
駆動装置

【課題】電気−機械変換素子12を異なる周波数域で伸縮させて電気−機械変換素子12の伸縮を第1の駆動部材14と第2の駆動部材15に選択的に伝達し、第1の被駆動部材16と第2の被駆動部材17とを単一の駆動源で個別に移動できる駆動装置を提供すること。
【解決手段】一端をベースフレーム11に固定された電気−機械変換素子12の他端に連結部材13aを固定し、電気−機械変換素子12と平行に連結部材13aに第1の駆動部材14及び第2の駆動部材15を固定し、第1の被駆動部材16に設けられた第1の摩擦係合部材18により第1の被駆動部材16が第1の駆動部材14に摩擦係合状態に連結すると共に、第2の被駆動部材17に設けられた第2の摩擦係合部材19により第2の被駆動部材17が第2の駆動部材15に摩擦係合状態に連結し、第1の被駆動部材16と第2の被駆動部材17とを、異なる周波数域で動作させる。
【解決手段】一端をベースフレーム11に固定された電気−機械変換素子12の他端に連結部材13aを固定し、電気−機械変換素子12と平行に連結部材13aに第1の駆動部材14及び第2の駆動部材15を固定し、第1の被駆動部材16に設けられた第1の摩擦係合部材18により第1の被駆動部材16が第1の駆動部材14に摩擦係合状態に連結すると共に、第2の被駆動部材17に設けられた第2の摩擦係合部材19により第2の被駆動部材17が第2の駆動部材15に摩擦係合状態に連結し、第1の被駆動部材16と第2の被駆動部材17とを、異なる周波数域で動作させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気−機械変換素子を伸縮させ電気−機械変換素子の伸縮方向の側方へ離れている駆動部材を伸縮させ駆動部材に係合する被駆動部材を往復動させ得る駆動装置に関する。
【背景技術】
【0002】
従来のレンズ駆動装置としては、レンズを保持するレンズ枠、レンズ枠を光軸方向にガイドするガイドシャフト、レンズ枠を光軸方向の一方向に付勢するスプリング、レンズ枠の一部に回転不能に保持された雌ネジを有するナット、ベースフレームに固定されたモータ等からなる。このように、モータを駆動源とする構成では、部品点数が多く、構造が複雑になり、組立てが難しく、高コストになるといった問題がある。
【0003】
そこで、レンズ駆動装置の駆動源として電気−機械変換素子(例えば圧電素子)を用いることが提案されている。従来の電気−機械変換素子を用いた駆動装置は、インパクト方式(IDM)やStic/Slip方式及びスムースインパクト方式(SIDM)等の方式で一般的に知られている。
【0004】
従来、1つの電気−機械変換素子を用い複数の被駆動部材を移動する駆動装置が提案されている。特許文献1に記載された駆動装置は、圧電素子の一端に第1の被駆動部材が固着され、圧電素子の他端に駆動部材が固着され、駆動部材に第2の被駆動部材が摩擦係合され、第1及び第2の被駆動部材には、ガイドに対する位置の固定・固定解除を切り替える保持手段を有し、第1の被駆動部材と第2の被駆動部材のいずれかを選択的に移動する。
【0005】
特許文献2に記載された駆動装置は、1本の駆動棒に2つの被駆動部材(レンズホルダ)が係合され、各別に設けられた係止機構を選択的に機能させて任意の一方の被駆動部材の移動を阻止し、他方の被駆動部材を移動する。
【0006】
【特許文献1】特開2002−281771号公報
【特許文献2】特開平11−265212号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載された駆動装置によれば、2つの被駆動部材に対応して4本のリード線が必要であるので、広い範囲で移動させることが実質上困難であり、さらに、各被駆動部材に対応して保持部材を備えるので、小型化が困難であり、さらに、被駆動部材の移動時にはどちらかの保持手段は通電状態になり、消費電力が大きくなる懸念がある。特許文献2に記載された駆動装置においても、カメラボディに固定されたプランジャにより係止板がレンズホルダの突起に当接している構成であり、プランジャーを使用するので小型化が困難であるとともに、プランジャーの電力を必要とする。
【0008】
本発明は、上記の事情にかんがみてなされたものであり、その目的とするところは、単一の電気−機械変換素子の伸縮を複数の駆動部材に選択的に伝達し、伸縮を伝達された駆動部材に摩擦係合状態に連結した被駆動部材を個別に移動することができ、小型化に有利で消費電力が小さくて済む駆動装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明の駆動装置は、ベースフレームと、伸縮方向の一端を前記ベースフレーム側に固定された電気−機械変換素子と、前記電気−機械変換素子の伸縮方向の他端に固定された連結部材と、前記連結部材に固定され、前記電機−機械変換素子の伸縮方向に平行に延びる第1の駆動部材及び第2の駆動部材と、前記第1の駆動部材及び前記第2の駆動部材にそれぞれ対応する第1の被駆動部材及び第2の被駆動部材と、前記第1の被駆動部材に設けられ該第1の被駆動部材を前記第1の駆動部材に摩擦係合状態に連結する第1の摩擦係合部材と、前記第2の被駆動部材に設けられ該第2の被駆動部材を前記第2の駆動部材に摩擦係合状態に連結する第2の摩擦係合部材とを備え、前記第1の被駆動部材と前記第2の被駆動部材とが、異なる周波数域で動作するように設けられていることを特徴とする。上記構成において、第1の被駆動部材と第2の被駆動部材とを、異なる周波数域で動作させるには、第1の駆動部材及び第2の駆動部材について、長さ、外径、重量及び電気−機械変換素子からの離間距離の少なくともいずれか1つが相違させるようにすれば良い。
【0010】
