
顕微鏡用試料、その作製方法及び顕微鏡観察方法
【課題】試料の傾斜角度を短時間で高精度に調整できる顕微鏡用試料、その作製方法及び顕微鏡観察方法を提供する。
【解決手段】試料22の側面にマーカー23を形成する。マーカー23は、観察面に平行な方向に延びる第1の直線に沿って段違いに配置された第1及び第2の構造体23a,23dと、第1の直線に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体23b,23cとを有する。顕微鏡像でこれらの構造体23a〜23dの重なり状態や各構造体の特定部分の間隔等を調べ、その結果に基づいて顕微鏡の試料ホルダーを制御して、試料22の観察面が光軸に対し垂直となるようにする。
【解決手段】試料22の側面にマーカー23を形成する。マーカー23は、観察面に平行な方向に延びる第1の直線に沿って段違いに配置された第1及び第2の構造体23a,23dと、第1の直線に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体23b,23cとを有する。顕微鏡像でこれらの構造体23a〜23dの重なり状態や各構造体の特定部分の間隔等を調べ、その結果に基づいて顕微鏡の試料ホルダーを制御して、試料22の観察面が光軸に対し垂直となるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、透過電子顕微鏡及び走査電子顕微鏡等に用いる顕微鏡用試料、その作製方法及び顕微鏡観察方法に関する。
【背景技術】
【0002】
近年、コンピュータ技術の発展により、集束イオンビーム(Focused Ion Beam:以下、FIBともいう)加工装置の自動加工や、透過電子顕微鏡(Transmission electron microscope:以下、TEMともいう)の自動観察が可能となった。
【0003】
TEM観察用試料の作製方法の一つにFIBリフトアウト法がある。FIBリフトアウト法では、TEM観察しようとする部分をFIB加工装置により薄片化し、マニピュレータを用いて薄片化した試料を取り出す。そして、この試料をカーボン支持膜付きメッシュグリッドに載せてTEM観察する。
【0004】
FIBリフトアウト法では、メッシュグリッドに多数の試料を載せることができるため、多数の試料を連続的にTEM観察できるという利点がある。また、TEM観察用試料を短時間で作製できるという利点もある。
【特許文献1】特開平6−267482号公報
【特許文献2】特許第4016981号公報
【特許文献3】特開2005−34547号公報
【非特許文献1】薮内康文 半導体デバイス観察へのFIBの適用:電子顕微鏡, vol.37, 159-162, 2002
【発明の開示】
【発明が解決しようとする課題】
【0005】
TEM観察において、メッシュグリッドに載置された試料の観察面が光軸(試料に照射される電子線の中心軸)に対し傾斜していると、例えば測長精度が低下するという問題が発生する。そのため、測長をともなうTEM観察の場合などでは、試料の傾斜角度を調整することが重要である。
【0006】
例えば、オペレータ(観察者)がTEM観察しながら試料の傾斜角度を調整することが考えられる。しかし、傾斜角度の調整には熟練を要するという問題がある。また、傾斜角度の調整に時間がかかってしまうと、試料が長時間電子線に曝されることになるため、試料にコンタミネーション(汚染)が発生したり、試料の構造が変化してしまうなどの問題が発生する。
【0007】
以上から、試料の傾斜角度を短時間で高精度に調整できる顕微鏡用試料、その作製方法及び顕微鏡観察方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
一観点によれば、観察面と、前記観察面に交差する面上に形成されたマーカーとを有し、前記マーカーが、前記観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、前記第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有する顕微鏡用試料が提供される。
【発明の効果】
【0009】
上記一観点によれば、試料の観察面に交差する面にマーカーが設けられている。このマーカーは、試料の観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有している。これらの構造体を顕微鏡で観察した場合、試料の傾斜角度(光軸に対する傾斜角度)に応じて第1〜第4の構造体の特定の部分(特定の辺など:以下、「特徴点」ともいう)間の間隔が変化する。逆に、第1〜第4の構造体の特定の部分間の間隔がわかれば、試料の観察面と光軸との角度を知ることができる。
【0010】
従って、第1〜第4の構造体の特定の部分間の間隔を調べ、その結果に基づいて試料を傾斜させることにより、試料の観察面を光軸に対し垂直に配置することができる。その結果、例えば測長部の長さを良好な精度で測定することができる。
【発明を実施するための最良の形態】
【0011】
以下、実施形態について説明する前に、実施形態の理解を容易にするための予備的事項について説明する。
【0012】
図1〜図3はFIBリフトアウト法によるTEM観察試料の作製方法の一例を示す模式図である。
【0013】
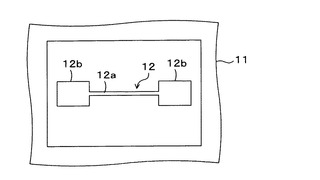
まず、図1に示すように、FIB加工装置を使用してウエハなどの基材11をFIB加工し、TEM観察する試料12を切り出す。ここでは、試料12は、TEM観察する部分を含む薄膜部12aと、薄膜部12aの両端にそれぞれ接続する一対の肉厚の補強部12bとを有するものとする。
【0014】
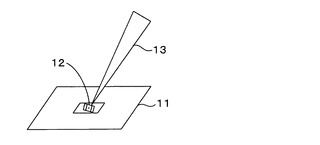
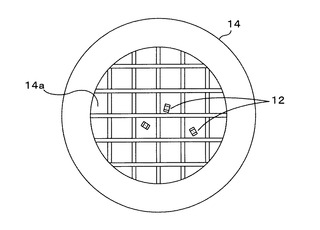
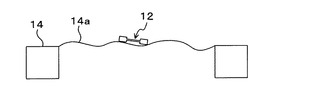
次に、図2に示すように、FIB加工により基材11から切り出した試料12をマニピュレータ13を用いて取り出す。そして、図3に示すように、カーボン支持膜付きメッシュグリッド14の上に試料12を載置する。メッシュグリッド14上に複数の試料12を載置する場合は、図3に示すように各試料12をそれぞれ異なるグリッド(ます目)の上に載置する。次いで、このメッシュグリッド14をTEMの試料ホルダーに取り付け、TEM観察を行う。
【0015】
ところで、メッシュグリッド14の上には極めて薄いカーボン支持膜14aが貼り付けられている。このカーボン支持膜14aは平らであるとは限らず、図4に模式的に示すように湾曲していることもある。
【0016】
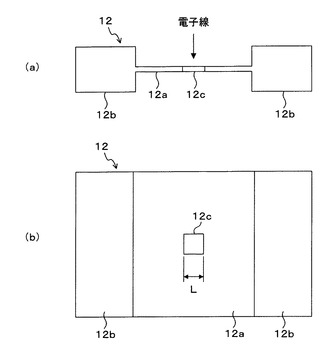
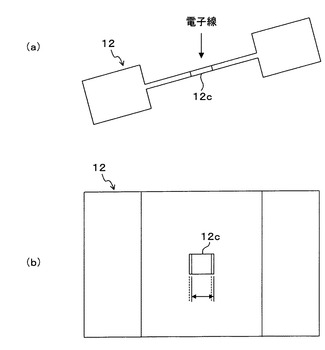
例えば図5(a)の断面図に示すように、測長部12cを有する試料12に対し電子線が垂直に透過する場合は、図5(b)の平面図に示すようにTEM観察像から測長部12cの長さLを良好な精度で測定することができる。しかし、例えば図6(a)の断面図に示すように、測長部12cを有する試料12に対し電子線が斜めに透過する場合は、図6(b)の平面図に示すようにTEM観察像から測長部12cのエッジを正確に判定することが難しく、測長部12cの長さを精度よく測定することが困難になる。
【0017】
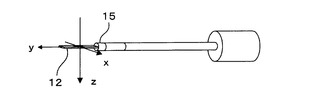
図7に示すように、一般的にTEMの試料ホルダー15は、相互に直交するx軸及びy軸を中心として試料12を回転できるようになっており、試料12の傾きを調整することができる。しかし、TEM観察しながらオペレータ(観察者)が試料12の傾きを調整することは困難であり、熟練を要するとともに時間がかかるという難点がある。
【0018】
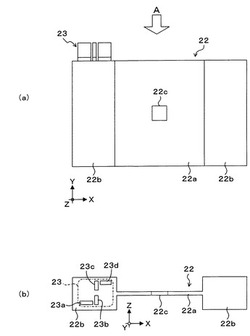
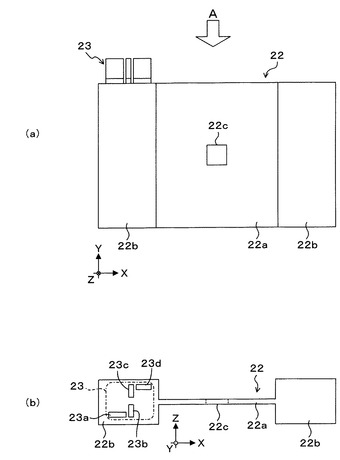
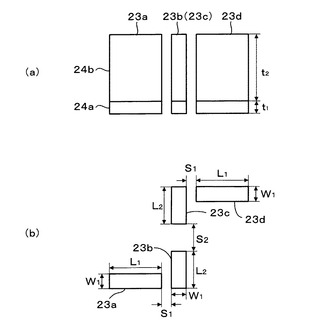
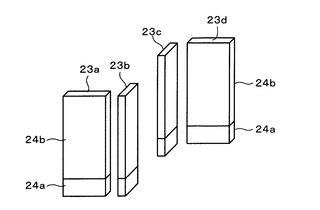
