
音響波測定装置および音響波測定方法
【課題】 被検体を目視確認することができない場合、測定位置に照射手段を高精度で移動させることが難しい。
【解決手段】 本発明の音響波測定装置は、被検体を保持する保持手段と、前記被検体に光を照射する照射手段と、前記光により前記被検体内で発生する音響波を前記保持手段を介して受信する音響波検出手段と、を有し、さらに、前記被検体を撮像する撮像装置と、前記撮像装置により取得された画像上における測定位置を測定者が指定するための位置指定手段と、前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換する座標変換手段と、前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御手段と、を有する。
【解決手段】 本発明の音響波測定装置は、被検体を保持する保持手段と、前記被検体に光を照射する照射手段と、前記光により前記被検体内で発生する音響波を前記保持手段を介して受信する音響波検出手段と、を有し、さらに、前記被検体を撮像する撮像装置と、前記撮像装置により取得された画像上における測定位置を測定者が指定するための位置指定手段と、前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換する座標変換手段と、前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、音響波測定装置および音響波測定方法に関する。特に、光を照射することにより被検体で発生する音響波を受信する音響波測定装置及び音響波測定方法に関する。
【背景技術】
【0002】
近赤外光を用いた生体内イメージング技術の一つとして、光音響トモグラフィー(Photo Acoustic Tomography:PAT)がある。PATでは、光源から発生したパルス光を生体等の被検体に照射することにより、被検体内で伝播・拡散した光が光吸収体で吸収されて音響波(典型的には超音波)が発生する。この音響波発生の機序は光音響効果と呼ばれている。腫瘍は、その周辺組織に対して近赤外光の光エネルギーの吸収率が高いため、周辺組織よりも多くの光を吸収して瞬間的に膨張し、近赤外光を吸収した領域に応じた音響波を発生する。音響波測定装置である光音響イメージング装置は、この音響波を音響波検出素子で受信し、この受信信号を解析処理することにより、被検体内で発生した音響波の空間初期音圧分布等の情報を算出し画像化する装置である。発生した音圧の分布は、光の吸収係数に関係したものであるため、この光の吸収係数に関連した分布を用いて被検体を診断することが研究されている。
【0003】
光音響効果を用いて生体を測定する音響波測定装置は、近赤外波長の高出力短パルス(〜数十ナノ秒)光源を用いる。生体による光の吸収が低い近赤外波長帯域は、生体の窓といわれ、生体深部まで光を到達させることができる。
PATを用いた音響波測定装置では、測定者に光が照射されないようにする必要がある。特に、眼に光が照射されないようにする必要がある。
【0004】
そこで、非特許文献1に示されている装置では、暗幕により被検体と測定者とを隔離している。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】Srirang Manohar,Sanne E.Vaartjes,Johan C.G.van Hespen,Joost M.Klasse,Frank M.van den Engh,Andy K.H.The,Wiendelt Steenbergen,and Ton G. van Leeuwen,”Region−of−interest breast studies using the Twente Photoacoustic Mammoscope(PAM)”,Proc.of SPIE Vol6437 643702
【発明の概要】
【発明が解決しようとする課題】
【0006】
音響波測定装置では、音響波を効率よく受信するために、音響波検出手段である音響波探触子を被検体の所定の測定位置に移動させて音響波を検出することが望ましい。さらに、効率よく音響波を発生させるために、光を照射する照射手段も所定の測定位置に移動させて光を照射することが望ましい。そのため、測定者は被検体上の測定位置を確認し、そこへ音響波探触子と照射手段とを移動させる。しかしながら、非特許文献1に記載の装置は、被検体と測定者とが暗幕により隔離されるので被検体を目視確認することができず、測定位置に照射手段を高精度で移動させることが難しいという課題を持つ。また、光の照射を行わずに暗幕を開放して目視で照射手段を測定位置に移動させてから、暗幕を閉じて測定を行う方法も考えられるが、この場合は、暗幕の開閉動作を測定毎に行うため、暗幕の閉め忘れや、隙間の発生が生じ易くなる。
【課題を解決するための手段】
【0007】
本発明の音響波測定装置は、被検体を保持する保持手段と、前記被検体に光を照射する照射手段と、前記光により前記被検体内で発生する音響波を前記保持手段を介して受信する音響波検出手段と、を有する音響波測定装置であって、前記被検体を撮像する撮像装置と、前記撮像装置により取得された画像上における測定位置を測定者が指定するための位置指定手段と、前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換する座標変換手段と、前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御手段と、を有することを特徴とする。
【0008】
また、本発明の音響波測定方法は、照射手段により被検体に光を照射することにより、前記被検体から発生する音響波を、前記被検体を保持する保持手段を介して音響波検出手段により受信する音響波測定方法であって、前記被検体を撮像する撮像ステップと、測定者により指定された、前記撮像装置により取得された画像上における測定位置の座標を、前記保持手段上の対応する位置の座標に変換する座標変換ステップと、前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御ステップと、を有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、音響波測定装置において、高精度に測定位置を指定し、所望の位置で音響波を取得することが可能となる。
【図面の簡単な説明】
【0010】
【図1】第一の実施形態の音響波測定装置の概要を示す模式図である。
【図2】カメラ103側から見た際の模式図である。
【図3】第一の実施形態における測定のフローを示した図である。
【図4】測定位置ピクセル座標と可動保持板上座標との関係を示した模式図である。
【図5】第一の実施形態において固定保持板105と可動保持板104とカメラ103とを装置上面から見た模式図である。
【図6】第二の実施形態の音響波測定装置の概要を示す模式図である。
【図7】第二の実施形態における測定のフローを示した図である。
【図8】第二の実施形態において固定保持板105と可動保持板104とカメラ103とを装置上面から見た模式図である。
【発明を実施するための形態】
【0011】
本発明において、音響波とは、音波、超音波、光音響波と呼ばれるものを含み、被検体に近赤外線等の光(電磁波)を照射することで発生する弾性波のことを示す。
【0012】
(第一の実施形態)
第一の実施形態の音響波測定装置は、乳房を被検体とし、両側から乳房を挟持して乳房を保持する装置構成において、乳房を撮像する撮像装置であるカメラを設ける。そして、カメラにより得られた画像上で測定位置を指示して対応する被検体上の位置に照射手段と音響波検出手段のうち少なくとも一方を移動させる。
