
顕微鏡システム、対象物観察方法および対象物観察プログラム

【課題】複数の単位領域について測定対象物と対物レンズとの間の相対的な距離の範囲を短時間で効率的に設定可能な顕微鏡システム、対象物観察方法および対象物観察プログラムを提供する。
【解決手段】観察範囲の指示に基づいて複数の単位領域が設定される。隣接する単位領域間で重複部分が形成される。各単位領域について、当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置が決定される。初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動され、当該単位領域について光学系と観察対象物との相対的な移動範囲が設定される。最初の単位領域を除く各単位領域については、当該単位領域の重複部分についての画素データに基づいて光学系と観察対象物との相対的な初期位置が決定される。
【解決手段】観察範囲の指示に基づいて複数の単位領域が設定される。隣接する単位領域間で重複部分が形成される。各単位領域について、当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置が決定される。初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動され、当該単位領域について光学系と観察対象物との相対的な移動範囲が設定される。最初の単位領域を除く各単位領域については、当該単位領域の重複部分についての画素データに基づいて光学系と観察対象物との相対的な初期位置が決定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、顕微鏡システム、対象物観察方法および対象物観察プログラムに関する。
【背景技術】
【0002】
共焦点顕微鏡では、レーザ光源から出射されたレーザ光が対物レンズにより測定対象物に集光される。測定対象物からの反射光が受光レンズにより集光され、ピンホールを通して受光素子に入射する(例えば、特許文献1参照)。レーザ光は測定対象物の表面で二次元的に走査される。また、測定対象物と対物レンズとの間の相対的な距離を変化させることにより受光素子の受光量の分布が変化する。測定対象物の表面に焦点が合ったときに受光量のピークが現れる。受光量分布のピーク強度に基づいて非常に高い焦点深度を有する超深度画像を得ることができる。また、受光量分布のピーク位置に基づいて測定対象物の表面の高さ分布を示す高さ画像を得ることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−83601号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
共焦点顕微鏡によれば、測定対象物と対物レンズとの間の相対的な距離を変化させつつレーザ光を測定対象物の表面で二次元的に走査させることにより、測定対象物と対物レンズとの間の相対的な複数の距離に対応する複数の共焦点画像データが生成される。生成された複数の共焦点画像データに基づいて超深度画像データまたは高さ画像データが生成される。超深度画像データまたは高さ画像データに基づいて超深度画像または高さ画像が表示部に表示される。使用者は、測定対象物の観察範囲を指定することができる。
【0005】
特許文献1に記載の共焦点顕微鏡においては、測定対象物に対する対物レンズの高さ方向の移動範囲(上限位置および下限位置)が使用者により設定される。この場合、使用者は、受光量のピークが移動範囲内に現れるように、移動範囲を適切に設定する必要がある。移動範囲を広く設定すると、受光量のピークが移動範囲内に現れる確率が高くなるが、取得される共焦点画像データの量が多くなる。一方、移動範囲を狭く設定すると、取得される共焦点画像データの量が少なくなるが、受光量のピークが移動範囲内に現れる確率が低くなる。そこで、使用者は、受光量のピークが移動範囲内に現れかつ取得される共焦点画像データの量ができるだけ少なくなるように、対物レンズの移動範囲を適切に設定する必要がある。
【0006】
使用者が共焦点顕微鏡の観察可能な領域よりも広い範囲を指定した場合には、共焦点顕微鏡のステージが移動することにより測定対象物の複数の領域の超深度画像データまたは高さ画像データがそれぞれ生成される。その後、複数の領域の超深度画像データまたは高さ画像データが連結されることにより測定対象物の広い範囲の超深度画像または高さ画像が作業用メモリを用いて表示部に表示される。
【0007】
このような場合、測定対象物の領域ごとに表面の高さが異なる可能性がある。そのため、使用者は、各領域ごとに対物レンズの高さ方向の移動範囲を適切に設定する必要がある。したがって、測定対象物と対物レンズとの間の相対的な距離の範囲の設定に多大な時間を要する。
【0008】
本発明の目的は、複数の単位領域について測定対象物と対物レンズとの間の相対的な距離の範囲を短時間で効率的に設定可能な顕微鏡システム、対象物観察法法および対象物観察プログラムを提供することである。
【課題を解決するための手段】
【0009】
(1)第1の発明に係る顕微鏡システムは、観察対象物の表面の状態を観察する顕微鏡システムであって、受光素子と、観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を受光素子に導く光学系と、単位領域に垂直な方向に沿った複数の位置で単位領域内での光学系による光の照射が行われるように光学系と観察対象物とを相対的に移動させる相対的移動部と、観察範囲として複数の単位領域を設定する観察範囲設定部と、観察範囲設定部により設定された複数の単位領域の各々について、光学系と観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、光学系および相対的移動部を制御することにより移動範囲設定処理において設定された移動範囲内で光学系と観察対象物とを相対的に移動させるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行う制御部とを備え、観察範囲設定部は、隣接する単位領域間で重複部分が形成されるように複数の単位領域を設定し、制御部は、各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置を決定し、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置を決定するものである。
【0010】
この顕微鏡システムにおいては、観察範囲として複数の単位領域が設定される。このとき、隣接する単位領域間では、重複部分が形成される。複数の単位領域の各々について、移動範囲設定処理により光学系と観察対象物との相対的な移動範囲が設定され、測定処理により当該単位領域に設定された移動範囲内で光学系と観察対象物とが相対的に移動されるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データが取得される。
【0011】
各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置が決定される。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されるとともに複数の画素データが取得される。複数の画素データに基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲が設定される。
【0012】
最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置が決定される。
【0013】
これにより、光学系と観察対象物とが初期位置にある状態で、当該単位領域の少なくとも一部から受光素子に光が導かれる。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されることにより、当該単位領域の少なくとも一部に光学系の焦点が合う状態から当該単位領域に光学系の焦点が合わなくなるときの光学系と観察対象物との相対的な位置を検出することができる。検出された位置に基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲を適切に設定することができる。
【0014】
上記のように、最初の単位領域を除く各単位領域については、当該単位領域についての移動範囲設定処理において、重複部分について既に取得された画素データに基づいて初期位置を決定することができる。そのため、初期位置を決定するために画素データを取得する必要がない。したがって、初期位置を短時間で設定することができる。その結果、複数の単位領域についての複数の画素データを短時間で効率的に取得することができる。
【0015】
(2)制御部は、各単位領域についての移動範囲設定処理において、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置を検出し、検出された相対的な位置に基づいて当該単位領域について移動範囲を設定し、最初の単位領域を除く各単位領域については、相対的な位置が検出されない場合に、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の重複部分の各部分にそれぞれ光学系の焦点が合うときの光学系と観察対象物との相対的な複数の位置を含むように当該単位領域についての移動範囲を設定してもよい。
【0016】
各単位領域についての移動範囲設定処理において、初期位置では、当該単位領域の少なくとも一部に光学系の焦点が合っている。この場合、受光素子の出力信号のレベルは高い。一方、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させると、当該単位領域から光学系の焦点が離れるにつれて、受光素子の出力信号のレベルが低くなる。
【0017】
したがって、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置を検出することにより当該単位領域について移動範囲を最小限に設定することができる。それにより、測定処理の時間が短縮される。
【0018】
また、光学系と観察対象物との相対的な位置が検出されない場合でも、光学系と観察対象物との相対的な移動範囲が設定されるので、当該単位領域の測定処理を行うことが可能となる。
【0019】
(3)制御部は、各単位領域についての移動範囲設定処理において、決定された初期位置から光学系と観察対象物とが近づく方向に光学系と観察対象物とが相対的に移動している場合に、取得された画素データに基づいて、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置を第1の相対位置として検出し、決定された初期位置から光学系と観察対象物とが遠ざかる方向に光学系と観察対象物とが相対的に移動している場合に、取得された画素データに基づいて、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置を第2の相対位置として検出し、検出された第1および第2の相対位置に基づいて当該単位領域についての移動範囲を設定してもよい。
【0020】
この場合、決定された初期位置から光学系と観察対象物とが近づく方向に光学系と観察対象物とが相対的に移動している場合に、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点で第1の相対位置が検出される。
【0021】
また、決定された初期位置から光学系と観察対象物とが遠ざかる方向に光学系と観察対象物とが相対的に移動している場合に、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点で第2の相対位置が検出される。検出された第1および第2の相対位置に基づいて当該単位領域についての移動範囲が設定される。これにより、移動範囲設定処理の時間を十分に短くすることができる。
【0022】
(4)制御部は、各単位領域についての移動範囲設定処理において、決定された初期位置から光学系と観察対象物との相対的な距離が第1の距離から第1の距離よりも大きい第2の距離になるまでの予め定められた範囲にわたって光学系と観察対象物とを相対的に移動させ、取得された画素データに基づいて、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する複数の時点における光学系と観察対象物との相対的な複数の位置をそれぞれ検出し、検出された複数の位置を含むように当該単位領域についての移動範囲を設定してもよい。
【0023】
この場合、各単位領域についての移動範囲設定処理において、初期位置から光学系と観察対象物との相対的な距離が第1の距離から第1の距離よりも大きい第2の距離になるまで光学系と観察対象物とが相対的に移動する。受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から予め定められたレベル以下に変化する複数の時点における光学系と観察対象物との相対的な複数の位置がそれぞれ検出される。検出された複数の位置を含むように当該単位領域についての移動範囲が設定される。
【0024】
これにより、光学系と観察対象物とが第1の距離から第2の距離に移動する間に、受光素子の出力信号のレベルが予め定められたレベルよりも高くなる時点の光学系と観察対象物との相対的な距離が確実に含まれるように移動範囲を設定することができる。したがって、観察対象物の表面の状態によらず、当該単位領域の全面について測定処理を行うことができる。
【0025】
(5)制御部は、各単位領域についての移動範囲設定処理において、取得された画素データに基づいて受光素子の出力信号のレベルが予め定められたレベルよりも高いか否かを判定し、受光素子の出力信号のレベルが予め定められたレベルよりも大きいときに光学系と観察対象物とを相対的に第1の移動量づつ移動させ、受光素子の出力信号のレベルが予め定められたレベル以下であるときに光学系と観察対象物とを相対的に第2の移動量づつ移動させ、第2の移動量は、第1の移動量よりも大きくてもよい。
【0026】
受光素子の出力信号のレベルが予め定められたレベル以下であるときには、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置は検出されない。したがって、受光素子の出力信号のレベルが予め定められたレベル以下であるときに、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態に比べて光学系と観察対象物との相対的な移動量を大きくすることにより、移動範囲設定処理の時間を短くすることができる。
【0027】
(6)制御部は、各単位領域についての移動範囲設定処理において、第1の距離から第2の距離になるまでの予め定められた範囲にわたって光学系と観察対象物とを相対的に移動させても移動範囲が設定されない場合に、決定された初期位置から光学系と観察対象物との相対的な距離が第1の距離よりも小さい第3の距離から第2の距離よりも大きい第4の距離になるまでの予め定められた範囲にわたって光学系と観察対象物とを相対的に移動させ、取得された画素データに基づいて、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する複数の時点における光学系と観察対象物との相対的な複数の位置をそれぞれ検出し、検出された複数の位置を含むように当該単位領域についての移動範囲を設定してもよい。
【0028】
この場合、第1の距離から第2の距離になるまでの予め定められた範囲にわたって光学系と観察対象物とを相対的に移動させても移動範囲が設定されない場合に、初期位置から光学系と観察対象物との相対的な距離が第1の距離よりも小さい第3の距離から第2の距離よりも大きい第4の距離になるまで光学系と観察対象物とが相対的に移動する。受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から予め定められたレベル以下に変化する複数の時点における光学系と観察対象物との相対的な複数の位置がそれぞれ検出される。
【0029】
このように、移動範囲設定処理において、光学系と観察対象物との相対的な複数の位置を検出するための光学系と観察対象物との相対的な距離範囲が拡大された状態で光学系と観察対象物とが相対的に移動し、光学系と観察対象物との相対的な複数の位置がそれぞれ検出される。これにより、光学系と観察対象物との相対的な複数の位置を広い範囲に渡って検出することができるので、広い範囲に渡って正確に各単位領域についての移動範囲を設定することが可能となる。
【0030】
(7)第2の発明に係る対象物観察方法は、観察対象物の表面の状態を観察する顕微鏡システムが備える光学系と観察対象物とを相対的に移動させる範囲を設定するための対象物観察方法であって、光学系により観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を受光素子に導くステップと、単位領域に垂直な方向に沿った複数の位置で単位領域内での光学系による光の照射が行われるように光学系と観察対象物とを相対的に移動させるステップと、観察範囲として複数の単位領域を設定するステップと、設定された複数の単位領域の各々について、光学系と観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、光学系および相対的移動部を制御することにより移動範囲設定処理において設定された移動範囲内で光学系と観察対象物とを相対的に移動させるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行うステップとを備え、複数の単位領域を設定するステップは、隣接する単位領域間で重複部分が形成されるように複数の単位領域を設定するステップを含み、移動範囲設定処理を行い、測定処理を行うステップは、各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置を決定し、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と初期位置を決定するステップを含むものである。
【0031】
この対象物観察方法においては、観察範囲として複数の単位領域が設定される。このとき、隣接する単位領域間では、重複部分が形成される。複数の単位領域の各々について、移動範囲設定処理により光学系と観察対象物との相対的な移動範囲が設定され、測定処理により当該単位領域に設定された移動範囲内で光学系と観察対象物とが相対的に移動されるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データが取得される。
【0032】
各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置が決定される。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されるとともに複数の画素データが取得される。複数の画素データに基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲が設定される。
【0033】
最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置が決定される。
【0034】
これにより、光学系と観察対象物とが初期位置にある状態で、当該単位領域の少なくとも一部から受光素子に光が導かれる。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されることにより、当該単位領域の少なくとも一部に光学系の焦点が合う状態から当該単位領域に光学系の焦点が合わなくなるときの光学系と観察対象物との相対的な位置を検出することができる。検出された位置に基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲を適切に設定することができる。
【0035】
上記のように、最初の単位領域を除く各単位領域については、当該単位領域についての移動範囲設定処理において、重複部分について既に取得された画素データに基づいて初期位置を決定することができる。そのため、初期位置を決定するために画素データを取得する必要がない。したがって、初期位置を短時間で設定することができる。その結果、複数の単位領域についての複数の画素データを短時間で効率的に取得することができる。
【0036】
(8)第3の発明に係る対象物観察プログラムは、観察対象物の表面の状態を観察する顕微鏡システムが備える光学系と観察対象物とを相対的に移動させる範囲を設定する処理を処理装置に実行させる対象物観察プログラムであって、光学系により観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を受光素子に導く処理と、単位領域に垂直な方向に沿った複数の位置で単位領域内での光学系による光の照射が行われるように光学系と観察対象物とを相対的に移動させる処理と、観察範囲として複数の単位領域を設定する処理と、設定された複数の単位領域の各々について、光学系と観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、光学系および相対的移動部を制御することにより移動範囲設定処理において設定された移動範囲内で光学系と観察対象物とを相対的に移動させるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行う処理とを、処理装置に実行させ、複数の単位領域を設定する処理は、隣接する単位領域間で重複部分が形成されるように複数の単位領域を設定する処理を含み、移動範囲設定処理を行い、測定処理を行う処理は、各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置を決定し、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と初期位置を決定する処理を含むものである。
【0037】
この対象物観察プログラムにおいては、観察範囲として複数の単位領域が設定される。このとき、隣接する単位領域間では、重複部分が形成される。複数の単位領域の各々について、移動範囲設定処理により光学系と観察対象物との相対的な移動範囲が設定され、測定処理により当該単位領域に設定された移動範囲内で光学系と観察対象物とが相対的に移動されるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データが取得される。
【0038】
各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置が決定される。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されるとともに複数の画素データが取得される。複数の画素データに基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲が設定される。
【0039】
最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置が決定される。
【0040】
これにより、光学系と観察対象物とが初期位置にある状態で、当該単位領域の少なくとも一部から受光素子に光が導かれる。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されることにより、当該単位領域の少なくとも一部に光学系の焦点が合う状態から当該単位領域に光学系の焦点が合わなくなるときの光学系と観察対象物との相対的な位置を検出することができる。検出された位置に基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲を適切に設定することができる。
【0041】
上記のように、最初の単位領域を除く各単位領域については、当該単位領域についての移動範囲設定処理において、重複部分について既に取得された画素データに基づいて初期位置を決定することができる。そのため、初期位置を決定するために画素データを取得する必要がない。したがって、初期位置を短時間で設定することができる。その結果、複数の単位領域についての複数の画素データを短時間で効率的に取得することができる。
【発明の効果】
【0042】
本発明によれば、複数の単位領域について測定対象物と対物レンズとの間の相対的な距離の範囲を短時間で効率的に設定することができる。
【図面の簡単な説明】
【0043】
【図1】本発明の一実施の形態に係る共焦点顕微鏡システムの構成を示すブロック図である。
【図2】X方向、Y方向およびZ方向を定義するための図である。
【図3】画素データの取得範囲に4個の単位領域が設定される例を示す図である。
【図4】1つの画素において観察対象物のZ方向の位置と受光素子の受光強度との関係を示す図である。
【図5】画素データの取得範囲の設定前における表示部の表示例を示す図である。
【図6】1つの画素についての対物レンズのZ方向の位置と有効な画素データの値との関係を説明するための図である。
【図7】評価値を用いたピーク位置探索処理を説明するための図である。
【図8】高さ画像データおよび超深度画像データの生成時における対物レンズ3のZ方向の上限位置および下限位置の設定方法を説明するための図である。
【図9】表面に段差を有する観察対象物と対物レンズとの位置関係を示す模式図である。
【図10】図9の観察対象物に対してレーザ光を走査させることにより得られる対物レンズのZ方向の位置と評価値との関係を示す図である。
【図11】共焦点顕微鏡システムにおいて実行される対象物観察処理を示すフローチャートである。
【図12】共焦点顕微鏡システムにおいて実行される対象物観察処理を示すフローチャートである。
【図13】図11の上下限自動設定処理を示すフローチャートである。
【図14】図11の上下限自動設定処理を示すフローチャートである。
【図15】図11の上下限自動設定処理を示すフローチャートである。
【図16】図14および図15の境界位置探索処理を示すフローチャートである。
【図17】図14および図15の境界位置探索処理を示すフローチャートである。
【図18】図14および図15の境界位置探索処理を示すフローチャートである。
【図19】境界位置探索処理の他の例を示すフローチャートである。
【発明を実施するための形態】
【0044】
本発明の一実施の形態に係る顕微鏡システムについて図面を参照しながら説明する。以下では、顕微鏡システムの一例として共焦点顕微鏡システムを説明する。
【0045】
(1)共焦点顕微鏡システムの基本構成
図1は、本発明の一実施の形態に係る共焦点顕微鏡システム500の構成を示すブロック図である。図1に示すように、共焦点顕微鏡システム500は、測定部100、PC(パーソナルコンピュータ)200、制御部300および表示部400を備える。測定部100は、レーザ光源10、X−Yスキャン光学系20、受光素子30、照明用白色光源40、カラーCCD(電荷結合素子)カメラ50およびステージ60を含む。ステージ60上には、観察対象物Sが載置される。
【0046】
レーザ光源10は、例えば半導体レーザである。レーザ光源10から出射されたレーザ光は、レンズ1により平行光に変換された後、ハーフミラー4を透過してX−Yスキャン光学系20に入射する。なお、レーザ光源10に代えて水銀ランプ等の他の光源が用いられてもよい。この場合、水銀ランプ等の光源とX−Yスキャン光学系20との間に帯域通過フィルタが配置される。水銀ランプ等の光源から出射された光は、帯域通過フィルタを通過することにより単色光となり、X−Yスキャン光学系20に入射する。
【0047】
X−Yスキャン光学系20は、例えばガルバノミラーである。X−Yスキャン光学系20は、ステージ60上の観察対象物Sの表面上においてレーザ光をX方向およびY方向に走査する機能を有する。X方向、Y方向およびZ方向の定義については後述する。X−Yスキャン光学系20により走査されたレーザ光は、ハーフミラー5により反射された後、ハーフミラー6を透過し、対物レンズ3によりステージ60上の観察対象物Sに集光される。なお、ハーフミラー4〜6に代えて偏光ビームスプリッタが用いられてもよい。
【0048】
観察対象物Sにより反射されたレーザ光は、対物レンズ3およびハーフミラー6を透過した後、ハーフミラー5により反射され、X−Yスキャン光学系20を透過する。X−Yスキャン光学系20を透過したレーザ光は、ハーフミラー4により反射され、レンズ2により集光され、ピンホール部材7のピンホールおよびND(Neutral Density)フィルタ8を透過して受光素子30に入射する。このように、本実施の形態においては反射型の共焦点顕微鏡システム500が用いられるが、観察対象物Sが細胞等の透明体である場合には、透過型の共焦点顕微鏡システムが用いられてもよい。
【0049】
ピンホール部材7のピンホールは、レンズ2の焦点位置に配置される。NDフィルタ8は、受光素子30に入射するレーザ光の強度を減衰させるために用いられる。そのため、レーザ光の強度が十分減衰されている場合には、NDフィルタ8は設けられなくてもよい。
【0050】
本実施の形態では、受光素子30は光電子増倍管である。受光素子30としてフォトダイオードおよび増幅器を用いてもよい。受光素子30は、受光量に対応するアナログの電気信号(以下、受光信号と呼ぶ)を出力する。制御部300は、2つのA/D変換器(アナログ/デジタル変換器)、FIFO(First In First Out)メモリおよびCPU(中央演算処理装置)を含む。受光素子30から出力される受光信号は、制御部300の1つのA/D変換器により一定のサンプリング周期でサンプリングされるとともにデジタル信号に変換される。A/D変換器から出力されるデジタル信号は、FIFOメモリに順次蓄積される。FIFOメモリに蓄積されたデジタル信号は画素データとして順次PC200に転送される。
【0051】
照明用白色光源40は、例えばハロゲンランプまたは白色LED(発光ダイオード)である。照明用白色光源40により発生された白色光は、ハーフミラー6により反射された後、対物レンズ3によりステージ60上の観察対象物Sに集光される。
