
鞍乗型車両の操舵装置及びこれを搭載した自動二輪車
【課題】鞍乗型車両の停止状態における操向ハンドルの操作に対する補助力(操舵補助力)を適切にすることを可能とする鞍乗型車両の操舵装置を提供する。
【解決手段】操向ハンドル18に付与される操作力に電動モータによる補助力を加えるパワーアシスト部の前記補助力を設定する補助力制御部は、鞍乗型車両の低車速領域では、前記補助力の最大値を含むよう前記補助力を設定し、前記低車速領域よりも高速の高車速領域では、前記補助力の最小値を含むよう前記補助力を設定し、停止状態では、前記補助力の最大値と前記補助力の最小値との間の中間値を設定するようにしたので、鞍乗型車両の停止状態において、適切な補助力を付与することができる。
【解決手段】操向ハンドル18に付与される操作力に電動モータによる補助力を加えるパワーアシスト部の前記補助力を設定する補助力制御部は、鞍乗型車両の低車速領域では、前記補助力の最大値を含むよう前記補助力を設定し、前記低車速領域よりも高速の高車速領域では、前記補助力の最小値を含むよう前記補助力を設定し、停止状態では、前記補助力の最大値と前記補助力の最小値との間の中間値を設定するようにしたので、鞍乗型車両の停止状態において、適切な補助力を付与することができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、運転者の操舵負担を軽減する電動式パワーステアリング装置を採用した自動二輪車等の鞍乗型車両の操舵装置及びこれを搭載した自動二輪車に関する。
【背景技術】
【0002】
従来から、四輪の自動車では、操向ハンドルの軽い操舵力で車両を旋回できるように、電動モータの動力を操舵系に補助力として伝え、前記操向ハンドルの操舵力を軽減する電動式パワーステアリング装置が実用化されている(特許文献1)。
【0003】
特許文献1の図5、図6に開示されているように、四輪の自動車の電動式パワーステアリング装置では、車速が低くなるほど、操向ハンドルの操舵力(操舵トルク)に対する電動モータによる補助力が大きくなるように設定され(従って操向ハンドルの操舵が軽くなり)、車速が高くされるにつれ補助力が小さくなるように設定されている(従って操向ハンドルの操舵が重くなる)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−127420号公報([0014]、[0090])
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、自動二輪車等の鞍乗型車両では、狭い駐車スペースに駐車しなければならない場合が多々ある。その際には、鞍乗型車両の電源を入れた状態でエンジンが停止状態にあるときに、例えば、前輪を車軸に対して左右方向に位置させ全長を短くして駐車スペースに駐車させるため、あるいは狭い駐車スペースの最適駐車位置に車両を整列させて駐車させるために操向ハンドルの操作が必要とされる。
【0006】
しかしながら、鞍乗型車両に、上記特許文献1に係る技術を適用した場合、車速ゼロ近傍の状態では、補助力が最大となるので、停止状態における操向ハンドルの操作に対して補助力が過敏になりすぎて操向ハンドルの操作が行い難くなる可能性があり、利便性の向上が望まれる。
【0007】
この発明は、このような課題を考慮してなされたものであって、鞍乗型車両の停止状態における操向ハンドルの操作に対する補助力(操舵補助力)を適切にすることを可能とする鞍乗型車両の操舵装置及びこれを搭載した自動二輪車を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1に係る発明の鞍乗型車両の操舵装置は、操向ハンドル(18)と、前記操向ハンドル(18)に連結されるとともに、ヘッドパイプ(14)に回動自在に支持され、前記操向ハンドル(18)に加えられる操作力が付与されるステアリング軸(24)と、前記操作力に補助力を加える電動モータ(90)と、車速を検出する車速センサ(35)と、検出された車速に応じて前記電動モータ(90)による前記補助力を制御する補助力制御部(200)と、を備える鞍乗型車両の操舵装置であって、前記補助力制御部(200)は、前記車速センサが車速ゼロ近傍の状態を検出しているときは、前記補助力の最大値(C1max)と前記補助力の最小値(C1min)との間の所定の中間値(C1mid)を前記補助力として設定することを特徴とする。
【0009】
請求項2に係る発明は、請求項1記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、前記車速センサが、低車速領域の状態を検出しているときは前記補助力の前記最大値(C1max)を含むよう前記補助力を設定し、前記低車速領域よりも高速の高車速領域の状態を検出しているときは前記補助力の前記最小値(C1min)を含むよう前記補助力を設定し、車速ゼロ近傍の状態を検出しているときは、前記補助力の前記最大値(C1max)と前記補助力の前記最小値(C1min)との間の所定の中間値(C1mid)を前記補助力として設定することを特徴とする。
【0010】
請求項3に係る発明は、請求項2記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、前記車速ゼロ近傍の状態から前記低車速領域までの極低車速領域(Vsa)では、前記中間値(C1mid)を一定値に設定することを特徴とする。
【0011】
請求項4に係る発明は、請求項3記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、前記極低車速領域(Vsa)から前記低車速領域(Vsc)への遷移領域(Vsb)では、車速が高くなるにつれて補助力を漸次大きくなるように設定することを特徴とする。
【0012】
請求項5に係る発明は、請求項1〜4のいずれか1項に記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、少なくとも前記高車速領域では、前記鞍乗型車両の加速時に前記補助力が小さくなるように補正し、減速時に前記補助力が大きくなるように補正することを特徴とする。
【0013】
請求項6に係る発明は、請求項5に記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、相対的に重心の高い前記鞍乗型車両の前記補助力の補正幅は、相対的に重心の低い前記鞍乗型車両の補助力の補正幅に比較して、大きく設定することを特徴とする。
【0014】
請求項7に係る発明は、請求項5に記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、相対的に車重の重い前記鞍乗型車両の前記補助力の補正幅は、相対的に車重の軽い前記鞍乗型車両の補助力の補正幅に比較して、大きく設定することを特徴とする。
【0015】
請求項8に係る発明の自動二輪車は、請求項1〜7のいずれか1項に記載の鞍乗型車両の操舵装置を搭載している。
【発明の効果】
【0016】
請求項1に係る発明によれば、操向ハンドルに付与される操作力に電動モータにより加えられる補助力を設定する補助力制御部は、車速センサが車速ゼロ近傍の状態を検出しているときは、補助力の最大値と補助力の最小値との間の所定の中間値を前記補助力として設定するようにしたので、車速ゼロ近傍の状態では、運転者の操向ハンドルの操作力に対して補助力が過敏になり過ぎないようにすることができ、適切な補助力を付与することができる。このため、狭い駐車スペースに駐車することが多い自動二輪車等の鞍乗型車両において、駐車の際に、操向ハンドルの操作が行い易くなり、利便性を向上させることができる。
【0017】
請求項2に係る発明によれば、補助力制御部は、前記車速センサが、低車速領域の状態を検出しているときは前記補助力の前記最大値を含むよう前記補助力を設定し、前記低車速領域よりも高速の高車速領域の状態を検出しているときは前記補助力の前記最小値を含むよう前記補助力を設定し、車速ゼロ近傍の状態を検出しているときは、前記補助力の前記最大値と前記補助力の前記最小値との間の所定の中間値を前記補助力として設定するようにしたので、車速ゼロ近傍の状態では、運転者の操向ハンドルの操作力に対して補助力が過敏になり過ぎないようにすることができることを含め、低車速領域及び高車速領域において車速領域に対応した適切な補助力を設定することができる。
【0018】
請求項3に係る発明によれば、補助力制御部は、前記車速ゼロ近傍の状態から前記低車速領域までの極低車速領域では、前記中間値を一定値に設定するようにしている。鞍乗型車両では、停止状態及び極低車速走行時では、車両の姿勢を維持すべく、運転者の操向ハンドルの操作(操舵)に余分な力が入りやすくなる傾向があるが、この請求項3に係る発明のように、補助力の最大値よりも小さく、かつ最小値よりも大きい一定の中間値の補助力を付与することで、運転者による操向ハンドルの操作力に対して補助力が過敏になりすぎないようにすることができる。すなわち、停止状態の操向ハンドルの操作(操舵)に対して適切な補助力を付与することができる。
【0019】
請求項4に係る発明によれば、前記極低車速領域から前記低車速領域への遷移領域では、車速が高くなるにつれて補助力が漸次大きくなるように設定しているので、補助力の急な変動を防止することができる。
【0020】
請求項5に係る発明によれば、少なくとも前記高車速領域では、加速時に前記補助力が小さくなるように補正し、減速時に前記補助力が大きくなるように補正するようにしている。少なくとも高車速領域での加速時はフロント荷重が下がって操向ハンドルの操舵が軽くなりやすいので補助力を小さくして(操向ハンドルの操舵は重くなる)ハンドル操舵感を得ることができ、減速時はフロント荷重が上がって操向ハンドルの操舵が重くなるので補助力を大きくして(操向ハンドルの操舵は軽くなる)ハンドル操舵を軽くすることで操作性が向上する。
【0021】
請求項6に係る発明によれば、相対的に重心の高い鞍乗型車両の補助力は、相対的に重心の低い鞍乗型車両の補助力の補正幅に比較して、大きく設定するようにしたので、重心が高くて加減速によるフロント荷重への影響が大きい車両であっても、適切な補助力を付与することができる。
【0022】
請求項7に係る発明によれば、相対的に車重の重い鞍乗型車両の補助力の補正幅は、相対的に車重の軽い鞍乗型車両の補助力に比較して、大きく設定するようにしたので、車重が重くて加減速によるフロント荷重への影響が大きい車両であっても、適切な補助力を付与することができる。
【図面の簡単な説明】
【0023】
【図1】実施の形態の自動二輪車の側面図である。
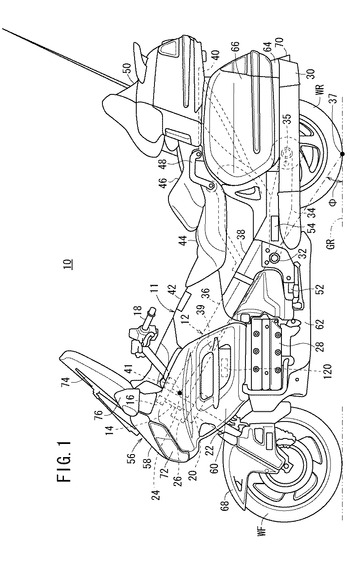
【図2】図1に示す自動二輪車の一部省略正面図である。
【図3】変位検出センサによるロール角とヨー角の説明図である。
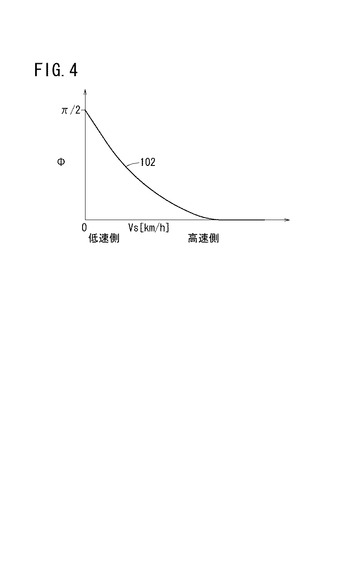
【図4】車速に対する変位検出センサの取付角度の変更特性を示す説明図である。
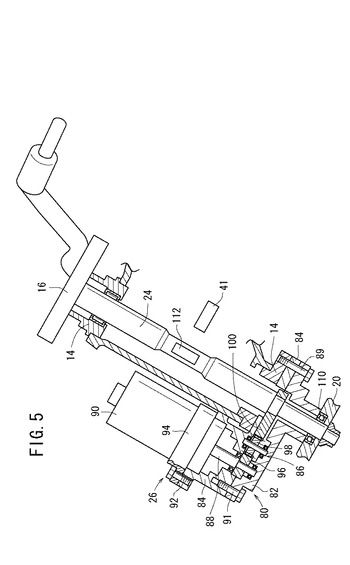
【図5】パワーアシスト部の一部省略断面説明図である。
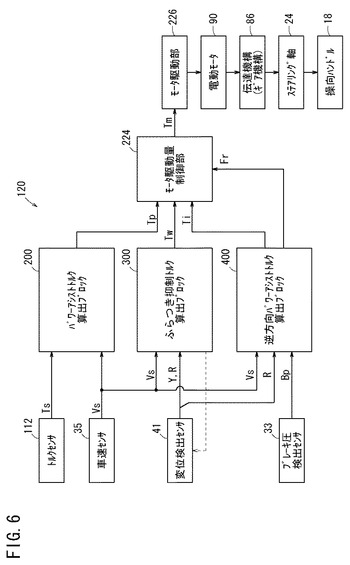
【図6】制御全体ブロック図である。
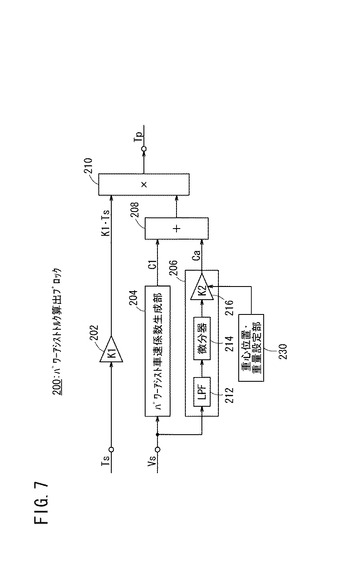
【図7】図6に示す制御全体ブロック中、パワーアシストトルク算出ブロックの詳細図である。
【図8】パワーアシスト車速係数の特性を示す説明図である。
【図9】図6に示す制御全体ブロック中、ふらつき抑制トルク算出ブロックの詳細図である。
【図10】比例車速係数の特性を示す説明図である。
【図11】図6に示す制御全体ブロック中、逆方向パワーアシストトルク算出ブロックの詳細図である。
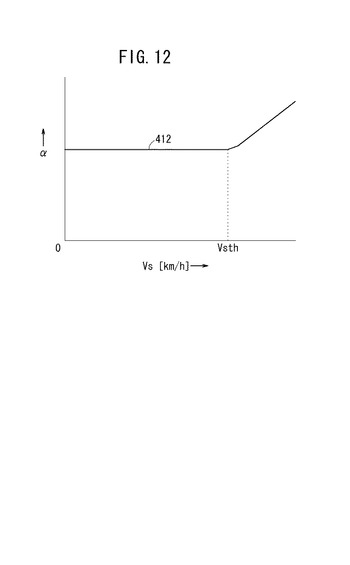
【図12】逆パワーアシストトルク算出処理に供される車速アシスト係数の特性を示す説明図である。
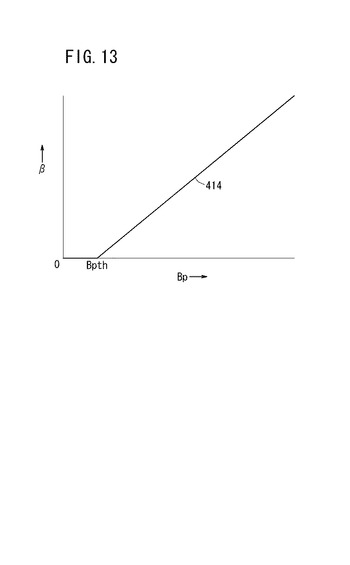
【図13】逆パワーアシストトルク算出処理に供されるブレーキ圧アシスト係数の特性を示す説明図である。
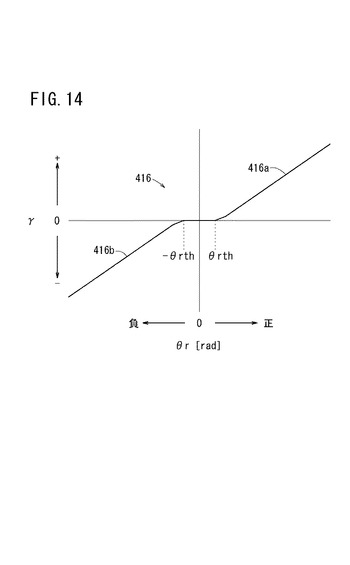
【図14】逆パワーアシストトルク算出処理に供されるロール角アシスト係数の特性を示す説明図である。
【図15】第1実施例及び第2実施例の動作説明に供されるフローチャートである。
【図16】第3実施例の動作説明に供されるフローチャートである。
【図17】第3実施例の変形例の動作説明に供されるフローチャートである。
【発明を実施するための形態】
【0024】
以下、この発明について、好適な実施の形態を掲げ、添付の図面を参照しながら詳細に説明する。
【0025】
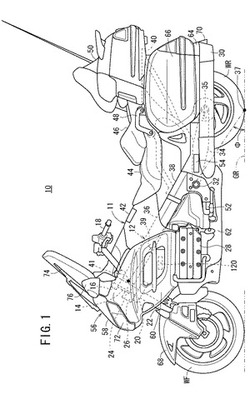
図1は、自動二輪車等の鞍乗型車両の操舵装置が搭載された自動二輪車10の側面図である。図2は、図1に示す自動二輪車10の一部省略正面図である。
【0026】
自動二輪車10は、車体11の車体フレーム12と、車体フレーム12の前端部に設けられたヘッドパイプ14と、ヘッドパイプ14の上端に摺接するトップブリッジ16に連結された操向ハンドル18と、前記トップブリッジ16の左右両端に連結されるとともにボトムブリッジ20を貫通して前輪WFを回転自在に支持する左右一対のフロントフォーク22と、前記ヘッドパイプ14内に挿通され一端がトップブリッジ16に固着されるとともに他端がボトムブリッジ20に回動自在に支持されるステアリング軸24と、ステアリング軸24に操舵補助力を伝達するパワーアシスト部26(図1参照)と、車体フレーム12に支持されたエンジン28と、エンジン28の図示しない排気管を介して連結された排気マフラ30と、一端が車体フレーム12の後下部のピボット軸32に揺動可能に支持され他端側が後輪WRを回転自在に支持するスイングアーム34とを備える。
【0027】
操向ハンドル18のブレーキレバー31近傍の図示しないブレーキリザーバタンクには、ブレーキ圧Bpを検出して出力するブレーキ圧検出センサ33(図2参照)が設けられている。図示しないフットブレーキ用のブレーキリザーバタンクにもブレーキ圧検出センサを設けてもよい。なお、ブレーキ圧検出センサ33は、その圧力によりブレーキレバー31が操作されているか否か(ブレーキがかけられているか否か)を検出するセンサ(ブレーキ検出センサ)として用いることもできる。なお、ブレーキ検出センサとしては、ブレーキレバー31の操作に応じてストップランプを点灯させるスイッチを用いることもできる。
【0028】
スイングアーム34には、後輪WRの車輪速から車速Vを検出する車速センサ35が取り付けられている。車速センサは、カウンターシャフトに取り付けることもできる。
【0029】
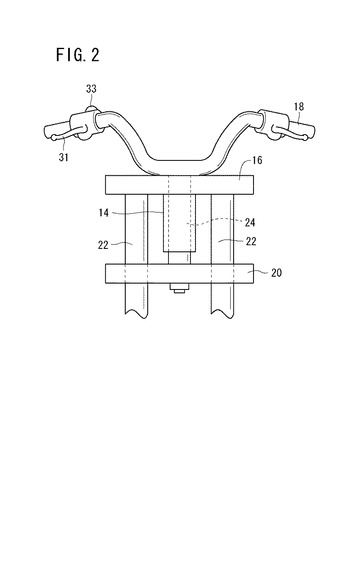
さらに、後輪WRが地面GRに接する接地点37とヘッドパイプ14の略中央部を結ぶ線分39上、ヘッドパイプ14側の先端に自動二輪車10のロール方向の変位とヨー方向の両方向の変位を検出する変位検出センサ41が設けられている。水平線(X軸という。)に対する傾斜角を変位検出センサ41の取付角φという。
【0030】