図8(a)は実施形態に係る顕微鏡観察用試料22を示す上面図、図8(b)は顕微鏡観察用試料22を図8(a)中に矢印Aで示す方向から見た側面図である。また、図9(a)はマーカー23の配列を示す上面図、図9(b)はマーカー23を図8(a)中に矢印Aで示す方向から見た側面図である。更に、図10はマーカー23の配列を示す斜視図である。
【0019】
図8(a),(b)に示すように、試料22は、TEM観察する部分(測長部22c)を含む薄膜部22aと、薄膜部22aの両側にそれぞれ接続する一対の肉厚の補強部22bとを有している。
【0020】
一方の側(図8(a),(b)では左側)の補強部22bの側面には、マーカー23が設けられている。なお、本実施形態では、マーカー23が設けられた補強部22bの側面と、薄膜部22aの表面を含む平面とが直交するものとしている。
【0021】
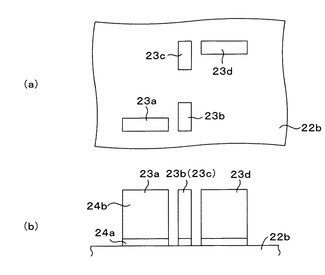
マーカー23は、補強部22bの側面から垂直方向に突出する4つの直方体形状の構造体23a,23b,23c,23dからなる。構造体23a(第1の構造体)及び構造体23b(第3の構造体)は“L”字状に配置され、構造体23c(第4の構造体)及び構造体23d(第2の構造体)は逆“L”字状に配置されている。また、構造体23b,23cは薄膜部22aの表面を含む平面に直交する方向(図8(b)中のZ軸方向)に延びる直線上に所定の間隔をおいて配置され、構造体23a,23dは薄膜部22aの表面に平行な方向(図8(b)中のX軸方向)に延びる直線に沿って段違いに配置されている。
【0022】
なお、本実施体では構造体23a〜23dをそれぞれ分離している。しかし、これらの構造体23a〜23dは必ずしも分離している必要はなく、例えば構造体23a,23bを一体的に形成し、構造体23c,23dを一体的に形成してもよい。
【0023】
これらの構造体23a〜23dは単一の材料により形成されていてもよく、密度が相互に異なる2つの層を積層した構造を有していてもよい。本実施形態では、図9(a)及び図10に示すように、構造体23a〜23dがいずれも、密度が低い材料からなる下層24aと、密度が高い材料からなる上層24bとの2層構造を有するものとする。例えば、下層24aをカーボン又はシリコン酸化物により形成し、上層24bをタングステン又は白金等の金属により形成する。このように構造体23a〜23dを密度が相互に異なる複数の層を積層した構造とするのは、TEM像に下層24aと上層24bとの界面が明瞭に写るようにするためである。これにより、後述するように試料22のX軸周りの回転(傾き)を容易に確認することができる。下層24aを密度が高い材料により形成し、上層24bを密度が低い材料により形成してもよい。
【0024】
図9(a),(b)において、構造体23a〜23dの幅W1はいずれも100〜200nmである。また、構造体23a,23dの長さL1は400〜800nm、構造体23b,23cの長さL2は250〜500nmである。更に、構造体23aと構造体23bとの間隔S1は50〜150nmであり、構造体23cと構造体23dとの間隔S1も50〜150nmである。更にまた、構造体23bと構造体23cとの間隔S2は250〜500nmである。また、下層24aの厚さt1は0.2〜1μmであり、上層24bの厚さt2は0.5〜2μmである。但し、これらの構造体23a〜23dの大きさ、厚さ及び間隔は、試料の大きさ及び顕微鏡の倍率等に応じて適宜設定すればよい。
【0025】
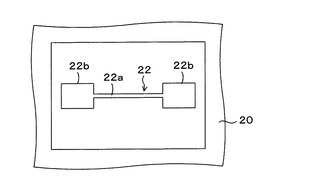
図11〜図15は、本実施形態に係る電子顕微鏡用試料の作製方法を工程順に示す図である。なお、図11は顕微鏡用試料の全体を示す平面図であり、図12(a),図13(a),図14(a),図15(a)は顕微鏡試料の補強部及びその上に形成されるマーカーを拡大して示す平面図、図12(b),図13(b),図14(b),図15(b)は同じくその補強部及びマーカーの断面図である。
【0026】
まず、図11に示すように、FIB加工装置を使用し、FIBエッチング法によりウエハ等の基材20を加工して試料22を得る。試料22は、薄膜部22aと、薄膜部22aの両側にそれぞれ接続する一対の補強部22bとを有するものとする。但し、後述するように、後工程で試料22を更に加工して最終的な形状(観察時の形状)とする。この図11に示す工程では、試料22を最終的な形状とするのではなく、薄膜部22a及び補強部22bの厚さを十分厚くしておく。また、試料22は基材20と切り離さないでおく。
【0027】
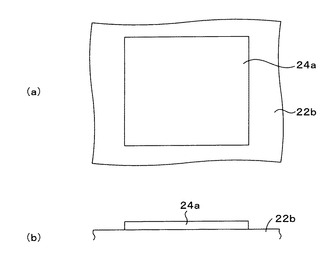
次に、図12(a),(b)に示すように、FIB加工装置を使用し、FIBデポジッション法により一方の補強部22bの所定の領域(例えば3μm×3μmの領域)上にカーボン又はシリコン酸化物を堆積して、厚さが0.2〜1μmの下層24aを形成する。
【0028】
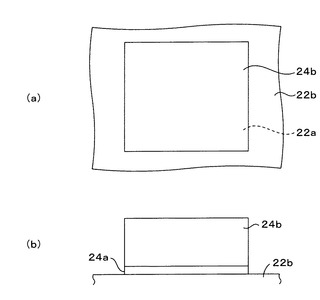
次に、図13(a),(b)に示すように、下層24aの上に、FIBデポジッション法によりタングステン又は白金を堆積して、厚さが0.5〜2μmの上層24bを形成する。
【0029】
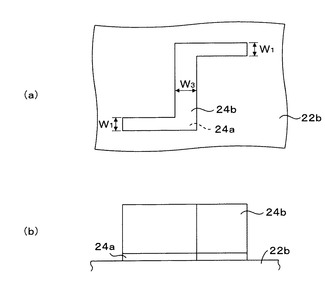
次に、図14(a),図14(b)に示すように、FIB加工装置を使用し、FIBエッチング法により、下層24a及び上層24bを上から見たときにクランク状となるようにパターニングする。このとき、クランクの両端部の幅W1は、構造体23a,23dの幅W1に合わせる。また、クランクの中央部の幅W3は、構造体23b,23cの幅W1よりも2S1分だけ太くする(図9参照)。
【0030】
次いで、図15(a),(b)に示すように、FIBエッチング法により、クランク状にパターニングされた上層24b及び下層24aを更にパターニングして、構造体23a〜23dを形成する。
【0031】
このようにしてマーカー23(構造体23a〜23d)を形成した後、FIB加工装置により試料22を所望の形状(観察時の形状)に加工し、更に試料22と基材20とを切り離す。そして、マニピュレータにより試料22を取り出し、メッシュグリッドの上に載置する(図2,図3参照)。
【0032】
なお、構造体23b,23cの側面にFIBエッチングにより発生したごみ(エッチングにより基材20から剥離した元素)が付着すると、TEM観察時に構造体23b,23cの幅が見掛け上異なってしまい、構造体23a〜23dの重なりが不明瞭になって試料22の角度調整が不正確になることが考えられる。このため、上述したように、構造体23b,23cは試料作製工程の最後のほうの工程で形成することが好ましい。
【0033】
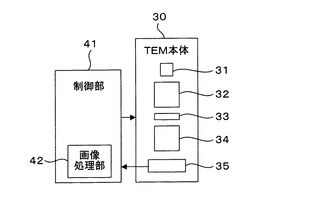
図16は、透過電子顕微鏡(TEM)の構成を示すブロック図である。この図16に示すように、本実施形態で使用する透過電子顕微鏡は、電子顕微鏡本体30と、画像処理部42を備えた制御部(コンピュータ)41とを有している。電子顕微鏡本体30には、電子銃31と、複数の収束レンズを備えた照射系レンズ群32と、試料ホルダー33と、対物レンズ及び投射レンズを備えた結像系レンズ群34と、撮像素子を備えた撮像部35とを有している。
【0034】
TEM観察時には、電子銃31から電子線が出射される。この電子線は、照射系レンズ群32により収束され、試料ホルダー33に搭載された試料22(図8(a),(b)参照)に照射される。そして、試料22を透過した電子線は、結像系レンズ群34を介して撮像部35に到達する。撮像部35は、到達した電子線に応じた電気信号を出力する。
【0035】
画像処理部42は、1又は複数画像分の画像メモリを有している。この画像処理部42は、撮像部35から出力された電気信号に対し所定の信号処理を施して画像メモリにTEM像を展開する。そして、展開されたTEM像を画像処理して、マーカー23の各構造体23a〜23dのエッジを抽出する。制御部41は、画像処理部42による画像処理の結果に基づいて試料22の傾斜状態を判定する。そして、その傾斜状態の判定結果に応じて試料ホルダー33を制御し、試料22の観察面に対し電子線の光軸が垂直になるように試料22の傾きを調整する。
【0036】
図17〜図19は、本実施形態に係る顕微鏡用試料の角度調整方法の概要を示す図である。
【0037】
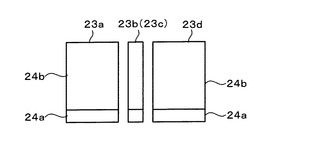