【0052】
観察対象物Sにより反射された白色光は、対物レンズ3、ハーフミラー6およびハーフミラー5を透過してカラーCCDカメラ50に入射する。カラーCCDカメラ50に代えてCMOS(相補性金属酸化膜半導体)イメージセンサ等の撮像素子が用いられてもよい。カラーCCDカメラ50は、受光量に対応する電気信号を出力する。カラーCCDカメラ50の出力信号は、制御部300の他の1つのA/D変換器により一定のサンプリング周期でサンプリングされるとともにデジタル信号に変換される。A/D変換器から出力されるデジタル信号は、カメラデータとして順次PC200に転送される。
【0053】
制御部300は、画素データおよびカメラデータをPC200に与えるとともに、PC200からの指令に基づいて受光素子30の受光感度(ゲイン)およびカラーCCDカメラ50を制御する。また、制御部300は、PC200からの指令に基づいてX−Yスキャン光学系20を制御することによりレーザ光を観察対象物S上でX方向およびY方向に走査させる。
【0054】
対物レンズ3は、レンズ駆動部63によりZ方向に移動可能に設けられる。制御部300は、PC200からの指令に基づいてレンズ駆動部63を制御することにより対物レンズ3をZ方向に移動させることができる。これにより、対物レンズ3に対する観察対象物Sの相対的なZ方向の位置を変化させることができる。
【0055】
PC200は、CPU(中央演算処理装置)210、ROM(リードオンリメモリ)220、作業用メモリ230および記憶装置240を含む。ROM220には、システムプログラムが記憶される。作業用メモリ230は、RAM(ランダムアクセスメモリ)からなり、種々のデータの処理のために用いられる。記憶装置240は、ハードディスク等からなる。記憶装置240には、対象物観察プログラムが記憶されるとともに、制御部300から与えられる画素データおよびカメラデータ等の種々のデータを保存するために用いられる。対象物観察プログラムの詳細は後述する。
【0056】
CPU210は、制御部300から与えられる画素データに基づいて画像データを生成する。以下、画素データに基づいて生成される画像データを共焦点画像データと呼ぶ。また、共焦点画像データに基づいて表示される画像を共焦点画像と呼ぶ。
【0057】
CPU210は、制御部300から与えられるカメラデータに基づいて画像データを生成する。以下、カメラデータに基づいて生成される画像データをカメラ画像データと呼ぶ。また、カメラ画像データに基づいて表示される画像をカメラ画像と呼ぶ。
【0058】
CPU210は、生成した共焦点画像データおよびカメラ画像データに作業用メモリ230を用いて各種処理を行うとともに、共焦点画像データに基づく共焦点画像およびカメラ画像データに基づくカメラ画像を表示部400に表示させる。また、CPU210は、後述するステージ駆動部62に駆動パルスを与える。
【0059】
表示部400は、例えば液晶ディスプレイパネルまたは有機EL(エレクトロルミネッセンス)パネルにより構成される。
【0060】
ステージ60は、X方向移動機構、Y方向移動機構およびZ方向移動機構を有する。X方向移動機構、Y方向移動機構およびZ方向移動機構には、ステッピングモータが用いられる。
【0061】
ステージ60のX方向移動機構、Y方向移動機構およびZ方向移動機構は、ステージ操作部61およびステージ駆動部62により駆動される。使用者は、ステージ操作部61を手動で操作することにより、ステージ60を対物レンズ3に対して相対的にX方向、Y方向およびZ方向に移動させることができる。
【0062】
ステージ駆動部62は、PC200より与えられる駆動パルスに基づいて、ステージ60のステッピングモータに電流を供給することにより、ステージ60を対物レンズ3に相対的にX方向、Y方向またはZ方向に移動させることができる。
【0063】
(2)共焦点画像、超深度画像および高さ画像
図2は、X方向、Y方向およびZ方向を定義するための図である。図2に示すように、対物レンズ3により集光されたレーザ光が観察対象物Sに照射される。本実施の形態においては、対物レンズ3の光軸の方向をZ方向と定義する。また、Z方向と直交する面において、互いに直交する二方向をそれぞれX方向およびY方向と定義する。X方向、Y方向およびZ方向を矢印X,Y,Zでそれぞれ示す。
【0064】
Z方向において対物レンズ3に対する観察対象物Sの表面の相対的な位置を観察対象物SのZ方向の位置と呼ぶ。共焦点画像データの生成は、単位領域ごとに行なわれる。単位領域は対物レンズ3の倍率により定まる。
【0065】
観察対象物SのZ方向の位置が一定の状態で、X−Yスキャン光学系20により単位領域内のY方向の端部でレーザ光がX方向に走査される。X方向の走査が終了すると、レーザ光がX−Yスキャン光学系20によりY方向に一定の間隔変移される。この状態でレーザ光がX方向に走査される。単位領域内でレーザ光のX方向の走査およびY方向の変移が繰り返されることにより、単位領域のX方向およびY方向の走査が終了する。次に、対物レンズ3がZ方向に移動される。それにより、対物レンズ3のZ方向の位置が前回と異なる一定の状態で、単位領域のX方向およびY方向の走査が行なわれる。観察対象物SのZ方向の複数の位置で単位領域のX方向およびY方向の走査が行なわれる。
【0066】
観察対象物SのZ方向の位置ごとにX方向およびY方向の走査により共焦点画像データが生成される。これにより、単位領域内でZ方向の位置が異なる複数の共焦点画像データが生成される。
【0067】
ここで、共焦点画像データのX方向の画素数は、X−Yスキャン光学系20によるレーザ光のX方向の走査速度と制御部300のサンプリング周期とにより定まる。1回のX方向の走査(1本の走査線)におけるサンプリング数がX方向の画素数となる。また、単位領域の共焦点画像データのY方向の画素数は、X方向の走査の終了ごとのX−Yスキャン光学系20によるレーザ光のY方向の変移量により定まる。Y方向における走査線の数がY方向の画素数となる。さらに、単位領域の共焦点画像データの数は、観察対象物SのZ方向の移動回数により定まる。単位領域の複数の共焦点画像データに基づいて、後述する方法で超深度画像データおよび高さ画像データが生成される。
【0068】
図2の例では、まず、ステージ60の最初の位置で単位領域s1における観察対象物Sの複数の共焦点画像データが生成されるとともに単位領域s1の超深度画像データおよび高さ画像データが生成される。続いて、ステージ60が順次移動することにより単位領域s2〜s4における観察対象物Sの複数の共焦点画像データが生成されるとともに単位領域s2〜s4の超深度画像データおよび高さ画像データが生成される。この場合、隣接する単位領域の一部が互いに重なるように、単位領域s1〜s4が設定される。互いに重なる単位領域の一部の超深度画像データおよび高さ画像データを用いてパターンマッチングを行うことにより、複数の単位領域s1〜s4の超深度画像データおよび高さ画像データを高い精度で連結することができる。本実施の形態においては、互いに隣接する複数の単位領域が重なる部分を重複部分と呼ぶ。
【0069】
図3は、画素データの取得範囲に4個の単位領域s1〜s4が設定される例を示す図である。図3の例では、単位領域s1〜s4が2行2列で設定される。1行目に単位領域s1,s2が並び、2行目に単位領域s3,s4が並ぶ。
【0070】
この場合、横方向(行方向)において互いに隣接する単位領域s1と単位領域s2との間で重複部分ovが設定される。また、縦方向(列方向)において互いに隣接する単位領域s1と単位領域s3との間で重複部分ovが設定される。さらに、斜め方向において互いに隣接する単位領域s1と単位領域s4との間で重複部分ovが設定される。同様に、互いに隣接する各2つの単位領域間でそれぞれ重複部分ovが設定される。図3では、重複部分ovにハッチングが施されている。
【0071】
図4は、1つの画素において観察対象物SのZ方向の位置と受光素子30の受光強度との関係を示す図である。図1に示したように、ピンホール部材7のピンホールはレンズ2の焦点位置に配置される。そのため、観察対象物Sの表面が対物レンズ3の焦点位置にあるときに、観察対象物Sにより反射されたレーザ光がピンホール部材7のピンホールの位置に集光される。それにより、観察対象物Sにより反射されたレーザ光の大部分がピンホール部材7のピンホールを通過して受光素子30に入射する。この場合、受光素子30の受光強度は最大になる。それにより、受光素子30から出力される受光信号の電圧値は最大となる。
【0072】
一方、観察対象物Sが対物レンズ3の焦点位置が外れた位置にあるときには、観察対象物Sにより反射されたレーザ光はピンホール部材7のピンホールの前または後の位置に集光される。それにより、観察対象物Sにより反射されたレーザ光の多くはピンホール部材7のピンホールの周囲の部分で遮られ、受光素子30の受光強度は低下する。それにより、受光素子30から出力される受光信号の電圧値は低下する。
【0073】
このように、観察対象物Sの表面が対物レンズ3の焦点位置にある状態で受光素子30の受光強度分布にピークが現れる。各単位領域の複数の共焦点画像データから、画素ごとにZ方向における受光強度分布が得られる。それにより、画素ごとに受光強度分布のピーク位置とピーク強度(ピークの受光強度)とが得られる。
【0074】
各単位領域に対応する複数の画素についてのZ方向におけるピーク位置を表すデータを高さ画像データと呼び、高さ画像データに基づいて表示される画像を高さ画像と呼ぶ。高さ画像は、観察対象物Sの表面形状を表す。また、各単位領域に対応する複数の画素についてのピーク強度を表すデータを超深度画像データと呼び、超深度画像データに基づいて表される画像を超深度画像と呼ぶ。超深度画像は、観察対象物Sの表面のすべての部分にピントが合った状態で得られる画像である。PC200は、制御部300から与えられる単位領域の複数の画素データに基づいて単位領域の複数の共焦点画像データを生成し、複数の共焦点画像データに基づいて単位領域の高さ画像データおよび超深度画像データを生成する。以下、高さ画像データおよび超深度画像データを総称して表面画像データと呼び、高さ画像および超深度画像を総称して表面の画像と呼ぶ。
【0075】
(3)画素データの取得範囲(観察範囲)の設定
図5は、画素データの取得範囲の設定前における表示部400の表示例を示す図である。図5に示すように、表示部400の画面上には、画像表示領域410および条件設定領域420が表示される。画像表示領域410には、共焦点画像データに基づく共焦点画像またはカメラ画像データに基づくカメラ画像が表示される。条件設定領域420には、範囲設定ボタン421および取得開始ボタン422が表示される。
【0076】
使用者は、図1の共焦点顕微鏡システム500のステージ60に観察対象物Sを載置する。制御部300は、カメラデータを順次PC200に与える。PC200のCPU210は、制御部300により与えられたカメラデータに基づいてカメラ画像データを生成し、観察対象物Sのカメラ画像を表示部400の画像表示領域410に表示させる。この場合、使用者は、ステージ60をX方向またはY方向に移動させることにより画像表示領域410に表示される観察対象物Sのカメラ画像の範囲を変更することができる。
【0077】
使用者は、PC200に接続されたマウス等のポインティングデバイスを用いて条件設定領域420の範囲設定ボタン421を操作する。これにより、PC200のCPU210は、表示部400に画素データの取得範囲の設定画面(図示せず)を表示させる。使用者は、取得範囲の設定画面が表示された状態で、ポインティングデバイスを用いて画素データの取得範囲を設定する。
【0078】
PC200のCPU210は、設定された取得範囲が単位領域よりも大きい場合、設定された取得範囲にn個(nは2以上の自然数)の単位領域を設定する。この場合、CPU210は、互いに隣接する各2つの単位領域間に重複部分ovを設定する。以下では、取得範囲が単位領域よりも大きい場合に設定される複数の単位領域をそれぞれ1番目〜n番目の単位領域と呼ぶ。
【0079】
画素データの取得範囲が設定された後、使用者は、条件設定領域420の取得開始ボタン422を操作する。これにより、PC200のCPU210は、1番目の単位領域について、本発明の移動範囲設定処理に対応する処理として上下限自動設定処理を実行する。
【0080】
上下限自動設定処理は、高さ画像データおよび超深度画像データの生成時に移動する対物レンズ3のZ方向における上限位置および下限位置を設定する処理である。上下限自動設定処理の詳細は後述する。
【0081】
上下限自動設定処理の実行後、PC200のCPU210は、設定された上限位置と下限位置との間のZ方向の複数の位置でレーザ光をX方向およびY方向に走査させ、1番目の単位領域における複数の画素データを取得する。これにより、1番目の単位領域内においてZ方向の異なる複数の位置に対応する複数の共焦点画像データが生成され、生成された複数の共焦点画像データに基づいて表面画像データ(高さ画像データおよび超深度画像データ)が生成される。
【0082】
続いて、PC200のCPU210は、2番目の単位領域について後述する上下限自動設定処理を実行する。また、PC200のCPU210は、設定された上限位置と下限位置との間のZ方向の複数の位置でレーザ光をX方向およびY方向に走査させ、2番目の単位領域における複数の画素データを取得する。これにより、2番目の単位領域において、Z方向の異なる複数の位置に対応する複数の共焦点画像データが生成され、生成された複数の共焦点画像データに基づいて表面画像データが生成される。
【0083】
以後同様に、PC200のCPU210は、3番目〜n番目の単位領域についても、それぞれ上下限自動設定処理を実行するとともに複数の画素データを取得する。このようにして、全ての単位領域について表面画像データが生成される。
【0084】
最後に、PC200のCPU210は、生成された全て(1番目〜n番目)の単位領域の表面画像データを連結し、連結された表面画像データに基づく観察対象物Sの表面の画像を表示部400に表示させる。
【0085】
以下、1番目の単位領域について実行される上下限自動設定処理を1番目の上下限自動設定処理と呼び、2番目以降のm(mは2以上n以下の自然数)番目の単位領域について実行される上下限自動設定処理をm番目の上下限自動設定処理と呼ぶ。
【0086】
本実施の形態において、1番目の上下限自動設定処理は、m番目の上下限自動設定処理とは異なる。m番目の上下限自動設定処理では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovにおいて既に取得された複数の画素データが用いられる。それにより、m番目以降の上下限自動設定処理は、1番目の上下限自動設定処理に比べて単純化される。1番目の上下限自動設定処理およびm番目の上下限自動設定処理の詳細について説明する。
【0087】
(4)1番目の上下限自動設定処理
1番目の上下限自動設定処理の詳細を説明する。図6は、1つの画素についての対物レンズ3のZ方向の位置と有効な画素データの値との関係を説明するための図である。図6において、縦軸は画素データの値を表し、横軸は対物レンズ3のZ方向の位置を表す。図6の横軸においては、左から右に向かって対物レンズ3のZ方向の位置が高くなる。
【0088】
以下では、受光素子30の出力信号のレベルとして、画素データの値を用いる。また、受光素子30の出力信号の予め定められたレベルとしてノイズレベルnlを用いる。
【0089】
画素データは受光素子30から出力される受光信号に対応するデジタル信号である。そのため、画素データの値は、受光素子30のゲインが大きくなるほど大きく、受光素子30のゲインが小さくなるほど小さい。また、画素データはA/D変換器から出力される。したがって、画素データの上限値は、A/D変換器の出力レンジの上限値(以下、出力上限値maxと呼ぶ)である。
【0090】
画素データの値が出力上限値maxで飽和すると、受光素子30の受光強度に対応する画素データの値を得ることができない。また、画素データの値がノイズレベルnl以下であると、画素データのピークを受光素子30のノイズから明確に識別することはできない。以下では、出力上限値maxよりも小さく、ノイズレベルnlよりも大きい画素データの値を有効な画素データの値と呼ぶ。
【0091】
図6においては、有効な画素データの値の範囲が矢印HLで示される。この場合、曲線l1で示すように、受光素子30に任意の第1のゲインが設定されているときに、1つの画素についての画素データの値は、対物レンズ3がピーク位置z0よりも低い位置ma1からピーク位置z0よりも高い位置mb1までの範囲にある状態で有効となる。
【0092】
したがって、1つの画素についての有効な画素データの値を取得するための対物レンズ3のZ方向の上限位置および下限位置は、出力上限値maxおよびノイズレベルnlに応じて定まる。
【0093】
図6に曲線l2で示すように、受光素子30に第1のゲインよりも小さい第2のゲインが設定されると、画素データの値は、受光素子30に第1のゲインが設定されている場合に比べて全体的に小さくなる。この場合、1つの画素についての画素データの値は、対物レンズ3が位置ma1よりも高い位置ma2から位置mb1よりも低い位置mb2までの範囲にある状態で有効となる。このように、受光素子30に設定されるゲインが変化すると、有効な画素データの値を得ることができる対物レンズ3のZ方向の上限位置および下限位置も変化する。
【0094】
1つの画素についての上限位置および下限位置を設定する場合には、ピーク位置z0における画素データの値が出力上限値maxにできる限り近づくようにゲインを設定する。この場合、画素データのピークがノイズレベルnlよりも十分に大きくなる。したがって、画素データのピークを受光素子30のノイズから明確に識別することが可能となる。
【0095】
ここで、1つの画素についての上限位置および下限位置を設定する場合には、まず、焦点が観察対象物Sの表面に合うように対物レンズ3をZ方向に移動させる。すなわち、対物レンズ3を初期位置としてピーク位置z0に移動させる。対物レンズ3がピーク位置z0にある場合には、画素データの値が確実に有効となる。この場合、対物レンズ3をピーク位置z0から上に向かう方向および下に向かう方向に移動させることにより、対物レンズ3の焦点が観察対象物Sの表面から十分にずれるとき、すなわち画素データの値がノイズレベルnl以下となるときの対物レンズ3の位置を検出することができる。検出された位置に基づいて、対物レンズ3のZ方向の上限位置および下限位置を適切に設定することができる。
【0096】
このように、対物レンズ3のZ方向の上限位置および下限位置を設定することにより、有効な画素データが得られない範囲で対物レンズ3をZ方向に移動させる必要がなくなる。その結果、対物レンズ3のZ方向の上限位置および下限位置を設定するための処理の時間を短くすることができる。
【0097】
また、この場合、対物レンズ3のZ方向の下限位置は、対物レンズ3の焦点位置が観察対象物Sの表面よりも下方に移動し、画素データの値が有効な値からノイズレベルnl以下となる時点の位置に設定される。そのため、対物レンズ3のZ方向の下限位置が設定されるときに、対物レンズ3が下方に移動しすぎることにより観察対象物Sの表面に衝突することが防止される。
【0098】
本実施の形態では、1番目の上下限自動設定処理時に、後述する評価値を用いて上記のピーク位置z0に対応する対物レンズ3のZ方向の位置(後述する評価ピーク位置Ez0)を検出するとともに、受光素子30のゲインを調整するためのピーク位置探索処理が行われる。
【0099】
図7は、評価値を用いたピーク位置探索処理を説明するための図である。ここで、評価値は、観察対象物Sの表面のうち予め定められた領域についての複数の画素データの値に基づいて算出される値である。本実施の形態では、評価値は、単位領域についての全ての画素データの値の和である。評価値がピーク値を示すときの対物レンズ3のZ方向の位置を評価ピーク位置Ez0と呼ぶ。また、A/D変換器の出力上限値maxと評価値を算出するための複数の画素データの数(本例では、単位領域の全画素データの数)との乗算値を出力上限値Emaxと呼ぶ。さらに、ノイズレベルnlと評価値を算出するための複数の画素データの数(本例では、単位領域の全画素データの数)との乗算値をノイズ評価レベルEnlと呼ぶ。
【0100】
以下では、受光素子30の出力信号のレベルとして、後述する評価値を用いる。また、受光素子30の出力信号の予め定められられたレベルとして後述するノイズ評価レベルEnlを用いる。
【0101】
図7(a)に対物レンズ3のZ方向の位置と評価値との関係が示される。図7(a)において、縦軸は評価値を表し、横軸は対物レンズ3のZ方向の位置を表す。図7(a)の横軸においては、左から右に向かって対物レンズ3のZ方向の位置が高くなる。
【0102】
ピーク位置探索処理の開始時においては、受光素子30のゲインは、算出される評価値が評価上限値Emaxよりも小さくかつノイズ評価レベルEnlよりも十分に大きくなるように設定される。本例では、受光素子30のゲインは、算出される評価値が評価上限値Emaxの1/2になるように設定される。
【0103】
その後、図7(a)に太い実線の矢印で示すように、対物レンズ3を現在のZ方向の位置zs1(評価ピーク位置Ez0よりも低い位置)から徐々に上に向かう方向に移動させつつ設定されたゲインで単位領域についての全ての画素データを取得するとともに評価値を算出する。
【0104】
この場合、評価値は対物レンズ3が評価ピーク位置Ez0に到達するまでの間、指数関数的に増加する。そこで、このピーク位置探索処理においては、評価値が評価上限値Emaxに達するごとに一定量ゲインを減少させる。
【0105】
これにより、対物レンズ3がZ方向の位置zs1から評価ピーク位置Ez0に移動するまでの間、指数関数的に増加する評価値が評価上限値Emaxで飽和することが防止される。その結果、評価ピーク位置Ez0の近傍では、最終的に受光素子30のゲインが適切な値に設定される。
【0106】
評価値は受光素子30のゲインが減少すると小さくなる。そのため、ピーク位置探索処理においては、受光素子30のゲインの減少回数に基づいて、算出された評価値を補正する。
【0107】
本実施の形態では、算出された評価値にピーク位置探索処理の開始後の受光素子30のゲインの減少回数と評価上限値Emaxとの乗算値を加算することにより、評価値の補正を行う。これにより、対物レンズ3のZ方向の全範囲に渡って、補正後の評価値と受光素子30の受光強度とを近似的に対応付けることが可能となる。
【0108】
図7(b)に対物レンズ3のZ方向の位置と補正された評価値との関係が示される。図7(b)において、縦軸は補正後の評価値を表し、横軸は対物レンズ3のZ方向の位置を表す。図7(b)の横軸においては、左から右に向かって対物レンズ3のZ方向の位置が高くなる。
【0109】
図7(b)に示すように、補正後の評価値は、受光素子30の受光強度と同様に、ピーク値まで指数関数的に増加した後、ピーク値から指数関数的に減少する。これにより、対物レンズ3をZ方向の一方向(上に向かう方向)に移動させることにより、補正後の評価値の増減が切り替わったか否かを判定する。補正後の評価値の増減が切り替わった場合には、対物レンズ3をZ方向の一方向(上に向かう方向)にさらに移動させることにより、補正後の評価値がピーク値から予め定められた値pi2分減少したか否かを判定する。
【0110】
補正後の評価値がピーク値から値pi2分減少した場合には、補正後の評価値の増減が切り替わる前に補正後の評価値が予め定められた値pi1分増加したか否かを判定する。補正後の評価値が予め定められた値pi1分増加した場合には、評価値がピーク値を示すときの対物レンズ3の位置を評価ピーク位置Ez0として検出することができる。
【0111】
対物レンズ3のZ方向に移動可能な範囲は、対物レンズ3の倍率により予め定められている。予め許容された対物レンズ3の下側の位置を下端位置zt1と呼び、予め許容された対物レンズ3の上側の位置を上端位置zt2と呼ぶ。
【0112】
最初に対物レンズ3が評価ピーク位置Ez0よりも高い位置zs2にある場合、対物レンズ3を上に向かう方向に移動させても評価ピーク位置Ez0を検出することはできない。この場合、図7(b)に太い点線の矢印で示すように、対物レンズ3を上端位置zt2まで移動させた後、対物レンズ3を逆方向(下に向かう方向)に移動させる。これにより、上記と同様に、評価ピーク位置Ez0を検出することができる。
【0113】
画素データの値は、受光素子30のノイズの影響により変化する。そこで、上記の値pi1,pi2は、例えばノイズレベルnlと評価値を算出するための複数の画素データの数(本例では、単位領域の全画素データの数)とのノイズ評価レベルEnlよりも大きい値に設定される。これにより、補正後の評価値が受光素子30のノイズの影響により変化する場合でも、評価ピーク位置Ez0が誤って検出されることが防止される。値pi1,pi2は、同じ値であってもよいし、互いに異なる値であってもよい。
【0114】
1番目の上下限自動設定処理においては、上記のように、ピーク位置探索処理により受光素子30のゲインが調整されつつ評価ピーク位置Ez0が探索される。
【0115】
本例では、1番目の単位領域に対して対物レンズ3の焦点が合う位置として近似的に評価ピーク位置Ez0を用いる。対物レンズ3を初期位置として評価ピーク位置Ez0に移動させ、対物レンズ3のZ方向の上限位置および下限位置を設定する。この場合、対物レンズ3の焦点位置に観察対象物Sの表面が存在する。そのため、後述するように、対物レンズ3のZ方向の位置を評価ピーク位置Ez0から上に向かう方向に変化させつつ評価値を算出することにより、評価値がノイズ評価レベルEnl以下となる位置を、対物レンズ3のZ方向の上限位置として適切に設定することができる。一方、対物レンズ3のZ方向の位置を評価ピーク位置Ez0から下に向かう方向に変化させつつ評価値を算出することにより、評価値がノイズ評価レベルEnl以下となる位置を、対物レンズ3のZ方向の下限位置として適切に設定することができる。
【0116】
図8は、高さ画像データおよび超深度画像データの生成時における対物レンズ3のZ方向の上限位置および下限位置の設定方法を説明するための図である。
【0117】
この設定方法においては、まず、対物レンズ3をピーク位置探索処理により検出された評価ピーク位置Ez0に保持した状態で、単位領域のX方向およびY方向の走査を行い、単位領域についての全ての画素データを取得する。
【0118】
いずれかの画素データの値が出力上限値max(図6)である場合には、その画素データの値は有効ではない。そこで、受光素子30のゲインを一定量減少させる。その後、再び単位領域のX方向およびY方向の走査を行うことにより、単位領域についての全ての画素データを取得する。
【0119】
上記のゲイン調整および画素データの取得を繰り返すことにより、全ての画素データの値が出力上限値max(図6)よりも小さくなった場合に、評価値が所定のしきい値以下であるか否かを判定する。本実施の形態では、所定のしきい値は、ノイズ評価レベルEnl(図7および図10)である。評価値がノイズ評価レベルEnl(図7および図10)以下でない場合、図8に太い実線の矢印naで示すように、対物レンズ3を一定量上に向かう方向に移動させる。
【0120】
続いて、上記のゲイン調整、画素データの取得、画素データの判定動作および対物レンズ3の上に向かう方向への移動を繰り返す。それにより、評価値がノイズ評価レベルEnl以下であると判定されたときの対物レンズ3のZ方向の位置を上限位置UPとして設定する。
【0121】
受光素子30のゲインが変化すると、取得される画素データの値も変化する。そこで、上限位置UPの設定後、図8に太い実線の矢印nbで示すように、最後に受光素子30のゲインが減少された時点の位置Ez1まで対物レンズ3をZ方向に移動させる。ピーク位置探索処理後上限位置UPが設定されるまでの間、受光素子30のゲインが変化しない場合には、対物レンズ3を評価ピーク位置Ez0までZ方向に移動させる。この状態で、単位領域のX方向およびY方向の走査を行うことにより、単位領域についての全ての画素データを取得する。
【0122】
この場合においても、上記と同様に、いずれかの画素データの値が出力上限値max(図6)である場合には、受光素子30のゲインを一定量減少させる。その後、再び単位領域のX方向およびY方向の走査を行うことにより、単位領域についての全ての画素データを取得する。
【0123】
上記のゲイン調整および画素データの取得を繰り返すことにより、全ての画素データの値が出力上限値max(図6)よりも小さくなった場合には、評価値がノイズ評価レベルEnl以下であるか否かを判定する。
【0124】
評価値がノイズ評価レベルEnl以下でない場合、図8に太い実線の矢印ncで示すように、対物レンズ3を一定量下に向かう方向に移動させる。続いて、上記のゲイン調整、画素データの取得、画素データの判定動作および対物レンズ3の下に向かう方向への移動を繰り返す。それにより、評価値がノイズ評価レベルEnl以下であると判定されたときの対物レンズ3のZ方向の位置を下限位置BPとして設定する。
【0125】
上記のように、受光素子30のゲインが変化すると、取得される画素データの値も変化し、有効な画素データの値を得ることができる対物レンズ3のZ方向の範囲も変化する。すなわち、上限位置UPの設定後下限位置BPが設定されるまでの間に受光素子30のゲインが変化すると、ゲインの変化量に応じて上限位置UPも変化する。そこで、上限位置UPの設定後の下限位置BPの設定時に受光素子30のゲインが減少された場合、図8に太い実線の矢印ndで示すように、最後に受光素子30のゲインが減少された時点の位置Ez2まで対物レンズ3をZ方向に移動させる。
【0126】
