
顕微鏡制御装置、顕微鏡システム及び該制御方法
【課題】人間の手による操作指示と実際の駆動完了までの時間差によって起こる操作の違和感や、制御完了までの過剰な時間を改善、短縮する顕微鏡装置を提供する。
【解決手段】試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置は、指示入力部と、顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部と、指示入力部から指示情報が入力された場合、該指示情報に応じて電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する制御部と、を備えることにより、上記課題の解決を図る。
【解決手段】試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置は、指示入力部と、顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部と、指示入力部から指示情報が入力された場合、該指示情報に応じて電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する制御部と、を備えることにより、上記課題の解決を図る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動ステージを備えた顕微鏡システムに関する。
【背景技術】
【0002】
顕微鏡装置は工業分野を始め、生物分野における研究や検査等において広く利用されている。さらに、従来から、観察方法や対物レンズの倍率等に応じた調光制御や各種光学素子の切り換え、あるいは標本を載置するステージの平面内の移動や、昇降といった観察に伴う各部の調整を電動で行う電動顕微鏡が知られている。
【0003】
このような電動顕微鏡は、パーソナルコンピュータ(PC)等の入力装置が接続され、その入力装置からの制御内容に基づいて電動顕微鏡の各部が作動制御される。また、その観察像は近年、CCD(Charge Coupled Device)カメラ等の撮像手段の採用により、画像データとして記録、モニタなどの表示部への表示等ができるようになった。
【0004】
しかしながら、電動顕微鏡は手動顕微鏡と比べ、人間の手で操作を行わない分、観察者が行う入力指示に対して得られる表示部への画像表示という結果に、電動駆動部が動くことに起因する誤差や遅延における違和感、操作感の悪さが生じる場合がある。
【0005】
このような場合の誤差に対しては、操作後に取得画像に対して機械的な調整を行うことで、補正を行う手段が開示されている(例えば、特許文献1。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−29163号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の技術では、操作する人間の感覚と、駆動部の遅延に対する違和感は解消されない。そのために、操作指示と操作結果の間の遅延時間に余分な操作(例えば、移動が完了していない間に、電動ステージに余分な駆動指示を行ってしまうことで、位置を戻す必要が出るなど)を行ってしまうことがある。
【0008】
上記課題に鑑み、本発明では、人間の手による操作指示と実際の駆動完了までの時間差によって起こる操作の違和感や、制御完了までの過剰な時間を改善、短縮する顕微鏡装置を提供する。
【課題を解決するための手段】
【0009】
本発明にかかる、試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置は、前記顕微鏡システムを操作するための指示情報を入力する指示入力部と、前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部と、前記指示入力部から前記指示情報が入力された場合、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する制御部と、を備えることを特徴とする。
【0010】
また、前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであり、前記制御部は、前記指示情報が前記ステージを前記光軸方向に対して垂直方向へ移動させる旨の指示である場合、該指示に追従して前記所定画像の表示位置を移動させることを特徴とする。
【0011】
また、前記制御部は、前記指示情報が前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示である場合、該指示に追従して前記所定画像のサイズを変更することを特徴とする。
【0012】
また、前記制御部は、前記指示入力部により前記指示情報が入力された場合、前記電動部の駆動状況に応じて、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示することを特徴とする。
【0013】
また、前記電動部が、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであって、前記指示入力部により前記指示情報が入力された状況において、単位時間当たりの前記撮像部の撮像速度が所定の閾値以下である場合、または前記電動ステージの移動速度が所定の閾値以下である場合、もしくは電動ステージの移動時間が所定の閾値以上である場合、前記制御部は、前記指示情報に応じて前記電動部を駆動させる制御を行うことを特徴とする。
【0014】
また、前記制御部は、所定の時間内に、連続して複数回の指示情報が入力された場合、該各指示に追従して前記所定画像の表示態様を変化させると共に、該指示の対象である前記電動部が最小限の駆動をするように制御することを特徴とする。
【0015】
また、前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであり、前記制御部は、所定の時間内に、前記電動ステージを光軸方向に対して垂直方向へ移動させる旨の指示が連続して複数回入力された場合、該各指示に追従して前記所定画像を移動させると共に、前記電動ステージが最短の移動をするように制御することを特徴とする。
【0016】
また、前記制御部は、所定の時間内で、前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示情報が連続して複数回入力された場合、該各操作指示に追従して前記所定画像のサイズを変化させると共に、前記視野の切り替えが最小限となるように制御することを特徴とする。
【0017】
前記顕微鏡システムは、さらに、前記所定画像と、前記ステージの座標及び観察視野の倍率のうち少なくともいずれか1とが関係付けられて記憶されている記憶部を備えることを特徴とすることを特徴とする。
【0018】
また、顕微鏡システムは、前記顕微鏡制御装置を備えていてもよい。
本発明に係る、試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置の制御方法は、前記顕微鏡システムを操作するための指示情報を入力する指示入力部から前記指示情報が入力された場合、該指示情報に応じて、前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示することを特徴とする。
【発明の効果】
【0019】
本発明によれば、人間の手による操作指示と実際の駆動完了までの時間差によって起こる操作の違和感や、制御完了までの過剰な時間を改善、短縮することができる。
【図面の簡単な説明】
【0020】
【図1】第1の実施形態(実施例1)における顕微鏡システムの構成例を示す。
【図2】第1の実施形態(実施例1)におけるモニタ18に表示されるGUIの表示例を示す。
【図3】表示部201のみが設定されているモニタの設定例を示す。
【図4】第1の実施形態(実施例1)における観察視野に対応する電動ステージ9の位置を説明するための図である。
【図5】第1の実施形態(実施例1)における、電動ステージを目的位置へ移動させると共に、操作者の操作指示に追従して擬似画像を移動させ、電動ステージ9の移動完了後、その擬似画像をリアルタイムの画像データに置き換える処理を説明するための図である。
【図6】第1の実施形態(実施例1)における電動ステージ9の移動に伴う表示画像の表示制御処理フローを示す。
【図7】第1の実施形態(実施例2)における顕微鏡システムの構成例を示す。
【図8】第1の実施形態(実施例2)における電動ステージ9上での視野切り替え(スキャナ振幅の変更)に伴い、切り替えられた観察視野を示す。
【図9A】第1の実施形態(実施例2)における、観察視野を拡大方向(スキャナ振幅を大→小へ変更)へ切り替えると共に、操作者の操作指示に追従してその擬似画像を拡大し、観察視野の切り替え完了後、その擬似画像をリアルタイムで取得した画像データに置き換える処理を説明するための図である。
【図9B】第1の実施形態(実施例2)における、観察視野を縮小方向(スキャナ振幅を小→大へ変更)へ切り替えると共に、操作者の操作指示に追従してその擬似画像を縮小し、観察視野の切り替え完了後、その擬似画像をリアルタイムで取得した画像データに置き換える処理を説明するための図である。
【図10】第1の実施形態(実施例2)における観察視野の切り替えに伴う表示画像の表示制御処理フローを示す。
【図11】第2の実施形態における電動ステージの移動に伴う表示画像の表示制御処理フローを示す。
【図12】第3の実施形態(実施例1)における、電動ステージ9を駆動させる場合の(A)指示経路と、(B)実移動経路を示す。
【図13】第3の実施形態(実施例1)における電動ステージ9の駆動に伴う表示画像の表示制御処理フローを示す。
【図14】第3の実施形態(実施例2)における、(A)視野切り替えの指示経過と、(B)視野切り替えの実駆動を示す。
【図15】第3の実施形態(実施例2)における2次元走査機構30の駆動に伴う表示画像の表示制御処理フローを示す。
【図16】第4の実施形態における電動ステージ9のXY座標及び対物レンズ8の倍率と関連付けられた擬似画像を管理するための擬似画像管理テーブル40を示す。
【図17】第4の実施形態における電動ステージ9の移動に伴う表示画像の表示制御処理フローを示す。
【図18】第1〜第4の実施形態におけるコンピュータ21のハードウェア環境の構成ブロック図である。
【発明を実施するための形態】
【0021】
本実施形態に係る顕微鏡制御装置は、試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する。顕微鏡制御装置は、指示入力部、電動部、制御部を備える。
【0022】
指示入力部は、前記顕微鏡システムを操作するための指示情報を入力する。指示入力部は、例えば、本実施形態で言えば、操作領域203または方向指示部205に相当する。
電動部は、前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる。電動部は、例えば、本実施形態で言えば、電動ステージ9、2次元走査機構30に相当する。
【0023】
制御部は、前記指示入力部から前記指示情報が入力された場合、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示することができる。制御部は、例えば、本実施形態で言えば、制御部21−1に相当する。
【0024】
このように構成することにより、人間の手による操作指示と実際の駆動完了までの時間差によって起こる操作の違和感や、制御完了までの過剰な時間を改善、短縮することができる。
【0025】
前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージである。この場合、前記制御部は、前記指示情報が前記ステージを前記光軸方向に対して垂直方向へ移動させる旨の指示である場合、該指示に追従して前記所定画像の表示位置を移動させることができる。
【0026】
このように構成することにより、指示したタイミングで電動ステージの駆動完了位置が分かるために、駆動系の遅れによる操作の違和感を解消することができる。
前記制御部は、前記指示情報が前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示である場合、該指示に追従して前記所定画像のサイズを変更することができる。
【0027】
このように構成することにより、指示したタイミングで倍率変更後の視野が分かるために、駆動系の遅れによる操作の違和感を解消することができ、目的とする視野へ調整するまでの時間短縮を図ることができる。
【0028】
前記制御部は、前記指示入力部により前記指示情報が入力された場合、前記電動部の駆動状況に応じて、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する。
【0029】
このように構成することにより、所定の場合にのみ、擬似画像の表示処理を行うことで、画面の過剰な切り換えを抑制できる。
前記電動部が、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであって、前記指示入力部により前記指示情報が入力された状況において、前記制御部は、次を行う。すなわち、単位時間当たりの前記撮像部の撮像速度が所定の閾値以下である場合、または前記電動ステージの移動速度が所定の閾値以下である場合、もしくは電動ステージの移動時間が所定の閾値以上である場合、前記制御部は、前記指示情報に応じて前記電動部を駆動させる制御を行う。
【0030】
このように構成することにより、電動ステージ9の移動速度が閾値T1より遅いか、移動時間が閾値T2より長いか、またはフレームレートが閾値T3より遅い場合にのみ、擬似画像の表示処理を行うことで、画面の過剰な切り換えを抑制できる。その結果、コンピュータ21の制御部21−1への負荷を減らせることで、処理速度の遅れを防ぐことができる。また、必要のない画面の切り換えの発生を防止することができる。そのため、切り換えによる待ち時間や、擬似画像とリアルタイム画像の短時間での切り換えに起因する混乱等を防ぐことができ、操作感が向上する。
【0031】
前記制御部は、所定の時間内に、連続して複数回の指示情報が入力された場合、該各指示に追従して前記所定画像の表示態様を変化させると共に、該指示の対象である前記電動部が最小限の駆動をするように制御する。
【0032】
このように構成することにより、操作者は過剰な指示による顕微鏡システムの無駄な動きを気にせずに、表示画面を見ながらの目的位置への微調整を操作感よく行うことができる。また、顕微鏡システムの無駄な駆動がなくなり、駆動完了までの時間を短縮することができる。
【0033】
前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージである。この場合、前記制御部は、所定の時間内に、前記電動ステージを光軸方向に対して垂直方向へ移動させる旨の指示が連続して複数回入力された場合、該各指示に追従して前記所定画像を移動させると共に、前記電動ステージの移動が最小限となるように制御する。
【0034】
このように構成することにより、規定時間内に入力された複数回の駆動指示がされた場合、表示系では逐次その指示に追従して擬似画像の表示形態が変化する一方、駆動系では、その駆動指示を1つにまとめ、最小限の駆動で最終的な指示位置に到達することができる。
【0035】
前記制御部は、所定の時間内で、前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示情報が連続して複数回入力された場合、該各操作指示に追従して前記所定画像のサイズを変化させると共に、前記視野の切り替えの駆動が最小限となるように制御する。
【0036】
このように構成することにより、規定時間内に入力された複数回の駆動指示がされた場合、表示系では逐次その指示に追従して擬似画像の表示形態が変化する一方、駆動系では、その駆動指示を1つにまとめ、最小限の駆動で最終的な視野に切り替えることができる。
【0037】
前記顕微鏡システムは、さらに、前記所定画像と、前記ステージの座標及び観察視野の倍率のうち少なくともいずれか1とが関係付けられて記憶されている記憶部を備えてもよい。
【0038】
このように構成することにより、より最適な擬似画像データを取得、保存しておくことにより、操作指示時にデータ保存を行う必要がないために擬似画像への切り換えをすばやく行え、時間が短縮できる。
【0039】
なお、顕微鏡システムが顕微鏡制御装置を備えていてもよい。
以下に、本実施形態の詳細について説明する。
<第1の実施形態>
(実施例1)
第1の実施形態(実施例1)では、電動ステージ9の移動中は擬似画像を表示させ、操作者の操作指示があった場合にはその操作指示に追従してその擬似画像を移動させると共に、電動ステージ9の移動完了後、その擬似画像をリアルタイムの画像データに置き換える顕微鏡システムについて説明する。
