
非接触給電装置のインピーダンス整合方法とそれを用いた非接触給電装置
【課題】共鳴型非接触給電装置のインピーダンス整合を効率よく行う汎用的な方法を提供する。
【解決手段】
交流電源から負荷に電力を伝送する非接触給電装置において、送電用共鳴コイルと受電用共鳴コイルの共鳴周波数を交流電源の出力周波数foに略一致させて、前記送電用共鳴コイルと前記受電用共鳴コイルの間に電磁界結合による電磁界共鳴を引き起こし、交流電源が前記送電整合回路に入力した交流電力を、コイル間の電磁界共鳴により前記受電用共鳴コイルに伝送して、負荷へ出力する電磁界共鳴方式の非接触給電装置のインピーダンス整合方法であって、更に、非共鳴状態に送電部が持つ入力抵抗Rtiと、非共鳴状態で受電部が持つ入力抵抗Rriと、送電部と受電部の結合による相互インダクタンスMとの3要素の中で2要素を調整して、共鳴状態における非接触給電装置のインピーダンスを整合する。
【解決手段】
交流電源から負荷に電力を伝送する非接触給電装置において、送電用共鳴コイルと受電用共鳴コイルの共鳴周波数を交流電源の出力周波数foに略一致させて、前記送電用共鳴コイルと前記受電用共鳴コイルの間に電磁界結合による電磁界共鳴を引き起こし、交流電源が前記送電整合回路に入力した交流電力を、コイル間の電磁界共鳴により前記受電用共鳴コイルに伝送して、負荷へ出力する電磁界共鳴方式の非接触給電装置のインピーダンス整合方法であって、更に、非共鳴状態に送電部が持つ入力抵抗Rtiと、非共鳴状態で受電部が持つ入力抵抗Rriと、送電部と受電部の結合による相互インダクタンスMとの3要素の中で2要素を調整して、共鳴状態における非接触給電装置のインピーダンスを整合する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁界共鳴現象を利用した非接触給電装置のインピーダンス整合方法、そのインピーダンス整合方法を用いた非接触給電装置、およびその非接触給電装置を搭載した電動車両に関するものである。
【背景技術】
【0002】
電磁界共鳴現象を利用した非接触給電技術(以下、共鳴型非接触給電)は、送電部から受電部までの距離が遠い場合に従来の電磁誘導型非接触給電よりも高い送電効率が得られる特長を持つ。例えば、非特許文献1によれば、2つの直径60cmの螺旋型の共鳴コイルを2m離しても、40%の送電効率が得られている。
交流電気回路において、出力側の出力インピーダンスZoと入力側の入力インピーダンスZiが互いに複素共役の関係にある時に出力側から入力側に伝達される電力が最大になることが、最大電力伝達定理として知られている。ZoとZiを複素共役に合わせる操作をインピーダンス整合と言う。インピーダンス整合は、例えば、複数のコンデンサからなる整合回路を出力側と入力側の間に配置して、コンデンサの容量を調整することで行われる。共鳴型非接触給電においても、高い送電効率を得るためには、電源と送電部の間でのインピーダンス整合と、受電部と負荷の間のインピーダンス整合が必要である。
【0003】
共振性の高い磁気共鳴用アンテナコイルの整合回路は特許文献1に開示されている。特許文献1の技術は、アンテナコイルのほぼ中点に信号線を接続し、アンテナコイルの両側に容量可変のトリマコンデンサの一端子を接続し、該トリマコンデンサのもう一つの端子はグラウンドに接続する。特許文献1によれば、このような整合回路は抵抗損失の小さいアンテナコイルが本来有する高いクオリティファクタ(Q値、Quality factor)を低下させることなく、共振特性の整合を実現する。
【0004】
特許文献2に開示されたインピーダンス整合方法は、送電部と受電部を非共鳴状態にして行う第1段階と、共鳴状態にして行う第2段階からなる。第1段階の非共鳴状態は、整合回路の可変素子を調整して、片方の共鳴周波数を他方の共鳴周波数から離すことで、得られる。さらにこの状態で、送電部と電源のインピーダンス整合と、受電部と負荷のインピーダンス整合を行う。第2段階では、整合回路の可変素子を調整して、送電部と受電部の共鳴周波数を一致させて、送電部と受電部を共鳴状態にする。送電部と受電部が共鳴状態になると、第1段階で達成した電源と送電部間および受電部と負荷間のインピーダンス整合が破れる。特許文献2に開示されたインピーダンス整合方法は、送電側と受電側のインピーダンス整合を繰り返すことで、共鳴状態でのインピーダンス整合を達成する。この時、片方をインピーダンス整合するため整合回路を調整すると、他方のインピーダンスも変わる。このため、送電部と電源のインピーダンス整合と受電部と負荷のインピーダンス整合を複数回繰り返し行う。
【0005】
特許文献3に開示された技術は、インピーダンス整合が頻繁に必要な場合でも、それを効率よく行う方法である。特許文献3に開示された技術に使用する装置は、負荷検出手段と、位置検出手段と、負荷および位置に対応する整合回路設定値を記憶するメモリを備える。特許文献3によれば、負荷検出手段および位置検出手段で負荷および送受信部間の距離を検出して、負荷および距離に対応する整合回路の設定値をメモリから読み出して整合回路を設定することにより、効率よくインピーダンス整合ができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−122141号公報
【特許文献2】WO2010/036980A1号公報
【特許文献3】特開2010−141977号公報
【非特許文献】
【0007】
【非特許文献1】A.KuRsら、Wireless Power Transfer via Strongly Coupled Magnetic Resonancec、Science、317巻、83−86、2007年
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に開示された技術は、計測用試料に高周波を送電して該試料の高周波応答を受電するアンテナに適用する技術であるため、一つのアンテナコイルを整合する技術に関するものであり、共鳴型非接触給電に適用する上で相互結合した送電部と受電部の整合に関しては適用が困難であるという課題を残す。
【0009】
また、特許文献2に開示された技術は、インピーダンス整合に必要な整合回路の調整回数が多いため、インピーダンス整合が頻繁に必要になる応用に対して課題を残す。インピーダンス整合が必要になる場合の例としては、送電部と受電部の間の位置関係が変化した場合と、負荷が変化した場合がある。位置変化の典型的な例は、電動車両に対する給電である。受電部を搭載した電動車両の駐車位置が変化するため、駐車の度にインピーダンス整合が必要となる。負荷変化の典型的な例は、電池の充電状態に応じた抵抗変化である。電池を受電部の負荷として接続して非接触給電で充電する時、電池の充電量が増加すると、電池の電流−電圧特性により、負荷抵抗が変化する。したがって、前記のインピーダンス整合が頻繁に必要となる課題がある。
【0010】
また、特許文献3に開示された技術は、負荷および位置に対応する整合回路の設定値を実験または理論計算を用いて求めて、メモリに予め記憶する必要がある。整合回路の設定値は送電部と受電部の回路に依存するため、予めメモリに整合回路値を記憶させておいた送電部および受電部の対についてのみ、効率よく動作する。即ち、メモリに予め記憶させていない送電部と受電部の対に対して特許文献3の技術を適用することは難しいという課題がある。
【0011】
そこで、本発明はこのような問題点を解決するもので、その目的とするところは、共鳴型の非接触給電装置のインピーダンス整合を効率よく行う汎用的な方法を提供することである。
【課題を解決するための手段】
【0012】
前記の課題を解決して、本発明の目的を達成するために、以下のように構成した。
すなわち、交流電源から負荷に電力を伝送する非接触給電装置において、交流電源の出力に接続される送電整合回路と、送電整合回路の出力に接続された送電用共鳴コイルと、受電用共鳴コイルと、受電用共鳴コイルの出力に接続された受電整合回路と、を備え、前記送電用共鳴コイルの共鳴周波数を交流電源の出力周波数foに略一致させて、更に前記受電用共鳴コイルの共鳴周波数を前記送電用共鳴コイルの共鳴周波数と略一致させて、前記送電用共鳴コイルと前記受電用共鳴コイルの間に電磁界結合による電磁界共鳴を引き起こし、交流電源が前記送電整合回路に入力した交流電力を、コイル間の電磁界共鳴により前記受電用共鳴コイルに伝送して、前記受電整合回路から負荷へ出力する電磁界共鳴方式の非接触給電装置のインピーダンス整合方法であって、更に、非共鳴状態で送電部が持つ入力抵抗Rtiと、非共鳴状態で受電部が持つ入力抵抗Rriと、送電部と受電部の結合による相互インダクタンスMとの3要素の中で2要素を調整して、共鳴状態における非接触給電装置のインピーダンスを整合することを特徴とする。
【発明の効果】
【0013】
本発明によれば、共鳴型の非接触給電装置のインピーダンス整合を効率よく行う汎用的な方法を提供できる。
【図面の簡単な説明】
【0014】
【図1】本発明の非接触給電装置のインピーダンス整合方法の第1実施形態に用いる非接触給電装置10の構成を示すブロック図である。
【図2】本発明の非接触給電装置のインピーダンス整合方法の第1実施形態に用いる非接触給電装置の送電部と非共鳴状態にある受電用共鳴コイル121と受電整合回路122の等価回路図であり、(a)は4端子回路網、(b)は可変素子を表している。
【図3】本実施形態における固有整合を達成する可変容量(コンデンサ)と入力抵抗の関係の一例を示す図である。
【図4】本実施形態における固有整合状態における動作周波数foの近傍帯域でのインピーダンスの典型的な特性例を示す図である。
【図5】本発明の第1実施形態における受電用共鳴コイルと受電整合回路を直列共振RLC回路に近似した等価回路図である。
【図6】本発明の第1実施形態において共鳴状態にある送電整合回路と送電用共鳴コイルと受電用共鳴コイルと受電整合回路と負荷14もしくは交流電源13との等価回路図であり、(a)は送電部と受電部の共鳴、(b)は端子Tt1、Tt2からの等価回路、(c)は端子Tr1、Tr2からの等価回路を表している。
【図7】本発明の第1実施形態のインピーダンス整合方法を示すフローチャートである。
【図8】本発明の第2実施形態の特性評価に用いた共鳴コイル227の斜視図である。
【図9】本発明の第2実施形態の特性評価の送電用共鳴コイル117と受電用共鳴コイル121の設定条件を示す概略の斜視図である。
【図10】本発明の第2実施形態における入力抵抗−送電効率特性の評価結果を示す特性図である。
【図11】本発明の第2実施形態における固有整合値Rの調整に伴うインピーダンスの変化を示すスミスチャートである。
【図12】本発明の第3実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【図13】本発明の第3、第4実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す別の構成図であり、受電用共鳴コイルが電動車両に搭載される場合の構成を示す図である。
【図14】本発明の第4実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連において長尺と短尺を持つ共鳴コイルの効果を示す概念図である。
【図15】本発明の第5実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【図16】本発明の第5実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連において回転軸を共鳴コイルの端部に位置させる効果を示す概念図であり、(a)は回転軸が端部、(b)は回転軸が中心部の場合を表している。
【図17】本発明の第6実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【図18】本発明の第7実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【図19】本発明の第8実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態を、図面を用いて説明する。
(非接触給電装置のインピーダンス整合方法の第1実施形態)
本発明は電磁界共鳴現象を利用した非接触給電装置のインピーダンス整合方法に大きな特徴があるが、まず、電磁界共鳴現象を利用した非接触給電装置の構成を先に説明し、その後に、当該の非接触給電装置を用いたインピーダンス整合方法について述べる。
なお、以下は非接触給電装置を用いたインピーダンス整合方法の説明が主たる目的であるが、それを実現する非接触給電装置の構成の説明も兼ねる。
【0016】
≪非接触給電装置10の構成≫
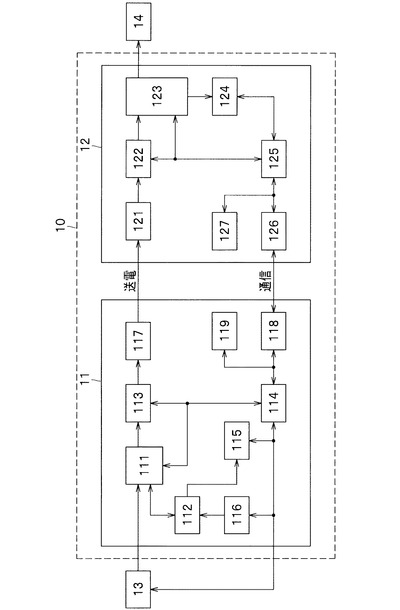
図1は、本発明の非接触給電装置のインピーダンス整合方法の第1実施形態を適用する電磁界共鳴型の非接触給電装置10の構成を示すブロック図である。
図1において、非接触給電装置10は、送電部11と受電部12からなる。送電部11の入力端子は交流電源13に接続され、受電部12の出力端子は負荷14に接続される。
非接触給電装置10における送電部11と受電部12との間には、電磁界共鳴現象を利用した非接触給電方法を用いる。
【0017】
なお、本実施形態の非接触給電において、インピーダンス整合方法の概略は以下の通りである。
まず、送電部11と受電部12との間で、インピーダンスの整合をとるが、この際、交流電源13の周波数foにおいて、送電部11、受電部12、負荷14のインピーダンス整合を行う。
また、交流電源13の出力インピーダンス、送電部11の入出力インピーダンス、受電部12の入出力インピーダンス、負荷14の入力インピーダンスはすべて、実質的に実数成分のみを持つように調整する。
その後、送電部11の出力インピーダンス、受電部12の入力インピーダンスの実数成分を、送電部と受電部との結合による相互インダクタンスMとの関連とともに、調整し、最大の送電効率となるように選択して、インピーダンス整合を行う。
図1の非接触給電装置10は以上のインピーダンス整合方法に適した構成をしている。
【0018】
≪交流電源13≫
交流電源13はfoの周波数を持つ交流電力を送電部11に供給する。周波数foは、産業・科学・医療目的に使用できるISM(Industrial, Scientific, and Medical)帯域に属する周波数であり、例えば、13.56MHz±7KHzに属する。
周波数foは回路構成を簡単にするため固定周波数にすることが望ましいが、後述する送電効率の最適化のためにISM帯域の中で可変にしてもよい。交流電源13の周波数foにおける出力インピーダンスZs(fo)は、jを虚数単位として、
Zs=Rs+jXs
と、実数成分Rsと虚数成分Xsで表した際に、前記した理由から、実質的に実数成分Rsのみを持つようにする。虚数成分Xsは完全に0ではないにしても、その絶対値|Xs|がRsより十分小さい値、例えばRs/10以下であればよい。実数成分Rsの値は、交流電源13の効率を考慮して選定すればよいが、以下における実施形態では高周波分野で広く使われる50Ωを用いて説明する。
【0019】
≪負荷14≫
負荷14は前記周波数foを有する電力を消費する負荷、あるいは負荷に相当する回路、装置である。例えば、整流回路を介して接続される2次電池である。また、整流回路を介さず周波数foの電力をそのまま利用する負荷もある。例えば、プラズマ発生装置や高周波誘導加熱装置などである。
非接触給電装置10から負荷14に電力を供給する際には、負荷14が前記したようないずれの種類でも、周波数foにおける負荷の入力インピーダンスZl(fo)は、
Zl=Rl+jXl
と、実数成分Rlと虚数成分Xlで表した際に、前記した理由から、実質的に実数成分Rlのみを持つようにする。虚数成分Xlは完全に0ではないにしても、その絶対値|Xl|がRlより十分小さい値、例えばRl/10以下であればよい。Rlの値は、負荷の種類により異なるが、以下実施形態では高周波分野で広く使われる50Ωを用いて説明する。
【0020】
前記|Xs|および|Xl|が各々RsおよびRlより十分小さくない場合でも、以下で開示する本発明の方法を簡単に拡張することで、容易にインピーダンスを整合することが可能である。RsおよびRlに比べてXsおよびXlを無視できない場合に対する適用方法は後述する。
【0021】
≪送電部11の構成≫
送電部11の構成を説明する。送電部11は、送電整合用切替部111と、送電整合用方向性結合器112と、送電整合回路113と、送電制御部114と、送電計測部115と、整合用交流信号出力部116と、送電用共鳴コイル117と、送電通信部118と、送電記憶部119を備えている。
送電整合用切替部111は2つの入力端子と1つの出力端子を有する。送電整合用切替部111の第1の入力端子は交流電源13に接続され、第2の入力端子は送電整合用方向性結合器112に接続され、出力端子は送電整合回路113に接続される。
送電制御部114は、送電整合用切替部111を制御し、送電時には交流電源13と送電整合回路113を接続させ、インピーダンス整合時には送電整合用方向性結合器112と送電整合回路113を接続させる。
【0022】
送電整合用方向性結合器112は、出力端子と反射出力端子と入力端子を有する電気回路であり、出力端子は送電整合用切替部111と、反射出力端子は送電計測部115と、入力端子は整合用交流信号出力部116と、各々、接続される。