試料22がTEMの電子線の光軸に対し垂直に配置されている場合、TEM像では、図17に示すように構造体23b,23cが完全に重なって観察される。また、構造体23a〜23dは横方向に並んで観察され、これらの構造体23a〜23dの間に段差はない。このようにTEM像が観察される場合は、試料22(観察面)に対し電子線が垂直に照射される状態(図5(a),(b)参照)であり、試料22の測長部22cの長さを高精度に測定することができる。
【0038】
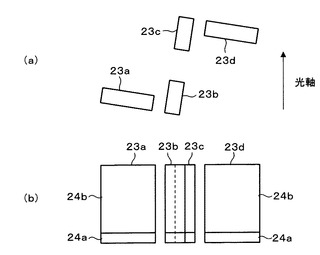
試料22がY軸周りに回転している場合、すなわち試料22が図8(a),(b)に示すY軸に平行な直線を中心に回転(傾斜)している場合は、図18(a)に示すように、マーカー23(構造体23a〜23d)が光軸に対し斜めになる。この場合、TEM像では、図18(b)に示すように、構造体23bと構造体23cとが横方向にずれて観察される。
【0039】
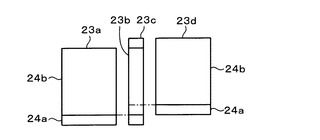
一方、試料22がX軸周りに回転している場合、すなわち試料22が図8(a),(b)に示すX軸に平行な直線を中心に回転(傾斜)している場合、TEM像では、図19に示すように、構造体23a,23b及び構造体23c,23dの上層24bと下層24bとの界面の位置(又は、構造体23a,23b及び構造体23c,23dの底面若しくは上面の位置)が高さ方向にずれて観察される。
【0040】
すなわち、試料22の観察面(この例では薄膜部22a)が電子線の光軸に対し斜めに配置されている場合は、TEM像の観察により傾きの方向を容易に知ることができる。図17に示すように構造体23b,23cが完全に重なり、構造体23a〜23d間に段差が発生しないように試料22の傾きを調整すれば、試料22の観察面が電子線の光軸に対し垂直に配置されたことになる。これにより、例えば試料22の測長部22cの長さを精度よく測定することができる。また、次に説明するように、制御部41により試料ホルダー33の角度調整機構を制御して試料22の傾きを自動的に調整することも可能である。
【0041】
図20は、実施形態に係る顕微鏡観察用試料の角度自動調整方法の一例を示すフローチャートである。また、図21は、図20中のステップS15の角度調整処理工程をより詳細に示すフローチャート、図22は図21中のステップS24及びステップS30の距離dの算出処理工程をより詳細に示すフローチャートである。なお、ここでは、電子顕微鏡本体30の試料ホルダー33には、図8(a),(b)に示す試料22を載置したメッシュグリッドが搭載されているものとする。また、制御部41内には、以下に示す処理を実行するためのプログラムが読み込まれているものとする。
【0042】
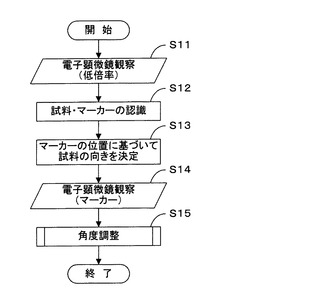
まず、ステップS11において、制御部41は電子顕微鏡本体30の照射レンズ系32及び結像レンズ系34を制御して電子顕微鏡を低倍率に設定し、電子銃31及び撮像部35を駆動して画像処理部42により試料22のTEM像を取得する。その後、ステップS12に移行し、画像処理部42は画像処理を行ってTEM像から試料22及びマーカー23を特定する。
【0043】
次に、ステップS13に移行し、制御部41は、マーカー23の位置に基づいて試料22の向き(X軸及びY軸)を決定する。後述するように、試料ホルダー33の角度調整機構を制御して試料22をX軸周り又はY軸周りに回転(傾斜)させるためには、試料22の向き(X軸及びY軸)を決定しておくことが重要である。
【0044】
次に、ステップS14に移行し、制御部41は、電子顕微鏡観察を行ってマーカー23の部分のTEM像を得る。そして、ステップS15に移行し、試料22のX軸周りの角度調整及びY軸周りの角度調整を行う。以下、図21を参照して、ステップS15の角度調整処理工程の詳細を説明する。
【0045】
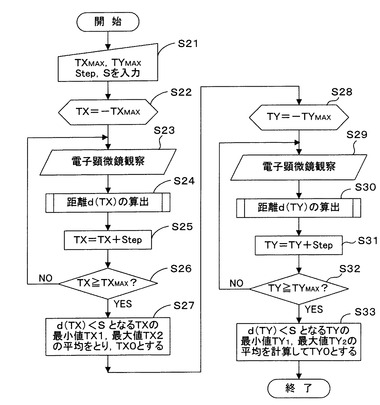
まず、ステップS21において、オペレータにより、X軸周りの角度変更範囲の最大値TXMAX、Y軸周りの角度変更範囲の最大値TYMAX、角度変化量Step及びしきい値Sを設定する。但し、これらの値は、予め制御部41内に設定されていてもよい。
【0046】
次に、ステップS22において、制御部41は、変数TXに−TXMAXを代入する。すなわち、−TXMAXから+TXMAXまでの範囲をX軸周りの角度変更範囲とする。
【0047】
次に、ステップS23に移行し、制御部41は電子顕微鏡本体30を制御して、マーカー23のTEM像を取得する。そして、ステップS24において、X軸周りの回転(傾斜)における試料22の特定点間の距離d(TX)を算出する。ここで、図22を参照して、X軸周りの回転における試料22の特定点間の距離d(TX)の算出方法を説明する。
【0048】
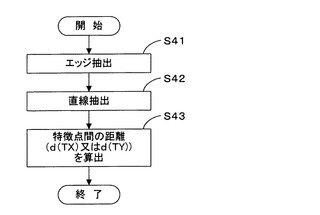
まず、ステップS41において、画像処理部42はTEM像を画像処理(一次微分又は二次微分)し、構造体23a〜23dのエッジを抽出する。その後、ステップS42に移行し、画像処理部42は、更に画像処理(ハフ変換)を行って、構造体23a〜23dのエッジから直線部分を抽出する。
【0049】
試料22がX軸周りに回転(傾斜)しているときは、図19に示すように、構造体23a,23bの下層24aと上層24bとの界面の位置がずれて観察される。従って、制御部41は、ステップS42で各構造体23a〜23dの下層24aと上層24bとの界面に対応する直線を抽出し、それらの直線のずれ量を算出して、特徴点間の距離d(TX)とする。なお、構造体23a〜23dの底面又は上面に対応する直線を抽出し、それらの直線のずれ量を特徴点間の距離d(TX)としてもよい。
【0050】
このようにして試料22がX軸周りの回転(傾斜)における特徴点間の距離d(TX)を算出した後、図21のステップS25に移行する。
【0051】
ステップS25では、変数TXの値に角度変化量Stepを加算した値を新たに変数TXの値とする(TX=TX+Step)。その後、ステップS26に移行し、TXの値とステップS21で設定されたTXMAXの値とを比較する。TXの値がTXMAXの値よりも小さい場合(NOの場合)は、ステップS23に戻って上記の処理を繰り返す。
【0052】
このようにして、試料22をX軸周りに−TXMAXから+TXMAXまで角度変化量Stepづつ順次回転させて特徴点間の距離d(TX)を取得すると、ステップS26からステップS27に移行する。
【0053】
ステップS27では、試料22のX軸周りの傾斜が最も小さくなる角度TX0を算出する。以下、図23を参照して、角度TX0の算出方法を説明する。
【0054】
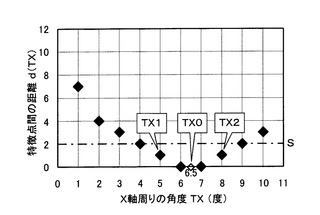
図23は、横軸にX軸周りの角度TXをとり、縦軸に特徴点間の距離d(TX)をとって、両者の関係を示す図である。ステップS23〜ステップS26を繰り返すことにより、図23に示すような曲線が得られる。この図23に示すように、角度TXの増加にともなってd(TX)の値は徐々に減少し、ある角度を超えると角度TXの増加とともにd(TX)の値も徐々に増加する。
【0055】
特徴点間の距離d(TX)の値が極小となる角度が試料22のX軸周りの傾きが最も小さい角度ということができる。但し、d(TX)の値が小さいほど誤差が大きくなると考えられるので、本実施形態ではd(TX)の値がしきい値S(図23の例ではS=2)よりも小さくなる角度TXの最小値(TX1)と最大値(TX2)とを抽出し、それらの平均値を試料22のX軸周りの傾きが最も小さくなる角度TX0としている。図23に示す例では、TX1=5、TX2=8であり、TX0は6.5となる。
【0056】
このようにして試料22のX軸周りの傾きが最も小さくなる角度TX0を算出した後、ステップS27からステップS28に移行する。ステップS28において、制御部41は変数TYに−TYMAXを代入する。すなわち、−TYMAXから+TYMAXまでの範囲をY軸周りの角度変更範囲とする。
【0057】
次に、ステップS29に移行し、制御部41は電子顕微鏡本体30を制御して、マーカー23のTEM像を取得する。そして、ステップS30において、Y軸周りの回転(傾斜)における試料22の特定点間の距離d(TY)を算出する。特定点間の距離d(TY)の算出方法は、基本的に図21に示す特定点間の距離d(TX)の算出方法と同様であるので、ここでは説明を省略する。
