
駆動ユニット方向検出システム
【課題】各電動装置への電力供給をオフからオンとした場合であっても、駆動ユニットの車体に対する向きを直ぐに判定できるようにすることにある。
【解決手段】駆動ユニット22の車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、駆動ユニット22の車体に対する360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくデータ格納装置29,39と、回転情報テーブル根拠情報と回転角度値とから駆動ユニット22の車体に対する向きを導出する主制御回路40とを備える。ここで、データ格納装置29,39は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されている。
【解決手段】駆動ユニット22の車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、駆動ユニット22の車体に対する360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくデータ格納装置29,39と、回転情報テーブル根拠情報と回転角度値とから駆動ユニット22の車体に対する向きを導出する主制御回路40とを備える。ここで、データ格納装置29,39は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行床面に敷設されたガイドを読み取りながらワークステーション間を自動走行する自動搬送車の駆動源としての駆動ユニットの、車体に対する向きを導出する駆動ユニット方向検出システムに関する。
【背景技術】
【0002】
近年、自動車の組立て工場等においては、荷台に組立てパーツを積載して搬送する自動搬送車が導入されている。この自動搬送車は、走行床面に敷設されたガイドライン等のガイドを読み取り、組立てパーツを積載するエリア、この積載した組立てパーツを積み下ろす組立てエリア(以下、これらのエリアを総じて『ワークステーション』と称する。)間を自動走行する。この種の自動搬送車には、自動走行するにあたっての駆動ユニットが設置されている。この駆動ユニットは、車体下部における前後バランス位置に1つずつ設置されている。各駆動ユニットは、並列配置される2つ車輪と、この2つの車輪のそれぞれに対応し独自に回転駆動させる2つの駆動モータとを備える。
【0003】
上記した各駆動ユニットは、2つの駆動モータを独立して駆動制御することにより2つの車輪に回転差を発生させる。この2つの車輪間に発生した回転差によって、各駆動ユニットは車体に対して回転するものとなっている。このように車体に対して各駆動ユニットの向きが変わることにより、自動搬送車を操舵して自動走行するようになっている。
ところで、自動搬送車を操舵して自動走行するためには、駆動ユニットが車体に対してどのような向きを向いているのかを検出しておくことが必要である。そこで、この種の自動搬送車には、上記した各駆動ユニットのそれぞれの車体に対する向きを導出する駆動ユニット方向検出システムが設けられている。
【特許文献1】特開2001−5526
【発明の開示】
【発明が解決しようとする課題】
【0004】
一方、上記の駆動ユニット方向検出システムには、様々な要請がある。すなわち、一つ目の要請としては「安価に製作したい」、二つ目の要請としては「荷台の高さ位置を低くするために高さ方向の嵩張りを減らしたい」というものである。
【0005】
他方、上記の自動搬送車にあっては、メンテナンス等の理由により、各電動装置への電力供給をオフにして、人力で移動することがある。そうすると、各電動装置への電力供給を再びオンにした場合に、車体に対する駆動ユニットの向きを正しい向きに変更するようにしておきたい。このような駆動ユニットの車体に対する向きを正しい向きに変更するにあたっては、上記した駆動ユニット方向検出システムによる検出が利用される。つまり、三つ目の要請としては、「各電動装置への電力供給をオフからオンとした場合であっても、駆動ユニットの車体に対する向きを直ぐに判定できるようにする」というものである。
【0006】
本発明は、上記した要請に鑑みなされたものであって、本発明が解決しようとする課題は、走行床面に敷設されたガイドを読み取りながらワークステーション間を自動走行する自動搬送車の駆動源としての駆動ユニットの、車体に対する向きを導出する駆動ユニット方向検出システムにおいて、安価に製作することができ、高さ方向の嵩張りを減らすことができ、さらに、各電動装置への電力供給をオフからオンとした場合であっても、駆動ユニットの車体に対する向きを直ぐに判定できるようにすることにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明に係る駆動ユニット方向検出システムは、次の手段を採用する。
すなわち、本発明に係る駆動ユニット方向検出システムは、走行床面に敷設されたガイドを読み取りながらワークステーション間を自動走行する自動搬送車の駆動源としての駆動ユニットの、車体に対する向きを導出する駆動ユニット方向検出システムであって、前記駆動ユニットの前記車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、前記駆動ユニットの前記車体に対する回転に連動して回転する回転軸に設置され連動回転する2つの回転板状体により360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、前記360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくテーブル根拠情報更新格納手段と、前記回転情報テーブル根拠情報と前記回転角度値とから前記駆動ユニットの前記車体に対する向きを導出する駆動ユニット向き導出処理手段とを備え、前記テーブル根拠情報更新格納手段は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されていることを特徴とする。
【0008】
この駆動ユニット方向検出システムによれば、駆動ユニットの車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、駆動ユニットの車体に対する回転に連動して回転する回転軸に設置され連動回転する2つの回転板状体により360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブルを更新して格納しておくテーブル根拠情報更新格納手段と、回転角度値と回転情報テーブルとから駆動ユニットの車体に対する向きを導出する駆動ユニット向き導出処理手段とを備えているので、駆動ユニットの車体に対する向きを、360度までの範囲を超えるような場合に対しても、多回転検出用ロータリーエンコーダを用いることなく導出することができる。
これによって、多回転検出用ロータリーエンコーダに比して安価且つ小型な単回転検出用ロータリーエンコーダを用いるので、安価に製作することができ、高さ方向の嵩張りを減らすことができる。
つまり、このような駆動ユニット方向検出システムを用いて自動搬送車を構成した場合には、高さ方向の嵩張りを減らすことができ、ひいては自動搬送車の荷台の高さ位置を低く設定することができるようになる。したがって、荷台に搬送物を積み上げたり積み下ろしたりする作業が行い易くなる自動搬送車とすることができる。
【0009】
また、この駆動ユニット方向検出システムによれば、テーブル根拠情報更新格納手段は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されているので、単回転検出用ロータリーエンコーダ、360度単位回転数検出機構、およびテーブル根拠情報更新格納手段は、各電動装置への電力供給がオフとなる状態でも機能状態を維持できる。
これによって、各電動装置への電力供給を一時オフとした場合であっても、回転情報テーブル根拠情報と回転角度値とを保持することができて、各電動装置への電力供給を一時オフからオンに復帰した場合であっても、駆動ユニット向き導出処理手段により駆動ユニットの車体に対する向きを直ぐに導出することができる。例えば、メンテナンス等の理由により各電動装置への電力供給をオフにして人力で移動したような場合でも、この移動に対する調整処理を行うことなく、駆動ユニットの車体に対する向きを直ぐに判定でき、各電動装置への電力供給の再開と同時に自動搬送車としての自動走行を直ぐに再開することができる。
【発明の効果】
【0010】
本発明に係る駆動ユニット方向検出システムによれば、多回転検出用ロータリーエンコーダに比して安価且つ小型な単回転検出用ロータリーエンコーダを用いるので、安価に製作することができ、高さ方向の嵩張りを減らすことができる。
また、本発明に係る駆動ユニット方向検出システムによれば、各電動装置への電力供給を一時オフとした場合であっても、回転情報テーブル根拠情報と回転角度値とを保持することができて、各電動装置への電力供給を一時オフからオンに復帰した場合であっても、駆動ユニット向き導出処理手段により駆動ユニットの車体に対する向きを直ぐに導出することができ、駆動ユニットの車体に対する向きを直ぐに判定することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明を実施するための最良の形態について、図面を参照しながら説明する。
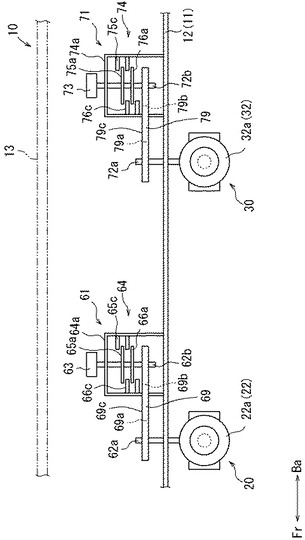
