
顔形状提示装置
【課題】 様々な人の三次元顔形状を1つの装置により提示できる顔形状提示装置を実現する。
【解決手段】 弾性変形可能な素材で平均顔のお面31を作成する。この平均顔のお面31の駆動点(例えば19箇所)の位置を、特徴点駆動ユニット32で三次元(又は二次元)に移動させ、お面を弾性変形させる。お面を弾性変形させることによって、様々な人の三次元顔形状を1つの装置により提示できる。また、映像投影機40によって、顔データに対応する顔の画像を、平均顔のお面31へ投射する。
【解決手段】 弾性変形可能な素材で平均顔のお面31を作成する。この平均顔のお面31の駆動点(例えば19箇所)の位置を、特徴点駆動ユニット32で三次元(又は二次元)に移動させ、お面を弾性変形させる。お面を弾性変形させることによって、様々な人の三次元顔形状を1つの装置により提示できる。また、映像投影機40によって、顔データに対応する顔の画像を、平均顔のお面31へ投射する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は顔形状提示装置に関し、特に任意の個人の顔形状を提示する三次元顔形状提示装置に関する。
【背景技術】
【0002】
従来の、人間の顔を提示する顔型ロボットは、東京理科大学の小林研究室の受付ロボットSAYA(非特許文献1)、早稲田大学の高西研究室のWE−4RII(非特許文献2)など、特定の個人の顔の表情を提示するというものがある。また、軟素材を用いた装置により表情を提示するものとして、表情変化装置がある(特許文献1参照)。
これらに共通して言えることは、Aさんの表情という特定の個人の表情ついては変化させ提示することが可能でも、Aさんの顔、Bさんの顔、Cさんの顔といったように、複数の個人の顔形状を提示はできない。一般に、顔の形状と表情との関係は、次のようになる。すなわち、Aさんの無表情の顔、Bさんの無表情の顔、Cさんの無表情の顔…という概念が「顔の形状」である。これに対し、Aさんの笑った顔、Aさんの怒った顔、Aさんの驚いた顔などという概念が「顔の表情」である。このように、様々な任意の個人の三次元顔形状を提示可能な顔ロボットは現状存在しない。
【0003】
ところで、様々な任意の個人の顔の形状を提示するのみであれば、粘土などの材料で作ることも考えられる。しかしながら、粘土を用いて作る場合、ある顔形状を作って、次の顔形状を作るまでにある程度時間が必要となる。また、顔形状を粘土で作成するのは、一般的に高度な技を必要とする。
【特許文献1】特開平8−107983号公報
【非特許文献1】H. Kobayashi、 Y. Ichikawa、 M. Senda、 and T. Shiiba: “"Realization of Realistic and Rich Facial Expressions by Face Robot”、Proceedings of the 2003 IEEE International Conference on Intelligent Robots and Systems Oct.27-31 Las Vegas、 Nevada、 USA、 pp.1123-1128、(2003-10)
【非特許文献2】Hiroyasu Miwa、 Kazuko Itoh、 Munemichi Matsumoto、 Massimiliano Zecca、 Hideaki Takanobu、 Stefano Roccella、 Maria Chiara Carrozza、 Paolo Dario、 Atsuo Takanishi:" Effective Emotional Expressions with Emotion Expression Humanoid Robot WE-4RII"Proceedings of the 2004 IEEE/RSJ Intl.Conference on Intelligent Robot and Systems
【発明の開示】
【発明が解決しようとする課題】
【0004】
人間の顔を提示する顔型ロボットにおいて、特定の個人の顔の表情を提示するものは存在しているが、任意の個人の顔形状を1つのロボットで提示できるものは存在していない。現在、遠隔地の通信で、相手の顔が見えるテレビ電話やテレビ会議システムが存在するが、画像は平面であり、リアリティに欠ける。
また、パーソナルロボットの顔について、顔形状を変えることはできないため、使用者の気に入らない顔形状でも顔形状を変更できないという問題があった。また、粘土などで色々な人の顔を提示するのは、技術的にも難しく、作成に時間がかかるという問題があった。また、美容整形など、顔の手術を行うようなとき、術後の顔形状を三次元で確認することができないという課題がある。
本発明は上述した従来技術の問題点を解決するためになされたものであり、その目的は様々な人の三次元顔形状を1つの装置により提示できる顔形状提示装置を提供することである。
【課題を解決するための手段】
【0005】
本発明の請求項1による顔形状提示装置は、弾性変形可能な、顔形状のマスクと、外部から入力される顔データに応じて、前記マスクを弾性変形させるアクチュエータとを含み、任意な顔の形状を提示することを特徴とする。このように構成すれば、様々な人の三次元顔形状を1つの装置により提示できる。
本発明の請求項2による顔形状提示装置は、請求項1において、前記アクチュエータは、前記マスクに接触し該接触部分に力を加えるN個(Nは自然数、以下同じ)の接触部と、前記N個の接触部に対応して設けられ、対応する接触部の位置を、前記顔データに応じて変化させる位置制御部とを含むことを特徴とする。このように構成すれば、マスクを自在に弾性変形させることができ、任意な顔の形状を提示できる。
【0006】
本発明の請求項3による顔形状提示装置は、請求項1又は2において、前記顔データに対応する顔の映像を、前記マスクに投影する投影手段を更に含むことを特徴とする。このように構成すれば、顔の形状をよりリアルに提示できる。
本発明の請求項4による顔形状提示装置は、請求項1から請求項3までのいずれか1項において、外部から入力される信号に応じた音声を出力する音声出力手段と、入力される音声に対応する信号を導出する音声入力手段と、の少なくとも一方を更に含むことを特徴とする。このように構成すれば、顔形状が提示可能な顔電話を実現でき、よりリアルで存在感を伝えることができる。
【発明の効果】
【0007】
以上説明したように本発明は、様々な人の三次元顔形状を1つの装置により提示できるという効果が得られる。任意の三次元顔形状を作り出せるため、誰の顔形状でも提示可能であり、リアリティのある遠隔通信を実現できる。そして、顔形状が提示可能な顔電話に利用することで、テレビ電話以上によりリアルで存在感を伝える遠隔コミュニケーションを実現できるという効果が得られる。また、顔形状の三次元シミュレータとして、術後の顔形状を三次元的に事前に確認できるという効果が得られる。
【発明を実施するための最良の形態】
【0008】
ここでは、任意の個人の三次元顔形状を提示する手法について説明する。1つの装置で、複数の顔形状を提示するために、平均顔のお面(すなわちマスク)を初期形状とし、顔の特徴点などを駆動点として提示したい人の顔形状にする。
平均顔とは、提示したい顔グループの形状を平均化したものである。例えば、日本人全体の顔形状を平均したものや世界中の人の顔形状を平均したもの、ネグロイド、モンゴロイド、オーストラロイド、コーカソイド、アメリンドなど人種の顔形状を平均したもの、テレビ番組や映画などに登場するヒーローやヒロインなどのキャラクターの顔形状を平均したもの、犬、猫などの動物の顔形状を平均化したものなどが考えられる。
【0009】
平均顔のお面を初期形状とすることで、一つ一つの駆動点の可動範囲を小さくすることができる。顔の画像については、各個人を提示した顔形状に対して、外からプロジェクターで投影する方法や、平均顔を作るお面自体がフレキシブルな映像ディスプレイである方法が考えられる。
また、任意の顔形状を粘土で作ると、その作成に時間がかかるという問題がある。これに対し、本例では、平均顔のお面を柔軟な素材で形成し、その特徴点をモータや人工筋肉などのアクチュエータでコントロールしているので、瞬時に色々な顔を提示できる。
以下、本発明の実施例について、図面を参照して説明する。なお、以下の説明において参照する各図では、他の図と同等部分は同一符号によって示されている。
【実施例1】
【0010】
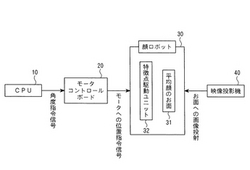
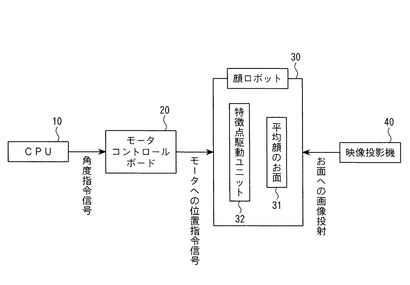
