
駐車ブレーキ制御装置
【課題】ケーブルの伸びの影響等をよるブレーキの引き擦り感を防止できる駐車ブレーキ制御装置を提供する。
【解決手段】リリース制御時にモータ電流(電流IMA)の微分値に基づいてEPBにより発生させたブレーキ力が解除されるタイミングを求め、そこからリリース制御終了のタイミングを求める。これにより、ケーブルの伸びに拘わらず、ブレーキ力が解除されたタイミングおよびリリース制御終了のタイミングを的確に判定できる。したがって、リリース不足によるブレーキの引き擦り感、つまりEPBによるロックを解除したのにも拘わらずブレーキ力が発生しているような感覚をドライバに与えることを防止できる。
【解決手段】リリース制御時にモータ電流(電流IMA)の微分値に基づいてEPBにより発生させたブレーキ力が解除されるタイミングを求め、そこからリリース制御終了のタイミングを求める。これにより、ケーブルの伸びに拘わらず、ブレーキ力が解除されたタイミングおよびリリース制御終了のタイミングを的確に判定できる。したがって、リリース不足によるブレーキの引き擦り感、つまりEPBによるロックを解除したのにも拘わらずブレーキ力が発生しているような感覚をドライバに与えることを防止できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電子パーキングブレーキ(以下、EPB(Electronic parking brake)という)をロック・リリースする制御を行う駐車ブレーキ制御装置に関するものである。
【背景技術】
【0002】
従来より、駐車時の車両の移動を規制するためにパーキングブレーキが用いられているが、パーキングブレーキには操作レバーによってブレーキケーブルを引っ張ることで操作力をブレーキ機構に伝える手動式のものと、モータの回転力を利用してケーブルを引っ張ることでモータ回転力をブレーキ機構に伝える電動式のものがある。
【0003】
電動式のパーキングブレーキであるEPBでは、ロック時には、モータをロック側に回転(正回転)させてモータ回転力をブレーキ機構に伝えると共に、ブレーキ力を発生させた状態でモータ駆動を停止させ、リリース時には、モータをリリース側に回転(逆回転)させることでブレーキ力を解除する。
【0004】
このようなロック・リリースの制御において、特許文献1では、ロック時にはモータ電流が所定値となるまでロック側へモータを駆動し、リリース時にはモータ回転数が所定値となるまでリリース側へモータを回転させている。すなわち、リリース時のモータ回転数がロック時にモータを駆動したときのモータの回転数、換言すればケーブルを引っ張った距離と対応する回転数に達したときにモータ駆動を終了することで、ケーブルを引っ張った分だけ戻している。
【0005】
また、特許文献2では、ロック時にはモータ電流が所定値となるまでロック側へモータを駆動し、リリース時にはロック制御中のストロークを計測しておき、そのストロークにケーブルの伸び量を考慮した値を足した値になるまでモータをリリース側に回転させている。
【特許文献1】特開2002−205627号公報
【特許文献2】特開2005−329930号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1のように、モータ回転数がケーブルを引っ張った分に相当する値になったときにリリースを終了するという制御手法では、ケーブルの伸びの影響等を受けてしまい、制御誤差が大きくなる。
【0007】
また、特許文献2のように、ロック時のストロークを計測し、そのストロークに伸びを考慮した値を足した値になるまでモータをリリース側に回転させるという制御手法では、ケーブルの伸びの影響を考慮しているものの、長時間ロック状態で放置された後にリリースしたときに対応できない。つまり、ケーブルの伸びが想定値以上になったときに、結局その影響を受け、制御誤差が生じてしまう。
【0008】
このように、制御誤差が生じると、リリース不足によるブレーキの引き擦り、つまりEPBによるロックを解除したのにも拘わらずブレーキ力が発生していることになるという問題がある。
【0009】
本発明は上記点に鑑みて、ケーブルの伸びの影響等によるブレーキの引き擦りを防止できる駐車ブレーキ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、請求項1に記載の発明では、リリース制御手段(170)にて、電動モータ(15)の駆動時に流れるモータ電流の電流値(IAM、IBM)を取得し、該取得した電流値の微分値が一定範囲(KDIREND)内に含まれる時間が所定時間(KTREND)継続したときに電動モータ(15)の駆動を停止することを特徴としている。
【0011】
このように、微分値が一定範囲(KDIREND)内に含まれるようになったタイミングをEPBによるブレーキ力が解除されたタイミングとして、そこからその状態が所定時間(KTREND)継続したときをリリース制御終了のタイミングとしている。このため、ケーブル(13)の伸びに拘わらず、ブレーキ力が解除されたタイミングおよびリリース制御終了のタイミングを的確に判定できる。これにより、リリース不足によるブレーキの引き擦り、つまりEPBによるロックを解除したのにも拘わらずブレーキ力が発生しているようなことを防止できる。
【0012】
例えば、請求項2に示すように、所定時間(KTREND)は、ブレーキ力が解除されてから摩擦材(11)と被摩擦材(10)との間に所定のクリアランスが空いたと想定される時間に設定される。
【0013】
請求項3に記載の発明では、リリース制御手段(170)は、電動モータ(15)の電源電圧(VB)の大きさに応じて所定時間(KTREND)を変化させ、電源電圧(VB)が大きいほど所定時間(KTREND)を小さく設定することを特徴としている。
【0014】
このように、電動モータ(15)の電源電圧(VB)に基づいて判定値となる所定時間(KTREND)を可変にすることができる。これにより、電源電圧(VB)の大きさに応じて適切な判定値とすることができ、より的確に上記請求項1に示した効果を得ることができる。
【0015】
請求項4に記載の発明では、リリース制御手段(170)は、モータ電流(IAM)の微分値の絶対値が大きいほど所定時間(KTREND)を小さく設定することを特徴としている。
【0016】
このように、モータ電流(IAM)の微分値の大きさに基づいて判定値となる所定時間(KTREND)を可変にすることができる。これにより、モータ電流(IAM)の微分値の大きさの大きさに応じて適切な判定値とすることができ、より的確に上記請求項1に示した効果を得ることができる。例えば、請求項5に示すように、リリース制御手段(170)は、モータ電流(IAM)の微分値の最小値(dMIMIN(n))の絶対値が大きいほど所定時間(KTREND)を小さく設定することができる。
【0017】
請求項6に記載の発明では、リリース制御手段(170)は、電動モータの逆回転駆動を開始してからのリリース制御時間(CTR)を計測し、該リリース制御時間(CTR)が予め決められた最小リリース制御時間(KTRLG)を超えている場合にのみ、微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴としている。
【0018】
リリースが完了するするまでに掛かる時間はある程度決まっているため、リリース制御時間(CTR)が最小リリース制御時間(KTRLG)よりも短いときは必ずリリース中であると想定される。このため、リリース制御時間(CTR)が最小リリース制御時間(KTRLG)よりも短い場合を排除し、リリース制御時間(CTR)が最小リリース制御時間(KTRLG)を超えている場合にのみ、微分値が一定範囲(KDIREND)内に含まれるか否かを判定することで、リリース開始初期時の誤判定を防止して誤判定によりリリースを終了してしまわないようにできる。
【0019】
請求項7に記載の発明では、リリース制御手段(170)は、電流値(IAM)が閾値(KIRUG)を超えていないときにのみ、微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴としている。
【0020】
モータ電流(IAM)はモータ(15)に加えられる負荷に応じて変動するが、通常は無負荷時の電流値(無負荷電流)を超えることは無い。したがって、電流値(IAM)が閾値(KIRUG)を超えていないときにのみ、微分値が一定範囲(KDIREND)内に含まれるか否かを判定することで、MAXガード用の閾値(KIRUG)を超えるような場合、例えば突入電流発生時のようにモータ電流(IAM)がノイズ的に大きくなる場合を排除できる。これにより、突入電流発生時などの誤判定を防止して誤判定によりリリースを終了してしまわないようにできる。例えば、請求項8に示すように、リリース制御手段(170)は、MAXガード用の閾値(KIRUG)として無負荷電流の最大値を用いることができる。
【0021】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明を実施するための最良の形態】
【0022】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0023】
(第1実施形態)
本発明の第1実施形態について説明する。図1は、本実施形態にかかる駐車ブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。
【0024】
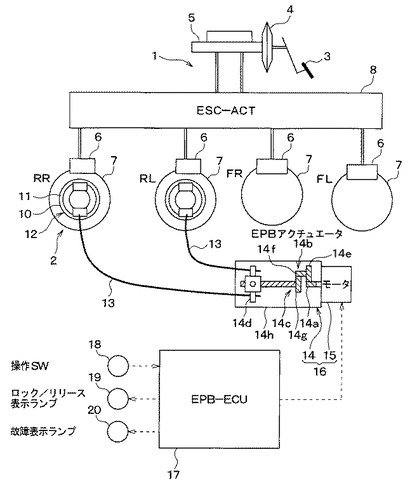
図1に示すように、ブレーキシステムには、ドライバの踏力に基づいてブレーキ力を発生させるサービスブレーキ1と駐車時に車両の移動を規制するためのEPB2とを有して構成されている。
【0025】
サービスブレーキ1は、ドライバによるブレーキペダル3の踏み込みに応じた踏力を倍力装置4にて倍力したのち、この倍力された踏力に応じたブレーキ液圧をマスタシリンダ5内に発生させ、このブレーキ液圧を各車輪のホイールシリンダ6に伝えることでブレーキ力を発生させる。具体的には、ホイールシリンダ6にブレーキ液圧を伝えることにより、キャリパ内に備えられたブレーキパッドにてブレーキディスク7を挟み込み、その摩擦力によりブレーキ力を発生させる。また、マスタシリンダ5とホイールシリンダ6との間にブレーキ液圧制御用のアクチュエータ8が備えられており、サービスブレーキ1により発生させるブレーキ力を調整できる構造とされている。なお、これらサービスブレーキ1に関しては従来より周知のものであるため、ここでは詳細については省略する。
【0026】
一方、EPB2は、パーキングブレーキ専用ドラム10とブレーキシュー11等により構成されるパーキングブレーキ機構12と、ケーブル13やギア機構14およびモータ15を有して構成されたEPBアクチュエータ16と、EPB制御装置(以下、EPB−ECUという)17とを有して構成されている。
【0027】
パーキングブレーキ機構12は、摩擦材としてのブレーキシュー11の摩擦面が被摩擦材としてのドラム10の内壁面と接触することでブレーキ力を発生させる。このパーキングブレーキ機構12が発生させるブレーキ力により、駐車中の車両の移動が規制される。このパーキングブレーキ機構12におけるブレーキシュー11がEPBアクチュエータ16に備えられたケーブル13にて駆動されるようになっており、ケーブル13を引っ張るとその張力によりブレーキシュー11の摩擦面がドラム10の内壁面に接触させられることでブレーキ力を発生させ、引っ張られた状態からケーブル13を緩めるとブレーキシュー11の摩擦面がドラム10の内壁面から離されることでブレーキ力を解除させる構造とされている。このケーブル13は、EPBアクチュエータ16に備えられたギア機構14にてモータ15の回転力を直線運動方向に変換した力によって引っ張られたり、緩められる。
【0028】
ギア機構14は、モータ15の回転軸に備えられた入力用歯車14aと、減速歯車14bと、出力軸14cおよびドライブナット14dにて構成されている。減速歯車14bは、入力用歯車14aに噛合わされた第1平歯車14eと、この第1平歯車14eの回転軸と同軸的に備えられ、第1平歯車14eよりも歯数が少なくされた第2平歯車14fにて構成されている。出力軸14cは、雄ネジ溝が形成されたドライブスクリューであり、一端に減速歯車14bの第2平歯車14fに噛合わされた第3平歯車14gが備えられ、減速歯車14bを介して第3平歯車14gがモータ15にて駆動されると、この第3平歯車と同軸的に回転する。ドライブナット14dは、ギア機構14を収容するギアボックス14h内に備えられた図示しないガイドにより出力軸14cの平行方向に移動し、直線運動を行うように構成されている。このドライブナット14dにケーブル13が接続され、モータ回転に伴ってドライブナット14dが出力軸14cに沿って移動させられると、ケーブル13が引っ張られたり、緩められる。
【0029】
このようなギア機構14では、モータ15の回転を停止すると、その時点で各歯車の駆動も停止させられ、出力軸14cとドライブナット14dの嵌め合いによる摩擦力により、ケーブル13をその状態で保持することができる。このため、モータ15の回転に伴ってケーブル13を引っ張りパーキングブレーキ機構12にてブレーキ力を発生させたときに、モータ15の回転を停止させると、そのブレーキ力が保持される。
【0030】
EPB−ECU17は、CPU、ROM、RAM、I/Oなどを備えた周知のマイクロコンピュータによって構成され、ROMなどに記憶されたプログラムにしたがってモータ15の回転を制御することにより駐車ブレーキ制御を行うものである。このEPB−ECU17が本発明の駐車ブレーキ制御装置に相当する。EPB−ECU17には、例えば車室内のインストルメントパネル(図示せず)に備えられた操作スイッチ(SW)18の操作状態に応じた信号が入力されており、EPB−ECU17は、操作SW18の操作状態に応じてモータ15を駆動する。また、EPB−ECU17は、インストルメントパネルに備えられたロック/リリース表示ランプ19に対してモータ15の駆動状態に応じて、ロック中であるかリリース中であるかを示す信号を出力したり、故障表示ランプ20に対してEPB2の故障時にその旨の信号を出力する。
