
鞍乗型車両
【課題】乗車フィーリングを損なうことなく、エンジン回転速度または車両速度が規定値を超えないようにすることのできる鞍乗型車両を提供する。
【解決手段】鞍乗型車両は、エンジン12と、エンジン12に空気を導入する吸気管33と、アクセルグリップ4bの操作量に応じて制御されるスロットルバルブ32と、エンジン12の回転速度Rを検出するエンジン回転速度検出部21または車両速度Vを検出する車速検出部23と、ECU10と、を備えている。ECU10は、エンジン回転速度Rが規定回転速度RLより小さい設定回転速度RSまではスロットルバルブ32の開度を増加または一定を保ち、エンジン回転速度Rが設定回転速度RSを超えるとアクセルグリップ4bの操作に拘わらずスロットルバルブ32の開度を減少させる。
【解決手段】鞍乗型車両は、エンジン12と、エンジン12に空気を導入する吸気管33と、アクセルグリップ4bの操作量に応じて制御されるスロットルバルブ32と、エンジン12の回転速度Rを検出するエンジン回転速度検出部21または車両速度Vを検出する車速検出部23と、ECU10と、を備えている。ECU10は、エンジン回転速度Rが規定回転速度RLより小さい設定回転速度RSまではスロットルバルブ32の開度を増加または一定を保ち、エンジン回転速度Rが設定回転速度RSを超えるとアクセルグリップ4bの操作に拘わらずスロットルバルブ32の開度を減少させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は鞍乗型車両に関する。
【背景技術】
【0002】
鞍乗型車両において、エンジン回転速度または車両速度が規定値に達するような運転が行われると、エンジン回転速度または車両速度が規定値を超えないようにした技術が知られている。このような技術として、例えば、下記特許文献1に記載された技術が知られている。
【0003】
下記特許文献1に記載の技術は、鞍乗型車両のうち、電子制御スロットルを備えた自動二輪車であって、エンジン回転速度または車両速度が規定値に達すると、スロットルバルブの開度をアクセル操作量に応じたスロットルバルブの標準開度よりも減少させるようにしている。その結果、吸入空気量が絞られてエンジン出力が制限される。これにより、エンジン回転速度または車両速度は規定値を超えないように制限される。また、下記特許文献1に記載の技術は、エンジン点火のカットや間引き、燃料供給の停止等でエンジン出力を制限するようにしていた従来のものに比較して、出力制限時にエンジンの燃焼の安定性を向上できることを特長とする。したがって、運転者の乗車フィーリングの低下や排気性能の低下を防止することができるとしている。
【特許文献1】特開2006−104953号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載の鞍乗型車両では、規定値に達したことを契機として、スロットルバルブの開度を減少させる制御を開始するので、規定値を超えないように制御すると乗車フィーリング(具体的には減速感が出てしまう)が損なわれ、さらに場合によっては規定値を超えてしまうおそれがある。
【0005】
本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、乗車フィーリングを損なうことなく、エンジン回転速度または車両速度が規定値を超えないようにすることのできる鞍乗型車両を提供することにある。
【課題を解決するための手段】
【0006】
本発明の鞍乗型車両は、エンジンと、前記エンジンに空気を導入する吸気通路と、前記吸気通路に配置され、アクセル操作子の操作量に応じて制御される電子制御式のスロットル弁と、前記エンジンの回転速度または車両速度を検出する検出装置と、前記検出装置によって検出されるエンジン回転速度または車両速度である検出速度が規定値以下となるよう前記スロットル弁を制御する制御装置と、を備えている。また、前記制御装置は、前記検出速度が前記規定値よりも小さい所定速度までは前記スロットル弁の開度を増加または一定を保ち、前記検出速度が前記規定値よりも小さい所定速度を超えると、前記スロットル弁の開度を減少させる。
【発明の効果】
【0007】
以上のように、本発明によれば、乗車フィーリングを損なうことなく、エンジン回転速度または車両速度が規定値を超えないようにすることのできる鞍乗型車両を提供することができる。
【発明を実施するための最良の形態】
【0008】
《実施形態1》
以下、図面を参照しながら本発明の実施形態について説明する。
【0009】
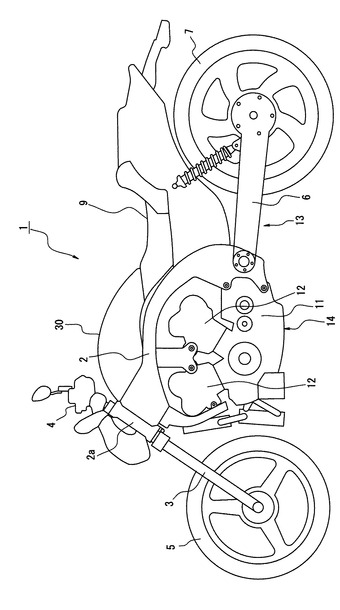
本発明の実施形態における鞍乗型車両の一例として、自動二輪車1を図1に示す。自動二輪車1は、所謂モータサイクルタイプの自動二輪車である。なお、本発明の実施形態における鞍乗型車両は、例えば、ロードレーサタイプ、オフロードタイプ、スクータータイプ、所謂モペットタイプの自動二輪車であってもよい。また、本発明の実施形態における鞍乗型車両は、ATV、四輪バギー等であってもよい。以下の説明では、左右の方向は、特に限定した記載のない限り、自動二輪車1のシート9に着座したライダーから見た左右の方向をいうものとする。図1に示すように、本発明の実施形態に係る自動二輪車1は、ヘッドパイプ2aを有する車体フレーム2を備えている。車体フレーム2には、燃料タンク30およびシート9が支持されている。
【0010】
ヘッドパイプ2aには、フロントフォーク3が旋回可能に支持されている。フロントフォーク3の上部には、ハンドル4が取り付けられている。フロントフォーク3の下部には、前輪5が回転自在に支持されている。
【0011】
エンジン12は、車体フレーム2に懸架されている。本実施形態では、エンジン12は燃料にガソリンを用いた、V型2気筒の4サイクルエンジンである。ただし、エンジン12の気筒数や型式は限定されない。エンジン12は、2サイクルでもよい。また、エンジン12は空冷式であっても水冷式であってもよい。
【0012】
車体フレーム2の後端部には、スイングアーム6が揺動可能に取り付けられている。スイングアーム6の後端部には、後輪7が回転可能に取り付けられている。
【0013】
自動二輪車1は、複数段の変速段を有する変速装置11を備えている。変速装置11により、自動二輪車1は、所定の変速比で以って走行することができる。つまり、変速装置11は、エンジン12の回転速度を所定の回転速度に変更する。変速装置11は、車両速度やエンジン回転速度に応じて自動的に変速比が変更される、いわゆるAT(Automatic Transmission)の形態でもよい。また、変速装置11は、ライダーの操作により変速比が変更されるMT(Manual Transmission)の形態でもよい。自動二輪車1は、エンジン12と変速装置11とで、パワーユニット14を構成している。本実施形態において、変速装置11は、5段の変速段を有している。ただし、変速装置11の変速段数は限定されない。変速装置11の変速段数は、自動二輪車1の走行において、必要な変速比が得られる段数であればよい。
【0014】
