
駆動装置および撮像装置
【課題】電気エネルギーを効率よく使用することができ、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠の保持が可能で、駆動力が大きくて精密な制御が可能な駆動装置および撮像装置を提供する。
【解決手段】保持機構105により可撓性部材401を引張状態にした場合、接触部材402を介して移動枠101を転動部201に押圧し、押圧による摩擦力により移動枠101を固定枠102の定位置に保持する一方、保持機構105により可撓性部材401を弛緩状態にした場合、接触部材402が移動枠101から離れて固定枠102の移動枠101への保持を解除する。
【解決手段】保持機構105により可撓性部材401を引張状態にした場合、接触部材402を介して移動枠101を転動部201に押圧し、押圧による摩擦力により移動枠101を固定枠102の定位置に保持する一方、保持機構105により可撓性部材401を弛緩状態にした場合、接触部材402が移動枠101から離れて固定枠102の移動枠101への保持を解除する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、アクチュエータを利用して移動体を駆動して所定の方向に移動させる駆動装置および駆動装置によりブレ補正や画面の傾き補正を行う撮像装置に関する。
【背景技術】
【0002】
従来から、直交座標系の互いに直交する3つの軸の回転が可能な電動ステージが様々なところで用いられている。具体的には、ブレ補正機能を備えるデジタルカメラ等の撮像装置に電動ステージが用いられている。
【0003】
撮像装置が備えるブレ補正機能としては、カメラピッチ方向のブレ振動とカメラヨー方向のブレ振動とを角速度センサ等のブレ検出手段を用いて検出し、検出したブレ信号に基づいて、撮像光学系の一部または撮像素子を撮影光軸に直交する平面内で水平方向および垂直方向にそれぞれ独立に移動させることで、撮像素子の撮像面上での像のブレを補正している。
【0004】
このような手ブレ補正機能を有する手ブレ補正機構においては、手ブレを補正するため、撮影レンズの一部のレンズ、または撮像素子そのものを撮影光軸に直交する平面内で水平方向および垂直方向に移動させる駆動手段が用いられている。この駆動手段は、手ブレに追随して動作させたとき、精密に駆動(微小駆動)する必要があるうえ、駆動するときにも撮影レンズに対して移動体位置(撮像面位置)が正確に位置決めされることが要求される。
【0005】
また、駆動手段には、移動体の重力に打ち勝って制御に必要な加速度を得るため、大きな駆動力が求められる。さらに、駆動手段の電源を切っても、移動体の位置を保持する保持性能が要求される。そして、当然であるが、複雑な機構を持たず、小型で安価な機構であることが求められる。
【0006】
上述した各要求に応じて、固定枠に相当するベースヨーク板に先端が平滑面の複数の基板支持突起と、対向したところに設けられ、コイルばねで押圧されて先端が平滑面の押しピンとが、移動枠に相当する可動部を挟んで保持し、可動部側に設置されたコイルと、ベースヨーク板側に設けられた磁石とでボイスコイルモータ(以下、「VCM」という)を構成し、基板支持突起の端面が形成する面内のX軸方向(水平方向)、Y軸方向(垂直方向)、XY平面に垂直な軸周りの回転が可能な駆動機構が開示されている(特許文献1参照)。
【0007】
また、移動枠に相当する可動子を、固定枠に相当する固定子に対して直線的に移動する移動用アクチュエータ(たとえばVCM)を備え、移動用アクチュエータが駆動力を発生していない場合、可動子と固定子とを相互に押し付けて可動子と固定子とが相互に移動しないようにし、移動用アクチュエータが駆動量を発生したとき、可動子と固定子との押し付け力を制動用アクチュエータ(たとえば圧電体)で解除する技術が開示されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008−129326号公報
【特許文献2】特開2010−282028号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1では、移動枠には常に押圧支持の摩擦力が作用しており、VCMで移動枠を駆動する場合、その摩擦力によってVCMの出力が低下してしまうという問題点があった。特に、VCMの動作を停止した場合、押圧支持の摩擦力によって移動枠が固定枠に保持されることになるが、保持力を大きくして保持性能を高くすると、摩擦力も大きくなり、さらに、VCMの出力が低下することになる。
【0010】
また、特許文献2では、駆動機構が可動子と固定子との押し付け力を制動用アクチュエータで解除しており、解除の状態を保つため、制動部アクチュエータを常時駆動させる必要があるので、電気エネルギーを消費して効率が良くないという問題点があった。
【0011】
本発明は、上記に鑑みてなされたものであって、電気エネルギーを効率よく使用することができ、簡単な構成で移動枠の保持を行うことができる駆動装置およびこの駆動装置を備えた撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上述した課題を解決し、目的を達成するために、本発明にかかる駆動装置は、複数の転動部を介して固定枠に押圧して支持され、水平方向に移動可能な移動枠と、前記移動枠を前記固定枠内で水平方向に移動させる駆動機構と、前記移動枠と離接自在な接触部材と、一端側に前記接触部材が設けられ、他端側を前記固定枠に固定した支持部材と、前記接触部材が接続され、引張または弛緩可能な可撓性部材と、前記可撓性部材が接続され、該可撓性部材を引張状態または弛緩状態にする引張機構と、を備え、前記引張機構により前記可撓性部材を引張状態にした場合、前記移動枠が前記接触部材と接触して前記転動部を押圧し、該押圧による摩擦力により前記固定枠が前記移動枠を保持する一方、前記引張機構により前記可撓性部材を弛緩状態にした場合、前記接触部材が前記移動枠から離れて前記固定枠が前記移動枠の保持を解除することを特徴とする。
【0013】
また、本発明にかかる駆動装置は、上記発明において、前記転動部は、前記固定枠上に少なくとも3つ以上配置され、前記可撓性部材は、前記複数の転動部をそれぞれ通過する直線で結ぶ領域上に配置されていることを特徴とする。
【0014】
前記転動部は、前記固定枠上に3つ配置され、前記可撓性部材は、3つの前記転動部をそれぞれ通過する直線で形成される三角形の領域上に配置されていることを特徴とする。
【0015】
また、本発明にかかる駆動装置は、上記発明において、前記可撓性部材は、一端側に前記接触部材を接続し、他端側を前記固定枠に配置することを特徴とする。
【0016】
また、本発明にかかる駆動装置は、上記発明において、前記移動枠は、平面から突起した突起部を有し、前記接触部材は、変形可能であり、前記可撓性部材は、前記接触部材を貫通して保持することを特徴とする。
【0017】
また、本発明にかかる駆動装置は、上記発明において、前記駆動機構は、ボイスコイルモータ、リニアモータ、回転モータまたは超音波モータのいずれか一つであることを特徴とする。
【0018】
また、本発明にかかる駆動装置は、上記発明において、前記可撓性部材は、紐状または帯状をなすことを特徴とする。
【0019】
また、本発明にかかる駆動装置は、上記発明において、前記引張機構は、前記固定枠に設けられていることを特徴とする。
【0020】
また、本発明にかかる駆動装置は、上記発明において、前記移動枠は、光学素子が配置されていることを特徴とする。
【0021】
また、本発明にかかる駆動装置は、上記発明において、前記移動枠は、光学素子が配置されていることを特徴とする。
【0022】
また、本発明にかかる撮像装置は、被写体を撮像して該被写体の画像データを生成する撮像装置であって、上記した駆動装置と、前記光学素子の位置を変位させる所定の撮影モードが設定された場合、当該撮像装置の撮影光軸に直交する平面内に前記光学素子を変位させるように前記駆動装置を駆動するとともに、前記可撓性部材を弛緩状態になるように前記引張機構を駆動する一方、前記所定の撮影モードが設定されていない場合、前記駆動装置の駆動を停止するとともに、前記可撓性部材を引張状態になるように前記引張機構を駆動する制御部と、を備えたことを特徴とする。
【0023】
また、本発明にかかる撮像装置は、上記発明において、当該撮像装置のブレを検出するブレ検出部をさらに備え、前記所定の撮影モードは、当該撮像装置のブレを補償する手ブレ補正モードであり、前記制御部は、前記手ブレ補正モードが設定された場合、前記ブレ検出部が検出した検出結果に基づいて、当該撮像装置の撮影光軸に直交する平面内に前記光学素子を変位させるように前記駆動装置を駆動することを特徴とする。
【0024】
また、本発明にかかる撮像装置は、上記発明において、前記所定の撮影モードは、前記光学素子を当該撮像装置の撮影光軸に直交する所定の平面内に前記光学素子を移動させるアオリ撮影モードであり、前記制御部は、前記アオリ撮影モードが設定された場合、前記所定の平面内に前記光学素子を移動させるように前記駆動装置を駆動し、該所定の平面内に前記光学素子が到達したとき、前記駆動装置の駆動を停止して前記引張機構を駆動することを特徴とする。
【0025】
また、本発明にかかる撮像装置は、上記発明において、前記光学素子は、撮像素子または撮像レンズであることを特徴とする。
【発明の効果】
【0026】
本発明によれば、引張機構により可撓性部材を引張状態にした場合、接触部材が移動枠に接触して押圧され、該押圧による摩擦力により固定枠が移動枠を保持する一方、引張機構により可撓性部材を弛緩状態にした場合、接触部材が移動枠から離れて固定枠が移動枠の保持を解除する。この結果、電気エネルギーを効率よく使用することができ、簡単で構成で移動枠の保持を行うことができるという効果を奏する。
【図面の簡単な説明】
【0027】
【図1】図1は、本発明の一実施の形態にかかるカメラシステムの機能構成を模式的に示すブロック図である。
【図2】図2は、本発明の一実施の形態にかかる撮像部および駆動装置を含む撮像部移動駆動機構の構成例を模式的に示す正面図である。
【図3】図3は、図2のA−A線断面図である。
【図4】図4は、図2のB−B線断面図である。
【図5】図5は、図2のC−C線断面図である。
【図6】図6は、図2のD−D線断面図である。
【図7】図7は、本発明の一実施の形態にかかる駆動装置を構成するVCMの概略構成を示す正面図である。
【図8】図8は、図7のE−E線断面図である。
【図9】図9は、本発明の一実施の形態にかかる引張部の要部を模式的に拡大して展開した断面図である。
【図10】図10は、本発明の一実施の形態にかかる引張機構の動作の概要を説明する動作図である。
【図11】図11は、本発明の一実施の形態にかかるカメラシステムの動作を説明するフローチャートである。
【図12】図12は、図11の中立保持動作処理の概要を示すフローチャートである。
【図13】図13は、本発明の一実施の形態の変形例1にかかる撮像部移動機構の概要を模式的に示す正面図である。
【図14】図14は、図13のF−F線断面図である。
【図15】図15は、図13のG−G線断面図である。
【図16】図16は、本発明の一実施の形態の変形例2にかかる撮像部移動機構の概要を模式的に示す正面図である。
【図17】図17は、図16のH−H線断面図である。
【発明を実施するための形態】
【0028】
以下に、図面を参照して、本発明を実施するための形態(以下、「実施の形態」という)について説明する。なお、以下の説明において、本発明にかかる撮像装置の一例として、光電変換によって画像信号を得る撮像素子を含む撮像ユニットの手ブレ補正を行うための駆動装置を搭載したレンズ交換可能なデジタル一眼レフカメラを例示するが、この実施の形態によって本発明が限定されるものではない。また、図面の記載において、同一の部分には同一の符号を付して説明する。
【0029】
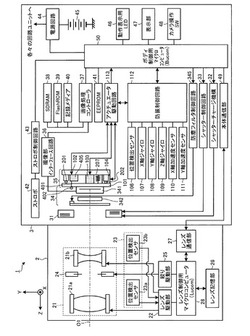
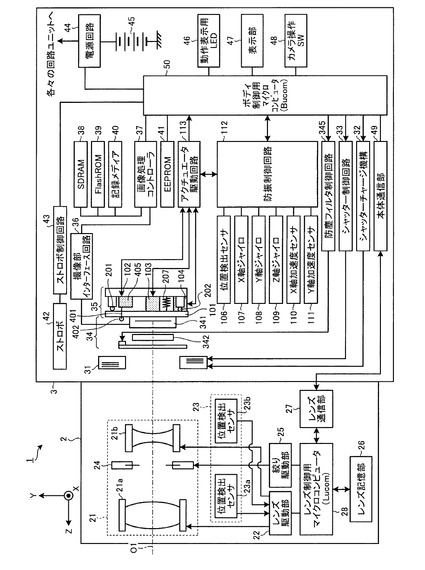
図1は、本発明の一実施の形態にかかるカメラシステムの機能構成を模式的に示すブロック図である。なお、図1においては、左側を前方側とし、右側を後方側として説明する。
【0030】
図1に示すように、カメラシステム1は、所定の視野領域を集光するレンズユニット2と、レンズユニット2が着脱自在に装着されるボディユニット3と、を備える。レンズユニット2の後方側レンズマウント(図示せず)を、ボディユニット3の前方側に設けられた本体側マウントリング(図示せず)に結合することにより、レンズユニット2がボディユニット3に装着される。これにより、カメラシステム1は、様々なレンズユニット2を交換して装着し、撮影することができる。なお、上述した本体側マウントリングは、バヨネットタイプ等が用いられる。
【0031】
また、以下の説明においては、レンズユニット2が構成する光学系の光軸O1と一致する軸をZ軸とし、Z軸に直交する平面上において互いに直交する2つの軸をX軸(水平方向の軸)およびY軸(垂直方向の軸)とする。
【0032】
まず、レンズユニット2の詳細な構成について説明する。レンズユニット2は、撮像レンズ21と、レンズ駆動部22と、位置検出部23と、絞り24と、絞り駆動部25と、レンズ記憶部26と、レンズ通信部27と、レンズ制御用マイクロコンピュータ28(以下、「Lucom28」という)と、を備える。
【0033】
撮影レンズ21は、被写体の光学像を結像する。撮影レンズ21は、フォーカスレンズ21aと、変倍レンズ21bと、を有する。フォーカスレンズ21aは、一または複数のレンズを用いて構成され、光軸O1方向に沿って駆動されることにより、撮影レンズ21の焦点状態を調整する。変倍レンズ21bは、一または複数のズームレンズを用いて構成され、光軸O1方向に沿って駆動されることにより、撮影レンズ21の焦点距離を変更する。
【0034】
レンズ駆動部22は、ステッピングモータ等のアクチュエータおよびモータドライブ回路等を用いて構成され、Lucom28の制御のもと、フォーカスレンズ21aおよび変倍レンズ21bを光軸O1方向に沿って移動させる。
【0035】
位置検出部23は、フォトインタラプタ、リニアエンコーダおよび可変抵抗素子等のポテンショメータやA/D変換回路等を用いて構成され、レンズ駆動部22によって駆動されたフォーカスレンズ21aの位置を検出する位置検出センサ23aと、変倍レンズ21bの位置を検出する位置検出センサ23bと、を有する。位置検出センサ23aは、レンズ駆動部22に含まれるアクチュエータの回転量をパルス数に変換し、変換したパルス数に基づいて、無限端を基準とする基準位置からのフォーカスレンズ21aの位置を検出する。同様に、位置検出センサ23bは、無限端を基準とする基準位置からの変倍レンズ21bの位置を検出する。
【0036】
絞り24は、開口面積を変化させてボディユニット3に入射する被写体光量を調整する。具体的には、絞り24は、撮影レンズ21が集光する光の入射量を制限することにより露出の調整を行う。
【0037】
絞り駆動部25は、ステッピングモータやモータドライバ等を用いて構成され、Lucom28の制御のもと、絞り24を駆動する。
【0038】
レンズ記憶部26は、不揮発性メモリや揮発性メモリを用いて構成され、フォーカスレンズ21aおよび変倍レンズ21bの位置および動きを決定するための制御用プログラム、フォーカスレンズ21aおよび変倍レンズ21bそれぞれのレンズ特性(色収差等)および各種パラメータを含む光学データを記憶する。
【0039】
レンズ通信部27は、レンズユニット2がボディユニット3に装着されたとき、後述するボディユニット3と通信を行うための通信インターフェースである。
【0040】
Lucom28は、CPU等を用いて構成され、レンズユニット2の各部の動作を制御する。具体的には、Lucom28は、レンズ駆動部22および絞り駆動部25の駆動制御を行う。
【0041】
つぎに、ボディユニット3の詳細な構成について説明する。ボディユニット3は、シャッター31と、シャッターチャージ機構32と、シャッター制御回路33と、撮像部34と、撮像部移動駆動機構35と、撮像部インターフェース回路36と、画像処理コントローラ37と、SDRAM38と、FlashROM39と、記録メディア40と、EEPROM41と、ストロボ42と、ストロボ制御回路43と、電源回路44と、電池45と、動作表示用LED46と、表示部47と、カメラ操作SW48と、本体通信部49と、ボディ制御用マイクロコンピュータ50(以下、「Bucom50」という)と、を備える。
【0042】
シャッター31は、開閉動作を行うことにより、撮像部34の状態を露光状態または遮光状態に設定する露光動作を行う。シャッター31は、フォーカルプレーンシャッター等を用いて構成される。シャッターチャージ機構32は、シャッター31の先幕と後幕とを駆動するバネをチャージする。シャッター制御回路33は、シャッター31の先幕と後幕との動きを制御する。
【0043】
撮像部34は、光軸O1上に設けられ、レンズユニット2が集光して結像した被写体像を光電変換することによって画像データを生成する。撮像部34は、たとえば4:3のアスペクト比でやや横長に形成された矩形状のCCD(Charge Coupled Device)またはCMOS(Complementary Metal Oxide Semiconductor)等の撮像素子341を用いて構成される。撮像素子341の前面には、光学ローパスフィルタ342「以下、「光学LPF342」という」および防塵フィルタ343が配設されている。撮像部34は、撮像素子341、光学LPF342および防塵フィルタ343をユニットとして一体化したものである。防塵フィルタ343の周縁部には、圧電素子344が取り付けられている。圧電素子344は、2つの電極を有しており、防塵フィルタ制御回路345の制御のもと、防塵フィルタ343の寸法や材質にとって定まる所定の周波数で振動させて防塵フィルタ343を振動させることで、防塵フィルタ343のフィルタ表面に付着した塵を除去し得るように構成されている。撮像部34は、後述する駆動装置を含む手ブレ補正用の撮像部移動駆動機構35を介してボディユニット3内に保持される。
【0044】
