
領域抽出方法、領域抽出プログラム及び領域抽出装置
【課題】航空写真等のデータに基づいて、建物の領域を、より正確に抽出する技術を提供する。
【解決手段】航空写真等のデータに基づいて建物の領域を抽出するに際し、複数の異なる離散化幅を設定し、それぞれの離散化幅について、データの輝度値を当該離散化幅で離散設定された複数の値に離散化する。また、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する。そして、複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する。
【解決手段】航空写真等のデータに基づいて建物の領域を抽出するに際し、複数の異なる離散化幅を設定し、それぞれの離散化幅について、データの輝度値を当該離散化幅で離散設定された複数の値に離散化する。また、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する。そして、複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する方法、プログラム及び装置に関する。
【背景技術】
【0002】
都市を俯瞰した場合の特徴抽出、領域抽出は昔から重要なテーマであった(例えば、非特許文献1)。例えば、航空写真又は人工衛星画像からの道路抽出は盛んに研究されてきた(例えば、非特許文献2,3)。リモートセンシング画像の分類手法は、画素単位の分類と領域(オブジェクト)単位の分類とに大別できる。クラスタリング(いわゆる教師なし)、最尤法(教師つき)、Support Vector Machines (SVM)(教師つき)に代表される画素単位の分類手法は、統計的理論に基づき、各画素を分類クラスに割り当てていく(例えば、非特許文献4)。一方、領域単位の分類手法では、画素の周辺の情報(Context)を利用する。例えば、数学的 Morphological アプローチを用いた分類などが代表例として挙げられる(例えば、非特許文献5〜9)。
【0003】
図1の(a)及び(b)は、家屋が密集した市街地(京都市東山区)の航空写真の一例である。このような密集市街地では、従来の領域抽出手法が効果的に機能しない。その要因を分析すると、まず、(イ)建物同士が接近しているため、屋根の輝度値、テクスチャが似ていると、建物の境界線が明瞭でなくなる点である。また、(ロ)隣接した建物の影が写り込みやすい、という密集市街地特有の要因がある。さらに、日本の伝統的建物では波型の横断面形状を持つ屋根(例えばスレート屋根)が使用されていることもあり、(ハ)輝度値にばらつきのあるテクスチャの屋根の輪郭抽出が困難である、という対象地域の建物特性による要因も確認できる。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】Weng, Q. and Quattrochi, D.A., "Urban Remote Sensing", CRC Press, 2007
【非特許文献2】Hu, J., Razdan, A., Femiani, J.C., Cui, M. and Wonka, P., "Road network extraction and intersection detection from aerial images by tracking road footprints", IEEE Transactions on Geoscience and Remote Sensing, Vol. 45, No. 12, pp. 4144 - 4157, 2007
【非特許文献3】Movaghati, S., Moghaddamjoo, A. and Tavakoli, A., "Road extraction from satellite images using particle filtering and extended Kalman filtering", IEEE Transactions on Geoscience and Remote Sensing, Vol. 48, No. 7, pp. 2807 - 2817, 2010
【非特許文献4】Tso, B. and Mather, P.M., "Classification methods for remotely sensed data -- 2nd ed.", CRC Press, 2009
【非特許文献5】Soille, P. and Pesaresi, M. , " Advances in mathematical morphology applied to geoscience and remote sensing", IEEE Transactions on Geoscience and Remote Sensing, Vol. 40, No. 9, pp. 2042-2055, 2002
【非特許文献6】Benediktsson, J.A., Pesaresi, M. and Amason, K., "Classification and feature extraction for remote sensing images from urban areas based on morphological transformations", IEEE Transactions on Geoscience and Remote Sensing, Vol. 41, No. 9, pp. 1940 - 1949, 2003
【非特許文献7】Benediktsson, J.A., Palmason, J.A. and Sveinsson, J.R., "Classification of hyperspectral data from urban areas based on extended morphological profiles", IEEE Transactions on Geoscience and Remote Sensing, Vol. 43, No. 3, pp. 480 - 491, 2005
【非特許文献8】Bellens, R., Gautama, S., Martinez-Fonte, L., Philips, W., Chan, J.C.-W., Canters, F., "Improved Classification of VHR Images of Urban Areas Using Directional Morphological Profiles", IEEE Transactions on Geoscience and Remote Sensing, Vol. 46, No. 10, pp. 2803 - 2813, 2008
【非特許文献9】Tuia, D., Pacifici, F., Kanevski, M. and Emery, W.J., "Classification of Very High Spatial Resolution Imagery Using Mathematical Morphology and Support Vector Machines", IEEE Transactions on Geoscience and Remote Sensing, Vol. 47, No. 11, pp. 3866 - 3879, 2009
【非特許文献10】Canny, J., "A Computational Approach to Edge Detection", IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. PAMI-8, No. 6, pp. 679 - 698, 1986
【非特許文献11】Zhong, J. and Ning, R., "Image denoising based on wavelets and multifractals for singularity detection", IEEE Transactions on Image Processing, Vol. 14, No. 10, pp. 1435 - 1447, 2005
【非特許文献12】Tonazzini, A., Bedini, L. and Salerno, E., "A Markov model for blind image separation by a mean-field EM algorithm", IEEE Transactions on Image Processing, Vol. 15, No. 2, pp. 473 - 482, 2006
【非特許文献13】Berlemont, S. and Olivo-Marin, J.-C., "Combining Local Filtering and Multiscale Analysis for Edge, Ridge, and Curvilinear Objects Detection", IEEE Transactions on Image Processing, Vol. 19, No. 1, pp. 74 - 84, 2010
【非特許文献14】Ding, J., Ma, R. and Chen, S., "A Scale-Based Connected Coherence Tree Algorithm for Image Segmentation", IEEE Transactions on Image Processing, Vol. 17, No. 2, pp. 204 - 216, 2008
【非特許文献15】Chien, S .Y., Ma, S.Y. and Chen, L.G., "Efficient moving object segmentation algorithm using background registration technique", IEEE Transactions on Circuits and Systems for Video Technology, Vol. 12 , No. 7, pp. 577 - 586, 2002
【非特許文献16】Tsai, V.J.D., "A comparative study on shadow compensation of color aerial images in invariant color models", IEEE Transactions on Geoscience and Remote Sensing, Vol. 44, No. 6, pp. 1661 - 1671, 2006
【非特許文献17】Ma, H., Qin, Q. and Shen, X., "Shadow Segmentation and Compensation in High Resolution Satellite Images", Proceedings of IEEE International Geoscience and Remote Sensing Symposium, 2008, Vol. 2, pp. II-1036 - II-1039, 2008
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記(イ)の要因は、言い換えれば、領域のエッジが十分に得られていない場合に、どう対処するか、という課題を与えている。また、上記(ハ)の要因により過剰に抽出されるエッジから不要なエッジを除外することも課題である。ここで、(ハ)の課題は(イ)の課題とも関連していると考えられる。例えば、非特許文献10において、Cannyはノイズに強いエッジ抽出オペレータを提唱している。これは、これまでに幅広く使われている代表的なエッジ抽出オペレータの一つといえる。またWaveletを使ってノイズを除去したり(例えば、非特許文献11)、平均値(例えば、非特許文献12)や多重解像度画像(例えば、非特許文献13)を活用したりする手法が報告されている。
