
駆動装置
【課題】自由に組み立てることができる玩具において、多用途に構成部品として使用できる駆動装置の提供を図る。
【解決手段】駆動装置10であって、玩具の構成部品として形成され、着脱可能に設けられた原動部11及び動力伝達部12を内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される駆動手段13を備えた駆動装置本体14を有する。
【解決手段】駆動装置10であって、玩具の構成部品として形成され、着脱可能に設けられた原動部11及び動力伝達部12を内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される駆動手段13を備えた駆動装置本体14を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動装置に係り、特に、ロボットコンテストに使用されるロボット等の玩具、模型の構成部品として使用される駆動装置に関する。
【背景技術】
【0002】
近年、中学校・高等学校、高等専門学校等において、各学生同士が作成したロボット同士をゲーム形式で対戦形式で、箱を積み上げたり、ボールを搬送したりする適宜の作業を行う優劣を競うロボットコンテストが開催されている。
上記ロボットコンテストに際しては、各学生がアイデアを出しながら、工作パーツを組み合わせることにより、出場用のロボットが製作されている。
【0003】
このような工作パーツとしては、例えば、ロボットの移動手段として構成された走行装置がある。上記ロボットコンテストにおいては、相手のロボットとの対戦競技の中で、段差のある部位や、様々な障害物を乗り越える必要があることから、ロボットの駆動手段として無限軌道走行装置を使用する場合も多い。
【0004】
このようなロボットコンテストにおいて使用される無限軌道走行装置は、従来、板状のフレームと、この板状のフレームの両側に配設された一対の無限軌道部とを備え、上記板状のフレーム上に原動機、駆動力伝達部及びバッテリーを固定するように構成されている。
【0005】
このように構成された従来の無限軌道装置にあっては、無限軌道部に駆動力を供給する原動機、駆動力伝達部及びバッテリーを配置するスペースを確保するために上記板状のフレームが必要となり、この板状のフレームの両側に無限軌道装置が配設されていることから、他の部材、部品等との接合に関しては制約があり、ロボットコンテストに向けてのロボットの製作の自由度には限界があった。
【0006】
従って、本来、ロボット製作における自由な発想を重視し、児童や学生の知育に資するための教育的な観点から行われているロボットコンテストの趣旨から、子供や学生に、より自由な発想を可能とし、様々な部品と自由に組み合わせて様々な形態のロボットを作製することができる、ロボット作成の自由度を確保できる走行装置が望まれていた。
【0007】
また、さらに、様々な形態のロボットを構成することについての要望があることから、原動機及び駆動力伝達機構等の部品を取り外し、アセンブリーとして走行以外の目的にも容易に適用でき、また、無限軌道を取りはずした状態で他の用途にも容易に適用できる汎用性に富んだ駆動装置があれば便利である。
【0008】
このような観点から、原動機や駆動力伝達機構を内部に備える無限軌道装置を調査したところ以下のような文献が発見された(特許文献1、特許文献2、特許文献3)。
【特許文献1】特公昭49−21676
【特許文献2】特公昭47−12139
【特許文献3】特開平06−305455
【発明の開示】
【発明が解決しようとする課題】
【0009】
上記特許文献1には、無限軌道装置内部にモータ及び駆動力伝達機構が備えられた玩具としてのスノーモビルが開示されている。また、上記特許文献2には無限軌道内部に原動機及び駆動力伝達機構が内蔵されたモータ駆動玩具が開示されている。また、上記特許文献3には、同様に原動機及び伝達機構を内蔵したクローラ式走行装置が開示されている。
【0010】
しかしながら、上記特許文献に開示されたいずれの無限軌道装置にあっても、無限軌道装置全体があらかじめ一体となって形成されているものであり、原動機及び駆動力伝達機構のみを取り外し他の用途に使用しうるようには構成されていない。さらに、上記無限軌道装置を備えた玩具等を全体としてそのまま他の用途に利用するようには構成されていない。
【0011】
上記ロボットコンテストにおいては、学生の自由かつ柔軟なアイデアにより各工作パーツを組み合わせて構成することにより各種のロボットを製作することにより、児童の知育や学生の自主性、主体性の醸成を図ることを趣旨とするものであり、また、上記ロボットコンテストでは、使用可能な工作パーツも限定されることから、ユニット的に各構成部品が複数の用途に使用できることが望ましい。
【0012】
そこで、本発明が解決しようとする課題は、自由に組み立てることができる玩具において、多様途に構成部品として使用できる駆動装置を提供することにある。
【課題を解決するための手段】
【0013】
このような技術的課題の解決のため、請求項1記載の発明は、駆動装置10であって、玩具の構成部品として形成され、着脱可能に設けられた原動部11及び動力伝達部12を内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される駆動手段13を備えた駆動装置本体14を有することを特徴とする。
【0014】
したがって、上記駆動装置10は、原動部11からの動力が上記動力伝達部12を介して上記駆動手段13へ伝達されることにより駆動されている。
また、上記原動部11及び上記動力伝達部12は、上記駆動装置10に内装されている。
上記駆動装置本体14は、夫々玩具の構成部品として形成されているため、上記各構成部品をロボットコンテスト等における様々な形態を構成する部品として、様々な用途に使用することができる。
【0015】
請求項2記載の発明は、上記駆動手段13は無限軌道15であって、上記無限軌道15を駆動しうる駆動輪16と従動輪17とを有し、上記動力伝達部12を介して上記駆動輪16に動力を供給する上記原動部11及び上記動力伝達部12は上記駆動輪16と上記従動輪17との間に設けられていることを特徴とする。
【0016】
したがって、上記無限軌道15は、上記動力伝達部12を介して供給される上記原動部11からの動力により駆動されている。
【0017】
請求項3記載の発明は、上記駆動輪16は駆動装置本体14の一端部18に配置されると共に他端部19には従動輪17が配置され、上記駆動輪16の内方には上記原動部11及び上記動力伝達部12が設けられ、上記無限軌道15は駆動輪16及び上記従動輪17に巻装され、駆動輪15により上記無限軌道15が駆動されて走行するように走行装置28として構成されていることを特徴とする。
【0018】
したがって、上記駆動装置10は、上記駆動輪16を介して駆動され、上記無限軌道15により走行することができる。
【0019】
請求項4記載の発明は、上記駆動装置本体14は車軸フレーム部20を有し、上記駆動輪16及び従動輪17は軸部21を介して上記車軸フレーム部20に回動可能に固定されていると共に、上記動力伝達部12は互いに歯合するギア比の異なる複数の歯車22を有し、上記歯車22は歯車軸部23を介して上記車軸フレーム部20に回動可能に固定されていることを特徴とする。
【0020】
したがって、上記車軸フレーム部20により回動可能に固定された上記駆動輪16及び従動輪17により上記駆動装置本体14を走行させることができる。
また、互いにギア比の異なる複数の歯車22を有する動力伝達部12により上記原動部11から発生する駆動力の大きさを上記複数の歯車により変換して駆動することができる。
【0021】
請求項5記載の発明は、上記車軸フレーム部20は複数のフレーム部24に分割形成され、上記原動部11及び動力伝達部12は同一フレームに夫々着脱可能に固定されていることを特徴とする。
【0022】
したがって、上記車軸フレーム部20に設けられた上記原動部11及び動力伝達部12を夫々分離して別個に、夫々駆動装置10以外の用途に使用することもできる。
【0023】
請求項6記載の発明は、上記車軸フレーム部は、複数のフレーム部に分割され、上記分割されたフレーム部は、上記駆動輪が設けられた駆動輪側方フレーム部と、上記従動輪が設けられた従動輪側方フレーム部と、上記駆動輪側方フレーム部と上記従動輪側方フレーム部との間に配置され、上記動力伝達部が設けられた動力伝達部側方フレーム部と、上記従動輪側方フレーム部と上記動力伝達部側方フレーム部との間に配置され、上記原動部が設けられた原動部取付フレーム部とにより構成され、上記駆動輪側方フレーム部と、上記原動部取付フレーム部は、夫々上記動力伝達部側方フレーム部に夫々着脱可能に固定され、上記動力伝達部側方フレーム部と上記従動輪側方フレーム部とが互いに無限軌道の長さ方向において移動可能に固定されていることを特徴とする。
【0024】
請求項7記載の発明は、上記従動輪側方フレーム部には、無限軌道の長さ方向に沿って設けられたスライド長孔部が設けられ、上記動力伝達フレーム部には、上記スライド長孔部の長さ方向に沿って移動しうるように配置されたスライド棒部が設けられていることを特徴とする。
【0025】
請求項8記載の発明は、上記動力伝達部側方フレーム部は、一対の動力伝達部フレームと、上記各動力伝達部フレーム同士を支持しうるように設けられた動力伝達部支柱とにより形成され、上記従動輪側方フレーム部は、一対の従動輪フレームと、上記各従動輪フレーム同士を支持しうるように設けられた従動輪支柱とにより形成され、上記動力伝達部側方フレーム部は上記従動輪フレーム間に配置され、上記動力伝達部フレームの外側面には、無限軌道の長さ方向に沿って設けられた案内溝部が設けられ、上記従動輪フレームの内側面には、上記動力伝達部フレームに設けられている案内溝部と係合して、上記動力伝達部側方フレーム部を無限軌道の長さ方向に沿って移動しうるように形成されている突条が設けられていることを特徴とする。
【0026】
請求項9記載の発明は、上記突条は上記従動輪フレームの各内側面に設けられ、上記各案内溝部には、無限軌道の長さ方向に沿って所定の間隔寸法をおいて配置された複数の凹部が設けられ、上記各突条には、上記案内溝部に設けられた上記各凹部に係合して、上記動力伝達部側方フレーム部を長さ方向に対する移動を固定しうるように形成された凸部が設けられ、上記各案内溝部に設けられている各凹部は、夫々上記動力伝達部側方フレーム部の幅方向中心を基準として対称位置に配置され、上記各突条に設けられている各凸部は、夫々上記従動輪側方フレーム部の幅方向中心を基準として対称位置に配置されている。
【0027】
請求項10記載の発明は、上記従動輪側方フレーム部及び、上記駆動輪側方フレーム部にはそれぞれ取付孔部が設けられ、上記従動輪側方フレーム部と、上記駆動輪側方フレーム部とは、上記各取付孔部を介して上記無限軌道の長さ方向に沿って設けられた細長板状延長部材により着脱可能に固定され、無限軌道の長さ方向において延長可能に形成されていることを特徴とする。
【0028】
請求項11記載の発明は、上記原動部11及び動力伝達部12は、一体的に着脱可能に形成されていることを特徴とする。
したがって、上記原動部11及び動力伝達部12を一体として駆動装置10から着脱し、他の用途に使用することもできる。
【0029】
請求項12記載の発明は、上記各歯車軸部23は上記車軸フレーム部20を貫通して外方へ延設され、上記歯車22と共に回動可能に形成され、延設された各歯車軸部23の先端部には、駆動装置本体14を走行させうる外装車輪26が装着されうるように構成されていることを特徴とする。
【0030】
したがって、上記駆動装置10は、上記各歯車軸部23の先端部に装着された外装車輪26及び無限軌道15の双方により走行することができる。
【0031】
請求項13記載の発明は、上記複数の歯車22は、原動部11に備えられた原動歯車27に歯合する、原動歯車27に対してギヤ比の小さな歯車22aと、駆動輪16に歯合する、上記原動歯車27に対してギヤ比の大きな歯車22dと、上記ギヤ比の小さな歯車22bと大きな歯車22cとの間に配置された上記中間のギヤ比の歯車22b,22cとにより構成され、上記外装車輪26は上記いずれかの歯車軸部23a,23b,23c,23dに着脱可能に固定されることを特徴とする。
【0032】
したがって、上記外装車輪26を上記いずれかの歯車軸部23a,23b,23c,23dに装着することにより外装車輪26を必要に応じた速度及びトルクで回動することができる。
【0033】
請求項14記載の発明は、上記複数の駆動装置本体14は、各駆動装置本体14の車軸フレーム部20が、夫々、相互に連結手段36により結合されることにより無限軌道15の長さ方向において互いに並列に配置され、各駆動装置本体14は個別に駆動制御されるように構成されていることを特徴とする。
したがって、上記駆動装置本体14を上記無限軌道15の長さ方向において夫々並列に配置されている駆動装置10として使用することができる。
【0034】
請求項15記載の発明は、上記複数の駆動装置本体14は、上記車軸フレーム部20が相互に上記連結手段36により結合されることにより無限軌道15の長さ方向において直列に配置されていることを特徴とする。
したがって、上記駆動装置本体14を上記無限軌道15の長さ方向において夫々直列に配置されている駆動装置10として使用することができる。
【0035】
請求項16記載の発明は、上記並列に配置された複数の駆動装置本体14は、無限軌道15の長さ方向に沿って互いに連結手段36によって接合されることにより直列に配置され、複数の駆動装置本体14は個別に駆動制御されるように構成されていることを特徴とする。
したがって、上記並列に配置されている駆動装置本体14を無限軌道15の長さ方向において直列に配置されている駆動装置10として使用することができる。
【0036】
請求項17記載の発明は、上記並列に配置された複数の駆動装置本体14の互いに対向する車軸フレーム部20に接合され上記駆動装置本体14の上方へ延設された支持フレーム部29を有し、上記支持フレーム29は上記駆動装置本体の上方に配置されるテーブル部30を有することを特徴とする。
【0037】
したがって、上記テーブル部30上に様々なロボット構成部品や創作玩具の構成部品等を配設することができる。
【0038】
請求項18記載の発明は、一対の脚部31,31と、上記一対の脚部31,31に夫々取り付けられると共に互いに連結手段36により結合されて並列に配置された上記駆動装置本体14とを備え、上記脚部31と駆動装置本体14とは、一端部37が上記歯車軸部23に固定されると共に、他端部38が上記脚部31の上端部39に回動可能に固定されたクランク軸部40と、一端部41が上記車軸フレーム部20に固定されると共に他端部42が上記脚部31に長さ方向に沿って開設された長孔74内において、上記長孔74の長さ方向に沿って移動しうるように配置される揺動軸部43とを有することを特徴とする。
【0039】
したがって、上記原動部10の駆動力が上記クランク軸40を介して上記脚部31、31に伝達され、上記脚部31、31によって歩行可能な歩行装置として使用することができる。
【0040】
請求項19記載の発明は、上記駆動輪16及び従動輪17が軸支されている車軸フレーム部20には、上記無限軌道15が巻装される補助輪32が装着されることを特徴とする。
したがって、上記駆動装置10は上記補助輪32により支持されている。
【0041】
請求項20記載の発明は、玩具の構成部品として形成され、着脱可能に設けられた原動部11と動力伝達部12とを内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される搬送手段44を有することを特徴とする。
したがって、上記駆動装置10は、上記搬送手段44により荷物を搬送することができる搬送装置として使用することができる。
【0042】
請求項21記載の発明は、上記搬送手段44はベルトコンベア46であることを特徴とする。
したがって、上記駆動装置10は、上記ベルトコンベア46に荷物を載置して搬送できる搬送装置として使用することができる。
【0043】
請求項22記載の発明は、上記駆動装置本体14は、ロボットコンテストにおいて使用されるロボットの構成部品として使用されることを特徴とする。
したがって、上記駆動装置本体14を、ロボットコンテストにおける様々な構成部品に使用することができる。
【発明の効果】
【0044】
本発明は、上記のように構成されているので、以下の効果を奏する。
請求項1記載の発明によれば、上記駆動装置10は、原動部11と、動力伝達部12とを内装した駆動手段13を有する駆動装置本体14を備えていることから、上記駆動装置10を構成部品として用い何らかの玩具等を構成する場合に、上記原動部11や動力伝達部12を配置するスペースを別途必要としない。
【0045】
従って、上記駆動装置10を用いて様々な形態、構成の組立玩具を形成する場合、例えばロボットコンテストに出品するためのロボットを製作する場合に、ロボットの設計、製作の自由度を確保することができる。
【0046】
また、上記駆動装置10は、玩具の構成部品として形成されていることから、上記駆動装置10全体として、広く様々な用途に自由に使用することができる。
【0047】
さらに、上記原動部11及び動力伝達部12は、着脱可能に設けられていることから、多様な構成部品と自由に組み合わせて、様々な玩具、例えば、様々な形態、構成のロボットコンテスト用のロボットを製作することができ、特に、玩具の設計、製作の自由度を確保することができる。
【0048】
請求項2記載の発明によれば、上記原動部11及び上記動力伝達部12は、駆動輪16と従動輪17の間に設けられていることから、上記駆動手段13を備えた駆動装置10を用いてロボット等の組立玩具を設計する場合には、別途上記原動部11や上記動力伝達部12を配設するスペースが不要となる。
【0049】
従って、ロボット等の組立玩具の設計や配置において制約がなく、様々な形態や構成の玩具を製作することができる。
【0050】
また、上記駆動手段13は無限軌道15からなることから、駆動装置10が走行装置28として利用された場合には、段差や様々な障害物を乗り越えることができるロボットコンテスト用のロボット等の玩具を提供することができる。
【0051】
請求項3記載の発明によれば、上記原動部11及び上記動力伝達部12は上記駆動輪16の内方に配置されていることから、請求項2記載の効果と同様に、上記駆動装置10の外部に別途上記原動部及び上記動力伝達部12を配置するスペースを設ける必要がなく、構成の自由度を有する駆動装置を提供することができる。
【0052】
請求項4記載の発明によれば、上記駆動輪16及び上記従動輪17は、軸部21を介して上記車軸フレーム部20に回動可能に固定されていることから、上記駆動輪16及び従動輪17により、上記駆動装置本体14を走行させることができる。
【0053】
また、上記動力伝達部12は互いに歯合するギア比の異なる複数の歯車22を有することから、上記原動部11から発生する駆動力の大きさを上記複数の歯車により変換して駆動輪に伝達することができる。
【0054】
請求項5記載の発明によれば、上記車軸フレーム部20は複数のフレーム部24に分割形成され、上記原動部11及び動力伝達部12は同一フレームに夫々着脱可能に固定されていることから、原動部11及び動力伝達部12を、夫々、分離して別個に、夫々駆動装置10以外の用途に使用することができる。
【0055】
請求項6記載の発明によれば、上記動力伝達部側方フレーム部と、上記従動輪側方フレーム部とは互いに無限軌道の長さ方向において移動可能に固定されていることから、上記従動輪側方フレーム部に取り付けられている上記従動輪17wと、上記動力伝達部側方フレーム部を介して取り付けられている上記駆動輪側方フレーム部に設けられている上記駆動輪16w間の間隔寸法を自由に変更することができる。
【0056】
上記従動輪と上記駆動輪間の間隔寸法を自由に変更することにより、ロボットコンテスト等で作成される組み立て玩具等において必要とされる長さ寸法を有する駆動装置本体を形成することができる。
また、市販のされている様々な長さ寸法を有する無限軌道を使用することができるため、上記無限軌道の種類に限定されず、ロボットコンテスト等においてロボット等の製作の自由度を確保することができる。
【0057】
その結果、組み立て玩具やロボットコンテスト等において、長さ寸法が大きな駆動装置を作成する必要がある場合にあっても、上記従動輪と上記駆動輪間の間隔寸法を自由に変更することにより、駆動装置本体の長さ寸法を変更することができるため、上記駆動装置を組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
従って、従来の無限軌道の駆動装置においては一定の長さ寸法に限定されていたために、ロボットコンテストで作成される組立玩具の作成の自由度が制限されるという不具合を解消することができる。
また、様々な長さ寸法を有する無限軌道を使用したい場合には、別途駆動輪と従動輪と、及び上記駆動輪と従動輪間に配置されて使用されるフレーム部材等を組み合わせて作成しなければならず、また、上記作成した駆動装置にあっては、自由に長さ寸法を変更することができず、煩雑であるという不具合を解消することができる。
【0058】
請求項7記載の発明によれば、上記従動輪側方フレーム部には、無限軌道の長さ方向に沿って形成されたスライド長孔部と、上記動力伝達部側方フレーム部に設けられているスライド棒部により、上記動力伝達部を、上記無限軌道の長さ方向に沿って移動可能に保持されている。
したがって、上記スライド長孔部を介して上記駆動装置の長さ寸法を伸縮することができるため、安定して伸縮可能な駆動装置を形成することができる。
【0059】
請求項8記載の発明よれば、上記従動輪側方フレーム部に設けられている突条を上記動力伝達部側方フレーム部に設けられている案内溝部に移動可能に係合させることにより、上記動力伝達部側方フレームと上記従動輪側方フレーム部とを、上記無限軌道の長さ方向において移動可能に保持することができる。
【0060】
請求項9記載の発明によれば、上記突条に設けられている凸部を上記案内溝部に設けられている凹部に嵌入させることにより、上記駆動装置の長さ方向への移動を阻止することができ、上記動力伝達部側方フレーム部と上記従動輪側方フレーム部との間の間隔寸法を一定状態で保持することができる。
また、上記各案内溝部に設けられている各凹部は、夫々上記動力伝達部側方フレーム部の幅方向中心を基準として対称位置に配置され、上記各突条に設けられている各凸部は、夫々上記従動輪側方フレーム部の幅方向中心を基準として対称位置に配置されていることから、上記各凸部を、上記各凹部に夫々嵌入させることにより、上記動力伝達部側方フレーム部と、上記従動輪側方フレーム部とが互いに上記車軸フレーム部の幅方向同位置で固定され、上記動力伝達部側方フレーム部と、上記従動輪側方フレーム部との長さ方向に対する移動を固定する際にあっては、上記各動力伝達部側方フレーム部と上記従動輪側方フレーム部とが幅方向において傾くことなく容易に固定することができる。
【0061】
請求項10記載の発明によれば、上記従動輪側方フレーム部と、上記駆動輪側方フレーム部とは、上記各取付孔部を介して上記無限軌道の長さ方向に沿って設けられた細長板状延長部材により着脱可能に固定され、無限軌道の長さ方向において延長可能に形成されていることから、上記従動輪と上記駆動輪間の間隔寸法を自由に変更することができる。
【0062】
上記従動輪と上記駆動輪間の間隔寸法を自由に変更することにより、ロボットコンテスト等で作成される組み立て玩具等において必要とされる長さ寸法を有する駆動装置本体を形成することができる。
また、市販のされている様々な長さ寸法を有する無限軌道を使用することができるため、上記無限軌道の種類に限定されず、ロボットコンテスト等においてロボット等の製作の自由度を確保することができる。
【0063】
その結果、組み立て玩具やロボットコンテスト等において、長さ寸法が大きな駆動装置を作成する必要がある場合にあっても、上記従動輪と上記駆動輪間の間隔寸法を自由に変更することにより、駆動装置本体の長さ寸法を変更することができるため、上記駆動装置を組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
【0064】
請求項11記載の発明によれば、上記原動部11及び動力伝達部12は一体に着脱可能に形成されていることから、上記原動部11及び動力伝達部12を一体として駆動装置10から着脱でき、原動部11及び動力伝達部12を一つのユニットとして他の用途に使用することができる。
【0065】
請求項12記載の発明によれば、上記各歯車軸部23の先端部25には、外装車輪26が装着されうることから、請求項7記載の発明により走行装置28を構成した場合には、上記先端部25に上記外装車輪26を装着することにより、上記外装車輪26及び上記駆動手段13の双方により走行することができる。
【0066】
したがって、このように構成された走行装置28にあっては、上記外装車輪26により走行可能であるとともに、障害物がある場合には、上記無限軌道により走行することにより障害物を乗り越えることができ、多様な走行形態を実現できる走行装置28を提供することができる。
【0067】
請求項13記載の発明によれば、上記外装車輪26はギヤ比の異なる各歯車軸部23に着脱可能に固定されていることから、必要に応じて、上記外装車輪26を上記歯車軸部23から離脱させ、他のギヤ比の歯車の歯車軸部23に装着することができることから、所望の速度及びトルクにより上記外装車輪26を駆動することができる。
【0068】
その結果、請求項8記載の発明により走行装置28を構成した場合には、走行状況に応じて、速度及びトルクを適宜変更することができる走行装置28を構成することができる。
【0069】
請求項14記載の発明によれば、上記駆動装置本体14は並列に配置されていることから、例えば、走行装置28として駆動装置10を使用した場合には、安定して走行可能な走行装置28として、使用することができる。
また、走行装置28以外の用途に利用する場合には、並行に配置された2つの駆動部を使用する駆動装置として利用することができる。
【0070】
また、請求項14記載の発明にあっては、上記駆動装置本体14は個別に駆動制御されるように構成されていることから、駆動装置10が走行装置28として使用された場合には、各駆動装置本体14の駆動状態を個別に制御することにより、上記駆動装置10の走行状態を自由に制御することができる。
同様に、上記のように駆動装置として利用された場合にも、駆動状態を個別に制御することができるため、多様な駆動状態を形成することができる。
【0071】
請求項15記載の発明によれば、駆動装置本体14は無限軌道の長さ方向に沿って直列に配置されていることから、駆動力を直列方向に出力する駆動装置を提供することができる。
また、請求項10記載の発明に係る発明に係る駆動装置本体14を走行装置28として使用した場合には、幅寸法の小さい走行装置28を形成することができる。
また、駆動装置本体14を走行装置28以外の用途の、駆動力を提供する装置として使用した場合には、駆動力を直列に出力する駆動装置として利用することができる。
【0072】
請求項16記載の発明によれば、上記駆動装置10は並列に配置された複数の駆動装置本体14が互いに接合されていることから、駆動装置本体14からの駆動力が直列方向であってかつ並列に、全体として大きな出力が出力される駆動装置が提供される。
【0073】
また、本請求項に係る駆動装置本体14が走行装置28として利用された場合には、駆動装置本体14が直列状態であって、かつ並列に配置され、大きな駆動力でかつ安定した走行ができる走行装置28が提供される。
【0074】
請求項17記載の発明によれば、上記駆動装置10は、上記テーブル部30を有することから、上記テーブル部30上に様々なロボット構成部品や創作玩具の構成部品等を配設することができる。
【0075】
また、上記テーブル部30は、上方に延設された上記支持フレーム部29により、上記駆動装置本体14の上方に配置されていることから、上記駆動装置本体14間に障害物がある場合においても、上記テーブル部30は上記障害物に衝接することなく、走行することが可能となり、例えば、ロボットコンテストにおけるロボットの構成上の多様性を確保することができる。
【0076】
請求項18記載の発明によれば、上記駆動装置本体14と、上記一対の脚部31,31とが、回動可能に固定されたクランク軸部40、40及び、上記脚部31,31に設けられた長孔において、長さ方向に沿って移動可能に配置されていることから、上記クランク軸部が回動することにより、上記脚部31,31が駆動される。
したがって、上記駆動装置10により上記脚部31,31を駆動することによって設置面上を歩行可能な駆動装置として使用することができる。
【0077】
請求項19記載の発明によれば、上記補助輪32が装着されていることから、無限軌道15の回転時における保持箇所が増加するため、上記駆動輪16により上記無限軌道が駆動された場合に、上記無限軌道15が駆動輪16及び従動輪17から脱離することを抑止し、安定した巻装状態を維持することができる。
また、上記駆動装置10は上記補助輪32で支持されているため、上記駆動装置10にかかる荷重を分散することができ、上記駆動装置を安定して走行させることができる。
【0078】
請求項20記載の発明によれば、上記駆動装置10を物品を搬送しうる搬送装置として使用することができる。
【0079】
請求項21記載の発明によれば、上記搬送装置はベルトコンベアにより駆動されていることから、上記ベルトコンベア上に荷物等を載置して搬送できる搬送装置として使用することができる。
【0080】
請求項22記載の発明によれば、上記駆動装置本体14をロボットコンテストにおいて使用できるロボットの構成部品として使用できることから、設計構成における制限が少なく、様々な用途に使用することができる。
したがって、児童や学生のより自由な発想を可能とし、上記発想を具現化できるロボットの製作を可能とするものである。
【発明を実施するための最良の形態】
【0081】
以下、添付図面に示す実施の形態に基づき、本発明にかかる駆動装置10を詳細に説明する。
【0082】
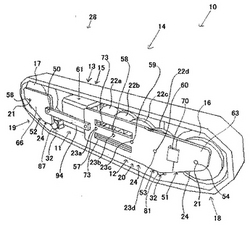
図1に示すように、本実施の形態に係る駆動装置10は、玩具の構成部品として形成され、着脱可能に設けられた原動部11及び動力伝達部12を内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される駆動手段13を備えた駆動装置本体14により構成されている。
【0083】
上記駆動手段13は無限軌道15であって、上記無限軌道15を駆動しうる駆動輪16と従動輪17とを有し、上記動力伝達部12を介して上記駆動輪16に動力を供給する上記原動部11及び上記動力伝達部12は上記駆動輪16と上記従動輪17との間に設けられている。
【0084】
上記駆動輪16は駆動装置本体14の一端部18に配置されると共に他端部19には従動輪17が配置され、上記駆動輪16の内方には上記原動部11及び上記動力伝達部12が設けられ、上記無限軌道15は駆動輪16及び上記従動輪17に巻装され、駆動輪15により上記無限軌道15が駆動されて走行する走行装置28として構成されている。
【0085】
上記駆動装置本体14は車軸フレーム部20を有し、上記駆動輪16及び従動輪17は軸部21を介して上記車軸フレーム部20に回動可能に固定されていると共に、上記動力伝達部12は互いに歯合するギア比の異なる複数の歯車22を有し、上記歯車22は歯車軸部23を介して上記車軸フレーム部20に回動可能に固定されている。
【0086】
上記車軸フレーム部20は複数のフレーム部24に分割形成され、上記原動部11及び動力伝達部12は同一フレームに夫々着脱可能に固定されている。
【0087】
上記車軸フレーム部は、複数のフレーム部に分割され、上記分割されたフレーム部は、上記駆動輪が設けられた駆動輪側方フレーム部と、上記従動輪が設けられた従動輪側方フレーム部と、上記駆動輪側方フレーム部と上記従動輪側方フレーム部との間に配置され、上記動力伝達部が設けられた動力伝達部側方フレーム部と、上記従動輪側方フレーム部と上記動力伝達部側方フレーム部との間に配置され、上記原動部が設けられた原動部取付フレーム部とにより構成され、上記駆動輪側方フレーム部と、上記原動部取付フレーム部は、夫々上記動力伝達部側方フレーム部に夫々着脱可能に固定され、上記動力伝達部側方フレーム部と上記従動輪側方フレーム部とが互いに無限軌道の長さ方向において移動可能に固定されている。
【0088】