【0040】
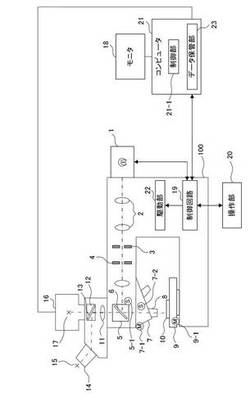
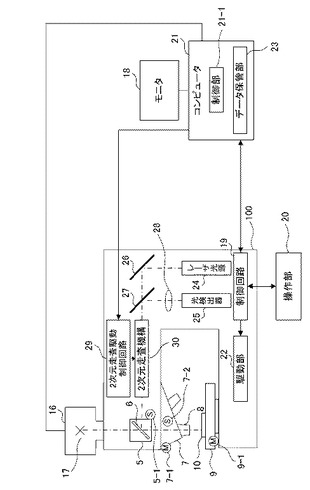
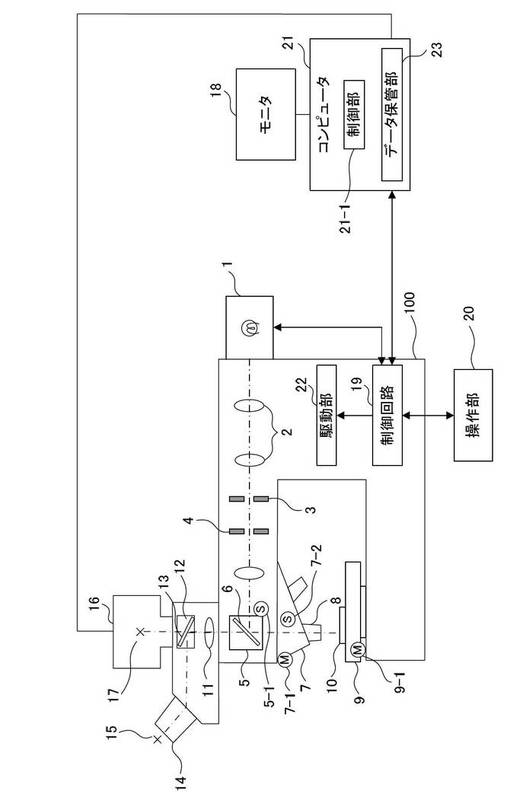
図1は、第1の実施形態(実施例1)における顕微鏡システムの構成例を示す。落射照明用光源1は、例えば、ハロゲンランプ、LED(Light−emitting diode)等からなる。本実施形態における顕微鏡システムの光学系では、落射照明用光源1からの光は、照明系レンズ2、開口絞り3、視野絞り4を介し、観察法切り換えユニット5に構成されているハーフミラー6等の光学部材により反射する。そのハーフミラー6等の光学部材で反射した光は、レボルバ7により選択可能な対物レンズ8を介して、電動ステージ9へ置かれた試料10へ反射させて落射照明をする。
【0041】
試料10からの反射光は、対物レンズ8を介し、観察法切り換えユニット5のハーフミラー6を透過し、結像レンズ11に入射する。光路切り換えユニット12が目視側に選択されている場合は、結像レンズ11に入射した光は、ミラー13によって反射され、鏡筒双眼部14へと入射され、アイポイント15にて結像される。光路切り換えユニット12がカメラ観察側に選択されている場合は、結像レンズ11に入射した光は、カメラ16内部の撮像素子17にて結像される。
【0042】
観察法切り換えユニット5はそれぞれ、各種光学素子を有する複数のキューブユニットからなる。この観察法切り換えユニット5は、操作者が複数のキューブユニットの中からいずれか1つを選択的に切換えて観察光軸上に配置させることができる。また、このキューブユニットはセンサ5−1により選択状態を判別できる。
【0043】
光路切り換えユニット12は、前述した通り、操作者がミラー13を挿脱することにより、結像位置を切り換えることができる。結像位置をカメラ16内部の撮像素子17にした場合は、撮像素子17にて検出した画像がモニタ18に表示される。
【0044】
レボルバ7は、倍率、観察法等ごとに種類の違う対物レンズ8が複数取り付けられている。図1中の「M」はモータが存在する電動部を示し、図1中の「S」は検出用のセンサが存在することを示す。本実施形態では、駆動部22によりモータ7−1を制御してレボルバ7を回転させ、対物レンズ8を切り換えて、この切り換え位置をセンサ7−2により検出することでどの対物レンズが光路上に配置されているか検出できる。
【0045】
電動ステージ9は、試料10を対物レンズ8に対置した状態で、駆動部22によりモータ9−1を制御することにより、XY方向に移動できる。電動ステージ9は、例えば、ステッピングモータを使用した構成や、レーザースケールを組み込んだ構成等、現在座標を管理できるような装置が組み込まれている。
【0046】
制御回路19は、コンピュータ21によって構成されてモニタ18に表示されるグラフィカルユーザーインターフェース(GUI)を介して入力された指示や操作部20からの指示を受信する。そして、制御回路19は、その受け取った指示に基づいて、各電動部を駆動するための制御信号を駆動部22に送る。
【0047】
コンピュータ21は、内部に画像処理を行う演算機能や、データ保管部23を有する。データ保管部23は、カメラ16にて撮像された画像データや様々な設定情報等を保管するメモリである。データ保管部23は、コンピュータ21内部にあっても良いし、顕微鏡本体100や、カメラ16等、他の部分に組み込まれていても良いし、別個に構成されていても良い。
【0048】
操作部20は、操作ボタンが配置されたハンドスイッチ、ジョイスティック、エンコーダ等にて構成されるが、タッチパネルPCのように、コンピュータ21とモニタ18のような機能を持つ装置としてもよい。
【0049】
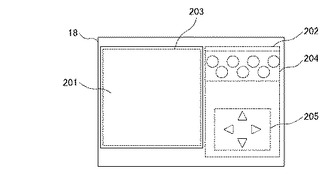
図2は、第1の実施形態(実施例1)におけるモニタ18に表示されるGUIの表示例を示す。モニタ18に表示されるGUIは、画像表示部201、操作領域202を有する。画像表示部201は、カメラ16にて撮像中の画像データや、後述する擬似画像を表示する。操作領域202には、方向指示部205、光学部材切り換え操作部204等の操作指示部が設けられている。方向指示部205を操作することにより、移動方向、切り換え方向を指示することができる。光学部材切り換え操作部204には、光学部材を切り換えるためのボタンが配置されている。
【0050】
さらに、操作領域203は、画像表示部201上に配置されており、画像上をドラッグやクリックすることで、電動ステージ9の移動を指示できる。なお、操作部20を用いて制御回路19への指示を行う場合は、図3で説明するようにしてもよい。
【0051】
図3は、表示部201のみが設定されているモニタの設定例を示す。操作部20を使用して制御回路19への指示を行う場合は、図3に示すように、モニタ18に表示部201のみを設定するようにしてもよい。
【0052】
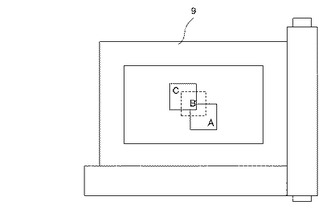
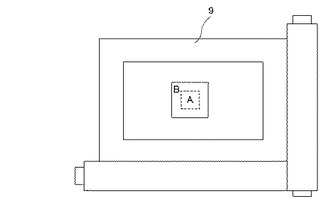
図4は、第1の実施形態(実施例1)における観察視野に対応する電動ステージ9の位置を説明するための図である。移動指示前の観察視野に対応する電動ステージ9の位置を位置Aで示す。電動ステージ9の移動完了後の観察視野に対応する電動ステージ9の位置を位置Cで示す。位置Aと位置Cの中間位置を位置Bで示す。観察視野に対応する位置を、位置Aから位置Cへ移動するように指示した場合、電動ステージ9は、中間位置Bを通り、時間をかけて位置Aから位置Cへ移動する。従来の構成ではカメラ16にて現在撮像されている画像データを画像データ表示部201に表示していた。そのため、操作者は電動ステージ9の移動が完了するまで、指示した移動先の位置を把握することは出来ず、操作者が目的とする位置まで動くかどうかを電動ステージ9の駆動完了までは確認できない。
【0053】
そこで、第1の実施形態(実施例1)では、電動ステージ9の移動中は擬似画像を表示させ、操作者の操作指示に追従してリアルタイムでその擬似画像を移動させるようにする。そして、電動ステージ9の移動完了後、移動完了位置でのリアルタイムの画像データの取得が完了したら、その擬似画像を、そのリアルタイムで取得した画像データに置き換える処理を行う。これについて、図5を用いて説明する。
【0054】
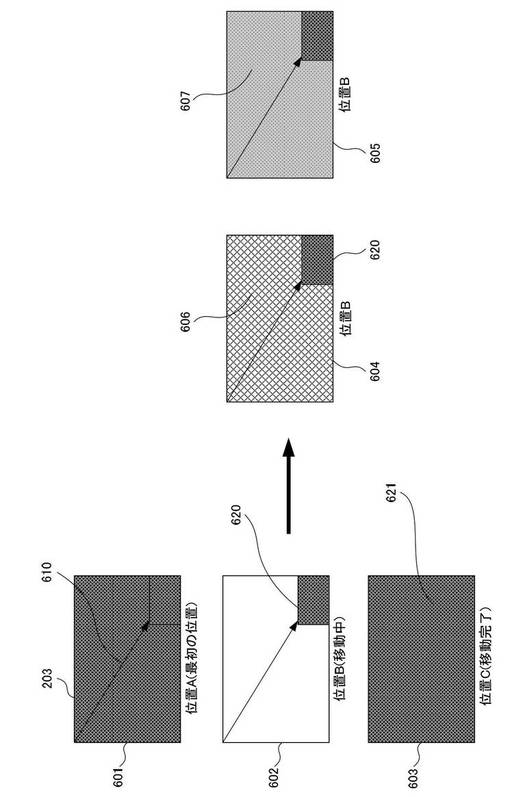
図5は、第1の実施形態(実施例1)における、電動ステージを目的位置へ移動させると共に、操作者の操作指示に追従して擬似画像を移動させ、電動ステージ9の移動完了後、その擬似画像をリアルタイムの画像データに置き換える処理を説明するための図である。
【0055】
表示状態601は、電動ステージ9の位置A(最初の位置)において、画像表示部201に表示された位置A(最初の位置)における画像データである。表示状態601において、操作者が矢印610で示すように移動指示を行うと、コンピュータ21の制御部21−1は、画像表示部201に現在表示されている、位置Aにおける観察視野の画像を擬似画像620として保持する。なお、予め所定の画像を保持しておき、その保持している画像を擬似画像620としてもよい。
【0056】
操作者が、例えば操作領域203等を操作して電動ステージ9の移動指示を行うとする。すると、表示状態602に示すように、その移動指示に合わせ座標に合った位置に瞬時に、画像表示部201に表示された画像(擬似画像620)が移動する。すなわち、コンピュータ21に制御により、その擬似画像620が移動指示の指示量に併せてリアルタイムで移動する。
【0057】
移動が完了して、観察視野が電動ステージ9の位置Cに到達したら、位置Cでの観察視野の画像をリアルタイムで取得する。そして、表示状態603に示すように、擬似画像620をそのリアルタイムで取得した画像621で更新する。
【0058】
このように、画像表示部201に表示した擬似画像620を、操作者の指示速度に合わせて動かして表示する。これにより、電動ステージ9の駆動中でも表示状態602に示すように、表示状態601に示す位置A(移動前)の画像が、電動ステージ9の移動後に視野の(つまり、画像表示部201の表示範囲の)どの位置にくるかが解る。よって、操作者は移動指示をしたタイミングで移動後の観察視野の状態を擬似的に把握することができる。
【0059】
このとき、擬似画像を移動した結果、それまで擬似画像が表示されていた領域については、表示状態602のように何も表示されていない状態でもよい。また、表示状態604に示すように、解像度は落ちるが擬似画像620以外の部分について、視野の広い別の倍率(例えば、低い倍率)の画像606を補って擬似的に表示してもよい。また、表示状態605に示すように、電動ステージ9のXY座標に関連付けられた他の画像607(例えば、貼り合わせ用等のために保存された画像)があれば、その画像607を用いて擬似画像を補ってもよい。なお、張り合わせ用のために保存された画像とは、観察対象を複数の区画に分けて高精細な画像を撮像し、相互に隣接する区画の画像の隣接縁側を張り合わせて、1つの観察画像を形成する場合の、これらの各区分に分けた画像をいう。
【0060】
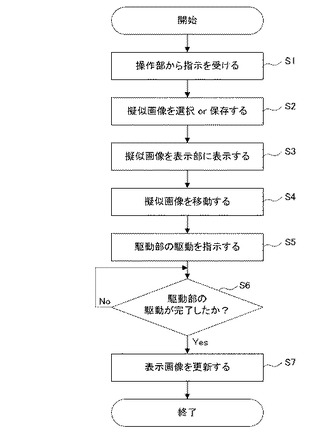
図6は、第1の実施形態(実施例1)における電動ステージ9の移動に伴う表示画像の表示制御処理フローを示す。顕微鏡の操作者は、モニタ18に表示された画像を見ながら、操作領域203、または方向指示部205の方向指示にて電動ステージ9の移動を指示する。このとき操作領域203を使用する場合、操作者は、画像表示部201に表示されている画像をクリック、またはドラッグすることにより移動指示を行う。
【0061】
コンピュータ21の制御部21−1は、その移動指示を受けたら(S1)、現在表示されている観察視野の画像の保存を行うか、または、データ保管部23に保管された画像データから任意の画像の選択を行う(S2)。そして、制御部21−1は、保存したデータ、または選択した画像データを擬似画像620として画像表示部201に表示する(S3)。
【0062】
次に、制御部21−1は、画像表示部201に表示されている擬似画像を、操作領域203への指示量に合わせて移動させる(S4)。制御部21−1は、現在選択されている視野に対応するステージ座標と操作領域203にて示された指示量とに基づいて、電動ステージ9の駆動量を演算し、制御回路19に電動ステージ9への駆動指示を出力する。
【0063】
制御回路19は、駆動部22へ制御信号を出力し、電動ステージ9の駆動を開始する(S5)。手順S4、S5については、どちらの処理を先に行ってもよいし、同時に行ってもよい。
【0064】
電動ステージ9の駆動が完了したら(S6で「Yes」)、制御部21−1は、画像表示部201に表示されている画像の更新を行う(S7)。すなわち、表示状態603に示すように、画像表示部201に表示されている画像は、擬似画像620から、カメラ16によりリアルタイムで撮像された画像データに切り換わる。
【0065】
なお、上記では、手順S4、S5については、どちらの処理を先に行ってもよいし、同時に行ってもよいとしたが、S4における擬似画像の移動完了の確定後に、S5の電動ステージ9の駆動を開始するようにしてもよい。
【0066】
従来の構成では、操作指示に対して駆動系の駆動が遅れると、駆動完了前に過剰な指示量を指定して、それを戻す為の指示を繰り返していた。また、指示量が足りないことが操作指示時に分からないために何度も駆動完了を待ち、足りなかった分の駆動指示を繰り返していた。しかしながら、本実施形態によれば、指示したタイミングで駆動完了位置が分かるために、駆動系の遅れによる操作の違和感を解消することができる。そのため、過剰な指示量の指定をし難く、操作者が目的とする位置へ電動ステージ9を駆動するまでの時間短縮を図ることができる。
【0067】
また、停止、駆動を繰り返すと、モータなどの駆動系は負荷を軽減するために、全体的な駆動量が変わらない場合でも、駆動速度に対し台形駆動など、移動開始直後や、停止直前は速度が落ちる方式で駆動していることが多い。このような駆動方式の場合、全体の移動量に対して速度が一定でないことから、操作者は駆動直後に遅すぎると感じたり、停止前にどこで止まるかわからないといった、操作上の違和感を覚えやすい。また、少量の移動では最高速度に達しない間に移動が終わるため、開始、停止を少量ずつ繰り返すということが起こると移動に余計な時間がかかる。しかしながら、本実施形態によれば、表示されている画像(擬似画像)について、指示したタイミングでリアルタイムに指示した位置へ移動するので、このような違和感を解消できる。したがって、少量の移動を繰り返す必要がなくなることからも時間短縮を図ることができる。
【0068】
(実施例2)
本実施形態(実施例2)では、視野の切り替え中は擬似画像を表示させ、操作者の操作指示があった場合にはその操作者の操作指示に追従してその擬似画像の表示サイズを変更し、観察視野の切り替え完了後、その擬似画像をリアルタイムの画像データに置き換える顕微鏡システムについて説明する。
【0069】
図7は、第1の実施形態(実施例2)における顕微鏡システムの構成例を示す。本実施例ではレーザ走査型顕微鏡と一般的に呼ばれる顕微鏡を用いる。
まず、スポット光としてのレーザ光を発生するレーザ光源24からのレーザ光は、ミラー26で反射し、ハーフミラー27を透過して2次元走査機構30に入射する。
【0070】
2次元走査機構30は、ミラー26を介して得たレーザ光源24からのレーザ光を2次元走査するための機構で、X方向用、Y方向用のガルバノスキャナが組み合わされた2軸のスキャナ等にて構成されている。2次元走査機構30は、2次元走査駆動制御回路29の制御に基づいて、ガルバノスキャナをX軸方向、Y軸方向に振ることでスポット光の光路を2次元走査する。
【0071】
2次元走査機構30で2次元走査されたスポット光は、半透明鏡であるハーフミラー6で反射し、対物レンズ8を介して電動ステージ9に保持した試料10上に照射する。試料10からの反射光は、対物レンズ8、2次元走査機構30を介して半透明鏡であるハーフミラー27に戻ってくる。このハーフミラー27を介して得た試料10表面からの反射光は、レンズ28で集光され、光検出器25に入射し、電気信号に変換された後、コンピュータ21に出力される。
【0072】
コンピュータ21は、光検出器25から入力された電気信号と2次元走査駆動制御回路29からのタイミング信号とを基に画像化処理を行ない、モニタ18に試料10の表面情報を表示する。
【0073】
実施例2の顕微鏡の視野は、2次元走査機構30のスキャナの走査幅を変えることで変化させることができる。スキャナの走査幅を小さくし、前述した2次元走査駆動制御回路29からのタイミング信号による画像化を行うと、取得画像の視野は小さくなる。しかし、1画面内のデータのサンプリング総数は変わらないため、分解能が上がり、画像が拡大された状態で表示される。
【0074】
また、走査幅を大きくした場合は、視野は大きくなる。しかし、データのサンプリング総数は変わらないため、分解能が下がり、画像が縮小された状態で表示される。実施例2の顕微鏡では、このような制御により、連続的な画像の拡大、縮小を行っている。
【0075】
図8は、第1の実施形態(実施例2)における電動ステージ9上での視野切り替え(スキャナ振幅の変更)に伴い、切り替えられた観察視野を示す。観察視野の拡大前の観察視野をAで示す。観察視野の拡大後の観察視野をBで示す。
【0076】
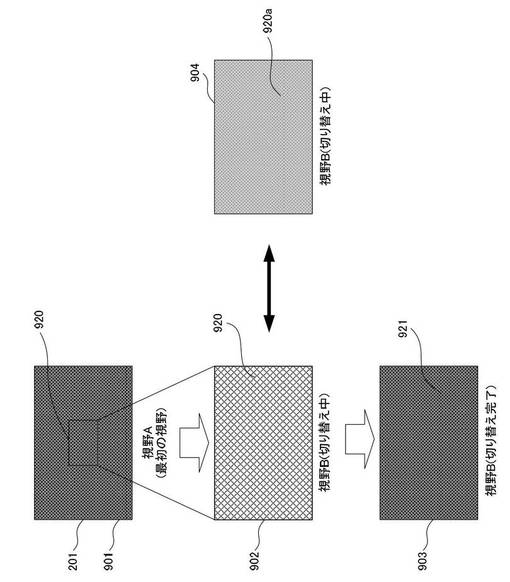
図9Aは、第1の実施形態(実施例2)における、観察視野を拡大方向(スキャナ振幅を大→小へ変更)へ切り替えると共に、操作者の操作指示に追従してその擬似画像を拡大し、観察視野の切り替え完了後、その擬似画像をリアルタイムで取得した画像データに置き換える処理を説明するための図である。
【0077】
表示状態901は、画像表示部201に表示された視野領域Aに相当する画像データである。表示状態901において、操作者は、画像表示部201に表示されている画像の一部を拡大して表示させる指示をする。この拡大指示は、ユーザが視野を指定した領域を拡大させてもよいし、ドラッグ動作でも、対物レンズ切り替えでも、ZOOMでも何でも良い。すると、その指定された領域の画像が擬似画像920として保持される。
【0078】
すると、表示状態902に示すように、画像表示部201の表示領域(視野)に合った擬似画像920が瞬時に表示される。この場合、擬似画像920は、画像表示部201の表示領域サイズまで引き伸ばされている。
【0079】
なお、擬似画像920は、予め保持している画像を用いてもよい。例えば、表示状態904に示すように、前回擬似画像として用いた画像や、保存された該当倍率の画像を擬似画像920aとして用いてもよい。