【0031】
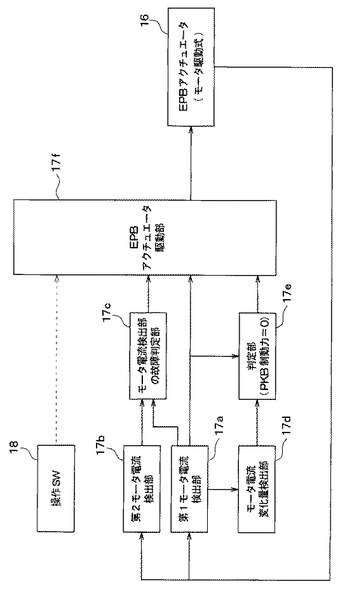
図2は、EPB−ECU17の内部構造の一部を示したブロック図である。この図に示されるように、EPB−ECU17は、第1、第2モータ電流検出部17a、17b、故障判定部17c、モータ電流の変化量検出部17d、判定部17e、EPBアクチュエータ駆動部17fにて構成されている。
【0032】
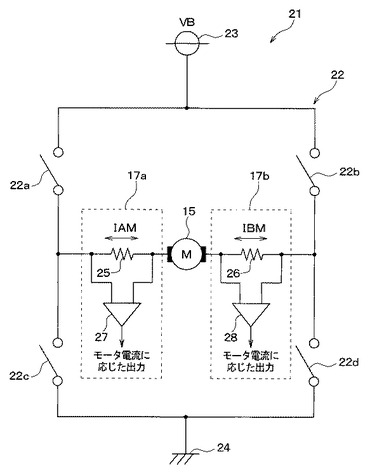
第1、第2モータ電流検出部17a、17bは、モータ15に流される電流(モータ電流)を異なる2箇所、具体的にはモータ15の上流側と下流側の2箇所で検出するものである。これら第1、第2モータ電流検出部17a、17bについて、図3を参照して説明する。
【0033】
図3は、モータ15に対してモータ電流の供給を制御するモータ駆動回路21の模式図である。この図に示されるように、モータ駆動回路21にはHブリッジ回路22が備えられており、モータ15の駆動を停止するときには各スイッチ22a〜22dをすべてオフにし、モータ15を正回転もしくは逆回転させるときにはHブリッジ回路の各スイッチ22a〜22dが対角線の関係でオンとオフに制御されることで、モータ15に対して異なる方向の電流が供給できるように構成されている。
【0034】
そして、このようなモータ駆動回路21におけるモータ15の両側、つまりモータ15とスイッチ22aおよびスイッチ22cの接続点の間、および、モータ15とスイッチ22bおよびスイッチ22dの接続点の間のそれぞれに電流検出抵抗25、26が備えられている。各電流検出抵抗25、26の両端電位は差動増幅器27、28に入力されており、この差動増幅器27、28の出力電位が各電流検出抵抗25、26を流れる電流IAM、IBMと対応する値となる。したがって、これら各電流検出抵抗25、26および各差動増幅器27、28を第1、第2モータ電流検出部17a、17bとしてモータ電流を異なる2箇所で検出する。
【0035】
故障判定部17cは、第1、第2モータ電流検出部17a、17bにて検出された異なる2箇所の電流IAM、IBMの差が一定範囲内であるか否かに基づいてモータ15もしくはモータ駆動回路21の故障を判定する。そして、故障判定部17cは、故障と判定したときに、EPBアクチュエータ駆動部17fにその旨を伝え、EPB2の駆動を停止する。
【0036】
変化量検出部17dは、モータ電流の変化量を検出する。具体的には、変化量検出部17dは、一定周期毎のモータ電流の変化量、つまりモータ電流の微分値を求める。このモータ電流の微分値は、後述するように、EPB2をリリースすべくモータ15を逆回転させるとき、そのモータ回転をいつ停止するかの判定に用いられる。
【0037】
判定部17eは、EPB2が発生させるブレーキ力が0になったか否かの判定を行う。ブレーキ力が0になったことは、上述した変化量検出部17dで検出したモータ電流の微分値に基づいて判定する。この判定部17eにおける判定手法に関しては、後で詳細に説明する。
【0038】
EPBアクチュエータ駆動部17fは、モータ15を制御することにより、EPBアクチュエータ16の駆動状態の制御を行う。このEPBアクチュエータ駆動部17fは、基本的には操作SW18の操作状態に基づいてモータ15を正回転や逆回転させたりモータ15の回転を停止させることで、EPB2をロック・リリースする制御を行うが、故障判定部17cや判定部17eの判定結果に応じてEPB2をロック・リリースする制御におけるモータ15の動作の切替えも行う。以上のようにして、本実施形態にかかるブレーキシステムが構成されている。
【0039】
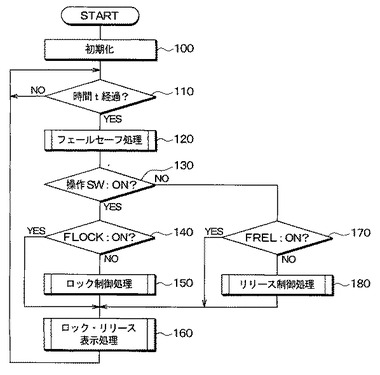
続いて、上記のように構成されたブレーキシステムを用いてEPB−ECU17が上記各構成要素17a〜17fおよび図示しない内蔵のROMに記憶されたプログラムに従って実行する駐車ブレーキ制御について説明する。図4は、駐車ブレーキ制御処理の詳細を示したフローチャートである。
【0040】
まず、ステップ100において時間計測用カウンタやフラグリセットなどの一般的な初期化処理を行ったのち、ステップ110に進み、時間tが経過したか否かを判定する。ここでいう時間tは、制御周期を規定するものである。つまり、初期化処理が終了してからの時間もしくは前回本ステップで肯定判定されたときからの経過時間が時間tが経過するまで繰り返し本ステップでの判定が行われるようにすることで、時間tが経過するごとに駐車ブレーキ制御が実行されるようにしている。
【0041】
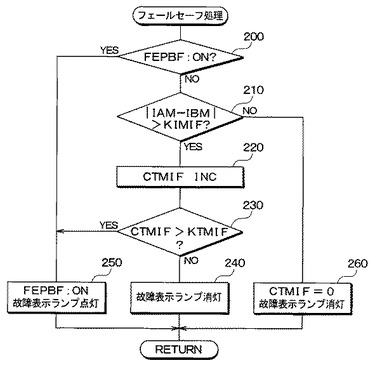
続く、ステップ120では、フェールセーフ処理を実行する。図5は、フェールセーフ処理の詳細を示したフローチャートである。フェールセーフ処理が実行されると、ステップ200に進み、EPB2が異常の状態であることを示すEPB異常フラグFEPBFがオンされているか否かを判定する。このEPB異常フラグFEPBFは、後述するようにEPB−ECU17が異常であると判定されたときにステップ250においてオンされる。
【0042】
ここで否定判定された場合には、ステップ210に進み、第1、第2電流検出部17a、17bで検出した電流IAMと電流IBMとの誤差が故障判定閾値KIMIFを超えているか否かを判定する。具体的には、これら電流IAMと電流IBMの差の絶対値が故障判定閾値KIMIFを超えているか否かを判定している。通常、電流IAMと電流IBMは、共に同じモータ15に流れるモータ電流であるため、基本的には同じ値になる。しかしながら、モータ15の故障やモータ15の上下流において断線・短絡故障等、何らかの故障が発生していると、電流IAMと電流IBMが同じ値にならなくなる。したがって、電流IAMと電流IBMの検出誤差を考慮に入れて故障判定閾値KIMIFを設定し、電流IAMと電流IBMの差の絶対値が故障判定閾値KIMIFを超えるような場合には、故障が発生していると判定する。
【0043】
ただし、ここでモータ電流に基づいて何らかの故障が発生していると判定された場合であっても、ノイズ的なものである可能性もある。したがって、本ステップで肯定判定された場合には、ステップ220にて異常継続タイマCTMIFをインクリメントしたのち、ステップ230に進んで、異常継続タイマCTMIFが閾値KTILTを超えているか否かを判定する。このようにすることで、上記故障が発生していると判定される状況が一定時間継続したら最終的に故障が生じたと判定できる。このため、ステップ230で否定判定されている間はステップ240に進んで故障表示ランプ20を消灯した状態にし、肯定判定されるとステップ250に進んで故障表示ランプ20を点灯させると共に、EPB異常フラグFEPBFをオンする。なお、ステップ200において、EPB異常フラグFEPBFがオンされているときには、ステップ250に進んで故障表示ランプ20の点灯が維持される。
【0044】
一方、ステップ210において電流IAMと電流IBMの差の絶対値が故障判定閾値KIMIFを超えておらず否定判定されると、ステップ260に進み、異常継続タイマCTMIFを0にリセットすると共に、故障表示ランプ20を消灯して処理を終了する。このようにしてフェールセーフ処理が完了する。
【0045】
フェールセーフ処理が完了すると、図1のステップ130に進み、操作SW18がオンしているか否かを判定する。操作SW18がオンの状態とはドライバがEPB2を作動させてロック状態にしようとしていることを意味し、オフの状態とはドライバがEPB2をリリース状態にしようとしていることを意味している。このため、本ステップで肯定判定されればステップ140に進み、ロック状態フラグFLOCKがオンしているか否かを判定する。ここで、ロック状態フラグFLOCKとは、EPB2を作動させてロック状態になったときにオンされるフラグであり、このロック状態フラグFLOCKがオンになっているときには既にEPB2の作動が完了して所望のブレーキ力が発生させられている状態となる。したがって、ここで否定判定された場合にのみステップ150のロック制御処理に進み、肯定判定された場合には既にロック制御処理が完了しているものとしてステップ160に進む。
【0046】
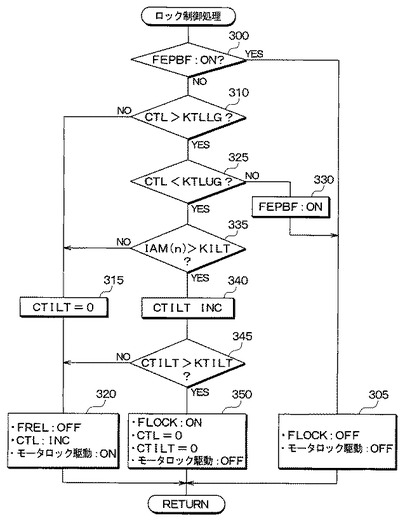
ロック制御処理では、モータ15を回転させることによりEPB2を作動させ、パーキングブレーキ機構12にて所望のブレーキ力を発生させられる位置でモータ15の回転を停止し、この状態を維持するという処理を行う。図6にロック制御処理の詳細を示したフローチャートを示し、この図を参照してロック制御処理について説明する。
【0047】
まず、ステップ300では、EPB異常フラグFEPBFがオンになっているか否かを判定する。ここで肯定判定された場合には、何らかの故障が発生している状態であるため、ステップ305に進んでロック状態フラグをオフにすると共に、モータ15ロック駆動をオフ、つまりモータ15の駆動を行わないもしくは停止して処理を終了する。一方、ステップ300で否定判定されればステップ310に進む。
【0048】
ステップ310では、ロック制御時間カウンタCTLが予め決められた最小ロック制御時間KTLLGを超えているか否かを判定する。ロック制御時間カウンタCTLとは、ロック制御が開始されてからの経過時間を計測するカウンタであり、ロック制御処理開始と同時にカウントを始める。最小ロック制御時間KTLLGとは、ロック制御に掛かると想定される最小時間のことであり、ケーブル13の長さやモータ15の回転速度などに応じて予め決まる値である。後述するように、モータ電流がロック制御目標電流値KILTに到達した時にケーブル13の張力により発生させられたブレーキ力が所望の値に近づいた判定するが、モータ15への電流供給初期時の突入電流などによりモータ電流がそのロック制御目標電流値KILTを超えることになる。このため、ロック制御時間カウンタCTLを最小ロック制御時間KTLLGと比較することで、制御初期時をマスクでき、突入電流などによる誤判定を防止することが可能となる。
【0049】
したがって、ロック制御時間カウンタCTLが最小時間を超えていない状態であれば、まだロック制御が継続されることになるため、ステップ315に進んで後述するロック制御終了タイマCTILTを0に初期化したのちステップ320に進み、リリース状態フラグをオフすると共にロック制御時間カウンタCTLをインクリメントし、モータ15ロック駆動をオン、つまりモータ15を正回転させる。これにより、モータ15の正回転に伴ってギア機構14が駆動され、ドライブナット14dが出力軸14cの軸方向に沿って移動してケーブル13がロック側に引っ張られる。
【0050】
一方、ステップ310で肯定判定されると、ロック制御時間カウンタCTLが予め決められた最大ロック制御時間KTLUG未満であるか否かを判定する。最大ロック制御時間KTLUGとは、ロック制御に掛かると想定される最大時間のことであり、ケーブル13の長さやモータ15の回転速度などに応じて予め決まる値である。ロック制御が開始されてから最大ロック制御時間KTLUG以上時間が経過しても未だロック制御時間カウンタCTLがカウントされ続けていれば何らかの故障が発生している場合と考えられる。例えば、ギア機構14もしくはケーブル13の破損によりロック制御目標電流値KILTに長時間到達しないような場合にこのような状況になり得る。このため、この場合にはステップ330に進み、EPB異常フラグFEPBFをオンしたのち、ステップ305の処理を行う。また、ステップ325で肯定判定されればステップ335に進む。
【0051】
ステップ335では、電流IAM(n)がロック制御目標電流値KILTを超えているか否かを判定する。電流IAM(n)とは、今回の制御周期のときの電流IAMのことである。モータ電流はモータ15に加えられる負荷に応じて変動するが、本実施形態の場合にはモータ15に加えられる負荷はケーブル13の張力に相当するため、モータ電流に相当する電流IAMがケーブル13の負荷と対応した値となる。このため、電流IAM(n)がロック制御目標電流値KILTを超えていればケーブル13の張力により所望のブレーキ力に近づいた状態、例えばケーブル13によってパーキングブレーキ機構12におけるブレーキシュー11の摩擦面がドラム10の内壁面にある程度の力で押さえ付けられた状態として、ステップ340に進む。そして、ステップ340においてロック制御終了タイマCTILTをインクリメントしたのち、ステップ345に進んでロック制御終了タイマCTILTがロック制御終了時間KTILT、すなわち所望のブレーキ力に近づいてから経過した時間が所望のブレーキ力を発生させられたと想定される時間に達したか否かを判定し、達するまではステップ320の処理を行い、達するとステップ350に進む。
【0052】
この後、ステップ350において、ロックが完了したことを意味するロック状態フラグをオンすると共にロック制御時間カウンタCTLおよびロック制御終了タイマCTILTを0にし、モータ15ロック駆動を停止する。これにより、モータ15の回転が停止され、ギア機構14の駆動が停止させられる。そして、ギア機構14における出力軸14cとドライブナット14dとの噛合いによる摩擦力により、ケーブル13を引っ張ったままの状態で保持できるため、その時に発生させたブレーキ力が保持される。これにより、駐車中の車両の移動が規制される。このようにして、ロック制御処理が完了する。
【0053】