【0006】
また上記(ロ)の要因に関連して、影領域の輝度値を回復する研究事例が報告されている(例えば、非特許文献14〜17)。しかしながら例えば非特許文献17における回復結果を見る限りでは、回復後の画像において元々の影領域と非影領域との境界線が明瞭に出てしまうという問題点、及び、影領域内の補正値の決定が難しく、過剰に回復することもある、といった問題点が、依然として解決できていない。
【0007】
かかる従来の問題点に鑑み、本発明は、航空写真等のデータに基づいて、建物の領域をより正確に抽出する技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)本発明は、航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出方法であって、複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化し、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出し、前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用することを特徴とする。
【0009】
上記のような領域抽出方法では、離散化によって、輝度値の分散が大きいテクスチャを持つ領域も、1つの領域として抽出可能である。また、同一値を持つ点を連結し、長方形に近い形状の領域を抽出することで、建物以外の領域を除去し易くなる。また、複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用することにより、局所的に最適な、空間的な平滑化パラメータを適用していることに等しい機能を発揮させることができる。
【0010】
(2)また、上記(1)の領域抽出方法において、長方形に近い形状を表す指数として、(領域の面積/領域を取り囲む長方形の面積)によって定義される長方形指数を用いることができる。
この場合、長方形に近い形状における「近さ」の度合いを、指数として簡単かつ的確に表すことができる。
【0011】
(3)また、上記(1)又は(2)の領域抽出方法において、上記抽出において、互いに隣接する領域同士が併合された場合にさらに長方形に近くなる場合は、当該併合を実行可能とするようにしてもよい。
この場合、より正確に建物の領域を捉えることができる。
【0012】
(4)また、上記(2)の領域抽出方法において、長方形指数が所定値より小さい場合は、建物の領域として採用しないことが好ましい。
この場合、建物でない可能性が高い領域を抽出の対象から除外することができる。
【0013】
(5)また、上記(1)の領域抽出方法において、RGB輝度値に基づいて、植生と推測される領域を抽出対象から除外してもよい。
この場合、植生の色の特徴を考慮して当該領域を抽出対象から除外することができる。
【0014】
(6)一方、本発明は、航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出プログラムであって、複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化する機能、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する機能、及び、前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する機能を、コンピュータによって実現させるための領域抽出プログラムである。
【0015】
(7)また、本発明は、航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出装置であって、複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化する機能と、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する機能と、前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する機能とを有するものである。
【0016】
上記(6)、(7)の領域抽出プログラム/領域抽出装置では、離散化によって、輝度値の分散が大きいテクスチャを持つ領域も、1つの領域として抽出可能である。また、同一値を持つ点を連結し、長方形に近い形状の領域を抽出することで、建物以外の領域を除去し易くなる。また、複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用することにより、局所的に最適な空間的な平滑化パラメータを適用していることに等しい機能を発揮させることができる。
【発明の効果】
【0017】
本発明によれば、航空写真等の写真のデータに基づいて、建物の領域をより正確に抽出することができる。
【図面の簡単な説明】
【0018】
【図1】家屋が密集した市街地(京都市東山区)の航空写真の一例である。
【図2】京都市東山区法観寺から東大路通り周辺を地上で撮影した写真である。
【図3】領域抽出方法を実施するためのコンピュータ装置の一例を示すブロック図である。
【図4】画素の連結の概念図である。
【図5】長方形指数算出の概念図である。
【図6】対象領域と、それに隣接する領域との統合の概念図である。
【図7】低層建物が密集する市街地(地域1)におけるエッジ抽出の結果を示す図である。
【図8】高層ビルと低層建物とが混在する市街地(地域2)におけるエッジ抽出の結果を示す図である。
【図9】高木が建物に隣接している地域(地域3)におけるエッジ抽出の結果を示す図である。
【図10】寄棟屋根作りの建物が多数存在する地域(地域4)におけるエッジ抽出の結果を示す図である。
【図11】地域1における領域抽出の結果を示す図である。
【図12】地域2における領域抽出の結果を示す図である。
【図13】地域3における領域抽出の結果を示す図である。
【図14】地域4における領域抽出の結果を示す図である。
【図15】地域1についての領域抽出の比較結果を示す図である。
【図16】地域2についての領域抽出の比較結果を示す図である。
【図17】地域3についての領域抽出の比較結果を示す図である。
【図18】地域4についての領域抽出の比較結果を示す図である。
【発明を実施するための形態】
【0019】
以下、本発明の一実施形態に係る領域抽出方法・領域抽出プログラムについて、説明する。領域抽出のモデル地域としては、京都市東山区法観寺から東大路通り周辺を対象とした。この地域では木造建築が敷地間口いっぱいに立ち並んでいる。図2は、当該地域を地上で撮影した写真である。また、この地域の航空写真データとして、25cm解像度、オルソ(正射投影)処理済みのデータ(市販品)を使用した。このデータは、平面直角座標系に合わせてある。なお、オルソ処理されていても、若干は建物の側面が見えるが、実用上は特に問題ない。
【0020】
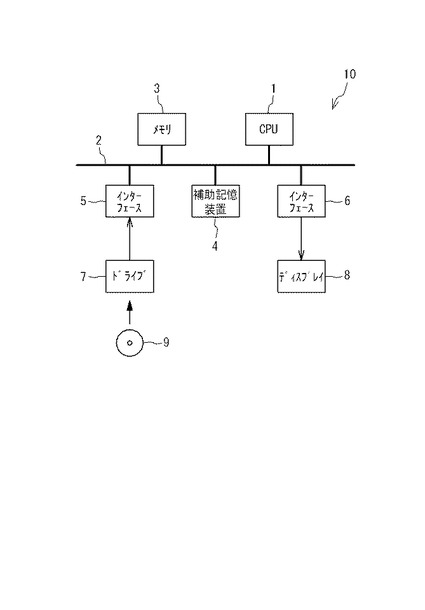
次に、建物の領域(屋根の輪郭形状)を抽出する領域抽出方法・領域抽出プログラムについて説明する。図3は、領域抽出方法を実施するためのコンピュータ装置10の一例を示すブロック図であり、また、領域抽出プログラムは、このコンピュータ装置10に機能を実現させるものである。また、領域抽出プログラムの機能が搭載されたコンピュータ装置10は、本発明の一実施形態に係る領域抽出装置である。
【0021】
このコンピュータ装置10は、CPU1と、バス2を介してCPU1と接続されたメモリ3と、ハードディスク等の補助記憶装置4と、インターフェース5,6と、インターフェース5及び6にそれぞれ接続されたドライブ7及びディスプレイ8とを含むものであり、典型的には、これは、パーソナルコンピュータである。入力装置としてのドライブ7に、航空写真を収めたCD,DVD等の記憶媒体9を装着することにより、航空写真のデータが読込み可能となる。なお、領域抽出プログラムは、航空写真とは別に、記憶媒体又はネットワーク経由で補助記憶装置4にインストールして実行される。すなわち、領域抽出プログラムは、記憶(記録)媒体としても存在・流通し得る。
【0022】
《領域抽出の手順》
以下、領域抽出(方法・プログラムの主要ステップ)について詳細に説明する。
領域抽出の概要としては、輝度値の分散が大きいテクスチャを持つ屋根も効果的に抽出すべく、輝度値を所定数の値に離散化し、同一の離散化値を持つ領域をラベリングする。そして、平面視した建物に見られる長方形に近い形状の領域を優先的に抽出する。また、複数の異なる離散化幅を適用して得られた領域群に対し、より長方形に近い領域から順次採用していくことで、局所的に最適な、空間的な平滑化パラメータを適用したのと同様な処理を実現する。以下、ステップごとに詳細に説明する。
【0023】
(第1ステップ)
まず、1バイト(輝度値の範囲:0〜255)×3バンド(RGB)画像の任意の1バンドの輝度値に対し、Ndisc種類の離散化幅を設定する。各離散化幅の下で、Noff種類の異なるオフセット値を適用し、画像輝度値を離散化する。例えば、「輝度値の離散化幅=40」「オフセット数=5」のときに「オフセット値幅=8」となり、「オフセット値={0,8,16,24,32}」のNoff種類の離散化画像が得られる。「オフセット値=0」の下では、原画像の輝度値「0〜39」が同一離散化値を与えられ、同様に「40〜79」「80〜119」「120〜159」「160〜199」「200〜239」「240〜255」を含めた7つの区分に離散化される。本実験では一例として次のパラメータを使用した。
【0024】
使用バンド:赤(R)バンド
輝度値の離散化幅Δd={40,30,20}
オフセット数Noff=5
オフセット値幅Δoff=Δd/Noff={8,6,4}
【0025】
(第2ステップ)
次に、各離散化画像において、4方向(上下左右)を探索し、同じ値を持つ画素を連結し領域として抽出する。一定面積以上の大領域(例えば6400画素以上)は除去する。また一定面積未満(例えば80画素未満)の小領域は周辺に一定面積以上の領域があれば統合し、なければ除去する。その後、各領域のエッジ(輪郭)を抽出する。
【0026】
(第3ステップ)
次に、ある離散化幅におけるNoff種類の離散化画像から得られたエッジを全て1枚に重ね合わせる。
【0027】
(第4ステップ)
次に、一定強度以上のエッジを残し、それに連結するエッジも抽出する。この時点で隣接する屋根や建物がほぼ同様の輝度値を持つ場合にそれらのエッジが抽出されていないことも多いため、エッジが存在しなくても周辺に直線状のエッジが存在することが確認できれば、エッジを連結する。
【0028】
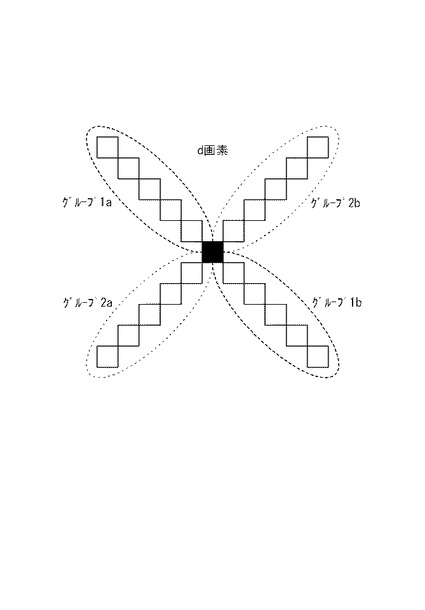
このエッジ連結について、補足説明する。まず、エッジではない画素の周辺8方向(上下左右斜め)を探索し、一定画素数dの中に存在するエッジの数を調べる。
図4は、左上の方向にあるエッジ群グループ1aと、右下の方向にあるエッジ群グループ1bとを探索する例を示している。例えば、(a)グループ1aにd1以上、かつ、グループ1bにもd1以上にエッジ群が存在し、(b)グループ2aにd2以下、かつ、グループ2bにもd2以下のエッジ群しか存在しない、という条件を用意し、条件(a)、(b)を共に満足する場合に、非エッジである中心画素をエッジとして補完する。(b)の条件があることで、矩形領域の隅に近い領域内部の画素を誤ってエッジと抽出することを防いでいる。探索は、上下方向、左右方向、左上から右下、右上から左下の4回にわたって調べる。今回は、d=7、d1=5、d2=1と設定した。