【0080】
観察視野の切り替えが完了したら、その切り替え後の観察視野における現在の画像を取得する。そして、表示状態903に示すように、擬似画像920(または920a)をその取得したリアルタイムの画像921で更新する。
【0081】
このように、スキャナ振幅の変更中でも表示状態902のように、拡大前の画像を引き伸ばして擬似的に拡大後の画像として、操作指示と同時のタイミングで表示させる。これにより、操作者は拡大後の状態を擬似的に把握できる。
【0082】
図9Bは、第1の実施形態(実施例2)における、観察視野を縮小方向(スキャナ振幅を小→大へ変更)へ切り替えると共に、操作者の操作指示に追従してその擬似画像を縮小し、観察視野の切り替え完了後、その擬似画像をリアルタイムで取得した画像データに置き換える処理を説明するための図である。
【0083】
表示状態910に示すように、画像表示部201に表示されている視野領域の画像を擬似画像920として取得及び保存する。そして、表示状態911に示すように、操作者の操作指示に追従して擬似画像920を縮小する。
【0084】
観察視野の切り替えが完了したら、その切り替え後の観察視野の画像をリアルタイムで取得する。そして、擬似画像920をその取得したリアルタイムの画像で更新する。
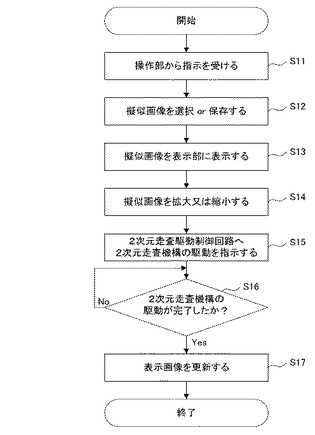
図10は、第1の実施形態(実施例2)における観察視野の切り替えに伴う表示画像の表示制御処理フローを示す。実施例2では、2次元走査駆動制御回路29により2次元走査機構30が制御されることにより、スキャナの振幅幅が変化(分解能を変化)させて、画像の拡大、縮小を行っている。
【0085】
まず、顕微鏡操作者は、操作部20や、モニタ18に表示されたGUI表示の操作領域202、操作領域203等から、視野切り替え(画像の拡大、縮小)を指示する。この指示は、例えば、操作領域203において、中心部から外側に向けてドラッグすることで拡大、外側から中心部に向けてドラッグすることで縮小などとしてもよい。また、操作領域202に拡大、縮小を表す指示部を表示し、その指示部を用いて指示を行ってもよい。
【0086】
コンピュータ21の制御部21−1は、視野切り替えの操作指示を受けると(S11)、擬似画像の保存または選択(S12)、擬似画像の表示(S13)を行う。S11,S12,S13の処理はそれぞれ、図6のS1,S2,S3と同様の処理である。
【0087】
次に、制御部21−1は、画像表示部201に表示されている擬似画像920を、操作領域203から入力された指示量及び指示のタイミングに合わせて拡大または縮小する(S14)。このとき、制御部21−1は、現在選択されている視野と操作領域203にて指示された指示量とに基づいて、スキャナの走査幅を演算し、2次元走査駆動制御回路29に2次元走査機構30への駆動指示を出力する。
【0088】
2次元走査駆動制御回路29が2次元走査機構30へ制御信号を出力すると、2次元走査機構30は駆動を開始する(S15)。拡大画像への切り替えの場合には、スキャナの走査幅を小さくして、分解能を上げた状態で画像を取得する。縮小画像への切り替えの場合には、スキャナの走査幅を大きくして、分解能を下げた状態で画像を取得する。なお、手順S14、S15については、どちらの処理を先に行ってもよいし、同時に行ってもよい。
【0089】
拡大画像または縮小画像への切り替えが完了したら(S16で「Yes」)、制御部21−1は、表示画像の更新を行う(S17)。すなわち、表示状態903に示すように、画像表示部201の画像は、擬似画像920から、カメラ16によりリアルタイムで撮像された画像データに切り換わる。
【0090】
スキャナ振幅の変更時間だけでなく、このような画素毎をタイミング信号にてサンプリングしていく構成では、画面上側と下側の拡大率が違う、歪んだ正しくない画像が表示される場合もある。すなわち、スキャナ変更時間に、画面が追従しなくなる場合と、追従するが画面に異常を来たすおそれがある場合がある。スキャナ振幅を電気的に変更しているときにそのまま撮像していると、スキャナ振幅が変更していく過程が映り込む。このとき、画面上側は変更前の振幅、画面下側は指示後の振幅といった、ゆがんだ画像が映ってしまうおそれがある。しかしながら、実施例2を適用すれば、このようなことも回避できる。すなわち、そのような正常でないスケールの画像を、擬似画像で隠すことができるので、ユーザの混乱を招くことがない。
【0091】
実施例2では、スキャナを用いて説明を行ったが、もちろんズームレンズを駆動させて視野の拡大縮小を行うような構成としてもよいし、対物レンズを切り換えて視野を切り換えるような構成でもよく、これらを組み合わせたものでもよい。対物レンズを切り換えた場合は、変化が連続でないことを示す為に、表示の切り換え時に何も表示しない画面などを明示的に挿入してもよい。このようにすると、操作領域203からの指示中に、この拡大まではズームレンズによるもの、ここから先は対物レンズの切り換えによるもの、ということが操作者にも分かりやすい。
【0092】
実施例1と同様、指示したタイミングで変更後の視野が分かるために、駆動系の遅れによる操作の違和感を解消することができ、目的とする視野へ調整するまでの時間短縮を図ることができる。
【0093】
なお、実施例2では、手順S14、S15については、どちらの処理を先に行ってもよいし、同時に行ってもよいとしたが、S14における擬似画像のサイズ変更完了の確定後に、S15の2次元走査機構30の駆動を開始するようにしてもよい。
【0094】
また、第1の実施形態において、擬似画像は、前回擬似画像として用いた画像や、保存された該当倍率の画像を用いてもよい。
本実施形態(実施例1)によれば、指示したタイミングで電動ステージの駆動完了位置が分かるために、駆動系の遅れによる操作の違和感を解消することができる。そのため、過剰な指示量の指定をし難く、操作者が目的とする位置へ電動ステージ9を駆動するまでの時間短縮を図ることができる。また、少量の移動を繰り返す必要がなくなることからも時間短縮を図ることができる。
【0095】
また、本実施形態(実施例2)によれば、指示したタイミングで倍率変更後の視野が分かるために、駆動系の遅れによる操作の違和感を解消することができ、目的とする視野へ調整するまでの時間短縮を図ることができる。
【0096】
<第2の実施形態>
本実施形態では、電動ステージ9の移動速度が所定速度より遅いもしくはその移動時間が所定時間より長い、または撮像素子17のフレームレートが所定速度より遅い場合に、第1の実施形態(実施例1)で説明した擬似表示を行う顕微鏡システムについて説明する。
【0097】
本実施形態における顕微鏡システムの構成は、第1の実施形態(実施例1)と同様のため省略する。本実施形態では、顕微鏡100の状態によって、擬似表示を行うか、行わないかの判別を行う。
【0098】
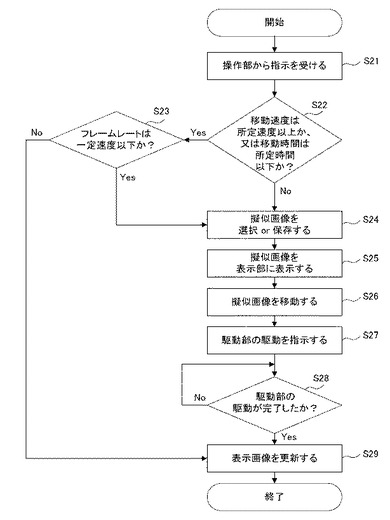
図11は、第2の実施形態における電動ステージの移動に伴う表示画像の表示制御処理フローを示す。例えば、本実施形態では、操作部20より操作指示を受ける(S21)と、コンピュータ21の制御部21−1は、電動ステージ9の移動速度が閾値T1以上か否かまたは移動時間が閾値T2以下か否かの判別を行う(S22)。
【0099】
電動ステージ9の移動速度が指示された移動速度に対して十分速ければ、操作者は違和感なく操作指示を行うことができるため、擬似画像を使用する必要がない。よって、電動ステージ9の移動速度が閾値T1以上と判定された場合(S22で「Yes」)、S23の処理へ進む。
【0100】
また、電動ステージ9の移動量が微小であれば、移動時間は早いので、擬似画像の表示切換えをするほうが時間的な遅れとなる場合もある。この場合も擬似画像を使用する必要はない。よって、電動ステージ9の移動時間が閾値T2以下と判定された場合(S22で「Yes」)、S23の処理へ進む。
【0101】
次に、電動ステージ9の移動速度が閾値T1以上または移動時間が閾値T2以下と判定された場合、制御部21−1は、露光時間や表示画素数などにより決まる単位時間当たりに撮像素子17より取得される画像枚数を示すフレームレートが閾値T3以下か否かの判別を行う(S23)。フレームレートが遅いと、駆動系が追従していても画面の切り換わりが遅いため、画像更新の間隔が時間的に空いてしまう。すると、移動量の確認が難しかったり、画面の上と下で撮像位置が違うといった正しくない画面が出てしまうおそれがある。この為、例えば、フレームレートが遅い場合(S23で「No」)は、擬似表示を行うという設定に切り換えて使用する。このような視野の切り換えにおける閾値T1,T2,T3は、任意に設定することができる。例えば、閾値T1,T2,T3は、データ保管部23などに保存されている。
【0102】
電動ステージ9の移動速度が閾値T1より遅い、または移動時間が閾値T2より長いと判定された場合(S22で「No」)、または、フレームレートが閾値T3より遅いと判定された場合(S23で「No」)、すなわち、擬似表示が必要であると判断された場合、制御部21−1は、S24〜S29の処理を行う。S24からS29の処理はそれぞれ、図6のS2〜S7と同様の処理である。
【0103】
一方、擬似表示の必要がないと判断されれば(S23で「Yes」)、通常通り、表示データをリアルタイムに更新する(S29)。
本実施形態のように、電動ステージ9の移動速度が閾値T1より遅いか、移動時間が閾値T2より長いか、またはフレームレートが閾値T3より遅い場合にのみ、擬似画像の表示処理を行うことで、画面の過剰な切り換えを抑制できる。その結果、コンピュータ21の制御部21−1への負荷を減らせることで、処理速度の遅れを防ぐことができる。また、必要のない画面の切り換えの発生を防止することができる。そのため、切り換えによる待ち時間や、擬似画像とリアルタイム画像の短時間での切り換えに起因する混乱等を防ぐことができ、操作感が向上する。
【0104】
<第3の実施形態>
本実施形態では、所定の電動ユニット(例えば、電動ステージ9、2次元走査機構30等)の駆動中は擬似画像を表示させ、所定時間内に、連続して複数回の操作指示がなされた場合、表示画面上で、操作者の各操作指示に追従してその擬似画像の表示形態を変化させると共に、電動ユニットの実駆動については、それらの操作指示を1つに統合して、最小限の駆動をさせる顕微鏡システムについて説明する。
【0105】
(実施例1)
たとえば、第3の実施形態を第1の実施形態(実施例1)に適用した場合には、次のようになる。すなわち、電動ステージ9の移動中は擬似画像を表示させ、所定時間内に、連続して移動指示がなされた場合、操作者の操作指示に追従してその擬似画像を移動させると共に、ステージ移動の実駆動については、最小限の駆動で目的位置へ到達させるように駆動をさせる。
【0106】
なお、本実施形態における顕微鏡システムの構成は第1の実施形態(実施例1)と同様のため省略する。
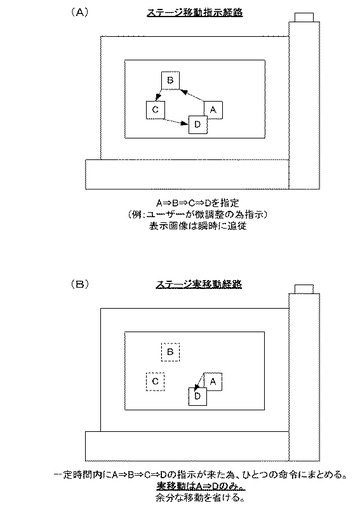
図12は、第3の実施形態(実施例1)における、電動ステージ9を駆動させる場合の(A)指示経路と、(B)実移動経路を示す。例えば、観察視野の位置が位置A,B,C,Dの順に移動するように、操作者は規定時間内に移動指示をする。この場合、画像表示部201に表示された擬似画像は、図12(A)に示すように、その指示に追従して位置A,B,C,Dと順に移動する。しかし、電動ステージ9の実移動については、それらの命令を1つにまとめて、図12(B)に示すように、位置Aから目的位置Dへと直接移動するように制御される。
【0107】
また、電動ステージ9が位置Aから位置Bへ移動中に、位置C,Dへの移動指示がされた場合に、目的位置を変更し、電動ステージ9が位置Dへと移動するといった動作を行うこともできる。
【0108】
図13は、第3の実施形態(実施例1)における電動ステージ9の駆動に伴う表示画像の表示制御処理フローを示す。第1の実施形態(実施例1)と同様に、操作者より操作指示を受ける(S31)。すると、コンピュータ21の制御部21−1は、擬似画像データの保存または選択を行い(S32)、擬似画像を画像表示部201に表示する(S33)。そして、制御部21−1は、表示させた擬似画像を操作者の指示に追従させて移動させる(S34)。このとき、規定時間内に指示が追加して入力された場合(S35で「Yes」,S36で「Yes」)、制御部21−1は、手順S34に戻り、再度擬似画像を移動させる。移動量により、擬似画像データの再選択が必要となった場合は、手順S32まで戻すようにしてもよい。
【0109】
規定時間後、制御部21−1は、これまでに入力された指示情報から電動ステージ9の実駆動が最小となるように、それらの指示情報を1つに統合し、その統合した指示を駆動部22へ通知する(S37)。すなわち、電動ステージ9の移動の実駆動については最短のルートで目的位置へ到達させるように、制御部21−1は、駆動部22へその駆動情報を通知する。ここで、指示情報を1つに統合する方法として、例えば、以下の方法が挙げられる。
【0110】
例えば、規定時間内に移動指示がされた場合であって、移動に関して絶対座標で座標が管理されている場合には、制御部21−1は、規定時間内の最後に指示された絶対座標に電動ステージ9を移動させるように指示してもよい。
【0111】
また、例えば、目的地としてメモリに設定された座標を、最後に指示された座標にすぐ上書きして、電動ステージ9を移動させるように制御するようにしてもよい。これにより、電動ステージ9が駆動を完了する前に、目的地を示す座標を上書きして電動ステージ9を駆動させることができる。
【0112】
また、例えば、タッチパネル等、ユーザが操作部から手を離した時の座標に、電動ステージ9を移動させるようにしてもよい。また、例えば、ダブルクリックしたら電動ステージ9を移動させる等、何らかのタイミングで電動ステージ9を移動させるようにしてもよい。
【0113】
また、例えば、ポーリングして、ある時間毎に最終到達座標を更新して電動ステージ9を移動させるようにしてもよい。
また、例えば、1回目の指示時は駆動完了まで電動ステージ9が駆動し、駆動完了に至るまでに入力された最後の座標に電動ステージ9を移動させるようにしてもよい。
【0114】
制御部21−1により通知された指示情報に基づいて、駆動部22は電動ステージ9の駆動を開始させる。電動ステージ9の駆動が完了する前に、操作者から操作指示があれば(S38で「No」、S39で「Yes」)、制御部21−1は、手順S34に戻り、再度擬似画像を移動させる。
【0115】
電動ステージ9の駆動が完了したら(S38で「Yes」)、制御部21−1は、表示画像の更新を行う(S40)。すなわち、画像表示部201に表示されている画像は、擬似画像から、カメラ16からのリアルタイム画像データに切り換わる。
【0116】
このように、規定時間内に入力された複数回の駆動指示がされた場合、表示系では逐次その指示に追従して擬似画像の表示形態が変化する一方、駆動系では、その駆動指示を1つにまとめ、最小限の駆動で最終的な指示位置に到達することができる。
【0117】
なお、駆動部22の駆動中に操作を受付け、擬似画像の移動、駆動座標の再設定を行ってもよい。この操作の受付けは、操作される毎でもよいが、規定時間内に受け付けた駆動を1回として駆動指示を行ってもよい。
【0118】
(実施例2)
また、たとえば、第3の実施形態を第1の実施形態(実施例2)に適用した場合には、次のようになる。すなわち、視野の切り替え中は擬似画像を表示させ、所定時間内に連続して複数の視野切り替え指示がなされた場合、操作者の操作指示に追従してその擬似画像を拡大または縮小させると共に、視野切り替えの実駆動については、指示された操作に基づいて最小限の駆動で視野切り替えを行うように駆動させる。
【0119】
なお。本実施形態における顕微鏡システムの構成は第1の実施形態(実施例1)と同様のため省略する。
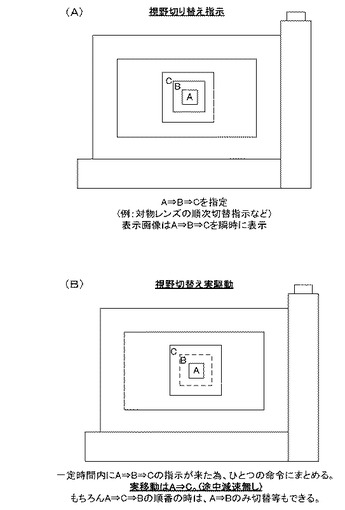
図14は、第3の実施形態(実施例2)における、(A)視野切り替えの指示経過と、(B)視野切り替えの実駆動を示す。例えば、観察視野がA,B、Cの順で切り替わるように、操作者が規定時間内に視野切り換え指示をする。画像表示部201に表示された擬似画像は、図14(A)に示すように、操作者の視野切り換え指示に追従して、視野A,B,Cと順に切り替えて表示される。しかし、視野切り替えユニット(例えば、第1の実施形態の実施例2の場合には、2次元走査機構30)の実駆動については、それらの命令を1つにまとめて、視野Aから視野Cへ直接切り替えるようにする。これにより、視野Bに切り替えることがないので、視野切り替えユニットの駆動が途中で減速することもない。また、視野A,C,Bと順に切り替え指示がなされた場合には、視野切り替えユニットの実駆動については、それらの命令を1つにまとめて、視野Aから視野Bへ直接切り替えるようにする。また、視野A,B,C,Bのように、行き過ぎて視野を戻すような操作指示の場合は、視野Aから視野Bへ直接視野を切り替えるようにする。
