
靴の設計方法、靴の販売方法及び靴
【課題】動作による靴の滑りを抑制しうる靴の設計方法の提供。
【解決手段】この発明は、動作に適した突出部が靴底に設けられた靴を設計する方法に関する。この設計方法は、上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ(St1)と、上記三次元床反力の測定と同期させて、上記複数の時刻における靴底の接触面エリアを取得するステップ(St2))と、各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ(St3)とを含む。好ましくは、上記時刻Tsから上記時刻Tfまでが滑りやすい時刻とされる。
【解決手段】この発明は、動作に適した突出部が靴底に設けられた靴を設計する方法に関する。この設計方法は、上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ(St1)と、上記三次元床反力の測定と同期させて、上記複数の時刻における靴底の接触面エリアを取得するステップ(St2))と、各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ(St3)とを含む。好ましくは、上記時刻Tsから上記時刻Tfまでが滑りやすい時刻とされる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、靴の設計方法、靴の販売方法及び靴に関する。
【背景技術】
【0002】
靴底に多数の突出部が設けられた靴が知られている。
【0003】
特開2002−34609号公報では、防滑性能に優れたゴルフ靴が開示されている。この公報では、ゴルフスイング中に滑りにくい突出部の配置方法が開示されている。この配置方法は、ゴルフスイング中の水平方向及び鉛直方向の床反力を三次元床反力計で測定し、鉛直荷重に対する水平荷重の比率を算出するステップと、この比率が最大値となる時刻であるピーク時刻を決定するステップと、この比率が最大値に向かって上昇している段階にあってかつこの比率が最大値の60%となる時刻である開始時刻と、この比率が最大値から下降している段階にあってかつこの比率が最大値の60%となる時刻である終了時刻とを決定するステップと、この開始時刻と終了時刻との間の、所定間隔の三次元床反力データの水平成分ベクトルをその原点を一致させて並べるステップと、これらのベクトルの前端を結ぶ線である基準線を想定するステップと、この基準線に沿って側壁が並ぶように突出部の位置を決定するステップとを含む。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−34609号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1では、三次元床反力計の測定と同期されて、スイング中の足圧分布が測定されている(段落[0027]等を参照)。この文献1では、分圧測定センサが靴の中敷きとして用いられ、分圧が高い部分に突起が配置されている。しかし、靴の内部における分圧と、靴底面と地面との間の圧力とは、必ずしも一致しない。
【0006】
特定の動作に対してより一層滑りにくい靴について検討がなされた。その結果、従来とは異なる方法により、防滑性能に優れた突出部が設計されうることが見いだされた。
【0007】
本発明の目的は、動作による滑りが生じにくい靴を得るための突出部の設計方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明に係る靴の設計方法は、動作に適した突出部が靴底に設けられた靴を設計する方法であって、以下のステップを含む。
(1)上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ。
(2)上記三次元床反力の測定と同期させて、上記複数の時刻における靴底の接触面エリアを取得するステップ。
(3)各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ。
【0009】
好ましくは、上記時刻Tsから上記時刻Tfまでが滑りやすい時刻とされる。
【0010】
好ましくは、上記突出部を設計するステップにおいて、突出部E1が設計される。ただし、上記突出部E1とは、その上面の中央位置PC1が、時刻T1での上記接触面エリアに含まれており、且つ、上記上面のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトル又はその延長線が、その下端と交わるように設計された突出部である。この「延長線」とは、上記時刻T1での上記三次元押圧力ベクトルの延長線を意味する。
【0011】
好ましくは、平面視において、上記突出部E1の上記上面が、上記時刻T1での上記接触面エリアの重心gpを含む。
【0012】
好ましい設計方法は、上記水平方向の床反力の大きさf1の、上記鉛直方向の床反力の大きさf2に対する比(f1/f2)の最大値を決定するステップを更に含む。好ましくは、上記時刻Tsが、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされる。好ましくは、上記時刻Tfが、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされる。
【0013】
好ましくは、上記時刻Tsは、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされる。好ましくは、上記時刻Tfは、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされる。
【0014】
好ましくは、上記突出部の個数が、全ての突出部の個数の50%以上である。
【0015】
好ましくは、上記動作がゴルフスイングである。
【0016】
本発明に係る靴は、上記のいずれかの設計方法によって突出部が設計された靴である。
【0017】
本発明に係る靴の販売方法は、個人に適した突出部に設けられた靴を販売する方法であって、次のステップを含む。
(1)上記個人に動作を行わせ、上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ。
(2)上記三次元床反力の測定と同期させて、上記時刻Tsから上記時刻Tfまでの複数の時刻における靴底の接触面エリアを取得するステップ。
(3)各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ。
(4)上記突出部を設計するステップによって設計された突出部を備えた靴を上記個人に販売するステップ。
【発明の効果】
【0018】
動作に対応した突出部が設計され、滑りにくい靴が得られる。
【図面の簡単な説明】
【0019】
【図1】図1は、本発明の一実施形態に係る設計方法を行うための計測の様子を示す図である。
【図2】図2は、図1を上方から見た図である。
【図3】図3は、図1における被験者の右足付近の斜視図である。
【図4】図4は、接触面観察装置の概略を示す側面図である。
【図5】図5は、接触面観察装置の原理を説明するための図である。
【図6】図6は、ステップ(St1)及びステップ(St2)に用いられる計測用靴の一例の底面図である。
【図7】図7は、接触面エリアについて説明するための図である。
【図8】図8は、接触面エリアの画像の一例及びスイング中における摩擦係数の推移を示すグラフの一例である。
【図9】図9は、スイング中における摩擦係数の推移を示すグラフの他の一例である。
【図10】図10は、スイング中の3つの時刻における接触面エリアの画像の一例である。
【図11】図11は、スイング中の3つの時刻における接触面エリアの画像の他の一例である。
【図12】図12は、スイング中の3つの時刻における接触面エリアの画像の他の一例である。
【図13】図13は、スイング中の3つの時刻における接触面エリアの重心gpの位置を示す図である。
【図14】図14は、突出部の位置の補完について説明するための図である。
【図15】図15は、突出部の位置の展開について説明するための図である。
【図16】図16は、突出部の角度θ1の補完方法について説明するための図である。
【図17】図17は、突出部の角度θ2の補完方法について説明するための図である。
【図18】図18は、設計された突出部の一例を示す斜視図である。
【図19】図19は、設計された突出部の他の一例を示す斜視図である。
【図20】図20は、設計された突出部の他の一例を示す斜視図である。
【図21】図21は、本発明の一実施形態に係る靴の一例を示す側面図である。
【図22】図22は、図21の靴の底面の一部を示す図である。
【図23】図23は、設計された突出部の他の一例を示す斜視図である。
【図24】図24は、実施例及び比較例の靴のピン住所を示す底面図である。
【発明を実施するための形態】
【0020】
以下、適宜図面が参照されつつ、好ましい実施形態に基づいて本発明が詳細に説明される。
【0021】
本願においては、突出部等の位置が規定される。本願における「位置」は、水平面sh上に投影した場合における位置である。この投影は、鉛直方向になされる。この水平面shは、靴を単独で水平面上に静置した場合における、その水平面である。換言すれば、本願における「位置」とは、靴底を平面視したときの位置である。以下の説明では、「平面視」という用語が適宜用いられる。「平面視」とは、靴底の平面視である。
【0022】
本発明では、動作に適した突出部を有する靴が設計される。以下の実施形態は、この動作がゴルフスイングである場合の例である。
【0023】
本実施形態の設計方法は、以下のステップ(St1)、ステップ(St2)及びステップ(St3)を含む。
・ステップ(St1):上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ。
・ステップ(St2):上記三次元床反力の測定と同期させて、上記時刻Tsから上記時刻Tfまでの複数の時刻における靴底の接触面エリアを取得するステップ。
・ステップ(St3)各時刻における上記三次元床反力及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ。
【0024】
上記ステップ(St1)と上記ステップ(St2)とは、同時に実施される。上記ステップ(St1)のデータと上記ステップ(St2)のデータとは、同期がとられる。
【0025】
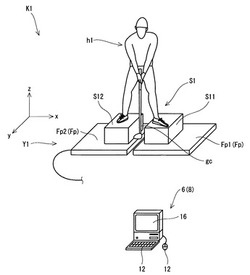
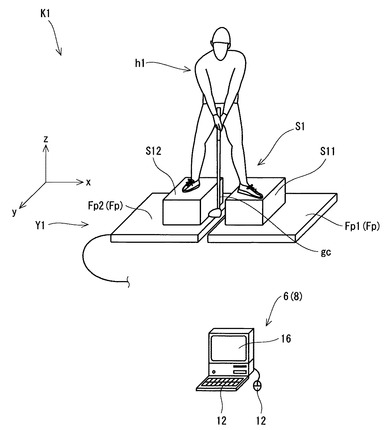
図1は、ステップ(St1)及びステップ(St2)に係る測定がなされている様子を示す斜視図である。図2は、図1を上方から見た図である。
【0026】
図1及び図2では、解析システムK1、被験者h1及びゴルフクラブgcが示されている。なお図1では、後述される第一装置S11及び第二装置S12が、簡略化されて、直方体で示されている。
【0027】
ゴルフクラブgcは限定されない。ゴルフクラブgcとして、ウッド型ゴルフクラブ、アイアン型ゴルフクラブ、パター等が例示される。図1では、ウッド型ゴルフクラブが用いられている。ゴルフクラブgcに代わるものが用いられてもよい。素振りで測定がなされる場合、ゴルフクラブgcは必ずしも必要ではない。また手に何も持たずにスイングがなされてもよい。
【0028】
この測定では、解析システムK1が用いられる。この解析システムK1は、床反力計Y1と、接触面観察装置S1とを有する。更に解析システムK1は、データ解析装置6を有する。
【0029】
データ解析装置6として、コンピュータ8が用いられる。コンピュータ8は、1台であってもよいし、複数台であってもよい。
【0030】
データ解析装置6は、操作入力部12と、データ入力部(図示されず)と、表示部16と、記憶部(図示されず)と、メモリ(図示されず)と、CPU(図示されず)とを備えている。
【0031】
操作入力部12は、キーボードとマウスとを備えている(図1参照)。
【0032】
上記データ入力部は、カメラ22やフォースプレートFpから出力されるデータを入力するためのインタフェースボード(図示省略)等を備えている。データ入力部に入力されたデータは、CPUに出力される。
【0033】
コンピュータ8は、A/Dコンバータを有している。このA/Dコンバータにより、アナログ信号がデジタル信号に変換される。床反力計Y1からのアナログ信号が、デジタル信号に変換される。
【0034】
表示部16は、例えば、ディスプレイである。この表示部16は、CPUに制御されつつ、各種データを表示しうる。
【0035】
CPUは、例えば、ハードディスクに記憶されているプログラムを読み出してメモリの作業領域に展開し、そのプログラムに従って各種処理を実行する。
【0036】
メモリは、例えば、書き換え可能なメモリであり、ハードディスクから読み出されたプログラムや入力データ等の格納領域や作業領域等を構成する。
【0037】
記憶部(ハードディスク)は、データ処理等に必要なプログラム及びデータ等を記憶している。このプログラムは、CPUに、必要なデータ処理を実行させる。
【0038】
接触面観察装置S1は、第一装置S11と、第二装置S12とを有する。第一装置S11は、左足用である。第二装置S12は、右足用である。
【0039】
床反力計Y1は、三次元床反力計である。床反力計Y1は、フォースプレートFpを有する。このフォースプレートFpは、第一プレートFp1と、第二プレートFp2とからなる。第一プレートFp1は、左足用である。第二プレートFp2は、右足用である。
【0040】
接触面観察装置S1が、フォースプレートFpに固定されている。本実施形態では、第一装置S11が、第一プレートFp1の上に固定されており、第二装置S12が、第二プレートFp2の上に固定されている。本実施形態の解析システムK1では、右足のデータと、左足のデータとが、それぞれ得られる。即ち、ステップ(St1)及びステップ(St2)において、右足のデータと、左足のデータとが、それぞれ得られる。
【0041】
被験者h1は、接触面観察装置S1の上に立って、スイングを行う。このスイング中の三次元床反力が、床反力計Y1によって測定される。このスイング中における靴底の接地面の画像が、接触面観察装置S1により得られる。
【0042】
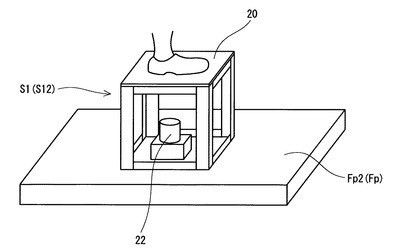
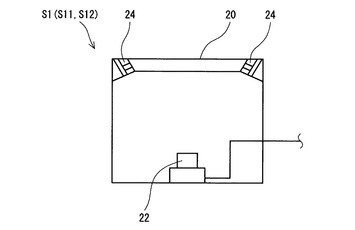
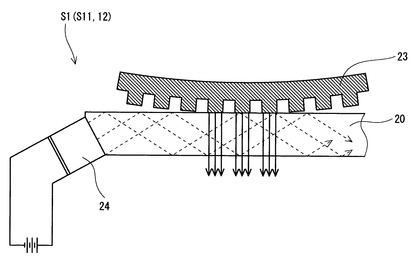
図3は、接触面観察装置S1(第二装置S12)を側面側から見た斜視図である。なお、第一装置S11と第二装置S12とは、同じである。図4は、接触面観察装置S1の概略構成を示す側面図である。図5は、接触面観察装置S1の原理を説明するための図である。
【0043】
接触面観察装置S1は、平板20と、カメラ22とを有する。平板20は、透明性を有する。本実施形態の平板20は、ガラス板である。平板20の上面と靴底とが接触する。平板20の上側に、透明な樹脂シートが配置されてもよい。
【0044】
図4が示すように、カメラ22は、上向きで取り付けられている。カメラ22は、平板20を下方から撮影する。カメラ22により、平板20の上面と靴底との接触面の画像が取得される。典型的なカメラ22は、CCDカメラである。
【0045】
図4及び図5が示すように、平板20の側面には、光源24が設けられている。光源24からの光は、平板20の側面から、平板20の内部に入射する。好ましい光源は、LEDである。
【0046】
光源の光は、臨界角以下の角度で、平板20に入射する。この臨界角は、平板20(ガラス)の屈折率と空気の屈折率との比によって決定される。臨界角以下の角度で入射した光は、平板20と空気との境界で全反射する(図5の破線矢印を参照)。よって、臨界角以下の角度で入射した光は、ガラスの内部から外部に出ることができない。
【0047】
ガラス20と靴底23とが接触した場合、この接触部分は乱反射する。この乱反射は、靴底23の素材(ゴム等)の反射率に起因する。この乱反射した光が、下方に向かって放出される(図5の下向き矢印参照)。この乱反射した光に起因して、靴底と平板20とが接触した部分の像が、下方のカメラ22によって撮影される。
【0048】
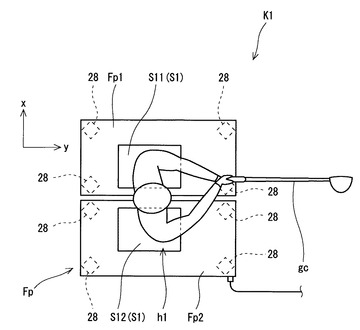
図2が示すように、床反力計Y1は、被験者h1が載るフォースプレートFpと、フォースプレートFpの下側に設けられたロードセル28とを有する。フォースプレートFpの上面は、平面である。フォースプレートFpの上面は、水平に設置される。このフォースプレートFpの上面に、接触面観察装置S1が固定されている。
【0049】
本実施形態では、フォースプレートFpは、左右に2分割されている(図1及び図2参照)。第一プレートFp1に固定された第一装置S11に、左足が載せられる。第二プレートFp2に固定された第二装置S12に、右足が載せられる。なお、フォースプレートFpの分割数は、2分割に限定されない。右足用及び左足用に2分割された本実施形態のフォースプレートFpでは、右足と左足のそれぞれについてのデータが収集されうる点で好ましい。
【0050】
ロードセル28は、フォースプレートFpを下方から支持している。本実施形態では、ロードセル28は、第一プレートFp1の四隅及び第二プレートFp2の四隅に設けられる。(図2参照)。
【0051】
ロードセル28は、互いに直交する三軸の各方向における分力を検出しうる。即ちロードセル28はx軸方向分力検出器と、y軸方向分力検出器と、z軸方向分力検出器とを有する。床反力計Y1は、三次元床反力計である。
【0052】