【0029】
(第5ステップ)
次に、エッジで閉じた領域にラベル番号を付与(ラベリング)し、RGB輝度値から判断して、植生らしい領域を除去する。ステップ2と同様に、一定面積以上の大領域(例えば6400画素以上)を除去し、一定面積以下(例えば30画素以下)の小領域は周辺に一定面積以上の領域があれば統合し、なければ除去する。
【0030】
植生の除去について補足説明する。対象地域では、植生には緑系統と赤系統の植生が確認できた。そのため、
(1)Bgrn ≧ Tveg, DN, Bblue ≧ Tveg, DN, and Bgrn / Bblue ≧ Tveg, g2b_ratio
(2)Bred ≧ Tveg, DN, Bblue ≧ Tveg, DN, and Bred / Bblue ≧ Tveg, r2b_ratio
のいずれかを満足する画素が占有する割合Rgrn_veg, Rred_vegを計算する。ここでBred、 Bgrn 、Bblueは赤、緑、青バンドの輝度値を、Tveg, DNは輝度値の閾値を、Tveg, g2b_ratio、Tveg, r2b_ratioは指標の閾値を意味する。Rgrn_veg, Rred_vegのいずれかが閾値Tveg, ratio以上であれば、植生領域として除去する。ここでは、Tveg, DN =20、 Tveg, g2b_ratio =1.25、 Tveg, r2b_ratio =2.0、 Tveg, ratio =0.3の値を採用した。
【0031】
(第6ステップ)
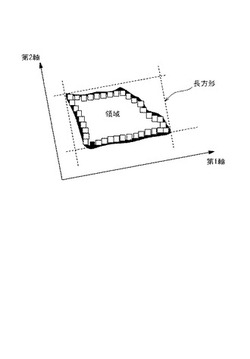
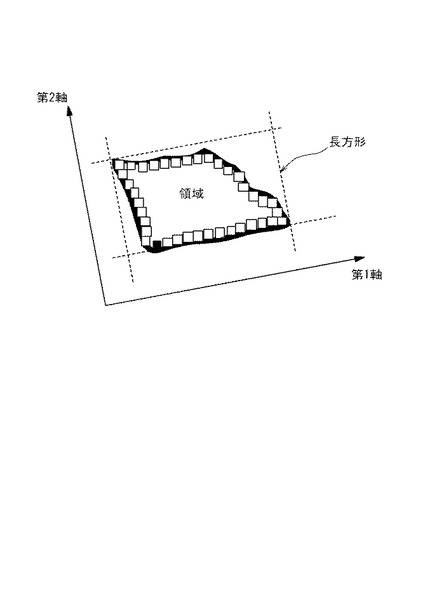
次に、各領域の長方形指数と呼ぶ指数を、次のように計算する。
(ア)領域のエッジの集合(エッジ群と呼ぶ。)の2次元座標から、第1軸及び第2軸を決定する。
(イ)領域の存在範囲を第1軸と第2軸の値で表現し、第1軸の(最大値−最小値+1)、第2軸の(最大値−最小値+1)を掛け合わせて、領域を取り囲む矩形の面積を得る。
(ウ)(実際の領域の面積/領域を取り囲む矩形の面積)を長方形指数と定義する。
ここで、長方形指数が一定値(例えば0.4)を下回ると、建物でない可能性が高いと判断して、抽出の対象から除外する。
【0032】
長方形指数について補足説明する。図5に長方形指数算出の概念図を示す。ある領域のエッジ群から第1,第2軸を計算し、各々の辺が第1,第2軸に平行な長方形のうち、対象領域を取り囲む、図示のような最小の長方形を求める。この第1,第2軸の決定には、2点間の距離が一定値(5画素以上20画素以下)にあるエッジ群を用いて直線の傾きを投票し、最大の頻度が発生する傾きを第1軸の向きとし、第2軸は第1軸に直交するように定めた。
idx = Sactual/Srect ・・・(1)
と定義する。ここでidxは長方形指数を、Sactualはある領域の面積を、Srectはその領域を取り囲む長方形の面積を表す。長方形指数は0から1の範囲の値を取り、1に近いほど長方形に近い形状を有する。このような指数により、長方形に近い形状における「近さ」の度合いを、指数として簡単かつ的確に表すことができる。
【0033】
(第7ステップ)
式(1)の長方形指数を用いて、ステップ7では、影で分断されている屋根・建物を統合し、本来の領域を推定する。
例えば、ある領域Aの近隣の領域を探索し、
(ア)併合した場合の長方形指数が各々の長方形指数よりも向上する。
(イ)指定した閾値(0.7)以上である。
(ウ)領域の平均輝度値の差が一定値(30)以内である。
という条件を満たすか否かを判定する。満たす場合には、近隣の領域のうち、併合時の長方形指数が最大となる領域を併合の候補とし、これを、仮に領域Bとする。領域Bでも同様に探索し、領域Aが(ア)〜(ウ)の全ての条件を満たし、かつ併合時の長方形指数が最大となる領域である場合に、領域AとBとを互いに併合する。
【0034】
例えば図6に示すように、対象領域αに隣接する領域β、γ、δの全てを対象に、仮に統合した場合の長方形指数を計算する。この際の第1,第2軸は、2つの領域のエッジ群のうち、互いの領域に近いエッジ群は除外したエッジ群を用いて計算される。軸の決定には、2点間の距離が一定値(5画素以上20画素以下)にあるエッジ群を用いて直線の傾きを投票し、最大の頻度が発生する傾きを第1軸の向きとし、第2軸は第1軸に直交するように定めた。
【0035】
(第8ステップ)
次に、Ndisc種類の離散化幅の下で得られた一定面積以上の領域を、長方形指数が高い順に選んでいく。ただし、当該領域の一部でも既に選ばれた領域に重なっていれば、その領域は選ばない。
【0036】
(第9ステップ)
選ばれなかった領域に対し、再度選定していく。今度は既に選ばれた領域との重なりが一定値未満(30%)で、かつ一定面積(80画素)未満であれば、重なっていない部分だけを新たな領域として追加選出する。ただし重なっていない部分に対しても長方形指数を算出し、閾値(0.45)以上である場合に限る。
【0037】
(第10ステップ)
最後に、領域内の穴を埋める。
【0038】
《実例》
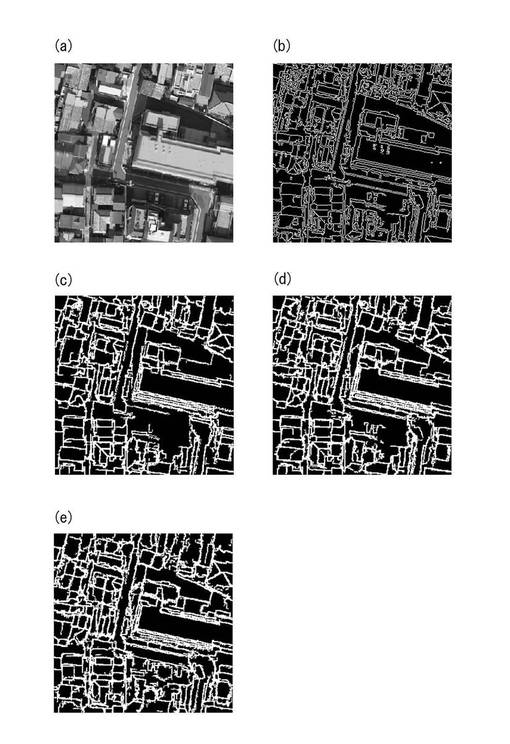
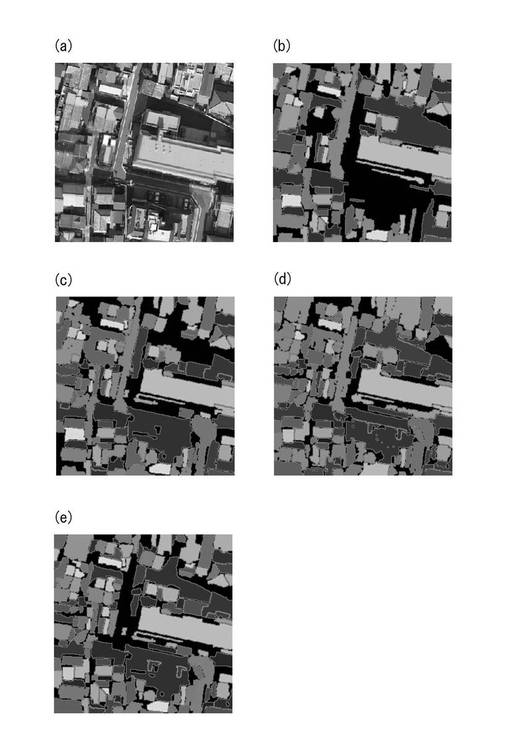
以下、実例を示す。図7は、低層建物が密集する市街地(以下、地域1という。)におけるエッジ抽出の結果を示す図である。(a)は撮影の解像度300×300画素で、実寸法約75m×75mのエリアを撮影した航空写真である。(b)は、(a)のデータに対して既知のキャニー(Canny)フィルタを用いた結果である。(c)は、上述の離散化において離散化幅40を用いた際のエッジ抽出結果(第1段階)である。さらに、(d)は、離散化幅30を用いた際のエッジ抽出結果(第2段階)、(e)は、離散化幅20を用いた際のエッジ抽出結果(第3段階)である。
【0039】
図8は、高層ビルと低層建物とが混在する市街地(以下、地域2という。)におけるエッジ抽出の結果を示す図である。(a)〜(e)は、図7と同様であり、(a)は航空写真、(b)はキャニーフィルタを用いた結果、(c)は離散化幅40を用いた際のエッジ抽出結果(第1段階)、(d)は離散化幅30を用いた際のエッジ抽出結果(第2段階)、(e)は離散化幅20を用いた際のエッジ抽出結果(第3段階)である。
【0040】
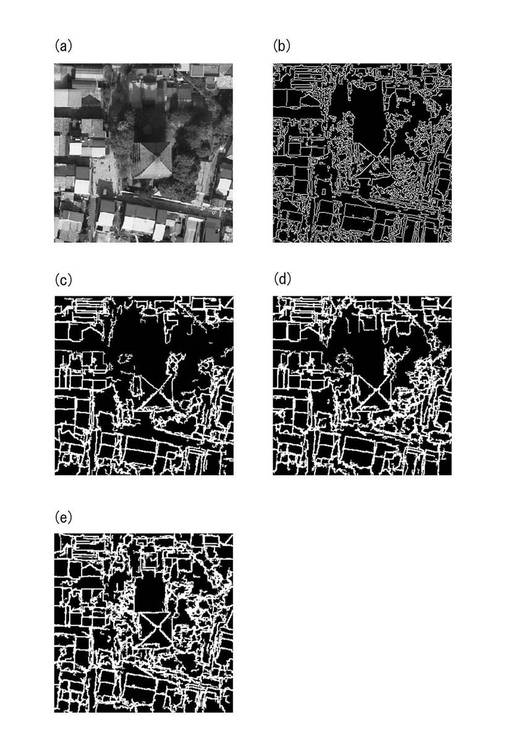
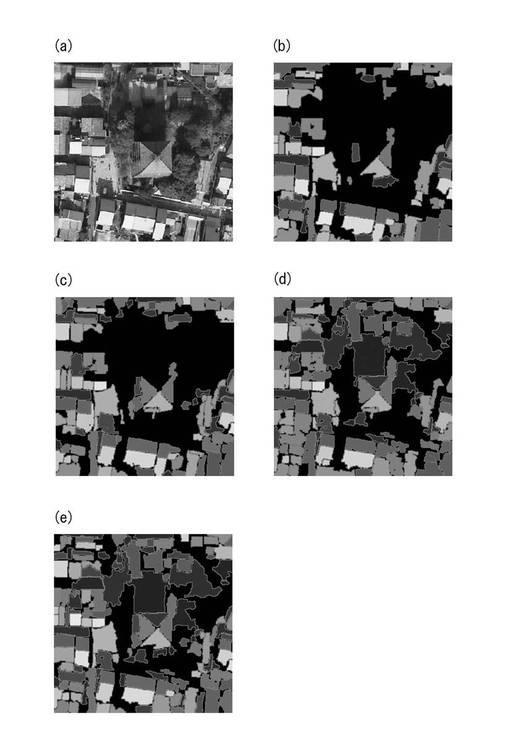
図9は、高木が建物に隣接している地域(以下、地域3という。)におけるエッジ抽出の結果を示す図である。(a)〜(e)は、図7と同様であり、(a)は航空写真、(b)はキャニーフィルタを用いた結果、(c)は離散化幅40を用いた際のエッジ抽出結果(第1段階)、(d)は離散化幅30を用いた際のエッジ抽出結果(第2段階)、(e)は離散化幅20を用いた際のエッジ抽出結果(第3段階)である。
【0041】
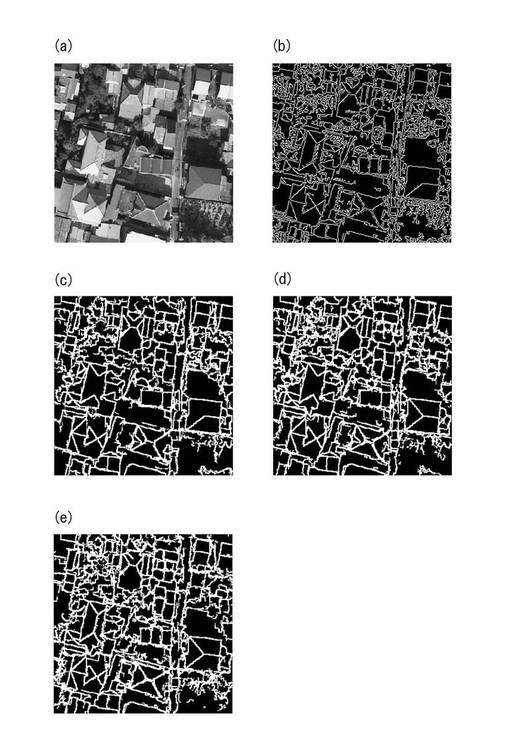
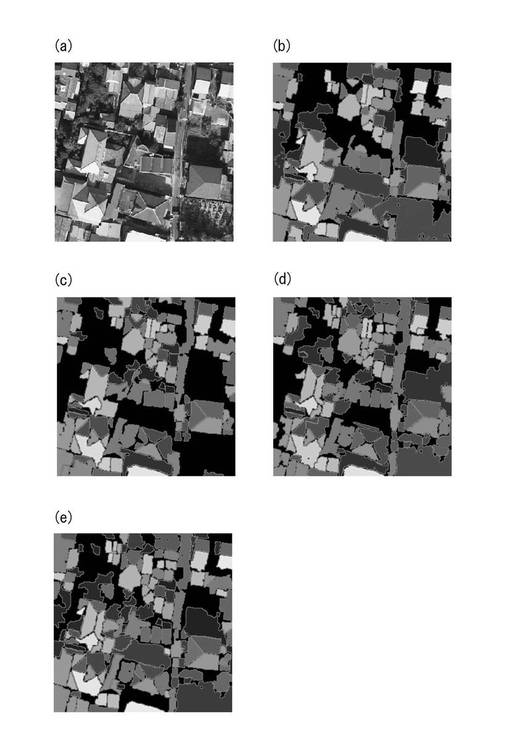
図10は、寄棟屋根作りの建物が多数存在する地域(以下、地域4という。)におけるエッジ抽出の結果を示す図である。(a)〜(e)は、図7と同様であり、(a)は航空写真、(b)はキャニーフィルタを用いた結果、(c)は離散化幅40を用いた際のエッジ抽出結果(第1段階)、(d)は離散化幅30を用いた際のエッジ抽出結果(第2段階)、(e)は離散化幅20を用いた際のエッジ抽出結果(第3段階)である。
【0042】
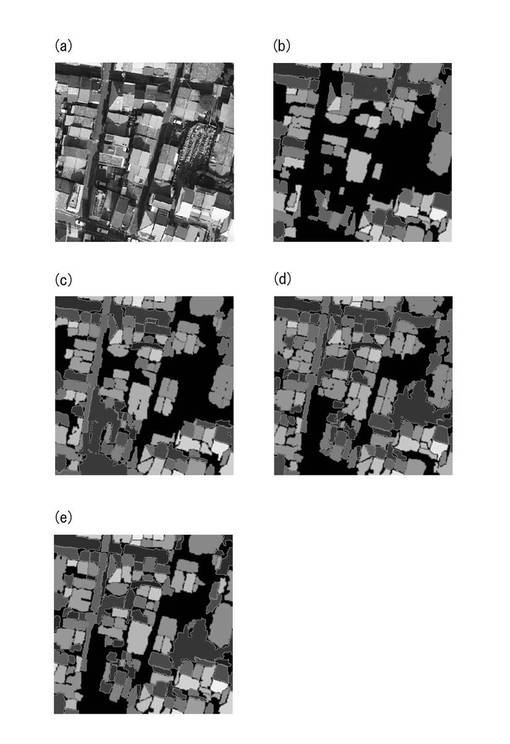
図11,図12,図13,図14はそれぞれ、上述の地域1(図7),地域2(図8),地域3(図9),地域4(図10)における領域抽出の結果を示す図である。図11〜14の各図において、(a)は各地域の航空写真、(b)は離散化幅40を用いた際の領域抽出結果(第1段階)、(c)は離散化幅30を用いた際の領域抽出結果(第2段階)、(d)は離散化幅20を用いた際のエッジ抽出結果(第3段階)、(e)は、長方形指数を用いて3つの結果((b)〜(d))を統合した最終結果の図である。図11〜14のいずれにおいても、(e)は、(b)〜(d)の各結果と比較すると明らかなように、局所的に3つの結果の最も良いところを取った状態となり、建物の領域(エッジ)がより正確に抽出されている。
【0043】
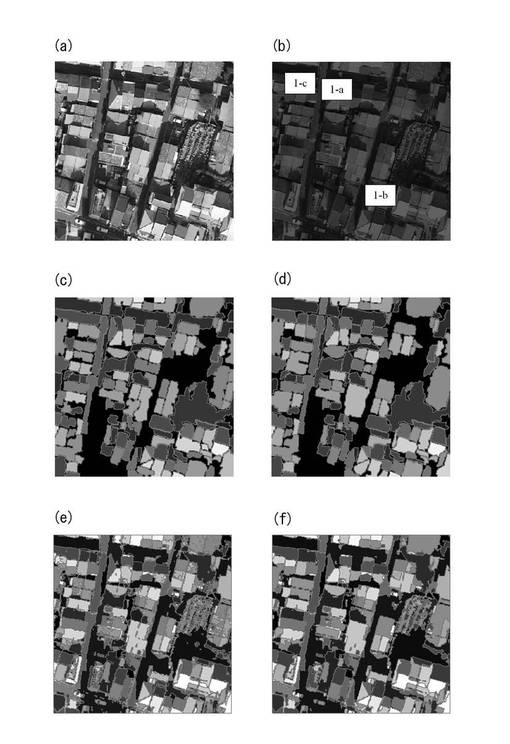
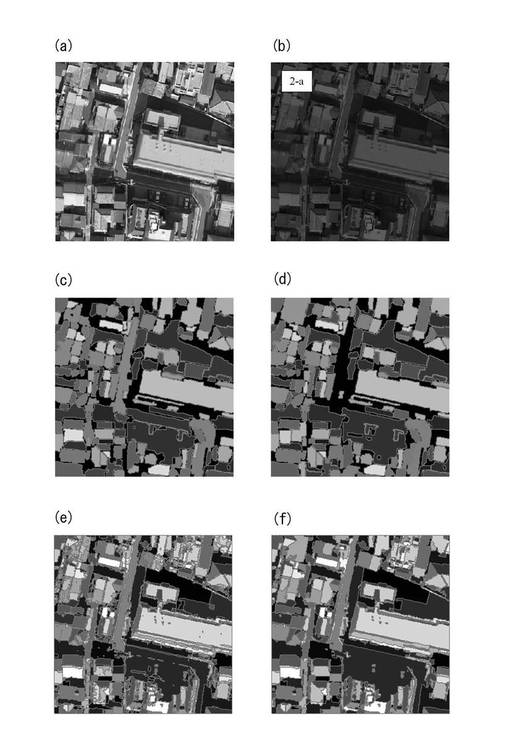
図15は、地域1についての図であり、(a)〜(f)はそれぞれ、(a)航空写真、(b)領域抽出結果を比較するための参照点、(c)領域抽出結果(主たる方向を計算する際に主成分分析を利用)、(d)領域抽出結果(主たる方向を計算する際に2点間を通る直線の傾きを投票して決定)、(e)ITT Visual Information Solutions の画像処理ソフトENVI EXでScale=50, Merge=50に設定した時の領域抽出結果、(f)ENVI EXでScale=50, Merge=80に設定した時の領域抽出結果、である。なお、(c)〜(f)はカラー画像では建物のエッジが明瞭に表示されるが、この図では建物の縁取りのように見えているのがエッジである。
【0044】
なお、ENVI EXの「Feature Extraction」という機能で設定を要求されるパラメータは、「Scale Level」と「Merge Level」である。本例の対象地域では分散値の大きいテクスチャを持つ屋根が多い。「Merge Level」を変更することで最終的に残される領域の大きさや数が変わるため、「Scale Level = 50.0」は共通とし、「Merge Level = 50.0」「Merge Level = 80.0」の2種類の値で実行した。
【0045】
図16は、地域2についての図であり、(a)〜(f)はそれぞれ、(a)航空写真、(b)領域抽出結果を比較するための参照点、(c)領域抽出結果(主たる方向を計算する際に主成分分析を利用)、(d)領域抽出結果(主たる方向を計算する際に2点間を通る直線の傾きを投票して決定)、(e)ENVI EXでScale=50, Merge=50に設定した時の領域抽出結果、(f)ENVI EXでScale=50, Merge=80に設定した時の領域抽出結果、である。
【0046】
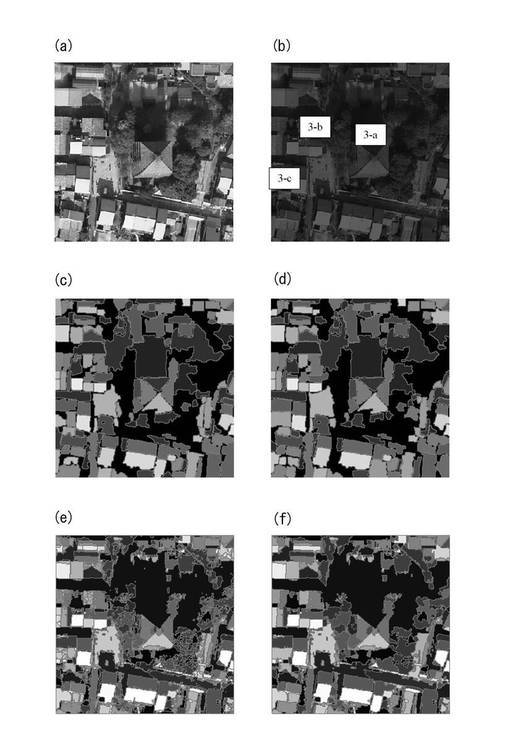
図17は、地域3についての図であり、(a)〜(f)はそれぞれ、(a)航空写真、(b)領域抽出結果を比較するための参照点、(c)領域抽出結果(主たる方向を計算する際に主成分分析を利用)、(d)領域抽出結果(主たる方向を計算する際に2点間を通る直線の傾きを投票して決定)、(e)ENVI EXでScale=50, Merge=50に設定した時の領域抽出結果、(f)ENVI EXでScale=50, Merge=80に設定した時の領域抽出結果、である。
【0047】
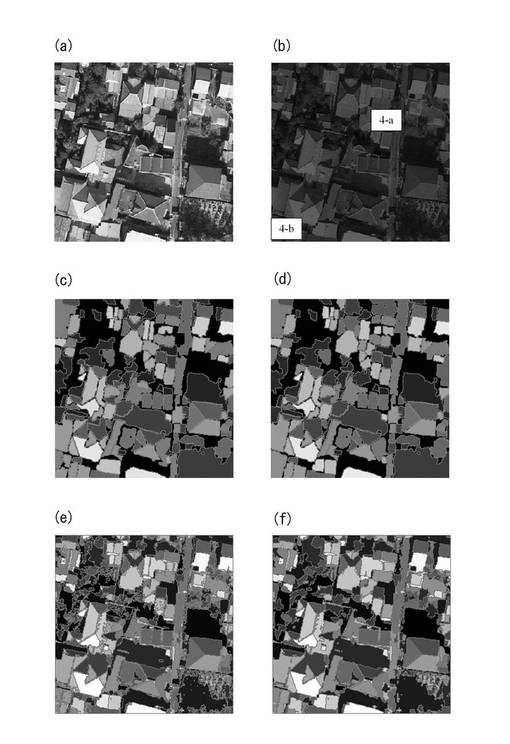
図18は、地域4についての図であり、(a)〜(f)はそれぞれ、(a)航空写真、(b)領域抽出結果を比較するための参照点、(c)領域抽出結果(主たる方向を計算する際に主成分分析を利用)、(d)領域抽出結果(主たる方向を計算する際に2点間を通る直線の傾きを投票して決定)、(e)ENVI EXでScale=50, Merge=50に設定した時の領域抽出結果、(f)ENVI EXでScale=50, Merge=80に設定した時の領域抽出結果、である。