その後、図8に太い実線の矢印neで示すように、再び上限位置UPの探索を行う。上記のように、一度上限位置UPおよび下限位置BPが設定されている場合には、受光素子30のゲインは十分に減少していると考えられる。そのため、再度の上限位置UPの探索時には、受光素子30のゲインはほとんど減少しない。したがって、受光素子30が下限位置BPの設定時のゲインとほぼ同じゲインに調整された状態で、上限位置UPが再設定される。
【0127】
(5)m番目以降の上下限自動設定処理
上述のように、m番目の上下限自動設定処理では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについて既に取得された複数の画素データが用いられる。以下、m番目以降の上下限自動設定処理の詳細を説明する。
【0128】
m番目以降の上下限自動設定処理が開始される場合には、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについての複数の画素データが既に取得されている。
【0129】
例えば、図3の2番目の単位領域s2について2番目の上下限自動設定処理が開始される場合には、1番目の単位領域s1と2番目の単位領域s2との間の重複部分ovについての複数の画素データが既に取得されている。同様に、図3の4番目の単位領域s4について4番目の上下限自動設定処理が開始される場合には、2番目の単位領域s2と4番目の単位領域s4との間の重複部分ovおよび3番目の単位領域s3と4番目の単位領域s4との間の重複部分ovについての複数の画素データが既に取得されている。
【0130】
そこで、m番目の上下限自動設定処理では、1番目の単位領域の上下限自動設定処理で実行されるピーク位置探索処理の代わりに、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについて既に取得された複数の画素データに基づいて、上限位置UPおよび下限位置BPを探索するためのZ方向における対物レンズ3の初期位置が決定される。
【0131】
重複部分ovについて既に取得された複数の画素データは、有効な画素データである。したがって、これらの複数の有効な画素データを用いることにより、評価値がノイズ評価レベルEnlよりも大きくなるように対物レンズ3の初期位置を決定することができる。その結果、m番目の上下限自動設定処理において、対物レンズ3のZ方向の上限位置および下限位置を短時間で設定することが可能となる。
【0132】
具体的には、初期位置は、次のように決定することができる。単位領域についての複数の画素データが取得されることにより、単位領域の高さ画像データおよび超深度画像データが生成される。したがって、m番目の上下限自動設定処理時には、既にm番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについての高さ画像データおよび超深度画像データが生成されている。そこで、m番目の上下限自動設定処理では、既に生成された重複部分ovについての高さ画像データに基づいて、Z方向における重複部分ovの表面のうち最も低い高さ(または最も高い高さ)を求める。求められた高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を初期位置として決定する。
【0133】
または、初期位置は、次のように決定することができる。既に生成された重複部分ovの高さ画像データに基づいて、Z方向における重複部分ovの表面の平均高さを算出する。算出された平均高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を初期位置として決定する。
【0134】
または、初期位置は、次のように決定することができる。既に生成された重複部分ovについての高さ画像データに基づいて、Z方向における重複部分ovの表面の高さについてのヒストグラム(度数分布)を求める。求められたヒストグラムにおいてピークを示す高さに焦点位置が一致するときの対物レンズ3の位置を初期位置として決定する。
【0135】
画素データの値がノイズレベルnl以下であると、画素データの値のピークを受光素子30のノイズから明確に識別することは難しい。そこで、初期位置を決定する場合には、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについて既に取得された複数の画素データのうちノイズレベルnlを超える画素データを抽出してもよい。この場合、抽出された画素データに基づいて初期位置を決定することにより、有効な画素データに基づいて初期位置を適切に決定することができる。
【0136】
なお、m番目の単位領域が複数の単位領域に隣接する場合には、複数の重複部分ovについての複数の画素データに基づいて、対物レンズ3の初期位置が決定されてもよい。
【0137】
続いて、対物レンズ3をZ方向の初期位置に保持した状態で、m番目の単位領域のX方向およびY方向の走査を行うことにより、単位領域についての全ての画素データを取得する。この状態で、全ての画素データの値が予め定められた規定値以上でない場合、受光素子30のゲインを一定量増加させる。画素データの取得および受光素子30のゲインの調整を繰り返し、全ての画素データの値が予め定められた規定値以上になると、初期位置を基準として対物レンズ3の上限位置UPおよび下限位置BPの探索を開始する。
【0138】
m番目の上下限自動設定処理における上限位置UPおよび下限位置BPの探索動作は、1番目の上下限自動設定処理における上限位置UPおよび下限位置BPの探索動作と同じである。
【0139】
上記のように、m番目の上下限自動設定処理においては、既に取得されている重複部分ovについての画素データに基づいて対物レンズ3の上限位置UPおよび下限位置BPを探索するための初期位置が決定される。したがって、ピーク位置探索処理を実行する必要がない。その結果、上下限自動設定処理の処理時間が十分に短くなる。
【0140】
(6)上下限自動設定処理の他の例
図9は、表面に段差を有する観察対象物Sと対物レンズ3との位置関係を示す模式図である。図9の例では、観察対象物Sの表面に第1、第2および第3の面Sa1,Sa2,Sa3からなる段差が形成されている。第1および第3の面Sa1,Sa3はXY方向に平行であり、第2の面Sa2はYZ方向に平行である。Z方向において、第1の面Sa1は第3の面Sa3よりも高い。X方向において、第2の面Sa2は第1および第3の面Sa1,Sa3の間に位置する。
【0141】
図9(a)に示すように、Z方向において対物レンズ3の焦点位置fpが第1の面Sa1と第2の面Sa2との交差部に位置するときの対物レンズ3のZ方向の位置を第1のZ位置zp1と呼ぶ。図9(b)に示すように、Z方向において対物レンズ3の焦点位置fpが第2の面Sa2上でかつZ方向における第1の面Sa1と第3の面Sa3との間に位置するときの対物レンズ3のZ方向の位置を第2のZ位置zp2と呼ぶ。図9(c)に示すように、Z方向において対物レンズ3の焦点位置fpが第2の面Sa2と第3の面Sa3との交差部に位置するときの対物レンズ3のZ方向の位置を第3のZ位置zp3と呼ぶ。
【0142】
図9の観察対象物SのZ方向の複数の位置でレーザ光をX方向およびY方向に走査させる。図10は、図9の観察対象物Sに対してレーザ光を走査させることにより得られる対物レンズ3のZ方向の位置と評価値との関係を示す図である。図10の縦軸は評価値を表し、横軸は対物レンズ3のZ方向の位置を表す。横軸においては、左から右に向かって対物レンズ3のZ方向の位置が高くなる。また、図10の横軸には、上述の下端位置zt1、上端位置zt2および第1〜第3のZ位置zp1〜zp3が示される。
【0143】
図10に示すように、対物レンズ3のZ方向の位置が第1のZ位置zp1にある場合には、対物レンズ3の焦点位置fpが第1の面Sa1上に位置する(図9(a)参照)。この場合、対物レンズ3の焦点位置fpでレーザ光の一部が第1の面Sa1で反射することにより評価値が大きくなる。また、対物レンズ3のZ方向の位置が第3のZ位置zp3にある場合には、対物レンズ3の焦点位置fpが第3の面Sa3上に位置する(図9(c)参照)。この場合、対物レンズ3の焦点位置fpでレーザ光の一部が第3の面Sa3で反射することにより評価値が大きくなる。一方、対物レンズ3が第2のZ位置zp2にある場合には、対物レンズ3の焦点位置fpが対物レンズ3の光軸に直交する面(XY方向に平行な面)上に存在しない。この場合、対物レンズ3の焦点位置fpにはZ方向にレーザ光を反射する面が存在しない。そのため、評価値が小さくなる。
【0144】
本例では、対物レンズ3が下端位置zt1から位置zn1までの間の範囲AZ1、位置zn2から位置zn3までの間の範囲AZ2、および位置zn4から上端位置zt2までの間の範囲AZ3にある場合、評価値が上述のノイズ評価レベルEnl以下である。第1のZ位置zp1は、位置zn1と位置zn2との間に位置し、第2のZ位置zp2は、位置zn2と位置zn3との間に位置し、第3のZ位置zp3は、位置zn3と位置zn4との間に位置する。
【0145】
上記の上下限自動設定処理によれば、対物レンズ3を第1の位置zp1に移動させた後、ゲイン調整、画素データの取得および対物レンズ3の上に向かう方向への移動を繰り返す。これにより、評価値が最初にノイズ評価レベルEnl以下となったときの対物レンズ3のZ方向の位置zn2が上限位置UPとして設定される。また、上限位置UPの設定後、対物レンズ3を最後に受光素子30のゲインが減少された時点の位置に移動させた後、ゲイン調整、画素データの取得および対物レンズ3の下に向かう方向への移動を繰り返す。これにより、評価値が最初にノイズ評価レベルEnl以下となったときの対物レンズ3のZ方向の位置zn1が下限位置BPとして設定される。受光素子30のゲインが変化した場合には、上限位置UPの再探索および再設定が行われる。このように上限位置UPおよび下限位置BPが設定される場合には、第3のZ位置zp3が上限位置UPと下限位置BPとの間の範囲から外れる。そのため、使用者は第3の面Sa3を観察することができなくなる。
【0146】
そこで、本実施の形態に係る共焦点顕微鏡システム500においては、上記の図8を用いて説明した上下限自動設定処理に加えて、以下の上下限自動設定処理が行われてもよい。
【0147】
本例の上下限自動設定処理においては、対物レンズ3を第1の位置zp1に移動させた後、対物レンズ3が上端位置zt2に達するまで、ゲイン調整、画素データの取得および対物レンズ3の上に向かう方向への移動を繰り返す(図10の太い矢印参照)。評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置(本例では位置zn4)を上限位置UPとして設定する。
【0148】
また、上限位置UPの設定後、対物レンズ3を最後に受光素子30のゲインが減少された時点の位置に移動させた後、対物レンズ3が下端位置zt1に達するまで、ゲイン調整、画素データの取得および対物レンズ3の下に向かう方向への移動を繰り返す。評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置(本例では位置zn1)を下限位置BPとして設定する。
【0149】
受光素子30のゲインが変化した場合には、対物レンズ3を最後に受光素子30のゲインが減少された位置に移動させた後、対物レンズ3が上端位置zt2に達するまで、ゲイン調整、画素データの取得および対物レンズ3の上に向かう方向への移動を繰り返す。評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置を上限位置UPとして再設定する。
【0150】
この方法によれば、観察対象物Sの表面が大きな段差を有する場合でも、使用者は、段差を構成する全ての面(図9の第1および第3の面Sa1,Sa3)を観察することができる。
【0151】
上記のように、対物レンズ3のZ方向に移動可能な範囲は、対物レンズ3の倍率により予め定められている。しかしながら、下限位置BPおよび上限位置UPは、必ずしも対物レンズ3の倍率により予め定められた下端位置zt1と上端位置zt2との間に位置するとは限らない。
【0152】
したがって、上下限自動設定処理において、下限位置BPおよび上限位置UPが設定できない場合には、上端位置zt2(図7、図9および図10)よりも一定距離高い位置を新たな上端位置とし、下端位置zt1(図7、図9および図10)よりも一定距離低い位置を新たな下端位置として設定した後、新たに設定された上端位置および下端位置に基づいて上下限自動設定処理を再度行ってもよい。
【0153】
このように、上限位置UPおよび下限位置BPが予め定められた対物レンズ3のZ方向に移動可能な範囲内に設定されない場合に、新たな上端位置および下限位置が設定される。これにより、対物レンズ3のZ方向に移動可能な範囲が拡大された状態で再度上下限自動設定処理が行われるので、Z方向の広い範囲に渡って上限位置UPおよび下限位置BPを正確に設定することが可能となる。
【0154】
上限位置UPおよび下限位置BPの探索時には、実質的に下端位置zt1から上端位置zt2までの範囲でゲイン調整および画素データの取得が行われる。そのため、上下限自動設定処理の時間が長くなる。そこで、本例の上下限自動設定処理においては、以下のように上限位置UPおよび下限位置BPを探索してもよい。
【0155】
上記のように、上限位置UPまたは下限位置BPの探索時には、評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置が上限位置UPまたは下限位置BPとして設定される。したがって、上限位置UPまたは下限位置BPの探索時には、評価値がノイズ評価レベルEnlよりも大きい場合に、対物レンズ3のZ方向の移動ピッチを小さく設定する。この理由について、移動ピッチの具体的な設定例とともに説明する。
【0156】
Z方向において、対物レンズ3から観察対象物Sに照射されるレーザ光の強度は、対物レンズ3の焦点位置fpで最も大きくなり、対物レンズ3の焦点位置fpから離れるほど小さくなる。観察対象物Sの表面に照射されるレーザ光の強度が小さすぎると、観察対象物Sの表面を正確に観察することができない。そのため、上限位置UPまたは下限位置BPの探索時における対物レンズ3のZ方向の移動ピッチは、単位領域の表面全体に一定強度以上のレーザ光が照射されるように設定される。
【0157】
上述のように、1つの画素についての上限位置および下限位置を設定する場合には、ピーク位置z0における画素データの値が出力上限値maxにできる限り近づくようにゲインが設定される。したがって、観察対象物Sの表面にピーク強度の1/2の強度でレーザ光が照射される場合でも、観察対象物Sの表面を観察するために十分な反射光を得ることができる。
【0158】
ここで、対物レンズ3が固定された状態で、レーザ光の強度がピーク強度の1/2になるときのZ方向の位置と焦点位置fpとの間の距離を強度半減距離と呼ぶ。本例では、評価値がノイズ評価レベルEnlよりも大きい値である場合に、対物レンズ3のZ方向の移動ピッチを強度半減距離に設定する。この場合、上限位置UPまたは下限位置BPの探索時において、単位領域の表面全体にピーク強度の1/2以上の強度でレーザ光を照射することができる。これにより、上限位置UPまたは下限位置BPを精度よく設定することができる。
【0159】
評価値がノイズ評価レベルEnl以下である場合(例えば、対物レンズ3の位置が図10の範囲AZ1,AZ2,AZ3にある場合)には、Z方向の移動ピッチを大きく設定する。この理由について、移動ピッチの具体的な設定例とともに説明する。
【0160】
評価値がノイズ評価レベルEnl以下である状態では、上限位置UPおよび下限位置BPは設定されない。評価値がノイズ評価レベルEnl以下である場合には、評価値がノイズ評価レベルEnlよりも大きい値に変化したか否かが判定できればよい。
【0161】
そこで、本例では、評価値がノイズ評価レベルEnl以下である場合に、受光素子30のゲインを一定量大きくする。この場合、取得される複数の画素データの値がそれぞれ大きくなり、評価値が大きくなる。これにより、単位領域の表面に照射されるレーザ光の強度が低い場合でも、評価値とノイズ評価レベルEnlとを比較することが可能となる。それにより、対物レンズ3のZ方向の移動ピッチを上記の強度半減距離よりも大きく設定することができる。
【0162】
このように、評価値がノイズ評価レベルEnlよりも大きい場合に比べて、対物レンズ3のZ方向の移動ピッチを大きく設定する。これにより、画素データの取得回数を低減することができるので、上下限自動設定処理の時間が短くなる。
【0163】
評価値がノイズ評価レベルEnl以下である場合には、受光素子30のゲインを一定量増加させる代わりにレーザ光源10から出射されるレーザ光の光量を一定量増加させてもよい。この場合、上記の強度半減距離が大きくなる。それにより、評価値がノイズ評価レベルEnlよりも大きい値である場合に比べて、対物レンズ3のZ方向の移動ピッチを大きく設定することができる。
【0164】
評価値がノイズ評価レベルEnl以下である場合には、受光素子30のゲインを一定量増加させる代わりにNDフィルタ8の減衰率を一定量低下させてもよい。この場合、上記の強度半減距離が大きくなる。それにより、評価値がノイズ評価レベルEnlよりも大きい値である場合に比べて、対物レンズ3のZ方向の移動ピッチを大きく設定することができる。
【0165】
上記の例では、上限位置UPの設定後、対物レンズ3を最後に受光素子30のゲインが減少された時点の位置に移動させた後、対物レンズ3が下端位置zt1に達するまで、ゲイン調整、画素データの取得および対物レンズ3の下に向かう方向への移動が繰り返され、評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置が下限位置BPとして設定される。
【0166】
(7)対象物観察処理
共焦点顕微鏡システム500において、観察対象物Sを観察する場合に図1のPC200のCPU210が行う対象物観察処理について説明する。
【0167】
図11および図12は、共焦点顕微鏡システム500において実行される対象物観察処理を示すフローチャートである。図1のPC200のCPU210は、記憶装置240に記憶される対象物観察プログラムに従って動作する。
【0168】
以下に説明する対象物観察処理においては、本発明の移動範囲設定処理として上下限自動設定処理(後述するステップS4)が実行され、本発明の測定処理として単位領域についての画素データを取得する処理(後述するステップS7)が実行される。なお、フローチャートのステップS8,S9では、共焦点画像データおよび表面画像データを画像データと略記する。対象物観察処理には、上記の上下限自動設定処理が含まれる。上記のように、m番目の上下限自動設定処理では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovにおいて既に取得された複数の画素データが用いられる。それにより、m番目以降の上下限自動設定処理が1番目の上下限自動設定処理に比べて単純化されるので、m番目の上下限自動設定処理の時間が十分に短くなる。
【0169】
まず、CPU210は、制御部300により与えられるカメラデータに基づいてカメラ画像データを生成し、カメラ画像データに基づいて観察対象物Sのカメラ画像を図5の表示部400の画像表示領域410に表示させる(ステップS1)。
【0170】
次に、使用者は、ポインティングデバイスを用いて画素データの取得範囲を指示する。CPU210は、使用者の指示に基づいて、画素データの取得範囲を設定する(ステップS2)。本実施の形態では、画素データの取得範囲が単位領域よりも大きい場合に、隣接する単位領域の一部が互いに重なるように、取得範囲内の各単位領域の位置および単位領域の数が決定される。決定された取得範囲内の各単位領域の位置および単位領域の数が作業用メモリ230に記憶される。
【0171】
続いて、CPU210は、作業用メモリ230に記憶された単位領域の位置に基づいて図1のステージ駆動部62に駆動パルスを与えることによりステージ60を移動させる(ステップS3)。
【0172】
続いて、CPU210は、上記の上下限自動設定処理を行う(ステップS4)。上下限自動設定処理により、対物レンズ3のZ方向の移動範囲が設定される。上下限自動設定処理の詳細については後述する(図13〜図16参照)。その後、CPU210は、上下限自動設定処理が成功したか否かを判定する(ステップS5)。上下限自動設定処理が成功した場合、CPU210は、制御部300にX方向の走査におけるサンプリング数、走査線数およびZ方向の移動範囲を通知するとともに単位領域についての画素データの取得を指令する(ステップS6)。
【0173】
制御部300は、CPU210から通知されたX方向の走査におけるサンプリング数、走査線数およびZ方向の移動範囲に基づいて、図1のX−Yスキャン光学系20を制御するとともに対物レンズ3のZ位置(観察対象物SのZ方向の位置)を移動させ、受光素子30から出力される受光信号に基づいて画素データをPC200のCPU210に与える。CPU210は、制御部300から単位領域についての画素データを取得する(ステップS7)。CPU210は、取得した画素データに基づいて単位領域の複数の共焦点画像データを生成するとともに表面画像データを生成し(ステップS8)、記憶装置240に記憶する。
【0174】
ここで、CPU210は、全ての単位領域の共焦点画像データおよび表面画像データを生成したか否かを判定する(ステップS9)。全ての単位領域の共焦点画像データおよび表面画像データを生成していない場合、CPU210は、ステップS3の処理に戻る。CPU210は、次の単位領域の共焦点画像データの生成が可能な位置にステージ60を移動させ、ステップS4〜S9の処理を繰り返す。
【0175】
一方、ステップS9において、全ての単位領域の共焦点画像データおよび表面画像データを生成した場合、CPU210は、記憶装置240に記憶された複数の単位領域の表面画像データを記憶装置240を用いて連結する(ステップS10)。これにより、指示された取得範囲の表面画像データが生成される。画素データの取得範囲内に単位領域が1つしか含まれない場合、ステップS10において表面画像データの連結は行われない。
【0176】
その後、CPU210は、連結された表面画像データに基づく観察対象物Sの表面の画像を作業用メモリ230を用いて表示部400に表示させる(ステップS11)。最後に、CPU210は、連結された表面画像データを記憶装置240に記憶し、対象物観察処理を終了する。
【0177】
上記のステップS5において、上下限自動設定処理が失敗した場合、CPU210は、画像処理が失敗したことを示す画像を表示部400に表示させ(ステップS12)、対象物観察処理を終了する。
【0178】
このように、図11および図12の対象物観察処理においては、ステップS5,S12により上下限自動設定処理が失敗した場合に対象物観察処理が終了する。これに限らず、ステップS5において上下限自動設定処理が失敗した場合に、CPU210は、上端位置zt2(図7、図9および図10)を上限位置UPとして設定し、下端位置zt1(図7、図9および図10)を下限位置BPとして設定してもよい。この場合、CPU210は、下限位置BPおよび上限位置UPの設定後、ステップS6の処理に進んでもよい。これにより、上下限自動設定処理が失敗した場合でも、観察対象物Sの表面の画像を表示部400に表示させることが可能となる。
【0179】
上記の例に限らず、ステップS5において上下限自動設定処理が失敗した場合に、CPU210は、上端位置zt2(図7、図9および図10)よりも一定距離高い位置を新たな上端位置とし、下端位置zt1(図7、図9および図10)よりも一定距離低い位置を新たな下端位置として設定した後、新たに設定された上端位置および下端位置に基づいてステップS4の上下限自動設定処理を再度行ってもよい。
【0180】
上端位置zt2(図7、図9および図10)と新たな上端位置との間の一定距離、および下端位置zt1(図7、図9および図10)と新たな下端位置との間の一定距離は、等しくてもよいし、互いに異なってもよい。また、これらの一定距離は、対物レンズ3の倍率により予め定められた距離であってもよいし、使用者がPC200(図1)に接続されたマウス等のポインティングデバイスを用いて設定した距離であってもよい。
【0181】
上記のように、上限位置UPおよび下限位置BPが予め定められた対物レンズ3のZ方向に移動可能な範囲内に設定されない場合に、新たな上端位置および下限位置が設定される。これにより、対物レンズ3のZ方向に移動可能な範囲が拡大された状態で再度上下限自動設定処理が行われるので、Z方向の広い範囲に渡って上限位置UPおよび下限位置BPを正確に設定することが可能となる。
【0182】
なお、CPU210は、上限位置UPが設定されかつ下限位置BPが設定されない場合に、新たな上端位置のみを設定し、新たに設定された上端位置および下端位置zt1(図7、図9および図10)に基づいてステップS4の上下限自動設定処理を再度行ってもよい。同様に、CPU210は、下限位置BPが設定されかつ上限位置UPが設定されない場合に、新たな下端位置のみを設定し、新たに設定された下端位置および上端位置zt2(図7、図9および図10)に基づいてステップS4の上下限自動設定処理を再度行ってもよい。
【0183】
(8)上下限自動設定処理
図13〜図15は、図11の上下限自動設定処理を示すフローチャートである。図13に示すように、CPU210は、まず現在の上下限自動設定処理が1番目の上下限自動設定処理であるか否かを判定する(ステップS20)。現在の上下限自動設定処理が1番目の上下限自動設定処理である場合、CPU210は、上記の評価値を用いたピーク位置探索処理(図7参照)を行うことにより、評価ピーク位置Ez0を検出する(ステップS21)。続いて、CPU210は、検出された評価ピーク位置Ez0を1番目の上下限自動設定処理の初期位置とし、対物レンズ3をその初期位置に移動させる(ステップS22)。
【0184】
m番目の上下限自動設定処理が開始される時点では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについての複数の画素データが既に取得されている。そのため、ステップS20において、現在の上下限自動設定処理が1番目以外のm番目の上下限自動設定処理である場合、CPU210は、重複部分ovについての複数の画素データに基づいて上述の初期位置を決定し、決定した初期位置を作業用メモリ230に記憶する(ステップS23)。その後、CPU210は、対物レンズ3をその初期位置に移動させる(ステップS24)。また、CPU210は、対物レンズ3が初期位置にある状態で、受光素子30のゲインを調整する(ステップS25)。具体的には、CPU210は、対物レンズ3が初期位置にある状態で、単位領域についての全ての画素データの値を取得し、取得される全ての画素データの値が予め定められた規定値以上になるように受光素子30のゲインを調整する。これにより、取得される複数の画素データの値をノイズレベルnlよりも十分に大きくすることができる。
【0185】
上記のように、m番目の上下限自動設定処理では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovにおいて既に取得された複数の画素データが用いられる。それにより、m番目以降の上下限自動設定処理では、評価ピーク位置Ez0を検出する必要がない。したがって、m番目以降の上下限自動設定処理が1番目の上下限自動設定処理に比べて単純化されるので、m番目の上下限自動設定処理の時間が十分に短くなる。
【0186】
ステップS22またはステップS25の処理後、CPU210は、対物レンズ3が初期位置にある状態で、Z方向の一方向(例えば上に向かう方向)について後述する図16〜図18の境界位置探索処理を開始する(ステップS26)。境界位置探索処理は、受光素子30のゲイン調整を行いつつ上限位置UPまたは下限位置BPを探索する処理である。境界位置探索処理の詳細は後述する。
【0187】
続いて、CPU210は、ステップS28で上限位置UPが設定されたか否か、すなわち境界位置探索処理が成功したか否かを判定する(ステップS27)。境界位置探索処理が失敗した場合、CPU210は、後述するステップS149の処理に進む。
【0188】
境界位置探索処理においては、後述する図16のステップS81で受光素子30のゲインが一定量減少される場合がある。そこで、ステップS27において境界位置探索処理が成功した場合、CPU210は、ステップS26の境界位置探索処理において受光素子30のゲインが減少したか否かを判定する(ステップS28)。受光素子30のゲインが減少していない場合、CPU210は、対物レンズ3を初期位置に移動させる(ステップS29)。一方、受光素子30のゲインが減少している場合、CPU210は、対物レンズ3を後述する境界位置探索処理のステップS71(図16)またはステップS82(図16)で最後に記憶された対物レンズ3のZ位置へ移動させる(ステップS30)。その後、CPU210は、Z方向の逆方向(例えば下に向かう方向)について後述する図16〜図18の境界位置探索処理を開始する(ステップS31)。
【0189】
続いて、CPU210は、ステップS31で下限位置BPが設定されたか否か、すなわち境界位置探索処理が成功したか否かを判定する(ステップS32)。境界位置探索処理が失敗した場合、CPU210は、後述するステップS149の処理に進む。
【0190】
境界位置探索処理が成功した場合、CPU210は、ステップS28と同様に、ステップS31の境界位置探索処理において受光素子30のゲインが減少したか否かを判定する(ステップS33)。
【0191】
後述する境界位置探索処理においては、図17のステップS76の処理で作業用メモリ230に対物レンズ3のZ位置の境界位置が記憶または更新される。ステップS33において受光素子30のゲインが減少していない場合、CPU210は、ステップS26で境界位置探索処理により記憶された境界位置に基づいて対物レンズ3の上限位置UPを設定し、ステップS31で境界位置探索処理により記憶された境界位置に基づいて対物レンズ3の下限位置BPを設定し(ステップS34)、上下限自動設定処理を終了する。