【0013】
(装置構成)
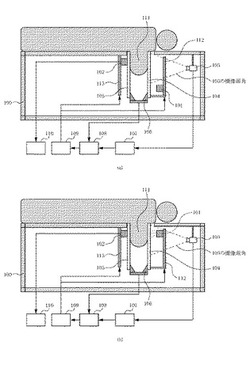
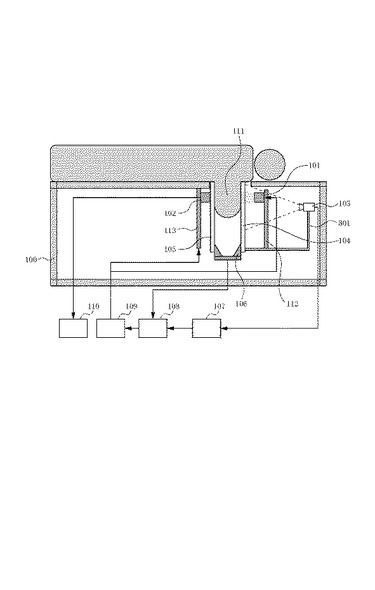
図1は、本発明の第一の実施形態である音響波測定装置の概要を示す側面図である。図1(a)はカメラ103の撮像範囲外に照射部101が移動している状態、図1(b)はカメラ103の撮像範囲内に照射部101が移動し、測定位置に光を照射する状態を示す模式図である。
【0014】
本発明の適用できる音響波測定装置は、光源から光(パルス光)を発生させ、照射部101を介して被検体111に光を照射する。本実施形態においては、筐体100により、被検体111に照射される光が外部に漏れることを防いでいる。被検体111内の光吸収体(腫瘍等の検出対象)は光エネルギーを吸収して音響波を発生する。発生した音響波は被検体内を伝播し、保持手段である固定保持板105を介して音響波検出手段である音響波探触子102に到達する。音響波探触子102は音響波を受信して電気信号に変換し、信号処理手段である光音響演算部110に出力する。光音響演算部110は、入力された信号を用いて光音響画像データを生成(画像再構成)する。また、撮像手段であるカメラ103は保持手段である可動保持板104を介して被検体を撮像し画像情報を得る。測定位置指定部107は、カメラ103から送られて来た画像情報を基に、測定者が測定位置を指定するためのものであり、指定された画像上の測定位置は、ピクセル座標として座標変換部108へ出力される。座標変換部108は、測定位置指定部107から出力されたピクセル座標を、可動保持板104上の座標(保持手段上の座標)に変換する。このとき、距離測定器106で測定した固定保持板105と可動保持板104との距離を用いて座標変換を行う。変換された座標は、位置制御部109に出力される。位置制御部109は、移動手段である音響波探触子駆動機構113と照射部駆動機構112のうち少なくとも一方を制御して音響波探触子102と照射部101のうち少なくとも一方を移動させる。
【0015】
本発明の光源は、コヒーレント、または、インコヒーレントのパルス光源を少なくとも一つは備える。光音響効果を発生させるため、パルス幅は数100ナノ秒以下が好ましく、5ナノから50ナノ秒がより好ましい。また、乳がん等を測定する場合は、生体を構成する成分のうち特定の成分(例えばヘモグロビン)に吸収される特定の波長の光を発生する。光源としては大きな出力が得られるレーザが好ましいが、レーザのかわりに発光ダイオードなどを用いることも可能である。レーザとしては、固体レーザ、ガスレーザー、色素レーザ、半導体レーザなど様々なレーザを使用することができる。
【0016】
照射手段である照射部101は、光源の光を測定に適した方法で被検体に照射する。本実施形態では、音響波探触子102とは反対側から光を照射しているが、本発明はこれに限定されない。例えば、音響波探触子102と同じ側面から光を照射しても良く、被検体の両側から光を照射しても良い。音響波の音圧は光の強度に比例するので、被検体の一部の側面からだけでなく、複数の面から光を照射すると信号のSN比が高くなるため好ましい。照射部101は、具体的には、ミラーや、光を集光したり拡大したり形状を変化させるレンズ、又は、光を分散・屈折・反射するプリズムや、光ファイバーを含む光学部品である。このような光学部品は、上記以外にも、光源から発せられた光を被検体に所望の方法(照射方向、形状等)で照射することができればどのようなものを用いてもよい。また、光が被検体上に照射される領域は被検体上を移動可能であると、より広範囲に光を照射することができるため好ましい。具体的には、被検体に対して照射部101自体を移動させるとよい。また、光が被検体に照射される領域は、音響波探触子102と同期して移動するとさらに好ましい。また、光源が小さい場合は光源を照射部と兼用し、光源自体を機械的に移動させてもよい。
【0017】
音響波検出手段である音響波探触子102は音響波を電気信号である受信信号に変換する。音響波探触子は、圧電現象を用いた変換素子、光の共振を用いた変換素子、容量の変化を用いた変換素子など、音響波を受信して電気信号に変換できる素子であればどのような変換素子を用いてもよい。また、変換素子を複数並べた素子アレイを用いることにより広い範囲で音響波を受信できるため好ましい。音響波は、音響波探触子102で受信され、受信信号は光音響演算部110へ入力される。音響波探触子102は図1においては固定保持板105側に設けられているが、可動保持板104側に設けても良い。
【0018】
信号処理手段である光音響演算部110は、コンピュータに実装されるプログラムであってもよいし、電子回路であってもよい。光音響演算部110は、トモグラフィー技術で通常に用いられるタイムドメインあるいはフーリエドメインでの逆投影などを用いて光音響画像データを生成(画像再構成)する。本発明における光音響画像データは、2次元または3次元を問わず、被検体内部の情報(生体内の初期音圧分布や光吸収係数分布等の生体情報)を示すデータのことを示す。光音響画像データは、2次元の場合はピクセルデータを複数並べて構成され、3次元の場合はボクセルデータを複数並べて構成される。
【0019】
保持手段である固定保持板105と可動保持板104は、被検体を保持し、被検体の少なくとも一部の形状を一定に保つための保持手段である。図1に示すように被検体を両側から挟むようにすると、被検体は測定中での位置が固定されるので、体動等による位置誤差を低減することができる。また、被検体を圧迫することにより、被検体の深部まで光を効率良く到達させることができる。照射部101が設けられる側の保持手段(図1においては可動保持板104)は、光の透過率が高い部材を用いることが好ましい。音響波探触子102が設けられる側の保持手段(図1においては固定保持板105)は、被検体111や音響波探触子102との音響整合性が高い(音響インピーダンスが近い)部材を用いることが好ましい。音響整合性を高めることを目的として、保持手段と被検体111との間や、保持手段と音響波探触子102との間にジェル等の音響整合材を介在させてもよい。また、保持手段としては、上記構成に限られず、両方の保持板を可動にしても良い。さらに、両側から挟持する構成ではなく、おわん型の部材で下側から被検体を保持する構成にしても良い。
【0020】
筐体100は、照射部101や音響波探触子102等の周囲を囲むことにより、被検体111に照射される光が外部に漏れることを防ぐ機能を有する。これにより、測定者へ光が照射されることを防止する。また本実施形態の筐体100は被験者を載置する機能も有している。
【0021】
撮像手段であるカメラ103は、筐体100内部に設置され、被検体111の画像情報を取得する。カメラ103としては、CCDカメラ、CMOSカメラ等を用いることができる。本実施形態のカメラ103は、筐体100に固定されている。カメラ103が被検体を撮像する際は、照射部101は撮像領域外に移動させ、被検体と重ならないようにすることが好ましい。また図1では、可動保持板104側にカメラ103を設けているが、固定保持板105側に設けることも可能である。
【0022】
移動手段である照射部駆動機構112は、照射部101をカメラ103の撮像領域内の任意の位置に移動させたり、照射部101をカメラ103の撮像領域外に移動させたりすることができる。
【0023】
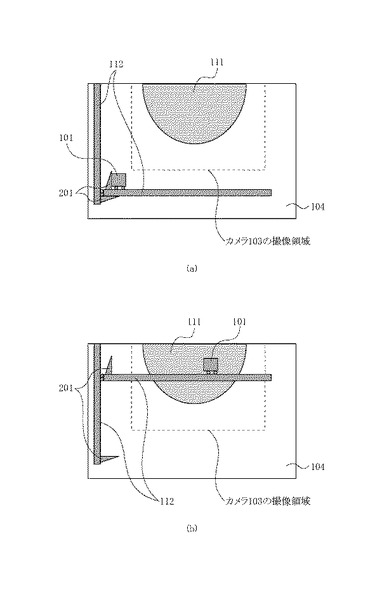