三次元直交座標系として、例えば、以下のように定義されたx軸、y軸及びz軸が用いられうる。x軸の方向は、ボールを打ち出す目標方向であって、飛球線方向とも称される。x軸は、水平である。y軸の方向は、被験者h1にとっての前後方向である。y軸は、x軸に対して垂直である。y軸は、水平である。z軸は、x軸及びy軸に対して垂直である。z軸は、鉛直方向である。z軸は、フォースプレートFpの上面に対して垂直である。これらのx軸、y軸及びz軸が、図1及び図2に示されている。このような三次元直交座標系以外の三次元直交座標系が用いられてもよい。
【0053】
ロードセル28から得られたデータは、データ解析装置6に取り込まれる。このデータは、A/Dコンバータによりデジタル化される。x軸方向、y軸方向及びz軸方向のそれぞれについて、床反力のデータが時系列的に得られる。即ち、三次元押圧力ベクトルが時系列的に得られる。この床反力のデータは、必要に応じて、ハードディスクに記憶されているプログラムによって、処理される。
【0054】
図示しないが、解析システムK1は、ハブを有する。このハブを介して、解析システムK1はネットワークを構成している。接触面観察装置S1と床反力計Y1とデータ解析装置6とがネットワークを構成している。ネットワークプロトコルとして、例えば、TCP/IPが用いられる。
【0055】
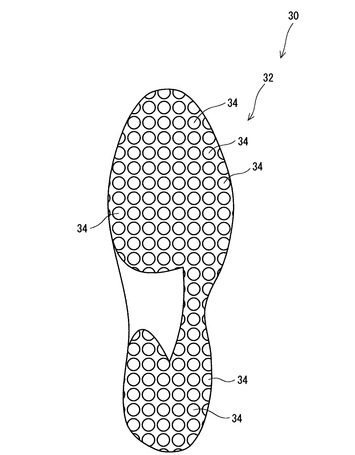
図6は、本実施形態で用いられる靴30を裏側から見た図である。図6は、靴30の靴底面の平面図である。靴30は、左足用である。右足用の靴30における靴底面の形状は、図6の鏡像である。
【0056】
靴30は、上記ステップ(St1)及び上記ステップ(St2)を行うために用いられる計測用の靴である。
【0057】
靴30の靴底32には、多数の突出部34が設けられている。全ての突出部34は、円柱状である。全ての突出部34の形状は等しい。ただし、外縁に配置された突出部34では、円柱の一部が欠落している。突出部34は、規則的に並んでいる。
【0058】
この靴30が用いられた場合、平板20と靴底面との接触面は、円形のドットの集合として示される。
【0059】
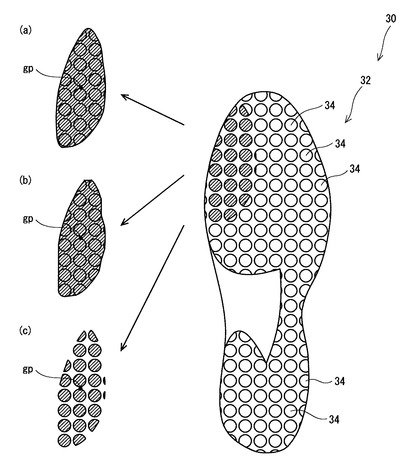
図7は、靴30を用いて得られる接触面エリアの一例を示す。図7の例では、左足の爪先側であり且つインサイド側の部分が接地している。ハッチングで示されている部分が、接触面である。実際には、この接触面が、白っぽい画像で示される。図5が示すように、接触面エリアからの光が、画像として捉えられる。
【0060】
[接触面エリア]
好ましくは、ステップ(St3)において、接触面エリアの重心gpが考慮される。図6で示すような接地面32を有する靴30の場合、接触面エリアは、図7の(c)においてハッチングで示されるエリアであってもよいし、図7の(a)においてハッチングで示されるエリアであってもよいし、図7の(b)においてハッチングで示されるエリアであってもよい。図7の(a)で示されるエリアは、突出部34を有さない靴底面であった場合の仮想接触面エリアである。同様に、図7の(b)で示されるエリアは、突出部34を有さない靴底面であった場合の仮想接触面エリアである。図7(a)の仮想接触面エリアの輪郭は、曲線である。図7(b)の仮想接触面エリアの輪郭は、多数の直線である。このように、接触面エリアは、実際の接触面のエリアであってもよいし、仮想接触面エリアであってもよい。
【0061】
[接触面エリアの重心gp]
図6で示すような接地面32を有する靴30の場合、接触面エリアの重心gpは、図7の(c)においてハッチングで示されるエリアの重心とされうる。接触面エリアの重心gpは、図7の(a)においてハッチングで示されるエリアの重心とされてもよいし、図7の(b)においてハッチングで示されるエリアの重心とされてもよい。突出部34の配置及び密度が適切であれば、仮想接地面エリアの重心gpの位置は、実際の接触面の重心とほぼ同じである。
【0062】
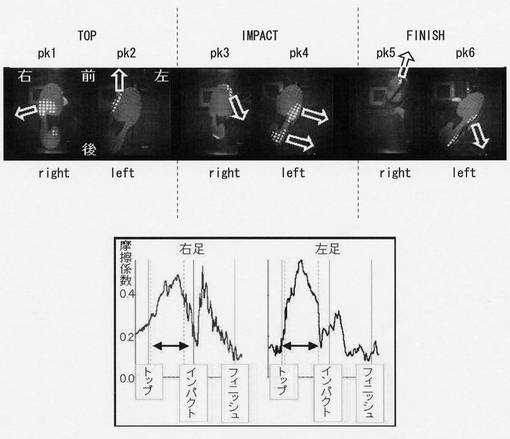
図8は、実際の測定によって得られた画像及びグラフである。図8に示される画像は、上記ステップ(St2)において取得された接触面エリアの画像の一例である。図8に示されるグラフは、スイング中における比(f1/f2)の時系列データである。この比(f1/f2)は、上記ステップ(St1)により得られる。この接触面エリアの画像と、比(f1/f2)のグラフとは、同期されている。換言すれば、上記ステップ(St1)と上記ステップ(St2)とは同期されている。
【0063】
比(f1/f2)は、摩擦係数である。比(f1/f2)は、本願において、摩擦係数又はCOFとも称される。図8のグラフにおける縦軸は、比(f1/f2)の値である。図8のグラフにおける横軸は、スイング開始時刻からの経過時間である。
【0064】
図8の画像は、トップオブスイングにおける右足の画像pk1、トップオブスイングにおける左足の画像pk2、インパクトにおける右足の画像pk3、インパクトにおける左足の画像pk4、フィニッシュにおける右足の画像pk5及びフィニッシュにおける左足の画像pk6である。これらの画像のそれぞれに付されている矢印は、各時刻において靴底面に作用している水平方向の外力の向きを示している。この外力とは、被験者h1が靴底面に付与している力の水平方向成分である。この水平方向成分の力の大きさは、水平方向の床反力と同じである。この水平方向成分の力の向きは、作用・反作用の関係で、水平方向の床反力の向きの逆である。
【0065】
床反力計Y1により測定されたx軸方向の床反力Fxの大きさがfxとされ、床反力計Y1により測定されたy軸方向の床反力Fyの大きさがfyとされ、床反力計Y1により測定されたz軸方向の床反力Fzの大きさがfzとされる。床反力Fx及び床反力Fyが水平方向の力であり、床反力Fzが鉛直方向の力である。
【0066】
本実施形態では、x軸方向の床反力Fx、y軸方向の床反力Fy及び床反力Fzが、それぞれ、時系列的に得られる。よって、各時刻における三次元押圧力ベクトルが得られる。
【0067】
水平方向の床反力F1は、床反力Fxと床反力Fyとのベクトル和である。水平方向の床反力F1の大きさf1は、次の式により算出される。
f1=(fx2+fy2)1/2
【0068】
鉛直方向の床反力F2は、床反力Fzである。鉛直方向の床反力F2の大きさf2は、床反力Fzの大きさfzに等しい。
【0069】
図8が示すように、ステップ(St1)により、スイング中の比(f1/f2)が時系列的に得られる。図8が示すように、ステップ(St2)により、スイング中の接触面エリアの画像が時系列的に得られる。
【0070】
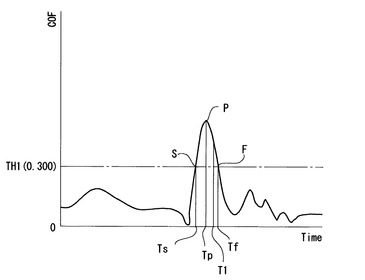
図9は、スイング中における比(f1/f2)の時系列データの一例である。図9の縦軸は比(f1/f2)であり、図9の横軸はスイング開始時刻からの経過時間である。この図9では、理解を容易とする観点から、グラフ線がスムージングされている。
【0071】
好ましい実施形態では、滑りやすい時刻が考慮される。
【0072】
滑りやすい時刻は、例えば、比(f1/f2)の閾値TH1に基づいて決定されうる。図9は、閾値TH1が0.300とされた場合の例である。図9の実施形態では、時刻Tsから時刻Tfまでが、滑りやすい時刻である。好ましくは、上記ステップ(St3)における上記各時刻が、滑りやすい時刻とされる。この場合、滑りやすい時刻を考慮して突出部が設計されるので、防滑性能が向上しやすい。
【0073】
図9の例では、比(f1/f2)の最大値は、ピーク点Pにおける比(f1/f2)の値である。図9の例では、比(f1/f2)が最大値に向かって上昇している段階における閾値TH1(図9の点SのCOF)と、比(f1/f2)が上記最大値から下降している段階における閾値TH1(図9の点FのCOF)とが同じである。
【0074】
比(f1/f2)が最大値に向かって上昇している段階における閾値TH1と、比(f1/f2)が上記最大値から下降している段階における閾値TH1とが、異なっていてもよい。
【0075】
上記のように、比(f1/f2)は、絶対値で規定されてもよい。汎用性の観点から、閾値TH1は、比(f1/f2)の最大値に対する割合によって規定されるのが好ましい。
【0076】
好ましい設計方法は、次のステップ(St4)を含む。
・ステップ(St4):比(f1/f2)の最大値を決定するステップ。
【0077】
好ましくは、閾値TH1の、上記最大値に対する割合が、30%以上60%以下とされる。閾値TH1がこの範囲に設定された場合、上記滑りやすい時刻における比(f1/f2)の値が、突出部の無い靴底の芝生上における静止摩擦係数よりも大きくなりやすい。よって、靴底の滑りやすい条件が突出部の設計に反映されやすい。この観点から、より好ましくは、閾値TH1の、上記最大値に対する割合は、60%とされる。なお、ここに言う靴底は、ゴム製の靴底及び樹脂製の靴底を含み、更に、ゴム製又は樹脂製の靴底基部に脱着可能な鋲が装着された靴底をも含む。この鋲の材質として金属、樹脂及びゴムが例示される。
【0078】
靴底の滑りやすい条件を突出部の設計に反映させる観点から、上記時刻Tsは、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされるのが好ましい。この観点から、上記時刻Tsは、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%とされるのがより好ましい。
【0079】
靴底の滑りやすい条件を突出部の設計に反映させる観点から、上記時刻Tfは、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされるのが好ましい。この観点から、上記時刻Tfは、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされるのがより好ましい。
【0080】
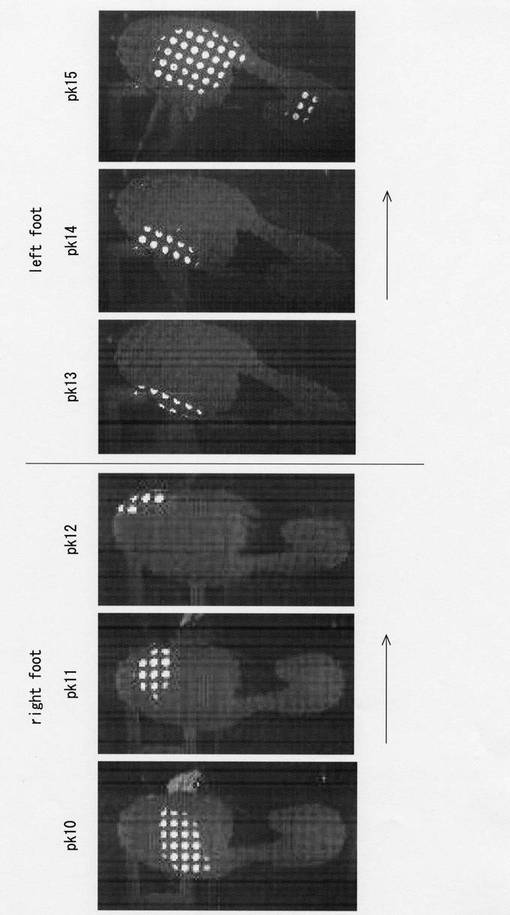
図10、図11及び図12は、図6で示された靴底を用いて測定された接触面エリアの画像を示している。図10は、テスターAの画像である。図11は、テスターBの画像である。図12は、テスターCの画像である。
【0081】
図10の画像pk10、画像pk11及び画像pk12は、右足の接触面画像を示す。 図10の画像pk13、画像pk14及び画像pk15は、左足の接触面画像を示す。図10は、三つの時刻における画像を示している。画像pk10及び画像pk13は、第一の時刻tk1における接触面画像である。画像pk11及び画像pk14は、第二の時刻tk2における接触面画像である。画像pk12及び画像pk15は、第三の時刻tk3における接触面画像である。
【0082】
第二の時刻tk2は、第一の時刻tk1よりも後の時刻である。第三の時刻tk3は、第二の時刻tk2よりも後の時刻である。
【0083】
第一の時刻tk1、第二の時刻tk2及び第三の時刻tk3は、いずれも、滑りやすい時刻である。図10は、滑りやすい時刻における接触面エリアの推移を示している。図10が示すように、各時刻における接触面エリアが観測される。
【0084】
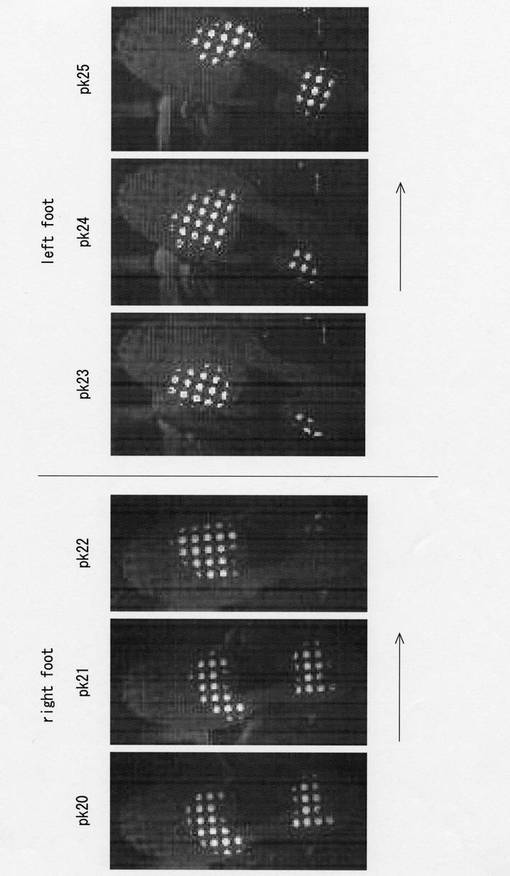
図11の画像pk20、画像pk21及び画像pk22は、右足の接触面画像を示す。 図11の画像pk23、画像pk24及び画像pk25は、左足の接触面画像を示す。図11は、三つの時刻における画像を示している。画像pk20及び画像pk23は、第一の時刻tk1における接触面画像である。画像pk21及び画像pk24は、第二の時刻tk2における接触面画像である。画像pk22及び画像pk25は、第三の時刻tk3における接触面画像である。
【0085】
第二の時刻tk2は、第一の時刻tk1よりも後の時刻である。第三の時刻tk3は、第二の時刻tk2よりも後の時刻である。
【0086】
第一の時刻tk1、第二の時刻tk2及び第三の時刻tk3は、いずれも、滑りやすい時刻である。図11は、滑りやすい時刻における接触面画像の推移を示している。図11が示すように、各時刻における接触面画像が観測される。図10と図11との比較により理解されるように、テスターが異なる場合、接触面画像も異なる。
【0087】
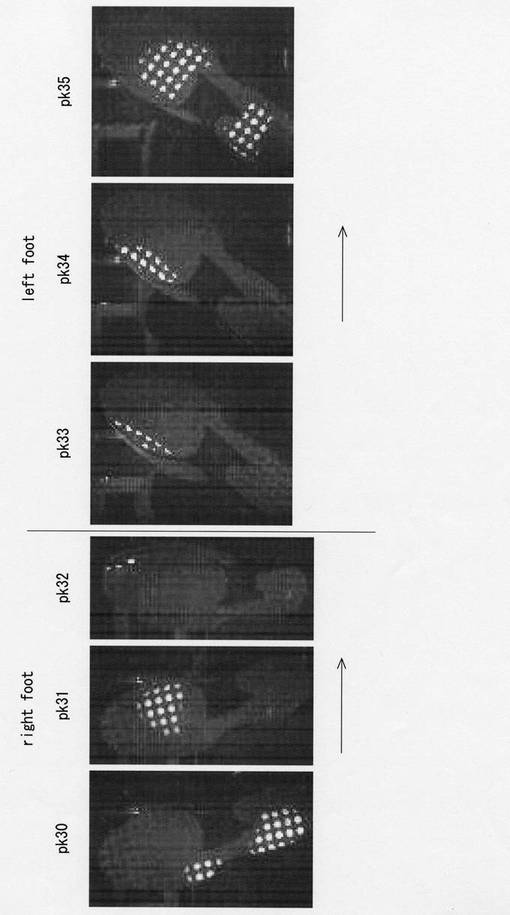
図12の画像pk30、画像pk31及び画像pk32は、右足の接触面画像を示す。 図12の画像pk33、画像pk34及び画像pk35は、左足の接触面画像を示す。図12は、三つの時刻における画像を示している。画像pk30及び画像pk33は、第一の時刻tk1における接触面画像である。画像pk31及び画像pk34は、第二の時刻tk2における接触面画像である。画像pk32及び画像pk35は、第三の時刻tk3における接触面画像である。
【0088】
第二の時刻tk2は、第一の時刻tk1よりも後の時刻である。第三の時刻tk3は、第二の時刻tk2よりも後の時刻である。
【0089】
第一の時刻tk1、第二の時刻tk2及び第三の時刻tk3は、いずれも、滑りやすい時刻である。図12は、滑りやすい時刻における接触面画像の推移を示している。図12が示すように、各時刻における接触面画像が観測される。図10及び図11と図12との比較により理解されるように、テスターが異なる場合、接触面画像も異なる。
【0090】
図10から図12が示すように、接触面エリアの重心gpは、時間の経過とともに、右側から左側へと移動している。この傾向は、全てのテスターにおいて観測される。
【0091】
また、右足に関しては、接触面エリアの重心gpが踵側から爪先側へと移動している。この傾向は、特にテスターA(図10)及びテスターC(図13)において顕著である。
【0092】
図10、図11及び図12において、土踏まずよりも爪先側の部分と、土踏まずよりも踵側の部分とに、接触面が分布している画像がある。具体的には、画像pk15、画像pk20、画像pk21、画像pk23、画像pk24、画像pk25、画像pk30及び画像pk35では、土踏まずよりも爪先側の部分と、土踏まずよりも踵側の部分とに、接触面が分布している。この場合、土踏まずよりも爪先側の接触面と、土踏まずよりも踵側の部分の接触面とを比較し、いずれか広い方の接触面が、上記接触面エリアとして採用されるのが好ましい。この例では、土踏まず部分が接地していない。よって、土踏まずよりも爪先側と踵側との両者の接触面を考慮した重心gpは、土踏まず付近になる場合がある。土踏まず付近の突出部は、防滑性能に寄与しにくい。土踏まず付近で分断された複数の接触面のうちの広い方が採用されることにより、突出部の位置がより一層適切となり、防滑性が向上しうる。
【0093】
好ましくは、上記ステップ(St2)及び上記ステップ(Stp2)で用いられる靴底のベース形状のタイプは、本発明により得られる靴のベース形状のタイプと同じであるのが好ましい。このベース形状のタイプとして、以下のタイプ1、タイプ2、タイプ3及びタイプ4が挙げられる。
(タイプ1)土踏まずを有さないタイプ。
(タイプ2)全面接触タイプ(扁平タイプ)
(タイプ3)他の部分よりも突出した踵部を有するタイプ
(タイプ4)靴底が全体として凸状のラウンド(丸み)を有しているタイプ
【0094】
例えば、(タイプ2)の靴底では土踏まず部の接触面が観測されうるのに対して、(タイプ3)の靴底では、踵部が高いため、土踏まず部付近が接触面となりえない。同じ人が同じ動作を行った場合であっても、上記タイプの相違によって、接触面が相違しやすい。よって、タイプが異なる靴底を用いてステップ(St2)及びステップ(Stp2)が行われた場合、計測の精度が低下しうる。計測精度の観点から、上記ステップ(St2)及び上記ステップ(Stp2)で用いられる靴底のベース形状のタイプは、本発明により得られる靴のベース形状のタイプと同じであるのが好ましい。
【0095】
上記ステップ(St3)では、例えば、第一の時刻A1における接触面エリアSA1に、その時刻A1における三次元押圧力ベクトルVA1を考慮した突出部a1が配置され、第二の時刻A2における接触面エリアSA2に、その時刻A2における三次元押圧力ベクトルVA2を考慮した突出部a2が配置される。このとき、接触面エリアSA1と接触面エリアSA2とが重複する場合がある。また、突出部a1と突出部a2とが重複する場合もある。このような場合、以下のような処理が可能である。
[重複処理1]:時刻A1又は時刻A2のいずれか一方のデータを採用し、他方のデータは削除する。
[重複処理2]:三次元押圧力ベクトルVA1及び三次元押圧力ベクトルVA2のうち、比(f1/f2)が大きい方を選び、比(f1/f2)が大きい方の時刻のデータを採用し、比(f1/f2)が小さい方の時刻のデータは削除する。
[重複処理3(接触面エリアSA1と接触面エリアSA2とが重複した場合)]
:平面視において、接触面エリアSA1と接触面エリアSA2との重複部分に分割線を引く。この分割線によって分割されたエリアの一方(接触面エリアSA1側)に突出部a1を配置し、この分割線によって分割されたエリアの他方(接触面エリアSA2側)に突出部a2を配置する。
[重複処理4(接触面エリアSA1と接触面エリアSA2とが重複した場合)]
:突出部a1と突出部a2とが重複しない場合は、そのまま、突出部a1及び突出部a2を配置する。
[重複処理5(突出部a1と突出部a2とが重複した場合)]
:突出部a1の下端と突出部a2の下端とが重複しない場合、両者が一部重複した状態で、突出部a1及び突出部a2を設ける。
【0096】
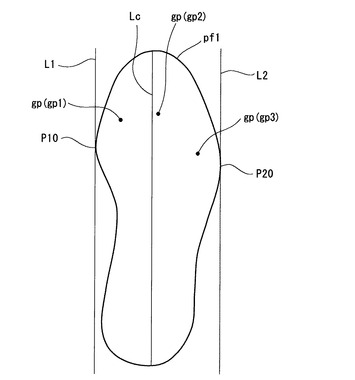
図13は、ステップ(St3)における突出部の位置の設計を説明するための図である。図13には、左足用の靴の輪郭線pf1が示されている。この図に置いて線分Lcは、底面の最大長さを示す線分である。直線L1は、線分Lcから最も左に離れた位置P10を通過する、線分Lcと平行な直線である。また、直線L2は、線分Lcから最も右に離れた位置P20を通過する、線分Lcと平行な直線である。