一方、図1のステップ130で否定判定された場合にはステップ170に進み、リリース状態フラグFRELがオンしているか否かを判定する。ここで、リリース状態フラグFRELとは、EPB2を作動させてリリース状態、つまりパーキングブレーキ機構12によるブレーキ力を解除した状態になったときにオンされるフラグであり、このリリース状態フラグFRELがオンになっているときには既にEPB2の作動が完了してブレーキ力が解除させられている状態となる。したがって、ここで否定判定された場合にのみステップ180のリリース制御処理に進み、肯定判定された場合には既にロック制御処理が完了しているものとしてステップ160に進む。
【0054】
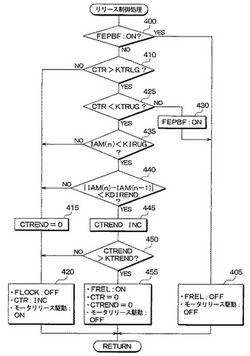
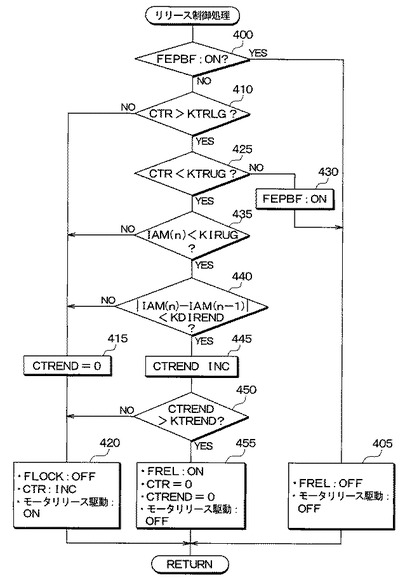
リリース制御処理では、モータ15を回転させることによりEPB2を作動させ、パーキングブレーキ機構12にて発生させられているブレーキ力を解除するという処理を行う。図7にリリース制御処理の詳細を示したフローチャートを示し、この図を参照してリリース制御処理について説明する。
【0055】
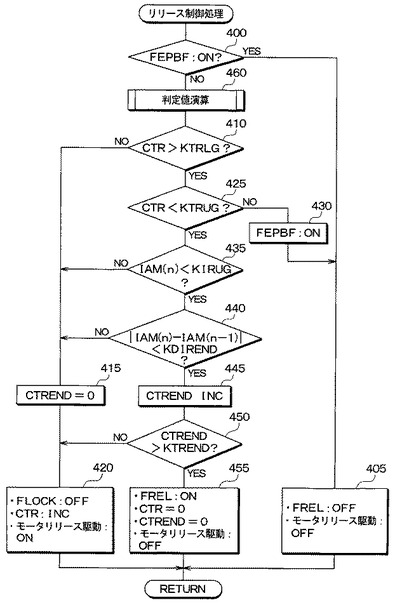
まず、ステップ400では、EPB異常フラグFEPBFがオンになっているか否かを判定する。ここで肯定判定された場合には、何らかの故障が発生している状態であるため、ステップ405に進んでリリース状態フラグをオフにすると共に、モータリリース駆動をオフ、つまりモータ15の駆動を行わないもしくは停止して処理を終了する。一方、ステップ400で否定判定されればステップ410に進む。
【0056】
ステップ410では、リリース制御時間を計測するリリース制御時間カウンタCTRが予め決められた最小リリース制御時間KTRLGを超えているか否かを判定する。リリース制御時間カウンタCTRとは、リリース制御が開始されてからの経過時間を計測するカウンタであり、リリース制御処理開始と同時にカウントを始める。最小リリース制御時間KTRLGとは、リリース制御に掛かると想定される最小時間のことであり、最小ロック制御時間KTLLGと対応する値とされ、ケーブル13の長さやモータ15の回転速度などに応じて予め決まる値である。ロック状態からリリース状態に移行する際に、リリースが完了するするまでに掛かる時間はある程度決まっている。このため、リリース制御時間カウンタCTRが最小リリース制御時間KTRLGよりも短いときは必ずリリース中であると想定し、リリース開始初期時の誤判定を防止して誤判定によりリリースを終了してしまわないようにしている。
【0057】
したがって、リリース制御時間カウンタCTRが最小時間を超えていない状態であれば、まだリリース制御が継続されることになるため、ステップ415に進んで後述するリリース制御終了タイマCTRENDを0に初期化したのちステップ420に進み、リリース状態フラグFRELをオフすると共にリリース制御時間カウンタCTRをインクリメントし、モータリリース駆動をオン、つまりモータ15を逆回転させる。これにより、モータ15の逆回転に伴ってギア機構14が駆動され、ドライブナット14dが出力軸14cの軸方向に沿って移動してケーブル13がリリース側に戻されることで張力が緩められる。
【0058】
一方、ステップ410で肯定判定されると、リリース制御時間カウンタCTRが予め決められた最大リリース制御時間KTRUG未満であるか否かを判定する。最大リリース制御時間KTRUGとは、リリース制御に掛かると想定される最大時間のことであり、最大ロック制御時間KTLUGと対応した値とされ、ケーブル13の長さやモータ15の回転速度などに応じて予め決まる値である。リリース制御が開始されてから最大リリース制御時間KTRUG以上時間が経過しても未だリリース制御時間カウンタCTRがカウントされ続けていれば何らかの故障が発生している場合と考えられる。例えば、ギア機構14もしくはケーブル13の破損が生じているような状況が想定される。このため、この場合にはステップ430に進み、EPB異常フラグFEPBFをオンしたのち、ステップ405の処理を行う。また、ステップ425で肯定判定されればステップ435に進む。
【0059】
ステップ435では、今回の制御周期のときの電流IAM(n)がリリースMAXガード電流値KIRUGを超えているか否かを判定する。モータ電流はモータ15に加えられる負荷に応じて変動するが、通常は無負荷時の電流値(無負荷電流)を超えることは無い。このため、MAXガード用の閾値として例えば無負荷電流の最大値と比較し、突入電流発生時のように電流IAM(n)がノイズ的に大きくなるような場合を排除し、これ以降の処理で誤判定が行われることを防止している。したがって、本ステップで否定判定された場合にはステップ415および420に進み、肯定判定された場合にのみステップ440に進む。
【0060】
ステップ440では、今回の制御周期のときの電流IAM(n)と前回の制御周期のときの電流IAM(n−1)との差の絶対値|IAM(n)−IAM(n−1)|がリリース制御終了判定電流変化値KDIREND未満であるか否かを判定する。電流IAM(n)と電流IAM(n−1)との差は、電流IAMの変化量、つまり電流IAMの微分値dMI(n)に相当する。電流IAMは、上述したように、モータ電流はモータ15に加えられる負荷に応じて変動し、本実施形態の場合にはモータ15に加えられる負荷はケーブル13の張力に相当するため、ケーブル13の張力が小さくなるほど電流が小さくなり、張力が無くなった時点、つまりブレーキ力が解除された時点から一定値となる。しかしながら、電流IAMは温度などの様々な条件によって変動し、一定値と言ってもその値にバラツキがあり、単に電流IAMを確認してもブレーキ力が解除された時点を確認するのは容易ではない。つまり、一定値となったときの値が決まっていれば電流IAMを判定用の閾値と比較すれば良いが、一定値となるときの値にバラツキがあるため、閾値を固定することが困難である。
【0061】
このため、本実施形態では、電流IAMの微分値であれば上記のようなバラツキによらないことに着目し、電流IAMの微分値が閾値となるリリース制御終了判定電流変化値KDIREND未満になるとブレーキ力が解除したと判定している。なお、リリース制御終了判定電流変化値KDIRENDは、電流IAMの微分値の変動許容値、つまり電流IAMが一定値になったとしても様々な要因により全く変動しないわけではないため、それによる電流IAMの変動を見込んだ許容値である。ただし、ケーブル13に張力が発生しているときと張力が無くなったときとを比較できるように、リリース制御終了判定電流変化値KDIRENDはケーブル13に張力が発生しているときの電流IAMの微分値よりも小さい値に設定される。
【0062】
したがって、ステップ440で肯定判定されればステップ445に進み、リリース制御終了タイマCTRENDをインクリメントしたのち、ステップ450に進んでリリース制御終了タイマCTRENDがリリース制御終了時間KTREND、すなわちブレーキ力が解除されてから所望の時間、具体的にはブレーキシュー11の摩擦面とドラム10の内壁面との間に遊び分の間隔が空いたと想定される時間に達したか否かを判定し、達するまではステップ420の処理を行い、達するとステップ455に進む。
【0063】
この後、ステップ455において、リリースが完了したことを意味するリリース状態フラグFRELをオンすると共にリリース制御時間カウンタCTRおよびリリース制御終了タイマCTRENDを0にし、モータリリース駆動を停止する。これにより、モータ15の回転が停止され、ギア機構14の駆動が停止させられる。そして、ギア機構14における出力軸14cとドライブナット14dとの嵌め合いによる摩擦力により、ケーブル13が緩められたままの状態で保持される。このようにして、リリース制御処理が完了する。
【0064】
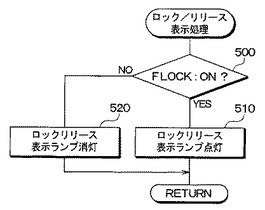
このようにして、ロック制御処理およびリリース制御処理が終了すると、図1のステップ160におけるロック・リリース表示処理を行う。図8にロック・リリース表示処理の詳細を示したフローチャートを示し、この図を参照してロック・リリース表示処理について説明する。
【0065】
ステップ500では、ロック状態フラグFLOCKがオンされているか否かを判定する。ここで肯定判定されればステップ510に進んでロック・リリース表示ランプ19を点灯させ、否定判定されればステップ520に進んでロック・リリース表示ランプ19を消灯する。このように、ロック状態であればロック・リリース表示ランプ19を点灯し、リリース状態もしくはリリース制御が開始された状態のときにはロック・リリース表示ランプ19を消灯する。これにより、ドライバにロック状態であるか否かを認識させることが可能となる。このようにして、ロック・リリース表示処理が完了し、これに伴って駐車ブレーキ制御処理が完了する。
【0066】
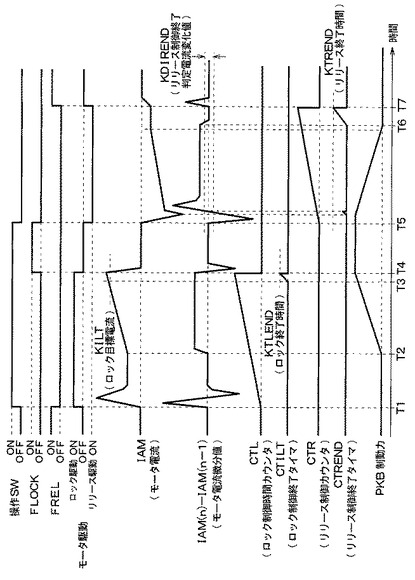
図9は、このような駐車ブレーキ制御処理を実行したときのタイミングチャートである。この図に示されるように、時点T1において操作SW18がオンされると、それと同時にリリース状態フラグFRELがオンからオフに切り替わり、モータ15ロック駆動がオンになる。そして、ロック制御時間カウンタCTLがインクリメントされていく。そして、モータ15に電流が流される。モータ電流に相当する電流IAMは、モータ15に電流が流された当初は突入電流により大きな値となるが、その後、ケーブル13に張力が発生していない無負荷時の電流値(一定値)となる。
【0067】
その後、時点T2においてケーブル13に張力が発生し始めた状態、すなわちブレーキシュー11の摩擦面がドラム10の内壁面と接触してブレーキ力が発生させられ始められた状態となる。そして、時点T3になると電流IAMがロック制御目標電流値KILTに到達し、ケーブル13の張力により発生させられたブレーキ力が所望の値に近づいた状態となり、ロック制御終了タイマCTILTがインクリメントされ始める。それから、時点T4においてロック制御終了タイマCTILTがロック制御終了時間KTILTに達すると、所望のブレーキ力が発生させられたものとしてロック制御が完了となり、ロック状態フラグFLOCKがオンされると共にモータ15ロック駆動が停止され、ロック制御時間カウンタCTLおよびロック制御終了タイマCTILTが0となる。これにより、モータ電流が低下し、オフ時の電流値(=0)となる。
【0068】
次に、時点T5において操作SWがオフされると、それと同時にロック状態フラグFLOCKがオンからオフに切り替わり、モータリリース駆動がオンになる。そして、リリース制御時間カウンタCTRがインクリメントされていく。そして、モータ15に電流が流される。このとき、電流IAMは、モータ15を逆回転させる方向に流れるため、マイナスの値となり、モータ15に電流が流された当初は突入電流により大きな値となるが、その後、ケーブル13に発生している張力に対応する値まで低下する。この低下時に、電流IAMの微分値に相当するIAM(n)−IAM(n−1)が一旦0になるため、リリース制御終了タイマCTRENDがインクリメントされる可能性があるが、瞬間的なものであるため、再び0に戻る。なお、上述したステップ410において、リリース開始初期時の誤判定を防止しているため、この時間内であればリリース制御終了タイマCTRENDがインクリメントされることもない。
【0069】
続いて、時点T6においてケーブル13に張力が無くなった状態、すなわちブレーキシュー11の摩擦面がドラム10の内壁面から離れ始めてブレーキ力が解除された状態となる。これにより、電流IAMが一定値となり、電流IAMの微分値に相当するIAM(n)−IAM(n−1)が低下し、絶対値|IAM(n)−IAM(n−1)|がリリース制御終了判定電流変化値KDIREND未満となり、リリース制御終了タイマCTRENDをインクリメントされ始める。それから、時点T7においてリリース制御終了タイマCTRENDがリリース制御終了時間KTRENDに達すると、ブレーキ力が解除させられ、かつ、ブレーキシュー11の摩擦面とドラム10の内壁面との間に所望の遊びが設けられた状態になったものとしてリリース制御が完了となり、リリース状態フラグFRELがオンされると共にモータリリース駆動が停止され、リリース制御時間カウンタCTRおよびリリース制御終了タイマCTRENDが0となる。これにより、モータ電流がオフ時の電流値(=0)となる。
【0070】
以上説明したように、本実施形態では、リリース制御時にモータ電流(電流IMA)の微分値に基づいてEPB2により発生させたブレーキ力が解除されるタイミングを求め、そこからリリース制御終了のタイミングを求めるようにしている。このため、ケーブル13の伸びに拘わらず、ブレーキ力が解除されたタイミングおよびリリース制御終了のタイミングを的確に判定できる。これにより、リリース不足によるブレーキの引き擦り、つまりEPB2によるロックを解除したのにも拘わらずブレーキ力が発生しているような状態を防止できる。
【0071】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対して各種判定に用いている判定値(閾値)を可変にするものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0072】
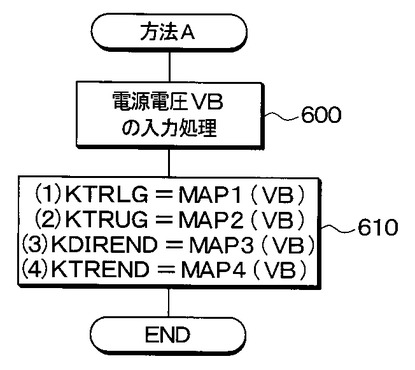
本実施形態では、上記第1実施形態の図7で示したリリース制御処理において判定値演算を行う。図10は、図6に代えて実行するリリース制御処理の詳細を示したフローチャートである。この図に示すように、ステップ400の処理が完了したあと、ステップ410に進む前に、ステップ460の判定値演算を行う。図11は、この判定値演算の詳細を示したフローチャートである。また、図12(a)〜(d)は、判定値演算に用いる各種マップである。
【0073】
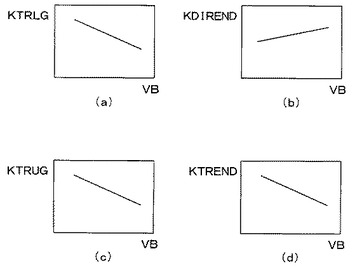
