
飛行体
【課題】スタビライザ等の姿勢安定化手段を設けることなく安定した飛行を行なうことができ、軽量化に有利であり、また、太陽電池と回路部との間における電圧降下や電力の損失を低減することができる飛行体を提供する。
【解決手段】本発明の飛行体は、回転可能に設けられ、複数の回転翼34を有するロータ3と、電力により駆動し、前記ロータ3を回転させる駆動源とを備え、前記回転翼34の回転により生じる推力により飛行する飛行体であって、前記回転翼34の表面に、光を受光して光電変換し、電気を生成する太陽電池71を設け、前記回転翼34の内部に、前記太陽電池71で生成された電気を充電する充電部を有する回路部72を設けたことを特徴とする。
【解決手段】本発明の飛行体は、回転可能に設けられ、複数の回転翼34を有するロータ3と、電力により駆動し、前記ロータ3を回転させる駆動源とを備え、前記回転翼34の回転により生じる推力により飛行する飛行体であって、前記回転翼34の表面に、光を受光して光電変換し、電気を生成する太陽電池71を設け、前記回転翼34の内部に、前記太陽電池71で生成された電気を充電する充電部を有する回路部72を設けたことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛行体に関するものである。
【背景技術】
【0002】
複数の回転翼を有するロータを回転させて空中に浮揚(飛行)する飛行体として、ヘリコプタ等が知られており、例えば、小型の飛行体は、玩具(ヘリコプタの玩具)等として用いられている(例えば、特許文献1参照)。このような飛行体には、飛行姿勢を安定化させるために、スタビライザ等の姿勢安定化手段が設けられている。
しかしながら、従来の飛行体では、スタビライザ等の姿勢安定化手段の分、重量が増加し、例えば、長時間の飛行や、遠方への飛行には不利である。
【0003】
また、回転翼(プロペラ)の表面に、太陽電池(太陽電池パネル)を装着してなる飛行体が提案されている(例えば、特許文献2参照)。このような飛行体では、回転翼に太陽電池のみが設置され、太陽電池で生成された電気を充電する充電部を有する回路部(制御システム部)は、回転翼から離間した別の部位に設置されている。そして、太陽電池と回路部とは、ケーブル(導線)により、電気的に接続されている。
しかしながら、従来の飛行体では、回路部が回転翼から離間した別の部位に設置されているので、太陽電池で生成された電気は、比較的長いケーブルを介して、充電部に充電され、そのケーブルでの電圧降下や電力の損失が非常に大きいという問題がある。
【0004】
【特許文献1】特開2000−218064号公報
【特許文献2】実開平6−34175号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の目的は、スタビライザ等の姿勢安定化手段を設けることなく安定した飛行を行なうことができ、軽量化に有利であり、また、太陽電池と回路部との間における電圧降下や電力の損失を低減することができる飛行体を提供することにある。
【課題を解決するための手段】
【0006】
このような目的は、下記の本発明により達成される。
本発明の飛行体は、回転可能に設けられ、複数の回転翼を有するロータと、
電力により駆動し、前記ロータを回転させる駆動源とを備え、
前記回転翼の回転により生じる推力により飛行する飛行体であって、
前記回転翼の表面に、光を受光して光電変換し、電気を生成する太陽電池を設け、
前記回転翼の内部に、前記太陽電池で生成された電気を充電する充電部を有する回路部を設けたことを特徴とする。
【0007】
これにより、太陽電池と回路部とを接近させることができ、太陽電池と回路部との間における電圧降下や電力の損失を低減することができる。
また、回転翼に太陽電池および回路部が設けられているので、飛行体全体の重量を変えずに、回転翼の重量を増大させることができる。これにより、飛行体全体の重量を変えることなく、回転翼の慣性モーメントを増大させることができ(ジャイロ効果が増大し)、これによって、スタビライザ等の姿勢安定化手段を設けることなく、飛行姿勢を安定させることができ、安定した飛行を行なうことができる。
【0008】
また、姿勢安定化手段を設ける必要がないので、軽量化を図ることができる。
また、回路部が回転翼の内部に設けられているので、回路部が保護され、回路部に、例えば、異物が衝突したり、水等がかかったりして、回路部が故障(例えば、損傷、破損、断線、ショート等)してしまうのを防止することができる。
また、回路部が回転翼の内部に設けられているので、ロータが回転したときの気流(空気流)により、回転翼を介して回路部を冷却することができ、これによって、回路部の誤動作や故障を防止することができる。また、別途、冷却手段を設ける必要がないので、小型化・軽量化に有利である。
【0009】
また、回路部が、回転翼の表面ではなく、回転翼の内部に設けられているので、太陽電池を設けることができる領域を広く確保することができ、これにより、発電量(発電能力)を大きくすることができる。
また、太陽電池を有しているので、長時間の飛行や、遠方への飛行を、容易に行なうことができる。
【0010】
本発明の飛行体では、前記駆動源の駆動のために用いられる電力の少なくとも一部は、前記充電部から供給されるよう構成されていることが好ましい。
これにより、長時間の飛行や、遠方への飛行を、容易に行なうことができる。
本発明の飛行体では、前記回転翼をその厚さ方向から見たとき、前記回路部の略全体が前記太陽電池の一部と重なっていることが好ましい。
このような場合は、回転翼の表面の広範囲に太陽電池が設けられており、これにより、発電量を大きくすることができる。
【0011】
本発明の飛行体では、前記回路部は、前記各回転翼の内部に分散された部分回路部で構成され、
前記各回転翼の部分回路部は、それぞれ、該回転翼の回転中心と該回転翼の端部との中点よりも端部側に、該部分回路部の重心が位置するように設けられていることが好ましい。
これにより、回転翼の慣性モーメントをより大きくすることができ(ジャイロ効果がより大きくなり)、これによって安定した飛行を行なうことができる。
【0012】
本発明の飛行体では、前記回路部は、前記各回転翼の内部に分散された部分回路部で構成され、
前記各回転翼の部分回路部は、それぞれ、該回転翼の回転中心と該回転翼の部分回路部の重心との間の距離が、全て略等しくなるように設けられていることが好ましい。
これにより、ロータ全体のバランスが良くなり、ロータが安定的に回転することができ、安定した飛行を行なうことができる。
【0013】
本発明の飛行体では、略同軸的に設けられ、互いに反対方向に回転する2つの前記ロータを有することが好ましい。
これにより、大型化・重量増加を招来することなく、容易かつ確実に、飛行体全体の回転を防止したり、向きを制御したりすることができる。
また、2つのロータの回転方向は、互いに反対方向なので、鉛直方向下方のロータの回転翼側の太陽電池が、上方のロータの回転翼によって遮光されるのは、一瞬であり、このため、十分に発電することができる。
【0014】
本発明の飛行体では、重心を移動させることにより飛行姿勢を変更する姿勢変更手段を有することが好ましい。
これにより、飛行体の飛行姿勢を容易かつ確実に変更することができ、飛行体を容易かつ確実に任意の位置に飛行(移動)させることができる。
本発明の飛行体では、前記姿勢変更手段は、錘要素と、該錘要素を変位させる変位機構とを有することが好ましい。
これにより、簡易な構成で、飛行体の重心を容易かつ確実に移動させることができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の飛行体を添付図面に示す好適実施形態に基づいて詳細に説明する。
図1は、本発明の飛行体の実施形態を示す斜視図、図2は、図1に示す飛行体における中心軸付近を拡大して示す断面側面図、図3は、図1に示す飛行体におけるロータを模式的に示す平面図、図4は、図1に示す飛行体における振動体の斜視図、図5は、図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図、図6は、図1に示す飛行体における振動体の凸部が楕円運動する様子を示す平面図、図7は、図1に示す小型飛翔体における姿勢変更手段の斜視図、図8は、図1に示す小型飛翔体における姿勢変更手段の分解斜視図、図9は、図1に示す飛行体における姿勢変更手段のリニアアクチュエータの斜視図、図10は、図1に示す飛行体における姿勢変更手段のリニアアクチュエータの平面図、図11は、図1に示す飛行体における姿勢変更手段のリニアアクチュエータの側面図、図12は、図10中のA−A線での断面図、図13は、図1に示す飛行体における振動体の斜視図、図14および図15は、それぞれ、図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図、図16は、図1に示す飛行体の回路構成を示すブロック図である。
【0016】
なお、以下の説明では、図1、図2、図7および図8中の上方(上側)を「上」、下方(下側)を「下」として説明する。
また、図1に示す飛行体の姿勢を「基本姿勢」とし、図1中、上下方向を「鉛直方向」、上方(上側)を「鉛直方向上方(鉛直方向上側)」、下方(下側)を「鉛直方向下方(鉛直方向下側)」とする。
また、図1、図7および図8において、図示のように、互いに直交するx軸、y軸およびz軸(x−y−z座標)を想定する。この場合、z軸は、ロータの回転中心線(回転中心軸)と一致または平行になるように想定される。
【0017】
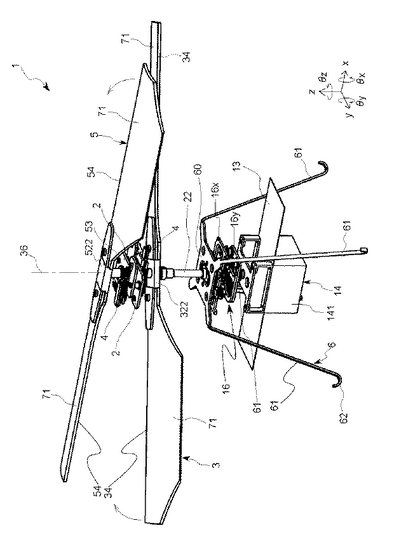
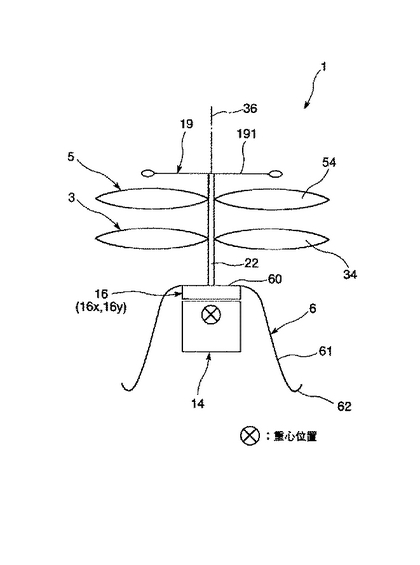
これらの図に示す飛行体1は、略円筒状の中心軸(軸)22と、互いに対向するように中心軸22に固定された2つの基部2と、中心軸22(下側の基部2)に対し回転可能に設置され、2枚の回転翼(第1の回転翼)34を備えたロータ(第1のロータ)3と、下側の基部2に設けられ、ロータ3を回転駆動する(回転させる)駆動源である振動体(第1の振動体)(第1の超音波モータ)4と、中心軸22(上側の基部2)に対し回転可能に設置され、2枚の回転翼(第2の回転翼)54を備えたロータ(第2のロータ)5と、上側の基部2に設けられ、ロータ5を回転駆動する(回転させる)駆動源である振動体(第2の振動体)(第2の超音波モータ)4と、重心の移動により飛行体1の飛行姿勢を変更する姿勢変更手段16と、中心軸22に固定され、飛行体1を支持する接地手段6とを有している。ロータ3と、ロータ5とは、互いに反対方向に回転し、かつ、同軸的に設けられている。すなわち、この飛行体1は、2重反転ロータを備えている。
【0018】
前記ロータ3、5、ロータ3を回転駆動する振動体4およびロータ5を回転駆動する振動体4により、推力(揚力)を発生させる推力発生手段(揚力発生手段)の主要部が構成される。基本姿勢において、この推力発生手段は、鉛直方向上方に位置し、姿勢変更手段16および接地手段6は、それぞれ、鉛直方向下方に位置している。
また、本実施形態では、前記ロータ3を回転駆動する振動体(第1の振動体)4により、超音波モータ(第1の超音波モータ)が構成されているが、本発明では、その超音波モータは、振動体4の他に、他の構成物を有していてもよい。
【0019】
同様に、本実施形態では、前記ロータ5を回転駆動する振動体(第2の振動体)4により、超音波モータ(第2の超音波モータ)が構成されているが、本発明では、その超音波モータは、振動体4の他に、他の構成物を有していてもよい。
なお、姿勢変更手段16の後述するリニアアクチュエータ16xおよび16yの振動体についても同様である。
【0020】
以下、各部の構成について説明する。
図1および図2に示すように、2つの基部2は、それぞれ、略平板状をなす基板21と、基板21に設けられた振動体取付部23とを有している。上側の基部2では、振動体取付部23は、基板21の上側に設けられ、下側の基部2では、振動体取付部23は、基板21の下側に設けられている。
【0021】
中心軸22の、下側の基部2の下方であって、その基部2の近傍には、ロータ3が回転可能に設置されている。このロータ3は、平面視で(図2中上側から見たとき)時計回りに回転する。
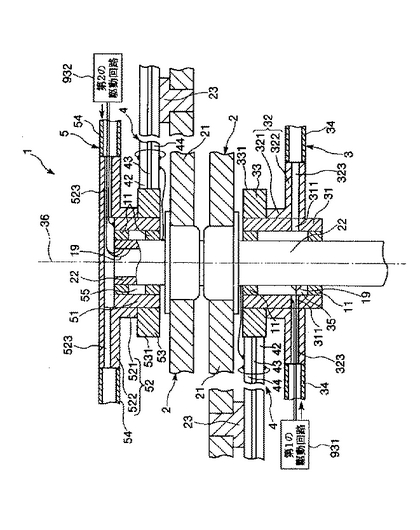
図2に示すように、ロータ3は、略円筒状をなす筒状部材31と、筒状部材31の外側(外周)にそれぞれ固着(固定)された回転翼固定部材32および被駆動体(第1の被駆動体)33と、回転翼固定部材32にそれぞれ固着された2枚の回転翼34とを有している。
【0022】
このロータ3は、筒状部材31の内腔、すなわち軸孔35に中心軸22が挿入した状態で設置されている。中心軸22と、軸孔35の内面との間には、2つの軸受け11、11がそれぞれ設けられており、これにより、ロータ3は、基部2に対し中心軸22(回転中心線36)を中心として滑らかに回転可能になっている。
軸受け11は、滑り軸受けで構成されているが、転がり軸受け(ベアリング)であってもよい。
【0023】
筒状部材31の回転翼34に対応する位置には、図2中左右方向に延在す2つの貫通孔311が形成されている。
回転翼固定部材32は、略円筒状に形成された筒状部321と、筒状部321の下端部からロータ3の回転中心線36と略垂直な方向に突出形成された固定部322とで構成されている。回転翼固定部材32の回転翼34に対応する位置には、図2中左右方向に延在し、前記対応する貫通孔311に連通する2つの貫通孔323が形成されている。この回転翼固定部材32は、筒状部321の内側に筒状部材31が挿入した状態で、例えば圧入により、筒状部材31に固着されている。
【0024】
固定部322には、2枚の回転翼34の基端部(根元部)がそれぞれ固着されている。
2枚の回転翼34は、回転中心線36から互いに反対側に延びるように設けられている。すなわち、2枚の回転翼34は、略180°間隔で設けられている。また、回転翼34は、回転中心線36に対し略垂直な姿勢で設置されている。
ロータ3が後述する振動体4の駆動により平面視で(図2中上側から見たとき)時計回りに回転すると、回転翼34には、揚力(回転中心線36に略平行で上向きの力)が作用する。
なお、ロータ3に設けられた回転翼34の枚数は、2枚に限らず、3枚以上設けられていてもよい。
【0025】
筒状部材31の上端部外周には、被駆動体33が設けられている。すなわち、被駆動体33は、回転翼固定部材32の上側に位置している。
被駆動体33は、略リング状(円環状)をなしており、その内側に筒状部材31の上端部が挿入した状態で、例えば圧入により、筒状部材31に対し固着されている。
基部2の下側には、このようなロータ3を回転駆動する振動体4が、その後述する補強板43の凸部(接触部)46が被駆動体33の外周面331に当接するようにして設置されている。この振動体4は、回転翼34の近傍に位置している。
【0026】
一方、中心軸22の、上側の基部2の上方であって、その基部2の近傍には、ロータ5が回転可能に設置されている。このロータ5は、平面視で(図2中上側から見たとき)反時計回りに回転する。
ロータ5は、略円筒状をなす筒状部材51と、筒状部材51の外側(外周)にそれぞれ固着(固定)された回転翼固定部材52および被駆動体(第2の被駆動体)53と、回転翼固定部材52にそれぞれ固着された2枚の回転翼54と有しており、ロータ3と同軸的(同心的)に、ロータ3の上方に設置されている。
【0027】
このロータ5は、筒状部材51の内腔、すなわち軸孔55に中心軸22が挿入した状態で設置されている。中心軸22と、軸孔55の内面との間には、2つの軸受け11、11がそれぞれ設けられており、これにより、ロータ5は、基部2に対し中心軸22(回転中心線36)を中心として滑らかに回転可能になっている。
軸受け11は、滑り軸受けで構成されているが、転がり軸受け(ベアリング)であってもよい。
【0028】
回転翼固定部材52は、上側が閉じ、略円筒状に形成された筒状部521と、筒状部521の上端部からロータ5の回転中心線36と略垂直な方向に突出形成された固定部522とで構成されている。回転翼固定部材52の回転翼54に対応する位置には、図2中左右方向に延在する2つの貫通孔523が形成されている。この回転翼固定部材52は、筒状部521の内側に筒状部材51が挿入した状態で、例えば圧入により、筒状部材51に固着されている。
【0029】
固定部522には、2枚の回転翼54の基端部(根元部)がそれぞれ固着されている。
2枚の回転翼54は、回転中心線36から互いに反対側に延びるように設けられている。すなわち、2枚の回転翼54は、略180°間隔で設けられている。また、回転翼54は、回転中心線36に対し略垂直な姿勢で設置されている。
ロータ5が後述する振動体4の駆動により平面視で(図2中上側から見たとき)反時計回りに回転すると、回転翼54には、揚力(回転中心線36に略平行で上向きの力)が作用する。
なお、ロータ5に設けられた回転翼54の枚数は、2枚に限らず、3枚以上設けられていてもよい。
【0030】
筒状部材51の下端部外周には、被駆動体53が設けられている。すなわち、被駆動体53は、回転翼固定部材52の下側に位置している。
被駆動体53は、略リング状(円環状)をなしており、その内側に筒状部材51の下端部が挿入した状態で、例えば圧入により、筒状部材51に対し固着されている。
基部2の上側には、このようなロータ5を回転駆動する振動体4が、その後述する補強板43の凸部(接触部)46が被駆動体53の外周面531に当接するようにして設置されている。この振動体4は、回転翼54の近傍に位置している。
【0031】
このような構成により、回転翼54は、回転翼34より上側に位置している。また、回転翼54は、上側の基部2の基板21の上側に位置し、回転翼34は、下側の基部2の基板21の下側に位置している。
前記ロータ3が平面視で(図2中上側から見たとき)時計回りに回転すると、回転翼34に揚力が作用し、また、ロータ5がロータ3と反対方向に回転すると、回転翼54に揚力が作用し、これらの揚力により、飛行体1は、空中に浮揚(飛行)する。すなわち、飛行体1は、回転翼34および35の回転により生じる揚力(推力)により飛行する。
【0032】
