
食用果実の検査方法、検査装置およびプログラム
【課題】食用果実の内部を精度よく検査する検査方法を提供する。
【解決手段】食用果実の内部を検査する食用果実検査装置が行うとき、前記検査装置は、食用果実の内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する。食用果実の内部を検査するとき、前記検査装置は、検査用食用果実の所定の波長帯域における透過光画像を取得し、取得された透過光画像と、前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出する。さらに、前記検査装置は、前記疑第1領域の幾何学形状の特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する。
【解決手段】食用果実の内部を検査する食用果実検査装置が行うとき、前記検査装置は、食用果実の内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する。食用果実の内部を検査するとき、前記検査装置は、検査用食用果実の所定の波長帯域における透過光画像を取得し、取得された透過光画像と、前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出する。さらに、前記検査装置は、前記疑第1領域の幾何学形状の特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、食用果実の内部を検査する食用果実検査装置が行う検査方法、検査装置およびプログラムに関する。
【背景技術】
【0002】
干し柿などの食用果実は、種有りより種無しのほうが商品価値が高いことから、解体することなく種など所定部位の有無を判別することが求められる。種の有無を判別するため、所定の波長帯域で受光して得られる画像中の被写体に対応する部分の分光特性を用いて、被写体の特性を推定することが行われている。分光特性を用いる例としては、例えば、人物の顔や食物を撮影被写体とした画像、あるいは空から土地を撮影したハイパースペクトル画像から、人物の顔の部位や食物の熟成度や土地の利用状況等の情報を得ることが知られている。
【0003】
例えば、人工衛星等のプラットフォームに搭載されたマルチスペクトルセンサで撮影対象物を撮像した画像を処理するマルチスペクトル画像処理装置であって、大分類“農業植生”、中分類“沈水植物群落”、小分類“大根”等が入力設定されるカテゴリ情報と、第1のマルチスペクトルセンサで取得したマルチスペクトル画像中で対応する部分の画素のデータを参照用スペクトルデータとして関連づけて参照スペクトルデータに登録する参照スペクトルデータ登録処理部と、入力マルチスペクトル画像を画素単位毎に、参照スペクトルデータの参照用スペクトルデータと照合して、そのカテゴリ情報を推定するカテゴリ推定処理部を含んだマルチスペクトル画像処理装置が知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−280591号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記マルチスペクトル画像処理装置は、撮影被写体の表面の部位を識別することはできるが、撮影被写体の内部構造、例えば、撮影被写体が干し柿などの食用果実である場合、食用果実に種があるか否か等の内部情報を得ることはできない。
【0006】
本発明は、食用果実の内部を精度よく検査する食用果実検査方法、検査装置およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様は、食用果実の内部を検査する食用果実検査装置が行う検査方法である。
前記食用果実検査装置は、参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する。
食用果実の内部を検査するとき、前記食用果実検査装置は、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する。
【0008】
本発明の別の態様は、食用果実の内部の検査を、コンピュータに実行させる検査プログラムである。当該検査プログラムは、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例としてコンピュータの記憶手段に予め記憶させ、
食用果実の内部を検査するとき、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、処理をコンピュータに実行させる。
【0009】
本発明のさらに別の態様は、食用果実の内部を検査する食用果実の検査装置である。当該検査装置は、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する記憶部と、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定する推定部と、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する判別部と、とを有する。
【発明の効果】
【0010】
上述の態様の食用果実検査方法、検査装置およびプログラムによれば、食用果実の内部を精度よく検査することができる。
【図面の簡単な説明】
【0011】
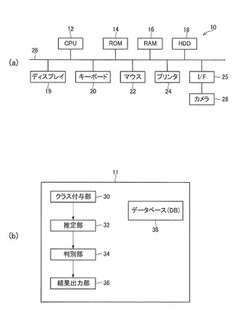
【図1】(a)は、本実施形態の食用果実の検査方法を実施する食用果実を検査する検査装置の構成図であり、(b)は、(a)に示される検査装置で生成される検査モジュールの能ブロック図である。
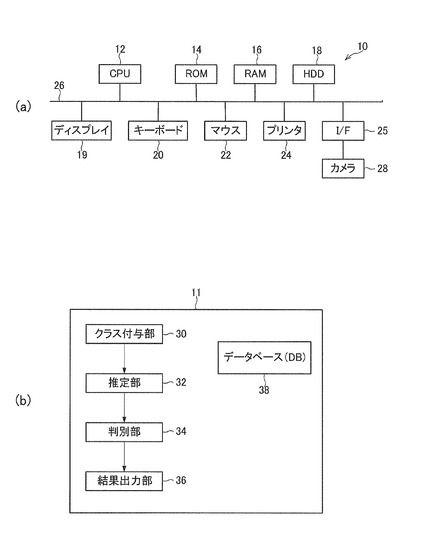
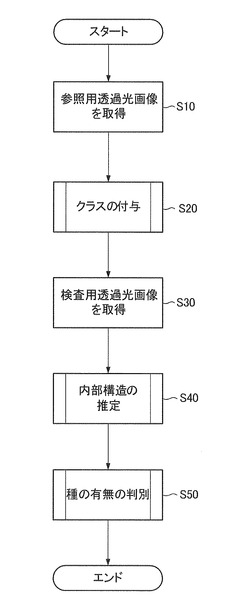
【図2】図1(b)に示される判別部の詳細なブロック図である。
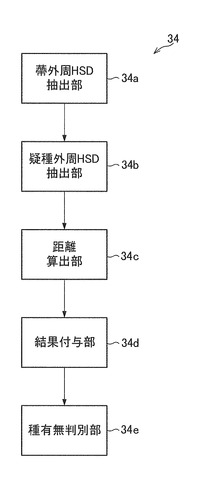
【図3】本実施形態である干し柿の検査方法の全体フローを示す図である。
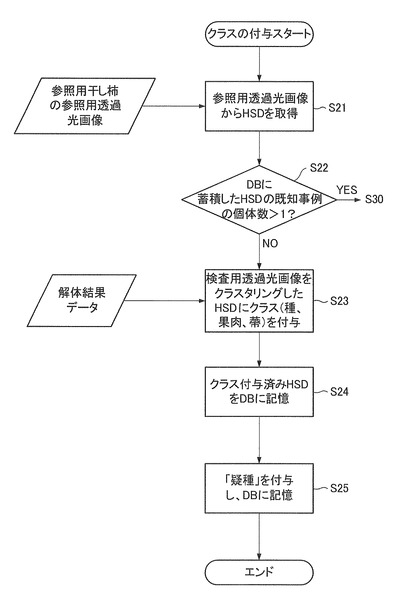
【図4】本実施形態の検査装置が行うクラスの付与の処理のフローを示す図である。
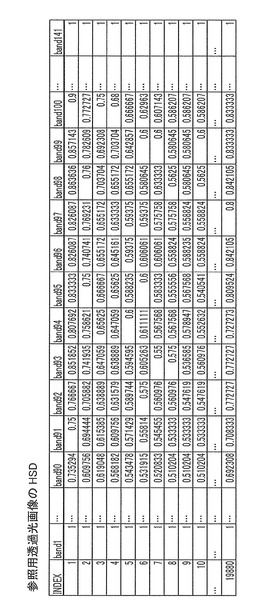
【図5】本実施形態で用いる参照用透過光画像のHSDの一例を示す図である。
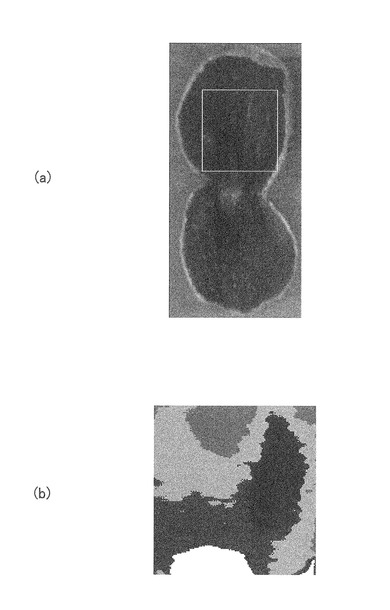
【図6】(a)は、本実施形態に用いる参照用干し柿の解体した写真の一例を示す図であり、(b)は、本実施形態に用いる参照用透過光画像についてクラスタリングを行った結果の一例を示す図である。
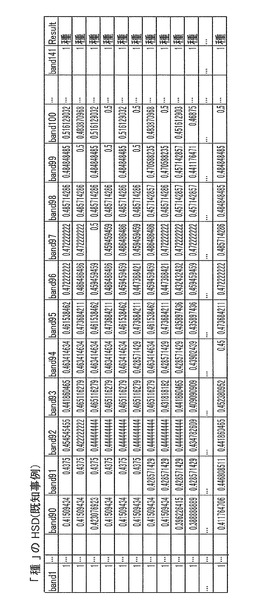
【図7A】本実施形態で得られる「種」のHSDの一例を示す図である。
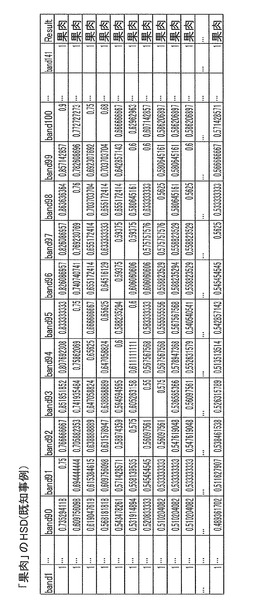
【図7B】本実施形態で得られる「果肉」のHSDの一例を示す図である。
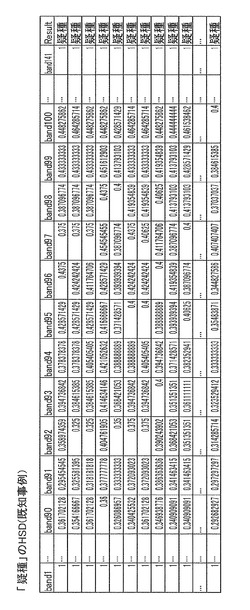
【図7C】本実施形態で得られる「蔕」のHSDの一例を示す図である。
【図8】(a),(b)は、本実施形態で交用いる差検定を説明する図である。
【図9】本実施形態で得られる「疑種」のHSDの一例を示す図である。
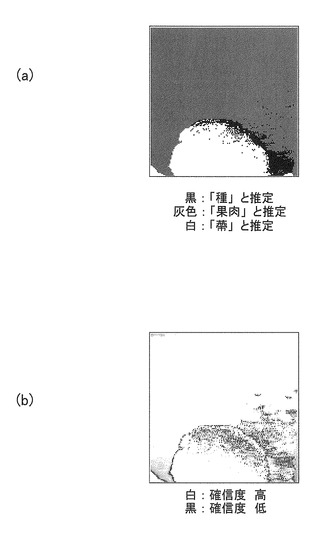
【図10】(a)は、MBRを用いて検査用透過光画像から、「種」、「果肉」、「果肉」の3つのクラスを用いて推定した結果の一例を示す図であり、(b)は、推定で得られる確信度の高低の分布を示す図である。
【図11】本実施形態で行われる内部構造の推定のフローを示す図である。
【図12】本実施形態で行われる種の有無の判別のフローを示す図である。
【図13】(a)〜(c)は、本実施形態で用いる距離の算出方法を説明する図である。
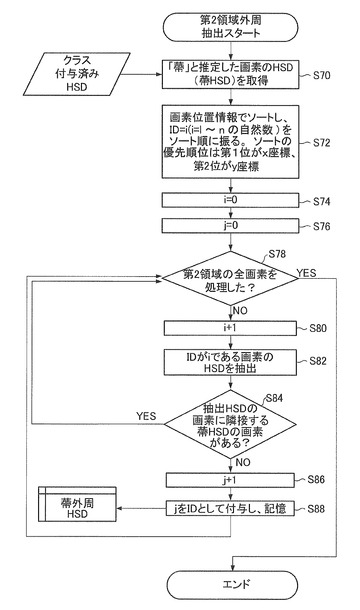
【図14】本実施形態で用いる第2領域の外周を抽出するフローを示す図である。
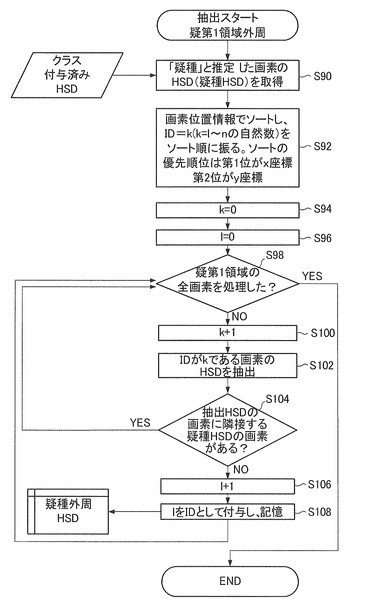
【図15】本実施形態で用いる疑第1領域の外周を抽出するフローを示す図である。
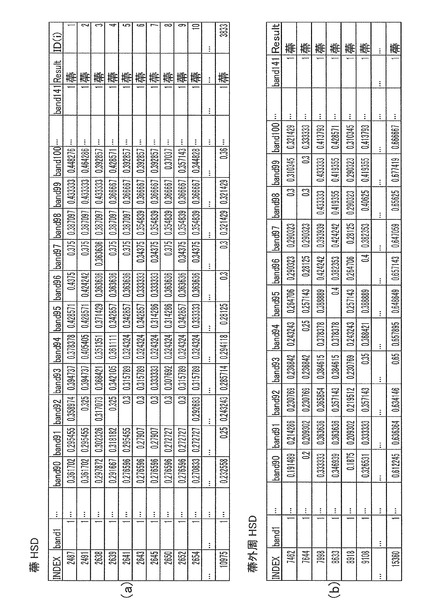
【図16】(a)は、本実施形態で得られる蔕HSDの一例を示す図であり、(b)は、本実施形態で得られる蔕外周HSDの一例を示す図である。
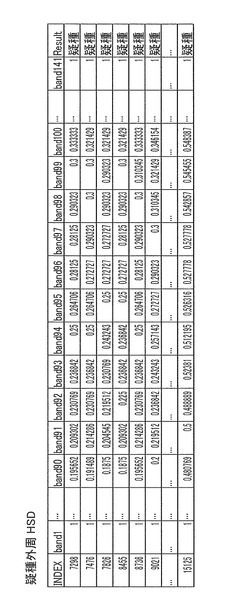
【図17】本実施形態で得られる疑種外周HSDの一例を示す図である。
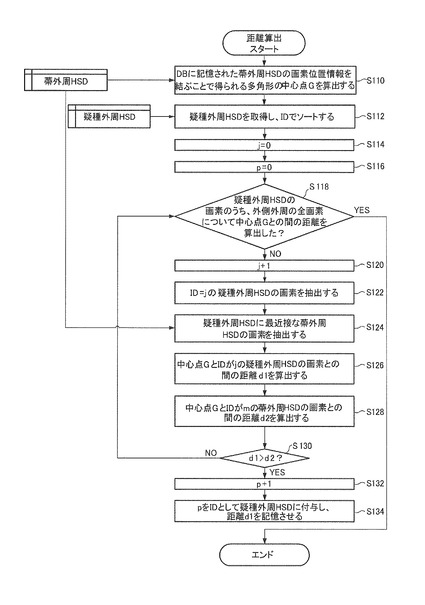
【図18】本実施形態で行う第2領域の中心点の算出と、中心点と疑第1領域の外周との間の距離の算出のフローを詳細に示す図である。
【図19】(a)〜(d)は、本実施形態で得られる算出結果の例を示す図である。
【図20】本実施形態で行われる結果付与のフローを詳細に示す図である。
【発明を実施するための形態】
【0012】
食用果実の種の有無を判別するため、例えば、干し柿に対して透過させた透過光を用いた分光スペクトルデータを計測し、その計測データを基に食用果実に食用果実に種があるか否かを判別することが考えられる。しかし、本発明者の実験の結果、干し柿の種の透過分光スペクトルデータは、蔕に隣接する部分の透過分光スペクトルデータと類似するため、種の有無の判別が難しいことが分かった。
以下、食用果実の内部における所定の部位の有無を精度よく検査する本発明の食用果実の検査方法、検査装置およびプログラムを実施形態に基づいて説明する。図1(a)は、本実施形態の食用果実の検査方法を実施する食用果実を検査する検査装置10の構成図である。
【0013】
(検査装置)
検査装置10は、図1(a)に示すように、CPU(Central Processing Unit)12と、ROM(Read Only Memory)14と、RAM(Random Access Memory)16と、ハードディスクドライブ装置18と、ディスプレイ19と、キーボード20と、マウス22と、プリンタ24と、インターフェース25と、を備え、これらは、互いにバス26を介して通信可能に接続されている。
【0014】
ここで、CPU12は、検査装置10の全体の制御を司る。ROM14は、ブートプログラムなどのプログラムを記憶している。RAM16は、CPU12のワークエリアとして使用される。ハードディスクドライブ装置18は、CPU12の制御に応じてハードディスクに対するデータの読み出し、書き込みを制御する。ハードディスクドライブ装置18は、後述する食用果実の検査を実行する検査プログラムを記憶し保持する。
ディスプレイ19は、文字情報や画像などの各種情報を表示する。
【0015】
キーボード20は、文字、数字、各種指示などの入力のためのキーを備え、オペレータから入力を受ける。マウス22は、ディスプレイ19に表示するカーソルの移動や範囲選択、あるいはウィンドウの移動やサイズの変更などを行う。プリンタ24は、画像データや文字情報をプリント出力する。この他、インターフェース25は、カメラ28と接続されている。カメラ28は、例えば、複数の波長帯域、例えば141の波長帯域で被写体の透過光を受光して撮像された被写体の透過光画像の各画素の位置(例えば2次元画像の水平方向の座標及び垂直方向の座標)を示す情報と、各画素における画像値(透過光の強度)の組(以降、HSD(Hyper Spectrum Data)という)を取得する。本実施形態におけるHSDは、通常、ハイパースペクトルセンサを用いて取得することができる。ハイパースペクトルセンサを用いたHSDの取得によれば、広範囲の波長帯で連続的に得ることができるので好ましいが、HSDの取得手段はこれに限られるものではない。例えば、マルチスペクトルセンサで、比較的狭い波長域帯で被写体の透過光画像を、波長帯域を変えて複数回撮像したものを、本実施形態におけるHSDとして用いてもよい。
取得されるHSDの波長帯域は、被写体において有無を識別したい部位(例えば「種」)を透過する光の波長を含む所定の範囲の波長帯域である。被写体が干し柿などの食用果実であるとき、波長帯域は例えば、350nm〜1050nmの範囲とすることができる。また、350nm〜1050nmの範囲で5nm毎に分割して複数の波長帯域としてもよい。
このHSDがインターフェース25を介して検査装置10に取り込まれ、ハーディスクドライブ装置18に記憶される。従って、記憶される透過光画像のHSDは、カメラ28の波長帯域毎に対応した値を画素毎に有する。
【0016】
CPU12は、オペレータの指示によってハードディスクドライブ装置18に記憶されている検査プログラムを読み出し実行することにより、図1(b)に示す検査モジュール11を生成する。図1(b)は、検査装置10で生成される検査モジュール11のブロック図である。検査プログラムは、ハードディスクドライブ装置18から読み出されて実行することにより、後述する図3に示す検査方法を実行する。
【0017】
検査モジュール11は、クラス付与部30と、推定部32と、判別部34と、結果出力部36と、データベース(以降、DBという)38と、を備える。クラス付与部30、推定部32、判別部34、および、結果出力部36の処理は、実質的にCPU12が担う。すなわち、クラス付与部30、推定部32、判別部34、および、結果出力部36は、ソフトウェアモジュールである。データベース38は、RAM16あるいはハードディスクドライブ装置18によって形成される。
【0018】
検査モジュール11を生成した検査装置10は、食用果実の内部の検査をする装置、具体的には、食用果実内に種が有るか無いかを確実に判別することができる装置である。以降では、食用果実として干し柿を例示して説明する。食用果実として、この他に、プルーン等のドライフルーツやブドウ等を挙げることができる。果実とは、引用文献(http://www.biol.tsukuba.ac.jp/~algae/BotanyWEB/fruit1.html)によれば、種子を包む子房壁やそれ以外の器官が成熟した実のことである。
【0019】
検査プログラムを起動した検査装置10は、まず、既知事例の蓄積を行う。具体的には、検査装置10は、カメラ28で撮像して得られた参照用干し柿の透過光画像、すなわち参照用透過光画像の各画素のHSDと、この撮像に用いた参照用干し柿の内部構造の複数の部位のそれぞれとの間で対応付けを行う。これによって、検査装置10は、干し柿における「種」、「蔕」、「果肉」、および「種」の候補となる「疑種」のHSDを少なくとも既知事例としてDB38に記憶し格納する。HSDは、1つの画素における波長帯域毎の画素値の組である。したがって、カメラ28が141個の波長帯域で干し柿を撮像した場合、画素値の組には1つの画素に141個の画素値があるので、HSDは141個の画素値の組となる。
【0020】
次に、検査装置10が、干し柿の内部を、既知事例を用いて検査する。具体的には、検査装置10は、まず、検査用干し柿の透過光をカメラ28の複数の波長帯域で受光して検査用干し柿の透過光画像、すなわち検査用透過光画像を取得する。検査用透過光画像は、参照用透過光画像と同じ撮像条件でカメラ28により撮像された画像である。
【0021】
検査装置10は、取得された検査用透過光画像と、DB38に記憶されている既知事例とを用いて、透過光画像内で、「種」として識別される第1領域、「蔕」として識別される第2領域、および、第2領域の周りに位置し、「疑種」として識別される領域を含む疑第1領域を抽出することにより、干し柿の内部構造を推定する。さらに、検査装置10は、上記疑第1領域の、第2領域に対する幾何学形状の特徴量を算出することにより、疑第1領域が「種」に該当するか否かを判定して、検査用干し柿に「種」が存在するか否かを判別する。
【0022】
