の位相差に代えて電気信号の振幅比を用いてもよい。すなわち、位置演算部26Dは、4個の電極10Ca〜10Cdの位置関係10Ca(0,0)、10Cb(S1,0)、10Cc(0,S2)、10Cd(S1,S2)、及び、4個の電極10Ca〜10Cdからの電気信号の振幅比関係から、人の位置を求めてもよい。具体的には、位置演算部26Dは、電極10Ca及び電極10Cbからの電気信号の振幅比を満足する直線L1を求めると共に、電極10Cc及び電極10Cdからの電気信号の振幅比を満足する直線L2を求め、これらの直線L1と直線L2との交点を、人の位置P(x,y)として求めてもよい。これは、検出電気信号の振幅が人との距離に比例して人との距離が近いほど大きいことを利用するものである。
【0073】
このように、少なくとも4つの電極の振幅比関係を満たす任意の1点を求めることによって、人の位相の特定を行うことができる。また、電気信号の振幅比を用いることによって、人の動作速度の変動に起因する電気信号の振幅の変動を打ち消すことができるので、人の位置を高精度に求めることができる。
[第6の実施形態]
【0074】
第4及び第5の実施形態では、第1の実施形態のように、電極からの電流信号が小さいことに起因するノイズの影響を低減するために、複数の電極からの電流信号をまとめて検出してもよい。以下に、第4の実施形態を用いた変形を例示する。
【0075】
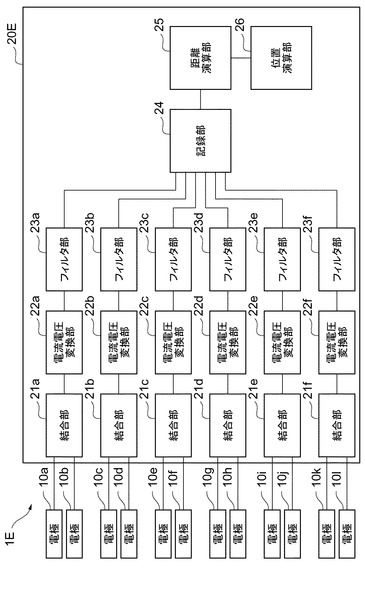
図13は、本発明の第6の実施形態に係る非接触動作検出装置を示す図である。図13に示す非接触動作検出装置1Eは、非接触動作検出装置1Cにおいて4個の電極10Ca〜10Cdに代えて第1の実施形態における12個の電極10a〜10lを備えており、ECU20Cに代えてECU20Eを備えている点で第1の実施形態と異なっている。
【0076】
ECU20Eは、ECU20Cにおいて4個の電流電圧変換部22a〜22d及び4個のフィルタ部23a〜23dに代えて6個の電流電圧変換部22a〜22f、6個のフィルタ部23a〜23fを備えており、更に6個の結合部21a〜21fを備えている構成でECU20Cと異なっている。ECU20Eのその他の構成はECU20Cと同一である。
【0077】
結合部21a〜21fは、それぞれ、結合部21と同一であり、12個の電極10a〜10lのうちの異なる2つの電極から電流信号を受け、これらの電流信号をまとめて出力する。具体的には、結合部21aは車体前側に位置する電極10a,10bからの電流を結合し、結合部21bは車体左前側に位置する電極10c,10dからの電流を結合し、結合部21cは車体左後側に位置する電極10e,10fからの電流を結合し、結合部21dは車体右前側に位置する電極10g,10hからの電流を結合し、結合部21eは車体右後側に位置する電極10i,10jからの電流を結合し、結合部21fは車体後側に位置する電極10k,10lからの電流を結合する。
【0078】
電流電圧変換部22a〜22fは、それぞれ、電流電圧変換部22と同一であり、結合部21a〜21fそれぞれからの電流信号を電圧信号に変換する。
【0079】
フィルタ部23a〜23fは、それぞれ、フィルタ部23と同一であり、電流電圧変換部22a〜22fそれぞれからの電圧信号における商用周波数成分を除去する。
【0080】
記録部24は、フィルタ部23a〜23fからの電圧信号をそれぞれディジタル化した後、それぞれを逐次に記録する。
【0081】
距離演算部25は、記録部24に記録された電圧信号の振幅の大きさと周期とに基づいて、6個の電極群、すなわち、車体前側電極群10a,10b、車体左前側電極群10c,10d、車体左後側電極群10e,10f、車体右前側電極群10g,10h、車体右後側電極群10i,10j、車体後側電極群10k,10lそれぞれに対して人との距離を求める。
【0082】
位置演算部26は、距離演算部25によって求めた人と各電極群との距離から、人の位置を求める。
【0083】
この第6の実施形態の非接触動作検出装置1Eでも、第4の実施形態の非接触動作検出装置1Cと同様の利点を得ることができる。
【0084】
なお、本発明は上記した本実施形態に限定されることなく種々の変形が可能である。例えば、本実施形態では、電極(電極部)10a〜10l,10A,10Ba〜10Bd,10Ca〜10Cdは、人の動作に起因して変化する静電容量を検出したが、人体やその動作に起因して発生・変化する心拍や呼吸などの電気信号を非接触に検出するものであってもよい。
【0085】
また、本実施形態では、結合部21,21a〜21f、電流電圧変換部22,22a〜22f、及び、フィルタ部23,23a〜23fをECUで実現したが、ハード構成によって実現してもよい。例えば、結合部21として、複数の電極部からの配線を1本にまとめる結合器などが考えられる。
【0086】
また、本実施形態における結合部21,21a〜21f、電流電圧変換部22,22a〜22f、フィルタ部23,23a〜23f、記録部24、距離演算部25、及び、位置演算部26,26Dは、コンピュータやマイクロプロセッサなどのメモリと演算処理可能なPU(Processing Unit)とによって実現可能である。したがって、車両用に限定されることなく、会社用や家庭用、携帯用などの一般的な未然防犯機器として用いることも可能である。