自動二輪車1の後輪7は、動力伝達機構13を介して、エンジン12に接続している。後輪7は、エンジン12の回転に基づいて駆動する。エンジン12の回転は、変速装置11を経て、動力伝達機構13を介し、後輪7へ伝達する。動力伝達機構13の形態は、特に限定されない。動力伝達機構13は、エンジン12の回転をベルトにより後輪7に伝達するベルトドライブの機構を有していてもよい。また、動力伝達機構13は、エンジン12の回転をチェーンにより後輪7に伝達するチェーンドライブの機構でもよく、エンジン12の回転をシャフトの回転により後輪7に伝達するシャフトドライブの機構を有していてもよい。
【0015】
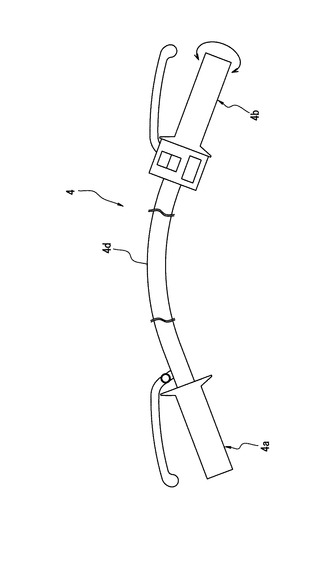
図2は、自動二輪車1のフロントフォーク3の上部に取り付けられるハンドル4を示している。ハンドル4は、ヘッドパイプ2aに接続されたハンドルバー4dを備えている。ハンドル4は、ハンドルバー4dの左端部に位置する左グリップ部4aと、ハンドルバー4dの右端部に位置する右グリップ部4bとを備えている。右グリップ部4bは、ハンドルバー4dに対して回転可能である。ライダーが、この右グリップ部4bを回転させることで、スロットルバルブ32(図3参照)が操作され、スロットル開度が調整される。本実施形態において、右グリップ部4bをアクセルグリップ4bと呼称する。なお、アクセルグリップ4bには、アクセル開度センサ44(図3参照)が取り付けられている。アクセルグリップ4bの操作量は、アクセル開度センサ44によって検出される。
【0016】
また、図3に示すように、燃料供給装置31は、燃料タンク30にある燃料をエンジン12に供給する。燃料供給装置31は、吸気管33に燃料を直噴する形態のものでもよい。また、燃料供給装置31は、吸気管33の空気の流れより燃料を吸い上げて混合気を作り出す形態のものでもよい。吸気管33には、スロットルバルブ32が配置されている。このスロットルバルブ32は、吸気管33の流路面積を調整することにより、吸気管33を流れる空気量または燃料量を調整するためのものである。スロットルバルブ32は、アクセルグリップ4b(図2参照)の操作に基づいて駆動される。アクセルグリップ4bの操作により、スロットルバルブ32が開かれ、吸気管33を流れる吸気量が増大する。それに従い、エンジン12は、出力が変化する。
【0017】
また、例えば、スロットルバルブ32には、スロットル開度センサ42が取り付けられている。スロットルバルブ32の開度は、スロットル開度センサ42によって、検出される。
【0018】
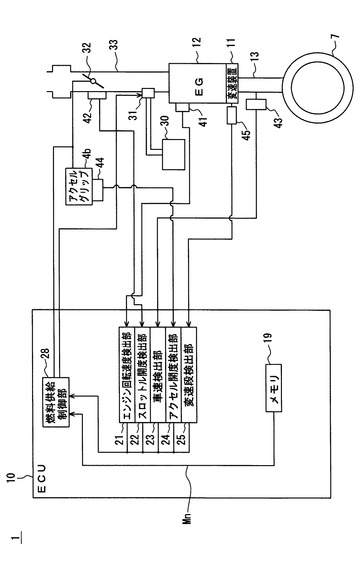
図3は、本実施形態に係るスロットルの制御システムを示している。自動二輪車1は、制御装置としてのECU10を備えている。ECU10は、自動二輪車1の走行状態またはエンジン12の出力状態を検出する検出装置として、エンジン回転速度検出部21、スロットル開度検出部22、車速検出部23、アクセル開度検出部24、変速段検出部25を有している。また、ECU10は、自動二輪車1の走行に必要なデータ等を記憶したメモリ19を備えている。
【0019】
エンジン回転速度検出部21は、エンジン回転速度センサ41にて検出されるエンジン12の回転速度に基づく信号を入力する。例えば、自動二輪車1には、エンジン回転速度センサ41が設けられている。エンジン回転速度センサ41は、エンジン12の回転速度を直接的または間接的に検出する。エンジン回転速度センサ41が間接的にエンジン12の回転速度を検出する場合、エンジン回転速度検出部21は、算出等の機能を有する。この場合、エンジン回転速度検出部21は、エンジン12の出力状態より、エンジン回転速度を算出する。もしくは、ECU10が図示しない算出部を有し、算出部にてエンジン回転速度が算出されることにしてもよい。この場合、算出部は、エンジン12の出力状態より、エンジン回転速度を算出する。エンジン回転速度検出部21は、算出されたエンジン回転速度に基づく信号を入力する。
【0020】
スロットル開度検出部22は、スロットルバルブ32の開度に基づく信号を入力する。図3では、自動二輪車1には、スロットル開度センサ42が設けられている。スロットル開度センサ42は、スロットルバルブ32の開度を検出する。
【0021】
車速検出部23は、車速センサ43にて検出される自動二輪車1の車両速度に基づく信号を入力する。図3では、自動二輪車1には、動力伝達機構13に車速センサ43が設けられている。ただし、車速センサ43は、図3に示す動力伝達機構13に取り付けられることに限定されない。車速センサ43は、エンジン12に取り付けられ、エンジン12の出力状態を読み取ることにしてもよい。車速センサ43は、変速装置11に取り付けられ、変速装置11の回転を読み取ることにしてもよい。また、車速センサ43は、後輪7または前輪5(図1参照)に取り付けられ、前輪5または後輪7の回転速度を読み取ることにしてもよい。車速センサ43は、自動二輪車1の車速を間接的に検出する。それにより、車速検出部23は、算出等の機能を有し、エンジン12の出力状態または前輪5の回転速度または後輪7の回転速度より、車速を算出する。もしくは、ECU10が図示しない算出部を有し、算出部にて車速が算出されることにしてもよい。この場合、車速検出部23は、算出された車速に基づく信号を入力する。
【0022】
アクセル開度検出部24は、アクセルグリップ4bの開閉に基づく信号を入力する。前述したように、アクセルグリップ4bには、アクセル開度センサ44が取り付けられている。アクセル開度センサ44は、アクセルグリップ4bの操作量を検出する。
【0023】
変速段検出部25は、変速装置11の現在の変速段に基づく信号を入力する。変速装置11の現在の変速段は、変速段センサ45にて検出される。図3では、変速段センサ45は、変速装置11に取り付けられている。
【0024】
燃料供給制御部28は、前記各検出部にて検出された値、および、メモリ19に記憶されたマップMnにおけるエンジン回転速度RP、スロットル開度THP、アクセル開度GP等に基づき、スロットルバルブ32のスロットル開度THを制御する。ここで、RP、GP、THPは、マップMn上の各点におけるエンジン回転速度R、アクセル開度G、およびスロットル開度THの設定値である。燃料供給制御部28は、メモリ19より、所定のマップMnを入力する。また、燃料供給制御部28は、エンジン回転速度検出部21より、エンジン回転速度に基づく信号を入力する。同様に、燃料供給制御部28は、スロットル開度検出部22より、スロットル開度に基づく信号を入力し、車速検出部23より、車速に基づく信号を入力し、アクセル開度検出部24より、アクセル開度に基づく信号を入力し、変速段検出部25より、現在の変速段に基づく信号を入力する。スロットルバルブ32は、マップMnおよび前記各検出部にて検出された値に基づく信号を燃料供給制御部28より入力する。スロットルバルブ32は、前記信号に基づき、バルブの開度が調整される。これにより、エンジン12への吸気量が調整される。エンジン12は、スロットルバルブ32の開閉により調整された吸気量に基づき、出力が変化する。
【0025】
