
非破壊探査装置及びその方法並びにプログラム
【課題】浅い位置に埋設された埋設物の位置及び形状の検出を従来例に比較して高い精度で行え、従来には行えなかった埋設物の材質の推定を行う非破壊探査装置を提供する。
【解決手段】本発明の非破壊探査装置は、送信波を発信し、反射波を受信するマイクロ波レーダ部と、反射波形から送信波形を減算して差分波形を求める差分計算部と、差分波形及び送信波形の相互相関のヒルベルト変換を行い、複素反射係数の絶対値のモデル適応度関数を得る相互相関ヒルベルト変換部と、モデル適応度関数の時間差の最大値及び最大値の時間差を保持し、所定の時間差幅の境界モデル適応度関数に変換する境界モデル適応度演算部と、測定点毎の反射波の境界モデル適応度関数を考慮点の信頼度とし、反射波の境界モデル適応度関数のヒストグラムにより逆投影画像を生成する逆投影像生成部と、逆投影画像にてヒストグラムの極大値を与える送信波形の位相を求める位相検出部とを有する。
【解決手段】本発明の非破壊探査装置は、送信波を発信し、反射波を受信するマイクロ波レーダ部と、反射波形から送信波形を減算して差分波形を求める差分計算部と、差分波形及び送信波形の相互相関のヒルベルト変換を行い、複素反射係数の絶対値のモデル適応度関数を得る相互相関ヒルベルト変換部と、モデル適応度関数の時間差の最大値及び最大値の時間差を保持し、所定の時間差幅の境界モデル適応度関数に変換する境界モデル適応度演算部と、測定点毎の反射波の境界モデル適応度関数を考慮点の信頼度とし、反射波の境界モデル適応度関数のヒストグラムにより逆投影画像を生成する逆投影像生成部と、逆投影画像にてヒストグラムの極大値を与える送信波形の位相を求める位相検出部とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コンクリートや地中などに埋設されている埋設物の位置及び深さを、電磁波を用いて探査する非破壊探査装置及びその方法並びにプログラムに関する。
【背景技術】
【0002】
従来、移動台車に搭載した発信器から、コンクリートや土などの媒体の表面に対し、マイクロ波を放射して、その反射波を受信器にて受信し、その反射波の伝播時間により媒体内部に埋設されている埋設物の位置及び深さを検出する探査方法がある(例えば、特許文献1参照)。
例えば、上記特許文献1に記載されている技術は、コンクリート等に埋設されている鉄筋の直径をマイクロ波レーダなどを用いて非破壊に測定するものである。
【特許文献1】特開平05−323026号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来例は、コンクリートに埋設されている鉄筋を測定対象としており、コンクリート壁面に埋設されている種々の材質の管の断面を画像化したり、管の材質を弁別したりすることはできなかった。
また、コンクリートにおける鉄筋の埋設位置は通常ある程度の深さをもっているが、種々の埋設管は壁表面から浅い位置にあるものもある。
従来の探査方法では、浅い位置の埋設物の観察において、送信波と埋設物による反射波とが重なるため、それらを検知するのは困難であった。
【0004】
本発明は、このような事情に鑑みてなされたもので、浅い位置に埋設されている埋設物の位置及び形状の検出を従来例に比較して高い精度で行い、かつ従来には行えなかった埋設物の材質の推定が行える非破壊探査装置及びその方法並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の非破壊探査装置は、媒体内に埋設されている埋設物を探査する非破壊探査装置であり、マイクロ波を送信波として発信し、反射波を受信するマイクロ波レーダ部と、媒体内に伝播する前記送信波からの反射波形を求め、反射波形から前記送信波形を減算して差分波形を求める差分計算部と、該差分波形及び送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、該複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する相互相関ヒルベルト変換部と、前記モデル適応度関数の時間差τにおける最大値及び最大値を与える時間差を保持し、所定の時間差幅を有する境界モデル適応度関数O’(τ)に変換する境界モデル適応度演算部と、各測定点毎の反射波の前記境界モデル適応度関数O’(τ)の時間差をマイクロ波の伝播速度を元に距離へ換算し、各考慮点における信頼度として、複数の反射波の境界モデル適応度関数O’(τ)をヒストグラムとして加え合わせ、その分布を逆投影画像として生成する逆投影像生成部と、前記逆投影画像においてヒストグラムの極大値を与える送信波形における反射位相を求める位相検出部とを有することを特徴とする。
【0006】
本発明の非破壊探査装置は、前記位相検出部が前記逆投影画像におけるヒストグラムの極大値を与える送信波形における位相を反射位相として出力することを特徴とする。
【0007】
本発明の非破壊探査装置は、前記埋設物の材質と、前記送信波形に対する反射位相との対応を示すテーブルを有し、求められた反射位相に対応した材質を該テーブルから読み出し出力する埋設物材質推定部をさらに有することを特徴とする。
【0008】
本発明の非破壊探査装置は、前記逆投影画像生成部において、ヒストグラムとして重ね合わせる境界モデル適応度関数O’(τ)の観測点数と、少なくとも、前記マイクロ波の指向特性と、逆投影を行う考慮点の位置とを、予め対応付けたテーブルを有していることを特徴とする。
【0009】
本発明の非破壊探査方法は、媒体内に埋設されている埋設物を探査する非破壊探査装置を用いた非破壊探査方法であり、マイクロ波レーダ部がマイクロ波を送信波として発信し、反射波を受信するマイクロ波送受信過程と、差分計算部が媒体内に伝播する前記送信波からの反射波形を求め、該反射波形から前記送信波の送信波形を減算して差分波形を求める差分計算過程と、相互相関ヒルベルト変換部が該差分波形及び送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する相互相関ヒルベルト変換過程と、境界モデル適応度演算部が前記モデル適応度関数O(τ)の時間差τにおける最大値、及び最大値を与える時間差を保持し、所定の時間幅の境界モデル適応度関数O’(τ)に変換する境界モデル適応度演算過程と、逆投影像生成部が各測定点毎の反射波の境界モデル適応度関数O’(τ)の時間差をマイクロ波の伝播速度を元に距離へ換算し、各考慮点における信頼度として、複数の反射波を考慮点においてヒストグラムとして加え合わせ、その分布を逆投影画像として生成する逆投影像生成過程と、位相検出部が前記逆投影画像においてヒストグラムの極大値を与える送信波形に対応する位相を求める位相検出過程とを有することを特徴とする。
【0010】
本発明のプログラムは、上記いずれかに記載の非破壊探査装置として、コンピュータを機能させるための非破壊探査プログラムである。
【発明の効果】
【0011】
以上説明したように、本発明によれば、送信波と反射波との干渉を受けずに、高い精度にて埋設物の埋設位置を特定することができ、かつ送信波の位相と反射波の位相との位相差から、埋設物の材質を推定することができる。
【発明を実施するための最良の形態】
【0012】
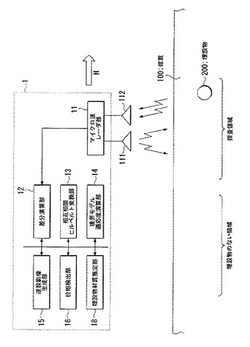
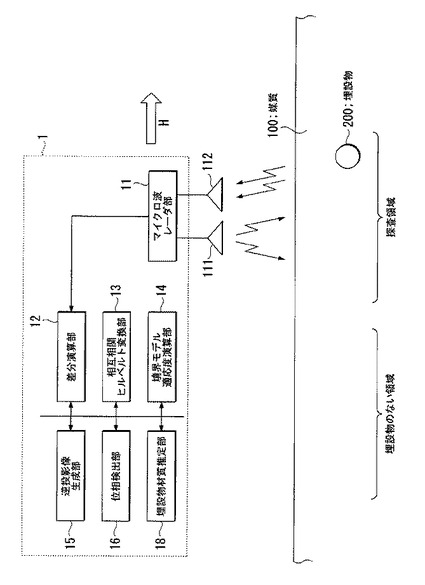
以下、図を用いて本発明の一実施形態の非破壊探査装置の説明を行う。図1は本発明の一実施形態による非破壊探査装置の構成例を示すブロック図である。
図1に示す構成は、コンクリートや土などの媒体100内に埋設されている埋設物200(水道配管,ガス配管,電線など)を探査する非破壊探査装置1であり、マイクロ波レーダ部11,差分計算部12,相互相関ヒルベルト変換部13,境界モデル適応度演算部14,逆投影像生成部15,位相検出部16,埋設物材質推定部18から構成されている。
【0013】
マイクロ波レーダ部11は、送信アンテナ111からマイクロ波を送信波として発信し、媒体100内に埋設されている埋設物200等からの反射波を受信アンテナ112により受信する。
差分計算部12は、媒体100内に伝播する上記送信波の同定送信波形を求め、かつ受信した反射波から上記同定送信波形を減算して差分波形を求める。
相互相関ヒルベルト変換部13は、該差分波形及び同定送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する。ここで、時間差τとは、媒質100内部において、マイクロ波を送信してから、埋設物200までの距離を反射波として往復するまでの伝播時間を示している。すなわち、モデル適応度関数O(τ)は、時間差毎における反射波の強度の分布を示している。
【0014】