【0058】
次に、ステップS31に移行し、変数TYの値に角度変化量Stepを加算した値を新たに変数TYの値とする(TY=TY+Step)。その後、ステップS32に移行し、TYの値とステップS21で設定されたTYMAXの値とを比較する。TYの値がTYMAXの値よりも小さい場合(NOの場合)は、ステップS29に戻って上記の処理を繰り返す。
【0059】
このようにして、試料22をY軸周りに−TYMAXから+TYMAXまで角度変化量Stepづつ順次回転させて特徴点間の距離d(TY)を取得する。その後、ステップS33に移行し、d(TX)の場合と同様にして、特徴点間の距離d(TY)の値が極小となる角度TY0を算出する。
【0060】
角度TX0,TY0を求めた後、試料22を保持する試料ホルダー33の先端をX軸周りに角度TX0、Y軸周りに角度TY0だけ傾けると、試料22の観察面(薄膜部22a)が電子線の光軸に対し垂直に配置される。
【0061】
本実施形態によれば、画像処理部42によりTEM像を画像処理してマーカー23を自動的に認識し、試料22の向きを検出する。そして、更にマーカー23(構造体23a〜23d)の状態に基づいて試料22の観察面(薄膜部22a)が電子線の光軸に対し垂直になるように試料22の傾斜を自動的に修正する。これにより、例えば測長部22cの長さを良好な精度で測定することができる。また、短時間で高精度に試料22の角度調整ができ、試料22のコンタミネーションや構造変化が回避される。
【0062】
なお、上記実施形態では−TXMAXから+TXMAXまで1Stepづつ角度を増加させて各角度毎に特徴点間の距離d(TX)を算出している。しかし、例えば−TXMAX側から1Stepづつ角度を増加して特徴点間の距離d(TX)がしきい値Sよりも小さくなる角度TX1を検出し、+TXMAX側から1Stepづつ角度を減少してd(TX)がしきい値Sよりも小さくなる角度TX2を検出して、それらのTX1,TX2の中間の角度を特徴点間の距離d(TX)が最も小さくなる角度TX0としてもよい。Y軸周りの角度TY0を求める場合も同様である。
【0063】
(変形例)
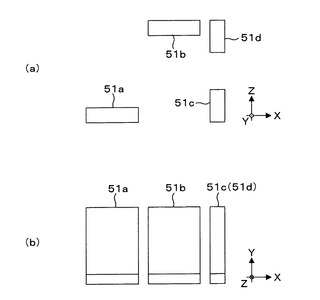
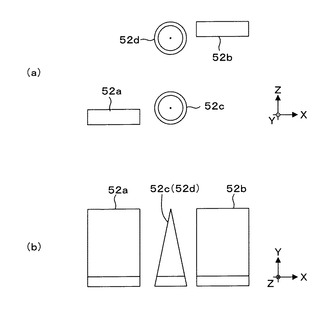
図24(a),(b)はマーカーの変形例1を示す平面図及び側面図、図25(a),(b)はマーカーの変形例2を示す平面図及び側面図である。
【0064】
図24(a),(b)に示すマーカーは、直方体形状の4つの構造体51a,51b,51c,51dからなる。構造体51a,51bをX軸方向に延びる直線に沿って段違いに配置しており、それらの構造体51a,51bの右側に構造体51c,51dがZ軸方向に延びる直線上に所定の間隔をおいて配置している。
【0065】
図25(a),(b)に示すマーカーは、直方体形状の2つの構造体52a,52dと、円錐形状の2つの構造体52b,52cとからなる構造体52a,52dはX軸方向に延びる直線に沿って段違いに配置されており、構造体52c,52dはZ軸方向に延びる直線上に所定の間隔をおいて配置している。
【0066】
実施形態で使用したマーカーに替えてこれらの変形例1,2のマーカーを使用しても、同様の効果を得ることができる。
【0067】
また、実施形態ではTEM観察用試料について説明したが、実施形態で開示した技術を走査電子顕微鏡(SEM)又は走査透過電子顕微鏡(STEM)による観察に応用することもできる。
【図面の簡単な説明】
【0068】
【図1】図1は、FIBリフトアウト法によるTEM観察試料の作製方法の一例を示す模式図(その1)である。
【図2】図2は、FIBリフトアウト法によるTEM観察試料の作製方法の一例を示す模式図(その2)である。
【図3】図3は、FIBリフトアウト法によるTEM観察試料の作製方法の一例を示す模式図(その3)である。
【図4】図4は、湾曲したカーボン支持膜の上に載置された試料を示す模式図である。
【図5】図5(a)は電子線の光軸に対し観察面が垂直に配置された試料を示す断面図、図5(b)は同じくその顕微鏡観察像を示す模式図である。
【図6】図6(a)は電子線の光軸に対し観察面が斜めに配置された試料を示す断面図、図6(b)は同じくその顕微鏡観察像を示す模式図である。
【図7】電子顕微鏡の試料ホルダーの例を示す斜視図である。
【図8】図8(a)は実施形態に係る顕微鏡観察用試料を示す上面図、図8(b)は顕微鏡観察用試料の側面図である。
【図9】図9(a)はマーカー(構造体)の配列を示す上面図、図9(b)はマーカーの側面図である。
【図10】図10はマーカー(構造体)の配列を示す斜視図である。
【図11】図11は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その1)である。
【図12】図12は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その2)である。
【図13】図13は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その3)である。
【図14】図14は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その4)である。
【図15】図15は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その5)である。
【図16】図16は、透過電子顕微鏡(TEM)の構成を示すブロック図である。
【図17】図17は、実施形態に係る顕微鏡用試料の角度調整方法の概要を示す図(その1)である。
【図18】図18は、実施形態に係る顕微鏡用試料の角度調整方法の概要を示す図(その2)である。
【図19】図19は、実施形態に係る顕微鏡用試料の角度調整方法の概要を示す図(その3)である。
【図20】図20は、実施例に係る顕微鏡観察用試料の角度自動調整方法の一例を示すフローチャートである。
【図21】図21は、図20中のステップS15の角度調整処理工程をより詳細に示すフローチャートである。
【図22】図22は、図21中のステップS24及びステップS30の距離dの算出処理工程をより詳細に示すフローチャートである。
【図23】図23は、角度TX0の算出方法を説明するための図である。
【図24】図24(a),(b)はマーカーの変形例1を示す平面図及び側面図である。
【図25】図25(a),(b)はマーカーの変形例2を示す平面図及び側面図である。
【符号の説明】
【0069】
11…基材、12…試料、12a…薄膜部、12b…補強部、12c…測長部、13…マニピュレータ、14…メッシュグリッド、14a…支持膜、15…試料ホルダー、20…基材、22…顕微鏡観察用試料、22a…薄膜部、22b…補強部、22c…測長部、23…マーカー、23a〜23d…構造体、24a…下層、24b…上層、30…電子顕微鏡本体、31…電子銃、32…照射系レンズ群、33…試料ホルダー、34…結像系レンズ群、35…撮像部、41…制御部、42…画像処理部、51a〜51d…構造体、52a〜52d…構造体。
【技術分野】
【0001】
本発明は、透過電子顕微鏡及び走査電子顕微鏡等に用いる顕微鏡用試料、その作製方法及び顕微鏡観察方法に関する。
【背景技術】
【0002】
近年、コンピュータ技術の発展により、集束イオンビーム(Focused Ion Beam:以下、FIBともいう)加工装置の自動加工や、透過電子顕微鏡(Transmission electron microscope:以下、TEMともいう)の自動観察が可能となった。
【0003】
TEM観察用試料の作製方法の一つにFIBリフトアウト法がある。FIBリフトアウト法では、TEM観察しようとする部分をFIB加工装置により薄片化し、マニピュレータを用いて薄片化した試料を取り出す。そして、この試料をカーボン支持膜付きメッシュグリッドに載せてTEM観察する。
【0004】
FIBリフトアウト法では、メッシュグリッドに多数の試料を載せることができるため、多数の試料を連続的にTEM観察できるという利点がある。また、TEM観察用試料を短時間で作製できるという利点もある。
【特許文献1】特開平6−267482号公報
【特許文献2】特許第4016981号公報
【特許文献3】特開2005−34547号公報
【非特許文献1】薮内康文 半導体デバイス観察へのFIBの適用:電子顕微鏡, vol.37, 159-162, 2002