また、燃料供給制御部28は、前記各検出部にて検出された値、および、メモリ19に記憶されたマップMnにおけるエンジン回転速度RP、スロットル開度THP、アクセル開度GP等に基づき、燃料供給装置31のエンジン12への燃料供給量を制御する。燃料供給装置31は、前記信号に基づき、エンジン12への燃料の供給量を調整する。エンジン12は、燃料供給装置31より供給される燃料量に基づき、出力が変化する。
【0026】
記憶装置19は、自動二輪車1の運転等に必要なデータを記憶している。本実施形態に本実施形態において、記憶装置19は、以下に記載するマップMn(以下の説明において、添字nは変速装置11における変速段数を表すものとする)を少なくとも記憶している。
【0027】
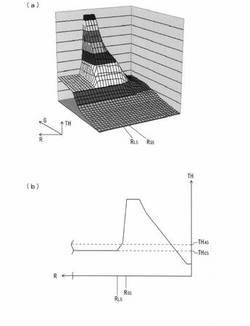
図4示すように、本実施形態に係るマップMnは、エンジン回転速度R、スロットル開度TH、アクセル開度Gの値を設定している。マップMnは、変速装置11に係る変速段ごとに設定されている。本実施形態において、変速装置11は、5段の変速段を有している。そのため、マップMnは、第1速から第5速まで、5つ設定されている。以下において、第1速のマップは、マップM1で示す。第2速から第5速まで、順に、マップM2、マップM3、マップM4、および、マップM5で示す。自動二輪車1の走行において使用されるマップMnは、変速装置11における各変速段に応じて切り替えられる。
【0028】
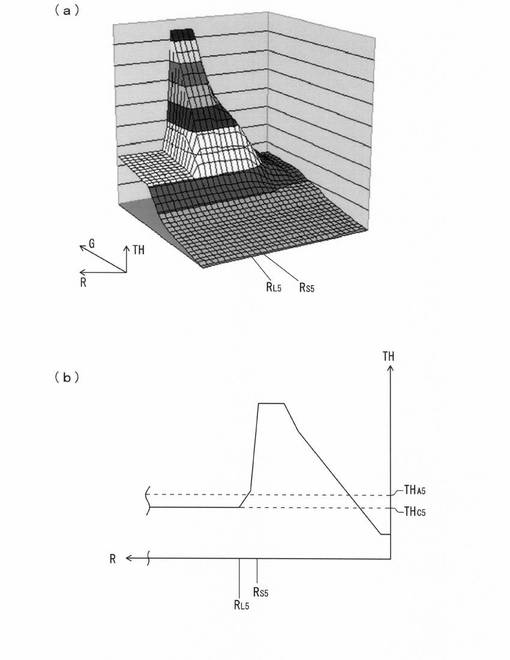
図4は、マップM5を示している。図4(a)に示すように、マップM5を含め、本実施形態に係るマップMnは、エンジン回転速度R、スロットル開度TH、アクセル開度Gの値を設定している。一方、図4(b)は、アクセル開度Gが90°である場合について、エンジン回転速度Rとスロットル開度THとの二次元を例として示す。それぞれの単位は、例えば、エンジン回転速度Rが、(r/min)、スロットル開度THおよびアクセル開度Gが、(deg)で表される。ただし、それぞれの単位は、前記のように設定されることに限定されない。それぞれの単位は、例えば、エンジン回転速度Rが、(m/s)、スロットル開度THおよびアクセル開度Gが、(%)で表されていてもよい。前記の記号について、rは回転数、minは時間(分)、degは角度、mは長さ(メートル)、および、sは時間(秒)である。
【0029】
図4(a)および図4(b)に示すように、エンジン回転速度Rが、所定の値を超えると、スロットル開度THは、所定のアクセル開度G以上では減少していく。このときの、所定のエンジン回転速度Rを設定回転速度RS5と称する。本実施形態において、設定回転速度RS5は、7500r/minに設定されている。設定回転速度RS5は、アクセル開度Gによらず一定値である。
【0030】
所定のアクセル開度G以上において、設定回転速度RS5を超えてエンジン回転速度Rが上昇した後、スロットル開度THは、規定のエンジン回転速度Rで一定となる。このときの、規定のエンジン回転速度Rを規定回転速度RL5と称する。規定回転速度RL5は、エンジン12の運転性能または自動二輪車1の走行性能に基づく規定車速VLに対応した値である。また、図4(a)および図4(b)に示すように、本実施形態において、規定回転速度RL5は、8500r/minに設定されている。規定回転速度RL5は、マップM5上において、アクセル開度Gによらず、一定値として設定されている。また、規定回転速度RL5を超え、一定値となるスロットル開度THを収束開度THC5と称する。第5速における収束開度THC5は、自動二輪車1の加速が可能な加速可能開度THA5よりも小さいスロットル開度THである。そのため、自動二輪車1は、規定回転速度RL5を超えて走行する場合は、加速することができない。
【0031】
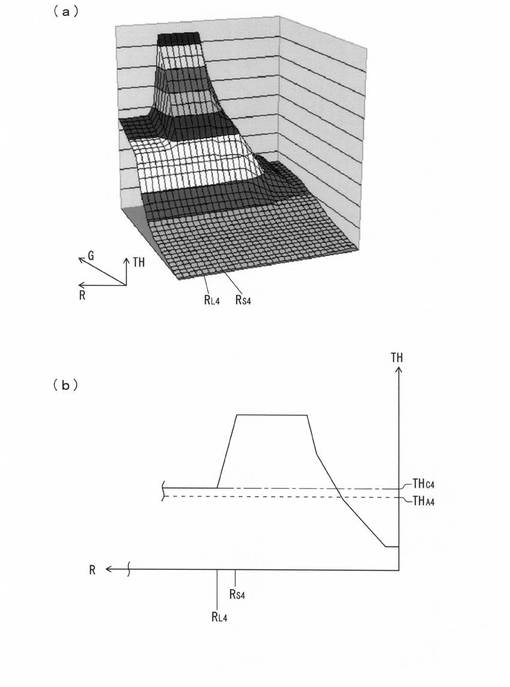
図5は、マップM4を示している。図5(a)は、エンジン回転速度R、スロットル開度TH、アクセル開度Gの値を示す三次元マップである。一方、図5(b)は、アクセル開度Gが90°である場合について、エンジン回転速度Rとスロットル開度THとの二次元を例として示す。
【0032】
図5(a)および図5(b)に示すように、エンジン回転速度Rが、所定の値を超えると、スロットル開度THは、所定のアクセル開度G以上では減少していく。このときの、所定のエンジン回転速度Rを設定回転速度RS4と称する。本実施形態において、設定回転速度RS4は、9000r/minに設定されている。設定回転速度RS4は、アクセル開度Gによらず一定値である。ただし、第5速における設定回転速度RS5と第4速における設定回転速度RS4とは、互いに異なった値である。
【0033】
所定のアクセル開度G以上において、設定回転速度RS4を超えてエンジン回転速度Rが上昇した後、スロットル開度THは、規定のエンジン回転速度Rで一定となる。このときの、規定のエンジン回転速度Rを規定回転速度RL4と称する。規定回転速度RL4は、エンジン12の運転性能または自動二輪車1の走行性能に基づく規定車速VLに対応した値である。本実施形態において、規定回転速度RL4は、10000r/minに設定されている。規定回転速度RL4は、マップM4上において、アクセル開度Gによらず、一定値として設定されている。また、規定回転速度RL4を超え、一定値となるスロットル開度THを収束開度THC4と称する。第4速における収束開度THC4は、自動二輪車1の加速が可能な加速可能開度THA4よりも大きいスロットル開度THである。そのため、自動二輪車1は、規定回転速度RL4を超えて走行する場合も、加速することができる。
【0034】
このように、スロットル開度THが調整されることにより、エンジン12の出力が変化する。エンジン12の出力の変化および変速装置11での変速比に基づき、自動二輪車1の車速Vが変化する。
【0035】
(作用および効果)
以上、本実施形態によれば、エンジン回転速度Rが、規定回転速度RLnよりも小さい設定回転速度RSnに達した段階で、スロットル開度THが減少する。この場合、エンジン回転速度Rが規定回転速度RLnに達した時点でスロットル開度THを減少させる場合に比べ、エンジン12の回転速度Rまたは自動二輪車1の車速Vについて、規定値を超えることが、より確実に抑制される。また、前述のとおり、スロットル開度THが減少するエンジン回転速度Rは、規定回転速度RLnよりも低い。このため、この場合、エンジン回転速度Rが規定回転速度RLnに達した時点で突然スロットル開度THを減少させる場合に比べ、自動二輪車1の乗車フィーリングを損なうことが抑制される。
【0036】
また、図4および図5に示すように、設定回転速度RSnを超えてから規定回転速度RLnに至るまで、スロットル開度THは、徐々に減少していく。この場合、エンジン回転速度Rが設定回転速度RSnを超えた時点で突然スロットル開度THを減少させる場合に比べ、自動二輪車1の乗車フィーリングを損なうことが抑制される。エンジン回転速度Rが設定回転速度RSnを超えた時点で突然スロットル開度THを減少させる場合は、図4(b)において、設定回転速度RS5と、収束開度THになるときのエンジン回転速度Rが一致する場合のことである。また、図5(b)において、設定回転速度RS4と、収束開度THになるときのエンジン回転速度Rが一致する場合のことである。