上記構成によれば、電気−機械変換素子の伸縮を連結部材を介して第1の駆動部材及び第2の駆動部材に伝達できる。電気−機械変換素子の伸縮は、伸縮の周波数が連結部材と駆動部材から構成される機械振動系の共振周波数と合致している方の第1の駆動部材、又は第2の駆動部材に伝達される。電気−機械変換素子の伸縮周波数域を変えることで、第1の駆動部材の共振周波数に相関した振動と第2の駆動部材の共振周波数に相関した振動とを選択的に起こさせることができ、これにより、第1の被駆動部材をベースフレームに対して接近離隔する移動と、第2の被駆動部材をベースフレームに対して接近離隔する移動とを選択的に行うことができる。
【0011】
電気−機械変換素子が急速伸長と緩速収縮とを交番して行うとき、共振周波数が合致した方の第1の駆動部材又は第2の駆動部材に摩擦係合する第1の被駆動部材又は第2の被駆動部材の急速伸張時の慣性力が摩擦係合力よりも大きくなるので、第1の被駆動部材又は第2の被駆動部材が電気−機械変換素子に接近する方向に微小ステップ移動していく。また、上記と逆に、電気−機械変換素子が緩速伸長と急速収縮とを交番して行うときは、第1の被駆動部材又は第2の被駆動部材が電気−機械変換素子に離隔する方向に微小ステップ移動していく。
【発明の効果】
【0012】
本発明の駆動装置によれば、単一の電気−機械変換素子の伸縮を複数の駆動部材に選択的に伝達し、伸縮を伝達された駆動部材に摩擦係合状態に連結した被駆動部材を個別に移動することができ、小型化に有利で消費電力が小さくて済む。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態の駆動装置について、添付図面を参照しつつ説明する。
【0014】
〔基本的構成〕
まず、本発明の実施形態に共通する駆動装置の基本的構成について、第1の実施形態に係る図1〜図6を参照して説明する。駆動装置10は、伸縮方向の一端をベースフレーム11に固定された電気−機械変換素子12の他端に連結部材13aの中途を固定し、連結部材13aの電気−機械変換素子12の非固定面側の電気−機械変換素子12を挟む両側位置へ電気−機械変換素子12の伸縮方向に平行に延在するように第1の駆動部材14及び第2の駆動部材15を固定し、第1の被駆動部材16に設けられた第1の摩擦係合部材18により第1の被駆動部材16が第1の駆動部材14に摩擦係合状態に連結すると共に、第2の被駆動部材17に設けられた第2の摩擦係合部材19により第2の被駆動部材17が第2の駆動部材15に摩擦係合状態に連結し、第1の被駆動部材16と第2の被駆動部材17とを、異なる周波数域で動作させるように設けた構成である。
【0015】
電気−機械変換素子12は制御電圧を印加されることにより伸縮し、この伸縮を連結部材13aを介して第1の駆動部材14及び第2の駆動部材15に軸方向の振動として伝達できる。第1の駆動部材14及び第2の駆動部材15への伸縮伝達は、連結部材13aと、第1の駆動部材14又は第2の駆動部材15から構成される機械振動系の共振周波数付近で実行される。
【0016】
第1の被駆動部材16と第2の被駆動部材17とを、異なる周波数域で動作させるには、第1の駆動部材14及び第2の駆動部材15について、長さ、外径、重量及び電気−機械変換素子12からの離間寸法の少なくともいずれか1つが相違させるようにすれば良い。そのようにすることで、第1の駆動部材14が共振を起こす周波数域と、第2の駆動部材15が共振を起こす周波数域とを異ならせることができる。そして、電気−機械変換素子12の伸縮周波数域を変えることで、第1の駆動部材14の共振周波数に相関した振動と第2の駆動部材15の共振周波数に相関した振動とを選択的に起こさせることができ、これにより、第1の被駆動部材16のベースフレーム11に対して接近離隔する移動と、第2の被駆動部材17のベースフレーム11に対して接近離隔する移動とを選択的に行うことができる。
【0017】
電気−機械変換素子12が急速伸長と緩速収縮とを交番して行うとき、共振周波数が合致した方の第1の駆動部材14又は第2の駆動部材15が電気−機械変換素子12の伸縮を伝達され、共振周波数に相関した振動した方の第1の駆動部材14又は第2の駆動部材15に摩擦係合する第1の被駆動部材16又は第2の被駆動部材17の急速伸張時の慣性力が摩擦係合力よりも大きくなるので、第1の被駆動部材16又は第2の被駆動部材17が電気−機械変換素子12に接近する方向に微小ステップ移動していく。また、上記と逆に、電気−機械変換素子12が緩速伸長と急速収縮とを交番して行うときは、第1の被駆動部材16又は第2の被駆動部材17が電気−機械変換素子12に離隔する方向に微小ステップ移動していく。
【0018】
上記構成によれば、電気−機械変換素子12を異なる周波数域で伸縮させて該電気−機械変換素子12の伸縮を第1の駆動部材14と第2の駆動部材15に選択的に伝達し、第1の被駆動部材16と第2の被駆動部材17とを単一の駆動源(電気−機械変換素子12)で個別に移動することができ、小型化に有利で消費電力が小さくて済む。
【0019】
〔第1の実施形態〕
図1は、第1の実施形態に係る駆動装置10の概略図である。駆動装置10は、電気−機械変換素子12の伸縮を第1の駆動部材14及び第2の駆動部材15に伝達する連結部材13aが、台枠13Aに形成されている。該台枠13Aは、連結部材13aと、連結部材13aに対応してベースフレーム11に密着固定される固定部材13bと、連結部材13aと固定部材13bの各両端の端部同士を連結する側面部材13c、13dとを含む長矩形枠に形成されている。電気−機械変換素子12を台枠13Aに挟んで設ける構成であり、電気−機械変換素子12の取付けをベースフレーム11と切離して行えるので電気−機械変換素子12の組付性が向上する。くびれ部13a’は、台枠13Aの連結部材13aの両端部分の強度を弱くして可撓性を増して電気−機械変換素子12の伸縮を第1の駆動部材14と第2の駆動部材15とに良好に伝えるために設けられている。
