
駆動式搬送チェーン
【課題】搬送チェーンの小型化および簡素化を図るとともに、リニアモータとスプロケットとを両用でき、搬送装置全体の小型化、省スペース化も達成できる駆動式搬送チェーンを提供すること。
【解決手段】搬送チェーン側に配置したリニアモータ機構の二次側可動子の一部分となるバックアイアンがチェーン構成要素であるガイドユニットのガイドプレート140と一体に構成され、このガイドプレート140の垂直な外側面に二次側可動子の残りの部分を構成するリアクションプレート160が固着されて、リニアモータ駆動とスプロケット駆動の両方に用いられる駆動式搬送チェーン。
【解決手段】搬送チェーン側に配置したリニアモータ機構の二次側可動子の一部分となるバックアイアンがチェーン構成要素であるガイドユニットのガイドプレート140と一体に構成され、このガイドプレート140の垂直な外側面に二次側可動子の残りの部分を構成するリアクションプレート160が固着されて、リニアモータ駆動とスプロケット駆動の両方に用いられる駆動式搬送チェーン。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品の搬送装置などに用いられる駆動式搬送チェーン、特に、リニアモータ駆動とスプロケット駆動の両方に用いられるハイブリッド駆動式搬送チェーンに関する。
【背景技術】
【0002】
近年、物品の搬送装置に用いるためのリニアモータ駆動式搬送チェーンが開発されており、たとえば、シート状基材の両側耳縁を保持して所定速度で連続的に移動処理するテンターに用いるための、リニアモータの可動子部を適宜間隔で連続して取り付けたテンターチェンからなるリニアモータ駆動式搬送チェーンがある(例えば、特許文献1参照)。
【特許文献1】特開平6−57618号公報(第1頁、図1−図2)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来のリニアモータ駆動式搬送チェーンは、チェーン本体にリニアモータの可動子部が追加されて取り付けられているため、チェーン構造が複雑化してスプロケット駆動との両用ができず、また、このようなチェーン構造を組み込んだ搬送装置も複雑化に伴って大型化し、その設置スペースも余分に必要となるという問題があった。
【0004】
そこで、本発明の目的は、従来の問題を解決するものであって、搬送チェーンの小型化および簡素化を図るとともに、リニアモータとスプロケットとを両用でき、しかも、搬送装置全体の小型化、省スペース化も達成することができる駆動式搬送チェーンを提供することである。
【課題を解決するための手段】
【0005】
前記目的のため、本請求項1に係る発明の駆動式搬送チェーンは、搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素と一体化したものである。
【0006】
そして、本請求項2に係る発明の駆動式搬送チェーンは、請求項1記載の構成に加えて、リニアモータ駆動とスプロケット駆動の両方に用いられるハイブリッド駆動式搬送チェーンとして構成したものである。
【0007】
ここで、本発明の駆動式搬送チェーンは、搬送ラインのチェーン周回軌道上を走行する走行ガイド体と前記走行ガイド体を相互にチェーン長手方向に連結するリンク体と構成される基本構造を備えており、スラットコンベヤ、スクレーパーコンベヤ、バケットコンベヤ、プッシャドッグ式コンベヤなどに組み込まれるようになっている。
【0008】
そして、前記二次側可動子の一部分は、チェーン構成要素である走行ガイド体とリンク体のいずれかにバックアイアンとして一体化され、また、二次側可動子の残りの部分は、走行ガイド体、または、リンク体の少なくとも一部に固着などして設けられている。
【0009】
さらに、本発明における二次側可動子の素材として、非磁性導体であるアルミニウムや銅などの単一導体、あるいは、このような単一導体と鉄などの強磁性体と組み合わせた複合導体を用いた場合には、一次側固定子に発生する進行磁界の中で渦電流を誘起し推力を発生させる、「リニア誘導モータ(LIM)」と称するリニアモータ機構となり、また、磁界中に入れると磁化する磁性体として鉄などの突極鉄芯を用いた場合には、一次側固定子に発生する進行磁界の吸引力により、二次側に推力を発生させる、「リニアリラクタンスモータ(LRM)」と称するリニアモータ機構となり、さらに、永久磁石、あるいは、永久磁石を鉄などの強磁性体と組み合わせて用いた場合には、一次側固定子と二次側の界磁磁極との間で発生する吸引力と反発力により、進行磁界の移動速度に同期させて二次側を移動させる、「リニア同期モータ(LSM)」と称するリニアモータ機構となる。
なお、上述したようなリニア誘導モータ(LIM)やリニア同期モータ(LSM)と称するリニアモータ機構の二次側可動子側を複合導体で構成した場合には、強磁性体に磁路が形成されるため、二次側可動子側を単一導体で構成した場合よりも大きな推力が得られる。
【0010】
他方、本発明におけるリニアモータ機構の二次側可動子に相対させる一次側固定子は、これに発生する移動磁界によって二次側可動子側に推力を誘発させるものであれば、如何なるものでも良く、例えば、積層されたけい素鋼板にコイル(相巻線)を巻回したモータコイル、あるいは、コイル(相巻線)を非磁性部材でモールド成型したコアレス型モータコイルと称するものを採用することができ、特に、コアレス型モータコイルの場合には、コイル間に磁路が形成されるように二次側可動子の両側に配置すると良い。
【発明の効果】
【0011】
本発明の駆動式搬送チェーンは、搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素と一体化して、リニアモータ駆動とスプロケット駆動の両方に用いられるように構成したことにより、従来のようなチェーン構成要素に二次側可動子を追加して取り付けた場合と比較すると、搬送チェーンの小型化および簡素化を図ることができるとともに、特に、リニアモータとスプロケットとを両用するハイブリッド駆動を実現することができ、しかも、搬送装置全体の小型化、省スペース化も達成することができる。
【発明を実施するための最良の形態】
【0012】
