
領域抽出装置及び領域抽出方法
【課題】残像を考慮しつつ背景から目的の対象物を抽出することができる領域抽出装置及び領域抽出方法を提供すること。
【解決手段】領域抽出装置1は、波長λ1及び波長λ2のレーザ光又はLED光を対象物に照射して得られる反射光について3フレーム以上の画像データを取得する撮像部15と、撮像部15が取得した各フレーム間の画像データの演算に基づき人肌抽出指標NDHIを算出する演算部17とを有する。演算部17は、撮像部15の撮像結果に基づき残像係数を算出する残像係数算出手段と、この残像係数に基づき波長λ1及び波長λ2における残像を除去した反射強度を算出する強度算出手段と、波長λ1及び波長λ2の反射強度に基づき背景から肌領域を抽出する人肌抽出指標を算出する指標算出手段とを有する。
【解決手段】領域抽出装置1は、波長λ1及び波長λ2のレーザ光又はLED光を対象物に照射して得られる反射光について3フレーム以上の画像データを取得する撮像部15と、撮像部15が取得した各フレーム間の画像データの演算に基づき人肌抽出指標NDHIを算出する演算部17とを有する。演算部17は、撮像部15の撮像結果に基づき残像係数を算出する残像係数算出手段と、この残像係数に基づき波長λ1及び波長λ2における残像を除去した反射強度を算出する強度算出手段と、波長λ1及び波長λ2の反射強度に基づき背景から肌領域を抽出する人肌抽出指標を算出する指標算出手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、防災や防犯を目的とした画像処理の中で、例えば人間の肌を選択的に抽出するのに好適な領域抽出装置及び領域抽出方法に関する。
【背景技術】
【0002】
従来、可視光源のない中で、背景の中から人体を選択的に画像として検知する手段としては、赤外線サーモグラフィを用いたセンシングシステムが用いられてきた。しかしながら、この方法では、表面体温が低下している場合は、背景温度が人体の表面温度に近い場合には、判別能力が極端に低下するという問題点がある。さらには、波長の長い熱赤外を用いた画像センサでは、人体が水面下にある場合には、熱赤外域の水の吸収が極めて大きいため、観測が困難であった。
【0003】
これに対して、水の吸収の比較的少ない波長で、かつ人体とその他の背景との反射率の異なる複数の波長での観測結果を組み合わせ、正規化演算を行うことで、人の肌のみを他の背景と分離して写し出すことが可能である(非特許文献1参照)。
【0004】
ところが、赤外域の複数の波長について物体の反射率分布を2次元の画像として測定するためには、通常は、分光器を備えた高価なハイパースペクトルカメラ、あるいはマルチスペクトルカメラが必要である。なお、可視光域では、照明光源の波長を時分割で切り替えることで、実質的に複数の波長での反射率を測定することも可能ではある(例えば、特許文献1)。
【特許文献1】特開2002−345760号公報
【特許文献2】特許第2752085号公報
【非特許文献1】枝長孝幸、宇都有昭、小杉幸夫著、「短波長赤外領域スペクトル情報を用いた人肌抽出に関する研究」、日本写真測量学会、秋季学術講演会、2005年
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら特許文献1に記載の方法では、エネルギーレベルの低い赤外域では、常温で動作する応答特性のよい画像センサを得ることが困難で、一般には、ビジコンなどの蓄積管が使用される。このような蓄積管では、廉価で高感度な特性が得られる反面、残像現象があるため、照明光源の波長を時分割で切り替える場合には、他の波長の観測結果が残像として重畳され、正確な分光反射率計測が不可能である。残像の除去を行う手段としては、1フレーム前の画像をフレームバッファに記録しておき、現時点での観測画像から残像分を差し引く方式が提案されているが(特許文献2参照)、この場合、残像係数を仮定して、入力パネルから手動で残像係数を入力する必要がある。ところが、残像係数は、蓄積管の温度や観測履歴によっても変動し、受光面内でも焼付等により分布を持つことがある。特に、屋外での捜索現場では、機器の温度や入力履歴も時々刻々変動することから、残像係数は固定化せず、自動的に残像量の補正が行われることが望ましい。
【0006】
本発明は、このような問題点を解決するためになされたものであり、残像を考慮しつつ背景から目的の対象物を抽出することができる領域抽出装置及び領域抽出方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明にかかる領域抽出装置は、入力された画像の中から抽出対象に対応する対象領域を抽出する領域抽出装置であって、第1波長及びこの第1波長とは波長が異なる第2波長のレーザ電磁波を対象物に照射して得られる反射光又は透過光について3フレーム以上の画像データを取得する画像取得手段と、前記画像取得手段が取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出手段と、前記残像係数に基づき前記第1波長及び第2波長における残像を除去した反射強度又は透過強度を算出する強度算出手段と、前記第1波長及び前記第2波長の前記反射強度又は透過強度に基づき背景から前記抽出対象を抽出する抽出指標を算出する指標算出手段とを有するものである。
【0008】
本発明においては、3フレーム以上の画像データを取得し、そのフレーム間の画素値の演算に基づき残像係数を求め、この残像係数を使用して反射強度又は透過強度を求める。こうして得られた領域抽出指標は、残像が考慮された値となり、正確に領域抽出することができる。
【0009】
また、前記指標算出手段は、前記第1波長及び第2波長の前記反射強度又は透過強度に基づき反射率を算出し、当該反射率に基づき前記抽出指標を算出することができる。反射率に基づき抽出指標を算出するため、各波長におけるデータのばらつきを低減する。
【0010】
さらに、前記指標算出手段は、前記第1波長及び第2波長の前記反射率の差分を正規化して前記抽出指標を算出することができる。第1波長及び第2波長の反射率を正規化することで、照明強度の変化の影響を低減しつつ目的の対象物を選択的に抽出可能となる。
【0011】
さらにまた、残像係数算出手段は、例えば、注目画素の残像係数をk(i)、注目画素iの時刻tにおける現在フレームの反射強度又は透過強度をIt(i)、注目画素iの時刻t−1における前フレームからの残像を含む、前記画像取得手段が取得する受光強度をxt(i)としたとき、xt(i)=k(i)xt−1(i)+It(i)として残像係数を求めることができる。
【0012】
または、前記画像取得手段は、時間間隔Δtで照射強度を変化させた3フレーム以上の画像データを取得し、前記強度算出手段は、時刻tにおける画素値をx(t)、残像係数θ(0<θ<1)としたとき、第1の波長における反射強度又は透過強度を
【数1】

第2の波長における反射強度又は透過強度を
【数2】
として前記反射強度又は透過強度を算出することができる。
【0013】
この場合、前記残像係数算出手段は、時刻tにおける反射強度又は透過強度をI(t)、残像係数を表す関数をk(t)、残像を含む、前記画像撮像手段が取得する受光強度をx(t)としたとき、
【数3】
として残像係数θ=k(Δt/2)を算出することができる。
【0014】
また、前記第1波長及び第2波長の光を照射する照射手段と、前記照射手段の輝度を変調する輝度変調手段とを更に有することができる。輝度変調手段により、輝度を変調して照射することができる。
【0015】
さらに、前記強度算出手段は、前記輝度変調手段により輝度が変調された前記第1波長及び第2波長の反射光又は透過光の画像データに基づき前記反射強度又は透過強度を算出することができる。これにより、精度よく残像係数を求めることができる。
【0016】
さらにまた、第1波長における反射率又は透過率をR1、第2波長における反射率又は透過率をR2としたとき、前記指標算出手段は、抽出指標=(R1−R2)/(R1+R2)を求めることができる。R1+R2で除すことで正規化指標形式とすることができ、照明強度の変化の影響を低減しつつ、目的の領域のみ抽出することができる。
【0017】
また、前記抽出指標を閾値処理により二値化した画像を出力する出力手段を更に有することができる。二値化することで、目的の領域を簡単に視認することができる。
【0018】
本発明にかかる領域抽出方法は、入力された画像の中から抽出対象に対応する対象領域を抽出する領域抽出方法であって、第1波長及びこの第1波長とは波長が異なる第2波長の電磁波を対象物に照射して得られる反射波又は透過波について3フレーム以上の画像データを取得する画像取得工程と、前記画像取得工程にて取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出工程と、前記残像係数に基づき前記第1波長及び第2波長における残像を除去した反射強度又は透過強度を算出する強度算出工程と、前記第1波長及び前記第2波長の前記反射強度又は透過強度に基づき背景から前記抽出対象を抽出する抽出指標を算出する指標算出工程とを有するものである。
【発明の効果】
【0019】
本発明によれば、残像を考慮しつつ背景から目的の対象物を抽出することができる領域抽出装置及び領域抽出方法を提供することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。この実施の形態は、本発明を、人間の肌領域を抽出する領域抽出装置に適用したものである。
【0021】
実施の形態1.
洪水や津波、水難事故などによって行方不明になった際、ヘリコプター等による上空からの捜索が行われるが、広範囲にわたって、肉眼による継続的な捜索は困難を極める。特に夜間の水上捜索など、二次災害の危険を低減し、捜索をより安全かつ確実に行うためには、無人機による自動探索が有効であるが、この場合、観測画像の中から背景やその他の漂流物と、ヒトの肌を選択的に分離する技術の実現が求められている。また、防犯の分野でも、動物や、揺れ動く木々の像と、分離して、ヒトの肌のみを選択的に検出する画像観測装置の実現が望まれている。
【0022】
そこで、本実施の形態においては、ヒトの肌が有する赤外域での特異な反射率スペクトル特性を利用して、ヒト肌の画像のみを選択的に観測する。なお、本実施の形態における残像除去方式は、以下に説明する人間の肌領域の抽出に限らず、人工衛星搭載センサ等、高速撮影が要求されるCCDのスミア除去に利用可能である。特に、1100nmの長波長側では残像が生じやすい。また、1100nm以下であっても高速撮影を実施すれば残像が生じるが、このような場合の残像除去を行なうにも好適である。
【0023】
本実施の形態においては、光学特性が解明されつつある短波長赤外領域に着目し、その波長帯域のヒトと背景物の反射スペクトルの違いに基づき、ヒトを、アスファルト、コンクリート、植物、土砂等のさまざまな背景物から抽出する指標NDHI(Normalized Difference Human Index)を算出し、このNDHIに基づき肌領域を抽出する。
【0024】
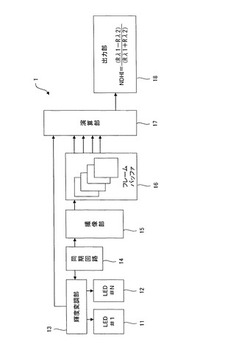
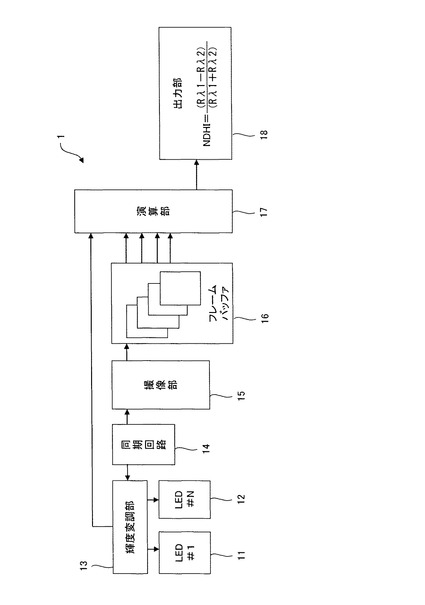
図1は、本発明の実施の形態にかかる領域抽出装置を示す図である。図1に示すように、ヒトの肌を特異的に検出するのに有効な複数の波長(例えば波長λ1、λ2)の高輝度赤外発光ダイオード(LED)11、12と、LED11、12の輝度変調を制御する輝度変調部13と、LED11、12の波長帯に受光感度を有する蓄積型の例えばビジコン等の撮像部15と、LED輝度変調のタイミングを撮像部15の画像取得タイミングと同期化する同期回路14と、撮像部15から得られる3コマ以上の連続画像を記憶保持するフレームバッファ16と、これらのフレームバッファ16の各画素毎に、各タイミングで取得された観測輝度間の演算によって、画像各部における残像係数と各波長における各画像毎の反射率を演算する演算部17とを有する。
【0025】
LED11、LED12は、それぞれ波長λ1、λ2の光を照射する。輝度変調部13は、LED11、LED12の輝度を変調して照射させる。撮像部15は、波長λ1及びこの波長λ1とは波長が異なる波長λ2のレーザ光又はLED光等の電磁波を対象物に照射して得られる反射波について3フレーム以上の画像データを取得する。本実施の形態においては、撮像部15は、肌を含む領域にLED光を照射して得られる反射波の画像データを取得する。
【0026】
演算部17は、撮像部15が取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出手段と、その残像係数に基づき波長λ1及び波長λ2における残像を除去した反射強度を算出する強度算出手段と、波長λ1及び波長λ2の反射強度に基づき背景から抽出対象である肌領域を抽出するための人肌抽出指標を算出する指標算出手段とを有する。ここでは、強度算出手段は、反射強度を算出するものとして説明するが、人肌以外の被測定対象物においては透過強度を算出するようにしてもよい。
【0027】
次に、各画素における残像係数と各波長における各画素毎の対象物の反射率を取得する演算部17の演算方法について説明する。本実施の形態においては、2つの演算方法を適用することができる。先ず1番目の演算方法(方式1)について説明する。
【0028】
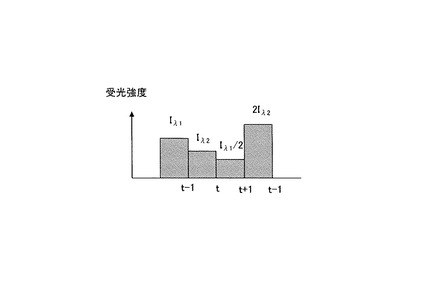
連続画像から撮像部15が取得する残像が加わった画素iの時刻tにおける撮像部15の受光強度(撮像結果)をxt(i)、画素iについての残像係数をk(i)、あるフレームの特定の画素iの時刻tにおける反射強度をIt(i)とする。ここで、反射強度Itは、下記に説明する方法により、受光強度xtから残像の影響を取り除いた値を示す。例えば、波長λ1のLED11及び波長λ2のLED12の各発光輝度を変化させることにより、各タイミングtにおける撮像部15の受光強度を、以下のように設定することが可能である。
It−1(i)=Iλ1
It(i)=Iλ2
It+1(i)=ξIλ1
It+2(i)=ηIλ2
【0029】
図2は、たとえば、ξ=1/2、η=2としたときの反射強度Iの変化の例を示す図である。このようにLED11、12の発光強度を制御した場合、反射強度Itと撮像部15の出力値である受光強度xtの関係は以下のように表される。
xt(i)=k(i)xt−1(i)+Iλ2・・・(1)
xt+1(i)=k(i)xt(i)+ξIλ1・・・(2)
xt+2(i)=k(i)xt+1(i)+ηIλ2・・・(3)
式(1)×η−式(3)によりIλ2を消去する。
ηxt(i)−xt+2(i)=ηk(i)xt−1(i)−k(i)xt+1(i)・・・(4)
上式より、以下のように各画素毎に独立に残像係数k(i)を得ることができる。
k(i)={ηxt(i)−xt+2(i)}/{ηxt−1(i)−xt+1(i)}・・・(4')
【0030】
この結果を式(2)及び(3)に代入することで、以下のように、各波長λ1、λ2での反射強度Iλ1、Iλ2を得ることができる。
Iλ1={xt+1(i)−k(i)xt(i)}/ξ
=[xt+1(i)−{ηxt(i)−xt+2(i)}/{ηxt−1(i)−xt+1(i)}xt(i)]/ξ・・・(5)
Iλ2={xt+2(i)−k(i)xt+1(i)}/η
=[xt+2(i)−{ηxt(i)−xt+2(i)}/{ηxt−1(i)−xt+1(i)}xt+1(i)]/η・・・(6)
【0031】
ここで、人肌抽出指標NDHIは、式(7)に示す波長λ1、λ2の反射率Rλ1、Rλ2から算出することができる。この反射率Rλ1、Rλ2は、反射強度Iλ1、Iλ2を、各波長の光を白色板に照射した際の反射強度I0で除すことで求められる。演算部17は、上記のように反射強度Iλ1、Iλ2、及び白色板強度I0(λ1)、I0(λ2)を求め、その反射率Rλ1、Rλ2よりNDHIを算出する。
NDHI=(Iλ1/I0(λ1)−Iλ2/I0(λ2))/(Iλ1/I0(λ1)+Iλ2/I0(λ2))(Rλ1−Rλ2)/(Rλ1+Rλ2)=・・・(7)
【0032】
ここで、コンクリート、アスファルト、及び芝生等の植生から人肌を抽出するために最適な波長λ1としては、1000乃至1300nmが好ましい。また、波長λ2としては、1500乃至1650nmとすることが好ましい。これらの範囲外の波長とすると、コンクリートの一部や建物のガラス部分からノイズが発生し、人肌抽出が困難な場合がある。
【0033】
このようにしてNDHIを計算したものを、0を黒、1を白としてグレースケール化することでNDHI画像を得ることができる。また、グレースケール化してNDHI画像を所定の閾値で処理し、二値の画像に変換することも可能である。出力部18は、NDHI画像や二値化画像を表示する。
【0034】
次に第2の方法(方式2)について説明する。方式2では、フレーム内の減衰(残像)の時間的変化を厳密に考慮する。
【0035】
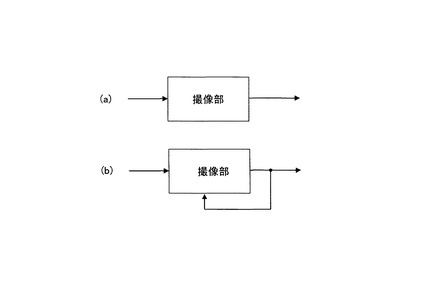
残像係数の関数k(t)が式(8)で示される指数関数である場合、撮像部15が取得した受光強度x(t)を実現する積分系(図3(a))は、外部入力付き自己回帰系(図3(b))と等価である(式(9))。
k(t)=αβt・・・(8)
【数4】
【0036】
式(9)で示されるビジコン自己回帰モデルに一定輝度光Iを照射したとき、式(10)よりその平衡値xequは式(11)で与えられ、式(12)により平衡値から反射強度Iを容易に推定することが可能である。
dx(t)/dt=0 (10)
xequ=−I/(β・lnα)・・・(11)
【数5】
【0037】
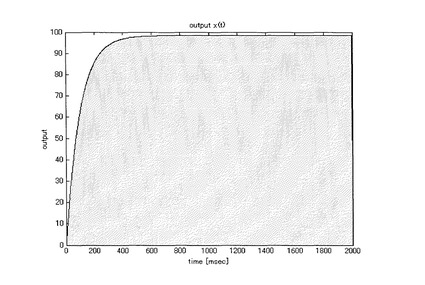
また、平衡値のy%までの到達時間[ms]は式(13)で与えられ、仮にI=1、α=0.6、β=1/50の時を考えるとき、Iequ=97.88、y95=278[ms]、y99=450[ms]となる(図4参照)。
ty=(1/β)logα(1−y/100) (13)
【0038】
動作する対象の情報を式(12)に基づきリアルタイムで取得することを想定した場合、上述の平衡到達時間は十分小さいとはいえない。したがって、リアルタイム処理を実現するためには、飽和特性の立ち上がりの領域の値を用いた推定が必要である。
【0039】
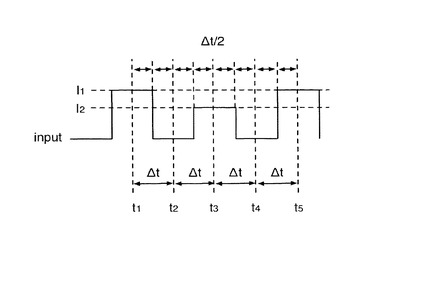
図5に示すように、2種類の入力値を時間間隔ΔtでIλ1−休止−Iλ2−休止−Iλ1の順に与え、各入力・休止の中間時刻Δt/2における観測により5つの観測値を取得するとき、残像係数θ=k(Δt/2)は、式(8)、(9)を展開することで式(14)、(15)で示される3次方程式の解のうち、条件式(16)を満たすものとして推定される。
x(t4)θ3−x(t1)θ2−x(t5)θ+x(t2)=0・・・(14)
x(t2)θ3−x(t3)θ2−x(t3)θ+x(t4)=0・・・(15)
0<θ<1・・・(16)
また、推定されたθを用いて、2入力の推定値が式(16)、(17)で算出される。
【数6】
【数7】
【0040】
本実施の形態によれば、温度や感光面の劣化、部分的な焼付きなどによって変化する残像の効果を、各画素毎に自動的に補正して、対象物の波長毎の反射輝度値を時分割方式で推定することが可能になる。
【0041】
また、短波長赤外の複数の波長における反射率間の演算を、Rλ1+Rλ2で除すことで波長λ1(例えば1070nm)及び波長λ2(例えば1550nm)の正規化指標形式とすることができ、照明強度の変化の影響を低減しつつ、ヒトの肌と、その他の地物が画像上で容易に識別可能となり、ヒトの肌のみを選択的に検出可能である。
【0042】
さらに、時分割で複数の波長の測定を繰り返す際、照明の強度に変調を加え、その変調強度比を先見情報として時系列観測データを連立させることにより、各画素ごとに残像の影響を自動補正し、複数の波長での受光強度の真値を推定することが可能となる。
【0043】
実施の形態2.