判定値演算が行われると、まず、図11に示すように、ステップ600において電源電圧VBの入力処理を行う。電源電圧VBは、例えば図示しない電源ECU等において常時検出されているため、その値を用いることができる。その後、ステップ610に進み、図12(a)〜(d)に示す各種マップに基づいて各種判定値を設定する。
【0074】
具体的には、図12(a)は、電源電圧VBに対する最小リリース制御時間KTRLGの関係を示したマップである。電源電圧VBが高いとモータ15の回転速度を早くでき、リリースに必要となる時間が短くなる。このため、このマップに示されるように、電源電圧VBが高い程、最小リリース制御時間KTRLGが小さくなるように、電源電圧VBに基づいて最小リリース制御時間KTRLGを可変することができる。
【0075】
図12(b)は、電源電圧VBに対するリリース制御終了判定電流変化値KDIRENDの関係を示したマップである。電源電圧VBが高いと電流変化も大きくなる。このため、このマップに示されるように、電源電圧VBが高い程、リリース制御終了判定電流変化値KDIRENDが大きくなるように、電源電圧VBに基づいてリリース制御終了判定電流変化値KDIRENDを可変することができる。
【0076】
図12(c)は、電源電圧VBに対する最大リリース制御時間KTRUGの関係を示したマップである。電源電圧VBが高いとモータ15の回転速度を早くでき、リリースに必要となる時間が短くなる。このため、このマップに示されるように、電源電圧VBが高い程、最大リリース制御時間KTRUGが小さくなるように、電源電圧VBに基づいて最大リリース制御時間KTRUGを可変することができる。
【0077】
図12(d)は、電源電圧VBに対するリリース制御終了時間KTRENDの関係を示したマップである。電源電圧VBが高いとモータ15の回転速度が早くなるため、ブレーキシュー11の摩擦面とドラム10の内壁面との間に遊び分の間隔が空く時間が短くなる。このため、このマップに示されるように、電源電圧VBが高い程、リリース制御終了時間KTRENDが小さくなるように、電源電圧VBに基づいてリリース制御終了時間KTRENDを可変することができる。
【0078】
このようにして、最小リリース制御時間KTRLG、リリース制御終了判定電流変化値KDIREND、最大リリース制御時間KTRUG、リリース制御終了時間KTRENDを演算できる。これにより、判定値演算処理が完了し、その後は、図11に示す各ステップにおいて図6と同様の処理を行う。そして、ステップ410、425、440、450において、この判定値演算にて演算した最小リリース制御時間KTRLG、リリース制御終了判定電流変化値KDIREND、最大リリース制御時間KTRUG、リリース制御終了時間KTRENDを用いて判定を行う。
【0079】
以上説明したように、電源電圧VBに基づいて各種判定値を可変にすることができる。これにより、電源電圧VBの大きさに応じて適切な判定値とすることができ、より的確に上記第1実施形態に示した効果を得ることができる。
【0080】
(第3実施形態)
本発明の第3実施形態について説明する。本実施形態は、第2実施形態に対して判定値演算の手法を変更し、モータ電流の微分値で可変にしたものであり、その他に関しては第2実施形態と同様であるため、第2実施形態と異なる部分についてのみ説明する。
【0081】
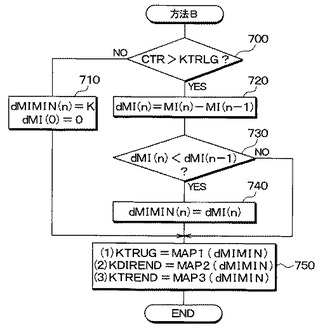
本実施形態では、第2実施形態と同様、図10に示すリリース制御処理を実行し、この図中のステップ460における判定値演算を第2実施形態と異なる手法で行う。図13は、図11に代えて実行する判定値演算の詳細を示したフローチャートである。また、図14(a)〜(c)は、判定値演算に用いる各種マップである。
【0082】
判定値演算が行われると、まず、図13に示すように、ステップ700では、リリース制御時間カウンタCTRが最小リリース制御時間KTRLGを超えているか否かを判定する。そして、このステップで肯定判定されるまではステップ710に進み、電流IMAの微分値dMI(0)を0、最小値dMIMIN(n)をK(一定値)とし、このステップで肯定判定されるとステップ720に進み、今回の制御周期のときの電流IMA(n)と前回の制御周期のときの電流IMA(n−1)の差より微分値dMI(n)を演算する。なお、微分値dMI(0)とは微分値dMI(n)の初期値を意味しており、最小値dMIMIN(n)とはn周期分の微分値dMI(n)のうちの最小値を意味している。
【0083】
その後、ステップ730において、今回の制御周期のときの微分値dMI(n)が前回の制御周期のときの微分値dMI(n−1)よりも小さいか否かを判定し、肯定判定されればステップ740に進んで最小値dMIMIN(n)を今回の制御周期のときの微分値dMI(n)に更新し、否定判定されれば更新しない。この場合、前回の最小値dMIMIN(n−1)がそのまま維持されることになる。
【0084】
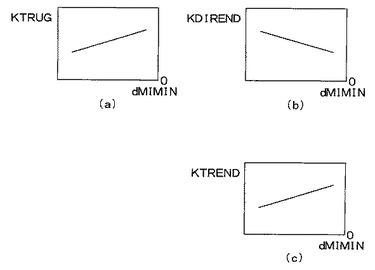
そして、ステップ750に進み、図14(a)〜(c)に示す各種マップに基づいて各種判定値を設定する。
【0085】
具体的には、図14(a)は、最小値dMIMIN(n)に対する最大リリース制御時間KTRUGの関係を示したマップである。最小値dMIMIN(n)はリリース制御時には負の値で示されるため、この値が小さいことはモータ電流の傾きが小さい(負側に急勾配)ことを意味することになり、リリースに必要となる時間が短くなる。このため、このマップに示されるように、最小値dMIMIN(n)が小さい程、最大リリース制御時間KTRUGが小さくなるように、最小値dMIMIN(n)に基づいて最大リリース制御時間KTRUGを可変することができる。
【0086】
図14(b)は、最小値dMIMIN(n)に対するリリース制御終了判定電流変化値KDIRENDの関係を示したマップである。最小値dMIMIN(n)が小さいほどモータ電流の傾きが小さいことを意味しているため、この値が小さいほどモータ電流の変化も大きくなる。このため、このマップに示されるように、最小値dMIMIN(n)が小さい程、リリース制御終了判定電流変化値KDIRENDが大きくなるように、最小値dMIMIN(n)に基づいてリリース制御終了判定電流変化値KDIRENDを可変することができる。
【0087】
図14(c)は、最小値dMIMIN(n)に対するリリース制御終了時間KTRENDの関係を示したマップである。最小値dMIMIN(n)が小さいほどモータ電流の傾きが小さいことを意味しているため、この値が小さいほどモータ15の回転速度が早く、ブレーキシュー11の摩擦面とドラム10の内壁面との間に遊び分の間隔が空く時間が短くなる。このため、このマップに示されるように、最小値dMIMIN(n)が小さい程、リリース制御終了時間KTRENDが小さくなるように、最小値dMIMIN(n)に基づいてリリース制御終了時間KTRENDを可変することができる。
【0088】
このようにして、最大リリース制御時間KTRUG、リリース制御終了判定電流変化値KDIREND、リリース制御終了時間KTRENDを演算できる。これにより、判定値演算処理が完了し、その後は、図11に示す各ステップにおいて図6と同様の処理を行う。そして、ステップ425、440、450において、この判定値演算にて演算した最大リリース制御時間KTRUG、リリース制御終了判定電流変化値KDIREND、リリース制御終了時間KTRENDを用いて判定を行う。
【0089】
以上説明したように、最小値dMIMIN(n)に基づいて各種判定値を可変にすることができる。これにより、最小値dMIMIN(n)の大きさに応じて適切な判定値とすることができ、より的確に上記第1実施形態に示した効果を得ることができる。
【0090】
(他の実施形態)
上記第2、第3実施形態において電源電圧VBや最小値dMIMIN(n)に基づいて各種判定値を変更したが、他のパラメータに応じて各種判定値を変更することもできる。例えばリリースMAXガード電流値KIRUGを温度に応じて変更することもできる。すなわち、温度が低くなるほどモータ15の無負荷電流が大きくなるため、温度が低くなるほどリリースMAXガード電流値KIRUGを大きくするように補正しても良い。
【0091】
上記各実施形態では、図3に示したようにモータ電流の流れる方向がモータ15を正回転させる場合と逆回転させる場合とで逆方向になる位置で電流IAM、IBMを検出しているが、これは単なる一例であり、常にモータ電流の流れる方向が同じになる場所で電流IAM、IBMを検出しても良い。この場合、電流IAM、IBMの正負が常に同じになるため、最小値dMIMIN(n)の符号が上記各実施形態と変わり得るが、単に符号が変わるだけであり、判定条件なども符号の変化に対応して変えるだけで良い。すなわち、最小値dMIMIN(n)の絶対値が大きくなるほどリリース制御終了時間KTRENDが小さくなるようにすれば良い。なお、ここでは最小値dMIMIN(n)を用いたが、単に微分値dMI(n)に応じてリリース制御終了時間KTRENDを可変にしても良い。
【0092】
また、EPB2のブレーキ力を発生させる摩擦材としてブレーキシュー11を例に挙げ、車輪に取り付けられた摩擦面としてドラム10の内壁面を例に挙げたが、一般的なEPBであればどのようなものであっても良く、例えばEPB2をディスクブレーキタイプもので構成しても構わない。
【0093】
また、上記実施形態では、EPB2の作動指示を行う手段として操作SW18を例に挙げたが、操作SW18に限らず、操作レバーや操作ペダルなどにてEPB2の作動を行うような形態であっても構わない。
【0094】
なお、各図中に示したステップは、各種処理を実行する手段に対応するものである。
【図面の簡単な説明】
【0095】
【図1】本発明の第1実施形態にかかる駐車ブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。
【図2】EPB−ECUの内部構造の一部を示したブロック図である。
【図3】モータに対してモータ電流の供給を制御するモータ駆動回路の模式図である。
【図4】駐車ブレーキ制御処理の詳細を示したフローチャートである。
【図5】フェールセーフ処理の詳細を示したフローチャートである。
【図6】ロック制御処理の詳細を示したフローチャートである。
【図7】リリース制御処理の詳細を示したフローチャートである。
【図8】ロック・リリース表示処理の詳細を示したフローチャートである。
【図9】駐車ブレーキ制御処理を実行したときのタイミングチャートである。
【図10】リリース制御処理の詳細を示したフローチャートである。
【図11】判定値演算の詳細を示したフローチャートである。
【図12】(a)〜(d)は、判定値演算に用いる各種マップである。
【図13】判定値演算の詳細を示したフローチャートである。
【図14】(a)〜(c)は、判定値演算に用いる各種マップである。
【符号の説明】
【0096】
1…サービスブレーキ、2…EPB、6…ホイールシリンダ、7…ブレーキディスク、10…ドラム、11…ブレーキシュー、12…パーキングブレーキ機構、13…ケーブル、14…ギア機構、14a…入力用歯車、14b…減速歯車、14c…出力軸、14d…ドライブナット、15…モータ、16…EPBアクチュエータ、17…EPB−ECU、17a、17b…第1、第2モータ電流検出部、17c…故障判定部、17d…変化量検出部、17e…ブレーキ力判定部、17f…アクチュエータ駆動部、18…操作SW、19…リリース表示ランプ、20…故障表示ランプ、21…モータ駆動回路
【技術分野】
【0001】
本発明は、電子パーキングブレーキ(以下、EPB(Electronic parking brake)という)をロック・リリースする制御を行う駐車ブレーキ制御装置に関するものである。
【背景技術】
【0002】
従来より、駐車時の車両の移動を規制するためにパーキングブレーキが用いられているが、パーキングブレーキには操作レバーによってブレーキケーブルを引っ張ることで操作力をブレーキ機構に伝える手動式のものと、モータの回転力を利用してケーブルを引っ張ることでモータ回転力をブレーキ機構に伝える電動式のものがある。
【0003】
電動式のパーキングブレーキであるEPBでは、ロック時には、モータをロック側に回転(正回転)させてモータ回転力をブレーキ機構に伝えると共に、ブレーキ力を発生させた状態でモータ駆動を停止させ、リリース時には、モータをリリース側に回転(逆回転)させることでブレーキ力を解除する。
【0004】
このようなロック・リリースの制御において、特許文献1では、ロック時にはモータ電流が所定値となるまでロック側へモータを駆動し、リリース時にはモータ回転数が所定値となるまでリリース側へモータを回転させている。すなわち、リリース時のモータ回転数がロック時にモータを駆動したときのモータの回転数、換言すればケーブルを引っ張った距離と対応する回転数に達したときにモータ駆動を終了することで、ケーブルを引っ張った分だけ戻している。
【0005】
また、特許文献2では、ロック時にはモータ電流が所定値となるまでロック側へモータを駆動し、リリース時にはロック制御中のストロークを計測しておき、そのストロークにケーブルの伸び量を考慮した値を足した値になるまでモータをリリース側に回転させている。
【特許文献1】特開2002−205627号公報
【特許文献2】特開2005−329930号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1のように、モータ回転数がケーブルを引っ張った分に相当する値になったときにリリースを終了するという制御手法では、ケーブルの伸びの影響等を受けてしまい、制御誤差が大きくなる。
【0007】
