
首振り装置
【課題】上下左右方向等立体方向に均等に首振り運動ができる首振り装置を提供する。
【解決手段】固定枠部11に、第一揺動軸21,22を介して可動枠部16を軸支すると共に、第三揺動軸32,33を介してガイド部34を有するカムガイド24を軸支する。また、前記可動枠部16に、第二揺動軸30,31を介して、首振り可動部9を軸支すると共に、この首振り可動部9に、前記ガイド部34に案内されて摺動するカム25を設ける。また、首振り用電動機36により駆動される第一ギア39及びこれと噛合する第二ギア40を設け、これらと第一リンク機構42及び第二リンク機構43によって、前記可動枠部16及びカムガイド24を正確に同期させて揺動させる。これによって、前記第一揺動軸21,22を中心とした揺動と、前記第二揺動軸30,31を中心とした揺動とが合成され、前記首振り可動部9が立体的に且つ均等に揺動する。
【解決手段】固定枠部11に、第一揺動軸21,22を介して可動枠部16を軸支すると共に、第三揺動軸32,33を介してガイド部34を有するカムガイド24を軸支する。また、前記可動枠部16に、第二揺動軸30,31を介して、首振り可動部9を軸支すると共に、この首振り可動部9に、前記ガイド部34に案内されて摺動するカム25を設ける。また、首振り用電動機36により駆動される第一ギア39及びこれと噛合する第二ギア40を設け、これらと第一リンク機構42及び第二リンク機構43によって、前記可動枠部16及びカムガイド24を正確に同期させて揺動させる。これによって、前記第一揺動軸21,22を中心とした揺動と、前記第二揺動軸30,31を中心とした揺動とが合成され、前記首振り可動部9が立体的に且つ均等に揺動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、扇風機、サーキュレータ等の送風機、赤外線ヒータ等の電気ヒータなどに用いられる首振り装置に関するものである。
【背景技術】
【0002】
従来、上下方向及び左右方向の首振りを同時に行う首振り装置を用いた装置として、首振り用の電動機の回転力を平歯車に伝え、この平歯車の回転をロッドによって往復運動に変換することで、主電動機を左右方向に首振り運動させると共に、前記首振り用の電動機の回転を、傘歯車を用いて前記平歯車の回転軸と直交する回転軸回りに回転するようにさせ、この傘歯車の回転をロッドによって往復運動に変換することで、主電動機を上下方向に首振り運動させる扇風機が知られている(例えば特許文献1)。
【0003】
また、左右方向用首振りモータの回転力により、主電動機を左右方向に首振り運動させると共に、上下方向用首振りモータの回転力により、主電動機を上下方向に首振り運動させるものも知られている(例えば特許文献2)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭59−65593号公報
【特許文献2】特開昭59−65594号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
両者の従来技術は、左右方向と上下方向の首振り運動を個別に見れば、それぞれ均等に働くため、一見、合成された首振り運動も上下左右方向に均等となるように見える。しかしながら、実際には、両者とも例えば「8」の字状に首振りさせようとしても、歪んだ軌道を描き、上下及び左右に不均等に動くという問題があった。特に、後者の従来技術では、左右方向用首振りモータの回転数と上下方向用首振りモータの回転数が完全に一致しなければ、「8」の字状の首振り運動の軌道が徐々にずれる虞がある。
【0006】
このように、従来技術において、首振りを正確な「8」の字状の軌道にすることができないのは、左右方向の首振り運動と上下方向の首振り運動との同期が正確でないことに起因する。
【0007】
本発明は以上の問題点を解決し、上下左右方向等、立体方向に均等に首振り運動ができる首振り装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の請求項1に記載の首振り装置は、固定枠部と、この固定枠部に対して第一揺動軸回りに揺動可能に軸支される可動枠部と、この可動枠部に対し、前記第一揺動軸と直交する第二揺動軸回りに揺動可能に軸支される首振り可動部と、電動機等の駆動源と、この駆動源によって前記第一回転軸回りに回転させられる第一回動部材と、前記第一回動部材の回転に伴って前記第一回転軸と直交する第二回転軸回りに回転する第二回動部材と、前記第一回動部材に一端が接続された第一リンク機構と、前記第二回動部材に一端が接続された第二リンク機構とを有して構成される首振り装置であって、前記第一揺動軸と直交する第三揺動軸回りに揺動可能であると共に、ガイド部を有するカムガイドを前記固定枠部に軸支し、前記ガイド部に案内されて摺動するカムを前記首振り可動部に設けると共に、前記第一リンク機構の他端を前記可動枠部又はカムガイドの何れか一方に接続し、前記第二リンク機構の他端を前記可動枠部又はカムガイドの何れか他方に接続したものである。
【0009】
また、本発明の請求項2に記載の首振り装置は、請求項1において、前記ガイド部が、前記第一揺動軸と前記第三揺動軸の交点を中心とする円弧状に形成されるものである。
【0010】
また、本発明の請求項3に記載の首振り装置は、請求項1又は2において、前記第一回動部材及び前記第二回動部材が、それぞれギアによって形成されるものである。
【0011】
更に、本発明の請求項4に記載の首振り装置は、請求項1〜3のいずれかにおいて、前記第一回動部材と前記第二回動部材間の回転比が整数であるものである。
【発明の効果】
【0012】
請求項1の発明によれば、前記駆動源によって、前記可動枠部が前記第一揺動軸を回動中心として揺動すると、前記首振り可動部も、前記第一揺動軸回りに揺動する。この際、前記首振り可動部に設けられた前記カムは、前記カムガイドのガイド部に案内されて摺動する。同時に、前記カムガイドは、前記第三揺動軸を回動中心として揺動する。この際、前記カムが設けられた前記首振り可動部は、揺動する前記カムガイドによって、前記第二揺動軸を回動中心として揺動する。このように、第一揺動軸回りの揺動と第二揺動軸回りの揺動とが合成されることで、前記首振り可動部は立体的に首振りする。この際、前記可動枠部とカムガイドの揺動が、互いに悪影響を与え合わないので、前記首振り可動部を正確且つ均等に首振りさせることができる。
【0013】
なお、前記ガイド部を、前記第一揺動軸と第三揺動軸の交点を中心とする円弧状に形成することで、前記カムとガイド部との当接位置から前記首振り可動部の揺動中心までの距離が変化しないので、前記首振り可動部を揺動させる際の負荷が変化せず、この首振り可動部をスムーズに揺動させることができる。
【0014】
また、前記第一回動部材及び第二回動部材をそれぞれギアによって形成することで、両者間の回転力の伝動をタイミング良く伝えることができる。
【0015】
更に、前記第一回動部材と第二回動部材間の回転比を整数とすることで、前記首振り可動部の軌道をずらさず、前記第一回動部材又は第二回転部材の1回転で「8」の字状等の1サイクルとすることができる。
【図面の簡単な説明】
【0016】
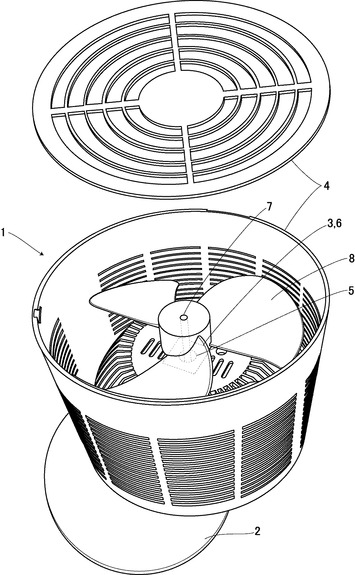
【図1】本発明の実施例1を示す首振り装置を用いたサーキュレータの全体斜視図である。
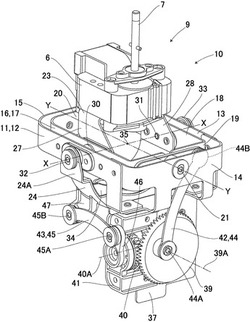
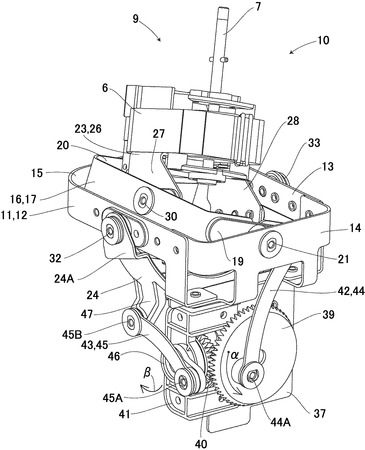
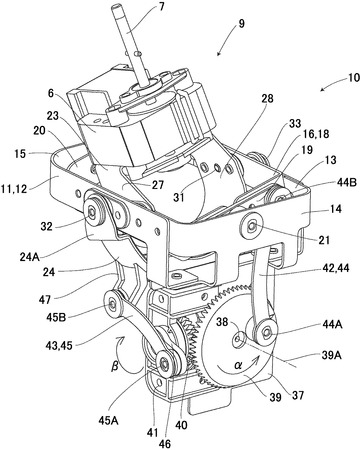
【図2】同、首振り装置の第一行程における一部分解斜視図である。
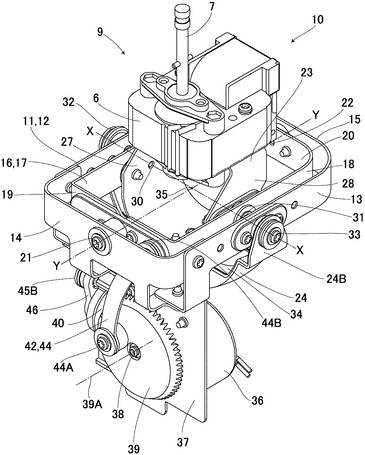
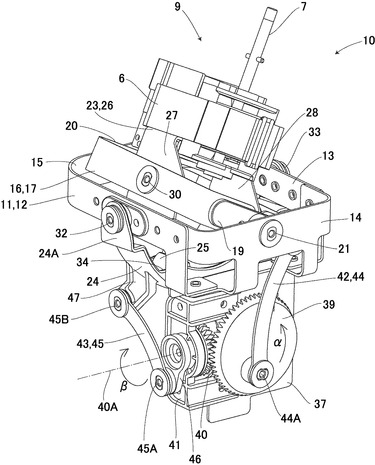
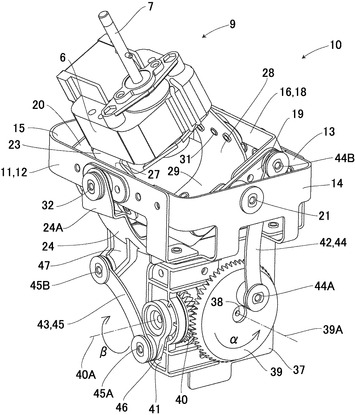
【図3】同、首振り装置の他の方向から見た第一行程における斜視図である。
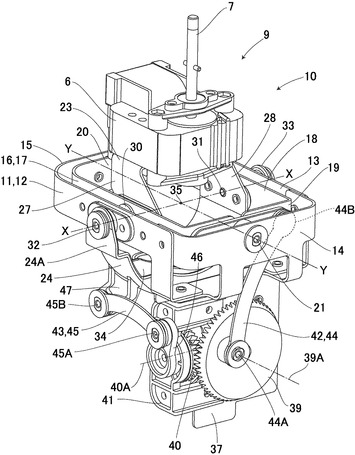
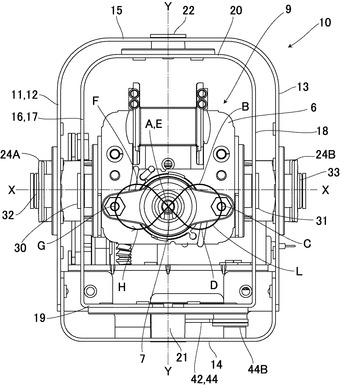
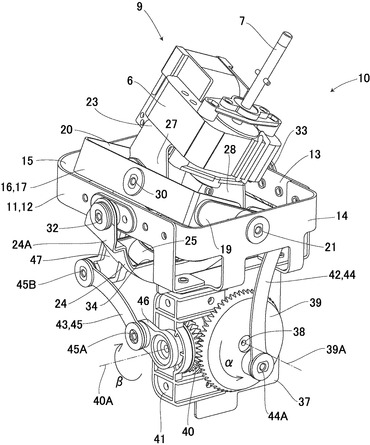
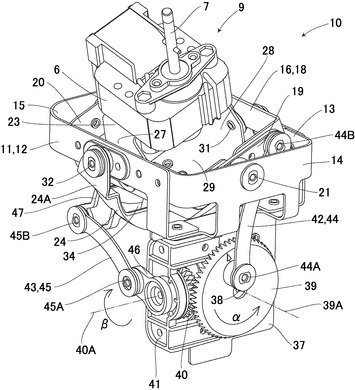
【図4】同、首振り装置の平面図である。
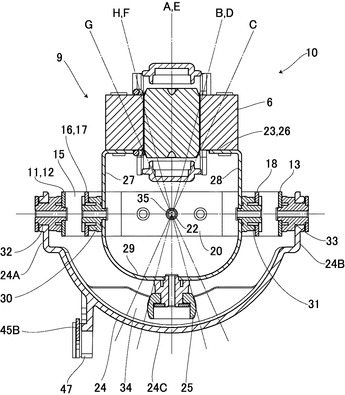
【図5】同、図4のX−X線断面図である。
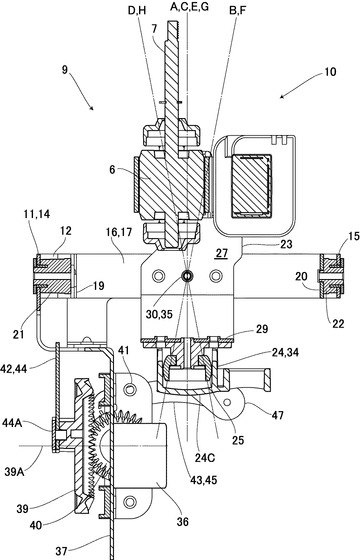
【図6】同、図4のY−Y線断面図である。
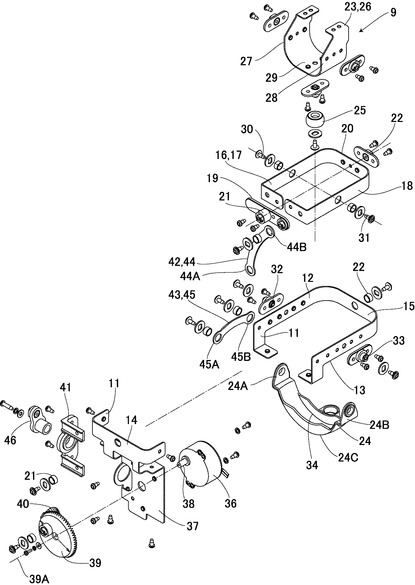
【図7】同、首振り装置の分解斜視図である。
【図8】同、首振り装置の第二行程における斜視図である。
【図9】同、首振り装置の第三行程における斜視図である。
【図10】同、首振り装置の第四行程における斜視図である。