【0192】
ステップS34において、受光素子30のゲインが減少している場合には、CPU210は、対物レンズ3を後述する境界位置探索処理のステップS71(図16)またはステップS82(図16)で最後に記憶された対物レンズ3のZ位置へ移動させる(ステップS146)。その後、CPU210は、Z方向の一方向(例えば上に向かう方向)について再度後述する図16〜図18の境界位置探索処理を開始する(ステップS147)。
【0193】
続いて、CPU210は、ステップS147で上限位置UPが設定されたか否か、すなわち境界位置探索処理が成功したか否かを判定する(ステップS148)。境界位置探索処理が失敗した場合、CPU210は、後述するステップS149の処理に進む。
【0194】
境界位置探索処理が成功した場合、CPU210は、ステップS34の処理に進む。ステップS34において、CPU210は、ステップS147で記憶された境界位置に基づいて対物レンズ3の上限位置UPを設定し、ステップS31で記憶された境界位置に基づいて対物レンズ3の下限位置BPを設定する。これにより、受光素子30のゲインが最適な値に調整された状態で、対物レンズ3の上限位置UPおよび下限位置BPが設定される。
【0195】
ステップS148において、境界位置探索処理が失敗した場合、CPU210は、現在の上下限自動設定処理が1番目の上下限自動設定処理であるか否かを判定する(ステップS149)。現在の上下限自動設定処理が1番目の上下限自動設定処理である場合、CPU210は、図11のステップS12の処理に進み、画像処理が失敗したことを示す画像を表示部400に表示させる。
【0196】
m番目の上下限自動設定処理が開始される時点では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについての複数の画素データが既に取得されている。そのため、ステップS149において、現在の上下限自動設定処理が1番目以外のm番目の上下限自動設定処理である場合、CPU210は、重複部分ovについての複数の画素データに基づいて上限位置UPおよび下限位置BPを設定し(ステップS150)、上下限自動設定処理を終了する。これにより、m番目の上下限自動設定処理においては、後述する境界位置探索処理が失敗した場合でも、既に記憶されている重複部分ovについての複数の画素データに基づいて上限位置UPおよび下限位置BPが設定される。
【0197】
ステップS150において、CPU210は、重複部分ovの複数の画素データに基づいて、Z方向における重複部分ovの表面のうち最も低い高さを求め、求められた高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を下限位置BPとして設定してもよい。XY方向における対物レンズ3の大きさは各単位領域の大きさよりも十分に大きい。したがって、重複部分ovの表面のうち最も低い高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を下限位置BPとした場合には、複数の画素データの取得時に対物レンズ3が観察対象物Sの表面に衝突することが防止される。
【0198】
ステップS150において、CPU210は、重複部分ovの複数の画素データに基づいて、Z方向における重複部分ovの表面のうち最も高い高さを求め、求められた高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を上限位置BPとして設定してもよい。
【0199】
ステップS150において、CPU210は、隣接する単位領域に既に設定された上限位置UPおよび下限位置BPを、それぞれ現在の単位領域の上限位置UPおよび下限位置BPとして設定してもよい。
【0200】
さらに、ステップS150において、CPU210は、隣接する単位領域に既に設定された上限位置UPよりも高い位置に、現在の単位領域の上限位置UPを設定してもよい。また、CPU210は、隣接する単位領域に既に設定された下限位置BPよりも低い位置に、現在の単位領域の下限位置BPを設定してもよい。
【0201】
(9)境界位置探索処理方法
図16〜図18は、図14および図15の境界位置探索処理を示すフローチャートである。本実施の形態に係る共焦点顕微鏡システム500においては、境界位置探索処理方法を2つのモードに切り替えることができる。2つのモードのうちの一方は図8を用いて説明した上下限自動設定処理であり、2つのモードのうちの他方は図10を用いて説明した上下限自動設定処理である。本フローチャートは、図10を用いて説明した上下限自動設定処理に対応する。
【0202】
図16に示すように、CPU210は、現在の対物レンズ3のZ位置を作業用メモリ230に記憶する(ステップS70)。
【0203】
続いて、CPU210は、現在の対物レンズ3のZ位置において、単位領域についての全ての画素データの値を取得し、取得された画素データの値を図1の作業用メモリ230に記憶する(ステップS71)。
【0204】
次に、CPU210は、記憶された複数の画素データのうちのいずれかの値が出力上限値max(図6)であるか否かを判定する(ステップS72)。全ての画素データの値が出力上限値max(図6)でない場合、CPU210は、単位領域についての全ての画素データの値を取得することにより評価値を算出し(ステップS73)、算出された評価値が予め定められたしきい値以下であるか否かを判定する(ステップS74)。ここで、しきい値は、上記のノイズ評価レベルEnl(図7および図10)と等しい値に設定されてもよいし、そのノイズ評価レベルEnl(図7および図10)よりも大きい値に設定されてもよい。さらに、しきい値は、互いに異なる受光素子30の複数のゲインにそれぞれ対応するように複数設定されてもよい。この場合、ステップS74において、CPU210は、算出された評価値が現在設定されている受光素子30のゲインに対応するしきい値以下であるか否かを判定する。
【0205】
後述するステップS77の処理において、対物レンズ3のZ位置が下端位置zt1(図7、図9および図10)または上端位置zt2(図7、図9および図10)に達しない場合には、上記のステップS71〜S74の処理が繰り返される。算出された評価値がしきい値以下である場合、CPU210は、前回のステップS74の処理時に評価値がしきい値よりも大きかったか否かを判定する(ステップS75)。前回のステップS74の処理時に評価値がしきい値以下であった場合、CPU210は後述するステップS77の処理に進む。
【0206】
一方、前回のステップS74の処理時に評価値がしきい値よりも大きかった場合、CPU210は、現在の対物レンズ3のZ位置をZ方向の一方向における境界位置として作業用メモリ230に記憶する。または、CPU210は、境界位置が既に作業用メモリ230に記憶されている場合、現在の対物レンズ3のZ位置で境界位置を更新する(ステップS76)。
【0207】
続いて、CPU210は、対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達したか否かを判定する(ステップS77)。対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達した場合に境界位置探索処理が終了する。一方、対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達していない場合、CPU210は対物レンズ3をZ方向の一方向に第2のピッチ移動させ(ステップS87)、ステップS71の処理に戻る。第2のピッチは、後述する第1のピッチよりも大きくなるように設定される。第2のピッチが第1のピッチよりも大きく設定されることにより、境界位置探索処理の時間が短くなる。
【0208】
ステップS72において、いずれかの画素データの値が出力上限値maxである場合、CPU210は、受光素子30のゲインを一定量減少させるとともにゲインを減少した旨を作業用メモリ230に記憶する(ステップS81)。続いて、CPU210は、現在の対物レンズ3のZ位置によりステップS70で作業用メモリ230に記憶された対物レンズ3のZ位置を更新し(ステップS82)、ステップS71の処理に戻る。
【0209】
ステップS74において、算出された評価値がしきい値よりも大きい場合、CPU210は対物レンズ3をZ方向の一方向に第1のピッチ移動させ(ステップS83)、対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達したか否かを判定する(ステップS84)。第1のピッチは、上記の強度半減距離と等しい大きさに設定される。これにより、対物レンズ3の上限位置UPおよび下限位置BPを精度よく設定することが可能となる。
【0210】
ステップS84において、Z位置が下端位置zt1または上端位置zt2に達していない場合、CPU210はステップS71の処理に戻る。一方、Z位置が下端位置zt1または上端位置zt2に達した場合、図18に示すように、CPU210は、ステップS76の処理により作業用メモリ230に境界位置が記憶されているか否かを判定する(ステップS85)。
【0211】
作業用メモリ230に境界位置が記憶されている場合、境界位置探索処理が終了する。一方、作業用メモリ230に境界位置が記憶されていない場合、CPU210は、境界位置探索処理の失敗を判定する(ステップS86)。
【0212】
上記のように、図16〜図18の境界位置探索処理において、CPU210は、対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達するまで、対物レンズ3をZ方向に移動させる。
【0213】
上記に対して、CPU210は、図8を用いて説明した上下限自動設定処理ではステップS75,S77,S84,S87の処理を行わない。すなわち、CPU210は、図17のステップS76の処理において、境界位置が作業用メモリ230に記憶された時点で境界位置探索処理を終了する。この場合、境界位置探索処理時に下端位置zt1から上端位置zt2までの全ての範囲に渡って対物レンズ3をZ方向に移動させる必要がなくなる。その結果、境界位置探索処理の時間が短くなる。
【0214】
(10)境界位置探索処理方法の他の例
図19は、境界位置探索処理の他の例を示すフローチャートである。図19には、図16〜図18の境界位置探索処理と異なる処理のみ図示される。
【0215】
図19に示すように、図17のステップS87の処理後、CPU210は、図16〜図18の境界位置探索処理に加えて以下の処理を行ってもよい。
【0216】
ステップS87の処理後、CPU210は、受光素子30のゲインを一定量増加させる(ステップS91)。続いて、CPU210は、現在の対物レンズ3のZ位置において、単位領域についての全ての画素データの値を取得し、取得された画素データの値を図1の作業用メモリ230に記憶する(ステップS92)。
【0217】
次に、CPU210は、ステップS92において取得された画素データの値に基づいて評価値を算出し(ステップS93)、算出された評価値が予め定められたしきい値以下であるか否かを判定する(ステップS94)。
【0218】
ここで、ステップS91において受光素子30のゲインが増加された場合には、算出される評価値が大きくなる。そのため、本例では、ステップS94のしきい値は、ステップS91の処理の前後の受光素子30のゲインの比と上記のノイズ評価レベルEnl(図7および図10)とを乗算した値に設定される。
【0219】
算出された評価値がしきい値以下である場合、CPU210は、図17のステップS87の処理に進む。一方、算出された評価値が予め定められたしきい値よりも大きい場合、CPU210は、受光素子30のゲインを一定量減少させる(ステップS95)。このときのゲインの減少量は、ステップS91におけるゲインの増加量に等しく設定される。その後、CPU210は、図16のステップS83の処理に進む。
【0220】
上記のように、本例では、評価値がしきい値以下であるときに受光素子30のゲインが一時的に増加する。それにより、取得される複数の画素データの値が大きくなり、評価値が大きくなる。これにより、単位領域の表面に照射されるレーザ光の強度が低い場合でも、評価値とノイズ評価レベルEnlとを比較することが可能となる。それにより、第2のピッチを第1のピッチに比べて十分に大きく設定することができる。その結果、画素データの取得回数を十分に低減することができるので、境界位置探索処理の時間がさらに短くなる。
【0221】
なお、上記のステップS91において、CPU210は受光素子30のゲインを一定量増加させる代わりに、レーザ光源10から出射されるレーザ光の光量を一定量大きく設定してもよいし、NDフィルタ8の減衰率を一定量小さく設定してもよい。この場合、CPU210は、ステップS95において、CPU210は受光素子30のゲインを一定量減少させる代わりに、レーザ光源10から出射されるレーザ光の光量を一定量小さく設定し、またはNDフィルタ8の減衰率を一定量大きく設定する。これらの場合においても、境界位置探索処理の時間をさらに短くすることができる。
【0222】
(11)他の実施の形態
(11−1)上記の実施の形態では、共焦点顕微鏡システム500において上下限自動設定処理が実行される。これに限らず、上記の上下限自動設定処理は、観察対象物に投射され、受光素子30に導かれる光の強さに対応して取得されるデジタル信号に基づいて観察対象物の表面の状態を観察する顕微鏡システムに適用することができる。このような顕微鏡システムとして、例えば光干渉法を用いた顕微鏡システムがある。
【0223】
(11−2)上記の実施の形態において、対物レンズ3がZ方向に移動されることにより対物レンズ3に対する観察対象物Sの相対的なZ方向の位置が変化されるが、これに限定されない。ステージ60がZ方向に移動されることにより対物レンズ3に対する観察対象物Sの相対的なZ方向の位置が変化されてもよい。
【0224】
(11−3)上記の実施の形態において、X−Yスキャン光学系20が制御されることによりレーザ光が観察対象物S上でX方向およびY方向に走査されるが、これに限定されない。ステージ60が移動されることによりレーザ光が観察対象物S上でX方向およびY方向に走査されてもよい。
【0225】
また、レーザ光としてライン光(例えばX方向に延びる細長い光)が用いられてもよい。この場合、X−Yスキャン光学系20に代えてX方向への走査を行わないYスキャン光学系が用いられる。また、受光素子30に代えて、X方向に対応する方向に配列された複数の受光素子からなるラインCCDカメラ等が用いられる。
【0226】
なお、ラインCCDカメラの各受光素子のY方向に対応する方向の受光面のサイズは一般的に数10μmである。この場合、ラインCCDカメラの受光面がレンズ2の焦点位置に配置される。観察対象物Sの表面が対物レンズ3の焦点位置にあるときに、観察対象物Sにより反射されたライン光がラインCCDカメラの受光面に集光される。それにより、観察対象物Sにより反射されたライン光の大部分がラインCCDカメラの受光面に入射する。
【0227】
一方、観察対象物Sが対物レンズ3の焦点位置から外れた位置にあるときには、観察対象物Sにより反射されたライン光はラインCCDカメラの受光面の前または後の位置に集光される。それにより、観察対象物Sにより反射されたライン光の一部のみがラインCCDカメラの受光面に入射する。したがって、ラインCCDカメラの前にピンホール部材7を配置することが不要となる。
【0228】
(11−4)上記の実施の形態において、PC200のCPU210が制御部300の機能を有していてもよい。この場合、制御部300は設けられなくてもよい。
【0229】
(11−5)上記の実施の形態では、評価値は、単位領域についての全画素データの値の和である。これに限らず、評価値は、単位領域についての全画素データの値の平均値であってもよい。また、評価値は、単位領域内についての一部の画素データの値の和または平均値であってもよい。
【0230】
(12)請求項の各構成要素と実施の形態の各部との対応関係
以下、請求項の各構成要素と実施の形態の各部との対応の例について説明するが、本発明は下記の例に限定されない。
【0231】
上記実施の形態においては、観察対象物Sが観察対象物の例であり、共焦点顕微鏡システム500が顕微鏡システムの例であり、受光素子30が受光素子の例であり、レンズ1,2、対物レンズ3、ピンホール部材7、NDフィルタ8およびレーザ光源10が光学系の例である。
【0232】
また、単位領域s1〜s4が単位領域の例であり、レンズ駆動部63が相対的移動部の例であり、制御部300およびPC200のCPU210が制御部の例であり、PC200が観察範囲設定部および処理装置の例である。
【0233】
さらに、重複部分ovが重複部分の例であり、上下限自動設定処理が移動範囲設定処理の例であり、上限位置UPおよび下限位置BPにより定められる範囲が移動範囲設定処理により設定される光学系と観察対象物との相対的な移動範囲の例である。
【0234】
また、各単位領域において、表面画像データを生成するために複数の画素データを取得する処理が測定処理の例であり、ノイズよりも大きい強度の光、すなわちノイズレベルnlよりも大きい画素データの値を得ることができる強度の光が予め定められた強度の光の例である。
【0235】
また、下端位置zt1が予め定められた第1の距離の例であり、上端位置zt2が予め定められた第2の距離の例であり、第1のピッチが第1の移動量の例であり、第2のピッチが第2の移動量の例である。
【0236】
また、図11のステップS5において上下限自動設定処理が失敗した場合に設定される下端位置zt1(図7、図9および図10)よりも一定距離低い新たな下端位置が第3の距離の例である。さらに、図11のステップS5において上下限自動設定処理が失敗した場合に設定される上端位置zt2(図7、図9および図10)よりも一定距離高い新たな上端位置が第4の距離の例である。
【0237】
請求項の各構成要素として、請求項に記載されている構成または機能を有する他の種々の要素を用いることもできる。
【産業上の利用可能性】
【0238】
本発明は、種々の顕微鏡システムに有効に利用することができる。
【符号の説明】
【0239】
1,2 レンズ
3 対物レンズ
4〜6 ハーフミラー
7 ピンホール部材
8 NDフィルタ
10 レーザ光源
20 X−Yスキャン光学系
30 受光素子
40 照明用白色光源
50 カラーCCDカメラ
60 ステージ
61 ステージ操作部
62 ステージ駆動部
63 レンズ駆動部
200 PC
210 CPU
220 ROM
230 作業用メモリ
240 記憶装置
300 制御部
400 表示部
410 画像表示領域
420 条件設定領域
421 範囲設定ボタン
422 取得開始ボタン
500 共焦点顕微鏡システム
AZ1,AZ2,AZ3 範囲
BP 下限位置
Emax,max 出力上限値
Enl ノイズ評価レベル
Ez0 評価ピーク位置
Ez1,Ez2,ma1,ma2,mb1,mb2,zn1,zn2,zn3,zn4,zs1,zs2 位置
fp 焦点位置
nl ノイズレベル
s1〜s4 単位領域
ov 重複部分
pi1,pi2 値
UP 上限位置
S 観察対象物
Sa1 第1の面
Sa2 第2の面
Sa3 第3の面
z0 ピーク位置
zp1 第1のZ位置
zp2 第2のZ位置
zp3 第3のZ位置
zt1 下端位置
zt2 上端位置
【技術分野】
【0001】
本発明は、顕微鏡システム、対象物観察方法および対象物観察プログラムに関する。
【背景技術】
【0002】
共焦点顕微鏡では、レーザ光源から出射されたレーザ光が対物レンズにより測定対象物に集光される。測定対象物からの反射光が受光レンズにより集光され、ピンホールを通して受光素子に入射する(例えば、特許文献1参照)。レーザ光は測定対象物の表面で二次元的に走査される。また、測定対象物と対物レンズとの間の相対的な距離を変化させることにより受光素子の受光量の分布が変化する。測定対象物の表面に焦点が合ったときに受光量のピークが現れる。受光量分布のピーク強度に基づいて非常に高い焦点深度を有する超深度画像を得ることができる。また、受光量分布のピーク位置に基づいて測定対象物の表面の高さ分布を示す高さ画像を得ることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−83601号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
共焦点顕微鏡によれば、測定対象物と対物レンズとの間の相対的な距離を変化させつつレーザ光を測定対象物の表面で二次元的に走査させることにより、測定対象物と対物レンズとの間の相対的な複数の距離に対応する複数の共焦点画像データが生成される。生成された複数の共焦点画像データに基づいて超深度画像データまたは高さ画像データが生成される。超深度画像データまたは高さ画像データに基づいて超深度画像または高さ画像が表示部に表示される。使用者は、測定対象物の観察範囲を指定することができる。
【0005】
特許文献1に記載の共焦点顕微鏡においては、測定対象物に対する対物レンズの高さ方向の移動範囲(上限位置および下限位置)が使用者により設定される。この場合、使用者は、受光量のピークが移動範囲内に現れるように、移動範囲を適切に設定する必要がある。移動範囲を広く設定すると、受光量のピークが移動範囲内に現れる確率が高くなるが、取得される共焦点画像データの量が多くなる。一方、移動範囲を狭く設定すると、取得される共焦点画像データの量が少なくなるが、受光量のピークが移動範囲内に現れる確率が低くなる。そこで、使用者は、受光量のピークが移動範囲内に現れかつ取得される共焦点画像データの量ができるだけ少なくなるように、対物レンズの移動範囲を適切に設定する必要がある。
【0006】
使用者が共焦点顕微鏡の観察可能な領域よりも広い範囲を指定した場合には、共焦点顕微鏡のステージが移動することにより測定対象物の複数の領域の超深度画像データまたは高さ画像データがそれぞれ生成される。その後、複数の領域の超深度画像データまたは高さ画像データが連結されることにより測定対象物の広い範囲の超深度画像または高さ画像が作業用メモリを用いて表示部に表示される。
【0007】
このような場合、測定対象物の領域ごとに表面の高さが異なる可能性がある。そのため、使用者は、各領域ごとに対物レンズの高さ方向の移動範囲を適切に設定する必要がある。したがって、測定対象物と対物レンズとの間の相対的な距離の範囲の設定に多大な時間を要する。
【0008】
本発明の目的は、複数の単位領域について測定対象物と対物レンズとの間の相対的な距離の範囲を短時間で効率的に設定可能な顕微鏡システム、対象物観察法法および対象物観察プログラムを提供することである。
【課題を解決するための手段】
【0009】
(1)第1の発明に係る顕微鏡システムは、観察対象物の表面の状態を観察する顕微鏡システムであって、受光素子と、観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を受光素子に導く光学系と、単位領域に垂直な方向に沿った複数の位置で単位領域内での光学系による光の照射が行われるように光学系と観察対象物とを相対的に移動させる相対的移動部と、観察範囲として複数の単位領域を設定する観察範囲設定部と、観察範囲設定部により設定された複数の単位領域の各々について、光学系と観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、光学系および相対的移動部を制御することにより移動範囲設定処理において設定された移動範囲内で光学系と観察対象物とを相対的に移動させるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行う制御部とを備え、観察範囲設定部は、隣接する単位領域間で重複部分が形成されるように複数の単位領域を設定し、制御部は、各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置を決定し、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置を決定するものである。
【0010】
この顕微鏡システムにおいては、観察範囲として複数の単位領域が設定される。このとき、隣接する単位領域間では、重複部分が形成される。複数の単位領域の各々について、移動範囲設定処理により光学系と観察対象物との相対的な移動範囲が設定され、測定処理により当該単位領域に設定された移動範囲内で光学系と観察対象物とが相対的に移動されるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データが取得される。
【0011】
各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置が決定される。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されるとともに複数の画素データが取得される。複数の画素データに基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲が設定される。
【0012】
最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置が決定される。
【0013】
これにより、光学系と観察対象物とが初期位置にある状態で、当該単位領域の少なくとも一部から受光素子に光が導かれる。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されることにより、当該単位領域の少なくとも一部に光学系の焦点が合う状態から当該単位領域に光学系の焦点が合わなくなるときの光学系と観察対象物との相対的な位置を検出することができる。検出された位置に基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲を適切に設定することができる。
【0014】
上記のように、最初の単位領域を除く各単位領域については、当該単位領域についての移動範囲設定処理において、重複部分について既に取得された画素データに基づいて初期位置を決定することができる。そのため、初期位置を決定するために画素データを取得する必要がない。したがって、初期位置を短時間で設定することができる。その結果、複数の単位領域についての複数の画素データを短時間で効率的に取得することができる。
【0015】
(2)制御部は、各単位領域についての移動範囲設定処理において、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置を検出し、検出された相対的な位置に基づいて当該単位領域について移動範囲を設定し、最初の単位領域を除く各単位領域については、相対的な位置が検出されない場合に、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の重複部分の各部分にそれぞれ光学系の焦点が合うときの光学系と観察対象物との相対的な複数の位置を含むように当該単位領域についての移動範囲を設定してもよい。
【0016】
各単位領域についての移動範囲設定処理において、初期位置では、当該単位領域の少なくとも一部に光学系の焦点が合っている。この場合、受光素子の出力信号のレベルは高い。一方、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させると、当該単位領域から光学系の焦点が離れるにつれて、受光素子の出力信号のレベルが低くなる。
【0017】
したがって、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置を検出することにより当該単位領域について移動範囲を最小限に設定することができる。それにより、測定処理の時間が短縮される。
【0018】
また、光学系と観察対象物との相対的な位置が検出されない場合でも、光学系と観察対象物との相対的な移動範囲が設定されるので、当該単位領域の測定処理を行うことが可能となる。
【0019】
(3)制御部は、各単位領域についての移動範囲設定処理において、決定された初期位置から光学系と観察対象物とが近づく方向に光学系と観察対象物とが相対的に移動している場合に、取得された画素データに基づいて、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置を第1の相対位置として検出し、決定された初期位置から光学系と観察対象物とが遠ざかる方向に光学系と観察対象物とが相対的に移動している場合に、取得された画素データに基づいて、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置を第2の相対位置として検出し、検出された第1および第2の相対位置に基づいて当該単位領域についての移動範囲を設定してもよい。
【0020】
この場合、決定された初期位置から光学系と観察対象物とが近づく方向に光学系と観察対象物とが相対的に移動している場合に、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点で第1の相対位置が検出される。
【0021】
また、決定された初期位置から光学系と観察対象物とが遠ざかる方向に光学系と観察対象物とが相対的に移動している場合に、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点で第2の相対位置が検出される。検出された第1および第2の相対位置に基づいて当該単位領域についての移動範囲が設定される。これにより、移動範囲設定処理の時間を十分に短くすることができる。
【0022】
(4)制御部は、各単位領域についての移動範囲設定処理において、決定された初期位置から光学系と観察対象物との相対的な距離が第1の距離から第1の距離よりも大きい第2の距離になるまでの予め定められた範囲にわたって光学系と観察対象物とを相対的に移動させ、取得された画素データに基づいて、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する複数の時点における光学系と観察対象物との相対的な複数の位置をそれぞれ検出し、検出された複数の位置を含むように当該単位領域についての移動範囲を設定してもよい。
