
音響波取得装置および音響波取得方法
【課題】複数の関心領域を指定して音響波探触子による測定を行う場合に、ユーザの設定操作の煩雑さを改善し、操作効率を向上させるための技術を提供する。
【解決手段】被検体から伝播する音響波を測定する探触子と、探触子を移動させる走査手段と、被検体における複数の関心領域の指定を受ける領域指定手段と、複数の関心領域の位置に基づいて、探触子が音響波を測定する領域である複数の指定測定領域を決定し、走査手段により探触子が移動するときの軌道を、複数の指定測定領域の位置に基づいて決定する軌道決定手段を有する音響波取得装置を用いる。
【解決手段】被検体から伝播する音響波を測定する探触子と、探触子を移動させる走査手段と、被検体における複数の関心領域の指定を受ける領域指定手段と、複数の関心領域の位置に基づいて、探触子が音響波を測定する領域である複数の指定測定領域を決定し、走査手段により探触子が移動するときの軌道を、複数の指定測定領域の位置に基づいて決定する軌道決定手段を有する音響波取得装置を用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、音響波取得装置および音響波取得方法に関する。
【背景技術】
【0002】
従来から、超音波を生体に対して送波し、反射してきた超音波を解析することで、生体内の構造を画像化する超音波測定装置が医療現場で運用されている。超音波測定装置では、超音波を生体に送波すると、生体内での音響インピーダンスの異なる境界面で超音波の反射が起こる。この反射波を解析することで、音響インピーダンスの異なる境界面が生体内の形態情報として画像化する。
また近年では、生体にレーザ光を照射することで、生体内部からレーザ照射に起因する音響波(光音響波)を発生させ、この光音響波を解析することで、生体表面および内部の構造・状況を解析する技術が考案されている(特許文献1参照)。この技術は光音響波計測とも呼ばれ、非侵襲で検査が行えるため、人体内部の検査のために医療転用する動きもある。
【0003】
上記2方式の装置では共に、超音波(光音響波)を受信するために音響波探触子が搭載されている。音響波探触子を検出器とする装置の構成としては、ユーザが情報取得を希望する関心領域付近の皮膚に押しつけて使用するハンディタイプのものや、機械走査機構を導入し、生体の皮膚表面上を機械的に走査するものなどがある。このように、手動や自動による走査手段を装置に具備させることで、関心領域の測定を実現している。
現在の音響波探触子は、生産歩留まりやコストの関係で、X線撮影装置のような大開口のセンサを製作することは困難である。そのため、必要な検査対象領域よりも小さなサイズの音響波探触子を用い、自動または手動によって走査させることで検査対象領域をカバーする使い方が一般的である。
【0004】
音響波探触子を自動的に走査する測定装置は、ユーザによって関心領域を設定するための入力設定部を有する。入力設定部は、たとえばキーボードなどのボタン入力装置や、マウス、タッチペンといったポインティングデバイスで構成され、キーボードで測定詳細設定を入力したり、測定位置をマウスなどのポインティングデバイスで指定したりできる。上記装置の中には、タッチペンを利用するなどして、ユーザによって探触子の走査軌道を細かく指定できるものもある(特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5840023号明細書
【特許文献2】特開2006−000185号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来装置における走査軌道指定の例としては、ユーザが表示装置に表示されている被検体の画像を参照しながら、タッチペンなどのポインティングデバイスを操作して、走査軌道を指示する方法がある。走査軌道の設定方法は様々であり、例えば、音響波探触子を移動させる軌道を線で描画したり、移動先の座標を複数箇所指定することで走査軌道を設定したりすることが可能となっている。装置側は、指示された走査軌道をトレースするように音響波探触子を移動させながら測定を行う。
【0007】
関心領域が複数ある場合においては特に、ユーザは走査軌道を指示する際に、全ての関
心領域が、測定される領域に含まれるように音響波探触子を移動させることを意識する必要があり、設定操作が煩雑となっていた。
【0008】
本発明は、上記課題を鑑みてなされたものであり、複数の関心領域を指定して音響波探触子による測定を行う場合に、ユーザの設定操作の煩雑さを改善し、操作効率を向上させるための技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は以下の構成を採用する。すなわち、被検体から伝播する音響波を測定する探触子と、前記探触子を移動させる走査手段と、被検体における複数の関心領域の指定を受ける領域指定手段と、前記複数の関心領域の位置に基づいて、前記探触子が音響波を測定する領域である複数の指定測定領域を決定し、前記走査手段により前記探触子が移動するときの軌道を、前記複数の指定測定領域の位置に基づいて決定する軌道決定手段と、を有することを特徴とする音響波取得装置である。
【0010】
本発明はまた、以下の構成を採用する。すなわち、探触子が、被検体から伝播する音響波を測定するステップと、走査手段が、前記探触子を移動させるステップと、領域指定手段が、被検体における複数の関心領域の指定を受けるステップと、軌道決定手段が、前記複数の関心領域の位置に基づいて、前記探触子が音響波を測定する領域である複数の指定測定領域を決定し、前記走査手段により前記探触子が移動するときの軌道を、前記複数の指定測定領域の位置に基づいて決定するステップと、を有することを特徴とする音響波取得方法である。
【発明の効果】
【0011】
本発明によれば、複数の関心領域を指定して音響波探触子による測定を行う場合に、ユーザの設定操作の煩雑さを改善し、操作効率を向上させるための技術を提供することができる。
【図面の簡単な説明】
【0012】
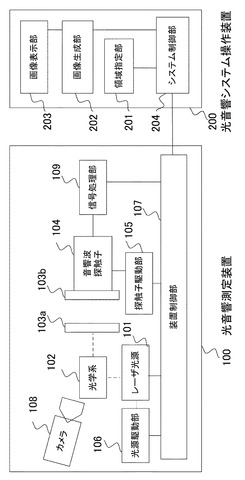
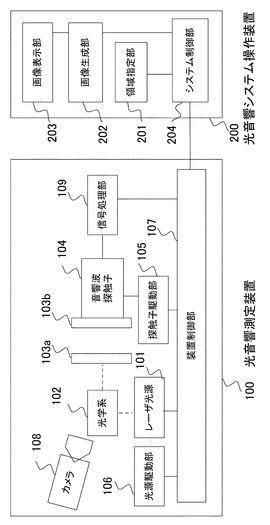
【図1】本発明に係る光音響測定装置と光音響システム操作装置の構成図。
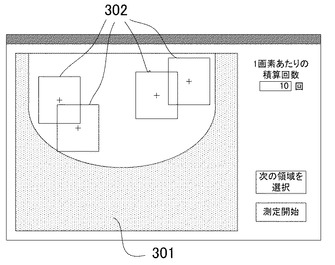
【図2】関心領域設定画面の一例を示す図。
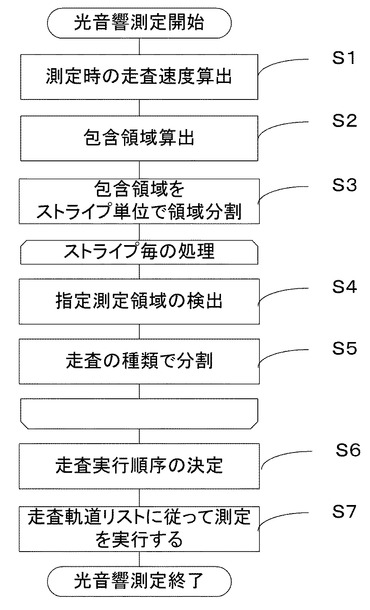
【図3】本発明の実施例に係るフローチャート。
【図4】複数の関心領域設定の概要図。
【図5】本発明の実施例に係る包含領域の概要図。
【図6】本発明の実施例に係るストライプの一例を示す図。
【図7】本発明の実施例に係る走査領域判定の概要図。
【発明を実施するための形態】
【0013】
以下、図面を参照しつつ本発明をより詳細に説明する。同一の構成要素には原則として同一の参照番号を付して、説明を省略する。以下の記載においては本発明の音響波取得装置の例として光音響装置を取り上げるが、本発明の適用対象はこれに限られない。音響波探触子をユーザの指示する関心領域に応じて走査する装置であれば適用可能であり、例えば被検体に超音波を送信し、反射により戻ってきた超音波エコー受信して用いる超音波測定装置も適用対象となる。
【0014】
<実施例>
(光音響装置の構成と機能)
まず、図1を参照しながら本実施例にかかる光音響装置の構成を説明する。光音響装置は、被検体の内部の情報を取得する装置である。さらに取得した被検体内部の情報を画像化する光音響イメージング装置として構成される場合もある。被検体が生体の場合、光音
響装置は、悪性腫瘍や血管疾患などの診断や化学治療の経過観察などを目的として、被検体情報の画像化を可能とする。本実施例のような光音響効果を利用した装置において「被検体情報」とは、光照射によって生じた音響波の発生源分布であり、生体内の初期音圧分布あるいはそれから導かれる光エネルギー吸収密度分布を示す。また、酸素飽和度分布や酸化・還元ヘモグロビン濃度分布のような物質濃度分布を含まれる。一方、超音波エコーを利用した超音波測定装置における被検体情報とは、被検体内部の組織の音響インピーダンスの違いを反映した情報である。
