
非接触空中超音波探傷技術における位相一定法を用いた超音波探触子
【課題】入射角一定フォーカシング法を用いつつ、S/Nを向上させる。
【解決手段】超音波探触子は、非接触空中超音波探傷技術における位相一定法を用いており、被検査管としてのパイプに対向する開口を有する筐体と、筐体内に収容され、パイプに対してパルス状の超音波を出力する複数の振動子とを備えている。各振動子は、当該各振動子の中心A,B,C,Kがパイプの中心Dから一定距離だけ離れた仮想曲面L上に位置し、且つ超音波の出力方向がパイプの任意に定めた半径線r1上の位置であって当該パイプの中心Dから所定距離だけ離れた位置Oに焦点を結ぶように、配列されている。このように構成された超音波探触子によれば、入射角iが一定で且つ(距離一定AE=BF=CG=KHに対応して)位相を一定とする位相一定フォーカシング法を適用した構成により、従来の入射角一定フォーカシング法を用いつつ、S/Nを向上できる。
【解決手段】超音波探触子は、非接触空中超音波探傷技術における位相一定法を用いており、被検査管としてのパイプに対向する開口を有する筐体と、筐体内に収容され、パイプに対してパルス状の超音波を出力する複数の振動子とを備えている。各振動子は、当該各振動子の中心A,B,C,Kがパイプの中心Dから一定距離だけ離れた仮想曲面L上に位置し、且つ超音波の出力方向がパイプの任意に定めた半径線r1上の位置であって当該パイプの中心Dから所定距離だけ離れた位置Oに焦点を結ぶように、配列されている。このように構成された超音波探触子によれば、入射角iが一定で且つ(距離一定AE=BF=CG=KHに対応して)位相を一定とする位相一定フォーカシング法を適用した構成により、従来の入射角一定フォーカシング法を用いつつ、S/Nを向上できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、非接触空中超音波探傷技術における位相一定法を用い、被検査管に対して非接触空中超音波で超音波探傷を実施できる超音波探触子に関する。
【背景技術】
【0002】
従来、被検査管(以下、パイプともいう)に対して非接触空中超音波で超音波探傷を実施する際に、平面探触子が広く用いられている。しかしながら、パイプを平面探触子により探傷する場合、被検査管の外面における超音波の入射位置によって入射角が異なるため、効率よく超音波を入射させることができない。
【0003】
これに対し、パイプの中心線上に平行に所定距離だけずらした点に超音波ビームをフォーカシングすることにより、パイプに対する超音波ビームの入射角を一定にする入射角一定フォーカシング法が提案されている(例えば、非特許文献1参照。)。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】高橋雅和他、非接触空中超音波探傷によるパイプの入射角一定フォーカシング法の開発、日本非破壊検査協会、平成21年度春季大会講演概要集、pp11-12,(2009)
【発明の概要】
【発明が解決しようとする課題】
【0005】
以上のような入射角一定フォーカシング法は、通常は特に問題がないものの、本発明者の検討によれば、検出された信号にノイズの目立つ箇所があるため、S/N(信号対雑音比)の向上を図る余地があると考えられる。
【0006】
本発明は上記実情を考慮してなされたもので、入射角一定フォーカシング法を用いつつ、S/Nを向上し得る超音波探触子を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一局面における超音波探触子は、非接触空中超音波探傷技術における位相一定法を用いており、被検査管に対向する開口を有する筐体と、前記筐体内に収容され、前記被検査管に対してパルス状の超音波を出力する複数の振動子とを備え、前記各振動子としては、当該各振動子の中心が前記被検査管の中心から一定距離だけ離れた仮想曲面上に位置し、且つ前記超音波の出力方向が前記被検査管の任意に定めた半径線上の位置であって当該被検査管の中心から所定距離だけ離れた位置に焦点を結ぶように、配列されている超音波探触子である。なお、前記各振動子における超音波の出力面は、前記焦点を結ぶ位置を曲率中心とする曲面に形成されていてもよい。本発明の一局面における超音波探触子によれば、入射角が一定で且つ位相を一定とする位相一定フォーカシング法を適用した構成により、従来の入射角一定フォーカシング法を用いつつ、S/Nを向上できる。
【発明の効果】
【0008】
以上説明したように本発明によれば、入射角一定フォーカシング法を用いつつ、S/Nを向上させることができる。
【図面の簡単な説明】