【0023】
この場合、各単位領域についての移動範囲設定処理において、初期位置から光学系と観察対象物との相対的な距離が第1の距離から第1の距離よりも大きい第2の距離になるまで光学系と観察対象物とが相対的に移動する。受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から予め定められたレベル以下に変化する複数の時点における光学系と観察対象物との相対的な複数の位置がそれぞれ検出される。検出された複数の位置を含むように当該単位領域についての移動範囲が設定される。
【0024】
これにより、光学系と観察対象物とが第1の距離から第2の距離に移動する間に、受光素子の出力信号のレベルが予め定められたレベルよりも高くなる時点の光学系と観察対象物との相対的な距離が確実に含まれるように移動範囲を設定することができる。したがって、観察対象物の表面の状態によらず、当該単位領域の全面について測定処理を行うことができる。
【0025】
(5)制御部は、各単位領域についての移動範囲設定処理において、取得された画素データに基づいて受光素子の出力信号のレベルが予め定められたレベルよりも高いか否かを判定し、受光素子の出力信号のレベルが予め定められたレベルよりも大きいときに光学系と観察対象物とを相対的に第1の移動量づつ移動させ、受光素子の出力信号のレベルが予め定められたレベル以下であるときに光学系と観察対象物とを相対的に第2の移動量づつ移動させ、第2の移動量は、第1の移動量よりも大きくてもよい。
【0026】
受光素子の出力信号のレベルが予め定められたレベル以下であるときには、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する時点における光学系と観察対象物との相対的な位置は検出されない。したがって、受光素子の出力信号のレベルが予め定められたレベル以下であるときに、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態に比べて光学系と観察対象物との相対的な移動量を大きくすることにより、移動範囲設定処理の時間を短くすることができる。
【0027】
(6)制御部は、各単位領域についての移動範囲設定処理において、第1の距離から第2の距離になるまでの予め定められた範囲にわたって光学系と観察対象物とを相対的に移動させても移動範囲が設定されない場合に、決定された初期位置から光学系と観察対象物との相対的な距離が第1の距離よりも小さい第3の距離から第2の距離よりも大きい第4の距離になるまでの予め定められた範囲にわたって光学系と観察対象物とを相対的に移動させ、取得された画素データに基づいて、受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から受光素子の出力信号のレベルが予め定められたレベル以下に変化する複数の時点における光学系と観察対象物との相対的な複数の位置をそれぞれ検出し、検出された複数の位置を含むように当該単位領域についての移動範囲を設定してもよい。
【0028】
この場合、第1の距離から第2の距離になるまでの予め定められた範囲にわたって光学系と観察対象物とを相対的に移動させても移動範囲が設定されない場合に、初期位置から光学系と観察対象物との相対的な距離が第1の距離よりも小さい第3の距離から第2の距離よりも大きい第4の距離になるまで光学系と観察対象物とが相対的に移動する。受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から予め定められたレベル以下に変化する複数の時点における光学系と観察対象物との相対的な複数の位置がそれぞれ検出される。
【0029】
このように、移動範囲設定処理において、光学系と観察対象物との相対的な複数の位置を検出するための光学系と観察対象物との相対的な距離範囲が拡大された状態で光学系と観察対象物とが相対的に移動し、光学系と観察対象物との相対的な複数の位置がそれぞれ検出される。これにより、光学系と観察対象物との相対的な複数の位置を広い範囲に渡って検出することができるので、広い範囲に渡って正確に各単位領域についての移動範囲を設定することが可能となる。
【0030】
(7)第2の発明に係る対象物観察方法は、観察対象物の表面の状態を観察する顕微鏡システムが備える光学系と観察対象物とを相対的に移動させる範囲を設定するための対象物観察方法であって、光学系により観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を受光素子に導くステップと、単位領域に垂直な方向に沿った複数の位置で単位領域内での光学系による光の照射が行われるように光学系と観察対象物とを相対的に移動させるステップと、観察範囲として複数の単位領域を設定するステップと、設定された複数の単位領域の各々について、光学系と観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、光学系および相対的移動部を制御することにより移動範囲設定処理において設定された移動範囲内で光学系と観察対象物とを相対的に移動させるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行うステップとを備え、複数の単位領域を設定するステップは、隣接する単位領域間で重複部分が形成されるように複数の単位領域を設定するステップを含み、移動範囲設定処理を行い、測定処理を行うステップは、各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置を決定し、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と初期位置を決定するステップを含むものである。
【0031】
この対象物観察方法においては、観察範囲として複数の単位領域が設定される。このとき、隣接する単位領域間では、重複部分が形成される。複数の単位領域の各々について、移動範囲設定処理により光学系と観察対象物との相対的な移動範囲が設定され、測定処理により当該単位領域に設定された移動範囲内で光学系と観察対象物とが相対的に移動されるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データが取得される。
【0032】
各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置が決定される。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されるとともに複数の画素データが取得される。複数の画素データに基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲が設定される。
【0033】
最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置が決定される。
【0034】
これにより、光学系と観察対象物とが初期位置にある状態で、当該単位領域の少なくとも一部から受光素子に光が導かれる。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されることにより、当該単位領域の少なくとも一部に光学系の焦点が合う状態から当該単位領域に光学系の焦点が合わなくなるときの光学系と観察対象物との相対的な位置を検出することができる。検出された位置に基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲を適切に設定することができる。
【0035】
上記のように、最初の単位領域を除く各単位領域については、当該単位領域についての移動範囲設定処理において、重複部分について既に取得された画素データに基づいて初期位置を決定することができる。そのため、初期位置を決定するために画素データを取得する必要がない。したがって、初期位置を短時間で設定することができる。その結果、複数の単位領域についての複数の画素データを短時間で効率的に取得することができる。
【0036】
(8)第3の発明に係る対象物観察プログラムは、観察対象物の表面の状態を観察する顕微鏡システムが備える光学系と観察対象物とを相対的に移動させる範囲を設定する処理を処理装置に実行させる対象物観察プログラムであって、光学系により観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を受光素子に導く処理と、単位領域に垂直な方向に沿った複数の位置で単位領域内での光学系による光の照射が行われるように光学系と観察対象物とを相対的に移動させる処理と、観察範囲として複数の単位領域を設定する処理と、設定された複数の単位領域の各々について、光学系と観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、光学系および相対的移動部を制御することにより移動範囲設定処理において設定された移動範囲内で光学系と観察対象物とを相対的に移動させるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行う処理とを、処理装置に実行させ、複数の単位領域を設定する処理は、隣接する単位領域間で重複部分が形成されるように複数の単位領域を設定する処理を含み、移動範囲設定処理を行い、測定処理を行う処理は、各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置を決定し、決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と初期位置を決定する処理を含むものである。
【0037】
この対象物観察プログラムにおいては、観察範囲として複数の単位領域が設定される。このとき、隣接する単位領域間では、重複部分が形成される。複数の単位領域の各々について、移動範囲設定処理により光学系と観察対象物との相対的な移動範囲が設定され、測定処理により当該単位領域に設定された移動範囲内で光学系と観察対象物とが相対的に移動されるとともに受光素子の出力信号に基づいて当該単位領域についての複数の画素データが取得される。
【0038】
各単位領域についての移動範囲設定処理において、光学系と観察対象物との相対的な初期位置が決定される。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されるとともに複数の画素データが取得される。複数の画素データに基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲が設定される。
【0039】
最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の少なくとも一部に光学系の焦点が合うように光学系と観察対象物との相対的な初期位置が決定される。
【0040】
これにより、光学系と観察対象物とが初期位置にある状態で、当該単位領域の少なくとも一部から受光素子に光が導かれる。決定された初期位置から光学系と観察対象物とが近づく方向および遠ざかる方向に光学系と観察対象物とが相対的に移動されることにより、当該単位領域の少なくとも一部に光学系の焦点が合う状態から当該単位領域に光学系の焦点が合わなくなるときの光学系と観察対象物との相対的な位置を検出することができる。検出された位置に基づいて当該単位領域について光学系と観察対象物との相対的な移動範囲を適切に設定することができる。
【0041】
上記のように、最初の単位領域を除く各単位領域については、当該単位領域についての移動範囲設定処理において、重複部分について既に取得された画素データに基づいて初期位置を決定することができる。そのため、初期位置を決定するために画素データを取得する必要がない。したがって、初期位置を短時間で設定することができる。その結果、複数の単位領域についての複数の画素データを短時間で効率的に取得することができる。
【発明の効果】
【0042】
本発明によれば、複数の単位領域について測定対象物と対物レンズとの間の相対的な距離の範囲を短時間で効率的に設定することができる。
【図面の簡単な説明】
【0043】
【図1】本発明の一実施の形態に係る共焦点顕微鏡システムの構成を示すブロック図である。
【図2】X方向、Y方向およびZ方向を定義するための図である。
【図3】画素データの取得範囲に4個の単位領域が設定される例を示す図である。
【図4】1つの画素において観察対象物のZ方向の位置と受光素子の受光強度との関係を示す図である。
【図5】画素データの取得範囲の設定前における表示部の表示例を示す図である。
【図6】1つの画素についての対物レンズのZ方向の位置と有効な画素データの値との関係を説明するための図である。
【図7】評価値を用いたピーク位置探索処理を説明するための図である。
【図8】高さ画像データおよび超深度画像データの生成時における対物レンズ3のZ方向の上限位置および下限位置の設定方法を説明するための図である。
【図9】表面に段差を有する観察対象物と対物レンズとの位置関係を示す模式図である。
【図10】図9の観察対象物に対してレーザ光を走査させることにより得られる対物レンズのZ方向の位置と評価値との関係を示す図である。
【図11】共焦点顕微鏡システムにおいて実行される対象物観察処理を示すフローチャートである。
【図12】共焦点顕微鏡システムにおいて実行される対象物観察処理を示すフローチャートである。
【図13】図11の上下限自動設定処理を示すフローチャートである。
【図14】図11の上下限自動設定処理を示すフローチャートである。
【図15】図11の上下限自動設定処理を示すフローチャートである。
【図16】図14および図15の境界位置探索処理を示すフローチャートである。
【図17】図14および図15の境界位置探索処理を示すフローチャートである。
【図18】図14および図15の境界位置探索処理を示すフローチャートである。
【図19】境界位置探索処理の他の例を示すフローチャートである。
【発明を実施するための形態】
【0044】
本発明の一実施の形態に係る顕微鏡システムについて図面を参照しながら説明する。以下では、顕微鏡システムの一例として共焦点顕微鏡システムを説明する。
【0045】
(1)共焦点顕微鏡システムの基本構成
図1は、本発明の一実施の形態に係る共焦点顕微鏡システム500の構成を示すブロック図である。図1に示すように、共焦点顕微鏡システム500は、測定部100、PC(パーソナルコンピュータ)200、制御部300および表示部400を備える。測定部100は、レーザ光源10、X−Yスキャン光学系20、受光素子30、照明用白色光源40、カラーCCD(電荷結合素子)カメラ50およびステージ60を含む。ステージ60上には、観察対象物Sが載置される。
【0046】
レーザ光源10は、例えば半導体レーザである。レーザ光源10から出射されたレーザ光は、レンズ1により平行光に変換された後、ハーフミラー4を透過してX−Yスキャン光学系20に入射する。なお、レーザ光源10に代えて水銀ランプ等の他の光源が用いられてもよい。この場合、水銀ランプ等の光源とX−Yスキャン光学系20との間に帯域通過フィルタが配置される。水銀ランプ等の光源から出射された光は、帯域通過フィルタを通過することにより単色光となり、X−Yスキャン光学系20に入射する。
【0047】
X−Yスキャン光学系20は、例えばガルバノミラーである。X−Yスキャン光学系20は、ステージ60上の観察対象物Sの表面上においてレーザ光をX方向およびY方向に走査する機能を有する。X方向、Y方向およびZ方向の定義については後述する。X−Yスキャン光学系20により走査されたレーザ光は、ハーフミラー5により反射された後、ハーフミラー6を透過し、対物レンズ3によりステージ60上の観察対象物Sに集光される。なお、ハーフミラー4〜6に代えて偏光ビームスプリッタが用いられてもよい。
【0048】
観察対象物Sにより反射されたレーザ光は、対物レンズ3およびハーフミラー6を透過した後、ハーフミラー5により反射され、X−Yスキャン光学系20を透過する。X−Yスキャン光学系20を透過したレーザ光は、ハーフミラー4により反射され、レンズ2により集光され、ピンホール部材7のピンホールおよびND(Neutral Density)フィルタ8を透過して受光素子30に入射する。このように、本実施の形態においては反射型の共焦点顕微鏡システム500が用いられるが、観察対象物Sが細胞等の透明体である場合には、透過型の共焦点顕微鏡システムが用いられてもよい。
【0049】
ピンホール部材7のピンホールは、レンズ2の焦点位置に配置される。NDフィルタ8は、受光素子30に入射するレーザ光の強度を減衰させるために用いられる。そのため、レーザ光の強度が十分減衰されている場合には、NDフィルタ8は設けられなくてもよい。
【0050】
本実施の形態では、受光素子30は光電子増倍管である。受光素子30としてフォトダイオードおよび増幅器を用いてもよい。受光素子30は、受光量に対応するアナログの電気信号(以下、受光信号と呼ぶ)を出力する。制御部300は、2つのA/D変換器(アナログ/デジタル変換器)、FIFO(First In First Out)メモリおよびCPU(中央演算処理装置)を含む。受光素子30から出力される受光信号は、制御部300の1つのA/D変換器により一定のサンプリング周期でサンプリングされるとともにデジタル信号に変換される。A/D変換器から出力されるデジタル信号は、FIFOメモリに順次蓄積される。FIFOメモリに蓄積されたデジタル信号は画素データとして順次PC200に転送される。
【0051】
照明用白色光源40は、例えばハロゲンランプまたは白色LED(発光ダイオード)である。照明用白色光源40により発生された白色光は、ハーフミラー6により反射された後、対物レンズ3によりステージ60上の観察対象物Sに集光される。
【0052】
観察対象物Sにより反射された白色光は、対物レンズ3、ハーフミラー6およびハーフミラー5を透過してカラーCCDカメラ50に入射する。カラーCCDカメラ50に代えてCMOS(相補性金属酸化膜半導体)イメージセンサ等の撮像素子が用いられてもよい。カラーCCDカメラ50は、受光量に対応する電気信号を出力する。カラーCCDカメラ50の出力信号は、制御部300の他の1つのA/D変換器により一定のサンプリング周期でサンプリングされるとともにデジタル信号に変換される。A/D変換器から出力されるデジタル信号は、カメラデータとして順次PC200に転送される。
【0053】
制御部300は、画素データおよびカメラデータをPC200に与えるとともに、PC200からの指令に基づいて受光素子30の受光感度(ゲイン)およびカラーCCDカメラ50を制御する。また、制御部300は、PC200からの指令に基づいてX−Yスキャン光学系20を制御することによりレーザ光を観察対象物S上でX方向およびY方向に走査させる。
【0054】
対物レンズ3は、レンズ駆動部63によりZ方向に移動可能に設けられる。制御部300は、PC200からの指令に基づいてレンズ駆動部63を制御することにより対物レンズ3をZ方向に移動させることができる。これにより、対物レンズ3に対する観察対象物Sの相対的なZ方向の位置を変化させることができる。
【0055】
PC200は、CPU(中央演算処理装置)210、ROM(リードオンリメモリ)220、作業用メモリ230および記憶装置240を含む。ROM220には、システムプログラムが記憶される。作業用メモリ230は、RAM(ランダムアクセスメモリ)からなり、種々のデータの処理のために用いられる。記憶装置240は、ハードディスク等からなる。記憶装置240には、対象物観察プログラムが記憶されるとともに、制御部300から与えられる画素データおよびカメラデータ等の種々のデータを保存するために用いられる。対象物観察プログラムの詳細は後述する。
【0056】
CPU210は、制御部300から与えられる画素データに基づいて画像データを生成する。以下、画素データに基づいて生成される画像データを共焦点画像データと呼ぶ。また、共焦点画像データに基づいて表示される画像を共焦点画像と呼ぶ。
【0057】
CPU210は、制御部300から与えられるカメラデータに基づいて画像データを生成する。以下、カメラデータに基づいて生成される画像データをカメラ画像データと呼ぶ。また、カメラ画像データに基づいて表示される画像をカメラ画像と呼ぶ。
【0058】
CPU210は、生成した共焦点画像データおよびカメラ画像データに作業用メモリ230を用いて各種処理を行うとともに、共焦点画像データに基づく共焦点画像およびカメラ画像データに基づくカメラ画像を表示部400に表示させる。また、CPU210は、後述するステージ駆動部62に駆動パルスを与える。
【0059】
表示部400は、例えば液晶ディスプレイパネルまたは有機EL(エレクトロルミネッセンス)パネルにより構成される。
【0060】
ステージ60は、X方向移動機構、Y方向移動機構およびZ方向移動機構を有する。X方向移動機構、Y方向移動機構およびZ方向移動機構には、ステッピングモータが用いられる。
【0061】
ステージ60のX方向移動機構、Y方向移動機構およびZ方向移動機構は、ステージ操作部61およびステージ駆動部62により駆動される。使用者は、ステージ操作部61を手動で操作することにより、ステージ60を対物レンズ3に対して相対的にX方向、Y方向およびZ方向に移動させることができる。
【0062】
ステージ駆動部62は、PC200より与えられる駆動パルスに基づいて、ステージ60のステッピングモータに電流を供給することにより、ステージ60を対物レンズ3に相対的にX方向、Y方向またはZ方向に移動させることができる。
【0063】
(2)共焦点画像、超深度画像および高さ画像
図2は、X方向、Y方向およびZ方向を定義するための図である。図2に示すように、対物レンズ3により集光されたレーザ光が観察対象物Sに照射される。本実施の形態においては、対物レンズ3の光軸の方向をZ方向と定義する。また、Z方向と直交する面において、互いに直交する二方向をそれぞれX方向およびY方向と定義する。X方向、Y方向およびZ方向を矢印X,Y,Zでそれぞれ示す。
【0064】
Z方向において対物レンズ3に対する観察対象物Sの表面の相対的な位置を観察対象物SのZ方向の位置と呼ぶ。共焦点画像データの生成は、単位領域ごとに行なわれる。単位領域は対物レンズ3の倍率により定まる。
【0065】
観察対象物SのZ方向の位置が一定の状態で、X−Yスキャン光学系20により単位領域内のY方向の端部でレーザ光がX方向に走査される。X方向の走査が終了すると、レーザ光がX−Yスキャン光学系20によりY方向に一定の間隔変移される。この状態でレーザ光がX方向に走査される。単位領域内でレーザ光のX方向の走査およびY方向の変移が繰り返されることにより、単位領域のX方向およびY方向の走査が終了する。次に、対物レンズ3がZ方向に移動される。それにより、対物レンズ3のZ方向の位置が前回と異なる一定の状態で、単位領域のX方向およびY方向の走査が行なわれる。観察対象物SのZ方向の複数の位置で単位領域のX方向およびY方向の走査が行なわれる。
【0066】
観察対象物SのZ方向の位置ごとにX方向およびY方向の走査により共焦点画像データが生成される。これにより、単位領域内でZ方向の位置が異なる複数の共焦点画像データが生成される。
【0067】
ここで、共焦点画像データのX方向の画素数は、X−Yスキャン光学系20によるレーザ光のX方向の走査速度と制御部300のサンプリング周期とにより定まる。1回のX方向の走査(1本の走査線)におけるサンプリング数がX方向の画素数となる。また、単位領域の共焦点画像データのY方向の画素数は、X方向の走査の終了ごとのX−Yスキャン光学系20によるレーザ光のY方向の変移量により定まる。Y方向における走査線の数がY方向の画素数となる。さらに、単位領域の共焦点画像データの数は、観察対象物SのZ方向の移動回数により定まる。単位領域の複数の共焦点画像データに基づいて、後述する方法で超深度画像データおよび高さ画像データが生成される。
【0068】
図2の例では、まず、ステージ60の最初の位置で単位領域s1における観察対象物Sの複数の共焦点画像データが生成されるとともに単位領域s1の超深度画像データおよび高さ画像データが生成される。続いて、ステージ60が順次移動することにより単位領域s2〜s4における観察対象物Sの複数の共焦点画像データが生成されるとともに単位領域s2〜s4の超深度画像データおよび高さ画像データが生成される。この場合、隣接する単位領域の一部が互いに重なるように、単位領域s1〜s4が設定される。互いに重なる単位領域の一部の超深度画像データおよび高さ画像データを用いてパターンマッチングを行うことにより、複数の単位領域s1〜s4の超深度画像データおよび高さ画像データを高い精度で連結することができる。本実施の形態においては、互いに隣接する複数の単位領域が重なる部分を重複部分と呼ぶ。
【0069】
図3は、画素データの取得範囲に4個の単位領域s1〜s4が設定される例を示す図である。図3の例では、単位領域s1〜s4が2行2列で設定される。1行目に単位領域s1,s2が並び、2行目に単位領域s3,s4が並ぶ。
【0070】
この場合、横方向(行方向)において互いに隣接する単位領域s1と単位領域s2との間で重複部分ovが設定される。また、縦方向(列方向)において互いに隣接する単位領域s1と単位領域s3との間で重複部分ovが設定される。さらに、斜め方向において互いに隣接する単位領域s1と単位領域s4との間で重複部分ovが設定される。同様に、互いに隣接する各2つの単位領域間でそれぞれ重複部分ovが設定される。図3では、重複部分ovにハッチングが施されている。
【0071】
図4は、1つの画素において観察対象物SのZ方向の位置と受光素子30の受光強度との関係を示す図である。図1に示したように、ピンホール部材7のピンホールはレンズ2の焦点位置に配置される。そのため、観察対象物Sの表面が対物レンズ3の焦点位置にあるときに、観察対象物Sにより反射されたレーザ光がピンホール部材7のピンホールの位置に集光される。それにより、観察対象物Sにより反射されたレーザ光の大部分がピンホール部材7のピンホールを通過して受光素子30に入射する。この場合、受光素子30の受光強度は最大になる。それにより、受光素子30から出力される受光信号の電圧値は最大となる。
【0072】
一方、観察対象物Sが対物レンズ3の焦点位置が外れた位置にあるときには、観察対象物Sにより反射されたレーザ光はピンホール部材7のピンホールの前または後の位置に集光される。それにより、観察対象物Sにより反射されたレーザ光の多くはピンホール部材7のピンホールの周囲の部分で遮られ、受光素子30の受光強度は低下する。それにより、受光素子30から出力される受光信号の電圧値は低下する。
【0073】
このように、観察対象物Sの表面が対物レンズ3の焦点位置にある状態で受光素子30の受光強度分布にピークが現れる。各単位領域の複数の共焦点画像データから、画素ごとにZ方向における受光強度分布が得られる。それにより、画素ごとに受光強度分布のピーク位置とピーク強度(ピークの受光強度)とが得られる。
【0074】
各単位領域に対応する複数の画素についてのZ方向におけるピーク位置を表すデータを高さ画像データと呼び、高さ画像データに基づいて表示される画像を高さ画像と呼ぶ。高さ画像は、観察対象物Sの表面形状を表す。また、各単位領域に対応する複数の画素についてのピーク強度を表すデータを超深度画像データと呼び、超深度画像データに基づいて表される画像を超深度画像と呼ぶ。超深度画像は、観察対象物Sの表面のすべての部分にピントが合った状態で得られる画像である。PC200は、制御部300から与えられる単位領域の複数の画素データに基づいて単位領域の複数の共焦点画像データを生成し、複数の共焦点画像データに基づいて単位領域の高さ画像データおよび超深度画像データを生成する。以下、高さ画像データおよび超深度画像データを総称して表面画像データと呼び、高さ画像および超深度画像を総称して表面の画像と呼ぶ。
【0075】
(3)画素データの取得範囲(観察範囲)の設定
図5は、画素データの取得範囲の設定前における表示部400の表示例を示す図である。図5に示すように、表示部400の画面上には、画像表示領域410および条件設定領域420が表示される。画像表示領域410には、共焦点画像データに基づく共焦点画像またはカメラ画像データに基づくカメラ画像が表示される。条件設定領域420には、範囲設定ボタン421および取得開始ボタン422が表示される。
【0076】
使用者は、図1の共焦点顕微鏡システム500のステージ60に観察対象物Sを載置する。制御部300は、カメラデータを順次PC200に与える。PC200のCPU210は、制御部300により与えられたカメラデータに基づいてカメラ画像データを生成し、観察対象物Sのカメラ画像を表示部400の画像表示領域410に表示させる。この場合、使用者は、ステージ60をX方向またはY方向に移動させることにより画像表示領域410に表示される観察対象物Sのカメラ画像の範囲を変更することができる。
【0077】
使用者は、PC200に接続されたマウス等のポインティングデバイスを用いて条件設定領域420の範囲設定ボタン421を操作する。これにより、PC200のCPU210は、表示部400に画素データの取得範囲の設定画面(図示せず)を表示させる。使用者は、取得範囲の設定画面が表示された状態で、ポインティングデバイスを用いて画素データの取得範囲を設定する。
【0078】
PC200のCPU210は、設定された取得範囲が単位領域よりも大きい場合、設定された取得範囲にn個(nは2以上の自然数)の単位領域を設定する。この場合、CPU210は、互いに隣接する各2つの単位領域間に重複部分ovを設定する。以下では、取得範囲が単位領域よりも大きい場合に設定される複数の単位領域をそれぞれ1番目〜n番目の単位領域と呼ぶ。
【0079】
画素データの取得範囲が設定された後、使用者は、条件設定領域420の取得開始ボタン422を操作する。これにより、PC200のCPU210は、1番目の単位領域について、本発明の移動範囲設定処理に対応する処理として上下限自動設定処理を実行する。