【0120】
図15は、第3の実施形態(実施例2)における2次元走査機構30の駆動に伴う表示画像の表示制御処理フローを示す。
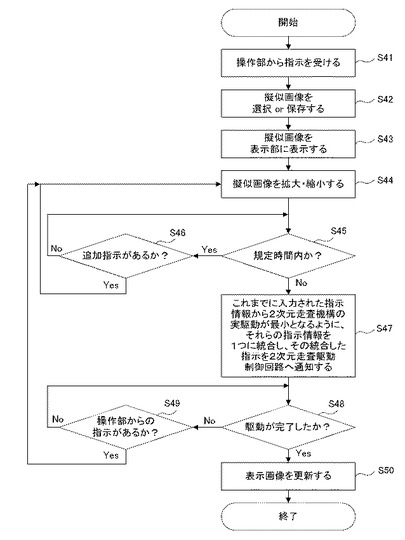
第1(実施例2)の実施形態と同様に、操作者より操作指示を受ける(S41)。すると、第1の実施形態(実施例2)と同様に、コンピュータ21の制御部21−1は、擬似画像データの保存または選択を行い(S42)、擬似画像を画像表示部201に表示する(S43)。そして、制御部21−1は、操作者の指示に追従して、表示させた擬似画像を拡大・縮小する(S44)。このとき、規定時間内に指示が追加して入力された場合(S45で「Yes」,S46で「Yes」)、制御部21−1は、手順S44に戻り、再度擬似画像を拡大・縮小する。擬似画像の拡大・縮小の変更量により、擬似画像データの再選択が必要となった場合は、手順S42まで戻してもよい。
【0121】
規定時間後、制御部21−1は、これまでに入力された指示情報から2次元走査機構30の実駆動が最小となるように、それらの指示情報を1つに統合し、その統合した指示を2次元走査駆動制御回路29へ通知する(S47)。すなわち、制御部21−1は、複数回の操作を1回の操作にまとめて、不必要な切り替えを行わず、2次元走査機構30の駆動が最小の切り替え動作で済むように、最終的に決定した擬似画像のサイズに基づいて、2次元走査機構30の走査幅を算出する。それから、制御部21−1は、2次元走査駆動制御回路29へその算出した操作幅に基づく駆動情報を通知する。ここで、指示情報を1つに統合する方法として、例えば、以下の方法が挙げられる。
【0122】
たとえば、視野A,B,Cと順に切り替え指示がなされた場合には、制御部21−1は、最終的に決定した視野Cの擬似画像のサイズに対応する走査幅を算出し、2次元走査駆動制御回路29へその算出した操作幅に基づく駆動情報を通知するようにしてもよい。
【0123】
制御部21−1により通知された指示情報に基づいて、2次元走査駆動制御回路29は2次元走査機構30の駆動を開始する。2次元走査機構30の駆動が完了する前に、操作者から操作指示があれば(S48で「No」、S49で「Yes」)、制御部21−1は、手順S44に戻り、再度擬似画像を拡大・縮小させる。
【0124】
視野切り替え処理が完了したら(S48で「Yes」)、制御部21−1は、表示画像の更新を行う(S50)。すなわち、画像表示部201の画像は、擬似画像から、カメラ16からのリアルタイム画像データに切り換わる。
【0125】
このように、規定時間内に入力された複数回の駆動指示を1つにまとめることができる。なお、駆動中に操作を受付け、擬似データの移動、駆動座標の再設定を行ってもよい。この操作の受付けは、操作される毎でもよいが、規定時間内に受け付けた駆動を1回として駆動指示を行ってもよい。
【0126】
本実施形態によれば、操作者は過剰な指示による顕微鏡システムの無駄な動きを気にせずに、表示画面を見ながらの目的位置への微調整を操作感よく行うことができる。また、顕微鏡システムの無駄な駆動がなくなり、駆動完了までの時間を短縮することができる。
【0127】
<第4の実施形態>
本実施形態では、対物レンズの倍率及び電動ステージのXY座標に関連付けされた擬似画像を用いて、第1〜第3の実施形態の処理を行う顕微鏡システムについて説明する。なお、本実施形態における顕微鏡システムの構成は第1の実施形態と同様のため省略する。
【0128】
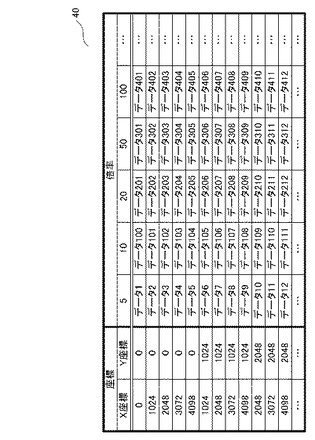
図16は、第4の実施形態における電動ステージ9のXY座標及び対物レンズ8の倍率と関連付けられた擬似画像を管理するための擬似画像管理テーブル40を示す。擬似画像管理テーブル40は、データ保管部23に格納されている。
【0129】
擬似画像管理テーブル40は、座標(X座標、Y座標)、倍率(5倍、10倍、20倍、50倍、100倍、・・・)の組み合わせに関係付けられた擬似画像を識別する擬似画像識別情報が格納されている。例えば、電動ステージ9のXY座標が(1024,0)で、対物レンズの倍率が20倍の組み合わせの場合、擬似画像識別情報は「データ202」となる。なお、擬似画像識別情報に対応する擬似画像は、データ保管部23に格納されている。
【0130】
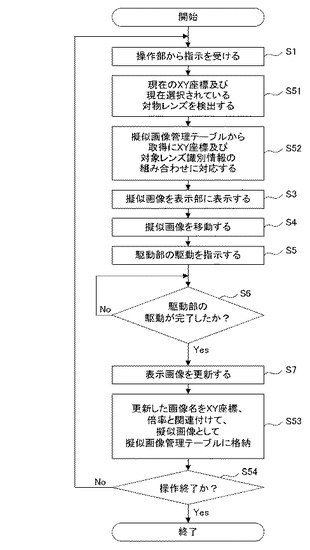
図17は、第4の実施形態における電動ステージ9の移動に伴う表示画像の表示制御処理フローを示す。図17のフローは、図6におけるS2の処理をS51,S52の処理に置き換え、S7の処理後にS53,S54を追加したものである。
【0131】
実施例1(図6)と同様に、コンピュータ21の制御部21−1は、操作指示を受けると(S1)、電動ステージ9から現在のXY座標を取得する。さらに、制御部21−1は、センサ7−2から現在選択されている対物レンズ8を識別する対物レンズ識別情報を取得する。ここで、データ保管部23には、各対物レンズ識別情報に対応する倍率情報が格納されている。制御部21−1は、データ保管部23から、取得した対物レンズ識別情報に対応する倍率情報を取得する(S51)。
【0132】
制御部21−1は、その取得したXY座標及び倍率情報の組み合わせに対応する擬似画像識別情報を、擬似画像管理テーブル40から取得する。制御部21−1は、その取得した擬似画像識別情報に対応する擬似画像データをデータ保管部23から取得する(S52)。これ以降の処理は、図6のフローと同様に、S3〜S7の処理を行う。
【0133】
電動ステージ9の駆動が完了したら(S6で「Yes」)、制御部21−1は、画像表示部201に表示されている画像の更新を行う(S7)。すなわち、表示状態603に示すように、画像表示部201に表示されている画像は、擬似画像620から、カメラ16からのリアルタイムの画像データに切り換わる。
【0134】
それから、その更新に用いた画像をデータ保管部23へ擬似画像として格納すると共に、その更新に用いた画像の画像識別情報を、その更新に用いた画像を取得したときのXY座標及び倍率情報と関連づけて、擬似画像管理テーブル40へ格納する(S53)。
【0135】
操作終了となるまで、当該フローを繰り返す(S54で「No」)。当該フローを繰り返すことにより、擬似画像管理テーブル40の情報量も増加していく。
本実施形態は、第1の実施形態(実施例2)、第2の実施形態、及び第3の実施形態についても適用することができる。本実施形態を第1の実施形態(実施例2)に適用する場合には、図10のS12の処理をS51,S52の処理に置き換え、S17の処理の後にS53,S54の処理を追加する。本実施形態を第2の実施形態に適用する場合には、図11のS24の処理をS51,S52の処理に置き換え、S29の処理の後にS53,S54の処理を追加する。本実施形態を第3の実施形態に適用する場合には、図14のS32の処理または図15のS42をS51,S52の処理に置き換え、S40またはS50の処理の後にS53,S54の処理を追加する。
【0136】
図16では、擬似画像管理テーブル40は、座標、倍率に関連したテーブルであるか、この関連付けの条件はこの限りではなく、また、直前の操作完了時のデータを1枚だけ常に保存してもよい。
【0137】
データを保存するタイミングは、第1〜第3の実施形態のように、操作指示時でもよいが、第4の実施形態のように操作完了時としておけば、擬似データ保存時間が操作開始時にかかることなく、擬似画像データの表示までの時間が短縮できる。
【0138】
第4の実施形態によれば、擬似画像データを取得、保存しておくことにより、操作指示時にデータ保存を行う必要がないために擬似画像への切り換えをすばやく行え、時間が短縮できる。かつ、擬似画像データを専用として保存することで、観察用の画像よりも画像を軽くでき、コンピュータ21の負荷を軽減し、画像データの移動がスムーズになることで、操作感がより向上する。また、前記ステージの座標及び観察視野の倍率に応じた最適な擬似画像を用いることができる。
【0139】
また、第4の実施形態において、図16の擬似画像管理テーブル40で管理される擬似画像データは、保存するタイミングの条件を設定できてもよい。例えばオートフォーカス機能など、焦点が合った状態を検出できる場合は、オートフォーカスがかかった状態から、焦準部を動かしていない状態の駆動指示後の最新状態を、擬似画像管理テーブル40を更新して保存する等してもよい。
【0140】
第1〜4の実施形態において、擬似画像データは、擬似画像表示専用とする為、リアルタイムに表示する画像などよりも解像度を落とし、データ量を軽くしたものを保存してもよい。これにより保存時間を短縮でき、表示させた擬似画像を移動させる際もデータ量が軽い為に、コンピュータ21の制御部21−1の負荷を軽減することができ、操作指示に合わせてより早い擬似画像の移動を行うことができる。
【0141】
また、第1〜4の実施形態において、擬似画像データの表示については、ある一定以上の範囲は擬似画像データを移動できない、つまり、操作領域202、203からの指示を受け付けないという制限をつけてもよい。例えば、移動制限の範囲は、電動ステージ9の駆動範囲外とならない位置や、対物レンズ8を保持したレボルバ7が一回転して元の視野に戻る位置、電動ステージ9の移動前の視野が画像表示部201の範囲外とならない位置まで等としてもよい。これにより実際の動作と擬似画像への操作がかけ離れすぎることを防ぐことができる。
【0142】
また、第1〜4の実施形態において、擬似画像データから、リアルタイムで撮像した画像データに更新されるタイミングについては、駆動完了だけではなく、例えば移動完了位置の視野に入ったら更新、規定時間操作指示がなければ更新、規定時間毎に更新など設定できてもよい。
【0143】
以上述べたように、本実施例の発明によれば、操作者からの指示と実際の駆動系に時間的な差がある場合でも、操作時に駆動完了の目的地を把握できることで、操作感が改善すると共に、目的位置への微調整等のための追加操作指示にかかる時間を短縮できる。
【0144】
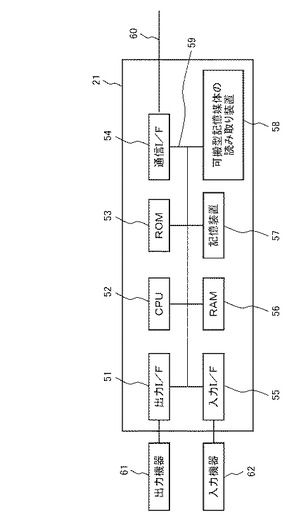
図18は、第1〜第4の実施形態におけるコンピュータ21のハードウェア環境の構成ブロック図である。コンピュータ21は、CPU52、ROM53、RAM56、通信I/F54、記憶装置57、出力I/F51、入力I/F55、読み取り装置58、バス59、出力機器61、入力機器62によって構成されている。
【0145】
ここで、CPUは、中央演算装置を示す。CPUは、上記の実施形態の制御部21−1に相当する。ROMは、リードオンリメモリを示す。RAMは、ランダムアクセスメモリを示す。I/Fは、通信インターフェースを示す。
【0146】
バス59には、CPU52、ROM53、RAM56、通信I/F54、記憶装置57、出力I/F51、入力I/F55、及び読み取り装置58が接続されている。読み取り装置58は、可搬型記録媒体を読み出す装置である。出力機器61は、出力I/F51に接続されている。入力機器62は、入力I/F55に接続にされている。
【0147】
記憶装置57としてはハードディスク、フラッシュメモリ、磁気ディスクなど様々な形式の記憶装置を使用することができる。このような記憶装置57、またはROM53には、上記で説明した用いたフローのプログラム、擬似画像、及び擬似画像管理テーブル40が格納されている。
【0148】
上記で説明したフローのプログラムは、プログラム提供者側から通信ネットワーク60、および通信I/F54を介して、例えば記憶装置57に格納してもよい。また、このプログラムは、市販され、流通している可搬型記憶媒体に格納されていてもよい。この場合、この可搬型記憶媒体は読み取り装置58にセットされて、CPU52によってそのプログラムが読み出されて、実行されてもよい。可搬型記憶媒体としてはCD−ROM、フレキシブルディスク、光ディスク、光磁気ディスク、ICカード、USBメモリ装置など様々な形式の記憶媒体を使用することができ、このような記憶媒体に格納されたプログラムが読み取り装置58によって読み取られる。
【0149】
また、入力機器62には、キーボード、マウス、電子カメラ、ウェブカメラ、マイク、スキャナ、センサ、タブレットなどを用いることが可能である。また、出力機器61には、ディスプレイ、プリンタ、スピーカなどを用いることが可能である。また、ネットワーク60は、インターネット、LAN、WAN、専用線、有線、無線等の通信網であってよい。
【0150】
なお、本発明は、以上に述べた実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の構成または実施形態を取ることができる。また、上記の実施形態を2以上組み合わせてもよい。
【符号の説明】
【0151】
1 落射照明用光
2 照明系レンズ
3 開口絞り
4 視野絞り
5 観察法切り換えユニット
6 ハーフミラー
7 レボルバ
7−1 モータ
7−2 センサ
8 対物レンズ
9 電動ステージ
9−1 モータ
10 試料
11 結像レンズ
12 光路切り換えユニット
13 ミラー
14 鏡筒双眼部
15 アイポイント
16 カメラ
17 撮像素子
18 モニタ
19 制御回路
20 操作部
21 コンピュータ
21−1 制御部
22 駆動部
23 データ保管部
24 レーザ光源
25 光検出器
26 ミラー
27 ハーフミラー
28 レンズ
29 2次元走査駆動制御回路
30 2次元走査機構
【技術分野】
【0001】
本発明は、電動ステージを備えた顕微鏡システムに関する。
【背景技術】
【0002】
顕微鏡装置は工業分野を始め、生物分野における研究や検査等において広く利用されている。さらに、従来から、観察方法や対物レンズの倍率等に応じた調光制御や各種光学素子の切り換え、あるいは標本を載置するステージの平面内の移動や、昇降といった観察に伴う各部の調整を電動で行う電動顕微鏡が知られている。
【0003】
このような電動顕微鏡は、パーソナルコンピュータ(PC)等の入力装置が接続され、その入力装置からの制御内容に基づいて電動顕微鏡の各部が作動制御される。また、その観察像は近年、CCD(Charge Coupled Device)カメラ等の撮像手段の採用により、画像データとして記録、モニタなどの表示部への表示等ができるようになった。
【0004】
しかしながら、電動顕微鏡は手動顕微鏡と比べ、人間の手で操作を行わない分、観察者が行う入力指示に対して得られる表示部への画像表示という結果に、電動駆動部が動くことに起因する誤差や遅延における違和感、操作感の悪さが生じる場合がある。
【0005】
このような場合の誤差に対しては、操作後に取得画像に対して機械的な調整を行うことで、補正を行う手段が開示されている(例えば、特許文献1。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−29163号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の技術では、操作する人間の感覚と、駆動部の遅延に対する違和感は解消されない。そのために、操作指示と操作結果の間の遅延時間に余分な操作(例えば、移動が完了していない間に、電動ステージに余分な駆動指示を行ってしまうことで、位置を戻す必要が出るなど)を行ってしまうことがある。
【0008】
上記課題に鑑み、本発明では、人間の手による操作指示と実際の駆動完了までの時間差によって起こる操作の違和感や、制御完了までの過剰な時間を改善、短縮する顕微鏡装置を提供する。
【課題を解決するための手段】
【0009】
本発明にかかる、試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置は、前記顕微鏡システムを操作するための指示情報を入力する指示入力部と、前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部と、前記指示入力部から前記指示情報が入力された場合、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する制御部と、を備えることを特徴とする。
【0010】
また、前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであり、前記制御部は、前記指示情報が前記ステージを前記光軸方向に対して垂直方向へ移動させる旨の指示である場合、該指示に追従して前記所定画像の表示位置を移動させることを特徴とする。
【0011】
また、前記制御部は、前記指示情報が前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示である場合、該指示に追従して前記所定画像のサイズを変更することを特徴とする。
【0012】
