
非磁性サーボ機構磁力計
【課題】 1軸方式光磁気共鳴磁力計では目標上空を通過した時に生ずる磁気歪み量を元に目標の存在の有無を識別するが、地磁気の向きに対して動作しない不感帯があるため、従来は、DCモータを使用したサーボ機構等を用いて常に不感帯を避けた向きになるように磁力計の姿勢制御していた。そのため、磁力計の方位を検出するために姿勢制御するためのDCモータを用いていたが、モータによって発生する変動磁界によって磁力計周囲の磁界を歪ませて磁力計動揺時に動揺磁気雑音が生じ、探知性能を低下させるという課題があった。
【解決手段】 ピエゾ素子(圧電セラミック弾性素子)に電圧を印加するとピエゾ素子自信が伸び縮みする電歪現象を利用した非磁性超音波モータを用いた非磁性サーボ機構15により、周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御するようにした。
【解決手段】 ピエゾ素子(圧電セラミック弾性素子)に電圧を印加するとピエゾ素子自信が伸び縮みする電歪現象を利用した非磁性超音波モータを用いた非磁性サーボ機構15により、周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、1軸方式光磁気共鳴磁力計の目標探知能力向上に関するものである。
【背景技術】
【0002】
1軸方式光磁気共鳴磁力計を航空機等の移動体に設置して目標上空を通過した時に生ずる磁界変化量を基に目標の存在の有無を識別するようにしたものは既に開示されている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2002−296334号(第5図)
【発明の開示】
【発明が解決しようとする課題】
【0004】
吸収セル、セシウムランプ、光検知器、光学系、高周波電源、増幅器、コイル等から構成される1軸方式光磁気共鳴磁力計は地磁気の向きに対して動作しない不感帯があるため、従来は、例えば、DCモータを使用したサーボ機構等を用いて常に不感帯を避けた向きになるように磁力計を姿勢制御していた。
そのため、磁力計の方位を検出するためのフラックスゲート方式磁気方位センサや姿勢制御をするためのDCモータを用いていたが、夫々、パーマロイコア、鉄製ステータなど強磁性体が使用されており、磁力計周囲の磁界を歪ませていた。
この静的な磁界は磁気補償などにより、ある程度低減できるが、モータによって発生する磁界は絶えず変動するので磁気補償することが困難であり、補償不可能の動揺磁気雑音として残り、探知性能を低下させるという問題点があった。
【0005】
この発明は上記のような問題点を解決するためになされたものであり、サーボ機構を用いた1軸方式光磁気共鳴磁力計のサーボ機構を非磁性にして変動磁界が発生しないようにし、磁力計周囲の磁界を歪ませないようにして目標の探知能力向上を目的としたものである。
【課題を解決するための手段】
【0006】
この発明の非磁性サーボ機構磁力計は、量子遷移を起こすゼーマンサブレベルを有するセシウムを内蔵した吸収セルと、上記吸収セルに光を照射するセシウムランプと、上記吸収セルを透過したセシウムの光を電気信号に変換する光検知器と、上記セシウムランプと吸収セルを点灯させるための高周波電源と、上記光検知器からの電気信号を増幅するRF増幅器と、上記吸収セルに磁気共鳴を生じせしめるために上記増幅器で増幅した電気信号を磁界に変換して印加するための上記吸収セルの近傍に設けたコイルとから構成される1軸方式光磁気共鳴磁力計と、上記1軸方式光磁気共鳴磁力計の出力を基に地磁気に対するセンサ光軸の向きを検出する方位検出部と、上記方位検出部の出力を基に上記1軸方式光磁気共鳴磁力計の出力が常に最大となるように方位制御するサーボモータ制御部と、上記サーボモータ制御部の出力を基に上記1軸方式光磁気共鳴磁力計のセンサ光軸と地磁気が常に45°の向きになるように超音波モータを駆動して当該センサ光軸の方位を制御する非磁性サーボ機構とを設けたものである。
【発明の効果】
【0007】
この発明は、ピエゾ素子(圧電セラミック弾性素子)に電圧を印加するとピエゾ素子自信が伸び縮みする電歪現象を利用した非磁性超音波モータを用いた非磁性サーボ機構により、周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御するようにしたことによって、絶えず磁力計の姿勢が変化する移動式磁力計の場合でも、磁力計周囲の磁界歪や、変動磁界を発生することなく、常に不感帯を避けた向きになるように姿勢制御することができるので、磁気補償量や動揺磁気雑音を減少させ、探知能力を向上させることができるという効果が得られる。
【0008】
実施の形態1.
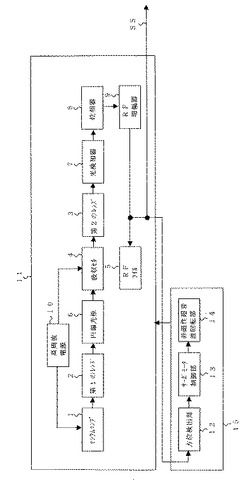
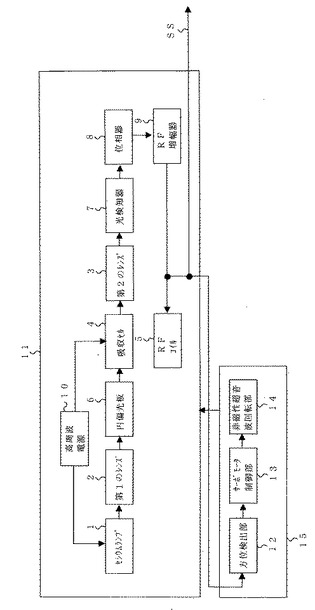
図1はこの発明の実施例1を示す構成図である。
図中、1はセシウムランプ、2、3はそれぞれ第1、第2のレンズ、4は吸収セル、5はRFコイル、6は円偏光板、7は光検知器、8は位相器、9はRF増幅器、10は高周波電源、11はセシウムランプ1、第1のレンズ2、第2のレンズ3、吸収セル4、RFコイル5、円偏光板6、光検知器7、位相器8、RF増幅器9、高周波電源10で構成される1軸方式光磁気共鳴磁力計、12は方位検出部、13はサーボモータ制御部、14は非磁性超音波回転部、15は方位検出部12、サーボモータ制御部13、非磁性超音波回転部14で構成される非磁性サーボ機構15、H0は周囲磁界、SSは磁力計の出力である。
【0009】
次に、この発明の実施例1の1軸方式光磁気共鳴磁力計の動作について説明する。
高周波電源10によって、セシウムランプ1と吸収セル4に高周波電力が供給されて点灯され、セシウムランプ1で先ずD1光を発生してこの光を第1のレンズで平行にして、さらに、円偏光板6によって円偏向に変換した光を吸収セル4に投射すると、吸収セル4中のセシウムがゼーマンサブレベルにおいて偏分布するが、この状態の時に、周囲磁界に比例したゼーマンサブレベル間隔に対応する周波数で振動する高周波磁界をRFコイル5を介して吸収セル4に印加すると誘導遷移が発生して原子群が基底状態のゼーマンサブレベルにランダムに分布する初期状態に戻る動作が連続して起こる。
【0010】
この現象を第2のレンズ3、光検知器7によって変調光信号という形で取出してさらに電気信号に変換し、この電気信号を位相器8、RF増幅器9によってRFコイル5に正帰還がかかるようにしてこの発振周波数を計測することによって周囲磁界を計測することができる。
【0011】
セシウム原子の場合、磁界1nT当り約3Hzのスケールファクタで地球の各地域において周囲磁界H0の大きさに応じて100KHz〜200KHzで発振するので、この発振周波数を電圧変換したものを磁力計出力として計測すれば、周囲磁界H0を正確に計測することができる。
【0012】
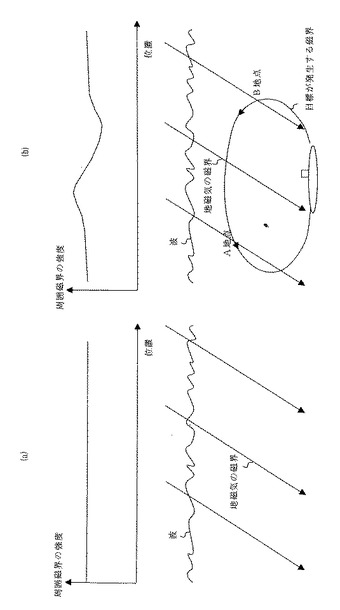
図4は目標が存在しない場合と存在する場合の磁界分布を示す図である。
目標が存在しない場合は図4(a)のように地磁気の磁界はこのように局所的には大きさも向きも一様であり、例えば北半球では斜め下に向かっているが、目標が存在する場合は、船体材質の磁性体が棒磁石のように弓なり状の磁界を誘起するので、例えば、図4(b)のA地点では地磁気と目標が誘起する磁界は両方とも下向きでベクトル的に加算されて大きくなり、B地点では、目標が誘起する磁界は上向きになっていて地磁気と逆方向なのでベクトル的に減算されて小さくなって目標の周辺では歪んだ空間分布をしている。
【0013】
その結果、周囲磁界H0は水中移動体等の目標がない状態では、図4(a)のように地磁気のみの一様な空間分布をしているが、目標が存在する場合は目標が誘起する磁界と地磁気とがベクトル的に加減算されて、図4(b)のように僅かに正弦波状に歪んだ空間分布、即ち、磁気歪みを生じている。