撮像部移動駆動機構35は、撮影時におけるユーザの手ブレを補正するため、撮像部34をX軸方向、Y軸方向およびZ軸周りの回転方向に機械的に移動させる。撮像部移動駆動機構35は、本実施の形態の駆動装置として機能する。なお、撮像部移動駆動機構35の詳細な構成について後述する。
【0045】
撮像部インターフェース回路36は、撮像部34の動作を制御する。具体的には、撮像部インターフェース回路36は、所定の撮像タイミングで撮像部34から画像データを出力させる。撮像部34、撮像部インターフェース回路36および画像処理コントローラ37は、電気的に接続されている。
【0046】
画像処理コントローラ37は、撮像部インターフェース回路36を介して撮像部34から出力される画像データ(画像信号)に基づいて、画像を生成する。画像処理コントローラ37は、画像データに対して、各種の画像処理を施す。具体的には、画像処理コントローラ37は、画像データに対して、オプティカルブラック減算処理、ホワイトバランス調整処理、画像データの同時化処理、カラーマトリクス演算処理、γ補正処理、色再現処理およびエッジ強調処理等を含む画像処理を行う。
【0047】
また、画像処理コントローラ37は、コントラスト検出方式によるオートフォーカスを行う。具体的には、画像処理コントローラ37は、フォーカスレンズ21aを光軸O1方向に所定の振幅で振動(以下、「ウォブリング動作」という)させて生成した複数の画像データに対して、所定の領域(フォーカスエリア)におけるコントラストを算出して、無限端側または至近端側のいずれかの方向に焦点位置があるのか検出する。その後、画像処理コントローラ37は、ウォブリング動作をしながら焦点のある方向にフォーカスレンズ21aを移動させつつ、画像データの取り込み(撮影する)と、それらの画像データからコントラストが最大値になるフォーカスレンズ21aの位置(焦点位置)を検出し、その位置でフォーカスレンズ21aを停止させることにより、オートフォーカスを行う。
【0048】
SDRAM38は、揮発性メモリを用いて構成される。SDRAM38は、Bucom50の処理中の情報を一時的に記憶する。
【0049】
FlashROM39は、不揮発性メモリを用いて構成される。FlashROM39は、カメラシステム1を動作させるための各種プログラム、プログラムの実行中に使用される各種データおよび画像処理コントローラ37による画像処理の動作に必要な各種パラメータ等を記憶する。
【0050】
記録メディア40は、ボディユニット3の外部から装着されるメモリカードやHDD等を用いて構成される。記録メディア40は、メモリI/F(図示せず)を介してボディユニット3に着脱自在に装着される。記録メディア40は、カメラシステム1で撮像された画像データ(動画データの場合は音声データも含む)が記録される一方、記録した画像データが読み出される。
【0051】
EEPROM41は、カメラシステム1の制御に必要な所定の制御パラメータを記憶する。EEPROM41は、Bucom50からアクセス可能に設けられている。
【0052】
ストロボ42は、キセノンランプまたはLED等によって構成される。ストロボ42は、シャッター31の露光動作と同期して所定の視野領域に向けて発光する。ストロボ制御回路43は、Bucom50の制御のもと、ストロボ42を発光させる。
【0053】
電源回路44は、電池45の電圧をカメラシステム1の各構成部および各回路ユニットが必要とする電圧に変換して供給する。また、ボディユニット3内には、外部電源からジャック(図示せず)を介して電流が供給されたときの電圧変化を検知する電圧検出回路(図示せず)が設けられている。
【0054】
動作表示用LED46は、Bucom50の制御のもと、カメラシステム1の動作状態を表示出力(発光)することによって、ユーザへ告知する。
【0055】
表示部47は、液晶または有機EL(Electro Luminescence)等からなる表示パネルを用いて構成される。表示部47は、Bucom50を介して画像処理コントローラ37に電気的に接続されており、画像処理コントローラ37によって画像処理が施された画像データに対応する画像を表示する。表示部47は、撮像部34が連続的に生成する画像データに対応するライブビュー画像を表示する。これにより、ユーザは、表示部47が表示するライブビュー画像をリアルタイムで確認することで撮影時の構図を設定することができる。
【0056】
カメラ操作SW48は、カメラシステム1の電源状態をオン状態またはオフ状態に切換える電源スイッチ(図示せず)と、静止画撮影の指示を与える静止画レリーズ信号の入力を受け付けるレリーズスイッチ(図示せず)と、カメラシステム1に設定された各種撮影モードを切換える撮影モード切換スイッチ(図示せず)と、動画撮影の指示を与える動画レリーズ信号の入力を受け付ける動画スイッチ(図示せず)と、を有する。レリーズスイッチは、外部からの押圧により進退可能であり、半押しされた場合に撮影準備動作を指示するファーストレリーズ信号(以下、「1st信号」という)の入力を受け付ける一方、全押しされた場合に静止画撮影を指示するセカンドレリーズ信号(以下、「2nd信号」という)の入力を受け付ける。
【0057】
本体通信部49は、ボディユニット3に装着されるレンズユニット2との通信を行うための通信インターフェースである。また、本体通信部49は、電源回路44からの電力を、レンズ通信部27を介してレンズユニット2の各ユニットに供給する。
【0058】
Bucom50は、CPU等を用いて構成される。Bucom50は、カメラ操作SW48からの指示信号に応じて、カメラシステム1を構成する各部に対応する指示やデータの転送等を行ってカメラシステム1の動作を統括的に制御する。Bucom50は、ボディユニット3にレンズユニット2が装着された状態において、本体通信部49およびレンズ通信部27を介して互いに双方向に通信可能に電気的に接続される。これにより、Lucom28は、Bucom50に従属的に協働しながら稼動するように構成される。
【0059】
このように構成されたカメラシステム1は、Bucom50の制御のもと、撮像部インターフェース回路36が撮像部34の撮像素子341からの画像データを画像処理コントローラ37に出力させる。この画像データは、画像処理コントローラ37でビデオ信号に変換され、表示部47に出力表示される。ユーザは、表示部47で表示される画像から撮影した際の画像を仮想的に確認することができる。
【0060】
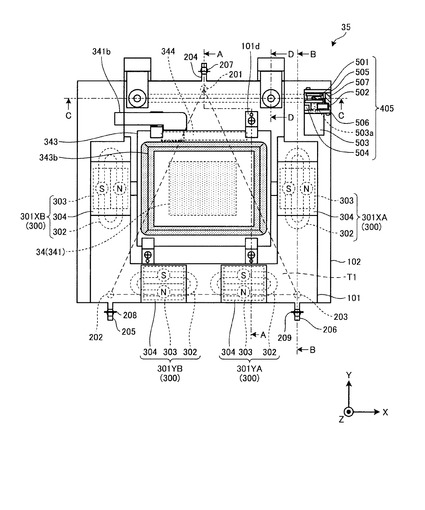
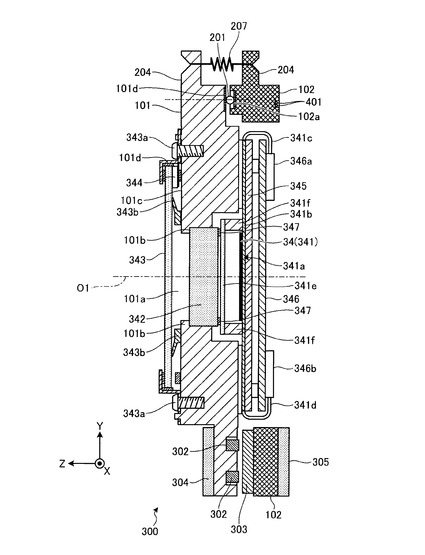
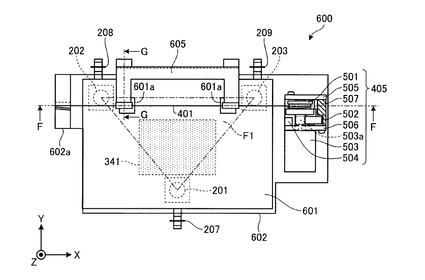
つぎに、上述した撮像部34および本実施の形態の駆動装置としての撮像部移動駆動機構35の詳細な構成について説明する。図2は、実施の形態にかかる撮像部34および駆動機構300を含む撮像部移動駆動機構35の構成例を模式的に示す正面図である。図3は、図2のA−A線断面図である。図4は、図2のB−B線断面である。図5は、図2のC−C線断面図である。図6は、図2のD−D線断面図である。
【0061】
撮像部移動駆動機構35は、図1〜6に示すように、撮像部34と、移動枠101と、固定枠102と、X軸アクチュエータ103と、Y軸アクチュエータ104と、保持機構105と、位置検出センサ106と、X軸ジャイロ107と、Y軸ジャイロ108と、Z軸ジャイロ109と、X軸加速度センサ110と、Y軸加速度センサ111と、防振制御回路112と、アクチュエータ駆動回路113と、を備える。
【0062】
まず、撮像部34の詳細な構成について説明する。図2〜図6に示すように、撮像部34は、レンズユニット2を透過し光電変換面上に照射された光に対応した画像信号を得る撮像素子341と、撮像素子341の光電変換面側に配置され、レンズユニット2を透過して照射される被写体光束から高周波成分を取り除く光学LPF342と、光学LPF342の前面側において所定間隔をあけて対向配置された防塵フィルタ343と、防塵フィルタ343の周縁部に配置されて防塵フィルタ343に対して所定の振動を与える圧電素子344と、を有する。
【0063】
ここで、撮像素子341の撮像素子チップ341aは、固定板345上に配置されたフレキシブル基板341b上に直接実装され、フレキシブル基板341bの両端から出た接続部341c,341dが主回路基板346に設けられたコネクタ346a,346bを介して主回路基板346側と接続されている。
【0064】
また、撮像素子341が有する保護ガラス341eは、スペーサ341fを介してフレキシブル基板341b上に固着されている。
【0065】
さらに、撮像素子341と光学LPF342との間には、弾性部材等からなるフィルタ受け付け部材347が配設されている。フィルタ受け付け部材347は、撮像素子341の前面側周縁部で光電変換面の有効領域を避ける位置に配設され、かつ、光学LPF342の背面側周縁部の近傍に当接することで、撮像素子341と光学LPF342との間を略気密性が保持されるように構成されている。そして、撮像素子341と光学LPF342とを気密的に覆う移動枠101(ホルダ)が配置されている。
【0066】
移動枠101は、光軸O1周りの略中央部分に矩形状の開口部101aを有する。開口部101aの防塵フィルタ343側の内周縁部には、断面が略L字形状の段部101bが形成されている。移動枠101は、開口部101aに対してその後方側から光学LPF342および撮像素子341が配設されている。ここで、光学LPF342の前面側周縁部を段部101bに対して略気密的に接触させるように配置することで、光学LPF342が段部101bによって光軸O1方向における位置規制がなされ、移動枠101の内部から前面側に対する抜け止めがなされる。
【0067】
移動枠101は、撮像部34を保持する。移動枠101は、固定枠102によってX軸方向、Y軸方向およびZ軸周りの回転方向に移動可能に支持されている。移動枠101の支持は、固定枠102に配置された3つの摺動板102aに各々接して保持された3つのボール等の転動部201,202,203が移動枠101に配置された摺動板101dを受け、移動枠101および固定枠102の外周部に対向して設けられた3つの突起部204,205,206に押さえバネ207,208,209を装着して、移動枠101を転動部201,202,203に押圧することにより支持されている。
【0068】
固定枠102は、ボディユニット3に固定される。固定枠102は、移動枠101を水平方向または垂直方向に移動可能に支持する。具体的には、固定枠102は、移動枠101をX軸方向、Y軸方向およびZ軸周りの回転方向に移動可能に支持する。
【0069】
このような構成により、移動枠101は、3つの転動部201,202,203が移動枠101の摺動板101dと接触する3点で形成される平面内方向に自由に動くことができる。この場合、Z軸方向の移動枠101の位置は、転動部201,202,203が移動枠101の摺動板101dと接触する3点で形成される平面位置となり、この平面がXY面に平行である。このため、移動枠101は、後述する駆動機構300をなすX軸アクチュエータ103およびY軸アクチュエータ104が動作していない場合、たとえば重力などの外力が加わることにより、固定枠102に対してXY面内方向に自由に動いてしまう。具体的には、移動枠101は、重力方向(−Y方向)に移動する。
【0070】
ここで、移動枠101をXY面内方向に駆動するX軸アクチュエータ103およびY軸アクチュエータ104であるVCMを駆動源として用いる本実施の形態にかかる駆動機構300について詳細に説明する。図7は、本実施の形態にかかる駆動機構300を構成するVCM301の概略構成を示す正面図である。図8は、図2のE−E線の断面図である。
【0071】
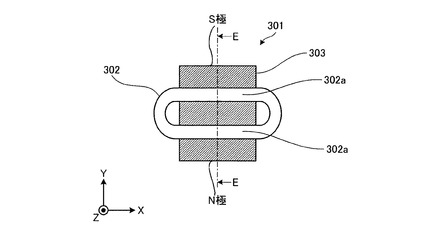
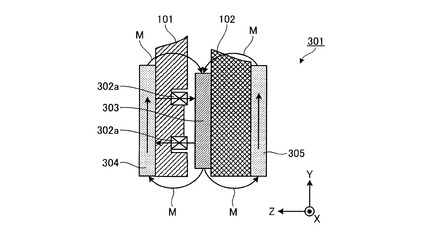
図7および図8に示すように、VCM301は、コイル302と、磁石303と、ヨーク304,305と、によって構成される。
【0072】
VCM301は、絶縁被覆された導電性の細線をトラック形状に巻いたコイル302が移動枠101に接着剤で固定されている。VCM301は、板状の磁石303が図7において下側がN極、上側がS極となるようにY方向に着磁され、固定枠102に接着剤等で固定される。ヨーク304,305は、コイル302および磁石303を挟み込んで移動枠101および固定枠102にそれぞれ接着剤で固定され、磁石303の磁力線、またはコイル302に電流が流れた際の磁力線が外部に漏れないように磁気回路を形成している。この状態で、コイル302に電流を流した場合、コイル302の2つの直線部302aは、磁石303の磁力線Mに対して電流が直交し、磁力線Mの方向と電流の方向とがコイル302の2つの直線部302aで逆方向になるので、磁力線Mおよび電流と直交する同じ方向に力が働き、移動枠101が駆動される。
【0073】
これに対し、移動枠101は、電流の向きが逆転された場合、逆方向に駆動される。また、コイル302に流れる電流の大きさにより発生する力を変更することも可能である。なお、本実施の形態1では、ヨーク304,305を別途設けたていたが、移動枠101および固定枠102を磁性体で形成することで設ける必要がない。
【0074】
このように駆動機構300は、図2に示すように、図7および図8で上述したVCM301であるVCM301XA、VCM301XB、VCM301YAおよびVCM301YBがそれぞれ配置されている。VCM301XAおよびVCM301XBは、X方向の駆動力を発生することにより、X軸アクチュエータ103として機能する。VCM301YAおよびVCM301YBは、Y方向の駆動力を発生することにより、Y軸アクチュエータ104として機能する。また、VCM301YAおよびVCM301YBに異なる駆動力(場合によっては反対方向の駆動力)を付与することにより、Z軸周りの回転方向の駆動量を発生する。駆動機構300は、移動枠101のX軸方向、移動枠101のX軸方向、Y軸方向およびZ軸周りの回転方向を検出する位置検出センサ106の検出結果に基づいて、アクチュエータ駆動回路113の制御のもと、VCM301XA、VCM301XB、VCM301YAおよびVCM301YBがそれぞれ駆動される。
【0075】
ところで、移動枠101の位置は、アクチュエータ駆動回路113の制御により、固定枠102に対して所定位置に停止させても、駆動機構300の電源が切れた場合、小さな外力で簡単に動いてしまう。
【0076】
そこで、移動枠101を駆動機構300により、所定の位置に停止させた後に、移動枠101を保持するための本実施の形態にかかる保持機構105について説明する。
【0077】
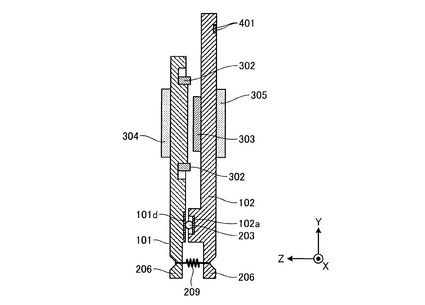
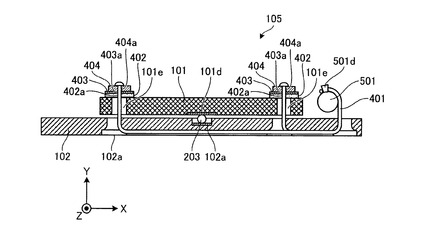
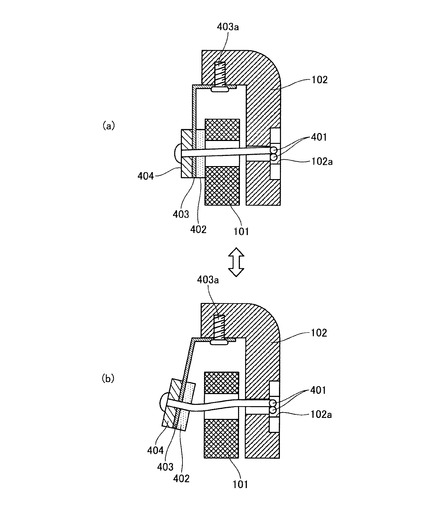
保持機構105は、図5および図6に示すように、紐状をなす可撓性部材401と、可撓性部材401の一端部に設けられた接触部材402と、接触部材402を一端に固定し、他端が固定枠302に固定された板状であって可撓性部材401の引張方向に弾性変形する支持部材403と、可撓性部材401の一端部に設けられ、接触部材402に可撓性部材401の引張力を押圧力として加えるために可撓性部材401の端部を固着し、支持部材403に固定されている押圧板404と、可撓性部材401の他端部を引張する引張機構405と、を有する。ここで、押圧板404の一方の面に接触部材402を接着で固定し、他方の面に支持部材403に固定する機構にしてもよい。
【0078】
可撓性部材401は、強度、軽量化および摺動性に優れる炭素繊維を用いて構成される。可撓性部材401は、紐状または帯状をなす。なお、可撓性部材401は、炭素繊維以外にもパラ系のポリアミド繊維等の強度のある樹脂繊維を用いてもよい。可撓性部材401は、転動部201,202,203をそれぞれ通過する直線で形成される三角形の領域T1上に配置される(図2を参照)。なお、可撓性部材401は、転動部201,202,203のいずれか2つ以上の中心を通る位置に配置されてもよい。
【0079】
接触部材402は、シリコーンゴム、EPDM(エチレン・プロピレン・ジエンゴム)等のゴム材料を用いて構成され、支持部材403に固着される。接触部材402は、移動枠101と離接自在である。接触部材402は、可撓性部材401が通る穴部402aを有する。
【0080】
支持部材403は、バネ性のあるステンレス、リン青銅等の板を用いて形成される。支持部材403は、押圧方向に対して変位し易く形成され、押圧方向と直交する方向に対して殆ど変位しないように剛性を高くして形成される。支持部材403は、断面が略L字状に形成される。支持部材403は、一端を固定枠102にビス403aで固定され、他端に接触部材402が固定されている。支持部材403は、可撓性部材401が通る穴(溝)403aを有する。
【0081】
押圧板404は、鉄、ステンレスまたは黄銅等の銅合金を用いて構成される。押圧板404は、可撓性部材401が通る穴404aを有する。押圧板404は、穴404aに可撓性部材401を通したのち塑性変形させる部材、たとえばカシメ等を用いて構成されてもよい。また、可撓性部材401と押圧板404との固定は、接着剤で固定してもよい。
【0082】
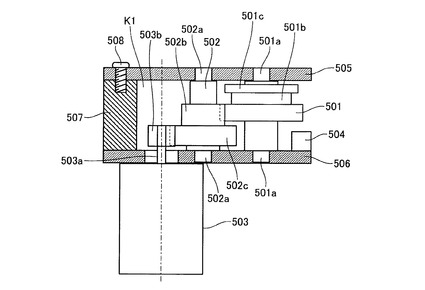
引張機構405は、可撓性部材401が接続され、可撓性部材を引張状態または弛緩状態にする。図9は、引張機構405の要部を模式的に拡大して展開した断面図である。引張機構405は、図9に示すように、ローラ501と、段ギヤ502と、モータ503と、位置センサ504と、板505と、板506と、を有する。
【0083】
ローラ501は、固定枠102に固定された板505と板506とによって形成された空間K1に配置され、両端のローラ軸501aがそれぞれ板505および板506の穴に回転自在に保持される。ローラ501は、ローラギヤ501bと、可撓性部材401が巻き付けられる巻き付け部501cと、巻き付け部501c上に設けられ、可撓性部材401が固定される突起部501d(図5を参照)と、を有する。