【符号の説明】
【0087】
1,1A,1B,1C,1D,1E…非接触動作検出装置、10a〜10l,10A,10Ba〜10Bd,10Ca〜10Cd…電極(電極部)、20,20A,20C,20D,20E…ECU、21,21a〜21f…結合部、22,22a〜22f…電流電圧変換部、23,23a〜23f…フィルタ部、24…記録部、25…距離演算部、26,26D…位置演算部。
【技術分野】
【0001】
本発明は、人の動作を非接触で検出する装置に関するものである。
【背景技術】
【0002】
ユーザへのお出迎え(おもてなし機能)や、不審者への対応(防犯機能)を目的として、駐車中の車両周辺の人物を検知する技術が知られている。特に、防犯機能として、悪意を持った人物が車両に対して接触した後、又は、車両に対して危害を加えた後にアラームを鳴らしたり、外部に通報を行ったりする技術が知られている。しかしながら、車両に対して接触する前に、悪意を持った人物を判断し対策を行う未然防犯技術はまだ開発途上であり、早急な開発が求められている。
【0003】
未然防犯技術としては、カメラなどで車両周辺を監視し周辺人物の行動を判断することが考えられるが、カメラを設置し、画像解析するにあたり、コストが大幅に増加してしまうことが予想される。また、常時撮影が必要となり、バッテリの消費電力が増加してしまうことが予想される。
【0004】
これらの点に関し、特許文献1には、カメラを用いることなく、人の歩行状態を非接触で検出する非接触歩行検出方法が開示されている。この非接触歩行検出方法では、人の歩行路に近接して電極を設け、人の歩行に起因して変化する電極の浮遊容量、すなわち電気信号を検出し、この電気信号から人の歩行状態を検出する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−110072号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、未然防犯技術では、車両周辺の人物との距離や人物の位置を検知することが求められている。しかしながら、特許文献1に記載の非接触歩行検出方法では、人の歩行速度が変動すると、電極で検出される電気信号の大きさが変動してしまう。そのため、検出電気信号の大きさに基づくと、人と電極との間の距離を正確に検知することができないという問題があった。具体的には、歩行速度が速い場合には検出電気信号の大きさが実際よりも大きく検出されてしまい、反対に、歩行速度が遅い場合には実際よりも検出電気信号の大きさが小さく検出されてしまう傾向がある。そのため、未然防犯技術に適用すると、誤検知したり、未然に検知できなかったりする虞がある。
【0007】
そこで、本発明は、人との距離を高精度に求めることが可能な非接触動作検出装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
本発明の非接触動作検出装置は、人の動作を非接触で検出する非接触動作検出装置において、人の動作に起因して生じる電気信号を非接触で検出する電極部と、電極部によって検出された電気信号の振幅及び周期に基づいて、人との距離を求める距離演算部と、を備える。
【0009】
人の動作に起因して生じる電気信号は、足が離地する際に大きくなるパルス状をなしている。したがって、このパルス状の電気信号の周期は、人の動作速度を示すこととなる。
【0010】
本発明によれば、電気信号の振幅に加えて、電気信号の周期、すなわち人の動作速度に基づいて人との距離を求めるので、人の動作速度が変動して検出電気信号の振幅が変動しても、電気信号の周期に基づいて補正することによって、人との距離を高精度に求めることができる。
【0011】
上記した電極部は、少なくとも2つの第1及び第2の電極を有し、上記した距離演算部は、第1及び第2の電極それぞれに対して人との距離を求め、距離演算部によって求められた第1の電極と人との距離、及び、第2の電極と人との距離から、人の位置を求める位置演算部を更に備えることが好ましい。
【0012】
このように、少なくとも2つの電極に対する人との距離を満たす任意の1点を求めることによって、人の位置の特定を行うことができる。また、距離演算部によって求められた高精度な距離に基づくので、人の位置を高精度に求めることができる。
【0013】
また、上記した電極部は、少なくとも4つの第1〜第4の電極を有し、第1〜第4の電極それぞれによって検出された電気信号の位相関係から、人の位置を求める位置演算部を更に備えてもよい。例えば、位置演算部は、第1及び第2の電極それぞれによって検出された電気信号の位相差を満たす第1の直線と、第3及び第4の電極それぞれによって検出された電気信号の位相差を満たす第2の直線とを求め、第1の直線と第2の直線との交点を、人の位置として求める。
【0014】
このように、少なくとも4つの電極からの電気信号の位相関係を満たす任意の1点を求めることによって、人の位置の特定を行うことができる。また、電気信号の位相は人の動作速度の変動に依存しないので、人の位置を高精度に求めることができる。
