
駆動装置
【課題】モータの回転動力を作動部に伝達する駆動伝達機構の不具合を装置自身で解消し得るようにする。
【解決手段】演算・制御部11は、動力伝達機構4に不具合が生じたときに動力伝達機構4に衝撃を与えてその不具合を解消するための振動手段16を備えている。振動手段16はモータ6の駆動を開始してから所定時間内にエンコーダ8のカウント数が収束状態にならないときに振動動作を実行するよう構成されている。
【解決手段】演算・制御部11は、動力伝達機構4に不具合が生じたときに動力伝達機構4に衝撃を与えてその不具合を解消するための振動手段16を備えている。振動手段16はモータ6の駆動を開始してから所定時間内にエンコーダ8のカウント数が収束状態にならないときに振動動作を実行するよう構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えばオートサンプラなど、モータを駆動することによりアームなどの作動部を所定の位置へ移動させる駆動装置に関するものである。
【背景技術】
【0002】
例えばオートサンプラなど、DC(直流)モータを用いてアームなどの作動部を一定方向に移動させる駆動装置がある(例えば、特許文献1参照。)。このような駆動装置では、作動部を駆動するためのモータにエンコーダが設けられており、モータの回転量をエンコーダのカウント数として計測することで、作動部の位置を検知している。作動部を移動させるべき目標位置が指定されると、作動部をその目標位置に移動させるために必要なエンコーダのカウント数が設定され、エンコーダのカウント数が設定されたカウント数となるようにモータへの供給電力をフィードバック制御する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−196008号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の駆動装置では、モータの回転速度の制御を高精度に行なわなければ、作動部を目標位置に正確に移動させることは不可能である。駆動装置には、モータの回転動力を一定方向への駆動力として作動部に伝達するための動力伝達機構(例えばギアボックス)が存在するが、その動力伝達機構を構成するギアの遊びやギアを含む構成部品の生産のばらつきなどの機械的な原因によって、ギア同士の噛み合わせが悪くなる箇所が発生することがあり、そのような箇所が存在するとモータにかかる負荷が変化し、モータの回転速度に影響を与え、高精度な制御が困難となる。
【0005】
モータの回転速度の高精度制御が困難となるようなギア同士の噛み合わせがエンコーダのカウント数が目標のカウント数付近となるようなタイミングで発生していると、エンコーダのカウント数を目標のカウント数に近づけるように何度もフィードバック制御を行なっても、エンコーダのカウント数が目標のカウント数の近傍で安定せず、作動部を目標位置に移動させることができなくなる。このような不具合が発生した場合、従来は、装置の動作を停止させて動力伝達機構の組立ての手直しなどを行なう必要があった。
【0006】
そこで、本発明は、モータの回転動力を作動部に伝達する駆動伝達機構の不具合を装置自身で解消し得るようにすることを目的とするものである。
【課題を解決するための手段】
【0007】
本発明にかかる駆動装置は、モータと、モータの駆動により設定された目標位置へ移動するように駆動される作動部と、モータの回転動力を一定方向への駆動力として作動部に伝達する動力伝達機構と、モータに電力を供給するためのモータ駆動部と、モータの回転量に応じた数のパルス信号を発生させ、そのパルス信号のカウント数を計測するエンコーダと、目標位置まで作動部を移動させるために必要なエンコーダのパルス信号のカウント数である目標カウント数を保持する目標カウント数保持部と、目標カウント数に基づいて設定された目標カウント数を含む周辺の範囲である許容範囲を保持する許容範囲保持部と、エンコーダのカウント数を取り込み、そのカウント数を目標カウント数に近づけるようにモータ駆動部からモータへの供給電圧とその電圧の供給時間を制御する制御部と、を備えている。
そして、制御部は、作動部の駆動を開始した後所定時間内に、カウント数が一定時間以上連続して許容範囲内で収束する収束状態とならないときに、モータを作動部を目標位置へ移動させる時の通常時の回転速度よりも早く許容範囲の幅のカウント数よりも大きなカウント数の幅で正方向と逆方向に連続的に切り替えて回転させる振動動作を行なう振動手段を備えている。
【0008】
振動動作においては、モータへの供給電圧を一定にした状態で一定周期でその正負を反転させるようにしてもよい。そうすれば、振動動作におけるモータの駆動制御が容易である。
【発明の効果】
【0009】