上記従動輪側方フレーム部には、無限軌道の長さ方向に沿って設けられたスライド長孔部が設けられ、上記動力伝達フレーム部には、上記スライド長孔部の長さ方向に沿って移動しうるように配置されたスライド棒部が設けられている。
【0089】
上記動力伝達部側方フレーム部は、一対の動力伝達部フレームと、上記各動力伝達部フレーム同士を支持しうるように設けられた動力伝達部支柱とにより形成され、上記従動輪側方フレーム部は、一対の従動輪フレームと、上記各従動輪フレーム同士を支持しうるように設けられた従動輪支柱とにより形成され、上記動力伝達部側方フレーム部は上記従動輪フレーム間に配置され、上記動力伝達部フレームの外側面には、無限軌道の長さ方向に沿って設けられた案内溝部が設けられ、上記従動輪フレームの内側面には、上記動力伝達部フレームに設けられている案内溝部と係合して、上記動力伝達部側方フレーム部を無限軌道の長さ方向に沿って移動しうるように形成されている突条が設けられている。
【0090】
上記突条は上記従動輪フレームの各内側面に設けられ、上記各案内溝部には、無限軌道の長さ方向に沿って所定の間隔寸法をおいて配置された複数の凹部が設けられ、上記各突条には、上記案内溝部に設けられた上記各凹部に係合して、上記動力伝達部側方フレーム部を長さ方向に対する移動を固定しうるように形成された凸部が設けられ、上記各案内溝部に設けられている各凹部は、夫々上記動力伝達部側方フレーム部の幅方向中心を基準として対称位置に配置され、上記各突条に設けられている各凸部は、夫々上記従動輪側方フレーム部の幅方向中心を基準として対称位置に配置されている。
【0091】
上記従動輪側方フレーム部及び、上記駆動輪側方フレーム部にはそれぞれ取付孔部が設けられ、上記従動輪側方フレーム部と、上記駆動輪側方フレーム部とは、上記各取付孔部を介して上記無限軌道の長さ方向に沿って設けられた細長板状延長部材により着脱可能に固定され、無限軌道の長さ方向において延長可能に形成されている。
【0092】
上記原動部11及び動力伝達部12は、一体的に着脱可能に形成されている。
【0093】
上記各歯車軸部23は上記車軸フレーム部20を貫通して外方へ延設され、上記歯車22と共に回動可能に形成され、延設された各歯車軸部23の先端部には、駆動装置本体14を走行させうる外装車輪26が装着されうるように構成されている。
【0094】
上記複数の歯車22は、原動部11に備えられた原動歯車27に歯合する、原動歯車27に対してギヤ比の小さな歯車22aと、駆動輪16に歯合する、上記原動歯車27に対してギヤ比の大きな歯車22dと、上記ギヤ比の小さな歯車22aと大きな歯車22dとの間に配置された上記中間のギヤ比の歯車22b,22cとにより構成され、上記外装車輪26は上記いずれかの歯車軸部23に着脱可能に固定される。
【0095】
上記複数の駆動装置本体14は、各駆動装置本体14の車軸フレーム部20が、夫々、相互に連結手段により結合されることにより無限軌道15の長さ方向において互いに並列に配置され、各駆動装置本体14は個別に駆動制御されるように構成されている。
【0096】
上記複数の駆動装置本体14は、上記車軸フレーム部20が相互に上記連結手段36により結合されることにより無限軌道15の長さ方向において直列に配置されている。
【0097】
上記並列に配置された複数の駆動装置本体14は、無限軌道15の長さ方向に沿って互いに連結手段36によって接合されることにより直列に配置され、複数の駆動装置本体14は個別に駆動制御されるように構成されている。
【0098】
上記並列に配置された複数の駆動装置本体14の互いに対向する車軸フレーム部20に接合され上記駆動装置本体14の上方へ延設された支持フレーム部29を有し、上記支持フレーム29は上記駆動装置本体の上方に配置されるテーブル部30を有する。
【0099】
一対の脚部31,31と、上記一対の脚部31,31に夫々取り付けられると共に互いに連結手段36により結合されて並列に配置された上記駆動装置本体14とを備え、上記脚部31と駆動装置本体14とは、一端部37が上記歯車軸部23に固定されると共に、他端部38が上記脚部31の上端部39に回動可能に固定されたクランク軸部40と、一端部41が上記車軸フレーム部20に固定されると共に他端部42が上記脚部31に長さ方向に沿って開設された長孔74内において、上記長孔74の長さ方向に沿って移動しうるように配置される揺動軸部43とを有する。
【0100】
上記駆動輪16及び従動輪17が軸支されている車軸フレーム部20には、上記無限軌道15が巻装される補助輪32が装着される。
【0101】
玩具の構成部品として形成され、着脱可能に設けられた原動部11と動力伝達部12とを内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される搬送手段44を有し、上記搬送手段44はベルトコンベア46により形成されている。
【0102】
上記駆動装置本体14は、ロボットコンテストにおいて使用されるロボットの構成部品として使用される。
【実施例】
【0103】
本発明に係る駆動装置の第一実施例を示す。本実施例に係る駆動装置10にあっては、図1に示すように、ロボットコンテストに使用されるロボット等の玩具、模型の構成部品として使用される。
【0104】
図1〜図3に示すように、上記車軸フレーム部20は、複数のフレーム部24に分割され、上記分割されたフレーム部24は、上記駆動装置本体14の一端部18に配置された駆動輪側方フレーム部51と、上記駆動装置本体14の他端部19に配置された従動輪側方フレーム部52と、上記駆動輪側方フレーム部51と上記従動輪側方フレーム部52との間に設けられた動力伝達部側方フレーム部53と、上記従動輪側方フレーム部52と上記動力伝達部側方フレーム部53との間に配置された原動部取付フレーム部61とにより構成されている。
上記車軸フレーム部20を構成する駆動輪側方フレーム部51と、上記従動輪側方フレーム部52と、上記動力伝達部側方フレーム部53と、上記原動部取付フレーム部61は所定の剛性を有するプラスティック素材により形成されている。
【0105】
図2に示すように、上記駆動輪側方フレーム部51は横断面コ字状に形成され、底面部62と、上記底面部62の両側端縁部から直角に延設された一対の側面部63,63とを有している。
図2に示すように、上記側面部63、63には、上記側面部63に貫通して設けられた固定軸孔部54,54と、取付孔部49,49と、上記駆動装置本体14内方に向かって延設された左右一対のフレーム係合爪部70,70とが形成されている。
上記底面部62には、上記補助輪32を固定可能な固定孔部64が形成されている。
【0106】
上記フレーム結合爪部70、70は、上記駆動装置本体14内方に向かって延設され、上記車軸フレーム部20の幅方向略中央部に配設され、上記車軸フレーム部20の幅方向の寸法の略半分の幅寸法に形成されている。
【0107】
図2、図3に示すように、上記フレーム係合爪部70、70は、可撓性を有する板状プラスティック素材により形成され、上記フレーム係合爪部70,70の先端部には、後述の上記動力伝達部側方フレーム部53に設けられた原動部側方フレーム取付溝部71,71の深さ寸法L7と略同一の長さ寸法L8に形成され、上記駆動装置本体14内方に屈曲された爪先端部80,80が形成されている。
【0108】
上記駆動輪側方フレーム部51の底面部62には、補助輪32aが設けられ、上記補助輪32aは横断面コ字状に形成された補助輪固定具82により、補助輪81が回動可能に固定されている。
上記補助輪固定具82は、上面部83と、上記上面部83の両側端縁部から直角方向へ延設された側面部84,84とにより形成されている。
【0109】
図2に示すように、上記補助輪81は短円筒状に形成され、上記側面部84,84間に挿通された回動軸85により、上記側面部84,84間に回動可能に支持されている。
上記上面部83には、補助輪固定具82の取付孔部86が設けられ、上記補助輪固定具82は、上記取付孔部86と、上記駆動輪側方フレーム部51の底面部62に設けられた固定孔部64との間に挿通された螺子により着脱可能に固定されている。
【0110】
図2に示すように、上記従動輪側方フレーム部52は、横断面コ字状に形成され、底面部65と、上記底面部65の両側端縁部から直角に延設された一対の側面部66、66とを有している。
図2に示すように、上記側面部66、66には、上記側面部66、66に貫通して設けられた固定軸孔部56、56と、取付孔部50、50とが形成されている。
上記底面部65には、上記補助輪32を固定可能な固定孔部67が形成されている。
【0111】
上記従動輪側方フレーム部52の底面部65には、補助輪32bが設けられ、上記補助輪32bは横断面コ字状に形成された補助輪固定具88により、補助輪87が回動可能に支持されている。
上記補助輪固定具88は、上面部89と、上記上面部89の両側端縁部から直角方向へ延設された側面部90,90とにより形成されている。
【0112】
図2に示すように、上記補助輪87は短円筒状に形成され、上記側面部90,90間に挿通された回動軸91により、上記側面部90,90の間に回動可能に支持されている。
上記上面部89には、補助輪固定具88の取付孔部92が設けられている。
上記補助輪固定具88は、上記取付孔部92と上記従動輪側方フレーム部52の底面部65に設けられた固定孔部67との間に挿通された螺子93により着脱可能に固定されている。
【0113】
上記原動部取付フレーム部61は、上記原動部11が圧入されうる横断面口字状の筒型形状に形成され、底面部75と、上記底面部75の両側端縁部から直角に延設された一対の側面部76,76と、上記側面部76,76の上端縁部において、上記底面部75と平行して形成された上面部77とを有している。
【0114】
上記側面部76,76には、上記動力伝達部側方フレーム部53に設けられている原動部側方フレーム取付溝部72に係合可能なフレーム係合爪部78、78が形成されている。
【0115】
上記フレーム結合爪部78、78は、上記駆動装置本体14内方に向かって延設され、上記車軸フレーム部20の幅方向略中央部に配設され、上記車軸フレーム部20の幅方向寸法の略半分の幅寸法に形成されている。
【0116】
上記フレーム係合爪部78、78は、可撓性を有する板状プラスティック素材により形成され、上記フレーム係合爪部78,78の先端部には、上記動力伝達部側方フレーム部53に設けられた原動部側方フレーム取付溝部72,72の深さ寸法L3と略同一の長さ寸法L4に形成され、上記駆動装置本体14内方に屈曲された爪先端部79,79が設けられている。
【0117】
上記原動部11は、電動モーターにより形成され、上記底面部75と、一対の側面部76,76と、上面部77とにより形成された原動部取付フレーム部61に着脱可能に圧入されている。
上記電動モーターは、回転子と、上記回転子と相互作用して回転モーメントを発生させる固定子と、上記回転子の回転を外部に伝える原動軸部189とにより形成され、上記原動軸部189の先端部には原動歯車27が設けられている。
【0118】
図2、図3に示すように、上記動力伝達部側方フレーム部53は、横断面コ字状に形成され、底面部68と、上記底面部68の両側端縁部から直角に延設された一対の側面部69,69とを有している。
【0119】
上記側面部69、69には、上記側面部69、69に貫通して設けられた歯車軸部孔部57,58,59、60と、取付孔部47,48と、駆動輪側方フレーム取付溝部71と、原動部側方フレーム取付溝部72と、窓部73,73とが形成されている。
【0120】
図2、図3に示すように、上記歯車軸部孔部57,58,59,60は、上記動力伝達部側方フレーム部53の側面部69において、幅方向略中央位置に長さ方向に沿って、所定の間隔寸法をおいて形成されている。
【0121】
上記歯車軸部孔部57,58,59,60は、上記動力伝達部側方フレーム部53の側面部69の幅方向において、上記底面部68からの高さ寸法が、上記各歯車22a,22b,22c,22dのうち最大の半径寸法を有する歯車の半径寸法より大きい高さ寸法に形成されている。
【0122】
上記窓部73,73は、所定の幅寸法を有し、上記動力伝達部側方フレーム部53の長さ方向に沿って、上記歯車軸部57,58,59,60を中心として鏡像位置に、幅方向に所定の間隔寸法を置いて一対に並列に設けられている。
【0123】
図2、図3に示すように、上記駆動輪側方フレーム取付溝部71は、上記動力伝達部側方フレーム部53の長さ方向駆動輪側方フレーム部51側の側端縁部において、幅方向に沿って設けられている。
上記駆動輪側方フレーム取付溝部71の長さ寸法は、上記駆動輪側方フレーム部51の上記フレーム係合爪部70の幅寸法と略同一の幅寸法を有し、上記動力伝達部側方フレーム部53に設けられたフレーム係合爪部70が係合しうる形状に形成されている。
【0124】
上記原動部側方フレーム取付溝部72は、上記動力伝達部側方フレーム部53の長さ方向原動部取付フレーム部61側の側端縁部において、幅方向に沿って設けられている。
上記原動部側方フレーム取付溝部72の長さ寸法は、上記原動部取付フレーム部61の上記フレーム係合爪部78の幅寸法と略同一の幅寸法を有し、上記原動部取付フレーム部61に設けられたフレーム係合爪部78が係合しうる形状に形成されている。
【0125】
図2に示すように、上記従動輪側方フレーム部52は、上記車軸フレーム部20の長さ方向両側方において設けられた棒状固定部材94,94により上記動力伝達部側方フレーム部53に対し着脱可能に固定されている。
上記棒状固定部材94,94は、細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部95が同一間隔を置いて複数設けられている。
【0126】
上記棒状固定部材94は、上記孔部95のうち一の孔部95a及び、上記従動輪側方フレーム部52の上記側面部66に設けられた上記取付孔部50を介して、この間に挿通される螺子96により上記従動輪側方フレーム部52に対して着脱可能に固定されるとともに、上記孔部95のうち一の孔部95b及び、上記動力伝達部側方フレーム部53の側面部69に設けられた取付孔部47を介して、この間に挿通される螺子97により上記動力伝達部側方フレーム部53に対して着脱自在に固定されている。
【0127】
図2,3に示すように、上記原動部取付フレーム部61には、原動機98が圧入され、上記原動部取付フレーム部61のフレーム係合爪部78側には、上記原動機98に備えられた原動歯車27が突出して形成されている。上記原動歯車27はピニオンギヤにより形成されている。
【0128】
図2、図3に示すように、上記歯車22a,22b,22c,22dは、互いにギア比の異なる複数の歯車からなり、上記原動歯車27に対してギヤ比の小さな歯車22aと、上記駆動輪16に歯合する、上記原動歯車27に対してギヤ比の大きな歯車22dと、上記ギヤ比の小さな歯車22aとギヤ比の大きな歯車22dとの間に配置された上記中間の歯車22b及び歯車22cとにより構成されている。
【0129】
図3に示すように、上記ギヤ比の小さな歯車22aはフェースギヤ104及び、上記フェースギヤ104の直径寸法より小さな径寸法を有し、上記フェースギヤ104と隣接して共に回動可能に固定された平歯車109により形成されている。
【0130】
図3に示すように、上記中間のギヤ比の歯車22bは平歯車105及び、上記平歯車105の直径寸法より小さな径寸法を有し、上記平歯車105と隣接して共に回動可能に固定された平歯車106により形成されている。
図3に示すように、上記中間のギヤ比の歯車22cは平歯車107及び、上記平歯車107の直径寸法より小さな径寸法を有し、上記平歯車107と隣接して共に回動可能に固定された平歯車108により形成されている。
【0131】
図3に示すように、上記各歯車22a,22b、22c、22dは、上記動力伝達部側方フレーム部53の側面部69,69に設けられた各歯車軸部孔部57,57間、58,58間、59,59間、60,60間に挿通された各歯車軸部23a,23b,23c,23dに固定され、上記動力伝達部側方フレーム部53に対して回動可能に支持されている。
【0132】
上記歯車軸部孔部57,58間の間隔寸法は上記平歯車109と上記平歯車105の半径寸法の和の間隔寸法と略同一寸法に形成され、上記歯車軸部孔部58,59間の間隔寸法は上記歯車106と上記歯車107との半径寸法の和の間隔寸法と略同一寸法に形成され、上記歯車軸部孔部59,60間の間隔寸法は上記歯車108と上記歯車22dの半径寸法の和の間隔寸法と略同一寸法に形成されている。
【0133】
上記原動歯車27は上記フェースギヤ104と歯合し、上記平歯車109は上記平歯車105と歯合し、上記平歯車106は上記平歯車107と歯合し、上記平歯車108は上記歯車22dに歯合している。
【0134】
上記動力伝達部側方フレーム部53の側面部69,69に設けられた各歯車軸部孔部57,57間、58,58間、59,59間、60,60間に挿通された各歯車軸部23a,23b,23c,23dは、横断面六角形状に形成され、上記各歯車22a,22b,22c,22d内の中心に設けられた各軸穴圧入され、軸方向に着脱可能に形成されている。
【0135】
上記各歯車軸部23a,23b,23c,23dの長さ寸法は、上記側面部69,69間の幅寸法と略同一の長さ寸法に形成されている。
【0136】
図2に示すように、上記駆動輪16は、所定の厚さ寸法を有する全体円盤状に形成され、上記駆動輪側方フレーム部51の側面部63,63の高さ寸法L17よりも大きい直径寸法L18を有している。
上記駆動輪16は、上記駆動輪側方フレーム部51の底面部62及び上記側面部63,63の上端から夫々突出するように形成されている。
【0137】
図3に示すように、上記駆動輪16の側方には、上記駆動輪16と共に回動可能な駆動歯車111が隣接して形成されている。
上記駆動歯車111の直径寸法は、上記駆動輪側方フレーム部51を上記動力伝達部側方フレーム部53に係合させた場合に、上記動力伝達部側方フレーム部53に形成された歯車22dと歯合し、上記駆動歯車111が回動可能な径寸法に形成されている。
【0138】
図3に示すように、上記駆動輪16は、上記駆動輪側方フレーム部51の側面部63,63に設けられた固定軸孔部54,54間に挿通された駆動輪固定軸110により固定され、上記駆動輪側方フレーム部51に対して回動可能に支持されている。
上記駆動輪16の外周面には、上記無限軌道15と歯合し、上記無限軌道15を駆動可能な無限軌道歯車112が形成されている。
【0139】
図2に示すように、上記従動輪17は、所定の厚さ寸法を有する全体円盤状に形成され、上記従動輪側方フレーム部52の側面部66,66の高さ寸法よりも大きい直径寸法を有している。
上記従動輪17は、上記従動輪側方フレーム部52の底面部65及び上記側面部66,66の上端から夫々突出するように形成されている。
上記従動輪17は、上記従動輪側方フレーム部52の側面部66,66に設けられた固定軸孔部56,56間に挿通された従動輪固定軸117に固定され、上記従動輪側方フレーム部52に対して回動可能に支持されている。
【0140】
図1に示すように、上記無限軌道15は、上記車軸フレーム部20の幅寸法と略同一の幅寸法を有し、無端帯状に形成されている。
【0141】
上記無限軌道15は、上記駆動輪側方フレーム部51に設けられた駆動輪16と、上記従動輪側方フレーム部52に設けられた従動輪17と、上記駆動輪側方フレーム部51の底面部62に設けられた上記補助輪81と、上記従動輪側方フレーム部52の底面部65に設けられた上記補助輪87とに掛け回されて装着されている。
【0142】
その結果、図1に示すように、上記無限軌道15の内方には、上記原動部11が内包された原動部取付フレーム部61と、上記歯車22が設けられた動力伝達部側方フレーム部53とが配設されている。
【0143】
図6は本発明に係る駆動装置の第二実施例を示す。本実施例に係る駆動装置10aにあっては、上記駆動装置本体14a,14bは、上記無限軌道15の長さ方向に対し直交するように配置された幅方向連結材123により結合され、上記無限軌道15の長さ方向において互いに並列に配置されている。
上記幅方向連結材123は、横断面矩形の細長板状に形成され、上記幅方向連結材123の幅方向中央には孔部124が設けられ、上記孔部124は、長さ方向に沿って所定の間隔寸法を置いて複数形成されている。
【0144】
図6、図11、図12に示すように、上記駆動装置本体14a,14bの動力伝達部側方フレーム部53a、53bの側面部69a、69bには取付孔部が設けられ、上記取付孔部には、図11、図12に示す横断面形状がL字型の板状のL字型固定具が着脱可能に取り付けられている。
【0145】
図11、図12に示すように、上記L字型固定具125は、側面部128と上面部129とにより形成され、上記側面部128及び上記上面部129は夫々直角方向に配設されている。
【0146】
図11、図12に示すように、上記L字型固定具125の上記側面部128及び上記上面部129は夫々横断面矩形の細長板状に形成され、上記側面部128及び上記上面部129の夫々の幅方向中央部には、長さ方向に沿って孔部130、131が同一間隔を置いて複数設けられている。
【0147】
図6、図11、図12に示すように、上記L字型固定具125は、上記動力伝達部側方フレーム部53aの側面部69aに設けられた取付孔部に対して、上記L字型固定具125の上記側面部128に設けられた孔部130のうち一の孔部130aを介してボルトとナットにより着脱可能に固定されるとともに、上記L字型固定具125は、上記幅方向連結材123の一端部に設けられた孔部124aに対し、上記L字型固定具125の上記上面部129に設けられた孔部131のうち一の孔部131aを介してボルトとナットにより着脱可能に固定されている。
【0148】
同様に上記駆動装置本体14aと並列して配置されている上記駆動装置本体14bの側面部53bの上記駆動装置本体14b側に設けられた取付孔部には、図11、図12に示すL字型固定具が着脱可能に取り付けられている。
【0149】
図4は本発明に係る駆動装置の第三実施例を示す。本実施例に係る駆動装置10fにあっては、上記外装車輪26,26は、円筒形状に形成され、上記駆動装置本体14r、14tの上記動力伝達部側方フレーム部53r、53tの側面部69,69を貫通して外方に延設された各歯車軸部23a,23b,23c,23dのいずれかの先端部25a,25b,25c,25dに装着して回転させうるようにして構成されている。
【0150】
図5に示すように、上記外装車輪26を各歯車軸部23a,23b,23c,23dのいずれかの先端部25a,25b,25c,25dに装着する場合には、上記各歯車軸部23a,23b,23c,23dを上記各歯車軸部23a,23b,23c,23dの夫々の軸穴及び、上記歯車軸部孔部57,58,59,60から抜き取り、上記側面部69,69間の幅寸法L19より長く、かつ、上記外装車輪26を固定しうる長さ寸法L21を有する歯車軸部23e,23f,23g,23hを圧入し、これらの歯車軸部23e,23f,23g,23hに上記外装車輪26を固定する。
【0151】
図4に示すように、上記外装車輪26の直径寸法L24は、上記駆動装置本体14に設けられた無限軌道15の高さ寸法L25よりも大きい径寸法により形成されている。
【0152】
図7は本発明に係る駆動装置の第四実施例を示す。本実施例に係る駆動装置10bにあっては、上記幅方向連結材123a,123b,123cとにより夫々並列に配置された6基の駆動装置本体14eと14f,14gと14h,14iと14jが、無限軌道15の長さ方向に沿って長さ方向連結材材137により結合されている。
【0153】
上記長さ方向連結材材137は、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部138が同一間隔を置いて複数設けられている。
上記幅方向連結材123a,123b,123cは、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部139が同一間隔を置いて複数設けられている。
【0154】
上記駆動装置10bは、上記駆動装置本体14eと14fとを結合する上記幅方向連結材123aの長さ方向略中間位置に設けられている孔部139aと、上記長さ方向連結材材137の孔部138のうち一端部に設けられた孔部138aとが固定され、上記駆動装置本体14iと14jとを結合する上記幅方向連結材123cの長さ方向略中間位置に設けられている孔部139cと、上記長さ方向連結材材137の孔部138のうち他端部に設けられた孔部138cとが固定され、上記駆動装置本体14gと14hとを結合する上記幅方向連結材123bの長さ方向略中間位置に設けられている孔部139bと、上記長さ方向連結材材137の孔部138のうち孔部138aと、138cとの中間位置に設けられた孔部138bとが固定されている。
【0155】
上記駆動装置10bを構成する上記駆動装置本体14e,14f,14g,14h,14i,14jは夫々原動部と、動力伝達部と、上記駆動装置本体14e,14f,14g,14h,14i,14jの一端部に設けられた駆動輪と、他端部に設けられた従動輪とを有し、上記駆動輪と従動輪に巻装された無限軌道により形成されている。
【0156】
図8は本発明に係る駆動装置の第五実施例を示す。本実施例に係る駆動装置10cにあっては、上記並列に配置された複数の駆動装置本体14n、14pの互いに対向する車軸フレーム部20n,20pに接合され上記駆動装置本体14n、14pの上方へ延設された支持フレーム部29a,29b,29c,29dを有し、上記支持フレーム部29a,29b,29c,29dの上端部は上記駆動装置本体14n、14pの上方に配置され、固定孔部144a,144b,144c,144dを介して着脱可能に固定されたテーブル部30が設けられている。
【0157】
上記テーブル部30は平面矩形の板状体より形成され、組み立て玩具やロボットコンテストで用いられる各種構成部材が載置可能な程度の所定の剛性を有している。
上記テーブル部30は上記駆動装置10cの走行面192に対して略水平状態に維持され、上記テーブル部30上にロボットコンテストで作成されるロボットの各種構成部品を載置して搬送可能な程度の所定の広さ面積を有する。
【0158】
上記テーブル部30の各隅部には固定孔部144a,144b,144c,144dが形成され、上記テーブル部30は、上記支持フレーム部29a,29b,29c,29dに対して、上記固定孔部144a,144b,144c,144dを介して夫々固定されている。
【0159】
上記支持フレーム部29a,29b,29c,29dは、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部140、141、142、143が同一間隔を置いて複数設けられている。
【0160】
図8に示すように、上記支持フレーム部29aは、上記駆動輪側方フレーム部51nに対して、上記支持フレーム部29aの一端部に設けられた孔部140aと、上記駆動装置本体14nの上記駆動輪側方フレーム部51nの側面部63nに設けられた取付孔部49nを介して、螺子によって着脱可能に固定されている。
【0161】
上記支持フレーム部29aの他端部には、図11に示す横断面形状L字型のL字型固定具が設けられている。
上記L字型固定具は、側面部と上面部とにより形成され、上記側面部及び上記上面部は夫々直角方向に配設されている。
【0162】
上記L字型固定具は、上記支持フレーム部29aの他端部に対して、上記L字型固定具の側面部に設けられた孔部と、上記支持フレーム部29aの他端部に設けられた孔部とを介して螺子によって着脱可能に固定されている。
【0163】
上記テーブル部30は、上記L字型固定具の上面部に設けられた孔部と、上記テーブル部30の隅部に設けられた固定孔部144aとを介して上記支持フレーム部29aの他端部に着脱可能に固定されている。
【0164】
上記支持フレーム部29bも同様に、上記駆動装置本体14nの従動輪側方フレーム部52nに着脱可能に固定され、上記支持フレーム部29c、29dも夫々駆動装置本体14pに対して着脱可能に固定されている。
【0165】
上記テーブル部30は、上記各支持フレーム部29a,29b,29c,29dに対して、着脱可能に固定された上記各支持フレーム部29a,29b,29c,29dに固定されている上記L字型固定具を介して、上記駆動装置本体14n,14pの上方に着脱可能に固定されている。
【0166】
図9は本発明に係る駆動装置の第六実施例を示す。本実施例に係る駆動装置10dにあっては、一対の脚部31a,31bと、上記一対の脚部31a,31bに夫々取り付けられると共に互いに連結部材36aにより結合されて並列に配置された上記駆動装置本体14s,14kとを備えた歩行装置183として形成されている。
【0167】
上記連結部材36aは、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部147が同一間隔を置いて複数設けられている。
【0168】
上記連結部材36aは両端部において、上記動力伝達部側方フレーム部53s、53kに対して、L字型固定具125s、125kを介して螺子により、着脱可能に固定されている。
【0169】
上記脚部31a、31bは、上記駆動装置14s,14kの長さ方向に沿って並列に配置され、歩行面148に対して略垂直方向に立設されている。
上記脚部31a、31bの下端部には、上記脚部31a、31bの長さ方向に対して直角に延設された板状の接地面部149a、149bが設けられている。
【0170】
上記脚部31a、31bは、横断面矩形の細長板状に形成され、上記脚部31a,31bの長さ方向中間部には、長さ方向に沿って長孔74a,74bが夫々形成され、下端部の幅方向中央部には、長さ方向に沿って孔部163,164が同一間隔を置いて複数設けられている。
【0171】
図9に示すように、上記接地面部149a、149bは、互いに並列に配設された平面長方形状の接地主面部193a,193bと、上記接地主面部193a,193bに延設された凸部150a,150bとにより、全体形状平面凸型に形成されている。
上記接地面部149aの凸部150aと、上記接地面部149bの凸部150bとは互いに上記駆動装置10dの内方に向かって突出するように形成されている。
【0172】
上記脚部31a、31bと、上記接地面部149a、149bとは、夫々横断面L字型形状のL字型固定具151,152を介して固定されている。
上記L字型固定具151,152は、側面部153、154と下面部155,156とにより形成され、上記側面部153,154と上記下面部155,156とは夫々直角方向に形成されている。
【0173】
図9に示すように、上記接地面部149a、149bは、上記L字型固定具151、152に対して、上記接地主面部193a,193bに設けられた孔部と、上記L字型固定具151、152の下端部155、156に設けられた孔部157、158とを介して、螺子によって夫々着脱可能に固定されている。
【0174】
上記L字型固定具151、152は、上記脚部31a、31bの下端部165a,165bに対して、L字型固定具151、152の側面部153,154に形成された孔部161、162と、上記脚部31a、31bに設けられた孔部163、164のうち、上記脚部31a,31bの下端部に設けられた孔部163a,164aとを介して、螺子によって着脱可能に固定されている。
【0175】
図9、図13、図14に示すように、上記駆動装置本体14s、14kの動力伝達部側方フレーム部53s、53kに設けられた歯車軸部23d,23dには、上記クランク軸部40s、40kの一端部37a、37bが夫々固定されている。
【0176】
図13に示すように、上記クランク軸部40s、40kは、細長板状の連結部166と、上記連結部166の一端部から直角方向へ延設された歯車軸固定管部167とにより形成されている。
図13に示すように、上記歯車軸固定管部167は、上記歯車軸固定管部167の内方に歯車軸部23が挿入可能な空洞部168が形成され、上記歯車軸固定管部167の外周面には、上記歯車軸固定管部167の内方に向かって貫通して配設された歯車軸固定螺子169が装着されている。
【0177】
図13に示すように、上記連結部166は、幅方向中央部において、長さ方向に沿って孔部170が同一間隔をおいて複数設けられている。
【0178】
図14に示すように、上記クランク軸部40sの一端部37aにおいては、上記動力伝達部側方フレーム部53を貫通して外方へ延設された歯車軸部23を、上記歯車軸固定管部167の空洞部168内に収納固定し、上記歯車軸固定螺子169で固定させることにより、上記歯車軸部23に対し着脱可能に固定されている。