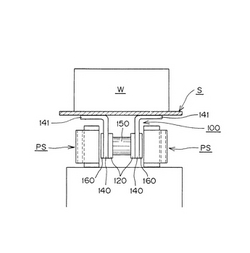
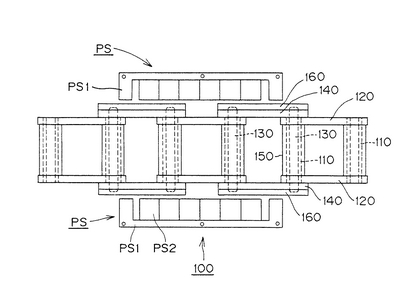
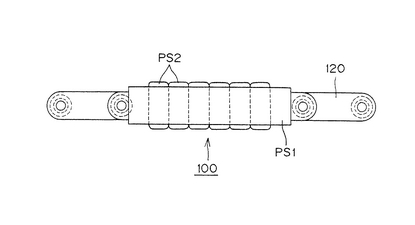
以下、図1乃至図3に基づいて、本発明の第1実施例である駆動式搬送チェーン100について説明する。図1は、第1実施例である駆動式搬送チェーン100を組み込んだスラットコンベヤの断面図であって、図2は、第1実施例である駆動式搬送チェーン100を示す斜視図であり、図3は、図2に示す駆動式搬送チェーン100の側面図である。
【0013】
まず、本実施例の駆動式搬送チェーン100は、図1に示すようにスラットコンベヤの下部に組み込まれて搬送ラインのチェーン周回軌道上を走行できるようになっており、図2に示すように、2個のブシュ110の両端に圧入された一対のリンクプレート120を有するリンクユニットと、隣接するリンクユニットのブシュ110内にそれぞれ遊嵌された2本の連結ピン130の両端に圧入された一対のガイドプレート140を有するガイドユニットとが交互に屈曲自在に多数連結され、さらに、前記ブシュ110には、図示しないが搬送ラインに沿って設けた走行レールを転動して走行するローラ150が挿嵌されている。これらの構成部材は、既存のローラチェーンの構成部材と基本的に何ら変わるところがない。
そして、搬送ラインに沿って対向配置された一対のガイドプレート140、140には、その垂直部分を互いに外向きに曲げて延長したアタッチメント部分141が一体に形成され、このアタッチメント部分141に搬送物Wを載置するためのスラットSが取り付けるようになっている。
【0014】
本実施例の駆動式搬送チェーン100は、搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素であるガイドユニットで構成したことを最も特徴としている。
すなわち、前記ガイドユニットの両外側を構成している一対のガイドプレート140、140の垂直な外側面には、リニアモータ機構の二次側可動子を構成するリアクションプレート160が固着され、リニアモータ機構の一次側固定子PSと僅かな隙間をあけて対向配置されている。
【0015】
前記リニアモータの一次側固定子PSは、搬送チェーン100を挟むように設置され、電磁鋼板でできた櫛形状の鉄心PS1と巻線PS2からなり、鉄心PS1のスロット部分に巻線PS2が何重にも捲回されている。この巻線PS2は、一定の極間隔で空間的にずれた幾つかのコイル(相巻線)を構成しており、各コイルに交流電流を流すことにより、時間と共に移動させる進行磁界が発生するようになっている。
【0016】
他方、二次側可動子の一部となるリアクションプレート160は、非磁性導体であるアルミニウムや銅などの単一導体から構成され、前述した一次側固定子PSに進行磁界が発生すると、リアクションプレート160の表面に渦電流が誘起され、リアクションプレート160にフレミング則による推力が発生する「リニア誘導モータ(LIM)」と称するリニアモータ機構を形成する。
なお、前記ガイドユニットのガイドプレート140は、鉄鋼板から強磁性体で形成されてリニア駆動の推力を助長するバックアイアンとなっているため、このガイドユニットのガイドプレート140とリアクションプレート160とが複合導体からなる二次側可動子を構成して、強磁性体からなるガイドユニットのガイドプレート140に大きな磁路が形成され、大きな推力が得られるようになっている。
【0017】
したがって、このようにして得られた本実施例の駆動式搬送チェーン100は、それぞれのリアクションプレート160に発生する推力により分散駆動されるため、チェーン張力が小さくなり、長距離、重量物搬送用として使用してもチェーン寿命の長期化を十分に図ることができ、また、チェーン張力が小さくなると、リンクプレート120やガイドプレート140のプレート厚みが薄くなり、これに加えて、二次側可動子の一部分となるバックアイアンがチェーン構成要素であるガイドユニットのガイドプレート140で構成されているため、搬送チェーンの小型化と簡素化を達成でき、さらに、走行速度の制御を一次側固定子に印加する電流の周波数制御により行うために滑らかに搬送速度を制御できる。
【0018】
しかも、本実施例の駆動式搬送チェーン100は、ガイドユニットを構成するガイドプレート140、140の垂直な外側面にリニアモータ機構の二次側可動子を構成するリアクションプレート160が固着されているため、搬送ライン上に配置したリニアモータ機構の一次側固定子PSに代えて通常のスプロケットを配置した場合には、スプロケットで駆動することも可能となり、リニアモータとスプロケットとを両用するハイブリッド駆動を実現する、所謂、ハイブリッド駆動式搬送チェーンとして機能することができるなど、その効果は甚大である。
【0019】
なお、本実施例の駆動式搬送チェーン100では、一対のガイドプレート140の垂直な側面にリニアモータの二次側可動子の一部となるリアクションプレート160を固着しているが、必要とされる推力等に応じて、ガイドプレート140の一方の側面にのみにリアクションプレート160を設けたり、ガイドプレート140の左右の側面に交互に振り分けて、リアクションプレート160を設けたりすることも可能である。
【0020】
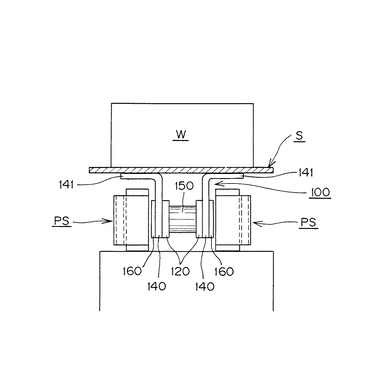
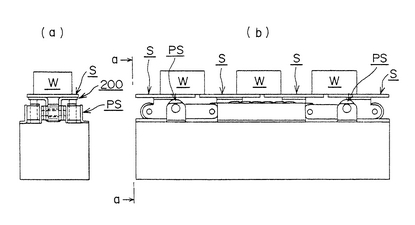
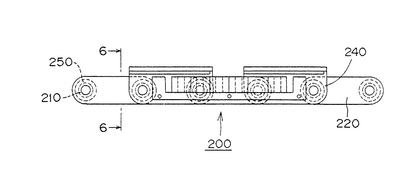
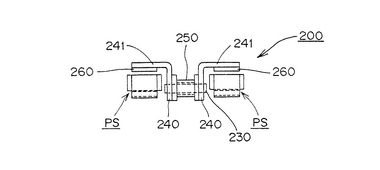
次に、図4乃至図6に基づいて、本発明の第2実施例である駆動式搬送チェーン200について説明する。図4は、第2実施例である駆動式搬送チェーン200を組み込んだスラットコンベヤであって、(a)は、そのスラットコンベヤの断面図であって、(b)は、(a)のa−a線における側面図であり、図5は、図4に示した駆動式搬送チェーンの側面図であり、図6は、図5の6−6線における断面図である。
【0021】
