
駆動装置、及び画像形成装置
【課題】駆動源からの回転駆動力を遊星歯車減速装置を介して被駆動体に伝達する駆動装置において、被駆動体を高精度に回転駆動できる駆動装置を提供する。
【解決手段】遊星歯車減速装置30として2K−H型2段構成の遊星歯車機構を用い、モータ20の回転駆動力を、この遊星歯車減速装置30の出力軸40から減速して、感光体ドラム1のドラム軸50に伝達する複写機500で次の構成を備える。ドラム軸50は感光体ドラム1を支持し、出力軸40からの回転駆動力を感光体ドラム1に伝達する。また、第1太陽歯車30、内歯歯車32、第1キャリア34、第2太陽歯車36、第2キャリア38、出力軸40、ドラム軸50、及び感光体ドラム1のドラム52の中心軸の全てを同一軸上に配置し、第1キャリア34を浮動支持する。そして、各キャリアのキャリアピンの両端を支持する孔を設けた第1側板及び第2側板と、これらを連結する連結部とを1部品で構成する。
【解決手段】遊星歯車減速装置30として2K−H型2段構成の遊星歯車機構を用い、モータ20の回転駆動力を、この遊星歯車減速装置30の出力軸40から減速して、感光体ドラム1のドラム軸50に伝達する複写機500で次の構成を備える。ドラム軸50は感光体ドラム1を支持し、出力軸40からの回転駆動力を感光体ドラム1に伝達する。また、第1太陽歯車30、内歯歯車32、第1キャリア34、第2太陽歯車36、第2キャリア38、出力軸40、ドラム軸50、及び感光体ドラム1のドラム52の中心軸の全てを同一軸上に配置し、第1キャリア34を浮動支持する。そして、各キャリアのキャリアピンの両端を支持する孔を設けた第1側板及び第2側板と、これらを連結する連結部とを1部品で構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、遊星歯車減速装置を介して被駆動体を回転駆動する駆動装置、及びこの駆動装置を備えた画像形成装置に関するものである。
【背景技術】
【0002】
電子写真方式を採用した画像形成装置では、回転する円筒状の像担持体(以下、感光体ドラムという)の表面上に静電潜像を形成し、形成した静電潜像にトナーを付着させて現像するものが広く普及している。この現像したトナー画像は、回転駆動される無端状ベルト(以下、中間転写ベルトという)に1次転写し、さらに記録紙上に2次転写を行って定着したり、記録紙上に直接転写した後、定着したりして画像を得るようにしている。
【0003】
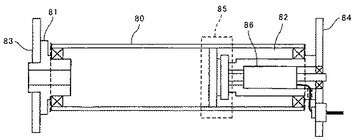
そして、感光体ドラムや中間転写ベルトの回転駆動に、大口径樹脂ギア等に比べて省スペースで高減速比が得られ、耐久性が高い遊星減速装置を介して駆動源の回転駆動力を伝達する駆動装置を備えた画像形成装置が普及している。遊星減速装置を用いる駆動装置として、従来から様々な駆動装置が提案されている。例えば、特許文献1には、次のような感光体ドラムや中間転写ベルトの駆動ローラ等の被駆動体(駆動ローラ)を回転駆動させる駆動装置(ローラ駆動装置)が記載されている。図13に示すように、駆動ローラ80は前後それぞれ軸受を介して前後ホルダ、81、82に保持され、前ホルダ81は前側板83、後ホルダ82は後側板84に保持位置決めされている。そして、駆動ローラ80内部には遊星歯車減速装置85(ギア部)と駆動源であるモータ86が配置されており、遊星歯車減速装置85およびモータ86はそれぞれ後ホルダ82に保持されている。モータ86の出力とは反対側の端部は軸受けを介して後側板に支持されている。以上のような構成とすることで駆動ローラ80内部に駆動系を実装し、駆動装置を省スペース化し、画像形成装置の小型化を達成するというものである。
【0004】
また、特許文献2には、次のような構成の感光体ドラム駆動装置が記載されている。遊星ローラ減速機構及びモータを感光体ドラムの外側に配置し、モータ、感光体ドラム、遊星ローラ減速機構の出力軸等を同一軸上に配置した構成である。このように同軸上に配置することで、駆動装置の感光体ドラムの径方向に占めるスペースを縮小し、画像形成装置の小型化を達成するというものである。また、この感光体ドラム駆動装置に用いる遊星ローラ減速機構では、遊星ローラの支持軸はローラ保持部材により片側のみ支持される構成となっており、軸方向のスペースも縮小させているものと考えられる。
【0005】
また、特許文献3には、次のような遊星歯車減速装置(遊星歯車機構)を備えた駆動装置(アクチュエータ)が記載されている。2段目以降の太陽歯車(サンギア)を、内歯歯車(リングギヤ)を保持するハウジングの出力軸側の開口まで延ばした1段目の太陽歯車に、回転自在に組み付けている。また、遊星歯車(プラネタリギヤ)、遊星歯車の支持軸(プラネタリギヤ軸)、及びキャリア(プラネタリキャリア)は、キャリア組立体として事前に組立てられてハウジングに組み込まれる。このキャリア組立体は、遊星歯車(プラネタリギヤ)に設けたニードルベアリングに支持軸を通し、その径を中央部よりも小さくした支持軸の両端を、第1側板と第2側板とで挟み込む。そして、第1側板には、複数の脚部が一体に設けられており、遊星歯車の支持軸を第2側板とで挟み込む際に、第1側板と第2側板とが、この脚部及び支持軸で連結される。このように構成することで、遊星歯車減速装置の組み付け性を向上させ、かつ、キャリア組立体の変形を抑制して各ギアの耐久性を向上させるというものである。
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の構成では、以下のような欠点がある。モータ86も後ホルダ82も後側板84で位置決めされている。そして、モータ86は後ホルダ82にも保持されている構成のため、モータ86は2つの部品により位置決めされる構成となっている。このため各部品寸法のばらつきによっては、モータ86と後側板84の位置決め部で組み立て不良が発生したり、組み立てることができてもモータ86又は後ホルダ82が変形した状態で組み立てられてしまう場合がある。その結果、組み立て不良や、モータ86又は後ホルダ82の変形により、次のような問題が発生する可能性がある。感光体ドラムや中間転写ベルト等の被駆動体に対する遊星歯車減速装置85及びモータ86の位置決め保持、及び被駆動体と後側板84との位置決め保持を精度良く行えず駆動回転品質を悪化させ、被駆動体の高精度な回転駆動が行えないという問題である。
【0007】
また、特許文献2に記載の構成では、上述したように、遊星ローラの支持軸はローラ保持部材により片側のみ支持される構成となっている。このため、遊星ローラの支持軸が傾き、遊星ローラが太陽ローラや固定ローラに片あたりして遊星ローラの耐久性が低下したり、遊星ローラ1回転の回転ムラが発生したりして、高精度な回転駆動が行えないという問題が発生する。
【0008】
また、特許文献3に記載の構成では、上述したように、遊星歯車に設けたニードルベアリングに支持軸を通し、その径を中央部よりも小さくした支持軸の両端をキャリアの第1側板と第2側板とで挟み込みんでいる。このため、各部品寸法のばらつき及び組み立て誤差により、第1側板に設けられた遊星歯車の支持軸を保持する孔と、第2側板に設けられた遊星歯車の支持軸を保持する孔との位置にズレが発生し、遊星歯車の傾きが発生する可能性がある。この傾きにより遊星歯車の耐久性が低下したり、遊星歯車1回転の回転ムラが発生したりして、高精度な回転駆動が行えないという問題が発生する。また、各キャリアと、入力軸に嵌め合わされる各太陽歯車(サンギヤ)との間に調心効果を生じるクリアランスは設けられておらず、遊星歯車、太陽歯車、及び固定歯車のギア精度による回転ムラが出力軸側への伝達されてしまい、高精度な回転駆動が行えないという問題が発生する。
【0009】
以上のように高精度な回転駆動が行えないと、高精度に一定速度で回転するべき感光体ドラムや、中間転写ベルトに速度変動が生じて、出力された画像にジッタや濃度ムラが生じる。ある周波数で速度変動が継続すると画像全体に周期濃度ムラが生じ、縞模様のバンディングとして目視される。そして、感光体ドラムの速度変動は書き込み系の露光ラインの副走査位置ずれを発生させると同時に、中間転写ベルトへの1次転写時の副走査位置ずれを発生させる。また、中間転写ベルトの速度変動は、1次転写時と2次転写時の副走査位置ずれを発生させる。この速度変動に起因したバンディングにより画像品質が著しく低下してしまう。
【0010】
本発明は以上の問題点に鑑みなされたものであり、その目的は、駆動源からの回転駆動力を遊星歯車減速装置を介して被駆動体に伝達する駆動装置において、被駆動体を高精度に回転駆動できる駆動装置を提供することである。
【課題を解決するための手段】
【0011】
上記目的を達成するために、請求項1に記載の発明は、駆動源からの回転駆動力を受けて回転する太陽歯車と、前記太陽歯車と同軸上で配設された内歯歯車と、前記内歯歯車内に円周方向で等間隔に配設され前記太陽歯車と前記内歯歯車とに噛み合う複数の遊星歯車と、前記遊星歯車を回転自在に支持するとともに前記太陽歯車や前記内歯歯車と同軸上で回転自在なキャリアと、前記キャリアに保持され前記遊星歯車を回転自在に支持する支持軸とを有した遊星歯車機構を少なくとも2段以上設け、最終段のキャリアに出力軸を有した遊星歯車減速装置と、前記遊星歯車減速装置により減速された回転駆動力により回転駆動される被駆動体と、該被駆動体を支持するとともに、前記遊星歯車減速装置の出力軸からの回転駆動力を該被駆動体に伝達する被駆動体軸と、を備えた駆動装置において、前記太陽歯車、前記内歯歯車、前記キャリア、前記出力軸、前記被駆動体軸、及び前記被駆動体の中心軸のすべてが同一軸上に配置されるとともに、少なくとも1つ以上のキャリアは前記内歯歯車に対して浮動支持され、各キャリアは、遊星歯車を回転自在に支持する支持軸の両端部と嵌め合わされて、該支持軸を保持する孔が設けられた、1部品で構成されていることを特徴とするものである。
本発明は、太陽歯車、内歯歯車、キャリア、遊星歯車減速装置の出力軸、被駆動体軸、及び被駆動体の中心軸をすべて同軸上に配置することで、駆動源から被駆動体まで同軸度を最小化することができる。したがって、被駆動体に対する遊星減速装置及び駆動モータの位置決め保持、被駆動体と本体装置との位置決め保持の位置精度を高めることができ、被駆動体を高精度に駆動することができる。また、1つ以上のキャリアが浮動支持されることで、このキャリアで支持する遊星歯車や内歯歯車のギア精度が悪くても、噛み合いに応じてキャリアが調心され、出力軸側に上記歯車のギア精度による回転ムラが伝達されるのを抑制できる。さらに、キャリアを1部品で構成して、遊星歯車を支持する支持軸の両端部と嵌め合って保持する孔を設けることで、遊星歯車を支持する支持軸の傾きを最小限に抑えることができる。つまり、遊星歯車の支持軸の位置決め保持の位置精度を高めることができ、遊星歯車1回転の回転ムラの発生も抑えることができる。
【発明の効果】
【0012】
本発明は、駆動源から被駆動体まで同軸度を最小化し、浮動支持するキャリアに支持した遊星歯車や内歯歯車のギア精度による回転ムラの出力軸側への伝達を抑制でき、さらに、遊星歯車1回転の回転ムラの発生も抑えることができる。
よって、駆動源からの回転駆動力を遊星歯車減速装置を介して被駆動体に伝達する駆動装置において、被駆動体を高精度に回転駆動できる駆動装置を提供できる。
【図面の簡単な説明】
【0013】
【図1】実施形態に係る複写機の全体概要図。
【図2】実施例1に係る感光体駆動装置の主要部の斜視図。
【図3】実施例1に係る感光体駆動装置の断面図。
【図4】連結部材の構成を示す図。
【図5】連結部材の他の構成を示す図。
【図6】1部品で構成したキャリアへの遊星歯車の組み付け説明図。
【図7】キャリアへ遊星歯車と支持軸を組み付ける際の説明図。
【図8】実施例2に係る感光体駆動装置の断面図。
【図9】実施例3に係る感光体駆動装置の断面図。
【図10】駆動側板へネジ締結する内歯歯車の座面における変形箇所の説明図。
【図11】実施例4に係る感光体駆動装置の断面図。
【図12】実施例5に係る感光体駆動装置の断面図。
【図13】従来の被駆動体を回転駆動させる駆動装置の例。
【発明を実施するための形態】
【0014】
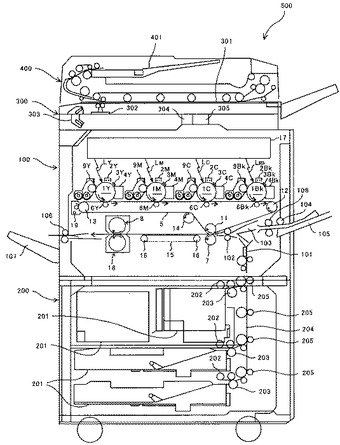
以下、本発明を、画像形成装置である電子写真方式のカラー複写機(以下、複写機という)に適用した一実施形態について、複数の実施例を挙げ、図を用いて説明する。まず、各実施例に共通する本実施形態の複写機の全体概要について説明する。ここで、図1は、本実施形態に係る複写機の全体概要図である。
【0015】
本実施形態における複写機500は、いわゆるタンデム式の画像形成装置であって、乾式二成分現像剤を用いた乾式二成分現像方式を採用したものである。この複写機500は、複写機本体100、複写機本体100を載置する給紙テーブル200、複写機本体100上に取り付けるスキャナ300、及びスキャナ300の上部に取り付ける原稿自動搬送装置400から構成されている。この複写機500では、スキャナ300から読み取った画像情報である画像データを受け取って画像形成処理を行う。複写機本体100には、図に示すように、イエロー(Y)、マゼンタ(M)、シアン(C)、ブラック(Bk)の各色用の4個の被駆動体としての像担持体である感光体ドラム1Y,1M,1C,1Bkが並設されている。これら感光体ドラム1Y,1M,1C,1Bkは、駆動ローラを含む回転可能な複数のローラに支持された無端ベルト状の中間転写ベルト5に接触するように、そのベルト移動方向に沿って並んで配置されている。
【0016】
また、感光体ドラム1Y,1M,1C,1Bkの周りには、それぞれ、帯電器2Y,2M,2C,2Bk、各色対応の現像装置9Y,9M,9C,9Bk、クリーニング装置4Y,4M,4C,4Bk、除電ランプ3Y,3M,3C,3Bk等の電子写真プロセス用部材がプロセス順に配設されている。そして、各感光体ドラム1の上方には、光書込装置17が設けられている。また、各感光体ドラム1の中間転写ベルト5を介して対向する位置には、それぞれ1次転写手段である1次転写ローラ6Y,6M,6C,6Bkが配置されている。