【0009】
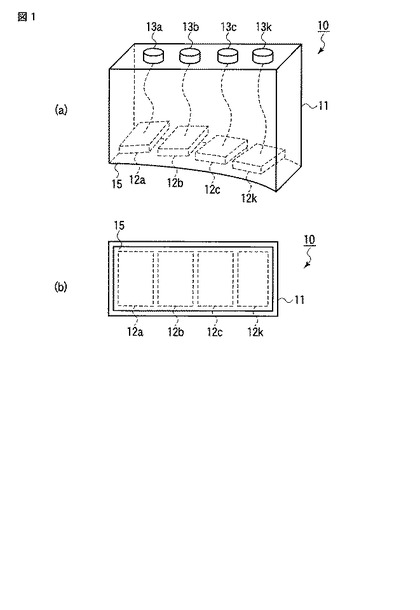
【図1】一実施形態に係る一実施形態に係る超音波探触子の構成を模式的に示す斜視図及び底面図である。
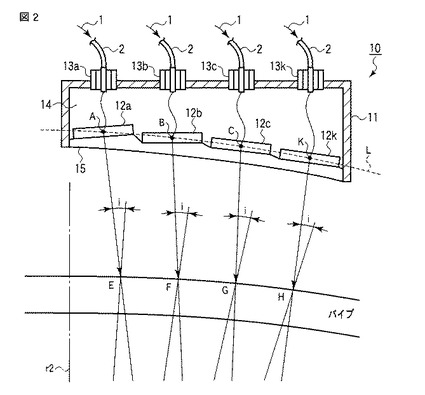
【図2】同実施形態における超音波探触子の構成を模式的に示す断面図である。
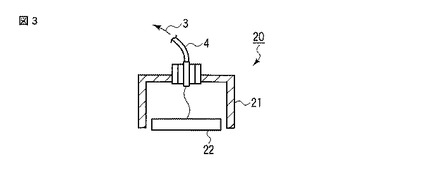
【図3】同実施形態における受信側の超音波探触子の構成を模式的に示す断面図である。
【図4】同実施形態における超音波探触子又は従来の超音波探触子を周回波法に用いたときの配置を表す模式図である。
【図5】従来の超音波探触子による周回波と、同実施形態の超音波探触子による周回波とを比較して示す波形図である。
【図6】同実施形態において、同時励振する振動子の個数を変えた場合の周回波を比較して示す波形図である。
【図7】同実施形態の超音波探触子を周回干渉波法に用いたときの干渉波形を示す波形図である。
【図8】同実施形態の超音波探触子を反射法に用いたときの配置を表す模式図である。
【図9】同実施形態の超音波探触子を反射法に用いたときの反射波形を示す波形図である。
【図10】従来の入射角一定フォーカシング法を説明するための模式図である。
【図11】一実施形態に適用される位相一定フォーカシング法を説明するための模式図である。
【図12】一実施形態に適用される位相一定フォーカシング法を説明するための模式図である。
【図13】一実施形態に適用される位相一定フォーカシング法の具体例を説明するための模式図である。
【図14】図13の一部を拡大して示す模式図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態について図面を用いて説明するが、その前に一実施形態の前提となる位相一定フォーカシング法(非接触空中超音波探傷技術における位相一定法)について述べる。位相一定フォーカシング法は、従来の入射角一定フォーカシング法を改善した手法であり、一実施形態に係る超音波探触子に適用されている。
【0011】
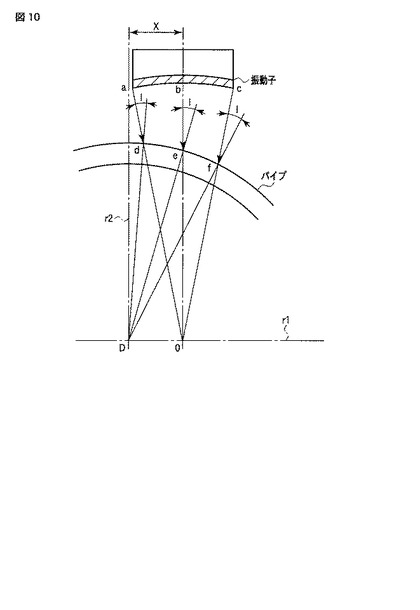
従来の入射角一定フォーカシング法においては、図10に示すように、パイプの任意の半径線r1に平行に(当該半径線r1とは直交する半径線r2から)所定距離Xだけシフトした振動子から、当該半径線r1上でパイプの中心Dから所定距離Xだけ離れたO点に超音波ビームをフォーカシングすることにより、超音波ビームの入射角(I)を一定にする。しかしながら、従来の入射角一定フォーカシング法では、振動子面a,b,cと、被検査管の外表面d,e,fとの距離ad,be,cfが異なる。例えば、距離adは29.89mmであり、距離beは32.01mmであり、距離cfは34.10mmである。
【0012】
これらの距離の差は、入射する超音波の位相を異ならせることにより、感度及びS/Nを低下させてしまう。
【0013】
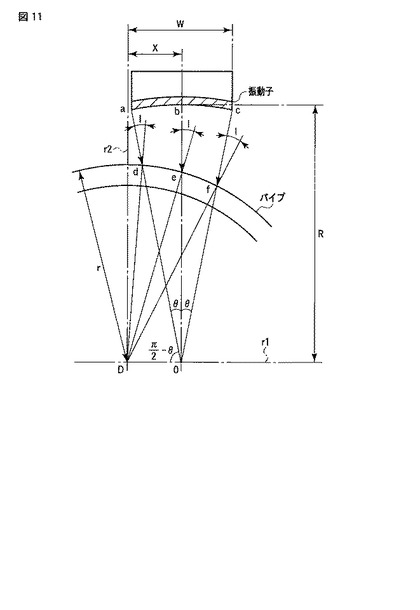
これに対し、本発明者は、振動子面とパイプの外表面との距離を一定にすることにより、入射角及び位相を一定にする位相一定フォーカシング法を開発した。
【0014】
始めに、位相一定フォーカシング法では、図11に示す関係において、各距離ad,be,cfの差ΔWe,ΔWfを次式に示すように算出する。
【0015】
ΔWe=be−ad …(1)
ΔWf=cf−ad …(2)
続いて、三角形DdO,DeO,DfOに関し、DO=Xで共通、dD=eD=fD=パイプの外径の半径rであるから、次の関係が得られる。
【0016】
∠DdO=∠DeO=∠DfO=入射角(I)=sin-1(X/r)
…(3)
また、三角形DdO,DeO,DfOに正弦定理を適用すると、式(4)が得られる。
【数1】

【0017】
ad=R−Od …(6)
距離beも同様にして、次式のように得られる。
【0018】
be=R−r・cos(I) …(7)
距離cfも以下のようにして導く。
【0019】
cf=R−Of …(8)
三角形DfOに正弦定理を適用して、式(9)を得る。
【数2】
【0020】
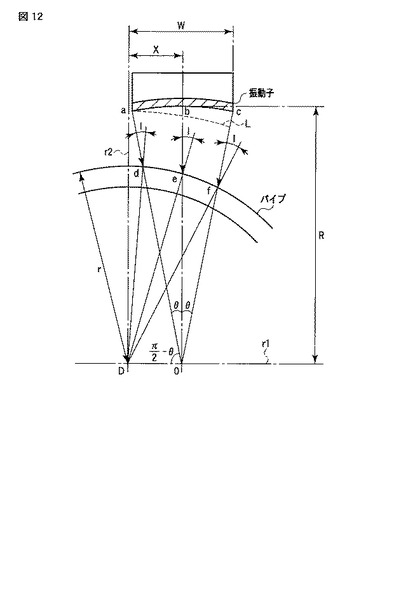
式(3)〜(10)によって、距離be[式(7)],ad[式(6)],cf[式(8)]は容易に求まる。その結果、距離差ΔWe,ΔWfを補正することにより、入射角一定・距離差一定の位相一定フォーカシング法を実現できる。位相一定フォーカシング法によれば、図12に破線Lで示す如き、パイプの中心Dから一定距離aDだけ離れた曲面L上に各振動子が配列されることになる。