【0015】
また、上記した電極部は、少なくとも4つの第1〜第4の電極を有し、第1〜第4の電極それぞれによって検出された電気信号の振幅比関係から、人の位置を求める位置演算部を更に備えてもよい。例えば、位置演算部は、第1及び第2の電極それぞれによって検出された電気信号の振幅比を満たす第1の直線と、第3及び第4の電極それぞれによって検出された電気信号の振幅比を満たす第2の直線とを求め、第1の直線と第2の直線との交点を、人の位置として求める。
【0016】
このように、少なくとも4つの電極の振幅比関係を満たす任意の1点を求めることによって、人の位相の特定を行うことができる。また、電気信号の振幅比を用いることによって、人の動作速度の変動に起因する電気信号の振幅の変動を打ち消すことができるので、人の位置を高精度に求めることができる。
【0017】
また、上記した電極部は車両に設けられていることが好ましい。これによれば、車両への人の接近を検出することができる。
【0018】
また、上記した電極部は車両のボディパネルや、ボディパネルパーツであることが好ましい。ボディパネルパーツとしては、ドアパネル、ボンネットパネル、及び、トランクパネル等が考えられる。これによれば、別途電極を設ける必要がない。
【発明の効果】
【0019】
本発明によれば、非接触動作検出装置において、人との距離を高精度で求めることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1の実施形態に係る非接触動作検出装置を示す図である。
【図2】第1の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図3】第1の実施形態の非接触動作検出装置における記録部に記録された電圧信号の波形を示す図である。
【図4】本発明の第2の実施形態に係る非接触動作検出装置を示す図である。
【図5】第2の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図6】本発明の第3の実施形態に係る非接触動作検出装置を示す図である。
【図7】第3の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図8】本発明の第4の実施形態に係る非接触動作検出装置を示す図である。
【図9】第4の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図10】第4の実施形態の非接触動作検出装置による人の位置を求める概念図である。
【図11】本発明の第5の実施形態に係る非接触動作検出装置を示す図である。
【図12】第5の実施形態の非接触動作検出装置における電極(電極部)の配置の一例を示す図である。
【図13】本発明の第6の実施形態に係る非接触動作検出装置を示す図である。
【発明を実施するための形態】
【0021】
以下、図面を参照して本発明の好適な実施形態について詳細に説明する。なお、各図面において同一又は相当の部分に対しては同一の符号を附すこととする。
[第1の実施形態]
【0022】
図1は、本発明の第1の実施形態に係る非接触動作検出装置を示す図である。図1に示す非接触動作検出装置1は、12個の電極(電極部)10a〜10lと、ECU(Electronic Control Unit)20とを備えている。
【0023】
12個の電極10a〜10lは、例えば、フィルム状の透明電極であり、車両における窓ガラスやバンパー等の絶縁体部分の表面又は内面に配置されている。図2に、車両に対する電極の配置の一例を示す。
【0024】
図2に示すように、例えば、電極10aはフロントバンパーの車体左側に貼り付けられており、電極10bはフロントバンパーの車体右側に貼り付けられており、電極10cはフロント窓ガラスの車体左側に貼り付けられており、電極10dは車体左側のフロントドアの窓ガラスに貼り付けられており、電極10eは車体左側のリアドアの窓ガラスに貼り付けられており、電極10fはラゲッジルームの車体左側の窓ガラスに貼り付けられている。
【0025】
また、図2では一部省略されているが、電極10gはフロント窓ガラスの車体右側に貼り付けられており、電極10hは車体右側のフロントドアの窓ガラスに貼り付けられており、電極10iは車体右側のリアドアの窓ガラスに貼り付けられており、電極10jはラゲッジルームの車体右側の窓ガラスに貼り付けられており、電極10kはリアバンパーの車体右側に貼り付けられており、電極10lはリアバンパーの車体左側に貼り付けられている。
【0026】
なお、電極10e,10jは、それぞれ、リア窓ガラスの車体左側、右側に貼り付けられていてもよい。また、電極10a〜10lは、車両における導体部分にフィルム状の絶縁体を貼り付け、この絶縁体の上に貼り付けられてもよい。この場合、電極10a〜10lは、金属電極などであってもよい。
【0027】
これらの電極10a〜10lは、それぞれ、人Hの動作に伴う電位の変動、例えば静電容量C1やC2などの変動を検出し、それに応じた電気信号、すなわち電流信号をECU20へ送信する。