【0084】
段ギヤ502は、空間K1内に配置され、両端の段ギヤ502の軸502aがそれぞれ板505および板506の穴に回転自在に保持される。段ギヤ502は、ローラ501のローラギヤ501bと噛合する噛合ギヤ502bと、噛合ギヤ502cと、を有する。
【0085】
モータ503は、板506に固定され、回転軸503aの端部に段ギヤ502の噛合ギヤ502cと噛合するピニオンギヤ503bが設けられる。
【0086】
位置センサ504は、フォトインタラプタ等を用いて構成され、ローラ501の回転位置を検出する。
【0087】
板505および板506は、スペーサ507を間に挟み込みビス508により固定される。これにより、引張機構405が構成される。さらに、引張機構405は、固定枠102の裏面からスペーサ507をビス(図示せず)で固定される。
【0088】
このように構成された引張機構405は、可撓性部材401を接触部材402、支持部材403、押圧板404、移動枠101の穴101eおよび固定枠102の穴102aそれぞれを通してローラ501の突起部501dにかけられて固定される。
【0089】
図1〜図6に戻り、撮像部移動駆動機構35の説明を続ける。位置検出センサ106は、移動枠101のX軸方向、Y軸方向およびZ軸周りの回転方向を検出する。位置検出センサ106は、固定枠102に配設させたホール素子(図示せず)と、このホール素子に対向するように移動枠101の一部に配設させたマグネット(図示せず)とから構成される。
【0090】
X軸ジャイロ107は、カメラシステム1のX軸周りの回動(ブレ)の角速度を検出する。Y軸ジャイロ108は、カメラシステム1のY軸周りの回動の角速度を検出する。Z軸ジャイロ109は、カメラシステム1のXY平面内の回動の角速度と回転中心位置を検出する。X軸加速度センサ110は、カメラシステム1のX軸方向の加速度を検出する。X軸加速度センサ111は、カメラシステム1のY軸方向の加速度を検出する。X軸ジャイロ107、Y軸ジャイロ108、Z軸ジャイロ109、X軸加速度センサ110およびY軸加速度センサ111は、固定枠102に配設される。
【0091】
防振制御回路112は、手ブレを補償するため、X軸ジャイロ107、Y軸ジャイロ108、Z軸ジャイロ109、X軸加速度センサ110およびY軸加速度センサ111がそれぞれ検出した検出結果に基づいて、手ブレ補償量を演算する。
【0092】
アクチュエータ駆動回路113は、Bucom50の制御のもと、防振制御回路112の手ブレ補償量の演算結果に基づいて、駆動機構300を駆動して移動枠101を移動させることにより、カメラシステム1の光軸O1に直交する平面内に撮像部34を変位移動させる。
【0093】
以上のように構成された撮像部34および駆動機構300を備える撮像部移動駆動機構35が行うブレ補正動作および中立位置保持動作について説明する。
【0094】
まず、ブレ補正動作について説明する。この場合、X軸ジャイロ107は、カメラシステム1のX軸周りの回動(ブレ)の角速度を検出し、Y軸ジャイロ108は、カメラシステム1のY軸周りの角速度を検出し、Z軸ジャイロ109は、カメラシステム1のXY平面内の回動の角速度と回転中心位置を検出する。続いて、防振制御回路112は、各センサで検出されたカメラシステム1の角速度および回転中心位置に基づいて、手ブレ補償量を演算し、撮像部34を、ブレを補償するように駆動装置300により移動させる。これにより、画像に生じるブレを補償することができる。
【0095】
つぎに、中立位置保持動作について説明する。まず、カメラシステム1は、位置検出センサ106により、撮像部34が撮像レンズ21の光軸O1中心に駆動機構300により制御された状態で、引張機構405のモータ503が回転し、ローラ501が回転して可撓性部材401が引張された場合、可撓性部材401に固定された押圧板404が下方に引かれる(図10(a)→図10(b))。この場合、支持部材403が変位することで、支持部材403に固着された接触部材402が移動枠101を押圧する。これにより、移動枠101が接触部材402と接触して転動部201,202,203を押圧し、この押圧により接触部材402と移動枠101との間には摩擦力が発生し、固定枠102が移動枠101を保持することができる。
【0096】
続いて、支持部材403は、一端を固定枠102に固定されているので、固定枠102に対して接触部材402が位置決めされて保持される。これにより、移動枠101は、固定枠102に位置決めされて保持される。この状態で駆動機構300への通電を停止すると、可撓性部材401は、モータ503に取り付けられたピニオンギヤ503bからローラ501までの機構系の機械的な摩擦力により、引張された状態が保たれ、移動枠101と固定枠102の位置は保たれる。すなわち、移動枠101が固定枠102に対して中立位置に保持される。
【0097】
その後、カメラシステム1は、再び駆動機構300に通電した場合、移動枠101が固定枠102に位置決めされた状態になった状態で、モータ503を回転させて可撓性部材401を弛緩させた場合、可撓性部材401が支持部材403のバネの力により引かれ変位し(図10(b)→図10(a))、同時に支持部材403に固着された接触部材402が移動枠101から離れて固定枠102の保持が解除される。これにより、移動枠101は、固定枠102に対して自由に変位可能となる。
【0098】
以上のような構成を有する撮像部移動駆動機構35は、カメラシステム1の動きに応じて撮像部34を移動させることによって、カメラシステム1の動きに起因する撮像部34での被写体像のブレを抑制する機能、いわゆる撮像素子シフト方式の手振れ補正機能を有する。本実施の形態では、駆動機構300は撮像素子シフト方式の手ブレ補正に適用されたが、撮影レンズ側を本発明の駆動装置で移動させて像歪を補正するレンズシフト方式(チルト撮影またはアオリ撮影)に適用しても勿論良い。また、撮像部移動駆動機構35において、撮像部34を移動させるアクチュエータの構成は、本実施の形態ではVCMを用いているが、回転モータ、リニアモータ、超音波モータ等、特に限定されるものではない。
【0099】
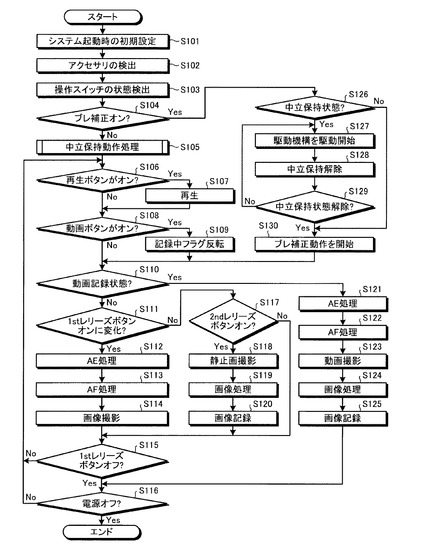
つぎに、本実施の形態にかかるカメラシステム1の動作について説明する。図11は、本実施の形態にかかるカメラシステム1の動作を説明するフローチャートである。
【0100】
図11に示すように、カメラシステムの電源が投入されると、レンズユニット2およびボディユニット3が動作可能状態となり、ボディユニット3内のBucom50は、カメラ制御を開始する。すなわち、電源スイッチがオンしてBucom50が起動すると、システム起動時の初期設定を行う(ステップS101)。
【0101】
続いて、Bucom50は、ボディユニット3に装着されたレンズユニット2またはストロボ等のアクセサリの検出を行い(ステップS102)、各アクセサリを起動し、カメラシステム1のモードスイッチ、レリーズスイッチ等のカメラ操作SW48の状態検出を行う(ステップS103)。
【0102】
その後、Bucom50は、ブレ補正のモードのスイッチがオン状態になっているか否かを判定する(ステップS104)。ブレ補正のモードのスイッチがオン状態になっているとBucom50が判断した場合(ステップS104:Yes)、カメラシステム1は、後述するステップS126へ移行する。一方、ブレ補正のモードのスイッチがオン状態になっていないとBucom50が判断した場合(ステップS104:No)、カメラシステム1は、後述するステップS105へ移行する。
【0103】
ステップS105において、カメラシステム1は、撮像部34の撮像面上をレンズユニット2の光軸O1の中立位置に保持する中立保持動作処理を実行する。なお、中立保持動作処理の詳細な内容については後述する。
【0104】
続いて、Bucom50は、再生スイッチがオン状態であるか判断する(ステップS106)。再生スイッチがオン状態であるとBucom50が判断した場合(ステップS106:Yes)、Bucom50は、記録メディア40に記憶された画像データに対応する画像を表示部47に表示させる再生を行う(ステップS107)。その後、カメラシステム1は、ステップS108へ移行する。一方、再生スイッチがオン状態でないとBucom50が判断した場合(ステップS106:No)、カメラシステム1は、ステップS108へ移行する。
【0105】
その後、Bucom50は、動画スイッチがオン状態であるか否かを判断する(ステップS108)。動画スイッチがオン状態であるとBucom50が判断した場合(ステップS108:Yes)、Bucom50は、記録中フラグを反転する(ステップS09)。その後、カメラシステム1は、ステップS110へ移行する。一方、動画スイッチがオン状態でないとBucom50が判断した場合(ステップS108:No)、カメラシステム1は、ステップS110へ移行する。
【0106】
続いて、Bucom50は、カメラシステム1が動画記録中であるか判断する(ステップS110)。具体的には、Bucom50は、記録中フラグ(たとえば「0」→「1」)が立っているか否か判断することにより、カメラシステム1が動画記録中であるか否かを判断する。カメラシステム1が動画記録中であるとBucom50が判断した場合(ステップS110:Yes)、カメラシステム1は、後述するステップS121へ移行する。一方、カメラシステム1が動画記録中でないとBucom50が判断した場合(ステップS110:No)、カメラシステム1は、後述するステップS111へ移行する。
【0107】
ステップS111において、1stレリーズスイッチがオン状態である場合(ステップS111:Yes)、Bucom50は、撮像部34が生成する画像データから測光を行い、絞り24を制御して適性露出となるようにAE(自動露出)処理を実行し(ステップS112)、フォーカスレンズ21aを移動させながら撮像部34によって生成された画像が最大のコントラストとなるように焦点位置を制御するコントラストAF処理を実行する(ステップS113)。
【0108】
その後、Bucom50は、撮像部34に画像の撮影を行わせ、撮像部34によって生成された画像データに対応するライブビュー画像を表示部47に表示させる(ステップS114)。
【0109】
続いて、1stレリーズボタンのスイッチがオフ状態でなければ(ステップS115:No)、カメラシステム1は、ステップS106へ戻る。一方、1stレリーズボタンのスイッチがオフの場合(ステップS115:Yes)、カメラシステム1は、ステップS116へ移行する。
【0110】
ステップS116において、Bucom50は、電源ボタンのスイッチがオフ状態であるか否かを判断する。電源ボタンのスイッチがオフ状態であるとBucom50が判断した場合(ステップS116:Yes)、カメラシステム1は、本処理を終了する。一方、電源ボタンのスイッチがオフ状態でないとBucom50が判断した場合(ステップS116:No)、カメラシステム1は、ステップS106へ戻る。
【0111】
ステップS111において、1stレリーズスイッチがオン状態でない場合(ステップS111:No)について説明する。この場合、Bucom50は、2ndレリーズボタンのスイッチがオン状態であるか否かを判断する(ステップS117)。2ndレリーズボタンのスイッチがオン状態であるとBucom50が判断した場合(ステップS117:Yes)、カメラシステム1は、ステップS118へ移行する。一方、2ndレリーズボタンのスイッチがオン状態でないとBucom50が判断した場合(ステップS117:No)、カメラシステム1は、ステップS115へ移行する。
【0112】
ステップS118において、Bucom50は、撮像部34に静止画撮影を行わせ、画像処理コントローラ37に撮像部34によって生成された画像データに対して画像処理を実行させ(ステップS119)、画像処理が施された画像データを記録メディア40に記憶する(ステップS120)。その後、カメラシステム1は、ステップS115へ移行する。
【0113】
ステップS121において、Bucom50は、AE処理を実行し、AF処理を実行する(ステップS122)。
【0114】
続いて、Bucom50は、撮像部34が連続的に生成する動画撮影を行い(ステップS123)、画像処理コントローラ37で順次画像処理を施して(ステップS124)、画像処理が施された画像データを記録メディアに記憶する(ステップS125)。その後、カメラシステム1は、ステップS116へ移行する。
【0115】
ステップS126において、Bucom50は、引張機構405により撮像部34が光軸O1の中心位置に保持されている中立保持状態であるか否かを判断する。撮像部34が光軸O1の中心位置に保持されている中立保持状態であるとBucom50が判断した場合(ステップS126:Yes)、カメラシステム1は、後述するステップS127へ移行する。一方、撮像部34が光軸O1の中心位置に保持されている中立保持状態でないとBucom50が判断した場合(ステップS126:No)、カメラシステム1は、後述するステップS130へ移行する。
【0116】
ステップS127において、Bucom50は、アクチュエータ駆動回路113に駆動信号を出力して駆動機構300の駆動を開始する。
【0117】
続いて、Bucom50は、アクチュエータ駆動回路113にモータ503を駆動する駆動信号を出力して可撓性部材401を緩ませ、接触部材402が支持部材403のバネ力で移動枠101から離間させて中立保持を解除させる(ステップS128)。
【0118】
その後、Bucom50は、位置センサ504が検出したローラ503の回転位置に基づいて、中立保持状態が解除されたか否かを判断する(ステップS129)。中立保持状態が解除されたとBucom50が判断した場合(ステップS129:Yes)、カメラシステム1は、ステップS130へ移行する。一方、中立保持状態が解除されたとBucom50が判断しない場合(ステップS129:No)、カメラシステム1は、この判断を続ける。
【0119】
続いて、カメラシステム1は、撮影時におけるユーザの手ブレを補正するブレ補正動作を開始し(ステップS130)、ステップS110へ移行する。
【0120】
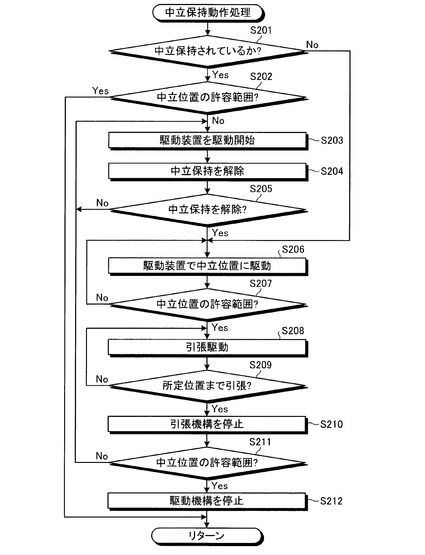
つぎに、ステップS105の中立保持動作処理について説明する。図12は、中立保持動作処理の概要を示すフローチャートである。
【0121】
図12に示すように、Bucom50は、位置センサ504によって検出されたローラ501の回転位置に基づいて、撮像部34が中立保持状態であるか否かを判断する(ステップS201)。撮像部34が中立保持状態であるとBucom50が判断した場合(ステップS201:Yes)、カメラシステム1は、後述するステップS202へ移行する。一方、撮像部34が中立保持状態でないとBucom50が判断した場合(ステップS201:No)、カメラシステム1は、後述するステップS206へ移行する。
【0122】
ステップS202において、Bucom50は、位置検出センサ106によって検出された検出結果に基づいて、撮像部34が中立位置許容範囲にあるか否かを判断する。撮像部34が中立位置許容範囲にあるとBucom50が判断した場合(ステップS202:Yes)、カメラシステム1は、上述した図11のメインルーチンへ戻る。一方、撮像部34が中立位置許容範囲にないとBucom50が判断した場合(ステップS202:No)、カメラシステム1は、ステップS203へ移行する。
【0123】
ステップS203〜ステップS205は、図11のステップS127およびステップS129にそれぞれ対応する。
【0124】
ステップS206において、Bucom50は、位置検出センサ106が検出する移動枠101の位置結果に基づいて、移動枠101に保持された撮像部34が所定の中立位置になるようにアクチュエータ駆動回路113に駆動信号を出力することにより、駆動機構300のX軸アクチュエータ103およびY軸アクチュエータ104を駆動する。
【0125】
続いて、Bucom50は、位置検出センサ106によって検出された位置結果に基づいて、撮像部34が中立位置の許容範囲内にあるか否かを判断する(ステップS207)。撮像部34が中立位置の許容範囲内にあるとBucom50が判断した場合(ステップS207:Yes)、カメラシステム1は、ステップS208へ移行する。一方、撮像部34が中立位置の許容範囲内にないとBucom50が判断した場合(ステップS207:No)、カメラシステム1は、ステップS206へ戻る。
【0126】
ステップS207の後、Bucom50は、アクチュエータ駆動回路113を介して引張機構405のモータ503を動作させ、可撓性部材401をローラ501で引張させることで、接触部材402を移動枠101に押圧させる引張駆動を実行する(ステップS208)。
【0127】
続いて、Bucom50は、引張機構405により所定の引張がなされたか否かを判断する(ステップS209)。引張機構405により所定の引張がなされたとBucom50が判断した場合(ステップS209:Yes)、カメラシステム1は、ステップS210へ移行する。一方、引張機構405により所定の引張がなされていないとBucom50が判断した場合(ステップS209:No)、カメラシステム1は、ステップS208へ戻る。
【0128】
ステップS209の後、Bucom50は、アクチュエータ駆動回路113を介して引張機構405の動作を停止する(ステップS210)。これにより、ローラ501による可撓性部材401の引張を停止する。
【0129】
続いて、Bucom50は、位置検出センサ106によって検出された位置結果に基づいて、撮像部34が中立位置の許容範囲内にあるか否かを判断する(ステップS211)。撮像部34が中立位置の許容範囲内にあるとBucom50が判断した場合(ステップS211:Yes)、カメラシステム1は、駆動機構300の駆動を停止し(ステップS212)、図11のメインルーチンへ戻る。一方、撮像部34が中立位置の許容範囲内にないとBucom50が判断した場合(ステップS211:No)、カメラシステム1は、ステップS203へ戻り、中立保持動作を再度行う。なお、本実施の形態では、中立動作のやり直しの回数を図示していないが、中立動作が所定回数に達した場合、中立保持動作を停止して表示部47に警告を表示させてもよい。