【0015】
光音響装置は、主なハード構成として、光音響測定装置100および光音響システム操作装置200で構成される。光音響測定装置100は、ハード構成として、レーザ光源101、光学系102、音響波探触子104、装置制御部107、カメラ108を有する。光音響測定装置100は更に、探触子駆動部105、光源駆動部106、信号処理部109を有する。また、光音響システム操作装置200は、領域指定部201と、画像生成部202、画像表示部203と、システム制御部204を有する。以下、被検体の計測について説明する。光音響システム操作装置としてはPC等の情報処理装置を用いることもできる。ただし各ブロックの配置はこの図の例に限られず、例えば全ての構成要素を一体に形成しても良い。
【0016】
生体などの被検体(不図示)は、これを両側から圧迫固定するプレート103a、103bに固定される。これらは圧迫板ということもある。レーザ光源からのパルス光は、例えばレンズ、ミラー、光ファイバーなどの光学系102によって、プレート103a表面に導かれ、拡散パルス光となり被検体に照射される。被検体の内部を伝播した光のエネルギーの一部が血管などの光吸収体に吸収されると、その光吸収体から熱膨張により音響波が発生する。すなわち、パルス光の吸収により光吸収体の温度が上昇し、その温度上昇により体積膨張が起こり、音響波が発生する。この現象を光音響効果という。音響波は一種の弾性波であり、音波、超音波、音響波、光音響波、光超音波と呼ばれるものを含む。
【0017】
音響波を検出するための音響波探触子104は、音響波を検出する複数の受信素子からなる検出器である。検出器は、被検体内で発生して伝播した音響波を検出し、アナログ信号である電気信号に変換する。この検出器から取得される検出信号は「光音響信号」という。
【0018】
信号処理部109では、この光音響信号から被検体内部の情報を取得する。信号処理部109は、音響波探触子104から取得した光音響信号を受信アンプによって増幅し、A/Dコンバータによってデジタル信号としての光音響信号に変換する。すなわち光音響信号とは、音響波探触子により検出されたアナログ信号と、信号処理部による処理を施されたデジタル信号を含む概念である。このデジタル信号としての光音響信号は、通信線を介した装置制御部107とシステム制御部204の通信により、光音響システム操作装置200に伝えられる。
【0019】
画像生成部202は、光音響信号に対して画像再構成処理によって三次元情報に演算処理を行い、被検体内の画像を生成する。画像表示部203は、生成された被検体の画像(光音響像)を表示する。光音響システム操作装置200のシステム制御部204や画像生成部202は、例えばCPU資源を利用して動作するプログラムや専用の回路として構成することができる。光音響測定装置の装置制御部107、信号処理部109なども同様である。
【0020】
光音響測定装置100のカメラ108は、被検体の画像を撮影し、ユーザが被検体に対する関心領域を指定する際に提供する。ユーザへの提供は、例えば画像表示部203への表示により行うことができる。
光音響システム操作装置200の領域指定部201は、カメラ108による撮影画像を見たユーザによる関心領域指定を受け付ける手段である。
【0021】
続いて、主な構成要件、および詳細説明が必要な各部について、順次説明する。
(レーザ光源101)
被検体が生体の場合、光源からは生体を構成する成分のうち特定の成分に吸収される特定の波長の光を照射する。光源としては数ナノから数百ナノ秒オーダーのパルス光を発生可能なパルス光源が好ましい。光源としてはレーザが好ましいが、レーザのかわりに発光ダイオードなどを用いることも可能である。レーザとしては、固体レーザ、ガスレーザ、色素レーザ、半導体レーザなど様々なレーザを使用することができる。
なお、本実施の形態においては、単一の光源の例を示しているが、複数の光源を用いても良い。複数光源の場合は、生体に照射する光の照射強度を上げるため、同じ波長を発振する光源を複数用いても良いし、光学特性値分布の波長による違いを測定するために、発振波長の異なる光源を複数個用いても良い。なお、光源として、発振する波長の変換可能な色素やOPO(Optical Parametric Oscillators)を用いることができれば、光学特性値分布の波長による違いを測定することも可能になる。
【0022】
レーザ光源が使用する波長に関しては、生体内において吸収が少ない700nmから1100nmの波長領域が好ましい。ただし、比較的生体表面付近の生体組織の光学特性値分布を求める場合は、上記の波長領域よりも範囲の広い、例えば400nmから1600nmの波長領域を使用することも可能である。
また、レーザ光源は、通常、照射周波数が決まっている。これは、所望の強度のパルス光を継続的に照射するために、設計値として定められるが、照射周波数は、単位時間に行える光音響測定の回数に影響するため、照射周波数が高いものほど、好ましい。本実施例においては、レーザ光源の照射周波数は10Hzとする。
【0023】
(音響波探触子104)
音響波探触子は、音響波を検知し、電気信号に変換する検出器である。被検体から発生する光音響波は、100KHzから100MHzの超音波である。そのため音響波探触子104には、上記の周波数帯を受信できる検出器が用いられる。圧電現象を用いたトランスデューサ、光の共振を用いたトランスデューサ、容量の変化を用いたトランスデューサなど音響波信号を検知できるものであれば、どのような検出器を用いてもよい。本実施形態の音響波探触子104は、複数の受信素子が2次元的に配列されたものが好ましい。このような2次元配列素子を用いることで、同時に複数の場所で音響波を検出することができるので、検出時間を短縮できると共に、被検体の振動などの影響を低減できる。本実施例では、受信素子ピッチは2mm間隔、受信素子配列は主走査方向に5素子、副走査方向に5素子が配列されているものとする。なお主走査方向とは音響波探触子が被検体からの音響波を受信しながら移動する方向であり、副走査方向とは主走査方向に直交する、音響波探触子を移動させる方向である。ただし後述する移動領域のように音響波を受信する必要のない領域も存在する。
【0024】
(カメラ108)
本実施例の光音響装置では、光音響測定を行う関心領域を指定する際に参照する画像を提供するために、カメラが設置されている。カメラは、被検体を圧迫保持する保持板に対して略直交する視線方向で設置されており、撮影された画像が光音響システム操作装置に送信されている。カメラの視野は、光音響測定可能範囲が一覧できる視野角で設置されていることが好ましい。圧迫保持されている被検体を観察できるように設置されており、ユーザは圧迫保持されている被検体を観察しながら関心領域の指定ができるようになっている。ただし、装置の制約によりカメラの撮影方向が保持板に対して略直交する方向でない場合でも、画像補正等により被検体全体をユーザが観察できるように表示することは可能
である。
【0025】
(領域指定部201)
本実施例の光音響装置は、ユーザが関心領域を指定する手段を有する。ユーザは、表示装置に表示される圧迫保持された被検体の観察画像を参照しながら、マウスなどの入力手段によって、関心領域を指定する。入力手段はマウスやキーボードに限らず、ペンタブレットタイプのものや表示装置表面に取り付けたタッチパッドでもよい。本実施例では、複数の関心領域を指定することが可能である。
【0026】