境界モデル適応度演算部14は、上記モデル適応度関数O(τ)の時間差軸における最大値の位置(時刻)、すなわちモデル適応度関数O(τ)の包絡波形の最大値とを保持し、予め設定される所定の時間差τの幅に、例えばモデル適応度関数O(τ)の強度の最大値を分布の中心とする範囲を、予め設定した時間差τの範囲となるよう狭めることにより、モデル適応度関数O(τ)を境界モデル適応度関数O’(τ)に変換する。
逆投影像生成部15は、各観測点毎の反射波に対し、各反射波の複素反射係数から、送信アンテナ111から送信される送信波の指向性に基づく楕円(送信アンテナ111および受信アンテナ112を焦点とする楕円)面全面に対し、境界モデル適応度関数O’(τ)の時間差τをマイクロ波の伝播速度を元に距離(地表面の観測点から反射体、すなわち埋設物までの距離)へ換算し、各考慮点(画像表示におけるピクセル)の信頼度を表す値として、境界モデル適応度関数O’(τ)の強度値を、それぞれ時間差τに対応する距離の考慮点に与えて逆投影画像を生成する。このとき、逆投影像生成部15は、ユーザの指定により上記強度値をピクセルの階調度、あるいは強度値別に設定した色として与える。
また、逆投影像生成部15は、複数の逆投影像を選択する選択窓を、隣接する上記逆投影像毎にシフトさせ、シフトする毎に選択窓に含まれる逆投影像全てを重ならせて、共通部分を抽出して中間画像を生成する。
ここで、逆投影像生成部15は、シフト毎に得られた共通部分の中間画像をすべて重ね合わせ、位置,深さ及び形状を示す探査画像を生成する。
位相検出部16は、相互相関ヒルベルト変換部13が出力する反射位相と、境界モデル適応度演算部14が出力する極大時刻と、逆投影像生成部15が出力する探査画像から、逆投影画像における極大値を与える領域での差分波形の反射位相を出力する。
また、埋設物材質推定部18は、位相検出部16が出力する反射位相から、対応する埋設物の材質を推定する。
【0015】
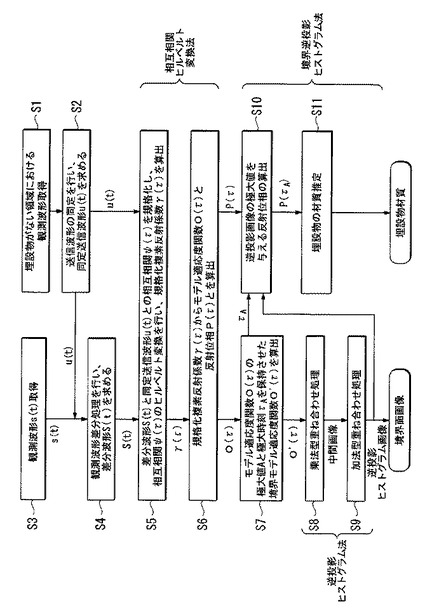
次に、図1及び図2を用いて、本実施形態による破壊探査装置による埋設物の探査動作を説明する。図2は本実施形態による非破壊探査装置による埋設物の探査動作の例を示すフローチャートである。
ステップS1において、ユーザは、埋設物が埋設されていないことが明確な領域(図1の埋設物のない領域)において、マイクロ波レーダ部11から送信波を送信アンテナから媒質100に対して発信する。 これにより、マイクロ波レーダ部11は、媒質100から出射される送信波及び反射波(異なる媒質の境界面等、例えばコンクリートと土との境界面からの)を、受信アンテナ112により受信し、電気信号(あるいはデジタルデータ)に変換し、観測送信波形として差分演算部12へ出力する。
【0016】
そして、ステップS2において、差分演算部12は、マイクロ波レーダ部11から入力された観測送信波形を、波形形状を示す関数のパラメータを調整して、観測送信波形と形状が同様となる波形関数を求め(同定処理)、得られた波形関数を同定送信波形u(t)とする。
すなわち、差分演算部12は、埋設物がない領域における上記観測送信波形を、送信波の伝播及び埋設物200からの反射でない他からの反射波などのバックグラウンドノイズを含めて、同定送信波形u(t)として同定する。
【0017】
次に、ステップS3において、ユーザは、図1においてH方向に非破壊探査装置1を移動させ、埋設物200の探査処理を開始する。
ここで、ユーザは非破壊探査装置1を埋設物が埋設されている探査領域に移動させ、マイクロ波レーダ部11から送信波を送信アンテナから媒質100に対して発信する。
これにより、マイクロ波レーダ部11は、媒質100から出射される反射波を、受信アンテナ112により受信し、電気信号(あるいはデジタルデータ)に変換し、観測反射波形s(t)として差分演算部12へ出力する(観測波形の取得処理)。
【0018】
そして、ユーザは、順次H方向に対して、予め設定した間隔(例えば、10mm毎)にて配置された観測点毎に、マイクロ波レーダ部11から送信波を発信し、媒質100から出射される反射波(埋設物200にて送信波が反射して出射される反射波)を受信し、上述した観測波形として観測反射波形s(t)を取得する。
このとき、差分演算部12は、マイクロ波レーダ部11から入力される観測反射波形s(t)を各観測点に対応し、内部の記憶部に対して記憶する。
【0019】
次に、ステップS4において、予め設定された観測点における観測処理が終了すると、ユーザが探査演算処理の開始を指示する制御命令を非破壊探査装置1に対して入力する。
これにより、差分演算部12は、上記記憶部に記憶されている、各観測点毎の観測反射波形s(t)に対し、それぞれ観測反射波形s(t)から同定送信波形u(t)を減算し、差分波形S(t)を求める。
すなわち、観測反射波形s(t)から、反射波形及び干渉等のバックグラウンドノイズを除去して、反射波のみの波形を、観測波形である観測反射波形s(t)から抽出する。
このとき、差分演算部12は、観測反射波形s(t)と、同定送信波形u(t)との0点(強度及び時刻)を合わせて差し引いて差分波形S(t)を取得する。
また、同定送信波形u(t)が媒質100を伝播する際に、以下の(1)式に示す媒質100の伝達関数H(ω)、すなわち反射体などの伝播特性のモデルによって推定される推定波形を、推定波形S’(t)とする。上記伝達関数H(ω)は、送信波が媒質を通過して反射波となる、媒質の特性として定義される。
【0020】
【数1】

【0021】
上記(1)式において、Γiは実数部の反射係数であり、Γrは虚数部の反射係数であり、ωは角周波数を示す。
すべての観測点における差分波形S(t)の演算が終了すると、ステップS5及びステップS6において、相互相関ヒルベルト変換部13は、差分波形S(t)と推定波形S’(t)との2乗誤差をI(t)として、以下の(2)式により求める。
【0022】
【数2】
【0023】
上記(2)式において、uh(t−τ)は伝播波形データu(t−τ)をヒルベルト変換した関数である。また、S(ω)及びU(ω)はそれぞれ差分波形データS(t)、同定送信波形u(t)をフーリエ変換したものである。上記τは、送信波が送信された時刻と、反射波が戻ってくる時刻との時間差、すなわち電波が媒質100を伝播して埋設物200までの距離を往復する時間を示している。
この(2)式は差分波形S(t)と推定波形S'(t)との時間差τにおける一致度としても示され、相互相関ヒルベルト変換部13は、以下の(3)式によりモデル適応度関数O(τ)を求める。
【0024】
【数3】
【0025】
上記(3)式は、I(τ)が「0」すなわち、差分波形S(t)と推定波形S’(t)とが一致したとき最大値となる、差分波形S(t)と推定波形S’(t)との一致度を表す指標である。
ここで、相互相関ヒルベルト変換部13は、I(τ)を最小化する反射係数Γr及びΓiを、(2)式を展開して解析的に得られる(4)式により求める。
【0026】
【数4】
【0027】
上記(4)式において、ψus(τ)は差分波形S(t)と同定送信波形u(t)との相互相関関数である。この相互相関関数は、2つの信号波形の類似性,時間差を表すのに用いる関数である。
(4)式を(3)式に代入すると、以下に示す(5)式となり、相互相関ヒルベルト変換部13は、この(5)式によりモデル適応度(Model fitness)関数O(τ)を演算する。
すなわち、マイクロ波レーダの波形における周波数帯域は広く、通常、中心周波数を有するメキシカンハット型の周波数分布を有する送信波が用いられる。
このメキシカンハット型の反射波の波形の包絡線、すなわち、時間差毎の反射波形の強度を示す波形に対する包絡線である上記モデル適応度関数O(τ)を生成し、送信波に対し、埋設物から反射してくる反射波の伝播時間を測定し易いようにする。
【0028】
【数5】
【0029】
上記(5)式において、H(*)はヒルベルト変換を示す。
また、反射波データにおける反射位相P(τ)は、以下の(6)式に示され、相互相関ヒルベルト変換部13は、この(6)式により、反射位相P(τ)を演算する。
【0030】
【数6】
【0031】
ところで、規格化複素反射係数γ(τ)として、以下の(7)式を演算すると、
O(τ)=|γ(τ)|
P(τ)=∠γ(τ)
と一致することが判る。
【0032】
【数7】
【0033】
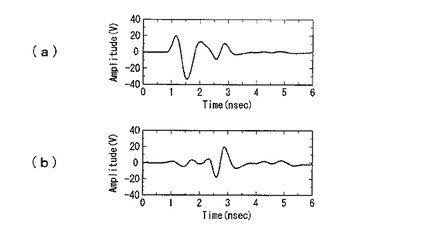
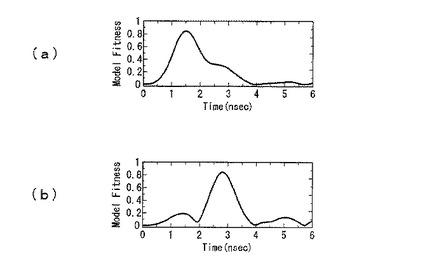
図3及び図4に観測反射波形から同定送信波形u(t)を差し引いた差分波形S(t)を用いた場合と、用いない場合のモデル適応度関数O(τ)を示す。
図3(a)が観測反射波形そのままの状態を示し、図3(b)が差分波形S(t)を示している。
そして、図4(a)が観測反射波形そのままを用いてモデル適応度関数O(τ)を生成した場合であり、一方、図4(b)が差分波形S(τ)を用いてモデル適応度関数O(τ)を生成した場合である。