【0037】
また、マップMn上において、設定回転速度RSnの値は、アクセル開度Gによらず一定である。このため、スロットル開度THは、エンジン12の回転速度Rまたは自動二輪車1の車速Vについて、規定値を超えるような場合、自動二輪車1に乗車するライダーのアクセルグリップ4bの操作によらず、ECU10により制御される。これにより、エンジン12または自動二輪車1は、所定の状態を超えることが、より確実に抑制される。
【0038】
さらに、設定回転速度RSnは、変速装置11に係る変速段において、隣り合う2つの変速段で互いに異なっている。具体的に、本実施形態において、第5速における設定回転速度RS5は、7500r/minであり、第4速における設定回転速度RS4は、9000r/minである。そのため、例えば、自動二輪車1が第5速での設定回転速度RS5に比較的近いエンジン回転速度Rで走行しているときから、第4速にシフトダウンした場合、急激なエンジンブレーキが掛かることが抑制される。また、例えば、自動二輪車1は、第4速での設定回転速度RS4に比較的近いエンジン回転速度Rで走行しているときから第5速にシフトアップした場合、さらに加速することが可能な場合がある。したがって、本実施形態に係る自動二輪車1は、乗車フィーリングを損なうことが抑制されている。
【0039】
また、自動二輪車1において、スロットル開度THが設定回転速度RSnを超えたとき、スロットルバルブ32の開度を減少させる制御は、マップMnに設定された値に従って実行される。このため、スロットル開度THを所定の値に調整する場合、フィードバック制御のような余計な制御応答を必要としない。それゆえ、自動二輪車1は、スロットル開度THの開度調整において、制御速度の向上を図ることができる。また、マップMnに設定されるデータが精度の高いものであれば、それだけ、比較的精度の高い制御を実行することができる。マップMnに設定されるデータを高い精度で設定することは、自動二輪車1において実際の制御場面で高い精度を保持するのに比べ、コストパフォーマンスに優れており、また、容易に設定することができる。
【0040】
《その他の変形例》
前記実施形態1において、燃料供給を停止する制御および点火をキャンセルする制御は、エンジン回転速度R、スロットル開度TH、アクセル開度Gが設定されたマップMnに基づいて実行されていた。しかし、マップは、車速V、スロットル開度TH、アクセル開度Gが設定されている形態のものでもよい。この車速V、スロットル開度TH、アクセル開度Gが設定されているマップを、マップMn´と便宜的に表記する。マップMn´は、マップMnと同様に、変速装置11の変速段ごとに切り替えられる。そのため、マップMn´は、第1速から第5速まで、5つ設定されている。第1速のマップは、マップM1´で示す。第2速から第5速まで、順に、マップM2´、マップM3´、マップM4´、および、マップM5´で表される。
【0041】
マップMn´には、規定車速VLが所定値として設定されている。規定車速VLは、マップMn´において、規定回転速度RLnに対応した値で設定されている。規定回転速度RLは、エンジン12の運転性能または自動二輪車1の走行性能に基づく値である。また、マップMn´には、規定車速VLよりも小さい値である設定車速VSが所定値として設定されている。そのため、変速装置11において、減速比の大きいギア段(例えば、第1速から第2速)では、規定車速VLおよび設定車速VSに到達し得ない。この場合、マップMn´において、実質的に規定車速VLおよび設定車速VSが設定されていないマップMn´がある。規定車速VLおよび設定車速VSが設定されていないマップMn´は、例えば、マップM1´とマップM2´である。
【0042】
図3に示す燃料供給制御部28は、前記各検出部にて検出された値およびマップMn´に設定された値に基づき、スロットルバルブ32の開度を調整する制御を実行する。また、燃料供給制御部28は、前記各検出部にて検出された値およびマップMn´に設定された値に基づき、燃料供給装置31において燃料供給を停止させる制御を実行する。もしくは、燃料供給制御部28は、前記各検出部にて検出された値およびマップMn´に設定された値に基づき、点火装置61において点火をキャンセルする制御を実行する。
【0043】
このように、エンジン回転速度Rに代えて車速Vを用いても、前記実施形態と同様の制御を行うことができる。それにより、前述の効果を得ることが可能である。
【0044】
《本明細書における用語等の定義》
「規定車速VL」の値は特に限定されないが、例えば、鞍乗型車両の最高速度よりも小さい車両速度である。最高速度は、例えば、自主的に規制された上限速度、すなわち、リミッター車速である。自動二輪車1が規定車速VLに到達することがあっても、リミッター車速には到達しない。
【産業上の利用可能性】
【0045】
本発明は鞍乗型車両に関して有用である。
【図面の簡単な説明】
【0046】
【図1】自動二輪車の左側面図である。
【図2】ハンドルを示す概略図である。
【図3】自動二輪車の制御ブロック図である。
【図4】変速装置における第5速のマップを示す図であり、(a)は、エンジン回転速度、スロットル開度、アクセル開度の三次元で表される図であり、(b)は、エンジン回転速度、スロットル開度の二次元で表される図である。
【図5】変速装置における第4速のマップを示す図であり、(a)は、エンジン回転速度、スロットル開度、アクセル開度の三次元で表される図であり、(b)は、エンジン回転速度、スロットル開度の二次元で表される図である。
【符号の説明】
【0047】
1 自動二輪車
4b アクセルグリップ(アクセル操作子)
7 後輪
10 ECU(制御装置)
11 変速装置
12 エンジン
13 動力伝達機構
14 パワーユニット
19 メモリ(記憶装置)
21 エンジン回転速度検出部(検出装置)
23 車速検出部(検出装置)
28 燃料供給制御部
30 燃料タンク
31 燃料供給装置
32 スロットルバルブ(スロットル弁)
33 吸気管(吸気通路)
【技術分野】
【0001】
本発明は鞍乗型車両に関する。
【背景技術】
【0002】
鞍乗型車両において、エンジン回転速度または車両速度が規定値に達するような運転が行われると、エンジン回転速度または車両速度が規定値を超えないようにした技術が知られている。このような技術として、例えば、下記特許文献1に記載された技術が知られている。
【0003】
下記特許文献1に記載の技術は、鞍乗型車両のうち、電子制御スロットルを備えた自動二輪車であって、エンジン回転速度または車両速度が規定値に達すると、スロットルバルブの開度をアクセル操作量に応じたスロットルバルブの標準開度よりも減少させるようにしている。その結果、吸入空気量が絞られてエンジン出力が制限される。これにより、エンジン回転速度または車両速度は規定値を超えないように制限される。また、下記特許文献1に記載の技術は、エンジン点火のカットや間引き、燃料供給の停止等でエンジン出力を制限するようにしていた従来のものに比較して、出力制限時にエンジンの燃焼の安定性を向上できることを特長とする。したがって、運転者の乗車フィーリングの低下や排気性能の低下を防止することができるとしている。