【0048】
図15〜18のそれぞれにおいて、中段の(c),(d)と下段の(e),(f)との比較により明らかなように、本実施形態の領域抽出による(c),(d)では、建物の長方形の領域が、より正確に抽出されていることがわかる。ENVI EXによる(e),(f)では不要なエッジや、細かすぎるエッジが非常に多く、(c),(d)に比べると領域抽出の出来映えが良くない。
【0049】
《考察》
上記実施形態に係る領域抽出の手法では異なる離散化幅を適用して得られたエッジを統合しているが、このことは異なる空間解像度へ変換し処理することと本質的には同じである。ただし、オフセット値を変えて適用し統合することで、単なる平滑化フィルタと異なりエッジは保存されている。何より重要なのは、複数の異なる離散化幅を適用し得られた領域群に対し、長方形指数の大きい領域から順次採用していくことは局所的に最適な、空間的な平滑化パラメータを適用していることに等しい、ということである。
【0050】
図11〜14からは、統合する処理を通じて、屋根や建物の大きさに応じて局所的に最適な空間スケールパラメータを選択できていることが示されている。ただし、離散化後の画像を用いたラベリングには時間を要し、画像サイズが大きくなるほど処理時間が増大する。例えば、クロック3.2GHzで動作するCPUに、6GBのメモリを使用するコンピュータの場合、各対象地域での平均処理時間は約90秒であった。
【0051】
なお、領域のエッジから算出される形状に関する指標を活用して、屋根や建物に見られる長方形の形状の領域を優先的に抽出することが好ましい。その際にエッジを抽出しても完全に閉じない屋根や建物が多く、このことが領域抽出の精度を下げる要因であるが、完全に閉じていないエッジ群に対しては、長方形や三角形の形状の可能性が高い場合にエッジを閉じる処理を加えることが好ましい。
【0052】
また上述の、例えば3つの異なる離散化幅を用いることで、特にΔd=20の結果(図7〜10における(e))から図15〜18の参照点1−a,1−b,3−a,4−aのような影がかかっている屋根のエッジを明瞭に抽出できていることがわかる。この場合でもエッジを閉じる処理がなければ分離されないことも確認できており、エッジ補完(連結)処理の有効性が確認できた。すなわち、エッジ補完処理と、異なる離散化幅の結果の統合という2つの要因が効果を発揮して、領域抽出精度が向上したと考えられる。ただし、ステップ7に示した「領域の平均輝度値の差が一定値以内」という条件がないと、明瞭に分かれている屋根も過剰に統合する結果が確認された。
【0053】
寄棟屋根に見られる三角形の領域も、図15〜18の結果からは良好に抽出されていることが分かる。理想的な三角形の長方形指数は0.5に留まり、優先的に採用される訳ではない。今回良好に抽出できた要因として、三角形領域周辺の長方形領域が良好に抽出された点が挙げられる。離散化幅やオフセット値によっては、三角形領域と長方形領域が統合されることもある。しかしながら、3種類の離散化幅で得られた領域抽出結果を長方形指数という尺度で評価すると、三角形領域と長方形領域が統合される領域の長方形指数は、本来の長方形単独の領域の長方形指数より低く採用されにくい。このような選考過程に基づいて、長方形領域が先に選抜され、続いて三角形領域が抽出された。
【0054】
既存の領域抽出手法の結果に比べて、上述の手法の結果では領域が存在しない範囲が広い。これは領域面積に上限を設けたことも一因であるが、領域の長方形指数が一定値(0.4)未満であると屋根・建物の可能性が低いとして除去していることに大きく起因している。全てではないが大半の植生や、図15の墓地を含む領域は形状が長方形には程遠く、結果的に除去できている。すなわち、建物領域抽出という観点では十分に機能していると言える。
【0055】
長方形指数を領域面積の観点から述べる。本手法では長方形指数が高い領域から順次抽出していくため、比較的小さな領域が優先的に抽出されることが多くなり、多少長方形指数が小さくても大まかな外形を捉えている領域が選ばれないこともありえる。そのような大まかな外形を捉えたい応用に対応するため、その方法を検討した。例えば、下記の式(2)を用いた補正を実行することで、一部の領域では図15〜18に示す結果よりも大きく、複数の屋根・建物に対応した領域が得られた。
Didx=C1・ln(Sactual・C2+C3) ・・・(2)
【0056】
ここでDidxは長方形指数の補正値、C1〜C3は経験的に定める係数を表す。前述の対象地域に適用して経験的に確認した結果、C1=0.05,C2=100.0,C3=1.0とした。式(2)の係数の中でもC1が特に最終抽出結果に大きな影響を与えることが判明した。C1=1.0と設定すると、補正値が大きすぎて道路やそれに繋がる大きな面積を持つ領域の長方形指数が高くなり、それに応じて優先的に選ばれるようになり、本来目的としている屋根・建物の抽出数が減少する結果となった。今回は伝統的な日本建物が建ち並ぶ地域を対象にしているが、この長方形指数補正における関数や、パラメータ値は、抽出したい建物を念頭に調整するべきである。
【0057】
一方、長方形指数を算出する場合、図15〜18の(c)には主成分分析で軸を決めた場合の領域抽出の結果が示されている。参照点2−a、3−b、3−c、4−bにおいては、主成分分析を適用するとスレート屋根の領域が分割されて、一部が欠けて抽出された。完全な長方形でない限り、エッジ群を用いて主成分分析を適用すると、特に今回対象にしているような影で分断されている屋根では、第1主成分は屋根の辺に平行になるとは限られない結果が得られた。その反面、1−cでは主成分分析を用いた領域抽出結果では、4つの屋根が一つの大きな領域として抽出されている。
【0058】
このように主成分分析を用いることで領域抽出結果の安定性を欠くことが確認できたため、主成分分析を適用せず、2点間の距離が一定値にあるエッジ群を用いて直線の傾きを投票し、最大の頻度が発生する傾きを第1軸の向きとし、第2軸は第1軸に直交するように定めた。この2点間の距離の上限、下限を変更すると一部領域抽出の結果にも変化が生じたが、主成分分析を用いた結果ほど大きな変化は見られなかった。この閾値は対象地域の特性に応じて経験的に決めることが求められる。
【0059】
最後に、植生領域の除去について述べる。本実施形態では市街地の建物抽出が目的であり、植生は除去すべき対象であった。領域抽出の前処理として、画素単位の輝度値を参照して植生らしさが高い画素を除去する方法も考えられる。しかしながら、屋根や道路に部分的にかかる植生を除去することで本来の屋根や建物の形状が得られず、分断されたり、あるいはそもそも領域が小さくなりすぎて抽出されなくなったりすることがある。
【0060】
そこで、検討の結果、植生領域も領域抽出の対象に含めながら処理を進め、最終段階で適用することにした。この方針は現実的に高精度の抽出に貢献しているといえる。例えば赤色の植生を除去しようとすると、赤色の屋根が誤って除去されることがあった。そのため、赤色植生を慎重に除去すべく、閾値をTveg, r2b_ratio =2.0と高めに設定した。同様の発想で影も一つの領域として抽出し、長方形指数が向上する場合には近隣の領域と統合するように対処した。影らしい領域には道路が多数含まれており、輝度値を用いて除去することも検討したが、誤って屋根や建物も除去される事例が確認できたため、最終的に除去しなかった。
【0061】
以上のように、本実施形態の領域抽出によれば、密集市街地で効果的に建物あるいは屋根を領域として抽出できる。当該手法では、輝度値の分散が大きいテクスチャを持つ屋根も効果的に抽出するため、輝度値を少数個の値に離散化し、同一の離散化値を持つ領域をラベリングする。そして、領域のエッジから算出される長方形指数を活用して、屋根や建物に見られる長方形の形状の領域を優先的に抽出するようにした。また完全に閉じていないエッジ群に対し、長方形や三角形の形状の可能性が高い場合にエッジを閉じる処理を加えた。
【0062】
京都市の伝統的な建物が密集する地域が撮影された25cm解像度の航空写真を用いた実験では、3つの異なる離散化幅を適用したが、エッジ補完処理と異なる離散化幅の結果の統合という2つの要因が効果を発揮して、既存手法では十分に抽出できにくい影領域も明瞭に抽出されるようになった。当該手法の最も重要な特徴としては、複数の異なる離散化幅を適用し得られた領域群に対し、長方形指数の大きい領域から順次採用していくことで、局所的に最適な、空間的な平滑化パラメータを適用した処理を実現している点である。
【0063】
また寄棟屋根に見られる三角形の領域は、長方形指数は低く優先的に採用される訳ではないが、結果的には良好に抽出できた。三角形領域と長方形領域が統合される領域の長方形指数は、本来の長方形単独の領域の長方形指数より低く採用されにくく、長方形領域が先に選抜されることで、続いて三角形領域が抽出された。最終的に、低層建物が密集する市街地、高層ビルと低層建物が混在する市街地、高木が建物に隣接している地域、寄棟屋根作りの建物が多数存在する地域の全ての対象地域において、従来の領域抽出手法より良好な結果を得ることができた。よって、輝度値の離散化と長方形指数の活用に特徴を有する手法は有用であることが確認できた。
【0064】
なお、上記実施形態では元データとして航空写真を利用したが、航空写真に代えて、高精度に撮影された人工衛星から撮影した写真のデータを用いることも可能である。
また、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0065】
10:コンピュータ装置(領域抽出装置)
【技術分野】
【0001】
本発明は、航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する方法、プログラム及び装置に関する。
【背景技術】
【0002】
都市を俯瞰した場合の特徴抽出、領域抽出は昔から重要なテーマであった(例えば、非特許文献1)。例えば、航空写真又は人工衛星画像からの道路抽出は盛んに研究されてきた(例えば、非特許文献2,3)。リモートセンシング画像の分類手法は、画素単位の分類と領域(オブジェクト)単位の分類とに大別できる。クラスタリング(いわゆる教師なし)、最尤法(教師つき)、Support Vector Machines (SVM)(教師つき)に代表される画素単位の分類手法は、統計的理論に基づき、各画素を分類クラスに割り当てていく(例えば、非特許文献4)。一方、領域単位の分類手法では、画素の周辺の情報(Context)を利用する。例えば、数学的 Morphological アプローチを用いた分類などが代表例として挙げられる(例えば、非特許文献5〜9)。
【0003】
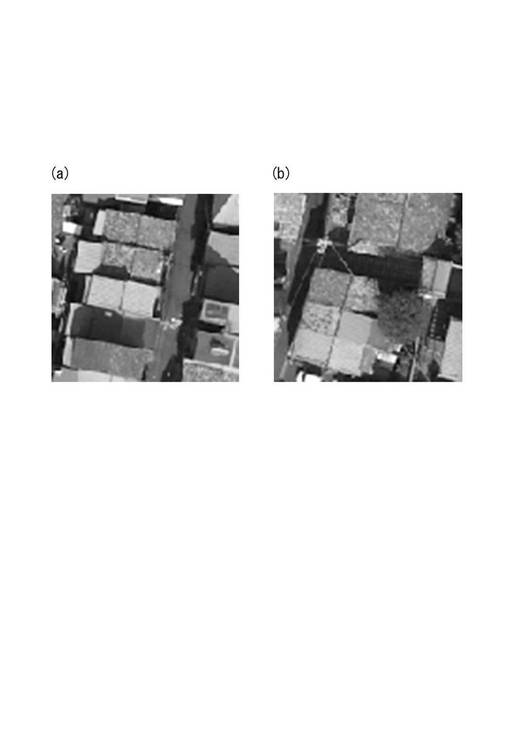
図1の(a)及び(b)は、家屋が密集した市街地(京都市東山区)の航空写真の一例である。このような密集市街地では、従来の領域抽出手法が効果的に機能しない。その要因を分析すると、まず、(イ)建物同士が接近しているため、屋根の輝度値、テクスチャが似ていると、建物の境界線が明瞭でなくなる点である。また、(ロ)隣接した建物の影が写り込みやすい、という密集市街地特有の要因がある。さらに、日本の伝統的建物では波型の横断面形状を持つ屋根(例えばスレート屋根)が使用されていることもあり、(ハ)輝度値にばらつきのあるテクスチャの屋根の輪郭抽出が困難である、という対象地域の建物特性による要因も確認できる。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】Weng, Q. and Quattrochi, D.A., "Urban Remote Sensing", CRC Press, 2007