変位検出センサ41は、ロール方向出力R(ロール角速度成分)と、ヨー方向出力Y(ヨー角速度成分)を出力する。
【0031】
図3に示すように、ロール方向出力Rの積分値として得られるロール角θrは、車両前後方向に延びる水平線(X軸とする。)回りの回転角を表し、ヨー方向出力Yの積分値として得られるヨー角θyは、ここでは、後輪接地点37に対する変位検出センサ41の前記X軸に対し鉛直方向に直交する軸(Z軸とする。)回りの回転角を表す。ロール角θrは、自動二輪車10の左右方向(車幅方向)の傾斜角とも言える。
【0032】
変位検出センサ41は、当該変位検出センサ41(の軸)がZ軸方向を向いているときに、ヨー方向出力Yの検出感度が最大になるとともに、ロール方向出力Rの検出感度が最小になる一方、当該変位検出センサ41(の軸)がX軸方向を向いているときに、ヨー方向出力Yの検出感度が最小になるとともに、ロール方向出力Rの検出感度が最大になる特性を有している。
【0033】
そして、自動二輪車10では、低速時には、操向ハンドル18による転舵(ヨー)が発生してから、バンク(ロール)が発生する特性を有するので、ヨーが先行しヨー成分を多く検出できることが好ましい。その一方、高速時には、バンク(ロール)が発生してから転舵(ヨー)が発生する特性を有するので、ロールが先行しロール成分を多く検出できることが好ましい。これらの特性を自動二輪車10の転舵特性という。
【0034】
そこで、この出願の発明者等は、鋭意検討の結果、上述したように、後輪WRの接地点37とヘッドパイプ14の略中央部を結ぶ線分39に、変位検出センサ41の軸を同軸上とし、かつ線分39のヘッドパイプ14側に変位検出センサ41を取り付けることとした。
【0035】
このように取り付ければ、変位検出センサ41により速度V=0の停止時を含む低速領域を優先して自動二輪車10の姿勢を高精度に制御することができる。低速時から高速時までの全速度領域で、好適に、ヨー角θy及びロール角θrを検出することができる。
【0036】
この場合、検出された車速Vに応じて、変位検出センサ41のヨー方向出力Yとロール方向出力Rを調整して(重み付けして)合成出力を出力するように構成すると制御が簡単となりより好ましい。
【0037】
この合成出力は、上述した自動二輪車10の転舵特性から車速Vが低いときにはヨー方向出力Yを多く取り出した出力とされ、車速Vが高いときにはロール方向出力Rを多く取り出した出力とされることが好ましい。
【0038】
例えば、合成出力を、次の(1)式に示すように、ヨー方向出力Yに第1調整値AD1を乗算した値(Y×AD1)と、ロール方向出力Rに第2調整値AD2を乗算した値(R×AD2)との合成値(合成出力)Sを生成する。
S=Y×AD1+R×AD2 …(1)
【0039】
この場合、第1調整値AD1は、低速側で大きく高速側で小さくなるように設定し、第2調整値AD2は、低速側で小さく高速側で大きくなるように設定することが好ましい。
【0040】
そして、さらに、車速Vと変位検出センサ41の取付角φ(疑似取付角)を関係づければ(リンクさせれば)、第1調整値AD1をsinφ、第2調整値AD2をcosφ、取付角φ(疑似取付角)の取り得る値を0〜π/2以内として、取付角φ(疑似取付角)のπ/2[ラジアン]=90[゜]側は低車速に対応させ、取付角φ(疑似取付角)の0[ラジアン]=0[゜]側は高車速に対応させ、合成値(合成出力)Sを、次の(2)式で示すように算出するようにする。
S=Y×sinφ+Rcosφ …(2)
【0041】
図4は、(2)式に代入する取付角φ(疑似取付角)と車速Vとの関係の一例を示す特性102の特性図である。低速側の車速Vsで、例えば停止時に、φ=π/2とすることで、S=Y(R=0)となり、高速側の最高車速Vsで、φ=0とすることで、S=R(Y=0)となることが分かる。
【0042】
なお、この実施形態では、分かり易く説明するために、φの上限値をπ/2に設定しているが、これに限らず、φの上限値をπ/2未満の値に適宜設定するようにしてもよい。
【0043】
また、取付角φは、図3中に示すように、変位検出センサ41の取付角φを連結アーム105を介して機械的に直接変化させるアクチュエータ104を設け、車速Vに応じて変位検出センサ41の取付角φを、図3に示したようにアクチュエータ104によりX´方向(X軸と平行)とZ´軸方向(Z軸と平行)との間で変化させることで、合成値(合成出力)Sを直接調整するようにしてもよい。
【0044】
アクチュエータ104は、例えば、ヘッドパイプ14の空間内に電動モータを設け、一端が変位検出センサ41に連結され他端がアクチュエータ104(電動モータ)の軸107に連結される連結アーム105を車速Vに応じて図3に示す取付角φだけ回動させることで変位検出センサ41の取付角φを調整するように構成することで、合成値(合成出力)Yを、車速Vに応じて機械的(メカニカル)に調整することができる。
【0045】
再び図1において、車体フレーム12は、ヘッドパイプ14から左右に分岐して後斜め下方に延びる左右一対のメインフレーム36と、メインフレーム36の後部に接続される左右一対のピボットプレート38と、ピボットプレート38の前部及び後部から後方斜め上方に延びる左右一対のシートフレーム40とを有する。
【0046】
メインフレーム36の上方に燃料タンク42が設けられ、シートフレーム40の上部には、運転者シート44及び同乗者シート46が取付けられ、同乗者シート46の後方には、グラブレール48及びトランクボックス50が取付けられている。
【0047】
車体フレーム12のピボットプレート38には、運転者シート44に着座した運転者用の左右一対のステップ52と、同乗者シート46に着座した同乗者用の左右一対のステップ54とが取付けられている。
【0048】
車体フレーム12には、車体カウリング56が取付けられ、車体カウリング56は、車体前方を覆うフロントカバー58と、車体側部を覆う左右一対のサイドカバー60と、車体下部を覆うアンダーカバー62と、車体後部を覆うリアシートカウル64とを備えており、リアシートカウル64には、左右一対のサドルバック66が一体に形成されている。また、前輪WFを覆うフロントフェンダ68がフロントフォーク22に取付けられ、後輪WRを覆うリアフェンダ70がリアシートカウル64に取付けられている。
【0049】
フロントカバー58の前面には、ヘッドライト72が取付けられ、その上部にはウインドシールド74が取付けられ、左右端には、サイドミラー76が取付けられている。
【0050】
図5は、ステアリング軸24に操舵補助力を伝達するパワーアシスト部26を含むヘッドパイプ14近傍の一部省略説明図を示している。
【0051】
パワーアシスト部26は、基本的には、電動モータ90と、この電動モータ90を支持するとともに、電動モータ90の回転駆動力をステアリング軸24に伝達する支持伝達部材80とから構成される。
【0052】
電動モータ90は、ヘッドパイプ14のボトムブリッジ20側に、支持伝達部材80を介して取り付けられている。
【0053】
支持伝達部材80は、ベース部材82と保持部材84と、ベース部材82と保持部材84との間に介装される伝達機構86{ギア機構(歯車列)}とから構成されている。
【0054】
ベース部材82は、下端側がボトムブリッジ20に連結され、上端側の一端部が保持部材84を貫通するボルト89を介してヘッドパイプ14に連結されるとともに、上端側の他端部がボルト91を介して保持部材84に連結される。
【0055】
保持部材84には、回転駆動軸88有する電動モータ90が、バンド状部を有する支持部材94を通じて保持される。
【0056】
電動モータ90の回転駆動軸88には、同軸上にドライブギア96が固着され、ドライブギア96がアイドルギア98を介して扇形ギアであるドリブンギア100に歯合されている。
【0057】
ドリブンギア100は、ボトムブリッジ20の軸受110に回動自在に係合するステアリング軸24のボトムブリッジ20側に固着されている。
【0058】
ステアリング軸24の略中央部の細くされた部分には、歪ゲージトルクセンサであり、運転者による操向ハンドル18の操作力(操舵力)に応じた操舵トルクTsを検出して出力する操舵トルクセンサ112が取り付けられている。なお、操舵トルクTsは、歪ゲージトルクセンサの他、磁歪式トルクセンサ等を用いることができる。操舵トルクTsの符号により操向ハンドル18の切れ方向を併せて検出することができる。
【0059】
電動モータ90は、ヘッドパイプ14の前方下端部に、ヘッドパイプ14と軸が平行になるように配置しているので、スペース効率がよい。
【0060】
エンジン28の上部とメインフレーム36の下側とサイドカバー60により形成される空間部に、電動モータ90等を駆動する駆動部と制御部とを有する制御ユニット120が取り付けられている。
【0061】
図6は、制御ユニット120の詳細構成を説明するブロック図である。制御ユニット120は、ECU(Electronic Control Unit)を含んで構成され、ECUは、マイクロコンピュータを含む計算機であり、CPU(中央処理装置)、メモリであるROM(EEPROMも含む。)、RAM(ランダムアクセスメモリ)、その他、A/D変換器、D/A変換器等の入出力装置、計時部としてのタイマ等を有しており、CPUがROMに記録されているプログラムを読み出し実行することで各種機能実現部(機能実現手段)として機能する。
【0062】
この実施形態で、ECUは、それぞれが補助力制御部であるパワーアシストトルク算出ブロック200、ふらつき抑制トルク算出ブロック300、及び逆方向パワーアシストトルク算出ブロック400等として機能する。各ブロック200、300、400は、後述するように、単独に動作することが可能であり、全体として動作することも可能であり、任意の2つのブロックを組み合わせて動作することも可能である。
【0063】
[第1実施例:パワーアシストトルク算出ブロック200の構成と作用]
この第1実施例において、モータ駆動量制御部224は、入力と出力を直結する構成とされる(Tp=Tm)。
【0064】
図7に示すように、補助力制御部としてのパワーアシストトルク算出ブロック200は、運転者の操向ハンドル18に対する操舵力に基づき操舵トルクセンサ112により検出された操舵トルクTsをゲインK1倍した操舵トルクK1・Tsを出力するゲイン調整器202と、車速センサ35により検出された車速Vsに基づきパワーアシスト車速係数C1を生成するパワーアシスト車速係数生成部204と、車速Vsに基づき算出した加減速に応じて前記パワーアシスト車速係数C1を増減するための補正係数Caを生成する補正係数生成部206と、パワーアシスト車速係数C1と補正係数Caを加算し係数(C1+Ca)を出力する加算器208と、係数(C1+Ca)を操舵トルクK1・Tsに乗算した次の(3)式に示すパワーアシストトルク(補助トルク)Tpを出力するモータ駆動トルク算出部としての乗算器210とを備える。
Tp=K1・Ts・(C1+Ca) …(3)
【0065】
補正係数生成部206は、低域通過フィルタ(LPF)212と微分器214と可変ゲイン調整器216の直列回路により構成される。微分器214は、車速Vsを微分して加速(値が+)走行又は減速(値が−)走行あるいは定速(値が0又は値が0近傍)走行を検出する。一般に、計測データの微分値は、センサノイズの影響を大きく受ける。車速微分値の制御は、体感上、位相遅れの影響をあまり受けないため、微分器214による微分の前に低域通過フィルタ212によるLPF処理を掛けることで、不必要な変動を抑制するようにしている。
【0066】
乗算器210から出力されたパワーアシストトルクTp{Tp=K1・Ts・(C1+Ca)}は、モータ駆動量制御部224を通じてモータ駆動トルクTmとしてモータ駆動部226に供給される。
【0067】
ここで、例えば、モータ駆動トルクTmがパワーアシストトルクTp{Tp=K1・Ts・(C1+Ca)}に等しいとすると、モータ駆動部226は、モータ駆動トルクTm(この場合、Tm=Tp)を、トルクを発生させるためのモータ電流(トルク電流という。)に変換し、電動モータ90に供給する。
【0068】
トルク電流が供給されているとき、その期間、トルク電流の大きさに応じた駆動力を発生して電動モータ90が回転し、電動モータ90の回転が伝達機構86を通じてステアリング軸24を回転する力に変換され、ステアリング軸24を通じて操向ハンドル18に対し、モータ駆動トルクTm(この場合、パワーアシストトルクTp)に応じた補助力(操舵補助力)が付与される。
【0069】
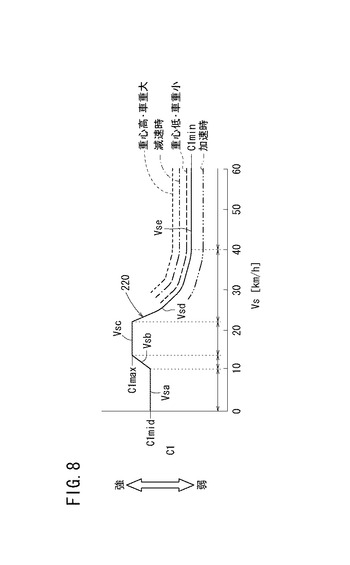
図8は、制御ユニット120内の図示しないメモリ(記憶部)に記憶されているパワーアシスト車速係数C1の特性220を示している。なお、パワーアシスト車速係数C1は、(3)式に示したように、パワーアシストトルクTaを生成する際に操舵トルクK1・Tsに乗算される比例定数(係数)であるので、補助力(操舵補助力)に対応すると考えることができる。パワーアシスト車速係数C1は、例えば、0<C1≦1の範囲の値を取る。
【0070】
特性220から分かるように、低車速領域Vscでは、補助力(パワーアシスト車速係数C1)が最大値C1maxを含むよう当該補助力(パワーアシスト車速係数C1)を設定し、低車速領域Vscよりも高速の高車速領域Vsdでは、補助力(パワーアシスト車速係数C1)の最小値C1minを含むよう当該補助力(パワーアシスト車速係数C1)を設定し、停止状態(Vs=0)では、補助力(パワーアシスト車速係数C1)の最大値C1maxと補助力(パワーアシスト車速係数C1)の最小値C1minとの間の中間値C1midを設定する(C1min<C1mid<C1max)。中間値C1midの具体的な値は、操舵トルクK1・Sに対して50[%]の補助力を与えるように設定すればよい。
【0071】
図8に示すように、停止状態(Vs=0)から低車速領域Vscまでの車速ゼロ近傍の極低車速領域Vsaでは、一定の中間値C1midを設定する。パワーアシスト車速係数C1の中間値C1midの具体的な値は、例えば、操舵トルクK1・Tsに対して50[%]の補助力を与えるように設定すればよい(Tp=C1mid×K1・Ts=0.5×K1・Ts)。低車速領域Vscの最大値C1maxの具体的な値は、例えば、操舵トルクK1・Tsに対して60[%]の補助力を与えるように設定すればよい(Tp=C1mid×K1・Ts=0.6×K1・Ts)。
【0072】
さらに、図8に示すように、極低車速領域Vsaから低車速領域Vscへの遷移領域Vsbでは、車速Vsが高くなるにつれて補助力(パワーアシスト車速係数C1)が徐々に大きくなるように設定する。
【0073】
車速領域の具体的な車速について説明すると、それぞれ概ね、いわゆる一本橋走行等に係わる車速Vsを含む極低車速領域Vsaは、0≦Vsa≦15[km/h]の範囲、低車速領域Vscは、5≦Vsc≦25[km/h]の範囲、高車速領域(中車速領域)Vsdは、20≦Vsd≦45[km]の範囲、超高車速領域(高車速領域)Vseは、40[km/h]≦Vseの範囲と言える。上記の各領域は、車種、機種等に応じて、隣り合う範囲が重複しないように設定することが好ましい。
【0074】