人肌抽出による要救助者の捜索は、肌が多く露出している海水浴、マリンスポーツ等での水難事故、及び津波や洪水災害後に利用することで有用性を発揮すると考えられる。このような場合、実際には水が不透明に濁っていることが多い。そこで、本実施の形態にかかる領域抽出装置においては、泥水内外の人肌領域を抽出する。
【0044】
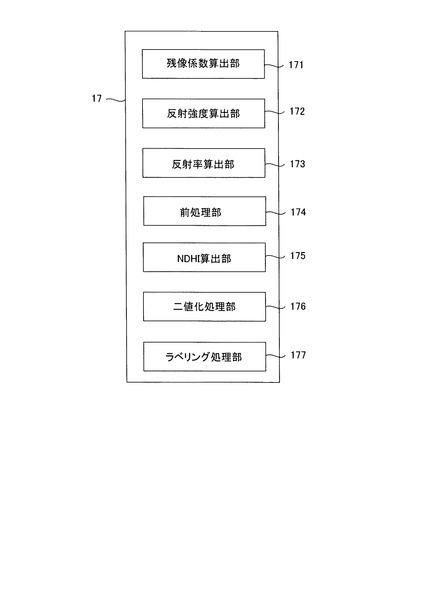
本実施の形態にかかる領域抽出装置は、実施の形態1と同様、図1に示す構成を有する。さらに、本実施の形態にかかる演算部17は、図6に示す構成を有する。図6は、実施の形態2にかかる領域抽出装置の演算部を示す図である。演算部17は、残像係数算出部171、反射強度算出部172、反射率算出部173、前処理部174、NDHI算出部175、二値化処理部176、及びラベリング処理部177を有する。
【0045】
実施の形態1と同様、残像係数算出部171は、方式1又は方式2に従って、複数フレームの撮像画像から残像係数を算出する。反射強度算出部172は、残像係数算出部171により算出された残像係数を使用して、式(5)、(6)、又は式(17)、(18)により2つの波長λ1、λ2における反射強度Iλ1、Iλ2を算出する。反射率算出部173は、各波長λ1、λ2における白色板の受光強度I0により、Rλ1=Iλ1/I0(λ1)、Rλ2=Iλ2/I0(λ2)を算出する。
【0046】
ここで、NDHIを算出するために有効な波長λ1としては、1000乃至1300nm、波長λ2としては、1500乃至1650nmを使用することができる。これらの波長範囲であれば、NDHIを使用して、コンクリート、アスファルト、及び芝生などの植生から人肌を抽出することができる。
【0047】
さらに、泥水等水中の物体を抽出するためのλ1としては、透視度(cm)T=∞、深度10cmのとき、1060乃至1075nm、透視度T=40、深度8cmのとき、1055乃至1085nm、透視度20、深度8cmのとき1060乃至1080nm、透視度10、深度6cmのとき、1045乃至1095nmとすることができる。すなわち、泥水等水中の中の人肌を含む物体を抽出するためには、波長λ1を1070±40nm程度とすることが好ましい。これらの波長範囲であれば、NDHIにより、泥水等の水中の物体を抽出することができる。
【0048】
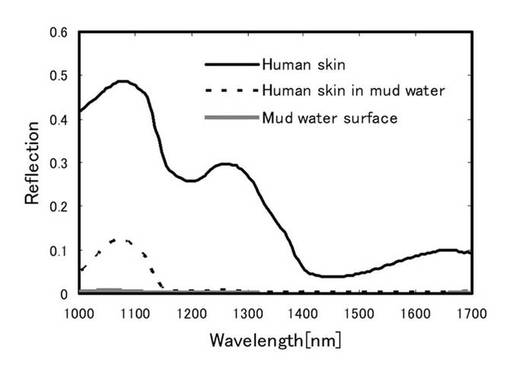
前処理部174は、人肌以外を除去するため、Rλ1≧閾値THの処理をする。図7は、空気中の人肌、泥水中の人肌、及び泥水表面における反射率を示すグラフ図である。図7に示すように、泥水の表面の反射率R3<泥水中の人肌反射率R2<空気中の人肌反射率R1の関係を有する。このことを利用して、閾値処理することで、泥水表面を除去したり、空気中の人肌のみを抽出したりすることができる。すなわち、泥水表面反射率R3より大きく泥水中の人肌反射率R2より小さい値を閾値th1(例えば0.01〜0.025程度)とし、泥水中の人肌反射率R2より大きく空気中の人肌反射率R1より小さい値を閾値th2(例えば0.15〜0.2程度)とし、Rλ1≧th1を求めることにより、泥水表面を画像から削除することができる。また、Rλ1≧th2を求めることにより、画像から空気中の人肌のみを抽出することができる。
【0049】
NDHI算出部175は、式(7)により、2つの反射率の差分に基づき人肌抽出指標NDHIを算出する。ここで、上記前処理部174により2つの閾値th1、th2により閾値処理された値から、2種類のNDHIが求まり、2つのNDHI画像を得ることができる。以下では、閾値th1により閾値処理された反射率から求めたNDHI画像を画像A、閾値th2により閾値処理された反射率から求めたNDHI画像を画像Bという。
【0050】
二値化処理部176は、例えば閾値0.5等でNDHI画像A、Bを二値化する。ここでの閾値は、目的の抽出画像が得られるように適宜調整することができる。
【0051】
ラベリング処理部177は、二値化した画素値にラベルを付す。二値化した画像Aについてラベリング処理したもの(ラベルは2種類)と、二値化した画像Bについてラベリング処理したもの(ラベルは2種類)を比較し、同種ラベルを連結することで、空気中及び泥水中の人肌を連結し、泥水中の他の物体を排除することができる。例えば、泥水中に手を入れた画像について、二値化した画像A、Bを取得すると、二値化した画像Aについては、泥水水面領域が削除され、空気中の人肌と共に、泥水中の人肌及び物体が抽出される。泥水中の物体は人肌と同様のNDHIを有するためである。一方、二値化した画像Bについては、空気中の人肌のみが抽出される。そして、二つの画像において二値化した画像Bと同様の領域が空気中の人肌であり、この領域と同じラベルを有し、当該領域に連結する領域は、人肌(水中)となる。そして、人肌に物体が接していれば、接している物体も連結領域として抽出される。こうしてラベリング処理した結果画像を出力部に出力する。
【0052】
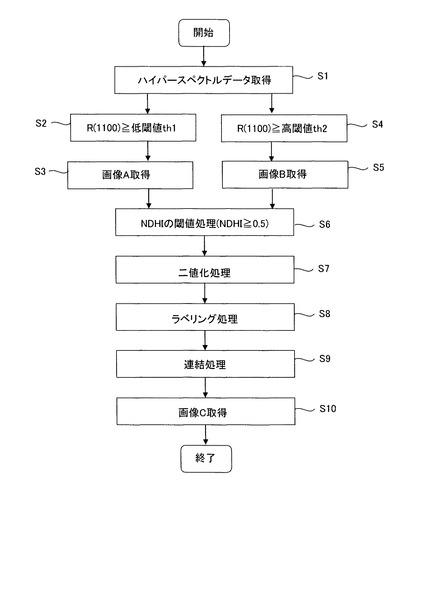
次に、本実施の形態にかかる領域抽出装置において泥水中の人肌を抽出する方法について説明する。図8は、泥水中の人肌を抽出する方法を示すフローチャートである。図8に示すように、先ず撮像部15によりハイパースペクトルデータを取得する(ステップS1)。本例においては、波長λ1として1100nmm、波長λ2として1550nmを使用することとする。取得したデータは演算部17に入力される。そして演算部17の残像係数算出部171において算出された残像係数により、残像の影響を削除した発射強度Iを算出し、反射率Rλ1、Rλ2を求める。
【0053】
次に、前処理部174により、Rλ1の閾値処理を実施する(ステップS2、S3)。上述したように、本実施の形態においては、水面領域を除去する閾値th1と、空気中の人肌のみを抽出する閾値th2を使用して、Rλ1(λ1=1100)≧th1と、Rλ1(λ1=1100)≧th2を使用して前処理を実施する。閾値th1は、例えば0.025であり、閾値th2は例えば0.2である。
【0054】
そして、Rλ1≧th1により前処理したデータから、水面領域を除去したNDHI画像Aを求め(ステップS3)、Rλ2≧th2により前処理したデータから、空気中の人肌のみ抽出したNDHI画像Bを求める(ステップS4、5)。次に、得られた2つのNDHI画像を二値化処理し(ステップS6)、ラベリング処理をする(ステップS7)。二値化処理により、二値の値にされた各画素値の値が同じものに同じラベルを付す。次に、連結処理により、Aの画像からBの画像と重なる部分を有するラベルのみを抽出することで、空気中の人肌領域と連結している領域のみを抽出する(ステップS7)。このように、ラベリング処理により、泥水等水中でヒトに接していない物体を削除し、ヒト肌及び水中でヒトが接している物体を抽出することができる(ステップS8)。
【0055】
本実施の形態においては、Rλ1を前処理することにより、2種類の画像を取得し、空気中のヒトと認識した部分と連結している水面下の物体を抽出することができる。これにより、例えば生存している要救助者の身体の一部(特に呼吸のため顔面部分)が水面から出ているような場合、泥水外の人肌の部位を抽出することでヒトの発見が可能となり、連結する泥水面下の情報を得ることができる。よって、泥水外の人肌の部位だけを抽出して要救助者を捜索するだけではなく、泥水内の情報を抽出することで、要救助者の状況把握にも役立たせることができる。
【0056】
[実施例1]
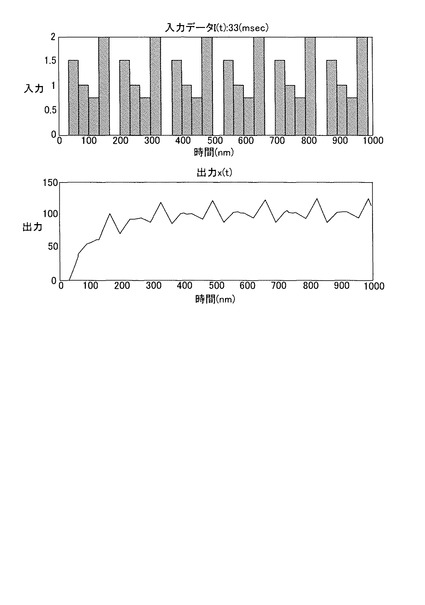
次に、本発明の実施例を、従来方法である比較例と比較して説明する。実施の形態1の方式1において、入力Iλ1、Iλ2、一定入力の間隔Δt、残像関数k(t)、受光強度比ξ、ηをそれぞれ以下のように設定した場合のシミュレ−ションによる入出力値関係図を図9に示す。
Iλ1=1.5、Iλ2=1.0、Δt=33ms、k(t)=0.6t/50、ξ=1/2、η=2
【0057】
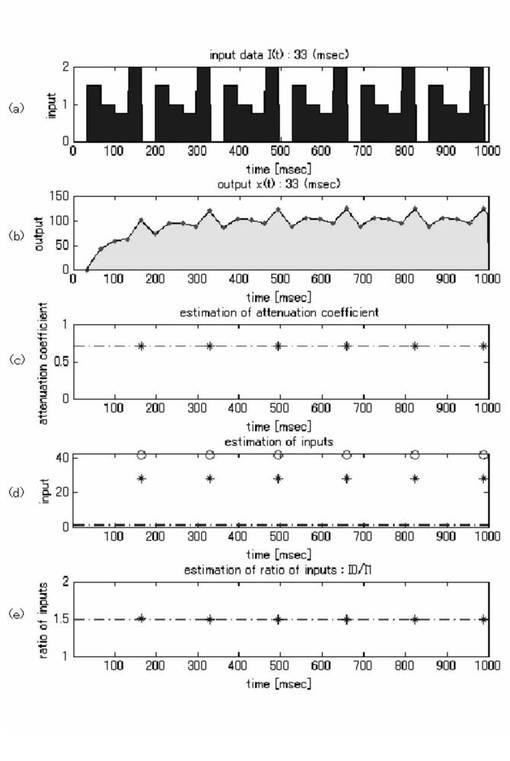
データ取得のタイミング(方式1のt−1、t、t+1、t+2に相当)を入力値の変化する時刻(図2の不連続部分)としたときに得られる観測値及び式(4')、(5)、(6)に基づき推定した残像係数k(Δt)、入力値Iλ1、Iλ2、入力値の比Iλ1/Iλ2を図10に示す。図10は、(a)入力、(b)出力及びサンプル点、(c)推定残像係数(*印)及び真の残像係数(一点破線)、(d)推定入力値(Iλ1(○印)、Iλ2(*印))及び真の入力値(Iλ1、Iλ2一点青破線)、(e)推定入力比Iλ1/Iλ2(*印)及び真の入力比Iλ1/Iλ2(一点破線)を示す。
【0058】
以上のシミュレ−ションにより、残像係数及び入力比の高精度推定が確認された。すなわち、kの真値(k=0.7138)が厳密に推定された残像係数k(真値k=0.7138、推定値k=0.7138)に基づき、厳密な入力値比Iλ1/Iλ2(真値1.5、推定値1.5)が推定された。
【0059】
なお、ここで推定されるIλ1およびIλ2は残像関数の積分値と受光強度の積であり、真の受光強度の推定のためには、推定値を定数倍する必要がある。しかしながら、入力比の算出においては、除算により定数倍分が相殺されるため、推定値は真の値Iλ1/Iλ2の高精度推定を実現している。本発明の目的である人肌抽出指標NDHIの算出の際に要求される値はNDHI=(Rλ1−Rλ2)/(Rλ1+Rλ2)=(Rλ1/Rλ2−1)/(Rλ1/Rλ2+1)であり、上記定数値の算出が要求されない。
【0060】
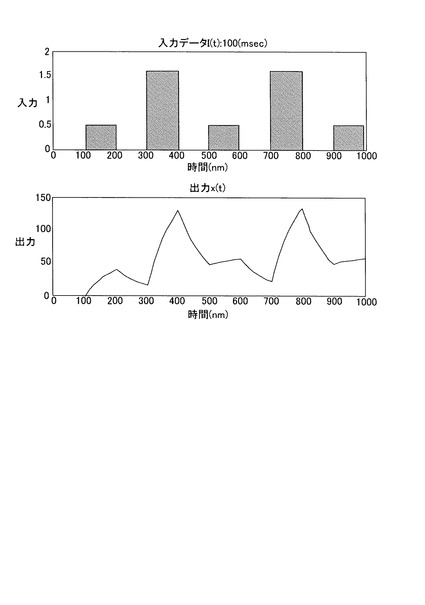
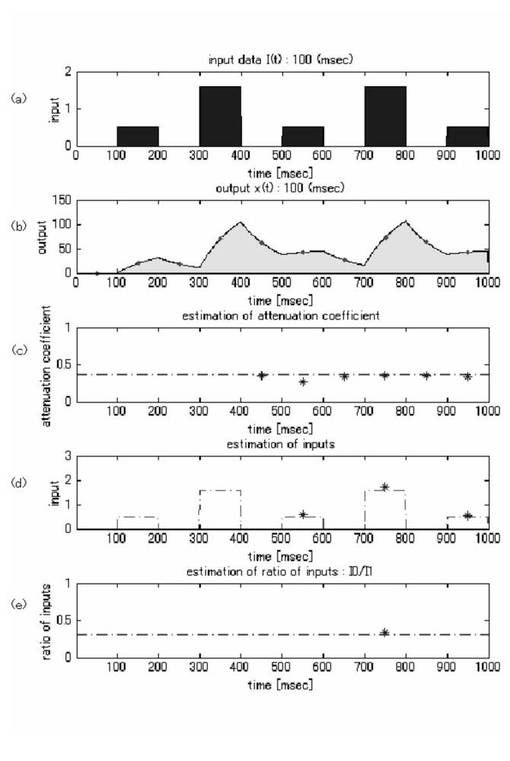
次に、方式2による実施例について説明する。入力Iλ1、Iλ2、一定入力の間隔Δt、残像関数k(t)、をそれぞれ以下のように設定した場合のシミュレ−ションによる入出力値関係図を図11に示す。
Iλ1=1.5、Iλ2=1.0、Δt=100ms、k(t)=0.6t/50
【0061】
データ取得のタイミング(方式2のt1、t2、t3、t4、t5に相当)を図5に基づき設定した場合に得られる観測値及び式(9)乃至(13)に基づき推定した残像係数k(Δt)、入力値Iλ1、Iλ2、入力値の比Iλ1/Iλ2を図12に示す。図12は、それぞれ(a)入力、(b)出力及びサンプル点、(c)推定残像係数(*印)及び真の残像係数(一点破線)、(d)推定入力値(Iλ1(○印)、Iλ2(*印))及び真の入力値(Iλ1、Iλ2一点青破線)、(e)推定入力比Iλ1/Iλ2(*印)及び真の入力比Iλ1/Iλ2(一点破線)を示す。
【0062】
方式2は、方式1と比較して、入力値の制御が容易である。一定光照射の中間時刻における測定という、方式1の場合と比較して困難な状況を考慮した場合、残像係数及び入力比推定において良好な推定精度を実現している。
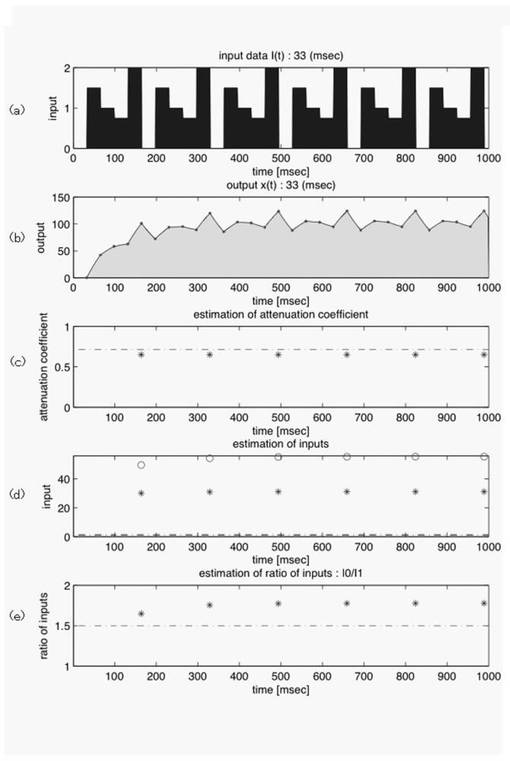
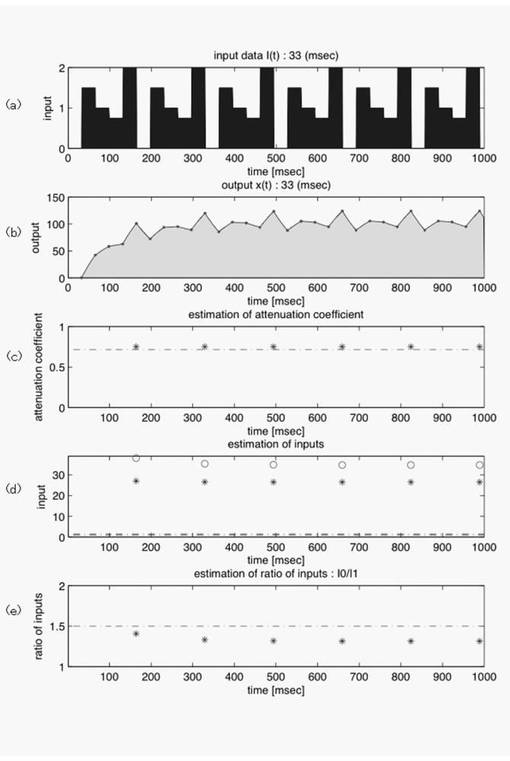
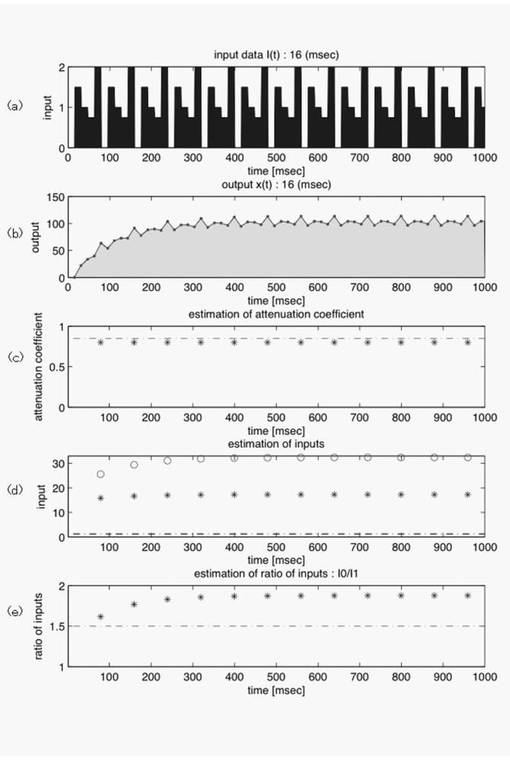
【0063】
次に、方法1において残像係数kを適応的に設定できない場合を比較例として説明する。残像係数kの値を適応的に自動推定できない従来法において、正しい残像係数kの値が設定されない場合の推定結果を図13乃至図15に示す。図13は、k=0.65とした場合、図13は、k=0.75とした場合、図14は、k=0.8とした場合を示す。図13乃至図15に示すように、残像係数が真値と僅かに異なる場合でも、入力値比の推定精度が大きく劣化する。すなわち、正しいNDHIが算出されず、人肌抽出を行なうことができない。
【0064】
[実施例2]
次に、実施の形態2にかかる実施例について説明する。NDHIを利用して泥水内外の人肌を抽出する。また、NDHIの有用性を調べるために、赤外線カメラを用いた体温感知によるヒト認識との比較を行う。
【0065】