【非特許文献2】Hu, J., Razdan, A., Femiani, J.C., Cui, M. and Wonka, P., "Road network extraction and intersection detection from aerial images by tracking road footprints", IEEE Transactions on Geoscience and Remote Sensing, Vol. 45, No. 12, pp. 4144 - 4157, 2007
【非特許文献3】Movaghati, S., Moghaddamjoo, A. and Tavakoli, A., "Road extraction from satellite images using particle filtering and extended Kalman filtering", IEEE Transactions on Geoscience and Remote Sensing, Vol. 48, No. 7, pp. 2807 - 2817, 2010
【非特許文献4】Tso, B. and Mather, P.M., "Classification methods for remotely sensed data -- 2nd ed.", CRC Press, 2009
【非特許文献5】Soille, P. and Pesaresi, M. , " Advances in mathematical morphology applied to geoscience and remote sensing", IEEE Transactions on Geoscience and Remote Sensing, Vol. 40, No. 9, pp. 2042-2055, 2002
【非特許文献6】Benediktsson, J.A., Pesaresi, M. and Amason, K., "Classification and feature extraction for remote sensing images from urban areas based on morphological transformations", IEEE Transactions on Geoscience and Remote Sensing, Vol. 41, No. 9, pp. 1940 - 1949, 2003
【非特許文献7】Benediktsson, J.A., Palmason, J.A. and Sveinsson, J.R., "Classification of hyperspectral data from urban areas based on extended morphological profiles", IEEE Transactions on Geoscience and Remote Sensing, Vol. 43, No. 3, pp. 480 - 491, 2005
【非特許文献8】Bellens, R., Gautama, S., Martinez-Fonte, L., Philips, W., Chan, J.C.-W., Canters, F., "Improved Classification of VHR Images of Urban Areas Using Directional Morphological Profiles", IEEE Transactions on Geoscience and Remote Sensing, Vol. 46, No. 10, pp. 2803 - 2813, 2008
【非特許文献9】Tuia, D., Pacifici, F., Kanevski, M. and Emery, W.J., "Classification of Very High Spatial Resolution Imagery Using Mathematical Morphology and Support Vector Machines", IEEE Transactions on Geoscience and Remote Sensing, Vol. 47, No. 11, pp. 3866 - 3879, 2009
【非特許文献10】Canny, J., "A Computational Approach to Edge Detection", IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. PAMI-8, No. 6, pp. 679 - 698, 1986
【非特許文献11】Zhong, J. and Ning, R., "Image denoising based on wavelets and multifractals for singularity detection", IEEE Transactions on Image Processing, Vol. 14, No. 10, pp. 1435 - 1447, 2005
【非特許文献12】Tonazzini, A., Bedini, L. and Salerno, E., "A Markov model for blind image separation by a mean-field EM algorithm", IEEE Transactions on Image Processing, Vol. 15, No. 2, pp. 473 - 482, 2006
【非特許文献13】Berlemont, S. and Olivo-Marin, J.-C., "Combining Local Filtering and Multiscale Analysis for Edge, Ridge, and Curvilinear Objects Detection", IEEE Transactions on Image Processing, Vol. 19, No. 1, pp. 74 - 84, 2010
【非特許文献14】Ding, J., Ma, R. and Chen, S., "A Scale-Based Connected Coherence Tree Algorithm for Image Segmentation", IEEE Transactions on Image Processing, Vol. 17, No. 2, pp. 204 - 216, 2008
【非特許文献15】Chien, S .Y., Ma, S.Y. and Chen, L.G., "Efficient moving object segmentation algorithm using background registration technique", IEEE Transactions on Circuits and Systems for Video Technology, Vol. 12 , No. 7, pp. 577 - 586, 2002
【非特許文献16】Tsai, V.J.D., "A comparative study on shadow compensation of color aerial images in invariant color models", IEEE Transactions on Geoscience and Remote Sensing, Vol. 44, No. 6, pp. 1661 - 1671, 2006
【非特許文献17】Ma, H., Qin, Q. and Shen, X., "Shadow Segmentation and Compensation in High Resolution Satellite Images", Proceedings of IEEE International Geoscience and Remote Sensing Symposium, 2008, Vol. 2, pp. II-1036 - II-1039, 2008
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記(イ)の要因は、言い換えれば、領域のエッジが十分に得られていない場合に、どう対処するか、という課題を与えている。また、上記(ハ)の要因により過剰に抽出されるエッジから不要なエッジを除外することも課題である。ここで、(ハ)の課題は(イ)の課題とも関連していると考えられる。例えば、非特許文献10において、Cannyはノイズに強いエッジ抽出オペレータを提唱している。これは、これまでに幅広く使われている代表的なエッジ抽出オペレータの一つといえる。またWaveletを使ってノイズを除去したり(例えば、非特許文献11)、平均値(例えば、非特許文献12)や多重解像度画像(例えば、非特許文献13)を活用したりする手法が報告されている。
【0006】
また上記(ロ)の要因に関連して、影領域の輝度値を回復する研究事例が報告されている(例えば、非特許文献14〜17)。しかしながら例えば非特許文献17における回復結果を見る限りでは、回復後の画像において元々の影領域と非影領域との境界線が明瞭に出てしまうという問題点、及び、影領域内の補正値の決定が難しく、過剰に回復することもある、といった問題点が、依然として解決できていない。
【0007】
かかる従来の問題点に鑑み、本発明は、航空写真等のデータに基づいて、建物の領域をより正確に抽出する技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)本発明は、航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出方法であって、複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化し、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出し、前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用することを特徴とする。
【0009】
上記のような領域抽出方法では、離散化によって、輝度値の分散が大きいテクスチャを持つ領域も、1つの領域として抽出可能である。また、同一値を持つ点を連結し、長方形に近い形状の領域を抽出することで、建物以外の領域を除去し易くなる。また、複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用することにより、局所的に最適な、空間的な平滑化パラメータを適用していることに等しい機能を発揮させることができる。
【0010】
(2)また、上記(1)の領域抽出方法において、長方形に近い形状を表す指数として、(領域の面積/領域を取り囲む長方形の面積)によって定義される長方形指数を用いることができる。
この場合、長方形に近い形状における「近さ」の度合いを、指数として簡単かつ的確に表すことができる。
【0011】
(3)また、上記(1)又は(2)の領域抽出方法において、上記抽出において、互いに隣接する領域同士が併合された場合にさらに長方形に近くなる場合は、当該併合を実行可能とするようにしてもよい。
この場合、より正確に建物の領域を捉えることができる。
【0012】
(4)また、上記(2)の領域抽出方法において、長方形指数が所定値より小さい場合は、建物の領域として採用しないことが好ましい。
この場合、建物でない可能性が高い領域を抽出の対象から除外することができる。
【0013】