【0017】
中間転写ベルト5は、架張ローラ11,12,13及びテンションローラ14に架け渡されており、不図示の駆動源により回転駆動される駆動ローラである架張ローラ12の回転により回転駆動される。ここで、架張ローラ13の中間転写ベルト5を介して対向する位置には、ベルトクリーニング装置19が設けられており、2次転写後に中間転写ベルト5上に残留する残トナーを除去する。また、架張ローラ11は、2次転写手段である2次転写ローラ7に対向する2次転写対向ローラであり、中間転写ベルト5を介して2次転写ローラ7との間に2次転写ニップ部を形成する。
【0018】
この2次転写ニップ部の転写紙搬送方向下流側には、架張ローラ対16に架張された転写紙搬送ベルト15が設けられており、トナー像が2次転写された転写紙を定着装置18まで搬送する。定着装置18は、定着ローラ対8を備えており、その定着ニップ部で熱及び圧力を加えて、未定着のトナー像を転写紙上に定着する。
【0019】
次に、本実施形態における複合機500のコピー動作について説明する。本実施形態に係る複写機500でフルカラー画像を形成する場合、まず、原稿自動搬送装置400の原稿台401に原稿をセットする。又は、原稿自動搬送装置400を開いてスキャナ300のコンタクトガラス301上に原稿をセットし、原稿自動搬送装置400を閉じて押さえる。その後、ユーザーがスタートスイッチ(不図示)を押すと、原稿自動搬送装置400に原稿をセットしたときには、原稿がコンタクトガラス301上に搬送される。そして、スキャナ300が駆動して第1走行体302および第2走行体303が走行を開始する。これにより、第1走行体302からの光がコンタクトガラス301上の原稿で反射し、その反射光が第2走行体303のミラーで反射されて、結像レンズ304を通じて読取センサ305に案内される。このようにしいて原稿の画像情報を読み取る。
【0020】
また、ユーザーによりスタートスイッチが押されると、駆動モータ(不図示)が駆動し、駆動ローラである架張ローラ12が回転駆動して中間転写ベルト5が回転駆動する。また、これと同時に、不図示の感光体駆動装置10Yにより、感光体ドラム1Yを図中矢印の方向に回転駆動しながら帯電器2Yで一様帯電する。その後、光書込装置17からの光ビームLyを照射して感光体ドラム1Y上にY静電潜像を形成する。このY静電潜像は、現像装置9Yにより、現像剤中のYトナーにより現像される。現像時には、現像ローラと感光体ドラム1Yとの間に所定の現像バイアスが印加され、現像ローラ上のYトナーは、感光体ドラム1Y上のY静電潜像部分に静電吸着する。
【0021】
このように現像されて形成されたYトナー像は、感光体ドラム1Yの回転に伴い、感光体ドラム1Yと中間転写ベルト5とが接触する1次転写位置に搬送される。この1次転写位置において、中間転写ベルト5の裏面には、1次転写ローラ6Yにより所定のバイアス電圧が印加される。そして、このバイアス印加によって発生した1次転写電界により、感光体ドラム1Y上のYトナー像を中間転写ベルト5側に引き寄せ、中間転写ベルト5上に1次転写する。以下、同様にして、Mトナー像、Cトナー像、Bkトナー像も、中間転写ベルト5上のYトナー像に順次重ね合うように1次転写される。なお、2次転写後の中間転写ベルト5上に残留した転写残トナーは、ベルトクリーニング装置19により除去される。
【0022】
また、ユーザーによりスタートスイッチが押されると、ユーザーが選択した転写紙に応じた給紙テーブル200の給紙ローラ202が回転し、給紙カセット201の1つから転写紙が送り出される。送り出された転写紙は、分離ローラ203で1枚に分離して給紙路204に入り込み、搬送ローラ205により複合機本体100内の給紙路101まで搬送される。このようにして搬送された転写紙は、レジストローラ102に突き当たったところで止められる。なお、給紙カセット201にセットされていない転写紙を使用する場合、手差しトレイ105にセットされた転写紙を給紙ローラ104により送り出し、分離ローラ108で1枚に分離した後、手差し給紙路103を通って搬送される。そして、同じくレジストローラ102に突き当たったところで止められる。
【0023】
中間転写ベルト5上に4色重なり合ったトナー像は、中間転写ベルト5の回転にともない、2次転写ローラ7と対向する2次転写位置に搬送される。また、レジストローラ102は、上述のようにして中間転写ベルト5上に形成された合成トナー像が2次転写位置に搬送されるタイミングに合わせて回転を開始する。そして、この2次転写位置において、2次転写ローラ7により転写紙の裏面に所定のバイアス電圧が印加され、そのバイアス印加により発生した2次転写電界及び2次転写位置での当接圧により、中間転写ベルト5上のトナー像が転写紙上に一括して2次転写される。その後、トナー像が2次転写された転写紙は、転写紙搬送ベルト15により定着装置18に搬送されて、定着装置18に設けられた定着ローラ対8により定着処理が行われる。そして、定着処理が行われた転写紙は、排紙ローラ対106により、装置外に設けられた排紙トレイ107状に排出されてスタックされる。
【0024】
次に、本発明の特徴である、駆動源からの回転駆動力を遊星歯車減速装置を介して、像担持体や中間転写ベルトの駆動ローラ等の被駆動体に伝達する構成を、感光体駆動装置に適用した例について、実施例を挙げ、図を用いて説明する。ここで、被駆動体である各感光体ドラム1Y、1M、1C、1Bkは、同一構成の感光体駆動装置により回転駆動されているので、以下、各色に対応する符号Y、M、C、Bkを省略して説明する。また、本発明は、中間転写ベルト5の駆動ローラである架張ローラ12のローラ駆動装置等にも適用可能である。
【0025】
(実施例1)
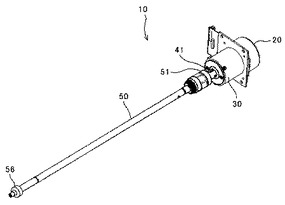
まず、本実施形態の第1の実施例である実施例1について、図を用いて説明する。図2は、本実施例に係る感光体駆動装置の主要部の斜視図、図3は、本実施例に係る感光体駆動装置10の断面図、図4は、連結部材の構成を示す図、図5は、連結部材の他の構成を示す図である。また、図6は、1部品で構成したキャリアへの遊星歯車の組み付け説明図である。そして、図7は、キャリアへ遊星歯車と支持軸を組み付ける際の説明図であり、(a)は、従来のニードルベアリングを介して支持される遊星歯車、(b)は、本実施例のベアリングレスにて支持される遊星歯車についての説明図である。
【0026】
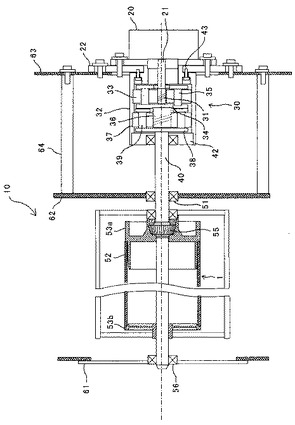
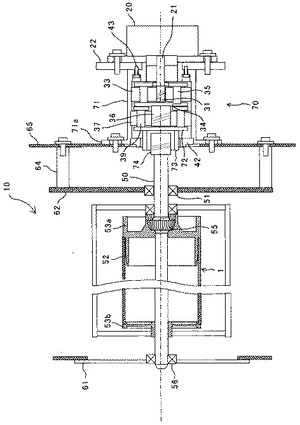
図2に示すように、感光体駆動装置10は駆動源であるモータ20、遊星歯車減速装置30、連結部材であるジョイント41、被駆動軸であるドラム軸50から主に構成されている。また、図3に示すように、遊星歯車減速装置30の出力軸40はドラム軸50とジョイント41により連結固定されている。そして、ドラム軸50には軸受51が圧入されており、この軸受51を介して装置本体の筐体に固定された後側板62に支持位置決めされるとともに、装置筐体に固定された前側板61に設けた軸受け56にドラム軸50の先端近傍が支持位置決めされる構成である。つまり、ドラム軸50は画像形成装置の筐体の一部である前側板61及び後側板62に両端部を、それぞれ軸受51,56を介して位置決め支持され、感光体ドラム1はドラム軸50を介して本体に対して位置決め支持される。これにより、感光体ドラム1は、相対的位置精度が求められる部材(例えば2次転写ベルト5等)と、前側板61及び後側板62を介して相対的に位置関係が決められ、感光体ドラム1に関連する複数の部材との位置関係を高精度にきめることができる。
【0027】
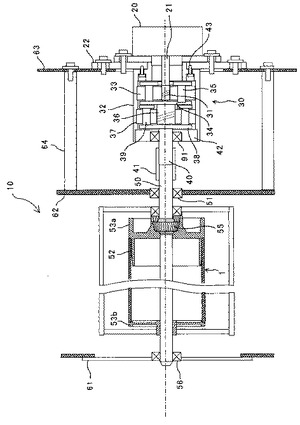
次に、図3を用いて遊星歯車減速装置30の内部構造の詳細について説明する。本実施例の遊星歯車減速装置30は2K−H型2段構成の遊星歯車機構が用いられている。ここで、本実施例では遊星歯車機構を2段構成としているが、減速比に応じて3段、4段と段数をさらに重ね合わせることも可能である。また、この遊星歯車減速装置30は、各段の太陽歯車、内歯歯車、キャリア、及び最終段のキャリアに設けた出力軸の中心軸のすべてを同一軸上に配置した構成である。
【0028】
この遊星歯車減速装置30では、駆動源であるモータ20のモータ出力軸21には、第1太陽歯車31を直接歯切りしている。そして、この第1太陽歯車31及び内歯固定フランジ22に固定された内歯歯車32に噛み合う1段目の第1遊星歯車33が、1段目の第1キャリア34により支持されて第1太陽歯車31の外周を公転するようになっている。この第1遊星歯車33は、回転バランスとトルク分担のために、同心状に第1キャリア34の3箇所に配置される。このように本実施例では、周方向で3等分された第1キャリア34の位置にそれぞれ第1遊星歯車33が配置されている。また、各第1遊星歯車33は、第1キャリア34に両端を固定支持される支持軸である第1キャリアピン35に、支持されて自転する構成となっている。そして、第1遊星歯車33は、第1太陽歯車31と内歯歯車32との噛合いにより、自転及び公転回転し、第1遊星歯車33を支持する第1キャリア34は、第1太陽歯車31の回転に対し減速回転し、1段目の減速比が獲得される。
【0029】
また、本実施例では第1キャリア34に回転支持部はなく、浮動回転を行うように構成されている。そして、第1キャリア34の回転中心に設けられた第2太陽歯車36が2段目減速機構の入力となる。なお、第1キャリア34、第1キャリアピン35、第1遊星歯車33の構成の詳細については後に説明する。
【0030】
また、2段目の第2太陽歯車36には、2段目まで一体で形成された内歯歯車32に噛み合う2段目の第2遊星歯車37が2段目の第2キャリア38により支持されて2段目の第2太陽歯車36の外周を公転するようになっている。本実施例では、周方向で4等分された第2キャリア38の位置にそれぞれ第2遊星歯車37が配置されている。各第2遊星歯車は、第2キャリア38に両端を支持固定された第2キャリアピン39に支持されて自転および公転する。最終段に相当する2段目の第2キャリア38の回転中心には出力軸40が設けられており、中空円筒上のジョイント41を介してドラム軸50と連結されている。ここで第2キャリア38の出力軸40は内歯歯車32により位置決めされた内歯歯車キャップ42に圧入された軸受により支持される構成となっている。内歯歯車キャップ42は内歯歯車32の内周とインローで位置決めされる構成となっているため、回転駆動された際にも、出力軸40は内歯歯車32の中心軸との同軸度を最小化できる構成となっている。また、出力軸40を設けた最終段の第2キャリア38は内歯歯車32に対して、その回転中心軸が移動しないことで、回転駆動時の調心による出力軸40の変動がなくなり、ドラム軸50と出力軸40の同軸度を最小化することができる。したがって、被駆動体である感光体ドラム1を高精度に駆動することができる。
【0031】
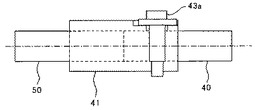
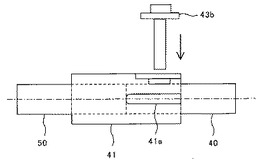
また、ドラム軸50を感光体ドラム1と出力軸40の間に設け、ドラム軸50と出力軸40とをジョイント41で同軸になるように連結している。ここで、ジョイント41の構成については、例えば、図4、5に示すような構成があげられる。図4に示すジョイント41は中空円筒形状となっており、ドラム軸50、遊星歯車減速装置30の出力軸40は同じ直径となっており、ドラム軸50側では、ジョイント41がドラム軸50に圧入される構成となっている。また、出力軸40側では、出力軸40とはすきまばめとなっており、ジョイント41と段付きネジ43aにより連結固定される構成となっている。一方、図5に示すジョイント41は中空円筒形状の中央部にスリット41aを有しており、出力軸40はネジ43bにより押し曲げられたジョイントとの摩擦力により連結固定されている構成となっている。いずれの構成もジョイント部分によるドラム軸50と出力軸40の中心軸のずれを最小化し、駆動伝達できる構成となっている。
【0032】
このようにジョイント41を設けることで、メインテナンス時等に感光体ドラム1及びドラム軸50を着脱できるとともに、本体筐体の一部である前側板61及び後側板62に支持位置決めされるドラム軸50を介して、感光体ドラム1を本体に高精度に位置決めできる。また、ジョイント41を中空円筒形状とすることで、ドラム軸50と出力軸40を、それぞれ円筒内部に嵌め合いで連結することができる。これにより、遊星歯車減速装置出力軸と被駆動体軸の同軸度に与える因子を円筒部材の内部の真直度だけとすることができ、同軸度を最小化することができる。
【0033】
また、モータ20のモータ出力軸21は、図3に示すように内歯固定フランジ22により支持されている。また、内歯歯車32は、内歯固定フランジ22に対してネジ43によって固定されており、内歯固定フランジ22は内歯歯車32の固定・保持およびモータ20の固定・保持している。そして、内歯固定フランジ22は駆動側板63とねじによって固定される構成となっている。ここで、駆動側板63は後側板62にカシメられたスタッド64により支持位置決めされている。そして、内歯歯車32のモータ20側には、内歯歯車32の中心軸に中空円筒形状のボスが設けられており、モータ20はその円筒形状内周とモータ20側に設けられた軸受けがインローによる勘合で位置決めされる。また、中空円筒形状の外周は内歯固定フランジ22に形成された孔とインローによる勘合で位置決めされる構成となっている。
【0034】
このような構成とすることで、内歯歯車32を基準として、モータ出力軸21、内歯固定フランジ22、遊星歯車減速装置30の出力軸40の中心軸をすべて同軸上に配置し、かつ部品寸法のばらつきによる同軸度を最小化することが可能な構成となっている。これより、モータ出力軸21からドラム軸50まで中心軸をすべて同軸上に配置できかつ、部品寸法のばらつきによる同軸度を最小化することが可能となっている。また、遊星歯車減速装置30は後側板62、及び後側板62により支持される駆動側板63により支持されることで、遊星歯車減速装置30及びモータ20の自重による遊星歯車減速装置30自身のたわみを抑制することができる。したがって、モータ20とドラム軸50との同軸度を最小化することができ、感光体ドラム1を高精度に駆動することができる。