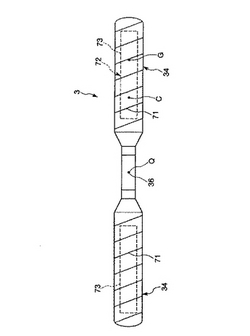
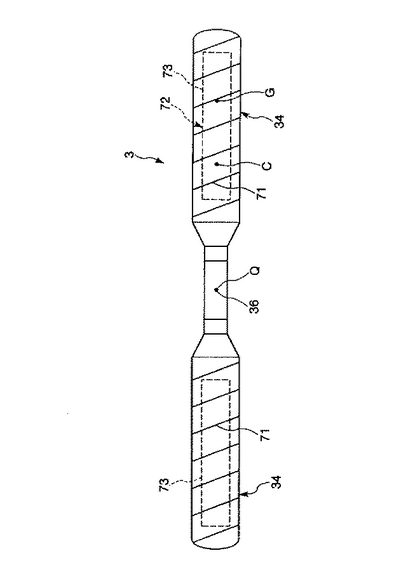
図3には、飛行体1におけるロータ3が模式的に示されており、図3および図16に示すように、この飛行体1では、ロータ3に、光を受光して光電変換し、電気を生成する太陽電池(太陽電池パネル)(光電変換素子)71と、駆動制御手段9のうちの回路部72とが設けられている。回路部72は、太陽電池71で生成された電気を充電する充電部(充電システム)74と、ロータ3を回転駆動する振動体4を駆動する第1の駆動回路931とを有している。また、充電部74は、電気が充電される2次電池と、この2次電池に太陽電池71で生成された電気を充電するための回路とを有している。なお、図3では、太陽電池71の部分を斜線で示す。
【0033】
同様に、ロータ5に、光を受光して光電変換し、電気を生成する太陽電池(太陽電池パネル)(光電変換素子)71と、駆動制御手段9のうちの回路部72とが設けられている。回路部72は、太陽電池71で生成された電気を充電する充電部(充電システム)74と、ロータ5を回転駆動する振動体4を駆動する第2の駆動回路932とを有している。また、充電部74は、電気が充電される2次電池と、この2次電池に太陽電池71で生成された電気を充電するための回路とを有している。
なお、前記ロータ3側の構成と前記ロータ5側の構成とは、同様であるので、以下、代表的に、ロータ3側について説明する。
【0034】
太陽電池71は、ロータ3の各回転翼34の表面にそれぞれ設けられている。この場合、太陽電池71は、各回転翼34の上側の面に設置される。
一方、ロータ3の各回転翼34は、それぞれ、中空部を有しており、回路部72は、各中空部(各回転翼34の内部)に設けられている。すなわち、回路部72は、各回転翼34の内部に分散された2つの部分回路部73で構成されている。なお、回路部72と、太陽電池71とは、互いに電気的に接続されている。
【0035】
ロータ3を回転駆動する振動体4の駆動のために用いられる電力(電圧)は、この回路部72の充電部74から供給される。
このような構成により、太陽電池71と回路部72(充電部74)とを接近させることができ、太陽電池71と回路部72との間における電圧降下や電力の損失を低減することができる。
【0036】
また、各回転翼34に太陽電池71および部分回路部73が設けられているので、飛行体1全体の重量を変えずに、各回転翼34(ロータ3)の重量を増大させることができる。これにより、飛行体1全体の重量を変えることなく、各回転翼34(ロータ3)の慣性モーメントを増大させることができ(ジャイロ効果が増大し)、これによって、スタビライザ等の姿勢安定化手段を設けることなく、飛行姿勢を安定させることができ、安定した飛行を行なうことができる。
【0037】
また、姿勢安定化手段を設ける必要がないので、軽量化を図ることができる。
また、回路部72が回転翼34の内部に設けられているので(各部分回路部73が各回転翼34の内部に設けられているので)、回路部72が保護され、回路部72に、例えば、異物が衝突したり、水等がかかったりして、回路部72が故障(例えば、損傷、破損、断線、ショート等)してしまうのを防止することができる。
【0038】
また、回路部72が回転翼34の内部に設けられているので、ロータ3が回転したときの気流(空気流)により、回転翼34を介して回路部72を冷却することができ、これによって、回路部72の誤動作や故障を防止することができる。また、別途、冷却手段を設ける必要がないので、小型化・軽量化に有利である。
また、回路部72が、回転翼34の表面ではなく、回転翼34の内部に設けられているので、太陽電池71を設けることができる領域を広く確保することができ、これにより、発電量(発電能力)を大きくすることができる。
【0039】
また、随時、太陽電池71により発電し、充電部74によりその電気を充電することができるので、長時間の飛行や、遠方への飛行を、容易に行なうことができる。
また、ロータ3とロータ5の回転方向は、互いに反対方向なので、下方のロータ3の回転翼34側の太陽電池71が、上方のロータ5の回転翼54によって遮光されるのは、一瞬であり、このため、十分に発電することができる。
【0040】
ここで、太陽電池71は、回転翼34をその厚さ方向から見たとき(平面視で)、回路部72の略全体が太陽電池71の一部と重なるように、すなわち、各部分回路部73の略全体が、それぞれ、太陽電池71の一部と重なるように設置されるのが好ましく、各回転翼34の上側の面の略全面に設置されるのがより好ましい。これにより、発電量を大きくすることができる。
【0041】
また、各回転翼34の部分回路部73は、それぞれ、回転翼34(ロータ3)の回転中心Qと回転翼34の端部との中点Cよりも端部側に、部分回路部73の重心Gが位置するように設けられている。これにより、回転翼34の慣性モーメントをより大きくすることができ(ジャイロ効果がより大きくなり)、これによって安定した飛行を行なうことができる。
【0042】
また、各回転翼34の部分回路部73は、それぞれ、回転翼34の回転中心Qと回転翼34の部分回路部73の重心Gとの間の距離が、全て略等しくなるように設けられている。これにより、ロータ3全体のバランスが良くなり、ロータ3が安定的に回転することができ、安定した飛行を行なうことができる。
なお、本実施形態では、充電部74から供給される電力のみによって、振動体4が駆動されるように構成されているが、これに限らず、例えば、充電部74から供給される電力が、振動体4の駆動のための補助電力として用いられるよう構成されていてもよい。すなわち、振動体4の駆動のために用いられる電力の一部が、充電部74から供給されるようになっていてもよい。
【0043】
また、この飛行体1では、軸22は、上側の基部2より上側の部分と、下側の基部2より下側の部分とが、それぞれ、金属等の導電材料で構成されており、上側の基部2と下側の基部2との間の部分が、絶縁材料で構成されている。これにより、軸22における上側の基部2より上側の部分と、下側の基部2より下側の部分とは、互いに絶縁されている。
また、筒状部材31、51、被駆動体33および53は、それぞれ、金属等の導電材料で構成されている。そして、筒状部材31と被駆動体33とは、互い導通し、筒状部材51と被駆動体53とは、互い導通している。
そして、軸22の導電性を有している部分と、筒状部材31および被駆動体33と、筒状部材51と被駆動体53とは、互いに絶縁されている。
【0044】
図2に示すように、第1の駆動回路931の交流電圧を出力する出力部の一方の端子は、導線(ケーブル)を介して、筒状部材31に電気的に接続され、他方の端子は、導線を介して、ブラシ19に電気的に接続されている。このブラシ19は、軸22における下側の基部2より下側の部分の外周面に接触(導通)している。
また、軸22における下側の基部2より下側の部分の外周面と、ロータ3を回転駆動する振動体4の後述する圧電素子44側の電極45とは、導線を介して、電気的に接続されている。また、この振動体4の圧電素子44側の電極45と、圧電素子42側の後述する電極41とは、導線を介して、電気的に接続されている。
【0045】
これにより、第1の駆動回路931の交流電圧を出力する出力部の一方の端子は、筒状部材31、被駆動体33および振動体4の後述する補強板43の凸部(接触部)46等を介して、その補強板43に電気的に接続される。
一方、第1の駆動回路931の交流電圧を出力する出力部の他方の端子は、ブラシ19および軸22における下側の基部2より下側の部分等を介して、その振動体4の電極41および45に電気的に接続される。
【0046】
同様に、第2の駆動回路932の交流電圧を出力する出力部の一方の端子は、導線(ケーブル)を介して、筒状部材51に電気的に接続され、他方の端子は、導線を介して、ブラシ19に電気的に接続されている。このブラシ19は、軸22における上側の基部2より上側の部分の外周面に接触(導通)している。
また、軸22における上側の基部2より上側の部分の外周面と、ロータ5を回転駆動する振動体4の圧電素子44側の電極45とは、導線を介して、電気的に接続されている。また、この振動体4の圧電素子44側の電極45と、圧電素子42側の電極41とは、導線を介して、電気的に接続されている。
【0047】
これにより、第2の駆動回路932の交流電圧を出力する出力部の一方の端子は、筒状部材51、被駆動体53および振動体4の補強板43の凸部(接触部)46等を介して、その補強板43に電気的に接続される。
一方、第2の駆動回路932の交流電圧を出力する出力部の他方の端子は、ブラシ19および軸22における上側の基部2より上側の部分等を介して、その振動体4の電極41および45に電気的に接続される。
【0048】
図1に示すように、接地手段6は、中心軸22に固定された板状の固定部60と、弾性(バネ性)を有し、棒状の4本の脚(接地脚)61とを備えている。
各脚61は、それぞれ、図1に示す基本姿勢において、固定部60から垂直方向斜め下方に延出し、かつ、垂直方向下方に向かって拡開している。また、各脚61は、固定部60を中心にして等間隔(等角度間隔)で配置されている。また、各脚61の先端部(下側の端部)62は、それぞれ、下側が凸となるように、外側に向かって湾曲している。
【0049】
固定部60は、基本姿勢において重心(飛行体1の重心)よりも鉛直方向上方で、かつ、姿勢変更手段16よりも鉛直方向上方の部位(中心軸22)に固定されている。
この接地手段6により、地面(床面)に安定的に接地することができ、離着陸を容易かつ確実に行なうことができる。
特に、着地の際は、脚61の弾性で、着地の衝撃を吸収することができ、また、飛行体1が傾いた状態で着地しても、最初に接地した脚61のバネ力で、飛行体1の姿勢を直すので、横転を防止することができる。
【0050】
次に、振動体4について、代表的に、ロータ3を回転駆動する振動体4を説明する。
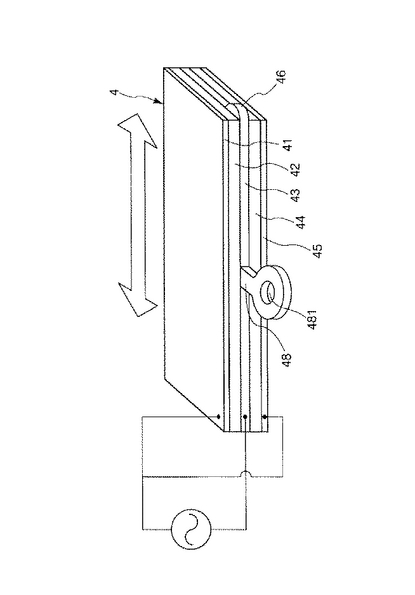
図4に示すように、振動体4は、略長方形の板状をなしている。振動体4は、図4中の上側から板状の電極41と、板状の圧電素子42と、補強板(振動板)43と、板状の圧電素子44と、板状の電極45とをこの順に積層して構成されている。なお、図4では、厚さ方向を誇張して示している。
【0051】
圧電素子42、44は、それぞれ、長方形状をなし、電圧を印加することにより、その長手方向に伸長・収縮する。圧電素子42、44の構成材料としては、特に限定されず、例えば、チタン酸ジルコニウム酸鉛(PZT)、水晶、ニオブ酸リチウム、チタン酸バリウム、チタン酸鉛、メタニオブ酸鉛、ポリフッ化ビニリデン、亜鉛ニオブ酸鉛、スカンジウムニオブ酸鉛等の各種のものを用いることができる。
【0052】
これらの圧電素子42、44は、補強板43の両面にそれぞれ固着されている。補強板43は、振動体4全体を補強する機能を有しており、振動体4が過振幅、外力等によって損傷するのを防止する。補強板43の構成材料としては、弾性材料(弾性変形し得るもの)であれば特に限定されないが、例えばステンレス鋼、アルミニウムまたはアルミニウム合金、チタンまたはチタン合金、銅または銅系合金等の各種金属材料であるのが好ましい。なお、本実施形態では、補強板43の構成材料として、金属材料を用いる。
【0053】
この補強板43は、圧電素子42、44よりも厚さが薄い(小さい)ものであることが好ましい。これにより、振動体4を高い効率で振動させることができる。
補強板43は、圧電素子42、44に対する共通の電極としての機能をも有している。すなわち、圧電素子42には、電極41と補強板43とによって交流電圧が印加され、圧電素子44には、電極45と補強板43とによって交流電圧が印加される。すなわち、前述したように(図16に示すように)、振動体4は、回路部72の第1の駆動回路931に接続されており、その第1の駆動回路931により交流電圧が印加されるようになっている。
【0054】
圧電素子42、44は、交流電圧が印加されると長手方向に繰り返し伸縮し、これに伴なって、補強板43も長手方向に繰り返し伸縮する。すなわち、圧電素子42、44に交流電圧を印加すると、振動体4は、図4中の矢印で示すように、長手方向に微小な振幅で振動(縦振動)し、凸部46が縦振動(往復運動)する。
補強板43の図4中の右端部には、凸部(接触部)46が一体的に形成されている。この凸部46は、補強板43の幅方向中央(中心線49)からずれた位置(図示の構成では角部)に設けられている。この凸部46は、図示の構成では、略半円形状に突出するように形成されている。
【0055】
また、補強板43には、弾性(可撓性)を有する腕部48が一体的に形成されている。腕部48は、補強板43の長手方向略中央から、長手方向と略垂直な方向に突出するように設けられている。この腕部48には、ボルト12が挿入する孔481が形成されている。
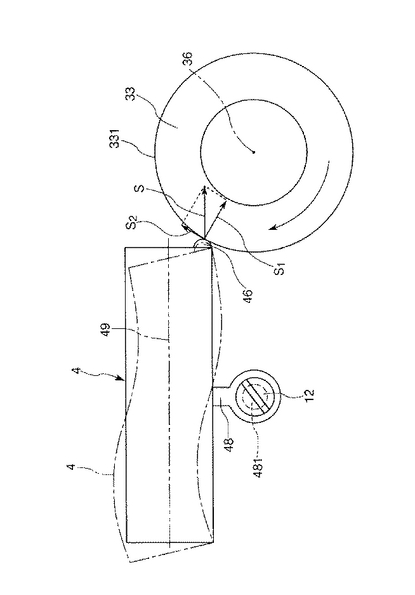
図2および図5に示すように、このような振動体4は、凸部46にて被駆動体33の外周面331に当接(接触)するように設置されている。すなわち、本実施形態では、振動体4は、被駆動体33に対し被駆動体33の半径方向外周側から当接して設置されている。
なお、図示の構成では、外周面331は、平滑になっているが、全周に渡り溝を形成し、この溝内に凸部46が当接することとしてもよい。
【0056】
図2および図5に示すように、下側の基部2の基板21から下方に向かって突設された振動体取付部23には、ネジ穴が形成されており、振動体4は、腕部48の孔481に挿入されたボルト12によって、この振動体取付部23に固定されている。
このように、振動体4は、腕部48によって支持されている。これにより、振動体4は自由に振動することができ、比較的大きい振幅で振動する。また、振動体4は、腕部48の弾性によって、凸部46が外周面331に圧接された状態で設置されている。
また、振動体4は、回転中心線36に略垂直な姿勢(回転翼34に略平行な姿勢)で設置されている。これにより、振動体4が占めるスペースが上下方向に小さくなる。
【0057】
凸部46が被駆動体33の外周面331に当接した状態で、圧電素子42、44に交流電圧を印加して振動体4を振動させると、被駆動体33は、振動体4が伸長するときに凸部46から摩擦力(押圧力)を受ける。
すなわち、図5に示すように、凸部46の振動変位Sの径方向成分S1(被駆動体33の径方向の変位)によって、凸部46と外周面331との間に大きな摩擦力が与えられ、振動変位Sの周方向成分S2(被駆動体33の円周方向の変位)によって、被駆動体33に図5中の時計回りの回転力が与えられる。
【0058】
振動体4が振動すると、このような力が被駆動体33に繰り返し作用し、被駆動体33は、図5中の時計回りに回転する。これにより、ロータ3は、図5中の(図2中下側から見たときの)時計回りに回転する。
なお、ロータ5を回転駆動する振動体4については、前記ロータ3を回転駆動する振動体4と同様であるので、説明を省略するが、振動体4も同様に、その凸部46にて、被駆動体53の外周面531に当接するように設けられている。
【0059】
ロータ5は、振動体4の駆動により、ロータ3と反対方向、すなわち、図示しない平面視で(図2中下側から見たときの)反時計回りに回転する。
ロータ3が図5中の時計回りに回転すると、回転翼34に揚力が作用し、また、ロータ5がロータ3と反対方向に回転すると、回転翼54に揚力が作用し、これらの揚力により、飛行体1は、空中に浮揚(飛行)する。
【0060】
なお、ロータ3側には、ロータ3の回転数(回転速度)を検出する回転数検出手段を設けるのが好ましく、ロータ5側には、ロータ5の回転数(回転速度)を検出する回転数検出手段を設けるのが好ましい。
このように、振動体4は、構造が簡単で、小型(特に薄型)・軽量である。また、通常の電磁モータのように磁力で駆動する場合と異なり、前記のような摩擦力(押圧力)によって被駆動体33、53を駆動することから、駆動力が大きい。
【0061】
この飛行体1は、このような振動体4を用いてロータ3、5を回転駆動するようにしたことにより、小型化に極めて有利である。また、軽量化にも有利であり、飛行体1のペイロード(荷重)を大きくとることができる。また、製造コストの低減も図ることができる。
また、本実施形態では、前述したように、被駆動体33が筒状部材31に固着され、被駆動体33は、ロータ3と一体になっている。すなわち、振動体4は、ロータ3を直接に回転駆動するようになっており、動力伝達機構や変速機構等が設けられていない(不要である)。ロータ5側も同様に、振動体4は、ロータ5を直接に回転駆動するようになっており、動力伝達機構や変速機構等が設けられていない(不要である)。これにより、飛行体1は、特に簡単な構造、かつ軽量になっており、小型化・軽量化(ペイロード確保)に特に有利になっている。
【0062】
なお、前述したように、振動体4は、駆動力が大きいため、本実施形態のように、変速機構(減速機構)を介さなくてもロータ3、5を十分なトルクで回転することができる。
また、本実施形態では、振動体4の面内振動をロータ3、5の回転(面内回転)に直接変換するので、この変換に伴なうエネルギーロスが少なく、ロータ3、5を高い効率で回転駆動することができる。
また、本実施形態では、凸部46が被駆動体33に及ぼす摩擦力(押圧力)の方向は、回転中心線36に対し略垂直な方向であるため、ロータ3を傾斜させるような力が作用することがなく、ロータ3がより円滑かつ確実に回転する。同様に、ロータ5もより円滑かつ確実に回転する。
【0063】
なお、図示の構成と異なり、ロータ3を回転駆動する振動体4は、回転中心線36に平行な方向から被駆動体33の上面または下面に当接するように設置されていてもよく、また、ロータ5を回転駆動する振動体4は、ロータ5の回転中心線36に平行な方向から被駆動体53の上面または下面に当接するように設置されていてもよい。
また、ロータ3とロータ5との2つが揚力を発生するので、大きな揚力が得られる。
また、ロータ3とロータ5とが互いに反対方向に回転することにより、飛行体1(基部2)が受ける反力が相殺され、飛行体1が回転中心線36の回りに回転するのを防止することができる。