図2は、装置をカメラ103側から見た場合の模式図である。図2(a)は、カメラ103の撮像領域外に照射部101を移動させた場合、図2(b)は、カメラ103の撮像領域内に照射部101を移動させた場合を示す模式図である。照射部駆動機構112は、照射部101を水平方向と垂直方向に独立に駆動する機構を有している。駆動する機構には、モータとラックピニオン、モータとベルト、リニアモータ等を用いることができる。照射部駆動機構112は、原点センサ201を有している。原点センサ201の位置は、原点センサ201により規定される照射部101の位置がカメラ103の撮像領域外となるように設計されている。原点センサには、接触センサ、光学式センサ、アブソリュートエンコーダの原点マーカ等を用いることができる。照射部駆動機構112は、位置制御部109により制御される。照射部101をカメラ103の撮像領域外に移動させるには、照射部101を原点位置に移動させる指令を位置制御部109から照射部駆動機構112に送る。これにより図2(a)のように照射部101をカメラ103の撮像領域外に移動させることで、図1(a)の状態を実現する。照射部101をカメラ103の撮像領域内に移動させるには、照射部101を撮像領域内の位置に移動させる指令を位置制御部109から照射部駆動機構112に送る。これにより、図2(b)のように照射部101をカメラ103の撮像領域内に移動させることで、図1(b)の状態を実現する。
【0024】
移動手段である音響波探触子駆動機構113は、照射部101と被検体を挟んで対向する位置に音響波探触子102を移動させると良い。音響波探触子駆動機構113は、位置制御部109により制御される。また、カメラ103が音響波探触子102側に設けられる場合は、撮像時に被検体と音響波探触子102とが重ならないよう、上記した照射部101と同様の移動をさせると良い。
【0025】
距離測定手段である距離測定器106は、固定保持板105と可動保持板104との距離を測定する。ここでいう距離とは、カメラ103の光軸方向の距離である。距離測定器106の一端は固定保持板105に固定され、もう一端は可動保持板104に固定されている。被検体111毎の特性(大きさ等)により異なる距離を、座標変換部108へ出力する。
【0026】
測定位置指定部107は、カメラ103により取得された画像上における測定位置を測定者が指定するためのものである。具体的には、カメラからの画像情報を用いてモニタ等の表示部に画像を表示し、表示された画像上における測定位置をマウスで指定したり、接触式位置検出センサを持つ画面上の測定位置を指で指定したりする。また、キーボード等を用いて画像上における測定位置の座標を入力して指定してもよい。指定された測定位置は、画像上のピクセル座標として座標変換部108へ出力される。
【0027】
座標変換部108は、測定位置指定部107から出力されたピクセル座標を、保持手段上(本実施形態においては可動保持板104上)の前記ピクセル座標に対応する位置の座標に変換する。このとき、距離測定器106で測定された固定保持板と可動保持板との距離を用いて変換を行う。変換された座標は、位置制御部109に出力される。
【0028】
位置制御部109は、音響波探触子駆動機構113と照射部駆動機構112とを制御して音響波探触子102と照射部101のうち少なくとも一方を移動させる。例えば、照射部101を座標変換部108から出力された座標の位置に移動させたり、原点センサ201で規定される原点位置に移動させたりすることができる。
【0029】
(測定フロー)
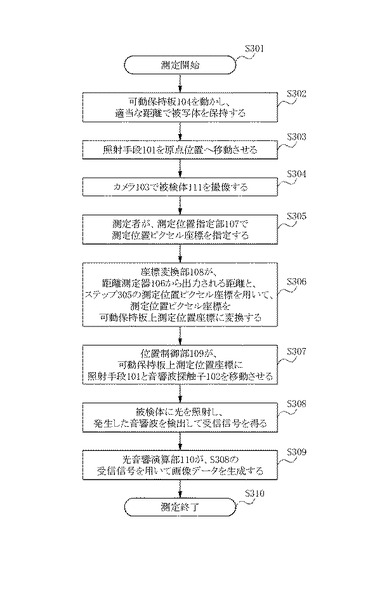
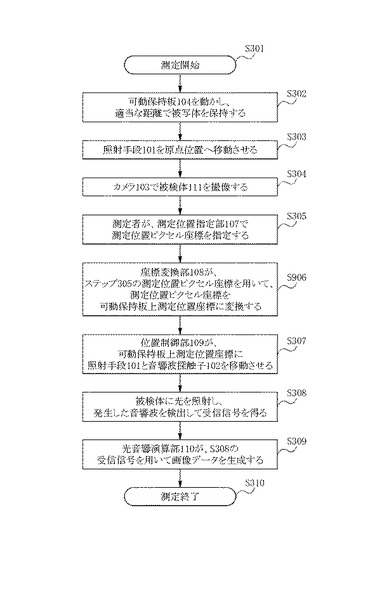
本実施形態の測定フローを図3に示す。測定フローの各ステップを図1と図3を用いて詳細に説明する。以降の説明においては、図1のように、固定保持手段と可動保持手段とからなる保持手段を有し、固定保持手段側に音響波探触子102を設け、可動保持手段側に照射部101を設ける形態を例として説明する。ただし、上記したように本発明はこのような形態に限定されるものではない。
【0030】
まず測定を開始(ステップ301)すると、固定保持板105と可動保持板104との間に被検体を挿入し、ステップ302で、測定者が可動保持板104を動かして被検体111を保持する。このとき、取得される受信信号のSN比と測定深さの点から被検体111をできるだけ薄く保持することが望ましい。保持完了時、固定保持板105と可動保持板104との距離が距離測定器106により測定される。
【0031】
ステップ303では、照射部101を原点位置に移動させる。位置制御部109により照射部駆動機構112が駆動され、照射部101が原点位置へ移動する。
【0032】
ステップ304(撮像ステップ)では、カメラ103により被検体111を撮影する。ステップ303において照射部101はカメラ103の撮像領域外である原点位置に移動してあるので、測定位置を含む被検体111全体を撮像することができる。
【0033】
ステップ305では、ステップ304で得られた被検体111の画像情報を基に、測定者が画像上における測定位置をピクセル座標で指定し、測定位置ピクセル座標が得られる。
【0034】
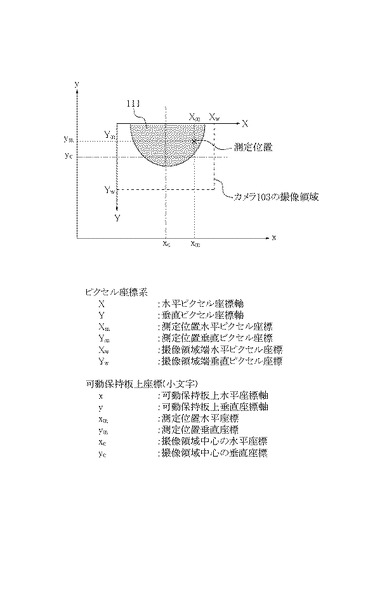
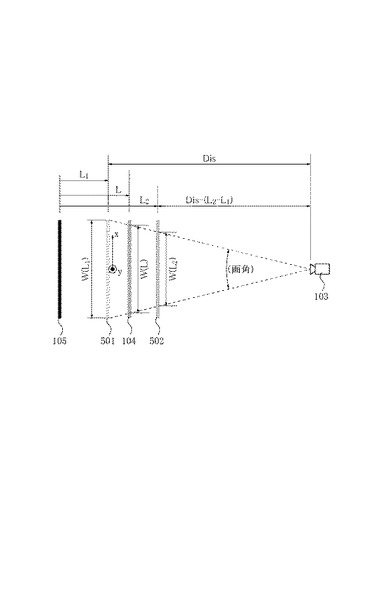
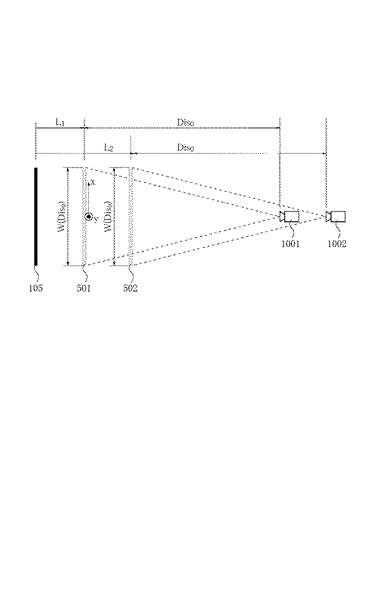
ステップ306(座標変換ステップ)での処理を、図4と図5を用いて説明する。図4は、画像上のピクセル座標と可動保持板上座標の関係を示した模式図である。座標変換部108は、ステップ305で測定者により指定された測定位置のピクセル座標(Xm、Ym)を可動保持板上測定位置座標(xm、ym)に変換する。可動保持板上測定位置座標は、例えばミリメートルやマイクロメートルを単位とした値で示される。次に、変換式について説明する。図5は、固定保持板105と可動保持板104とカメラ103とを装置上面から見た模式図である。可動保持板104は、任意の距離Lをとることができる。501、502はそれぞれ、L=L1の時、L=L2の時の、可動保持板の位置を示す。ある距離Lの時の、カメラ103の撮像幅をW(L)で表す。図5からわかるように、可動保持板の位置によって撮像幅Wが変化する。L=L1の時の、可動保持板とカメラ103との距離をDisで表す。Disは、図5中の画角を頂角とする二等辺三角形の関係から、以下の式(1)で表される。
【0035】
【数1】

【0036】
図4で示される座標関係から、測定位置ピクセル座標を可動保持板上測定位置座標に変換する変換式は、式(1)のDisを用いて、
【0037】
【数2】
【0038】
で表される。式(2)によりピクセル座標Xmがxmに変換されることを以下に説明する。図4において、Xは水平ピクセル座標軸、Yは垂直ピクセル座標軸、Xmは測定位置水平ピクセル座標、Ymは測定位置垂直ピクセル座標、Xwは撮像領域端水平ピクセル座標、Ywは撮像領域端垂直ピクセル座標である。また、xは可動保持板上水平座標軸、yは可動保持板上垂直座標軸、xmは測定位置水平座標、ymは測定位置垂直座標、xcは撮像領域中心の水平座標、ycは撮像領域中心の垂直座標である。
【0039】
式(2)中の、
【0040】
【数3】
【0041】
は、カメラ103と測定位置との距離により決定される変換係数である。式(3)は、任意のLにおける撮像幅W(L)を示す。式(3)で示される撮像幅W(L)を図4の撮像領域端水平ピクセル座標XWで割ることにより、1ピクセルあたりの可動保持板上座標量である
【0042】
【数4】
【0043】
が得られる。式(4)を、式(2)中の画像中心からXmまでのピクセル量である
【0044】
【数5】
【0045】