【0014】
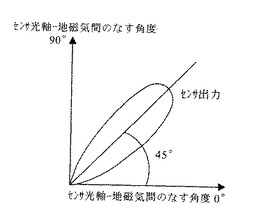
ここで1軸方式光磁気共鳴磁力計のセンサ出力は地磁気との向きに対して依存性があり、センサ光軸、即ち、セシウムランプ1、第1のレンズ2、第2のレンズ3、吸収セル4、円偏光板6、光検知器7を一直線に結ぶ向きと地磁気のなす角度によってセンサ出力の大きさが変わるという特性を有している。
図5はこの様子を示したものであり、横軸はセンサ光軸−地磁気間のなす角度が0°の場合、縦軸は90°の場合であり、クローバ状の曲線はその間の任意の角度におけるセンサ出力を示しており、45°の時にセンサ出力は最大となり、0°、90°の場合はゼロとなる。
【0015】
移動式磁力計の場合では、例えば、1軸方式光磁気共鳴磁力計を航空機や水中ビークル等の移動体に搭載して上空を飛行したり、海中を推進してスキャンし、この磁気歪みを時系列の磁気歪み信号として検出することによって目標の存在の有無を探知するが、1軸方式光磁気共鳴磁力計は図5のように地磁気に対してセンサ光軸と地磁気のなす角度が、0°又は90°になると、磁力計出力がゼロとなって動作しない不感帯があるため、磁力計の向きが頻繁に変わる移動式磁力計の場合には、従来は、DCモータを使用したサーボ機構等を用いて常に不感帯を避けた向きになるように磁力計を姿勢制御していた。
【0016】
そのため、磁力計の方位を検出するためのフラックスゲート方式磁気方位センサや姿勢制御をするためのDCモータを用いていたが、夫々、パーマロイコア、鉄製ステータなど強磁性体が使用されており、磁力計周囲の磁界を歪ませていた。
【0017】
この静的な磁界は磁気補償などによりある程度低減できるが、DCモータによって発生する磁界は絶えず変動するので磁気補償することが困難であり、補償不可能の動揺磁気雑音として残り、磁力計としての性能を低下させる。
【0018】
そこで、絶えず磁力計の方位が変わる移動式磁力計の場合であっても、磁力計自身の出力及びピエゾ素子の摺動運動を利用した非磁性超音波モータを用いることにより、磁力計周囲の磁界を歪ませることなく、不感帯を避けた向きになるように姿勢制御し、目標の探知能力を向上させた。
【0019】
この発明の実施例1の非磁性サーボ機構15磁力計の動作について説明する。
非磁性超音波回転部14を構成する非磁性超音波モータは従来の磁力を利用したモータとは異なり、ピエゾ素子(圧電セラミック弾性素子)に電圧を印加するとピエゾ素子自信が伸び縮みする電歪現象を利用したものであり、複数のピエゾ素子が非磁性化した金属のステータ片面に固定されていて、もう一方のステータ面がロータと重なりあって垂直方向から圧力が印加された状態となっている。
【0020】
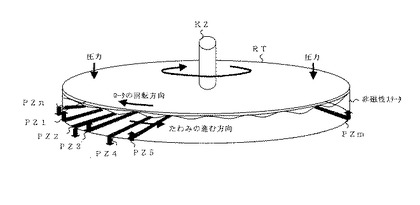
図6はこの様子を示すものであり、図6中、KZは非磁性超音波モータの回転軸、RT、STは銅やりん青銅等の非磁性金属を用いて非磁性化した、其々、非磁性ロータRT、非磁性ステータ、PZ1、PZ2、…、PZnは、其々、第1、第2、…第nのピエゾ素子である。
上記第1、第2、…第nのピエゾ素子PZ1、PZ2、…、PZnは非磁性ステータSTの片面に全周に渡って固定されていて、もう一方のステータ面が非磁性ロータRTと重なりあっており、この非磁性ロータRTが同様に銅やりん青銅を用いて非磁性化したケースとバネによって垂直方向に圧力が加わえられている。
【0021】
このような構成において、個々のピエゾ素子に印加された高周波電圧によって順次ピエゾ素子が盛り上がったり下がったりしながら、例えば第1のピエゾ素子PZ1に正弦波の+電圧が、第2のピエゾ素子PZ2に正弦波の−電圧が加わるように位相制御しながら、其々、第1、第2のピエゾ素子に高周波電圧を印加して、其々、第1、第2のピエゾ素子が、順次、伸び、縮みするようにして、非磁性ステータSTをこの順に順次連続的にたわませ、そのたわみに応じて垂直方向に加えられている圧力によって上側にある非磁性ロータRTが横滑りして回転するものである。
【0022】
非磁性超音波回転部14はこのように非磁性の状態で回転する非磁性超音波モータと強化プラスチック等で非磁性化し非磁性超音波モータの回転を利用して回転制御する回転機構をロール、ピッチ、ヨー方向の3軸方向に設けて其々、±180°の範囲内で自由に回転できるようになっている。
【0023】
尚、ロール軸、ピッチ軸、ヨー軸の超音波モータの制御信号は符号が回転の向きを表し、大きさが回転角度に対応しており、この制御信号により、機体機軸に対して1軸方式光磁気共鳴磁力計11をロール、ピッチ、ヨー方向に回転させてどの方位にも変えられるようになっている。
【0024】
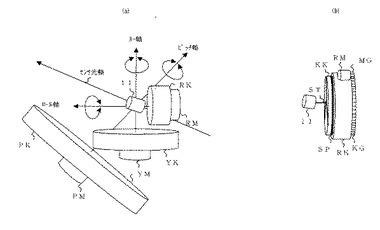
図7はこの様子を示したものであり、図7(a)図は非磁性超音波回転部14の構成を示したものであり、RKはロール軸用回転機構、RMはロール軸用非磁性超音波モータ、YKはヨー軸用回転機構、YMはヨー軸用非磁性超音波モータ、PKはピッチ軸用回転機構、PMはピッチ軸軸用非磁性超音波モータである。
また、図7(b)図は一例としてこの中のロール軸回転部を示したものであり、RKはロール軸用回転機構、RMはロール軸用非磁性超音波モータ、MGは非磁性超音波モータに取付けられた超音波モータ用歯車、STは固定用支柱、SPはスリップリング、KGは回転機構用歯車、KKは上記固定用支柱ST、スリップリングSP、回転機構用歯車KGから構成される回転アッセイである。なお、これら固定用支柱ST、スリップリングSP、モータ用歯車MG、回転機構用歯車KG、回転アッセイKKはいづれも銅、りん青銅、強化プラスチック等で非磁性化されている。
【0025】
このような構成において光磁気共鳴磁力計11の一端が上記固定用支柱STによってロール軸の回転アッセイKKに固定されて支えられる一方、上記回転アッセイKKが回転フリーの状態で上記ロール軸用回転機構回転RKの枠で包み込まれ、ロール軸用非磁性超音波モータRMがこの枠に固定されていて、ロール軸用非磁性超音波モータRMの回転が超音波モータ用歯車MG、回転機構用歯車KGを介して伝えられて回転制御されるようになっている。なお、光磁気共鳴磁力計11の電源や信号線はスリップリングSPを介してロール軸用回転機構RKに接続されるようになっている。
【0026】
さらに、このロール軸用回転機構RKの一端が、同様にヨー軸用回転機構YKの固定用支柱STによって固定されて支えられ、ヨー軸用非磁性超音波モータYM、超音波モータ用歯車MG、スリップリングSP、回転機構用歯車KG、回転アッセイKKによって電源や信号線の接続を保ちながらロール軸用回転機構RKがヨー方向に回転制御され、ヨー軸用回転機構YKが、同様に、ピッチ軸用回転機構PKの固定用支柱STによって固定されて支えられ、ヨー軸用非磁性超音波モータYM、超音波モータ用歯車MG、スリップリングSP、回転機構用歯車KG、回転アッセイKKによって電源や信号線の接続を保ちながらロール軸用回転機構RKがヨー方向に回転制御される。
【0027】
一方、方位検出部12は機体から入力したGPS情報やロール情報等機体の方位情報を基にセンサ光軸を地球の基準方位に対して、例えば、磁北に対して所定の方位に向けるための機体機軸におけるセンサ光軸の方位情報を算出するとともに、この方位情報と磁力計出力SSを時々刻々記憶する役目をし、サーボモータ制御部13は方位検出部12の方位情報を基に非磁性超音波回転部14のロール軸、ピッチ軸、ヨー軸の3つの超音波モータを制御する制御信号を生成し、非磁性超音波回転部14はサーボモータ制御部13の制御信号を入力して1軸方式光磁気共鳴磁力計11を所定の方位に姿勢制御する役目をする。
【0028】