【0028】
ECU20は、演算を行うCPU(Central Processing Unit)、CPUに各処理を実行させるためのプログラム等を記憶するROM(ReadOnly Memory)、演算結果などの各種データを記憶するRAM(Random Access Memory)などから構成されている。このような構成により、ECU20には、結合部21、電流電圧変換部22、フィルタ部23、記録部24、及び、距離演算部25が構築されている。
【0029】
結合部21は、12個の電極10a〜10lから電流信号を受け、これらの電流信号をまとめて出力する。一般に、単一の電極からの電流信号はpA程度の微弱な電流値であるので、単一の電極からの電流信号をそのまま用いると、ノイズの影響が大きかったり、検出エリアが制限されたりしてしまう虞がある。そこで、本発明では、結合部21によって複数の電極からの電気信号をまとめることにより、ノイズの影響を低減し、広範囲の検出を可能にする。
【0030】
電流電圧変換部22は、結合部21からの電流信号を電圧信号に変換する。
【0031】
フィルタ部23は、例えば、カットオフ周波数20Hzのローパスフィルタであり、電流電圧変換部22からの電圧信号における商用周波数成分(50Hz又は60Hz成分)を除去する。これによって、商用電力に起因するノイズ成分が除去され、約20Hz以下の人間の動作により生じる電圧信号のみを抽出することとなる。
【0032】
記録部24は、A/Dコンバータを含んでおり、フィルタ部23からの電圧信号をディジタル化した後、逐次に記録する。
【0033】
距離演算部25は、記録部24に記録された電圧信号に基づいて、電極10a〜10l、すなわち車両に対する人との距離を求める。図3に、記録部24に記録された電圧信号、すなわち、車両周りでの人の歩行動作を検出した電圧信号の波形を示す。図3における横軸はサンプリングデータ数、すなわち時間を示す。図3では、時点t1〜t2において被験者は直立で停止しており、時点t2で歩行を初め、時点t3で歩行を停止し、再び時点t4まで直立で停止した。ここで、時点t2〜t3において被験者は約8歩の歩行動作を行った。
【0034】
図3によれば、歩行動作停止状態では電圧信号がほぼ平坦であるが、歩行動作が始まるとパルス状の電圧信号が観測されている。このパルス状の電圧信号は、足が離地する際に発生したものである。
【0035】
このように、歩行動作中に観測されるパルス状の電気信号のピーク値、すなわち振幅は、最初は小さいが、次第に大きくなり、停止の直前になって再び減少している。この振幅の大きさは、足の離地の際の速度と対応し、足の離地の速度が歩行始めと歩行停止直前とでは遅くなることにより小さく検出されている。換言すれば、検出電気信号の振幅の大きさは、歩行速度が速いと大きくなり、歩行速度が遅いと小さくなる。
【0036】
また、パルス状の電気信号の数をカウントすることにより、被験者の歩数を検出することができると共に、パルス状の電気信号の周期を求めることにより、被験者の歩行速度を検出することができる。
【0037】
距離演算部25は、パルス状の電気信号の振幅の大きさと周期とに基づいて、人との距離を求める。具体的には、距離演算部25は、パルス状の電気信号の周期によって振幅の大きさを補正し、この補正した振幅の大きさに基づいて、人との距離を求める。
【0038】
このように、第1の実施形態の非接触動作検出装置1は、人の動作に起因して生じる電気信号を検出し、この電気信号の振幅に加えて電気信号の周期、すなわち人の動作速度に基づいて人との距離を求めるので、人の動作速度が変動して検出電気信号の振幅が変動しても、電気信号の周期に基づいて振幅の大きさを補正することによって、人との距離を高精度に求めることができる。
【0039】
従来、人の動作に起因して生じる電気信号を検出する手法としては、人の動作に伴う電位変化を計測する方法と、人の動作に伴う静電容量の変化を計測する方法とが知られている。
【0040】
人の動作に伴う電位変化を検出する従来法1では、基準となるアースが必要であった。このため、被験者はアースに接地した電極の上に貼り付けた絶縁シート上を歩行する必要があり、計測条件が制限されていた。一方、第1の実施形態の非接触動作検出装置1では、電位ではなく、電流(人の動作に起因する静電誘導電流)を検出するので、計測条件の制限がない。
【0041】
また、従来法1では、電位検出の際、一般にアース電位にノイズ成分が多かった。そこで、第1の実施形態の非接触動作検出装置1では、電極10a〜10lをフローティングにすることによって、ノイズの影響を低減している。
【0042】
また、従来法1では、人の電位変化を検出するためにワイヤ状の電極を用いていた。これは、人間の動作範囲が大きい場合には、アスペクト比の大きい細長い電極やワイヤ状の電極を用いることが好ましかったことによる。しかしながら、この従来法1では、ワイヤ電極がアンテナとなり、電磁波を検出するので、ノイズの影響を強く受けることとなり、計測適用範囲が制限されていた。どこで、第1の実施形態の非接触動作検出装置1では、
