
飛しょう体及び飛しょう体誘導システム
【課題】 地上や車両等に設置された誘導管制装置が、複数ある目標を弁別することが困難な状況であっても、複数の飛しょう体は、複数ある目標のそれぞれ異なる目標に向けて誘導される飛しょう体を得る。
【解決手段】 この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で捕捉した目標の位置や速度等の情報を相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、捜索範囲に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えるようにした。
【解決手段】 この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で捕捉した目標の位置や速度等の情報を相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、捜索範囲に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、目標に向けて誘導される飛しょう体に関するものである。詳しくは、複数の飛しょう体の間で目標に関する情報の授受を行い、異なる目標に向けて誘導される飛しょう体に関するものである。
【背景技術】
【0002】
従来の同時多目標誘導方式では、地上、車両、船舶、航空機等に搭載されたレーダ装置と誘導管制装置との間で情報の授受を行い、誘導管制装置が複数の飛しょう体に対して個々の目標情報を与えることで、複数の飛しょう体を複数の目標に向けて誘導している。一例として、地上レーダを介して入力される射撃管制装置により計算された反射波のドップラー周波数を飛しょう体が受信できるように、飛しょう体の局部発振周波数を設定するコミュニケーションリンクを形成した同時多目標誘導方式が示されている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平7−198298号公報(第4頁、第1図)
【発明の開示】
【発明が解決しようとする課題】
【0004】
複数の目標が接近しほぼ同一の速度で進行してくる場合、レーダ装置から得られる目標情報が似ているために、誘導管制装置は複数の目標を弁別することが困難となる。また、目標がレーダ装置の見通し外となる射撃やレーダ装置の精度の問題によりレーダ装置が目標の正確な情報を得られない場合にも、誘導管制装置は複数の目標を弁別することが困難となる。
このような場合、従来の誘導方式では、誘導管制装置は、複数の飛しょう体に対して個々の目標情報を与えることができず、複数の飛しょう体は同一の目標にロックオンして
同一の目標に誘導されるという課題があった。また、目標の弁別が可能であっても目標と飛しょう体の位置関係により、複数の飛しょう体が同一目標にロックオンし同一の目標に誘導されてしまうという課題があった。
【0005】
この発明は係る課題を解決するために成されたものであり、誘導管制装置が複数ある目標の弁別が困難な状況であっても、複数の飛しょう体は各々異なる目標にロックオンし、異なる目標に向けて誘導される飛しょう体を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報を用いて、前記他の飛しょう体が捕捉した目標を前記シーカの捜索範囲に含まない捜索範囲を設定する信号処理部とを備えるようにした。
【発明の効果】
【0007】
この発明に係る飛しょう体によれば、複数の目標が接近している等により、地上等に設置された誘導管制装置が複数ある目標の弁別が困難な場合においても、各々の飛しょう体は異なる目標を捕捉して、それぞれの目標に誘導される。
【発明を実施するための最良の形態】
【0008】
実施の形態1
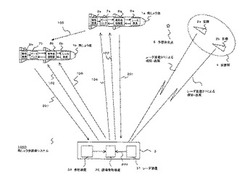
図1は、この発明の実施の形態1による飛しょう体誘導システムの構成を示す図である。この発明の飛しょう体誘導システムは、目標を探知、追尾して目標の位置と速度等の情報である目標位置速度情報200を出力するレーダ装置31と、飛しょう体の誘導を行う誘導管制装置32と、飛しょう体間で相互通信を行う複数の飛しょう体1とを備える。レーダ装置31、飛しょう体の誘導を行う誘導管制装置32は地上、車両、艦船、航空機等に搭載される。ここでは、レーダ装置31と誘導管制装置32と発射装置33とをあわせて発射誘導装置3という。
【0009】
図1において、目標2a、2bは近接しほぼ同一の速度で接近しているものとする。このため、レーダ装置31は目標2a、2bを分離、弁別することができず、複数の目標の群れである目標群4として認識して探知追尾する。発射装置33は誘導管制装置32からの発射指令信号100、101(図示しない)により複数の飛しょう体1を発射する。ここでは2体の飛しょう体1a、1bを発射するものとするが2体以上であってもよい。
【0010】
