
非破壊検査装置、非破壊検査システム及び非破壊検査用車両
【課題】目的に応じた解析手法の確立、並びに精度とスピードの両立を図った、実用的な非破壊検査装置を提供する。
【解決手段】検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データDを受け付けるデータ受付手段61と、受け付けた反射波データDと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データDを複数の基本反射波に分離する反射波分離手段62と、反射波分離手段62によって分離した基本反射波のうち特定の検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから検査項目に係る所定の被検値を算出する一又は複数の目的別解析モジュール63と、検査項目の設定・入力等を受け付ける設定入力手段64とを備え、検査項目に関連する基本反射波に基づく被検値Doutの算出を行わせる。
【解決手段】検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データDを受け付けるデータ受付手段61と、受け付けた反射波データDと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データDを複数の基本反射波に分離する反射波分離手段62と、反射波分離手段62によって分離した基本反射波のうち特定の検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから検査項目に係る所定の被検値を算出する一又は複数の目的別解析モジュール63と、検査項目の設定・入力等を受け付ける設定入力手段64とを備え、検査項目に関連する基本反射波に基づく被検値Doutの算出を行わせる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、高速道路や各種の一般道路の健全度診断等に特に好適に利用される非破壊検査装置、非破壊検査システム及び非破壊検査用車両等に関するものである。
【背景技術】
【0002】
この種のコンクリート構造物の非破壊検査方法として、本発明者は特許文献1、2等において、コンクリート構造物の表面に対向して設けた送信アンテナから電磁波を前記コンクリート構造物に向けて発信し、前記コンクリート構造物の内部に存在する媒質非連続箇所で反射した電磁波を前記コンクリート構造物の表面に対向して設けた受信アンテナで受波信号として検出することによりコンクリート構造物の内部構造を検査する検査方法を開示した。
【0003】
この方法は、取得した時系列の反射波データに対して、解析ソフトを適用することにより、前記コンクリート構造物の内部の一つ以上の前記媒質非連続箇所で反射した電磁波の反射波から形成される前記受波信号の波形(受信信号波形)と、前記コンクリート構造物の内部の一つ以上の前記媒質非連続箇所の存在から理論的及び/又は実験的に予測される予測受波信号の波形(予測信号波形)とのパターンマッチングを行い、前記媒質非連続箇所を検出するものである。
【0004】
ここに言う媒質非連続箇所には、具体的には舗装材と床版との界面のほか、鉄骨、鉄筋、異物、クラック、空隙等が存在する部位における周辺媒質との界面を想定しており、コンクリート構造物中にこれらの媒質非連続箇所が存在すると、電磁波はこれらの媒質非連続箇所で反射する。従って、媒質非連続箇所がコンクリート構造物中に種々の状態で存在するとの仮説の下に作成した予測信号波形と、実際に受信アンテナで受信した受信信号波形とのパターンマッチングを図り、パターンマッチングが最も良好になる予測信号波形を求めると、この予測信号波形を与える媒質非連続箇所の状態が、現実のコンクリート構造物中に生起している媒質非連続箇所の状態であると判断することができる。
【0005】
したがって、鉄骨、鉄筋、異物、クラック、穴等がコンクリート構造物中に存在することで媒質非連続箇所が生じている場合、これらの位置の計測を、旧来の打音検査方法等に比べて遥かに短時間で高信頼度の下に高精度に行うことが可能となる。更に、媒質非連続箇所が深さ方向に複数箇所存在しても、各媒質非連続箇所を個別に検出して、それぞれの位置を計測することが可能である。
【特許文献1】特開2003−207463号公報
【特許文献2】特開2008−39429号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
このように、電磁波を用いた非破壊検査手法は、旧来の検査方法と比べて効率、信頼性、精度の面で飛躍的な進歩をもたらす可能性を秘めたものである。とは言え、いくつかの仮説に基づくパターンマッチングからコンクリート内部状況の診断項目全ての一覧を得る過程は、厳格な計算に基づくほど計算処理量を大幅に増加させる。コンピュータのハードウェア資源の性能を向上させ、或いはパターンマッチングのアルゴリズム自体に改良を重ねれば、精度を損なわずに検査のリアルタイム性を追求する可能性は勿論あるが、比較的手近な手法を通じて、検査精度と検査スピードとの両立を図るための実用的な手法を検討することも極めて重要である。
【0007】
加えて、複数の媒質を通過して受信される受信波の伝播時間や一次結合係数には多くの情報が重畳しており、予測信号波形の立て方、マッチングの結果得られる一次結合係数や伝播時間の解釈の仕方次第で、いかようにも取り扱えるものである。したがって、検査対象であるコンクリート構造物の内部構造や特質を踏まえた明確なアプローチを欠けば、実状とかけ離れた結論が導き出され、いかに優れた検査方法と言えども、得られるデータは意味をなさなくなる場合もある。
【0008】
特に、高速道路や一般道路の保守点検等においては、長距離に亘る路面を形成するコンクリート構造物の劣化状況を舗装を剥がさずに短時間にデータ収集して早期に診断できることが重要であり、このような目的に合致して的確で高効率の検査を可能にする具体的な検査装置、検査システム作りが希求される。
【0009】
本発明は、このような着眼に立ち、実施に向けて非破壊検査の合理性および具体的妥当性を追求するとともに、目的に応じた解析手法の確立、並びに検査精度とスピードの両立を図った、実用的な非破壊検査装置、非破壊検査システム及び非破壊検査車両等を新たに提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明は、かかる目的を達成するために、次のような手段を講じたものである。
【0011】
すなわち、本発明の非破壊検査装置は、検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データを受け付けるデータ受付手段と、受け付けた前記反射波データと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データを複数の基本反射波に分離する反射波分離手段と、前記反射波分離手段によって分離した基本反射波のうち特定の検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから前記検査項目に係る所定の被検値を算出する一又は複数の目的別解析モジュールと、検査項目の設定・入力等を受け付ける設定入力手段とを具備し、この設定入力手段において受け付けた検査項目に対応する前記特定の目的別解析モジュールを起動させて、当該検査項目に関連する基本反射波に基づく被検値の算出を行わせるようにしていることを特徴とする
【0012】
このように構成すると、設定入力手段において特定の検査項目の設定・入力があった場合に、対応する目的別解析モジュールが起動して、反射波分離手段によって分離した基本反射波のうち関連する基本反射波の伝播時間や一次結合係数から特定の検査項目に係る被検値を算出するので、目的別解析モジュールのアルゴリズムが目的ごとの計算負荷の少ない簡素なものでよく、被検値の算出に要する時間は主として反射波分離手段および特定の目的別解析モジュールの作動時間を加えたもので足る。しかも、引き続き他の目的別解析モジュールが起動する場合には、既に実行した反射波分離手段の分離結果が利用可能であるため、計算負荷は激減する。このように、共通の反射波分離プロセスを経た後に、目的・用途に合致するアルゴリズムごとの目的別解析モジュールを起動させるので、短時間で効率の良い検査を適宜必要に応じて行うことが可能となる。
【0013】
より高精度の検査等を可能にするためには、前記反射波分離手段によって分離した基本反射波のうち特定の検査項目に関連する基本反射波以外の基本反射波に係る伝播時間や一次結合係数等の数値データを固定した状態で、当該特定の検査項目に関連する基本反射波を更に細分化してその数、伝播時間、一次結合係数を変数とする予測信号波形と実際の反射波データとの間で再度パターンマッチングを行う反射波再分離部をさらに備え、この反射波再分離部で再分離した基本反射波の数値データに基づき前記目的別解析モジュールに更に詳細な被検値の算出を実行させるようにしていることが望ましい。
【0014】
すなわち、反射波分離手段で分離した基本反射波を更に詳細に解析する場合や、反射波分離手段で分離した基本反射波の伝播時間や一次結合係数をそのまま利用できない場合には、他の基本反射波に対しては既に得られた伝播時間や一次結合係数を固定した状態で、反射波再分離部が新たな仮説に基づき特定の検査項目に関連する基本反射波を再分離するので、局所的あるいは限定的なパターンマッチングを通じて特定の検査項目に関するより精度の高い被検値を有効に算出することができる。この場合、変数が減り、計算負荷が激減するため、計算プロセスの増加が処理スピードに及ぼす影響はわずかで済む。
【0015】
目的別解析モジュールの好ましい実施の態様としては、以下のようなものが挙げられる。
【0016】
舗装材と床版との界面付近に生じる浮遊を捉えるために必要な一又は二以上の基本反射波に関する数値データを取得して、当該一の基本反射波の大きさ、又は浮遊部分に生じる空隙における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて舗装材の浮きに関する所定の被検値を算出するように構成されたアスファルト浮遊解析モジュール。
【0017】
コンクリート構造物中に生じるクラックを捉えるために必要な一又は二以上の基本反射波に関する数値データを取得して、当該一の基本反射波の大きさ、又はクラック内部における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいてクラックに関する所定の被検値を算出するように構成されたクラック解析モジュール。
【0018】
コンクリート構造物中の鉄筋の深さ方向の位置を捉えるために必要な二以上の基本反射波に関する数値データを取得して、鉄筋上にかぶっている媒質の比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて鉄筋上の媒質の被覆に関する所定の被検値を算出するように構成された鉄筋被覆解析モジュール。
【0019】
コンクリート構造物中に存する交差鉄筋を構成する縦筋および横筋からの反射波に対応する基本反射波を異なる波形として取り扱うものであって、それらの鉄筋の各々の腐食を捉えるために必要な一又は二以上の基本反射波に関する数値データを各々の鉄筋について取得して、当該一の基本反射波の大きさ、又は腐食部における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて各々の鉄筋の腐食に関する所定の被検値を同時に算出するように構成された鉄筋腐食解析モジュール。
【0020】
特定の媒質の上下両面で反射する二以上の基本反射波に関する数値データを取得して、当該二以上の基本反射波の前記媒質における伝播時間差に基づいて少なくとも媒質中の水分含有率を計測するために必要な被検値を算出するように構成された堆水解析モジュール。
【0021】
特定の媒質の上下両面で反射する二以上の基本反射波に関する数値データを取得して、当該二以上の基本反射波の大きさに基づき、特定の基本反射波が特定の媒質を通過したときの電磁波の減衰率を、当該媒質中の塩化物イオン含浸率を相対評価するための被検値として算出するように構成された塩害解析モジュール。
【0022】
これらにおいて、特定の媒質が床版又は舗装材であって、内部が性質の異なる複数の床版層又はアスファルト層の積層構造からなる場合に、前記目的別解析モジュールに、各層ごとに上下両面で反射する基本反射波に関する数値データを取得させ、各々の層毎の被検値を算出させるように構成している堆水解析モジュール又は塩害解析モジュール。
【0023】
特定の媒質が鉄筋を内有する床版である場合に、当該床版が鉄筋によって床版上面から鉄筋までの区画、鉄筋から床版底面までの区画の2つに分割されているとみなして、各区画ごとに上下両面で反射する基本反射波に関する数値データを取得し、各々の区画毎の被検値を算出するように構成された上記の堆水解析モジュール又は塩害解析モジュール。
【0024】
事後的に検査位置とデータとの関連づけを容易とするためには、データ受付手段が、反射波データに関連づけられた検査位置特定情報を同時に受け付けるものであり、算出した被検値を検査位置特定情報に基づきマップ化するマップ生成手段を更に具備していることが望ましい。
【0025】
このように構成すると、被検値が検査位置特定情報に基づきマップ生成手段によってマップ化され、異常場所をマップ上で確認できるので、必ずしも反射波データを取得した場所において解析を行う必要はない。したがって、特定の被検値に対して現場で粗いスクリーニングを行い、必要に応じてスポット的に詳しい追加検査を実施するなど、効率的な運用を図ることが可能になる。
【0026】
特に好ましくは、データ受付手段が、2次元方向にマトリクス状の複数の計測ポイントで得られる反射波データを受け付け、マップ生成手段が各計測ポイント毎の被検値を2次元マップ上にプロットするものであることが有用である。
【0027】
迅速にデータを取得するとともに、随時随所における解析の機会を得るためには、検査対象となるコンクリート構造物の舗装表面に対し電磁波を照射することによって反射波データを取得する電磁波探査手段と、電磁波探査した測定ポイントに関する検査位置特定情報を取得する位置情報取得手段と、これらの反射波データ及び検査位置特定情報を関連づけて記憶する記憶手段とを非破壊検査車両に搭載するとともに、この記憶手段に記憶した反射波データ及び検査位置特定情報を上記何れかに記載の非破壊検査装置にデータ入力して非破壊検査を行うように非破壊検査システムを構築することが望ましい。
【0028】
このようにすれば、非破壊検査車両を走行させてデータを取得し、必要な時にいつでも非破壊検査装置によるデータ解析を行うことが可能になる。
【0029】
リアルタイムの検査を可能にするためには、検査対象となるコンクリート構造物の舗装表面に照射することによって反射波データを取得する電磁波探査手段と、電磁波探査した測定ポイントに関する検査位置特定情報を取得する位置情報取得手段とを、上記何れかに記載の非破壊検査装置とともに車両本体に搭載し、前記電磁波探査手段からの反射波データ及び前記位置情報取得手段からの検査位置特定情報を前記非破壊検査装置のデータ受付手段に入力するように非破壊検査用車両を構成することが望ましい。
【0030】
このようにすれば、走行によってデータを取得し、車両にて非破壊検査装置によるデータ解析を即座に行うことで、現場にて速やかな修復等に対応することが可能になる。
【0031】
なお、上記の非破壊検査装置を簡易に利用する上で、以下のようなプログラムが有効となる。
【0032】
コンピュータに読み込まれることによって、上記何れかに記載の非破壊検査装置を構成する反射波分離手段として少なくとも機能するプログラム。
【0033】
コンピュータに読み込まれることによって、上記何れかに記載の非破壊検査装置を構成する反射波分離手段及び反射波再分離部として少なくとも機能するプログラム。
【0034】
コンピュータに読み込まれることによって、上記何れかに記載のプログラムと関連づけられて目的別解析モジュールとして機能するプログラム。
【0035】
以上に述べた非破壊検査装置や非破壊検査システム等に具現される本発明の非破壊検査方法は、検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データを受け付けるデータ受付ステップと、受け付けた前記反射波データと仮説に基づく予測信号波形との間でパターンマッチングを行うことによって当該反射波データを複数の基本反射波に分離する反射波分離ステップと、検査項目の設定・入力等を受け付ける設定入力受付ステップと、前記反射波分離手段によって分離した基本反射波のうち受け付けた検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから前記検査項目に係る所定の被検値を算出する目的別解析ステップとを具備してなることを特徴とする。
【0036】
この場合、上記と同様の理由で、前記反射波分離ステップによって分離した基本反射波のうち特定の検査項目に関連する基本反射波以外の基本反射波に係る伝播時間や一次結合係数等の数値データを固定した状態で、当該特定の検査項目に関連する基本反射波を更に細分化してその数、伝播時間、一次結合係数を変数とする予測信号波形と実際の反射波データとの間で再度パターンマッチングを行う反射波再分離ステップをさらに備え、この反射波再分離ステップで再分離した基本反射波の数値データに基づき前記目的別解析ステップで更に詳細な被検値の算出を行う方法を採用することが望ましい。
【0037】
更に、データ受付ステップにおいて、反射波データに関連づけられた検査位置特定情報を同時に受け付けることにより、目的別解析ステップで算出した被検値に対し更に検査位置特定情報に基づいてマップ化するマップ生成ステップを具備しておくことが実用上、極めて有用な手法となり得る。
【発明の効果】
【0038】
本発明は、以上説明した構成であるから、現場における電磁波探査と、得られる反射波データに対する種々の角度からの解析とを、効率良く両立させつつ、コンクリート構造物に対する健全度の検査を、対象部位を破壊することなく、高精度、高信頼性の下に行うことができる。このため、広範囲に亘って存在し、その破損や老朽化を未然に防止するために早期の診断が要求される高速道路や一般道路等に対して、多大な費用や時間、人的労力、高度の熟練を要さずに、簡易にして確実な健全度チェックを行うことを可能にする極めて有用なものとなり得る。
【発明を実施するための最良の形態】
【0039】
以下、本発明の一実施形態を、図面を参照して説明する。
【0040】
最初に、電磁波を用いた非破壊検査についての前提となる解析手法を述べた上で、本実施形態に係る非破壊検査装置の構成及び適用例に言及する。
(前提となる解析手法)
【0041】
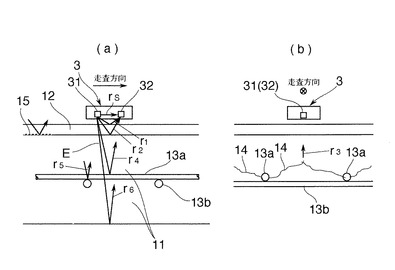
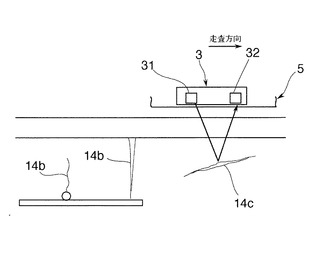
図1は、検査対象となるコンクリート構造物たる高速道路と電磁波探査手段たる電磁波レーダ3との関係を示している。高速道路の場合、コンクリート製の床版11及びアスファルト製の舗装材12の層からなり、コンクリート中には鉄筋13a,13bが配筋されるなど、複数の異なる媒質からなっている。電磁波は媒質非連続箇所で反射するが、コンクリート構造物中には、劣化に伴ってクラック14が生じたり、アスファルトに浮き15が生じる場合があり、厚みの違いはあるにせよ、これらは共にコンクリート中に空隙部を形成して、反射波の大きさや極性等を変化させる。そこで、送信器31及び受信器32からなる電磁波レーダ3を用いてコンクリート構造物に対し表面から電磁波Eを照射し、媒質非連続箇所において生じる反射波を受信して解析を行う。
【0042】