【0097】
この突出部の位置の決定では、先ず、各時刻における接触面エリアの重心gpが決定される。図13の実施形態では、第一の時刻における接触面エリアの重心gp1、第二の時刻における接触面エリアの重心gp2及び第三の時刻における接触面エリアの重心gp3が示されている。好ましくは、重心gp1、重心gp2及び重心gp3は、滑りやすい時刻における接触面エリアの重心である。
【0098】
好ましくは、これら重心gp1、重心gp2及び重心gp3のそれぞれの位置に、突出部が設けられる。これらの突出部により、防滑性能が効果的に向上しうる。
【0099】
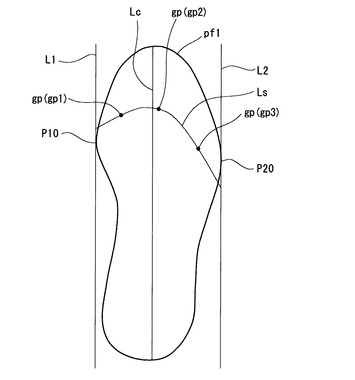
図14は、より好ましい実施形態を説明するための図である。より好ましい設計方法は、突出部の位置に関する補完工程(1)を含む。この補完工程(1)では、接触面エリアの重心gp以外の点にも突出部が配置される。このましい補完工程(1)では、複数の重心gpを繋ぐ補完線Lsが設定される(図14参照)。
【0100】
補完線Lsとして、線形補完線、二次補完線(放物線補完線)、多項式補完線、移動平均線、フーリエ変換による補完線、最小二乗法による補完線等が例示される。図14は、二次補完線を示している。図示しないが、例えば線形補完線は、隣接する重心gp同士を直線で結ぶことにより描かれる。
【0101】
好ましい設計方法では、この補完線Lsに沿って、突出部(補完突出部)が配置される。好ましくは、この補完線Lsに沿って、重心gp以外に位置する突出部(補完突出部)が配置される。上記補完線Lsに沿った連続的な突出部が設けられてもよい。好ましくは、突出部の側壁が補完線Lsに沿うように、突出部が配置される。この側壁は、防滑面となる。
【0102】
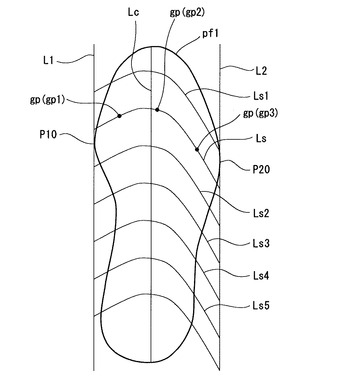
図15は、補完線Lsの展開について説明するための図である。補完線Lsは、他の位置に展開されてもよい。図15の実施形態では、補完線Lsよりも爪先側に位置する補助補完線Ls1が示されている。図15の実施形態では、補完線Lsよりも踵側に位置する補助補完線Ls2、補助補完線Ls3、補助補完線Ls4及び補助補完線Ls5が示されている。これらの補助補完線は、補完線Lsと平行である。これらの補助補完線は、上記線分Lcに対して垂直な方向に補完線Lsを移動させてなる。
【0103】
補完線Lsの形状は、防滑性能を高めるのに適している。よって、補助補完線も、防滑性能を高めうる。
【0104】
好ましくは、上記重心gp1、上記重心gp2及び上記重心gp3のそれぞれの位置に設けられた突出部は、各時刻における三次元押圧力ベクトルの向きを考慮して設計される。時刻T11における接触面エリアの重心が重心gp1である場合、その時刻T11における三次元床反力が考慮されて、その重心gp1に位置する突出部の形状が設計される。
【0105】
床反力の三次元ベクトルと、靴底が床を押す力の三次元ベクトルとは、作用・反作用の関係で、互いにその向きが逆である。床反力の三次元ベクトルと、靴底が床を押す力の三次元ベクトルとは、互いに平行である。床反力の三次元ベクトルを考慮して突出部を設計することにより、防滑性能が向上しうる。
【0106】
本願において、三次元押圧力ベクトルとは、靴底が床を押す力の三次元ベクトルを意味する。この三次元押圧力ベクトルの反力が、床反力である。
【0107】
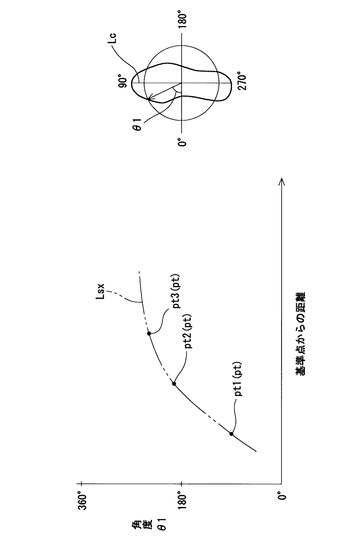
三次元押圧力ベクトルの方向が、突出部の設計において考慮される。図16においてθ1で示されるのは、xy平面への投影像における三次元押圧力ベクトルの角度である。換言すれば、平面視における三次元押圧力ベクトルの角度が、角度θ1である。この角度θ1の値は、例えば、図16に示されるように、上記線分Lcを基準として設定される。
【0108】
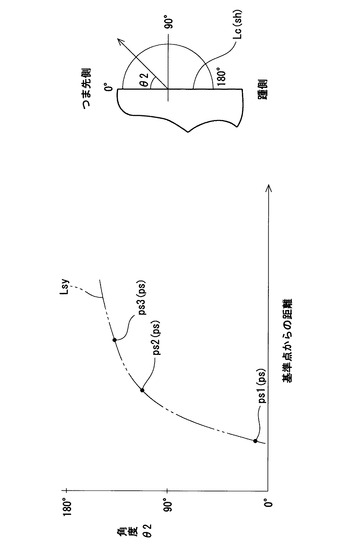
図17においてθ2で示されるのは、yz平面への投影像における三次元押圧力ベクトルの角度である。換言すれば、水平面に対して垂直であり且つ線分Lcを含む平面に投影されたときの三次元押圧力ベクトルの角度が、角度θ2である。この角度θ2の値は、例えば、図17に示されるように、上記線分Lc(水平面sh)を基準として設定される。
【0109】
上記角度θ1及び上記角度θ2により、三次元押圧力ベクトルの方向が三次元的に記述される。
【0110】
防滑性能を高める観点から、各時刻における重心gpに配置された突出部の向きは、その時刻における三次元押圧力ベクトルを考慮して決定されるのが好ましい。
【0111】
上記三次元押圧力ベクトルの向きは、上記補完突出部にも適用されうる。
【0112】
図16のグラフは、上記補完突出部の上記角度θ1を決定する方法の一例を説明するための図である。図17のグラフは、上記補完突出部の上記角度θ2を決定する方法の一例を説明するための図である。
【0113】
図16のグラフに基づき、上記補完突出部の上記角度θ1を決定する方法の一例が説明される。図16のグラフの横軸は基準点からの距離であり、図16のグラフの縦軸は上記角度θ1である。この図16のグラフにおいてプロットされているのは、上記第一の時刻における点pt1、上記第二の時刻における点pt2及び上記第三の時刻における点pt3である。横軸である「基準点の距離」とは、各時刻における上記重心gpと基準点との距離である。基準点の位置は特に限定されない。図16のグラフとは異なるが、上記第一の時刻における重心gpが基準点とされてもよい。即ち、複数の重心gpのうち最も時刻の早い重心gpが、基準点とされてもよい。
【0114】
より好ましい設計方法は、上記補完突出部の上記角度θ1に関する補完工程(2)を含む。この補完工程(2)では、複数の点ptを繋ぐ補完線Lsxが設定される(図16参照)。例えば、この補完線Lsxに基づいて、上記補完突出部の上記角度θ1が設定される。
【0115】
補完線Lsxとして、線形補完線、二次補完線(放物線補完線)、多項式補完線、移動平均線、フーリエ変換による補完線、最小二乗法による補完線等が例示される。図16の補完線Lsxは、二次補完線である。図示しないが、例えば線形補完線は、隣接する点pt同士を直線で結ぶことにより描かれる。
【0116】
図17のグラフに基づき、上記補完突出部の上記角度θ2を決定する方法の一例が説明される。図17のグラフの横軸は基準点からの距離であり、図17のグラフの縦軸は上記角度θ2である。この図17のグラフにおいてプロットされているのは、上記第一の時刻における点ps1、上記第二の時刻における点ps2及び上記第三の時刻における点ps3である。横軸である「基準点の距離」の意味は、上記図16のグラフと同一である。図17のグラフとは異なるが、上記第一の時刻における重心gpが基準点とされてもよい。即ち、複数の重心gpのうち最も時刻の早い重心gpが、基準点とされてもよい。
【0117】
より好ましい設計方法は、上記補完突出部の上記角度θ2に関する補完工程(3)を含む。この補完工程(3)では、複数の点psを繋ぐ補完線Lsyが設定される(図17参照)。例えば、この補完線Lsyに基づいて、上記補完突出部の上記角度θ2が設定される。
【0118】
補完線Lsyとして、線形補完線、二次補完線(放物線補完線)、多項式補完線、移動平均線、フーリエ変換による補完線、最小二乗法による補完線等が例示される。図17の補完線Lsyは、二次補完線である。図示しないが、例えば線形補完線は、隣接する点ps同士を直線で結ぶことにより描かれる。
【0119】
好ましい実施形態では、突出部E1が設計される。本願において突出部E1とは、その上面の中央位置PC1が、上記時刻T1での上記接触面エリアに含まれており、且つ、上記上面のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトルが、その下端と交わるような突出部を意味する。その上面の中央位置PC1が上記時刻T1での上記接触面エリアに含まれているか否かは、靴底の平面視において判断される。
【0120】
上記突出部E1の上面の中央位置PC1が上記時刻T1での上記接触面エリアに含まれているので、突出部が防滑に適した位置に配置される。よって、その時刻T1における滑りが効果的に抑制される。
【0121】
上記突出部E1の上面のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトルが、突出部E1の下端と交わっているので、上記突出部E1が三次元押圧力ベクトルの方向に沿いやすい。よって、上記時刻T1における滑りが効果的に抑制される。
【0122】
なお、突出部が靴底の基部から伸びている場合、突出部の上記上面とは、その基部とその突出部との境界面である。
【0123】
また、上記中央位置PC1とは、突出部の上記上面の重心位置である。
【0124】
上記突出部のE1の上記下端の形状は限定されない。上記突出部E1の上記下端は、面であってもよいし、線(稜線)であってもよいし、点(頂点)であってもよい。上記突出部E1の上記下端が面である場合、この面は平面であってもよいし、曲面であってもよい。上記突出部E1の上記下端が線である場合、この線は直線であってもよいし、曲線であってもよいし、異なる直線同士が連結された線であってもよいし、直線と曲線とが連結された線であってもよい。
【0125】
より好ましくは、平面視において、上記突出部E1の上記上面が、上記時刻T1での上記接触面エリアの重心gpを含む。上記突出部E1の上記上面が上記時刻T1での上記接触面エリアの重心gpを含むか否かは、靴底の平面視において判断される。この場合、上記突出部E1の配置が一層適切となり、上記時刻T1における防滑性能が一層向上しうる。
【0126】
上記突出部E1のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトルが、突出部E1の下端と交わっているので、上記突出部E1が三次元押圧力ベクトルに沿いやすい。よって、上記時刻T1における滑りが効果的に抑制されうr。
【0127】
より好ましくは、上記突出部E1において、上記時刻T1における上記重心gpを始点としたときの上記時刻T1での上記三次元押圧力ベクトルが、上記突出部E1の下端と交わる。この場合、上記突出部E1が三次元押圧力ベクトルに沿いやすいので、防滑性能が発揮されやすい。
【0128】
上記時刻T1は、上記時刻Tsから上記時刻Tfまでのいずれかの時刻である。好ましい上記時刻T1は、滑りやすい時刻である。好ましくは、上記ステップ(St1)において、上記三次元押圧力ベクトルは、複数の時刻T1において計測される。好ましくは、上記ステップ(St2)において、上記接触面エリアは、複数の上記時刻T1において計測される。
【0129】
図18、図19及び図20は、それぞれ、ステップ(St3)により設計された上記突出部の例を示している。
【0130】
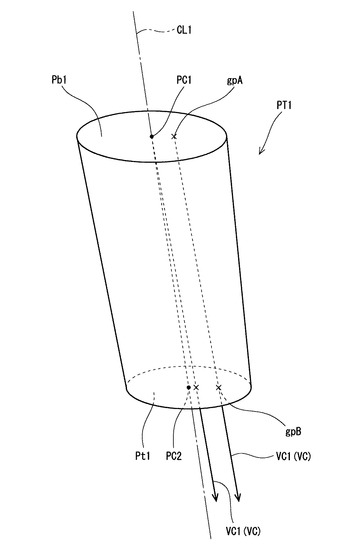
図18に示される突出部PT1は、上記突出部E1である。突出部PT1は、略円柱状である。突出部PT1の下端は、面である。
【0131】
突出部PT1の上面Pb1は、実際には、靴底の基部と突出部PT1との境界面である。理解しやすい図面とする観点から、図18は、上面Pb1が直接見えているように描かれている。
【0132】
この突出部PT1は、上記時刻T1におけるデータに基づいて設けられている。
【0133】
平面視において、突出部PT1の上面Pb1は、上記時刻T1での接触面エリアの重心gpに対応する対応点gpAを含んでいる。
【0134】
平面視において、対応点gpAと重心gpとは、同じ点である。換言すれば、平面視において、対応点gpAと重心gpとは、重なる。
【0135】
上記時刻T1における三次元押圧力ベクトルVCが、ベクトルVC1及びベクトルV10である。
【0136】
ベクトルVC1の始点が、突出部PT1の上面Pb1の中央位置PC1とされた場合、ベクトルVC1は、突出部PT1の下端面Pt1と交わっている。この場合、突出部PT1の延在方向がベクトルVC1の方向に近づきやすい。この場合、突出部PT1は、三次元押圧力による滑りを効果的に抑制しうる。
【0137】
ベクトルVC1の始点が、上記対応点gpAとされた場合も、ベクトルVC1は、突出部PT1の下端面Pt1と交わっている。ベクトルVC1と突出部PT1の下端面Pt1との交点が点gpBである。交点gpBが存在する場合、突出部PT1の延在方向がベクトルVC1の方向に近づきやすい。この場合、突出部PT1は、ベクトルVC1の三次元押圧力による滑りを効果的に抑制しうる。
【0138】
上面Pb1の中央位置PC1と、下端面Pt1の中央位置PC2とを結ぶ直線が、中心線CL1である。防滑性能の観点から、中心線CL1とベクトルVC1とは平行に近いのが好ましい。この観点から、中心線CL1とベクトルVC1との成す角度θ3(図示省略)は、30度以下が好ましく、20度以下がより好ましく、10度以下がより好ましく、5度以下がより好ましく、0度が特に好ましい。上記角度θ3が0度である場合、中心線CL1とベクトルVC1とは平行である。
【0139】
防滑性能の観点から、中央位置PC1と点gpAとの平面視における距離D1は、近い方が好ましい。この観点から、距離D1は、上面Pb1の最大長さの50%以下が好ましく、30%以下がより好ましく、20%以下がより好ましく、10%以下が更に好ましい。防滑性能の観点から、中央位置PC1と点gpAとは平面視において一致しているのが更に好ましい。
【0140】
上面Pb1の最大長さは、平面視における上面Pb1の最大長さである。
【0141】
防滑性能の観点から、中央位置PC2と点gpBとの平面視における距離D2(図示省略)は、近い方が好ましい。この観点から、距離D2は、上記距離D1以下であるのが好ましい。
【0142】
この突出部PT1のように、突出部の下端が面である場合、中心位置PC2は、下端面Pt1の重心である。
【0143】
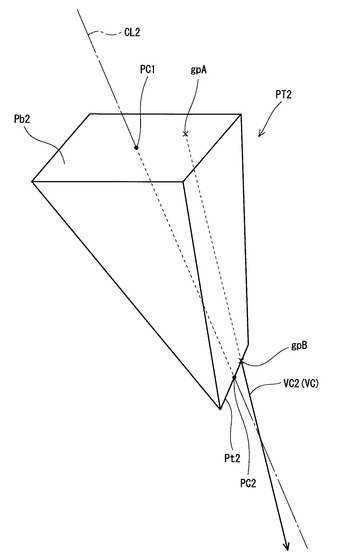
図19に示される突出部PT2は、上記突出部E1である。突出部PT2の下端は、線である。
【0144】
突出部PT2の上面Pb2は、実際には、靴底の基部と突出部PT2との境界面である。理解しやすい図面とする観点から、図19は、上面Pb2が直接見えているように描かれている。
【0145】
この突出部PT2は、上記時刻T1におけるデータに基づいて設けられている。
【0146】
平面視において、突出部PT2の上面Pb2は、上記時刻T1での接触面エリアの重心gpを含んでいる。即ち、突出部PT2の上面Pb2は、上記時刻T1での接触面エリアの対応点gpAを含んでいる。
【0147】
上記時刻T1における三次元押圧力ベクトルVCが、ベクトルVC2である。ベクトルVC2の始点は、上記時刻T1における接触面エリアの対応点gpAである。ベクトルVC2は、突出部PT2の下端線Pt2と交わっている。ベクトルVC2と突出部PT2の下端線Pt2との交点が、点gpBである。交点gpBが存在する場合、突出部PT2の延在方向がベクトルVC2の方向に近づきやすい。この場合、突出部PT2は、ベクトルVC2の三次元押圧力による滑りを効果的に抑制しうる。
【0148】
上面Pb2の中央位置PC1と、突出部PT2の下端(下端線Pt2)の中央位置PC2とを結ぶ直線が、中心線CL2である。防滑性能の観点から、中心線CL2とベクトルVC2とは平行に近いのが好ましい。この観点から、中心線CL2とベクトルVC2との成す角度θ4(図示省略)は、30度以下が好ましく、20度以下がより好ましく、10度以下がより好ましく、5度以下がより好ましく、0度が特に好ましい。上記角度θ4が0度である場合、中心線CL2とベクトルVC2とは平行である。
【0149】
防滑性能の観点から、中央位置PC1と点gpAとの平面視における距離D1(図示省略)は、近い方が好ましい。この観点から、距離D1は、上面Pb2の最大長さの50%以下が好ましく、30%以下がより好ましく、20%以下がより好ましく、10%以下が更に好ましい。防滑性能の観点から、中央位置PC1と点gpAとは平面視において一致しているのが更に好ましい。
【0150】
防滑性能の観点から、中央位置PC2と点gpBとの平面視における距離D2(図示省略)は、近い方が好ましい。この観点から、距離D2は、上記距離D1以下であるのが好ましい。
【0151】
この突出部PT2のように、突出部の下端が線である場合、中心位置PC2は、下端線Pt2の中点である。
【0152】
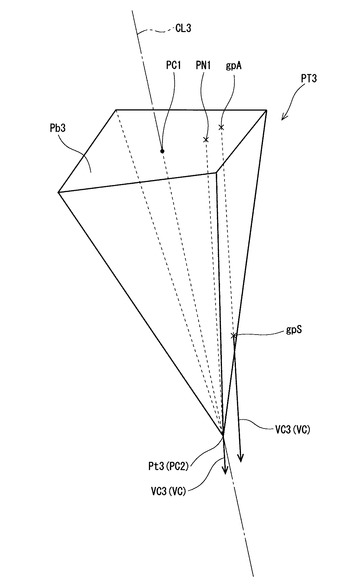
図20に示される突出部PT3は、上記突出部E1である。突出部PT3の下端は、点である。突出部PT3の先端は、尖っている。
【0153】
突出部PT3の上面Pb3は、実際には、靴底の基部と突出部PT3との境界面である。理解しやすい図面とする観点から、図20は、上面Pb3が直接見えているように描かれている。
【0154】
この突出部PT3は、上記時刻T1におけるデータに基づいて設けられている。
【0155】
平面視において、突出部PT3の上面Pb3は、上記時刻T1での接触面エリアの対応点gpAを含んでいる。
【0156】
上記時刻T1における三次元押圧力ベクトルVCが、ベクトルVC3である。ベクトルVC3の始点は、上記時刻T1における接触面エリアの対応点gpAである。ベクトルVC3は、突出部PT3の下端(下端点Pt3)と交わっていない。ベクトルVC3と突出部PT3の側面との交点が、点gpSである。
【0157】
ベクトルの始点の位置をずらすことにより、ベクトルVC3は、下端点Pt3と交わる。下端点Pt3と交わる。図20に示すように、ベクトルの始点が上面Pb3上の点PN1とされた場合、ベクトルVCは下端点Pt3と交わる。このように、図20の突出部PT3も、その上面Pb3のいずれかの位置を始点としたときの上記時刻T1での三次元押圧力ベクトルが、その下端と交わる。この突出部PT3も、上記突出部E1である。