このように検査装置10は、検査用透過光画像について予め「疑種」の部位を推定できるように、「疑種」の画素値の組を既知事例として記憶し、「疑種」として推定される領域を含む疑第1領域の、「蔕」に該当する第2領域に対する幾何学形状の特徴量を算出することにより、疑第1領域が、「種」の条件を満たすか否かを判定する。この判定結果を用いて、検査用干し柿に種が存在するか否かを判別する。このため、検査用干し柿の透過光画像を得ることにより、検査用干し柿の種の有無を非破壊で精度良く判別することができる。
以下、検査装置10について詳細に説明する。
【0023】
(検査モジュール)
検査モジュール11のクラス付与部30は、参照用透過光画像の各画素における画素値の組(HSD)に、「種」、「蔕」、「果肉」、および「疑種」の部位の名称をクラスとして付与し、DB30に記憶させる。
【0024】
まず、クラス付与部30は、参照用干し柿の参照用透過光画像の中から、「種」に該当する第1領域、「蔕」に該当する第2領域、および「果肉」に該当する第3領域を抽出する。この後、クラス付与部30は、第1領域、第2領域、および第3領域のいずれにも属しない残存領域が「残存部位」に該当するとして、残存領域の各画素について、交差検定を行う。具体的には、クラス付与部30は、交差検定をしようとする画素を除いた残存領域の他の画素、第1領域に属する画素、第2領域に属する画素、および第3領域に属する画素を既知の部位の画素として用いて交差検定を行う。これにより、クラス付与部30は、残存領域の各画素について部位の推定を行い、推定時に得られる推定の確信度が閾値より低く、第2領域の外周から設定された許容範囲内に位置する、残存領域の画素を見出す。クラス付与部30は、この見出した画素におけるHSDを「疑種」と定め、この「疑種」のHSDを既知事例とする。こうして、参照用透過光画像から得られた「種」、「蔕」、「果肉」、および「疑種」の既知事例は、DB38に記憶される。なお、交差検定とは、「種」、「蔕」等の部位(クラス)が付与されたHSDを既知事例として用いて、部位(クラス)が付与されていない、部位が未知のHSDについて部位(クラス)を推定し検定することをいう。ここでは、クラス付与部30は、残存領域の交差検定の対象となる1つの画素について部位(クラス)が付与されていないと仮定して交差検定を行う。このとき、クラス付与部30は、「残存部位」として付与された残存領域の他の画素(交差検定の対象となっていない画素)のHSD、「種」、「蔕」、および「果肉」が付与されたHSDを既知事例として用いて、上記交差検定の対象となっている1つの画素の部位(クラス)を推定する。この交差検定は、Leave-one-out交差検定である。交差検定は、Leave-one-out交差検定の他に、n-fold交差検定を用いることもできる。交差検定で行う部位の推定は、具体的には後述するMBR(Memory Based Reasoning)を用いて行われる。MBRは、クラス付与済みのHSDを蓄積した既知事例集合の中からクラスが未付与のHSDの類似事例を検索し、その類似事例のスペクトル値をもとに判別を行なう判別器であり、交差検定の対象となる1つの画素のHSDが、残存領域の他の画素(交差検定の対象となっていない画素)のHSD、「種」、「蔕」、および「果肉」が付与された各画素におけるHSDと類似しているか否かを、定義された距離の計算を行うことにより、部位の推定および確信度が算出される。MBRの代わりにクラス付与済みのHSDを蓄積した既知事例とクラスが未付与の未知事例を用い、判別結果に対する確信度が算出できる他の判別器(例えばSVM(Support Vector Machineなど)を用いてもよい。各画素におけるHSDと部位との対応付けを行ってHSDに部位を付与する具体的な方法は後述する。
【0025】
推定部32は、DB38に記憶された「種」、「蔕」、「果肉」、「疑種」に関する既知事例を用いて、干し柿の検査用透過光画像の各画素のHSDから、「種」、「蔕」、「果肉」、「疑種」の各部位に該当する領域を抽出して検査用干し柿の内部構造を推定する。領域の抽出には、上述のMBRが用いられる。検査用透過光画像の各画素は、「種」、「蔕」、「果肉」、「疑種」の部位の中から推定される。なお、「疑種」に該当する部分は、「種」、「蔕」および「果肉」に識別されず、「種」、「蔕」および「果肉」として推定ができない場所であるため、抽出される疑第1領域には、「疑種」として推定される領域の他に、「種」、「蔕」および「果肉」のいずれの部位についても低い確信度で推定される領域であって、「蔕」に該当する第2領域の周りに位置する領域が含まれる。「蔕」に該当する第2領域の周りに位置する領域とは、第2領域の外周から設定された許容範囲内に含まれる領域をいう。推定部34の処理については後述する。
【0026】
判別部34は、推定部34で抽出された第1領域と、第2領域と、疑第1領域とを用いて、検査用の干し柿に種が存在するか否かを判別する。判別部34は、疑第1領域の、「蔕」に該当する第2領域に対する幾何学形状の特徴量を算出し、この特徴量が第1部位である「種」の条件を満たすか否かを判定して、検査用の干し柿に「種」が存在するか否かを判別する。「種」の条件とは、具体的に、第2領域の中心点と「疑第1領域」の外側外周との間の距離の平均値およびこの距離の標準偏差を算出したとき、上記平均値と標準偏差が、与えられた値の範囲にあることをいう。なお、判別部34が判別結果として「種」有りと判別するには、「種」に該当する第1領域と、「種」の条件を満足する「ほぼ種」に該当する疑第1領域の合計の面積が、予め設定された閾値に対して高いことが条件とされる。この条件が課されるのは、「ほぼ種」および「種」の合計面積が面積比較用閾値以下である場合、実際に種が存在するとは言えず、第1領域の誤った推定、疑第1領域の誤った推定、および「ほぼ種」の誤った判定によって種が有ると誤って判別することがないようにするためである。
【0027】
図2は、判別部34の詳細なブロック図である。判別部34は、蔕外周HSD抽出部34aと、疑種外周HSD抽出部34bと、距離算出部34cと、結果付与部34dと、種有無判別部34eと、を備える。判別部34の処理、具体的には、蔕外周HSD抽出部34aと、疑種外周HSD抽出部34bと、距離算出部34cと、結果付与部34dと、種有無判別部34eの処理については後述する。
【0028】
結果出力部36は、判別部34で得られた種有無の判別結果と、「種」に該当する第1領域、「蔕」に該当する第2領域、「果肉」に該当する第3領域、および「疑種」に該当する疑第1領域の抽出結果をディスプレイ19に表示させる。さらに、結果出力部36は、種有無の判別結果に至る処理中に算出された情報もディスプレイ19に表示させてもよい。
【0029】
(検査方法)
次に、検査装置10で行われる干し柿の検査方法について説明する。図3は、干し柿の検査方法の全体フローを示す図である。
検査装置10は、まず、干し柿の各部位の既知事例の蓄積を行う。具体的には、検査装置10は、参照用干し柿の透過光をカメラ28で受光して得られる参照用透過光画像を、インターフェース25を介して取得する(ステップS10)。
【0030】
この後、検査装置10のクラス付与部30は、参照用透過光画像の画素毎に、クラスの付与を行う(ステップS20)。これにより、「種」、「蔕」、「果肉」および「疑種」の各部位(クラス)に関する画素値の組が既知事例としてDB38に記憶される。
次に、カメラ28が、検査用干し柿を参照用干し柿と同じ撮像条件(同じ光源、同じ光量、同じ画角、同じ撮像方向)で撮像することにより、検査装置10は、検査用干し柿の検査用透過光画像を取得する(ステップS30)。
検査装置10は、取得した検査用透過光画像から、DB38に記憶された上記既知事例を用いて、内部構造の推定を行う(ステップS40)。すなわち、検査装置10は、透過光画像内で、「種」として識別される第1領域、「蔕」として識別される第2領域、および、「疑種」として識別される領域を含む疑第1領域を抽出する。これにより、検査装置10は、内部構造の推定を行う。
【0031】
次に、検査装置10は、種の有無の判別を行う(ステップS50)。具体的には、検査装置10は、疑第1領域の、第2領域に対する幾何学形状の特徴量を算出し、算出した特長量が「種」の条件を満足するか否かを判定して、検査用干し柿に種が存在するか否かを判別する。
以下、クラスの付与(ステップS20)、内部構造の推定(ステップS40)、および種の有無の判別(ステップS50)について詳細に説明する。
【0032】
(クラスの付与)
図4は、検査装置10が既知事例の蓄積のために行うクラスの付与の処理のフローを示す図である。クラスの付与は、クラス付与部30において行われる。ここで、クラスとは、「種」、「蔕」、「果肉」といった部位の名称をいう。
クラス付与部30は、カメラ28で撮像されて得られた参照用干し柿の参照用透過光画像を取得し、HSDを取得する(ステップS21)。クラス付与部30は、参照用透過光画像を、インターフェース25から直接取得してもよいし、インターフェース25を介してDB38に一度記憶された参照用透過光画像を読み出して取得してもよい。図5は、参照用透過光画像のHSDの一例が示されている。図5に示す例に用いる参照用透過光画像は、142ピクセル×140ピクセル(縦×横)の画像で、合計19880画素を有する。画素には、参照用透過光画像の1つの角から順番に画素位置の番号を示すINDEX番号が記され、各画素は、141の波長帯域(band1〜band141)における画素値を有する。
【0033】
次に、クラス付与部30は、DB38に、干し柿の参照用透過光画像から求めて蓄積した各部位のHSDの既知事例の個体数(既知事例の数)が1より大きいか否かを判定する(ステップS22)。判定の結果、個体数が1より大きい、すなわち各部位の既知事例が2以上ある場合、検査装置10は、干し柿の検査が可能であると判断して、ステップS30(図3参照)に進む。上記個体数が1以下である場合、クラス付与部30は、検査用透過光画像をクラスタリングして参照用干し柿の参照用透過光画像の画素のHSDにクラスを付与する(ステップS23)。
【0034】
具体的には、クラス付与部30は、参照用透過光画像の画素のHSDについて、波長帯域毎の画素値に基づいてクラスタリングを行って、例えば周知のk-means法を用いたクラスタリングを行って参照用透過光画像の領域を分割する。その際、波長帯域毎の画素値に基づいてクラスタリングを行うので、「種」、「蔕」、「果肉」の各部位を区別した形でクラスタリング分割領域が生成され得る。しかし、クラスタリング分割領域のどの部分が「種」、「蔕」、「果肉」に該当するのか不明である。このため、オペレータが、参照用透過光画像の撮像方向に対して直交する面に沿って参照用干し柿を切断することにより参照用干し柿を解体し、オペレータの判断により切断面の各部分のうち、「種」、「蔕」、「果肉」であることが確実である部分について特定し、この特定した部分を解体結果データとして用いて、対応するクラスタリング分割領域を「種」、「蔕」、「果肉」の部位であると定める。したがって、オペレータは、参照用透過光画像中の各クラスタリング分割領域に該当する画素のHSDに、オペレータが付与しようとする「種」、「蔕」、「果肉」のいずれかの名称をキーボード20、マウス22を通して検査装置20に入力する。クラス付与部30は、「種」、「蔕」、「果肉」のいずれかの名称の入力をオペレータから受けることにより、参照用透過光画像中の対応する画素におけるHSDに「種」、「蔕」、「果肉」の名称をクラスとして付与する。参照用透過光画像には、「種」、「蔕」、「果肉」の名称が付与されなかった残りの領域(残存領域)もある。
【0035】
なお、クラスタリングを行う場合、参照用透過光画像を、「種」、「蔕」、「果肉」の3つの領域に少なくとも分割するために、クラスタリング分割領域が3つ以上となるように分割数を3以上とすることが好ましい。参照用透過光画像は、「種」の部位および「種」の周辺部分、「蔕」の部位および「蔕」の周辺部分、「果肉」の部位に分割されるように、分割数を少なくとも5以上にすることがより好ましい。特に、参照用透過光画像から「種」の領域であることが確実であるクラスタリング分割領域を生成するには、「種」、「蔕」、「果肉」の3つの領域に少なくとも分割するためのクラスタリングを行った後、「種」と想定される範囲の複数のクラスタリング分割領域を対象として、さらに、細かなクラスタリングを行うとよい。これにより、「種」の領域であることが確実なクラスタリング領域を抽出することができる。
【0036】
図6(a)は、参照用干し柿を解体した写真の一例を示す。図6(b)は、参照用透過光画像の中の、図6(a)中の白枠で囲まれた範囲内の領域について、クラスタリング(5分割)を行った結果の一例を示す。図6(b)に示すクラスタリング結果では、黒部分は「種」に対応するクラスタリング分割領域であり、この黒部分の周りの灰色部分は、「果肉」に対応するクラスタリング分割領域であり、白色部分は、「蔕」に対応するクラスタリング分割領域である。
【0037】
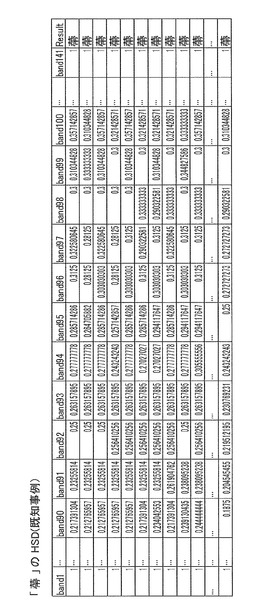
クラス付与部30は、「種」、「蔕」、「果肉」の名称が付与されたHSD、すなわちクラス付与済みHSDを、「種」、「蔕」、「果肉」に関する既知事例として、DB38に記憶させる(ステップS24)。図7A〜図7Cは、「種」、「果肉」、「蔕」に関する既知事例である「種」、「果肉」、「蔕」のHSDの一例が示されている。
【0038】
次に、クラス付与部30は、「種」、「蔕」、「果肉」の名称が付与されたクラス付与済みHSDをDB38から読み出し、このクラス付与済みHSDと、ステップS23においてクラスが付与されなかった残存領域を用いて、残存領域の少なくとも一部分の画素におけるHSDに、「種」の候補となる「疑種」の名称をクラスとして付与し、「疑種」の付与された画素値の組をDB38に記憶させる(ステップS25)。
【0039】
具体的には、クラス付与部30は、「種」、「蔕」、および「果肉」のいずれにも属しない残存領域を「残存部位」として、「残存部位」に該当する残存領域の各画素について交差検定を行う。具体的には、クラス付与部30は、残存領域の他の画素、すなわち、交差検定の対象となる画素以外の、「残存部位」に該当する画素、「種」に該当する第1領域に属する画素、「蔕」に該当する第2領域に属する画素、および「果肉」に該当する第3領域に属する画素を既知事例の画素として用いて交差検定を行う。これにより、クラス付与部30は、残存領域の各画素について部位を推定し、「種」として誤って推定する画素および推定時に得られる推定の確信度が閾値より低く、「蔕」該当する第2領域の周りに位置する、残存領域の画素のHSDを「疑種」の名称を付与して既知事例としてDB38に記憶させる。第2領域の周りに位置するとは、第2領域の外周から設定された許容範囲内に位置することをいう。
【0040】
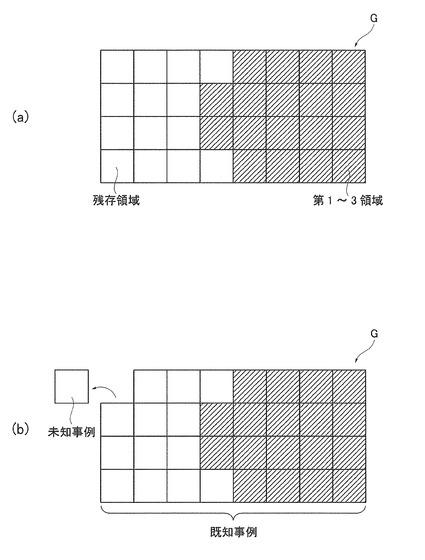
図8(a),(b)は、交差検定を説明する図である。図8(a)に示すように、参照用透過光画像Gの中で、「種」、「蔕」および「果肉」に該当する第1〜第3領域(斜線領域))と「残存部位」に該当する残存領域(白い領域)が定められているとする。このとき、クラス付与部30は、図8(b)に示すように、残存領域の1つの画素に付与されているクラスが未知であるとして、これ以外の残存領域の画素におけるHSDと、第1〜3領域の画素におけるHSD、すなわち「種」、「蔕」、「果肉」に関する既知事例とを用いて、クラスが未知である(未知事例である)とした上記1つの画素のクラスを推定する。このように交差検定の対象となる画素は、残存領域の全画素であり、クラスの推定が繰り返される。図9は、「疑種」に関する既知事例としてDB38に記憶される「疑種」のHSDの一例が示されている。
【0041】
クラス付与部30は、この推定において、残存領域の各画素のうち、「種」と誤って推定される画素におけるHSD、および、推定の確信度が設定された閾値より低く、「蔕」に該当する第2領域の周りに位置する画素におけるHSDに、「疑種」の名称をクラスとして付与する。「疑種」が付与されたHSDは、「疑種」に関する既知事例としてDB38に記憶される。なお、上記推定では、下記に説明するMBRを用いて行うことが好ましい。MBRに代えて、SVMを用いることもできる。MBRでは、残存領域の各画素のHSDを未知事例とし、この未知事例について、DB38に記憶された「種」、「蔕」、および「果肉」に関する既知事例、さらには、「残存部位」とされた画素におけるHSDそれぞれとの間で類似度を算出することにより推定が行われる。
