
駐車ブレーキ制御装置
【課題】ブレーキ失陥などの異常時にEPBを作動させることにより、的確に所望の制動力が発生させられるようにする。
【解決手段】主制動装置の異常もしくは負圧低下状態のときに、EPBのロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPBによる制動力を解除もしくは減少させるときにEPBをリリース動作させる補助リリース制御を行う。そして、補助ロック判定にて判定された失陥の形態に対応して、補助ロック制御を行う車輪と該補助ロック制御により発生させる駐車ブレーキ力を設定する。したがって、主制動装置の異常もしくは負圧低下状態のときにも、的確に所望の制動力が発生させられる。また、所望の制動力を発生させられることから、所望の減速度[G]が得られるようにすることが可能となる。
【解決手段】主制動装置の異常もしくは負圧低下状態のときに、EPBのロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPBによる制動力を解除もしくは減少させるときにEPBをリリース動作させる補助リリース制御を行う。そして、補助ロック判定にて判定された失陥の形態に対応して、補助ロック制御を行う車輪と該補助ロック制御により発生させる駐車ブレーキ力を設定する。したがって、主制動装置の異常もしくは負圧低下状態のときにも、的確に所望の制動力が発生させられる。また、所望の制動力を発生させられることから、所望の減速度[G]が得られるようにすることが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、サービスブレーキと電動パーキングブレーキ(以下、EPB(Electric parking brake)という)とを有する車両用ブレーキシステムに適用される駐車ブレーキ制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、車両走行中にサービスブレーキの故障時に、EPBのスイッチ操作を行うことで、EPBを動作させて制動力を発生させ、所望の減速度を得るようにする場合において、スイッチの操作時間に基づいてEPBの反応時間を早くしたり、遅くしたりする制御を行う駐車ブレーキ制御装置が提案されている。また、特許文献2において、サービスブレーキでのブレーキ失陥時に、EPBで制動力を発生させることで、所望の減速度を得るようにする駐車ブレーキ制御装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−162013号公報
【特許文献2】特開2005−343248号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のように、EPBの操作スイッチが操作されることを前提としてEPBを作動させるものでは、緊急時に操作スイッチを操作するのが難しかったり、操作遅れが生じるなど、的確にEPBを作動させられない可能性がある。また、特許文献2では、ブレーキ失陥時にEPBによって制動力を発生させることが開示されているものの、具体的にどのように作動させるかについては何ら開示がされていない。
【0005】
本発明は上記点に鑑みて、ブレーキ失陥などの異常時にEPBを作動させることにより、的確に所望の制動力が発生させられる駐車ブレーキ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明では、駐車ブレーキ装置(2)を制御して駐車ブレーキ力を発生させる補助ロック制御および該駐車ブレーキ力を解除する補助リリース制御を実行することで、主制動装置が発生させる制動力と駐車ブレーキ力とにより、ブレーキ操作部材(3)の操作量に応じた目標制動力を発生させる補助制御を実行する補助制御手段(115〜145)を有し、補助制御手段(115〜145)は、主制動装置の異常が発生しているか否かを判定する異常判定手段(210)と、異常判定手段(210)によって異常が判定されたときに、当該異常が2系統のうちの片方の系統が失陥する片系統失陥であるか、2系統の両方が失陥する両系統失陥であるかを判定すると共に、駐車ブレーキ装置(2)を制御して駐車ブレーキ力を発生させる補助ロック制御を実行するか否かを判定する補助ロック判定手段(240)と、補助ロック制御後に、補助ロック制御によって発生させた駐車ブレーキ力を解除する補助リリース制御を実行するか否かを判定する補助リリース判定手段(250)と、補助ロック判定手段(240)にて判定された失陥の形態に対応して、補助ロック制御を行う車輪と該補助ロック制御により発生させる駐車ブレーキ力を設定する補助ロック制御処理手段(135)と、補助リリース判定手段(250)の判定に基づいて、補助ロック制御により発生させた駐車ブレーキ力を解除する補助リリース制御を実行する補助リリース制御処理手段(145)と、を有していることを特徴としている。
【0007】
このように、主制動装置の異常のときに、駐車ブレーキ装置(2)のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、駐車ブレーキ装置(2)による制動力を解除するときに駐車ブレーキ装置(2)をリリース動作させる補助リリース制御を行っている。そして、補助ロック判定手段(240)にて判定された失陥の形態に対応して、補助ロック制御を行う車輪と該補助ロック制御により発生させる駐車ブレーキ力を設定するようにしている。したがって、主制動装置の異常のときにも、的確に所望の制動力を発生させることが可能となる。