【0158】
上面Pb3の中央位置PC1と、突出部PT3の下端(下端点Pt3)の中央位置PC2とを結ぶ直線が、中心線CL3である。本実施形態では、下端点Pt3が、突出部PT3の下端の中央位置PC2である。
【0159】
防滑性能の観点から、中心線CL3とベクトルVC3とは平行に近いのが好ましい。この観点から、中心線CL3とベクトルVC3との成す角度θ5(図示省略)は、30度以下が好ましく、20度以下がより好ましく、10度以下がより好ましく、5度以下がより好ましく、0度が特に好ましい。上記角度θ5が0度である場合、中心線CL3とベクトルVC3とは平行である。
【0160】
防滑性能の観点から、中央位置PC1と点gpAとの平面視における距離D1(図示省略)は、近い方が好ましい。この観点から、距離D1は、上面Pb3の最大長さの50%以下が好ましく、30%以下がより好ましく、20%以下がより好ましく、10%以下が更に好ましい。防滑性能の観点から、中央位置PC1と点gpAとは平面視において一致しているのが更に好ましい。
【0161】
防滑性能の観点から、中央位置PC2と点gpSとの平面視における距離D3(図示省略)は、近い方が好ましい。この観点から、距離D3は、上記距離D1以下であるのが好ましい。
【0162】
この突出部PT3のように、突出部の下端が点である場合、中心位置PC2は、この突出部の下端点である。
【0163】
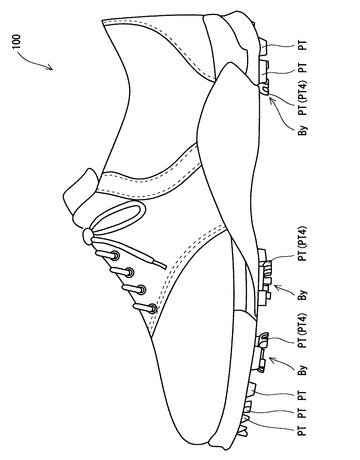
図21は、本発明の一実施形態である靴100の側面図である。この靴100は、ゴルフ靴である。この靴100は、複数の突出部PTを有する。
【0164】
図22は、靴100の靴底の一部を示す平面図である。図22では、爪先部分のみが示されている。
【0165】
靴100の突出部PTの少なくとも一部が、上記設計方法により設計された突出部であるのが好ましい。防滑性能の観点から、上記設計方法により設計された突出部の個数が、全ての突出部の個数の50%以上であるのが好ましく、60%以上であるのがより好ましく、70%以上であるのが更に好ましく、80%以上であるのが更に好ましく、100%であるのが特に好ましい。
【0166】
防滑性能の観点から、靴100の突出部PTの少なくとも一部が、上記突出部E1であるのがより好ましい。防滑性能の観点から、上記突出部E1の個数が、全ての突出部の個数の50%以上であるのが好ましく、60%以上であるのがより好ましく、70%以上であるのが更に好ましく、80%以上であるのが更に好ましい。
【0167】
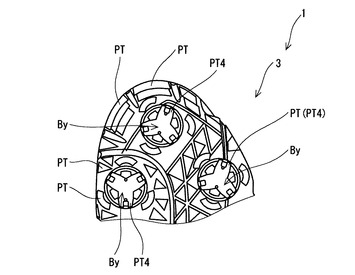
靴100は、鋲Byを有する。この鋲Byは、着脱可能である。図示しないが、鋲Byは、雄ネジ部を有する。図示しないが、靴100の靴底は、雌ネジ部を有する。この雌ネジ部に、鋲Byの雄ネジ部がネジ込まれている。この鋲Byは、一般に、樹脂スパイクなどと称されている。
【0168】
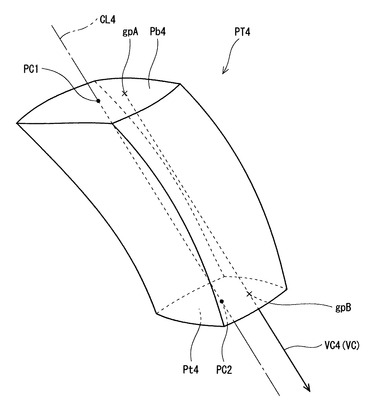
一つの鋲Byは、複数の突出部PTを有する。鋲Byの突出部PTが、突出部PT4である。図23は、この突出部PT4が単独で描かれた図である。図23は、一つの鋲Byが有する複数の突出部PT4のうち、上記設計方法に基づく突出部PT4を示している。
【0169】
鋲Byは、回転対称性を有する。鋲Byの回転対称軸は、上記雄ネジ部の中心軸である。回転対称性を有する鋲Byにおいて、その全ての突出部PT4を上記設計方法による突出部とすることは、通常、困難である。通常は、一つの鋲Byが有する複数の突出部PT4のうちの一部の突出部PT4が、上記設計方法に基づく突出部とされる。通常は、一つの鋲Byが有する複数の突出部PT4のうちの一部の突出部PT4が、上記突出部E1とされる。
【0170】
鋲Byの回転対称軸の向き及び鋲Byの位置が適切に設定されることにより、一つの鋲Byが有する複数の突出部PT4のうちの一部の突出部PT4が、上記設計方法に基づく突出部とされうる。鋲Byの回転対称軸の向き及び鋲Byの位置が適切に設定されることにより、一つの鋲Byが有する複数の突出部PT4のうちの一部の突出部PT4が、上記突出部E1とされうる。
【0171】
図23が示すように、突出部PT4は、曲がって延びている。
【0172】
この突出部PT4は、上記時刻T1におけるデータに基づいて設けられている。
【0173】
平面視において、突出部PT4の上面Pb4は、上記時刻T1での接触面エリアの重心gpを含んでいる。即ち、突出部PT4の上面Pb4は、上記時刻T1での接触面エリアの対応点gpAを含んでいる。
【0174】
上記時刻T1における三次元押圧力ベクトルVCが、ベクトルVC4である。ベクトルVC4の始点は、上記時刻T1における接触面エリアの対応点gpAである。ベクトルVC4は、突出部PT4の下端面Pt4と交わっている。ベクトルVC4と突出部PT4の下端面Pt4との交点が、点gpBである。交点gpBが存在する場合、突出部PT4の延在方向がベクトルVC4の方向に近づきやすい。この場合、突出部PT4は、ベクトルVC4の三次元押圧力による滑りを効果的に抑制しうる。
【0175】
上面Pb4の中央位置PC1と、突出部PT4の下端(下端面Pt4)の中央位置PC2とを結ぶ直線が、中心線CL4である。防滑性能の観点から、中心線CL4とベクトルVC4とは平行に近いのが好ましい。この観点から、中心線CL4とベクトルVC4との成す角度θ5(図示省略)は、30度以下が好ましく、20度以下がより好ましく、10度以下がより好ましく、5度以下がより好ましく、0度が特に好ましい。上記角度θ5が0度である場合、中心線CL4とベクトルVC4とは平行である。
【0176】
防滑性能の観点から、中央位置PC1と点gpAとの平面視における距離D1(図示省略)は、近い方が好ましい。この観点から、距離D1は、上面Pb4の最大長さの50%以下が好ましく、30%以下がより好ましく、20%以下がより好ましく、10%以下が更に好ましい。防滑性能の観点から、中央位置PC1と点gpAとは平面視において一致しているのが更に好ましい。
【0177】
防滑性能の観点から、中央位置PC2と点gpBとの平面視における距離D2(図示省略)は、近い方が好ましい。この観点から、距離D2は、上記距離D1以下であるのが好ましい。
【0178】
平面視における突出部の上面の面積Sm1は限定されない。三次元押圧力ベクトルに起因する滑りを抑制する観点から、面積Sm1は、900mm2以下が好ましく、400mm2以下がより好ましく、100mm2以下がより好ましい。突出部が細すぎる場合、地面(芝生面を含む)の内部において突出部が移動しやすい。この観点から、この面積Sm1は、15mm2以上が好ましく、50mm2以上がより好ましい。
【0179】
平面視における突出部の下端の面積Sm2は限定されない。三次元押圧力ベクトルに起因する滑りを抑制する観点から、面積Sm2は、400mm2以下が好ましく、100mm2以下がより好ましく、50mm2以下がより好ましい。突出部が細すぎる場合、地面(芝生面を含む)の内部において突出部が移動しやすい。この観点から、この面積Sm2は、5mm2以上が好ましく、20mm2以上がより好ましい。なお、この面積Sm2は、実質的にゼロであってもよい。面積Sm2が実質的にゼロである例は、図19に示される突出部PT2及び図20に示される突出部PT3である。
【0180】
上記の実施形態では、突出部の下端と三次元押圧力ベクトルとの交わりが説明された。突出部の下端が、三次元押圧力ベクトルの延長線と交わっていてもよい。突出部の延在方向を三次元押圧力ベクトルに沿った方向に近づける観点からは、三次元押圧力ベクトルの長さ(大きさ)は問題ではない。この観点から、三次元押圧力ベクトルの延長線が突出部の下端と交わっていてもよいことは明らかである。
【0181】
上記突出部の形態は限定されない。上記突出部は、ブロック状であってもよいし、スパイク状であってもよいし、壁状であってもよい。
【0182】
本発明における靴の用途は限定されない。即ち、上記動作は限定されない。上記動作として、ゴルフスイング、アメリカンフットボール、サッカー、ラグビー、テニス及び陸上競技が例示される。陸上競技として、短距離走などの直線に沿って走る競技、中距離走やリレーなどの曲線に沿って走る競技、走り高跳び、走り幅跳び、なとが例示される。
【0183】
直線に沿って歩行する場合、靴底に作用する力は、比較的単純である。しかし、上記スポーツにおいては、靴底に作用する力は、複雑である。曲線に沿って走る競技では、直線に沿って走る競技と比較して、靴底に作用する力は複雑である。
【0184】
上記スポーツでは、靴底に作用する力の解析は難しい。例えばゴルフスイングでは、動作中における足の変位はほとんど見られないので、解析が難しい。足の動作からは、靴底に作用する力の解析が困難である場合、本発明は特に有効である。この観点から、上記動作がゴルフスイングであるのが特に好ましい。
【0185】
本発明は、靴を販売する方法にも適用される。図10、図11及び図12で示した例からも理解されるように、靴底に作用する力には、個人差がある。本発明は、個人に適した突出部が靴底に設けられた靴を販売する方法に好ましく応用される。
【0186】
この販売方法は、好ましくは、次のステップ(Stp1)、ステップ(Stp2)、ステップ(Stp3)及びステップ(Stp4)を含む。
・ステップ(Stp1):上記個人に動作を行わせ、上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ。
・ステップ(Stp2):上記三次元床反力の測定と同期させて、上記時刻Tsから上記時刻Tfまでの複数の時刻における靴底の接触面エリアを取得するステップ。
・ステップ(Stp3):各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ。
・ステップ(Stp4):上記突出部を設計するステップによって設計された突出部を備えた靴を上記個人に販売するステップ。
【0187】
この販売方法により、各個人に適した靴が提供されうる。
【0188】
上記ステップ(St2)及び上記ステップ(Stp2)で用いられる靴の底面のベース形状は、本発明で設計される靴に近似した形状であるのが好ましい。ベース形状とは、本発明で設計される突出部を除いた部分の形状である。この近似した形状として、以下が挙げられる。
・[近似した形状1]:本発明により得られる靴底面から、本発明で設計される突出部が除かれた形状。
・[近似した形状2]:上記[近似した形状1]に、一定の形状を有し且つ規則的に並べられた複数の突出部が設けられた形状。
【0189】
上記近似した形状とされることにより、最終的に得られる靴と計測される靴とでベース形状が近似するため、最終的に得られる靴において効果的な突出部が設計されうる。
【0190】
上記[近似した形状2]の例は、図6で示される靴底である。
【実施例】
【0191】
以下、実施例によって本発明の効果が明らかにされるが、この実施例の記載に基づいて本発明が限定的に解釈されるべきではない。
【0192】
[実施例1のための計測]
前述の解析システムK1と、同一の突出部が規則的に並んでいる靴底を用いて、上記ステップ(St1)及び上記ステップ(St2)がなされた。床反力計として、キスラー社製の床反力計(商品名「9287B」)が用いられた。計測の状況は、図1に示される通りとされた。被験者h1がゴルフクラブをスイングして、計測が行われた。
【0193】
計測に用いられた靴の靴底は、図6で示す靴底とほぼ同じとされた。ただし、図6で示される靴底と異なり、土踏まず部が凹んでおらず、土踏まず部にも突出部を有する靴が用いられた。
【0194】
得られたデータが解析された。この解析では、上記時刻Tsが、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされ、上記時刻Tfが、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされた。この時刻Tsから時刻Tfまでの時間を9等分して定まる10の時刻のそれぞれにおいて、接触面エリアの重心gp、上記角度θ1及び上記角度θ2を得た。
【0195】
本発明に係る突出部の形状は限定されず、円柱、半円柱、円錐、円筒、四角錐等の多角錐、方形柱及びそれらに類似した形状が例示される。本発明に係る突出部は、靴底の基部と一体成形されていてもよいし、市販のスパイクピン等と同様に、着脱可能とされていてもよい。
【0196】
[実施例1]
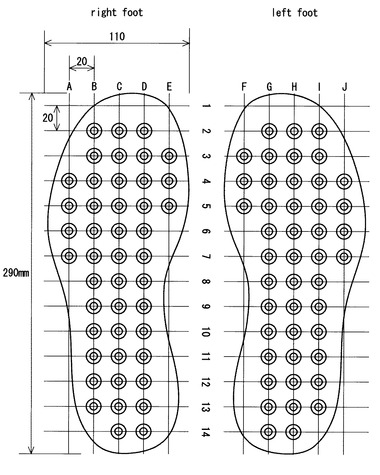
靴底面に複数のネジ孔が設けられた試験用靴が用意された。靴底の材質はEVAとされ、このEVAの靴底に、金属製のネジ孔部材(爪つきナット)が埋設された。このネジ孔の位置が、図24に示される。ネジ孔は、一つの靴あたり45箇所に設けられた。即ち、右足用の靴に45箇所のネジ孔が設けられ、左足用の靴に45箇所のネジ孔が設けられた。ネジ孔は、20mm間隔で規則的に並べられた。図24に示すように、各ネジ孔に住所が割り当てられている。例えば、左足用の靴において、最も踵寄りであり且つ最もインサイドであるネジ孔の住所は、G14である。
【0197】
全てのネジ孔にスパイクピンが取り付けられた。このスパイクピンは鋼製であった。このスパイクピンの形状は略円錐形であり、根本の直径は約4mmであり、先端の直径は約2.5mmであった。このスパイクピンの突出長さは、8mmであった。このスパイクピンは、市販品である。次に、上記の計測結果に基づいて、スパイクピンを塑性変形させた。具体的には、スパイクピンをペンチで曲げた。スパイクピンは、根元において曲げられた。各時刻における接触面エリアの重心gpに最も近い住所のスパイクピンが、その時刻における上記角度θ1及び上記角度θ2となるように曲げられた。ただし、上記角度θ1及び上記角度θ2については、一の位が四捨五入された値が用いられた。実施例1におけるピン住所、上記角度θ1及び上記角度θ2が、下記の表1に示される。表1に示されていない住所には、ピンが設けられなかった。なお、上記角度θ1及び上記角度θ2の定義は、図16及び図17に示される通りである。実施例1の仕様及び評価結果が下記の表1に示される。
【0198】
[比較例1]
全てのピンが曲げられずに真っ直ぐとされた他は実施例1と同様にして、比較例1の靴を得た。比較例1の仕様及び評価結果が下記の表1に示される。表1に示されていない住所には、ピンが設けられなかった。
【0199】
[比較例2]
ピンの住所及び角度が表1に示される通りとされた他は実施例1と同様にして、比較例2の靴を得た。比較例2の仕様及び評価結果が下記の表1に示される。表1に示されていない住所には、ピンが設けられなかった。
【0200】
なお、ピンが真っ直ぐである場合、表1の上記角度θ1は空欄である。
【0201】
【表1】

【0202】
[評価方法]
ゴルフ場のティーグラウンドで、ゴルフクラブをスイングした。官能評価により、滑りやすさが10段階で評価された。最も滑りにくい場合が10点とされ、最も滑りやすい場合が1点とされた。5人のゴルファーによる評価の平均点(小数点以下は四捨五入)が、表1に示される。
【0203】
表1に示されるように、実施例は、比較例に比べて評価が高い。この評価結果から、本発明の優位性は明らかである。
【産業上の利用可能性】
【0204】
以上説明された方法は、突出部を有するあらゆる靴に適用されうる。
【符号の説明】
【0205】
6・・・データ解析装置
8・・・コンピュータ
20・・・平板
22・・・カメラ
24・・・光源
30・・・靴(ステップ(St1)及びステップ(St2)を行うための靴であり、ステップ(Stp1)及びステップ(Stp2)を行うための靴でもある。)
PT、PT1、PT2、PT3、PT4・・・突出部
Pb1、Pb2、Pb3、Pb4・・・突出部の上面
Pt1、Pt2、Pt3、Pt4・・・突出部の下端
S1・・・接触面観察装置
Fp・・・フォースプレート
h1・・・被験者
gc・・・ゴルフクラブ
【技術分野】
【0001】
本発明は、靴の設計方法、靴の販売方法及び靴に関する。
【背景技術】
【0002】
靴底に多数の突出部が設けられた靴が知られている。
【0003】
特開2002−34609号公報では、防滑性能に優れたゴルフ靴が開示されている。この公報では、ゴルフスイング中に滑りにくい突出部の配置方法が開示されている。この配置方法は、ゴルフスイング中の水平方向及び鉛直方向の床反力を三次元床反力計で測定し、鉛直荷重に対する水平荷重の比率を算出するステップと、この比率が最大値となる時刻であるピーク時刻を決定するステップと、この比率が最大値に向かって上昇している段階にあってかつこの比率が最大値の60%となる時刻である開始時刻と、この比率が最大値から下降している段階にあってかつこの比率が最大値の60%となる時刻である終了時刻とを決定するステップと、この開始時刻と終了時刻との間の、所定間隔の三次元床反力データの水平成分ベクトルをその原点を一致させて並べるステップと、これらのベクトルの前端を結ぶ線である基準線を想定するステップと、この基準線に沿って側壁が並ぶように突出部の位置を決定するステップとを含む。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−34609号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1では、三次元床反力計の測定と同期されて、スイング中の足圧分布が測定されている(段落[0027]等を参照)。この文献1では、分圧測定センサが靴の中敷きとして用いられ、分圧が高い部分に突起が配置されている。しかし、靴の内部における分圧と、靴底面と地面との間の圧力とは、必ずしも一致しない。
【0006】
特定の動作に対してより一層滑りにくい靴について検討がなされた。その結果、従来とは異なる方法により、防滑性能に優れた突出部が設計されうることが見いだされた。