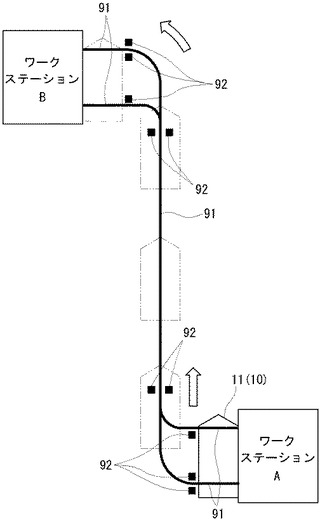
図1は、側面視した自動搬送車10の構成概略を模式的に示す構成概略側面模式図である。なお、図中符号Frは前方を、図中符号Baは後方を、表している。図2は、自動搬送車10の各部構成の電気的関係を示すブロック図である。図8は、ワークステーションA,B間を自動走行する自動搬送車10の軌跡の一例を模式的に示す概略図である。
この自動搬送車10は、例えば自動車等の組立て工場等において導入されるものであって、図8に示すように走行床面に敷設されたガイドライン91およびガイドマーカ92に案内されて2つ以上のワークステーション(例えば、ワークステーションAからワークステーションBまで)間を自動走行し、積み上げ積み下ろしする組立てパーツを搬送する。
すなわち、この自動搬送車10は、組立てパーツを積載する荷台13を具備する車体11と、この車体11下側の前位置および後位置のそれぞれに設置され且つそれぞれ独自に駆動操舵される前側駆動操舵装置20および後側駆動操舵装置30を備える。
【0012】
前側駆動操舵装置20および後側駆動操舵装置30は、車体11の下側に位置する車体フレーム12に取り付けられる。このように前側駆動操舵装置20および後側駆動操舵装置30が駆動することにより、自動搬送車10は自動走行するようになっている。両者は、設置される個所が車体11下側の前位置および後位置のそれぞれである点で異なるものであって、構成に関しては同様に構成される。以下においては、前側駆動操舵装置20に関して詳細に説明し、後側駆動操舵装置30に関しての説明は簡単なものとする。
前側駆動操舵装置20は、図2に示すように、主制御回路40に接続されるものであって、概略、主制御回路40から送信された制御処理信号に基づいて駆動操舵する駆動部21と、駆動部21が駆動操舵するための検出信号を主制御回路40に送信する読取部25とを備えて構成される。
駆動部21は、自動搬送車10の駆動源となる前側駆動ユニット22と、この前側駆動ユニット22を制御するドライバ装置23とを備えて構成される。
【0013】
前側駆動ユニット22は、図1および図2に示すように、車体11に対して回転可能な操舵用回転軸62aの下部に取り付けられており、それぞれ独立して駆動するL側駆動輪装置22aおよびR側駆動輪装置22bとを備える。L側駆動輪装置22aは、図示していないが、L側駆動輪と、このL側駆動輪を回転させるL側駆動モータとを備えて構成されている。また、R側駆動輪装置22bも、図示していないが、R側駆動輪と、このR側駆動輪を回転させるR側駆動モータとを備えて構成されている。
L側駆動モータは、ドライバ装置23を構成するL側モータドライバ23aにて制御されており、R側駆動モータは、ドライバ装置23を構成するR側モータドライバ23bにて制御されている。また、L側モータドライバ23aおよびR側モータドライバ23bは、主制御回路40から送信された制御処理信号に基づき、それぞれに対応したL側駆動モータおよびR側駆動モータの回転を制御するようになっている。つまり、2つの駆動モータを独立して制御することにより2つの駆動輪に回転差を発生させ、この2つの駆動輪間に発生した回転差によって、前側駆動ユニット22は車体11に対して回転するものとなっている。
【0014】
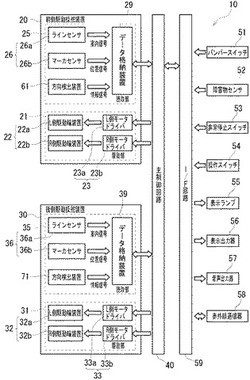
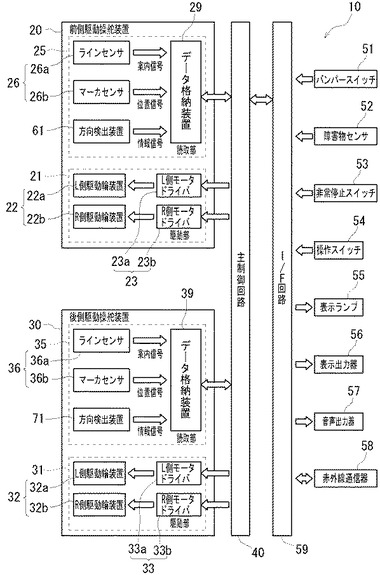
読取部25は、概略、ガイドライン91およびガイドマーカ92に関して検出するガイド検出器26と、前側駆動ユニット22の車体11に対する向きに関して検出する方向検出装置61と、これらガイド検出器26および方向検出装置61にて検出された信号をデータとして格納しつつ主制御回路40に送信するデータ格納装置29とを備えて構成される。
具体的には、ガイド検出器26は、走行床面の所定位置に敷設されたガイドライン91を検出するラインセンサ26aと、走行床面の所定位置に敷設されたガイドマーカ92を検出するマーカセンサ26bとを備えて構成される。
ラインセンサ26aは、ガイドライン91を検出することにより生成されるガイド検出信号としての案内信号を、データ格納装置29を介して主制御回路40に送信する。マーカセンサ26bは、車体11の現在の位置を認識するように、ガイドマーカ92を検出することにより生成されるガイド検出信号としての位置信号を、データ格納装置29を介して主制御回路40に送信する。
【0015】
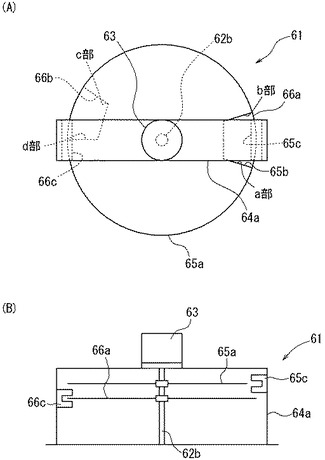
図3(A)は、図1に示す方向検出装置61に関する拡大上面模式図である。図3(B)は、図1に示す方向検出装置61に関する拡大側面模式図である。
方向検出装置61は、図1、図3(A)、図3(B)に示すように、前側駆動ユニット22の車体11に対する向きに関する情報を検出するものである。方向検出装置61は、連動機構69を介して操舵用回転軸62aに依存して回転する検出用回転軸62bに対して取り付けられる。つまり、検出用回転軸62bは、前側駆動ユニット22の車体11に対する回転に連動して回転する回転軸であり、この検出用回転軸62bには、単回転検出用ロータリーエンコーダ63および360度単位回転数検出機構64が設置されている。
なお、この前側駆動ユニット22の車体11に対する向きに関する情報としては、単回転検出用ロータリーエンコーダ63によって検出される回転角度値(エンコーダ値)と、360度単位回転数検出機構64によってメカニカル的に検出される360度回転及び回転方向の検出値を含む。
【0016】
連動機構69は、操舵用回転軸62aに取り付けられた操舵側プーリ69aと、検出用回転軸62bに取り付けられた検出側プーリ69bと、これら操舵側プーリ69aと検出側プーリ69bとを連動して回転させるタイミングベルト69cとを備えて構成される。なお、操舵側プーリ69aと検出側プーリ69bとは、回転が同期するように同一径で形成されており、操舵側プーリ69aが一回転すると、検出側プーリ69bも一回転するようになっている。このようにして、検出用回転軸62bは、前側駆動ユニット22の操舵用回転軸62aと連動して回転するようになっている。
【0017】
単回転検出用ロータリーエンコーダ63は、前側駆動ユニット22の車体11に対する回転角度値を360度までの範囲で検出するものであり、いわゆるアブソリュート型エンコーダである。具体的には、単回転検出用ロータリーエンコーダ63は、上記した検出用回転軸62bの回転角度値(エンコーダ値)を検出することによって、操舵用回転軸62aの回転角度値を検出し、その検出した内容を情報信号としてデータ格納装置29に送信している。なお、この単回転検出用ロータリーエンコーダ63は、検出範囲が360度までの範囲となっており、360度位置まで回転すると、0度位置と同一の回転角度値(エンコーダ値)を検出するようになっている。また、この単回転検出用ロータリーエンコーダ63は、このように検出した内容を情報信号としてデータ格納装置29に送信する。
【0018】
360度単位回転数検出機構64は、連動回転する2つの回転板状体65a,65bにより360度回転及び回転方向をメカニカル的に検出するものである。具体的には、図1、図3(A)、図3(B)に示すように、360度単位回転数検出機構64は、前側駆動ユニット22の車体11に対する回転に連動して回転する検出用回転軸62bに設置されて連動回転する2つの回転板状体65a,65bを備える。この2つの回転板状体65a,65bは、略円盤状に形成されており、検出用回転軸62bに対し鉛直方向に並べられて取り付けられている。また、この第1回転板状体65aおよび第2回転板状体66aのそれぞれには、被検出部65b,66bが形成されている。この被検出部65b,66bは、互いに180度反転した位置からずらされた位置に設定されている。この第1回転板状体65aおよび第2回転板状体66aの周囲に配置されるブラケット64aには、被検出部65b,66bを検出する検出部65c,66cが設けられている。この検出部65c,66cは、磁力によりオンオフ状態を検出する磁気型リードスイッチにより形成され、互いに対向配置されるようにブラケット64aに取り付けられている。
なお、360度単位回転数検出機構64は、このように検出した内容を情報信号としてデータ格納装置29に送信する。
【0019】
つまり、360度単位回転数検出機構64は、この2つの回転板状体65a,65bのそれぞれが、互いにずれるタイミングで検出するように構成されており、このずらされたタイミングによる検出によって、検出用回転軸62bが左右の何れの方向で360度回転したか否かを検出できるようになっている。
例えば、この360度単位回転数検出機構64は、検出部65c,66cにて、第2回転板状体66aの被検出部66bのc部、第1回転板状体65aの被検出部65bのa部、第2回転板状体66aの被検出部66bのd部、第1回転板状体65aの被検出部65bのb部、と順次検出した場合には、データ格納装置29にて前側駆動ユニット22の車体11に対する回転が右回転である判定ができるようになっている。また逆に、この360度単位回転数検出機構64は、検出部65c,66cにて、第1回転板状体65aの被検出部65bのb部、第2回転板状体66aの被検出部66bのd部、第1回転板状体65aの被検出部65bのa部、第2回転板状体66aの被検出部66bのc部、と順次検出した場合には、データ格納装置29にて前側駆動ユニット22の車体11に対する回転が左回転である判定ができるようになっている。