高速道路のような一般的なコンクリート構造物は、交叉鉄筋を含む床版上にアスファルトが敷設されているため、当面の反射波としては、図1に示すように、アスファルト12の表面からの反射波r1、アスファルト12の底面と床版(コンクリート)11の上面との界面からの反射波r2、クラック14からの反射波r3、交差鉄筋構造を構成する縦筋13aおよび横筋13bからの2反射波r4、r5、床版11の底面からの反射波r6の6反射波を考えておけば十分である。rs(t)は送信器31から受信器32に直接伝播する波である。図1(a)は電磁波レーダを紙面左から右に向かって走査する様子を示し、また同図(b)は電磁波レーダを紙面に垂直な方向に走査する様子を示している。
【0043】
まず、電磁波Eの伝播に際し、異なる媒質の境界面での反射係数、透過係数は次式(1)によって与えられる。
【数1】

【0044】
ここに、ε1、ε2はそれぞれ入射前後の媒質の比誘電率である。したがって、透過係数は常に正となるが、反射係数は、2つの媒質の比誘電率に応じて正負いずれの値をも取り得ることになる。
【0045】
このように、電磁波レーダ3の受信器32で受信される検査対象内の各部位からの反射波の大きさ、伝播時間および位相は、伝播径路の長さおよびどのような媒質境界面で反射あるいは透過を繰り返して来たかによって異なる。したがって、受波信号波形r(t)は、上述した6反射を想定した場合に、r0(t)を基本反射波形として次式(2)のような予測信号波形rp(t)としてモデル化できる。
rp(t)=rs(t)+c1r0(t−T1)+c2r0(t−T2)+…+c5r0(t−T5)+c6r0(t−T6) (2)
【0046】
ここに基本反射波形は紡錘型振動波形であって、(2)式において便宜上全てr0(t)で表しており、以下の説明においても同様の表現を用いているが、実際には反射する対象全てについて基本反射波形が同一というわけではない。例えば、鉄筋で反射する反射波と、それ以外の部位で反射する反射波とでは波形が異なり、少なくとも2種類の波形タイプが存する。鉄筋が交差鉄筋である場合には、更に電磁波による走査方向に延びる縦筋13aと、当該走査方向と直交する方向に延びる横筋13bとでも基本反射波形が異なるため、計3種類の波形タイプとなる。また、(2)式において、T1,T2,…は検査対象内の各反射面(境界面)からの第1反射波が到達する時刻(すなわち往復伝播時間)を表す。この場合、電磁波の送信時刻はゼロとし、各境界面からの第2、第3反射波は第1反射波に比し小さいため、無視できるとしている。なお、rs(t)は送信器31から受信器32に直接伝播する波であり、これは別途実験等によって求めることができるため、以下の取り扱いにおいては省略している。
【0047】
(2)式の一次結合係数c1、c2、…は、当該基本反射波の伝播過程に関わる反射係数、透過係数および(電波径路に関わる)減衰係数の積で与えられるため、それらの大きさおよび符号は、電磁波レーダ3の直下の異常に関する情報を含んでいることになる。
【0048】
信号伝播モデルに基づく異常診断に際しては、(2)式のように基本反射波形r0(t)を時間的にずらして一次結合した予測信号波形rp(t)と、実際の受波信号波形r(t)との最適パターンマッチングを図り、基本反射波の伝播時間{T1,T2,…}および一次結合係数{c1、c2、…}を求める。最適パターンマッチングの評価関数としては、次式(3)等を利用することができる。そして、予測信号波形rp(t)の一次結合係数の大きさや極性に基づき、検査対象に異常が存するか否、或いはその異常の程度を判断することができる。
【数2】
【0049】
ここで、θは実波形r(t)と予測信号波形rp(t)との幾何学的角度であり、2つの波形のパターンマッチング度を表わす。ここに、(・,・)および
【数3】
はそれぞれヒルベルト空間の内積およびノルムである。
【0050】
このθを最小にする伝播時間{T1,T2,…}および一次結合係数{c1、c2、…}により、クラックかアスファルトの浮きか等の異常の形態と共に、それらの深度・厚みが求められる。つまり、一次結合係数{ci}(i=1,2,…)の符号や大きさにより異常の形態が、また伝播時間{Ti}によりアスファルトの厚さやクラックの深度などが求まる。深度および厚みを求めるためには、伝播時間{Ti}と各媒質内の電磁波速度c/√ε(c:光速、ε:比誘電率)を用いて異常部等の深度とアスファルト厚を求めることになる。なお、最適化に当たって{ci}および{Ti}を全て変数にとれば、局所解に陥る危険性があるだけでなく、計算にかなりの時間がかかるので、{Ti}については探索を数値的に行うものの、{ci}については解析解を利用する。
【0051】
以上のようにして異常検出が行われるが、クラックに関しては、実際問題、深さ方向に1個ある場合を考えておけば充分である。従って、(2)式の信号伝播モデルは、一般的な仮説としては、前述した6反射r1〜r6に対応するモデルを想定すればよく、適宜必要に応じて、更に想定する反射波を増やせばよい。このように、かかる信号伝播モデルは、検査目的であるコンクリート構造物に想定される内部構造の特異性や、実施しようとする検査項目等によって、抽出を必要とする反射波の種類や数に応じた適切な仮説を立て、その仮説の下にパターンマッチングを行うようにすればよい。
【0052】
ここに、深部の異常を探索する場合は、異常箇所からの反射信号が小さくなるので、実際の受波信号と(2)式によるモデルに基づく予測受波信号の両者に指数関数形のSTCゲインを乗じ、このゲインを乗じた後の2信号に対し(3)式によるパターンマッチングを行うことが有効となる。
【0053】
上記において、計算時間を短縮化するために、まず反射波の大きいものに対する2パラメータを最適化し、次に、これを固定し、残りの3パラメータを最適化する、いわゆる逐次最適化手法を採用することも有効である。ただし、これにより計算時間の大幅な短縮化は可能となるものの、同時最適化でないため、真に最適なパラメータを求めるものではない。従って、上記の方法により求めた準最適解を初期値に、改めて全変数により同時最適化を行えばよい。これにより、最初から全変数で同時最適化するものに比べれば大幅に計算時間は低減化する。
【0054】
アルゴリズムの改善等により高い計算処理能力が見込まれる場合は、基本的な解析手法の考え方は全く変えずに、各反射波の伝播時間の数値解法(最適化)を、リアルタイム性を損なうことなく、より厳密化することができる。この場合には、同時最適化を実現する厳密な最適化手法を採用する。
【0055】
また、特許文献2においては、直交交差鉄筋からの強い反射波の影響を低減することと最適パラメータの数を減らすことの2つの理由により、鉄筋ピッチの50%の区画での受波信号を平均する前処理を実行しているが、本実施形態では実用的な車載型を追求するために、各測定ポイント毎に最適化を実行する。
(本実施形態における非破壊検査装置の具体的な目的)
【0056】
高速道路における保守点検等の運用においては、長距離に亘る路面を形成するコンクリート構造物の劣化状況を舗装を剥がさずに短時間にデータ収集して早期に診断できることが求められる。そして、上記基本的な解析方法の具現化にあたっては、極度の劣化、損傷等に至る手前での適切な健全度診断、そのために望ましい検査項目の特定、現場作業の迅速性および解析精度の両立が図れるシステム構築等が望まれる。
【0057】
本実施形態では、このような観点に基づいて、相互に強い因果関係があり、アスファルトの上から道路の劣化の前兆を捉えて早期に対処する上で有効となるアスファルトの浮き、クラックの厚み、鉄筋のかぶり、鉄筋の腐食度、堆水度、塩害度等に着目し、現場でこれらの検査項目に関する必要なデータを短時間で大量採取するとともに、リアルタイムで若しくは必要に応じ事後的に所望の被検値に関するデータを抽出することで、道路の健全度を早期診断し、また、マップ化しておくことによって、必要であればいつでも更にスポット的な再検査に利用できるようにしたシステムを構築することを目的とする。
<装置構成>
【0058】
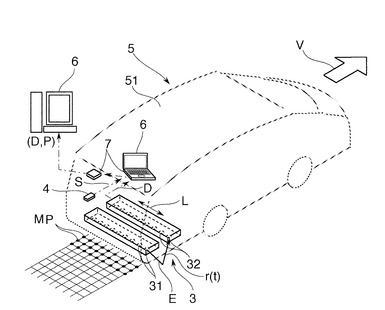
そこで、この実施形態は、図2に示すように、電磁波探査手段である電磁波レーダ3及び位置情報取得手段4を非破壊検査車両5の車両本体51に搭載し、調査区画を走行して調査対象部位を電磁波レーダ3によって走査し、時系列の反射波データDを検査位置特定情報Sとともに非破壊検査装置6に入力してデータ処理を行う。この非破壊検査装置6は車両本体51に搭載してもよいし、リアルタイムの計算処理能力に限界がある場合等にはRAMやHDD、フラッシュメモリ等の適宜の記憶媒体を利用した記憶手段7を車両本体51に搭載して反射波データD及び検査位置特定情報Sを記憶手段7に記憶し、事後的に非破壊検査装置6において処理してもよい。
【0059】
非破壊検査車両5は、手押し車などの小型の形態のものでもよいが、ここでは車両本体51が通常の乗用車もしくはそれ以上の車幅を有し、ライン方向(図2における矢印L方向)に複数に対をなす送信器31及び受信器32を備えた電磁波レーダ3を搭載して、前記ラインLと直交する走査方向(V方向)に走行しながら2次元方向にマトリクス状の複数の計測ポイントMP毎に反射波r(t)を取得する。図1、図5、図7、図8、図10、図11、図13、図15においては、簡略化のために1対の送信器31及び受信器32のみを表しているが、これらは車幅方向に複数対備わるものである。電磁波レーダ3は、コンクリート構造物の表面に対向して設けた複数の送信器31から電磁波Eをコンクリート構造物に向けて発信し、コンクリート構造物の表面および内部に存在する媒質非連続箇所で反射した反射波r(t)をコンクリート構造物の表面に対向して設けた前記送信器31と対をなす受信器32で受信して増幅する。この受信反射波r(t)に対しては、A/D変換等の必要な信号処理が施される。既存の電磁波レーダはその殆どがBモード(濃淡画像)を出力する機能に留まるものであるが、本実施形態で用いる電磁波レーダは時系列の波形データを数値として出力する機能を備える。
【0060】
位置情報取得手段4は、GPS(Global Positioning System)などと連携して、電磁波によって探査した計測ポイントMP毎に検査位置特定情報Sを取得する。「計測ポイントMP毎の検査位置特定情報Sの取得」には、周辺位置情報を含んで計測ポイントMPの位置情報を間欠的もしくは連続的に取得する態様も含まれ、例えば、位置情報取得手段4が路面を撮影する撮像機等である場合が挙げられる。この検査位置特定情報Sは、探査の結果得られる各計測ポイントMP毎の反射波データDと関連づけて非破壊検査装置6に入力され、または記憶手段7に記憶される。
【0061】
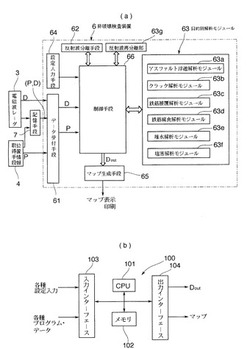
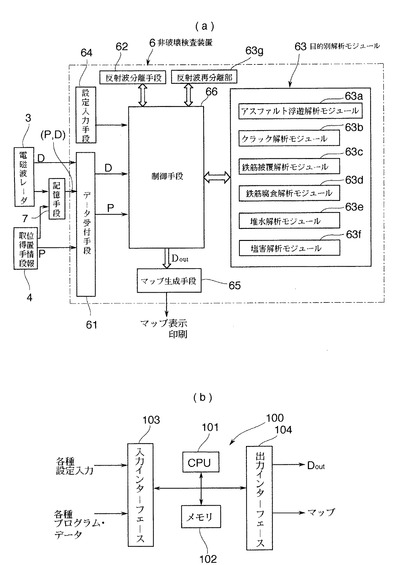
一方、非破壊検査装置6は、図3(a)に示すように、データ受付手段61、反射波分離手段62、目的別解析モジュール63、反射波再分離部63g、設定入力手段64、マップ生成手段65および制御手段66を備える。
【0062】
データ受付手段61は、反射波データD(例えば6反射波)、及びこれに関連づけられた検査対象部位を特定するための検査位置特定情報Pの入力を受け付ける。
【0063】
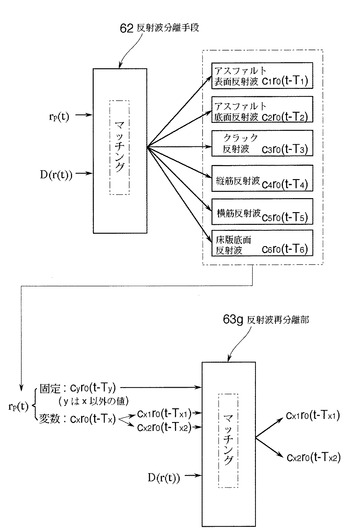
反射波分離手段62は、図4に示すように、受け付けた前記反射波データD(r(t))と、設定入力手段64を通じて設定される予測信号波形rp(t)とから、当該予測信号波形rp(t)を構成する基本反射波cir0(t−Ti)(i=1,2,…,6)を分離する。この実施形態における基本的な仮説に基づく予測信号波形rp(t)は前述した反射波r1、r2、…、r6に対応する6反射波モデル、すなわち、アスファルト12の表面からの反射波r1に対応したアスファルト表面反射波c1r0(t−T1)、アスファルト12の底面と床版(コンクリート)11の上面との界面からの反射波r2に対応したアスファルト底面反射波c2r0(t−T2)、クラック14からの反射波r3に対応したクラック反射波c3r0(t−T3)、交差鉄筋構造を構成する縦筋13aおよび横筋13bからの反射波r4、r5に対応した縦筋反射波c4r0(t−T4)および横筋反射波c5r0(t−T5)、床版11の底面からの反射波r6に対応した床版底面反射波c6r0(t−T6)の6反射波である。勿論、適宜必要に応じて想定する基本反射波は増減される。
【0064】
図3(a)に示す目的別解析モジュール63(63a〜63f)は、分離した反射波c1r0(t−T1)、c2r0(t−T2)…の伝播時間{Ti}や振幅{ci}等の数値データのうち適宜のデータを取り込んで特定の検査項目に係る所定の被検値Doutを算出するために必要なアルゴリズムを備える。この実施形態における目的別解析モジュールとしては、検査項目であるアスファルトの浮きを検査するためのアスファルト浮遊解析モジュール63a、検査項目であるクラックを検査するためのクラック解析モジュール63b、検査項目である鉄筋の被覆厚を検査するための鉄筋被覆解析モジュール63c、検査項目である鉄筋の劣化を検査するための鉄筋腐食解析モジュール63d、検査項目である水の含浸を検査するための堆水解析モジュール63e、検査項目である塩化物イオンの含浸を検査するための含塩解析モジュール63f等である。
【0065】
これらの解析モジュール63a〜63fは、反射波分離手段62によって分離された反射波についての演算結果をそのまま利用してもよいが、検査目的に関連する項目に関してより高精度の被検値Doutを得るために、再度、反射波データDに対する更に詳細な反射波の再分離を行い、その結果を利用するコマンドを含んでいてもよい。そして、そのためにこの非破壊検査装置6は、図4に示すような反射波再分離部63gを備えている。この反射波再分離部63gは、(2)式の予測信号波形rp(t)のうち、例えば特定の検査項目に関連する反射波がcxr0(t−Tx)であるとした場合、分離の結果得られた反射波c1r0(t−T1),c2r0(t−T2)…のうち上記特定の検査項目に関連する反射波cxr0(t−Tx)以外の反射波cyr0(t−Ty){yはx以外}に係る伝播時間Tyや一次結合係数cyを固定し、当該特定の検査項目に関連する反射波cxr0(t−Tx)を更に2つの反射波cx1r0(t−Tx1)、cx2r0(t−Tx2)に細分化して変数とし、このように書き換えた(2)式に基づいて反射波データD(r(t))とのパターンマッチングを行う。勿論、この場合も前述したように、基本反射波は反射部位が鉄筋か、それ以外か等によって波形タイプが異なるため、パターンマッチングは該当する波形タイプの基本反射波に基づく。この結果、2つの反射波cx1r0(t−Tx1)、cx2r0(t−Tx2)についての伝播時間Tx1、Tx2や一次結合係数cx1、cx2が求められる。
【0066】
パターンマッチングの手法は上記反射波分離手段62における手法と基本的に同様であり、変数が少ない分、演算負荷は激減し、しかも検査項目を限定したマッチングを通じて、局部や限定箇所における解析精度は格段に向上する。
【0067】
図3の設定入力手段64は、(2)式の仮説に基づく予測信号波形のパターン設定や検査項目の設定、媒質の比誘電率等の設定等、必要なデータの設定入力を受け付ける。
【0068】
マップ生成手段65は、算出した被検値Doutを検査位置特定情報Pと関連づけてマップ化する。この実施形態では、2次元方向にマトリクス状に複数の計測ポイントMPが設定してあるため、各計測ポイントMP毎に算出される被検値を2次元マップ上にプロットする。マップは地図や写真のレイヤーに被検値のレイヤーを重ねるような態様で生成してもよい。
【0069】
制御部66は、設定入力手段64から入力される予測信号波形rp(t)と反射波データD(r(t))とを反射波分離手段62に与えて反射波分離を実行させ、分離した反射波の伝播時間{Ti}や一次結合係数{ci}等の数値データを保存する。設定入力手段64から実行すべき検査項目が与えられると、目的別解析モジュール63a〜63fのうち対応するものを起動させて、分離した反射波のうち当該検査項目に対応した反射波の伝播時間{Ti}や一次結合係数{ci}等の数値データを引き渡し、当該目的別解析モジュール63に被検値Doutを算出させて、これを記憶する。目的別解析モジュール63a〜63fに反射波再分離を実行するコマンドが含まれている場合には、反射波再分離部63gを起動させて、先に分離した伝播時間{Ti}や一次結合係数{ci}等の数値データの一部を固定値として与えるとともに、再分離を要する特定の反射波を新たにマッチングすべき2つの反射波(図4参照)に書き換えて、予測信号波形rp(t)と反射波データD(r(t))とを再度マッチングさせる。そして、当該目的別解析モジュール63a〜63fが算出した被検値Doutを記憶する。制御部66は最後に、マップ生成手段65を起動させて、上記の被検値Doutを検査位置特定情報Pとともに引き渡す。
【0070】
図3(b)は、この非破壊検査装置6のハードウェア資源を簡略に示している。この非破壊検査装置は、CPU101,メモリ102、入力インターフェース103及び出力インターフェース104を具備するコンピュータ100によって構成され、メモリ102には各種プログラム(ソフトウェア)として、反射波分離プログラム、各種解析プログラム、反射波再分離プログラム、制御プログラム等が入力インターフェース103を介して、或いは予め記憶させてある。そして、CPU101は適宜所定のプログラムを呼び出して実行し、周辺ハードウェアと協働して、上述したデータ受付手段61、反射波分離手段62、目的別解析モジュール63(63a〜63f)、反射波再分離部63g、設定入力手段64、マップ生成手段65、制御手段66などとしての役割を果たす。
【0071】
以下、目的別解析モジュール63が実行する目的別の解析手法を例示する。
<アスファルトの浮遊解析>
【0072】
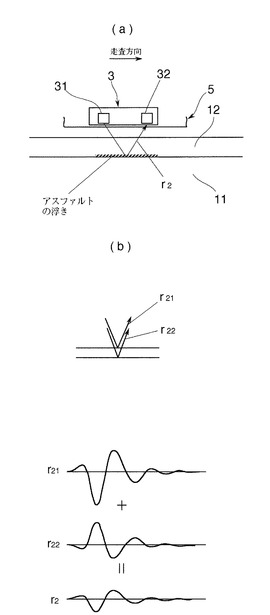
図3におけるアスファルト浮遊解析モジュール63aは、図5に示すようにアスファルト12の底面で反射する反射波r2の強度および位相(符号)を解析するための解析アルゴリズムを備える。
【0073】
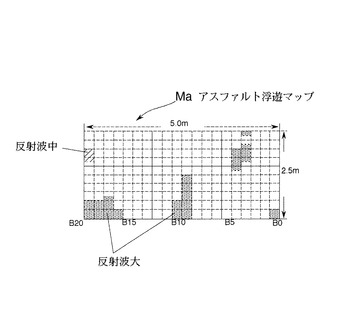
アスファルト12の浮遊は、アスファルト12と床版11との接着が剥がれることによって生じる。アスファルト12が浮遊すると、アスファルト底面反射波r2は、厳密には図5(b)に示すように、床版11の上面で反射する反射波r22の直前に、正常時であれば生じない極性の反転した反射波r21が現われる。アスファルト12が剥がれた部位に生じる空隙と当該アスファルト12との境界からの反射は、アスファルト12と床版11であるコンクリートとの媒質同士の界面における反射とは比誘電率の関係が異なり、反射波の極性が反転するからである。結局、このアスファルト12の底面からの反射波r21の方が床版11の上面からの反射波r22に比べ振幅が大きいため、アスファルト12の浮きがある箇所では正常箇所と異なり、この部分からの反射波r2の極性は異なるものになる。そこで、(2)式の仮説に基づくマッチングを通じて反射波分離手段62で得られた床版11の上面付近からの極性の反転した図4のアスファルト底面反射波c2r0(t−T2)を抽出し、そのアスファルト底面反射波の大きさc2をこのアルゴリズムにおいて離散的なレベル値に変換する。このレベル値が被検値Doutとして目的別解析モジュール63からマップ生成手段65に送られることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にレベル値をプロットし、図6のようなアスファルト浮遊マップMaを生成する。
【0074】
このモジュール63aは、特定の値を閾値にしてレベルごとの階層に分類する機能、および、階層ごとに異なる濃淡や斜線等の識別を付す機能を備えている。以下に述べる他のモジュール63b〜63fにおいても同様である。