非磁性サーボ機構15は、方位検出部12、サーボモータ制御部13、非磁性超音波回転部14によって、先ず、機体から入力した機体の方位情報を基に、磁北に対してセンサ光軸を所定の方位に向けるための制御信号を生成して1軸方式光磁気共鳴磁力計11を所定の方位に向けるとともに、このときの磁力計出力SSとセンサ光軸の方位情報を時々刻々記憶しながら1軸方式光磁気共鳴磁力計11を全ての方位に変え、この時の磁力計出力SSと記憶している磁力計出力SSを比較することによってこの値が最大となる方位、即ち、センサ光軸と地磁気のなす角度が45°となって磁力計出力SSが最大となる方位を見つけ、この後、その向きを中心にロール、ピッチ、ヨー方向に微小角度振りながら磁力計出力SSを基に非磁性超音波回転部14のロール軸用、ピッチ軸用、ヨー軸用の3つの超音波モータにフィードバック制御して、磁力計出力SSが常に最大となるように姿勢制御する。
【0029】
このような非磁性サーボ機構15により周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御することができるので、従来のように磁力計の方位検出用フラックスゲート方式磁気方位センサや姿勢制御用DCモータを用いていたために生じていた磁界歪が減少し、さらに、変動性の磁界を発生しないので、磁気補償量が少なくて済み、さらに、従来は磁気補償することが困難で補償不可能の磁気雑音として残っていた動揺磁気雑音をほとんどなくすことができる。
【0030】
以上によれば、絶えず磁力計の姿勢が変化する移動式磁力計の場合でも、磁力計周囲の磁界歪や、変動磁界を発生することなく、常に不感帯を避けた向きになるように姿勢制御することができるので、磁気補償量や動揺磁気雑音を減少させ、探知能力を向上させることができる。
【0031】
実施の形態2.
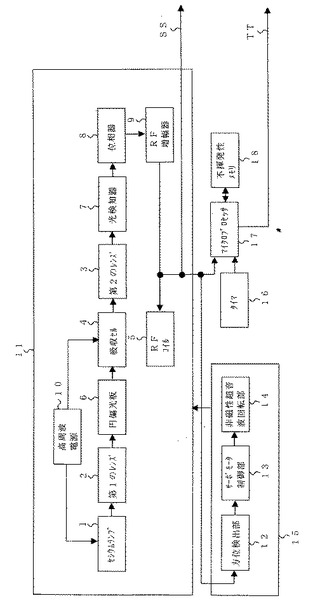
図2はこの発明の実施例2を示す構成図であり、1〜15は実施例1と同一のもの、16は磁力計の電源がオンにされてから上記非磁性サーボ機構15によりセンサ光軸と地磁気のなす角度が最良の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分に安定した時間に、例えば5分後に、良否判別モニタ用計測指令信号を発するタイマ、17は上記タイマ16の良否判別モニタ用計測指令信号により最良動作角度における磁力計出力SSを基に上記1軸方式光磁気共鳴磁力計11の構成部品であるセシウムランプ1や吸収セル4の良否判別をするマイクロプロセッサ、18はマイクロプロセッサ17が判断した最良動作角度における磁力計出力SSの数分間の平均値を記憶しておくための不揮発性メモリ、TTはマイクロプロセッサから出力される良否判別信号である。
【0032】
1軸方式光磁気共鳴磁力計11によってゼーマンサブレベルの編分布を利用して周囲磁界を計測し、構成される非磁性サーボ機構15によって上記1軸方式光磁気共鳴磁力計11が常に不感帯を避けた向きになるように姿勢制御しているところまでは実施例1と同じである。
【0033】
ここでタイマ16は、磁力計を動作させる都度、上記非磁性サーボ機構15によりセンサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分安定した例えば電源オン5分後にタイマ16が良否判別モニタ用計測指令信号を生成し、この良否判別モニタ計測指令信号によってマイクロプロセッサ17が最良動作角度における磁力計出力SSの数分間の平均値を計測してこの値を取込むとともに閾値と比較することによってランプ1や吸収セル4が劣化していないか判断して、この値を劣化状態を示す指標値として磁力計を動作させた最初の1回のみ、この指標値を上記不揮発性メモリ18に出力し、レファレンス用の指標値として記憶しておく。
【0034】
そして次回に磁力計を動作させたときに非磁性サーボ機構15、タイマ16、マイクロプロセッサ17によって、同様にして電源オン5分後の最良動作角度における磁力計出力SSの数分間の平均値を計測してセシウムランプ1や吸収セル4の劣化状態を示す指標値として算出し、この値と最初の磁力計動作時に不揮発性メモリ18に記憶させたレファレンス用の指標値との比がある値以下に下がっていないかどうか判定することによってランプ1や吸収セル4が劣化していないかどうかを判断する。
【0035】
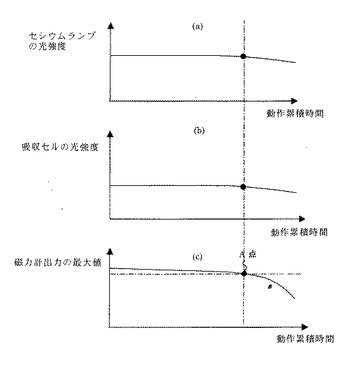
図8はこの様子を示す図であり、図8(a)は動作累積時間に対するセシウムランプ1の光強度、(b)は動作累積時間に対する吸収セル4の光強度、図8(c)は動作累積時間に対する上記セシウムランプ1と上記吸収セル4の光強度の相関値として表される磁力計出力SSの最大値との関係を示している。なお、図8(a)、図8(b)、図8(c)とも横軸の動作累積時間を合せて示しており、図8(a)はセシウムランプの光強度が動作累積時間とともにゆるやかに低下し例えばA点において急激に低下する特性を、また、図8(b)は吸収セルの光強度が動作累積時間とともにゆるやかに低下し例えばA点において急激に低下する特性を、また、図8(c)はこれらセシウムランプ、吸収セルの特性に伴って、セシウムランプと吸収セルの光強度の積も動作累積時間とともにゆるやかに低下しA点において急激に低下する特性を示している。
【0036】
このようにセシウムランプ1や吸収セル4は一般的に動作累積時間、即ち、寿命とともに光強度もゆるやかに低下していって両者の積の相関値である磁力計出力SSの最大値は図(c)のようにある動作累積時間においてA点のように急激に低下する特性を有しているので、磁力計を動作させる度に、例えば、磁力計の電源をオンにした5分後にタイマ16の良否判別モニタ用計測指令信号によって、センサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分安定した時の磁力計出力SSを指標値としてマイクロプロセッサ17が取込んで、この指標値と磁力計初回動作時に記憶させたレファレンス用の指標値との比がある値以下に下がっていないかどうかマイクロプロセッサ17が判定することによってセシウムランプ1や吸収セル4が劣化していないかどうかを判断し、良否判別信号TTとして出力する。
【0037】
こうして磁力計は、非磁性サーボ機構15により磁力計周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御することができるので、従来のように磁力計の方位検出用フラックスゲート方式磁気方位センサや姿勢制御用DCモータを用いていたために生じていた磁界歪が減少し、さらに、変動性の磁界を発生しないので、磁気補償量が少なくて済み、さらに、従来は磁気補償することが困難で補償不可能の磁気雑音として残っていた動揺磁気雑音をほとんどなくすことができる上に、磁力計の電源をオンにしてからセンサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプや吸収セルが十分安定した時の磁力計出力SSをマイクロプロセッサが指標値として取込んで、この指標値と磁力計初回動作時に記憶させたレファレンス用の指標値との比がある値以下に下がっていないかどうか判定することによってセシウムランプや吸収セルが劣化していないかどうか自動的に判断して報知するので、交換時期を見極めるのに、実機に組込まれたセシウムランプや吸収セルを外して専用装置にかけて定期的に診断しなければならないという不便をなくすことができる。
【0038】
以上によれば、絶えず磁力計の姿勢が変化する移動式磁力計の場合でも、磁力計周囲の磁界歪や、変動磁界を発生することなく、常に不感帯を避けた向きになるように姿勢制御することができるので、磁気補償量や動揺磁気雑音を減少させ、探知能力を向上させることができる上に、動作する毎に磁力計出力が減少していないか確認することによりセシウムランプや吸収セルが劣化していないか自動判別するので、定期的に診断しなければならないという不便をなくすことができる。
【0039】
実施の形態3.
