
駆動装置
【課題】インバータと昇圧コンバータとを備える装置において、装置の故障を検出すると共に故障箇所をより正確に特定する。
【解決手段】モータMG1,MG2が駆動されている最中にバッテリ電流Ibを監視してバッテリへの過電流を検出した場合(S100,110)、所定期間に亘ってモータMG1,MG2の各相電流を入力しその絶対値の最大相電流をモータMG1,MG2毎に比較して各相の最大相電流が互いに一致するか否かをそれぞれ判定し(S120〜150)、各相の最大相電流が一致しないモータがあればインバータ24,25のうち各相電流が一致しないモータを駆動するインバータのオープン故障と判定し(S160〜180)、各相の最大相電流が一致しないモータがないときには昇圧コンバータ30の故障と判定する(S190)。
【解決手段】モータMG1,MG2が駆動されている最中にバッテリ電流Ibを監視してバッテリへの過電流を検出した場合(S100,110)、所定期間に亘ってモータMG1,MG2の各相電流を入力しその絶対値の最大相電流をモータMG1,MG2毎に比較して各相の最大相電流が互いに一致するか否かをそれぞれ判定し(S120〜150)、各相の最大相電流が一致しないモータがあればインバータ24,25のうち各相電流が一致しないモータを駆動するインバータのオープン故障と判定し(S160〜180)、各相の最大相電流が一致しないモータがないときには昇圧コンバータ30の故障と判定する(S190)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動装置に関する。
【背景技術】
【0002】
従来、この種の駆動装置としては、三相交流により駆動するモータMG1,MG2と、複数のスイッチング素子を有しモータMG1,MG2を駆動するインバータと、バッテリと、バッテリの電圧を昇圧してインバータに供給する昇圧コンバータと、バッテリに入出力されるバッテリ電流を検出する電流センサと、バッテリの電圧を検出する電圧センサとを備え、モータMG1,MG2のそれぞれのトルク指令値と回転数とを乗じて算出した電力の和を電圧センサにより検出されるバッテリの電圧で除すことによりバッテリ電流の推定値を算出し、算出した推定値と電流センサにより検出されるバッテリ電流の検出値とに基づいてインバータの1相オープン故障を判定するものが提案されている(例えば、特許文献1参照)。この駆動装置では、推定値と検出値との偏差が所定の閾値を超える場合に所定期間に亘って検出値と推定値との大小を比較して、検出値が推定値を上回るHレベルの信号と検出値が推定値を下回るLレベルの信号とを生成し、LレベルからHレベルへの立ち上がりの間隔に基づいてバッテリ電流の周波数を算出する。そして、算出した周波数がモータMG1,MG2のいずれの回転数に同期しているかを判定し、同期していると判定したモータを駆動するインバータに1相オープン故障が生じていると判定するものとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−178556号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の駆動装置では、検出値が推定値を下回るLレベルから検出値が推定値を上回るHレベルへの立ち上がりを抽出することによりバッテリ電流の周波数を算出するから、検出値と推定値との偏差が閾値を大きく超えた場合にはその立ち上がりを適切に抽出できずバッテリ電流の周波数を算出できなくなってしまう。その場合、1相オープン故障が生じているインバータを正確に特定できないおそれがある。また、バッテリに入出力される電流にはインバータ以外に昇圧コンバータも影響を与えることから、インバータだけではなく昇圧コンバータの故障についても正確に特定できることが求められる。
【0005】
本発明の駆動装置は、インバータと昇圧コンバータとを備える装置において、装置の故障を検出すると共に故障箇所をより正確に特定することを主目的とする。
【課題を解決するための手段】
【0006】
本発明の駆動装置は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明の駆動装置は、
三相交流により駆動される一以上の電動機と、複数のスイッチング素子のスイッチングにより前記電動機を駆動する一以上のインバータと、バッテリと、前記バッテリが接続された低電圧系と前記インバータが接続された高電圧系との間で電圧を変換する昇圧コンバータと、前記低電圧系に流れる電流を検出する低電圧系電流検出手段と、前記電動機の各相に流れる相電流を検出する相電流検出手段と、前記バッテリに充放電が許容される許容範囲内で前記電動機が駆動されるよう前記インバータと前記昇圧コンバータとを制御する制御手段と、を備える駆動装置において、
前記電動機が駆動されている最中に前記低電圧系電流検出手段により前記バッテリの前記許容範囲を超える充放電が検出された場合、前記相電流検出手段により一周期以上の所定期間に亘って検出される相電流の絶対値の最大値を比較することにより各相電流が互いに一致するか否かを前記電動機毎に判定し、前記各相電流が一致しない電動機があるときには該各相電流が一致しない電動機を駆動するインバータのスイッチング素子がオープンしているオープン故障と判定し、前記各相電流が一致しない電動機がないときには前記昇圧コンバータの故障と判定する
ことを特徴とする。
【0008】
この本発明の駆動装置では、電動機が駆動されている最中に低電圧系電流検出手段によりバッテリの許容範囲を超える充放電が検出された場合、相電流検出手段により一周期以上の所定期間に亘って検出される相電流の絶対値の最大値を比較することにより各相電流が互いに一致するか否かを電動機毎に判定し、各相電流が一致しない電動機があるときには各相電流が一致しない電動機を駆動するインバータのスイッチング素子がオープンしているオープン故障と判定し、各相電流が一致しない電動機がないときには昇圧コンバータの故障と判定する。インバータのオープン故障の判定は、インバータのスイッチング素子のいずれかがオープン故障した場合に、オープンしているスイッチング素子には電流が流れなくなるため、各相電流の波形が大きくばらつくことに基づいている。したがって、いずれのインバータにオープン故障が生じているのかをより正確に特定することができ、また、オープン故障が生じているインバータを特定できないときには昇圧コンバータの故障と特定することができる。この結果、装置の故障を検出すると共に故障箇所をより正確に特定することができる。