本発明では、作動部の駆動を開始した後所定時間内に、エンコーダのカウント数が許容範囲に収束しないときに、モータを作動部を目標位置へ移動させる時の通常時の回転速度よりも早く許容範囲の幅のカウント数よりも大きなカウント数の幅で正方向と逆方向に連続的に切り替えて回転させる振動動作を行なう振動手段を備えているので、装置が自動的に振動動作を行なって動力伝達機構に衝撃を与え、動力伝達機構におけるギアの噛み合いの不具合などがあれば、それを解消することができる。これにより、動力伝達機構に不具合が生じていても、操作者が動力伝達機構を組み直すなどの作業を行なう必要がなくなる。
【図面の簡単な説明】
【0010】
【図1】駆動装置の一実施例を概略的に示すブロック図である。
【図2】同実施例の動作を説明するためのフローチャートである。
【図3】同実施例の動作におけるエンコーダのカウント数の時間変化の一例を示すグラフであり、(A)は動力伝達機構に不具合が生じていない場合、(B)は動力伝達機構に不具合が生じている場合である。
【図4】同実施例の駆動装置の一例であるオートサンプラの構造を示す図である。
【図5】同実施例のオートサンプラのモータ及び動力伝達機構の一例を示す正面図である。
【発明を実施するための形態】
【0011】
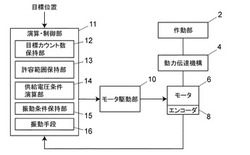
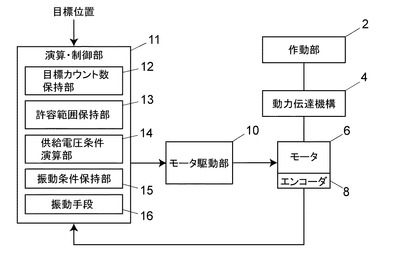
駆動装置の一実施例を図1を用いて説明する。
作動部2を移動させるための機構として動力伝達機構4とモータ6を備えている。動力伝達機構4はモータ6の駆動軸の回転動力をギアの組み合わせによって作動部2に伝達して作動部2を一定方向へ移動させるものである。モータ6はモータ駆動部10から供給される電圧によって駆動される。モータ駆動部10からモータ6に供給される電圧は演算・制御部12により制御される。
【0012】
モータ6の回転量に応じた数のパルス信号が得られるエンコーダ8が設けられている。以下、エンコーダ8で得られるパルス信号の数をカウント数と呼ぶ。エンコーダ8はロータリーエンコーダであり、対向配置された光源と光検出器の間にモータ6の回転軸とともに回転するスリット円板が光源からの光検出器への光の光路を遮断するように配置されている。スリット円板の板面には円周方向に沿って均等に配列された複数のスリットが設けられており、スリット円板が一定量回転するたびにスリットが光源からの光の光路上に配置され、光源からの光がスリットを通って光検出器に入射する。光検出器は光が入射したときにパルス信号を発するため、モータ6の回転軸が一定量回転するたびに光検出器でパルス信号が得られる。したがって、カウント数を計測することでモータ6の回転量が求められる。エンコーダ8のパルス信号のカウント数は演算・制御部12に取り込まれる。
【0013】
演算・制御部12は、エンコーダ8から取り込んだカウント数と予め設定された作動部2を目標位置へ移動させるために必要なカウント数である目標カウント数とに基づいて、エンコーダ8をカウント数を目標カウント数に近づけるようにモータ6に供給する電圧の大きさ及び供給時間の条件を演算する供給電圧条件演算部14を備えている。演算・制御部12は、供給電圧条件演算部14で演算した条件に基づいてモータ駆動部10を介してモータ6を駆動し、駆動した後のエンコーダ8のカウント数をさらに取り込んで供給電圧条件演算部14で新たな供給電圧の条件を演算し、演算した新たな条件に基づいてモータ駆動部10を介してモータ6を駆動するという動作を繰り返すフィードバック制御を行なうように構成されている。
【0014】
演算・制御部12は、目標カウント数を保持する目標カウント数保持部12と、目標カウント数に基づいて設定された許容範囲を保持する許容範囲保持部13を備えている。目標カウント数は、操作者によって目標位置が設定されたときに、その目標位置へ作動部2を移動させるために必要なモータ6の回転量が演算され、その回転量に相当するエンコーダ8のパルス信号のカウント数として演算される。許容範囲は、作動部2が目標位置に到達したとみなすことができるカウント数の範囲(目標カウント数−α〜目標カウント数+α)である。
【0015】
演算・制御部12は振動条件保持部15及び振動手段16も備えている。振動手段16は、モータ6の駆動を開始してから所定時間(例えば10秒)内にエンコーダ8のカウント数が収束状態にならないときに、振動動作を実行するように構成されている。収束状態とは、エンコーダ8のカウント数が一定時間(例えば6秒間)以上許容範囲内にある状態を意味する。
【0016】