本実施例では、波長毎のスペクトルの強度の詳細を調べる必要があるため、ハイパースペクトルセンサを使用した。ハイパースペクトルセンサはプリズムと回折格子から構成されるPGP分光部(Specim社製Imspector-N17)とCCD部(Sensors Unlimited社製SU320M-1.7RT)から構成されている。このセンサの測定波長帯域は短波長赤外の前半領域の950nmから1700nmであり、CCDのピクセル数は空間軸方向に240ピクセル、波長軸方向に320ピクセル、記録速度は最高で1秒当たり30フレームのラインセンサである。データ取得時には、白色板のDN値(Digital Number)及び暗電流値によるデータ補正を行った。実験装置は屋外と室内の測定系の2種類に分けた。屋外の測定系では、日本精工(株)製のメガトルクモータYSB2020の上にセンサを固定し、このモータを回転させ、センサの水平方向に配置された測定対象物に対してラインスキャンを行った。室内の測定系では、IAI(株)製の直動アクチュエータRCS-SM-100に固定したセンサを水平移動させることで垂直下向きの測定対象物に対してラインスキャンを行った。室内の測定系の照明条件としては、データの精度向上のため外来光を遮断し、センサと一体駆動される500Wのハロゲンランプ2個を用いた。照明の照度は白色板補正位置で約19000Lxであった。
【0066】
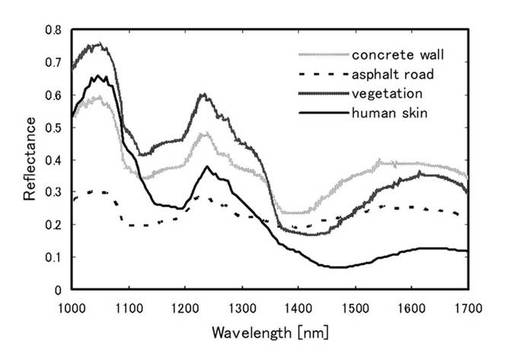
人肌のスペクトルは、オキシヘモグロビンの影響により410nm、540nm、575nm、水分の影響により970nm、1430nm、1925nm、脂質の影響により1710乃至1780nm間、また水分及び脂質の影響により1200nmの波長域においてそれぞれ吸収特性を有する。特にオキシヘモグロビンの影響による410nm、水分の影響による1430nm、1925nmに大きなスペクトル吸収特性を有する。これに対し、1100nm付近では最も両者の吸収の影響が少なく、基準とするのに適した波長である。オキシヘモグロビンはヒトの真皮中の血管に多く存在するため、人肌を抽出するのに大きな手がかりなると考えられる。しかし、この410nm付近の短い波長は大気散乱の影響を受け易いため反射強度が安定しない。また、1100nmを基準と考えた場合、可視・近赤外領域と短波長赤外領域を同時に測定するために2種類のCCD部が必要になり、光学系の構成が複雑になる。そこで、本実施例においては2波長間の反射率のギャップが大きく、最も近接する波長帯である短波長赤外領域の波長に着目し、本実施例では、スペクトル吸収が小さく高い反射率を持つ1100nm付近及び、水分による吸収が大きい1430nm付近の波長を用いた指標を使用する。人肌抽出指標NDHIは、1100nm付近の反射率をR1、1430nm付近の反射率をR2とし、次式(19)から算出する。
NDHI=(R1−R2)/(R1+R2)・・・(19)
【0067】
式(19)における人肌抽出に適切なR1とR2として、本実施例においては、R1には1100nmの反射率、R2には1550nmにおける反射率を利用する。次に、この理由について説明する。
【0068】
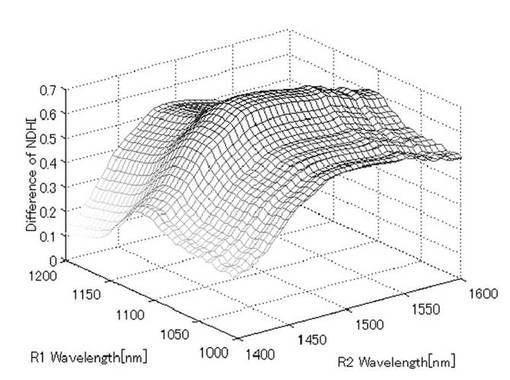
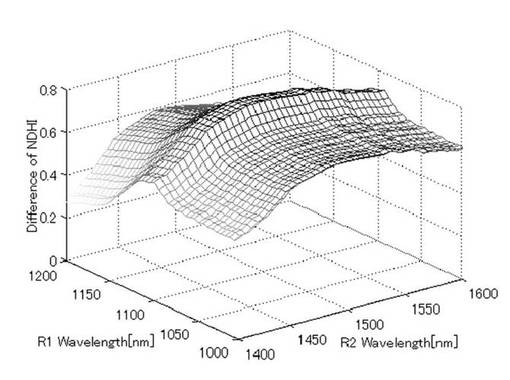
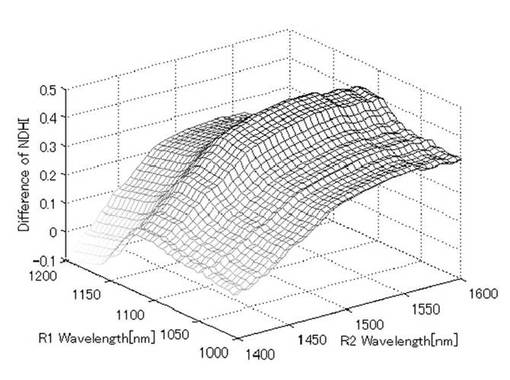
人肌抽出に適切な波長を調べるため、ハイパースペクトルセンサを使用して屋外においてヒトと背景を含む範囲を測定した。測定した背景には、建物のコンクリート壁面、アスファルト道路、芝生などの植生が含まれていた。得られた人肌とそれぞれの背景物の反射スペクトル特性を図16に示す。NDHIに適切な波長を見つけるために、R1は1000nmから1200nm、R2は1400nmから1600nmの範囲で人肌とそれぞれの背景物とのNDHI値の差を調べた。この結果を図17乃至図19に示す。このNDHIの差が大きいほど、背景から人肌の抽出力が向上す。まず、人肌とコンクリート壁面では、R1:1116nm、R2:1493nmのときNDHIの差が最大値0.68、人肌とアスファルト道路では、R1:1096nm、R2:1488nmのときNDHIの差が最大値0.80、また人肌と芝生などの植生では、R1:1116nm、R2:1559nmのときNDHIの差が最大値0.42という結果が得られた。人肌に対するコンクリート壁面やアスファルト道路のNDHIの差は大きく、十分な抽出力がある。しかし、人肌と芝生などの植生ではNDHIの差が比較的小さい。そこで、人肌と芝生などの植生で最大値をとった波長付近、R1:1100nm、R2:1550nmのときの人肌とコンクリート壁面やアスファルト道路のNDHIの差をみるとそれぞれ0.65と0.75となり、人肌との差を十分に維持できることが分かった。よって、NDHIに適切な波長をR1:1100nm、R2:1550nmとし、NDHIを次のような式(20)とした。
NDHI=(R(1100)−R(1550))/(R(1100)+R(1550))・・・(20)
ここで、R(λ)は波長λnmでの反射率を表している。
【0069】
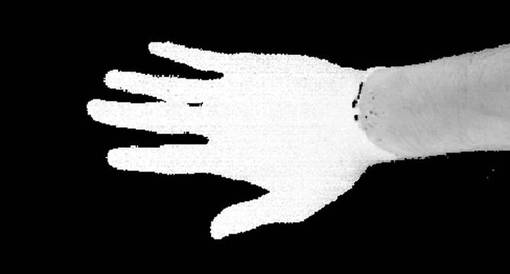
この式(20)のNDHIを利用して、人肌抽出を行った。本実施例では、屋外の背景中に手を広げたヒトが立ち、そのNDHIを計測した。個人差によるNDHIの差を簡単に調べるため、モンゴロイド人種4名を被験者とした。NDHIを計算したものをグレースケール化したNDHI画像を見ると、図20に示すように人肌の部分は高いNDHI値を有することがわかった。また、NDHI値は、コンクリート壁面やアスファルト道路では小さいが、芝生などの植生ではやや高い値を示すことがわかった。そこで、NDHIを閾値処理(閾値0.5)し、背景から人肌の部分のみ抽出を行えるようにした(図21参照)。NDHIは眉毛や頭髪を抽出していないため、ヒトと体毛を持つ動物と区別が可能である。他の3名の被験者のNDHI画像と2値化画像も人肌の部分をよく抽出できることから、モンゴロイド人種間での個人差によるNDHIの差は少ないと考えられる(図22、23参照)。
【0070】
次に、土砂域におけるヒト抽出の有用性を検証するため、土砂とヒトを含む状態で実験計測を行った。測定した背景には、土砂、ビニール製シート、建物のコンクリート壁面、植物などが含まれていた。取得されたデータからNDHIを計算し、NDHI画像と2値化画像を作成した(図24、25参照)。閾値0.5の場合、植物由来のノイズが多少みられたが、このノイズは閾値を0.6に上げることで取り除けた。この閾値の差の原因は、データを取得した環境の日照角度や、測定対象物が立体構造であるため、反射スペクトルに対してBidirectional Reflectance Distribution Function(BRDF)の影響が発生し、白色板補正では正確に較正されない部分が存在することによるものと考えられる。この問題はセンサから測定対象物までの距離が離れるほど緩和され、実際に航空機などで上空からヒトをスキャンする場合には、誤差が小さくなる。以上より、NDHIは土砂を背景とした場合でも人肌抽出が可能である。
【0071】
ところで、NDHIによる要救助者の捜索は、人肌が多く露出している海水浴やマリンスポーツ等での水難事故や、津波、洪水災害後など、上空から人肌が測定可能な状態で広域に捜索する必要がある場面においてより有用性を発揮すると考えられる。このような場合、実際には水が不透明に濁っていることが多いので、NDHIを用いて泥水内外の人肌抽出に関して検証を行った。検証実験には室内の測定系を使用した。泥水は市販の土粘土を水に懸濁したものを使用し、透視度計を用いて濁り具合を調節した。透視度は透明なガラス管に泥水を入れて徐々に排水し、上部から目視で二重十字(白色標識板上に太さ0.5mm、間隔1mmの二重線で描画)を識別したときの水層の高さ(cm)で表される。また、水槽はサイズW780×D390×H370mmの緑色のトランクカーゴを使用し、水面の高さを25cmとした。
【0072】
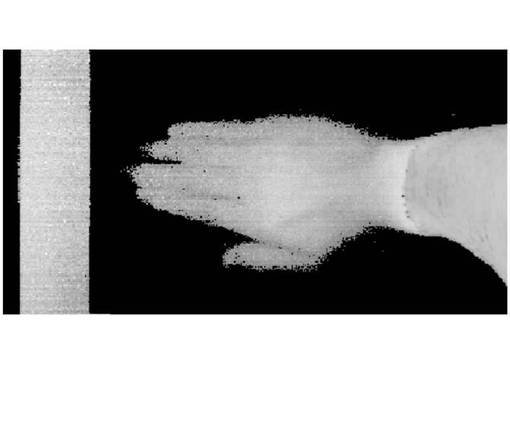
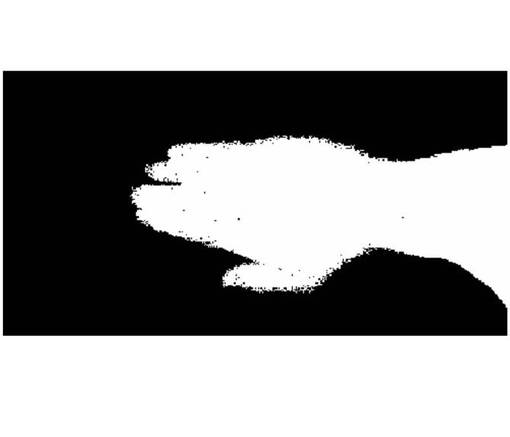
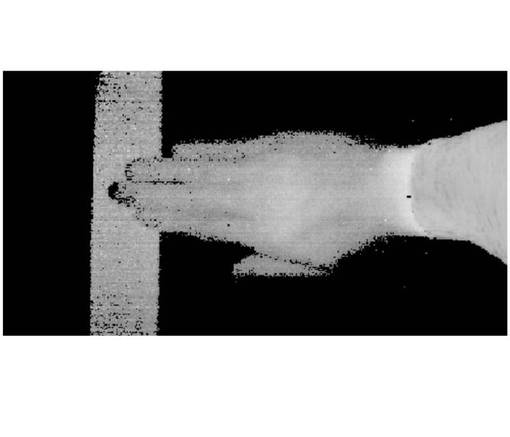
透視度10の泥水に、手の配置深度2cmで片手を浸し、測定を行った。NDHI画像を見ると水面のNDHI値が高く、泥水内の人肌の確認だけでなく泥水外の人肌の認識も困難であった(図26参照)。泥水外の人肌、泥水内の人肌及び水面のそれぞれのスペクトルを比較すると、R(1100)において泥水内の人肌の反射率は水面より高い値を示した(図7参照)。また、水面のR(1550)の反射率がほぼ0に近いので、NDHIの値がR(1100)/R(1100)=1(−1≦NDHI≦1)と高い値になる。そこで、NDHI算出の前処理としてR(1100)≧0.025で閾値処理を行い、水面の削除を行った(図27参照)。また、閾値をR(1100)≧0.2に上げることで泥水内の人肌と水面を削除し、泥水外の人肌のみを抽出することが可能となった(図28参照)。つまり、NDHI算出の前にR(1100)の閾値処理を行うことで、泥水内の人肌と泥水外の人肌がともに抽出可能になる。
【0073】
このように、NDHI算出の前にR(1100)の閾値処理を行うことで、次の2枚の画像を作成することが可能である。
A:泥水内の物体(人肌、及びヒト以外の物体)と泥水外の人肌を抽出した画像
B:泥水内の物体を削除し、泥水外の人肌のみ抽出した画像
ただし、画像A、BのR(1100)の閾値については、泥水内の物体の深度、泥水の透視度ごとに調節する必要がある。
【0074】
[実施例3]
次に、実施例3について説明する。上述の実施例2の方法では、ヒト以外の物体が同じ程度の水深に存在する場合、その物体を人肌と同様に抽出するため、泥水外の人肌と連続した泥水内の物体をヒトとして認識する必要がある。そこで、本実施例では、実施の形態2に示す方法により、泥水内外のヒト識別を行なう。
【0075】
実施例2と同様の室内の測定系を用い、透視度30の泥水に、手の配置深度5cmで片手を浸し、測定を行った。透視度、使用した水槽、センサと照明、測定対象物の位置関係などは実施例2と同様である。この実験においてはR(1100)の閾値処理を、画像AではR(1100)≧0.01、画像BではR(1100)≧0.15とした。
【0076】
実施の形態2における泥水内外のヒト識別方法を検証するため、同深度に配置した木片と手が接触、非接触の2状態で測定を実施した。水中で木片と手が非接触の状態で、泥水内の物体(人肌、及びヒト以外の物体)と泥水外の人肌を抽出した画像(図29)、泥水内の物体を削除し、泥水外の人肌のみ抽出した画像(図30)、そして、その2枚の画像から抽出された泥水外のヒトと認識した部分と連結している水面下の物体を抽出した画像(図31)を見ると、泥水内のヒト以外の物体を取り除き、ヒトの部分のみを抽出することができた。他方、水中で木片と手が接触の状態での画像A(図32)、画像B(図33)、画像C(図34)の画像を見ると、泥水内でヒトに接触している物体も抽出された。
【0077】
[実施例4]
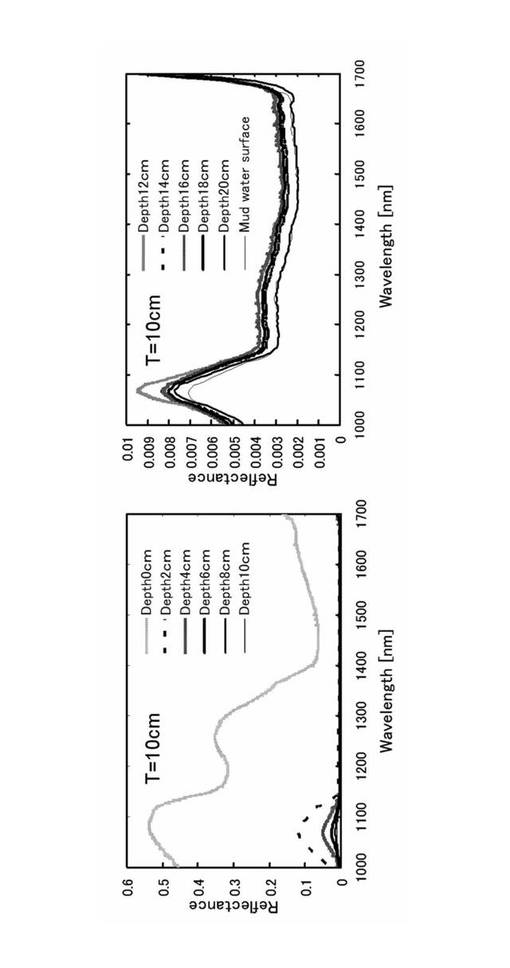
次に、実施例4について説明する。泥水内の物体抽出に際し、NDHIが適用可能な泥水の深度と透視度の関係を調査した。実施例2、3と同様の室内の測定系(ただし水面の高さは30cmとする)を用い、右手の甲の部分の深度が0cmから20cmに至るまで2cm間隔で深度を変えて測定を実施した。泥水は透視度40、20、及び10の3種類を準備し、透視度∞の水として中水を使用した。それぞれの透視度における各深度の人肌のスペクトル特性を図35乃至図38に示す。
【0078】
図35に示すように、透視度∞で深度を変えた場合、反射スペクトルは波長1070nm付近で反射が大きく、深度が深くなるにつれ反射が小さくなった。1150nmより長い波長域では反射がほぼ0に近かった。そのため、NDHIを水中の物体抽出に利用するにはR1:1100nmよりも1070nmの反射を使用する方が有効であると考えられる。また、透視度が下がると波長1000nmから1700nm間の反射が全体的に大きくなる傾向がみられた。これは、透視度が下がるほど水中に含まれる土粘土の比率が多くなり、さらに、深度が深くなるほど土粘土の反射影響が大きくなるためと考えられる。
【0079】
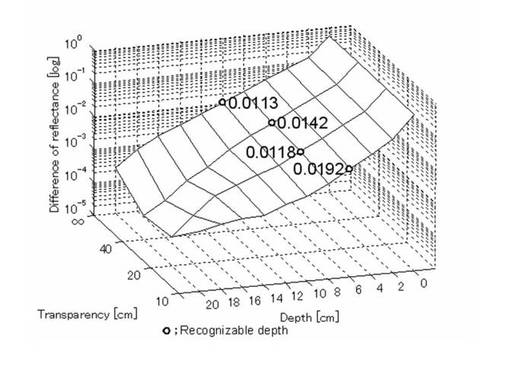
以上の結果から、次に水中の物体抽出に有効な波長R1を1070nmに変更し、抽出可能な透視度と深度の関係、抽出可能な水中の手と水面の反射率の差を調べた結果を図39に示す。抽出の可否判定は指先までの輪郭形状が目視にて認識できるかで行っている。透視度∞の場合には深度10cmまで、透視度40、20では深度8cmまで、透視度10では深度6cmまで抽出可能であった。泥水中から物体を抽出するには、R1の閾値処理で物体のない水面を削除する必要があり、透視度が下がるとR1での水中の手と水面の反射率の差が小さくなるため、抽出深度が浅くなった。
【0080】