にかけることにより、可動保持板上座標量である
【0046】
【数6】
【0047】
を得る。式(6)のxcを左辺に移項することで式(2)のxmを得る。以上は水平方向について説明したが、垂直方向、すなわちYmからymへの変換も同じ原理である。
【0048】
L1、L2、W(L1)、W(L2)は予め測定された既知の値であり、xc、xc、Xw、Ywは、装置の緒元値として予め得られている。ステップ302で測定された固定保持板105と可動保持板104との距離を式(2)のLに代入し、ステップ305で得られた測定位置ピクセル座標を式(2)の(Xm、Ym)に代入することで、可動保持板上測定位置座標(xm、ym)を得る事ができる。可動保持板104とカメラ103との距離が変化しても、ステップ306を行うことで、ピクセル座標と可動保持板上測定位置座標との関係が正しく補正される。
【0049】
ステップ307(位置制御ステップ)では、位置制御部109によりステップ306で得られた可動保持板上測定位置座標に照射部101を移動させる。ステップ306で固定保持板105と可動保持板104との距離を考慮した変換がなされているので、高精度に移動させることができる。このステップでは、照射部101だけでなく、音響波探触子102も固定保持板上における測定位置の座標(xm、ym)に移動させるとよい。ここで、測定位置とは、被検体上の特に詳しく測定したい位置、又は、音響波探触子102や照射部101を移動しながら測定する場合の開始位置等である。
【0050】
ステップ308では、照射部101から被検体に光を照射し、発生した音響波を音響波探触子102で検出して受信信号を得る。ステップ309では、ステップ308で得た受信信号を用いて、光音響演算部110で光音響画像データを生成する。光音響画像データは、例えば数値情報や画像として表示部(不図示)に表示されることにより測定者に提示され、測定を終了する(ステップ309)。
【0051】
以上のように、目視による測定位置指定が困難な音響波測定装置においても、カメラ103を設けることで測定位置の指定が可能となる。さらに、カメラ103撮影領域外に照射部101を移動させる照射部駆動機構112と距離測定器106とを設けることで、高精度に測定位置を指定することが可能となる。
【0052】
(第二の実施形態)
第二の実施形態では、特に被検体を撮像する撮像手段と可動保持手段との距離を一定に保つ機構を持つ場合を説明する。それ以外の構成は第一の実施形態と同様である。
【0053】
(装置構成)
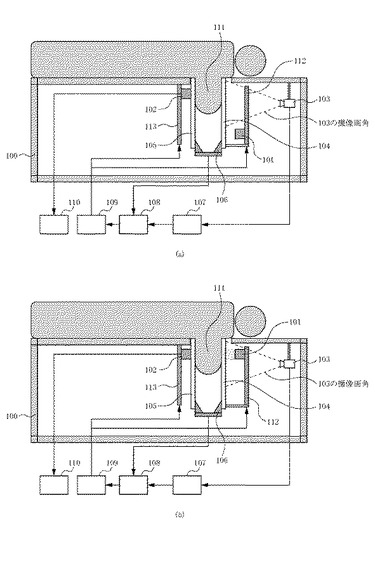
図6は、本発明の第二の実施形態である音響波測定装置の概要を示す模式図である。本実施形態において、座標変換部での処理内容は第一の実施形態と異なるが、それ以外の構成要素は第一の実施形態と同じであるため、同一の用語に関しては、説明を省略する。
【0054】
距離固定手段である固定具801は、可動保持板104とカメラ103とを固定する。固定具801は、可動保持板104とカメラ103との距離をある値に固定するように設計されている。このため、可動保持板104が動いても、カメラ103との距離は一定に保たれる。固定具801は、カメラ103の撮像領域内に入らないように配置することが好ましい。座標変換部108は、測定位置指定部107から出力されたピクセル座標を、可動保持板104上の座標に変換する。このとき、固定具801により決まる距離を用いて変換を行う。変換された座標は、位置制御部109に出力される。
【0055】
(測定フロー)
本実施形態の測定フローを図7に示す。本実施形態の座標変換ステップ(ステップ906)は第一の実施形態のステップ306と異なるが、それ以外のステップは図3と同じであるため説明を省略する。
【0056】
ステップ906での処理を、図8を用いて説明する。図8は、固定保持板105と可動保持板104とカメラ103とを装置上面から見た模式図である。1001、1002はそれぞれ、固定保持板105と可動保持板104との距離がL1、L2の時のカメラ103の位置を示す。固定具801により可動保持板104とカメラ103との距離Dis0が一定であるため、距離L1、L2いずれの場合もカメラ103の撮像幅WはDis0により決まる値となる。図4と図8より、測定位置ピクセル座標を可動保持板上測定位置座標に変換する変換式は以下の式(3)で表される。
【0057】
【数7】
【0058】
式(7)中のW(Dis0)は撮像手段と測定位置との距離により決定される変換係数である。Dis0は固定具801により決定される装置の緒元値なので、変換係数W(Dis0)は予め得られている。ステップ305で得られた測定位置ピクセル座標を式(3)の(Xm、Ym)に代入することで、可動保持板上測定位置座標(xm、ym)を得る事ができる。
【0059】
以上のように、目視による測定位置指定が困難な音響波測定装置においてもカメラ103を設けることで測定位置の指定が可能となる。さらに、固定具801を設けることで、被検体を挟持する厚みが変化しても可動保持板104とカメラ103との距離が変わらないため、座標変換ステップでの処理が簡単になる。
【符号の説明】
【0060】
100 筐体
101 照射部
102 音響波探触子
103 カメラ
104 可動保持板
105 固定保持板
106 距離測定器
107 測定位置指定部
108 座標変換部
109 位置制御部
112 照射部駆動機構
113 音響波探触子駆動機構
【技術分野】
【0001】
本発明は、音響波測定装置および音響波測定方法に関する。特に、光を照射することにより被検体で発生する音響波を受信する音響波測定装置及び音響波測定方法に関する。
【背景技術】
【0002】
近赤外光を用いた生体内イメージング技術の一つとして、光音響トモグラフィー(Photo Acoustic Tomography:PAT)がある。PATでは、光源から発生したパルス光を生体等の被検体に照射することにより、被検体内で伝播・拡散した光が光吸収体で吸収されて音響波(典型的には超音波)が発生する。この音響波発生の機序は光音響効果と呼ばれている。腫瘍は、その周辺組織に対して近赤外光の光エネルギーの吸収率が高いため、周辺組織よりも多くの光を吸収して瞬間的に膨張し、近赤外光を吸収した領域に応じた音響波を発生する。音響波測定装置である光音響イメージング装置は、この音響波を音響波検出素子で受信し、この受信信号を解析処理することにより、被検体内で発生した音響波の空間初期音圧分布等の情報を算出し画像化する装置である。発生した音圧の分布は、光の吸収係数に関係したものであるため、この光の吸収係数に関連した分布を用いて被検体を診断することが研究されている。
【0003】
光音響効果を用いて生体を測定する音響波測定装置は、近赤外波長の高出力短パルス(〜数十ナノ秒)光源を用いる。生体による光の吸収が低い近赤外波長帯域は、生体の窓といわれ、生体深部まで光を到達させることができる。
PATを用いた音響波測定装置では、測定者に光が照射されないようにする必要がある。特に、眼に光が照射されないようにする必要がある。
【0004】
そこで、非特許文献1に示されている装置では、暗幕により被検体と測定者とを隔離している。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】Srirang Manohar,Sanne E.Vaartjes,Johan C.G.van Hespen,Joost M.Klasse,Frank M.van den Engh,Andy K.H.The,Wiendelt Steenbergen,and Ton G. van Leeuwen,”Region−of−interest breast studies using the Twente Photoacoustic Mammoscope(PAM)”,Proc.of SPIE Vol6437 643702