【0130】
以上説明した本発明の一実施の形態によれば、固定枠102と移動枠101との間に第1の駆動機構としてコイルと磁石からなるいわゆるVCMおよび移動枠101を支持する転動部201〜203を設置し、一方、移動枠101に一端が固定され、他端が駆動源としてのモータを含む保持機構105に固定され、移動枠101を押圧支持する接触部材402を設けた紐状の可撓性部材401を設け、VCMにより、移動枠101を転動部201〜203の接触部が形成する平面(XY平面)内に駆動する場合は、保持機構105で可撓性部材401を弛緩させることにより、接触部材402の摩擦力を低減して駆動機構300(VCM)の出力損失を低減して大きな出力を得ている。また、駆動装置の駆動を停止した場合に、可撓性部材401を保持機構105で引張することによって押圧板404を押圧方向に変位させることにより、接触部材402に大きな摩擦力を発生させるとともに、可撓性部材401に大きな張力を発生させ、かつ、接触部材402を支持部材403で保持することで可撓性部材401の引張方向と直交する方向に移動枠101を支持しており、固定枠102に移動枠101を確実に保持することが可能である。可撓性部材401を弛緩させることにより、接触部材402を移動枠101から離間させて、移動枠101に全く作用しないようにすることが可能である。この結果、電気エネルギーを効率よく使用することがで、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠の保持が可能で、駆動力が大きくて精密な制御が可能になる。
【0131】
また、本発明の一実施の形態によれば、高出力になるとともに、駆動を停止した場合にも移動枠101を任意の位置で保持することができる。
【0132】
さらに、本発明の一実施の形態によれば、紐状の可撓性部材401を用いることにより省スペースで、かつ、引張機構405の配置の自由度があり、また、簡単な駆動機構300であることから、小型で安価に作成することができる。さらに画像機器に本発明の駆動装置を適用した場合も、同様な効果を得られることは勿論であるが、カメラ等の精密な駆動が必要で小型な機器では、その効果は大きい。
【0133】
さらにまた、本発明の一実施の形態によれば、引張機構405を固定枠102に設けているので、省スペース化を図れるとともに、カメラシステム1を容易に組み立てることができる。
【0134】
なお、本発明の一実施の形態では、カメラシステム1が手ブレ補正モードに設定された場合について説明したが、撮像部34をカメラシステム1の光軸O1に直交する所定の平面内に撮像部34を移動させるアオリ撮影モード(チルト撮影またはシフト撮影)であっても適用することができる。この場合、Bucom50は、カメラシステム1がアオリ撮影モードに設定された場合、アクチュエータ駆動回路113を介して駆動機構300を駆動することにより、撮像部34をカメラシステム1の光軸O1に直交する所定の平面内、たとえばカメラ操作SW48から入力される指示信号に応じた位置に移動させるようにしてもよい。この場合、Bucom50は、カメラ操作SW48から入力される指示信号に応じた位置に撮像部34が到達した時点で駆動機構300を停止して引張機構405を駆動して撮像部34を所定の平面位置に停止させる。これにより、電気エネルギーを効率よく使用することができ」、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠の保持が可能で、駆動力が大きくて精密な制御でアオリ撮影を行うことができる。
【0135】
また、本発明の一実施の形態では、移動枠101上に撮像部34の撮像素子341が光学素子として配置されていたが、撮像素子341に変えてレンズであってもよい。この場合、レンズユニット2に適用することで手ブレ補正機能を有するレンズユニットを構成することができる。
【0136】
(変形例1)
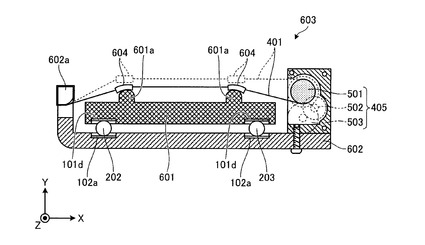
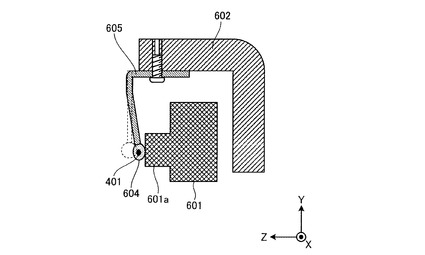
上述した実施の形態において撮像部移動機構の構造を変更することも可能である。図13は、本実施の形態の変形例1にかかる撮像部移動駆動機構600の概要を模式的に示す正面図である。図14は、図13のF−F線断面図である。図15は、図13のG−G線断面である。なお、以下においては、同一の構成には同一の符号を付して説明する。
【0137】
図13〜図15に示すように、撮像部移動機構600は、撮像素子341と、移動枠601と、固定枠602と、保持機構603と、を備える。なお、撮像部移動機構600は、上述したX軸アクチュエータ103と、Y軸アクチュエータ104と、位置検出センサ106と、X軸ジャイロ107と、Y軸ジャイロ108と、Z軸ジャイロ109と、X軸加速度センサ110と、Y軸加速度センサ111と、防振制御回路112と、アクチュエータ駆動回路113とを備えるが、説明を省略するため、図示しないものとする。
【0138】
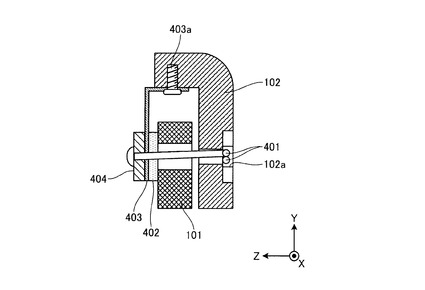
移動枠601は、撮像部34を保持する面上から上方に突起した突起部601aが形成されている。突起部601aは、断面が逆U字状に形成される。
【0139】
固定枠602は、移動枠601を保持する。固定枠602は、図14において断面が略U字状に形成される。固定枠602は、後述する可撓性部材401が巻きつけられる突起部602aを有する。
【0140】
保持機構603は、可撓性部材401と、接触部材604と、支持部材605と、引張機構405と、を備える。
【0141】
可撓性部材401は、一端が固定枠602の外周側に設けられた突起部601aに巻きつけられて接着固定され、他端がローラ501に巻きつけられて接着固定されている。
【0142】
接触部材604は、ゴムや樹脂等の弾性部材を用いて構成される。接触部材604は、支持部材605の端部に固着される。接触部材604は、中心に穴を有し(図15を参照)、筒状に形成される。接触部材604は、可撓性部材401と中心の穴の部分を摺動可能に形成される。なお、接触部材604は、可撓性部材401との摩擦を防止するため、樹脂材料で形成された可撓性パイプの外周にゴムパイプをかぶせたもの、あるいは可撓性パイプの外周にゴムコートしたもので形成してもよい。
【0143】
支持部材605は、バネ性のあるステンレス、リン青銅等の板を用いて形成される。支持部材605は、押圧方向に対して変位し易く形成され、押圧方向と直交する方向に対して殆ど変位しないように剛性を高くして形成される。支持部材605は、断面が略L字状に形成される。支持部材605は、一端を固定枠602にビス403aで固定され、他端に2つの接触部材604がそれぞれ固定されている。
【0144】
このように構成された撮像部移動機構600の動作について説明する。まず、ローラ501を回転させて、可撓性部材401に張力を与えることにより押圧力を接触部材604に与えることで、移動枠601の2箇所に設けた突起部601aの円筒面を押圧する。これにより、接触部材604は、突起部601aの円筒面に沿って変形し、移動枠601を保持する。この場合、保持力は、移動枠601の突起部601aの円筒面と接触部材604との摩擦力だけでなく、接触部材604の変形をもとに戻すための力(復元力)も加わり、大きなものとなる。
【0145】
さらに、接触部材604の変形は、支持部材605の端部も変形させる。支持部材605は、押圧方向に変位することで、可撓性部材401の引張方向のみだけでなく、それに垂直な方向にも剛性を増すことになり、移動枠601の保持がより確実なものとなる。
【0146】
以上説明した本実施の形態の変形例1によれば、電気エネルギーを効率よく使用することがで、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠101の保持が可能で、駆動力が大きくて精密な制御が可能になる(たとえば特開2010−87982号公報の図2に示すようなYステージ(中間支持部材)を介在させて置き換えることもよい)。
【0147】
(変形例2)
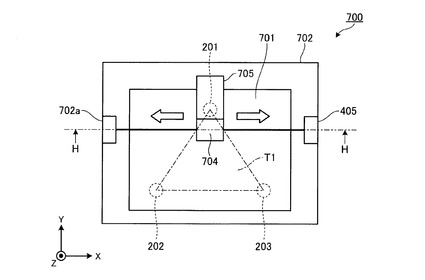
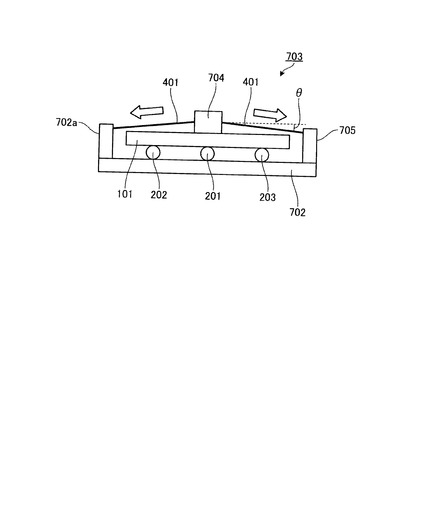
上述した実施の形態において撮像部移動機構の構造をさらに変更することも可能である。図16は、本実施の形態の変形例2にかかる撮像部移動駆動機構700の概要を模式的に示す正面図である。図17は、図16のH−H線断面図である。なお、以下において、同一の構成には同一の符号を付して説明する。
【0148】
図16および図17に示すように、撮像部移動機構700は、移動枠701と、移動枠701を保持する固定枠702と、保持機構703と、を備える。なお、撮像部移動機構700は、上述した撮像部34と、X軸アクチュエータ103と、Y軸アクチュエータ104と、位置検出センサ106と、X軸ジャイロ107と、Y軸ジャイロ108と、Z軸ジャイロ109と、X軸加速度センサ110と、Y軸加速度セン8サ111と、防振制御回路112と、アクチュエータ駆動回路113とを備えるが、説明を省略するため、図示しないものとする。
【0149】
保持機構703は、可撓性部材401と、接触部材704と、支持部材705と、引張機構405と、を備える。
【0150】
可撓性部材401が、一端が固定枠702の外周側に設けられた突起部702aに巻きつけられて接着固定され、他端がローラ501に巻きつけられて接着固定されている。
【0151】
接触部材704は、ゴムや樹脂等の弾性部材を用いて構成される。接触部材704は、ゴムや樹脂等の弾性部材を用いて構成される。接触部材704は、支持部材705の端部に固着される。接触部材704は、中心に穴を有し(図15を参照)、筒状に形成される。接触部材704は、可撓性部材401と中心の穴の部分を摺動可能に形成される。
【0152】
支持部材705は、バネ性のあるステンレス、リン青銅等の板を用いて形成される。支持部材705は、押圧方向に対して変位し易く形成され、押圧方向と直交する方向に対して殆ど変位しないように剛性を高くして形成される。
【0153】
このように構成された撮像部移動機構700の動作について説明する。ローラ501を回転させて可撓性部材401に与える張力をT、接触部材704に与える押圧力をFpとした場合、以下の式(1)が成り立つ。
Fp=2Tsinθ ・・・(1)
したがって、本実施の形態では、接触部材704が可能な限り移動枠701の外周部に配置し、角度(θ)を大きくするのが好ましい。
【0154】
また、摩擦力をFf、移動枠701と接触部材704の摩擦係数をμとした場合、以下の式(2)が成り立つ。
Ff=μ・Fp ・・・(2)
したがって、移動枠701および接触部材704は、互いに接触する接触部の摩擦係数(μ)を可能な限り高くすることが好ましい。たとえば、接触部材704としては、接触部材704をシリコーンゴムで構成し、移動枠701の接触部を砂目にすることが好ましい。
【0155】
また、X方向の保持は、可撓性部材401の張力Tと摩擦力Ffに依存し、より力が小さい摩擦力Ffによって決まる。
【0156】
また、Y方向の保持は、可撓性部材401の張力Tのみであると、Y方向の保持力が可撓性部材401の撓み力と摩擦力Ffに依存し、より小さい撓み力によって決まる。本実施の形態の変形例2では、接触部材704が支持部材705に固定されている。このため、支持部材705は、Y方向に充分な剛性を持っているので、摩擦力Ffによって決まる。したがって、支持部材705は、Y方向の剛性が必要であるが、それ以外の方向の剛性は必ずしも必要ではない。
【0157】
また、Z方向の保持は、ローラ501を回転させて可撓性部材401に与える張力Tによって、接触部材704に与える押圧力Fpによって決まる。
【0158】
以上説明した本実施の形態の変形例2によれば、電気エネルギーを効率よく使用することができ、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠101の保持が可能で、駆動力が大きくて精密な制御が可能になる。
【0159】
(その他の実施の形態)
【0160】
また、本発明にかかるカメラシステムは、デジタル一眼レフカメラ以外にも、例えばアクセサリ等を装着可能なデジタルカメラ、デジタルビデオカメラおよび撮影機能を有する携帯電話やタブレット型携帯機器等の電子機器にも適用することができる。
【0161】
また、本発明にかかるカメラシステムは、デジタル一眼レフカメラ以外にも、手ブレ補正機能付き電子双眼鏡等にも適用することができる。
【0162】
なお、本明細書におけるフローチャートの説明では、「まず」、「その後」、「続いて」等の表現を用いてステップ間の処理の前後関係を明示していたが、本発明を実施するために必要な処理の順序は、それらの表現によって一意的に定められるわけではない。すなわち、本明細書で記載したフローチャートにおける処理の順序は、矛盾のない範囲で変更することができる。
【0163】
このように、本発明は、ここでは記載していない様々な実施の形態を含みうるものであり、特許請求の範囲によって特定される技術的思想の範囲内で種々の設計変更等を行うことが可能である。
【符号の説明】
【0164】
1 カメラシステム
2 レンズユニット
3 ボディユニット
21 撮像レンズ
21a フォーカスレンズ
21b 変倍レンズ
22 レンズ駆動部
23,106 位置検出部
23a,23,106,504 位置検出センサ
24 絞り
25 絞り駆動部
26 レンズ記憶部
27 レンズ通信部
28 レンズ制御用マイクロコンピュータ
31 シャッター
32 シャッターチャージ機構
33 シャッター制御回路
34 撮像部
35,600,700 撮像部移動駆動機構
36 撮像部インターフェース回路
37 画像処理コントローラ
38 SDRAM
39 FlashROM
40 記録メディア
41 EEPROM
42 ストロボ
43 ストロボ制御回路
44 電源回路
45 電源
46 動作表示用LED
47 表示部
48 カメラ操作SW
49 本体通信部
50 ボディ制御用マイクロコンピュータ
101,601,701 移動枠
102,602,702 固定枠
103 X軸アクチュエータ
104 Y軸アクチュエータ
105,603,703 保持機構
107 X軸ジャイロ
108 Y軸ジャイロ
109 Z軸ジャイロ
110 X軸加速度センサ
111 Y軸加速度センサ
112 防振制御回路
113 アクチュエータ駆動回路
201,202,203 転動部
204,205,206 突起部
207,208,209 押さえバネ
300 駆動機構
301 VCM
301XA,301XB,301YA,301YB VCM
303 磁石
304,305 ヨーク
341 撮像素子
342 光学ローパスフィルタ
343 防塵フィルタ
344 圧電素子
345 防塵フィルタ制御回路
401 可撓性部材
402,604,704 接触部材
403,605,705 支持部材
404 押圧板
405 引張機構
【技術分野】
【0001】
本発明は、アクチュエータを利用して移動体を駆動して所定の方向に移動させる駆動装置および駆動装置によりブレ補正や画面の傾き補正を行う撮像装置に関する。
【背景技術】
【0002】
従来から、直交座標系の互いに直交する3つの軸の回転が可能な電動ステージが様々なところで用いられている。具体的には、ブレ補正機能を備えるデジタルカメラ等の撮像装置に電動ステージが用いられている。
【0003】
撮像装置が備えるブレ補正機能としては、カメラピッチ方向のブレ振動とカメラヨー方向のブレ振動とを角速度センサ等のブレ検出手段を用いて検出し、検出したブレ信号に基づいて、撮像光学系の一部または撮像素子を撮影光軸に直交する平面内で水平方向および垂直方向にそれぞれ独立に移動させることで、撮像素子の撮像面上での像のブレを補正している。
【0004】
このような手ブレ補正機能を有する手ブレ補正機構においては、手ブレを補正するため、撮影レンズの一部のレンズ、または撮像素子そのものを撮影光軸に直交する平面内で水平方向および垂直方向に移動させる駆動手段が用いられている。この駆動手段は、手ブレに追随して動作させたとき、精密に駆動(微小駆動)する必要があるうえ、駆動するときにも撮影レンズに対して移動体位置(撮像面位置)が正確に位置決めされることが要求される。
【0005】
また、駆動手段には、移動体の重力に打ち勝って制御に必要な加速度を得るため、大きな駆動力が求められる。さらに、駆動手段の電源を切っても、移動体の位置を保持する保持性能が要求される。そして、当然であるが、複雑な機構を持たず、小型で安価な機構であることが求められる。
【0006】
上述した各要求に応じて、固定枠に相当するベースヨーク板に先端が平滑面の複数の基板支持突起と、対向したところに設けられ、コイルばねで押圧されて先端が平滑面の押しピンとが、移動枠に相当する可動部を挟んで保持し、可動部側に設置されたコイルと、ベースヨーク板側に設けられた磁石とでボイスコイルモータ(以下、「VCM」という)を構成し、基板支持突起の端面が形成する面内のX軸方向(水平方向)、Y軸方向(垂直方向)、XY平面に垂直な軸周りの回転が可能な駆動機構が開示されている(特許文献1参照)。
【0007】
また、移動枠に相当する可動子を、固定枠に相当する固定子に対して直線的に移動する移動用アクチュエータ(たとえばVCM)を備え、移動用アクチュエータが駆動力を発生していない場合、可動子と固定子とを相互に押し付けて可動子と固定子とが相互に移動しないようにし、移動用アクチュエータが駆動量を発生したとき、可動子と固定子との押し付け力を制動用アクチュエータ(たとえば圧電体)で解除する技術が開示されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2008−129326号公報