【0035】
また、感光体ドラム1は筒状のドラム52と、ドラムフランジ53a,53bにより構成され、ドラム52はドラム両端に設けられたドラムフランジ53a,53bを介してドラム軸50に位置決めされる構成となっている。ドラムフランジ53a,53bはドラム52の中心軸位置に孔が設けられており、その孔とドラム軸50がインローで位置決めされる。また、ドラム軸50にはドラム52へと駆動伝達を行うジョイント55が圧入されており、ドラムフランジ53aを介してドラム52は駆動される構成となっている。この構成により、上述したモータ出力軸21からドラム軸50までに加え、ドラム52の中心軸も同軸上に配置することができる。つまり、モータ出力軸21(第1太陽歯車31)、内歯歯車32、第1キャリア34(第2太陽歯車36)、第2キャリア38、遊星歯車減速装置30の出力軸40、ドラム軸50、ドラム52の中心軸をすべて同一軸上に配置できる。このように配置することで、各部品寸法のばらつきによる同軸度を最小化できる。
【0036】
この遊星歯車減速装置30においては、各部品を次のような材料から構成している。モータ20のモータ出力軸21、すなわち遊星歯車機構の入力軸に直接歯切りされた第1太陽歯車31と、第1キャリアピン35、第2キャリアピン39は金属材料、例えばステンレス、炭素鋼などから構成している。また、その他の第1遊星歯車33、第1キャリア34及び一体で構成された第2太陽歯車36、第2遊星歯車37、第2キャリア38、第1遊星歯車と第2遊星歯車と噛み合う共通歯車仕様でハウジングケースと一体で構成された内歯歯車32は樹脂材料、例えばポリアセタールなどの成型品で構成している。
【0037】
このように、少なくとも第1遊星歯車33、第2遊星歯車37、及び内歯歯車32の材質を樹脂とすることで、金属に比べて樹脂の方が剛性が弱いため、各ギアの噛み合い時の衝撃を緩和することができる。このように緩和できるので、各ギアの噛み合いによる回転変動を小さくすることができる。また、内歯歯車32においては、その剛性が弱いことで、各遊星歯車との噛み合い時に、各ギアの精度に応じて内歯歯車32自体が変動して調心効果をもたらし、噛み合いによる回転変動を最小化することができる。
【0038】
次に、2K−H型遊星歯車機構に関する一般的な説明をおこなう。2K−H型遊星歯車機構は、太陽歯車(sun gear)、遊星歯車(planetary gear)、遊星歯車の公転運動を支持する遊星キャリア(planetary carrier)、内歯歯車(outer gear)の四点の部品から構成されている。太陽歯車の回転、遊星歯車の公転(キャリアの回転)、外輪歯車の回転の三つの要素の内、一つを固定、一つを入力、一つを出力に接続する。それぞれ、どれを入出力・固定に割り当てるかによって、一つのユニットで複数の減速比や回転方向の切替えが可能である。本実施例において対象とする2K−H型の2段構造は、複合遊星歯車機構(2個以上の2K−H型)に分類され、2個以上の2K−H型のそれぞれの3本の基本軸のうち2本の基本軸同士を結合し、残りの基本軸の1本を固定し、他の1軸を駆動軸または従動軸とする機構となる。
減速比に関しては、太陽歯車の歯数をZa、遊星歯車の歯数をZb、内歯歯車の歯数をZcとした場合に、次の式で表される。なお、式中の添え字1,2は1段目、2段目を意味している。
減速比=Za1 /(Za1+Zc1)×Za2 /(Za2+Zc2)
【0039】
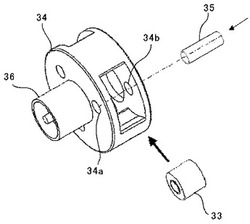
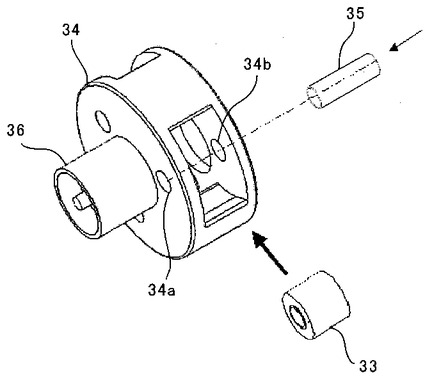
次に、本実施例の各キャリアが、キャリアピンの両端部と嵌め合わされて、このキャリアピンを保持する孔が設けられた1部品で構成されている構成について、1段目の第1キャリア34の構成を例に、図6を用いて説明する。図6に示すように、第1キャリア34は一部品で構成されており、第2太陽歯車36が設けられた第1側板と、モータ20側の第2側板からと、これらを連結する3つの連結部とからなる。そして、第1側板及び第2側板には、それそれ第1キャリアピン35の両端を支持する孔34a,34bが設けられている。この第1キャリア34は、事前に第1遊星歯車33と第1キャリアピン35とを組み立て、遊星歯車減速装置30に組み付けるように構成されている。第1遊星歯車33を組み立てる際には、第1遊星歯車33を第1キャリアの側面の連結部を設けていない開口から挿入する。そして、第1キャリアピン35を第1キャリア34の第1側板及び第2側板の孔34a,34bに挿入して組み立てる構成となっている。そして、第1キャリアピン35の径は第1キャリアの孔34a、34bよりも僅かに大きく、圧入する構成としている。このように第1キャリアピン35の両端を同一部品である第1キャリア34の第1側板及び第2側板で保持する構成となっているため、本実施例では第1遊星歯車33の傾きを小さくすることが可能となっている。
【0040】
ここで、例えば特許文献4のキャリアのように、分割して設けた第1側板と第2側板とで、ニードルベアリングを介して遊星歯車を支持するキャリアピンの両端部を挟み込んで保持する構成を、単に一体化するだけでは次のような不具合が生じる可能性がある。図7(a)に示すように、遊星歯車33の両端に設けた2つのニードルベアリング33aを介して遊星歯車33を支持するキャリアピン35と遊星歯車33とをキャリア34内に組み立てる場合には、次のようにして組み立てることとなる。遊星歯車33をキャリア34の側面の連結部を設けていない開口から挿入する。そして、キャリアピン35を、遊星歯車33に設けた2つのニードルベアリング33a、キャリア34の第1側板及び第2側板に設けた孔34a、34bのすべてと嵌め合わせながら、孔34b側から順に挿入して組み立てる。このように組み立てるため、組立作業性が悪化する。特に、遊星歯車33にニードルベアリング33aが設けられている場合、キャリアピン35との嵌め合う幅が短くなり、挿入時にキャリアピン35が傾きやすく、挿入方向下流側の孔に嵌め込み難くなり、著しく組立作業性が悪化する。このため、従来はキャリアの第1側板と第2側板とを分割して設け、ニードルベアリングを介して遊星歯車を支持するキャリアピンの両端部を挟み込むように組み立てる構成が多かった。
【0041】
そこで、本実施例では、図7(a)に示すように、遊星歯車33と、この遊星歯車33を回転自在に支持するキャリアピン35との摺動部に、ニードルベアリング33a等を設けないベアリングレスの構成としている。このように摺動部をベアリングレスとすることで、遊星歯車33とキャリアピン35との嵌め合う幅が長くなるため、キャリアピン35の挿入時にプラネタリギア軸が傾きにくくなる。したがって、キャリアピン35と遊星歯車33とをキャリア34内に組み立てる場合の組立作業性が向上する。
【0042】
そして、本発明を、本実施例のように感光体ドラム1を回転駆動する感光体駆動装置10に適用すること、つまり、被駆動体を像担持体である感光体ドラム1とすることで、次のような効果を奏することができる。像担持体である感光体ドラム1を省スペース、かつ低コストで高精度に駆動することができるとともに、感光体ドラム1の回転変動に関するジター等の画像不具合の発生を抑制することができる。また、本発明は、上述したように中間転写ベルト5の駆動ローラである架張ローラ12のローラ駆動装置等にも適用可能である。中間転写ベルト5のローラ駆動装置に適用すること、つまり、被駆動体を中間転写ベルト5の駆動ローラである架張ローラ12とすることで、次のような効果を奏することができる。中間転写ベルトである中間転写ベルト5を省スペース、かつ低コストで高精度に駆動することができるとともに、中間転写ベルト5の回転変動に関する色ずれ等の画像不具合の発生を抑制することができる。さらに、本発明を、画像を形成する上で重要な被駆動体である感光体ドラム1及び中間転写ベルト5の駆動ローラである架張ローラ12の回転駆動装置に適用することで、それぞれ高精度な回転駆動が行える。したがって、上述したようなの画像不具合の発生を、いずれか片方に適用するよりも抑制することができる画像形成装置を提供できる。
【0043】
(実施例2)
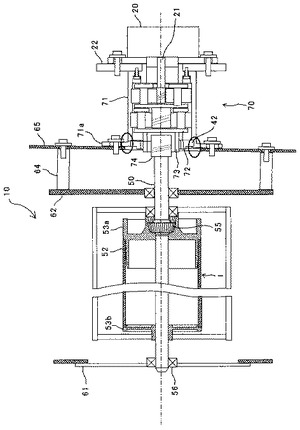
本実施形態の第2の実施例である実施例2について、図を用いて説明する。図8は、本実施例に係る感光体駆動装置の断面図である。ここで、実施例1と同じ構成の部分に関しては同じ符号を付し、同様な構成・動作については、適宜省略して説明する。
本実施例の感光体駆動装置10は、図8に示すように、遊星歯車減速装置30の出力軸40が、前側板61まで延びており、ドラム52はドラムフランジ53a,53bを介して、出力軸40により位置決めされる構成となっている。このように、出力軸40がドラム軸50を兼ねる構成となっているため、出力軸40とドラム軸50とを連結するジョイント41などの連結部材による同軸度の積み上がりを無くすことができる構成となっている。このように連結部材であるジョイント41を無くして、出力軸40がドラム軸50を兼ねる構成、つまり、出力軸40とドラム軸50とを一体に構成することで、出力軸40とドラム軸50の同軸度を最小化できる。
【0044】
(実施例3)
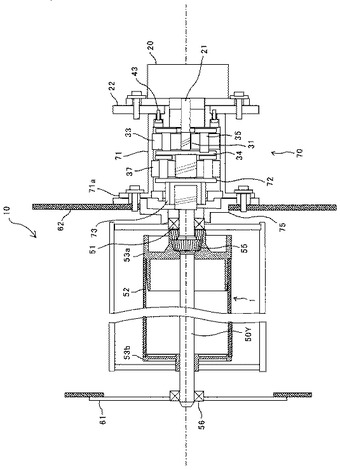
本実施形態の第3の実施例である実施例3について、図を用いて説明する。図9は、本実施例に係る感光体駆動装置10の断面図、図10は、駆動側板65へネジ締結する内歯歯車71の座面71aにおける変形箇所の説明図である。ここで、実施例1と同じ構成の部分に関しては同じ符号を付し、同様な構成・動作については、適宜省略して説明する。
本実施例の遊星歯車減速装置70には、実施例1と同様に2K−H型2段構成の遊星歯車機構が用いられている。モータ20、1段目太陽歯車31、1段目遊星歯車33、第1キャリア34、第2太陽歯車36、第2遊星歯車37、第1キャリアピン35、第2キャリアピン39などは実施例1と同様の構成である。
【0045】
図9に示すように、本実施例の遊星歯車減速装置70では、第2キャリア72の回転中心には雌型のスプラインジョイント73が第2キャリア72と一体で構成されている。一方、ドラム軸50の先端には雄型のスプラインジョイント74が圧入されており、遊星歯車減速装置70とジョイント連結する構成となっている。ここで、本実施例ではドラム軸50側を雄、第2キャリア側を雌としたが、逆の構成でもよい。このように連結部を構成することで、回転駆動時にスプラインジョイントには同心効果があるため、回転駆動時に遊星歯車減速装置70の出力軸として機能するスプラインジョイント73とドラム軸50の同軸度を最小化することができる。また、第2キャリア72は内歯歯車71に対して回転支持部を設けておらず、浮動回転する構成になっている。これにより、第2キャリア72は、駆動時に内歯歯車71と遊星歯車37のギアの噛み合い精度に応じて調心され、最終的な出力としての回転ムラを軽減できる構成となっている。
【0046】
また、ドラム軸50とのジョイントは、スプラインジョイント73、74となっているため、第2キャリア72側のスプラインジョイント73が調心されても、それに応じてスプラインジョイント74が同心される効果がある。このため、第2キャリア72側の調心により生じる偏心に起因した回転ムラがドラム軸51につたわることがない。さらに、内歯歯車71の材質が樹脂になっているため、内歯歯車71の調心効果があることも確認されている。
【0047】
ここで、遊星歯車減速装置70は内歯歯車71の出力側に形成された座面71aと駆動側板65がネジ締結されることで固定保持される構成となっている。また、駆動側板65は後側板62にカシメられたスタッド64により位置決め支持されている。そして、スタッド64が後側板62に対する直角性(図面幾何公差でいう直角度)がでていないと、スタッドを介して位置決め固定される駆動側板65は後側板に対してある傾きをもって固定される。このとき、遊星歯車減速装置70も駆動側板65の傾きと同じ姿勢で固定されてしまうと、ドラム軸50は前側板61と後側板62により位置決めされているため、次のような不具合が発生する可能性がある。スプラインジョイント73に対してスプラインジョイント74が傾きをもってしまい、うまく噛み合うことができなかったり、噛み合うことができても、このずれによる回転ムラが発生したりする不具合である。
【0048】
しかし、本実施例の構成では、内歯歯車71の座面71aと駆動側板65が固定される構成であること、また内歯歯車71の材質が樹脂であり、金属に対して剛性が弱いことから、ネジ締結時に座面71aの根元部分のみが変形する。そして、図10に示すように、座面71aは駆動側板65にならうが、内歯歯車71全体が傾くことなく、スプラインジョイント73はスプラインジョイント74と同軸を保って噛み合うことができる。
【0049】
すなわち、内歯歯車71を介して駆動側板65に支持される構成とすることで、駆動側板65が後側板62に対して傾いていた場合、内歯歯車71の駆動側板65との締結部である座面71aが変形した状態で固定される。そして、上述したように第2キャリア72を内歯歯車71に対して浮動支持としているため、内歯歯車71の変形は第2キャリア72の調心によりキャンセルすることができる。また、内歯歯車71を樹脂としていることで、内歯歯車71自身の変形による調心効果もあるため、駆動側板65との締結により内歯歯車71が変形しても遊星歯車減速装置70の回転変動に影響を与えないようにすることもできる。
【0050】
(実施例4)
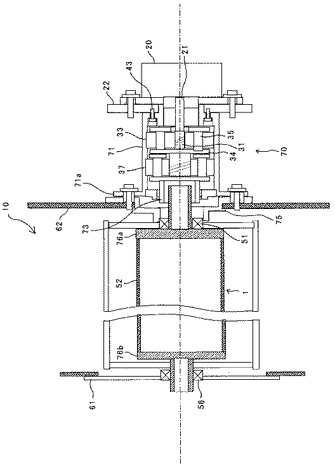