【特許文献1】特開2006−104953号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載の鞍乗型車両では、規定値に達したことを契機として、スロットルバルブの開度を減少させる制御を開始するので、規定値を超えないように制御すると乗車フィーリング(具体的には減速感が出てしまう)が損なわれ、さらに場合によっては規定値を超えてしまうおそれがある。
【0005】
本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、乗車フィーリングを損なうことなく、エンジン回転速度または車両速度が規定値を超えないようにすることのできる鞍乗型車両を提供することにある。
【課題を解決するための手段】
【0006】
本発明の鞍乗型車両は、エンジンと、前記エンジンに空気を導入する吸気通路と、前記吸気通路に配置され、アクセル操作子の操作量に応じて制御される電子制御式のスロットル弁と、前記エンジンの回転速度または車両速度を検出する検出装置と、前記検出装置によって検出されるエンジン回転速度または車両速度である検出速度が規定値以下となるよう前記スロットル弁を制御する制御装置と、を備えている。また、前記制御装置は、前記検出速度が前記規定値よりも小さい所定速度までは前記スロットル弁の開度を増加または一定を保ち、前記検出速度が前記規定値よりも小さい所定速度を超えると、前記スロットル弁の開度を減少させる。
【発明の効果】
【0007】
以上のように、本発明によれば、乗車フィーリングを損なうことなく、エンジン回転速度または車両速度が規定値を超えないようにすることのできる鞍乗型車両を提供することができる。
【発明を実施するための最良の形態】
【0008】
《実施形態1》
以下、図面を参照しながら本発明の実施形態について説明する。
【0009】
本発明の実施形態における鞍乗型車両の一例として、自動二輪車1を図1に示す。自動二輪車1は、所謂モータサイクルタイプの自動二輪車である。なお、本発明の実施形態における鞍乗型車両は、例えば、ロードレーサタイプ、オフロードタイプ、スクータータイプ、所謂モペットタイプの自動二輪車であってもよい。また、本発明の実施形態における鞍乗型車両は、ATV、四輪バギー等であってもよい。以下の説明では、左右の方向は、特に限定した記載のない限り、自動二輪車1のシート9に着座したライダーから見た左右の方向をいうものとする。図1に示すように、本発明の実施形態に係る自動二輪車1は、ヘッドパイプ2aを有する車体フレーム2を備えている。車体フレーム2には、燃料タンク30およびシート9が支持されている。
【0010】
ヘッドパイプ2aには、フロントフォーク3が旋回可能に支持されている。フロントフォーク3の上部には、ハンドル4が取り付けられている。フロントフォーク3の下部には、前輪5が回転自在に支持されている。
【0011】
エンジン12は、車体フレーム2に懸架されている。本実施形態では、エンジン12は燃料にガソリンを用いた、V型2気筒の4サイクルエンジンである。ただし、エンジン12の気筒数や型式は限定されない。エンジン12は、2サイクルでもよい。また、エンジン12は空冷式であっても水冷式であってもよい。
【0012】
車体フレーム2の後端部には、スイングアーム6が揺動可能に取り付けられている。スイングアーム6の後端部には、後輪7が回転可能に取り付けられている。
【0013】
自動二輪車1は、複数段の変速段を有する変速装置11を備えている。変速装置11により、自動二輪車1は、所定の変速比で以って走行することができる。つまり、変速装置11は、エンジン12の回転速度を所定の回転速度に変更する。変速装置11は、車両速度やエンジン回転速度に応じて自動的に変速比が変更される、いわゆるAT(Automatic Transmission)の形態でもよい。また、変速装置11は、ライダーの操作により変速比が変更されるMT(Manual Transmission)の形態でもよい。自動二輪車1は、エンジン12と変速装置11とで、パワーユニット14を構成している。本実施形態において、変速装置11は、5段の変速段を有している。ただし、変速装置11の変速段数は限定されない。変速装置11の変速段数は、自動二輪車1の走行において、必要な変速比が得られる段数であればよい。
【0014】
自動二輪車1の後輪7は、動力伝達機構13を介して、エンジン12に接続している。後輪7は、エンジン12の回転に基づいて駆動する。エンジン12の回転は、変速装置11を経て、動力伝達機構13を介し、後輪7へ伝達する。動力伝達機構13の形態は、特に限定されない。動力伝達機構13は、エンジン12の回転をベルトにより後輪7に伝達するベルトドライブの機構を有していてもよい。また、動力伝達機構13は、エンジン12の回転をチェーンにより後輪7に伝達するチェーンドライブの機構でもよく、エンジン12の回転をシャフトの回転により後輪7に伝達するシャフトドライブの機構を有していてもよい。
【0015】
図2は、自動二輪車1のフロントフォーク3の上部に取り付けられるハンドル4を示している。ハンドル4は、ヘッドパイプ2aに接続されたハンドルバー4dを備えている。ハンドル4は、ハンドルバー4dの左端部に位置する左グリップ部4aと、ハンドルバー4dの右端部に位置する右グリップ部4bとを備えている。右グリップ部4bは、ハンドルバー4dに対して回転可能である。ライダーが、この右グリップ部4bを回転させることで、スロットルバルブ32(図3参照)が操作され、スロットル開度が調整される。本実施形態において、右グリップ部4bをアクセルグリップ4bと呼称する。なお、アクセルグリップ4bには、アクセル開度センサ44(図3参照)が取り付けられている。アクセルグリップ4bの操作量は、アクセル開度センサ44によって検出される。
【0016】
また、図3に示すように、燃料供給装置31は、燃料タンク30にある燃料をエンジン12に供給する。燃料供給装置31は、吸気管33に燃料を直噴する形態のものでもよい。また、燃料供給装置31は、吸気管33の空気の流れより燃料を吸い上げて混合気を作り出す形態のものでもよい。吸気管33には、スロットルバルブ32が配置されている。このスロットルバルブ32は、吸気管33の流路面積を調整することにより、吸気管33を流れる空気量または燃料量を調整するためのものである。スロットルバルブ32は、アクセルグリップ4b(図2参照)の操作に基づいて駆動される。アクセルグリップ4bの操作により、スロットルバルブ32が開かれ、吸気管33を流れる吸気量が増大する。それに従い、エンジン12は、出力が変化する。
【0017】
また、例えば、スロットルバルブ32には、スロットル開度センサ42が取り付けられている。スロットルバルブ32の開度は、スロットル開度センサ42によって、検出される。
【0018】