以上により、クラスの付与が終了する。
【0042】
(MBR)
MBRでは、未知事例と、既知事例の集合に含まれる各既知事例との間の類似度が求められる。具体的には、事例(未知事例、既知事例)の各波長帯域の画素値ごとに、未知事例と既知事例との説明変数間距離が求められる。より具体的には、下記式(1)を用いて、画素値毎の説明変数間距離が求められ得る。説明変数間距離とは、類似するか否かを調べる2つのHSDの間で、対応する画素値同士の差分を規格化した値である。類似度は、この説明変数間距離djを用いて算出される。ただし、jは波長帯域を識別する識別子であり、djは説明変数間距離である。
【0043】
【数1】

【0044】
上記式(1)において、「種」、「蔕」および「果肉」に関するHSDである既知事例の集合の波長帯域jにおける画素値の分布から得られる標準偏差を分母とし、未知事例の波長帯域jにおける画素値と各既知事例の波長帯域jにおける画素値との差を分子とする値がdjとなる。説明変数間距離djは対応する画素値同士の差分を、標準偏差で規格化した値である。
【0045】
次に、上記式(1)により求めた説明変数間距離djと波長帯域jにおける画素値の目的変数値の予測に対する影響度とを用いて、未知事例と既知事例との間の事例間距離が求められる。具体的には、下記式(2)を用いて、既知事例と未知事例との間の事例間距離が求められる。ただし、Dは事例間距離である。nは、波長帯域数である。
【0046】
【数2】
【0047】
そして、上記式(2)により求めた事例間距離Dから未知事例と既知事例との間の類似度が求められる。類似度は、事例間距離Dが大きくなればなるほど小さくなる。具体的には、下記式(3)を用いて、事例間の類似度を求めることができる。ただし、Sは類似度、Δは類似度Sが無限大になることを防ぐための正値である。ここでは正値ΔをΔ=1とする。
【0048】
【数3】
【0049】
次に、既知事例の集合から、未知事例と既知事例との類似度が高い順に上位k個の既知事例(類似事例)が検索される。ここでは、類似度がi番目に高い類似事例を「第i類似事例」と表記する。また、第1類似事例は、「最類似事例」とも表記する。上記kは任意に設定可能な値である。
【0050】
このとき、上記影響度に基づく重要度wが既知事例に付与されている場合には、その重要度wを考慮して、既知事例の集合から既知事例が検索される。ここでは、第i類似事例の重要度を「w(i)」と表記する。重要度wの既知事例は、画素値と付与されたクラスとが同一の既知事例がw個あることを意味する。
【0051】
また、既知事例の集合から検索された類似事例の類似度の総和をあらわす類似度和は、検索された各既知事例の類似度に重要度wを掛け合わせてから和をとることにより求められる。ここでは、類似度和を「Sc」と表記する。たとえば、k=3でかつ第1類似事例の重要度がw(1)=3の場合、第1類似事例だけで類似事例の数が3に達するため、類似事例は第1類似事例のみとなる。
【0052】
なお、最下位の類似事例の重要度を足し合わせることで、類似事例集合の重要度の和がkを超える場合には、重要度の和がkとなるように最下位の類似事例の重要度に必要な係数を掛けてから類似度和を計算するものとする。たとえば、k=3で、第1類似事例の重要度がw(1)=1、第2類似事例の重要度がw(2)=3の場合、重要度の和が3となるように、第2類似事例の重要度に2/3を掛ける。
【0053】
ここで、第i類似事例の類似の順位をr(i)、重要度をw(i)、類似度をS(i)とし、クラス(「種」、「蔕」、「果肉」)をc(i)とすると、クラスがc(i)である上位k個の類似事例の類似度和Scは、下記式(4)〜(7)を用いてあらわすことができる。
【0054】
【数4】
【0055】
【数5】
【0056】
【数6】
【0057】
【数7】
【0058】
最後に、クラスcの確信度が求められる。確信度とは、クラスがcである確からしさをあらわす指標である。具体的には、下記式(8)を用いて、類似事例集合とその類似度とから確信度が求められる。ただし、確信度をp(c)とする。
【0059】
【数8】
【0060】
上記式(8)を用いて求めた確信度p(c)が最大となるクラスが推定の結果となる。なお、上記MBR方法に基く推定についての詳細な説明は、たとえば、特開2000−155681号公報を参照することができる。
【0061】
図10(a)は、MBRを用いて、後述する検査用透過光画像から、「種」、「果肉」、「果肉」の3つのクラス(「疑種」のクラスはない)を用いて推定した結果の一例を示している。この結果は、低い確信度で推定される場合であっても、最大の確信度で推定されるクラスを各画素のHSDに付与した例である。図10(a)に示す結果からわかるように、「種」と推定される領域は、「蔕」と推定される領域の周りに位置していることがわかる。図10(b)は、上記推定時に算出される確信度p(c)を予め設定された閾値で分けることにより得られる確信度p(c)の高低の分布を示す図である。図10(a)に示すように、「種」と推定される領域は、確信度p(c=「種」)が低いことがわかる。したがって、検査装置10は、図10(a)に示すように確信度が低く「種」と推定される部分を、予め「種」の候補となる「疑種」として定め、この「疑種」に関する既知事例を記憶し、「種」、「蔕」、「果肉」に加えて「疑種」に関する既知事例を用いて検査用透過光画像の各画素に対して部位を推定することにより、後述するように検査用干し柿の種の有無を精度良く判別することができる。
【0062】
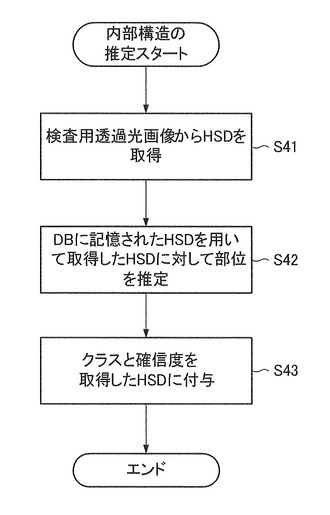
(内部構造の推定)
次に、図3に示す内部構造の推定(ステップS40)が行われる。図11は、内部構造の推定のフローを示す図である。内部構造の推定は、推定部32(図1(b)参照)において行われる。
推定部32は、用意した検査用干し柿をカメラ28で撮像して得られた検査用透過光画像を取得し、検査用透過光画像から各画素の画素値の組、すなわちHSDを取得する(ステップS41)。検査用透過光画像は、カメラ28からインターフェース25を通して直接取り込まれることで、HSDが取得されてもよいし、一度ハードディスクドライブ装置18に記憶された画像が読み出されることで、HSDが取得されてもよい。
【0063】
次に、推定部32は、DB38に記憶されている「種」、「蔕」、「果肉」、「疑種」に関する既知事例であるHSD(画素値の組)を用いて、ステップS41で取得されたHSDに対して、「種」、「蔕」、「果肉」あるいは「疑種」等の部位の推定を行う(ステップS42)。このとき、上述したMBRを用いた類似度および確信度を算出することにより推定を行う。推定部32は、算出された確信度が予め設定された閾値より高い画素に対して、確信度が最も高い部位の名称、すなわち「種」、「蔕」、「果肉」、「疑種」のいずれか1つの部位の名称をクラスとして付与する。これにより、「種」が付与された画素の集合が、「種」に該当する第1領域となり、「蔕」が付与された画素の集合が、「蔕」に該当する第2領域となり、「果肉」が付与された画素の集合が、「果肉」に該当する第3領域となる。さらに、「疑種」が付与された画素の集合が、「疑種」に該当する疑第1領域となる。また、確信度が上記設定された閾値より低く、「種」、「蔕」、「果肉」および「疑種」のいずれも付与されない画素であって、第2領域の周りに位置する画素も、疑第1領域に含められる。「疑種」は、本来「種」、「蔕」、「果肉」のいずれも付与されない確信度が低い部位である。図10(b)に示すように、「蔕」に該当する領域の周りに確信度が低い画素が多く存在する。このため、推定部32は、確信度が設定された閾値より低く、「種」、「蔕」、「果肉」および「疑種」のいずれも付与されない画素であって、「蔕」に該当する領域の周りに位置する画素を疑第1領域に含め、この画素のHSDに対して「疑種」を付与する。なお、「蔕」に該当する領域の周りに位置する画素とは、「蔕」に該当する第2領域の外周から設定された許容範囲内に含まれる画素である。
【0064】
この後、推定部32は、第1領域、第2領域、第3領域、および疑第1領域のそれぞれに含まれる画素におけるHSD、すなわち画素値の組に対して、推定したクラス(部位の名称)と確信度を付与する(ステップS43)。こうして、クラスおよび確信度が付与されたHSDは、クラス付与済みHSDとしてDB38に記憶される。
【0065】
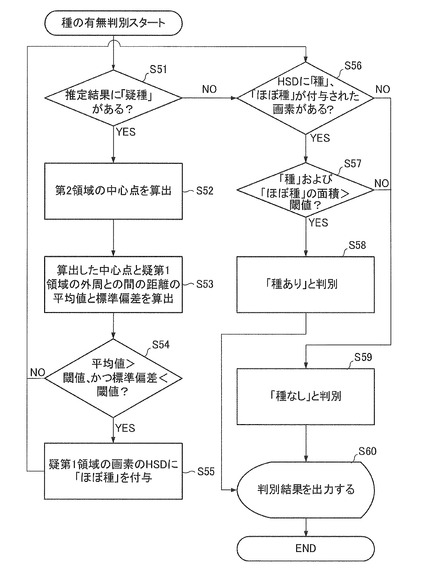
(種の有無の判別)
次に、図3に示す種の有無の判別(ステップS50)について説明する。図12は、種の有無の判別のフローを示す図である。種の有無の判別は、判別部34(図1(b)参照)で行われる。
【0066】
まず、判別部34は、ステップS40において推定された結果、すなわちクラス付与済みHSDに、「疑種」が付与されたHSDがあるか否かを判定する(ステップS51)。推定結果に「疑種」が付与されたHSDがある場合(ステップS51においてYESの場合)、判別部34は、「蔕」に該当する第2領域の中心点を算出する(ステップS52)。第2領域の中心点は、第2領域に属する画素の画素位置情報を用いて算出される。
【0067】
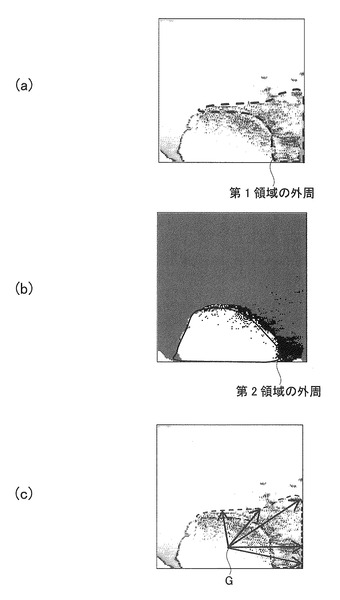
次に、判別部34は、算出した中心点と抽出された疑1領域の外周との距離の平均値と標準偏差を算出する(ステップS53)。
図13(a)〜(c)には、第2領域の中心点と抽出された疑1領域の外周との距離の算出方法を説明する図である。疑第1領域は、図13(a),(c)では、疑第1領域の外周が点線で示されている。図13(b)では、「蔕」に該当する第2領域の外周が実線で示されている。図13(c)では、第2領域の中心点Gと、抽出された疑1領域の外周との距離を示している。判別部34は、このような距離を算出して距離の平均値および距離の標準偏差を疑第1領域の幾何形状の特徴量として算出し、平均値および標準偏差が「種」の条件を満足するか否かを判定することができる。
【0068】
上記距離を算出するためには、まず、判別部34は、第2領域の外周および疑第1領域の外周を、第2領域および疑第1領域から算出する。
図14は、第2領域の外周を抽出するフローを示す図である。第2領域の外周の抽出は、蔕外周HSD抽出部34a(図2参照)で行われる。
【0069】
蔕外周HSD抽出部34aは、「蔕」に該当する第2領域に属する画素のHSD、すなわち「蔕」と推定した画素のHSD(以降、この画素のHSDを蔕HSDという)をDB38から読み出して取得する(ステップS70)。この後、蔕外周HSD抽出部34aは、画素の画素位置情報でソートを行って画素にID=i(i=1〜nの自然数(nは蔕HSDの画素の総数))を振る(ステップS72)。具体的に、ソートされた結果の順番に1から蔕HSDの総数までの自然数iがIDとして振られる。検査用透過光画像の直交する二方向のうち一方向をx方向とし残りの方向をy方向としたとき、例えば、ソートの優先順位はx方向を第1位とし、y方向を第2位として、ソートは行われる。次に、蔕外周HSD抽出部34aは、変数i,jを0に初期設定する(ステップS74,S76)。この後、蔕外周HSD抽出部34aは、第2領域の全画素を処理したか否かを判定する(ステップS78)。第2領域の全画素を処理していない場合、蔕外周HSD抽出部34aは、変数iをi+1に増やし(変数iを1増加し)、IDがiに対応する画素(ID(i)の画素)におけるHSDを抽出する(ステップS80,S82)。外周HSD抽出部34aは、抽出したHSDの画素に隣接する蔕HSDの画素が存在するか否かを判定する(ステップS84)。隣接する蔕HSDの画素とは、検査用透過光画像の注目する画素に直接接触する画素のみならず、注目する画素を中心として複数の画素数離れた範囲内に位置する画素を含んでもよい。例えば、注目する画素を中心として3画素×3画素、5画素×5画素のように、予め設定された数kに対して、k画素×k画素の範囲内の画素を隣接する蔕HSDの画素と定めてもよい。上記判定において隣接する画素がある場合(ステップS84においてYESの場合)、ステップS78に戻る。一方、上記判定結果が否定である場合(ステップS84においてNOの場合)、蔕外周HSD抽出部34aは、変数jをj+1に増やし(変数jを1増加し)(ステップS86)、ステップS82で抽出した蔕HSDの画素に変数jの値をIDとして付与し、蔕外周HSDとして、DB38に記憶させる(ステップS88)。このようにして第2領域外周が抽出される。
【0070】
図15は、疑第1領域外周を抽出するフローを示す図である。疑第1領域外周の抽出は、疑種外周HSD抽出部34b(図2参照)で行われる。疑第1領域外周の抽出は、ステップS90〜S108で行われるが、この処理は、図14に示す第2領域の外周の抽出におけるステップS70〜S88と同じ方法で行われる。したがって、ステップS90〜S108の説明は省略する。なお、第2領域外周の抽出および疑第1領域外周の抽出は、図14及び図15に示す方法の他に、画像処理の分野で用いるエッジ強度評価フィルタを用いた周知のエッジ抽出方法を用いることができる。このエッジ抽出方法では、エッジ強度評価フィルタとして、縦、横、斜め等、所定の方向のエッジを抽出する複数種類のエッジ強度評価フィルタのいずれか1つが用いられる。縦方向のエッジ強度評価フィルタを用いて畳込処理を行えば、主に縦方向のエッジが抽出され、横方向のエッジ強度評価フィルタを用いて畳込処理を行えば、主に横方向のエッジが抽出される。したがって、このエッジ抽出方法を用いる場合、エッジの抽出対象となる領域の形状から、その形状に適した種類のエッジ強度評価フィルタを予め選択しておき(例えば、主に横方向のエッジから構成される形状に対しては横方向のエッジ強度評価フィルタを予め選択しておく)、選択した1種類のエッジ強度評価フィルタを用いた畳込処理が行われる。また、エッジ抽出方法の一例として、特開2004−341844号公報に記載の方法も挙げられる。
【0071】
図16(a)は、蔕HSDの一例を示す。図16(b)は、蔕外周HSDの一例を示す。蔕外周HSDは、図14に示すフローに従って図16(a)に示す蔕HSDから抽出された結果である。図17は、図15に示すフローに従って抽出された疑第1領域の外周におけるHSD、すなわち疑種外周HSDの一例を示す。このような蔕外周HSDおよび疑種外周HSDがDB38に記憶される。
【0072】
図18は、「蔕」に該当する第2領域の中心点Gを算出し(ステップS52)、中心点Gと疑第1領域外周の各画素との間の距離の算出(ステップS53)のフローを詳細に示す図である。このフローは、距離算出部34c(図2参照)で行われる。
【0073】
まず、距離算出部34cは、DB38に記憶された蔕外周HSDを読み出して、蔕外周HSDの画素位置情報を結ぶことで得られる多角形の中心点を、第2領域における中心点Gとして算出する(ステップS110)。具体的に、距離算出部34cは、多角形を、多角形の一つの頂点を共通の頂点とする三角形に分けて三角形毎の重心を算出し、この重心を用いて多角形の中心点を算出する。
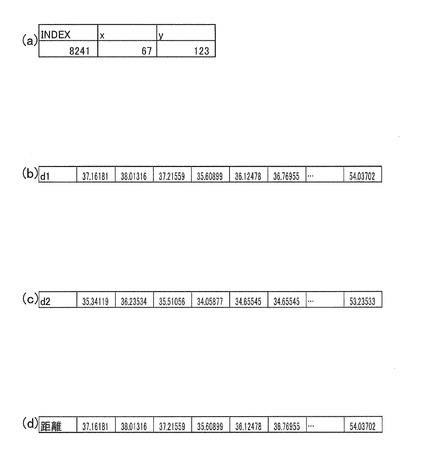
例えば、http://izumi-math.jp/F_Nakamura/heso/heso3.htmに記される方法が用いられ得る。図19(a)には、算出される重心点Gの画素位置情報の一例が示されている。
【0074】
次に、距離算出部34cは、疑種外周HSDをDB38から読み出して、疑種外周HSDを取得して、IDでソートを行う(ステップS112)。これにより、IDの番号の低い順番に並べられる。この後、距離算出部34cは、変数jおよび変数pを0として設定する(ステップS114,S116)。
【0075】