[実施例5]
次に、実施例5について説明する。NDHIと赤外線センサを使用したヒト認識との比較結果について説明する。従来のヒト認識の主な手法の一つに熱赤外領域を利用した赤外線センサによる体温感知がある。そこで水難事故や水災害を想定した場面での赤外線センサによる体温感知とNDHIとの比較を行う。赤外線センサはNEC社製TH3100MRを使用した。氷水中に30秒間右手を浸して体温を下げた後、透視度10の泥水中に手のひらを浸し、赤外線センサとハイパースペクトルセンサで測定を行った。海難事故や台風などによる水災害の多発する夏期8月の本州周辺の海水温は25〜29度℃である。そこで、泥水の温度を25度℃とした。赤外線センサによる測定は10分間行い、体温が戻る様子を観察した。赤外線センサの測定結果では、開始直後は泥水より手のひらの体温が低いが、時間の経過とともに徐々に体温が戻り始め、5分後には泥水に接する部分の温度が27度℃前後まで回復したが、水面から出ている手の部分の温度は10分後も27度℃前後から上昇せず、手の形状が認識できなかった。一方、NDHI画像(R(1100)≧0.035で閾値処理)の結果は、泥水内外の手の形状が明確に抽出可能であった。このように体温が下がっている状況での水面下のヒト認識には、赤外線センサを使用した体温認識と比較してNDHIの方が有効である。
【0081】
以上説明したように、ヒトと背景物の反射スペクトルの違いに基づき、背景から人肌のみを抽出する指標NDHIを求めることができる。NDHIにより、ヒトをさまざまな背景(アスファルト、コンクリート、植物、土砂など)から識別できる。また、複数フレームの観測輝度間の演算によって残像の影響を取り除いた反射率を求めることができ、高精度な指標NDHIを算出することができる。
【0082】
以上の実施例においては、光を用いた人肌検出について説明したが、本発明はX線を用いた、工業用、及び医療用の画像解析においても、波長分布が異なる2つのX線源を用いて、被検体の透過強度を測定して、被検体画像の中から目的対象物を選択的に抽出する場合にも有効である。
【0083】
なお、本発明は上述した実施の形態のみに限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能であることは勿論である。
【図面の簡単な説明】
【0084】
【図1】本発明の実施の形態1にかかる領域抽出装置を示す図である。
【図2】ξ=1/2、η=2としたときの反射強度Iの変化の例を示す図である。
【図3】(a)は、撮像部が取得した受光強度x(t)を実現する積分系、(b)は、外部入力付き自己回帰系を示す図である。
【図4】平衡値のy%までの到達時間[ms]を説明する図である。
【図5】2種類の入力値を時間間隔ΔtでIλ1−休止−Iλ2−休止−Iλ1の順に与え、各入力・休止の中間時刻Δt/2における5つの観測値を示す図である。
【図6】本発明の実施の形態2にかかる領域抽出装置の演算部を示す図である。
【図7】空気中の人肌、泥水中の人肌、及び泥水表面における反射率を示すグラフ図である。
【図8】本発明の実施の形態2における泥水中の人肌を抽出する方法を示すフローチャートである。
【図9】実施の形態1の方式1において、入力Iλ1、Iλ2、一定入力の間隔Δt、残像関数k(t)、受光強度比ξ、ηを設定した求めたシミュレ−ション結果を示す図である。
【図10】推定した残像係数k(Δt)、入力値Iλ1、Iλ2、入力値の比Iλ1/Iλ2を示す図である。
【図11】入力Iλ1、Iλ2、一定入力の間隔Δt、残像関数k(t)、を設定して求めたシミュレ−ション結果を示す図である。
【図12】推定した残像係数k(Δt)、入力値Iλ1、Iλ2、入力値の比Iλ1/Iλ2を示す図である。
【図13】残像係数kの値を適応的に自動推定できない従来法により正しい残像係数kの値が設定されず、k=0.65とした場合の推定結果を示す図である。
【図14】残像係数kの値を適応的に自動推定できない従来法により正しい残像係数kの値が設定されず、k=0.75とした場合の推定結果を示す図である。
【図15】残像係数kの値を適応的に自動推定できない従来法により正しい残像係数kの値が設定されず、k=0.8とした場合の推定結果を示す図である。
【図16】人肌とそれぞれの背景物の反射スペクトル特性を示す図である。
【図17】R1は1000nmから1200nm、R2は1400nmから1600nmの範囲で人肌とそれぞれの背景物とのNDHI値の差を示す図である。
【図18】同じく、R1は1000nmから1200nm、R2は1400nmから1600nmの範囲で人肌とそれぞれの背景物とのNDHI値の差を示す図である。
【図19】同じく、R1は1000nmから1200nm、R2は1400nmから1600nmの範囲で人肌とそれぞれの背景物とのNDHI値の差を示す図である。
【図20】NDHIを計算したものをグレースケール化したNDHI画像を示す図である。
【図21】NDHIを閾値処理(閾値0.5)し、背景から人肌の部分のみ抽出した図である。
【図22】他の被験者においてNDHIを計算したものをグレースケール化したNDHI画像を示す図である。
【図23】他の被験者においてNDHIを閾値処理(閾値0.5)し、背景から人肌の部分のみ抽出した図である。
【図24】撮影した背景のNDHI画像を示す図である。
【図25】撮影した背景の二値化画像を示す図である。
【図26】透視度10の泥水に、手の配置深度2cmで片手を浸した場合のNDHI画像を示す図である。
【図27】NDHI算出の前処理としてR(1100)≧0.025で閾値処理を行い、水面の削除を行った場合のNDHI画像を示す図である。
【図28】閾値をR(1100)≧0.2に上げることで泥水内の人肌と水面を削除し、泥水外の人肌のみを抽出した場合のNDHI画像を示す図である。
【図29】同深度に配置した木片と手が非接触の状態のNDHI画像を示す図である。
【図30】泥水内の物体を削除し、泥水外の人肌のみ抽出した画像を示す図である。
【図31】図28、図29の2枚の画像から抽出された泥水外のヒトと認識した部分と連結している水面下の物体を抽出した画像を示す図である。
【図32】同深度に配置した木片と手が接触の状態のNDHI画像を示す図である。
【図33】泥水内の物体を削除し、泥水外の人肌のみ抽出した画像を示す図である。
【図34】図32、図33の2枚の画像から抽出された泥水外のヒトと認識した部分と連結している水面下の物体を抽出した画像を示す図である。
【図35】透視度T=∞における各深度の人肌のスペクトル特性を示す図である。
【図36】透視度T=40おける各深度の人肌のスペクトル特性を示す図である。
【図37】透視度T=20における各深度の人肌のスペクトル特性を示す図である。
【図38】透視度T=10における各深度の人肌のスペクトル特性を示す図である。
【図39】水中の物体抽出に有効な波長R1を1070nmとし、抽出可能な透視度と深度の関係、抽出可能な水中の手と水面の反射率の差を調べた結果を示す図である。
【符号の説明】
【0085】
1 領域抽出装置
11、12 LED
13 輝度変調部
14 同期回路
15 撮像部
16 フレームバッファ
17 演算部
18 出力部
171 残像係数算出部
172 反射強度算出部
173 反射率算出部
174 前処理部
175 算出部
176 二値化処理部
177 ラベリング処理部
【技術分野】
【0001】
本発明は、防災や防犯を目的とした画像処理の中で、例えば人間の肌を選択的に抽出するのに好適な領域抽出装置及び領域抽出方法に関する。
【背景技術】
【0002】
従来、可視光源のない中で、背景の中から人体を選択的に画像として検知する手段としては、赤外線サーモグラフィを用いたセンシングシステムが用いられてきた。しかしながら、この方法では、表面体温が低下している場合は、背景温度が人体の表面温度に近い場合には、判別能力が極端に低下するという問題点がある。さらには、波長の長い熱赤外を用いた画像センサでは、人体が水面下にある場合には、熱赤外域の水の吸収が極めて大きいため、観測が困難であった。
【0003】
これに対して、水の吸収の比較的少ない波長で、かつ人体とその他の背景との反射率の異なる複数の波長での観測結果を組み合わせ、正規化演算を行うことで、人の肌のみを他の背景と分離して写し出すことが可能である(非特許文献1参照)。
【0004】
ところが、赤外域の複数の波長について物体の反射率分布を2次元の画像として測定するためには、通常は、分光器を備えた高価なハイパースペクトルカメラ、あるいはマルチスペクトルカメラが必要である。なお、可視光域では、照明光源の波長を時分割で切り替えることで、実質的に複数の波長での反射率を測定することも可能ではある(例えば、特許文献1)。
【特許文献1】特開2002−345760号公報
【特許文献2】特許第2752085号公報
【非特許文献1】枝長孝幸、宇都有昭、小杉幸夫著、「短波長赤外領域スペクトル情報を用いた人肌抽出に関する研究」、日本写真測量学会、秋季学術講演会、2005年
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら特許文献1に記載の方法では、エネルギーレベルの低い赤外域では、常温で動作する応答特性のよい画像センサを得ることが困難で、一般には、ビジコンなどの蓄積管が使用される。このような蓄積管では、廉価で高感度な特性が得られる反面、残像現象があるため、照明光源の波長を時分割で切り替える場合には、他の波長の観測結果が残像として重畳され、正確な分光反射率計測が不可能である。残像の除去を行う手段としては、1フレーム前の画像をフレームバッファに記録しておき、現時点での観測画像から残像分を差し引く方式が提案されているが(特許文献2参照)、この場合、残像係数を仮定して、入力パネルから手動で残像係数を入力する必要がある。ところが、残像係数は、蓄積管の温度や観測履歴によっても変動し、受光面内でも焼付等により分布を持つことがある。特に、屋外での捜索現場では、機器の温度や入力履歴も時々刻々変動することから、残像係数は固定化せず、自動的に残像量の補正が行われることが望ましい。
【0006】
本発明は、このような問題点を解決するためになされたものであり、残像を考慮しつつ背景から目的の対象物を抽出することができる領域抽出装置及び領域抽出方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明にかかる領域抽出装置は、入力された画像の中から抽出対象に対応する対象領域を抽出する領域抽出装置であって、第1波長及びこの第1波長とは波長が異なる第2波長のレーザ電磁波を対象物に照射して得られる反射光又は透過光について3フレーム以上の画像データを取得する画像取得手段と、前記画像取得手段が取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出手段と、前記残像係数に基づき前記第1波長及び第2波長における残像を除去した反射強度又は透過強度を算出する強度算出手段と、前記第1波長及び前記第2波長の前記反射強度又は透過強度に基づき背景から前記抽出対象を抽出する抽出指標を算出する指標算出手段とを有するものである。
【0008】
本発明においては、3フレーム以上の画像データを取得し、そのフレーム間の画素値の演算に基づき残像係数を求め、この残像係数を使用して反射強度又は透過強度を求める。こうして得られた領域抽出指標は、残像が考慮された値となり、正確に領域抽出することができる。
【0009】
また、前記指標算出手段は、前記第1波長及び第2波長の前記反射強度又は透過強度に基づき反射率を算出し、当該反射率に基づき前記抽出指標を算出することができる。反射率に基づき抽出指標を算出するため、各波長におけるデータのばらつきを低減する。
【0010】
さらに、前記指標算出手段は、前記第1波長及び第2波長の前記反射率の差分を正規化して前記抽出指標を算出することができる。第1波長及び第2波長の反射率を正規化することで、照明強度の変化の影響を低減しつつ目的の対象物を選択的に抽出可能となる。
【0011】
さらにまた、残像係数算出手段は、例えば、注目画素の残像係数をk(i)、注目画素iの時刻tにおける現在フレームの反射強度又は透過強度をIt(i)、注目画素iの時刻t−1における前フレームからの残像を含む、前記画像取得手段が取得する受光強度をxt(i)としたとき、xt(i)=k(i)xt−1(i)+It(i)として残像係数を求めることができる。
【0012】
または、前記画像取得手段は、時間間隔Δtで照射強度を変化させた3フレーム以上の画像データを取得し、前記強度算出手段は、時刻tにおける画素値をx(t)、残像係数θ(0<θ<1)としたとき、第1の波長における反射強度又は透過強度を
【数1】