かかる反射波r2は、浮きが大きくなるほど振幅(したがって基本反射波の一次結合係数c2)が大きくなるので、マップMaによって位置を特定し、そのレベル値をもって浮きの発生の激しい部位を推定することができる。
【0075】
図6は、具体的にある高速道路の橋梁床版に適用した場合の、2.5m×5.0mの領域(1車線幅×5mの長さ相当)に対するアスファルトの浮きの状態を示している。同図において、横および縦のラインは図1における床版11の上部の縦筋13a、横筋13bの位置を示す。また、無色の箇所は正常な箇所を、異常箇所には異常レベルに応じて異なるパターンやハッチングを付している。B0,B5,…、B20の数字は横筋の番号を表わす。アスファルトの浮きの位置と程度が一見して明らかである。
【0076】
なお、このアスファルト浮遊解析モジュール63aとして、反射波再分離部63gと連動したより仔細なアルゴリズムを用いることもできる。
【0077】
アスファルト12が浮いた部分では、図5(b)に基づいて既述したように、浮遊によって生じる空隙の手前のアスファルト12の底面で反射する反射波r21と、空隙を通過して床版11の上面で反射する反射波r22との間にわずかながら伝播時間差を生じる。そこで、(2)式の仮説における特定の反射波cxr0(t−Tx)、すなわち床版11の上面の箇所で反射する反射波c2r0(t−T2)を、図4に示したように2つの反射波c21r0(t−T21)、c22r0(t−T22)に分割して変数とし、反射波分離手段62において明らかとなった他の反射波cyr0(t−Ty)(y=1,3,4,5,6)を固定して反射波再分離部63gにおいて再度のパターンマッチングに付すとともに、予め浮遊によって生じる空隙の比誘電率を記憶させておく。そして、このパターンマッチングによって求まった2つの反射波c21r0(t−T21)、c22r0(t−T22)の往復伝播時間差の(1/2)倍に、比誘電率に基づく空隙中の電磁波Eの速度を乗じれば、浮遊量を算出することができる。そして、この浮遊量を被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップMa上の対応する部位にアスファルト浮遊量をプロットし、図6よりも更に厳密なアスファルト浮遊マップMaを生成する。
【0078】
アスファルト12の浮遊は、アスファルト12の欠損を始めとして床版11中のクラック14の発生につながり、床版11の損傷拡大の大きな原因となるため、早期に診断して劣化箇所の補修を行うことが極めて重要であり、早急な対応が望まれる。そこで、広範囲に亘る構造部の健全度をアスファルト12の浮きの観点から未然に評価することが非常に重要となり、本実施形態を通じてその効率化に多大に寄与することとなる。
<クラック解析>
【0079】
図3におけるクラック解析モジュール63bは、図7に示すように床版11中のクラック14で反射するクラック反射波r3を解析するための解析アルゴリズムを備える。
【0080】
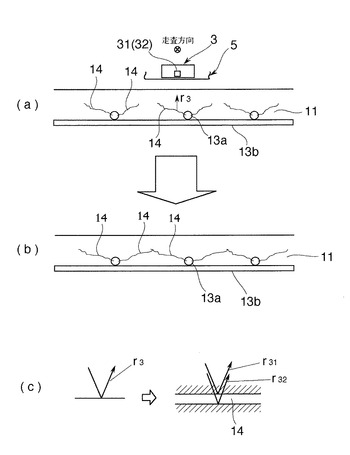
クラック14は、主として鉄筋13a、13bの腐食、膨張に起因している。床版11の場合はかぶりが少ないので、クラック14の形態は通常、上層部に位置する鉄筋(この実施形態では縦筋13a)から始まり、その軸方向からみて斜め上方に進行して、図7(b)のようなパターンになる。クラック14同士がつながったときに、床版11の剥離に発展する。クラック14はまた、かぶりが大きい場合等に図8に符号14bで示すごとく垂直に近くなる場合があり、このような垂直クラック14bが発生する他の要因としては、許容応力以上の荷重が掛かった場合や、長期的に繰り返し荷重を受けた場合が挙げられる。
【0081】
鉄筋腐食の要因が舗装面側から浸透するため、上述したように上側の鉄筋(縦筋;主筋)13aが先に腐食するが、更に下側の鉄筋13bも腐食する場合は、図7のクラック14と同じような形態のクラック14が下側の鉄筋13bを起点にして図7(b)中紙面に垂直方向にも発生し、縦横に2タイプのクラック14が入ることになる。
【0082】
さらに、縦筋13aに垂直な方向からみた場合に、図8に示すように斜めにクラック14cが生じることがある。要因としては、躯体に極端なひねり荷重が生じた場合等が挙げられる。また、クラック14として捉え得る空隙に、初期欠陥(締め固め不足等によるもの)がある。締め固め時に生コンクリートが沈降するが、鉄筋13a、13bが邪魔をするため、締め固め不足に陥り易い。鉄筋のない構造物でも、部分的に締め固め忘れが生じることによって空隙の原因となる。狭隘部、鉄筋の過密部分など、締め固めが十分に施しにくい場所にこの種の空隙が生じるケースが多い。
【0083】
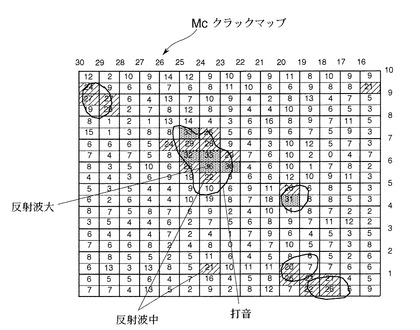
このように、種々の要因および形態でクラック14が発生し、発生したクラック14の箇所で図7(c)左図のようにクラック反射波r3が生じる。そして、クラック14が大きくなるほど振幅(したがって基本反射波の一次結合係数)が大きくなる。そこで、(2)式の仮説に基づくマッチングを通じて反射波分離手段62が分離したクラック14からの反射波である図4のクラック反射波c3r0(t−T3)を抽出し、そのクラック反射波の大きさc3をこのアルゴリズムにおいて離散的なレベル値に変換する。このレベル値が被検値Doutとして目的別解析モジュール63からマップ生成手段65に送られることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にレベル値をプロットし、図9のクラック発生マップMcを生成する。マトリクスの右辺及び上辺に付した数字は縦筋及び横筋の番号であり、マトリクスの中に付した数字はレベル値であって、値が大きいほど反射波r3が大きいことを表わしている。
【0084】
図9において、比較のためにアスファルトを剥がした後の打音検査によりクラック14が認められた場所が自由曲線(丸)で囲んであるが、反射波r3の大きい部位と打音によるクラック検出位置とがほぼ一致する結果となっている。
【0085】
なお、このクラック解析モジュール63bに、図3の反射波再分離部63gと連動したより仔細なクラック厚解析アルゴリズムを用いることもできる。
【0086】
クラックからの反射では、図7(c)右図に示すように、クラックの手前のコンクリート界面で反射する反射波r31と、クラックを通過した部位においてコンクリート界面で反射する反射波r32との間に僅かな伝播時間差を生じる。そこで、(2)式の仮説における図4のクラック反射波c3r0(t−T3)を2反射波c31r0(t−T31)、c32r0(t−T32)に分割して変数とし、反射波分離手段62において明らかとなった他の反射波cyr0(t−Ty)(y=1,2,4,5,6)を固定して、反射波再分離部63gにおいて再度のパターンマッチングに付すとともに、予めクラック14によって生じる空隙の比誘電率を記憶させておく。そして、このパターンマッチングにより新たに得られる前記2つの反射波c31r0(t−T31)、c32r0(t−T32)の往復伝播時間差の(1/2)倍に、比誘電率に基づくクラック中の電磁波の速度{電磁波の速度vは、伝播媒質の比誘電率をεとして、v=c/(ε)1/2 、cは光速}を乗じれば、クラック厚を算出することができる。このクラック厚データを被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にクラック厚をプロットし、図9よりも更に厳密なクラック発生マップMcを生成する。
【0087】
なお、通常のクラック14では、測定ポイントMPの直下から1つのクラック反射波が得られるだけであるが、図8に示すような垂直クラック14b(垂直に近いものを含む)では測定ポイントMPの直下から複数のクラック反射波が受信されることもある。そこで、予め(2)式の仮説を7反射波或いはそれ以上のモデルにするか、あるいは反射点が近いことが推定されれば(2)式の仮説に基づくマッチングを通じて分離された図4のクラック反射波c3r0(t−T3)を上記手法と同様に複数のクラック反射波c31r0(t−T31)、c32r0(t−T32)、…に分割して、反射波再分離部63gにおいて再度のパターンマッチングに付すれば、垂直クラック14bの検出も可能となる。
【0088】
クラック14はコンクリート構造物の強度低下、損傷の兆しであるため、早期に診断して劣化箇所の補修を行うことが極めて重要である。クラック14は構造物中に生起するため、高速道路の広範囲に亘ってアスファルト12を剥がして打音検査を行うには膨大な労力と時間を要するが、破壊せずに(舗装を切削せず)構造部の健全度をクラック発生の有無の観点から評価することが非常に重要となり、本実施形態を通じてその効率化に多大に寄与することとなる。
<鉄筋の被覆解析>
【0089】
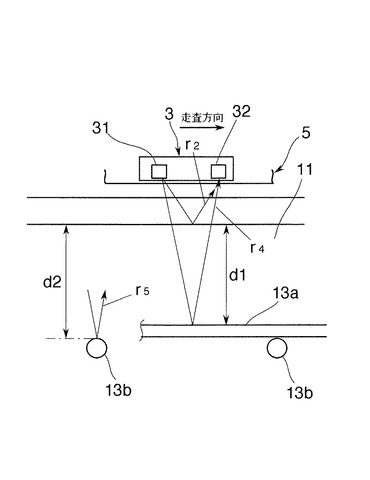
図3における鉄筋被覆解析モジュール63cは、図10に示すような鉄筋の被覆厚d1、d2を解析するための鉄筋被覆量解析アルゴリズムを備える。
【0090】
鉄筋13a、13bのかぶり、つまり、コンクリート11の表面と縦筋13aや横筋13bとの距離d1、d2は、前者においてはコンクリート11の上面で反射する反射波r2と鉄筋13aで反射する反射波r4との伝播時間差の(1/2)倍に比誘電率に基づくコンクリート11中の電磁波の速度を乗じたものとなり、後者においてはコンクリート11の上面で反射する反射波r2と鉄筋13bで反射する反射波r5との伝播時間差の(1/2)倍に比誘電率に基づくコンクリート11中の電磁波の速度を乗じたものとなる。
【0091】
そこで、(2)式の仮説に基づくマッチングを通じて反射波分離手段62が分離したこれらの反射波に対応する図4の反射波c2r0(t−T2)、c4r0(t−T4)、c5r0(t−T5)に基づき、鉄筋被覆解析モジュール63cが被覆厚を算出してこれを被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に被覆厚をプロットし、鉄筋被覆マップ(図示省略)を生成する。なお、この被覆厚は、アスファルト表面aと鉄筋13a、13bとの距離として算出することもできる。
【0092】
このような鉄筋被覆マップを利用すれば、補修工事等に有効に利用でき、高速道路のメンテナンスの便を格段に向上させることが可能となる。
<鉄筋の腐食解析>
【0093】
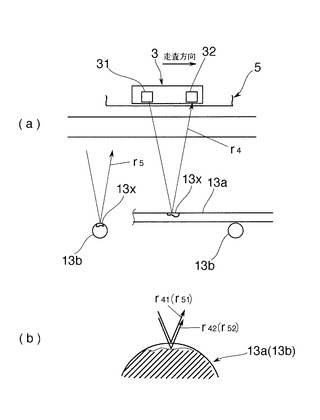
図3における鉄筋腐食解析モジュール63dは、図11に示すように鉄筋13a、13bで反射する反射波r4,r5から腐食部13xを捉えるための解析アルゴリズムを備える。
【0094】
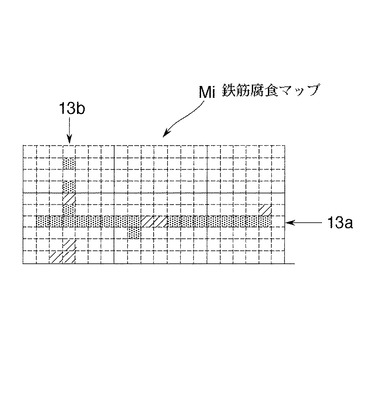
鉄筋13a、13bが腐食すると、反射波のレベル値が変化する。そこで、(2)式の仮説に基づくマッチングを通じて反射波分離手段62で得られた反射波のうち図4の鉄筋反射波c4r0(t−T4)、c5r0(t−T5)を抽出し、その振幅(したがって基本反射波の一次結合係数)c4、c5の大きさをこのアルゴリズムにおいて離散的なレベル値に変換する。このレベル値が被検値Doutとして目的別解析モジュール63からマップ生成手段65に送られることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にレベル値をプロットし、図12に示す鉄筋腐食マップMiを生成する。
【0095】
このマップMiによって、腐食位置を特定し、そのレベル値によって鉄筋腐食度を計測することができる。
【0096】
交差鉄筋は上述のように縦筋13aと横筋13bから構成され、(2)式にはこれらが含まれるため、図12のようにこれら縦筋13aや横筋13bに沿って腐食状況が確認できるマップが得られることが予想される。
【0097】
なお、この鉄筋腐食度解析モジュール63dとして、反射波再分離部63gと連動したより仔細な腐食度解析アルゴリズムを用いることもできる。
【0098】
例えば鉄筋13aが腐食した部分での反射では、図11(b)に示すように、腐食によって生じる空隙の手前のコンクリートとの界面で反射する縦筋13aの反射波r41と、空隙を通過して鉄筋非腐食部との界面で反射する反射波r42との合成波が同図(a)の縦筋反射波r4となり、両反射波r41、r42間にわずかながら伝播時間差を生じる。同様に、横筋13bの反射波r5についても、2つの反射波r51、r52の合成波が横筋反射波r5となる。そこで、(2)式の仮説における交差鉄筋13a、13bについての図4に示す反射波c4r0(t−T4){あるいは、c5r0(t−T5)}を各々2つの反射波c41r0(t−T41)、c42r0(t−T42){あるは、c51r0(t−T51)、c52r0(t−T52)}に分割して変数とし、反射波分離手段62において明らかとなった他の反射波cyr0(t−Ty)を固定して反射波再分離部63gにおいて再度のパターンマッチングに付すとともに、予め腐食によって生じる空隙の比誘電率を記憶させておく。そして、2つの反射波c41r0(t−T41)、c42r0(t−T42){あるは、c51r0(t−T51)、c52r0(t−T52)}の往復伝播時間差の(1/2)倍に、比誘電率に基づく腐食部の電磁波Eの速度を乗じれば、腐食の厚みを算出することができる。そして、この腐食厚を被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイント毎にマップ上の対応する部位に鉄筋腐食度をプロットし、図12よりも更に厳密な鉄筋腐食マップMiを生成する。上記は縦筋13aまたは横筋13bについて個別のパターンマッチングを行うことができ、場合によっては1つの鉄筋についてだけの腐食度を算出させることも勿論可能である。
【0099】
鉄筋の腐食は前述したようにクラック発生、床版の剥離の原因となるほか、何よりもコンクリート構造物の強度低下に直結するため、早期に診断して劣化箇所の補修を行うことが極めて重要である。この場合、鉄筋は構造物中に埋没しているため、高速道路の広範囲に亘ってアスファルトを剥がして検査を行うには膨大な労力と時間を要する。加えて、これまでは鉄筋腐食度を高精度に測る方法がなかった。そこで、破壊せずに(舗装を切削せず)構造部の健全度を鉄筋腐食の観点から評価することが非常に重要となり、本実施形態を通じてその効率化に多大に寄与することとなる。
【0100】
<堆水の解析>
【0101】
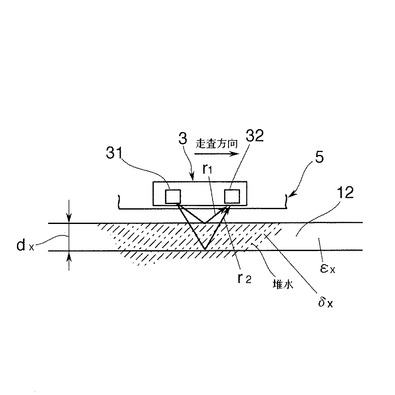
図3における堆水解析モジュール63eは、図13に示すような水を含んだアスファルト12の上下両面における反射波r1、r2から堆水度を解析するための含水率解析アルゴリズムを備える。
【0102】
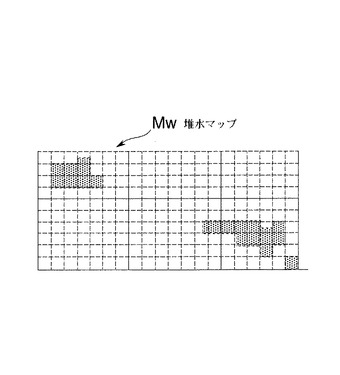
例えば、(2)式の仮説に基づくマッチングを通じて図4の反射波分離手段62で得られた反射波のうち、アスファルト上面と底面で反射した反射波r1、r2であるc1r0(t−T1)、c2r0(t−T2)を抽出し、それらの伝播時間差の(1/2)倍に、比誘電率に基づくアスファルト12中の電磁波の速度を乗じたものが、アスファルト12の厚み値dxとなる。しかし、アスファルト12に水が含浸すると、比誘電率εxがδxに変化し、アスファルト中を伝播する電磁波Eの速度c/√εxがc/√δxに変化する。そこで、予めアスファルト12の厚み値dxを与えるとともに、水分含有率とアスファルト中の比誘電率との関係を記憶させておき、上記伝播時間差を計測して、電磁波の速度から比誘電率を割り出せば、伝播時間差のみによって水の含浸率を算出することができる。そして、この含水率を被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に含水率をプロットし、堆水マップMwを生成する。以上は、水が電磁波の伝播径路上に均一に堆水していると仮定し、平均値として取り扱うことで、計算を単純化することができる。勿論、水分含有率とアスファルト中の比誘電率との関係を予め与えない場合であっても、水分含有量によって伝播時間差が変化するため、当該伝播時間差のみをもってしても、水分含有率を計測する被検値として有効に取り扱うことができる。
【0103】
なお、電磁波の伝播時間差に基づいてアスファルト12や床版11の厚み、鉄筋13a、13bのかぶり厚などを算出する場合には、予め各層の比誘電率が明らかでなければならず、逆に、アスファルト12や床版11等の水分含有率を算出するためには、予め各層の厚みが明らかでなければならない。すなわち、例えば前者では路面からある程度の深度までは一定の状態(たとえば乾いた状態)にあることが推定されるなど、比誘電率がある程度絞れる状況下に測定を実施する必要があるし、後者では予め厚みが測定済である必要があるなど、各目的別解析モジュール63(63a〜63f)は、相互に矛盾なく適用される必要がある。
【0104】
実験は行っていないが、図14は堆水マップMwのイメージ図であり、補修を要する箇所を推定することができる。
【0105】
以上は、床版の堆水についても全く同様である。
【0106】
舗装や床版が堆水しても、コンクリート構造物の劣化進行の大きな要因となるため、これ早期に検出して手当てを施すことが極めて重要となる。
<塩害の解析>
【0107】
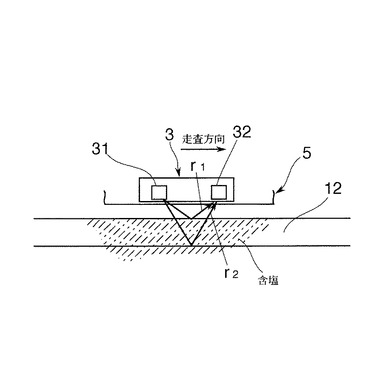
図3における堆水解析モジュール63eは、図15に示すような塩化物イオンを含んだアスファルト12の上下両面における反射波r1、r2から塩害度を解析するための含塩率解析アルゴリズムを備える。
【0108】
例えば、(2)式の仮説に基づくマッチングを通じて図4の反射波分離手段62で得られた反射波のうち、アスファルト上面と底面で反射した反射波成分c1r0(t−T1)、c2r0(t−T2)を抽出し、それらの大きさc1、c2から、媒質であるアスファルトを通過することによって生じる電磁波の減衰率を算出することができる。
【0109】
塩水中の塩化物イオンの存在によって電磁波速度は影響を受けず、むしろ減衰率に影響を及ぼす場合があることが予測されている。
【0110】
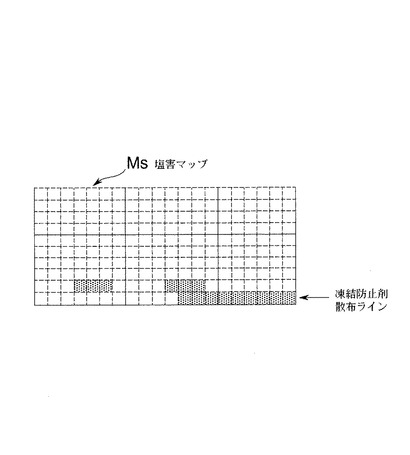
そこで、上記の減衰率を被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に減衰率をプロットし、図16に示す塩害マップMsを生成する。以上は、塩化物イオンが電磁波の伝播径路上に均一に分布していると仮定し、平均値として取り扱うことで、計算を単純化することができる。
【0111】
減衰率は検査対象物の内部構造や施工条件等によって変化するため、ここで求める減衰率は異なる検査対象物間では比較の難しいものであるが、同一検査対象物における相対的な評価値としては意味があり、減衰率が大きいほど、含塩率が高いと判断することができる。
【0112】
実験は行っていないが、図16は塩害マップMsのイメージ図であり、例えば凍結防止剤散布ラインに沿って含塩率の高いデータが得られること等が予想される。
【0113】
床版の含塩についても全く同様である。
【0114】
高速道路では、冬期の路面凍結防止を目的として、凍結防止材(塩化ナトリウム)を寒冷地では大量に散布している。コンクリート構造物に塩化物イオンが浸透して、鉄筋の腐食(塩害)が生じ、この結果、クラック、剥離、ポットホール等コンクリート構造物の損傷が生じている。
【0115】
損傷状況により補修に着手することになるが、経済的に、かつ効率的に補修するには、破壊せずに(舗装を切削せず)構造部の健全度を評価することが非常に重要となり、本実施形態を通じてその効率化に多大に寄与することとなる。
【0116】
なお、以上は塩化物イオンの濃度がコンクリート内部で均一であるとの前提の下に算出されるものであるが、厳密には、塩化物イオンの浸透によるコンクリート内部での濃度は一定ではなく、フィックの拡散方程式に従って濃度が分布する。すなわち、塩分は、時間とともにコンクリートに浸透してゆき、深さ方向の塩化物イオン濃度は、(1)コンクリートの供給量(Co)、(2)経過年数(t)、(3)浸透のしやすさ(D)、深さ(X)により異なる。