【0021】
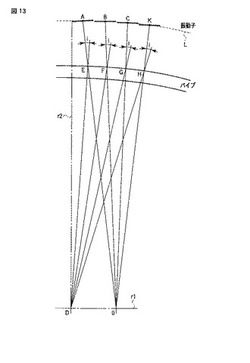
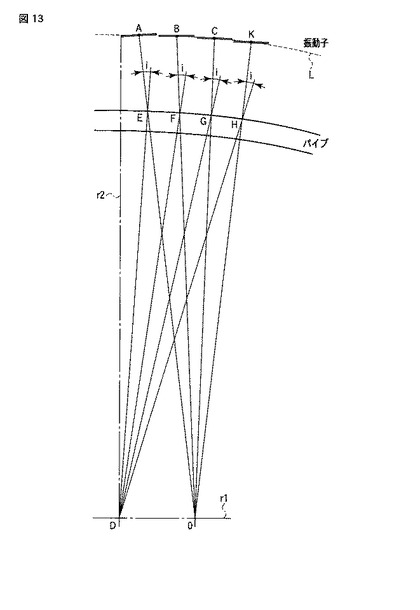
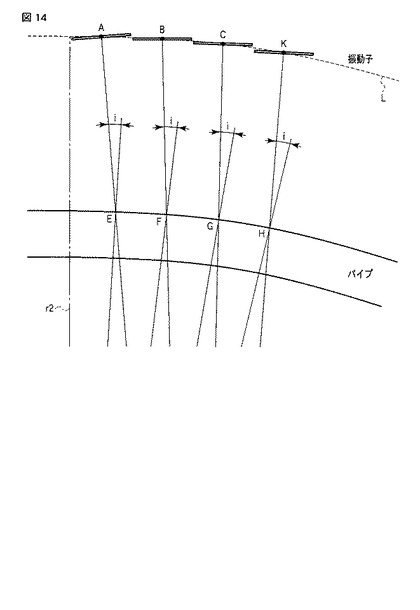
図13及び図14に位相一定フォーカシング法の具体例を示す。図13及び図14に示す例では、各々中心A,B,C,Kを有する4枚の振動子を用い、振動子面と、パイプの外表面E,F,G,Hとの距離がAE=BF=CG=KHで且つ超音波ビームのパイプ外表面E,F,G,Hへの入射角(i)が一定になるように設計している。
【0022】
以上が一実施形態の前提となる位相一定フォーカシング法の説明である。続いて、この位相一定フォーカシング法を適用した超音波探触子の一実施形態を述べる。
【0023】
<一実施形態>
図1は一実施形態に係る超音波探触子の構成を模式的に示す斜視図及び底面図であり、図2はこの超音波探触子の構成を模式的に示す断面図である。この超音波探触子10は、パイプ(被検査管)に対向する開口を有する筐体11と、当該筐体11内に収容され、当該パイプに対してパルス状の超音波を出力する複数の振動子12a,12b,12c,12kとを備えている。各振動子12a,12b,12c,12kは、図13に示したように、当該各振動子の中心A,B,C,Kがパイプの中心Dから一定距離だけ離れた仮想曲面L上に位置し、且つ超音波の出力方向がパイプの任意に定めた半径線r1上の位置であって当該パイプの中心Dから所定距離Xだけ離れた位置Oに焦点を結ぶように、配列されている。ここで、一定距離はパイプの外径の半径rよりも大きい距離であり、所定距離Xはパイプの内径の半径(r−t)(但し、tはパイプの厚み)よりも小さい距離である。なお、各振動子12a,12b,12c,12kにおける超音波の出力面は、図2に示した平面に限らず、当該焦点を結ぶ位置Oを曲率中心とする曲面に形成されていてもよい。
【0024】
また、筐体11は、電気信号の矩形バースト信号1を並列に入力するための信号ケーブル2を着脱自在に接続する接続端子13a,13b,13c,13kを振動子12a,12b,12c,12k毎に備えていてもよい。但し、4つの接続端子13a〜13kに代えて、1つの接続端子を設け、当該1つの接続端子から筐体11内で電気的に並列に矩形バースト信号1を各振動子12a,12b,12c,12kに入力する構成としてもよい。また、振動子12a,…としては、4個に限らず、任意の複数個を用いることが可能である。
【0025】
また、筐体11は、樹脂製のバッキング材14が充填され、バッキング材14上に各振動子12a,…,12kが配列され、各振動子12a,…,12kに貼り付けられた前面板15を備えていてもよい。
【0026】
バッキング材14は、例えば、エポキシ樹脂やゴムに、比重の大きい紛体(セラミックス、金属)を混入して形成され、超音波の吸収とダンピングを行うものである。
【0027】
前面板15としては、各振動子12a,…と空気との接続部分における超音波のレベル低下を防止する観点から、例えば、比重が0.7〜0.8程度の多孔性構造を有した樹脂材料の如き、空気の音響インピーダンスに近い材料を使用してもよい。
【0028】
一方、図3に示すように、受信側の超音波探触子20は、通常のものであり、パイプに対向する開口を有する筐体21と、当該筐体21内に収容され、当該パイプから受けた超音波パルス又は欠陥エコーを電気信号のパルス信号又は欠陥エコー信号3に変換して信号ケーブル4を介して公知の測定装置(図示せず)に出力する振動子22とを備えている。なお、公知の測定装置は、例えば特開2010−25817号公報に開示されている。
【0029】
以上のように構成された超音波探触子10によれば、入射角及び位相を一定とする位相一定フォーカシング法を適用した構成により、従来の入射角一定フォーカシング法を用いつつ、S/Nを向上できるという効果を得ることができる。
【0030】
以下、この効果について詳細に説明する。なお、以下の説明中、超音波探触子10としては、形式:0.4K40×20NR190、公称周波数:400kHz、振動子材質:コンポジット、振動子寸法:10×20mmを4枚、曲率半径:190mm、のものを用いている。また、パイプのサイズはφ318.5mm×14.3mmであり、パイプ外表面への入射角iは7.2°である。
【0031】
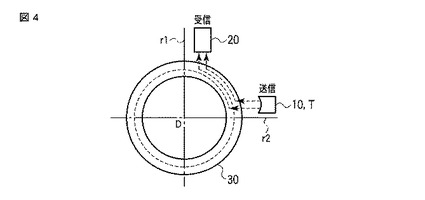