【図11】同、首振り装置の第五行程における斜視図である。
【図12】同、首振り装置の第六行程における斜視図である。
【図13】同、首振り装置の第七行程における斜視図である。
【図14】同、首振り装置の第八行程における斜視図である。
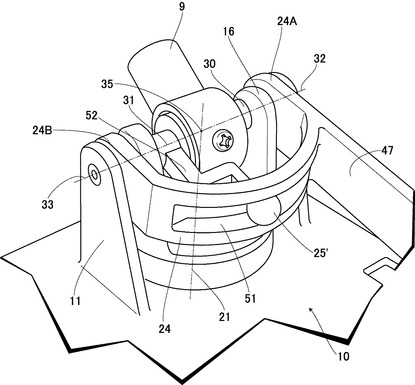
【図15】本発明の実施例2を示す首振り装置の斜視図である。
【発明を実施するための形態】
【0017】
本発明における好適な実施の形態について、添付図面を参照して説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を限定するものではない。また、以下に説明される構成の全てが、本発明の必須要件であるとは限らない。
【実施例1】
【0018】
以下、本発明の実施例1について、図1〜図14に基づいて説明する。なお、この実施例1は、サーキュレータの場合を示している。図1に示すように、このサーキュレータ1は、設置用の台2の上方に図示しない支持ケースを介して設けられた送風装置3と、この送風装置3の周囲及び先方を保護する保護枠4とを備える。この保護枠4には貫通部5が形成される。また、前記支持ケース内には、送風用電動機6が設けられる。そして、この送風用電動機6の回転軸7は、前記貫通部5を通って前記保護枠4内に突出すると共に、その先端に羽根8が固定される。そして、前記送風用電動機6と羽根8によって、前記送風装置3が構成される。
【0019】
次に、前記送風用電動機6を含む首振り可動部9を、「8」の字型の軌道Lとなるように揺動させる首振り装置10の構造について、図2〜図7を参照して説明する。前記支持ケース内に前記首振り装置10の固定枠部11が固定される。この固定枠部11は、一対の第一長辺部12,13と、これら一対の第一長辺部12,13と直交する一対の第一短辺部14,15とを有する矩形の枠形状であって、前記支持ケースに固定される。
【0020】
そして、前記固定枠部11の内側に、所定の間隔を空けて、可動枠部16が揺動自在に設けられる。この可動枠部16は、一対の第二長辺部17,18と、これら一対の第二長辺部17,18と直交する一対の第二短辺部19,20を有する矩形の枠形状である。そして、前記可動枠部16は、図2乃至図4の姿勢において、前記各第二長辺部17,18が前記各第一長辺部12,13と平行になるように、且つ、前記各第二短辺部19,20が前記各第一短辺部14,15と平行になるように、前記固定枠部11の内側に間隔を空けて配置される。そして、対向する前記第一短辺部14と第二短辺部19は、一方の第一揺動軸21を介して接続される。同様に、前記第一短辺部15と第二短辺部20は、他方の第一揺動軸22を介して接続される。前記第一揺動軸21は、前記第一短辺部14の略中央と第二短辺部19の略中央とを回動自在に接続する短軸により形成される。同様に、前記第一揺動軸22は、前記第一短辺部15の略中央と第二短辺部20の略中央とを回動自在に接続する短軸により形成される。そして、前記各第一揺動軸21,22は、同軸に配置される。これによって、前記可動枠部16は、前記固定枠部11に対し、前記各第一揺動軸21,22を揺動中心として揺動可能となる。
【0021】
前記可動枠部16の内側には、前記首振り可動部9を構成する取付枠23が設けられ、この取付枠23に前記送風用電動機6が取り付けられる。また、前記取付枠23には、カムガイド24の動きに従動するカム25が突設される。そして、前記取付枠23は、前記送風用電動機6を固定するための一対の台座部26と、これらの台座部26を一端に有する一対の支持用腕部27,28と、これらの支持用腕部27,28の他端同士を接続する底部29とで一体に形成される。そして、対向する前記第二長辺部17と支持用腕部27は、一方の第二揺動軸30を介して接続される。同様に、対向する前記第二長辺部18と支持用腕部28は、他方の第二揺動軸31を介して接続される。前記第二揺動軸30は、前記第二長辺部17の略中央と支持用腕部27の略中央とを回動自在に接続する短軸により形成される。同様に、前記第二揺動軸31は、前記第二長辺部18の略中央と支持用腕部28の略中央とをそれぞれ回動自在に接続する短軸により形成される。そして、前記各第二揺動軸30,31は、同軸に配置される。なお、前記各第二揺動軸30,31の軸心は、前記各第一揺動軸21,22の軸心と直交する。これによって、前記取付枠23、ひいては前記首振り可動部9は、前記可動枠部16に対し、前記各第二揺動軸30,31を揺動中心として揺動可能となる。また、前記カム25は、前記底部29の略中央に固定される。
【0022】
前記カムガイド24は、一対の基端部24A,24Bと、これらの基端部24A,24Bを接続する円弧状部24Cとを有して一体に形成される。前記基端部24Aは、前記固定枠部11の第一長辺部12の略中央に対し、外側から対向する。また、前記基端部24Bは、前記固定枠部11の第一長辺部13の略中央に対し、外側から対向する。更に、前記円弧状部24Cは、前記取付枠23の底部29に対し、外側から対向する。そして、対向する前記第一長辺部12と基端部24Aは、一方の第三揺動軸32を介して回動自在に接続される。同様に、対向する前記第一長辺部13と基端部24Bは、他方の第三揺動軸33を介して回動自在に接続される。そして、前記各第三揺動軸32,33は、それぞれ短軸により形成されると共に、同軸に配置される。なお、これらの第三揺動軸32,33の軸心は、前記各第一揺動軸21,22の軸心と直交する。本実施例では、図2乃至図4の姿勢において、前記各第二揺動軸30,31の軸心と前記各第三揺動軸32,33の軸心が一致する(X−X線)と共に、これらの揺動軸30,31,32,33の軸心が、前記各第一揺動軸21,22の軸心(Y−Y線)と直交する。なお、前記各第二揺動軸30,31の軸心と、前記各第三揺動軸32,33の軸心は、前記可動枠部16が前記各第一揺動軸21,22回りに揺動することで、同軸からずれる。また、前記円弧状部24Cには、この円弧状部24Cの長さ方向に沿って溝状のガイド部34が形成される。このガイド部34は、前記各第一揺動軸21,22の軸心と前記各第三揺動軸32,33の軸心との交点35を中心とした円弧状に形成される。前記ガイド部34は、前記カム25と遊嵌すると共に、その溝の長さ方向にのみ前記カム25が摺動することを許容する。そして、前記可動枠部16に軸支された前記首振り可動部9のカム25は、前記可動枠部16が前記各第一揺動軸21,22回りに揺動することで、前記ガイド部34に案内されて、その溝の長さ方向に沿って摺動するように構成される。一方、前記カム25は、前記カムガイド24が前記第三揺動軸32,33回りに揺動することで、前記カムガイド24に従動して、摺動方向と直交する方向に揺動するように構成される。この際、前記首振り可動部9は、前記第二揺動軸30,31回りに揺動する。
【0023】
前記固定枠部11には、前記首振り装置10の駆動源となる首振り用電動機36が固定される。この首振り用電動機36は、前記固定枠部11の第一短辺部14から延在して設けられた第一取付部37に装着される。なお、前記首振り用電動機36は、その回転軸38が前記第一揺動軸21,22の軸心と平行となるように配置される。そして、前記回転軸38には、伝動用の第一回動部材である第一ギア39が固定される。このため、この第一ギア39の回転中心は、前記第一揺動軸21,22と平行になる。また、前記第一ギア39と噛合うように、伝動用の第二回動部材である第二ギア40が設けられる。この第二ギア40は、前記第一長辺部12の下方に設けられた第二取付部41に対し回転可能に保持される。そして、前記第二ギア40の回転軸40Aは、前記第一ギア39の回転軸39A、即ち前記首振り用電動機36の回転軸38と直交する。なお、前記第一ギア39の歯数は、前記第二ギア40の歯数の整数倍に設定される。本実施例では、前記第一ギア39の歯数と前記第二ギア40の歯数との比を2:1とすることで、前記第一ギア39の回転数と前記第二ギア40の回転数との比は1:2となる。
【0024】
そして、前記第一ギア39と前記可動枠部16との間には、第一リンク機構42が介在する。また、前記第二ギア40と前記カムガイド24との間には、第二リンク機構43が介在する。前記第一リンク機構42を構成する第一リンクアーム44は、その一端44Aを前記回転軸39Aから偏心させて、前記第一ギア39に対し揺動可能に接続すると共に、その他端44Bを前記第一揺動軸21から偏心させて、前記第二短辺部19に対し揺動可能に接続する。また、前記第二リンク機構43を構成する第二リンクアーム45は、その一端45Aを前記回転軸40Aから偏心させて、前記第二ギア40に接続された偏心アーム46に対し揺動可能に接続すると共に、その他端45Bを、前記第三揺動軸32,33から偏心させて前記カムガイド24と一体に設けられた中継部47に対し、揺動可能に接続される。
【0025】