観測反射波形がそのままでは送信波形と反射波形とが干渉した状態となっており、観測反射波形及びモデル適応度関数O(τ)のいずれを用いても、埋設物からの反射時刻を同定することが容易でない。しかしながら、差分波形S(t)を用いることにより、送信波形の影響が除かれ、反射波形のピークが明確に検出されるため、反射時刻を容易に同定することができる。
【0034】
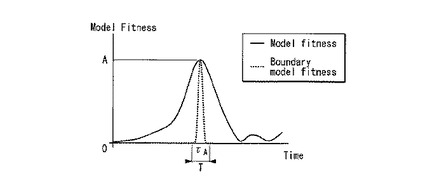
次に、ステップS7において、境界モデル適応度演算部14は、境界モデル適応度関数O’(τ)を図5に示すように、モデル適応関数O(τ)の強度の極大値(最大値)Aと、極大値Aにおける極大(最大)時刻τAとが維持(保存)された形状にて、所定の時間幅Tを有する境界モデル適応度関数(Boundary model fitness)O'(τ)に変換する。
ここで、境界モデル適応度演算部14は、モデル適応度関数O(τ)を所定の時間幅Tをもつ例えば正規分布のような分布に置き換える処理により、境界モデル適応度関数O'(τ)を生成する。
【0035】
次に、ユーザは、以下に示す逆投影画像を再構成する際に、画像処理を実行させる1ピクセルの大きさ、すなわち表示装置に表示させる画像の分解能を設定する。表示装置の表示画素を1×1として表示装置の画素と同一の分解能から、n×mの画素を1ピクセルとして設定する(n=mの場合も含む)。また、ピクセルの大きさは観測点の間隔とは独立に設定される数値である。
そして、逆投影像生成部15は、各観測点毎に、送信アンテナ111から送信される送信波の指向性に基づく楕円(送信アンテナ111および受信アンテナ112を焦点とする楕円)面全面に対し、境界モデル適応度関数O'(τ)の強度を、考慮点に対する信頼度を表す値として与え、逆投影画像を生成する。ここで、逆投影像生成部15は、時間差τを、マイクロ波の伝播速度を元に、深さ(地表面における観測点からの距離、すなわち送信波の指向方向に対応する楕円の径)に換算し、表示画像において対応するピクセルを考慮点として、この距離に対応する各考慮点に対して、対応する時間差τにおける境界モデル適応度関数O‘(τ)の強度値をそれぞれ付加する。
ここで、境界モデル適応度関数O'(τ)の時間幅によって規定される逆投影画像の厚さ(楕円面に対して垂直方向の厚さ)が広がりすぎると、後に中間画像を生成した際に、埋設物の位置が明確に特定できなくなるため、ある程度、逆投影画像の厚さ(図6のK)を薄くする必要がある。
しかしながら、時刻領域の時間幅Tを小さくし、厚さKを薄くし過ぎるとノイズの影響を受けやすくなるため、後述するように時刻領域の時間幅Tを調整する必要がある。
【0036】
そして、ステップS8において、逆投影像生成部15は、選択窓Dとして設定される領域中の隣接する複数、例えば隣接する3つの観測点に対し、複数の観測点からのすべての逆投影画像が重なり合う領域を重ね合わせたヒストグラム分布を中間画像として出力する。ここで、M個の観測点を含む選択窓Dを1つずつ隣接する観測点に対してシフトさせ、N個の総観測点に対して、N−M+1個の中間画像を生成する。
【0037】
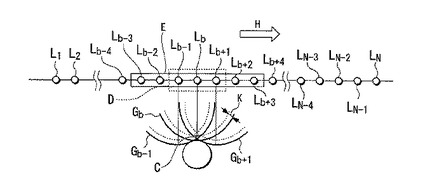
例えば、図6に示すように、逆投影像生成部15は、境界モデル適応度演算部14から、観測点L1,L2,…,Lb-4〜Lb+4,…,LN-4〜LNの各々の境界モデル適応度が入力されると,各々の観測点ごとに逆投影画像G1,G2,…,Gb-4〜Gb+4,GN-4〜GNを生成し、順次、選択窓Dにて選択された隣接する3つの逆投影画像が全て重なる共通領域Cのみを重ね合わせ、重なり合う各考慮点において、重なり合う全ての考慮点(観測点数Mであれば、M個の考慮点全て)が強度値を有する場合のみ強度値を加算して、この考慮点の集合を共通領域Cとして中間画像Fを生成する。ここで、逆投影像生成部15は、重なり合う考慮点において、いずれかの考慮点が強度値を有していない場合、重なり合う考慮点の強度値を「0」とし、共通領域がない、すなわち画像が無い状態とする。
すなわち、逆投影像生成部15は、観測点L1,L2,…,Lb-4〜Lb+4,…,LN4〜LNにおいて、隣接する3つの観測点、例えば観測点L1,L2及びL3を選択窓Dにて選択し、中間画像F2を生成すると、測定順の方向に選択窓Dを1つずつシフトし、観測点L2,L3及びL4を選択窓Dにて選択し、中間画像F3を生成する。この処理を繰り返し、選択窓Dによる観測点の全ての組合せにそれぞれの中間画像F*を生成する。
【0038】
このとき、重ね合わされる逆投影画像の厚さKが少ないと、選択窓D中の逆投影画像に対する中間画像での共通領域が無くなり、ステップS9における重ね合わせ処理において不十分な画像しか得られないため、中間画像での共通領域Cが無くならないように、境界モデル適応度関数O'(τ)の時間幅Tを調整する。
すなわち、逆投影像生成部15は、ステップS7とステップS8とを繰り返して、中間画像における共通領域Cが形成される状態となるように、境界モデル適応度関数O'(τ)の時間幅Tを調整する。
【0039】
調整時に得られる中間画像を図7に示す。この図7は、埋設物200を深さ80mmにある点状物質とし、座標としては、(x,z)=(0,80)の位置にあるとする。
また、総観測点数Nは、−100≦x≦100の範囲にある観測点の総数である。観測点数Mは、アンテナの指向性を考慮して設定される数であり、中間画像を生成するために用いる逆投影画像数、すなわち選択窓D中の観測点数である。σ2は境界モデル適応度の分散値(境界モデル適応度は正規分布として近似している)である。図7は観測点数Mと分散値σ2を変化させて、中間画像の形状をシミュレーションしたものである。
図7から判るように、分散値σ2を小さくすることにより、楕円面に付置された前記逆投影画像に対して垂直方向の広がりが少なくなり、中間画像における像の広がりが低減されることから、分散値と上記広がりとの関係が深いと考えられる。
しかし、σ2を小さくすると、すなわち、境界モデル適応度関数O'(τ)の時間幅Tを余り小さくすると、ノイズの影響等により画像がステップS9にて再構成されない可能性もあるため、上述したように、ステップS7とステップS8とを繰り返して、中間画像の共通領域Cが適当な大きさになるように調整する必要がある。
また、x軸方向に対する広がりには観測点数Mの関与が大きいことが判る。
【0040】
すなわち、中間画像は、埋設物200の深さと、観測点数Mと、分散値σ2と、によって形状が変化するが、特に分散値σ2が大きく関与していることが判る。
ここで、複数の観測点における画像を重ね合わせて中間画像を生成する際、選択窓Dにおける境界モデル適応度関数O’(τ)の観測点数Mと、マイクロ波の指向特性とを、予め対応付けたテーブルを用意し、逆投影像生成部15が、ユーザが入力する、少なくとも、前記マイクロ波の指向特性に対応した観測点数Mを上記テーブルから選択する。
上記選択窓D内の観測点数Mは、マイクロ波の指向性から考慮し、送信波に対する反射波を受信可能な範囲(距離)に入る観測点数として規定され、「観測点間の間隔×観測点数M」が上記選択窓の距離より小さくなるように設定する。しかしながら、下記に説明する選択窓Eとの関係において、[選択窓E内の観測点数R]>[選択窓D内の観測点数M]となるように、選択窓D内の観測点数Mを設定する。
また、埋設物200の埋設されている深さと大きさが予想される場合、重ね合わせに使用する選択窓D中の観測点数Mを、観測範囲と、マイクロ波の指向特性とに対応して予め設定されたテーブルを有していてもよい。
【0041】
次に、ステップS9において、逆投影像生成部15は、ステップS8にてマイクロ波の指向特性から決まる、考慮点Bを中心とする選択窓Eを算出し、選択窓Eによって選択された領域に含まれる複数の観測点の組み合わせから生成した前記中間画像Fを重ね合わせて考慮点Bに関するヒストグラム画像値を合成し、すべての考慮点に対して上記合成を繰り返して、逆投影ヒストグラム画像を生成する。すなわち、逆投影像生成部15は、選択窓Eの位置を一つの考慮点(ピクセル)ごとに、H方向にずらしながら、選択窓Eに含まれる観測点から生成された全中間画像Fの各ピクセル毎に、重なり合う各中間画像Fのピクセルの強度値を単純に加算していき、逆投影ヒストグラム画像を生成する。
このとき、選択窓Eに、観測点L1,L2,L3,L4が含まれる場合、中間画像F2及びF3が重なり合わせる対象の中間画像となり、逆投影像生成部15は、中間画像F2及びF3を重ならせ、選択窓Eの範囲にある重なり合ったピクセルのみ、それぞれの強度値を加算する処理を行い、選択窓Eの範囲外にあるピクセルの強度値を全て「0」とする。
そして、逆投影像生成部15は、選択窓Eを、観測点L1〜LNの範囲にあるピクセルにて、1ピクセルずつH方向にずらして、その時点で選択窓Eに含まれる観測点にて構成された中間画像の重なり合うピクセルの強度値の加算を行う。そして、逆投影像生成部15は、観測窓Eの最左端が観測点LNに移動して、その位置の中間画像の各ピクセルの加算処理が終了した後、各シフト位置の選択窓E毎に加算した結果を、全て重ね合わせることにより、逆投影ヒストグラム画像を生成する。