【0020】
電気−機械変換素子12は、台枠13Aの長尺方向の中央部に位置され、伸縮方向の両端を連結部材13aと固定部材13bとに固着されている。このように電気−機械変換素子12の両端が、連結部材13aと固定部材13bとの間に固着されているので、耐衝撃性が向上する。
【0021】
第1の被駆動部材16と第2の被駆動部材17は、この実施形態では、レンズLを保持するレンズ枠であり、略短円筒状に形成されている。第1の被駆動部材16は、外周面に固定係合部材18aとガイドブラケット22を有し、第2の被駆動部材17は、外周面に固定係合部材19aとガイドブラケット23を有する。
【0022】
固定係合部材18aは、三角溝状の凹部18a’に第1の駆動部材14を係合し位置決めして案内し、ガイドブラケット22にねじ等の止着具18cにより固定された帯板状のばね部材18bが、固定係合部材18aの凹部18a’に係合案内される第1の駆動部材14に対して凹部18a’の方向へ付勢している。これにより、第1の被駆動部材16に備えられた固定係合部材18aとばね部材18bとが、第1の被駆動部材16を第1の駆動部材14に対し摩擦係合状態に移動可能に連結している。
【0023】
上記と同様に、固定係合部材19aは、三角溝状の凹部19a’に第2の駆動部材15を係合し位置決めして案内し、ガイドブラケット23にねじ等の止着具19cにより固定された帯板状のばね部材19bが、固定係合部材19aの凹部19a’に係合案内される第2の駆動部材15に対して凹部19a’の方向へ付勢している。これにより、第2の被駆動部材17に備えられた固定係合部材19aとばね部材19bとが、第2の被駆動部材17を第2の駆動部材15に対し摩擦係合状態に移動可能に連結している。
【0024】
ベースフレーム11より設けられたガイド軸21が、ガイドブラケット22、23に開けられた長孔22a又は23aに挿通されている。長孔22a又は23aは、第1の被駆動部材16又は第2の被駆動部材17の移動方向と平行となるように設けられている。
【0025】
以上の構成により、第1の被駆動部材16は、第1の駆動部材14とガイド軸21により安定して係合支持され、筒中心を光軸Oに一致して移動可能に案内され、また第2の被駆動部材17は、第2の駆動部材15とガイド軸21により安定して係合支持され、筒中心を光軸Oに一致して移動可能に案内される。
【0026】
この実施形態によれば、第1の駆動部材14の共振周波数が合致して、電気−機械変換素子12が急速伸長と緩速収縮とを交番して行うとき、前述したように第1の被駆動部材16が電気−機械変換素子12に接近する方向に微小ステップ移動し、逆に、電気−機械変換素子12が緩速伸長と急速収縮とを交番して行うときは、第1の被駆動部材16が電気−機械変換素子12に離隔する方向に微小ステップ移動していく。
【0027】
また、第2の駆動部材15の共振周波数に合致させて、電気−機械変換素子12が急速伸長と緩速収縮とを交番して行うとき、前述したように第2の被駆動部材17が電気−機械変換素子12に接近する方向に微小ステップ移動し、逆に、電気−機械変換素子12が緩速伸長と急速収縮とを交番して行うときは、第2の被駆動部材17が電気−機械変換素子12に離隔する方向に微小ステップ移動していく。
【0028】
上記構成によれば、電気−機械変換素子12を異なる周波数域で伸縮させて該電気−機械変換素子12の周波数の異なる伸縮を第1の駆動部材14と第2の駆動部材15に選択的に伝達し、第1の被駆動部材16と第2の被駆動部材17とを単一の駆動源(電気−機械変換素子12)で個別に移動することができる。
【0029】
〔第2の実施形態〕
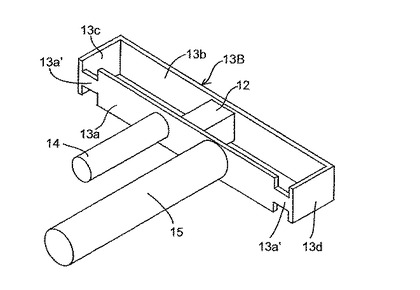
図7は、第2の実施形態に係る駆動装置の駆動部の斜視図である。この駆動装置の駆動部は、電気−機械変換素子12と、台枠13Bと、第1の駆動部材14及び第2の駆動部材15とで構成される点が、第1の実施形態に係る駆動装置の駆動部と同一であり、台枠13Bの構成が第1の実施形態に係る台枠13Aの構成と同一である。
一方、第1の駆動部材14と電気−機械変換素子12との離間距離、及び第2の駆動部材15と電気−機械変換素子12との離間距離が、第1の実施形態の場合に比べて小さくなっている点で、第1の実施形態とは異なっている。これにより、第1の駆動部材14への伸縮伝達、及び第2の駆動部材15への伸縮伝達を行う周波数域が第1の実施形態の場合と相違している。また、第1の駆動部材14と電気−機械変換素子12との離間距離、及び第2の駆動部材15と電気−機械変換素子12との離間距離が小さいため、電気−機械変換素子12の伸縮による変位を有効に第1の駆動部材14と第2の駆動部材15に伝達することができる。
【0030】
〔第3の実施形態〕
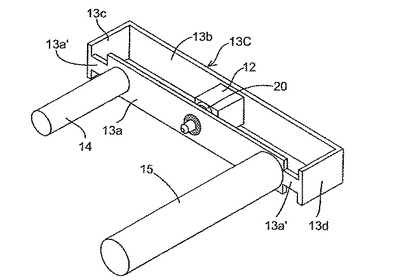
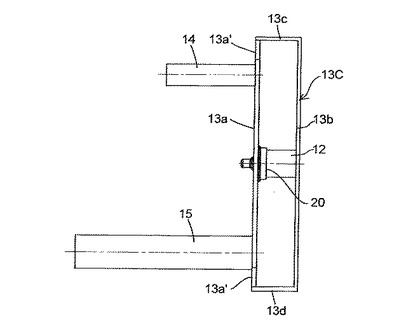
図8は、第3の実施形態に係る駆動装置の駆動部の斜視図である。図9は平面図である。この駆動装置の駆動部は、台枠13Cを構成する連結部材13aと、電気−機械変換素子12との間に、中間部材20を介在したことを特徴とする。中間部材20は、軸部を有する形状として、該軸部を連結部材13aに開けた孔に通し、かつ接着剤を用いて固着するのが好ましい。
この構成により、中間部材20がスペーサになり、電気−機械変換素子12の位置決め、組付性が向上する。
【0031】
〔第4の実施形態〕
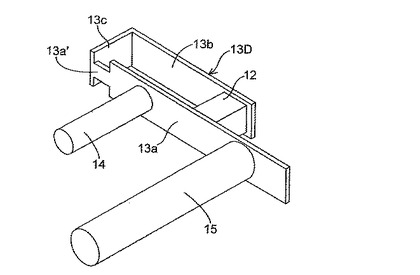