送電整合回路113は、2つ以上の可変素子を含み、可変素子の値は送電制御部114により設定される。送電整合回路113の出力端子は送電用共鳴コイル117に接続される。
【0023】
送電通信部118は、送電制御部114が外部装置、特に、受電部12と通信を行うための部品である。
送電記憶部119は、送電部の非共鳴状態における入力インピーダンスZtiと送電整合回路113の可変素子値との対応関係を記憶する。
送電制御部114は、送電記憶部119に記憶されたデータを利用して、後述の固有整合(intrinsic match)を行う。固有整合の内容はインピーダンス整合方法の説明で更に詳しく述べる。
【0024】
≪受電部12の構成≫
受電部12の構成を説明する。受電部12は、受電用共鳴コイル121と、受電整合回路122と、受電整合用切替部123と、受電計測部124と、受電制御部125と、受電通信部126と、受電記憶部127を含む。
受電用共鳴コイル121の出力端子は受電整合回路122に接続され、受電整合回路122の出力は受電整合用切替部123に接続される。
受電整合回路122は2つ以上の可変素子を含み、可変素子の値は受電制御部125により設定される。
受電整合用切替部123は2つの出力端子を有し、第1出力端子は負荷14に接続され、第2出力端子は受電計測部124に接続される。
【0025】
受電制御部125は、受電整合用切替部123を制御し、受電時には受電整合回路122と負荷14を接続させ、インピーダンス整合時には受電整合回路122と受電計測部124を接続させる。
受電通信部126は、受電制御部125が外部装置、特に、送電部11と通信を行うための部品である。
受電記憶部127は、受電部の非共鳴状態における入力インピーダンスZriと受電整合回路122の可変素子値との対応関係を記憶する。
受電制御部125は、受電記憶部127に記憶されたデータを利用して、固有整合を行う。固有整合の内容はインピーダンス整合方法の説明で更に詳しく述する。
【0026】
<インピーダンス整合の関連部の構成と動作>
インピーダンス整合時に、送電部11と受電部12は、送電効率が最大になるように送電整合回路113と受電整合回路122を調整する。送電効率を計測するために、以下の動作を行う。
送電制御部114は、交流電源13の出力を停止させ、送電整合用切替部111の第2入力端子を出力端子と接続させ、整合用交流信号出力部116の出力を開始させ、整合用交流信号出力部116の出力信号を送電整合用方向性結合器112と送電整合用切替部111を通って送電整合回路113に送り、送電計測部115が検出した送電整合回路113からの反射信号の電圧または電流または電力を読み取る。
【0027】
受電制御部125は、受電整合用切替部123の入力端子を第2出力端子と接続させ、受電整合回路122から出力される信号を受電計測部124に送り、受電計測部124で測定された信号の電圧または電流または電力を読み取る。
送電制御部114または受電制御部125が、整合用交流信号出力部116の出力電力と受電計測部124の測定値から求めた受電電力の比を求めて、その比に100を乗算した値を送電効率とする。
送電制御部114または受電制御部125は、また送電計測部115の測定値から反射電力を求め、更に前記出力電力から前記受電電力と反射電力の和を減算して、損失電力を求める。特に、後述の方法でインピーダンス整合を行った後の反射電力と損失電力の値は、非接触給電装置1の電気回路の正常動作を確認するデータとして利用できる。
【0028】
前記構成は、受電電力と反射電力の両方を計測する構成であるが、片方だけを計測する構成でも本発明の方法を適用できる。例えば、受電電力のみを計測しインピーダンス整合に利用して、反射電力による回路動作確認は省略することができる。
また、損失電力を無視し、前記出力電力と反射電力の差を受電電力と近似して、反射電力のみを計測する構成も可能である。
これらの構成は、回路動作の確認機能を省略する代わりに回路規模を小さくできる利点がある。
【0029】
<固有整合によるインピーダンス整合方法>
第1実施形態の固有整合によるインピーダンス整合方法を説明する。
本実施形態の非接触給電において、前記したように、まず、送電部11と受電部12との間で、インピーダンスの整合をとるが、この際、交流電源13の周波数foにおいて、送電部11、受電部12、負荷14のインピーダンス整合を行う。
また、交流電源13の出力インピーダンス、送電部11の入出力インピーダンス、受電部12の入出力インピーダンス、負荷14の入力インピーダンスはすべて、実質的に実数成分のみを持つように調整する。
その後、送電部11の出力インピーダンス、受電部12の入力インピーダンスの実数成分を、送電部と受電部との結合による相互インダクタンスMとの関連とともに、調整し、最大の送電効率となるように選択して、インピーダンス整合を行う。
以上が本実施形態の固有整合によるインピーダンス整合方法の特徴である。次に、固有整合によるインピーダンス整合方法を詳しく説明する。
【0030】
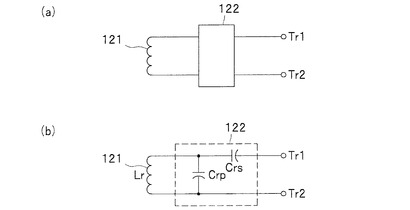
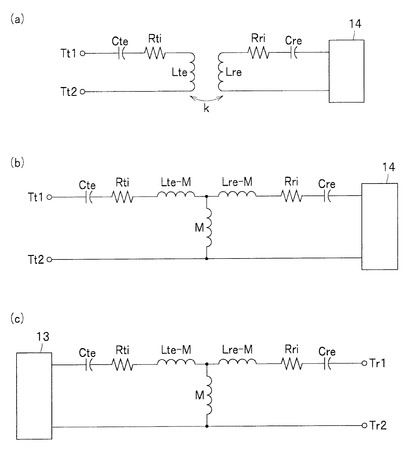
図2は、送電部と非共鳴状態にある受電用共鳴コイル121と受電整合回路122の等価回路図である。図2(a)は受電整合回路122を4端子回路網で表し、図2(b)は整合回路の一例として、2つの可変素子がコンデンサからなり、受電用共鳴コイル121(コイルLr)に対して並列に接続された可変容量コンデンサCrpと、直列に接続された可変容量コンデンサCrsを用いた回路を示している。
なお、図2(b)においては、Crp、Crsは可変容量コンデンサとしての素子を表す場合と静電容量値を表す場合とがある。
回路の整合をとる過程として、可変容量コンデンサCrpと可変容量コンデンサCrsの静電容量値であるCrpとCrsの値を調整して、端子Tr1とTr2とで測定した受電整合回路122の入力インピーダンスZri(fo)が実数部Rriのみになるようにする。
【0031】
例えば、図2(b)の整合回路の場合、受電用共鳴コイル121のインダクタンス値をLr、受電用共鳴コイル121に含まれる抵抗成分をRrdとし、可変容量コンデンサCrpとCrsの静電容量値であるCrpとCrsの値を、次に示す数式の(1)式の関係を満たすように調整する。
すると、数式の(1)式の関係により入力インピーダンスZri(fo)の虚数成分はほぼ0となって消え、Zri(fo)は数式の(2)式に示す実数部Rriのみを持つ。ここでωo=2πfoである。
[数式の(1)式]
2ωo2LrCrp−(ωo2Lr2+Rrd2)ωo2Crp2
+ωoCrs[ωoLr−ωoCrpRrd2−ωo3Lr2Crp]=1
[数式の(2)式]
Rri=Rrd/{(1+ωo2LrCrp)2+(ωoCrsRrd)2}
【0032】
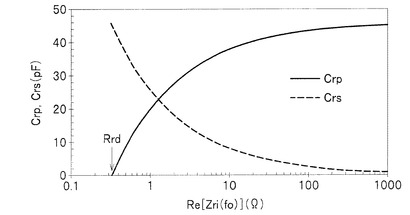
図3は固有整合を達成する可変容量(コンデンサ)と入力抵抗との関係を示す図であり、数式の(1)式と(2)式を満たすCrpとCriの一例を示す。図3において、縦軸にはCrpとCriの静電容量値(単位pF)を示し、横軸にはインピーダンスZri(fo)(単位Ω)を示している。また、数式の(1)式を満たすCrpとCrsの特性線は、それぞれ実線と破線で示されている。
つまり、数式の(1)式を満たすようにCrpとCrsを変化させると、数式の(2)式によって、入力インピーダンスZri(fo)の実数成分であるRriは変化する。このときのCrpとCrsとRri(Re[Zri(fo)])との関係を図示したものが図3である。
【0033】
次に図3を用いて、数式の(1)式を満たしながら、所望のRri値を見出す方法について述べる。
図2(b)に示した回路において、コイルインダクタンスLr=3μH、周波数fo=13.56MHz、コイルの損失を表すQ値は、foにおいて800である(図3の場合)。なお、コンデンサの損失はコイル損失より十分小さいため無視する。
図3において、前記したように横軸はZri(fo)の実数部、即ち、Rriである。Zri(fo)をある実数値にするためには、横軸からRri値を探し、CrpとCrsを該Rri値に対応する値に設定すればよい。
図3の中のRrdは図示の例においてRriが取ることのできる最小値である。Rrdは、前記したようにコイルの等価直流抵抗に相当し、ωoLr/Qで見積もることができる。
【0034】
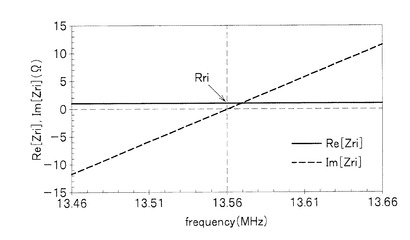
図4は固有整合状態における動作周波数foの近傍帯域でのインピーダンスの典型的な特性例を示す図であり、fo=13.56MHzにおけるインピーダンス虚数部が0になるように調整した回路のZri(f)の一例を示す。回路構成は図3と同じであり、Crp=20pF、Crs=25.9pFとした。
図4は13.56MHzより±100KHzの帯域におけるZri(f)を示しており、前記のISM帯域13.56MHz±7KHzより14倍(100/7)以上広い帯域でのZri(f)を表している。
図4に示した帯域において、インピーダンス実数部のRe[Zri]は実質的に一定値に近似でき、またインピーダンス虚数部のIm[Zri]は実質的に周波数に比例する1次関数に近似できる。なお、図4においては、前記したように周波数帯域が広く、fo=13.56MHzから離れた周波数において、インピーダンス虚数部のIm[Zri]は0の値から乖離している。
このようなインピーダンス特性はRLC直列共振回路に等しい。
【0035】
インピーダンス整合に有用な表現を得るため、本発明ではインピーダンスの虚数部が0になるように調整した状態の図2(a)の回路をRLC直列共振回路に近似する。
なお、図2(b)は、説明に用いる整合回路の一例であり、本実施形態の方法および回路は、動作周波数foの近傍帯域におけるインピーダンス特性をRLC直列共振回路のインピーダンスで近似できる全ての整合回路に適用できる。
【0036】
図5はRLC直列共振回路に近似した受電用共鳴コイル121と受電整合回路122の等価回路図である。送電部11(図1)とは非共鳴状態である。
図5のLreとCreは、周波数foにおける受電整合回路122の実効インダクタンスと実効静電容量である。周波数foでインピーダンスの虚数部が0であることから、次に示す、数式の(3)式が成り立つ。
[数式の(3)式]
XLr(fo)−XCr(fo)=0
Zri(fo)=Rri
ここで、XLr(f)=2πfLre
XCr(f)=1/(2πfCre)
である。
【0037】
なお、XLr(fo)とは、周波数foにおけるコイルLrのリアクタンスXを意味し、また、XCr(fo)とは、周波数foにおけるコンデンサCrのリアクタンスXを意味する。また、πは円周率である。
また、図5の回路は、図2(b)の例のみならず、foで直列共振する任意の回路を表現する。
【0038】
本発明では、Zri(fo)が実質的に数式の(3)式で表現できる、つまり実数部のみとなるように、整合回路を調整することを、固有整合と呼ぶ。
受電部の固有整合は、前記受電制御部125が所定のZriに対応する受電整合回路122の可変素子値を受電記憶部127から読み出して受電整合回路122に設定することで、行われる。以上では受電部12に対する固有整合を説明したが、送電部11でも同様の固有整合を行う。
なお、固有整合は、Rriと前記負荷14の入力抵抗Rlが一致しない点と、固有整合後の送電部の実効抵抗Rtiと前記電源2の出力抵抗Rsが一致しない点で、特許文献1における第1段階の整合と異なる。
また、本実施形態の固有整合は、送電部11と受電部12の共鳴周波数を離すことなく、送電記憶部119および受電記憶部127のデータを利用して行われる点でも、特許文献1における第1段階の整合と異なる。
【0039】
<固有整合で共鳴状態のインピーダンスの等価回路>
固有整合された送電部11と受電部12が共鳴状態で持つインピーダンスについて、図6の等価回路を用いて説明する。
送電部と受電部の共鳴は、図6(a)示すように、コイルLteとコイルLreが結合係数kで結合した回路で表現できる。図6(a)の回路は、交流理論から、図6(b)の回路に変換できる。この時、Mは相互インダクタンスであり、
M=k(LteLre)1/2
である。
【0040】
図6(b)の端子Tt1とTt2間のインピーダンスZt(f)は、送電整合回路113(図1)と受電整合回路122(図1)に依存し、固有整合をしていない場合は、一般的に複雑な関数である。しかし、前記の固有整合を送電部および受電部に施すと、周波数foの近傍において、インピーダンスZt(f)は、図6(b)のRti、Rriの値の等価回路に近似できる。
そして、周波数foにおけるインピーダンスZt(fo)は、次に示す数式の(4)式で示される単純な式で表現される。ここでXm(f)は、相互インダクタンスMによるリアクタンスωoMである。
[数式の(4)式]
Zt(fo)=Rti+jXm(fo)2/[Rri+Zl(fo)]
=Rti+jωo2M2/[Rri+Zl(fo)]
【0041】
また、図6(c)に示したTr1とTr2端子間のインピーダンスZr(fo)は、回路の対称性から、Zt(fo)→Zr(fo)、Rti→Rri、Zl(fo)→Zs(fo)にそれぞれ対応するので、以下に示す数式の(5)式になる。
[数式の(5)式]
Zr(fo)=Rri+jXm(fo)2/[Rti+Zs(fo)]
=Rri+jωo2M2/[Rti+Zs(fo)]
【0042】
<各部のインピーダンス整合>
また、送電部11と交流電源13の間のインピーダンス整合は数式の(6)式で、受電部12と負荷14の間のインピーダンス整合は数式の(7)式で、各々、表現される。
なお、Zs(fo)*、Zl(fo)*は、それぞれZs(fo)、Zl(fo)の複素共役を表す。
[数式の(6)式]
Zs(fo)*=Rs(fo)−jXs(fo)=Zt(fo)
[数式の(7)式]
Zl(fo)*=Rl(fo)−jXl(fo)=Zr(fo)
【0043】
前記、数式の(6)式と(7)式を同時に満たす条件は、数式の(4)式と(5)式とともに解くと、以下の数式の(8)式と(9)式と(10)式を同時に満たすことに置き換えられる。
[数式の(8)式]
Rs(fo)Rl(fo)−Rti(fo)Rri(fo)=ωo2M2
[数式の(9)式]
Rs(fo)Rri(fo)−Rl(fo)Rti(fo)=0
[数式の(10)式]
Xs(fo)=Xl(fo)=0
【0044】
数式の(8)式〜(10)式において、送電時に変化する独立変数は、負荷抵抗を表すRl(fo)と、送電部11と受電部12間の相対位置により変化する相互インダクタンスMである。
非共鳴状態における送電部11の入力抵抗Rti(fo)と受電部12の出力抵抗Rri(fo)は、送電整合回路113と受電整合回路122を固有整合することで、調整できる。
その他、動作周波数foと、交流電源13の出力インピーダンスのRs(fo)とXs(fo)と、負荷14の入力リアクタンスXI(fo)と、インダクタンスLteとLreとは、設計時または製造時に固定できる。
【0045】
特に、Xs(fo)とXI(fo)を0にすれば、数式の(10)式の条件は満たされる。従って、数式の(8)式と(9)式を満たすRt(fo)とRr(fo)を、それぞれ固有整合するRtiとRriとにすれば、インピーダンス整合を達成できる。
本発明の固有整合に用いるRtiとRriを数式の(11)式と(12)式に示す。
[数式の(11)式]
Rti=(Rl2−ωo2M2Rl/Rs)1/2
[数式の(12)式]
Rri=(Rs2−ωo2M2Rs/Rl)1/2
なお、ここでωo=2πfoである。
【0046】
<第1実施形態のインピーダンス整合方法のフローチャート>
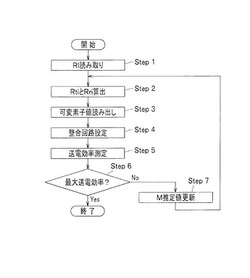
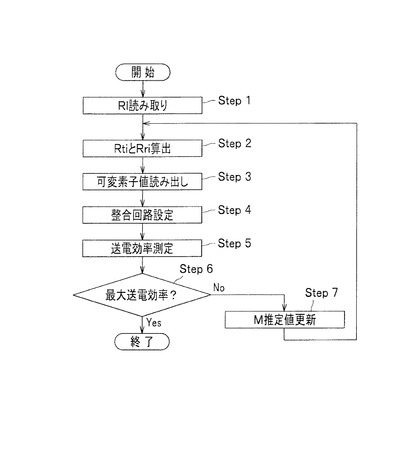
図7は本発明の第1実施形態によるインピーダンス整合方法を示すフローチャートである。以下にこのフローチャートを説明する。
【0047】
第1ステップで、受電制御部125(図1)が負荷抵抗14(図1)の抵抗値Rl(負荷抵抗Rl)を読み取る(Step1)。
負荷抵抗Rlを検出回路によって検出する技術は一般的に周知である。更に、受電制御部125は読み取ったRlの値を、通信によって送電制御部114(図1)に伝達する。
【0048】
第2ステップで、送電制御部114(図1)と受電制御部125(図1)は、M推定値を暫定的に決めて、第1ステップで読み取ったRlと前記M推定値を数式の(11)式および(12)式に代入してRtiとRriを算出する(Step2)。
なお、送電効率を最大にする相互インダクタンスM(送電部11と受電部12間の相対位置により変化)をM推定値と称する。
また、送電制御部114(図1)と受電制御部125(図1)は、通信によって、同じM推定値を用いる。
【0049】
第3ステップで、送電制御部114(図1)と受電制御部125(図1)は、算出したRtiとRriに対応する可変素子値を、送電記憶部119(図1)と受電記憶部127(図1)から読み出す(Step3)。
【0050】
第4ステップで、送電制御部114(図1)は第3ステップで読み出した可変素子値を送電整合回路113(図1)に設定し、受電制御部125(図1)は第3ステップで読み出した可変素子値を受電整合回路122(図1)に設定する(Step4)。