ここで、実施例1による顔形状提示装置の構成例が図1に示されている。同図に示されているように、本例の顔形状提示装置は、パーソナルコンピュータ(以下、PCと略称する)等に設けられているCPU(Central Processing Unit)10と、モータコントロールボード20と、顔ロボット30と、映像投影機40とを含んで構成されている。
【0011】
顔ロボット30は、平均顔のお面31と、お面の特徴点の位置を変化させるための特徴点駆動ユニット32とを含んで構成されている。特徴点駆動ユニット32は、後述するように複数のモータを含んで構成されたアクチュエータとしての機能を有している。そして、モータコントロールボード20から入力される位置指令信号に応じて、特徴点駆動ユニット32は平均顔のお面31の特徴点に力を加え、弾性変形させる。モータコントロールボード20は、CPU10から入力される角度指令信号に応じて、位置指令信号を出力する機能を有している。つまり、外部から入力される顔データに応じて、お面31を弾性変形させる。
【0012】
映像投影機40は、顔データに対応する顔の画像を、平均顔のお面へ投射する機能を有している。
平均顔のお面31には、後述するように、特徴点に対応する複数の駆動点がある。そして、各駆動点に対応して駆動ユニットが設けられ、対応する駆動点を駆動する。この駆動ユニットが複数集合したものが、特徴点駆動ユニット32である。
【0013】
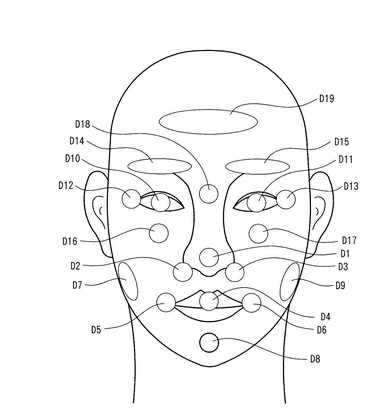
本例での各駆動点は、棒状部材の先端部分であり、この先端部分が、平均顔のお面の裏面に接着されている。そして、お面の形状を任意の個人の顔形状にするために、各駆動点の位置を制御する。駆動点の位置を制御することで、特徴点を駆動し、顔の形状を変化させる。お面の駆動点の配置を示す図2を参照すると、同図には19箇所の駆動点が示されている。そして、各駆動点すなわちお面裏面への、棒状部材の接触部に力を加えることによってその接触部の位置を変化させ、お面を弾性変形させる。お面を弾性変形させることによって、様々な人の三次元顔形状を1つの装置により提示できる。
【0014】
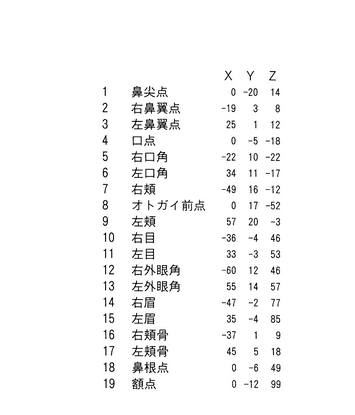
駆動点は、同図に示されているように、左右対称に配置されており、正中線上に5点、左右に7点ずつの14点、計19点である。これらの駆動点は、一例に過ぎず、人間が顔形状の認識を行う際の特徴点などを参考にして決定すると良い。
同図に示されている駆動点は、鼻尖点D1、右鼻翼点D2、左鼻翼点D3、口点D4、右口角D5、左口角D6、右頬D7、オトガイ前点D8、左頬D9、右目D10、左目D11、右外眼角D12、左外眼角D13、右眉D14、左眉D15、右頬骨D16、左頬骨D17、鼻根点D18、額点D19である。駆動点先端部に押し出し部材を取り付けた状態が図3に示されている。同図に示されているように、図2に示されている各駆動点に対応する位置に、押し出し部材がそれぞれ設けられている。
【0015】
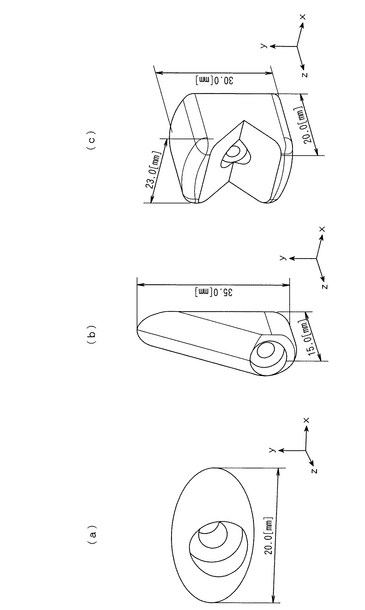
図3に示されているように、各駆動点の先端部分は、各駆動点によって、形状が異なっていても良い。例えば、目部分の駆動点の先端部分形状は、図4(a)に示すように眼球形状に倣って、半球状などになっていたり、鼻部分の駆動点の先端部分形状は図4(b)に示すようになっていたり、図4(c)に示すように口唇部の先端部分形状は上下の唇を同時に押し出せるような形状になっていたりしても良い。なお、同図(a)に示されている眼球部の最大幅は20.0[mm]である。同図(b)に示されている鼻部の長さは35.0[mm]、その高さは15.0[mm]である。同図(c)に示されている口唇部の左右幅は23.0[mm]、上下幅は30.0[mm]、奥行は20.0[mm]である。
駆動点の数については、19個に限定されるものではない。より精密な顔形状を提示しようとすれば、駆動点の数を多くする必要がある。一方、精密さが要求されなかったり、提示する顔形状の種類が少なかったりすれば、駆動点の数は少なくて良い。
【0016】
(平均顔のお面)
平均顔のお面は、例えば、次のような方法で作成する。すなわち、三次元光造型機で平均顔を成形し、それを石膏で型を取り、耐久性に優れたゴムであるセプトン(クラレ社製の高性能熱可塑性エラストマー)などで平均顔のお面を成形する。セプトンの厚さに関しては、10mm前後で成形すると良い。厚みを部位ごとに変えることも考えられる。
なお、本例では、各駆動点に、X−Y−Z方向の3自由度、またはY−Z方向の2自由度を持たせる。X−Y−Z方向の3自由度を持つ駆動ユニットは、人間の顔サイズに複数配置するため、ある程度小型である必要がある。
【0017】
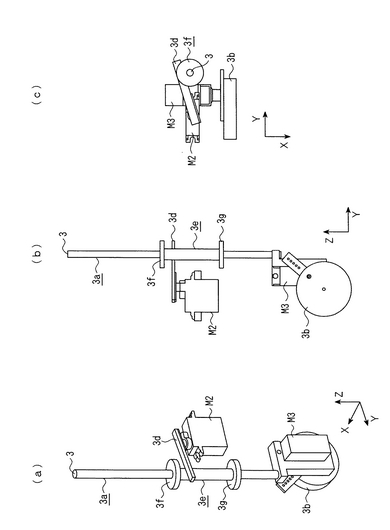
(3自由度の駆動ユニット)
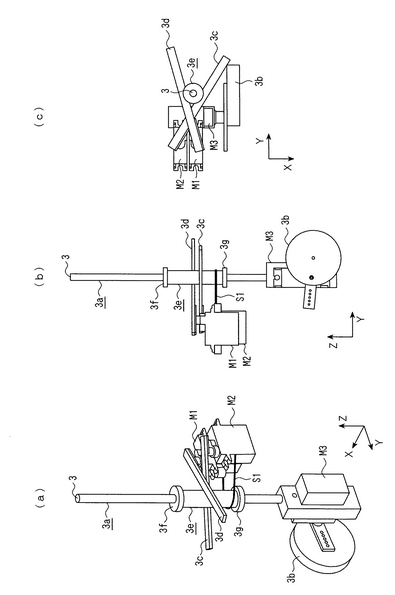
3自由度の駆動ユニットの一構成例が、図5に示されている。同図(a)は3自由度の駆動ユニットの構成を示す斜視図、同図(b)は同図(a)をX軸方向からみた図、同図(c)は同図(a)をZ軸方向からみた図である。これらの図を参照すると、駆動ユニットには、先端部が駆動点3となる棒状部材3aと、棒状部材3aの根元部に取り付けられているモータM3と、モータM3の回転軸が接続されているZ方向駆動用カム3bと、棒状部材3aによって中空部が貫かれている円筒部材3eと、円筒部材3eの中間部に当接して駆動点3の位置をX方向及びY方向に移動させるためのガイド3c及び3dと、ガイド3c、3dの端部に回転軸を介して接続されているモータM1、M2と、棒状部材3aの中間部をモータM1及びM2の方向に引っ張るバネS1とを含んで構成されている。
【0018】
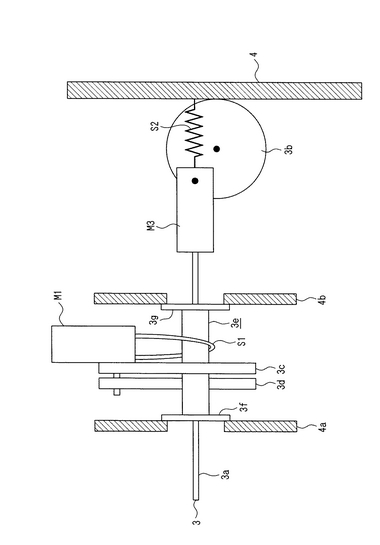
ここで、駆動ユニットは、「X−Y方向駆動ユニット」と「Z方向駆動ユニット」の大きく2つの部分に分けられる。X−Y方向駆動ユニットは、円筒部材3eと、駆動点3のX座標及びY座標の位置を制御するための2つのモータM1及びM2と、X−Y方向のガイド3c及び3dとから構成される。一方、Z方向駆動ユニットは、駆動点のZ座標の位置を制御するための1つのモータM3と、Z方向駆動用カム3bとから構成される。なお、図6に示されているように、円筒部材3eの端部3fは支持板4aと接した状態で摺動でき、端部3gは支持板4bと接した状態で摺動できるようになっている。
【0019】
(X−Y方向駆動ユニット)
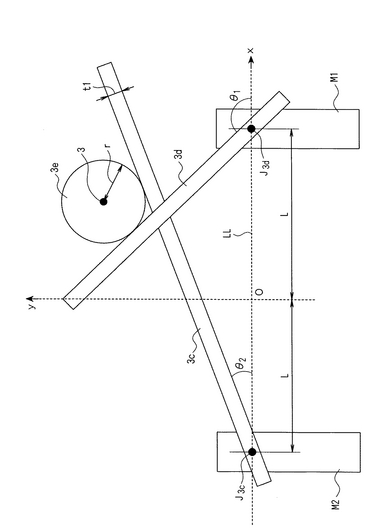
図5に戻り、X−Y方向駆動ユニットにおいては、バネS1によって、棒状部材3aの中間部がモータM1及びM2の方向に常に引っ張られている。このため、図7に示されているように、ガイド3cの回動軸J3cとガイド3dの回動軸J3dとを結んだ直線LLとガイド3cとのなす角度θ2(すなわちモータM2の回動角度)、直線LLとガイド3dとのなす角度θ1(すなわちモータM1の回動角度)を変化させれば、棒状部材3aの先端部すなわち駆動点3の位置がX方向又はY方向に変化することになる。なお、本例では、ガイド3c及び3dと接する、円筒部材3eの中間部の半径はr、ガイド3c及び3dの厚みはt1、直線LLの中点Oまでの長さはLである。
【0020】
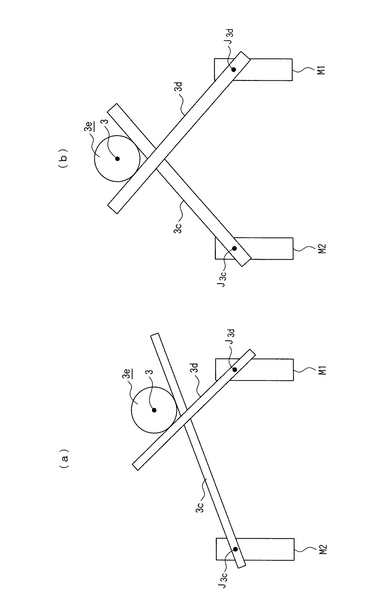
以上のように構成されたX−Y方向駆動ユニットの動作の様子が図8に示されている。図7に示されている状態に対応する図8(a)の状態において、上記角度θ2(すなわちモータM2の回動角度)を増加させるようにモータM2を駆動し、かつ、上記角度θ1(すなわちモータM1の回動角度)を減少させるようにモータM1を駆動すれば、図8(b)に示されている状態になる。同図(b)に示されている状態は、同図(a)に示されている状態からX方向及びY方向が変化した状態である。
【0021】
(Z方向駆動ユニット)
図6に示されているように、Z方向駆動ユニットの構成要素であるモータM3には、引っ張りバネS2の一端が接続され、引っ張りバネS2の他端は支持板4に固定されている。このため、モータM3に接続されている棒状部材3aは、引っ張りバネS2により、支持板4の方向に引っ張られている。このため、Z方向駆動用カム3bは支持板4に接した状態になっている。
【0022】
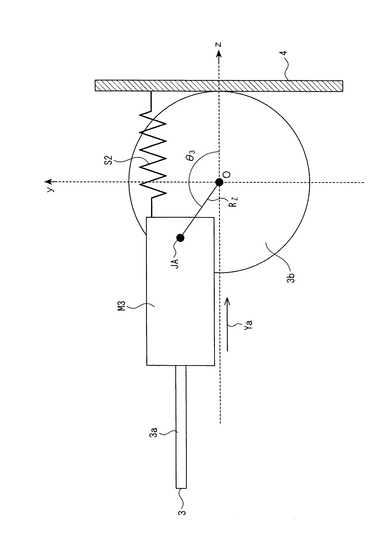
このような接続関係を模式的に示した図が図9である。同図において、モータM3の回転軸JAが図中時計回りに回転すれば、Z方向駆動用カム3bの回転軸Oと回転軸JAとを結ぶ直線RzとZ軸とのなす角度θ3が減少し、棒状部材3aは矢印Ya方向に移動する。これにより、駆動点3は矢印Ya方向に移動する。