図10は、第4の実施形態に係る駆動装置の駆動部の斜視図である。この駆動装置の駆動部は、連結部材13aと、連結部材13aに対応してベースフレーム11に密着固定される固定部材13bと、連結部材13aと固定部材13bの一端の端部同士を連結する側面部材13cとを含む台枠13Dとして形成され、該台枠13の略中央に前記電気−機械変換素子12の伸縮方向の両端が固着されている。
この構成により、第2の駆動部材15の振動ストロークを第1の駆動部材14の振動ストロークよりも大きくすることができるので、第2の被駆動部材17の移動速度を第1の被駆動部材16の移動速度よりも大きくすることができる。
【0032】
〔第5の実施形態〕
図11は、第5の実施形態に係る駆動装置の駆動部の斜視図である。この駆動装置の駆動部は、電気−機械変換素子12の伸縮方向の両端に連結部材13aと固定部材13bとを連結し、連結部材13aに第1の駆動部材14と第2の駆動部材15とを連結してなる組立体を、ベースフレーム11に密着固定する構成である。連結部材13aは台枠として構成されない。この構成により、組立性の向上及び駆動部材の配置の自由度が増す。
【0033】
〔その他の実施の形態、変形例〕
以上、本発明に係る実施形態及び実施例について図面を参照し説明したが、本発明は、これに限定されるものではなく、要旨を逸脱しない範囲で種々の設計変更や工程の変更が可能であり、そのような変更を技術的範囲に含むものである。
【0034】
第1ないし第4の実施形態において、台枠13Aないし13Dは、連結部材13aを別部材で構成することにより又は固定部材13bを別部材で構成することにより組立性を向上させることができる、
【0035】
上記実施形態では、台枠の形状は、被駆動部材16、17側から見て、矩形状のものとしているが、被駆動部材を避けて、円弧状、あるいはV字状とすることも本発明に含まれるものである。
【0036】
上記実施形態では、駆動部材14、15の連結部材13a上への配置は、固定部材13bと反対の方向側に向けて配置しているが、図11に示す実施の形態において駆動部材14、15を固定部材13bのある側の連結部材13aに設ける、あるいは他の実施の形態においても、固定部材13bが駆動部材14、15の障害とならないように形成することにより駆動部材14、15を固定部材13bのある側の連結部材13aに設けることも本発明に含まれるものである。
上記実施形態では、駆動部材14、15の連結部材13a上への配置は、電気−機械変換素子12を挟む両側に配置しているが、電気−機械変換素子12を挟まない片側に設けることも本発明に含まれるものである。
上記実施形態では、駆動部材が2つであるが、これに限定されないことは言うまでもない。
【0037】
本発明の駆動装置は、構造の簡素化、小型化等を達成しており、近年小型化されているデジタルカメラの駆動装置として適用できるのは勿論のこと、その他のレンズ光学系の駆動装置としても有用である。
【図面の簡単な説明】
【0038】
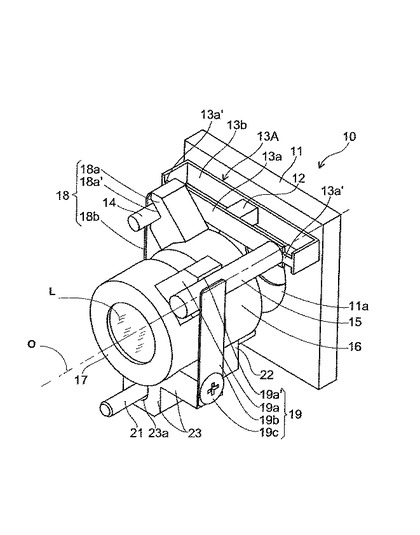
【図1】一実施形態に係る駆動装置の斜視図である。
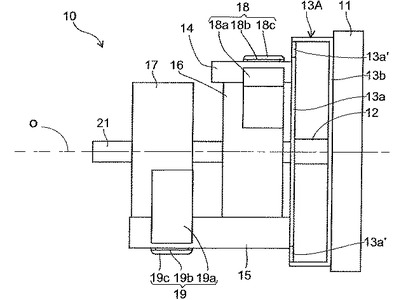
【図2】図1の駆動装置の平面図である。
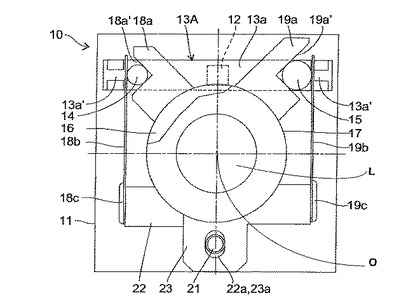
【図3】図1の駆動装置の正面図である。
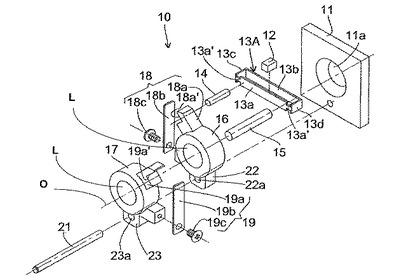
【図4】図1の駆動装置の分解斜視図である。
【図5】図1の駆動装置の駆動部の斜視図である。
【図6】図1の駆動装置の駆動部の平面図である。
【図7】他の実施形態に係る駆動装置の駆動部の斜視図である。
【図8】他の実施形態に係る駆動装置の駆動部の斜視図である。
【図9】図8の駆動装置に係る駆動部の平面図である。
【図10】他の実施形態に係る駆動装置の駆動部の斜視図である。
【図11】他の実施形態に係る駆動装置の駆動部の斜視図である。
【符号の説明】
【0039】
10 駆動装置
11 ベースフレーム
12 電気−機械変換素子
13A〜13D 台枠
13a 連結部材
13a’ くびれ部
13b 固定部材
13c 側面部材
13d 側面部材
14 第1の駆動部材
15 第2の駆動部材
16 第1の被駆動部材
17 第2の被駆動部材
18 第1の摩擦係合部材
19 第2の摩擦係合部材
20 中間部材
【技術分野】
【0001】
本発明は、電気−機械変換素子を伸縮させ電気−機械変換素子の伸縮方向の側方へ離れている駆動部材を伸縮させ駆動部材に係合する被駆動部材を往復動させ得る駆動装置に関する。
【背景技術】
【0002】
従来のレンズ駆動装置としては、レンズを保持するレンズ枠、レンズ枠を光軸方向にガイドするガイドシャフト、レンズ枠を光軸方向の一方向に付勢するスプリング、レンズ枠の一部に回転不能に保持された雌ネジを有するナット、ベースフレームに固定されたモータ等からなる。このように、モータを駆動源とする構成では、部品点数が多く、構造が複雑になり、組立てが難しく、高コストになるといった問題がある。
【0003】
そこで、レンズ駆動装置の駆動源として電気−機械変換素子(例えば圧電素子)を用いることが提案されている。従来の電気−機械変換素子を用いた駆動装置は、インパクト方式(IDM)やStic/Slip方式及びスムースインパクト方式(SIDM)等の方式で一般的に知られている。
【0004】
従来、1つの電気−機械変換素子を用い複数の被駆動部材を移動する駆動装置が提案されている。特許文献1に記載された駆動装置は、圧電素子の一端に第1の被駆動部材が固着され、圧電素子の他端に駆動部材が固着され、駆動部材に第2の被駆動部材が摩擦係合され、第1及び第2の被駆動部材には、ガイドに対する位置の固定・固定解除を切り替える保持手段を有し、第1の被駆動部材と第2の被駆動部材のいずれかを選択的に移動する。
【0005】