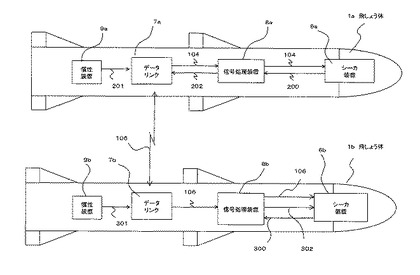
図2は、飛しょう体1の構成を示す図である。飛しょう体1はシーカ装置6、データリンク装置7、信号処理装置8、慣性装置9を備える。飛しょう体1aと飛しょう体1bの構成は同じである。慣性装置9は、飛しょう体1の位置と速度の情報である飛しょう体位置速度情報201をデータリンク7に周期的に出力する。データリンク7は通信設備を備えており、飛しょう体位置速度情報201を周期的に誘導管制装置32に対して送信する。
【0011】
誘導管制装置32は、目標位置速度情報200と飛しょう体位置速度情報201とを用いて飛しょう体1と目標郡4との距離を算出する。飛しょう体1と目標郡4との距離が所定の距離より遠い時点では、誘導管制装置32は目標郡4を誘導対象として、飛しょう体1と目標郡4が会合する会合位置である予想会合点5を、目標位置速度情報200と飛しょう体位置速度情報201を用いて所定の周期で算出する。目標位置速度情報200は、目標群4の位置、速度、進行方向等の目標に関する情報である。
誘導管制装置32は、予想会合点5の情報である予想会合点情報102を逐次、飛しょう中の飛しょう体1aと飛しょう体1bとに対して送信する。
【0012】
実施の形態1では、飛しょう体1aと飛しょう体1bの位置関係は、図1のように、飛しょう体1aが飛しょう体1bよりも先行しているものとする。
【0013】
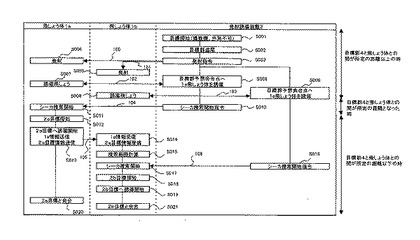
図3は、飛しょう体誘導システムの動作を説明するフローチャートである。飛しょう体1と目標郡4との距離が所定の距離となるまでは、発射誘導装置3は飛しょう体1に対して予想会合点情報102を送信し、飛しょう体1a、1bは予想会合点情報102に基づいて目標郡4に誘導される(ステップS001〜ステップS009)。
【0014】
飛しょう体1と目標郡4との距離が所定の距離となると、誘導管制装置32は先行する飛しょう体1aに対してシーカ検索開始指令104を送信する(S010)。
【0015】
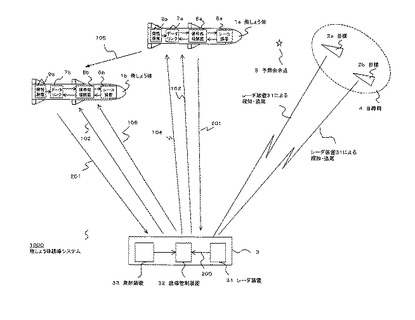
次に、発射誘導装置3がシーカ検索開始指令104を送信した後、飛しょう体1a、1bが目標2を検索する検索範囲を設定する動作を図1〜図5を用いて説明する。
図4は、飛しょう体1a、1bが目標の検索範囲を設定する動作を説明する図である。図5は、飛しょう体1bが目標の検索範囲を設定する動作のフローチャートである。
【0016】
先行する飛しょう体1aのシーカ装置6aは、発射誘導装置3からのシーカ検索開始指令104により動作し、目標2の捜索、追尾を開始する(S011)。
【0017】
シーカ装置6aは、目標郡4の中から目標2を検索する。目標郡4の中で複数の目標が検索された場合は、複数の目標の中で飛しょう体1aに最も近い目標を抽出する。ここでは、抽出された目標を目標2aとする。シーカ装置6aは、目標2aの位置と速度を探知する(S012)。
ここでは、最も近い目標を抽出するとしたが、シーカ装置6aが捜索して、一番最初に探知した目標を抽出するとしてもよい。
飛しょう体6aは、地上等の設けられた誘導管制装置32よりも目標2に近く、また検索しやすい検索方向で目標2を検索することができることから、目標郡4の中から個別の目標2を検索することができる。
【0018】
次にシーカ装置6aは信号処理装置8aに対して、飛しょう体1aを目標2aに向けて誘導するための誘導信号200を出力する。誘導信号200は、目標2aの位置と速度を含む。
【0019】
信号処理部8aは、誘導信号200を用いて飛しょう体1aを誘導する。
【0020】
信号処理部8aは、誘導信号200からロックオンした目標2aの位置と速度の情報を取り出して、目標位置速度情報202をデータリンク7aに出力する。
【0021】
データリンク7aは、信号処理装置8aが出力するロックオンした目標2aの目標位置速度情報202と、慣性装置9aが出力する飛しょう体1aの位置と速度の情報である飛しょう体位置速度情報201とを先行飛しょう体情報105として、後方に位置する飛しょう体1bのデータリンク7bに対して送信する。
【0022】
飛しょう体1bが先行飛しょう体情報105を受信すると(S014)、信号処理装置8bはシーカ装置6bの捜索範囲を算出し、算出した検索範囲302をシーカ装置6bに出力する(S015)。
シーカ装置6bは、シーカの捜索範囲302及び発射誘導装置3からのシーカ検索開始指令106を受信すると目標の検索、追尾を開始する(S017)。
【0023】
ここで、図5を用いて、信号処理装置8bがシーカ6bの捜索範囲を算出する動作について説明する。
【0024】
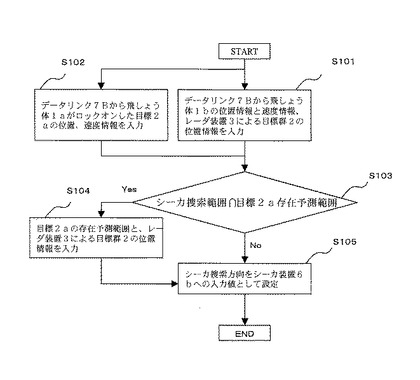
まず、信号処理装置8bは、飛しょう体1bの位置情報と速度情報、レーダ装置3による目標群2の位置情報を入力し、式1により、シーカ捜索方向とシーカ捜索範囲を算出する(ステップS101)。
【0025】