舗装のクラックの進展状況、床版の健全度の状況、また床版の調査位置によって、上記(1)、(3)が異なることから平面的な塩化物イオン濃度(供給量)が異なり、更に深さ方向でも塩化物イオン濃度が異なる。
【0117】
例えば、コンクリート表面に供給される塩化物イオン濃度を基準にすれば、
C(x、t)=Co(1-erf(x/(2√(D・t)))) (4)
で表わされる。ここに、
C(x,t):深さX、経過時間t年の場合の塩化物イオン濃度(kg/m3)
C0:コンクリート表面に供給される塩化物イオン濃度(kg/m3)
X:コンクリート表面からの深さ(cm)
D:塩化物イオンの拡散係数(拡散のしやすさ)(cm2/年)
t:経過時間(year)
である。
【0118】
そして、塩化物濃度が異なれば媒質中を通過する電磁波の減衰率も変化する点、コンクリート表面に供給される塩化物イオンが全てコンクリート中に浸透・拡散するわけではない点などを考慮した上で、電磁波の減衰率を濃度分布と関連づけた関数として上述した塩化物イオン含浸率を算出すれば、より実情に近いマップを生成することも可能でなる。
【0119】
既に述べた水分含有量についても、アスファルト表面から水が浸透する場合の分布を考慮した補正を行うことによって、より精度の高い堆水マップを生成する可能性も追求することができる。
<床版や舗装材が積層構造からなる場合>
【0120】
床版11や舗装材であるアスファルト12は、常に全体が均質な媒質であるとは限らない。例えば、時期を異ならせてコンクリートの打設やアスファルトによる舗装が行われている場合には、これらは積層構造となる上に、個々の層は打設や舗装時の材料や作業環境等の相違から、媒質としての性質が異なってくる場合が少なくない。したがって、上述した堆水状況も、各層ごとに把握することがより望ましい。
【0121】
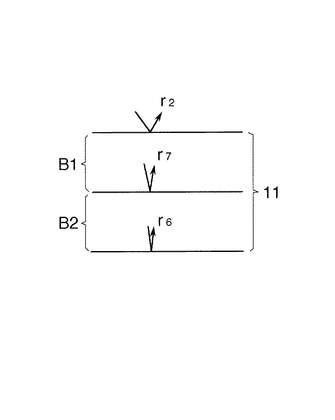
そこで、例えば図17に示すように複数層B1、B2の積層構造からなる床版11に対して上述した堆水解析モジュール63eや塩害解析モジュール63fを適用する際には、層B1、B2間で反射する反射波r7に対応して(2)式の仮説に新たに反射波c7r0(t−T7)を加えた上で、各層の上下両面で反射する反射波(r2、r7)、(r7、r6)に対応した反射波に関する数値データを取得させ、各々の層B1、B2毎に媒質中の水分含有率を計測するための被検値を算出させることも有効となる。
【0122】
以上は、アスファルト12が複数層の積層構造からなる場合にも全く同様である。
<アスファルト表面に対する異変部の解析>
【0123】
さらにまた、以上の手法を用いれば、非破壊検査装置の他の用途として、アスファルト表面に生じている水溜りや凹部等の異変解析も行うこともできる。
【0124】
この場合、図3における目的別解析モジュール63の一つに、同図においては図示しないが、次に述べるようなアスファルト表面解析モジュールを組み込んでおくことが有効となる。
【0125】
このアスファルト表面解析モジュールは、アスファルト表面に凹部が存在しその凹部に水溜りが生じた場合にこれを検出する処理手順と、乾燥時にアスファルト表面に存在する凹部を検出する処理手順とを備える。
【0126】
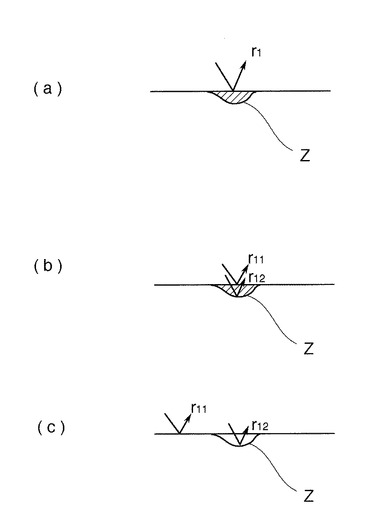
先ず、アスファルト表面に図18(a)に示すような凹部Zができて水溜りが生じた場合には、アスファルト表面の反射波r1が大きくなる。これは、アスファルトの比誘電率が概ね5〜6であるのに対し、水の比誘電率が81であるため、(1)式より明らかである。そこで、降雨後に路面を走査し、(2)式の仮説に基づくマッチングを通じて図3および図4に示した反射波分離手段62が分離したアスファルト12の表面からの反射波であるアスファルト反射波c1r0(t−T1)を抽出し、そのアスファルト反射波r1の大きさc1をこのアルゴリズムにおいて離散的なレベル値に変換する。このレベル値が被検値Doutとして目的別解析モジュール63からマップ生成手段65に送られることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にレベル値をプロットし、水溜りに関するアスファルト表面異変部発生マップ(図示省略)を生成することができる。
【0127】
この場合、このアスファルト表面解析モジュールとして、反射波再分離部63gと連動したより仔細なアスファルト表面解析アルゴリズムを用いることもできる。
【0128】
すなわち、図18(b)に示すようにアスファルト表面の凹部Zに水溜まりが生じると、水面で反射する反射波r11の近傍において僅かな伝播時間差で凹部Zの底面からの反射波r12が受信される。そこで、(2)式の仮説における図4のアスファルト反射波c1r0(t−T1)を2反射波c11r0(t−T11)、c12r0(t−T12)に分割して変数とし、反射波分離手段62において明らかとなった他の反射波cyr0(t−Ty)(y=2,3、4,5,6)を固定して、反射波再分離部63gにおいて再度のパターンマッチングに付すとともに、異変部の媒質である水等の比誘電率を記憶させておく。そして、新たに得られる前記2つの反射波c11r0(t−T11)、c12r0(t−T12)の往復伝播時間差の(1/2)倍に、比誘電率に基づく異変部中の電磁波の速度{電磁波の速度vは、伝播媒質の比誘電率をεとして、v=c/(ε)1/2 、cは光速}を乗じれば、異変部である水溜りの厚みあるいは凹部の厚みを算出することができる。そして、この水溜り厚データを被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に水溜り厚(凹部の深さ)をプロットし、水溜りあるいは凹部に関するアスファルト表面異変部発生マップを生成することができる(図示省略)。
【0129】
一方、乾燥時(天気が良く水溜り等が生じていない日)においても、アスファルト12の表面に存在する凹部Zの検出が可能である。すなわち、この場合のアスファルト表面からの反射波は、図18(c)に示すように凹部における反射波r12の伝播時間T12の方が正常なアスファルト表面における反射波r11の伝播時間T11よりも大きくなる。そこで、これらの往復伝播時間差の(1/2)倍に、空中での電磁波の速度{電磁波の速度vは、伝播媒質の比誘電率をεとして、v=c/(ε)1/2 、cは光速}を乗じれば、異変部である凹部の厚みを算出することができる。そして、この凹部厚データを被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に凹部厚(深さ)をプロットし、凹部Zに関するアスファルト表面異変部発生マップを生成することができる(図示省略)。
【0130】
なお、最後に付言すると、本実施形態の早期診断により適切な対応が可能となるものに、ポットホールが挙げられる。ポットホールとは、何らかの原因により、舗装の表面部分が円形状に剥がれ、または沈下してくぼみができる現象を言い、以下の要因が考えられる。
1)円形状に表層部が剥がれるケース
a)何らかの原因により1本ひび割れから亀甲状に拡大し、表面の舗装が飛び出して、円形状の穴ができる場合。ひび割れから亀甲状への進展(拡大)は雨水がひび割れに浸透した場合に起こり易く、短時間でポットホールに進展する。一般的にはコンクリート構造物の表層部に損傷が発生するが、基層、路盤の損傷が原因により生じるポットホールも珍しくない。
b)舗装厚さが不足、又は舗装耐力が不足していることにより、交通荷重で舗装面が沈下し、舗装にひび割れが発生、更に雨水などが浸透して、くぼみが大きくなる場合、又はくぼみと合わせて、舗装体が細分化(破砕)し、通過交通で路面に散らばり、くぼみが深くなる場合、ポットホールに至る。
c)土工部においても、舗装の下になる路床の耐力不足から、舗装全体が沈下・変状・クラック発生して、表層部或いは基層部も含んで、通過交通により表面の舗装が砕け、飛び散って、ポットホールに至るケースがある。
d)舗装のクラックから劣化因子が浸透し、橋梁床版の劣化が生じ、舗装にクラックが生じて、ポットホールに進展する。
e)舗装面に油などが落ち、舗装がカットバック(アスファルトで固められている舗装合材が油が原因によりバラバラになる現象:固結力を失った状況)し、舗装が飛び散る現象によりポットホールに至る場合もある。
2)沈下してくぼみができる場合
舗装厚さ不足、又は耐力が不足していることが原因となり、舗装面が沈下する場合で、上記1)に示す、ポットホールの前段とも言える状況である。
【0131】
放置しておくと、ひび割れに雨水が入り、舗装体が細分化され、細分化された材料が舗装面にちらばり、ポットホールの拡大が生じる。上記1)b)に同じである。
【0132】
上記いずれの場合も、水が介入するとポットホールへと進展するスピードは速く、水の浸透を防ぐことが予防保全の大前提となる。よって、本実施形態による空隙の発見、堆水状態の発見等は、このようなポットホールの発生を未然に防ぐ意味においても極めて有用なものとなり得る。
【0133】
以上、本発明の一実施形態について説明したが、各部の具体的な構成は、上述した実施形態のみに限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【0134】
例えば、最適化手法は必ずしも上記(2)式のパターンマッチング及びその評価関数に限られず、速度向上のために適した他の類似性判断手法があれば、そのアルゴリズムを有効に採用することができる。
【0135】
また、上記実施形態は高速道路を適用対象としたが、高速道路以外の道路等にも同様に適用できることは言うまでもない。
【図面の簡単な説明】
【0136】
【図1】本発明の一実施形態に係る検査モデルを示す概略図。
【図2】同実施形態に非破壊検査に使用する車両、装置及びシステムを示す図。
【図3】同実施形態の非破壊検査装置の機能構成及びハードウェア資源を示すブロック図。
【図4】同実施形態の反射波分離手段及び反射波再分離部の機能説明図。
【図5】同実施形態におけるアスファルト浮遊解析の説明図。
【図6】同実施形態において生成されるアスファルト浮遊マップを示す図。
【図7】同実施形態におけるクラック解析の説明図。
【図8】同実施形態におけるクラック解析の説明図。
【図9】同実施形態において生成されるクラックマップを示す図。
【図10】同実施形態における鉄筋被覆解析の説明図。
【図11】同実施形態における鉄筋腐食解析の説明図。
【図12】同実施形態において生成される鉄筋腐食マップを示す図。
【図13】同実施形態における堆水解析の説明図。
【図14】同実施形態において生成される堆水マップを示す図。
【図15】同実施形態における塩害解析の説明図。
【図16】同実施形態において生成される塩害マップを示す図。
【図17】同実施形態における堆水や塩害のより詳細な解析手法を示す図。
【図18】同実施形態におけるアスファルト表面異変解析の説明図。
【符号の説明】
【0137】
3…電磁波探査手段(電磁波レーダ)
4…位置情報取得手段
5…非破壊検査用車両
6…非破壊検査装置
7…記憶手段
51…車両本体
61…データ受付手段
62…反射波分離手段
63a…目的別解析モジュール(アスファルト浮遊解析モジュール)
63b…目的別解析モジュール(クラック解析モジュール)
63c…目的別解析モジュール(鉄筋被覆解析モジュール)
63d…目的別解析モジュール(鉄筋腐食解析モジュール)
63e…目的別解析モジュール(堆水解析モジュール)
63f…目的別解析モジュール(塩害解析モジュール)
63g…反射波再分離部
64…設定入力手段
65…マップ生成手段
E…電磁波
MP…計測ポイント
r(t)、r1、r2、r3、r4,r5、r6…反射波
rp(t)…予測信号波形
r0(t)…基本反射波
【技術分野】
【0001】
本発明は、高速道路や各種の一般道路の健全度診断等に特に好適に利用される非破壊検査装置、非破壊検査システム及び非破壊検査用車両等に関するものである。
【背景技術】
【0002】
この種のコンクリート構造物の非破壊検査方法として、本発明者は特許文献1、2等において、コンクリート構造物の表面に対向して設けた送信アンテナから電磁波を前記コンクリート構造物に向けて発信し、前記コンクリート構造物の内部に存在する媒質非連続箇所で反射した電磁波を前記コンクリート構造物の表面に対向して設けた受信アンテナで受波信号として検出することによりコンクリート構造物の内部構造を検査する検査方法を開示した。
【0003】
この方法は、取得した時系列の反射波データに対して、解析ソフトを適用することにより、前記コンクリート構造物の内部の一つ以上の前記媒質非連続箇所で反射した電磁波の反射波から形成される前記受波信号の波形(受信信号波形)と、前記コンクリート構造物の内部の一つ以上の前記媒質非連続箇所の存在から理論的及び/又は実験的に予測される予測受波信号の波形(予測信号波形)とのパターンマッチングを行い、前記媒質非連続箇所を検出するものである。
【0004】
ここに言う媒質非連続箇所には、具体的には舗装材と床版との界面のほか、鉄骨、鉄筋、異物、クラック、空隙等が存在する部位における周辺媒質との界面を想定しており、コンクリート構造物中にこれらの媒質非連続箇所が存在すると、電磁波はこれらの媒質非連続箇所で反射する。従って、媒質非連続箇所がコンクリート構造物中に種々の状態で存在するとの仮説の下に作成した予測信号波形と、実際に受信アンテナで受信した受信信号波形とのパターンマッチングを図り、パターンマッチングが最も良好になる予測信号波形を求めると、この予測信号波形を与える媒質非連続箇所の状態が、現実のコンクリート構造物中に生起している媒質非連続箇所の状態であると判断することができる。
【0005】
したがって、鉄骨、鉄筋、異物、クラック、穴等がコンクリート構造物中に存在することで媒質非連続箇所が生じている場合、これらの位置の計測を、旧来の打音検査方法等に比べて遥かに短時間で高信頼度の下に高精度に行うことが可能となる。更に、媒質非連続箇所が深さ方向に複数箇所存在しても、各媒質非連続箇所を個別に検出して、それぞれの位置を計測することが可能である。
【特許文献1】特開2003−207463号公報
【特許文献2】特開2008−39429号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
このように、電磁波を用いた非破壊検査手法は、旧来の検査方法と比べて効率、信頼性、精度の面で飛躍的な進歩をもたらす可能性を秘めたものである。とは言え、いくつかの仮説に基づくパターンマッチングからコンクリート内部状況の診断項目全ての一覧を得る過程は、厳格な計算に基づくほど計算処理量を大幅に増加させる。コンピュータのハードウェア資源の性能を向上させ、或いはパターンマッチングのアルゴリズム自体に改良を重ねれば、精度を損なわずに検査のリアルタイム性を追求する可能性は勿論あるが、比較的手近な手法を通じて、検査精度と検査スピードとの両立を図るための実用的な手法を検討することも極めて重要である。
【0007】
加えて、複数の媒質を通過して受信される受信波の伝播時間や一次結合係数には多くの情報が重畳しており、予測信号波形の立て方、マッチングの結果得られる一次結合係数や伝播時間の解釈の仕方次第で、いかようにも取り扱えるものである。したがって、検査対象であるコンクリート構造物の内部構造や特質を踏まえた明確なアプローチを欠けば、実状とかけ離れた結論が導き出され、いかに優れた検査方法と言えども、得られるデータは意味をなさなくなる場合もある。
【0008】
特に、高速道路や一般道路の保守点検等においては、長距離に亘る路面を形成するコンクリート構造物の劣化状況を舗装を剥がさずに短時間にデータ収集して早期に診断できることが重要であり、このような目的に合致して的確で高効率の検査を可能にする具体的な検査装置、検査システム作りが希求される。
【0009】
本発明は、このような着眼に立ち、実施に向けて非破壊検査の合理性および具体的妥当性を追求するとともに、目的に応じた解析手法の確立、並びに検査精度とスピードの両立を図った、実用的な非破壊検査装置、非破壊検査システム及び非破壊検査車両等を新たに提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明は、かかる目的を達成するために、次のような手段を講じたものである。
【0011】
すなわち、本発明の非破壊検査装置は、検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データを受け付けるデータ受付手段と、受け付けた前記反射波データと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データを複数の基本反射波に分離する反射波分離手段と、前記反射波分離手段によって分離した基本反射波のうち特定の検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから前記検査項目に係る所定の被検値を算出する一又は複数の目的別解析モジュールと、検査項目の設定・入力等を受け付ける設定入力手段とを具備し、この設定入力手段において受け付けた検査項目に対応する前記特定の目的別解析モジュールを起動させて、当該検査項目に関連する基本反射波に基づく被検値の算出を行わせるようにしていることを特徴とする
【0012】
このように構成すると、設定入力手段において特定の検査項目の設定・入力があった場合に、対応する目的別解析モジュールが起動して、反射波分離手段によって分離した基本反射波のうち関連する基本反射波の伝播時間や一次結合係数から特定の検査項目に係る被検値を算出するので、目的別解析モジュールのアルゴリズムが目的ごとの計算負荷の少ない簡素なものでよく、被検値の算出に要する時間は主として反射波分離手段および特定の目的別解析モジュールの作動時間を加えたもので足る。しかも、引き続き他の目的別解析モジュールが起動する場合には、既に実行した反射波分離手段の分離結果が利用可能であるため、計算負荷は激減する。このように、共通の反射波分離プロセスを経た後に、目的・用途に合致するアルゴリズムごとの目的別解析モジュールを起動させるので、短時間で効率の良い検査を適宜必要に応じて行うことが可能となる。
【0013】
より高精度の検査等を可能にするためには、前記反射波分離手段によって分離した基本反射波のうち特定の検査項目に関連する基本反射波以外の基本反射波に係る伝播時間や一次結合係数等の数値データを固定した状態で、当該特定の検査項目に関連する基本反射波を更に細分化してその数、伝播時間、一次結合係数を変数とする予測信号波形と実際の反射波データとの間で再度パターンマッチングを行う反射波再分離部をさらに備え、この反射波再分離部で再分離した基本反射波の数値データに基づき前記目的別解析モジュールに更に詳細な被検値の算出を実行させるようにしていることが望ましい。
【0014】
すなわち、反射波分離手段で分離した基本反射波を更に詳細に解析する場合や、反射波分離手段で分離した基本反射波の伝播時間や一次結合係数をそのまま利用できない場合には、他の基本反射波に対しては既に得られた伝播時間や一次結合係数を固定した状態で、反射波再分離部が新たな仮説に基づき特定の検査項目に関連する基本反射波を再分離するので、局所的あるいは限定的なパターンマッチングを通じて特定の検査項目に関するより精度の高い被検値を有効に算出することができる。この場合、変数が減り、計算負荷が激減するため、計算プロセスの増加が処理スピードに及ぼす影響はわずかで済む。
【0015】
目的別解析モジュールの好ましい実施の態様としては、以下のようなものが挙げられる。
【0016】
舗装材と床版との界面付近に生じる浮遊を捉えるために必要な一又は二以上の基本反射波に関する数値データを取得して、当該一の基本反射波の大きさ、又は浮遊部分に生じる空隙における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて舗装材の浮きに関する所定の被検値を算出するように構成されたアスファルト浮遊解析モジュール。