【0051】
第5ステップで、送電制御部114(図1)または受電制御部125(図1)が、該M推定値に対する送電効率を前述の方法で測定する(Step5)。なお、送電効率の測定値は、測定を行った制御部(送電制御部114または受電制御部125)内の送電効率記憶部(不図示)に保存される。
【0052】
第6ステップで、測定された送電効率を前記制御部(送電制御部114または受電制御部125)内の送電効率記憶部(不図示)に保存された送電効率と比較して、最大送電効率かを判断する。最大送電効率と判断された場合(Yes)は、インピーダンス整合を終了し、また、最大送電効率でないと判断された場合(No)は、第7ステップに移行する(Step6)。
【0053】
第7ステップで、送電制御部114(図1)または受電制御部125(図1)がM推定値を更新する(Step7)。
M推定値の更新方法は、送電効率を最大にする任意の最適化アルゴリズムでよい。最適化の独立変数がMだけであるため、単純なアルゴリズムを使うことができ、例えば、山登り法(現在の解の近傍の内で最も評価度の高い解を近傍解として選び、現在の解より近傍解の評価度の高い場合に、近傍解と現在の解を入れ換える局所探索法)でもよい。
【0054】
以上の方法で、送電効率を最大にするM推定値と、固有整合値RtiおよびRriと、これらに対応する送電整合回路113(図1)、および受電整合回路122(図1)の可変素子値が得られる。
なお、送電効率を最大にするM推定値を、固有整合値RtiおよびRriを調整して見出す手法は、非共鳴状態で送電部と受電部がそれぞれ持つ入力抵抗RtiとRriと、送電部と受電部の結合による相互インダクタンスMとの3要素間で少なくとも2要素を調整してインピーダンス整合をとる方法のひとつの形態である。
【0055】
(非接触給電装置のインピーダンス整合方法の第2実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第2実施形態を示す。なお、第2実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を、第1実施形態で用いた構成より、更に具体的な構造を用いて実施した形態を示す。
【0056】
≪共鳴コイル≫
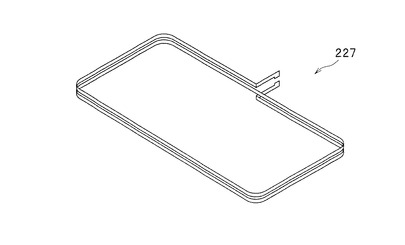
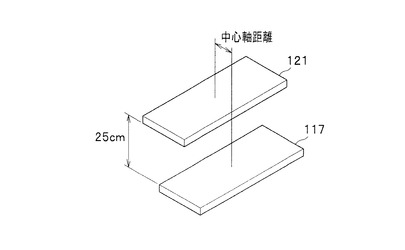
図8は、第1実施形態の特性評価に用いた共鳴コイル227の斜視図であり、銅線を長方形に2回巻いた共鳴コイル227を示している。
また、図9は、第1実施形態の特性評価の送電用共鳴コイル117と受電用共鳴コイル121の設定条件を示す概略の斜視図である。
図8に示した共鳴コイル227の1対を、図9において送電用コイル117および受電用共鳴コイル121として用いて、図9に示すようにコイル117、121面間の距離を25cmに固定しながら、コイル117、121を相対的に面方向に平行して移動し、コイル中心軸間の距離を変化させた。
【0057】
<入力抵抗−送電効率特性>
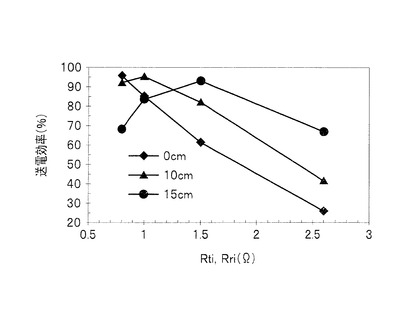
図10は本発明の第2実施形態における入力抵抗−送電効率特性の評価結果を示す特性図であり、固有整合に用いた固有整合値(入力抵抗値)Rti、Rriと得られた送電効率(%)の関係(入力抵抗−送電効率特性)の評価結果を示す。
図10においては、コイル117、121(図9)の各中心軸間距離(0cm、10cm、15cm)における特性結果を示している。なお、送電用と受電用に同じ共鳴コイルと整合回路を用いたため、横軸のRtiとRriは同じ値にしている。
図10に示す評価結果では、固有整合値(入力抵抗値)Rti、Rriを変化させると送電効率も変化し、送電効率が最大になる固有整合値Rが存在することが示されている。
したがって、図10に相当する特性評価結果を用いれば、最適な固有整合値Rを得ることができ、共鳴コイル間の相対位置が変化しても、簡便にインピーダンス整合(Rti、Rriを調整)を行って、最大送電効率を得ることができる。
【0058】
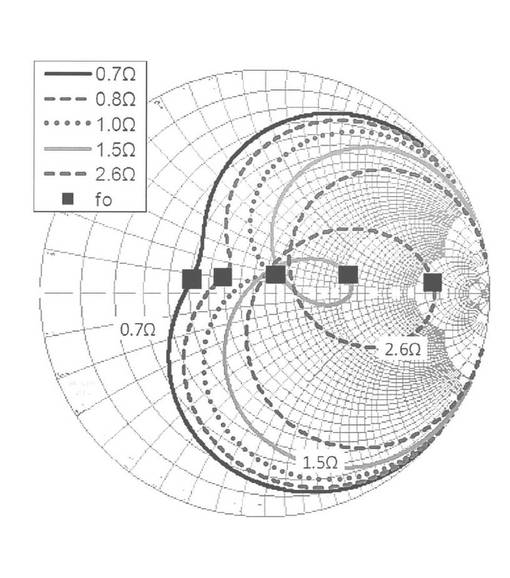
<固有整合値Rの調整に伴うインピーダンス変化>
図11は、第1実施形態における固有整合値Rの調整に伴うインピーダンスの変化を示すスミスチャートであり、一例として、コイル中心軸距離が10cmの時の特性をスミスチャート上に示す。
複素インピーダンスと複素反射係数の関係を図で表現するスミスチャートにおいては、円の中心が反射係数0、すなわち整合が完全にとれたことを意味する。したがって、整合をとるためには、インピーダンスをスミスチャート上で表現した場合において、円の中心に近い方が望ましい。
厳密なインピーダンス整合ではfo(ここでは13.56MHz)の点が円の中心に位置する。図11はfo点の位置が固有整合値Rの調整で移動し、Rti=Rri=1.0Ωで円中心に最も近くなることを示している。
【0059】
図10に示した送電効率も、中心軸距離10cmにおいてRti=Rri=1.0Ωの時に最大であった。図10と図11の結果から、最大送電効率が得られるようにRtiとRriを調整することで、厳密ではないとしても、実用的なインピーダンス整合が得られることが解る。
なお、本実施形態においては、インピーダンスの虚数成分がほぼ0になるように調整してから整合を行う固有整合の手法をとっているので、図11のスミスチャート上においては、fo点の位置は虚数成分がほぼ0の水平方向の円の半径上の近傍を移動(調整)している。
【0060】
もし、前記相対位置と相互インダクタンスMの対応関係を知ることができれば、送電用共鳴コイル117と受電用共鳴コイル121の相対位置を検出する位置検出手段を設けて、数式の(11)式と(12)式を利用してインピーダンス整合に適正な固有整合値RtiとRriを直接得ることができる。
この方法は、相対位置とMの対応関係を予め知る送電部11(図1)と受電部12(図1)の対にだけ適用できる制約があるが、インピーダンス整合をより迅速に行うことができる。
【0061】
また、前記方法で得た送電整合回路113(図1)および受電整合回路122(図1)の可変素子の最適値を初期値として、更に第2段階の別の最適化操作を行うこともできる。第2段階の最適化は、送電部11(図1)および受電部12(図1)をRLC直列共振回路に単純化したことに起因する誤差を低減する効果を持つ。
なお、第2段階の最適化とは、例えば可変素子Crp、Crs、Ctp、Ctsの1要素を僅かに変化させて、その近傍により最適点が存在するか否か(前記した山登り法)を試験し、より最適点があればその条件に移行するものである。なお、この際においては、インピーダンスの実数部を0とする固有整合の手法には必ずしも拘らない。
【0062】
本発明の第1、第2実施形態では、以上説明したとおり、M推定値に対して数式の(11)式と(12)式を適用して求めたRtiとRriで固有整合を行い、最大送電効率が得られるようにM推定値を更新することで、インピーダンス整合を行う。
この方法を用いれば、送電部11(図1)と受電部12(図1)の対を予め限定することなく、共鳴型非接触給電装置のインピーダンス整合を効率よく行うことができる。
【0063】
(非接触給電装置のインピーダンス整合方法の第3実施形態)
次に、本発明の非接触給電装置のインピーダンス整合方法の第3実施形態を示す。
なお、第3実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの具体的な構造については、図12、図13を参照して後述する。
【0064】
<インピーダンス整合方法・第3実施形態>
第3実施形態においては、前記固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117(図1)と受電用共鳴コイル121(図1)間の距離を変えることで、インピーダンス整合を達成する。
Rriを固定すれば、受電部12(図1)に搭載される受電整合回路122(図1)の回路素子値を給電時に調整する機構が不要になり、受電部12(図1)の体積および重量を軽減する効果がある。
【0065】
また、Rtiを固定すると、送電整合回路113(図1)の回路素子値を、給電時に調整する機構を省略できるため、送電部11(図1)の体積および重量を軽減する効果がある。
Rriをある固定整合値Rri0に固定して、Rtiを調整する例を示す。前記した数式の(9)式から、負荷抵抗Rlの変化に対して、Rtiは数式の(13)式に従って調整する。
[数式の(13)式]
Rti=Rri0×Rs/Rl
【0066】
負荷14(図1)が2次電池であれば、負荷抵抗Rlは充電率上昇に伴い緩慢に変化するため、Rtiの調整は、例えば数分または数十分に一回の頻度で行えばよい。RsとRriが固定され、更にRlとRtiも緩慢な変化のために実質的に固定されると、数式の(8)式から、相互インダクタンスMが数式の(14)式を満たせば、インピーダンス整合ができる。
[数式の(14)式]
M=(RsRl−Rri02×Rs/Rl)1/2/ωo
【0067】
以上ではRriを固定する場合を説明した。RtiをRti0と固定する場合は、数式の(15)式と(16)式を用いてインピーダンス整合ができる。
[数式の(15)式]
Rri=Rti0×Rl/Rs
[数式の(16)式]
M=(RsRl−Rti02×Rl/Rs)1/2/ωo
【0068】
≪コイル位置変化構造≫
第3実施形態では、送電用共鳴コイル117(図1、図12)と受電用共鳴コイル121(図1、図12)の間の距離を変えて、数式の(14)式または(16)式を満たすMを得る。
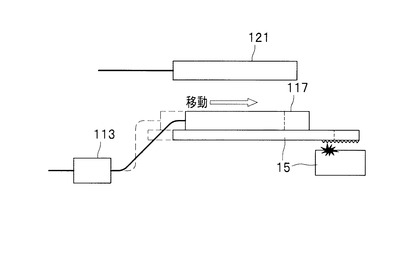
図12に本発明の第3実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連の構成を示す。図12では、移動手段15を用いて共鳴コイル117の位置を変える構成を示す。
図12は送電用共鳴コイル117をコイル面と平行な方向に移動(→)させる例を示しているが、コイル面の法線方向に移動させてもよいし、また平行方向と法線方向の組み合わせで移動させてもよい。
【0069】
また、送電用共鳴コイル117だけを移動する例を示しているが、送電用共鳴コイル117を含む送電部11の一部または全部を移動してもよい。
更に、受電用共鳴コイル121または受電用共鳴コイル121を含む受電部12の一部または全部を移動してもよい。
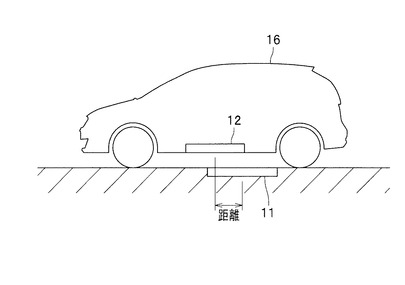
また、図12に示した受電用共鳴コイル121または受電用共鳴コイル121を含む受電部12の一部または全部が、図13を参照して後述する電動車両16に搭載される場合もある。
また、図12においては、送電整合回路113と送電用共鳴コイル117が接続されていることが示されている。
なお、図13は受電用共鳴コイル121または受電用共鳴コイル121を含む受電部12の一部または全部が電動車両16に搭載される場合の構成図である。したがって、前記第3実施形態や、次に述べる第4実施形態にも参照される。
【0070】
(非接触給電装置のインピーダンス整合方法の第4実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第4実施形態を示す。なお、第4実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造は、受電部12(図1、図13)が電動車両に搭載される場合を示す。
【0071】
≪電動車両へ受電部の搭載構造≫
図13は、受電部12を搭載した電動車両16が移動する構造と構成を示す。床下、または路面に送電部11を埋め込み、電動車両16に搭載された受電部12に電磁界共鳴による非接触の給電を行う。
【0072】
<インピーダンス整合方法・第4実施形態>
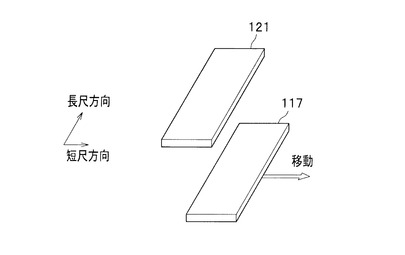
図14は、本発明の第4実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連における共鳴コイルの効果を示す概念図であり、長尺方向と短尺方向を持つ2つの共鳴コイルを用いて実施する場合を示す。
図14において、送電用共鳴コイル117と受電用共鳴コイル121の長尺および短尺方向を揃える。方向を揃えるためには目印標識などのガイドを用いればよいが、位置検出手段と制御部を有する自動位置制御装置を使ってもよい。
両コイルの短尺方向を揃えておき、インピーダンス整合時には送電用共鳴コイル117または受電用共鳴コイル121を短尺方向に移動させる。
短尺方向に移動させることで、より少ない移動距離で相互インダクタンスMを大きく変えることができ、移動手段15を含む送電部11または受電部12の体積および重量の低減、移動で消費されるエネルギーの低減の効果が得られる。
【0073】
電動車両16(図13)を移動させるためにエネルギーが消費される点と、電動車両16(図13)の位置制御を必要とする点とが、図12の構成より不利であるが、別途の移動手段を備える必要がない利点がある。
送電用共鳴コイル117(図1)および受電用共鳴コイル121(図1)として、従来から線材を同軸状に巻いた軸対称型のコイルが広く知られている。しかし、本発明を第4実施形態のごとく実施する上で、特に図13の如くコイル中心軸間の距離を変化させる場合は、図14の如く長尺方向と短尺方向を持たせた形状の共鳴コイル117、121(図14)が有利である。
本発明の第4実施形態では、以上説明したとおり、固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117と受電用共鳴コイル121間の相対位置を変えることで、インピーダンス整合を効率よく達成する汎用的な手段を提供できる。
【0074】
(非接触給電装置のインピーダンス整合方法の第5実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第5実施形態を示す。第5実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を次に示す。
【0075】
≪コイルの上下回転による傾斜角度の変化構造≫
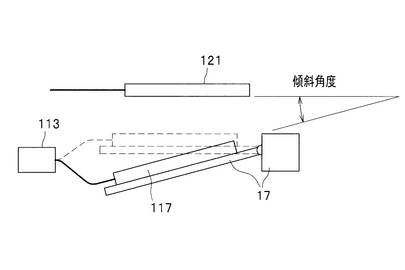
図15は本発明の第5実施形態における、送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
図15において、傾斜手段17は送電用共鳴コイル117の一部を回転軸に該コイルを上下回転させることで、送電用共鳴コイル117と受電用共鳴コイル121間の傾斜角度を変える。
図15の如く回転させる共鳴コイルが、長尺方向と短尺方向を持つようにして、回転軸を長尺方向と平行にすれば、回転に伴うコイルの上下移動距離が短くなり、装置の体積および重量を低減する効果がある。
【0076】
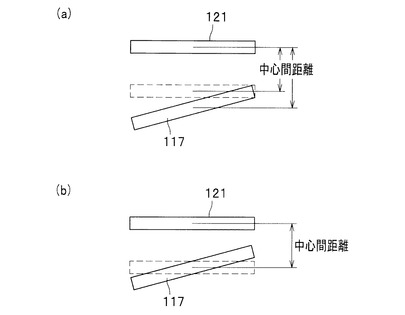
また、図16は第5実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連において、回転軸を共鳴コイルの端部に位置させる効果を示す概念図である。
図16(a)に示すように、回転軸を共鳴コイル117の端部に位置させることで、図16(b)に示すような回転軸を共鳴コイル117の中央に位置させた場合より、共鳴コイルの中心間の平均距離を短縮することができる。共鳴コイル間の距離を短くすることで、共鳴コイル間の結合を強くして、送電効率を向上させる効果がある。
【0077】
更に、回転軸を共鳴コイルの端部に位置させることで、傾斜角度と共にコイル中心間距離を変化させることができて、インピーダンス調整に必要な傾斜角度調整量を減らす効果もある。
以上の説明では、送電用共鳴コイル117を傾斜させる例を示したが、受電用共鳴コイル121を傾斜させてもよい。
【0078】
<インピーダンス整合方法・第5実施形態>
本発明の第5実施形態は、前記固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117(図15、図16)と受電用共鳴コイル121(図15、図16)間の傾斜角度を変えることで、インピーダンス整合を達成する。
前記の第3実施形態で説明したように、RtiとRriの中で片方を固定して他方を緩慢に調整しながら、相互インダクタンスMを調整することで、インピーダンス整合ができる。
本実施形態は、相互インダクタンスMを変えるため、コイル間の傾斜角度を変える。
本実施形態では、以上説明したとおり、固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117(図15、図16)と受電用共鳴コイル121(図15、図16)間の傾斜角度を変えることでインピーダンス整合を効率よく達成する汎用的な手段を提供できる。
【0079】
(非接触給電装置のインピーダンス整合方法の第6実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第6実施形態を示す。第6実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を次に示す。
【0080】