補正係数生成部206は、特性220を有するパワーアシスト車速係数C1に対し、図8中の一点鎖線の減速時及び二点鎖線の加速時に示すように、加減速時には、前輪WF側のフロント分担加重の増減による操舵重さ感の変化が小さくなるようにゲインK2を調整して補正係数Caを設定する。具体的には、加速時には、フロント分担加重が減少するので、補助力が小さくなるようにゲインK2を調整して補正係数Caを小さくし、減速時には、フロント分担加重が増加するので、補助力が大きくなるようにゲインK2を調整して補正係数Caを大きくする。
【0075】
なお、図8中、一点鎖線の減速時の特性の上下に点線で示すように、重心が高く車重が大きいときには、減速時の操舵感の変化が顕著となるので、減速時のゲインK2の調整幅を補正係数Caが大きくなる側により大きくする特性とすることが好ましい。逆に重心が低く、車重が小さいときには、減速時の操舵感の変化が緩慢となるので、減速時のゲインK2の調整幅を補正係数Caが小さくなる側に小さくすることが好ましい。図示はしないが、同様に、二点鎖線の加速時の特性に対して上下に、重心が高く車重が大きいときには、加速時の操舵感の変化が顕著となるので、加速時のゲインK2の調整幅を補正係数Caが小さくなる側により大きくする特性(図8中、加速時特性の下側)とすることが好ましい。逆に重心が低く、車重が小さいときには、加速時の操舵感の変化が緩慢となるので、加速時のゲインK2の調整幅を補正係数Caが大きくなる側に小さくする特性(図8中、加速時特性の上側)とすることが好ましい。
【0076】
減速時、又は加速時におけるゲインK2の調整幅は、車種、機種等に応じた重心位置・重量設定部230の設定により可変ゲイン調整器216のゲインK2を変えるように構成している。
【0077】
また、図8から分かるように、パワーアシスト車速係数C1の特性220は、全車速において、操舵補助力が、操向ハンドル18の操作力に対して軽さが演出できるようにしつつ、車速上昇に伴い、操舵重さ感が徐々に重くなるように設定している。
【0078】
上述したように第1実施例によれば、操向ハンドル18に付与される操作力に電動モータ90により加えられる補助力を設定する補助力制御部としてのパワーアシストトルク算出ブロック200は、図8に示したように、低車速領域Vscでは、補助力の最大値を含むよう係数C1maxを設定し、低車速領域Vscよりも高速の高車速領域Vsd、Vseでは、前記補助力の最小値を含むよう係数C1minを設定し、停止状態では、前記補助力の最大値と前記補助力の最小値との間の中間値となるよう係数C1midを設定するようにしたので、自動二輪車10の停止状態において、強すぎず弱すぎず、適切な補助力を付与することができる。
【0079】
このため、狭い駐車スペースに駐車することが多い自動二輪車10の駐車の際に、操向ハンドル18の操作が行い易くなり、短時間で所定の駐車位置に駐車させることができる。
【0080】
この場合、補助力制御部としてのパワーアシストトルク算出ブロック200は、停止状態(Vs=0)から低車速領域Vscまでの極低車速領域Vsaでは、前記中間値となるように設定した係数C1midを一定値に設定するようにしている。自動二輪車10では、停止状態及び極低車速走行時では、車両の姿勢を維持すべく、運転者の操向ハンドル18の操作(操舵)に余分な力が入りやすくなる傾向があるが、補助力の最大値を付与する係数C1maxよりも小さく、かつ最小値Caminよりも大きい一定の中間値の補助力を付与する係数Camidを設定することで、運転者による操向ハンドル18の操作力に対して補助力が過敏になりすぎないようにすることができる。すなわち、停止状態の操向ハンドル18の操作(操舵)に対して適切な補助力を付与することができる。
【0081】
また、極低車速領域Vsaから低車速領域Vscへの遷移領域Vsbでは、車速が高くなるにつれて補助力に対応するパワーアシスト車速係数C1が大きくなるように設定しているので、補助力の急な変動を防止することができる。
【0082】
また、少なくとも高車速領域Vsd、Vseでは、加速時に前記補助力が小さくなるようにパワーアシスト車速係数C1を補正し、減速時に前記補助力が大きくなるようにパワーアシスト車速係数C1を補正するようにしている。高車速領域Vsd、Vseでの加速時はフロント荷重が下がって操向ハンドル18の操舵が軽くなりやすいので補助力を小さくして(操向ハンドルの操舵は重くなる)ハンドル操舵感を得ることができ、高車速領域Vsd、Vseでの減速時はフロント荷重が上がって操向ハンドル18の操舵が重くなるので補助力を大きくして(操向ハンドルの操舵は軽くなる)ハンドル操舵を軽くすることで高車速領域Vsd、Vseでの操作性が向上する。なお、加速時又は低速時における補助力の補正は、全車速域において設定するようにしてもよい。
【0083】
さらに、相対的に重心の高い自動二輪車10に対する補助力は、相対的に重心の低い自動二輪車10の補助力に比較して、大きく設定するようにしたので、重心が高くて加減速によるフロント荷重への影響が大きい車両であっても、適切な補助力を付与することができる。
【0084】
同様に、相対的に車重の重い自動二輪車10の補助力は、相対的に車重の軽い自動二輪車10の補助力に比較して、大きく設定するようにしたので、車重が重くて加減速によるフロント荷重への影響が大きい車両であっても、適切な補助力を付与することができる。
【0085】
このように、第1実施例では、パワーアシストトルク算出ブロック200のみを利用したパワーアシストトルクTpをモータ駆動トルクTm(Tm=Tp)として操向ハンドル18の操作力(操舵力)を補助する補助力を与えることができる。
【0086】
[第2実施例:ふらつき抑制トルク算出ブロック300の構成と作用]
この第2実施例において、モータ駆動量制御部224は、基本的には、加算器として動作する(Tm=Tp+Tw)。なお、モータ駆動量制御部224は、直結動作(Tm=Tw)にするように変更することもできる。
【0087】
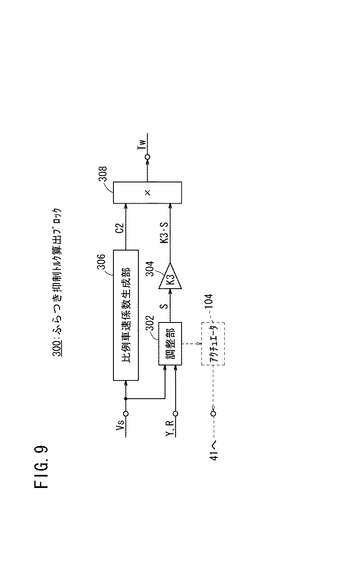
図9に示すように、補助力制御部としてのふらつき抑制トルク算出ブロック300は、車両のヨー方向とロール方向の変位を検出する変位検出センサ41から出力されるヨー方向出力Yとロール方向出力Rを調整して合成出力Sを出力する調整部302と、合成出力SをゲインK3倍してふらつき抑制トルクK3・Sに変換して出力するゲイン調整器304と、車速センサ35から出力される車速Vsに基づきふらつき抑制車速係数(比例値車速係数)C2を生成する比例車速係数生成部306と、ふらつき抑制トルクK3・Sに比例車速係数C2を乗算した次の(4)式に示すふらつき抑制トルク(補助トルク)Twを出力するモータ駆動トルク算出部としての乗算器308と、を備える。
Tw=K3・S・C2 …(4)
【0088】
乗算器308から出力されたふらつき抑制トルクTw(Tw=K3・S・C2)は、モータ駆動量制御部224によりパワーアシストトルクTp=K1・Ts・(C1+Ca)に加算されて、モータ駆動部226に供給される。
【0089】
モータ駆動部226は、パワーアシストトルクTpとふらつき抑制トルクTwとの合成トルクTp+Tw=K1・Ts・(C1+Ca)+K3・S・C2をトルク電流に変換し、電動モータ90に供給する。
【0090】
トルク電流が供給されているとき、その期間、トルク電流の大きさに応じた駆動力を発生して電動モータ90が回転し、電動モータ90の回転が伝達機構86を通じてステアリング軸24を回転する力に変換され、ステアリング軸24を通じて操向ハンドル18に対し補助力(操舵補助力)が付与される。
【0091】
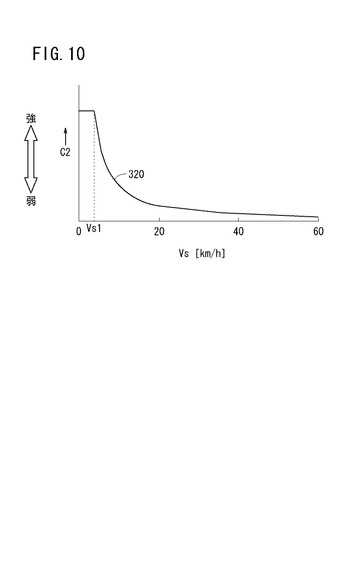
図10は、制御ユニット120中の図示しないメモリに記憶されている比例値車速係数C2の特性320を示している。比例値車速係数C2は、0<C2≦1の範囲の値を取る。車速Vsが0から数[km/h]程度の車速Vs1まで、比較的に大きな一定値が設定され、車速Vs1以降では、車速Vs=20[km/h]程度まで値が比例的に小さくなるように設定される。車速Vs=20[km]〜60[km/h]までは僅かに小さくなるように設定される。
【0092】
周知のように、自動二輪車10は、高速になるほど自立力が上がるので、比例値車速係数C2、換言すれば、ふらつき抑制の係数は、高速になるほど小さな値に設定している。
【0093】
一方、調整部302の合成出力Sは、(1)式、(2)式、及び(3)式を参照して説明したように、低速側ではヨー方向出力Yを多く取り出し、高速側ではロール方向出力Rを多く取り出すように出力される。
【0094】
結果として、ふらつき抑制トルクTw(Tw=K3・S・C2)は、車体11が倒れようとする方向に操向ハンドル18を切るような補助力を、電動モータ90を通じてステアリング軸24に付与するが、低速側ではヨー方向出力Yに係るふらつきを抑制し、高速側ではロール方向出力Rに係るふらつきを抑制することができる。なお、ふらつき抑制トルクTw(Tw=K3・S・C2)は、変位検出センサ41の出力値に対応する合成出力Sと、比例値車速係数C2がそれぞれ大きいほど大きくなるので、対応する補助力が大きくなることが分かる。
【0095】
モータ駆動トルクTmが、パワーアシストトルクTpと、ふらつき抑制トルクTwの加算値(合成値)であるTm=Tp+Twとされてパワーステアリングが制御される場合には、停止状態から高速領域に至る全領域で適切な補助力が操向ハンドル18に付与される。例えば、停止状態においてパワーアシストルクTpによる補助力が付与されて駐車位置等への位置決めが容易化される。一本橋走行等を含む低速時におけるふらつきはヨー方向出力Yを多く取り出して検出し、高速時におけるふらつきはロール方向出力Rを多く取り出して検出して、車体11が倒れようとする方向に、ふらつき抑制トルクTwに応じた操舵補助力、換言すれば舵角を付与することで接地点を移動させ車体11が起きあがるように姿勢を制御することができる。
【0096】
上述した第2実施例によれば、自動二輪車10の姿勢を検出し、その検出結果に基づいて、自動二輪車10のステアリング系(操向ハンドル18、トップブリッジ16、ボトムブリッジ20、ステアリング軸24、フロントフォーク22、及び前輪WF等の少なくとも一つを含む)を制御することで自動二輪車10の姿勢を制御する姿勢制御システムを備えた自動二輪車10の姿勢制御装置において、前記姿勢制御システムは、自動二輪車10の車速Vsを検出する車速センサ35と、自動二輪車10のヨー方向とロール方向の変位を検出し、ヨー方向出力Yとロール方向出力Rを出力する変位検出センサ41と、検出された車速Vsに応じて、前記変位検出センサ41のヨー方向出力Yとロール方向出力Rを調整して合成出力Sを出力する調整部302と、合成出力Sに基づき自動二輪車10の姿勢を制御するアクチュエータ(この第2実施例では、電動モータ90)と、を備え、調整部302は、変位検出センサ41から出力されるヨー方向出力Yとロール方向出力Rをそれぞれ調整部302により調整して合成出力Sを出力する際、車速Vsが低いときには、ヨー方向出力Yとロール方向出力Rのうち、ヨー方向出力Yを多く取り出した合成出力Sを出力し、車速Vsが高いときには、ヨー方向出力Yとロール方向出力Rのうち、ロール方向出力Rを多く取り出した合成出力Sを出力するように構成したので、上述した第1実施例による作用効果に加えて、あるいは単独に、低速時及び高速時のどちらの場合であっても、自動二輪車10の変位、挙動を高精度に検出することができ、結果として、自動二輪車10の姿勢を高精度に制御することができる。
【0097】
なお、合成出力Sを、(1)式に示したように、ヨー方向出力Yに第1調整値AD1を乗算した値(Y×AD1)と、ロール方向出力Rに第2調整値AD2を乗算した値(R×AD2)との合成値(合成出力)(S=Y×AD1+R×AD2)として生成するように構成したので、第1及び第2調整値AD1、AD2の調整によりヨー方向出力Yとロール方向出力Yのうち、多く取り出す方の出力を決定でき、合成値(合成出力)Sを簡易に取り出すことができる。
【0098】
具体的には、低速側で大きく高速側で小さくなるように第1調整値AD1を設定し、逆に低速側で小さく高速側で大きくなるように第2調整値AD2を設定することで、低速側ではヨー方向出力を多く取り出し、高速側ではロール方向出力を多く取り出して簡易に取り出すことができる。
【0099】
なお、合成値(合成出力)Sを、(2)式に示したように、合成値(合成出力)S=ヨー方向出力Y×sinφ+ロール方向出力R×cosφとし、φのπ/2[ラジアン]側を低車速に対応させ、φの0[ラジアン]側を高車速に対応させているので、車速Vsに応じて、適切な値の合成値(合成出力)Sを算出することができる。
【0100】
また、姿勢を制御するアクチュエータである電動モータ90とは他のアクチュエータ104(図3、図9参照)により、車速Vsに基づいて、調整部302を通じて変位検出センサ41の取付角度φを直接変化させるようにすることで、簡単な構成で、車体11の変位、挙動を高精度に検出することができ、姿勢制御の精度も高めることができる。
【0101】
この場合、他のアクチュエータ104が、変位検出センサ41の初期取付角度を、車速ゼロを含む低車速域で、ヨー方向出力Yが主成分となる角度に設定するようにしているので、走行する上で最初に通過する低速領域において、高感度に自動二輪車10の変位、挙動を検出することができる。なお、初期取付角度は、例えば、ヨー方向出力Y>ロール方向出力R≠0となる角度に取り付ければよい。
【0102】
ここで、変位検出センサ41を、後輪接地点37とヘッドパイプ14を結ぶ線分39上、ヘッドパイプ14側でヘッドパイプ14の中央近傍に取り付けているので、自動二輪車10が走行する上で最初に通過するとともに、最も走行頻度の高い低速領域の制御を優先した取付角度φとすることができる。
【0103】
さらにまた、当該自動二輪車10のロール方向における傾き方向に電動モータ90(姿勢を制御するアクチュエータ)によりステアリング軸24に操舵補助力を付与するようにしているので、車体(車両)11のロール方向へのふらつきを抑制する(ふらつきを素早く吸収する)ことができる。
【0104】
[第3実施例:逆方向パワーアシストトルク算出ブロック400の構成と作用]
この第3実施例において、モータ駆動量制御部224は、傾斜走行判別部410から供給される傾斜走行判別フラグFrの状態により切り替えられ、傾斜走行判別フラグFrがFr=1のときに、補助力制御部としての逆方向パワーアシストトルク算出ブロック400の出力とモータ駆動部226の入力とが直結状態とされ、モータ駆動トルクTmが逆方向パワーアシストトルクTiとされる(Tm=Ti)。
【0105】
その一方、傾斜走行フラグFrがFr=0のときに、パワーアシストトルクTpとふらつき抑制トルクTwの加算値Tp+Twがモータ駆動トルクTmとしてモータ駆動部226に入力される、排他的制御{TmがTiか(Tp+Tw)のいずれか一方}とされる。
【0106】
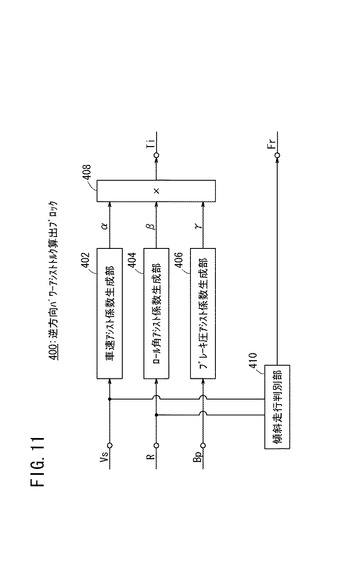
図11に示すように、逆方向パワーアシストトルク算出ブロック400は、傾斜センサとしての変位検出センサ41により検出されたロール方向出力Rに基づくロール角θrと、ブレーキ圧検出センサ33により検出されたブレーキ圧Bpとに基づき、傾斜走行判別フラグFrの値を決定して出力する傾斜走行判別部410と、車速センサ35により検出された車速Vsに応じて車速アシスト係数αを出力する車速アシスト係数生成部402と、ロール角θrに応じてロール角アシスト係数βを生成するロール角アシスト係数生成部404と、ブレーキ圧Bpに応じてブレーキ圧アシスト係数γを生成するブレーキ圧アシスト係数生成部406と、モータ駆動トルク算出部である乗算器408とを備える。