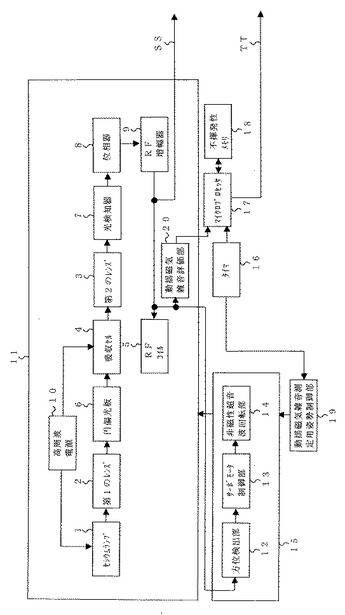
図3はこの発明の実施例3を示す構成図であり、1〜18は実施例2と同一のもの、19はタイマ16の良否判別モニタ用計測指令信号により、ある一定の期間だけ非磁性サーボ機構15を制御して1軸方式光磁気共鳴磁力計11を、順次、ロール、ピッチ、ヨー方向に±数度姿勢を強制的に変える動揺磁気雑音測定用姿勢制御部、20は磁力計出力SSをF/V変換して、さらに、バンドパスフィルタでフィルタ処理をし、磁界変化分のみを検出して動揺磁気雑音を計測する動揺磁気雑音評価部である。
【0040】
このような構成において、1軸方式光磁気共鳴磁力計11によってゼーマンサブレベルの編分布を利用して周囲磁界を計測し、非磁性サーボ機構15によって上記1軸方式光磁気共鳴磁力計11が常に不感帯を避けた向きになるように姿勢制御しているところまでは実施例1と同じである。
【0041】
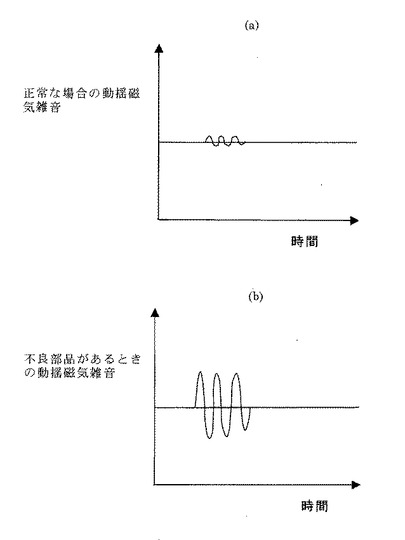
図9は動揺磁気雑音の様子を示す図である。
図9は、例えば、ロール方向に±5°数秒の周期で磁力計を回転させた時に生ずる動揺磁気雑音を示したものであり、ピッチ方向、ヨー方向に±5°数秒の周期で磁力計を回転させた時にも同様の動揺磁気雑音が生じ、図9(a)の場合は磁力計11の構成部品が正常な場合であり、図9(b)の場合は異常がある場合を示している。
【0042】
一般に磁力計の姿勢が、例えば、ロール、ピッチ、ヨー方向に変化したときに誤差計測分として生ずる動揺磁気雑音は、1軸方式光磁気共鳴磁力計11の構成部品が正常の場合には、図9の(a)のようには僅かであるが、磁化していたり、光透過率が低下して性能が劣化している場合には図9(b)のように大きくなる。
【0043】
タイマ16は、磁力計を動作させる都度、上記非磁性サーボ機構15によりセンサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分安定した例えば電源オン5分後に良否判別モニタ用計測指令信号を生成し、この良否判別モニタ用計測指令信号によって動揺磁気雑音測定用姿勢制御部19が非磁性サーボ機構15を制御して、順次、ロール軸、ピッチ軸、ヨー軸方向に1軸方式光磁気共鳴磁力計11を±数度姿勢を強制的に変え、その時に生ずる動揺磁気雑音を動揺磁気雑音評価部20が計測する。
【0044】
この動揺磁気雑音の総和値をマイクロプロセッサ17が動揺磁気雑音評価指数として取込み、この値を閾値と比較することによって1軸方式光磁気共鳴磁力計11を構成する部品が磁化したことを含めて劣化していないか判断するとともにこの値を劣化状態を示す評価指数値として磁力計を動作させた最初の1回のみ、この評価指数値を上記不揮発性メモリ18に出力し、レファレンス用の評価指数値として記憶しておく。
【0045】
そして次回に磁力計を動作させたときに非磁性サーボ機構15、タイマ16、マイクロプロセッサ17、動揺磁気雑音測定用姿勢制御部19、動揺磁気雑音評価部20によって、同様にして電源オン5分後の磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分安定した時の動揺磁気雑音の総和値を動揺磁気雑音評価指数として算出し、この値と最初の磁力計動作時に記憶不揮発性メモリ18に記憶させたレファレンス用の評価指数値との比がある値以上に上がっていないかどうか判定することによって1軸方式光磁気共鳴磁力計11を構成する部品が磁化したことを含めて劣化していないか判断する。
【0046】
こうして磁力計は、非磁性サーボ機構15により磁力計周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御することができるので、方位検出用フラックスゲート方式磁気方位センサや姿勢制御用DCモータを用いていたために生じていた磁界歪が減少し、さらに、変動性の磁界を発生しないので、磁気補償量が少なくて済むことになる。
【0047】
さらに、従来は磁気補償することが困難で補償不可能の磁気雑音として残っていた動揺磁気雑音をほとんどなくすことができる上に、磁力計の電源をオンにしてからセンサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ、吸収セルが十分安定した時の動揺磁気雑音の総和値をマイクロプロセッサが動揺磁気雑音評価指数として取込み、この評価指数値と磁力計初回動作時に記憶させたレファレンス用の評価指数値との比がある値以上に上がっていないかどうか判定することによって1軸方式光磁気共鳴磁力計の構成部品が劣化していないかどうか自動的に判断して報知するので、構成部品を外して専用装置にかけて定期的に診断しなければならないという不便をなくする上に、さらに広い範囲に渡っての故障診断ができるという長所がある。
【0048】
以上によれば、絶えず磁力計の姿勢が変化する移動式磁力計の場合でも、磁力計周囲の磁界歪や、変動磁界を発生することなく、常に不感帯を避けた向きになるように姿勢制御することができるので、磁気補償量や動揺磁気雑音を減少させ、探知能力を向上させることができる上に、動作する毎に磁力計を強制的に動揺させその時に動揺磁気雑音が増加していないか比較確認することにより磁力計の構成部品が劣化していないか自動判別するので、定期的に診断しなければならないという不便がなくなる上に、さらに広い範囲に渡っての故障診断ができるという長所がある。
【図面の簡単な説明】
【0049】
【図1】この発明の実施の形態1の例を示すブロック図である。
【図2】この発明の実施の形態2の例を示すブロック図である
【図3】この発明の実施の形態3の例を示すブロック図である。
【図4】目標の存在の有無と周囲磁界関係を示す図である。
【図5】センサ光軸−地磁気間の方位角度対する磁力計出力の関係を示す図である。
【図6】非磁性超音波モータの構成と原理を示す図である。
【図7】非磁性超音波回転部の構成の一例を示す図である。
【図8】経過時間に対するセシウムランプや吸収セルの光強度及びこれらの相関値との関係を示す図である。
【図9】磁気センサ構成部品不良の有無と動揺磁気雑音との関係を示す図である。
【符号の説明】
【0050】
1 セシウムランプ、 2 第1のレンズ、 3 第2のレンズ、 4 吸収セル、 5 RFコイル、 6 円偏向板、 7 光検知器、 8 位相器、 9 RF増幅器、 10 高周波電源、 11 1軸方式光磁気共鳴磁力計、 12 方位特性検出部、 13 サーボモータ制御部、 14 非磁性超音波回転部、 15 非磁性サーボ機構15。
【技術分野】
【0001】
この発明は、1軸方式光磁気共鳴磁力計の目標探知能力向上に関するものである。
【背景技術】
【0002】
1軸方式光磁気共鳴磁力計を航空機等の移動体に設置して目標上空を通過した時に生ずる磁界変化量を基に目標の存在の有無を識別するようにしたものは既に開示されている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2002−296334号(第5図)
【発明の開示】
【発明が解決しようとする課題】
【0004】
吸収セル、セシウムランプ、光検知器、光学系、高周波電源、増幅器、コイル等から構成される1軸方式光磁気共鳴磁力計は地磁気の向きに対して動作しない不感帯があるため、従来は、例えば、DCモータを使用したサーボ機構等を用いて常に不感帯を避けた向きになるように磁力計を姿勢制御していた。