次に前記構成について、作用を説明する。前記首振り用電動機36が回転すると、前記電動機36の回転軸38、即ち前記第一ギア39の回転軸39A回りに、前記第一ギア39が回転する。そして、前記第一ギア39が回転することで、前記第一リンク機構42によって、前記可動枠部16が前記第一揺動軸21,22を中心として揺動する。同時に、前記第一ギア39に従動して、この第一ギア39と噛合する第二ギア40も回転する。そして、前記第二ギア40が回転することで、前記第二リンク機構43によって、前記カムガイド24が前記第三揺動軸32,33を中心として揺動する。この際、従来の構造と異なり、前記可動枠部16の揺動姿勢によらず、前記第二ギア40の回転軸40Aから前記各第三揺動軸32,33の軸心までの距離が変化せず、また、前記カムガイド24の揺動姿勢によらず、前記第一ギア39の回転軸39Aから前記各第一揺動軸21,22の軸心までの距離が変化しない。このため、前記可動枠部16の揺動が前記カムガイド24の揺動に影響を与えず、逆に、前記カムガイド24の揺動も前記可動枠16の揺動に影響を与えない。一方、前記首振り可動部9は、前記可動枠部16の揺動に伴って、前記各第一揺動軸21,22を中心に揺動すると共に、前記カムガイド24の揺動に伴って、前記各第二揺動軸30,31を中心に揺動する。即ち、前記首振り可動部9は、前記各第一揺動軸21,22を中心とした揺動と、前記各第二揺動軸30,31を中心とした揺動とを合成した、三次元的な首振り運動をする。そして、前記可動枠部16とカムガイド24が、互いの揺動に影響を与え合わないことで、正確に同期されるので、これらの可動枠部16とカムガイド24に従動する前記首振り可動部9は、均等且つ正確な軌道Lを描く。なお、前述した通り、前記第一ギア39と第二ギア40の歯数の比が2:1であるため、前記第一ギア39が一回転(回転角度α=2π)する間に、前記第二ギア40は二回転(回転角度β=4π)する。即ち、図2の姿勢から図8〜図14の姿勢を経て図2の姿勢に戻る1サイクルの間に、前記可動枠部16が一往復するのに対し、前記カムガイド24は二往復する。このため、前記首振り可動部9の軌道Lは、正確な「8」の字を描く。
【0026】
更に、本実施例の作用を第一行程〜第八行程に従って詳述する。なお、これらの行程は便宜上付けた名称である。また、以下の説明において、前記固定枠部11の第一短辺部14側を前、前記第一短辺部15側を後、前記第一長辺部12側を左、前記第一長辺部13側を右と規定する。また、図2及び図8〜図14の姿勢における上方を上、下方を下と規定する。
【0027】
第一行程(図2)
この第一行程は、前記第一ギア39が初期位置、即ち回転角度αが0の状態である。この状態では、前記可動枠部16は、前記固定枠部11に対して傾斜せず、水平となる。また、前記第二ギア40も初期位置、即ち回転角度βが0の状態である。この状態では、前記カムガイド24は前記固定枠部11に対して傾斜せず、垂直となる。このため、前記カム25は、垂直姿勢となった前記カムガイド24のガイド部34の中央に位置する。従って、前記首振り可動部9は、前記各第一揺動軸21,22回りにも、前記各第二揺動軸30,31回りにも傾斜していない姿勢となる。この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は垂直となり、軌道Lの中心である垂直なA位置となる。
【0028】
第二行程(図8)
この第二行程は、前記第一ギア39の回転角度αがπ/4の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、左側(前記第一長辺部12側)が高く、右側(前記第一長辺部13側)が低くなるように、前記固定枠部11に対して正面視で右回りに回動して傾斜する。そして、前記可動枠部16の傾斜によって、前記首振り可動部9も正面視で右回りに回動して傾斜すると共に、前記カム25が前記ガイド部34に案内されて、このガイド部34の左側へ摺動する。
【0029】
一方、この第二行程は、前記第二ギア40の回転角度βがπ/2の状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記円弧状部24Cが前記各基端部24A、24Bよりも前方となるように、前記固定枠部11に対して傾斜する。そして、このように前記カムガイド24が傾斜すると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前方に移動する。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、後方へ傾斜する。
【0030】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、右後方に傾斜したB位置となる。
【0031】
第三行程(図9)
この第三行程は、前記第一ギア39の回転角度αがπ/2の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、左側が最も高く、右側が最も低くなるように、前記固定枠部11に対して正面視で右回りに更に回動して最大限傾斜する。そして、前記可動枠部16の傾斜によって、前記首振り可動部9も正面視で右回りに更に回動して最大限傾斜すると共に、前記カム25は、前記ガイド部34に案内されて、このガイド部34の最大限左側へ摺動する。
【0032】
一方、この第三行程は、前記第二ギア40の回転角度βがπの状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記固定枠部11に対して垂直な状態に戻る。そして、このように前記カムガイド24が垂直に戻ると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前後方向の中央に戻る。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前後方向の中央に戻る。
【0033】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、右に最大限傾斜したC位置となる。
【0034】
第四行程(図10)
この第四行程は、前記第一ギア39の回転角度αが3π/4の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、水平に近付くように正面視で左回りに回動する。しかしながら、前記可動枠部16は、未だ左側が高く、右側が低くなるように、前記固定枠部11に対して傾斜している。そして、前記可動枠部16の回動によって、前記首振り可動部9も正面視で左回りに回動するものの、未だ右側へ傾斜している。また、前記カム25は前記ガイド部34に案内されて、このガイド部34の右側に向かって摺動するものの、未だ前記ガイド部34の左側に位置する。
【0035】
一方、この第四行程は、前記第二ギア40の回転角度βが3π/2の状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記円弧状部24Cが前記各基端部24A、24Bよりも後方となるように、前記固定枠部11に対して傾斜する。そして、このように前記カムガイド24が傾斜すると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に後方に移動する。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前方へ傾斜する。
【0036】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、右前方に傾斜したD位置となる。
【0037】
第五行程(図11(なお、図11は、実際には、第五行程の寸前の状態である。))
この第五行程は、前記第一ギア39の回転角度αがπの状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、正面視で左回りに回動し、水平に戻る。そして、前記可動枠部16の回動によって、前記首振り可動部9も垂直に戻る。また、前記カム25は前記ガイド部34に案内されて摺動し、このガイド部34の中央に位置する。
【0038】
一方、この第五行程は、前記第二ギア40の回転角度βが2πの状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記固定枠部11に対して垂直な状態に戻る。そして、このように前記カムガイド24が垂直に戻ると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前後方向の中央に戻る。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前後方向の中央に戻る。
【0039】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、軌道Lの中心である垂直なA位置と同じE位置となる。
【0040】
第六行程(図12)
この第六行程は、前記第一ギア39の回転角度αが5π/4の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、左側が低く、右側が高くなるように、前記固定枠部11に対して正面視で左回りに回動して傾斜する。そして、前記可動枠部16の傾斜によって、前記首振り可動部9も正面視で左回りに回動して傾斜すると共に、前記カム25が前記ガイド部34に案内されて、このガイド部34の右側へ摺動する。