アスペクト比が小さい電極10a〜10lを用いて、適切な間隔で複数配置することによって、ノイズの影響を低減している。
【0043】
一方、人の動作に伴う静電容量の変化を検出する従来法2では、上記したように、一般に単一の電極からの電流信号がpA程度の微弱な電流値であるので、単一の電極からの電流信号をそのまま用いると、ノイズの影響が大きかったり、検出エリアが制限されたりしていた。一方、第1の実施形態の非接触動作検出装置1では、複数の電極10a〜10lからの電流信号を結合部21によりまとめることにより、ノイズの影響を低減し、広範囲の検出を可能にしている。
【0044】
ところで、人物による未然防犯機能として重要な点は、人物と単なる障害物とを区別して検出可能なことである。第1の実施形態の非接触動作検出装置1によれば、人の動作に起因して生じる電気信号を検出するので、障害物と区別して人のみの動作を検出することができる。
【0045】
また、車両搭載用の未然防犯機能として重要な点は、搭載コストやバッテリ消費電力が低いことである。第1の実施形態の非接触動作検出装置1によれば、カメラなどの能動的な検出手段を用いず、電極やアンテナ等の受動的な検出手段を用いているので、搭載コストやバッテリ消費電力の増加を低減することができる。
[第2の実施形態]
【0046】
図4は、本発明の第2の実施形態に係る非接触動作検出装置を示す図である。図4に示す非接触動作検出装置1Aは、非接触動作検出装置1において12個の電極10a〜10lに代えて1個の電極10Aを備え、ECU20に代えてECU20Aを備えている点で第1の実施形態と異なっている。
【0047】
電極10Aは、図5に示すように、車両における金属ボディパネルそのものである。この場合、車両における金属ボディパネルは、接地電位や、他の電位に対してフローティングされていることが重要である。
【0048】
ECU20Aは、ECU20において結合部21を備えていない点でECU20と異なっている。ECU20Aのその他の構成はECU20と同一である。
【0049】
この第2の実施形態の非接触動作検出装置1Aでも、第1の実施形態の非接触動作検出装置1と同様の利点を得ることができる。
【0050】
また、第2の実施形態の非接触動作検出装置1Aによれば、車両の金属ボディパネルそのものを電極10Aとして用いているので、人に起因する静電容量を検出するための電極を別途設ける必要がないという利点を有する。
[第3の実施形態]
【0051】
第2の実施形態では、車両の金属ボディパネル全体を電極として用いたが、車両における個々の金属ボディパネルパーツを電極として用いてもよい。以下に、その一例を示す。
【0052】
図6は、本発明の第3の実施形態に係る非接触動作検出装置を示す図である。図6に示す非接触動作検出装置1Bは、非接触動作検出装置1Aにおいて電極10Aに代えて4個の電極10Ba〜10Bdを備えており、ECU20Aに代えて第1の実施形態におけるECU20を備えている点で第2の実施形態と異なっている。
【0053】
電極10Ba〜10Bdは、図7に示すように(一部省略)、それぞれ、車両のドアパネルにおける金属ボディパネルそのものである。具体的には、電極10Baは車体右側におけるフロントドアの金属ボディパネルそのものであり、電極10Bbは車体右側におけるリアドアの金属ボディパネルそのものであり、電極10Bcは車体左側におけるフロントドアの金属ボディパネルそのものであり、電極10Bdは車体左側におけるリアドアの金属ボディパネルそのものである。この場合、車両のドアパネルにおける金属ボディパネルは、接地電位や、他の電位に対してフローティングされていることが重要である。なお、金属ボディパネルパーツとしては、絶縁したボンネットパネルやトランクパネルなどが用いられてもよい。
【0054】
この第3の実施形態の非接触動作検出装置1Bでも、第2の実施形態の非接触動作検出装置1Aと同様の利点を得ることができる。
[第4の実施形態]
【0055】
図8は、本発明の第4の実施形態に係る非接触動作検出装置を示す図である。図8に示す非接触動作検出装置1Cは、非接触動作検出装置1Aにおいて電極10Aに代えて4個の電極10Ca〜10Cdを備えており、ECU20Aに代えてECU20Cを備えている点で第2の実施形態と異なっている。
【0056】
電極10Ca〜10Cdは、それぞれ、第1の実施形態における電極10h、10i、10d、10eと同様である。すなわち、電極10Ca〜10Cdは、例えば、フィルム状の透明電極である。そして、図9に示すように(一部省略)、電極10Caは車体右側のフロントドアの窓ガラスに貼り付けられており、電極10Cbは車体右側のリアドアの窓ガラスに貼り付けられており、電極10Ccは車体左側のフロントドアの窓ガラスに貼り付けられており、電極10Cdは車体左側のリアドアの窓ガラスに貼り付けられている。
【0057】
ECU20Cは、ECU20Aにおいて電流電圧変換部22及びフィルタ部23に代えて、4個の電流電圧変換部22a〜22d、4個のフィルタ部23a〜23dを備えており、更に位置演算部26を備えている点で第3の実施形態と異なっている。ECU20Cのその他の構成はECU20Aと同一である。