特許文献2に記載された駆動装置は、1本の駆動棒に2つの被駆動部材(レンズホルダ)が係合され、各別に設けられた係止機構を選択的に機能させて任意の一方の被駆動部材の移動を阻止し、他方の被駆動部材を移動する。
【0006】
【特許文献1】特開2002−281771号公報
【特許文献2】特開平11−265212号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載された駆動装置によれば、2つの被駆動部材に対応して4本のリード線が必要であるので、広い範囲で移動させることが実質上困難であり、さらに、各被駆動部材に対応して保持部材を備えるので、小型化が困難であり、さらに、被駆動部材の移動時にはどちらかの保持手段は通電状態になり、消費電力が大きくなる懸念がある。特許文献2に記載された駆動装置においても、カメラボディに固定されたプランジャにより係止板がレンズホルダの突起に当接している構成であり、プランジャーを使用するので小型化が困難であるとともに、プランジャーの電力を必要とする。
【0008】
本発明は、上記の事情にかんがみてなされたものであり、その目的とするところは、単一の電気−機械変換素子の伸縮を複数の駆動部材に選択的に伝達し、伸縮を伝達された駆動部材に摩擦係合状態に連結した被駆動部材を個別に移動することができ、小型化に有利で消費電力が小さくて済む駆動装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明の駆動装置は、ベースフレームと、伸縮方向の一端を前記ベースフレーム側に固定された電気−機械変換素子と、前記電気−機械変換素子の伸縮方向の他端に固定された連結部材と、前記連結部材に固定され、前記電機−機械変換素子の伸縮方向に平行に延びる第1の駆動部材及び第2の駆動部材と、前記第1の駆動部材及び前記第2の駆動部材にそれぞれ対応する第1の被駆動部材及び第2の被駆動部材と、前記第1の被駆動部材に設けられ該第1の被駆動部材を前記第1の駆動部材に摩擦係合状態に連結する第1の摩擦係合部材と、前記第2の被駆動部材に設けられ該第2の被駆動部材を前記第2の駆動部材に摩擦係合状態に連結する第2の摩擦係合部材とを備え、前記第1の被駆動部材と前記第2の被駆動部材とが、異なる周波数域で動作するように設けられていることを特徴とする。上記構成において、第1の被駆動部材と第2の被駆動部材とを、異なる周波数域で動作させるには、第1の駆動部材及び第2の駆動部材について、長さ、外径、重量及び電気−機械変換素子からの離間距離の少なくともいずれか1つが相違させるようにすれば良い。
【0010】
上記構成によれば、電気−機械変換素子の伸縮を連結部材を介して第1の駆動部材及び第2の駆動部材に伝達できる。電気−機械変換素子の伸縮は、伸縮の周波数が連結部材と駆動部材から構成される機械振動系の共振周波数と合致している方の第1の駆動部材、又は第2の駆動部材に伝達される。電気−機械変換素子の伸縮周波数域を変えることで、第1の駆動部材の共振周波数に相関した振動と第2の駆動部材の共振周波数に相関した振動とを選択的に起こさせることができ、これにより、第1の被駆動部材をベースフレームに対して接近離隔する移動と、第2の被駆動部材をベースフレームに対して接近離隔する移動とを選択的に行うことができる。
【0011】
電気−機械変換素子が急速伸長と緩速収縮とを交番して行うとき、共振周波数が合致した方の第1の駆動部材又は第2の駆動部材に摩擦係合する第1の被駆動部材又は第2の被駆動部材の急速伸張時の慣性力が摩擦係合力よりも大きくなるので、第1の被駆動部材又は第2の被駆動部材が電気−機械変換素子に接近する方向に微小ステップ移動していく。また、上記と逆に、電気−機械変換素子が緩速伸長と急速収縮とを交番して行うときは、第1の被駆動部材又は第2の被駆動部材が電気−機械変換素子に離隔する方向に微小ステップ移動していく。
【発明の効果】
【0012】
本発明の駆動装置によれば、単一の電気−機械変換素子の伸縮を複数の駆動部材に選択的に伝達し、伸縮を伝達された駆動部材に摩擦係合状態に連結した被駆動部材を個別に移動することができ、小型化に有利で消費電力が小さくて済む。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態の駆動装置について、添付図面を参照しつつ説明する。
【0014】
〔基本的構成〕
まず、本発明の実施形態に共通する駆動装置の基本的構成について、第1の実施形態に係る図1〜図6を参照して説明する。駆動装置10は、伸縮方向の一端をベースフレーム11に固定された電気−機械変換素子12の他端に連結部材13aの中途を固定し、連結部材13aの電気−機械変換素子12の非固定面側の電気−機械変換素子12を挟む両側位置へ電気−機械変換素子12の伸縮方向に平行に延在するように第1の駆動部材14及び第2の駆動部材15を固定し、第1の被駆動部材16に設けられた第1の摩擦係合部材18により第1の被駆動部材16が第1の駆動部材14に摩擦係合状態に連結すると共に、第2の被駆動部材17に設けられた第2の摩擦係合部材19により第2の被駆動部材17が第2の駆動部材15に摩擦係合状態に連結し、第1の被駆動部材16と第2の被駆動部材17とを、異なる周波数域で動作させるように設けた構成である。
【0015】
電気−機械変換素子12は制御電圧を印加されることにより伸縮し、この伸縮を連結部材13aを介して第1の駆動部材14及び第2の駆動部材15に軸方向の振動として伝達できる。第1の駆動部材14及び第2の駆動部材15への伸縮伝達は、連結部材13aと、第1の駆動部材14又は第2の駆動部材15から構成される機械振動系の共振周波数付近で実行される。
【0016】