【図面の簡単な説明】
【0009】
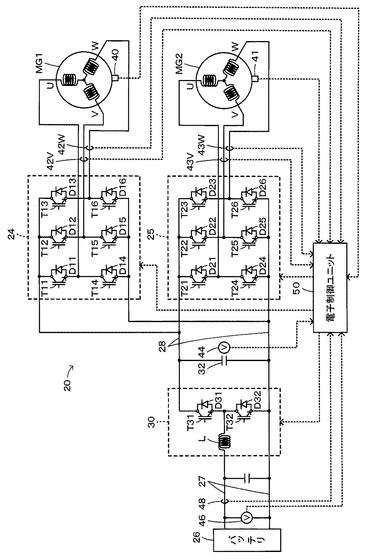
【図1】本発明の一実施例としての駆動装置20の構成の概略を示す構成図である。
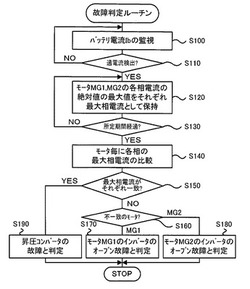
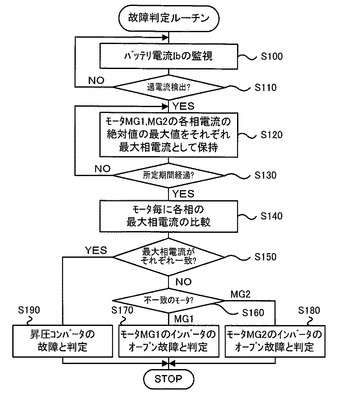
【図2】電子制御ユニット50により実行される故障判定ルーチンの一例を示すフローチャートである。
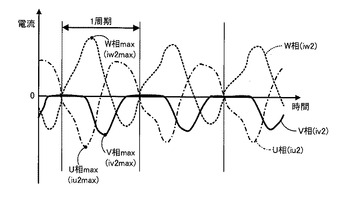
【図3】インバータにオープン故障が生じたときの相電流の電流波形を示す説明図である。
【発明を実施するための形態】
【0010】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0011】
図1は、本発明の一実施例としての駆動装置20の構成の概略を示す構成図である。実施例の駆動装置20は、電気自動車やハイブリッド自動車に搭載され、永久磁石が貼り付けられた回転子と三相コイルが巻回された固定子とを有する同期発電電動機として構成された二つのモータMG1,MG2と、複数のスイッチング素子のオンオフによりモータMG1,MG2を駆動する二つのインバータ24,25と、バッテリ26と、バッテリ26が接続された低電圧系電力ライン27とインバータ24,25が接続された高電圧系電力ライン28との間で電圧を変換して電力のやり取りが可能な昇圧コンバータ30と、装置全体をコントロールする電子制御ユニット50と、を備える。インバータ24,25は、スイッチング素子として高電圧系電力ライン28の正極母線と負極母線とに対して2個ずつペアで配置された6つのトランジスタT11〜T16,T21〜26と、トランジスタT11〜T16,T21〜T26の各々に逆方向に並列接続された6つのダイオードD11〜D16,D21〜D26とにより構成されている。これらの6つのトランジスタT11〜T16,T21〜T26は、対となるトランジスタ同士の接続点の各々にモータMG1,MG2の三相コイル(U相,V相,W相)の各々が接続されている。また、昇圧コンバータ30は、高電圧系電力ライン28の正極母線に接続されたトランジスタT31および負極母線に接続されたトランジスタT32と、このトランジスタT31,T32の各々に逆方向に並列接続されたダイオードD31,D32と、トランジスタT31,T32の接続点に接続されると共に低電圧系電力ライン27の正極母線に接続されたリアクトルLとにより構成されている。また、電子制御ユニット50は、バッテリ26の出力端子に取り付けられた電流センサ48からのバッテリ電流Ibやバッテリ26の端子間に取り付けられた電圧センサ46からのバッテリ電圧Vb、昇圧コンバータ30の出力側にインバータ24,25に並列に接続されたコンデンサ32の端子間に取り付けられた電圧センサ44からの高電圧系の電圧VH、モータMG1,MG2の回転子の回転位置を検出するレゾルバ40,41からの回転位置θ1,θ2、モータMG1,MG2の三相コイルのV相,W相を流れる相電流を検出する電流センサ42V,42W,43V,43Wからの相電流iv1,iw1,iv2,iw2などを入力すると共にインバータ24,25や昇圧コンバータ30を制御するための制御信号を出力する。この電子制御ユニット50では、三相交流電流の各相電流の瞬時値の和が値0となることに基づいて、電流センサ42V,42Wからの相電流iv1,iw1を用いてモータMG1のU相に流れる相電流iu1を算出したり、電流センサ43V,43Wからの相電流iv2,iw2を用いてモータMG2のU相に流れる相電流iu2を算出したりする。なお、本実施例では、二つのモータMG1,MG2とそれを駆動する二つのインバータ24,25とを備えるものとしたが、一つのモータとそれを駆動する一つのインバータとを備えるものとしてもよいし、三つ以上の複数のモータとそれを駆動する三つ以上の複数のインバータとを備えるものとしてもよい。
【0012】
実施例の駆動装置20では、電流センサ48からのバッテリ電流Ibの積算値に基づいてバッテリ26に蓄えられている蓄電量の全容量(蓄電容量)に対する割合である蓄電割合SOCを演算したり、演算した蓄電割合SOCと図示しない温度センサからのバッテリ温度とに基づいてバッテリ26を充放電してもよい最大許容電力である入出力制限Win,Woutを演算したりする。また、モータMG1,MG2から出力すべきトルクとしての各トルク指令Tm1*,Tm2*をバッテリ26の入出力制限Win,Woutの範囲内で設定し、設定した各トルク指令Tm1*,Tm2*に基づいてインバータ24,25をスイッチング制御するための制御信号を出力する。具体的には、例えばモータMG1について説明すると、各相の相電流iu1,iv1,iw1と回転位置θ1とに基づいて各相電流をd軸電流およびq軸電流に三相二相変換し、トルク指令Tm1*に基づいてd軸電流指令およびq軸電流指令を設定し、変換したd軸電流と設定したd軸電流指令との偏差および変換したq軸電流と設定したq軸電流指令との偏差が小さくなるようフィードバック制御によりd軸電圧指令およびq軸電圧指令をそれぞれ設定し、設定したd軸電圧指令,q軸電圧指令を各相の相電圧指令に二相三相変換し、変換した各相の相電圧指令に応じた電圧がモータMG1の各相に印加されるようインバータ24のスイッチング素子をスイッチング制御するための制御信号を出力する。また、コンデンサ32の電圧VHが目標電圧VH*に近付くよう昇圧コンバータ30をスイッチング制御するための制御信号を出力する。具体的には、モータMG1,MG2の各トルク指令Tm1*,Tm2*や各回転位置θ1,θ2から算出される各回転数Nm1,Nm2に基づいてインバータ24,25に印加すべき電圧としての目標電圧VH*を設定し、高電圧系の電圧VHと目標電圧VH*との偏差が小さくなるようフィードバック制御によりデューティを設定し、設定したデューティに応じたオン時間の割合をもって昇圧コンバータ30のスイッチング素子をスイッチング制御するための制御信号を出力する。