上述のように、演算・制御部12はエンコーダ8のカウント数を目標カウント数に近づけるようにフィードバック制御を行なっているため、正常な状態であれば、エンコーダ8のカウント数が目標カウント数に近づくと、その後は目標カウント数から大きく離れることなく、目標カウント数の近傍でモータ6のカウント数の微細なフィードバック制御が行なわれ、モータ6のカウント数は許容範囲から外れることなく許容範囲内に収束する。他方、目標カウント数の近傍で動力伝達機構4のギアの噛み合わせの悪い場所などが発生していると、モータ6にかかる負荷が不安定になり、モータ6を所望のタイミングで停止させることができず、エンコーダ8のカウント数が目標カウント数の近傍で安定せず、許容範囲内で収束しなくなる。
【0017】
振動手段16は、このような動力伝達機構4における不具合を解消するために、動力伝達機構4に衝撃を与える振動動作を実行するように構成されている。振動動作は、モータ6を作動部2を目標位置まで移動させるときの通常の駆動速度よりも早い速度でかつ許容範囲(±α)の幅のカウント数よりも広い幅のカウント数(例えば±14カウント)に相当する回転量だけ正方向と逆方向に連続的に切り替えて回転させる動作である。振動動作として、例えばモータ6に供給する電圧の大きさの絶対値を作動部2を目標位置まで移動させるときの電圧値よりも大きくした状態で、その電圧の正負を30Hzの周波数で0.2秒間連続的に反転させる動作が挙げられる。振動条件保持部15は、この振動動作時のモータ6への供給電圧や供給時間、正負切り替えのタイミング等の条件を保持している。
【0018】
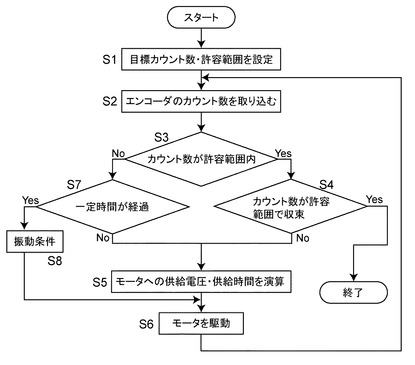
同実施例の動作について図2を用いて説明する。
まず、指定された目標位置の情報に基づいて、目標カウント数及び許容範囲が設定される(ステップS1)。ここで、許容範囲は目標カウント数±αとして設定される。αは例えば6カウントである。目標カウント数が1000カウントであるとすると、許容範囲は994カウントから1006カウントとなる。
【0019】
演算・制御部11には、目標カウント数及び許容範囲が設定された後のほか、モータ6を駆動した直後にもエンコーダ8のカウント数が取り込まれる(ステップS2)。演算・制御部11は、取り込んだカウント数が許容範囲内か否かを判定するが(ステップS3)、いずれの場合にも、エンコーダ8から取り込んだカウント数を目標カウント数に近づけるようにモータ6への供給電圧や供給時間を演算し(ステップS5)、その演算結果に基づいてモータ6を駆動する(ステップS6)という動作を繰り返し行なう。
【0020】
演算・処理部11は、エンコーダ8から取り込んだカウント数が許容範囲内にある場合には、エンコーダ8のカウント数が許容範囲内において収束状態となっているか否かを判定する(ステップS4)。演算・処理部11は、過去に取り込んだエンコーダ8のカウント数を記憶しており、それらの情報からエンコーダ8のカウント数が所定時間(例えば6秒間)以上許容範囲内にあるか否かで収束状態となっているか否かを判定する。カウント数が所定時間以上許容範囲内にあれば収束状態であると判定する。カウント数が収束状態になれば、作動部2が正常に目標位置に移動したものと判断し、その目標位置への作動部2の駆動を終了し、新たな目標位置が設定されるまでは、モータをフリー状態またはホールド状態にする。フリー状態とは、モータ駆動部10から電圧を印加しない状態を指し、ホールド状態とは、モータ駆動部10からの電圧印加によってモータにブレーキをかけた状態を指す。
【0021】
演算・処理部11は、エンコーダ8から取り込んだカウント数が許容範囲内にない場合、モータ6の駆動を開始してから一定時間(例えば10秒)が経過するまでは(ステップS7)、エンコーダ8のカウント数を目標カウント数に近づけるようにモータ6への供給電圧及び供給時間の条件を演算し(ステップS5)、その演算結果に基づいてモータ6を駆動する(ステップS6)というフィードバック制御を繰り返し行なう。このフィードバック制御を繰り返し、一定時間が経過(ステップS7)しても、エンコーダ8のカウント数が収束状態とならない場合には、振動条件保持部15に保持されている振動条件をモータ6の駆動条件として設定し(ステップS8)、その条件に基づいてモータ6を駆動して振動動作を行なう(ステップS6)。
【0022】
振動動作が終了した後、演算・制御部11は、エンコーダ8のカウント数を取り込み、そのカウント数が目標カウント数に近づくようにモータ6のフィードバック制御を再開する(ステップS2〜S6)。なお、このフィードバック制御の再開後のステップS7における「一定時間」とは、フィードバック制御を再開してからの一定時間である。すなわち、振動動作を行なうことにより、モータ6の駆動を開始してからの経過時間が初期化される。
【0023】
上記の振動動作によって動力伝達機構4に衝撃を与えることで、動力伝達機構4を構成しているギアとギアの間の噛み合わせが変化し、不具合が解消される。これにより、操作者が動力伝達機構4を分解して組み直すなどの作業が不要となる。
なお、図2においては示されていないが、振動動作を行なった後さらに一定時間が経過してもモータ6のカウント数が収束状態にならない場合には、動力伝達機構4以外の場所に不具合が発生していることを操作者に通知する機能を備えていてもよい。