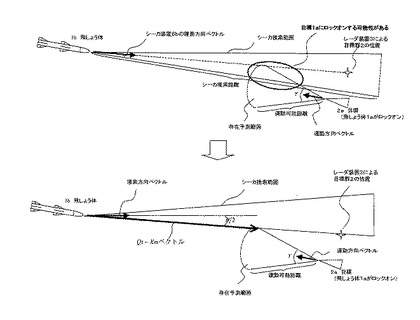
シーカ捜索範囲は、飛しょう体1bのシーカ装置6bを頂点とした底面が球の一部となる円錐で表される。よって、シーカ捜索範囲は、円錐の斜辺であり、球の半径となるシーカ捜索距離mと円錐の頂角となるシーカ捜索角度θ、円錐の軸の方向を示す捜索方向単位ベクトルn(0)によって決定される。ここで、シーカ捜索角度θはシーカ装置の特性により任意に決定できる。
【0026】
【数1】

【0027】
次に、信号処理装置8bは、先行飛しょう体情報105から得られた飛しょう体1aがロックオンした目標2aの位置、速度情報を入力し、式2により、目標2aの存在予測範囲を算出する(S102)。
【0028】
存在予測範囲は、飛しょう体1aのロックオンした目標1aの位置を中心とした底面が球の一部の円錐として表される。よって、存在予想範囲は、円錐の斜辺であり、球の半径となる運動可能距離kと円錐の頂角となる運動可能角度γ、円錐の軸の方向を示す運動方向単位ベクトルjによって決定される。ここで、運動可能角度γは目標2aの特性により任意に決定できる。
【0029】
【数2】
【0030】
次に、信号処理装置8bは、シーカ捜索範囲と目標2aの存在予測範囲を比較する(S103)。
シーカ捜索範囲と目標2aの存在予測範囲とが重複しない場合は、シーカ捜索方向をそのまま、シーカ装置6bへの入力値として設定する。
シーカ捜索範囲と目標2aの存在予測範囲は重複する場合は、目標2aの存在予測範囲とレーダ装置3による目標群4の位置情報を用いて、シーカ捜索範囲を次のように再度算出する。
【0031】
信号処理装置8bは、目標2aの存在予測範囲と、レーダ装置3による目標群2の位置情報を入力し、式3により、目標2aの存在予測範囲と重複しないシーカ捜索方向とシーカ捜索範囲を算出する。
信号処理装置8bは、シーカ捜索方向をシーカ装置6bへの入力値として設定する(S104)。
【0032】
このとき算出されるシーカ捜索範囲は、レーダ装置3による目標群2の位置情報側へと偏る。この場合も、シーカ捜索範囲は、円錐の斜辺であり、球の半径となるシーカ捜索距離mと円錐の頂角となるシーカ捜索角度θ、円錐の軸の方向を示す更新された捜索方向単位ベクトルn(1)によって決定される。ここでは、飛しょう体1b位置、目標2aの存在範囲内で、飛しょう体1bへの最近点、レーダ装置3による目標群2位置の3点で構成される平面において、式3を適用する。
【0033】
【数3】
【0034】
シーカ装置6bは、信号処理部7bにおいて算出されたシーカ捜索範囲内で目標の捜索、追尾を実施する。
【0035】
シーカ装置6bは目標2bを検索すると、目標2bの位置と速度等の目標位置速度情報300を信号処理装置8bへと出力する。
【0036】
信号処理部8bは、シーカ装置6bの出力した目標情報に基づいて飛しょう体1bを誘導する。
【0037】
このように、この発明の飛しょう体は、飛しょう体間で通信を行うデータリンクを備えるようにした。先行する飛しょう体は、ロックオンした目標の位置や速度等の情報をデータリンクにより、後方に位置する飛しょう体に送信するようにした。後方に位置する飛しょう体は、先行する飛しょう体がロックオンした目標の位置や速度等の情報を受信すると、先行する飛しょう体がロックオンした目標がシーカ装置の検索範囲から外れるような検索範囲を設定するようにした。
これにより、誘導管制装置が複数ある目標の弁別が困難な状況であっても、複数の飛しょう体は各々異なる目標にロックオンし、各々異なる目標に向けて誘導されることが可能となる飛しょう体を得ることができる。
【0038】
実施の形態2
実施の形態1では、発射誘導装置3が目標を分離、弁別することができず複数の目標の群れである目標群4として認識した場合において、先行する飛しょう体1aの後方に位置する飛しょう体1bは、既にロックされた目標1aが除外されるように検索範囲を設定するようにした。実施の形態2では、後方に位置する飛しょう体1bは、既にロックされた目標1aが除外されるように検索を開始する検索開始時間を設定するようにした。
【0039】
実施の形態2の飛しょう体誘導システムの構成は実施の形態1と同じである。ここでは図1、図2、図6、図7を用いて、飛しょう体1が検索範囲を設定する動作について説明する。飛しょう体1と目標郡4との距離が所定の距離となるまでは、実施の形態1と同じであるため説明は省略し、飛しょう体1と目標郡4との距離が所定の距離となった時点からの動作について説明する。また、実施の形態1と同じ構成については同一番号を付し、説明を省略する。
【0040】
図6はこの発明の実施の形態2による飛しょう体1a、1bが目標の検索範囲を設定する動作を説明する図である。図7はこの発明の実施の形態1による飛しょう体1bが目標の検索開始時間を設定する動作のフローチャートである。
【0041】
先行する飛しょう体1aは目標2aを探知し、探知した目標2aの位置と速度の情報である位置速度情報400をデータリンク7aを経由して、飛しょう体1bに送信する。
