
飛翔体誘導装置
【課題】飛翔体が最接近点から遠くても精度良く会合時間を計算することができ、更に、飛翔体が目標に再接近する前に目標形状を認識、目標半径を検出し、最接近点から遠くても精度よく直撃できるどうかを判定することのできる飛翔体誘導装置を提供する。
【解決手段】演算処理装置3が、飛翔体1の位置を基準とする相対座標系において、目標Tは等速直線運動するものとし、飛翔体1は等速加速度直線運動するものとして飛翔体1と目標Tとの会合点と会合時間を推定計算する。
【解決手段】演算処理装置3が、飛翔体1の位置を基準とする相対座標系において、目標Tは等速直線運動するものとし、飛翔体1は等速加速度直線運動するものとして飛翔体1と目標Tとの会合点と会合時間を推定計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、弾頭を搭載して移動する目標との会合点に向けて飛翔する飛翔体を、移動する目標に向けて誘導する飛翔体誘導装置に関する。
【背景技術】
【0002】
飛翔体に搭載された弾頭を起爆させ、飛来する敵ミサイルや戦闘機等の相手移動目標を破壊しようとするとき、弾頭を搭載したミサイル等の飛翔体は、相手移動目標に命中するように飛翔体誘導装置によって誘導制御されている。
【0003】
しかしながら、飛翔体誘導装置による誘導制御では、空中を高速飛行している相手方の移動目標に対し、ミサイル等の飛翔体を100%命中するように誘導制御するのは容易でなく、飛翔体と移動目標とが、いわゆる離隔量(以下、本明細書では、ミスディスタンスという)を形成して、互いにすれ違うように交差してしまうことが多い。
【0004】
そのため、飛翔体が移動目標に命中しない場合でも、相手方の移動目標を破壊させ、あるいはこれに多大な損傷を与えるには、飛翔体は、移動目標に最接近した位置、すなわち会合点近くに到達したタイミングで、弾頭を起爆させることが必要となる。
【0005】
なお、弾頭の起爆動作特性は弾頭の種類によって異なることが多いから、弾頭の種類や性能に則した起爆タイミングを会合点への到達時刻(会合時間)に対応して個々に設定する必要がある。
【0006】
通常、飛翔体誘導装置では、飛翔体と移動する目標との最接近点(会合点)までの経過時間である会合時間を計算式により算出して予測し、この予測した会合時間を基に、飛翔体の起爆タイミングを決定している。
【0007】
会合時間の予測に用いる計算式のデータは、飛翔体に設けられているシーカ等の追尾装置により得られる目標の速度や位置等の目標情報から取得している。
【0008】
また、会合時間の算出による予測に用いる計算式の一例としては、「飛翔体及び目標はそれぞれ直線の軌道を移動し、その軌道がある点で交差し、その交差する点までの経過時間がそれぞれ等しい。」という前提条件(仮定事項)を基に計算して予測している。すなわち飛翔体と目標の最接近点でのミスディスタンスがゼロという前提条件(仮定事項)で計算する方法が使用されている。
【0009】
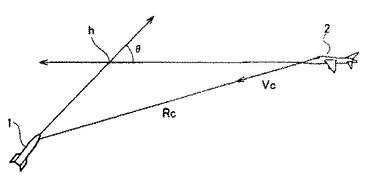
また、図11に説明図を示したように、従来、飛翔体1及び移動している目標Tがいずれも等速度直線飛行を行い、たとえば45度の交戦角θを形成し、会合点hでは離隔量を形成することなく飛翔体1が移動目標Tに命中すると仮定したとき、観測される両者間の相対距離Rc及び相対速度Vcから、会合時間Tcは、会合時間Tc=(相対距離Rc/相対速度Vc)の計算式で求められることが知られている。(例えば、特許文献1参照)
また、飛翔体の加速度についても、加速度を有さない、すなわち加速度がゼロという前提条件(仮定事項)で計算する方法が使用されている例がある。(例えば特許文献2参照)
【特許文献1】特開平8−178598号公報
【特許文献2】特開平04−059497公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
上述に一例を示したように、従来方式の会合時間の予測計算の計算式では、ミスディスタンスはゼロであることが前提条件としている場合が多い。
【0011】
すなわち、上述の図11に示したように、飛翔体1と移動目標Tとがともに直線上を等速度で飛行している場合、飛翔体1が移動目標Tに衝突し命中するとしたときには、理論上、会合時間Tc=(相対距離Rc/相対速度Vc)なる式が成立する。
【0012】
従って、飛翔体1及び移動目標Tの双方の現在位置や速度等の運動状態の検出に観測上の誤差がないものとすれば、飛翔体1に搭載したパルスレーダ装置による、飛翔体1と移動目標Tとの間の相対距離Rcや相対速度Vcの観測値から、上記式による計算により、実会合時間に近い会合時間Tcを得ることができる。
【0013】
上記のように、上記式(Tc=Rc/Vc)の成立条件は、飛翔体1及び移動している目標Tがともに直線上を等速度で飛行し、かつ、会合点hにおいて飛翔体1が移動目標2に命中して衝突することが前提である。
【0014】
一般に、空中を飛行する飛翔体1や移動している目標Tには、重力や空力抵抗等の種々の外力が作用し、また両者ともに常に一定推力のもとで飛行しているとは限らないから、会合点に向けて飛行する飛翔体1と移動している目標Tとが共に、等速度直線飛行をしているものとは言い難い。もっとも、会合点hの間近の、例えば手前側数10m程度のごく短い区間領域に限れば、飛翔体1のみならず移動している目標Tも、直線上を等速度で移動していると見なすことができる。
【0015】
しかしながら、上記式(Tc=Rc/Vc)は、たとえ飛翔体1及び移動している目標Tの直線上を等速度飛行を行っているとしても、会合点hにおいて、両者がすれ違うことなく命中して衝突するという条件が満足してはじめて成立するものである。
【0016】
つまり、実際には、飛翔体1の加速度等を考慮すると、「飛翔体1及び目標Tはそれぞれ直線の軌道を移動し、その軌道がある点で交差し、その交差する点までの経過時間がそれぞれ等しい。」という前提が成立しない場合がある。その結果、ミスディスタンスはゼロとならない場合が存在する。ミスディスタンスはゼロとならない場合、飛翔体1と目標Tとが最接近点に近づくほど、会合時間の計算値と実際の会合時間との誤差が大きくなってしまう。
【0017】
また、従来方式のように飛翔体の加速度を考慮していないと、飛翔体に加速度がある場合には、飛翔体と目標が最接近点から遠いほど、会合時間の計算値と実際の会合時間との誤差が大きくなってしまう。