また、前記制御部は、前記指示入力部により前記指示情報が入力された場合、前記電動部の駆動状況に応じて、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示することを特徴とする。
【0013】
また、前記電動部が、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであって、前記指示入力部により前記指示情報が入力された状況において、単位時間当たりの前記撮像部の撮像速度が所定の閾値以下である場合、または前記電動ステージの移動速度が所定の閾値以下である場合、もしくは電動ステージの移動時間が所定の閾値以上である場合、前記制御部は、前記指示情報に応じて前記電動部を駆動させる制御を行うことを特徴とする。
【0014】
また、前記制御部は、所定の時間内に、連続して複数回の指示情報が入力された場合、該各指示に追従して前記所定画像の表示態様を変化させると共に、該指示の対象である前記電動部が最小限の駆動をするように制御することを特徴とする。
【0015】
また、前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであり、前記制御部は、所定の時間内に、前記電動ステージを光軸方向に対して垂直方向へ移動させる旨の指示が連続して複数回入力された場合、該各指示に追従して前記所定画像を移動させると共に、前記電動ステージが最短の移動をするように制御することを特徴とする。
【0016】
また、前記制御部は、所定の時間内で、前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示情報が連続して複数回入力された場合、該各操作指示に追従して前記所定画像のサイズを変化させると共に、前記視野の切り替えが最小限となるように制御することを特徴とする。
【0017】
前記顕微鏡システムは、さらに、前記所定画像と、前記ステージの座標及び観察視野の倍率のうち少なくともいずれか1とが関係付けられて記憶されている記憶部を備えることを特徴とすることを特徴とする。
【0018】
また、顕微鏡システムは、前記顕微鏡制御装置を備えていてもよい。
本発明に係る、試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置の制御方法は、前記顕微鏡システムを操作するための指示情報を入力する指示入力部から前記指示情報が入力された場合、該指示情報に応じて、前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示することを特徴とする。
【発明の効果】
【0019】
本発明によれば、人間の手による操作指示と実際の駆動完了までの時間差によって起こる操作の違和感や、制御完了までの過剰な時間を改善、短縮することができる。
【図面の簡単な説明】
【0020】
【図1】第1の実施形態(実施例1)における顕微鏡システムの構成例を示す。
【図2】第1の実施形態(実施例1)におけるモニタ18に表示されるGUIの表示例を示す。
【図3】表示部201のみが設定されているモニタの設定例を示す。
【図4】第1の実施形態(実施例1)における観察視野に対応する電動ステージ9の位置を説明するための図である。
【図5】第1の実施形態(実施例1)における、電動ステージを目的位置へ移動させると共に、操作者の操作指示に追従して擬似画像を移動させ、電動ステージ9の移動完了後、その擬似画像をリアルタイムの画像データに置き換える処理を説明するための図である。
【図6】第1の実施形態(実施例1)における電動ステージ9の移動に伴う表示画像の表示制御処理フローを示す。
【図7】第1の実施形態(実施例2)における顕微鏡システムの構成例を示す。
【図8】第1の実施形態(実施例2)における電動ステージ9上での視野切り替え(スキャナ振幅の変更)に伴い、切り替えられた観察視野を示す。
【図9A】第1の実施形態(実施例2)における、観察視野を拡大方向(スキャナ振幅を大→小へ変更)へ切り替えると共に、操作者の操作指示に追従してその擬似画像を拡大し、観察視野の切り替え完了後、その擬似画像をリアルタイムで取得した画像データに置き換える処理を説明するための図である。
【図9B】第1の実施形態(実施例2)における、観察視野を縮小方向(スキャナ振幅を小→大へ変更)へ切り替えると共に、操作者の操作指示に追従してその擬似画像を縮小し、観察視野の切り替え完了後、その擬似画像をリアルタイムで取得した画像データに置き換える処理を説明するための図である。
【図10】第1の実施形態(実施例2)における観察視野の切り替えに伴う表示画像の表示制御処理フローを示す。
【図11】第2の実施形態における電動ステージの移動に伴う表示画像の表示制御処理フローを示す。
【図12】第3の実施形態(実施例1)における、電動ステージ9を駆動させる場合の(A)指示経路と、(B)実移動経路を示す。
【図13】第3の実施形態(実施例1)における電動ステージ9の駆動に伴う表示画像の表示制御処理フローを示す。
【図14】第3の実施形態(実施例2)における、(A)視野切り替えの指示経過と、(B)視野切り替えの実駆動を示す。
【図15】第3の実施形態(実施例2)における2次元走査機構30の駆動に伴う表示画像の表示制御処理フローを示す。
【図16】第4の実施形態における電動ステージ9のXY座標及び対物レンズ8の倍率と関連付けられた擬似画像を管理するための擬似画像管理テーブル40を示す。
【図17】第4の実施形態における電動ステージ9の移動に伴う表示画像の表示制御処理フローを示す。
【図18】第1〜第4の実施形態におけるコンピュータ21のハードウェア環境の構成ブロック図である。
【発明を実施するための形態】
【0021】
本実施形態に係る顕微鏡制御装置は、試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する。顕微鏡制御装置は、指示入力部、電動部、制御部を備える。
【0022】
指示入力部は、前記顕微鏡システムを操作するための指示情報を入力する。指示入力部は、例えば、本実施形態で言えば、操作領域203または方向指示部205に相当する。
電動部は、前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる。電動部は、例えば、本実施形態で言えば、電動ステージ9、2次元走査機構30に相当する。
【0023】
制御部は、前記指示入力部から前記指示情報が入力された場合、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示することができる。制御部は、例えば、本実施形態で言えば、制御部21−1に相当する。
【0024】
このように構成することにより、人間の手による操作指示と実際の駆動完了までの時間差によって起こる操作の違和感や、制御完了までの過剰な時間を改善、短縮することができる。
【0025】
前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージである。この場合、前記制御部は、前記指示情報が前記ステージを前記光軸方向に対して垂直方向へ移動させる旨の指示である場合、該指示に追従して前記所定画像の表示位置を移動させることができる。
【0026】
このように構成することにより、指示したタイミングで電動ステージの駆動完了位置が分かるために、駆動系の遅れによる操作の違和感を解消することができる。
前記制御部は、前記指示情報が前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示である場合、該指示に追従して前記所定画像のサイズを変更することができる。
【0027】
このように構成することにより、指示したタイミングで倍率変更後の視野が分かるために、駆動系の遅れによる操作の違和感を解消することができ、目的とする視野へ調整するまでの時間短縮を図ることができる。
【0028】
前記制御部は、前記指示入力部により前記指示情報が入力された場合、前記電動部の駆動状況に応じて、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する。
【0029】
このように構成することにより、所定の場合にのみ、擬似画像の表示処理を行うことで、画面の過剰な切り換えを抑制できる。
前記電動部が、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであって、前記指示入力部により前記指示情報が入力された状況において、前記制御部は、次を行う。すなわち、単位時間当たりの前記撮像部の撮像速度が所定の閾値以下である場合、または前記電動ステージの移動速度が所定の閾値以下である場合、もしくは電動ステージの移動時間が所定の閾値以上である場合、前記制御部は、前記指示情報に応じて前記電動部を駆動させる制御を行う。
【0030】
このように構成することにより、電動ステージ9の移動速度が閾値T1より遅いか、移動時間が閾値T2より長いか、またはフレームレートが閾値T3より遅い場合にのみ、擬似画像の表示処理を行うことで、画面の過剰な切り換えを抑制できる。その結果、コンピュータ21の制御部21−1への負荷を減らせることで、処理速度の遅れを防ぐことができる。また、必要のない画面の切り換えの発生を防止することができる。そのため、切り換えによる待ち時間や、擬似画像とリアルタイム画像の短時間での切り換えに起因する混乱等を防ぐことができ、操作感が向上する。
【0031】
前記制御部は、所定の時間内に、連続して複数回の指示情報が入力された場合、該各指示に追従して前記所定画像の表示態様を変化させると共に、該指示の対象である前記電動部が最小限の駆動をするように制御する。
【0032】
このように構成することにより、操作者は過剰な指示による顕微鏡システムの無駄な動きを気にせずに、表示画面を見ながらの目的位置への微調整を操作感よく行うことができる。また、顕微鏡システムの無駄な駆動がなくなり、駆動完了までの時間を短縮することができる。
【0033】
前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージである。この場合、前記制御部は、所定の時間内に、前記電動ステージを光軸方向に対して垂直方向へ移動させる旨の指示が連続して複数回入力された場合、該各指示に追従して前記所定画像を移動させると共に、前記電動ステージの移動が最小限となるように制御する。
【0034】
このように構成することにより、規定時間内に入力された複数回の駆動指示がされた場合、表示系では逐次その指示に追従して擬似画像の表示形態が変化する一方、駆動系では、その駆動指示を1つにまとめ、最小限の駆動で最終的な指示位置に到達することができる。
【0035】
前記制御部は、所定の時間内で、前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示情報が連続して複数回入力された場合、該各操作指示に追従して前記所定画像のサイズを変化させると共に、前記視野の切り替えの駆動が最小限となるように制御する。
【0036】
このように構成することにより、規定時間内に入力された複数回の駆動指示がされた場合、表示系では逐次その指示に追従して擬似画像の表示形態が変化する一方、駆動系では、その駆動指示を1つにまとめ、最小限の駆動で最終的な視野に切り替えることができる。
【0037】
前記顕微鏡システムは、さらに、前記所定画像と、前記ステージの座標及び観察視野の倍率のうち少なくともいずれか1とが関係付けられて記憶されている記憶部を備えてもよい。
【0038】
このように構成することにより、より最適な擬似画像データを取得、保存しておくことにより、操作指示時にデータ保存を行う必要がないために擬似画像への切り換えをすばやく行え、時間が短縮できる。
【0039】
なお、顕微鏡システムが顕微鏡制御装置を備えていてもよい。
以下に、本実施形態の詳細について説明する。
<第1の実施形態>
(実施例1)
第1の実施形態(実施例1)では、電動ステージ9の移動中は擬似画像を表示させ、操作者の操作指示があった場合にはその操作指示に追従してその擬似画像を移動させると共に、電動ステージ9の移動完了後、その擬似画像をリアルタイムの画像データに置き換える顕微鏡システムについて説明する。
【0040】
図1は、第1の実施形態(実施例1)における顕微鏡システムの構成例を示す。落射照明用光源1は、例えば、ハロゲンランプ、LED(Light−emitting diode)等からなる。本実施形態における顕微鏡システムの光学系では、落射照明用光源1からの光は、照明系レンズ2、開口絞り3、視野絞り4を介し、観察法切り換えユニット5に構成されているハーフミラー6等の光学部材により反射する。そのハーフミラー6等の光学部材で反射した光は、レボルバ7により選択可能な対物レンズ8を介して、電動ステージ9へ置かれた試料10へ反射させて落射照明をする。
【0041】
試料10からの反射光は、対物レンズ8を介し、観察法切り換えユニット5のハーフミラー6を透過し、結像レンズ11に入射する。光路切り換えユニット12が目視側に選択されている場合は、結像レンズ11に入射した光は、ミラー13によって反射され、鏡筒双眼部14へと入射され、アイポイント15にて結像される。光路切り換えユニット12がカメラ観察側に選択されている場合は、結像レンズ11に入射した光は、カメラ16内部の撮像素子17にて結像される。
【0042】
観察法切り換えユニット5はそれぞれ、各種光学素子を有する複数のキューブユニットからなる。この観察法切り換えユニット5は、操作者が複数のキューブユニットの中からいずれか1つを選択的に切換えて観察光軸上に配置させることができる。また、このキューブユニットはセンサ5−1により選択状態を判別できる。
【0043】
光路切り換えユニット12は、前述した通り、操作者がミラー13を挿脱することにより、結像位置を切り換えることができる。結像位置をカメラ16内部の撮像素子17にした場合は、撮像素子17にて検出した画像がモニタ18に表示される。
【0044】
レボルバ7は、倍率、観察法等ごとに種類の違う対物レンズ8が複数取り付けられている。図1中の「M」はモータが存在する電動部を示し、図1中の「S」は検出用のセンサが存在することを示す。本実施形態では、駆動部22によりモータ7−1を制御してレボルバ7を回転させ、対物レンズ8を切り換えて、この切り換え位置をセンサ7−2により検出することでどの対物レンズが光路上に配置されているか検出できる。
【0045】
電動ステージ9は、試料10を対物レンズ8に対置した状態で、駆動部22によりモータ9−1を制御することにより、XY方向に移動できる。電動ステージ9は、例えば、ステッピングモータを使用した構成や、レーザースケールを組み込んだ構成等、現在座標を管理できるような装置が組み込まれている。
【0046】
制御回路19は、コンピュータ21によって構成されてモニタ18に表示されるグラフィカルユーザーインターフェース(GUI)を介して入力された指示や操作部20からの指示を受信する。そして、制御回路19は、その受け取った指示に基づいて、各電動部を駆動するための制御信号を駆動部22に送る。
【0047】
コンピュータ21は、内部に画像処理を行う演算機能や、データ保管部23を有する。データ保管部23は、カメラ16にて撮像された画像データや様々な設定情報等を保管するメモリである。データ保管部23は、コンピュータ21内部にあっても良いし、顕微鏡本体100や、カメラ16等、他の部分に組み込まれていても良いし、別個に構成されていても良い。
【0048】
操作部20は、操作ボタンが配置されたハンドスイッチ、ジョイスティック、エンコーダ等にて構成されるが、タッチパネルPCのように、コンピュータ21とモニタ18のような機能を持つ装置としてもよい。
【0049】
図2は、第1の実施形態(実施例1)におけるモニタ18に表示されるGUIの表示例を示す。モニタ18に表示されるGUIは、画像表示部201、操作領域202を有する。画像表示部201は、カメラ16にて撮像中の画像データや、後述する擬似画像を表示する。操作領域202には、方向指示部205、光学部材切り換え操作部204等の操作指示部が設けられている。方向指示部205を操作することにより、移動方向、切り換え方向を指示することができる。光学部材切り換え操作部204には、光学部材を切り換えるためのボタンが配置されている。
【0050】
さらに、操作領域203は、画像表示部201上に配置されており、画像上をドラッグやクリックすることで、電動ステージ9の移動を指示できる。なお、操作部20を用いて制御回路19への指示を行う場合は、図3で説明するようにしてもよい。
【0051】
図3は、表示部201のみが設定されているモニタの設定例を示す。操作部20を使用して制御回路19への指示を行う場合は、図3に示すように、モニタ18に表示部201のみを設定するようにしてもよい。
【0052】