そのため、磁力計の方位を検出するためのフラックスゲート方式磁気方位センサや姿勢制御をするためのDCモータを用いていたが、夫々、パーマロイコア、鉄製ステータなど強磁性体が使用されており、磁力計周囲の磁界を歪ませていた。
この静的な磁界は磁気補償などにより、ある程度低減できるが、モータによって発生する磁界は絶えず変動するので磁気補償することが困難であり、補償不可能の動揺磁気雑音として残り、探知性能を低下させるという問題点があった。
【0005】
この発明は上記のような問題点を解決するためになされたものであり、サーボ機構を用いた1軸方式光磁気共鳴磁力計のサーボ機構を非磁性にして変動磁界が発生しないようにし、磁力計周囲の磁界を歪ませないようにして目標の探知能力向上を目的としたものである。
【課題を解決するための手段】
【0006】
この発明の非磁性サーボ機構磁力計は、量子遷移を起こすゼーマンサブレベルを有するセシウムを内蔵した吸収セルと、上記吸収セルに光を照射するセシウムランプと、上記吸収セルを透過したセシウムの光を電気信号に変換する光検知器と、上記セシウムランプと吸収セルを点灯させるための高周波電源と、上記光検知器からの電気信号を増幅するRF増幅器と、上記吸収セルに磁気共鳴を生じせしめるために上記増幅器で増幅した電気信号を磁界に変換して印加するための上記吸収セルの近傍に設けたコイルとから構成される1軸方式光磁気共鳴磁力計と、上記1軸方式光磁気共鳴磁力計の出力を基に地磁気に対するセンサ光軸の向きを検出する方位検出部と、上記方位検出部の出力を基に上記1軸方式光磁気共鳴磁力計の出力が常に最大となるように方位制御するサーボモータ制御部と、上記サーボモータ制御部の出力を基に上記1軸方式光磁気共鳴磁力計のセンサ光軸と地磁気が常に45°の向きになるように超音波モータを駆動して当該センサ光軸の方位を制御する非磁性サーボ機構とを設けたものである。
【発明の効果】
【0007】
この発明は、ピエゾ素子(圧電セラミック弾性素子)に電圧を印加するとピエゾ素子自信が伸び縮みする電歪現象を利用した非磁性超音波モータを用いた非磁性サーボ機構により、周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御するようにしたことによって、絶えず磁力計の姿勢が変化する移動式磁力計の場合でも、磁力計周囲の磁界歪や、変動磁界を発生することなく、常に不感帯を避けた向きになるように姿勢制御することができるので、磁気補償量や動揺磁気雑音を減少させ、探知能力を向上させることができるという効果が得られる。
【0008】
実施の形態1.
図1はこの発明の実施例1を示す構成図である。
図中、1はセシウムランプ、2、3はそれぞれ第1、第2のレンズ、4は吸収セル、5はRFコイル、6は円偏光板、7は光検知器、8は位相器、9はRF増幅器、10は高周波電源、11はセシウムランプ1、第1のレンズ2、第2のレンズ3、吸収セル4、RFコイル5、円偏光板6、光検知器7、位相器8、RF増幅器9、高周波電源10で構成される1軸方式光磁気共鳴磁力計、12は方位検出部、13はサーボモータ制御部、14は非磁性超音波回転部、15は方位検出部12、サーボモータ制御部13、非磁性超音波回転部14で構成される非磁性サーボ機構15、H0は周囲磁界、SSは磁力計の出力である。
【0009】
次に、この発明の実施例1の1軸方式光磁気共鳴磁力計の動作について説明する。
高周波電源10によって、セシウムランプ1と吸収セル4に高周波電力が供給されて点灯され、セシウムランプ1で先ずD1光を発生してこの光を第1のレンズで平行にして、さらに、円偏光板6によって円偏向に変換した光を吸収セル4に投射すると、吸収セル4中のセシウムがゼーマンサブレベルにおいて偏分布するが、この状態の時に、周囲磁界に比例したゼーマンサブレベル間隔に対応する周波数で振動する高周波磁界をRFコイル5を介して吸収セル4に印加すると誘導遷移が発生して原子群が基底状態のゼーマンサブレベルにランダムに分布する初期状態に戻る動作が連続して起こる。
【0010】
この現象を第2のレンズ3、光検知器7によって変調光信号という形で取出してさらに電気信号に変換し、この電気信号を位相器8、RF増幅器9によってRFコイル5に正帰還がかかるようにしてこの発振周波数を計測することによって周囲磁界を計測することができる。
【0011】
セシウム原子の場合、磁界1nT当り約3Hzのスケールファクタで地球の各地域において周囲磁界H0の大きさに応じて100KHz〜200KHzで発振するので、この発振周波数を電圧変換したものを磁力計出力として計測すれば、周囲磁界H0を正確に計測することができる。
【0012】
図4は目標が存在しない場合と存在する場合の磁界分布を示す図である。
目標が存在しない場合は図4(a)のように地磁気の磁界はこのように局所的には大きさも向きも一様であり、例えば北半球では斜め下に向かっているが、目標が存在する場合は、船体材質の磁性体が棒磁石のように弓なり状の磁界を誘起するので、例えば、図4(b)のA地点では地磁気と目標が誘起する磁界は両方とも下向きでベクトル的に加算されて大きくなり、B地点では、目標が誘起する磁界は上向きになっていて地磁気と逆方向なのでベクトル的に減算されて小さくなって目標の周辺では歪んだ空間分布をしている。
【0013】
その結果、周囲磁界H0は水中移動体等の目標がない状態では、図4(a)のように地磁気のみの一様な空間分布をしているが、目標が存在する場合は目標が誘起する磁界と地磁気とがベクトル的に加減算されて、図4(b)のように僅かに正弦波状に歪んだ空間分布、即ち、磁気歪みを生じている。
【0014】
ここで1軸方式光磁気共鳴磁力計のセンサ出力は地磁気との向きに対して依存性があり、センサ光軸、即ち、セシウムランプ1、第1のレンズ2、第2のレンズ3、吸収セル4、円偏光板6、光検知器7を一直線に結ぶ向きと地磁気のなす角度によってセンサ出力の大きさが変わるという特性を有している。
図5はこの様子を示したものであり、横軸はセンサ光軸−地磁気間のなす角度が0°の場合、縦軸は90°の場合であり、クローバ状の曲線はその間の任意の角度におけるセンサ出力を示しており、45°の時にセンサ出力は最大となり、0°、90°の場合はゼロとなる。
【0015】
移動式磁力計の場合では、例えば、1軸方式光磁気共鳴磁力計を航空機や水中ビークル等の移動体に搭載して上空を飛行したり、海中を推進してスキャンし、この磁気歪みを時系列の磁気歪み信号として検出することによって目標の存在の有無を探知するが、1軸方式光磁気共鳴磁力計は図5のように地磁気に対してセンサ光軸と地磁気のなす角度が、0°又は90°になると、磁力計出力がゼロとなって動作しない不感帯があるため、磁力計の向きが頻繁に変わる移動式磁力計の場合には、従来は、DCモータを使用したサーボ機構等を用いて常に不感帯を避けた向きになるように磁力計を姿勢制御していた。
【0016】
そのため、磁力計の方位を検出するためのフラックスゲート方式磁気方位センサや姿勢制御をするためのDCモータを用いていたが、夫々、パーマロイコア、鉄製ステータなど強磁性体が使用されており、磁力計周囲の磁界を歪ませていた。
【0017】
この静的な磁界は磁気補償などによりある程度低減できるが、DCモータによって発生する磁界は絶えず変動するので磁気補償することが困難であり、補償不可能の動揺磁気雑音として残り、磁力計としての性能を低下させる。
【0018】