【0042】
飛しょう体1bは目標2の検索を行うが、飛しょう体1aから位置速度情報400を受信した時点で検索を行うと、飛しょう体1aがロックオンした目標2aにロックオンしてしまう可能性が高い。このため、飛しょう体1bは目標2の検索を開始する時間を設定する。飛しょう体2bが検索開始時間を設定する手順を図7を用いて説明する。
【0043】
図7において、飛しょう体2は、飛しょう体1aから飛しょう体1aがロックオンした目標2aの位置速度情報400を受信する(S201)
【0044】
飛しょう体2は、発射誘導装置3から目標郡4の位置と速度の情報である位置速度情報410を受信する(S202)。
【0045】
次に、飛しょう体2は、位置速度情報410を用いて式1によりシーカ捜索範囲を算出する。次に、飛しょう体2は、算出したシーカ検索範囲と位置速度情報400を用いて、シーカ検索範囲の中に既にロックオンした目標2aが存在するか否かを判断する(S203)。
【0046】
シーカ捜索範囲内に目標2aが存在しない場合は、シーカ装置6bに捜索開始信号を入力する(S204)。
【0047】
シーカ捜索範囲内に目標2aが存在する場合は、再度データリンク7bを通して、飛しょう体1aから、飛しょう体1aがロックオンした目標2aの位置情報、レーダ装置3から目標2a及び目標2bの位置情報を更新、慣性装置9bから飛しょう体1bの位置情報を更新し、S201の処理へと返す。
【0048】
このように実施の形態2では、発射誘導装置3が目標を分離、弁別することができず複数の目標の群れである目標群4として認識した場合において、後方に位置する飛しょう体は、先行する飛しょう体により既にロックされた目標が除外されるように、シーカ装置が目標の検索を開始する検索開始時間を設定するようにした。
これにより、誘導管制装置が複数ある目標の弁別が困難な状況であっても、複数の飛しょう体は各々異なる目標にロックオンし、各々異なる目標に向けて誘導されることが可能となる飛しょう体を得ることができる。
【図面の簡単な説明】
【0049】
【図1】この発明の実施の形態1による飛しょう体誘導システムの構成を示す図である。
【図2】この発明の実施の形態1による飛しょう体1の構成を説明する図である。
【図3】この発明の実施の形態1による飛しょう体誘導システムの動作を説明するフローチャートである。
【図4】この発明の実施の形態1による飛しょう体1a、1bが目標の検索範囲を設定する動作を説明する図である。
【図5】この発明の実施の形態1による飛しょう体1bが目標の検索範囲を設定する動作のフローチャートである。
【図6】この発明の実施の形態2による飛しょう体1a、1bが目標を検索する動作を説明する図である。
【図7】この発明の実施の形態2による飛しょう体1bが目標の検索開始時間を設定する動作のフローチャートである。
【符号の説明】
【0050】
1a 飛しょう体、1b 飛しょう体、2 目標、2a 2b 目標、3 発射誘導装置、4 目標群、5 予想会合点、 6a シーカ装置、6b シーカ装置、7a データリンク、7b データリンク、8a 信号処理装置、8b 信号処理装置、9a 慣性装置、9b 慣性装置、31 レーダ装置、32 誘導管制装置、33 発射装置、100、101 発射指令信号、102予想会合点情報、104、106 シーカ検索開始指令、105 先行飛しょう体情報、200 目標位置速度情報、201 飛しょう体位置速度情報、202 目標位置速度情報、300 目標位置速度情報、302 シーカ検索範囲、1000 飛しょう体誘導システム。
【技術分野】
【0001】
この発明は、目標に向けて誘導される飛しょう体に関するものである。詳しくは、複数の飛しょう体の間で目標に関する情報の授受を行い、異なる目標に向けて誘導される飛しょう体に関するものである。
【背景技術】
【0002】
従来の同時多目標誘導方式では、地上、車両、船舶、航空機等に搭載されたレーダ装置と誘導管制装置との間で情報の授受を行い、誘導管制装置が複数の飛しょう体に対して個々の目標情報を与えることで、複数の飛しょう体を複数の目標に向けて誘導している。一例として、地上レーダを介して入力される射撃管制装置により計算された反射波のドップラー周波数を飛しょう体が受信できるように、飛しょう体の局部発振周波数を設定するコミュニケーションリンクを形成した同時多目標誘導方式が示されている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平7−198298号公報(第4頁、第1図)
【発明の開示】
【発明が解決しようとする課題】
【0004】
複数の目標が接近しほぼ同一の速度で進行してくる場合、レーダ装置から得られる目標情報が似ているために、誘導管制装置は複数の目標を弁別することが困難となる。また、目標がレーダ装置の見通し外となる射撃やレーダ装置の精度の問題によりレーダ装置が目標の正確な情報を得られない場合にも、誘導管制装置は複数の目標を弁別することが困難となる。