【発明の概要】
【発明が解決しようとする課題】
【0006】
音響波測定装置では、音響波を効率よく受信するために、音響波検出手段である音響波探触子を被検体の所定の測定位置に移動させて音響波を検出することが望ましい。さらに、効率よく音響波を発生させるために、光を照射する照射手段も所定の測定位置に移動させて光を照射することが望ましい。そのため、測定者は被検体上の測定位置を確認し、そこへ音響波探触子と照射手段とを移動させる。しかしながら、非特許文献1に記載の装置は、被検体と測定者とが暗幕により隔離されるので被検体を目視確認することができず、測定位置に照射手段を高精度で移動させることが難しいという課題を持つ。また、光の照射を行わずに暗幕を開放して目視で照射手段を測定位置に移動させてから、暗幕を閉じて測定を行う方法も考えられるが、この場合は、暗幕の開閉動作を測定毎に行うため、暗幕の閉め忘れや、隙間の発生が生じ易くなる。
【課題を解決するための手段】
【0007】
本発明の音響波測定装置は、被検体を保持する保持手段と、前記被検体に光を照射する照射手段と、前記光により前記被検体内で発生する音響波を前記保持手段を介して受信する音響波検出手段と、を有する音響波測定装置であって、前記被検体を撮像する撮像装置と、前記撮像装置により取得された画像上における測定位置を測定者が指定するための位置指定手段と、前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換する座標変換手段と、前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御手段と、を有することを特徴とする。
【0008】
また、本発明の音響波測定方法は、照射手段により被検体に光を照射することにより、前記被検体から発生する音響波を、前記被検体を保持する保持手段を介して音響波検出手段により受信する音響波測定方法であって、前記被検体を撮像する撮像ステップと、測定者により指定された、前記撮像装置により取得された画像上における測定位置の座標を、前記保持手段上の対応する位置の座標に変換する座標変換ステップと、前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御ステップと、を有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、音響波測定装置において、高精度に測定位置を指定し、所望の位置で音響波を取得することが可能となる。
【図面の簡単な説明】
【0010】
【図1】第一の実施形態の音響波測定装置の概要を示す模式図である。
【図2】カメラ103側から見た際の模式図である。
【図3】第一の実施形態における測定のフローを示した図である。
【図4】測定位置ピクセル座標と可動保持板上座標との関係を示した模式図である。
【図5】第一の実施形態において固定保持板105と可動保持板104とカメラ103とを装置上面から見た模式図である。
【図6】第二の実施形態の音響波測定装置の概要を示す模式図である。
【図7】第二の実施形態における測定のフローを示した図である。
【図8】第二の実施形態において固定保持板105と可動保持板104とカメラ103とを装置上面から見た模式図である。
【発明を実施するための形態】
【0011】
本発明において、音響波とは、音波、超音波、光音響波と呼ばれるものを含み、被検体に近赤外線等の光(電磁波)を照射することで発生する弾性波のことを示す。
【0012】
(第一の実施形態)
第一の実施形態の音響波測定装置は、乳房を被検体とし、両側から乳房を挟持して乳房を保持する装置構成において、乳房を撮像する撮像装置であるカメラを設ける。そして、カメラにより得られた画像上で測定位置を指示して対応する被検体上の位置に照射手段と音響波検出手段のうち少なくとも一方を移動させる。
【0013】
(装置構成)
図1は、本発明の第一の実施形態である音響波測定装置の概要を示す側面図である。図1(a)はカメラ103の撮像範囲外に照射部101が移動している状態、図1(b)はカメラ103の撮像範囲内に照射部101が移動し、測定位置に光を照射する状態を示す模式図である。
【0014】
本発明の適用できる音響波測定装置は、光源から光(パルス光)を発生させ、照射部101を介して被検体111に光を照射する。本実施形態においては、筐体100により、被検体111に照射される光が外部に漏れることを防いでいる。被検体111内の光吸収体(腫瘍等の検出対象)は光エネルギーを吸収して音響波を発生する。発生した音響波は被検体内を伝播し、保持手段である固定保持板105を介して音響波検出手段である音響波探触子102に到達する。音響波探触子102は音響波を受信して電気信号に変換し、信号処理手段である光音響演算部110に出力する。光音響演算部110は、入力された信号を用いて光音響画像データを生成(画像再構成)する。また、撮像手段であるカメラ103は保持手段である可動保持板104を介して被検体を撮像し画像情報を得る。測定位置指定部107は、カメラ103から送られて来た画像情報を基に、測定者が測定位置を指定するためのものであり、指定された画像上の測定位置は、ピクセル座標として座標変換部108へ出力される。座標変換部108は、測定位置指定部107から出力されたピクセル座標を、可動保持板104上の座標(保持手段上の座標)に変換する。このとき、距離測定器106で測定した固定保持板105と可動保持板104との距離を用いて座標変換を行う。変換された座標は、位置制御部109に出力される。位置制御部109は、移動手段である音響波探触子駆動機構113と照射部駆動機構112のうち少なくとも一方を制御して音響波探触子102と照射部101のうち少なくとも一方を移動させる。
【0015】
本発明の光源は、コヒーレント、または、インコヒーレントのパルス光源を少なくとも一つは備える。光音響効果を発生させるため、パルス幅は数100ナノ秒以下が好ましく、5ナノから50ナノ秒がより好ましい。また、乳がん等を測定する場合は、生体を構成する成分のうち特定の成分(例えばヘモグロビン)に吸収される特定の波長の光を発生する。光源としては大きな出力が得られるレーザが好ましいが、レーザのかわりに発光ダイオードなどを用いることも可能である。レーザとしては、固体レーザ、ガスレーザー、色素レーザ、半導体レーザなど様々なレーザを使用することができる。
【0016】
照射手段である照射部101は、光源の光を測定に適した方法で被検体に照射する。本実施形態では、音響波探触子102とは反対側から光を照射しているが、本発明はこれに限定されない。例えば、音響波探触子102と同じ側面から光を照射しても良く、被検体の両側から光を照射しても良い。音響波の音圧は光の強度に比例するので、被検体の一部の側面からだけでなく、複数の面から光を照射すると信号のSN比が高くなるため好ましい。照射部101は、具体的には、ミラーや、光を集光したり拡大したり形状を変化させるレンズ、又は、光を分散・屈折・反射するプリズムや、光ファイバーを含む光学部品である。このような光学部品は、上記以外にも、光源から発せられた光を被検体に所望の方法(照射方向、形状等)で照射することができればどのようなものを用いてもよい。また、光が被検体上に照射される領域は被検体上を移動可能であると、より広範囲に光を照射することができるため好ましい。具体的には、被検体に対して照射部101自体を移動させるとよい。また、光が被検体に照射される領域は、音響波探触子102と同期して移動するとさらに好ましい。また、光源が小さい場合は光源を照射部と兼用し、光源自体を機械的に移動させてもよい。