【0179】
図14に示すように、上記クランク軸部40sの他端部38aは、上記脚部31aに対して、上記孔部170のうち最外方の孔部170aと、上記脚部31に設けられた孔部163のうち上端部39aに設けられた孔部163bとに挿通されたボルト171とを介して、上記ボルト171に歯合されたナット172によって回動可能かつ、着脱可能に形成されている。
【0180】
同様に、上記駆動装置本体14kの脚部31bは、上記駆動装置本体14kの上記動力伝達部側方フレーム部を貫通して外方へ延設された歯車軸部23に対して、上記クランク軸部を介して回動可能かつ、着脱可能に取り付けられている。
【0181】
図9に示すように、上記駆動装置本体14s,14kの従動輪側方フレーム部52s、52kに形成された取付孔部50、50には、揺動軸部43、43が配設されている。
図14に示すように、上記揺動軸部43は、ナット173と、揺動軸支持筒部174と、ボルト175とにより形成されている。
【0182】
図14に示すように、上記揺動支持筒部174は、上記従動輪側方フレーム部53の側面部66に設けられた取付孔部50に挿通され、上記ナット173と螺着され、上記取付孔部50に固定されている。
上記ボルト175は、上記脚部31に形成された長孔74に挿通し、上記長孔74の長さ方向に沿って移動しうるように上記揺動支持筒部174に対して螺着されている。
【0183】
図10は本発明に係る駆動装置の第七実施例を示す。本実施例に係る駆動装置10eにあっては、玩具の構成部品として形成され、着脱可能に設けられた原動部11と動力伝達部12とを内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動されるベルトコンベア46により形成された荷物176の搬送装置45として形成されている。
【0184】
上記ベルトコンベア46は、所定の幅広寸法を有し、可撓性を有する無端帯状に形成されている。
【0185】
図10に示すように、上記駆動装置本体14mの両側面には、横断面形状がL字型の細長板状の荷物ガイド部材177,177が着脱可能に取り付けられている。
上記荷物ガイド部材177,177は、上記ベルトコンベア46からの荷物176の脱落を防止できるような所定の剛性を有し、側面部178,178と上面部179,179とにより形成され、上記側面部178,178及び上記上面部179,179は夫々鈍角に配設されている。
【0186】
上記側面部178,178には、上記荷物ガイド部材177,177を上記駆動装置本体14mに取り付け可能な取付孔部180、181が形成されている。
【0187】
上記荷物ガイド部材177,177は、上記駆動装置本体14mに対して、上記従動輪側方フレーム部52mの側面部66m,66mに設けられた取付孔部と、上記ガイド部材177,177の取付孔部180,180とを介して螺子により着脱可能に固定され、上記駆動輪側方フレーム部51mの側面部63m,63mに設けられた取付孔部と、上記ガイド部材177,177の取付孔部181,181とを介して螺子により着脱可能に固定されている。
【0188】
上記上面部179は上記側面部178に対し鈍角に形成されていることから、上記上面部179,179によって荷物搬送路182が形成され、上記ベルトコンベア46上を不安定な荷物176が搬送される場合であっても、上記荷物がベルトコンベア46上から脱落されることを防止することができる。
【0189】
尚、図7に示す駆動装置10bとは異なり上記駆動装置10は、上記駆動装置本体14、14が、棒状固定部材により結合されることにより、無限軌道15の長さ方向において直列に配置されていてもよい。
【0190】
このような構成の実施例にあっては、上記棒状固定部材は、上記駆動装置本体14,14の車軸フレーム部20の両側面部において着脱可能に固定されている。
上記棒状固定部材は、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部が同一間隔を置いて複数設けられている。
【0191】
上記従動輪側方フレーム部52は、上記車軸フレーム部20の長さ方向両側方において設けられた棒状固定部材により上記動力伝達部側方フレーム部53に対し着脱可能に固定されている。
【0192】
上記棒状固定部材は、上記孔部のうち一の孔部と、上記従動輪側方フレーム部52の側面部66に設けられた上記取付孔部50との間に挿通された螺子により着脱可能に固定されるとともに、上記孔部のうち上記棒状固定部材の中間位置に設けられた孔部と、上記動力伝達部側方フレーム部53の側面部69に設けられた取付孔部47,48との間に挿通された螺子により着脱自在に固定されている。
【0193】
以下、添付図面に示す実施例に基づき、本発明に係る駆動装置10の第一実施例の作用について説明する。
上記駆動装置10は、図1に示すように、ロボットコンテストに使用されるロボット等の走行装置28として使用される。
【0194】
図1に示すように、本実施例にかかる駆動装置10は、駆動輪15と従動輪17とを有し、動力伝達部12を介して駆動輪15に動力を供給する原動部11及び上記動力伝達部12が上記駆動輪16と上記従動輪17との間に設けられ、上記駆動輪15と上記従動輪17とに巻装された無限軌道15によって駆動される駆動装置10として使用することができる。
【0195】
図1に示すように、上記駆動装置10を走行装置28として使用する場合には、上記原動部11から発生する駆動力を上記原動歯車27を介して上記動力伝達部12に伝達し、上記動力伝達部12に設けられた複数のギヤ22a,22b,22c,22dを介して上記原動部11のトルクを増幅し、上記増幅されたトルクにより駆動輪16を駆動することができる。
上記駆動輪16が駆動することにより、上記駆動輪16に巻装されている無限軌道15が駆動され、上記従動輪17も協働して回動する。
このことにより、上記駆動装置10は上記無限軌道15により走行することができ、段差や様々な障害物を乗り越えることができるロボットコンテスト用のロボット等として利用することができる。
【0196】
上記原動部11及び、動力伝達部12を夫々駆動装置10以外の組み立て部材の構成部品として使用する場合には、上記原動部11が設けられた原動部取付フレーム部61と、上記動力伝達部12が設けられた動力伝達部側方フレーム部53とを夫々上記フレーム係合爪部78、78と、原動部側方フレーム取付溝部72,72とに夫々着脱可能に係合させる。
【0197】
上記原動部取付フレーム部61の内方に向かって弾性を有する上記フレーム係合爪部78、78の爪先端部79,79は、上記原動部側方フレーム取付溝部72,72に対して係合している。
上記フレーム係合爪部78、78の爪先端部79,79を上記原動部側方フレーム取付溝部の外方へ押し広げることにより、上記フレーム係合爪部78、78による係合状態を解除することができる。
【0198】
したがって、上記原動部11及び動力伝達部12は一体的に着脱可能に形成されているため、上記原動部11及び動力伝達部12を一体の構成部品として駆動装置10以外の組み立て玩具の構成部品として使用することができる。
また、上記原動部11及び動力伝達部12は夫々着脱可能であることから、を夫々を駆動装置10以外の組み立て玩具の構成部品として使用することができる。
【0199】
上記駆動輪16が設けられた駆動輪取付フレーム部51は、上記動力伝達部12が設けられた動力伝達部側方フレーム部53に対して、上記フレーム係合爪部70,70と、原動部側方フレーム取付溝部71,71とを介して着脱可能に係合されている。
【0200】
駆動輪取付フレーム部51の内方に向かって弾性を有する上記フレーム係合爪部70の爪先端部80,80は、上記駆動輪側方フレーム取付溝部71,71に対して係合している。
【0201】
上記結合状態を解除し、上記駆動輪取付フレーム部51及び、動力伝達部12を夫々駆動装置10以外の組み立て部材の構成部品として使用する場合には、上記フレーム係合爪部70,70の爪先端部80,80を上記駆動輪側方フレーム取付溝部71,71の外方へ押し広げることにより、上記フレーム係合爪部70、70による係合状態を解除することができる。
したがって、上記駆動輪取付フレーム部51及び動力伝達部12を夫々の構成部品として分割することができる。
【0202】
上記従動輪側方フレーム部52は、上記両側方に設けられた棒状固定部材94,94によって上記動力伝達部側方フレーム部53に対して着脱可能に形成されている。
【0203】
上記駆動輪16と従動輪17間の間隔寸法を広げる場合には、上記棒状固定部材94、94に設けられた孔部95、95のうち、上記動力伝達部側方フレーム部53の取付孔部47,48に取り付ける孔部95、95の部位、及び上記従動輪側方フレーム部52の取付孔部50、50に取り付ける孔部95、95の部位を変えることにより、上記従動輪17と上記駆動輪16間の間隔寸法を自由に変更することができる。
【0204】
上記従動輪17と上記駆動輪16間の間隔寸法を自由に変更することにより、ロボットコンテスト等で作成される組み立て玩具等において必要とされる長さ寸法を有する駆動装置本体14を形成することができる。
また、市販のされている様々な長さ寸法を有する無限軌道15を使用することができるため、上記無限軌道15の種類に限定されず、ロボットコンテスト等においてロボット等の製作の自由度を確保することができる。
【0205】
その結果、組み立て玩具やロボットコンテスト等において、長さ寸法が大きな駆動装置10を作成する必要がある場合にあっても、上記従動輪17と上記駆動輪16間の間隔寸法を自由に変更することにより、駆動装置本体14の長さ寸法を変更することができるため、上記駆動装置10を組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
【0206】
図3に示すように、上記原動部11の駆動力を上記動力伝達部12に伝達させる場合には、上記原動軸部189固定された上記原動歯車27が、動力伝達部側方フレーム部53に設けられた歯車22aのフェースギヤ104に歯合していることにより、上記原動部11の駆動力を上記動力伝達部12に伝達することができる。
【0207】
上記原動歯車27により伝達された駆動力は、上記フェースギヤ104に隣接して協働して回動可能に結合されている平歯車109に伝達される。
上記平歯車109に伝達された駆動力は、上記歯車22bの上記平歯車109に歯合されている上記平歯車105に伝達され、上記平歯車105に隣接して協働して回動可能に結合されている平歯車106に伝達される。
【0208】
上記平歯車106に伝達された駆動力は、上記歯車22cの上記平歯車106に歯合されている上記平歯車107に伝達され、上記平歯車107に隣接して協働して回動可能に結合されている平歯車108に伝達される。
【0209】
上記平歯車108に伝達された駆動力は、上記平歯車108に歯合されている上記歯車22dに伝達されている。
上記歯車22dは、上記駆動輪16の側方に隣接して形成され協働して回動可能に形成された上記駆動歯車111と歯合している。
【0210】
したがって、上記原動部11から出力される駆動力は、上記原動歯車27を介して動力伝達部12に設けられているギヤ比の小さな歯車22aに伝達される。
上記歯車22aに伝達された駆動力は、上記歯車22aより大きなギヤ比を有する歯車22bに伝達され、上記歯車22bに伝達された駆動力は、上記歯車22bより大きなギヤ比を有する歯車22cに伝達され、上記歯車22cに伝達された駆動力は、上記歯車22cより大きなギヤ比を有する歯車22dに夫々伝達される。
この結果、上記動力伝達部12に設けられた複数のギヤ22a,22b,22c,22dを介して上記原動部11のトルクが増幅され、上記増幅されたトルクにより上記駆動輪16を駆動することができる。
【0211】
また、上記駆動装置本体14、14は個別に駆動制御されるように構成されていることから、駆動装置10が走行装置28として使用された場合には、各駆動装置本体14の駆動状態を個別に制御することにより、上記駆動装置10の走行状態を自由に制御することができる。
【0212】
したがって、例えば右側に配置した駆動装置本体14の駆動速度を早く駆動させるとともに、他方左側の駆動装置本体14の駆動速度を一定にして走行した場合にあっては、上記駆動速度を早くした駆動装置本体14側の駆動装置本体14が前方に進行し、駆動装置10全体として左旋回が可能となるように形成されている。
【0213】
また、上記駆動装置10には、補助輪32が装着されていることから、無限軌道15の回転時における保持箇所が増加するため、上記駆動輪16により上記無限軌道が駆動された場合に、上記無限軌道15が駆動輪16及び従動輪17から脱離することを抑止し、安定した巻装状態を維持することができる。
【0214】
また、上記駆動装置10は上記補助輪32で支持されているため、上記駆動装置10にかかる荷重を分散することができ、上記駆動装置を安定して走行させることができる。
【0215】
本発明に係る駆動装置の第二実施例の作用について説明する。
上記駆動装置10aは図6に示すように、上記駆動装置本体14a,14を互いに並列方向に配置固定して、上記駆動装置10aが形成され、上記駆動装置14a,14bと直行方向に配置され、長さ方向に複数の孔部124が設けられている棒状構成部材123によって着脱可能に固定されている。
その結果、上記駆動装置10aを走行装置28として使用した場合には、安定して走行可能な走行装置28として使用することができる。
【0216】
また、上記駆動装置本体14a,14b同士を結合するのに使用される孔部124の部位を変更することによって、容易に上記駆動装置本体14a,14b同士の間隔寸法を変更することができる。
【0217】
その結果、上記駆動装置10の全幅を小さくすることができ、上記駆動装置10を様々な組み立て玩具の部位に適合することができる構成部品として使用することができる。
【0218】
また上記駆動装置本体14a,14bは個別に駆動制御されるように構成されていることから、上記走行装置28を上記従動輪側方フレーム部52,52側に進行させた場合、例えば進行方向右側に配置された駆動装置本体14aの走行速度を増加させることによって、上記走行装置28全体を左側に旋回させて走行することが可能となる。
【0219】
本発明に係る駆動装置の第三実施例の作用について説明する。上記駆動装置10は図4、図5に示すように、上記外装車輪26,26を上記各歯車軸部23a,23b、23c,23dに装着して使用することができる。
この場合、上記外装車輪26,26は夫々各歯車軸部23a、23b、23c,23dに装着されていることから、上記原動歯車27により伝達される駆動力によって上記各歯車軸部23a、23b、23c,23dが回動され、上記各歯車軸部23a、23b、23c,23dのいずれかに装着されている外装車輪26,26が回転される。
【0220】
図4に示すように、上記外装車輪26,26の直径寸法L24は、上記駆動装置本体14に設けられた無限軌道15の高さ寸法L25よりも大きい径寸法により形成されている。
したがって、上記駆動装置10fに外装車輪26、26が装着されている場合には、上記外装車輪26,26が走行面198に接地されるため、上記駆動装置10は各外装車輪26、26により走行することができる。
【0221】
図3、図4に示すように、上記外装車輪26,26は、ギヤ比の異なる上記歯車軸部23a,23b,23c,23dの先端部に夫々着脱可能に固定されていることから、必要に応じて、上記外装車輪26,26を上記歯車軸部23a,23b,23c,23dから離脱させ、他のギヤ比の歯車の歯車軸部23に装着することができる。
【0222】
所望の速度及びトルクにより上記外装車輪26を駆動することができることから、走行状況に応じて、速度及びトルクを適宜変更することができる走行装置28を構成することができる。
【0223】
この結果、ロボットコンテスト等で必要とされる様々な使用形態に対応し、自由な設計を行うことができる上記駆動装置10fとして使用することができる。
したがって例えば、上記駆動装置10を高速走行させたい場合には、図5に示すように、上記外装車輪26,26を上記小径の歯車22aの歯車軸部23eの先端部に装着することにより、上記駆動装置10を高速で走行できる走行装置として使用することができる。
【0224】
また、上記歯車軸部23eに上記外装車輪26を装着した場合には、通常は上記外装車輪26により高速で走行することができるとともに、上記駆動装置10が障害物に当接した場合には、上記無限軌道15により、障害物を乗り越えることができ、かつ上記障害物が外装車輪26に当接した場合であっても、上記外装車輪26は回動していることから、上記外装車輪26及び上記無限軌道15の双方によって上記駆動装置10を駆動することができる。
【0225】
したがって、悪路や障害物に使用した場合であっても乗り越えることができ、多様な走行形態を実現することができる。
【0226】
図4に示すように、四輪で走行する走行装置として使用する場合には、上記駆動装置本体14に外装車輪26、26を装着するとともに、上記従動輪側方フレーム部52の側面部66,66に設けられた取付孔部に対し外装車輪26b,26bの車輪軸部をボルトで回動可能に固定し、上記車輪軸部に対し上記外装車輪26、26の直径寸法と略同一の直径寸法を有する外装車輪26b,26bを装着して使用することができる。
上記車輪軸部は、上記外装車輪26b,26bを回動可能に固定するように形成されている。
その結果、上記外装車輪26、26及び上記外装車輪26b,26bで走行可能な四輪の走行装置を形成することができる。
【0227】
本発明に係る駆動装置の第四実施例の作用について説明する。
上記駆動装置10bは図7に示すように、上記無限軌道15に対し並列に配置された駆動装置本体14e,14fと、14g,14hと、14i,14jが、長さ方向に沿って複数の孔部138が設けられた長さ方向連結材137によって夫々直列に連結固定されている。
【0228】
したがって、上記並列に配置された上記駆動装置本体14e,14fと、14g,14hと、14i,14j同士を結合するのに使用される孔部138の部位を変更することによって、容易に上記駆動装置本体14e,14fと、14g,14hと、14i,14j同士の間隔寸法を変更することができる。
【0229】
その結果、駆動装置本体14e,14fと、14g,14hと、14i,14jからの駆動力が直列方向であって、かつ並列に全体として大きな出力が得られる駆動装置10bを形成することができる。
【0230】
本発明に係る駆動装置の第五実施例の作用について説明する。
上記駆動装置10cは図8に示すように、上方へ延設され、長さ方向に複数の孔部140,141,142,143が設けられた支持フレーム部29a,29b,29c,29dにより着脱可能に固定されたテーブル部30が形成されている。
【0231】
上記テーブル部30の固定に使用されている孔部140,141,142,143の部位を変更することにより、上記テーブル部30の高さ位置を容易に変更することができる。
したがって、上記駆動装置本体14間に障害物がある場合においても、上記テーブル部30は上記障害物に衝接することなく、走行することが可能となる。
【0232】
また、上記テーブル部30上にロボット構成部品等を配置することができ、ロボットコンテストにおけるロボットの構成上の多様性を確保することができる。
【0233】
本発明に係る駆動装置の第六実施例の作用について説明する。
上記駆動装置10dは図9に示すように、一対の脚部31a,31bによって2足歩行可能な歩行装置183として形成されている。
図9、図14に示すように、上記クランク軸部40s,40kは、上記歯車軸部23dに着脱可能に固定されていることから、上記歯車22dが原動部11から伝達された駆動力により回動した場合には、上記歯車22dを回動可能に固定している歯車軸部23dが回動し、上記クランク軸部40s,40kは、上記歯車軸部23dを中心として回動する。
【0234】
このことにより、上記クランク軸部40s,40kは、上記歯車軸部23dを中心として回動され、上記クランク軸部40s,40kの他端部38a,38bが上記脚部31a,31bの長さ方向上方へ回動された場合には、上記クランク軸部40s,40kに対して回動可能に固定されている脚部31a,31bは、上記クランク軸部40s,40kの回動運動にあわせて、上方へ移動される。
【0235】
また、上記脚部31a,31bは、幅方向中央部において、長さ方向に沿って延設された長孔74a,74bが設けられ、上記長孔74a,74bは上記従動輪側方フレーム部52s、52kの取付孔部に配設された揺動軸部43、43に挿通されている。
上記揺動軸部43、43は上記脚部31a,31bに設けられた上記長孔74a,74b内において、上記駆動装置本体14s,14kの長さ方向に沿って移動可能に固定されている。
【0236】
したがって、上記クランク軸部40s,40kが、上記原動部11の駆動力が伝達されることによって上記歯車軸部23dが回動され、上記歯車軸部23dに装着されている上記クランク軸部40s,40kが回動されることにより、上記クランク軸部40s,40kの他端部38a,38bに設けられた脚部31a,31bが上方へ配置された場合には、上記長孔74内に挿通された揺動軸部43は、上記長孔74内を相対的に下方へ移動することとなる。
【0237】
上記脚部31a,31bは、上記揺動軸部43,43が上記脚部31a,31bに設けられた上記長孔74、74内を上下方向に移動することにより、上記脚部31a,31bの回動中心が上記長孔74a、74b内を上下方向に移動しつつ、上記クランク軸部40s,40kの他端部38a,38bを中心に回動運動する。
その結果、上記脚部31は、上記長孔74内を長さ方向に上下方向に移動しながら揺動する上記揺動軸部42を中心として回動運動が行われる。
【0238】
図9に示すように、上記クランク軸部40s,40kが回動運動することにより、上記クランク軸部40sの他端部38aが上方へ配置された場合には、上記脚部31aが上方へ移動し、上記脚部31aの下端部に設けられた接地面部149aは、走行面148から上方へ配置されることとなる。
【0239】
また、上記駆動装置本体14sと並列して設けられた上記駆動装置本体14kにおいても、上記と同様の構造により形成されているため、上記歯車軸部23dに着脱可能に固定されたクランク軸部40kの回動運動によって、上記脚部31bが上記揺動軸部43を中心とした回動運動が行われる。
【0240】
すなわち、上記駆動装置本体14sに設けられたクランク軸部40sと、上記駆動装置本体14kに設けられたクランク軸部40kとを、夫々個別に遅延制御させることにより逆方向に配置し、上記クランク軸部40s、40kに着脱可能に固定されている歯車軸部23d,23dを上記駆動装置本体14s,14kの長さ方向に対し同方向に回転させることにより、上記駆動装置本体14sに設けられた脚部31sが上方へ配置された場合には、上記駆動装置本体14kに設けられた脚部31kが下方へ配置され、歩行面148に設置された状態となる。
【0241】
また、上記クランク軸部40sの他端部38aが、図9において前面に移動した場合には、上記脚部31sは上記揺動軸部43を中心として回動され、上記脚部31sの接地面部149aが後方へ配置されるように移動される。
上記クランク軸部40sの他端部38aが、前面に移動された場合には、上記クランク軸部40kの他端部38bは、後方へ配置されるように移動し、上記脚部31kは上記揺動軸部43を中心として回動され、上記脚部31kの接地面部149bが前方へ配置されるように移動される。
【0242】
このことにより、上記駆動装置10は、上記原動部11の駆動力が上記歯車軸部23を介して上記脚部31に伝達される駆動装置10として使用され、上記脚部31,31によって歩行可能な歩行装置としてしようすることができる。
【0243】
本発明に係る駆動装置10の第七実施例の作用について、詳細に説明する。本実施例に係る駆動装置10にあっては、図10に示すように、ベルトコンベア46によって荷物を搬送可能な搬送装置45として形成することができる。
上記搬送装置45は、上記原動部11からの駆動力が上記動力伝達部12を介してベルトコンベア45を駆動することによって使用される。
したがって、上記ベルトコンベア45の上端面に荷物176を載置した場合には、上記ベルトコンベア45面上を上記荷物176が移動される。
【0244】
図10に示すように、上記ベルトコンベア45上に丸形状などにより形成された不安定な荷物176が載置された場合にあっても、上記駆動装置本体14mの両側面には、荷物ガイド部材177,177が設けられていることから、上記ベルトコンベア45上からの荷物の脱落が防止されるように形成されている。
【0245】
尚、図7に示す駆動装置10bとは異なり、上記駆動装置14、14同士を長尺の棒状固定部材を介して直列に配置して固定することにより、長さ方向に直列して配置された駆動装置10を形成することができる。
したがって、駆動力を直列方向に出力する駆動装置10を形成することができる。
【0246】
上記棒状固定部材には、長さ方向に沿って複数の孔部が設けられ、上記駆動装置14、14は上記駆動装置14,14の側方に設けられた上記棒状固定部材を介して着脱可能に固定されている。
【0247】
上記駆動装置14,14は、上記棒状構成部材に対して、上記棒状構成部材に設けられている孔部と、上記駆動装置14,14の側方に形成された取付孔部とを介して結合することにより着脱可能に固定することができる。
【0248】
したがって、組み立て玩具やロボットコンテスト等において、上記駆動装置10を幅寸法の小さい走行装置として使用することができる。
また、長さ寸法が大きい駆動装置10を作成する必要がある場合は、上記棒状構成部材の孔部と上記取付孔部の取付部位を変えることにより、上記駆動装置本体14,14間の間隔寸法を変更することができるため、上記駆動装置10を組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
【0249】
図16は、本発明に係る駆動装置の第八実施例を示す。本実施例に係る駆動装置10wにあっては、無限軌道の長さ方向において伸縮可能な駆動装置として形成されている。
上記車軸フレーム部20wは、上記駆動輪16wが設けられた駆動輪側方フレーム部51wと、上記従動輪17wが設けられた従動輪側方フレーム部52wと、上記駆動輪側方フレーム部51wと上記従動輪側方フレーム部52wとの間に配置され、上記動力伝達部12wが設けられた動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wと上記動力伝達部側方フレーム部53wとの間に配置され、上記原動部11wが設けられた原動部取付フレーム部61wとにより構成されている。
上記駆動輪側方フレーム部51wと、上記原動部取付フレーム部61wとは、夫々上記動力伝達部側方フレーム部53wに夫々着脱可能に固定され、上記動力伝達部フレーム部53wと上記従動輪側方フレーム部52wとが互いに無限軌道の長さ方向において移動可能に固定されている。
【0250】
図17に示すように、上記動力伝達部側方フレーム部53wは、平面長方形板状に形成され、上記車軸フレーム部20wの幅方向両側方において、一対に設けられた動力伝達部フレーム200a,200bと、上記車軸フレーム部20wの幅方向に沿って複数設けられ、上記各動力伝達部フレーム200a,200b同士を接続して支持しうるように形成された動力伝達部支柱201とにより形成されている。
本実施例においては、上記動力伝達部支柱201は円筒状に形成され、上記動力伝達部フレーム200a,200bの上端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って4本設けられるとともに、図示しないが、上記動力伝達部フレーム200a,200bの下端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って4本設けられている。
【0251】
図17に示すように、上記動力伝達部フレーム200a,200bと上記複数の動力伝達部支柱201とは、夫々上記動力伝達部フレーム200a,200bに設けられた孔部(図示せず)を介して、上記動力伝達部支柱201に挿通された各螺子228により着脱可能に固定されている。
【0252】
図17に示すように、上記従動輪側方フレーム部52wは、平面長板状に形成され、上記車軸フレーム部20wの幅方向両側方において、一対に設けられた従動輪フレーム202a,202bと、上記車軸フレーム部20wの幅方向に沿って複数設けられ、上記各従動輪フレーム202a,202b同士を接続して支持しうるように形成された複数の従動輪支柱203とにより形成されている。
本実施例においては、上記従動輪支柱203は円筒状に形成され、長さ方向上記従動輪フレーム202a,202bの従動輪17w側の上端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って2本設けられるとともに、図示しないが、上記従動輪フレーム202a,202bの下端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って2本設けられている。
図16に示すように、上記従動輪フレームのうち、一の従動輪フレーム202aにおいて、上記各従動輪支柱203間に配置された支持板204が設けられ、上記両従動輪フレーム202a,202b同士の係合状態を保持しうるように形成されている。
【0253】
図17に示すように、上記従動輪フレーム202a,202bと上記複数の従動輪支柱203とは、夫々上記従動輪フレーム202a,202bに設けられた孔部(図示せず)を介して、上記従動輪支柱203に挿通された各螺子216により着脱可能に固定されている。
【0254】
図16に示すように、上記駆動輪側方フレーム部51wは、平面板状に形成され、上記車軸フレーム部20wの幅方向両側方において、一対に設けられた駆動輪側面部213a,213bと、上記車軸フレーム部20wの幅方向に沿って複数設けられ、上記各駆動輪側面部213a,213b同士を接続して支持しうるように形成された駆動輪支持柱部214とにより形成されている。
【0255】
図17に示すように、本実施例においては、上記駆動輪支持柱部214は円筒状に形成され、上記駆動輪側面部213a,213bの上端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って2本設けられるとともに、上記駆動輪側面部213a,213bの下端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って2本設けられている。
上記駆動輪側面部213a,213bのうち、一の駆動輪側面部213aにおいて、上記各駆動輪支持柱部214間に配置された支持板215が設けられ、上記両駆動輪側面部213a,213b同士の係合状態を保持しうるように形成されている。
【0256】
図17に示すように、上記駆動輪側面部213a,213bと上記複数の駆動輪支持柱部214とは、夫々上記駆動輪側面部213a,213bに設けられた孔部(図示せず)を介して、上記駆動輪支持柱部2214に挿通された各螺子229により着脱可能に固定されている。
【0257】
図18は、図16における車軸フレーム部20wのY−Y'断面における幅方向断面図を示し図16、図18に示すように、上記動力伝達部側方フレーム部53wは、上記車軸フレーム部20wの幅方向上記従動輪フレーム202a,202b間に配置されている。
図17に示すように、上記動力伝達部フレーム200a,200bの外側面には、夫々上記車軸フレーム部20wの長さ方向に沿って設けられた案内溝部206a,206bが設けられている。
図17に示すように、上記案内溝部206a,206bは、上記動力伝達部フレーム200a,200bの長さ方向に沿って、幅方向において所定の間隔寸法W1をおいて幅方向に夫々2本ずつ設けられている。
図18に示すように、上記案内溝部206a,206bの溝は深さ寸法H1に形成されている。
【0258】
図17,図18に示すように、上記従動輪フレーム202a,202bの内側面211a,211bには、上記動力伝達部フレーム200a,200bに設けられている案内溝部206a,206bと移動可能に係合して、上記動力伝達部側方フレーム部53wを上記車軸フレーム部20wの長さ方向に沿って摺動しうるように形成されている突条205a,205bが設けられている。
図17に示すように、上記突条205a,205bは、上記従動輪フレーム202a,202bの長さ方向に沿って、上記動力伝達部フレーム200a,200bに設けられている案内溝部206a,206bの間隔寸法W1と略同じ間隔寸法W2をおいて設けられている。