また、特許文献2のように、ロック時のストロークを計測し、そのストロークに伸びを考慮した値を足した値になるまでモータをリリース側に回転させるという制御手法では、ケーブルの伸びの影響を考慮しているものの、長時間ロック状態で放置された後にリリースしたときに対応できない。つまり、ケーブルの伸びが想定値以上になったときに、結局その影響を受け、制御誤差が生じてしまう。
【0008】
このように、制御誤差が生じると、リリース不足によるブレーキの引き擦り、つまりEPBによるロックを解除したのにも拘わらずブレーキ力が発生していることになるという問題がある。
【0009】
本発明は上記点に鑑みて、ケーブルの伸びの影響等によるブレーキの引き擦りを防止できる駐車ブレーキ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、請求項1に記載の発明では、リリース制御手段(170)にて、電動モータ(15)の駆動時に流れるモータ電流の電流値(IAM、IBM)を取得し、該取得した電流値の微分値が一定範囲(KDIREND)内に含まれる時間が所定時間(KTREND)継続したときに電動モータ(15)の駆動を停止することを特徴としている。
【0011】
このように、微分値が一定範囲(KDIREND)内に含まれるようになったタイミングをEPBによるブレーキ力が解除されたタイミングとして、そこからその状態が所定時間(KTREND)継続したときをリリース制御終了のタイミングとしている。このため、ケーブル(13)の伸びに拘わらず、ブレーキ力が解除されたタイミングおよびリリース制御終了のタイミングを的確に判定できる。これにより、リリース不足によるブレーキの引き擦り、つまりEPBによるロックを解除したのにも拘わらずブレーキ力が発生しているようなことを防止できる。
【0012】
例えば、請求項2に示すように、所定時間(KTREND)は、ブレーキ力が解除されてから摩擦材(11)と被摩擦材(10)との間に所定のクリアランスが空いたと想定される時間に設定される。
【0013】
請求項3に記載の発明では、リリース制御手段(170)は、電動モータ(15)の電源電圧(VB)の大きさに応じて所定時間(KTREND)を変化させ、電源電圧(VB)が大きいほど所定時間(KTREND)を小さく設定することを特徴としている。
【0014】
このように、電動モータ(15)の電源電圧(VB)に基づいて判定値となる所定時間(KTREND)を可変にすることができる。これにより、電源電圧(VB)の大きさに応じて適切な判定値とすることができ、より的確に上記請求項1に示した効果を得ることができる。
【0015】
請求項4に記載の発明では、リリース制御手段(170)は、モータ電流(IAM)の微分値の絶対値が大きいほど所定時間(KTREND)を小さく設定することを特徴としている。
【0016】
このように、モータ電流(IAM)の微分値の大きさに基づいて判定値となる所定時間(KTREND)を可変にすることができる。これにより、モータ電流(IAM)の微分値の大きさの大きさに応じて適切な判定値とすることができ、より的確に上記請求項1に示した効果を得ることができる。例えば、請求項5に示すように、リリース制御手段(170)は、モータ電流(IAM)の微分値の最小値(dMIMIN(n))の絶対値が大きいほど所定時間(KTREND)を小さく設定することができる。
【0017】
請求項6に記載の発明では、リリース制御手段(170)は、電動モータの逆回転駆動を開始してからのリリース制御時間(CTR)を計測し、該リリース制御時間(CTR)が予め決められた最小リリース制御時間(KTRLG)を超えている場合にのみ、微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴としている。
【0018】
リリースが完了するするまでに掛かる時間はある程度決まっているため、リリース制御時間(CTR)が最小リリース制御時間(KTRLG)よりも短いときは必ずリリース中であると想定される。このため、リリース制御時間(CTR)が最小リリース制御時間(KTRLG)よりも短い場合を排除し、リリース制御時間(CTR)が最小リリース制御時間(KTRLG)を超えている場合にのみ、微分値が一定範囲(KDIREND)内に含まれるか否かを判定することで、リリース開始初期時の誤判定を防止して誤判定によりリリースを終了してしまわないようにできる。
【0019】
請求項7に記載の発明では、リリース制御手段(170)は、電流値(IAM)が閾値(KIRUG)を超えていないときにのみ、微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴としている。
【0020】
モータ電流(IAM)はモータ(15)に加えられる負荷に応じて変動するが、通常は無負荷時の電流値(無負荷電流)を超えることは無い。したがって、電流値(IAM)が閾値(KIRUG)を超えていないときにのみ、微分値が一定範囲(KDIREND)内に含まれるか否かを判定することで、MAXガード用の閾値(KIRUG)を超えるような場合、例えば突入電流発生時のようにモータ電流(IAM)がノイズ的に大きくなる場合を排除できる。これにより、突入電流発生時などの誤判定を防止して誤判定によりリリースを終了してしまわないようにできる。例えば、請求項8に示すように、リリース制御手段(170)は、MAXガード用の閾値(KIRUG)として無負荷電流の最大値を用いることができる。
【0021】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明を実施するための最良の形態】
【0022】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0023】
(第1実施形態)
本発明の第1実施形態について説明する。図1は、本実施形態にかかる駐車ブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。
【0024】
図1に示すように、ブレーキシステムには、ドライバの踏力に基づいてブレーキ力を発生させるサービスブレーキ1と駐車時に車両の移動を規制するためのEPB2とを有して構成されている。
【0025】
サービスブレーキ1は、ドライバによるブレーキペダル3の踏み込みに応じた踏力を倍力装置4にて倍力したのち、この倍力された踏力に応じたブレーキ液圧をマスタシリンダ5内に発生させ、このブレーキ液圧を各車輪のホイールシリンダ6に伝えることでブレーキ力を発生させる。具体的には、ホイールシリンダ6にブレーキ液圧を伝えることにより、キャリパ内に備えられたブレーキパッドにてブレーキディスク7を挟み込み、その摩擦力によりブレーキ力を発生させる。また、マスタシリンダ5とホイールシリンダ6との間にブレーキ液圧制御用のアクチュエータ8が備えられており、サービスブレーキ1により発生させるブレーキ力を調整できる構造とされている。なお、これらサービスブレーキ1に関しては従来より周知のものであるため、ここでは詳細については省略する。
【0026】
一方、EPB2は、パーキングブレーキ専用ドラム10とブレーキシュー11等により構成されるパーキングブレーキ機構12と、ケーブル13やギア機構14およびモータ15を有して構成されたEPBアクチュエータ16と、EPB制御装置(以下、EPB−ECUという)17とを有して構成されている。
【0027】
パーキングブレーキ機構12は、摩擦材としてのブレーキシュー11の摩擦面が被摩擦材としてのドラム10の内壁面と接触することでブレーキ力を発生させる。このパーキングブレーキ機構12が発生させるブレーキ力により、駐車中の車両の移動が規制される。このパーキングブレーキ機構12におけるブレーキシュー11がEPBアクチュエータ16に備えられたケーブル13にて駆動されるようになっており、ケーブル13を引っ張るとその張力によりブレーキシュー11の摩擦面がドラム10の内壁面に接触させられることでブレーキ力を発生させ、引っ張られた状態からケーブル13を緩めるとブレーキシュー11の摩擦面がドラム10の内壁面から離されることでブレーキ力を解除させる構造とされている。このケーブル13は、EPBアクチュエータ16に備えられたギア機構14にてモータ15の回転力を直線運動方向に変換した力によって引っ張られたり、緩められる。
【0028】
ギア機構14は、モータ15の回転軸に備えられた入力用歯車14aと、減速歯車14bと、出力軸14cおよびドライブナット14dにて構成されている。減速歯車14bは、入力用歯車14aに噛合わされた第1平歯車14eと、この第1平歯車14eの回転軸と同軸的に備えられ、第1平歯車14eよりも歯数が少なくされた第2平歯車14fにて構成されている。出力軸14cは、雄ネジ溝が形成されたドライブスクリューであり、一端に減速歯車14bの第2平歯車14fに噛合わされた第3平歯車14gが備えられ、減速歯車14bを介して第3平歯車14gがモータ15にて駆動されると、この第3平歯車と同軸的に回転する。ドライブナット14dは、ギア機構14を収容するギアボックス14h内に備えられた図示しないガイドにより出力軸14cの平行方向に移動し、直線運動を行うように構成されている。このドライブナット14dにケーブル13が接続され、モータ回転に伴ってドライブナット14dが出力軸14cに沿って移動させられると、ケーブル13が引っ張られたり、緩められる。
【0029】
このようなギア機構14では、モータ15の回転を停止すると、その時点で各歯車の駆動も停止させられ、出力軸14cとドライブナット14dの嵌め合いによる摩擦力により、ケーブル13をその状態で保持することができる。このため、モータ15の回転に伴ってケーブル13を引っ張りパーキングブレーキ機構12にてブレーキ力を発生させたときに、モータ15の回転を停止させると、そのブレーキ力が保持される。
【0030】
EPB−ECU17は、CPU、ROM、RAM、I/Oなどを備えた周知のマイクロコンピュータによって構成され、ROMなどに記憶されたプログラムにしたがってモータ15の回転を制御することにより駐車ブレーキ制御を行うものである。このEPB−ECU17が本発明の駐車ブレーキ制御装置に相当する。EPB−ECU17には、例えば車室内のインストルメントパネル(図示せず)に備えられた操作スイッチ(SW)18の操作状態に応じた信号が入力されており、EPB−ECU17は、操作SW18の操作状態に応じてモータ15を駆動する。また、EPB−ECU17は、インストルメントパネルに備えられたロック/リリース表示ランプ19に対してモータ15の駆動状態に応じて、ロック中であるかリリース中であるかを示す信号を出力したり、故障表示ランプ20に対してEPB2の故障時にその旨の信号を出力する。
【0031】
図2は、EPB−ECU17の内部構造の一部を示したブロック図である。この図に示されるように、EPB−ECU17は、第1、第2モータ電流検出部17a、17b、故障判定部17c、モータ電流の変化量検出部17d、判定部17e、EPBアクチュエータ駆動部17fにて構成されている。
【0032】
第1、第2モータ電流検出部17a、17bは、モータ15に流される電流(モータ電流)を異なる2箇所、具体的にはモータ15の上流側と下流側の2箇所で検出するものである。これら第1、第2モータ電流検出部17a、17bについて、図3を参照して説明する。
【0033】
図3は、モータ15に対してモータ電流の供給を制御するモータ駆動回路21の模式図である。この図に示されるように、モータ駆動回路21にはHブリッジ回路22が備えられており、モータ15の駆動を停止するときには各スイッチ22a〜22dをすべてオフにし、モータ15を正回転もしくは逆回転させるときにはHブリッジ回路の各スイッチ22a〜22dが対角線の関係でオンとオフに制御されることで、モータ15に対して異なる方向の電流が供給できるように構成されている。
【0034】
そして、このようなモータ駆動回路21におけるモータ15の両側、つまりモータ15とスイッチ22aおよびスイッチ22cの接続点の間、および、モータ15とスイッチ22bおよびスイッチ22dの接続点の間のそれぞれに電流検出抵抗25、26が備えられている。各電流検出抵抗25、26の両端電位は差動増幅器27、28に入力されており、この差動増幅器27、28の出力電位が各電流検出抵抗25、26を流れる電流IAM、IBMと対応する値となる。したがって、これら各電流検出抵抗25、26および各差動増幅器27、28を第1、第2モータ電流検出部17a、17bとしてモータ電流を異なる2箇所で検出する。
【0035】
故障判定部17cは、第1、第2モータ電流検出部17a、17bにて検出された異なる2箇所の電流IAM、IBMの差が一定範囲内であるか否かに基づいてモータ15もしくはモータ駆動回路21の故障を判定する。そして、故障判定部17cは、故障と判定したときに、EPBアクチュエータ駆動部17fにその旨を伝え、EPB2の駆動を停止する。
【0036】
変化量検出部17dは、モータ電流の変化量を検出する。具体的には、変化量検出部17dは、一定周期毎のモータ電流の変化量、つまりモータ電流の微分値を求める。このモータ電流の微分値は、後述するように、EPB2をリリースすべくモータ15を逆回転させるとき、そのモータ回転をいつ停止するかの判定に用いられる。
【0037】
判定部17eは、EPB2が発生させるブレーキ力が0になったか否かの判定を行う。ブレーキ力が0になったことは、上述した変化量検出部17dで検出したモータ電流の微分値に基づいて判定する。この判定部17eにおける判定手法に関しては、後で詳細に説明する。
【0038】
EPBアクチュエータ駆動部17fは、モータ15を制御することにより、EPBアクチュエータ16の駆動状態の制御を行う。このEPBアクチュエータ駆動部17fは、基本的には操作SW18の操作状態に基づいてモータ15を正回転や逆回転させたりモータ15の回転を停止させることで、EPB2をロック・リリースする制御を行うが、故障判定部17cや判定部17eの判定結果に応じてEPB2をロック・リリースする制御におけるモータ15の動作の切替えも行う。以上のようにして、本実施形態にかかるブレーキシステムが構成されている。