【0080】
上下限自動設定処理は、高さ画像データおよび超深度画像データの生成時に移動する対物レンズ3のZ方向における上限位置および下限位置を設定する処理である。上下限自動設定処理の詳細は後述する。
【0081】
上下限自動設定処理の実行後、PC200のCPU210は、設定された上限位置と下限位置との間のZ方向の複数の位置でレーザ光をX方向およびY方向に走査させ、1番目の単位領域における複数の画素データを取得する。これにより、1番目の単位領域内においてZ方向の異なる複数の位置に対応する複数の共焦点画像データが生成され、生成された複数の共焦点画像データに基づいて表面画像データ(高さ画像データおよび超深度画像データ)が生成される。
【0082】
続いて、PC200のCPU210は、2番目の単位領域について後述する上下限自動設定処理を実行する。また、PC200のCPU210は、設定された上限位置と下限位置との間のZ方向の複数の位置でレーザ光をX方向およびY方向に走査させ、2番目の単位領域における複数の画素データを取得する。これにより、2番目の単位領域において、Z方向の異なる複数の位置に対応する複数の共焦点画像データが生成され、生成された複数の共焦点画像データに基づいて表面画像データが生成される。
【0083】
以後同様に、PC200のCPU210は、3番目〜n番目の単位領域についても、それぞれ上下限自動設定処理を実行するとともに複数の画素データを取得する。このようにして、全ての単位領域について表面画像データが生成される。
【0084】
最後に、PC200のCPU210は、生成された全て(1番目〜n番目)の単位領域の表面画像データを連結し、連結された表面画像データに基づく観察対象物Sの表面の画像を表示部400に表示させる。
【0085】
以下、1番目の単位領域について実行される上下限自動設定処理を1番目の上下限自動設定処理と呼び、2番目以降のm(mは2以上n以下の自然数)番目の単位領域について実行される上下限自動設定処理をm番目の上下限自動設定処理と呼ぶ。
【0086】
本実施の形態において、1番目の上下限自動設定処理は、m番目の上下限自動設定処理とは異なる。m番目の上下限自動設定処理では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovにおいて既に取得された複数の画素データが用いられる。それにより、m番目以降の上下限自動設定処理は、1番目の上下限自動設定処理に比べて単純化される。1番目の上下限自動設定処理およびm番目の上下限自動設定処理の詳細について説明する。
【0087】
(4)1番目の上下限自動設定処理
1番目の上下限自動設定処理の詳細を説明する。図6は、1つの画素についての対物レンズ3のZ方向の位置と有効な画素データの値との関係を説明するための図である。図6において、縦軸は画素データの値を表し、横軸は対物レンズ3のZ方向の位置を表す。図6の横軸においては、左から右に向かって対物レンズ3のZ方向の位置が高くなる。
【0088】
以下では、受光素子30の出力信号のレベルとして、画素データの値を用いる。また、受光素子30の出力信号の予め定められたレベルとしてノイズレベルnlを用いる。
【0089】
画素データは受光素子30から出力される受光信号に対応するデジタル信号である。そのため、画素データの値は、受光素子30のゲインが大きくなるほど大きく、受光素子30のゲインが小さくなるほど小さい。また、画素データはA/D変換器から出力される。したがって、画素データの上限値は、A/D変換器の出力レンジの上限値(以下、出力上限値maxと呼ぶ)である。
【0090】
画素データの値が出力上限値maxで飽和すると、受光素子30の受光強度に対応する画素データの値を得ることができない。また、画素データの値がノイズレベルnl以下であると、画素データのピークを受光素子30のノイズから明確に識別することはできない。以下では、出力上限値maxよりも小さく、ノイズレベルnlよりも大きい画素データの値を有効な画素データの値と呼ぶ。
【0091】
図6においては、有効な画素データの値の範囲が矢印HLで示される。この場合、曲線l1で示すように、受光素子30に任意の第1のゲインが設定されているときに、1つの画素についての画素データの値は、対物レンズ3がピーク位置z0よりも低い位置ma1からピーク位置z0よりも高い位置mb1までの範囲にある状態で有効となる。
【0092】
したがって、1つの画素についての有効な画素データの値を取得するための対物レンズ3のZ方向の上限位置および下限位置は、出力上限値maxおよびノイズレベルnlに応じて定まる。
【0093】
図6に曲線l2で示すように、受光素子30に第1のゲインよりも小さい第2のゲインが設定されると、画素データの値は、受光素子30に第1のゲインが設定されている場合に比べて全体的に小さくなる。この場合、1つの画素についての画素データの値は、対物レンズ3が位置ma1よりも高い位置ma2から位置mb1よりも低い位置mb2までの範囲にある状態で有効となる。このように、受光素子30に設定されるゲインが変化すると、有効な画素データの値を得ることができる対物レンズ3のZ方向の上限位置および下限位置も変化する。
【0094】
1つの画素についての上限位置および下限位置を設定する場合には、ピーク位置z0における画素データの値が出力上限値maxにできる限り近づくようにゲインを設定する。この場合、画素データのピークがノイズレベルnlよりも十分に大きくなる。したがって、画素データのピークを受光素子30のノイズから明確に識別することが可能となる。
【0095】
ここで、1つの画素についての上限位置および下限位置を設定する場合には、まず、焦点が観察対象物Sの表面に合うように対物レンズ3をZ方向に移動させる。すなわち、対物レンズ3を初期位置としてピーク位置z0に移動させる。対物レンズ3がピーク位置z0にある場合には、画素データの値が確実に有効となる。この場合、対物レンズ3をピーク位置z0から上に向かう方向および下に向かう方向に移動させることにより、対物レンズ3の焦点が観察対象物Sの表面から十分にずれるとき、すなわち画素データの値がノイズレベルnl以下となるときの対物レンズ3の位置を検出することができる。検出された位置に基づいて、対物レンズ3のZ方向の上限位置および下限位置を適切に設定することができる。
【0096】
このように、対物レンズ3のZ方向の上限位置および下限位置を設定することにより、有効な画素データが得られない範囲で対物レンズ3をZ方向に移動させる必要がなくなる。その結果、対物レンズ3のZ方向の上限位置および下限位置を設定するための処理の時間を短くすることができる。
【0097】
また、この場合、対物レンズ3のZ方向の下限位置は、対物レンズ3の焦点位置が観察対象物Sの表面よりも下方に移動し、画素データの値が有効な値からノイズレベルnl以下となる時点の位置に設定される。そのため、対物レンズ3のZ方向の下限位置が設定されるときに、対物レンズ3が下方に移動しすぎることにより観察対象物Sの表面に衝突することが防止される。
【0098】
本実施の形態では、1番目の上下限自動設定処理時に、後述する評価値を用いて上記のピーク位置z0に対応する対物レンズ3のZ方向の位置(後述する評価ピーク位置Ez0)を検出するとともに、受光素子30のゲインを調整するためのピーク位置探索処理が行われる。
【0099】
図7は、評価値を用いたピーク位置探索処理を説明するための図である。ここで、評価値は、観察対象物Sの表面のうち予め定められた領域についての複数の画素データの値に基づいて算出される値である。本実施の形態では、評価値は、単位領域についての全ての画素データの値の和である。評価値がピーク値を示すときの対物レンズ3のZ方向の位置を評価ピーク位置Ez0と呼ぶ。また、A/D変換器の出力上限値maxと評価値を算出するための複数の画素データの数(本例では、単位領域の全画素データの数)との乗算値を出力上限値Emaxと呼ぶ。さらに、ノイズレベルnlと評価値を算出するための複数の画素データの数(本例では、単位領域の全画素データの数)との乗算値をノイズ評価レベルEnlと呼ぶ。
【0100】
以下では、受光素子30の出力信号のレベルとして、後述する評価値を用いる。また、受光素子30の出力信号の予め定められられたレベルとして後述するノイズ評価レベルEnlを用いる。
【0101】
図7(a)に対物レンズ3のZ方向の位置と評価値との関係が示される。図7(a)において、縦軸は評価値を表し、横軸は対物レンズ3のZ方向の位置を表す。図7(a)の横軸においては、左から右に向かって対物レンズ3のZ方向の位置が高くなる。
【0102】
ピーク位置探索処理の開始時においては、受光素子30のゲインは、算出される評価値が評価上限値Emaxよりも小さくかつノイズ評価レベルEnlよりも十分に大きくなるように設定される。本例では、受光素子30のゲインは、算出される評価値が評価上限値Emaxの1/2になるように設定される。
【0103】
その後、図7(a)に太い実線の矢印で示すように、対物レンズ3を現在のZ方向の位置zs1(評価ピーク位置Ez0よりも低い位置)から徐々に上に向かう方向に移動させつつ設定されたゲインで単位領域についての全ての画素データを取得するとともに評価値を算出する。
【0104】
この場合、評価値は対物レンズ3が評価ピーク位置Ez0に到達するまでの間、指数関数的に増加する。そこで、このピーク位置探索処理においては、評価値が評価上限値Emaxに達するごとに一定量ゲインを減少させる。
【0105】
これにより、対物レンズ3がZ方向の位置zs1から評価ピーク位置Ez0に移動するまでの間、指数関数的に増加する評価値が評価上限値Emaxで飽和することが防止される。その結果、評価ピーク位置Ez0の近傍では、最終的に受光素子30のゲインが適切な値に設定される。
【0106】
評価値は受光素子30のゲインが減少すると小さくなる。そのため、ピーク位置探索処理においては、受光素子30のゲインの減少回数に基づいて、算出された評価値を補正する。
【0107】
本実施の形態では、算出された評価値にピーク位置探索処理の開始後の受光素子30のゲインの減少回数と評価上限値Emaxとの乗算値を加算することにより、評価値の補正を行う。これにより、対物レンズ3のZ方向の全範囲に渡って、補正後の評価値と受光素子30の受光強度とを近似的に対応付けることが可能となる。
【0108】
図7(b)に対物レンズ3のZ方向の位置と補正された評価値との関係が示される。図7(b)において、縦軸は補正後の評価値を表し、横軸は対物レンズ3のZ方向の位置を表す。図7(b)の横軸においては、左から右に向かって対物レンズ3のZ方向の位置が高くなる。
【0109】
図7(b)に示すように、補正後の評価値は、受光素子30の受光強度と同様に、ピーク値まで指数関数的に増加した後、ピーク値から指数関数的に減少する。これにより、対物レンズ3をZ方向の一方向(上に向かう方向)に移動させることにより、補正後の評価値の増減が切り替わったか否かを判定する。補正後の評価値の増減が切り替わった場合には、対物レンズ3をZ方向の一方向(上に向かう方向)にさらに移動させることにより、補正後の評価値がピーク値から予め定められた値pi2分減少したか否かを判定する。
【0110】
補正後の評価値がピーク値から値pi2分減少した場合には、補正後の評価値の増減が切り替わる前に補正後の評価値が予め定められた値pi1分増加したか否かを判定する。補正後の評価値が予め定められた値pi1分増加した場合には、評価値がピーク値を示すときの対物レンズ3の位置を評価ピーク位置Ez0として検出することができる。
【0111】
対物レンズ3のZ方向に移動可能な範囲は、対物レンズ3の倍率により予め定められている。予め許容された対物レンズ3の下側の位置を下端位置zt1と呼び、予め許容された対物レンズ3の上側の位置を上端位置zt2と呼ぶ。
【0112】
最初に対物レンズ3が評価ピーク位置Ez0よりも高い位置zs2にある場合、対物レンズ3を上に向かう方向に移動させても評価ピーク位置Ez0を検出することはできない。この場合、図7(b)に太い点線の矢印で示すように、対物レンズ3を上端位置zt2まで移動させた後、対物レンズ3を逆方向(下に向かう方向)に移動させる。これにより、上記と同様に、評価ピーク位置Ez0を検出することができる。
【0113】
画素データの値は、受光素子30のノイズの影響により変化する。そこで、上記の値pi1,pi2は、例えばノイズレベルnlと評価値を算出するための複数の画素データの数(本例では、単位領域の全画素データの数)とのノイズ評価レベルEnlよりも大きい値に設定される。これにより、補正後の評価値が受光素子30のノイズの影響により変化する場合でも、評価ピーク位置Ez0が誤って検出されることが防止される。値pi1,pi2は、同じ値であってもよいし、互いに異なる値であってもよい。
【0114】
1番目の上下限自動設定処理においては、上記のように、ピーク位置探索処理により受光素子30のゲインが調整されつつ評価ピーク位置Ez0が探索される。
【0115】
本例では、1番目の単位領域に対して対物レンズ3の焦点が合う位置として近似的に評価ピーク位置Ez0を用いる。対物レンズ3を初期位置として評価ピーク位置Ez0に移動させ、対物レンズ3のZ方向の上限位置および下限位置を設定する。この場合、対物レンズ3の焦点位置に観察対象物Sの表面が存在する。そのため、後述するように、対物レンズ3のZ方向の位置を評価ピーク位置Ez0から上に向かう方向に変化させつつ評価値を算出することにより、評価値がノイズ評価レベルEnl以下となる位置を、対物レンズ3のZ方向の上限位置として適切に設定することができる。一方、対物レンズ3のZ方向の位置を評価ピーク位置Ez0から下に向かう方向に変化させつつ評価値を算出することにより、評価値がノイズ評価レベルEnl以下となる位置を、対物レンズ3のZ方向の下限位置として適切に設定することができる。
【0116】
図8は、高さ画像データおよび超深度画像データの生成時における対物レンズ3のZ方向の上限位置および下限位置の設定方法を説明するための図である。
【0117】
この設定方法においては、まず、対物レンズ3をピーク位置探索処理により検出された評価ピーク位置Ez0に保持した状態で、単位領域のX方向およびY方向の走査を行い、単位領域についての全ての画素データを取得する。
【0118】
いずれかの画素データの値が出力上限値max(図6)である場合には、その画素データの値は有効ではない。そこで、受光素子30のゲインを一定量減少させる。その後、再び単位領域のX方向およびY方向の走査を行うことにより、単位領域についての全ての画素データを取得する。
【0119】
上記のゲイン調整および画素データの取得を繰り返すことにより、全ての画素データの値が出力上限値max(図6)よりも小さくなった場合に、評価値が所定のしきい値以下であるか否かを判定する。本実施の形態では、所定のしきい値は、ノイズ評価レベルEnl(図7および図10)である。評価値がノイズ評価レベルEnl(図7および図10)以下でない場合、図8に太い実線の矢印naで示すように、対物レンズ3を一定量上に向かう方向に移動させる。
【0120】
続いて、上記のゲイン調整、画素データの取得、画素データの判定動作および対物レンズ3の上に向かう方向への移動を繰り返す。それにより、評価値がノイズ評価レベルEnl以下であると判定されたときの対物レンズ3のZ方向の位置を上限位置UPとして設定する。
【0121】
受光素子30のゲインが変化すると、取得される画素データの値も変化する。そこで、上限位置UPの設定後、図8に太い実線の矢印nbで示すように、最後に受光素子30のゲインが減少された時点の位置Ez1まで対物レンズ3をZ方向に移動させる。ピーク位置探索処理後上限位置UPが設定されるまでの間、受光素子30のゲインが変化しない場合には、対物レンズ3を評価ピーク位置Ez0までZ方向に移動させる。この状態で、単位領域のX方向およびY方向の走査を行うことにより、単位領域についての全ての画素データを取得する。
【0122】
この場合においても、上記と同様に、いずれかの画素データの値が出力上限値max(図6)である場合には、受光素子30のゲインを一定量減少させる。その後、再び単位領域のX方向およびY方向の走査を行うことにより、単位領域についての全ての画素データを取得する。
【0123】
上記のゲイン調整および画素データの取得を繰り返すことにより、全ての画素データの値が出力上限値max(図6)よりも小さくなった場合には、評価値がノイズ評価レベルEnl以下であるか否かを判定する。
【0124】
評価値がノイズ評価レベルEnl以下でない場合、図8に太い実線の矢印ncで示すように、対物レンズ3を一定量下に向かう方向に移動させる。続いて、上記のゲイン調整、画素データの取得、画素データの判定動作および対物レンズ3の下に向かう方向への移動を繰り返す。それにより、評価値がノイズ評価レベルEnl以下であると判定されたときの対物レンズ3のZ方向の位置を下限位置BPとして設定する。
【0125】
上記のように、受光素子30のゲインが変化すると、取得される画素データの値も変化し、有効な画素データの値を得ることができる対物レンズ3のZ方向の範囲も変化する。すなわち、上限位置UPの設定後下限位置BPが設定されるまでの間に受光素子30のゲインが変化すると、ゲインの変化量に応じて上限位置UPも変化する。そこで、上限位置UPの設定後の下限位置BPの設定時に受光素子30のゲインが減少された場合、図8に太い実線の矢印ndで示すように、最後に受光素子30のゲインが減少された時点の位置Ez2まで対物レンズ3をZ方向に移動させる。
【0126】
その後、図8に太い実線の矢印neで示すように、再び上限位置UPの探索を行う。上記のように、一度上限位置UPおよび下限位置BPが設定されている場合には、受光素子30のゲインは十分に減少していると考えられる。そのため、再度の上限位置UPの探索時には、受光素子30のゲインはほとんど減少しない。したがって、受光素子30が下限位置BPの設定時のゲインとほぼ同じゲインに調整された状態で、上限位置UPが再設定される。
【0127】
(5)m番目以降の上下限自動設定処理
上述のように、m番目の上下限自動設定処理では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについて既に取得された複数の画素データが用いられる。以下、m番目以降の上下限自動設定処理の詳細を説明する。
【0128】
m番目以降の上下限自動設定処理が開始される場合には、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについての複数の画素データが既に取得されている。
【0129】
例えば、図3の2番目の単位領域s2について2番目の上下限自動設定処理が開始される場合には、1番目の単位領域s1と2番目の単位領域s2との間の重複部分ovについての複数の画素データが既に取得されている。同様に、図3の4番目の単位領域s4について4番目の上下限自動設定処理が開始される場合には、2番目の単位領域s2と4番目の単位領域s4との間の重複部分ovおよび3番目の単位領域s3と4番目の単位領域s4との間の重複部分ovについての複数の画素データが既に取得されている。
【0130】
そこで、m番目の上下限自動設定処理では、1番目の単位領域の上下限自動設定処理で実行されるピーク位置探索処理の代わりに、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについて既に取得された複数の画素データに基づいて、上限位置UPおよび下限位置BPを探索するためのZ方向における対物レンズ3の初期位置が決定される。
【0131】
重複部分ovについて既に取得された複数の画素データは、有効な画素データである。したがって、これらの複数の有効な画素データを用いることにより、評価値がノイズ評価レベルEnlよりも大きくなるように対物レンズ3の初期位置を決定することができる。その結果、m番目の上下限自動設定処理において、対物レンズ3のZ方向の上限位置および下限位置を短時間で設定することが可能となる。
【0132】
具体的には、初期位置は、次のように決定することができる。単位領域についての複数の画素データが取得されることにより、単位領域の高さ画像データおよび超深度画像データが生成される。したがって、m番目の上下限自動設定処理時には、既にm番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについての高さ画像データおよび超深度画像データが生成されている。そこで、m番目の上下限自動設定処理では、既に生成された重複部分ovについての高さ画像データに基づいて、Z方向における重複部分ovの表面のうち最も低い高さ(または最も高い高さ)を求める。求められた高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を初期位置として決定する。
【0133】
または、初期位置は、次のように決定することができる。既に生成された重複部分ovの高さ画像データに基づいて、Z方向における重複部分ovの表面の平均高さを算出する。算出された平均高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を初期位置として決定する。
【0134】
または、初期位置は、次のように決定することができる。既に生成された重複部分ovについての高さ画像データに基づいて、Z方向における重複部分ovの表面の高さについてのヒストグラム(度数分布)を求める。求められたヒストグラムにおいてピークを示す高さに焦点位置が一致するときの対物レンズ3の位置を初期位置として決定する。
【0135】
画素データの値がノイズレベルnl以下であると、画素データの値のピークを受光素子30のノイズから明確に識別することは難しい。そこで、初期位置を決定する場合には、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについて既に取得された複数の画素データのうちノイズレベルnlを超える画素データを抽出してもよい。この場合、抽出された画素データに基づいて初期位置を決定することにより、有効な画素データに基づいて初期位置を適切に決定することができる。
【0136】
なお、m番目の単位領域が複数の単位領域に隣接する場合には、複数の重複部分ovについての複数の画素データに基づいて、対物レンズ3の初期位置が決定されてもよい。
【0137】
続いて、対物レンズ3をZ方向の初期位置に保持した状態で、m番目の単位領域のX方向およびY方向の走査を行うことにより、単位領域についての全ての画素データを取得する。この状態で、全ての画素データの値が予め定められた規定値以上でない場合、受光素子30のゲインを一定量増加させる。画素データの取得および受光素子30のゲインの調整を繰り返し、全ての画素データの値が予め定められた規定値以上になると、初期位置を基準として対物レンズ3の上限位置UPおよび下限位置BPの探索を開始する。
【0138】
m番目の上下限自動設定処理における上限位置UPおよび下限位置BPの探索動作は、1番目の上下限自動設定処理における上限位置UPおよび下限位置BPの探索動作と同じである。
【0139】
上記のように、m番目の上下限自動設定処理においては、既に取得されている重複部分ovについての画素データに基づいて対物レンズ3の上限位置UPおよび下限位置BPを探索するための初期位置が決定される。したがって、ピーク位置探索処理を実行する必要がない。その結果、上下限自動設定処理の処理時間が十分に短くなる。
【0140】
(6)上下限自動設定処理の他の例
図9は、表面に段差を有する観察対象物Sと対物レンズ3との位置関係を示す模式図である。図9の例では、観察対象物Sの表面に第1、第2および第3の面Sa1,Sa2,Sa3からなる段差が形成されている。第1および第3の面Sa1,Sa3はXY方向に平行であり、第2の面Sa2はYZ方向に平行である。Z方向において、第1の面Sa1は第3の面Sa3よりも高い。X方向において、第2の面Sa2は第1および第3の面Sa1,Sa3の間に位置する。
【0141】
図9(a)に示すように、Z方向において対物レンズ3の焦点位置fpが第1の面Sa1と第2の面Sa2との交差部に位置するときの対物レンズ3のZ方向の位置を第1のZ位置zp1と呼ぶ。図9(b)に示すように、Z方向において対物レンズ3の焦点位置fpが第2の面Sa2上でかつZ方向における第1の面Sa1と第3の面Sa3との間に位置するときの対物レンズ3のZ方向の位置を第2のZ位置zp2と呼ぶ。図9(c)に示すように、Z方向において対物レンズ3の焦点位置fpが第2の面Sa2と第3の面Sa3との交差部に位置するときの対物レンズ3のZ方向の位置を第3のZ位置zp3と呼ぶ。
【0142】
図9の観察対象物SのZ方向の複数の位置でレーザ光をX方向およびY方向に走査させる。図10は、図9の観察対象物Sに対してレーザ光を走査させることにより得られる対物レンズ3のZ方向の位置と評価値との関係を示す図である。図10の縦軸は評価値を表し、横軸は対物レンズ3のZ方向の位置を表す。横軸においては、左から右に向かって対物レンズ3のZ方向の位置が高くなる。また、図10の横軸には、上述の下端位置zt1、上端位置zt2および第1〜第3のZ位置zp1〜zp3が示される。
【0143】
図10に示すように、対物レンズ3のZ方向の位置が第1のZ位置zp1にある場合には、対物レンズ3の焦点位置fpが第1の面Sa1上に位置する(図9(a)参照)。この場合、対物レンズ3の焦点位置fpでレーザ光の一部が第1の面Sa1で反射することにより評価値が大きくなる。また、対物レンズ3のZ方向の位置が第3のZ位置zp3にある場合には、対物レンズ3の焦点位置fpが第3の面Sa3上に位置する(図9(c)参照)。この場合、対物レンズ3の焦点位置fpでレーザ光の一部が第3の面Sa3で反射することにより評価値が大きくなる。一方、対物レンズ3が第2のZ位置zp2にある場合には、対物レンズ3の焦点位置fpが対物レンズ3の光軸に直交する面(XY方向に平行な面)上に存在しない。この場合、対物レンズ3の焦点位置fpにはZ方向にレーザ光を反射する面が存在しない。そのため、評価値が小さくなる。
【0144】
本例では、対物レンズ3が下端位置zt1から位置zn1までの間の範囲AZ1、位置zn2から位置zn3までの間の範囲AZ2、および位置zn4から上端位置zt2までの間の範囲AZ3にある場合、評価値が上述のノイズ評価レベルEnl以下である。第1のZ位置zp1は、位置zn1と位置zn2との間に位置し、第2のZ位置zp2は、位置zn2と位置zn3との間に位置し、第3のZ位置zp3は、位置zn3と位置zn4との間に位置する。
【0145】
上記の上下限自動設定処理によれば、対物レンズ3を第1の位置zp1に移動させた後、ゲイン調整、画素データの取得および対物レンズ3の上に向かう方向への移動を繰り返す。これにより、評価値が最初にノイズ評価レベルEnl以下となったときの対物レンズ3のZ方向の位置zn2が上限位置UPとして設定される。また、上限位置UPの設定後、対物レンズ3を最後に受光素子30のゲインが減少された時点の位置に移動させた後、ゲイン調整、画素データの取得および対物レンズ3の下に向かう方向への移動を繰り返す。これにより、評価値が最初にノイズ評価レベルEnl以下となったときの対物レンズ3のZ方向の位置zn1が下限位置BPとして設定される。受光素子30のゲインが変化した場合には、上限位置UPの再探索および再設定が行われる。このように上限位置UPおよび下限位置BPが設定される場合には、第3のZ位置zp3が上限位置UPと下限位置BPとの間の範囲から外れる。そのため、使用者は第3の面Sa3を観察することができなくなる。
【0146】
そこで、本実施の形態に係る共焦点顕微鏡システム500においては、上記の図8を用いて説明した上下限自動設定処理に加えて、以下の上下限自動設定処理が行われてもよい。
【0147】
本例の上下限自動設定処理においては、対物レンズ3を第1の位置zp1に移動させた後、対物レンズ3が上端位置zt2に達するまで、ゲイン調整、画素データの取得および対物レンズ3の上に向かう方向への移動を繰り返す(図10の太い矢印参照)。評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置(本例では位置zn4)を上限位置UPとして設定する。
【0148】
また、上限位置UPの設定後、対物レンズ3を最後に受光素子30のゲインが減少された時点の位置に移動させた後、対物レンズ3が下端位置zt1に達するまで、ゲイン調整、画素データの取得および対物レンズ3の下に向かう方向への移動を繰り返す。評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置(本例では位置zn1)を下限位置BPとして設定する。
【0149】
受光素子30のゲインが変化した場合には、対物レンズ3を最後に受光素子30のゲインが減少された位置に移動させた後、対物レンズ3が上端位置zt2に達するまで、ゲイン調整、画素データの取得および対物レンズ3の上に向かう方向への移動を繰り返す。評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置を上限位置UPとして再設定する。
【0150】
この方法によれば、観察対象物Sの表面が大きな段差を有する場合でも、使用者は、段差を構成する全ての面(図9の第1および第3の面Sa1,Sa3)を観察することができる。
【0151】
上記のように、対物レンズ3のZ方向に移動可能な範囲は、対物レンズ3の倍率により予め定められている。しかしながら、下限位置BPおよび上限位置UPは、必ずしも対物レンズ3の倍率により予め定められた下端位置zt1と上端位置zt2との間に位置するとは限らない。
【0152】
したがって、上下限自動設定処理において、下限位置BPおよび上限位置UPが設定できない場合には、上端位置zt2(図7、図9および図10)よりも一定距離高い位置を新たな上端位置とし、下端位置zt1(図7、図9および図10)よりも一定距離低い位置を新たな下端位置として設定した後、新たに設定された上端位置および下端位置に基づいて上下限自動設定処理を再度行ってもよい。