≪コイルのZ軸回転による傾斜角度の変化構造≫
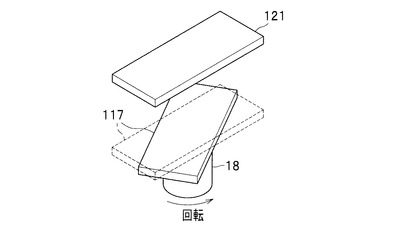
図17は本発明の第6実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
図17において、回転手段18は送電用共鳴コイル117を、図中のZ軸を回転軸に回転させる。送電用共鳴コイル117の代わりに受電用共鳴コイル121を回転させてもよい。
【0081】
<インピーダンス整合方法・第6実施形態>
本発明の第6実施形態は、前記固有整合に用いるRtiとRriの中で一つを固定しておき、長尺方向と短尺方向を有する送電用共鳴コイル117(図17)および受電用共鳴コイル121(図17)を用いて、送電用共鳴コイル117(図17)または受電用共鳴コイル121(図17)を回転させ、両共鳴コイルの長尺方向間の角度を変えることで、インピーダンス整合を達成する。
本実施形態によれば、両共鳴コイルの中心軸間距離は固定したまま、相互インダクタンスMを変えることができるため、前記第3実施形態より装置の体積および重量を低減する効果がある。
【0082】
(非接触給電装置のインピーダンス整合方法の第7実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第7実施形態を示す。第7実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を次に示す。
【0083】
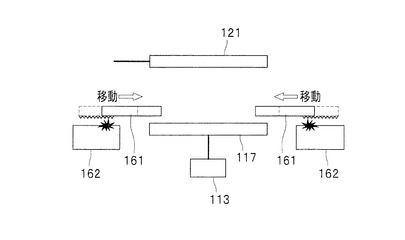
≪常磁性体または反磁性体による電磁界調整構造≫
図18は本発明の第7実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
図18において、送電用共鳴コイル117または受電用共鳴コイル121の少なくとも一方に近接して、常磁性体または反磁性体からなる一つまたは複数の電磁界調整部品161と、該電磁界調整部品の位置を移動させる電磁界調整部移動手段162を備える。
【0084】
<インピーダンス整合方法・第7実施形態>
前記固有整合に用いるRtiとRriの中で一つを固定しておき、電磁界調整部移動手段162を用いて電磁界調整部品161を移動させることで、両共鳴コイル間の電磁界分布を変えて、相互インダクタンスMを調整する。電磁界調整部移動手段162による電磁界調整部品161の移動は、平行移動と回転と傾斜の組み合わせでよい。
【0085】
本発明の第7実施形態では、以上説明したとおり、固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117と受電用共鳴コイル121間の相互インダクタンスMを、電磁界調整部品161と電磁界調整部移動手段162を用いて調整することで、インピーダンス整合を効率よく達成する汎用的な手段を提供できる。
第7実施形態の構成は、電気配線に接続された共鳴コイルは固定しておき、電気配線から独立した電磁界調整部品161を移動させることでインピーダンス整合を達成するため、電気配線の劣化を低減できる利点がある。
【0086】
(非接触給電装置のインピーダンス整合方法の第8実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第8実施形態を示す。第8実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を次に示す。
【0087】
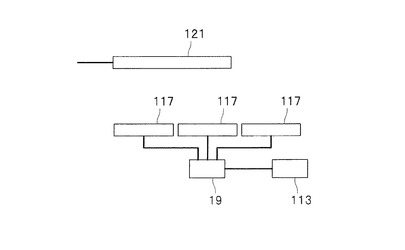
≪複数の共鳴コイルの選択構造≫
図19は本発明の第8実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。第8実施形態では、複数の共鳴コイルから一つを選ぶことで、相互インダクタンスMを変える。
図19には複数の送電用共鳴コイル117と一つの受電用共鳴コイル121を用いる構成を示すが、送電用共鳴コイル117を一つにして受電用共鳴コイル121を複数にする構成も可能である。ただし、送電用共鳴コイル117を複数にする図19の構成が、受電部12およびそれを搭載した電動車両16の重量低減の面で有利である。
【0088】
以下では、送電用共鳴コイル117を複数にする図19の構成で説明する。複数の送電用共鳴コイル117は、共鳴コイル切替部19に接続され、共鳴コイル切替部19は、送電整合回路113に接続される。
共鳴コイル切替部19は、送電制御部114の制御に従い、送電用共鳴コイル117の中の1つを選択して送電整合回路113に連結する。これによって、相互インダクタンスMを変える。
【0089】
<インピーダンス整合方法・第8実施形態>
次に、前記第3実施形態と同じく、固有整合に用いるRtiとRriの中で一つを固定して、他方を前記の数式の(13)式または(15)式に従って調整する。
共鳴コイル切替部19を制御して、送電整合回路113と連結される送電用共鳴コイル117を変えると、送電用共鳴コイル117を実効的に移動させた効果が得られ、数式の(14)式または(16)式の相互インダクタンスMを調整できる。この時、選択された1つのコイル以外の送電用共鳴コイル117を送電整合回路113と連結しないことで、それらの共鳴周波数を前記foから大きく離して、電磁界共鳴に及ぼすそれらコイルの干渉を実質的に排除する。
【0090】
したがって、共鳴コイル切替部19を制御して、送電効率が最大になる送電用共鳴コイル117を選択することで、インピーダンス整合を効率よく達成することができる。共鳴コイル切替部19は電気回路を用いて実施することができるため、本実施例の構成では、共鳴コイルまたはその他部品を移動または傾斜または回転させる必要がなくなり、摩耗による装置の劣化を低減できる利点がある。
【0091】
(その他の実施形態)
本発明は前記の実施形態に限定されるものではない。以下に例をあげる。
第1実施形態において、図2(b)は整合回路として、直列のコンデンサCrsと並列のコンデンサCrpを用いた例を示したが、コイルを用いてもよい。またコンデンサとコイルを併せて用いてもよい。また3個以上の可変素子を用いてもよい。
【0092】
第1実施形態においては、固有整合として、交流電源13の出力インピーダンスが実質的に実数部Reのみを有し、また前記負荷14の入力インピーダンスが実質的に実数部Rlのみを有する場合を前提にした。
つまり、高周波分野においては、同軸線路で相互接続する装置の入力および出力インピーダンスを同軸線路の特性インピーダンスに一致させることが一般的であり、同軸線路の特性インピーダンスは例えば50Ωまたは75Ωのように実数部のみを有することが一般的である。したがって、上記の前提は十分、一般的である。
ただし、|Xs|および|Xl|が各々RsおよびRlより十分小さくない場合でも、本発明の固有整合を
XLr(fo)−XCr(fo)=Xs
および
XLt(fo)−XCt(fo)=Xl
を満たすことに拡張し、かつ図7に示したフローチャートの手順を進めることも可能である。
【0093】
また、本発明のインピーダンス整合方法は、磁界結合の他に電界結合による電磁界共鳴を利用する非接触給電装置にも適用することができる。
【0094】
また、電力の代わりに信号の送受を行う送信アンテナと受信アンテナの対であって、片方のインピーダンス整合が他方のインピーダンスを変化させる装置で効率よくインピーダンス整合を得る用途にも適用できる。
【0095】
また、以上において非接触給電装置の受電用共鳴コイルが搭載される例を電動車両としたが、ハイブリッド自動車や燃料電池自動車に用いることもできる。
【0096】
(本発明、実施形態の補足)
なお、本実施形態の非接触給電において、概略のインピーダンス整合方法は前記したように、まず、送電部11と受電部12との間で、インピーダンスの整合をとるが、この際、交流電源13の周波数foにおいて、送電部11、受電部12、負荷14のインピーダンス整合を行い、
次に、交流電源13の出力インピーダンス、送電部11の入出力インピーダンス、受電部12の入出力インピーダンス、負荷14の入力インピーダンスはすべて、実質的に実数成分のみを持つように調整し、
その後、送電部11の出力インピーダンス、受電部12の入力インピーダンスの実数成分を、送電部11と受電部12間の相互コンダクタンスMとの関連とともに、可変素子で調整し、最大の送電効率となるように選択して、インピーダンス整合を行う。
【0097】
このように、電源と送電部間および受電部と負荷間のインピーダンス整合を、非共鳴状態の入力抵抗RtiおよびRriを利用して行うことで、送電部と受電部のあり得る全ての対に対して予め実験または理論計算を行うことなく、インピーダンス整合に要求される回路調整の回数を最小にする方法である。
また送電部と受電部の対を制限する必要もなくなり、多種多様な共鳴型非接触給電装置で効率よくインピーダンス整合を行うことができる。
【符号の説明】
【0098】
10 非接触給電装置
11 送電部
111 送電整合用切替部
112 送電整合用方向性結合器
113 送電整合回路
114 送電制御部
115 送電計測部
116 整合用交流信号出力部
117 送電用共鳴コイル、共鳴コイル
118 送電通信部
119 送電記憶部
12 受電部
121 受電用共鳴コイル、共鳴コイル
122 受電整合回路
123 受電整合用切替部
124 受電計測部
125 受電制御部
126 受電通信部
127 受電記憶部
13 交流電源
14 負荷
15 移動手段
16 電動車両
161 電磁界調整部品
162 電磁界調整部移動手段
17 傾斜手段
18 回転手段
19 共鳴コイル切替部
227 共鳴コイル
Cre コンデンサ(受電部)、受電整合回路の実効静電容量
Cte コンデンサ(送電部)、送電整合回路の実効静電容量
Crp、Crs コンデンサ、可変容量コンデンサ
Lr コイル、コイルインダクタンス、インダクタンス値
Lre コイル(受電部)、受電整合回路の実効インダクタンス
Lte コイル(送電部)、送電整合回路の実効インダクタンス
M 相互インダクタンス
Rri 入力抵抗値、固有整合値(受電部)
Rti 入力抵抗値、固有整合値(送電部)
Tr1、Tr2 端子(受電部)
Tt1、Tt2 端子(送電部)
【技術分野】
【0001】
本発明は、電磁界共鳴現象を利用した非接触給電装置のインピーダンス整合方法、そのインピーダンス整合方法を用いた非接触給電装置、およびその非接触給電装置を搭載した電動車両に関するものである。
【背景技術】
【0002】
電磁界共鳴現象を利用した非接触給電技術(以下、共鳴型非接触給電)は、送電部から受電部までの距離が遠い場合に従来の電磁誘導型非接触給電よりも高い送電効率が得られる特長を持つ。例えば、非特許文献1によれば、2つの直径60cmの螺旋型の共鳴コイルを2m離しても、40%の送電効率が得られている。
交流電気回路において、出力側の出力インピーダンスZoと入力側の入力インピーダンスZiが互いに複素共役の関係にある時に出力側から入力側に伝達される電力が最大になることが、最大電力伝達定理として知られている。ZoとZiを複素共役に合わせる操作をインピーダンス整合と言う。インピーダンス整合は、例えば、複数のコンデンサからなる整合回路を出力側と入力側の間に配置して、コンデンサの容量を調整することで行われる。共鳴型非接触給電においても、高い送電効率を得るためには、電源と送電部の間でのインピーダンス整合と、受電部と負荷の間のインピーダンス整合が必要である。
【0003】
共振性の高い磁気共鳴用アンテナコイルの整合回路は特許文献1に開示されている。特許文献1の技術は、アンテナコイルのほぼ中点に信号線を接続し、アンテナコイルの両側に容量可変のトリマコンデンサの一端子を接続し、該トリマコンデンサのもう一つの端子はグラウンドに接続する。特許文献1によれば、このような整合回路は抵抗損失の小さいアンテナコイルが本来有する高いクオリティファクタ(Q値、Quality factor)を低下させることなく、共振特性の整合を実現する。
【0004】
特許文献2に開示されたインピーダンス整合方法は、送電部と受電部を非共鳴状態にして行う第1段階と、共鳴状態にして行う第2段階からなる。第1段階の非共鳴状態は、整合回路の可変素子を調整して、片方の共鳴周波数を他方の共鳴周波数から離すことで、得られる。さらにこの状態で、送電部と電源のインピーダンス整合と、受電部と負荷のインピーダンス整合を行う。第2段階では、整合回路の可変素子を調整して、送電部と受電部の共鳴周波数を一致させて、送電部と受電部を共鳴状態にする。送電部と受電部が共鳴状態になると、第1段階で達成した電源と送電部間および受電部と負荷間のインピーダンス整合が破れる。特許文献2に開示されたインピーダンス整合方法は、送電側と受電側のインピーダンス整合を繰り返すことで、共鳴状態でのインピーダンス整合を達成する。この時、片方をインピーダンス整合するため整合回路を調整すると、他方のインピーダンスも変わる。このため、送電部と電源のインピーダンス整合と受電部と負荷のインピーダンス整合を複数回繰り返し行う。
【0005】
特許文献3に開示された技術は、インピーダンス整合が頻繁に必要な場合でも、それを効率よく行う方法である。特許文献3に開示された技術に使用する装置は、負荷検出手段と、位置検出手段と、負荷および位置に対応する整合回路設定値を記憶するメモリを備える。特許文献3によれば、負荷検出手段および位置検出手段で負荷および送受信部間の距離を検出して、負荷および距離に対応する整合回路の設定値をメモリから読み出して整合回路を設定することにより、効率よくインピーダンス整合ができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−122141号公報
【特許文献2】WO2010/036980A1号公報
【特許文献3】特開2010−141977号公報
【非特許文献】
【0007】
【非特許文献1】A.KuRsら、Wireless Power Transfer via Strongly Coupled Magnetic Resonancec、Science、317巻、83−86、2007年
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に開示された技術は、計測用試料に高周波を送電して該試料の高周波応答を受電するアンテナに適用する技術であるため、一つのアンテナコイルを整合する技術に関するものであり、共鳴型非接触給電に適用する上で相互結合した送電部と受電部の整合に関しては適用が困難であるという課題を残す。
【0009】
また、特許文献2に開示された技術は、インピーダンス整合に必要な整合回路の調整回数が多いため、インピーダンス整合が頻繁に必要になる応用に対して課題を残す。インピーダンス整合が必要になる場合の例としては、送電部と受電部の間の位置関係が変化した場合と、負荷が変化した場合がある。位置変化の典型的な例は、電動車両に対する給電である。受電部を搭載した電動車両の駐車位置が変化するため、駐車の度にインピーダンス整合が必要となる。負荷変化の典型的な例は、電池の充電状態に応じた抵抗変化である。電池を受電部の負荷として接続して非接触給電で充電する時、電池の充電量が増加すると、電池の電流−電圧特性により、負荷抵抗が変化する。したがって、前記のインピーダンス整合が頻繁に必要となる課題がある。
【0010】
また、特許文献3に開示された技術は、負荷および位置に対応する整合回路の設定値を実験または理論計算を用いて求めて、メモリに予め記憶する必要がある。整合回路の設定値は送電部と受電部の回路に依存するため、予めメモリに整合回路値を記憶させておいた送電部および受電部の対についてのみ、効率よく動作する。即ち、メモリに予め記憶させていない送電部と受電部の対に対して特許文献3の技術を適用することは難しいという課題がある。
【0011】
そこで、本発明はこのような問題点を解決するもので、その目的とするところは、共鳴型の非接触給電装置のインピーダンス整合を効率よく行う汎用的な方法を提供することである。
【課題を解決するための手段】
【0012】
前記の課題を解決して、本発明の目的を達成するために、以下のように構成した。
すなわち、交流電源から負荷に電力を伝送する非接触給電装置において、交流電源の出力に接続される送電整合回路と、送電整合回路の出力に接続された送電用共鳴コイルと、受電用共鳴コイルと、受電用共鳴コイルの出力に接続された受電整合回路と、を備え、前記送電用共鳴コイルの共鳴周波数を交流電源の出力周波数foに略一致させて、更に前記受電用共鳴コイルの共鳴周波数を前記送電用共鳴コイルの共鳴周波数と略一致させて、前記送電用共鳴コイルと前記受電用共鳴コイルの間に電磁界結合による電磁界共鳴を引き起こし、交流電源が前記送電整合回路に入力した交流電力を、コイル間の電磁界共鳴により前記受電用共鳴コイルに伝送して、前記受電整合回路から負荷へ出力する電磁界共鳴方式の非接触給電装置のインピーダンス整合方法であって、更に、非共鳴状態で送電部が持つ入力抵抗Rtiと、非共鳴状態で受電部が持つ入力抵抗Rriと、送電部と受電部の結合による相互インダクタンスMとの3要素の中で2要素を調整して、共鳴状態における非接触給電装置のインピーダンスを整合することを特徴とする。
【発明の効果】
【0013】
本発明によれば、共鳴型の非接触給電装置のインピーダンス整合を効率よく行う汎用的な方法を提供できる。
【図面の簡単な説明】