【0018】
このため、飛翔体と目標との最接近時におけるミスディスタンスがゼロでない場合に、最接近点で、従来方式よりも精度良く会合時間を計算できる方策が望まれていた。
【0019】
また、飛翔体に加速度がある場合に、最接近点から遠くても、従来方式よりも精度良く会合時間を計算できて、最接近点から遠くても、直撃できるどうかを判定する方策が望まれていた。
【0020】
本発明は上記の事情を考慮してなされたもので、飛翔体と目標との最接近時におけるミスディスタンスがゼロでない場合でも、最接近点の近くでも精度良く会合時間を計算することができ、飛翔体に加速度がある場合に、最接近点から遠くても精度良く会合時間を計算することができ、更に、飛翔体が目標に再接近する前に目標形状を認識、目標半径を検出し、最接近点から遠くても精度よく直撃できるどうかを判定することのできる飛翔体誘導装置を提供することを目的としている。
【課題を解決するための手段】
【0021】
本発明の一態様によれば、
目標を追尾するセンサとして機能するシーカと、
このシーカで検出された目標を捕捉・追尾して飛翔体と該目標との会合点と会合時間を推定計算し、計算結果から所定時刻におけるミスディスタンスを求め、求めたミスディスタンスと前記シーカからの検出情報から算出して目標を検出できる角度範囲と比較して誘導信号を生成する演算処理装置と、
この演算処理装置で生成された前記誘導信号に基づいて前記飛翔体自体を前記目標に向けることにより該目標を追尾する前記飛翔体の操舵を行う操舵制御装置により制御される操舵装置と、
前記演算処理装置で推定計算された会合点近傍で爆薬の起爆タイミングを決定する起爆装置とを搭載した飛翔体誘導装置であって、
前記演算処理装置は、前記飛翔体の位置を基準とする相対座標系において、等速加速度直線運動する前記飛翔体と等速直線運動する前記目標との会合点と会合時間を推定計算することを特徴とする飛翔体誘導装置が提供される。
【0022】
また、前記演算処理装置は、前記ミスディスタンスと前記目標を検出できる角度範囲と比較して、前記ミスティスタンスの方が小さい場合か等しい場合に直撃可能との誘導信号を生成することを特徴とする飛翔体誘導装置が提供される。
【0023】
また、前記演算処理装置は、前記ミスディスタンスと前記目標を検出できる角度範囲と比較して、前記ミスティスタンスの方が大きい場合に直撃不可能と判定することを特徴とする飛翔体誘導装置が提供される。
【発明の効果】
【0024】
本発明の実施形態によれば、飛翔体と目標との最接近時におけるミスディスタンスがゼロでない場合に、最接近点の近くでも、精度良く会合時間を計算することができる。それにより、飛翔体に加速度がある場合に、最接近点から遠くても精度良く会合時間を計算することができ、最接近点から遠くても直撃できるどうかを判定することのできる飛翔体誘導装置が得られる。
【0025】
しかも、ミスディスタンスを、飛翔体の半径でなく、目標の半径と比較し、飛翔体が目標に会合するか否かを判定しているので、会合の有無を更に正確に判定できる効果が得られる。
【発明を実施するための最良の形態】
【0026】
以下、本発明の実施するための最良の形態の一例を、図面参照して説明する。
【0027】
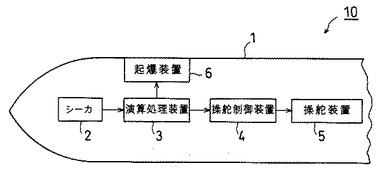
図1は本発明に係る飛翔体誘導装置の一実施形態の構成を示すブロック図である。
【0028】
飛翔体誘導装置10は、飛翔体1に、目標T(例えば、図11で示した)を追尾するセンサとして機能するシーカ2、このシーカ2で検出された目標Tを捕捉・追尾して当該飛翔体1と目標Tとの会合時間と会合点を推定計算し、さらに、所定時刻におけるミスディスタンスを求め、そして、シーカ2からの検出情報から算出して目標Tを検出できる角度範囲を求め、さらに、この角度範囲とミスディスタンスとの比較結果に応じて誘導信号を生成する演算処理装置3、この演算処理装置3で生成された誘導信号に基づいて、飛翔体1自体を目標に向けることにより目標Tを追尾する飛翔体1の操舵を行うために操舵制御装置4により制御されている操舵装置5、および、演算処理装置3で推定計算された会合点近傍で効果的に爆薬の起爆タイミングを決定する起爆装置6を搭載して構成されている。
【0029】
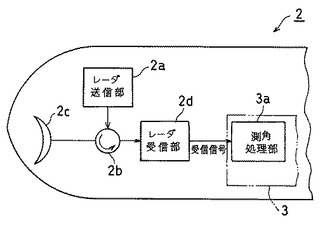
シーカ2は、その制御の要部を図2にブロック図を示したように、例えば、飛翔体1の弾頭部に搭載されている電波シーカで、目標Tに向けてビームを照射し目標Tからの反射電波に基づいて誘導信号を生成する。つまり、レーダ送信部2aからサーキュレータ2bおよびアンテナ2cを介して、レーダ電波が目標(図示せず)に向け照射される。目標Tからの反射波は、アンテナ2c、サーキュレータ2bを介してレーダ受信部2dにて受信され、受信信号が演算処理装置3の測角処理部3aに与えられる。測角処理部3aでは、与えられた受信信号よりレーダビームと目標とのなす角(誤差角:レーダ測角信号)εが算出される。
【0030】
なお、シーカ2は電波シーカの他に、赤外線シーカを用いることもできる。
【0031】
操舵装置5は操舵制御装置4により制御され、飛翔体1の胴体外周面から機体軸と直交する方向等,外方向に複数本の駆動軸を突出させて設け、この駆動軸の先端部に固定され、駆動軸の軸心まわりの回動により、飛翔時の大気方向に対する角度、いわゆる、舵角を変更できるようにした操舵翼の制御している。この制御により、操舵翼に発生する空気力を舵角の変更によって変え、飛翔体1の姿勢制御を行わせ、目標に向けて飛翔させることができるようにしている。
【0032】
つまり、操舵装置5を設けた飛翔体1は、操舵制御装置4により胴体内部に設置した駆動手段としてのサーボ装置によって、駆動される駆動軸の軸心まわりの回動量を制御する。それにより、駆動軸の先端部に固着され、胴体外周面から、例えば十字状に突出させた、操舵翼のそれぞれの飛翔時における大気方向に対する角度である舵角を制御している。それらの制御により、大気方向に対する角度を変動させ、この舵角が変動した操舵翼に発生する空気力を制御することによって、飛翔体1の姿勢を急速に変え、飛翔体1が目標Tに向けて飛翔できる。
【0033】
起爆装置6は、起爆信号発生回路(不図示)より送られた起爆信号を火薬の発火エネルギーに変えて出力する。弾頭(不図示)は起爆装置6からの発火エネルギーにより爆発し、爆風圧力を発生させるとともに破片を生成する。弾頭の爆発により発生した爆風圧力と生成した破片により目標Tの内部機器を破壊する。