【0017】
音響波検出手段である音響波探触子102は音響波を電気信号である受信信号に変換する。音響波探触子は、圧電現象を用いた変換素子、光の共振を用いた変換素子、容量の変化を用いた変換素子など、音響波を受信して電気信号に変換できる素子であればどのような変換素子を用いてもよい。また、変換素子を複数並べた素子アレイを用いることにより広い範囲で音響波を受信できるため好ましい。音響波は、音響波探触子102で受信され、受信信号は光音響演算部110へ入力される。音響波探触子102は図1においては固定保持板105側に設けられているが、可動保持板104側に設けても良い。
【0018】
信号処理手段である光音響演算部110は、コンピュータに実装されるプログラムであってもよいし、電子回路であってもよい。光音響演算部110は、トモグラフィー技術で通常に用いられるタイムドメインあるいはフーリエドメインでの逆投影などを用いて光音響画像データを生成(画像再構成)する。本発明における光音響画像データは、2次元または3次元を問わず、被検体内部の情報(生体内の初期音圧分布や光吸収係数分布等の生体情報)を示すデータのことを示す。光音響画像データは、2次元の場合はピクセルデータを複数並べて構成され、3次元の場合はボクセルデータを複数並べて構成される。
【0019】
保持手段である固定保持板105と可動保持板104は、被検体を保持し、被検体の少なくとも一部の形状を一定に保つための保持手段である。図1に示すように被検体を両側から挟むようにすると、被検体は測定中での位置が固定されるので、体動等による位置誤差を低減することができる。また、被検体を圧迫することにより、被検体の深部まで光を効率良く到達させることができる。照射部101が設けられる側の保持手段(図1においては可動保持板104)は、光の透過率が高い部材を用いることが好ましい。音響波探触子102が設けられる側の保持手段(図1においては固定保持板105)は、被検体111や音響波探触子102との音響整合性が高い(音響インピーダンスが近い)部材を用いることが好ましい。音響整合性を高めることを目的として、保持手段と被検体111との間や、保持手段と音響波探触子102との間にジェル等の音響整合材を介在させてもよい。また、保持手段としては、上記構成に限られず、両方の保持板を可動にしても良い。さらに、両側から挟持する構成ではなく、おわん型の部材で下側から被検体を保持する構成にしても良い。
【0020】
筐体100は、照射部101や音響波探触子102等の周囲を囲むことにより、被検体111に照射される光が外部に漏れることを防ぐ機能を有する。これにより、測定者へ光が照射されることを防止する。また本実施形態の筐体100は被験者を載置する機能も有している。
【0021】
撮像手段であるカメラ103は、筐体100内部に設置され、被検体111の画像情報を取得する。カメラ103としては、CCDカメラ、CMOSカメラ等を用いることができる。本実施形態のカメラ103は、筐体100に固定されている。カメラ103が被検体を撮像する際は、照射部101は撮像領域外に移動させ、被検体と重ならないようにすることが好ましい。また図1では、可動保持板104側にカメラ103を設けているが、固定保持板105側に設けることも可能である。
【0022】
移動手段である照射部駆動機構112は、照射部101をカメラ103の撮像領域内の任意の位置に移動させたり、照射部101をカメラ103の撮像領域外に移動させたりすることができる。
【0023】
図2は、装置をカメラ103側から見た場合の模式図である。図2(a)は、カメラ103の撮像領域外に照射部101を移動させた場合、図2(b)は、カメラ103の撮像領域内に照射部101を移動させた場合を示す模式図である。照射部駆動機構112は、照射部101を水平方向と垂直方向に独立に駆動する機構を有している。駆動する機構には、モータとラックピニオン、モータとベルト、リニアモータ等を用いることができる。照射部駆動機構112は、原点センサ201を有している。原点センサ201の位置は、原点センサ201により規定される照射部101の位置がカメラ103の撮像領域外となるように設計されている。原点センサには、接触センサ、光学式センサ、アブソリュートエンコーダの原点マーカ等を用いることができる。照射部駆動機構112は、位置制御部109により制御される。照射部101をカメラ103の撮像領域外に移動させるには、照射部101を原点位置に移動させる指令を位置制御部109から照射部駆動機構112に送る。これにより図2(a)のように照射部101をカメラ103の撮像領域外に移動させることで、図1(a)の状態を実現する。照射部101をカメラ103の撮像領域内に移動させるには、照射部101を撮像領域内の位置に移動させる指令を位置制御部109から照射部駆動機構112に送る。これにより、図2(b)のように照射部101をカメラ103の撮像領域内に移動させることで、図1(b)の状態を実現する。
【0024】
移動手段である音響波探触子駆動機構113は、照射部101と被検体を挟んで対向する位置に音響波探触子102を移動させると良い。音響波探触子駆動機構113は、位置制御部109により制御される。また、カメラ103が音響波探触子102側に設けられる場合は、撮像時に被検体と音響波探触子102とが重ならないよう、上記した照射部101と同様の移動をさせると良い。
【0025】
距離測定手段である距離測定器106は、固定保持板105と可動保持板104との距離を測定する。ここでいう距離とは、カメラ103の光軸方向の距離である。距離測定器106の一端は固定保持板105に固定され、もう一端は可動保持板104に固定されている。被検体111毎の特性(大きさ等)により異なる距離を、座標変換部108へ出力する。
【0026】
測定位置指定部107は、カメラ103により取得された画像上における測定位置を測定者が指定するためのものである。具体的には、カメラからの画像情報を用いてモニタ等の表示部に画像を表示し、表示された画像上における測定位置をマウスで指定したり、接触式位置検出センサを持つ画面上の測定位置を指で指定したりする。また、キーボード等を用いて画像上における測定位置の座標を入力して指定してもよい。指定された測定位置は、画像上のピクセル座標として座標変換部108へ出力される。
【0027】
座標変換部108は、測定位置指定部107から出力されたピクセル座標を、保持手段上(本実施形態においては可動保持板104上)の前記ピクセル座標に対応する位置の座標に変換する。このとき、距離測定器106で測定された固定保持板と可動保持板との距離を用いて変換を行う。変換された座標は、位置制御部109に出力される。
【0028】
位置制御部109は、音響波探触子駆動機構113と照射部駆動機構112とを制御して音響波探触子102と照射部101のうち少なくとも一方を移動させる。例えば、照射部101を座標変換部108から出力された座標の位置に移動させたり、原点センサ201で規定される原点位置に移動させたりすることができる。
【0029】
(測定フロー)
本実施形態の測定フローを図3に示す。測定フローの各ステップを図1と図3を用いて詳細に説明する。以降の説明においては、図1のように、固定保持手段と可動保持手段とからなる保持手段を有し、固定保持手段側に音響波探触子102を設け、可動保持手段側に照射部101を設ける形態を例として説明する。ただし、上記したように本発明はこのような形態に限定されるものではない。
【0030】