【特許文献2】特開2010−282028号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1では、移動枠には常に押圧支持の摩擦力が作用しており、VCMで移動枠を駆動する場合、その摩擦力によってVCMの出力が低下してしまうという問題点があった。特に、VCMの動作を停止した場合、押圧支持の摩擦力によって移動枠が固定枠に保持されることになるが、保持力を大きくして保持性能を高くすると、摩擦力も大きくなり、さらに、VCMの出力が低下することになる。
【0010】
また、特許文献2では、駆動機構が可動子と固定子との押し付け力を制動用アクチュエータで解除しており、解除の状態を保つため、制動部アクチュエータを常時駆動させる必要があるので、電気エネルギーを消費して効率が良くないという問題点があった。
【0011】
本発明は、上記に鑑みてなされたものであって、電気エネルギーを効率よく使用することができ、簡単な構成で移動枠の保持を行うことができる駆動装置およびこの駆動装置を備えた撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上述した課題を解決し、目的を達成するために、本発明にかかる駆動装置は、複数の転動部を介して固定枠に押圧して支持され、水平方向に移動可能な移動枠と、前記移動枠を前記固定枠内で水平方向に移動させる駆動機構と、前記移動枠と離接自在な接触部材と、一端側に前記接触部材が設けられ、他端側を前記固定枠に固定した支持部材と、前記接触部材が接続され、引張または弛緩可能な可撓性部材と、前記可撓性部材が接続され、該可撓性部材を引張状態または弛緩状態にする引張機構と、を備え、前記引張機構により前記可撓性部材を引張状態にした場合、前記移動枠が前記接触部材と接触して前記転動部を押圧し、該押圧による摩擦力により前記固定枠が前記移動枠を保持する一方、前記引張機構により前記可撓性部材を弛緩状態にした場合、前記接触部材が前記移動枠から離れて前記固定枠が前記移動枠の保持を解除することを特徴とする。
【0013】
また、本発明にかかる駆動装置は、上記発明において、前記転動部は、前記固定枠上に少なくとも3つ以上配置され、前記可撓性部材は、前記複数の転動部をそれぞれ通過する直線で結ぶ領域上に配置されていることを特徴とする。
【0014】
前記転動部は、前記固定枠上に3つ配置され、前記可撓性部材は、3つの前記転動部をそれぞれ通過する直線で形成される三角形の領域上に配置されていることを特徴とする。
【0015】
また、本発明にかかる駆動装置は、上記発明において、前記可撓性部材は、一端側に前記接触部材を接続し、他端側を前記固定枠に配置することを特徴とする。
【0016】
また、本発明にかかる駆動装置は、上記発明において、前記移動枠は、平面から突起した突起部を有し、前記接触部材は、変形可能であり、前記可撓性部材は、前記接触部材を貫通して保持することを特徴とする。
【0017】
また、本発明にかかる駆動装置は、上記発明において、前記駆動機構は、ボイスコイルモータ、リニアモータ、回転モータまたは超音波モータのいずれか一つであることを特徴とする。
【0018】
また、本発明にかかる駆動装置は、上記発明において、前記可撓性部材は、紐状または帯状をなすことを特徴とする。
【0019】
また、本発明にかかる駆動装置は、上記発明において、前記引張機構は、前記固定枠に設けられていることを特徴とする。
【0020】
また、本発明にかかる駆動装置は、上記発明において、前記移動枠は、光学素子が配置されていることを特徴とする。
【0021】
また、本発明にかかる駆動装置は、上記発明において、前記移動枠は、光学素子が配置されていることを特徴とする。
【0022】
また、本発明にかかる撮像装置は、被写体を撮像して該被写体の画像データを生成する撮像装置であって、上記した駆動装置と、前記光学素子の位置を変位させる所定の撮影モードが設定された場合、当該撮像装置の撮影光軸に直交する平面内に前記光学素子を変位させるように前記駆動装置を駆動するとともに、前記可撓性部材を弛緩状態になるように前記引張機構を駆動する一方、前記所定の撮影モードが設定されていない場合、前記駆動装置の駆動を停止するとともに、前記可撓性部材を引張状態になるように前記引張機構を駆動する制御部と、を備えたことを特徴とする。
【0023】
また、本発明にかかる撮像装置は、上記発明において、当該撮像装置のブレを検出するブレ検出部をさらに備え、前記所定の撮影モードは、当該撮像装置のブレを補償する手ブレ補正モードであり、前記制御部は、前記手ブレ補正モードが設定された場合、前記ブレ検出部が検出した検出結果に基づいて、当該撮像装置の撮影光軸に直交する平面内に前記光学素子を変位させるように前記駆動装置を駆動することを特徴とする。
【0024】
また、本発明にかかる撮像装置は、上記発明において、前記所定の撮影モードは、前記光学素子を当該撮像装置の撮影光軸に直交する所定の平面内に前記光学素子を移動させるアオリ撮影モードであり、前記制御部は、前記アオリ撮影モードが設定された場合、前記所定の平面内に前記光学素子を移動させるように前記駆動装置を駆動し、該所定の平面内に前記光学素子が到達したとき、前記駆動装置の駆動を停止して前記引張機構を駆動することを特徴とする。
【0025】
また、本発明にかかる撮像装置は、上記発明において、前記光学素子は、撮像素子または撮像レンズであることを特徴とする。
【発明の効果】
【0026】
本発明によれば、引張機構により可撓性部材を引張状態にした場合、接触部材が移動枠に接触して押圧され、該押圧による摩擦力により固定枠が移動枠を保持する一方、引張機構により可撓性部材を弛緩状態にした場合、接触部材が移動枠から離れて固定枠が移動枠の保持を解除する。この結果、電気エネルギーを効率よく使用することができ、簡単で構成で移動枠の保持を行うことができるという効果を奏する。
【図面の簡単な説明】
【0027】
【図1】図1は、本発明の一実施の形態にかかるカメラシステムの機能構成を模式的に示すブロック図である。
【図2】図2は、本発明の一実施の形態にかかる撮像部および駆動装置を含む撮像部移動駆動機構の構成例を模式的に示す正面図である。
【図3】図3は、図2のA−A線断面図である。
【図4】図4は、図2のB−B線断面図である。
【図5】図5は、図2のC−C線断面図である。
【図6】図6は、図2のD−D線断面図である。
【図7】図7は、本発明の一実施の形態にかかる駆動装置を構成するVCMの概略構成を示す正面図である。
【図8】図8は、図7のE−E線断面図である。
【図9】図9は、本発明の一実施の形態にかかる引張部の要部を模式的に拡大して展開した断面図である。
【図10】図10は、本発明の一実施の形態にかかる引張機構の動作の概要を説明する動作図である。
【図11】図11は、本発明の一実施の形態にかかるカメラシステムの動作を説明するフローチャートである。
【図12】図12は、図11の中立保持動作処理の概要を示すフローチャートである。
【図13】図13は、本発明の一実施の形態の変形例1にかかる撮像部移動機構の概要を模式的に示す正面図である。
【図14】図14は、図13のF−F線断面図である。
【図15】図15は、図13のG−G線断面図である。
【図16】図16は、本発明の一実施の形態の変形例2にかかる撮像部移動機構の概要を模式的に示す正面図である。
【図17】図17は、図16のH−H線断面図である。
【発明を実施するための形態】
【0028】
以下に、図面を参照して、本発明を実施するための形態(以下、「実施の形態」という)について説明する。なお、以下の説明において、本発明にかかる撮像装置の一例として、光電変換によって画像信号を得る撮像素子を含む撮像ユニットの手ブレ補正を行うための駆動装置を搭載したレンズ交換可能なデジタル一眼レフカメラを例示するが、この実施の形態によって本発明が限定されるものではない。また、図面の記載において、同一の部分には同一の符号を付して説明する。
【0029】
図1は、本発明の一実施の形態にかかるカメラシステムの機能構成を模式的に示すブロック図である。なお、図1においては、左側を前方側とし、右側を後方側として説明する。
【0030】
図1に示すように、カメラシステム1は、所定の視野領域を集光するレンズユニット2と、レンズユニット2が着脱自在に装着されるボディユニット3と、を備える。レンズユニット2の後方側レンズマウント(図示せず)を、ボディユニット3の前方側に設けられた本体側マウントリング(図示せず)に結合することにより、レンズユニット2がボディユニット3に装着される。これにより、カメラシステム1は、様々なレンズユニット2を交換して装着し、撮影することができる。なお、上述した本体側マウントリングは、バヨネットタイプ等が用いられる。
【0031】
また、以下の説明においては、レンズユニット2が構成する光学系の光軸O1と一致する軸をZ軸とし、Z軸に直交する平面上において互いに直交する2つの軸をX軸(水平方向の軸)およびY軸(垂直方向の軸)とする。
【0032】
まず、レンズユニット2の詳細な構成について説明する。レンズユニット2は、撮像レンズ21と、レンズ駆動部22と、位置検出部23と、絞り24と、絞り駆動部25と、レンズ記憶部26と、レンズ通信部27と、レンズ制御用マイクロコンピュータ28(以下、「Lucom28」という)と、を備える。
【0033】
撮影レンズ21は、被写体の光学像を結像する。撮影レンズ21は、フォーカスレンズ21aと、変倍レンズ21bと、を有する。フォーカスレンズ21aは、一または複数のレンズを用いて構成され、光軸O1方向に沿って駆動されることにより、撮影レンズ21の焦点状態を調整する。変倍レンズ21bは、一または複数のズームレンズを用いて構成され、光軸O1方向に沿って駆動されることにより、撮影レンズ21の焦点距離を変更する。
【0034】
レンズ駆動部22は、ステッピングモータ等のアクチュエータおよびモータドライブ回路等を用いて構成され、Lucom28の制御のもと、フォーカスレンズ21aおよび変倍レンズ21bを光軸O1方向に沿って移動させる。
【0035】
位置検出部23は、フォトインタラプタ、リニアエンコーダおよび可変抵抗素子等のポテンショメータやA/D変換回路等を用いて構成され、レンズ駆動部22によって駆動されたフォーカスレンズ21aの位置を検出する位置検出センサ23aと、変倍レンズ21bの位置を検出する位置検出センサ23bと、を有する。位置検出センサ23aは、レンズ駆動部22に含まれるアクチュエータの回転量をパルス数に変換し、変換したパルス数に基づいて、無限端を基準とする基準位置からのフォーカスレンズ21aの位置を検出する。同様に、位置検出センサ23bは、無限端を基準とする基準位置からの変倍レンズ21bの位置を検出する。
【0036】
絞り24は、開口面積を変化させてボディユニット3に入射する被写体光量を調整する。具体的には、絞り24は、撮影レンズ21が集光する光の入射量を制限することにより露出の調整を行う。
【0037】
絞り駆動部25は、ステッピングモータやモータドライバ等を用いて構成され、Lucom28の制御のもと、絞り24を駆動する。
【0038】
レンズ記憶部26は、不揮発性メモリや揮発性メモリを用いて構成され、フォーカスレンズ21aおよび変倍レンズ21bの位置および動きを決定するための制御用プログラム、フォーカスレンズ21aおよび変倍レンズ21bそれぞれのレンズ特性(色収差等)および各種パラメータを含む光学データを記憶する。
【0039】
レンズ通信部27は、レンズユニット2がボディユニット3に装着されたとき、後述するボディユニット3と通信を行うための通信インターフェースである。
【0040】
Lucom28は、CPU等を用いて構成され、レンズユニット2の各部の動作を制御する。具体的には、Lucom28は、レンズ駆動部22および絞り駆動部25の駆動制御を行う。
【0041】
つぎに、ボディユニット3の詳細な構成について説明する。ボディユニット3は、シャッター31と、シャッターチャージ機構32と、シャッター制御回路33と、撮像部34と、撮像部移動駆動機構35と、撮像部インターフェース回路36と、画像処理コントローラ37と、SDRAM38と、FlashROM39と、記録メディア40と、EEPROM41と、ストロボ42と、ストロボ制御回路43と、電源回路44と、電池45と、動作表示用LED46と、表示部47と、カメラ操作SW48と、本体通信部49と、ボディ制御用マイクロコンピュータ50(以下、「Bucom50」という)と、を備える。
【0042】
シャッター31は、開閉動作を行うことにより、撮像部34の状態を露光状態または遮光状態に設定する露光動作を行う。シャッター31は、フォーカルプレーンシャッター等を用いて構成される。シャッターチャージ機構32は、シャッター31の先幕と後幕とを駆動するバネをチャージする。シャッター制御回路33は、シャッター31の先幕と後幕との動きを制御する。
【0043】
撮像部34は、光軸O1上に設けられ、レンズユニット2が集光して結像した被写体像を光電変換することによって画像データを生成する。撮像部34は、たとえば4:3のアスペクト比でやや横長に形成された矩形状のCCD(Charge Coupled Device)またはCMOS(Complementary Metal Oxide Semiconductor)等の撮像素子341を用いて構成される。撮像素子341の前面には、光学ローパスフィルタ342「以下、「光学LPF342」という」および防塵フィルタ343が配設されている。撮像部34は、撮像素子341、光学LPF342および防塵フィルタ343をユニットとして一体化したものである。防塵フィルタ343の周縁部には、圧電素子344が取り付けられている。圧電素子344は、2つの電極を有しており、防塵フィルタ制御回路345の制御のもと、防塵フィルタ343の寸法や材質にとって定まる所定の周波数で振動させて防塵フィルタ343を振動させることで、防塵フィルタ343のフィルタ表面に付着した塵を除去し得るように構成されている。撮像部34は、後述する駆動装置を含む手ブレ補正用の撮像部移動駆動機構35を介してボディユニット3内に保持される。
【0044】
撮像部移動駆動機構35は、撮影時におけるユーザの手ブレを補正するため、撮像部34をX軸方向、Y軸方向およびZ軸周りの回転方向に機械的に移動させる。撮像部移動駆動機構35は、本実施の形態の駆動装置として機能する。なお、撮像部移動駆動機構35の詳細な構成について後述する。
【0045】
撮像部インターフェース回路36は、撮像部34の動作を制御する。具体的には、撮像部インターフェース回路36は、所定の撮像タイミングで撮像部34から画像データを出力させる。撮像部34、撮像部インターフェース回路36および画像処理コントローラ37は、電気的に接続されている。
【0046】
画像処理コントローラ37は、撮像部インターフェース回路36を介して撮像部34から出力される画像データ(画像信号)に基づいて、画像を生成する。画像処理コントローラ37は、画像データに対して、各種の画像処理を施す。具体的には、画像処理コントローラ37は、画像データに対して、オプティカルブラック減算処理、ホワイトバランス調整処理、画像データの同時化処理、カラーマトリクス演算処理、γ補正処理、色再現処理およびエッジ強調処理等を含む画像処理を行う。
【0047】
また、画像処理コントローラ37は、コントラスト検出方式によるオートフォーカスを行う。具体的には、画像処理コントローラ37は、フォーカスレンズ21aを光軸O1方向に所定の振幅で振動(以下、「ウォブリング動作」という)させて生成した複数の画像データに対して、所定の領域(フォーカスエリア)におけるコントラストを算出して、無限端側または至近端側のいずれかの方向に焦点位置があるのか検出する。その後、画像処理コントローラ37は、ウォブリング動作をしながら焦点のある方向にフォーカスレンズ21aを移動させつつ、画像データの取り込み(撮影する)と、それらの画像データからコントラストが最大値になるフォーカスレンズ21aの位置(焦点位置)を検出し、その位置でフォーカスレンズ21aを停止させることにより、オートフォーカスを行う。
【0048】
SDRAM38は、揮発性メモリを用いて構成される。SDRAM38は、Bucom50の処理中の情報を一時的に記憶する。
【0049】
FlashROM39は、不揮発性メモリを用いて構成される。FlashROM39は、カメラシステム1を動作させるための各種プログラム、プログラムの実行中に使用される各種データおよび画像処理コントローラ37による画像処理の動作に必要な各種パラメータ等を記憶する。
【0050】
記録メディア40は、ボディユニット3の外部から装着されるメモリカードやHDD等を用いて構成される。記録メディア40は、メモリI/F(図示せず)を介してボディユニット3に着脱自在に装着される。記録メディア40は、カメラシステム1で撮像された画像データ(動画データの場合は音声データも含む)が記録される一方、記録した画像データが読み出される。
【0051】
EEPROM41は、カメラシステム1の制御に必要な所定の制御パラメータを記憶する。EEPROM41は、Bucom50からアクセス可能に設けられている。
【0052】
ストロボ42は、キセノンランプまたはLED等によって構成される。ストロボ42は、シャッター31の露光動作と同期して所定の視野領域に向けて発光する。ストロボ制御回路43は、Bucom50の制御のもと、ストロボ42を発光させる。
【0053】
電源回路44は、電池45の電圧をカメラシステム1の各構成部および各回路ユニットが必要とする電圧に変換して供給する。また、ボディユニット3内には、外部電源からジャック(図示せず)を介して電流が供給されたときの電圧変化を検知する電圧検出回路(図示せず)が設けられている。
【0054】
動作表示用LED46は、Bucom50の制御のもと、カメラシステム1の動作状態を表示出力(発光)することによって、ユーザへ告知する。
【0055】
表示部47は、液晶または有機EL(Electro Luminescence)等からなる表示パネルを用いて構成される。表示部47は、Bucom50を介して画像処理コントローラ37に電気的に接続されており、画像処理コントローラ37によって画像処理が施された画像データに対応する画像を表示する。表示部47は、撮像部34が連続的に生成する画像データに対応するライブビュー画像を表示する。これにより、ユーザは、表示部47が表示するライブビュー画像をリアルタイムで確認することで撮影時の構図を設定することができる。