本実施形態の第4の実施例である実施例4について、図を用いて説明する。図11は、本実施例に係る感光体駆動装置10の断面図である。ここで、実施例1乃至3と同じ構成の部分に関しては同じ符号を付し、同様な構成・動作については、適宜省略して説明する。
図11に示すように、本実施例の遊星歯車減速装置70では、後側板62には、ドラム軸50と同軸上にハウジング75設けられており、ハウジング75は感光体ドラム1の軸受51を支持している。一方、遊星歯車減速装置70の内歯歯車71の座面71aはハウジング75と接しており、ネジにより後側板62に支持されている。このように、実施例1乃至3とは異なり遊星歯車減速装置70を後側板62に直接保持する構成もある。
【0051】
(実施例5)
本実施形態の第5の実施例である実施例5について、図を用いて説明する。図12は、本実施例に係る感光体駆動装置10の断面図である。ここで、実施例1乃至4と同じ構成の部分に関しては同じ符号を付し、同様な構成・動作については、適宜省略して説明する。
図12に示すように、本実施例の遊星歯車減速装置70では、ドラム52の両端部にはドラムフランジ76a,76bが圧入されている。そして、ドラムフランジ76a,76bの回転中心部には円筒状のボス部が設けられており、ドラムフランジ76bは前記ボスを介して前側板61の軸受56により、支持されている。また、ドラムフランジ76aに設けたボス部の円筒外側にはギアが形成されており、遊星歯車減速装置70の出力軸として機能するスプラインジョイント73と噛み合う構成となっている。ここで、本実施例の構成では、ドラムフランジ76a側が雄のジョイント、スプラインジョイント73を雌のジョイントとしているが、逆の構成でもなんら問題はない。このように、実施例1乃至4とは異なりドラム軸のない構成を提供することも可能である。
【0052】
以上に説明したものは一例であり、本発明は、次の態様毎に特有の効果を奏する。
(態様A)
本態様の感光体駆動装置10などの駆動装置は、モータ20などの駆動源からの回転駆動力を受けて回転する第1太陽歯車31などの太陽歯車と、前記太陽歯車と同軸上で配設された内歯歯車32などの内歯歯車と、前記内歯歯車内に円周方向で等間隔に配設され前記太陽歯車と前記内歯歯車とに噛み合う複数の第1遊星歯車33などの遊星歯車と、前記遊星歯車を回転自在に支持するとともに前記太陽歯車や前記内歯歯車と同軸上で回転自在な第1キャリア34などのキャリアと、前記キャリアに保持され前記遊星歯車を回転自在に支持する第1キャリアピン35などの支持軸とを有した遊星歯車機構を少なくとも2段以上設け、第2キャリア38などの最終段のキャリアに出力軸40などの出力軸を有した遊星歯車減速装置30などの遊星歯車減速装置と、前記遊星歯車減速装置により減速された回転駆動力により回転駆動される感光体ドラム1などの被駆動体と、該被駆動体を支持するとともに、前記遊星歯車減速装置の出力軸からの回転駆動力を該被駆動体に伝達するドラム軸50などの被駆動体軸と、を備えた駆動装置において、前記太陽歯車、前記内歯歯車、前記キャリア、前記出力軸、前記被駆動体軸、及び前記被駆動体の中心軸のすべてが同一軸上に配置されるとともに、少なくとも1つ以上のキャリアは前記内歯歯車に対して浮動支持され、各キャリアは、遊星歯車を回転自在に支持する支持軸の両端部と嵌め合わされて、該支持軸を保持する孔34a,34bなどの孔が設けられた、1部品で構成されていることを特徴とするものである。
これによれば、上記実施例1について説明したように、モータ20などの駆動源からの回転駆動力を遊星歯車減速装置30などの遊星歯車減速装置を介して感光体ドラム1などの被駆動体に伝達する感光体駆動装置10などの駆動装置において、高精度な被駆動体の回転駆動が行える駆動装置を提供できる。
(態様B)
本態様の感光体駆動装置10などの駆動装置は、(態様A)において、遊星歯車減速装置30などの前記遊星歯車減速装置の出力側の最終段となる第2キャリア38などのキャリアは内歯歯車32などの前記内歯歯車に対して、その回転中心が移動しないように支持されていることを特徴とするものである。
これによれば、上記実施例1について説明したように、出力側の最終段となる第2キャリア38などのキャリアは内歯歯車32などの内歯歯車に対して、その回転中心が移動しないように支持することができる。このことで、回転駆動時に出力軸40などの出力軸は調心による変動はなくなり、ドラム軸50などの被駆動体軸と出力軸の同軸度を最小化することができ、感光体ドラム1などの被駆動体を高精度に駆動する駆動装置を提供できる。
(態様C)
本態様の感光体駆動装置10などの駆動装置は、(態様A)又は(態様B)において、ドラム軸50などの前記被駆動体軸は、駆動装置を用いる装置の筐体の一部である前側板61などの前側板及び後側板62などの後側板に、両端部をそれぞれ軸受け51、56などの軸受を介して位置決め支持され、遊星歯車減速装置30などの前記遊星歯車減速装置は、前記後側板と、該後側板に保持された駆動側板63などの駆動側板とで支持されることを特徴とするものである。
これによれば、上記実施例1について説明したように、感光体ドラム1などの被駆動体に関連する複数の部材との位置関係を高精度にきめることができる。また、モータ出力軸21などの駆動源の出力軸と被駆動体軸との同軸度を最小化することができ、被駆動体を高精度に駆動することもできる。
(態様D)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様C)のいずれか一において、遊星歯車減速装置30などの前記遊星歯車減速装置の、第1遊星歯車33などの前記遊星歯車及び内歯歯車32などの前記内歯車の材質を樹脂としたことを特徴とするものである。
これによれば、上記実施例1について説明したように、遊星歯車減速装置30などの遊星歯車減速装置内のギアの噛み合いにより発生する回転変動を最小化することができる。
(態様E)
本態様の感光体駆動装置10などの駆動装置は、(態様D)において、遊星歯車減速装置70などの前記遊星歯車減速装置は内歯歯車71などの前記内歯歯車を介して駆動側板65などの前記駆動側板に支持される構成としたことを特徴とするものである。
これによれば、上記実施例3について説明したように、内歯歯車71などの内歯歯車の変形は第2キャリア72などのキャリアの調心によりキャンセルすることができる。また、駆動側板65などの駆動側板との締結により内歯歯車71が変形しても遊星歯車減速装置70などの遊星歯車減速装置の回転変動に影響を与えないようにすることもできる。
(態様F)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様E)のいずれか一において、遊星歯車減速装置30などの前記遊星歯車減速装置の出力軸40などの出力軸とドラム軸50などの前記被駆動体軸とを連結するジョイント41などの連結部材を備え、前記連結部材が、中空円筒状の部材から構成されていることを特徴とするものである。
これによれば、上記実施例1について説明したように、感光体ドラム1などの被駆動体及びドラム軸50などの被駆動体軸を着脱できるとともに、この駆動装置を用いる複写機500などの装置本体に高精度に位置決めできる。また、出力軸40などの出力軸と被駆動体軸の同軸度に与える因子を円筒部材の内部の真直度だけとすることができ、同軸度を最小化することができる。
(態様G)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様E)のいずれか一において、遊星歯車減速装置70などの前記遊星歯車減速装置の出力軸とドラム軸50などの前記被駆動体軸とを連結する連結部材を備え、前記連結部材を、スプラインジョイント73及びスプラインジョイント74などから構成されるスプラインジョイントとしたことを特徴とするものである。
これによれば、上記実施例3について説明したように、感光体ドラム1などの被駆動体及びドラム軸50などの被駆動体軸を着脱できるとともに、この駆動装置を用いる複写機500などの装置本体に高精度に位置決めできる。また、回転駆動時に遊星歯車減速装置70などの遊星歯車減速装置の出力軸として機能するスプラインジョイント73とドラム軸50の同軸度を最小化することができる。
(態様H)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様E)のいずれか一において、遊星歯車減速装置30などの前記遊星歯車減速装置の出力軸40などの出力軸とドラム軸50などの被駆動体軸とを一体に構成したことを特徴とするものである。
これによれば、上記実施例2について説明したような、効果を奏することができる。
(態様I)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様H)のいずれか一において、遊星歯車減速装置30などの前記遊星歯車減速装置に有した第1遊星歯車33などの各遊星歯車と、該遊星歯車を回転自在に支持する第1キャリア34などの支持軸との摺動部が、ベアリングレスで構成されていることを特徴とするものである。
これによれば、上記実施例1について説明したように、キャリアピン35などの支持軸と遊星歯車33などの遊星歯車とをキャリア34などのキャリア内に組み立てる場合の組立作業性が向上する。
(態様J)
本態様の複写機500などの画像形成装置は、感光体ドラム1などの像担持体や中間転写ベルト5などの中間転写ベルトの駆動ローラ等の被駆動体の内、少なくとも1以上の被駆動体の駆動装置として、(態様A)乃至(態様I)のいずれか一の駆動装置を備えていることを特徴とするものである。
これによれば、(態様A)乃至(態様I)のいずれか一の駆動装置と同様な効果を奏することができる。
【符号の説明】
【0053】
1 感光体ドラム
2 帯電器
3 除電ランプ
4 クリーニング装置
5 中間転写ベルト
6 1次転写ローラ
7 2次転写ローラ
8 定着ローラ対
9 現像装置
10 感光体駆動装置
11 架張ローラ(駆動ローラ)
12,13 架張ローラ
14 テンションローラ
15 転写紙搬送ベルト
16 架張ローラ対
17 光書込装置
18 定着装置
19 ベルトクリーニング装置
20 モータ
21 モータ出力軸
22 内歯固定フランジ
30 遊星歯車減速装置
31 第1太陽歯車
32 内歯歯車
33 第1遊星歯車
33a ニードルベアリング
34 第1キャリア
34a,34b 孔
35 第1キャリアピン
36 第2太陽歯車
37 第2遊星歯車
38 第2キャリア
39 第2キャリアピン
40 出力軸
41 ジョイント
41a スリット
42 内歯歯車キャップ
43、43a、43b ネジ
50 ドラム軸
51,56 軸受
52 ドラム
53a,b ドラムフランジ
53a,53b ドラムフランジ
55 ジョイント
61 前側板
62 後側板
63 駆動側板
64 スタッド
65 駆動側板
70 遊星歯車減速装置
71 内歯歯車
71a 座面
72 第2キャリア
73 スプラインジョイント(雌型)
74 スプラインジョイント(雄型)
75 ハウジング
76a,76b ドラムフランジ
80 駆動ローラ
81 前ホルダ
82 後ホルダ
83 前側板
84 後側板
85 遊星歯車減速装置
86 モータ
100 複合機本体
101 給紙路
102 レジストローラ
103 給紙路
104 給紙ローラ
105 トレイ
106 排紙ローラ対
107 排紙トレイ
108 分離ローラ
200 給紙テーブル
201 給紙カセット
202 給紙ローラ
203 分離ローラ
204 給紙路
205 搬送ローラ
300 スキャナ
301 コンタクトガラス
302 第1走行体
303 第2走行体
304 結像レンズ
305 読取センサ
400 原稿自動搬送装置
401 原稿台
500 複写機
L 光ビーム
【先行技術文献】
【特許文献】
【0054】
【特許文献1】特開2008−151868号公報
【特許文献2】特開平10−240069号公報
【特許文献3】特開2001−330087号公報
【技術分野】
【0001】
本発明は、遊星歯車減速装置を介して被駆動体を回転駆動する駆動装置、及びこの駆動装置を備えた画像形成装置に関するものである。
【背景技術】
【0002】
電子写真方式を採用した画像形成装置では、回転する円筒状の像担持体(以下、感光体ドラムという)の表面上に静電潜像を形成し、形成した静電潜像にトナーを付着させて現像するものが広く普及している。この現像したトナー画像は、回転駆動される無端状ベルト(以下、中間転写ベルトという)に1次転写し、さらに記録紙上に2次転写を行って定着したり、記録紙上に直接転写した後、定着したりして画像を得るようにしている。
【0003】
そして、感光体ドラムや中間転写ベルトの回転駆動に、大口径樹脂ギア等に比べて省スペースで高減速比が得られ、耐久性が高い遊星減速装置を介して駆動源の回転駆動力を伝達する駆動装置を備えた画像形成装置が普及している。遊星減速装置を用いる駆動装置として、従来から様々な駆動装置が提案されている。例えば、特許文献1には、次のような感光体ドラムや中間転写ベルトの駆動ローラ等の被駆動体(駆動ローラ)を回転駆動させる駆動装置(ローラ駆動装置)が記載されている。図13に示すように、駆動ローラ80は前後それぞれ軸受を介して前後ホルダ、81、82に保持され、前ホルダ81は前側板83、後ホルダ82は後側板84に保持位置決めされている。そして、駆動ローラ80内部には遊星歯車減速装置85(ギア部)と駆動源であるモータ86が配置されており、遊星歯車減速装置85およびモータ86はそれぞれ後ホルダ82に保持されている。モータ86の出力とは反対側の端部は軸受けを介して後側板に支持されている。以上のような構成とすることで駆動ローラ80内部に駆動系を実装し、駆動装置を省スペース化し、画像形成装置の小型化を達成するというものである。
【0004】
また、特許文献2には、次のような構成の感光体ドラム駆動装置が記載されている。遊星ローラ減速機構及びモータを感光体ドラムの外側に配置し、モータ、感光体ドラム、遊星ローラ減速機構の出力軸等を同一軸上に配置した構成である。このように同軸上に配置することで、駆動装置の感光体ドラムの径方向に占めるスペースを縮小し、画像形成装置の小型化を達成するというものである。また、この感光体ドラム駆動装置に用いる遊星ローラ減速機構では、遊星ローラの支持軸はローラ保持部材により片側のみ支持される構成となっており、軸方向のスペースも縮小させているものと考えられる。