【0064】
特に、ロータ3に対する振動体4と、ロータ5に対する振動体4とを別個に設けたことから、ロータ3の回転数(回転速度)と、ロータ5の回転数(回転速度)とをそれぞれ別個に調整(調節)することができ、これにより、飛行体1(基部2)が回転中心線36の回りに回転するのをより確実に防止したり、飛行体1の回転中心線36の回りに回転(向き)を制御したりすることができる。
【0065】
また、ロータ3とロータ5とが同軸的に設けられていることにより、ロータを2つ設けたことによる大型化・重量増加を招来することなく、上記効果を達成することができる。すなわち、小型化・軽量化に有利である。
なお、図示の構成では、ロータ3とロータ5とは、直径や、回転翼の枚数(2枚)、回転翼の形状等の条件が同じになっているが、直径、回転翼の枚数、回転翼の形状等の条件が互いに異なるものであってもよい。
また、本発明では、ロータ3とロータ5とが同軸的に設けられていないもの(並設されたもの)であってもよい。
【0066】
圧電素子42、44に印加する交流電圧の周波数は、特に限定されないが、振動体4の振動(例えば、縦振動)の共振周波数と略同程度であるのが好ましい。これにより、振動体4の振幅が大きくなり、高い効率でロータ3、5を回転駆動することができる。
前述したように、振動体4は、主に、その長手方向に縦振動するが、縦振動と屈曲振動とを同時に励振し、凸部46を楕円運動(楕円振動)させることとするのがより好ましい。これにより、より高い効率でロータ3、5を回転駆動することができる。以下、この点について、代表的に、ロータ3を回転駆動する振動体4で説明する。
【0067】
振動体4が被駆動体33を回転駆動するとき、凸部46は、被駆動体33から反力を受ける。本実施形態では、凸部46が振動体4の中心線49からずれた位置に設けられていることから、振動体4は、この反力によって、図5中の一点鎖線で示すように面内方向に屈曲するように変形、振動(屈曲振動)する。なお、図5では、振動体4の変形を誇張して示している。
【0068】
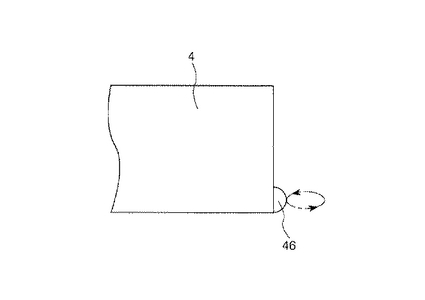
また、印加電圧の周波数、振動体4の形状・大きさ、凸部46の位置などを適宜選択することにより、振動体4の縦振動と屈曲振動との複合振動を励振することができ、例えば、振幅が大きくなるとともに、凸部46は、図6中の一点鎖線で示すように、略楕円に沿って変位(楕円振動)する。
これにより、振動体4の1回の振動において、凸部46が被駆動体33を回転方向に送るときには、凸部46が被駆動体33により強い力で圧接され、凸部46が戻るときには、被駆動体33との摩擦力を低減または消滅させることができるため、振動体4の振動をロータ3の回転により高い効率で変換することができる。
【0069】
なお、本実施形態では、振動体4でロータ3を直接的に回転駆動するものとなっているが、本発明では、振動体4がロータ3を間接的に駆動するものであってもよい。すなわち、被駆動体33をロータ3と別個に設け、被駆動体33の回転力を回転力伝達機構によってロータ3に伝達するようなものであってもよい(ロータ3が被駆動体33に連動して回転するようになっていればよい)。同様に、本実施形態では、振動体4でロータ5を直接的に回転駆動するものとなっているが、本発明では、振動体4がロータ5を間接的に駆動するものであってもよい。すなわち、被駆動体53をロータ5と別個に設け、被駆動体53の回転力を回転力伝達機構によってロータ5に伝達するようなものであってもよい(ロータ5が被駆動体53に連動して回転するようになっていればよい)。これらの場合、回転力伝達機構としては、例えば、歯車列(歯車伝動機構)や、プーリー、ベルト、チェーン等を用いた巻き掛け伝動機構等、いかなる機構を用いるものでもよい。
【0070】
また、本実施形態では、ロータ3(被駆動体33)を回転駆動する振動体4は、1つ設置されているが、本発明では、その振動体4を複数設け、被駆動体33を複数の振動体4で回転駆動してもよい。同様に、本実施形態では、ロータ5(被駆動体53)を回転駆動する振動体4は、1つ設置されているが、本発明では、その振動体4を複数設け、被駆動体53を複数の振動体4で回転駆動してもよい。
【0071】
次に、姿勢変更手段16について説明する。
図1、図7および図8に示す姿勢変更手段16は、重心の移動により、飛行体1の姿勢を変更(調節)することで、ロータ3および5の回転中心線(回転中心軸)36を鉛直線(鉛直方向:重力の方向)に対して所定方向に所定角度傾斜させるもの(傾きを調節するもの)である。
【0072】
図1に示すように、姿勢変更手段16は、回転翼34の下方に位置している。すなわち、姿勢変更手段16は、中心軸22の下端に設置(固定)されている。
本実施形態における姿勢変更手段16は、錘要素(錘)14と、錘要素14をy軸方向に移動(変位)させるy軸方向移動手段(y軸方向変位手段)であるリニアアクチュエータ(第1のリニアアクチュエータ)16yと、リニアアクチュエータ(y軸方向移動手段)16yおよび錘要素14をx軸方向に移動(変位)させるx軸方向移動手段(x軸方向変位手段)であるリニアアクチュエータ(第2のリニアアクチュエータ)16xとを有している。
なお、前記リニアアクチュエータ16xおよび16yにより、飛行体1に対して錘要素14を移動(変位)させる移動手段(変位手段(変位機構))が構成される。
【0073】
図7および図8に示すように、リニアアクチュエータ16xと、リニアアクチュエータ16yとは、互いの後述するスライダ181が対向した状態で、4つのピン186を介して、互いに接合されている。この場合、各ピン186は、それぞれ、一端側がリニアアクチュエータ16yのスライダ181の孔部185(図9および10参照)に挿入され、他端側がリニアアクチュエータ16xのスライダ181の孔部185(図9および10参照)に挿入され、互いのスライダ181同士を連結している。
【0074】
また、リニアアクチュエータ16xと、リニアアクチュエータ16yとは、互いのスライダ181の移動方向が直交、すなわち、リニアアクチュエータ16xのスライダ181の移動方向がx軸方向、リニアアクチュエータ16yのスライダ181の移動方向がy軸方向となるように接合されている。
また、この姿勢変更手段16では、リニアアクチュエータ16xが、上方に位置し、リニアアクチュエータ16yが下方に位置し、図1に示すように、リニアアクチュエータ16xの後述するベース161の中央部の上側が、中心軸22の下端に接合されている。そして、リニアアクチュエータ16yの後述するベース161の中央部の下側に、錘要素14が接合されている。
【0075】
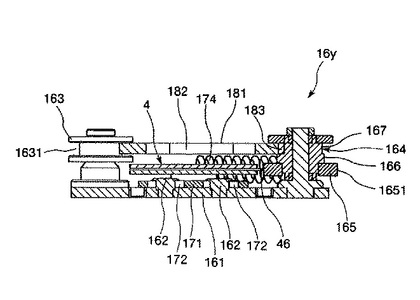
次に、リニアアクチュエータ16yと、リニアアクチュエータ16xとについて、代表的に、リニアアクチュエータ16yを説明する。
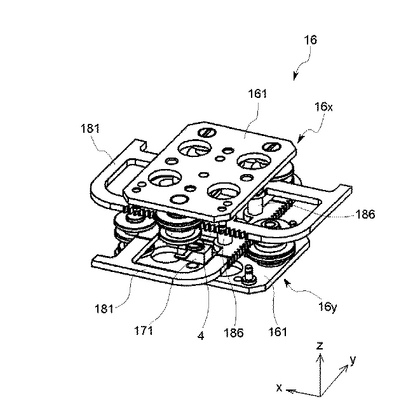
図9〜図12に示すように、リニアアクチュエータ16yは、板状のベース161と、板状の基台171と、板状のスライダ181と、振動体(駆動源)4とを有している。これらベース161、基台171、スライダ181および振動体は、それぞれ、互いに平行(一部が面方向に重なる場合も含む)になるように設置されている。
【0076】
基台171は、ベース161の中央部に、そのベース161に対して図10〜図12中左右方向に移動可能に設置されている。この場合、ベース161の中央部には、1対のガイドピン162が図10〜図12中左右方向に沿って立設され、基台171には、図10〜図12中左右方向に長い1対の長穴172が図10〜図12中左右方向に沿って形成されている。各ガイドピン162は、それぞれ、対応する長穴172に挿入されている。これにより、基台171は、ガイドピン162に案内され、長穴172に沿って図10〜図12中左右方向に移動することができる。
【0077】
この基台171には、後述するロータ164(被駆動体165)を回転駆動する振動体4が設置されている。振動体は、凸部(接触部)46および1対の腕部48を有し、その凸部46が図10〜図12中右側を向くように、基台171に対し、各腕部48に形成された孔481に挿入されたボルト175によって固定されている。これにより、振動体4は、振動し得るように、各腕部48によって支持される。なお、振動体4については、後に詳述する。
【0078】
また、ベース161の図10〜図12中右側の端部(角部)には、1対のバネ止めピン168が立設されている。一方、基台171には、1対のバネ掛け部173が形成されている。一方のバネ掛け部173は、基台171の図10中上側に設けられ、他方のバネ掛け部173は、基台171の図10中下に設けられている。
そして、これら対応するバネ止めピン168とバネ掛け部173には、それぞれ、コイルバネ174(付勢手段)が伸張した状態(伸張状態)で設置されている。すなわち、各コイルバネ174は、それぞれ、その一端側が、基台171のバネ掛け部173に掛けられ(固定され)、他端側が、ベース161のバネ止めピン168に取り付けられている(固定されている)。
【0079】
各コイルバネ174の弾性力(復元力)により、ベース161は、図10〜図12中右側に向かって付勢され、振動体4の凸部46は、後述する被駆動体165の外周面1651に当接するとともに押圧される。
また、ベース161の図10〜図12中右側の端部で、かつ、図10中上下方向の中央部には、ロータ164が回転可能に設置されている。ロータ164は、略円筒状をなす筒状部166と、筒状部166の外側(外周)に固着(固定)された被駆動体165とを有している。被駆動体165は、略リング状(円環状)をなしており、振動体4に対応する位置(基端側)に位置している。
【0080】
また、ロータ164(筒状部166)の先端側の外周面1651には、ピニオンギア167が形成されている。これにより、ロータ164が回転すると、被駆動体165とピニオンギア167とが一体的に回転する。
また、ロータ164のピニオンギア167が形成されている部位(回転体である歯車)の径(外径)は、被駆動体165の径(外径)より小さく設定されており、これにより、減速機構が構成される。
【0081】
また、前記ロータ164のピニオンギア167が形成されている部位(回転体である歯車)の径と、被駆動体165の径との比率を調整(変更)することにより、スライダ181の移動速度を任意に調整(変更)することができる。
また、ベース161の図10〜図12中左側の端部(角部)には、溝1631を有する2つのローラ163が回転可能に設置されている。
【0082】
スライダ181は、これらのローラ163の溝1631内に位置し、各ローラ163とロータ164とで挟み込まれ、ベース161に対して図10中上下方向に移動可能に設置されている。すなわち、スライダ181は、各ローラ163およびロータ164により、その移動方向が図10中上下方向になり、かつ、姿勢が一定に保持されるように規制される。
【0083】
このスライダ181の形状は、略四角形の枠状をなしている。すなわち、スライダ181の中央部には、略四角形の開口182が設けられている。
これにより、軽量化を図ることができる。また、この開口182を利用して振動体の4の着脱を行なうことができ、メンテナンス性が向上する。
また、スライダ181の幅(図10〜図12中の左右方向の長さ)は、比較的長く設定されるのが好ましい。これにより、ベース161(ベース面)とスライダ181(スライダ面)とにおける、拗れを軽減することができる。
【0084】
また、スライダ181の図10〜図12中右側の外側の端面には、スライダ181の移動方向に沿って、前記ロータ164に設けられているピニオンギア167と噛合するラックギア183が形成されている。このラックギア183とピニオンギア167とにより、ロータ164の回転運動がスライダ181の直線運動に変換される。従って、ラックギア183とピニオンギア167とで回転/移動変換機構が構成される。
【0085】
また、スライダ181の図10中右側の両角部には、それぞれ、突出部184(ストッパ)が形成されている。これらの突出部184により、スライダ181の移動範囲が制限され(所定位置を越える移動が阻止され)、スライダ181の離脱が阻止(防止)される。
また、スライダ181における、振動体4の近傍には、4つの孔部185が形成されている。
【0086】
このリニアアクチュエータ16yでは、振動体4が所定のパターンで振動すると、その振動により、凸部46から(凸部46を介して)被駆動体165に所定方向の回転力(駆動力)が繰り返し加えられ(与えられ)、ロータ164は、所定方向に回転する。そして、ロータ164に設けられているピニオンギア167と、スライダ181に設けられているラックギア183とにより、ロータ164の回転運動がスライダ181の直線運動に変換され、スライダ181は、各ローラ163に案内され、所定方向(例えば、y軸方向の正方向)に移動する。すなわち、このスライダ181に対して、相対的に、ベース161と錘要素14とが一体的に移動する。
【0087】
一方、前記振動が逆になるように振動体4を励振すると、凸部46から被駆動体165に前記と逆方向の回転力が繰り返し加えられ、ロータ164は、前記と逆方向に回転する。そして、ロータ164に設けられているピニオンギア167と、スライダ181に設けられているラックギア183とにより、ロータ164の回転運動がスライダ181の直線運動に変換され、スライダ181は、各ローラ163に案内され、前記と逆方向(例えば、y軸方向の負方向)に移動する。すなわち、このスライダ181に対して、相対的に、ベース161と錘要素14とが一体的に移動する。
【0088】
このリニアアクチュエータ16yによれば、構造が簡単で、小型化(特に、薄型化)・軽量化を図ることができ、また、低速で、かつ、高い駆動力が得られる。
これにより、錘要素14、すなわち、重心を低速で、容易かつ確実に移動させることができ、これによって、飛行体1の姿勢を正確かつ確実に変更することができ、安定した飛行を行なうことができる。
また、スライダ181と振動体4とを重ねて配置することができるので、リニアアクチュエータ16yの総面積を小さくすることができ、小型化に有利である。
【0089】
また、例えば、振動体の接触部をスライダに当接して、直接、そのスライダを移動させる形態のリニアアクチュエータを用いる場合は、振動体をスライダに押し付ける力が、スライダの移動の際の抵抗になってしまうが、このリニアアクチュエータ16yでは、振動体4からスライダ181へかかる負荷をなくすことができ、これにより、リニアアクチュエータ16yの駆動が安定し、より安定した飛行を行なうことができる。
【0090】
また、前記直接スライダを移動させる形態のリニアアクチュエータを用いる場合は、振動体の接触部によるスライダの摩耗を抑制するため、スライダを金属で構成するので、リニアアクチュエータの軽量化には不利であるが、このリニアアクチュエータ16yでは、振動体4がスライダ181を直接駆動するわけではないので、スライダ181を、例えば、樹脂等の軽量な材料で構成することができ、これにより、リニアアクチュエータ16yの軽量化、すなわち、飛行体1の軽量化を図ることができる。
【0091】
リニアアクチュエータ16xについては、前記リニアアクチュエータ16yと同様であるので、説明を省略する。
なお、本発明では、リニアアクチュエータ16yと、リニアアクチュエータ16xとの一方を省略してもよい。
姿勢変更手段16の振動体4では、電極を複数に分割し、それらに対して選択的に電圧を印加して、圧電素子を部分的に駆動することにより、面内の縦・屈曲の振動を任意に選択し得るようになっている。すなわち、振動体4への通電状態(振動体4の振動パターン)を変更することにより、振動体4の凸部46の振動(振動変位)の方向を変え、これにより、被駆動体165を図10中時計回りと反時計回り(正方向と逆方向)のいずれの方向にも回転させることができるように構成されている。以下、この振動体4について説明するが、前記ロータ3および5を回転駆動する振動体4との相違点を中心に説明し、同様の事項はその説明を省略する。
【0092】
図13に示すように、振動体4は、前記ロータ3および5を回転駆動する振動体4と同様に、補強板43の図13中上側に圧電素子42、下側に圧電素子44を積層した構造であるが、圧電素子42の図13中上側に、板状の4つの電極41a、41b、41cおよび41dが設置され、圧電素子44の図13中下側に、板状の4つの電極45a、45b、45cおよび45d(電極45a、45b、45cおよび45dは、図示せず、各符号のみを括弧内に示す)が設置されている点で、前記ロータ3および5を回転駆動する振動体4と異なっている。すなわち、圧電素子42を4つの長方形の領域に略等しく分割(区分)し、分割された各領域に、それぞれ、長方形状をなす電極41a、41b、41cおよび41dが設置され、同様に、圧電素子44を4つの領域に分割(区分)し、分割された各領域に、それぞれ、長方形状をなす電極45a、45b、45cおよび45dが設置されている。なお、電極41a、41b、41cおよび41dの裏側に、それぞれ、電極45a、45b、45cおよび45dが配置されている。
【0093】
一方の対角線上の電極41aおよび41cと、これらの裏側に位置する電極45aおよび45cとは、すべて電気的に接続され、同時に通電されるようになっており、同様に、他方の対角線上の電極41bおよび41dと、これらの裏側に位置する電極45bおよび45dとは、すべて電気的に接続(以下、単に「接続」と言う)され、同時に通電されるようになっている。
【0094】
補強板43は、アース(接地)されており、また、通電される電極41a、41c、45aおよび45cと、電極41b、41d、45bおよび45dとは、図示しないスイッチ(切替スイッチ)で切り替わり、そのいずれか一方に交流電圧が印加されるように構成されている。すなわち、図16に示すように、振動体4は、駆動制御手段9のうちの、図示しない前記スイッチを有する後述する駆動制御回路90に接続されており、その駆動制御回路90により、通電される電極が選択され(切り替わり)、交流電圧が印加されるようになっている。
【0095】
また、凸部46は、図13中の右端部(短辺側)であって、補強板43の幅方向中央(短辺の中央)に設けられている。