【0007】
本発明の目的は、動作による滑りが生じにくい靴を得るための突出部の設計方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明に係る靴の設計方法は、動作に適した突出部が靴底に設けられた靴を設計する方法であって、以下のステップを含む。
(1)上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ。
(2)上記三次元床反力の測定と同期させて、上記複数の時刻における靴底の接触面エリアを取得するステップ。
(3)各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ。
【0009】
好ましくは、上記時刻Tsから上記時刻Tfまでが滑りやすい時刻とされる。
【0010】
好ましくは、上記突出部を設計するステップにおいて、突出部E1が設計される。ただし、上記突出部E1とは、その上面の中央位置PC1が、時刻T1での上記接触面エリアに含まれており、且つ、上記上面のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトル又はその延長線が、その下端と交わるように設計された突出部である。この「延長線」とは、上記時刻T1での上記三次元押圧力ベクトルの延長線を意味する。
【0011】
好ましくは、平面視において、上記突出部E1の上記上面が、上記時刻T1での上記接触面エリアの重心gpを含む。
【0012】
好ましい設計方法は、上記水平方向の床反力の大きさf1の、上記鉛直方向の床反力の大きさf2に対する比(f1/f2)の最大値を決定するステップを更に含む。好ましくは、上記時刻Tsが、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされる。好ましくは、上記時刻Tfが、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされる。
【0013】
好ましくは、上記時刻Tsは、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされる。好ましくは、上記時刻Tfは、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされる。
【0014】
好ましくは、上記突出部の個数が、全ての突出部の個数の50%以上である。
【0015】
好ましくは、上記動作がゴルフスイングである。
【0016】
本発明に係る靴は、上記のいずれかの設計方法によって突出部が設計された靴である。
【0017】
本発明に係る靴の販売方法は、個人に適した突出部に設けられた靴を販売する方法であって、次のステップを含む。
(1)上記個人に動作を行わせ、上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ。
(2)上記三次元床反力の測定と同期させて、上記時刻Tsから上記時刻Tfまでの複数の時刻における靴底の接触面エリアを取得するステップ。
(3)各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ。
(4)上記突出部を設計するステップによって設計された突出部を備えた靴を上記個人に販売するステップ。
【発明の効果】
【0018】
動作に対応した突出部が設計され、滑りにくい靴が得られる。
【図面の簡単な説明】
【0019】
【図1】図1は、本発明の一実施形態に係る設計方法を行うための計測の様子を示す図である。
【図2】図2は、図1を上方から見た図である。
【図3】図3は、図1における被験者の右足付近の斜視図である。
【図4】図4は、接触面観察装置の概略を示す側面図である。
【図5】図5は、接触面観察装置の原理を説明するための図である。
【図6】図6は、ステップ(St1)及びステップ(St2)に用いられる計測用靴の一例の底面図である。
【図7】図7は、接触面エリアについて説明するための図である。
【図8】図8は、接触面エリアの画像の一例及びスイング中における摩擦係数の推移を示すグラフの一例である。
【図9】図9は、スイング中における摩擦係数の推移を示すグラフの他の一例である。
【図10】図10は、スイング中の3つの時刻における接触面エリアの画像の一例である。
【図11】図11は、スイング中の3つの時刻における接触面エリアの画像の他の一例である。
【図12】図12は、スイング中の3つの時刻における接触面エリアの画像の他の一例である。
【図13】図13は、スイング中の3つの時刻における接触面エリアの重心gpの位置を示す図である。
【図14】図14は、突出部の位置の補完について説明するための図である。
【図15】図15は、突出部の位置の展開について説明するための図である。
【図16】図16は、突出部の角度θ1の補完方法について説明するための図である。
【図17】図17は、突出部の角度θ2の補完方法について説明するための図である。
【図18】図18は、設計された突出部の一例を示す斜視図である。
【図19】図19は、設計された突出部の他の一例を示す斜視図である。
【図20】図20は、設計された突出部の他の一例を示す斜視図である。
【図21】図21は、本発明の一実施形態に係る靴の一例を示す側面図である。
【図22】図22は、図21の靴の底面の一部を示す図である。
【図23】図23は、設計された突出部の他の一例を示す斜視図である。
【図24】図24は、実施例及び比較例の靴のピン住所を示す底面図である。
【発明を実施するための形態】
【0020】
以下、適宜図面が参照されつつ、好ましい実施形態に基づいて本発明が詳細に説明される。
【0021】
本願においては、突出部等の位置が規定される。本願における「位置」は、水平面sh上に投影した場合における位置である。この投影は、鉛直方向になされる。この水平面shは、靴を単独で水平面上に静置した場合における、その水平面である。換言すれば、本願における「位置」とは、靴底を平面視したときの位置である。以下の説明では、「平面視」という用語が適宜用いられる。「平面視」とは、靴底の平面視である。
【0022】
本発明では、動作に適した突出部を有する靴が設計される。以下の実施形態は、この動作がゴルフスイングである場合の例である。
【0023】
本実施形態の設計方法は、以下のステップ(St1)、ステップ(St2)及びステップ(St3)を含む。
・ステップ(St1):上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ。
・ステップ(St2):上記三次元床反力の測定と同期させて、上記時刻Tsから上記時刻Tfまでの複数の時刻における靴底の接触面エリアを取得するステップ。
・ステップ(St3)各時刻における上記三次元床反力及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ。
【0024】
上記ステップ(St1)と上記ステップ(St2)とは、同時に実施される。上記ステップ(St1)のデータと上記ステップ(St2)のデータとは、同期がとられる。
【0025】
図1は、ステップ(St1)及びステップ(St2)に係る測定がなされている様子を示す斜視図である。図2は、図1を上方から見た図である。
【0026】
図1及び図2では、解析システムK1、被験者h1及びゴルフクラブgcが示されている。なお図1では、後述される第一装置S11及び第二装置S12が、簡略化されて、直方体で示されている。
【0027】
ゴルフクラブgcは限定されない。ゴルフクラブgcとして、ウッド型ゴルフクラブ、アイアン型ゴルフクラブ、パター等が例示される。図1では、ウッド型ゴルフクラブが用いられている。ゴルフクラブgcに代わるものが用いられてもよい。素振りで測定がなされる場合、ゴルフクラブgcは必ずしも必要ではない。また手に何も持たずにスイングがなされてもよい。
【0028】
この測定では、解析システムK1が用いられる。この解析システムK1は、床反力計Y1と、接触面観察装置S1とを有する。更に解析システムK1は、データ解析装置6を有する。
【0029】
データ解析装置6として、コンピュータ8が用いられる。コンピュータ8は、1台であってもよいし、複数台であってもよい。
【0030】
データ解析装置6は、操作入力部12と、データ入力部(図示されず)と、表示部16と、記憶部(図示されず)と、メモリ(図示されず)と、CPU(図示されず)とを備えている。
【0031】
操作入力部12は、キーボードとマウスとを備えている(図1参照)。
【0032】
上記データ入力部は、カメラ22やフォースプレートFpから出力されるデータを入力するためのインタフェースボード(図示省略)等を備えている。データ入力部に入力されたデータは、CPUに出力される。
【0033】
コンピュータ8は、A/Dコンバータを有している。このA/Dコンバータにより、アナログ信号がデジタル信号に変換される。床反力計Y1からのアナログ信号が、デジタル信号に変換される。
【0034】
表示部16は、例えば、ディスプレイである。この表示部16は、CPUに制御されつつ、各種データを表示しうる。
【0035】
CPUは、例えば、ハードディスクに記憶されているプログラムを読み出してメモリの作業領域に展開し、そのプログラムに従って各種処理を実行する。
【0036】
メモリは、例えば、書き換え可能なメモリであり、ハードディスクから読み出されたプログラムや入力データ等の格納領域や作業領域等を構成する。
【0037】
記憶部(ハードディスク)は、データ処理等に必要なプログラム及びデータ等を記憶している。このプログラムは、CPUに、必要なデータ処理を実行させる。
【0038】
接触面観察装置S1は、第一装置S11と、第二装置S12とを有する。第一装置S11は、左足用である。第二装置S12は、右足用である。
【0039】
床反力計Y1は、三次元床反力計である。床反力計Y1は、フォースプレートFpを有する。このフォースプレートFpは、第一プレートFp1と、第二プレートFp2とからなる。第一プレートFp1は、左足用である。第二プレートFp2は、右足用である。
【0040】
接触面観察装置S1が、フォースプレートFpに固定されている。本実施形態では、第一装置S11が、第一プレートFp1の上に固定されており、第二装置S12が、第二プレートFp2の上に固定されている。本実施形態の解析システムK1では、右足のデータと、左足のデータとが、それぞれ得られる。即ち、ステップ(St1)及びステップ(St2)において、右足のデータと、左足のデータとが、それぞれ得られる。
【0041】
被験者h1は、接触面観察装置S1の上に立って、スイングを行う。このスイング中の三次元床反力が、床反力計Y1によって測定される。このスイング中における靴底の接地面の画像が、接触面観察装置S1により得られる。
【0042】
図3は、接触面観察装置S1(第二装置S12)を側面側から見た斜視図である。なお、第一装置S11と第二装置S12とは、同じである。図4は、接触面観察装置S1の概略構成を示す側面図である。図5は、接触面観察装置S1の原理を説明するための図である。
【0043】
接触面観察装置S1は、平板20と、カメラ22とを有する。平板20は、透明性を有する。本実施形態の平板20は、ガラス板である。平板20の上面と靴底とが接触する。平板20の上側に、透明な樹脂シートが配置されてもよい。
【0044】
図4が示すように、カメラ22は、上向きで取り付けられている。カメラ22は、平板20を下方から撮影する。カメラ22により、平板20の上面と靴底との接触面の画像が取得される。典型的なカメラ22は、CCDカメラである。
【0045】
図4及び図5が示すように、平板20の側面には、光源24が設けられている。光源24からの光は、平板20の側面から、平板20の内部に入射する。好ましい光源は、LEDである。
【0046】
光源の光は、臨界角以下の角度で、平板20に入射する。この臨界角は、平板20(ガラス)の屈折率と空気の屈折率との比によって決定される。臨界角以下の角度で入射した光は、平板20と空気との境界で全反射する(図5の破線矢印を参照)。よって、臨界角以下の角度で入射した光は、ガラスの内部から外部に出ることができない。
【0047】
ガラス20と靴底23とが接触した場合、この接触部分は乱反射する。この乱反射は、靴底23の素材(ゴム等)の反射率に起因する。この乱反射した光が、下方に向かって放出される(図5の下向き矢印参照)。この乱反射した光に起因して、靴底と平板20とが接触した部分の像が、下方のカメラ22によって撮影される。
【0048】
図2が示すように、床反力計Y1は、被験者h1が載るフォースプレートFpと、フォースプレートFpの下側に設けられたロードセル28とを有する。フォースプレートFpの上面は、平面である。フォースプレートFpの上面は、水平に設置される。このフォースプレートFpの上面に、接触面観察装置S1が固定されている。
【0049】
本実施形態では、フォースプレートFpは、左右に2分割されている(図1及び図2参照)。第一プレートFp1に固定された第一装置S11に、左足が載せられる。第二プレートFp2に固定された第二装置S12に、右足が載せられる。なお、フォースプレートFpの分割数は、2分割に限定されない。右足用及び左足用に2分割された本実施形態のフォースプレートFpでは、右足と左足のそれぞれについてのデータが収集されうる点で好ましい。
【0050】
ロードセル28は、フォースプレートFpを下方から支持している。本実施形態では、ロードセル28は、第一プレートFp1の四隅及び第二プレートFp2の四隅に設けられる。(図2参照)。
【0051】
ロードセル28は、互いに直交する三軸の各方向における分力を検出しうる。即ちロードセル28はx軸方向分力検出器と、y軸方向分力検出器と、z軸方向分力検出器とを有する。床反力計Y1は、三次元床反力計である。
【0052】
三次元直交座標系として、例えば、以下のように定義されたx軸、y軸及びz軸が用いられうる。x軸の方向は、ボールを打ち出す目標方向であって、飛球線方向とも称される。x軸は、水平である。y軸の方向は、被験者h1にとっての前後方向である。y軸は、x軸に対して垂直である。y軸は、水平である。z軸は、x軸及びy軸に対して垂直である。z軸は、鉛直方向である。z軸は、フォースプレートFpの上面に対して垂直である。これらのx軸、y軸及びz軸が、図1及び図2に示されている。このような三次元直交座標系以外の三次元直交座標系が用いられてもよい。
【0053】
ロードセル28から得られたデータは、データ解析装置6に取り込まれる。このデータは、A/Dコンバータによりデジタル化される。x軸方向、y軸方向及びz軸方向のそれぞれについて、床反力のデータが時系列的に得られる。即ち、三次元押圧力ベクトルが時系列的に得られる。この床反力のデータは、必要に応じて、ハードディスクに記憶されているプログラムによって、処理される。
【0054】
図示しないが、解析システムK1は、ハブを有する。このハブを介して、解析システムK1はネットワークを構成している。接触面観察装置S1と床反力計Y1とデータ解析装置6とがネットワークを構成している。ネットワークプロトコルとして、例えば、TCP/IPが用いられる。
【0055】
図6は、本実施形態で用いられる靴30を裏側から見た図である。図6は、靴30の靴底面の平面図である。靴30は、左足用である。右足用の靴30における靴底面の形状は、図6の鏡像である。
【0056】
靴30は、上記ステップ(St1)及び上記ステップ(St2)を行うために用いられる計測用の靴である。
【0057】
靴30の靴底32には、多数の突出部34が設けられている。全ての突出部34は、円柱状である。全ての突出部34の形状は等しい。ただし、外縁に配置された突出部34では、円柱の一部が欠落している。突出部34は、規則的に並んでいる。
【0058】
この靴30が用いられた場合、平板20と靴底面との接触面は、円形のドットの集合として示される。
【0059】
図7は、靴30を用いて得られる接触面エリアの一例を示す。図7の例では、左足の爪先側であり且つインサイド側の部分が接地している。ハッチングで示されている部分が、接触面である。実際には、この接触面が、白っぽい画像で示される。図5が示すように、接触面エリアからの光が、画像として捉えられる。
【0060】
[接触面エリア]
好ましくは、ステップ(St3)において、接触面エリアの重心gpが考慮される。図6で示すような接地面32を有する靴30の場合、接触面エリアは、図7の(c)においてハッチングで示されるエリアであってもよいし、図7の(a)においてハッチングで示されるエリアであってもよいし、図7の(b)においてハッチングで示されるエリアであってもよい。図7の(a)で示されるエリアは、突出部34を有さない靴底面であった場合の仮想接触面エリアである。同様に、図7の(b)で示されるエリアは、突出部34を有さない靴底面であった場合の仮想接触面エリアである。図7(a)の仮想接触面エリアの輪郭は、曲線である。図7(b)の仮想接触面エリアの輪郭は、多数の直線である。このように、接触面エリアは、実際の接触面のエリアであってもよいし、仮想接触面エリアであってもよい。
【0061】
[接触面エリアの重心gp]
図6で示すような接地面32を有する靴30の場合、接触面エリアの重心gpは、図7の(c)においてハッチングで示されるエリアの重心とされうる。接触面エリアの重心gpは、図7の(a)においてハッチングで示されるエリアの重心とされてもよいし、図7の(b)においてハッチングで示されるエリアの重心とされてもよい。突出部34の配置及び密度が適切であれば、仮想接地面エリアの重心gpの位置は、実際の接触面の重心とほぼ同じである。
【0062】