【0005】
また、特許文献3には、次のような遊星歯車減速装置(遊星歯車機構)を備えた駆動装置(アクチュエータ)が記載されている。2段目以降の太陽歯車(サンギア)を、内歯歯車(リングギヤ)を保持するハウジングの出力軸側の開口まで延ばした1段目の太陽歯車に、回転自在に組み付けている。また、遊星歯車(プラネタリギヤ)、遊星歯車の支持軸(プラネタリギヤ軸)、及びキャリア(プラネタリキャリア)は、キャリア組立体として事前に組立てられてハウジングに組み込まれる。このキャリア組立体は、遊星歯車(プラネタリギヤ)に設けたニードルベアリングに支持軸を通し、その径を中央部よりも小さくした支持軸の両端を、第1側板と第2側板とで挟み込む。そして、第1側板には、複数の脚部が一体に設けられており、遊星歯車の支持軸を第2側板とで挟み込む際に、第1側板と第2側板とが、この脚部及び支持軸で連結される。このように構成することで、遊星歯車減速装置の組み付け性を向上させ、かつ、キャリア組立体の変形を抑制して各ギアの耐久性を向上させるというものである。
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の構成では、以下のような欠点がある。モータ86も後ホルダ82も後側板84で位置決めされている。そして、モータ86は後ホルダ82にも保持されている構成のため、モータ86は2つの部品により位置決めされる構成となっている。このため各部品寸法のばらつきによっては、モータ86と後側板84の位置決め部で組み立て不良が発生したり、組み立てることができてもモータ86又は後ホルダ82が変形した状態で組み立てられてしまう場合がある。その結果、組み立て不良や、モータ86又は後ホルダ82の変形により、次のような問題が発生する可能性がある。感光体ドラムや中間転写ベルト等の被駆動体に対する遊星歯車減速装置85及びモータ86の位置決め保持、及び被駆動体と後側板84との位置決め保持を精度良く行えず駆動回転品質を悪化させ、被駆動体の高精度な回転駆動が行えないという問題である。
【0007】
また、特許文献2に記載の構成では、上述したように、遊星ローラの支持軸はローラ保持部材により片側のみ支持される構成となっている。このため、遊星ローラの支持軸が傾き、遊星ローラが太陽ローラや固定ローラに片あたりして遊星ローラの耐久性が低下したり、遊星ローラ1回転の回転ムラが発生したりして、高精度な回転駆動が行えないという問題が発生する。
【0008】
また、特許文献3に記載の構成では、上述したように、遊星歯車に設けたニードルベアリングに支持軸を通し、その径を中央部よりも小さくした支持軸の両端をキャリアの第1側板と第2側板とで挟み込みんでいる。このため、各部品寸法のばらつき及び組み立て誤差により、第1側板に設けられた遊星歯車の支持軸を保持する孔と、第2側板に設けられた遊星歯車の支持軸を保持する孔との位置にズレが発生し、遊星歯車の傾きが発生する可能性がある。この傾きにより遊星歯車の耐久性が低下したり、遊星歯車1回転の回転ムラが発生したりして、高精度な回転駆動が行えないという問題が発生する。また、各キャリアと、入力軸に嵌め合わされる各太陽歯車(サンギヤ)との間に調心効果を生じるクリアランスは設けられておらず、遊星歯車、太陽歯車、及び固定歯車のギア精度による回転ムラが出力軸側への伝達されてしまい、高精度な回転駆動が行えないという問題が発生する。
【0009】
以上のように高精度な回転駆動が行えないと、高精度に一定速度で回転するべき感光体ドラムや、中間転写ベルトに速度変動が生じて、出力された画像にジッタや濃度ムラが生じる。ある周波数で速度変動が継続すると画像全体に周期濃度ムラが生じ、縞模様のバンディングとして目視される。そして、感光体ドラムの速度変動は書き込み系の露光ラインの副走査位置ずれを発生させると同時に、中間転写ベルトへの1次転写時の副走査位置ずれを発生させる。また、中間転写ベルトの速度変動は、1次転写時と2次転写時の副走査位置ずれを発生させる。この速度変動に起因したバンディングにより画像品質が著しく低下してしまう。
【0010】
本発明は以上の問題点に鑑みなされたものであり、その目的は、駆動源からの回転駆動力を遊星歯車減速装置を介して被駆動体に伝達する駆動装置において、被駆動体を高精度に回転駆動できる駆動装置を提供することである。
【課題を解決するための手段】
【0011】
上記目的を達成するために、請求項1に記載の発明は、駆動源からの回転駆動力を受けて回転する太陽歯車と、前記太陽歯車と同軸上で配設された内歯歯車と、前記内歯歯車内に円周方向で等間隔に配設され前記太陽歯車と前記内歯歯車とに噛み合う複数の遊星歯車と、前記遊星歯車を回転自在に支持するとともに前記太陽歯車や前記内歯歯車と同軸上で回転自在なキャリアと、前記キャリアに保持され前記遊星歯車を回転自在に支持する支持軸とを有した遊星歯車機構を少なくとも2段以上設け、最終段のキャリアに出力軸を有した遊星歯車減速装置と、前記遊星歯車減速装置により減速された回転駆動力により回転駆動される被駆動体と、該被駆動体を支持するとともに、前記遊星歯車減速装置の出力軸からの回転駆動力を該被駆動体に伝達する被駆動体軸と、を備えた駆動装置において、前記太陽歯車、前記内歯歯車、前記キャリア、前記出力軸、前記被駆動体軸、及び前記被駆動体の中心軸のすべてが同一軸上に配置されるとともに、少なくとも1つ以上のキャリアは前記内歯歯車に対して浮動支持され、各キャリアは、遊星歯車を回転自在に支持する支持軸の両端部と嵌め合わされて、該支持軸を保持する孔が設けられた、1部品で構成されていることを特徴とするものである。
本発明は、太陽歯車、内歯歯車、キャリア、遊星歯車減速装置の出力軸、被駆動体軸、及び被駆動体の中心軸をすべて同軸上に配置することで、駆動源から被駆動体まで同軸度を最小化することができる。したがって、被駆動体に対する遊星減速装置及び駆動モータの位置決め保持、被駆動体と本体装置との位置決め保持の位置精度を高めることができ、被駆動体を高精度に駆動することができる。また、1つ以上のキャリアが浮動支持されることで、このキャリアで支持する遊星歯車や内歯歯車のギア精度が悪くても、噛み合いに応じてキャリアが調心され、出力軸側に上記歯車のギア精度による回転ムラが伝達されるのを抑制できる。さらに、キャリアを1部品で構成して、遊星歯車を支持する支持軸の両端部と嵌め合って保持する孔を設けることで、遊星歯車を支持する支持軸の傾きを最小限に抑えることができる。つまり、遊星歯車の支持軸の位置決め保持の位置精度を高めることができ、遊星歯車1回転の回転ムラの発生も抑えることができる。
【発明の効果】
【0012】
本発明は、駆動源から被駆動体まで同軸度を最小化し、浮動支持するキャリアに支持した遊星歯車や内歯歯車のギア精度による回転ムラの出力軸側への伝達を抑制でき、さらに、遊星歯車1回転の回転ムラの発生も抑えることができる。
よって、駆動源からの回転駆動力を遊星歯車減速装置を介して被駆動体に伝達する駆動装置において、被駆動体を高精度に回転駆動できる駆動装置を提供できる。
【図面の簡単な説明】
【0013】
【図1】実施形態に係る複写機の全体概要図。
【図2】実施例1に係る感光体駆動装置の主要部の斜視図。
【図3】実施例1に係る感光体駆動装置の断面図。
【図4】連結部材の構成を示す図。
【図5】連結部材の他の構成を示す図。
【図6】1部品で構成したキャリアへの遊星歯車の組み付け説明図。
【図7】キャリアへ遊星歯車と支持軸を組み付ける際の説明図。
【図8】実施例2に係る感光体駆動装置の断面図。
【図9】実施例3に係る感光体駆動装置の断面図。
【図10】駆動側板へネジ締結する内歯歯車の座面における変形箇所の説明図。
【図11】実施例4に係る感光体駆動装置の断面図。
【図12】実施例5に係る感光体駆動装置の断面図。
【図13】従来の被駆動体を回転駆動させる駆動装置の例。
【発明を実施するための形態】
【0014】
以下、本発明を、画像形成装置である電子写真方式のカラー複写機(以下、複写機という)に適用した一実施形態について、複数の実施例を挙げ、図を用いて説明する。まず、各実施例に共通する本実施形態の複写機の全体概要について説明する。ここで、図1は、本実施形態に係る複写機の全体概要図である。
【0015】
本実施形態における複写機500は、いわゆるタンデム式の画像形成装置であって、乾式二成分現像剤を用いた乾式二成分現像方式を採用したものである。この複写機500は、複写機本体100、複写機本体100を載置する給紙テーブル200、複写機本体100上に取り付けるスキャナ300、及びスキャナ300の上部に取り付ける原稿自動搬送装置400から構成されている。この複写機500では、スキャナ300から読み取った画像情報である画像データを受け取って画像形成処理を行う。複写機本体100には、図に示すように、イエロー(Y)、マゼンタ(M)、シアン(C)、ブラック(Bk)の各色用の4個の被駆動体としての像担持体である感光体ドラム1Y,1M,1C,1Bkが並設されている。これら感光体ドラム1Y,1M,1C,1Bkは、駆動ローラを含む回転可能な複数のローラに支持された無端ベルト状の中間転写ベルト5に接触するように、そのベルト移動方向に沿って並んで配置されている。
【0016】
また、感光体ドラム1Y,1M,1C,1Bkの周りには、それぞれ、帯電器2Y,2M,2C,2Bk、各色対応の現像装置9Y,9M,9C,9Bk、クリーニング装置4Y,4M,4C,4Bk、除電ランプ3Y,3M,3C,3Bk等の電子写真プロセス用部材がプロセス順に配設されている。そして、各感光体ドラム1の上方には、光書込装置17が設けられている。また、各感光体ドラム1の中間転写ベルト5を介して対向する位置には、それぞれ1次転写手段である1次転写ローラ6Y,6M,6C,6Bkが配置されている。
【0017】
中間転写ベルト5は、架張ローラ11,12,13及びテンションローラ14に架け渡されており、不図示の駆動源により回転駆動される駆動ローラである架張ローラ12の回転により回転駆動される。ここで、架張ローラ13の中間転写ベルト5を介して対向する位置には、ベルトクリーニング装置19が設けられており、2次転写後に中間転写ベルト5上に残留する残トナーを除去する。また、架張ローラ11は、2次転写手段である2次転写ローラ7に対向する2次転写対向ローラであり、中間転写ベルト5を介して2次転写ローラ7との間に2次転写ニップ部を形成する。
【0018】
この2次転写ニップ部の転写紙搬送方向下流側には、架張ローラ対16に架張された転写紙搬送ベルト15が設けられており、トナー像が2次転写された転写紙を定着装置18まで搬送する。定着装置18は、定着ローラ対8を備えており、その定着ニップ部で熱及び圧力を加えて、未定着のトナー像を転写紙上に定着する。
【0019】
次に、本実施形態における複合機500のコピー動作について説明する。本実施形態に係る複写機500でフルカラー画像を形成する場合、まず、原稿自動搬送装置400の原稿台401に原稿をセットする。又は、原稿自動搬送装置400を開いてスキャナ300のコンタクトガラス301上に原稿をセットし、原稿自動搬送装置400を閉じて押さえる。その後、ユーザーがスタートスイッチ(不図示)を押すと、原稿自動搬送装置400に原稿をセットしたときには、原稿がコンタクトガラス301上に搬送される。そして、スキャナ300が駆動して第1走行体302および第2走行体303が走行を開始する。これにより、第1走行体302からの光がコンタクトガラス301上の原稿で反射し、その反射光が第2走行体303のミラーで反射されて、結像レンズ304を通じて読取センサ305に案内される。このようにしいて原稿の画像情報を読み取る。
【0020】
また、ユーザーによりスタートスイッチが押されると、駆動モータ(不図示)が駆動し、駆動ローラである架張ローラ12が回転駆動して中間転写ベルト5が回転駆動する。また、これと同時に、不図示の感光体駆動装置10Yにより、感光体ドラム1Yを図中矢印の方向に回転駆動しながら帯電器2Yで一様帯電する。その後、光書込装置17からの光ビームLyを照射して感光体ドラム1Y上にY静電潜像を形成する。このY静電潜像は、現像装置9Yにより、現像剤中のYトナーにより現像される。現像時には、現像ローラと感光体ドラム1Yとの間に所定の現像バイアスが印加され、現像ローラ上のYトナーは、感光体ドラム1Y上のY静電潜像部分に静電吸着する。
【0021】
このように現像されて形成されたYトナー像は、感光体ドラム1Yの回転に伴い、感光体ドラム1Yと中間転写ベルト5とが接触する1次転写位置に搬送される。この1次転写位置において、中間転写ベルト5の裏面には、1次転写ローラ6Yにより所定のバイアス電圧が印加される。そして、このバイアス印加によって発生した1次転写電界により、感光体ドラム1Y上のYトナー像を中間転写ベルト5側に引き寄せ、中間転写ベルト5上に1次転写する。以下、同様にして、Mトナー像、Cトナー像、Bkトナー像も、中間転写ベルト5上のYトナー像に順次重ね合うように1次転写される。なお、2次転写後の中間転写ベルト5上に残留した転写残トナーは、ベルトクリーニング装置19により除去される。
【0022】
また、ユーザーによりスタートスイッチが押されると、ユーザーが選択した転写紙に応じた給紙テーブル200の給紙ローラ202が回転し、給紙カセット201の1つから転写紙が送り出される。送り出された転写紙は、分離ローラ203で1枚に分離して給紙路204に入り込み、搬送ローラ205により複合機本体100内の給紙路101まで搬送される。このようにして搬送された転写紙は、レジストローラ102に突き当たったところで止められる。なお、給紙カセット201にセットされていない転写紙を使用する場合、手差しトレイ105にセットされた転写紙を給紙ローラ104により送り出し、分離ローラ108で1枚に分離した後、手差し給紙路103を通って搬送される。そして、同じくレジストローラ102に突き当たったところで止められる。
【0023】