図4は、第1の実施形態(実施例1)における観察視野に対応する電動ステージ9の位置を説明するための図である。移動指示前の観察視野に対応する電動ステージ9の位置を位置Aで示す。電動ステージ9の移動完了後の観察視野に対応する電動ステージ9の位置を位置Cで示す。位置Aと位置Cの中間位置を位置Bで示す。観察視野に対応する位置を、位置Aから位置Cへ移動するように指示した場合、電動ステージ9は、中間位置Bを通り、時間をかけて位置Aから位置Cへ移動する。従来の構成ではカメラ16にて現在撮像されている画像データを画像データ表示部201に表示していた。そのため、操作者は電動ステージ9の移動が完了するまで、指示した移動先の位置を把握することは出来ず、操作者が目的とする位置まで動くかどうかを電動ステージ9の駆動完了までは確認できない。
【0053】
そこで、第1の実施形態(実施例1)では、電動ステージ9の移動中は擬似画像を表示させ、操作者の操作指示に追従してリアルタイムでその擬似画像を移動させるようにする。そして、電動ステージ9の移動完了後、移動完了位置でのリアルタイムの画像データの取得が完了したら、その擬似画像を、そのリアルタイムで取得した画像データに置き換える処理を行う。これについて、図5を用いて説明する。
【0054】
図5は、第1の実施形態(実施例1)における、電動ステージを目的位置へ移動させると共に、操作者の操作指示に追従して擬似画像を移動させ、電動ステージ9の移動完了後、その擬似画像をリアルタイムの画像データに置き換える処理を説明するための図である。
【0055】
表示状態601は、電動ステージ9の位置A(最初の位置)において、画像表示部201に表示された位置A(最初の位置)における画像データである。表示状態601において、操作者が矢印610で示すように移動指示を行うと、コンピュータ21の制御部21−1は、画像表示部201に現在表示されている、位置Aにおける観察視野の画像を擬似画像620として保持する。なお、予め所定の画像を保持しておき、その保持している画像を擬似画像620としてもよい。
【0056】
操作者が、例えば操作領域203等を操作して電動ステージ9の移動指示を行うとする。すると、表示状態602に示すように、その移動指示に合わせ座標に合った位置に瞬時に、画像表示部201に表示された画像(擬似画像620)が移動する。すなわち、コンピュータ21に制御により、その擬似画像620が移動指示の指示量に併せてリアルタイムで移動する。
【0057】
移動が完了して、観察視野が電動ステージ9の位置Cに到達したら、位置Cでの観察視野の画像をリアルタイムで取得する。そして、表示状態603に示すように、擬似画像620をそのリアルタイムで取得した画像621で更新する。
【0058】
このように、画像表示部201に表示した擬似画像620を、操作者の指示速度に合わせて動かして表示する。これにより、電動ステージ9の駆動中でも表示状態602に示すように、表示状態601に示す位置A(移動前)の画像が、電動ステージ9の移動後に視野の(つまり、画像表示部201の表示範囲の)どの位置にくるかが解る。よって、操作者は移動指示をしたタイミングで移動後の観察視野の状態を擬似的に把握することができる。
【0059】
このとき、擬似画像を移動した結果、それまで擬似画像が表示されていた領域については、表示状態602のように何も表示されていない状態でもよい。また、表示状態604に示すように、解像度は落ちるが擬似画像620以外の部分について、視野の広い別の倍率(例えば、低い倍率)の画像606を補って擬似的に表示してもよい。また、表示状態605に示すように、電動ステージ9のXY座標に関連付けられた他の画像607(例えば、貼り合わせ用等のために保存された画像)があれば、その画像607を用いて擬似画像を補ってもよい。なお、張り合わせ用のために保存された画像とは、観察対象を複数の区画に分けて高精細な画像を撮像し、相互に隣接する区画の画像の隣接縁側を張り合わせて、1つの観察画像を形成する場合の、これらの各区分に分けた画像をいう。
【0060】
図6は、第1の実施形態(実施例1)における電動ステージ9の移動に伴う表示画像の表示制御処理フローを示す。顕微鏡の操作者は、モニタ18に表示された画像を見ながら、操作領域203、または方向指示部205の方向指示にて電動ステージ9の移動を指示する。このとき操作領域203を使用する場合、操作者は、画像表示部201に表示されている画像をクリック、またはドラッグすることにより移動指示を行う。
【0061】
コンピュータ21の制御部21−1は、その移動指示を受けたら(S1)、現在表示されている観察視野の画像の保存を行うか、または、データ保管部23に保管された画像データから任意の画像の選択を行う(S2)。そして、制御部21−1は、保存したデータ、または選択した画像データを擬似画像620として画像表示部201に表示する(S3)。
【0062】
次に、制御部21−1は、画像表示部201に表示されている擬似画像を、操作領域203への指示量に合わせて移動させる(S4)。制御部21−1は、現在選択されている視野に対応するステージ座標と操作領域203にて示された指示量とに基づいて、電動ステージ9の駆動量を演算し、制御回路19に電動ステージ9への駆動指示を出力する。
【0063】
制御回路19は、駆動部22へ制御信号を出力し、電動ステージ9の駆動を開始する(S5)。手順S4、S5については、どちらの処理を先に行ってもよいし、同時に行ってもよい。
【0064】
電動ステージ9の駆動が完了したら(S6で「Yes」)、制御部21−1は、画像表示部201に表示されている画像の更新を行う(S7)。すなわち、表示状態603に示すように、画像表示部201に表示されている画像は、擬似画像620から、カメラ16によりリアルタイムで撮像された画像データに切り換わる。
【0065】
なお、上記では、手順S4、S5については、どちらの処理を先に行ってもよいし、同時に行ってもよいとしたが、S4における擬似画像の移動完了の確定後に、S5の電動ステージ9の駆動を開始するようにしてもよい。
【0066】
従来の構成では、操作指示に対して駆動系の駆動が遅れると、駆動完了前に過剰な指示量を指定して、それを戻す為の指示を繰り返していた。また、指示量が足りないことが操作指示時に分からないために何度も駆動完了を待ち、足りなかった分の駆動指示を繰り返していた。しかしながら、本実施形態によれば、指示したタイミングで駆動完了位置が分かるために、駆動系の遅れによる操作の違和感を解消することができる。そのため、過剰な指示量の指定をし難く、操作者が目的とする位置へ電動ステージ9を駆動するまでの時間短縮を図ることができる。
【0067】
また、停止、駆動を繰り返すと、モータなどの駆動系は負荷を軽減するために、全体的な駆動量が変わらない場合でも、駆動速度に対し台形駆動など、移動開始直後や、停止直前は速度が落ちる方式で駆動していることが多い。このような駆動方式の場合、全体の移動量に対して速度が一定でないことから、操作者は駆動直後に遅すぎると感じたり、停止前にどこで止まるかわからないといった、操作上の違和感を覚えやすい。また、少量の移動では最高速度に達しない間に移動が終わるため、開始、停止を少量ずつ繰り返すということが起こると移動に余計な時間がかかる。しかしながら、本実施形態によれば、表示されている画像(擬似画像)について、指示したタイミングでリアルタイムに指示した位置へ移動するので、このような違和感を解消できる。したがって、少量の移動を繰り返す必要がなくなることからも時間短縮を図ることができる。
【0068】
(実施例2)
本実施形態(実施例2)では、視野の切り替え中は擬似画像を表示させ、操作者の操作指示があった場合にはその操作者の操作指示に追従してその擬似画像の表示サイズを変更し、観察視野の切り替え完了後、その擬似画像をリアルタイムの画像データに置き換える顕微鏡システムについて説明する。
【0069】
図7は、第1の実施形態(実施例2)における顕微鏡システムの構成例を示す。本実施例ではレーザ走査型顕微鏡と一般的に呼ばれる顕微鏡を用いる。
まず、スポット光としてのレーザ光を発生するレーザ光源24からのレーザ光は、ミラー26で反射し、ハーフミラー27を透過して2次元走査機構30に入射する。
【0070】
2次元走査機構30は、ミラー26を介して得たレーザ光源24からのレーザ光を2次元走査するための機構で、X方向用、Y方向用のガルバノスキャナが組み合わされた2軸のスキャナ等にて構成されている。2次元走査機構30は、2次元走査駆動制御回路29の制御に基づいて、ガルバノスキャナをX軸方向、Y軸方向に振ることでスポット光の光路を2次元走査する。
【0071】
2次元走査機構30で2次元走査されたスポット光は、半透明鏡であるハーフミラー6で反射し、対物レンズ8を介して電動ステージ9に保持した試料10上に照射する。試料10からの反射光は、対物レンズ8、2次元走査機構30を介して半透明鏡であるハーフミラー27に戻ってくる。このハーフミラー27を介して得た試料10表面からの反射光は、レンズ28で集光され、光検出器25に入射し、電気信号に変換された後、コンピュータ21に出力される。
【0072】
コンピュータ21は、光検出器25から入力された電気信号と2次元走査駆動制御回路29からのタイミング信号とを基に画像化処理を行ない、モニタ18に試料10の表面情報を表示する。
【0073】
実施例2の顕微鏡の視野は、2次元走査機構30のスキャナの走査幅を変えることで変化させることができる。スキャナの走査幅を小さくし、前述した2次元走査駆動制御回路29からのタイミング信号による画像化を行うと、取得画像の視野は小さくなる。しかし、1画面内のデータのサンプリング総数は変わらないため、分解能が上がり、画像が拡大された状態で表示される。
【0074】
また、走査幅を大きくした場合は、視野は大きくなる。しかし、データのサンプリング総数は変わらないため、分解能が下がり、画像が縮小された状態で表示される。実施例2の顕微鏡では、このような制御により、連続的な画像の拡大、縮小を行っている。
【0075】
図8は、第1の実施形態(実施例2)における電動ステージ9上での視野切り替え(スキャナ振幅の変更)に伴い、切り替えられた観察視野を示す。観察視野の拡大前の観察視野をAで示す。観察視野の拡大後の観察視野をBで示す。
【0076】
図9Aは、第1の実施形態(実施例2)における、観察視野を拡大方向(スキャナ振幅を大→小へ変更)へ切り替えると共に、操作者の操作指示に追従してその擬似画像を拡大し、観察視野の切り替え完了後、その擬似画像をリアルタイムで取得した画像データに置き換える処理を説明するための図である。
【0077】
表示状態901は、画像表示部201に表示された視野領域Aに相当する画像データである。表示状態901において、操作者は、画像表示部201に表示されている画像の一部を拡大して表示させる指示をする。この拡大指示は、ユーザが視野を指定した領域を拡大させてもよいし、ドラッグ動作でも、対物レンズ切り替えでも、ZOOMでも何でも良い。すると、その指定された領域の画像が擬似画像920として保持される。
【0078】
すると、表示状態902に示すように、画像表示部201の表示領域(視野)に合った擬似画像920が瞬時に表示される。この場合、擬似画像920は、画像表示部201の表示領域サイズまで引き伸ばされている。
【0079】
なお、擬似画像920は、予め保持している画像を用いてもよい。例えば、表示状態904に示すように、前回擬似画像として用いた画像や、保存された該当倍率の画像を擬似画像920aとして用いてもよい。
【0080】
観察視野の切り替えが完了したら、その切り替え後の観察視野における現在の画像を取得する。そして、表示状態903に示すように、擬似画像920(または920a)をその取得したリアルタイムの画像921で更新する。
【0081】
このように、スキャナ振幅の変更中でも表示状態902のように、拡大前の画像を引き伸ばして擬似的に拡大後の画像として、操作指示と同時のタイミングで表示させる。これにより、操作者は拡大後の状態を擬似的に把握できる。
【0082】
図9Bは、第1の実施形態(実施例2)における、観察視野を縮小方向(スキャナ振幅を小→大へ変更)へ切り替えると共に、操作者の操作指示に追従してその擬似画像を縮小し、観察視野の切り替え完了後、その擬似画像をリアルタイムで取得した画像データに置き換える処理を説明するための図である。
【0083】
表示状態910に示すように、画像表示部201に表示されている視野領域の画像を擬似画像920として取得及び保存する。そして、表示状態911に示すように、操作者の操作指示に追従して擬似画像920を縮小する。
【0084】
観察視野の切り替えが完了したら、その切り替え後の観察視野の画像をリアルタイムで取得する。そして、擬似画像920をその取得したリアルタイムの画像で更新する。
図10は、第1の実施形態(実施例2)における観察視野の切り替えに伴う表示画像の表示制御処理フローを示す。実施例2では、2次元走査駆動制御回路29により2次元走査機構30が制御されることにより、スキャナの振幅幅が変化(分解能を変化)させて、画像の拡大、縮小を行っている。
【0085】
まず、顕微鏡操作者は、操作部20や、モニタ18に表示されたGUI表示の操作領域202、操作領域203等から、視野切り替え(画像の拡大、縮小)を指示する。この指示は、例えば、操作領域203において、中心部から外側に向けてドラッグすることで拡大、外側から中心部に向けてドラッグすることで縮小などとしてもよい。また、操作領域202に拡大、縮小を表す指示部を表示し、その指示部を用いて指示を行ってもよい。
【0086】
コンピュータ21の制御部21−1は、視野切り替えの操作指示を受けると(S11)、擬似画像の保存または選択(S12)、擬似画像の表示(S13)を行う。S11,S12,S13の処理はそれぞれ、図6のS1,S2,S3と同様の処理である。
【0087】
次に、制御部21−1は、画像表示部201に表示されている擬似画像920を、操作領域203から入力された指示量及び指示のタイミングに合わせて拡大または縮小する(S14)。このとき、制御部21−1は、現在選択されている視野と操作領域203にて指示された指示量とに基づいて、スキャナの走査幅を演算し、2次元走査駆動制御回路29に2次元走査機構30への駆動指示を出力する。
【0088】
2次元走査駆動制御回路29が2次元走査機構30へ制御信号を出力すると、2次元走査機構30は駆動を開始する(S15)。拡大画像への切り替えの場合には、スキャナの走査幅を小さくして、分解能を上げた状態で画像を取得する。縮小画像への切り替えの場合には、スキャナの走査幅を大きくして、分解能を下げた状態で画像を取得する。なお、手順S14、S15については、どちらの処理を先に行ってもよいし、同時に行ってもよい。
【0089】
拡大画像または縮小画像への切り替えが完了したら(S16で「Yes」)、制御部21−1は、表示画像の更新を行う(S17)。すなわち、表示状態903に示すように、画像表示部201の画像は、擬似画像920から、カメラ16によりリアルタイムで撮像された画像データに切り換わる。
【0090】
スキャナ振幅の変更時間だけでなく、このような画素毎をタイミング信号にてサンプリングしていく構成では、画面上側と下側の拡大率が違う、歪んだ正しくない画像が表示される場合もある。すなわち、スキャナ変更時間に、画面が追従しなくなる場合と、追従するが画面に異常を来たすおそれがある場合がある。スキャナ振幅を電気的に変更しているときにそのまま撮像していると、スキャナ振幅が変更していく過程が映り込む。このとき、画面上側は変更前の振幅、画面下側は指示後の振幅といった、ゆがんだ画像が映ってしまうおそれがある。しかしながら、実施例2を適用すれば、このようなことも回避できる。すなわち、そのような正常でないスケールの画像を、擬似画像で隠すことができるので、ユーザの混乱を招くことがない。
【0091】
実施例2では、スキャナを用いて説明を行ったが、もちろんズームレンズを駆動させて視野の拡大縮小を行うような構成としてもよいし、対物レンズを切り換えて視野を切り換えるような構成でもよく、これらを組み合わせたものでもよい。対物レンズを切り換えた場合は、変化が連続でないことを示す為に、表示の切り換え時に何も表示しない画面などを明示的に挿入してもよい。このようにすると、操作領域203からの指示中に、この拡大まではズームレンズによるもの、ここから先は対物レンズの切り換えによるもの、ということが操作者にも分かりやすい。
【0092】
実施例1と同様、指示したタイミングで変更後の視野が分かるために、駆動系の遅れによる操作の違和感を解消することができ、目的とする視野へ調整するまでの時間短縮を図ることができる。
【0093】
なお、実施例2では、手順S14、S15については、どちらの処理を先に行ってもよいし、同時に行ってもよいとしたが、S14における擬似画像のサイズ変更完了の確定後に、S15の2次元走査機構30の駆動を開始するようにしてもよい。
【0094】
また、第1の実施形態において、擬似画像は、前回擬似画像として用いた画像や、保存された該当倍率の画像を用いてもよい。