【0017】
コンクリート構造物中に生じるクラックを捉えるために必要な一又は二以上の基本反射波に関する数値データを取得して、当該一の基本反射波の大きさ、又はクラック内部における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいてクラックに関する所定の被検値を算出するように構成されたクラック解析モジュール。
【0018】
コンクリート構造物中の鉄筋の深さ方向の位置を捉えるために必要な二以上の基本反射波に関する数値データを取得して、鉄筋上にかぶっている媒質の比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて鉄筋上の媒質の被覆に関する所定の被検値を算出するように構成された鉄筋被覆解析モジュール。
【0019】
コンクリート構造物中に存する交差鉄筋を構成する縦筋および横筋からの反射波に対応する基本反射波を異なる波形として取り扱うものであって、それらの鉄筋の各々の腐食を捉えるために必要な一又は二以上の基本反射波に関する数値データを各々の鉄筋について取得して、当該一の基本反射波の大きさ、又は腐食部における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて各々の鉄筋の腐食に関する所定の被検値を同時に算出するように構成された鉄筋腐食解析モジュール。
【0020】
特定の媒質の上下両面で反射する二以上の基本反射波に関する数値データを取得して、当該二以上の基本反射波の前記媒質における伝播時間差に基づいて少なくとも媒質中の水分含有率を計測するために必要な被検値を算出するように構成された堆水解析モジュール。
【0021】
特定の媒質の上下両面で反射する二以上の基本反射波に関する数値データを取得して、当該二以上の基本反射波の大きさに基づき、特定の基本反射波が特定の媒質を通過したときの電磁波の減衰率を、当該媒質中の塩化物イオン含浸率を相対評価するための被検値として算出するように構成された塩害解析モジュール。
【0022】
これらにおいて、特定の媒質が床版又は舗装材であって、内部が性質の異なる複数の床版層又はアスファルト層の積層構造からなる場合に、前記目的別解析モジュールに、各層ごとに上下両面で反射する基本反射波に関する数値データを取得させ、各々の層毎の被検値を算出させるように構成している堆水解析モジュール又は塩害解析モジュール。
【0023】
特定の媒質が鉄筋を内有する床版である場合に、当該床版が鉄筋によって床版上面から鉄筋までの区画、鉄筋から床版底面までの区画の2つに分割されているとみなして、各区画ごとに上下両面で反射する基本反射波に関する数値データを取得し、各々の区画毎の被検値を算出するように構成された上記の堆水解析モジュール又は塩害解析モジュール。
【0024】
事後的に検査位置とデータとの関連づけを容易とするためには、データ受付手段が、反射波データに関連づけられた検査位置特定情報を同時に受け付けるものであり、算出した被検値を検査位置特定情報に基づきマップ化するマップ生成手段を更に具備していることが望ましい。
【0025】
このように構成すると、被検値が検査位置特定情報に基づきマップ生成手段によってマップ化され、異常場所をマップ上で確認できるので、必ずしも反射波データを取得した場所において解析を行う必要はない。したがって、特定の被検値に対して現場で粗いスクリーニングを行い、必要に応じてスポット的に詳しい追加検査を実施するなど、効率的な運用を図ることが可能になる。
【0026】
特に好ましくは、データ受付手段が、2次元方向にマトリクス状の複数の計測ポイントで得られる反射波データを受け付け、マップ生成手段が各計測ポイント毎の被検値を2次元マップ上にプロットするものであることが有用である。
【0027】
迅速にデータを取得するとともに、随時随所における解析の機会を得るためには、検査対象となるコンクリート構造物の舗装表面に対し電磁波を照射することによって反射波データを取得する電磁波探査手段と、電磁波探査した測定ポイントに関する検査位置特定情報を取得する位置情報取得手段と、これらの反射波データ及び検査位置特定情報を関連づけて記憶する記憶手段とを非破壊検査車両に搭載するとともに、この記憶手段に記憶した反射波データ及び検査位置特定情報を上記何れかに記載の非破壊検査装置にデータ入力して非破壊検査を行うように非破壊検査システムを構築することが望ましい。
【0028】
このようにすれば、非破壊検査車両を走行させてデータを取得し、必要な時にいつでも非破壊検査装置によるデータ解析を行うことが可能になる。
【0029】
リアルタイムの検査を可能にするためには、検査対象となるコンクリート構造物の舗装表面に照射することによって反射波データを取得する電磁波探査手段と、電磁波探査した測定ポイントに関する検査位置特定情報を取得する位置情報取得手段とを、上記何れかに記載の非破壊検査装置とともに車両本体に搭載し、前記電磁波探査手段からの反射波データ及び前記位置情報取得手段からの検査位置特定情報を前記非破壊検査装置のデータ受付手段に入力するように非破壊検査用車両を構成することが望ましい。
【0030】
このようにすれば、走行によってデータを取得し、車両にて非破壊検査装置によるデータ解析を即座に行うことで、現場にて速やかな修復等に対応することが可能になる。
【0031】
なお、上記の非破壊検査装置を簡易に利用する上で、以下のようなプログラムが有効となる。
【0032】
コンピュータに読み込まれることによって、上記何れかに記載の非破壊検査装置を構成する反射波分離手段として少なくとも機能するプログラム。
【0033】
コンピュータに読み込まれることによって、上記何れかに記載の非破壊検査装置を構成する反射波分離手段及び反射波再分離部として少なくとも機能するプログラム。
【0034】
コンピュータに読み込まれることによって、上記何れかに記載のプログラムと関連づけられて目的別解析モジュールとして機能するプログラム。
【0035】
以上に述べた非破壊検査装置や非破壊検査システム等に具現される本発明の非破壊検査方法は、検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データを受け付けるデータ受付ステップと、受け付けた前記反射波データと仮説に基づく予測信号波形との間でパターンマッチングを行うことによって当該反射波データを複数の基本反射波に分離する反射波分離ステップと、検査項目の設定・入力等を受け付ける設定入力受付ステップと、前記反射波分離手段によって分離した基本反射波のうち受け付けた検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから前記検査項目に係る所定の被検値を算出する目的別解析ステップとを具備してなることを特徴とする。
【0036】
この場合、上記と同様の理由で、前記反射波分離ステップによって分離した基本反射波のうち特定の検査項目に関連する基本反射波以外の基本反射波に係る伝播時間や一次結合係数等の数値データを固定した状態で、当該特定の検査項目に関連する基本反射波を更に細分化してその数、伝播時間、一次結合係数を変数とする予測信号波形と実際の反射波データとの間で再度パターンマッチングを行う反射波再分離ステップをさらに備え、この反射波再分離ステップで再分離した基本反射波の数値データに基づき前記目的別解析ステップで更に詳細な被検値の算出を行う方法を採用することが望ましい。
【0037】
更に、データ受付ステップにおいて、反射波データに関連づけられた検査位置特定情報を同時に受け付けることにより、目的別解析ステップで算出した被検値に対し更に検査位置特定情報に基づいてマップ化するマップ生成ステップを具備しておくことが実用上、極めて有用な手法となり得る。
【発明の効果】
【0038】
本発明は、以上説明した構成であるから、現場における電磁波探査と、得られる反射波データに対する種々の角度からの解析とを、効率良く両立させつつ、コンクリート構造物に対する健全度の検査を、対象部位を破壊することなく、高精度、高信頼性の下に行うことができる。このため、広範囲に亘って存在し、その破損や老朽化を未然に防止するために早期の診断が要求される高速道路や一般道路等に対して、多大な費用や時間、人的労力、高度の熟練を要さずに、簡易にして確実な健全度チェックを行うことを可能にする極めて有用なものとなり得る。
【発明を実施するための最良の形態】
【0039】
以下、本発明の一実施形態を、図面を参照して説明する。
【0040】
最初に、電磁波を用いた非破壊検査についての前提となる解析手法を述べた上で、本実施形態に係る非破壊検査装置の構成及び適用例に言及する。
(前提となる解析手法)
【0041】
図1は、検査対象となるコンクリート構造物たる高速道路と電磁波探査手段たる電磁波レーダ3との関係を示している。高速道路の場合、コンクリート製の床版11及びアスファルト製の舗装材12の層からなり、コンクリート中には鉄筋13a,13bが配筋されるなど、複数の異なる媒質からなっている。電磁波は媒質非連続箇所で反射するが、コンクリート構造物中には、劣化に伴ってクラック14が生じたり、アスファルトに浮き15が生じる場合があり、厚みの違いはあるにせよ、これらは共にコンクリート中に空隙部を形成して、反射波の大きさや極性等を変化させる。そこで、送信器31及び受信器32からなる電磁波レーダ3を用いてコンクリート構造物に対し表面から電磁波Eを照射し、媒質非連続箇所において生じる反射波を受信して解析を行う。
【0042】
高速道路のような一般的なコンクリート構造物は、交叉鉄筋を含む床版上にアスファルトが敷設されているため、当面の反射波としては、図1に示すように、アスファルト12の表面からの反射波r1、アスファルト12の底面と床版(コンクリート)11の上面との界面からの反射波r2、クラック14からの反射波r3、交差鉄筋構造を構成する縦筋13aおよび横筋13bからの2反射波r4、r5、床版11の底面からの反射波r6の6反射波を考えておけば十分である。rs(t)は送信器31から受信器32に直接伝播する波である。図1(a)は電磁波レーダを紙面左から右に向かって走査する様子を示し、また同図(b)は電磁波レーダを紙面に垂直な方向に走査する様子を示している。
【0043】
まず、電磁波Eの伝播に際し、異なる媒質の境界面での反射係数、透過係数は次式(1)によって与えられる。
【数1】
【0044】
ここに、ε1、ε2はそれぞれ入射前後の媒質の比誘電率である。したがって、透過係数は常に正となるが、反射係数は、2つの媒質の比誘電率に応じて正負いずれの値をも取り得ることになる。
【0045】
このように、電磁波レーダ3の受信器32で受信される検査対象内の各部位からの反射波の大きさ、伝播時間および位相は、伝播径路の長さおよびどのような媒質境界面で反射あるいは透過を繰り返して来たかによって異なる。したがって、受波信号波形r(t)は、上述した6反射を想定した場合に、r0(t)を基本反射波形として次式(2)のような予測信号波形rp(t)としてモデル化できる。
rp(t)=rs(t)+c1r0(t−T1)+c2r0(t−T2)+…+c5r0(t−T5)+c6r0(t−T6) (2)
【0046】
ここに基本反射波形は紡錘型振動波形であって、(2)式において便宜上全てr0(t)で表しており、以下の説明においても同様の表現を用いているが、実際には反射する対象全てについて基本反射波形が同一というわけではない。例えば、鉄筋で反射する反射波と、それ以外の部位で反射する反射波とでは波形が異なり、少なくとも2種類の波形タイプが存する。鉄筋が交差鉄筋である場合には、更に電磁波による走査方向に延びる縦筋13aと、当該走査方向と直交する方向に延びる横筋13bとでも基本反射波形が異なるため、計3種類の波形タイプとなる。また、(2)式において、T1,T2,…は検査対象内の各反射面(境界面)からの第1反射波が到達する時刻(すなわち往復伝播時間)を表す。この場合、電磁波の送信時刻はゼロとし、各境界面からの第2、第3反射波は第1反射波に比し小さいため、無視できるとしている。なお、rs(t)は送信器31から受信器32に直接伝播する波であり、これは別途実験等によって求めることができるため、以下の取り扱いにおいては省略している。
【0047】
(2)式の一次結合係数c1、c2、…は、当該基本反射波の伝播過程に関わる反射係数、透過係数および(電波径路に関わる)減衰係数の積で与えられるため、それらの大きさおよび符号は、電磁波レーダ3の直下の異常に関する情報を含んでいることになる。
【0048】
信号伝播モデルに基づく異常診断に際しては、(2)式のように基本反射波形r0(t)を時間的にずらして一次結合した予測信号波形rp(t)と、実際の受波信号波形r(t)との最適パターンマッチングを図り、基本反射波の伝播時間{T1,T2,…}および一次結合係数{c1、c2、…}を求める。最適パターンマッチングの評価関数としては、次式(3)等を利用することができる。そして、予測信号波形rp(t)の一次結合係数の大きさや極性に基づき、検査対象に異常が存するか否、或いはその異常の程度を判断することができる。
【数2】
【0049】
ここで、θは実波形r(t)と予測信号波形rp(t)との幾何学的角度であり、2つの波形のパターンマッチング度を表わす。ここに、(・,・)および
【数3】
はそれぞれヒルベルト空間の内積およびノルムである。
【0050】
このθを最小にする伝播時間{T1,T2,…}および一次結合係数{c1、c2、…}により、クラックかアスファルトの浮きか等の異常の形態と共に、それらの深度・厚みが求められる。つまり、一次結合係数{ci}(i=1,2,…)の符号や大きさにより異常の形態が、また伝播時間{Ti}によりアスファルトの厚さやクラックの深度などが求まる。深度および厚みを求めるためには、伝播時間{Ti}と各媒質内の電磁波速度c/√ε(c:光速、ε:比誘電率)を用いて異常部等の深度とアスファルト厚を求めることになる。なお、最適化に当たって{ci}および{Ti}を全て変数にとれば、局所解に陥る危険性があるだけでなく、計算にかなりの時間がかかるので、{Ti}については探索を数値的に行うものの、{ci}については解析解を利用する。
【0051】
以上のようにして異常検出が行われるが、クラックに関しては、実際問題、深さ方向に1個ある場合を考えておけば充分である。従って、(2)式の信号伝播モデルは、一般的な仮説としては、前述した6反射r1〜r6に対応するモデルを想定すればよく、適宜必要に応じて、更に想定する反射波を増やせばよい。このように、かかる信号伝播モデルは、検査目的であるコンクリート構造物に想定される内部構造の特異性や、実施しようとする検査項目等によって、抽出を必要とする反射波の種類や数に応じた適切な仮説を立て、その仮説の下にパターンマッチングを行うようにすればよい。
【0052】
ここに、深部の異常を探索する場合は、異常箇所からの反射信号が小さくなるので、実際の受波信号と(2)式によるモデルに基づく予測受波信号の両者に指数関数形のSTCゲインを乗じ、このゲインを乗じた後の2信号に対し(3)式によるパターンマッチングを行うことが有効となる。
【0053】
上記において、計算時間を短縮化するために、まず反射波の大きいものに対する2パラメータを最適化し、次に、これを固定し、残りの3パラメータを最適化する、いわゆる逐次最適化手法を採用することも有効である。ただし、これにより計算時間の大幅な短縮化は可能となるものの、同時最適化でないため、真に最適なパラメータを求めるものではない。従って、上記の方法により求めた準最適解を初期値に、改めて全変数により同時最適化を行えばよい。これにより、最初から全変数で同時最適化するものに比べれば大幅に計算時間は低減化する。
【0054】
アルゴリズムの改善等により高い計算処理能力が見込まれる場合は、基本的な解析手法の考え方は全く変えずに、各反射波の伝播時間の数値解法(最適化)を、リアルタイム性を損なうことなく、より厳密化することができる。この場合には、同時最適化を実現する厳密な最適化手法を採用する。
【0055】
また、特許文献2においては、直交交差鉄筋からの強い反射波の影響を低減することと最適パラメータの数を減らすことの2つの理由により、鉄筋ピッチの50%の区画での受波信号を平均する前処理を実行しているが、本実施形態では実用的な車載型を追求するために、各測定ポイント毎に最適化を実行する。
(本実施形態における非破壊検査装置の具体的な目的)
【0056】
高速道路における保守点検等の運用においては、長距離に亘る路面を形成するコンクリート構造物の劣化状況を舗装を剥がさずに短時間にデータ収集して早期に診断できることが求められる。そして、上記基本的な解析方法の具現化にあたっては、極度の劣化、損傷等に至る手前での適切な健全度診断、そのために望ましい検査項目の特定、現場作業の迅速性および解析精度の両立が図れるシステム構築等が望まれる。
【0057】
本実施形態では、このような観点に基づいて、相互に強い因果関係があり、アスファルトの上から道路の劣化の前兆を捉えて早期に対処する上で有効となるアスファルトの浮き、クラックの厚み、鉄筋のかぶり、鉄筋の腐食度、堆水度、塩害度等に着目し、現場でこれらの検査項目に関する必要なデータを短時間で大量採取するとともに、リアルタイムで若しくは必要に応じ事後的に所望の被検値に関するデータを抽出することで、道路の健全度を早期診断し、また、マップ化しておくことによって、必要であればいつでも更にスポット的な再検査に利用できるようにしたシステムを構築することを目的とする。
<装置構成>
【0058】
そこで、この実施形態は、図2に示すように、電磁波探査手段である電磁波レーダ3及び位置情報取得手段4を非破壊検査車両5の車両本体51に搭載し、調査区画を走行して調査対象部位を電磁波レーダ3によって走査し、時系列の反射波データDを検査位置特定情報Sとともに非破壊検査装置6に入力してデータ処理を行う。この非破壊検査装置6は車両本体51に搭載してもよいし、リアルタイムの計算処理能力に限界がある場合等にはRAMやHDD、フラッシュメモリ等の適宜の記憶媒体を利用した記憶手段7を車両本体51に搭載して反射波データD及び検査位置特定情報Sを記憶手段7に記憶し、事後的に非破壊検査装置6において処理してもよい。
【0059】
非破壊検査車両5は、手押し車などの小型の形態のものでもよいが、ここでは車両本体51が通常の乗用車もしくはそれ以上の車幅を有し、ライン方向(図2における矢印L方向)に複数に対をなす送信器31及び受信器32を備えた電磁波レーダ3を搭載して、前記ラインLと直交する走査方向(V方向)に走行しながら2次元方向にマトリクス状の複数の計測ポイントMP毎に反射波r(t)を取得する。図1、図5、図7、図8、図10、図11、図13、図15においては、簡略化のために1対の送信器31及び受信器32のみを表しているが、これらは車幅方向に複数対備わるものである。電磁波レーダ3は、コンクリート構造物の表面に対向して設けた複数の送信器31から電磁波Eをコンクリート構造物に向けて発信し、コンクリート構造物の表面および内部に存在する媒質非連続箇所で反射した反射波r(t)をコンクリート構造物の表面に対向して設けた前記送信器31と対をなす受信器32で受信して増幅する。この受信反射波r(t)に対しては、A/D変換等の必要な信号処理が施される。既存の電磁波レーダはその殆どがBモード(濃淡画像)を出力する機能に留まるものであるが、本実施形態で用いる電磁波レーダは時系列の波形データを数値として出力する機能を備える。
【0060】
位置情報取得手段4は、GPS(Global Positioning System)などと連携して、電磁波によって探査した計測ポイントMP毎に検査位置特定情報Sを取得する。「計測ポイントMP毎の検査位置特定情報Sの取得」には、周辺位置情報を含んで計測ポイントMPの位置情報を間欠的もしくは連続的に取得する態様も含まれ、例えば、位置情報取得手段4が路面を撮影する撮像機等である場合が挙げられる。この検査位置特定情報Sは、探査の結果得られる各計測ポイントMP毎の反射波データDと関連づけて非破壊検査装置6に入力され、または記憶手段7に記憶される。