【0034】
つまり、飛翔体1は目標Tの方向に誘導飛翔し、目標Tに命中する。飛翔体1が目標Tに命中すると目標Tの外板を貫通し、貫通後の存速にて目標Tの内部へ進入する。目標Tの内部へ進入した飛翔体1は目標Tに命中した時間を基準時間として、一定時間だけタイミングを遅らせて爆発し、爆風圧力及び破片の効果により目標Tの内部機器を破壊する。
【0035】
次に、上述の構成の飛翔体誘導装置10の動作について説明する。
【0036】
なお、飛翔体誘導装置10は動作の際に、以下の2つを前提条件としている。(1)目標T及び飛翔体1の運動については、目標Tに関しては等速直線運動とし、飛翔体1に関しては等加速度直線運動とする。(2)目標Tの半径をRtとしている。
【0037】
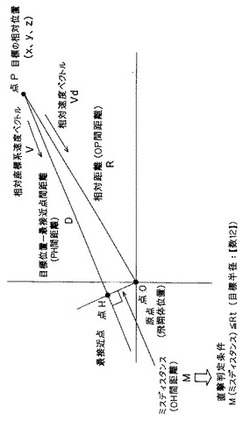
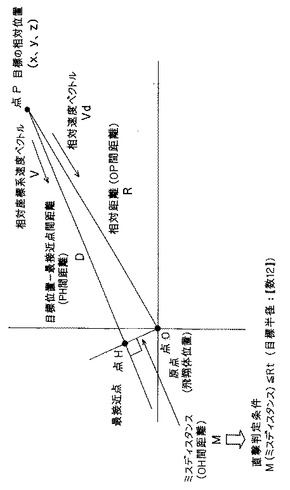
まず、図3を参照して飛翔体1と目標Tに関する座標系について説明する。なお、図3において、横軸は水平距離、縦軸は原点Oからの距離(二次元の場合は高度)を示しており、つまり、点Oは飛翔体1位置に相当する原点、点Pは目標Tの相対位置(x,y,z)、点Hは目標Tに対する飛翔体1の最接近点、Vは目標Tの相対座標系速度ベクトル、Vdは飛翔体1及び目標T間の相対速度ベクトル、Dは目標T位置−最接近点間距離(PH間距離)、Rは飛翔体1及び目標T間の相対距離(OP間距離)、Mは飛翔体1及び最接近点間のミスディスタンス(OH間距離)を表している。
【0038】
次に、以下、図4に示したフローチャートに沿って、図3で示した座標系を用いて、予測計算の流れを説明する。
【0039】
まず、目標Tの相対位置P(x,y,z)は(1)式のように定義する。この目標位置Pの時間経過に伴う移動については、ここでは直線上を移動するものと見なし、以下のような直線の式で表現するものとする(ステップS1)。
【0040】
これは、飛翔体1に直線方向の加速度がある場合には、この目標位置Pの移動は厳密には直線上とはならないが、実際に起爆装置6により起爆を実施する領域内であれば、直線と見なすことによる誤差は少ないためである。
【数1】

【0041】
(1)式の直線と原点O(飛翔体1の位置)から(1)式へ下ろした垂線との交点H(最接近点)の座標を、以下のように表す。ここで、t0は最接近点Hに至る時刻を表している。
【0042】
H座標:(Vx・t0 +X,Vy・t0 +Y,Vz・t0 +Z)
(1)式の直線と原点Oから、(1)式の直線に下ろした垂線への交点をHとし、原点Oを通り、H座標を通るベクトル(OH)は、以下の(2)式で表現すことができる(ステップS2)。
【数2】
【0043】
(1)式の直線の方向ベクトルと(2)式のベクトルとは互いに直交するので、その内積結果はゼロとなり、以下の(3)式のように表現できる。
【数3】
【0044】
上記の(3)式について、t0について解くと、以下の(4)式として表現することができる(ステップS3)。
【数4】
【0045】
求めた相対時刻t0の値を(1)式に代入すると以下の(5)式となる。この(5)式により求まる相対位置Pの座標(x0,y0,z0)を、飛翔体1と目標Tとの最接近点Hとする(ステップS4)。
【数5】
【0046】
次に、時刻tにおける相対位置Pから最接近点Hまでの距離(D)を、以下の(6)式により求める。
【数6】
【0047】
あるいは、時刻tにおける相対位置Pから最接近点Hまでの距離(D)は、飛翔体1と目標Tとの相対距離(R)を使用して、以下の(7)式で計算することも可能である(ステップS5)。
【数7】
【0048】
また、求めた時刻tにおける相対位置Pから最接近点Hまでの距離(D)は、会合時刻tにおける相対座標系速度の大きさ、相対座標系加速度の大きさ及び会合時刻tから、以下の(8)式のように表される。
【数8】
【0049】
この式を、以下の(9)式に示すように、時刻tについて解き、その時刻tの値を、会合時間とする(ステップS6)。
【数9】
【0050】
但し、時刻Tにおける相対座標系加速度の大きさAがゼロの場合は、以下の(9−1)式により時刻tの値を計算する。
【0051】
t=D/V …(9−1)
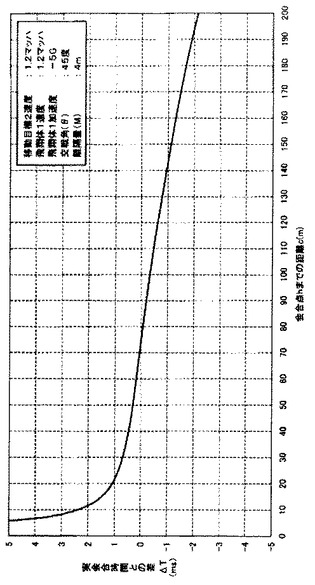
上記式(9−1)にて計算した会合時間について、会合時間誤差の例を、図5および図6に示す。図5は、「飛翔体1は加速度なし、観測誤差なし」を想定しており、図6は、「飛翔体1は加速度あり、観測誤差なし」を想定している。
【0052】
すなわち、図5および図6において、飛翔体1について、飛翔体1の会合点hまでの距離(横軸)に対する、上記(9−1)式により算出した会合時間Toと実会合時間Tとの差ΔT(縦軸)を示したものである。
【0053】
図5および図6に示したように、飛翔体1は、演算処理装置3の計算による会合時間Toの算出値が、会合点hに近い位置に到達しても、実会合時間Tとの差ΔTが殆ど生じないことを示している。
【0054】
従って、この演算処理装置3により算出された会合時間Toを、起爆装置6に供給したとき、起爆装置6は、弾頭の動作特性に即した適切な起爆時刻を設定し、その設定された起爆時刻に従って起爆回路を作動させることができる。それにより、飛翔体1は搭載した弾頭を効果的に起爆して、相手移動目標Tを的確に破壊させることができる。
【0055】
なお、比較のため、図7および図8にそれぞれ従来方式による会合時間の誤差の例を示す。図7は、「飛翔体1は、加速度なし、観測誤差なし」を想定しており、図8は、「飛翔体1は、加速度あり、観測誤差なし」を想定している。
【0056】
図7及び図8は、会合点hからの距離(横軸)に関し、上記式(Tc=Rc/Vc)に基づく、従来の計算上の会合時間Tcと実会合時間Tとの差ΔT(縦軸)を示した特性曲線である。
【0057】
なお、図7及び図8はいずれも、観測上の誤差がなく、飛翔体1及び移動目標Tのいずれもマッハ1.2の速度で飛行し、会合点hにおいては離隔量4mを有しつつ、45度の交戦角θで交差するものとし、また図7では、飛翔体1は加減速度はゼロで、図8では飛翔体1は−5Gの減速度を有して飛行するとして示したものである。
【0058】