本実施形態(実施例1)によれば、指示したタイミングで電動ステージの駆動完了位置が分かるために、駆動系の遅れによる操作の違和感を解消することができる。そのため、過剰な指示量の指定をし難く、操作者が目的とする位置へ電動ステージ9を駆動するまでの時間短縮を図ることができる。また、少量の移動を繰り返す必要がなくなることからも時間短縮を図ることができる。
【0095】
また、本実施形態(実施例2)によれば、指示したタイミングで倍率変更後の視野が分かるために、駆動系の遅れによる操作の違和感を解消することができ、目的とする視野へ調整するまでの時間短縮を図ることができる。
【0096】
<第2の実施形態>
本実施形態では、電動ステージ9の移動速度が所定速度より遅いもしくはその移動時間が所定時間より長い、または撮像素子17のフレームレートが所定速度より遅い場合に、第1の実施形態(実施例1)で説明した擬似表示を行う顕微鏡システムについて説明する。
【0097】
本実施形態における顕微鏡システムの構成は、第1の実施形態(実施例1)と同様のため省略する。本実施形態では、顕微鏡100の状態によって、擬似表示を行うか、行わないかの判別を行う。
【0098】
図11は、第2の実施形態における電動ステージの移動に伴う表示画像の表示制御処理フローを示す。例えば、本実施形態では、操作部20より操作指示を受ける(S21)と、コンピュータ21の制御部21−1は、電動ステージ9の移動速度が閾値T1以上か否かまたは移動時間が閾値T2以下か否かの判別を行う(S22)。
【0099】
電動ステージ9の移動速度が指示された移動速度に対して十分速ければ、操作者は違和感なく操作指示を行うことができるため、擬似画像を使用する必要がない。よって、電動ステージ9の移動速度が閾値T1以上と判定された場合(S22で「Yes」)、S23の処理へ進む。
【0100】
また、電動ステージ9の移動量が微小であれば、移動時間は早いので、擬似画像の表示切換えをするほうが時間的な遅れとなる場合もある。この場合も擬似画像を使用する必要はない。よって、電動ステージ9の移動時間が閾値T2以下と判定された場合(S22で「Yes」)、S23の処理へ進む。
【0101】
次に、電動ステージ9の移動速度が閾値T1以上または移動時間が閾値T2以下と判定された場合、制御部21−1は、露光時間や表示画素数などにより決まる単位時間当たりに撮像素子17より取得される画像枚数を示すフレームレートが閾値T3以下か否かの判別を行う(S23)。フレームレートが遅いと、駆動系が追従していても画面の切り換わりが遅いため、画像更新の間隔が時間的に空いてしまう。すると、移動量の確認が難しかったり、画面の上と下で撮像位置が違うといった正しくない画面が出てしまうおそれがある。この為、例えば、フレームレートが遅い場合(S23で「No」)は、擬似表示を行うという設定に切り換えて使用する。このような視野の切り換えにおける閾値T1,T2,T3は、任意に設定することができる。例えば、閾値T1,T2,T3は、データ保管部23などに保存されている。
【0102】
電動ステージ9の移動速度が閾値T1より遅い、または移動時間が閾値T2より長いと判定された場合(S22で「No」)、または、フレームレートが閾値T3より遅いと判定された場合(S23で「No」)、すなわち、擬似表示が必要であると判断された場合、制御部21−1は、S24〜S29の処理を行う。S24からS29の処理はそれぞれ、図6のS2〜S7と同様の処理である。
【0103】
一方、擬似表示の必要がないと判断されれば(S23で「Yes」)、通常通り、表示データをリアルタイムに更新する(S29)。
本実施形態のように、電動ステージ9の移動速度が閾値T1より遅いか、移動時間が閾値T2より長いか、またはフレームレートが閾値T3より遅い場合にのみ、擬似画像の表示処理を行うことで、画面の過剰な切り換えを抑制できる。その結果、コンピュータ21の制御部21−1への負荷を減らせることで、処理速度の遅れを防ぐことができる。また、必要のない画面の切り換えの発生を防止することができる。そのため、切り換えによる待ち時間や、擬似画像とリアルタイム画像の短時間での切り換えに起因する混乱等を防ぐことができ、操作感が向上する。
【0104】
<第3の実施形態>
本実施形態では、所定の電動ユニット(例えば、電動ステージ9、2次元走査機構30等)の駆動中は擬似画像を表示させ、所定時間内に、連続して複数回の操作指示がなされた場合、表示画面上で、操作者の各操作指示に追従してその擬似画像の表示形態を変化させると共に、電動ユニットの実駆動については、それらの操作指示を1つに統合して、最小限の駆動をさせる顕微鏡システムについて説明する。
【0105】
(実施例1)
たとえば、第3の実施形態を第1の実施形態(実施例1)に適用した場合には、次のようになる。すなわち、電動ステージ9の移動中は擬似画像を表示させ、所定時間内に、連続して移動指示がなされた場合、操作者の操作指示に追従してその擬似画像を移動させると共に、ステージ移動の実駆動については、最小限の駆動で目的位置へ到達させるように駆動をさせる。
【0106】
なお、本実施形態における顕微鏡システムの構成は第1の実施形態(実施例1)と同様のため省略する。
図12は、第3の実施形態(実施例1)における、電動ステージ9を駆動させる場合の(A)指示経路と、(B)実移動経路を示す。例えば、観察視野の位置が位置A,B,C,Dの順に移動するように、操作者は規定時間内に移動指示をする。この場合、画像表示部201に表示された擬似画像は、図12(A)に示すように、その指示に追従して位置A,B,C,Dと順に移動する。しかし、電動ステージ9の実移動については、それらの命令を1つにまとめて、図12(B)に示すように、位置Aから目的位置Dへと直接移動するように制御される。
【0107】
また、電動ステージ9が位置Aから位置Bへ移動中に、位置C,Dへの移動指示がされた場合に、目的位置を変更し、電動ステージ9が位置Dへと移動するといった動作を行うこともできる。
【0108】
図13は、第3の実施形態(実施例1)における電動ステージ9の駆動に伴う表示画像の表示制御処理フローを示す。第1の実施形態(実施例1)と同様に、操作者より操作指示を受ける(S31)。すると、コンピュータ21の制御部21−1は、擬似画像データの保存または選択を行い(S32)、擬似画像を画像表示部201に表示する(S33)。そして、制御部21−1は、表示させた擬似画像を操作者の指示に追従させて移動させる(S34)。このとき、規定時間内に指示が追加して入力された場合(S35で「Yes」,S36で「Yes」)、制御部21−1は、手順S34に戻り、再度擬似画像を移動させる。移動量により、擬似画像データの再選択が必要となった場合は、手順S32まで戻すようにしてもよい。
【0109】
規定時間後、制御部21−1は、これまでに入力された指示情報から電動ステージ9の実駆動が最小となるように、それらの指示情報を1つに統合し、その統合した指示を駆動部22へ通知する(S37)。すなわち、電動ステージ9の移動の実駆動については最短のルートで目的位置へ到達させるように、制御部21−1は、駆動部22へその駆動情報を通知する。ここで、指示情報を1つに統合する方法として、例えば、以下の方法が挙げられる。
【0110】
例えば、規定時間内に移動指示がされた場合であって、移動に関して絶対座標で座標が管理されている場合には、制御部21−1は、規定時間内の最後に指示された絶対座標に電動ステージ9を移動させるように指示してもよい。
【0111】
また、例えば、目的地としてメモリに設定された座標を、最後に指示された座標にすぐ上書きして、電動ステージ9を移動させるように制御するようにしてもよい。これにより、電動ステージ9が駆動を完了する前に、目的地を示す座標を上書きして電動ステージ9を駆動させることができる。
【0112】
また、例えば、タッチパネル等、ユーザが操作部から手を離した時の座標に、電動ステージ9を移動させるようにしてもよい。また、例えば、ダブルクリックしたら電動ステージ9を移動させる等、何らかのタイミングで電動ステージ9を移動させるようにしてもよい。
【0113】
また、例えば、ポーリングして、ある時間毎に最終到達座標を更新して電動ステージ9を移動させるようにしてもよい。
また、例えば、1回目の指示時は駆動完了まで電動ステージ9が駆動し、駆動完了に至るまでに入力された最後の座標に電動ステージ9を移動させるようにしてもよい。
【0114】
制御部21−1により通知された指示情報に基づいて、駆動部22は電動ステージ9の駆動を開始させる。電動ステージ9の駆動が完了する前に、操作者から操作指示があれば(S38で「No」、S39で「Yes」)、制御部21−1は、手順S34に戻り、再度擬似画像を移動させる。
【0115】
電動ステージ9の駆動が完了したら(S38で「Yes」)、制御部21−1は、表示画像の更新を行う(S40)。すなわち、画像表示部201に表示されている画像は、擬似画像から、カメラ16からのリアルタイム画像データに切り換わる。
【0116】
このように、規定時間内に入力された複数回の駆動指示がされた場合、表示系では逐次その指示に追従して擬似画像の表示形態が変化する一方、駆動系では、その駆動指示を1つにまとめ、最小限の駆動で最終的な指示位置に到達することができる。
【0117】
なお、駆動部22の駆動中に操作を受付け、擬似画像の移動、駆動座標の再設定を行ってもよい。この操作の受付けは、操作される毎でもよいが、規定時間内に受け付けた駆動を1回として駆動指示を行ってもよい。
【0118】
(実施例2)
また、たとえば、第3の実施形態を第1の実施形態(実施例2)に適用した場合には、次のようになる。すなわち、視野の切り替え中は擬似画像を表示させ、所定時間内に連続して複数の視野切り替え指示がなされた場合、操作者の操作指示に追従してその擬似画像を拡大または縮小させると共に、視野切り替えの実駆動については、指示された操作に基づいて最小限の駆動で視野切り替えを行うように駆動させる。
【0119】
なお。本実施形態における顕微鏡システムの構成は第1の実施形態(実施例1)と同様のため省略する。
図14は、第3の実施形態(実施例2)における、(A)視野切り替えの指示経過と、(B)視野切り替えの実駆動を示す。例えば、観察視野がA,B、Cの順で切り替わるように、操作者が規定時間内に視野切り換え指示をする。画像表示部201に表示された擬似画像は、図14(A)に示すように、操作者の視野切り換え指示に追従して、視野A,B,Cと順に切り替えて表示される。しかし、視野切り替えユニット(例えば、第1の実施形態の実施例2の場合には、2次元走査機構30)の実駆動については、それらの命令を1つにまとめて、視野Aから視野Cへ直接切り替えるようにする。これにより、視野Bに切り替えることがないので、視野切り替えユニットの駆動が途中で減速することもない。また、視野A,C,Bと順に切り替え指示がなされた場合には、視野切り替えユニットの実駆動については、それらの命令を1つにまとめて、視野Aから視野Bへ直接切り替えるようにする。また、視野A,B,C,Bのように、行き過ぎて視野を戻すような操作指示の場合は、視野Aから視野Bへ直接視野を切り替えるようにする。
【0120】
図15は、第3の実施形態(実施例2)における2次元走査機構30の駆動に伴う表示画像の表示制御処理フローを示す。
第1(実施例2)の実施形態と同様に、操作者より操作指示を受ける(S41)。すると、第1の実施形態(実施例2)と同様に、コンピュータ21の制御部21−1は、擬似画像データの保存または選択を行い(S42)、擬似画像を画像表示部201に表示する(S43)。そして、制御部21−1は、操作者の指示に追従して、表示させた擬似画像を拡大・縮小する(S44)。このとき、規定時間内に指示が追加して入力された場合(S45で「Yes」,S46で「Yes」)、制御部21−1は、手順S44に戻り、再度擬似画像を拡大・縮小する。擬似画像の拡大・縮小の変更量により、擬似画像データの再選択が必要となった場合は、手順S42まで戻してもよい。
【0121】
規定時間後、制御部21−1は、これまでに入力された指示情報から2次元走査機構30の実駆動が最小となるように、それらの指示情報を1つに統合し、その統合した指示を2次元走査駆動制御回路29へ通知する(S47)。すなわち、制御部21−1は、複数回の操作を1回の操作にまとめて、不必要な切り替えを行わず、2次元走査機構30の駆動が最小の切り替え動作で済むように、最終的に決定した擬似画像のサイズに基づいて、2次元走査機構30の走査幅を算出する。それから、制御部21−1は、2次元走査駆動制御回路29へその算出した操作幅に基づく駆動情報を通知する。ここで、指示情報を1つに統合する方法として、例えば、以下の方法が挙げられる。
【0122】
たとえば、視野A,B,Cと順に切り替え指示がなされた場合には、制御部21−1は、最終的に決定した視野Cの擬似画像のサイズに対応する走査幅を算出し、2次元走査駆動制御回路29へその算出した操作幅に基づく駆動情報を通知するようにしてもよい。
【0123】
制御部21−1により通知された指示情報に基づいて、2次元走査駆動制御回路29は2次元走査機構30の駆動を開始する。2次元走査機構30の駆動が完了する前に、操作者から操作指示があれば(S48で「No」、S49で「Yes」)、制御部21−1は、手順S44に戻り、再度擬似画像を拡大・縮小させる。
【0124】
視野切り替え処理が完了したら(S48で「Yes」)、制御部21−1は、表示画像の更新を行う(S50)。すなわち、画像表示部201の画像は、擬似画像から、カメラ16からのリアルタイム画像データに切り換わる。
【0125】
このように、規定時間内に入力された複数回の駆動指示を1つにまとめることができる。なお、駆動中に操作を受付け、擬似データの移動、駆動座標の再設定を行ってもよい。この操作の受付けは、操作される毎でもよいが、規定時間内に受け付けた駆動を1回として駆動指示を行ってもよい。
【0126】
本実施形態によれば、操作者は過剰な指示による顕微鏡システムの無駄な動きを気にせずに、表示画面を見ながらの目的位置への微調整を操作感よく行うことができる。また、顕微鏡システムの無駄な駆動がなくなり、駆動完了までの時間を短縮することができる。
【0127】
<第4の実施形態>
本実施形態では、対物レンズの倍率及び電動ステージのXY座標に関連付けされた擬似画像を用いて、第1〜第3の実施形態の処理を行う顕微鏡システムについて説明する。なお、本実施形態における顕微鏡システムの構成は第1の実施形態と同様のため省略する。
【0128】
図16は、第4の実施形態における電動ステージ9のXY座標及び対物レンズ8の倍率と関連付けられた擬似画像を管理するための擬似画像管理テーブル40を示す。擬似画像管理テーブル40は、データ保管部23に格納されている。
【0129】
擬似画像管理テーブル40は、座標(X座標、Y座標)、倍率(5倍、10倍、20倍、50倍、100倍、・・・)の組み合わせに関係付けられた擬似画像を識別する擬似画像識別情報が格納されている。例えば、電動ステージ9のXY座標が(1024,0)で、対物レンズの倍率が20倍の組み合わせの場合、擬似画像識別情報は「データ202」となる。なお、擬似画像識別情報に対応する擬似画像は、データ保管部23に格納されている。
【0130】
図17は、第4の実施形態における電動ステージ9の移動に伴う表示画像の表示制御処理フローを示す。図17のフローは、図6におけるS2の処理をS51,S52の処理に置き換え、S7の処理後にS53,S54を追加したものである。
【0131】
実施例1(図6)と同様に、コンピュータ21の制御部21−1は、操作指示を受けると(S1)、電動ステージ9から現在のXY座標を取得する。さらに、制御部21−1は、センサ7−2から現在選択されている対物レンズ8を識別する対物レンズ識別情報を取得する。ここで、データ保管部23には、各対物レンズ識別情報に対応する倍率情報が格納されている。制御部21−1は、データ保管部23から、取得した対物レンズ識別情報に対応する倍率情報を取得する(S51)。
【0132】
制御部21−1は、その取得したXY座標及び倍率情報の組み合わせに対応する擬似画像識別情報を、擬似画像管理テーブル40から取得する。制御部21−1は、その取得した擬似画像識別情報に対応する擬似画像データをデータ保管部23から取得する(S52)。これ以降の処理は、図6のフローと同様に、S3〜S7の処理を行う。
【0133】
電動ステージ9の駆動が完了したら(S6で「Yes」)、制御部21−1は、画像表示部201に表示されている画像の更新を行う(S7)。すなわち、表示状態603に示すように、画像表示部201に表示されている画像は、擬似画像620から、カメラ16からのリアルタイムの画像データに切り換わる。
【0134】
それから、その更新に用いた画像をデータ保管部23へ擬似画像として格納すると共に、その更新に用いた画像の画像識別情報を、その更新に用いた画像を取得したときのXY座標及び倍率情報と関連づけて、擬似画像管理テーブル40へ格納する(S53)。
【0135】