【0020】
データ格納装置29は、上記したように、ガイド検出器26および方向検出装置61にて検出された信号(案内信号、位置信号、情報信号)をデータとして格納しつつ、これらのデータを主制御回路40に送信する。このデータ格納装置29は、本発明に係るテーブル根拠情報更新格納手段に相当するものである。すなわち、データ格納装置29は、上記した360度単位回転数検出機構64による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新し、この更新された回転情報テーブル根拠情報を格納する機能を有する。なお、データ格納装置29では、この右左の回転回数に関しても判定できるようになっている。
ここで、回転情報テーブルとは、実際の駆動ユニット22の車体11に対する向きとして、上記した単回転検出用ロータリーエンコーダ63にて検出された回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータであり、主制御回路40に格納されている。
また、回転情報テーブル根拠情報とは、駆動ユニット22の車体11に対する向きを導出するために利用されるものであり、この回転情報テーブルの根拠となる情報であることを意味している。
【0021】
ところで、データ格納装置29は、上記した主制御回路40と異なる独立系統の電源(例えば、図示していないバックアップ用電源)から電力が供給されている。つまり、主制御回路40をはじめとして各電動装置(駆動部21,31、バンパースイッチ51、障害物センサ52、非常停止スイッチ53、操作スイッチ54、表示ランプ55、表示出力器56、音声出力器57、赤外線通信器58等)は主電源から電力が供給されており、この主電源からの電力供給がオフの状態となったとしても、このデータ格納装置29は、独立系統の電源から電力が供給されて、機能している状態(機能状態)が維持されるようになっている。
【0022】
後側駆動操舵装置30は、車体11下側の後位置に設置される点で、車体11下側の前位置に設置される上記前側駆動操舵装置20と相違するものであり、構成に関しては上記前側駆動操舵装置20と同様に構成される。このため、後側駆動操舵装置30のうち、上記前側駆動操舵装置20と同様に構成される個所については、図示20番台の符号を図示30番台の符号に置き換え、その説明を省略する。
また、後側駆動操舵装置30は、上記前側駆動操舵装置20と同様、方向検出装置61と同様に構成される方向検出装置71を備える。この後側駆動操舵装置30の方向検出装置71は、上記前側駆動操舵装置20の方向検出装置61と同様に構成される。このため、後側駆動操舵装置30の方向検出装置71のうち、上記前側駆動操舵装置20の方向検出装置61と同様に構成される個所については、図示60番台の符号を図示70番台の符号に置き換え、その説明を省略する。
【0023】
主制御回路40は、上記した読取部25,35から送信される検出信号(案内信号、位置信号、情報信号)を受信し、その受信した検出信号に基づいて制御処理を行い、その制御処理にて生成した制御処理信号を上記した駆動部21,31に送信する。なお、これら読取部25,35からの受信および駆動部21,31への送信は、制御処理の割込み時間(例えば、0.02秒)ごとに行われている。
この主制御回路40には、上記した前側駆動操舵装置20および後側駆動操舵装置30のほか、インターフェース(I/F)回路59を介して公知の各部が接続されている。具体的には、図2に示すように、主制御回路40には、インターフェース(I/F)回路59を介して、バンパースイッチ51、障害物センサ52、非常停止スイッチ53、操作スイッチ54、表示ランプ55、表示出力器56、音声出力器57、赤外線通信器58が接続されている。
【0024】
この主制御回路40は、本発明に係る駆動ユニット向き導出処理手段に相当するものである。すなわち、主制御回路40は、上記したデータ格納装置29,39から送信された回転情報テーブル根拠情報および回転角度値を受信する。そうすると、主制御回路40は、受信した回転情報テーブル根拠情報と回転角度値とから駆動ユニット22,32の車体11に対する向きを導出する。つまり、実施の形態の駆動ユニット22(32)の車体11に対する向きを導出する駆動ユニット方向検出システムは、上記した、単回転検出用ロータリーエンコーダ63(73)と、360度単位回転数検出機構64(74)と、データ格納装置29(39)と、主制御回路40とを備えて構成される。
なお、この主制御回路40をはじめとした各電動装置(駆動部21,31、バンパースイッチ51、障害物センサ52、非常停止スイッチ53、操作スイッチ54、表示ランプ55、表示出力器56、音声出力器57、赤外線通信器58等)は、上記したデータ格納装置29,39とは異なる主電源から電力が供給されている。したがって、メンテナンス等の理由により、主電源からの電力供給をオフの状態とした場合には、これら主制御回路40をはじめとした各電動装置21、31、51〜58等は、機能しない機能不可状態となる。
【0025】
以上のように構成された自動搬送車10に搭載される駆動ユニット方向検出システムによれば、次のような作用効果を奏することができる。なお、2つの方向検出装置61,71は、双方とも同様に構成され、同様に車体11に対する各駆動ユニット22,32の操舵角度を検出するものとなっているので、以下においては方向検出装置61を取り上げて説明する。
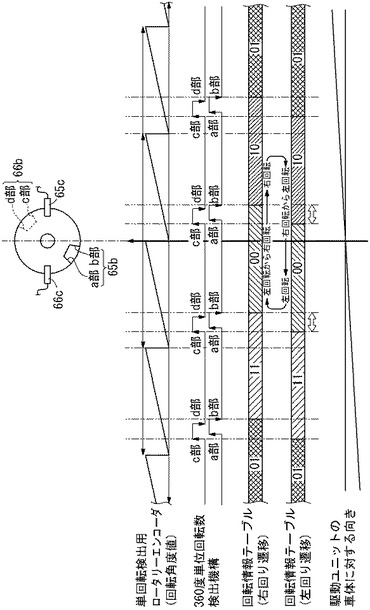
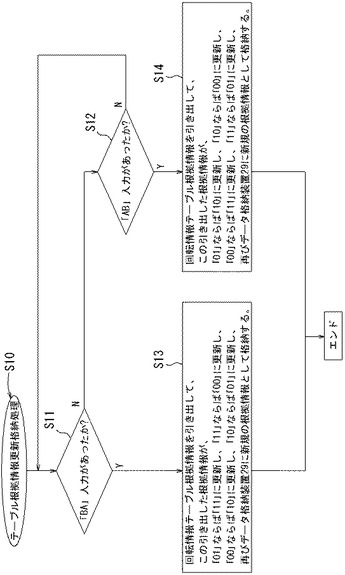
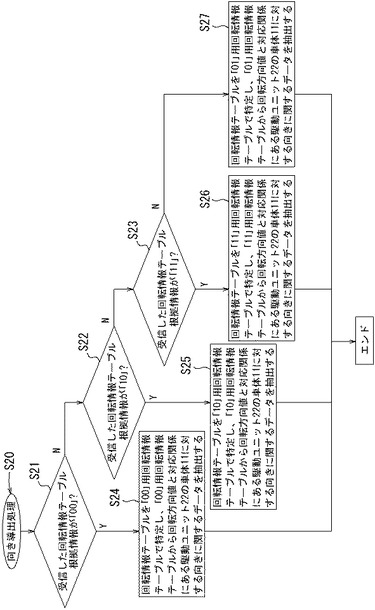
図4は、方向検出装置61による各検出信号の検出タイミングおよび回転情報テーブル根拠情報の遷移についての相関図である。図5は、360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくテーブル根拠情報更新格納処理に関するフローを示すフローチャートである。図6は、駆動ユニット22の車体11に対する向きを導出する向き導出処理に関するフローを示すフローチャートである。
【0026】
まず、テーブル根拠情報更新格納処理(S10)について、図4および図5を参照しながら説明する。図5に示すテーブル根拠情報更新格納処理(S10)は、データ格納装置29が行う処理である。したがって、このテーブル根拠情報更新格納処理(S10)は、主電源からの電力供給がオフの状態となったとしても常時行われる。
このテーブル根拠情報更新格納処理(S10)では、データ格納装置29が、360度単位回転数検出機構64による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納する。具体的には、360度単位回転数検出機構64から、第2回転板状体66aの被検出部66bのc部、第1回転板状体65aの被検出部65bのa部、第2回転板状体66aの被検出部66bのd部、第1回転板状体65aの被検出部65bのb部、と順次検出信号がデータ格納装置29に送られてきた場合には、データ格納装置29は『BA入力があった』と判断する(S11)。また逆に、360度単位回転数検出機構64から、第1回転板状体65aの被検出部65bのb部、第2回転板状体66aの被検出部66bのd部、第1回転板状体65aの被検出部65bのa部、第2回転板状体66aの被検出部66bのc部、と順次検出信号がデータ格納装置29に送られてきた場合には、データ格納装置29は『AB入力があった』と判断する(S12)。なお、この判断は、データ格納装置29の割込み時間ごとに繰り返し行っている(S11,S12)。
【0027】
データ格納装置29が上記S11において『BA入力があった』と判断した場合には、データ格納装置29は、回転情報テーブル根拠情報を引き出して、引出した根拠情報が『01』ならば『11』に更新し、引出した根拠情報が『11』ならば『00』に更新し、引出した根拠情報が『00』ならば『10』に更新し、引出した根拠情報が『10』ならば『01』に更新し、再びデータ格納装置29に新規の根拠情報として格納する(S13)。
また、これとは逆に、データ格納装置29が上記S12において『AB入力があった』と判断した場合には、データ格納装置29は、回転情報テーブル根拠情報を引き出して、引出した根拠情報が『01』ならば『10』に更新し、引出した根拠情報が『10』ならば『00』に更新し、引出した根拠情報が『00』ならば『11』に更新し、引出した根拠情報が『11』ならば『01』に更新し、再びデータ格納装置29に新規の根拠情報として格納する(S14)。
つまり、図4に示すように、データ格納装置29は、回転情報テーブル根拠情報を、回転回数を判定しながら更新し格納する。
【0028】
次に、向き導出処理(S20)について、図4および図6を参照しながら説明する。図6に示す向き導出処理(S20)は、主制御回路40が行う処理である。したがって、この向き導出処理(S20)は、主電源からの電力供給がオフの状態となった場合には行われない処理となっている。
この向き導出処理(S20)では、主制御回路40が、上記データ格納装置29から受信した回転情報テーブル根拠情報と回転角度値とから、駆動ユニット22,32の車体11に対する向きを導出する。詳しくは、この向き導出処理(S20)では、主制御回路40は、上記データ格納装置29から受信した回転情報テーブル根拠情報から回転情報テーブルを特定し、この回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する。