【0107】
乗算器408は、次の(5)式に示すように、車速アシスト係数αとロール角アシスト係数βとブレーキ圧アシスト係数γとを乗算して逆パワーアシストトルクTiを生成する。
Ti=α×β×γ …(5)
【0108】
図12に示すように、車速アシスト係数αは、車速Vsがゼロ値から閾値速度Vsthまでは、一定値あるいはゼロ値とされ、閾値速度Vsthから速度Vsの増加に応じて比例的に増加する特性412に設定されている。なお、閾値速度Vsthは、15[km/h]〜40[km/h]の間の値に設定される。
【0109】
図13に示すように、ブレーキ圧アシスト係数βは、ブレーキ圧Bpがゼロ値から閾値ブレーキ圧Bpthまでは、ゼロ値とされ、閾値ブレーキ圧Bpthからブレーキ圧Bpの増加に応じて比例的に増加する特性414に設定されている。閾値ブレーキ圧Bpthは、ブレーキの遊び等を含む誤動作防止の不感帯領域等の最大値に設定される。
【0110】
図14に示すように、ロール角アシスト係数γは、ゼロ値から正方向の閾値ロール角θrthまではゼロ値とされ閾値ロール角θからロール角θrの正方向の増加に応じて比例的に増加する特性416aと、ゼロ値から負方向(反対方向)の閾値ロール角−θrthまではゼロ値とされ、閾値ロール角−θrthより負の方向への増加に応じて比例的に減少する特性416bと、からなる特性416に設定されている。
【0111】
傾斜走行判別フラグFrは、ロール角θrが閾値ロール角|θrth|(絶対値)以上(θr≧|θrth|)であり、かつブレーキ圧Bpが閾値ブレーキ圧Bpth以上であるときに、セットとされて傾斜走行判別フラグFrがFr=1とされ、上記の少なくともいずれか1つの条件{ロール角θrが|θrth|未満(θr<|θrth|)、又はブレーキ圧Bpが閾値ブレーキ圧Bpth未満(Bp<Bpth)}が成立していない場合には、リセットされて傾斜走行判別フラグFrがFr=0とされる。
【0112】
この第3実施例において、傾斜走行判別フラグFrがFr=1にセットされているとき、操向ハンドル18の切れ方向に対して逆方向に、逆方向パワーアシストトルクTiが付与される。
【0113】
上述した第3実施例によれば、自動二輪車10が、例えばワインディング走行中等に、傾斜しながら走行(旋回走行)しており、かつブレーキ操作が検出されているときに、操向ハンドル18の切れ方向に対し、電動モータ90により逆方向に操舵補助力を付与するようにしているので、運転者によるブレーキレバー31等のブレーキの操作で操向ハンドル18に旋回方向へのトルクがかかるのに対して対向することができる。従って、車体11をバンクさせながらの旋回中にブレーキ操作をした場合の自動二輪車10の旋回の特性を向上させることができる。
【0114】
なお、操向ハンドル18の切れ方向は、車体11がロール(傾斜)している方向であるので、ロール角θrの符号、ここでは、ロール角アシスト係数γに織り込まれている。
【0115】
また、操向ハンドル18の切れ方向を判別するのに、ヘッドパイプ14に対するステアリング軸24の回転角を検出する操舵角センサを取り付けるようにしてもよい。
【0116】
また、操向ハンドル18の切れ方向に対し、逆方向に前記補助力を付与する際、ブレーキ圧Bpに応じた補助力を付与するようにしているので、ブレーキの状態に応じてリニアに補助力を制御することができる結果、操作フィーリングを向上させることができる。
【0117】
より具体的には、図13のブレーキ圧アシスト係数βの特性414に示すように、ブレーキ圧Bpが大きいほど大きい補助力が付与されるようにしている。旋回中にブレーキ圧Bpが大きくなるほど車体11の起きあがろうとする力が強くなるので、操向ハンドル18の切れ方向に対し、逆方向に加えられる補助力を、より大きくすることで車体11が起き上がろうとする力に対抗することができる。
【0118】
なお、ブレーキ圧Bpが所定圧である閾値ブレーキ圧Bpth以下の場合は、ブレーキ圧アシスト係数βをβ=0として、補助力の付与を禁止するようにしている。これにより、例えば、ブレーキの遊びを含む所定の範囲までは、必要以上に補助力が付与されないようにしておくことができる。
【0119】
なお、ロール角θrに応じて補助力を変化させるようにすることで、そのときのロール角θrの状態に応じてリニアに補助力を制御することができ、操作フィーリングを向上させることができる。
【0120】
より具体的には、図14に示すように、ロール角θrが大きくなるにつれて補助力が大きくなるようにしている。自動二輪車10では、ロール角θrが大きくなるほど車体の起きあがろうとする力が強くなるので、より補助力を大きくすることで車体11が起き上がろうとする力に対抗することができる。
【0121】
この場合において、ロール角θrが所定角度である閾値ロール角|θrth|以下の場合には補助力の付与を禁止するようにしている。これにより、車体11を直立させてブレーキを操作している通常のブレーキ操作において、違和感のないステアリング系のフィーリングを得ることができる。
【0122】
なお、逆方向パワーアシストトルクTiを算出する際は、ヨー方向出力Yは使用せず、ロール方向出力Rのみを使用するので、変位検出センサ41としてロール角速度のみを検出する加速度センサを、傾斜{自動二輪車10の左右方向(車幅方向)の傾斜}を検出する傾斜センサとして用いればよいことは言うまでもない。
【0123】
[第1〜第3実施例の総括的な動作説明]
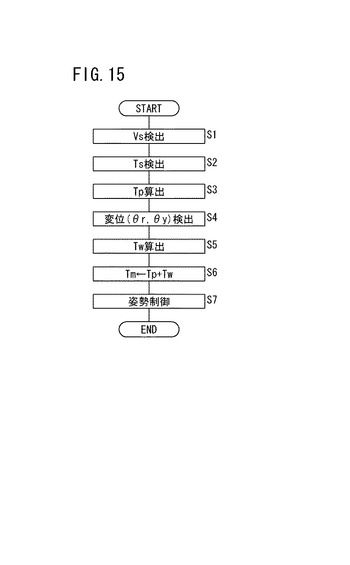
図15のフローチャートを参照して、まず第1及び第2実施例の全体的な動作について説明する。
【0124】
ステップS1において、車速センサ35により車速Vsが検出されるとともに、ステップS2において、操舵トルクセンサ112により操舵トルクTsが検出される。
【0125】
このとき、ステップS3において、パワーアシストトルク算出ブロック200により(3)式に示したパワーアシストトルクTpが算出される。
【0126】
さらに、ステップS4において、変位検出センサ41によりロール方向出力R(ロール角速度成分)及びヨー方向出力Y(ヨー角速度成分)が検出されると、ステップS5において、これらの出力R、Yと車速センサ35により検出されている車速Vsとに基づき、ふらつき抑制トルク算出ブロック300によりふらつき抑制トルクTwが算出される。
【0127】
次いで、ステップS6において、モータ駆動量制御部224によりモータ駆動量(モータ駆動トルク)Tmとして、パワーアシストトルクTpとふらつき抑制トルクTwの加算値(Tm←Tp+Tw)が算出されて、モータ駆動部226に供給される。
【0128】
ステップS7において、モータ駆動部226はトルクに応じた電流を電動モータ90に供給することで、電動モータ90、伝達機構86(ギア機構)、及びステアリング軸24を介して操向ハンドル18の操作力(操舵力)に加算される操舵補助力が付与される。
【0129】
なお、ステップS6では、モータ駆動量TmとしてパワーアシストトルクTpのみにより算出し(Tm←Tp)ステップS7における姿勢制御を行ってもよく(この場合、ステップS4、S5の処理は省略できる。)、あるいはステップS6では、モータ駆動量Tmとしてふらつき抑制トルクTwのみにより算出し(Tm←Tw)ステップS7における姿勢制御を行ってもよい(この場合、ステップS2、S3は省略できる。)。
【0130】
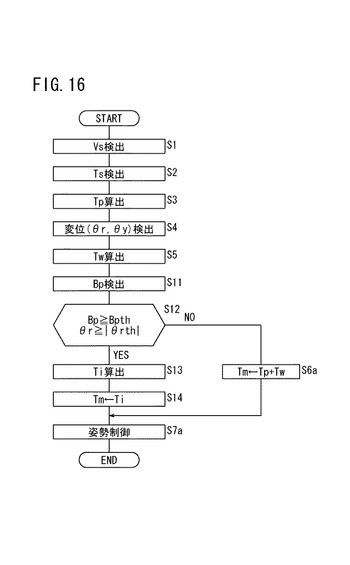
図16のフローチャートは、第1及び第2実施例と、第3実施例との排他制御を説明するフローチャートである。
【0131】
図16のフローチャートにおいて、ステップS5までの処理は、図15のフローチャートによる処理と同一の処理であり、ステップS6の処理がスキップされ、ステップS11において、ブレーキ圧検出センサ33によりブレーキ圧Bpが検出される。
【0132】
次いで、ステップS12において、ブレーキ圧Bpが閾値ブレーキ圧以上(Bp≧Bpth)、かつロール角θrが閾値ロール角θrthの絶対値|θrth|より大きいとき(θr≧|θrth|)、すなわち、ステップS12の判定が肯定的なとき、ステップS13において、逆方向パワーアシストトルク算出ブロック400により逆方向パワーアシストトルクTiが算出され、ステップS14において、モータ駆動量制御部224によりモータ駆動量Tmがこの逆方向パワーアシストトルクTiとされ、電動モータ90が駆動されることで、ステップS7aで操向ハンドル18の操作力(操舵力)に逆方向の補助力が加えられて姿勢制御(車体11が起き上がろうとする力に対抗する力としての補助力をステアリング系に印加する制御)がなされる。
【0133】
その一方、ステップS12の判定が否定的であった場合、上述したステップS6の処理と同一の処理がステップS6aでなされ、モータ駆動量制御部224によりモータ駆動量Tmとして、パワーアシストトルクTpとふらつき抑制トルクTwの加算値(Tm←Tp+Tw)が計算されて、モータ駆動部226に供給され、ステップS7aにおいて、操向ハンドル18に対し正方向の操舵助力が付与される。
【0134】
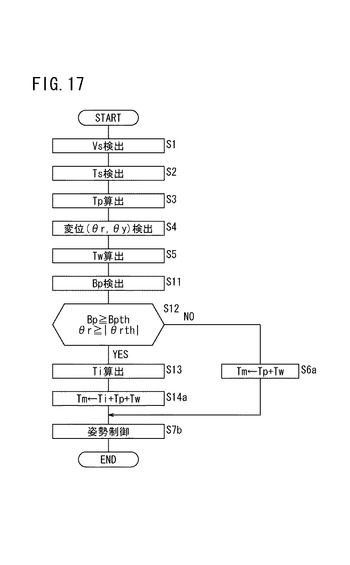
なお、図16のステップS14に代替して、図17の変形例のフローチャートのステップS14aに示すように、ステップS12の判定が肯定的であるとき、モータ駆動量TmをTm←Ti+Tp+Twとしてもよい。この場合、|Ti|>|Tp+Tw|となるよう、例えば、閾値車速Vth、閾値ロール角θrth、及び/又は閾値ブレーキ圧Bpthをチューニング(調整)しておくことにより、逆方向パワーアシストトルクTiによって旋回性を改善することができる。
【0135】
以上、この発明について好適な実施の形態を用いて説明したが、この発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更又は改良を加えることが可能であることが当業者に明らかである。その様な変更又は改良を加えた形態もこの発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。また、特許請求の範囲に記載された括弧書きの符号は、この発明の理解の容易化のために添付図面中の符号に倣って付したものであり、この発明がその符号をつけた要素に限定して解釈されるものではない。
【符号の説明】
【0136】
10…自動二輪車 11…車体
12…車体フレーム 14…ヘッドパイプ
16…トップブリッジ 18…操向ハンドル
20…ボトムブリッジ 22…フロントフォーク
24…ステアリング軸 26…パワーアシスト部
28…エンジン 30…排気マフラ
32…ピボット軸 34…スイングアーム
31…ブレーキレバー 33…ブレーキ圧検出センサ
35…車速センサ 37…後輪接地点
39…線分 41…変位検出センサ
36…メインフレーム 38…ピボットプレート
40…シートフレーム 42…燃料タンク
44…運転者シート 46…同乗者シート
48…グラブレール 50…トランクボックス
52、54…ステップ 56…車体カウリング
58…フロントカバー 60…サイドカバー
62…アンダーカバー 64…リアシートカウル
66…サドルバック 68…フロントフェンダ
70…リアフェンダ 72…ヘッドライト
74…ウインドシールド 76…サイドミラー
80…支持伝達部材 82…ベース部材
84…保持部材 86…伝達機構
88…回転駆動軸 89、91…ボルト
90…電動モータ 94…支持部材
96…ドライブギア 98…アイドルギア
100…ドリブンギア
102、220、320、412、414、416、416a、416b…特性
104…アクチュエータ 105…連結アーム
107…軸 110…軸受
112…操舵トルクセンサ 120…制御ユニット
200…パワーアシストトルク算出ブロック
202、304…ゲイン調整器 204…パワーアシスト車速係数生成部
206…補正係数生成部 208…加算器
210、308、408…乗算器 212…低域通過フィルタ
214…微分器 216…可変ゲイン調整器
224…モータ駆動量制御部 226…モータ駆動部
230…重心位置・重量設定部 300…ふらつき抑制トルク算出ブロック
302…調整部 306…比例車速係数生成部
400…逆方向パワーアシストトルク算出ブロック
402…車速アシスト係数生成部 404…ロール角アシスト係数生成部
406…ブレーキ圧アシスト係数生成部
410…傾斜走行判別部
【技術分野】
【0001】
この発明は、運転者の操舵負担を軽減する電動式パワーステアリング装置を採用した自動二輪車等の鞍乗型車両の操舵装置及びこれを搭載した自動二輪車に関する。
【背景技術】
【0002】
従来から、四輪の自動車では、操向ハンドルの軽い操舵力で車両を旋回できるように、電動モータの動力を操舵系に補助力として伝え、前記操向ハンドルの操舵力を軽減する電動式パワーステアリング装置が実用化されている(特許文献1)。
【0003】
特許文献1の図5、図6に開示されているように、四輪の自動車の電動式パワーステアリング装置では、車速が低くなるほど、操向ハンドルの操舵力(操舵トルク)に対する電動モータによる補助力が大きくなるように設定され(従って操向ハンドルの操舵が軽くなり)、車速が高くされるにつれ補助力が小さくなるように設定されている(従って操向ハンドルの操舵が重くなる)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−127420号公報([0014]、[0090])
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、自動二輪車等の鞍乗型車両では、狭い駐車スペースに駐車しなければならない場合が多々ある。その際には、鞍乗型車両の電源を入れた状態でエンジンが停止状態にあるときに、例えば、前輪を車軸に対して左右方向に位置させ全長を短くして駐車スペースに駐車させるため、あるいは狭い駐車スペースの最適駐車位置に車両を整列させて駐車させるために操向ハンドルの操作が必要とされる。
【0006】
しかしながら、鞍乗型車両に、上記特許文献1に係る技術を適用した場合、車速ゼロ近傍の状態では、補助力が最大となるので、停止状態における操向ハンドルの操作に対して補助力が過敏になりすぎて操向ハンドルの操作が行い難くなる可能性があり、利便性の向上が望まれる。
【0007】
この発明は、このような課題を考慮してなされたものであって、鞍乗型車両の停止状態における操向ハンドルの操作に対する補助力(操舵補助力)を適切にすることを可能とする鞍乗型車両の操舵装置及びこれを搭載した自動二輪車を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1に係る発明の鞍乗型車両の操舵装置は、操向ハンドル(18)と、前記操向ハンドル(18)に連結されるとともに、ヘッドパイプ(14)に回動自在に支持され、前記操向ハンドル(18)に加えられる操作力が付与されるステアリング軸(24)と、前記操作力に補助力を加える電動モータ(90)と、車速を検出する車速センサ(35)と、検出された車速に応じて前記電動モータ(90)による前記補助力を制御する補助力制御部(200)と、を備える鞍乗型車両の操舵装置であって、前記補助力制御部(200)は、前記車速センサが車速ゼロ近傍の状態を検出しているときは、前記補助力の最大値(C1max)と前記補助力の最小値(C1min)との間の所定の中間値(C1mid)を前記補助力として設定することを特徴とする。