次に、距離算出部34cは、疑種外周HSDの画素のうち外側外周の全画素についてステップS110で算出した中心点Gとの間の距離を算出したか否かを判定する(ステップS118)。ここで、疑種外周HSDの画素のうち外側外周とは、疑第1領域を囲む外周のうち、中心点Gから遠い外側の外周部分をいう。例えば、図13(c)に示すように疑第1領域の外周(点線)のうち、中心点Gから疑第1領域の外周に向けて直線を引いたとき、重心点Gから近い外周の部分と遠い外周の部分がある。この部分が遠い外周の部分であり、外側外周という。
ステップS118における判定の結果が肯定である場合、距離算出の処理は終了する。一方、ステップS118における判定結果が否定である場合、距離算出部34cは、変数jをj+1に増やして(変数jを1つ増加して)(ステップS120)、IDがjである疑種外周HSDを抽出する(ステップS122)。さらに、距離算出部34cは、IDがjである疑種外周HSDの画素に最も近接した蔕外周HSDの画素を抽出する(ステップS124)。このとき、抽出した最も近接した蔕外周HSDの画素のIDをmとする。
【0076】
次に、距離算出部34cは、中心点GとIDがjである疑種外周HSDの画素との間の距離d1を算出し、さらに、中心点GとIDがmである蔕外周HSDの画素との間の距離d2を算出する(ステップS126、S128)。このとき、距離算出部34cは、距離d1が距離d2に比べて大きいか否かを判定する(ステップS130)。この判定結果が否定である場合、ステップS118に戻る。一方、上記判定結果が肯定である場合、距離算出部34cは変数pをp+1に増やして(変数pを1つ増加して)(ステップS132)、ステップS122で抽出したIDがjである蔕外周HSDの画素にIDとして変数pを付与し、距離d1を算出すべき距離としてDB38に記憶させる(ステップS134)。ステップS130の判定において距離d2に比べて距離d1が長いことは、距離d1の算出に用いた疑種外周HSDの画素が、疑種外周HSDの画素のうち外側外周の画素であることを意味する。また、距離d1を算出するのは、疑第1領域の幾何形状の特徴量を求めるためである。図19(b),(c)には、算出された距離d1,d2の一例が示されている。図19(d)には、算出した距離の一例が示されている。
以上のようにして距離が算出される。
【0077】
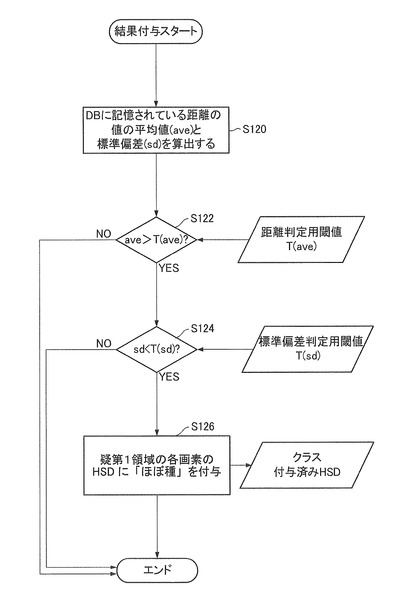
次に、図12に示すステップS53に戻って、ステップS53〜S56の処理が行われる。これらの処理は、結果付与部34d(図2参照)で行われる。結果付与部34dは、DB38に記憶された全ての距離を読み出し、距離の平均値および標準偏差を疑第1領域の幾何学形状の特徴量として算出する(ステップS53)。この後、結果付与部34dは、算出した距離の平均値が予め設定した距離判定用閾値に対して大きく、かつ、算出した距離の標準偏差が予め設定した標準偏差用閾値に対して小さいか否かを判定する(ステップS54)。この判定の結果が否定である場合、結果付与部34dは、後述するステップS56に移る。一方、上記判定の結果が肯定である場合、結果付与部34dは、疑第1領域に含まれる画素のHSDに「種」である可能性が極めて高い「ほぼ種」を付与する(ステップS55)。
【0078】
図20は、ステップS53〜S55の結果付与の処理のフローをより詳細に示す図である。すなわち、結果付与部34dは、距離の平均値aveと標準偏差sdを算出する(ステップS120)。結果付与部34dは、算出した平均値aveが予め定められた距離判定用閾値T(ave)に対して大きいか否かを判定する(ステップS122)。判定結果が否定である場合、結果付与部34dは結果付与の処理を終了する。一方、判定結果が肯定である場合、結果付与部34dは、さらに、算出した標準偏差sdが予め定められた標準偏差用閾値T(sd)に対して小さいか否かを判定する(ステップS124)。判定結果が否定である場合、結果付与部34dは結果付与の処理を終了する。一方、判定結果が肯定である場合、結果付与部34dは、この疑第1領域の各画素のHSDに「ほぼ種」を付与する(ステップS126)。このように、ステップS53で算出した距離の平均値と標準偏差を「種」の判定条件に用いることで、種の有無の判別をより精度良く行うことができる。距離の標準偏差が標準偏差用閾値T(sd)よりも小さいとは、上記距離が大きく変動せず、すなわち、疑第1領域が入り組んだ複雑な形状でなく、種のように滑らかな形状であることを意味する。「ほぼ種」が付与されたHSDは、クラス付与済みHSDとしてDB38に記憶される。
【0079】
次に、図12に戻り、ステップS56の処理が行われる。この処理は、種有無判別部34e(図2参照)で行われる。種有無判別部34eは、DB38に記憶された検査用透過光画像のクラス付与済みHSDの画素を読み出して、「種」あるいは「ほぼ種」が付与された画素があるか否かを判定する(ステップS56)。「種」が付与された画素は、第1領域に属する画素である。また、「ほぼ種」が付与された画素は、ステップS54の判定結果が肯定されて、「ほぼ種」が付与された疑第1領域に含まれる画素である。上記判定において、「種」あるいは「ほぼ種」が付与された画素が無い場合(ステップS56の判定においてNOの場合)、種有無判別部34eは、検査用干し柿に種はないと判別する(ステップS59)。一方、「種」あるいは「ほぼ種」が付与された画素がある場合(ステップS56の判定においてYESの場合)、種有無判別部34eは、「種」および「ほぼ種」が付与された画素の面積の合計が、予め設定された面積比較用閾値に比べて大きいか否かを判定する(ステップS57)。面積比較用閾値には、検査用透過光画像における種に該当する領域の面積の平均値に対して、1より小さい係数を乗算した積が用いられる。1より小さい係数とは、例えば0.9である。すなわち、種に該当する領域の面積の平均値に対して10%小さい面積を面積比較用閾値とする。このように、「種」および「ほぼ種」が付与された画素の面積の合計に下限を設定するのは、第1領域の誤った推定、疑第1領域の誤った推定、および「ほぼ種」の誤った判定によって、誤った判別結果にならないようにするためである。種はある程度の大きさを有するため、ステップS57におけるスクリーニングにより、種の有無を確実に判別することができる。
【0080】
ステップS57の判定結果が肯定である場合、種有無判別部34eは、検査用干し柿に種がある、と判別する(ステップS58)。一方、ステップS57の判定結果が否定である場合、種有無判別部34eは、検査用干し柿に種がない、と判別する(ステップS59)。
最後に、結果出力部36は、ステップS58,S59における判別結果を、ディスプレイ19、プリンタ24に出力させる(ステップS60)。判別結果とともに、判別に用いられた検査用透過光画像あるいは検査方法で算出された情報が出力されてもよい。
【0081】
以上のように、本実施形態は、「疑種」のHSDを既知事例として予め記憶し、疑第1領域を抽出して、疑第1領域の幾何学形状の特徴量を算出するので、この特徴量を用いて食用果実の内部を精度良く検査することができる。
また、本実施形態は、「種」に該当する第1領域、「蔕」に該当する第2領域、および「果肉」に該当する第3領域のいずれにも属しない残存領域を残存部位とし、この残存部位に該当する残存領域の各画素について交差検定を行う。このため、本実施形態は、「種」の候補となる「疑種」を確実に既知事例として得ることができる。
本実施形態は、残存領域の各画素の画素値の組について、「種」、「蔕」、および「果肉」の既知事例との間で類似度を算出するので、各画素の部位の推定を定量的に精度良く行うことができる。
検査用透過光画像の各画素の画素値の組と、既知事例との間で類似度を算出し、算出した類似度に基づいて部位を推定するとき得られる確信度に基づいて、第1領域、第2領域および疑第1領域を抽出する。このため、検査用透過光画像の各画素の部位の推定を定量的に精度良く行うことができる。
また、疑第1領域が、「種」に該当するか否かを判定するとき、本実施形態は、「蔕」に該当する第2領域の中心点と、疑第1領域の、中心点から遠い外側外周部分との間の距離を算出することによって疑第1領域の幾何学形状の特徴量を算出する。このため、特徴量が「種」の条件を満たすか否かを判定することができ、種の有無を精度良く判別することができる。
さらに、本実施形態は、疑第1領域および第1領域の合計の面積が、予め設定された面積比較用閾値を超えるか否かを判定する。このため、種の有無の判別結果の誤りはより少なくなる。
【0082】
上記実施形態及び変形例は、以下に示す内容を開示する。
【0083】
(付記1)
食用果実の内部を検査する食用果実検査装置が行う検査方法であって、
前記食用果実検査装置は、参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶し、
食用果実の内部を検査するとき、前記食用果実検査装置は、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、ことを特徴とする食用果実の検査方法。
【0084】
(付記2)
前記既知事例は、前記第1部位の画素値の組、前記第2部位の画素値の組、前記第1部位および前記第2部位に対して前記波長帯域の画素値によって識別される第3領域の画素値の組、および前記疑第1部位の画素値の組を含み、
前記食用果実検査装置は、前記参照用透過光画像から前記既知事例を作成するとき、前記参照用透過光画像の中から、前記第1部位に該当する第1領域、前記第2部位に該当する第2領域、および前記第3部位に該当する第3領域を抽出し、
さらに、前記第1領域、前記第2領域、および前記第3領域のいずれにも属しない残存領域を残存部位として、前記残存部位に該当する前記残存領域の各画素について、当該各画素を除いた前記残存領域の他の画素、前記第1領域に属する画素、前記第2領域に属する画素、および前記第3領域に属する画素を既知の部位の画素として用いて交差検定を行うことにより、前記残存領域の各画素の部位を推定し、推定時に得られる推定の確信度が閾値より低く、前記第2領域の周りに位置する前記残存領域の画素を見出し、当該見出した画素における画素値の組を前記疑第1部位の既知事例として求めて記憶する、付記1に記載の検査方法。
【0085】
(付記3)
前記残存領域の各画素の部位の推定は、前記残存領域の各画素の画素値の組について、前記第1部位、前記第2部位、および前記第3部位のそれぞれの既知事例との間で第1類似度を算出することにより行う、付記2に記載の検査方法。
【0086】
(付記4)
前記第1類似度は、類似するか否かを調べる2つの画素値の組の間で、対応する画素値同士の差分を規格化した値を用いて算出する、付記3に記載の検査方法。
【0087】
(付記5)
前記検査用透過光画像の各画素の画素値の組と、前記既知事例それぞれとの間で第2類似度を算出し、算出した前記第2類似度に基づいて部位を推定するとき得られる第2確信度に基づいて、前記第1領域、前記第2領域および前記疑第1領域を抽出する、付記1〜4のいずれか1項に記載の検査方法。
【0088】
(付記6)
前記第2類似度は、類似するか否かを調べる2つの画素値の組の間で、対応する画素値同士の差分を規格化した値を用いて算出する、付記5に記載の検査方法。
【0089】
(付記7)
前記特徴量は、前記第2領域の中心点と、前記疑第1領域の前記中心点からみて外側の外周部分との間の距離を算出することにより得られる値である、付記1〜6のいずれか1項に記載の検査方法。
【0090】
(付記8)
前記特徴量は、前記外周部分における前記距離の平均値および標準偏差である、付記7に記載の検査方法。
【0091】
(付記10)
前記疑第1領域の前記特徴量が、前記第1部位の条件を満たす場合、さらに、前記疑第1領域および前記第1領域の合計の面積が、予め設定された閾値を超えるか否かを判定する、付記1〜8のいずれか1項に記載の検査方法。
【0092】
(付記10)
食用果実の内部の検査を、コンピュータに実行させる検査プログラムであって、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例としてコンピュータの記憶手段は予め記憶させ、
食用果実の内部を検査するとき、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、処理をコンピュータに実行させることを特徴とする検査プログラム。
【0093】
(付記11)
食用果実の内部を検査する食用果実の検査装置であって、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する記憶部と、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定する推定部と、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する判別部と、とを有することを特徴とする食用果実の検査装置。
【0094】
以上、本発明の食用果実の検査方法、検査装置およびプログラムについて詳細に説明したが、本発明は上記実施形態に限定されず、本発明の主旨を逸脱しない範囲において、種々の改良や変更をしてもよいのはもちろんである。
【符号の説明】
【0095】
10 検査装置
12 CPU
14 ROM
16 RAM
18 ハードディスクドライブ装置
19 ディスプレイ
20 キーボード
22 マウス
24 プリンタ
25 インターフェース
26 バス
28 カメラ
30 クラス付与部
32 推定部
34 判別部
34a 蔕外周HSD抽出部
34b 疑種外周HSD抽出部
34c 距離算出部
34d 結果付与部
34e 種有無判別部
36 結果出力部
【技術分野】
【0001】
本発明は、食用果実の内部を検査する食用果実検査装置が行う検査方法、検査装置およびプログラムに関する。
【背景技術】
【0002】
干し柿などの食用果実は、種有りより種無しのほうが商品価値が高いことから、解体することなく種など所定部位の有無を判別することが求められる。種の有無を判別するため、所定の波長帯域で受光して得られる画像中の被写体に対応する部分の分光特性を用いて、被写体の特性を推定することが行われている。分光特性を用いる例としては、例えば、人物の顔や食物を撮影被写体とした画像、あるいは空から土地を撮影したハイパースペクトル画像から、人物の顔の部位や食物の熟成度や土地の利用状況等の情報を得ることが知られている。
【0003】
例えば、人工衛星等のプラットフォームに搭載されたマルチスペクトルセンサで撮影対象物を撮像した画像を処理するマルチスペクトル画像処理装置であって、大分類“農業植生”、中分類“沈水植物群落”、小分類“大根”等が入力設定されるカテゴリ情報と、第1のマルチスペクトルセンサで取得したマルチスペクトル画像中で対応する部分の画素のデータを参照用スペクトルデータとして関連づけて参照スペクトルデータに登録する参照スペクトルデータ登録処理部と、入力マルチスペクトル画像を画素単位毎に、参照スペクトルデータの参照用スペクトルデータと照合して、そのカテゴリ情報を推定するカテゴリ推定処理部を含んだマルチスペクトル画像処理装置が知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−280591号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記マルチスペクトル画像処理装置は、撮影被写体の表面の部位を識別することはできるが、撮影被写体の内部構造、例えば、撮影被写体が干し柿などの食用果実である場合、食用果実に種があるか否か等の内部情報を得ることはできない。
【0006】
本発明は、食用果実の内部を精度よく検査する食用果実検査方法、検査装置およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様は、食用果実の内部を検査する食用果実検査装置が行う検査方法である。
前記食用果実検査装置は、参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する。
食用果実の内部を検査するとき、前記食用果実検査装置は、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する。
【0008】