本発明の第2実施例である駆動式搬送チェーン200は、上述した第1実施例の駆動式搬送チェーン100に比較すると、リニアモータ機構の二次側可動子を構成するリアクションプレート260のガイドプレート240に対する取り付け形態のみが相違しており、基本的なチェーン構造が同じであるため、その他の構成については第1実施例における100番代の符号を200番代に読み替えて理解する。
【0022】
そこで、本実施例の駆動式搬送チェーン200は、搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素であるガイドユニットで構成したことを最も特徴としている。
すなわち、前記ガイドユニットの両外側を構成している一対のガイドプレート240、240の垂直部分を互いに外向きに曲げて延長したアタッチメント部分241が形成され、このアタッチメント部分241の外周側表面に搬送物Wを載置するためのスラットSが取り付けられるとともに、その内周側裏面にリニアモータ機構の二次側可動子を構成するリアクションプレート260が固着されてリニアモータ機構の一次側固定子PSと僅かな隙間をあけて対向配置されている。
そして、前記ガイドプレート240、24自体がリニア駆動の推力を助長するバックアイアンとなり、設備構成を一層小型化することが可能になっている。
【0023】
また、前記一次側固定子PSは、第1実施例と同様に、搬送チェーン200を挟むように設置され、電磁鋼板でできた櫛形状の鉄心PS1と巻線PS2からなり、鉄心PS1のスロット部分に巻線PS2が何重にも捲回されている。この巻線PS2は、一定の極間隔で空間的にずれた幾つかのコイル(相巻線)を構成しており、各コイルに交流電流を流すことにより、時間と共に移動させる進行磁界が発生するようになっている。
【0024】
他方、二次側可動子の一部となるリアクションプレート260は、非磁性導体であるアルミニウムや銅などの単一導体から構成され、前述した一次側固定子PSに進行磁界が発生すると、リアクションプレート260の表面に渦電流が誘起され、リアクションプレート260にフレミング則による推力が発生する「リニア誘導モータ(LIM)」と称するリニアモータ機構を形成する。
なお、前記ガイドユニットのガイドプレート240は、鉄鋼板から強磁性体で形成されてリニア駆動の推力を助長するバックアイアンとなっているため、このガイドユニットのガイドプレート240とリアクションプレート260とが複合導体からなる二次側可動子を構成して、強磁性体からなるガイドユニットのガイドプレート240に大きな磁路が形成され、大きな推力が得られるようになっている。
【0025】
したがって、本実施例の駆動式搬送チェーン200は、長距離、重量物搬送用として使用してもチェーン寿命の長期化を十分に図ることができるとともに、搬送チェーンの小型化と簡素化を達成でき、しかも、搬送ライン上に配置したリニアモータ機構の一次側固定子PSに代えて通常のスプロケットを配置した場合には、リニアモータとスプロケットとを両用するハイブリッド駆動を実現する、所謂、ハイブリッド駆動式搬送チェーンとして機能することができるなど、その効果は甚大である。
【0026】
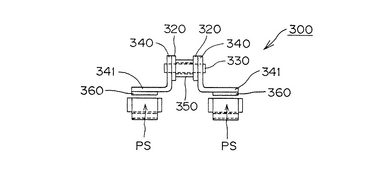
なお、前述した第2実施例におけるガイドプレート240、240のアタッチメント部分241は、ガイドプレート240の外周側に延長するように設けているが、図7に示す第3実施例の駆動式搬送チェーン300のように、アタッチメント部分341をガイドプレート340に対して内周側に延長するように設けても良く、さらに、図示しないが、一対のガイドプレート340、340のいずれか一方だけに設けても良い。
【0027】
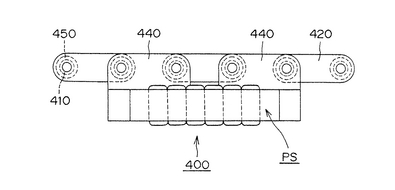
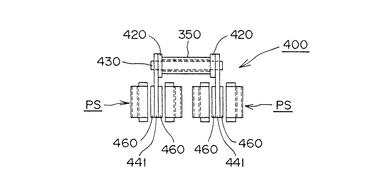
次に、図8及び図9に基づいて、本発明の第4実施例である駆動式搬送チェーン400について説明する。図8は、本発明の第4実施例である駆動式搬送チェーン400の側面図であり、図9は、図8の9−9線における断面図である。
【0028】
本発明の第4実施例である駆動式搬送チェーン400は、上述した第1実施例の駆動式搬送チェーン100に比較すると、リニアモータ機構の二次側可動子を構成するリアクションプレート460とガイドプレート440との取り付け形態のみが相違しており、基本的なチェーン構造が同じであるため、その他の構成については第1実施例における100番代の符号を400番代に読み替えて理解する。
【0029】
そこで、本実施例の駆動式搬送チェーン400は、ガイドプレート440の高さをリンクプレート420よりも外周側に延長してアタッチメント部分441を設け、このアタッチメント部分441にリアクションプレート460を固着させたことを最も特徴としている。
そして、二次側可動子の一部となるリアクションプレート460は、非磁性導体であるアルミニウムや銅などの単一導体から構成され、前述した第1実施例と同様な一次側固定子PSに進行磁界が発生すると、リアクションプレート460の表面に渦電流が誘起され、リアクションプレート460にフレミング則による推力が発生する「リニア誘導モータ(LIM)」と称するリニアモータ機構を形成する。
【0030】
したがって、本実施例である駆動式搬送チェーン400は、リニア駆動の推力を助長するバックアイアンとなるガイドプレート440の高さをリンクプレート420よりも外周側に延長してアタッチメント部分441を大きくすることにより、搬送チェーンの寸法に依らず、大きなリアクションプレート460を設置できるため、搬送チェーンの推力を大きくすることが可能となり、また、アタッチメント部分441を垂直に設けたことにより、両面にリアクションプレート460を設置できるため、更に一段と大きな推力を得ることが可能になる。
なお、本実施例である駆動式搬送チェーン400は、アタッチメント部分441を一対のガイドプレート440の両方に設けているが、一方だけに設けても良く、リアクションプレート460をアタッチメント部分441の片側だけに設けることも可能である。
【0031】