したがって、逆投影像生成部15は、ステップS8にて生成した中間画像Fを合成して、全ての中間画像の共通領域Cが重なりあった逆投影ヒストグラム画像を生成することとなる。
上記選択窓Eは、マイクロ波の指向性から考慮し、送信波に対する反射波を受信可能な範囲(距離)として規定している。そして、この距離内に含まれる観測点数Rを、R>M(選択窓Dの観測点数)の範囲内で設定し、上記各指向性毎に、対応する観測点数Rが記述されたテーブルを、逆投影像生成部15に設ける(R及びMは整数)。したがって、ユーザが指向性を入力することにより、逆投影像生成部15は、選択窓Eの範囲として、この指向性に対応する観測点数Rを、上記テーブルから読み出して用いる。
上述したように、逆投影像生成部15は、観測窓Dの場合と同様に、マイクロ波の指向特性と観測点数Rを示すテーブルを設けて、ユーザが入力するマイクロ波の指向特性に対応して、観測点数Rを読み出して、逆投影ヒストグラム画像を生成する。
上述した選択窓Eにより、中間画像を重ね合わせる際、反射波の受信されない距離にある領域のピクセルの強度値を「0」とし、観測点からの送信波に対して反射波が受信可能な距離のみのピクセルの強度値を加算しているため、受信可能な範囲外のノイズなどの影響を抑制することができる。
したがって、逆投影像生成部15は、ステップS8にて生成した中間画像F*を合成して、中間画像中の共通領域Cの中から埋設物が存在する可能性の高い領域のみを重ね合わせた画像として,逆投影ヒストグラム画像を生成することとなる。
図8(a)に示すように、境界モデル適応度関数O'(τ)を用いた逆投影ヒストグラム画像が、図8(b)に示すモデル適応度関数O(τ)を用いた逆投影ヒストグラム画像に比較して、埋設物200の位置,深さ及び形状をより明確に示す画像となり、埋設物200の位置,深さ及び形状を、従来例に比較して明確に再構成していることが判る。
【0042】
また、ステップS10において、位相検出部16は、相互相関ヒルベルト変換部13が出力する反射位相P(τ)、すなわち基準位相からの反射位相の位相差と、境界モデル適応度演算部が出力する極大時刻τAと、逆投影像生成部15が出力する逆投影ヒストグラム画像から、逆投影画像における極大値を与える領域における差分波形における位相P(τA)を算出する。
【0043】
そして、ステップS11において、埋設物材質推定部18は、反射位相P(τA)に対応して材質が設定された材質テーブルを有し、位相検出部16が出力するP(τA)、すなわち基準位相からの反射位相の位相差により、対応する材質を読みだして出力する。あるいは、ユーザが見て判定しても良い。
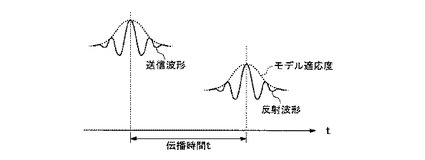
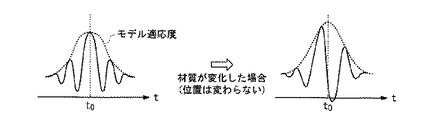
ここで、図9及び図10を用いて、反射位相の考え方を簡単に説明する。図9は、送信波形(送信波形データ)と反射波形(差分波形データ)との関係を示す波形図であり、縦軸は強度、横軸は時刻を示す。また、図10は材質による反射位相の変化を示す概念図である。
【0044】
送信波形が送信アンテナ111より発信されてから、受信アンテナ112が埋設物からの反射波を受信するまで時刻τかかっていることを示している。ここで、送信波及び反射波それぞれの上部に破線にて示されているのは包絡線、すなわちモデル適応度関数O(τ)である。送信波が発信されてから反射波が受信されるまでの時間は、上記モデル適応度関数O(τ)の極大値を基準として求められる。
既に述べたように、(6)式にて、反射位相P(τ)が求められるが、この(6)式における反射係数Γr及びΓiは、埋設物の材質による伝達特性(電気特性等により変化する)によって決定される。このため、送信波形及び反射波形の間の反射位相P(τ)の違いから、埋設物の電気特性を推定することができ、材質の弁別を行うことが可能となる。
【0045】
すなわち、図10に示すように、埋設物の位置が変化しないため、モデル適応度の極大値の時間的位置、すなわち極大時刻τAは変化することがない。
しかしながら、埋設物の材質の違いにより、モデル適応度関数O(τ)内における反射波形の極大値における位相(反射位相)が変化し、基準位相に対して位相差P(τA)が発生する。
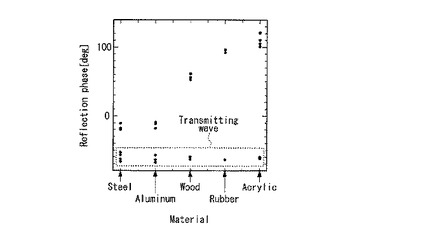
この位相差P(τA)の大きさに応じて、図11に示すように、金属(Steel,Aluminum)、木(Wood)、ゴム(Rubber)、樹脂(Acrylic)等の材質の違いにより反射波の位相が大きく異なっていることが判る。
そして、埋設物材質推定部18は、求めた位相差P(τA)に対応する材質を、内部の記憶部に記憶されたテーブルから読みだして、埋設物200の材質として出力する。
【図面の簡単な説明】
【0046】
【図1】本発明の一実施形態による非破壊探査装置の構成例を示すブロック図である。
【図2】図1の非破壊探査装置の動作例を示すフローチャートである。
【図3】図1における差分演算部12の動作を説明する波形図である。
【図4】図1における差分演算部12の動作を説明する波形図である。
【図5】図1における境界モデル適応度演算部14の動作を説明する波形図である。
【図6】図1における逆投影画像重なり部分抽出部16の動作を説明する概念図である。
【図7】図1の境界モデル適応度演算部14の動作を説明するシミュレーション図である。
【図8】モデル適応度関数O(τ)波形と境界モデル適応度関数O‘(τ)とを用いた逆投影ヒストグラム
【図9】図1における埋設物推定部18の動作を説明する波形図である。
【図10】図1における埋設物推定部18の動作を説明する概念図である。
【図11】図1における埋設物推定部18の動作を説明する概念図である。画像の比較を示す図である。
【符号の説明】
【0047】
1…非破壊探査装置
11…マイクロ波データ部
12…差分演算部
13…相互相関ヒルベルト変換部
14…境界モデル適応度演算部
15…逆投影生成部
16…位相検出部
18…埋設物材質推定部
100…媒質
111…送信アンテナ
112…受信アンテナ
200…埋設物
【技術分野】
【0001】
本発明は、コンクリートや地中などに埋設されている埋設物の位置及び深さを、電磁波を用いて探査する非破壊探査装置及びその方法並びにプログラムに関する。
【背景技術】
【0002】
従来、移動台車に搭載した発信器から、コンクリートや土などの媒体の表面に対し、マイクロ波を放射して、その反射波を受信器にて受信し、その反射波の伝播時間により媒体内部に埋設されている埋設物の位置及び深さを検出する探査方法がある(例えば、特許文献1参照)。
例えば、上記特許文献1に記載されている技術は、コンクリート等に埋設されている鉄筋の直径をマイクロ波レーダなどを用いて非破壊に測定するものである。
【特許文献1】特開平05−323026号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来例は、コンクリートに埋設されている鉄筋を測定対象としており、コンクリート壁面に埋設されている種々の材質の管の断面を画像化したり、管の材質を弁別したりすることはできなかった。
また、コンクリートにおける鉄筋の埋設位置は通常ある程度の深さをもっているが、種々の埋設管は壁表面から浅い位置にあるものもある。
従来の探査方法では、浅い位置の埋設物の観察において、送信波と埋設物による反射波とが重なるため、それらを検知するのは困難であった。
【0004】
本発明は、このような事情に鑑みてなされたもので、浅い位置に埋設されている埋設物の位置及び形状の検出を従来例に比較して高い精度で行い、かつ従来には行えなかった埋設物の材質の推定が行える非破壊探査装置及びその方法並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の非破壊探査装置は、媒体内に埋設されている埋設物を探査する非破壊探査装置であり、マイクロ波を送信波として発信し、反射波を受信するマイクロ波レーダ部と、媒体内に伝播する前記送信波からの反射波形を求め、反射波形から前記送信波形を減算して差分波形を求める差分計算部と、該差分波形及び送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、該複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する相互相関ヒルベルト変換部と、前記モデル適応度関数の時間差τにおける最大値及び最大値を与える時間差を保持し、所定の時間差幅を有する境界モデル適応度関数O’(τ)に変換する境界モデル適応度演算部と、各測定点毎の反射波の前記境界モデル適応度関数O’(τ)の時間差をマイクロ波の伝播速度を元に距離へ換算し、各考慮点における信頼度として、複数の反射波の境界モデル適応度関数O’(τ)をヒストグラムとして加え合わせ、その分布を逆投影画像として生成する逆投影像生成部と、前記逆投影画像においてヒストグラムの極大値を与える送信波形における反射位相を求める位相検出部とを有することを特徴とする。