(周回波法への適用例) 図4は本実施形態の超音波探触子10又は従来の超音波探触子Tを周回波法に用いたときの配置を表す模式図である。送信側の超音波探触子10,Tは、パイプ30の任意の半径線r1に平行に(当該半径線r1とは直交する半径線r2から)所定距離Xだけ反時計方向にシフトした位置に配置される。受信側の超音波探触子20は、パイプ30の半径線r2に平行に(当該半径線r2とは直交する半径線r1から)所定距離Yだけ時計方向にシフトした位置に配置される。
【0032】
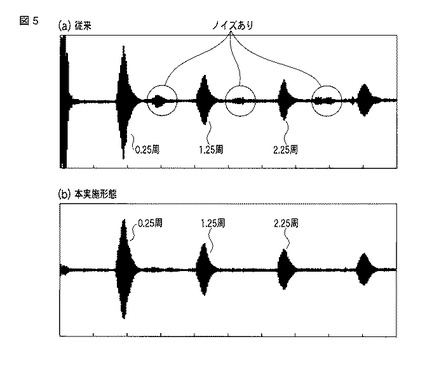
図5に従来の超音波探触子T(入射角一定フォーカシング法)による周回波と、本実施形態の超音波探触子10(位相一定フォーカシング法)による周回波とを比較して示す。なお、紙面の縦方向はエコー信号の電圧を表し、紙面の横方向は時間を表していて、これらは以下の各波形図でも同様である。従来の超音波探触子Tによる周回波は、図5(a)に示すように、ノイズの目立つ箇所がある。これに対し、本実施形態の超音波探触子10による周回波は、図5(b)に示すように、ノイズが見当たらない。このように、本実施形態の超音波探触子10によれば、従来の超音波探触子Tに比べ、S/Nを向上させることができる。
【0033】
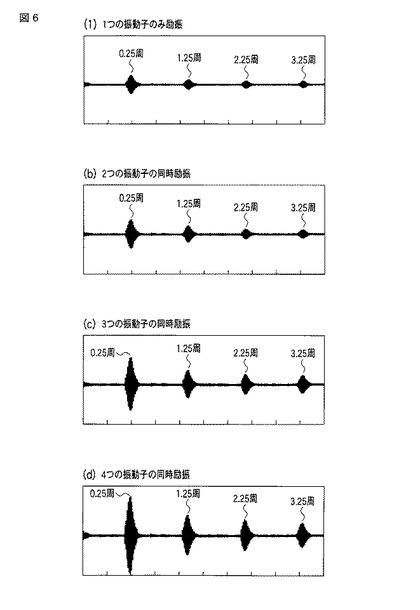
図6は本実施形態の超音波探触子10(位相一定フォーカシング法)において、同時励振する振動子の個数を変えた場合の周回波を比較して示す波形図である。図6(a)は1つの振動子12aのみを励振した場合を示し、以下、順に、図6(b)は2つの振動子12a,12bを同時励振した場合、図6(c)は3つの振動子12a,12b,12cを同時励振した場合、図6(d)は4つの振動子12a,12b,12c,12kを同時励振した場合、をそれぞれ示している。図示するように、同時励振する振動子12a,…の個数に応じて、エコー信号の電圧で示される周回波の振幅が大きくなっていることが分かる。このように、本実施形態の超音波探触子10によれば、S/Nの向上に加え、振動子の個数に応じて、感度を向上させることができる。
【0034】
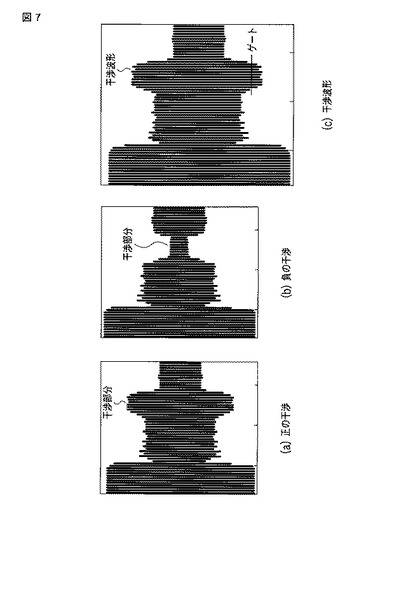
(周回干渉波法への適用例) 図7は本実施形態の超音波探触子10を周回干渉波法に用いたときの干渉波形を示す波形図である。図7(c)は評価に用いた干渉波形を示しており、図7(a)及び図7(b)は、正の干渉部分及び負の干渉部分をそれぞれ示している。図示するように、本実施形態の超音波探触子10によれば、周回干渉波法に用いた場合であっても、ノイズが見当たらず、S/Nを向上させることができる。
【0035】
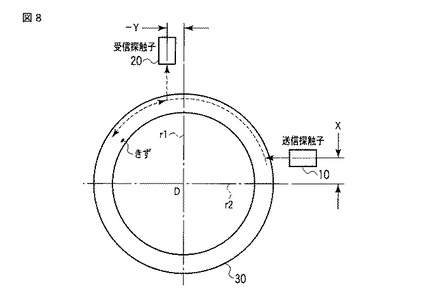
(反射法への適用例) 図8は本実施形態の超音波探触子10を反射法に用いたときの配置を表す模式図である。送信側の超音波探触子10は、パイプ30の任意の半径線r1に平行に(当該半径線r1とは直交する半径線r2から)所定距離Xだけ反時計方向にシフトした位置に配置される。受信側の超音波探触子20は、パイプ30の半径線r2に平行に(当該半径線r2とは直交する半径線r1から)所定距離−Yだけ反時計方向にシフトした位置に配置される。
【0036】
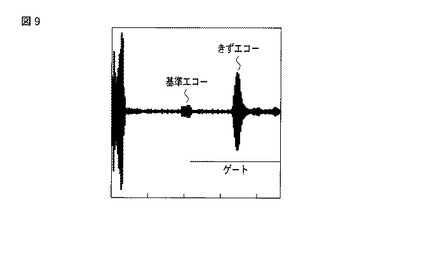
図9に本実施形態の超音波探触子10を反射法に用いたときの反射波形を示す。図示するように、ノイズが見当たらず、基準エコーと、きずエコーとが表れている。このように、本実施形態の超音波探触子10によれば、反射法に用いた場合であっても、ノイズが見当たらず、S/Nを向上させることができる。
【0037】
上述したように本実施形態によれば、入射角及び位相を一定とするように構成された超音波探触子10により、従来の入射角一定フォーカシング法を用いつつ、S/Nを向上させることができる。また、本実施形態によれば、振動子の個数に応じて、感度を向上させることができる。また、本実施形態の超音波探触子10は、周回波法、周回干渉波法及び反射法といった様々な測定方法に用いることができる。
【0038】
なお、本願発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に亘る構成要素を適宜組合せてもよい。
【符号の説明】
【0039】
1…矩形バースト信号、2,4…信号ケーブル、3…パルス信号又は欠陥エコー信号、10…送信側の超音波探触子、11,21…筐体、12a,12b,12c,12k,22…振動子、13a,13b,13c,13k…接続端子、14…バッキング材、15…前面板、20…受信側の超音波探触子。