図8は、実際の測定によって得られた画像及びグラフである。図8に示される画像は、上記ステップ(St2)において取得された接触面エリアの画像の一例である。図8に示されるグラフは、スイング中における比(f1/f2)の時系列データである。この比(f1/f2)は、上記ステップ(St1)により得られる。この接触面エリアの画像と、比(f1/f2)のグラフとは、同期されている。換言すれば、上記ステップ(St1)と上記ステップ(St2)とは同期されている。
【0063】
比(f1/f2)は、摩擦係数である。比(f1/f2)は、本願において、摩擦係数又はCOFとも称される。図8のグラフにおける縦軸は、比(f1/f2)の値である。図8のグラフにおける横軸は、スイング開始時刻からの経過時間である。
【0064】
図8の画像は、トップオブスイングにおける右足の画像pk1、トップオブスイングにおける左足の画像pk2、インパクトにおける右足の画像pk3、インパクトにおける左足の画像pk4、フィニッシュにおける右足の画像pk5及びフィニッシュにおける左足の画像pk6である。これらの画像のそれぞれに付されている矢印は、各時刻において靴底面に作用している水平方向の外力の向きを示している。この外力とは、被験者h1が靴底面に付与している力の水平方向成分である。この水平方向成分の力の大きさは、水平方向の床反力と同じである。この水平方向成分の力の向きは、作用・反作用の関係で、水平方向の床反力の向きの逆である。
【0065】
床反力計Y1により測定されたx軸方向の床反力Fxの大きさがfxとされ、床反力計Y1により測定されたy軸方向の床反力Fyの大きさがfyとされ、床反力計Y1により測定されたz軸方向の床反力Fzの大きさがfzとされる。床反力Fx及び床反力Fyが水平方向の力であり、床反力Fzが鉛直方向の力である。
【0066】
本実施形態では、x軸方向の床反力Fx、y軸方向の床反力Fy及び床反力Fzが、それぞれ、時系列的に得られる。よって、各時刻における三次元押圧力ベクトルが得られる。
【0067】
水平方向の床反力F1は、床反力Fxと床反力Fyとのベクトル和である。水平方向の床反力F1の大きさf1は、次の式により算出される。
f1=(fx2+fy2)1/2
【0068】
鉛直方向の床反力F2は、床反力Fzである。鉛直方向の床反力F2の大きさf2は、床反力Fzの大きさfzに等しい。
【0069】
図8が示すように、ステップ(St1)により、スイング中の比(f1/f2)が時系列的に得られる。図8が示すように、ステップ(St2)により、スイング中の接触面エリアの画像が時系列的に得られる。
【0070】
図9は、スイング中における比(f1/f2)の時系列データの一例である。図9の縦軸は比(f1/f2)であり、図9の横軸はスイング開始時刻からの経過時間である。この図9では、理解を容易とする観点から、グラフ線がスムージングされている。
【0071】
好ましい実施形態では、滑りやすい時刻が考慮される。
【0072】
滑りやすい時刻は、例えば、比(f1/f2)の閾値TH1に基づいて決定されうる。図9は、閾値TH1が0.300とされた場合の例である。図9の実施形態では、時刻Tsから時刻Tfまでが、滑りやすい時刻である。好ましくは、上記ステップ(St3)における上記各時刻が、滑りやすい時刻とされる。この場合、滑りやすい時刻を考慮して突出部が設計されるので、防滑性能が向上しやすい。
【0073】
図9の例では、比(f1/f2)の最大値は、ピーク点Pにおける比(f1/f2)の値である。図9の例では、比(f1/f2)が最大値に向かって上昇している段階における閾値TH1(図9の点SのCOF)と、比(f1/f2)が上記最大値から下降している段階における閾値TH1(図9の点FのCOF)とが同じである。
【0074】
比(f1/f2)が最大値に向かって上昇している段階における閾値TH1と、比(f1/f2)が上記最大値から下降している段階における閾値TH1とが、異なっていてもよい。
【0075】
上記のように、比(f1/f2)は、絶対値で規定されてもよい。汎用性の観点から、閾値TH1は、比(f1/f2)の最大値に対する割合によって規定されるのが好ましい。
【0076】
好ましい設計方法は、次のステップ(St4)を含む。
・ステップ(St4):比(f1/f2)の最大値を決定するステップ。
【0077】
好ましくは、閾値TH1の、上記最大値に対する割合が、30%以上60%以下とされる。閾値TH1がこの範囲に設定された場合、上記滑りやすい時刻における比(f1/f2)の値が、突出部の無い靴底の芝生上における静止摩擦係数よりも大きくなりやすい。よって、靴底の滑りやすい条件が突出部の設計に反映されやすい。この観点から、より好ましくは、閾値TH1の、上記最大値に対する割合は、60%とされる。なお、ここに言う靴底は、ゴム製の靴底及び樹脂製の靴底を含み、更に、ゴム製又は樹脂製の靴底基部に脱着可能な鋲が装着された靴底をも含む。この鋲の材質として金属、樹脂及びゴムが例示される。
【0078】
靴底の滑りやすい条件を突出部の設計に反映させる観点から、上記時刻Tsは、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされるのが好ましい。この観点から、上記時刻Tsは、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%とされるのがより好ましい。
【0079】
靴底の滑りやすい条件を突出部の設計に反映させる観点から、上記時刻Tfは、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされるのが好ましい。この観点から、上記時刻Tfは、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされるのがより好ましい。
【0080】
図10、図11及び図12は、図6で示された靴底を用いて測定された接触面エリアの画像を示している。図10は、テスターAの画像である。図11は、テスターBの画像である。図12は、テスターCの画像である。
【0081】
図10の画像pk10、画像pk11及び画像pk12は、右足の接触面画像を示す。 図10の画像pk13、画像pk14及び画像pk15は、左足の接触面画像を示す。図10は、三つの時刻における画像を示している。画像pk10及び画像pk13は、第一の時刻tk1における接触面画像である。画像pk11及び画像pk14は、第二の時刻tk2における接触面画像である。画像pk12及び画像pk15は、第三の時刻tk3における接触面画像である。
【0082】
第二の時刻tk2は、第一の時刻tk1よりも後の時刻である。第三の時刻tk3は、第二の時刻tk2よりも後の時刻である。
【0083】
第一の時刻tk1、第二の時刻tk2及び第三の時刻tk3は、いずれも、滑りやすい時刻である。図10は、滑りやすい時刻における接触面エリアの推移を示している。図10が示すように、各時刻における接触面エリアが観測される。
【0084】
図11の画像pk20、画像pk21及び画像pk22は、右足の接触面画像を示す。 図11の画像pk23、画像pk24及び画像pk25は、左足の接触面画像を示す。図11は、三つの時刻における画像を示している。画像pk20及び画像pk23は、第一の時刻tk1における接触面画像である。画像pk21及び画像pk24は、第二の時刻tk2における接触面画像である。画像pk22及び画像pk25は、第三の時刻tk3における接触面画像である。
【0085】
第二の時刻tk2は、第一の時刻tk1よりも後の時刻である。第三の時刻tk3は、第二の時刻tk2よりも後の時刻である。
【0086】
第一の時刻tk1、第二の時刻tk2及び第三の時刻tk3は、いずれも、滑りやすい時刻である。図11は、滑りやすい時刻における接触面画像の推移を示している。図11が示すように、各時刻における接触面画像が観測される。図10と図11との比較により理解されるように、テスターが異なる場合、接触面画像も異なる。
【0087】
図12の画像pk30、画像pk31及び画像pk32は、右足の接触面画像を示す。 図12の画像pk33、画像pk34及び画像pk35は、左足の接触面画像を示す。図12は、三つの時刻における画像を示している。画像pk30及び画像pk33は、第一の時刻tk1における接触面画像である。画像pk31及び画像pk34は、第二の時刻tk2における接触面画像である。画像pk32及び画像pk35は、第三の時刻tk3における接触面画像である。
【0088】
第二の時刻tk2は、第一の時刻tk1よりも後の時刻である。第三の時刻tk3は、第二の時刻tk2よりも後の時刻である。
【0089】
第一の時刻tk1、第二の時刻tk2及び第三の時刻tk3は、いずれも、滑りやすい時刻である。図12は、滑りやすい時刻における接触面画像の推移を示している。図12が示すように、各時刻における接触面画像が観測される。図10及び図11と図12との比較により理解されるように、テスターが異なる場合、接触面画像も異なる。
【0090】
図10から図12が示すように、接触面エリアの重心gpは、時間の経過とともに、右側から左側へと移動している。この傾向は、全てのテスターにおいて観測される。
【0091】
また、右足に関しては、接触面エリアの重心gpが踵側から爪先側へと移動している。この傾向は、特にテスターA(図10)及びテスターC(図13)において顕著である。
【0092】
図10、図11及び図12において、土踏まずよりも爪先側の部分と、土踏まずよりも踵側の部分とに、接触面が分布している画像がある。具体的には、画像pk15、画像pk20、画像pk21、画像pk23、画像pk24、画像pk25、画像pk30及び画像pk35では、土踏まずよりも爪先側の部分と、土踏まずよりも踵側の部分とに、接触面が分布している。この場合、土踏まずよりも爪先側の接触面と、土踏まずよりも踵側の部分の接触面とを比較し、いずれか広い方の接触面が、上記接触面エリアとして採用されるのが好ましい。この例では、土踏まず部分が接地していない。よって、土踏まずよりも爪先側と踵側との両者の接触面を考慮した重心gpは、土踏まず付近になる場合がある。土踏まず付近の突出部は、防滑性能に寄与しにくい。土踏まず付近で分断された複数の接触面のうちの広い方が採用されることにより、突出部の位置がより一層適切となり、防滑性が向上しうる。
【0093】
好ましくは、上記ステップ(St2)及び上記ステップ(Stp2)で用いられる靴底のベース形状のタイプは、本発明により得られる靴のベース形状のタイプと同じであるのが好ましい。このベース形状のタイプとして、以下のタイプ1、タイプ2、タイプ3及びタイプ4が挙げられる。
(タイプ1)土踏まずを有さないタイプ。
(タイプ2)全面接触タイプ(扁平タイプ)
(タイプ3)他の部分よりも突出した踵部を有するタイプ
(タイプ4)靴底が全体として凸状のラウンド(丸み)を有しているタイプ
【0094】
例えば、(タイプ2)の靴底では土踏まず部の接触面が観測されうるのに対して、(タイプ3)の靴底では、踵部が高いため、土踏まず部付近が接触面となりえない。同じ人が同じ動作を行った場合であっても、上記タイプの相違によって、接触面が相違しやすい。よって、タイプが異なる靴底を用いてステップ(St2)及びステップ(Stp2)が行われた場合、計測の精度が低下しうる。計測精度の観点から、上記ステップ(St2)及び上記ステップ(Stp2)で用いられる靴底のベース形状のタイプは、本発明により得られる靴のベース形状のタイプと同じであるのが好ましい。
【0095】
上記ステップ(St3)では、例えば、第一の時刻A1における接触面エリアSA1に、その時刻A1における三次元押圧力ベクトルVA1を考慮した突出部a1が配置され、第二の時刻A2における接触面エリアSA2に、その時刻A2における三次元押圧力ベクトルVA2を考慮した突出部a2が配置される。このとき、接触面エリアSA1と接触面エリアSA2とが重複する場合がある。また、突出部a1と突出部a2とが重複する場合もある。このような場合、以下のような処理が可能である。
[重複処理1]:時刻A1又は時刻A2のいずれか一方のデータを採用し、他方のデータは削除する。
[重複処理2]:三次元押圧力ベクトルVA1及び三次元押圧力ベクトルVA2のうち、比(f1/f2)が大きい方を選び、比(f1/f2)が大きい方の時刻のデータを採用し、比(f1/f2)が小さい方の時刻のデータは削除する。
[重複処理3(接触面エリアSA1と接触面エリアSA2とが重複した場合)]
:平面視において、接触面エリアSA1と接触面エリアSA2との重複部分に分割線を引く。この分割線によって分割されたエリアの一方(接触面エリアSA1側)に突出部a1を配置し、この分割線によって分割されたエリアの他方(接触面エリアSA2側)に突出部a2を配置する。
[重複処理4(接触面エリアSA1と接触面エリアSA2とが重複した場合)]
:突出部a1と突出部a2とが重複しない場合は、そのまま、突出部a1及び突出部a2を配置する。
[重複処理5(突出部a1と突出部a2とが重複した場合)]
:突出部a1の下端と突出部a2の下端とが重複しない場合、両者が一部重複した状態で、突出部a1及び突出部a2を設ける。
【0096】
図13は、ステップ(St3)における突出部の位置の設計を説明するための図である。図13には、左足用の靴の輪郭線pf1が示されている。この図に置いて線分Lcは、底面の最大長さを示す線分である。直線L1は、線分Lcから最も左に離れた位置P10を通過する、線分Lcと平行な直線である。また、直線L2は、線分Lcから最も右に離れた位置P20を通過する、線分Lcと平行な直線である。
【0097】
この突出部の位置の決定では、先ず、各時刻における接触面エリアの重心gpが決定される。図13の実施形態では、第一の時刻における接触面エリアの重心gp1、第二の時刻における接触面エリアの重心gp2及び第三の時刻における接触面エリアの重心gp3が示されている。好ましくは、重心gp1、重心gp2及び重心gp3は、滑りやすい時刻における接触面エリアの重心である。
【0098】
好ましくは、これら重心gp1、重心gp2及び重心gp3のそれぞれの位置に、突出部が設けられる。これらの突出部により、防滑性能が効果的に向上しうる。
【0099】
図14は、より好ましい実施形態を説明するための図である。より好ましい設計方法は、突出部の位置に関する補完工程(1)を含む。この補完工程(1)では、接触面エリアの重心gp以外の点にも突出部が配置される。このましい補完工程(1)では、複数の重心gpを繋ぐ補完線Lsが設定される(図14参照)。
【0100】
補完線Lsとして、線形補完線、二次補完線(放物線補完線)、多項式補完線、移動平均線、フーリエ変換による補完線、最小二乗法による補完線等が例示される。図14は、二次補完線を示している。図示しないが、例えば線形補完線は、隣接する重心gp同士を直線で結ぶことにより描かれる。
【0101】
好ましい設計方法では、この補完線Lsに沿って、突出部(補完突出部)が配置される。好ましくは、この補完線Lsに沿って、重心gp以外に位置する突出部(補完突出部)が配置される。上記補完線Lsに沿った連続的な突出部が設けられてもよい。好ましくは、突出部の側壁が補完線Lsに沿うように、突出部が配置される。この側壁は、防滑面となる。
【0102】
図15は、補完線Lsの展開について説明するための図である。補完線Lsは、他の位置に展開されてもよい。図15の実施形態では、補完線Lsよりも爪先側に位置する補助補完線Ls1が示されている。図15の実施形態では、補完線Lsよりも踵側に位置する補助補完線Ls2、補助補完線Ls3、補助補完線Ls4及び補助補完線Ls5が示されている。これらの補助補完線は、補完線Lsと平行である。これらの補助補完線は、上記線分Lcに対して垂直な方向に補完線Lsを移動させてなる。
【0103】
補完線Lsの形状は、防滑性能を高めるのに適している。よって、補助補完線も、防滑性能を高めうる。
【0104】
好ましくは、上記重心gp1、上記重心gp2及び上記重心gp3のそれぞれの位置に設けられた突出部は、各時刻における三次元押圧力ベクトルの向きを考慮して設計される。時刻T11における接触面エリアの重心が重心gp1である場合、その時刻T11における三次元床反力が考慮されて、その重心gp1に位置する突出部の形状が設計される。
【0105】
床反力の三次元ベクトルと、靴底が床を押す力の三次元ベクトルとは、作用・反作用の関係で、互いにその向きが逆である。床反力の三次元ベクトルと、靴底が床を押す力の三次元ベクトルとは、互いに平行である。床反力の三次元ベクトルを考慮して突出部を設計することにより、防滑性能が向上しうる。
【0106】
本願において、三次元押圧力ベクトルとは、靴底が床を押す力の三次元ベクトルを意味する。この三次元押圧力ベクトルの反力が、床反力である。
【0107】
三次元押圧力ベクトルの方向が、突出部の設計において考慮される。図16においてθ1で示されるのは、xy平面への投影像における三次元押圧力ベクトルの角度である。換言すれば、平面視における三次元押圧力ベクトルの角度が、角度θ1である。この角度θ1の値は、例えば、図16に示されるように、上記線分Lcを基準として設定される。
【0108】
図17においてθ2で示されるのは、yz平面への投影像における三次元押圧力ベクトルの角度である。換言すれば、水平面に対して垂直であり且つ線分Lcを含む平面に投影されたときの三次元押圧力ベクトルの角度が、角度θ2である。この角度θ2の値は、例えば、図17に示されるように、上記線分Lc(水平面sh)を基準として設定される。
【0109】
上記角度θ1及び上記角度θ2により、三次元押圧力ベクトルの方向が三次元的に記述される。
【0110】
防滑性能を高める観点から、各時刻における重心gpに配置された突出部の向きは、その時刻における三次元押圧力ベクトルを考慮して決定されるのが好ましい。
【0111】
上記三次元押圧力ベクトルの向きは、上記補完突出部にも適用されうる。
【0112】
図16のグラフは、上記補完突出部の上記角度θ1を決定する方法の一例を説明するための図である。図17のグラフは、上記補完突出部の上記角度θ2を決定する方法の一例を説明するための図である。