一方、モータM3の回転軸JAが図中反時計回りに回転すれば、直線RzとZ軸とのなす角度θ3が増加し、棒状部材3aは矢印Ya方向の逆の方向に移動する。これにより、駆動点3は矢印Ya方向の方向に移動する。このように、モータM3の回転方向に応じて、駆動点3をZ方向に駆動することができる。
以上のように特徴点駆動ユニットを構成した場合、各モータの角度指令値をθ1、θ2、θ3とした場合、駆動点3の座標(X、Y、Z)は以下の式で表される。
【0023】
【数1】

【0024】
なお、3自由度の駆動ユニットについては、小型でX−Y−Zの3自由度を持っていれば、図5に示されている構成に限定されるものではない。
(駆動ユニット全体の構成)
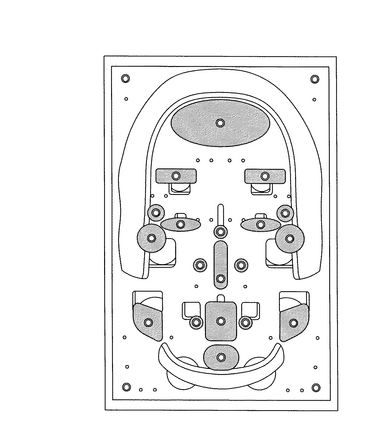
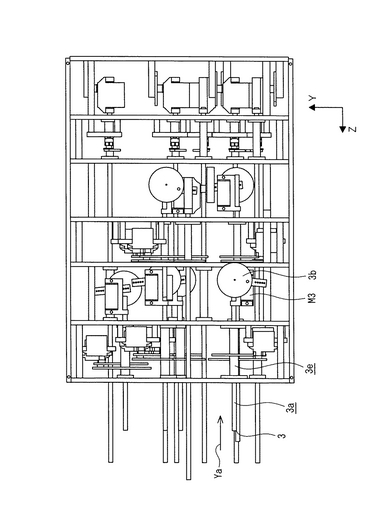
図10は、上述した3自由度の駆動ユニットの全体構成を示す斜視図である。同図に示されているように、図2のように配置される19箇所の駆動点それぞれに対応して3自由度の駆動ユニットが設けられ、各駆動ユニットは複数の支持板4、4a〜4fによって支持されている。
【0025】
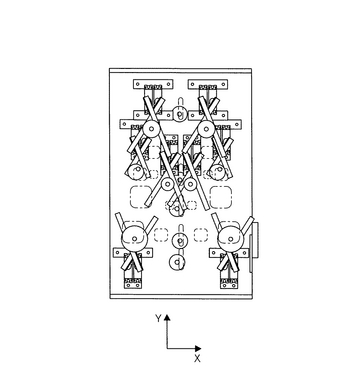
図11は図10に示されている駆動ユニットをZ軸方向から見た状態を示す図、図12は同じくX軸方向から見た状態を示す図である。これらの図に示されている各円筒部材3eは、2枚の支持板の間に挟まれた状態でX方向及びY方向に摺動できるようになっている。また、モータM3及びZ方向駆動用カム3bにより、棒状部材3aがZ軸方向に移動することにより、各駆動点3が矢印Ya又はその逆方向に移動することになる。このように、特徴点駆動ユニットを構成すれば、お面を弾性変形させ、様々な人の三次元顔形状を1つの装置により提示できる。
【0026】
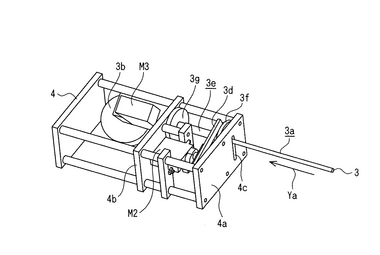
(2自由度の駆動ユニット)
また、Y−Z方向の2自由度を持つ駆動ユニットの一構成例が、図13に示されている。同図(a)は2自由度の駆動ユニットの構成を示す斜視図、同図(b)は同図(a)をX軸方向からみた図、同図(c)は同図(a)をZ軸方向からみた図である。これらの図を参照すると、2自由度の駆動ユニットの基本的な構造は、3自由度の駆動ユニットと同様である。すなわち、駆動ユニットには、先端部が駆動点3となる棒状部材3aと、棒状部材3aの根元部に取り付けられているモータM3と、モータM3の回転軸が接続されているZ方向駆動用カム3bと、棒状部材3aによって中空部が貫かれている円筒部材3eと、円筒部材3eの中間部に当接して駆動点3の位置をY方向に移動させるためのガイド3dと、ガイド3dの端部に回転軸を介して接続されているモータM2とを含んで構成されている。
【0027】
このような構成からなる2自由度の駆動ユニットは、図14に示されているように、支持板4、4a及び4bによって支持される。そして、棒状部材3aは、支持板4aに設けられている長孔4cに沿ってY方向に移動する他、矢印Ya又はその逆方向に移動する。このような構成の駆動ユニットは、X方向の駆動が必要ないため、モータの数が3自由度の駆動ユニットより1つ少ない2つで済む。駆動点3の位置については、3自由度の場合について説明した上記の式(1)において角度θ2を固定した式で表すことができる。
【0028】
(動作)
図1に戻り、各駆動点への駆動指令は、PC等に設けられているCPU10から与える。提示したい顔形状を提示するための駆動点の位置指令値をPC等から入力し、各モータの角度指令値として出力することにより、各モータM1〜M3を制御する。
ところで、平均顔のお面については、ゴムなどの柔らかい素材を用いて成形する場合と、素材自身が発光し、映像を映すことが可能な素材で成形する場合などが考えられる。前者の場合、顔形状を提示したお面の前方からプロジェクターなどの投影機を用いて映像を重ね合わせる方法や、口唇部や眼球部、眉毛、鼻孔などをゴム表面に直接、絵を描く方法などが考えられる。
【0029】
一方、後者の場合、素材自身が発光し、湾曲面を成形可能であれば、投影機が必要なくなる。映像を重ね合わせる際、通常のカメラにて撮影した画像をそのまま投影機や湾曲面を生成可能なディスプレイにて出力すると、顔形状が平面ではないため、画像が歪んでしまう。通常のカメラで撮影された映像は、平面に投影することを想定しているため、歪みの補正が必要となる。
【0030】
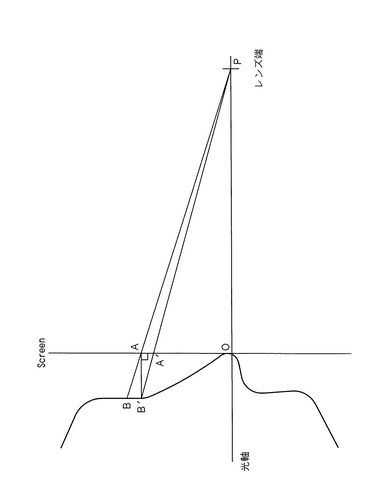
この歪みの補正方法について、図15を参照して説明する。顔ロボットの前方に投影機があり、投影機のレンズ端中心P、顔ロボットのお面の鼻尖点O、仮想平面スクリーン(Screen)が同図のような状態になっているとする。投影機のレンズ端中心Pからスクリーン上の点Aを通過する光は顔ロボットのお面の点Bに投射される。
【0031】
ここで、観察者が顔ロボットの真正面にいると仮定すると、点Aに投射される映像は、点Aを通りスクリーンに対して垂直な直線状に存在すれば、観察者から自然な形の映像として見える。よって、点Aからスクリーンに対して垂直な線を引き、顔ロボットのお面との交点B’に投射されれば自然な形の映像となるはずである。また、点B’に投射される映像は、スクリーン上の点A’に投射される。つまり、点Aの映像を点A’へ写像すれば、自然な形の映像を映し出せる。
【0032】
同図中の直線OAと直線OA’との関係は、
OA=OA’×(OP+AB’)/OP …(2)
で表される。これを画像全領域に対して繰り返せば、三次元顔形状のお面への画像の補正を行うことができる。画像の補正を正確に行うためには、提示したい顔の三次元形状を三次元形状計測装置などで計測する必要がある。提示したい顔を楕円などで近似することも考えられる。
以上のような機構を採用すれば、様々な人の顔を提示可能な顔ロボットを実現できる。
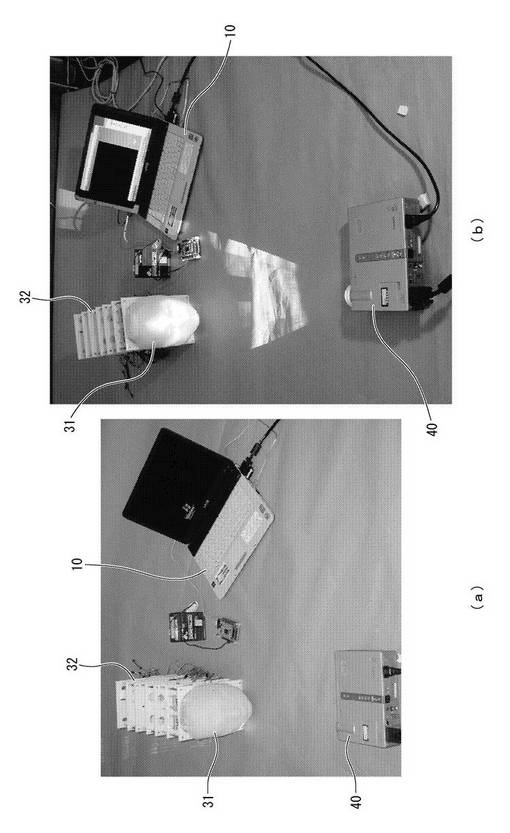
ここで、顔ロボットに映像を投影する前後の状態が図16に示されている。同図(a)は画像投影前の状態を示す図、同図(b)は画像投射後の状態を示す図である。
【0033】
以上のように、外部から入力される顔データに応じて、お面を弾性変形させることにより、任意の個人の三次元顔形状を提示することができる。このように、三次元顔形状を提示するアプリケーションとしては、顔の三次元形状を提示可能な「顔電話」や、美容整形時の「三次元顔形状シミュレータ」などが考えられる。顔電話では、通話相手の顔形状が提示されることでよりリアルなコミュニケーションが可能となる。三次元顔形状シミュレータでは、美容整形手術などにおいて、術後の顔を事前に三次元で確かめられるという効果がある。
【実施例2】
【0034】
次に、顔形状提示装置の実施例2であるコンテンツ再生システムについて説明する。このコンテンツ再生システムは、インターネットなどを通じて、仮想のキャラクターや実在する人物の顔形状データと、顔画像データとをダウンロードして、それをもとに顔形状を提示するシステムである。
まず、実在する人の顔形状を提示する場合、実在する人の顔形状を計測する必要がある。顔形状の計測については、提示したい人の顔をキャプチャ装置で計測する方法が考えられる。その場合、提示したい人の顔に計測点を配置することになる。その計測点は、図2を参照して説明した駆動点と同等の位置に配置する。また、三次元デジタイザで提示したい人の顔を計測し、上記駆動点と同等の位置の三次元座標を計測する方法などが考えられる。なお、計測点間の距離をノギスなどの道具で実測しても良い。
【0035】
計測された計測点のそれぞれのデータは、各駆動点の位置座標にそのまま置き換える。各駆動点の位置データは、図17に示されているようなデータ形式で整理される。すなわち、同図においては、鼻の下の付け根である鼻下点(図2中の右鼻翼点D2と左鼻翼点D3との中点)を原点とし、それぞれの駆動点の3次元位置データが記されている。このように得られた各駆動点の位置データを、各アクチュエータの角度指令値に変換し、これを出力することで提示したい人の顔形状を、顔ロボット上に提示できる。
【0036】
実在しない人の顔形状を提示する場合は、各駆動点の位置データを提示したい顔形状に合わせて作成すれば良い。すなわち、実在する人の場合は、計測によって図17に示すような各駆動点の位置データを得たが、実在しない人の顔形状を提示する場合は、各駆動点の位置データを直接作成することになる。