【0056】
カメラ操作SW48は、カメラシステム1の電源状態をオン状態またはオフ状態に切換える電源スイッチ(図示せず)と、静止画撮影の指示を与える静止画レリーズ信号の入力を受け付けるレリーズスイッチ(図示せず)と、カメラシステム1に設定された各種撮影モードを切換える撮影モード切換スイッチ(図示せず)と、動画撮影の指示を与える動画レリーズ信号の入力を受け付ける動画スイッチ(図示せず)と、を有する。レリーズスイッチは、外部からの押圧により進退可能であり、半押しされた場合に撮影準備動作を指示するファーストレリーズ信号(以下、「1st信号」という)の入力を受け付ける一方、全押しされた場合に静止画撮影を指示するセカンドレリーズ信号(以下、「2nd信号」という)の入力を受け付ける。
【0057】
本体通信部49は、ボディユニット3に装着されるレンズユニット2との通信を行うための通信インターフェースである。また、本体通信部49は、電源回路44からの電力を、レンズ通信部27を介してレンズユニット2の各ユニットに供給する。
【0058】
Bucom50は、CPU等を用いて構成される。Bucom50は、カメラ操作SW48からの指示信号に応じて、カメラシステム1を構成する各部に対応する指示やデータの転送等を行ってカメラシステム1の動作を統括的に制御する。Bucom50は、ボディユニット3にレンズユニット2が装着された状態において、本体通信部49およびレンズ通信部27を介して互いに双方向に通信可能に電気的に接続される。これにより、Lucom28は、Bucom50に従属的に協働しながら稼動するように構成される。
【0059】
このように構成されたカメラシステム1は、Bucom50の制御のもと、撮像部インターフェース回路36が撮像部34の撮像素子341からの画像データを画像処理コントローラ37に出力させる。この画像データは、画像処理コントローラ37でビデオ信号に変換され、表示部47に出力表示される。ユーザは、表示部47で表示される画像から撮影した際の画像を仮想的に確認することができる。
【0060】
つぎに、上述した撮像部34および本実施の形態の駆動装置としての撮像部移動駆動機構35の詳細な構成について説明する。図2は、実施の形態にかかる撮像部34および駆動機構300を含む撮像部移動駆動機構35の構成例を模式的に示す正面図である。図3は、図2のA−A線断面図である。図4は、図2のB−B線断面である。図5は、図2のC−C線断面図である。図6は、図2のD−D線断面図である。
【0061】
撮像部移動駆動機構35は、図1〜6に示すように、撮像部34と、移動枠101と、固定枠102と、X軸アクチュエータ103と、Y軸アクチュエータ104と、保持機構105と、位置検出センサ106と、X軸ジャイロ107と、Y軸ジャイロ108と、Z軸ジャイロ109と、X軸加速度センサ110と、Y軸加速度センサ111と、防振制御回路112と、アクチュエータ駆動回路113と、を備える。
【0062】
まず、撮像部34の詳細な構成について説明する。図2〜図6に示すように、撮像部34は、レンズユニット2を透過し光電変換面上に照射された光に対応した画像信号を得る撮像素子341と、撮像素子341の光電変換面側に配置され、レンズユニット2を透過して照射される被写体光束から高周波成分を取り除く光学LPF342と、光学LPF342の前面側において所定間隔をあけて対向配置された防塵フィルタ343と、防塵フィルタ343の周縁部に配置されて防塵フィルタ343に対して所定の振動を与える圧電素子344と、を有する。
【0063】
ここで、撮像素子341の撮像素子チップ341aは、固定板345上に配置されたフレキシブル基板341b上に直接実装され、フレキシブル基板341bの両端から出た接続部341c,341dが主回路基板346に設けられたコネクタ346a,346bを介して主回路基板346側と接続されている。
【0064】
また、撮像素子341が有する保護ガラス341eは、スペーサ341fを介してフレキシブル基板341b上に固着されている。
【0065】
さらに、撮像素子341と光学LPF342との間には、弾性部材等からなるフィルタ受け付け部材347が配設されている。フィルタ受け付け部材347は、撮像素子341の前面側周縁部で光電変換面の有効領域を避ける位置に配設され、かつ、光学LPF342の背面側周縁部の近傍に当接することで、撮像素子341と光学LPF342との間を略気密性が保持されるように構成されている。そして、撮像素子341と光学LPF342とを気密的に覆う移動枠101(ホルダ)が配置されている。
【0066】
移動枠101は、光軸O1周りの略中央部分に矩形状の開口部101aを有する。開口部101aの防塵フィルタ343側の内周縁部には、断面が略L字形状の段部101bが形成されている。移動枠101は、開口部101aに対してその後方側から光学LPF342および撮像素子341が配設されている。ここで、光学LPF342の前面側周縁部を段部101bに対して略気密的に接触させるように配置することで、光学LPF342が段部101bによって光軸O1方向における位置規制がなされ、移動枠101の内部から前面側に対する抜け止めがなされる。
【0067】
移動枠101は、撮像部34を保持する。移動枠101は、固定枠102によってX軸方向、Y軸方向およびZ軸周りの回転方向に移動可能に支持されている。移動枠101の支持は、固定枠102に配置された3つの摺動板102aに各々接して保持された3つのボール等の転動部201,202,203が移動枠101に配置された摺動板101dを受け、移動枠101および固定枠102の外周部に対向して設けられた3つの突起部204,205,206に押さえバネ207,208,209を装着して、移動枠101を転動部201,202,203に押圧することにより支持されている。
【0068】
固定枠102は、ボディユニット3に固定される。固定枠102は、移動枠101を水平方向または垂直方向に移動可能に支持する。具体的には、固定枠102は、移動枠101をX軸方向、Y軸方向およびZ軸周りの回転方向に移動可能に支持する。
【0069】
このような構成により、移動枠101は、3つの転動部201,202,203が移動枠101の摺動板101dと接触する3点で形成される平面内方向に自由に動くことができる。この場合、Z軸方向の移動枠101の位置は、転動部201,202,203が移動枠101の摺動板101dと接触する3点で形成される平面位置となり、この平面がXY面に平行である。このため、移動枠101は、後述する駆動機構300をなすX軸アクチュエータ103およびY軸アクチュエータ104が動作していない場合、たとえば重力などの外力が加わることにより、固定枠102に対してXY面内方向に自由に動いてしまう。具体的には、移動枠101は、重力方向(−Y方向)に移動する。
【0070】
ここで、移動枠101をXY面内方向に駆動するX軸アクチュエータ103およびY軸アクチュエータ104であるVCMを駆動源として用いる本実施の形態にかかる駆動機構300について詳細に説明する。図7は、本実施の形態にかかる駆動機構300を構成するVCM301の概略構成を示す正面図である。図8は、図2のE−E線の断面図である。
【0071】
図7および図8に示すように、VCM301は、コイル302と、磁石303と、ヨーク304,305と、によって構成される。
【0072】
VCM301は、絶縁被覆された導電性の細線をトラック形状に巻いたコイル302が移動枠101に接着剤で固定されている。VCM301は、板状の磁石303が図7において下側がN極、上側がS極となるようにY方向に着磁され、固定枠102に接着剤等で固定される。ヨーク304,305は、コイル302および磁石303を挟み込んで移動枠101および固定枠102にそれぞれ接着剤で固定され、磁石303の磁力線、またはコイル302に電流が流れた際の磁力線が外部に漏れないように磁気回路を形成している。この状態で、コイル302に電流を流した場合、コイル302の2つの直線部302aは、磁石303の磁力線Mに対して電流が直交し、磁力線Mの方向と電流の方向とがコイル302の2つの直線部302aで逆方向になるので、磁力線Mおよび電流と直交する同じ方向に力が働き、移動枠101が駆動される。
【0073】
これに対し、移動枠101は、電流の向きが逆転された場合、逆方向に駆動される。また、コイル302に流れる電流の大きさにより発生する力を変更することも可能である。なお、本実施の形態1では、ヨーク304,305を別途設けたていたが、移動枠101および固定枠102を磁性体で形成することで設ける必要がない。
【0074】
このように駆動機構300は、図2に示すように、図7および図8で上述したVCM301であるVCM301XA、VCM301XB、VCM301YAおよびVCM301YBがそれぞれ配置されている。VCM301XAおよびVCM301XBは、X方向の駆動力を発生することにより、X軸アクチュエータ103として機能する。VCM301YAおよびVCM301YBは、Y方向の駆動力を発生することにより、Y軸アクチュエータ104として機能する。また、VCM301YAおよびVCM301YBに異なる駆動力(場合によっては反対方向の駆動力)を付与することにより、Z軸周りの回転方向の駆動量を発生する。駆動機構300は、移動枠101のX軸方向、移動枠101のX軸方向、Y軸方向およびZ軸周りの回転方向を検出する位置検出センサ106の検出結果に基づいて、アクチュエータ駆動回路113の制御のもと、VCM301XA、VCM301XB、VCM301YAおよびVCM301YBがそれぞれ駆動される。
【0075】
ところで、移動枠101の位置は、アクチュエータ駆動回路113の制御により、固定枠102に対して所定位置に停止させても、駆動機構300の電源が切れた場合、小さな外力で簡単に動いてしまう。
【0076】
そこで、移動枠101を駆動機構300により、所定の位置に停止させた後に、移動枠101を保持するための本実施の形態にかかる保持機構105について説明する。
【0077】
保持機構105は、図5および図6に示すように、紐状をなす可撓性部材401と、可撓性部材401の一端部に設けられた接触部材402と、接触部材402を一端に固定し、他端が固定枠302に固定された板状であって可撓性部材401の引張方向に弾性変形する支持部材403と、可撓性部材401の一端部に設けられ、接触部材402に可撓性部材401の引張力を押圧力として加えるために可撓性部材401の端部を固着し、支持部材403に固定されている押圧板404と、可撓性部材401の他端部を引張する引張機構405と、を有する。ここで、押圧板404の一方の面に接触部材402を接着で固定し、他方の面に支持部材403に固定する機構にしてもよい。
【0078】
可撓性部材401は、強度、軽量化および摺動性に優れる炭素繊維を用いて構成される。可撓性部材401は、紐状または帯状をなす。なお、可撓性部材401は、炭素繊維以外にもパラ系のポリアミド繊維等の強度のある樹脂繊維を用いてもよい。可撓性部材401は、転動部201,202,203をそれぞれ通過する直線で形成される三角形の領域T1上に配置される(図2を参照)。なお、可撓性部材401は、転動部201,202,203のいずれか2つ以上の中心を通る位置に配置されてもよい。
【0079】
接触部材402は、シリコーンゴム、EPDM(エチレン・プロピレン・ジエンゴム)等のゴム材料を用いて構成され、支持部材403に固着される。接触部材402は、移動枠101と離接自在である。接触部材402は、可撓性部材401が通る穴部402aを有する。
【0080】
支持部材403は、バネ性のあるステンレス、リン青銅等の板を用いて形成される。支持部材403は、押圧方向に対して変位し易く形成され、押圧方向と直交する方向に対して殆ど変位しないように剛性を高くして形成される。支持部材403は、断面が略L字状に形成される。支持部材403は、一端を固定枠102にビス403aで固定され、他端に接触部材402が固定されている。支持部材403は、可撓性部材401が通る穴(溝)403aを有する。
【0081】
押圧板404は、鉄、ステンレスまたは黄銅等の銅合金を用いて構成される。押圧板404は、可撓性部材401が通る穴404aを有する。押圧板404は、穴404aに可撓性部材401を通したのち塑性変形させる部材、たとえばカシメ等を用いて構成されてもよい。また、可撓性部材401と押圧板404との固定は、接着剤で固定してもよい。
【0082】
引張機構405は、可撓性部材401が接続され、可撓性部材を引張状態または弛緩状態にする。図9は、引張機構405の要部を模式的に拡大して展開した断面図である。引張機構405は、図9に示すように、ローラ501と、段ギヤ502と、モータ503と、位置センサ504と、板505と、板506と、を有する。
【0083】
ローラ501は、固定枠102に固定された板505と板506とによって形成された空間K1に配置され、両端のローラ軸501aがそれぞれ板505および板506の穴に回転自在に保持される。ローラ501は、ローラギヤ501bと、可撓性部材401が巻き付けられる巻き付け部501cと、巻き付け部501c上に設けられ、可撓性部材401が固定される突起部501d(図5を参照)と、を有する。
【0084】
段ギヤ502は、空間K1内に配置され、両端の段ギヤ502の軸502aがそれぞれ板505および板506の穴に回転自在に保持される。段ギヤ502は、ローラ501のローラギヤ501bと噛合する噛合ギヤ502bと、噛合ギヤ502cと、を有する。
【0085】
モータ503は、板506に固定され、回転軸503aの端部に段ギヤ502の噛合ギヤ502cと噛合するピニオンギヤ503bが設けられる。
【0086】
位置センサ504は、フォトインタラプタ等を用いて構成され、ローラ501の回転位置を検出する。
【0087】
板505および板506は、スペーサ507を間に挟み込みビス508により固定される。これにより、引張機構405が構成される。さらに、引張機構405は、固定枠102の裏面からスペーサ507をビス(図示せず)で固定される。
【0088】
このように構成された引張機構405は、可撓性部材401を接触部材402、支持部材403、押圧板404、移動枠101の穴101eおよび固定枠102の穴102aそれぞれを通してローラ501の突起部501dにかけられて固定される。
【0089】
図1〜図6に戻り、撮像部移動駆動機構35の説明を続ける。位置検出センサ106は、移動枠101のX軸方向、Y軸方向およびZ軸周りの回転方向を検出する。位置検出センサ106は、固定枠102に配設させたホール素子(図示せず)と、このホール素子に対向するように移動枠101の一部に配設させたマグネット(図示せず)とから構成される。
【0090】
X軸ジャイロ107は、カメラシステム1のX軸周りの回動(ブレ)の角速度を検出する。Y軸ジャイロ108は、カメラシステム1のY軸周りの回動の角速度を検出する。Z軸ジャイロ109は、カメラシステム1のXY平面内の回動の角速度と回転中心位置を検出する。X軸加速度センサ110は、カメラシステム1のX軸方向の加速度を検出する。X軸加速度センサ111は、カメラシステム1のY軸方向の加速度を検出する。X軸ジャイロ107、Y軸ジャイロ108、Z軸ジャイロ109、X軸加速度センサ110およびY軸加速度センサ111は、固定枠102に配設される。
【0091】
防振制御回路112は、手ブレを補償するため、X軸ジャイロ107、Y軸ジャイロ108、Z軸ジャイロ109、X軸加速度センサ110およびY軸加速度センサ111がそれぞれ検出した検出結果に基づいて、手ブレ補償量を演算する。
【0092】
アクチュエータ駆動回路113は、Bucom50の制御のもと、防振制御回路112の手ブレ補償量の演算結果に基づいて、駆動機構300を駆動して移動枠101を移動させることにより、カメラシステム1の光軸O1に直交する平面内に撮像部34を変位移動させる。
【0093】
以上のように構成された撮像部34および駆動機構300を備える撮像部移動駆動機構35が行うブレ補正動作および中立位置保持動作について説明する。
【0094】
まず、ブレ補正動作について説明する。この場合、X軸ジャイロ107は、カメラシステム1のX軸周りの回動(ブレ)の角速度を検出し、Y軸ジャイロ108は、カメラシステム1のY軸周りの角速度を検出し、Z軸ジャイロ109は、カメラシステム1のXY平面内の回動の角速度と回転中心位置を検出する。続いて、防振制御回路112は、各センサで検出されたカメラシステム1の角速度および回転中心位置に基づいて、手ブレ補償量を演算し、撮像部34を、ブレを補償するように駆動装置300により移動させる。これにより、画像に生じるブレを補償することができる。
【0095】
つぎに、中立位置保持動作について説明する。まず、カメラシステム1は、位置検出センサ106により、撮像部34が撮像レンズ21の光軸O1中心に駆動機構300により制御された状態で、引張機構405のモータ503が回転し、ローラ501が回転して可撓性部材401が引張された場合、可撓性部材401に固定された押圧板404が下方に引かれる(図10(a)→図10(b))。この場合、支持部材403が変位することで、支持部材403に固着された接触部材402が移動枠101を押圧する。これにより、移動枠101が接触部材402と接触して転動部201,202,203を押圧し、この押圧により接触部材402と移動枠101との間には摩擦力が発生し、固定枠102が移動枠101を保持することができる。
【0096】
続いて、支持部材403は、一端を固定枠102に固定されているので、固定枠102に対して接触部材402が位置決めされて保持される。これにより、移動枠101は、固定枠102に位置決めされて保持される。この状態で駆動機構300への通電を停止すると、可撓性部材401は、モータ503に取り付けられたピニオンギヤ503bからローラ501までの機構系の機械的な摩擦力により、引張された状態が保たれ、移動枠101と固定枠102の位置は保たれる。すなわち、移動枠101が固定枠102に対して中立位置に保持される。
【0097】