また、補強板43には、弾性(可撓性)を有する1対(2つ)の腕部48が一体的に形成されている。1対の腕部48は、補強板43の長手方向(図10中左右方向)略中央に、長手方向と略垂直な方向であって、かつ、補強板(振動体4)を介して互いに反対方向に突出するように(図10中上下対称に)設けられている。
【0096】
振動体4の電極41a、41c、45aおよび45cに通電し、これらの電極41a、41c、45aおよび45cと、補強板43との間に、交流電圧が印加されると、図14に示すように、振動体4の電極41a、41c、45aおよび45cに対応する部分がそれぞれ矢印a方向に繰り返し伸縮し、これにより、振動体4の凸部46は、矢印bで示す斜めの方向に振動(往復運動)、または、矢印cで示すように、楕円振動(楕円運動)する。被駆動体165は、振動体4の電極41a、41c、45aおよび45cに対応する部分が伸長するときに凸部46から摩擦力(押圧力)を受ける。
すなわち、凸部46の振動変位Sの径方向成分S1(被駆動体165の径方向の変位)によって、凸部46と外周面1651との間に大きな摩擦力が与えられ、振動変位Sの周方向成分S2(被駆動体165の円周方向の変位)によって、被駆動体165に図14中の反時計回りの回転力が与えられる。
【0097】
振動体4が振動すると、このような力が被駆動体165に繰り返し作用し、被駆動体165は、図14中の反時計回りに回転する。これにより、ロータ164は、図14中の反時計回りに回転する。
前記と逆に、振動体4の電極41b、41d、45bおよび45dに通電し、これらの電極41b、41d、45bおよび45dと、補強板43との間に、交流電圧が印加されると、図15に示すように、振動体4の電極41b、41d、45bおよび45dに対応する部分がそれぞれ矢印a方向に繰り返し伸縮し、これにより、振動体4の凸部46は、矢印bで示す斜めの方向に振動(往復運動)、または、矢印cで示すように、楕円振動(楕円運動)する。被駆動体165は、振動体4の電極41b、41d、45bおよび45dに対応する部分が伸長するときに凸部46から摩擦力(押圧力)を受ける。
すなわち、凸部46の振動変位Sの径方向成分S1(被駆動体165の径方向の変位)によって、凸部46と外周面1651との間に大きな摩擦力が与えられ、振動変位Sの周方向成分S2(被駆動体165の円周方向の変位)によって、被駆動体165に図15中の時計回りの回転力が与えられる。
【0098】
振動体4が振動すると、このような力が被駆動体165に繰り返し作用し、被駆動体165は、図15中の時計回りに回転する。これにより、ロータ164は、図15中の時計回りに回転する。
なお、図14および図15では、それぞれ、振動体4の変形を誇張して示すとともに、腕部48は図示されていない。
【0099】
なお、本実施形態では、振動体4の電極を4分割して駆動する場合について説明したが、それは一例であり、本発明では、前述の振動体4の構造や駆動の方法に限定されるものではない。
また、各リニアアクチュエータ16xおよび16yは、それぞれ、スライダ181(錘要素14)のx軸方向の位置(移動量)およびy軸方向の位置(移動量)を検出する図示しない位置検出手段(移動量検出手段)を有している。各位置検出手段は、それぞれ、所定の位置検出用スケールと、発光部および受光部を有するセンサとで構成されている。
【0100】
リニアアクチュエータ16xの振動体4が駆動し、スライダ181が移動すると、センサからの信号が後述する駆動制御回路90のθy制御回路92yに供給(入力)され、θy制御回路92yは、その信号に基づいて、スライダ181(錘要素14)のx軸方向の移動量や位置を求める。前記スライダ181(錘要素14)の移動量や位置の情報は、スライダ181(錘要素14)をx軸方向へ移動させる際の所定の制御や処理に利用される。
【0101】
同様に、リニアアクチュエータ16yの振動体4が駆動し、スライダ181が移動すると、センサからの信号が、後述する駆動制御回路90のθx制御回路92xに供給(入力)され、θx制御回路92xは、その信号に基づいて、スライダ181(錘要素14)のy軸方向の移動量や位置を求める。前記スライダ181(錘要素14)の移動量や位置の情報は、スライダ181(錘要素14)をy軸方向へ移動させる際の所定の制御や処理に利用される。
なお、各位置検出手段は、それぞれ、光学的に検出するものに限らず、例えば、磁気的に検出するものであってもよい。
【0102】
次に、錘要素14について説明する。
図1に示すように、錘要素14は、箱状のケーシング141を有しており、このケーシング141の外側には、所定の駆動回路、例えば、図16に示す駆動制御手段9のうちの駆動制御回路90、姿勢制御センサ8等を有する回路基板(フレキシブル回路基板)13が設置されている。
【0103】
これにより、ロータ3、5が回転したときの回転翼34、54からの気流(空気流)により、回路基板13が冷却され、回路基板13で発生する熱を容易かつ確実に放熱することができ、これによって、駆動制御回路90、姿勢制御センサ8等の誤動作や故障を防止することができる。また、別途、冷却手段(放熱手段)を設ける必要がないので、小型化・軽量化に有利である。
【0104】
また、ケーシング141内には、例えば、無線通信用の図示しない送受信部と、前記駆動制御回路90、姿勢制御センサ8および送受信部等の飛行体1の各部に電力を供給する図16に示す電池(飛行体1を駆動するエネルギーを蓄積するエネルギー蓄積手段)15等が収納(内蔵)されている。
すなわち、本実施形態では、駆動制御回路90、姿勢制御センサ8、送受信部および電池15等が、姿勢変更手段16の錘要素14の一部を構成する。これにより、専用の錘の部分(錘としてのみ作用する部分)の重さを軽くすることができるので、飛行体1を軽量化することができ、飛行体1のペイロード(荷重)を大きくとることができる。
また、錘要素14の質量は、飛行体1の質量の大部分を占めるので、この錘要素14の移動により、重心の位置を容易に移動させることができる。
【0105】
図16に示すように、姿勢制御センサ8は、Z軸の回り(θz方向)の回転を検出するジャイロセンサ81zと、X軸の回り(θx方向)の回転を検出するジャイロセンサ81xと、Y軸の回り(θy方向)の回転を検出するジャイロセンサ81yとで構成されている。
また、駆動制御回路90は、θz検出回路91zと、θx検出回路91xと、θy検出回路91yと、θz制御回路92zと、θx制御回路92xと、θy制御回路92yと、y駆動回路93yと、x駆動回路93xと、リニアアクチュエータ16yの振動体4の通電される電極を切り替える図示しないスイッチ(切替スイッチ)と、リニアアクチュエータ16xの振動体4の通電される電極を切り替える図示しないスイッチ(切替スイッチ)とで構成されている。
【0106】
y駆動回路93yは、前記電極を切り替えるスイッチを介してリニアアクチュエータ16yの振動体4に接続され、x駆動回路93xは、前記電極を切り替えるスイッチを介してリニアアクチュエータ16xの振動体4に接続されている。
また、θz制御回路92zと、第1の駆動回路931およびの第2の駆動回路932とは、無線で信号の送信および受信(無線通信)を行うことができるようになっている。
また、電池15としては、例えば、1次電池、2次電池(蓄電池)、燃料電池、太陽電池(光電変換素子)と充電部(例えば、2次電池)とを組み合わせたもの等が挙げられる。
【0107】
図17および図18は、それぞれ、図1に示す飛行体の作用等を説明するための模式図(側面図)である。
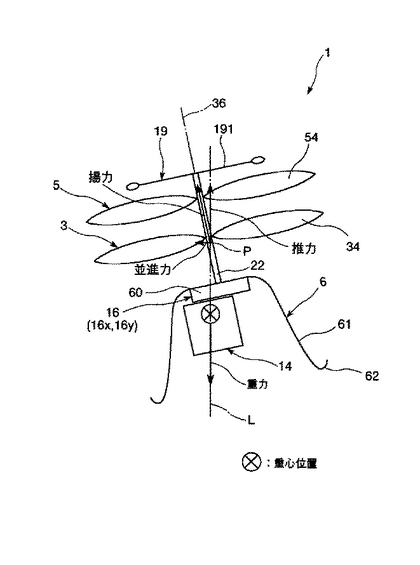
図17に示すように、重心の位置が回転中心線36(中心軸22)の延長線上にある場合は、回転中心線36の方向は、鉛直方向となる。このときの揚力は、鉛直成分(推力)のみである。
そして、図18に示すように、錘要素14の移動により、重心が移動すると、揚力が作用(発生)する支点Pと重心とを通る直線Lの方向が、鉛直方向となるように飛行体1(回転中心線36)が傾く。これにより、揚力に水平成分(並進力)が発生し、飛行体1は、水平方向に移動する。
【0108】
このような飛行体1に対し、地上(床)には、図示しない操作部(コントローラ)が設けられており、この操作部と飛行体1とは、無線で通信することができ、前記操作部から飛行体1を無線で遠隔操作(ロータ3および5の回転数の調整、錘要素14のx軸方向およびy軸方向の位置の調整等)することができるようになっている。
そして、この飛行体1では、ジャイロセンサ81zによるθz方向の検出値と、Z軸方向の指示値(高さ指示値)と、Z軸の回りの指示値(θz方向の指示値)とに基づいて、ロータ3およびロータ5の回転数(回転速度)をそれぞれ制御する。
【0109】
すなわち、Z軸方向の指示値がθz制御回路92zへ入力されると、そのZ軸方向の指示値(高さ)になるように、第1の駆動回路931および第2の駆動回路932を介して、ロータ3および5を回転駆動する各振動体4の駆動が制御される。これにより、飛行体1を上昇または下降させることができ、また、所定の高さに保持することができる。
また、θz方向の指示値がθz制御回路92zへ入力されると、そのθz方向の指示値(向き)になるように、第1の駆動回路931および第2の駆動回路932を介して、ロータ3および5を回転駆動する各振動体4の駆動が制御される。これにより、飛行体1をθz方向に、正逆いずれの方向へも所定量(所定角度)回転させることができ、θz方向に、所定の角度(向き)に保持することができる。
【0110】
また、この飛行体1では、ジャイロセンサ81xによるθx方向の検出値と、Y軸方向の指示値とに基づいて、錘要素14のY軸方向の位置を制御する。
すなわち、Y軸方向の指示値がθx制御回路92xへ入力されると、そのY軸方向の指示値になるように、y駆動回路93yを介して、リニアアクチュエータ16yの振動体4の駆動が制御される。これにより、ベース161とともに錘要素14がY軸方向へ移動し、飛行体1の重心がY軸方向へ移動して、飛行体1の各ロータ3および5の回転中心線36が、YZ平面内で所定角度回転し、鉛直線に対してy軸に向って所定角度傾斜する。
このようにして、飛行体1を前記回転中心線36の傾斜方向に、例えば、水平移動(飛行)させることができる。
【0111】
また、この飛行体1では、ジャイロセンサ81yによるθy方向の検出値と、X軸方向の指示値とに基づいて、錘要素14のX軸方向の位置を制御する。
すなわち、X軸方向の指示値がθy制御回路92yへ入力されると、そのX軸方向の指示値になるように、x駆動回路93xを介して、リニアアクチュエータ16xの振動体4の駆動が制御される。これにより、錘要素14およびリニアアクチュエータ16yがX軸方向へ移動し、飛行体1の重心がX軸方向へ移動して、飛行体1の各ロータ3および5の回転中心線36が、XZ平面内で所定角度回転し、鉛直線に対してx軸に向って所定角度傾斜する。
【0112】
このようにして、飛行体1を前記回転中心線の傾斜方向に、例えば、水平移動(飛行)させることができる。
以上のように、姿勢変更手段16により、飛行体1の飛行姿勢を容易かつ確実に変更することができ、飛行体1を容易かつ確実に任意の位置に飛行(移動)させることができる。
【0113】
以上、本発明の飛行体を、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。
また、本発明では、超音波モータの振動体の形状、構造は、図示の構成に限らず、被駆動体を回転駆動することができるものであればいかなるものでもよい。例えば、圧電素子が1枚のものや、補強板を有さないものや、被駆動体と当接する部分に向かって幅が漸減するような形状のもの等であってもよい。
【0114】
また、本発明では、ロータを回転させる駆動源は、電力により駆動するものであれば、超音波モータには限定されない。
また、本発明では、飛行体の遠隔操作の方法は、無線操縦に限らず、例えば、有線操縦によるものであってもよい。
また、本発明では、飛行体が自動飛行制御されるように構成されていてもよい。
【0115】
また、本発明の飛行体の大きさは、特に限定されないが、特に、複数の回転翼を備えたロータの直径が、例えば、5〜300mm程度の比較的小さい飛行体(小型飛行体)に好適である。
また、本発明の飛行体は、無人用(無人の飛行体)と、有人用(有人の飛行体)とのいずれにも適用することができる。
【0116】
また、本発明の飛行体は、複数の回転翼を備えたロータが1つ設けられているようなものでもよく、また、3つ以上設けられているようなものでもよい。すなわち、本発明は、図示の構造の飛行体に限定されず、例えば、ヘリコプタ等、複数の回転翼を備えたロータを有する各種の飛行体に適用することができる。
また、本発明の飛行体の用途は、特に限定されず、例えば、飛行体に、各種センサ(センシング手段)等の作業手段を搭載し、目的の場所へ飛行(移動)させ、各種の環境で各種の情報の収集(センシング作業)等を行うことができる。
【0117】
また、他にも、例えば、人間の入れない有害環境(人体に対して有害な環境を有する場所)において、各種センサにより情報収集等を行なうことができる。
また、飛行体は、地球上はもちろんのこと、地球以外の場所、例えば、火星等の他の惑星においても用いることができる(惑星探査用の飛行体(フライングロボット)にも適用することができる)。
【図面の簡単な説明】
【0118】
【図1】本発明の飛行体の実施形態を示す斜視図である。
【図2】図1に示す飛行体における中心軸付近を拡大して示す断面側面図である。
【図3】図1に示す飛行体におけるロータを模式的に示す平面図である。
【図4】図1に示す飛行体における振動体の斜視図である。
【図5】図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図である。
【図6】図1に示す飛行体における振動体の凸部が楕円運動する様子を示す平面図である。
【図7】図1に示す飛行体における姿勢変更手段の斜視図である。
【図8】図1に示す飛行体における姿勢変更手段の分解斜視図である。
【図9】図1に示す飛行体における姿勢変更手段のリニアアクチュエータの斜視図である。
【図10】図1に示す飛行体における姿勢変更手段のリニアアクチュエータの平面図である。
【図11】図1に示す飛行体における姿勢変更手段のリニアアクチュエータの側面図である。
【図12】図10中のA−A線での断面図である。
【図13】図1に示す飛行体における振動体の斜視図である
【図14】図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図である。
【図15】図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図である。
【図16】図1に示す飛行体の回路構成を示すブロック図である。
【図17】図1に示す飛行体の作用等を説明するための模式図である。
【図18】図1に示す飛行体の作用等を説明するための模式図である。
【符号の説明】
【0119】
1……飛行体 2……基部 21……基板 22……中心軸 23……振動体取付部 3……ロータ 31……筒状部材 311……貫通孔 32……回転翼固定部材 321……筒状部 322……固定部 323……貫通孔 33……被駆動体 331……外周面 34……回転翼 35……軸孔 36……回転中心線 4……振動体 41、45……電極 41a〜41d……電極 45a〜45d……電極 42、44……圧電素子 43……補強板 46……凸部 48……腕部 481……孔 49……中心線 5……ロータ 51……筒状部材 52……回転翼固定部材 521……筒状部 522……固定部 523……貫通孔 53……被駆動体 531……外周面 54……回転翼 541……軸 55……軸孔 6……接地手段 60……固定部 61……脚 62……先端部 71……太陽電池 72……回路部 73……部分回路部 74……充電部 8……姿勢制御センサ 81x、81y、81z……ジャイロセンサ 9……駆動制御手段 90……駆動制御回路 91x……θx検出回路 91y……θy検出回路 91z……θz検出回路 92x……θx制御回路 92y……θy制御回路 92z……θz制御回路 931……第1の駆動回路 932……第2の駆動回路 93x……x駆動回路 93y……y駆動回路 11……軸受け 12……ボルト 13……回路基板 14……錘要素 141……ケーシング 15……電池 16……姿勢変更手段 16x……リニアアクチュエータ 16y……リニアアクチュエータ 161……ベース 162……ガイドピン 163……ローラ 1631……溝 164……ロータ 165……被駆動体 1651……外周面 166……筒状部 167……ピニオンギア 168……バネ止めピン 171……基台 172……長穴 173……バネ掛け部 174……コイルバネ 175……ボルト 181……スライダ 182……開口 183……ラックギア 184……突出部 185……孔部 186……ピン 19……ブラシ
【技術分野】
【0001】
本発明は、飛行体に関するものである。
【背景技術】
【0002】
複数の回転翼を有するロータを回転させて空中に浮揚(飛行)する飛行体として、ヘリコプタ等が知られており、例えば、小型の飛行体は、玩具(ヘリコプタの玩具)等として用いられている(例えば、特許文献1参照)。このような飛行体には、飛行姿勢を安定化させるために、スタビライザ等の姿勢安定化手段が設けられている。
しかしながら、従来の飛行体では、スタビライザ等の姿勢安定化手段の分、重量が増加し、例えば、長時間の飛行や、遠方への飛行には不利である。
【0003】
また、回転翼(プロペラ)の表面に、太陽電池(太陽電池パネル)を装着してなる飛行体が提案されている(例えば、特許文献2参照)。このような飛行体では、回転翼に太陽電池のみが設置され、太陽電池で生成された電気を充電する充電部を有する回路部(制御システム部)は、回転翼から離間した別の部位に設置されている。そして、太陽電池と回路部とは、ケーブル(導線)により、電気的に接続されている。
しかしながら、従来の飛行体では、回路部が回転翼から離間した別の部位に設置されているので、太陽電池で生成された電気は、比較的長いケーブルを介して、充電部に充電され、そのケーブルでの電圧降下や電力の損失が非常に大きいという問題がある。