【0024】
図3はエンコーダ8のカウント数の時間変化の一例を示す図であり、(A)は動力伝達機構4に不具合が生じていない場合、(B)は動力伝達機構4に不具合が生じている場合である。
図3(A)に示されるように、動力伝達機構4に不具合がない場合には、エンコーダ8のカウント数が目標カウント数付近に達した後、エンコーダ8のカウント数が目標カウント数の近傍で小さく変動する程度の微細なモータ6のフィードバック制御が行なわれる。演算・制御部11は、この状態が所定時間(Ta)連続して続いたときに収束状態と判断して、作動部2が目標位置に正常に移動したと判断する。
【0025】
他方、図3(B)に示されているように、演算・制御部11は、モータ6の駆動を開始してから所定時間(t1)が経過しても収束状態とならないときに、振動動作を所定時間(Tb)実行する。振動動作が終了した後、モータ6のカウント数が目標カウント数に近づくようにモータ駆動部10のフィードバック制御を再開する。振動動作によって動力伝達機構4のギア同士の噛み合わせが変化することで、目標カウント数付近での不具合の発生がなくなり、エンコーダ8のカウント数が許容範囲内に連続して収まるようになり、演算・制御部11は、この状態が所定時間(Ta)連続して続いたときに収束状態と判断して、作動部2が目標位置に正常に移動したと判断する。
【0026】
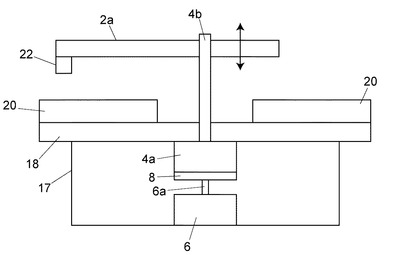
上記駆動装置の一例としてガスクロマトグラフで分析する試料や試薬のための容器を搬送するためのオートサンプラについて説明する。図4はオートサンプラの一実施例の構造を概略的に示す図である。
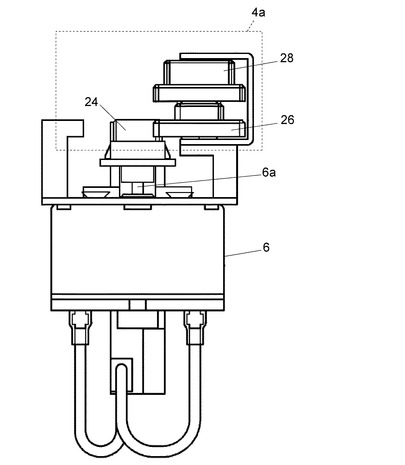
このオートサンプラは、作動部としてアーム2aを備えている。アーム2aを回転方向に駆動するための機構としてギアボックス4a、回転軸4b及びモータ6を備えている。ギアボックス4a及び回転軸4bは動力伝達機構4を構成するものである。ギアボックス4aは、図5に示されているように、モータ6の駆動軸6aの回転を回転軸4bに伝えて回転させるために互いに噛合した複数のギア24、26及び28などを備えたものである。モータ6とギアボックス4aとの間に回転軸6aの回転量をカウント数として計測するエンコーダ8が設けられている。
【0027】
ギアボックス4a、モータ6及びエンコーダ8のほか、モータ6に電圧を供給するモータ駆動部やモータ駆動部の制御を行なう制御部などは基台17の内部に収容されている。基台2の上面は、試料や試薬のための容器を収容するためのトレイ20を載置するためのテーブル18となっており、回転軸4bはテーブル18の中央部から上方へ垂直に立てられた状態で配置されている。アーム2aは水平方向へ延びた状態で基端部が回転軸4bに固定され、回転軸4bの回転にともなって水平面内で回転するようになっている。
【0028】
アーム2aは回転軸4bに沿って上下方向にも移動可能である。アーム2aの先端は容器22を把持することができるようになっており、平面内における回転と回転軸4bに沿った上下動により、トレイ20の容器の取出しや収容を行なう。なお、ここでは、アーム2aを上下方向へ駆動させる機構についての説明は省略する。
【符号の説明】
【0029】
2 作動部
4 動力伝達機構
6 モータ
8 エンコーダ
10 モータ駆動部
11 演算・制御部
12 目標カウント数保持部
13 許容範囲保持部
14 供給電圧条件保持部
15 振動条件保持部
16 振動手段
【技術分野】
【0001】
本発明は、例えばオートサンプラなど、モータを駆動することによりアームなどの作動部を所定の位置へ移動させる駆動装置に関するものである。
【背景技術】
【0002】
例えばオートサンプラなど、DC(直流)モータを用いてアームなどの作動部を一定方向に移動させる駆動装置がある(例えば、特許文献1参照。)。このような駆動装置では、作動部を駆動するためのモータにエンコーダが設けられており、モータの回転量をエンコーダのカウント数として計測することで、作動部の位置を検知している。作動部を移動させるべき目標位置が指定されると、作動部をその目標位置に移動させるために必要なエンコーダのカウント数が設定され、エンコーダのカウント数が設定されたカウント数となるようにモータへの供給電力をフィードバック制御する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−196008号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の駆動装置では、モータの回転速度の制御を高精度に行なわなければ、作動部を目標位置に正確に移動させることは不可能である。駆動装置には、モータの回転動力を一定方向への駆動力として作動部に伝達するための動力伝達機構(例えばギアボックス)が存在するが、その動力伝達機構を構成するギアの遊びやギアを含む構成部品の生産のばらつきなどの機械的な原因によって、ギア同士の噛み合わせが悪くなる箇所が発生することがあり、そのような箇所が存在するとモータにかかる負荷が変化し、モータの回転速度に影響を与え、高精度な制御が困難となる。