その後、カメラシステム1は、再び駆動機構300に通電した場合、移動枠101が固定枠102に位置決めされた状態になった状態で、モータ503を回転させて可撓性部材401を弛緩させた場合、可撓性部材401が支持部材403のバネの力により引かれ変位し(図10(b)→図10(a))、同時に支持部材403に固着された接触部材402が移動枠101から離れて固定枠102の保持が解除される。これにより、移動枠101は、固定枠102に対して自由に変位可能となる。
【0098】
以上のような構成を有する撮像部移動駆動機構35は、カメラシステム1の動きに応じて撮像部34を移動させることによって、カメラシステム1の動きに起因する撮像部34での被写体像のブレを抑制する機能、いわゆる撮像素子シフト方式の手振れ補正機能を有する。本実施の形態では、駆動機構300は撮像素子シフト方式の手ブレ補正に適用されたが、撮影レンズ側を本発明の駆動装置で移動させて像歪を補正するレンズシフト方式(チルト撮影またはアオリ撮影)に適用しても勿論良い。また、撮像部移動駆動機構35において、撮像部34を移動させるアクチュエータの構成は、本実施の形態ではVCMを用いているが、回転モータ、リニアモータ、超音波モータ等、特に限定されるものではない。
【0099】
つぎに、本実施の形態にかかるカメラシステム1の動作について説明する。図11は、本実施の形態にかかるカメラシステム1の動作を説明するフローチャートである。
【0100】
図11に示すように、カメラシステムの電源が投入されると、レンズユニット2およびボディユニット3が動作可能状態となり、ボディユニット3内のBucom50は、カメラ制御を開始する。すなわち、電源スイッチがオンしてBucom50が起動すると、システム起動時の初期設定を行う(ステップS101)。
【0101】
続いて、Bucom50は、ボディユニット3に装着されたレンズユニット2またはストロボ等のアクセサリの検出を行い(ステップS102)、各アクセサリを起動し、カメラシステム1のモードスイッチ、レリーズスイッチ等のカメラ操作SW48の状態検出を行う(ステップS103)。
【0102】
その後、Bucom50は、ブレ補正のモードのスイッチがオン状態になっているか否かを判定する(ステップS104)。ブレ補正のモードのスイッチがオン状態になっているとBucom50が判断した場合(ステップS104:Yes)、カメラシステム1は、後述するステップS126へ移行する。一方、ブレ補正のモードのスイッチがオン状態になっていないとBucom50が判断した場合(ステップS104:No)、カメラシステム1は、後述するステップS105へ移行する。
【0103】
ステップS105において、カメラシステム1は、撮像部34の撮像面上をレンズユニット2の光軸O1の中立位置に保持する中立保持動作処理を実行する。なお、中立保持動作処理の詳細な内容については後述する。
【0104】
続いて、Bucom50は、再生スイッチがオン状態であるか判断する(ステップS106)。再生スイッチがオン状態であるとBucom50が判断した場合(ステップS106:Yes)、Bucom50は、記録メディア40に記憶された画像データに対応する画像を表示部47に表示させる再生を行う(ステップS107)。その後、カメラシステム1は、ステップS108へ移行する。一方、再生スイッチがオン状態でないとBucom50が判断した場合(ステップS106:No)、カメラシステム1は、ステップS108へ移行する。
【0105】
その後、Bucom50は、動画スイッチがオン状態であるか否かを判断する(ステップS108)。動画スイッチがオン状態であるとBucom50が判断した場合(ステップS108:Yes)、Bucom50は、記録中フラグを反転する(ステップS09)。その後、カメラシステム1は、ステップS110へ移行する。一方、動画スイッチがオン状態でないとBucom50が判断した場合(ステップS108:No)、カメラシステム1は、ステップS110へ移行する。
【0106】
続いて、Bucom50は、カメラシステム1が動画記録中であるか判断する(ステップS110)。具体的には、Bucom50は、記録中フラグ(たとえば「0」→「1」)が立っているか否か判断することにより、カメラシステム1が動画記録中であるか否かを判断する。カメラシステム1が動画記録中であるとBucom50が判断した場合(ステップS110:Yes)、カメラシステム1は、後述するステップS121へ移行する。一方、カメラシステム1が動画記録中でないとBucom50が判断した場合(ステップS110:No)、カメラシステム1は、後述するステップS111へ移行する。
【0107】
ステップS111において、1stレリーズスイッチがオン状態である場合(ステップS111:Yes)、Bucom50は、撮像部34が生成する画像データから測光を行い、絞り24を制御して適性露出となるようにAE(自動露出)処理を実行し(ステップS112)、フォーカスレンズ21aを移動させながら撮像部34によって生成された画像が最大のコントラストとなるように焦点位置を制御するコントラストAF処理を実行する(ステップS113)。
【0108】
その後、Bucom50は、撮像部34に画像の撮影を行わせ、撮像部34によって生成された画像データに対応するライブビュー画像を表示部47に表示させる(ステップS114)。
【0109】
続いて、1stレリーズボタンのスイッチがオフ状態でなければ(ステップS115:No)、カメラシステム1は、ステップS106へ戻る。一方、1stレリーズボタンのスイッチがオフの場合(ステップS115:Yes)、カメラシステム1は、ステップS116へ移行する。
【0110】
ステップS116において、Bucom50は、電源ボタンのスイッチがオフ状態であるか否かを判断する。電源ボタンのスイッチがオフ状態であるとBucom50が判断した場合(ステップS116:Yes)、カメラシステム1は、本処理を終了する。一方、電源ボタンのスイッチがオフ状態でないとBucom50が判断した場合(ステップS116:No)、カメラシステム1は、ステップS106へ戻る。
【0111】
ステップS111において、1stレリーズスイッチがオン状態でない場合(ステップS111:No)について説明する。この場合、Bucom50は、2ndレリーズボタンのスイッチがオン状態であるか否かを判断する(ステップS117)。2ndレリーズボタンのスイッチがオン状態であるとBucom50が判断した場合(ステップS117:Yes)、カメラシステム1は、ステップS118へ移行する。一方、2ndレリーズボタンのスイッチがオン状態でないとBucom50が判断した場合(ステップS117:No)、カメラシステム1は、ステップS115へ移行する。
【0112】
ステップS118において、Bucom50は、撮像部34に静止画撮影を行わせ、画像処理コントローラ37に撮像部34によって生成された画像データに対して画像処理を実行させ(ステップS119)、画像処理が施された画像データを記録メディア40に記憶する(ステップS120)。その後、カメラシステム1は、ステップS115へ移行する。
【0113】
ステップS121において、Bucom50は、AE処理を実行し、AF処理を実行する(ステップS122)。
【0114】
続いて、Bucom50は、撮像部34が連続的に生成する動画撮影を行い(ステップS123)、画像処理コントローラ37で順次画像処理を施して(ステップS124)、画像処理が施された画像データを記録メディアに記憶する(ステップS125)。その後、カメラシステム1は、ステップS116へ移行する。
【0115】
ステップS126において、Bucom50は、引張機構405により撮像部34が光軸O1の中心位置に保持されている中立保持状態であるか否かを判断する。撮像部34が光軸O1の中心位置に保持されている中立保持状態であるとBucom50が判断した場合(ステップS126:Yes)、カメラシステム1は、後述するステップS127へ移行する。一方、撮像部34が光軸O1の中心位置に保持されている中立保持状態でないとBucom50が判断した場合(ステップS126:No)、カメラシステム1は、後述するステップS130へ移行する。
【0116】
ステップS127において、Bucom50は、アクチュエータ駆動回路113に駆動信号を出力して駆動機構300の駆動を開始する。
【0117】
続いて、Bucom50は、アクチュエータ駆動回路113にモータ503を駆動する駆動信号を出力して可撓性部材401を緩ませ、接触部材402が支持部材403のバネ力で移動枠101から離間させて中立保持を解除させる(ステップS128)。
【0118】
その後、Bucom50は、位置センサ504が検出したローラ503の回転位置に基づいて、中立保持状態が解除されたか否かを判断する(ステップS129)。中立保持状態が解除されたとBucom50が判断した場合(ステップS129:Yes)、カメラシステム1は、ステップS130へ移行する。一方、中立保持状態が解除されたとBucom50が判断しない場合(ステップS129:No)、カメラシステム1は、この判断を続ける。
【0119】
続いて、カメラシステム1は、撮影時におけるユーザの手ブレを補正するブレ補正動作を開始し(ステップS130)、ステップS110へ移行する。
【0120】
つぎに、ステップS105の中立保持動作処理について説明する。図12は、中立保持動作処理の概要を示すフローチャートである。
【0121】
図12に示すように、Bucom50は、位置センサ504によって検出されたローラ501の回転位置に基づいて、撮像部34が中立保持状態であるか否かを判断する(ステップS201)。撮像部34が中立保持状態であるとBucom50が判断した場合(ステップS201:Yes)、カメラシステム1は、後述するステップS202へ移行する。一方、撮像部34が中立保持状態でないとBucom50が判断した場合(ステップS201:No)、カメラシステム1は、後述するステップS206へ移行する。
【0122】
ステップS202において、Bucom50は、位置検出センサ106によって検出された検出結果に基づいて、撮像部34が中立位置許容範囲にあるか否かを判断する。撮像部34が中立位置許容範囲にあるとBucom50が判断した場合(ステップS202:Yes)、カメラシステム1は、上述した図11のメインルーチンへ戻る。一方、撮像部34が中立位置許容範囲にないとBucom50が判断した場合(ステップS202:No)、カメラシステム1は、ステップS203へ移行する。
【0123】
ステップS203〜ステップS205は、図11のステップS127およびステップS129にそれぞれ対応する。
【0124】
ステップS206において、Bucom50は、位置検出センサ106が検出する移動枠101の位置結果に基づいて、移動枠101に保持された撮像部34が所定の中立位置になるようにアクチュエータ駆動回路113に駆動信号を出力することにより、駆動機構300のX軸アクチュエータ103およびY軸アクチュエータ104を駆動する。
【0125】
続いて、Bucom50は、位置検出センサ106によって検出された位置結果に基づいて、撮像部34が中立位置の許容範囲内にあるか否かを判断する(ステップS207)。撮像部34が中立位置の許容範囲内にあるとBucom50が判断した場合(ステップS207:Yes)、カメラシステム1は、ステップS208へ移行する。一方、撮像部34が中立位置の許容範囲内にないとBucom50が判断した場合(ステップS207:No)、カメラシステム1は、ステップS206へ戻る。
【0126】
ステップS207の後、Bucom50は、アクチュエータ駆動回路113を介して引張機構405のモータ503を動作させ、可撓性部材401をローラ501で引張させることで、接触部材402を移動枠101に押圧させる引張駆動を実行する(ステップS208)。
【0127】
続いて、Bucom50は、引張機構405により所定の引張がなされたか否かを判断する(ステップS209)。引張機構405により所定の引張がなされたとBucom50が判断した場合(ステップS209:Yes)、カメラシステム1は、ステップS210へ移行する。一方、引張機構405により所定の引張がなされていないとBucom50が判断した場合(ステップS209:No)、カメラシステム1は、ステップS208へ戻る。
【0128】
ステップS209の後、Bucom50は、アクチュエータ駆動回路113を介して引張機構405の動作を停止する(ステップS210)。これにより、ローラ501による可撓性部材401の引張を停止する。
【0129】
続いて、Bucom50は、位置検出センサ106によって検出された位置結果に基づいて、撮像部34が中立位置の許容範囲内にあるか否かを判断する(ステップS211)。撮像部34が中立位置の許容範囲内にあるとBucom50が判断した場合(ステップS211:Yes)、カメラシステム1は、駆動機構300の駆動を停止し(ステップS212)、図11のメインルーチンへ戻る。一方、撮像部34が中立位置の許容範囲内にないとBucom50が判断した場合(ステップS211:No)、カメラシステム1は、ステップS203へ戻り、中立保持動作を再度行う。なお、本実施の形態では、中立動作のやり直しの回数を図示していないが、中立動作が所定回数に達した場合、中立保持動作を停止して表示部47に警告を表示させてもよい。
【0130】
以上説明した本発明の一実施の形態によれば、固定枠102と移動枠101との間に第1の駆動機構としてコイルと磁石からなるいわゆるVCMおよび移動枠101を支持する転動部201〜203を設置し、一方、移動枠101に一端が固定され、他端が駆動源としてのモータを含む保持機構105に固定され、移動枠101を押圧支持する接触部材402を設けた紐状の可撓性部材401を設け、VCMにより、移動枠101を転動部201〜203の接触部が形成する平面(XY平面)内に駆動する場合は、保持機構105で可撓性部材401を弛緩させることにより、接触部材402の摩擦力を低減して駆動機構300(VCM)の出力損失を低減して大きな出力を得ている。また、駆動装置の駆動を停止した場合に、可撓性部材401を保持機構105で引張することによって押圧板404を押圧方向に変位させることにより、接触部材402に大きな摩擦力を発生させるとともに、可撓性部材401に大きな張力を発生させ、かつ、接触部材402を支持部材403で保持することで可撓性部材401の引張方向と直交する方向に移動枠101を支持しており、固定枠102に移動枠101を確実に保持することが可能である。可撓性部材401を弛緩させることにより、接触部材402を移動枠101から離間させて、移動枠101に全く作用しないようにすることが可能である。この結果、電気エネルギーを効率よく使用することがで、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠の保持が可能で、駆動力が大きくて精密な制御が可能になる。
【0131】
また、本発明の一実施の形態によれば、高出力になるとともに、駆動を停止した場合にも移動枠101を任意の位置で保持することができる。
【0132】
さらに、本発明の一実施の形態によれば、紐状の可撓性部材401を用いることにより省スペースで、かつ、引張機構405の配置の自由度があり、また、簡単な駆動機構300であることから、小型で安価に作成することができる。さらに画像機器に本発明の駆動装置を適用した場合も、同様な効果を得られることは勿論であるが、カメラ等の精密な駆動が必要で小型な機器では、その効果は大きい。
【0133】
さらにまた、本発明の一実施の形態によれば、引張機構405を固定枠102に設けているので、省スペース化を図れるとともに、カメラシステム1を容易に組み立てることができる。
【0134】
なお、本発明の一実施の形態では、カメラシステム1が手ブレ補正モードに設定された場合について説明したが、撮像部34をカメラシステム1の光軸O1に直交する所定の平面内に撮像部34を移動させるアオリ撮影モード(チルト撮影またはシフト撮影)であっても適用することができる。この場合、Bucom50は、カメラシステム1がアオリ撮影モードに設定された場合、アクチュエータ駆動回路113を介して駆動機構300を駆動することにより、撮像部34をカメラシステム1の光軸O1に直交する所定の平面内、たとえばカメラ操作SW48から入力される指示信号に応じた位置に移動させるようにしてもよい。この場合、Bucom50は、カメラ操作SW48から入力される指示信号に応じた位置に撮像部34が到達した時点で駆動機構300を停止して引張機構405を駆動して撮像部34を所定の平面位置に停止させる。これにより、電気エネルギーを効率よく使用することができ」、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠の保持が可能で、駆動力が大きくて精密な制御でアオリ撮影を行うことができる。
【0135】
また、本発明の一実施の形態では、移動枠101上に撮像部34の撮像素子341が光学素子として配置されていたが、撮像素子341に変えてレンズであってもよい。この場合、レンズユニット2に適用することで手ブレ補正機能を有するレンズユニットを構成することができる。
【0136】
(変形例1)
上述した実施の形態において撮像部移動機構の構造を変更することも可能である。図13は、本実施の形態の変形例1にかかる撮像部移動駆動機構600の概要を模式的に示す正面図である。図14は、図13のF−F線断面図である。図15は、図13のG−G線断面である。なお、以下においては、同一の構成には同一の符号を付して説明する。
【0137】
図13〜図15に示すように、撮像部移動機構600は、撮像素子341と、移動枠601と、固定枠602と、保持機構603と、を備える。なお、撮像部移動機構600は、上述したX軸アクチュエータ103と、Y軸アクチュエータ104と、位置検出センサ106と、X軸ジャイロ107と、Y軸ジャイロ108と、Z軸ジャイロ109と、X軸加速度センサ110と、Y軸加速度センサ111と、防振制御回路112と、アクチュエータ駆動回路113とを備えるが、説明を省略するため、図示しないものとする。
【0138】
移動枠601は、撮像部34を保持する面上から上方に突起した突起部601aが形成されている。突起部601aは、断面が逆U字状に形成される。
【0139】
固定枠602は、移動枠601を保持する。固定枠602は、図14において断面が略U字状に形成される。固定枠602は、後述する可撓性部材401が巻きつけられる突起部602aを有する。