【0009】
請求項2に係る発明は、請求項1記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、前記車速センサが、低車速領域の状態を検出しているときは前記補助力の前記最大値(C1max)を含むよう前記補助力を設定し、前記低車速領域よりも高速の高車速領域の状態を検出しているときは前記補助力の前記最小値(C1min)を含むよう前記補助力を設定し、車速ゼロ近傍の状態を検出しているときは、前記補助力の前記最大値(C1max)と前記補助力の前記最小値(C1min)との間の所定の中間値(C1mid)を前記補助力として設定することを特徴とする。
【0010】
請求項3に係る発明は、請求項2記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、前記車速ゼロ近傍の状態から前記低車速領域までの極低車速領域(Vsa)では、前記中間値(C1mid)を一定値に設定することを特徴とする。
【0011】
請求項4に係る発明は、請求項3記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、前記極低車速領域(Vsa)から前記低車速領域(Vsc)への遷移領域(Vsb)では、車速が高くなるにつれて補助力を漸次大きくなるように設定することを特徴とする。
【0012】
請求項5に係る発明は、請求項1〜4のいずれか1項に記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、少なくとも前記高車速領域では、前記鞍乗型車両の加速時に前記補助力が小さくなるように補正し、減速時に前記補助力が大きくなるように補正することを特徴とする。
【0013】
請求項6に係る発明は、請求項5に記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、相対的に重心の高い前記鞍乗型車両の前記補助力の補正幅は、相対的に重心の低い前記鞍乗型車両の補助力の補正幅に比較して、大きく設定することを特徴とする。
【0014】
請求項7に係る発明は、請求項5に記載の鞍乗型車両の操舵装置において、前記補助力制御部(200)は、相対的に車重の重い前記鞍乗型車両の前記補助力の補正幅は、相対的に車重の軽い前記鞍乗型車両の補助力の補正幅に比較して、大きく設定することを特徴とする。
【0015】
請求項8に係る発明の自動二輪車は、請求項1〜7のいずれか1項に記載の鞍乗型車両の操舵装置を搭載している。
【発明の効果】
【0016】
請求項1に係る発明によれば、操向ハンドルに付与される操作力に電動モータにより加えられる補助力を設定する補助力制御部は、車速センサが車速ゼロ近傍の状態を検出しているときは、補助力の最大値と補助力の最小値との間の所定の中間値を前記補助力として設定するようにしたので、車速ゼロ近傍の状態では、運転者の操向ハンドルの操作力に対して補助力が過敏になり過ぎないようにすることができ、適切な補助力を付与することができる。このため、狭い駐車スペースに駐車することが多い自動二輪車等の鞍乗型車両において、駐車の際に、操向ハンドルの操作が行い易くなり、利便性を向上させることができる。
【0017】
請求項2に係る発明によれば、補助力制御部は、前記車速センサが、低車速領域の状態を検出しているときは前記補助力の前記最大値を含むよう前記補助力を設定し、前記低車速領域よりも高速の高車速領域の状態を検出しているときは前記補助力の前記最小値を含むよう前記補助力を設定し、車速ゼロ近傍の状態を検出しているときは、前記補助力の前記最大値と前記補助力の前記最小値との間の所定の中間値を前記補助力として設定するようにしたので、車速ゼロ近傍の状態では、運転者の操向ハンドルの操作力に対して補助力が過敏になり過ぎないようにすることができることを含め、低車速領域及び高車速領域において車速領域に対応した適切な補助力を設定することができる。
【0018】
請求項3に係る発明によれば、補助力制御部は、前記車速ゼロ近傍の状態から前記低車速領域までの極低車速領域では、前記中間値を一定値に設定するようにしている。鞍乗型車両では、停止状態及び極低車速走行時では、車両の姿勢を維持すべく、運転者の操向ハンドルの操作(操舵)に余分な力が入りやすくなる傾向があるが、この請求項3に係る発明のように、補助力の最大値よりも小さく、かつ最小値よりも大きい一定の中間値の補助力を付与することで、運転者による操向ハンドルの操作力に対して補助力が過敏になりすぎないようにすることができる。すなわち、停止状態の操向ハンドルの操作(操舵)に対して適切な補助力を付与することができる。
【0019】
請求項4に係る発明によれば、前記極低車速領域から前記低車速領域への遷移領域では、車速が高くなるにつれて補助力が漸次大きくなるように設定しているので、補助力の急な変動を防止することができる。
【0020】
請求項5に係る発明によれば、少なくとも前記高車速領域では、加速時に前記補助力が小さくなるように補正し、減速時に前記補助力が大きくなるように補正するようにしている。少なくとも高車速領域での加速時はフロント荷重が下がって操向ハンドルの操舵が軽くなりやすいので補助力を小さくして(操向ハンドルの操舵は重くなる)ハンドル操舵感を得ることができ、減速時はフロント荷重が上がって操向ハンドルの操舵が重くなるので補助力を大きくして(操向ハンドルの操舵は軽くなる)ハンドル操舵を軽くすることで操作性が向上する。
【0021】
請求項6に係る発明によれば、相対的に重心の高い鞍乗型車両の補助力は、相対的に重心の低い鞍乗型車両の補助力の補正幅に比較して、大きく設定するようにしたので、重心が高くて加減速によるフロント荷重への影響が大きい車両であっても、適切な補助力を付与することができる。
【0022】
請求項7に係る発明によれば、相対的に車重の重い鞍乗型車両の補助力の補正幅は、相対的に車重の軽い鞍乗型車両の補助力に比較して、大きく設定するようにしたので、車重が重くて加減速によるフロント荷重への影響が大きい車両であっても、適切な補助力を付与することができる。
【図面の簡単な説明】
【0023】
【図1】実施の形態の自動二輪車の側面図である。
【図2】図1に示す自動二輪車の一部省略正面図である。
【図3】変位検出センサによるロール角とヨー角の説明図である。
【図4】車速に対する変位検出センサの取付角度の変更特性を示す説明図である。
【図5】パワーアシスト部の一部省略断面説明図である。
【図6】制御全体ブロック図である。
【図7】図6に示す制御全体ブロック中、パワーアシストトルク算出ブロックの詳細図である。
【図8】パワーアシスト車速係数の特性を示す説明図である。
【図9】図6に示す制御全体ブロック中、ふらつき抑制トルク算出ブロックの詳細図である。
【図10】比例車速係数の特性を示す説明図である。
【図11】図6に示す制御全体ブロック中、逆方向パワーアシストトルク算出ブロックの詳細図である。
【図12】逆パワーアシストトルク算出処理に供される車速アシスト係数の特性を示す説明図である。
【図13】逆パワーアシストトルク算出処理に供されるブレーキ圧アシスト係数の特性を示す説明図である。
【図14】逆パワーアシストトルク算出処理に供されるロール角アシスト係数の特性を示す説明図である。
【図15】第1実施例及び第2実施例の動作説明に供されるフローチャートである。
【図16】第3実施例の動作説明に供されるフローチャートである。
【図17】第3実施例の変形例の動作説明に供されるフローチャートである。
【発明を実施するための形態】
【0024】
以下、この発明について、好適な実施の形態を掲げ、添付の図面を参照しながら詳細に説明する。
【0025】
図1は、自動二輪車等の鞍乗型車両の操舵装置が搭載された自動二輪車10の側面図である。図2は、図1に示す自動二輪車10の一部省略正面図である。
【0026】
自動二輪車10は、車体11の車体フレーム12と、車体フレーム12の前端部に設けられたヘッドパイプ14と、ヘッドパイプ14の上端に摺接するトップブリッジ16に連結された操向ハンドル18と、前記トップブリッジ16の左右両端に連結されるとともにボトムブリッジ20を貫通して前輪WFを回転自在に支持する左右一対のフロントフォーク22と、前記ヘッドパイプ14内に挿通され一端がトップブリッジ16に固着されるとともに他端がボトムブリッジ20に回動自在に支持されるステアリング軸24と、ステアリング軸24に操舵補助力を伝達するパワーアシスト部26(図1参照)と、車体フレーム12に支持されたエンジン28と、エンジン28の図示しない排気管を介して連結された排気マフラ30と、一端が車体フレーム12の後下部のピボット軸32に揺動可能に支持され他端側が後輪WRを回転自在に支持するスイングアーム34とを備える。
【0027】
操向ハンドル18のブレーキレバー31近傍の図示しないブレーキリザーバタンクには、ブレーキ圧Bpを検出して出力するブレーキ圧検出センサ33(図2参照)が設けられている。図示しないフットブレーキ用のブレーキリザーバタンクにもブレーキ圧検出センサを設けてもよい。なお、ブレーキ圧検出センサ33は、その圧力によりブレーキレバー31が操作されているか否か(ブレーキがかけられているか否か)を検出するセンサ(ブレーキ検出センサ)として用いることもできる。なお、ブレーキ検出センサとしては、ブレーキレバー31の操作に応じてストップランプを点灯させるスイッチを用いることもできる。
【0028】
スイングアーム34には、後輪WRの車輪速から車速Vを検出する車速センサ35が取り付けられている。車速センサは、カウンターシャフトに取り付けることもできる。
【0029】
さらに、後輪WRが地面GRに接する接地点37とヘッドパイプ14の略中央部を結ぶ線分39上、ヘッドパイプ14側の先端に自動二輪車10のロール方向の変位とヨー方向の両方向の変位を検出する変位検出センサ41が設けられている。水平線(X軸という。)に対する傾斜角を変位検出センサ41の取付角φという。
【0030】
変位検出センサ41は、ロール方向出力R(ロール角速度成分)と、ヨー方向出力Y(ヨー角速度成分)を出力する。
【0031】
図3に示すように、ロール方向出力Rの積分値として得られるロール角θrは、車両前後方向に延びる水平線(X軸とする。)回りの回転角を表し、ヨー方向出力Yの積分値として得られるヨー角θyは、ここでは、後輪接地点37に対する変位検出センサ41の前記X軸に対し鉛直方向に直交する軸(Z軸とする。)回りの回転角を表す。ロール角θrは、自動二輪車10の左右方向(車幅方向)の傾斜角とも言える。
【0032】
変位検出センサ41は、当該変位検出センサ41(の軸)がZ軸方向を向いているときに、ヨー方向出力Yの検出感度が最大になるとともに、ロール方向出力Rの検出感度が最小になる一方、当該変位検出センサ41(の軸)がX軸方向を向いているときに、ヨー方向出力Yの検出感度が最小になるとともに、ロール方向出力Rの検出感度が最大になる特性を有している。
【0033】
そして、自動二輪車10では、低速時には、操向ハンドル18による転舵(ヨー)が発生してから、バンク(ロール)が発生する特性を有するので、ヨーが先行しヨー成分を多く検出できることが好ましい。その一方、高速時には、バンク(ロール)が発生してから転舵(ヨー)が発生する特性を有するので、ロールが先行しロール成分を多く検出できることが好ましい。これらの特性を自動二輪車10の転舵特性という。
【0034】
そこで、この出願の発明者等は、鋭意検討の結果、上述したように、後輪WRの接地点37とヘッドパイプ14の略中央部を結ぶ線分39に、変位検出センサ41の軸を同軸上とし、かつ線分39のヘッドパイプ14側に変位検出センサ41を取り付けることとした。
【0035】
このように取り付ければ、変位検出センサ41により速度V=0の停止時を含む低速領域を優先して自動二輪車10の姿勢を高精度に制御することができる。低速時から高速時までの全速度領域で、好適に、ヨー角θy及びロール角θrを検出することができる。
【0036】
この場合、検出された車速Vに応じて、変位検出センサ41のヨー方向出力Yとロール方向出力Rを調整して(重み付けして)合成出力を出力するように構成すると制御が簡単となりより好ましい。
【0037】
この合成出力は、上述した自動二輪車10の転舵特性から車速Vが低いときにはヨー方向出力Yを多く取り出した出力とされ、車速Vが高いときにはロール方向出力Rを多く取り出した出力とされることが好ましい。
【0038】
例えば、合成出力を、次の(1)式に示すように、ヨー方向出力Yに第1調整値AD1を乗算した値(Y×AD1)と、ロール方向出力Rに第2調整値AD2を乗算した値(R×AD2)との合成値(合成出力)Sを生成する。
S=Y×AD1+R×AD2 …(1)
【0039】
この場合、第1調整値AD1は、低速側で大きく高速側で小さくなるように設定し、第2調整値AD2は、低速側で小さく高速側で大きくなるように設定することが好ましい。
【0040】
そして、さらに、車速Vと変位検出センサ41の取付角φ(疑似取付角)を関係づければ(リンクさせれば)、第1調整値AD1をsinφ、第2調整値AD2をcosφ、取付角φ(疑似取付角)の取り得る値を0〜π/2以内として、取付角φ(疑似取付角)のπ/2[ラジアン]=90[゜]側は低車速に対応させ、取付角φ(疑似取付角)の0[ラジアン]=0[゜]側は高車速に対応させ、合成値(合成出力)Sを、次の(2)式で示すように算出するようにする。
S=Y×sinφ+Rcosφ …(2)
【0041】
図4は、(2)式に代入する取付角φ(疑似取付角)と車速Vとの関係の一例を示す特性102の特性図である。低速側の車速Vsで、例えば停止時に、φ=π/2とすることで、S=Y(R=0)となり、高速側の最高車速Vsで、φ=0とすることで、S=R(Y=0)となることが分かる。
【0042】
なお、この実施形態では、分かり易く説明するために、φの上限値をπ/2に設定しているが、これに限らず、φの上限値をπ/2未満の値に適宜設定するようにしてもよい。
【0043】
また、取付角φは、図3中に示すように、変位検出センサ41の取付角φを連結アーム105を介して機械的に直接変化させるアクチュエータ104を設け、車速Vに応じて変位検出センサ41の取付角φを、図3に示したようにアクチュエータ104によりX´方向(X軸と平行)とZ´軸方向(Z軸と平行)との間で変化させることで、合成値(合成出力)Sを直接調整するようにしてもよい。
【0044】
アクチュエータ104は、例えば、ヘッドパイプ14の空間内に電動モータを設け、一端が変位検出センサ41に連結され他端がアクチュエータ104(電動モータ)の軸107に連結される連結アーム105を車速Vに応じて図3に示す取付角φだけ回動させることで変位検出センサ41の取付角φを調整するように構成することで、合成値(合成出力)Yを、車速Vに応じて機械的(メカニカル)に調整することができる。
【0045】