【0006】
本発明の非破壊探査装置は、前記位相検出部が前記逆投影画像におけるヒストグラムの極大値を与える送信波形における位相を反射位相として出力することを特徴とする。
【0007】
本発明の非破壊探査装置は、前記埋設物の材質と、前記送信波形に対する反射位相との対応を示すテーブルを有し、求められた反射位相に対応した材質を該テーブルから読み出し出力する埋設物材質推定部をさらに有することを特徴とする。
【0008】
本発明の非破壊探査装置は、前記逆投影画像生成部において、ヒストグラムとして重ね合わせる境界モデル適応度関数O’(τ)の観測点数と、少なくとも、前記マイクロ波の指向特性と、逆投影を行う考慮点の位置とを、予め対応付けたテーブルを有していることを特徴とする。
【0009】
本発明の非破壊探査方法は、媒体内に埋設されている埋設物を探査する非破壊探査装置を用いた非破壊探査方法であり、マイクロ波レーダ部がマイクロ波を送信波として発信し、反射波を受信するマイクロ波送受信過程と、差分計算部が媒体内に伝播する前記送信波からの反射波形を求め、該反射波形から前記送信波の送信波形を減算して差分波形を求める差分計算過程と、相互相関ヒルベルト変換部が該差分波形及び送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する相互相関ヒルベルト変換過程と、境界モデル適応度演算部が前記モデル適応度関数O(τ)の時間差τにおける最大値、及び最大値を与える時間差を保持し、所定の時間幅の境界モデル適応度関数O’(τ)に変換する境界モデル適応度演算過程と、逆投影像生成部が各測定点毎の反射波の境界モデル適応度関数O’(τ)の時間差をマイクロ波の伝播速度を元に距離へ換算し、各考慮点における信頼度として、複数の反射波を考慮点においてヒストグラムとして加え合わせ、その分布を逆投影画像として生成する逆投影像生成過程と、位相検出部が前記逆投影画像においてヒストグラムの極大値を与える送信波形に対応する位相を求める位相検出過程とを有することを特徴とする。
【0010】
本発明のプログラムは、上記いずれかに記載の非破壊探査装置として、コンピュータを機能させるための非破壊探査プログラムである。
【発明の効果】
【0011】
以上説明したように、本発明によれば、送信波と反射波との干渉を受けずに、高い精度にて埋設物の埋設位置を特定することができ、かつ送信波の位相と反射波の位相との位相差から、埋設物の材質を推定することができる。
【発明を実施するための最良の形態】
【0012】
以下、図を用いて本発明の一実施形態の非破壊探査装置の説明を行う。図1は本発明の一実施形態による非破壊探査装置の構成例を示すブロック図である。
図1に示す構成は、コンクリートや土などの媒体100内に埋設されている埋設物200(水道配管,ガス配管,電線など)を探査する非破壊探査装置1であり、マイクロ波レーダ部11,差分計算部12,相互相関ヒルベルト変換部13,境界モデル適応度演算部14,逆投影像生成部15,位相検出部16,埋設物材質推定部18から構成されている。
【0013】
マイクロ波レーダ部11は、送信アンテナ111からマイクロ波を送信波として発信し、媒体100内に埋設されている埋設物200等からの反射波を受信アンテナ112により受信する。
差分計算部12は、媒体100内に伝播する上記送信波の同定送信波形を求め、かつ受信した反射波から上記同定送信波形を減算して差分波形を求める。
相互相関ヒルベルト変換部13は、該差分波形及び同定送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する。ここで、時間差τとは、媒質100内部において、マイクロ波を送信してから、埋設物200までの距離を反射波として往復するまでの伝播時間を示している。すなわち、モデル適応度関数O(τ)は、時間差毎における反射波の強度の分布を示している。
【0014】
境界モデル適応度演算部14は、上記モデル適応度関数O(τ)の時間差軸における最大値の位置(時刻)、すなわちモデル適応度関数O(τ)の包絡波形の最大値とを保持し、予め設定される所定の時間差τの幅に、例えばモデル適応度関数O(τ)の強度の最大値を分布の中心とする範囲を、予め設定した時間差τの範囲となるよう狭めることにより、モデル適応度関数O(τ)を境界モデル適応度関数O’(τ)に変換する。
逆投影像生成部15は、各観測点毎の反射波に対し、各反射波の複素反射係数から、送信アンテナ111から送信される送信波の指向性に基づく楕円(送信アンテナ111および受信アンテナ112を焦点とする楕円)面全面に対し、境界モデル適応度関数O’(τ)の時間差τをマイクロ波の伝播速度を元に距離(地表面の観測点から反射体、すなわち埋設物までの距離)へ換算し、各考慮点(画像表示におけるピクセル)の信頼度を表す値として、境界モデル適応度関数O’(τ)の強度値を、それぞれ時間差τに対応する距離の考慮点に与えて逆投影画像を生成する。このとき、逆投影像生成部15は、ユーザの指定により上記強度値をピクセルの階調度、あるいは強度値別に設定した色として与える。
また、逆投影像生成部15は、複数の逆投影像を選択する選択窓を、隣接する上記逆投影像毎にシフトさせ、シフトする毎に選択窓に含まれる逆投影像全てを重ならせて、共通部分を抽出して中間画像を生成する。
ここで、逆投影像生成部15は、シフト毎に得られた共通部分の中間画像をすべて重ね合わせ、位置,深さ及び形状を示す探査画像を生成する。
位相検出部16は、相互相関ヒルベルト変換部13が出力する反射位相と、境界モデル適応度演算部14が出力する極大時刻と、逆投影像生成部15が出力する探査画像から、逆投影画像における極大値を与える領域での差分波形の反射位相を出力する。
また、埋設物材質推定部18は、位相検出部16が出力する反射位相から、対応する埋設物の材質を推定する。
【0015】
次に、図1及び図2を用いて、本実施形態による破壊探査装置による埋設物の探査動作を説明する。図2は本実施形態による非破壊探査装置による埋設物の探査動作の例を示すフローチャートである。
ステップS1において、ユーザは、埋設物が埋設されていないことが明確な領域(図1の埋設物のない領域)において、マイクロ波レーダ部11から送信波を送信アンテナから媒質100に対して発信する。 これにより、マイクロ波レーダ部11は、媒質100から出射される送信波及び反射波(異なる媒質の境界面等、例えばコンクリートと土との境界面からの)を、受信アンテナ112により受信し、電気信号(あるいはデジタルデータ)に変換し、観測送信波形として差分演算部12へ出力する。
【0016】
そして、ステップS2において、差分演算部12は、マイクロ波レーダ部11から入力された観測送信波形を、波形形状を示す関数のパラメータを調整して、観測送信波形と形状が同様となる波形関数を求め(同定処理)、得られた波形関数を同定送信波形u(t)とする。
すなわち、差分演算部12は、埋設物がない領域における上記観測送信波形を、送信波の伝播及び埋設物200からの反射でない他からの反射波などのバックグラウンドノイズを含めて、同定送信波形u(t)として同定する。
【0017】
次に、ステップS3において、ユーザは、図1においてH方向に非破壊探査装置1を移動させ、埋設物200の探査処理を開始する。
ここで、ユーザは非破壊探査装置1を埋設物が埋設されている探査領域に移動させ、マイクロ波レーダ部11から送信波を送信アンテナから媒質100に対して発信する。
これにより、マイクロ波レーダ部11は、媒質100から出射される反射波を、受信アンテナ112により受信し、電気信号(あるいはデジタルデータ)に変換し、観測反射波形s(t)として差分演算部12へ出力する(観測波形の取得処理)。
【0018】
そして、ユーザは、順次H方向に対して、予め設定した間隔(例えば、10mm毎)にて配置された観測点毎に、マイクロ波レーダ部11から送信波を発信し、媒質100から出射される反射波(埋設物200にて送信波が反射して出射される反射波)を受信し、上述した観測波形として観測反射波形s(t)を取得する。
このとき、差分演算部12は、マイクロ波レーダ部11から入力される観測反射波形s(t)を各観測点に対応し、内部の記憶部に対して記憶する。
【0019】
次に、ステップS4において、予め設定された観測点における観測処理が終了すると、ユーザが探査演算処理の開始を指示する制御命令を非破壊探査装置1に対して入力する。
これにより、差分演算部12は、上記記憶部に記憶されている、各観測点毎の観測反射波形s(t)に対し、それぞれ観測反射波形s(t)から同定送信波形u(t)を減算し、差分波形S(t)を求める。