【0013】
次に、こうして構成された実施例の駆動装置20の動作、特に、インバータ24,25や昇圧コンバータ30の故障を判定する際の動作について説明する。図2は、電子制御ユニット50により実行される故障判定ルーチンの一例を示すフローチャートである。
【0014】
故障判定ルーチンが実行されると、電子制御ユニット50は、まず、電流センサ48から入力されるバッテリ電流Ibを監視し(ステップS100)、バッテリ電流Ibがバッテリ26に入出力が許容される電流の上下限値としての許容電流Iin,Ioutにより定まる電流範囲から外れるか否かを判定することにより過電流を検出する(ステップS110)。ここで、許容電流Iin,Ioutは、バッテリ26の入出力制限Win,Woutを電圧センサ46からのバッテリ電圧Vbで除すことにより算出した値を用いるものとした。なお、低電圧系電力ライン27の電流を監視して過電流を検出できればよく、バッテリ電流Ibに代えて、昇圧コンバータ30のリアクトルLとトランジスタT31,T32の接続点との間に取り付けた電流センサからのリアクトル電流を用いるものなどとしてもよい。ステップS110で過電流を検出したときには、インバータ24,25,昇圧コンバータ30のいずれかに故障が生じていると判断し、所定期間が経過するまでモータMG1,MG2の各相に流れる相電流iu1,iv1,iw1,iu2,iv2,iw2を入力し入力した各相電流の絶対値の最大値をそれぞれ最大相電流iu1max,iv1max,iw1max,iu2max,iv2max,iw2maxとして保持する処理を繰り返す(ステップS120,130)。ここで、所定期間は、1周期以上の期間であればよく、本実施例では1周期とした。このステップS120,130の処理は、例えば相電流iu1について説明すると、所定期間(ここでは1周期)に亘って相電流iu1を順次入力し、入力した相電流iu1の絶対値|iu1|と保持している最大相電流iu1maxとを比較して、絶対値|iu1|が大きければその値を最大相電流iu1maxとして更新し、絶対値|iu1|が大きくなければ最大相電流iu1maxをそのまま保持する処理となる。このため、結果的には、1周期における相電流iu1の正側のピークと負側のピークとのうち絶対値が大きい方を最大相電流iu1maxに設定する処理となる。ステップS130で所定期間が経過したと判定すると、モータMG1,MG2毎に各相の最大相電流をそれぞれ比較し(ステップS140)、電流センサ42V,42W,43V,43Wの検出誤差などを考慮してモータMG1,MG2毎に各相の最大相電流がそれぞれ一致するか否か(iu1max≒iv1max≒iw1max,iu2max≒iv2max≒iw2max)を判定する(ステップS150)。モータMG1あるいはモータMG2の各相の最大相電流が一致しないと判定したときには、最大相電流が一致しないモータがモータMG1,MG2のいずれであるかを判定する(ステップS160)。最大相電流が一致しないモータがモータMG1のときには、モータMG1を駆動するインバータ24のスイッチング素子のいずれかがオープンしているオープン故障と判定して(ステップS170)、本ルーチンを終了する。一方、最大相電流が一致しないモータがモータMG2のときには、モータMG2を駆動するインバータ25のスイッチング素子のいずれかがオープンしているオープン故障と判定して(ステップS180)、本ルーチンを終了する。一方、ステップS150でモータMG1およびモータMG2の各相の最大相電流がいずれも一致すると判定したときには、インバータ24,25にオープン故障は生じていないと判断し、昇圧コンバータ30に故障が生じていると判定して(ステップS190)、本ルーチンを終了する。なお、昇圧コンバータ30の故障としては、トランジスタT31,T32のオンオフのタイミング不良などが挙げられる。
【0015】
ここで、上述した故障判定ルーチンにおける判定理由について説明する。上述した故障判定ルーチンでは、バッテリ電流Ibの過電流を検出した場合にインバータ24,25,昇圧コンバータ30のいずれかに故障が生じていると判断しており、まずはこの理由について説明する。インバータ24,25のいずれかにオープン故障が生じてモータMG1,MG2のいずれかの各相電流に乱れが生じた場合、コンデンサ電圧VHが大きく変動することによりバッテリ電流Ibも大きく変動するから、入出力制限Win,Woutの近傍で駆動制御がなされている場合などにおいてはバッテリ電流Ibが過電流となる可能性がある。また、昇圧コンバータ30の故障として挙げられるトランジスタT31,T32のオンオフのタイミング不良により、例えば昇圧中にトランジスタT32のオン時間の割合が設定したデューティに応じたオン時間の割合よりも大きくなると、オン時間に比例して電流が増加するリアクトルLには過大な電流が流れることになるから、バッテリ電流Ibが過電流となるおそれがある。これらのことから、過電流を検出した場合には、インバータ24,25,昇圧コンバータ30のいずれかに故障が生じていると判断しているのである。次に、インバータ24,25のオープン故障の判定理由について説明する。ここで、インバータのスイッチング素子の一つにオープン故障が生じたときの電流波形の一例を図3に示す。図3では、オープン故障の一例として、モータMG2のV相に接続されるインバータ25のトランジスタT22がオープン故障したときの電流波形を示す。インバータ25にオープン故障が生じていない正常時には、モータMG2の各相には正弦波状の相電流が印加される。