【発明の開示】
【発明が解決しようとする課題】
【0005】
TEM観察において、メッシュグリッドに載置された試料の観察面が光軸(試料に照射される電子線の中心軸)に対し傾斜していると、例えば測長精度が低下するという問題が発生する。そのため、測長をともなうTEM観察の場合などでは、試料の傾斜角度を調整することが重要である。
【0006】
例えば、オペレータ(観察者)がTEM観察しながら試料の傾斜角度を調整することが考えられる。しかし、傾斜角度の調整には熟練を要するという問題がある。また、傾斜角度の調整に時間がかかってしまうと、試料が長時間電子線に曝されることになるため、試料にコンタミネーション(汚染)が発生したり、試料の構造が変化してしまうなどの問題が発生する。
【0007】
以上から、試料の傾斜角度を短時間で高精度に調整できる顕微鏡用試料、その作製方法及び顕微鏡観察方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
一観点によれば、観察面と、前記観察面に交差する面上に形成されたマーカーとを有し、前記マーカーが、前記観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、前記第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有する顕微鏡用試料が提供される。
【発明の効果】
【0009】
上記一観点によれば、試料の観察面に交差する面にマーカーが設けられている。このマーカーは、試料の観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有している。これらの構造体を顕微鏡で観察した場合、試料の傾斜角度(光軸に対する傾斜角度)に応じて第1〜第4の構造体の特定の部分(特定の辺など:以下、「特徴点」ともいう)間の間隔が変化する。逆に、第1〜第4の構造体の特定の部分間の間隔がわかれば、試料の観察面と光軸との角度を知ることができる。
【0010】
従って、第1〜第4の構造体の特定の部分間の間隔を調べ、その結果に基づいて試料を傾斜させることにより、試料の観察面を光軸に対し垂直に配置することができる。その結果、例えば測長部の長さを良好な精度で測定することができる。
【発明を実施するための最良の形態】
【0011】
以下、実施形態について説明する前に、実施形態の理解を容易にするための予備的事項について説明する。
【0012】
図1〜図3はFIBリフトアウト法によるTEM観察試料の作製方法の一例を示す模式図である。
【0013】
まず、図1に示すように、FIB加工装置を使用してウエハなどの基材11をFIB加工し、TEM観察する試料12を切り出す。ここでは、試料12は、TEM観察する部分を含む薄膜部12aと、薄膜部12aの両端にそれぞれ接続する一対の肉厚の補強部12bとを有するものとする。
【0014】
次に、図2に示すように、FIB加工により基材11から切り出した試料12をマニピュレータ13を用いて取り出す。そして、図3に示すように、カーボン支持膜付きメッシュグリッド14の上に試料12を載置する。メッシュグリッド14上に複数の試料12を載置する場合は、図3に示すように各試料12をそれぞれ異なるグリッド(ます目)の上に載置する。次いで、このメッシュグリッド14をTEMの試料ホルダーに取り付け、TEM観察を行う。
【0015】
ところで、メッシュグリッド14の上には極めて薄いカーボン支持膜14aが貼り付けられている。このカーボン支持膜14aは平らであるとは限らず、図4に模式的に示すように湾曲していることもある。
【0016】
例えば図5(a)の断面図に示すように、測長部12cを有する試料12に対し電子線が垂直に透過する場合は、図5(b)の平面図に示すようにTEM観察像から測長部12cの長さLを良好な精度で測定することができる。しかし、例えば図6(a)の断面図に示すように、測長部12cを有する試料12に対し電子線が斜めに透過する場合は、図6(b)の平面図に示すようにTEM観察像から測長部12cのエッジを正確に判定することが難しく、測長部12cの長さを精度よく測定することが困難になる。
【0017】
図7に示すように、一般的にTEMの試料ホルダー15は、相互に直交するx軸及びy軸を中心として試料12を回転できるようになっており、試料12の傾きを調整することができる。しかし、TEM観察しながらオペレータ(観察者)が試料12の傾きを調整することは困難であり、熟練を要するとともに時間がかかるという難点がある。
【0018】
図8(a)は実施形態に係る顕微鏡観察用試料22を示す上面図、図8(b)は顕微鏡観察用試料22を図8(a)中に矢印Aで示す方向から見た側面図である。また、図9(a)はマーカー23の配列を示す上面図、図9(b)はマーカー23を図8(a)中に矢印Aで示す方向から見た側面図である。更に、図10はマーカー23の配列を示す斜視図である。
【0019】
図8(a),(b)に示すように、試料22は、TEM観察する部分(測長部22c)を含む薄膜部22aと、薄膜部22aの両側にそれぞれ接続する一対の肉厚の補強部22bとを有している。
【0020】
一方の側(図8(a),(b)では左側)の補強部22bの側面には、マーカー23が設けられている。なお、本実施形態では、マーカー23が設けられた補強部22bの側面と、薄膜部22aの表面を含む平面とが直交するものとしている。
【0021】
マーカー23は、補強部22bの側面から垂直方向に突出する4つの直方体形状の構造体23a,23b,23c,23dからなる。構造体23a(第1の構造体)及び構造体23b(第3の構造体)は“L”字状に配置され、構造体23c(第4の構造体)及び構造体23d(第2の構造体)は逆“L”字状に配置されている。また、構造体23b,23cは薄膜部22aの表面を含む平面に直交する方向(図8(b)中のZ軸方向)に延びる直線上に所定の間隔をおいて配置され、構造体23a,23dは薄膜部22aの表面に平行な方向(図8(b)中のX軸方向)に延びる直線に沿って段違いに配置されている。
【0022】
なお、本実施体では構造体23a〜23dをそれぞれ分離している。しかし、これらの構造体23a〜23dは必ずしも分離している必要はなく、例えば構造体23a,23bを一体的に形成し、構造体23c,23dを一体的に形成してもよい。
【0023】
これらの構造体23a〜23dは単一の材料により形成されていてもよく、密度が相互に異なる2つの層を積層した構造を有していてもよい。本実施形態では、図9(a)及び図10に示すように、構造体23a〜23dがいずれも、密度が低い材料からなる下層24aと、密度が高い材料からなる上層24bとの2層構造を有するものとする。例えば、下層24aをカーボン又はシリコン酸化物により形成し、上層24bをタングステン又は白金等の金属により形成する。このように構造体23a〜23dを密度が相互に異なる複数の層を積層した構造とするのは、TEM像に下層24aと上層24bとの界面が明瞭に写るようにするためである。これにより、後述するように試料22のX軸周りの回転(傾き)を容易に確認することができる。下層24aを密度が高い材料により形成し、上層24bを密度が低い材料により形成してもよい。
【0024】
図9(a),(b)において、構造体23a〜23dの幅W1はいずれも100〜200nmである。また、構造体23a,23dの長さL1は400〜800nm、構造体23b,23cの長さL2は250〜500nmである。更に、構造体23aと構造体23bとの間隔S1は50〜150nmであり、構造体23cと構造体23dとの間隔S1も50〜150nmである。更にまた、構造体23bと構造体23cとの間隔S2は250〜500nmである。また、下層24aの厚さt1は0.2〜1μmであり、上層24bの厚さt2は0.5〜2μmである。但し、これらの構造体23a〜23dの大きさ、厚さ及び間隔は、試料の大きさ及び顕微鏡の倍率等に応じて適宜設定すればよい。
【0025】
図11〜図15は、本実施形態に係る電子顕微鏡用試料の作製方法を工程順に示す図である。なお、図11は顕微鏡用試料の全体を示す平面図であり、図12(a),図13(a),図14(a),図15(a)は顕微鏡試料の補強部及びその上に形成されるマーカーを拡大して示す平面図、図12(b),図13(b),図14(b),図15(b)は同じくその補強部及びマーカーの断面図である。
【0026】