【0061】
一方、非破壊検査装置6は、図3(a)に示すように、データ受付手段61、反射波分離手段62、目的別解析モジュール63、反射波再分離部63g、設定入力手段64、マップ生成手段65および制御手段66を備える。
【0062】
データ受付手段61は、反射波データD(例えば6反射波)、及びこれに関連づけられた検査対象部位を特定するための検査位置特定情報Pの入力を受け付ける。
【0063】
反射波分離手段62は、図4に示すように、受け付けた前記反射波データD(r(t))と、設定入力手段64を通じて設定される予測信号波形rp(t)とから、当該予測信号波形rp(t)を構成する基本反射波cir0(t−Ti)(i=1,2,…,6)を分離する。この実施形態における基本的な仮説に基づく予測信号波形rp(t)は前述した反射波r1、r2、…、r6に対応する6反射波モデル、すなわち、アスファルト12の表面からの反射波r1に対応したアスファルト表面反射波c1r0(t−T1)、アスファルト12の底面と床版(コンクリート)11の上面との界面からの反射波r2に対応したアスファルト底面反射波c2r0(t−T2)、クラック14からの反射波r3に対応したクラック反射波c3r0(t−T3)、交差鉄筋構造を構成する縦筋13aおよび横筋13bからの反射波r4、r5に対応した縦筋反射波c4r0(t−T4)および横筋反射波c5r0(t−T5)、床版11の底面からの反射波r6に対応した床版底面反射波c6r0(t−T6)の6反射波である。勿論、適宜必要に応じて想定する基本反射波は増減される。
【0064】
図3(a)に示す目的別解析モジュール63(63a〜63f)は、分離した反射波c1r0(t−T1)、c2r0(t−T2)…の伝播時間{Ti}や振幅{ci}等の数値データのうち適宜のデータを取り込んで特定の検査項目に係る所定の被検値Doutを算出するために必要なアルゴリズムを備える。この実施形態における目的別解析モジュールとしては、検査項目であるアスファルトの浮きを検査するためのアスファルト浮遊解析モジュール63a、検査項目であるクラックを検査するためのクラック解析モジュール63b、検査項目である鉄筋の被覆厚を検査するための鉄筋被覆解析モジュール63c、検査項目である鉄筋の劣化を検査するための鉄筋腐食解析モジュール63d、検査項目である水の含浸を検査するための堆水解析モジュール63e、検査項目である塩化物イオンの含浸を検査するための含塩解析モジュール63f等である。
【0065】
これらの解析モジュール63a〜63fは、反射波分離手段62によって分離された反射波についての演算結果をそのまま利用してもよいが、検査目的に関連する項目に関してより高精度の被検値Doutを得るために、再度、反射波データDに対する更に詳細な反射波の再分離を行い、その結果を利用するコマンドを含んでいてもよい。そして、そのためにこの非破壊検査装置6は、図4に示すような反射波再分離部63gを備えている。この反射波再分離部63gは、(2)式の予測信号波形rp(t)のうち、例えば特定の検査項目に関連する反射波がcxr0(t−Tx)であるとした場合、分離の結果得られた反射波c1r0(t−T1),c2r0(t−T2)…のうち上記特定の検査項目に関連する反射波cxr0(t−Tx)以外の反射波cyr0(t−Ty){yはx以外}に係る伝播時間Tyや一次結合係数cyを固定し、当該特定の検査項目に関連する反射波cxr0(t−Tx)を更に2つの反射波cx1r0(t−Tx1)、cx2r0(t−Tx2)に細分化して変数とし、このように書き換えた(2)式に基づいて反射波データD(r(t))とのパターンマッチングを行う。勿論、この場合も前述したように、基本反射波は反射部位が鉄筋か、それ以外か等によって波形タイプが異なるため、パターンマッチングは該当する波形タイプの基本反射波に基づく。この結果、2つの反射波cx1r0(t−Tx1)、cx2r0(t−Tx2)についての伝播時間Tx1、Tx2や一次結合係数cx1、cx2が求められる。
【0066】
パターンマッチングの手法は上記反射波分離手段62における手法と基本的に同様であり、変数が少ない分、演算負荷は激減し、しかも検査項目を限定したマッチングを通じて、局部や限定箇所における解析精度は格段に向上する。
【0067】
図3の設定入力手段64は、(2)式の仮説に基づく予測信号波形のパターン設定や検査項目の設定、媒質の比誘電率等の設定等、必要なデータの設定入力を受け付ける。
【0068】
マップ生成手段65は、算出した被検値Doutを検査位置特定情報Pと関連づけてマップ化する。この実施形態では、2次元方向にマトリクス状に複数の計測ポイントMPが設定してあるため、各計測ポイントMP毎に算出される被検値を2次元マップ上にプロットする。マップは地図や写真のレイヤーに被検値のレイヤーを重ねるような態様で生成してもよい。
【0069】
制御部66は、設定入力手段64から入力される予測信号波形rp(t)と反射波データD(r(t))とを反射波分離手段62に与えて反射波分離を実行させ、分離した反射波の伝播時間{Ti}や一次結合係数{ci}等の数値データを保存する。設定入力手段64から実行すべき検査項目が与えられると、目的別解析モジュール63a〜63fのうち対応するものを起動させて、分離した反射波のうち当該検査項目に対応した反射波の伝播時間{Ti}や一次結合係数{ci}等の数値データを引き渡し、当該目的別解析モジュール63に被検値Doutを算出させて、これを記憶する。目的別解析モジュール63a〜63fに反射波再分離を実行するコマンドが含まれている場合には、反射波再分離部63gを起動させて、先に分離した伝播時間{Ti}や一次結合係数{ci}等の数値データの一部を固定値として与えるとともに、再分離を要する特定の反射波を新たにマッチングすべき2つの反射波(図4参照)に書き換えて、予測信号波形rp(t)と反射波データD(r(t))とを再度マッチングさせる。そして、当該目的別解析モジュール63a〜63fが算出した被検値Doutを記憶する。制御部66は最後に、マップ生成手段65を起動させて、上記の被検値Doutを検査位置特定情報Pとともに引き渡す。
【0070】
図3(b)は、この非破壊検査装置6のハードウェア資源を簡略に示している。この非破壊検査装置は、CPU101,メモリ102、入力インターフェース103及び出力インターフェース104を具備するコンピュータ100によって構成され、メモリ102には各種プログラム(ソフトウェア)として、反射波分離プログラム、各種解析プログラム、反射波再分離プログラム、制御プログラム等が入力インターフェース103を介して、或いは予め記憶させてある。そして、CPU101は適宜所定のプログラムを呼び出して実行し、周辺ハードウェアと協働して、上述したデータ受付手段61、反射波分離手段62、目的別解析モジュール63(63a〜63f)、反射波再分離部63g、設定入力手段64、マップ生成手段65、制御手段66などとしての役割を果たす。
【0071】
以下、目的別解析モジュール63が実行する目的別の解析手法を例示する。
<アスファルトの浮遊解析>
【0072】
図3におけるアスファルト浮遊解析モジュール63aは、図5に示すようにアスファルト12の底面で反射する反射波r2の強度および位相(符号)を解析するための解析アルゴリズムを備える。
【0073】
アスファルト12の浮遊は、アスファルト12と床版11との接着が剥がれることによって生じる。アスファルト12が浮遊すると、アスファルト底面反射波r2は、厳密には図5(b)に示すように、床版11の上面で反射する反射波r22の直前に、正常時であれば生じない極性の反転した反射波r21が現われる。アスファルト12が剥がれた部位に生じる空隙と当該アスファルト12との境界からの反射は、アスファルト12と床版11であるコンクリートとの媒質同士の界面における反射とは比誘電率の関係が異なり、反射波の極性が反転するからである。結局、このアスファルト12の底面からの反射波r21の方が床版11の上面からの反射波r22に比べ振幅が大きいため、アスファルト12の浮きがある箇所では正常箇所と異なり、この部分からの反射波r2の極性は異なるものになる。そこで、(2)式の仮説に基づくマッチングを通じて反射波分離手段62で得られた床版11の上面付近からの極性の反転した図4のアスファルト底面反射波c2r0(t−T2)を抽出し、そのアスファルト底面反射波の大きさc2をこのアルゴリズムにおいて離散的なレベル値に変換する。このレベル値が被検値Doutとして目的別解析モジュール63からマップ生成手段65に送られることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にレベル値をプロットし、図6のようなアスファルト浮遊マップMaを生成する。
【0074】
このモジュール63aは、特定の値を閾値にしてレベルごとの階層に分類する機能、および、階層ごとに異なる濃淡や斜線等の識別を付す機能を備えている。以下に述べる他のモジュール63b〜63fにおいても同様である。
かかる反射波r2は、浮きが大きくなるほど振幅(したがって基本反射波の一次結合係数c2)が大きくなるので、マップMaによって位置を特定し、そのレベル値をもって浮きの発生の激しい部位を推定することができる。
【0075】
図6は、具体的にある高速道路の橋梁床版に適用した場合の、2.5m×5.0mの領域(1車線幅×5mの長さ相当)に対するアスファルトの浮きの状態を示している。同図において、横および縦のラインは図1における床版11の上部の縦筋13a、横筋13bの位置を示す。また、無色の箇所は正常な箇所を、異常箇所には異常レベルに応じて異なるパターンやハッチングを付している。B0,B5,…、B20の数字は横筋の番号を表わす。アスファルトの浮きの位置と程度が一見して明らかである。
【0076】
なお、このアスファルト浮遊解析モジュール63aとして、反射波再分離部63gと連動したより仔細なアルゴリズムを用いることもできる。
【0077】
アスファルト12が浮いた部分では、図5(b)に基づいて既述したように、浮遊によって生じる空隙の手前のアスファルト12の底面で反射する反射波r21と、空隙を通過して床版11の上面で反射する反射波r22との間にわずかながら伝播時間差を生じる。そこで、(2)式の仮説における特定の反射波cxr0(t−Tx)、すなわち床版11の上面の箇所で反射する反射波c2r0(t−T2)を、図4に示したように2つの反射波c21r0(t−T21)、c22r0(t−T22)に分割して変数とし、反射波分離手段62において明らかとなった他の反射波cyr0(t−Ty)(y=1,3,4,5,6)を固定して反射波再分離部63gにおいて再度のパターンマッチングに付すとともに、予め浮遊によって生じる空隙の比誘電率を記憶させておく。そして、このパターンマッチングによって求まった2つの反射波c21r0(t−T21)、c22r0(t−T22)の往復伝播時間差の(1/2)倍に、比誘電率に基づく空隙中の電磁波Eの速度を乗じれば、浮遊量を算出することができる。そして、この浮遊量を被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップMa上の対応する部位にアスファルト浮遊量をプロットし、図6よりも更に厳密なアスファルト浮遊マップMaを生成する。
【0078】
アスファルト12の浮遊は、アスファルト12の欠損を始めとして床版11中のクラック14の発生につながり、床版11の損傷拡大の大きな原因となるため、早期に診断して劣化箇所の補修を行うことが極めて重要であり、早急な対応が望まれる。そこで、広範囲に亘る構造部の健全度をアスファルト12の浮きの観点から未然に評価することが非常に重要となり、本実施形態を通じてその効率化に多大に寄与することとなる。
<クラック解析>
【0079】
図3におけるクラック解析モジュール63bは、図7に示すように床版11中のクラック14で反射するクラック反射波r3を解析するための解析アルゴリズムを備える。
【0080】
クラック14は、主として鉄筋13a、13bの腐食、膨張に起因している。床版11の場合はかぶりが少ないので、クラック14の形態は通常、上層部に位置する鉄筋(この実施形態では縦筋13a)から始まり、その軸方向からみて斜め上方に進行して、図7(b)のようなパターンになる。クラック14同士がつながったときに、床版11の剥離に発展する。クラック14はまた、かぶりが大きい場合等に図8に符号14bで示すごとく垂直に近くなる場合があり、このような垂直クラック14bが発生する他の要因としては、許容応力以上の荷重が掛かった場合や、長期的に繰り返し荷重を受けた場合が挙げられる。
【0081】
鉄筋腐食の要因が舗装面側から浸透するため、上述したように上側の鉄筋(縦筋;主筋)13aが先に腐食するが、更に下側の鉄筋13bも腐食する場合は、図7のクラック14と同じような形態のクラック14が下側の鉄筋13bを起点にして図7(b)中紙面に垂直方向にも発生し、縦横に2タイプのクラック14が入ることになる。
【0082】
さらに、縦筋13aに垂直な方向からみた場合に、図8に示すように斜めにクラック14cが生じることがある。要因としては、躯体に極端なひねり荷重が生じた場合等が挙げられる。また、クラック14として捉え得る空隙に、初期欠陥(締め固め不足等によるもの)がある。締め固め時に生コンクリートが沈降するが、鉄筋13a、13bが邪魔をするため、締め固め不足に陥り易い。鉄筋のない構造物でも、部分的に締め固め忘れが生じることによって空隙の原因となる。狭隘部、鉄筋の過密部分など、締め固めが十分に施しにくい場所にこの種の空隙が生じるケースが多い。
【0083】
このように、種々の要因および形態でクラック14が発生し、発生したクラック14の箇所で図7(c)左図のようにクラック反射波r3が生じる。そして、クラック14が大きくなるほど振幅(したがって基本反射波の一次結合係数)が大きくなる。そこで、(2)式の仮説に基づくマッチングを通じて反射波分離手段62が分離したクラック14からの反射波である図4のクラック反射波c3r0(t−T3)を抽出し、そのクラック反射波の大きさc3をこのアルゴリズムにおいて離散的なレベル値に変換する。このレベル値が被検値Doutとして目的別解析モジュール63からマップ生成手段65に送られることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にレベル値をプロットし、図9のクラック発生マップMcを生成する。マトリクスの右辺及び上辺に付した数字は縦筋及び横筋の番号であり、マトリクスの中に付した数字はレベル値であって、値が大きいほど反射波r3が大きいことを表わしている。
【0084】
図9において、比較のためにアスファルトを剥がした後の打音検査によりクラック14が認められた場所が自由曲線(丸)で囲んであるが、反射波r3の大きい部位と打音によるクラック検出位置とがほぼ一致する結果となっている。
【0085】
なお、このクラック解析モジュール63bに、図3の反射波再分離部63gと連動したより仔細なクラック厚解析アルゴリズムを用いることもできる。
【0086】
クラックからの反射では、図7(c)右図に示すように、クラックの手前のコンクリート界面で反射する反射波r31と、クラックを通過した部位においてコンクリート界面で反射する反射波r32との間に僅かな伝播時間差を生じる。そこで、(2)式の仮説における図4のクラック反射波c3r0(t−T3)を2反射波c31r0(t−T31)、c32r0(t−T32)に分割して変数とし、反射波分離手段62において明らかとなった他の反射波cyr0(t−Ty)(y=1,2,4,5,6)を固定して、反射波再分離部63gにおいて再度のパターンマッチングに付すとともに、予めクラック14によって生じる空隙の比誘電率を記憶させておく。そして、このパターンマッチングにより新たに得られる前記2つの反射波c31r0(t−T31)、c32r0(t−T32)の往復伝播時間差の(1/2)倍に、比誘電率に基づくクラック中の電磁波の速度{電磁波の速度vは、伝播媒質の比誘電率をεとして、v=c/(ε)1/2 、cは光速}を乗じれば、クラック厚を算出することができる。このクラック厚データを被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にクラック厚をプロットし、図9よりも更に厳密なクラック発生マップMcを生成する。
【0087】
なお、通常のクラック14では、測定ポイントMPの直下から1つのクラック反射波が得られるだけであるが、図8に示すような垂直クラック14b(垂直に近いものを含む)では測定ポイントMPの直下から複数のクラック反射波が受信されることもある。そこで、予め(2)式の仮説を7反射波或いはそれ以上のモデルにするか、あるいは反射点が近いことが推定されれば(2)式の仮説に基づくマッチングを通じて分離された図4のクラック反射波c3r0(t−T3)を上記手法と同様に複数のクラック反射波c31r0(t−T31)、c32r0(t−T32)、…に分割して、反射波再分離部63gにおいて再度のパターンマッチングに付すれば、垂直クラック14bの検出も可能となる。
【0088】
クラック14はコンクリート構造物の強度低下、損傷の兆しであるため、早期に診断して劣化箇所の補修を行うことが極めて重要である。クラック14は構造物中に生起するため、高速道路の広範囲に亘ってアスファルト12を剥がして打音検査を行うには膨大な労力と時間を要するが、破壊せずに(舗装を切削せず)構造部の健全度をクラック発生の有無の観点から評価することが非常に重要となり、本実施形態を通じてその効率化に多大に寄与することとなる。
<鉄筋の被覆解析>
【0089】
図3における鉄筋被覆解析モジュール63cは、図10に示すような鉄筋の被覆厚d1、d2を解析するための鉄筋被覆量解析アルゴリズムを備える。
【0090】
鉄筋13a、13bのかぶり、つまり、コンクリート11の表面と縦筋13aや横筋13bとの距離d1、d2は、前者においてはコンクリート11の上面で反射する反射波r2と鉄筋13aで反射する反射波r4との伝播時間差の(1/2)倍に比誘電率に基づくコンクリート11中の電磁波の速度を乗じたものとなり、後者においてはコンクリート11の上面で反射する反射波r2と鉄筋13bで反射する反射波r5との伝播時間差の(1/2)倍に比誘電率に基づくコンクリート11中の電磁波の速度を乗じたものとなる。
【0091】
そこで、(2)式の仮説に基づくマッチングを通じて反射波分離手段62が分離したこれらの反射波に対応する図4の反射波c2r0(t−T2)、c4r0(t−T4)、c5r0(t−T5)に基づき、鉄筋被覆解析モジュール63cが被覆厚を算出してこれを被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に被覆厚をプロットし、鉄筋被覆マップ(図示省略)を生成する。なお、この被覆厚は、アスファルト表面aと鉄筋13a、13bとの距離として算出することもできる。
【0092】
このような鉄筋被覆マップを利用すれば、補修工事等に有効に利用でき、高速道路のメンテナンスの便を格段に向上させることが可能となる。
<鉄筋の腐食解析>
【0093】
図3における鉄筋腐食解析モジュール63dは、図11に示すように鉄筋13a、13bで反射する反射波r4,r5から腐食部13xを捉えるための解析アルゴリズムを備える。
【0094】
鉄筋13a、13bが腐食すると、反射波のレベル値が変化する。そこで、(2)式の仮説に基づくマッチングを通じて反射波分離手段62で得られた反射波のうち図4の鉄筋反射波c4r0(t−T4)、c5r0(t−T5)を抽出し、その振幅(したがって基本反射波の一次結合係数)c4、c5の大きさをこのアルゴリズムにおいて離散的なレベル値に変換する。このレベル値が被検値Doutとして目的別解析モジュール63からマップ生成手段65に送られることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にレベル値をプロットし、図12に示す鉄筋腐食マップMiを生成する。