【0259】
図18に示すように、上記突条205a,205bは、上記案内溝部206a,206bの溝の深さ寸法H1と略同じ高さ寸法H2に形成されている。
従って、上記突条205a,205bと、上記案内溝部206a,206bとが夫々移動可能に係合されているため、上記従動輪側方フレーム部52wと、上記動力伝達部側方フレーム部53wに設けられている駆動輪側方フレーム部51wとが夫々上記車軸フレーム部20wの長さ方向に沿って、上記駆動装置全体として伸縮可能に形成されている。
【0260】
図17、図18に示すように、上記各案内溝部206a,206bには、車軸フレーム部20wの長さ方向に沿って所定の間隔寸法W3をおいて配置された複数の凹部207a,207bが設けられている。本実施例に係る上記各凹部207b間の間隔寸法W3は2mmに形成されている。
図17、図18に示すように、上記各突条205a,205bには、上記案内溝部206a,206bに設けられた上記各凹部207a,207bに係合され、上記動力伝達部側方フレーム部53wを長さ方向に対する移動を固定しうるように形成された凸部208a,208bが設けられている。
【0261】
図18に示すように、上記凸部208a,208bの高さ寸法H3は、上記凹部207a,207bの高さ寸法H4と略同じ寸法に形成され、夫々上記凸部208aが上記凹部207aへ、上記凸部208bが上記凹部207bへ嵌入されることにより、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとが互いに係合し、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとを互いに、長さ方向において移動可能に固定することができ、上記車軸フレーム部20w全体の長さ寸法を自在に調整することができる。
【0262】
上記各案内溝部206aに設けられている凹部207aと、上記案内溝部206bに設けられている凹部207bとは、夫々上記動力伝達部側方フレーム部53wの幅方向中心を基準として対称位置に配置されている。
また同様に上記突条205aに設けられている凸部208aと、上記突条205bに設けられている凸部208bとは、夫々上記従動輪側方フレーム部52wの幅方向中心を基準として対称位置に配置されている。
従って、上記各凸部208a,208bを、上記各凹部207a,207bに夫々嵌入させることにより、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとが互いに上記車軸フレーム部20wの幅方向同位置で固定され、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとの長さ方向に対する移動を固定する際にあっては、上記各動力伝達部側方フレーム部53wと上記従動輪側方フレーム部52wとが幅方向において傾くことなく容易に固定することができる。
すなわち、上記動力伝達部側方フレーム部53wの幅方向一方向に設けられている上記凸部208aが上記従動輪側方フレーム部52wの一方向に設けられている上記凹部207aへ嵌入され、上記動力伝達部側方フレーム部53wの幅方向他方向に設けられている上記凸部208bが上記従動輪側方フレーム部52wの他方向に設けられている上記凹部208bへ夫々嵌入されることにより、上記凸部208aと上記凸部208bの長さ方向における固定位置を同位置にすることができ、上記動力伝達部側方フレーム部53wの長さ方向と、上記従動輪側方フレーム部52wの長さ方向とが同方向へ移動可能に固定することができる。
【0263】
図18に示すように、上記動力伝達部側方フレーム部53wを構成する上記動力伝達部フレーム200aの外側面210aと、上記動力伝達部フレーム200bの外側面210bとの間の間隔寸法W4と、上記従動輪側方フレーム部52wを構成する上記従動輪フレーム202aの内側面211aと、上記従動輪フレーム202bの内側面211bとの間の間隔寸法W5とは略同じ間隔寸法に形成されている。
従って、上記動力伝達部側方フレーム部53wは、上記車軸フレーム部20wの幅方向において、上記従動輪側方フレーム部52wの内方に配置されている。
【0264】
図16、図17に示すように、上記従動輪側方フレーム部52wを構成する上記各従動輪フレーム202a,202bの外側面217a,217bには、夫々短円筒形状に形成された取付孔部212a,212bが複数設けられ、上記駆動輪側方フレーム部51wを構成する上記各駆動輪側面部213a,213bの外側面218a,218bには、夫々短円筒形状に形成された取付孔部219a,219bが複数設けられている。
【0265】
図19に示すように、上記駆動輪側方フレーム部51wは、上記車軸フレーム部20wの長さ方向両側方において設けられた細長板状延長部材220a,220bにより上記従動輪側方フレーム部52wに対し着脱可能に固定されている。
上記細長板状延長部材220a,220bは細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部221が同一間隔を置いて複数設けられている。
【0266】
上記細長板状延長部材220aは、上記孔部221のうち一の孔部221及び、上記従動輪側方フレーム部52wの従動輪フレーム202a,202bに設けられている取付孔部212bのうち、一の取付孔部212bを介して、この間に挿通される螺子222により上記従動輪側方フレーム部52wに対して着脱可能に固定されるとともに、上記孔部221のうち一の孔部221及び、上記駆動輪側方フレーム部51wの駆動輪側面部213a,213bに設けられている取付孔部219bのうち、一の取付孔部219bを介して、この間に挿通される螺子222により上記駆動輪側方フレーム部53wに対して着脱自在に固定されている。
【0267】
従って、上記細長板状延長部材220a,220bに設けられている孔部221の個所と、上記従動輪側方フレーム部52w及び上記駆動輪側方フレーム部51wに設けられている取付孔部212a,212b,219a,219bの取り付け個所とを変更することにより、必要に応じて駆動装置10w全体の長さ寸法を延長したり伸縮して変更することができる。
【0268】
図16、図17に示すように、上記従動輪側方フレーム部52wを構成する上記従動輪フレーム202a,202bには、車軸フレーム部20wの長さ方向に沿って設けられ、長穴状に形成されたスライド長孔部223a,223bが設けられている。
上記動力伝達部側方フレーム部53wを構成する上記動力伝達部フレーム200a,200bには、上記スライド長孔部223a,223bに挿通された状態で、上記スライド長孔部223a,223bの長さ方向に沿って移動しうるように配置されたスライド棒部224a,224bが設けられている。
【0269】
図16に示すように、上記スライド軸部224a,224bは、皿状の頭部225を有する螺子226a,226bにより形成され、上記各螺子226a,226bは、上記各スライド長孔部223a,223bに挿通されている状態で、上記動力伝達部フレーム200a,200bにおいて、上記車軸フレーム部20wの長さ方向に沿って所定の間隔寸法をおいて設けられている孔部227a,227bに螺合されて取り付けられている。
【0270】
従って、上記スライド軸部224a,224bは、上記スライド長孔部223a,223b内において、上記車軸フレーム部20wの長さ方向に沿って移動可能に形成されているとともに、上記各螺子226a,226bに設けられている皿状の頭部225が、上記スライド長孔部223a,223bが設けられている上記従動輪フレーム202a,202bの外側面217a,217bに当接されるため、上記従動輪フレーム202aと上記動力伝達部フレーム200a及び、上記従動輪フレーム202bと上記動力伝達部フレーム200bとが夫々上記車軸フレーム部20wの長さ方向において移動可能に固定され、上記車軸フレーム部20w全体の長さ寸法を伸張または伸縮可能に形成されている。
【0271】
本発明に係る駆動装置の第八実施例の作用について説明する。
上記駆動装置10wは、上記駆動輪16wと、上記従動輪17w間の間隔寸法を変更し、駆動装置10w全体の長さ寸法を伸縮自在に変更することができる駆動装置10wとして使用することができる。
【0272】
上記駆動装置10wは、長さ寸法を変更する場合にあっては図16に示すように、上記動力伝達部側方フレーム部53wを構成する上記動力伝達部フレーム200a,200bに設けられている各螺子226a,226bを緩めることにより、上記各螺子226a,226bに設けられている各頭部225と、上記従動輪側方フレーム部52wを構成する従動輪フレーム202a,202bとの間の圧接状態を解除することができる。
上記圧接状態が解除されることにより、上記各螺子226a,226bは上記従動輪側方フレーム部52wに形成されている長さ方向に対し長孔状に形成されているスライド長孔部223a,223b内を長さ方向に移動され、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとの間の間隔寸法を変更することができる。
【0273】
従って、上記駆動装置10wの短縮時にあっては、上記各螺子226a,226bの締め付け状態を解除した状態で、図16に示すように、上記従動輪側方フレーム部52wと、上記動力伝達部側方フレーム部53wとの間の間隔寸法を最小とすることにより、上記駆動装置10wの長さ寸法を短縮することができる。
上記駆動装置10wを短縮した状態において、上記各螺子226a,226bを締め付けることにより、上記従動輪フレーム202aと動力伝達部フレーム200a間、及び、上記従動輪フレーム202bと動力伝達部フレーム200b間が狭まり、上記従動輪フレーム202a,202bにおいて長さ方向に配置されている突条205a,205bに設けられている凸部208a,208bが、上記動力伝達部フレーム200a,200bにおいて長さ方向に配置されている案内溝部206a,206bに設けられている凹部207a,207bに夫々嵌入され、上記動力伝達部側方フレーム部53wと上記従動輪側方フレーム部52wとの間の移動状態が阻止される。
従って、上記駆動装置10wの長さ寸法を短縮した状態で使用することができる駆動装置として使用することができる。
【0274】
また、上記駆動装置10wの伸張時にあっては、上記各螺子226a,226bの締め付け状態を解除することにより、上記従動輪フレーム202aと動力伝達部フレーム200a間、及び、上記従動輪フレーム202bと動力伝達部フレーム200b間が離間され、上記従動輪フレーム202a,202bにおいて長さ方向に配置されている突条205a,205bに設けられている凸部208a,208bと、上記動力伝達部フレーム200a,200bにおいて長さ方向に配置されている案内溝部206a,206bに設けられている凹部207a,207bとの嵌入状態を解除され、上記動力伝達部側方フレーム部53wと上記従動輪側方フレーム部52wとの間の移動可能状態となる。
上記移動可能状態において、図16に示すように、上記従動輪側方フレーム部52wと、上記動力伝達部側方フレーム部53wとの間の間隔寸法を最大とすることにより、上記駆動装置10wの長さ寸法を伸張することができる。
【0275】
同様に、上記駆動装置10wを伸張した状態において、上記各螺子226a,226bを締め付けることにより、上記従動輪フレーム202aと動力伝達部フレーム200a間、及び、上記従動輪フレーム202bと動力伝達部フレーム200b間が狭まり、上記従動輪フレーム202a,202bにおいて長さ方向に配置されている突条205a,205bに設けられている凸部208a,208bが、上記動力伝達部フレーム200a,200bにおいて長さ方向に配置されている案内溝部206a,206bに設けられている凹部207a,207bに夫々嵌入され、上記動力伝達部側方フレーム部53wと上記従動輪側方フレーム部52wとの間の移動状態が阻止される。
従って、上記駆動装置10wの長さ寸法を伸張した状態で使用することができる駆動装置として使用することができる。
【0276】
また図19に示すように、上記駆動輪16wと従動輪17w間の間隔寸法を変更する場合には、上記細長板状延長部材220a、220bに設けられた孔部221、221のうち、上記駆動輪側方フレーム部51wの取付孔部219b,219bに取り付ける孔部221、221の部位、及び上記従動輪側方フレーム部52wの取付孔部212a、212bに取り付ける孔部221、221の部位を変えることにより、上記従動輪17wと上記駆動輪16w間の間隔寸法を自由に変更することができる。
【0277】
上記従動輪17wと上記駆動輪16w間の間隔寸法を自由に変更することにより、ロボットコンテスト等で作成される組み立て玩具等において必要とされる長さ寸法を有する駆動装置本体14wを形成することができる。
また、市販のされている様々な長さ寸法を有する無限軌道15wを使用することができるため、上記無限軌道15の種類に限定されず、ロボットコンテスト等においてロボット等の製作の自由度を確保することができる。
【0278】
その結果、組み立て玩具やロボットコンテスト等において、長さ寸法が大きな駆動装置10wを作成する必要がある場合にあっても、上記従動輪17wと上記駆動輪16w間の間隔寸法を自由に変更することにより、駆動装置本体14wの長さ寸法を変更することができるため、上記駆動装置10wを組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
【産業上の利用可能性】
【0279】
本発明は、駆動装置に係り、特に、ロボットコンテストに使用されるロボット等の玩具、模型の構成部品として使用することが可能な駆動装置に適用できるものである。
【図面の簡単な説明】
【0280】
【図1】図1は、本発明に係る駆動装置を示す全体斜視図である。
【図2】図2は、本発明に係る駆動装置を構成部品毎に分割した状体を示す全体斜視図である。
【図3】図3は、本発明に係る駆動装置の原動部、動力伝達部及び駆動輪を示す平面図である。
【図4】図4は、本発明に係る駆動装置の歯車軸部23に外装車輪を装着した状体を示す全体斜視図である。
【図5】図5は、本発明に係る駆動装置のギヤ比の小さな歯車の歯車軸部に外装車輪を装着した状体を示す斜視図である。
【図6】図6は、本発明に係る駆動装置の駆動装置本体を互いに並列して配置した状体を示す全体斜視図である。
【図7】図7は、本発明に係る駆動装置の駆動装置本体を並列に配置し、上記並列に配置された駆動装置本体を長さ方向に連結した状体を示す全体斜視図である。
【図8】図8は、本発明に係る駆動装置の上方にテーブル部を配置した状体を示す全体斜視図である。
【図9】図9は、本発明に係る駆動装置が歩行装置として形成された状体を示す全体斜視図である。
【図10】図10は、本発明に係る駆動装置が荷物の搬送装置として使用されている状体を示す全体斜視図である。
【図11】図11は、本発明に係るL字型固定具を示す斜視図である。
【図12】図12は、本発明に係るL字型固定具と棒状固定部材が結合された状体を示す側面図である。
【図13】図13は、本発明に係るクランク軸部と歯車軸部を示す斜視図である。
【図14】図14は、本発明に係る歯車軸部、クランク軸部及び脚部の結合状体を示す側面図である。
【図15】図15は、本発明に係る脚部の正面図である。
【図16】図16は、本発明に係る駆動装置の第八実施例を示す全体斜視図である。
【図17】図17は、本発明に係る駆動装置の第八実施例の動力伝達部側方フレーム部と従動輪側方フレーム部とを離間した状態を示す全体斜視図である。
【図18】図18は、図16におけるY−Y'断面における幅方向横断面図である。
【図19】図19は、本発明に係る駆動装置を細長板状延長部材で延長した状態を示す全体斜視図である。
【符号の説明】
【0281】
10 駆動装置
10a 駆動装置
10b 駆動装置
10c 駆動装置
10d 駆動装置
10e 駆動装置
10f 駆動装置
10w 駆動装置
11 原動部
11w 原動部
12 動力伝達部
12w 動力伝達部
13 駆動手段
14 駆動装置本体
14a 駆動装置本体
14b 駆動装置本体
14c 駆動装置本体
14d 駆動装置本体
14e 駆動装置本体
14f 駆動装置本体
14g 駆動装置本体
14h 駆動装置本体
14i 駆動装置本体
14j 駆動装置本体
14k 駆動装置本体
14s 駆動装置本体
14m 駆動装置本体
14n 駆動装置本体
14p 駆動装置本体
14r 駆動装置本体
14t 駆動装置本体
14w 駆動装置本体
15 無限軌道
15w 無限軌道
16 駆動輪
16w 駆動輪
17 従動輪
17w 従動輪
18 一端部
19 他端部
20 車軸フレーム部
20n 車軸フレーム部
20p 車軸フレーム部
20w 車軸フレーム部
21 軸部
22 歯車
22a 歯車
22b 歯車
22c 歯車
22d 歯車
23 歯車軸部
23a 歯車軸部
23b 歯車軸部
23c 歯車軸部
23d 歯車軸部
23e 歯車軸部
23f 歯車軸部
23g 歯車軸部
23h 歯車軸部
24 フレーム部
25 先端部
25a 先端部
25b 先端部
25c 先端部
25d 先端部
26 外装車輪
26b 外装車輪
27 原動歯車
28 走行装置
29 支持フレーム部
29a 支持フレーム部
29b 支持フレーム部
29c 支持フレーム部
29d 支持フレーム部
30 テーブル部
31 脚部
31a 脚部
31b 脚部
32 補助輪
32a 補助輪
32b 補助輪
32w 補助輪
36 連結手段
36a 連結部材
37 一端部
37a 一端部
38 他端部
38a 他端部
39 上端部
40 クランク軸部
40s クランク軸部
40k クランク軸部
41 一端部
42 他端部
43 揺動軸部
44 搬送手段
45 搬送装置
46 ベルトコンベア
47 取付孔部
48 取付孔部
49 取付孔部
49n 取付孔部
49p 取付孔部
49m 取付孔部
50 取付孔部
50n 取付孔部
50p 取付孔部
50m 取付孔部
51 駆動輪側方フレーム部
51n 駆動輪側方フレーム部
51p 駆動輪側方フレーム部
51m 駆動輪側方フレーム部
51w 駆動輪側方フレーム部
52 従動輪側方フレーム部
52n 従動輪側方フレーム部
52p 従動輪側方フレーム部
52j 従動輪側方フレーム部
52k 従動輪側方フレーム部
52m 従動輪側方フレーム部
52w 従動輪側方フレーム部
53 動力伝達部側方フレーム部
53a 動力伝達部側方フレーム部
53b 動力伝達部側方フレーム部
53j 動力伝達部側方フレーム部
53k 動力伝達部側方フレーム部
53r 動力伝達部側方フレーム部
53t 動力伝達部側方フレーム部
53w 動力伝達部側方フレーム部
54 固定軸孔部
56 固定軸孔部
57 歯車軸部孔部
58 歯車軸部孔部
59 歯車軸部孔部
60 歯車軸部孔部
61 原動部取付フレーム部
61w 原動部取付フレーム部
62 底面部
63 側面部
63m 側面部
64 固定孔部
65 底面部
66 側面部
66m 側面部
67 固定孔部
68 底面部
69 側面部
69a 側面部
69b 側面部
70 フレーム係合爪部
71 駆動輪側方フレーム取付溝部
72 原動部側方フレーム取付溝部
73 窓部
74 長孔
74a 長孔
74b 長孔
75 底面部
76 側面部
77 上面部
78 フレーム係合爪部
79 爪先端部
80 爪先端部
81 補助輪
82 補助輪固定具
83 上面部
84 側面部
85 回動軸
86 取付孔部
87 補助輪
88 補助輪固定具
89 上面部
90 側面部
91 回動軸
92 取付孔部
93 螺子
94 棒状固定部材
95 孔部
95a 孔部
95b 孔部
96 螺子
97 螺子
98 原動機
104 フェースギヤ
105 平歯車
106 平歯車
107 平歯車
108 平歯車
109 平歯車
110 駆動輪固定軸
111 駆動歯車
112 無限軌道歯車
117 従動輪固定軸
118 板状部材
123 幅方向連結材
123a 幅方向連結材
123b 幅方向連結材
123c 幅方向連結材
124 孔部
124a 孔部
124b 孔部
125 L字型固定具
125a L字型固定具
125b L字型固定具
125e L字型固定具
125f L字型固定具
125n L字型固定具
125p L字型固定具
125i L字型固定具
125j L字型固定具
125p L字型固定具
126a ボルト
126b ボルト
127a ナット
127b ボルト
128 側面部
129 上面部
130 孔部
130a 孔部
130b 孔部
131 孔部
131a 孔部
131b 孔部
132a ボルト
132b ボルト
133a ナット
133b ナット
136a 螺子
137 長さ方向連結材
138 孔部
138a 孔部
138b 孔部
138c 孔部
139 孔部
139a 孔部
139b 孔部
139c 孔部
140 孔部
140a 孔部
141 孔部
141a 孔部
141b 孔部
142 孔部
142a 孔部
142b 孔部
143 孔部
143a 孔部
143b 孔部
144 固定孔部
144a 固定孔部
144b 固定孔部
144c 固定孔部
144d 固定孔部
145 下面部
146 棒状構成部材
148 歩行面
149a 接地面部
149b 接地面部
150a 凸部
150b 凸部
151 L字型固定具
152 L字型固定具
153 側面部
154 側面部
155 下端面部
156 下端面部
157 孔部
158 孔部
161 孔部
162 孔部
163 孔部
163a 孔部
163b 孔部
164 孔部
164a 孔部
164b 孔部
165 下端部
165a 下端部
165b 下端部
166 連結部
167 歯車軸固定管部
168 空洞部
169 歯車軸固定螺子
170 孔部
170a 孔部
171 ボルト
172 ナット
173 ナット
174 揺動軸支持筒部
175 ボルト
176 荷物
177 荷物ガイド部材
178 側面部
179 上面部
180 取付孔部
181 取付孔部
182 荷物搬送路
183 歩行装置
189 原動軸部
190 外装従動輪
192 走行面
193a 接地主面部
193b 接地主面部
200a 動力伝達部フレーム
200b 動力伝達部フレーム
201 動力伝達部支柱
202a 従動輪フレーム
202b 従動輪フレーム
203 従動輪支柱
204 支持板(従動輪支柱)
205a 突条
205b 突条
206a 案内溝部
206b 案内溝部
207a 凹部
207b 凹部
208a 凸部
209a 凸部
210a 外側面(動力伝達部フレーム)
210b 外側面(動力伝達部フレーム)
211a 内側面(従動輪フレーム)
211b 内側面(従動輪フレーム)
212a 取付孔部(従動輪フレーム)
212b 取付孔部(従動輪フレーム)
213a 駆動輪側面部
213b 駆動輪側面部
214 駆動輪支持柱部
215 支持板(駆動輪支持柱部)
216 螺子(従動輪支柱)
217a 外側面(従動輪フレーム)
217b 外側面(従動輪フレーム)
218a 外側面(駆動輪側面部)
218b 外側面(駆動輪側面部)
219a 取付孔部(駆動輪側面部)
219b 取付孔部(駆動輪側面部)
220a 細長板状延長部材
220b 細長板状延長部材
221 孔部(細長板状延長部材)
222 螺子(細長板状延長部材)
223a スライド長孔部
223b スライド長孔部
224a スライド棒部
224b スライド棒部
225 頭部(螺子)
226a 螺子
226b 螺子
227a 孔部(スライド軸部)
227b 孔部(スライド軸部)
228 螺子(動力伝達部支柱)
229 螺子(駆動輪支持柱部)
L3 深さ寸法
L4 長さ寸法
L7 深さ寸法
L8 長さ寸法
L17 高さ寸法
L18 直径寸法
L21 長さ寸法
W1 間隔寸法(案内溝部)
W2 間隔寸法(突条)
W3 間隔寸法(凹部)
W4 間隔寸法(動力伝達部フレーム)
W5 間隔寸法(従動輪フレーム)
H1 深さ寸法(案内溝部)
H2 高さ寸法(突条)
H3 高さ寸法(凸部)
H4 高さ寸法(凹部)
【技術分野】
【0001】
本発明は、駆動装置に係り、特に、ロボットコンテストに使用されるロボット等の玩具、模型の構成部品として使用される駆動装置に関する。
【背景技術】
【0002】
近年、中学校・高等学校、高等専門学校等において、各学生同士が作成したロボット同士をゲーム形式で対戦形式で、箱を積み上げたり、ボールを搬送したりする適宜の作業を行う優劣を競うロボットコンテストが開催されている。
上記ロボットコンテストに際しては、各学生がアイデアを出しながら、工作パーツを組み合わせることにより、出場用のロボットが製作されている。
【0003】
このような工作パーツとしては、例えば、ロボットの移動手段として構成された走行装置がある。上記ロボットコンテストにおいては、相手のロボットとの対戦競技の中で、段差のある部位や、様々な障害物を乗り越える必要があることから、ロボットの駆動手段として無限軌道走行装置を使用する場合も多い。
【0004】
このようなロボットコンテストにおいて使用される無限軌道走行装置は、従来、板状のフレームと、この板状のフレームの両側に配設された一対の無限軌道部とを備え、上記板状のフレーム上に原動機、駆動力伝達部及びバッテリーを固定するように構成されている。
【0005】
このように構成された従来の無限軌道装置にあっては、無限軌道部に駆動力を供給する原動機、駆動力伝達部及びバッテリーを配置するスペースを確保するために上記板状のフレームが必要となり、この板状のフレームの両側に無限軌道装置が配設されていることから、他の部材、部品等との接合に関しては制約があり、ロボットコンテストに向けてのロボットの製作の自由度には限界があった。
【0006】
従って、本来、ロボット製作における自由な発想を重視し、児童や学生の知育に資するための教育的な観点から行われているロボットコンテストの趣旨から、子供や学生に、より自由な発想を可能とし、様々な部品と自由に組み合わせて様々な形態のロボットを作製することができる、ロボット作成の自由度を確保できる走行装置が望まれていた。
【0007】
また、さらに、様々な形態のロボットを構成することについての要望があることから、原動機及び駆動力伝達機構等の部品を取り外し、アセンブリーとして走行以外の目的にも容易に適用でき、また、無限軌道を取りはずした状態で他の用途にも容易に適用できる汎用性に富んだ駆動装置があれば便利である。
【0008】
このような観点から、原動機や駆動力伝達機構を内部に備える無限軌道装置を調査したところ以下のような文献が発見された(特許文献1、特許文献2、特許文献3)。
【特許文献1】特公昭49−21676
【特許文献2】特公昭47−12139
【特許文献3】特開平06−305455
【発明の開示】
【発明が解決しようとする課題】
【0009】
上記特許文献1には、無限軌道装置内部にモータ及び駆動力伝達機構が備えられた玩具としてのスノーモビルが開示されている。また、上記特許文献2には無限軌道内部に原動機及び駆動力伝達機構が内蔵されたモータ駆動玩具が開示されている。また、上記特許文献3には、同様に原動機及び伝達機構を内蔵したクローラ式走行装置が開示されている。
【0010】
しかしながら、上記特許文献に開示されたいずれの無限軌道装置にあっても、無限軌道装置全体があらかじめ一体となって形成されているものであり、原動機及び駆動力伝達機構のみを取り外し他の用途に使用しうるようには構成されていない。さらに、上記無限軌道装置を備えた玩具等を全体としてそのまま他の用途に利用するようには構成されていない。
【0011】
上記ロボットコンテストにおいては、学生の自由かつ柔軟なアイデアにより各工作パーツを組み合わせて構成することにより各種のロボットを製作することにより、児童の知育や学生の自主性、主体性の醸成を図ることを趣旨とするものであり、また、上記ロボットコンテストでは、使用可能な工作パーツも限定されることから、ユニット的に各構成部品が複数の用途に使用できることが望ましい。
【0012】
そこで、本発明が解決しようとする課題は、自由に組み立てることができる玩具において、多様途に構成部品として使用できる駆動装置を提供することにある。
【課題を解決するための手段】
【0013】
このような技術的課題の解決のため、請求項1記載の発明は、駆動装置10であって、玩具の構成部品として形成され、着脱可能に設けられた原動部11及び動力伝達部12を内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される駆動手段13を備えた駆動装置本体14を有することを特徴とする。
【0014】
したがって、上記駆動装置10は、原動部11からの動力が上記動力伝達部12を介して上記駆動手段13へ伝達されることにより駆動されている。
また、上記原動部11及び上記動力伝達部12は、上記駆動装置10に内装されている。
上記駆動装置本体14は、夫々玩具の構成部品として形成されているため、上記各構成部品をロボットコンテスト等における様々な形態を構成する部品として、様々な用途に使用することができる。
【0015】
請求項2記載の発明は、上記駆動手段13は無限軌道15であって、上記無限軌道15を駆動しうる駆動輪16と従動輪17とを有し、上記動力伝達部12を介して上記駆動輪16に動力を供給する上記原動部11及び上記動力伝達部12は上記駆動輪16と上記従動輪17との間に設けられていることを特徴とする。
【0016】
したがって、上記無限軌道15は、上記動力伝達部12を介して供給される上記原動部11からの動力により駆動されている。
【0017】
請求項3記載の発明は、上記駆動輪16は駆動装置本体14の一端部18に配置されると共に他端部19には従動輪17が配置され、上記駆動輪16の内方には上記原動部11及び上記動力伝達部12が設けられ、上記無限軌道15は駆動輪16及び上記従動輪17に巻装され、駆動輪15により上記無限軌道15が駆動されて走行するように走行装置28として構成されていることを特徴とする。
【0018】
したがって、上記駆動装置10は、上記駆動輪16を介して駆動され、上記無限軌道15により走行することができる。
【0019】
請求項4記載の発明は、上記駆動装置本体14は車軸フレーム部20を有し、上記駆動輪16及び従動輪17は軸部21を介して上記車軸フレーム部20に回動可能に固定されていると共に、上記動力伝達部12は互いに歯合するギア比の異なる複数の歯車22を有し、上記歯車22は歯車軸部23を介して上記車軸フレーム部20に回動可能に固定されていることを特徴とする。
【0020】
したがって、上記車軸フレーム部20により回動可能に固定された上記駆動輪16及び従動輪17により上記駆動装置本体14を走行させることができる。
また、互いにギア比の異なる複数の歯車22を有する動力伝達部12により上記原動部11から発生する駆動力の大きさを上記複数の歯車により変換して駆動することができる。
【0021】
請求項5記載の発明は、上記車軸フレーム部20は複数のフレーム部24に分割形成され、上記原動部11及び動力伝達部12は同一フレームに夫々着脱可能に固定されていることを特徴とする。
【0022】
したがって、上記車軸フレーム部20に設けられた上記原動部11及び動力伝達部12を夫々分離して別個に、夫々駆動装置10以外の用途に使用することもできる。
【0023】
請求項6記載の発明は、上記車軸フレーム部は、複数のフレーム部に分割され、上記分割されたフレーム部は、上記駆動輪が設けられた駆動輪側方フレーム部と、上記従動輪が設けられた従動輪側方フレーム部と、上記駆動輪側方フレーム部と上記従動輪側方フレーム部との間に配置され、上記動力伝達部が設けられた動力伝達部側方フレーム部と、上記従動輪側方フレーム部と上記動力伝達部側方フレーム部との間に配置され、上記原動部が設けられた原動部取付フレーム部とにより構成され、上記駆動輪側方フレーム部と、上記原動部取付フレーム部は、夫々上記動力伝達部側方フレーム部に夫々着脱可能に固定され、上記動力伝達部側方フレーム部と上記従動輪側方フレーム部とが互いに無限軌道の長さ方向において移動可能に固定されていることを特徴とする。
【0024】
請求項7記載の発明は、上記従動輪側方フレーム部には、無限軌道の長さ方向に沿って設けられたスライド長孔部が設けられ、上記動力伝達フレーム部には、上記スライド長孔部の長さ方向に沿って移動しうるように配置されたスライド棒部が設けられていることを特徴とする。
【0025】