光音響測定では、被検体内部から伝播した光音響波も信号として取得されるので、二次元スライス画像のみならず、三次元体の画像化も行うことが可能である。しかし、本実施例においては、ユーザが指定するのは二次元の矩形である。また本実施例では理解を容易にするために矩形の範囲を指定するが、形状はこれに限られない。ユーザは、被検体の特定方向からの観察画像を参照しながら、光音響測定を行いたい位置に対応する場所を、画像平面上に二次元の矩形で設定する。このように、ユーザが関心領域に基づいて測定指示を行った二次元の矩形の範囲を、測定指示領域と呼ぶ。つまりユーザは、被検体に対する特定方向からの観察画像を参照し、その内部である奥行き部分が測定および画像化されることを想像しながら測定指示領域を設定することになる。
【0027】
測定領域の指定方法として、キーボード入力による座標指示を行ってもよい。このときの座標指示方法は、測定領域を特定するため、所定のサイズの測定領域の中心座標を指示するものであってもよいし、参照画像平面上に複数の頂点座標を指定することで測定指示領域を設定するものであってもよい。頂点座標の指定は、矩形の範囲の場合、対角線上の2点を指定するものでも良い。いずれの場合においても、参照画像平面上に二次元の矩形領域として測定指示領域を設定することが可能である。
ユーザによる指示を受けた光音響装置は、測定指示領域に基づき、カメラの撮影画像の画像座標系から装置座標系に変換する。そして探触子駆動部105と光源駆動部106の制御により、実際の被検体上で探触子とレーザ光源(測定系)を移動させる。探触子駆動部は、本発明の走査手段に相当する。
【0028】
本実施例における領域指定の画面イメージを図2に示す。図中、301は被検体に対する特定方向からの観察画像で、302は、観察画像を参照しながらユーザが指定した測定指示領域である。測定指示領域302に関しては、事前に設定されたサイズで指定することができる。また、ポインティングデバイスで矩形を入力することで、任意サイズの測定領域を指定することもできる。また、複数の測定指示領域を指定するための機能も有する。例えば、複数選択用ボタンを具備し、前記複数選択用ボタンを押しながら測定指示領域を指定すると、複数選択用ボタンを押している間に選択された測定指示領域が複数箇所記憶される方法である。他の方法としては、メニュー画面に「次の領域を選択」といったメニューを用意しておき、測定指示領域指定の都度、このメニューを指定することで、逐次関心領域を指定できるようにしてもよい。いずれの方法においても、指定した測定指示領域の一部または全部の指定を解除する手段を用意することが好ましい。
【0029】
(測定のフロー)
以下、実際の測定について図3のフローチャートに沿って説明する。本フローは、ユーザによる測定指示領域の指定がなされたことを前提としており、光音響測定開始の指示をトリガとして開始される。
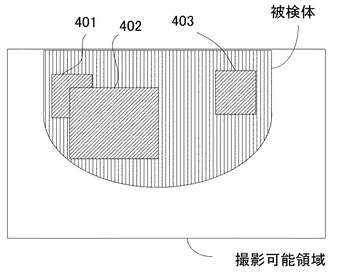
まず指定された測定指示領域について図4を参照して説明する。図4中、401、402、403は、ユーザによって領域指定部201を介して指定された測定指示領域である。またこのとき、光音響測定の測定条件設定も可能である。本実施例では、一画素あたりの光音響データの取得回数(積算回数)は10回積算が設定されているものとする。積算
回数に応じて、取得される被検体情報のSN比を向上させるなどの効果が得られる。
測定指示領域の設定後、ユーザからの測定開始指示をトリガとして、光音響測定システム制御装置200のシステム制御部204から、光音響測定装置100の装置制御部107への通信が行われ、光音響測定開始が依頼される。
【0030】
(測定のための走査速度の算出工程)
装置制御部107は測定開始依頼メッセージを受信すると、まず、測定のための走査速度を算出する(図3のステップS1)。ここで、音響波探触子の主走査方向の素子数をEnx個、素子ピッチをEp(mm)、光音響測定の積算回数をMn回、レーザ光源の発光周波数をLHz(Hz)と置く。説明を簡便にするため、積算回数Mnが素子数Enxの倍数であるものとする。このとき、測定系(音響波探触子とレーザ光源)の主走査方向の走査速度Vx(mm/sec)は式(1)により、走査回数Snは式(2)により、それぞれ算出される。
Vx=Ep×LHz …(1)
Sn=Mn/Enx …(2)
【0031】
本実施例の場合は、音響波探触子104の主走査方向の素子数Enxは5素子であり、積算回数Mnが10回と設定されているので、音響波探触子104を受信素子1素子分ずつ移動させる場合、式(2)より走査回数Snは2と求められる。すなわち、音響波探触子を一往復させれば10回積算が行える。また、素子ピッチEpは2mm、レーザ光源の発光周波数LHzは10Hzなので、式(1)より、測定時の測定系の走査速度Vxは20(mm/sec)となる。
上記のようにして求めた走査速度Vxや走査回数Snは、以降で説明する走査領域の算出や、測定順序の決定で使用される。このときの装置制御部は、本発明の速度算出手段に相当する。
【0032】
なお、光音響装置でなく超音波測定装置を対象とする場合は、発光周波数でなくビーム形成の能力に応じて、積算回数を実現するための主走査方向の走査速度や走査回数を決定すれば良い。すなわち、探触子の走査速度は、音響波探触子の駆動周波数および素子ピッチに基づき算出することができる。
【0033】
より複雑な条件、例えば、積算回数Mnが主走査方向の素子数Enxより小さい場合や、Enxより小さい値の倍数であった場合には、探触子移動一往復あたりの積算回数が小さくなる。この場合、音響波探触子の移動量を決定する際に、単位時間あたり2画素以上ずらしながら走査させるようにすれば、走査速度を高く設定できる。音響波探触子の移動速度は本実施例で例示した方法に限らず、測定条件や、装置構成に依存して、走査速度を調整するための様々なアルゴリズムを適用できる。
本実施例における走査速度算出機能は、測定のための探触子移動速度を求めることが目的であるので、参照パラメータやアルゴリズムは本件で記述している方式に限らない。
【0034】
(包含領域の算出)
続いて装置制御部107は、指定された複数の測定指示領域をすべて包含する包含領域を算出する(ステップS2)。複数の測定指示領域のうち、最外殻に位置する測定指示領域を特定し、前記最外殻の測定指示領域に外接する矩形を包含領域として求める。
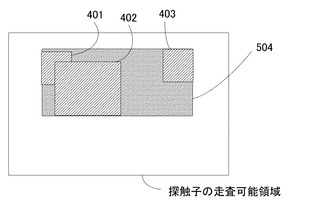
図5に包含領域のイメージを示す。図5中、矩形504が測定指示領域401、402、403から算出された、包含領域である。このように、測定指示領域が矩形である場合、全ての測定指示領域の各辺を延長し、上下左右それぞれにおいて最も外側にある辺を選択して矩形としたものが、包含領域になる。
【0035】
(ストライプごとの処理)
次に、装置制御部107は、包含領域をストライプ単位で領域分割する(ステップS3)。ここで、ストライプとは、音響波探触子およびレーザ光源(合わせて測定系とも呼ぶ)を、主走査方向に移動させて光音響測定される領域を差す。本実施例では、一度のレーザ発光によって光音響信号が取得できるサイズが、音響波探触子の全素子領域のサイズである。実際には、光音響測定が行われる領域は奥行き方向を含む三次元領域であるが、特に断りがない限りは、光音響測定が行われる領域を測定系の走査と平行な面で切り出した平面をストライプと表記する。
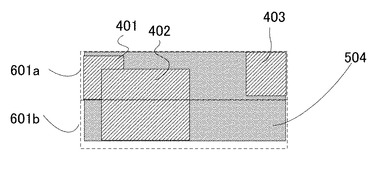
図6にストライプサイズによる領域分割の一例を示す。601a、601bは、それぞれ、包含領域504のストライプ単位の分割領域となる。
【0036】
次に、ストライプ単位で切り出した領域ごとに、ユーザによって指定された測定指示領域を含むために必ず測定の必要な領域(指定測定領域)を検出する(ステップS4)。このとき、注目ストライプと測定指示領域との接触判定を行い、両者が重なっている部分を指定測定領域であると判定する。
さらにこのとき、注目ストライプと測定指示領域の接触している部分が、ストライプの副走査方向の全幅分の領域(ストライプ高さ)に関して一部分であったとしても、ストライプ高さ分の領域を指定測定領域と判定する。例えば図6において、ストライプ601aと測定指示領域401が重なっているのは、測定指示領域401の高さ分だけであり、ストライプ601aの高さよりも低い。しかしこの場合でも、指定測定領域の高さはストライプ601aの高さである。またストライプ601bの下部のように、包含領域には含まれない範囲が指定測定領域に入ることもあり得る。