しかし、インバータ25のトランジスタT22がオープン故障すると、トランジスタT22をオフ駆動すると共にトランジスタT25をオン駆動するときには他のU相,W相のトランジスタT21,T23のオン駆動によってV相に相電流が印加されるが、トランジスタT22をオン駆動すると共にトランジスタT25をオフ駆動するときにはトランジスタT22をオン状態にさせることができずトランジスタT22,T25が共にオフとなるためV相に相電流が印加されないことになる。このため、図3に示すように、V相の電流波形は半波の波形となる。そして、このようなオープン故障時においても、三相交流電流の各相電流の瞬時値の和は値0となるため、他のU相,W相の相電流が大きくばらついて、所定期間(図3中の1周期)における各相の最大相電流が相異した値になる。上述した故障判定ルーチンでは、このような最大相電流の相異を検出することにより、オープン故障が生じたインバータを特定しているのである。一方で、バッテリ電流Ibの過電流の検出により故障箇所をインバータ24,25,昇圧コンバータ30のいずれかに絞っているから、インバータ24,25のオープン故障を特定できない場合には、昇圧コンバータ30の故障と判定するのである。これらのことから、インバータ24,25のオープン故障であるかあるいは昇圧コンバータ30の故障であるかを正確に特定することができる。そして、このように故障している機器を正確に特定できるため、故障が特定された機器をシャットダウン(ゲート遮断)させることなどによりバッテリ26に過電流が流れるのを防止することができるから、バッテリ26の適切な保護を図ることも可能となる。上述した故障判定ルーチンにおいて、バッテリ電流Ibを監視してバッテリ26への過電流を検出した上で、インバータ24,25のオープン故障や昇圧コンバータ30の故障を判定するのはこうした理由による。
【0016】
また、図示しないが、実施例の駆動装置20が搭載されて、エンジンと、モータMG1と、エンジンの出力軸にキャリアが接続されると共にモータMG1の回転軸にサンギヤが接続され且つ車軸に連結された駆動軸にリングギヤが接続された遊星歯車機構と、駆動軸に接続されたモータMG2とを備えるハイブリッド車を考えると、上述したように故障箇所を正確に特定することができるから故障が発生した場合に適切な退避走行をすることができる。例えば、インバータ24の故障が特定されたときにはインバータ24をシャットダウンしてインバータ25の制御によりモータMG2を駆動して走行する退避走行をしたり、インバータ25の故障が特定されたときにはインバータ25をシャットダウンしてインバータ24の制御によりモータMG1を駆動してエンジンからの動力により走行する退避走行をしたり、昇圧コンバータ30の故障が特定されたときには昇圧コンバータ30をシャットダウンしてバッテリ26からの電力を昇圧を伴わずにインバータ24,25側に供給してインバータ24,25の制御によりモータMG1,MG2を駆動して走行する退避走行をしたりすることができる。
【0017】
以上説明した実施例の駆動装置20によれば、モータMG1,MG2が駆動されている最中にバッテリ電流Ibを監視してバッテリ26への過電流を検出した場合、所定期間に亘ってモータMG1,MG2の各相電流を検出し、その絶対値の最大相電流をモータMG1,MG2毎に比較して各相の最大相電流が互いに一致するか否かをそれぞれ判定し、各相の最大相電流が一致しないモータがあればインバータ24,25のうち各相の最大電流が一致しないモータを駆動するインバータのオープン故障と判定し、各相の最大相電流が一致しないモータがないときにはインバータ24,25にオープン故障は生じていないと判断して昇圧コンバータ30の故障と判定するから、いずれのインバータにオープン故障が生じているのかをより正確に特定することができ、また、オープン故障が生じているインバータを特定できないときに昇圧コンバータの故障を特定することができる。この結果、装置の故障を検出すると共に故障箇所をより正確に特定することができる。
【0018】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、モータMG1やモータMG2が「電動機」に相当し、インバータ24やインバータ25が「インバータ」に相当し、バッテリ26が「バッテリ」に相当し、昇圧コンバータ30が「昇圧コンバータ」に相当し、バッテリ電流Ibを検出する電流センサ48が「低電圧系電流検出手段」に相当し、モータMG1,MG2の相電流を検出する電流センサ42V,42W,43V,43Wが「相電流検出手段」に相当し、インバータ24,25や昇圧コンバータ30を制御する電子制御ユニット50が「制御手段」に相当する。なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0019】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0020】
本発明は、駆動装置の製造産業に利用可能である。
【符号の説明】
【0021】
20 駆動装置、24,25 インバータ、26 バッテリ、27 低電圧系電力ライン、28 高電圧系電力ライン、30 昇圧コンバータ、32 コンデンサ、40,41 レゾルバ、42V,42W,43V,43W,48 電流センサ、44,46 電圧センサ、50 電子制御ユニット、D11〜D16,D21〜D26,D31,D32 ダイオード、L リアクトル、MG1,MG2 モータ、T11〜T16,T21〜T26,T31,T32 トランジスタ。
【技術分野】
【0001】
本発明は、駆動装置に関する。
【背景技術】
【0002】