中間転写ベルト5上に4色重なり合ったトナー像は、中間転写ベルト5の回転にともない、2次転写ローラ7と対向する2次転写位置に搬送される。また、レジストローラ102は、上述のようにして中間転写ベルト5上に形成された合成トナー像が2次転写位置に搬送されるタイミングに合わせて回転を開始する。そして、この2次転写位置において、2次転写ローラ7により転写紙の裏面に所定のバイアス電圧が印加され、そのバイアス印加により発生した2次転写電界及び2次転写位置での当接圧により、中間転写ベルト5上のトナー像が転写紙上に一括して2次転写される。その後、トナー像が2次転写された転写紙は、転写紙搬送ベルト15により定着装置18に搬送されて、定着装置18に設けられた定着ローラ対8により定着処理が行われる。そして、定着処理が行われた転写紙は、排紙ローラ対106により、装置外に設けられた排紙トレイ107状に排出されてスタックされる。
【0024】
次に、本発明の特徴である、駆動源からの回転駆動力を遊星歯車減速装置を介して、像担持体や中間転写ベルトの駆動ローラ等の被駆動体に伝達する構成を、感光体駆動装置に適用した例について、実施例を挙げ、図を用いて説明する。ここで、被駆動体である各感光体ドラム1Y、1M、1C、1Bkは、同一構成の感光体駆動装置により回転駆動されているので、以下、各色に対応する符号Y、M、C、Bkを省略して説明する。また、本発明は、中間転写ベルト5の駆動ローラである架張ローラ12のローラ駆動装置等にも適用可能である。
【0025】
(実施例1)
まず、本実施形態の第1の実施例である実施例1について、図を用いて説明する。図2は、本実施例に係る感光体駆動装置の主要部の斜視図、図3は、本実施例に係る感光体駆動装置10の断面図、図4は、連結部材の構成を示す図、図5は、連結部材の他の構成を示す図である。また、図6は、1部品で構成したキャリアへの遊星歯車の組み付け説明図である。そして、図7は、キャリアへ遊星歯車と支持軸を組み付ける際の説明図であり、(a)は、従来のニードルベアリングを介して支持される遊星歯車、(b)は、本実施例のベアリングレスにて支持される遊星歯車についての説明図である。
【0026】
図2に示すように、感光体駆動装置10は駆動源であるモータ20、遊星歯車減速装置30、連結部材であるジョイント41、被駆動軸であるドラム軸50から主に構成されている。また、図3に示すように、遊星歯車減速装置30の出力軸40はドラム軸50とジョイント41により連結固定されている。そして、ドラム軸50には軸受51が圧入されており、この軸受51を介して装置本体の筐体に固定された後側板62に支持位置決めされるとともに、装置筐体に固定された前側板61に設けた軸受け56にドラム軸50の先端近傍が支持位置決めされる構成である。つまり、ドラム軸50は画像形成装置の筐体の一部である前側板61及び後側板62に両端部を、それぞれ軸受51,56を介して位置決め支持され、感光体ドラム1はドラム軸50を介して本体に対して位置決め支持される。これにより、感光体ドラム1は、相対的位置精度が求められる部材(例えば2次転写ベルト5等)と、前側板61及び後側板62を介して相対的に位置関係が決められ、感光体ドラム1に関連する複数の部材との位置関係を高精度にきめることができる。
【0027】
次に、図3を用いて遊星歯車減速装置30の内部構造の詳細について説明する。本実施例の遊星歯車減速装置30は2K−H型2段構成の遊星歯車機構が用いられている。ここで、本実施例では遊星歯車機構を2段構成としているが、減速比に応じて3段、4段と段数をさらに重ね合わせることも可能である。また、この遊星歯車減速装置30は、各段の太陽歯車、内歯歯車、キャリア、及び最終段のキャリアに設けた出力軸の中心軸のすべてを同一軸上に配置した構成である。
【0028】
この遊星歯車減速装置30では、駆動源であるモータ20のモータ出力軸21には、第1太陽歯車31を直接歯切りしている。そして、この第1太陽歯車31及び内歯固定フランジ22に固定された内歯歯車32に噛み合う1段目の第1遊星歯車33が、1段目の第1キャリア34により支持されて第1太陽歯車31の外周を公転するようになっている。この第1遊星歯車33は、回転バランスとトルク分担のために、同心状に第1キャリア34の3箇所に配置される。このように本実施例では、周方向で3等分された第1キャリア34の位置にそれぞれ第1遊星歯車33が配置されている。また、各第1遊星歯車33は、第1キャリア34に両端を固定支持される支持軸である第1キャリアピン35に、支持されて自転する構成となっている。そして、第1遊星歯車33は、第1太陽歯車31と内歯歯車32との噛合いにより、自転及び公転回転し、第1遊星歯車33を支持する第1キャリア34は、第1太陽歯車31の回転に対し減速回転し、1段目の減速比が獲得される。
【0029】
また、本実施例では第1キャリア34に回転支持部はなく、浮動回転を行うように構成されている。そして、第1キャリア34の回転中心に設けられた第2太陽歯車36が2段目減速機構の入力となる。なお、第1キャリア34、第1キャリアピン35、第1遊星歯車33の構成の詳細については後に説明する。
【0030】
また、2段目の第2太陽歯車36には、2段目まで一体で形成された内歯歯車32に噛み合う2段目の第2遊星歯車37が2段目の第2キャリア38により支持されて2段目の第2太陽歯車36の外周を公転するようになっている。本実施例では、周方向で4等分された第2キャリア38の位置にそれぞれ第2遊星歯車37が配置されている。各第2遊星歯車は、第2キャリア38に両端を支持固定された第2キャリアピン39に支持されて自転および公転する。最終段に相当する2段目の第2キャリア38の回転中心には出力軸40が設けられており、中空円筒上のジョイント41を介してドラム軸50と連結されている。ここで第2キャリア38の出力軸40は内歯歯車32により位置決めされた内歯歯車キャップ42に圧入された軸受により支持される構成となっている。内歯歯車キャップ42は内歯歯車32の内周とインローで位置決めされる構成となっているため、回転駆動された際にも、出力軸40は内歯歯車32の中心軸との同軸度を最小化できる構成となっている。また、出力軸40を設けた最終段の第2キャリア38は内歯歯車32に対して、その回転中心軸が移動しないことで、回転駆動時の調心による出力軸40の変動がなくなり、ドラム軸50と出力軸40の同軸度を最小化することができる。したがって、被駆動体である感光体ドラム1を高精度に駆動することができる。
【0031】
また、ドラム軸50を感光体ドラム1と出力軸40の間に設け、ドラム軸50と出力軸40とをジョイント41で同軸になるように連結している。ここで、ジョイント41の構成については、例えば、図4、5に示すような構成があげられる。図4に示すジョイント41は中空円筒形状となっており、ドラム軸50、遊星歯車減速装置30の出力軸40は同じ直径となっており、ドラム軸50側では、ジョイント41がドラム軸50に圧入される構成となっている。また、出力軸40側では、出力軸40とはすきまばめとなっており、ジョイント41と段付きネジ43aにより連結固定される構成となっている。一方、図5に示すジョイント41は中空円筒形状の中央部にスリット41aを有しており、出力軸40はネジ43bにより押し曲げられたジョイントとの摩擦力により連結固定されている構成となっている。いずれの構成もジョイント部分によるドラム軸50と出力軸40の中心軸のずれを最小化し、駆動伝達できる構成となっている。
【0032】
このようにジョイント41を設けることで、メインテナンス時等に感光体ドラム1及びドラム軸50を着脱できるとともに、本体筐体の一部である前側板61及び後側板62に支持位置決めされるドラム軸50を介して、感光体ドラム1を本体に高精度に位置決めできる。また、ジョイント41を中空円筒形状とすることで、ドラム軸50と出力軸40を、それぞれ円筒内部に嵌め合いで連結することができる。これにより、遊星歯車減速装置出力軸と被駆動体軸の同軸度に与える因子を円筒部材の内部の真直度だけとすることができ、同軸度を最小化することができる。
【0033】
また、モータ20のモータ出力軸21は、図3に示すように内歯固定フランジ22により支持されている。また、内歯歯車32は、内歯固定フランジ22に対してネジ43によって固定されており、内歯固定フランジ22は内歯歯車32の固定・保持およびモータ20の固定・保持している。そして、内歯固定フランジ22は駆動側板63とねじによって固定される構成となっている。ここで、駆動側板63は後側板62にカシメられたスタッド64により支持位置決めされている。そして、内歯歯車32のモータ20側には、内歯歯車32の中心軸に中空円筒形状のボスが設けられており、モータ20はその円筒形状内周とモータ20側に設けられた軸受けがインローによる勘合で位置決めされる。また、中空円筒形状の外周は内歯固定フランジ22に形成された孔とインローによる勘合で位置決めされる構成となっている。
【0034】
このような構成とすることで、内歯歯車32を基準として、モータ出力軸21、内歯固定フランジ22、遊星歯車減速装置30の出力軸40の中心軸をすべて同軸上に配置し、かつ部品寸法のばらつきによる同軸度を最小化することが可能な構成となっている。これより、モータ出力軸21からドラム軸50まで中心軸をすべて同軸上に配置できかつ、部品寸法のばらつきによる同軸度を最小化することが可能となっている。また、遊星歯車減速装置30は後側板62、及び後側板62により支持される駆動側板63により支持されることで、遊星歯車減速装置30及びモータ20の自重による遊星歯車減速装置30自身のたわみを抑制することができる。したがって、モータ20とドラム軸50との同軸度を最小化することができ、感光体ドラム1を高精度に駆動することができる。
【0035】
また、感光体ドラム1は筒状のドラム52と、ドラムフランジ53a,53bにより構成され、ドラム52はドラム両端に設けられたドラムフランジ53a,53bを介してドラム軸50に位置決めされる構成となっている。ドラムフランジ53a,53bはドラム52の中心軸位置に孔が設けられており、その孔とドラム軸50がインローで位置決めされる。また、ドラム軸50にはドラム52へと駆動伝達を行うジョイント55が圧入されており、ドラムフランジ53aを介してドラム52は駆動される構成となっている。この構成により、上述したモータ出力軸21からドラム軸50までに加え、ドラム52の中心軸も同軸上に配置することができる。つまり、モータ出力軸21(第1太陽歯車31)、内歯歯車32、第1キャリア34(第2太陽歯車36)、第2キャリア38、遊星歯車減速装置30の出力軸40、ドラム軸50、ドラム52の中心軸をすべて同一軸上に配置できる。このように配置することで、各部品寸法のばらつきによる同軸度を最小化できる。
【0036】
この遊星歯車減速装置30においては、各部品を次のような材料から構成している。モータ20のモータ出力軸21、すなわち遊星歯車機構の入力軸に直接歯切りされた第1太陽歯車31と、第1キャリアピン35、第2キャリアピン39は金属材料、例えばステンレス、炭素鋼などから構成している。また、その他の第1遊星歯車33、第1キャリア34及び一体で構成された第2太陽歯車36、第2遊星歯車37、第2キャリア38、第1遊星歯車と第2遊星歯車と噛み合う共通歯車仕様でハウジングケースと一体で構成された内歯歯車32は樹脂材料、例えばポリアセタールなどの成型品で構成している。
【0037】
このように、少なくとも第1遊星歯車33、第2遊星歯車37、及び内歯歯車32の材質を樹脂とすることで、金属に比べて樹脂の方が剛性が弱いため、各ギアの噛み合い時の衝撃を緩和することができる。このように緩和できるので、各ギアの噛み合いによる回転変動を小さくすることができる。また、内歯歯車32においては、その剛性が弱いことで、各遊星歯車との噛み合い時に、各ギアの精度に応じて内歯歯車32自体が変動して調心効果をもたらし、噛み合いによる回転変動を最小化することができる。
【0038】
次に、2K−H型遊星歯車機構に関する一般的な説明をおこなう。2K−H型遊星歯車機構は、太陽歯車(sun gear)、遊星歯車(planetary gear)、遊星歯車の公転運動を支持する遊星キャリア(planetary carrier)、内歯歯車(outer gear)の四点の部品から構成されている。太陽歯車の回転、遊星歯車の公転(キャリアの回転)、外輪歯車の回転の三つの要素の内、一つを固定、一つを入力、一つを出力に接続する。それぞれ、どれを入出力・固定に割り当てるかによって、一つのユニットで複数の減速比や回転方向の切替えが可能である。本実施例において対象とする2K−H型の2段構造は、複合遊星歯車機構(2個以上の2K−H型)に分類され、2個以上の2K−H型のそれぞれの3本の基本軸のうち2本の基本軸同士を結合し、残りの基本軸の1本を固定し、他の1軸を駆動軸または従動軸とする機構となる。
減速比に関しては、太陽歯車の歯数をZa、遊星歯車の歯数をZb、内歯歯車の歯数をZcとした場合に、次の式で表される。なお、式中の添え字1,2は1段目、2段目を意味している。
減速比=Za1 /(Za1+Zc1)×Za2 /(Za2+Zc2)
【0039】
次に、本実施例の各キャリアが、キャリアピンの両端部と嵌め合わされて、このキャリアピンを保持する孔が設けられた1部品で構成されている構成について、1段目の第1キャリア34の構成を例に、図6を用いて説明する。図6に示すように、第1キャリア34は一部品で構成されており、第2太陽歯車36が設けられた第1側板と、モータ20側の第2側板からと、これらを連結する3つの連結部とからなる。そして、第1側板及び第2側板には、それそれ第1キャリアピン35の両端を支持する孔34a,34bが設けられている。この第1キャリア34は、事前に第1遊星歯車33と第1キャリアピン35とを組み立て、遊星歯車減速装置30に組み付けるように構成されている。第1遊星歯車33を組み立てる際には、第1遊星歯車33を第1キャリアの側面の連結部を設けていない開口から挿入する。そして、第1キャリアピン35を第1キャリア34の第1側板及び第2側板の孔34a,34bに挿入して組み立てる構成となっている。そして、第1キャリアピン35の径は第1キャリアの孔34a、34bよりも僅かに大きく、圧入する構成としている。このように第1キャリアピン35の両端を同一部品である第1キャリア34の第1側板及び第2側板で保持する構成となっているため、本実施例では第1遊星歯車33の傾きを小さくすることが可能となっている。