【0037】
次に装置制御部107は、注目ストライプについて、走査の種類に応じて3種類の走査領域に分割する(ステップS5)。このとき、ストライプ内の領域が、下記3種類のいずれの走査領域であるかを決定する判定処理が行われる。各走査領域は、一様に光音響測定または移動の処理を行う単位となる。
(1)一つ目は、測定系を連続走査させながら光音響測定を行う連続走査領域。
(2)二つ目は、測定系を移動するだけの移動領域。
(3)三つ目は、測定系を停止させて測定する固定測定領域。
【0038】
判定の際には、指定測定領域について、連続走査による測定か、固定測定の繰り返しで測定するかを判定する。また、複数の指定測定領域が存在する場合には、指定測定領域間の領域を移動領域とするか、連続走査領域とするかを判定する。判定基準は、各方式にした場合にかかる時間であって、注目ストライプの測定および移動処理にかかる時間が短くなるように領域を決定する。連続走査する時間は、前記、連続走査速度Vxと走査距離から算出し、固定走査時間は、積算回数とレーザ照射周波数から算出し、単純移動時間は所定の設計値から算出する。この時の装置制御部は、本発明の軌道決定手段に相当する。
【0039】
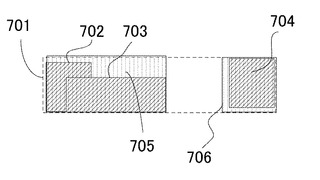
注目ストライプにおける領域分割処理の判定結果の一例を図7に示す。図中、701は注目ストライプである。702、703、704は、ユーザによって指示された測定指示領域401、402、403のうち、注目ストライプ701と接触している領域である。このとき、ストライプを分割する例として、主走査方向において、702のみがストライプと重なる部分、702と703が重複する部分、703のみが重なる部分、いずれも重ならない部分、704のみが重なる部分に分けることができる。あるいは単純に、主走査方向において、いずれかの測定指示領域が重なる部分と、どの測定指示領域も重ならない部分とに分けることもできる。いずれの分割方法においても、指定測定領域の高さはストライプ高さである。
【0040】
本図の例においては、測定指示領域702、703を含む指定測定領域については、連続走査を行った場合と固定測定を繰り返した場合の時間を比較して、一度に連続走査を行
う連続走査領域705とする。ここで、固定測定を繰り返す場合には、設定された積算回数に対応する光音響測定の時間に加えて、固定測定領域間の移動時間も必要となる。また、固定測定領域の幅が一定であることから、指定測定領域に含まれない部分(例えば移動領域)を測定してしまうこともある点に注意を要する。
一方、右側の測定指示領域704を含む指定測定領域は、固定測定領域706とする。図示したように、音響波探触子の幅に基づき、領域704の主走査方向の幅は、固定測定領域706の幅(言い換えると、音響波探触子の素子面の幅)に含まれているので連続走査の必要がない。
そして、連続走査領域705にも固定測定領域706にも含まれず残った部分は、移動領域とする。
上記のステップS4およびS5の処理を全ストライプで繰り返し、包含領域全体の領域分割を行う。
【0041】
(走査軌道の決定)
装置制御部107は、全てのストライプについての領域分割処理が済むと、分割されたそれぞれの走査領域について、測定の実行順序を決定する(ステップS6)。決定のための基準は、総測定時間の短縮である。具体的には測定系の移動距離、特に測定以外の移動距離が短くなるように実行順序を決定する。例えば、ステップS4で検出された指定測定領域相互の距離を求め、その移動距離が短い順に測定を行うようにしても良い。例えば実施例の包含領域において左上から測定を開始する場合、まず連続走査領域705から走査を開始し、705の終点に近い走査領域を次に測定するようにする。
【0042】
次に、前記実行順序に従い、測定軌道のリストを作成する。測定軌道リストには、少なくとも、測定開始座標、測定情報(連続走査測定か固定測定か)、連続走査の場合の走査距離の情報を1セットとして、測定実行順に列挙された情報が格納されている。
光音響装置は、上記手順で確定した測定軌道リストを参照して、光源駆動部106と探触子駆動部105の制御により測定系を移動させつつ音響波取得を行い、測定を実行する(ステップS7)。
【0043】
以上説明したように、本実施例の光音響装置は、参照画像上に複数指定された測定指示領域を全て含むように測定対象を領域分割し、自動的に測定系を移動させる軌道(測定実行順)を決定し、光音響測定を行う。これにより、ユーザにとっては、走査軌道について意識する必要がなく、関心領域の指定に集中できるよう、改善された装置が提供される。
また、本実施例の光音響装置は、測定条件設定に基づいて連続走査速度を算出し、測定のためにかかる時間を判定条件として走査領域を分割し、測定以外の移動距離を判定条件とした走査軌道を算出する。このことにより、複数箇所指定された測定指示領域に基づき、効率的に走査できる軌道を算出でき、測定時間を短くすることができる。
【符号の説明】
【0044】
100:光音響測定装置,104:音響波探触子,105:探触子駆動部,107:装置制御部,109:信号処理部,200:光音響システム操作装置,201:領域指定部
【技術分野】
【0001】
本発明は、音響波取得装置および音響波取得方法に関する。
【背景技術】
【0002】
従来から、超音波を生体に対して送波し、反射してきた超音波を解析することで、生体内の構造を画像化する超音波測定装置が医療現場で運用されている。超音波測定装置では、超音波を生体に送波すると、生体内での音響インピーダンスの異なる境界面で超音波の反射が起こる。この反射波を解析することで、音響インピーダンスの異なる境界面が生体内の形態情報として画像化する。
また近年では、生体にレーザ光を照射することで、生体内部からレーザ照射に起因する音響波(光音響波)を発生させ、この光音響波を解析することで、生体表面および内部の構造・状況を解析する技術が考案されている(特許文献1参照)。この技術は光音響波計測とも呼ばれ、非侵襲で検査が行えるため、人体内部の検査のために医療転用する動きもある。
【0003】
上記2方式の装置では共に、超音波(光音響波)を受信するために音響波探触子が搭載されている。音響波探触子を検出器とする装置の構成としては、ユーザが情報取得を希望する関心領域付近の皮膚に押しつけて使用するハンディタイプのものや、機械走査機構を導入し、生体の皮膚表面上を機械的に走査するものなどがある。このように、手動や自動による走査手段を装置に具備させることで、関心領域の測定を実現している。
現在の音響波探触子は、生産歩留まりやコストの関係で、X線撮影装置のような大開口のセンサを製作することは困難である。そのため、必要な検査対象領域よりも小さなサイズの音響波探触子を用い、自動または手動によって走査させることで検査対象領域をカバーする使い方が一般的である。
【0004】
音響波探触子を自動的に走査する測定装置は、ユーザによって関心領域を設定するための入力設定部を有する。入力設定部は、たとえばキーボードなどのボタン入力装置や、マウス、タッチペンといったポインティングデバイスで構成され、キーボードで測定詳細設定を入力したり、測定位置をマウスなどのポインティングデバイスで指定したりできる。上記装置の中には、タッチペンを利用するなどして、ユーザによって探触子の走査軌道を細かく指定できるものもある(特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5840023号明細書
【特許文献2】特開2006−000185号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来装置における走査軌道指定の例としては、ユーザが表示装置に表示されている被検体の画像を参照しながら、タッチペンなどのポインティングデバイスを操作して、走査軌道を指示する方法がある。走査軌道の設定方法は様々であり、例えば、音響波探触子を移動させる軌道を線で描画したり、移動先の座標を複数箇所指定することで走査軌道を設定したりすることが可能となっている。装置側は、指示された走査軌道をトレースするように音響波探触子を移動させながら測定を行う。