(5)また、上記(1)の領域抽出方法において、RGB輝度値に基づいて、植生と推測される領域を抽出対象から除外してもよい。
この場合、植生の色の特徴を考慮して当該領域を抽出対象から除外することができる。
【0014】
(6)一方、本発明は、航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出プログラムであって、複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化する機能、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する機能、及び、前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する機能を、コンピュータによって実現させるための領域抽出プログラムである。
【0015】
(7)また、本発明は、航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出装置であって、複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化する機能と、離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する機能と、前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する機能とを有するものである。
【0016】
上記(6)、(7)の領域抽出プログラム/領域抽出装置では、離散化によって、輝度値の分散が大きいテクスチャを持つ領域も、1つの領域として抽出可能である。また、同一値を持つ点を連結し、長方形に近い形状の領域を抽出することで、建物以外の領域を除去し易くなる。また、複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用することにより、局所的に最適な空間的な平滑化パラメータを適用していることに等しい機能を発揮させることができる。
【発明の効果】
【0017】
本発明によれば、航空写真等の写真のデータに基づいて、建物の領域をより正確に抽出することができる。
【図面の簡単な説明】
【0018】
【図1】家屋が密集した市街地(京都市東山区)の航空写真の一例である。
【図2】京都市東山区法観寺から東大路通り周辺を地上で撮影した写真である。
【図3】領域抽出方法を実施するためのコンピュータ装置の一例を示すブロック図である。
【図4】画素の連結の概念図である。
【図5】長方形指数算出の概念図である。
【図6】対象領域と、それに隣接する領域との統合の概念図である。
【図7】低層建物が密集する市街地(地域1)におけるエッジ抽出の結果を示す図である。
【図8】高層ビルと低層建物とが混在する市街地(地域2)におけるエッジ抽出の結果を示す図である。
【図9】高木が建物に隣接している地域(地域3)におけるエッジ抽出の結果を示す図である。
【図10】寄棟屋根作りの建物が多数存在する地域(地域4)におけるエッジ抽出の結果を示す図である。
【図11】地域1における領域抽出の結果を示す図である。
【図12】地域2における領域抽出の結果を示す図である。
【図13】地域3における領域抽出の結果を示す図である。
【図14】地域4における領域抽出の結果を示す図である。
【図15】地域1についての領域抽出の比較結果を示す図である。
【図16】地域2についての領域抽出の比較結果を示す図である。
【図17】地域3についての領域抽出の比較結果を示す図である。
【図18】地域4についての領域抽出の比較結果を示す図である。
【発明を実施するための形態】
【0019】
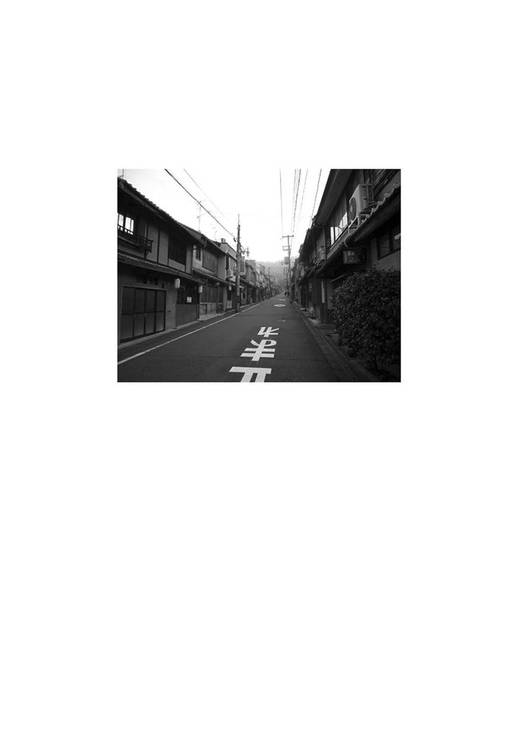
以下、本発明の一実施形態に係る領域抽出方法・領域抽出プログラムについて、説明する。領域抽出のモデル地域としては、京都市東山区法観寺から東大路通り周辺を対象とした。この地域では木造建築が敷地間口いっぱいに立ち並んでいる。図2は、当該地域を地上で撮影した写真である。また、この地域の航空写真データとして、25cm解像度、オルソ(正射投影)処理済みのデータ(市販品)を使用した。このデータは、平面直角座標系に合わせてある。なお、オルソ処理されていても、若干は建物の側面が見えるが、実用上は特に問題ない。
【0020】
次に、建物の領域(屋根の輪郭形状)を抽出する領域抽出方法・領域抽出プログラムについて説明する。図3は、領域抽出方法を実施するためのコンピュータ装置10の一例を示すブロック図であり、また、領域抽出プログラムは、このコンピュータ装置10に機能を実現させるものである。また、領域抽出プログラムの機能が搭載されたコンピュータ装置10は、本発明の一実施形態に係る領域抽出装置である。
【0021】
このコンピュータ装置10は、CPU1と、バス2を介してCPU1と接続されたメモリ3と、ハードディスク等の補助記憶装置4と、インターフェース5,6と、インターフェース5及び6にそれぞれ接続されたドライブ7及びディスプレイ8とを含むものであり、典型的には、これは、パーソナルコンピュータである。入力装置としてのドライブ7に、航空写真を収めたCD,DVD等の記憶媒体9を装着することにより、航空写真のデータが読込み可能となる。なお、領域抽出プログラムは、航空写真とは別に、記憶媒体又はネットワーク経由で補助記憶装置4にインストールして実行される。すなわち、領域抽出プログラムは、記憶(記録)媒体としても存在・流通し得る。
【0022】
《領域抽出の手順》
以下、領域抽出(方法・プログラムの主要ステップ)について詳細に説明する。
領域抽出の概要としては、輝度値の分散が大きいテクスチャを持つ屋根も効果的に抽出すべく、輝度値を所定数の値に離散化し、同一の離散化値を持つ領域をラベリングする。そして、平面視した建物に見られる長方形に近い形状の領域を優先的に抽出する。また、複数の異なる離散化幅を適用して得られた領域群に対し、より長方形に近い領域から順次採用していくことで、局所的に最適な、空間的な平滑化パラメータを適用したのと同様な処理を実現する。以下、ステップごとに詳細に説明する。
【0023】
(第1ステップ)
まず、1バイト(輝度値の範囲:0〜255)×3バンド(RGB)画像の任意の1バンドの輝度値に対し、Ndisc種類の離散化幅を設定する。各離散化幅の下で、Noff種類の異なるオフセット値を適用し、画像輝度値を離散化する。例えば、「輝度値の離散化幅=40」「オフセット数=5」のときに「オフセット値幅=8」となり、「オフセット値={0,8,16,24,32}」のNoff種類の離散化画像が得られる。「オフセット値=0」の下では、原画像の輝度値「0〜39」が同一離散化値を与えられ、同様に「40〜79」「80〜119」「120〜159」「160〜199」「200〜239」「240〜255」を含めた7つの区分に離散化される。本実験では一例として次のパラメータを使用した。
【0024】
使用バンド:赤(R)バンド
輝度値の離散化幅Δd={40,30,20}
オフセット数Noff=5
オフセット値幅Δoff=Δd/Noff={8,6,4}
【0025】
(第2ステップ)
次に、各離散化画像において、4方向(上下左右)を探索し、同じ値を持つ画素を連結し領域として抽出する。一定面積以上の大領域(例えば6400画素以上)は除去する。また一定面積未満(例えば80画素未満)の小領域は周辺に一定面積以上の領域があれば統合し、なければ除去する。その後、各領域のエッジ(輪郭)を抽出する。
【0026】
(第3ステップ)
次に、ある離散化幅におけるNoff種類の離散化画像から得られたエッジを全て1枚に重ね合わせる。
【0027】
(第4ステップ)
次に、一定強度以上のエッジを残し、それに連結するエッジも抽出する。この時点で隣接する屋根や建物がほぼ同様の輝度値を持つ場合にそれらのエッジが抽出されていないことも多いため、エッジが存在しなくても周辺に直線状のエッジが存在することが確認できれば、エッジを連結する。
【0028】
このエッジ連結について、補足説明する。まず、エッジではない画素の周辺8方向(上下左右斜め)を探索し、一定画素数dの中に存在するエッジの数を調べる。
図4は、左上の方向にあるエッジ群グループ1aと、右下の方向にあるエッジ群グループ1bとを探索する例を示している。例えば、(a)グループ1aにd1以上、かつ、グループ1bにもd1以上にエッジ群が存在し、(b)グループ2aにd2以下、かつ、グループ2bにもd2以下のエッジ群しか存在しない、という条件を用意し、条件(a)、(b)を共に満足する場合に、非エッジである中心画素をエッジとして補完する。(b)の条件があることで、矩形領域の隅に近い領域内部の画素を誤ってエッジと抽出することを防いでいる。探索は、上下方向、左右方向、左上から右下、右上から左下の4回にわたって調べる。今回は、d=7、d1=5、d2=1と設定した。
【0029】
(第5ステップ)
次に、エッジで閉じた領域にラベル番号を付与(ラベリング)し、RGB輝度値から判断して、植生らしい領域を除去する。ステップ2と同様に、一定面積以上の大領域(例えば6400画素以上)を除去し、一定面積以下(例えば30画素以下)の小領域は周辺に一定面積以上の領域があれば統合し、なければ除去する。
【0030】
植生の除去について補足説明する。対象地域では、植生には緑系統と赤系統の植生が確認できた。そのため、
(1)Bgrn ≧ Tveg, DN, Bblue ≧ Tveg, DN, and Bgrn / Bblue ≧ Tveg, g2b_ratio
(2)Bred ≧ Tveg, DN, Bblue ≧ Tveg, DN, and Bred / Bblue ≧ Tveg, r2b_ratio
のいずれかを満足する画素が占有する割合Rgrn_veg, Rred_vegを計算する。ここでBred、 Bgrn 、Bblueは赤、緑、青バンドの輝度値を、Tveg, DNは輝度値の閾値を、Tveg, g2b_ratio、Tveg, r2b_ratioは指標の閾値を意味する。Rgrn_veg, Rred_vegのいずれかが閾値Tveg, ratio以上であれば、植生領域として除去する。ここでは、Tveg, DN =20、 Tveg, g2b_ratio =1.25、 Tveg, r2b_ratio =2.0、 Tveg, ratio =0.3の値を採用した。
【0031】
(第6ステップ)
次に、各領域の長方形指数と呼ぶ指数を、次のように計算する。
(ア)領域のエッジの集合(エッジ群と呼ぶ。)の2次元座標から、第1軸及び第2軸を決定する。
(イ)領域の存在範囲を第1軸と第2軸の値で表現し、第1軸の(最大値−最小値+1)、第2軸の(最大値−最小値+1)を掛け合わせて、領域を取り囲む矩形の面積を得る。
(ウ)(実際の領域の面積/領域を取り囲む矩形の面積)を長方形指数と定義する。
ここで、長方形指数が一定値(例えば0.4)を下回ると、建物でない可能性が高いと判断して、抽出の対象から除外する。
【0032】
長方形指数について補足説明する。図5に長方形指数算出の概念図を示す。ある領域のエッジ群から第1,第2軸を計算し、各々の辺が第1,第2軸に平行な長方形のうち、対象領域を取り囲む、図示のような最小の長方形を求める。この第1,第2軸の決定には、2点間の距離が一定値(5画素以上20画素以下)にあるエッジ群を用いて直線の傾きを投票し、最大の頻度が発生する傾きを第1軸の向きとし、第2軸は第1軸に直交するように定めた。
idx = Sactual/Srect ・・・(1)
と定義する。ここでidxは長方形指数を、Sactualはある領域の面積を、Srectはその領域を取り囲む長方形の面積を表す。長方形指数は0から1の範囲の値を取り、1に近いほど長方形に近い形状を有する。このような指数により、長方形に近い形状における「近さ」の度合いを、指数として簡単かつ的確に表すことができる。