したがって、本実施例の駆動式搬送チェーン400は、長距離、重量物搬送用として使用してもチェーン寿命の長期化を十分に図ることができるとともに、搬送チェーンの小型化と簡素化を達成でき、しかも、搬送ライン上に配置したリニアモータ機構の一次側固定子PSに代えて通常のスプロケットを配置した場合には、リニアモータとスプロケットとを両用するハイブリッド駆動を実現する、所謂、ハイブリッド駆動式搬送チェーンとして機能することができるなど、その効果は甚大である。
【0032】
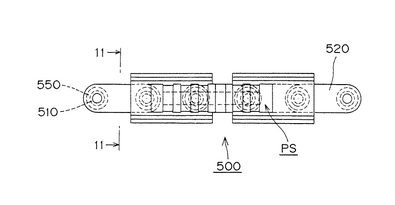
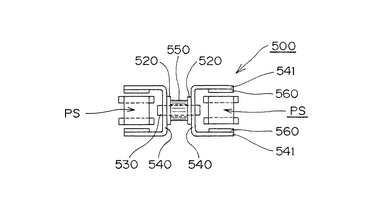
次に、図10及び図11に基づいて、本発明の第5実施例である駆動式搬送チェーン500について説明する。図10は、本発明の第5実施例である駆動式搬送チェーン500の側面図であり、図11は、図10の11−11線における断面図である。
【0033】
本発明の第5実施例である駆動式搬送チェーン500は、上述した第1実施例の駆動式搬送チェーン100に比較すると、リニアモータ機構の二次側可動子を構成するリアクションプレート560とガイドプレート540との取り付け形態のみが相違しており、基本的なチェーン構造が同じであるため、その他の構成については第1実施例における100番代の符号を500番代に読み替えて理解する。
【0034】
そこで、本実施例の駆動式搬送チェーン500は、ガイドプレート540を断面コ字状に形成することにより、1つのガイドプレート540に対して上下の外側方向に延長して対峙する2つのアタッチメント部分541を設け、これらのアタッチメント部分541の対向する面にリアクションプレート560を固着させたことを最も特徴としている。
前記リアクションプレート560は、非磁性導体であるアルミニウムや銅などの単一導体から構成され、前述した第1実施例と同様な一次側固定子PSに進行磁界が発生すると、リアクションプレート560の表面に渦電流が誘起され、リアクションプレート560にフレミング則による推力が発生する「リニア誘導モータ(LIM)」と称するリニアモータ機構を形成する。
なお、本実施例である駆動式搬送チェーン500は、アタッチメント部分541を一対のガイドプレート540の両方に設けているが、一方だけに設けても良く、リアクションプレート560をアタッチメント部分541の片側だけに設けることも可能である。
【0035】
したがって、本実施例である駆動式搬送チェーン500は、1つのガイドプレート540に対して上下の外側方向に延長して対峙する2つのアタッチメント部分541を設けたことにより、1つの一次側固定子PSが発生する進行磁界が、2つのリアクションプレート560に対して作用し、しかも、2つのリアクションプレート560は、断面コ字状のガイドプレートにより磁気回路を構成するため、漏れ磁界を少なくすることができ、搬送チェーンの推力を大きくすることが可能になる。
また、本実施例の駆動式搬送チェーン500は、長距離、重量物搬送用として使用してもチェーン寿命の長期化を十分に図ることができるとともに、搬送チェーンの小型化と簡素化を達成でき、しかも、搬送ライン上に配置したリニアモータ機構の一次側固定子PSに代えて通常のスプロケットを配置した場合には、リニアモータとスプロケットとを両用するハイブリッド駆動を実現する、所謂、ハイブリッド駆動式搬送チェーンとして機能することができるなど、その効果は甚大である。
【0036】
なお、上述したような第1実施例乃至第5実施例では、チェーン駆動源として用いるリニアモータ機構の二次側可動子の一部に非磁性導体であるアルミニウムや銅などの単一導体から構成されるリアクションプレート160、260、360、460、560を用いて一次側固定子PSに進行磁界を発生させることにより、リアクションプレートの表面に渦電流を誘起し推力を発生させる、「リニア誘導モータ(LIM)」と称するリニアモータ機構を構成しているが、これ以外の実施形態であっても良い。
【0037】
例えば、二次側可動子として、上記リアクションプレート160、260、360、460、560に替えて、磁界中に入れると磁化する磁性体として鉄などの突極鉄芯を用いた場合には、一次側固定子に発生する進行磁界の吸引力により、二次側に推力を発生させる、「リニアリラクタンスモータ(LRM)」と称するリニアモータ機構を構成することが可能である。
【0038】
同様に、上記リアクションプレート160、260、360、460、560に替えて、二次側可動子を永久磁石とし、一次側固定子と二次側の界磁磁極との相互作用により、進行磁界の移動速度に同期させて二次側を移動させる、「リニア同期モータ(LSM)」と称するリニアモータ機構を構成して定速搬送を達成することも可能である。
【0039】
また、上記に説明した第1実施例乃第5実施例では、スラットコンベヤに組み込んだ実施形態を示しているが、これ以外のスクレーパーコンベヤ、バケットコンベヤ、プッシャドッグ式コンベヤなどであっても組み込むことができる。
【図面の簡単な説明】
【0040】
【図1】本発明の第1実施例である駆動式搬送チェーン100を組み込んだスラットコンベヤの断面図。
【図2】図1に示した駆動式搬送チェーンの平面図。
【図3】図1に示した駆動式搬送チェーンの側面図。
【図4】本発明の第2実施例である駆動式搬送チェーン100を組み込んだスラットコンベヤであって、(a)は、そのスラットコンベヤの断面図であって、(b)は、(a)のa−a線における側面図。
【図5】図4に示した駆動式搬送チェーンの側面図。
【図6】図5の6−6線における断面図。
【図7】本発明の第3実施例である駆動式搬送チェーン300の断面図。
【図8】本発明の第4実施例である駆動式搬送チェーン400の側面図。
【図9】図8の9−9線における断面図。
【図10】本発明の第5実施例である駆動式搬送チェーン500の側面図。
【図11】図10の11−11線における断面図。
【符号の説明】
【0041】
100,200,300,400,500 ・・・ 駆動式搬送チェーン
110,210,310,410,510 ・・・ ブシュ
120,220,320,420,520 ・・・ リンクプレート
130,230,330,430,530 ・・・ 連結ピン