【0039】
続いて、上記のように構成されたブレーキシステムを用いてEPB−ECU17が上記各構成要素17a〜17fおよび図示しない内蔵のROMに記憶されたプログラムに従って実行する駐車ブレーキ制御について説明する。図4は、駐車ブレーキ制御処理の詳細を示したフローチャートである。
【0040】
まず、ステップ100において時間計測用カウンタやフラグリセットなどの一般的な初期化処理を行ったのち、ステップ110に進み、時間tが経過したか否かを判定する。ここでいう時間tは、制御周期を規定するものである。つまり、初期化処理が終了してからの時間もしくは前回本ステップで肯定判定されたときからの経過時間が時間tが経過するまで繰り返し本ステップでの判定が行われるようにすることで、時間tが経過するごとに駐車ブレーキ制御が実行されるようにしている。
【0041】
続く、ステップ120では、フェールセーフ処理を実行する。図5は、フェールセーフ処理の詳細を示したフローチャートである。フェールセーフ処理が実行されると、ステップ200に進み、EPB2が異常の状態であることを示すEPB異常フラグFEPBFがオンされているか否かを判定する。このEPB異常フラグFEPBFは、後述するようにEPB−ECU17が異常であると判定されたときにステップ250においてオンされる。
【0042】
ここで否定判定された場合には、ステップ210に進み、第1、第2電流検出部17a、17bで検出した電流IAMと電流IBMとの誤差が故障判定閾値KIMIFを超えているか否かを判定する。具体的には、これら電流IAMと電流IBMの差の絶対値が故障判定閾値KIMIFを超えているか否かを判定している。通常、電流IAMと電流IBMは、共に同じモータ15に流れるモータ電流であるため、基本的には同じ値になる。しかしながら、モータ15の故障やモータ15の上下流において断線・短絡故障等、何らかの故障が発生していると、電流IAMと電流IBMが同じ値にならなくなる。したがって、電流IAMと電流IBMの検出誤差を考慮に入れて故障判定閾値KIMIFを設定し、電流IAMと電流IBMの差の絶対値が故障判定閾値KIMIFを超えるような場合には、故障が発生していると判定する。
【0043】
ただし、ここでモータ電流に基づいて何らかの故障が発生していると判定された場合であっても、ノイズ的なものである可能性もある。したがって、本ステップで肯定判定された場合には、ステップ220にて異常継続タイマCTMIFをインクリメントしたのち、ステップ230に進んで、異常継続タイマCTMIFが閾値KTILTを超えているか否かを判定する。このようにすることで、上記故障が発生していると判定される状況が一定時間継続したら最終的に故障が生じたと判定できる。このため、ステップ230で否定判定されている間はステップ240に進んで故障表示ランプ20を消灯した状態にし、肯定判定されるとステップ250に進んで故障表示ランプ20を点灯させると共に、EPB異常フラグFEPBFをオンする。なお、ステップ200において、EPB異常フラグFEPBFがオンされているときには、ステップ250に進んで故障表示ランプ20の点灯が維持される。
【0044】
一方、ステップ210において電流IAMと電流IBMの差の絶対値が故障判定閾値KIMIFを超えておらず否定判定されると、ステップ260に進み、異常継続タイマCTMIFを0にリセットすると共に、故障表示ランプ20を消灯して処理を終了する。このようにしてフェールセーフ処理が完了する。
【0045】
フェールセーフ処理が完了すると、図1のステップ130に進み、操作SW18がオンしているか否かを判定する。操作SW18がオンの状態とはドライバがEPB2を作動させてロック状態にしようとしていることを意味し、オフの状態とはドライバがEPB2をリリース状態にしようとしていることを意味している。このため、本ステップで肯定判定されればステップ140に進み、ロック状態フラグFLOCKがオンしているか否かを判定する。ここで、ロック状態フラグFLOCKとは、EPB2を作動させてロック状態になったときにオンされるフラグであり、このロック状態フラグFLOCKがオンになっているときには既にEPB2の作動が完了して所望のブレーキ力が発生させられている状態となる。したがって、ここで否定判定された場合にのみステップ150のロック制御処理に進み、肯定判定された場合には既にロック制御処理が完了しているものとしてステップ160に進む。
【0046】
ロック制御処理では、モータ15を回転させることによりEPB2を作動させ、パーキングブレーキ機構12にて所望のブレーキ力を発生させられる位置でモータ15の回転を停止し、この状態を維持するという処理を行う。図6にロック制御処理の詳細を示したフローチャートを示し、この図を参照してロック制御処理について説明する。
【0047】
まず、ステップ300では、EPB異常フラグFEPBFがオンになっているか否かを判定する。ここで肯定判定された場合には、何らかの故障が発生している状態であるため、ステップ305に進んでロック状態フラグをオフにすると共に、モータ15ロック駆動をオフ、つまりモータ15の駆動を行わないもしくは停止して処理を終了する。一方、ステップ300で否定判定されればステップ310に進む。
【0048】
ステップ310では、ロック制御時間カウンタCTLが予め決められた最小ロック制御時間KTLLGを超えているか否かを判定する。ロック制御時間カウンタCTLとは、ロック制御が開始されてからの経過時間を計測するカウンタであり、ロック制御処理開始と同時にカウントを始める。最小ロック制御時間KTLLGとは、ロック制御に掛かると想定される最小時間のことであり、ケーブル13の長さやモータ15の回転速度などに応じて予め決まる値である。後述するように、モータ電流がロック制御目標電流値KILTに到達した時にケーブル13の張力により発生させられたブレーキ力が所望の値に近づいた判定するが、モータ15への電流供給初期時の突入電流などによりモータ電流がそのロック制御目標電流値KILTを超えることになる。このため、ロック制御時間カウンタCTLを最小ロック制御時間KTLLGと比較することで、制御初期時をマスクでき、突入電流などによる誤判定を防止することが可能となる。
【0049】
したがって、ロック制御時間カウンタCTLが最小時間を超えていない状態であれば、まだロック制御が継続されることになるため、ステップ315に進んで後述するロック制御終了タイマCTILTを0に初期化したのちステップ320に進み、リリース状態フラグをオフすると共にロック制御時間カウンタCTLをインクリメントし、モータ15ロック駆動をオン、つまりモータ15を正回転させる。これにより、モータ15の正回転に伴ってギア機構14が駆動され、ドライブナット14dが出力軸14cの軸方向に沿って移動してケーブル13がロック側に引っ張られる。
【0050】
一方、ステップ310で肯定判定されると、ロック制御時間カウンタCTLが予め決められた最大ロック制御時間KTLUG未満であるか否かを判定する。最大ロック制御時間KTLUGとは、ロック制御に掛かると想定される最大時間のことであり、ケーブル13の長さやモータ15の回転速度などに応じて予め決まる値である。ロック制御が開始されてから最大ロック制御時間KTLUG以上時間が経過しても未だロック制御時間カウンタCTLがカウントされ続けていれば何らかの故障が発生している場合と考えられる。例えば、ギア機構14もしくはケーブル13の破損によりロック制御目標電流値KILTに長時間到達しないような場合にこのような状況になり得る。このため、この場合にはステップ330に進み、EPB異常フラグFEPBFをオンしたのち、ステップ305の処理を行う。また、ステップ325で肯定判定されればステップ335に進む。
【0051】
ステップ335では、電流IAM(n)がロック制御目標電流値KILTを超えているか否かを判定する。電流IAM(n)とは、今回の制御周期のときの電流IAMのことである。モータ電流はモータ15に加えられる負荷に応じて変動するが、本実施形態の場合にはモータ15に加えられる負荷はケーブル13の張力に相当するため、モータ電流に相当する電流IAMがケーブル13の負荷と対応した値となる。このため、電流IAM(n)がロック制御目標電流値KILTを超えていればケーブル13の張力により所望のブレーキ力に近づいた状態、例えばケーブル13によってパーキングブレーキ機構12におけるブレーキシュー11の摩擦面がドラム10の内壁面にある程度の力で押さえ付けられた状態として、ステップ340に進む。そして、ステップ340においてロック制御終了タイマCTILTをインクリメントしたのち、ステップ345に進んでロック制御終了タイマCTILTがロック制御終了時間KTILT、すなわち所望のブレーキ力に近づいてから経過した時間が所望のブレーキ力を発生させられたと想定される時間に達したか否かを判定し、達するまではステップ320の処理を行い、達するとステップ350に進む。
【0052】
この後、ステップ350において、ロックが完了したことを意味するロック状態フラグをオンすると共にロック制御時間カウンタCTLおよびロック制御終了タイマCTILTを0にし、モータ15ロック駆動を停止する。これにより、モータ15の回転が停止され、ギア機構14の駆動が停止させられる。そして、ギア機構14における出力軸14cとドライブナット14dとの噛合いによる摩擦力により、ケーブル13を引っ張ったままの状態で保持できるため、その時に発生させたブレーキ力が保持される。これにより、駐車中の車両の移動が規制される。このようにして、ロック制御処理が完了する。
【0053】
一方、図1のステップ130で否定判定された場合にはステップ170に進み、リリース状態フラグFRELがオンしているか否かを判定する。ここで、リリース状態フラグFRELとは、EPB2を作動させてリリース状態、つまりパーキングブレーキ機構12によるブレーキ力を解除した状態になったときにオンされるフラグであり、このリリース状態フラグFRELがオンになっているときには既にEPB2の作動が完了してブレーキ力が解除させられている状態となる。したがって、ここで否定判定された場合にのみステップ180のリリース制御処理に進み、肯定判定された場合には既にロック制御処理が完了しているものとしてステップ160に進む。
【0054】
リリース制御処理では、モータ15を回転させることによりEPB2を作動させ、パーキングブレーキ機構12にて発生させられているブレーキ力を解除するという処理を行う。図7にリリース制御処理の詳細を示したフローチャートを示し、この図を参照してリリース制御処理について説明する。
【0055】
まず、ステップ400では、EPB異常フラグFEPBFがオンになっているか否かを判定する。ここで肯定判定された場合には、何らかの故障が発生している状態であるため、ステップ405に進んでリリース状態フラグをオフにすると共に、モータリリース駆動をオフ、つまりモータ15の駆動を行わないもしくは停止して処理を終了する。一方、ステップ400で否定判定されればステップ410に進む。
【0056】
ステップ410では、リリース制御時間を計測するリリース制御時間カウンタCTRが予め決められた最小リリース制御時間KTRLGを超えているか否かを判定する。リリース制御時間カウンタCTRとは、リリース制御が開始されてからの経過時間を計測するカウンタであり、リリース制御処理開始と同時にカウントを始める。最小リリース制御時間KTRLGとは、リリース制御に掛かると想定される最小時間のことであり、最小ロック制御時間KTLLGと対応する値とされ、ケーブル13の長さやモータ15の回転速度などに応じて予め決まる値である。ロック状態からリリース状態に移行する際に、リリースが完了するするまでに掛かる時間はある程度決まっている。このため、リリース制御時間カウンタCTRが最小リリース制御時間KTRLGよりも短いときは必ずリリース中であると想定し、リリース開始初期時の誤判定を防止して誤判定によりリリースを終了してしまわないようにしている。
【0057】
したがって、リリース制御時間カウンタCTRが最小時間を超えていない状態であれば、まだリリース制御が継続されることになるため、ステップ415に進んで後述するリリース制御終了タイマCTRENDを0に初期化したのちステップ420に進み、リリース状態フラグFRELをオフすると共にリリース制御時間カウンタCTRをインクリメントし、モータリリース駆動をオン、つまりモータ15を逆回転させる。これにより、モータ15の逆回転に伴ってギア機構14が駆動され、ドライブナット14dが出力軸14cの軸方向に沿って移動してケーブル13がリリース側に戻されることで張力が緩められる。
【0058】
一方、ステップ410で肯定判定されると、リリース制御時間カウンタCTRが予め決められた最大リリース制御時間KTRUG未満であるか否かを判定する。最大リリース制御時間KTRUGとは、リリース制御に掛かると想定される最大時間のことであり、最大ロック制御時間KTLUGと対応した値とされ、ケーブル13の長さやモータ15の回転速度などに応じて予め決まる値である。リリース制御が開始されてから最大リリース制御時間KTRUG以上時間が経過しても未だリリース制御時間カウンタCTRがカウントされ続けていれば何らかの故障が発生している場合と考えられる。例えば、ギア機構14もしくはケーブル13の破損が生じているような状況が想定される。このため、この場合にはステップ430に進み、EPB異常フラグFEPBFをオンしたのち、ステップ405の処理を行う。また、ステップ425で肯定判定されればステップ435に進む。
【0059】
ステップ435では、今回の制御周期のときの電流IAM(n)がリリースMAXガード電流値KIRUGを超えているか否かを判定する。モータ電流はモータ15に加えられる負荷に応じて変動するが、通常は無負荷時の電流値(無負荷電流)を超えることは無い。このため、MAXガード用の閾値として例えば無負荷電流の最大値と比較し、突入電流発生時のように電流IAM(n)がノイズ的に大きくなるような場合を排除し、これ以降の処理で誤判定が行われることを防止している。したがって、本ステップで否定判定された場合にはステップ415および420に進み、肯定判定された場合にのみステップ440に進む。