【0014】
【図1】本発明の非接触給電装置のインピーダンス整合方法の第1実施形態に用いる非接触給電装置10の構成を示すブロック図である。
【図2】本発明の非接触給電装置のインピーダンス整合方法の第1実施形態に用いる非接触給電装置の送電部と非共鳴状態にある受電用共鳴コイル121と受電整合回路122の等価回路図であり、(a)は4端子回路網、(b)は可変素子を表している。
【図3】本実施形態における固有整合を達成する可変容量(コンデンサ)と入力抵抗の関係の一例を示す図である。
【図4】本実施形態における固有整合状態における動作周波数foの近傍帯域でのインピーダンスの典型的な特性例を示す図である。
【図5】本発明の第1実施形態における受電用共鳴コイルと受電整合回路を直列共振RLC回路に近似した等価回路図である。
【図6】本発明の第1実施形態において共鳴状態にある送電整合回路と送電用共鳴コイルと受電用共鳴コイルと受電整合回路と負荷14もしくは交流電源13との等価回路図であり、(a)は送電部と受電部の共鳴、(b)は端子Tt1、Tt2からの等価回路、(c)は端子Tr1、Tr2からの等価回路を表している。
【図7】本発明の第1実施形態のインピーダンス整合方法を示すフローチャートである。
【図8】本発明の第2実施形態の特性評価に用いた共鳴コイル227の斜視図である。
【図9】本発明の第2実施形態の特性評価の送電用共鳴コイル117と受電用共鳴コイル121の設定条件を示す概略の斜視図である。
【図10】本発明の第2実施形態における入力抵抗−送電効率特性の評価結果を示す特性図である。
【図11】本発明の第2実施形態における固有整合値Rの調整に伴うインピーダンスの変化を示すスミスチャートである。
【図12】本発明の第3実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【図13】本発明の第3、第4実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す別の構成図であり、受電用共鳴コイルが電動車両に搭載される場合の構成を示す図である。
【図14】本発明の第4実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連において長尺と短尺を持つ共鳴コイルの効果を示す概念図である。
【図15】本発明の第5実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【図16】本発明の第5実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連において回転軸を共鳴コイルの端部に位置させる効果を示す概念図であり、(a)は回転軸が端部、(b)は回転軸が中心部の場合を表している。
【図17】本発明の第6実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【図18】本発明の第7実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【図19】本発明の第8実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態を、図面を用いて説明する。
(非接触給電装置のインピーダンス整合方法の第1実施形態)
本発明は電磁界共鳴現象を利用した非接触給電装置のインピーダンス整合方法に大きな特徴があるが、まず、電磁界共鳴現象を利用した非接触給電装置の構成を先に説明し、その後に、当該の非接触給電装置を用いたインピーダンス整合方法について述べる。
なお、以下は非接触給電装置を用いたインピーダンス整合方法の説明が主たる目的であるが、それを実現する非接触給電装置の構成の説明も兼ねる。
【0016】
≪非接触給電装置10の構成≫
図1は、本発明の非接触給電装置のインピーダンス整合方法の第1実施形態を適用する電磁界共鳴型の非接触給電装置10の構成を示すブロック図である。
図1において、非接触給電装置10は、送電部11と受電部12からなる。送電部11の入力端子は交流電源13に接続され、受電部12の出力端子は負荷14に接続される。
非接触給電装置10における送電部11と受電部12との間には、電磁界共鳴現象を利用した非接触給電方法を用いる。
【0017】
なお、本実施形態の非接触給電において、インピーダンス整合方法の概略は以下の通りである。
まず、送電部11と受電部12との間で、インピーダンスの整合をとるが、この際、交流電源13の周波数foにおいて、送電部11、受電部12、負荷14のインピーダンス整合を行う。
また、交流電源13の出力インピーダンス、送電部11の入出力インピーダンス、受電部12の入出力インピーダンス、負荷14の入力インピーダンスはすべて、実質的に実数成分のみを持つように調整する。
その後、送電部11の出力インピーダンス、受電部12の入力インピーダンスの実数成分を、送電部と受電部との結合による相互インダクタンスMとの関連とともに、調整し、最大の送電効率となるように選択して、インピーダンス整合を行う。
図1の非接触給電装置10は以上のインピーダンス整合方法に適した構成をしている。
【0018】
≪交流電源13≫
交流電源13はfoの周波数を持つ交流電力を送電部11に供給する。周波数foは、産業・科学・医療目的に使用できるISM(Industrial, Scientific, and Medical)帯域に属する周波数であり、例えば、13.56MHz±7KHzに属する。
周波数foは回路構成を簡単にするため固定周波数にすることが望ましいが、後述する送電効率の最適化のためにISM帯域の中で可変にしてもよい。交流電源13の周波数foにおける出力インピーダンスZs(fo)は、jを虚数単位として、
Zs=Rs+jXs
と、実数成分Rsと虚数成分Xsで表した際に、前記した理由から、実質的に実数成分Rsのみを持つようにする。虚数成分Xsは完全に0ではないにしても、その絶対値|Xs|がRsより十分小さい値、例えばRs/10以下であればよい。実数成分Rsの値は、交流電源13の効率を考慮して選定すればよいが、以下における実施形態では高周波分野で広く使われる50Ωを用いて説明する。
【0019】
≪負荷14≫
負荷14は前記周波数foを有する電力を消費する負荷、あるいは負荷に相当する回路、装置である。例えば、整流回路を介して接続される2次電池である。また、整流回路を介さず周波数foの電力をそのまま利用する負荷もある。例えば、プラズマ発生装置や高周波誘導加熱装置などである。
非接触給電装置10から負荷14に電力を供給する際には、負荷14が前記したようないずれの種類でも、周波数foにおける負荷の入力インピーダンスZl(fo)は、
Zl=Rl+jXl
と、実数成分Rlと虚数成分Xlで表した際に、前記した理由から、実質的に実数成分Rlのみを持つようにする。虚数成分Xlは完全に0ではないにしても、その絶対値|Xl|がRlより十分小さい値、例えばRl/10以下であればよい。Rlの値は、負荷の種類により異なるが、以下実施形態では高周波分野で広く使われる50Ωを用いて説明する。
【0020】
前記|Xs|および|Xl|が各々RsおよびRlより十分小さくない場合でも、以下で開示する本発明の方法を簡単に拡張することで、容易にインピーダンスを整合することが可能である。RsおよびRlに比べてXsおよびXlを無視できない場合に対する適用方法は後述する。
【0021】
≪送電部11の構成≫
送電部11の構成を説明する。送電部11は、送電整合用切替部111と、送電整合用方向性結合器112と、送電整合回路113と、送電制御部114と、送電計測部115と、整合用交流信号出力部116と、送電用共鳴コイル117と、送電通信部118と、送電記憶部119を備えている。
送電整合用切替部111は2つの入力端子と1つの出力端子を有する。送電整合用切替部111の第1の入力端子は交流電源13に接続され、第2の入力端子は送電整合用方向性結合器112に接続され、出力端子は送電整合回路113に接続される。
送電制御部114は、送電整合用切替部111を制御し、送電時には交流電源13と送電整合回路113を接続させ、インピーダンス整合時には送電整合用方向性結合器112と送電整合回路113を接続させる。
【0022】
送電整合用方向性結合器112は、出力端子と反射出力端子と入力端子を有する電気回路であり、出力端子は送電整合用切替部111と、反射出力端子は送電計測部115と、入力端子は整合用交流信号出力部116と、各々、接続される。
送電整合回路113は、2つ以上の可変素子を含み、可変素子の値は送電制御部114により設定される。送電整合回路113の出力端子は送電用共鳴コイル117に接続される。
【0023】
送電通信部118は、送電制御部114が外部装置、特に、受電部12と通信を行うための部品である。
送電記憶部119は、送電部の非共鳴状態における入力インピーダンスZtiと送電整合回路113の可変素子値との対応関係を記憶する。
送電制御部114は、送電記憶部119に記憶されたデータを利用して、後述の固有整合(intrinsic match)を行う。固有整合の内容はインピーダンス整合方法の説明で更に詳しく述べる。
【0024】
≪受電部12の構成≫
受電部12の構成を説明する。受電部12は、受電用共鳴コイル121と、受電整合回路122と、受電整合用切替部123と、受電計測部124と、受電制御部125と、受電通信部126と、受電記憶部127を含む。
受電用共鳴コイル121の出力端子は受電整合回路122に接続され、受電整合回路122の出力は受電整合用切替部123に接続される。
受電整合回路122は2つ以上の可変素子を含み、可変素子の値は受電制御部125により設定される。
受電整合用切替部123は2つの出力端子を有し、第1出力端子は負荷14に接続され、第2出力端子は受電計測部124に接続される。
【0025】
受電制御部125は、受電整合用切替部123を制御し、受電時には受電整合回路122と負荷14を接続させ、インピーダンス整合時には受電整合回路122と受電計測部124を接続させる。
受電通信部126は、受電制御部125が外部装置、特に、送電部11と通信を行うための部品である。
受電記憶部127は、受電部の非共鳴状態における入力インピーダンスZriと受電整合回路122の可変素子値との対応関係を記憶する。
受電制御部125は、受電記憶部127に記憶されたデータを利用して、固有整合を行う。固有整合の内容はインピーダンス整合方法の説明で更に詳しく述する。
【0026】
<インピーダンス整合の関連部の構成と動作>
インピーダンス整合時に、送電部11と受電部12は、送電効率が最大になるように送電整合回路113と受電整合回路122を調整する。送電効率を計測するために、以下の動作を行う。
送電制御部114は、交流電源13の出力を停止させ、送電整合用切替部111の第2入力端子を出力端子と接続させ、整合用交流信号出力部116の出力を開始させ、整合用交流信号出力部116の出力信号を送電整合用方向性結合器112と送電整合用切替部111を通って送電整合回路113に送り、送電計測部115が検出した送電整合回路113からの反射信号の電圧または電流または電力を読み取る。
【0027】
受電制御部125は、受電整合用切替部123の入力端子を第2出力端子と接続させ、受電整合回路122から出力される信号を受電計測部124に送り、受電計測部124で測定された信号の電圧または電流または電力を読み取る。
送電制御部114または受電制御部125が、整合用交流信号出力部116の出力電力と受電計測部124の測定値から求めた受電電力の比を求めて、その比に100を乗算した値を送電効率とする。
送電制御部114または受電制御部125は、また送電計測部115の測定値から反射電力を求め、更に前記出力電力から前記受電電力と反射電力の和を減算して、損失電力を求める。特に、後述の方法でインピーダンス整合を行った後の反射電力と損失電力の値は、非接触給電装置1の電気回路の正常動作を確認するデータとして利用できる。
【0028】
前記構成は、受電電力と反射電力の両方を計測する構成であるが、片方だけを計測する構成でも本発明の方法を適用できる。例えば、受電電力のみを計測しインピーダンス整合に利用して、反射電力による回路動作確認は省略することができる。
また、損失電力を無視し、前記出力電力と反射電力の差を受電電力と近似して、反射電力のみを計測する構成も可能である。
これらの構成は、回路動作の確認機能を省略する代わりに回路規模を小さくできる利点がある。
【0029】
<固有整合によるインピーダンス整合方法>
第1実施形態の固有整合によるインピーダンス整合方法を説明する。
本実施形態の非接触給電において、前記したように、まず、送電部11と受電部12との間で、インピーダンスの整合をとるが、この際、交流電源13の周波数foにおいて、送電部11、受電部12、負荷14のインピーダンス整合を行う。
また、交流電源13の出力インピーダンス、送電部11の入出力インピーダンス、受電部12の入出力インピーダンス、負荷14の入力インピーダンスはすべて、実質的に実数成分のみを持つように調整する。
その後、送電部11の出力インピーダンス、受電部12の入力インピーダンスの実数成分を、送電部と受電部との結合による相互インダクタンスMとの関連とともに、調整し、最大の送電効率となるように選択して、インピーダンス整合を行う。
以上が本実施形態の固有整合によるインピーダンス整合方法の特徴である。次に、固有整合によるインピーダンス整合方法を詳しく説明する。
【0030】
図2は、送電部と非共鳴状態にある受電用共鳴コイル121と受電整合回路122の等価回路図である。図2(a)は受電整合回路122を4端子回路網で表し、図2(b)は整合回路の一例として、2つの可変素子がコンデンサからなり、受電用共鳴コイル121(コイルLr)に対して並列に接続された可変容量コンデンサCrpと、直列に接続された可変容量コンデンサCrsを用いた回路を示している。
なお、図2(b)においては、Crp、Crsは可変容量コンデンサとしての素子を表す場合と静電容量値を表す場合とがある。
回路の整合をとる過程として、可変容量コンデンサCrpと可変容量コンデンサCrsの静電容量値であるCrpとCrsの値を調整して、端子Tr1とTr2とで測定した受電整合回路122の入力インピーダンスZri(fo)が実数部Rriのみになるようにする。
【0031】
例えば、図2(b)の整合回路の場合、受電用共鳴コイル121のインダクタンス値をLr、受電用共鳴コイル121に含まれる抵抗成分をRrdとし、可変容量コンデンサCrpとCrsの静電容量値であるCrpとCrsの値を、次に示す数式の(1)式の関係を満たすように調整する。
すると、数式の(1)式の関係により入力インピーダンスZri(fo)の虚数成分はほぼ0となって消え、Zri(fo)は数式の(2)式に示す実数部Rriのみを持つ。ここでωo=2πfoである。
[数式の(1)式]
2ωo2LrCrp−(ωo2Lr2+Rrd2)ωo2Crp2
+ωoCrs[ωoLr−ωoCrpRrd2−ωo3Lr2Crp]=1
[数式の(2)式]
Rri=Rrd/{(1+ωo2LrCrp)2+(ωoCrsRrd)2}
【0032】
図3は固有整合を達成する可変容量(コンデンサ)と入力抵抗との関係を示す図であり、数式の(1)式と(2)式を満たすCrpとCriの一例を示す。図3において、縦軸にはCrpとCriの静電容量値(単位pF)を示し、横軸にはインピーダンスZri(fo)(単位Ω)を示している。また、数式の(1)式を満たすCrpとCrsの特性線は、それぞれ実線と破線で示されている。
つまり、数式の(1)式を満たすようにCrpとCrsを変化させると、数式の(2)式によって、入力インピーダンスZri(fo)の実数成分であるRriは変化する。このときのCrpとCrsとRri(Re[Zri(fo)])との関係を図示したものが図3である。
【0033】
次に図3を用いて、数式の(1)式を満たしながら、所望のRri値を見出す方法について述べる。
図2(b)に示した回路において、コイルインダクタンスLr=3μH、周波数fo=13.56MHz、コイルの損失を表すQ値は、foにおいて800である(図3の場合)。なお、コンデンサの損失はコイル損失より十分小さいため無視する。
図3において、前記したように横軸はZri(fo)の実数部、即ち、Rriである。Zri(fo)をある実数値にするためには、横軸からRri値を探し、CrpとCrsを該Rri値に対応する値に設定すればよい。
図3の中のRrdは図示の例においてRriが取ることのできる最小値である。Rrdは、前記したようにコイルの等価直流抵抗に相当し、ωoLr/Qで見積もることができる。
【0034】
図4は固有整合状態における動作周波数foの近傍帯域でのインピーダンスの典型的な特性例を示す図であり、fo=13.56MHzにおけるインピーダンス虚数部が0になるように調整した回路のZri(f)の一例を示す。回路構成は図3と同じであり、Crp=20pF、Crs=25.9pFとした。
図4は13.56MHzより±100KHzの帯域におけるZri(f)を示しており、前記のISM帯域13.56MHz±7KHzより14倍(100/7)以上広い帯域でのZri(f)を表している。
図4に示した帯域において、インピーダンス実数部のRe[Zri]は実質的に一定値に近似でき、またインピーダンス虚数部のIm[Zri]は実質的に周波数に比例する1次関数に近似できる。なお、図4においては、前記したように周波数帯域が広く、fo=13.56MHzから離れた周波数において、インピーダンス虚数部のIm[Zri]は0の値から乖離している。