【0005】
モータの回転速度の高精度制御が困難となるようなギア同士の噛み合わせがエンコーダのカウント数が目標のカウント数付近となるようなタイミングで発生していると、エンコーダのカウント数を目標のカウント数に近づけるように何度もフィードバック制御を行なっても、エンコーダのカウント数が目標のカウント数の近傍で安定せず、作動部を目標位置に移動させることができなくなる。このような不具合が発生した場合、従来は、装置の動作を停止させて動力伝達機構の組立ての手直しなどを行なう必要があった。
【0006】
そこで、本発明は、モータの回転動力を作動部に伝達する駆動伝達機構の不具合を装置自身で解消し得るようにすることを目的とするものである。
【課題を解決するための手段】
【0007】
本発明にかかる駆動装置は、モータと、モータの駆動により設定された目標位置へ移動するように駆動される作動部と、モータの回転動力を一定方向への駆動力として作動部に伝達する動力伝達機構と、モータに電力を供給するためのモータ駆動部と、モータの回転量に応じた数のパルス信号を発生させ、そのパルス信号のカウント数を計測するエンコーダと、目標位置まで作動部を移動させるために必要なエンコーダのパルス信号のカウント数である目標カウント数を保持する目標カウント数保持部と、目標カウント数に基づいて設定された目標カウント数を含む周辺の範囲である許容範囲を保持する許容範囲保持部と、エンコーダのカウント数を取り込み、そのカウント数を目標カウント数に近づけるようにモータ駆動部からモータへの供給電圧とその電圧の供給時間を制御する制御部と、を備えている。
そして、制御部は、作動部の駆動を開始した後所定時間内に、カウント数が一定時間以上連続して許容範囲内で収束する収束状態とならないときに、モータを作動部を目標位置へ移動させる時の通常時の回転速度よりも早く許容範囲の幅のカウント数よりも大きなカウント数の幅で正方向と逆方向に連続的に切り替えて回転させる振動動作を行なう振動手段を備えている。
【0008】
振動動作においては、モータへの供給電圧を一定にした状態で一定周期でその正負を反転させるようにしてもよい。そうすれば、振動動作におけるモータの駆動制御が容易である。
【発明の効果】
【0009】
本発明では、作動部の駆動を開始した後所定時間内に、エンコーダのカウント数が許容範囲に収束しないときに、モータを作動部を目標位置へ移動させる時の通常時の回転速度よりも早く許容範囲の幅のカウント数よりも大きなカウント数の幅で正方向と逆方向に連続的に切り替えて回転させる振動動作を行なう振動手段を備えているので、装置が自動的に振動動作を行なって動力伝達機構に衝撃を与え、動力伝達機構におけるギアの噛み合いの不具合などがあれば、それを解消することができる。これにより、動力伝達機構に不具合が生じていても、操作者が動力伝達機構を組み直すなどの作業を行なう必要がなくなる。
【図面の簡単な説明】
【0010】
【図1】駆動装置の一実施例を概略的に示すブロック図である。
【図2】同実施例の動作を説明するためのフローチャートである。
【図3】同実施例の動作におけるエンコーダのカウント数の時間変化の一例を示すグラフであり、(A)は動力伝達機構に不具合が生じていない場合、(B)は動力伝達機構に不具合が生じている場合である。
【図4】同実施例の駆動装置の一例であるオートサンプラの構造を示す図である。
【図5】同実施例のオートサンプラのモータ及び動力伝達機構の一例を示す正面図である。
【発明を実施するための形態】
【0011】
駆動装置の一実施例を図1を用いて説明する。
作動部2を移動させるための機構として動力伝達機構4とモータ6を備えている。動力伝達機構4はモータ6の駆動軸の回転動力をギアの組み合わせによって作動部2に伝達して作動部2を一定方向へ移動させるものである。モータ6はモータ駆動部10から供給される電圧によって駆動される。モータ駆動部10からモータ6に供給される電圧は演算・制御部12により制御される。
【0012】