140,240,340,440,540 ・・・ ガイドプレート
141,241,341,441,541 ・・・ アタッチメント部分
150,250,350,450,550 ・・・ ローラ
160,260,360,460,560 ・・・ リアクションプレート
PS ・・・ 一次側固定子
W ・・・ 搬送物
S ・・・ スラット
【技術分野】
【0001】
本発明は、物品の搬送装置などに用いられる駆動式搬送チェーン、特に、リニアモータ駆動とスプロケット駆動の両方に用いられるハイブリッド駆動式搬送チェーンに関する。
【背景技術】
【0002】
近年、物品の搬送装置に用いるためのリニアモータ駆動式搬送チェーンが開発されており、たとえば、シート状基材の両側耳縁を保持して所定速度で連続的に移動処理するテンターに用いるための、リニアモータの可動子部を適宜間隔で連続して取り付けたテンターチェンからなるリニアモータ駆動式搬送チェーンがある(例えば、特許文献1参照)。
【特許文献1】特開平6−57618号公報(第1頁、図1−図2)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来のリニアモータ駆動式搬送チェーンは、チェーン本体にリニアモータの可動子部が追加されて取り付けられているため、チェーン構造が複雑化してスプロケット駆動との両用ができず、また、このようなチェーン構造を組み込んだ搬送装置も複雑化に伴って大型化し、その設置スペースも余分に必要となるという問題があった。
【0004】
そこで、本発明の目的は、従来の問題を解決するものであって、搬送チェーンの小型化および簡素化を図るとともに、リニアモータとスプロケットとを両用でき、しかも、搬送装置全体の小型化、省スペース化も達成することができる駆動式搬送チェーンを提供することである。
【課題を解決するための手段】
【0005】
前記目的のため、本請求項1に係る発明の駆動式搬送チェーンは、搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素と一体化したものである。
【0006】
そして、本請求項2に係る発明の駆動式搬送チェーンは、請求項1記載の構成に加えて、リニアモータ駆動とスプロケット駆動の両方に用いられるハイブリッド駆動式搬送チェーンとして構成したものである。
【0007】
ここで、本発明の駆動式搬送チェーンは、搬送ラインのチェーン周回軌道上を走行する走行ガイド体と前記走行ガイド体を相互にチェーン長手方向に連結するリンク体と構成される基本構造を備えており、スラットコンベヤ、スクレーパーコンベヤ、バケットコンベヤ、プッシャドッグ式コンベヤなどに組み込まれるようになっている。
【0008】
そして、前記二次側可動子の一部分は、チェーン構成要素である走行ガイド体とリンク体のいずれかにバックアイアンとして一体化され、また、二次側可動子の残りの部分は、走行ガイド体、または、リンク体の少なくとも一部に固着などして設けられている。
【0009】
さらに、本発明における二次側可動子の素材として、非磁性導体であるアルミニウムや銅などの単一導体、あるいは、このような単一導体と鉄などの強磁性体と組み合わせた複合導体を用いた場合には、一次側固定子に発生する進行磁界の中で渦電流を誘起し推力を発生させる、「リニア誘導モータ(LIM)」と称するリニアモータ機構となり、また、磁界中に入れると磁化する磁性体として鉄などの突極鉄芯を用いた場合には、一次側固定子に発生する進行磁界の吸引力により、二次側に推力を発生させる、「リニアリラクタンスモータ(LRM)」と称するリニアモータ機構となり、さらに、永久磁石、あるいは、永久磁石を鉄などの強磁性体と組み合わせて用いた場合には、一次側固定子と二次側の界磁磁極との間で発生する吸引力と反発力により、進行磁界の移動速度に同期させて二次側を移動させる、「リニア同期モータ(LSM)」と称するリニアモータ機構となる。
なお、上述したようなリニア誘導モータ(LIM)やリニア同期モータ(LSM)と称するリニアモータ機構の二次側可動子側を複合導体で構成した場合には、強磁性体に磁路が形成されるため、二次側可動子側を単一導体で構成した場合よりも大きな推力が得られる。
【0010】
他方、本発明におけるリニアモータ機構の二次側可動子に相対させる一次側固定子は、これに発生する移動磁界によって二次側可動子側に推力を誘発させるものであれば、如何なるものでも良く、例えば、積層されたけい素鋼板にコイル(相巻線)を巻回したモータコイル、あるいは、コイル(相巻線)を非磁性部材でモールド成型したコアレス型モータコイルと称するものを採用することができ、特に、コアレス型モータコイルの場合には、コイル間に磁路が形成されるように二次側可動子の両側に配置すると良い。
【発明の効果】
【0011】
本発明の駆動式搬送チェーンは、搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素と一体化して、リニアモータ駆動とスプロケット駆動の両方に用いられるように構成したことにより、従来のようなチェーン構成要素に二次側可動子を追加して取り付けた場合と比較すると、搬送チェーンの小型化および簡素化を図ることができるとともに、特に、リニアモータとスプロケットとを両用するハイブリッド駆動を実現することができ、しかも、搬送装置全体の小型化、省スペース化も達成することができる。
【発明を実施するための最良の形態】
【0012】
以下、図1乃至図3に基づいて、本発明の第1実施例である駆動式搬送チェーン100について説明する。図1は、第1実施例である駆動式搬送チェーン100を組み込んだスラットコンベヤの断面図であって、図2は、第1実施例である駆動式搬送チェーン100を示す斜視図であり、図3は、図2に示す駆動式搬送チェーン100の側面図である。
【0013】
まず、本実施例の駆動式搬送チェーン100は、図1に示すようにスラットコンベヤの下部に組み込まれて搬送ラインのチェーン周回軌道上を走行できるようになっており、図2に示すように、2個のブシュ110の両端に圧入された一対のリンクプレート120を有するリンクユニットと、隣接するリンクユニットのブシュ110内にそれぞれ遊嵌された2本の連結ピン130の両端に圧入された一対のガイドプレート140を有するガイドユニットとが交互に屈曲自在に多数連結され、さらに、前記ブシュ110には、図示しないが搬送ラインに沿って設けた走行レールを転動して走行するローラ150が挿嵌されている。これらの構成部材は、既存のローラチェーンの構成部材と基本的に何ら変わるところがない。