図3は、本実施形態に係るスロットルの制御システムを示している。自動二輪車1は、制御装置としてのECU10を備えている。ECU10は、自動二輪車1の走行状態またはエンジン12の出力状態を検出する検出装置として、エンジン回転速度検出部21、スロットル開度検出部22、車速検出部23、アクセル開度検出部24、変速段検出部25を有している。また、ECU10は、自動二輪車1の走行に必要なデータ等を記憶したメモリ19を備えている。
【0019】
エンジン回転速度検出部21は、エンジン回転速度センサ41にて検出されるエンジン12の回転速度に基づく信号を入力する。例えば、自動二輪車1には、エンジン回転速度センサ41が設けられている。エンジン回転速度センサ41は、エンジン12の回転速度を直接的または間接的に検出する。エンジン回転速度センサ41が間接的にエンジン12の回転速度を検出する場合、エンジン回転速度検出部21は、算出等の機能を有する。この場合、エンジン回転速度検出部21は、エンジン12の出力状態より、エンジン回転速度を算出する。もしくは、ECU10が図示しない算出部を有し、算出部にてエンジン回転速度が算出されることにしてもよい。この場合、算出部は、エンジン12の出力状態より、エンジン回転速度を算出する。エンジン回転速度検出部21は、算出されたエンジン回転速度に基づく信号を入力する。
【0020】
スロットル開度検出部22は、スロットルバルブ32の開度に基づく信号を入力する。図3では、自動二輪車1には、スロットル開度センサ42が設けられている。スロットル開度センサ42は、スロットルバルブ32の開度を検出する。
【0021】
車速検出部23は、車速センサ43にて検出される自動二輪車1の車両速度に基づく信号を入力する。図3では、自動二輪車1には、動力伝達機構13に車速センサ43が設けられている。ただし、車速センサ43は、図3に示す動力伝達機構13に取り付けられることに限定されない。車速センサ43は、エンジン12に取り付けられ、エンジン12の出力状態を読み取ることにしてもよい。車速センサ43は、変速装置11に取り付けられ、変速装置11の回転を読み取ることにしてもよい。また、車速センサ43は、後輪7または前輪5(図1参照)に取り付けられ、前輪5または後輪7の回転速度を読み取ることにしてもよい。車速センサ43は、自動二輪車1の車速を間接的に検出する。それにより、車速検出部23は、算出等の機能を有し、エンジン12の出力状態または前輪5の回転速度または後輪7の回転速度より、車速を算出する。もしくは、ECU10が図示しない算出部を有し、算出部にて車速が算出されることにしてもよい。この場合、車速検出部23は、算出された車速に基づく信号を入力する。
【0022】
アクセル開度検出部24は、アクセルグリップ4bの開閉に基づく信号を入力する。前述したように、アクセルグリップ4bには、アクセル開度センサ44が取り付けられている。アクセル開度センサ44は、アクセルグリップ4bの操作量を検出する。
【0023】
変速段検出部25は、変速装置11の現在の変速段に基づく信号を入力する。変速装置11の現在の変速段は、変速段センサ45にて検出される。図3では、変速段センサ45は、変速装置11に取り付けられている。
【0024】
燃料供給制御部28は、前記各検出部にて検出された値、および、メモリ19に記憶されたマップMnにおけるエンジン回転速度RP、スロットル開度THP、アクセル開度GP等に基づき、スロットルバルブ32のスロットル開度THを制御する。ここで、RP、GP、THPは、マップMn上の各点におけるエンジン回転速度R、アクセル開度G、およびスロットル開度THの設定値である。燃料供給制御部28は、メモリ19より、所定のマップMnを入力する。また、燃料供給制御部28は、エンジン回転速度検出部21より、エンジン回転速度に基づく信号を入力する。同様に、燃料供給制御部28は、スロットル開度検出部22より、スロットル開度に基づく信号を入力し、車速検出部23より、車速に基づく信号を入力し、アクセル開度検出部24より、アクセル開度に基づく信号を入力し、変速段検出部25より、現在の変速段に基づく信号を入力する。スロットルバルブ32は、マップMnおよび前記各検出部にて検出された値に基づく信号を燃料供給制御部28より入力する。スロットルバルブ32は、前記信号に基づき、バルブの開度が調整される。これにより、エンジン12への吸気量が調整される。エンジン12は、スロットルバルブ32の開閉により調整された吸気量に基づき、出力が変化する。
【0025】
また、燃料供給制御部28は、前記各検出部にて検出された値、および、メモリ19に記憶されたマップMnにおけるエンジン回転速度RP、スロットル開度THP、アクセル開度GP等に基づき、燃料供給装置31のエンジン12への燃料供給量を制御する。燃料供給装置31は、前記信号に基づき、エンジン12への燃料の供給量を調整する。エンジン12は、燃料供給装置31より供給される燃料量に基づき、出力が変化する。
【0026】
記憶装置19は、自動二輪車1の運転等に必要なデータを記憶している。本実施形態に本実施形態において、記憶装置19は、以下に記載するマップMn(以下の説明において、添字nは変速装置11における変速段数を表すものとする)を少なくとも記憶している。
【0027】
図4示すように、本実施形態に係るマップMnは、エンジン回転速度R、スロットル開度TH、アクセル開度Gの値を設定している。マップMnは、変速装置11に係る変速段ごとに設定されている。本実施形態において、変速装置11は、5段の変速段を有している。そのため、マップMnは、第1速から第5速まで、5つ設定されている。以下において、第1速のマップは、マップM1で示す。第2速から第5速まで、順に、マップM2、マップM3、マップM4、および、マップM5で示す。自動二輪車1の走行において使用されるマップMnは、変速装置11における各変速段に応じて切り替えられる。
【0028】
図4は、マップM5を示している。図4(a)に示すように、マップM5を含め、本実施形態に係るマップMnは、エンジン回転速度R、スロットル開度TH、アクセル開度Gの値を設定している。一方、図4(b)は、アクセル開度Gが90°である場合について、エンジン回転速度Rとスロットル開度THとの二次元を例として示す。それぞれの単位は、例えば、エンジン回転速度Rが、(r/min)、スロットル開度THおよびアクセル開度Gが、(deg)で表される。ただし、それぞれの単位は、前記のように設定されることに限定されない。それぞれの単位は、例えば、エンジン回転速度Rが、(m/s)、スロットル開度THおよびアクセル開度Gが、(%)で表されていてもよい。前記の記号について、rは回転数、minは時間(分)、degは角度、mは長さ(メートル)、および、sは時間(秒)である。
【0029】
図4(a)および図4(b)に示すように、エンジン回転速度Rが、所定の値を超えると、スロットル開度THは、所定のアクセル開度G以上では減少していく。このときの、所定のエンジン回転速度Rを設定回転速度RS5と称する。本実施形態において、設定回転速度RS5は、7500r/minに設定されている。設定回転速度RS5は、アクセル開度Gによらず一定値である。
【0030】