【0004】
【特許文献1】特開2000−218064号公報
【特許文献2】実開平6−34175号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の目的は、スタビライザ等の姿勢安定化手段を設けることなく安定した飛行を行なうことができ、軽量化に有利であり、また、太陽電池と回路部との間における電圧降下や電力の損失を低減することができる飛行体を提供することにある。
【課題を解決するための手段】
【0006】
このような目的は、下記の本発明により達成される。
本発明の飛行体は、回転可能に設けられ、複数の回転翼を有するロータと、
電力により駆動し、前記ロータを回転させる駆動源とを備え、
前記回転翼の回転により生じる推力により飛行する飛行体であって、
前記回転翼の表面に、光を受光して光電変換し、電気を生成する太陽電池を設け、
前記回転翼の内部に、前記太陽電池で生成された電気を充電する充電部を有する回路部を設けたことを特徴とする。
【0007】
これにより、太陽電池と回路部とを接近させることができ、太陽電池と回路部との間における電圧降下や電力の損失を低減することができる。
また、回転翼に太陽電池および回路部が設けられているので、飛行体全体の重量を変えずに、回転翼の重量を増大させることができる。これにより、飛行体全体の重量を変えることなく、回転翼の慣性モーメントを増大させることができ(ジャイロ効果が増大し)、これによって、スタビライザ等の姿勢安定化手段を設けることなく、飛行姿勢を安定させることができ、安定した飛行を行なうことができる。
【0008】
また、姿勢安定化手段を設ける必要がないので、軽量化を図ることができる。
また、回路部が回転翼の内部に設けられているので、回路部が保護され、回路部に、例えば、異物が衝突したり、水等がかかったりして、回路部が故障(例えば、損傷、破損、断線、ショート等)してしまうのを防止することができる。
また、回路部が回転翼の内部に設けられているので、ロータが回転したときの気流(空気流)により、回転翼を介して回路部を冷却することができ、これによって、回路部の誤動作や故障を防止することができる。また、別途、冷却手段を設ける必要がないので、小型化・軽量化に有利である。
【0009】
また、回路部が、回転翼の表面ではなく、回転翼の内部に設けられているので、太陽電池を設けることができる領域を広く確保することができ、これにより、発電量(発電能力)を大きくすることができる。
また、太陽電池を有しているので、長時間の飛行や、遠方への飛行を、容易に行なうことができる。
【0010】
本発明の飛行体では、前記駆動源の駆動のために用いられる電力の少なくとも一部は、前記充電部から供給されるよう構成されていることが好ましい。
これにより、長時間の飛行や、遠方への飛行を、容易に行なうことができる。
本発明の飛行体では、前記回転翼をその厚さ方向から見たとき、前記回路部の略全体が前記太陽電池の一部と重なっていることが好ましい。
このような場合は、回転翼の表面の広範囲に太陽電池が設けられており、これにより、発電量を大きくすることができる。
【0011】
本発明の飛行体では、前記回路部は、前記各回転翼の内部に分散された部分回路部で構成され、
前記各回転翼の部分回路部は、それぞれ、該回転翼の回転中心と該回転翼の端部との中点よりも端部側に、該部分回路部の重心が位置するように設けられていることが好ましい。
これにより、回転翼の慣性モーメントをより大きくすることができ(ジャイロ効果がより大きくなり)、これによって安定した飛行を行なうことができる。
【0012】
本発明の飛行体では、前記回路部は、前記各回転翼の内部に分散された部分回路部で構成され、
前記各回転翼の部分回路部は、それぞれ、該回転翼の回転中心と該回転翼の部分回路部の重心との間の距離が、全て略等しくなるように設けられていることが好ましい。
これにより、ロータ全体のバランスが良くなり、ロータが安定的に回転することができ、安定した飛行を行なうことができる。
【0013】
本発明の飛行体では、略同軸的に設けられ、互いに反対方向に回転する2つの前記ロータを有することが好ましい。
これにより、大型化・重量増加を招来することなく、容易かつ確実に、飛行体全体の回転を防止したり、向きを制御したりすることができる。
また、2つのロータの回転方向は、互いに反対方向なので、鉛直方向下方のロータの回転翼側の太陽電池が、上方のロータの回転翼によって遮光されるのは、一瞬であり、このため、十分に発電することができる。
【0014】
本発明の飛行体では、重心を移動させることにより飛行姿勢を変更する姿勢変更手段を有することが好ましい。
これにより、飛行体の飛行姿勢を容易かつ確実に変更することができ、飛行体を容易かつ確実に任意の位置に飛行(移動)させることができる。
本発明の飛行体では、前記姿勢変更手段は、錘要素と、該錘要素を変位させる変位機構とを有することが好ましい。
これにより、簡易な構成で、飛行体の重心を容易かつ確実に移動させることができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の飛行体を添付図面に示す好適実施形態に基づいて詳細に説明する。
図1は、本発明の飛行体の実施形態を示す斜視図、図2は、図1に示す飛行体における中心軸付近を拡大して示す断面側面図、図3は、図1に示す飛行体におけるロータを模式的に示す平面図、図4は、図1に示す飛行体における振動体の斜視図、図5は、図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図、図6は、図1に示す飛行体における振動体の凸部が楕円運動する様子を示す平面図、図7は、図1に示す小型飛翔体における姿勢変更手段の斜視図、図8は、図1に示す小型飛翔体における姿勢変更手段の分解斜視図、図9は、図1に示す飛行体における姿勢変更手段のリニアアクチュエータの斜視図、図10は、図1に示す飛行体における姿勢変更手段のリニアアクチュエータの平面図、図11は、図1に示す飛行体における姿勢変更手段のリニアアクチュエータの側面図、図12は、図10中のA−A線での断面図、図13は、図1に示す飛行体における振動体の斜視図、図14および図15は、それぞれ、図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図、図16は、図1に示す飛行体の回路構成を示すブロック図である。
【0016】
なお、以下の説明では、図1、図2、図7および図8中の上方(上側)を「上」、下方(下側)を「下」として説明する。
また、図1に示す飛行体の姿勢を「基本姿勢」とし、図1中、上下方向を「鉛直方向」、上方(上側)を「鉛直方向上方(鉛直方向上側)」、下方(下側)を「鉛直方向下方(鉛直方向下側)」とする。
また、図1、図7および図8において、図示のように、互いに直交するx軸、y軸およびz軸(x−y−z座標)を想定する。この場合、z軸は、ロータの回転中心線(回転中心軸)と一致または平行になるように想定される。
【0017】
これらの図に示す飛行体1は、略円筒状の中心軸(軸)22と、互いに対向するように中心軸22に固定された2つの基部2と、中心軸22(下側の基部2)に対し回転可能に設置され、2枚の回転翼(第1の回転翼)34を備えたロータ(第1のロータ)3と、下側の基部2に設けられ、ロータ3を回転駆動する(回転させる)駆動源である振動体(第1の振動体)(第1の超音波モータ)4と、中心軸22(上側の基部2)に対し回転可能に設置され、2枚の回転翼(第2の回転翼)54を備えたロータ(第2のロータ)5と、上側の基部2に設けられ、ロータ5を回転駆動する(回転させる)駆動源である振動体(第2の振動体)(第2の超音波モータ)4と、重心の移動により飛行体1の飛行姿勢を変更する姿勢変更手段16と、中心軸22に固定され、飛行体1を支持する接地手段6とを有している。ロータ3と、ロータ5とは、互いに反対方向に回転し、かつ、同軸的に設けられている。すなわち、この飛行体1は、2重反転ロータを備えている。
【0018】
前記ロータ3、5、ロータ3を回転駆動する振動体4およびロータ5を回転駆動する振動体4により、推力(揚力)を発生させる推力発生手段(揚力発生手段)の主要部が構成される。基本姿勢において、この推力発生手段は、鉛直方向上方に位置し、姿勢変更手段16および接地手段6は、それぞれ、鉛直方向下方に位置している。
また、本実施形態では、前記ロータ3を回転駆動する振動体(第1の振動体)4により、超音波モータ(第1の超音波モータ)が構成されているが、本発明では、その超音波モータは、振動体4の他に、他の構成物を有していてもよい。
【0019】
同様に、本実施形態では、前記ロータ5を回転駆動する振動体(第2の振動体)4により、超音波モータ(第2の超音波モータ)が構成されているが、本発明では、その超音波モータは、振動体4の他に、他の構成物を有していてもよい。
なお、姿勢変更手段16の後述するリニアアクチュエータ16xおよび16yの振動体についても同様である。
【0020】
以下、各部の構成について説明する。
図1および図2に示すように、2つの基部2は、それぞれ、略平板状をなす基板21と、基板21に設けられた振動体取付部23とを有している。上側の基部2では、振動体取付部23は、基板21の上側に設けられ、下側の基部2では、振動体取付部23は、基板21の下側に設けられている。
【0021】
中心軸22の、下側の基部2の下方であって、その基部2の近傍には、ロータ3が回転可能に設置されている。このロータ3は、平面視で(図2中上側から見たとき)時計回りに回転する。
図2に示すように、ロータ3は、略円筒状をなす筒状部材31と、筒状部材31の外側(外周)にそれぞれ固着(固定)された回転翼固定部材32および被駆動体(第1の被駆動体)33と、回転翼固定部材32にそれぞれ固着された2枚の回転翼34とを有している。
【0022】
このロータ3は、筒状部材31の内腔、すなわち軸孔35に中心軸22が挿入した状態で設置されている。中心軸22と、軸孔35の内面との間には、2つの軸受け11、11がそれぞれ設けられており、これにより、ロータ3は、基部2に対し中心軸22(回転中心線36)を中心として滑らかに回転可能になっている。
軸受け11は、滑り軸受けで構成されているが、転がり軸受け(ベアリング)であってもよい。
【0023】
筒状部材31の回転翼34に対応する位置には、図2中左右方向に延在す2つの貫通孔311が形成されている。
回転翼固定部材32は、略円筒状に形成された筒状部321と、筒状部321の下端部からロータ3の回転中心線36と略垂直な方向に突出形成された固定部322とで構成されている。回転翼固定部材32の回転翼34に対応する位置には、図2中左右方向に延在し、前記対応する貫通孔311に連通する2つの貫通孔323が形成されている。この回転翼固定部材32は、筒状部321の内側に筒状部材31が挿入した状態で、例えば圧入により、筒状部材31に固着されている。
【0024】
固定部322には、2枚の回転翼34の基端部(根元部)がそれぞれ固着されている。
2枚の回転翼34は、回転中心線36から互いに反対側に延びるように設けられている。すなわち、2枚の回転翼34は、略180°間隔で設けられている。また、回転翼34は、回転中心線36に対し略垂直な姿勢で設置されている。
ロータ3が後述する振動体4の駆動により平面視で(図2中上側から見たとき)時計回りに回転すると、回転翼34には、揚力(回転中心線36に略平行で上向きの力)が作用する。
なお、ロータ3に設けられた回転翼34の枚数は、2枚に限らず、3枚以上設けられていてもよい。
【0025】
筒状部材31の上端部外周には、被駆動体33が設けられている。すなわち、被駆動体33は、回転翼固定部材32の上側に位置している。
被駆動体33は、略リング状(円環状)をなしており、その内側に筒状部材31の上端部が挿入した状態で、例えば圧入により、筒状部材31に対し固着されている。
基部2の下側には、このようなロータ3を回転駆動する振動体4が、その後述する補強板43の凸部(接触部)46が被駆動体33の外周面331に当接するようにして設置されている。この振動体4は、回転翼34の近傍に位置している。
【0026】
一方、中心軸22の、上側の基部2の上方であって、その基部2の近傍には、ロータ5が回転可能に設置されている。このロータ5は、平面視で(図2中上側から見たとき)反時計回りに回転する。
ロータ5は、略円筒状をなす筒状部材51と、筒状部材51の外側(外周)にそれぞれ固着(固定)された回転翼固定部材52および被駆動体(第2の被駆動体)53と、回転翼固定部材52にそれぞれ固着された2枚の回転翼54と有しており、ロータ3と同軸的(同心的)に、ロータ3の上方に設置されている。
【0027】
このロータ5は、筒状部材51の内腔、すなわち軸孔55に中心軸22が挿入した状態で設置されている。中心軸22と、軸孔55の内面との間には、2つの軸受け11、11がそれぞれ設けられており、これにより、ロータ5は、基部2に対し中心軸22(回転中心線36)を中心として滑らかに回転可能になっている。
軸受け11は、滑り軸受けで構成されているが、転がり軸受け(ベアリング)であってもよい。
【0028】
回転翼固定部材52は、上側が閉じ、略円筒状に形成された筒状部521と、筒状部521の上端部からロータ5の回転中心線36と略垂直な方向に突出形成された固定部522とで構成されている。回転翼固定部材52の回転翼54に対応する位置には、図2中左右方向に延在する2つの貫通孔523が形成されている。この回転翼固定部材52は、筒状部521の内側に筒状部材51が挿入した状態で、例えば圧入により、筒状部材51に固着されている。
【0029】
固定部522には、2枚の回転翼54の基端部(根元部)がそれぞれ固着されている。
2枚の回転翼54は、回転中心線36から互いに反対側に延びるように設けられている。すなわち、2枚の回転翼54は、略180°間隔で設けられている。また、回転翼54は、回転中心線36に対し略垂直な姿勢で設置されている。
ロータ5が後述する振動体4の駆動により平面視で(図2中上側から見たとき)反時計回りに回転すると、回転翼54には、揚力(回転中心線36に略平行で上向きの力)が作用する。
なお、ロータ5に設けられた回転翼54の枚数は、2枚に限らず、3枚以上設けられていてもよい。
【0030】
筒状部材51の下端部外周には、被駆動体53が設けられている。すなわち、被駆動体53は、回転翼固定部材52の下側に位置している。
被駆動体53は、略リング状(円環状)をなしており、その内側に筒状部材51の下端部が挿入した状態で、例えば圧入により、筒状部材51に対し固着されている。
基部2の上側には、このようなロータ5を回転駆動する振動体4が、その後述する補強板43の凸部(接触部)46が被駆動体53の外周面531に当接するようにして設置されている。この振動体4は、回転翼54の近傍に位置している。
【0031】
このような構成により、回転翼54は、回転翼34より上側に位置している。また、回転翼54は、上側の基部2の基板21の上側に位置し、回転翼34は、下側の基部2の基板21の下側に位置している。
前記ロータ3が平面視で(図2中上側から見たとき)時計回りに回転すると、回転翼34に揚力が作用し、また、ロータ5がロータ3と反対方向に回転すると、回転翼54に揚力が作用し、これらの揚力により、飛行体1は、空中に浮揚(飛行)する。すなわち、飛行体1は、回転翼34および35の回転により生じる揚力(推力)により飛行する。
【0032】
図3には、飛行体1におけるロータ3が模式的に示されており、図3および図16に示すように、この飛行体1では、ロータ3に、光を受光して光電変換し、電気を生成する太陽電池(太陽電池パネル)(光電変換素子)71と、駆動制御手段9のうちの回路部72とが設けられている。回路部72は、太陽電池71で生成された電気を充電する充電部(充電システム)74と、ロータ3を回転駆動する振動体4を駆動する第1の駆動回路931とを有している。また、充電部74は、電気が充電される2次電池と、この2次電池に太陽電池71で生成された電気を充電するための回路とを有している。なお、図3では、太陽電池71の部分を斜線で示す。
【0033】
同様に、ロータ5に、光を受光して光電変換し、電気を生成する太陽電池(太陽電池パネル)(光電変換素子)71と、駆動制御手段9のうちの回路部72とが設けられている。回路部72は、太陽電池71で生成された電気を充電する充電部(充電システム)74と、ロータ5を回転駆動する振動体4を駆動する第2の駆動回路932とを有している。また、充電部74は、電気が充電される2次電池と、この2次電池に太陽電池71で生成された電気を充電するための回路とを有している。
なお、前記ロータ3側の構成と前記ロータ5側の構成とは、同様であるので、以下、代表的に、ロータ3側について説明する。
【0034】
太陽電池71は、ロータ3の各回転翼34の表面にそれぞれ設けられている。この場合、太陽電池71は、各回転翼34の上側の面に設置される。
一方、ロータ3の各回転翼34は、それぞれ、中空部を有しており、回路部72は、各中空部(各回転翼34の内部)に設けられている。すなわち、回路部72は、各回転翼34の内部に分散された2つの部分回路部73で構成されている。なお、回路部72と、太陽電池71とは、互いに電気的に接続されている。
【0035】
ロータ3を回転駆動する振動体4の駆動のために用いられる電力(電圧)は、この回路部72の充電部74から供給される。
このような構成により、太陽電池71と回路部72(充電部74)とを接近させることができ、太陽電池71と回路部72との間における電圧降下や電力の損失を低減することができる。
【0036】
また、各回転翼34に太陽電池71および部分回路部73が設けられているので、飛行体1全体の重量を変えずに、各回転翼34(ロータ3)の重量を増大させることができる。これにより、飛行体1全体の重量を変えることなく、各回転翼34(ロータ3)の慣性モーメントを増大させることができ(ジャイロ効果が増大し)、これによって、スタビライザ等の姿勢安定化手段を設けることなく、飛行姿勢を安定させることができ、安定した飛行を行なうことができる。
【0037】
また、姿勢安定化手段を設ける必要がないので、軽量化を図ることができる。