従来、この種の駆動装置としては、三相交流により駆動するモータMG1,MG2と、複数のスイッチング素子を有しモータMG1,MG2を駆動するインバータと、バッテリと、バッテリの電圧を昇圧してインバータに供給する昇圧コンバータと、バッテリに入出力されるバッテリ電流を検出する電流センサと、バッテリの電圧を検出する電圧センサとを備え、モータMG1,MG2のそれぞれのトルク指令値と回転数とを乗じて算出した電力の和を電圧センサにより検出されるバッテリの電圧で除すことによりバッテリ電流の推定値を算出し、算出した推定値と電流センサにより検出されるバッテリ電流の検出値とに基づいてインバータの1相オープン故障を判定するものが提案されている(例えば、特許文献1参照)。この駆動装置では、推定値と検出値との偏差が所定の閾値を超える場合に所定期間に亘って検出値と推定値との大小を比較して、検出値が推定値を上回るHレベルの信号と検出値が推定値を下回るLレベルの信号とを生成し、LレベルからHレベルへの立ち上がりの間隔に基づいてバッテリ電流の周波数を算出する。そして、算出した周波数がモータMG1,MG2のいずれの回転数に同期しているかを判定し、同期していると判定したモータを駆動するインバータに1相オープン故障が生じていると判定するものとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−178556号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の駆動装置では、検出値が推定値を下回るLレベルから検出値が推定値を上回るHレベルへの立ち上がりを抽出することによりバッテリ電流の周波数を算出するから、検出値と推定値との偏差が閾値を大きく超えた場合にはその立ち上がりを適切に抽出できずバッテリ電流の周波数を算出できなくなってしまう。その場合、1相オープン故障が生じているインバータを正確に特定できないおそれがある。また、バッテリに入出力される電流にはインバータ以外に昇圧コンバータも影響を与えることから、インバータだけではなく昇圧コンバータの故障についても正確に特定できることが求められる。
【0005】
本発明の駆動装置は、インバータと昇圧コンバータとを備える装置において、装置の故障を検出すると共に故障箇所をより正確に特定することを主目的とする。
【課題を解決するための手段】
【0006】
本発明の駆動装置は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明の駆動装置は、
三相交流により駆動される一以上の電動機と、複数のスイッチング素子のスイッチングにより前記電動機を駆動する一以上のインバータと、バッテリと、前記バッテリが接続された低電圧系と前記インバータが接続された高電圧系との間で電圧を変換する昇圧コンバータと、前記低電圧系に流れる電流を検出する低電圧系電流検出手段と、前記電動機の各相に流れる相電流を検出する相電流検出手段と、前記バッテリに充放電が許容される許容範囲内で前記電動機が駆動されるよう前記インバータと前記昇圧コンバータとを制御する制御手段と、を備える駆動装置において、
前記電動機が駆動されている最中に前記低電圧系電流検出手段により前記バッテリの前記許容範囲を超える充放電が検出された場合、前記相電流検出手段により一周期以上の所定期間に亘って検出される相電流の絶対値の最大値を比較することにより各相電流が互いに一致するか否かを前記電動機毎に判定し、前記各相電流が一致しない電動機があるときには該各相電流が一致しない電動機を駆動するインバータのスイッチング素子がオープンしているオープン故障と判定し、前記各相電流が一致しない電動機がないときには前記昇圧コンバータの故障と判定する
ことを特徴とする。
【0008】
この本発明の駆動装置では、電動機が駆動されている最中に低電圧系電流検出手段によりバッテリの許容範囲を超える充放電が検出された場合、相電流検出手段により一周期以上の所定期間に亘って検出される相電流の絶対値の最大値を比較することにより各相電流が互いに一致するか否かを電動機毎に判定し、各相電流が一致しない電動機があるときには各相電流が一致しない電動機を駆動するインバータのスイッチング素子がオープンしているオープン故障と判定し、各相電流が一致しない電動機がないときには昇圧コンバータの故障と判定する。インバータのオープン故障の判定は、インバータのスイッチング素子のいずれかがオープン故障した場合に、オープンしているスイッチング素子には電流が流れなくなるため、各相電流の波形が大きくばらつくことに基づいている。したがって、いずれのインバータにオープン故障が生じているのかをより正確に特定することができ、また、オープン故障が生じているインバータを特定できないときには昇圧コンバータの故障と特定することができる。この結果、装置の故障を検出すると共に故障箇所をより正確に特定することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施例としての駆動装置20の構成の概略を示す構成図である。
【図2】電子制御ユニット50により実行される故障判定ルーチンの一例を示すフローチャートである。
【図3】インバータにオープン故障が生じたときの相電流の電流波形を示す説明図である。
【発明を実施するための形態】
【0010】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0011】
図1は、本発明の一実施例としての駆動装置20の構成の概略を示す構成図である。実施例の駆動装置20は、電気自動車やハイブリッド自動車に搭載され、永久磁石が貼り付けられた回転子と三相コイルが巻回された固定子とを有する同期発電電動機として構成された二つのモータMG1,MG2と、複数のスイッチング素子のオンオフによりモータMG1,MG2を駆動する二つのインバータ24,25と、バッテリ26と、バッテリ26が接続された低電圧系電力ライン27とインバータ24,25が接続された高電圧系電力ライン28との間で電圧を変換して電力のやり取りが可能な昇圧コンバータ30と、装置全体をコントロールする電子制御ユニット50と、を備える。インバータ24,25は、スイッチング素子として高電圧系電力ライン28の正極母線と負極母線とに対して2個ずつペアで配置された6つのトランジスタT11〜T16,T21〜26と、トランジスタT11〜T16,T21〜T26の各々に逆方向に並列接続された6つのダイオードD11〜D16,D21〜D26とにより構成されている。