このような場合、従来の誘導方式では、誘導管制装置は、複数の飛しょう体に対して個々の目標情報を与えることができず、複数の飛しょう体は同一の目標にロックオンして
同一の目標に誘導されるという課題があった。また、目標の弁別が可能であっても目標と飛しょう体の位置関係により、複数の飛しょう体が同一目標にロックオンし同一の目標に誘導されてしまうという課題があった。
【0005】
この発明は係る課題を解決するために成されたものであり、誘導管制装置が複数ある目標の弁別が困難な状況であっても、複数の飛しょう体は各々異なる目標にロックオンし、異なる目標に向けて誘導される飛しょう体を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報を用いて、前記他の飛しょう体が捕捉した目標を前記シーカの捜索範囲に含まない捜索範囲を設定する信号処理部とを備えるようにした。
【発明の効果】
【0007】
この発明に係る飛しょう体によれば、複数の目標が接近している等により、地上等に設置された誘導管制装置が複数ある目標の弁別が困難な場合においても、各々の飛しょう体は異なる目標を捕捉して、それぞれの目標に誘導される。
【発明を実施するための最良の形態】
【0008】
実施の形態1
図1は、この発明の実施の形態1による飛しょう体誘導システムの構成を示す図である。この発明の飛しょう体誘導システムは、目標を探知、追尾して目標の位置と速度等の情報である目標位置速度情報200を出力するレーダ装置31と、飛しょう体の誘導を行う誘導管制装置32と、飛しょう体間で相互通信を行う複数の飛しょう体1とを備える。レーダ装置31、飛しょう体の誘導を行う誘導管制装置32は地上、車両、艦船、航空機等に搭載される。ここでは、レーダ装置31と誘導管制装置32と発射装置33とをあわせて発射誘導装置3という。
【0009】
図1において、目標2a、2bは近接しほぼ同一の速度で接近しているものとする。このため、レーダ装置31は目標2a、2bを分離、弁別することができず、複数の目標の群れである目標群4として認識して探知追尾する。発射装置33は誘導管制装置32からの発射指令信号100、101(図示しない)により複数の飛しょう体1を発射する。ここでは2体の飛しょう体1a、1bを発射するものとするが2体以上であってもよい。
【0010】
図2は、飛しょう体1の構成を示す図である。飛しょう体1はシーカ装置6、データリンク装置7、信号処理装置8、慣性装置9を備える。飛しょう体1aと飛しょう体1bの構成は同じである。慣性装置9は、飛しょう体1の位置と速度の情報である飛しょう体位置速度情報201をデータリンク7に周期的に出力する。データリンク7は通信設備を備えており、飛しょう体位置速度情報201を周期的に誘導管制装置32に対して送信する。
【0011】
誘導管制装置32は、目標位置速度情報200と飛しょう体位置速度情報201とを用いて飛しょう体1と目標郡4との距離を算出する。飛しょう体1と目標郡4との距離が所定の距離より遠い時点では、誘導管制装置32は目標郡4を誘導対象として、飛しょう体1と目標郡4が会合する会合位置である予想会合点5を、目標位置速度情報200と飛しょう体位置速度情報201を用いて所定の周期で算出する。目標位置速度情報200は、目標群4の位置、速度、進行方向等の目標に関する情報である。
誘導管制装置32は、予想会合点5の情報である予想会合点情報102を逐次、飛しょう中の飛しょう体1aと飛しょう体1bとに対して送信する。
【0012】
実施の形態1では、飛しょう体1aと飛しょう体1bの位置関係は、図1のように、飛しょう体1aが飛しょう体1bよりも先行しているものとする。
【0013】
図3は、飛しょう体誘導システムの動作を説明するフローチャートである。飛しょう体1と目標郡4との距離が所定の距離となるまでは、発射誘導装置3は飛しょう体1に対して予想会合点情報102を送信し、飛しょう体1a、1bは予想会合点情報102に基づいて目標郡4に誘導される(ステップS001〜ステップS009)。
【0014】
飛しょう体1と目標郡4との距離が所定の距離となると、誘導管制装置32は先行する飛しょう体1aに対してシーカ検索開始指令104を送信する(S010)。
【0015】
次に、発射誘導装置3がシーカ検索開始指令104を送信した後、飛しょう体1a、1bが目標2を検索する検索範囲を設定する動作を図1〜図5を用いて説明する。
図4は、飛しょう体1a、1bが目標の検索範囲を設定する動作を説明する図である。図5は、飛しょう体1bが目標の検索範囲を設定する動作のフローチャートである。
【0016】
先行する飛しょう体1aのシーカ装置6aは、発射誘導装置3からのシーカ検索開始指令104により動作し、目標2の捜索、追尾を開始する(S011)。
【0017】
シーカ装置6aは、目標郡4の中から目標2を検索する。目標郡4の中で複数の目標が検索された場合は、複数の目標の中で飛しょう体1aに最も近い目標を抽出する。ここでは、抽出された目標を目標2aとする。シーカ装置6aは、目標2aの位置と速度を探知する(S012)。