本発明の別の態様は、食用果実の内部の検査を、コンピュータに実行させる検査プログラムである。当該検査プログラムは、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例としてコンピュータの記憶手段に予め記憶させ、
食用果実の内部を検査するとき、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、処理をコンピュータに実行させる。
【0009】
本発明のさらに別の態様は、食用果実の内部を検査する食用果実の検査装置である。当該検査装置は、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する記憶部と、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定する推定部と、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する判別部と、とを有する。
【発明の効果】
【0010】
上述の態様の食用果実検査方法、検査装置およびプログラムによれば、食用果実の内部を精度よく検査することができる。
【図面の簡単な説明】
【0011】
【図1】(a)は、本実施形態の食用果実の検査方法を実施する食用果実を検査する検査装置の構成図であり、(b)は、(a)に示される検査装置で生成される検査モジュールの能ブロック図である。
【図2】図1(b)に示される判別部の詳細なブロック図である。
【図3】本実施形態である干し柿の検査方法の全体フローを示す図である。
【図4】本実施形態の検査装置が行うクラスの付与の処理のフローを示す図である。
【図5】本実施形態で用いる参照用透過光画像のHSDの一例を示す図である。
【図6】(a)は、本実施形態に用いる参照用干し柿の解体した写真の一例を示す図であり、(b)は、本実施形態に用いる参照用透過光画像についてクラスタリングを行った結果の一例を示す図である。
【図7A】本実施形態で得られる「種」のHSDの一例を示す図である。
【図7B】本実施形態で得られる「果肉」のHSDの一例を示す図である。
【図7C】本実施形態で得られる「蔕」のHSDの一例を示す図である。
【図8】(a),(b)は、本実施形態で交用いる差検定を説明する図である。
【図9】本実施形態で得られる「疑種」のHSDの一例を示す図である。
【図10】(a)は、MBRを用いて検査用透過光画像から、「種」、「果肉」、「果肉」の3つのクラスを用いて推定した結果の一例を示す図であり、(b)は、推定で得られる確信度の高低の分布を示す図である。
【図11】本実施形態で行われる内部構造の推定のフローを示す図である。
【図12】本実施形態で行われる種の有無の判別のフローを示す図である。
【図13】(a)〜(c)は、本実施形態で用いる距離の算出方法を説明する図である。
【図14】本実施形態で用いる第2領域の外周を抽出するフローを示す図である。
【図15】本実施形態で用いる疑第1領域の外周を抽出するフローを示す図である。
【図16】(a)は、本実施形態で得られる蔕HSDの一例を示す図であり、(b)は、本実施形態で得られる蔕外周HSDの一例を示す図である。
【図17】本実施形態で得られる疑種外周HSDの一例を示す図である。
【図18】本実施形態で行う第2領域の中心点の算出と、中心点と疑第1領域の外周との間の距離の算出のフローを詳細に示す図である。
【図19】(a)〜(d)は、本実施形態で得られる算出結果の例を示す図である。
【図20】本実施形態で行われる結果付与のフローを詳細に示す図である。
【発明を実施するための形態】
【0012】
食用果実の種の有無を判別するため、例えば、干し柿に対して透過させた透過光を用いた分光スペクトルデータを計測し、その計測データを基に食用果実に食用果実に種があるか否かを判別することが考えられる。しかし、本発明者の実験の結果、干し柿の種の透過分光スペクトルデータは、蔕に隣接する部分の透過分光スペクトルデータと類似するため、種の有無の判別が難しいことが分かった。
以下、食用果実の内部における所定の部位の有無を精度よく検査する本発明の食用果実の検査方法、検査装置およびプログラムを実施形態に基づいて説明する。図1(a)は、本実施形態の食用果実の検査方法を実施する食用果実を検査する検査装置10の構成図である。
【0013】
(検査装置)
検査装置10は、図1(a)に示すように、CPU(Central Processing Unit)12と、ROM(Read Only Memory)14と、RAM(Random Access Memory)16と、ハードディスクドライブ装置18と、ディスプレイ19と、キーボード20と、マウス22と、プリンタ24と、インターフェース25と、を備え、これらは、互いにバス26を介して通信可能に接続されている。
【0014】
ここで、CPU12は、検査装置10の全体の制御を司る。ROM14は、ブートプログラムなどのプログラムを記憶している。RAM16は、CPU12のワークエリアとして使用される。ハードディスクドライブ装置18は、CPU12の制御に応じてハードディスクに対するデータの読み出し、書き込みを制御する。ハードディスクドライブ装置18は、後述する食用果実の検査を実行する検査プログラムを記憶し保持する。
ディスプレイ19は、文字情報や画像などの各種情報を表示する。
【0015】
キーボード20は、文字、数字、各種指示などの入力のためのキーを備え、オペレータから入力を受ける。マウス22は、ディスプレイ19に表示するカーソルの移動や範囲選択、あるいはウィンドウの移動やサイズの変更などを行う。プリンタ24は、画像データや文字情報をプリント出力する。この他、インターフェース25は、カメラ28と接続されている。カメラ28は、例えば、複数の波長帯域、例えば141の波長帯域で被写体の透過光を受光して撮像された被写体の透過光画像の各画素の位置(例えば2次元画像の水平方向の座標及び垂直方向の座標)を示す情報と、各画素における画像値(透過光の強度)の組(以降、HSD(Hyper Spectrum Data)という)を取得する。本実施形態におけるHSDは、通常、ハイパースペクトルセンサを用いて取得することができる。ハイパースペクトルセンサを用いたHSDの取得によれば、広範囲の波長帯で連続的に得ることができるので好ましいが、HSDの取得手段はこれに限られるものではない。例えば、マルチスペクトルセンサで、比較的狭い波長域帯で被写体の透過光画像を、波長帯域を変えて複数回撮像したものを、本実施形態におけるHSDとして用いてもよい。
取得されるHSDの波長帯域は、被写体において有無を識別したい部位(例えば「種」)を透過する光の波長を含む所定の範囲の波長帯域である。被写体が干し柿などの食用果実であるとき、波長帯域は例えば、350nm〜1050nmの範囲とすることができる。また、350nm〜1050nmの範囲で5nm毎に分割して複数の波長帯域としてもよい。
このHSDがインターフェース25を介して検査装置10に取り込まれ、ハーディスクドライブ装置18に記憶される。従って、記憶される透過光画像のHSDは、カメラ28の波長帯域毎に対応した値を画素毎に有する。
【0016】
CPU12は、オペレータの指示によってハードディスクドライブ装置18に記憶されている検査プログラムを読み出し実行することにより、図1(b)に示す検査モジュール11を生成する。図1(b)は、検査装置10で生成される検査モジュール11のブロック図である。検査プログラムは、ハードディスクドライブ装置18から読み出されて実行することにより、後述する図3に示す検査方法を実行する。
【0017】
検査モジュール11は、クラス付与部30と、推定部32と、判別部34と、結果出力部36と、データベース(以降、DBという)38と、を備える。クラス付与部30、推定部32、判別部34、および、結果出力部36の処理は、実質的にCPU12が担う。すなわち、クラス付与部30、推定部32、判別部34、および、結果出力部36は、ソフトウェアモジュールである。データベース38は、RAM16あるいはハードディスクドライブ装置18によって形成される。
【0018】
検査モジュール11を生成した検査装置10は、食用果実の内部の検査をする装置、具体的には、食用果実内に種が有るか無いかを確実に判別することができる装置である。以降では、食用果実として干し柿を例示して説明する。食用果実として、この他に、プルーン等のドライフルーツやブドウ等を挙げることができる。果実とは、引用文献(http://www.biol.tsukuba.ac.jp/~algae/BotanyWEB/fruit1.html)によれば、種子を包む子房壁やそれ以外の器官が成熟した実のことである。
【0019】
検査プログラムを起動した検査装置10は、まず、既知事例の蓄積を行う。具体的には、検査装置10は、カメラ28で撮像して得られた参照用干し柿の透過光画像、すなわち参照用透過光画像の各画素のHSDと、この撮像に用いた参照用干し柿の内部構造の複数の部位のそれぞれとの間で対応付けを行う。これによって、検査装置10は、干し柿における「種」、「蔕」、「果肉」、および「種」の候補となる「疑種」のHSDを少なくとも既知事例としてDB38に記憶し格納する。HSDは、1つの画素における波長帯域毎の画素値の組である。したがって、カメラ28が141個の波長帯域で干し柿を撮像した場合、画素値の組には1つの画素に141個の画素値があるので、HSDは141個の画素値の組となる。
【0020】
次に、検査装置10が、干し柿の内部を、既知事例を用いて検査する。具体的には、検査装置10は、まず、検査用干し柿の透過光をカメラ28の複数の波長帯域で受光して検査用干し柿の透過光画像、すなわち検査用透過光画像を取得する。検査用透過光画像は、参照用透過光画像と同じ撮像条件でカメラ28により撮像された画像である。
【0021】
検査装置10は、取得された検査用透過光画像と、DB38に記憶されている既知事例とを用いて、透過光画像内で、「種」として識別される第1領域、「蔕」として識別される第2領域、および、第2領域の周りに位置し、「疑種」として識別される領域を含む疑第1領域を抽出することにより、干し柿の内部構造を推定する。さらに、検査装置10は、上記疑第1領域の、第2領域に対する幾何学形状の特徴量を算出することにより、疑第1領域が「種」に該当するか否かを判定して、検査用干し柿に「種」が存在するか否かを判別する。
【0022】
このように検査装置10は、検査用透過光画像について予め「疑種」の部位を推定できるように、「疑種」の画素値の組を既知事例として記憶し、「疑種」として推定される領域を含む疑第1領域の、「蔕」に該当する第2領域に対する幾何学形状の特徴量を算出することにより、疑第1領域が、「種」の条件を満たすか否かを判定する。この判定結果を用いて、検査用干し柿に種が存在するか否かを判別する。このため、検査用干し柿の透過光画像を得ることにより、検査用干し柿の種の有無を非破壊で精度良く判別することができる。
以下、検査装置10について詳細に説明する。
【0023】
(検査モジュール)
検査モジュール11のクラス付与部30は、参照用透過光画像の各画素における画素値の組(HSD)に、「種」、「蔕」、「果肉」、および「疑種」の部位の名称をクラスとして付与し、DB30に記憶させる。
【0024】
まず、クラス付与部30は、参照用干し柿の参照用透過光画像の中から、「種」に該当する第1領域、「蔕」に該当する第2領域、および「果肉」に該当する第3領域を抽出する。この後、クラス付与部30は、第1領域、第2領域、および第3領域のいずれにも属しない残存領域が「残存部位」に該当するとして、残存領域の各画素について、交差検定を行う。具体的には、クラス付与部30は、交差検定をしようとする画素を除いた残存領域の他の画素、第1領域に属する画素、第2領域に属する画素、および第3領域に属する画素を既知の部位の画素として用いて交差検定を行う。これにより、クラス付与部30は、残存領域の各画素について部位の推定を行い、推定時に得られる推定の確信度が閾値より低く、第2領域の外周から設定された許容範囲内に位置する、残存領域の画素を見出す。クラス付与部30は、この見出した画素におけるHSDを「疑種」と定め、この「疑種」のHSDを既知事例とする。こうして、参照用透過光画像から得られた「種」、「蔕」、「果肉」、および「疑種」の既知事例は、DB38に記憶される。なお、交差検定とは、「種」、「蔕」等の部位(クラス)が付与されたHSDを既知事例として用いて、部位(クラス)が付与されていない、部位が未知のHSDについて部位(クラス)を推定し検定することをいう。ここでは、クラス付与部30は、残存領域の交差検定の対象となる1つの画素について部位(クラス)が付与されていないと仮定して交差検定を行う。このとき、クラス付与部30は、「残存部位」として付与された残存領域の他の画素(交差検定の対象となっていない画素)のHSD、「種」、「蔕」、および「果肉」が付与されたHSDを既知事例として用いて、上記交差検定の対象となっている1つの画素の部位(クラス)を推定する。この交差検定は、Leave-one-out交差検定である。交差検定は、Leave-one-out交差検定の他に、n-fold交差検定を用いることもできる。交差検定で行う部位の推定は、具体的には後述するMBR(Memory Based Reasoning)を用いて行われる。MBRは、クラス付与済みのHSDを蓄積した既知事例集合の中からクラスが未付与のHSDの類似事例を検索し、その類似事例のスペクトル値をもとに判別を行なう判別器であり、交差検定の対象となる1つの画素のHSDが、残存領域の他の画素(交差検定の対象となっていない画素)のHSD、「種」、「蔕」、および「果肉」が付与された各画素におけるHSDと類似しているか否かを、定義された距離の計算を行うことにより、部位の推定および確信度が算出される。MBRの代わりにクラス付与済みのHSDを蓄積した既知事例とクラスが未付与の未知事例を用い、判別結果に対する確信度が算出できる他の判別器(例えばSVM(Support Vector Machineなど)を用いてもよい。各画素におけるHSDと部位との対応付けを行ってHSDに部位を付与する具体的な方法は後述する。
【0025】
推定部32は、DB38に記憶された「種」、「蔕」、「果肉」、「疑種」に関する既知事例を用いて、干し柿の検査用透過光画像の各画素のHSDから、「種」、「蔕」、「果肉」、「疑種」の各部位に該当する領域を抽出して検査用干し柿の内部構造を推定する。領域の抽出には、上述のMBRが用いられる。検査用透過光画像の各画素は、「種」、「蔕」、「果肉」、「疑種」の部位の中から推定される。なお、「疑種」に該当する部分は、「種」、「蔕」および「果肉」に識別されず、「種」、「蔕」および「果肉」として推定ができない場所であるため、抽出される疑第1領域には、「疑種」として推定される領域の他に、「種」、「蔕」および「果肉」のいずれの部位についても低い確信度で推定される領域であって、「蔕」に該当する第2領域の周りに位置する領域が含まれる。「蔕」に該当する第2領域の周りに位置する領域とは、第2領域の外周から設定された許容範囲内に含まれる領域をいう。推定部34の処理については後述する。
【0026】
判別部34は、推定部34で抽出された第1領域と、第2領域と、疑第1領域とを用いて、検査用の干し柿に種が存在するか否かを判別する。判別部34は、疑第1領域の、「蔕」に該当する第2領域に対する幾何学形状の特徴量を算出し、この特徴量が第1部位である「種」の条件を満たすか否かを判定して、検査用の干し柿に「種」が存在するか否かを判別する。「種」の条件とは、具体的に、第2領域の中心点と「疑第1領域」の外側外周との間の距離の平均値およびこの距離の標準偏差を算出したとき、上記平均値と標準偏差が、与えられた値の範囲にあることをいう。なお、判別部34が判別結果として「種」有りと判別するには、「種」に該当する第1領域と、「種」の条件を満足する「ほぼ種」に該当する疑第1領域の合計の面積が、予め設定された閾値に対して高いことが条件とされる。この条件が課されるのは、「ほぼ種」および「種」の合計面積が面積比較用閾値以下である場合、実際に種が存在するとは言えず、第1領域の誤った推定、疑第1領域の誤った推定、および「ほぼ種」の誤った判定によって種が有ると誤って判別することがないようにするためである。