このようなインピーダンス特性はRLC直列共振回路に等しい。
【0035】
インピーダンス整合に有用な表現を得るため、本発明ではインピーダンスの虚数部が0になるように調整した状態の図2(a)の回路をRLC直列共振回路に近似する。
なお、図2(b)は、説明に用いる整合回路の一例であり、本実施形態の方法および回路は、動作周波数foの近傍帯域におけるインピーダンス特性をRLC直列共振回路のインピーダンスで近似できる全ての整合回路に適用できる。
【0036】
図5はRLC直列共振回路に近似した受電用共鳴コイル121と受電整合回路122の等価回路図である。送電部11(図1)とは非共鳴状態である。
図5のLreとCreは、周波数foにおける受電整合回路122の実効インダクタンスと実効静電容量である。周波数foでインピーダンスの虚数部が0であることから、次に示す、数式の(3)式が成り立つ。
[数式の(3)式]
XLr(fo)−XCr(fo)=0
Zri(fo)=Rri
ここで、XLr(f)=2πfLre
XCr(f)=1/(2πfCre)
である。
【0037】
なお、XLr(fo)とは、周波数foにおけるコイルLrのリアクタンスXを意味し、また、XCr(fo)とは、周波数foにおけるコンデンサCrのリアクタンスXを意味する。また、πは円周率である。
また、図5の回路は、図2(b)の例のみならず、foで直列共振する任意の回路を表現する。
【0038】
本発明では、Zri(fo)が実質的に数式の(3)式で表現できる、つまり実数部のみとなるように、整合回路を調整することを、固有整合と呼ぶ。
受電部の固有整合は、前記受電制御部125が所定のZriに対応する受電整合回路122の可変素子値を受電記憶部127から読み出して受電整合回路122に設定することで、行われる。以上では受電部12に対する固有整合を説明したが、送電部11でも同様の固有整合を行う。
なお、固有整合は、Rriと前記負荷14の入力抵抗Rlが一致しない点と、固有整合後の送電部の実効抵抗Rtiと前記電源2の出力抵抗Rsが一致しない点で、特許文献1における第1段階の整合と異なる。
また、本実施形態の固有整合は、送電部11と受電部12の共鳴周波数を離すことなく、送電記憶部119および受電記憶部127のデータを利用して行われる点でも、特許文献1における第1段階の整合と異なる。
【0039】
<固有整合で共鳴状態のインピーダンスの等価回路>
固有整合された送電部11と受電部12が共鳴状態で持つインピーダンスについて、図6の等価回路を用いて説明する。
送電部と受電部の共鳴は、図6(a)示すように、コイルLteとコイルLreが結合係数kで結合した回路で表現できる。図6(a)の回路は、交流理論から、図6(b)の回路に変換できる。この時、Mは相互インダクタンスであり、
M=k(LteLre)1/2
である。
【0040】
図6(b)の端子Tt1とTt2間のインピーダンスZt(f)は、送電整合回路113(図1)と受電整合回路122(図1)に依存し、固有整合をしていない場合は、一般的に複雑な関数である。しかし、前記の固有整合を送電部および受電部に施すと、周波数foの近傍において、インピーダンスZt(f)は、図6(b)のRti、Rriの値の等価回路に近似できる。
そして、周波数foにおけるインピーダンスZt(fo)は、次に示す数式の(4)式で示される単純な式で表現される。ここでXm(f)は、相互インダクタンスMによるリアクタンスωoMである。
[数式の(4)式]
Zt(fo)=Rti+jXm(fo)2/[Rri+Zl(fo)]
=Rti+jωo2M2/[Rri+Zl(fo)]
【0041】
また、図6(c)に示したTr1とTr2端子間のインピーダンスZr(fo)は、回路の対称性から、Zt(fo)→Zr(fo)、Rti→Rri、Zl(fo)→Zs(fo)にそれぞれ対応するので、以下に示す数式の(5)式になる。
[数式の(5)式]
Zr(fo)=Rri+jXm(fo)2/[Rti+Zs(fo)]
=Rri+jωo2M2/[Rti+Zs(fo)]
【0042】
<各部のインピーダンス整合>
また、送電部11と交流電源13の間のインピーダンス整合は数式の(6)式で、受電部12と負荷14の間のインピーダンス整合は数式の(7)式で、各々、表現される。
なお、Zs(fo)*、Zl(fo)*は、それぞれZs(fo)、Zl(fo)の複素共役を表す。
[数式の(6)式]
Zs(fo)*=Rs(fo)−jXs(fo)=Zt(fo)
[数式の(7)式]
Zl(fo)*=Rl(fo)−jXl(fo)=Zr(fo)
【0043】
前記、数式の(6)式と(7)式を同時に満たす条件は、数式の(4)式と(5)式とともに解くと、以下の数式の(8)式と(9)式と(10)式を同時に満たすことに置き換えられる。
[数式の(8)式]
Rs(fo)Rl(fo)−Rti(fo)Rri(fo)=ωo2M2
[数式の(9)式]
Rs(fo)Rri(fo)−Rl(fo)Rti(fo)=0
[数式の(10)式]
Xs(fo)=Xl(fo)=0
【0044】
数式の(8)式〜(10)式において、送電時に変化する独立変数は、負荷抵抗を表すRl(fo)と、送電部11と受電部12間の相対位置により変化する相互インダクタンスMである。
非共鳴状態における送電部11の入力抵抗Rti(fo)と受電部12の出力抵抗Rri(fo)は、送電整合回路113と受電整合回路122を固有整合することで、調整できる。
その他、動作周波数foと、交流電源13の出力インピーダンスのRs(fo)とXs(fo)と、負荷14の入力リアクタンスXI(fo)と、インダクタンスLteとLreとは、設計時または製造時に固定できる。
【0045】
特に、Xs(fo)とXI(fo)を0にすれば、数式の(10)式の条件は満たされる。従って、数式の(8)式と(9)式を満たすRt(fo)とRr(fo)を、それぞれ固有整合するRtiとRriとにすれば、インピーダンス整合を達成できる。
本発明の固有整合に用いるRtiとRriを数式の(11)式と(12)式に示す。
[数式の(11)式]
Rti=(Rl2−ωo2M2Rl/Rs)1/2
[数式の(12)式]
Rri=(Rs2−ωo2M2Rs/Rl)1/2
なお、ここでωo=2πfoである。
【0046】
<第1実施形態のインピーダンス整合方法のフローチャート>
図7は本発明の第1実施形態によるインピーダンス整合方法を示すフローチャートである。以下にこのフローチャートを説明する。
【0047】
第1ステップで、受電制御部125(図1)が負荷抵抗14(図1)の抵抗値Rl(負荷抵抗Rl)を読み取る(Step1)。
負荷抵抗Rlを検出回路によって検出する技術は一般的に周知である。更に、受電制御部125は読み取ったRlの値を、通信によって送電制御部114(図1)に伝達する。
【0048】
第2ステップで、送電制御部114(図1)と受電制御部125(図1)は、M推定値を暫定的に決めて、第1ステップで読み取ったRlと前記M推定値を数式の(11)式および(12)式に代入してRtiとRriを算出する(Step2)。
なお、送電効率を最大にする相互インダクタンスM(送電部11と受電部12間の相対位置により変化)をM推定値と称する。
また、送電制御部114(図1)と受電制御部125(図1)は、通信によって、同じM推定値を用いる。
【0049】
第3ステップで、送電制御部114(図1)と受電制御部125(図1)は、算出したRtiとRriに対応する可変素子値を、送電記憶部119(図1)と受電記憶部127(図1)から読み出す(Step3)。
【0050】
第4ステップで、送電制御部114(図1)は第3ステップで読み出した可変素子値を送電整合回路113(図1)に設定し、受電制御部125(図1)は第3ステップで読み出した可変素子値を受電整合回路122(図1)に設定する(Step4)。
【0051】
第5ステップで、送電制御部114(図1)または受電制御部125(図1)が、該M推定値に対する送電効率を前述の方法で測定する(Step5)。なお、送電効率の測定値は、測定を行った制御部(送電制御部114または受電制御部125)内の送電効率記憶部(不図示)に保存される。
【0052】
第6ステップで、測定された送電効率を前記制御部(送電制御部114または受電制御部125)内の送電効率記憶部(不図示)に保存された送電効率と比較して、最大送電効率かを判断する。最大送電効率と判断された場合(Yes)は、インピーダンス整合を終了し、また、最大送電効率でないと判断された場合(No)は、第7ステップに移行する(Step6)。
【0053】
第7ステップで、送電制御部114(図1)または受電制御部125(図1)がM推定値を更新する(Step7)。
M推定値の更新方法は、送電効率を最大にする任意の最適化アルゴリズムでよい。最適化の独立変数がMだけであるため、単純なアルゴリズムを使うことができ、例えば、山登り法(現在の解の近傍の内で最も評価度の高い解を近傍解として選び、現在の解より近傍解の評価度の高い場合に、近傍解と現在の解を入れ換える局所探索法)でもよい。
【0054】
以上の方法で、送電効率を最大にするM推定値と、固有整合値RtiおよびRriと、これらに対応する送電整合回路113(図1)、および受電整合回路122(図1)の可変素子値が得られる。
なお、送電効率を最大にするM推定値を、固有整合値RtiおよびRriを調整して見出す手法は、非共鳴状態で送電部と受電部がそれぞれ持つ入力抵抗RtiとRriと、送電部と受電部の結合による相互インダクタンスMとの3要素間で少なくとも2要素を調整してインピーダンス整合をとる方法のひとつの形態である。
【0055】
(非接触給電装置のインピーダンス整合方法の第2実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第2実施形態を示す。なお、第2実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を、第1実施形態で用いた構成より、更に具体的な構造を用いて実施した形態を示す。
【0056】
≪共鳴コイル≫
図8は、第1実施形態の特性評価に用いた共鳴コイル227の斜視図であり、銅線を長方形に2回巻いた共鳴コイル227を示している。
また、図9は、第1実施形態の特性評価の送電用共鳴コイル117と受電用共鳴コイル121の設定条件を示す概略の斜視図である。
図8に示した共鳴コイル227の1対を、図9において送電用コイル117および受電用共鳴コイル121として用いて、図9に示すようにコイル117、121面間の距離を25cmに固定しながら、コイル117、121を相対的に面方向に平行して移動し、コイル中心軸間の距離を変化させた。
【0057】
<入力抵抗−送電効率特性>
図10は本発明の第2実施形態における入力抵抗−送電効率特性の評価結果を示す特性図であり、固有整合に用いた固有整合値(入力抵抗値)Rti、Rriと得られた送電効率(%)の関係(入力抵抗−送電効率特性)の評価結果を示す。
図10においては、コイル117、121(図9)の各中心軸間距離(0cm、10cm、15cm)における特性結果を示している。なお、送電用と受電用に同じ共鳴コイルと整合回路を用いたため、横軸のRtiとRriは同じ値にしている。
図10に示す評価結果では、固有整合値(入力抵抗値)Rti、Rriを変化させると送電効率も変化し、送電効率が最大になる固有整合値Rが存在することが示されている。
したがって、図10に相当する特性評価結果を用いれば、最適な固有整合値Rを得ることができ、共鳴コイル間の相対位置が変化しても、簡便にインピーダンス整合(Rti、Rriを調整)を行って、最大送電効率を得ることができる。
【0058】
<固有整合値Rの調整に伴うインピーダンス変化>
図11は、第1実施形態における固有整合値Rの調整に伴うインピーダンスの変化を示すスミスチャートであり、一例として、コイル中心軸距離が10cmの時の特性をスミスチャート上に示す。
複素インピーダンスと複素反射係数の関係を図で表現するスミスチャートにおいては、円の中心が反射係数0、すなわち整合が完全にとれたことを意味する。したがって、整合をとるためには、インピーダンスをスミスチャート上で表現した場合において、円の中心に近い方が望ましい。
厳密なインピーダンス整合ではfo(ここでは13.56MHz)の点が円の中心に位置する。図11はfo点の位置が固有整合値Rの調整で移動し、Rti=Rri=1.0Ωで円中心に最も近くなることを示している。
【0059】
図10に示した送電効率も、中心軸距離10cmにおいてRti=Rri=1.0Ωの時に最大であった。図10と図11の結果から、最大送電効率が得られるようにRtiとRriを調整することで、厳密ではないとしても、実用的なインピーダンス整合が得られることが解る。
なお、本実施形態においては、インピーダンスの虚数成分がほぼ0になるように調整してから整合を行う固有整合の手法をとっているので、図11のスミスチャート上においては、fo点の位置は虚数成分がほぼ0の水平方向の円の半径上の近傍を移動(調整)している。
【0060】
もし、前記相対位置と相互インダクタンスMの対応関係を知ることができれば、送電用共鳴コイル117と受電用共鳴コイル121の相対位置を検出する位置検出手段を設けて、数式の(11)式と(12)式を利用してインピーダンス整合に適正な固有整合値RtiとRriを直接得ることができる。
この方法は、相対位置とMの対応関係を予め知る送電部11(図1)と受電部12(図1)の対にだけ適用できる制約があるが、インピーダンス整合をより迅速に行うことができる。
【0061】
また、前記方法で得た送電整合回路113(図1)および受電整合回路122(図1)の可変素子の最適値を初期値として、更に第2段階の別の最適化操作を行うこともできる。第2段階の最適化は、送電部11(図1)および受電部12(図1)をRLC直列共振回路に単純化したことに起因する誤差を低減する効果を持つ。
なお、第2段階の最適化とは、例えば可変素子Crp、Crs、Ctp、Ctsの1要素を僅かに変化させて、その近傍により最適点が存在するか否か(前記した山登り法)を試験し、より最適点があればその条件に移行するものである。なお、この際においては、インピーダンスの実数部を0とする固有整合の手法には必ずしも拘らない。
【0062】
本発明の第1、第2実施形態では、以上説明したとおり、M推定値に対して数式の(11)式と(12)式を適用して求めたRtiとRriで固有整合を行い、最大送電効率が得られるようにM推定値を更新することで、インピーダンス整合を行う。
この方法を用いれば、送電部11(図1)と受電部12(図1)の対を予め限定することなく、共鳴型非接触給電装置のインピーダンス整合を効率よく行うことができる。
【0063】
(非接触給電装置のインピーダンス整合方法の第3実施形態)
次に、本発明の非接触給電装置のインピーダンス整合方法の第3実施形態を示す。
なお、第3実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの具体的な構造については、図12、図13を参照して後述する。
【0064】
<インピーダンス整合方法・第3実施形態>
第3実施形態においては、前記固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117(図1)と受電用共鳴コイル121(図1)間の距離を変えることで、インピーダンス整合を達成する。
Rriを固定すれば、受電部12(図1)に搭載される受電整合回路122(図1)の回路素子値を給電時に調整する機構が不要になり、受電部12(図1)の体積および重量を軽減する効果がある。
【0065】
また、Rtiを固定すると、送電整合回路113(図1)の回路素子値を、給電時に調整する機構を省略できるため、送電部11(図1)の体積および重量を軽減する効果がある。
Rriをある固定整合値Rri0に固定して、Rtiを調整する例を示す。前記した数式の(9)式から、負荷抵抗Rlの変化に対して、Rtiは数式の(13)式に従って調整する。
[数式の(13)式]
Rti=Rri0×Rs/Rl
【0066】
負荷14(図1)が2次電池であれば、負荷抵抗Rlは充電率上昇に伴い緩慢に変化するため、Rtiの調整は、例えば数分または数十分に一回の頻度で行えばよい。RsとRriが固定され、更にRlとRtiも緩慢な変化のために実質的に固定されると、数式の(8)式から、相互インダクタンスMが数式の(14)式を満たせば、インピーダンス整合ができる。
[数式の(14)式]
M=(RsRl−Rri02×Rs/Rl)1/2/ωo
【0067】
以上ではRriを固定する場合を説明した。RtiをRti0と固定する場合は、数式の(15)式と(16)式を用いてインピーダンス整合ができる。
[数式の(15)式]
Rri=Rti0×Rl/Rs
[数式の(16)式]
M=(RsRl−Rti02×Rl/Rs)1/2/ωo
【0068】
≪コイル位置変化構造≫
第3実施形態では、送電用共鳴コイル117(図1、図12)と受電用共鳴コイル121(図1、図12)の間の距離を変えて、数式の(14)式または(16)式を満たすMを得る。
図12に本発明の第3実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連の構成を示す。図12では、移動手段15を用いて共鳴コイル117の位置を変える構成を示す。