そこで、絶えず磁力計の方位が変わる移動式磁力計の場合であっても、磁力計自身の出力及びピエゾ素子の摺動運動を利用した非磁性超音波モータを用いることにより、磁力計周囲の磁界を歪ませることなく、不感帯を避けた向きになるように姿勢制御し、目標の探知能力を向上させた。
【0019】
この発明の実施例1の非磁性サーボ機構15磁力計の動作について説明する。
非磁性超音波回転部14を構成する非磁性超音波モータは従来の磁力を利用したモータとは異なり、ピエゾ素子(圧電セラミック弾性素子)に電圧を印加するとピエゾ素子自信が伸び縮みする電歪現象を利用したものであり、複数のピエゾ素子が非磁性化した金属のステータ片面に固定されていて、もう一方のステータ面がロータと重なりあって垂直方向から圧力が印加された状態となっている。
【0020】
図6はこの様子を示すものであり、図6中、KZは非磁性超音波モータの回転軸、RT、STは銅やりん青銅等の非磁性金属を用いて非磁性化した、其々、非磁性ロータRT、非磁性ステータ、PZ1、PZ2、…、PZnは、其々、第1、第2、…第nのピエゾ素子である。
上記第1、第2、…第nのピエゾ素子PZ1、PZ2、…、PZnは非磁性ステータSTの片面に全周に渡って固定されていて、もう一方のステータ面が非磁性ロータRTと重なりあっており、この非磁性ロータRTが同様に銅やりん青銅を用いて非磁性化したケースとバネによって垂直方向に圧力が加わえられている。
【0021】
このような構成において、個々のピエゾ素子に印加された高周波電圧によって順次ピエゾ素子が盛り上がったり下がったりしながら、例えば第1のピエゾ素子PZ1に正弦波の+電圧が、第2のピエゾ素子PZ2に正弦波の−電圧が加わるように位相制御しながら、其々、第1、第2のピエゾ素子に高周波電圧を印加して、其々、第1、第2のピエゾ素子が、順次、伸び、縮みするようにして、非磁性ステータSTをこの順に順次連続的にたわませ、そのたわみに応じて垂直方向に加えられている圧力によって上側にある非磁性ロータRTが横滑りして回転するものである。
【0022】
非磁性超音波回転部14はこのように非磁性の状態で回転する非磁性超音波モータと強化プラスチック等で非磁性化し非磁性超音波モータの回転を利用して回転制御する回転機構をロール、ピッチ、ヨー方向の3軸方向に設けて其々、±180°の範囲内で自由に回転できるようになっている。
【0023】
尚、ロール軸、ピッチ軸、ヨー軸の超音波モータの制御信号は符号が回転の向きを表し、大きさが回転角度に対応しており、この制御信号により、機体機軸に対して1軸方式光磁気共鳴磁力計11をロール、ピッチ、ヨー方向に回転させてどの方位にも変えられるようになっている。
【0024】
図7はこの様子を示したものであり、図7(a)図は非磁性超音波回転部14の構成を示したものであり、RKはロール軸用回転機構、RMはロール軸用非磁性超音波モータ、YKはヨー軸用回転機構、YMはヨー軸用非磁性超音波モータ、PKはピッチ軸用回転機構、PMはピッチ軸軸用非磁性超音波モータである。
また、図7(b)図は一例としてこの中のロール軸回転部を示したものであり、RKはロール軸用回転機構、RMはロール軸用非磁性超音波モータ、MGは非磁性超音波モータに取付けられた超音波モータ用歯車、STは固定用支柱、SPはスリップリング、KGは回転機構用歯車、KKは上記固定用支柱ST、スリップリングSP、回転機構用歯車KGから構成される回転アッセイである。なお、これら固定用支柱ST、スリップリングSP、モータ用歯車MG、回転機構用歯車KG、回転アッセイKKはいづれも銅、りん青銅、強化プラスチック等で非磁性化されている。
【0025】
このような構成において光磁気共鳴磁力計11の一端が上記固定用支柱STによってロール軸の回転アッセイKKに固定されて支えられる一方、上記回転アッセイKKが回転フリーの状態で上記ロール軸用回転機構回転RKの枠で包み込まれ、ロール軸用非磁性超音波モータRMがこの枠に固定されていて、ロール軸用非磁性超音波モータRMの回転が超音波モータ用歯車MG、回転機構用歯車KGを介して伝えられて回転制御されるようになっている。なお、光磁気共鳴磁力計11の電源や信号線はスリップリングSPを介してロール軸用回転機構RKに接続されるようになっている。
【0026】
さらに、このロール軸用回転機構RKの一端が、同様にヨー軸用回転機構YKの固定用支柱STによって固定されて支えられ、ヨー軸用非磁性超音波モータYM、超音波モータ用歯車MG、スリップリングSP、回転機構用歯車KG、回転アッセイKKによって電源や信号線の接続を保ちながらロール軸用回転機構RKがヨー方向に回転制御され、ヨー軸用回転機構YKが、同様に、ピッチ軸用回転機構PKの固定用支柱STによって固定されて支えられ、ヨー軸用非磁性超音波モータYM、超音波モータ用歯車MG、スリップリングSP、回転機構用歯車KG、回転アッセイKKによって電源や信号線の接続を保ちながらロール軸用回転機構RKがヨー方向に回転制御される。
【0027】
一方、方位検出部12は機体から入力したGPS情報やロール情報等機体の方位情報を基にセンサ光軸を地球の基準方位に対して、例えば、磁北に対して所定の方位に向けるための機体機軸におけるセンサ光軸の方位情報を算出するとともに、この方位情報と磁力計出力SSを時々刻々記憶する役目をし、サーボモータ制御部13は方位検出部12の方位情報を基に非磁性超音波回転部14のロール軸、ピッチ軸、ヨー軸の3つの超音波モータを制御する制御信号を生成し、非磁性超音波回転部14はサーボモータ制御部13の制御信号を入力して1軸方式光磁気共鳴磁力計11を所定の方位に姿勢制御する役目をする。
【0028】
非磁性サーボ機構15は、方位検出部12、サーボモータ制御部13、非磁性超音波回転部14によって、先ず、機体から入力した機体の方位情報を基に、磁北に対してセンサ光軸を所定の方位に向けるための制御信号を生成して1軸方式光磁気共鳴磁力計11を所定の方位に向けるとともに、このときの磁力計出力SSとセンサ光軸の方位情報を時々刻々記憶しながら1軸方式光磁気共鳴磁力計11を全ての方位に変え、この時の磁力計出力SSと記憶している磁力計出力SSを比較することによってこの値が最大となる方位、即ち、センサ光軸と地磁気のなす角度が45°となって磁力計出力SSが最大となる方位を見つけ、この後、その向きを中心にロール、ピッチ、ヨー方向に微小角度振りながら磁力計出力SSを基に非磁性超音波回転部14のロール軸用、ピッチ軸用、ヨー軸用の3つの超音波モータにフィードバック制御して、磁力計出力SSが常に最大となるように姿勢制御する。
【0029】
このような非磁性サーボ機構15により周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御することができるので、従来のように磁力計の方位検出用フラックスゲート方式磁気方位センサや姿勢制御用DCモータを用いていたために生じていた磁界歪が減少し、さらに、変動性の磁界を発生しないので、磁気補償量が少なくて済み、さらに、従来は磁気補償することが困難で補償不可能の磁気雑音として残っていた動揺磁気雑音をほとんどなくすことができる。
【0030】
以上によれば、絶えず磁力計の姿勢が変化する移動式磁力計の場合でも、磁力計周囲の磁界歪や、変動磁界を発生することなく、常に不感帯を避けた向きになるように姿勢制御することができるので、磁気補償量や動揺磁気雑音を減少させ、探知能力を向上させることができる。
【0031】
実施の形態2.