【0027】
図2は、判別部34の詳細なブロック図である。判別部34は、蔕外周HSD抽出部34aと、疑種外周HSD抽出部34bと、距離算出部34cと、結果付与部34dと、種有無判別部34eと、を備える。判別部34の処理、具体的には、蔕外周HSD抽出部34aと、疑種外周HSD抽出部34bと、距離算出部34cと、結果付与部34dと、種有無判別部34eの処理については後述する。
【0028】
結果出力部36は、判別部34で得られた種有無の判別結果と、「種」に該当する第1領域、「蔕」に該当する第2領域、「果肉」に該当する第3領域、および「疑種」に該当する疑第1領域の抽出結果をディスプレイ19に表示させる。さらに、結果出力部36は、種有無の判別結果に至る処理中に算出された情報もディスプレイ19に表示させてもよい。
【0029】
(検査方法)
次に、検査装置10で行われる干し柿の検査方法について説明する。図3は、干し柿の検査方法の全体フローを示す図である。
検査装置10は、まず、干し柿の各部位の既知事例の蓄積を行う。具体的には、検査装置10は、参照用干し柿の透過光をカメラ28で受光して得られる参照用透過光画像を、インターフェース25を介して取得する(ステップS10)。
【0030】
この後、検査装置10のクラス付与部30は、参照用透過光画像の画素毎に、クラスの付与を行う(ステップS20)。これにより、「種」、「蔕」、「果肉」および「疑種」の各部位(クラス)に関する画素値の組が既知事例としてDB38に記憶される。
次に、カメラ28が、検査用干し柿を参照用干し柿と同じ撮像条件(同じ光源、同じ光量、同じ画角、同じ撮像方向)で撮像することにより、検査装置10は、検査用干し柿の検査用透過光画像を取得する(ステップS30)。
検査装置10は、取得した検査用透過光画像から、DB38に記憶された上記既知事例を用いて、内部構造の推定を行う(ステップS40)。すなわち、検査装置10は、透過光画像内で、「種」として識別される第1領域、「蔕」として識別される第2領域、および、「疑種」として識別される領域を含む疑第1領域を抽出する。これにより、検査装置10は、内部構造の推定を行う。
【0031】
次に、検査装置10は、種の有無の判別を行う(ステップS50)。具体的には、検査装置10は、疑第1領域の、第2領域に対する幾何学形状の特徴量を算出し、算出した特長量が「種」の条件を満足するか否かを判定して、検査用干し柿に種が存在するか否かを判別する。
以下、クラスの付与(ステップS20)、内部構造の推定(ステップS40)、および種の有無の判別(ステップS50)について詳細に説明する。
【0032】
(クラスの付与)
図4は、検査装置10が既知事例の蓄積のために行うクラスの付与の処理のフローを示す図である。クラスの付与は、クラス付与部30において行われる。ここで、クラスとは、「種」、「蔕」、「果肉」といった部位の名称をいう。
クラス付与部30は、カメラ28で撮像されて得られた参照用干し柿の参照用透過光画像を取得し、HSDを取得する(ステップS21)。クラス付与部30は、参照用透過光画像を、インターフェース25から直接取得してもよいし、インターフェース25を介してDB38に一度記憶された参照用透過光画像を読み出して取得してもよい。図5は、参照用透過光画像のHSDの一例が示されている。図5に示す例に用いる参照用透過光画像は、142ピクセル×140ピクセル(縦×横)の画像で、合計19880画素を有する。画素には、参照用透過光画像の1つの角から順番に画素位置の番号を示すINDEX番号が記され、各画素は、141の波長帯域(band1〜band141)における画素値を有する。
【0033】
次に、クラス付与部30は、DB38に、干し柿の参照用透過光画像から求めて蓄積した各部位のHSDの既知事例の個体数(既知事例の数)が1より大きいか否かを判定する(ステップS22)。判定の結果、個体数が1より大きい、すなわち各部位の既知事例が2以上ある場合、検査装置10は、干し柿の検査が可能であると判断して、ステップS30(図3参照)に進む。上記個体数が1以下である場合、クラス付与部30は、検査用透過光画像をクラスタリングして参照用干し柿の参照用透過光画像の画素のHSDにクラスを付与する(ステップS23)。
【0034】
具体的には、クラス付与部30は、参照用透過光画像の画素のHSDについて、波長帯域毎の画素値に基づいてクラスタリングを行って、例えば周知のk-means法を用いたクラスタリングを行って参照用透過光画像の領域を分割する。その際、波長帯域毎の画素値に基づいてクラスタリングを行うので、「種」、「蔕」、「果肉」の各部位を区別した形でクラスタリング分割領域が生成され得る。しかし、クラスタリング分割領域のどの部分が「種」、「蔕」、「果肉」に該当するのか不明である。このため、オペレータが、参照用透過光画像の撮像方向に対して直交する面に沿って参照用干し柿を切断することにより参照用干し柿を解体し、オペレータの判断により切断面の各部分のうち、「種」、「蔕」、「果肉」であることが確実である部分について特定し、この特定した部分を解体結果データとして用いて、対応するクラスタリング分割領域を「種」、「蔕」、「果肉」の部位であると定める。したがって、オペレータは、参照用透過光画像中の各クラスタリング分割領域に該当する画素のHSDに、オペレータが付与しようとする「種」、「蔕」、「果肉」のいずれかの名称をキーボード20、マウス22を通して検査装置20に入力する。クラス付与部30は、「種」、「蔕」、「果肉」のいずれかの名称の入力をオペレータから受けることにより、参照用透過光画像中の対応する画素におけるHSDに「種」、「蔕」、「果肉」の名称をクラスとして付与する。参照用透過光画像には、「種」、「蔕」、「果肉」の名称が付与されなかった残りの領域(残存領域)もある。
【0035】
なお、クラスタリングを行う場合、参照用透過光画像を、「種」、「蔕」、「果肉」の3つの領域に少なくとも分割するために、クラスタリング分割領域が3つ以上となるように分割数を3以上とすることが好ましい。参照用透過光画像は、「種」の部位および「種」の周辺部分、「蔕」の部位および「蔕」の周辺部分、「果肉」の部位に分割されるように、分割数を少なくとも5以上にすることがより好ましい。特に、参照用透過光画像から「種」の領域であることが確実であるクラスタリング分割領域を生成するには、「種」、「蔕」、「果肉」の3つの領域に少なくとも分割するためのクラスタリングを行った後、「種」と想定される範囲の複数のクラスタリング分割領域を対象として、さらに、細かなクラスタリングを行うとよい。これにより、「種」の領域であることが確実なクラスタリング領域を抽出することができる。
【0036】
図6(a)は、参照用干し柿を解体した写真の一例を示す。図6(b)は、参照用透過光画像の中の、図6(a)中の白枠で囲まれた範囲内の領域について、クラスタリング(5分割)を行った結果の一例を示す。図6(b)に示すクラスタリング結果では、黒部分は「種」に対応するクラスタリング分割領域であり、この黒部分の周りの灰色部分は、「果肉」に対応するクラスタリング分割領域であり、白色部分は、「蔕」に対応するクラスタリング分割領域である。
【0037】
クラス付与部30は、「種」、「蔕」、「果肉」の名称が付与されたHSD、すなわちクラス付与済みHSDを、「種」、「蔕」、「果肉」に関する既知事例として、DB38に記憶させる(ステップS24)。図7A〜図7Cは、「種」、「果肉」、「蔕」に関する既知事例である「種」、「果肉」、「蔕」のHSDの一例が示されている。
【0038】
次に、クラス付与部30は、「種」、「蔕」、「果肉」の名称が付与されたクラス付与済みHSDをDB38から読み出し、このクラス付与済みHSDと、ステップS23においてクラスが付与されなかった残存領域を用いて、残存領域の少なくとも一部分の画素におけるHSDに、「種」の候補となる「疑種」の名称をクラスとして付与し、「疑種」の付与された画素値の組をDB38に記憶させる(ステップS25)。
【0039】
具体的には、クラス付与部30は、「種」、「蔕」、および「果肉」のいずれにも属しない残存領域を「残存部位」として、「残存部位」に該当する残存領域の各画素について交差検定を行う。具体的には、クラス付与部30は、残存領域の他の画素、すなわち、交差検定の対象となる画素以外の、「残存部位」に該当する画素、「種」に該当する第1領域に属する画素、「蔕」に該当する第2領域に属する画素、および「果肉」に該当する第3領域に属する画素を既知事例の画素として用いて交差検定を行う。これにより、クラス付与部30は、残存領域の各画素について部位を推定し、「種」として誤って推定する画素および推定時に得られる推定の確信度が閾値より低く、「蔕」該当する第2領域の周りに位置する、残存領域の画素のHSDを「疑種」の名称を付与して既知事例としてDB38に記憶させる。第2領域の周りに位置するとは、第2領域の外周から設定された許容範囲内に位置することをいう。
【0040】
図8(a),(b)は、交差検定を説明する図である。図8(a)に示すように、参照用透過光画像Gの中で、「種」、「蔕」および「果肉」に該当する第1〜第3領域(斜線領域))と「残存部位」に該当する残存領域(白い領域)が定められているとする。このとき、クラス付与部30は、図8(b)に示すように、残存領域の1つの画素に付与されているクラスが未知であるとして、これ以外の残存領域の画素におけるHSDと、第1〜3領域の画素におけるHSD、すなわち「種」、「蔕」、「果肉」に関する既知事例とを用いて、クラスが未知である(未知事例である)とした上記1つの画素のクラスを推定する。このように交差検定の対象となる画素は、残存領域の全画素であり、クラスの推定が繰り返される。図9は、「疑種」に関する既知事例としてDB38に記憶される「疑種」のHSDの一例が示されている。
【0041】
クラス付与部30は、この推定において、残存領域の各画素のうち、「種」と誤って推定される画素におけるHSD、および、推定の確信度が設定された閾値より低く、「蔕」に該当する第2領域の周りに位置する画素におけるHSDに、「疑種」の名称をクラスとして付与する。「疑種」が付与されたHSDは、「疑種」に関する既知事例としてDB38に記憶される。なお、上記推定では、下記に説明するMBRを用いて行うことが好ましい。MBRに代えて、SVMを用いることもできる。MBRでは、残存領域の各画素のHSDを未知事例とし、この未知事例について、DB38に記憶された「種」、「蔕」、および「果肉」に関する既知事例、さらには、「残存部位」とされた画素におけるHSDそれぞれとの間で類似度を算出することにより推定が行われる。
以上により、クラスの付与が終了する。
【0042】
(MBR)
MBRでは、未知事例と、既知事例の集合に含まれる各既知事例との間の類似度が求められる。具体的には、事例(未知事例、既知事例)の各波長帯域の画素値ごとに、未知事例と既知事例との説明変数間距離が求められる。より具体的には、下記式(1)を用いて、画素値毎の説明変数間距離が求められ得る。説明変数間距離とは、類似するか否かを調べる2つのHSDの間で、対応する画素値同士の差分を規格化した値である。類似度は、この説明変数間距離djを用いて算出される。ただし、jは波長帯域を識別する識別子であり、djは説明変数間距離である。
【0043】
【数1】
【0044】
上記式(1)において、「種」、「蔕」および「果肉」に関するHSDである既知事例の集合の波長帯域jにおける画素値の分布から得られる標準偏差を分母とし、未知事例の波長帯域jにおける画素値と各既知事例の波長帯域jにおける画素値との差を分子とする値がdjとなる。説明変数間距離djは対応する画素値同士の差分を、標準偏差で規格化した値である。
【0045】
次に、上記式(1)により求めた説明変数間距離djと波長帯域jにおける画素値の目的変数値の予測に対する影響度とを用いて、未知事例と既知事例との間の事例間距離が求められる。具体的には、下記式(2)を用いて、既知事例と未知事例との間の事例間距離が求められる。ただし、Dは事例間距離である。nは、波長帯域数である。
【0046】
【数2】
【0047】
そして、上記式(2)により求めた事例間距離Dから未知事例と既知事例との間の類似度が求められる。類似度は、事例間距離Dが大きくなればなるほど小さくなる。具体的には、下記式(3)を用いて、事例間の類似度を求めることができる。ただし、Sは類似度、Δは類似度Sが無限大になることを防ぐための正値である。ここでは正値ΔをΔ=1とする。
【0048】
【数3】
【0049】
次に、既知事例の集合から、未知事例と既知事例との類似度が高い順に上位k個の既知事例(類似事例)が検索される。ここでは、類似度がi番目に高い類似事例を「第i類似事例」と表記する。また、第1類似事例は、「最類似事例」とも表記する。上記kは任意に設定可能な値である。
【0050】
このとき、上記影響度に基づく重要度wが既知事例に付与されている場合には、その重要度wを考慮して、既知事例の集合から既知事例が検索される。ここでは、第i類似事例の重要度を「w(i)」と表記する。重要度wの既知事例は、画素値と付与されたクラスとが同一の既知事例がw個あることを意味する。
【0051】
また、既知事例の集合から検索された類似事例の類似度の総和をあらわす類似度和は、検索された各既知事例の類似度に重要度wを掛け合わせてから和をとることにより求められる。ここでは、類似度和を「Sc」と表記する。たとえば、k=3でかつ第1類似事例の重要度がw(1)=3の場合、第1類似事例だけで類似事例の数が3に達するため、類似事例は第1類似事例のみとなる。
【0052】
なお、最下位の類似事例の重要度を足し合わせることで、類似事例集合の重要度の和がkを超える場合には、重要度の和がkとなるように最下位の類似事例の重要度に必要な係数を掛けてから類似度和を計算するものとする。たとえば、k=3で、第1類似事例の重要度がw(1)=1、第2類似事例の重要度がw(2)=3の場合、重要度の和が3となるように、第2類似事例の重要度に2/3を掛ける。
【0053】
ここで、第i類似事例の類似の順位をr(i)、重要度をw(i)、類似度をS(i)とし、クラス(「種」、「蔕」、「果肉」)をc(i)とすると、クラスがc(i)である上位k個の類似事例の類似度和Scは、下記式(4)〜(7)を用いてあらわすことができる。
【0054】
【数4】
【0055】
【数5】
【0056】
【数6】
【0057】
【数7】
【0058】
最後に、クラスcの確信度が求められる。確信度とは、クラスがcである確からしさをあらわす指標である。具体的には、下記式(8)を用いて、類似事例集合とその類似度とから確信度が求められる。ただし、確信度をp(c)とする。
【0059】
【数8】
【0060】
上記式(8)を用いて求めた確信度p(c)が最大となるクラスが推定の結果となる。なお、上記MBR方法に基く推定についての詳細な説明は、たとえば、特開2000−155681号公報を参照することができる。
【0061】
図10(a)は、MBRを用いて、後述する検査用透過光画像から、「種」、「果肉」、「果肉」の3つのクラス(「疑種」のクラスはない)を用いて推定した結果の一例を示している。この結果は、低い確信度で推定される場合であっても、最大の確信度で推定されるクラスを各画素のHSDに付与した例である。図10(a)に示す結果からわかるように、「種」と推定される領域は、「蔕」と推定される領域の周りに位置していることがわかる。図10(b)は、上記推定時に算出される確信度p(c)を予め設定された閾値で分けることにより得られる確信度p(c)の高低の分布を示す図である。図10(a)に示すように、「種」と推定される領域は、確信度p(c=「種」)が低いことがわかる。したがって、検査装置10は、図10(a)に示すように確信度が低く「種」と推定される部分を、予め「種」の候補となる「疑種」として定め、この「疑種」に関する既知事例を記憶し、「種」、「蔕」、「果肉」に加えて「疑種」に関する既知事例を用いて検査用透過光画像の各画素に対して部位を推定することにより、後述するように検査用干し柿の種の有無を精度良く判別することができる。