【0033】
(第7ステップ)
式(1)の長方形指数を用いて、ステップ7では、影で分断されている屋根・建物を統合し、本来の領域を推定する。
例えば、ある領域Aの近隣の領域を探索し、
(ア)併合した場合の長方形指数が各々の長方形指数よりも向上する。
(イ)指定した閾値(0.7)以上である。
(ウ)領域の平均輝度値の差が一定値(30)以内である。
という条件を満たすか否かを判定する。満たす場合には、近隣の領域のうち、併合時の長方形指数が最大となる領域を併合の候補とし、これを、仮に領域Bとする。領域Bでも同様に探索し、領域Aが(ア)〜(ウ)の全ての条件を満たし、かつ併合時の長方形指数が最大となる領域である場合に、領域AとBとを互いに併合する。
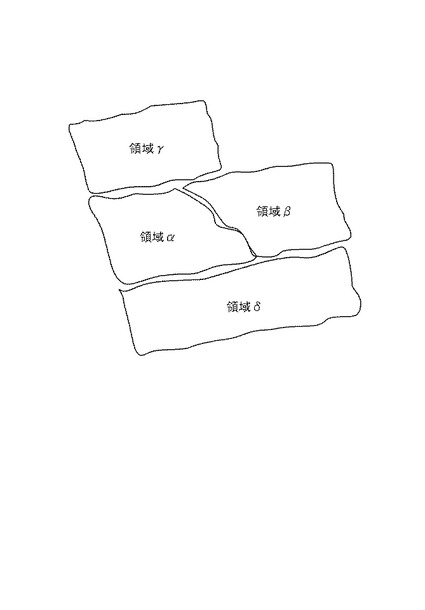
【0034】
例えば図6に示すように、対象領域αに隣接する領域β、γ、δの全てを対象に、仮に統合した場合の長方形指数を計算する。この際の第1,第2軸は、2つの領域のエッジ群のうち、互いの領域に近いエッジ群は除外したエッジ群を用いて計算される。軸の決定には、2点間の距離が一定値(5画素以上20画素以下)にあるエッジ群を用いて直線の傾きを投票し、最大の頻度が発生する傾きを第1軸の向きとし、第2軸は第1軸に直交するように定めた。
【0035】
(第8ステップ)
次に、Ndisc種類の離散化幅の下で得られた一定面積以上の領域を、長方形指数が高い順に選んでいく。ただし、当該領域の一部でも既に選ばれた領域に重なっていれば、その領域は選ばない。
【0036】
(第9ステップ)
選ばれなかった領域に対し、再度選定していく。今度は既に選ばれた領域との重なりが一定値未満(30%)で、かつ一定面積(80画素)未満であれば、重なっていない部分だけを新たな領域として追加選出する。ただし重なっていない部分に対しても長方形指数を算出し、閾値(0.45)以上である場合に限る。
【0037】
(第10ステップ)
最後に、領域内の穴を埋める。
【0038】
《実例》
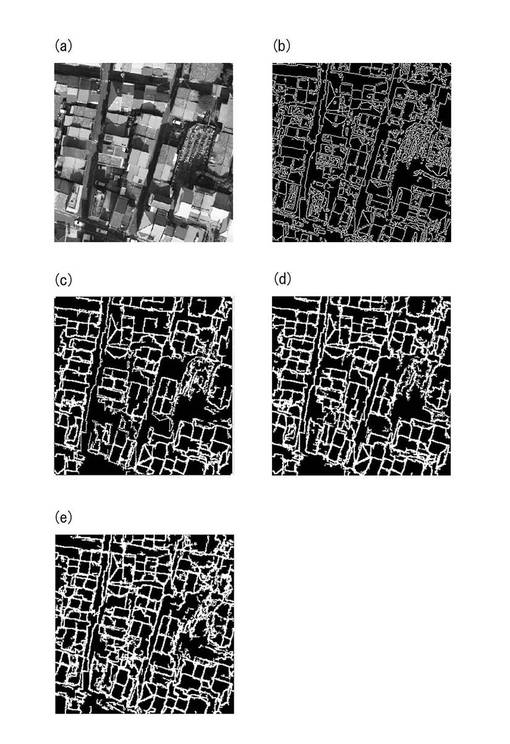
以下、実例を示す。図7は、低層建物が密集する市街地(以下、地域1という。)におけるエッジ抽出の結果を示す図である。(a)は撮影の解像度300×300画素で、実寸法約75m×75mのエリアを撮影した航空写真である。(b)は、(a)のデータに対して既知のキャニー(Canny)フィルタを用いた結果である。(c)は、上述の離散化において離散化幅40を用いた際のエッジ抽出結果(第1段階)である。さらに、(d)は、離散化幅30を用いた際のエッジ抽出結果(第2段階)、(e)は、離散化幅20を用いた際のエッジ抽出結果(第3段階)である。
【0039】
図8は、高層ビルと低層建物とが混在する市街地(以下、地域2という。)におけるエッジ抽出の結果を示す図である。(a)〜(e)は、図7と同様であり、(a)は航空写真、(b)はキャニーフィルタを用いた結果、(c)は離散化幅40を用いた際のエッジ抽出結果(第1段階)、(d)は離散化幅30を用いた際のエッジ抽出結果(第2段階)、(e)は離散化幅20を用いた際のエッジ抽出結果(第3段階)である。
【0040】
図9は、高木が建物に隣接している地域(以下、地域3という。)におけるエッジ抽出の結果を示す図である。(a)〜(e)は、図7と同様であり、(a)は航空写真、(b)はキャニーフィルタを用いた結果、(c)は離散化幅40を用いた際のエッジ抽出結果(第1段階)、(d)は離散化幅30を用いた際のエッジ抽出結果(第2段階)、(e)は離散化幅20を用いた際のエッジ抽出結果(第3段階)である。
【0041】
図10は、寄棟屋根作りの建物が多数存在する地域(以下、地域4という。)におけるエッジ抽出の結果を示す図である。(a)〜(e)は、図7と同様であり、(a)は航空写真、(b)はキャニーフィルタを用いた結果、(c)は離散化幅40を用いた際のエッジ抽出結果(第1段階)、(d)は離散化幅30を用いた際のエッジ抽出結果(第2段階)、(e)は離散化幅20を用いた際のエッジ抽出結果(第3段階)である。
【0042】
図11,図12,図13,図14はそれぞれ、上述の地域1(図7),地域2(図8),地域3(図9),地域4(図10)における領域抽出の結果を示す図である。図11〜14の各図において、(a)は各地域の航空写真、(b)は離散化幅40を用いた際の領域抽出結果(第1段階)、(c)は離散化幅30を用いた際の領域抽出結果(第2段階)、(d)は離散化幅20を用いた際のエッジ抽出結果(第3段階)、(e)は、長方形指数を用いて3つの結果((b)〜(d))を統合した最終結果の図である。図11〜14のいずれにおいても、(e)は、(b)〜(d)の各結果と比較すると明らかなように、局所的に3つの結果の最も良いところを取った状態となり、建物の領域(エッジ)がより正確に抽出されている。
【0043】
図15は、地域1についての図であり、(a)〜(f)はそれぞれ、(a)航空写真、(b)領域抽出結果を比較するための参照点、(c)領域抽出結果(主たる方向を計算する際に主成分分析を利用)、(d)領域抽出結果(主たる方向を計算する際に2点間を通る直線の傾きを投票して決定)、(e)ITT Visual Information Solutions の画像処理ソフトENVI EXでScale=50, Merge=50に設定した時の領域抽出結果、(f)ENVI EXでScale=50, Merge=80に設定した時の領域抽出結果、である。なお、(c)〜(f)はカラー画像では建物のエッジが明瞭に表示されるが、この図では建物の縁取りのように見えているのがエッジである。
【0044】
なお、ENVI EXの「Feature Extraction」という機能で設定を要求されるパラメータは、「Scale Level」と「Merge Level」である。本例の対象地域では分散値の大きいテクスチャを持つ屋根が多い。「Merge Level」を変更することで最終的に残される領域の大きさや数が変わるため、「Scale Level = 50.0」は共通とし、「Merge Level = 50.0」「Merge Level = 80.0」の2種類の値で実行した。
【0045】
図16は、地域2についての図であり、(a)〜(f)はそれぞれ、(a)航空写真、(b)領域抽出結果を比較するための参照点、(c)領域抽出結果(主たる方向を計算する際に主成分分析を利用)、(d)領域抽出結果(主たる方向を計算する際に2点間を通る直線の傾きを投票して決定)、(e)ENVI EXでScale=50, Merge=50に設定した時の領域抽出結果、(f)ENVI EXでScale=50, Merge=80に設定した時の領域抽出結果、である。
【0046】
図17は、地域3についての図であり、(a)〜(f)はそれぞれ、(a)航空写真、(b)領域抽出結果を比較するための参照点、(c)領域抽出結果(主たる方向を計算する際に主成分分析を利用)、(d)領域抽出結果(主たる方向を計算する際に2点間を通る直線の傾きを投票して決定)、(e)ENVI EXでScale=50, Merge=50に設定した時の領域抽出結果、(f)ENVI EXでScale=50, Merge=80に設定した時の領域抽出結果、である。
【0047】
図18は、地域4についての図であり、(a)〜(f)はそれぞれ、(a)航空写真、(b)領域抽出結果を比較するための参照点、(c)領域抽出結果(主たる方向を計算する際に主成分分析を利用)、(d)領域抽出結果(主たる方向を計算する際に2点間を通る直線の傾きを投票して決定)、(e)ENVI EXでScale=50, Merge=50に設定した時の領域抽出結果、(f)ENVI EXでScale=50, Merge=80に設定した時の領域抽出結果、である。
【0048】
図15〜18のそれぞれにおいて、中段の(c),(d)と下段の(e),(f)との比較により明らかなように、本実施形態の領域抽出による(c),(d)では、建物の長方形の領域が、より正確に抽出されていることがわかる。ENVI EXによる(e),(f)では不要なエッジや、細かすぎるエッジが非常に多く、(c),(d)に比べると領域抽出の出来映えが良くない。
【0049】
《考察》
上記実施形態に係る領域抽出の手法では異なる離散化幅を適用して得られたエッジを統合しているが、このことは異なる空間解像度へ変換し処理することと本質的には同じである。ただし、オフセット値を変えて適用し統合することで、単なる平滑化フィルタと異なりエッジは保存されている。何より重要なのは、複数の異なる離散化幅を適用し得られた領域群に対し、長方形指数の大きい領域から順次採用していくことは局所的に最適な、空間的な平滑化パラメータを適用していることに等しい、ということである。
【0050】
図11〜14からは、統合する処理を通じて、屋根や建物の大きさに応じて局所的に最適な空間スケールパラメータを選択できていることが示されている。ただし、離散化後の画像を用いたラベリングには時間を要し、画像サイズが大きくなるほど処理時間が増大する。例えば、クロック3.2GHzで動作するCPUに、6GBのメモリを使用するコンピュータの場合、各対象地域での平均処理時間は約90秒であった。
【0051】
なお、領域のエッジから算出される形状に関する指標を活用して、屋根や建物に見られる長方形の形状の領域を優先的に抽出することが好ましい。その際にエッジを抽出しても完全に閉じない屋根や建物が多く、このことが領域抽出の精度を下げる要因であるが、完全に閉じていないエッジ群に対しては、長方形や三角形の形状の可能性が高い場合にエッジを閉じる処理を加えることが好ましい。
【0052】
また上述の、例えば3つの異なる離散化幅を用いることで、特にΔd=20の結果(図7〜10における(e))から図15〜18の参照点1−a,1−b,3−a,4−aのような影がかかっている屋根のエッジを明瞭に抽出できていることがわかる。この場合でもエッジを閉じる処理がなければ分離されないことも確認できており、エッジ補完(連結)処理の有効性が確認できた。すなわち、エッジ補完処理と、異なる離散化幅の結果の統合という2つの要因が効果を発揮して、領域抽出精度が向上したと考えられる。ただし、ステップ7に示した「領域の平均輝度値の差が一定値以内」という条件がないと、明瞭に分かれている屋根も過剰に統合する結果が確認された。
【0053】
寄棟屋根に見られる三角形の領域も、図15〜18の結果からは良好に抽出されていることが分かる。理想的な三角形の長方形指数は0.5に留まり、優先的に採用される訳ではない。今回良好に抽出できた要因として、三角形領域周辺の長方形領域が良好に抽出された点が挙げられる。離散化幅やオフセット値によっては、三角形領域と長方形領域が統合されることもある。しかしながら、3種類の離散化幅で得られた領域抽出結果を長方形指数という尺度で評価すると、三角形領域と長方形領域が統合される領域の長方形指数は、本来の長方形単独の領域の長方形指数より低く採用されにくい。このような選考過程に基づいて、長方形領域が先に選抜され、続いて三角形領域が抽出された。
【0054】
既存の領域抽出手法の結果に比べて、上述の手法の結果では領域が存在しない範囲が広い。これは領域面積に上限を設けたことも一因であるが、領域の長方形指数が一定値(0.4)未満であると屋根・建物の可能性が低いとして除去していることに大きく起因している。全てではないが大半の植生や、図15の墓地を含む領域は形状が長方形には程遠く、結果的に除去できている。すなわち、建物領域抽出という観点では十分に機能していると言える。
【0055】