まず測定を開始(ステップ301)すると、固定保持板105と可動保持板104との間に被検体を挿入し、ステップ302で、測定者が可動保持板104を動かして被検体111を保持する。このとき、取得される受信信号のSN比と測定深さの点から被検体111をできるだけ薄く保持することが望ましい。保持完了時、固定保持板105と可動保持板104との距離が距離測定器106により測定される。
【0031】
ステップ303では、照射部101を原点位置に移動させる。位置制御部109により照射部駆動機構112が駆動され、照射部101が原点位置へ移動する。
【0032】
ステップ304(撮像ステップ)では、カメラ103により被検体111を撮影する。ステップ303において照射部101はカメラ103の撮像領域外である原点位置に移動してあるので、測定位置を含む被検体111全体を撮像することができる。
【0033】
ステップ305では、ステップ304で得られた被検体111の画像情報を基に、測定者が画像上における測定位置をピクセル座標で指定し、測定位置ピクセル座標が得られる。
【0034】
ステップ306(座標変換ステップ)での処理を、図4と図5を用いて説明する。図4は、画像上のピクセル座標と可動保持板上座標の関係を示した模式図である。座標変換部108は、ステップ305で測定者により指定された測定位置のピクセル座標(Xm、Ym)を可動保持板上測定位置座標(xm、ym)に変換する。可動保持板上測定位置座標は、例えばミリメートルやマイクロメートルを単位とした値で示される。次に、変換式について説明する。図5は、固定保持板105と可動保持板104とカメラ103とを装置上面から見た模式図である。可動保持板104は、任意の距離Lをとることができる。501、502はそれぞれ、L=L1の時、L=L2の時の、可動保持板の位置を示す。ある距離Lの時の、カメラ103の撮像幅をW(L)で表す。図5からわかるように、可動保持板の位置によって撮像幅Wが変化する。L=L1の時の、可動保持板とカメラ103との距離をDisで表す。Disは、図5中の画角を頂角とする二等辺三角形の関係から、以下の式(1)で表される。
【0035】
【数1】
【0036】
図4で示される座標関係から、測定位置ピクセル座標を可動保持板上測定位置座標に変換する変換式は、式(1)のDisを用いて、
【0037】
【数2】
【0038】
で表される。式(2)によりピクセル座標Xmがxmに変換されることを以下に説明する。図4において、Xは水平ピクセル座標軸、Yは垂直ピクセル座標軸、Xmは測定位置水平ピクセル座標、Ymは測定位置垂直ピクセル座標、Xwは撮像領域端水平ピクセル座標、Ywは撮像領域端垂直ピクセル座標である。また、xは可動保持板上水平座標軸、yは可動保持板上垂直座標軸、xmは測定位置水平座標、ymは測定位置垂直座標、xcは撮像領域中心の水平座標、ycは撮像領域中心の垂直座標である。
【0039】
式(2)中の、
【0040】
【数3】
【0041】
は、カメラ103と測定位置との距離により決定される変換係数である。式(3)は、任意のLにおける撮像幅W(L)を示す。式(3)で示される撮像幅W(L)を図4の撮像領域端水平ピクセル座標XWで割ることにより、1ピクセルあたりの可動保持板上座標量である
【0042】
【数4】
【0043】
が得られる。式(4)を、式(2)中の画像中心からXmまでのピクセル量である
【0044】
【数5】
【0045】
にかけることにより、可動保持板上座標量である
【0046】
【数6】
【0047】
を得る。式(6)のxcを左辺に移項することで式(2)のxmを得る。以上は水平方向について説明したが、垂直方向、すなわちYmからymへの変換も同じ原理である。
【0048】
L1、L2、W(L1)、W(L2)は予め測定された既知の値であり、xc、xc、Xw、Ywは、装置の緒元値として予め得られている。ステップ302で測定された固定保持板105と可動保持板104との距離を式(2)のLに代入し、ステップ305で得られた測定位置ピクセル座標を式(2)の(Xm、Ym)に代入することで、可動保持板上測定位置座標(xm、ym)を得る事ができる。可動保持板104とカメラ103との距離が変化しても、ステップ306を行うことで、ピクセル座標と可動保持板上測定位置座標との関係が正しく補正される。
【0049】
ステップ307(位置制御ステップ)では、位置制御部109によりステップ306で得られた可動保持板上測定位置座標に照射部101を移動させる。ステップ306で固定保持板105と可動保持板104との距離を考慮した変換がなされているので、高精度に移動させることができる。このステップでは、照射部101だけでなく、音響波探触子102も固定保持板上における測定位置の座標(xm、ym)に移動させるとよい。ここで、測定位置とは、被検体上の特に詳しく測定したい位置、又は、音響波探触子102や照射部101を移動しながら測定する場合の開始位置等である。
【0050】
ステップ308では、照射部101から被検体に光を照射し、発生した音響波を音響波探触子102で検出して受信信号を得る。ステップ309では、ステップ308で得た受信信号を用いて、光音響演算部110で光音響画像データを生成する。光音響画像データは、例えば数値情報や画像として表示部(不図示)に表示されることにより測定者に提示され、測定を終了する(ステップ309)。
【0051】
以上のように、目視による測定位置指定が困難な音響波測定装置においても、カメラ103を設けることで測定位置の指定が可能となる。さらに、カメラ103撮影領域外に照射部101を移動させる照射部駆動機構112と距離測定器106とを設けることで、高精度に測定位置を指定することが可能となる。
【0052】
(第二の実施形態)
第二の実施形態では、特に被検体を撮像する撮像手段と可動保持手段との距離を一定に保つ機構を持つ場合を説明する。それ以外の構成は第一の実施形態と同様である。
【0053】
(装置構成)
図6は、本発明の第二の実施形態である音響波測定装置の概要を示す模式図である。本実施形態において、座標変換部での処理内容は第一の実施形態と異なるが、それ以外の構成要素は第一の実施形態と同じであるため、同一の用語に関しては、説明を省略する。
【0054】
距離固定手段である固定具801は、可動保持板104とカメラ103とを固定する。固定具801は、可動保持板104とカメラ103との距離をある値に固定するように設計されている。このため、可動保持板104が動いても、カメラ103との距離は一定に保たれる。固定具801は、カメラ103の撮像領域内に入らないように配置することが好ましい。座標変換部108は、測定位置指定部107から出力されたピクセル座標を、可動保持板104上の座標に変換する。このとき、固定具801により決まる距離を用いて変換を行う。変換された座標は、位置制御部109に出力される。
【0055】
(測定フロー)
本実施形態の測定フローを図7に示す。本実施形態の座標変換ステップ(ステップ906)は第一の実施形態のステップ306と異なるが、それ以外のステップは図3と同じであるため説明を省略する。
【0056】
ステップ906での処理を、図8を用いて説明する。図8は、固定保持板105と可動保持板104とカメラ103とを装置上面から見た模式図である。1001、1002はそれぞれ、固定保持板105と可動保持板104との距離がL1、L2の時のカメラ103の位置を示す。固定具801により可動保持板104とカメラ103との距離Dis0が一定であるため、距離L1、L2いずれの場合もカメラ103の撮像幅WはDis0により決まる値となる。図4と図8より、測定位置ピクセル座標を可動保持板上測定位置座標に変換する変換式は以下の式(3)で表される。
【0057】
【数7】
【0058】