図7及び図8にも示したように、上記式(Tc=Rc/Vc)に基づく計算上の会合時間Tcと実会合時間Tとの差ΔTは、飛翔体1(あるいは、移動目標T)が会合点hにごく接近した位置において顕著であり、また図8に示したように、飛翔体1が加減速度を有して飛翔している場合には、会合点hからやや離れた領域においても発生する。
【0059】
つまり、図5および図6に示したように、本実施形態の予測計算によれば、飛翔体1と目標Tとの最接近点におけるミスディスタンスがゼロでない場合に最接近点に近づいても、会合時間の計算誤差は大きくならず、従来方式と比較して、より正確に会合時間を計算することが可能となる。また、飛翔体1に加速度がある場合に、最接近点から遠くても、会合時間の計算誤差は大きくならず、従来方式と比較して、より正確に会合時間を計算することが可能となる。
【0060】
また、上記の予測計算で求まった時刻tを会合時間t1として(1)式に代入すると、以下の(10)式が成立する。この(10)式により求まる相対位置(x1,y1,z1)を、飛翔体1と目標Tとの最接近点Hとする(ステップS7)。
【数10】
【0061】
時刻t1における相対位置から原点までの距離(M):ミスディスタンスは、以下の(11)式により求める(ステップS8)。
【数11】
【0062】
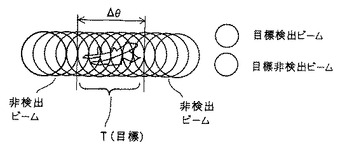
飛翔体1と目標Tが最接近する前にビーム走査数を増大させることにより、データレートを向上させて、ビームを角度方向に走査すると図9に示すように目標Tの形状に従い、ビーム走査結果が得られ、目標Tを検出できる角度範囲(Δθ)を得る。
【0063】
(ステップS9)
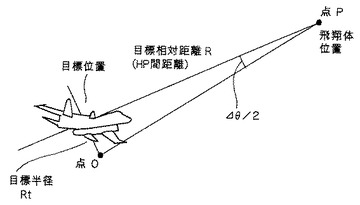
目標Tと飛翔体1の関係は図10に示す関係となるので、目標Tを検出できる角度範囲(Δθ)と目標Tとの相対距離(R)から、目標T半径(Rt)を以下の(12)式より、求める(ステップS10)。
【0064】
Rt=R×Tan−1(Δθ/2) ・・・(12)
次に、先に求めたミスディスタンスMが上記の目標T半径(Rt)を満足しているか否かを判断する(ステップS11)。
【0065】
判断結果に従って、先に求めたミスディスタンスMが上記の目標T半径(Rt)を満足している場合には、直撃可能と判定する(ステップS12)。
【0066】
一方、満足していない場合は直撃不可能と判定する(ステップS13)。
【0067】
M(ミスディスタンス)≦Rt(目標T半径)
以上述べたように、本発明の飛翔体誘導装置によれば、ミスディスタンスを使用して会合時間を計算することができるので、ミスディスタンスがゼロとならない場合に、最接近点近くでも、従来方式よりも精度よく会合時間の計算を行うことができる。
【0068】
また、飛翔体1に加速度がある場合に、最接近点から遠くても、従来方式よりも精度よく会合時間の計算を行うことができる。
【0069】
上述のように、本実施形態による飛翔体誘導装置10は、会合時間の計算時に、最接近点におけるミスディスタンスを計算し、その値を使用して会合時間の計算を行っている。
【0070】
また、飛翔体1の加速度を考慮して会合時間の計算を行い、その会合時間に従って正確なミスディスタンスを求め、更に、目標Tの形状を認識して、目標半径を算出し、直撃できるかどうかを判定している。
【0071】
つまり、本実施形態によれば、飛翔体1と目標Tとの最接近時におけるミスディスタンスがゼロでない場合に、最接近点の近くでも精度良く会合時間を計算することができ、飛翔体1に加速度がある場合に、最接近点から遠くても精度良く会合時間を計算することができ、最接近点から遠くても直撃できるどうかを判定することのできる飛翔体誘導装置10が得られる。
【0072】
また、シーカ2も、上記実施形態では、ミスディスタンスを、飛翔体1の半径でなく、目標Tの半径と比較し、飛翔体1が目標Tに会合するか否かを判定しているので、会合の有無を更に正確に判定できる効果が得られる。
【0073】
なお、本発明は上記の実施形態のそのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記の実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0074】
【図1】本発明に係る飛翔体誘導装置の一実施形態の構成を示すブロック図。
【図2】本発明に係る飛翔体誘導装置に用いられているシーカの制御の要部のブロック図。
【図3】飛翔体と目標に関する座標系の説明図。
【図4】本発明に係る飛翔体誘導装置の一実施形態の動作を示すフローチャート。
【図5】本発明に係る飛翔体誘導装置の一実施形態の会合時間誤差の例を示すグラフ。
【図6】本発明に係る飛翔体誘導装置の一実施形態の会合時間誤差の例を示すグラフ。
【図7】従来の飛翔体誘導装置の会合時間誤差の例を示すグラフ。
【図8】従来の飛翔体誘導装置の会合時間誤差の例を示すグラフ。
【図9】本発明に係る飛翔体誘導装置の一実施形態での、目標の形状に従ったビーム走査結果の説明図。
【図10】本発明に係る飛翔体誘導装置の一実施形態での、目標と飛翔体の関係の説明図。
【図11】従来の飛翔体誘導装置の飛翔体と目標との飛行動作の説明図。
【符号の説明】
【0075】
1…飛翔体、2…シーカ、3…演算処理装置、4…操舵制御装置、5…操舵装置、6…起爆装置、10…飛翔体誘導装置。
【技術分野】
【0001】
本発明は、弾頭を搭載して移動する目標との会合点に向けて飛翔する飛翔体を、移動する目標に向けて誘導する飛翔体誘導装置に関する。
【背景技術】
【0002】
飛翔体に搭載された弾頭を起爆させ、飛来する敵ミサイルや戦闘機等の相手移動目標を破壊しようとするとき、弾頭を搭載したミサイル等の飛翔体は、相手移動目標に命中するように飛翔体誘導装置によって誘導制御されている。
【0003】
しかしながら、飛翔体誘導装置による誘導制御では、空中を高速飛行している相手方の移動目標に対し、ミサイル等の飛翔体を100%命中するように誘導制御するのは容易でなく、飛翔体と移動目標とが、いわゆる離隔量(以下、本明細書では、ミスディスタンスという)を形成して、互いにすれ違うように交差してしまうことが多い。
【0004】
そのため、飛翔体が移動目標に命中しない場合でも、相手方の移動目標を破壊させ、あるいはこれに多大な損傷を与えるには、飛翔体は、移動目標に最接近した位置、すなわち会合点近くに到達したタイミングで、弾頭を起爆させることが必要となる。