【0040】
ここで、例えば特許文献4のキャリアのように、分割して設けた第1側板と第2側板とで、ニードルベアリングを介して遊星歯車を支持するキャリアピンの両端部を挟み込んで保持する構成を、単に一体化するだけでは次のような不具合が生じる可能性がある。図7(a)に示すように、遊星歯車33の両端に設けた2つのニードルベアリング33aを介して遊星歯車33を支持するキャリアピン35と遊星歯車33とをキャリア34内に組み立てる場合には、次のようにして組み立てることとなる。遊星歯車33をキャリア34の側面の連結部を設けていない開口から挿入する。そして、キャリアピン35を、遊星歯車33に設けた2つのニードルベアリング33a、キャリア34の第1側板及び第2側板に設けた孔34a、34bのすべてと嵌め合わせながら、孔34b側から順に挿入して組み立てる。このように組み立てるため、組立作業性が悪化する。特に、遊星歯車33にニードルベアリング33aが設けられている場合、キャリアピン35との嵌め合う幅が短くなり、挿入時にキャリアピン35が傾きやすく、挿入方向下流側の孔に嵌め込み難くなり、著しく組立作業性が悪化する。このため、従来はキャリアの第1側板と第2側板とを分割して設け、ニードルベアリングを介して遊星歯車を支持するキャリアピンの両端部を挟み込むように組み立てる構成が多かった。
【0041】
そこで、本実施例では、図7(a)に示すように、遊星歯車33と、この遊星歯車33を回転自在に支持するキャリアピン35との摺動部に、ニードルベアリング33a等を設けないベアリングレスの構成としている。このように摺動部をベアリングレスとすることで、遊星歯車33とキャリアピン35との嵌め合う幅が長くなるため、キャリアピン35の挿入時にプラネタリギア軸が傾きにくくなる。したがって、キャリアピン35と遊星歯車33とをキャリア34内に組み立てる場合の組立作業性が向上する。
【0042】
そして、本発明を、本実施例のように感光体ドラム1を回転駆動する感光体駆動装置10に適用すること、つまり、被駆動体を像担持体である感光体ドラム1とすることで、次のような効果を奏することができる。像担持体である感光体ドラム1を省スペース、かつ低コストで高精度に駆動することができるとともに、感光体ドラム1の回転変動に関するジター等の画像不具合の発生を抑制することができる。また、本発明は、上述したように中間転写ベルト5の駆動ローラである架張ローラ12のローラ駆動装置等にも適用可能である。中間転写ベルト5のローラ駆動装置に適用すること、つまり、被駆動体を中間転写ベルト5の駆動ローラである架張ローラ12とすることで、次のような効果を奏することができる。中間転写ベルトである中間転写ベルト5を省スペース、かつ低コストで高精度に駆動することができるとともに、中間転写ベルト5の回転変動に関する色ずれ等の画像不具合の発生を抑制することができる。さらに、本発明を、画像を形成する上で重要な被駆動体である感光体ドラム1及び中間転写ベルト5の駆動ローラである架張ローラ12の回転駆動装置に適用することで、それぞれ高精度な回転駆動が行える。したがって、上述したようなの画像不具合の発生を、いずれか片方に適用するよりも抑制することができる画像形成装置を提供できる。
【0043】
(実施例2)
本実施形態の第2の実施例である実施例2について、図を用いて説明する。図8は、本実施例に係る感光体駆動装置の断面図である。ここで、実施例1と同じ構成の部分に関しては同じ符号を付し、同様な構成・動作については、適宜省略して説明する。
本実施例の感光体駆動装置10は、図8に示すように、遊星歯車減速装置30の出力軸40が、前側板61まで延びており、ドラム52はドラムフランジ53a,53bを介して、出力軸40により位置決めされる構成となっている。このように、出力軸40がドラム軸50を兼ねる構成となっているため、出力軸40とドラム軸50とを連結するジョイント41などの連結部材による同軸度の積み上がりを無くすことができる構成となっている。このように連結部材であるジョイント41を無くして、出力軸40がドラム軸50を兼ねる構成、つまり、出力軸40とドラム軸50とを一体に構成することで、出力軸40とドラム軸50の同軸度を最小化できる。
【0044】
(実施例3)
本実施形態の第3の実施例である実施例3について、図を用いて説明する。図9は、本実施例に係る感光体駆動装置10の断面図、図10は、駆動側板65へネジ締結する内歯歯車71の座面71aにおける変形箇所の説明図である。ここで、実施例1と同じ構成の部分に関しては同じ符号を付し、同様な構成・動作については、適宜省略して説明する。
本実施例の遊星歯車減速装置70には、実施例1と同様に2K−H型2段構成の遊星歯車機構が用いられている。モータ20、1段目太陽歯車31、1段目遊星歯車33、第1キャリア34、第2太陽歯車36、第2遊星歯車37、第1キャリアピン35、第2キャリアピン39などは実施例1と同様の構成である。
【0045】
図9に示すように、本実施例の遊星歯車減速装置70では、第2キャリア72の回転中心には雌型のスプラインジョイント73が第2キャリア72と一体で構成されている。一方、ドラム軸50の先端には雄型のスプラインジョイント74が圧入されており、遊星歯車減速装置70とジョイント連結する構成となっている。ここで、本実施例ではドラム軸50側を雄、第2キャリア側を雌としたが、逆の構成でもよい。このように連結部を構成することで、回転駆動時にスプラインジョイントには同心効果があるため、回転駆動時に遊星歯車減速装置70の出力軸として機能するスプラインジョイント73とドラム軸50の同軸度を最小化することができる。また、第2キャリア72は内歯歯車71に対して回転支持部を設けておらず、浮動回転する構成になっている。これにより、第2キャリア72は、駆動時に内歯歯車71と遊星歯車37のギアの噛み合い精度に応じて調心され、最終的な出力としての回転ムラを軽減できる構成となっている。
【0046】
また、ドラム軸50とのジョイントは、スプラインジョイント73、74となっているため、第2キャリア72側のスプラインジョイント73が調心されても、それに応じてスプラインジョイント74が同心される効果がある。このため、第2キャリア72側の調心により生じる偏心に起因した回転ムラがドラム軸51につたわることがない。さらに、内歯歯車71の材質が樹脂になっているため、内歯歯車71の調心効果があることも確認されている。
【0047】
ここで、遊星歯車減速装置70は内歯歯車71の出力側に形成された座面71aと駆動側板65がネジ締結されることで固定保持される構成となっている。また、駆動側板65は後側板62にカシメられたスタッド64により位置決め支持されている。そして、スタッド64が後側板62に対する直角性(図面幾何公差でいう直角度)がでていないと、スタッドを介して位置決め固定される駆動側板65は後側板に対してある傾きをもって固定される。このとき、遊星歯車減速装置70も駆動側板65の傾きと同じ姿勢で固定されてしまうと、ドラム軸50は前側板61と後側板62により位置決めされているため、次のような不具合が発生する可能性がある。スプラインジョイント73に対してスプラインジョイント74が傾きをもってしまい、うまく噛み合うことができなかったり、噛み合うことができても、このずれによる回転ムラが発生したりする不具合である。
【0048】
しかし、本実施例の構成では、内歯歯車71の座面71aと駆動側板65が固定される構成であること、また内歯歯車71の材質が樹脂であり、金属に対して剛性が弱いことから、ネジ締結時に座面71aの根元部分のみが変形する。そして、図10に示すように、座面71aは駆動側板65にならうが、内歯歯車71全体が傾くことなく、スプラインジョイント73はスプラインジョイント74と同軸を保って噛み合うことができる。
【0049】
すなわち、内歯歯車71を介して駆動側板65に支持される構成とすることで、駆動側板65が後側板62に対して傾いていた場合、内歯歯車71の駆動側板65との締結部である座面71aが変形した状態で固定される。そして、上述したように第2キャリア72を内歯歯車71に対して浮動支持としているため、内歯歯車71の変形は第2キャリア72の調心によりキャンセルすることができる。また、内歯歯車71を樹脂としていることで、内歯歯車71自身の変形による調心効果もあるため、駆動側板65との締結により内歯歯車71が変形しても遊星歯車減速装置70の回転変動に影響を与えないようにすることもできる。
【0050】
(実施例4)
本実施形態の第4の実施例である実施例4について、図を用いて説明する。図11は、本実施例に係る感光体駆動装置10の断面図である。ここで、実施例1乃至3と同じ構成の部分に関しては同じ符号を付し、同様な構成・動作については、適宜省略して説明する。
図11に示すように、本実施例の遊星歯車減速装置70では、後側板62には、ドラム軸50と同軸上にハウジング75設けられており、ハウジング75は感光体ドラム1の軸受51を支持している。一方、遊星歯車減速装置70の内歯歯車71の座面71aはハウジング75と接しており、ネジにより後側板62に支持されている。このように、実施例1乃至3とは異なり遊星歯車減速装置70を後側板62に直接保持する構成もある。
【0051】
(実施例5)
本実施形態の第5の実施例である実施例5について、図を用いて説明する。図12は、本実施例に係る感光体駆動装置10の断面図である。ここで、実施例1乃至4と同じ構成の部分に関しては同じ符号を付し、同様な構成・動作については、適宜省略して説明する。
図12に示すように、本実施例の遊星歯車減速装置70では、ドラム52の両端部にはドラムフランジ76a,76bが圧入されている。そして、ドラムフランジ76a,76bの回転中心部には円筒状のボス部が設けられており、ドラムフランジ76bは前記ボスを介して前側板61の軸受56により、支持されている。また、ドラムフランジ76aに設けたボス部の円筒外側にはギアが形成されており、遊星歯車減速装置70の出力軸として機能するスプラインジョイント73と噛み合う構成となっている。ここで、本実施例の構成では、ドラムフランジ76a側が雄のジョイント、スプラインジョイント73を雌のジョイントとしているが、逆の構成でもなんら問題はない。このように、実施例1乃至4とは異なりドラム軸のない構成を提供することも可能である。
【0052】
以上に説明したものは一例であり、本発明は、次の態様毎に特有の効果を奏する。
(態様A)
本態様の感光体駆動装置10などの駆動装置は、モータ20などの駆動源からの回転駆動力を受けて回転する第1太陽歯車31などの太陽歯車と、前記太陽歯車と同軸上で配設された内歯歯車32などの内歯歯車と、前記内歯歯車内に円周方向で等間隔に配設され前記太陽歯車と前記内歯歯車とに噛み合う複数の第1遊星歯車33などの遊星歯車と、前記遊星歯車を回転自在に支持するとともに前記太陽歯車や前記内歯歯車と同軸上で回転自在な第1キャリア34などのキャリアと、前記キャリアに保持され前記遊星歯車を回転自在に支持する第1キャリアピン35などの支持軸とを有した遊星歯車機構を少なくとも2段以上設け、第2キャリア38などの最終段のキャリアに出力軸40などの出力軸を有した遊星歯車減速装置30などの遊星歯車減速装置と、前記遊星歯車減速装置により減速された回転駆動力により回転駆動される感光体ドラム1などの被駆動体と、該被駆動体を支持するとともに、前記遊星歯車減速装置の出力軸からの回転駆動力を該被駆動体に伝達するドラム軸50などの被駆動体軸と、を備えた駆動装置において、前記太陽歯車、前記内歯歯車、前記キャリア、前記出力軸、前記被駆動体軸、及び前記被駆動体の中心軸のすべてが同一軸上に配置されるとともに、少なくとも1つ以上のキャリアは前記内歯歯車に対して浮動支持され、各キャリアは、遊星歯車を回転自在に支持する支持軸の両端部と嵌め合わされて、該支持軸を保持する孔34a,34bなどの孔が設けられた、1部品で構成されていることを特徴とするものである。
これによれば、上記実施例1について説明したように、モータ20などの駆動源からの回転駆動力を遊星歯車減速装置30などの遊星歯車減速装置を介して感光体ドラム1などの被駆動体に伝達する感光体駆動装置10などの駆動装置において、高精度な被駆動体の回転駆動が行える駆動装置を提供できる。
(態様B)
本態様の感光体駆動装置10などの駆動装置は、(態様A)において、遊星歯車減速装置30などの前記遊星歯車減速装置の出力側の最終段となる第2キャリア38などのキャリアは内歯歯車32などの前記内歯歯車に対して、その回転中心が移動しないように支持されていることを特徴とするものである。
これによれば、上記実施例1について説明したように、出力側の最終段となる第2キャリア38などのキャリアは内歯歯車32などの内歯歯車に対して、その回転中心が移動しないように支持することができる。このことで、回転駆動時に出力軸40などの出力軸は調心による変動はなくなり、ドラム軸50などの被駆動体軸と出力軸の同軸度を最小化することができ、感光体ドラム1などの被駆動体を高精度に駆動する駆動装置を提供できる。
(態様C)
本態様の感光体駆動装置10などの駆動装置は、(態様A)又は(態様B)において、ドラム軸50などの前記被駆動体軸は、駆動装置を用いる装置の筐体の一部である前側板61などの前側板及び後側板62などの後側板に、両端部をそれぞれ軸受け51、56などの軸受を介して位置決め支持され、遊星歯車減速装置30などの前記遊星歯車減速装置は、前記後側板と、該後側板に保持された駆動側板63などの駆動側板とで支持されることを特徴とするものである。
これによれば、上記実施例1について説明したように、感光体ドラム1などの被駆動体に関連する複数の部材との位置関係を高精度にきめることができる。また、モータ出力軸21などの駆動源の出力軸と被駆動体軸との同軸度を最小化することができ、被駆動体を高精度に駆動することもできる。