【0007】
関心領域が複数ある場合においては特に、ユーザは走査軌道を指示する際に、全ての関
心領域が、測定される領域に含まれるように音響波探触子を移動させることを意識する必要があり、設定操作が煩雑となっていた。
【0008】
本発明は、上記課題を鑑みてなされたものであり、複数の関心領域を指定して音響波探触子による測定を行う場合に、ユーザの設定操作の煩雑さを改善し、操作効率を向上させるための技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は以下の構成を採用する。すなわち、被検体から伝播する音響波を測定する探触子と、前記探触子を移動させる走査手段と、被検体における複数の関心領域の指定を受ける領域指定手段と、前記複数の関心領域の位置に基づいて、前記探触子が音響波を測定する領域である複数の指定測定領域を決定し、前記走査手段により前記探触子が移動するときの軌道を、前記複数の指定測定領域の位置に基づいて決定する軌道決定手段と、を有することを特徴とする音響波取得装置である。
【0010】
本発明はまた、以下の構成を採用する。すなわち、探触子が、被検体から伝播する音響波を測定するステップと、走査手段が、前記探触子を移動させるステップと、領域指定手段が、被検体における複数の関心領域の指定を受けるステップと、軌道決定手段が、前記複数の関心領域の位置に基づいて、前記探触子が音響波を測定する領域である複数の指定測定領域を決定し、前記走査手段により前記探触子が移動するときの軌道を、前記複数の指定測定領域の位置に基づいて決定するステップと、を有することを特徴とする音響波取得方法である。
【発明の効果】
【0011】
本発明によれば、複数の関心領域を指定して音響波探触子による測定を行う場合に、ユーザの設定操作の煩雑さを改善し、操作効率を向上させるための技術を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る光音響測定装置と光音響システム操作装置の構成図。
【図2】関心領域設定画面の一例を示す図。
【図3】本発明の実施例に係るフローチャート。
【図4】複数の関心領域設定の概要図。
【図5】本発明の実施例に係る包含領域の概要図。
【図6】本発明の実施例に係るストライプの一例を示す図。
【図7】本発明の実施例に係る走査領域判定の概要図。
【発明を実施するための形態】
【0013】
以下、図面を参照しつつ本発明をより詳細に説明する。同一の構成要素には原則として同一の参照番号を付して、説明を省略する。以下の記載においては本発明の音響波取得装置の例として光音響装置を取り上げるが、本発明の適用対象はこれに限られない。音響波探触子をユーザの指示する関心領域に応じて走査する装置であれば適用可能であり、例えば被検体に超音波を送信し、反射により戻ってきた超音波エコー受信して用いる超音波測定装置も適用対象となる。
【0014】
<実施例>
(光音響装置の構成と機能)
まず、図1を参照しながら本実施例にかかる光音響装置の構成を説明する。光音響装置は、被検体の内部の情報を取得する装置である。さらに取得した被検体内部の情報を画像化する光音響イメージング装置として構成される場合もある。被検体が生体の場合、光音
響装置は、悪性腫瘍や血管疾患などの診断や化学治療の経過観察などを目的として、被検体情報の画像化を可能とする。本実施例のような光音響効果を利用した装置において「被検体情報」とは、光照射によって生じた音響波の発生源分布であり、生体内の初期音圧分布あるいはそれから導かれる光エネルギー吸収密度分布を示す。また、酸素飽和度分布や酸化・還元ヘモグロビン濃度分布のような物質濃度分布を含まれる。一方、超音波エコーを利用した超音波測定装置における被検体情報とは、被検体内部の組織の音響インピーダンスの違いを反映した情報である。
【0015】
光音響装置は、主なハード構成として、光音響測定装置100および光音響システム操作装置200で構成される。光音響測定装置100は、ハード構成として、レーザ光源101、光学系102、音響波探触子104、装置制御部107、カメラ108を有する。光音響測定装置100は更に、探触子駆動部105、光源駆動部106、信号処理部109を有する。また、光音響システム操作装置200は、領域指定部201と、画像生成部202、画像表示部203と、システム制御部204を有する。以下、被検体の計測について説明する。光音響システム操作装置としてはPC等の情報処理装置を用いることもできる。ただし各ブロックの配置はこの図の例に限られず、例えば全ての構成要素を一体に形成しても良い。
【0016】
生体などの被検体(不図示)は、これを両側から圧迫固定するプレート103a、103bに固定される。これらは圧迫板ということもある。レーザ光源からのパルス光は、例えばレンズ、ミラー、光ファイバーなどの光学系102によって、プレート103a表面に導かれ、拡散パルス光となり被検体に照射される。被検体の内部を伝播した光のエネルギーの一部が血管などの光吸収体に吸収されると、その光吸収体から熱膨張により音響波が発生する。すなわち、パルス光の吸収により光吸収体の温度が上昇し、その温度上昇により体積膨張が起こり、音響波が発生する。この現象を光音響効果という。音響波は一種の弾性波であり、音波、超音波、音響波、光音響波、光超音波と呼ばれるものを含む。
【0017】
音響波を検出するための音響波探触子104は、音響波を検出する複数の受信素子からなる検出器である。検出器は、被検体内で発生して伝播した音響波を検出し、アナログ信号である電気信号に変換する。この検出器から取得される検出信号は「光音響信号」という。
【0018】
信号処理部109では、この光音響信号から被検体内部の情報を取得する。信号処理部109は、音響波探触子104から取得した光音響信号を受信アンプによって増幅し、A/Dコンバータによってデジタル信号としての光音響信号に変換する。すなわち光音響信号とは、音響波探触子により検出されたアナログ信号と、信号処理部による処理を施されたデジタル信号を含む概念である。このデジタル信号としての光音響信号は、通信線を介した装置制御部107とシステム制御部204の通信により、光音響システム操作装置200に伝えられる。
【0019】
画像生成部202は、光音響信号に対して画像再構成処理によって三次元情報に演算処理を行い、被検体内の画像を生成する。画像表示部203は、生成された被検体の画像(光音響像)を表示する。光音響システム操作装置200のシステム制御部204や画像生成部202は、例えばCPU資源を利用して動作するプログラムや専用の回路として構成することができる。光音響測定装置の装置制御部107、信号処理部109なども同様である。
【0020】
光音響測定装置100のカメラ108は、被検体の画像を撮影し、ユーザが被検体に対する関心領域を指定する際に提供する。ユーザへの提供は、例えば画像表示部203への表示により行うことができる。
光音響システム操作装置200の領域指定部201は、カメラ108による撮影画像を見たユーザによる関心領域指定を受け付ける手段である。
【0021】
続いて、主な構成要件、および詳細説明が必要な各部について、順次説明する。
(レーザ光源101)
被検体が生体の場合、光源からは生体を構成する成分のうち特定の成分に吸収される特定の波長の光を照射する。光源としては数ナノから数百ナノ秒オーダーのパルス光を発生可能なパルス光源が好ましい。光源としてはレーザが好ましいが、レーザのかわりに発光ダイオードなどを用いることも可能である。レーザとしては、固体レーザ、ガスレーザ、色素レーザ、半導体レーザなど様々なレーザを使用することができる。