モータ6の回転量に応じた数のパルス信号が得られるエンコーダ8が設けられている。以下、エンコーダ8で得られるパルス信号の数をカウント数と呼ぶ。エンコーダ8はロータリーエンコーダであり、対向配置された光源と光検出器の間にモータ6の回転軸とともに回転するスリット円板が光源からの光検出器への光の光路を遮断するように配置されている。スリット円板の板面には円周方向に沿って均等に配列された複数のスリットが設けられており、スリット円板が一定量回転するたびにスリットが光源からの光の光路上に配置され、光源からの光がスリットを通って光検出器に入射する。光検出器は光が入射したときにパルス信号を発するため、モータ6の回転軸が一定量回転するたびに光検出器でパルス信号が得られる。したがって、カウント数を計測することでモータ6の回転量が求められる。エンコーダ8のパルス信号のカウント数は演算・制御部12に取り込まれる。
【0013】
演算・制御部12は、エンコーダ8から取り込んだカウント数と予め設定された作動部2を目標位置へ移動させるために必要なカウント数である目標カウント数とに基づいて、エンコーダ8をカウント数を目標カウント数に近づけるようにモータ6に供給する電圧の大きさ及び供給時間の条件を演算する供給電圧条件演算部14を備えている。演算・制御部12は、供給電圧条件演算部14で演算した条件に基づいてモータ駆動部10を介してモータ6を駆動し、駆動した後のエンコーダ8のカウント数をさらに取り込んで供給電圧条件演算部14で新たな供給電圧の条件を演算し、演算した新たな条件に基づいてモータ駆動部10を介してモータ6を駆動するという動作を繰り返すフィードバック制御を行なうように構成されている。
【0014】
演算・制御部12は、目標カウント数を保持する目標カウント数保持部12と、目標カウント数に基づいて設定された許容範囲を保持する許容範囲保持部13を備えている。目標カウント数は、操作者によって目標位置が設定されたときに、その目標位置へ作動部2を移動させるために必要なモータ6の回転量が演算され、その回転量に相当するエンコーダ8のパルス信号のカウント数として演算される。許容範囲は、作動部2が目標位置に到達したとみなすことができるカウント数の範囲(目標カウント数−α〜目標カウント数+α)である。
【0015】
演算・制御部12は振動条件保持部15及び振動手段16も備えている。振動手段16は、モータ6の駆動を開始してから所定時間(例えば10秒)内にエンコーダ8のカウント数が収束状態にならないときに、振動動作を実行するように構成されている。収束状態とは、エンコーダ8のカウント数が一定時間(例えば6秒間)以上許容範囲内にある状態を意味する。
【0016】
上述のように、演算・制御部12はエンコーダ8のカウント数を目標カウント数に近づけるようにフィードバック制御を行なっているため、正常な状態であれば、エンコーダ8のカウント数が目標カウント数に近づくと、その後は目標カウント数から大きく離れることなく、目標カウント数の近傍でモータ6のカウント数の微細なフィードバック制御が行なわれ、モータ6のカウント数は許容範囲から外れることなく許容範囲内に収束する。他方、目標カウント数の近傍で動力伝達機構4のギアの噛み合わせの悪い場所などが発生していると、モータ6にかかる負荷が不安定になり、モータ6を所望のタイミングで停止させることができず、エンコーダ8のカウント数が目標カウント数の近傍で安定せず、許容範囲内で収束しなくなる。
【0017】
振動手段16は、このような動力伝達機構4における不具合を解消するために、動力伝達機構4に衝撃を与える振動動作を実行するように構成されている。振動動作は、モータ6を作動部2を目標位置まで移動させるときの通常の駆動速度よりも早い速度でかつ許容範囲(±α)の幅のカウント数よりも広い幅のカウント数(例えば±14カウント)に相当する回転量だけ正方向と逆方向に連続的に切り替えて回転させる動作である。振動動作として、例えばモータ6に供給する電圧の大きさの絶対値を作動部2を目標位置まで移動させるときの電圧値よりも大きくした状態で、その電圧の正負を30Hzの周波数で0.2秒間連続的に反転させる動作が挙げられる。振動条件保持部15は、この振動動作時のモータ6への供給電圧や供給時間、正負切り替えのタイミング等の条件を保持している。
【0018】
同実施例の動作について図2を用いて説明する。
まず、指定された目標位置の情報に基づいて、目標カウント数及び許容範囲が設定される(ステップS1)。ここで、許容範囲は目標カウント数±αとして設定される。αは例えば6カウントである。目標カウント数が1000カウントであるとすると、許容範囲は994カウントから1006カウントとなる。
【0019】
演算・制御部11には、目標カウント数及び許容範囲が設定された後のほか、モータ6を駆動した直後にもエンコーダ8のカウント数が取り込まれる(ステップS2)。演算・制御部11は、取り込んだカウント数が許容範囲内か否かを判定するが(ステップS3)、いずれの場合にも、エンコーダ8から取り込んだカウント数を目標カウント数に近づけるようにモータ6への供給電圧や供給時間を演算し(ステップS5)、その演算結果に基づいてモータ6を駆動する(ステップS6)という動作を繰り返し行なう。
【0020】