【0029】
具体的には、まず、上記データ格納装置29から受信した回転情報テーブル根拠情報が、『00』、『10』、『11』、『01』の何れであるかを判断する(S21,S22,S23)。なお、このデータ格納装置29からの回転情報テーブル根拠情報の受信は、主制御回路40の割込み時間ごとに繰り返し行っている。
ここで、主制御回路40が、受信した回転情報テーブル根拠情報が『00』であると判断した場合には(S21)、回転情報テーブルを『00』用回転情報テーブルで特定し、主制御回路40は、この『00』用回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する(S24)。
また、主制御回路40が、受信した回転情報テーブル根拠情報が『10』であると判断した場合には(S22)、回転情報テーブルを『10』用回転情報テーブルで特定し、主制御回路40は、この『10』用回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する(S25)。
また、主制御回路40が、受信した回転情報テーブル根拠情報が『11』であると判断した場合には(S23)、回転情報テーブルを『11』用回転情報テーブルで特定し、主制御回路40は、この『11』用回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する(S26)。
また、主制御回路40が、受信した回転情報テーブル根拠情報が『00』『10』『11』の何れでもない、つまり『01』であると判断した場合には(S21,S22,23)、回転情報テーブルを『01』用回転情報テーブルで特定し、主制御回路40は、この『01』用回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する(S27)。
【0030】
以上より、駆動ユニット方向検出システム(63,64,29,40)によれば、図4に示すように、主制御回路40は、駆動ユニット22の車体11に対する向きを、360度までの範囲を超えるような場合に対しても、多回転検出用ロータリーエンコーダを用いることなく導出することができる。これによって、多回転検出用ロータリーエンコーダに比して安価且つ小型な単回転検出用ロータリーエンコーダ63を用いるので、安価に製作することができ、高さ方向の嵩張りを減らすことができる。
つまり、このような駆動ユニット方向検出システム(63,64,29,40)を用いて自動搬送車10を構成した場合には、高さ方向の嵩張りを減らすことができ、ひいては自動搬送車10の荷台の高さ位置を低く設定することができるようになる。したがって、荷台に搬送物を積み上げたり積み下ろしたりする作業が行い易くなる自動搬送車とすることができる。
【0031】
また、この駆動ユニット方向検出システム(63,64,29,40)によれば、データ格納装置(テーブル根拠情報更新格納手段)29は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されているので、単回転検出用ロータリーエンコーダ63、360度単位回転数検出機構64、およびデータ格納装置29は、各電動装置への電力供給がオフとなる状態でも機能状態を維持できる。
これによって、各電動装置40等への電力供給を一時オフとした場合であっても、回転情報テーブル根拠情報と回転角度値とを保持することができて、各電動装置40等への電力供給を一時オフからオンに復帰した場合であっても、主制御回路(駆動ユニット向き導出処理手段)40により駆動ユニット22の車体11に対する向きを直ぐに導出することができる。例えば、メンテナンス等の理由により各電動装置40等への電力供給をオフにして人力で移動したような場合でも、この移動に対する調整処理を行うことなく、駆動ユニット22の車体11に対する向きを直ぐに判定でき、各電動装置40等への電力供給の再開と同時に自動搬送車10としての自動走行を直ぐに再開することができる。
【0032】
なお、以上の作用効果の説明においては、二つの駆動ユニット方向検出システム(63,64,29,40)、(73,74,39,40)のうち、前側駆動操舵装置20の駆動ユニット22に関するものについて説明するものであったが、後側駆動操舵装置30の駆動ユニット32に関するものについても同様である。
【0033】
また、本発明に係る自動搬送車にあっては、上記した実施の形態に限定されるものではなく、本発明の要旨を変更しない範囲で適宜に変更することができる。
例えば、上記した第1回転板状体65aおよび第2回転板状体66aのそれぞれに設けられる検出部65c,66cおよび被検出部65b,66bは、次のように構成されるものであってもよい。
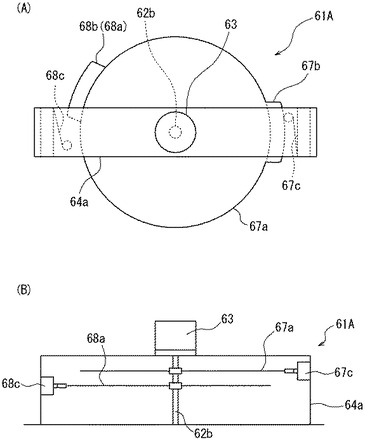
図7(A)は、他の例となる2つ回転板状体(第3回転板状体67a、第4回転板状体68a)を備えた方向検出装置61Aに関する拡大上面模式図である。図7(B)は、他の例となる2つ回転板状体(第3回転板状体67a、第4回転板状体68a)を備えた方向検出装置61Aに関する拡大側面模式図である。なお、以下説明する実施の形態は、上記の実施の形態の検出部65c,66cおよび被検出部65b,66bの形状等が相違するだけである。したがって、他の上記の実施の形態と同一の構成については、同一の符号を付して説明を省略する。
すなわち、図7(A)および図7(B)に示すように、第3回転板状体67a、第2回転板状体68aの被検出部67b,68bは、円盤状の外周部が外方に突出する凸状に形成されるものであってもよい。また、検出部67c,68cは、外方に突出する凸状を接触によりオンオフ状態を検出するマイクロ接点スイッチにより形成されるものであってもよいし、赤外線受信によりオンオフ状態を検出する赤外線受信スイッチにより形成されるものであってもよい。
【0034】
また、上記した単回転検出用ロータリーエンコーダ63および360度単位回転数検出機構64は、連動機構69を介して操舵用回転軸62aに依存して回転する検出用回転軸62bの操舵角度を検出することにより、操舵用回転軸62aの操舵角度を検出するものとしていた。しかしながら、本発明に係る単回転検出用ロータリーエンコーダおよび360度単位回転数検出機構による駆動ユニットの向きの導出は、これに限定されるものではなく、上記した連動機構69を介することなく操舵用回転軸62aを直接的に検出するものであってもよいし、更に適宜の連動機構を追加して操舵用回転軸62aを間接的に検出するものであってもよい。
ただ、単回転検出用ロータリーエンコーダおよび360度単位回転数検出機構による駆動ユニットの向きの導出は、適宜の連動機構を介して操舵用回転軸の操舵角度を検出するようにした方が、各機構を分散配置できるようになって、鉛直方向の嵩張りを減らすことができ、荷台の高さ位置を低く設定するにあたって有利となる。
【図面の簡単な説明】
【0035】
【図1】自動搬送車の構成概略を模式的に示す構成概略側面模式図である。
【図2】自動搬送車の各部構成の電気的関係を示すブロック図である。
【図3】図1に示す駆動ユニットに関する拡大上面模式図および拡大側面模式図である。
【図4】方向検出装置による各検出信号の検出タイミングおよび回転情報テーブルの遷移についての相関図である。
【図5】回転情報テーブルを更新して格納しておくテーブル更新格納処理に関するフローを示すフローチャートである。
【図6】駆動ユニットの車体に対する向きを導出する向き導出処理に関するフローを示すフローチャートである。
【図7】他の例となる2つ回転板状体を備えた駆動ユニットに関する拡大上面模式図および拡大側面模式図である。
【図8】ワークステーション間を自動走行する自動搬送車の軌跡の一例を模式的に示す概略図である。
【符号の説明】
【0036】
10 自動搬送車
11 車体
13 荷台
20 前側駆動ユニット
30 後側駆動ユニット
21,31 駆動部
22,32 駆動ユニット
22a,32a L側駆動輪装置
22b,32b R側駆動輪装置
23,33 ドライバ装置
23a,33a L側モータドライバ
23b,33b R側モータドライバ
25,35 読取部
26a,36a ラインセンサ
26b,36b マーカセンサ
29,39 データ格納装置(テーブル根拠情報更新格納手段)
40 主制御回路(駆動ユニット向き導出処理手段)
61,71 方向検出装置
62a,72a 操舵用回転軸
62b,72b 検出用回転軸
63,73 単回転検出用ロータリーエンコーダ
64,74 360度単位回転数検出機構
64a,74a ブラケット
65a,75a 第1回転板状体(回転板状体)
66a,76a 第2回転板状体(回転板状体)
65b,66b 被検出部
65c,66c,75c,76c 検出部
69,79 連動機構
69a,79a 操舵側プーリ
69b,79b 検出側プーリ
69c,79c タイミングベルト
91 ガイドライン
92 ガイドマーカ
【技術分野】
【0001】
本発明は、走行床面に敷設されたガイドを読み取りながらワークステーション間を自動走行する自動搬送車の駆動源としての駆動ユニットの、車体に対する向きを導出する駆動ユニット方向検出システムに関する。
【背景技術】
【0002】