第2の波長における反射強度又は透過強度を
【数2】
として前記反射強度又は透過強度を算出することができる。
【0013】
この場合、前記残像係数算出手段は、時刻tにおける反射強度又は透過強度をI(t)、残像係数を表す関数をk(t)、残像を含む、前記画像撮像手段が取得する受光強度をx(t)としたとき、
【数3】
として残像係数θ=k(Δt/2)を算出することができる。
【0014】
また、前記第1波長及び第2波長の光を照射する照射手段と、前記照射手段の輝度を変調する輝度変調手段とを更に有することができる。輝度変調手段により、輝度を変調して照射することができる。
【0015】
さらに、前記強度算出手段は、前記輝度変調手段により輝度が変調された前記第1波長及び第2波長の反射光又は透過光の画像データに基づき前記反射強度又は透過強度を算出することができる。これにより、精度よく残像係数を求めることができる。
【0016】
さらにまた、第1波長における反射率又は透過率をR1、第2波長における反射率又は透過率をR2としたとき、前記指標算出手段は、抽出指標=(R1−R2)/(R1+R2)を求めることができる。R1+R2で除すことで正規化指標形式とすることができ、照明強度の変化の影響を低減しつつ、目的の領域のみ抽出することができる。
【0017】
また、前記抽出指標を閾値処理により二値化した画像を出力する出力手段を更に有することができる。二値化することで、目的の領域を簡単に視認することができる。
【0018】
本発明にかかる領域抽出方法は、入力された画像の中から抽出対象に対応する対象領域を抽出する領域抽出方法であって、第1波長及びこの第1波長とは波長が異なる第2波長の電磁波を対象物に照射して得られる反射波又は透過波について3フレーム以上の画像データを取得する画像取得工程と、前記画像取得工程にて取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出工程と、前記残像係数に基づき前記第1波長及び第2波長における残像を除去した反射強度又は透過強度を算出する強度算出工程と、前記第1波長及び前記第2波長の前記反射強度又は透過強度に基づき背景から前記抽出対象を抽出する抽出指標を算出する指標算出工程とを有するものである。
【発明の効果】
【0019】
本発明によれば、残像を考慮しつつ背景から目的の対象物を抽出することができる領域抽出装置及び領域抽出方法を提供することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。この実施の形態は、本発明を、人間の肌領域を抽出する領域抽出装置に適用したものである。
【0021】
実施の形態1.
洪水や津波、水難事故などによって行方不明になった際、ヘリコプター等による上空からの捜索が行われるが、広範囲にわたって、肉眼による継続的な捜索は困難を極める。特に夜間の水上捜索など、二次災害の危険を低減し、捜索をより安全かつ確実に行うためには、無人機による自動探索が有効であるが、この場合、観測画像の中から背景やその他の漂流物と、ヒトの肌を選択的に分離する技術の実現が求められている。また、防犯の分野でも、動物や、揺れ動く木々の像と、分離して、ヒトの肌のみを選択的に検出する画像観測装置の実現が望まれている。
【0022】
そこで、本実施の形態においては、ヒトの肌が有する赤外域での特異な反射率スペクトル特性を利用して、ヒト肌の画像のみを選択的に観測する。なお、本実施の形態における残像除去方式は、以下に説明する人間の肌領域の抽出に限らず、人工衛星搭載センサ等、高速撮影が要求されるCCDのスミア除去に利用可能である。特に、1100nmの長波長側では残像が生じやすい。また、1100nm以下であっても高速撮影を実施すれば残像が生じるが、このような場合の残像除去を行なうにも好適である。
【0023】
本実施の形態においては、光学特性が解明されつつある短波長赤外領域に着目し、その波長帯域のヒトと背景物の反射スペクトルの違いに基づき、ヒトを、アスファルト、コンクリート、植物、土砂等のさまざまな背景物から抽出する指標NDHI(Normalized Difference Human Index)を算出し、このNDHIに基づき肌領域を抽出する。
【0024】
図1は、本発明の実施の形態にかかる領域抽出装置を示す図である。図1に示すように、ヒトの肌を特異的に検出するのに有効な複数の波長(例えば波長λ1、λ2)の高輝度赤外発光ダイオード(LED)11、12と、LED11、12の輝度変調を制御する輝度変調部13と、LED11、12の波長帯に受光感度を有する蓄積型の例えばビジコン等の撮像部15と、LED輝度変調のタイミングを撮像部15の画像取得タイミングと同期化する同期回路14と、撮像部15から得られる3コマ以上の連続画像を記憶保持するフレームバッファ16と、これらのフレームバッファ16の各画素毎に、各タイミングで取得された観測輝度間の演算によって、画像各部における残像係数と各波長における各画像毎の反射率を演算する演算部17とを有する。
【0025】
LED11、LED12は、それぞれ波長λ1、λ2の光を照射する。輝度変調部13は、LED11、LED12の輝度を変調して照射させる。撮像部15は、波長λ1及びこの波長λ1とは波長が異なる波長λ2のレーザ光又はLED光等の電磁波を対象物に照射して得られる反射波について3フレーム以上の画像データを取得する。本実施の形態においては、撮像部15は、肌を含む領域にLED光を照射して得られる反射波の画像データを取得する。
【0026】
演算部17は、撮像部15が取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出手段と、その残像係数に基づき波長λ1及び波長λ2における残像を除去した反射強度を算出する強度算出手段と、波長λ1及び波長λ2の反射強度に基づき背景から抽出対象である肌領域を抽出するための人肌抽出指標を算出する指標算出手段とを有する。ここでは、強度算出手段は、反射強度を算出するものとして説明するが、人肌以外の被測定対象物においては透過強度を算出するようにしてもよい。
【0027】
次に、各画素における残像係数と各波長における各画素毎の対象物の反射率を取得する演算部17の演算方法について説明する。本実施の形態においては、2つの演算方法を適用することができる。先ず1番目の演算方法(方式1)について説明する。
【0028】
連続画像から撮像部15が取得する残像が加わった画素iの時刻tにおける撮像部15の受光強度(撮像結果)をxt(i)、画素iについての残像係数をk(i)、あるフレームの特定の画素iの時刻tにおける反射強度をIt(i)とする。ここで、反射強度Itは、下記に説明する方法により、受光強度xtから残像の影響を取り除いた値を示す。例えば、波長λ1のLED11及び波長λ2のLED12の各発光輝度を変化させることにより、各タイミングtにおける撮像部15の受光強度を、以下のように設定することが可能である。
It−1(i)=Iλ1
It(i)=Iλ2
It+1(i)=ξIλ1
It+2(i)=ηIλ2
【0029】
図2は、たとえば、ξ=1/2、η=2としたときの反射強度Iの変化の例を示す図である。このようにLED11、12の発光強度を制御した場合、反射強度Itと撮像部15の出力値である受光強度xtの関係は以下のように表される。
xt(i)=k(i)xt−1(i)+Iλ2・・・(1)
xt+1(i)=k(i)xt(i)+ξIλ1・・・(2)
xt+2(i)=k(i)xt+1(i)+ηIλ2・・・(3)
式(1)×η−式(3)によりIλ2を消去する。
ηxt(i)−xt+2(i)=ηk(i)xt−1(i)−k(i)xt+1(i)・・・(4)
上式より、以下のように各画素毎に独立に残像係数k(i)を得ることができる。
k(i)={ηxt(i)−xt+2(i)}/{ηxt−1(i)−xt+1(i)}・・・(4')
【0030】
この結果を式(2)及び(3)に代入することで、以下のように、各波長λ1、λ2での反射強度Iλ1、Iλ2を得ることができる。
Iλ1={xt+1(i)−k(i)xt(i)}/ξ
=[xt+1(i)−{ηxt(i)−xt+2(i)}/{ηxt−1(i)−xt+1(i)}xt(i)]/ξ・・・(5)
Iλ2={xt+2(i)−k(i)xt+1(i)}/η
=[xt+2(i)−{ηxt(i)−xt+2(i)}/{ηxt−1(i)−xt+1(i)}xt+1(i)]/η・・・(6)
【0031】
ここで、人肌抽出指標NDHIは、式(7)に示す波長λ1、λ2の反射率Rλ1、Rλ2から算出することができる。この反射率Rλ1、Rλ2は、反射強度Iλ1、Iλ2を、各波長の光を白色板に照射した際の反射強度I0で除すことで求められる。演算部17は、上記のように反射強度Iλ1、Iλ2、及び白色板強度I0(λ1)、I0(λ2)を求め、その反射率Rλ1、Rλ2よりNDHIを算出する。
NDHI=(Iλ1/I0(λ1)−Iλ2/I0(λ2))/(Iλ1/I0(λ1)+Iλ2/I0(λ2))(Rλ1−Rλ2)/(Rλ1+Rλ2)=・・・(7)
【0032】
ここで、コンクリート、アスファルト、及び芝生等の植生から人肌を抽出するために最適な波長λ1としては、1000乃至1300nmが好ましい。また、波長λ2としては、1500乃至1650nmとすることが好ましい。これらの範囲外の波長とすると、コンクリートの一部や建物のガラス部分からノイズが発生し、人肌抽出が困難な場合がある。
【0033】
このようにしてNDHIを計算したものを、0を黒、1を白としてグレースケール化することでNDHI画像を得ることができる。また、グレースケール化してNDHI画像を所定の閾値で処理し、二値の画像に変換することも可能である。出力部18は、NDHI画像や二値化画像を表示する。
【0034】
次に第2の方法(方式2)について説明する。方式2では、フレーム内の減衰(残像)の時間的変化を厳密に考慮する。
【0035】
残像係数の関数k(t)が式(8)で示される指数関数である場合、撮像部15が取得した受光強度x(t)を実現する積分系(図3(a))は、外部入力付き自己回帰系(図3(b))と等価である(式(9))。
k(t)=αβt・・・(8)
【数4】
【0036】
式(9)で示されるビジコン自己回帰モデルに一定輝度光Iを照射したとき、式(10)よりその平衡値xequは式(11)で与えられ、式(12)により平衡値から反射強度Iを容易に推定することが可能である。
dx(t)/dt=0 (10)
xequ=−I/(β・lnα)・・・(11)
【数5】
【0037】
また、平衡値のy%までの到達時間[ms]は式(13)で与えられ、仮にI=1、α=0.6、β=1/50の時を考えるとき、Iequ=97.88、y95=278[ms]、y99=450[ms]となる(図4参照)。
ty=(1/β)logα(1−y/100) (13)
【0038】
動作する対象の情報を式(12)に基づきリアルタイムで取得することを想定した場合、上述の平衡到達時間は十分小さいとはいえない。したがって、リアルタイム処理を実現するためには、飽和特性の立ち上がりの領域の値を用いた推定が必要である。
【0039】
図5に示すように、2種類の入力値を時間間隔ΔtでIλ1−休止−Iλ2−休止−Iλ1の順に与え、各入力・休止の中間時刻Δt/2における観測により5つの観測値を取得するとき、残像係数θ=k(Δt/2)は、式(8)、(9)を展開することで式(14)、(15)で示される3次方程式の解のうち、条件式(16)を満たすものとして推定される。
x(t4)θ3−x(t1)θ2−x(t5)θ+x(t2)=0・・・(14)
x(t2)θ3−x(t3)θ2−x(t3)θ+x(t4)=0・・・(15)
0<θ<1・・・(16)
また、推定されたθを用いて、2入力の推定値が式(16)、(17)で算出される。
【数6】
【数7】
【0040】
本実施の形態によれば、温度や感光面の劣化、部分的な焼付きなどによって変化する残像の効果を、各画素毎に自動的に補正して、対象物の波長毎の反射輝度値を時分割方式で推定することが可能になる。
【0041】
また、短波長赤外の複数の波長における反射率間の演算を、Rλ1+Rλ2で除すことで波長λ1(例えば1070nm)及び波長λ2(例えば1550nm)の正規化指標形式とすることができ、照明強度の変化の影響を低減しつつ、ヒトの肌と、その他の地物が画像上で容易に識別可能となり、ヒトの肌のみを選択的に検出可能である。
【0042】
さらに、時分割で複数の波長の測定を繰り返す際、照明の強度に変調を加え、その変調強度比を先見情報として時系列観測データを連立させることにより、各画素ごとに残像の影響を自動補正し、複数の波長での受光強度の真値を推定することが可能となる。
【0043】
実施の形態2.