演算・処理部11は、エンコーダ8から取り込んだカウント数が許容範囲内にある場合には、エンコーダ8のカウント数が許容範囲内において収束状態となっているか否かを判定する(ステップS4)。演算・処理部11は、過去に取り込んだエンコーダ8のカウント数を記憶しており、それらの情報からエンコーダ8のカウント数が所定時間(例えば6秒間)以上許容範囲内にあるか否かで収束状態となっているか否かを判定する。カウント数が所定時間以上許容範囲内にあれば収束状態であると判定する。カウント数が収束状態になれば、作動部2が正常に目標位置に移動したものと判断し、その目標位置への作動部2の駆動を終了し、新たな目標位置が設定されるまでは、モータをフリー状態またはホールド状態にする。フリー状態とは、モータ駆動部10から電圧を印加しない状態を指し、ホールド状態とは、モータ駆動部10からの電圧印加によってモータにブレーキをかけた状態を指す。
【0021】
演算・処理部11は、エンコーダ8から取り込んだカウント数が許容範囲内にない場合、モータ6の駆動を開始してから一定時間(例えば10秒)が経過するまでは(ステップS7)、エンコーダ8のカウント数を目標カウント数に近づけるようにモータ6への供給電圧及び供給時間の条件を演算し(ステップS5)、その演算結果に基づいてモータ6を駆動する(ステップS6)というフィードバック制御を繰り返し行なう。このフィードバック制御を繰り返し、一定時間が経過(ステップS7)しても、エンコーダ8のカウント数が収束状態とならない場合には、振動条件保持部15に保持されている振動条件をモータ6の駆動条件として設定し(ステップS8)、その条件に基づいてモータ6を駆動して振動動作を行なう(ステップS6)。
【0022】
振動動作が終了した後、演算・制御部11は、エンコーダ8のカウント数を取り込み、そのカウント数が目標カウント数に近づくようにモータ6のフィードバック制御を再開する(ステップS2〜S6)。なお、このフィードバック制御の再開後のステップS7における「一定時間」とは、フィードバック制御を再開してからの一定時間である。すなわち、振動動作を行なうことにより、モータ6の駆動を開始してからの経過時間が初期化される。
【0023】
上記の振動動作によって動力伝達機構4に衝撃を与えることで、動力伝達機構4を構成しているギアとギアの間の噛み合わせが変化し、不具合が解消される。これにより、操作者が動力伝達機構4を分解して組み直すなどの作業が不要となる。
なお、図2においては示されていないが、振動動作を行なった後さらに一定時間が経過してもモータ6のカウント数が収束状態にならない場合には、動力伝達機構4以外の場所に不具合が発生していることを操作者に通知する機能を備えていてもよい。
【0024】
図3はエンコーダ8のカウント数の時間変化の一例を示す図であり、(A)は動力伝達機構4に不具合が生じていない場合、(B)は動力伝達機構4に不具合が生じている場合である。
図3(A)に示されるように、動力伝達機構4に不具合がない場合には、エンコーダ8のカウント数が目標カウント数付近に達した後、エンコーダ8のカウント数が目標カウント数の近傍で小さく変動する程度の微細なモータ6のフィードバック制御が行なわれる。演算・制御部11は、この状態が所定時間(Ta)連続して続いたときに収束状態と判断して、作動部2が目標位置に正常に移動したと判断する。
【0025】
他方、図3(B)に示されているように、演算・制御部11は、モータ6の駆動を開始してから所定時間(t1)が経過しても収束状態とならないときに、振動動作を所定時間(Tb)実行する。振動動作が終了した後、モータ6のカウント数が目標カウント数に近づくようにモータ駆動部10のフィードバック制御を再開する。振動動作によって動力伝達機構4のギア同士の噛み合わせが変化することで、目標カウント数付近での不具合の発生がなくなり、エンコーダ8のカウント数が許容範囲内に連続して収まるようになり、演算・制御部11は、この状態が所定時間(Ta)連続して続いたときに収束状態と判断して、作動部2が目標位置に正常に移動したと判断する。
【0026】
上記駆動装置の一例としてガスクロマトグラフで分析する試料や試薬のための容器を搬送するためのオートサンプラについて説明する。図4はオートサンプラの一実施例の構造を概略的に示す図である。
このオートサンプラは、作動部としてアーム2aを備えている。アーム2aを回転方向に駆動するための機構としてギアボックス4a、回転軸4b及びモータ6を備えている。ギアボックス4a及び回転軸4bは動力伝達機構4を構成するものである。ギアボックス4aは、図5に示されているように、モータ6の駆動軸6aの回転を回転軸4bに伝えて回転させるために互いに噛合した複数のギア24、26及び28などを備えたものである。モータ6とギアボックス4aとの間に回転軸6aの回転量をカウント数として計測するエンコーダ8が設けられている。
【0027】