長方形指数を領域面積の観点から述べる。本手法では長方形指数が高い領域から順次抽出していくため、比較的小さな領域が優先的に抽出されることが多くなり、多少長方形指数が小さくても大まかな外形を捉えている領域が選ばれないこともありえる。そのような大まかな外形を捉えたい応用に対応するため、その方法を検討した。例えば、下記の式(2)を用いた補正を実行することで、一部の領域では図15〜18に示す結果よりも大きく、複数の屋根・建物に対応した領域が得られた。
Didx=C1・ln(Sactual・C2+C3) ・・・(2)
【0056】
ここでDidxは長方形指数の補正値、C1〜C3は経験的に定める係数を表す。前述の対象地域に適用して経験的に確認した結果、C1=0.05,C2=100.0,C3=1.0とした。式(2)の係数の中でもC1が特に最終抽出結果に大きな影響を与えることが判明した。C1=1.0と設定すると、補正値が大きすぎて道路やそれに繋がる大きな面積を持つ領域の長方形指数が高くなり、それに応じて優先的に選ばれるようになり、本来目的としている屋根・建物の抽出数が減少する結果となった。今回は伝統的な日本建物が建ち並ぶ地域を対象にしているが、この長方形指数補正における関数や、パラメータ値は、抽出したい建物を念頭に調整するべきである。
【0057】
一方、長方形指数を算出する場合、図15〜18の(c)には主成分分析で軸を決めた場合の領域抽出の結果が示されている。参照点2−a、3−b、3−c、4−bにおいては、主成分分析を適用するとスレート屋根の領域が分割されて、一部が欠けて抽出された。完全な長方形でない限り、エッジ群を用いて主成分分析を適用すると、特に今回対象にしているような影で分断されている屋根では、第1主成分は屋根の辺に平行になるとは限られない結果が得られた。その反面、1−cでは主成分分析を用いた領域抽出結果では、4つの屋根が一つの大きな領域として抽出されている。
【0058】
このように主成分分析を用いることで領域抽出結果の安定性を欠くことが確認できたため、主成分分析を適用せず、2点間の距離が一定値にあるエッジ群を用いて直線の傾きを投票し、最大の頻度が発生する傾きを第1軸の向きとし、第2軸は第1軸に直交するように定めた。この2点間の距離の上限、下限を変更すると一部領域抽出の結果にも変化が生じたが、主成分分析を用いた結果ほど大きな変化は見られなかった。この閾値は対象地域の特性に応じて経験的に決めることが求められる。
【0059】
最後に、植生領域の除去について述べる。本実施形態では市街地の建物抽出が目的であり、植生は除去すべき対象であった。領域抽出の前処理として、画素単位の輝度値を参照して植生らしさが高い画素を除去する方法も考えられる。しかしながら、屋根や道路に部分的にかかる植生を除去することで本来の屋根や建物の形状が得られず、分断されたり、あるいはそもそも領域が小さくなりすぎて抽出されなくなったりすることがある。
【0060】
そこで、検討の結果、植生領域も領域抽出の対象に含めながら処理を進め、最終段階で適用することにした。この方針は現実的に高精度の抽出に貢献しているといえる。例えば赤色の植生を除去しようとすると、赤色の屋根が誤って除去されることがあった。そのため、赤色植生を慎重に除去すべく、閾値をTveg, r2b_ratio =2.0と高めに設定した。同様の発想で影も一つの領域として抽出し、長方形指数が向上する場合には近隣の領域と統合するように対処した。影らしい領域には道路が多数含まれており、輝度値を用いて除去することも検討したが、誤って屋根や建物も除去される事例が確認できたため、最終的に除去しなかった。
【0061】
以上のように、本実施形態の領域抽出によれば、密集市街地で効果的に建物あるいは屋根を領域として抽出できる。当該手法では、輝度値の分散が大きいテクスチャを持つ屋根も効果的に抽出するため、輝度値を少数個の値に離散化し、同一の離散化値を持つ領域をラベリングする。そして、領域のエッジから算出される長方形指数を活用して、屋根や建物に見られる長方形の形状の領域を優先的に抽出するようにした。また完全に閉じていないエッジ群に対し、長方形や三角形の形状の可能性が高い場合にエッジを閉じる処理を加えた。
【0062】
京都市の伝統的な建物が密集する地域が撮影された25cm解像度の航空写真を用いた実験では、3つの異なる離散化幅を適用したが、エッジ補完処理と異なる離散化幅の結果の統合という2つの要因が効果を発揮して、既存手法では十分に抽出できにくい影領域も明瞭に抽出されるようになった。当該手法の最も重要な特徴としては、複数の異なる離散化幅を適用し得られた領域群に対し、長方形指数の大きい領域から順次採用していくことで、局所的に最適な、空間的な平滑化パラメータを適用した処理を実現している点である。
【0063】
また寄棟屋根に見られる三角形の領域は、長方形指数は低く優先的に採用される訳ではないが、結果的には良好に抽出できた。三角形領域と長方形領域が統合される領域の長方形指数は、本来の長方形単独の領域の長方形指数より低く採用されにくく、長方形領域が先に選抜されることで、続いて三角形領域が抽出された。最終的に、低層建物が密集する市街地、高層ビルと低層建物が混在する市街地、高木が建物に隣接している地域、寄棟屋根作りの建物が多数存在する地域の全ての対象地域において、従来の領域抽出手法より良好な結果を得ることができた。よって、輝度値の離散化と長方形指数の活用に特徴を有する手法は有用であることが確認できた。
【0064】
なお、上記実施形態では元データとして航空写真を利用したが、航空写真に代えて、高精度に撮影された人工衛星から撮影した写真のデータを用いることも可能である。
また、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内での全ての変更が含まれることが意図される。
【符号の説明】
【0065】
10:コンピュータ装置(領域抽出装置)
【特許請求の範囲】
【請求項1】
航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出方法であって、
複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化し、
離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出し、
前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する
ことを特徴とする領域抽出方法。
【請求項2】
長方形に近い形状を表す指数として、(領域の面積/領域を取り囲む長方形の面積)によって定義される長方形指数を用いる請求項1記載の領域抽出方法。
【請求項3】
前記抽出において、互いに隣接する領域同士が併合された場合にさらに長方形に近くなる場合は、当該併合を実行可能とする請求項1又は2に記載の領域抽出方法。
【請求項4】
長方形指数が所定値より小さい場合は、建物の領域として採用しない請求項2記載の領域抽出方法。
【請求項5】
RGB輝度値に基づいて、植生と推測される領域を抽出対象から除外する請求項1記載の領域抽出方法。
【請求項6】
航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出プログラムであって、
複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化する機能、
離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する機能、及び、
前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する機能を、コンピュータによって実現させるための領域抽出プログラム。
【請求項7】
航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出装置であって、
複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化する機能と、
離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する機能と、
前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する機能と
を有することを特徴とする領域抽出装置。
【請求項1】
航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出方法であって、
複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化し、
離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出し、
前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する
ことを特徴とする領域抽出方法。
【請求項2】
長方形に近い形状を表す指数として、(領域の面積/領域を取り囲む長方形の面積)によって定義される長方形指数を用いる請求項1記載の領域抽出方法。
【請求項3】
前記抽出において、互いに隣接する領域同士が併合された場合にさらに長方形に近くなる場合は、当該併合を実行可能とする請求項1又は2に記載の領域抽出方法。
【請求項4】
長方形指数が所定値より小さい場合は、建物の領域として採用しない請求項2記載の領域抽出方法。
【請求項5】
RGB輝度値に基づいて、植生と推測される領域を抽出対象から除外する請求項1記載の領域抽出方法。
【請求項6】
航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出プログラムであって、
複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化する機能、
離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する機能、及び、
前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する機能を、コンピュータによって実現させるための領域抽出プログラム。
【請求項7】
航空機又は人工衛星から撮影した写真のデータに基づいて建物の領域を抽出する領域抽出装置であって、
複数の異なる離散化幅を設定し、それぞれの離散化幅について、前記データの輝度値を当該離散化幅で離散設定された複数の値に離散化する機能と、
離散化して得られた離散化画像において同一値を持つ画素を連結し、建物の領域の候補として長方形に近い形状の領域を抽出する機能と、
前記複数の異なる離散化幅ごとに抽出された複数の領域群のうち、より長方形に近い形状の領域を、建物の領域として採用する機能と
を有することを特徴とする領域抽出装置。
【図3】


【図4】
【図5】
【図6】
【図1】
【図2】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図4】
【図5】
【図6】
【図1】
【図2】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−12034(P2013−12034A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−144266(P2011−144266)
【出願日】平成23年6月29日(2011.6.29)
【出願人】(504132272)国立大学法人京都大学 (1,269)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月29日(2011.6.29)
【出願人】(504132272)国立大学法人京都大学 (1,269)
【Fターム(参考)】
[ Back to top ]