近年、自動車の組立て工場等においては、荷台に組立てパーツを積載して搬送する自動搬送車が導入されている。この自動搬送車は、走行床面に敷設されたガイドライン等のガイドを読み取り、組立てパーツを積載するエリア、この積載した組立てパーツを積み下ろす組立てエリア(以下、これらのエリアを総じて『ワークステーション』と称する。)間を自動走行する。この種の自動搬送車には、自動走行するにあたっての駆動ユニットが設置されている。この駆動ユニットは、車体下部における前後バランス位置に1つずつ設置されている。各駆動ユニットは、並列配置される2つ車輪と、この2つの車輪のそれぞれに対応し独自に回転駆動させる2つの駆動モータとを備える。
【0003】
上記した各駆動ユニットは、2つの駆動モータを独立して駆動制御することにより2つの車輪に回転差を発生させる。この2つの車輪間に発生した回転差によって、各駆動ユニットは車体に対して回転するものとなっている。このように車体に対して各駆動ユニットの向きが変わることにより、自動搬送車を操舵して自動走行するようになっている。
ところで、自動搬送車を操舵して自動走行するためには、駆動ユニットが車体に対してどのような向きを向いているのかを検出しておくことが必要である。そこで、この種の自動搬送車には、上記した各駆動ユニットのそれぞれの車体に対する向きを導出する駆動ユニット方向検出システムが設けられている。
【特許文献1】特開2001−5526
【発明の開示】
【発明が解決しようとする課題】
【0004】
一方、上記の駆動ユニット方向検出システムには、様々な要請がある。すなわち、一つ目の要請としては「安価に製作したい」、二つ目の要請としては「荷台の高さ位置を低くするために高さ方向の嵩張りを減らしたい」というものである。
【0005】
他方、上記の自動搬送車にあっては、メンテナンス等の理由により、各電動装置への電力供給をオフにして、人力で移動することがある。そうすると、各電動装置への電力供給を再びオンにした場合に、車体に対する駆動ユニットの向きを正しい向きに変更するようにしておきたい。このような駆動ユニットの車体に対する向きを正しい向きに変更するにあたっては、上記した駆動ユニット方向検出システムによる検出が利用される。つまり、三つ目の要請としては、「各電動装置への電力供給をオフからオンとした場合であっても、駆動ユニットの車体に対する向きを直ぐに判定できるようにする」というものである。
【0006】
本発明は、上記した要請に鑑みなされたものであって、本発明が解決しようとする課題は、走行床面に敷設されたガイドを読み取りながらワークステーション間を自動走行する自動搬送車の駆動源としての駆動ユニットの、車体に対する向きを導出する駆動ユニット方向検出システムにおいて、安価に製作することができ、高さ方向の嵩張りを減らすことができ、さらに、各電動装置への電力供給をオフからオンとした場合であっても、駆動ユニットの車体に対する向きを直ぐに判定できるようにすることにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明に係る駆動ユニット方向検出システムは、次の手段を採用する。
すなわち、本発明に係る駆動ユニット方向検出システムは、走行床面に敷設されたガイドを読み取りながらワークステーション間を自動走行する自動搬送車の駆動源としての駆動ユニットの、車体に対する向きを導出する駆動ユニット方向検出システムであって、前記駆動ユニットの前記車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、前記駆動ユニットの前記車体に対する回転に連動して回転する回転軸に設置され連動回転する2つの回転板状体により360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、前記360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくテーブル根拠情報更新格納手段と、前記回転情報テーブル根拠情報と前記回転角度値とから前記駆動ユニットの前記車体に対する向きを導出する駆動ユニット向き導出処理手段とを備え、前記テーブル根拠情報更新格納手段は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されていることを特徴とする。
【0008】
この駆動ユニット方向検出システムによれば、駆動ユニットの車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、駆動ユニットの車体に対する回転に連動して回転する回転軸に設置され連動回転する2つの回転板状体により360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブルを更新して格納しておくテーブル根拠情報更新格納手段と、回転角度値と回転情報テーブルとから駆動ユニットの車体に対する向きを導出する駆動ユニット向き導出処理手段とを備えているので、駆動ユニットの車体に対する向きを、360度までの範囲を超えるような場合に対しても、多回転検出用ロータリーエンコーダを用いることなく導出することができる。
これによって、多回転検出用ロータリーエンコーダに比して安価且つ小型な単回転検出用ロータリーエンコーダを用いるので、安価に製作することができ、高さ方向の嵩張りを減らすことができる。
つまり、このような駆動ユニット方向検出システムを用いて自動搬送車を構成した場合には、高さ方向の嵩張りを減らすことができ、ひいては自動搬送車の荷台の高さ位置を低く設定することができるようになる。したがって、荷台に搬送物を積み上げたり積み下ろしたりする作業が行い易くなる自動搬送車とすることができる。
【0009】
また、この駆動ユニット方向検出システムによれば、テーブル根拠情報更新格納手段は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されているので、単回転検出用ロータリーエンコーダ、360度単位回転数検出機構、およびテーブル根拠情報更新格納手段は、各電動装置への電力供給がオフとなる状態でも機能状態を維持できる。
これによって、各電動装置への電力供給を一時オフとした場合であっても、回転情報テーブル根拠情報と回転角度値とを保持することができて、各電動装置への電力供給を一時オフからオンに復帰した場合であっても、駆動ユニット向き導出処理手段により駆動ユニットの車体に対する向きを直ぐに導出することができる。例えば、メンテナンス等の理由により各電動装置への電力供給をオフにして人力で移動したような場合でも、この移動に対する調整処理を行うことなく、駆動ユニットの車体に対する向きを直ぐに判定でき、各電動装置への電力供給の再開と同時に自動搬送車としての自動走行を直ぐに再開することができる。
【発明の効果】
【0010】
本発明に係る駆動ユニット方向検出システムによれば、多回転検出用ロータリーエンコーダに比して安価且つ小型な単回転検出用ロータリーエンコーダを用いるので、安価に製作することができ、高さ方向の嵩張りを減らすことができる。
また、本発明に係る駆動ユニット方向検出システムによれば、各電動装置への電力供給を一時オフとした場合であっても、回転情報テーブル根拠情報と回転角度値とを保持することができて、各電動装置への電力供給を一時オフからオンに復帰した場合であっても、駆動ユニット向き導出処理手段により駆動ユニットの車体に対する向きを直ぐに導出することができ、駆動ユニットの車体に対する向きを直ぐに判定することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明を実施するための最良の形態について、図面を参照しながら説明する。
図1は、側面視した自動搬送車10の構成概略を模式的に示す構成概略側面模式図である。なお、図中符号Frは前方を、図中符号Baは後方を、表している。図2は、自動搬送車10の各部構成の電気的関係を示すブロック図である。図8は、ワークステーションA,B間を自動走行する自動搬送車10の軌跡の一例を模式的に示す概略図である。
この自動搬送車10は、例えば自動車等の組立て工場等において導入されるものであって、図8に示すように走行床面に敷設されたガイドライン91およびガイドマーカ92に案内されて2つ以上のワークステーション(例えば、ワークステーションAからワークステーションBまで)間を自動走行し、積み上げ積み下ろしする組立てパーツを搬送する。
すなわち、この自動搬送車10は、組立てパーツを積載する荷台13を具備する車体11と、この車体11下側の前位置および後位置のそれぞれに設置され且つそれぞれ独自に駆動操舵される前側駆動操舵装置20および後側駆動操舵装置30を備える。
【0012】
前側駆動操舵装置20および後側駆動操舵装置30は、車体11の下側に位置する車体フレーム12に取り付けられる。このように前側駆動操舵装置20および後側駆動操舵装置30が駆動することにより、自動搬送車10は自動走行するようになっている。両者は、設置される個所が車体11下側の前位置および後位置のそれぞれである点で異なるものであって、構成に関しては同様に構成される。以下においては、前側駆動操舵装置20に関して詳細に説明し、後側駆動操舵装置30に関しての説明は簡単なものとする。
前側駆動操舵装置20は、図2に示すように、主制御回路40に接続されるものであって、概略、主制御回路40から送信された制御処理信号に基づいて駆動操舵する駆動部21と、駆動部21が駆動操舵するための検出信号を主制御回路40に送信する読取部25とを備えて構成される。
駆動部21は、自動搬送車10の駆動源となる前側駆動ユニット22と、この前側駆動ユニット22を制御するドライバ装置23とを備えて構成される。