【0095】
このマップMiによって、腐食位置を特定し、そのレベル値によって鉄筋腐食度を計測することができる。
【0096】
交差鉄筋は上述のように縦筋13aと横筋13bから構成され、(2)式にはこれらが含まれるため、図12のようにこれら縦筋13aや横筋13bに沿って腐食状況が確認できるマップが得られることが予想される。
【0097】
なお、この鉄筋腐食度解析モジュール63dとして、反射波再分離部63gと連動したより仔細な腐食度解析アルゴリズムを用いることもできる。
【0098】
例えば鉄筋13aが腐食した部分での反射では、図11(b)に示すように、腐食によって生じる空隙の手前のコンクリートとの界面で反射する縦筋13aの反射波r41と、空隙を通過して鉄筋非腐食部との界面で反射する反射波r42との合成波が同図(a)の縦筋反射波r4となり、両反射波r41、r42間にわずかながら伝播時間差を生じる。同様に、横筋13bの反射波r5についても、2つの反射波r51、r52の合成波が横筋反射波r5となる。そこで、(2)式の仮説における交差鉄筋13a、13bについての図4に示す反射波c4r0(t−T4){あるいは、c5r0(t−T5)}を各々2つの反射波c41r0(t−T41)、c42r0(t−T42){あるは、c51r0(t−T51)、c52r0(t−T52)}に分割して変数とし、反射波分離手段62において明らかとなった他の反射波cyr0(t−Ty)を固定して反射波再分離部63gにおいて再度のパターンマッチングに付すとともに、予め腐食によって生じる空隙の比誘電率を記憶させておく。そして、2つの反射波c41r0(t−T41)、c42r0(t−T42){あるは、c51r0(t−T51)、c52r0(t−T52)}の往復伝播時間差の(1/2)倍に、比誘電率に基づく腐食部の電磁波Eの速度を乗じれば、腐食の厚みを算出することができる。そして、この腐食厚を被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイント毎にマップ上の対応する部位に鉄筋腐食度をプロットし、図12よりも更に厳密な鉄筋腐食マップMiを生成する。上記は縦筋13aまたは横筋13bについて個別のパターンマッチングを行うことができ、場合によっては1つの鉄筋についてだけの腐食度を算出させることも勿論可能である。
【0099】
鉄筋の腐食は前述したようにクラック発生、床版の剥離の原因となるほか、何よりもコンクリート構造物の強度低下に直結するため、早期に診断して劣化箇所の補修を行うことが極めて重要である。この場合、鉄筋は構造物中に埋没しているため、高速道路の広範囲に亘ってアスファルトを剥がして検査を行うには膨大な労力と時間を要する。加えて、これまでは鉄筋腐食度を高精度に測る方法がなかった。そこで、破壊せずに(舗装を切削せず)構造部の健全度を鉄筋腐食の観点から評価することが非常に重要となり、本実施形態を通じてその効率化に多大に寄与することとなる。
【0100】
<堆水の解析>
【0101】
図3における堆水解析モジュール63eは、図13に示すような水を含んだアスファルト12の上下両面における反射波r1、r2から堆水度を解析するための含水率解析アルゴリズムを備える。
【0102】
例えば、(2)式の仮説に基づくマッチングを通じて図4の反射波分離手段62で得られた反射波のうち、アスファルト上面と底面で反射した反射波r1、r2であるc1r0(t−T1)、c2r0(t−T2)を抽出し、それらの伝播時間差の(1/2)倍に、比誘電率に基づくアスファルト12中の電磁波の速度を乗じたものが、アスファルト12の厚み値dxとなる。しかし、アスファルト12に水が含浸すると、比誘電率εxがδxに変化し、アスファルト中を伝播する電磁波Eの速度c/√εxがc/√δxに変化する。そこで、予めアスファルト12の厚み値dxを与えるとともに、水分含有率とアスファルト中の比誘電率との関係を記憶させておき、上記伝播時間差を計測して、電磁波の速度から比誘電率を割り出せば、伝播時間差のみによって水の含浸率を算出することができる。そして、この含水率を被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に含水率をプロットし、堆水マップMwを生成する。以上は、水が電磁波の伝播径路上に均一に堆水していると仮定し、平均値として取り扱うことで、計算を単純化することができる。勿論、水分含有率とアスファルト中の比誘電率との関係を予め与えない場合であっても、水分含有量によって伝播時間差が変化するため、当該伝播時間差のみをもってしても、水分含有率を計測する被検値として有効に取り扱うことができる。
【0103】
なお、電磁波の伝播時間差に基づいてアスファルト12や床版11の厚み、鉄筋13a、13bのかぶり厚などを算出する場合には、予め各層の比誘電率が明らかでなければならず、逆に、アスファルト12や床版11等の水分含有率を算出するためには、予め各層の厚みが明らかでなければならない。すなわち、例えば前者では路面からある程度の深度までは一定の状態(たとえば乾いた状態)にあることが推定されるなど、比誘電率がある程度絞れる状況下に測定を実施する必要があるし、後者では予め厚みが測定済である必要があるなど、各目的別解析モジュール63(63a〜63f)は、相互に矛盾なく適用される必要がある。
【0104】
実験は行っていないが、図14は堆水マップMwのイメージ図であり、補修を要する箇所を推定することができる。
【0105】
以上は、床版の堆水についても全く同様である。
【0106】
舗装や床版が堆水しても、コンクリート構造物の劣化進行の大きな要因となるため、これ早期に検出して手当てを施すことが極めて重要となる。
<塩害の解析>
【0107】
図3における堆水解析モジュール63eは、図15に示すような塩化物イオンを含んだアスファルト12の上下両面における反射波r1、r2から塩害度を解析するための含塩率解析アルゴリズムを備える。
【0108】
例えば、(2)式の仮説に基づくマッチングを通じて図4の反射波分離手段62で得られた反射波のうち、アスファルト上面と底面で反射した反射波成分c1r0(t−T1)、c2r0(t−T2)を抽出し、それらの大きさc1、c2から、媒質であるアスファルトを通過することによって生じる電磁波の減衰率を算出することができる。
【0109】
塩水中の塩化物イオンの存在によって電磁波速度は影響を受けず、むしろ減衰率に影響を及ぼす場合があることが予測されている。
【0110】
そこで、上記の減衰率を被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は、関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に減衰率をプロットし、図16に示す塩害マップMsを生成する。以上は、塩化物イオンが電磁波の伝播径路上に均一に分布していると仮定し、平均値として取り扱うことで、計算を単純化することができる。
【0111】
減衰率は検査対象物の内部構造や施工条件等によって変化するため、ここで求める減衰率は異なる検査対象物間では比較の難しいものであるが、同一検査対象物における相対的な評価値としては意味があり、減衰率が大きいほど、含塩率が高いと判断することができる。
【0112】
実験は行っていないが、図16は塩害マップMsのイメージ図であり、例えば凍結防止剤散布ラインに沿って含塩率の高いデータが得られること等が予想される。
【0113】
床版の含塩についても全く同様である。
【0114】
高速道路では、冬期の路面凍結防止を目的として、凍結防止材(塩化ナトリウム)を寒冷地では大量に散布している。コンクリート構造物に塩化物イオンが浸透して、鉄筋の腐食(塩害)が生じ、この結果、クラック、剥離、ポットホール等コンクリート構造物の損傷が生じている。
【0115】
損傷状況により補修に着手することになるが、経済的に、かつ効率的に補修するには、破壊せずに(舗装を切削せず)構造部の健全度を評価することが非常に重要となり、本実施形態を通じてその効率化に多大に寄与することとなる。
【0116】
なお、以上は塩化物イオンの濃度がコンクリート内部で均一であるとの前提の下に算出されるものであるが、厳密には、塩化物イオンの浸透によるコンクリート内部での濃度は一定ではなく、フィックの拡散方程式に従って濃度が分布する。すなわち、塩分は、時間とともにコンクリートに浸透してゆき、深さ方向の塩化物イオン濃度は、(1)コンクリートの供給量(Co)、(2)経過年数(t)、(3)浸透のしやすさ(D)、深さ(X)により異なる。
舗装のクラックの進展状況、床版の健全度の状況、また床版の調査位置によって、上記(1)、(3)が異なることから平面的な塩化物イオン濃度(供給量)が異なり、更に深さ方向でも塩化物イオン濃度が異なる。
【0117】
例えば、コンクリート表面に供給される塩化物イオン濃度を基準にすれば、
C(x、t)=Co(1-erf(x/(2√(D・t)))) (4)
で表わされる。ここに、
C(x,t):深さX、経過時間t年の場合の塩化物イオン濃度(kg/m3)
C0:コンクリート表面に供給される塩化物イオン濃度(kg/m3)
X:コンクリート表面からの深さ(cm)
D:塩化物イオンの拡散係数(拡散のしやすさ)(cm2/年)
t:経過時間(year)
である。
【0118】
そして、塩化物濃度が異なれば媒質中を通過する電磁波の減衰率も変化する点、コンクリート表面に供給される塩化物イオンが全てコンクリート中に浸透・拡散するわけではない点などを考慮した上で、電磁波の減衰率を濃度分布と関連づけた関数として上述した塩化物イオン含浸率を算出すれば、より実情に近いマップを生成することも可能でなる。
【0119】
既に述べた水分含有量についても、アスファルト表面から水が浸透する場合の分布を考慮した補正を行うことによって、より精度の高い堆水マップを生成する可能性も追求することができる。
<床版や舗装材が積層構造からなる場合>
【0120】
床版11や舗装材であるアスファルト12は、常に全体が均質な媒質であるとは限らない。例えば、時期を異ならせてコンクリートの打設やアスファルトによる舗装が行われている場合には、これらは積層構造となる上に、個々の層は打設や舗装時の材料や作業環境等の相違から、媒質としての性質が異なってくる場合が少なくない。したがって、上述した堆水状況も、各層ごとに把握することがより望ましい。
【0121】
そこで、例えば図17に示すように複数層B1、B2の積層構造からなる床版11に対して上述した堆水解析モジュール63eや塩害解析モジュール63fを適用する際には、層B1、B2間で反射する反射波r7に対応して(2)式の仮説に新たに反射波c7r0(t−T7)を加えた上で、各層の上下両面で反射する反射波(r2、r7)、(r7、r6)に対応した反射波に関する数値データを取得させ、各々の層B1、B2毎に媒質中の水分含有率を計測するための被検値を算出させることも有効となる。
【0122】
以上は、アスファルト12が複数層の積層構造からなる場合にも全く同様である。
<アスファルト表面に対する異変部の解析>
【0123】
さらにまた、以上の手法を用いれば、非破壊検査装置の他の用途として、アスファルト表面に生じている水溜りや凹部等の異変解析も行うこともできる。
【0124】
この場合、図3における目的別解析モジュール63の一つに、同図においては図示しないが、次に述べるようなアスファルト表面解析モジュールを組み込んでおくことが有効となる。
【0125】
このアスファルト表面解析モジュールは、アスファルト表面に凹部が存在しその凹部に水溜りが生じた場合にこれを検出する処理手順と、乾燥時にアスファルト表面に存在する凹部を検出する処理手順とを備える。
【0126】
先ず、アスファルト表面に図18(a)に示すような凹部Zができて水溜りが生じた場合には、アスファルト表面の反射波r1が大きくなる。これは、アスファルトの比誘電率が概ね5〜6であるのに対し、水の比誘電率が81であるため、(1)式より明らかである。そこで、降雨後に路面を走査し、(2)式の仮説に基づくマッチングを通じて図3および図4に示した反射波分離手段62が分離したアスファルト12の表面からの反射波であるアスファルト反射波c1r0(t−T1)を抽出し、そのアスファルト反射波r1の大きさc1をこのアルゴリズムにおいて離散的なレベル値に変換する。このレベル値が被検値Doutとして目的別解析モジュール63からマップ生成手段65に送られることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位にレベル値をプロットし、水溜りに関するアスファルト表面異変部発生マップ(図示省略)を生成することができる。
【0127】
この場合、このアスファルト表面解析モジュールとして、反射波再分離部63gと連動したより仔細なアスファルト表面解析アルゴリズムを用いることもできる。
【0128】
すなわち、図18(b)に示すようにアスファルト表面の凹部Zに水溜まりが生じると、水面で反射する反射波r11の近傍において僅かな伝播時間差で凹部Zの底面からの反射波r12が受信される。そこで、(2)式の仮説における図4のアスファルト反射波c1r0(t−T1)を2反射波c11r0(t−T11)、c12r0(t−T12)に分割して変数とし、反射波分離手段62において明らかとなった他の反射波cyr0(t−Ty)(y=2,3、4,5,6)を固定して、反射波再分離部63gにおいて再度のパターンマッチングに付すとともに、異変部の媒質である水等の比誘電率を記憶させておく。そして、新たに得られる前記2つの反射波c11r0(t−T11)、c12r0(t−T12)の往復伝播時間差の(1/2)倍に、比誘電率に基づく異変部中の電磁波の速度{電磁波の速度vは、伝播媒質の比誘電率をεとして、v=c/(ε)1/2 、cは光速}を乗じれば、異変部である水溜りの厚みあるいは凹部の厚みを算出することができる。そして、この水溜り厚データを被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に水溜り厚(凹部の深さ)をプロットし、水溜りあるいは凹部に関するアスファルト表面異変部発生マップを生成することができる(図示省略)。
【0129】
一方、乾燥時(天気が良く水溜り等が生じていない日)においても、アスファルト12の表面に存在する凹部Zの検出が可能である。すなわち、この場合のアスファルト表面からの反射波は、図18(c)に示すように凹部における反射波r12の伝播時間T12の方が正常なアスファルト表面における反射波r11の伝播時間T11よりも大きくなる。そこで、これらの往復伝播時間差の(1/2)倍に、空中での電磁波の速度{電磁波の速度vは、伝播媒質の比誘電率をεとして、v=c/(ε)1/2 、cは光速}を乗じれば、異変部である凹部の厚みを算出することができる。そして、この凹部厚データを被検値Doutとしてマップ生成手段65に送ることで、マップ生成手段65は関連づけられた検査位置特定情報Pに基づいて、各計測ポイントMP毎にマップ上の対応する部位に凹部厚(深さ)をプロットし、凹部Zに関するアスファルト表面異変部発生マップを生成することができる(図示省略)。
【0130】
なお、最後に付言すると、本実施形態の早期診断により適切な対応が可能となるものに、ポットホールが挙げられる。ポットホールとは、何らかの原因により、舗装の表面部分が円形状に剥がれ、または沈下してくぼみができる現象を言い、以下の要因が考えられる。
1)円形状に表層部が剥がれるケース
a)何らかの原因により1本ひび割れから亀甲状に拡大し、表面の舗装が飛び出して、円形状の穴ができる場合。ひび割れから亀甲状への進展(拡大)は雨水がひび割れに浸透した場合に起こり易く、短時間でポットホールに進展する。一般的にはコンクリート構造物の表層部に損傷が発生するが、基層、路盤の損傷が原因により生じるポットホールも珍しくない。
b)舗装厚さが不足、又は舗装耐力が不足していることにより、交通荷重で舗装面が沈下し、舗装にひび割れが発生、更に雨水などが浸透して、くぼみが大きくなる場合、又はくぼみと合わせて、舗装体が細分化(破砕)し、通過交通で路面に散らばり、くぼみが深くなる場合、ポットホールに至る。
c)土工部においても、舗装の下になる路床の耐力不足から、舗装全体が沈下・変状・クラック発生して、表層部或いは基層部も含んで、通過交通により表面の舗装が砕け、飛び散って、ポットホールに至るケースがある。
d)舗装のクラックから劣化因子が浸透し、橋梁床版の劣化が生じ、舗装にクラックが生じて、ポットホールに進展する。
e)舗装面に油などが落ち、舗装がカットバック(アスファルトで固められている舗装合材が油が原因によりバラバラになる現象:固結力を失った状況)し、舗装が飛び散る現象によりポットホールに至る場合もある。
2)沈下してくぼみができる場合
舗装厚さ不足、又は耐力が不足していることが原因となり、舗装面が沈下する場合で、上記1)に示す、ポットホールの前段とも言える状況である。
【0131】
放置しておくと、ひび割れに雨水が入り、舗装体が細分化され、細分化された材料が舗装面にちらばり、ポットホールの拡大が生じる。上記1)b)に同じである。
【0132】
上記いずれの場合も、水が介入するとポットホールへと進展するスピードは速く、水の浸透を防ぐことが予防保全の大前提となる。よって、本実施形態による空隙の発見、堆水状態の発見等は、このようなポットホールの発生を未然に防ぐ意味においても極めて有用なものとなり得る。
【0133】
以上、本発明の一実施形態について説明したが、各部の具体的な構成は、上述した実施形態のみに限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【0134】
例えば、最適化手法は必ずしも上記(2)式のパターンマッチング及びその評価関数に限られず、速度向上のために適した他の類似性判断手法があれば、そのアルゴリズムを有効に採用することができる。
【0135】
また、上記実施形態は高速道路を適用対象としたが、高速道路以外の道路等にも同様に適用できることは言うまでもない。
【図面の簡単な説明】
【0136】
【図1】本発明の一実施形態に係る検査モデルを示す概略図。
【図2】同実施形態に非破壊検査に使用する車両、装置及びシステムを示す図。
【図3】同実施形態の非破壊検査装置の機能構成及びハードウェア資源を示すブロック図。
【図4】同実施形態の反射波分離手段及び反射波再分離部の機能説明図。
【図5】同実施形態におけるアスファルト浮遊解析の説明図。
【図6】同実施形態において生成されるアスファルト浮遊マップを示す図。
【図7】同実施形態におけるクラック解析の説明図。
【図8】同実施形態におけるクラック解析の説明図。
【図9】同実施形態において生成されるクラックマップを示す図。
【図10】同実施形態における鉄筋被覆解析の説明図。
【図11】同実施形態における鉄筋腐食解析の説明図。
【図12】同実施形態において生成される鉄筋腐食マップを示す図。
【図13】同実施形態における堆水解析の説明図。
【図14】同実施形態において生成される堆水マップを示す図。
【図15】同実施形態における塩害解析の説明図。
【図16】同実施形態において生成される塩害マップを示す図。
【図17】同実施形態における堆水や塩害のより詳細な解析手法を示す図。
【図18】同実施形態におけるアスファルト表面異変解析の説明図。
【符号の説明】
【0137】
3…電磁波探査手段(電磁波レーダ)
4…位置情報取得手段
5…非破壊検査用車両
6…非破壊検査装置
7…記憶手段
51…車両本体
61…データ受付手段
62…反射波分離手段
63a…目的別解析モジュール(アスファルト浮遊解析モジュール)
63b…目的別解析モジュール(クラック解析モジュール)
63c…目的別解析モジュール(鉄筋被覆解析モジュール)
63d…目的別解析モジュール(鉄筋腐食解析モジュール)
63e…目的別解析モジュール(堆水解析モジュール)
63f…目的別解析モジュール(塩害解析モジュール)
63g…反射波再分離部
64…設定入力手段