請求項8記載の発明は、上記動力伝達部側方フレーム部は、一対の動力伝達部フレームと、上記各動力伝達部フレーム同士を支持しうるように設けられた動力伝達部支柱とにより形成され、上記従動輪側方フレーム部は、一対の従動輪フレームと、上記各従動輪フレーム同士を支持しうるように設けられた従動輪支柱とにより形成され、上記動力伝達部側方フレーム部は上記従動輪フレーム間に配置され、上記動力伝達部フレームの外側面には、無限軌道の長さ方向に沿って設けられた案内溝部が設けられ、上記従動輪フレームの内側面には、上記動力伝達部フレームに設けられている案内溝部と係合して、上記動力伝達部側方フレーム部を無限軌道の長さ方向に沿って移動しうるように形成されている突条が設けられていることを特徴とする。
【0026】
請求項9記載の発明は、上記突条は上記従動輪フレームの各内側面に設けられ、上記各案内溝部には、無限軌道の長さ方向に沿って所定の間隔寸法をおいて配置された複数の凹部が設けられ、上記各突条には、上記案内溝部に設けられた上記各凹部に係合して、上記動力伝達部側方フレーム部を長さ方向に対する移動を固定しうるように形成された凸部が設けられ、上記各案内溝部に設けられている各凹部は、夫々上記動力伝達部側方フレーム部の幅方向中心を基準として対称位置に配置され、上記各突条に設けられている各凸部は、夫々上記従動輪側方フレーム部の幅方向中心を基準として対称位置に配置されている。
【0027】
請求項10記載の発明は、上記従動輪側方フレーム部及び、上記駆動輪側方フレーム部にはそれぞれ取付孔部が設けられ、上記従動輪側方フレーム部と、上記駆動輪側方フレーム部とは、上記各取付孔部を介して上記無限軌道の長さ方向に沿って設けられた細長板状延長部材により着脱可能に固定され、無限軌道の長さ方向において延長可能に形成されていることを特徴とする。
【0028】
請求項11記載の発明は、上記原動部11及び動力伝達部12は、一体的に着脱可能に形成されていることを特徴とする。
したがって、上記原動部11及び動力伝達部12を一体として駆動装置10から着脱し、他の用途に使用することもできる。
【0029】
請求項12記載の発明は、上記各歯車軸部23は上記車軸フレーム部20を貫通して外方へ延設され、上記歯車22と共に回動可能に形成され、延設された各歯車軸部23の先端部には、駆動装置本体14を走行させうる外装車輪26が装着されうるように構成されていることを特徴とする。
【0030】
したがって、上記駆動装置10は、上記各歯車軸部23の先端部に装着された外装車輪26及び無限軌道15の双方により走行することができる。
【0031】
請求項13記載の発明は、上記複数の歯車22は、原動部11に備えられた原動歯車27に歯合する、原動歯車27に対してギヤ比の小さな歯車22aと、駆動輪16に歯合する、上記原動歯車27に対してギヤ比の大きな歯車22dと、上記ギヤ比の小さな歯車22bと大きな歯車22cとの間に配置された上記中間のギヤ比の歯車22b,22cとにより構成され、上記外装車輪26は上記いずれかの歯車軸部23a,23b,23c,23dに着脱可能に固定されることを特徴とする。
【0032】
したがって、上記外装車輪26を上記いずれかの歯車軸部23a,23b,23c,23dに装着することにより外装車輪26を必要に応じた速度及びトルクで回動することができる。
【0033】
請求項14記載の発明は、上記複数の駆動装置本体14は、各駆動装置本体14の車軸フレーム部20が、夫々、相互に連結手段36により結合されることにより無限軌道15の長さ方向において互いに並列に配置され、各駆動装置本体14は個別に駆動制御されるように構成されていることを特徴とする。
したがって、上記駆動装置本体14を上記無限軌道15の長さ方向において夫々並列に配置されている駆動装置10として使用することができる。
【0034】
請求項15記載の発明は、上記複数の駆動装置本体14は、上記車軸フレーム部20が相互に上記連結手段36により結合されることにより無限軌道15の長さ方向において直列に配置されていることを特徴とする。
したがって、上記駆動装置本体14を上記無限軌道15の長さ方向において夫々直列に配置されている駆動装置10として使用することができる。
【0035】
請求項16記載の発明は、上記並列に配置された複数の駆動装置本体14は、無限軌道15の長さ方向に沿って互いに連結手段36によって接合されることにより直列に配置され、複数の駆動装置本体14は個別に駆動制御されるように構成されていることを特徴とする。
したがって、上記並列に配置されている駆動装置本体14を無限軌道15の長さ方向において直列に配置されている駆動装置10として使用することができる。
【0036】
請求項17記載の発明は、上記並列に配置された複数の駆動装置本体14の互いに対向する車軸フレーム部20に接合され上記駆動装置本体14の上方へ延設された支持フレーム部29を有し、上記支持フレーム29は上記駆動装置本体の上方に配置されるテーブル部30を有することを特徴とする。
【0037】
したがって、上記テーブル部30上に様々なロボット構成部品や創作玩具の構成部品等を配設することができる。
【0038】
請求項18記載の発明は、一対の脚部31,31と、上記一対の脚部31,31に夫々取り付けられると共に互いに連結手段36により結合されて並列に配置された上記駆動装置本体14とを備え、上記脚部31と駆動装置本体14とは、一端部37が上記歯車軸部23に固定されると共に、他端部38が上記脚部31の上端部39に回動可能に固定されたクランク軸部40と、一端部41が上記車軸フレーム部20に固定されると共に他端部42が上記脚部31に長さ方向に沿って開設された長孔74内において、上記長孔74の長さ方向に沿って移動しうるように配置される揺動軸部43とを有することを特徴とする。
【0039】
したがって、上記原動部10の駆動力が上記クランク軸40を介して上記脚部31、31に伝達され、上記脚部31、31によって歩行可能な歩行装置として使用することができる。
【0040】
請求項19記載の発明は、上記駆動輪16及び従動輪17が軸支されている車軸フレーム部20には、上記無限軌道15が巻装される補助輪32が装着されることを特徴とする。
したがって、上記駆動装置10は上記補助輪32により支持されている。
【0041】
請求項20記載の発明は、玩具の構成部品として形成され、着脱可能に設けられた原動部11と動力伝達部12とを内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される搬送手段44を有することを特徴とする。
したがって、上記駆動装置10は、上記搬送手段44により荷物を搬送することができる搬送装置として使用することができる。
【0042】
請求項21記載の発明は、上記搬送手段44はベルトコンベア46であることを特徴とする。
したがって、上記駆動装置10は、上記ベルトコンベア46に荷物を載置して搬送できる搬送装置として使用することができる。
【0043】
請求項22記載の発明は、上記駆動装置本体14は、ロボットコンテストにおいて使用されるロボットの構成部品として使用されることを特徴とする。
したがって、上記駆動装置本体14を、ロボットコンテストにおける様々な構成部品に使用することができる。
【発明の効果】
【0044】
本発明は、上記のように構成されているので、以下の効果を奏する。
請求項1記載の発明によれば、上記駆動装置10は、原動部11と、動力伝達部12とを内装した駆動手段13を有する駆動装置本体14を備えていることから、上記駆動装置10を構成部品として用い何らかの玩具等を構成する場合に、上記原動部11や動力伝達部12を配置するスペースを別途必要としない。
【0045】
従って、上記駆動装置10を用いて様々な形態、構成の組立玩具を形成する場合、例えばロボットコンテストに出品するためのロボットを製作する場合に、ロボットの設計、製作の自由度を確保することができる。
【0046】
また、上記駆動装置10は、玩具の構成部品として形成されていることから、上記駆動装置10全体として、広く様々な用途に自由に使用することができる。
【0047】
さらに、上記原動部11及び動力伝達部12は、着脱可能に設けられていることから、多様な構成部品と自由に組み合わせて、様々な玩具、例えば、様々な形態、構成のロボットコンテスト用のロボットを製作することができ、特に、玩具の設計、製作の自由度を確保することができる。
【0048】
請求項2記載の発明によれば、上記原動部11及び上記動力伝達部12は、駆動輪16と従動輪17の間に設けられていることから、上記駆動手段13を備えた駆動装置10を用いてロボット等の組立玩具を設計する場合には、別途上記原動部11や上記動力伝達部12を配設するスペースが不要となる。
【0049】
従って、ロボット等の組立玩具の設計や配置において制約がなく、様々な形態や構成の玩具を製作することができる。
【0050】
また、上記駆動手段13は無限軌道15からなることから、駆動装置10が走行装置28として利用された場合には、段差や様々な障害物を乗り越えることができるロボットコンテスト用のロボット等の玩具を提供することができる。
【0051】
請求項3記載の発明によれば、上記原動部11及び上記動力伝達部12は上記駆動輪16の内方に配置されていることから、請求項2記載の効果と同様に、上記駆動装置10の外部に別途上記原動部及び上記動力伝達部12を配置するスペースを設ける必要がなく、構成の自由度を有する駆動装置を提供することができる。
【0052】
請求項4記載の発明によれば、上記駆動輪16及び上記従動輪17は、軸部21を介して上記車軸フレーム部20に回動可能に固定されていることから、上記駆動輪16及び従動輪17により、上記駆動装置本体14を走行させることができる。
【0053】
また、上記動力伝達部12は互いに歯合するギア比の異なる複数の歯車22を有することから、上記原動部11から発生する駆動力の大きさを上記複数の歯車により変換して駆動輪に伝達することができる。
【0054】
請求項5記載の発明によれば、上記車軸フレーム部20は複数のフレーム部24に分割形成され、上記原動部11及び動力伝達部12は同一フレームに夫々着脱可能に固定されていることから、原動部11及び動力伝達部12を、夫々、分離して別個に、夫々駆動装置10以外の用途に使用することができる。
【0055】
請求項6記載の発明によれば、上記動力伝達部側方フレーム部と、上記従動輪側方フレーム部とは互いに無限軌道の長さ方向において移動可能に固定されていることから、上記従動輪側方フレーム部に取り付けられている上記従動輪17wと、上記動力伝達部側方フレーム部を介して取り付けられている上記駆動輪側方フレーム部に設けられている上記駆動輪16w間の間隔寸法を自由に変更することができる。
【0056】
上記従動輪と上記駆動輪間の間隔寸法を自由に変更することにより、ロボットコンテスト等で作成される組み立て玩具等において必要とされる長さ寸法を有する駆動装置本体を形成することができる。
また、市販のされている様々な長さ寸法を有する無限軌道を使用することができるため、上記無限軌道の種類に限定されず、ロボットコンテスト等においてロボット等の製作の自由度を確保することができる。
【0057】
その結果、組み立て玩具やロボットコンテスト等において、長さ寸法が大きな駆動装置を作成する必要がある場合にあっても、上記従動輪と上記駆動輪間の間隔寸法を自由に変更することにより、駆動装置本体の長さ寸法を変更することができるため、上記駆動装置を組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
従って、従来の無限軌道の駆動装置においては一定の長さ寸法に限定されていたために、ロボットコンテストで作成される組立玩具の作成の自由度が制限されるという不具合を解消することができる。
また、様々な長さ寸法を有する無限軌道を使用したい場合には、別途駆動輪と従動輪と、及び上記駆動輪と従動輪間に配置されて使用されるフレーム部材等を組み合わせて作成しなければならず、また、上記作成した駆動装置にあっては、自由に長さ寸法を変更することができず、煩雑であるという不具合を解消することができる。
【0058】
請求項7記載の発明によれば、上記従動輪側方フレーム部には、無限軌道の長さ方向に沿って形成されたスライド長孔部と、上記動力伝達部側方フレーム部に設けられているスライド棒部により、上記動力伝達部を、上記無限軌道の長さ方向に沿って移動可能に保持されている。
したがって、上記スライド長孔部を介して上記駆動装置の長さ寸法を伸縮することができるため、安定して伸縮可能な駆動装置を形成することができる。
【0059】
請求項8記載の発明よれば、上記従動輪側方フレーム部に設けられている突条を上記動力伝達部側方フレーム部に設けられている案内溝部に移動可能に係合させることにより、上記動力伝達部側方フレームと上記従動輪側方フレーム部とを、上記無限軌道の長さ方向において移動可能に保持することができる。
【0060】
請求項9記載の発明によれば、上記突条に設けられている凸部を上記案内溝部に設けられている凹部に嵌入させることにより、上記駆動装置の長さ方向への移動を阻止することができ、上記動力伝達部側方フレーム部と上記従動輪側方フレーム部との間の間隔寸法を一定状態で保持することができる。
また、上記各案内溝部に設けられている各凹部は、夫々上記動力伝達部側方フレーム部の幅方向中心を基準として対称位置に配置され、上記各突条に設けられている各凸部は、夫々上記従動輪側方フレーム部の幅方向中心を基準として対称位置に配置されていることから、上記各凸部を、上記各凹部に夫々嵌入させることにより、上記動力伝達部側方フレーム部と、上記従動輪側方フレーム部とが互いに上記車軸フレーム部の幅方向同位置で固定され、上記動力伝達部側方フレーム部と、上記従動輪側方フレーム部との長さ方向に対する移動を固定する際にあっては、上記各動力伝達部側方フレーム部と上記従動輪側方フレーム部とが幅方向において傾くことなく容易に固定することができる。
【0061】
請求項10記載の発明によれば、上記従動輪側方フレーム部と、上記駆動輪側方フレーム部とは、上記各取付孔部を介して上記無限軌道の長さ方向に沿って設けられた細長板状延長部材により着脱可能に固定され、無限軌道の長さ方向において延長可能に形成されていることから、上記従動輪と上記駆動輪間の間隔寸法を自由に変更することができる。
【0062】
上記従動輪と上記駆動輪間の間隔寸法を自由に変更することにより、ロボットコンテスト等で作成される組み立て玩具等において必要とされる長さ寸法を有する駆動装置本体を形成することができる。
また、市販のされている様々な長さ寸法を有する無限軌道を使用することができるため、上記無限軌道の種類に限定されず、ロボットコンテスト等においてロボット等の製作の自由度を確保することができる。
【0063】
その結果、組み立て玩具やロボットコンテスト等において、長さ寸法が大きな駆動装置を作成する必要がある場合にあっても、上記従動輪と上記駆動輪間の間隔寸法を自由に変更することにより、駆動装置本体の長さ寸法を変更することができるため、上記駆動装置を組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
【0064】
請求項11記載の発明によれば、上記原動部11及び動力伝達部12は一体に着脱可能に形成されていることから、上記原動部11及び動力伝達部12を一体として駆動装置10から着脱でき、原動部11及び動力伝達部12を一つのユニットとして他の用途に使用することができる。
【0065】
請求項12記載の発明によれば、上記各歯車軸部23の先端部25には、外装車輪26が装着されうることから、請求項7記載の発明により走行装置28を構成した場合には、上記先端部25に上記外装車輪26を装着することにより、上記外装車輪26及び上記駆動手段13の双方により走行することができる。
【0066】
したがって、このように構成された走行装置28にあっては、上記外装車輪26により走行可能であるとともに、障害物がある場合には、上記無限軌道により走行することにより障害物を乗り越えることができ、多様な走行形態を実現できる走行装置28を提供することができる。
【0067】
請求項13記載の発明によれば、上記外装車輪26はギヤ比の異なる各歯車軸部23に着脱可能に固定されていることから、必要に応じて、上記外装車輪26を上記歯車軸部23から離脱させ、他のギヤ比の歯車の歯車軸部23に装着することができることから、所望の速度及びトルクにより上記外装車輪26を駆動することができる。
【0068】
その結果、請求項8記載の発明により走行装置28を構成した場合には、走行状況に応じて、速度及びトルクを適宜変更することができる走行装置28を構成することができる。
【0069】
請求項14記載の発明によれば、上記駆動装置本体14は並列に配置されていることから、例えば、走行装置28として駆動装置10を使用した場合には、安定して走行可能な走行装置28として、使用することができる。
また、走行装置28以外の用途に利用する場合には、並行に配置された2つの駆動部を使用する駆動装置として利用することができる。
【0070】
また、請求項14記載の発明にあっては、上記駆動装置本体14は個別に駆動制御されるように構成されていることから、駆動装置10が走行装置28として使用された場合には、各駆動装置本体14の駆動状態を個別に制御することにより、上記駆動装置10の走行状態を自由に制御することができる。
同様に、上記のように駆動装置として利用された場合にも、駆動状態を個別に制御することができるため、多様な駆動状態を形成することができる。
【0071】
請求項15記載の発明によれば、駆動装置本体14は無限軌道の長さ方向に沿って直列に配置されていることから、駆動力を直列方向に出力する駆動装置を提供することができる。
また、請求項10記載の発明に係る発明に係る駆動装置本体14を走行装置28として使用した場合には、幅寸法の小さい走行装置28を形成することができる。
また、駆動装置本体14を走行装置28以外の用途の、駆動力を提供する装置として使用した場合には、駆動力を直列に出力する駆動装置として利用することができる。
【0072】
請求項16記載の発明によれば、上記駆動装置10は並列に配置された複数の駆動装置本体14が互いに接合されていることから、駆動装置本体14からの駆動力が直列方向であってかつ並列に、全体として大きな出力が出力される駆動装置が提供される。
【0073】
また、本請求項に係る駆動装置本体14が走行装置28として利用された場合には、駆動装置本体14が直列状態であって、かつ並列に配置され、大きな駆動力でかつ安定した走行ができる走行装置28が提供される。
【0074】
請求項17記載の発明によれば、上記駆動装置10は、上記テーブル部30を有することから、上記テーブル部30上に様々なロボット構成部品や創作玩具の構成部品等を配設することができる。
【0075】
また、上記テーブル部30は、上方に延設された上記支持フレーム部29により、上記駆動装置本体14の上方に配置されていることから、上記駆動装置本体14間に障害物がある場合においても、上記テーブル部30は上記障害物に衝接することなく、走行することが可能となり、例えば、ロボットコンテストにおけるロボットの構成上の多様性を確保することができる。
【0076】
請求項18記載の発明によれば、上記駆動装置本体14と、上記一対の脚部31,31とが、回動可能に固定されたクランク軸部40、40及び、上記脚部31,31に設けられた長孔において、長さ方向に沿って移動可能に配置されていることから、上記クランク軸部が回動することにより、上記脚部31,31が駆動される。
したがって、上記駆動装置10により上記脚部31,31を駆動することによって設置面上を歩行可能な駆動装置として使用することができる。
【0077】
請求項19記載の発明によれば、上記補助輪32が装着されていることから、無限軌道15の回転時における保持箇所が増加するため、上記駆動輪16により上記無限軌道が駆動された場合に、上記無限軌道15が駆動輪16及び従動輪17から脱離することを抑止し、安定した巻装状態を維持することができる。
また、上記駆動装置10は上記補助輪32で支持されているため、上記駆動装置10にかかる荷重を分散することができ、上記駆動装置を安定して走行させることができる。
【0078】
請求項20記載の発明によれば、上記駆動装置10を物品を搬送しうる搬送装置として使用することができる。
【0079】
請求項21記載の発明によれば、上記搬送装置はベルトコンベアにより駆動されていることから、上記ベルトコンベア上に荷物等を載置して搬送できる搬送装置として使用することができる。
【0080】
請求項22記載の発明によれば、上記駆動装置本体14をロボットコンテストにおいて使用できるロボットの構成部品として使用できることから、設計構成における制限が少なく、様々な用途に使用することができる。
したがって、児童や学生のより自由な発想を可能とし、上記発想を具現化できるロボットの製作を可能とするものである。
【発明を実施するための最良の形態】
【0081】
以下、添付図面に示す実施の形態に基づき、本発明にかかる駆動装置10を詳細に説明する。
【0082】
図1に示すように、本実施の形態に係る駆動装置10は、玩具の構成部品として形成され、着脱可能に設けられた原動部11及び動力伝達部12を内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される駆動手段13を備えた駆動装置本体14により構成されている。
【0083】
上記駆動手段13は無限軌道15であって、上記無限軌道15を駆動しうる駆動輪16と従動輪17とを有し、上記動力伝達部12を介して上記駆動輪16に動力を供給する上記原動部11及び上記動力伝達部12は上記駆動輪16と上記従動輪17との間に設けられている。
【0084】
上記駆動輪16は駆動装置本体14の一端部18に配置されると共に他端部19には従動輪17が配置され、上記駆動輪16の内方には上記原動部11及び上記動力伝達部12が設けられ、上記無限軌道15は駆動輪16及び上記従動輪17に巻装され、駆動輪15により上記無限軌道15が駆動されて走行する走行装置28として構成されている。
【0085】
上記駆動装置本体14は車軸フレーム部20を有し、上記駆動輪16及び従動輪17は軸部21を介して上記車軸フレーム部20に回動可能に固定されていると共に、上記動力伝達部12は互いに歯合するギア比の異なる複数の歯車22を有し、上記歯車22は歯車軸部23を介して上記車軸フレーム部20に回動可能に固定されている。
【0086】
上記車軸フレーム部20は複数のフレーム部24に分割形成され、上記原動部11及び動力伝達部12は同一フレームに夫々着脱可能に固定されている。
【0087】
上記車軸フレーム部は、複数のフレーム部に分割され、上記分割されたフレーム部は、上記駆動輪が設けられた駆動輪側方フレーム部と、上記従動輪が設けられた従動輪側方フレーム部と、上記駆動輪側方フレーム部と上記従動輪側方フレーム部との間に配置され、上記動力伝達部が設けられた動力伝達部側方フレーム部と、上記従動輪側方フレーム部と上記動力伝達部側方フレーム部との間に配置され、上記原動部が設けられた原動部取付フレーム部とにより構成され、上記駆動輪側方フレーム部と、上記原動部取付フレーム部は、夫々上記動力伝達部側方フレーム部に夫々着脱可能に固定され、上記動力伝達部側方フレーム部と上記従動輪側方フレーム部とが互いに無限軌道の長さ方向において移動可能に固定されている。
【0088】
上記従動輪側方フレーム部には、無限軌道の長さ方向に沿って設けられたスライド長孔部が設けられ、上記動力伝達フレーム部には、上記スライド長孔部の長さ方向に沿って移動しうるように配置されたスライド棒部が設けられている。
【0089】
上記動力伝達部側方フレーム部は、一対の動力伝達部フレームと、上記各動力伝達部フレーム同士を支持しうるように設けられた動力伝達部支柱とにより形成され、上記従動輪側方フレーム部は、一対の従動輪フレームと、上記各従動輪フレーム同士を支持しうるように設けられた従動輪支柱とにより形成され、上記動力伝達部側方フレーム部は上記従動輪フレーム間に配置され、上記動力伝達部フレームの外側面には、無限軌道の長さ方向に沿って設けられた案内溝部が設けられ、上記従動輪フレームの内側面には、上記動力伝達部フレームに設けられている案内溝部と係合して、上記動力伝達部側方フレーム部を無限軌道の長さ方向に沿って移動しうるように形成されている突条が設けられている。
【0090】
上記突条は上記従動輪フレームの各内側面に設けられ、上記各案内溝部には、無限軌道の長さ方向に沿って所定の間隔寸法をおいて配置された複数の凹部が設けられ、上記各突条には、上記案内溝部に設けられた上記各凹部に係合して、上記動力伝達部側方フレーム部を長さ方向に対する移動を固定しうるように形成された凸部が設けられ、上記各案内溝部に設けられている各凹部は、夫々上記動力伝達部側方フレーム部の幅方向中心を基準として対称位置に配置され、上記各突条に設けられている各凸部は、夫々上記従動輪側方フレーム部の幅方向中心を基準として対称位置に配置されている。
【0091】
上記従動輪側方フレーム部及び、上記駆動輪側方フレーム部にはそれぞれ取付孔部が設けられ、上記従動輪側方フレーム部と、上記駆動輪側方フレーム部とは、上記各取付孔部を介して上記無限軌道の長さ方向に沿って設けられた細長板状延長部材により着脱可能に固定され、無限軌道の長さ方向において延長可能に形成されている。
【0092】
上記原動部11及び動力伝達部12は、一体的に着脱可能に形成されている。
【0093】
上記各歯車軸部23は上記車軸フレーム部20を貫通して外方へ延設され、上記歯車22と共に回動可能に形成され、延設された各歯車軸部23の先端部には、駆動装置本体14を走行させうる外装車輪26が装着されうるように構成されている。
【0094】
上記複数の歯車22は、原動部11に備えられた原動歯車27に歯合する、原動歯車27に対してギヤ比の小さな歯車22aと、駆動輪16に歯合する、上記原動歯車27に対してギヤ比の大きな歯車22dと、上記ギヤ比の小さな歯車22aと大きな歯車22dとの間に配置された上記中間のギヤ比の歯車22b,22cとにより構成され、上記外装車輪26は上記いずれかの歯車軸部23に着脱可能に固定される。
【0095】
上記複数の駆動装置本体14は、各駆動装置本体14の車軸フレーム部20が、夫々、相互に連結手段により結合されることにより無限軌道15の長さ方向において互いに並列に配置され、各駆動装置本体14は個別に駆動制御されるように構成されている。
【0096】
上記複数の駆動装置本体14は、上記車軸フレーム部20が相互に上記連結手段36により結合されることにより無限軌道15の長さ方向において直列に配置されている。
【0097】
上記並列に配置された複数の駆動装置本体14は、無限軌道15の長さ方向に沿って互いに連結手段36によって接合されることにより直列に配置され、複数の駆動装置本体14は個別に駆動制御されるように構成されている。
【0098】
上記並列に配置された複数の駆動装置本体14の互いに対向する車軸フレーム部20に接合され上記駆動装置本体14の上方へ延設された支持フレーム部29を有し、上記支持フレーム29は上記駆動装置本体の上方に配置されるテーブル部30を有する。
【0099】
一対の脚部31,31と、上記一対の脚部31,31に夫々取り付けられると共に互いに連結手段36により結合されて並列に配置された上記駆動装置本体14とを備え、上記脚部31と駆動装置本体14とは、一端部37が上記歯車軸部23に固定されると共に、他端部38が上記脚部31の上端部39に回動可能に固定されたクランク軸部40と、一端部41が上記車軸フレーム部20に固定されると共に他端部42が上記脚部31に長さ方向に沿って開設された長孔74内において、上記長孔74の長さ方向に沿って移動しうるように配置される揺動軸部43とを有する。
【0100】
上記駆動輪16及び従動輪17が軸支されている車軸フレーム部20には、上記無限軌道15が巻装される補助輪32が装着される。
【0101】
玩具の構成部品として形成され、着脱可能に設けられた原動部11と動力伝達部12とを内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動される搬送手段44を有し、上記搬送手段44はベルトコンベア46により形成されている。
【0102】
上記駆動装置本体14は、ロボットコンテストにおいて使用されるロボットの構成部品として使用される。
【実施例】
【0103】
本発明に係る駆動装置の第一実施例を示す。本実施例に係る駆動装置10にあっては、図1に示すように、ロボットコンテストに使用されるロボット等の玩具、模型の構成部品として使用される。
【0104】
図1〜図3に示すように、上記車軸フレーム部20は、複数のフレーム部24に分割され、上記分割されたフレーム部24は、上記駆動装置本体14の一端部18に配置された駆動輪側方フレーム部51と、上記駆動装置本体14の他端部19に配置された従動輪側方フレーム部52と、上記駆動輪側方フレーム部51と上記従動輪側方フレーム部52との間に設けられた動力伝達部側方フレーム部53と、上記従動輪側方フレーム部52と上記動力伝達部側方フレーム部53との間に配置された原動部取付フレーム部61とにより構成されている。
上記車軸フレーム部20を構成する駆動輪側方フレーム部51と、上記従動輪側方フレーム部52と、上記動力伝達部側方フレーム部53と、上記原動部取付フレーム部61は所定の剛性を有するプラスティック素材により形成されている。
【0105】
図2に示すように、上記駆動輪側方フレーム部51は横断面コ字状に形成され、底面部62と、上記底面部62の両側端縁部から直角に延設された一対の側面部63,63とを有している。
図2に示すように、上記側面部63、63には、上記側面部63に貫通して設けられた固定軸孔部54,54と、取付孔部49,49と、上記駆動装置本体14内方に向かって延設された左右一対のフレーム係合爪部70,70とが形成されている。
上記底面部62には、上記補助輪32を固定可能な固定孔部64が形成されている。
【0106】
上記フレーム結合爪部70、70は、上記駆動装置本体14内方に向かって延設され、上記車軸フレーム部20の幅方向略中央部に配設され、上記車軸フレーム部20の幅方向の寸法の略半分の幅寸法に形成されている。
【0107】
図2、図3に示すように、上記フレーム係合爪部70、70は、可撓性を有する板状プラスティック素材により形成され、上記フレーム係合爪部70,70の先端部には、後述の上記動力伝達部側方フレーム部53に設けられた原動部側方フレーム取付溝部71,71の深さ寸法L7と略同一の長さ寸法L8に形成され、上記駆動装置本体14内方に屈曲された爪先端部80,80が形成されている。
【0108】
上記駆動輪側方フレーム部51の底面部62には、補助輪32aが設けられ、上記補助輪32aは横断面コ字状に形成された補助輪固定具82により、補助輪81が回動可能に固定されている。
上記補助輪固定具82は、上面部83と、上記上面部83の両側端縁部から直角方向へ延設された側面部84,84とにより形成されている。
【0109】
図2に示すように、上記補助輪81は短円筒状に形成され、上記側面部84,84間に挿通された回動軸85により、上記側面部84,84間に回動可能に支持されている。
上記上面部83には、補助輪固定具82の取付孔部86が設けられ、上記補助輪固定具82は、上記取付孔部86と、上記駆動輪側方フレーム部51の底面部62に設けられた固定孔部64との間に挿通された螺子により着脱可能に固定されている。
【0110】
図2に示すように、上記従動輪側方フレーム部52は、横断面コ字状に形成され、底面部65と、上記底面部65の両側端縁部から直角に延設された一対の側面部66、66とを有している。
図2に示すように、上記側面部66、66には、上記側面部66、66に貫通して設けられた固定軸孔部56、56と、取付孔部50、50とが形成されている。
上記底面部65には、上記補助輪32を固定可能な固定孔部67が形成されている。
【0111】
上記従動輪側方フレーム部52の底面部65には、補助輪32bが設けられ、上記補助輪32bは横断面コ字状に形成された補助輪固定具88により、補助輪87が回動可能に支持されている。
上記補助輪固定具88は、上面部89と、上記上面部89の両側端縁部から直角方向へ延設された側面部90,90とにより形成されている。
【0112】
図2に示すように、上記補助輪87は短円筒状に形成され、上記側面部90,90間に挿通された回動軸91により、上記側面部90,90の間に回動可能に支持されている。
上記上面部89には、補助輪固定具88の取付孔部92が設けられている。
上記補助輪固定具88は、上記取付孔部92と上記従動輪側方フレーム部52の底面部65に設けられた固定孔部67との間に挿通された螺子93により着脱可能に固定されている。
【0113】