図2はこの発明の実施例2を示す構成図であり、1〜15は実施例1と同一のもの、16は磁力計の電源がオンにされてから上記非磁性サーボ機構15によりセンサ光軸と地磁気のなす角度が最良の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分に安定した時間に、例えば5分後に、良否判別モニタ用計測指令信号を発するタイマ、17は上記タイマ16の良否判別モニタ用計測指令信号により最良動作角度における磁力計出力SSを基に上記1軸方式光磁気共鳴磁力計11の構成部品であるセシウムランプ1や吸収セル4の良否判別をするマイクロプロセッサ、18はマイクロプロセッサ17が判断した最良動作角度における磁力計出力SSの数分間の平均値を記憶しておくための不揮発性メモリ、TTはマイクロプロセッサから出力される良否判別信号である。
【0032】
1軸方式光磁気共鳴磁力計11によってゼーマンサブレベルの編分布を利用して周囲磁界を計測し、構成される非磁性サーボ機構15によって上記1軸方式光磁気共鳴磁力計11が常に不感帯を避けた向きになるように姿勢制御しているところまでは実施例1と同じである。
【0033】
ここでタイマ16は、磁力計を動作させる都度、上記非磁性サーボ機構15によりセンサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分安定した例えば電源オン5分後にタイマ16が良否判別モニタ用計測指令信号を生成し、この良否判別モニタ計測指令信号によってマイクロプロセッサ17が最良動作角度における磁力計出力SSの数分間の平均値を計測してこの値を取込むとともに閾値と比較することによってランプ1や吸収セル4が劣化していないか判断して、この値を劣化状態を示す指標値として磁力計を動作させた最初の1回のみ、この指標値を上記不揮発性メモリ18に出力し、レファレンス用の指標値として記憶しておく。
【0034】
そして次回に磁力計を動作させたときに非磁性サーボ機構15、タイマ16、マイクロプロセッサ17によって、同様にして電源オン5分後の最良動作角度における磁力計出力SSの数分間の平均値を計測してセシウムランプ1や吸収セル4の劣化状態を示す指標値として算出し、この値と最初の磁力計動作時に不揮発性メモリ18に記憶させたレファレンス用の指標値との比がある値以下に下がっていないかどうか判定することによってランプ1や吸収セル4が劣化していないかどうかを判断する。
【0035】
図8はこの様子を示す図であり、図8(a)は動作累積時間に対するセシウムランプ1の光強度、(b)は動作累積時間に対する吸収セル4の光強度、図8(c)は動作累積時間に対する上記セシウムランプ1と上記吸収セル4の光強度の相関値として表される磁力計出力SSの最大値との関係を示している。なお、図8(a)、図8(b)、図8(c)とも横軸の動作累積時間を合せて示しており、図8(a)はセシウムランプの光強度が動作累積時間とともにゆるやかに低下し例えばA点において急激に低下する特性を、また、図8(b)は吸収セルの光強度が動作累積時間とともにゆるやかに低下し例えばA点において急激に低下する特性を、また、図8(c)はこれらセシウムランプ、吸収セルの特性に伴って、セシウムランプと吸収セルの光強度の積も動作累積時間とともにゆるやかに低下しA点において急激に低下する特性を示している。
【0036】
このようにセシウムランプ1や吸収セル4は一般的に動作累積時間、即ち、寿命とともに光強度もゆるやかに低下していって両者の積の相関値である磁力計出力SSの最大値は図(c)のようにある動作累積時間においてA点のように急激に低下する特性を有しているので、磁力計を動作させる度に、例えば、磁力計の電源をオンにした5分後にタイマ16の良否判別モニタ用計測指令信号によって、センサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分安定した時の磁力計出力SSを指標値としてマイクロプロセッサ17が取込んで、この指標値と磁力計初回動作時に記憶させたレファレンス用の指標値との比がある値以下に下がっていないかどうかマイクロプロセッサ17が判定することによってセシウムランプ1や吸収セル4が劣化していないかどうかを判断し、良否判別信号TTとして出力する。
【0037】
こうして磁力計は、非磁性サーボ機構15により磁力計周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御することができるので、従来のように磁力計の方位検出用フラックスゲート方式磁気方位センサや姿勢制御用DCモータを用いていたために生じていた磁界歪が減少し、さらに、変動性の磁界を発生しないので、磁気補償量が少なくて済み、さらに、従来は磁気補償することが困難で補償不可能の磁気雑音として残っていた動揺磁気雑音をほとんどなくすことができる上に、磁力計の電源をオンにしてからセンサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプや吸収セルが十分安定した時の磁力計出力SSをマイクロプロセッサが指標値として取込んで、この指標値と磁力計初回動作時に記憶させたレファレンス用の指標値との比がある値以下に下がっていないかどうか判定することによってセシウムランプや吸収セルが劣化していないかどうか自動的に判断して報知するので、交換時期を見極めるのに、実機に組込まれたセシウムランプや吸収セルを外して専用装置にかけて定期的に診断しなければならないという不便をなくすことができる。
【0038】
以上によれば、絶えず磁力計の姿勢が変化する移動式磁力計の場合でも、磁力計周囲の磁界歪や、変動磁界を発生することなく、常に不感帯を避けた向きになるように姿勢制御することができるので、磁気補償量や動揺磁気雑音を減少させ、探知能力を向上させることができる上に、動作する毎に磁力計出力が減少していないか確認することによりセシウムランプや吸収セルが劣化していないか自動判別するので、定期的に診断しなければならないという不便をなくすことができる。
【0039】
実施の形態3.
図3はこの発明の実施例3を示す構成図であり、1〜18は実施例2と同一のもの、19はタイマ16の良否判別モニタ用計測指令信号により、ある一定の期間だけ非磁性サーボ機構15を制御して1軸方式光磁気共鳴磁力計11を、順次、ロール、ピッチ、ヨー方向に±数度姿勢を強制的に変える動揺磁気雑音測定用姿勢制御部、20は磁力計出力SSをF/V変換して、さらに、バンドパスフィルタでフィルタ処理をし、磁界変化分のみを検出して動揺磁気雑音を計測する動揺磁気雑音評価部である。
【0040】
このような構成において、1軸方式光磁気共鳴磁力計11によってゼーマンサブレベルの編分布を利用して周囲磁界を計測し、非磁性サーボ機構15によって上記1軸方式光磁気共鳴磁力計11が常に不感帯を避けた向きになるように姿勢制御しているところまでは実施例1と同じである。
【0041】
図9は動揺磁気雑音の様子を示す図である。
図9は、例えば、ロール方向に±5°数秒の周期で磁力計を回転させた時に生ずる動揺磁気雑音を示したものであり、ピッチ方向、ヨー方向に±5°数秒の周期で磁力計を回転させた時にも同様の動揺磁気雑音が生じ、図9(a)の場合は磁力計11の構成部品が正常な場合であり、図9(b)の場合は異常がある場合を示している。
【0042】
一般に磁力計の姿勢が、例えば、ロール、ピッチ、ヨー方向に変化したときに誤差計測分として生ずる動揺磁気雑音は、1軸方式光磁気共鳴磁力計11の構成部品が正常の場合には、図9の(a)のようには僅かであるが、磁化していたり、光透過率が低下して性能が劣化している場合には図9(b)のように大きくなる。
【0043】
タイマ16は、磁力計を動作させる都度、上記非磁性サーボ機構15によりセンサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分安定した例えば電源オン5分後に良否判別モニタ用計測指令信号を生成し、この良否判別モニタ用計測指令信号によって動揺磁気雑音測定用姿勢制御部19が非磁性サーボ機構15を制御して、順次、ロール軸、ピッチ軸、ヨー軸方向に1軸方式光磁気共鳴磁力計11を±数度姿勢を強制的に変え、その時に生ずる動揺磁気雑音を動揺磁気雑音評価部20が計測する。
【0044】
この動揺磁気雑音の総和値をマイクロプロセッサ17が動揺磁気雑音評価指数として取込み、この値を閾値と比較することによって1軸方式光磁気共鳴磁力計11を構成する部品が磁化したことを含めて劣化していないか判断するとともにこの値を劣化状態を示す評価指数値として磁力計を動作させた最初の1回のみ、この評価指数値を上記不揮発性メモリ18に出力し、レファレンス用の評価指数値として記憶しておく。