【0060】
ステップ440では、今回の制御周期のときの電流IAM(n)と前回の制御周期のときの電流IAM(n−1)との差の絶対値|IAM(n)−IAM(n−1)|がリリース制御終了判定電流変化値KDIREND未満であるか否かを判定する。電流IAM(n)と電流IAM(n−1)との差は、電流IAMの変化量、つまり電流IAMの微分値dMI(n)に相当する。電流IAMは、上述したように、モータ電流はモータ15に加えられる負荷に応じて変動し、本実施形態の場合にはモータ15に加えられる負荷はケーブル13の張力に相当するため、ケーブル13の張力が小さくなるほど電流が小さくなり、張力が無くなった時点、つまりブレーキ力が解除された時点から一定値となる。しかしながら、電流IAMは温度などの様々な条件によって変動し、一定値と言ってもその値にバラツキがあり、単に電流IAMを確認してもブレーキ力が解除された時点を確認するのは容易ではない。つまり、一定値となったときの値が決まっていれば電流IAMを判定用の閾値と比較すれば良いが、一定値となるときの値にバラツキがあるため、閾値を固定することが困難である。
【0061】
このため、本実施形態では、電流IAMの微分値であれば上記のようなバラツキによらないことに着目し、電流IAMの微分値が閾値となるリリース制御終了判定電流変化値KDIREND未満になるとブレーキ力が解除したと判定している。なお、リリース制御終了判定電流変化値KDIRENDは、電流IAMの微分値の変動許容値、つまり電流IAMが一定値になったとしても様々な要因により全く変動しないわけではないため、それによる電流IAMの変動を見込んだ許容値である。ただし、ケーブル13に張力が発生しているときと張力が無くなったときとを比較できるように、リリース制御終了判定電流変化値KDIRENDはケーブル13に張力が発生しているときの電流IAMの微分値よりも小さい値に設定される。
【0062】
したがって、ステップ440で肯定判定されればステップ445に進み、リリース制御終了タイマCTRENDをインクリメントしたのち、ステップ450に進んでリリース制御終了タイマCTRENDがリリース制御終了時間KTREND、すなわちブレーキ力が解除されてから所望の時間、具体的にはブレーキシュー11の摩擦面とドラム10の内壁面との間に遊び分の間隔が空いたと想定される時間に達したか否かを判定し、達するまではステップ420の処理を行い、達するとステップ455に進む。
【0063】
この後、ステップ455において、リリースが完了したことを意味するリリース状態フラグFRELをオンすると共にリリース制御時間カウンタCTRおよびリリース制御終了タイマCTRENDを0にし、モータリリース駆動を停止する。これにより、モータ15の回転が停止され、ギア機構14の駆動が停止させられる。そして、ギア機構14における出力軸14cとドライブナット14dとの嵌め合いによる摩擦力により、ケーブル13が緩められたままの状態で保持される。このようにして、リリース制御処理が完了する。
【0064】
このようにして、ロック制御処理およびリリース制御処理が終了すると、図1のステップ160におけるロック・リリース表示処理を行う。図8にロック・リリース表示処理の詳細を示したフローチャートを示し、この図を参照してロック・リリース表示処理について説明する。
【0065】
ステップ500では、ロック状態フラグFLOCKがオンされているか否かを判定する。ここで肯定判定されればステップ510に進んでロック・リリース表示ランプ19を点灯させ、否定判定されればステップ520に進んでロック・リリース表示ランプ19を消灯する。このように、ロック状態であればロック・リリース表示ランプ19を点灯し、リリース状態もしくはリリース制御が開始された状態のときにはロック・リリース表示ランプ19を消灯する。これにより、ドライバにロック状態であるか否かを認識させることが可能となる。このようにして、ロック・リリース表示処理が完了し、これに伴って駐車ブレーキ制御処理が完了する。
【0066】
図9は、このような駐車ブレーキ制御処理を実行したときのタイミングチャートである。この図に示されるように、時点T1において操作SW18がオンされると、それと同時にリリース状態フラグFRELがオンからオフに切り替わり、モータ15ロック駆動がオンになる。そして、ロック制御時間カウンタCTLがインクリメントされていく。そして、モータ15に電流が流される。モータ電流に相当する電流IAMは、モータ15に電流が流された当初は突入電流により大きな値となるが、その後、ケーブル13に張力が発生していない無負荷時の電流値(一定値)となる。
【0067】
その後、時点T2においてケーブル13に張力が発生し始めた状態、すなわちブレーキシュー11の摩擦面がドラム10の内壁面と接触してブレーキ力が発生させられ始められた状態となる。そして、時点T3になると電流IAMがロック制御目標電流値KILTに到達し、ケーブル13の張力により発生させられたブレーキ力が所望の値に近づいた状態となり、ロック制御終了タイマCTILTがインクリメントされ始める。それから、時点T4においてロック制御終了タイマCTILTがロック制御終了時間KTILTに達すると、所望のブレーキ力が発生させられたものとしてロック制御が完了となり、ロック状態フラグFLOCKがオンされると共にモータ15ロック駆動が停止され、ロック制御時間カウンタCTLおよびロック制御終了タイマCTILTが0となる。これにより、モータ電流が低下し、オフ時の電流値(=0)となる。
【0068】
次に、時点T5において操作SWがオフされると、それと同時にロック状態フラグFLOCKがオンからオフに切り替わり、モータリリース駆動がオンになる。そして、リリース制御時間カウンタCTRがインクリメントされていく。そして、モータ15に電流が流される。このとき、電流IAMは、モータ15を逆回転させる方向に流れるため、マイナスの値となり、モータ15に電流が流された当初は突入電流により大きな値となるが、その後、ケーブル13に発生している張力に対応する値まで低下する。この低下時に、電流IAMの微分値に相当するIAM(n)−IAM(n−1)が一旦0になるため、リリース制御終了タイマCTRENDがインクリメントされる可能性があるが、瞬間的なものであるため、再び0に戻る。なお、上述したステップ410において、リリース開始初期時の誤判定を防止しているため、この時間内であればリリース制御終了タイマCTRENDがインクリメントされることもない。
【0069】
続いて、時点T6においてケーブル13に張力が無くなった状態、すなわちブレーキシュー11の摩擦面がドラム10の内壁面から離れ始めてブレーキ力が解除された状態となる。これにより、電流IAMが一定値となり、電流IAMの微分値に相当するIAM(n)−IAM(n−1)が低下し、絶対値|IAM(n)−IAM(n−1)|がリリース制御終了判定電流変化値KDIREND未満となり、リリース制御終了タイマCTRENDをインクリメントされ始める。それから、時点T7においてリリース制御終了タイマCTRENDがリリース制御終了時間KTRENDに達すると、ブレーキ力が解除させられ、かつ、ブレーキシュー11の摩擦面とドラム10の内壁面との間に所望の遊びが設けられた状態になったものとしてリリース制御が完了となり、リリース状態フラグFRELがオンされると共にモータリリース駆動が停止され、リリース制御時間カウンタCTRおよびリリース制御終了タイマCTRENDが0となる。これにより、モータ電流がオフ時の電流値(=0)となる。
【0070】
以上説明したように、本実施形態では、リリース制御時にモータ電流(電流IMA)の微分値に基づいてEPB2により発生させたブレーキ力が解除されるタイミングを求め、そこからリリース制御終了のタイミングを求めるようにしている。このため、ケーブル13の伸びに拘わらず、ブレーキ力が解除されたタイミングおよびリリース制御終了のタイミングを的確に判定できる。これにより、リリース不足によるブレーキの引き擦り、つまりEPB2によるロックを解除したのにも拘わらずブレーキ力が発生しているような状態を防止できる。
【0071】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対して各種判定に用いている判定値(閾値)を可変にするものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0072】
本実施形態では、上記第1実施形態の図7で示したリリース制御処理において判定値演算を行う。図10は、図6に代えて実行するリリース制御処理の詳細を示したフローチャートである。この図に示すように、ステップ400の処理が完了したあと、ステップ410に進む前に、ステップ460の判定値演算を行う。図11は、この判定値演算の詳細を示したフローチャートである。また、図12(a)〜(d)は、判定値演算に用いる各種マップである。
【0073】
判定値演算が行われると、まず、図11に示すように、ステップ600において電源電圧VBの入力処理を行う。電源電圧VBは、例えば図示しない電源ECU等において常時検出されているため、その値を用いることができる。その後、ステップ610に進み、図12(a)〜(d)に示す各種マップに基づいて各種判定値を設定する。
【0074】
具体的には、図12(a)は、電源電圧VBに対する最小リリース制御時間KTRLGの関係を示したマップである。電源電圧VBが高いとモータ15の回転速度を早くでき、リリースに必要となる時間が短くなる。このため、このマップに示されるように、電源電圧VBが高い程、最小リリース制御時間KTRLGが小さくなるように、電源電圧VBに基づいて最小リリース制御時間KTRLGを可変することができる。
【0075】
図12(b)は、電源電圧VBに対するリリース制御終了判定電流変化値KDIRENDの関係を示したマップである。電源電圧VBが高いと電流変化も大きくなる。このため、このマップに示されるように、電源電圧VBが高い程、リリース制御終了判定電流変化値KDIRENDが大きくなるように、電源電圧VBに基づいてリリース制御終了判定電流変化値KDIRENDを可変することができる。
【0076】
図12(c)は、電源電圧VBに対する最大リリース制御時間KTRUGの関係を示したマップである。電源電圧VBが高いとモータ15の回転速度を早くでき、リリースに必要となる時間が短くなる。このため、このマップに示されるように、電源電圧VBが高い程、最大リリース制御時間KTRUGが小さくなるように、電源電圧VBに基づいて最大リリース制御時間KTRUGを可変することができる。
【0077】
図12(d)は、電源電圧VBに対するリリース制御終了時間KTRENDの関係を示したマップである。電源電圧VBが高いとモータ15の回転速度が早くなるため、ブレーキシュー11の摩擦面とドラム10の内壁面との間に遊び分の間隔が空く時間が短くなる。このため、このマップに示されるように、電源電圧VBが高い程、リリース制御終了時間KTRENDが小さくなるように、電源電圧VBに基づいてリリース制御終了時間KTRENDを可変することができる。
【0078】
このようにして、最小リリース制御時間KTRLG、リリース制御終了判定電流変化値KDIREND、最大リリース制御時間KTRUG、リリース制御終了時間KTRENDを演算できる。これにより、判定値演算処理が完了し、その後は、図11に示す各ステップにおいて図6と同様の処理を行う。そして、ステップ410、425、440、450において、この判定値演算にて演算した最小リリース制御時間KTRLG、リリース制御終了判定電流変化値KDIREND、最大リリース制御時間KTRUG、リリース制御終了時間KTRENDを用いて判定を行う。
【0079】
以上説明したように、電源電圧VBに基づいて各種判定値を可変にすることができる。これにより、電源電圧VBの大きさに応じて適切な判定値とすることができ、より的確に上記第1実施形態に示した効果を得ることができる。
【0080】
(第3実施形態)
本発明の第3実施形態について説明する。本実施形態は、第2実施形態に対して判定値演算の手法を変更し、モータ電流の微分値で可変にしたものであり、その他に関しては第2実施形態と同様であるため、第2実施形態と異なる部分についてのみ説明する。
【0081】
本実施形態では、第2実施形態と同様、図10に示すリリース制御処理を実行し、この図中のステップ460における判定値演算を第2実施形態と異なる手法で行う。図13は、図11に代えて実行する判定値演算の詳細を示したフローチャートである。また、図14(a)〜(c)は、判定値演算に用いる各種マップである。
【0082】
判定値演算が行われると、まず、図13に示すように、ステップ700では、リリース制御時間カウンタCTRが最小リリース制御時間KTRLGを超えているか否かを判定する。そして、このステップで肯定判定されるまではステップ710に進み、電流IMAの微分値dMI(0)を0、最小値dMIMIN(n)をK(一定値)とし、このステップで肯定判定されるとステップ720に進み、今回の制御周期のときの電流IMA(n)と前回の制御周期のときの電流IMA(n−1)の差より微分値dMI(n)を演算する。なお、微分値dMI(0)とは微分値dMI(n)の初期値を意味しており、最小値dMIMIN(n)とはn周期分の微分値dMI(n)のうちの最小値を意味している。
【0083】
その後、ステップ730において、今回の制御周期のときの微分値dMI(n)が前回の制御周期のときの微分値dMI(n−1)よりも小さいか否かを判定し、肯定判定されればステップ740に進んで最小値dMIMIN(n)を今回の制御周期のときの微分値dMI(n)に更新し、否定判定されれば更新しない。この場合、前回の最小値dMIMIN(n−1)がそのまま維持されることになる。