式(7)中のW(Dis0)は撮像手段と測定位置との距離により決定される変換係数である。Dis0は固定具801により決定される装置の緒元値なので、変換係数W(Dis0)は予め得られている。ステップ305で得られた測定位置ピクセル座標を式(3)の(Xm、Ym)に代入することで、可動保持板上測定位置座標(xm、ym)を得る事ができる。
【0059】
以上のように、目視による測定位置指定が困難な音響波測定装置においてもカメラ103を設けることで測定位置の指定が可能となる。さらに、固定具801を設けることで、被検体を挟持する厚みが変化しても可動保持板104とカメラ103との距離が変わらないため、座標変換ステップでの処理が簡単になる。
【符号の説明】
【0060】
100 筐体
101 照射部
102 音響波探触子
103 カメラ
104 可動保持板
105 固定保持板
106 距離測定器
107 測定位置指定部
108 座標変換部
109 位置制御部
112 照射部駆動機構
113 音響波探触子駆動機構
【特許請求の範囲】
【請求項1】
被検体を保持する保持手段と、前記被検体に光を照射する照射手段と、前記光により前記被検体内で発生する音響波を前記保持手段を介して受信する音響波検出手段と、を有する音響波測定装置であって、
前記被検体を撮像する撮像装置と、
前記撮像装置により取得された画像上における測定位置を測定者が指定するための位置指定手段と、
前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換する座標変換手段と、
前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御手段と、
を有することを特徴とする音響波測定装置。
【請求項2】
前記座標変換手段は、前記保持手段と前記撮像手段との距離により決定される変換係数を用いて前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換することを特徴とする請求項1に記載の音響波測定装置。
【請求項3】
前記保持手段は、前記被検体を両側から挟持するための固定保持板と可動保持板とからなり、
前記座標変換手段は、前記可動保持板と前記撮像手段との距離により決定させる変換係数を用いて前記画像上の測定位置の座標を前記可動保持板上の対応する位置の座標に変換することを特徴とする請求項2に記載の音響波測定装置。
【請求項4】
前記可動保持板と前記撮像手段との距離を測定するための距離測定手段を有することを特徴とする請求項3に記載の音響波測定装置。
【請求項5】
前記可動保持板と前記撮像手段との距離を一定に保つ距離固定手段を有することを特徴とする請求項3に記載の音響波測定装置。
【請求項6】
照射手段により被検体に光を照射することにより、前記被検体から発生する音響波を、前記被検体を保持する保持手段を介して音響波検出手段により受信する音響波測定方法であって、
前記被検体を撮像する撮像ステップと、
測定者により指定された、前記撮像装置により取得された画像上における測定位置の座標を、前記保持手段上の対応する位置の座標に変換する座標変換ステップと、
前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御ステップと、
を有することを特徴とする音響波測定方法。
【請求項7】
前記座標変換ステップにおいて、前記保持手段と前記撮像手段との距離により決定される変換係数を用いて前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換することを特徴とする請求項6に記載の音響波測定方法。
【請求項8】
前記被検体は、固定保持板と可動保持板により両側から保持されており、
前記座標変換ステップにおいて、前記可動保持板と前記撮像手段との距離により決定される変換係数を用いて前記画像上の測定位置の座標を前記可動保持板上の対応する位置の座標に変換することを特徴とする請求項7に記載の音響波測定方法。
【請求項9】
前記可動保持板と前記撮像手段との距離を測定する距離測定ステップを有することを特徴とする請求項8に記載の音響波測定方法。
【請求項1】
被検体を保持する保持手段と、前記被検体に光を照射する照射手段と、前記光により前記被検体内で発生する音響波を前記保持手段を介して受信する音響波検出手段と、を有する音響波測定装置であって、
前記被検体を撮像する撮像装置と、
前記撮像装置により取得された画像上における測定位置を測定者が指定するための位置指定手段と、
前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換する座標変換手段と、
前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御手段と、
を有することを特徴とする音響波測定装置。
【請求項2】
前記座標変換手段は、前記保持手段と前記撮像手段との距離により決定される変換係数を用いて前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換することを特徴とする請求項1に記載の音響波測定装置。
【請求項3】
前記保持手段は、前記被検体を両側から挟持するための固定保持板と可動保持板とからなり、
前記座標変換手段は、前記可動保持板と前記撮像手段との距離により決定させる変換係数を用いて前記画像上の測定位置の座標を前記可動保持板上の対応する位置の座標に変換することを特徴とする請求項2に記載の音響波測定装置。
【請求項4】
前記可動保持板と前記撮像手段との距離を測定するための距離測定手段を有することを特徴とする請求項3に記載の音響波測定装置。
【請求項5】
前記可動保持板と前記撮像手段との距離を一定に保つ距離固定手段を有することを特徴とする請求項3に記載の音響波測定装置。
【請求項6】
照射手段により被検体に光を照射することにより、前記被検体から発生する音響波を、前記被検体を保持する保持手段を介して音響波検出手段により受信する音響波測定方法であって、
前記被検体を撮像する撮像ステップと、
測定者により指定された、前記撮像装置により取得された画像上における測定位置の座標を、前記保持手段上の対応する位置の座標に変換する座標変換ステップと、
前記保持手段上の前記対応する位置に、前記照射手段と前記音響波検出手段のうち少なくとも一方を移動させる位置制御ステップと、
を有することを特徴とする音響波測定方法。
【請求項7】
前記座標変換ステップにおいて、前記保持手段と前記撮像手段との距離により決定される変換係数を用いて前記画像上の測定位置の座標を前記保持手段上の対応する位置の座標に変換することを特徴とする請求項6に記載の音響波測定方法。
【請求項8】
前記被検体は、固定保持板と可動保持板により両側から保持されており、
前記座標変換ステップにおいて、前記可動保持板と前記撮像手段との距離により決定される変換係数を用いて前記画像上の測定位置の座標を前記可動保持板上の対応する位置の座標に変換することを特徴とする請求項7に記載の音響波測定方法。
【請求項9】
前記可動保持板と前記撮像手段との距離を測定する距離測定ステップを有することを特徴とする請求項8に記載の音響波測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−229620(P2011−229620A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−101300(P2010−101300)
【出願日】平成22年4月26日(2010.4.26)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月26日(2010.4.26)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]