【0062】
(内部構造の推定)
次に、図3に示す内部構造の推定(ステップS40)が行われる。図11は、内部構造の推定のフローを示す図である。内部構造の推定は、推定部32(図1(b)参照)において行われる。
推定部32は、用意した検査用干し柿をカメラ28で撮像して得られた検査用透過光画像を取得し、検査用透過光画像から各画素の画素値の組、すなわちHSDを取得する(ステップS41)。検査用透過光画像は、カメラ28からインターフェース25を通して直接取り込まれることで、HSDが取得されてもよいし、一度ハードディスクドライブ装置18に記憶された画像が読み出されることで、HSDが取得されてもよい。
【0063】
次に、推定部32は、DB38に記憶されている「種」、「蔕」、「果肉」、「疑種」に関する既知事例であるHSD(画素値の組)を用いて、ステップS41で取得されたHSDに対して、「種」、「蔕」、「果肉」あるいは「疑種」等の部位の推定を行う(ステップS42)。このとき、上述したMBRを用いた類似度および確信度を算出することにより推定を行う。推定部32は、算出された確信度が予め設定された閾値より高い画素に対して、確信度が最も高い部位の名称、すなわち「種」、「蔕」、「果肉」、「疑種」のいずれか1つの部位の名称をクラスとして付与する。これにより、「種」が付与された画素の集合が、「種」に該当する第1領域となり、「蔕」が付与された画素の集合が、「蔕」に該当する第2領域となり、「果肉」が付与された画素の集合が、「果肉」に該当する第3領域となる。さらに、「疑種」が付与された画素の集合が、「疑種」に該当する疑第1領域となる。また、確信度が上記設定された閾値より低く、「種」、「蔕」、「果肉」および「疑種」のいずれも付与されない画素であって、第2領域の周りに位置する画素も、疑第1領域に含められる。「疑種」は、本来「種」、「蔕」、「果肉」のいずれも付与されない確信度が低い部位である。図10(b)に示すように、「蔕」に該当する領域の周りに確信度が低い画素が多く存在する。このため、推定部32は、確信度が設定された閾値より低く、「種」、「蔕」、「果肉」および「疑種」のいずれも付与されない画素であって、「蔕」に該当する領域の周りに位置する画素を疑第1領域に含め、この画素のHSDに対して「疑種」を付与する。なお、「蔕」に該当する領域の周りに位置する画素とは、「蔕」に該当する第2領域の外周から設定された許容範囲内に含まれる画素である。
【0064】
この後、推定部32は、第1領域、第2領域、第3領域、および疑第1領域のそれぞれに含まれる画素におけるHSD、すなわち画素値の組に対して、推定したクラス(部位の名称)と確信度を付与する(ステップS43)。こうして、クラスおよび確信度が付与されたHSDは、クラス付与済みHSDとしてDB38に記憶される。
【0065】
(種の有無の判別)
次に、図3に示す種の有無の判別(ステップS50)について説明する。図12は、種の有無の判別のフローを示す図である。種の有無の判別は、判別部34(図1(b)参照)で行われる。
【0066】
まず、判別部34は、ステップS40において推定された結果、すなわちクラス付与済みHSDに、「疑種」が付与されたHSDがあるか否かを判定する(ステップS51)。推定結果に「疑種」が付与されたHSDがある場合(ステップS51においてYESの場合)、判別部34は、「蔕」に該当する第2領域の中心点を算出する(ステップS52)。第2領域の中心点は、第2領域に属する画素の画素位置情報を用いて算出される。
【0067】
次に、判別部34は、算出した中心点と抽出された疑1領域の外周との距離の平均値と標準偏差を算出する(ステップS53)。
図13(a)〜(c)には、第2領域の中心点と抽出された疑1領域の外周との距離の算出方法を説明する図である。疑第1領域は、図13(a),(c)では、疑第1領域の外周が点線で示されている。図13(b)では、「蔕」に該当する第2領域の外周が実線で示されている。図13(c)では、第2領域の中心点Gと、抽出された疑1領域の外周との距離を示している。判別部34は、このような距離を算出して距離の平均値および距離の標準偏差を疑第1領域の幾何形状の特徴量として算出し、平均値および標準偏差が「種」の条件を満足するか否かを判定することができる。
【0068】
上記距離を算出するためには、まず、判別部34は、第2領域の外周および疑第1領域の外周を、第2領域および疑第1領域から算出する。
図14は、第2領域の外周を抽出するフローを示す図である。第2領域の外周の抽出は、蔕外周HSD抽出部34a(図2参照)で行われる。
【0069】
蔕外周HSD抽出部34aは、「蔕」に該当する第2領域に属する画素のHSD、すなわち「蔕」と推定した画素のHSD(以降、この画素のHSDを蔕HSDという)をDB38から読み出して取得する(ステップS70)。この後、蔕外周HSD抽出部34aは、画素の画素位置情報でソートを行って画素にID=i(i=1〜nの自然数(nは蔕HSDの画素の総数))を振る(ステップS72)。具体的に、ソートされた結果の順番に1から蔕HSDの総数までの自然数iがIDとして振られる。検査用透過光画像の直交する二方向のうち一方向をx方向とし残りの方向をy方向としたとき、例えば、ソートの優先順位はx方向を第1位とし、y方向を第2位として、ソートは行われる。次に、蔕外周HSD抽出部34aは、変数i,jを0に初期設定する(ステップS74,S76)。この後、蔕外周HSD抽出部34aは、第2領域の全画素を処理したか否かを判定する(ステップS78)。第2領域の全画素を処理していない場合、蔕外周HSD抽出部34aは、変数iをi+1に増やし(変数iを1増加し)、IDがiに対応する画素(ID(i)の画素)におけるHSDを抽出する(ステップS80,S82)。外周HSD抽出部34aは、抽出したHSDの画素に隣接する蔕HSDの画素が存在するか否かを判定する(ステップS84)。隣接する蔕HSDの画素とは、検査用透過光画像の注目する画素に直接接触する画素のみならず、注目する画素を中心として複数の画素数離れた範囲内に位置する画素を含んでもよい。例えば、注目する画素を中心として3画素×3画素、5画素×5画素のように、予め設定された数kに対して、k画素×k画素の範囲内の画素を隣接する蔕HSDの画素と定めてもよい。上記判定において隣接する画素がある場合(ステップS84においてYESの場合)、ステップS78に戻る。一方、上記判定結果が否定である場合(ステップS84においてNOの場合)、蔕外周HSD抽出部34aは、変数jをj+1に増やし(変数jを1増加し)(ステップS86)、ステップS82で抽出した蔕HSDの画素に変数jの値をIDとして付与し、蔕外周HSDとして、DB38に記憶させる(ステップS88)。このようにして第2領域外周が抽出される。
【0070】
図15は、疑第1領域外周を抽出するフローを示す図である。疑第1領域外周の抽出は、疑種外周HSD抽出部34b(図2参照)で行われる。疑第1領域外周の抽出は、ステップS90〜S108で行われるが、この処理は、図14に示す第2領域の外周の抽出におけるステップS70〜S88と同じ方法で行われる。したがって、ステップS90〜S108の説明は省略する。なお、第2領域外周の抽出および疑第1領域外周の抽出は、図14及び図15に示す方法の他に、画像処理の分野で用いるエッジ強度評価フィルタを用いた周知のエッジ抽出方法を用いることができる。このエッジ抽出方法では、エッジ強度評価フィルタとして、縦、横、斜め等、所定の方向のエッジを抽出する複数種類のエッジ強度評価フィルタのいずれか1つが用いられる。縦方向のエッジ強度評価フィルタを用いて畳込処理を行えば、主に縦方向のエッジが抽出され、横方向のエッジ強度評価フィルタを用いて畳込処理を行えば、主に横方向のエッジが抽出される。したがって、このエッジ抽出方法を用いる場合、エッジの抽出対象となる領域の形状から、その形状に適した種類のエッジ強度評価フィルタを予め選択しておき(例えば、主に横方向のエッジから構成される形状に対しては横方向のエッジ強度評価フィルタを予め選択しておく)、選択した1種類のエッジ強度評価フィルタを用いた畳込処理が行われる。また、エッジ抽出方法の一例として、特開2004−341844号公報に記載の方法も挙げられる。
【0071】
図16(a)は、蔕HSDの一例を示す。図16(b)は、蔕外周HSDの一例を示す。蔕外周HSDは、図14に示すフローに従って図16(a)に示す蔕HSDから抽出された結果である。図17は、図15に示すフローに従って抽出された疑第1領域の外周におけるHSD、すなわち疑種外周HSDの一例を示す。このような蔕外周HSDおよび疑種外周HSDがDB38に記憶される。
【0072】
図18は、「蔕」に該当する第2領域の中心点Gを算出し(ステップS52)、中心点Gと疑第1領域外周の各画素との間の距離の算出(ステップS53)のフローを詳細に示す図である。このフローは、距離算出部34c(図2参照)で行われる。
【0073】
まず、距離算出部34cは、DB38に記憶された蔕外周HSDを読み出して、蔕外周HSDの画素位置情報を結ぶことで得られる多角形の中心点を、第2領域における中心点Gとして算出する(ステップS110)。具体的に、距離算出部34cは、多角形を、多角形の一つの頂点を共通の頂点とする三角形に分けて三角形毎の重心を算出し、この重心を用いて多角形の中心点を算出する。
例えば、http://izumi-math.jp/F_Nakamura/heso/heso3.htmに記される方法が用いられ得る。図19(a)には、算出される重心点Gの画素位置情報の一例が示されている。
【0074】
次に、距離算出部34cは、疑種外周HSDをDB38から読み出して、疑種外周HSDを取得して、IDでソートを行う(ステップS112)。これにより、IDの番号の低い順番に並べられる。この後、距離算出部34cは、変数jおよび変数pを0として設定する(ステップS114,S116)。
【0075】
次に、距離算出部34cは、疑種外周HSDの画素のうち外側外周の全画素についてステップS110で算出した中心点Gとの間の距離を算出したか否かを判定する(ステップS118)。ここで、疑種外周HSDの画素のうち外側外周とは、疑第1領域を囲む外周のうち、中心点Gから遠い外側の外周部分をいう。例えば、図13(c)に示すように疑第1領域の外周(点線)のうち、中心点Gから疑第1領域の外周に向けて直線を引いたとき、重心点Gから近い外周の部分と遠い外周の部分がある。この部分が遠い外周の部分であり、外側外周という。
ステップS118における判定の結果が肯定である場合、距離算出の処理は終了する。一方、ステップS118における判定結果が否定である場合、距離算出部34cは、変数jをj+1に増やして(変数jを1つ増加して)(ステップS120)、IDがjである疑種外周HSDを抽出する(ステップS122)。さらに、距離算出部34cは、IDがjである疑種外周HSDの画素に最も近接した蔕外周HSDの画素を抽出する(ステップS124)。このとき、抽出した最も近接した蔕外周HSDの画素のIDをmとする。
【0076】
次に、距離算出部34cは、中心点GとIDがjである疑種外周HSDの画素との間の距離d1を算出し、さらに、中心点GとIDがmである蔕外周HSDの画素との間の距離d2を算出する(ステップS126、S128)。このとき、距離算出部34cは、距離d1が距離d2に比べて大きいか否かを判定する(ステップS130)。この判定結果が否定である場合、ステップS118に戻る。一方、上記判定結果が肯定である場合、距離算出部34cは変数pをp+1に増やして(変数pを1つ増加して)(ステップS132)、ステップS122で抽出したIDがjである蔕外周HSDの画素にIDとして変数pを付与し、距離d1を算出すべき距離としてDB38に記憶させる(ステップS134)。ステップS130の判定において距離d2に比べて距離d1が長いことは、距離d1の算出に用いた疑種外周HSDの画素が、疑種外周HSDの画素のうち外側外周の画素であることを意味する。また、距離d1を算出するのは、疑第1領域の幾何形状の特徴量を求めるためである。図19(b),(c)には、算出された距離d1,d2の一例が示されている。図19(d)には、算出した距離の一例が示されている。
以上のようにして距離が算出される。
【0077】
次に、図12に示すステップS53に戻って、ステップS53〜S56の処理が行われる。これらの処理は、結果付与部34d(図2参照)で行われる。結果付与部34dは、DB38に記憶された全ての距離を読み出し、距離の平均値および標準偏差を疑第1領域の幾何学形状の特徴量として算出する(ステップS53)。この後、結果付与部34dは、算出した距離の平均値が予め設定した距離判定用閾値に対して大きく、かつ、算出した距離の標準偏差が予め設定した標準偏差用閾値に対して小さいか否かを判定する(ステップS54)。この判定の結果が否定である場合、結果付与部34dは、後述するステップS56に移る。一方、上記判定の結果が肯定である場合、結果付与部34dは、疑第1領域に含まれる画素のHSDに「種」である可能性が極めて高い「ほぼ種」を付与する(ステップS55)。
【0078】
図20は、ステップS53〜S55の結果付与の処理のフローをより詳細に示す図である。すなわち、結果付与部34dは、距離の平均値aveと標準偏差sdを算出する(ステップS120)。結果付与部34dは、算出した平均値aveが予め定められた距離判定用閾値T(ave)に対して大きいか否かを判定する(ステップS122)。判定結果が否定である場合、結果付与部34dは結果付与の処理を終了する。一方、判定結果が肯定である場合、結果付与部34dは、さらに、算出した標準偏差sdが予め定められた標準偏差用閾値T(sd)に対して小さいか否かを判定する(ステップS124)。判定結果が否定である場合、結果付与部34dは結果付与の処理を終了する。一方、判定結果が肯定である場合、結果付与部34dは、この疑第1領域の各画素のHSDに「ほぼ種」を付与する(ステップS126)。このように、ステップS53で算出した距離の平均値と標準偏差を「種」の判定条件に用いることで、種の有無の判別をより精度良く行うことができる。距離の標準偏差が標準偏差用閾値T(sd)よりも小さいとは、上記距離が大きく変動せず、すなわち、疑第1領域が入り組んだ複雑な形状でなく、種のように滑らかな形状であることを意味する。「ほぼ種」が付与されたHSDは、クラス付与済みHSDとしてDB38に記憶される。
【0079】
次に、図12に戻り、ステップS56の処理が行われる。この処理は、種有無判別部34e(図2参照)で行われる。種有無判別部34eは、DB38に記憶された検査用透過光画像のクラス付与済みHSDの画素を読み出して、「種」あるいは「ほぼ種」が付与された画素があるか否かを判定する(ステップS56)。「種」が付与された画素は、第1領域に属する画素である。また、「ほぼ種」が付与された画素は、ステップS54の判定結果が肯定されて、「ほぼ種」が付与された疑第1領域に含まれる画素である。上記判定において、「種」あるいは「ほぼ種」が付与された画素が無い場合(ステップS56の判定においてNOの場合)、種有無判別部34eは、検査用干し柿に種はないと判別する(ステップS59)。一方、「種」あるいは「ほぼ種」が付与された画素がある場合(ステップS56の判定においてYESの場合)、種有無判別部34eは、「種」および「ほぼ種」が付与された画素の面積の合計が、予め設定された面積比較用閾値に比べて大きいか否かを判定する(ステップS57)。面積比較用閾値には、検査用透過光画像における種に該当する領域の面積の平均値に対して、1より小さい係数を乗算した積が用いられる。1より小さい係数とは、例えば0.9である。すなわち、種に該当する領域の面積の平均値に対して10%小さい面積を面積比較用閾値とする。このように、「種」および「ほぼ種」が付与された画素の面積の合計に下限を設定するのは、第1領域の誤った推定、疑第1領域の誤った推定、および「ほぼ種」の誤った判定によって、誤った判別結果にならないようにするためである。種はある程度の大きさを有するため、ステップS57におけるスクリーニングにより、種の有無を確実に判別することができる。
【0080】