これらの6つのトランジスタT11〜T16,T21〜T26は、対となるトランジスタ同士の接続点の各々にモータMG1,MG2の三相コイル(U相,V相,W相)の各々が接続されている。また、昇圧コンバータ30は、高電圧系電力ライン28の正極母線に接続されたトランジスタT31および負極母線に接続されたトランジスタT32と、このトランジスタT31,T32の各々に逆方向に並列接続されたダイオードD31,D32と、トランジスタT31,T32の接続点に接続されると共に低電圧系電力ライン27の正極母線に接続されたリアクトルLとにより構成されている。また、電子制御ユニット50は、バッテリ26の出力端子に取り付けられた電流センサ48からのバッテリ電流Ibやバッテリ26の端子間に取り付けられた電圧センサ46からのバッテリ電圧Vb、昇圧コンバータ30の出力側にインバータ24,25に並列に接続されたコンデンサ32の端子間に取り付けられた電圧センサ44からの高電圧系の電圧VH、モータMG1,MG2の回転子の回転位置を検出するレゾルバ40,41からの回転位置θ1,θ2、モータMG1,MG2の三相コイルのV相,W相を流れる相電流を検出する電流センサ42V,42W,43V,43Wからの相電流iv1,iw1,iv2,iw2などを入力すると共にインバータ24,25や昇圧コンバータ30を制御するための制御信号を出力する。この電子制御ユニット50では、三相交流電流の各相電流の瞬時値の和が値0となることに基づいて、電流センサ42V,42Wからの相電流iv1,iw1を用いてモータMG1のU相に流れる相電流iu1を算出したり、電流センサ43V,43Wからの相電流iv2,iw2を用いてモータMG2のU相に流れる相電流iu2を算出したりする。なお、本実施例では、二つのモータMG1,MG2とそれを駆動する二つのインバータ24,25とを備えるものとしたが、一つのモータとそれを駆動する一つのインバータとを備えるものとしてもよいし、三つ以上の複数のモータとそれを駆動する三つ以上の複数のインバータとを備えるものとしてもよい。
【0012】
実施例の駆動装置20では、電流センサ48からのバッテリ電流Ibの積算値に基づいてバッテリ26に蓄えられている蓄電量の全容量(蓄電容量)に対する割合である蓄電割合SOCを演算したり、演算した蓄電割合SOCと図示しない温度センサからのバッテリ温度とに基づいてバッテリ26を充放電してもよい最大許容電力である入出力制限Win,Woutを演算したりする。また、モータMG1,MG2から出力すべきトルクとしての各トルク指令Tm1*,Tm2*をバッテリ26の入出力制限Win,Woutの範囲内で設定し、設定した各トルク指令Tm1*,Tm2*に基づいてインバータ24,25をスイッチング制御するための制御信号を出力する。具体的には、例えばモータMG1について説明すると、各相の相電流iu1,iv1,iw1と回転位置θ1とに基づいて各相電流をd軸電流およびq軸電流に三相二相変換し、トルク指令Tm1*に基づいてd軸電流指令およびq軸電流指令を設定し、変換したd軸電流と設定したd軸電流指令との偏差および変換したq軸電流と設定したq軸電流指令との偏差が小さくなるようフィードバック制御によりd軸電圧指令およびq軸電圧指令をそれぞれ設定し、設定したd軸電圧指令,q軸電圧指令を各相の相電圧指令に二相三相変換し、変換した各相の相電圧指令に応じた電圧がモータMG1の各相に印加されるようインバータ24のスイッチング素子をスイッチング制御するための制御信号を出力する。また、コンデンサ32の電圧VHが目標電圧VH*に近付くよう昇圧コンバータ30をスイッチング制御するための制御信号を出力する。具体的には、モータMG1,MG2の各トルク指令Tm1*,Tm2*や各回転位置θ1,θ2から算出される各回転数Nm1,Nm2に基づいてインバータ24,25に印加すべき電圧としての目標電圧VH*を設定し、高電圧系の電圧VHと目標電圧VH*との偏差が小さくなるようフィードバック制御によりデューティを設定し、設定したデューティに応じたオン時間の割合をもって昇圧コンバータ30のスイッチング素子をスイッチング制御するための制御信号を出力する。
【0013】
次に、こうして構成された実施例の駆動装置20の動作、特に、インバータ24,25や昇圧コンバータ30の故障を判定する際の動作について説明する。図2は、電子制御ユニット50により実行される故障判定ルーチンの一例を示すフローチャートである。
【0014】
故障判定ルーチンが実行されると、電子制御ユニット50は、まず、電流センサ48から入力されるバッテリ電流Ibを監視し(ステップS100)、バッテリ電流Ibがバッテリ26に入出力が許容される電流の上下限値としての許容電流Iin,Ioutにより定まる電流範囲から外れるか否かを判定することにより過電流を検出する(ステップS110)。ここで、許容電流Iin,Ioutは、バッテリ26の入出力制限Win,Woutを電圧センサ46からのバッテリ電圧Vbで除すことにより算出した値を用いるものとした。なお、低電圧系電力ライン27の電流を監視して過電流を検出できればよく、バッテリ電流Ibに代えて、昇圧コンバータ30のリアクトルLとトランジスタT31,T32の接続点との間に取り付けた電流センサからのリアクトル電流を用いるものなどとしてもよい。ステップS110で過電流を検出したときには、インバータ24,25,昇圧コンバータ30のいずれかに故障が生じていると判断し、所定期間が経過するまでモータMG1,MG2の各相に流れる相電流iu1,iv1,iw1,iu2,iv2,iw2を入力し入力した各相電流の絶対値の最大値をそれぞれ最大相電流iu1max,iv1max,iw1max,iu2max,iv2max,iw2maxとして保持する処理を繰り返す(ステップS120,130)。ここで、所定期間は、1周期以上の期間であればよく、本実施例では1周期とした。このステップS120,130の処理は、例えば相電流iu1について説明すると、所定期間(ここでは1周期)に亘って相電流iu1を順次入力し、入力した相電流iu1の絶対値|iu1|と保持している最大相電流iu1maxとを比較して、絶対値|iu1|が大きければその値を最大相電流iu1maxとして更新し、絶対値|iu1|が大きくなければ最大相電流iu1maxをそのまま保持する処理となる。