ここでは、最も近い目標を抽出するとしたが、シーカ装置6aが捜索して、一番最初に探知した目標を抽出するとしてもよい。
飛しょう体6aは、地上等の設けられた誘導管制装置32よりも目標2に近く、また検索しやすい検索方向で目標2を検索することができることから、目標郡4の中から個別の目標2を検索することができる。
【0018】
次にシーカ装置6aは信号処理装置8aに対して、飛しょう体1aを目標2aに向けて誘導するための誘導信号200を出力する。誘導信号200は、目標2aの位置と速度を含む。
【0019】
信号処理部8aは、誘導信号200を用いて飛しょう体1aを誘導する。
【0020】
信号処理部8aは、誘導信号200からロックオンした目標2aの位置と速度の情報を取り出して、目標位置速度情報202をデータリンク7aに出力する。
【0021】
データリンク7aは、信号処理装置8aが出力するロックオンした目標2aの目標位置速度情報202と、慣性装置9aが出力する飛しょう体1aの位置と速度の情報である飛しょう体位置速度情報201とを先行飛しょう体情報105として、後方に位置する飛しょう体1bのデータリンク7bに対して送信する。
【0022】
飛しょう体1bが先行飛しょう体情報105を受信すると(S014)、信号処理装置8bはシーカ装置6bの捜索範囲を算出し、算出した検索範囲302をシーカ装置6bに出力する(S015)。
シーカ装置6bは、シーカの捜索範囲302及び発射誘導装置3からのシーカ検索開始指令106を受信すると目標の検索、追尾を開始する(S017)。
【0023】
ここで、図5を用いて、信号処理装置8bがシーカ6bの捜索範囲を算出する動作について説明する。
【0024】
まず、信号処理装置8bは、飛しょう体1bの位置情報と速度情報、レーダ装置3による目標群2の位置情報を入力し、式1により、シーカ捜索方向とシーカ捜索範囲を算出する(ステップS101)。
【0025】
シーカ捜索範囲は、飛しょう体1bのシーカ装置6bを頂点とした底面が球の一部となる円錐で表される。よって、シーカ捜索範囲は、円錐の斜辺であり、球の半径となるシーカ捜索距離mと円錐の頂角となるシーカ捜索角度θ、円錐の軸の方向を示す捜索方向単位ベクトルn(0)によって決定される。ここで、シーカ捜索角度θはシーカ装置の特性により任意に決定できる。
【0026】
【数1】
【0027】
次に、信号処理装置8bは、先行飛しょう体情報105から得られた飛しょう体1aがロックオンした目標2aの位置、速度情報を入力し、式2により、目標2aの存在予測範囲を算出する(S102)。
【0028】
存在予測範囲は、飛しょう体1aのロックオンした目標1aの位置を中心とした底面が球の一部の円錐として表される。よって、存在予想範囲は、円錐の斜辺であり、球の半径となる運動可能距離kと円錐の頂角となる運動可能角度γ、円錐の軸の方向を示す運動方向単位ベクトルjによって決定される。ここで、運動可能角度γは目標2aの特性により任意に決定できる。
【0029】
【数2】
【0030】
次に、信号処理装置8bは、シーカ捜索範囲と目標2aの存在予測範囲を比較する(S103)。
シーカ捜索範囲と目標2aの存在予測範囲とが重複しない場合は、シーカ捜索方向をそのまま、シーカ装置6bへの入力値として設定する。
シーカ捜索範囲と目標2aの存在予測範囲は重複する場合は、目標2aの存在予測範囲とレーダ装置3による目標群4の位置情報を用いて、シーカ捜索範囲を次のように再度算出する。
【0031】
信号処理装置8bは、目標2aの存在予測範囲と、レーダ装置3による目標群2の位置情報を入力し、式3により、目標2aの存在予測範囲と重複しないシーカ捜索方向とシーカ捜索範囲を算出する。
信号処理装置8bは、シーカ捜索方向をシーカ装置6bへの入力値として設定する(S104)。
【0032】
このとき算出されるシーカ捜索範囲は、レーダ装置3による目標群2の位置情報側へと偏る。この場合も、シーカ捜索範囲は、円錐の斜辺であり、球の半径となるシーカ捜索距離mと円錐の頂角となるシーカ捜索角度θ、円錐の軸の方向を示す更新された捜索方向単位ベクトルn(1)によって決定される。ここでは、飛しょう体1b位置、目標2aの存在範囲内で、飛しょう体1bへの最近点、レーダ装置3による目標群2位置の3点で構成される平面において、式3を適用する。
【0033】
【数3】
【0034】
シーカ装置6bは、信号処理部7bにおいて算出されたシーカ捜索範囲内で目標の捜索、追尾を実施する。
【0035】
シーカ装置6bは目標2bを検索すると、目標2bの位置と速度等の目標位置速度情報300を信号処理装置8bへと出力する。
【0036】
信号処理部8bは、シーカ装置6bの出力した目標情報に基づいて飛しょう体1bを誘導する。
【0037】