【0041】
一方、この第六行程は、前記第二ギア40の回転角度βが5π/2の状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記円弧状部24Cが前記各基端部24A、24Bよりも前方となるように、前記固定枠部11に対して傾斜する。そして、このように前記カムガイド24が傾斜すると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前方に移動する。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、後方へ傾斜する。
【0042】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、左後方に傾斜したF位置となる。
【0043】
第七行程(図13)
この第七行程は、前記第一ギア39の回転角度αが3π/2の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、左側が最も低く、右側が最も高くなるように、前記固定枠部11に対して正面視で左回りに更に回動して最大限傾斜する。そして、前記可動枠部16の傾斜によって、前記首振り可動部9も正面視で左回りに更に回動して最大限傾斜すると共に、前記カム25は、前記ガイド部34に案内されて、このガイド部34の最大限右側へ摺動する。
【0044】
一方、この第七行程は、前記第二ギア40の回転角度βが3πの状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記固定枠部11に対して垂直な状態に戻る。そして、このように前記カムガイド24が垂直に戻ると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前後方向の中央に戻る。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前後方向の中央に戻る。
【0045】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、左に最大限傾斜したG位置となる。
【0046】
第八行程(図14)
この第八行程は、前記第一ギア39の回転角度αが7π/4の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、水平に近付くように正面視で右回りに回動する。しかしながら、前記可動枠部16は、未だ左側が低く、右側が高くなるように、前記固定枠部11に対して傾斜している。そして、前記可動枠部16の回動によって、前記首振り可動部9も正面視で右回りに回動するものの、未だ左側へ傾斜している。また、前記カム25は前記ガイド部34に案内されて、このガイド部34の左側に向かって摺動するものの、未だ前記ガイド部34の右側に位置する。
【0047】
一方、この第八行程は、前記第二ギア40の回転角度βが7π/2の状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記円弧状部24Cが前記各基端部24A、24Bよりも後方となるように、前記固定枠部11に対して傾斜する。そして、このように前記カムガイド24が傾斜すると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に後方に移動する。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前方へ傾斜する。
【0048】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、左前方に傾斜したH位置となる。
【0049】
そして、前記第一ギア39の回転角度αが2π、即ち1回転、前記第二ギア40の回転角度βが4π、即ち2回転することで、第一行程に戻る。このように、前記首振り可動部9は、A位置からH位置を順に経てA位置に戻る「8」の字軌道Lを正確に描くことができる。このため、前記首振り可動部9の送風用電動機6によって構成される前記送風機3の送風方向を正確な「8」の字形状とし、室内に上下左右均等に繰り返し送風することができる。
【0050】
以上のように、本実施形態は、固定枠部11と、この固定枠部11に対して第一揺動軸21,22回りに揺動可能に軸支される可動枠部16と、この可動枠部16に対して前記各第一揺動軸21,22と軸方向が直交する第二揺動軸30,31回りに揺動可能に軸支される首振り可動部9と、首振り用電動機36と、この首振り用電動機36によって第一回転軸39A回りに回転させられる第一回転部材としての第一ギア39と、この第一ギア39の回転に伴って第一回転軸39Aと直交する第二回転軸40A回りに回転する第二回転部材としての第二ギア40と、前記第一ギア39に一端44Aが接続された第一リンク機構42と、前記第二ギア40に一端45Aが接続された第二リンク機構43とを有し、前記各第一揺動軸21,22と軸方向が直交する第三揺動軸32,33回りに揺動可能であると共に、ガイド部34を有するカムガイド24を前記固定枠部11に軸支し、前記ガイド部34に案内されて摺動するカム25を前記首振り可動部9に設けると共に、前記第一リンク機構42を構成する第一リンクアーム44の他端44Bを前記可動枠部16に接続し、第二リンク機構43を構成する第二リンクアーム45の他端45Bを前記カムガイド24に接続したことにより、前記可動枠16とカムガイド24の揺動が、互いに悪影響を与え合わないので、前記可動枠部16の揺動に伴う前記各第一揺動軸21,22回りの揺動と、前記カムガイド24の揺動に伴う前記各第二揺動軸30,31回りの揺動とを正確に同期させ、合成された前記首振り可動部9の立体的な首振り運動を正確且つ均等に行わせることができる。
【0051】
また、前記ガイド部34を、前記各第一揺動軸21,22と第三揺動軸32,33の交点35を中心とする円弧状に形成することで、前記カム25とガイド部34との当接位置から前記首振り可動部9の揺動中心となる交点35までの距離が変化しないので、前記首振り可動部9を揺動させる際の負荷が変化せず、この首振り可動部9をスムーズに揺動させることができる。
【0052】
また、前記第一回動部材及び第二回動部材をそれぞれ前記第一ギア39及び第二ギア40によって形成することで、前記首振り用電動機26の回転力を前記第一ギア39から第二ギア40に確実に伝達して、両者を正確に同期させることができる。
【0053】
更に、前記第一ギア39と第二ギア40のギア比を整数、例えば2:1とすることで、前記首振り可動部9の軌道Lをずらさず、前記第一ギア39の1回転で「8」の字状等の軌道Lを描かせるようにすることができる。
【実施例2】
【0054】
図15に示す実施例2では、カムガイド24に一対の第三揺動軸32,33間を結ぶように細長な貫通部からなるガイド部51を設け、そして、首振り可動部9を回動自在に支持する第三揺動軸32,33から直交して突設したアーム部52の先端にカム25´を設け、このカム25´を前記ガイド部51に挿入することで、前記カムガイド24の揺動に応動して、前記首振り可動部9を揺動できるようになっている。この場合、前記ガイド部51は、必ずしも第一揺動軸21と前記各第三揺動軸32,33との交点35を中心とした円弧でなくてもよい。
【0055】
なお、本発明は以上の実施例に限定されるものではなく、発明の要旨の範囲内で種々の変形実施が可能である。例えば、回動部材は、スプロケットとチェーン、歯付きローラと歯付きベルトのような組み合わせでもよい。また、上記実施例1において、第一ギアを主動ギア、第二ギアを従動ギアとしたが、第一ギアを従動ギア、第二ギアを主動ギアとしてもよい。更に、上記実施例1において、前記第一ギアと第二ギアのギア比を2:1としたが、一方が他方の倍数となる値であれば、他のギア比、例えば3:1、或いは1:2であってもよい。
【産業上の利用可能性】
【0056】
以上のように、本発明に係る首振り装置は、扇風機等の送風機、赤外線ヒータ等の電気ヒータなど各種の用途に適用できる。
【符号の説明】
【0057】
9 首振り可動部
10 立体首振り装置
11 固定枠部
16 可動枠部
21,22 第一揺動軸
24 カムガイド
25 25´ カム
30,31 第二揺動軸
32,33 第三揺動軸
34 ガイド部
35 交点
36 首振り用電動機(駆動源)
39 第一ギア(第一回動部材)
40 第二ギア(第二回動部材)
42 第一リンク機構
43 第二リンク機構
44A 一端
44B 44B´ 他端
45A 一端
45B 45B´ 他端
【技術分野】
【0001】
本発明は、扇風機、サーキュレータ等の送風機、赤外線ヒータ等の電気ヒータなどに用いられる首振り装置に関するものである。
【背景技術】
【0002】