再び図1において、車体フレーム12は、ヘッドパイプ14から左右に分岐して後斜め下方に延びる左右一対のメインフレーム36と、メインフレーム36の後部に接続される左右一対のピボットプレート38と、ピボットプレート38の前部及び後部から後方斜め上方に延びる左右一対のシートフレーム40とを有する。
【0046】
メインフレーム36の上方に燃料タンク42が設けられ、シートフレーム40の上部には、運転者シート44及び同乗者シート46が取付けられ、同乗者シート46の後方には、グラブレール48及びトランクボックス50が取付けられている。
【0047】
車体フレーム12のピボットプレート38には、運転者シート44に着座した運転者用の左右一対のステップ52と、同乗者シート46に着座した同乗者用の左右一対のステップ54とが取付けられている。
【0048】
車体フレーム12には、車体カウリング56が取付けられ、車体カウリング56は、車体前方を覆うフロントカバー58と、車体側部を覆う左右一対のサイドカバー60と、車体下部を覆うアンダーカバー62と、車体後部を覆うリアシートカウル64とを備えており、リアシートカウル64には、左右一対のサドルバック66が一体に形成されている。また、前輪WFを覆うフロントフェンダ68がフロントフォーク22に取付けられ、後輪WRを覆うリアフェンダ70がリアシートカウル64に取付けられている。
【0049】
フロントカバー58の前面には、ヘッドライト72が取付けられ、その上部にはウインドシールド74が取付けられ、左右端には、サイドミラー76が取付けられている。
【0050】
図5は、ステアリング軸24に操舵補助力を伝達するパワーアシスト部26を含むヘッドパイプ14近傍の一部省略説明図を示している。
【0051】
パワーアシスト部26は、基本的には、電動モータ90と、この電動モータ90を支持するとともに、電動モータ90の回転駆動力をステアリング軸24に伝達する支持伝達部材80とから構成される。
【0052】
電動モータ90は、ヘッドパイプ14のボトムブリッジ20側に、支持伝達部材80を介して取り付けられている。
【0053】
支持伝達部材80は、ベース部材82と保持部材84と、ベース部材82と保持部材84との間に介装される伝達機構86{ギア機構(歯車列)}とから構成されている。
【0054】
ベース部材82は、下端側がボトムブリッジ20に連結され、上端側の一端部が保持部材84を貫通するボルト89を介してヘッドパイプ14に連結されるとともに、上端側の他端部がボルト91を介して保持部材84に連結される。
【0055】
保持部材84には、回転駆動軸88有する電動モータ90が、バンド状部を有する支持部材94を通じて保持される。
【0056】
電動モータ90の回転駆動軸88には、同軸上にドライブギア96が固着され、ドライブギア96がアイドルギア98を介して扇形ギアであるドリブンギア100に歯合されている。
【0057】
ドリブンギア100は、ボトムブリッジ20の軸受110に回動自在に係合するステアリング軸24のボトムブリッジ20側に固着されている。
【0058】
ステアリング軸24の略中央部の細くされた部分には、歪ゲージトルクセンサであり、運転者による操向ハンドル18の操作力(操舵力)に応じた操舵トルクTsを検出して出力する操舵トルクセンサ112が取り付けられている。なお、操舵トルクTsは、歪ゲージトルクセンサの他、磁歪式トルクセンサ等を用いることができる。操舵トルクTsの符号により操向ハンドル18の切れ方向を併せて検出することができる。
【0059】
電動モータ90は、ヘッドパイプ14の前方下端部に、ヘッドパイプ14と軸が平行になるように配置しているので、スペース効率がよい。
【0060】
エンジン28の上部とメインフレーム36の下側とサイドカバー60により形成される空間部に、電動モータ90等を駆動する駆動部と制御部とを有する制御ユニット120が取り付けられている。
【0061】
図6は、制御ユニット120の詳細構成を説明するブロック図である。制御ユニット120は、ECU(Electronic Control Unit)を含んで構成され、ECUは、マイクロコンピュータを含む計算機であり、CPU(中央処理装置)、メモリであるROM(EEPROMも含む。)、RAM(ランダムアクセスメモリ)、その他、A/D変換器、D/A変換器等の入出力装置、計時部としてのタイマ等を有しており、CPUがROMに記録されているプログラムを読み出し実行することで各種機能実現部(機能実現手段)として機能する。
【0062】
この実施形態で、ECUは、それぞれが補助力制御部であるパワーアシストトルク算出ブロック200、ふらつき抑制トルク算出ブロック300、及び逆方向パワーアシストトルク算出ブロック400等として機能する。各ブロック200、300、400は、後述するように、単独に動作することが可能であり、全体として動作することも可能であり、任意の2つのブロックを組み合わせて動作することも可能である。
【0063】
[第1実施例:パワーアシストトルク算出ブロック200の構成と作用]
この第1実施例において、モータ駆動量制御部224は、入力と出力を直結する構成とされる(Tp=Tm)。
【0064】
図7に示すように、補助力制御部としてのパワーアシストトルク算出ブロック200は、運転者の操向ハンドル18に対する操舵力に基づき操舵トルクセンサ112により検出された操舵トルクTsをゲインK1倍した操舵トルクK1・Tsを出力するゲイン調整器202と、車速センサ35により検出された車速Vsに基づきパワーアシスト車速係数C1を生成するパワーアシスト車速係数生成部204と、車速Vsに基づき算出した加減速に応じて前記パワーアシスト車速係数C1を増減するための補正係数Caを生成する補正係数生成部206と、パワーアシスト車速係数C1と補正係数Caを加算し係数(C1+Ca)を出力する加算器208と、係数(C1+Ca)を操舵トルクK1・Tsに乗算した次の(3)式に示すパワーアシストトルク(補助トルク)Tpを出力するモータ駆動トルク算出部としての乗算器210とを備える。
Tp=K1・Ts・(C1+Ca) …(3)
【0065】
補正係数生成部206は、低域通過フィルタ(LPF)212と微分器214と可変ゲイン調整器216の直列回路により構成される。微分器214は、車速Vsを微分して加速(値が+)走行又は減速(値が−)走行あるいは定速(値が0又は値が0近傍)走行を検出する。一般に、計測データの微分値は、センサノイズの影響を大きく受ける。車速微分値の制御は、体感上、位相遅れの影響をあまり受けないため、微分器214による微分の前に低域通過フィルタ212によるLPF処理を掛けることで、不必要な変動を抑制するようにしている。
【0066】
乗算器210から出力されたパワーアシストトルクTp{Tp=K1・Ts・(C1+Ca)}は、モータ駆動量制御部224を通じてモータ駆動トルクTmとしてモータ駆動部226に供給される。
【0067】
ここで、例えば、モータ駆動トルクTmがパワーアシストトルクTp{Tp=K1・Ts・(C1+Ca)}に等しいとすると、モータ駆動部226は、モータ駆動トルクTm(この場合、Tm=Tp)を、トルクを発生させるためのモータ電流(トルク電流という。)に変換し、電動モータ90に供給する。
【0068】
トルク電流が供給されているとき、その期間、トルク電流の大きさに応じた駆動力を発生して電動モータ90が回転し、電動モータ90の回転が伝達機構86を通じてステアリング軸24を回転する力に変換され、ステアリング軸24を通じて操向ハンドル18に対し、モータ駆動トルクTm(この場合、パワーアシストトルクTp)に応じた補助力(操舵補助力)が付与される。
【0069】
図8は、制御ユニット120内の図示しないメモリ(記憶部)に記憶されているパワーアシスト車速係数C1の特性220を示している。なお、パワーアシスト車速係数C1は、(3)式に示したように、パワーアシストトルクTaを生成する際に操舵トルクK1・Tsに乗算される比例定数(係数)であるので、補助力(操舵補助力)に対応すると考えることができる。パワーアシスト車速係数C1は、例えば、0<C1≦1の範囲の値を取る。
【0070】
特性220から分かるように、低車速領域Vscでは、補助力(パワーアシスト車速係数C1)が最大値C1maxを含むよう当該補助力(パワーアシスト車速係数C1)を設定し、低車速領域Vscよりも高速の高車速領域Vsdでは、補助力(パワーアシスト車速係数C1)の最小値C1minを含むよう当該補助力(パワーアシスト車速係数C1)を設定し、停止状態(Vs=0)では、補助力(パワーアシスト車速係数C1)の最大値C1maxと補助力(パワーアシスト車速係数C1)の最小値C1minとの間の中間値C1midを設定する(C1min<C1mid<C1max)。中間値C1midの具体的な値は、操舵トルクK1・Sに対して50[%]の補助力を与えるように設定すればよい。
【0071】
図8に示すように、停止状態(Vs=0)から低車速領域Vscまでの車速ゼロ近傍の極低車速領域Vsaでは、一定の中間値C1midを設定する。パワーアシスト車速係数C1の中間値C1midの具体的な値は、例えば、操舵トルクK1・Tsに対して50[%]の補助力を与えるように設定すればよい(Tp=C1mid×K1・Ts=0.5×K1・Ts)。低車速領域Vscの最大値C1maxの具体的な値は、例えば、操舵トルクK1・Tsに対して60[%]の補助力を与えるように設定すればよい(Tp=C1mid×K1・Ts=0.6×K1・Ts)。
【0072】
さらに、図8に示すように、極低車速領域Vsaから低車速領域Vscへの遷移領域Vsbでは、車速Vsが高くなるにつれて補助力(パワーアシスト車速係数C1)が徐々に大きくなるように設定する。
【0073】
車速領域の具体的な車速について説明すると、それぞれ概ね、いわゆる一本橋走行等に係わる車速Vsを含む極低車速領域Vsaは、0≦Vsa≦15[km/h]の範囲、低車速領域Vscは、5≦Vsc≦25[km/h]の範囲、高車速領域(中車速領域)Vsdは、20≦Vsd≦45[km]の範囲、超高車速領域(高車速領域)Vseは、40[km/h]≦Vseの範囲と言える。上記の各領域は、車種、機種等に応じて、隣り合う範囲が重複しないように設定することが好ましい。
【0074】
補正係数生成部206は、特性220を有するパワーアシスト車速係数C1に対し、図8中の一点鎖線の減速時及び二点鎖線の加速時に示すように、加減速時には、前輪WF側のフロント分担加重の増減による操舵重さ感の変化が小さくなるようにゲインK2を調整して補正係数Caを設定する。具体的には、加速時には、フロント分担加重が減少するので、補助力が小さくなるようにゲインK2を調整して補正係数Caを小さくし、減速時には、フロント分担加重が増加するので、補助力が大きくなるようにゲインK2を調整して補正係数Caを大きくする。
【0075】
なお、図8中、一点鎖線の減速時の特性の上下に点線で示すように、重心が高く車重が大きいときには、減速時の操舵感の変化が顕著となるので、減速時のゲインK2の調整幅を補正係数Caが大きくなる側により大きくする特性とすることが好ましい。逆に重心が低く、車重が小さいときには、減速時の操舵感の変化が緩慢となるので、減速時のゲインK2の調整幅を補正係数Caが小さくなる側に小さくすることが好ましい。図示はしないが、同様に、二点鎖線の加速時の特性に対して上下に、重心が高く車重が大きいときには、加速時の操舵感の変化が顕著となるので、加速時のゲインK2の調整幅を補正係数Caが小さくなる側により大きくする特性(図8中、加速時特性の下側)とすることが好ましい。逆に重心が低く、車重が小さいときには、加速時の操舵感の変化が緩慢となるので、加速時のゲインK2の調整幅を補正係数Caが大きくなる側に小さくする特性(図8中、加速時特性の上側)とすることが好ましい。
【0076】
減速時、又は加速時におけるゲインK2の調整幅は、車種、機種等に応じた重心位置・重量設定部230の設定により可変ゲイン調整器216のゲインK2を変えるように構成している。
【0077】
また、図8から分かるように、パワーアシスト車速係数C1の特性220は、全車速において、操舵補助力が、操向ハンドル18の操作力に対して軽さが演出できるようにしつつ、車速上昇に伴い、操舵重さ感が徐々に重くなるように設定している。
【0078】
上述したように第1実施例によれば、操向ハンドル18に付与される操作力に電動モータ90により加えられる補助力を設定する補助力制御部としてのパワーアシストトルク算出ブロック200は、図8に示したように、低車速領域Vscでは、補助力の最大値を含むよう係数C1maxを設定し、低車速領域Vscよりも高速の高車速領域Vsd、Vseでは、前記補助力の最小値を含むよう係数C1minを設定し、停止状態では、前記補助力の最大値と前記補助力の最小値との間の中間値となるよう係数C1midを設定するようにしたので、自動二輪車10の停止状態において、強すぎず弱すぎず、適切な補助力を付与することができる。
【0079】
このため、狭い駐車スペースに駐車することが多い自動二輪車10の駐車の際に、操向ハンドル18の操作が行い易くなり、短時間で所定の駐車位置に駐車させることができる。
【0080】
この場合、補助力制御部としてのパワーアシストトルク算出ブロック200は、停止状態(Vs=0)から低車速領域Vscまでの極低車速領域Vsaでは、前記中間値となるように設定した係数C1midを一定値に設定するようにしている。自動二輪車10では、停止状態及び極低車速走行時では、車両の姿勢を維持すべく、運転者の操向ハンドル18の操作(操舵)に余分な力が入りやすくなる傾向があるが、補助力の最大値を付与する係数C1maxよりも小さく、かつ最小値Caminよりも大きい一定の中間値の補助力を付与する係数Camidを設定することで、運転者による操向ハンドル18の操作力に対して補助力が過敏になりすぎないようにすることができる。すなわち、停止状態の操向ハンドル18の操作(操舵)に対して適切な補助力を付与することができる。
【0081】
また、極低車速領域Vsaから低車速領域Vscへの遷移領域Vsbでは、車速が高くなるにつれて補助力に対応するパワーアシスト車速係数C1が大きくなるように設定しているので、補助力の急な変動を防止することができる。
【0082】
また、少なくとも高車速領域Vsd、Vseでは、加速時に前記補助力が小さくなるようにパワーアシスト車速係数C1を補正し、減速時に前記補助力が大きくなるようにパワーアシスト車速係数C1を補正するようにしている。高車速領域Vsd、Vseでの加速時はフロント荷重が下がって操向ハンドル18の操舵が軽くなりやすいので補助力を小さくして(操向ハンドルの操舵は重くなる)ハンドル操舵感を得ることができ、高車速領域Vsd、Vseでの減速時はフロント荷重が上がって操向ハンドル18の操舵が重くなるので補助力を大きくして(操向ハンドルの操舵は軽くなる)ハンドル操舵を軽くすることで高車速領域Vsd、Vseでの操作性が向上する。なお、加速時又は低速時における補助力の補正は、全車速域において設定するようにしてもよい。
【0083】
さらに、相対的に重心の高い自動二輪車10に対する補助力は、相対的に重心の低い自動二輪車10の補助力に比較して、大きく設定するようにしたので、重心が高くて加減速によるフロント荷重への影響が大きい車両であっても、適切な補助力を付与することができる。
【0084】