【技術分野】
【0001】
本発明は、非接触空中超音波探傷技術における位相一定法を用い、被検査管に対して非接触空中超音波で超音波探傷を実施できる超音波探触子に関する。
【背景技術】
【0002】
従来、被検査管(以下、パイプともいう)に対して非接触空中超音波で超音波探傷を実施する際に、平面探触子が広く用いられている。しかしながら、パイプを平面探触子により探傷する場合、被検査管の外面における超音波の入射位置によって入射角が異なるため、効率よく超音波を入射させることができない。
【0003】
これに対し、パイプの中心線上に平行に所定距離だけずらした点に超音波ビームをフォーカシングすることにより、パイプに対する超音波ビームの入射角を一定にする入射角一定フォーカシング法が提案されている(例えば、非特許文献1参照。)。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】高橋雅和他、非接触空中超音波探傷によるパイプの入射角一定フォーカシング法の開発、日本非破壊検査協会、平成21年度春季大会講演概要集、pp11-12,(2009)
【発明の概要】
【発明が解決しようとする課題】
【0005】
以上のような入射角一定フォーカシング法は、通常は特に問題がないものの、本発明者の検討によれば、検出された信号にノイズの目立つ箇所があるため、S/N(信号対雑音比)の向上を図る余地があると考えられる。
【0006】
本発明は上記実情を考慮してなされたもので、入射角一定フォーカシング法を用いつつ、S/Nを向上し得る超音波探触子を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一局面における超音波探触子は、非接触空中超音波探傷技術における位相一定法を用いており、被検査管に対向する開口を有する筐体と、前記筐体内に収容され、前記被検査管に対してパルス状の超音波を出力する複数の振動子とを備え、前記各振動子としては、当該各振動子の中心が前記被検査管の中心から一定距離だけ離れた仮想曲面上に位置し、且つ前記超音波の出力方向が前記被検査管の任意に定めた半径線上の位置であって当該被検査管の中心から所定距離だけ離れた位置に焦点を結ぶように、配列されている超音波探触子である。なお、前記各振動子における超音波の出力面は、前記焦点を結ぶ位置を曲率中心とする曲面に形成されていてもよい。本発明の一局面における超音波探触子によれば、入射角が一定で且つ位相を一定とする位相一定フォーカシング法を適用した構成により、従来の入射角一定フォーカシング法を用いつつ、S/Nを向上できる。
【発明の効果】
【0008】
以上説明したように本発明によれば、入射角一定フォーカシング法を用いつつ、S/Nを向上させることができる。
【図面の簡単な説明】
【0009】
【図1】一実施形態に係る一実施形態に係る超音波探触子の構成を模式的に示す斜視図及び底面図である。
【図2】同実施形態における超音波探触子の構成を模式的に示す断面図である。
【図3】同実施形態における受信側の超音波探触子の構成を模式的に示す断面図である。
【図4】同実施形態における超音波探触子又は従来の超音波探触子を周回波法に用いたときの配置を表す模式図である。
【図5】従来の超音波探触子による周回波と、同実施形態の超音波探触子による周回波とを比較して示す波形図である。
【図6】同実施形態において、同時励振する振動子の個数を変えた場合の周回波を比較して示す波形図である。
【図7】同実施形態の超音波探触子を周回干渉波法に用いたときの干渉波形を示す波形図である。
【図8】同実施形態の超音波探触子を反射法に用いたときの配置を表す模式図である。
【図9】同実施形態の超音波探触子を反射法に用いたときの反射波形を示す波形図である。
【図10】従来の入射角一定フォーカシング法を説明するための模式図である。
【図11】一実施形態に適用される位相一定フォーカシング法を説明するための模式図である。
【図12】一実施形態に適用される位相一定フォーカシング法を説明するための模式図である。
【図13】一実施形態に適用される位相一定フォーカシング法の具体例を説明するための模式図である。
【図14】図13の一部を拡大して示す模式図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態について図面を用いて説明するが、その前に一実施形態の前提となる位相一定フォーカシング法(非接触空中超音波探傷技術における位相一定法)について述べる。位相一定フォーカシング法は、従来の入射角一定フォーカシング法を改善した手法であり、一実施形態に係る超音波探触子に適用されている。