第1の被駆動部材16と第2の被駆動部材17とを、異なる周波数域で動作させるには、第1の駆動部材14及び第2の駆動部材15について、長さ、外径、重量及び電気−機械変換素子12からの離間寸法の少なくともいずれか1つが相違させるようにすれば良い。そのようにすることで、第1の駆動部材14が共振を起こす周波数域と、第2の駆動部材15が共振を起こす周波数域とを異ならせることができる。そして、電気−機械変換素子12の伸縮周波数域を変えることで、第1の駆動部材14の共振周波数に相関した振動と第2の駆動部材15の共振周波数に相関した振動とを選択的に起こさせることができ、これにより、第1の被駆動部材16のベースフレーム11に対して接近離隔する移動と、第2の被駆動部材17のベースフレーム11に対して接近離隔する移動とを選択的に行うことができる。
【0017】
電気−機械変換素子12が急速伸長と緩速収縮とを交番して行うとき、共振周波数が合致した方の第1の駆動部材14又は第2の駆動部材15が電気−機械変換素子12の伸縮を伝達され、共振周波数に相関した振動した方の第1の駆動部材14又は第2の駆動部材15に摩擦係合する第1の被駆動部材16又は第2の被駆動部材17の急速伸張時の慣性力が摩擦係合力よりも大きくなるので、第1の被駆動部材16又は第2の被駆動部材17が電気−機械変換素子12に接近する方向に微小ステップ移動していく。また、上記と逆に、電気−機械変換素子12が緩速伸長と急速収縮とを交番して行うときは、第1の被駆動部材16又は第2の被駆動部材17が電気−機械変換素子12に離隔する方向に微小ステップ移動していく。
【0018】
上記構成によれば、電気−機械変換素子12を異なる周波数域で伸縮させて該電気−機械変換素子12の伸縮を第1の駆動部材14と第2の駆動部材15に選択的に伝達し、第1の被駆動部材16と第2の被駆動部材17とを単一の駆動源(電気−機械変換素子12)で個別に移動することができ、小型化に有利で消費電力が小さくて済む。
【0019】
〔第1の実施形態〕
図1は、第1の実施形態に係る駆動装置10の概略図である。駆動装置10は、電気−機械変換素子12の伸縮を第1の駆動部材14及び第2の駆動部材15に伝達する連結部材13aが、台枠13Aに形成されている。該台枠13Aは、連結部材13aと、連結部材13aに対応してベースフレーム11に密着固定される固定部材13bと、連結部材13aと固定部材13bの各両端の端部同士を連結する側面部材13c、13dとを含む長矩形枠に形成されている。電気−機械変換素子12を台枠13Aに挟んで設ける構成であり、電気−機械変換素子12の取付けをベースフレーム11と切離して行えるので電気−機械変換素子12の組付性が向上する。くびれ部13a’は、台枠13Aの連結部材13aの両端部分の強度を弱くして可撓性を増して電気−機械変換素子12の伸縮を第1の駆動部材14と第2の駆動部材15とに良好に伝えるために設けられている。
【0020】
電気−機械変換素子12は、台枠13Aの長尺方向の中央部に位置され、伸縮方向の両端を連結部材13aと固定部材13bとに固着されている。このように電気−機械変換素子12の両端が、連結部材13aと固定部材13bとの間に固着されているので、耐衝撃性が向上する。
【0021】
第1の被駆動部材16と第2の被駆動部材17は、この実施形態では、レンズLを保持するレンズ枠であり、略短円筒状に形成されている。第1の被駆動部材16は、外周面に固定係合部材18aとガイドブラケット22を有し、第2の被駆動部材17は、外周面に固定係合部材19aとガイドブラケット23を有する。
【0022】
固定係合部材18aは、三角溝状の凹部18a’に第1の駆動部材14を係合し位置決めして案内し、ガイドブラケット22にねじ等の止着具18cにより固定された帯板状のばね部材18bが、固定係合部材18aの凹部18a’に係合案内される第1の駆動部材14に対して凹部18a’の方向へ付勢している。これにより、第1の被駆動部材16に備えられた固定係合部材18aとばね部材18bとが、第1の被駆動部材16を第1の駆動部材14に対し摩擦係合状態に移動可能に連結している。
【0023】
上記と同様に、固定係合部材19aは、三角溝状の凹部19a’に第2の駆動部材15を係合し位置決めして案内し、ガイドブラケット23にねじ等の止着具19cにより固定された帯板状のばね部材19bが、固定係合部材19aの凹部19a’に係合案内される第2の駆動部材15に対して凹部19a’の方向へ付勢している。これにより、第2の被駆動部材17に備えられた固定係合部材19aとばね部材19bとが、第2の被駆動部材17を第2の駆動部材15に対し摩擦係合状態に移動可能に連結している。
【0024】
ベースフレーム11より設けられたガイド軸21が、ガイドブラケット22、23に開けられた長孔22a又は23aに挿通されている。長孔22a又は23aは、第1の被駆動部材16又は第2の被駆動部材17の移動方向と平行となるように設けられている。
【0025】
以上の構成により、第1の被駆動部材16は、第1の駆動部材14とガイド軸21により安定して係合支持され、筒中心を光軸Oに一致して移動可能に案内され、また第2の被駆動部材17は、第2の駆動部材15とガイド軸21により安定して係合支持され、筒中心を光軸Oに一致して移動可能に案内される。
【0026】
この実施形態によれば、第1の駆動部材14の共振周波数が合致して、電気−機械変換素子12が急速伸長と緩速収縮とを交番して行うとき、前述したように第1の被駆動部材16が電気−機械変換素子12に接近する方向に微小ステップ移動し、逆に、電気−機械変換素子12が緩速伸長と急速収縮とを交番して行うときは、第1の被駆動部材16が電気−機械変換素子12に離隔する方向に微小ステップ移動していく。
【0027】
また、第2の駆動部材15の共振周波数に合致させて、電気−機械変換素子12が急速伸長と緩速収縮とを交番して行うとき、前述したように第2の被駆動部材17が電気−機械変換素子12に接近する方向に微小ステップ移動し、逆に、電気−機械変換素子12が緩速伸長と急速収縮とを交番して行うときは、第2の被駆動部材17が電気−機械変換素子12に離隔する方向に微小ステップ移動していく。