上記のようにして提示した顔形状に重ね合わせるように、提示したい人の顔の映像を投影機などで投影する。こうすることで、三次元の顔を顔ロボット上に提示できる。なお、投影する映像は、静止画でも動画でも構わない。動画を投影する際、その表情に合わせて各駆動点の位置を制御することも考えられる。
【実施例3】
【0037】
次に、顔形状提示装置の実施例3である顔電話システムについて説明する。この顔電話システムは、電話の代わりとして顔形状提示装置を使用するシステムである。
顔電話システムの場合、テレビ電話のように電話を掛けてきている人の顔の形が本顔ロボットにより提示され、あたかもその人がその場にいるような存在感を出す効果がある。
【0038】
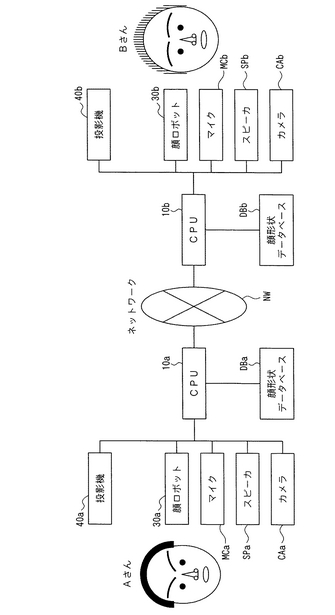
この顔電話システムの構成例が図18に示されている。同図に示されている顔電話システムは、各部を制御するためのCPU10aと、顔形状を提示するための顔ロボット30aと、映像を投影するための映像投影機40aと、音声を収録するためのマイクロフォンMCaと、音声を出力するためのスピーカSPaと、顔形状を撮影するためのカメラCAaと、顔形状に関するデータが記憶されてなる顔形状データベースDBaとがAさん側に設けられている。一方、Bさん側には、各部を制御するためのCPU10bと、顔形状を提示するための顔ロボット30bと、映像を投影するための映像投影機40bと、音声を収録するためのマイクロフォンMCbと、音声を出力するためのスピーカSPbと、顔形状を撮影するためのカメラCAbと、顔形状に関するデータが記憶されてなる顔形状データベースDBbとが設けられている。そして、Aさん側の構成とBさん側の構成とがネットワークNWを介して、相互に通信できるようになっている。
【0039】
このような構成において、AさんとBさんとが顔ロボットを介して遠隔通信を行う場合について説明する。上述した構成により、Aさんの近くにある顔ロボット30aには、Bさんの顔形状が、Bさんの近くにある顔ロボット30bにはAさんの顔形状が、それぞれ提示される。そして、Aさんの近くにある顔ロボット30aに提示されているBさんの顔形状のお面には、Bさんの顔の映像が静止画や動画で映し出される。同様に、Bさんの近くにある顔ロボット30bに提示されているAさんの顔形状のお面には、Aさんの顔の映像が静止画や動画で映し出される。この場合、それぞれの顔映像は、カメラCAa、CAbによって撮影され、その映像が投影機により映し出される。
【0040】
また、音声情報については、以下の通り取り扱われる。すなわち、通常の電話機と同様に、マイクロフォンとスピーカとがAさん側、Bさん側にそれぞれ設けられており、Aさんの声をマイクロフォンMCaで収録し、Bさんの近くにあるスピーカSPbから再生出力する。また、Bさんの声をマイクロフォンMCbで収録し、Aさんの近くにあるスピーカSPaから再生出力する。
【0041】
ところで、顔形状については、予め顔形状を計測しておき、その計測データをデータベースDBa、DBbに蓄えておく方法と、顔形状をカメラCAa、CAbなどでリアルタイムに撮影する方法とが考えられる。データベースとして蓄える場合、それぞれの顔ロボットがデータベースを持っても良いし、ネットワーク上にデータベースがあっても良い。一方、カメラなどでリアルタイムに計測する場合、三次元計測装置を用いて計測しても良いし、2次元のカメラを用いて撮影した映像の陰影などから顔形状を推定し、三次元データとする方法も考えられる。
なお、用途によっては、音声の入力又は出力の一方のみを行う場合も考えられる。その場合には、マイクロフォン及びスピーカの少なくとも一方を設ければ良い。
【実施例4】
【0042】
上述した実施例3の顔電話システムでは、通話相手の顔形状が提示される場合について説明したが、通話相手とは違う顔形状を顔ロボットに提示する場合も考えられる。例えば、AさんとBさんが遠隔通信している場合、Bさんの顔がAさんの近くの顔ロボットに提示されるだけでなく、Bさんではない人の顔を提示しても良い。すなわち、データベースに三次元形状が蓄えられている形状であれば、誰の顔でも提示できる。例えば、全く別のCさんの顔形状や、なんらかのキャラクターや動物の顔形状を提示しても良い。またその際、Bさんの声を顔形状に合わせてCさんの声や、なんらかのキャラクターや動物の声に声質変換を行うことも考えられる。
【0043】
Aさんの近くの顔ロボットに誰の顔を提示するかの決定権は、Aさんにある場合と、通話相手であるBさんにある場合とがある。例えば、Bさんが自分の顔形状を見られたくないような場合、Bさんが顔形状の決定権を持ち、Aさんの近くにある顔ロボットのデフォルトの形状(平均顔の形状)のままで遠隔通信を行うことも考えられる。また、AさんがBさんの顔も見たくないような場合、Aさんが顔形状の決定権を持ち、全く違うキャラクターや動物などの顔を提示する場合もある。
上記のように、Bさんではない顔形状に変えた場合、それぞれの顔に合った映像を重ね合わせることが自然に見えるために必要になる。
【実施例5】
【0044】
上述した実施例3、上述した実施例4のどちらにおいても、提示したい顔形状を誇張したり、逆に加減したりして提示する場合もある。誇張の方法、加減の方法は特定の方法に囚われない。顔の形状だけでなく、同時に投射する映像も形状と同様に誇張、加減することで、自然な顔に見える。
顔の誇張及び加減の方法は、平均顔の特徴点と、提示したい顔の特徴点との距離を増加させたり減少させたりすることで行う。すなわち、図19(a)に示されているように、例えばAさんの鼻尖点の位置をAとし、平均顔の鼻尖点をOとすると、距離OAは平均顔の特徴点OとAさんの特徴点Aとのズレとなる。このため、同図(b)に示されているように、距離OAよりも長い距離OA’を採用すれば、Aさんの特徴点を誇張することになる。一方、同図(c)に示されているように、距離OAよりも短い距離OA’’を採用すれば、Aさんの特徴点を加減することになる。
【産業上の利用可能性】
【0045】
本発明は、リアルで存在感を伝える遠隔コミュニケーションや顔形状の三次元シミュレータとして利用することができる。
【図面の簡単な説明】
【0046】
【図1】顔形状提示装置全体の構成を示すブロック図である。
【図2】駆動点の配置例を示す図である。
【図3】押し出し部材を取り付けた駆動点の配置例を示す図である。
【図4】顔ロボットの押し出し部材の例を示す図であり、(a)は眼球部、(b)は鼻部、(c)は口唇部である。
【図5】X−Y−Zの3自由度駆動ユニットの構成例を示す図である。
【図6】3自由度ユニットのZ方向駆動ユニットの構成例を示す図である。
【図7】3自由度ユニットのX−Y方向駆動ユニットの構成例を示す図である。
【図8】3自由度ユニットのX−Y方向駆動ユニットの動作の様子を示す図である。
【図9】Z方向駆動ユニットの拡大図の構成例を示す図である。
【図10】顔提示装置における特徴点駆動ユニットの構成例を示す斜視図である。
【図11】図10の特徴点駆動ユニットをZ軸方向から見た状態を示す正面図である。
【図12】図10の特徴点駆動ユニットをZ軸方向から見た状態を示す側面図である。
【図13】Y−Zの2自由度駆動ユニットの構成例を示す図であり、(a)は斜視図、(b)はX軸方向から見た状態を示す図、(c)はZ軸方向から見た状態を示す図である。
【図14】Y−Zの2自由度駆動ユニットの構成例を示す斜視図である。
【図15】顔ロボットに対して前方から映像を投影する状態を示す図である。
【図16】本装置全体の構成を示す図であり、(a)は画像投影前の状態を示す図、(b)は画像投射後の状態を示す図である。
【図17】位置データの例を示す図である。
【図18】本発明による顔提示装置を用いた顔電話システムの構成例を示す図である。
【図19】顔提示装置における、顔の誇張及び加減の手法を示す概念図である。
【符号の説明】
【0047】
3 駆動点
3a 棒状部材
3b Z方向駆動用カム
3c、3d ガイド
3e 円筒部材
4、4a、4b 支持板
4c 長孔
20 モータコントロールボード
30、30a、30b 顔ロボット
31 お面
32 特徴点駆動ユニット
40、40a、40b 映像投影機
CAa、CAb カメラ
DBa、DBb 顔形状データベース
M1〜M3 モータ
MCa、MCb マイクロフォン
NW ネットワーク
SPa、SPb スピーカ
【技術分野】
【0001】
本発明は顔形状提示装置に関し、特に任意の個人の顔形状を提示する三次元顔形状提示装置に関する。
【背景技術】
【0002】
従来の、人間の顔を提示する顔型ロボットは、東京理科大学の小林研究室の受付ロボットSAYA(非特許文献1)、早稲田大学の高西研究室のWE−4RII(非特許文献2)など、特定の個人の顔の表情を提示するというものがある。また、軟素材を用いた装置により表情を提示するものとして、表情変化装置がある(特許文献1参照)。