【0005】
なお、弾頭の起爆動作特性は弾頭の種類によって異なることが多いから、弾頭の種類や性能に則した起爆タイミングを会合点への到達時刻(会合時間)に対応して個々に設定する必要がある。
【0006】
通常、飛翔体誘導装置では、飛翔体と移動する目標との最接近点(会合点)までの経過時間である会合時間を計算式により算出して予測し、この予測した会合時間を基に、飛翔体の起爆タイミングを決定している。
【0007】
会合時間の予測に用いる計算式のデータは、飛翔体に設けられているシーカ等の追尾装置により得られる目標の速度や位置等の目標情報から取得している。
【0008】
また、会合時間の算出による予測に用いる計算式の一例としては、「飛翔体及び目標はそれぞれ直線の軌道を移動し、その軌道がある点で交差し、その交差する点までの経過時間がそれぞれ等しい。」という前提条件(仮定事項)を基に計算して予測している。すなわち飛翔体と目標の最接近点でのミスディスタンスがゼロという前提条件(仮定事項)で計算する方法が使用されている。
【0009】
また、図11に説明図を示したように、従来、飛翔体1及び移動している目標Tがいずれも等速度直線飛行を行い、たとえば45度の交戦角θを形成し、会合点hでは離隔量を形成することなく飛翔体1が移動目標Tに命中すると仮定したとき、観測される両者間の相対距離Rc及び相対速度Vcから、会合時間Tcは、会合時間Tc=(相対距離Rc/相対速度Vc)の計算式で求められることが知られている。(例えば、特許文献1参照)
また、飛翔体の加速度についても、加速度を有さない、すなわち加速度がゼロという前提条件(仮定事項)で計算する方法が使用されている例がある。(例えば特許文献2参照)
【特許文献1】特開平8−178598号公報
【特許文献2】特開平04−059497公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
上述に一例を示したように、従来方式の会合時間の予測計算の計算式では、ミスディスタンスはゼロであることが前提条件としている場合が多い。
【0011】
すなわち、上述の図11に示したように、飛翔体1と移動目標Tとがともに直線上を等速度で飛行している場合、飛翔体1が移動目標Tに衝突し命中するとしたときには、理論上、会合時間Tc=(相対距離Rc/相対速度Vc)なる式が成立する。
【0012】
従って、飛翔体1及び移動目標Tの双方の現在位置や速度等の運動状態の検出に観測上の誤差がないものとすれば、飛翔体1に搭載したパルスレーダ装置による、飛翔体1と移動目標Tとの間の相対距離Rcや相対速度Vcの観測値から、上記式による計算により、実会合時間に近い会合時間Tcを得ることができる。
【0013】
上記のように、上記式(Tc=Rc/Vc)の成立条件は、飛翔体1及び移動している目標Tがともに直線上を等速度で飛行し、かつ、会合点hにおいて飛翔体1が移動目標2に命中して衝突することが前提である。
【0014】
一般に、空中を飛行する飛翔体1や移動している目標Tには、重力や空力抵抗等の種々の外力が作用し、また両者ともに常に一定推力のもとで飛行しているとは限らないから、会合点に向けて飛行する飛翔体1と移動している目標Tとが共に、等速度直線飛行をしているものとは言い難い。もっとも、会合点hの間近の、例えば手前側数10m程度のごく短い区間領域に限れば、飛翔体1のみならず移動している目標Tも、直線上を等速度で移動していると見なすことができる。
【0015】
しかしながら、上記式(Tc=Rc/Vc)は、たとえ飛翔体1及び移動している目標Tの直線上を等速度飛行を行っているとしても、会合点hにおいて、両者がすれ違うことなく命中して衝突するという条件が満足してはじめて成立するものである。
【0016】
つまり、実際には、飛翔体1の加速度等を考慮すると、「飛翔体1及び目標Tはそれぞれ直線の軌道を移動し、その軌道がある点で交差し、その交差する点までの経過時間がそれぞれ等しい。」という前提が成立しない場合がある。その結果、ミスディスタンスはゼロとならない場合が存在する。ミスディスタンスはゼロとならない場合、飛翔体1と目標Tとが最接近点に近づくほど、会合時間の計算値と実際の会合時間との誤差が大きくなってしまう。
【0017】
また、従来方式のように飛翔体の加速度を考慮していないと、飛翔体に加速度がある場合には、飛翔体と目標が最接近点から遠いほど、会合時間の計算値と実際の会合時間との誤差が大きくなってしまう。
【0018】
このため、飛翔体と目標との最接近時におけるミスディスタンスがゼロでない場合に、最接近点で、従来方式よりも精度良く会合時間を計算できる方策が望まれていた。
【0019】
また、飛翔体に加速度がある場合に、最接近点から遠くても、従来方式よりも精度良く会合時間を計算できて、最接近点から遠くても、直撃できるどうかを判定する方策が望まれていた。
【0020】
本発明は上記の事情を考慮してなされたもので、飛翔体と目標との最接近時におけるミスディスタンスがゼロでない場合でも、最接近点の近くでも精度良く会合時間を計算することができ、飛翔体に加速度がある場合に、最接近点から遠くても精度良く会合時間を計算することができ、更に、飛翔体が目標に再接近する前に目標形状を認識、目標半径を検出し、最接近点から遠くても精度よく直撃できるどうかを判定することのできる飛翔体誘導装置を提供することを目的としている。
【課題を解決するための手段】
【0021】
本発明の一態様によれば、
目標を追尾するセンサとして機能するシーカと、
このシーカで検出された目標を捕捉・追尾して飛翔体と該目標との会合点と会合時間を推定計算し、計算結果から所定時刻におけるミスディスタンスを求め、求めたミスディスタンスと前記シーカからの検出情報から算出して目標を検出できる角度範囲と比較して誘導信号を生成する演算処理装置と、
この演算処理装置で生成された前記誘導信号に基づいて前記飛翔体自体を前記目標に向けることにより該目標を追尾する前記飛翔体の操舵を行う操舵制御装置により制御される操舵装置と、
前記演算処理装置で推定計算された会合点近傍で爆薬の起爆タイミングを決定する起爆装置とを搭載した飛翔体誘導装置であって、
前記演算処理装置は、前記飛翔体の位置を基準とする相対座標系において、等速加速度直線運動する前記飛翔体と等速直線運動する前記目標との会合点と会合時間を推定計算することを特徴とする飛翔体誘導装置が提供される。