従来、上下方向及び左右方向の首振りを同時に行う首振り装置を用いた装置として、首振り用の電動機の回転力を平歯車に伝え、この平歯車の回転をロッドによって往復運動に変換することで、主電動機を左右方向に首振り運動させると共に、前記首振り用の電動機の回転を、傘歯車を用いて前記平歯車の回転軸と直交する回転軸回りに回転するようにさせ、この傘歯車の回転をロッドによって往復運動に変換することで、主電動機を上下方向に首振り運動させる扇風機が知られている(例えば特許文献1)。
【0003】
また、左右方向用首振りモータの回転力により、主電動機を左右方向に首振り運動させると共に、上下方向用首振りモータの回転力により、主電動機を上下方向に首振り運動させるものも知られている(例えば特許文献2)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭59−65593号公報
【特許文献2】特開昭59−65594号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
両者の従来技術は、左右方向と上下方向の首振り運動を個別に見れば、それぞれ均等に働くため、一見、合成された首振り運動も上下左右方向に均等となるように見える。しかしながら、実際には、両者とも例えば「8」の字状に首振りさせようとしても、歪んだ軌道を描き、上下及び左右に不均等に動くという問題があった。特に、後者の従来技術では、左右方向用首振りモータの回転数と上下方向用首振りモータの回転数が完全に一致しなければ、「8」の字状の首振り運動の軌道が徐々にずれる虞がある。
【0006】
このように、従来技術において、首振りを正確な「8」の字状の軌道にすることができないのは、左右方向の首振り運動と上下方向の首振り運動との同期が正確でないことに起因する。
【0007】
本発明は以上の問題点を解決し、上下左右方向等、立体方向に均等に首振り運動ができる首振り装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の請求項1に記載の首振り装置は、固定枠部と、この固定枠部に対して第一揺動軸回りに揺動可能に軸支される可動枠部と、この可動枠部に対し、前記第一揺動軸と直交する第二揺動軸回りに揺動可能に軸支される首振り可動部と、電動機等の駆動源と、この駆動源によって前記第一回転軸回りに回転させられる第一回動部材と、前記第一回動部材の回転に伴って前記第一回転軸と直交する第二回転軸回りに回転する第二回動部材と、前記第一回動部材に一端が接続された第一リンク機構と、前記第二回動部材に一端が接続された第二リンク機構とを有して構成される首振り装置であって、前記第一揺動軸と直交する第三揺動軸回りに揺動可能であると共に、ガイド部を有するカムガイドを前記固定枠部に軸支し、前記ガイド部に案内されて摺動するカムを前記首振り可動部に設けると共に、前記第一リンク機構の他端を前記可動枠部又はカムガイドの何れか一方に接続し、前記第二リンク機構の他端を前記可動枠部又はカムガイドの何れか他方に接続したものである。
【0009】
また、本発明の請求項2に記載の首振り装置は、請求項1において、前記ガイド部が、前記第一揺動軸と前記第三揺動軸の交点を中心とする円弧状に形成されるものである。
【0010】
また、本発明の請求項3に記載の首振り装置は、請求項1又は2において、前記第一回動部材及び前記第二回動部材が、それぞれギアによって形成されるものである。
【0011】
更に、本発明の請求項4に記載の首振り装置は、請求項1〜3のいずれかにおいて、前記第一回動部材と前記第二回動部材間の回転比が整数であるものである。
【発明の効果】
【0012】
請求項1の発明によれば、前記駆動源によって、前記可動枠部が前記第一揺動軸を回動中心として揺動すると、前記首振り可動部も、前記第一揺動軸回りに揺動する。この際、前記首振り可動部に設けられた前記カムは、前記カムガイドのガイド部に案内されて摺動する。同時に、前記カムガイドは、前記第三揺動軸を回動中心として揺動する。この際、前記カムが設けられた前記首振り可動部は、揺動する前記カムガイドによって、前記第二揺動軸を回動中心として揺動する。このように、第一揺動軸回りの揺動と第二揺動軸回りの揺動とが合成されることで、前記首振り可動部は立体的に首振りする。この際、前記可動枠部とカムガイドの揺動が、互いに悪影響を与え合わないので、前記首振り可動部を正確且つ均等に首振りさせることができる。
【0013】
なお、前記ガイド部を、前記第一揺動軸と第三揺動軸の交点を中心とする円弧状に形成することで、前記カムとガイド部との当接位置から前記首振り可動部の揺動中心までの距離が変化しないので、前記首振り可動部を揺動させる際の負荷が変化せず、この首振り可動部をスムーズに揺動させることができる。
【0014】
また、前記第一回動部材及び第二回動部材をそれぞれギアによって形成することで、両者間の回転力の伝動をタイミング良く伝えることができる。
【0015】
更に、前記第一回動部材と第二回動部材間の回転比を整数とすることで、前記首振り可動部の軌道をずらさず、前記第一回動部材又は第二回転部材の1回転で「8」の字状等の1サイクルとすることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施例1を示す首振り装置を用いたサーキュレータの全体斜視図である。
【図2】同、首振り装置の第一行程における一部分解斜視図である。
【図3】同、首振り装置の他の方向から見た第一行程における斜視図である。
【図4】同、首振り装置の平面図である。
【図5】同、図4のX−X線断面図である。
【図6】同、図4のY−Y線断面図である。
【図7】同、首振り装置の分解斜視図である。
【図8】同、首振り装置の第二行程における斜視図である。
【図9】同、首振り装置の第三行程における斜視図である。
【図10】同、首振り装置の第四行程における斜視図である。
【図11】同、首振り装置の第五行程における斜視図である。
【図12】同、首振り装置の第六行程における斜視図である。
【図13】同、首振り装置の第七行程における斜視図である。
【図14】同、首振り装置の第八行程における斜視図である。
【図15】本発明の実施例2を示す首振り装置の斜視図である。
【発明を実施するための形態】
【0017】
本発明における好適な実施の形態について、添付図面を参照して説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を限定するものではない。また、以下に説明される構成の全てが、本発明の必須要件であるとは限らない。
【実施例1】
【0018】
以下、本発明の実施例1について、図1〜図14に基づいて説明する。なお、この実施例1は、サーキュレータの場合を示している。図1に示すように、このサーキュレータ1は、設置用の台2の上方に図示しない支持ケースを介して設けられた送風装置3と、この送風装置3の周囲及び先方を保護する保護枠4とを備える。この保護枠4には貫通部5が形成される。また、前記支持ケース内には、送風用電動機6が設けられる。そして、この送風用電動機6の回転軸7は、前記貫通部5を通って前記保護枠4内に突出すると共に、その先端に羽根8が固定される。そして、前記送風用電動機6と羽根8によって、前記送風装置3が構成される。
【0019】
次に、前記送風用電動機6を含む首振り可動部9を、「8」の字型の軌道Lとなるように揺動させる首振り装置10の構造について、図2〜図7を参照して説明する。前記支持ケース内に前記首振り装置10の固定枠部11が固定される。この固定枠部11は、一対の第一長辺部12,13と、これら一対の第一長辺部12,13と直交する一対の第一短辺部14,15とを有する矩形の枠形状であって、前記支持ケースに固定される。
【0020】
そして、前記固定枠部11の内側に、所定の間隔を空けて、可動枠部16が揺動自在に設けられる。この可動枠部16は、一対の第二長辺部17,18と、これら一対の第二長辺部17,18と直交する一対の第二短辺部19,20を有する矩形の枠形状である。そして、前記可動枠部16は、図2乃至図4の姿勢において、前記各第二長辺部17,18が前記各第一長辺部12,13と平行になるように、且つ、前記各第二短辺部19,20が前記各第一短辺部14,15と平行になるように、前記固定枠部11の内側に間隔を空けて配置される。そして、対向する前記第一短辺部14と第二短辺部19は、一方の第一揺動軸21を介して接続される。同様に、前記第一短辺部15と第二短辺部20は、他方の第一揺動軸22を介して接続される。前記第一揺動軸21は、前記第一短辺部14の略中央と第二短辺部19の略中央とを回動自在に接続する短軸により形成される。同様に、前記第一揺動軸22は、前記第一短辺部15の略中央と第二短辺部20の略中央とを回動自在に接続する短軸により形成される。そして、前記各第一揺動軸21,22は、同軸に配置される。これによって、前記可動枠部16は、前記固定枠部11に対し、前記各第一揺動軸21,22を揺動中心として揺動可能となる。
【0021】