これらに共通して言えることは、Aさんの表情という特定の個人の表情ついては変化させ提示することが可能でも、Aさんの顔、Bさんの顔、Cさんの顔といったように、複数の個人の顔形状を提示はできない。一般に、顔の形状と表情との関係は、次のようになる。すなわち、Aさんの無表情の顔、Bさんの無表情の顔、Cさんの無表情の顔…という概念が「顔の形状」である。これに対し、Aさんの笑った顔、Aさんの怒った顔、Aさんの驚いた顔などという概念が「顔の表情」である。このように、様々な任意の個人の三次元顔形状を提示可能な顔ロボットは現状存在しない。
【0003】
ところで、様々な任意の個人の顔の形状を提示するのみであれば、粘土などの材料で作ることも考えられる。しかしながら、粘土を用いて作る場合、ある顔形状を作って、次の顔形状を作るまでにある程度時間が必要となる。また、顔形状を粘土で作成するのは、一般的に高度な技を必要とする。
【特許文献1】特開平8−107983号公報
【非特許文献1】H. Kobayashi、 Y. Ichikawa、 M. Senda、 and T. Shiiba: “"Realization of Realistic and Rich Facial Expressions by Face Robot”、Proceedings of the 2003 IEEE International Conference on Intelligent Robots and Systems Oct.27-31 Las Vegas、 Nevada、 USA、 pp.1123-1128、(2003-10)
【非特許文献2】Hiroyasu Miwa、 Kazuko Itoh、 Munemichi Matsumoto、 Massimiliano Zecca、 Hideaki Takanobu、 Stefano Roccella、 Maria Chiara Carrozza、 Paolo Dario、 Atsuo Takanishi:" Effective Emotional Expressions with Emotion Expression Humanoid Robot WE-4RII"Proceedings of the 2004 IEEE/RSJ Intl.Conference on Intelligent Robot and Systems
【発明の開示】
【発明が解決しようとする課題】
【0004】
人間の顔を提示する顔型ロボットにおいて、特定の個人の顔の表情を提示するものは存在しているが、任意の個人の顔形状を1つのロボットで提示できるものは存在していない。現在、遠隔地の通信で、相手の顔が見えるテレビ電話やテレビ会議システムが存在するが、画像は平面であり、リアリティに欠ける。
また、パーソナルロボットの顔について、顔形状を変えることはできないため、使用者の気に入らない顔形状でも顔形状を変更できないという問題があった。また、粘土などで色々な人の顔を提示するのは、技術的にも難しく、作成に時間がかかるという問題があった。また、美容整形など、顔の手術を行うようなとき、術後の顔形状を三次元で確認することができないという課題がある。
本発明は上述した従来技術の問題点を解決するためになされたものであり、その目的は様々な人の三次元顔形状を1つの装置により提示できる顔形状提示装置を提供することである。
【課題を解決するための手段】
【0005】
本発明の請求項1による顔形状提示装置は、弾性変形可能な、顔形状のマスクと、外部から入力される顔データに応じて、前記マスクを弾性変形させるアクチュエータとを含み、任意な顔の形状を提示することを特徴とする。このように構成すれば、様々な人の三次元顔形状を1つの装置により提示できる。
本発明の請求項2による顔形状提示装置は、請求項1において、前記アクチュエータは、前記マスクに接触し該接触部分に力を加えるN個(Nは自然数、以下同じ)の接触部と、前記N個の接触部に対応して設けられ、対応する接触部の位置を、前記顔データに応じて変化させる位置制御部とを含むことを特徴とする。このように構成すれば、マスクを自在に弾性変形させることができ、任意な顔の形状を提示できる。
【0006】
本発明の請求項3による顔形状提示装置は、請求項1又は2において、前記顔データに対応する顔の映像を、前記マスクに投影する投影手段を更に含むことを特徴とする。このように構成すれば、顔の形状をよりリアルに提示できる。
本発明の請求項4による顔形状提示装置は、請求項1から請求項3までのいずれか1項において、外部から入力される信号に応じた音声を出力する音声出力手段と、入力される音声に対応する信号を導出する音声入力手段と、の少なくとも一方を更に含むことを特徴とする。このように構成すれば、顔形状が提示可能な顔電話を実現でき、よりリアルで存在感を伝えることができる。
【発明の効果】
【0007】
以上説明したように本発明は、様々な人の三次元顔形状を1つの装置により提示できるという効果が得られる。任意の三次元顔形状を作り出せるため、誰の顔形状でも提示可能であり、リアリティのある遠隔通信を実現できる。そして、顔形状が提示可能な顔電話に利用することで、テレビ電話以上によりリアルで存在感を伝える遠隔コミュニケーションを実現できるという効果が得られる。また、顔形状の三次元シミュレータとして、術後の顔形状を三次元的に事前に確認できるという効果が得られる。
【発明を実施するための最良の形態】
【0008】
ここでは、任意の個人の三次元顔形状を提示する手法について説明する。1つの装置で、複数の顔形状を提示するために、平均顔のお面(すなわちマスク)を初期形状とし、顔の特徴点などを駆動点として提示したい人の顔形状にする。
平均顔とは、提示したい顔グループの形状を平均化したものである。例えば、日本人全体の顔形状を平均したものや世界中の人の顔形状を平均したもの、ネグロイド、モンゴロイド、オーストラロイド、コーカソイド、アメリンドなど人種の顔形状を平均したもの、テレビ番組や映画などに登場するヒーローやヒロインなどのキャラクターの顔形状を平均したもの、犬、猫などの動物の顔形状を平均化したものなどが考えられる。
【0009】
平均顔のお面を初期形状とすることで、一つ一つの駆動点の可動範囲を小さくすることができる。顔の画像については、各個人を提示した顔形状に対して、外からプロジェクターで投影する方法や、平均顔を作るお面自体がフレキシブルな映像ディスプレイである方法が考えられる。
また、任意の顔形状を粘土で作ると、その作成に時間がかかるという問題がある。これに対し、本例では、平均顔のお面を柔軟な素材で形成し、その特徴点をモータや人工筋肉などのアクチュエータでコントロールしているので、瞬時に色々な顔を提示できる。
以下、本発明の実施例について、図面を参照して説明する。なお、以下の説明において参照する各図では、他の図と同等部分は同一符号によって示されている。
【実施例1】
【0010】
ここで、実施例1による顔形状提示装置の構成例が図1に示されている。同図に示されているように、本例の顔形状提示装置は、パーソナルコンピュータ(以下、PCと略称する)等に設けられているCPU(Central Processing Unit)10と、モータコントロールボード20と、顔ロボット30と、映像投影機40とを含んで構成されている。
【0011】
顔ロボット30は、平均顔のお面31と、お面の特徴点の位置を変化させるための特徴点駆動ユニット32とを含んで構成されている。特徴点駆動ユニット32は、後述するように複数のモータを含んで構成されたアクチュエータとしての機能を有している。そして、モータコントロールボード20から入力される位置指令信号に応じて、特徴点駆動ユニット32は平均顔のお面31の特徴点に力を加え、弾性変形させる。モータコントロールボード20は、CPU10から入力される角度指令信号に応じて、位置指令信号を出力する機能を有している。つまり、外部から入力される顔データに応じて、お面31を弾性変形させる。
【0012】
映像投影機40は、顔データに対応する顔の画像を、平均顔のお面へ投射する機能を有している。
平均顔のお面31には、後述するように、特徴点に対応する複数の駆動点がある。そして、各駆動点に対応して駆動ユニットが設けられ、対応する駆動点を駆動する。この駆動ユニットが複数集合したものが、特徴点駆動ユニット32である。
【0013】