所定のアクセル開度G以上において、設定回転速度RS5を超えてエンジン回転速度Rが上昇した後、スロットル開度THは、規定のエンジン回転速度Rで一定となる。このときの、規定のエンジン回転速度Rを規定回転速度RL5と称する。規定回転速度RL5は、エンジン12の運転性能または自動二輪車1の走行性能に基づく規定車速VLに対応した値である。また、図4(a)および図4(b)に示すように、本実施形態において、規定回転速度RL5は、8500r/minに設定されている。規定回転速度RL5は、マップM5上において、アクセル開度Gによらず、一定値として設定されている。また、規定回転速度RL5を超え、一定値となるスロットル開度THを収束開度THC5と称する。第5速における収束開度THC5は、自動二輪車1の加速が可能な加速可能開度THA5よりも小さいスロットル開度THである。そのため、自動二輪車1は、規定回転速度RL5を超えて走行する場合は、加速することができない。
【0031】
図5は、マップM4を示している。図5(a)は、エンジン回転速度R、スロットル開度TH、アクセル開度Gの値を示す三次元マップである。一方、図5(b)は、アクセル開度Gが90°である場合について、エンジン回転速度Rとスロットル開度THとの二次元を例として示す。
【0032】
図5(a)および図5(b)に示すように、エンジン回転速度Rが、所定の値を超えると、スロットル開度THは、所定のアクセル開度G以上では減少していく。このときの、所定のエンジン回転速度Rを設定回転速度RS4と称する。本実施形態において、設定回転速度RS4は、9000r/minに設定されている。設定回転速度RS4は、アクセル開度Gによらず一定値である。ただし、第5速における設定回転速度RS5と第4速における設定回転速度RS4とは、互いに異なった値である。
【0033】
所定のアクセル開度G以上において、設定回転速度RS4を超えてエンジン回転速度Rが上昇した後、スロットル開度THは、規定のエンジン回転速度Rで一定となる。このときの、規定のエンジン回転速度Rを規定回転速度RL4と称する。規定回転速度RL4は、エンジン12の運転性能または自動二輪車1の走行性能に基づく規定車速VLに対応した値である。本実施形態において、規定回転速度RL4は、10000r/minに設定されている。規定回転速度RL4は、マップM4上において、アクセル開度Gによらず、一定値として設定されている。また、規定回転速度RL4を超え、一定値となるスロットル開度THを収束開度THC4と称する。第4速における収束開度THC4は、自動二輪車1の加速が可能な加速可能開度THA4よりも大きいスロットル開度THである。そのため、自動二輪車1は、規定回転速度RL4を超えて走行する場合も、加速することができる。
【0034】
このように、スロットル開度THが調整されることにより、エンジン12の出力が変化する。エンジン12の出力の変化および変速装置11での変速比に基づき、自動二輪車1の車速Vが変化する。
【0035】
(作用および効果)
以上、本実施形態によれば、エンジン回転速度Rが、規定回転速度RLnよりも小さい設定回転速度RSnに達した段階で、スロットル開度THが減少する。この場合、エンジン回転速度Rが規定回転速度RLnに達した時点でスロットル開度THを減少させる場合に比べ、エンジン12の回転速度Rまたは自動二輪車1の車速Vについて、規定値を超えることが、より確実に抑制される。また、前述のとおり、スロットル開度THが減少するエンジン回転速度Rは、規定回転速度RLnよりも低い。このため、この場合、エンジン回転速度Rが規定回転速度RLnに達した時点で突然スロットル開度THを減少させる場合に比べ、自動二輪車1の乗車フィーリングを損なうことが抑制される。
【0036】
また、図4および図5に示すように、設定回転速度RSnを超えてから規定回転速度RLnに至るまで、スロットル開度THは、徐々に減少していく。この場合、エンジン回転速度Rが設定回転速度RSnを超えた時点で突然スロットル開度THを減少させる場合に比べ、自動二輪車1の乗車フィーリングを損なうことが抑制される。エンジン回転速度Rが設定回転速度RSnを超えた時点で突然スロットル開度THを減少させる場合は、図4(b)において、設定回転速度RS5と、収束開度THになるときのエンジン回転速度Rが一致する場合のことである。また、図5(b)において、設定回転速度RS4と、収束開度THになるときのエンジン回転速度Rが一致する場合のことである。
【0037】
また、マップMn上において、設定回転速度RSnの値は、アクセル開度Gによらず一定である。このため、スロットル開度THは、エンジン12の回転速度Rまたは自動二輪車1の車速Vについて、規定値を超えるような場合、自動二輪車1に乗車するライダーのアクセルグリップ4bの操作によらず、ECU10により制御される。これにより、エンジン12または自動二輪車1は、所定の状態を超えることが、より確実に抑制される。
【0038】
さらに、設定回転速度RSnは、変速装置11に係る変速段において、隣り合う2つの変速段で互いに異なっている。具体的に、本実施形態において、第5速における設定回転速度RS5は、7500r/minであり、第4速における設定回転速度RS4は、9000r/minである。そのため、例えば、自動二輪車1が第5速での設定回転速度RS5に比較的近いエンジン回転速度Rで走行しているときから、第4速にシフトダウンした場合、急激なエンジンブレーキが掛かることが抑制される。また、例えば、自動二輪車1は、第4速での設定回転速度RS4に比較的近いエンジン回転速度Rで走行しているときから第5速にシフトアップした場合、さらに加速することが可能な場合がある。したがって、本実施形態に係る自動二輪車1は、乗車フィーリングを損なうことが抑制されている。
【0039】
また、自動二輪車1において、スロットル開度THが設定回転速度RSnを超えたとき、スロットルバルブ32の開度を減少させる制御は、マップMnに設定された値に従って実行される。このため、スロットル開度THを所定の値に調整する場合、フィードバック制御のような余計な制御応答を必要としない。それゆえ、自動二輪車1は、スロットル開度THの開度調整において、制御速度の向上を図ることができる。また、マップMnに設定されるデータが精度の高いものであれば、それだけ、比較的精度の高い制御を実行することができる。マップMnに設定されるデータを高い精度で設定することは、自動二輪車1において実際の制御場面で高い精度を保持するのに比べ、コストパフォーマンスに優れており、また、容易に設定することができる。
【0040】
《その他の変形例》
前記実施形態1において、燃料供給を停止する制御および点火をキャンセルする制御は、エンジン回転速度R、スロットル開度TH、アクセル開度Gが設定されたマップMnに基づいて実行されていた。しかし、マップは、車速V、スロットル開度TH、アクセル開度Gが設定されている形態のものでもよい。この車速V、スロットル開度TH、アクセル開度Gが設定されているマップを、マップMn´と便宜的に表記する。マップMn´は、マップMnと同様に、変速装置11の変速段ごとに切り替えられる。そのため、マップMn´は、第1速から第5速まで、5つ設定されている。第1速のマップは、マップM1´で示す。第2速から第5速まで、順に、マップM2´、マップM3´、マップM4´、および、マップM5´で表される。