前記可動枠部16の内側には、前記首振り可動部9を構成する取付枠23が設けられ、この取付枠23に前記送風用電動機6が取り付けられる。また、前記取付枠23には、カムガイド24の動きに従動するカム25が突設される。そして、前記取付枠23は、前記送風用電動機6を固定するための一対の台座部26と、これらの台座部26を一端に有する一対の支持用腕部27,28と、これらの支持用腕部27,28の他端同士を接続する底部29とで一体に形成される。そして、対向する前記第二長辺部17と支持用腕部27は、一方の第二揺動軸30を介して接続される。同様に、対向する前記第二長辺部18と支持用腕部28は、他方の第二揺動軸31を介して接続される。前記第二揺動軸30は、前記第二長辺部17の略中央と支持用腕部27の略中央とを回動自在に接続する短軸により形成される。同様に、前記第二揺動軸31は、前記第二長辺部18の略中央と支持用腕部28の略中央とをそれぞれ回動自在に接続する短軸により形成される。そして、前記各第二揺動軸30,31は、同軸に配置される。なお、前記各第二揺動軸30,31の軸心は、前記各第一揺動軸21,22の軸心と直交する。これによって、前記取付枠23、ひいては前記首振り可動部9は、前記可動枠部16に対し、前記各第二揺動軸30,31を揺動中心として揺動可能となる。また、前記カム25は、前記底部29の略中央に固定される。
【0022】
前記カムガイド24は、一対の基端部24A,24Bと、これらの基端部24A,24Bを接続する円弧状部24Cとを有して一体に形成される。前記基端部24Aは、前記固定枠部11の第一長辺部12の略中央に対し、外側から対向する。また、前記基端部24Bは、前記固定枠部11の第一長辺部13の略中央に対し、外側から対向する。更に、前記円弧状部24Cは、前記取付枠23の底部29に対し、外側から対向する。そして、対向する前記第一長辺部12と基端部24Aは、一方の第三揺動軸32を介して回動自在に接続される。同様に、対向する前記第一長辺部13と基端部24Bは、他方の第三揺動軸33を介して回動自在に接続される。そして、前記各第三揺動軸32,33は、それぞれ短軸により形成されると共に、同軸に配置される。なお、これらの第三揺動軸32,33の軸心は、前記各第一揺動軸21,22の軸心と直交する。本実施例では、図2乃至図4の姿勢において、前記各第二揺動軸30,31の軸心と前記各第三揺動軸32,33の軸心が一致する(X−X線)と共に、これらの揺動軸30,31,32,33の軸心が、前記各第一揺動軸21,22の軸心(Y−Y線)と直交する。なお、前記各第二揺動軸30,31の軸心と、前記各第三揺動軸32,33の軸心は、前記可動枠部16が前記各第一揺動軸21,22回りに揺動することで、同軸からずれる。また、前記円弧状部24Cには、この円弧状部24Cの長さ方向に沿って溝状のガイド部34が形成される。このガイド部34は、前記各第一揺動軸21,22の軸心と前記各第三揺動軸32,33の軸心との交点35を中心とした円弧状に形成される。前記ガイド部34は、前記カム25と遊嵌すると共に、その溝の長さ方向にのみ前記カム25が摺動することを許容する。そして、前記可動枠部16に軸支された前記首振り可動部9のカム25は、前記可動枠部16が前記各第一揺動軸21,22回りに揺動することで、前記ガイド部34に案内されて、その溝の長さ方向に沿って摺動するように構成される。一方、前記カム25は、前記カムガイド24が前記第三揺動軸32,33回りに揺動することで、前記カムガイド24に従動して、摺動方向と直交する方向に揺動するように構成される。この際、前記首振り可動部9は、前記第二揺動軸30,31回りに揺動する。
【0023】
前記固定枠部11には、前記首振り装置10の駆動源となる首振り用電動機36が固定される。この首振り用電動機36は、前記固定枠部11の第一短辺部14から延在して設けられた第一取付部37に装着される。なお、前記首振り用電動機36は、その回転軸38が前記第一揺動軸21,22の軸心と平行となるように配置される。そして、前記回転軸38には、伝動用の第一回動部材である第一ギア39が固定される。このため、この第一ギア39の回転中心は、前記第一揺動軸21,22と平行になる。また、前記第一ギア39と噛合うように、伝動用の第二回動部材である第二ギア40が設けられる。この第二ギア40は、前記第一長辺部12の下方に設けられた第二取付部41に対し回転可能に保持される。そして、前記第二ギア40の回転軸40Aは、前記第一ギア39の回転軸39A、即ち前記首振り用電動機36の回転軸38と直交する。なお、前記第一ギア39の歯数は、前記第二ギア40の歯数の整数倍に設定される。本実施例では、前記第一ギア39の歯数と前記第二ギア40の歯数との比を2:1とすることで、前記第一ギア39の回転数と前記第二ギア40の回転数との比は1:2となる。
【0024】
そして、前記第一ギア39と前記可動枠部16との間には、第一リンク機構42が介在する。また、前記第二ギア40と前記カムガイド24との間には、第二リンク機構43が介在する。前記第一リンク機構42を構成する第一リンクアーム44は、その一端44Aを前記回転軸39Aから偏心させて、前記第一ギア39に対し揺動可能に接続すると共に、その他端44Bを前記第一揺動軸21から偏心させて、前記第二短辺部19に対し揺動可能に接続する。また、前記第二リンク機構43を構成する第二リンクアーム45は、その一端45Aを前記回転軸40Aから偏心させて、前記第二ギア40に接続された偏心アーム46に対し揺動可能に接続すると共に、その他端45Bを、前記第三揺動軸32,33から偏心させて前記カムガイド24と一体に設けられた中継部47に対し、揺動可能に接続される。
【0025】
次に前記構成について、作用を説明する。前記首振り用電動機36が回転すると、前記電動機36の回転軸38、即ち前記第一ギア39の回転軸39A回りに、前記第一ギア39が回転する。そして、前記第一ギア39が回転することで、前記第一リンク機構42によって、前記可動枠部16が前記第一揺動軸21,22を中心として揺動する。同時に、前記第一ギア39に従動して、この第一ギア39と噛合する第二ギア40も回転する。そして、前記第二ギア40が回転することで、前記第二リンク機構43によって、前記カムガイド24が前記第三揺動軸32,33を中心として揺動する。この際、従来の構造と異なり、前記可動枠部16の揺動姿勢によらず、前記第二ギア40の回転軸40Aから前記各第三揺動軸32,33の軸心までの距離が変化せず、また、前記カムガイド24の揺動姿勢によらず、前記第一ギア39の回転軸39Aから前記各第一揺動軸21,22の軸心までの距離が変化しない。このため、前記可動枠部16の揺動が前記カムガイド24の揺動に影響を与えず、逆に、前記カムガイド24の揺動も前記可動枠16の揺動に影響を与えない。一方、前記首振り可動部9は、前記可動枠部16の揺動に伴って、前記各第一揺動軸21,22を中心に揺動すると共に、前記カムガイド24の揺動に伴って、前記各第二揺動軸30,31を中心に揺動する。即ち、前記首振り可動部9は、前記各第一揺動軸21,22を中心とした揺動と、前記各第二揺動軸30,31を中心とした揺動とを合成した、三次元的な首振り運動をする。そして、前記可動枠部16とカムガイド24が、互いの揺動に影響を与え合わないことで、正確に同期されるので、これらの可動枠部16とカムガイド24に従動する前記首振り可動部9は、均等且つ正確な軌道Lを描く。なお、前述した通り、前記第一ギア39と第二ギア40の歯数の比が2:1であるため、前記第一ギア39が一回転(回転角度α=2π)する間に、前記第二ギア40は二回転(回転角度β=4π)する。即ち、図2の姿勢から図8〜図14の姿勢を経て図2の姿勢に戻る1サイクルの間に、前記可動枠部16が一往復するのに対し、前記カムガイド24は二往復する。このため、前記首振り可動部9の軌道Lは、正確な「8」の字を描く。
【0026】
更に、本実施例の作用を第一行程〜第八行程に従って詳述する。なお、これらの行程は便宜上付けた名称である。また、以下の説明において、前記固定枠部11の第一短辺部14側を前、前記第一短辺部15側を後、前記第一長辺部12側を左、前記第一長辺部13側を右と規定する。また、図2及び図8〜図14の姿勢における上方を上、下方を下と規定する。
【0027】
第一行程(図2)
この第一行程は、前記第一ギア39が初期位置、即ち回転角度αが0の状態である。この状態では、前記可動枠部16は、前記固定枠部11に対して傾斜せず、水平となる。また、前記第二ギア40も初期位置、即ち回転角度βが0の状態である。この状態では、前記カムガイド24は前記固定枠部11に対して傾斜せず、垂直となる。このため、前記カム25は、垂直姿勢となった前記カムガイド24のガイド部34の中央に位置する。従って、前記首振り可動部9は、前記各第一揺動軸21,22回りにも、前記各第二揺動軸30,31回りにも傾斜していない姿勢となる。この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は垂直となり、軌道Lの中心である垂直なA位置となる。
【0028】
第二行程(図8)