本例での各駆動点は、棒状部材の先端部分であり、この先端部分が、平均顔のお面の裏面に接着されている。そして、お面の形状を任意の個人の顔形状にするために、各駆動点の位置を制御する。駆動点の位置を制御することで、特徴点を駆動し、顔の形状を変化させる。お面の駆動点の配置を示す図2を参照すると、同図には19箇所の駆動点が示されている。そして、各駆動点すなわちお面裏面への、棒状部材の接触部に力を加えることによってその接触部の位置を変化させ、お面を弾性変形させる。お面を弾性変形させることによって、様々な人の三次元顔形状を1つの装置により提示できる。
【0014】
駆動点は、同図に示されているように、左右対称に配置されており、正中線上に5点、左右に7点ずつの14点、計19点である。これらの駆動点は、一例に過ぎず、人間が顔形状の認識を行う際の特徴点などを参考にして決定すると良い。
同図に示されている駆動点は、鼻尖点D1、右鼻翼点D2、左鼻翼点D3、口点D4、右口角D5、左口角D6、右頬D7、オトガイ前点D8、左頬D9、右目D10、左目D11、右外眼角D12、左外眼角D13、右眉D14、左眉D15、右頬骨D16、左頬骨D17、鼻根点D18、額点D19である。駆動点先端部に押し出し部材を取り付けた状態が図3に示されている。同図に示されているように、図2に示されている各駆動点に対応する位置に、押し出し部材がそれぞれ設けられている。
【0015】
図3に示されているように、各駆動点の先端部分は、各駆動点によって、形状が異なっていても良い。例えば、目部分の駆動点の先端部分形状は、図4(a)に示すように眼球形状に倣って、半球状などになっていたり、鼻部分の駆動点の先端部分形状は図4(b)に示すようになっていたり、図4(c)に示すように口唇部の先端部分形状は上下の唇を同時に押し出せるような形状になっていたりしても良い。なお、同図(a)に示されている眼球部の最大幅は20.0[mm]である。同図(b)に示されている鼻部の長さは35.0[mm]、その高さは15.0[mm]である。同図(c)に示されている口唇部の左右幅は23.0[mm]、上下幅は30.0[mm]、奥行は20.0[mm]である。
駆動点の数については、19個に限定されるものではない。より精密な顔形状を提示しようとすれば、駆動点の数を多くする必要がある。一方、精密さが要求されなかったり、提示する顔形状の種類が少なかったりすれば、駆動点の数は少なくて良い。
【0016】
(平均顔のお面)
平均顔のお面は、例えば、次のような方法で作成する。すなわち、三次元光造型機で平均顔を成形し、それを石膏で型を取り、耐久性に優れたゴムであるセプトン(クラレ社製の高性能熱可塑性エラストマー)などで平均顔のお面を成形する。セプトンの厚さに関しては、10mm前後で成形すると良い。厚みを部位ごとに変えることも考えられる。
なお、本例では、各駆動点に、X−Y−Z方向の3自由度、またはY−Z方向の2自由度を持たせる。X−Y−Z方向の3自由度を持つ駆動ユニットは、人間の顔サイズに複数配置するため、ある程度小型である必要がある。
【0017】
(3自由度の駆動ユニット)
3自由度の駆動ユニットの一構成例が、図5に示されている。同図(a)は3自由度の駆動ユニットの構成を示す斜視図、同図(b)は同図(a)をX軸方向からみた図、同図(c)は同図(a)をZ軸方向からみた図である。これらの図を参照すると、駆動ユニットには、先端部が駆動点3となる棒状部材3aと、棒状部材3aの根元部に取り付けられているモータM3と、モータM3の回転軸が接続されているZ方向駆動用カム3bと、棒状部材3aによって中空部が貫かれている円筒部材3eと、円筒部材3eの中間部に当接して駆動点3の位置をX方向及びY方向に移動させるためのガイド3c及び3dと、ガイド3c、3dの端部に回転軸を介して接続されているモータM1、M2と、棒状部材3aの中間部をモータM1及びM2の方向に引っ張るバネS1とを含んで構成されている。
【0018】
ここで、駆動ユニットは、「X−Y方向駆動ユニット」と「Z方向駆動ユニット」の大きく2つの部分に分けられる。X−Y方向駆動ユニットは、円筒部材3eと、駆動点3のX座標及びY座標の位置を制御するための2つのモータM1及びM2と、X−Y方向のガイド3c及び3dとから構成される。一方、Z方向駆動ユニットは、駆動点のZ座標の位置を制御するための1つのモータM3と、Z方向駆動用カム3bとから構成される。なお、図6に示されているように、円筒部材3eの端部3fは支持板4aと接した状態で摺動でき、端部3gは支持板4bと接した状態で摺動できるようになっている。
【0019】
(X−Y方向駆動ユニット)
図5に戻り、X−Y方向駆動ユニットにおいては、バネS1によって、棒状部材3aの中間部がモータM1及びM2の方向に常に引っ張られている。このため、図7に示されているように、ガイド3cの回動軸J3cとガイド3dの回動軸J3dとを結んだ直線LLとガイド3cとのなす角度θ2(すなわちモータM2の回動角度)、直線LLとガイド3dとのなす角度θ1(すなわちモータM1の回動角度)を変化させれば、棒状部材3aの先端部すなわち駆動点3の位置がX方向又はY方向に変化することになる。なお、本例では、ガイド3c及び3dと接する、円筒部材3eの中間部の半径はr、ガイド3c及び3dの厚みはt1、直線LLの中点Oまでの長さはLである。
【0020】
以上のように構成されたX−Y方向駆動ユニットの動作の様子が図8に示されている。図7に示されている状態に対応する図8(a)の状態において、上記角度θ2(すなわちモータM2の回動角度)を増加させるようにモータM2を駆動し、かつ、上記角度θ1(すなわちモータM1の回動角度)を減少させるようにモータM1を駆動すれば、図8(b)に示されている状態になる。同図(b)に示されている状態は、同図(a)に示されている状態からX方向及びY方向が変化した状態である。
【0021】
(Z方向駆動ユニット)
図6に示されているように、Z方向駆動ユニットの構成要素であるモータM3には、引っ張りバネS2の一端が接続され、引っ張りバネS2の他端は支持板4に固定されている。このため、モータM3に接続されている棒状部材3aは、引っ張りバネS2により、支持板4の方向に引っ張られている。このため、Z方向駆動用カム3bは支持板4に接した状態になっている。
【0022】
このような接続関係を模式的に示した図が図9である。同図において、モータM3の回転軸JAが図中時計回りに回転すれば、Z方向駆動用カム3bの回転軸Oと回転軸JAとを結ぶ直線RzとZ軸とのなす角度θ3が減少し、棒状部材3aは矢印Ya方向に移動する。これにより、駆動点3は矢印Ya方向に移動する。
一方、モータM3の回転軸JAが図中反時計回りに回転すれば、直線RzとZ軸とのなす角度θ3が増加し、棒状部材3aは矢印Ya方向の逆の方向に移動する。これにより、駆動点3は矢印Ya方向の方向に移動する。このように、モータM3の回転方向に応じて、駆動点3をZ方向に駆動することができる。
以上のように特徴点駆動ユニットを構成した場合、各モータの角度指令値をθ1、θ2、θ3とした場合、駆動点3の座標(X、Y、Z)は以下の式で表される。
【0023】
【数1】
【0024】
なお、3自由度の駆動ユニットについては、小型でX−Y−Zの3自由度を持っていれば、図5に示されている構成に限定されるものではない。
(駆動ユニット全体の構成)
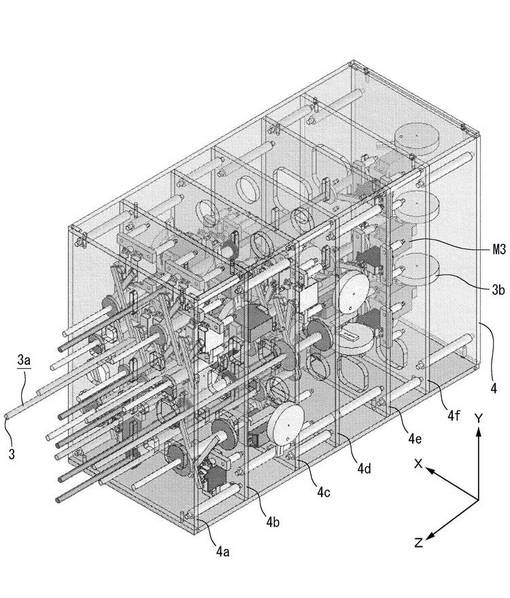
図10は、上述した3自由度の駆動ユニットの全体構成を示す斜視図である。同図に示されているように、図2のように配置される19箇所の駆動点それぞれに対応して3自由度の駆動ユニットが設けられ、各駆動ユニットは複数の支持板4、4a〜4fによって支持されている。
【0025】
図11は図10に示されている駆動ユニットをZ軸方向から見た状態を示す図、図12は同じくX軸方向から見た状態を示す図である。これらの図に示されている各円筒部材3eは、2枚の支持板の間に挟まれた状態でX方向及びY方向に摺動できるようになっている。また、モータM3及びZ方向駆動用カム3bにより、棒状部材3aがZ軸方向に移動することにより、各駆動点3が矢印Ya又はその逆方向に移動することになる。このように、特徴点駆動ユニットを構成すれば、お面を弾性変形させ、様々な人の三次元顔形状を1つの装置により提示できる。
【0026】
(2自由度の駆動ユニット)
また、Y−Z方向の2自由度を持つ駆動ユニットの一構成例が、図13に示されている。同図(a)は2自由度の駆動ユニットの構成を示す斜視図、同図(b)は同図(a)をX軸方向からみた図、同図(c)は同図(a)をZ軸方向からみた図である。これらの図を参照すると、2自由度の駆動ユニットの基本的な構造は、3自由度の駆動ユニットと同様である。すなわち、駆動ユニットには、先端部が駆動点3となる棒状部材3aと、棒状部材3aの根元部に取り付けられているモータM3と、モータM3の回転軸が接続されているZ方向駆動用カム3bと、棒状部材3aによって中空部が貫かれている円筒部材3eと、円筒部材3eの中間部に当接して駆動点3の位置をY方向に移動させるためのガイド3dと、ガイド3dの端部に回転軸を介して接続されているモータM2とを含んで構成されている。