【0041】
マップMn´には、規定車速VLが所定値として設定されている。規定車速VLは、マップMn´において、規定回転速度RLnに対応した値で設定されている。規定回転速度RLは、エンジン12の運転性能または自動二輪車1の走行性能に基づく値である。また、マップMn´には、規定車速VLよりも小さい値である設定車速VSが所定値として設定されている。そのため、変速装置11において、減速比の大きいギア段(例えば、第1速から第2速)では、規定車速VLおよび設定車速VSに到達し得ない。この場合、マップMn´において、実質的に規定車速VLおよび設定車速VSが設定されていないマップMn´がある。規定車速VLおよび設定車速VSが設定されていないマップMn´は、例えば、マップM1´とマップM2´である。
【0042】
図3に示す燃料供給制御部28は、前記各検出部にて検出された値およびマップMn´に設定された値に基づき、スロットルバルブ32の開度を調整する制御を実行する。また、燃料供給制御部28は、前記各検出部にて検出された値およびマップMn´に設定された値に基づき、燃料供給装置31において燃料供給を停止させる制御を実行する。もしくは、燃料供給制御部28は、前記各検出部にて検出された値およびマップMn´に設定された値に基づき、点火装置61において点火をキャンセルする制御を実行する。
【0043】
このように、エンジン回転速度Rに代えて車速Vを用いても、前記実施形態と同様の制御を行うことができる。それにより、前述の効果を得ることが可能である。
【0044】
《本明細書における用語等の定義》
「規定車速VL」の値は特に限定されないが、例えば、鞍乗型車両の最高速度よりも小さい車両速度である。最高速度は、例えば、自主的に規制された上限速度、すなわち、リミッター車速である。自動二輪車1が規定車速VLに到達することがあっても、リミッター車速には到達しない。
【産業上の利用可能性】
【0045】
本発明は鞍乗型車両に関して有用である。
【図面の簡単な説明】
【0046】
【図1】自動二輪車の左側面図である。
【図2】ハンドルを示す概略図である。
【図3】自動二輪車の制御ブロック図である。
【図4】変速装置における第5速のマップを示す図であり、(a)は、エンジン回転速度、スロットル開度、アクセル開度の三次元で表される図であり、(b)は、エンジン回転速度、スロットル開度の二次元で表される図である。
【図5】変速装置における第4速のマップを示す図であり、(a)は、エンジン回転速度、スロットル開度、アクセル開度の三次元で表される図であり、(b)は、エンジン回転速度、スロットル開度の二次元で表される図である。
【符号の説明】
【0047】
1 自動二輪車
4b アクセルグリップ(アクセル操作子)
7 後輪
10 ECU(制御装置)
11 変速装置
12 エンジン
13 動力伝達機構
14 パワーユニット
19 メモリ(記憶装置)
21 エンジン回転速度検出部(検出装置)
23 車速検出部(検出装置)
28 燃料供給制御部
30 燃料タンク
31 燃料供給装置
32 スロットルバルブ(スロットル弁)
33 吸気管(吸気通路)
【特許請求の範囲】
【請求項1】
エンジンと、
前記エンジンに空気を導入する吸気通路と、
前記吸気通路に配置され、アクセル操作子の操作量に応じて制御される電子制御式のスロットル弁と、
前記エンジンの回転速度または車両速度を検出する検出装置と、
前記検出装置によって検出されるエンジン回転速度または車両速度である検出速度が規定値以下となるよう前記スロットル弁を制御する制御装置と、を備え、
前記制御装置は、
前記検出速度が前記規定値よりも小さい所定速度までは前記スロットル弁の開度を増加または一定を保ち、
前記検出速度が前記規定値よりも小さい所定速度を超えると、前記スロットル弁の開度を減少させることを特徴とする
鞍乗型車両。
【請求項2】
前記制御装置は、前記検出速度が前記所定速度を超えて増加すると、前記スロットル弁の開度を徐々に減少させる、
請求項1に記載の鞍乗型車両。
【請求項3】
前記所定速度は、前記アクセル操作子の操作量に拘わらず一定である、
請求項1に記載の鞍乗型車両。
【請求項4】
複数の変速ギア段を有する変速装置をさらに備え、
前記所定速度は、少なくとも2つの変速ギア段同士において互いに異なっている、
請求項1に記載の鞍乗型車両。
【請求項5】
前記アクセル操作子の開度であるアクセル開度と、前記スロットル弁の開度であるスロットル開度と、前記検出速度とに関する変速ギア段ごとのマップを記憶した記憶装置をさらに備え、
前記制御装置は、前記スロットル弁の開度を減少させる制御を前記マップに従って実行する、
請求項1に記載の鞍乗型車両。
【請求項1】
エンジンと、
前記エンジンに空気を導入する吸気通路と、
前記吸気通路に配置され、アクセル操作子の操作量に応じて制御される電子制御式のスロットル弁と、
前記エンジンの回転速度または車両速度を検出する検出装置と、
前記検出装置によって検出されるエンジン回転速度または車両速度である検出速度が規定値以下となるよう前記スロットル弁を制御する制御装置と、を備え、
前記制御装置は、
前記検出速度が前記規定値よりも小さい所定速度までは前記スロットル弁の開度を増加または一定を保ち、
前記検出速度が前記規定値よりも小さい所定速度を超えると、前記スロットル弁の開度を減少させることを特徴とする
鞍乗型車両。
【請求項2】
前記制御装置は、前記検出速度が前記所定速度を超えて増加すると、前記スロットル弁の開度を徐々に減少させる、
請求項1に記載の鞍乗型車両。
【請求項3】
前記所定速度は、前記アクセル操作子の操作量に拘わらず一定である、
請求項1に記載の鞍乗型車両。
【請求項4】
複数の変速ギア段を有する変速装置をさらに備え、
前記所定速度は、少なくとも2つの変速ギア段同士において互いに異なっている、
請求項1に記載の鞍乗型車両。
【請求項5】
前記アクセル操作子の開度であるアクセル開度と、前記スロットル弁の開度であるスロットル開度と、前記検出速度とに関する変速ギア段ごとのマップを記憶した記憶装置をさらに備え、
前記制御装置は、前記スロットル弁の開度を減少させる制御を前記マップに従って実行する、
請求項1に記載の鞍乗型車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−257270(P2009−257270A)
【公開日】平成21年11月5日(2009.11.5)
【国際特許分類】
【出願番号】特願2008−109763(P2008−109763)
【出願日】平成20年4月21日(2008.4.21)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
【公開日】平成21年11月5日(2009.11.5)
【国際特許分類】
【出願日】平成20年4月21日(2008.4.21)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
[ Back to top ]