そして、搬送ラインに沿って対向配置された一対のガイドプレート140、140には、その垂直部分を互いに外向きに曲げて延長したアタッチメント部分141が一体に形成され、このアタッチメント部分141に搬送物Wを載置するためのスラットSが取り付けるようになっている。
【0014】
本実施例の駆動式搬送チェーン100は、搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素であるガイドユニットで構成したことを最も特徴としている。
すなわち、前記ガイドユニットの両外側を構成している一対のガイドプレート140、140の垂直な外側面には、リニアモータ機構の二次側可動子を構成するリアクションプレート160が固着され、リニアモータ機構の一次側固定子PSと僅かな隙間をあけて対向配置されている。
【0015】
前記リニアモータの一次側固定子PSは、搬送チェーン100を挟むように設置され、電磁鋼板でできた櫛形状の鉄心PS1と巻線PS2からなり、鉄心PS1のスロット部分に巻線PS2が何重にも捲回されている。この巻線PS2は、一定の極間隔で空間的にずれた幾つかのコイル(相巻線)を構成しており、各コイルに交流電流を流すことにより、時間と共に移動させる進行磁界が発生するようになっている。
【0016】
他方、二次側可動子の一部となるリアクションプレート160は、非磁性導体であるアルミニウムや銅などの単一導体から構成され、前述した一次側固定子PSに進行磁界が発生すると、リアクションプレート160の表面に渦電流が誘起され、リアクションプレート160にフレミング則による推力が発生する「リニア誘導モータ(LIM)」と称するリニアモータ機構を形成する。
なお、前記ガイドユニットのガイドプレート140は、鉄鋼板から強磁性体で形成されてリニア駆動の推力を助長するバックアイアンとなっているため、このガイドユニットのガイドプレート140とリアクションプレート160とが複合導体からなる二次側可動子を構成して、強磁性体からなるガイドユニットのガイドプレート140に大きな磁路が形成され、大きな推力が得られるようになっている。
【0017】
したがって、このようにして得られた本実施例の駆動式搬送チェーン100は、それぞれのリアクションプレート160に発生する推力により分散駆動されるため、チェーン張力が小さくなり、長距離、重量物搬送用として使用してもチェーン寿命の長期化を十分に図ることができ、また、チェーン張力が小さくなると、リンクプレート120やガイドプレート140のプレート厚みが薄くなり、これに加えて、二次側可動子の一部分となるバックアイアンがチェーン構成要素であるガイドユニットのガイドプレート140で構成されているため、搬送チェーンの小型化と簡素化を達成でき、さらに、走行速度の制御を一次側固定子に印加する電流の周波数制御により行うために滑らかに搬送速度を制御できる。
【0018】
しかも、本実施例の駆動式搬送チェーン100は、ガイドユニットを構成するガイドプレート140、140の垂直な外側面にリニアモータ機構の二次側可動子を構成するリアクションプレート160が固着されているため、搬送ライン上に配置したリニアモータ機構の一次側固定子PSに代えて通常のスプロケットを配置した場合には、スプロケットで駆動することも可能となり、リニアモータとスプロケットとを両用するハイブリッド駆動を実現する、所謂、ハイブリッド駆動式搬送チェーンとして機能することができるなど、その効果は甚大である。
【0019】
なお、本実施例の駆動式搬送チェーン100では、一対のガイドプレート140の垂直な側面にリニアモータの二次側可動子の一部となるリアクションプレート160を固着しているが、必要とされる推力等に応じて、ガイドプレート140の一方の側面にのみにリアクションプレート160を設けたり、ガイドプレート140の左右の側面に交互に振り分けて、リアクションプレート160を設けたりすることも可能である。
【0020】
次に、図4乃至図6に基づいて、本発明の第2実施例である駆動式搬送チェーン200について説明する。図4は、第2実施例である駆動式搬送チェーン200を組み込んだスラットコンベヤであって、(a)は、そのスラットコンベヤの断面図であって、(b)は、(a)のa−a線における側面図であり、図5は、図4に示した駆動式搬送チェーンの側面図であり、図6は、図5の6−6線における断面図である。
【0021】
本発明の第2実施例である駆動式搬送チェーン200は、上述した第1実施例の駆動式搬送チェーン100に比較すると、リニアモータ機構の二次側可動子を構成するリアクションプレート260のガイドプレート240に対する取り付け形態のみが相違しており、基本的なチェーン構造が同じであるため、その他の構成については第1実施例における100番代の符号を200番代に読み替えて理解する。
【0022】
そこで、本実施例の駆動式搬送チェーン200は、搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素であるガイドユニットで構成したことを最も特徴としている。
すなわち、前記ガイドユニットの両外側を構成している一対のガイドプレート240、240の垂直部分を互いに外向きに曲げて延長したアタッチメント部分241が形成され、このアタッチメント部分241の外周側表面に搬送物Wを載置するためのスラットSが取り付けられるとともに、その内周側裏面にリニアモータ機構の二次側可動子を構成するリアクションプレート260が固着されてリニアモータ機構の一次側固定子PSと僅かな隙間をあけて対向配置されている。
そして、前記ガイドプレート240、24自体がリニア駆動の推力を助長するバックアイアンとなり、設備構成を一層小型化することが可能になっている。
【0023】