人肌抽出による要救助者の捜索は、肌が多く露出している海水浴、マリンスポーツ等での水難事故、及び津波や洪水災害後に利用することで有用性を発揮すると考えられる。このような場合、実際には水が不透明に濁っていることが多い。そこで、本実施の形態にかかる領域抽出装置においては、泥水内外の人肌領域を抽出する。
【0044】
本実施の形態にかかる領域抽出装置は、実施の形態1と同様、図1に示す構成を有する。さらに、本実施の形態にかかる演算部17は、図6に示す構成を有する。図6は、実施の形態2にかかる領域抽出装置の演算部を示す図である。演算部17は、残像係数算出部171、反射強度算出部172、反射率算出部173、前処理部174、NDHI算出部175、二値化処理部176、及びラベリング処理部177を有する。
【0045】
実施の形態1と同様、残像係数算出部171は、方式1又は方式2に従って、複数フレームの撮像画像から残像係数を算出する。反射強度算出部172は、残像係数算出部171により算出された残像係数を使用して、式(5)、(6)、又は式(17)、(18)により2つの波長λ1、λ2における反射強度Iλ1、Iλ2を算出する。反射率算出部173は、各波長λ1、λ2における白色板の受光強度I0により、Rλ1=Iλ1/I0(λ1)、Rλ2=Iλ2/I0(λ2)を算出する。
【0046】
ここで、NDHIを算出するために有効な波長λ1としては、1000乃至1300nm、波長λ2としては、1500乃至1650nmを使用することができる。これらの波長範囲であれば、NDHIを使用して、コンクリート、アスファルト、及び芝生などの植生から人肌を抽出することができる。
【0047】
さらに、泥水等水中の物体を抽出するためのλ1としては、透視度(cm)T=∞、深度10cmのとき、1060乃至1075nm、透視度T=40、深度8cmのとき、1055乃至1085nm、透視度20、深度8cmのとき1060乃至1080nm、透視度10、深度6cmのとき、1045乃至1095nmとすることができる。すなわち、泥水等水中の中の人肌を含む物体を抽出するためには、波長λ1を1070±40nm程度とすることが好ましい。これらの波長範囲であれば、NDHIにより、泥水等の水中の物体を抽出することができる。
【0048】
前処理部174は、人肌以外を除去するため、Rλ1≧閾値THの処理をする。図7は、空気中の人肌、泥水中の人肌、及び泥水表面における反射率を示すグラフ図である。図7に示すように、泥水の表面の反射率R3<泥水中の人肌反射率R2<空気中の人肌反射率R1の関係を有する。このことを利用して、閾値処理することで、泥水表面を除去したり、空気中の人肌のみを抽出したりすることができる。すなわち、泥水表面反射率R3より大きく泥水中の人肌反射率R2より小さい値を閾値th1(例えば0.01〜0.025程度)とし、泥水中の人肌反射率R2より大きく空気中の人肌反射率R1より小さい値を閾値th2(例えば0.15〜0.2程度)とし、Rλ1≧th1を求めることにより、泥水表面を画像から削除することができる。また、Rλ1≧th2を求めることにより、画像から空気中の人肌のみを抽出することができる。
【0049】
NDHI算出部175は、式(7)により、2つの反射率の差分に基づき人肌抽出指標NDHIを算出する。ここで、上記前処理部174により2つの閾値th1、th2により閾値処理された値から、2種類のNDHIが求まり、2つのNDHI画像を得ることができる。以下では、閾値th1により閾値処理された反射率から求めたNDHI画像を画像A、閾値th2により閾値処理された反射率から求めたNDHI画像を画像Bという。
【0050】
二値化処理部176は、例えば閾値0.5等でNDHI画像A、Bを二値化する。ここでの閾値は、目的の抽出画像が得られるように適宜調整することができる。
【0051】
ラベリング処理部177は、二値化した画素値にラベルを付す。二値化した画像Aについてラベリング処理したもの(ラベルは2種類)と、二値化した画像Bについてラベリング処理したもの(ラベルは2種類)を比較し、同種ラベルを連結することで、空気中及び泥水中の人肌を連結し、泥水中の他の物体を排除することができる。例えば、泥水中に手を入れた画像について、二値化した画像A、Bを取得すると、二値化した画像Aについては、泥水水面領域が削除され、空気中の人肌と共に、泥水中の人肌及び物体が抽出される。泥水中の物体は人肌と同様のNDHIを有するためである。一方、二値化した画像Bについては、空気中の人肌のみが抽出される。そして、二つの画像において二値化した画像Bと同様の領域が空気中の人肌であり、この領域と同じラベルを有し、当該領域に連結する領域は、人肌(水中)となる。そして、人肌に物体が接していれば、接している物体も連結領域として抽出される。こうしてラベリング処理した結果画像を出力部に出力する。
【0052】
次に、本実施の形態にかかる領域抽出装置において泥水中の人肌を抽出する方法について説明する。図8は、泥水中の人肌を抽出する方法を示すフローチャートである。図8に示すように、先ず撮像部15によりハイパースペクトルデータを取得する(ステップS1)。本例においては、波長λ1として1100nmm、波長λ2として1550nmを使用することとする。取得したデータは演算部17に入力される。そして演算部17の残像係数算出部171において算出された残像係数により、残像の影響を削除した発射強度Iを算出し、反射率Rλ1、Rλ2を求める。
【0053】
次に、前処理部174により、Rλ1の閾値処理を実施する(ステップS2、S3)。上述したように、本実施の形態においては、水面領域を除去する閾値th1と、空気中の人肌のみを抽出する閾値th2を使用して、Rλ1(λ1=1100)≧th1と、Rλ1(λ1=1100)≧th2を使用して前処理を実施する。閾値th1は、例えば0.025であり、閾値th2は例えば0.2である。
【0054】
そして、Rλ1≧th1により前処理したデータから、水面領域を除去したNDHI画像Aを求め(ステップS3)、Rλ2≧th2により前処理したデータから、空気中の人肌のみ抽出したNDHI画像Bを求める(ステップS4、5)。次に、得られた2つのNDHI画像を二値化処理し(ステップS6)、ラベリング処理をする(ステップS7)。二値化処理により、二値の値にされた各画素値の値が同じものに同じラベルを付す。次に、連結処理により、Aの画像からBの画像と重なる部分を有するラベルのみを抽出することで、空気中の人肌領域と連結している領域のみを抽出する(ステップS7)。このように、ラベリング処理により、泥水等水中でヒトに接していない物体を削除し、ヒト肌及び水中でヒトが接している物体を抽出することができる(ステップS8)。
【0055】
本実施の形態においては、Rλ1を前処理することにより、2種類の画像を取得し、空気中のヒトと認識した部分と連結している水面下の物体を抽出することができる。これにより、例えば生存している要救助者の身体の一部(特に呼吸のため顔面部分)が水面から出ているような場合、泥水外の人肌の部位を抽出することでヒトの発見が可能となり、連結する泥水面下の情報を得ることができる。よって、泥水外の人肌の部位だけを抽出して要救助者を捜索するだけではなく、泥水内の情報を抽出することで、要救助者の状況把握にも役立たせることができる。
【0056】
[実施例1]
次に、本発明の実施例を、従来方法である比較例と比較して説明する。実施の形態1の方式1において、入力Iλ1、Iλ2、一定入力の間隔Δt、残像関数k(t)、受光強度比ξ、ηをそれぞれ以下のように設定した場合のシミュレ−ションによる入出力値関係図を図9に示す。
Iλ1=1.5、Iλ2=1.0、Δt=33ms、k(t)=0.6t/50、ξ=1/2、η=2
【0057】
データ取得のタイミング(方式1のt−1、t、t+1、t+2に相当)を入力値の変化する時刻(図2の不連続部分)としたときに得られる観測値及び式(4')、(5)、(6)に基づき推定した残像係数k(Δt)、入力値Iλ1、Iλ2、入力値の比Iλ1/Iλ2を図10に示す。図10は、(a)入力、(b)出力及びサンプル点、(c)推定残像係数(*印)及び真の残像係数(一点破線)、(d)推定入力値(Iλ1(○印)、Iλ2(*印))及び真の入力値(Iλ1、Iλ2一点青破線)、(e)推定入力比Iλ1/Iλ2(*印)及び真の入力比Iλ1/Iλ2(一点破線)を示す。
【0058】
以上のシミュレ−ションにより、残像係数及び入力比の高精度推定が確認された。すなわち、kの真値(k=0.7138)が厳密に推定された残像係数k(真値k=0.7138、推定値k=0.7138)に基づき、厳密な入力値比Iλ1/Iλ2(真値1.5、推定値1.5)が推定された。
【0059】
なお、ここで推定されるIλ1およびIλ2は残像関数の積分値と受光強度の積であり、真の受光強度の推定のためには、推定値を定数倍する必要がある。しかしながら、入力比の算出においては、除算により定数倍分が相殺されるため、推定値は真の値Iλ1/Iλ2の高精度推定を実現している。本発明の目的である人肌抽出指標NDHIの算出の際に要求される値はNDHI=(Rλ1−Rλ2)/(Rλ1+Rλ2)=(Rλ1/Rλ2−1)/(Rλ1/Rλ2+1)であり、上記定数値の算出が要求されない。
【0060】
次に、方式2による実施例について説明する。入力Iλ1、Iλ2、一定入力の間隔Δt、残像関数k(t)、をそれぞれ以下のように設定した場合のシミュレ−ションによる入出力値関係図を図11に示す。
Iλ1=1.5、Iλ2=1.0、Δt=100ms、k(t)=0.6t/50
【0061】
データ取得のタイミング(方式2のt1、t2、t3、t4、t5に相当)を図5に基づき設定した場合に得られる観測値及び式(9)乃至(13)に基づき推定した残像係数k(Δt)、入力値Iλ1、Iλ2、入力値の比Iλ1/Iλ2を図12に示す。図12は、それぞれ(a)入力、(b)出力及びサンプル点、(c)推定残像係数(*印)及び真の残像係数(一点破線)、(d)推定入力値(Iλ1(○印)、Iλ2(*印))及び真の入力値(Iλ1、Iλ2一点青破線)、(e)推定入力比Iλ1/Iλ2(*印)及び真の入力比Iλ1/Iλ2(一点破線)を示す。
【0062】
方式2は、方式1と比較して、入力値の制御が容易である。一定光照射の中間時刻における測定という、方式1の場合と比較して困難な状況を考慮した場合、残像係数及び入力比推定において良好な推定精度を実現している。
【0063】
次に、方法1において残像係数kを適応的に設定できない場合を比較例として説明する。残像係数kの値を適応的に自動推定できない従来法において、正しい残像係数kの値が設定されない場合の推定結果を図13乃至図15に示す。図13は、k=0.65とした場合、図13は、k=0.75とした場合、図14は、k=0.8とした場合を示す。図13乃至図15に示すように、残像係数が真値と僅かに異なる場合でも、入力値比の推定精度が大きく劣化する。すなわち、正しいNDHIが算出されず、人肌抽出を行なうことができない。
【0064】
[実施例2]
次に、実施の形態2にかかる実施例について説明する。NDHIを利用して泥水内外の人肌を抽出する。また、NDHIの有用性を調べるために、赤外線カメラを用いた体温感知によるヒト認識との比較を行う。
【0065】
本実施例では、波長毎のスペクトルの強度の詳細を調べる必要があるため、ハイパースペクトルセンサを使用した。ハイパースペクトルセンサはプリズムと回折格子から構成されるPGP分光部(Specim社製Imspector-N17)とCCD部(Sensors Unlimited社製SU320M-1.7RT)から構成されている。このセンサの測定波長帯域は短波長赤外の前半領域の950nmから1700nmであり、CCDのピクセル数は空間軸方向に240ピクセル、波長軸方向に320ピクセル、記録速度は最高で1秒当たり30フレームのラインセンサである。データ取得時には、白色板のDN値(Digital Number)及び暗電流値によるデータ補正を行った。実験装置は屋外と室内の測定系の2種類に分けた。屋外の測定系では、日本精工(株)製のメガトルクモータYSB2020の上にセンサを固定し、このモータを回転させ、センサの水平方向に配置された測定対象物に対してラインスキャンを行った。室内の測定系では、IAI(株)製の直動アクチュエータRCS-SM-100に固定したセンサを水平移動させることで垂直下向きの測定対象物に対してラインスキャンを行った。室内の測定系の照明条件としては、データの精度向上のため外来光を遮断し、センサと一体駆動される500Wのハロゲンランプ2個を用いた。照明の照度は白色板補正位置で約19000Lxであった。
【0066】
人肌のスペクトルは、オキシヘモグロビンの影響により410nm、540nm、575nm、水分の影響により970nm、1430nm、1925nm、脂質の影響により1710乃至1780nm間、また水分及び脂質の影響により1200nmの波長域においてそれぞれ吸収特性を有する。特にオキシヘモグロビンの影響による410nm、水分の影響による1430nm、1925nmに大きなスペクトル吸収特性を有する。これに対し、1100nm付近では最も両者の吸収の影響が少なく、基準とするのに適した波長である。オキシヘモグロビンはヒトの真皮中の血管に多く存在するため、人肌を抽出するのに大きな手がかりなると考えられる。しかし、この410nm付近の短い波長は大気散乱の影響を受け易いため反射強度が安定しない。また、1100nmを基準と考えた場合、可視・近赤外領域と短波長赤外領域を同時に測定するために2種類のCCD部が必要になり、光学系の構成が複雑になる。そこで、本実施例においては2波長間の反射率のギャップが大きく、最も近接する波長帯である短波長赤外領域の波長に着目し、本実施例では、スペクトル吸収が小さく高い反射率を持つ1100nm付近及び、水分による吸収が大きい1430nm付近の波長を用いた指標を使用する。人肌抽出指標NDHIは、1100nm付近の反射率をR1、1430nm付近の反射率をR2とし、次式(19)から算出する。
NDHI=(R1−R2)/(R1+R2)・・・(19)
【0067】
式(19)における人肌抽出に適切なR1とR2として、本実施例においては、R1には1100nmの反射率、R2には1550nmにおける反射率を利用する。次に、この理由について説明する。
【0068】
人肌抽出に適切な波長を調べるため、ハイパースペクトルセンサを使用して屋外においてヒトと背景を含む範囲を測定した。測定した背景には、建物のコンクリート壁面、アスファルト道路、芝生などの植生が含まれていた。得られた人肌とそれぞれの背景物の反射スペクトル特性を図16に示す。NDHIに適切な波長を見つけるために、R1は1000nmから1200nm、R2は1400nmから1600nmの範囲で人肌とそれぞれの背景物とのNDHI値の差を調べた。この結果を図17乃至図19に示す。このNDHIの差が大きいほど、背景から人肌の抽出力が向上す。まず、人肌とコンクリート壁面では、R1:1116nm、R2:1493nmのときNDHIの差が最大値0.68、人肌とアスファルト道路では、R1:1096nm、R2:1488nmのときNDHIの差が最大値0.80、また人肌と芝生などの植生では、R1:1116nm、R2:1559nmのときNDHIの差が最大値0.42という結果が得られた。人肌に対するコンクリート壁面やアスファルト道路のNDHIの差は大きく、十分な抽出力がある。しかし、人肌と芝生などの植生ではNDHIの差が比較的小さい。そこで、人肌と芝生などの植生で最大値をとった波長付近、R1:1100nm、R2:1550nmのときの人肌とコンクリート壁面やアスファルト道路のNDHIの差をみるとそれぞれ0.65と0.75となり、人肌との差を十分に維持できることが分かった。よって、NDHIに適切な波長をR1:1100nm、R2:1550nmとし、NDHIを次のような式(20)とした。