操作終了となるまで、当該フローを繰り返す(S54で「No」)。当該フローを繰り返すことにより、擬似画像管理テーブル40の情報量も増加していく。
本実施形態は、第1の実施形態(実施例2)、第2の実施形態、及び第3の実施形態についても適用することができる。本実施形態を第1の実施形態(実施例2)に適用する場合には、図10のS12の処理をS51,S52の処理に置き換え、S17の処理の後にS53,S54の処理を追加する。本実施形態を第2の実施形態に適用する場合には、図11のS24の処理をS51,S52の処理に置き換え、S29の処理の後にS53,S54の処理を追加する。本実施形態を第3の実施形態に適用する場合には、図14のS32の処理または図15のS42をS51,S52の処理に置き換え、S40またはS50の処理の後にS53,S54の処理を追加する。
【0136】
図16では、擬似画像管理テーブル40は、座標、倍率に関連したテーブルであるか、この関連付けの条件はこの限りではなく、また、直前の操作完了時のデータを1枚だけ常に保存してもよい。
【0137】
データを保存するタイミングは、第1〜第3の実施形態のように、操作指示時でもよいが、第4の実施形態のように操作完了時としておけば、擬似データ保存時間が操作開始時にかかることなく、擬似画像データの表示までの時間が短縮できる。
【0138】
第4の実施形態によれば、擬似画像データを取得、保存しておくことにより、操作指示時にデータ保存を行う必要がないために擬似画像への切り換えをすばやく行え、時間が短縮できる。かつ、擬似画像データを専用として保存することで、観察用の画像よりも画像を軽くでき、コンピュータ21の負荷を軽減し、画像データの移動がスムーズになることで、操作感がより向上する。また、前記ステージの座標及び観察視野の倍率に応じた最適な擬似画像を用いることができる。
【0139】
また、第4の実施形態において、図16の擬似画像管理テーブル40で管理される擬似画像データは、保存するタイミングの条件を設定できてもよい。例えばオートフォーカス機能など、焦点が合った状態を検出できる場合は、オートフォーカスがかかった状態から、焦準部を動かしていない状態の駆動指示後の最新状態を、擬似画像管理テーブル40を更新して保存する等してもよい。
【0140】
第1〜4の実施形態において、擬似画像データは、擬似画像表示専用とする為、リアルタイムに表示する画像などよりも解像度を落とし、データ量を軽くしたものを保存してもよい。これにより保存時間を短縮でき、表示させた擬似画像を移動させる際もデータ量が軽い為に、コンピュータ21の制御部21−1の負荷を軽減することができ、操作指示に合わせてより早い擬似画像の移動を行うことができる。
【0141】
また、第1〜4の実施形態において、擬似画像データの表示については、ある一定以上の範囲は擬似画像データを移動できない、つまり、操作領域202、203からの指示を受け付けないという制限をつけてもよい。例えば、移動制限の範囲は、電動ステージ9の駆動範囲外とならない位置や、対物レンズ8を保持したレボルバ7が一回転して元の視野に戻る位置、電動ステージ9の移動前の視野が画像表示部201の範囲外とならない位置まで等としてもよい。これにより実際の動作と擬似画像への操作がかけ離れすぎることを防ぐことができる。
【0142】
また、第1〜4の実施形態において、擬似画像データから、リアルタイムで撮像した画像データに更新されるタイミングについては、駆動完了だけではなく、例えば移動完了位置の視野に入ったら更新、規定時間操作指示がなければ更新、規定時間毎に更新など設定できてもよい。
【0143】
以上述べたように、本実施例の発明によれば、操作者からの指示と実際の駆動系に時間的な差がある場合でも、操作時に駆動完了の目的地を把握できることで、操作感が改善すると共に、目的位置への微調整等のための追加操作指示にかかる時間を短縮できる。
【0144】
図18は、第1〜第4の実施形態におけるコンピュータ21のハードウェア環境の構成ブロック図である。コンピュータ21は、CPU52、ROM53、RAM56、通信I/F54、記憶装置57、出力I/F51、入力I/F55、読み取り装置58、バス59、出力機器61、入力機器62によって構成されている。
【0145】
ここで、CPUは、中央演算装置を示す。CPUは、上記の実施形態の制御部21−1に相当する。ROMは、リードオンリメモリを示す。RAMは、ランダムアクセスメモリを示す。I/Fは、通信インターフェースを示す。
【0146】
バス59には、CPU52、ROM53、RAM56、通信I/F54、記憶装置57、出力I/F51、入力I/F55、及び読み取り装置58が接続されている。読み取り装置58は、可搬型記録媒体を読み出す装置である。出力機器61は、出力I/F51に接続されている。入力機器62は、入力I/F55に接続にされている。
【0147】
記憶装置57としてはハードディスク、フラッシュメモリ、磁気ディスクなど様々な形式の記憶装置を使用することができる。このような記憶装置57、またはROM53には、上記で説明した用いたフローのプログラム、擬似画像、及び擬似画像管理テーブル40が格納されている。
【0148】
上記で説明したフローのプログラムは、プログラム提供者側から通信ネットワーク60、および通信I/F54を介して、例えば記憶装置57に格納してもよい。また、このプログラムは、市販され、流通している可搬型記憶媒体に格納されていてもよい。この場合、この可搬型記憶媒体は読み取り装置58にセットされて、CPU52によってそのプログラムが読み出されて、実行されてもよい。可搬型記憶媒体としてはCD−ROM、フレキシブルディスク、光ディスク、光磁気ディスク、ICカード、USBメモリ装置など様々な形式の記憶媒体を使用することができ、このような記憶媒体に格納されたプログラムが読み取り装置58によって読み取られる。
【0149】
また、入力機器62には、キーボード、マウス、電子カメラ、ウェブカメラ、マイク、スキャナ、センサ、タブレットなどを用いることが可能である。また、出力機器61には、ディスプレイ、プリンタ、スピーカなどを用いることが可能である。また、ネットワーク60は、インターネット、LAN、WAN、専用線、有線、無線等の通信網であってよい。
【0150】
なお、本発明は、以上に述べた実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内で種々の構成または実施形態を取ることができる。また、上記の実施形態を2以上組み合わせてもよい。
【符号の説明】
【0151】
1 落射照明用光
2 照明系レンズ
3 開口絞り
4 視野絞り
5 観察法切り換えユニット
6 ハーフミラー
7 レボルバ
7−1 モータ
7−2 センサ
8 対物レンズ
9 電動ステージ
9−1 モータ
10 試料
11 結像レンズ
12 光路切り換えユニット
13 ミラー
14 鏡筒双眼部
15 アイポイント
16 カメラ
17 撮像素子
18 モニタ
19 制御回路
20 操作部
21 コンピュータ
21−1 制御部
22 駆動部
23 データ保管部
24 レーザ光源
25 光検出器
26 ミラー
27 ハーフミラー
28 レンズ
29 2次元走査駆動制御回路
30 2次元走査機構
【特許請求の範囲】
【請求項1】
試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置であって、
前記顕微鏡システムを操作するための指示情報を入力する指示入力部と、
前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部と、
前記指示入力部から前記指示情報が入力された場合、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する制御部と、
を備えることを特徴とする顕微鏡制御装置。
【請求項2】
前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであり、
前記制御部は、前記指示情報が前記ステージを前記光軸方向に対して垂直方向へ移動させる旨の指示である場合、該指示に追従して前記所定画像の表示位置を移動させる
ことを特徴とする請求項1に記載の顕微鏡制御装置。
【請求項3】
前記制御部は、前記指示情報が前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示である場合、該指示に追従して前記所定画像のサイズを変更する
ことを特徴とする請求項1または2に記載の顕微鏡制御装置。
【請求項4】
前記制御部は、前記指示入力部により前記指示情報が入力された場合、前記電動部の駆動状況に応じて、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する
ことを特徴とする請求項1〜3のうちいずれか1項に記載の顕微鏡制御装置。
【請求項5】
前記電動部が、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであって、前記指示入力部により前記指示情報が入力された状況において、
単位時間当たりの前記撮像部の撮像速度が所定の閾値以下である場合、または前記電動ステージの移動速度が所定の閾値以下である場合、もしくは電動ステージの移動時間が所定の閾値以上である場合、前記制御部は、前記指示情報に応じて前記電動部を駆動させる制御を行う
ことを特徴とする請求項4に記載の顕微鏡制御装置。
【請求項6】
前記制御部は、所定の時間内に、連続して複数回の指示情報が入力された場合、該各指示に追従して前記所定画像の表示態様を変化させると共に、該指示の対象である前記電動部が最小限の駆動をするように制御する
ことを特徴とする請求項1〜5に記載の顕微鏡制御装置。
【請求項7】
前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであり、
前記制御部は、所定の時間内に、前記電動ステージを光軸方向に対して垂直方向へ移動させる旨の指示が連続して複数回入力された場合、該各指示に追従して前記所定画像を移動させると共に、前記電動ステージの移動が最小限となるように制御する
ことを特徴とする請求項6に記載の顕微鏡制御装置。
【請求項8】
前記制御部は、所定の時間内で、前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示情報が連続して複数回入力された場合、該各操作指示に追従して前記所定画像のサイズを変化させると共に、前記視野の切り替えの駆動が最小限となるように制御する
ことを特徴とする請求項6に記載の顕微鏡制御装置。
【請求項9】
前記顕微鏡システムは、さらに、
前記所定画像と、前記ステージの座標及び観察視野の倍率のうち少なくともいずれか1とが関係付けられて記憶されている記憶部
を備えることを特徴とする請求項1〜8のうちいずれか1項に記載の顕微鏡制御装置。
【請求項10】
請求項1〜9のうちいずれか1項に記載の顕微鏡制御装置を備える顕微鏡システム。
【請求項11】
試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置の制御方法であって、
前記顕微鏡システムを操作するための指示情報を入力する指示入力部から前記指示情報が入力された場合、該指示情報に応じて、前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する
ことを特徴とする顕微鏡制御装置の制御方法。
【請求項1】
試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置であって、
前記顕微鏡システムを操作するための指示情報を入力する指示入力部と、
前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部と、
前記指示入力部から前記指示情報が入力された場合、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する制御部と、
を備えることを特徴とする顕微鏡制御装置。
【請求項2】
前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであり、
前記制御部は、前記指示情報が前記ステージを前記光軸方向に対して垂直方向へ移動させる旨の指示である場合、該指示に追従して前記所定画像の表示位置を移動させる
ことを特徴とする請求項1に記載の顕微鏡制御装置。
【請求項3】
前記制御部は、前記指示情報が前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示である場合、該指示に追従して前記所定画像のサイズを変更する
ことを特徴とする請求項1または2に記載の顕微鏡制御装置。
【請求項4】
前記制御部は、前記指示入力部により前記指示情報が入力された場合、前記電動部の駆動状況に応じて、該指示情報に応じて前記電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する
ことを特徴とする請求項1〜3のうちいずれか1項に記載の顕微鏡制御装置。
【請求項5】
前記電動部が、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであって、前記指示入力部により前記指示情報が入力された状況において、
単位時間当たりの前記撮像部の撮像速度が所定の閾値以下である場合、または前記電動ステージの移動速度が所定の閾値以下である場合、もしくは電動ステージの移動時間が所定の閾値以上である場合、前記制御部は、前記指示情報に応じて前記電動部を駆動させる制御を行う
ことを特徴とする請求項4に記載の顕微鏡制御装置。
【請求項6】
前記制御部は、所定の時間内に、連続して複数回の指示情報が入力された場合、該各指示に追従して前記所定画像の表示態様を変化させると共に、該指示の対象である前記電動部が最小限の駆動をするように制御する
ことを特徴とする請求項1〜5に記載の顕微鏡制御装置。
【請求項7】
前記電動部は、前記試料が載置され、少なくとも、光軸方向に対して垂直方向へ、前記顕微鏡に対して相対的に移動する電動ステージであり、
前記制御部は、所定の時間内に、前記電動ステージを光軸方向に対して垂直方向へ移動させる旨の指示が連続して複数回入力された場合、該各指示に追従して前記所定画像を移動させると共に、前記電動ステージの移動が最小限となるように制御する
ことを特徴とする請求項6に記載の顕微鏡制御装置。
【請求項8】
前記制御部は、所定の時間内で、前記表示部に表示された顕微鏡画像の観察視野を変更する旨の指示情報が連続して複数回入力された場合、該各操作指示に追従して前記所定画像のサイズを変化させると共に、前記視野の切り替えの駆動が最小限となるように制御する
ことを特徴とする請求項6に記載の顕微鏡制御装置。
【請求項9】
前記顕微鏡システムは、さらに、
前記所定画像と、前記ステージの座標及び観察視野の倍率のうち少なくともいずれか1とが関係付けられて記憶されている記憶部
を備えることを特徴とする請求項1〜8のうちいずれか1項に記載の顕微鏡制御装置。
【請求項10】
請求項1〜9のうちいずれか1項に記載の顕微鏡制御装置を備える顕微鏡システム。
【請求項11】
試料を観察する顕微鏡を介して撮像部により撮像された顕微鏡画像を表示部へ表示する顕微鏡システムを制御する顕微鏡制御装置の制御方法であって、
前記顕微鏡システムを操作するための指示情報を入力する指示入力部から前記指示情報が入力された場合、該指示情報に応じて、前記顕微鏡システムの構成要素であって該顕微鏡システムを駆動させる電動部を駆動させる制御を行うと共に、該電動部の駆動が完了するまでの間、所定画像を前記表示部に表示させ、該指示情報の示す指示に追従して該所定画像の表示態様を変更し、該電動部の駆動完了後、前記撮像部によりリアルタイムで撮像された顕微鏡画像を前記表示部に表示する
ことを特徴とする顕微鏡制御装置の制御方法。
【図2】


【図3】
【図4】
【図6】
【図7】
【図8】
【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】
【図1】
【図5】
【図9A】
【図9B】

【図3】
【図4】
【図6】
【図7】
【図8】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図1】
【図5】
【図9A】
【図9B】
【公開番号】特開2012−150142(P2012−150142A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−6611(P2011−6611)
【出願日】平成23年1月17日(2011.1.17)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月17日(2011.1.17)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]