【0058】
電流電圧変換部22a〜22dは、それぞれ、電流電圧変換部22と同一の構成であり、電極10Ca〜10Cdそれぞれからの電流信号を受け、電圧信号に変換する。
【0059】
フィルタ部23a〜23dは、それぞれ、フィルタ部23と同一の構成であり、電流電圧変換部22a〜22dそれぞれからの電圧信号における商用周波数成分を除去する。
【0060】
記録部24は、フィルタ部23a〜23dからの電圧信号をディジタル化した後、それぞれを逐次に記録する。
【0061】
距離演算部25は、記録部24に記録された電圧信号の振幅の大きさと周期とに基づいて、電極10Ca〜10Cdそれぞれに対して人との距離を求める。
【0062】
位置演算部26は、4個の電極10Ca〜10Cdの位置関係10Ca(0,0)、10Cb(S1,0)、10Cc(0,S2)、10Cd(S1,S2)、及び、距離演算部25によって求めた人と各電極10Ca〜10Cdとの距離から、人の位置を求める。例えば、図10に示すように、2つの電極10Ca,10Cbに対し、電極10Caと人との距離D1と、電極10Cbと人との距離D2とを共に満足する位置P(x,y)を求める。なお、位置演算部26は、検出電気信号の大きさが人との距離に比例して人との距離が近いほど大きいことを利用するものである。
【0063】
この第4の実施形態の非接触動作検出装置1Cでも、距離演算部25を備えているので、第3の実施形態の非接触動作検出装置1Bと同様の利点を得ることができる。
【0064】
更に、第4の実施形態の非接触動作検出装置1Cによれば、位置演算部26によって、少なくとも2つの電極に対する人との距離を満たす任意の1点を求めることによって、人の位置の特定を行うことができる。また、位置演算部26は、距離演算部25によって求めた高精度な距離に基づくので、人の位置を高精度に求めることができる。
【0065】
また、第4の実施形態の非接触動作検出装置1Cでは、人の位置、及び、動作速度(歩行速度)に加え、進行方向をも検出することができる。例えば、人の位置を定期的に求めることによって進行方向を検出することができる。
[第5の実施形態]
【0066】
第4の実施形態では、距離演算部25によって求めた距離に基づいて人の位置を求めたが、距離演算部25によって求めた距離を用いずとも、少なくとも4個の電極を用いれば、人の位置を精度よく検出することが可能である。
【0067】
図11は、本発明の第5の実施形態に係る非接触動作検出装置を示す図である。図11に示す非接触動作検出装置1Dは、非接触動作検出装置1CにおいてECU20Cに代えてECU20Dを備えている点で第4の実施形態と異なっている。
【0068】
ECU20Dは、ECU20Cにおいて位置演算部26に代えて位置演算部26Dを備えている点でECU20Cと異なっている。ECU20Dのその他の構成はECU20Cと同一である。
【0069】
位置演算部26Dは、4個の電極10Ca〜10Cdの位置関係10Ca(0,0)、10Cb(S1,0)、10Cc(0,S2)、10Cd(S1,S2)、及び、4個の電極10Ca〜10Cdからの電気信号の位相関係から、人の位置を求める。具体的には、図12に示すように、位置演算部26Dは、電極10Ca及び電極10Cbからの電気信号の位相差を満足する直線L1を求める。同様に、位置演算部26Dは、電極10Cc及び電極10Cdからの電気信号の位相差を満足する直線L2を求める。そして、位置演算部26Dは、これらの直線L1と直線L2との交点を、人の位置P(x,y)として求める。なお、位置演算部26Dは、検出電気信号の位相が人との距離に比例して人との距離が遠いほど遅れることを利用するものである。
【0070】
この第5の実施形態の非接触動作検出装置1Dでも、距離演算部25及び位置演算部26Dを備えているので、第4の実施形態の非接触動作検出装置1Cと同様の利点を得ることができる。
【0071】
特に、位置演算部26Dによって、少なくとも4つの電極からの電気信号の位相関係を満たす任意の1点を求めることによって、人の位置の特定を行うことができる。また、電気信号の位相は人の動作速度の変動に依存しないものであるので、人の位置を高精度に求めることができる。
【0072】
なお、第5の実施形態の非接触動作検出装置1Dでは、電気信号の位相差に代えて電気信号の振幅比を用いてもよい。すなわち、位置演算部26Dは、4個の電極10Ca〜10Cdの位置関係10Ca(0,0)、10Cb(S1,0)、10Cc(0,S2)、10Cd(S1,S2)、及び、4個の電極10Ca〜10Cdからの電気信号の振幅比関係から、人の位置を求めてもよい。具体的には、位置演算部26Dは、電極10Ca及び電極10Cbからの電気信号の振幅比を満足する直線L1を求めると共に、電極10Cc及び電極10Cdからの電気信号の振幅比を満足する直線L2を求め、これらの直線L1と直線L2との交点を、人の位置P(x,y)として求めてもよい。これは、検出電気信号の振幅が人との距離に比例して人との距離が近いほど大きいことを利用するものである。
【0073】