このため、結果的には、1周期における相電流iu1の正側のピークと負側のピークとのうち絶対値が大きい方を最大相電流iu1maxに設定する処理となる。ステップS130で所定期間が経過したと判定すると、モータMG1,MG2毎に各相の最大相電流をそれぞれ比較し(ステップS140)、電流センサ42V,42W,43V,43Wの検出誤差などを考慮してモータMG1,MG2毎に各相の最大相電流がそれぞれ一致するか否か(iu1max≒iv1max≒iw1max,iu2max≒iv2max≒iw2max)を判定する(ステップS150)。モータMG1あるいはモータMG2の各相の最大相電流が一致しないと判定したときには、最大相電流が一致しないモータがモータMG1,MG2のいずれであるかを判定する(ステップS160)。最大相電流が一致しないモータがモータMG1のときには、モータMG1を駆動するインバータ24のスイッチング素子のいずれかがオープンしているオープン故障と判定して(ステップS170)、本ルーチンを終了する。一方、最大相電流が一致しないモータがモータMG2のときには、モータMG2を駆動するインバータ25のスイッチング素子のいずれかがオープンしているオープン故障と判定して(ステップS180)、本ルーチンを終了する。一方、ステップS150でモータMG1およびモータMG2の各相の最大相電流がいずれも一致すると判定したときには、インバータ24,25にオープン故障は生じていないと判断し、昇圧コンバータ30に故障が生じていると判定して(ステップS190)、本ルーチンを終了する。なお、昇圧コンバータ30の故障としては、トランジスタT31,T32のオンオフのタイミング不良などが挙げられる。
【0015】
ここで、上述した故障判定ルーチンにおける判定理由について説明する。上述した故障判定ルーチンでは、バッテリ電流Ibの過電流を検出した場合にインバータ24,25,昇圧コンバータ30のいずれかに故障が生じていると判断しており、まずはこの理由について説明する。インバータ24,25のいずれかにオープン故障が生じてモータMG1,MG2のいずれかの各相電流に乱れが生じた場合、コンデンサ電圧VHが大きく変動することによりバッテリ電流Ibも大きく変動するから、入出力制限Win,Woutの近傍で駆動制御がなされている場合などにおいてはバッテリ電流Ibが過電流となる可能性がある。また、昇圧コンバータ30の故障として挙げられるトランジスタT31,T32のオンオフのタイミング不良により、例えば昇圧中にトランジスタT32のオン時間の割合が設定したデューティに応じたオン時間の割合よりも大きくなると、オン時間に比例して電流が増加するリアクトルLには過大な電流が流れることになるから、バッテリ電流Ibが過電流となるおそれがある。これらのことから、過電流を検出した場合には、インバータ24,25,昇圧コンバータ30のいずれかに故障が生じていると判断しているのである。次に、インバータ24,25のオープン故障の判定理由について説明する。ここで、インバータのスイッチング素子の一つにオープン故障が生じたときの電流波形の一例を図3に示す。図3では、オープン故障の一例として、モータMG2のV相に接続されるインバータ25のトランジスタT22がオープン故障したときの電流波形を示す。インバータ25にオープン故障が生じていない正常時には、モータMG2の各相には正弦波状の相電流が印加される。しかし、インバータ25のトランジスタT22がオープン故障すると、トランジスタT22をオフ駆動すると共にトランジスタT25をオン駆動するときには他のU相,W相のトランジスタT21,T23のオン駆動によってV相に相電流が印加されるが、トランジスタT22をオン駆動すると共にトランジスタT25をオフ駆動するときにはトランジスタT22をオン状態にさせることができずトランジスタT22,T25が共にオフとなるためV相に相電流が印加されないことになる。このため、図3に示すように、V相の電流波形は半波の波形となる。そして、このようなオープン故障時においても、三相交流電流の各相電流の瞬時値の和は値0となるため、他のU相,W相の相電流が大きくばらついて、所定期間(図3中の1周期)における各相の最大相電流が相異した値になる。上述した故障判定ルーチンでは、このような最大相電流の相異を検出することにより、オープン故障が生じたインバータを特定しているのである。一方で、バッテリ電流Ibの過電流の検出により故障箇所をインバータ24,25,昇圧コンバータ30のいずれかに絞っているから、インバータ24,25のオープン故障を特定できない場合には、昇圧コンバータ30の故障と判定するのである。これらのことから、インバータ24,25のオープン故障であるかあるいは昇圧コンバータ30の故障であるかを正確に特定することができる。そして、このように故障している機器を正確に特定できるため、故障が特定された機器をシャットダウン(ゲート遮断)させることなどによりバッテリ26に過電流が流れるのを防止することができるから、バッテリ26の適切な保護を図ることも可能となる。上述した故障判定ルーチンにおいて、バッテリ電流Ibを監視してバッテリ26への過電流を検出した上で、インバータ24,25のオープン故障や昇圧コンバータ30の故障を判定するのはこうした理由による。
【0016】
また、図示しないが、実施例の駆動装置20が搭載されて、エンジンと、モータMG1と、エンジンの出力軸にキャリアが接続されると共にモータMG1の回転軸にサンギヤが接続され且つ車軸に連結された駆動軸にリングギヤが接続された遊星歯車機構と、駆動軸に接続されたモータMG2とを備えるハイブリッド車を考えると、上述したように故障箇所を正確に特定することができるから故障が発生した場合に適切な退避走行をすることができる。例えば、インバータ24の故障が特定されたときにはインバータ24をシャットダウンしてインバータ25の制御によりモータMG2を駆動して走行する退避走行をしたり、インバータ25の故障が特定されたときにはインバータ25をシャットダウンしてインバータ24の制御によりモータMG1を駆動してエンジンからの動力により走行する退避走行をしたり、昇圧コンバータ30の故障が特定されたときには昇圧コンバータ30をシャットダウンしてバッテリ26からの電力を昇圧を伴わずにインバータ24,25側に供給してインバータ24,25の制御によりモータMG1,MG2を駆動して走行する退避走行をしたりすることができる。