同様に、相対的に車重の重い自動二輪車10の補助力は、相対的に車重の軽い自動二輪車10の補助力に比較して、大きく設定するようにしたので、車重が重くて加減速によるフロント荷重への影響が大きい車両であっても、適切な補助力を付与することができる。
【0085】
このように、第1実施例では、パワーアシストトルク算出ブロック200のみを利用したパワーアシストトルクTpをモータ駆動トルクTm(Tm=Tp)として操向ハンドル18の操作力(操舵力)を補助する補助力を与えることができる。
【0086】
[第2実施例:ふらつき抑制トルク算出ブロック300の構成と作用]
この第2実施例において、モータ駆動量制御部224は、基本的には、加算器として動作する(Tm=Tp+Tw)。なお、モータ駆動量制御部224は、直結動作(Tm=Tw)にするように変更することもできる。
【0087】
図9に示すように、補助力制御部としてのふらつき抑制トルク算出ブロック300は、車両のヨー方向とロール方向の変位を検出する変位検出センサ41から出力されるヨー方向出力Yとロール方向出力Rを調整して合成出力Sを出力する調整部302と、合成出力SをゲインK3倍してふらつき抑制トルクK3・Sに変換して出力するゲイン調整器304と、車速センサ35から出力される車速Vsに基づきふらつき抑制車速係数(比例値車速係数)C2を生成する比例車速係数生成部306と、ふらつき抑制トルクK3・Sに比例車速係数C2を乗算した次の(4)式に示すふらつき抑制トルク(補助トルク)Twを出力するモータ駆動トルク算出部としての乗算器308と、を備える。
Tw=K3・S・C2 …(4)
【0088】
乗算器308から出力されたふらつき抑制トルクTw(Tw=K3・S・C2)は、モータ駆動量制御部224によりパワーアシストトルクTp=K1・Ts・(C1+Ca)に加算されて、モータ駆動部226に供給される。
【0089】
モータ駆動部226は、パワーアシストトルクTpとふらつき抑制トルクTwとの合成トルクTp+Tw=K1・Ts・(C1+Ca)+K3・S・C2をトルク電流に変換し、電動モータ90に供給する。
【0090】
トルク電流が供給されているとき、その期間、トルク電流の大きさに応じた駆動力を発生して電動モータ90が回転し、電動モータ90の回転が伝達機構86を通じてステアリング軸24を回転する力に変換され、ステアリング軸24を通じて操向ハンドル18に対し補助力(操舵補助力)が付与される。
【0091】
図10は、制御ユニット120中の図示しないメモリに記憶されている比例値車速係数C2の特性320を示している。比例値車速係数C2は、0<C2≦1の範囲の値を取る。車速Vsが0から数[km/h]程度の車速Vs1まで、比較的に大きな一定値が設定され、車速Vs1以降では、車速Vs=20[km/h]程度まで値が比例的に小さくなるように設定される。車速Vs=20[km]〜60[km/h]までは僅かに小さくなるように設定される。
【0092】
周知のように、自動二輪車10は、高速になるほど自立力が上がるので、比例値車速係数C2、換言すれば、ふらつき抑制の係数は、高速になるほど小さな値に設定している。
【0093】
一方、調整部302の合成出力Sは、(1)式、(2)式、及び(3)式を参照して説明したように、低速側ではヨー方向出力Yを多く取り出し、高速側ではロール方向出力Rを多く取り出すように出力される。
【0094】
結果として、ふらつき抑制トルクTw(Tw=K3・S・C2)は、車体11が倒れようとする方向に操向ハンドル18を切るような補助力を、電動モータ90を通じてステアリング軸24に付与するが、低速側ではヨー方向出力Yに係るふらつきを抑制し、高速側ではロール方向出力Rに係るふらつきを抑制することができる。なお、ふらつき抑制トルクTw(Tw=K3・S・C2)は、変位検出センサ41の出力値に対応する合成出力Sと、比例値車速係数C2がそれぞれ大きいほど大きくなるので、対応する補助力が大きくなることが分かる。
【0095】
モータ駆動トルクTmが、パワーアシストトルクTpと、ふらつき抑制トルクTwの加算値(合成値)であるTm=Tp+Twとされてパワーステアリングが制御される場合には、停止状態から高速領域に至る全領域で適切な補助力が操向ハンドル18に付与される。例えば、停止状態においてパワーアシストルクTpによる補助力が付与されて駐車位置等への位置決めが容易化される。一本橋走行等を含む低速時におけるふらつきはヨー方向出力Yを多く取り出して検出し、高速時におけるふらつきはロール方向出力Rを多く取り出して検出して、車体11が倒れようとする方向に、ふらつき抑制トルクTwに応じた操舵補助力、換言すれば舵角を付与することで接地点を移動させ車体11が起きあがるように姿勢を制御することができる。
【0096】
上述した第2実施例によれば、自動二輪車10の姿勢を検出し、その検出結果に基づいて、自動二輪車10のステアリング系(操向ハンドル18、トップブリッジ16、ボトムブリッジ20、ステアリング軸24、フロントフォーク22、及び前輪WF等の少なくとも一つを含む)を制御することで自動二輪車10の姿勢を制御する姿勢制御システムを備えた自動二輪車10の姿勢制御装置において、前記姿勢制御システムは、自動二輪車10の車速Vsを検出する車速センサ35と、自動二輪車10のヨー方向とロール方向の変位を検出し、ヨー方向出力Yとロール方向出力Rを出力する変位検出センサ41と、検出された車速Vsに応じて、前記変位検出センサ41のヨー方向出力Yとロール方向出力Rを調整して合成出力Sを出力する調整部302と、合成出力Sに基づき自動二輪車10の姿勢を制御するアクチュエータ(この第2実施例では、電動モータ90)と、を備え、調整部302は、変位検出センサ41から出力されるヨー方向出力Yとロール方向出力Rをそれぞれ調整部302により調整して合成出力Sを出力する際、車速Vsが低いときには、ヨー方向出力Yとロール方向出力Rのうち、ヨー方向出力Yを多く取り出した合成出力Sを出力し、車速Vsが高いときには、ヨー方向出力Yとロール方向出力Rのうち、ロール方向出力Rを多く取り出した合成出力Sを出力するように構成したので、上述した第1実施例による作用効果に加えて、あるいは単独に、低速時及び高速時のどちらの場合であっても、自動二輪車10の変位、挙動を高精度に検出することができ、結果として、自動二輪車10の姿勢を高精度に制御することができる。
【0097】
なお、合成出力Sを、(1)式に示したように、ヨー方向出力Yに第1調整値AD1を乗算した値(Y×AD1)と、ロール方向出力Rに第2調整値AD2を乗算した値(R×AD2)との合成値(合成出力)(S=Y×AD1+R×AD2)として生成するように構成したので、第1及び第2調整値AD1、AD2の調整によりヨー方向出力Yとロール方向出力Yのうち、多く取り出す方の出力を決定でき、合成値(合成出力)Sを簡易に取り出すことができる。
【0098】
具体的には、低速側で大きく高速側で小さくなるように第1調整値AD1を設定し、逆に低速側で小さく高速側で大きくなるように第2調整値AD2を設定することで、低速側ではヨー方向出力を多く取り出し、高速側ではロール方向出力を多く取り出して簡易に取り出すことができる。
【0099】
なお、合成値(合成出力)Sを、(2)式に示したように、合成値(合成出力)S=ヨー方向出力Y×sinφ+ロール方向出力R×cosφとし、φのπ/2[ラジアン]側を低車速に対応させ、φの0[ラジアン]側を高車速に対応させているので、車速Vsに応じて、適切な値の合成値(合成出力)Sを算出することができる。
【0100】
また、姿勢を制御するアクチュエータである電動モータ90とは他のアクチュエータ104(図3、図9参照)により、車速Vsに基づいて、調整部302を通じて変位検出センサ41の取付角度φを直接変化させるようにすることで、簡単な構成で、車体11の変位、挙動を高精度に検出することができ、姿勢制御の精度も高めることができる。
【0101】
この場合、他のアクチュエータ104が、変位検出センサ41の初期取付角度を、車速ゼロを含む低車速域で、ヨー方向出力Yが主成分となる角度に設定するようにしているので、走行する上で最初に通過する低速領域において、高感度に自動二輪車10の変位、挙動を検出することができる。なお、初期取付角度は、例えば、ヨー方向出力Y>ロール方向出力R≠0となる角度に取り付ければよい。
【0102】
ここで、変位検出センサ41を、後輪接地点37とヘッドパイプ14を結ぶ線分39上、ヘッドパイプ14側でヘッドパイプ14の中央近傍に取り付けているので、自動二輪車10が走行する上で最初に通過するとともに、最も走行頻度の高い低速領域の制御を優先した取付角度φとすることができる。
【0103】
さらにまた、当該自動二輪車10のロール方向における傾き方向に電動モータ90(姿勢を制御するアクチュエータ)によりステアリング軸24に操舵補助力を付与するようにしているので、車体(車両)11のロール方向へのふらつきを抑制する(ふらつきを素早く吸収する)ことができる。
【0104】
[第3実施例:逆方向パワーアシストトルク算出ブロック400の構成と作用]
この第3実施例において、モータ駆動量制御部224は、傾斜走行判別部410から供給される傾斜走行判別フラグFrの状態により切り替えられ、傾斜走行判別フラグFrがFr=1のときに、補助力制御部としての逆方向パワーアシストトルク算出ブロック400の出力とモータ駆動部226の入力とが直結状態とされ、モータ駆動トルクTmが逆方向パワーアシストトルクTiとされる(Tm=Ti)。
【0105】
その一方、傾斜走行フラグFrがFr=0のときに、パワーアシストトルクTpとふらつき抑制トルクTwの加算値Tp+Twがモータ駆動トルクTmとしてモータ駆動部226に入力される、排他的制御{TmがTiか(Tp+Tw)のいずれか一方}とされる。
【0106】
図11に示すように、逆方向パワーアシストトルク算出ブロック400は、傾斜センサとしての変位検出センサ41により検出されたロール方向出力Rに基づくロール角θrと、ブレーキ圧検出センサ33により検出されたブレーキ圧Bpとに基づき、傾斜走行判別フラグFrの値を決定して出力する傾斜走行判別部410と、車速センサ35により検出された車速Vsに応じて車速アシスト係数αを出力する車速アシスト係数生成部402と、ロール角θrに応じてロール角アシスト係数βを生成するロール角アシスト係数生成部404と、ブレーキ圧Bpに応じてブレーキ圧アシスト係数γを生成するブレーキ圧アシスト係数生成部406と、モータ駆動トルク算出部である乗算器408とを備える。
【0107】
乗算器408は、次の(5)式に示すように、車速アシスト係数αとロール角アシスト係数βとブレーキ圧アシスト係数γとを乗算して逆パワーアシストトルクTiを生成する。
Ti=α×β×γ …(5)
【0108】
図12に示すように、車速アシスト係数αは、車速Vsがゼロ値から閾値速度Vsthまでは、一定値あるいはゼロ値とされ、閾値速度Vsthから速度Vsの増加に応じて比例的に増加する特性412に設定されている。なお、閾値速度Vsthは、15[km/h]〜40[km/h]の間の値に設定される。
【0109】
図13に示すように、ブレーキ圧アシスト係数βは、ブレーキ圧Bpがゼロ値から閾値ブレーキ圧Bpthまでは、ゼロ値とされ、閾値ブレーキ圧Bpthからブレーキ圧Bpの増加に応じて比例的に増加する特性414に設定されている。閾値ブレーキ圧Bpthは、ブレーキの遊び等を含む誤動作防止の不感帯領域等の最大値に設定される。
【0110】
図14に示すように、ロール角アシスト係数γは、ゼロ値から正方向の閾値ロール角θrthまではゼロ値とされ閾値ロール角θからロール角θrの正方向の増加に応じて比例的に増加する特性416aと、ゼロ値から負方向(反対方向)の閾値ロール角−θrthまではゼロ値とされ、閾値ロール角−θrthより負の方向への増加に応じて比例的に減少する特性416bと、からなる特性416に設定されている。
【0111】
傾斜走行判別フラグFrは、ロール角θrが閾値ロール角|θrth|(絶対値)以上(θr≧|θrth|)であり、かつブレーキ圧Bpが閾値ブレーキ圧Bpth以上であるときに、セットとされて傾斜走行判別フラグFrがFr=1とされ、上記の少なくともいずれか1つの条件{ロール角θrが|θrth|未満(θr<|θrth|)、又はブレーキ圧Bpが閾値ブレーキ圧Bpth未満(Bp<Bpth)}が成立していない場合には、リセットされて傾斜走行判別フラグFrがFr=0とされる。
【0112】
この第3実施例において、傾斜走行判別フラグFrがFr=1にセットされているとき、操向ハンドル18の切れ方向に対して逆方向に、逆方向パワーアシストトルクTiが付与される。
【0113】
上述した第3実施例によれば、自動二輪車10が、例えばワインディング走行中等に、傾斜しながら走行(旋回走行)しており、かつブレーキ操作が検出されているときに、操向ハンドル18の切れ方向に対し、電動モータ90により逆方向に操舵補助力を付与するようにしているので、運転者によるブレーキレバー31等のブレーキの操作で操向ハンドル18に旋回方向へのトルクがかかるのに対して対向することができる。従って、車体11をバンクさせながらの旋回中にブレーキ操作をした場合の自動二輪車10の旋回の特性を向上させることができる。
【0114】
なお、操向ハンドル18の切れ方向は、車体11がロール(傾斜)している方向であるので、ロール角θrの符号、ここでは、ロール角アシスト係数γに織り込まれている。
【0115】
また、操向ハンドル18の切れ方向を判別するのに、ヘッドパイプ14に対するステアリング軸24の回転角を検出する操舵角センサを取り付けるようにしてもよい。
【0116】
また、操向ハンドル18の切れ方向に対し、逆方向に前記補助力を付与する際、ブレーキ圧Bpに応じた補助力を付与するようにしているので、ブレーキの状態に応じてリニアに補助力を制御することができる結果、操作フィーリングを向上させることができる。
【0117】
より具体的には、図13のブレーキ圧アシスト係数βの特性414に示すように、ブレーキ圧Bpが大きいほど大きい補助力が付与されるようにしている。旋回中にブレーキ圧Bpが大きくなるほど車体11の起きあがろうとする力が強くなるので、操向ハンドル18の切れ方向に対し、逆方向に加えられる補助力を、より大きくすることで車体11が起き上がろうとする力に対抗することができる。
【0118】
なお、ブレーキ圧Bpが所定圧である閾値ブレーキ圧Bpth以下の場合は、ブレーキ圧アシスト係数βをβ=0として、補助力の付与を禁止するようにしている。これにより、例えば、ブレーキの遊びを含む所定の範囲までは、必要以上に補助力が付与されないようにしておくことができる。
【0119】
なお、ロール角θrに応じて補助力を変化させるようにすることで、そのときのロール角θrの状態に応じてリニアに補助力を制御することができ、操作フィーリングを向上させることができる。
【0120】
より具体的には、図14に示すように、ロール角θrが大きくなるにつれて補助力が大きくなるようにしている。自動二輪車10では、ロール角θrが大きくなるほど車体の起きあがろうとする力が強くなるので、より補助力を大きくすることで車体11が起き上がろうとする力に対抗することができる。
【0121】
この場合において、ロール角θrが所定角度である閾値ロール角|θrth|以下の場合には補助力の付与を禁止するようにしている。これにより、車体11を直立させてブレーキを操作している通常のブレーキ操作において、違和感のないステアリング系のフィーリングを得ることができる。