【0113】
図16のグラフに基づき、上記補完突出部の上記角度θ1を決定する方法の一例が説明される。図16のグラフの横軸は基準点からの距離であり、図16のグラフの縦軸は上記角度θ1である。この図16のグラフにおいてプロットされているのは、上記第一の時刻における点pt1、上記第二の時刻における点pt2及び上記第三の時刻における点pt3である。横軸である「基準点の距離」とは、各時刻における上記重心gpと基準点との距離である。基準点の位置は特に限定されない。図16のグラフとは異なるが、上記第一の時刻における重心gpが基準点とされてもよい。即ち、複数の重心gpのうち最も時刻の早い重心gpが、基準点とされてもよい。
【0114】
より好ましい設計方法は、上記補完突出部の上記角度θ1に関する補完工程(2)を含む。この補完工程(2)では、複数の点ptを繋ぐ補完線Lsxが設定される(図16参照)。例えば、この補完線Lsxに基づいて、上記補完突出部の上記角度θ1が設定される。
【0115】
補完線Lsxとして、線形補完線、二次補完線(放物線補完線)、多項式補完線、移動平均線、フーリエ変換による補完線、最小二乗法による補完線等が例示される。図16の補完線Lsxは、二次補完線である。図示しないが、例えば線形補完線は、隣接する点pt同士を直線で結ぶことにより描かれる。
【0116】
図17のグラフに基づき、上記補完突出部の上記角度θ2を決定する方法の一例が説明される。図17のグラフの横軸は基準点からの距離であり、図17のグラフの縦軸は上記角度θ2である。この図17のグラフにおいてプロットされているのは、上記第一の時刻における点ps1、上記第二の時刻における点ps2及び上記第三の時刻における点ps3である。横軸である「基準点の距離」の意味は、上記図16のグラフと同一である。図17のグラフとは異なるが、上記第一の時刻における重心gpが基準点とされてもよい。即ち、複数の重心gpのうち最も時刻の早い重心gpが、基準点とされてもよい。
【0117】
より好ましい設計方法は、上記補完突出部の上記角度θ2に関する補完工程(3)を含む。この補完工程(3)では、複数の点psを繋ぐ補完線Lsyが設定される(図17参照)。例えば、この補完線Lsyに基づいて、上記補完突出部の上記角度θ2が設定される。
【0118】
補完線Lsyとして、線形補完線、二次補完線(放物線補完線)、多項式補完線、移動平均線、フーリエ変換による補完線、最小二乗法による補完線等が例示される。図17の補完線Lsyは、二次補完線である。図示しないが、例えば線形補完線は、隣接する点ps同士を直線で結ぶことにより描かれる。
【0119】
好ましい実施形態では、突出部E1が設計される。本願において突出部E1とは、その上面の中央位置PC1が、上記時刻T1での上記接触面エリアに含まれており、且つ、上記上面のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトルが、その下端と交わるような突出部を意味する。その上面の中央位置PC1が上記時刻T1での上記接触面エリアに含まれているか否かは、靴底の平面視において判断される。
【0120】
上記突出部E1の上面の中央位置PC1が上記時刻T1での上記接触面エリアに含まれているので、突出部が防滑に適した位置に配置される。よって、その時刻T1における滑りが効果的に抑制される。
【0121】
上記突出部E1の上面のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトルが、突出部E1の下端と交わっているので、上記突出部E1が三次元押圧力ベクトルの方向に沿いやすい。よって、上記時刻T1における滑りが効果的に抑制される。
【0122】
なお、突出部が靴底の基部から伸びている場合、突出部の上記上面とは、その基部とその突出部との境界面である。
【0123】
また、上記中央位置PC1とは、突出部の上記上面の重心位置である。
【0124】
上記突出部のE1の上記下端の形状は限定されない。上記突出部E1の上記下端は、面であってもよいし、線(稜線)であってもよいし、点(頂点)であってもよい。上記突出部E1の上記下端が面である場合、この面は平面であってもよいし、曲面であってもよい。上記突出部E1の上記下端が線である場合、この線は直線であってもよいし、曲線であってもよいし、異なる直線同士が連結された線であってもよいし、直線と曲線とが連結された線であってもよい。
【0125】
より好ましくは、平面視において、上記突出部E1の上記上面が、上記時刻T1での上記接触面エリアの重心gpを含む。上記突出部E1の上記上面が上記時刻T1での上記接触面エリアの重心gpを含むか否かは、靴底の平面視において判断される。この場合、上記突出部E1の配置が一層適切となり、上記時刻T1における防滑性能が一層向上しうる。
【0126】
上記突出部E1のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトルが、突出部E1の下端と交わっているので、上記突出部E1が三次元押圧力ベクトルに沿いやすい。よって、上記時刻T1における滑りが効果的に抑制されうr。
【0127】
より好ましくは、上記突出部E1において、上記時刻T1における上記重心gpを始点としたときの上記時刻T1での上記三次元押圧力ベクトルが、上記突出部E1の下端と交わる。この場合、上記突出部E1が三次元押圧力ベクトルに沿いやすいので、防滑性能が発揮されやすい。
【0128】
上記時刻T1は、上記時刻Tsから上記時刻Tfまでのいずれかの時刻である。好ましい上記時刻T1は、滑りやすい時刻である。好ましくは、上記ステップ(St1)において、上記三次元押圧力ベクトルは、複数の時刻T1において計測される。好ましくは、上記ステップ(St2)において、上記接触面エリアは、複数の上記時刻T1において計測される。
【0129】
図18、図19及び図20は、それぞれ、ステップ(St3)により設計された上記突出部の例を示している。
【0130】
図18に示される突出部PT1は、上記突出部E1である。突出部PT1は、略円柱状である。突出部PT1の下端は、面である。
【0131】
突出部PT1の上面Pb1は、実際には、靴底の基部と突出部PT1との境界面である。理解しやすい図面とする観点から、図18は、上面Pb1が直接見えているように描かれている。
【0132】
この突出部PT1は、上記時刻T1におけるデータに基づいて設けられている。
【0133】
平面視において、突出部PT1の上面Pb1は、上記時刻T1での接触面エリアの重心gpに対応する対応点gpAを含んでいる。
【0134】
平面視において、対応点gpAと重心gpとは、同じ点である。換言すれば、平面視において、対応点gpAと重心gpとは、重なる。
【0135】
上記時刻T1における三次元押圧力ベクトルVCが、ベクトルVC1及びベクトルV10である。
【0136】
ベクトルVC1の始点が、突出部PT1の上面Pb1の中央位置PC1とされた場合、ベクトルVC1は、突出部PT1の下端面Pt1と交わっている。この場合、突出部PT1の延在方向がベクトルVC1の方向に近づきやすい。この場合、突出部PT1は、三次元押圧力による滑りを効果的に抑制しうる。
【0137】
ベクトルVC1の始点が、上記対応点gpAとされた場合も、ベクトルVC1は、突出部PT1の下端面Pt1と交わっている。ベクトルVC1と突出部PT1の下端面Pt1との交点が点gpBである。交点gpBが存在する場合、突出部PT1の延在方向がベクトルVC1の方向に近づきやすい。この場合、突出部PT1は、ベクトルVC1の三次元押圧力による滑りを効果的に抑制しうる。
【0138】
上面Pb1の中央位置PC1と、下端面Pt1の中央位置PC2とを結ぶ直線が、中心線CL1である。防滑性能の観点から、中心線CL1とベクトルVC1とは平行に近いのが好ましい。この観点から、中心線CL1とベクトルVC1との成す角度θ3(図示省略)は、30度以下が好ましく、20度以下がより好ましく、10度以下がより好ましく、5度以下がより好ましく、0度が特に好ましい。上記角度θ3が0度である場合、中心線CL1とベクトルVC1とは平行である。
【0139】
防滑性能の観点から、中央位置PC1と点gpAとの平面視における距離D1は、近い方が好ましい。この観点から、距離D1は、上面Pb1の最大長さの50%以下が好ましく、30%以下がより好ましく、20%以下がより好ましく、10%以下が更に好ましい。防滑性能の観点から、中央位置PC1と点gpAとは平面視において一致しているのが更に好ましい。
【0140】
上面Pb1の最大長さは、平面視における上面Pb1の最大長さである。
【0141】
防滑性能の観点から、中央位置PC2と点gpBとの平面視における距離D2(図示省略)は、近い方が好ましい。この観点から、距離D2は、上記距離D1以下であるのが好ましい。
【0142】
この突出部PT1のように、突出部の下端が面である場合、中心位置PC2は、下端面Pt1の重心である。
【0143】
図19に示される突出部PT2は、上記突出部E1である。突出部PT2の下端は、線である。
【0144】
突出部PT2の上面Pb2は、実際には、靴底の基部と突出部PT2との境界面である。理解しやすい図面とする観点から、図19は、上面Pb2が直接見えているように描かれている。
【0145】
この突出部PT2は、上記時刻T1におけるデータに基づいて設けられている。
【0146】
平面視において、突出部PT2の上面Pb2は、上記時刻T1での接触面エリアの重心gpを含んでいる。即ち、突出部PT2の上面Pb2は、上記時刻T1での接触面エリアの対応点gpAを含んでいる。
【0147】
上記時刻T1における三次元押圧力ベクトルVCが、ベクトルVC2である。ベクトルVC2の始点は、上記時刻T1における接触面エリアの対応点gpAである。ベクトルVC2は、突出部PT2の下端線Pt2と交わっている。ベクトルVC2と突出部PT2の下端線Pt2との交点が、点gpBである。交点gpBが存在する場合、突出部PT2の延在方向がベクトルVC2の方向に近づきやすい。この場合、突出部PT2は、ベクトルVC2の三次元押圧力による滑りを効果的に抑制しうる。
【0148】
上面Pb2の中央位置PC1と、突出部PT2の下端(下端線Pt2)の中央位置PC2とを結ぶ直線が、中心線CL2である。防滑性能の観点から、中心線CL2とベクトルVC2とは平行に近いのが好ましい。この観点から、中心線CL2とベクトルVC2との成す角度θ4(図示省略)は、30度以下が好ましく、20度以下がより好ましく、10度以下がより好ましく、5度以下がより好ましく、0度が特に好ましい。上記角度θ4が0度である場合、中心線CL2とベクトルVC2とは平行である。
【0149】
防滑性能の観点から、中央位置PC1と点gpAとの平面視における距離D1(図示省略)は、近い方が好ましい。この観点から、距離D1は、上面Pb2の最大長さの50%以下が好ましく、30%以下がより好ましく、20%以下がより好ましく、10%以下が更に好ましい。防滑性能の観点から、中央位置PC1と点gpAとは平面視において一致しているのが更に好ましい。
【0150】
防滑性能の観点から、中央位置PC2と点gpBとの平面視における距離D2(図示省略)は、近い方が好ましい。この観点から、距離D2は、上記距離D1以下であるのが好ましい。
【0151】
この突出部PT2のように、突出部の下端が線である場合、中心位置PC2は、下端線Pt2の中点である。
【0152】
図20に示される突出部PT3は、上記突出部E1である。突出部PT3の下端は、点である。突出部PT3の先端は、尖っている。
【0153】
突出部PT3の上面Pb3は、実際には、靴底の基部と突出部PT3との境界面である。理解しやすい図面とする観点から、図20は、上面Pb3が直接見えているように描かれている。
【0154】
この突出部PT3は、上記時刻T1におけるデータに基づいて設けられている。
【0155】
平面視において、突出部PT3の上面Pb3は、上記時刻T1での接触面エリアの対応点gpAを含んでいる。
【0156】
上記時刻T1における三次元押圧力ベクトルVCが、ベクトルVC3である。ベクトルVC3の始点は、上記時刻T1における接触面エリアの対応点gpAである。ベクトルVC3は、突出部PT3の下端(下端点Pt3)と交わっていない。ベクトルVC3と突出部PT3の側面との交点が、点gpSである。
【0157】
ベクトルの始点の位置をずらすことにより、ベクトルVC3は、下端点Pt3と交わる。下端点Pt3と交わる。図20に示すように、ベクトルの始点が上面Pb3上の点PN1とされた場合、ベクトルVCは下端点Pt3と交わる。このように、図20の突出部PT3も、その上面Pb3のいずれかの位置を始点としたときの上記時刻T1での三次元押圧力ベクトルが、その下端と交わる。この突出部PT3も、上記突出部E1である。
【0158】
上面Pb3の中央位置PC1と、突出部PT3の下端(下端点Pt3)の中央位置PC2とを結ぶ直線が、中心線CL3である。本実施形態では、下端点Pt3が、突出部PT3の下端の中央位置PC2である。
【0159】
防滑性能の観点から、中心線CL3とベクトルVC3とは平行に近いのが好ましい。この観点から、中心線CL3とベクトルVC3との成す角度θ5(図示省略)は、30度以下が好ましく、20度以下がより好ましく、10度以下がより好ましく、5度以下がより好ましく、0度が特に好ましい。上記角度θ5が0度である場合、中心線CL3とベクトルVC3とは平行である。
【0160】
防滑性能の観点から、中央位置PC1と点gpAとの平面視における距離D1(図示省略)は、近い方が好ましい。この観点から、距離D1は、上面Pb3の最大長さの50%以下が好ましく、30%以下がより好ましく、20%以下がより好ましく、10%以下が更に好ましい。防滑性能の観点から、中央位置PC1と点gpAとは平面視において一致しているのが更に好ましい。
【0161】
防滑性能の観点から、中央位置PC2と点gpSとの平面視における距離D3(図示省略)は、近い方が好ましい。この観点から、距離D3は、上記距離D1以下であるのが好ましい。
【0162】
この突出部PT3のように、突出部の下端が点である場合、中心位置PC2は、この突出部の下端点である。
【0163】
図21は、本発明の一実施形態である靴100の側面図である。この靴100は、ゴルフ靴である。この靴100は、複数の突出部PTを有する。
【0164】
図22は、靴100の靴底の一部を示す平面図である。図22では、爪先部分のみが示されている。
【0165】
靴100の突出部PTの少なくとも一部が、上記設計方法により設計された突出部であるのが好ましい。防滑性能の観点から、上記設計方法により設計された突出部の個数が、全ての突出部の個数の50%以上であるのが好ましく、60%以上であるのがより好ましく、70%以上であるのが更に好ましく、80%以上であるのが更に好ましく、100%であるのが特に好ましい。
【0166】
防滑性能の観点から、靴100の突出部PTの少なくとも一部が、上記突出部E1であるのがより好ましい。防滑性能の観点から、上記突出部E1の個数が、全ての突出部の個数の50%以上であるのが好ましく、60%以上であるのがより好ましく、70%以上であるのが更に好ましく、80%以上であるのが更に好ましい。
【0167】
靴100は、鋲Byを有する。この鋲Byは、着脱可能である。図示しないが、鋲Byは、雄ネジ部を有する。図示しないが、靴100の靴底は、雌ネジ部を有する。この雌ネジ部に、鋲Byの雄ネジ部がネジ込まれている。この鋲Byは、一般に、樹脂スパイクなどと称されている。
【0168】
一つの鋲Byは、複数の突出部PTを有する。鋲Byの突出部PTが、突出部PT4である。図23は、この突出部PT4が単独で描かれた図である。図23は、一つの鋲Byが有する複数の突出部PT4のうち、上記設計方法に基づく突出部PT4を示している。
【0169】
鋲Byは、回転対称性を有する。鋲Byの回転対称軸は、上記雄ネジ部の中心軸である。回転対称性を有する鋲Byにおいて、その全ての突出部PT4を上記設計方法による突出部とすることは、通常、困難である。通常は、一つの鋲Byが有する複数の突出部PT4のうちの一部の突出部PT4が、上記設計方法に基づく突出部とされる。通常は、一つの鋲Byが有する複数の突出部PT4のうちの一部の突出部PT4が、上記突出部E1とされる。
【0170】
鋲Byの回転対称軸の向き及び鋲Byの位置が適切に設定されることにより、一つの鋲Byが有する複数の突出部PT4のうちの一部の突出部PT4が、上記設計方法に基づく突出部とされうる。鋲Byの回転対称軸の向き及び鋲Byの位置が適切に設定されることにより、一つの鋲Byが有する複数の突出部PT4のうちの一部の突出部PT4が、上記突出部E1とされうる。
【0171】
図23が示すように、突出部PT4は、曲がって延びている。
【0172】
この突出部PT4は、上記時刻T1におけるデータに基づいて設けられている。
【0173】
平面視において、突出部PT4の上面Pb4は、上記時刻T1での接触面エリアの重心gpを含んでいる。即ち、突出部PT4の上面Pb4は、上記時刻T1での接触面エリアの対応点gpAを含んでいる。
【0174】
上記時刻T1における三次元押圧力ベクトルVCが、ベクトルVC4である。ベクトルVC4の始点は、上記時刻T1における接触面エリアの対応点gpAである。ベクトルVC4は、突出部PT4の下端面Pt4と交わっている。ベクトルVC4と突出部PT4の下端面Pt4との交点が、点gpBである。交点gpBが存在する場合、突出部PT4の延在方向がベクトルVC4の方向に近づきやすい。この場合、突出部PT4は、ベクトルVC4の三次元押圧力による滑りを効果的に抑制しうる。
【0175】
上面Pb4の中央位置PC1と、突出部PT4の下端(下端面Pt4)の中央位置PC2とを結ぶ直線が、中心線CL4である。防滑性能の観点から、中心線CL4とベクトルVC4とは平行に近いのが好ましい。この観点から、中心線CL4とベクトルVC4との成す角度θ5(図示省略)は、30度以下が好ましく、20度以下がより好ましく、10度以下がより好ましく、5度以下がより好ましく、0度が特に好ましい。上記角度θ5が0度である場合、中心線CL4とベクトルVC4とは平行である。