また、前記一次側固定子PSは、第1実施例と同様に、搬送チェーン200を挟むように設置され、電磁鋼板でできた櫛形状の鉄心PS1と巻線PS2からなり、鉄心PS1のスロット部分に巻線PS2が何重にも捲回されている。この巻線PS2は、一定の極間隔で空間的にずれた幾つかのコイル(相巻線)を構成しており、各コイルに交流電流を流すことにより、時間と共に移動させる進行磁界が発生するようになっている。
【0024】
他方、二次側可動子の一部となるリアクションプレート260は、非磁性導体であるアルミニウムや銅などの単一導体から構成され、前述した一次側固定子PSに進行磁界が発生すると、リアクションプレート260の表面に渦電流が誘起され、リアクションプレート260にフレミング則による推力が発生する「リニア誘導モータ(LIM)」と称するリニアモータ機構を形成する。
なお、前記ガイドユニットのガイドプレート240は、鉄鋼板から強磁性体で形成されてリニア駆動の推力を助長するバックアイアンとなっているため、このガイドユニットのガイドプレート240とリアクションプレート260とが複合導体からなる二次側可動子を構成して、強磁性体からなるガイドユニットのガイドプレート240に大きな磁路が形成され、大きな推力が得られるようになっている。
【0025】
したがって、本実施例の駆動式搬送チェーン200は、長距離、重量物搬送用として使用してもチェーン寿命の長期化を十分に図ることができるとともに、搬送チェーンの小型化と簡素化を達成でき、しかも、搬送ライン上に配置したリニアモータ機構の一次側固定子PSに代えて通常のスプロケットを配置した場合には、リニアモータとスプロケットとを両用するハイブリッド駆動を実現する、所謂、ハイブリッド駆動式搬送チェーンとして機能することができるなど、その効果は甚大である。
【0026】
なお、前述した第2実施例におけるガイドプレート240、240のアタッチメント部分241は、ガイドプレート240の外周側に延長するように設けているが、図7に示す第3実施例の駆動式搬送チェーン300のように、アタッチメント部分341をガイドプレート340に対して内周側に延長するように設けても良く、さらに、図示しないが、一対のガイドプレート340、340のいずれか一方だけに設けても良い。
【0027】
次に、図8及び図9に基づいて、本発明の第4実施例である駆動式搬送チェーン400について説明する。図8は、本発明の第4実施例である駆動式搬送チェーン400の側面図であり、図9は、図8の9−9線における断面図である。
【0028】
本発明の第4実施例である駆動式搬送チェーン400は、上述した第1実施例の駆動式搬送チェーン100に比較すると、リニアモータ機構の二次側可動子を構成するリアクションプレート460とガイドプレート440との取り付け形態のみが相違しており、基本的なチェーン構造が同じであるため、その他の構成については第1実施例における100番代の符号を400番代に読み替えて理解する。
【0029】
そこで、本実施例の駆動式搬送チェーン400は、ガイドプレート440の高さをリンクプレート420よりも外周側に延長してアタッチメント部分441を設け、このアタッチメント部分441にリアクションプレート460を固着させたことを最も特徴としている。
そして、二次側可動子の一部となるリアクションプレート460は、非磁性導体であるアルミニウムや銅などの単一導体から構成され、前述した第1実施例と同様な一次側固定子PSに進行磁界が発生すると、リアクションプレート460の表面に渦電流が誘起され、リアクションプレート460にフレミング則による推力が発生する「リニア誘導モータ(LIM)」と称するリニアモータ機構を形成する。
【0030】
したがって、本実施例である駆動式搬送チェーン400は、リニア駆動の推力を助長するバックアイアンとなるガイドプレート440の高さをリンクプレート420よりも外周側に延長してアタッチメント部分441を大きくすることにより、搬送チェーンの寸法に依らず、大きなリアクションプレート460を設置できるため、搬送チェーンの推力を大きくすることが可能となり、また、アタッチメント部分441を垂直に設けたことにより、両面にリアクションプレート460を設置できるため、更に一段と大きな推力を得ることが可能になる。
なお、本実施例である駆動式搬送チェーン400は、アタッチメント部分441を一対のガイドプレート440の両方に設けているが、一方だけに設けても良く、リアクションプレート460をアタッチメント部分441の片側だけに設けることも可能である。
【0031】
したがって、本実施例の駆動式搬送チェーン400は、長距離、重量物搬送用として使用してもチェーン寿命の長期化を十分に図ることができるとともに、搬送チェーンの小型化と簡素化を達成でき、しかも、搬送ライン上に配置したリニアモータ機構の一次側固定子PSに代えて通常のスプロケットを配置した場合には、リニアモータとスプロケットとを両用するハイブリッド駆動を実現する、所謂、ハイブリッド駆動式搬送チェーンとして機能することができるなど、その効果は甚大である。
【0032】
次に、図10及び図11に基づいて、本発明の第5実施例である駆動式搬送チェーン500について説明する。図10は、本発明の第5実施例である駆動式搬送チェーン500の側面図であり、図11は、図10の11−11線における断面図である。
【0033】
本発明の第5実施例である駆動式搬送チェーン500は、上述した第1実施例の駆動式搬送チェーン100に比較すると、リニアモータ機構の二次側可動子を構成するリアクションプレート560とガイドプレート540との取り付け形態のみが相違しており、基本的なチェーン構造が同じであるため、その他の構成については第1実施例における100番代の符号を500番代に読み替えて理解する。
【0034】
そこで、本実施例の駆動式搬送チェーン500は、ガイドプレート540を断面コ字状に形成することにより、1つのガイドプレート540に対して上下の外側方向に延長して対峙する2つのアタッチメント部分541を設け、これらのアタッチメント部分541の対向する面にリアクションプレート560を固着させたことを最も特徴としている。