【0017】
以上説明した実施例の駆動装置20によれば、モータMG1,MG2が駆動されている最中にバッテリ電流Ibを監視してバッテリ26への過電流を検出した場合、所定期間に亘ってモータMG1,MG2の各相電流を検出し、その絶対値の最大相電流をモータMG1,MG2毎に比較して各相の最大相電流が互いに一致するか否かをそれぞれ判定し、各相の最大相電流が一致しないモータがあればインバータ24,25のうち各相の最大電流が一致しないモータを駆動するインバータのオープン故障と判定し、各相の最大相電流が一致しないモータがないときにはインバータ24,25にオープン故障は生じていないと判断して昇圧コンバータ30の故障と判定するから、いずれのインバータにオープン故障が生じているのかをより正確に特定することができ、また、オープン故障が生じているインバータを特定できないときに昇圧コンバータの故障を特定することができる。この結果、装置の故障を検出すると共に故障箇所をより正確に特定することができる。
【0018】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、モータMG1やモータMG2が「電動機」に相当し、インバータ24やインバータ25が「インバータ」に相当し、バッテリ26が「バッテリ」に相当し、昇圧コンバータ30が「昇圧コンバータ」に相当し、バッテリ電流Ibを検出する電流センサ48が「低電圧系電流検出手段」に相当し、モータMG1,MG2の相電流を検出する電流センサ42V,42W,43V,43Wが「相電流検出手段」に相当し、インバータ24,25や昇圧コンバータ30を制御する電子制御ユニット50が「制御手段」に相当する。なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0019】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0020】
本発明は、駆動装置の製造産業に利用可能である。
【符号の説明】
【0021】
20 駆動装置、24,25 インバータ、26 バッテリ、27 低電圧系電力ライン、28 高電圧系電力ライン、30 昇圧コンバータ、32 コンデンサ、40,41 レゾルバ、42V,42W,43V,43W,48 電流センサ、44,46 電圧センサ、50 電子制御ユニット、D11〜D16,D21〜D26,D31,D32 ダイオード、L リアクトル、MG1,MG2 モータ、T11〜T16,T21〜T26,T31,T32 トランジスタ。
【特許請求の範囲】
【請求項1】
三相交流により駆動される一以上の電動機と、複数のスイッチング素子のスイッチングにより前記電動機を駆動する一以上のインバータと、バッテリと、前記バッテリが接続された低電圧系と前記インバータが接続された高電圧系との間で電圧を変換する昇圧コンバータと、前記低電圧系に流れる電流を検出する低電圧系電流検出手段と、前記電動機の各相に流れる相電流を検出する相電流検出手段と、前記バッテリに充放電が許容される許容範囲内で前記電動機が駆動されるよう前記インバータと前記昇圧コンバータとを制御する制御手段と、を備える駆動装置において、
前記電動機が駆動されている最中に前記低電圧系電流検出手段により前記バッテリの前記許容範囲を超える充放電が検出された場合、前記相電流検出手段により一周期以上の所定期間に亘って検出される相電流の絶対値の最大値を比較することにより各相電流が互いに一致するか否かを前記電動機毎に判定し、前記各相電流が一致しない電動機があるときには該各相電流が一致しない電動機を駆動するインバータのスイッチング素子がオープンしているオープン故障と判定し、前記各相電流が一致しない電動機がないときには前記昇圧コンバータの故障と判定する
ことを特徴とする駆動装置。
【請求項1】
三相交流により駆動される一以上の電動機と、複数のスイッチング素子のスイッチングにより前記電動機を駆動する一以上のインバータと、バッテリと、前記バッテリが接続された低電圧系と前記インバータが接続された高電圧系との間で電圧を変換する昇圧コンバータと、前記低電圧系に流れる電流を検出する低電圧系電流検出手段と、前記電動機の各相に流れる相電流を検出する相電流検出手段と、前記バッテリに充放電が許容される許容範囲内で前記電動機が駆動されるよう前記インバータと前記昇圧コンバータとを制御する制御手段と、を備える駆動装置において、
前記電動機が駆動されている最中に前記低電圧系電流検出手段により前記バッテリの前記許容範囲を超える充放電が検出された場合、前記相電流検出手段により一周期以上の所定期間に亘って検出される相電流の絶対値の最大値を比較することにより各相電流が互いに一致するか否かを前記電動機毎に判定し、前記各相電流が一致しない電動機があるときには該各相電流が一致しない電動機を駆動するインバータのスイッチング素子がオープンしているオープン故障と判定し、前記各相電流が一致しない電動機がないときには前記昇圧コンバータの故障と判定する
ことを特徴とする駆動装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−105498(P2012−105498A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−253740(P2010−253740)
【出願日】平成22年11月12日(2010.11.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月12日(2010.11.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]