このように、この発明の飛しょう体は、飛しょう体間で通信を行うデータリンクを備えるようにした。先行する飛しょう体は、ロックオンした目標の位置や速度等の情報をデータリンクにより、後方に位置する飛しょう体に送信するようにした。後方に位置する飛しょう体は、先行する飛しょう体がロックオンした目標の位置や速度等の情報を受信すると、先行する飛しょう体がロックオンした目標がシーカ装置の検索範囲から外れるような検索範囲を設定するようにした。
これにより、誘導管制装置が複数ある目標の弁別が困難な状況であっても、複数の飛しょう体は各々異なる目標にロックオンし、各々異なる目標に向けて誘導されることが可能となる飛しょう体を得ることができる。
【0038】
実施の形態2
実施の形態1では、発射誘導装置3が目標を分離、弁別することができず複数の目標の群れである目標群4として認識した場合において、先行する飛しょう体1aの後方に位置する飛しょう体1bは、既にロックされた目標1aが除外されるように検索範囲を設定するようにした。実施の形態2では、後方に位置する飛しょう体1bは、既にロックされた目標1aが除外されるように検索を開始する検索開始時間を設定するようにした。
【0039】
実施の形態2の飛しょう体誘導システムの構成は実施の形態1と同じである。ここでは図1、図2、図6、図7を用いて、飛しょう体1が検索範囲を設定する動作について説明する。飛しょう体1と目標郡4との距離が所定の距離となるまでは、実施の形態1と同じであるため説明は省略し、飛しょう体1と目標郡4との距離が所定の距離となった時点からの動作について説明する。また、実施の形態1と同じ構成については同一番号を付し、説明を省略する。
【0040】
図6はこの発明の実施の形態2による飛しょう体1a、1bが目標の検索範囲を設定する動作を説明する図である。図7はこの発明の実施の形態1による飛しょう体1bが目標の検索開始時間を設定する動作のフローチャートである。
【0041】
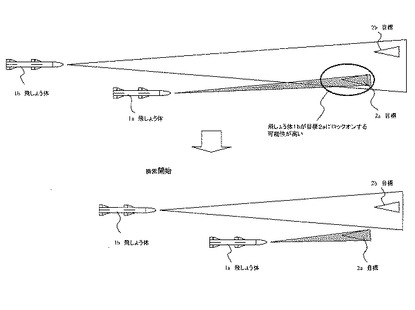
先行する飛しょう体1aは目標2aを探知し、探知した目標2aの位置と速度の情報である位置速度情報400をデータリンク7aを経由して、飛しょう体1bに送信する。
【0042】
飛しょう体1bは目標2の検索を行うが、飛しょう体1aから位置速度情報400を受信した時点で検索を行うと、飛しょう体1aがロックオンした目標2aにロックオンしてしまう可能性が高い。このため、飛しょう体1bは目標2の検索を開始する時間を設定する。飛しょう体2bが検索開始時間を設定する手順を図7を用いて説明する。
【0043】
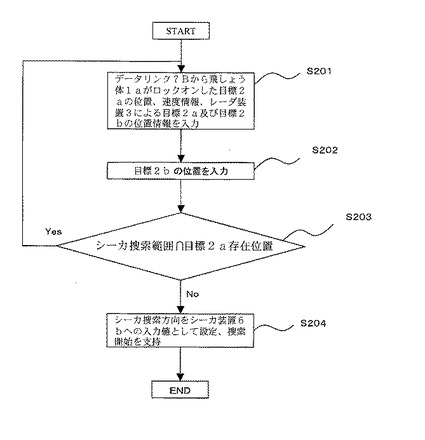
図7において、飛しょう体2は、飛しょう体1aから飛しょう体1aがロックオンした目標2aの位置速度情報400を受信する(S201)
【0044】
飛しょう体2は、発射誘導装置3から目標郡4の位置と速度の情報である位置速度情報410を受信する(S202)。
【0045】
次に、飛しょう体2は、位置速度情報410を用いて式1によりシーカ捜索範囲を算出する。次に、飛しょう体2は、算出したシーカ検索範囲と位置速度情報400を用いて、シーカ検索範囲の中に既にロックオンした目標2aが存在するか否かを判断する(S203)。
【0046】
シーカ捜索範囲内に目標2aが存在しない場合は、シーカ装置6bに捜索開始信号を入力する(S204)。
【0047】
シーカ捜索範囲内に目標2aが存在する場合は、再度データリンク7bを通して、飛しょう体1aから、飛しょう体1aがロックオンした目標2aの位置情報、レーダ装置3から目標2a及び目標2bの位置情報を更新、慣性装置9bから飛しょう体1bの位置情報を更新し、S201の処理へと返す。
【0048】
このように実施の形態2では、発射誘導装置3が目標を分離、弁別することができず複数の目標の群れである目標群4として認識した場合において、後方に位置する飛しょう体は、先行する飛しょう体により既にロックされた目標が除外されるように、シーカ装置が目標の検索を開始する検索開始時間を設定するようにした。
これにより、誘導管制装置が複数ある目標の弁別が困難な状況であっても、複数の飛しょう体は各々異なる目標にロックオンし、各々異なる目標に向けて誘導されることが可能となる飛しょう体を得ることができる。
【図面の簡単な説明】
【0049】
【図1】この発明の実施の形態1による飛しょう体誘導システムの構成を示す図である。
【図2】この発明の実施の形態1による飛しょう体1の構成を説明する図である。
【図3】この発明の実施の形態1による飛しょう体誘導システムの動作を説明するフローチャートである。
【図4】この発明の実施の形態1による飛しょう体1a、1bが目標の検索範囲を設定する動作を説明する図である。
【図5】この発明の実施の形態1による飛しょう体1bが目標の検索範囲を設定する動作のフローチャートである。
【図6】この発明の実施の形態2による飛しょう体1a、1bが目標を検索する動作を説明する図である。
【図7】この発明の実施の形態2による飛しょう体1bが目標の検索開始時間を設定する動作のフローチャートである。
【符号の説明】
【0050】