NDHI=(R(1100)−R(1550))/(R(1100)+R(1550))・・・(20)
ここで、R(λ)は波長λnmでの反射率を表している。
【0069】
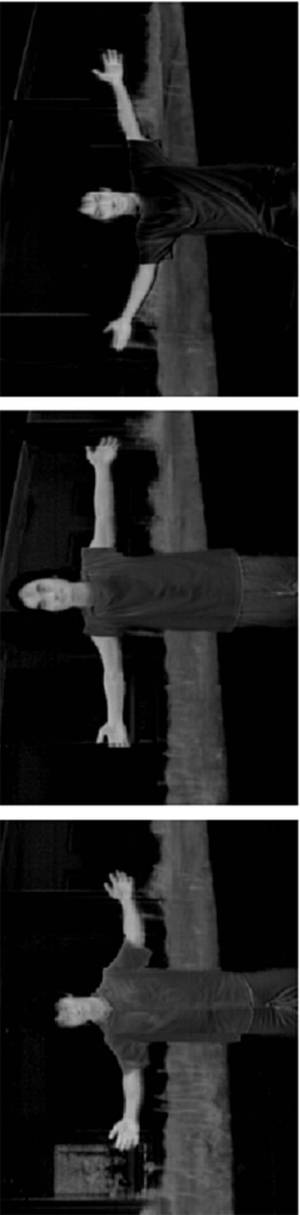
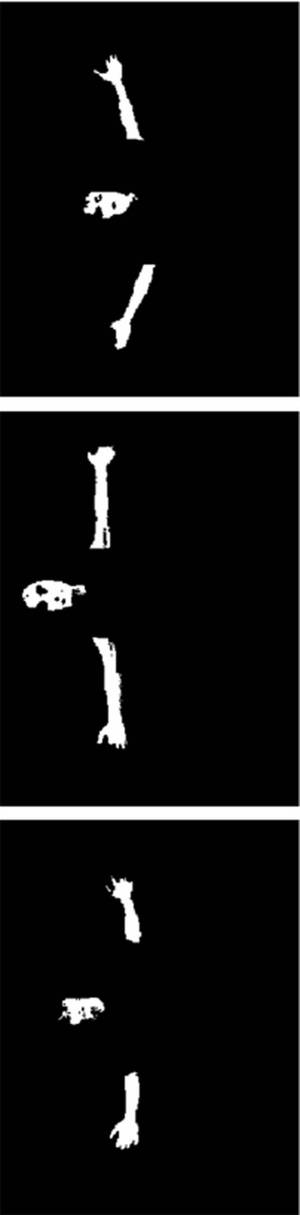
この式(20)のNDHIを利用して、人肌抽出を行った。本実施例では、屋外の背景中に手を広げたヒトが立ち、そのNDHIを計測した。個人差によるNDHIの差を簡単に調べるため、モンゴロイド人種4名を被験者とした。NDHIを計算したものをグレースケール化したNDHI画像を見ると、図20に示すように人肌の部分は高いNDHI値を有することがわかった。また、NDHI値は、コンクリート壁面やアスファルト道路では小さいが、芝生などの植生ではやや高い値を示すことがわかった。そこで、NDHIを閾値処理(閾値0.5)し、背景から人肌の部分のみ抽出を行えるようにした(図21参照)。NDHIは眉毛や頭髪を抽出していないため、ヒトと体毛を持つ動物と区別が可能である。他の3名の被験者のNDHI画像と2値化画像も人肌の部分をよく抽出できることから、モンゴロイド人種間での個人差によるNDHIの差は少ないと考えられる(図22、23参照)。
【0070】
次に、土砂域におけるヒト抽出の有用性を検証するため、土砂とヒトを含む状態で実験計測を行った。測定した背景には、土砂、ビニール製シート、建物のコンクリート壁面、植物などが含まれていた。取得されたデータからNDHIを計算し、NDHI画像と2値化画像を作成した(図24、25参照)。閾値0.5の場合、植物由来のノイズが多少みられたが、このノイズは閾値を0.6に上げることで取り除けた。この閾値の差の原因は、データを取得した環境の日照角度や、測定対象物が立体構造であるため、反射スペクトルに対してBidirectional Reflectance Distribution Function(BRDF)の影響が発生し、白色板補正では正確に較正されない部分が存在することによるものと考えられる。この問題はセンサから測定対象物までの距離が離れるほど緩和され、実際に航空機などで上空からヒトをスキャンする場合には、誤差が小さくなる。以上より、NDHIは土砂を背景とした場合でも人肌抽出が可能である。
【0071】
ところで、NDHIによる要救助者の捜索は、人肌が多く露出している海水浴やマリンスポーツ等での水難事故や、津波、洪水災害後など、上空から人肌が測定可能な状態で広域に捜索する必要がある場面においてより有用性を発揮すると考えられる。このような場合、実際には水が不透明に濁っていることが多いので、NDHIを用いて泥水内外の人肌抽出に関して検証を行った。検証実験には室内の測定系を使用した。泥水は市販の土粘土を水に懸濁したものを使用し、透視度計を用いて濁り具合を調節した。透視度は透明なガラス管に泥水を入れて徐々に排水し、上部から目視で二重十字(白色標識板上に太さ0.5mm、間隔1mmの二重線で描画)を識別したときの水層の高さ(cm)で表される。また、水槽はサイズW780×D390×H370mmの緑色のトランクカーゴを使用し、水面の高さを25cmとした。
【0072】
透視度10の泥水に、手の配置深度2cmで片手を浸し、測定を行った。NDHI画像を見ると水面のNDHI値が高く、泥水内の人肌の確認だけでなく泥水外の人肌の認識も困難であった(図26参照)。泥水外の人肌、泥水内の人肌及び水面のそれぞれのスペクトルを比較すると、R(1100)において泥水内の人肌の反射率は水面より高い値を示した(図7参照)。また、水面のR(1550)の反射率がほぼ0に近いので、NDHIの値がR(1100)/R(1100)=1(−1≦NDHI≦1)と高い値になる。そこで、NDHI算出の前処理としてR(1100)≧0.025で閾値処理を行い、水面の削除を行った(図27参照)。また、閾値をR(1100)≧0.2に上げることで泥水内の人肌と水面を削除し、泥水外の人肌のみを抽出することが可能となった(図28参照)。つまり、NDHI算出の前にR(1100)の閾値処理を行うことで、泥水内の人肌と泥水外の人肌がともに抽出可能になる。
【0073】
このように、NDHI算出の前にR(1100)の閾値処理を行うことで、次の2枚の画像を作成することが可能である。
A:泥水内の物体(人肌、及びヒト以外の物体)と泥水外の人肌を抽出した画像
B:泥水内の物体を削除し、泥水外の人肌のみ抽出した画像
ただし、画像A、BのR(1100)の閾値については、泥水内の物体の深度、泥水の透視度ごとに調節する必要がある。
【0074】
[実施例3]
次に、実施例3について説明する。上述の実施例2の方法では、ヒト以外の物体が同じ程度の水深に存在する場合、その物体を人肌と同様に抽出するため、泥水外の人肌と連続した泥水内の物体をヒトとして認識する必要がある。そこで、本実施例では、実施の形態2に示す方法により、泥水内外のヒト識別を行なう。
【0075】
実施例2と同様の室内の測定系を用い、透視度30の泥水に、手の配置深度5cmで片手を浸し、測定を行った。透視度、使用した水槽、センサと照明、測定対象物の位置関係などは実施例2と同様である。この実験においてはR(1100)の閾値処理を、画像AではR(1100)≧0.01、画像BではR(1100)≧0.15とした。
【0076】
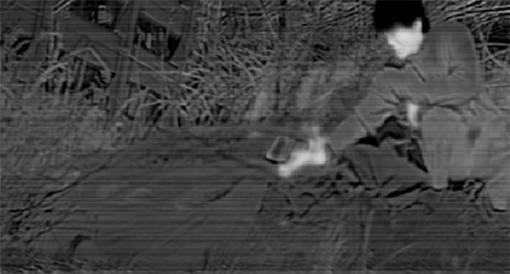
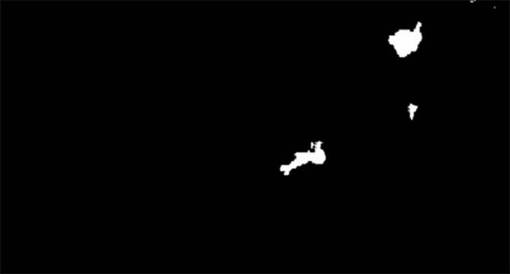
実施の形態2における泥水内外のヒト識別方法を検証するため、同深度に配置した木片と手が接触、非接触の2状態で測定を実施した。水中で木片と手が非接触の状態で、泥水内の物体(人肌、及びヒト以外の物体)と泥水外の人肌を抽出した画像(図29)、泥水内の物体を削除し、泥水外の人肌のみ抽出した画像(図30)、そして、その2枚の画像から抽出された泥水外のヒトと認識した部分と連結している水面下の物体を抽出した画像(図31)を見ると、泥水内のヒト以外の物体を取り除き、ヒトの部分のみを抽出することができた。他方、水中で木片と手が接触の状態での画像A(図32)、画像B(図33)、画像C(図34)の画像を見ると、泥水内でヒトに接触している物体も抽出された。
【0077】
[実施例4]
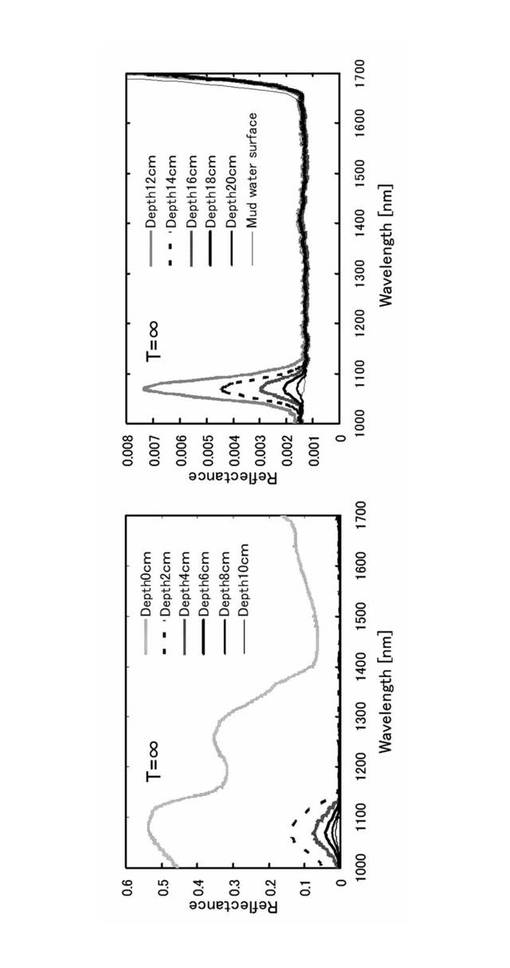
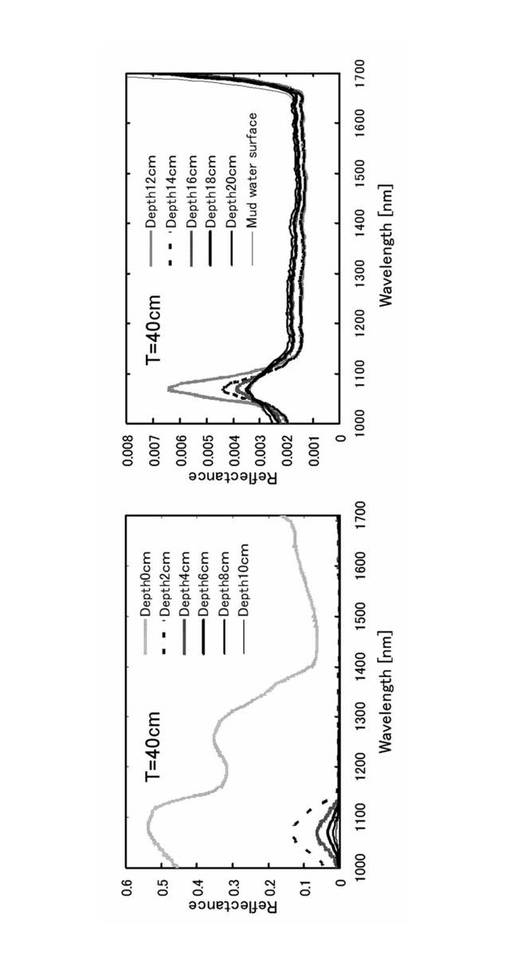
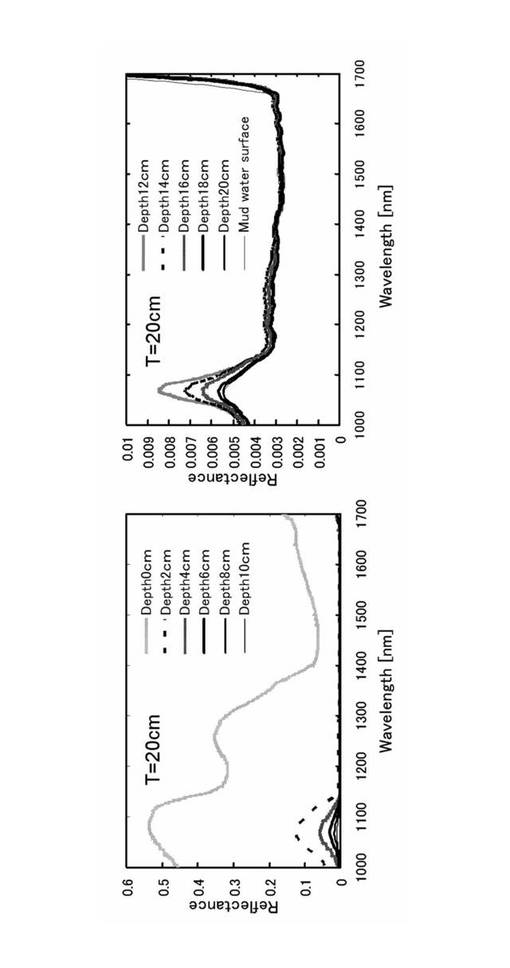
次に、実施例4について説明する。泥水内の物体抽出に際し、NDHIが適用可能な泥水の深度と透視度の関係を調査した。実施例2、3と同様の室内の測定系(ただし水面の高さは30cmとする)を用い、右手の甲の部分の深度が0cmから20cmに至るまで2cm間隔で深度を変えて測定を実施した。泥水は透視度40、20、及び10の3種類を準備し、透視度∞の水として中水を使用した。それぞれの透視度における各深度の人肌のスペクトル特性を図35乃至図38に示す。
【0078】
図35に示すように、透視度∞で深度を変えた場合、反射スペクトルは波長1070nm付近で反射が大きく、深度が深くなるにつれ反射が小さくなった。1150nmより長い波長域では反射がほぼ0に近かった。そのため、NDHIを水中の物体抽出に利用するにはR1:1100nmよりも1070nmの反射を使用する方が有効であると考えられる。また、透視度が下がると波長1000nmから1700nm間の反射が全体的に大きくなる傾向がみられた。これは、透視度が下がるほど水中に含まれる土粘土の比率が多くなり、さらに、深度が深くなるほど土粘土の反射影響が大きくなるためと考えられる。
【0079】
以上の結果から、次に水中の物体抽出に有効な波長R1を1070nmに変更し、抽出可能な透視度と深度の関係、抽出可能な水中の手と水面の反射率の差を調べた結果を図39に示す。抽出の可否判定は指先までの輪郭形状が目視にて認識できるかで行っている。透視度∞の場合には深度10cmまで、透視度40、20では深度8cmまで、透視度10では深度6cmまで抽出可能であった。泥水中から物体を抽出するには、R1の閾値処理で物体のない水面を削除する必要があり、透視度が下がるとR1での水中の手と水面の反射率の差が小さくなるため、抽出深度が浅くなった。
【0080】
[実施例5]
次に、実施例5について説明する。NDHIと赤外線センサを使用したヒト認識との比較結果について説明する。従来のヒト認識の主な手法の一つに熱赤外領域を利用した赤外線センサによる体温感知がある。そこで水難事故や水災害を想定した場面での赤外線センサによる体温感知とNDHIとの比較を行う。赤外線センサはNEC社製TH3100MRを使用した。氷水中に30秒間右手を浸して体温を下げた後、透視度10の泥水中に手のひらを浸し、赤外線センサとハイパースペクトルセンサで測定を行った。海難事故や台風などによる水災害の多発する夏期8月の本州周辺の海水温は25〜29度℃である。そこで、泥水の温度を25度℃とした。赤外線センサによる測定は10分間行い、体温が戻る様子を観察した。赤外線センサの測定結果では、開始直後は泥水より手のひらの体温が低いが、時間の経過とともに徐々に体温が戻り始め、5分後には泥水に接する部分の温度が27度℃前後まで回復したが、水面から出ている手の部分の温度は10分後も27度℃前後から上昇せず、手の形状が認識できなかった。一方、NDHI画像(R(1100)≧0.035で閾値処理)の結果は、泥水内外の手の形状が明確に抽出可能であった。このように体温が下がっている状況での水面下のヒト認識には、赤外線センサを使用した体温認識と比較してNDHIの方が有効である。
【0081】
以上説明したように、ヒトと背景物の反射スペクトルの違いに基づき、背景から人肌のみを抽出する指標NDHIを求めることができる。NDHIにより、ヒトをさまざまな背景(アスファルト、コンクリート、植物、土砂など)から識別できる。また、複数フレームの観測輝度間の演算によって残像の影響を取り除いた反射率を求めることができ、高精度な指標NDHIを算出することができる。
【0082】
以上の実施例においては、光を用いた人肌検出について説明したが、本発明はX線を用いた、工業用、及び医療用の画像解析においても、波長分布が異なる2つのX線源を用いて、被検体の透過強度を測定して、被検体画像の中から目的対象物を選択的に抽出する場合にも有効である。
【0083】
なお、本発明は上述した実施の形態のみに限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能であることは勿論である。
【図面の簡単な説明】
【0084】
【図1】本発明の実施の形態1にかかる領域抽出装置を示す図である。
【図2】ξ=1/2、η=2としたときの反射強度Iの変化の例を示す図である。
【図3】(a)は、撮像部が取得した受光強度x(t)を実現する積分系、(b)は、外部入力付き自己回帰系を示す図である。
【図4】平衡値のy%までの到達時間[ms]を説明する図である。
【図5】2種類の入力値を時間間隔ΔtでIλ1−休止−Iλ2−休止−Iλ1の順に与え、各入力・休止の中間時刻Δt/2における5つの観測値を示す図である。
【図6】本発明の実施の形態2にかかる領域抽出装置の演算部を示す図である。
【図7】空気中の人肌、泥水中の人肌、及び泥水表面における反射率を示すグラフ図である。
【図8】本発明の実施の形態2における泥水中の人肌を抽出する方法を示すフローチャートである。
【図9】実施の形態1の方式1において、入力Iλ1、Iλ2、一定入力の間隔Δt、残像関数k(t)、受光強度比ξ、ηを設定した求めたシミュレ−ション結果を示す図である。
【図10】推定した残像係数k(Δt)、入力値Iλ1、Iλ2、入力値の比Iλ1/Iλ2を示す図である。
【図11】入力Iλ1、Iλ2、一定入力の間隔Δt、残像関数k(t)、を設定して求めたシミュレ−ション結果を示す図である。
【図12】推定した残像係数k(Δt)、入力値Iλ1、Iλ2、入力値の比Iλ1/Iλ2を示す図である。
【図13】残像係数kの値を適応的に自動推定できない従来法により正しい残像係数kの値が設定されず、k=0.65とした場合の推定結果を示す図である。
【図14】残像係数kの値を適応的に自動推定できない従来法により正しい残像係数kの値が設定されず、k=0.75とした場合の推定結果を示す図である。
【図15】残像係数kの値を適応的に自動推定できない従来法により正しい残像係数kの値が設定されず、k=0.8とした場合の推定結果を示す図である。
【図16】人肌とそれぞれの背景物の反射スペクトル特性を示す図である。
【図17】R1は1000nmから1200nm、R2は1400nmから1600nmの範囲で人肌とそれぞれの背景物とのNDHI値の差を示す図である。
【図18】同じく、R1は1000nmから1200nm、R2は1400nmから1600nmの範囲で人肌とそれぞれの背景物とのNDHI値の差を示す図である。
【図19】同じく、R1は1000nmから1200nm、R2は1400nmから1600nmの範囲で人肌とそれぞれの背景物とのNDHI値の差を示す図である。
【図20】NDHIを計算したものをグレースケール化したNDHI画像を示す図である。
【図21】NDHIを閾値処理(閾値0.5)し、背景から人肌の部分のみ抽出した図である。
【図22】他の被験者においてNDHIを計算したものをグレースケール化したNDHI画像を示す図である。
【図23】他の被験者においてNDHIを閾値処理(閾値0.5)し、背景から人肌の部分のみ抽出した図である。
【図24】撮影した背景のNDHI画像を示す図である。
【図25】撮影した背景の二値化画像を示す図である。
【図26】透視度10の泥水に、手の配置深度2cmで片手を浸した場合のNDHI画像を示す図である。
【図27】NDHI算出の前処理としてR(1100)≧0.025で閾値処理を行い、水面の削除を行った場合のNDHI画像を示す図である。
【図28】閾値をR(1100)≧0.2に上げることで泥水内の人肌と水面を削除し、泥水外の人肌のみを抽出した場合のNDHI画像を示す図である。
【図29】同深度に配置した木片と手が非接触の状態のNDHI画像を示す図である。
【図30】泥水内の物体を削除し、泥水外の人肌のみ抽出した画像を示す図である。
【図31】図28、図29の2枚の画像から抽出された泥水外のヒトと認識した部分と連結している水面下の物体を抽出した画像を示す図である。
【図32】同深度に配置した木片と手が接触の状態のNDHI画像を示す図である。
【図33】泥水内の物体を削除し、泥水外の人肌のみ抽出した画像を示す図である。