【0027】
このような構成からなる2自由度の駆動ユニットは、図14に示されているように、支持板4、4a及び4bによって支持される。そして、棒状部材3aは、支持板4aに設けられている長孔4cに沿ってY方向に移動する他、矢印Ya又はその逆方向に移動する。このような構成の駆動ユニットは、X方向の駆動が必要ないため、モータの数が3自由度の駆動ユニットより1つ少ない2つで済む。駆動点3の位置については、3自由度の場合について説明した上記の式(1)において角度θ2を固定した式で表すことができる。
【0028】
(動作)
図1に戻り、各駆動点への駆動指令は、PC等に設けられているCPU10から与える。提示したい顔形状を提示するための駆動点の位置指令値をPC等から入力し、各モータの角度指令値として出力することにより、各モータM1〜M3を制御する。
ところで、平均顔のお面については、ゴムなどの柔らかい素材を用いて成形する場合と、素材自身が発光し、映像を映すことが可能な素材で成形する場合などが考えられる。前者の場合、顔形状を提示したお面の前方からプロジェクターなどの投影機を用いて映像を重ね合わせる方法や、口唇部や眼球部、眉毛、鼻孔などをゴム表面に直接、絵を描く方法などが考えられる。
【0029】
一方、後者の場合、素材自身が発光し、湾曲面を成形可能であれば、投影機が必要なくなる。映像を重ね合わせる際、通常のカメラにて撮影した画像をそのまま投影機や湾曲面を生成可能なディスプレイにて出力すると、顔形状が平面ではないため、画像が歪んでしまう。通常のカメラで撮影された映像は、平面に投影することを想定しているため、歪みの補正が必要となる。
【0030】
この歪みの補正方法について、図15を参照して説明する。顔ロボットの前方に投影機があり、投影機のレンズ端中心P、顔ロボットのお面の鼻尖点O、仮想平面スクリーン(Screen)が同図のような状態になっているとする。投影機のレンズ端中心Pからスクリーン上の点Aを通過する光は顔ロボットのお面の点Bに投射される。
【0031】
ここで、観察者が顔ロボットの真正面にいると仮定すると、点Aに投射される映像は、点Aを通りスクリーンに対して垂直な直線状に存在すれば、観察者から自然な形の映像として見える。よって、点Aからスクリーンに対して垂直な線を引き、顔ロボットのお面との交点B’に投射されれば自然な形の映像となるはずである。また、点B’に投射される映像は、スクリーン上の点A’に投射される。つまり、点Aの映像を点A’へ写像すれば、自然な形の映像を映し出せる。
【0032】
同図中の直線OAと直線OA’との関係は、
OA=OA’×(OP+AB’)/OP …(2)
で表される。これを画像全領域に対して繰り返せば、三次元顔形状のお面への画像の補正を行うことができる。画像の補正を正確に行うためには、提示したい顔の三次元形状を三次元形状計測装置などで計測する必要がある。提示したい顔を楕円などで近似することも考えられる。
以上のような機構を採用すれば、様々な人の顔を提示可能な顔ロボットを実現できる。
ここで、顔ロボットに映像を投影する前後の状態が図16に示されている。同図(a)は画像投影前の状態を示す図、同図(b)は画像投射後の状態を示す図である。
【0033】
以上のように、外部から入力される顔データに応じて、お面を弾性変形させることにより、任意の個人の三次元顔形状を提示することができる。このように、三次元顔形状を提示するアプリケーションとしては、顔の三次元形状を提示可能な「顔電話」や、美容整形時の「三次元顔形状シミュレータ」などが考えられる。顔電話では、通話相手の顔形状が提示されることでよりリアルなコミュニケーションが可能となる。三次元顔形状シミュレータでは、美容整形手術などにおいて、術後の顔を事前に三次元で確かめられるという効果がある。
【実施例2】
【0034】
次に、顔形状提示装置の実施例2であるコンテンツ再生システムについて説明する。このコンテンツ再生システムは、インターネットなどを通じて、仮想のキャラクターや実在する人物の顔形状データと、顔画像データとをダウンロードして、それをもとに顔形状を提示するシステムである。
まず、実在する人の顔形状を提示する場合、実在する人の顔形状を計測する必要がある。顔形状の計測については、提示したい人の顔をキャプチャ装置で計測する方法が考えられる。その場合、提示したい人の顔に計測点を配置することになる。その計測点は、図2を参照して説明した駆動点と同等の位置に配置する。また、三次元デジタイザで提示したい人の顔を計測し、上記駆動点と同等の位置の三次元座標を計測する方法などが考えられる。なお、計測点間の距離をノギスなどの道具で実測しても良い。
【0035】
計測された計測点のそれぞれのデータは、各駆動点の位置座標にそのまま置き換える。各駆動点の位置データは、図17に示されているようなデータ形式で整理される。すなわち、同図においては、鼻の下の付け根である鼻下点(図2中の右鼻翼点D2と左鼻翼点D3との中点)を原点とし、それぞれの駆動点の3次元位置データが記されている。このように得られた各駆動点の位置データを、各アクチュエータの角度指令値に変換し、これを出力することで提示したい人の顔形状を、顔ロボット上に提示できる。
【0036】
実在しない人の顔形状を提示する場合は、各駆動点の位置データを提示したい顔形状に合わせて作成すれば良い。すなわち、実在する人の場合は、計測によって図17に示すような各駆動点の位置データを得たが、実在しない人の顔形状を提示する場合は、各駆動点の位置データを直接作成することになる。
上記のようにして提示した顔形状に重ね合わせるように、提示したい人の顔の映像を投影機などで投影する。こうすることで、三次元の顔を顔ロボット上に提示できる。なお、投影する映像は、静止画でも動画でも構わない。動画を投影する際、その表情に合わせて各駆動点の位置を制御することも考えられる。
【実施例3】
【0037】
次に、顔形状提示装置の実施例3である顔電話システムについて説明する。この顔電話システムは、電話の代わりとして顔形状提示装置を使用するシステムである。
顔電話システムの場合、テレビ電話のように電話を掛けてきている人の顔の形が本顔ロボットにより提示され、あたかもその人がその場にいるような存在感を出す効果がある。
【0038】
この顔電話システムの構成例が図18に示されている。同図に示されている顔電話システムは、各部を制御するためのCPU10aと、顔形状を提示するための顔ロボット30aと、映像を投影するための映像投影機40aと、音声を収録するためのマイクロフォンMCaと、音声を出力するためのスピーカSPaと、顔形状を撮影するためのカメラCAaと、顔形状に関するデータが記憶されてなる顔形状データベースDBaとがAさん側に設けられている。一方、Bさん側には、各部を制御するためのCPU10bと、顔形状を提示するための顔ロボット30bと、映像を投影するための映像投影機40bと、音声を収録するためのマイクロフォンMCbと、音声を出力するためのスピーカSPbと、顔形状を撮影するためのカメラCAbと、顔形状に関するデータが記憶されてなる顔形状データベースDBbとが設けられている。そして、Aさん側の構成とBさん側の構成とがネットワークNWを介して、相互に通信できるようになっている。
【0039】
このような構成において、AさんとBさんとが顔ロボットを介して遠隔通信を行う場合について説明する。上述した構成により、Aさんの近くにある顔ロボット30aには、Bさんの顔形状が、Bさんの近くにある顔ロボット30bにはAさんの顔形状が、それぞれ提示される。そして、Aさんの近くにある顔ロボット30aに提示されているBさんの顔形状のお面には、Bさんの顔の映像が静止画や動画で映し出される。同様に、Bさんの近くにある顔ロボット30bに提示されているAさんの顔形状のお面には、Aさんの顔の映像が静止画や動画で映し出される。この場合、それぞれの顔映像は、カメラCAa、CAbによって撮影され、その映像が投影機により映し出される。
【0040】
また、音声情報については、以下の通り取り扱われる。すなわち、通常の電話機と同様に、マイクロフォンとスピーカとがAさん側、Bさん側にそれぞれ設けられており、Aさんの声をマイクロフォンMCaで収録し、Bさんの近くにあるスピーカSPbから再生出力する。また、Bさんの声をマイクロフォンMCbで収録し、Aさんの近くにあるスピーカSPaから再生出力する。
【0041】