1a 飛しょう体、1b 飛しょう体、2 目標、2a 2b 目標、3 発射誘導装置、4 目標群、5 予想会合点、 6a シーカ装置、6b シーカ装置、7a データリンク、7b データリンク、8a 信号処理装置、8b 信号処理装置、9a 慣性装置、9b 慣性装置、31 レーダ装置、32 誘導管制装置、33 発射装置、100、101 発射指令信号、102予想会合点情報、104、106 シーカ検索開始指令、105 先行飛しょう体情報、200 目標位置速度情報、201 飛しょう体位置速度情報、202 目標位置速度情報、300 目標位置速度情報、302 シーカ検索範囲、1000 飛しょう体誘導システム。
【特許請求の範囲】
【請求項1】
目標を捜索するシーカと、
他の飛しょう体との間で相互に情報伝達する通信装置と、
前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、前記シーカの捜索範囲の中に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えた飛しょう体。
【請求項2】
目標を探知、追尾して目標の位置と速度等の目標情報を取得するレーダ装置と、
前記目標情報に基づいて算出した前記目標と飛しょう体との会合位置を算出して前記飛しょう体に送信する誘導管制装置と、
前記目標を捜索するシーカと、前記誘導管制装置から前記会合位置を受信すると共に他の飛しょう体との間で相互に情報伝達する通信装置と、前記シーカの捜索範囲を設定する信号処理部とを備えた複数の飛しょう体とを備え、
前記誘導管制装置が複数ある目標の識別ができない時に、前記飛しょう体は、前記通信装置を経由して他の飛しょう体から、前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報を受信し、前記目標情報に基づいて前記シーカの捜索範囲の中に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定することを特徴とする飛しょう体誘導システム。
【請求項3】
目標を捜索するシーカと、
他の飛しょう体との間で相互に情報伝達する通信装置と、
前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報を用いて、前記他の飛しょう体が捕捉した目標が前記シーカの捜索範囲に含まれなくなる時刻を算出し、前記時刻において前記シーカに対して検索を開始する検索開始指示を出力する信号処理部とを備えた飛しょう体。
【請求項1】
目標を捜索するシーカと、
他の飛しょう体との間で相互に情報伝達する通信装置と、
前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、前記シーカの捜索範囲の中に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えた飛しょう体。
【請求項2】
目標を探知、追尾して目標の位置と速度等の目標情報を取得するレーダ装置と、
前記目標情報に基づいて算出した前記目標と飛しょう体との会合位置を算出して前記飛しょう体に送信する誘導管制装置と、
前記目標を捜索するシーカと、前記誘導管制装置から前記会合位置を受信すると共に他の飛しょう体との間で相互に情報伝達する通信装置と、前記シーカの捜索範囲を設定する信号処理部とを備えた複数の飛しょう体とを備え、
前記誘導管制装置が複数ある目標の識別ができない時に、前記飛しょう体は、前記通信装置を経由して他の飛しょう体から、前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報を受信し、前記目標情報に基づいて前記シーカの捜索範囲の中に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定することを特徴とする飛しょう体誘導システム。
【請求項3】
目標を捜索するシーカと、
他の飛しょう体との間で相互に情報伝達する通信装置と、
前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報を用いて、前記他の飛しょう体が捕捉した目標が前記シーカの捜索範囲に含まれなくなる時刻を算出し、前記時刻において前記シーカに対して検索を開始する検索開始指示を出力する信号処理部とを備えた飛しょう体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−247952(P2007−247952A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−71000(P2006−71000)
【出願日】平成18年3月15日(2006.3.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月15日(2006.3.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]