まず、図11に示すように、FIB加工装置を使用し、FIBエッチング法によりウエハ等の基材20を加工して試料22を得る。試料22は、薄膜部22aと、薄膜部22aの両側にそれぞれ接続する一対の補強部22bとを有するものとする。但し、後述するように、後工程で試料22を更に加工して最終的な形状(観察時の形状)とする。この図11に示す工程では、試料22を最終的な形状とするのではなく、薄膜部22a及び補強部22bの厚さを十分厚くしておく。また、試料22は基材20と切り離さないでおく。
【0027】
次に、図12(a),(b)に示すように、FIB加工装置を使用し、FIBデポジッション法により一方の補強部22bの所定の領域(例えば3μm×3μmの領域)上にカーボン又はシリコン酸化物を堆積して、厚さが0.2〜1μmの下層24aを形成する。
【0028】
次に、図13(a),(b)に示すように、下層24aの上に、FIBデポジッション法によりタングステン又は白金を堆積して、厚さが0.5〜2μmの上層24bを形成する。
【0029】
次に、図14(a),図14(b)に示すように、FIB加工装置を使用し、FIBエッチング法により、下層24a及び上層24bを上から見たときにクランク状となるようにパターニングする。このとき、クランクの両端部の幅W1は、構造体23a,23dの幅W1に合わせる。また、クランクの中央部の幅W3は、構造体23b,23cの幅W1よりも2S1分だけ太くする(図9参照)。
【0030】
次いで、図15(a),(b)に示すように、FIBエッチング法により、クランク状にパターニングされた上層24b及び下層24aを更にパターニングして、構造体23a〜23dを形成する。
【0031】
このようにしてマーカー23(構造体23a〜23d)を形成した後、FIB加工装置により試料22を所望の形状(観察時の形状)に加工し、更に試料22と基材20とを切り離す。そして、マニピュレータにより試料22を取り出し、メッシュグリッドの上に載置する(図2,図3参照)。
【0032】
なお、構造体23b,23cの側面にFIBエッチングにより発生したごみ(エッチングにより基材20から剥離した元素)が付着すると、TEM観察時に構造体23b,23cの幅が見掛け上異なってしまい、構造体23a〜23dの重なりが不明瞭になって試料22の角度調整が不正確になることが考えられる。このため、上述したように、構造体23b,23cは試料作製工程の最後のほうの工程で形成することが好ましい。
【0033】
図16は、透過電子顕微鏡(TEM)の構成を示すブロック図である。この図16に示すように、本実施形態で使用する透過電子顕微鏡は、電子顕微鏡本体30と、画像処理部42を備えた制御部(コンピュータ)41とを有している。電子顕微鏡本体30には、電子銃31と、複数の収束レンズを備えた照射系レンズ群32と、試料ホルダー33と、対物レンズ及び投射レンズを備えた結像系レンズ群34と、撮像素子を備えた撮像部35とを有している。
【0034】
TEM観察時には、電子銃31から電子線が出射される。この電子線は、照射系レンズ群32により収束され、試料ホルダー33に搭載された試料22(図8(a),(b)参照)に照射される。そして、試料22を透過した電子線は、結像系レンズ群34を介して撮像部35に到達する。撮像部35は、到達した電子線に応じた電気信号を出力する。
【0035】
画像処理部42は、1又は複数画像分の画像メモリを有している。この画像処理部42は、撮像部35から出力された電気信号に対し所定の信号処理を施して画像メモリにTEM像を展開する。そして、展開されたTEM像を画像処理して、マーカー23の各構造体23a〜23dのエッジを抽出する。制御部41は、画像処理部42による画像処理の結果に基づいて試料22の傾斜状態を判定する。そして、その傾斜状態の判定結果に応じて試料ホルダー33を制御し、試料22の観察面に対し電子線の光軸が垂直になるように試料22の傾きを調整する。
【0036】
図17〜図19は、本実施形態に係る顕微鏡用試料の角度調整方法の概要を示す図である。
【0037】
試料22がTEMの電子線の光軸に対し垂直に配置されている場合、TEM像では、図17に示すように構造体23b,23cが完全に重なって観察される。また、構造体23a〜23dは横方向に並んで観察され、これらの構造体23a〜23dの間に段差はない。このようにTEM像が観察される場合は、試料22(観察面)に対し電子線が垂直に照射される状態(図5(a),(b)参照)であり、試料22の測長部22cの長さを高精度に測定することができる。
【0038】
試料22がY軸周りに回転している場合、すなわち試料22が図8(a),(b)に示すY軸に平行な直線を中心に回転(傾斜)している場合は、図18(a)に示すように、マーカー23(構造体23a〜23d)が光軸に対し斜めになる。この場合、TEM像では、図18(b)に示すように、構造体23bと構造体23cとが横方向にずれて観察される。
【0039】
一方、試料22がX軸周りに回転している場合、すなわち試料22が図8(a),(b)に示すX軸に平行な直線を中心に回転(傾斜)している場合、TEM像では、図19に示すように、構造体23a,23b及び構造体23c,23dの上層24bと下層24bとの界面の位置(又は、構造体23a,23b及び構造体23c,23dの底面若しくは上面の位置)が高さ方向にずれて観察される。
【0040】
すなわち、試料22の観察面(この例では薄膜部22a)が電子線の光軸に対し斜めに配置されている場合は、TEM像の観察により傾きの方向を容易に知ることができる。図17に示すように構造体23b,23cが完全に重なり、構造体23a〜23d間に段差が発生しないように試料22の傾きを調整すれば、試料22の観察面が電子線の光軸に対し垂直に配置されたことになる。これにより、例えば試料22の測長部22cの長さを精度よく測定することができる。また、次に説明するように、制御部41により試料ホルダー33の角度調整機構を制御して試料22の傾きを自動的に調整することも可能である。
【0041】
図20は、実施形態に係る顕微鏡観察用試料の角度自動調整方法の一例を示すフローチャートである。また、図21は、図20中のステップS15の角度調整処理工程をより詳細に示すフローチャート、図22は図21中のステップS24及びステップS30の距離dの算出処理工程をより詳細に示すフローチャートである。なお、ここでは、電子顕微鏡本体30の試料ホルダー33には、図8(a),(b)に示す試料22を載置したメッシュグリッドが搭載されているものとする。また、制御部41内には、以下に示す処理を実行するためのプログラムが読み込まれているものとする。
【0042】
まず、ステップS11において、制御部41は電子顕微鏡本体30の照射レンズ系32及び結像レンズ系34を制御して電子顕微鏡を低倍率に設定し、電子銃31及び撮像部35を駆動して画像処理部42により試料22のTEM像を取得する。その後、ステップS12に移行し、画像処理部42は画像処理を行ってTEM像から試料22及びマーカー23を特定する。
【0043】
次に、ステップS13に移行し、制御部41は、マーカー23の位置に基づいて試料22の向き(X軸及びY軸)を決定する。後述するように、試料ホルダー33の角度調整機構を制御して試料22をX軸周り又はY軸周りに回転(傾斜)させるためには、試料22の向き(X軸及びY軸)を決定しておくことが重要である。
【0044】
次に、ステップS14に移行し、制御部41は、電子顕微鏡観察を行ってマーカー23の部分のTEM像を得る。そして、ステップS15に移行し、試料22のX軸周りの角度調整及びY軸周りの角度調整を行う。以下、図21を参照して、ステップS15の角度調整処理工程の詳細を説明する。
【0045】
まず、ステップS21において、オペレータにより、X軸周りの角度変更範囲の最大値TXMAX、Y軸周りの角度変更範囲の最大値TYMAX、角度変化量Step及びしきい値Sを設定する。但し、これらの値は、予め制御部41内に設定されていてもよい。
【0046】
次に、ステップS22において、制御部41は、変数TXに−TXMAXを代入する。すなわち、−TXMAXから+TXMAXまでの範囲をX軸周りの角度変更範囲とする。
【0047】
次に、ステップS23に移行し、制御部41は電子顕微鏡本体30を制御して、マーカー23のTEM像を取得する。そして、ステップS24において、X軸周りの回転(傾斜)における試料22の特定点間の距離d(TX)を算出する。ここで、図22を参照して、X軸周りの回転における試料22の特定点間の距離d(TX)の算出方法を説明する。