【0028】
上記構成によれば、電気−機械変換素子12を異なる周波数域で伸縮させて該電気−機械変換素子12の周波数の異なる伸縮を第1の駆動部材14と第2の駆動部材15に選択的に伝達し、第1の被駆動部材16と第2の被駆動部材17とを単一の駆動源(電気−機械変換素子12)で個別に移動することができる。
【0029】
〔第2の実施形態〕
図7は、第2の実施形態に係る駆動装置の駆動部の斜視図である。この駆動装置の駆動部は、電気−機械変換素子12と、台枠13Bと、第1の駆動部材14及び第2の駆動部材15とで構成される点が、第1の実施形態に係る駆動装置の駆動部と同一であり、台枠13Bの構成が第1の実施形態に係る台枠13Aの構成と同一である。
一方、第1の駆動部材14と電気−機械変換素子12との離間距離、及び第2の駆動部材15と電気−機械変換素子12との離間距離が、第1の実施形態の場合に比べて小さくなっている点で、第1の実施形態とは異なっている。これにより、第1の駆動部材14への伸縮伝達、及び第2の駆動部材15への伸縮伝達を行う周波数域が第1の実施形態の場合と相違している。また、第1の駆動部材14と電気−機械変換素子12との離間距離、及び第2の駆動部材15と電気−機械変換素子12との離間距離が小さいため、電気−機械変換素子12の伸縮による変位を有効に第1の駆動部材14と第2の駆動部材15に伝達することができる。
【0030】
〔第3の実施形態〕
図8は、第3の実施形態に係る駆動装置の駆動部の斜視図である。図9は平面図である。この駆動装置の駆動部は、台枠13Cを構成する連結部材13aと、電気−機械変換素子12との間に、中間部材20を介在したことを特徴とする。中間部材20は、軸部を有する形状として、該軸部を連結部材13aに開けた孔に通し、かつ接着剤を用いて固着するのが好ましい。
この構成により、中間部材20がスペーサになり、電気−機械変換素子12の位置決め、組付性が向上する。
【0031】
〔第4の実施形態〕
図10は、第4の実施形態に係る駆動装置の駆動部の斜視図である。この駆動装置の駆動部は、連結部材13aと、連結部材13aに対応してベースフレーム11に密着固定される固定部材13bと、連結部材13aと固定部材13bの一端の端部同士を連結する側面部材13cとを含む台枠13Dとして形成され、該台枠13の略中央に前記電気−機械変換素子12の伸縮方向の両端が固着されている。
この構成により、第2の駆動部材15の振動ストロークを第1の駆動部材14の振動ストロークよりも大きくすることができるので、第2の被駆動部材17の移動速度を第1の被駆動部材16の移動速度よりも大きくすることができる。
【0032】
〔第5の実施形態〕
図11は、第5の実施形態に係る駆動装置の駆動部の斜視図である。この駆動装置の駆動部は、電気−機械変換素子12の伸縮方向の両端に連結部材13aと固定部材13bとを連結し、連結部材13aに第1の駆動部材14と第2の駆動部材15とを連結してなる組立体を、ベースフレーム11に密着固定する構成である。連結部材13aは台枠として構成されない。この構成により、組立性の向上及び駆動部材の配置の自由度が増す。
【0033】
〔その他の実施の形態、変形例〕
以上、本発明に係る実施形態及び実施例について図面を参照し説明したが、本発明は、これに限定されるものではなく、要旨を逸脱しない範囲で種々の設計変更や工程の変更が可能であり、そのような変更を技術的範囲に含むものである。
【0034】
第1ないし第4の実施形態において、台枠13Aないし13Dは、連結部材13aを別部材で構成することにより又は固定部材13bを別部材で構成することにより組立性を向上させることができる、
【0035】
上記実施形態では、台枠の形状は、被駆動部材16、17側から見て、矩形状のものとしているが、被駆動部材を避けて、円弧状、あるいはV字状とすることも本発明に含まれるものである。
【0036】
上記実施形態では、駆動部材14、15の連結部材13a上への配置は、固定部材13bと反対の方向側に向けて配置しているが、図11に示す実施の形態において駆動部材14、15を固定部材13bのある側の連結部材13aに設ける、あるいは他の実施の形態においても、固定部材13bが駆動部材14、15の障害とならないように形成することにより駆動部材14、15を固定部材13bのある側の連結部材13aに設けることも本発明に含まれるものである。
上記実施形態では、駆動部材14、15の連結部材13a上への配置は、電気−機械変換素子12を挟む両側に配置しているが、電気−機械変換素子12を挟まない片側に設けることも本発明に含まれるものである。
上記実施形態では、駆動部材が2つであるが、これに限定されないことは言うまでもない。
【0037】
本発明の駆動装置は、構造の簡素化、小型化等を達成しており、近年小型化されているデジタルカメラの駆動装置として適用できるのは勿論のこと、その他のレンズ光学系の駆動装置としても有用である。
【図面の簡単な説明】
【0038】
【図1】一実施形態に係る駆動装置の斜視図である。
【図2】図1の駆動装置の平面図である。
【図3】図1の駆動装置の正面図である。
【図4】図1の駆動装置の分解斜視図である。
【図5】図1の駆動装置の駆動部の斜視図である。
【図6】図1の駆動装置の駆動部の平面図である。
【図7】他の実施形態に係る駆動装置の駆動部の斜視図である。
【図8】他の実施形態に係る駆動装置の駆動部の斜視図である。
【図9】図8の駆動装置に係る駆動部の平面図である。
【図10】他の実施形態に係る駆動装置の駆動部の斜視図である。
【図11】他の実施形態に係る駆動装置の駆動部の斜視図である。
【符号の説明】
【0039】
10 駆動装置
11 ベースフレーム
12 電気−機械変換素子
13A〜13D 台枠