上記原動部取付フレーム部61は、上記原動部11が圧入されうる横断面口字状の筒型形状に形成され、底面部75と、上記底面部75の両側端縁部から直角に延設された一対の側面部76,76と、上記側面部76,76の上端縁部において、上記底面部75と平行して形成された上面部77とを有している。
【0114】
上記側面部76,76には、上記動力伝達部側方フレーム部53に設けられている原動部側方フレーム取付溝部72に係合可能なフレーム係合爪部78、78が形成されている。
【0115】
上記フレーム結合爪部78、78は、上記駆動装置本体14内方に向かって延設され、上記車軸フレーム部20の幅方向略中央部に配設され、上記車軸フレーム部20の幅方向寸法の略半分の幅寸法に形成されている。
【0116】
上記フレーム係合爪部78、78は、可撓性を有する板状プラスティック素材により形成され、上記フレーム係合爪部78,78の先端部には、上記動力伝達部側方フレーム部53に設けられた原動部側方フレーム取付溝部72,72の深さ寸法L3と略同一の長さ寸法L4に形成され、上記駆動装置本体14内方に屈曲された爪先端部79,79が設けられている。
【0117】
上記原動部11は、電動モーターにより形成され、上記底面部75と、一対の側面部76,76と、上面部77とにより形成された原動部取付フレーム部61に着脱可能に圧入されている。
上記電動モーターは、回転子と、上記回転子と相互作用して回転モーメントを発生させる固定子と、上記回転子の回転を外部に伝える原動軸部189とにより形成され、上記原動軸部189の先端部には原動歯車27が設けられている。
【0118】
図2、図3に示すように、上記動力伝達部側方フレーム部53は、横断面コ字状に形成され、底面部68と、上記底面部68の両側端縁部から直角に延設された一対の側面部69,69とを有している。
【0119】
上記側面部69、69には、上記側面部69、69に貫通して設けられた歯車軸部孔部57,58,59、60と、取付孔部47,48と、駆動輪側方フレーム取付溝部71と、原動部側方フレーム取付溝部72と、窓部73,73とが形成されている。
【0120】
図2、図3に示すように、上記歯車軸部孔部57,58,59,60は、上記動力伝達部側方フレーム部53の側面部69において、幅方向略中央位置に長さ方向に沿って、所定の間隔寸法をおいて形成されている。
【0121】
上記歯車軸部孔部57,58,59,60は、上記動力伝達部側方フレーム部53の側面部69の幅方向において、上記底面部68からの高さ寸法が、上記各歯車22a,22b,22c,22dのうち最大の半径寸法を有する歯車の半径寸法より大きい高さ寸法に形成されている。
【0122】
上記窓部73,73は、所定の幅寸法を有し、上記動力伝達部側方フレーム部53の長さ方向に沿って、上記歯車軸部57,58,59,60を中心として鏡像位置に、幅方向に所定の間隔寸法を置いて一対に並列に設けられている。
【0123】
図2、図3に示すように、上記駆動輪側方フレーム取付溝部71は、上記動力伝達部側方フレーム部53の長さ方向駆動輪側方フレーム部51側の側端縁部において、幅方向に沿って設けられている。
上記駆動輪側方フレーム取付溝部71の長さ寸法は、上記駆動輪側方フレーム部51の上記フレーム係合爪部70の幅寸法と略同一の幅寸法を有し、上記動力伝達部側方フレーム部53に設けられたフレーム係合爪部70が係合しうる形状に形成されている。
【0124】
上記原動部側方フレーム取付溝部72は、上記動力伝達部側方フレーム部53の長さ方向原動部取付フレーム部61側の側端縁部において、幅方向に沿って設けられている。
上記原動部側方フレーム取付溝部72の長さ寸法は、上記原動部取付フレーム部61の上記フレーム係合爪部78の幅寸法と略同一の幅寸法を有し、上記原動部取付フレーム部61に設けられたフレーム係合爪部78が係合しうる形状に形成されている。
【0125】
図2に示すように、上記従動輪側方フレーム部52は、上記車軸フレーム部20の長さ方向両側方において設けられた棒状固定部材94,94により上記動力伝達部側方フレーム部53に対し着脱可能に固定されている。
上記棒状固定部材94,94は、細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部95が同一間隔を置いて複数設けられている。
【0126】
上記棒状固定部材94は、上記孔部95のうち一の孔部95a及び、上記従動輪側方フレーム部52の上記側面部66に設けられた上記取付孔部50を介して、この間に挿通される螺子96により上記従動輪側方フレーム部52に対して着脱可能に固定されるとともに、上記孔部95のうち一の孔部95b及び、上記動力伝達部側方フレーム部53の側面部69に設けられた取付孔部47を介して、この間に挿通される螺子97により上記動力伝達部側方フレーム部53に対して着脱自在に固定されている。
【0127】
図2,3に示すように、上記原動部取付フレーム部61には、原動機98が圧入され、上記原動部取付フレーム部61のフレーム係合爪部78側には、上記原動機98に備えられた原動歯車27が突出して形成されている。上記原動歯車27はピニオンギヤにより形成されている。
【0128】
図2、図3に示すように、上記歯車22a,22b,22c,22dは、互いにギア比の異なる複数の歯車からなり、上記原動歯車27に対してギヤ比の小さな歯車22aと、上記駆動輪16に歯合する、上記原動歯車27に対してギヤ比の大きな歯車22dと、上記ギヤ比の小さな歯車22aとギヤ比の大きな歯車22dとの間に配置された上記中間の歯車22b及び歯車22cとにより構成されている。
【0129】
図3に示すように、上記ギヤ比の小さな歯車22aはフェースギヤ104及び、上記フェースギヤ104の直径寸法より小さな径寸法を有し、上記フェースギヤ104と隣接して共に回動可能に固定された平歯車109により形成されている。
【0130】
図3に示すように、上記中間のギヤ比の歯車22bは平歯車105及び、上記平歯車105の直径寸法より小さな径寸法を有し、上記平歯車105と隣接して共に回動可能に固定された平歯車106により形成されている。
図3に示すように、上記中間のギヤ比の歯車22cは平歯車107及び、上記平歯車107の直径寸法より小さな径寸法を有し、上記平歯車107と隣接して共に回動可能に固定された平歯車108により形成されている。
【0131】
図3に示すように、上記各歯車22a,22b、22c、22dは、上記動力伝達部側方フレーム部53の側面部69,69に設けられた各歯車軸部孔部57,57間、58,58間、59,59間、60,60間に挿通された各歯車軸部23a,23b,23c,23dに固定され、上記動力伝達部側方フレーム部53に対して回動可能に支持されている。
【0132】
上記歯車軸部孔部57,58間の間隔寸法は上記平歯車109と上記平歯車105の半径寸法の和の間隔寸法と略同一寸法に形成され、上記歯車軸部孔部58,59間の間隔寸法は上記歯車106と上記歯車107との半径寸法の和の間隔寸法と略同一寸法に形成され、上記歯車軸部孔部59,60間の間隔寸法は上記歯車108と上記歯車22dの半径寸法の和の間隔寸法と略同一寸法に形成されている。
【0133】
上記原動歯車27は上記フェースギヤ104と歯合し、上記平歯車109は上記平歯車105と歯合し、上記平歯車106は上記平歯車107と歯合し、上記平歯車108は上記歯車22dに歯合している。
【0134】
上記動力伝達部側方フレーム部53の側面部69,69に設けられた各歯車軸部孔部57,57間、58,58間、59,59間、60,60間に挿通された各歯車軸部23a,23b,23c,23dは、横断面六角形状に形成され、上記各歯車22a,22b,22c,22d内の中心に設けられた各軸穴圧入され、軸方向に着脱可能に形成されている。
【0135】
上記各歯車軸部23a,23b,23c,23dの長さ寸法は、上記側面部69,69間の幅寸法と略同一の長さ寸法に形成されている。
【0136】
図2に示すように、上記駆動輪16は、所定の厚さ寸法を有する全体円盤状に形成され、上記駆動輪側方フレーム部51の側面部63,63の高さ寸法L17よりも大きい直径寸法L18を有している。
上記駆動輪16は、上記駆動輪側方フレーム部51の底面部62及び上記側面部63,63の上端から夫々突出するように形成されている。
【0137】
図3に示すように、上記駆動輪16の側方には、上記駆動輪16と共に回動可能な駆動歯車111が隣接して形成されている。
上記駆動歯車111の直径寸法は、上記駆動輪側方フレーム部51を上記動力伝達部側方フレーム部53に係合させた場合に、上記動力伝達部側方フレーム部53に形成された歯車22dと歯合し、上記駆動歯車111が回動可能な径寸法に形成されている。
【0138】
図3に示すように、上記駆動輪16は、上記駆動輪側方フレーム部51の側面部63,63に設けられた固定軸孔部54,54間に挿通された駆動輪固定軸110により固定され、上記駆動輪側方フレーム部51に対して回動可能に支持されている。
上記駆動輪16の外周面には、上記無限軌道15と歯合し、上記無限軌道15を駆動可能な無限軌道歯車112が形成されている。
【0139】
図2に示すように、上記従動輪17は、所定の厚さ寸法を有する全体円盤状に形成され、上記従動輪側方フレーム部52の側面部66,66の高さ寸法よりも大きい直径寸法を有している。
上記従動輪17は、上記従動輪側方フレーム部52の底面部65及び上記側面部66,66の上端から夫々突出するように形成されている。
上記従動輪17は、上記従動輪側方フレーム部52の側面部66,66に設けられた固定軸孔部56,56間に挿通された従動輪固定軸117に固定され、上記従動輪側方フレーム部52に対して回動可能に支持されている。
【0140】
図1に示すように、上記無限軌道15は、上記車軸フレーム部20の幅寸法と略同一の幅寸法を有し、無端帯状に形成されている。
【0141】
上記無限軌道15は、上記駆動輪側方フレーム部51に設けられた駆動輪16と、上記従動輪側方フレーム部52に設けられた従動輪17と、上記駆動輪側方フレーム部51の底面部62に設けられた上記補助輪81と、上記従動輪側方フレーム部52の底面部65に設けられた上記補助輪87とに掛け回されて装着されている。
【0142】
その結果、図1に示すように、上記無限軌道15の内方には、上記原動部11が内包された原動部取付フレーム部61と、上記歯車22が設けられた動力伝達部側方フレーム部53とが配設されている。
【0143】
図6は本発明に係る駆動装置の第二実施例を示す。本実施例に係る駆動装置10aにあっては、上記駆動装置本体14a,14bは、上記無限軌道15の長さ方向に対し直交するように配置された幅方向連結材123により結合され、上記無限軌道15の長さ方向において互いに並列に配置されている。
上記幅方向連結材123は、横断面矩形の細長板状に形成され、上記幅方向連結材123の幅方向中央には孔部124が設けられ、上記孔部124は、長さ方向に沿って所定の間隔寸法を置いて複数形成されている。
【0144】
図6、図11、図12に示すように、上記駆動装置本体14a,14bの動力伝達部側方フレーム部53a、53bの側面部69a、69bには取付孔部が設けられ、上記取付孔部には、図11、図12に示す横断面形状がL字型の板状のL字型固定具が着脱可能に取り付けられている。
【0145】
図11、図12に示すように、上記L字型固定具125は、側面部128と上面部129とにより形成され、上記側面部128及び上記上面部129は夫々直角方向に配設されている。
【0146】
図11、図12に示すように、上記L字型固定具125の上記側面部128及び上記上面部129は夫々横断面矩形の細長板状に形成され、上記側面部128及び上記上面部129の夫々の幅方向中央部には、長さ方向に沿って孔部130、131が同一間隔を置いて複数設けられている。
【0147】
図6、図11、図12に示すように、上記L字型固定具125は、上記動力伝達部側方フレーム部53aの側面部69aに設けられた取付孔部に対して、上記L字型固定具125の上記側面部128に設けられた孔部130のうち一の孔部130aを介してボルトとナットにより着脱可能に固定されるとともに、上記L字型固定具125は、上記幅方向連結材123の一端部に設けられた孔部124aに対し、上記L字型固定具125の上記上面部129に設けられた孔部131のうち一の孔部131aを介してボルトとナットにより着脱可能に固定されている。
【0148】
同様に上記駆動装置本体14aと並列して配置されている上記駆動装置本体14bの側面部53bの上記駆動装置本体14b側に設けられた取付孔部には、図11、図12に示すL字型固定具が着脱可能に取り付けられている。
【0149】
図4は本発明に係る駆動装置の第三実施例を示す。本実施例に係る駆動装置10fにあっては、上記外装車輪26,26は、円筒形状に形成され、上記駆動装置本体14r、14tの上記動力伝達部側方フレーム部53r、53tの側面部69,69を貫通して外方に延設された各歯車軸部23a,23b,23c,23dのいずれかの先端部25a,25b,25c,25dに装着して回転させうるようにして構成されている。
【0150】
図5に示すように、上記外装車輪26を各歯車軸部23a,23b,23c,23dのいずれかの先端部25a,25b,25c,25dに装着する場合には、上記各歯車軸部23a,23b,23c,23dを上記各歯車軸部23a,23b,23c,23dの夫々の軸穴及び、上記歯車軸部孔部57,58,59,60から抜き取り、上記側面部69,69間の幅寸法L19より長く、かつ、上記外装車輪26を固定しうる長さ寸法L21を有する歯車軸部23e,23f,23g,23hを圧入し、これらの歯車軸部23e,23f,23g,23hに上記外装車輪26を固定する。
【0151】
図4に示すように、上記外装車輪26の直径寸法L24は、上記駆動装置本体14に設けられた無限軌道15の高さ寸法L25よりも大きい径寸法により形成されている。
【0152】
図7は本発明に係る駆動装置の第四実施例を示す。本実施例に係る駆動装置10bにあっては、上記幅方向連結材123a,123b,123cとにより夫々並列に配置された6基の駆動装置本体14eと14f,14gと14h,14iと14jが、無限軌道15の長さ方向に沿って長さ方向連結材材137により結合されている。
【0153】
上記長さ方向連結材材137は、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部138が同一間隔を置いて複数設けられている。
上記幅方向連結材123a,123b,123cは、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部139が同一間隔を置いて複数設けられている。
【0154】
上記駆動装置10bは、上記駆動装置本体14eと14fとを結合する上記幅方向連結材123aの長さ方向略中間位置に設けられている孔部139aと、上記長さ方向連結材材137の孔部138のうち一端部に設けられた孔部138aとが固定され、上記駆動装置本体14iと14jとを結合する上記幅方向連結材123cの長さ方向略中間位置に設けられている孔部139cと、上記長さ方向連結材材137の孔部138のうち他端部に設けられた孔部138cとが固定され、上記駆動装置本体14gと14hとを結合する上記幅方向連結材123bの長さ方向略中間位置に設けられている孔部139bと、上記長さ方向連結材材137の孔部138のうち孔部138aと、138cとの中間位置に設けられた孔部138bとが固定されている。
【0155】
上記駆動装置10bを構成する上記駆動装置本体14e,14f,14g,14h,14i,14jは夫々原動部と、動力伝達部と、上記駆動装置本体14e,14f,14g,14h,14i,14jの一端部に設けられた駆動輪と、他端部に設けられた従動輪とを有し、上記駆動輪と従動輪に巻装された無限軌道により形成されている。
【0156】
図8は本発明に係る駆動装置の第五実施例を示す。本実施例に係る駆動装置10cにあっては、上記並列に配置された複数の駆動装置本体14n、14pの互いに対向する車軸フレーム部20n,20pに接合され上記駆動装置本体14n、14pの上方へ延設された支持フレーム部29a,29b,29c,29dを有し、上記支持フレーム部29a,29b,29c,29dの上端部は上記駆動装置本体14n、14pの上方に配置され、固定孔部144a,144b,144c,144dを介して着脱可能に固定されたテーブル部30が設けられている。
【0157】
上記テーブル部30は平面矩形の板状体より形成され、組み立て玩具やロボットコンテストで用いられる各種構成部材が載置可能な程度の所定の剛性を有している。
上記テーブル部30は上記駆動装置10cの走行面192に対して略水平状態に維持され、上記テーブル部30上にロボットコンテストで作成されるロボットの各種構成部品を載置して搬送可能な程度の所定の広さ面積を有する。
【0158】
上記テーブル部30の各隅部には固定孔部144a,144b,144c,144dが形成され、上記テーブル部30は、上記支持フレーム部29a,29b,29c,29dに対して、上記固定孔部144a,144b,144c,144dを介して夫々固定されている。
【0159】
上記支持フレーム部29a,29b,29c,29dは、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部140、141、142、143が同一間隔を置いて複数設けられている。
【0160】
図8に示すように、上記支持フレーム部29aは、上記駆動輪側方フレーム部51nに対して、上記支持フレーム部29aの一端部に設けられた孔部140aと、上記駆動装置本体14nの上記駆動輪側方フレーム部51nの側面部63nに設けられた取付孔部49nを介して、螺子によって着脱可能に固定されている。
【0161】
上記支持フレーム部29aの他端部には、図11に示す横断面形状L字型のL字型固定具が設けられている。
上記L字型固定具は、側面部と上面部とにより形成され、上記側面部及び上記上面部は夫々直角方向に配設されている。
【0162】
上記L字型固定具は、上記支持フレーム部29aの他端部に対して、上記L字型固定具の側面部に設けられた孔部と、上記支持フレーム部29aの他端部に設けられた孔部とを介して螺子によって着脱可能に固定されている。
【0163】
上記テーブル部30は、上記L字型固定具の上面部に設けられた孔部と、上記テーブル部30の隅部に設けられた固定孔部144aとを介して上記支持フレーム部29aの他端部に着脱可能に固定されている。
【0164】
上記支持フレーム部29bも同様に、上記駆動装置本体14nの従動輪側方フレーム部52nに着脱可能に固定され、上記支持フレーム部29c、29dも夫々駆動装置本体14pに対して着脱可能に固定されている。
【0165】
上記テーブル部30は、上記各支持フレーム部29a,29b,29c,29dに対して、着脱可能に固定された上記各支持フレーム部29a,29b,29c,29dに固定されている上記L字型固定具を介して、上記駆動装置本体14n,14pの上方に着脱可能に固定されている。
【0166】
図9は本発明に係る駆動装置の第六実施例を示す。本実施例に係る駆動装置10dにあっては、一対の脚部31a,31bと、上記一対の脚部31a,31bに夫々取り付けられると共に互いに連結部材36aにより結合されて並列に配置された上記駆動装置本体14s,14kとを備えた歩行装置183として形成されている。
【0167】
上記連結部材36aは、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部147が同一間隔を置いて複数設けられている。
【0168】
上記連結部材36aは両端部において、上記動力伝達部側方フレーム部53s、53kに対して、L字型固定具125s、125kを介して螺子により、着脱可能に固定されている。
【0169】
上記脚部31a、31bは、上記駆動装置14s,14kの長さ方向に沿って並列に配置され、歩行面148に対して略垂直方向に立設されている。
上記脚部31a、31bの下端部には、上記脚部31a、31bの長さ方向に対して直角に延設された板状の接地面部149a、149bが設けられている。
【0170】
上記脚部31a、31bは、横断面矩形の細長板状に形成され、上記脚部31a,31bの長さ方向中間部には、長さ方向に沿って長孔74a,74bが夫々形成され、下端部の幅方向中央部には、長さ方向に沿って孔部163,164が同一間隔を置いて複数設けられている。
【0171】
図9に示すように、上記接地面部149a、149bは、互いに並列に配設された平面長方形状の接地主面部193a,193bと、上記接地主面部193a,193bに延設された凸部150a,150bとにより、全体形状平面凸型に形成されている。
上記接地面部149aの凸部150aと、上記接地面部149bの凸部150bとは互いに上記駆動装置10dの内方に向かって突出するように形成されている。
【0172】
上記脚部31a、31bと、上記接地面部149a、149bとは、夫々横断面L字型形状のL字型固定具151,152を介して固定されている。
上記L字型固定具151,152は、側面部153、154と下面部155,156とにより形成され、上記側面部153,154と上記下面部155,156とは夫々直角方向に形成されている。
【0173】
図9に示すように、上記接地面部149a、149bは、上記L字型固定具151、152に対して、上記接地主面部193a,193bに設けられた孔部と、上記L字型固定具151、152の下端部155、156に設けられた孔部157、158とを介して、螺子によって夫々着脱可能に固定されている。
【0174】
上記L字型固定具151、152は、上記脚部31a、31bの下端部165a,165bに対して、L字型固定具151、152の側面部153,154に形成された孔部161、162と、上記脚部31a、31bに設けられた孔部163、164のうち、上記脚部31a,31bの下端部に設けられた孔部163a,164aとを介して、螺子によって着脱可能に固定されている。
【0175】
図9、図13、図14に示すように、上記駆動装置本体14s、14kの動力伝達部側方フレーム部53s、53kに設けられた歯車軸部23d,23dには、上記クランク軸部40s、40kの一端部37a、37bが夫々固定されている。
【0176】
図13に示すように、上記クランク軸部40s、40kは、細長板状の連結部166と、上記連結部166の一端部から直角方向へ延設された歯車軸固定管部167とにより形成されている。
図13に示すように、上記歯車軸固定管部167は、上記歯車軸固定管部167の内方に歯車軸部23が挿入可能な空洞部168が形成され、上記歯車軸固定管部167の外周面には、上記歯車軸固定管部167の内方に向かって貫通して配設された歯車軸固定螺子169が装着されている。
【0177】
図13に示すように、上記連結部166は、幅方向中央部において、長さ方向に沿って孔部170が同一間隔をおいて複数設けられている。
【0178】
図14に示すように、上記クランク軸部40sの一端部37aにおいては、上記動力伝達部側方フレーム部53を貫通して外方へ延設された歯車軸部23を、上記歯車軸固定管部167の空洞部168内に収納固定し、上記歯車軸固定螺子169で固定させることにより、上記歯車軸部23に対し着脱可能に固定されている。
【0179】
図14に示すように、上記クランク軸部40sの他端部38aは、上記脚部31aに対して、上記孔部170のうち最外方の孔部170aと、上記脚部31に設けられた孔部163のうち上端部39aに設けられた孔部163bとに挿通されたボルト171とを介して、上記ボルト171に歯合されたナット172によって回動可能かつ、着脱可能に形成されている。
【0180】
同様に、上記駆動装置本体14kの脚部31bは、上記駆動装置本体14kの上記動力伝達部側方フレーム部を貫通して外方へ延設された歯車軸部23に対して、上記クランク軸部を介して回動可能かつ、着脱可能に取り付けられている。
【0181】
図9に示すように、上記駆動装置本体14s,14kの従動輪側方フレーム部52s、52kに形成された取付孔部50、50には、揺動軸部43、43が配設されている。
図14に示すように、上記揺動軸部43は、ナット173と、揺動軸支持筒部174と、ボルト175とにより形成されている。
【0182】
図14に示すように、上記揺動支持筒部174は、上記従動輪側方フレーム部53の側面部66に設けられた取付孔部50に挿通され、上記ナット173と螺着され、上記取付孔部50に固定されている。
上記ボルト175は、上記脚部31に形成された長孔74に挿通し、上記長孔74の長さ方向に沿って移動しうるように上記揺動支持筒部174に対して螺着されている。
【0183】
図10は本発明に係る駆動装置の第七実施例を示す。本実施例に係る駆動装置10eにあっては、玩具の構成部品として形成され、着脱可能に設けられた原動部11と動力伝達部12とを内装し、上記原動部11の動力が上記動力伝達部12を介して伝達されて駆動されるベルトコンベア46により形成された荷物176の搬送装置45として形成されている。
【0184】
上記ベルトコンベア46は、所定の幅広寸法を有し、可撓性を有する無端帯状に形成されている。
【0185】
図10に示すように、上記駆動装置本体14mの両側面には、横断面形状がL字型の細長板状の荷物ガイド部材177,177が着脱可能に取り付けられている。
上記荷物ガイド部材177,177は、上記ベルトコンベア46からの荷物176の脱落を防止できるような所定の剛性を有し、側面部178,178と上面部179,179とにより形成され、上記側面部178,178及び上記上面部179,179は夫々鈍角に配設されている。
【0186】
上記側面部178,178には、上記荷物ガイド部材177,177を上記駆動装置本体14mに取り付け可能な取付孔部180、181が形成されている。
【0187】
上記荷物ガイド部材177,177は、上記駆動装置本体14mに対して、上記従動輪側方フレーム部52mの側面部66m,66mに設けられた取付孔部と、上記ガイド部材177,177の取付孔部180,180とを介して螺子により着脱可能に固定され、上記駆動輪側方フレーム部51mの側面部63m,63mに設けられた取付孔部と、上記ガイド部材177,177の取付孔部181,181とを介して螺子により着脱可能に固定されている。
【0188】
上記上面部179は上記側面部178に対し鈍角に形成されていることから、上記上面部179,179によって荷物搬送路182が形成され、上記ベルトコンベア46上を不安定な荷物176が搬送される場合であっても、上記荷物がベルトコンベア46上から脱落されることを防止することができる。
【0189】
尚、図7に示す駆動装置10bとは異なり上記駆動装置10は、上記駆動装置本体14、14が、棒状固定部材により結合されることにより、無限軌道15の長さ方向において直列に配置されていてもよい。
【0190】
このような構成の実施例にあっては、上記棒状固定部材は、上記駆動装置本体14,14の車軸フレーム部20の両側面部において着脱可能に固定されている。
上記棒状固定部材は、横断面矩形の細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部が同一間隔を置いて複数設けられている。
【0191】
上記従動輪側方フレーム部52は、上記車軸フレーム部20の長さ方向両側方において設けられた棒状固定部材により上記動力伝達部側方フレーム部53に対し着脱可能に固定されている。
【0192】
上記棒状固定部材は、上記孔部のうち一の孔部と、上記従動輪側方フレーム部52の側面部66に設けられた上記取付孔部50との間に挿通された螺子により着脱可能に固定されるとともに、上記孔部のうち上記棒状固定部材の中間位置に設けられた孔部と、上記動力伝達部側方フレーム部53の側面部69に設けられた取付孔部47,48との間に挿通された螺子により着脱自在に固定されている。
【0193】
以下、添付図面に示す実施例に基づき、本発明に係る駆動装置10の第一実施例の作用について説明する。
上記駆動装置10は、図1に示すように、ロボットコンテストに使用されるロボット等の走行装置28として使用される。
【0194】
図1に示すように、本実施例にかかる駆動装置10は、駆動輪15と従動輪17とを有し、動力伝達部12を介して駆動輪15に動力を供給する原動部11及び上記動力伝達部12が上記駆動輪16と上記従動輪17との間に設けられ、上記駆動輪15と上記従動輪17とに巻装された無限軌道15によって駆動される駆動装置10として使用することができる。
【0195】
図1に示すように、上記駆動装置10を走行装置28として使用する場合には、上記原動部11から発生する駆動力を上記原動歯車27を介して上記動力伝達部12に伝達し、上記動力伝達部12に設けられた複数のギヤ22a,22b,22c,22dを介して上記原動部11のトルクを増幅し、上記増幅されたトルクにより駆動輪16を駆動することができる。
上記駆動輪16が駆動することにより、上記駆動輪16に巻装されている無限軌道15が駆動され、上記従動輪17も協働して回動する。
このことにより、上記駆動装置10は上記無限軌道15により走行することができ、段差や様々な障害物を乗り越えることができるロボットコンテスト用のロボット等として利用することができる。
【0196】
上記原動部11及び、動力伝達部12を夫々駆動装置10以外の組み立て部材の構成部品として使用する場合には、上記原動部11が設けられた原動部取付フレーム部61と、上記動力伝達部12が設けられた動力伝達部側方フレーム部53とを夫々上記フレーム係合爪部78、78と、原動部側方フレーム取付溝部72,72とに夫々着脱可能に係合させる。
【0197】
上記原動部取付フレーム部61の内方に向かって弾性を有する上記フレーム係合爪部78、78の爪先端部79,79は、上記原動部側方フレーム取付溝部72,72に対して係合している。
上記フレーム係合爪部78、78の爪先端部79,79を上記原動部側方フレーム取付溝部の外方へ押し広げることにより、上記フレーム係合爪部78、78による係合状態を解除することができる。
【0198】
したがって、上記原動部11及び動力伝達部12は一体的に着脱可能に形成されているため、上記原動部11及び動力伝達部12を一体の構成部品として駆動装置10以外の組み立て玩具の構成部品として使用することができる。
また、上記原動部11及び動力伝達部12は夫々着脱可能であることから、を夫々を駆動装置10以外の組み立て玩具の構成部品として使用することができる。
【0199】
上記駆動輪16が設けられた駆動輪取付フレーム部51は、上記動力伝達部12が設けられた動力伝達部側方フレーム部53に対して、上記フレーム係合爪部70,70と、原動部側方フレーム取付溝部71,71とを介して着脱可能に係合されている。
【0200】
駆動輪取付フレーム部51の内方に向かって弾性を有する上記フレーム係合爪部70の爪先端部80,80は、上記駆動輪側方フレーム取付溝部71,71に対して係合している。
【0201】
上記結合状態を解除し、上記駆動輪取付フレーム部51及び、動力伝達部12を夫々駆動装置10以外の組み立て部材の構成部品として使用する場合には、上記フレーム係合爪部70,70の爪先端部80,80を上記駆動輪側方フレーム取付溝部71,71の外方へ押し広げることにより、上記フレーム係合爪部70、70による係合状態を解除することができる。
したがって、上記駆動輪取付フレーム部51及び動力伝達部12を夫々の構成部品として分割することができる。
【0202】
上記従動輪側方フレーム部52は、上記両側方に設けられた棒状固定部材94,94によって上記動力伝達部側方フレーム部53に対して着脱可能に形成されている。
【0203】
上記駆動輪16と従動輪17間の間隔寸法を広げる場合には、上記棒状固定部材94、94に設けられた孔部95、95のうち、上記動力伝達部側方フレーム部53の取付孔部47,48に取り付ける孔部95、95の部位、及び上記従動輪側方フレーム部52の取付孔部50、50に取り付ける孔部95、95の部位を変えることにより、上記従動輪17と上記駆動輪16間の間隔寸法を自由に変更することができる。
【0204】
上記従動輪17と上記駆動輪16間の間隔寸法を自由に変更することにより、ロボットコンテスト等で作成される組み立て玩具等において必要とされる長さ寸法を有する駆動装置本体14を形成することができる。
また、市販のされている様々な長さ寸法を有する無限軌道15を使用することができるため、上記無限軌道15の種類に限定されず、ロボットコンテスト等においてロボット等の製作の自由度を確保することができる。
【0205】