【0048】
まず、ステップS41において、画像処理部42はTEM像を画像処理(一次微分又は二次微分)し、構造体23a〜23dのエッジを抽出する。その後、ステップS42に移行し、画像処理部42は、更に画像処理(ハフ変換)を行って、構造体23a〜23dのエッジから直線部分を抽出する。
【0049】
試料22がX軸周りに回転(傾斜)しているときは、図19に示すように、構造体23a,23bの下層24aと上層24bとの界面の位置がずれて観察される。従って、制御部41は、ステップS42で各構造体23a〜23dの下層24aと上層24bとの界面に対応する直線を抽出し、それらの直線のずれ量を算出して、特徴点間の距離d(TX)とする。なお、構造体23a〜23dの底面又は上面に対応する直線を抽出し、それらの直線のずれ量を特徴点間の距離d(TX)としてもよい。
【0050】
このようにして試料22がX軸周りの回転(傾斜)における特徴点間の距離d(TX)を算出した後、図21のステップS25に移行する。
【0051】
ステップS25では、変数TXの値に角度変化量Stepを加算した値を新たに変数TXの値とする(TX=TX+Step)。その後、ステップS26に移行し、TXの値とステップS21で設定されたTXMAXの値とを比較する。TXの値がTXMAXの値よりも小さい場合(NOの場合)は、ステップS23に戻って上記の処理を繰り返す。
【0052】
このようにして、試料22をX軸周りに−TXMAXから+TXMAXまで角度変化量Stepづつ順次回転させて特徴点間の距離d(TX)を取得すると、ステップS26からステップS27に移行する。
【0053】
ステップS27では、試料22のX軸周りの傾斜が最も小さくなる角度TX0を算出する。以下、図23を参照して、角度TX0の算出方法を説明する。
【0054】
図23は、横軸にX軸周りの角度TXをとり、縦軸に特徴点間の距離d(TX)をとって、両者の関係を示す図である。ステップS23〜ステップS26を繰り返すことにより、図23に示すような曲線が得られる。この図23に示すように、角度TXの増加にともなってd(TX)の値は徐々に減少し、ある角度を超えると角度TXの増加とともにd(TX)の値も徐々に増加する。
【0055】
特徴点間の距離d(TX)の値が極小となる角度が試料22のX軸周りの傾きが最も小さい角度ということができる。但し、d(TX)の値が小さいほど誤差が大きくなると考えられるので、本実施形態ではd(TX)の値がしきい値S(図23の例ではS=2)よりも小さくなる角度TXの最小値(TX1)と最大値(TX2)とを抽出し、それらの平均値を試料22のX軸周りの傾きが最も小さくなる角度TX0としている。図23に示す例では、TX1=5、TX2=8であり、TX0は6.5となる。
【0056】
このようにして試料22のX軸周りの傾きが最も小さくなる角度TX0を算出した後、ステップS27からステップS28に移行する。ステップS28において、制御部41は変数TYに−TYMAXを代入する。すなわち、−TYMAXから+TYMAXまでの範囲をY軸周りの角度変更範囲とする。
【0057】
次に、ステップS29に移行し、制御部41は電子顕微鏡本体30を制御して、マーカー23のTEM像を取得する。そして、ステップS30において、Y軸周りの回転(傾斜)における試料22の特定点間の距離d(TY)を算出する。特定点間の距離d(TY)の算出方法は、基本的に図21に示す特定点間の距離d(TX)の算出方法と同様であるので、ここでは説明を省略する。
【0058】
次に、ステップS31に移行し、変数TYの値に角度変化量Stepを加算した値を新たに変数TYの値とする(TY=TY+Step)。その後、ステップS32に移行し、TYの値とステップS21で設定されたTYMAXの値とを比較する。TYの値がTYMAXの値よりも小さい場合(NOの場合)は、ステップS29に戻って上記の処理を繰り返す。
【0059】
このようにして、試料22をY軸周りに−TYMAXから+TYMAXまで角度変化量Stepづつ順次回転させて特徴点間の距離d(TY)を取得する。その後、ステップS33に移行し、d(TX)の場合と同様にして、特徴点間の距離d(TY)の値が極小となる角度TY0を算出する。
【0060】
角度TX0,TY0を求めた後、試料22を保持する試料ホルダー33の先端をX軸周りに角度TX0、Y軸周りに角度TY0だけ傾けると、試料22の観察面(薄膜部22a)が電子線の光軸に対し垂直に配置される。
【0061】
本実施形態によれば、画像処理部42によりTEM像を画像処理してマーカー23を自動的に認識し、試料22の向きを検出する。そして、更にマーカー23(構造体23a〜23d)の状態に基づいて試料22の観察面(薄膜部22a)が電子線の光軸に対し垂直になるように試料22の傾斜を自動的に修正する。これにより、例えば測長部22cの長さを良好な精度で測定することができる。また、短時間で高精度に試料22の角度調整ができ、試料22のコンタミネーションや構造変化が回避される。
【0062】
なお、上記実施形態では−TXMAXから+TXMAXまで1Stepづつ角度を増加させて各角度毎に特徴点間の距離d(TX)を算出している。しかし、例えば−TXMAX側から1Stepづつ角度を増加して特徴点間の距離d(TX)がしきい値Sよりも小さくなる角度TX1を検出し、+TXMAX側から1Stepづつ角度を減少してd(TX)がしきい値Sよりも小さくなる角度TX2を検出して、それらのTX1,TX2の中間の角度を特徴点間の距離d(TX)が最も小さくなる角度TX0としてもよい。Y軸周りの角度TY0を求める場合も同様である。
【0063】
(変形例)
図24(a),(b)はマーカーの変形例1を示す平面図及び側面図、図25(a),(b)はマーカーの変形例2を示す平面図及び側面図である。
【0064】
図24(a),(b)に示すマーカーは、直方体形状の4つの構造体51a,51b,51c,51dからなる。構造体51a,51bをX軸方向に延びる直線に沿って段違いに配置しており、それらの構造体51a,51bの右側に構造体51c,51dがZ軸方向に延びる直線上に所定の間隔をおいて配置している。
【0065】
図25(a),(b)に示すマーカーは、直方体形状の2つの構造体52a,52dと、円錐形状の2つの構造体52b,52cとからなる構造体52a,52dはX軸方向に延びる直線に沿って段違いに配置されており、構造体52c,52dはZ軸方向に延びる直線上に所定の間隔をおいて配置している。
【0066】
実施形態で使用したマーカーに替えてこれらの変形例1,2のマーカーを使用しても、同様の効果を得ることができる。
【0067】
また、実施形態ではTEM観察用試料について説明したが、実施形態で開示した技術を走査電子顕微鏡(SEM)又は走査透過電子顕微鏡(STEM)による観察に応用することもできる。
【図面の簡単な説明】
【0068】
【図1】図1は、FIBリフトアウト法によるTEM観察試料の作製方法の一例を示す模式図(その1)である。
【図2】図2は、FIBリフトアウト法によるTEM観察試料の作製方法の一例を示す模式図(その2)である。
【図3】図3は、FIBリフトアウト法によるTEM観察試料の作製方法の一例を示す模式図(その3)である。
【図4】図4は、湾曲したカーボン支持膜の上に載置された試料を示す模式図である。
【図5】図5(a)は電子線の光軸に対し観察面が垂直に配置された試料を示す断面図、図5(b)は同じくその顕微鏡観察像を示す模式図である。
【図6】図6(a)は電子線の光軸に対し観察面が斜めに配置された試料を示す断面図、図6(b)は同じくその顕微鏡観察像を示す模式図である。
【図7】電子顕微鏡の試料ホルダーの例を示す斜視図である。
【図8】図8(a)は実施形態に係る顕微鏡観察用試料を示す上面図、図8(b)は顕微鏡観察用試料の側面図である。
【図9】図9(a)はマーカー(構造体)の配列を示す上面図、図9(b)はマーカーの側面図である。
【図10】図10はマーカー(構造体)の配列を示す斜視図である。
【図11】図11は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その1)である。
【図12】図12は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その2)である。