【0153】
このように、上限位置UPおよび下限位置BPが予め定められた対物レンズ3のZ方向に移動可能な範囲内に設定されない場合に、新たな上端位置および下限位置が設定される。これにより、対物レンズ3のZ方向に移動可能な範囲が拡大された状態で再度上下限自動設定処理が行われるので、Z方向の広い範囲に渡って上限位置UPおよび下限位置BPを正確に設定することが可能となる。
【0154】
上限位置UPおよび下限位置BPの探索時には、実質的に下端位置zt1から上端位置zt2までの範囲でゲイン調整および画素データの取得が行われる。そのため、上下限自動設定処理の時間が長くなる。そこで、本例の上下限自動設定処理においては、以下のように上限位置UPおよび下限位置BPを探索してもよい。
【0155】
上記のように、上限位置UPまたは下限位置BPの探索時には、評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置が上限位置UPまたは下限位置BPとして設定される。したがって、上限位置UPまたは下限位置BPの探索時には、評価値がノイズ評価レベルEnlよりも大きい場合に、対物レンズ3のZ方向の移動ピッチを小さく設定する。この理由について、移動ピッチの具体的な設定例とともに説明する。
【0156】
Z方向において、対物レンズ3から観察対象物Sに照射されるレーザ光の強度は、対物レンズ3の焦点位置fpで最も大きくなり、対物レンズ3の焦点位置fpから離れるほど小さくなる。観察対象物Sの表面に照射されるレーザ光の強度が小さすぎると、観察対象物Sの表面を正確に観察することができない。そのため、上限位置UPまたは下限位置BPの探索時における対物レンズ3のZ方向の移動ピッチは、単位領域の表面全体に一定強度以上のレーザ光が照射されるように設定される。
【0157】
上述のように、1つの画素についての上限位置および下限位置を設定する場合には、ピーク位置z0における画素データの値が出力上限値maxにできる限り近づくようにゲインが設定される。したがって、観察対象物Sの表面にピーク強度の1/2の強度でレーザ光が照射される場合でも、観察対象物Sの表面を観察するために十分な反射光を得ることができる。
【0158】
ここで、対物レンズ3が固定された状態で、レーザ光の強度がピーク強度の1/2になるときのZ方向の位置と焦点位置fpとの間の距離を強度半減距離と呼ぶ。本例では、評価値がノイズ評価レベルEnlよりも大きい値である場合に、対物レンズ3のZ方向の移動ピッチを強度半減距離に設定する。この場合、上限位置UPまたは下限位置BPの探索時において、単位領域の表面全体にピーク強度の1/2以上の強度でレーザ光を照射することができる。これにより、上限位置UPまたは下限位置BPを精度よく設定することができる。
【0159】
評価値がノイズ評価レベルEnl以下である場合(例えば、対物レンズ3の位置が図10の範囲AZ1,AZ2,AZ3にある場合)には、Z方向の移動ピッチを大きく設定する。この理由について、移動ピッチの具体的な設定例とともに説明する。
【0160】
評価値がノイズ評価レベルEnl以下である状態では、上限位置UPおよび下限位置BPは設定されない。評価値がノイズ評価レベルEnl以下である場合には、評価値がノイズ評価レベルEnlよりも大きい値に変化したか否かが判定できればよい。
【0161】
そこで、本例では、評価値がノイズ評価レベルEnl以下である場合に、受光素子30のゲインを一定量大きくする。この場合、取得される複数の画素データの値がそれぞれ大きくなり、評価値が大きくなる。これにより、単位領域の表面に照射されるレーザ光の強度が低い場合でも、評価値とノイズ評価レベルEnlとを比較することが可能となる。それにより、対物レンズ3のZ方向の移動ピッチを上記の強度半減距離よりも大きく設定することができる。
【0162】
このように、評価値がノイズ評価レベルEnlよりも大きい場合に比べて、対物レンズ3のZ方向の移動ピッチを大きく設定する。これにより、画素データの取得回数を低減することができるので、上下限自動設定処理の時間が短くなる。
【0163】
評価値がノイズ評価レベルEnl以下である場合には、受光素子30のゲインを一定量増加させる代わりにレーザ光源10から出射されるレーザ光の光量を一定量増加させてもよい。この場合、上記の強度半減距離が大きくなる。それにより、評価値がノイズ評価レベルEnlよりも大きい値である場合に比べて、対物レンズ3のZ方向の移動ピッチを大きく設定することができる。
【0164】
評価値がノイズ評価レベルEnl以下である場合には、受光素子30のゲインを一定量増加させる代わりにNDフィルタ8の減衰率を一定量低下させてもよい。この場合、上記の強度半減距離が大きくなる。それにより、評価値がノイズ評価レベルEnlよりも大きい値である場合に比べて、対物レンズ3のZ方向の移動ピッチを大きく設定することができる。
【0165】
上記の例では、上限位置UPの設定後、対物レンズ3を最後に受光素子30のゲインが減少された時点の位置に移動させた後、対物レンズ3が下端位置zt1に達するまで、ゲイン調整、画素データの取得および対物レンズ3の下に向かう方向への移動が繰り返され、評価値が最後にノイズ評価レベルEnlよりも大きい値からノイズ評価レベルEnl以下となるときの対物レンズ3のZ方向の位置が下限位置BPとして設定される。
【0166】
(7)対象物観察処理
共焦点顕微鏡システム500において、観察対象物Sを観察する場合に図1のPC200のCPU210が行う対象物観察処理について説明する。
【0167】
図11および図12は、共焦点顕微鏡システム500において実行される対象物観察処理を示すフローチャートである。図1のPC200のCPU210は、記憶装置240に記憶される対象物観察プログラムに従って動作する。
【0168】
以下に説明する対象物観察処理においては、本発明の移動範囲設定処理として上下限自動設定処理(後述するステップS4)が実行され、本発明の測定処理として単位領域についての画素データを取得する処理(後述するステップS7)が実行される。なお、フローチャートのステップS8,S9では、共焦点画像データおよび表面画像データを画像データと略記する。対象物観察処理には、上記の上下限自動設定処理が含まれる。上記のように、m番目の上下限自動設定処理では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovにおいて既に取得された複数の画素データが用いられる。それにより、m番目以降の上下限自動設定処理が1番目の上下限自動設定処理に比べて単純化されるので、m番目の上下限自動設定処理の時間が十分に短くなる。
【0169】
まず、CPU210は、制御部300により与えられるカメラデータに基づいてカメラ画像データを生成し、カメラ画像データに基づいて観察対象物Sのカメラ画像を図5の表示部400の画像表示領域410に表示させる(ステップS1)。
【0170】
次に、使用者は、ポインティングデバイスを用いて画素データの取得範囲を指示する。CPU210は、使用者の指示に基づいて、画素データの取得範囲を設定する(ステップS2)。本実施の形態では、画素データの取得範囲が単位領域よりも大きい場合に、隣接する単位領域の一部が互いに重なるように、取得範囲内の各単位領域の位置および単位領域の数が決定される。決定された取得範囲内の各単位領域の位置および単位領域の数が作業用メモリ230に記憶される。
【0171】
続いて、CPU210は、作業用メモリ230に記憶された単位領域の位置に基づいて図1のステージ駆動部62に駆動パルスを与えることによりステージ60を移動させる(ステップS3)。
【0172】
続いて、CPU210は、上記の上下限自動設定処理を行う(ステップS4)。上下限自動設定処理により、対物レンズ3のZ方向の移動範囲が設定される。上下限自動設定処理の詳細については後述する(図13〜図16参照)。その後、CPU210は、上下限自動設定処理が成功したか否かを判定する(ステップS5)。上下限自動設定処理が成功した場合、CPU210は、制御部300にX方向の走査におけるサンプリング数、走査線数およびZ方向の移動範囲を通知するとともに単位領域についての画素データの取得を指令する(ステップS6)。
【0173】
制御部300は、CPU210から通知されたX方向の走査におけるサンプリング数、走査線数およびZ方向の移動範囲に基づいて、図1のX−Yスキャン光学系20を制御するとともに対物レンズ3のZ位置(観察対象物SのZ方向の位置)を移動させ、受光素子30から出力される受光信号に基づいて画素データをPC200のCPU210に与える。CPU210は、制御部300から単位領域についての画素データを取得する(ステップS7)。CPU210は、取得した画素データに基づいて単位領域の複数の共焦点画像データを生成するとともに表面画像データを生成し(ステップS8)、記憶装置240に記憶する。
【0174】
ここで、CPU210は、全ての単位領域の共焦点画像データおよび表面画像データを生成したか否かを判定する(ステップS9)。全ての単位領域の共焦点画像データおよび表面画像データを生成していない場合、CPU210は、ステップS3の処理に戻る。CPU210は、次の単位領域の共焦点画像データの生成が可能な位置にステージ60を移動させ、ステップS4〜S9の処理を繰り返す。
【0175】
一方、ステップS9において、全ての単位領域の共焦点画像データおよび表面画像データを生成した場合、CPU210は、記憶装置240に記憶された複数の単位領域の表面画像データを記憶装置240を用いて連結する(ステップS10)。これにより、指示された取得範囲の表面画像データが生成される。画素データの取得範囲内に単位領域が1つしか含まれない場合、ステップS10において表面画像データの連結は行われない。
【0176】
その後、CPU210は、連結された表面画像データに基づく観察対象物Sの表面の画像を作業用メモリ230を用いて表示部400に表示させる(ステップS11)。最後に、CPU210は、連結された表面画像データを記憶装置240に記憶し、対象物観察処理を終了する。
【0177】
上記のステップS5において、上下限自動設定処理が失敗した場合、CPU210は、画像処理が失敗したことを示す画像を表示部400に表示させ(ステップS12)、対象物観察処理を終了する。
【0178】
このように、図11および図12の対象物観察処理においては、ステップS5,S12により上下限自動設定処理が失敗した場合に対象物観察処理が終了する。これに限らず、ステップS5において上下限自動設定処理が失敗した場合に、CPU210は、上端位置zt2(図7、図9および図10)を上限位置UPとして設定し、下端位置zt1(図7、図9および図10)を下限位置BPとして設定してもよい。この場合、CPU210は、下限位置BPおよび上限位置UPの設定後、ステップS6の処理に進んでもよい。これにより、上下限自動設定処理が失敗した場合でも、観察対象物Sの表面の画像を表示部400に表示させることが可能となる。
【0179】
上記の例に限らず、ステップS5において上下限自動設定処理が失敗した場合に、CPU210は、上端位置zt2(図7、図9および図10)よりも一定距離高い位置を新たな上端位置とし、下端位置zt1(図7、図9および図10)よりも一定距離低い位置を新たな下端位置として設定した後、新たに設定された上端位置および下端位置に基づいてステップS4の上下限自動設定処理を再度行ってもよい。
【0180】
上端位置zt2(図7、図9および図10)と新たな上端位置との間の一定距離、および下端位置zt1(図7、図9および図10)と新たな下端位置との間の一定距離は、等しくてもよいし、互いに異なってもよい。また、これらの一定距離は、対物レンズ3の倍率により予め定められた距離であってもよいし、使用者がPC200(図1)に接続されたマウス等のポインティングデバイスを用いて設定した距離であってもよい。
【0181】
上記のように、上限位置UPおよび下限位置BPが予め定められた対物レンズ3のZ方向に移動可能な範囲内に設定されない場合に、新たな上端位置および下限位置が設定される。これにより、対物レンズ3のZ方向に移動可能な範囲が拡大された状態で再度上下限自動設定処理が行われるので、Z方向の広い範囲に渡って上限位置UPおよび下限位置BPを正確に設定することが可能となる。
【0182】
なお、CPU210は、上限位置UPが設定されかつ下限位置BPが設定されない場合に、新たな上端位置のみを設定し、新たに設定された上端位置および下端位置zt1(図7、図9および図10)に基づいてステップS4の上下限自動設定処理を再度行ってもよい。同様に、CPU210は、下限位置BPが設定されかつ上限位置UPが設定されない場合に、新たな下端位置のみを設定し、新たに設定された下端位置および上端位置zt2(図7、図9および図10)に基づいてステップS4の上下限自動設定処理を再度行ってもよい。
【0183】
(8)上下限自動設定処理
図13〜図15は、図11の上下限自動設定処理を示すフローチャートである。図13に示すように、CPU210は、まず現在の上下限自動設定処理が1番目の上下限自動設定処理であるか否かを判定する(ステップS20)。現在の上下限自動設定処理が1番目の上下限自動設定処理である場合、CPU210は、上記の評価値を用いたピーク位置探索処理(図7参照)を行うことにより、評価ピーク位置Ez0を検出する(ステップS21)。続いて、CPU210は、検出された評価ピーク位置Ez0を1番目の上下限自動設定処理の初期位置とし、対物レンズ3をその初期位置に移動させる(ステップS22)。
【0184】
m番目の上下限自動設定処理が開始される時点では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについての複数の画素データが既に取得されている。そのため、ステップS20において、現在の上下限自動設定処理が1番目以外のm番目の上下限自動設定処理である場合、CPU210は、重複部分ovについての複数の画素データに基づいて上述の初期位置を決定し、決定した初期位置を作業用メモリ230に記憶する(ステップS23)。その後、CPU210は、対物レンズ3をその初期位置に移動させる(ステップS24)。また、CPU210は、対物レンズ3が初期位置にある状態で、受光素子30のゲインを調整する(ステップS25)。具体的には、CPU210は、対物レンズ3が初期位置にある状態で、単位領域についての全ての画素データの値を取得し、取得される全ての画素データの値が予め定められた規定値以上になるように受光素子30のゲインを調整する。これにより、取得される複数の画素データの値をノイズレベルnlよりも十分に大きくすることができる。
【0185】
上記のように、m番目の上下限自動設定処理では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovにおいて既に取得された複数の画素データが用いられる。それにより、m番目以降の上下限自動設定処理では、評価ピーク位置Ez0を検出する必要がない。したがって、m番目以降の上下限自動設定処理が1番目の上下限自動設定処理に比べて単純化されるので、m番目の上下限自動設定処理の時間が十分に短くなる。
【0186】
ステップS22またはステップS25の処理後、CPU210は、対物レンズ3が初期位置にある状態で、Z方向の一方向(例えば上に向かう方向)について後述する図16〜図18の境界位置探索処理を開始する(ステップS26)。境界位置探索処理は、受光素子30のゲイン調整を行いつつ上限位置UPまたは下限位置BPを探索する処理である。境界位置探索処理の詳細は後述する。
【0187】
続いて、CPU210は、ステップS28で上限位置UPが設定されたか否か、すなわち境界位置探索処理が成功したか否かを判定する(ステップS27)。境界位置探索処理が失敗した場合、CPU210は、後述するステップS149の処理に進む。
【0188】
境界位置探索処理においては、後述する図16のステップS81で受光素子30のゲインが一定量減少される場合がある。そこで、ステップS27において境界位置探索処理が成功した場合、CPU210は、ステップS26の境界位置探索処理において受光素子30のゲインが減少したか否かを判定する(ステップS28)。受光素子30のゲインが減少していない場合、CPU210は、対物レンズ3を初期位置に移動させる(ステップS29)。一方、受光素子30のゲインが減少している場合、CPU210は、対物レンズ3を後述する境界位置探索処理のステップS71(図16)またはステップS82(図16)で最後に記憶された対物レンズ3のZ位置へ移動させる(ステップS30)。その後、CPU210は、Z方向の逆方向(例えば下に向かう方向)について後述する図16〜図18の境界位置探索処理を開始する(ステップS31)。
【0189】
続いて、CPU210は、ステップS31で下限位置BPが設定されたか否か、すなわち境界位置探索処理が成功したか否かを判定する(ステップS32)。境界位置探索処理が失敗した場合、CPU210は、後述するステップS149の処理に進む。
【0190】
境界位置探索処理が成功した場合、CPU210は、ステップS28と同様に、ステップS31の境界位置探索処理において受光素子30のゲインが減少したか否かを判定する(ステップS33)。
【0191】
後述する境界位置探索処理においては、図17のステップS76の処理で作業用メモリ230に対物レンズ3のZ位置の境界位置が記憶または更新される。ステップS33において受光素子30のゲインが減少していない場合、CPU210は、ステップS26で境界位置探索処理により記憶された境界位置に基づいて対物レンズ3の上限位置UPを設定し、ステップS31で境界位置探索処理により記憶された境界位置に基づいて対物レンズ3の下限位置BPを設定し(ステップS34)、上下限自動設定処理を終了する。
【0192】
ステップS34において、受光素子30のゲインが減少している場合には、CPU210は、対物レンズ3を後述する境界位置探索処理のステップS71(図16)またはステップS82(図16)で最後に記憶された対物レンズ3のZ位置へ移動させる(ステップS146)。その後、CPU210は、Z方向の一方向(例えば上に向かう方向)について再度後述する図16〜図18の境界位置探索処理を開始する(ステップS147)。
【0193】
続いて、CPU210は、ステップS147で上限位置UPが設定されたか否か、すなわち境界位置探索処理が成功したか否かを判定する(ステップS148)。境界位置探索処理が失敗した場合、CPU210は、後述するステップS149の処理に進む。
【0194】
境界位置探索処理が成功した場合、CPU210は、ステップS34の処理に進む。ステップS34において、CPU210は、ステップS147で記憶された境界位置に基づいて対物レンズ3の上限位置UPを設定し、ステップS31で記憶された境界位置に基づいて対物レンズ3の下限位置BPを設定する。これにより、受光素子30のゲインが最適な値に調整された状態で、対物レンズ3の上限位置UPおよび下限位置BPが設定される。
【0195】
ステップS148において、境界位置探索処理が失敗した場合、CPU210は、現在の上下限自動設定処理が1番目の上下限自動設定処理であるか否かを判定する(ステップS149)。現在の上下限自動設定処理が1番目の上下限自動設定処理である場合、CPU210は、図11のステップS12の処理に進み、画像処理が失敗したことを示す画像を表示部400に表示させる。
【0196】
m番目の上下限自動設定処理が開始される時点では、m番目の単位領域とそのm番目の単位領域に隣接する単位領域との間の重複部分ovについての複数の画素データが既に取得されている。そのため、ステップS149において、現在の上下限自動設定処理が1番目以外のm番目の上下限自動設定処理である場合、CPU210は、重複部分ovについての複数の画素データに基づいて上限位置UPおよび下限位置BPを設定し(ステップS150)、上下限自動設定処理を終了する。これにより、m番目の上下限自動設定処理においては、後述する境界位置探索処理が失敗した場合でも、既に記憶されている重複部分ovについての複数の画素データに基づいて上限位置UPおよび下限位置BPが設定される。
【0197】
ステップS150において、CPU210は、重複部分ovの複数の画素データに基づいて、Z方向における重複部分ovの表面のうち最も低い高さを求め、求められた高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を下限位置BPとして設定してもよい。XY方向における対物レンズ3の大きさは各単位領域の大きさよりも十分に大きい。したがって、重複部分ovの表面のうち最も低い高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を下限位置BPとした場合には、複数の画素データの取得時に対物レンズ3が観察対象物Sの表面に衝突することが防止される。
【0198】
ステップS150において、CPU210は、重複部分ovの複数の画素データに基づいて、Z方向における重複部分ovの表面のうち最も高い高さを求め、求められた高さに焦点位置が一致するときの対物レンズ3のZ方向の位置を上限位置BPとして設定してもよい。
【0199】
ステップS150において、CPU210は、隣接する単位領域に既に設定された上限位置UPおよび下限位置BPを、それぞれ現在の単位領域の上限位置UPおよび下限位置BPとして設定してもよい。
【0200】
さらに、ステップS150において、CPU210は、隣接する単位領域に既に設定された上限位置UPよりも高い位置に、現在の単位領域の上限位置UPを設定してもよい。また、CPU210は、隣接する単位領域に既に設定された下限位置BPよりも低い位置に、現在の単位領域の下限位置BPを設定してもよい。
【0201】
(9)境界位置探索処理方法
図16〜図18は、図14および図15の境界位置探索処理を示すフローチャートである。本実施の形態に係る共焦点顕微鏡システム500においては、境界位置探索処理方法を2つのモードに切り替えることができる。2つのモードのうちの一方は図8を用いて説明した上下限自動設定処理であり、2つのモードのうちの他方は図10を用いて説明した上下限自動設定処理である。本フローチャートは、図10を用いて説明した上下限自動設定処理に対応する。
【0202】
図16に示すように、CPU210は、現在の対物レンズ3のZ位置を作業用メモリ230に記憶する(ステップS70)。
【0203】
続いて、CPU210は、現在の対物レンズ3のZ位置において、単位領域についての全ての画素データの値を取得し、取得された画素データの値を図1の作業用メモリ230に記憶する(ステップS71)。
【0204】
次に、CPU210は、記憶された複数の画素データのうちのいずれかの値が出力上限値max(図6)であるか否かを判定する(ステップS72)。全ての画素データの値が出力上限値max(図6)でない場合、CPU210は、単位領域についての全ての画素データの値を取得することにより評価値を算出し(ステップS73)、算出された評価値が予め定められたしきい値以下であるか否かを判定する(ステップS74)。ここで、しきい値は、上記のノイズ評価レベルEnl(図7および図10)と等しい値に設定されてもよいし、そのノイズ評価レベルEnl(図7および図10)よりも大きい値に設定されてもよい。さらに、しきい値は、互いに異なる受光素子30の複数のゲインにそれぞれ対応するように複数設定されてもよい。この場合、ステップS74において、CPU210は、算出された評価値が現在設定されている受光素子30のゲインに対応するしきい値以下であるか否かを判定する。
【0205】
後述するステップS77の処理において、対物レンズ3のZ位置が下端位置zt1(図7、図9および図10)または上端位置zt2(図7、図9および図10)に達しない場合には、上記のステップS71〜S74の処理が繰り返される。算出された評価値がしきい値以下である場合、CPU210は、前回のステップS74の処理時に評価値がしきい値よりも大きかったか否かを判定する(ステップS75)。前回のステップS74の処理時に評価値がしきい値以下であった場合、CPU210は後述するステップS77の処理に進む。
【0206】
一方、前回のステップS74の処理時に評価値がしきい値よりも大きかった場合、CPU210は、現在の対物レンズ3のZ位置をZ方向の一方向における境界位置として作業用メモリ230に記憶する。または、CPU210は、境界位置が既に作業用メモリ230に記憶されている場合、現在の対物レンズ3のZ位置で境界位置を更新する(ステップS76)。
【0207】
続いて、CPU210は、対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達したか否かを判定する(ステップS77)。対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達した場合に境界位置探索処理が終了する。一方、対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達していない場合、CPU210は対物レンズ3をZ方向の一方向に第2のピッチ移動させ(ステップS87)、ステップS71の処理に戻る。第2のピッチは、後述する第1のピッチよりも大きくなるように設定される。第2のピッチが第1のピッチよりも大きく設定されることにより、境界位置探索処理の時間が短くなる。
【0208】
ステップS72において、いずれかの画素データの値が出力上限値maxである場合、CPU210は、受光素子30のゲインを一定量減少させるとともにゲインを減少した旨を作業用メモリ230に記憶する(ステップS81)。続いて、CPU210は、現在の対物レンズ3のZ位置によりステップS70で作業用メモリ230に記憶された対物レンズ3のZ位置を更新し(ステップS82)、ステップS71の処理に戻る。
【0209】
ステップS74において、算出された評価値がしきい値よりも大きい場合、CPU210は対物レンズ3をZ方向の一方向に第1のピッチ移動させ(ステップS83)、対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達したか否かを判定する(ステップS84)。第1のピッチは、上記の強度半減距離と等しい大きさに設定される。これにより、対物レンズ3の上限位置UPおよび下限位置BPを精度よく設定することが可能となる。
【0210】
ステップS84において、Z位置が下端位置zt1または上端位置zt2に達していない場合、CPU210はステップS71の処理に戻る。一方、Z位置が下端位置zt1または上端位置zt2に達した場合、図18に示すように、CPU210は、ステップS76の処理により作業用メモリ230に境界位置が記憶されているか否かを判定する(ステップS85)。
【0211】
作業用メモリ230に境界位置が記憶されている場合、境界位置探索処理が終了する。一方、作業用メモリ230に境界位置が記憶されていない場合、CPU210は、境界位置探索処理の失敗を判定する(ステップS86)。
【0212】
上記のように、図16〜図18の境界位置探索処理において、CPU210は、対物レンズ3のZ位置が下端位置zt1または上端位置zt2に達するまで、対物レンズ3をZ方向に移動させる。
【0213】
上記に対して、CPU210は、図8を用いて説明した上下限自動設定処理ではステップS75,S77,S84,S87の処理を行わない。すなわち、CPU210は、図17のステップS76の処理において、境界位置が作業用メモリ230に記憶された時点で境界位置探索処理を終了する。この場合、境界位置探索処理時に下端位置zt1から上端位置zt2までの全ての範囲に渡って対物レンズ3をZ方向に移動させる必要がなくなる。その結果、境界位置探索処理の時間が短くなる。
【0214】
(10)境界位置探索処理方法の他の例
図19は、境界位置探索処理の他の例を示すフローチャートである。図19には、図16〜図18の境界位置探索処理と異なる処理のみ図示される。
【0215】
図19に示すように、図17のステップS87の処理後、CPU210は、図16〜図18の境界位置探索処理に加えて以下の処理を行ってもよい。
【0216】
ステップS87の処理後、CPU210は、受光素子30のゲインを一定量増加させる(ステップS91)。続いて、CPU210は、現在の対物レンズ3のZ位置において、単位領域についての全ての画素データの値を取得し、取得された画素データの値を図1の作業用メモリ230に記憶する(ステップS92)。
【0217】
次に、CPU210は、ステップS92において取得された画素データの値に基づいて評価値を算出し(ステップS93)、算出された評価値が予め定められたしきい値以下であるか否かを判定する(ステップS94)。
【0218】
ここで、ステップS91において受光素子30のゲインが増加された場合には、算出される評価値が大きくなる。そのため、本例では、ステップS94のしきい値は、ステップS91の処理の前後の受光素子30のゲインの比と上記のノイズ評価レベルEnl(図7および図10)とを乗算した値に設定される。
【0219】
算出された評価値がしきい値以下である場合、CPU210は、図17のステップS87の処理に進む。一方、算出された評価値が予め定められたしきい値よりも大きい場合、CPU210は、受光素子30のゲインを一定量減少させる(ステップS95)。このときのゲインの減少量は、ステップS91におけるゲインの増加量に等しく設定される。その後、CPU210は、図16のステップS83の処理に進む。
【0220】
上記のように、本例では、評価値がしきい値以下であるときに受光素子30のゲインが一時的に増加する。それにより、取得される複数の画素データの値が大きくなり、評価値が大きくなる。これにより、単位領域の表面に照射されるレーザ光の強度が低い場合でも、評価値とノイズ評価レベルEnlとを比較することが可能となる。それにより、第2のピッチを第1のピッチに比べて十分に大きく設定することができる。その結果、画素データの取得回数を十分に低減することができるので、境界位置探索処理の時間がさらに短くなる。