【0022】
また、前記演算処理装置は、前記ミスディスタンスと前記目標を検出できる角度範囲と比較して、前記ミスティスタンスの方が小さい場合か等しい場合に直撃可能との誘導信号を生成することを特徴とする飛翔体誘導装置が提供される。
【0023】
また、前記演算処理装置は、前記ミスディスタンスと前記目標を検出できる角度範囲と比較して、前記ミスティスタンスの方が大きい場合に直撃不可能と判定することを特徴とする飛翔体誘導装置が提供される。
【発明の効果】
【0024】
本発明の実施形態によれば、飛翔体と目標との最接近時におけるミスディスタンスがゼロでない場合に、最接近点の近くでも、精度良く会合時間を計算することができる。それにより、飛翔体に加速度がある場合に、最接近点から遠くても精度良く会合時間を計算することができ、最接近点から遠くても直撃できるどうかを判定することのできる飛翔体誘導装置が得られる。
【0025】
しかも、ミスディスタンスを、飛翔体の半径でなく、目標の半径と比較し、飛翔体が目標に会合するか否かを判定しているので、会合の有無を更に正確に判定できる効果が得られる。
【発明を実施するための最良の形態】
【0026】
以下、本発明の実施するための最良の形態の一例を、図面参照して説明する。
【0027】
図1は本発明に係る飛翔体誘導装置の一実施形態の構成を示すブロック図である。
【0028】
飛翔体誘導装置10は、飛翔体1に、目標T(例えば、図11で示した)を追尾するセンサとして機能するシーカ2、このシーカ2で検出された目標Tを捕捉・追尾して当該飛翔体1と目標Tとの会合時間と会合点を推定計算し、さらに、所定時刻におけるミスディスタンスを求め、そして、シーカ2からの検出情報から算出して目標Tを検出できる角度範囲を求め、さらに、この角度範囲とミスディスタンスとの比較結果に応じて誘導信号を生成する演算処理装置3、この演算処理装置3で生成された誘導信号に基づいて、飛翔体1自体を目標に向けることにより目標Tを追尾する飛翔体1の操舵を行うために操舵制御装置4により制御されている操舵装置5、および、演算処理装置3で推定計算された会合点近傍で効果的に爆薬の起爆タイミングを決定する起爆装置6を搭載して構成されている。
【0029】
シーカ2は、その制御の要部を図2にブロック図を示したように、例えば、飛翔体1の弾頭部に搭載されている電波シーカで、目標Tに向けてビームを照射し目標Tからの反射電波に基づいて誘導信号を生成する。つまり、レーダ送信部2aからサーキュレータ2bおよびアンテナ2cを介して、レーダ電波が目標(図示せず)に向け照射される。目標Tからの反射波は、アンテナ2c、サーキュレータ2bを介してレーダ受信部2dにて受信され、受信信号が演算処理装置3の測角処理部3aに与えられる。測角処理部3aでは、与えられた受信信号よりレーダビームと目標とのなす角(誤差角:レーダ測角信号)εが算出される。
【0030】
なお、シーカ2は電波シーカの他に、赤外線シーカを用いることもできる。
【0031】
操舵装置5は操舵制御装置4により制御され、飛翔体1の胴体外周面から機体軸と直交する方向等,外方向に複数本の駆動軸を突出させて設け、この駆動軸の先端部に固定され、駆動軸の軸心まわりの回動により、飛翔時の大気方向に対する角度、いわゆる、舵角を変更できるようにした操舵翼の制御している。この制御により、操舵翼に発生する空気力を舵角の変更によって変え、飛翔体1の姿勢制御を行わせ、目標に向けて飛翔させることができるようにしている。
【0032】
つまり、操舵装置5を設けた飛翔体1は、操舵制御装置4により胴体内部に設置した駆動手段としてのサーボ装置によって、駆動される駆動軸の軸心まわりの回動量を制御する。それにより、駆動軸の先端部に固着され、胴体外周面から、例えば十字状に突出させた、操舵翼のそれぞれの飛翔時における大気方向に対する角度である舵角を制御している。それらの制御により、大気方向に対する角度を変動させ、この舵角が変動した操舵翼に発生する空気力を制御することによって、飛翔体1の姿勢を急速に変え、飛翔体1が目標Tに向けて飛翔できる。
【0033】
起爆装置6は、起爆信号発生回路(不図示)より送られた起爆信号を火薬の発火エネルギーに変えて出力する。弾頭(不図示)は起爆装置6からの発火エネルギーにより爆発し、爆風圧力を発生させるとともに破片を生成する。弾頭の爆発により発生した爆風圧力と生成した破片により目標Tの内部機器を破壊する。
【0034】
つまり、飛翔体1は目標Tの方向に誘導飛翔し、目標Tに命中する。飛翔体1が目標Tに命中すると目標Tの外板を貫通し、貫通後の存速にて目標Tの内部へ進入する。目標Tの内部へ進入した飛翔体1は目標Tに命中した時間を基準時間として、一定時間だけタイミングを遅らせて爆発し、爆風圧力及び破片の効果により目標Tの内部機器を破壊する。
【0035】
次に、上述の構成の飛翔体誘導装置10の動作について説明する。
【0036】
なお、飛翔体誘導装置10は動作の際に、以下の2つを前提条件としている。(1)目標T及び飛翔体1の運動については、目標Tに関しては等速直線運動とし、飛翔体1に関しては等加速度直線運動とする。(2)目標Tの半径をRtとしている。
【0037】
まず、図3を参照して飛翔体1と目標Tに関する座標系について説明する。なお、図3において、横軸は水平距離、縦軸は原点Oからの距離(二次元の場合は高度)を示しており、つまり、点Oは飛翔体1位置に相当する原点、点Pは目標Tの相対位置(x,y,z)、点Hは目標Tに対する飛翔体1の最接近点、Vは目標Tの相対座標系速度ベクトル、Vdは飛翔体1及び目標T間の相対速度ベクトル、Dは目標T位置−最接近点間距離(PH間距離)、Rは飛翔体1及び目標T間の相対距離(OP間距離)、Mは飛翔体1及び最接近点間のミスディスタンス(OH間距離)を表している。
【0038】
次に、以下、図4に示したフローチャートに沿って、図3で示した座標系を用いて、予測計算の流れを説明する。
【0039】
まず、目標Tの相対位置P(x,y,z)は(1)式のように定義する。この目標位置Pの時間経過に伴う移動については、ここでは直線上を移動するものと見なし、以下のような直線の式で表現するものとする(ステップS1)。
【0040】
これは、飛翔体1に直線方向の加速度がある場合には、この目標位置Pの移動は厳密には直線上とはならないが、実際に起爆装置6により起爆を実施する領域内であれば、直線と見なすことによる誤差は少ないためである。