(態様D)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様C)のいずれか一において、遊星歯車減速装置30などの前記遊星歯車減速装置の、第1遊星歯車33などの前記遊星歯車及び内歯歯車32などの前記内歯車の材質を樹脂としたことを特徴とするものである。
これによれば、上記実施例1について説明したように、遊星歯車減速装置30などの遊星歯車減速装置内のギアの噛み合いにより発生する回転変動を最小化することができる。
(態様E)
本態様の感光体駆動装置10などの駆動装置は、(態様D)において、遊星歯車減速装置70などの前記遊星歯車減速装置は内歯歯車71などの前記内歯歯車を介して駆動側板65などの前記駆動側板に支持される構成としたことを特徴とするものである。
これによれば、上記実施例3について説明したように、内歯歯車71などの内歯歯車の変形は第2キャリア72などのキャリアの調心によりキャンセルすることができる。また、駆動側板65などの駆動側板との締結により内歯歯車71が変形しても遊星歯車減速装置70などの遊星歯車減速装置の回転変動に影響を与えないようにすることもできる。
(態様F)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様E)のいずれか一において、遊星歯車減速装置30などの前記遊星歯車減速装置の出力軸40などの出力軸とドラム軸50などの前記被駆動体軸とを連結するジョイント41などの連結部材を備え、前記連結部材が、中空円筒状の部材から構成されていることを特徴とするものである。
これによれば、上記実施例1について説明したように、感光体ドラム1などの被駆動体及びドラム軸50などの被駆動体軸を着脱できるとともに、この駆動装置を用いる複写機500などの装置本体に高精度に位置決めできる。また、出力軸40などの出力軸と被駆動体軸の同軸度に与える因子を円筒部材の内部の真直度だけとすることができ、同軸度を最小化することができる。
(態様G)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様E)のいずれか一において、遊星歯車減速装置70などの前記遊星歯車減速装置の出力軸とドラム軸50などの前記被駆動体軸とを連結する連結部材を備え、前記連結部材を、スプラインジョイント73及びスプラインジョイント74などから構成されるスプラインジョイントとしたことを特徴とするものである。
これによれば、上記実施例3について説明したように、感光体ドラム1などの被駆動体及びドラム軸50などの被駆動体軸を着脱できるとともに、この駆動装置を用いる複写機500などの装置本体に高精度に位置決めできる。また、回転駆動時に遊星歯車減速装置70などの遊星歯車減速装置の出力軸として機能するスプラインジョイント73とドラム軸50の同軸度を最小化することができる。
(態様H)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様E)のいずれか一において、遊星歯車減速装置30などの前記遊星歯車減速装置の出力軸40などの出力軸とドラム軸50などの被駆動体軸とを一体に構成したことを特徴とするものである。
これによれば、上記実施例2について説明したような、効果を奏することができる。
(態様I)
本態様の感光体駆動装置10などの駆動装置は、(態様A)乃至(態様H)のいずれか一において、遊星歯車減速装置30などの前記遊星歯車減速装置に有した第1遊星歯車33などの各遊星歯車と、該遊星歯車を回転自在に支持する第1キャリア34などの支持軸との摺動部が、ベアリングレスで構成されていることを特徴とするものである。
これによれば、上記実施例1について説明したように、キャリアピン35などの支持軸と遊星歯車33などの遊星歯車とをキャリア34などのキャリア内に組み立てる場合の組立作業性が向上する。
(態様J)
本態様の複写機500などの画像形成装置は、感光体ドラム1などの像担持体や中間転写ベルト5などの中間転写ベルトの駆動ローラ等の被駆動体の内、少なくとも1以上の被駆動体の駆動装置として、(態様A)乃至(態様I)のいずれか一の駆動装置を備えていることを特徴とするものである。
これによれば、(態様A)乃至(態様I)のいずれか一の駆動装置と同様な効果を奏することができる。
【符号の説明】
【0053】
1 感光体ドラム
2 帯電器
3 除電ランプ
4 クリーニング装置
5 中間転写ベルト
6 1次転写ローラ
7 2次転写ローラ
8 定着ローラ対
9 現像装置
10 感光体駆動装置
11 架張ローラ(駆動ローラ)
12,13 架張ローラ
14 テンションローラ
15 転写紙搬送ベルト
16 架張ローラ対
17 光書込装置
18 定着装置
19 ベルトクリーニング装置
20 モータ
21 モータ出力軸
22 内歯固定フランジ
30 遊星歯車減速装置
31 第1太陽歯車
32 内歯歯車
33 第1遊星歯車
33a ニードルベアリング
34 第1キャリア
34a,34b 孔
35 第1キャリアピン
36 第2太陽歯車
37 第2遊星歯車
38 第2キャリア
39 第2キャリアピン
40 出力軸
41 ジョイント
41a スリット
42 内歯歯車キャップ
43、43a、43b ネジ
50 ドラム軸
51,56 軸受
52 ドラム
53a,b ドラムフランジ
53a,53b ドラムフランジ
55 ジョイント
61 前側板
62 後側板
63 駆動側板
64 スタッド
65 駆動側板
70 遊星歯車減速装置
71 内歯歯車
71a 座面
72 第2キャリア
73 スプラインジョイント(雌型)
74 スプラインジョイント(雄型)
75 ハウジング
76a,76b ドラムフランジ
80 駆動ローラ
81 前ホルダ
82 後ホルダ
83 前側板
84 後側板
85 遊星歯車減速装置
86 モータ
100 複合機本体
101 給紙路
102 レジストローラ
103 給紙路
104 給紙ローラ
105 トレイ
106 排紙ローラ対
107 排紙トレイ
108 分離ローラ
200 給紙テーブル
201 給紙カセット
202 給紙ローラ
203 分離ローラ
204 給紙路
205 搬送ローラ
300 スキャナ
301 コンタクトガラス
302 第1走行体
303 第2走行体
304 結像レンズ
305 読取センサ
400 原稿自動搬送装置
401 原稿台
500 複写機
L 光ビーム
【先行技術文献】
【特許文献】
【0054】
【特許文献1】特開2008−151868号公報
【特許文献2】特開平10−240069号公報
【特許文献3】特開2001−330087号公報
【特許請求の範囲】
【請求項1】
駆動源からの回転駆動力を受けて回転する太陽歯車と、前記太陽歯車と同軸上で配設された内歯歯車と、前記内歯歯車内に円周方向で等間隔に配設され前記太陽歯車と前記内歯歯車とに噛み合う複数の遊星歯車と、前記遊星歯車を回転自在に支持するとともに前記太陽歯車や前記内歯歯車と同軸上で回転自在なキャリアと、前記キャリアに保持され前記遊星歯車を回転自在に支持する支持軸とを有した遊星歯車機構を少なくとも2段以上設け、最終段のキャリアに出力軸を有した遊星歯車減速装置と、
前記遊星歯車減速装置により減速された回転駆動力により回転駆動される被駆動体と、
該被駆動体を支持するとともに、前記遊星歯車減速装置の出力軸からの回転駆動力を該被駆動体に伝達する被駆動体軸と、を備えた駆動装置において、
前記太陽歯車、前記内歯歯車、前記キャリア、前記出力軸、前記被駆動体軸、及び前記被駆動体の中心軸のすべてが同一軸上に配置されるとともに、少なくとも1つ以上のキャリアは前記内歯歯車に対して浮動支持され、
各キャリアは、遊星歯車を回転自在に支持する支持軸の両端部と嵌め合わされて、該支持軸を保持する孔が設けられた、1部品で構成されていることを特徴とする駆動装置。
【請求項2】
請求項1に記載の駆動装置において、
前記遊星歯車減速装置の出力側の最終段となるキャリアは前記内歯歯車に対して、その回転中心が移動しないように支持されていることを特徴とする駆動装置。
【請求項3】
請求項1又は2に記載の駆動装置において、
前記被駆動体軸は、駆動装置を用いる装置の筐体の一部である前側板及び後側板に、両端部をそれぞれ軸受を介して位置決め支持され、
前記遊星歯車減速装置は、前記後側板と、該後側板に保持された駆動側板とで支持されることを特徴とする駆動装置。
【請求項4】
請求項1乃至3のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置の、前記遊星歯車及び前記内歯車の材質を樹脂としたことを特徴とする駆動装置。
【請求項5】
請求項4に記載の駆動装置において、
前記遊星歯車減速装置は前記内歯歯車を介して前記駆動側板に支持される構成としたことを特徴とする駆動装置。
【請求項6】
請求項1乃至5のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置の出力軸と前記被駆動体軸とを連結する連結部材を備え、前記連結部材が、中空円筒状の部材から構成されていることを特徴とする駆動装置。
【請求項7】
請求項1乃至5のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置の出力軸と前記被駆動体軸とを連結する連結部材を備え、前記連結部材を、スプラインジョイントとしたことを特徴とする駆動装置。
【請求項8】
請求項1乃至5のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置の出力軸と被駆動体軸とを一体に構成したことを特徴とする駆動装置。
【請求項9】
請求項1乃至8のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置に有した各遊星歯車と、該遊星歯車を回転自在に支持する支持軸との摺動部が、ベアリングレスで構成されていることを特徴とする駆動装置。
【請求項10】
像担持体や中間転写ベルトの駆動ローラ等の被駆動体の内、少なくとも1以上の被駆動体の駆動装置として、請求項1乃至9のいずれか一に記載の駆動装置を備えていることを特徴とする画像形成装置。
【請求項1】
駆動源からの回転駆動力を受けて回転する太陽歯車と、前記太陽歯車と同軸上で配設された内歯歯車と、前記内歯歯車内に円周方向で等間隔に配設され前記太陽歯車と前記内歯歯車とに噛み合う複数の遊星歯車と、前記遊星歯車を回転自在に支持するとともに前記太陽歯車や前記内歯歯車と同軸上で回転自在なキャリアと、前記キャリアに保持され前記遊星歯車を回転自在に支持する支持軸とを有した遊星歯車機構を少なくとも2段以上設け、最終段のキャリアに出力軸を有した遊星歯車減速装置と、
前記遊星歯車減速装置により減速された回転駆動力により回転駆動される被駆動体と、
該被駆動体を支持するとともに、前記遊星歯車減速装置の出力軸からの回転駆動力を該被駆動体に伝達する被駆動体軸と、を備えた駆動装置において、
前記太陽歯車、前記内歯歯車、前記キャリア、前記出力軸、前記被駆動体軸、及び前記被駆動体の中心軸のすべてが同一軸上に配置されるとともに、少なくとも1つ以上のキャリアは前記内歯歯車に対して浮動支持され、
各キャリアは、遊星歯車を回転自在に支持する支持軸の両端部と嵌め合わされて、該支持軸を保持する孔が設けられた、1部品で構成されていることを特徴とする駆動装置。
【請求項2】
請求項1に記載の駆動装置において、
前記遊星歯車減速装置の出力側の最終段となるキャリアは前記内歯歯車に対して、その回転中心が移動しないように支持されていることを特徴とする駆動装置。
【請求項3】
請求項1又は2に記載の駆動装置において、
前記被駆動体軸は、駆動装置を用いる装置の筐体の一部である前側板及び後側板に、両端部をそれぞれ軸受を介して位置決め支持され、
前記遊星歯車減速装置は、前記後側板と、該後側板に保持された駆動側板とで支持されることを特徴とする駆動装置。
【請求項4】
請求項1乃至3のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置の、前記遊星歯車及び前記内歯車の材質を樹脂としたことを特徴とする駆動装置。
【請求項5】
請求項4に記載の駆動装置において、
前記遊星歯車減速装置は前記内歯歯車を介して前記駆動側板に支持される構成としたことを特徴とする駆動装置。
【請求項6】
請求項1乃至5のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置の出力軸と前記被駆動体軸とを連結する連結部材を備え、前記連結部材が、中空円筒状の部材から構成されていることを特徴とする駆動装置。
【請求項7】
請求項1乃至5のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置の出力軸と前記被駆動体軸とを連結する連結部材を備え、前記連結部材を、スプラインジョイントとしたことを特徴とする駆動装置。
【請求項8】
請求項1乃至5のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置の出力軸と被駆動体軸とを一体に構成したことを特徴とする駆動装置。
【請求項9】
請求項1乃至8のいずれか一に記載の駆動装置において、
前記遊星歯車減速装置に有した各遊星歯車と、該遊星歯車を回転自在に支持する支持軸との摺動部が、ベアリングレスで構成されていることを特徴とする駆動装置。
【請求項10】
像担持体や中間転写ベルトの駆動ローラ等の被駆動体の内、少なくとも1以上の被駆動体の駆動装置として、請求項1乃至9のいずれか一に記載の駆動装置を備えていることを特徴とする画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−19490(P2013−19490A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−153864(P2011−153864)
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]