すなわち、観測反射波形s(t)から、反射波形及び干渉等のバックグラウンドノイズを除去して、反射波のみの波形を、観測波形である観測反射波形s(t)から抽出する。
このとき、差分演算部12は、観測反射波形s(t)と、同定送信波形u(t)との0点(強度及び時刻)を合わせて差し引いて差分波形S(t)を取得する。
また、同定送信波形u(t)が媒質100を伝播する際に、以下の(1)式に示す媒質100の伝達関数H(ω)、すなわち反射体などの伝播特性のモデルによって推定される推定波形を、推定波形S’(t)とする。上記伝達関数H(ω)は、送信波が媒質を通過して反射波となる、媒質の特性として定義される。
【0020】
【数1】
【0021】
上記(1)式において、Γiは実数部の反射係数であり、Γrは虚数部の反射係数であり、ωは角周波数を示す。
すべての観測点における差分波形S(t)の演算が終了すると、ステップS5及びステップS6において、相互相関ヒルベルト変換部13は、差分波形S(t)と推定波形S’(t)との2乗誤差をI(t)として、以下の(2)式により求める。
【0022】
【数2】
【0023】
上記(2)式において、uh(t−τ)は伝播波形データu(t−τ)をヒルベルト変換した関数である。また、S(ω)及びU(ω)はそれぞれ差分波形データS(t)、同定送信波形u(t)をフーリエ変換したものである。上記τは、送信波が送信された時刻と、反射波が戻ってくる時刻との時間差、すなわち電波が媒質100を伝播して埋設物200までの距離を往復する時間を示している。
この(2)式は差分波形S(t)と推定波形S'(t)との時間差τにおける一致度としても示され、相互相関ヒルベルト変換部13は、以下の(3)式によりモデル適応度関数O(τ)を求める。
【0024】
【数3】
【0025】
上記(3)式は、I(τ)が「0」すなわち、差分波形S(t)と推定波形S’(t)とが一致したとき最大値となる、差分波形S(t)と推定波形S’(t)との一致度を表す指標である。
ここで、相互相関ヒルベルト変換部13は、I(τ)を最小化する反射係数Γr及びΓiを、(2)式を展開して解析的に得られる(4)式により求める。
【0026】
【数4】
【0027】
上記(4)式において、ψus(τ)は差分波形S(t)と同定送信波形u(t)との相互相関関数である。この相互相関関数は、2つの信号波形の類似性,時間差を表すのに用いる関数である。
(4)式を(3)式に代入すると、以下に示す(5)式となり、相互相関ヒルベルト変換部13は、この(5)式によりモデル適応度(Model fitness)関数O(τ)を演算する。
すなわち、マイクロ波レーダの波形における周波数帯域は広く、通常、中心周波数を有するメキシカンハット型の周波数分布を有する送信波が用いられる。
このメキシカンハット型の反射波の波形の包絡線、すなわち、時間差毎の反射波形の強度を示す波形に対する包絡線である上記モデル適応度関数O(τ)を生成し、送信波に対し、埋設物から反射してくる反射波の伝播時間を測定し易いようにする。
【0028】
【数5】
【0029】
上記(5)式において、H(*)はヒルベルト変換を示す。
また、反射波データにおける反射位相P(τ)は、以下の(6)式に示され、相互相関ヒルベルト変換部13は、この(6)式により、反射位相P(τ)を演算する。
【0030】
【数6】
【0031】
ところで、規格化複素反射係数γ(τ)として、以下の(7)式を演算すると、
O(τ)=|γ(τ)|
P(τ)=∠γ(τ)
と一致することが判る。
【0032】
【数7】
【0033】
図3及び図4に観測反射波形から同定送信波形u(t)を差し引いた差分波形S(t)を用いた場合と、用いない場合のモデル適応度関数O(τ)を示す。
図3(a)が観測反射波形そのままの状態を示し、図3(b)が差分波形S(t)を示している。
そして、図4(a)が観測反射波形そのままを用いてモデル適応度関数O(τ)を生成した場合であり、一方、図4(b)が差分波形S(τ)を用いてモデル適応度関数O(τ)を生成した場合である。
観測反射波形がそのままでは送信波形と反射波形とが干渉した状態となっており、観測反射波形及びモデル適応度関数O(τ)のいずれを用いても、埋設物からの反射時刻を同定することが容易でない。しかしながら、差分波形S(t)を用いることにより、送信波形の影響が除かれ、反射波形のピークが明確に検出されるため、反射時刻を容易に同定することができる。
【0034】
次に、ステップS7において、境界モデル適応度演算部14は、境界モデル適応度関数O’(τ)を図5に示すように、モデル適応関数O(τ)の強度の極大値(最大値)Aと、極大値Aにおける極大(最大)時刻τAとが維持(保存)された形状にて、所定の時間幅Tを有する境界モデル適応度関数(Boundary model fitness)O'(τ)に変換する。
ここで、境界モデル適応度演算部14は、モデル適応度関数O(τ)を所定の時間幅Tをもつ例えば正規分布のような分布に置き換える処理により、境界モデル適応度関数O'(τ)を生成する。
【0035】
次に、ユーザは、以下に示す逆投影画像を再構成する際に、画像処理を実行させる1ピクセルの大きさ、すなわち表示装置に表示させる画像の分解能を設定する。表示装置の表示画素を1×1として表示装置の画素と同一の分解能から、n×mの画素を1ピクセルとして設定する(n=mの場合も含む)。また、ピクセルの大きさは観測点の間隔とは独立に設定される数値である。
そして、逆投影像生成部15は、各観測点毎に、送信アンテナ111から送信される送信波の指向性に基づく楕円(送信アンテナ111および受信アンテナ112を焦点とする楕円)面全面に対し、境界モデル適応度関数O'(τ)の強度を、考慮点に対する信頼度を表す値として与え、逆投影画像を生成する。ここで、逆投影像生成部15は、時間差τを、マイクロ波の伝播速度を元に、深さ(地表面における観測点からの距離、すなわち送信波の指向方向に対応する楕円の径)に換算し、表示画像において対応するピクセルを考慮点として、この距離に対応する各考慮点に対して、対応する時間差τにおける境界モデル適応度関数O‘(τ)の強度値をそれぞれ付加する。
ここで、境界モデル適応度関数O'(τ)の時間幅によって規定される逆投影画像の厚さ(楕円面に対して垂直方向の厚さ)が広がりすぎると、後に中間画像を生成した際に、埋設物の位置が明確に特定できなくなるため、ある程度、逆投影画像の厚さ(図6のK)を薄くする必要がある。
しかしながら、時刻領域の時間幅Tを小さくし、厚さKを薄くし過ぎるとノイズの影響を受けやすくなるため、後述するように時刻領域の時間幅Tを調整する必要がある。
【0036】
そして、ステップS8において、逆投影像生成部15は、選択窓Dとして設定される領域中の隣接する複数、例えば隣接する3つの観測点に対し、複数の観測点からのすべての逆投影画像が重なり合う領域を重ね合わせたヒストグラム分布を中間画像として出力する。ここで、M個の観測点を含む選択窓Dを1つずつ隣接する観測点に対してシフトさせ、N個の総観測点に対して、N−M+1個の中間画像を生成する。
【0037】
例えば、図6に示すように、逆投影像生成部15は、境界モデル適応度演算部14から、観測点L1,L2,…,Lb-4〜Lb+4,…,LN-4〜LNの各々の境界モデル適応度が入力されると,各々の観測点ごとに逆投影画像G1,G2,…,Gb-4〜Gb+4,GN-4〜GNを生成し、順次、選択窓Dにて選択された隣接する3つの逆投影画像が全て重なる共通領域Cのみを重ね合わせ、重なり合う各考慮点において、重なり合う全ての考慮点(観測点数Mであれば、M個の考慮点全て)が強度値を有する場合のみ強度値を加算して、この考慮点の集合を共通領域Cとして中間画像Fを生成する。ここで、逆投影像生成部15は、重なり合う考慮点において、いずれかの考慮点が強度値を有していない場合、重なり合う考慮点の強度値を「0」とし、共通領域がない、すなわち画像が無い状態とする。
すなわち、逆投影像生成部15は、観測点L1,L2,…,Lb-4〜Lb+4,…,LN4〜LNにおいて、隣接する3つの観測点、例えば観測点L1,L2及びL3を選択窓Dにて選択し、中間画像F2を生成すると、測定順の方向に選択窓Dを1つずつシフトし、観測点L2,L3及びL4を選択窓Dにて選択し、中間画像F3を生成する。この処理を繰り返し、選択窓Dによる観測点の全ての組合せにそれぞれの中間画像F*を生成する。
【0038】
このとき、重ね合わされる逆投影画像の厚さKが少ないと、選択窓D中の逆投影画像に対する中間画像での共通領域が無くなり、ステップS9における重ね合わせ処理において不十分な画像しか得られないため、中間画像での共通領域Cが無くならないように、境界モデル適応度関数O'(τ)の時間幅Tを調整する。
すなわち、逆投影像生成部15は、ステップS7とステップS8とを繰り返して、中間画像における共通領域Cが形成される状態となるように、境界モデル適応度関数O'(τ)の時間幅Tを調整する。
【0039】