ステップS57の判定結果が肯定である場合、種有無判別部34eは、検査用干し柿に種がある、と判別する(ステップS58)。一方、ステップS57の判定結果が否定である場合、種有無判別部34eは、検査用干し柿に種がない、と判別する(ステップS59)。
最後に、結果出力部36は、ステップS58,S59における判別結果を、ディスプレイ19、プリンタ24に出力させる(ステップS60)。判別結果とともに、判別に用いられた検査用透過光画像あるいは検査方法で算出された情報が出力されてもよい。
【0081】
以上のように、本実施形態は、「疑種」のHSDを既知事例として予め記憶し、疑第1領域を抽出して、疑第1領域の幾何学形状の特徴量を算出するので、この特徴量を用いて食用果実の内部を精度良く検査することができる。
また、本実施形態は、「種」に該当する第1領域、「蔕」に該当する第2領域、および「果肉」に該当する第3領域のいずれにも属しない残存領域を残存部位とし、この残存部位に該当する残存領域の各画素について交差検定を行う。このため、本実施形態は、「種」の候補となる「疑種」を確実に既知事例として得ることができる。
本実施形態は、残存領域の各画素の画素値の組について、「種」、「蔕」、および「果肉」の既知事例との間で類似度を算出するので、各画素の部位の推定を定量的に精度良く行うことができる。
検査用透過光画像の各画素の画素値の組と、既知事例との間で類似度を算出し、算出した類似度に基づいて部位を推定するとき得られる確信度に基づいて、第1領域、第2領域および疑第1領域を抽出する。このため、検査用透過光画像の各画素の部位の推定を定量的に精度良く行うことができる。
また、疑第1領域が、「種」に該当するか否かを判定するとき、本実施形態は、「蔕」に該当する第2領域の中心点と、疑第1領域の、中心点から遠い外側外周部分との間の距離を算出することによって疑第1領域の幾何学形状の特徴量を算出する。このため、特徴量が「種」の条件を満たすか否かを判定することができ、種の有無を精度良く判別することができる。
さらに、本実施形態は、疑第1領域および第1領域の合計の面積が、予め設定された面積比較用閾値を超えるか否かを判定する。このため、種の有無の判別結果の誤りはより少なくなる。
【0082】
上記実施形態及び変形例は、以下に示す内容を開示する。
【0083】
(付記1)
食用果実の内部を検査する食用果実検査装置が行う検査方法であって、
前記食用果実検査装置は、参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶し、
食用果実の内部を検査するとき、前記食用果実検査装置は、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、ことを特徴とする食用果実の検査方法。
【0084】
(付記2)
前記既知事例は、前記第1部位の画素値の組、前記第2部位の画素値の組、前記第1部位および前記第2部位に対して前記波長帯域の画素値によって識別される第3領域の画素値の組、および前記疑第1部位の画素値の組を含み、
前記食用果実検査装置は、前記参照用透過光画像から前記既知事例を作成するとき、前記参照用透過光画像の中から、前記第1部位に該当する第1領域、前記第2部位に該当する第2領域、および前記第3部位に該当する第3領域を抽出し、
さらに、前記第1領域、前記第2領域、および前記第3領域のいずれにも属しない残存領域を残存部位として、前記残存部位に該当する前記残存領域の各画素について、当該各画素を除いた前記残存領域の他の画素、前記第1領域に属する画素、前記第2領域に属する画素、および前記第3領域に属する画素を既知の部位の画素として用いて交差検定を行うことにより、前記残存領域の各画素の部位を推定し、推定時に得られる推定の確信度が閾値より低く、前記第2領域の周りに位置する前記残存領域の画素を見出し、当該見出した画素における画素値の組を前記疑第1部位の既知事例として求めて記憶する、付記1に記載の検査方法。
【0085】
(付記3)
前記残存領域の各画素の部位の推定は、前記残存領域の各画素の画素値の組について、前記第1部位、前記第2部位、および前記第3部位のそれぞれの既知事例との間で第1類似度を算出することにより行う、付記2に記載の検査方法。
【0086】
(付記4)
前記第1類似度は、類似するか否かを調べる2つの画素値の組の間で、対応する画素値同士の差分を規格化した値を用いて算出する、付記3に記載の検査方法。
【0087】
(付記5)
前記検査用透過光画像の各画素の画素値の組と、前記既知事例それぞれとの間で第2類似度を算出し、算出した前記第2類似度に基づいて部位を推定するとき得られる第2確信度に基づいて、前記第1領域、前記第2領域および前記疑第1領域を抽出する、付記1〜4のいずれか1項に記載の検査方法。
【0088】
(付記6)
前記第2類似度は、類似するか否かを調べる2つの画素値の組の間で、対応する画素値同士の差分を規格化した値を用いて算出する、付記5に記載の検査方法。
【0089】
(付記7)
前記特徴量は、前記第2領域の中心点と、前記疑第1領域の前記中心点からみて外側の外周部分との間の距離を算出することにより得られる値である、付記1〜6のいずれか1項に記載の検査方法。
【0090】
(付記8)
前記特徴量は、前記外周部分における前記距離の平均値および標準偏差である、付記7に記載の検査方法。
【0091】
(付記10)
前記疑第1領域の前記特徴量が、前記第1部位の条件を満たす場合、さらに、前記疑第1領域および前記第1領域の合計の面積が、予め設定された閾値を超えるか否かを判定する、付記1〜8のいずれか1項に記載の検査方法。
【0092】
(付記10)
食用果実の内部の検査を、コンピュータに実行させる検査プログラムであって、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例としてコンピュータの記憶手段は予め記憶させ、
食用果実の内部を検査するとき、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、処理をコンピュータに実行させることを特徴とする検査プログラム。
【0093】
(付記11)
食用果実の内部を検査する食用果実の検査装置であって、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する記憶部と、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定する推定部と、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する判別部と、とを有することを特徴とする食用果実の検査装置。
【0094】
以上、本発明の食用果実の検査方法、検査装置およびプログラムについて詳細に説明したが、本発明は上記実施形態に限定されず、本発明の主旨を逸脱しない範囲において、種々の改良や変更をしてもよいのはもちろんである。
【符号の説明】
【0095】
10 検査装置
12 CPU
14 ROM
16 RAM
18 ハードディスクドライブ装置
19 ディスプレイ
20 キーボード
22 マウス
24 プリンタ
25 インターフェース
26 バス
28 カメラ
30 クラス付与部
32 推定部
34 判別部
34a 蔕外周HSD抽出部
34b 疑種外周HSD抽出部
34c 距離算出部
34d 結果付与部
34e 種有無判別部
36 結果出力部
【特許請求の範囲】
【請求項1】
食用果実の内部を検査する食用果実検査装置が行う検査方法であって、
前記食用果実検査装置は、参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶し、
食用果実の内部を検査するとき、前記食用果実検査装置は、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、ことを特徴とする食用果実の検査方法。
【請求項2】
前記既知事例は、前記第1部位の画素値の組、前記第2部位の画素値の組、前記第1部位および前記第2部位に対して前記波長帯域の画素値によって識別される第3領域の画素値の組、および前記疑第1部位の画素値の組を含み、
前記食用果実検査装置は、前記参照用透過光画像から前記既知事例を作成するとき、前記参照用透過光画像の中から、前記第1部位に該当する第1領域、前記第2部位に該当する第2領域、および前記第3部位に該当する第3領域を抽出し、
さらに、前記第1領域、前記第2領域、および前記第3領域のいずれにも属しない残存領域を残存部位として、前記残存部位に該当する前記残存領域の各画素について、当該各画素を除いた前記残存領域の他の画素、前記第1領域に属する画素、前記第2領域に属する画素、および前記第3領域に属する画素を既知の部位の画素として用いて交差検定を行うことにより、前記残存領域の各画素の部位を推定し、推定時に得られる推定の確信度が閾値より低く、前記第2領域の周りに位置する前記残存領域の画素を見出し、当該見出した画素における画素値の組を前記疑第1部位の既知事例として求めて記憶する、請求項1に記載の検査方法。
【請求項3】
前記残存領域の各画素の部位の推定は、前記残存領域の各画素の画素値の組について、前記第1部位、前記第2部位、および前記第3部位のそれぞれの既知事例との間で第1類似度を算出することにより行う、請求項2に記載の検査方法。
【請求項4】
前記検査用透過光画像の各画素の画素値の組と、前記既知事例それぞれとの間で第2類似度を算出し、算出した前記第2類似度に基づいて部位を推定するとき得られる第2確信度に基づいて、前記第1領域、前記第2領域および前記疑第1領域を抽出する、請求項1〜3のいずれか1項に記載の検査方法。
【請求項5】
前記特徴量は、前記第2領域の中心点と、前記疑第1領域の前記中心点からみて外側の外周部分との間の距離を算出することにより得られる値である、請求項1〜4のいずれか1項に記載の検査方法。
【請求項6】
前記疑第1領域の前記特徴量が、前記第1部位の条件を満たす場合、さらに、前記疑第1領域および前記第1領域の合計の面積が、予め設定された閾値を超えるか否かを判定する、請求項1〜5のいずれか1項に記載の検査方法。
【請求項7】
食用果実の内部の検査を、コンピュータに実行させる検査プログラムであって、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例としてコンピュータの記憶手段に予め記憶させ、
食用果実の内部を検査するとき、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、処理をコンピュータに実行させることを特徴とする検査プログラム。
【請求項8】
食用果実の内部を検査する食用果実の検査装置であって、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する記憶部と、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定する推定部と、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する判別部と、とを有することを特徴とする食用果実の検査装置。
【請求項1】
食用果実の内部を検査する食用果実検査装置が行う検査方法であって、
前記食用果実検査装置は、参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶し、
食用果実の内部を検査するとき、前記食用果実検査装置は、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、ことを特徴とする食用果実の検査方法。
【請求項2】
前記既知事例は、前記第1部位の画素値の組、前記第2部位の画素値の組、前記第1部位および前記第2部位に対して前記波長帯域の画素値によって識別される第3領域の画素値の組、および前記疑第1部位の画素値の組を含み、
前記食用果実検査装置は、前記参照用透過光画像から前記既知事例を作成するとき、前記参照用透過光画像の中から、前記第1部位に該当する第1領域、前記第2部位に該当する第2領域、および前記第3部位に該当する第3領域を抽出し、
さらに、前記第1領域、前記第2領域、および前記第3領域のいずれにも属しない残存領域を残存部位として、前記残存部位に該当する前記残存領域の各画素について、当該各画素を除いた前記残存領域の他の画素、前記第1領域に属する画素、前記第2領域に属する画素、および前記第3領域に属する画素を既知の部位の画素として用いて交差検定を行うことにより、前記残存領域の各画素の部位を推定し、推定時に得られる推定の確信度が閾値より低く、前記第2領域の周りに位置する前記残存領域の画素を見出し、当該見出した画素における画素値の組を前記疑第1部位の既知事例として求めて記憶する、請求項1に記載の検査方法。
【請求項3】
前記残存領域の各画素の部位の推定は、前記残存領域の各画素の画素値の組について、前記第1部位、前記第2部位、および前記第3部位のそれぞれの既知事例との間で第1類似度を算出することにより行う、請求項2に記載の検査方法。
【請求項4】
前記検査用透過光画像の各画素の画素値の組と、前記既知事例それぞれとの間で第2類似度を算出し、算出した前記第2類似度に基づいて部位を推定するとき得られる第2確信度に基づいて、前記第1領域、前記第2領域および前記疑第1領域を抽出する、請求項1〜3のいずれか1項に記載の検査方法。
【請求項5】
前記特徴量は、前記第2領域の中心点と、前記疑第1領域の前記中心点からみて外側の外周部分との間の距離を算出することにより得られる値である、請求項1〜4のいずれか1項に記載の検査方法。
【請求項6】
前記疑第1領域の前記特徴量が、前記第1部位の条件を満たす場合、さらに、前記疑第1領域および前記第1領域の合計の面積が、予め設定された閾値を超えるか否かを判定する、請求項1〜5のいずれか1項に記載の検査方法。
【請求項7】
食用果実の内部の検査を、コンピュータに実行させる検査プログラムであって、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例としてコンピュータの記憶手段に予め記憶させ、
食用果実の内部を検査するとき、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、
取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定し、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する、処理をコンピュータに実行させることを特徴とする検査プログラム。
【請求項8】
食用果実の内部を検査する食用果実の検査装置であって、
参照用食用果実の内部構造における複数の部位のそれぞれと、参照用食用果実の透過光を所定の波長帯域で受光した参照用透過光画像の画素値の組との間で対応付けを行うことによって、前記内部構造における第1部位、第2部位、および前記第1部位の候補となる疑第1部位の画素値の組を少なくとも既知事例として予め記憶する記憶部と、
検査用食用果実の透過光を前記波長帯域で受光して得られる検査用透過光画像を取得し、取得された前記検査用透過光画像と記憶されている前記既知事例とを用いて、前記透過光画像内で、前記第1部位として識別される第1領域、前記第2部位として識別される第2領域、および、前記第2領域の周りに位置し、前記疑第1部位として識別される領域を含む疑第1領域を抽出することにより、前記内部構造を推定する推定部と、
前記疑第1領域の、前記第2領域に対する幾何学形状の特徴量を算出し、算出した前記特徴量が前記第1部位の条件を満たすか否かを判定して、検査用食用果実に前記第1部位が存在するか否かを判別する判別部と、とを有することを特徴とする食用果実の検査装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2012−234245(P2012−234245A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−100436(P2011−100436)
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]