また、回路部72が回転翼34の内部に設けられているので(各部分回路部73が各回転翼34の内部に設けられているので)、回路部72が保護され、回路部72に、例えば、異物が衝突したり、水等がかかったりして、回路部72が故障(例えば、損傷、破損、断線、ショート等)してしまうのを防止することができる。
【0038】
また、回路部72が回転翼34の内部に設けられているので、ロータ3が回転したときの気流(空気流)により、回転翼34を介して回路部72を冷却することができ、これによって、回路部72の誤動作や故障を防止することができる。また、別途、冷却手段を設ける必要がないので、小型化・軽量化に有利である。
また、回路部72が、回転翼34の表面ではなく、回転翼34の内部に設けられているので、太陽電池71を設けることができる領域を広く確保することができ、これにより、発電量(発電能力)を大きくすることができる。
【0039】
また、随時、太陽電池71により発電し、充電部74によりその電気を充電することができるので、長時間の飛行や、遠方への飛行を、容易に行なうことができる。
また、ロータ3とロータ5の回転方向は、互いに反対方向なので、下方のロータ3の回転翼34側の太陽電池71が、上方のロータ5の回転翼54によって遮光されるのは、一瞬であり、このため、十分に発電することができる。
【0040】
ここで、太陽電池71は、回転翼34をその厚さ方向から見たとき(平面視で)、回路部72の略全体が太陽電池71の一部と重なるように、すなわち、各部分回路部73の略全体が、それぞれ、太陽電池71の一部と重なるように設置されるのが好ましく、各回転翼34の上側の面の略全面に設置されるのがより好ましい。これにより、発電量を大きくすることができる。
【0041】
また、各回転翼34の部分回路部73は、それぞれ、回転翼34(ロータ3)の回転中心Qと回転翼34の端部との中点Cよりも端部側に、部分回路部73の重心Gが位置するように設けられている。これにより、回転翼34の慣性モーメントをより大きくすることができ(ジャイロ効果がより大きくなり)、これによって安定した飛行を行なうことができる。
【0042】
また、各回転翼34の部分回路部73は、それぞれ、回転翼34の回転中心Qと回転翼34の部分回路部73の重心Gとの間の距離が、全て略等しくなるように設けられている。これにより、ロータ3全体のバランスが良くなり、ロータ3が安定的に回転することができ、安定した飛行を行なうことができる。
なお、本実施形態では、充電部74から供給される電力のみによって、振動体4が駆動されるように構成されているが、これに限らず、例えば、充電部74から供給される電力が、振動体4の駆動のための補助電力として用いられるよう構成されていてもよい。すなわち、振動体4の駆動のために用いられる電力の一部が、充電部74から供給されるようになっていてもよい。
【0043】
また、この飛行体1では、軸22は、上側の基部2より上側の部分と、下側の基部2より下側の部分とが、それぞれ、金属等の導電材料で構成されており、上側の基部2と下側の基部2との間の部分が、絶縁材料で構成されている。これにより、軸22における上側の基部2より上側の部分と、下側の基部2より下側の部分とは、互いに絶縁されている。
また、筒状部材31、51、被駆動体33および53は、それぞれ、金属等の導電材料で構成されている。そして、筒状部材31と被駆動体33とは、互い導通し、筒状部材51と被駆動体53とは、互い導通している。
そして、軸22の導電性を有している部分と、筒状部材31および被駆動体33と、筒状部材51と被駆動体53とは、互いに絶縁されている。
【0044】
図2に示すように、第1の駆動回路931の交流電圧を出力する出力部の一方の端子は、導線(ケーブル)を介して、筒状部材31に電気的に接続され、他方の端子は、導線を介して、ブラシ19に電気的に接続されている。このブラシ19は、軸22における下側の基部2より下側の部分の外周面に接触(導通)している。
また、軸22における下側の基部2より下側の部分の外周面と、ロータ3を回転駆動する振動体4の後述する圧電素子44側の電極45とは、導線を介して、電気的に接続されている。また、この振動体4の圧電素子44側の電極45と、圧電素子42側の後述する電極41とは、導線を介して、電気的に接続されている。
【0045】
これにより、第1の駆動回路931の交流電圧を出力する出力部の一方の端子は、筒状部材31、被駆動体33および振動体4の後述する補強板43の凸部(接触部)46等を介して、その補強板43に電気的に接続される。
一方、第1の駆動回路931の交流電圧を出力する出力部の他方の端子は、ブラシ19および軸22における下側の基部2より下側の部分等を介して、その振動体4の電極41および45に電気的に接続される。
【0046】
同様に、第2の駆動回路932の交流電圧を出力する出力部の一方の端子は、導線(ケーブル)を介して、筒状部材51に電気的に接続され、他方の端子は、導線を介して、ブラシ19に電気的に接続されている。このブラシ19は、軸22における上側の基部2より上側の部分の外周面に接触(導通)している。
また、軸22における上側の基部2より上側の部分の外周面と、ロータ5を回転駆動する振動体4の圧電素子44側の電極45とは、導線を介して、電気的に接続されている。また、この振動体4の圧電素子44側の電極45と、圧電素子42側の電極41とは、導線を介して、電気的に接続されている。
【0047】
これにより、第2の駆動回路932の交流電圧を出力する出力部の一方の端子は、筒状部材51、被駆動体53および振動体4の補強板43の凸部(接触部)46等を介して、その補強板43に電気的に接続される。
一方、第2の駆動回路932の交流電圧を出力する出力部の他方の端子は、ブラシ19および軸22における上側の基部2より上側の部分等を介して、その振動体4の電極41および45に電気的に接続される。
【0048】
図1に示すように、接地手段6は、中心軸22に固定された板状の固定部60と、弾性(バネ性)を有し、棒状の4本の脚(接地脚)61とを備えている。
各脚61は、それぞれ、図1に示す基本姿勢において、固定部60から垂直方向斜め下方に延出し、かつ、垂直方向下方に向かって拡開している。また、各脚61は、固定部60を中心にして等間隔(等角度間隔)で配置されている。また、各脚61の先端部(下側の端部)62は、それぞれ、下側が凸となるように、外側に向かって湾曲している。
【0049】
固定部60は、基本姿勢において重心(飛行体1の重心)よりも鉛直方向上方で、かつ、姿勢変更手段16よりも鉛直方向上方の部位(中心軸22)に固定されている。
この接地手段6により、地面(床面)に安定的に接地することができ、離着陸を容易かつ確実に行なうことができる。
特に、着地の際は、脚61の弾性で、着地の衝撃を吸収することができ、また、飛行体1が傾いた状態で着地しても、最初に接地した脚61のバネ力で、飛行体1の姿勢を直すので、横転を防止することができる。
【0050】
次に、振動体4について、代表的に、ロータ3を回転駆動する振動体4を説明する。
図4に示すように、振動体4は、略長方形の板状をなしている。振動体4は、図4中の上側から板状の電極41と、板状の圧電素子42と、補強板(振動板)43と、板状の圧電素子44と、板状の電極45とをこの順に積層して構成されている。なお、図4では、厚さ方向を誇張して示している。
【0051】
圧電素子42、44は、それぞれ、長方形状をなし、電圧を印加することにより、その長手方向に伸長・収縮する。圧電素子42、44の構成材料としては、特に限定されず、例えば、チタン酸ジルコニウム酸鉛(PZT)、水晶、ニオブ酸リチウム、チタン酸バリウム、チタン酸鉛、メタニオブ酸鉛、ポリフッ化ビニリデン、亜鉛ニオブ酸鉛、スカンジウムニオブ酸鉛等の各種のものを用いることができる。
【0052】
これらの圧電素子42、44は、補強板43の両面にそれぞれ固着されている。補強板43は、振動体4全体を補強する機能を有しており、振動体4が過振幅、外力等によって損傷するのを防止する。補強板43の構成材料としては、弾性材料(弾性変形し得るもの)であれば特に限定されないが、例えばステンレス鋼、アルミニウムまたはアルミニウム合金、チタンまたはチタン合金、銅または銅系合金等の各種金属材料であるのが好ましい。なお、本実施形態では、補強板43の構成材料として、金属材料を用いる。
【0053】
この補強板43は、圧電素子42、44よりも厚さが薄い(小さい)ものであることが好ましい。これにより、振動体4を高い効率で振動させることができる。
補強板43は、圧電素子42、44に対する共通の電極としての機能をも有している。すなわち、圧電素子42には、電極41と補強板43とによって交流電圧が印加され、圧電素子44には、電極45と補強板43とによって交流電圧が印加される。すなわち、前述したように(図16に示すように)、振動体4は、回路部72の第1の駆動回路931に接続されており、その第1の駆動回路931により交流電圧が印加されるようになっている。
【0054】
圧電素子42、44は、交流電圧が印加されると長手方向に繰り返し伸縮し、これに伴なって、補強板43も長手方向に繰り返し伸縮する。すなわち、圧電素子42、44に交流電圧を印加すると、振動体4は、図4中の矢印で示すように、長手方向に微小な振幅で振動(縦振動)し、凸部46が縦振動(往復運動)する。
補強板43の図4中の右端部には、凸部(接触部)46が一体的に形成されている。この凸部46は、補強板43の幅方向中央(中心線49)からずれた位置(図示の構成では角部)に設けられている。この凸部46は、図示の構成では、略半円形状に突出するように形成されている。
【0055】
また、補強板43には、弾性(可撓性)を有する腕部48が一体的に形成されている。腕部48は、補強板43の長手方向略中央から、長手方向と略垂直な方向に突出するように設けられている。この腕部48には、ボルト12が挿入する孔481が形成されている。
図2および図5に示すように、このような振動体4は、凸部46にて被駆動体33の外周面331に当接(接触)するように設置されている。すなわち、本実施形態では、振動体4は、被駆動体33に対し被駆動体33の半径方向外周側から当接して設置されている。
なお、図示の構成では、外周面331は、平滑になっているが、全周に渡り溝を形成し、この溝内に凸部46が当接することとしてもよい。
【0056】
図2および図5に示すように、下側の基部2の基板21から下方に向かって突設された振動体取付部23には、ネジ穴が形成されており、振動体4は、腕部48の孔481に挿入されたボルト12によって、この振動体取付部23に固定されている。
このように、振動体4は、腕部48によって支持されている。これにより、振動体4は自由に振動することができ、比較的大きい振幅で振動する。また、振動体4は、腕部48の弾性によって、凸部46が外周面331に圧接された状態で設置されている。
また、振動体4は、回転中心線36に略垂直な姿勢(回転翼34に略平行な姿勢)で設置されている。これにより、振動体4が占めるスペースが上下方向に小さくなる。
【0057】
凸部46が被駆動体33の外周面331に当接した状態で、圧電素子42、44に交流電圧を印加して振動体4を振動させると、被駆動体33は、振動体4が伸長するときに凸部46から摩擦力(押圧力)を受ける。
すなわち、図5に示すように、凸部46の振動変位Sの径方向成分S1(被駆動体33の径方向の変位)によって、凸部46と外周面331との間に大きな摩擦力が与えられ、振動変位Sの周方向成分S2(被駆動体33の円周方向の変位)によって、被駆動体33に図5中の時計回りの回転力が与えられる。
【0058】
振動体4が振動すると、このような力が被駆動体33に繰り返し作用し、被駆動体33は、図5中の時計回りに回転する。これにより、ロータ3は、図5中の(図2中下側から見たときの)時計回りに回転する。
なお、ロータ5を回転駆動する振動体4については、前記ロータ3を回転駆動する振動体4と同様であるので、説明を省略するが、振動体4も同様に、その凸部46にて、被駆動体53の外周面531に当接するように設けられている。
【0059】
ロータ5は、振動体4の駆動により、ロータ3と反対方向、すなわち、図示しない平面視で(図2中下側から見たときの)反時計回りに回転する。
ロータ3が図5中の時計回りに回転すると、回転翼34に揚力が作用し、また、ロータ5がロータ3と反対方向に回転すると、回転翼54に揚力が作用し、これらの揚力により、飛行体1は、空中に浮揚(飛行)する。
【0060】
なお、ロータ3側には、ロータ3の回転数(回転速度)を検出する回転数検出手段を設けるのが好ましく、ロータ5側には、ロータ5の回転数(回転速度)を検出する回転数検出手段を設けるのが好ましい。
このように、振動体4は、構造が簡単で、小型(特に薄型)・軽量である。また、通常の電磁モータのように磁力で駆動する場合と異なり、前記のような摩擦力(押圧力)によって被駆動体33、53を駆動することから、駆動力が大きい。
【0061】
この飛行体1は、このような振動体4を用いてロータ3、5を回転駆動するようにしたことにより、小型化に極めて有利である。また、軽量化にも有利であり、飛行体1のペイロード(荷重)を大きくとることができる。また、製造コストの低減も図ることができる。
また、本実施形態では、前述したように、被駆動体33が筒状部材31に固着され、被駆動体33は、ロータ3と一体になっている。すなわち、振動体4は、ロータ3を直接に回転駆動するようになっており、動力伝達機構や変速機構等が設けられていない(不要である)。ロータ5側も同様に、振動体4は、ロータ5を直接に回転駆動するようになっており、動力伝達機構や変速機構等が設けられていない(不要である)。これにより、飛行体1は、特に簡単な構造、かつ軽量になっており、小型化・軽量化(ペイロード確保)に特に有利になっている。
【0062】
なお、前述したように、振動体4は、駆動力が大きいため、本実施形態のように、変速機構(減速機構)を介さなくてもロータ3、5を十分なトルクで回転することができる。
また、本実施形態では、振動体4の面内振動をロータ3、5の回転(面内回転)に直接変換するので、この変換に伴なうエネルギーロスが少なく、ロータ3、5を高い効率で回転駆動することができる。
また、本実施形態では、凸部46が被駆動体33に及ぼす摩擦力(押圧力)の方向は、回転中心線36に対し略垂直な方向であるため、ロータ3を傾斜させるような力が作用することがなく、ロータ3がより円滑かつ確実に回転する。同様に、ロータ5もより円滑かつ確実に回転する。
【0063】
なお、図示の構成と異なり、ロータ3を回転駆動する振動体4は、回転中心線36に平行な方向から被駆動体33の上面または下面に当接するように設置されていてもよく、また、ロータ5を回転駆動する振動体4は、ロータ5の回転中心線36に平行な方向から被駆動体53の上面または下面に当接するように設置されていてもよい。
また、ロータ3とロータ5との2つが揚力を発生するので、大きな揚力が得られる。
また、ロータ3とロータ5とが互いに反対方向に回転することにより、飛行体1(基部2)が受ける反力が相殺され、飛行体1が回転中心線36の回りに回転するのを防止することができる。
【0064】
特に、ロータ3に対する振動体4と、ロータ5に対する振動体4とを別個に設けたことから、ロータ3の回転数(回転速度)と、ロータ5の回転数(回転速度)とをそれぞれ別個に調整(調節)することができ、これにより、飛行体1(基部2)が回転中心線36の回りに回転するのをより確実に防止したり、飛行体1の回転中心線36の回りに回転(向き)を制御したりすることができる。
【0065】
また、ロータ3とロータ5とが同軸的に設けられていることにより、ロータを2つ設けたことによる大型化・重量増加を招来することなく、上記効果を達成することができる。すなわち、小型化・軽量化に有利である。
なお、図示の構成では、ロータ3とロータ5とは、直径や、回転翼の枚数(2枚)、回転翼の形状等の条件が同じになっているが、直径、回転翼の枚数、回転翼の形状等の条件が互いに異なるものであってもよい。
また、本発明では、ロータ3とロータ5とが同軸的に設けられていないもの(並設されたもの)であってもよい。
【0066】
圧電素子42、44に印加する交流電圧の周波数は、特に限定されないが、振動体4の振動(例えば、縦振動)の共振周波数と略同程度であるのが好ましい。これにより、振動体4の振幅が大きくなり、高い効率でロータ3、5を回転駆動することができる。
前述したように、振動体4は、主に、その長手方向に縦振動するが、縦振動と屈曲振動とを同時に励振し、凸部46を楕円運動(楕円振動)させることとするのがより好ましい。これにより、より高い効率でロータ3、5を回転駆動することができる。以下、この点について、代表的に、ロータ3を回転駆動する振動体4で説明する。
【0067】
振動体4が被駆動体33を回転駆動するとき、凸部46は、被駆動体33から反力を受ける。本実施形態では、凸部46が振動体4の中心線49からずれた位置に設けられていることから、振動体4は、この反力によって、図5中の一点鎖線で示すように面内方向に屈曲するように変形、振動(屈曲振動)する。なお、図5では、振動体4の変形を誇張して示している。
【0068】
また、印加電圧の周波数、振動体4の形状・大きさ、凸部46の位置などを適宜選択することにより、振動体4の縦振動と屈曲振動との複合振動を励振することができ、例えば、振幅が大きくなるとともに、凸部46は、図6中の一点鎖線で示すように、略楕円に沿って変位(楕円振動)する。
これにより、振動体4の1回の振動において、凸部46が被駆動体33を回転方向に送るときには、凸部46が被駆動体33により強い力で圧接され、凸部46が戻るときには、被駆動体33との摩擦力を低減または消滅させることができるため、振動体4の振動をロータ3の回転により高い効率で変換することができる。
【0069】