前記リアクションプレート560は、非磁性導体であるアルミニウムや銅などの単一導体から構成され、前述した第1実施例と同様な一次側固定子PSに進行磁界が発生すると、リアクションプレート560の表面に渦電流が誘起され、リアクションプレート560にフレミング則による推力が発生する「リニア誘導モータ(LIM)」と称するリニアモータ機構を形成する。
なお、本実施例である駆動式搬送チェーン500は、アタッチメント部分541を一対のガイドプレート540の両方に設けているが、一方だけに設けても良く、リアクションプレート560をアタッチメント部分541の片側だけに設けることも可能である。
【0035】
したがって、本実施例である駆動式搬送チェーン500は、1つのガイドプレート540に対して上下の外側方向に延長して対峙する2つのアタッチメント部分541を設けたことにより、1つの一次側固定子PSが発生する進行磁界が、2つのリアクションプレート560に対して作用し、しかも、2つのリアクションプレート560は、断面コ字状のガイドプレートにより磁気回路を構成するため、漏れ磁界を少なくすることができ、搬送チェーンの推力を大きくすることが可能になる。
また、本実施例の駆動式搬送チェーン500は、長距離、重量物搬送用として使用してもチェーン寿命の長期化を十分に図ることができるとともに、搬送チェーンの小型化と簡素化を達成でき、しかも、搬送ライン上に配置したリニアモータ機構の一次側固定子PSに代えて通常のスプロケットを配置した場合には、リニアモータとスプロケットとを両用するハイブリッド駆動を実現する、所謂、ハイブリッド駆動式搬送チェーンとして機能することができるなど、その効果は甚大である。
【0036】
なお、上述したような第1実施例乃至第5実施例では、チェーン駆動源として用いるリニアモータ機構の二次側可動子の一部に非磁性導体であるアルミニウムや銅などの単一導体から構成されるリアクションプレート160、260、360、460、560を用いて一次側固定子PSに進行磁界を発生させることにより、リアクションプレートの表面に渦電流を誘起し推力を発生させる、「リニア誘導モータ(LIM)」と称するリニアモータ機構を構成しているが、これ以外の実施形態であっても良い。
【0037】
例えば、二次側可動子として、上記リアクションプレート160、260、360、460、560に替えて、磁界中に入れると磁化する磁性体として鉄などの突極鉄芯を用いた場合には、一次側固定子に発生する進行磁界の吸引力により、二次側に推力を発生させる、「リニアリラクタンスモータ(LRM)」と称するリニアモータ機構を構成することが可能である。
【0038】
同様に、上記リアクションプレート160、260、360、460、560に替えて、二次側可動子を永久磁石とし、一次側固定子と二次側の界磁磁極との相互作用により、進行磁界の移動速度に同期させて二次側を移動させる、「リニア同期モータ(LSM)」と称するリニアモータ機構を構成して定速搬送を達成することも可能である。
【0039】
また、上記に説明した第1実施例乃第5実施例では、スラットコンベヤに組み込んだ実施形態を示しているが、これ以外のスクレーパーコンベヤ、バケットコンベヤ、プッシャドッグ式コンベヤなどであっても組み込むことができる。
【図面の簡単な説明】
【0040】
【図1】本発明の第1実施例である駆動式搬送チェーン100を組み込んだスラットコンベヤの断面図。
【図2】図1に示した駆動式搬送チェーンの平面図。
【図3】図1に示した駆動式搬送チェーンの側面図。
【図4】本発明の第2実施例である駆動式搬送チェーン100を組み込んだスラットコンベヤであって、(a)は、そのスラットコンベヤの断面図であって、(b)は、(a)のa−a線における側面図。
【図5】図4に示した駆動式搬送チェーンの側面図。
【図6】図5の6−6線における断面図。
【図7】本発明の第3実施例である駆動式搬送チェーン300の断面図。
【図8】本発明の第4実施例である駆動式搬送チェーン400の側面図。
【図9】図8の9−9線における断面図。
【図10】本発明の第5実施例である駆動式搬送チェーン500の側面図。
【図11】図10の11−11線における断面図。
【符号の説明】
【0041】
100,200,300,400,500 ・・・ 駆動式搬送チェーン
110,210,310,410,510 ・・・ ブシュ
120,220,320,420,520 ・・・ リンクプレート
130,230,330,430,530 ・・・ 連結ピン
140,240,340,440,540 ・・・ ガイドプレート
141,241,341,441,541 ・・・ アタッチメント部分
150,250,350,450,550 ・・・ ローラ
160,260,360,460,560 ・・・ リアクションプレート
PS ・・・ 一次側固定子
W ・・・ 搬送物
S ・・・ スラット
【特許請求の範囲】
【請求項1】
搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素と一体化したことを特徴とする駆動式搬送チェーン。
【請求項2】
請求項1記載の駆動式搬送チェーンをリニアモータ駆動とスプロケット駆動の両方に用いられるように構成したことを特徴とする駆動式搬送チェーン。
【請求項1】
搬送チェーン側にリニアモータ機構の二次側可動子を配置するとともに、前記二次側可動子の一部分をチェーン構成要素と一体化したことを特徴とする駆動式搬送チェーン。
【請求項2】
請求項1記載の駆動式搬送チェーンをリニアモータ駆動とスプロケット駆動の両方に用いられるように構成したことを特徴とする駆動式搬送チェーン。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−213462(P2006−213462A)
【公開日】平成18年8月17日(2006.8.17)
【国際特許分類】
【出願番号】特願2005−27827(P2005−27827)
【出願日】平成17年2月3日(2005.2.3)
【出願人】(000003355)株式会社椿本チエイン (861)
【Fターム(参考)】
【公開日】平成18年8月17日(2006.8.17)
【国際特許分類】
【出願日】平成17年2月3日(2005.2.3)
【出願人】(000003355)株式会社椿本チエイン (861)
【Fターム(参考)】
[ Back to top ]