【0011】
従来の入射角一定フォーカシング法においては、図10に示すように、パイプの任意の半径線r1に平行に(当該半径線r1とは直交する半径線r2から)所定距離Xだけシフトした振動子から、当該半径線r1上でパイプの中心Dから所定距離Xだけ離れたO点に超音波ビームをフォーカシングすることにより、超音波ビームの入射角(I)を一定にする。しかしながら、従来の入射角一定フォーカシング法では、振動子面a,b,cと、被検査管の外表面d,e,fとの距離ad,be,cfが異なる。例えば、距離adは29.89mmであり、距離beは32.01mmであり、距離cfは34.10mmである。
【0012】
これらの距離の差は、入射する超音波の位相を異ならせることにより、感度及びS/Nを低下させてしまう。
【0013】
これに対し、本発明者は、振動子面とパイプの外表面との距離を一定にすることにより、入射角及び位相を一定にする位相一定フォーカシング法を開発した。
【0014】
始めに、位相一定フォーカシング法では、図11に示す関係において、各距離ad,be,cfの差ΔWe,ΔWfを次式に示すように算出する。
【0015】
ΔWe=be−ad …(1)
ΔWf=cf−ad …(2)
続いて、三角形DdO,DeO,DfOに関し、DO=Xで共通、dD=eD=fD=パイプの外径の半径rであるから、次の関係が得られる。
【0016】
∠DdO=∠DeO=∠DfO=入射角(I)=sin-1(X/r)
…(3)
また、三角形DdO,DeO,DfOに正弦定理を適用すると、式(4)が得られる。
【数1】
【0017】
ad=R−Od …(6)
距離beも同様にして、次式のように得られる。
【0018】
be=R−r・cos(I) …(7)
距離cfも以下のようにして導く。
【0019】
cf=R−Of …(8)
三角形DfOに正弦定理を適用して、式(9)を得る。
【数2】
【0020】
式(3)〜(10)によって、距離be[式(7)],ad[式(6)],cf[式(8)]は容易に求まる。その結果、距離差ΔWe,ΔWfを補正することにより、入射角一定・距離差一定の位相一定フォーカシング法を実現できる。位相一定フォーカシング法によれば、図12に破線Lで示す如き、パイプの中心Dから一定距離aDだけ離れた曲面L上に各振動子が配列されることになる。
【0021】
図13及び図14に位相一定フォーカシング法の具体例を示す。図13及び図14に示す例では、各々中心A,B,C,Kを有する4枚の振動子を用い、振動子面と、パイプの外表面E,F,G,Hとの距離がAE=BF=CG=KHで且つ超音波ビームのパイプ外表面E,F,G,Hへの入射角(i)が一定になるように設計している。
【0022】
以上が一実施形態の前提となる位相一定フォーカシング法の説明である。続いて、この位相一定フォーカシング法を適用した超音波探触子の一実施形態を述べる。
【0023】
<一実施形態>
図1は一実施形態に係る超音波探触子の構成を模式的に示す斜視図及び底面図であり、図2はこの超音波探触子の構成を模式的に示す断面図である。この超音波探触子10は、パイプ(被検査管)に対向する開口を有する筐体11と、当該筐体11内に収容され、当該パイプに対してパルス状の超音波を出力する複数の振動子12a,12b,12c,12kとを備えている。各振動子12a,12b,12c,12kは、図13に示したように、当該各振動子の中心A,B,C,Kがパイプの中心Dから一定距離だけ離れた仮想曲面L上に位置し、且つ超音波の出力方向がパイプの任意に定めた半径線r1上の位置であって当該パイプの中心Dから所定距離Xだけ離れた位置Oに焦点を結ぶように、配列されている。ここで、一定距離はパイプの外径の半径rよりも大きい距離であり、所定距離Xはパイプの内径の半径(r−t)(但し、tはパイプの厚み)よりも小さい距離である。なお、各振動子12a,12b,12c,12kにおける超音波の出力面は、図2に示した平面に限らず、当該焦点を結ぶ位置Oを曲率中心とする曲面に形成されていてもよい。
【0024】
また、筐体11は、電気信号の矩形バースト信号1を並列に入力するための信号ケーブル2を着脱自在に接続する接続端子13a,13b,13c,13kを振動子12a,12b,12c,12k毎に備えていてもよい。但し、4つの接続端子13a〜13kに代えて、1つの接続端子を設け、当該1つの接続端子から筐体11内で電気的に並列に矩形バースト信号1を各振動子12a,12b,12c,12kに入力する構成としてもよい。また、振動子12a,…としては、4個に限らず、任意の複数個を用いることが可能である。