【数1】
【0041】
(1)式の直線と原点O(飛翔体1の位置)から(1)式へ下ろした垂線との交点H(最接近点)の座標を、以下のように表す。ここで、t0は最接近点Hに至る時刻を表している。
【0042】
H座標:(Vx・t0 +X,Vy・t0 +Y,Vz・t0 +Z)
(1)式の直線と原点Oから、(1)式の直線に下ろした垂線への交点をHとし、原点Oを通り、H座標を通るベクトル(OH)は、以下の(2)式で表現すことができる(ステップS2)。
【数2】
【0043】
(1)式の直線の方向ベクトルと(2)式のベクトルとは互いに直交するので、その内積結果はゼロとなり、以下の(3)式のように表現できる。
【数3】
【0044】
上記の(3)式について、t0について解くと、以下の(4)式として表現することができる(ステップS3)。
【数4】
【0045】
求めた相対時刻t0の値を(1)式に代入すると以下の(5)式となる。この(5)式により求まる相対位置Pの座標(x0,y0,z0)を、飛翔体1と目標Tとの最接近点Hとする(ステップS4)。
【数5】
【0046】
次に、時刻tにおける相対位置Pから最接近点Hまでの距離(D)を、以下の(6)式により求める。
【数6】
【0047】
あるいは、時刻tにおける相対位置Pから最接近点Hまでの距離(D)は、飛翔体1と目標Tとの相対距離(R)を使用して、以下の(7)式で計算することも可能である(ステップS5)。
【数7】
【0048】
また、求めた時刻tにおける相対位置Pから最接近点Hまでの距離(D)は、会合時刻tにおける相対座標系速度の大きさ、相対座標系加速度の大きさ及び会合時刻tから、以下の(8)式のように表される。
【数8】
【0049】
この式を、以下の(9)式に示すように、時刻tについて解き、その時刻tの値を、会合時間とする(ステップS6)。
【数9】
【0050】
但し、時刻Tにおける相対座標系加速度の大きさAがゼロの場合は、以下の(9−1)式により時刻tの値を計算する。
【0051】
t=D/V …(9−1)
上記式(9−1)にて計算した会合時間について、会合時間誤差の例を、図5および図6に示す。図5は、「飛翔体1は加速度なし、観測誤差なし」を想定しており、図6は、「飛翔体1は加速度あり、観測誤差なし」を想定している。
【0052】
すなわち、図5および図6において、飛翔体1について、飛翔体1の会合点hまでの距離(横軸)に対する、上記(9−1)式により算出した会合時間Toと実会合時間Tとの差ΔT(縦軸)を示したものである。
【0053】
図5および図6に示したように、飛翔体1は、演算処理装置3の計算による会合時間Toの算出値が、会合点hに近い位置に到達しても、実会合時間Tとの差ΔTが殆ど生じないことを示している。
【0054】
従って、この演算処理装置3により算出された会合時間Toを、起爆装置6に供給したとき、起爆装置6は、弾頭の動作特性に即した適切な起爆時刻を設定し、その設定された起爆時刻に従って起爆回路を作動させることができる。それにより、飛翔体1は搭載した弾頭を効果的に起爆して、相手移動目標Tを的確に破壊させることができる。
【0055】
なお、比較のため、図7および図8にそれぞれ従来方式による会合時間の誤差の例を示す。図7は、「飛翔体1は、加速度なし、観測誤差なし」を想定しており、図8は、「飛翔体1は、加速度あり、観測誤差なし」を想定している。
【0056】
図7及び図8は、会合点hからの距離(横軸)に関し、上記式(Tc=Rc/Vc)に基づく、従来の計算上の会合時間Tcと実会合時間Tとの差ΔT(縦軸)を示した特性曲線である。
【0057】
なお、図7及び図8はいずれも、観測上の誤差がなく、飛翔体1及び移動目標Tのいずれもマッハ1.2の速度で飛行し、会合点hにおいては離隔量4mを有しつつ、45度の交戦角θで交差するものとし、また図7では、飛翔体1は加減速度はゼロで、図8では飛翔体1は−5Gの減速度を有して飛行するとして示したものである。
【0058】
図7及び図8にも示したように、上記式(Tc=Rc/Vc)に基づく計算上の会合時間Tcと実会合時間Tとの差ΔTは、飛翔体1(あるいは、移動目標T)が会合点hにごく接近した位置において顕著であり、また図8に示したように、飛翔体1が加減速度を有して飛翔している場合には、会合点hからやや離れた領域においても発生する。
【0059】
つまり、図5および図6に示したように、本実施形態の予測計算によれば、飛翔体1と目標Tとの最接近点におけるミスディスタンスがゼロでない場合に最接近点に近づいても、会合時間の計算誤差は大きくならず、従来方式と比較して、より正確に会合時間を計算することが可能となる。また、飛翔体1に加速度がある場合に、最接近点から遠くても、会合時間の計算誤差は大きくならず、従来方式と比較して、より正確に会合時間を計算することが可能となる。
【0060】
また、上記の予測計算で求まった時刻tを会合時間t1として(1)式に代入すると、以下の(10)式が成立する。この(10)式により求まる相対位置(x1,y1,z1)を、飛翔体1と目標Tとの最接近点Hとする(ステップS7)。
【数10】
【0061】
時刻t1における相対位置から原点までの距離(M):ミスディスタンスは、以下の(11)式により求める(ステップS8)。
【数11】
【0062】
飛翔体1と目標Tが最接近する前にビーム走査数を増大させることにより、データレートを向上させて、ビームを角度方向に走査すると図9に示すように目標Tの形状に従い、ビーム走査結果が得られ、目標Tを検出できる角度範囲(Δθ)を得る。
【0063】
(ステップS9)
目標Tと飛翔体1の関係は図10に示す関係となるので、目標Tを検出できる角度範囲(Δθ)と目標Tとの相対距離(R)から、目標T半径(Rt)を以下の(12)式より、求める(ステップS10)。
【0064】
Rt=R×Tan−1(Δθ/2) ・・・(12)
次に、先に求めたミスディスタンスMが上記の目標T半径(Rt)を満足しているか否かを判断する(ステップS11)。
【0065】
判断結果に従って、先に求めたミスディスタンスMが上記の目標T半径(Rt)を満足している場合には、直撃可能と判定する(ステップS12)。
【0066】
一方、満足していない場合は直撃不可能と判定する(ステップS13)。
【0067】
M(ミスディスタンス)≦Rt(目標T半径)