ところで、顔形状については、予め顔形状を計測しておき、その計測データをデータベースDBa、DBbに蓄えておく方法と、顔形状をカメラCAa、CAbなどでリアルタイムに撮影する方法とが考えられる。データベースとして蓄える場合、それぞれの顔ロボットがデータベースを持っても良いし、ネットワーク上にデータベースがあっても良い。一方、カメラなどでリアルタイムに計測する場合、三次元計測装置を用いて計測しても良いし、2次元のカメラを用いて撮影した映像の陰影などから顔形状を推定し、三次元データとする方法も考えられる。
なお、用途によっては、音声の入力又は出力の一方のみを行う場合も考えられる。その場合には、マイクロフォン及びスピーカの少なくとも一方を設ければ良い。
【実施例4】
【0042】
上述した実施例3の顔電話システムでは、通話相手の顔形状が提示される場合について説明したが、通話相手とは違う顔形状を顔ロボットに提示する場合も考えられる。例えば、AさんとBさんが遠隔通信している場合、Bさんの顔がAさんの近くの顔ロボットに提示されるだけでなく、Bさんではない人の顔を提示しても良い。すなわち、データベースに三次元形状が蓄えられている形状であれば、誰の顔でも提示できる。例えば、全く別のCさんの顔形状や、なんらかのキャラクターや動物の顔形状を提示しても良い。またその際、Bさんの声を顔形状に合わせてCさんの声や、なんらかのキャラクターや動物の声に声質変換を行うことも考えられる。
【0043】
Aさんの近くの顔ロボットに誰の顔を提示するかの決定権は、Aさんにある場合と、通話相手であるBさんにある場合とがある。例えば、Bさんが自分の顔形状を見られたくないような場合、Bさんが顔形状の決定権を持ち、Aさんの近くにある顔ロボットのデフォルトの形状(平均顔の形状)のままで遠隔通信を行うことも考えられる。また、AさんがBさんの顔も見たくないような場合、Aさんが顔形状の決定権を持ち、全く違うキャラクターや動物などの顔を提示する場合もある。
上記のように、Bさんではない顔形状に変えた場合、それぞれの顔に合った映像を重ね合わせることが自然に見えるために必要になる。
【実施例5】
【0044】
上述した実施例3、上述した実施例4のどちらにおいても、提示したい顔形状を誇張したり、逆に加減したりして提示する場合もある。誇張の方法、加減の方法は特定の方法に囚われない。顔の形状だけでなく、同時に投射する映像も形状と同様に誇張、加減することで、自然な顔に見える。
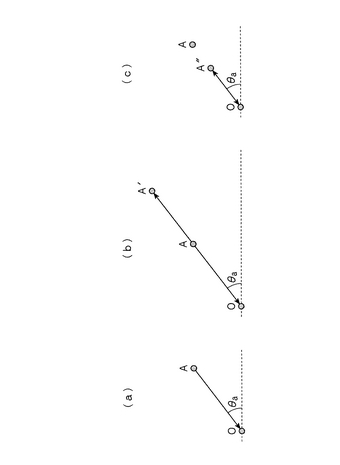
顔の誇張及び加減の方法は、平均顔の特徴点と、提示したい顔の特徴点との距離を増加させたり減少させたりすることで行う。すなわち、図19(a)に示されているように、例えばAさんの鼻尖点の位置をAとし、平均顔の鼻尖点をOとすると、距離OAは平均顔の特徴点OとAさんの特徴点Aとのズレとなる。このため、同図(b)に示されているように、距離OAよりも長い距離OA’を採用すれば、Aさんの特徴点を誇張することになる。一方、同図(c)に示されているように、距離OAよりも短い距離OA’’を採用すれば、Aさんの特徴点を加減することになる。
【産業上の利用可能性】
【0045】
本発明は、リアルで存在感を伝える遠隔コミュニケーションや顔形状の三次元シミュレータとして利用することができる。
【図面の簡単な説明】
【0046】
【図1】顔形状提示装置全体の構成を示すブロック図である。
【図2】駆動点の配置例を示す図である。
【図3】押し出し部材を取り付けた駆動点の配置例を示す図である。
【図4】顔ロボットの押し出し部材の例を示す図であり、(a)は眼球部、(b)は鼻部、(c)は口唇部である。
【図5】X−Y−Zの3自由度駆動ユニットの構成例を示す図である。
【図6】3自由度ユニットのZ方向駆動ユニットの構成例を示す図である。
【図7】3自由度ユニットのX−Y方向駆動ユニットの構成例を示す図である。
【図8】3自由度ユニットのX−Y方向駆動ユニットの動作の様子を示す図である。
【図9】Z方向駆動ユニットの拡大図の構成例を示す図である。
【図10】顔提示装置における特徴点駆動ユニットの構成例を示す斜視図である。
【図11】図10の特徴点駆動ユニットをZ軸方向から見た状態を示す正面図である。
【図12】図10の特徴点駆動ユニットをZ軸方向から見た状態を示す側面図である。
【図13】Y−Zの2自由度駆動ユニットの構成例を示す図であり、(a)は斜視図、(b)はX軸方向から見た状態を示す図、(c)はZ軸方向から見た状態を示す図である。
【図14】Y−Zの2自由度駆動ユニットの構成例を示す斜視図である。
【図15】顔ロボットに対して前方から映像を投影する状態を示す図である。
【図16】本装置全体の構成を示す図であり、(a)は画像投影前の状態を示す図、(b)は画像投射後の状態を示す図である。
【図17】位置データの例を示す図である。
【図18】本発明による顔提示装置を用いた顔電話システムの構成例を示す図である。
【図19】顔提示装置における、顔の誇張及び加減の手法を示す概念図である。
【符号の説明】
【0047】
3 駆動点
3a 棒状部材
3b Z方向駆動用カム
3c、3d ガイド
3e 円筒部材
4、4a、4b 支持板
4c 長孔
20 モータコントロールボード
30、30a、30b 顔ロボット
31 お面
32 特徴点駆動ユニット
40、40a、40b 映像投影機
CAa、CAb カメラ
DBa、DBb 顔形状データベース
M1〜M3 モータ
MCa、MCb マイクロフォン
NW ネットワーク
SPa、SPb スピーカ
【特許請求の範囲】
【請求項1】
弾性変形可能な、顔形状のマスクと、外部から入力される顔データに応じて、前記マスクを弾性変形させるアクチュエータとを含み、任意な顔の形状を提示することを特徴とする顔形状提示装置。
【請求項2】
前記アクチュエータは、前記マスクに接触し該接触部分に力を加えるN個(Nは自然数、以下同じ)の接触部と、前記N個の接触部に対応して設けられ、対応する接触部の位置を、前記顔データに応じて変化させる位置制御部とを含むことを特徴とする請求項1記載の顔形状提示装置。
【請求項3】
前記顔データに対応する顔の映像を、前記マスクに投影する投影手段を更に含むことを特徴とする請求項1又は2記載の顔形状提示装置。
【請求項4】
外部から入力される信号に応じた音声を出力する音声出力手段と、入力される音声に対応する信号を導出する音声入力手段と、の少なくとも一方を更に含むことを特徴とする請求項1から請求項3までのいずれか1項に記載の顔形状提示装置。
【請求項1】
弾性変形可能な、顔形状のマスクと、外部から入力される顔データに応じて、前記マスクを弾性変形させるアクチュエータとを含み、任意な顔の形状を提示することを特徴とする顔形状提示装置。
【請求項2】
前記アクチュエータは、前記マスクに接触し該接触部分に力を加えるN個(Nは自然数、以下同じ)の接触部と、前記N個の接触部に対応して設けられ、対応する接触部の位置を、前記顔データに応じて変化させる位置制御部とを含むことを特徴とする請求項1記載の顔形状提示装置。
【請求項3】
前記顔データに対応する顔の映像を、前記マスクに投影する投影手段を更に含むことを特徴とする請求項1又は2記載の顔形状提示装置。
【請求項4】
外部から入力される信号に応じた音声を出力する音声出力手段と、入力される音声に対応する信号を導出する音声入力手段と、の少なくとも一方を更に含むことを特徴とする請求項1から請求項3までのいずれか1項に記載の顔形状提示装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図13】
【図14】
【図15】
【図17】
【図18】
【図19】
【図10】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図13】
【図14】
【図15】
【図17】
【図18】
【図19】
【図10】
【図16】
【公開番号】特開2006−343583(P2006−343583A)
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願番号】特願2005−169750(P2005−169750)
【出願日】平成17年6月9日(2005.6.9)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【出願人】(899000068)学校法人早稲田大学 (602)
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願日】平成17年6月9日(2005.6.9)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【出願人】(899000068)学校法人早稲田大学 (602)
[ Back to top ]