【0025】
また、筐体11は、樹脂製のバッキング材14が充填され、バッキング材14上に各振動子12a,…,12kが配列され、各振動子12a,…,12kに貼り付けられた前面板15を備えていてもよい。
【0026】
バッキング材14は、例えば、エポキシ樹脂やゴムに、比重の大きい紛体(セラミックス、金属)を混入して形成され、超音波の吸収とダンピングを行うものである。
【0027】
前面板15としては、各振動子12a,…と空気との接続部分における超音波のレベル低下を防止する観点から、例えば、比重が0.7〜0.8程度の多孔性構造を有した樹脂材料の如き、空気の音響インピーダンスに近い材料を使用してもよい。
【0028】
一方、図3に示すように、受信側の超音波探触子20は、通常のものであり、パイプに対向する開口を有する筐体21と、当該筐体21内に収容され、当該パイプから受けた超音波パルス又は欠陥エコーを電気信号のパルス信号又は欠陥エコー信号3に変換して信号ケーブル4を介して公知の測定装置(図示せず)に出力する振動子22とを備えている。なお、公知の測定装置は、例えば特開2010−25817号公報に開示されている。
【0029】
以上のように構成された超音波探触子10によれば、入射角及び位相を一定とする位相一定フォーカシング法を適用した構成により、従来の入射角一定フォーカシング法を用いつつ、S/Nを向上できるという効果を得ることができる。
【0030】
以下、この効果について詳細に説明する。なお、以下の説明中、超音波探触子10としては、形式:0.4K40×20NR190、公称周波数:400kHz、振動子材質:コンポジット、振動子寸法:10×20mmを4枚、曲率半径:190mm、のものを用いている。また、パイプのサイズはφ318.5mm×14.3mmであり、パイプ外表面への入射角iは7.2°である。
【0031】
(周回波法への適用例) 図4は本実施形態の超音波探触子10又は従来の超音波探触子Tを周回波法に用いたときの配置を表す模式図である。送信側の超音波探触子10,Tは、パイプ30の任意の半径線r1に平行に(当該半径線r1とは直交する半径線r2から)所定距離Xだけ反時計方向にシフトした位置に配置される。受信側の超音波探触子20は、パイプ30の半径線r2に平行に(当該半径線r2とは直交する半径線r1から)所定距離Yだけ時計方向にシフトした位置に配置される。
【0032】
図5に従来の超音波探触子T(入射角一定フォーカシング法)による周回波と、本実施形態の超音波探触子10(位相一定フォーカシング法)による周回波とを比較して示す。なお、紙面の縦方向はエコー信号の電圧を表し、紙面の横方向は時間を表していて、これらは以下の各波形図でも同様である。従来の超音波探触子Tによる周回波は、図5(a)に示すように、ノイズの目立つ箇所がある。これに対し、本実施形態の超音波探触子10による周回波は、図5(b)に示すように、ノイズが見当たらない。このように、本実施形態の超音波探触子10によれば、従来の超音波探触子Tに比べ、S/Nを向上させることができる。
【0033】
図6は本実施形態の超音波探触子10(位相一定フォーカシング法)において、同時励振する振動子の個数を変えた場合の周回波を比較して示す波形図である。図6(a)は1つの振動子12aのみを励振した場合を示し、以下、順に、図6(b)は2つの振動子12a,12bを同時励振した場合、図6(c)は3つの振動子12a,12b,12cを同時励振した場合、図6(d)は4つの振動子12a,12b,12c,12kを同時励振した場合、をそれぞれ示している。図示するように、同時励振する振動子12a,…の個数に応じて、エコー信号の電圧で示される周回波の振幅が大きくなっていることが分かる。このように、本実施形態の超音波探触子10によれば、S/Nの向上に加え、振動子の個数に応じて、感度を向上させることができる。
【0034】
(周回干渉波法への適用例) 図7は本実施形態の超音波探触子10を周回干渉波法に用いたときの干渉波形を示す波形図である。図7(c)は評価に用いた干渉波形を示しており、図7(a)及び図7(b)は、正の干渉部分及び負の干渉部分をそれぞれ示している。図示するように、本実施形態の超音波探触子10によれば、周回干渉波法に用いた場合であっても、ノイズが見当たらず、S/Nを向上させることができる。
【0035】
(反射法への適用例) 図8は本実施形態の超音波探触子10を反射法に用いたときの配置を表す模式図である。送信側の超音波探触子10は、パイプ30の任意の半径線r1に平行に(当該半径線r1とは直交する半径線r2から)所定距離Xだけ反時計方向にシフトした位置に配置される。受信側の超音波探触子20は、パイプ30の半径線r2に平行に(当該半径線r2とは直交する半径線r1から)所定距離−Yだけ反時計方向にシフトした位置に配置される。