図12は送電用共鳴コイル117をコイル面と平行な方向に移動(→)させる例を示しているが、コイル面の法線方向に移動させてもよいし、また平行方向と法線方向の組み合わせで移動させてもよい。
【0069】
また、送電用共鳴コイル117だけを移動する例を示しているが、送電用共鳴コイル117を含む送電部11の一部または全部を移動してもよい。
更に、受電用共鳴コイル121または受電用共鳴コイル121を含む受電部12の一部または全部を移動してもよい。
また、図12に示した受電用共鳴コイル121または受電用共鳴コイル121を含む受電部12の一部または全部が、図13を参照して後述する電動車両16に搭載される場合もある。
また、図12においては、送電整合回路113と送電用共鳴コイル117が接続されていることが示されている。
なお、図13は受電用共鳴コイル121または受電用共鳴コイル121を含む受電部12の一部または全部が電動車両16に搭載される場合の構成図である。したがって、前記第3実施形態や、次に述べる第4実施形態にも参照される。
【0070】
(非接触給電装置のインピーダンス整合方法の第4実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第4実施形態を示す。なお、第4実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造は、受電部12(図1、図13)が電動車両に搭載される場合を示す。
【0071】
≪電動車両へ受電部の搭載構造≫
図13は、受電部12を搭載した電動車両16が移動する構造と構成を示す。床下、または路面に送電部11を埋め込み、電動車両16に搭載された受電部12に電磁界共鳴による非接触の給電を行う。
【0072】
<インピーダンス整合方法・第4実施形態>
図14は、本発明の第4実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連における共鳴コイルの効果を示す概念図であり、長尺方向と短尺方向を持つ2つの共鳴コイルを用いて実施する場合を示す。
図14において、送電用共鳴コイル117と受電用共鳴コイル121の長尺および短尺方向を揃える。方向を揃えるためには目印標識などのガイドを用いればよいが、位置検出手段と制御部を有する自動位置制御装置を使ってもよい。
両コイルの短尺方向を揃えておき、インピーダンス整合時には送電用共鳴コイル117または受電用共鳴コイル121を短尺方向に移動させる。
短尺方向に移動させることで、より少ない移動距離で相互インダクタンスMを大きく変えることができ、移動手段15を含む送電部11または受電部12の体積および重量の低減、移動で消費されるエネルギーの低減の効果が得られる。
【0073】
電動車両16(図13)を移動させるためにエネルギーが消費される点と、電動車両16(図13)の位置制御を必要とする点とが、図12の構成より不利であるが、別途の移動手段を備える必要がない利点がある。
送電用共鳴コイル117(図1)および受電用共鳴コイル121(図1)として、従来から線材を同軸状に巻いた軸対称型のコイルが広く知られている。しかし、本発明を第4実施形態のごとく実施する上で、特に図13の如くコイル中心軸間の距離を変化させる場合は、図14の如く長尺方向と短尺方向を持たせた形状の共鳴コイル117、121(図14)が有利である。
本発明の第4実施形態では、以上説明したとおり、固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117と受電用共鳴コイル121間の相対位置を変えることで、インピーダンス整合を効率よく達成する汎用的な手段を提供できる。
【0074】
(非接触給電装置のインピーダンス整合方法の第5実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第5実施形態を示す。第5実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を次に示す。
【0075】
≪コイルの上下回転による傾斜角度の変化構造≫
図15は本発明の第5実施形態における、送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
図15において、傾斜手段17は送電用共鳴コイル117の一部を回転軸に該コイルを上下回転させることで、送電用共鳴コイル117と受電用共鳴コイル121間の傾斜角度を変える。
図15の如く回転させる共鳴コイルが、長尺方向と短尺方向を持つようにして、回転軸を長尺方向と平行にすれば、回転に伴うコイルの上下移動距離が短くなり、装置の体積および重量を低減する効果がある。
【0076】
また、図16は第5実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連において、回転軸を共鳴コイルの端部に位置させる効果を示す概念図である。
図16(a)に示すように、回転軸を共鳴コイル117の端部に位置させることで、図16(b)に示すような回転軸を共鳴コイル117の中央に位置させた場合より、共鳴コイルの中心間の平均距離を短縮することができる。共鳴コイル間の距離を短くすることで、共鳴コイル間の結合を強くして、送電効率を向上させる効果がある。
【0077】
更に、回転軸を共鳴コイルの端部に位置させることで、傾斜角度と共にコイル中心間距離を変化させることができて、インピーダンス調整に必要な傾斜角度調整量を減らす効果もある。
以上の説明では、送電用共鳴コイル117を傾斜させる例を示したが、受電用共鳴コイル121を傾斜させてもよい。
【0078】
<インピーダンス整合方法・第5実施形態>
本発明の第5実施形態は、前記固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117(図15、図16)と受電用共鳴コイル121(図15、図16)間の傾斜角度を変えることで、インピーダンス整合を達成する。
前記の第3実施形態で説明したように、RtiとRriの中で片方を固定して他方を緩慢に調整しながら、相互インダクタンスMを調整することで、インピーダンス整合ができる。
本実施形態は、相互インダクタンスMを変えるため、コイル間の傾斜角度を変える。
本実施形態では、以上説明したとおり、固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117(図15、図16)と受電用共鳴コイル121(図15、図16)間の傾斜角度を変えることでインピーダンス整合を効率よく達成する汎用的な手段を提供できる。
【0079】
(非接触給電装置のインピーダンス整合方法の第6実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第6実施形態を示す。第6実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を次に示す。
【0080】
≪コイルのZ軸回転による傾斜角度の変化構造≫
図17は本発明の第6実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
図17において、回転手段18は送電用共鳴コイル117を、図中のZ軸を回転軸に回転させる。送電用共鳴コイル117の代わりに受電用共鳴コイル121を回転させてもよい。
【0081】
<インピーダンス整合方法・第6実施形態>
本発明の第6実施形態は、前記固有整合に用いるRtiとRriの中で一つを固定しておき、長尺方向と短尺方向を有する送電用共鳴コイル117(図17)および受電用共鳴コイル121(図17)を用いて、送電用共鳴コイル117(図17)または受電用共鳴コイル121(図17)を回転させ、両共鳴コイルの長尺方向間の角度を変えることで、インピーダンス整合を達成する。
本実施形態によれば、両共鳴コイルの中心軸間距離は固定したまま、相互インダクタンスMを変えることができるため、前記第3実施形態より装置の体積および重量を低減する効果がある。
【0082】
(非接触給電装置のインピーダンス整合方法の第7実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第7実施形態を示す。第7実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を次に示す。
【0083】
≪常磁性体または反磁性体による電磁界調整構造≫
図18は本発明の第7実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。
図18において、送電用共鳴コイル117または受電用共鳴コイル121の少なくとも一方に近接して、常磁性体または反磁性体からなる一つまたは複数の電磁界調整部品161と、該電磁界調整部品の位置を移動させる電磁界調整部移動手段162を備える。
【0084】
<インピーダンス整合方法・第7実施形態>
前記固有整合に用いるRtiとRriの中で一つを固定しておき、電磁界調整部移動手段162を用いて電磁界調整部品161を移動させることで、両共鳴コイル間の電磁界分布を変えて、相互インダクタンスMを調整する。電磁界調整部移動手段162による電磁界調整部品161の移動は、平行移動と回転と傾斜の組み合わせでよい。
【0085】
本発明の第7実施形態では、以上説明したとおり、固有整合に用いるRtiとRriの中で一つを固定しておき、送電用共鳴コイル117と受電用共鳴コイル121間の相互インダクタンスMを、電磁界調整部品161と電磁界調整部移動手段162を用いて調整することで、インピーダンス整合を効率よく達成する汎用的な手段を提供できる。
第7実施形態の構成は、電気配線に接続された共鳴コイルは固定しておき、電気配線から独立した電磁界調整部品161を移動させることでインピーダンス整合を達成するため、電気配線の劣化を低減できる利点がある。
【0086】
(非接触給電装置のインピーダンス整合方法の第8実施形態)
以下、本発明の非接触給電装置のインピーダンス整合方法の第8実施形態を示す。第8実施形態を実現する非接触給電装置の送電用共鳴コイルと受電用共鳴コイルの構造を次に示す。
【0087】
≪複数の共鳴コイルの選択構造≫
図19は本発明の第8実施形態における送電用共鳴コイル117と受電用共鳴コイル121との関連を示す構成図である。第8実施形態では、複数の共鳴コイルから一つを選ぶことで、相互インダクタンスMを変える。
図19には複数の送電用共鳴コイル117と一つの受電用共鳴コイル121を用いる構成を示すが、送電用共鳴コイル117を一つにして受電用共鳴コイル121を複数にする構成も可能である。ただし、送電用共鳴コイル117を複数にする図19の構成が、受電部12およびそれを搭載した電動車両16の重量低減の面で有利である。
【0088】
以下では、送電用共鳴コイル117を複数にする図19の構成で説明する。複数の送電用共鳴コイル117は、共鳴コイル切替部19に接続され、共鳴コイル切替部19は、送電整合回路113に接続される。
共鳴コイル切替部19は、送電制御部114の制御に従い、送電用共鳴コイル117の中の1つを選択して送電整合回路113に連結する。これによって、相互インダクタンスMを変える。
【0089】
<インピーダンス整合方法・第8実施形態>
次に、前記第3実施形態と同じく、固有整合に用いるRtiとRriの中で一つを固定して、他方を前記の数式の(13)式または(15)式に従って調整する。
共鳴コイル切替部19を制御して、送電整合回路113と連結される送電用共鳴コイル117を変えると、送電用共鳴コイル117を実効的に移動させた効果が得られ、数式の(14)式または(16)式の相互インダクタンスMを調整できる。この時、選択された1つのコイル以外の送電用共鳴コイル117を送電整合回路113と連結しないことで、それらの共鳴周波数を前記foから大きく離して、電磁界共鳴に及ぼすそれらコイルの干渉を実質的に排除する。
【0090】
したがって、共鳴コイル切替部19を制御して、送電効率が最大になる送電用共鳴コイル117を選択することで、インピーダンス整合を効率よく達成することができる。共鳴コイル切替部19は電気回路を用いて実施することができるため、本実施例の構成では、共鳴コイルまたはその他部品を移動または傾斜または回転させる必要がなくなり、摩耗による装置の劣化を低減できる利点がある。
【0091】
(その他の実施形態)
本発明は前記の実施形態に限定されるものではない。以下に例をあげる。
第1実施形態において、図2(b)は整合回路として、直列のコンデンサCrsと並列のコンデンサCrpを用いた例を示したが、コイルを用いてもよい。またコンデンサとコイルを併せて用いてもよい。また3個以上の可変素子を用いてもよい。
【0092】
第1実施形態においては、固有整合として、交流電源13の出力インピーダンスが実質的に実数部Reのみを有し、また前記負荷14の入力インピーダンスが実質的に実数部Rlのみを有する場合を前提にした。
つまり、高周波分野においては、同軸線路で相互接続する装置の入力および出力インピーダンスを同軸線路の特性インピーダンスに一致させることが一般的であり、同軸線路の特性インピーダンスは例えば50Ωまたは75Ωのように実数部のみを有することが一般的である。したがって、上記の前提は十分、一般的である。
ただし、|Xs|および|Xl|が各々RsおよびRlより十分小さくない場合でも、本発明の固有整合を
XLr(fo)−XCr(fo)=Xs
および
XLt(fo)−XCt(fo)=Xl
を満たすことに拡張し、かつ図7に示したフローチャートの手順を進めることも可能である。
【0093】
また、本発明のインピーダンス整合方法は、磁界結合の他に電界結合による電磁界共鳴を利用する非接触給電装置にも適用することができる。
【0094】
また、電力の代わりに信号の送受を行う送信アンテナと受信アンテナの対であって、片方のインピーダンス整合が他方のインピーダンスを変化させる装置で効率よくインピーダンス整合を得る用途にも適用できる。
【0095】
また、以上において非接触給電装置の受電用共鳴コイルが搭載される例を電動車両としたが、ハイブリッド自動車や燃料電池自動車に用いることもできる。
【0096】
(本発明、実施形態の補足)
なお、本実施形態の非接触給電において、概略のインピーダンス整合方法は前記したように、まず、送電部11と受電部12との間で、インピーダンスの整合をとるが、この際、交流電源13の周波数foにおいて、送電部11、受電部12、負荷14のインピーダンス整合を行い、
次に、交流電源13の出力インピーダンス、送電部11の入出力インピーダンス、受電部12の入出力インピーダンス、負荷14の入力インピーダンスはすべて、実質的に実数成分のみを持つように調整し、
その後、送電部11の出力インピーダンス、受電部12の入力インピーダンスの実数成分を、送電部11と受電部12間の相互コンダクタンスMとの関連とともに、可変素子で調整し、最大の送電効率となるように選択して、インピーダンス整合を行う。
【0097】
このように、電源と送電部間および受電部と負荷間のインピーダンス整合を、非共鳴状態の入力抵抗RtiおよびRriを利用して行うことで、送電部と受電部のあり得る全ての対に対して予め実験または理論計算を行うことなく、インピーダンス整合に要求される回路調整の回数を最小にする方法である。
また送電部と受電部の対を制限する必要もなくなり、多種多様な共鳴型非接触給電装置で効率よくインピーダンス整合を行うことができる。
【符号の説明】
【0098】
10 非接触給電装置
11 送電部
111 送電整合用切替部
112 送電整合用方向性結合器
113 送電整合回路
114 送電制御部
115 送電計測部
116 整合用交流信号出力部
117 送電用共鳴コイル、共鳴コイル
118 送電通信部
119 送電記憶部
12 受電部
121 受電用共鳴コイル、共鳴コイル
122 受電整合回路
123 受電整合用切替部
124 受電計測部
125 受電制御部
126 受電通信部
127 受電記憶部
13 交流電源
14 負荷
15 移動手段
16 電動車両
161 電磁界調整部品
162 電磁界調整部移動手段
17 傾斜手段
18 回転手段
19 共鳴コイル切替部
227 共鳴コイル
Cre コンデンサ(受電部)、受電整合回路の実効静電容量
Cte コンデンサ(送電部)、送電整合回路の実効静電容量
Crp、Crs コンデンサ、可変容量コンデンサ
Lr コイル、コイルインダクタンス、インダクタンス値
Lre コイル(受電部)、受電整合回路の実効インダクタンス
Lte コイル(送電部)、送電整合回路の実効インダクタンス
M 相互インダクタンス
Rri 入力抵抗値、固有整合値(受電部)
Rti 入力抵抗値、固有整合値(送電部)
Tr1、Tr2 端子(受電部)
Tt1、Tt2 端子(送電部)
【特許請求の範囲】
【請求項1】
交流電源から負荷に電力を伝送する非接触給電装置において、交流電源の出力に接続される送電整合回路と、送電整合回路の出力に接続された送電用共鳴コイルと、受電用共鳴コイルと、受電用共鳴コイルの出力に接続された受電整合回路と、を備え、
前記送電用共鳴コイルの共鳴周波数を交流電源の出力周波数foに略一致させて、更に前記受電用共鳴コイルの共鳴周波数を前記送電用共鳴コイルの共鳴周波数と略一致させて、前記送電用共鳴コイルと前記受電用共鳴コイルの間に電磁界結合による電磁界共鳴を引き起こし、交流電源が前記送電整合回路に入力した交流電力を、コイル間の電磁界共鳴により前記受電用共鳴コイルに伝送して、前記受電整合回路から負荷へ出力する電磁界共鳴方式の非接触給電装置のインピーダンス整合方法であって、