調整時に得られる中間画像を図7に示す。この図7は、埋設物200を深さ80mmにある点状物質とし、座標としては、(x,z)=(0,80)の位置にあるとする。
また、総観測点数Nは、−100≦x≦100の範囲にある観測点の総数である。観測点数Mは、アンテナの指向性を考慮して設定される数であり、中間画像を生成するために用いる逆投影画像数、すなわち選択窓D中の観測点数である。σ2は境界モデル適応度の分散値(境界モデル適応度は正規分布として近似している)である。図7は観測点数Mと分散値σ2を変化させて、中間画像の形状をシミュレーションしたものである。
図7から判るように、分散値σ2を小さくすることにより、楕円面に付置された前記逆投影画像に対して垂直方向の広がりが少なくなり、中間画像における像の広がりが低減されることから、分散値と上記広がりとの関係が深いと考えられる。
しかし、σ2を小さくすると、すなわち、境界モデル適応度関数O'(τ)の時間幅Tを余り小さくすると、ノイズの影響等により画像がステップS9にて再構成されない可能性もあるため、上述したように、ステップS7とステップS8とを繰り返して、中間画像の共通領域Cが適当な大きさになるように調整する必要がある。
また、x軸方向に対する広がりには観測点数Mの関与が大きいことが判る。
【0040】
すなわち、中間画像は、埋設物200の深さと、観測点数Mと、分散値σ2と、によって形状が変化するが、特に分散値σ2が大きく関与していることが判る。
ここで、複数の観測点における画像を重ね合わせて中間画像を生成する際、選択窓Dにおける境界モデル適応度関数O’(τ)の観測点数Mと、マイクロ波の指向特性とを、予め対応付けたテーブルを用意し、逆投影像生成部15が、ユーザが入力する、少なくとも、前記マイクロ波の指向特性に対応した観測点数Mを上記テーブルから選択する。
上記選択窓D内の観測点数Mは、マイクロ波の指向性から考慮し、送信波に対する反射波を受信可能な範囲(距離)に入る観測点数として規定され、「観測点間の間隔×観測点数M」が上記選択窓の距離より小さくなるように設定する。しかしながら、下記に説明する選択窓Eとの関係において、[選択窓E内の観測点数R]>[選択窓D内の観測点数M]となるように、選択窓D内の観測点数Mを設定する。
また、埋設物200の埋設されている深さと大きさが予想される場合、重ね合わせに使用する選択窓D中の観測点数Mを、観測範囲と、マイクロ波の指向特性とに対応して予め設定されたテーブルを有していてもよい。
【0041】
次に、ステップS9において、逆投影像生成部15は、ステップS8にてマイクロ波の指向特性から決まる、考慮点Bを中心とする選択窓Eを算出し、選択窓Eによって選択された領域に含まれる複数の観測点の組み合わせから生成した前記中間画像Fを重ね合わせて考慮点Bに関するヒストグラム画像値を合成し、すべての考慮点に対して上記合成を繰り返して、逆投影ヒストグラム画像を生成する。すなわち、逆投影像生成部15は、選択窓Eの位置を一つの考慮点(ピクセル)ごとに、H方向にずらしながら、選択窓Eに含まれる観測点から生成された全中間画像Fの各ピクセル毎に、重なり合う各中間画像Fのピクセルの強度値を単純に加算していき、逆投影ヒストグラム画像を生成する。
このとき、選択窓Eに、観測点L1,L2,L3,L4が含まれる場合、中間画像F2及びF3が重なり合わせる対象の中間画像となり、逆投影像生成部15は、中間画像F2及びF3を重ならせ、選択窓Eの範囲にある重なり合ったピクセルのみ、それぞれの強度値を加算する処理を行い、選択窓Eの範囲外にあるピクセルの強度値を全て「0」とする。
そして、逆投影像生成部15は、選択窓Eを、観測点L1〜LNの範囲にあるピクセルにて、1ピクセルずつH方向にずらして、その時点で選択窓Eに含まれる観測点にて構成された中間画像の重なり合うピクセルの強度値の加算を行う。そして、逆投影像生成部15は、観測窓Eの最左端が観測点LNに移動して、その位置の中間画像の各ピクセルの加算処理が終了した後、各シフト位置の選択窓E毎に加算した結果を、全て重ね合わせることにより、逆投影ヒストグラム画像を生成する。
したがって、逆投影像生成部15は、ステップS8にて生成した中間画像Fを合成して、全ての中間画像の共通領域Cが重なりあった逆投影ヒストグラム画像を生成することとなる。
上記選択窓Eは、マイクロ波の指向性から考慮し、送信波に対する反射波を受信可能な範囲(距離)として規定している。そして、この距離内に含まれる観測点数Rを、R>M(選択窓Dの観測点数)の範囲内で設定し、上記各指向性毎に、対応する観測点数Rが記述されたテーブルを、逆投影像生成部15に設ける(R及びMは整数)。したがって、ユーザが指向性を入力することにより、逆投影像生成部15は、選択窓Eの範囲として、この指向性に対応する観測点数Rを、上記テーブルから読み出して用いる。
上述したように、逆投影像生成部15は、観測窓Dの場合と同様に、マイクロ波の指向特性と観測点数Rを示すテーブルを設けて、ユーザが入力するマイクロ波の指向特性に対応して、観測点数Rを読み出して、逆投影ヒストグラム画像を生成する。
上述した選択窓Eにより、中間画像を重ね合わせる際、反射波の受信されない距離にある領域のピクセルの強度値を「0」とし、観測点からの送信波に対して反射波が受信可能な距離のみのピクセルの強度値を加算しているため、受信可能な範囲外のノイズなどの影響を抑制することができる。
したがって、逆投影像生成部15は、ステップS8にて生成した中間画像F*を合成して、中間画像中の共通領域Cの中から埋設物が存在する可能性の高い領域のみを重ね合わせた画像として,逆投影ヒストグラム画像を生成することとなる。
図8(a)に示すように、境界モデル適応度関数O'(τ)を用いた逆投影ヒストグラム画像が、図8(b)に示すモデル適応度関数O(τ)を用いた逆投影ヒストグラム画像に比較して、埋設物200の位置,深さ及び形状をより明確に示す画像となり、埋設物200の位置,深さ及び形状を、従来例に比較して明確に再構成していることが判る。
【0042】
また、ステップS10において、位相検出部16は、相互相関ヒルベルト変換部13が出力する反射位相P(τ)、すなわち基準位相からの反射位相の位相差と、境界モデル適応度演算部が出力する極大時刻τAと、逆投影像生成部15が出力する逆投影ヒストグラム画像から、逆投影画像における極大値を与える領域における差分波形における位相P(τA)を算出する。
【0043】
そして、ステップS11において、埋設物材質推定部18は、反射位相P(τA)に対応して材質が設定された材質テーブルを有し、位相検出部16が出力するP(τA)、すなわち基準位相からの反射位相の位相差により、対応する材質を読みだして出力する。あるいは、ユーザが見て判定しても良い。
ここで、図9及び図10を用いて、反射位相の考え方を簡単に説明する。図9は、送信波形(送信波形データ)と反射波形(差分波形データ)との関係を示す波形図であり、縦軸は強度、横軸は時刻を示す。また、図10は材質による反射位相の変化を示す概念図である。
【0044】
送信波形が送信アンテナ111より発信されてから、受信アンテナ112が埋設物からの反射波を受信するまで時刻τかかっていることを示している。ここで、送信波及び反射波それぞれの上部に破線にて示されているのは包絡線、すなわちモデル適応度関数O(τ)である。送信波が発信されてから反射波が受信されるまでの時間は、上記モデル適応度関数O(τ)の極大値を基準として求められる。
既に述べたように、(6)式にて、反射位相P(τ)が求められるが、この(6)式における反射係数Γr及びΓiは、埋設物の材質による伝達特性(電気特性等により変化する)によって決定される。このため、送信波形及び反射波形の間の反射位相P(τ)の違いから、埋設物の電気特性を推定することができ、材質の弁別を行うことが可能となる。
【0045】
すなわち、図10に示すように、埋設物の位置が変化しないため、モデル適応度の極大値の時間的位置、すなわち極大時刻τAは変化することがない。
しかしながら、埋設物の材質の違いにより、モデル適応度関数O(τ)内における反射波形の極大値における位相(反射位相)が変化し、基準位相に対して位相差P(τA)が発生する。
この位相差P(τA)の大きさに応じて、図11に示すように、金属(Steel,Aluminum)、木(Wood)、ゴム(Rubber)、樹脂(Acrylic)等の材質の違いにより反射波の位相が大きく異なっていることが判る。
そして、埋設物材質推定部18は、求めた位相差P(τA)に対応する材質を、内部の記憶部に記憶されたテーブルから読みだして、埋設物200の材質として出力する。
【図面の簡単な説明】
【0046】
【図1】本発明の一実施形態による非破壊探査装置の構成例を示すブロック図である。
【図2】図1の非破壊探査装置の動作例を示すフローチャートである。
【図3】図1における差分演算部12の動作を説明する波形図である。
【図4】図1における差分演算部12の動作を説明する波形図である。