この第二行程は、前記第一ギア39の回転角度αがπ/4の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、左側(前記第一長辺部12側)が高く、右側(前記第一長辺部13側)が低くなるように、前記固定枠部11に対して正面視で右回りに回動して傾斜する。そして、前記可動枠部16の傾斜によって、前記首振り可動部9も正面視で右回りに回動して傾斜すると共に、前記カム25が前記ガイド部34に案内されて、このガイド部34の左側へ摺動する。
【0029】
一方、この第二行程は、前記第二ギア40の回転角度βがπ/2の状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記円弧状部24Cが前記各基端部24A、24Bよりも前方となるように、前記固定枠部11に対して傾斜する。そして、このように前記カムガイド24が傾斜すると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前方に移動する。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、後方へ傾斜する。
【0030】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、右後方に傾斜したB位置となる。
【0031】
第三行程(図9)
この第三行程は、前記第一ギア39の回転角度αがπ/2の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、左側が最も高く、右側が最も低くなるように、前記固定枠部11に対して正面視で右回りに更に回動して最大限傾斜する。そして、前記可動枠部16の傾斜によって、前記首振り可動部9も正面視で右回りに更に回動して最大限傾斜すると共に、前記カム25は、前記ガイド部34に案内されて、このガイド部34の最大限左側へ摺動する。
【0032】
一方、この第三行程は、前記第二ギア40の回転角度βがπの状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記固定枠部11に対して垂直な状態に戻る。そして、このように前記カムガイド24が垂直に戻ると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前後方向の中央に戻る。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前後方向の中央に戻る。
【0033】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、右に最大限傾斜したC位置となる。
【0034】
第四行程(図10)
この第四行程は、前記第一ギア39の回転角度αが3π/4の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、水平に近付くように正面視で左回りに回動する。しかしながら、前記可動枠部16は、未だ左側が高く、右側が低くなるように、前記固定枠部11に対して傾斜している。そして、前記可動枠部16の回動によって、前記首振り可動部9も正面視で左回りに回動するものの、未だ右側へ傾斜している。また、前記カム25は前記ガイド部34に案内されて、このガイド部34の右側に向かって摺動するものの、未だ前記ガイド部34の左側に位置する。
【0035】
一方、この第四行程は、前記第二ギア40の回転角度βが3π/2の状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記円弧状部24Cが前記各基端部24A、24Bよりも後方となるように、前記固定枠部11に対して傾斜する。そして、このように前記カムガイド24が傾斜すると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に後方に移動する。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前方へ傾斜する。
【0036】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、右前方に傾斜したD位置となる。
【0037】
第五行程(図11(なお、図11は、実際には、第五行程の寸前の状態である。))
この第五行程は、前記第一ギア39の回転角度αがπの状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、正面視で左回りに回動し、水平に戻る。そして、前記可動枠部16の回動によって、前記首振り可動部9も垂直に戻る。また、前記カム25は前記ガイド部34に案内されて摺動し、このガイド部34の中央に位置する。
【0038】
一方、この第五行程は、前記第二ギア40の回転角度βが2πの状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記固定枠部11に対して垂直な状態に戻る。そして、このように前記カムガイド24が垂直に戻ると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前後方向の中央に戻る。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前後方向の中央に戻る。
【0039】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、軌道Lの中心である垂直なA位置と同じE位置となる。
【0040】
第六行程(図12)
この第六行程は、前記第一ギア39の回転角度αが5π/4の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、左側が低く、右側が高くなるように、前記固定枠部11に対して正面視で左回りに回動して傾斜する。そして、前記可動枠部16の傾斜によって、前記首振り可動部9も正面視で左回りに回動して傾斜すると共に、前記カム25が前記ガイド部34に案内されて、このガイド部34の右側へ摺動する。
【0041】
一方、この第六行程は、前記第二ギア40の回転角度βが5π/2の状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記円弧状部24Cが前記各基端部24A、24Bよりも前方となるように、前記固定枠部11に対して傾斜する。そして、このように前記カムガイド24が傾斜すると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前方に移動する。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、後方へ傾斜する。
【0042】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、左後方に傾斜したF位置となる。
【0043】
第七行程(図13)
この第七行程は、前記第一ギア39の回転角度αが3π/2の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、左側が最も低く、右側が最も高くなるように、前記固定枠部11に対して正面視で左回りに更に回動して最大限傾斜する。そして、前記可動枠部16の傾斜によって、前記首振り可動部9も正面視で左回りに更に回動して最大限傾斜すると共に、前記カム25は、前記ガイド部34に案内されて、このガイド部34の最大限右側へ摺動する。
【0044】
一方、この第七行程は、前記第二ギア40の回転角度βが3πの状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記固定枠部11に対して垂直な状態に戻る。そして、このように前記カムガイド24が垂直に戻ると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に前後方向の中央に戻る。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前後方向の中央に戻る。
【0045】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、左に最大限傾斜したG位置となる。
【0046】
第八行程(図14)
この第八行程は、前記第一ギア39の回転角度αが7π/4の状態である。この状態では、前記第一リンク機構42によって、前記可動枠部16は、前記各第一揺動軸21,22を中心として、水平に近付くように正面視で右回りに回動する。しかしながら、前記可動枠部16は、未だ左側が低く、右側が高くなるように、前記固定枠部11に対して傾斜している。そして、前記可動枠部16の回動によって、前記首振り可動部9も正面視で右回りに回動するものの、未だ左側へ傾斜している。また、前記カム25は前記ガイド部34に案内されて、このガイド部34の左側に向かって摺動するものの、未だ前記ガイド部34の右側に位置する。
【0047】