なお、本実施の形態においては、単一の光源の例を示しているが、複数の光源を用いても良い。複数光源の場合は、生体に照射する光の照射強度を上げるため、同じ波長を発振する光源を複数用いても良いし、光学特性値分布の波長による違いを測定するために、発振波長の異なる光源を複数個用いても良い。なお、光源として、発振する波長の変換可能な色素やOPO(Optical Parametric Oscillators)を用いることができれば、光学特性値分布の波長による違いを測定することも可能になる。
【0022】
レーザ光源が使用する波長に関しては、生体内において吸収が少ない700nmから1100nmの波長領域が好ましい。ただし、比較的生体表面付近の生体組織の光学特性値分布を求める場合は、上記の波長領域よりも範囲の広い、例えば400nmから1600nmの波長領域を使用することも可能である。
また、レーザ光源は、通常、照射周波数が決まっている。これは、所望の強度のパルス光を継続的に照射するために、設計値として定められるが、照射周波数は、単位時間に行える光音響測定の回数に影響するため、照射周波数が高いものほど、好ましい。本実施例においては、レーザ光源の照射周波数は10Hzとする。
【0023】
(音響波探触子104)
音響波探触子は、音響波を検知し、電気信号に変換する検出器である。被検体から発生する光音響波は、100KHzから100MHzの超音波である。そのため音響波探触子104には、上記の周波数帯を受信できる検出器が用いられる。圧電現象を用いたトランスデューサ、光の共振を用いたトランスデューサ、容量の変化を用いたトランスデューサなど音響波信号を検知できるものであれば、どのような検出器を用いてもよい。本実施形態の音響波探触子104は、複数の受信素子が2次元的に配列されたものが好ましい。このような2次元配列素子を用いることで、同時に複数の場所で音響波を検出することができるので、検出時間を短縮できると共に、被検体の振動などの影響を低減できる。本実施例では、受信素子ピッチは2mm間隔、受信素子配列は主走査方向に5素子、副走査方向に5素子が配列されているものとする。なお主走査方向とは音響波探触子が被検体からの音響波を受信しながら移動する方向であり、副走査方向とは主走査方向に直交する、音響波探触子を移動させる方向である。ただし後述する移動領域のように音響波を受信する必要のない領域も存在する。
【0024】
(カメラ108)
本実施例の光音響装置では、光音響測定を行う関心領域を指定する際に参照する画像を提供するために、カメラが設置されている。カメラは、被検体を圧迫保持する保持板に対して略直交する視線方向で設置されており、撮影された画像が光音響システム操作装置に送信されている。カメラの視野は、光音響測定可能範囲が一覧できる視野角で設置されていることが好ましい。圧迫保持されている被検体を観察できるように設置されており、ユーザは圧迫保持されている被検体を観察しながら関心領域の指定ができるようになっている。ただし、装置の制約によりカメラの撮影方向が保持板に対して略直交する方向でない場合でも、画像補正等により被検体全体をユーザが観察できるように表示することは可能
である。
【0025】
(領域指定部201)
本実施例の光音響装置は、ユーザが関心領域を指定する手段を有する。ユーザは、表示装置に表示される圧迫保持された被検体の観察画像を参照しながら、マウスなどの入力手段によって、関心領域を指定する。入力手段はマウスやキーボードに限らず、ペンタブレットタイプのものや表示装置表面に取り付けたタッチパッドでもよい。本実施例では、複数の関心領域を指定することが可能である。
【0026】
光音響測定では、被検体内部から伝播した光音響波も信号として取得されるので、二次元スライス画像のみならず、三次元体の画像化も行うことが可能である。しかし、本実施例においては、ユーザが指定するのは二次元の矩形である。また本実施例では理解を容易にするために矩形の範囲を指定するが、形状はこれに限られない。ユーザは、被検体の特定方向からの観察画像を参照しながら、光音響測定を行いたい位置に対応する場所を、画像平面上に二次元の矩形で設定する。このように、ユーザが関心領域に基づいて測定指示を行った二次元の矩形の範囲を、測定指示領域と呼ぶ。つまりユーザは、被検体に対する特定方向からの観察画像を参照し、その内部である奥行き部分が測定および画像化されることを想像しながら測定指示領域を設定することになる。
【0027】
測定領域の指定方法として、キーボード入力による座標指示を行ってもよい。このときの座標指示方法は、測定領域を特定するため、所定のサイズの測定領域の中心座標を指示するものであってもよいし、参照画像平面上に複数の頂点座標を指定することで測定指示領域を設定するものであってもよい。頂点座標の指定は、矩形の範囲の場合、対角線上の2点を指定するものでも良い。いずれの場合においても、参照画像平面上に二次元の矩形領域として測定指示領域を設定することが可能である。
ユーザによる指示を受けた光音響装置は、測定指示領域に基づき、カメラの撮影画像の画像座標系から装置座標系に変換する。そして探触子駆動部105と光源駆動部106の制御により、実際の被検体上で探触子とレーザ光源(測定系)を移動させる。探触子駆動部は、本発明の走査手段に相当する。
【0028】
本実施例における領域指定の画面イメージを図2に示す。図中、301は被検体に対する特定方向からの観察画像で、302は、観察画像を参照しながらユーザが指定した測定指示領域である。測定指示領域302に関しては、事前に設定されたサイズで指定することができる。また、ポインティングデバイスで矩形を入力することで、任意サイズの測定領域を指定することもできる。また、複数の測定指示領域を指定するための機能も有する。例えば、複数選択用ボタンを具備し、前記複数選択用ボタンを押しながら測定指示領域を指定すると、複数選択用ボタンを押している間に選択された測定指示領域が複数箇所記憶される方法である。他の方法としては、メニュー画面に「次の領域を選択」といったメニューを用意しておき、測定指示領域指定の都度、このメニューを指定することで、逐次関心領域を指定できるようにしてもよい。いずれの方法においても、指定した測定指示領域の一部または全部の指定を解除する手段を用意することが好ましい。
【0029】
(測定のフロー)
以下、実際の測定について図3のフローチャートに沿って説明する。本フローは、ユーザによる測定指示領域の指定がなされたことを前提としており、光音響測定開始の指示をトリガとして開始される。
まず指定された測定指示領域について図4を参照して説明する。図4中、401、402、403は、ユーザによって領域指定部201を介して指定された測定指示領域である。またこのとき、光音響測定の測定条件設定も可能である。本実施例では、一画素あたりの光音響データの取得回数(積算回数)は10回積算が設定されているものとする。積算
回数に応じて、取得される被検体情報のSN比を向上させるなどの効果が得られる。
測定指示領域の設定後、ユーザからの測定開始指示をトリガとして、光音響測定システム制御装置200のシステム制御部204から、光音響測定装置100の装置制御部107への通信が行われ、光音響測定開始が依頼される。
【0030】
(測定のための走査速度の算出工程)
装置制御部107は測定開始依頼メッセージを受信すると、まず、測定のための走査速度を算出する(図3のステップS1)。ここで、音響波探触子の主走査方向の素子数をEnx個、素子ピッチをEp(mm)、光音響測定の積算回数をMn回、レーザ光源の発光周波数をLHz(Hz)と置く。説明を簡便にするため、積算回数Mnが素子数Enxの倍数であるものとする。このとき、測定系(音響波探触子とレーザ光源)の主走査方向の走査速度Vx(mm/sec)は式(1)により、走査回数Snは式(2)により、それぞれ算出される。
Vx=Ep×LHz …(1)
Sn=Mn/Enx …(2)
【0031】
本実施例の場合は、音響波探触子104の主走査方向の素子数Enxは5素子であり、積算回数Mnが10回と設定されているので、音響波探触子104を受信素子1素子分ずつ移動させる場合、式(2)より走査回数Snは2と求められる。すなわち、音響波探触子を一往復させれば10回積算が行える。また、素子ピッチEpは2mm、レーザ光源の発光周波数LHzは10Hzなので、式(1)より、測定時の測定系の走査速度Vxは20(mm/sec)となる。