【図34】図32、図33の2枚の画像から抽出された泥水外のヒトと認識した部分と連結している水面下の物体を抽出した画像を示す図である。
【図35】透視度T=∞における各深度の人肌のスペクトル特性を示す図である。
【図36】透視度T=40おける各深度の人肌のスペクトル特性を示す図である。
【図37】透視度T=20における各深度の人肌のスペクトル特性を示す図である。
【図38】透視度T=10における各深度の人肌のスペクトル特性を示す図である。
【図39】水中の物体抽出に有効な波長R1を1070nmとし、抽出可能な透視度と深度の関係、抽出可能な水中の手と水面の反射率の差を調べた結果を示す図である。
【符号の説明】
【0085】
1 領域抽出装置
11、12 LED
13 輝度変調部
14 同期回路
15 撮像部
16 フレームバッファ
17 演算部
18 出力部
171 残像係数算出部
172 反射強度算出部
173 反射率算出部
174 前処理部
175 算出部
176 二値化処理部
177 ラベリング処理部
【特許請求の範囲】
【請求項1】
入力された画像の中から抽出対象に対応する対象領域を抽出する領域抽出装置であって、
第1波長及びこの第1波長とは波長が異なる第2波長の電磁波を対象物に照射して得られる反射波又は透過波について3フレーム以上の画像データを取得する画像取得手段と、
前記画像取得手段が取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出手段と、
前記残像係数に基づき前記第1波長及び第2波長における残像を除去した反射強度又は透過強度を算出する強度算出手段と、
前記第1波長及び前記第2波長の前記反射強度又は透過強度に基づき背景から前記抽出対象を抽出する抽出指標を算出する指標算出手段とを有する領域抽出装置。
【請求項2】
前記指標算出手段は、前記第1波長及び第2波長の前記反射強度又は透過強度に基づき反射率又は透過率を算出し、当該反射率又は透過率に基づき前記抽出指標を算出する
ことを特徴とする請求項1記載の領域抽出装置。
【請求項3】
前記指標算出手段は、前記第1波長及び第2波長の前記反射率又は透過率の差分を正規化して前記抽出指標を算出する
ことを特徴とする請求項2記載の領域抽出装置。
【請求項4】
前記残像係数算出手段は、注目画素の残像係数をk(i)、注目画素iの時刻tにおける現在フレームの反射強度又は透過強度をIt(i)、注目画素iの時刻t−1における前フレームからの残像を含む、前記画像取得手段が取得する受光強度又は透過強度をxt(i)としたとき、xt(i)=k(i)xt−1(i)+It(i)として残像係数を求める
ことを特徴とする請求項1乃至3のいずれか1項記載の領域抽出装置。
【請求項5】
前記画像取得手段は、時間間隔Δtで照射強度を変化させた3フレーム以上の画像データを取得し、
前記強度算出手段は、時刻tにおける画素値をx(t)、残像係数θ(0<θ<1)としたとき、
第1の波長における反射強度又は透過強度を
【数1】
第2の波長における反射強度又は透過強度を
【数2】
として前記反射強度又は透過強度を算出する
ことを特徴とする請求項1乃至3のいずれか1項記載の領域抽出装置。
【請求項6】
前記画像取得手段は、時間間隔Δtで照射強度を変化させた3フレーム以上の画像データを取得し、
前記残像係数算出手段は、時刻tにおける反射強度又は透過強度をI(t)、残像係数を表す関数をk(t)、残像を含む、前記画像撮像手段が取得する受光強度をx(t)としたとき、
【数3】
として残像係数θ=k(Δt/2)を算出する
ことを特徴とする請求項1、2、3又は5記載の領域抽出装置。
【請求項7】
前記第1波長及び第2波長の光を照射する照射手段と、
前記照射手段の輝度を変調する輝度変調手段とを更に有する
ことを特徴とする請求項1乃至6のいずれか1項記載の領域抽出装置。
【請求項8】
前記強度算出手段は、前記輝度変調手段により輝度が変調された前記第1波長及び第2波長の反射光又は透過光の画像データに基づき前記反射強度又は透過強度を算出する
ことを特徴とする請求項7項記載の領域抽出装置。
【請求項9】
第1波長における反射率又は透過率をR1、第2波長における反射率又は透過率をR2としたとき、前記指標算出手段は、抽出指標=(R1−R2)/(R1+R2)を求める
ことを特徴とする請求項1乃至8のいずれか1項記載の物体抽出装置。
【請求項10】
前記抽出指標を閾値処理により二値化した画像を出力する出力手段を更に有する
ことを特徴とする請求項1乃至9のいずれか1項記載の領域抽出装置。
【請求項11】
前記抽出対象は、人間の肌である
ことを特徴とする請求項1乃至10のいずれか1項記載の領域抽出装置。
【請求項12】
前記電磁波は、レーザ光又は発光ダイオード光である
ことを特徴とする請求項1乃至11のいずれか1項記載の領域抽出装置。
【請求項13】
入力された画像の中から抽出対象に対応する対象領域を抽出する領域抽出方法であって、
第1波長及びこの第1波長とは波長が異なる第2波長の電磁波を対象物に照射して得られる反射波又は透過波について3フレーム以上の画像データを取得する画像取得工程と、
前記画像取得工程にて取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出工程と、
前記残像係数に基づき前記第1波長及び第2波長における残像を除去した反射強度又は透過強度を算出する強度算出工程と、
前記第1波長及び前記第2波長の前記反射強度又は透過強度に基づき背景から前記抽出対象を抽出する抽出指標を算出する指標算出工程とを有する領域抽出方法。
【請求項14】
前記指標算出工程では、前記第1波長及び第2波長の前記反射強度又は透過強度に基づき反射率又は透過率を算出し、当該反射率に基づき前記抽出指標を算出する
ことを特徴とする請求項13記載の領域抽出方法。
【請求項15】
前記指標算出工程では、前記第1波長及び第2波長の前記反射率又は透過率の差分を正規化して前記抽出指標を算出する
ことを特徴とする請求項14記載の領域抽出方法。
【請求項16】
前記残像係数算出工程では、注目画素の残像係数をk(i)、注目画素iの時刻tにおける現在フレームの反射強度又は透過強度をIt(i)、注目画素iの時刻t−1における前フレームからの残像を含む、前記画像取得工程にて取得する受光強度をxt(i)としたとき、xt(i)=k(i)xt−1(i)+It(i)として残像係数を求める
ことを特徴とする請求項13乃至15のいずれか1項記載の領域抽出方法。
【請求項17】
前記画像取得工程では、時間間隔Δtで照射強度を変化させた3フレーム以上の画像データを取得し、
前記強度算出工程では、時刻tにおける画素値をx(t)、残像係数θ(0<θ<1)としたとき、
第1の波長における反射強度又は透過強度を
【数4】
第2の波長における反射強度又は透過強度を
【数5】
として前記反射強度又は透過強度を算出する
ことを特徴とする請求項13乃至15のいずれか1項記載の領域抽出方法。
【請求項1】
入力された画像の中から抽出対象に対応する対象領域を抽出する領域抽出装置であって、
第1波長及びこの第1波長とは波長が異なる第2波長の電磁波を対象物に照射して得られる反射波又は透過波について3フレーム以上の画像データを取得する画像取得手段と、
前記画像取得手段が取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出手段と、
前記残像係数に基づき前記第1波長及び第2波長における残像を除去した反射強度又は透過強度を算出する強度算出手段と、
前記第1波長及び前記第2波長の前記反射強度又は透過強度に基づき背景から前記抽出対象を抽出する抽出指標を算出する指標算出手段とを有する領域抽出装置。
【請求項2】
前記指標算出手段は、前記第1波長及び第2波長の前記反射強度又は透過強度に基づき反射率又は透過率を算出し、当該反射率又は透過率に基づき前記抽出指標を算出する
ことを特徴とする請求項1記載の領域抽出装置。
【請求項3】
前記指標算出手段は、前記第1波長及び第2波長の前記反射率又は透過率の差分を正規化して前記抽出指標を算出する
ことを特徴とする請求項2記載の領域抽出装置。
【請求項4】
前記残像係数算出手段は、注目画素の残像係数をk(i)、注目画素iの時刻tにおける現在フレームの反射強度又は透過強度をIt(i)、注目画素iの時刻t−1における前フレームからの残像を含む、前記画像取得手段が取得する受光強度又は透過強度をxt(i)としたとき、xt(i)=k(i)xt−1(i)+It(i)として残像係数を求める
ことを特徴とする請求項1乃至3のいずれか1項記載の領域抽出装置。
【請求項5】
前記画像取得手段は、時間間隔Δtで照射強度を変化させた3フレーム以上の画像データを取得し、
前記強度算出手段は、時刻tにおける画素値をx(t)、残像係数θ(0<θ<1)としたとき、
第1の波長における反射強度又は透過強度を
【数1】
第2の波長における反射強度又は透過強度を
【数2】
として前記反射強度又は透過強度を算出する
ことを特徴とする請求項1乃至3のいずれか1項記載の領域抽出装置。
【請求項6】
前記画像取得手段は、時間間隔Δtで照射強度を変化させた3フレーム以上の画像データを取得し、
前記残像係数算出手段は、時刻tにおける反射強度又は透過強度をI(t)、残像係数を表す関数をk(t)、残像を含む、前記画像撮像手段が取得する受光強度をx(t)としたとき、
【数3】
として残像係数θ=k(Δt/2)を算出する
ことを特徴とする請求項1、2、3又は5記載の領域抽出装置。
【請求項7】
前記第1波長及び第2波長の光を照射する照射手段と、
前記照射手段の輝度を変調する輝度変調手段とを更に有する
ことを特徴とする請求項1乃至6のいずれか1項記載の領域抽出装置。
【請求項8】
前記強度算出手段は、前記輝度変調手段により輝度が変調された前記第1波長及び第2波長の反射光又は透過光の画像データに基づき前記反射強度又は透過強度を算出する
ことを特徴とする請求項7項記載の領域抽出装置。
【請求項9】
第1波長における反射率又は透過率をR1、第2波長における反射率又は透過率をR2としたとき、前記指標算出手段は、抽出指標=(R1−R2)/(R1+R2)を求める
ことを特徴とする請求項1乃至8のいずれか1項記載の物体抽出装置。
【請求項10】
前記抽出指標を閾値処理により二値化した画像を出力する出力手段を更に有する
ことを特徴とする請求項1乃至9のいずれか1項記載の領域抽出装置。
【請求項11】
前記抽出対象は、人間の肌である
ことを特徴とする請求項1乃至10のいずれか1項記載の領域抽出装置。
【請求項12】
前記電磁波は、レーザ光又は発光ダイオード光である
ことを特徴とする請求項1乃至11のいずれか1項記載の領域抽出装置。
【請求項13】
入力された画像の中から抽出対象に対応する対象領域を抽出する領域抽出方法であって、
第1波長及びこの第1波長とは波長が異なる第2波長の電磁波を対象物に照射して得られる反射波又は透過波について3フレーム以上の画像データを取得する画像取得工程と、
前記画像取得工程にて取得した各フレーム間の画像データの演算に基づき残像係数を算出する残像係数算出工程と、
前記残像係数に基づき前記第1波長及び第2波長における残像を除去した反射強度又は透過強度を算出する強度算出工程と、
前記第1波長及び前記第2波長の前記反射強度又は透過強度に基づき背景から前記抽出対象を抽出する抽出指標を算出する指標算出工程とを有する領域抽出方法。
【請求項14】
前記指標算出工程では、前記第1波長及び第2波長の前記反射強度又は透過強度に基づき反射率又は透過率を算出し、当該反射率に基づき前記抽出指標を算出する
ことを特徴とする請求項13記載の領域抽出方法。
【請求項15】
前記指標算出工程では、前記第1波長及び第2波長の前記反射率又は透過率の差分を正規化して前記抽出指標を算出する
ことを特徴とする請求項14記載の領域抽出方法。
【請求項16】
前記残像係数算出工程では、注目画素の残像係数をk(i)、注目画素iの時刻tにおける現在フレームの反射強度又は透過強度をIt(i)、注目画素iの時刻t−1における前フレームからの残像を含む、前記画像取得工程にて取得する受光強度をxt(i)としたとき、xt(i)=k(i)xt−1(i)+It(i)として残像係数を求める
ことを特徴とする請求項13乃至15のいずれか1項記載の領域抽出方法。
【請求項17】
前記画像取得工程では、時間間隔Δtで照射強度を変化させた3フレーム以上の画像データを取得し、
前記強度算出工程では、時刻tにおける画素値をx(t)、残像係数θ(0<θ<1)としたとき、
第1の波長における反射強度又は透過強度を
【数4】
第2の波長における反射強度又は透過強度を
【数5】
として前記反射強度又は透過強度を算出する
ことを特徴とする請求項13乃至15のいずれか1項記載の領域抽出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図11】
【図7】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図21】

【図22】
【図23】
【図24】
【図25】
【図26】

【図27】
【図28】

【図29】
【図30】

【図31】
【図32】
【図33】

【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図11】
【図7】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【公開番号】特開2008−275477(P2008−275477A)
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願番号】特願2007−120072(P2007−120072)
【出願日】平成19年4月27日(2007.4.27)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成19年3月 文部科学省 研究開発局 独立行政法人 防災科学技術研究所の「大都市大震災軽減化特別プロジェクト 平成18年度 成果報告書」に発表
【国等の委託研究の成果に係る記載事項】(出願人による申告)「国等の委託研究の成果に係る特許出願(平成18年度、文部科学省、大都市大震災軽減化特別プロジェクト「変化域抽出精度の向上と大規模処理の高速化の研究」にかかる委託研究、産業活力再生特別措置法第30条の適用を受けるもの)」
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願日】平成19年4月27日(2007.4.27)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成19年3月 文部科学省 研究開発局 独立行政法人 防災科学技術研究所の「大都市大震災軽減化特別プロジェクト 平成18年度 成果報告書」に発表
【国等の委託研究の成果に係る記載事項】(出願人による申告)「国等の委託研究の成果に係る特許出願(平成18年度、文部科学省、大都市大震災軽減化特別プロジェクト「変化域抽出精度の向上と大規模処理の高速化の研究」にかかる委託研究、産業活力再生特別措置法第30条の適用を受けるもの)」
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]