一方、この第八行程は、前記第二ギア40の回転角度βが7π/2の状態である。この状態では、前記第二リンク機構43によって、前記カムガイド24は、前記各第三揺動軸32,33を中心として、前記円弧状部24Cが前記各基端部24A、24Bよりも後方となるように、前記固定枠部11に対して傾斜する。そして、このように前記カムガイド24が傾斜すると、前記カムガイド24のガイド部34に挟まれた前記カム25も、前記カムガイド24と共に後方に移動する。これによって、前記首振り可動部9は、前記第二揺動軸30,31を中心として、前方へ傾斜する。
【0048】
この結果、前記首振り可動部9を構成する前記送風用電動機6の回転軸7の軸線は、左前方に傾斜したH位置となる。
【0049】
そして、前記第一ギア39の回転角度αが2π、即ち1回転、前記第二ギア40の回転角度βが4π、即ち2回転することで、第一行程に戻る。このように、前記首振り可動部9は、A位置からH位置を順に経てA位置に戻る「8」の字軌道Lを正確に描くことができる。このため、前記首振り可動部9の送風用電動機6によって構成される前記送風機3の送風方向を正確な「8」の字形状とし、室内に上下左右均等に繰り返し送風することができる。
【0050】
以上のように、本実施形態は、固定枠部11と、この固定枠部11に対して第一揺動軸21,22回りに揺動可能に軸支される可動枠部16と、この可動枠部16に対して前記各第一揺動軸21,22と軸方向が直交する第二揺動軸30,31回りに揺動可能に軸支される首振り可動部9と、首振り用電動機36と、この首振り用電動機36によって第一回転軸39A回りに回転させられる第一回転部材としての第一ギア39と、この第一ギア39の回転に伴って第一回転軸39Aと直交する第二回転軸40A回りに回転する第二回転部材としての第二ギア40と、前記第一ギア39に一端44Aが接続された第一リンク機構42と、前記第二ギア40に一端45Aが接続された第二リンク機構43とを有し、前記各第一揺動軸21,22と軸方向が直交する第三揺動軸32,33回りに揺動可能であると共に、ガイド部34を有するカムガイド24を前記固定枠部11に軸支し、前記ガイド部34に案内されて摺動するカム25を前記首振り可動部9に設けると共に、前記第一リンク機構42を構成する第一リンクアーム44の他端44Bを前記可動枠部16に接続し、第二リンク機構43を構成する第二リンクアーム45の他端45Bを前記カムガイド24に接続したことにより、前記可動枠16とカムガイド24の揺動が、互いに悪影響を与え合わないので、前記可動枠部16の揺動に伴う前記各第一揺動軸21,22回りの揺動と、前記カムガイド24の揺動に伴う前記各第二揺動軸30,31回りの揺動とを正確に同期させ、合成された前記首振り可動部9の立体的な首振り運動を正確且つ均等に行わせることができる。
【0051】
また、前記ガイド部34を、前記各第一揺動軸21,22と第三揺動軸32,33の交点35を中心とする円弧状に形成することで、前記カム25とガイド部34との当接位置から前記首振り可動部9の揺動中心となる交点35までの距離が変化しないので、前記首振り可動部9を揺動させる際の負荷が変化せず、この首振り可動部9をスムーズに揺動させることができる。
【0052】
また、前記第一回動部材及び第二回動部材をそれぞれ前記第一ギア39及び第二ギア40によって形成することで、前記首振り用電動機26の回転力を前記第一ギア39から第二ギア40に確実に伝達して、両者を正確に同期させることができる。
【0053】
更に、前記第一ギア39と第二ギア40のギア比を整数、例えば2:1とすることで、前記首振り可動部9の軌道Lをずらさず、前記第一ギア39の1回転で「8」の字状等の軌道Lを描かせるようにすることができる。
【実施例2】
【0054】
図15に示す実施例2では、カムガイド24に一対の第三揺動軸32,33間を結ぶように細長な貫通部からなるガイド部51を設け、そして、首振り可動部9を回動自在に支持する第三揺動軸32,33から直交して突設したアーム部52の先端にカム25´を設け、このカム25´を前記ガイド部51に挿入することで、前記カムガイド24の揺動に応動して、前記首振り可動部9を揺動できるようになっている。この場合、前記ガイド部51は、必ずしも第一揺動軸21と前記各第三揺動軸32,33との交点35を中心とした円弧でなくてもよい。
【0055】
なお、本発明は以上の実施例に限定されるものではなく、発明の要旨の範囲内で種々の変形実施が可能である。例えば、回動部材は、スプロケットとチェーン、歯付きローラと歯付きベルトのような組み合わせでもよい。また、上記実施例1において、第一ギアを主動ギア、第二ギアを従動ギアとしたが、第一ギアを従動ギア、第二ギアを主動ギアとしてもよい。更に、上記実施例1において、前記第一ギアと第二ギアのギア比を2:1としたが、一方が他方の倍数となる値であれば、他のギア比、例えば3:1、或いは1:2であってもよい。
【産業上の利用可能性】
【0056】
以上のように、本発明に係る首振り装置は、扇風機等の送風機、赤外線ヒータ等の電気ヒータなど各種の用途に適用できる。
【符号の説明】
【0057】
9 首振り可動部
10 立体首振り装置
11 固定枠部
16 可動枠部
21,22 第一揺動軸
24 カムガイド
25 25´ カム
30,31 第二揺動軸
32,33 第三揺動軸
34 ガイド部
35 交点
36 首振り用電動機(駆動源)
39 第一ギア(第一回動部材)
40 第二ギア(第二回動部材)
42 第一リンク機構
43 第二リンク機構
44A 一端
44B 44B´ 他端
45A 一端
45B 45B´ 他端
【特許請求の範囲】
【請求項1】
固定枠部と、
この固定枠部に対して第一揺動軸回りに揺動可能に軸支される可動枠部と、
この可動枠部に対し、前記第一揺動軸と直交する第二揺動軸回りに揺動可能に軸支される首振り可動部と、
電動機等の駆動源と、
この駆動源によって前記第一回転軸回りに回転させられる第一回動部材と、
前記第一回動部材の回転に伴って前記第一回転軸と直交する第二回転軸回りに回転する第二回動部材と、
前記第一回動部材に一端が接続された第一リンク機構と、
前記第二回動部材に一端が接続された第二リンク機構とを有して構成される首振り装置であって、
前記第一揺動軸と直交する第三揺動軸回りに揺動可能であると共に、ガイド部を有するカムガイドを前記固定枠部に軸支し、
前記ガイド部に案内されて摺動するカムを前記首振り可動部に設けると共に、
前記第一リンク機構の他端を前記可動枠部又はカムガイドの何れか一方に接続し、
前記第二リンク機構の他端を前記可動枠部又はカムガイドの何れか他方に接続したことを特徴とする首振り装置。
【請求項2】
前記ガイド部が、前記第一揺動軸と前記第三揺動軸の交点を中心とする円弧状に形成されることを特徴とする請求項1記載の首振り装置。
【請求項3】
前記第一回動部材及び前記第二回動部材が、それぞれギアによって形成されることを特徴とする請求項1又は2記載の首振り装置。
【請求項4】
前記第一回動部材と前記第二回動部材間の回転比が整数であることを特徴とする請求項1〜3のいずれか1項に記載の首振り装置。
【請求項1】
固定枠部と、
この固定枠部に対して第一揺動軸回りに揺動可能に軸支される可動枠部と、
この可動枠部に対し、前記第一揺動軸と直交する第二揺動軸回りに揺動可能に軸支される首振り可動部と、
電動機等の駆動源と、
この駆動源によって前記第一回転軸回りに回転させられる第一回動部材と、
前記第一回動部材の回転に伴って前記第一回転軸と直交する第二回転軸回りに回転する第二回動部材と、
前記第一回動部材に一端が接続された第一リンク機構と、
前記第二回動部材に一端が接続された第二リンク機構とを有して構成される首振り装置であって、
前記第一揺動軸と直交する第三揺動軸回りに揺動可能であると共に、ガイド部を有するカムガイドを前記固定枠部に軸支し、
前記ガイド部に案内されて摺動するカムを前記首振り可動部に設けると共に、
前記第一リンク機構の他端を前記可動枠部又はカムガイドの何れか一方に接続し、
前記第二リンク機構の他端を前記可動枠部又はカムガイドの何れか他方に接続したことを特徴とする首振り装置。
【請求項2】
前記ガイド部が、前記第一揺動軸と前記第三揺動軸の交点を中心とする円弧状に形成されることを特徴とする請求項1記載の首振り装置。
【請求項3】
前記第一回動部材及び前記第二回動部材が、それぞれギアによって形成されることを特徴とする請求項1又は2記載の首振り装置。
【請求項4】
前記第一回動部材と前記第二回動部材間の回転比が整数であることを特徴とする請求項1〜3のいずれか1項に記載の首振り装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−163163(P2012−163163A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−24354(P2011−24354)
【出願日】平成23年2月7日(2011.2.7)
【出願人】(000109325)ツインバード工業株式会社 (176)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月7日(2011.2.7)
【出願人】(000109325)ツインバード工業株式会社 (176)
【Fターム(参考)】
[ Back to top ]