【図5】図1における境界モデル適応度演算部14の動作を説明する波形図である。
【図6】図1における逆投影画像重なり部分抽出部16の動作を説明する概念図である。
【図7】図1の境界モデル適応度演算部14の動作を説明するシミュレーション図である。
【図8】モデル適応度関数O(τ)波形と境界モデル適応度関数O‘(τ)とを用いた逆投影ヒストグラム
【図9】図1における埋設物推定部18の動作を説明する波形図である。
【図10】図1における埋設物推定部18の動作を説明する概念図である。
【図11】図1における埋設物推定部18の動作を説明する概念図である。画像の比較を示す図である。
【符号の説明】
【0047】
1…非破壊探査装置
11…マイクロ波データ部
12…差分演算部
13…相互相関ヒルベルト変換部
14…境界モデル適応度演算部
15…逆投影生成部
16…位相検出部
18…埋設物材質推定部
100…媒質
111…送信アンテナ
112…受信アンテナ
200…埋設物
【特許請求の範囲】
【請求項1】
媒体内に埋設されている埋設物を探査する非破壊探査装置であり、
マイクロ波を送信波として発信し、反射波を受信するマイクロ波レーダ部と、
媒体内に伝播する前記送信波からの反射波形を求め、反射波形から前記送信波形を減算して差分波形を求める差分演算部と、
該差分波形及び送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、該複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する相互相関ヒルベルト変換部と、
前記モデル適応度関数の時間差τにおける最大値及び最大値を与える時間差を保持し、所定の時間差幅を有する境界モデル適応度関数O’(τ)に変換する境界モデル適応度演算部と、
各測定点毎の反射波の前記境界モデル適応度関数O’(τ)の時間差をマイクロ波の伝播速度を元に距離へ換算し、各考慮点における信頼度を表す値として、複数の反射波の境界モデル適応度関数O’(τ)をヒストグラムとして重ね合わせ、その分布を逆投影画像として生成する逆投影像生成部と、
前記逆投影画像においてヒストグラムの極大値を与える送信波形における反射位相を求める位相検出部と
を有することを特徴とする非破壊探査装置。
【請求項2】
前記位相検出部が前記逆投影画像におけるヒストグラムの極大値を与える送信波形における位相を反射位相として出力することを特徴とする請求項1記載の非破壊探査装置。
【請求項3】
前記埋設物の材質と、前記送信波形に対する反射位相との対応を示すテーブルを有し、求められた反射位相に対応した材質を該テーブルから読み出し出力する埋設物材質推定部をさらに有することを特徴とする請求項2記載の非破壊探査装置。
【請求項4】
前記逆投影像生成部において、ヒストグラムとして重ね合わせる境界モデル適応度関数O’(τ)の観測点数と、少なくとも、前記マイクロ波の指向特性と、前記逆投影を行う考慮点の位置とを、予め対応付けたテーブルを有していることを特徴とする請求項1から請求項3のいずれかに記載の非破壊探査装置。
【請求項5】
媒体内に埋設されている埋設物を探査する非破壊探査装置を用いた非破壊探査方法であり、
マイクロ波レーダ部がマイクロ波を送信波として発信し、反射波を受信するマイクロ波送受信過程と、
差分計算部が媒体内に伝播する前記送信波からの反射波形を求め、該反射波形から前記送信波の送信波形を減算して差分波形を求める差分計算過程と、
相互相関ヒルベルト変換部が該差分波形及び送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する相互相関ヒルベルト変換過程と、
境界モデル適応度演算部が前記モデル適応度関数O(τ)の時間差τにおける最大値、及び最大値を与える時間差を保持し、所定の時間幅の境界モデル適応度関数O’(τ)に変換する境界モデル適応度演算過程と、
逆投影像生成部が各測定点毎の反射波の境界モデル適応度関数O’(τ)の時間差をマイクロ波の伝播速度を元に距離へ換算し、各考慮点における信頼度として、複数の反射波を考慮点においてヒストグラムとして加え合わせ、その分布を逆投影画像として生成する逆投影像生成過程と、
位相検出部が前記逆投影画像においてヒストグラムの極大値を与える送信波形に対応する位相を求める位相検出過程と
を有することを特徴とする非破壊探査方法。
【請求項6】
請求項1から請求項4のいずれかに記載の非破壊探査装置として、コンピュータを機能させるための非破壊探査プログラム。
【請求項1】
媒体内に埋設されている埋設物を探査する非破壊探査装置であり、
マイクロ波を送信波として発信し、反射波を受信するマイクロ波レーダ部と、
媒体内に伝播する前記送信波からの反射波形を求め、反射波形から前記送信波形を減算して差分波形を求める差分演算部と、
該差分波形及び送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、該複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する相互相関ヒルベルト変換部と、
前記モデル適応度関数の時間差τにおける最大値及び最大値を与える時間差を保持し、所定の時間差幅を有する境界モデル適応度関数O’(τ)に変換する境界モデル適応度演算部と、
各測定点毎の反射波の前記境界モデル適応度関数O’(τ)の時間差をマイクロ波の伝播速度を元に距離へ換算し、各考慮点における信頼度を表す値として、複数の反射波の境界モデル適応度関数O’(τ)をヒストグラムとして重ね合わせ、その分布を逆投影画像として生成する逆投影像生成部と、
前記逆投影画像においてヒストグラムの極大値を与える送信波形における反射位相を求める位相検出部と
を有することを特徴とする非破壊探査装置。
【請求項2】
前記位相検出部が前記逆投影画像におけるヒストグラムの極大値を与える送信波形における位相を反射位相として出力することを特徴とする請求項1記載の非破壊探査装置。
【請求項3】
前記埋設物の材質と、前記送信波形に対する反射位相との対応を示すテーブルを有し、求められた反射位相に対応した材質を該テーブルから読み出し出力する埋設物材質推定部をさらに有することを特徴とする請求項2記載の非破壊探査装置。
【請求項4】
前記逆投影像生成部において、ヒストグラムとして重ね合わせる境界モデル適応度関数O’(τ)の観測点数と、少なくとも、前記マイクロ波の指向特性と、前記逆投影を行う考慮点の位置とを、予め対応付けたテーブルを有していることを特徴とする請求項1から請求項3のいずれかに記載の非破壊探査装置。
【請求項5】
媒体内に埋設されている埋設物を探査する非破壊探査装置を用いた非破壊探査方法であり、
マイクロ波レーダ部がマイクロ波を送信波として発信し、反射波を受信するマイクロ波送受信過程と、
差分計算部が媒体内に伝播する前記送信波からの反射波形を求め、該反射波形から前記送信波の送信波形を減算して差分波形を求める差分計算過程と、
相互相関ヒルベルト変換部が該差分波形及び送信波形の相互相関を求め、該相互相関のヒルベルト変換を行い、複素反射係数を求め、複素反射係数の絶対値からなるモデル適応度関数O(τ)を出力する相互相関ヒルベルト変換過程と、
境界モデル適応度演算部が前記モデル適応度関数O(τ)の時間差τにおける最大値、及び最大値を与える時間差を保持し、所定の時間幅の境界モデル適応度関数O’(τ)に変換する境界モデル適応度演算過程と、
逆投影像生成部が各測定点毎の反射波の境界モデル適応度関数O’(τ)の時間差をマイクロ波の伝播速度を元に距離へ換算し、各考慮点における信頼度として、複数の反射波を考慮点においてヒストグラムとして加え合わせ、その分布を逆投影画像として生成する逆投影像生成過程と、
位相検出部が前記逆投影画像においてヒストグラムの極大値を与える送信波形に対応する位相を求める位相検出過程と
を有することを特徴とする非破壊探査方法。
【請求項6】
請求項1から請求項4のいずれかに記載の非破壊探査装置として、コンピュータを機能させるための非破壊探査プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2008−82971(P2008−82971A)
【公開日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願番号】特願2006−265711(P2006−265711)
【出願日】平成18年9月28日(2006.9.28)
【出願人】(593063161)株式会社NTTファシリティーズ (475)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願日】平成18年9月28日(2006.9.28)
【出願人】(593063161)株式会社NTTファシリティーズ (475)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]