更に、非共鳴状態で送電部が持つ入力抵抗Rtiと、非共鳴状態で受電部が持つ入力抵抗Rriと、送電部と受電部の結合による相互インダクタンスMとの3要素の中で2要素を調整して、共鳴状態における非接触給電装置のインピーダンスを整合することを特徴とする非接触給電装置のインピーダンス整合方法。
【請求項2】
前記送電整合回路の可変素子設定値と前記送電用共鳴コイルの前記入力抵抗Rtiとの対応関係と、前記受電整合回路の可変素子設定値と前記受電用共鳴コイルの前記入力抵抗Rriとの対応関係とを予め記録しておき、
前記送電用共鳴コイルと前記受電用共鳴コイルが共鳴する状態で、前記負荷の入力抵抗Rlを検出する第1ステップと、
前記相互インダクタンスMを推定し、前記入力抵抗Rlと該相互インダクタンスMと前記共鳴各周波数と前記交流電源の出力抵抗Rsから、前記入力抵抗Rtiと前記入力抵抗Rriを算出する第2ステップと、
前記入力抵抗Rtiに対応する可変素子値と、前記入力抵抗Rriに対応する可変素子値とを読み出す第3ステップと、
前記可変素子値を前記送電整合回路と、前記受電整合回路とにそれぞれ設定する第4ステップと、
前記非接触給電装置に備えられた送電制御部または受電制御部が送電効率を測定し保存する第5ステップと、
測定された前記送電効率を前記送電制御部または前記受電制御部に保存されていた送電効率と比較して、最大送電効率かを判定する第6ステップと、
最大送電効率となる相互インダクタンスMの推定値を更新する第7ステップと、
を備えたことを特徴とする請求項1に記載の非接触給電装置のインピーダンス整合方法。
【請求項3】
前記第2ステップにおいて、前記入力抵抗Rtiと前記入力抵抗Rriを算出する手段が、
Rti={Rl2−(2πfo)2M2Rl/Rs}1/2
Rri={Rs2−(2πfo)2M2Rs/Rl}1/2
であることを特徴とする請求項2に記載の非接触給電装置のインピーダンス整合方法。
【請求項4】
前記送電整合回路または前記受電整合回路の一方の素子値を固定して、前記負荷の入力抵抗Rlを検出して、前記送電整合回路または前記受電整合回路の中で素子値が可変である方の入力抵抗を、前記交流電源の出力抵抗Rsとの間に、RsRri−RlRti=0の関係式が満たされるように設定し、
前記送電整合回路に入力される電力と前記受電整合回路から出力される電力との比を算出し、
該電力の比が最大になるように前記相互インダクタンスMを調整する
ことを特徴とする請求項1に記載の非接触給電装置のインピーダンス整合方法。
【請求項5】
前記送電用共鳴コイルと前記受電用共鳴コイルの少なくとも一方を移動させることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項6】
前記送電用共鳴コイルと前記受電用共鳴コイルの少なくとも一方を傾斜させることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項7】
前記送電用共鳴コイルと前記受電用共鳴コイルに長尺方向と短尺方向を持たせ、送電用共鳴コイルまたは受電用共鳴コイルの少なくとも一方を回転させて送電用共鳴コイルと受電用共鳴コイルとの長尺方向間の角度を変えることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項8】
前記送電用共鳴コイルまたは前記受電用共鳴コイルの少なくとも一方に近接して一つまたは複数の常磁性体または反磁性体を備えて、該常磁性体または反磁性体を移動させることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項9】
複数の前記送電用共鳴コイルまたは複数の前記受電用共鳴コイルを備え、該複数の共鳴コイルの中で共鳴に用いるコイルを選択して変えることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項10】
交流電源から負荷に電力を伝送する電磁界共鳴方式の非接触給電装置であって、
前記交流電源の出力に接続される送電整合回路と、
前記送電整合回路の出力に接続された送電用共鳴コイルと、
受電用共鳴コイルと、
前記受電用共鳴コイルの出力に接続された受電整合回路と、
前記送電整合回路に入力される電力と前記受電整合回路から出力される電力の比を算出する送電効率算出手段と、
前記送電整合回路の可変素子設定値と送電整合回路の入力抵抗Rtiとの対応関係を記憶する送電記憶部、または、
前記受電整合回路の可変素子設定値と受電整合回路の入力抵抗Rriとの対応関係を記憶する受電記憶部の中で少なくても1つの記憶部と、
前記送電記憶部または前記受電記憶部に具備され、前記送電整合回路と前記受電整合回路のインピーダンス整合過程で測定した送電効率を記憶する送電効率記憶部と、
を備え、
前記送電用共鳴コイルの共鳴周波数を前記交流電源の出力周波数に一致させて、更に前記受電用共鳴コイルの共鳴周波数を送電用共鳴コイルの共鳴周波数に一致させて、前記送電用共鳴コイルと前記受電用共鳴コイルとの間に電磁界結合による電磁界共鳴を引き起こし、前記交流電源が前記送電整合回路に入力した交流電力を、前記送電用共鳴コイルと前記受電用共鳴コイル間の電磁界共鳴により前記受電用共鳴コイルに伝送して、前記受電整合回路から負荷へ出力することを特徴とする非接触給電装置。
【請求項11】
前記送電用共鳴コイルまたは前記受電用共鳴コイルの少なくとも一方のコイルを移動させる移動手段を備えたことを特徴とする請求項10に記載の非接触給電装置。
【請求項12】
前記送電用共鳴コイルと前記受電用共鳴コイルの少なくとも一方が長尺方向と短尺方向を有し、該コイルの短尺方向にコイルを移動させる前記移動手段を備えたことを特徴とする請求項11に記載の非接触給電装置。
【請求項13】
前記送電用共鳴コイルまたは前記受電用共鳴コイルの少なくとも一方のコイルを他方のコイルに対して傾斜させる傾斜手段を備えたことを特徴とする請求項10に記載の非接触給電装置。
【請求項14】
前記傾斜手段は、傾斜される前記コイルに長尺方向と短尺方向を設け、該コイルの長尺方向を軸にコイルを傾斜させることを特徴とする請求項13に記載の非接触給電装置。
【請求項15】
前記送電用共鳴コイルと前記受電用共鳴コイルの両方が長尺方向と短尺方向を有し、前記送電用共鳴コイルと前記受電用共鳴コイルの少なくとも一方のコイルを他方のコイルに対して回転させる回転手段を備えたことを特徴とする請求項10に記載の非接触給電装置。
【請求項16】
前記送電用共鳴コイルまたは前記受電用共鳴コイルの少なくとも一方に近接して常磁性体または反磁性体からなる一つまたは複数の電磁界調整部品と、該電磁界調整部品の位置を移動させる電磁界調整部移動手段とを、更に備えることを特徴とする請求項10に記載の非接触給電装置。
【請求項17】
複数の前記送電用共鳴コイルまたは複数の前記受電用共鳴コイルと、共鳴に用いるコイルを選択する切り替え手段とを、更に備えることを特徴とする請求項10に記載の非接触給電装置。
【請求項18】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項10乃至請求項12のいずれか一項に記載の非接触給電装置。
【請求項19】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項13または請求項14に記載の非接触給電装置。
【請求項20】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項15に記載の非接触給電装置。
【請求項21】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項16に記載の非接触給電装置。
【請求項22】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項17に記載の非接触給電装置。
【請求項1】
交流電源から負荷に電力を伝送する非接触給電装置において、交流電源の出力に接続される送電整合回路と、送電整合回路の出力に接続された送電用共鳴コイルと、受電用共鳴コイルと、受電用共鳴コイルの出力に接続された受電整合回路と、を備え、
前記送電用共鳴コイルの共鳴周波数を交流電源の出力周波数foに略一致させて、更に前記受電用共鳴コイルの共鳴周波数を前記送電用共鳴コイルの共鳴周波数と略一致させて、前記送電用共鳴コイルと前記受電用共鳴コイルの間に電磁界結合による電磁界共鳴を引き起こし、交流電源が前記送電整合回路に入力した交流電力を、コイル間の電磁界共鳴により前記受電用共鳴コイルに伝送して、前記受電整合回路から負荷へ出力する電磁界共鳴方式の非接触給電装置のインピーダンス整合方法であって、
更に、非共鳴状態で送電部が持つ入力抵抗Rtiと、非共鳴状態で受電部が持つ入力抵抗Rriと、送電部と受電部の結合による相互インダクタンスMとの3要素の中で2要素を調整して、共鳴状態における非接触給電装置のインピーダンスを整合することを特徴とする非接触給電装置のインピーダンス整合方法。
【請求項2】
前記送電整合回路の可変素子設定値と前記送電用共鳴コイルの前記入力抵抗Rtiとの対応関係と、前記受電整合回路の可変素子設定値と前記受電用共鳴コイルの前記入力抵抗Rriとの対応関係とを予め記録しておき、
前記送電用共鳴コイルと前記受電用共鳴コイルが共鳴する状態で、前記負荷の入力抵抗Rlを検出する第1ステップと、
前記相互インダクタンスMを推定し、前記入力抵抗Rlと該相互インダクタンスMと前記共鳴各周波数と前記交流電源の出力抵抗Rsから、前記入力抵抗Rtiと前記入力抵抗Rriを算出する第2ステップと、
前記入力抵抗Rtiに対応する可変素子値と、前記入力抵抗Rriに対応する可変素子値とを読み出す第3ステップと、
前記可変素子値を前記送電整合回路と、前記受電整合回路とにそれぞれ設定する第4ステップと、
前記非接触給電装置に備えられた送電制御部または受電制御部が送電効率を測定し保存する第5ステップと、
測定された前記送電効率を前記送電制御部または前記受電制御部に保存されていた送電効率と比較して、最大送電効率かを判定する第6ステップと、
最大送電効率となる相互インダクタンスMの推定値を更新する第7ステップと、
を備えたことを特徴とする請求項1に記載の非接触給電装置のインピーダンス整合方法。
【請求項3】
前記第2ステップにおいて、前記入力抵抗Rtiと前記入力抵抗Rriを算出する手段が、
Rti={Rl2−(2πfo)2M2Rl/Rs}1/2
Rri={Rs2−(2πfo)2M2Rs/Rl}1/2
であることを特徴とする請求項2に記載の非接触給電装置のインピーダンス整合方法。
【請求項4】
前記送電整合回路または前記受電整合回路の一方の素子値を固定して、前記負荷の入力抵抗Rlを検出して、前記送電整合回路または前記受電整合回路の中で素子値が可変である方の入力抵抗を、前記交流電源の出力抵抗Rsとの間に、RsRri−RlRti=0の関係式が満たされるように設定し、
前記送電整合回路に入力される電力と前記受電整合回路から出力される電力との比を算出し、
該電力の比が最大になるように前記相互インダクタンスMを調整する
ことを特徴とする請求項1に記載の非接触給電装置のインピーダンス整合方法。
【請求項5】
前記送電用共鳴コイルと前記受電用共鳴コイルの少なくとも一方を移動させることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項6】
前記送電用共鳴コイルと前記受電用共鳴コイルの少なくとも一方を傾斜させることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項7】
前記送電用共鳴コイルと前記受電用共鳴コイルに長尺方向と短尺方向を持たせ、送電用共鳴コイルまたは受電用共鳴コイルの少なくとも一方を回転させて送電用共鳴コイルと受電用共鳴コイルとの長尺方向間の角度を変えることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項8】
前記送電用共鳴コイルまたは前記受電用共鳴コイルの少なくとも一方に近接して一つまたは複数の常磁性体または反磁性体を備えて、該常磁性体または反磁性体を移動させることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項9】
複数の前記送電用共鳴コイルまたは複数の前記受電用共鳴コイルを備え、該複数の共鳴コイルの中で共鳴に用いるコイルを選択して変えることで、相互インダクタンスMの調整を行うことを特徴とする請求項4に記載の非接触給電装置のインピーダンス整合方法。
【請求項10】
交流電源から負荷に電力を伝送する電磁界共鳴方式の非接触給電装置であって、
前記交流電源の出力に接続される送電整合回路と、
前記送電整合回路の出力に接続された送電用共鳴コイルと、
受電用共鳴コイルと、
前記受電用共鳴コイルの出力に接続された受電整合回路と、
前記送電整合回路に入力される電力と前記受電整合回路から出力される電力の比を算出する送電効率算出手段と、
前記送電整合回路の可変素子設定値と送電整合回路の入力抵抗Rtiとの対応関係を記憶する送電記憶部、または、
前記受電整合回路の可変素子設定値と受電整合回路の入力抵抗Rriとの対応関係を記憶する受電記憶部の中で少なくても1つの記憶部と、
前記送電記憶部または前記受電記憶部に具備され、前記送電整合回路と前記受電整合回路のインピーダンス整合過程で測定した送電効率を記憶する送電効率記憶部と、
を備え、
前記送電用共鳴コイルの共鳴周波数を前記交流電源の出力周波数に一致させて、更に前記受電用共鳴コイルの共鳴周波数を送電用共鳴コイルの共鳴周波数に一致させて、前記送電用共鳴コイルと前記受電用共鳴コイルとの間に電磁界結合による電磁界共鳴を引き起こし、前記交流電源が前記送電整合回路に入力した交流電力を、前記送電用共鳴コイルと前記受電用共鳴コイル間の電磁界共鳴により前記受電用共鳴コイルに伝送して、前記受電整合回路から負荷へ出力することを特徴とする非接触給電装置。
【請求項11】
前記送電用共鳴コイルまたは前記受電用共鳴コイルの少なくとも一方のコイルを移動させる移動手段を備えたことを特徴とする請求項10に記載の非接触給電装置。
【請求項12】
前記送電用共鳴コイルと前記受電用共鳴コイルの少なくとも一方が長尺方向と短尺方向を有し、該コイルの短尺方向にコイルを移動させる前記移動手段を備えたことを特徴とする請求項11に記載の非接触給電装置。
【請求項13】
前記送電用共鳴コイルまたは前記受電用共鳴コイルの少なくとも一方のコイルを他方のコイルに対して傾斜させる傾斜手段を備えたことを特徴とする請求項10に記載の非接触給電装置。
【請求項14】
前記傾斜手段は、傾斜される前記コイルに長尺方向と短尺方向を設け、該コイルの長尺方向を軸にコイルを傾斜させることを特徴とする請求項13に記載の非接触給電装置。
【請求項15】
前記送電用共鳴コイルと前記受電用共鳴コイルの両方が長尺方向と短尺方向を有し、前記送電用共鳴コイルと前記受電用共鳴コイルの少なくとも一方のコイルを他方のコイルに対して回転させる回転手段を備えたことを特徴とする請求項10に記載の非接触給電装置。
【請求項16】
前記送電用共鳴コイルまたは前記受電用共鳴コイルの少なくとも一方に近接して常磁性体または反磁性体からなる一つまたは複数の電磁界調整部品と、該電磁界調整部品の位置を移動させる電磁界調整部移動手段とを、更に備えることを特徴とする請求項10に記載の非接触給電装置。
【請求項17】
複数の前記送電用共鳴コイルまたは複数の前記受電用共鳴コイルと、共鳴に用いるコイルを選択する切り替え手段とを、更に備えることを特徴とする請求項10に記載の非接触給電装置。
【請求項18】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項10乃至請求項12のいずれか一項に記載の非接触給電装置。
【請求項19】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項13または請求項14に記載の非接触給電装置。
【請求項20】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項15に記載の非接触給電装置。
【請求項21】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項16に記載の非接触給電装置。
【請求項22】
前記受電用共鳴コイルが電動車両に搭載されたことを特徴とする請求項17に記載の非接触給電装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図11】
【公開番号】特開2012−120288(P2012−120288A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−266470(P2010−266470)
【出願日】平成22年11月30日(2010.11.30)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年11月30日(2010.11.30)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]