上記のようにして求めた走査速度Vxや走査回数Snは、以降で説明する走査領域の算出や、測定順序の決定で使用される。このときの装置制御部は、本発明の速度算出手段に相当する。
【0032】
なお、光音響装置でなく超音波測定装置を対象とする場合は、発光周波数でなくビーム形成の能力に応じて、積算回数を実現するための主走査方向の走査速度や走査回数を決定すれば良い。すなわち、探触子の走査速度は、音響波探触子の駆動周波数および素子ピッチに基づき算出することができる。
【0033】
より複雑な条件、例えば、積算回数Mnが主走査方向の素子数Enxより小さい場合や、Enxより小さい値の倍数であった場合には、探触子移動一往復あたりの積算回数が小さくなる。この場合、音響波探触子の移動量を決定する際に、単位時間あたり2画素以上ずらしながら走査させるようにすれば、走査速度を高く設定できる。音響波探触子の移動速度は本実施例で例示した方法に限らず、測定条件や、装置構成に依存して、走査速度を調整するための様々なアルゴリズムを適用できる。
本実施例における走査速度算出機能は、測定のための探触子移動速度を求めることが目的であるので、参照パラメータやアルゴリズムは本件で記述している方式に限らない。
【0034】
(包含領域の算出)
続いて装置制御部107は、指定された複数の測定指示領域をすべて包含する包含領域を算出する(ステップS2)。複数の測定指示領域のうち、最外殻に位置する測定指示領域を特定し、前記最外殻の測定指示領域に外接する矩形を包含領域として求める。
図5に包含領域のイメージを示す。図5中、矩形504が測定指示領域401、402、403から算出された、包含領域である。このように、測定指示領域が矩形である場合、全ての測定指示領域の各辺を延長し、上下左右それぞれにおいて最も外側にある辺を選択して矩形としたものが、包含領域になる。
【0035】
(ストライプごとの処理)
次に、装置制御部107は、包含領域をストライプ単位で領域分割する(ステップS3)。ここで、ストライプとは、音響波探触子およびレーザ光源(合わせて測定系とも呼ぶ)を、主走査方向に移動させて光音響測定される領域を差す。本実施例では、一度のレーザ発光によって光音響信号が取得できるサイズが、音響波探触子の全素子領域のサイズである。実際には、光音響測定が行われる領域は奥行き方向を含む三次元領域であるが、特に断りがない限りは、光音響測定が行われる領域を測定系の走査と平行な面で切り出した平面をストライプと表記する。
図6にストライプサイズによる領域分割の一例を示す。601a、601bは、それぞれ、包含領域504のストライプ単位の分割領域となる。
【0036】
次に、ストライプ単位で切り出した領域ごとに、ユーザによって指定された測定指示領域を含むために必ず測定の必要な領域(指定測定領域)を検出する(ステップS4)。このとき、注目ストライプと測定指示領域との接触判定を行い、両者が重なっている部分を指定測定領域であると判定する。
さらにこのとき、注目ストライプと測定指示領域の接触している部分が、ストライプの副走査方向の全幅分の領域(ストライプ高さ)に関して一部分であったとしても、ストライプ高さ分の領域を指定測定領域と判定する。例えば図6において、ストライプ601aと測定指示領域401が重なっているのは、測定指示領域401の高さ分だけであり、ストライプ601aの高さよりも低い。しかしこの場合でも、指定測定領域の高さはストライプ601aの高さである。またストライプ601bの下部のように、包含領域には含まれない範囲が指定測定領域に入ることもあり得る。
【0037】
次に装置制御部107は、注目ストライプについて、走査の種類に応じて3種類の走査領域に分割する(ステップS5)。このとき、ストライプ内の領域が、下記3種類のいずれの走査領域であるかを決定する判定処理が行われる。各走査領域は、一様に光音響測定または移動の処理を行う単位となる。
(1)一つ目は、測定系を連続走査させながら光音響測定を行う連続走査領域。
(2)二つ目は、測定系を移動するだけの移動領域。
(3)三つ目は、測定系を停止させて測定する固定測定領域。
【0038】
判定の際には、指定測定領域について、連続走査による測定か、固定測定の繰り返しで測定するかを判定する。また、複数の指定測定領域が存在する場合には、指定測定領域間の領域を移動領域とするか、連続走査領域とするかを判定する。判定基準は、各方式にした場合にかかる時間であって、注目ストライプの測定および移動処理にかかる時間が短くなるように領域を決定する。連続走査する時間は、前記、連続走査速度Vxと走査距離から算出し、固定走査時間は、積算回数とレーザ照射周波数から算出し、単純移動時間は所定の設計値から算出する。この時の装置制御部は、本発明の軌道決定手段に相当する。
【0039】
注目ストライプにおける領域分割処理の判定結果の一例を図7に示す。図中、701は注目ストライプである。702、703、704は、ユーザによって指示された測定指示領域401、402、403のうち、注目ストライプ701と接触している領域である。このとき、ストライプを分割する例として、主走査方向において、702のみがストライプと重なる部分、702と703が重複する部分、703のみが重なる部分、いずれも重ならない部分、704のみが重なる部分に分けることができる。あるいは単純に、主走査方向において、いずれかの測定指示領域が重なる部分と、どの測定指示領域も重ならない部分とに分けることもできる。いずれの分割方法においても、指定測定領域の高さはストライプ高さである。
【0040】
本図の例においては、測定指示領域702、703を含む指定測定領域については、連続走査を行った場合と固定測定を繰り返した場合の時間を比較して、一度に連続走査を行
う連続走査領域705とする。ここで、固定測定を繰り返す場合には、設定された積算回数に対応する光音響測定の時間に加えて、固定測定領域間の移動時間も必要となる。また、固定測定領域の幅が一定であることから、指定測定領域に含まれない部分(例えば移動領域)を測定してしまうこともある点に注意を要する。
一方、右側の測定指示領域704を含む指定測定領域は、固定測定領域706とする。図示したように、音響波探触子の幅に基づき、領域704の主走査方向の幅は、固定測定領域706の幅(言い換えると、音響波探触子の素子面の幅)に含まれているので連続走査の必要がない。
そして、連続走査領域705にも固定測定領域706にも含まれず残った部分は、移動領域とする。
上記のステップS4およびS5の処理を全ストライプで繰り返し、包含領域全体の領域分割を行う。
【0041】
(走査軌道の決定)
装置制御部107は、全てのストライプについての領域分割処理が済むと、分割されたそれぞれの走査領域について、測定の実行順序を決定する(ステップS6)。決定のための基準は、総測定時間の短縮である。具体的には測定系の移動距離、特に測定以外の移動距離が短くなるように実行順序を決定する。例えば、ステップS4で検出された指定測定領域相互の距離を求め、その移動距離が短い順に測定を行うようにしても良い。例えば実施例の包含領域において左上から測定を開始する場合、まず連続走査領域705から走査を開始し、705の終点に近い走査領域を次に測定するようにする。
【0042】
次に、前記実行順序に従い、測定軌道のリストを作成する。測定軌道リストには、少なくとも、測定開始座標、測定情報(連続走査測定か固定測定か)、連続走査の場合の走査距離の情報を1セットとして、測定実行順に列挙された情報が格納されている。
光音響装置は、上記手順で確定した測定軌道リストを参照して、光源駆動部106と探触子駆動部105の制御により測定系を移動させつつ音響波取得を行い、測定を実行する(ステップS7)。
【0043】