【0013】
前側駆動ユニット22は、図1および図2に示すように、車体11に対して回転可能な操舵用回転軸62aの下部に取り付けられており、それぞれ独立して駆動するL側駆動輪装置22aおよびR側駆動輪装置22bとを備える。L側駆動輪装置22aは、図示していないが、L側駆動輪と、このL側駆動輪を回転させるL側駆動モータとを備えて構成されている。また、R側駆動輪装置22bも、図示していないが、R側駆動輪と、このR側駆動輪を回転させるR側駆動モータとを備えて構成されている。
L側駆動モータは、ドライバ装置23を構成するL側モータドライバ23aにて制御されており、R側駆動モータは、ドライバ装置23を構成するR側モータドライバ23bにて制御されている。また、L側モータドライバ23aおよびR側モータドライバ23bは、主制御回路40から送信された制御処理信号に基づき、それぞれに対応したL側駆動モータおよびR側駆動モータの回転を制御するようになっている。つまり、2つの駆動モータを独立して制御することにより2つの駆動輪に回転差を発生させ、この2つの駆動輪間に発生した回転差によって、前側駆動ユニット22は車体11に対して回転するものとなっている。
【0014】
読取部25は、概略、ガイドライン91およびガイドマーカ92に関して検出するガイド検出器26と、前側駆動ユニット22の車体11に対する向きに関して検出する方向検出装置61と、これらガイド検出器26および方向検出装置61にて検出された信号をデータとして格納しつつ主制御回路40に送信するデータ格納装置29とを備えて構成される。
具体的には、ガイド検出器26は、走行床面の所定位置に敷設されたガイドライン91を検出するラインセンサ26aと、走行床面の所定位置に敷設されたガイドマーカ92を検出するマーカセンサ26bとを備えて構成される。
ラインセンサ26aは、ガイドライン91を検出することにより生成されるガイド検出信号としての案内信号を、データ格納装置29を介して主制御回路40に送信する。マーカセンサ26bは、車体11の現在の位置を認識するように、ガイドマーカ92を検出することにより生成されるガイド検出信号としての位置信号を、データ格納装置29を介して主制御回路40に送信する。
【0015】
図3(A)は、図1に示す方向検出装置61に関する拡大上面模式図である。図3(B)は、図1に示す方向検出装置61に関する拡大側面模式図である。
方向検出装置61は、図1、図3(A)、図3(B)に示すように、前側駆動ユニット22の車体11に対する向きに関する情報を検出するものである。方向検出装置61は、連動機構69を介して操舵用回転軸62aに依存して回転する検出用回転軸62bに対して取り付けられる。つまり、検出用回転軸62bは、前側駆動ユニット22の車体11に対する回転に連動して回転する回転軸であり、この検出用回転軸62bには、単回転検出用ロータリーエンコーダ63および360度単位回転数検出機構64が設置されている。
なお、この前側駆動ユニット22の車体11に対する向きに関する情報としては、単回転検出用ロータリーエンコーダ63によって検出される回転角度値(エンコーダ値)と、360度単位回転数検出機構64によってメカニカル的に検出される360度回転及び回転方向の検出値を含む。
【0016】
連動機構69は、操舵用回転軸62aに取り付けられた操舵側プーリ69aと、検出用回転軸62bに取り付けられた検出側プーリ69bと、これら操舵側プーリ69aと検出側プーリ69bとを連動して回転させるタイミングベルト69cとを備えて構成される。なお、操舵側プーリ69aと検出側プーリ69bとは、回転が同期するように同一径で形成されており、操舵側プーリ69aが一回転すると、検出側プーリ69bも一回転するようになっている。このようにして、検出用回転軸62bは、前側駆動ユニット22の操舵用回転軸62aと連動して回転するようになっている。
【0017】
単回転検出用ロータリーエンコーダ63は、前側駆動ユニット22の車体11に対する回転角度値を360度までの範囲で検出するものであり、いわゆるアブソリュート型エンコーダである。具体的には、単回転検出用ロータリーエンコーダ63は、上記した検出用回転軸62bの回転角度値(エンコーダ値)を検出することによって、操舵用回転軸62aの回転角度値を検出し、その検出した内容を情報信号としてデータ格納装置29に送信している。なお、この単回転検出用ロータリーエンコーダ63は、検出範囲が360度までの範囲となっており、360度位置まで回転すると、0度位置と同一の回転角度値(エンコーダ値)を検出するようになっている。また、この単回転検出用ロータリーエンコーダ63は、このように検出した内容を情報信号としてデータ格納装置29に送信する。
【0018】
360度単位回転数検出機構64は、連動回転する2つの回転板状体65a,65bにより360度回転及び回転方向をメカニカル的に検出するものである。具体的には、図1、図3(A)、図3(B)に示すように、360度単位回転数検出機構64は、前側駆動ユニット22の車体11に対する回転に連動して回転する検出用回転軸62bに設置されて連動回転する2つの回転板状体65a,65bを備える。この2つの回転板状体65a,65bは、略円盤状に形成されており、検出用回転軸62bに対し鉛直方向に並べられて取り付けられている。また、この第1回転板状体65aおよび第2回転板状体66aのそれぞれには、被検出部65b,66bが形成されている。この被検出部65b,66bは、互いに180度反転した位置からずらされた位置に設定されている。この第1回転板状体65aおよび第2回転板状体66aの周囲に配置されるブラケット64aには、被検出部65b,66bを検出する検出部65c,66cが設けられている。この検出部65c,66cは、磁力によりオンオフ状態を検出する磁気型リードスイッチにより形成され、互いに対向配置されるようにブラケット64aに取り付けられている。
なお、360度単位回転数検出機構64は、このように検出した内容を情報信号としてデータ格納装置29に送信する。
【0019】
つまり、360度単位回転数検出機構64は、この2つの回転板状体65a,65bのそれぞれが、互いにずれるタイミングで検出するように構成されており、このずらされたタイミングによる検出によって、検出用回転軸62bが左右の何れの方向で360度回転したか否かを検出できるようになっている。
例えば、この360度単位回転数検出機構64は、検出部65c,66cにて、第2回転板状体66aの被検出部66bのc部、第1回転板状体65aの被検出部65bのa部、第2回転板状体66aの被検出部66bのd部、第1回転板状体65aの被検出部65bのb部、と順次検出した場合には、データ格納装置29にて前側駆動ユニット22の車体11に対する回転が右回転である判定ができるようになっている。また逆に、この360度単位回転数検出機構64は、検出部65c,66cにて、第1回転板状体65aの被検出部65bのb部、第2回転板状体66aの被検出部66bのd部、第1回転板状体65aの被検出部65bのa部、第2回転板状体66aの被検出部66bのc部、と順次検出した場合には、データ格納装置29にて前側駆動ユニット22の車体11に対する回転が左回転である判定ができるようになっている。
【0020】
データ格納装置29は、上記したように、ガイド検出器26および方向検出装置61にて検出された信号(案内信号、位置信号、情報信号)をデータとして格納しつつ、これらのデータを主制御回路40に送信する。このデータ格納装置29は、本発明に係るテーブル根拠情報更新格納手段に相当するものである。すなわち、データ格納装置29は、上記した360度単位回転数検出機構64による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新し、この更新された回転情報テーブル根拠情報を格納する機能を有する。なお、データ格納装置29では、この右左の回転回数に関しても判定できるようになっている。
ここで、回転情報テーブルとは、実際の駆動ユニット22の車体11に対する向きとして、上記した単回転検出用ロータリーエンコーダ63にて検出された回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータであり、主制御回路40に格納されている。
また、回転情報テーブル根拠情報とは、駆動ユニット22の車体11に対する向きを導出するために利用されるものであり、この回転情報テーブルの根拠となる情報であることを意味している。
【0021】
ところで、データ格納装置29は、上記した主制御回路40と異なる独立系統の電源(例えば、図示していないバックアップ用電源)から電力が供給されている。つまり、主制御回路40をはじめとして各電動装置(駆動部21,31、バンパースイッチ51、障害物センサ52、非常停止スイッチ53、操作スイッチ54、表示ランプ55、表示出力器56、音声出力器57、赤外線通信器58等)は主電源から電力が供給されており、この主電源からの電力供給がオフの状態となったとしても、このデータ格納装置29は、独立系統の電源から電力が供給されて、機能している状態(機能状態)が維持されるようになっている。
【0022】
後側駆動操舵装置30は、車体11下側の後位置に設置される点で、車体11下側の前位置に設置される上記前側駆動操舵装置20と相違するものであり、構成に関しては上記前側駆動操舵装置20と同様に構成される。このため、後側駆動操舵装置30のうち、上記前側駆動操舵装置20と同様に構成される個所については、図示20番台の符号を図示30番台の符号に置き換え、その説明を省略する。