【0084】
そして、ステップ750に進み、図14(a)〜(c)に示す各種マップに基づいて各種判定値を設定する。
【0085】
具体的には、図14(a)は、最小値dMIMIN(n)に対する最大リリース制御時間KTRUGの関係を示したマップである。最小値dMIMIN(n)はリリース制御時には負の値で示されるため、この値が小さいことはモータ電流の傾きが小さい(負側に急勾配)ことを意味することになり、リリースに必要となる時間が短くなる。このため、このマップに示されるように、最小値dMIMIN(n)が小さい程、最大リリース制御時間KTRUGが小さくなるように、最小値dMIMIN(n)に基づいて最大リリース制御時間KTRUGを可変することができる。
【0086】
図14(b)は、最小値dMIMIN(n)に対するリリース制御終了判定電流変化値KDIRENDの関係を示したマップである。最小値dMIMIN(n)が小さいほどモータ電流の傾きが小さいことを意味しているため、この値が小さいほどモータ電流の変化も大きくなる。このため、このマップに示されるように、最小値dMIMIN(n)が小さい程、リリース制御終了判定電流変化値KDIRENDが大きくなるように、最小値dMIMIN(n)に基づいてリリース制御終了判定電流変化値KDIRENDを可変することができる。
【0087】
図14(c)は、最小値dMIMIN(n)に対するリリース制御終了時間KTRENDの関係を示したマップである。最小値dMIMIN(n)が小さいほどモータ電流の傾きが小さいことを意味しているため、この値が小さいほどモータ15の回転速度が早く、ブレーキシュー11の摩擦面とドラム10の内壁面との間に遊び分の間隔が空く時間が短くなる。このため、このマップに示されるように、最小値dMIMIN(n)が小さい程、リリース制御終了時間KTRENDが小さくなるように、最小値dMIMIN(n)に基づいてリリース制御終了時間KTRENDを可変することができる。
【0088】
このようにして、最大リリース制御時間KTRUG、リリース制御終了判定電流変化値KDIREND、リリース制御終了時間KTRENDを演算できる。これにより、判定値演算処理が完了し、その後は、図11に示す各ステップにおいて図6と同様の処理を行う。そして、ステップ425、440、450において、この判定値演算にて演算した最大リリース制御時間KTRUG、リリース制御終了判定電流変化値KDIREND、リリース制御終了時間KTRENDを用いて判定を行う。
【0089】
以上説明したように、最小値dMIMIN(n)に基づいて各種判定値を可変にすることができる。これにより、最小値dMIMIN(n)の大きさに応じて適切な判定値とすることができ、より的確に上記第1実施形態に示した効果を得ることができる。
【0090】
(他の実施形態)
上記第2、第3実施形態において電源電圧VBや最小値dMIMIN(n)に基づいて各種判定値を変更したが、他のパラメータに応じて各種判定値を変更することもできる。例えばリリースMAXガード電流値KIRUGを温度に応じて変更することもできる。すなわち、温度が低くなるほどモータ15の無負荷電流が大きくなるため、温度が低くなるほどリリースMAXガード電流値KIRUGを大きくするように補正しても良い。
【0091】
上記各実施形態では、図3に示したようにモータ電流の流れる方向がモータ15を正回転させる場合と逆回転させる場合とで逆方向になる位置で電流IAM、IBMを検出しているが、これは単なる一例であり、常にモータ電流の流れる方向が同じになる場所で電流IAM、IBMを検出しても良い。この場合、電流IAM、IBMの正負が常に同じになるため、最小値dMIMIN(n)の符号が上記各実施形態と変わり得るが、単に符号が変わるだけであり、判定条件なども符号の変化に対応して変えるだけで良い。すなわち、最小値dMIMIN(n)の絶対値が大きくなるほどリリース制御終了時間KTRENDが小さくなるようにすれば良い。なお、ここでは最小値dMIMIN(n)を用いたが、単に微分値dMI(n)に応じてリリース制御終了時間KTRENDを可変にしても良い。
【0092】
また、EPB2のブレーキ力を発生させる摩擦材としてブレーキシュー11を例に挙げ、車輪に取り付けられた摩擦面としてドラム10の内壁面を例に挙げたが、一般的なEPBであればどのようなものであっても良く、例えばEPB2をディスクブレーキタイプもので構成しても構わない。
【0093】
また、上記実施形態では、EPB2の作動指示を行う手段として操作SW18を例に挙げたが、操作SW18に限らず、操作レバーや操作ペダルなどにてEPB2の作動を行うような形態であっても構わない。
【0094】
なお、各図中に示したステップは、各種処理を実行する手段に対応するものである。
【図面の簡単な説明】
【0095】
【図1】本発明の第1実施形態にかかる駐車ブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。
【図2】EPB−ECUの内部構造の一部を示したブロック図である。
【図3】モータに対してモータ電流の供給を制御するモータ駆動回路の模式図である。
【図4】駐車ブレーキ制御処理の詳細を示したフローチャートである。
【図5】フェールセーフ処理の詳細を示したフローチャートである。
【図6】ロック制御処理の詳細を示したフローチャートである。
【図7】リリース制御処理の詳細を示したフローチャートである。
【図8】ロック・リリース表示処理の詳細を示したフローチャートである。
【図9】駐車ブレーキ制御処理を実行したときのタイミングチャートである。
【図10】リリース制御処理の詳細を示したフローチャートである。
【図11】判定値演算の詳細を示したフローチャートである。
【図12】(a)〜(d)は、判定値演算に用いる各種マップである。
【図13】判定値演算の詳細を示したフローチャートである。
【図14】(a)〜(c)は、判定値演算に用いる各種マップである。
【符号の説明】
【0096】
1…サービスブレーキ、2…EPB、6…ホイールシリンダ、7…ブレーキディスク、10…ドラム、11…ブレーキシュー、12…パーキングブレーキ機構、13…ケーブル、14…ギア機構、14a…入力用歯車、14b…減速歯車、14c…出力軸、14d…ドライブナット、15…モータ、16…EPBアクチュエータ、17…EPB−ECU、17a、17b…第1、第2モータ電流検出部、17c…故障判定部、17d…変化量検出部、17e…ブレーキ力判定部、17f…アクチュエータ駆動部、18…操作SW、19…リリース表示ランプ、20…故障表示ランプ、21…モータ駆動回路
【特許請求の範囲】
【請求項1】
電動モータ(15)を正回転駆動することによりケーブル(13)を引っ張り、該ケーブル(13)の張力により摩擦材(11)を車輪に取り付けられた被摩擦材(10)に向かう方向に移動させてパーキングブレーキによるブレーキ力を発生させたのち、前記電動モータ(15)の駆動を停止して前記ブレーキ力を保持するロック制御手段(150)と、
前記電動モータ(15)を逆回転駆動することにより前記ケーブル(13)を緩め、前記摩擦材(11)を前記被摩擦材(10)から離れる方向に移動させて前記パーキングブレーキによるブレーキ力を低減させたのち、前記電動モータの駆動を停止して前記ブレーキ力を解除するリリース制御手段(170)とを備える駐車ブレーキ制御装置において、
前記リリース制御手段(170)は、前記電動モータ(15)の駆動時に流れるモータ電流の電流値(IAM、IBM)を取得し、該取得した電流値の微分値が一定範囲(KDIREND)内に含まれる時間が所定時間(KTREND)継続したときに前記電動モータ(15)の駆動を停止することを特徴とする駐車ブレーキ制御装置。
【請求項2】
前記所定時間(KTREND)は、前記ブレーキ力が解除されてから前記摩擦材(11)と前記被摩擦材(10)との間に所定のクリアランスが空いたと想定される時間に設定されていることを特徴とする請求項1に記載の駐車ブレーキ制御装置。
【請求項3】
前記リリース制御手段(170)は、前記電動モータ(15)の電源電圧(VB)の大きさに応じて前記所定時間(KTREND)を変化させ、前記電源電圧(VB)が大きいほど前記所定時間(KTREND)を小さく設定することを特徴とする請求項1または2に記載の駐車ブレーキ制御装置。
【請求項4】
前記リリース制御手段(170)は、前記モータ電流(IAM)の微分値の絶対値が大きいほど前記所定時間(KTREND)を小さく設定することを特徴とする請求項1ないし3のいずれか1つに記載の駐車ブレーキ制御装置。
【請求項5】
前記リリース制御手段(170)は、前記モータ電流(IAM)の微分値の最小値(dMIMIN(n))の絶対値が大きいほど前記所定時間(KTREND)を小さく設定することを特徴とする請求項4に記載の駐車ブレーキ制御装置。
【請求項6】
前記リリース制御手段(170)は、前記電動モータの逆回転駆動を開始してからのリリース制御時間(CTR)を計測し、該リリース制御時間(CTR)が予め決められた最小リリース制御時間(KTRLG)を超えている場合にのみ、前記微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴とする請求項1ないし5のいずれか1つに記載の駐車ブレーキ制御装置。
【請求項7】
前記リリース制御手段(170)は、前記電流値(IMA)が閾値(KIRUG)を超えていないときにのみ、前記微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴とする請求項1ないし6のいずれか1つに記載の駐車ブレーキ制御装置。
【請求項8】
前記リリース制御手段(170)は、前記電流値(IAM)が前記電動モータ(15)の無負荷電流の最大値を超えていないときにのみ、前記微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴とする請求項7に記載の駐車ブレーキ制御装置。
【請求項1】
電動モータ(15)を正回転駆動することによりケーブル(13)を引っ張り、該ケーブル(13)の張力により摩擦材(11)を車輪に取り付けられた被摩擦材(10)に向かう方向に移動させてパーキングブレーキによるブレーキ力を発生させたのち、前記電動モータ(15)の駆動を停止して前記ブレーキ力を保持するロック制御手段(150)と、
前記電動モータ(15)を逆回転駆動することにより前記ケーブル(13)を緩め、前記摩擦材(11)を前記被摩擦材(10)から離れる方向に移動させて前記パーキングブレーキによるブレーキ力を低減させたのち、前記電動モータの駆動を停止して前記ブレーキ力を解除するリリース制御手段(170)とを備える駐車ブレーキ制御装置において、
前記リリース制御手段(170)は、前記電動モータ(15)の駆動時に流れるモータ電流の電流値(IAM、IBM)を取得し、該取得した電流値の微分値が一定範囲(KDIREND)内に含まれる時間が所定時間(KTREND)継続したときに前記電動モータ(15)の駆動を停止することを特徴とする駐車ブレーキ制御装置。
【請求項2】
前記所定時間(KTREND)は、前記ブレーキ力が解除されてから前記摩擦材(11)と前記被摩擦材(10)との間に所定のクリアランスが空いたと想定される時間に設定されていることを特徴とする請求項1に記載の駐車ブレーキ制御装置。
【請求項3】
前記リリース制御手段(170)は、前記電動モータ(15)の電源電圧(VB)の大きさに応じて前記所定時間(KTREND)を変化させ、前記電源電圧(VB)が大きいほど前記所定時間(KTREND)を小さく設定することを特徴とする請求項1または2に記載の駐車ブレーキ制御装置。
【請求項4】
前記リリース制御手段(170)は、前記モータ電流(IAM)の微分値の絶対値が大きいほど前記所定時間(KTREND)を小さく設定することを特徴とする請求項1ないし3のいずれか1つに記載の駐車ブレーキ制御装置。
【請求項5】
前記リリース制御手段(170)は、前記モータ電流(IAM)の微分値の最小値(dMIMIN(n))の絶対値が大きいほど前記所定時間(KTREND)を小さく設定することを特徴とする請求項4に記載の駐車ブレーキ制御装置。
【請求項6】
前記リリース制御手段(170)は、前記電動モータの逆回転駆動を開始してからのリリース制御時間(CTR)を計測し、該リリース制御時間(CTR)が予め決められた最小リリース制御時間(KTRLG)を超えている場合にのみ、前記微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴とする請求項1ないし5のいずれか1つに記載の駐車ブレーキ制御装置。
【請求項7】
前記リリース制御手段(170)は、前記電流値(IMA)が閾値(KIRUG)を超えていないときにのみ、前記微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴とする請求項1ないし6のいずれか1つに記載の駐車ブレーキ制御装置。
【請求項8】
前記リリース制御手段(170)は、前記電流値(IAM)が前記電動モータ(15)の無負荷電流の最大値を超えていないときにのみ、前記微分値が一定範囲(KDIREND)内に含まれるか否かを判定することを特徴とする請求項7に記載の駐車ブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−90854(P2009−90854A)
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願番号】特願2007−264478(P2007−264478)
【出願日】平成19年10月10日(2007.10.10)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願日】平成19年10月10日(2007.10.10)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]