以上説明したように、本実施例の光音響装置は、参照画像上に複数指定された測定指示領域を全て含むように測定対象を領域分割し、自動的に測定系を移動させる軌道(測定実行順)を決定し、光音響測定を行う。これにより、ユーザにとっては、走査軌道について意識する必要がなく、関心領域の指定に集中できるよう、改善された装置が提供される。
また、本実施例の光音響装置は、測定条件設定に基づいて連続走査速度を算出し、測定のためにかかる時間を判定条件として走査領域を分割し、測定以外の移動距離を判定条件とした走査軌道を算出する。このことにより、複数箇所指定された測定指示領域に基づき、効率的に走査できる軌道を算出でき、測定時間を短くすることができる。
【符号の説明】
【0044】
100:光音響測定装置,104:音響波探触子,105:探触子駆動部,107:装置制御部,109:信号処理部,200:光音響システム操作装置,201:領域指定部
【特許請求の範囲】
【請求項1】
被検体から伝播する音響波を測定する探触子と、
前記探触子を移動させる走査手段と、
被検体における複数の関心領域の指定を受ける領域指定手段と、
前記複数の関心領域の位置に基づいて、前記探触子が音響波を測定する領域である複数の指定測定領域を決定し、前記走査手段により前記探触子が移動するときの軌道を、前記複数の指定測定領域の位置に基づいて決定する軌道決定手段と、
を有することを特徴とする音響波取得装置。
【請求項2】
前記複数の関心領域に含まれる領域は、前記複数の指定測定領域のいずれかに含まれている
ことを特徴とする請求項1に記載の音響波取得装置。
【請求項3】
前記走査手段は、前記複数の関心領域を全て含む領域である包含領域において、前記探触子を、主走査方向および前記主走査方向に直交する副走査方向に移動させるものであり、
前記軌道決定手段は、前記探触子の主走査方向の移動によりできる矩形の領域であるストライプを、前記関心領域を含む領域と含まない領域に分割し、前記関心領域を含む領域を前記指定測定領域とする
ことを特徴とする請求項1または2に記載の音響波取得装置。
【請求項4】
前記指定測定領域は、前記探触子を前記走査手段により移動させながら音響波を測定する連続走査領域と、前記探触子を停止させて音響波を測定する固定測定領域を含んでいることを特徴とする請求項3に記載の音響波取得装置。
【請求項5】
前記軌道決定手段は、前記連続走査領域における移動および測定にかかる時間、前記固定測定領域における測定にかかる時間、および、前記複数の指定測定領域の間の移動にかかる時間からなる測定時間が短くなるように、軌道の決定を行う
ことを特徴とする請求項4に記載の音響波取得装置。
【請求項6】
前記軌道決定手段は、前記探触子の移動距離が短くなるように、前記複数の指定測定領域を測定する順序を決定し、当該順序を用いて軌道の決定を行う
ことを特徴とする請求項5に記載の音響波取得装置。
【請求項7】
少なくとも前記探触子の素子に関する情報に基づいて、前記連続走査領域における前記探触子の移動速度を算出する速度算出手段をさらに有し、
前記軌道決定手段は、算出された速度を用いて前記連続走査領域における移動および測定にかかる時間を求める
ことを特徴とする請求項5または6に記載の音響波取得装置。
【請求項8】
被検体から伝播する音響波とは、光を照射された被検体から発生する光音響波であり、
前記速度算出手段は、前記光の周波数と、前記探触子の主走査方向の素子ピッチから、前記移動速度を算出する
ことを特徴とする請求項7に記載の音響波取得装置。
【請求項9】
被検体から伝播する音響波とは、前記探触子が被検体に送信した音響波が反射したものであり、
前記速度算出手段は、前記探触子の駆動周波数と、前記探触子の主走査方向の素子ピッチから、前記移動速度を算出する
ことを特徴とする請求項7に記載の音響波取得装置。
【請求項10】
探触子が、被検体から伝播する音響波を測定するステップと、
走査手段が、前記探触子を移動させるステップと、
領域指定手段が、被検体における複数の関心領域の指定を受けるステップと、
軌道決定手段が、前記複数の関心領域の位置に基づいて、前記探触子が音響波を測定する領域である複数の指定測定領域を決定し、前記走査手段により前記探触子が移動するときの軌道を、前記複数の指定測定領域の位置に基づいて決定するステップと、
を有することを特徴とする音響波取得方法。
【請求項1】
被検体から伝播する音響波を測定する探触子と、
前記探触子を移動させる走査手段と、
被検体における複数の関心領域の指定を受ける領域指定手段と、
前記複数の関心領域の位置に基づいて、前記探触子が音響波を測定する領域である複数の指定測定領域を決定し、前記走査手段により前記探触子が移動するときの軌道を、前記複数の指定測定領域の位置に基づいて決定する軌道決定手段と、
を有することを特徴とする音響波取得装置。
【請求項2】
前記複数の関心領域に含まれる領域は、前記複数の指定測定領域のいずれかに含まれている
ことを特徴とする請求項1に記載の音響波取得装置。
【請求項3】
前記走査手段は、前記複数の関心領域を全て含む領域である包含領域において、前記探触子を、主走査方向および前記主走査方向に直交する副走査方向に移動させるものであり、
前記軌道決定手段は、前記探触子の主走査方向の移動によりできる矩形の領域であるストライプを、前記関心領域を含む領域と含まない領域に分割し、前記関心領域を含む領域を前記指定測定領域とする
ことを特徴とする請求項1または2に記載の音響波取得装置。
【請求項4】
前記指定測定領域は、前記探触子を前記走査手段により移動させながら音響波を測定する連続走査領域と、前記探触子を停止させて音響波を測定する固定測定領域を含んでいることを特徴とする請求項3に記載の音響波取得装置。
【請求項5】
前記軌道決定手段は、前記連続走査領域における移動および測定にかかる時間、前記固定測定領域における測定にかかる時間、および、前記複数の指定測定領域の間の移動にかかる時間からなる測定時間が短くなるように、軌道の決定を行う
ことを特徴とする請求項4に記載の音響波取得装置。
【請求項6】
前記軌道決定手段は、前記探触子の移動距離が短くなるように、前記複数の指定測定領域を測定する順序を決定し、当該順序を用いて軌道の決定を行う
ことを特徴とする請求項5に記載の音響波取得装置。
【請求項7】
少なくとも前記探触子の素子に関する情報に基づいて、前記連続走査領域における前記探触子の移動速度を算出する速度算出手段をさらに有し、
前記軌道決定手段は、算出された速度を用いて前記連続走査領域における移動および測定にかかる時間を求める
ことを特徴とする請求項5または6に記載の音響波取得装置。
【請求項8】
被検体から伝播する音響波とは、光を照射された被検体から発生する光音響波であり、
前記速度算出手段は、前記光の周波数と、前記探触子の主走査方向の素子ピッチから、前記移動速度を算出する
ことを特徴とする請求項7に記載の音響波取得装置。
【請求項9】
被検体から伝播する音響波とは、前記探触子が被検体に送信した音響波が反射したものであり、
前記速度算出手段は、前記探触子の駆動周波数と、前記探触子の主走査方向の素子ピッチから、前記移動速度を算出する
ことを特徴とする請求項7に記載の音響波取得装置。
【請求項10】
探触子が、被検体から伝播する音響波を測定するステップと、
走査手段が、前記探触子を移動させるステップと、
領域指定手段が、被検体における複数の関心領域の指定を受けるステップと、
軌道決定手段が、前記複数の関心領域の位置に基づいて、前記探触子が音響波を測定する領域である複数の指定測定領域を決定し、前記走査手段により前記探触子が移動するときの軌道を、前記複数の指定測定領域の位置に基づいて決定するステップと、
を有することを特徴とする音響波取得方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−94537(P2013−94537A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−242270(P2011−242270)
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]