【0036】
図9に本実施形態の超音波探触子10を反射法に用いたときの反射波形を示す。図示するように、ノイズが見当たらず、基準エコーと、きずエコーとが表れている。このように、本実施形態の超音波探触子10によれば、反射法に用いた場合であっても、ノイズが見当たらず、S/Nを向上させることができる。
【0037】
上述したように本実施形態によれば、入射角及び位相を一定とするように構成された超音波探触子10により、従来の入射角一定フォーカシング法を用いつつ、S/Nを向上させることができる。また、本実施形態によれば、振動子の個数に応じて、感度を向上させることができる。また、本実施形態の超音波探触子10は、周回波法、周回干渉波法及び反射法といった様々な測定方法に用いることができる。
【0038】
なお、本願発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に亘る構成要素を適宜組合せてもよい。
【符号の説明】
【0039】
1…矩形バースト信号、2,4…信号ケーブル、3…パルス信号又は欠陥エコー信号、10…送信側の超音波探触子、11,21…筐体、12a,12b,12c,12k,22…振動子、13a,13b,13c,13k…接続端子、14…バッキング材、15…前面板、20…受信側の超音波探触子。
【特許請求の範囲】
【請求項1】
非接触空中超音波探傷技術における位相一定法を用いた超音波探触子であって、
被検査管に対向する開口を有する筐体と、
前記筐体内に収容され、前記被検査管に対してパルス状の超音波を出力する複数の振動子とを備え、
前記各振動子は、当該各振動子の中心が前記被検査管の中心から一定距離だけ離れた仮想曲面上に位置し、且つ前記超音波の出力方向が前記被検査管の任意に定めた半径線上の位置であって当該被検査管の中心から所定距離だけ離れた位置に焦点を結ぶように、配列されていることを特徴とする超音波探触子。
【請求項2】
請求項1に記載の超音波探触子において、
前記各振動子における超音波の出力面は、前記焦点を結ぶ位置を曲率中心とする曲面に形成されていることを特徴とする超音波探触子。
【請求項1】
非接触空中超音波探傷技術における位相一定法を用いた超音波探触子であって、
被検査管に対向する開口を有する筐体と、
前記筐体内に収容され、前記被検査管に対してパルス状の超音波を出力する複数の振動子とを備え、
前記各振動子は、当該各振動子の中心が前記被検査管の中心から一定距離だけ離れた仮想曲面上に位置し、且つ前記超音波の出力方向が前記被検査管の任意に定めた半径線上の位置であって当該被検査管の中心から所定距離だけ離れた位置に焦点を結ぶように、配列されていることを特徴とする超音波探触子。
【請求項2】
請求項1に記載の超音波探触子において、
前記各振動子における超音波の出力面は、前記焦点を結ぶ位置を曲率中心とする曲面に形成されていることを特徴とする超音波探触子。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−108925(P2013−108925A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255984(P2011−255984)
【出願日】平成23年11月24日(2011.11.24)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成23年5月25日 社団法人日本非破壊検査協会発行の「平成23年度春季講演大会 講演概要集」に発表 平成23年7月15日 社団法人日本機械学会頒布の「M&M2011材料力学カンファレンス CD−ROM論文集 講演番号0S0309」に発表
【出願人】(000164438)九州電力株式会社 (245)
【出願人】(591041417)ジャパンプローブ株式会社 (12)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成23年5月25日 社団法人日本非破壊検査協会発行の「平成23年度春季講演大会 講演概要集」に発表 平成23年7月15日 社団法人日本機械学会頒布の「M&M2011材料力学カンファレンス CD−ROM論文集 講演番号0S0309」に発表
【出願人】(000164438)九州電力株式会社 (245)
【出願人】(591041417)ジャパンプローブ株式会社 (12)
【Fターム(参考)】
[ Back to top ]