【図13】図13は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その3)である。
【図14】図14は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その4)である。
【図15】図15は、実施形態に係る電子顕微鏡用試料の作製方法を示す図(その5)である。
【図16】図16は、透過電子顕微鏡(TEM)の構成を示すブロック図である。
【図17】図17は、実施形態に係る顕微鏡用試料の角度調整方法の概要を示す図(その1)である。
【図18】図18は、実施形態に係る顕微鏡用試料の角度調整方法の概要を示す図(その2)である。
【図19】図19は、実施形態に係る顕微鏡用試料の角度調整方法の概要を示す図(その3)である。
【図20】図20は、実施例に係る顕微鏡観察用試料の角度自動調整方法の一例を示すフローチャートである。
【図21】図21は、図20中のステップS15の角度調整処理工程をより詳細に示すフローチャートである。
【図22】図22は、図21中のステップS24及びステップS30の距離dの算出処理工程をより詳細に示すフローチャートである。
【図23】図23は、角度TX0の算出方法を説明するための図である。
【図24】図24(a),(b)はマーカーの変形例1を示す平面図及び側面図である。
【図25】図25(a),(b)はマーカーの変形例2を示す平面図及び側面図である。
【符号の説明】
【0069】
11…基材、12…試料、12a…薄膜部、12b…補強部、12c…測長部、13…マニピュレータ、14…メッシュグリッド、14a…支持膜、15…試料ホルダー、20…基材、22…顕微鏡観察用試料、22a…薄膜部、22b…補強部、22c…測長部、23…マーカー、23a〜23d…構造体、24a…下層、24b…上層、30…電子顕微鏡本体、31…電子銃、32…照射系レンズ群、33…試料ホルダー、34…結像系レンズ群、35…撮像部、41…制御部、42…画像処理部、51a〜51d…構造体、52a〜52d…構造体。
【特許請求の範囲】
【請求項1】
観察面と、
前記観察面に交差する面上に形成されたマーカーとを有し、
前記マーカーが、前記観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、
前記第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有することを特徴とする顕微鏡用試料。
【請求項2】
基材の顕微鏡用試料となる領域の上に膜を形成する工程と、
前記膜をパターニングしてマーカーを形成する工程とを有し、
前記マーカーが、観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、
前記第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有することを特徴とする顕微鏡用試料の作製方法。
【請求項3】
試料の側面に、前記試料の観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、前記第1の方向に直交する第2の方向に延びる直線上に配置した第3及び第4の構造体とを有するマーカーを形成する工程と、
前記マーカーを備えた前記試料を顕微鏡の試料ホルダーに取り付ける工程と、
制御部により前記試料ホルダーを制御して光軸に対する前記試料の傾斜角度を順次変更し、前記マーカーの観察像を画像処理部により画像処理して、前記第1乃至第4の構造体の特徴点間の距離を角度毎に検出する工程と、
前記角度毎の前記特徴点間の距離の検出結果に基づき、前記試料の観察面が光軸に対し垂直となるように前記制御部が前記試料ホルダーを制御する工程と
を有することを特徴とする顕微鏡観察方法。
【請求項4】
前記第1及び第3の構造体を“L”字状に配置し、前記第2及び第4の構造体を逆“L”字状に配置することを特徴とする請求項3に記載の顕微鏡観察方法。
【請求項5】
観察面と、前記観察面に交差する面上に形成されたマーカーとを備え、前記マーカーが、前記観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、前記第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有する試料が取り付けられた試料ホルダーを制御する顕微鏡観察用コンピュータに読み込まれるプログラムであって、
前記試料ホルダーを制御して前記試料を傾斜させる第1のステップと、
顕微鏡に設けられた撮像部を介して前記マーカーの観察像を得る第2のステップと、
前記観察像を画像処理して前記マーカーの特徴点間の間隔を求める第3のステップと、
前記第1乃至第3のステップを繰り返して得られる前記特徴点間の間隔と前記試料の傾斜角度との関係から前記特徴点間の距離が最も小さくなる角度を求める第4のステップと
を前記顕微鏡観察用コンピュータに実行させるプログラム。
【請求項1】
観察面と、
前記観察面に交差する面上に形成されたマーカーとを有し、
前記マーカーが、前記観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、
前記第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有することを特徴とする顕微鏡用試料。
【請求項2】
基材の顕微鏡用試料となる領域の上に膜を形成する工程と、
前記膜をパターニングしてマーカーを形成する工程とを有し、
前記マーカーが、観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、
前記第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有することを特徴とする顕微鏡用試料の作製方法。
【請求項3】
試料の側面に、前記試料の観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、前記第1の方向に直交する第2の方向に延びる直線上に配置した第3及び第4の構造体とを有するマーカーを形成する工程と、
前記マーカーを備えた前記試料を顕微鏡の試料ホルダーに取り付ける工程と、
制御部により前記試料ホルダーを制御して光軸に対する前記試料の傾斜角度を順次変更し、前記マーカーの観察像を画像処理部により画像処理して、前記第1乃至第4の構造体の特徴点間の距離を角度毎に検出する工程と、
前記角度毎の前記特徴点間の距離の検出結果に基づき、前記試料の観察面が光軸に対し垂直となるように前記制御部が前記試料ホルダーを制御する工程と
を有することを特徴とする顕微鏡観察方法。
【請求項4】
前記第1及び第3の構造体を“L”字状に配置し、前記第2及び第4の構造体を逆“L”字状に配置することを特徴とする請求項3に記載の顕微鏡観察方法。
【請求項5】
観察面と、前記観察面に交差する面上に形成されたマーカーとを備え、前記マーカーが、前記観察面に平行な第1の方向に延びる直線に沿って段違いに配置された第1及び第2の構造体と、前記第1の方向に直交する第2の方向に延びる直線上に配列した第3及び第4の構造体とを有する試料が取り付けられた試料ホルダーを制御する顕微鏡観察用コンピュータに読み込まれるプログラムであって、
前記試料ホルダーを制御して前記試料を傾斜させる第1のステップと、
顕微鏡に設けられた撮像部を介して前記マーカーの観察像を得る第2のステップと、
前記観察像を画像処理して前記マーカーの特徴点間の間隔を求める第3のステップと、
前記第1乃至第3のステップを繰り返して得られる前記特徴点間の間隔と前記試料の傾斜角度との関係から前記特徴点間の距離が最も小さくなる角度を求める第4のステップと
を前記顕微鏡観察用コンピュータに実行させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2010−78332(P2010−78332A)
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願番号】特願2008−243654(P2008−243654)
【出願日】平成20年9月24日(2008.9.24)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願日】平成20年9月24日(2008.9.24)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]