なお、本実施形態では、振動体4でロータ3を直接的に回転駆動するものとなっているが、本発明では、振動体4がロータ3を間接的に駆動するものであってもよい。すなわち、被駆動体33をロータ3と別個に設け、被駆動体33の回転力を回転力伝達機構によってロータ3に伝達するようなものであってもよい(ロータ3が被駆動体33に連動して回転するようになっていればよい)。同様に、本実施形態では、振動体4でロータ5を直接的に回転駆動するものとなっているが、本発明では、振動体4がロータ5を間接的に駆動するものであってもよい。すなわち、被駆動体53をロータ5と別個に設け、被駆動体53の回転力を回転力伝達機構によってロータ5に伝達するようなものであってもよい(ロータ5が被駆動体53に連動して回転するようになっていればよい)。これらの場合、回転力伝達機構としては、例えば、歯車列(歯車伝動機構)や、プーリー、ベルト、チェーン等を用いた巻き掛け伝動機構等、いかなる機構を用いるものでもよい。
【0070】
また、本実施形態では、ロータ3(被駆動体33)を回転駆動する振動体4は、1つ設置されているが、本発明では、その振動体4を複数設け、被駆動体33を複数の振動体4で回転駆動してもよい。同様に、本実施形態では、ロータ5(被駆動体53)を回転駆動する振動体4は、1つ設置されているが、本発明では、その振動体4を複数設け、被駆動体53を複数の振動体4で回転駆動してもよい。
【0071】
次に、姿勢変更手段16について説明する。
図1、図7および図8に示す姿勢変更手段16は、重心の移動により、飛行体1の姿勢を変更(調節)することで、ロータ3および5の回転中心線(回転中心軸)36を鉛直線(鉛直方向:重力の方向)に対して所定方向に所定角度傾斜させるもの(傾きを調節するもの)である。
【0072】
図1に示すように、姿勢変更手段16は、回転翼34の下方に位置している。すなわち、姿勢変更手段16は、中心軸22の下端に設置(固定)されている。
本実施形態における姿勢変更手段16は、錘要素(錘)14と、錘要素14をy軸方向に移動(変位)させるy軸方向移動手段(y軸方向変位手段)であるリニアアクチュエータ(第1のリニアアクチュエータ)16yと、リニアアクチュエータ(y軸方向移動手段)16yおよび錘要素14をx軸方向に移動(変位)させるx軸方向移動手段(x軸方向変位手段)であるリニアアクチュエータ(第2のリニアアクチュエータ)16xとを有している。
なお、前記リニアアクチュエータ16xおよび16yにより、飛行体1に対して錘要素14を移動(変位)させる移動手段(変位手段(変位機構))が構成される。
【0073】
図7および図8に示すように、リニアアクチュエータ16xと、リニアアクチュエータ16yとは、互いの後述するスライダ181が対向した状態で、4つのピン186を介して、互いに接合されている。この場合、各ピン186は、それぞれ、一端側がリニアアクチュエータ16yのスライダ181の孔部185(図9および10参照)に挿入され、他端側がリニアアクチュエータ16xのスライダ181の孔部185(図9および10参照)に挿入され、互いのスライダ181同士を連結している。
【0074】
また、リニアアクチュエータ16xと、リニアアクチュエータ16yとは、互いのスライダ181の移動方向が直交、すなわち、リニアアクチュエータ16xのスライダ181の移動方向がx軸方向、リニアアクチュエータ16yのスライダ181の移動方向がy軸方向となるように接合されている。
また、この姿勢変更手段16では、リニアアクチュエータ16xが、上方に位置し、リニアアクチュエータ16yが下方に位置し、図1に示すように、リニアアクチュエータ16xの後述するベース161の中央部の上側が、中心軸22の下端に接合されている。そして、リニアアクチュエータ16yの後述するベース161の中央部の下側に、錘要素14が接合されている。
【0075】
次に、リニアアクチュエータ16yと、リニアアクチュエータ16xとについて、代表的に、リニアアクチュエータ16yを説明する。
図9〜図12に示すように、リニアアクチュエータ16yは、板状のベース161と、板状の基台171と、板状のスライダ181と、振動体(駆動源)4とを有している。これらベース161、基台171、スライダ181および振動体は、それぞれ、互いに平行(一部が面方向に重なる場合も含む)になるように設置されている。
【0076】
基台171は、ベース161の中央部に、そのベース161に対して図10〜図12中左右方向に移動可能に設置されている。この場合、ベース161の中央部には、1対のガイドピン162が図10〜図12中左右方向に沿って立設され、基台171には、図10〜図12中左右方向に長い1対の長穴172が図10〜図12中左右方向に沿って形成されている。各ガイドピン162は、それぞれ、対応する長穴172に挿入されている。これにより、基台171は、ガイドピン162に案内され、長穴172に沿って図10〜図12中左右方向に移動することができる。
【0077】
この基台171には、後述するロータ164(被駆動体165)を回転駆動する振動体4が設置されている。振動体は、凸部(接触部)46および1対の腕部48を有し、その凸部46が図10〜図12中右側を向くように、基台171に対し、各腕部48に形成された孔481に挿入されたボルト175によって固定されている。これにより、振動体4は、振動し得るように、各腕部48によって支持される。なお、振動体4については、後に詳述する。
【0078】
また、ベース161の図10〜図12中右側の端部(角部)には、1対のバネ止めピン168が立設されている。一方、基台171には、1対のバネ掛け部173が形成されている。一方のバネ掛け部173は、基台171の図10中上側に設けられ、他方のバネ掛け部173は、基台171の図10中下に設けられている。
そして、これら対応するバネ止めピン168とバネ掛け部173には、それぞれ、コイルバネ174(付勢手段)が伸張した状態(伸張状態)で設置されている。すなわち、各コイルバネ174は、それぞれ、その一端側が、基台171のバネ掛け部173に掛けられ(固定され)、他端側が、ベース161のバネ止めピン168に取り付けられている(固定されている)。
【0079】
各コイルバネ174の弾性力(復元力)により、ベース161は、図10〜図12中右側に向かって付勢され、振動体4の凸部46は、後述する被駆動体165の外周面1651に当接するとともに押圧される。
また、ベース161の図10〜図12中右側の端部で、かつ、図10中上下方向の中央部には、ロータ164が回転可能に設置されている。ロータ164は、略円筒状をなす筒状部166と、筒状部166の外側(外周)に固着(固定)された被駆動体165とを有している。被駆動体165は、略リング状(円環状)をなしており、振動体4に対応する位置(基端側)に位置している。
【0080】
また、ロータ164(筒状部166)の先端側の外周面1651には、ピニオンギア167が形成されている。これにより、ロータ164が回転すると、被駆動体165とピニオンギア167とが一体的に回転する。
また、ロータ164のピニオンギア167が形成されている部位(回転体である歯車)の径(外径)は、被駆動体165の径(外径)より小さく設定されており、これにより、減速機構が構成される。
【0081】
また、前記ロータ164のピニオンギア167が形成されている部位(回転体である歯車)の径と、被駆動体165の径との比率を調整(変更)することにより、スライダ181の移動速度を任意に調整(変更)することができる。
また、ベース161の図10〜図12中左側の端部(角部)には、溝1631を有する2つのローラ163が回転可能に設置されている。
【0082】
スライダ181は、これらのローラ163の溝1631内に位置し、各ローラ163とロータ164とで挟み込まれ、ベース161に対して図10中上下方向に移動可能に設置されている。すなわち、スライダ181は、各ローラ163およびロータ164により、その移動方向が図10中上下方向になり、かつ、姿勢が一定に保持されるように規制される。
【0083】
このスライダ181の形状は、略四角形の枠状をなしている。すなわち、スライダ181の中央部には、略四角形の開口182が設けられている。
これにより、軽量化を図ることができる。また、この開口182を利用して振動体の4の着脱を行なうことができ、メンテナンス性が向上する。
また、スライダ181の幅(図10〜図12中の左右方向の長さ)は、比較的長く設定されるのが好ましい。これにより、ベース161(ベース面)とスライダ181(スライダ面)とにおける、拗れを軽減することができる。
【0084】
また、スライダ181の図10〜図12中右側の外側の端面には、スライダ181の移動方向に沿って、前記ロータ164に設けられているピニオンギア167と噛合するラックギア183が形成されている。このラックギア183とピニオンギア167とにより、ロータ164の回転運動がスライダ181の直線運動に変換される。従って、ラックギア183とピニオンギア167とで回転/移動変換機構が構成される。
【0085】
また、スライダ181の図10中右側の両角部には、それぞれ、突出部184(ストッパ)が形成されている。これらの突出部184により、スライダ181の移動範囲が制限され(所定位置を越える移動が阻止され)、スライダ181の離脱が阻止(防止)される。
また、スライダ181における、振動体4の近傍には、4つの孔部185が形成されている。
【0086】
このリニアアクチュエータ16yでは、振動体4が所定のパターンで振動すると、その振動により、凸部46から(凸部46を介して)被駆動体165に所定方向の回転力(駆動力)が繰り返し加えられ(与えられ)、ロータ164は、所定方向に回転する。そして、ロータ164に設けられているピニオンギア167と、スライダ181に設けられているラックギア183とにより、ロータ164の回転運動がスライダ181の直線運動に変換され、スライダ181は、各ローラ163に案内され、所定方向(例えば、y軸方向の正方向)に移動する。すなわち、このスライダ181に対して、相対的に、ベース161と錘要素14とが一体的に移動する。
【0087】
一方、前記振動が逆になるように振動体4を励振すると、凸部46から被駆動体165に前記と逆方向の回転力が繰り返し加えられ、ロータ164は、前記と逆方向に回転する。そして、ロータ164に設けられているピニオンギア167と、スライダ181に設けられているラックギア183とにより、ロータ164の回転運動がスライダ181の直線運動に変換され、スライダ181は、各ローラ163に案内され、前記と逆方向(例えば、y軸方向の負方向)に移動する。すなわち、このスライダ181に対して、相対的に、ベース161と錘要素14とが一体的に移動する。
【0088】
このリニアアクチュエータ16yによれば、構造が簡単で、小型化(特に、薄型化)・軽量化を図ることができ、また、低速で、かつ、高い駆動力が得られる。
これにより、錘要素14、すなわち、重心を低速で、容易かつ確実に移動させることができ、これによって、飛行体1の姿勢を正確かつ確実に変更することができ、安定した飛行を行なうことができる。
また、スライダ181と振動体4とを重ねて配置することができるので、リニアアクチュエータ16yの総面積を小さくすることができ、小型化に有利である。
【0089】
また、例えば、振動体の接触部をスライダに当接して、直接、そのスライダを移動させる形態のリニアアクチュエータを用いる場合は、振動体をスライダに押し付ける力が、スライダの移動の際の抵抗になってしまうが、このリニアアクチュエータ16yでは、振動体4からスライダ181へかかる負荷をなくすことができ、これにより、リニアアクチュエータ16yの駆動が安定し、より安定した飛行を行なうことができる。
【0090】
また、前記直接スライダを移動させる形態のリニアアクチュエータを用いる場合は、振動体の接触部によるスライダの摩耗を抑制するため、スライダを金属で構成するので、リニアアクチュエータの軽量化には不利であるが、このリニアアクチュエータ16yでは、振動体4がスライダ181を直接駆動するわけではないので、スライダ181を、例えば、樹脂等の軽量な材料で構成することができ、これにより、リニアアクチュエータ16yの軽量化、すなわち、飛行体1の軽量化を図ることができる。
【0091】
リニアアクチュエータ16xについては、前記リニアアクチュエータ16yと同様であるので、説明を省略する。
なお、本発明では、リニアアクチュエータ16yと、リニアアクチュエータ16xとの一方を省略してもよい。
姿勢変更手段16の振動体4では、電極を複数に分割し、それらに対して選択的に電圧を印加して、圧電素子を部分的に駆動することにより、面内の縦・屈曲の振動を任意に選択し得るようになっている。すなわち、振動体4への通電状態(振動体4の振動パターン)を変更することにより、振動体4の凸部46の振動(振動変位)の方向を変え、これにより、被駆動体165を図10中時計回りと反時計回り(正方向と逆方向)のいずれの方向にも回転させることができるように構成されている。以下、この振動体4について説明するが、前記ロータ3および5を回転駆動する振動体4との相違点を中心に説明し、同様の事項はその説明を省略する。
【0092】
図13に示すように、振動体4は、前記ロータ3および5を回転駆動する振動体4と同様に、補強板43の図13中上側に圧電素子42、下側に圧電素子44を積層した構造であるが、圧電素子42の図13中上側に、板状の4つの電極41a、41b、41cおよび41dが設置され、圧電素子44の図13中下側に、板状の4つの電極45a、45b、45cおよび45d(電極45a、45b、45cおよび45dは、図示せず、各符号のみを括弧内に示す)が設置されている点で、前記ロータ3および5を回転駆動する振動体4と異なっている。すなわち、圧電素子42を4つの長方形の領域に略等しく分割(区分)し、分割された各領域に、それぞれ、長方形状をなす電極41a、41b、41cおよび41dが設置され、同様に、圧電素子44を4つの領域に分割(区分)し、分割された各領域に、それぞれ、長方形状をなす電極45a、45b、45cおよび45dが設置されている。なお、電極41a、41b、41cおよび41dの裏側に、それぞれ、電極45a、45b、45cおよび45dが配置されている。
【0093】
一方の対角線上の電極41aおよび41cと、これらの裏側に位置する電極45aおよび45cとは、すべて電気的に接続され、同時に通電されるようになっており、同様に、他方の対角線上の電極41bおよび41dと、これらの裏側に位置する電極45bおよび45dとは、すべて電気的に接続(以下、単に「接続」と言う)され、同時に通電されるようになっている。
【0094】
補強板43は、アース(接地)されており、また、通電される電極41a、41c、45aおよび45cと、電極41b、41d、45bおよび45dとは、図示しないスイッチ(切替スイッチ)で切り替わり、そのいずれか一方に交流電圧が印加されるように構成されている。すなわち、図16に示すように、振動体4は、駆動制御手段9のうちの、図示しない前記スイッチを有する後述する駆動制御回路90に接続されており、その駆動制御回路90により、通電される電極が選択され(切り替わり)、交流電圧が印加されるようになっている。
【0095】
また、凸部46は、図13中の右端部(短辺側)であって、補強板43の幅方向中央(短辺の中央)に設けられている。
また、補強板43には、弾性(可撓性)を有する1対(2つ)の腕部48が一体的に形成されている。1対の腕部48は、補強板43の長手方向(図10中左右方向)略中央に、長手方向と略垂直な方向であって、かつ、補強板(振動体4)を介して互いに反対方向に突出するように(図10中上下対称に)設けられている。
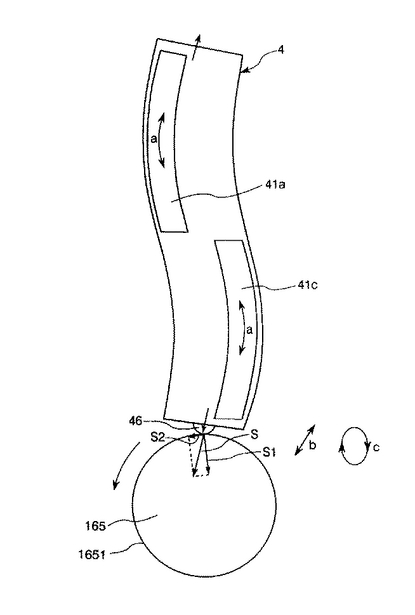
【0096】
振動体4の電極41a、41c、45aおよび45cに通電し、これらの電極41a、41c、45aおよび45cと、補強板43との間に、交流電圧が印加されると、図14に示すように、振動体4の電極41a、41c、45aおよび45cに対応する部分がそれぞれ矢印a方向に繰り返し伸縮し、これにより、振動体4の凸部46は、矢印bで示す斜めの方向に振動(往復運動)、または、矢印cで示すように、楕円振動(楕円運動)する。被駆動体165は、振動体4の電極41a、41c、45aおよび45cに対応する部分が伸長するときに凸部46から摩擦力(押圧力)を受ける。
すなわち、凸部46の振動変位Sの径方向成分S1(被駆動体165の径方向の変位)によって、凸部46と外周面1651との間に大きな摩擦力が与えられ、振動変位Sの周方向成分S2(被駆動体165の円周方向の変位)によって、被駆動体165に図14中の反時計回りの回転力が与えられる。
【0097】
振動体4が振動すると、このような力が被駆動体165に繰り返し作用し、被駆動体165は、図14中の反時計回りに回転する。これにより、ロータ164は、図14中の反時計回りに回転する。
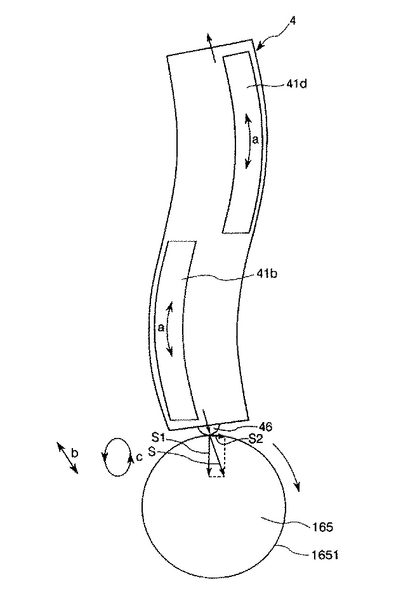
前記と逆に、振動体4の電極41b、41d、45bおよび45dに通電し、これらの電極41b、41d、45bおよび45dと、補強板43との間に、交流電圧が印加されると、図15に示すように、振動体4の電極41b、41d、45bおよび45dに対応する部分がそれぞれ矢印a方向に繰り返し伸縮し、これにより、振動体4の凸部46は、矢印bで示す斜めの方向に振動(往復運動)、または、矢印cで示すように、楕円振動(楕円運動)する。被駆動体165は、振動体4の電極41b、41d、45bおよび45dに対応する部分が伸長するときに凸部46から摩擦力(押圧力)を受ける。
すなわち、凸部46の振動変位Sの径方向成分S1(被駆動体165の径方向の変位)によって、凸部46と外周面1651との間に大きな摩擦力が与えられ、振動変位Sの周方向成分S2(被駆動体165の円周方向の変位)によって、被駆動体165に図15中の時計回りの回転力が与えられる。
【0098】
振動体4が振動すると、このような力が被駆動体165に繰り返し作用し、被駆動体165は、図15中の時計回りに回転する。これにより、ロータ164は、図15中の時計回りに回転する。
なお、図14および図15では、それぞれ、振動体4の変形を誇張して示すとともに、腕部48は図示されていない。
【0099】
なお、本実施形態では、振動体4の電極を4分割して駆動する場合について説明したが、それは一例であり、本発明では、前述の振動体4の構造や駆動の方法に限定されるものではない。