また、後側駆動操舵装置30は、上記前側駆動操舵装置20と同様、方向検出装置61と同様に構成される方向検出装置71を備える。この後側駆動操舵装置30の方向検出装置71は、上記前側駆動操舵装置20の方向検出装置61と同様に構成される。このため、後側駆動操舵装置30の方向検出装置71のうち、上記前側駆動操舵装置20の方向検出装置61と同様に構成される個所については、図示60番台の符号を図示70番台の符号に置き換え、その説明を省略する。
【0023】
主制御回路40は、上記した読取部25,35から送信される検出信号(案内信号、位置信号、情報信号)を受信し、その受信した検出信号に基づいて制御処理を行い、その制御処理にて生成した制御処理信号を上記した駆動部21,31に送信する。なお、これら読取部25,35からの受信および駆動部21,31への送信は、制御処理の割込み時間(例えば、0.02秒)ごとに行われている。
この主制御回路40には、上記した前側駆動操舵装置20および後側駆動操舵装置30のほか、インターフェース(I/F)回路59を介して公知の各部が接続されている。具体的には、図2に示すように、主制御回路40には、インターフェース(I/F)回路59を介して、バンパースイッチ51、障害物センサ52、非常停止スイッチ53、操作スイッチ54、表示ランプ55、表示出力器56、音声出力器57、赤外線通信器58が接続されている。
【0024】
この主制御回路40は、本発明に係る駆動ユニット向き導出処理手段に相当するものである。すなわち、主制御回路40は、上記したデータ格納装置29,39から送信された回転情報テーブル根拠情報および回転角度値を受信する。そうすると、主制御回路40は、受信した回転情報テーブル根拠情報と回転角度値とから駆動ユニット22,32の車体11に対する向きを導出する。つまり、実施の形態の駆動ユニット22(32)の車体11に対する向きを導出する駆動ユニット方向検出システムは、上記した、単回転検出用ロータリーエンコーダ63(73)と、360度単位回転数検出機構64(74)と、データ格納装置29(39)と、主制御回路40とを備えて構成される。
なお、この主制御回路40をはじめとした各電動装置(駆動部21,31、バンパースイッチ51、障害物センサ52、非常停止スイッチ53、操作スイッチ54、表示ランプ55、表示出力器56、音声出力器57、赤外線通信器58等)は、上記したデータ格納装置29,39とは異なる主電源から電力が供給されている。したがって、メンテナンス等の理由により、主電源からの電力供給をオフの状態とした場合には、これら主制御回路40をはじめとした各電動装置21、31、51〜58等は、機能しない機能不可状態となる。
【0025】
以上のように構成された自動搬送車10に搭載される駆動ユニット方向検出システムによれば、次のような作用効果を奏することができる。なお、2つの方向検出装置61,71は、双方とも同様に構成され、同様に車体11に対する各駆動ユニット22,32の操舵角度を検出するものとなっているので、以下においては方向検出装置61を取り上げて説明する。
図4は、方向検出装置61による各検出信号の検出タイミングおよび回転情報テーブル根拠情報の遷移についての相関図である。図5は、360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくテーブル根拠情報更新格納処理に関するフローを示すフローチャートである。図6は、駆動ユニット22の車体11に対する向きを導出する向き導出処理に関するフローを示すフローチャートである。
【0026】
まず、テーブル根拠情報更新格納処理(S10)について、図4および図5を参照しながら説明する。図5に示すテーブル根拠情報更新格納処理(S10)は、データ格納装置29が行う処理である。したがって、このテーブル根拠情報更新格納処理(S10)は、主電源からの電力供給がオフの状態となったとしても常時行われる。
このテーブル根拠情報更新格納処理(S10)では、データ格納装置29が、360度単位回転数検出機構64による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納する。具体的には、360度単位回転数検出機構64から、第2回転板状体66aの被検出部66bのc部、第1回転板状体65aの被検出部65bのa部、第2回転板状体66aの被検出部66bのd部、第1回転板状体65aの被検出部65bのb部、と順次検出信号がデータ格納装置29に送られてきた場合には、データ格納装置29は『BA入力があった』と判断する(S11)。また逆に、360度単位回転数検出機構64から、第1回転板状体65aの被検出部65bのb部、第2回転板状体66aの被検出部66bのd部、第1回転板状体65aの被検出部65bのa部、第2回転板状体66aの被検出部66bのc部、と順次検出信号がデータ格納装置29に送られてきた場合には、データ格納装置29は『AB入力があった』と判断する(S12)。なお、この判断は、データ格納装置29の割込み時間ごとに繰り返し行っている(S11,S12)。
【0027】
データ格納装置29が上記S11において『BA入力があった』と判断した場合には、データ格納装置29は、回転情報テーブル根拠情報を引き出して、引出した根拠情報が『01』ならば『11』に更新し、引出した根拠情報が『11』ならば『00』に更新し、引出した根拠情報が『00』ならば『10』に更新し、引出した根拠情報が『10』ならば『01』に更新し、再びデータ格納装置29に新規の根拠情報として格納する(S13)。
また、これとは逆に、データ格納装置29が上記S12において『AB入力があった』と判断した場合には、データ格納装置29は、回転情報テーブル根拠情報を引き出して、引出した根拠情報が『01』ならば『10』に更新し、引出した根拠情報が『10』ならば『00』に更新し、引出した根拠情報が『00』ならば『11』に更新し、引出した根拠情報が『11』ならば『01』に更新し、再びデータ格納装置29に新規の根拠情報として格納する(S14)。
つまり、図4に示すように、データ格納装置29は、回転情報テーブル根拠情報を、回転回数を判定しながら更新し格納する。
【0028】
次に、向き導出処理(S20)について、図4および図6を参照しながら説明する。図6に示す向き導出処理(S20)は、主制御回路40が行う処理である。したがって、この向き導出処理(S20)は、主電源からの電力供給がオフの状態となった場合には行われない処理となっている。
この向き導出処理(S20)では、主制御回路40が、上記データ格納装置29から受信した回転情報テーブル根拠情報と回転角度値とから、駆動ユニット22,32の車体11に対する向きを導出する。詳しくは、この向き導出処理(S20)では、主制御回路40は、上記データ格納装置29から受信した回転情報テーブル根拠情報から回転情報テーブルを特定し、この回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する。
【0029】
具体的には、まず、上記データ格納装置29から受信した回転情報テーブル根拠情報が、『00』、『10』、『11』、『01』の何れであるかを判断する(S21,S22,S23)。なお、このデータ格納装置29からの回転情報テーブル根拠情報の受信は、主制御回路40の割込み時間ごとに繰り返し行っている。
ここで、主制御回路40が、受信した回転情報テーブル根拠情報が『00』であると判断した場合には(S21)、回転情報テーブルを『00』用回転情報テーブルで特定し、主制御回路40は、この『00』用回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する(S24)。
また、主制御回路40が、受信した回転情報テーブル根拠情報が『10』であると判断した場合には(S22)、回転情報テーブルを『10』用回転情報テーブルで特定し、主制御回路40は、この『10』用回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する(S25)。
また、主制御回路40が、受信した回転情報テーブル根拠情報が『11』であると判断した場合には(S23)、回転情報テーブルを『11』用回転情報テーブルで特定し、主制御回路40は、この『11』用回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する(S26)。
また、主制御回路40が、受信した回転情報テーブル根拠情報が『00』『10』『11』の何れでもない、つまり『01』であると判断した場合には(S21,S22,23)、回転情報テーブルを『01』用回転情報テーブルで特定し、主制御回路40は、この『01』用回転情報テーブルから回転角度値と対応関係にある駆動ユニット22の車体11に対する向きに関するデータを抽出する(S27)。
【0030】
以上より、駆動ユニット方向検出システム(63,64,29,40)によれば、図4に示すように、主制御回路40は、駆動ユニット22の車体11に対する向きを、360度までの範囲を超えるような場合に対しても、多回転検出用ロータリーエンコーダを用いることなく導出することができる。これによって、多回転検出用ロータリーエンコーダに比して安価且つ小型な単回転検出用ロータリーエンコーダ63を用いるので、安価に製作することができ、高さ方向の嵩張りを減らすことができる。