【0176】
防滑性能の観点から、中央位置PC1と点gpAとの平面視における距離D1(図示省略)は、近い方が好ましい。この観点から、距離D1は、上面Pb4の最大長さの50%以下が好ましく、30%以下がより好ましく、20%以下がより好ましく、10%以下が更に好ましい。防滑性能の観点から、中央位置PC1と点gpAとは平面視において一致しているのが更に好ましい。
【0177】
防滑性能の観点から、中央位置PC2と点gpBとの平面視における距離D2(図示省略)は、近い方が好ましい。この観点から、距離D2は、上記距離D1以下であるのが好ましい。
【0178】
平面視における突出部の上面の面積Sm1は限定されない。三次元押圧力ベクトルに起因する滑りを抑制する観点から、面積Sm1は、900mm2以下が好ましく、400mm2以下がより好ましく、100mm2以下がより好ましい。突出部が細すぎる場合、地面(芝生面を含む)の内部において突出部が移動しやすい。この観点から、この面積Sm1は、15mm2以上が好ましく、50mm2以上がより好ましい。
【0179】
平面視における突出部の下端の面積Sm2は限定されない。三次元押圧力ベクトルに起因する滑りを抑制する観点から、面積Sm2は、400mm2以下が好ましく、100mm2以下がより好ましく、50mm2以下がより好ましい。突出部が細すぎる場合、地面(芝生面を含む)の内部において突出部が移動しやすい。この観点から、この面積Sm2は、5mm2以上が好ましく、20mm2以上がより好ましい。なお、この面積Sm2は、実質的にゼロであってもよい。面積Sm2が実質的にゼロである例は、図19に示される突出部PT2及び図20に示される突出部PT3である。
【0180】
上記の実施形態では、突出部の下端と三次元押圧力ベクトルとの交わりが説明された。突出部の下端が、三次元押圧力ベクトルの延長線と交わっていてもよい。突出部の延在方向を三次元押圧力ベクトルに沿った方向に近づける観点からは、三次元押圧力ベクトルの長さ(大きさ)は問題ではない。この観点から、三次元押圧力ベクトルの延長線が突出部の下端と交わっていてもよいことは明らかである。
【0181】
上記突出部の形態は限定されない。上記突出部は、ブロック状であってもよいし、スパイク状であってもよいし、壁状であってもよい。
【0182】
本発明における靴の用途は限定されない。即ち、上記動作は限定されない。上記動作として、ゴルフスイング、アメリカンフットボール、サッカー、ラグビー、テニス及び陸上競技が例示される。陸上競技として、短距離走などの直線に沿って走る競技、中距離走やリレーなどの曲線に沿って走る競技、走り高跳び、走り幅跳び、なとが例示される。
【0183】
直線に沿って歩行する場合、靴底に作用する力は、比較的単純である。しかし、上記スポーツにおいては、靴底に作用する力は、複雑である。曲線に沿って走る競技では、直線に沿って走る競技と比較して、靴底に作用する力は複雑である。
【0184】
上記スポーツでは、靴底に作用する力の解析は難しい。例えばゴルフスイングでは、動作中における足の変位はほとんど見られないので、解析が難しい。足の動作からは、靴底に作用する力の解析が困難である場合、本発明は特に有効である。この観点から、上記動作がゴルフスイングであるのが特に好ましい。
【0185】
本発明は、靴を販売する方法にも適用される。図10、図11及び図12で示した例からも理解されるように、靴底に作用する力には、個人差がある。本発明は、個人に適した突出部が靴底に設けられた靴を販売する方法に好ましく応用される。
【0186】
この販売方法は、好ましくは、次のステップ(Stp1)、ステップ(Stp2)、ステップ(Stp3)及びステップ(Stp4)を含む。
・ステップ(Stp1):上記個人に動作を行わせ、上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップ。
・ステップ(Stp2):上記三次元床反力の測定と同期させて、上記時刻Tsから上記時刻Tfまでの複数の時刻における靴底の接触面エリアを取得するステップ。
・ステップ(Stp3):各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップ。
・ステップ(Stp4):上記突出部を設計するステップによって設計された突出部を備えた靴を上記個人に販売するステップ。
【0187】
この販売方法により、各個人に適した靴が提供されうる。
【0188】
上記ステップ(St2)及び上記ステップ(Stp2)で用いられる靴の底面のベース形状は、本発明で設計される靴に近似した形状であるのが好ましい。ベース形状とは、本発明で設計される突出部を除いた部分の形状である。この近似した形状として、以下が挙げられる。
・[近似した形状1]:本発明により得られる靴底面から、本発明で設計される突出部が除かれた形状。
・[近似した形状2]:上記[近似した形状1]に、一定の形状を有し且つ規則的に並べられた複数の突出部が設けられた形状。
【0189】
上記近似した形状とされることにより、最終的に得られる靴と計測される靴とでベース形状が近似するため、最終的に得られる靴において効果的な突出部が設計されうる。
【0190】
上記[近似した形状2]の例は、図6で示される靴底である。
【実施例】
【0191】
以下、実施例によって本発明の効果が明らかにされるが、この実施例の記載に基づいて本発明が限定的に解釈されるべきではない。
【0192】
[実施例1のための計測]
前述の解析システムK1と、同一の突出部が規則的に並んでいる靴底を用いて、上記ステップ(St1)及び上記ステップ(St2)がなされた。床反力計として、キスラー社製の床反力計(商品名「9287B」)が用いられた。計測の状況は、図1に示される通りとされた。被験者h1がゴルフクラブをスイングして、計測が行われた。
【0193】
計測に用いられた靴の靴底は、図6で示す靴底とほぼ同じとされた。ただし、図6で示される靴底と異なり、土踏まず部が凹んでおらず、土踏まず部にも突出部を有する靴が用いられた。
【0194】
得られたデータが解析された。この解析では、上記時刻Tsが、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされ、上記時刻Tfが、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされた。この時刻Tsから時刻Tfまでの時間を9等分して定まる10の時刻のそれぞれにおいて、接触面エリアの重心gp、上記角度θ1及び上記角度θ2を得た。
【0195】
本発明に係る突出部の形状は限定されず、円柱、半円柱、円錐、円筒、四角錐等の多角錐、方形柱及びそれらに類似した形状が例示される。本発明に係る突出部は、靴底の基部と一体成形されていてもよいし、市販のスパイクピン等と同様に、着脱可能とされていてもよい。
【0196】
[実施例1]
靴底面に複数のネジ孔が設けられた試験用靴が用意された。靴底の材質はEVAとされ、このEVAの靴底に、金属製のネジ孔部材(爪つきナット)が埋設された。このネジ孔の位置が、図24に示される。ネジ孔は、一つの靴あたり45箇所に設けられた。即ち、右足用の靴に45箇所のネジ孔が設けられ、左足用の靴に45箇所のネジ孔が設けられた。ネジ孔は、20mm間隔で規則的に並べられた。図24に示すように、各ネジ孔に住所が割り当てられている。例えば、左足用の靴において、最も踵寄りであり且つ最もインサイドであるネジ孔の住所は、G14である。
【0197】
全てのネジ孔にスパイクピンが取り付けられた。このスパイクピンは鋼製であった。このスパイクピンの形状は略円錐形であり、根本の直径は約4mmであり、先端の直径は約2.5mmであった。このスパイクピンの突出長さは、8mmであった。このスパイクピンは、市販品である。次に、上記の計測結果に基づいて、スパイクピンを塑性変形させた。具体的には、スパイクピンをペンチで曲げた。スパイクピンは、根元において曲げられた。各時刻における接触面エリアの重心gpに最も近い住所のスパイクピンが、その時刻における上記角度θ1及び上記角度θ2となるように曲げられた。ただし、上記角度θ1及び上記角度θ2については、一の位が四捨五入された値が用いられた。実施例1におけるピン住所、上記角度θ1及び上記角度θ2が、下記の表1に示される。表1に示されていない住所には、ピンが設けられなかった。なお、上記角度θ1及び上記角度θ2の定義は、図16及び図17に示される通りである。実施例1の仕様及び評価結果が下記の表1に示される。
【0198】
[比較例1]
全てのピンが曲げられずに真っ直ぐとされた他は実施例1と同様にして、比較例1の靴を得た。比較例1の仕様及び評価結果が下記の表1に示される。表1に示されていない住所には、ピンが設けられなかった。
【0199】
[比較例2]
ピンの住所及び角度が表1に示される通りとされた他は実施例1と同様にして、比較例2の靴を得た。比較例2の仕様及び評価結果が下記の表1に示される。表1に示されていない住所には、ピンが設けられなかった。
【0200】
なお、ピンが真っ直ぐである場合、表1の上記角度θ1は空欄である。
【0201】
【表1】
【0202】
[評価方法]
ゴルフ場のティーグラウンドで、ゴルフクラブをスイングした。官能評価により、滑りやすさが10段階で評価された。最も滑りにくい場合が10点とされ、最も滑りやすい場合が1点とされた。5人のゴルファーによる評価の平均点(小数点以下は四捨五入)が、表1に示される。
【0203】
表1に示されるように、実施例は、比較例に比べて評価が高い。この評価結果から、本発明の優位性は明らかである。
【産業上の利用可能性】
【0204】
以上説明された方法は、突出部を有するあらゆる靴に適用されうる。
【符号の説明】
【0205】
6・・・データ解析装置
8・・・コンピュータ
20・・・平板
22・・・カメラ
24・・・光源
30・・・靴(ステップ(St1)及びステップ(St2)を行うための靴であり、ステップ(Stp1)及びステップ(Stp2)を行うための靴でもある。)
PT、PT1、PT2、PT3、PT4・・・突出部
Pb1、Pb2、Pb3、Pb4・・・突出部の上面
Pt1、Pt2、Pt3、Pt4・・・突出部の下端
S1・・・接触面観察装置
Fp・・・フォースプレート
h1・・・被験者
gc・・・ゴルフクラブ
【特許請求の範囲】
【請求項1】
動作に適した突出部が靴底に設けられた靴を設計する方法であって、
上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップと、
上記三次元床反力の測定と同期させて、上記複数の時刻における靴底の接触面エリアを取得するステップと、
各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップとを含む設計方法。
【請求項2】
上記時刻Tsから上記時刻Tfまでが滑りやすい時刻とされる請求項1に記載の設計方法。
【請求項3】
上記突出部を設計するステップにおいて、次の突出部E1が設計される請求項1に記載の設計方法。
ただし、上記突出部E1とは、その上面の中央位置PC1が、時刻T1での上記接触面エリアに含まれており、且つ、上記上面のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトル又はその延長線が、その下端と交わるように設計された突出部である。
【請求項4】
平面視において、上記突出部E1の上記上面が、上記時刻T1での上記接触面エリアの重心gpを含む請求項3に記載の設計方法。
【請求項5】
上記水平方向の床反力の大きさf1の、上記鉛直方向の床反力の大きさf2に対する比(f1/f2)の最大値を決定するステップを更に含み、
上記時刻Tsが、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされ、
上記時刻Tfが、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされる請求項2に記載の設計方法。
【請求項6】
上記時刻Tsが、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされ、
上記時刻Tfが、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされる請求項5に記載の設計方法。
【請求項7】
上記突出部を設計するステップにより設計された突出部の個数が、全ての突出部の個数の50%以上である請求項1から6のいずれかに記載の設計方法。
【請求項8】
上記動作がゴルフスイングである請求項1から7のいずれかに記載の設計方法。
【請求項9】
請求項1から8のいずれかに記載の設計方法によって突出部が設計された靴。
【請求項10】
個人に適した突出部に設けられた靴を販売する方法であって、
上記個人に動作を行わせ、上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップと、
上記三次元床反力の測定と同期させて、上記時刻Tsから上記時刻Tfまでの複数の時刻における靴底の接触面エリアを取得するステップと、
各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップと、
上記突出部を設計するステップによって設計された突出部を備えた靴を上記個人に販売するステップとを含む販売方法。
【請求項1】
動作に適した突出部が靴底に設けられた靴を設計する方法であって、
上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップと、
上記三次元床反力の測定と同期させて、上記複数の時刻における靴底の接触面エリアを取得するステップと、
各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップとを含む設計方法。
【請求項2】
上記時刻Tsから上記時刻Tfまでが滑りやすい時刻とされる請求項1に記載の設計方法。
【請求項3】
上記突出部を設計するステップにおいて、次の突出部E1が設計される請求項1に記載の設計方法。
ただし、上記突出部E1とは、その上面の中央位置PC1が、時刻T1での上記接触面エリアに含まれており、且つ、上記上面のいずれかの箇所を始点としたときの上記時刻T1での上記三次元押圧力ベクトル又はその延長線が、その下端と交わるように設計された突出部である。
【請求項4】
平面視において、上記突出部E1の上記上面が、上記時刻T1での上記接触面エリアの重心gpを含む請求項3に記載の設計方法。
【請求項5】
上記水平方向の床反力の大きさf1の、上記鉛直方向の床反力の大きさf2に対する比(f1/f2)の最大値を決定するステップを更に含み、
上記時刻Tsが、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされ、
上記時刻Tfが、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が30%以上60%以下である時刻とされる請求項2に記載の設計方法。
【請求項6】
上記時刻Tsが、比(f1/f2)が上記最大値に向かって上昇している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされ、
上記時刻Tfが、比(f1/f2)が上記最大値から下降している段階にあって且つ上記最大値に対する比(f1/f2)の割合が60%である時刻とされる請求項5に記載の設計方法。
【請求項7】
上記突出部を設計するステップにより設計された突出部の個数が、全ての突出部の個数の50%以上である請求項1から6のいずれかに記載の設計方法。
【請求項8】
上記動作がゴルフスイングである請求項1から7のいずれかに記載の設計方法。
【請求項9】
請求項1から8のいずれかに記載の設計方法によって突出部が設計された靴。
【請求項10】
個人に適した突出部に設けられた靴を販売する方法であって、
上記個人に動作を行わせ、上記動作中の時刻Tsから時刻Tfまでの複数の時刻における水平方法及び鉛直方向の床反力を測定し、各時刻における三次元押圧力ベクトルを得るステップと、
上記三次元床反力の測定と同期させて、上記時刻Tsから上記時刻Tfまでの複数の時刻における靴底の接触面エリアを取得するステップと、
各時刻における上記三次元押圧力ベクトルの向き及び各時刻における上記接触面エリアの位置を考慮して、靴底の突出部を設計するステップと、
上記突出部を設計するステップによって設計された突出部を備えた靴を上記個人に販売するステップとを含む販売方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図8】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図8】
【図10】
【図11】
【図12】
【公開番号】特開2011−382(P2011−382A)
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願番号】特願2009−147700(P2009−147700)
【出願日】平成21年6月22日(2009.6.22)
【出願人】(504017809)SRIスポーツ株式会社 (701)
【出願人】(000183233)住友ゴム工業株式会社 (3,458)
【Fターム(参考)】
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願日】平成21年6月22日(2009.6.22)
【出願人】(504017809)SRIスポーツ株式会社 (701)
【出願人】(000183233)住友ゴム工業株式会社 (3,458)
【Fターム(参考)】
[ Back to top ]