【0122】
なお、逆方向パワーアシストトルクTiを算出する際は、ヨー方向出力Yは使用せず、ロール方向出力Rのみを使用するので、変位検出センサ41としてロール角速度のみを検出する加速度センサを、傾斜{自動二輪車10の左右方向(車幅方向)の傾斜}を検出する傾斜センサとして用いればよいことは言うまでもない。
【0123】
[第1〜第3実施例の総括的な動作説明]
図15のフローチャートを参照して、まず第1及び第2実施例の全体的な動作について説明する。
【0124】
ステップS1において、車速センサ35により車速Vsが検出されるとともに、ステップS2において、操舵トルクセンサ112により操舵トルクTsが検出される。
【0125】
このとき、ステップS3において、パワーアシストトルク算出ブロック200により(3)式に示したパワーアシストトルクTpが算出される。
【0126】
さらに、ステップS4において、変位検出センサ41によりロール方向出力R(ロール角速度成分)及びヨー方向出力Y(ヨー角速度成分)が検出されると、ステップS5において、これらの出力R、Yと車速センサ35により検出されている車速Vsとに基づき、ふらつき抑制トルク算出ブロック300によりふらつき抑制トルクTwが算出される。
【0127】
次いで、ステップS6において、モータ駆動量制御部224によりモータ駆動量(モータ駆動トルク)Tmとして、パワーアシストトルクTpとふらつき抑制トルクTwの加算値(Tm←Tp+Tw)が算出されて、モータ駆動部226に供給される。
【0128】
ステップS7において、モータ駆動部226はトルクに応じた電流を電動モータ90に供給することで、電動モータ90、伝達機構86(ギア機構)、及びステアリング軸24を介して操向ハンドル18の操作力(操舵力)に加算される操舵補助力が付与される。
【0129】
なお、ステップS6では、モータ駆動量TmとしてパワーアシストトルクTpのみにより算出し(Tm←Tp)ステップS7における姿勢制御を行ってもよく(この場合、ステップS4、S5の処理は省略できる。)、あるいはステップS6では、モータ駆動量Tmとしてふらつき抑制トルクTwのみにより算出し(Tm←Tw)ステップS7における姿勢制御を行ってもよい(この場合、ステップS2、S3は省略できる。)。
【0130】
図16のフローチャートは、第1及び第2実施例と、第3実施例との排他制御を説明するフローチャートである。
【0131】
図16のフローチャートにおいて、ステップS5までの処理は、図15のフローチャートによる処理と同一の処理であり、ステップS6の処理がスキップされ、ステップS11において、ブレーキ圧検出センサ33によりブレーキ圧Bpが検出される。
【0132】
次いで、ステップS12において、ブレーキ圧Bpが閾値ブレーキ圧以上(Bp≧Bpth)、かつロール角θrが閾値ロール角θrthの絶対値|θrth|より大きいとき(θr≧|θrth|)、すなわち、ステップS12の判定が肯定的なとき、ステップS13において、逆方向パワーアシストトルク算出ブロック400により逆方向パワーアシストトルクTiが算出され、ステップS14において、モータ駆動量制御部224によりモータ駆動量Tmがこの逆方向パワーアシストトルクTiとされ、電動モータ90が駆動されることで、ステップS7aで操向ハンドル18の操作力(操舵力)に逆方向の補助力が加えられて姿勢制御(車体11が起き上がろうとする力に対抗する力としての補助力をステアリング系に印加する制御)がなされる。
【0133】
その一方、ステップS12の判定が否定的であった場合、上述したステップS6の処理と同一の処理がステップS6aでなされ、モータ駆動量制御部224によりモータ駆動量Tmとして、パワーアシストトルクTpとふらつき抑制トルクTwの加算値(Tm←Tp+Tw)が計算されて、モータ駆動部226に供給され、ステップS7aにおいて、操向ハンドル18に対し正方向の操舵助力が付与される。
【0134】
なお、図16のステップS14に代替して、図17の変形例のフローチャートのステップS14aに示すように、ステップS12の判定が肯定的であるとき、モータ駆動量TmをTm←Ti+Tp+Twとしてもよい。この場合、|Ti|>|Tp+Tw|となるよう、例えば、閾値車速Vth、閾値ロール角θrth、及び/又は閾値ブレーキ圧Bpthをチューニング(調整)しておくことにより、逆方向パワーアシストトルクTiによって旋回性を改善することができる。
【0135】
以上、この発明について好適な実施の形態を用いて説明したが、この発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更又は改良を加えることが可能であることが当業者に明らかである。その様な変更又は改良を加えた形態もこの発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。また、特許請求の範囲に記載された括弧書きの符号は、この発明の理解の容易化のために添付図面中の符号に倣って付したものであり、この発明がその符号をつけた要素に限定して解釈されるものではない。
【符号の説明】
【0136】
10…自動二輪車 11…車体
12…車体フレーム 14…ヘッドパイプ
16…トップブリッジ 18…操向ハンドル
20…ボトムブリッジ 22…フロントフォーク
24…ステアリング軸 26…パワーアシスト部
28…エンジン 30…排気マフラ
32…ピボット軸 34…スイングアーム
31…ブレーキレバー 33…ブレーキ圧検出センサ
35…車速センサ 37…後輪接地点
39…線分 41…変位検出センサ
36…メインフレーム 38…ピボットプレート
40…シートフレーム 42…燃料タンク
44…運転者シート 46…同乗者シート
48…グラブレール 50…トランクボックス
52、54…ステップ 56…車体カウリング
58…フロントカバー 60…サイドカバー
62…アンダーカバー 64…リアシートカウル
66…サドルバック 68…フロントフェンダ
70…リアフェンダ 72…ヘッドライト
74…ウインドシールド 76…サイドミラー
80…支持伝達部材 82…ベース部材
84…保持部材 86…伝達機構
88…回転駆動軸 89、91…ボルト
90…電動モータ 94…支持部材
96…ドライブギア 98…アイドルギア
100…ドリブンギア
102、220、320、412、414、416、416a、416b…特性
104…アクチュエータ 105…連結アーム
107…軸 110…軸受
112…操舵トルクセンサ 120…制御ユニット
200…パワーアシストトルク算出ブロック
202、304…ゲイン調整器 204…パワーアシスト車速係数生成部
206…補正係数生成部 208…加算器
210、308、408…乗算器 212…低域通過フィルタ
214…微分器 216…可変ゲイン調整器
224…モータ駆動量制御部 226…モータ駆動部
230…重心位置・重量設定部 300…ふらつき抑制トルク算出ブロック
302…調整部 306…比例車速係数生成部
400…逆方向パワーアシストトルク算出ブロック
402…車速アシスト係数生成部 404…ロール角アシスト係数生成部
406…ブレーキ圧アシスト係数生成部
410…傾斜走行判別部
【特許請求の範囲】
【請求項1】
操向ハンドル(18)と、
前記操向ハンドル(18)に連結されるとともに、ヘッドパイプ(14)に回動自在に支持され、前記操向ハンドル(18)に加えられる操作力が付与されるステアリング軸(24)と、
前記操作力に補助力を加える電動モータ(90)と、
車速を検出する車速センサ(35)と、
検出された車速に応じて前記電動モータ(90)による前記補助力を制御する補助力制御部(200)と、を備える鞍乗型車両の操舵装置であって、
前記補助力制御部(200)は、
前記車速センサが車速ゼロ近傍の状態を検出しているときは、前記補助力の最大値(C1max)と前記補助力の最小値(C1min)との間の所定の中間値(C1mid)を前記補助力として設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項2】
請求項1記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
前記車速センサが、低車速領域の状態を検出しているときは前記補助力の前記最大値(C1max)を含むよう前記補助力を設定し、前記低車速領域よりも高速の高車速領域の状態を検出しているときは前記補助力の前記最小値(C1min)を含むよう前記補助力を設定し、車速ゼロ近傍の状態を検出しているときは、前記補助力の前記最大値(C1max)と前記補助力の前記最小値(C1min)との間の所定の中間値(C1mid)を前記補助力として設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項3】
請求項2記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
前記車速ゼロ近傍の状態から前記低車速領域までの極低車速領域(Vsa)では、前記中間値(C1mid)を一定値に設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項4】
請求項3記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
前記極低車速領域(Vsa)から前記低車速領域(Vsc)への遷移領域(Vsb)では、車速が高くなるにつれて補助力を漸次大きくなるように設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項5】
請求項1〜4のいずれか1項に記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
少なくとも前記高車速領域では、前記鞍乗型車両の加速時に前記補助力が小さくなるように補正し、減速時に前記補助力が大きくなるように補正する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項6】
請求項5に記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
相対的に重心の高い前記鞍乗型車両の前記補助力の補正幅は、相対的に重心の低い前記鞍乗型車両の補助力の補正幅に比較して、大きく設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項7】
請求項5に記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
相対的に車重の重い前記鞍乗型車両の前記補助力の補正幅は、相対的に車重の軽い前記鞍乗型車両の補助力の補正幅に比較して、大きく設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項8】
請求項1〜7のいずれか1項に記載の鞍乗型車両の操舵装置を搭載した自動二輪車。
【請求項1】
操向ハンドル(18)と、
前記操向ハンドル(18)に連結されるとともに、ヘッドパイプ(14)に回動自在に支持され、前記操向ハンドル(18)に加えられる操作力が付与されるステアリング軸(24)と、
前記操作力に補助力を加える電動モータ(90)と、
車速を検出する車速センサ(35)と、
検出された車速に応じて前記電動モータ(90)による前記補助力を制御する補助力制御部(200)と、を備える鞍乗型車両の操舵装置であって、
前記補助力制御部(200)は、
前記車速センサが車速ゼロ近傍の状態を検出しているときは、前記補助力の最大値(C1max)と前記補助力の最小値(C1min)との間の所定の中間値(C1mid)を前記補助力として設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項2】
請求項1記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
前記車速センサが、低車速領域の状態を検出しているときは前記補助力の前記最大値(C1max)を含むよう前記補助力を設定し、前記低車速領域よりも高速の高車速領域の状態を検出しているときは前記補助力の前記最小値(C1min)を含むよう前記補助力を設定し、車速ゼロ近傍の状態を検出しているときは、前記補助力の前記最大値(C1max)と前記補助力の前記最小値(C1min)との間の所定の中間値(C1mid)を前記補助力として設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項3】
請求項2記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
前記車速ゼロ近傍の状態から前記低車速領域までの極低車速領域(Vsa)では、前記中間値(C1mid)を一定値に設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項4】
請求項3記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
前記極低車速領域(Vsa)から前記低車速領域(Vsc)への遷移領域(Vsb)では、車速が高くなるにつれて補助力を漸次大きくなるように設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項5】
請求項1〜4のいずれか1項に記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
少なくとも前記高車速領域では、前記鞍乗型車両の加速時に前記補助力が小さくなるように補正し、減速時に前記補助力が大きくなるように補正する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項6】
請求項5に記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
相対的に重心の高い前記鞍乗型車両の前記補助力の補正幅は、相対的に重心の低い前記鞍乗型車両の補助力の補正幅に比較して、大きく設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項7】
請求項5に記載の鞍乗型車両の操舵装置において、
前記補助力制御部(200)は、
相対的に車重の重い前記鞍乗型車両の前記補助力の補正幅は、相対的に車重の軽い前記鞍乗型車両の補助力の補正幅に比較して、大きく設定する
ことを特徴とする鞍乗型車両の操舵装置。
【請求項8】
請求項1〜7のいずれか1項に記載の鞍乗型車両の操舵装置を搭載した自動二輪車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−76490(P2012−76490A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−220992(P2010−220992)
【出願日】平成22年9月30日(2010.9.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年9月30日(2010.9.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]