【0140】
保持機構603は、可撓性部材401と、接触部材604と、支持部材605と、引張機構405と、を備える。
【0141】
可撓性部材401は、一端が固定枠602の外周側に設けられた突起部601aに巻きつけられて接着固定され、他端がローラ501に巻きつけられて接着固定されている。
【0142】
接触部材604は、ゴムや樹脂等の弾性部材を用いて構成される。接触部材604は、支持部材605の端部に固着される。接触部材604は、中心に穴を有し(図15を参照)、筒状に形成される。接触部材604は、可撓性部材401と中心の穴の部分を摺動可能に形成される。なお、接触部材604は、可撓性部材401との摩擦を防止するため、樹脂材料で形成された可撓性パイプの外周にゴムパイプをかぶせたもの、あるいは可撓性パイプの外周にゴムコートしたもので形成してもよい。
【0143】
支持部材605は、バネ性のあるステンレス、リン青銅等の板を用いて形成される。支持部材605は、押圧方向に対して変位し易く形成され、押圧方向と直交する方向に対して殆ど変位しないように剛性を高くして形成される。支持部材605は、断面が略L字状に形成される。支持部材605は、一端を固定枠602にビス403aで固定され、他端に2つの接触部材604がそれぞれ固定されている。
【0144】
このように構成された撮像部移動機構600の動作について説明する。まず、ローラ501を回転させて、可撓性部材401に張力を与えることにより押圧力を接触部材604に与えることで、移動枠601の2箇所に設けた突起部601aの円筒面を押圧する。これにより、接触部材604は、突起部601aの円筒面に沿って変形し、移動枠601を保持する。この場合、保持力は、移動枠601の突起部601aの円筒面と接触部材604との摩擦力だけでなく、接触部材604の変形をもとに戻すための力(復元力)も加わり、大きなものとなる。
【0145】
さらに、接触部材604の変形は、支持部材605の端部も変形させる。支持部材605は、押圧方向に変位することで、可撓性部材401の引張方向のみだけでなく、それに垂直な方向にも剛性を増すことになり、移動枠601の保持がより確実なものとなる。
【0146】
以上説明した本実施の形態の変形例1によれば、電気エネルギーを効率よく使用することがで、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠101の保持が可能で、駆動力が大きくて精密な制御が可能になる(たとえば特開2010−87982号公報の図2に示すようなYステージ(中間支持部材)を介在させて置き換えることもよい)。
【0147】
(変形例2)
上述した実施の形態において撮像部移動機構の構造をさらに変更することも可能である。図16は、本実施の形態の変形例2にかかる撮像部移動駆動機構700の概要を模式的に示す正面図である。図17は、図16のH−H線断面図である。なお、以下において、同一の構成には同一の符号を付して説明する。
【0148】
図16および図17に示すように、撮像部移動機構700は、移動枠701と、移動枠701を保持する固定枠702と、保持機構703と、を備える。なお、撮像部移動機構700は、上述した撮像部34と、X軸アクチュエータ103と、Y軸アクチュエータ104と、位置検出センサ106と、X軸ジャイロ107と、Y軸ジャイロ108と、Z軸ジャイロ109と、X軸加速度センサ110と、Y軸加速度セン8サ111と、防振制御回路112と、アクチュエータ駆動回路113とを備えるが、説明を省略するため、図示しないものとする。
【0149】
保持機構703は、可撓性部材401と、接触部材704と、支持部材705と、引張機構405と、を備える。
【0150】
可撓性部材401が、一端が固定枠702の外周側に設けられた突起部702aに巻きつけられて接着固定され、他端がローラ501に巻きつけられて接着固定されている。
【0151】
接触部材704は、ゴムや樹脂等の弾性部材を用いて構成される。接触部材704は、ゴムや樹脂等の弾性部材を用いて構成される。接触部材704は、支持部材705の端部に固着される。接触部材704は、中心に穴を有し(図15を参照)、筒状に形成される。接触部材704は、可撓性部材401と中心の穴の部分を摺動可能に形成される。
【0152】
支持部材705は、バネ性のあるステンレス、リン青銅等の板を用いて形成される。支持部材705は、押圧方向に対して変位し易く形成され、押圧方向と直交する方向に対して殆ど変位しないように剛性を高くして形成される。
【0153】
このように構成された撮像部移動機構700の動作について説明する。ローラ501を回転させて可撓性部材401に与える張力をT、接触部材704に与える押圧力をFpとした場合、以下の式(1)が成り立つ。
Fp=2Tsinθ ・・・(1)
したがって、本実施の形態では、接触部材704が可能な限り移動枠701の外周部に配置し、角度(θ)を大きくするのが好ましい。
【0154】
また、摩擦力をFf、移動枠701と接触部材704の摩擦係数をμとした場合、以下の式(2)が成り立つ。
Ff=μ・Fp ・・・(2)
したがって、移動枠701および接触部材704は、互いに接触する接触部の摩擦係数(μ)を可能な限り高くすることが好ましい。たとえば、接触部材704としては、接触部材704をシリコーンゴムで構成し、移動枠701の接触部を砂目にすることが好ましい。
【0155】
また、X方向の保持は、可撓性部材401の張力Tと摩擦力Ffに依存し、より力が小さい摩擦力Ffによって決まる。
【0156】
また、Y方向の保持は、可撓性部材401の張力Tのみであると、Y方向の保持力が可撓性部材401の撓み力と摩擦力Ffに依存し、より小さい撓み力によって決まる。本実施の形態の変形例2では、接触部材704が支持部材705に固定されている。このため、支持部材705は、Y方向に充分な剛性を持っているので、摩擦力Ffによって決まる。したがって、支持部材705は、Y方向の剛性が必要であるが、それ以外の方向の剛性は必ずしも必要ではない。
【0157】
また、Z方向の保持は、ローラ501を回転させて可撓性部材401に与える張力Tによって、接触部材704に与える押圧力Fpによって決まる。
【0158】
以上説明した本実施の形態の変形例2によれば、電気エネルギーを効率よく使用することができ、簡単で安価な構成でXY平面内の駆動と、XY平面内の任意の位置で移動枠101の保持が可能で、駆動力が大きくて精密な制御が可能になる。
【0159】
(その他の実施の形態)
【0160】
また、本発明にかかるカメラシステムは、デジタル一眼レフカメラ以外にも、例えばアクセサリ等を装着可能なデジタルカメラ、デジタルビデオカメラおよび撮影機能を有する携帯電話やタブレット型携帯機器等の電子機器にも適用することができる。
【0161】
また、本発明にかかるカメラシステムは、デジタル一眼レフカメラ以外にも、手ブレ補正機能付き電子双眼鏡等にも適用することができる。
【0162】
なお、本明細書におけるフローチャートの説明では、「まず」、「その後」、「続いて」等の表現を用いてステップ間の処理の前後関係を明示していたが、本発明を実施するために必要な処理の順序は、それらの表現によって一意的に定められるわけではない。すなわち、本明細書で記載したフローチャートにおける処理の順序は、矛盾のない範囲で変更することができる。
【0163】
このように、本発明は、ここでは記載していない様々な実施の形態を含みうるものであり、特許請求の範囲によって特定される技術的思想の範囲内で種々の設計変更等を行うことが可能である。
【符号の説明】
【0164】
1 カメラシステム
2 レンズユニット
3 ボディユニット
21 撮像レンズ
21a フォーカスレンズ
21b 変倍レンズ
22 レンズ駆動部
23,106 位置検出部
23a,23,106,504 位置検出センサ
24 絞り
25 絞り駆動部
26 レンズ記憶部
27 レンズ通信部
28 レンズ制御用マイクロコンピュータ
31 シャッター
32 シャッターチャージ機構
33 シャッター制御回路
34 撮像部
35,600,700 撮像部移動駆動機構
36 撮像部インターフェース回路
37 画像処理コントローラ
38 SDRAM
39 FlashROM
40 記録メディア
41 EEPROM
42 ストロボ
43 ストロボ制御回路
44 電源回路
45 電源
46 動作表示用LED
47 表示部
48 カメラ操作SW
49 本体通信部
50 ボディ制御用マイクロコンピュータ
101,601,701 移動枠
102,602,702 固定枠
103 X軸アクチュエータ
104 Y軸アクチュエータ
105,603,703 保持機構
107 X軸ジャイロ
108 Y軸ジャイロ
109 Z軸ジャイロ
110 X軸加速度センサ
111 Y軸加速度センサ
112 防振制御回路
113 アクチュエータ駆動回路
201,202,203 転動部
204,205,206 突起部
207,208,209 押さえバネ
300 駆動機構
301 VCM
301XA,301XB,301YA,301YB VCM
303 磁石
304,305 ヨーク
341 撮像素子
342 光学ローパスフィルタ
343 防塵フィルタ
344 圧電素子
345 防塵フィルタ制御回路
401 可撓性部材
402,604,704 接触部材
403,605,705 支持部材
404 押圧板
405 引張機構
【特許請求の範囲】
【請求項1】
複数の転動部を介して固定枠に押圧して支持され、水平方向に移動可能な移動枠と、
前記移動枠を前記固定枠内で水平方向に移動させる駆動機構と、
前記移動枠と離接自在な接触部材と、
一端側に前記接触部材が設けられ、他端側を前記固定枠に固定した支持部材と、
前記接触部材が接続され、引張または弛緩可能な可撓性部材と、
前記可撓性部材が接続され、該可撓性部材を引張状態または弛緩状態にする引張機構と、
を備え、
前記引張機構により前記可撓性部材を引張状態にした場合、前記移動枠が前記接触部材と接触して前記転動部を押圧し、該押圧による摩擦力により前記固定枠が前記移動枠を保持する一方、前記引張機構により前記可撓性部材を弛緩状態にした場合、前記接触部材が前記移動枠から離れて前記固定枠が前記移動枠の保持を解除することを特徴とする駆動装置。
【請求項2】
前記転動部は、前記固定枠上に少なくとも3つ以上配置され、
前記可撓性部材は、前記複数の転動部をそれぞれ通過する直線で結ぶ領域上に配置されていることを特徴とする請求項1に記載の駆動装置。
【請求項3】
前記転動部は、前記固定枠上に3つ配置され、
前記可撓性部材は、3つの前記転動部をそれぞれ通過する直線で形成される三角形の領域上に配置されていることを特徴とする請求項1または2に記載の駆動装置。
【請求項4】
前記可撓性部材は、一端側に前記接触部材を接続し、他端側を前記固定枠に配置することを特徴とする請求項1〜3のいずれか一つに記載の駆動装置。
【請求項5】
前記移動枠は、平面から突起した突起部を有し、
前記接触部材は、変形可能であり、
前記可撓性部材は、前記接触部材を貫通して保持することを特徴とする請求項1〜3のいずれか一つに記載の駆動装置。
【請求項6】
前記駆動機構は、ボイスコイルモータ、リニアモータ、回転モータまたは超音波モータのいずれか一つであることを特徴とする請求項1〜5のいずれか一つに記載の駆動装置。
【請求項7】
前記可撓性部材は、紐状または帯状をなすことを特徴とする請求項1〜6のいずれか一つに記載の駆動装置。
【請求項8】
前記引張機構は、前記固定枠に設けられていることを特徴とする請求項1〜7のいずれか一つに記載の駆動装置。
【請求項9】
前記移動枠は、光学素子が配置されていることを特徴とする請求項1〜8のいずれか一つに記載の駆動装置。
【請求項10】
被写体を撮像して該被写体の画像データを生成する撮像装置であって、
請求項9に記載の駆動装置と、
前記光学素子の位置を変位させる所定の撮影モードが設定された場合、当該撮像装置の撮影光軸に直交する平面内に前記光学素子を変位させるように前記駆動装置を駆動するとともに、前記可撓性部材を弛緩状態になるように前記引張機構を駆動する一方、前記所定の撮影モードが設定されていない場合、前記駆動装置の駆動を停止するとともに、前記可撓性部材を引張状態になるように前記引張機構を駆動する制御部と、
を備えたことを特徴とする撮像装置。
【請求項11】
当該撮像装置のブレを検出するブレ検出部をさらに備え、
前記所定の撮影モードは、当該撮像装置のブレを補償する手ブレ補正モードであり、
前記制御部は、前記手ブレ補正モードが設定された場合、前記ブレ検出部が検出した検出結果に基づいて、当該撮像装置の撮影光軸に直交する平面内に前記光学素子を変位させるように前記駆動装置を駆動することを特徴とする請求項10に記載の撮像装置。
【請求項12】
前記所定の撮影モードは、前記光学素子を当該撮像装置の撮影光軸に直交する所定の平面内に前記光学素子を移動させるアオリ撮影モードであり、
前記制御部は、前記アオリ撮影モードが設定された場合、前記所定の平面内に前記光学素子を移動させるように前記駆動装置を駆動し、該所定の平面内に前記光学素子が到達したとき、前記駆動装置の駆動を停止して前記引張機構を駆動することを特徴とする請求項10に記載の撮像装置。
【請求項13】
前記光学素子は、撮像素子または撮像レンズであることを特徴とする請求項10〜12のいずれか一つに記載の撮像装置。
【請求項1】
複数の転動部を介して固定枠に押圧して支持され、水平方向に移動可能な移動枠と、
前記移動枠を前記固定枠内で水平方向に移動させる駆動機構と、
前記移動枠と離接自在な接触部材と、
一端側に前記接触部材が設けられ、他端側を前記固定枠に固定した支持部材と、
前記接触部材が接続され、引張または弛緩可能な可撓性部材と、
前記可撓性部材が接続され、該可撓性部材を引張状態または弛緩状態にする引張機構と、
を備え、
前記引張機構により前記可撓性部材を引張状態にした場合、前記移動枠が前記接触部材と接触して前記転動部を押圧し、該押圧による摩擦力により前記固定枠が前記移動枠を保持する一方、前記引張機構により前記可撓性部材を弛緩状態にした場合、前記接触部材が前記移動枠から離れて前記固定枠が前記移動枠の保持を解除することを特徴とする駆動装置。
【請求項2】
前記転動部は、前記固定枠上に少なくとも3つ以上配置され、
前記可撓性部材は、前記複数の転動部をそれぞれ通過する直線で結ぶ領域上に配置されていることを特徴とする請求項1に記載の駆動装置。
【請求項3】
前記転動部は、前記固定枠上に3つ配置され、
前記可撓性部材は、3つの前記転動部をそれぞれ通過する直線で形成される三角形の領域上に配置されていることを特徴とする請求項1または2に記載の駆動装置。
【請求項4】
前記可撓性部材は、一端側に前記接触部材を接続し、他端側を前記固定枠に配置することを特徴とする請求項1〜3のいずれか一つに記載の駆動装置。
【請求項5】
前記移動枠は、平面から突起した突起部を有し、
前記接触部材は、変形可能であり、
前記可撓性部材は、前記接触部材を貫通して保持することを特徴とする請求項1〜3のいずれか一つに記載の駆動装置。
【請求項6】
前記駆動機構は、ボイスコイルモータ、リニアモータ、回転モータまたは超音波モータのいずれか一つであることを特徴とする請求項1〜5のいずれか一つに記載の駆動装置。
【請求項7】
前記可撓性部材は、紐状または帯状をなすことを特徴とする請求項1〜6のいずれか一つに記載の駆動装置。
【請求項8】
前記引張機構は、前記固定枠に設けられていることを特徴とする請求項1〜7のいずれか一つに記載の駆動装置。
【請求項9】
前記移動枠は、光学素子が配置されていることを特徴とする請求項1〜8のいずれか一つに記載の駆動装置。
【請求項10】
被写体を撮像して該被写体の画像データを生成する撮像装置であって、
請求項9に記載の駆動装置と、
前記光学素子の位置を変位させる所定の撮影モードが設定された場合、当該撮像装置の撮影光軸に直交する平面内に前記光学素子を変位させるように前記駆動装置を駆動するとともに、前記可撓性部材を弛緩状態になるように前記引張機構を駆動する一方、前記所定の撮影モードが設定されていない場合、前記駆動装置の駆動を停止するとともに、前記可撓性部材を引張状態になるように前記引張機構を駆動する制御部と、
を備えたことを特徴とする撮像装置。
【請求項11】
当該撮像装置のブレを検出するブレ検出部をさらに備え、
前記所定の撮影モードは、当該撮像装置のブレを補償する手ブレ補正モードであり、
前記制御部は、前記手ブレ補正モードが設定された場合、前記ブレ検出部が検出した検出結果に基づいて、当該撮像装置の撮影光軸に直交する平面内に前記光学素子を変位させるように前記駆動装置を駆動することを特徴とする請求項10に記載の撮像装置。
【請求項12】
前記所定の撮影モードは、前記光学素子を当該撮像装置の撮影光軸に直交する所定の平面内に前記光学素子を移動させるアオリ撮影モードであり、
前記制御部は、前記アオリ撮影モードが設定された場合、前記所定の平面内に前記光学素子を移動させるように前記駆動装置を駆動し、該所定の平面内に前記光学素子が到達したとき、前記駆動装置の駆動を停止して前記引張機構を駆動することを特徴とする請求項10に記載の撮像装置。
【請求項13】
前記光学素子は、撮像素子または撮像レンズであることを特徴とする請求項10〜12のいずれか一つに記載の撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−101279(P2013−101279A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−245936(P2011−245936)
【出願日】平成23年11月9日(2011.11.9)
【出願人】(504371974)オリンパスイメージング株式会社 (2,647)
【出願人】(000000376)オリンパス株式会社 (11,466)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月9日(2011.11.9)
【出願人】(504371974)オリンパスイメージング株式会社 (2,647)
【出願人】(000000376)オリンパス株式会社 (11,466)
[ Back to top ]