【0045】
そして次回に磁力計を動作させたときに非磁性サーボ機構15、タイマ16、マイクロプロセッサ17、動揺磁気雑音測定用姿勢制御部19、動揺磁気雑音評価部20によって、同様にして電源オン5分後の磁力計出力SSが最大となり、かつ、セシウムランプ1、吸収セル4が十分安定した時の動揺磁気雑音の総和値を動揺磁気雑音評価指数として算出し、この値と最初の磁力計動作時に記憶不揮発性メモリ18に記憶させたレファレンス用の評価指数値との比がある値以上に上がっていないかどうか判定することによって1軸方式光磁気共鳴磁力計11を構成する部品が磁化したことを含めて劣化していないか判断する。
【0046】
こうして磁力計は、非磁性サーボ機構15により磁力計周囲の磁界を歪ませることなく、1軸方式光磁気共鳴磁力計を常に不感帯を避けた向きになるように姿勢制御することができるので、方位検出用フラックスゲート方式磁気方位センサや姿勢制御用DCモータを用いていたために生じていた磁界歪が減少し、さらに、変動性の磁界を発生しないので、磁気補償量が少なくて済むことになる。
【0047】
さらに、従来は磁気補償することが困難で補償不可能の磁気雑音として残っていた動揺磁気雑音をほとんどなくすことができる上に、磁力計の電源をオンにしてからセンサ光軸と地磁気のなす角度が最良動作角度の45°になって磁力計出力SSが最大となり、かつ、セシウムランプ、吸収セルが十分安定した時の動揺磁気雑音の総和値をマイクロプロセッサが動揺磁気雑音評価指数として取込み、この評価指数値と磁力計初回動作時に記憶させたレファレンス用の評価指数値との比がある値以上に上がっていないかどうか判定することによって1軸方式光磁気共鳴磁力計の構成部品が劣化していないかどうか自動的に判断して報知するので、構成部品を外して専用装置にかけて定期的に診断しなければならないという不便をなくする上に、さらに広い範囲に渡っての故障診断ができるという長所がある。
【0048】
以上によれば、絶えず磁力計の姿勢が変化する移動式磁力計の場合でも、磁力計周囲の磁界歪や、変動磁界を発生することなく、常に不感帯を避けた向きになるように姿勢制御することができるので、磁気補償量や動揺磁気雑音を減少させ、探知能力を向上させることができる上に、動作する毎に磁力計を強制的に動揺させその時に動揺磁気雑音が増加していないか比較確認することにより磁力計の構成部品が劣化していないか自動判別するので、定期的に診断しなければならないという不便がなくなる上に、さらに広い範囲に渡っての故障診断ができるという長所がある。
【図面の簡単な説明】
【0049】
【図1】この発明の実施の形態1の例を示すブロック図である。
【図2】この発明の実施の形態2の例を示すブロック図である
【図3】この発明の実施の形態3の例を示すブロック図である。
【図4】目標の存在の有無と周囲磁界関係を示す図である。
【図5】センサ光軸−地磁気間の方位角度対する磁力計出力の関係を示す図である。
【図6】非磁性超音波モータの構成と原理を示す図である。
【図7】非磁性超音波回転部の構成の一例を示す図である。
【図8】経過時間に対するセシウムランプや吸収セルの光強度及びこれらの相関値との関係を示す図である。
【図9】磁気センサ構成部品不良の有無と動揺磁気雑音との関係を示す図である。
【符号の説明】
【0050】
1 セシウムランプ、 2 第1のレンズ、 3 第2のレンズ、 4 吸収セル、 5 RFコイル、 6 円偏向板、 7 光検知器、 8 位相器、 9 RF増幅器、 10 高周波電源、 11 1軸方式光磁気共鳴磁力計、 12 方位特性検出部、 13 サーボモータ制御部、 14 非磁性超音波回転部、 15 非磁性サーボ機構15。
【特許請求の範囲】
【請求項1】
量子遷移を起こすゼーマンサブレベルを有するセシウムを内蔵した吸収セルと、上記吸収セルに光を照射するセシウムランプと、上記吸収セルを透過したセシウムの光を電気信号に変換する光検知器と、上記セシウムランプと吸収セルを点灯させるための高周波電源と、上記光検知器からの電気信号を増幅するRF増幅器と、上記吸収セルに磁気共鳴を生じせしめるために上記増幅器で増幅した電気信号を磁界に変換して印加するための上記吸収セルの近傍に設けたコイルとから構成される1軸方式光磁気共鳴磁力計と、
上記1軸方式光磁気共鳴磁力計の出力を基に地磁気に対するセンサ光軸の向きを検出する方位検出部と、
上記方位検出部の出力を基に上記1軸方式光磁気共鳴磁力計の出力が常に最大となるように方位制御するサーボモータ制御部と、
上記サーボモータ制御部の出力を基に上記1軸方式光磁気共鳴磁力計のセンサ光軸と地磁気が常に45°の向きになるように超音波モータを駆動して当該センサ光軸の方位を制御する非磁性サーボ機構と、
を設けたことを特徴とする非磁性サーボ機構磁力計。
【請求項2】
上記1軸方式光磁気共鳴磁力計出力の初回動作時に計測した最大値を記憶する不揮発メモリと、
上記RF増幅器からの電気信号により、動作開始一定時刻後の上記1軸方式光磁気共鳴磁力計出力で計測された最大値と、上記不揮発メモリに記憶された基準最大値とを比較して、上記セシウムランプ、及び上記吸収セルの良否判別を判断するマイクロプロセッサとを設けたことを特徴とする請求項1記載の非磁性サーボ機構磁力計。
【請求項3】
上記光検知器の向きをある一定期間変える動揺雑音測定用姿勢変更部と、
上記動揺雑音測定用姿勢変更部で制御された非磁性サーボ機構の駆動を受けてセンサ動揺時の動揺磁気雑音を演算及び上記不揮発メモリに記憶することによって1軸方式光磁気共鳴磁力計の構成部品の良否判別をするマイクロプロセッサとを設けたことを特徴とする請求項2記載の非磁性サーボ機構磁力計。
【請求項1】
量子遷移を起こすゼーマンサブレベルを有するセシウムを内蔵した吸収セルと、上記吸収セルに光を照射するセシウムランプと、上記吸収セルを透過したセシウムの光を電気信号に変換する光検知器と、上記セシウムランプと吸収セルを点灯させるための高周波電源と、上記光検知器からの電気信号を増幅するRF増幅器と、上記吸収セルに磁気共鳴を生じせしめるために上記増幅器で増幅した電気信号を磁界に変換して印加するための上記吸収セルの近傍に設けたコイルとから構成される1軸方式光磁気共鳴磁力計と、
上記1軸方式光磁気共鳴磁力計の出力を基に地磁気に対するセンサ光軸の向きを検出する方位検出部と、
上記方位検出部の出力を基に上記1軸方式光磁気共鳴磁力計の出力が常に最大となるように方位制御するサーボモータ制御部と、
上記サーボモータ制御部の出力を基に上記1軸方式光磁気共鳴磁力計のセンサ光軸と地磁気が常に45°の向きになるように超音波モータを駆動して当該センサ光軸の方位を制御する非磁性サーボ機構と、
を設けたことを特徴とする非磁性サーボ機構磁力計。
【請求項2】
上記1軸方式光磁気共鳴磁力計出力の初回動作時に計測した最大値を記憶する不揮発メモリと、
上記RF増幅器からの電気信号により、動作開始一定時刻後の上記1軸方式光磁気共鳴磁力計出力で計測された最大値と、上記不揮発メモリに記憶された基準最大値とを比較して、上記セシウムランプ、及び上記吸収セルの良否判別を判断するマイクロプロセッサとを設けたことを特徴とする請求項1記載の非磁性サーボ機構磁力計。
【請求項3】
上記光検知器の向きをある一定期間変える動揺雑音測定用姿勢変更部と、
上記動揺雑音測定用姿勢変更部で制御された非磁性サーボ機構の駆動を受けてセンサ動揺時の動揺磁気雑音を演算及び上記不揮発メモリに記憶することによって1軸方式光磁気共鳴磁力計の構成部品の良否判別をするマイクロプロセッサとを設けたことを特徴とする請求項2記載の非磁性サーボ機構磁力計。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−116322(P2008−116322A)
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願番号】特願2006−299784(P2006−299784)
【出願日】平成18年11月6日(2006.11.6)
【出願人】(000006013)三菱電機株式会社 (33,312)
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願日】平成18年11月6日(2006.11.6)
【出願人】(000006013)三菱電機株式会社 (33,312)
[ Back to top ]