65…マップ生成手段
E…電磁波
MP…計測ポイント
r(t)、r1、r2、r3、r4,r5、r6…反射波
rp(t)…予測信号波形
r0(t)…基本反射波
【特許請求の範囲】
【請求項1】
検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データを受け付けるデータ受付手段と、受け付けた前記反射波データと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データを複数の基本反射波に分離する反射波分離手段と、前記反射波分離手段によって分離した基本反射波のうち特定の検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから前記検査項目に係る所定の被検値を算出する一又は複数の目的別解析モジュールと、検査項目の設定・入力等を受け付ける設定入力手段とを具備し、この設定入力手段において受け付けた検査項目に対応する前記特定の目的別解析モジュールを起動させて、当該検査項目に関連する基本反射波に基づく被検値の算出を行わせるようにしていることを特徴とする非破壊検査装置。
【請求項2】
前記反射波分離手段によって分離した基本反射波のうち特定の検査項目に関連する基本反射波以外の基本反射波に係る伝播時間や一次結合係数等の数値データを固定した状態で、当該特定の検査項目に関連する基本反射波を更に細分化してその数、伝播時間、一次結合係数を変数とする予測信号波形と実際の反射波データとの間で再度パターンマッチングを行う反射波再分離部をさらに備え、この反射波再分離部で再分離した基本反射波の数値データに基づき前記目的別解析モジュールに更に詳細な被検値の算出を実行させるようにしている請求項1記載の非破壊検査装置。
【請求項3】
目的別解析モジュールの一つが、舗装材と床版との界面付近に生じる浮遊を捉えるために必要な一又は二以上の基本反射波に関する数値データを取得して、当該一の基本反射波の大きさ、又は浮遊部分に生じる空隙における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて舗装材の浮きに関する所定の被検値を算出するように構成されたアスファルト浮遊解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項4】
目的別解析モジュールの一つが、コンクリート構造物中に生じるクラックを捉えるために必要な一又は二以上の基本反射波に関する数値データを取得して、当該一の基本反射波の大きさ、又はクラック内部における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいてクラックに関する所定の被検値を算出するように構成されたクラック解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項5】
目的別解析モジュールの一つが、コンクリート構造物中の鉄筋の深さ方向の位置を捉えるために必要な二以上の基本反射波に関する数値データを取得して、鉄筋上にかぶっている媒質の比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて鉄筋上の媒質の被覆に関する所定の被検値を算出するように構成された鉄筋被覆解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項6】
目的別解析モジュールの一つが、コンクリート構造物中に存する交差鉄筋を構成する縦筋および横筋からの反射波に対応する基本反射波を異なる波形として取り扱うものであって、それらの鉄筋の各々の腐食を捉えるために必要な一又は二以上の基本反射波に関する数値データを各々の鉄筋について取得して、当該一の基本反射波の大きさ、又は腐食部における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて各々の鉄筋の腐食に関する所定の被検値を同時に算出するように構成された鉄筋腐食解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項7】
目的別解析モジュールの一つが、特定の媒質の上下両面で反射する二以上の基本反射波に関する数値データを取得して、当該二以上の基本反射波の前記媒質における伝播時間差に基づいて少なくとも媒質中の水分含有率を計測するために必要な被検値を算出するように構成された堆水解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項8】
目的別解析モジュールの一つが、特定の媒質の上下両面で反射する二以上の基本反射波に関する数値データを取得して、当該二以上の基本反射波の大きさに基づき、特定の基本反射波が特定の媒質を通過したときの電磁波の減衰率を、当該媒質中の塩化物イオン含浸率を相対評価するための被検値として算出するように構成された塩害解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項9】
特定の媒質が床版又は舗装材であって、内部が性質の異なる複数の床版層又はアスファルト層の積層構造からなる場合に、前記目的別解析モジュールに、各層ごとに上下両面で反射する基本反射波に関する数値データを取得させ、各々の層毎の被検値を算出させるように構成している請求項7又は8何れかに記載の非破壊検査装置。
【請求項10】
特定の媒質が鉄筋を内有する床版である場合に、当該床版が鉄筋によって床版上面から鉄筋までの区画、鉄筋から床版底面までの区画の2つに分割されているとみなして、前記目的別解析モジュールに、各区画ごとに上下両面で反射する基本反射波に関する数値データを取得させ、各々の区画毎の被検値を算出させるように構成している請求項7記載の非破壊検査装置。
【請求項11】
データ受付手段が、反射波データに関連づけられた検査位置特定情報を同時に受け付けるものであり、算出した被検値を検査位置特定情報に基づきマップ化するマップ生成手段を更に具備する請求項1〜10何れかに記載の非破壊検査装置。
【請求項12】
データ受付手段が、2次元方向にマトリクス状の複数の計測ポイントで得られる反射波データを受け付け、マップ生成手段が各計測ポイント毎の被検値を2次元マップ上にプロットする請求項11記載の非破壊検査装置。
【請求項13】
検査対象となるコンクリート構造物の舗装表面に対し電磁波を照射することによって反射波データを取得する電磁波探査手段と、電磁波探査した測定ポイントに関する検査位置特定情報を取得する位置情報取得手段と、これらの反射波データ及び検査位置特定情報を関連づけて記憶する記憶手段とを非破壊検査車両に搭載するとともに、この記憶手段に記憶した反射波データ及び検査位置特定情報を請求項11又は12何れかに記載の非破壊検査装置にデータ入力して非破壊検査を行うようにしていることを特徴とする非破壊検査システム。
【請求項14】
検査対象となるコンクリート構造物の舗装表面に照射することによって反射波データを取得する電磁波探査手段と、電磁波探査した測定ポイントに関する検査位置特定情報を取得する位置情報取得手段とを、請求項11又は12何れかに記載の非破壊検査装置とともに車両本体に搭載し、前記電磁波探査手段からの反射波データ及び前記位置情報取得手段からの検査位置特定情報を前記非破壊検査装置のデータ受付手段に入力するようにしていることを特徴とする非破壊検査用車両。
【請求項15】
コンピュータに読み込まれることによって、請求項1〜12何れかに記載の非破壊検査装置を構成する反射波分離手段として少なくとも機能することを特徴とするプログラム。
【請求項16】
コンピュータに読み込まれることによって、請求項1〜12何れかに記載の非破壊検査装置を構成する反射波分離手段及び反射波再分離部として少なくとも機能することを特徴とするプログラム。
【請求項17】
コンピュータに読み込まれることによって、請求項15又は16何れかに記載のプログラムと関連づけられて目的別解析モジュールとして機能することを特徴とするプログラム。
【請求項18】
検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データを受け付けるデータ受付ステップと、受け付けた前記反射波データと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データを複数の基本反射波に分離する反射波分離ステップと、検査項目の設定・入力等を受け付ける設定入力受付ステップと、前記反射波分離手段によって分離した基本反射波のうち受け付けた検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから前記検査項目に係る所定の被検値を算出する目的別解析ステップとを具備してなることを特徴とする非破壊検査方法。
【請求項19】
前記反射波分離ステップによって分離した基本反射波のうち特定の検査項目に関連する基本反射波以外の基本反射波に係る伝播時間や一次結合係数等の数値データを固定した状態で、当該特定の検査項目に関連する基本反射波を更に細分化してその数、伝播時間、一次結合係数を変数とする予測信号波形と実際の反射波データとの間で再度パターンマッチングを行う反射波再分離ステップをさらに備え、この反射波再分離ステップで再分離した基本反射波の数値データに基づき前記目的別解析ステップで更に詳細な被検値の算出を行うようにしている請求項18記載の非破壊検査方法。
【請求項20】
データ受付ステップにおいて、反射波データに関連づけられた検査位置特定情報を同時に受け付けることにより、目的別解析ステップで算出した被検値に対し更に検査位置特定情報に基づいてマップ化するマップ生成ステップを具備する請求項18又は19何れかに記載の非破壊検査方法。
【請求項1】
検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データを受け付けるデータ受付手段と、受け付けた前記反射波データと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データを複数の基本反射波に分離する反射波分離手段と、前記反射波分離手段によって分離した基本反射波のうち特定の検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから前記検査項目に係る所定の被検値を算出する一又は複数の目的別解析モジュールと、検査項目の設定・入力等を受け付ける設定入力手段とを具備し、この設定入力手段において受け付けた検査項目に対応する前記特定の目的別解析モジュールを起動させて、当該検査項目に関連する基本反射波に基づく被検値の算出を行わせるようにしていることを特徴とする非破壊検査装置。
【請求項2】
前記反射波分離手段によって分離した基本反射波のうち特定の検査項目に関連する基本反射波以外の基本反射波に係る伝播時間や一次結合係数等の数値データを固定した状態で、当該特定の検査項目に関連する基本反射波を更に細分化してその数、伝播時間、一次結合係数を変数とする予測信号波形と実際の反射波データとの間で再度パターンマッチングを行う反射波再分離部をさらに備え、この反射波再分離部で再分離した基本反射波の数値データに基づき前記目的別解析モジュールに更に詳細な被検値の算出を実行させるようにしている請求項1記載の非破壊検査装置。
【請求項3】
目的別解析モジュールの一つが、舗装材と床版との界面付近に生じる浮遊を捉えるために必要な一又は二以上の基本反射波に関する数値データを取得して、当該一の基本反射波の大きさ、又は浮遊部分に生じる空隙における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて舗装材の浮きに関する所定の被検値を算出するように構成されたアスファルト浮遊解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項4】
目的別解析モジュールの一つが、コンクリート構造物中に生じるクラックを捉えるために必要な一又は二以上の基本反射波に関する数値データを取得して、当該一の基本反射波の大きさ、又はクラック内部における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいてクラックに関する所定の被検値を算出するように構成されたクラック解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項5】
目的別解析モジュールの一つが、コンクリート構造物中の鉄筋の深さ方向の位置を捉えるために必要な二以上の基本反射波に関する数値データを取得して、鉄筋上にかぶっている媒質の比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて鉄筋上の媒質の被覆に関する所定の被検値を算出するように構成された鉄筋被覆解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項6】
目的別解析モジュールの一つが、コンクリート構造物中に存する交差鉄筋を構成する縦筋および横筋からの反射波に対応する基本反射波を異なる波形として取り扱うものであって、それらの鉄筋の各々の腐食を捉えるために必要な一又は二以上の基本反射波に関する数値データを各々の鉄筋について取得して、当該一の基本反射波の大きさ、又は腐食部における比誘電率を考慮した当該二以上の基本反射波の伝播時間差に基づいて各々の鉄筋の腐食に関する所定の被検値を同時に算出するように構成された鉄筋腐食解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項7】
目的別解析モジュールの一つが、特定の媒質の上下両面で反射する二以上の基本反射波に関する数値データを取得して、当該二以上の基本反射波の前記媒質における伝播時間差に基づいて少なくとも媒質中の水分含有率を計測するために必要な被検値を算出するように構成された堆水解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項8】
目的別解析モジュールの一つが、特定の媒質の上下両面で反射する二以上の基本反射波に関する数値データを取得して、当該二以上の基本反射波の大きさに基づき、特定の基本反射波が特定の媒質を通過したときの電磁波の減衰率を、当該媒質中の塩化物イオン含浸率を相対評価するための被検値として算出するように構成された塩害解析モジュールである請求項1又は2何れかに記載の非破壊検査装置。
【請求項9】
特定の媒質が床版又は舗装材であって、内部が性質の異なる複数の床版層又はアスファルト層の積層構造からなる場合に、前記目的別解析モジュールに、各層ごとに上下両面で反射する基本反射波に関する数値データを取得させ、各々の層毎の被検値を算出させるように構成している請求項7又は8何れかに記載の非破壊検査装置。
【請求項10】
特定の媒質が鉄筋を内有する床版である場合に、当該床版が鉄筋によって床版上面から鉄筋までの区画、鉄筋から床版底面までの区画の2つに分割されているとみなして、前記目的別解析モジュールに、各区画ごとに上下両面で反射する基本反射波に関する数値データを取得させ、各々の区画毎の被検値を算出させるように構成している請求項7記載の非破壊検査装置。
【請求項11】
データ受付手段が、反射波データに関連づけられた検査位置特定情報を同時に受け付けるものであり、算出した被検値を検査位置特定情報に基づきマップ化するマップ生成手段を更に具備する請求項1〜10何れかに記載の非破壊検査装置。
【請求項12】
データ受付手段が、2次元方向にマトリクス状の複数の計測ポイントで得られる反射波データを受け付け、マップ生成手段が各計測ポイント毎の被検値を2次元マップ上にプロットする請求項11記載の非破壊検査装置。
【請求項13】
検査対象となるコンクリート構造物の舗装表面に対し電磁波を照射することによって反射波データを取得する電磁波探査手段と、電磁波探査した測定ポイントに関する検査位置特定情報を取得する位置情報取得手段と、これらの反射波データ及び検査位置特定情報を関連づけて記憶する記憶手段とを非破壊検査車両に搭載するとともに、この記憶手段に記憶した反射波データ及び検査位置特定情報を請求項11又は12何れかに記載の非破壊検査装置にデータ入力して非破壊検査を行うようにしていることを特徴とする非破壊検査システム。
【請求項14】
検査対象となるコンクリート構造物の舗装表面に照射することによって反射波データを取得する電磁波探査手段と、電磁波探査した測定ポイントに関する検査位置特定情報を取得する位置情報取得手段とを、請求項11又は12何れかに記載の非破壊検査装置とともに車両本体に搭載し、前記電磁波探査手段からの反射波データ及び前記位置情報取得手段からの検査位置特定情報を前記非破壊検査装置のデータ受付手段に入力するようにしていることを特徴とする非破壊検査用車両。
【請求項15】
コンピュータに読み込まれることによって、請求項1〜12何れかに記載の非破壊検査装置を構成する反射波分離手段として少なくとも機能することを特徴とするプログラム。
【請求項16】
コンピュータに読み込まれることによって、請求項1〜12何れかに記載の非破壊検査装置を構成する反射波分離手段及び反射波再分離部として少なくとも機能することを特徴とするプログラム。
【請求項17】
コンピュータに読み込まれることによって、請求項15又は16何れかに記載のプログラムと関連づけられて目的別解析モジュールとして機能することを特徴とするプログラム。
【請求項18】
検査対象となるコンクリート構造物に対し電磁波を照射することによって取得される時系列の反射波データを受け付けるデータ受付ステップと、受け付けた前記反射波データと仮説に基づき複数の基本反射波を時間的にずらして一次結合した予測信号波形との間でパターンマッチングを行うことによって当該反射波データを複数の基本反射波に分離する反射波分離ステップと、検査項目の設定・入力等を受け付ける設定入力受付ステップと、前記反射波分離手段によって分離した基本反射波のうち受け付けた検査項目に関連する基本反射波に基づきその伝播時間や一次結合係数等の数値データから前記検査項目に係る所定の被検値を算出する目的別解析ステップとを具備してなることを特徴とする非破壊検査方法。
【請求項19】
前記反射波分離ステップによって分離した基本反射波のうち特定の検査項目に関連する基本反射波以外の基本反射波に係る伝播時間や一次結合係数等の数値データを固定した状態で、当該特定の検査項目に関連する基本反射波を更に細分化してその数、伝播時間、一次結合係数を変数とする予測信号波形と実際の反射波データとの間で再度パターンマッチングを行う反射波再分離ステップをさらに備え、この反射波再分離ステップで再分離した基本反射波の数値データに基づき前記目的別解析ステップで更に詳細な被検値の算出を行うようにしている請求項18記載の非破壊検査方法。
【請求項20】
データ受付ステップにおいて、反射波データに関連づけられた検査位置特定情報を同時に受け付けることにより、目的別解析ステップで算出した被検値に対し更に検査位置特定情報に基づいてマップ化するマップ生成ステップを具備する請求項18又は19何れかに記載の非破壊検査方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2010−14472(P2010−14472A)
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願番号】特願2008−173301(P2008−173301)
【出願日】平成20年7月2日(2008.7.2)
【出願人】(593183470)
【出願人】(505398963)西日本高速道路株式会社 (105)
【Fターム(参考)】
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願日】平成20年7月2日(2008.7.2)
【出願人】(593183470)
【出願人】(505398963)西日本高速道路株式会社 (105)
【Fターム(参考)】
[ Back to top ]