このように、少なくとも4つの電極の振幅比関係を満たす任意の1点を求めることによって、人の位相の特定を行うことができる。また、電気信号の振幅比を用いることによって、人の動作速度の変動に起因する電気信号の振幅の変動を打ち消すことができるので、人の位置を高精度に求めることができる。
[第6の実施形態]
【0074】
第4及び第5の実施形態では、第1の実施形態のように、電極からの電流信号が小さいことに起因するノイズの影響を低減するために、複数の電極からの電流信号をまとめて検出してもよい。以下に、第4の実施形態を用いた変形を例示する。
【0075】
図13は、本発明の第6の実施形態に係る非接触動作検出装置を示す図である。図13に示す非接触動作検出装置1Eは、非接触動作検出装置1Cにおいて4個の電極10Ca〜10Cdに代えて第1の実施形態における12個の電極10a〜10lを備えており、ECU20Cに代えてECU20Eを備えている点で第1の実施形態と異なっている。
【0076】
ECU20Eは、ECU20Cにおいて4個の電流電圧変換部22a〜22d及び4個のフィルタ部23a〜23dに代えて6個の電流電圧変換部22a〜22f、6個のフィルタ部23a〜23fを備えており、更に6個の結合部21a〜21fを備えている構成でECU20Cと異なっている。ECU20Eのその他の構成はECU20Cと同一である。
【0077】
結合部21a〜21fは、それぞれ、結合部21と同一であり、12個の電極10a〜10lのうちの異なる2つの電極から電流信号を受け、これらの電流信号をまとめて出力する。具体的には、結合部21aは車体前側に位置する電極10a,10bからの電流を結合し、結合部21bは車体左前側に位置する電極10c,10dからの電流を結合し、結合部21cは車体左後側に位置する電極10e,10fからの電流を結合し、結合部21dは車体右前側に位置する電極10g,10hからの電流を結合し、結合部21eは車体右後側に位置する電極10i,10jからの電流を結合し、結合部21fは車体後側に位置する電極10k,10lからの電流を結合する。
【0078】
電流電圧変換部22a〜22fは、それぞれ、電流電圧変換部22と同一であり、結合部21a〜21fそれぞれからの電流信号を電圧信号に変換する。
【0079】
フィルタ部23a〜23fは、それぞれ、フィルタ部23と同一であり、電流電圧変換部22a〜22fそれぞれからの電圧信号における商用周波数成分を除去する。
【0080】
記録部24は、フィルタ部23a〜23fからの電圧信号をそれぞれディジタル化した後、それぞれを逐次に記録する。
【0081】
距離演算部25は、記録部24に記録された電圧信号の振幅の大きさと周期とに基づいて、6個の電極群、すなわち、車体前側電極群10a,10b、車体左前側電極群10c,10d、車体左後側電極群10e,10f、車体右前側電極群10g,10h、車体右後側電極群10i,10j、車体後側電極群10k,10lそれぞれに対して人との距離を求める。
【0082】
位置演算部26は、距離演算部25によって求めた人と各電極群との距離から、人の位置を求める。
【0083】
この第6の実施形態の非接触動作検出装置1Eでも、第4の実施形態の非接触動作検出装置1Cと同様の利点を得ることができる。
【0084】
なお、本発明は上記した本実施形態に限定されることなく種々の変形が可能である。例えば、本実施形態では、電極(電極部)10a〜10l,10A,10Ba〜10Bd,10Ca〜10Cdは、人の動作に起因して変化する静電容量を検出したが、人体やその動作に起因して発生・変化する心拍や呼吸などの電気信号を非接触に検出するものであってもよい。
【0085】
また、本実施形態では、結合部21,21a〜21f、電流電圧変換部22,22a〜22f、及び、フィルタ部23,23a〜23fをECUで実現したが、ハード構成によって実現してもよい。例えば、結合部21として、複数の電極部からの配線を1本にまとめる結合器などが考えられる。
【0086】
また、本実施形態における結合部21,21a〜21f、電流電圧変換部22,22a〜22f、フィルタ部23,23a〜23f、記録部24、距離演算部25、及び、位置演算部26,26Dは、コンピュータやマイクロプロセッサなどのメモリと演算処理可能なPU(Processing Unit)とによって実現可能である。したがって、車両用に限定されることなく、会社用や家庭用、携帯用などの一般的な未然防犯機器として用いることも可能である。
【符号の説明】
【0087】
1,1A,1B,1C,1D,1E…非接触動作検出装置、10a〜10l,10A,10Ba〜10Bd,10Ca〜10Cd…電極(電極部)、20,20A,20C,20D,20E…ECU、21,21a〜21f…結合部、22,22a〜22f…電流電圧変換部、23,23a〜23f…フィルタ部、24…記録部、25…距離演算部、26,26D…位置演算部。
【特許請求の範囲】
【請求項1】
人の動作を非接触で検出する非接触動作検出装置において、
人の動作に起因して生じる電気信号を非接触で検出する電極部と、
前記電極部によって検出された電気信号の振幅及び周期に基づいて、人との距離を求める距離演算部と、
を備える、非接触動作検出装置。