また、各リニアアクチュエータ16xおよび16yは、それぞれ、スライダ181(錘要素14)のx軸方向の位置(移動量)およびy軸方向の位置(移動量)を検出する図示しない位置検出手段(移動量検出手段)を有している。各位置検出手段は、それぞれ、所定の位置検出用スケールと、発光部および受光部を有するセンサとで構成されている。
【0100】
リニアアクチュエータ16xの振動体4が駆動し、スライダ181が移動すると、センサからの信号が後述する駆動制御回路90のθy制御回路92yに供給(入力)され、θy制御回路92yは、その信号に基づいて、スライダ181(錘要素14)のx軸方向の移動量や位置を求める。前記スライダ181(錘要素14)の移動量や位置の情報は、スライダ181(錘要素14)をx軸方向へ移動させる際の所定の制御や処理に利用される。
【0101】
同様に、リニアアクチュエータ16yの振動体4が駆動し、スライダ181が移動すると、センサからの信号が、後述する駆動制御回路90のθx制御回路92xに供給(入力)され、θx制御回路92xは、その信号に基づいて、スライダ181(錘要素14)のy軸方向の移動量や位置を求める。前記スライダ181(錘要素14)の移動量や位置の情報は、スライダ181(錘要素14)をy軸方向へ移動させる際の所定の制御や処理に利用される。
なお、各位置検出手段は、それぞれ、光学的に検出するものに限らず、例えば、磁気的に検出するものであってもよい。
【0102】
次に、錘要素14について説明する。
図1に示すように、錘要素14は、箱状のケーシング141を有しており、このケーシング141の外側には、所定の駆動回路、例えば、図16に示す駆動制御手段9のうちの駆動制御回路90、姿勢制御センサ8等を有する回路基板(フレキシブル回路基板)13が設置されている。
【0103】
これにより、ロータ3、5が回転したときの回転翼34、54からの気流(空気流)により、回路基板13が冷却され、回路基板13で発生する熱を容易かつ確実に放熱することができ、これによって、駆動制御回路90、姿勢制御センサ8等の誤動作や故障を防止することができる。また、別途、冷却手段(放熱手段)を設ける必要がないので、小型化・軽量化に有利である。
【0104】
また、ケーシング141内には、例えば、無線通信用の図示しない送受信部と、前記駆動制御回路90、姿勢制御センサ8および送受信部等の飛行体1の各部に電力を供給する図16に示す電池(飛行体1を駆動するエネルギーを蓄積するエネルギー蓄積手段)15等が収納(内蔵)されている。
すなわち、本実施形態では、駆動制御回路90、姿勢制御センサ8、送受信部および電池15等が、姿勢変更手段16の錘要素14の一部を構成する。これにより、専用の錘の部分(錘としてのみ作用する部分)の重さを軽くすることができるので、飛行体1を軽量化することができ、飛行体1のペイロード(荷重)を大きくとることができる。
また、錘要素14の質量は、飛行体1の質量の大部分を占めるので、この錘要素14の移動により、重心の位置を容易に移動させることができる。
【0105】
図16に示すように、姿勢制御センサ8は、Z軸の回り(θz方向)の回転を検出するジャイロセンサ81zと、X軸の回り(θx方向)の回転を検出するジャイロセンサ81xと、Y軸の回り(θy方向)の回転を検出するジャイロセンサ81yとで構成されている。
また、駆動制御回路90は、θz検出回路91zと、θx検出回路91xと、θy検出回路91yと、θz制御回路92zと、θx制御回路92xと、θy制御回路92yと、y駆動回路93yと、x駆動回路93xと、リニアアクチュエータ16yの振動体4の通電される電極を切り替える図示しないスイッチ(切替スイッチ)と、リニアアクチュエータ16xの振動体4の通電される電極を切り替える図示しないスイッチ(切替スイッチ)とで構成されている。
【0106】
y駆動回路93yは、前記電極を切り替えるスイッチを介してリニアアクチュエータ16yの振動体4に接続され、x駆動回路93xは、前記電極を切り替えるスイッチを介してリニアアクチュエータ16xの振動体4に接続されている。
また、θz制御回路92zと、第1の駆動回路931およびの第2の駆動回路932とは、無線で信号の送信および受信(無線通信)を行うことができるようになっている。
また、電池15としては、例えば、1次電池、2次電池(蓄電池)、燃料電池、太陽電池(光電変換素子)と充電部(例えば、2次電池)とを組み合わせたもの等が挙げられる。
【0107】
図17および図18は、それぞれ、図1に示す飛行体の作用等を説明するための模式図(側面図)である。
図17に示すように、重心の位置が回転中心線36(中心軸22)の延長線上にある場合は、回転中心線36の方向は、鉛直方向となる。このときの揚力は、鉛直成分(推力)のみである。
そして、図18に示すように、錘要素14の移動により、重心が移動すると、揚力が作用(発生)する支点Pと重心とを通る直線Lの方向が、鉛直方向となるように飛行体1(回転中心線36)が傾く。これにより、揚力に水平成分(並進力)が発生し、飛行体1は、水平方向に移動する。
【0108】
このような飛行体1に対し、地上(床)には、図示しない操作部(コントローラ)が設けられており、この操作部と飛行体1とは、無線で通信することができ、前記操作部から飛行体1を無線で遠隔操作(ロータ3および5の回転数の調整、錘要素14のx軸方向およびy軸方向の位置の調整等)することができるようになっている。
そして、この飛行体1では、ジャイロセンサ81zによるθz方向の検出値と、Z軸方向の指示値(高さ指示値)と、Z軸の回りの指示値(θz方向の指示値)とに基づいて、ロータ3およびロータ5の回転数(回転速度)をそれぞれ制御する。
【0109】
すなわち、Z軸方向の指示値がθz制御回路92zへ入力されると、そのZ軸方向の指示値(高さ)になるように、第1の駆動回路931および第2の駆動回路932を介して、ロータ3および5を回転駆動する各振動体4の駆動が制御される。これにより、飛行体1を上昇または下降させることができ、また、所定の高さに保持することができる。
また、θz方向の指示値がθz制御回路92zへ入力されると、そのθz方向の指示値(向き)になるように、第1の駆動回路931および第2の駆動回路932を介して、ロータ3および5を回転駆動する各振動体4の駆動が制御される。これにより、飛行体1をθz方向に、正逆いずれの方向へも所定量(所定角度)回転させることができ、θz方向に、所定の角度(向き)に保持することができる。
【0110】
また、この飛行体1では、ジャイロセンサ81xによるθx方向の検出値と、Y軸方向の指示値とに基づいて、錘要素14のY軸方向の位置を制御する。
すなわち、Y軸方向の指示値がθx制御回路92xへ入力されると、そのY軸方向の指示値になるように、y駆動回路93yを介して、リニアアクチュエータ16yの振動体4の駆動が制御される。これにより、ベース161とともに錘要素14がY軸方向へ移動し、飛行体1の重心がY軸方向へ移動して、飛行体1の各ロータ3および5の回転中心線36が、YZ平面内で所定角度回転し、鉛直線に対してy軸に向って所定角度傾斜する。
このようにして、飛行体1を前記回転中心線36の傾斜方向に、例えば、水平移動(飛行)させることができる。
【0111】
また、この飛行体1では、ジャイロセンサ81yによるθy方向の検出値と、X軸方向の指示値とに基づいて、錘要素14のX軸方向の位置を制御する。
すなわち、X軸方向の指示値がθy制御回路92yへ入力されると、そのX軸方向の指示値になるように、x駆動回路93xを介して、リニアアクチュエータ16xの振動体4の駆動が制御される。これにより、錘要素14およびリニアアクチュエータ16yがX軸方向へ移動し、飛行体1の重心がX軸方向へ移動して、飛行体1の各ロータ3および5の回転中心線36が、XZ平面内で所定角度回転し、鉛直線に対してx軸に向って所定角度傾斜する。
【0112】
このようにして、飛行体1を前記回転中心線の傾斜方向に、例えば、水平移動(飛行)させることができる。
以上のように、姿勢変更手段16により、飛行体1の飛行姿勢を容易かつ確実に変更することができ、飛行体1を容易かつ確実に任意の位置に飛行(移動)させることができる。
【0113】
以上、本発明の飛行体を、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。
また、本発明では、超音波モータの振動体の形状、構造は、図示の構成に限らず、被駆動体を回転駆動することができるものであればいかなるものでもよい。例えば、圧電素子が1枚のものや、補強板を有さないものや、被駆動体と当接する部分に向かって幅が漸減するような形状のもの等であってもよい。
【0114】
また、本発明では、ロータを回転させる駆動源は、電力により駆動するものであれば、超音波モータには限定されない。
また、本発明では、飛行体の遠隔操作の方法は、無線操縦に限らず、例えば、有線操縦によるものであってもよい。
また、本発明では、飛行体が自動飛行制御されるように構成されていてもよい。
【0115】
また、本発明の飛行体の大きさは、特に限定されないが、特に、複数の回転翼を備えたロータの直径が、例えば、5〜300mm程度の比較的小さい飛行体(小型飛行体)に好適である。
また、本発明の飛行体は、無人用(無人の飛行体)と、有人用(有人の飛行体)とのいずれにも適用することができる。
【0116】
また、本発明の飛行体は、複数の回転翼を備えたロータが1つ設けられているようなものでもよく、また、3つ以上設けられているようなものでもよい。すなわち、本発明は、図示の構造の飛行体に限定されず、例えば、ヘリコプタ等、複数の回転翼を備えたロータを有する各種の飛行体に適用することができる。
また、本発明の飛行体の用途は、特に限定されず、例えば、飛行体に、各種センサ(センシング手段)等の作業手段を搭載し、目的の場所へ飛行(移動)させ、各種の環境で各種の情報の収集(センシング作業)等を行うことができる。
【0117】
また、他にも、例えば、人間の入れない有害環境(人体に対して有害な環境を有する場所)において、各種センサにより情報収集等を行なうことができる。
また、飛行体は、地球上はもちろんのこと、地球以外の場所、例えば、火星等の他の惑星においても用いることができる(惑星探査用の飛行体(フライングロボット)にも適用することができる)。
【図面の簡単な説明】
【0118】
【図1】本発明の飛行体の実施形態を示す斜視図である。
【図2】図1に示す飛行体における中心軸付近を拡大して示す断面側面図である。
【図3】図1に示す飛行体におけるロータを模式的に示す平面図である。
【図4】図1に示す飛行体における振動体の斜視図である。
【図5】図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図である。
【図6】図1に示す飛行体における振動体の凸部が楕円運動する様子を示す平面図である。
【図7】図1に示す飛行体における姿勢変更手段の斜視図である。
【図8】図1に示す飛行体における姿勢変更手段の分解斜視図である。
【図9】図1に示す飛行体における姿勢変更手段のリニアアクチュエータの斜視図である。
【図10】図1に示す飛行体における姿勢変更手段のリニアアクチュエータの平面図である。
【図11】図1に示す飛行体における姿勢変更手段のリニアアクチュエータの側面図である。
【図12】図10中のA−A線での断面図である。
【図13】図1に示す飛行体における振動体の斜視図である
【図14】図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図である。
【図15】図1に示す飛行体における振動体が被駆動体を駆動する様子を示す平面図である。
【図16】図1に示す飛行体の回路構成を示すブロック図である。
【図17】図1に示す飛行体の作用等を説明するための模式図である。
【図18】図1に示す飛行体の作用等を説明するための模式図である。
【符号の説明】
【0119】
1……飛行体 2……基部 21……基板 22……中心軸 23……振動体取付部 3……ロータ 31……筒状部材 311……貫通孔 32……回転翼固定部材 321……筒状部 322……固定部 323……貫通孔 33……被駆動体 331……外周面 34……回転翼 35……軸孔 36……回転中心線 4……振動体 41、45……電極 41a〜41d……電極 45a〜45d……電極 42、44……圧電素子 43……補強板 46……凸部 48……腕部 481……孔 49……中心線 5……ロータ 51……筒状部材 52……回転翼固定部材 521……筒状部 522……固定部 523……貫通孔 53……被駆動体 531……外周面 54……回転翼 541……軸 55……軸孔 6……接地手段 60……固定部 61……脚 62……先端部 71……太陽電池 72……回路部 73……部分回路部 74……充電部 8……姿勢制御センサ 81x、81y、81z……ジャイロセンサ 9……駆動制御手段 90……駆動制御回路 91x……θx検出回路 91y……θy検出回路 91z……θz検出回路 92x……θx制御回路 92y……θy制御回路 92z……θz制御回路 931……第1の駆動回路 932……第2の駆動回路 93x……x駆動回路 93y……y駆動回路 11……軸受け 12……ボルト 13……回路基板 14……錘要素 141……ケーシング 15……電池 16……姿勢変更手段 16x……リニアアクチュエータ 16y……リニアアクチュエータ 161……ベース 162……ガイドピン 163……ローラ 1631……溝 164……ロータ 165……被駆動体 1651……外周面 166……筒状部 167……ピニオンギア 168……バネ止めピン 171……基台 172……長穴 173……バネ掛け部 174……コイルバネ 175……ボルト 181……スライダ 182……開口 183……ラックギア 184……突出部 185……孔部 186……ピン 19……ブラシ
【特許請求の範囲】
【請求項1】
回転可能に設けられ、複数の回転翼を有するロータと、
電力により駆動し、前記ロータを回転させる駆動源とを備え、
前記回転翼の回転により生じる推力により飛行する飛行体であって、
前記回転翼の表面に、光を受光して光電変換し、電気を生成する太陽電池を設け、
前記回転翼の内部に、前記太陽電池で生成された電気を充電する充電部を有する回路部を設けたことを特徴とする飛行体。
【請求項2】
前記駆動源の駆動のために用いられる電力の少なくとも一部は、前記充電部から供給されるよう構成されている請求項1に記載の飛行体。
【請求項3】
前記回転翼をその厚さ方向から見たとき、前記回路部の略全体が前記太陽電池の一部と重なっている請求項1または2に記載の飛行体。
【請求項4】
前記回路部は、前記各回転翼の内部に分散された部分回路部で構成され、
前記各回転翼の部分回路部は、それぞれ、該回転翼の回転中心と該回転翼の端部との中点よりも端部側に、該部分回路部の重心が位置するように設けられている請求項1ないし3のいずれかに記載の飛行体。
【請求項5】
前記回路部は、前記各回転翼の内部に分散された部分回路部で構成され、
前記各回転翼の部分回路部は、それぞれ、該回転翼の回転中心と該回転翼の部分回路部の重心との間の距離が、全て略等しくなるように設けられている請求項1ないし4のいずれかに記載の飛行体。
【請求項6】
略同軸的に設けられ、互いに反対方向に回転する2つの前記ロータを有する請求項1ないし5のいずれかに記載の飛行体。
【請求項7】
重心を移動させることにより飛行姿勢を変更する姿勢変更手段を有する請求項1ないし6のいずれかに記載の飛行体。
【請求項8】
前記姿勢変更手段は、錘要素と、該錘要素を変位させる変位機構とを有する請求項7に記載の飛行体。
【請求項1】
回転可能に設けられ、複数の回転翼を有するロータと、
電力により駆動し、前記ロータを回転させる駆動源とを備え、
前記回転翼の回転により生じる推力により飛行する飛行体であって、
前記回転翼の表面に、光を受光して光電変換し、電気を生成する太陽電池を設け、
前記回転翼の内部に、前記太陽電池で生成された電気を充電する充電部を有する回路部を設けたことを特徴とする飛行体。
【請求項2】
前記駆動源の駆動のために用いられる電力の少なくとも一部は、前記充電部から供給されるよう構成されている請求項1に記載の飛行体。
【請求項3】
前記回転翼をその厚さ方向から見たとき、前記回路部の略全体が前記太陽電池の一部と重なっている請求項1または2に記載の飛行体。
【請求項4】
前記回路部は、前記各回転翼の内部に分散された部分回路部で構成され、
前記各回転翼の部分回路部は、それぞれ、該回転翼の回転中心と該回転翼の端部との中点よりも端部側に、該部分回路部の重心が位置するように設けられている請求項1ないし3のいずれかに記載の飛行体。
【請求項5】
前記回路部は、前記各回転翼の内部に分散された部分回路部で構成され、
前記各回転翼の部分回路部は、それぞれ、該回転翼の回転中心と該回転翼の部分回路部の重心との間の距離が、全て略等しくなるように設けられている請求項1ないし4のいずれかに記載の飛行体。
【請求項6】
略同軸的に設けられ、互いに反対方向に回転する2つの前記ロータを有する請求項1ないし5のいずれかに記載の飛行体。
【請求項7】
重心を移動させることにより飛行姿勢を変更する姿勢変更手段を有する請求項1ないし6のいずれかに記載の飛行体。
【請求項8】
前記姿勢変更手段は、錘要素と、該錘要素を変位させる変位機構とを有する請求項7に記載の飛行体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】

【図10】

【図11】

【図12】
【図13】

【図14】
【図15】
【図16】

【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2006−130993(P2006−130993A)
【公開日】平成18年5月25日(2006.5.25)
【国際特許分類】
【出願番号】特願2004−319833(P2004−319833)
【出願日】平成16年11月2日(2004.11.2)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成18年5月25日(2006.5.25)
【国際特許分類】
【出願日】平成16年11月2日(2004.11.2)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]