その結果、組み立て玩具やロボットコンテスト等において、長さ寸法が大きな駆動装置10を作成する必要がある場合にあっても、上記従動輪17と上記駆動輪16間の間隔寸法を自由に変更することにより、駆動装置本体14の長さ寸法を変更することができるため、上記駆動装置10を組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
【0206】
図3に示すように、上記原動部11の駆動力を上記動力伝達部12に伝達させる場合には、上記原動軸部189固定された上記原動歯車27が、動力伝達部側方フレーム部53に設けられた歯車22aのフェースギヤ104に歯合していることにより、上記原動部11の駆動力を上記動力伝達部12に伝達することができる。
【0207】
上記原動歯車27により伝達された駆動力は、上記フェースギヤ104に隣接して協働して回動可能に結合されている平歯車109に伝達される。
上記平歯車109に伝達された駆動力は、上記歯車22bの上記平歯車109に歯合されている上記平歯車105に伝達され、上記平歯車105に隣接して協働して回動可能に結合されている平歯車106に伝達される。
【0208】
上記平歯車106に伝達された駆動力は、上記歯車22cの上記平歯車106に歯合されている上記平歯車107に伝達され、上記平歯車107に隣接して協働して回動可能に結合されている平歯車108に伝達される。
【0209】
上記平歯車108に伝達された駆動力は、上記平歯車108に歯合されている上記歯車22dに伝達されている。
上記歯車22dは、上記駆動輪16の側方に隣接して形成され協働して回動可能に形成された上記駆動歯車111と歯合している。
【0210】
したがって、上記原動部11から出力される駆動力は、上記原動歯車27を介して動力伝達部12に設けられているギヤ比の小さな歯車22aに伝達される。
上記歯車22aに伝達された駆動力は、上記歯車22aより大きなギヤ比を有する歯車22bに伝達され、上記歯車22bに伝達された駆動力は、上記歯車22bより大きなギヤ比を有する歯車22cに伝達され、上記歯車22cに伝達された駆動力は、上記歯車22cより大きなギヤ比を有する歯車22dに夫々伝達される。
この結果、上記動力伝達部12に設けられた複数のギヤ22a,22b,22c,22dを介して上記原動部11のトルクが増幅され、上記増幅されたトルクにより上記駆動輪16を駆動することができる。
【0211】
また、上記駆動装置本体14、14は個別に駆動制御されるように構成されていることから、駆動装置10が走行装置28として使用された場合には、各駆動装置本体14の駆動状態を個別に制御することにより、上記駆動装置10の走行状態を自由に制御することができる。
【0212】
したがって、例えば右側に配置した駆動装置本体14の駆動速度を早く駆動させるとともに、他方左側の駆動装置本体14の駆動速度を一定にして走行した場合にあっては、上記駆動速度を早くした駆動装置本体14側の駆動装置本体14が前方に進行し、駆動装置10全体として左旋回が可能となるように形成されている。
【0213】
また、上記駆動装置10には、補助輪32が装着されていることから、無限軌道15の回転時における保持箇所が増加するため、上記駆動輪16により上記無限軌道が駆動された場合に、上記無限軌道15が駆動輪16及び従動輪17から脱離することを抑止し、安定した巻装状態を維持することができる。
【0214】
また、上記駆動装置10は上記補助輪32で支持されているため、上記駆動装置10にかかる荷重を分散することができ、上記駆動装置を安定して走行させることができる。
【0215】
本発明に係る駆動装置の第二実施例の作用について説明する。
上記駆動装置10aは図6に示すように、上記駆動装置本体14a,14を互いに並列方向に配置固定して、上記駆動装置10aが形成され、上記駆動装置14a,14bと直行方向に配置され、長さ方向に複数の孔部124が設けられている棒状構成部材123によって着脱可能に固定されている。
その結果、上記駆動装置10aを走行装置28として使用した場合には、安定して走行可能な走行装置28として使用することができる。
【0216】
また、上記駆動装置本体14a,14b同士を結合するのに使用される孔部124の部位を変更することによって、容易に上記駆動装置本体14a,14b同士の間隔寸法を変更することができる。
【0217】
その結果、上記駆動装置10の全幅を小さくすることができ、上記駆動装置10を様々な組み立て玩具の部位に適合することができる構成部品として使用することができる。
【0218】
また上記駆動装置本体14a,14bは個別に駆動制御されるように構成されていることから、上記走行装置28を上記従動輪側方フレーム部52,52側に進行させた場合、例えば進行方向右側に配置された駆動装置本体14aの走行速度を増加させることによって、上記走行装置28全体を左側に旋回させて走行することが可能となる。
【0219】
本発明に係る駆動装置の第三実施例の作用について説明する。上記駆動装置10は図4、図5に示すように、上記外装車輪26,26を上記各歯車軸部23a,23b、23c,23dに装着して使用することができる。
この場合、上記外装車輪26,26は夫々各歯車軸部23a、23b、23c,23dに装着されていることから、上記原動歯車27により伝達される駆動力によって上記各歯車軸部23a、23b、23c,23dが回動され、上記各歯車軸部23a、23b、23c,23dのいずれかに装着されている外装車輪26,26が回転される。
【0220】
図4に示すように、上記外装車輪26,26の直径寸法L24は、上記駆動装置本体14に設けられた無限軌道15の高さ寸法L25よりも大きい径寸法により形成されている。
したがって、上記駆動装置10fに外装車輪26、26が装着されている場合には、上記外装車輪26,26が走行面198に接地されるため、上記駆動装置10は各外装車輪26、26により走行することができる。
【0221】
図3、図4に示すように、上記外装車輪26,26は、ギヤ比の異なる上記歯車軸部23a,23b,23c,23dの先端部に夫々着脱可能に固定されていることから、必要に応じて、上記外装車輪26,26を上記歯車軸部23a,23b,23c,23dから離脱させ、他のギヤ比の歯車の歯車軸部23に装着することができる。
【0222】
所望の速度及びトルクにより上記外装車輪26を駆動することができることから、走行状況に応じて、速度及びトルクを適宜変更することができる走行装置28を構成することができる。
【0223】
この結果、ロボットコンテスト等で必要とされる様々な使用形態に対応し、自由な設計を行うことができる上記駆動装置10fとして使用することができる。
したがって例えば、上記駆動装置10を高速走行させたい場合には、図5に示すように、上記外装車輪26,26を上記小径の歯車22aの歯車軸部23eの先端部に装着することにより、上記駆動装置10を高速で走行できる走行装置として使用することができる。
【0224】
また、上記歯車軸部23eに上記外装車輪26を装着した場合には、通常は上記外装車輪26により高速で走行することができるとともに、上記駆動装置10が障害物に当接した場合には、上記無限軌道15により、障害物を乗り越えることができ、かつ上記障害物が外装車輪26に当接した場合であっても、上記外装車輪26は回動していることから、上記外装車輪26及び上記無限軌道15の双方によって上記駆動装置10を駆動することができる。
【0225】
したがって、悪路や障害物に使用した場合であっても乗り越えることができ、多様な走行形態を実現することができる。
【0226】
図4に示すように、四輪で走行する走行装置として使用する場合には、上記駆動装置本体14に外装車輪26、26を装着するとともに、上記従動輪側方フレーム部52の側面部66,66に設けられた取付孔部に対し外装車輪26b,26bの車輪軸部をボルトで回動可能に固定し、上記車輪軸部に対し上記外装車輪26、26の直径寸法と略同一の直径寸法を有する外装車輪26b,26bを装着して使用することができる。
上記車輪軸部は、上記外装車輪26b,26bを回動可能に固定するように形成されている。
その結果、上記外装車輪26、26及び上記外装車輪26b,26bで走行可能な四輪の走行装置を形成することができる。
【0227】
本発明に係る駆動装置の第四実施例の作用について説明する。
上記駆動装置10bは図7に示すように、上記無限軌道15に対し並列に配置された駆動装置本体14e,14fと、14g,14hと、14i,14jが、長さ方向に沿って複数の孔部138が設けられた長さ方向連結材137によって夫々直列に連結固定されている。
【0228】
したがって、上記並列に配置された上記駆動装置本体14e,14fと、14g,14hと、14i,14j同士を結合するのに使用される孔部138の部位を変更することによって、容易に上記駆動装置本体14e,14fと、14g,14hと、14i,14j同士の間隔寸法を変更することができる。
【0229】
その結果、駆動装置本体14e,14fと、14g,14hと、14i,14jからの駆動力が直列方向であって、かつ並列に全体として大きな出力が得られる駆動装置10bを形成することができる。
【0230】
本発明に係る駆動装置の第五実施例の作用について説明する。
上記駆動装置10cは図8に示すように、上方へ延設され、長さ方向に複数の孔部140,141,142,143が設けられた支持フレーム部29a,29b,29c,29dにより着脱可能に固定されたテーブル部30が形成されている。
【0231】
上記テーブル部30の固定に使用されている孔部140,141,142,143の部位を変更することにより、上記テーブル部30の高さ位置を容易に変更することができる。
したがって、上記駆動装置本体14間に障害物がある場合においても、上記テーブル部30は上記障害物に衝接することなく、走行することが可能となる。
【0232】
また、上記テーブル部30上にロボット構成部品等を配置することができ、ロボットコンテストにおけるロボットの構成上の多様性を確保することができる。
【0233】
本発明に係る駆動装置の第六実施例の作用について説明する。
上記駆動装置10dは図9に示すように、一対の脚部31a,31bによって2足歩行可能な歩行装置183として形成されている。
図9、図14に示すように、上記クランク軸部40s,40kは、上記歯車軸部23dに着脱可能に固定されていることから、上記歯車22dが原動部11から伝達された駆動力により回動した場合には、上記歯車22dを回動可能に固定している歯車軸部23dが回動し、上記クランク軸部40s,40kは、上記歯車軸部23dを中心として回動する。
【0234】
このことにより、上記クランク軸部40s,40kは、上記歯車軸部23dを中心として回動され、上記クランク軸部40s,40kの他端部38a,38bが上記脚部31a,31bの長さ方向上方へ回動された場合には、上記クランク軸部40s,40kに対して回動可能に固定されている脚部31a,31bは、上記クランク軸部40s,40kの回動運動にあわせて、上方へ移動される。
【0235】
また、上記脚部31a,31bは、幅方向中央部において、長さ方向に沿って延設された長孔74a,74bが設けられ、上記長孔74a,74bは上記従動輪側方フレーム部52s、52kの取付孔部に配設された揺動軸部43、43に挿通されている。
上記揺動軸部43、43は上記脚部31a,31bに設けられた上記長孔74a,74b内において、上記駆動装置本体14s,14kの長さ方向に沿って移動可能に固定されている。
【0236】
したがって、上記クランク軸部40s,40kが、上記原動部11の駆動力が伝達されることによって上記歯車軸部23dが回動され、上記歯車軸部23dに装着されている上記クランク軸部40s,40kが回動されることにより、上記クランク軸部40s,40kの他端部38a,38bに設けられた脚部31a,31bが上方へ配置された場合には、上記長孔74内に挿通された揺動軸部43は、上記長孔74内を相対的に下方へ移動することとなる。
【0237】
上記脚部31a,31bは、上記揺動軸部43,43が上記脚部31a,31bに設けられた上記長孔74、74内を上下方向に移動することにより、上記脚部31a,31bの回動中心が上記長孔74a、74b内を上下方向に移動しつつ、上記クランク軸部40s,40kの他端部38a,38bを中心に回動運動する。
その結果、上記脚部31は、上記長孔74内を長さ方向に上下方向に移動しながら揺動する上記揺動軸部42を中心として回動運動が行われる。
【0238】
図9に示すように、上記クランク軸部40s,40kが回動運動することにより、上記クランク軸部40sの他端部38aが上方へ配置された場合には、上記脚部31aが上方へ移動し、上記脚部31aの下端部に設けられた接地面部149aは、走行面148から上方へ配置されることとなる。
【0239】
また、上記駆動装置本体14sと並列して設けられた上記駆動装置本体14kにおいても、上記と同様の構造により形成されているため、上記歯車軸部23dに着脱可能に固定されたクランク軸部40kの回動運動によって、上記脚部31bが上記揺動軸部43を中心とした回動運動が行われる。
【0240】
すなわち、上記駆動装置本体14sに設けられたクランク軸部40sと、上記駆動装置本体14kに設けられたクランク軸部40kとを、夫々個別に遅延制御させることにより逆方向に配置し、上記クランク軸部40s、40kに着脱可能に固定されている歯車軸部23d,23dを上記駆動装置本体14s,14kの長さ方向に対し同方向に回転させることにより、上記駆動装置本体14sに設けられた脚部31sが上方へ配置された場合には、上記駆動装置本体14kに設けられた脚部31kが下方へ配置され、歩行面148に設置された状態となる。
【0241】
また、上記クランク軸部40sの他端部38aが、図9において前面に移動した場合には、上記脚部31sは上記揺動軸部43を中心として回動され、上記脚部31sの接地面部149aが後方へ配置されるように移動される。
上記クランク軸部40sの他端部38aが、前面に移動された場合には、上記クランク軸部40kの他端部38bは、後方へ配置されるように移動し、上記脚部31kは上記揺動軸部43を中心として回動され、上記脚部31kの接地面部149bが前方へ配置されるように移動される。
【0242】
このことにより、上記駆動装置10は、上記原動部11の駆動力が上記歯車軸部23を介して上記脚部31に伝達される駆動装置10として使用され、上記脚部31,31によって歩行可能な歩行装置としてしようすることができる。
【0243】
本発明に係る駆動装置10の第七実施例の作用について、詳細に説明する。本実施例に係る駆動装置10にあっては、図10に示すように、ベルトコンベア46によって荷物を搬送可能な搬送装置45として形成することができる。
上記搬送装置45は、上記原動部11からの駆動力が上記動力伝達部12を介してベルトコンベア45を駆動することによって使用される。
したがって、上記ベルトコンベア45の上端面に荷物176を載置した場合には、上記ベルトコンベア45面上を上記荷物176が移動される。
【0244】
図10に示すように、上記ベルトコンベア45上に丸形状などにより形成された不安定な荷物176が載置された場合にあっても、上記駆動装置本体14mの両側面には、荷物ガイド部材177,177が設けられていることから、上記ベルトコンベア45上からの荷物の脱落が防止されるように形成されている。
【0245】
尚、図7に示す駆動装置10bとは異なり、上記駆動装置14、14同士を長尺の棒状固定部材を介して直列に配置して固定することにより、長さ方向に直列して配置された駆動装置10を形成することができる。
したがって、駆動力を直列方向に出力する駆動装置10を形成することができる。
【0246】
上記棒状固定部材には、長さ方向に沿って複数の孔部が設けられ、上記駆動装置14、14は上記駆動装置14,14の側方に設けられた上記棒状固定部材を介して着脱可能に固定されている。
【0247】
上記駆動装置14,14は、上記棒状構成部材に対して、上記棒状構成部材に設けられている孔部と、上記駆動装置14,14の側方に形成された取付孔部とを介して結合することにより着脱可能に固定することができる。
【0248】
したがって、組み立て玩具やロボットコンテスト等において、上記駆動装置10を幅寸法の小さい走行装置として使用することができる。
また、長さ寸法が大きい駆動装置10を作成する必要がある場合は、上記棒状構成部材の孔部と上記取付孔部の取付部位を変えることにより、上記駆動装置本体14,14間の間隔寸法を変更することができるため、上記駆動装置10を組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
【0249】
図16は、本発明に係る駆動装置の第八実施例を示す。本実施例に係る駆動装置10wにあっては、無限軌道の長さ方向において伸縮可能な駆動装置として形成されている。
上記車軸フレーム部20wは、上記駆動輪16wが設けられた駆動輪側方フレーム部51wと、上記従動輪17wが設けられた従動輪側方フレーム部52wと、上記駆動輪側方フレーム部51wと上記従動輪側方フレーム部52wとの間に配置され、上記動力伝達部12wが設けられた動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wと上記動力伝達部側方フレーム部53wとの間に配置され、上記原動部11wが設けられた原動部取付フレーム部61wとにより構成されている。
上記駆動輪側方フレーム部51wと、上記原動部取付フレーム部61wとは、夫々上記動力伝達部側方フレーム部53wに夫々着脱可能に固定され、上記動力伝達部フレーム部53wと上記従動輪側方フレーム部52wとが互いに無限軌道の長さ方向において移動可能に固定されている。
【0250】
図17に示すように、上記動力伝達部側方フレーム部53wは、平面長方形板状に形成され、上記車軸フレーム部20wの幅方向両側方において、一対に設けられた動力伝達部フレーム200a,200bと、上記車軸フレーム部20wの幅方向に沿って複数設けられ、上記各動力伝達部フレーム200a,200b同士を接続して支持しうるように形成された動力伝達部支柱201とにより形成されている。
本実施例においては、上記動力伝達部支柱201は円筒状に形成され、上記動力伝達部フレーム200a,200bの上端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って4本設けられるとともに、図示しないが、上記動力伝達部フレーム200a,200bの下端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って4本設けられている。
【0251】
図17に示すように、上記動力伝達部フレーム200a,200bと上記複数の動力伝達部支柱201とは、夫々上記動力伝達部フレーム200a,200bに設けられた孔部(図示せず)を介して、上記動力伝達部支柱201に挿通された各螺子228により着脱可能に固定されている。
【0252】
図17に示すように、上記従動輪側方フレーム部52wは、平面長板状に形成され、上記車軸フレーム部20wの幅方向両側方において、一対に設けられた従動輪フレーム202a,202bと、上記車軸フレーム部20wの幅方向に沿って複数設けられ、上記各従動輪フレーム202a,202b同士を接続して支持しうるように形成された複数の従動輪支柱203とにより形成されている。
本実施例においては、上記従動輪支柱203は円筒状に形成され、長さ方向上記従動輪フレーム202a,202bの従動輪17w側の上端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って2本設けられるとともに、図示しないが、上記従動輪フレーム202a,202bの下端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って2本設けられている。
図16に示すように、上記従動輪フレームのうち、一の従動輪フレーム202aにおいて、上記各従動輪支柱203間に配置された支持板204が設けられ、上記両従動輪フレーム202a,202b同士の係合状態を保持しうるように形成されている。
【0253】
図17に示すように、上記従動輪フレーム202a,202bと上記複数の従動輪支柱203とは、夫々上記従動輪フレーム202a,202bに設けられた孔部(図示せず)を介して、上記従動輪支柱203に挿通された各螺子216により着脱可能に固定されている。
【0254】
図16に示すように、上記駆動輪側方フレーム部51wは、平面板状に形成され、上記車軸フレーム部20wの幅方向両側方において、一対に設けられた駆動輪側面部213a,213bと、上記車軸フレーム部20wの幅方向に沿って複数設けられ、上記各駆動輪側面部213a,213b同士を接続して支持しうるように形成された駆動輪支持柱部214とにより形成されている。
【0255】
図17に示すように、本実施例においては、上記駆動輪支持柱部214は円筒状に形成され、上記駆動輪側面部213a,213bの上端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って2本設けられるとともに、上記駆動輪側面部213a,213bの下端縁において、所定の間隔寸法をおいて上記車軸フレーム部20wの長さ方向に沿って2本設けられている。
上記駆動輪側面部213a,213bのうち、一の駆動輪側面部213aにおいて、上記各駆動輪支持柱部214間に配置された支持板215が設けられ、上記両駆動輪側面部213a,213b同士の係合状態を保持しうるように形成されている。
【0256】
図17に示すように、上記駆動輪側面部213a,213bと上記複数の駆動輪支持柱部214とは、夫々上記駆動輪側面部213a,213bに設けられた孔部(図示せず)を介して、上記駆動輪支持柱部2214に挿通された各螺子229により着脱可能に固定されている。
【0257】
図18は、図16における車軸フレーム部20wのY−Y'断面における幅方向断面図を示し図16、図18に示すように、上記動力伝達部側方フレーム部53wは、上記車軸フレーム部20wの幅方向上記従動輪フレーム202a,202b間に配置されている。
図17に示すように、上記動力伝達部フレーム200a,200bの外側面には、夫々上記車軸フレーム部20wの長さ方向に沿って設けられた案内溝部206a,206bが設けられている。
図17に示すように、上記案内溝部206a,206bは、上記動力伝達部フレーム200a,200bの長さ方向に沿って、幅方向において所定の間隔寸法W1をおいて幅方向に夫々2本ずつ設けられている。
図18に示すように、上記案内溝部206a,206bの溝は深さ寸法H1に形成されている。
【0258】
図17,図18に示すように、上記従動輪フレーム202a,202bの内側面211a,211bには、上記動力伝達部フレーム200a,200bに設けられている案内溝部206a,206bと移動可能に係合して、上記動力伝達部側方フレーム部53wを上記車軸フレーム部20wの長さ方向に沿って摺動しうるように形成されている突条205a,205bが設けられている。
図17に示すように、上記突条205a,205bは、上記従動輪フレーム202a,202bの長さ方向に沿って、上記動力伝達部フレーム200a,200bに設けられている案内溝部206a,206bの間隔寸法W1と略同じ間隔寸法W2をおいて設けられている。
【0259】
図18に示すように、上記突条205a,205bは、上記案内溝部206a,206bの溝の深さ寸法H1と略同じ高さ寸法H2に形成されている。
従って、上記突条205a,205bと、上記案内溝部206a,206bとが夫々移動可能に係合されているため、上記従動輪側方フレーム部52wと、上記動力伝達部側方フレーム部53wに設けられている駆動輪側方フレーム部51wとが夫々上記車軸フレーム部20wの長さ方向に沿って、上記駆動装置全体として伸縮可能に形成されている。
【0260】
図17、図18に示すように、上記各案内溝部206a,206bには、車軸フレーム部20wの長さ方向に沿って所定の間隔寸法W3をおいて配置された複数の凹部207a,207bが設けられている。本実施例に係る上記各凹部207b間の間隔寸法W3は2mmに形成されている。
図17、図18に示すように、上記各突条205a,205bには、上記案内溝部206a,206bに設けられた上記各凹部207a,207bに係合され、上記動力伝達部側方フレーム部53wを長さ方向に対する移動を固定しうるように形成された凸部208a,208bが設けられている。
【0261】
図18に示すように、上記凸部208a,208bの高さ寸法H3は、上記凹部207a,207bの高さ寸法H4と略同じ寸法に形成され、夫々上記凸部208aが上記凹部207aへ、上記凸部208bが上記凹部207bへ嵌入されることにより、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとが互いに係合し、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとを互いに、長さ方向において移動可能に固定することができ、上記車軸フレーム部20w全体の長さ寸法を自在に調整することができる。
【0262】
上記各案内溝部206aに設けられている凹部207aと、上記案内溝部206bに設けられている凹部207bとは、夫々上記動力伝達部側方フレーム部53wの幅方向中心を基準として対称位置に配置されている。
また同様に上記突条205aに設けられている凸部208aと、上記突条205bに設けられている凸部208bとは、夫々上記従動輪側方フレーム部52wの幅方向中心を基準として対称位置に配置されている。
従って、上記各凸部208a,208bを、上記各凹部207a,207bに夫々嵌入させることにより、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとが互いに上記車軸フレーム部20wの幅方向同位置で固定され、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとの長さ方向に対する移動を固定する際にあっては、上記各動力伝達部側方フレーム部53wと上記従動輪側方フレーム部52wとが幅方向において傾くことなく容易に固定することができる。
すなわち、上記動力伝達部側方フレーム部53wの幅方向一方向に設けられている上記凸部208aが上記従動輪側方フレーム部52wの一方向に設けられている上記凹部207aへ嵌入され、上記動力伝達部側方フレーム部53wの幅方向他方向に設けられている上記凸部208bが上記従動輪側方フレーム部52wの他方向に設けられている上記凹部208bへ夫々嵌入されることにより、上記凸部208aと上記凸部208bの長さ方向における固定位置を同位置にすることができ、上記動力伝達部側方フレーム部53wの長さ方向と、上記従動輪側方フレーム部52wの長さ方向とが同方向へ移動可能に固定することができる。
【0263】
図18に示すように、上記動力伝達部側方フレーム部53wを構成する上記動力伝達部フレーム200aの外側面210aと、上記動力伝達部フレーム200bの外側面210bとの間の間隔寸法W4と、上記従動輪側方フレーム部52wを構成する上記従動輪フレーム202aの内側面211aと、上記従動輪フレーム202bの内側面211bとの間の間隔寸法W5とは略同じ間隔寸法に形成されている。
従って、上記動力伝達部側方フレーム部53wは、上記車軸フレーム部20wの幅方向において、上記従動輪側方フレーム部52wの内方に配置されている。
【0264】
図16、図17に示すように、上記従動輪側方フレーム部52wを構成する上記各従動輪フレーム202a,202bの外側面217a,217bには、夫々短円筒形状に形成された取付孔部212a,212bが複数設けられ、上記駆動輪側方フレーム部51wを構成する上記各駆動輪側面部213a,213bの外側面218a,218bには、夫々短円筒形状に形成された取付孔部219a,219bが複数設けられている。
【0265】
図19に示すように、上記駆動輪側方フレーム部51wは、上記車軸フレーム部20wの長さ方向両側方において設けられた細長板状延長部材220a,220bにより上記従動輪側方フレーム部52wに対し着脱可能に固定されている。
上記細長板状延長部材220a,220bは細長板状に形成され、幅方向中央部には、長さ方向に沿って孔部221が同一間隔を置いて複数設けられている。
【0266】
上記細長板状延長部材220aは、上記孔部221のうち一の孔部221及び、上記従動輪側方フレーム部52wの従動輪フレーム202a,202bに設けられている取付孔部212bのうち、一の取付孔部212bを介して、この間に挿通される螺子222により上記従動輪側方フレーム部52wに対して着脱可能に固定されるとともに、上記孔部221のうち一の孔部221及び、上記駆動輪側方フレーム部51wの駆動輪側面部213a,213bに設けられている取付孔部219bのうち、一の取付孔部219bを介して、この間に挿通される螺子222により上記駆動輪側方フレーム部53wに対して着脱自在に固定されている。
【0267】
従って、上記細長板状延長部材220a,220bに設けられている孔部221の個所と、上記従動輪側方フレーム部52w及び上記駆動輪側方フレーム部51wに設けられている取付孔部212a,212b,219a,219bの取り付け個所とを変更することにより、必要に応じて駆動装置10w全体の長さ寸法を延長したり伸縮して変更することができる。
【0268】
図16、図17に示すように、上記従動輪側方フレーム部52wを構成する上記従動輪フレーム202a,202bには、車軸フレーム部20wの長さ方向に沿って設けられ、長穴状に形成されたスライド長孔部223a,223bが設けられている。
上記動力伝達部側方フレーム部53wを構成する上記動力伝達部フレーム200a,200bには、上記スライド長孔部223a,223bに挿通された状態で、上記スライド長孔部223a,223bの長さ方向に沿って移動しうるように配置されたスライド棒部224a,224bが設けられている。
【0269】
図16に示すように、上記スライド軸部224a,224bは、皿状の頭部225を有する螺子226a,226bにより形成され、上記各螺子226a,226bは、上記各スライド長孔部223a,223bに挿通されている状態で、上記動力伝達部フレーム200a,200bにおいて、上記車軸フレーム部20wの長さ方向に沿って所定の間隔寸法をおいて設けられている孔部227a,227bに螺合されて取り付けられている。
【0270】
従って、上記スライド軸部224a,224bは、上記スライド長孔部223a,223b内において、上記車軸フレーム部20wの長さ方向に沿って移動可能に形成されているとともに、上記各螺子226a,226bに設けられている皿状の頭部225が、上記スライド長孔部223a,223bが設けられている上記従動輪フレーム202a,202bの外側面217a,217bに当接されるため、上記従動輪フレーム202aと上記動力伝達部フレーム200a及び、上記従動輪フレーム202bと上記動力伝達部フレーム200bとが夫々上記車軸フレーム部20wの長さ方向において移動可能に固定され、上記車軸フレーム部20w全体の長さ寸法を伸張または伸縮可能に形成されている。
【0271】
本発明に係る駆動装置の第八実施例の作用について説明する。
上記駆動装置10wは、上記駆動輪16wと、上記従動輪17w間の間隔寸法を変更し、駆動装置10w全体の長さ寸法を伸縮自在に変更することができる駆動装置10wとして使用することができる。
【0272】
上記駆動装置10wは、長さ寸法を変更する場合にあっては図16に示すように、上記動力伝達部側方フレーム部53wを構成する上記動力伝達部フレーム200a,200bに設けられている各螺子226a,226bを緩めることにより、上記各螺子226a,226bに設けられている各頭部225と、上記従動輪側方フレーム部52wを構成する従動輪フレーム202a,202bとの間の圧接状態を解除することができる。
上記圧接状態が解除されることにより、上記各螺子226a,226bは上記従動輪側方フレーム部52wに形成されている長さ方向に対し長孔状に形成されているスライド長孔部223a,223b内を長さ方向に移動され、上記動力伝達部側方フレーム部53wと、上記従動輪側方フレーム部52wとの間の間隔寸法を変更することができる。
【0273】
従って、上記駆動装置10wの短縮時にあっては、上記各螺子226a,226bの締め付け状態を解除した状態で、図16に示すように、上記従動輪側方フレーム部52wと、上記動力伝達部側方フレーム部53wとの間の間隔寸法を最小とすることにより、上記駆動装置10wの長さ寸法を短縮することができる。