つまり、このような駆動ユニット方向検出システム(63,64,29,40)を用いて自動搬送車10を構成した場合には、高さ方向の嵩張りを減らすことができ、ひいては自動搬送車10の荷台の高さ位置を低く設定することができるようになる。したがって、荷台に搬送物を積み上げたり積み下ろしたりする作業が行い易くなる自動搬送車とすることができる。
【0031】
また、この駆動ユニット方向検出システム(63,64,29,40)によれば、データ格納装置(テーブル根拠情報更新格納手段)29は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されているので、単回転検出用ロータリーエンコーダ63、360度単位回転数検出機構64、およびデータ格納装置29は、各電動装置への電力供給がオフとなる状態でも機能状態を維持できる。
これによって、各電動装置40等への電力供給を一時オフとした場合であっても、回転情報テーブル根拠情報と回転角度値とを保持することができて、各電動装置40等への電力供給を一時オフからオンに復帰した場合であっても、主制御回路(駆動ユニット向き導出処理手段)40により駆動ユニット22の車体11に対する向きを直ぐに導出することができる。例えば、メンテナンス等の理由により各電動装置40等への電力供給をオフにして人力で移動したような場合でも、この移動に対する調整処理を行うことなく、駆動ユニット22の車体11に対する向きを直ぐに判定でき、各電動装置40等への電力供給の再開と同時に自動搬送車10としての自動走行を直ぐに再開することができる。
【0032】
なお、以上の作用効果の説明においては、二つの駆動ユニット方向検出システム(63,64,29,40)、(73,74,39,40)のうち、前側駆動操舵装置20の駆動ユニット22に関するものについて説明するものであったが、後側駆動操舵装置30の駆動ユニット32に関するものについても同様である。
【0033】
また、本発明に係る自動搬送車にあっては、上記した実施の形態に限定されるものではなく、本発明の要旨を変更しない範囲で適宜に変更することができる。
例えば、上記した第1回転板状体65aおよび第2回転板状体66aのそれぞれに設けられる検出部65c,66cおよび被検出部65b,66bは、次のように構成されるものであってもよい。
図7(A)は、他の例となる2つ回転板状体(第3回転板状体67a、第4回転板状体68a)を備えた方向検出装置61Aに関する拡大上面模式図である。図7(B)は、他の例となる2つ回転板状体(第3回転板状体67a、第4回転板状体68a)を備えた方向検出装置61Aに関する拡大側面模式図である。なお、以下説明する実施の形態は、上記の実施の形態の検出部65c,66cおよび被検出部65b,66bの形状等が相違するだけである。したがって、他の上記の実施の形態と同一の構成については、同一の符号を付して説明を省略する。
すなわち、図7(A)および図7(B)に示すように、第3回転板状体67a、第2回転板状体68aの被検出部67b,68bは、円盤状の外周部が外方に突出する凸状に形成されるものであってもよい。また、検出部67c,68cは、外方に突出する凸状を接触によりオンオフ状態を検出するマイクロ接点スイッチにより形成されるものであってもよいし、赤外線受信によりオンオフ状態を検出する赤外線受信スイッチにより形成されるものであってもよい。
【0034】
また、上記した単回転検出用ロータリーエンコーダ63および360度単位回転数検出機構64は、連動機構69を介して操舵用回転軸62aに依存して回転する検出用回転軸62bの操舵角度を検出することにより、操舵用回転軸62aの操舵角度を検出するものとしていた。しかしながら、本発明に係る単回転検出用ロータリーエンコーダおよび360度単位回転数検出機構による駆動ユニットの向きの導出は、これに限定されるものではなく、上記した連動機構69を介することなく操舵用回転軸62aを直接的に検出するものであってもよいし、更に適宜の連動機構を追加して操舵用回転軸62aを間接的に検出するものであってもよい。
ただ、単回転検出用ロータリーエンコーダおよび360度単位回転数検出機構による駆動ユニットの向きの導出は、適宜の連動機構を介して操舵用回転軸の操舵角度を検出するようにした方が、各機構を分散配置できるようになって、鉛直方向の嵩張りを減らすことができ、荷台の高さ位置を低く設定するにあたって有利となる。
【図面の簡単な説明】
【0035】
【図1】自動搬送車の構成概略を模式的に示す構成概略側面模式図である。
【図2】自動搬送車の各部構成の電気的関係を示すブロック図である。
【図3】図1に示す駆動ユニットに関する拡大上面模式図および拡大側面模式図である。
【図4】方向検出装置による各検出信号の検出タイミングおよび回転情報テーブルの遷移についての相関図である。
【図5】回転情報テーブルを更新して格納しておくテーブル更新格納処理に関するフローを示すフローチャートである。
【図6】駆動ユニットの車体に対する向きを導出する向き導出処理に関するフローを示すフローチャートである。
【図7】他の例となる2つ回転板状体を備えた駆動ユニットに関する拡大上面模式図および拡大側面模式図である。
【図8】ワークステーション間を自動走行する自動搬送車の軌跡の一例を模式的に示す概略図である。
【符号の説明】
【0036】
10 自動搬送車
11 車体
13 荷台
20 前側駆動ユニット
30 後側駆動ユニット
21,31 駆動部
22,32 駆動ユニット
22a,32a L側駆動輪装置
22b,32b R側駆動輪装置
23,33 ドライバ装置
23a,33a L側モータドライバ
23b,33b R側モータドライバ
25,35 読取部
26a,36a ラインセンサ
26b,36b マーカセンサ
29,39 データ格納装置(テーブル根拠情報更新格納手段)
40 主制御回路(駆動ユニット向き導出処理手段)
61,71 方向検出装置
62a,72a 操舵用回転軸
62b,72b 検出用回転軸
63,73 単回転検出用ロータリーエンコーダ
64,74 360度単位回転数検出機構
64a,74a ブラケット
65a,75a 第1回転板状体(回転板状体)
66a,76a 第2回転板状体(回転板状体)
65b,66b 被検出部
65c,66c,75c,76c 検出部
69,79 連動機構
69a,79a 操舵側プーリ
69b,79b 検出側プーリ
69c,79c タイミングベルト
91 ガイドライン
92 ガイドマーカ
【特許請求の範囲】
【請求項1】
走行床面に敷設されたガイドを読み取りながらワークステーション間を自動走行する自動搬送車の駆動源としての駆動ユニットの、車体に対する向きを導出する駆動ユニット方向検出システムであって、
前記駆動ユニットの前記車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、
前記駆動ユニットの前記車体に対する回転に連動して回転する回転軸に設置され連動回転する2つの回転板状体により360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、
前記360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくテーブル根拠情報更新格納手段と、
前記回転情報テーブル根拠情報と前記回転角度値とから前記駆動ユニットの前記車体に対する向きを導出する駆動ユニット向き導出処理手段とを備え、
前記テーブル根拠情報更新格納手段は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されていることを特徴とする駆動ユニット方向検出システム。
【請求項1】
走行床面に敷設されたガイドを読み取りながらワークステーション間を自動走行する自動搬送車の駆動源としての駆動ユニットの、車体に対する向きを導出する駆動ユニット方向検出システムであって、
前記駆動ユニットの前記車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、
前記駆動ユニットの前記車体に対する回転に連動して回転する回転軸に設置され連動回転する2つの回転板状体により360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、
前記360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくテーブル根拠情報更新格納手段と、
前記回転情報テーブル根拠情報と前記回転角度値とから前記駆動ユニットの前記車体に対する向きを導出する駆動ユニット向き導出処理手段とを備え、
前記テーブル根拠情報更新格納手段は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されていることを特徴とする駆動ユニット方向検出システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−133889(P2010−133889A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−312053(P2008−312053)
【出願日】平成20年12月8日(2008.12.8)
【出願人】(593018208)株式会社シンテックホズミ (8)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月8日(2008.12.8)
【出願人】(593018208)株式会社シンテックホズミ (8)
【Fターム(参考)】
[ Back to top ]