【0221】
なお、上記のステップS91において、CPU210は受光素子30のゲインを一定量増加させる代わりに、レーザ光源10から出射されるレーザ光の光量を一定量大きく設定してもよいし、NDフィルタ8の減衰率を一定量小さく設定してもよい。この場合、CPU210は、ステップS95において、CPU210は受光素子30のゲインを一定量減少させる代わりに、レーザ光源10から出射されるレーザ光の光量を一定量小さく設定し、またはNDフィルタ8の減衰率を一定量大きく設定する。これらの場合においても、境界位置探索処理の時間をさらに短くすることができる。
【0222】
(11)他の実施の形態
(11−1)上記の実施の形態では、共焦点顕微鏡システム500において上下限自動設定処理が実行される。これに限らず、上記の上下限自動設定処理は、観察対象物に投射され、受光素子30に導かれる光の強さに対応して取得されるデジタル信号に基づいて観察対象物の表面の状態を観察する顕微鏡システムに適用することができる。このような顕微鏡システムとして、例えば光干渉法を用いた顕微鏡システムがある。
【0223】
(11−2)上記の実施の形態において、対物レンズ3がZ方向に移動されることにより対物レンズ3に対する観察対象物Sの相対的なZ方向の位置が変化されるが、これに限定されない。ステージ60がZ方向に移動されることにより対物レンズ3に対する観察対象物Sの相対的なZ方向の位置が変化されてもよい。
【0224】
(11−3)上記の実施の形態において、X−Yスキャン光学系20が制御されることによりレーザ光が観察対象物S上でX方向およびY方向に走査されるが、これに限定されない。ステージ60が移動されることによりレーザ光が観察対象物S上でX方向およびY方向に走査されてもよい。
【0225】
また、レーザ光としてライン光(例えばX方向に延びる細長い光)が用いられてもよい。この場合、X−Yスキャン光学系20に代えてX方向への走査を行わないYスキャン光学系が用いられる。また、受光素子30に代えて、X方向に対応する方向に配列された複数の受光素子からなるラインCCDカメラ等が用いられる。
【0226】
なお、ラインCCDカメラの各受光素子のY方向に対応する方向の受光面のサイズは一般的に数10μmである。この場合、ラインCCDカメラの受光面がレンズ2の焦点位置に配置される。観察対象物Sの表面が対物レンズ3の焦点位置にあるときに、観察対象物Sにより反射されたライン光がラインCCDカメラの受光面に集光される。それにより、観察対象物Sにより反射されたライン光の大部分がラインCCDカメラの受光面に入射する。
【0227】
一方、観察対象物Sが対物レンズ3の焦点位置から外れた位置にあるときには、観察対象物Sにより反射されたライン光はラインCCDカメラの受光面の前または後の位置に集光される。それにより、観察対象物Sにより反射されたライン光の一部のみがラインCCDカメラの受光面に入射する。したがって、ラインCCDカメラの前にピンホール部材7を配置することが不要となる。
【0228】
(11−4)上記の実施の形態において、PC200のCPU210が制御部300の機能を有していてもよい。この場合、制御部300は設けられなくてもよい。
【0229】
(11−5)上記の実施の形態では、評価値は、単位領域についての全画素データの値の和である。これに限らず、評価値は、単位領域についての全画素データの値の平均値であってもよい。また、評価値は、単位領域内についての一部の画素データの値の和または平均値であってもよい。
【0230】
(12)請求項の各構成要素と実施の形態の各部との対応関係
以下、請求項の各構成要素と実施の形態の各部との対応の例について説明するが、本発明は下記の例に限定されない。
【0231】
上記実施の形態においては、観察対象物Sが観察対象物の例であり、共焦点顕微鏡システム500が顕微鏡システムの例であり、受光素子30が受光素子の例であり、レンズ1,2、対物レンズ3、ピンホール部材7、NDフィルタ8およびレーザ光源10が光学系の例である。
【0232】
また、単位領域s1〜s4が単位領域の例であり、レンズ駆動部63が相対的移動部の例であり、制御部300およびPC200のCPU210が制御部の例であり、PC200が観察範囲設定部および処理装置の例である。
【0233】
さらに、重複部分ovが重複部分の例であり、上下限自動設定処理が移動範囲設定処理の例であり、上限位置UPおよび下限位置BPにより定められる範囲が移動範囲設定処理により設定される光学系と観察対象物との相対的な移動範囲の例である。
【0234】
また、各単位領域において、表面画像データを生成するために複数の画素データを取得する処理が測定処理の例であり、ノイズよりも大きい強度の光、すなわちノイズレベルnlよりも大きい画素データの値を得ることができる強度の光が予め定められた強度の光の例である。
【0235】
また、下端位置zt1が予め定められた第1の距離の例であり、上端位置zt2が予め定められた第2の距離の例であり、第1のピッチが第1の移動量の例であり、第2のピッチが第2の移動量の例である。
【0236】
また、図11のステップS5において上下限自動設定処理が失敗した場合に設定される下端位置zt1(図7、図9および図10)よりも一定距離低い新たな下端位置が第3の距離の例である。さらに、図11のステップS5において上下限自動設定処理が失敗した場合に設定される上端位置zt2(図7、図9および図10)よりも一定距離高い新たな上端位置が第4の距離の例である。
【0237】
請求項の各構成要素として、請求項に記載されている構成または機能を有する他の種々の要素を用いることもできる。
【産業上の利用可能性】
【0238】
本発明は、種々の顕微鏡システムに有効に利用することができる。
【符号の説明】
【0239】
1,2 レンズ
3 対物レンズ
4〜6 ハーフミラー
7 ピンホール部材
8 NDフィルタ
10 レーザ光源
20 X−Yスキャン光学系
30 受光素子
40 照明用白色光源
50 カラーCCDカメラ
60 ステージ
61 ステージ操作部
62 ステージ駆動部
63 レンズ駆動部
200 PC
210 CPU
220 ROM
230 作業用メモリ
240 記憶装置
300 制御部
400 表示部
410 画像表示領域
420 条件設定領域
421 範囲設定ボタン
422 取得開始ボタン
500 共焦点顕微鏡システム
AZ1,AZ2,AZ3 範囲
BP 下限位置
Emax,max 出力上限値
Enl ノイズ評価レベル
Ez0 評価ピーク位置
Ez1,Ez2,ma1,ma2,mb1,mb2,zn1,zn2,zn3,zn4,zs1,zs2 位置
fp 焦点位置
nl ノイズレベル
s1〜s4 単位領域
ov 重複部分
pi1,pi2 値
UP 上限位置
S 観察対象物
Sa1 第1の面
Sa2 第2の面
Sa3 第3の面
z0 ピーク位置
zp1 第1のZ位置
zp2 第2のZ位置
zp3 第3のZ位置
zt1 下端位置
zt2 上端位置
【特許請求の範囲】
【請求項1】
観察対象物の表面の状態を観察する顕微鏡システムであって、
受光素子と、
観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を前記受光素子に導く光学系と、
単位領域に垂直な方向に沿った複数の位置で単位領域内での前記光学系による光の照射が行われるように前記光学系と前記観察対象物とを相対的に移動させる相対的移動部と、
観察範囲として複数の単位領域を設定する観察範囲設定部と、
前記観察範囲設定部により設定された複数の単位領域の各々について、前記光学系と前記観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、前記光学系および前記相対的移動部を制御することにより前記移動範囲設定処理において設定された移動範囲内で前記光学系と前記観察対象物とを相対的に移動させるとともに前記受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行う制御部とを備え、
前記観察範囲設定部は、隣接する単位領域間で重複部分が形成されるように前記複数の単位領域を設定し、
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記光学系と前記観察対象物との相対的な初期位置を決定し、決定された初期位置から前記光学系と前記観察対象物とが近づく方向および遠ざかる方向に前記光学系と前記観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて前記移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に前記光学系の焦点が合うように前記光学系と前記観察対象物との相対的な初期位置を決定することを特徴とする顕微鏡システム。
【請求項2】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記決定された初期位置から前記光学系と前記観察対象物とが近づく方向および遠ざかる方向に前記光学系と前記観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて前記受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する時点における前記光学系と前記観察対象物との相対的な位置を検出し、検出された相対的な位置に基づいて当該単位領域について前記移動範囲を設定し、最初の単位領域を除く各単位領域については、前記相対的な位置が検出されない場合に、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の重複部分の各部分にそれぞれ光学系の焦点が合うときの前記光学系と前記観察対象物との相対的な複数の位置を含むように当該単位領域についての前記移動範囲を設定することを特徴とする請求項1記載の顕微鏡システム。
【請求項3】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記決定された初期位置から前記光学系と前記観察対象物とが近づく方向に前記光学系と前記観察対象物とが相対的に移動している場合に、取得された画素データに基づいて、前記受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する時点における前記光学系と前記観察対象物との相対的な位置を第1の相対位置として検出し、前記決定された初期位置から前記光学系と前記観察対象物とが遠ざかる方向に前記光学系と前記観察対象物とが相対的に移動している場合に、取得された画素データに基づいて、前記受光素子の出力信号のレベルが前記予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する時点における前記光学系と前記観察対象物との相対的な位置を第2の相対位置として検出し、検出された第1および第2の相対位置に基づいて当該単位領域についての前記移動範囲を設定することを特徴とする請求項1または2記載の顕微鏡システム。
【請求項4】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記決定された初期位置から前記光学系と前記観察対象物との相対的な距離が第1の距離から前記第1の距離よりも大きい第2の距離になるまでの予め定められた範囲にわたって前記光学系と前記観察対象物とを相対的に移動させ、取得された画素データに基づいて、前記受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する複数の時点における前記光学系と前記観察対象物との相対的な複数の位置をそれぞれ検出し、検出された複数の位置を含むように当該単位領域についての前記移動範囲を設定することを特徴とする請求項1または2記載の顕微鏡システム。
【請求項5】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記取得された画素データに基づいて前記受光素子の出力信号のレベルが予め定められたレベルよりも高いか否かを判定し、前記受光素子の出力信号のレベルが前記予め定められたレベルよりも大きいときに前記光学系と前記観察対象物とを相対的に第1の移動量づつ移動させ、前記受光素子の出力信号のレベルが前記予め定められたレベル以下であるときに前記光学系と前記観察対象物とを相対的に第2の移動量づつ移動させ、
前記第2の移動量は、前記第1の移動量よりも大きいことを特徴とする請求項4記載の顕微鏡システム。
【請求項6】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記第1の距離から前記第2の距離になるまでの予め定められた範囲にわたって前記光学系と前記観察対象物とを相対的に移動させても前記移動範囲が設定されない場合に、前記決定された初期位置から前記光学系と前記観察対象物との相対的な距離が前記第1の距離よりも小さい第3の距離から前記第2の距離よりも大きい第4の距離になるまでの予め定められた範囲にわたって前記光学系と前記観察対象物とを相対的に移動させ、取得された画素データに基づいて、前記受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する複数の時点における前記光学系と前記観察対象物との相対的な複数の位置をそれぞれ検出し、検出された複数の位置を含むように当該単位領域についての前記移動範囲を設定することを特徴とする請求項4または5記載の顕微鏡システム。
【請求項7】
観察対象物の表面の状態を観察する顕微鏡システムが備える光学系と前記観察対象物とを相対的に移動させる範囲を設定するための対象物観察方法であって、
前記光学系により観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を前記受光素子に導くステップと、
単位領域に垂直な方向に沿った複数の位置で単位領域内での前記光学系による光の照射が行われるように前記光学系と前記観察対象物とを相対的に移動させるステップと、
観察範囲として複数の単位領域を設定するステップと、
設定された複数の単位領域の各々について、前記光学系と前記観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、前記光学系および前記相対的移動部を制御することにより前記移動範囲設定処理において設定された移動範囲内で前記光学系と前記観察対象物とを相対的に移動させるとともに前記受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行うステップとを備え、
前記複数の単位領域を設定するステップは、隣接する単位領域間で重複部分が形成されるように前記複数の単位領域を設定するステップを含み、
前記移動範囲設定処理を行い、前記測定処理を行うステップは、各単位領域についての前記移動範囲設定処理において、前記光学系と前記観察対象物との相対的な初期位置を決定し、決定された初期位置から前記光学系と前記観察対象物とが近づく方向および遠ざかる方向に前記光学系と前記観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて前記移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に前記光学系の焦点が合うように前記光学系と前記初期位置を決定するステップを含むことを特徴とする対象物観察方法。
【請求項8】
観察対象物の表面の状態を観察する顕微鏡システムが備える光学系と前記観察対象物とを相対的に移動させる範囲を設定する処理を処理装置に実行させる対象物観察プログラムであって、
前記光学系により観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を前記受光素子に導く処理と、
単位領域に垂直な方向に沿った複数の位置で単位領域内での前記光学系による光の照射が行われるように前記光学系と前記観察対象物とを相対的に移動させる処理と、
観察範囲として複数の単位領域を設定する処理と、
設定された複数の単位領域の各々について、前記光学系と前記観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、前記光学系および前記相対的移動部を制御することにより前記移動範囲設定処理において設定された移動範囲内で前記光学系と前記観察対象物とを相対的に移動させるとともに前記受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行う処理とを、
前記処理装置に実行させ、
前記複数の単位領域を設定する処理は、隣接する単位領域間で重複部分が形成されるように前記複数の単位領域を設定する処理を含み、
前記移動範囲設定処理を行い、前記測定処理を行う処理は、各単位領域についての前記移動範囲設定処理において、前記光学系と前記観察対象物との相対的な初期位置を決定し、決定された初期位置から前記光学系と前記観察対象物とが近づく方向および遠ざかる方向に前記光学系と前記観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて前記移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に前記光学系の焦点が合うように前記光学系と前記初期位置を決定する処理を含むことを特徴とする対象物観察プログラム。
【請求項1】
観察対象物の表面の状態を観察する顕微鏡システムであって、
受光素子と、
観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を前記受光素子に導く光学系と、
単位領域に垂直な方向に沿った複数の位置で単位領域内での前記光学系による光の照射が行われるように前記光学系と前記観察対象物とを相対的に移動させる相対的移動部と、
観察範囲として複数の単位領域を設定する観察範囲設定部と、
前記観察範囲設定部により設定された複数の単位領域の各々について、前記光学系と前記観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、前記光学系および前記相対的移動部を制御することにより前記移動範囲設定処理において設定された移動範囲内で前記光学系と前記観察対象物とを相対的に移動させるとともに前記受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行う制御部とを備え、
前記観察範囲設定部は、隣接する単位領域間で重複部分が形成されるように前記複数の単位領域を設定し、
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記光学系と前記観察対象物との相対的な初期位置を決定し、決定された初期位置から前記光学系と前記観察対象物とが近づく方向および遠ざかる方向に前記光学系と前記観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて前記移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に前記光学系の焦点が合うように前記光学系と前記観察対象物との相対的な初期位置を決定することを特徴とする顕微鏡システム。
【請求項2】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記決定された初期位置から前記光学系と前記観察対象物とが近づく方向および遠ざかる方向に前記光学系と前記観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて前記受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する時点における前記光学系と前記観察対象物との相対的な位置を検出し、検出された相対的な位置に基づいて当該単位領域について前記移動範囲を設定し、最初の単位領域を除く各単位領域については、前記相対的な位置が検出されない場合に、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて、当該単位領域の重複部分の各部分にそれぞれ光学系の焦点が合うときの前記光学系と前記観察対象物との相対的な複数の位置を含むように当該単位領域についての前記移動範囲を設定することを特徴とする請求項1記載の顕微鏡システム。
【請求項3】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記決定された初期位置から前記光学系と前記観察対象物とが近づく方向に前記光学系と前記観察対象物とが相対的に移動している場合に、取得された画素データに基づいて、前記受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する時点における前記光学系と前記観察対象物との相対的な位置を第1の相対位置として検出し、前記決定された初期位置から前記光学系と前記観察対象物とが遠ざかる方向に前記光学系と前記観察対象物とが相対的に移動している場合に、取得された画素データに基づいて、前記受光素子の出力信号のレベルが前記予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する時点における前記光学系と前記観察対象物との相対的な位置を第2の相対位置として検出し、検出された第1および第2の相対位置に基づいて当該単位領域についての前記移動範囲を設定することを特徴とする請求項1または2記載の顕微鏡システム。
【請求項4】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記決定された初期位置から前記光学系と前記観察対象物との相対的な距離が第1の距離から前記第1の距離よりも大きい第2の距離になるまでの予め定められた範囲にわたって前記光学系と前記観察対象物とを相対的に移動させ、取得された画素データに基づいて、前記受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する複数の時点における前記光学系と前記観察対象物との相対的な複数の位置をそれぞれ検出し、検出された複数の位置を含むように当該単位領域についての前記移動範囲を設定することを特徴とする請求項1または2記載の顕微鏡システム。
【請求項5】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記取得された画素データに基づいて前記受光素子の出力信号のレベルが予め定められたレベルよりも高いか否かを判定し、前記受光素子の出力信号のレベルが前記予め定められたレベルよりも大きいときに前記光学系と前記観察対象物とを相対的に第1の移動量づつ移動させ、前記受光素子の出力信号のレベルが前記予め定められたレベル以下であるときに前記光学系と前記観察対象物とを相対的に第2の移動量づつ移動させ、
前記第2の移動量は、前記第1の移動量よりも大きいことを特徴とする請求項4記載の顕微鏡システム。
【請求項6】
前記制御部は、各単位領域についての前記移動範囲設定処理において、前記第1の距離から前記第2の距離になるまでの予め定められた範囲にわたって前記光学系と前記観察対象物とを相対的に移動させても前記移動範囲が設定されない場合に、前記決定された初期位置から前記光学系と前記観察対象物との相対的な距離が前記第1の距離よりも小さい第3の距離から前記第2の距離よりも大きい第4の距離になるまでの予め定められた範囲にわたって前記光学系と前記観察対象物とを相対的に移動させ、取得された画素データに基づいて、前記受光素子の出力信号のレベルが予め定められたレベルよりも高い状態から前記受光素子の出力信号のレベルが前記予め定められたレベル以下に変化する複数の時点における前記光学系と前記観察対象物との相対的な複数の位置をそれぞれ検出し、検出された複数の位置を含むように当該単位領域についての前記移動範囲を設定することを特徴とする請求項4または5記載の顕微鏡システム。
【請求項7】
観察対象物の表面の状態を観察する顕微鏡システムが備える光学系と前記観察対象物とを相対的に移動させる範囲を設定するための対象物観察方法であって、
前記光学系により観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を前記受光素子に導くステップと、
単位領域に垂直な方向に沿った複数の位置で単位領域内での前記光学系による光の照射が行われるように前記光学系と前記観察対象物とを相対的に移動させるステップと、
観察範囲として複数の単位領域を設定するステップと、
設定された複数の単位領域の各々について、前記光学系と前記観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、前記光学系および前記相対的移動部を制御することにより前記移動範囲設定処理において設定された移動範囲内で前記光学系と前記観察対象物とを相対的に移動させるとともに前記受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行うステップとを備え、
前記複数の単位領域を設定するステップは、隣接する単位領域間で重複部分が形成されるように前記複数の単位領域を設定するステップを含み、
前記移動範囲設定処理を行い、前記測定処理を行うステップは、各単位領域についての前記移動範囲設定処理において、前記光学系と前記観察対象物との相対的な初期位置を決定し、決定された初期位置から前記光学系と前記観察対象物とが近づく方向および遠ざかる方向に前記光学系と前記観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて前記移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に前記光学系の焦点が合うように前記光学系と前記初期位置を決定するステップを含むことを特徴とする対象物観察方法。
【請求項8】
観察対象物の表面の状態を観察する顕微鏡システムが備える光学系と前記観察対象物とを相対的に移動させる範囲を設定する処理を処理装置に実行させる対象物観察プログラムであって、
前記光学系により観察対象物の表面に設定された単位領域に集光しつつ光を照射するとともに、単位領域に照射された光を前記受光素子に導く処理と、
単位領域に垂直な方向に沿った複数の位置で単位領域内での前記光学系による光の照射が行われるように前記光学系と前記観察対象物とを相対的に移動させる処理と、
観察範囲として複数の単位領域を設定する処理と、
設定された複数の単位領域の各々について、前記光学系と前記観察対象物との相対的な移動範囲を設定する移動範囲設定処理を行い、前記光学系および前記相対的移動部を制御することにより前記移動範囲設定処理において設定された移動範囲内で前記光学系と前記観察対象物とを相対的に移動させるとともに前記受光素子の出力信号に基づいて当該単位領域についての複数の画素データを取得する測定処理を行う処理とを、
前記処理装置に実行させ、
前記複数の単位領域を設定する処理は、隣接する単位領域間で重複部分が形成されるように前記複数の単位領域を設定する処理を含み、
前記移動範囲設定処理を行い、前記測定処理を行う処理は、各単位領域についての前記移動範囲設定処理において、前記光学系と前記観察対象物との相対的な初期位置を決定し、決定された初期位置から前記光学系と前記観察対象物とが近づく方向および遠ざかる方向に前記光学系と前記観察対象物とを相対的に移動させるとともに複数の画素データを取得し、取得された画素データに基づいて前記移動範囲を設定し、最初の単位領域を除く各単位領域については、隣接する他の単位領域の測定処理時に取得された画素データのうち当該単位領域の重複部分についての画素データに基づいて当該単位領域の少なくとも一部に前記光学系の焦点が合うように前記光学系と前記初期位置を決定する処理を含むことを特徴とする対象物観察プログラム。
【図1】


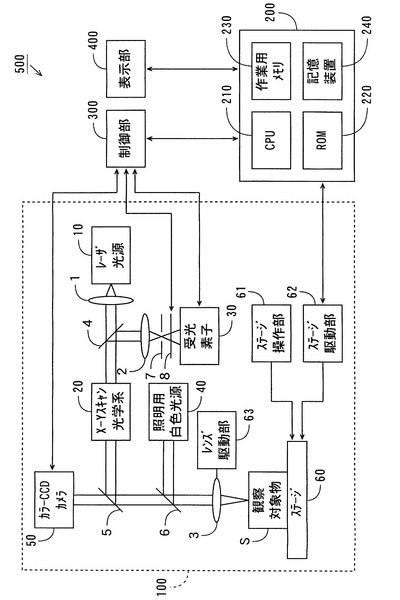
【図2】
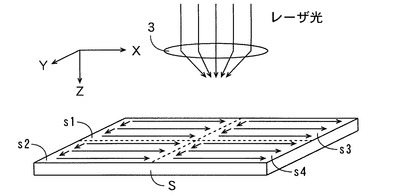
【図3】

【図4】
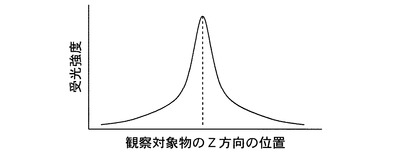
【図5】

【図6】
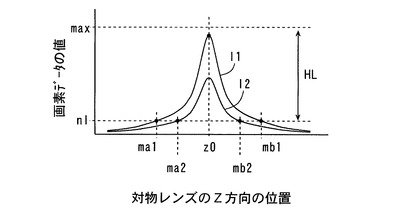
【図7】
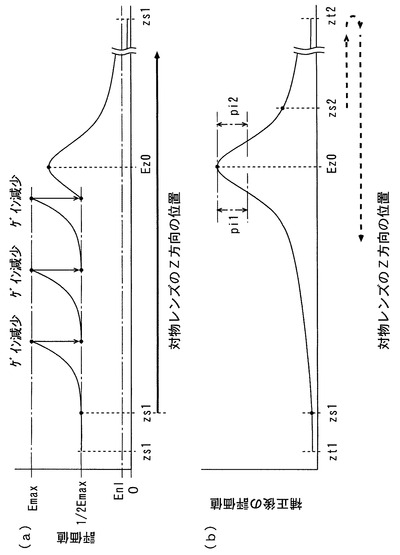
【図8】
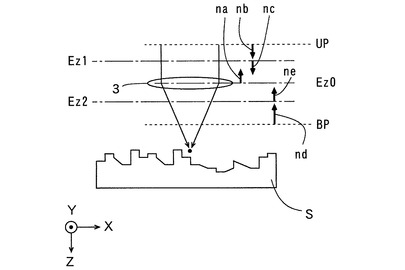
【図9】
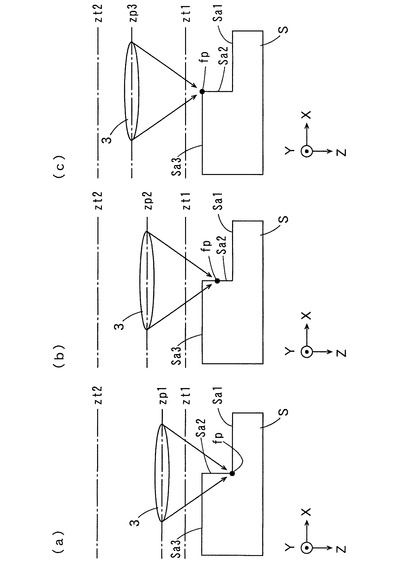
【図10】
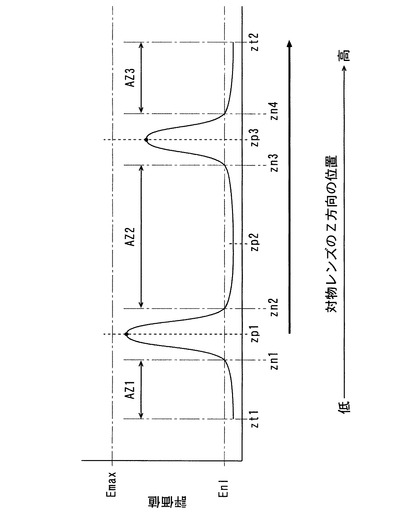
【図11】

【図12】

【図13】
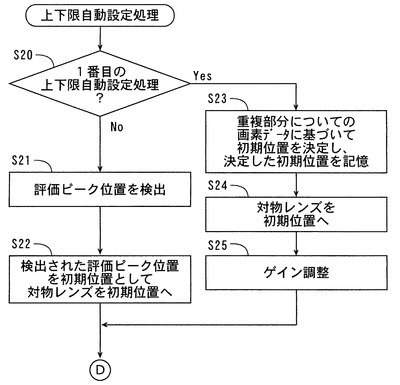
【図14】
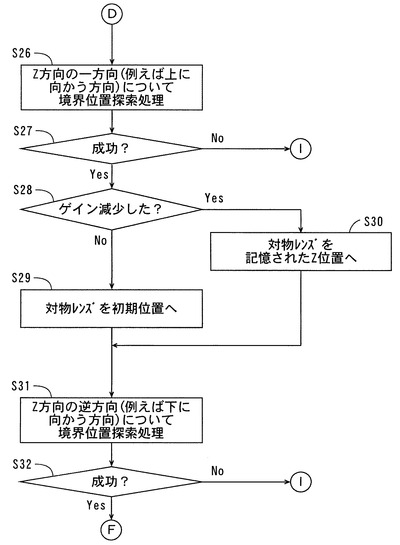
【図15】

【図16】
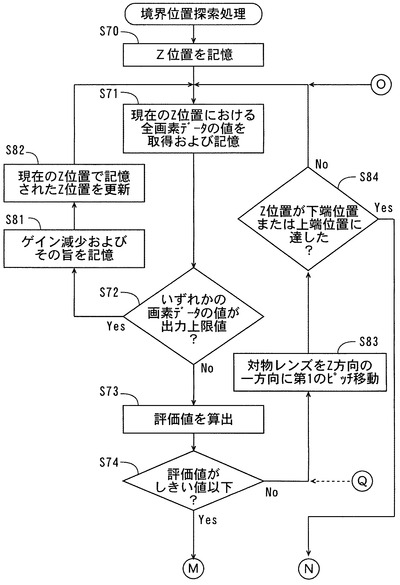
【図17】

【図18】
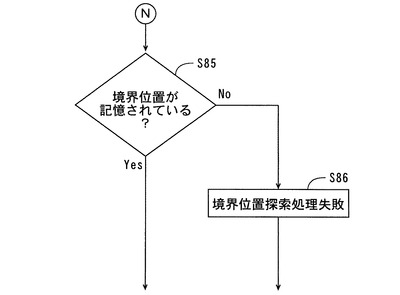
【図19】
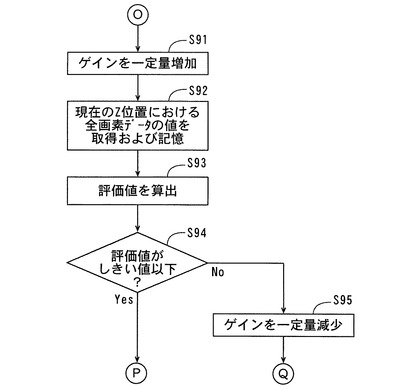
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−29551(P2013−29551A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−163632(P2011−163632)
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000129253)株式会社キーエンス (681)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000129253)株式会社キーエンス (681)
【Fターム(参考)】
[ Back to top ]