上記駆動装置10wを短縮した状態において、上記各螺子226a,226bを締め付けることにより、上記従動輪フレーム202aと動力伝達部フレーム200a間、及び、上記従動輪フレーム202bと動力伝達部フレーム200b間が狭まり、上記従動輪フレーム202a,202bにおいて長さ方向に配置されている突条205a,205bに設けられている凸部208a,208bが、上記動力伝達部フレーム200a,200bにおいて長さ方向に配置されている案内溝部206a,206bに設けられている凹部207a,207bに夫々嵌入され、上記動力伝達部側方フレーム部53wと上記従動輪側方フレーム部52wとの間の移動状態が阻止される。
従って、上記駆動装置10wの長さ寸法を短縮した状態で使用することができる駆動装置として使用することができる。
【0274】
また、上記駆動装置10wの伸張時にあっては、上記各螺子226a,226bの締め付け状態を解除することにより、上記従動輪フレーム202aと動力伝達部フレーム200a間、及び、上記従動輪フレーム202bと動力伝達部フレーム200b間が離間され、上記従動輪フレーム202a,202bにおいて長さ方向に配置されている突条205a,205bに設けられている凸部208a,208bと、上記動力伝達部フレーム200a,200bにおいて長さ方向に配置されている案内溝部206a,206bに設けられている凹部207a,207bとの嵌入状態を解除され、上記動力伝達部側方フレーム部53wと上記従動輪側方フレーム部52wとの間の移動可能状態となる。
上記移動可能状態において、図16に示すように、上記従動輪側方フレーム部52wと、上記動力伝達部側方フレーム部53wとの間の間隔寸法を最大とすることにより、上記駆動装置10wの長さ寸法を伸張することができる。
【0275】
同様に、上記駆動装置10wを伸張した状態において、上記各螺子226a,226bを締め付けることにより、上記従動輪フレーム202aと動力伝達部フレーム200a間、及び、上記従動輪フレーム202bと動力伝達部フレーム200b間が狭まり、上記従動輪フレーム202a,202bにおいて長さ方向に配置されている突条205a,205bに設けられている凸部208a,208bが、上記動力伝達部フレーム200a,200bにおいて長さ方向に配置されている案内溝部206a,206bに設けられている凹部207a,207bに夫々嵌入され、上記動力伝達部側方フレーム部53wと上記従動輪側方フレーム部52wとの間の移動状態が阻止される。
従って、上記駆動装置10wの長さ寸法を伸張した状態で使用することができる駆動装置として使用することができる。
【0276】
また図19に示すように、上記駆動輪16wと従動輪17w間の間隔寸法を変更する場合には、上記細長板状延長部材220a、220bに設けられた孔部221、221のうち、上記駆動輪側方フレーム部51wの取付孔部219b,219bに取り付ける孔部221、221の部位、及び上記従動輪側方フレーム部52wの取付孔部212a、212bに取り付ける孔部221、221の部位を変えることにより、上記従動輪17wと上記駆動輪16w間の間隔寸法を自由に変更することができる。
【0277】
上記従動輪17wと上記駆動輪16w間の間隔寸法を自由に変更することにより、ロボットコンテスト等で作成される組み立て玩具等において必要とされる長さ寸法を有する駆動装置本体14wを形成することができる。
また、市販のされている様々な長さ寸法を有する無限軌道15wを使用することができるため、上記無限軌道15の種類に限定されず、ロボットコンテスト等においてロボット等の製作の自由度を確保することができる。
【0278】
その結果、組み立て玩具やロボットコンテスト等において、長さ寸法が大きな駆動装置10wを作成する必要がある場合にあっても、上記従動輪17wと上記駆動輪16w間の間隔寸法を自由に変更することにより、駆動装置本体14wの長さ寸法を変更することができるため、上記駆動装置10wを組み立て玩具やロボットコンテスト等における構成部品として、様々な部位に適合した大きさで使用すること可能となる。
【産業上の利用可能性】
【0279】
本発明は、駆動装置に係り、特に、ロボットコンテストに使用されるロボット等の玩具、模型の構成部品として使用することが可能な駆動装置に適用できるものである。
【図面の簡単な説明】
【0280】
【図1】図1は、本発明に係る駆動装置を示す全体斜視図である。
【図2】図2は、本発明に係る駆動装置を構成部品毎に分割した状体を示す全体斜視図である。
【図3】図3は、本発明に係る駆動装置の原動部、動力伝達部及び駆動輪を示す平面図である。
【図4】図4は、本発明に係る駆動装置の歯車軸部23に外装車輪を装着した状体を示す全体斜視図である。
【図5】図5は、本発明に係る駆動装置のギヤ比の小さな歯車の歯車軸部に外装車輪を装着した状体を示す斜視図である。
【図6】図6は、本発明に係る駆動装置の駆動装置本体を互いに並列して配置した状体を示す全体斜視図である。
【図7】図7は、本発明に係る駆動装置の駆動装置本体を並列に配置し、上記並列に配置された駆動装置本体を長さ方向に連結した状体を示す全体斜視図である。
【図8】図8は、本発明に係る駆動装置の上方にテーブル部を配置した状体を示す全体斜視図である。
【図9】図9は、本発明に係る駆動装置が歩行装置として形成された状体を示す全体斜視図である。
【図10】図10は、本発明に係る駆動装置が荷物の搬送装置として使用されている状体を示す全体斜視図である。
【図11】図11は、本発明に係るL字型固定具を示す斜視図である。
【図12】図12は、本発明に係るL字型固定具と棒状固定部材が結合された状体を示す側面図である。
【図13】図13は、本発明に係るクランク軸部と歯車軸部を示す斜視図である。
【図14】図14は、本発明に係る歯車軸部、クランク軸部及び脚部の結合状体を示す側面図である。
【図15】図15は、本発明に係る脚部の正面図である。
【図16】図16は、本発明に係る駆動装置の第八実施例を示す全体斜視図である。
【図17】図17は、本発明に係る駆動装置の第八実施例の動力伝達部側方フレーム部と従動輪側方フレーム部とを離間した状態を示す全体斜視図である。
【図18】図18は、図16におけるY−Y'断面における幅方向横断面図である。
【図19】図19は、本発明に係る駆動装置を細長板状延長部材で延長した状態を示す全体斜視図である。
【符号の説明】
【0281】
10 駆動装置
10a 駆動装置
10b 駆動装置
10c 駆動装置
10d 駆動装置
10e 駆動装置
10f 駆動装置
10w 駆動装置
11 原動部
11w 原動部
12 動力伝達部
12w 動力伝達部
13 駆動手段
14 駆動装置本体
14a 駆動装置本体
14b 駆動装置本体
14c 駆動装置本体
14d 駆動装置本体
14e 駆動装置本体
14f 駆動装置本体
14g 駆動装置本体
14h 駆動装置本体
14i 駆動装置本体
14j 駆動装置本体
14k 駆動装置本体
14s 駆動装置本体
14m 駆動装置本体
14n 駆動装置本体
14p 駆動装置本体
14r 駆動装置本体
14t 駆動装置本体
14w 駆動装置本体
15 無限軌道
15w 無限軌道
16 駆動輪
16w 駆動輪
17 従動輪
17w 従動輪
18 一端部
19 他端部
20 車軸フレーム部
20n 車軸フレーム部
20p 車軸フレーム部
20w 車軸フレーム部
21 軸部
22 歯車
22a 歯車
22b 歯車
22c 歯車
22d 歯車
23 歯車軸部
23a 歯車軸部
23b 歯車軸部
23c 歯車軸部
23d 歯車軸部
23e 歯車軸部
23f 歯車軸部
23g 歯車軸部
23h 歯車軸部
24 フレーム部
25 先端部
25a 先端部
25b 先端部
25c 先端部
25d 先端部
26 外装車輪
26b 外装車輪
27 原動歯車
28 走行装置
29 支持フレーム部
29a 支持フレーム部
29b 支持フレーム部
29c 支持フレーム部
29d 支持フレーム部
30 テーブル部
31 脚部
31a 脚部
31b 脚部
32 補助輪
32a 補助輪
32b 補助輪
32w 補助輪
36 連結手段
36a 連結部材
37 一端部
37a 一端部
38 他端部
38a 他端部
39 上端部
40 クランク軸部
40s クランク軸部
40k クランク軸部
41 一端部
42 他端部
43 揺動軸部
44 搬送手段
45 搬送装置
46 ベルトコンベア
47 取付孔部
48 取付孔部
49 取付孔部
49n 取付孔部
49p 取付孔部
49m 取付孔部
50 取付孔部
50n 取付孔部
50p 取付孔部
50m 取付孔部
51 駆動輪側方フレーム部
51n 駆動輪側方フレーム部
51p 駆動輪側方フレーム部
51m 駆動輪側方フレーム部
51w 駆動輪側方フレーム部
52 従動輪側方フレーム部
52n 従動輪側方フレーム部
52p 従動輪側方フレーム部
52j 従動輪側方フレーム部
52k 従動輪側方フレーム部
52m 従動輪側方フレーム部
52w 従動輪側方フレーム部
53 動力伝達部側方フレーム部
53a 動力伝達部側方フレーム部
53b 動力伝達部側方フレーム部
53j 動力伝達部側方フレーム部
53k 動力伝達部側方フレーム部
53r 動力伝達部側方フレーム部
53t 動力伝達部側方フレーム部
53w 動力伝達部側方フレーム部
54 固定軸孔部
56 固定軸孔部
57 歯車軸部孔部
58 歯車軸部孔部
59 歯車軸部孔部
60 歯車軸部孔部
61 原動部取付フレーム部
61w 原動部取付フレーム部
62 底面部
63 側面部
63m 側面部
64 固定孔部
65 底面部
66 側面部
66m 側面部
67 固定孔部
68 底面部
69 側面部
69a 側面部
69b 側面部
70 フレーム係合爪部
71 駆動輪側方フレーム取付溝部
72 原動部側方フレーム取付溝部
73 窓部
74 長孔
74a 長孔
74b 長孔
75 底面部
76 側面部
77 上面部
78 フレーム係合爪部
79 爪先端部
80 爪先端部
81 補助輪
82 補助輪固定具
83 上面部
84 側面部
85 回動軸
86 取付孔部
87 補助輪
88 補助輪固定具
89 上面部
90 側面部
91 回動軸
92 取付孔部
93 螺子
94 棒状固定部材
95 孔部
95a 孔部
95b 孔部
96 螺子
97 螺子
98 原動機
104 フェースギヤ
105 平歯車
106 平歯車
107 平歯車
108 平歯車
109 平歯車
110 駆動輪固定軸
111 駆動歯車
112 無限軌道歯車
117 従動輪固定軸
118 板状部材
123 幅方向連結材
123a 幅方向連結材
123b 幅方向連結材
123c 幅方向連結材
124 孔部
124a 孔部
124b 孔部
125 L字型固定具
125a L字型固定具
125b L字型固定具
125e L字型固定具
125f L字型固定具
125n L字型固定具
125p L字型固定具
125i L字型固定具
125j L字型固定具
125p L字型固定具
126a ボルト
126b ボルト
127a ナット
127b ボルト
128 側面部
129 上面部
130 孔部
130a 孔部
130b 孔部
131 孔部
131a 孔部
131b 孔部
132a ボルト
132b ボルト
133a ナット
133b ナット
136a 螺子
137 長さ方向連結材
138 孔部
138a 孔部
138b 孔部
138c 孔部
139 孔部
139a 孔部
139b 孔部
139c 孔部
140 孔部
140a 孔部
141 孔部
141a 孔部
141b 孔部
142 孔部
142a 孔部
142b 孔部
143 孔部
143a 孔部
143b 孔部
144 固定孔部
144a 固定孔部
144b 固定孔部
144c 固定孔部
144d 固定孔部
145 下面部
146 棒状構成部材
148 歩行面
149a 接地面部
149b 接地面部
150a 凸部
150b 凸部
151 L字型固定具
152 L字型固定具
153 側面部
154 側面部
155 下端面部
156 下端面部
157 孔部
158 孔部
161 孔部
162 孔部
163 孔部
163a 孔部
163b 孔部
164 孔部
164a 孔部
164b 孔部
165 下端部
165a 下端部
165b 下端部
166 連結部
167 歯車軸固定管部
168 空洞部
169 歯車軸固定螺子
170 孔部
170a 孔部
171 ボルト
172 ナット
173 ナット
174 揺動軸支持筒部
175 ボルト
176 荷物
177 荷物ガイド部材
178 側面部
179 上面部
180 取付孔部
181 取付孔部
182 荷物搬送路
183 歩行装置
189 原動軸部
190 外装従動輪
192 走行面
193a 接地主面部
193b 接地主面部
200a 動力伝達部フレーム
200b 動力伝達部フレーム
201 動力伝達部支柱
202a 従動輪フレーム
202b 従動輪フレーム
203 従動輪支柱
204 支持板(従動輪支柱)
205a 突条
205b 突条
206a 案内溝部
206b 案内溝部
207a 凹部
207b 凹部
208a 凸部
209a 凸部
210a 外側面(動力伝達部フレーム)
210b 外側面(動力伝達部フレーム)
211a 内側面(従動輪フレーム)
211b 内側面(従動輪フレーム)
212a 取付孔部(従動輪フレーム)
212b 取付孔部(従動輪フレーム)
213a 駆動輪側面部
213b 駆動輪側面部
214 駆動輪支持柱部
215 支持板(駆動輪支持柱部)
216 螺子(従動輪支柱)
217a 外側面(従動輪フレーム)
217b 外側面(従動輪フレーム)
218a 外側面(駆動輪側面部)
218b 外側面(駆動輪側面部)
219a 取付孔部(駆動輪側面部)
219b 取付孔部(駆動輪側面部)
220a 細長板状延長部材
220b 細長板状延長部材
221 孔部(細長板状延長部材)
222 螺子(細長板状延長部材)
223a スライド長孔部
223b スライド長孔部
224a スライド棒部
224b スライド棒部
225 頭部(螺子)
226a 螺子
226b 螺子
227a 孔部(スライド軸部)
227b 孔部(スライド軸部)
228 螺子(動力伝達部支柱)
229 螺子(駆動輪支持柱部)
L3 深さ寸法
L4 長さ寸法
L7 深さ寸法
L8 長さ寸法
L17 高さ寸法
L18 直径寸法
L21 長さ寸法
W1 間隔寸法(案内溝部)
W2 間隔寸法(突条)
W3 間隔寸法(凹部)
W4 間隔寸法(動力伝達部フレーム)
W5 間隔寸法(従動輪フレーム)
H1 深さ寸法(案内溝部)
H2 高さ寸法(突条)
H3 高さ寸法(凸部)
H4 高さ寸法(凹部)
【特許請求の範囲】
【請求項1】
玩具の構成部品として形成され、着脱可能に設けられた原動部及び動力伝達部を内装し、
上記原動部の動力が上記動力伝達部を介して伝達されて駆動される駆動手段を備えた駆動装置本体を有することを特徴とする駆動装置。
【請求項2】
上記駆動手段は無限軌道であって、上記無限軌道を駆動しうる駆動輪と従動輪とを有し、
上記動力伝達部を介して上記駆動輪に動力を供給する上記原動部及び上記動力伝達部は上記駆動輪と上記従動輪との間に設けられていることを特徴とする請求項1記載の駆動装置。
【請求項3】
上記駆動輪は駆動装置本体の一端部に配置されると共に他端部には従動輪が配置され、
上記駆動輪の内方には上記原動部及び上記動力伝達部が設けられ、
上記無限軌道は駆動輪及び上記従動輪に巻装され、
駆動輪により上記無限軌道が駆動されて走行するように走行装置として構成されていることを特徴とする請求項2記載の駆動装置。
【請求項4】
上記駆動装置本体は車軸フレーム部を有し、
上記駆動輪及び従動輪は軸部を介して上記車軸フレーム部に回動可能に固定されていると共に、
上記動力伝達部は互いに歯合するギア比の異なる複数の歯車を有し、
上記歯車は歯車軸部を介して上記車軸フレーム部に回動可能に固定されていることを特徴とする請求項1〜3記載の駆動装置。
【請求項5】
上記車軸フレーム部は複数のフレーム部に分割形成され、上記原動部及び動力伝達部は同一フレームに夫々着脱可能に固定されていることを特徴とする請求項4記載の駆動装置。
【請求項6】
上記車軸フレーム部は、複数のフレーム部に分割され、
上記分割されたフレーム部は、上記駆動輪が設けられた駆動輪側方フレーム部と、
上記従動輪が設けられた従動輪側方フレーム部と、
上記駆動輪側方フレーム部と上記従動輪側方フレーム部との間に配置され、上記動力伝達部が設けられた動力伝達部側方フレーム部と、
上記従動輪側方フレーム部と上記動力伝達部側方フレーム部との間に配置され、上記原動部が設けられた原動部取付フレーム部とにより構成され、
上記駆動輪側方フレーム部と、上記原動部取付フレーム部は、夫々上記動力伝達部側方フレーム部に夫々着脱可能に固定され、
上記動力伝達部側方フレーム部と上記従動輪側方フレーム部とが互いに無限軌道の長さ方向において移動可能に固定されていることを特徴とする請求項4記載の駆動装置。
【請求項7】
上記従動輪側方フレーム部には、無限軌道の長さ方向に沿って設けられたスライド長孔部が設けられ、
上記動力伝達フレーム部には、上記スライド長孔部の長さ方向に沿って移動しうるように配置されたスライド棒部が設けられていることを特徴とする請求項6記載の駆動装置。
【請求項8】
上記動力伝達部側方フレーム部は、一対の動力伝達部フレームと、上記各動力伝達部フレーム同士を支持しうるように設けられた動力伝達部支柱とにより形成され、
上記従動輪側方フレーム部は、一対の従動輪フレームと、上記各従動輪フレーム同士を支持しうるように設けられた従動輪支柱とにより形成され、
上記動力伝達部側方フレーム部は上記従動輪フレーム間に配置され、
上記動力伝達部フレームの外側面には、無限軌道の長さ方向に沿って設けられた案内溝部が設けられ、
上記従動輪フレームの内側面には、上記動力伝達部フレームに設けられている案内溝部と係合して、上記動力伝達部側方フレーム部を無限軌道の長さ方向に沿って移動しうるように形成されている突条が設けられていることを特徴とする請求項7記載の駆動装置。
【請求項9】
上記突条は上記従動輪フレームの各内側面に設けられ、
上記各案内溝部には、無限軌道の長さ方向に沿って所定の間隔寸法をおいて配置された複数の凹部が設けられ、
上記各突条には、上記案内溝部に設けられた上記各凹部に係合して、上記動力伝達部側方フレーム部を長さ方向に対する移動を固定しうるように形成された凸部が設けられ、
上記各案内溝部に設けられている各凹部は、夫々上記動力伝達部側方フレーム部の幅方向中心を基準として対称位置に配置され、
上記各突条に設けられている各凸部は、夫々上記従動輪側方フレーム部の幅方向中心を基準として対称位置に配置されていることを特徴とする請求項8記載の駆動装置。
【請求項10】
上記従動輪側方フレーム部及び、上記駆動輪側方フレーム部にはそれぞれ取付孔部が設けられ、
上記従動輪側方フレーム部と、上記駆動輪側方フレーム部とは、上記各取付孔部を介して上記無限軌道の長さ方向に沿って設けられた細長板状延長部材により着脱可能に固定され、無限軌道の長さ方向において延長可能に形成されていることを特徴とする請求項6乃至請求項9記載の駆動装置。
【請求項11】
上記原動部及び動力伝達部は、一体的に着脱可能に形成されていることを特徴とする請求項5記載の駆動装置。
【請求項12】
上記各歯車軸部は上記車軸フレーム部を貫通して外方へ延設され、上記歯車と共に回動可能に形成され、延設された各歯車軸部の先端部には、駆動装置本体を走行させうる外装車輪が装着されうるように構成されていることを特徴とする請求項4〜11記載の駆動装置。
【請求項13】
上記複数の歯車は、原動部に備えられた原動歯車に歯合する、原動歯車に対してギヤ比の小さな歯車と、
駆動輪に歯合する、上記原動歯車に対してギヤ比の大きな歯車と、
上記ギヤ比の小さな歯車と大きな歯車との間に配置された上32記中間のギヤ比の歯車とにより構成され、
上記外装車輪は上記いずれかの歯車軸部に着脱可能に固定されることを特徴とする請求項4記載の駆動装置。
【請求項14】
上記複数の駆動装置本体は、各駆動装置本体の車軸フレーム部が、夫々、相互に連結手段により結合されることにより無限軌道の長さ方向において互いに並列に配置され、各駆動装置本体は個別に駆動制御されるように構成されていることを特徴とする請求項4〜13記載の駆動装置。
【請求項15】
上記複数の駆動装置本体は、上記車軸フレーム部が相互に上記連結手段により結合されることにより無限軌道の長さ方向において直列に配置されていることを特徴とする請求項4〜13記載の駆動装置。
【請求項16】
上記並列に配置された複数の駆動装置本体は、無限軌道の長さ方向に沿って互いに連結手段によって接合されることにより直列に配置され、複数の駆動装置は個別に駆動制御されるように構成されていることを特徴とする請求項4〜13記載の駆動装置。
【請求項17】
上記並列に配置された複数の駆動装置本体の互いに対向する車軸フレーム部に接合され上記駆動装置本体の上方へ延設された支持フレーム部を有し、上記支持フレームは上記駆動装置本体の上方に配置されるテーブル部を有することを特徴とする請求項14〜16記載の駆動装置。
【請求項18】
一対の脚部と、上記一対の脚部に夫々取り付けられると共に互いに連結手段により結合されて並列に配置された上記駆動装置本体とを備え、
上記脚部と駆動装置本体とは、一端部が上記歯車軸部に固定されると共に他端部が上記脚部の上端部に回動可能に固定されたクランク軸部と、
一端部が上記車軸フレーム部に固定されると共に他端部が上記脚部に長さ方向に沿って開設された長孔内において、上記長孔の長さ方向に沿って移動しうるように配置される揺動軸部とを有することを特徴とする請求項1記載の駆動装置。
【請求項19】
上記駆動輪及び従動輪が軸支されている車軸フレーム部には、上記無限軌道が巻装される補助輪が装着されることを特徴とする請求項4〜17記載の駆動装置。
【請求項20】
玩具の構成部品として形成され、着脱可能に設けられた原動部と動力伝達部とを内装し、
上記原動部の動力が上記動力伝達部を介して伝達されて駆動される搬送手段を有することを特徴とする駆動装置。
【請求項21】
上記搬送手段はベルトコンベアであることを特徴とする請求項20記載の駆動装置。
【請求項22】
上記駆動装置本体は、ロボットコンテストにおいて使用されるロボットの構成部品として使用されることを特徴とする請求項1から21記載の駆動装置。
【請求項1】
玩具の構成部品として形成され、着脱可能に設けられた原動部及び動力伝達部を内装し、
上記原動部の動力が上記動力伝達部を介して伝達されて駆動される駆動手段を備えた駆動装置本体を有することを特徴とする駆動装置。
【請求項2】
上記駆動手段は無限軌道であって、上記無限軌道を駆動しうる駆動輪と従動輪とを有し、
上記動力伝達部を介して上記駆動輪に動力を供給する上記原動部及び上記動力伝達部は上記駆動輪と上記従動輪との間に設けられていることを特徴とする請求項1記載の駆動装置。
【請求項3】
上記駆動輪は駆動装置本体の一端部に配置されると共に他端部には従動輪が配置され、
上記駆動輪の内方には上記原動部及び上記動力伝達部が設けられ、
上記無限軌道は駆動輪及び上記従動輪に巻装され、
駆動輪により上記無限軌道が駆動されて走行するように走行装置として構成されていることを特徴とする請求項2記載の駆動装置。
【請求項4】
上記駆動装置本体は車軸フレーム部を有し、
上記駆動輪及び従動輪は軸部を介して上記車軸フレーム部に回動可能に固定されていると共に、
上記動力伝達部は互いに歯合するギア比の異なる複数の歯車を有し、
上記歯車は歯車軸部を介して上記車軸フレーム部に回動可能に固定されていることを特徴とする請求項1〜3記載の駆動装置。
【請求項5】
上記車軸フレーム部は複数のフレーム部に分割形成され、上記原動部及び動力伝達部は同一フレームに夫々着脱可能に固定されていることを特徴とする請求項4記載の駆動装置。
【請求項6】
上記車軸フレーム部は、複数のフレーム部に分割され、
上記分割されたフレーム部は、上記駆動輪が設けられた駆動輪側方フレーム部と、
上記従動輪が設けられた従動輪側方フレーム部と、
上記駆動輪側方フレーム部と上記従動輪側方フレーム部との間に配置され、上記動力伝達部が設けられた動力伝達部側方フレーム部と、
上記従動輪側方フレーム部と上記動力伝達部側方フレーム部との間に配置され、上記原動部が設けられた原動部取付フレーム部とにより構成され、
上記駆動輪側方フレーム部と、上記原動部取付フレーム部は、夫々上記動力伝達部側方フレーム部に夫々着脱可能に固定され、
上記動力伝達部側方フレーム部と上記従動輪側方フレーム部とが互いに無限軌道の長さ方向において移動可能に固定されていることを特徴とする請求項4記載の駆動装置。
【請求項7】
上記従動輪側方フレーム部には、無限軌道の長さ方向に沿って設けられたスライド長孔部が設けられ、
上記動力伝達フレーム部には、上記スライド長孔部の長さ方向に沿って移動しうるように配置されたスライド棒部が設けられていることを特徴とする請求項6記載の駆動装置。
【請求項8】
上記動力伝達部側方フレーム部は、一対の動力伝達部フレームと、上記各動力伝達部フレーム同士を支持しうるように設けられた動力伝達部支柱とにより形成され、
上記従動輪側方フレーム部は、一対の従動輪フレームと、上記各従動輪フレーム同士を支持しうるように設けられた従動輪支柱とにより形成され、
上記動力伝達部側方フレーム部は上記従動輪フレーム間に配置され、
上記動力伝達部フレームの外側面には、無限軌道の長さ方向に沿って設けられた案内溝部が設けられ、
上記従動輪フレームの内側面には、上記動力伝達部フレームに設けられている案内溝部と係合して、上記動力伝達部側方フレーム部を無限軌道の長さ方向に沿って移動しうるように形成されている突条が設けられていることを特徴とする請求項7記載の駆動装置。
【請求項9】
上記突条は上記従動輪フレームの各内側面に設けられ、
上記各案内溝部には、無限軌道の長さ方向に沿って所定の間隔寸法をおいて配置された複数の凹部が設けられ、
上記各突条には、上記案内溝部に設けられた上記各凹部に係合して、上記動力伝達部側方フレーム部を長さ方向に対する移動を固定しうるように形成された凸部が設けられ、
上記各案内溝部に設けられている各凹部は、夫々上記動力伝達部側方フレーム部の幅方向中心を基準として対称位置に配置され、
上記各突条に設けられている各凸部は、夫々上記従動輪側方フレーム部の幅方向中心を基準として対称位置に配置されていることを特徴とする請求項8記載の駆動装置。
【請求項10】
上記従動輪側方フレーム部及び、上記駆動輪側方フレーム部にはそれぞれ取付孔部が設けられ、
上記従動輪側方フレーム部と、上記駆動輪側方フレーム部とは、上記各取付孔部を介して上記無限軌道の長さ方向に沿って設けられた細長板状延長部材により着脱可能に固定され、無限軌道の長さ方向において延長可能に形成されていることを特徴とする請求項6乃至請求項9記載の駆動装置。
【請求項11】
上記原動部及び動力伝達部は、一体的に着脱可能に形成されていることを特徴とする請求項5記載の駆動装置。
【請求項12】
上記各歯車軸部は上記車軸フレーム部を貫通して外方へ延設され、上記歯車と共に回動可能に形成され、延設された各歯車軸部の先端部には、駆動装置本体を走行させうる外装車輪が装着されうるように構成されていることを特徴とする請求項4〜11記載の駆動装置。
【請求項13】
上記複数の歯車は、原動部に備えられた原動歯車に歯合する、原動歯車に対してギヤ比の小さな歯車と、
駆動輪に歯合する、上記原動歯車に対してギヤ比の大きな歯車と、
上記ギヤ比の小さな歯車と大きな歯車との間に配置された上32記中間のギヤ比の歯車とにより構成され、
上記外装車輪は上記いずれかの歯車軸部に着脱可能に固定されることを特徴とする請求項4記載の駆動装置。
【請求項14】
上記複数の駆動装置本体は、各駆動装置本体の車軸フレーム部が、夫々、相互に連結手段により結合されることにより無限軌道の長さ方向において互いに並列に配置され、各駆動装置本体は個別に駆動制御されるように構成されていることを特徴とする請求項4〜13記載の駆動装置。
【請求項15】
上記複数の駆動装置本体は、上記車軸フレーム部が相互に上記連結手段により結合されることにより無限軌道の長さ方向において直列に配置されていることを特徴とする請求項4〜13記載の駆動装置。
【請求項16】
上記並列に配置された複数の駆動装置本体は、無限軌道の長さ方向に沿って互いに連結手段によって接合されることにより直列に配置され、複数の駆動装置は個別に駆動制御されるように構成されていることを特徴とする請求項4〜13記載の駆動装置。
【請求項17】
上記並列に配置された複数の駆動装置本体の互いに対向する車軸フレーム部に接合され上記駆動装置本体の上方へ延設された支持フレーム部を有し、上記支持フレームは上記駆動装置本体の上方に配置されるテーブル部を有することを特徴とする請求項14〜16記載の駆動装置。
【請求項18】
一対の脚部と、上記一対の脚部に夫々取り付けられると共に互いに連結手段により結合されて並列に配置された上記駆動装置本体とを備え、
上記脚部と駆動装置本体とは、一端部が上記歯車軸部に固定されると共に他端部が上記脚部の上端部に回動可能に固定されたクランク軸部と、
一端部が上記車軸フレーム部に固定されると共に他端部が上記脚部に長さ方向に沿って開設された長孔内において、上記長孔の長さ方向に沿って移動しうるように配置される揺動軸部とを有することを特徴とする請求項1記載の駆動装置。
【請求項19】
上記駆動輪及び従動輪が軸支されている車軸フレーム部には、上記無限軌道が巻装される補助輪が装着されることを特徴とする請求項4〜17記載の駆動装置。
【請求項20】
玩具の構成部品として形成され、着脱可能に設けられた原動部と動力伝達部とを内装し、
上記原動部の動力が上記動力伝達部を介して伝達されて駆動される搬送手段を有することを特徴とする駆動装置。
【請求項21】
上記搬送手段はベルトコンベアであることを特徴とする請求項20記載の駆動装置。
【請求項22】
上記駆動装置本体は、ロボットコンテストにおいて使用されるロボットの構成部品として使用されることを特徴とする請求項1から21記載の駆動装置。
【図1】


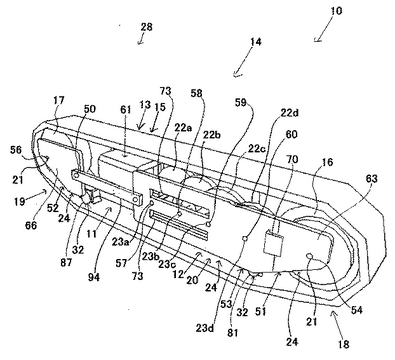
【図2】
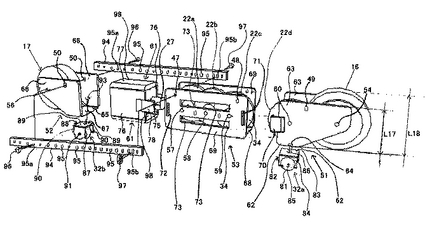
【図3】
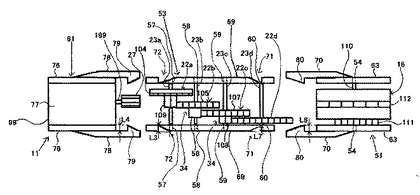
【図4】
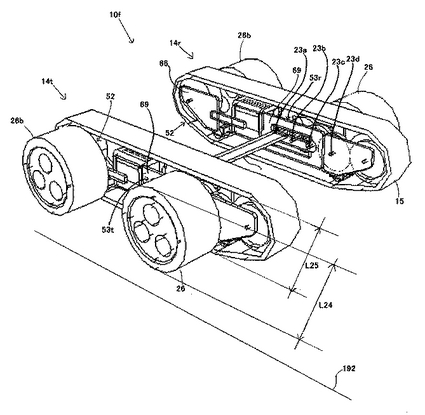
【図5】
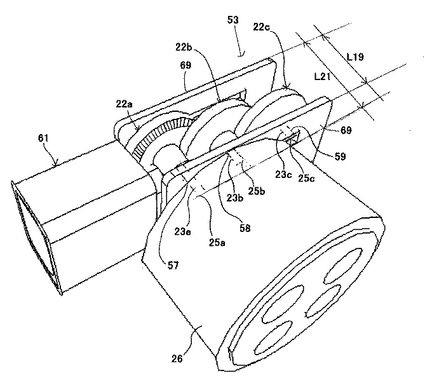
【図6】
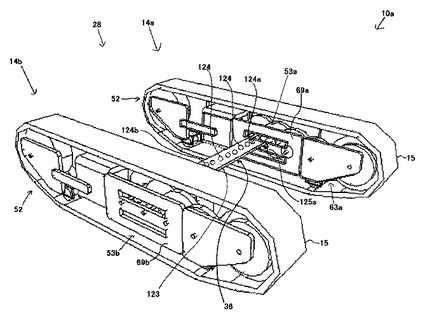
【図7】
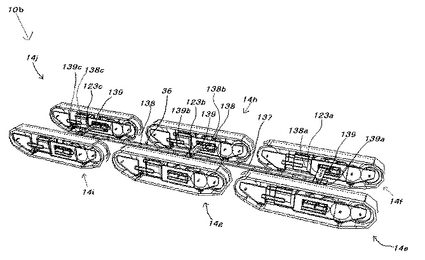
【図8】
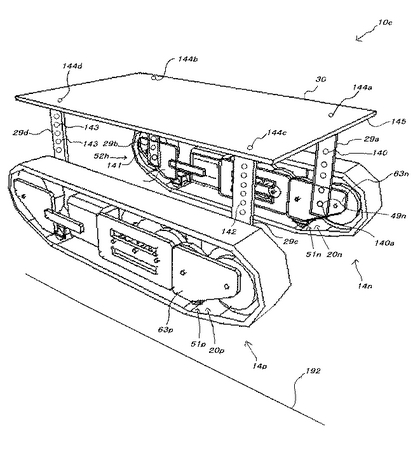
【図9】
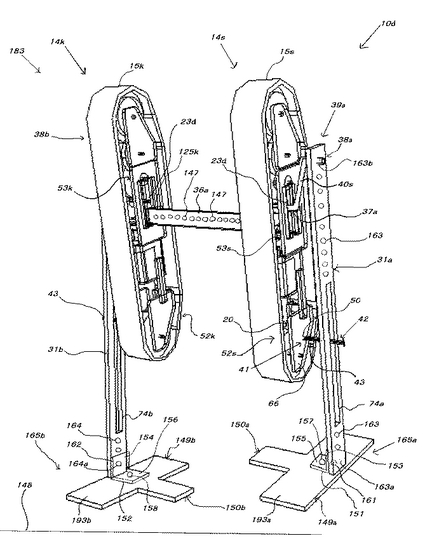
【図10】
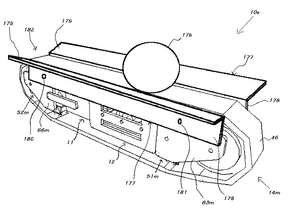
【図11】
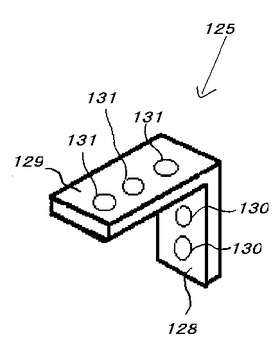
【図12】
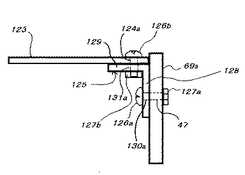
【図13】
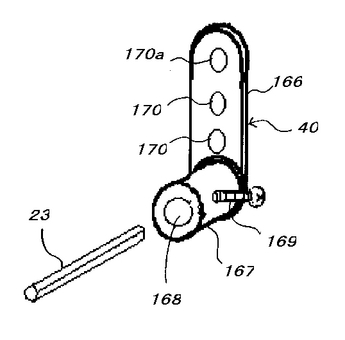
【図14】
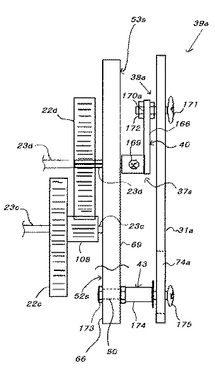
【図15】
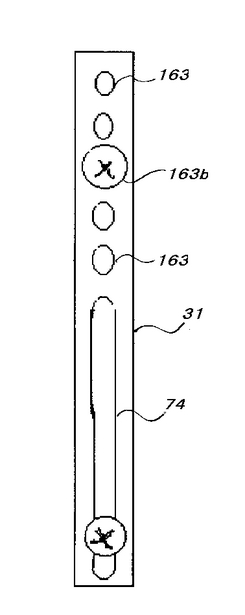
【図16】
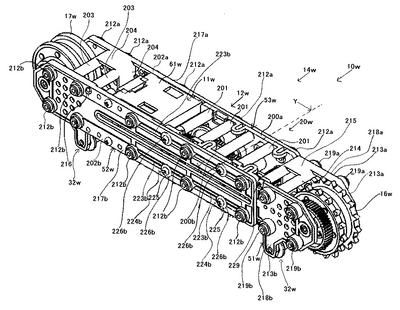
【図17】
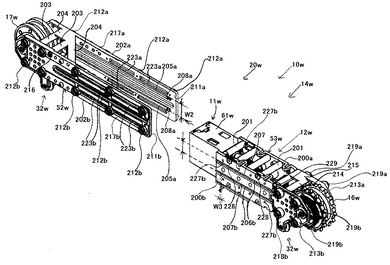
【図18】
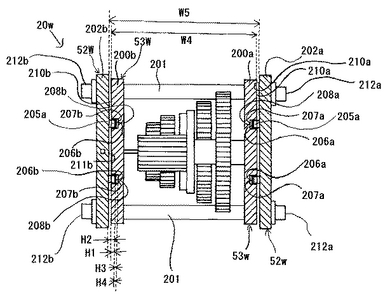
【図19】
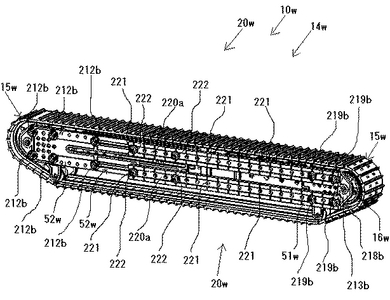
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2006−289069(P2006−289069A)
【公開日】平成18年10月26日(2006.10.26)
【国際特許分類】
【出願番号】特願2006−72672(P2006−72672)
【出願日】平成18年3月16日(2006.3.16)
【出願人】(000129264)株式会社キクイチ (10)
【Fターム(参考)】
【公開日】平成18年10月26日(2006.10.26)
【国際特許分類】
【出願日】平成18年3月16日(2006.3.16)
【出願人】(000129264)株式会社キクイチ (10)
【Fターム(参考)】
[ Back to top ]