【請求項2】
前記電極部は、少なくとも2つの第1及び第2の電極を有し、
前記距離演算部は、前記第1及び第2の電極それぞれに対して人との距離を求め、
前記距離演算部によって求められた前記第1の電極と人との距離、及び、前記第2の電極と人との距離から、人の位置を求める位置演算部を更に備える、
請求項1に記載の非接触動作検出装置。
【請求項3】
前記電極部は、少なくとも4つの第1〜第4の電極を有し、
前記第1〜第4の電極それぞれによって検出された電気信号の位相関係から、人の位置を求める位置演算部を更に備える、
請求項1に記載の非接触動作検出装置。
【請求項4】
前記位置演算部は、
前記第1及び第2の電極それぞれによって検出された電気信号の位相差を満たす第1の直線と、前記第3及び第4の電極それぞれによって検出された電気信号の位相差を満たす第2の直線とを求め、
前記第1の直線と前記第2の直線との交点を、人の位置として求める、
請求項3に記載の非接触動作検出装置。
【請求項5】
前記電極部は、少なくとも4つの第1〜第4の電極を有し、
前記第1〜第4の電極それぞれによって検出された電気信号の振幅比関係から、人の位置を求める位置演算部を更に備える、
請求項1に記載の非接触動作検出装置。
【請求項6】
前記位置演算部は、
前記第1及び第2の電極それぞれによって検出された電気信号の振幅比を満たす第1の直線と、前記第3及び第4の電極それぞれによって検出された電気信号の振幅比を満たす第2の直線とを求め、
前記第1の直線と前記第2の直線との交点を、人の位置として求める、
請求項5に記載の非接触動作検出装置。
【請求項7】
前記電極部は車両に設けられている、
請求項1に記載の非接触動作検出装置。
【請求項8】
前記電極部は車両のボディパネルである、
請求項1に記載の非接触動作検出装置。
【請求項9】
前記電極部は車両におけるボディパネルパーツである、
請求項1に記載の非接触動作検出装置。
【請求項1】
人の動作を非接触で検出する非接触動作検出装置において、
人の動作に起因して生じる電気信号を非接触で検出する電極部と、
前記電極部によって検出された電気信号の振幅及び周期に基づいて、人との距離を求める距離演算部と、
を備える、非接触動作検出装置。
【請求項2】
前記電極部は、少なくとも2つの第1及び第2の電極を有し、
前記距離演算部は、前記第1及び第2の電極それぞれに対して人との距離を求め、
前記距離演算部によって求められた前記第1の電極と人との距離、及び、前記第2の電極と人との距離から、人の位置を求める位置演算部を更に備える、
請求項1に記載の非接触動作検出装置。
【請求項3】
前記電極部は、少なくとも4つの第1〜第4の電極を有し、
前記第1〜第4の電極それぞれによって検出された電気信号の位相関係から、人の位置を求める位置演算部を更に備える、
請求項1に記載の非接触動作検出装置。
【請求項4】
前記位置演算部は、
前記第1及び第2の電極それぞれによって検出された電気信号の位相差を満たす第1の直線と、前記第3及び第4の電極それぞれによって検出された電気信号の位相差を満たす第2の直線とを求め、
前記第1の直線と前記第2の直線との交点を、人の位置として求める、
請求項3に記載の非接触動作検出装置。
【請求項5】
前記電極部は、少なくとも4つの第1〜第4の電極を有し、
前記第1〜第4の電極それぞれによって検出された電気信号の振幅比関係から、人の位置を求める位置演算部を更に備える、
請求項1に記載の非接触動作検出装置。
【請求項6】
前記位置演算部は、
前記第1及び第2の電極それぞれによって検出された電気信号の振幅比を満たす第1の直線と、前記第3及び第4の電極それぞれによって検出された電気信号の振幅比を満たす第2の直線とを求め、
前記第1の直線と前記第2の直線との交点を、人の位置として求める、
請求項5に記載の非接触動作検出装置。
【請求項7】
前記電極部は車両に設けられている、
請求項1に記載の非接触動作検出装置。
【請求項8】
前記電極部は車両のボディパネルである、
請求項1に記載の非接触動作検出装置。
【請求項9】
前記電極部は車両におけるボディパネルパーツである、
請求項1に記載の非接触動作検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−27630(P2011−27630A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−175535(P2009−175535)
【出願日】平成21年7月28日(2009.7.28)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(504237050)独立行政法人国立高等専門学校機構 (656)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月28日(2009.7.28)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(504237050)独立行政法人国立高等専門学校機構 (656)
【Fターム(参考)】
[ Back to top ]