ギアボックス4a、モータ6及びエンコーダ8のほか、モータ6に電圧を供給するモータ駆動部やモータ駆動部の制御を行なう制御部などは基台17の内部に収容されている。基台2の上面は、試料や試薬のための容器を収容するためのトレイ20を載置するためのテーブル18となっており、回転軸4bはテーブル18の中央部から上方へ垂直に立てられた状態で配置されている。アーム2aは水平方向へ延びた状態で基端部が回転軸4bに固定され、回転軸4bの回転にともなって水平面内で回転するようになっている。
【0028】
アーム2aは回転軸4bに沿って上下方向にも移動可能である。アーム2aの先端は容器22を把持することができるようになっており、平面内における回転と回転軸4bに沿った上下動により、トレイ20の容器の取出しや収容を行なう。なお、ここでは、アーム2aを上下方向へ駆動させる機構についての説明は省略する。
【符号の説明】
【0029】
2 作動部
4 動力伝達機構
6 モータ
8 エンコーダ
10 モータ駆動部
11 演算・制御部
12 目標カウント数保持部
13 許容範囲保持部
14 供給電圧条件保持部
15 振動条件保持部
16 振動手段
【特許請求の範囲】
【請求項1】
モータと、
前記モータの駆動により設定された目標位置へ移動するように駆動される作動部と、
前記モータの回転動力を一定方向への駆動力として前記作動部に伝達する動力伝達機構と、
前記モータに電圧を印加して前記モータを駆動するモータ駆動部と、
前記モータの回転量に応じた数のパルス信号を発生させ、そのパルス信号のカウント数を計測するエンコーダと、
前記目標位置まで前記作動部を移動させるために必要な前記エンコーダのパルス信号のカウント数である目標カウント数を保持する目標カウント数保持部と、
前記目標カウント数に基づいて設定された前記目標カウント数を含む周辺の範囲である許容範囲を保持する許容範囲保持部と、
前記エンコーダのカウント数を取り込み、そのカウント数を前記目標カウント数に近づけるように前記モータ駆動部から前記モータへの供給電圧とその電圧の供給時間を制御する制御部と、を備え、
前記制御部は、前記作動部の駆動を開始した後所定時間内に、前記カウント数が一定時間以上連続して前記許容範囲内で収束する収束状態とならないときに、前記モータを前記作動部を目標位置へ移動させる時の通常時の回転速度よりも早く前記許容範囲の幅のカウント数よりも大きなカウント数の幅で正方向と逆方向に連続的に切り替えて回転させる振動動作を行なう振動手段を備えていることを特徴とする駆動装置。
【請求項2】
前記振動動作は、前記モータへの供給電圧を一定にした状態で一定周期でその正負を反転させるものである請求項1に記載の駆動装置。
【請求項1】
モータと、
前記モータの駆動により設定された目標位置へ移動するように駆動される作動部と、
前記モータの回転動力を一定方向への駆動力として前記作動部に伝達する動力伝達機構と、
前記モータに電圧を印加して前記モータを駆動するモータ駆動部と、
前記モータの回転量に応じた数のパルス信号を発生させ、そのパルス信号のカウント数を計測するエンコーダと、
前記目標位置まで前記作動部を移動させるために必要な前記エンコーダのパルス信号のカウント数である目標カウント数を保持する目標カウント数保持部と、
前記目標カウント数に基づいて設定された前記目標カウント数を含む周辺の範囲である許容範囲を保持する許容範囲保持部と、
前記エンコーダのカウント数を取り込み、そのカウント数を前記目標カウント数に近づけるように前記モータ駆動部から前記モータへの供給電圧とその電圧の供給時間を制御する制御部と、を備え、
前記制御部は、前記作動部の駆動を開始した後所定時間内に、前記カウント数が一定時間以上連続して前記許容範囲内で収束する収束状態とならないときに、前記モータを前記作動部を目標位置へ移動させる時の通常時の回転速度よりも早く前記許容範囲の幅のカウント数よりも大きなカウント数の幅で正方向と逆方向に連続的に切り替えて回転させる振動動作を行なう振動手段を備えていることを特徴とする駆動装置。
【請求項2】
前記振動動作は、前記モータへの供給電圧を一定にした状態で一定周期でその正負を反転させるものである請求項1に記載の駆動装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−207945(P2012−207945A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−71911(P2011−71911)
【出願日】平成23年3月29日(2011.3.29)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月29日(2011.3.29)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
[ Back to top ]