13a 連結部材
13a’ くびれ部
13b 固定部材
13c 側面部材
13d 側面部材
14 第1の駆動部材
15 第2の駆動部材
16 第1の被駆動部材
17 第2の被駆動部材
18 第1の摩擦係合部材
19 第2の摩擦係合部材
20 中間部材
【特許請求の範囲】
【請求項1】
ベースフレームと、
伸縮方向の一端を前記ベースフレーム側に固定された電気−機械変換素子と、
前記電気−機械変換素子の伸縮方向の他端に固定された連結部材と、
前記連結部材に固定され、前記電機−機械変換素子の伸縮方向に平行に延びる第1の駆動部材及び第2の駆動部材と、
前記第1の駆動部材及び前記第2の駆動部材にそれぞれ対応する第1の被駆動部材及び第2の被駆動部材と、
前記第1の被駆動部材に設けられ該第1の被駆動部材を前記第1の駆動部材に摩擦係合状態に連結する第1の摩擦係合部材と、
前記第2の被駆動部材に設けられ該第2の被駆動部材を前記第2の駆動部材に摩擦係合状態に連結する第2の摩擦係合部材とを備え、
前記第1の被駆動部材と前記第2の被駆動部材とが、異なる周波数域で動作するように設けられている、
ことを特徴とする駆動装置。
【請求項2】
前記第1の駆動部材及び前記第2の駆動部材の、長さ、外径、重量、又は前記第1の駆動部材及び前記第2の駆動部材と前記電気−機械変換素子との離間距離の少なくともいずれか1つが相違していることにより、前記第1の被駆動部材と前記第2の被駆動部材とが、異なる周波数域で動作するように設けられている、
ことを特徴とする請求項1に記載の駆動装置。
【請求項3】
前記連結部材に一端を固着された前記電気−機械変換素子の他端に固定部材が固着され、該固定部材が前記ベースフレームに密着固定された、
ことを特徴とする請求項1又は2に記載の駆動装置。
【請求項4】
前記連結部材は、前記連結部材に対応して前記ベースフレームに密着固定される固定部材と、前記連結部材と固定部材の両端又は一端の端部同士を連結する側面部材とを含む台枠として形成され、該台枠に前記電気−機械変換素子の伸縮方向の両端が固着されている、
ことを特徴とする請求項1ないし3いずれかに記載の駆動装置。
【請求項5】
前記台枠を構成する前記連結部材の一端又は両端には、前記側面部材との間に断面積が小さいくびれ部を有する、
ことを特徴とする請求項4に記載の駆動装置。
【請求項6】
前記連結部材と、前記電気−機械変換素子との間に中間部材を配置した、
ことを特徴とする請求項1ないし5のいずれかに記載の駆動装置。
【請求項7】
前記第1の被駆動部材と前記第2の被駆動部材は、レンズを保持する
ことを特徴とする請求項1ないし6のいずれかに記載の駆動装置。
【請求項1】
ベースフレームと、
伸縮方向の一端を前記ベースフレーム側に固定された電気−機械変換素子と、
前記電気−機械変換素子の伸縮方向の他端に固定された連結部材と、
前記連結部材に固定され、前記電機−機械変換素子の伸縮方向に平行に延びる第1の駆動部材及び第2の駆動部材と、
前記第1の駆動部材及び前記第2の駆動部材にそれぞれ対応する第1の被駆動部材及び第2の被駆動部材と、
前記第1の被駆動部材に設けられ該第1の被駆動部材を前記第1の駆動部材に摩擦係合状態に連結する第1の摩擦係合部材と、
前記第2の被駆動部材に設けられ該第2の被駆動部材を前記第2の駆動部材に摩擦係合状態に連結する第2の摩擦係合部材とを備え、
前記第1の被駆動部材と前記第2の被駆動部材とが、異なる周波数域で動作するように設けられている、
ことを特徴とする駆動装置。
【請求項2】
前記第1の駆動部材及び前記第2の駆動部材の、長さ、外径、重量、又は前記第1の駆動部材及び前記第2の駆動部材と前記電気−機械変換素子との離間距離の少なくともいずれか1つが相違していることにより、前記第1の被駆動部材と前記第2の被駆動部材とが、異なる周波数域で動作するように設けられている、
ことを特徴とする請求項1に記載の駆動装置。
【請求項3】
前記連結部材に一端を固着された前記電気−機械変換素子の他端に固定部材が固着され、該固定部材が前記ベースフレームに密着固定された、
ことを特徴とする請求項1又は2に記載の駆動装置。
【請求項4】
前記連結部材は、前記連結部材に対応して前記ベースフレームに密着固定される固定部材と、前記連結部材と固定部材の両端又は一端の端部同士を連結する側面部材とを含む台枠として形成され、該台枠に前記電気−機械変換素子の伸縮方向の両端が固着されている、
ことを特徴とする請求項1ないし3いずれかに記載の駆動装置。
【請求項5】
前記台枠を構成する前記連結部材の一端又は両端には、前記側面部材との間に断面積が小さいくびれ部を有する、
ことを特徴とする請求項4に記載の駆動装置。
【請求項6】
前記連結部材と、前記電気−機械変換素子との間に中間部材を配置した、
ことを特徴とする請求項1ないし5のいずれかに記載の駆動装置。
【請求項7】
前記第1の被駆動部材と前記第2の被駆動部材は、レンズを保持する
ことを特徴とする請求項1ないし6のいずれかに記載の駆動装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−110127(P2010−110127A)
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願番号】特願2008−280249(P2008−280249)
【出願日】平成20年10月30日(2008.10.30)
【出願人】(000001225)日本電産コパル株式会社 (755)
【Fターム(参考)】
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願日】平成20年10月30日(2008.10.30)
【出願人】(000001225)日本電産コパル株式会社 (755)
【Fターム(参考)】
[ Back to top ]