以上述べたように、本発明の飛翔体誘導装置によれば、ミスディスタンスを使用して会合時間を計算することができるので、ミスディスタンスがゼロとならない場合に、最接近点近くでも、従来方式よりも精度よく会合時間の計算を行うことができる。
【0068】
また、飛翔体1に加速度がある場合に、最接近点から遠くても、従来方式よりも精度よく会合時間の計算を行うことができる。
【0069】
上述のように、本実施形態による飛翔体誘導装置10は、会合時間の計算時に、最接近点におけるミスディスタンスを計算し、その値を使用して会合時間の計算を行っている。
【0070】
また、飛翔体1の加速度を考慮して会合時間の計算を行い、その会合時間に従って正確なミスディスタンスを求め、更に、目標Tの形状を認識して、目標半径を算出し、直撃できるかどうかを判定している。
【0071】
つまり、本実施形態によれば、飛翔体1と目標Tとの最接近時におけるミスディスタンスがゼロでない場合に、最接近点の近くでも精度良く会合時間を計算することができ、飛翔体1に加速度がある場合に、最接近点から遠くても精度良く会合時間を計算することができ、最接近点から遠くても直撃できるどうかを判定することのできる飛翔体誘導装置10が得られる。
【0072】
また、シーカ2も、上記実施形態では、ミスディスタンスを、飛翔体1の半径でなく、目標Tの半径と比較し、飛翔体1が目標Tに会合するか否かを判定しているので、会合の有無を更に正確に判定できる効果が得られる。
【0073】
なお、本発明は上記の実施形態のそのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記の実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【図面の簡単な説明】
【0074】
【図1】本発明に係る飛翔体誘導装置の一実施形態の構成を示すブロック図。
【図2】本発明に係る飛翔体誘導装置に用いられているシーカの制御の要部のブロック図。
【図3】飛翔体と目標に関する座標系の説明図。
【図4】本発明に係る飛翔体誘導装置の一実施形態の動作を示すフローチャート。
【図5】本発明に係る飛翔体誘導装置の一実施形態の会合時間誤差の例を示すグラフ。
【図6】本発明に係る飛翔体誘導装置の一実施形態の会合時間誤差の例を示すグラフ。
【図7】従来の飛翔体誘導装置の会合時間誤差の例を示すグラフ。
【図8】従来の飛翔体誘導装置の会合時間誤差の例を示すグラフ。
【図9】本発明に係る飛翔体誘導装置の一実施形態での、目標の形状に従ったビーム走査結果の説明図。
【図10】本発明に係る飛翔体誘導装置の一実施形態での、目標と飛翔体の関係の説明図。
【図11】従来の飛翔体誘導装置の飛翔体と目標との飛行動作の説明図。
【符号の説明】
【0075】
1…飛翔体、2…シーカ、3…演算処理装置、4…操舵制御装置、5…操舵装置、6…起爆装置、10…飛翔体誘導装置。
【特許請求の範囲】
【請求項1】
目標を追尾するセンサとして機能するシーカと、
このシーカで検出された目標を捕捉・追尾して飛翔体と該目標との会合点と会合時間を推定計算し、計算結果から所定時刻におけるミスディスタンスを求め、求めたミスディスタンスと前記シーカからの検出情報から算出して目標を検出できる角度範囲と比較して誘導信号を生成する演算処理装置と、
この演算処理装置で生成された前記誘導信号に基づいて前記飛翔体自体を前記目標に向けることにより該目標を追尾する前記飛翔体の操舵を行う操舵制御装置により制御される操舵装置と、
前記演算処理装置で推定計算された会合点近傍で爆薬の起爆タイミングを決定する起爆装置とを搭載した飛翔体誘導装置であって、
前記演算処理装置は、前記飛翔体の位置を基準とする相対座標系において、等速加速度直線運動する前記飛翔体と等速直線運動する前記目標との会合点と会合時間を推定計算することを特徴とする飛翔体誘導装置。
【請求項2】
前記演算処理装置は、前記ミスディスタンスと前記目標を検出できる角度範囲と比較して、前記ミスティスタンスの方が小さい場合か等しい場合に直撃可能との誘導信号を生成することを特徴とする請求項1記載の飛翔体誘導装置。
【請求項3】
前記演算処理装置は、前記ミスディスタンスと前記目標を検出できる角度範囲と比較して、前記ミスティスタンスの方が大きい場合に直撃不可能と判定することを特徴とする請求項1記載の飛翔体誘導装置。
【請求項1】
目標を追尾するセンサとして機能するシーカと、
このシーカで検出された目標を捕捉・追尾して飛翔体と該目標との会合点と会合時間を推定計算し、計算結果から所定時刻におけるミスディスタンスを求め、求めたミスディスタンスと前記シーカからの検出情報から算出して目標を検出できる角度範囲と比較して誘導信号を生成する演算処理装置と、
この演算処理装置で生成された前記誘導信号に基づいて前記飛翔体自体を前記目標に向けることにより該目標を追尾する前記飛翔体の操舵を行う操舵制御装置により制御される操舵装置と、
前記演算処理装置で推定計算された会合点近傍で爆薬の起爆タイミングを決定する起爆装置とを搭載した飛翔体誘導装置であって、
前記演算処理装置は、前記飛翔体の位置を基準とする相対座標系において、等速加速度直線運動する前記飛翔体と等速直線運動する前記目標との会合点と会合時間を推定計算することを特徴とする飛翔体誘導装置。
【請求項2】
前記演算処理装置は、前記ミスディスタンスと前記目標を検出できる角度範囲と比較して、前記ミスティスタンスの方が小さい場合か等しい場合に直撃可能との誘導信号を生成することを特徴とする請求項1記載の飛翔体誘導装置。
【請求項3】
前記演算処理装置は、前記ミスディスタンスと前記目標を検出できる角度範囲と比較して、前記ミスティスタンスの方が大きい場合に直撃不可能と判定することを特徴とする請求項1記載の飛翔体誘導装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2008−45861(P2008−45861A)
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願番号】特願2006−224479(P2006−224479)
【出願日】平成18年8月21日(2006.8.21)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願日】平成18年8月21日(2006.8.21)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]