【0008】
請求項2に記載の発明では、補助ロック制御処理手段(135)は、補助ロック判定手段(240)にて判定された失陥が片系統失陥のときには、失陥が検出された系統の車輪に備えられる駐車ブレーキ装置(2)にて発生させる駐車ブレーキ力のみを設定し、補助ロック判定手段(240)にて判定された失陥が両系統失陥のときには、両系統の車輪に備えられる駐車ブレーキ装置(2)にて発生させる駐車ブレーキ力を設定することを特徴としている。
【0009】
このように、失陥が検出された車輪に備えられる駐車ブレーキ装置(2)にて駐車ブレーキ力を発生させることにより、失陥した系統の車輪に不足している制動力を補って、ヨーの発生を抑制する方向に制動力を作用させることが可能となる。これにより、より車両の安定性を確保しつつ、制動を行うことが可能となる。
【0010】
例えば、請求項3に記載したように、補助ロック判定手段(240)は、ブレーキ操作部材(3)のストローク量と操作力との関係、または、マスタシリンダ圧と車両に発生している減速度との関係が、片系統失陥が発生していない通常時に想定される関係から定められた所定範囲外であるか、もしくは、両系統失陥が発生していない通常時に想定される関係から定められた所定範囲外であるかを判定することで、片系統失陥および両系統失陥の判定を行うことができる。
【0011】
また、請求項4に記載したように、補助リリース判定手段(250)は、ブレーキ操作部材(3)のストローク量と操作力との関係、または、マスタシリンダ圧と車両に発生している減速度との関係が、片系統失陥が発生していない通常時に想定される関係から定められた所定範囲内になったとき、もしくは、両系統失陥が発生していない通常時に想定される関係から定められた所定範囲内になったときに、補助リリース制御を実行することを判定することができる。
【0012】
請求項5に記載の発明では、異常判定手段(210)は、倍力装置(4)が用いているエンジン負圧が低下している負圧低下状態になっているか否かについても異常の1つとして判定し、補助ロック判定手段(240)は、異常判定手段(210)によって負圧低下状態になっていることが判定されたときに、マスタシリンダ圧が所定のロック閾値下限からロック閾値上限の範囲内であり、かつ、マスタシリンダ圧の微分値が所定のロック微分閾値下限からロック微分閾値上限の範囲内であると、補助ロック制御を実行することを判定することを特徴としている。
【0013】
このように、負圧低下状態のときにも、駐車ブレーキ装置(2)のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、駐車ブレーキ装置(2)による制動力を解除するときに駐車ブレーキ装置(2)をリリース動作させる補助リリース制御を行っている。したがって、負圧低下状態のときにも、的確に所望の制動力を発生させることが可能となる。
【0014】
この場合、請求項6に記載したように、補助リリース判定手段(250)は、マスタシリンダ圧が所定のロック閾値下限より下もしくはロック閾値上限より上になり、かつ、マスタシリンダ圧の微分値が所定のロック微分閾値下限より下もしくはロック微分閾値上限より上になったときに、補助リリース制御を実行することを判定することができる。
【0015】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態にかかる駐車ブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。
【図2】ブレーキシステムに備えられる後輪系のブレーキ機構の断面模式図である。
【図3】駐車ブレーキ制御処理の詳細を示したフローチャートである。
【図4】EPB補助制御判定の詳細を示したフローチャートである。
【図5】補助ロック判定処理の詳細を示したフローチャートである。
【図6】補助リリース判定処理の詳細を示したフローチャートである。
【図7】主制動装置が片系統失陥となった場合に想定されるストローク量と踏力の関係の一例を示すマップである。
【図8】主制動装置が片系統失陥となった場合に想定されるM/C圧と減速度[G]の関係の一例を示すマップである。
【図9】主制動装置が両系統失陥となった場合に想定されるストローク量と踏力の関係の一例を示すマップである。
【図10】主制動装置が両系統失陥となった場合に想定されるM/C圧と減速度[G]の関係の一例を示すマップである。
【図11】主制動装置が正常のときに想定されるストローク量と踏力の関係の一例を示すマップである。
【図12】主制動装置が正常のときに想定されるM/C圧と減速度[G]の関係の一例を示すマップである。
【図13】補助ロック制御処理の詳細を示したフローチャートである。
【図14】M/C圧(MPa)と目標減速度[G]の関係を示したマップである。
【図15】M/C圧(MPa)と負圧低下時目標電流値[A]との関係を示したマップである。
【図16】補助リリース制御処理の詳細を示したフローチャートである。
【図17】ロック制御処理の詳細を示したフローチャートである。
【図18】目標制動力に対応する目標モータ電流値上昇量の関係を示したマップである。
【図19】M/C圧に対応する目標モータ電流値上昇量減算値の関係を示したマップである。
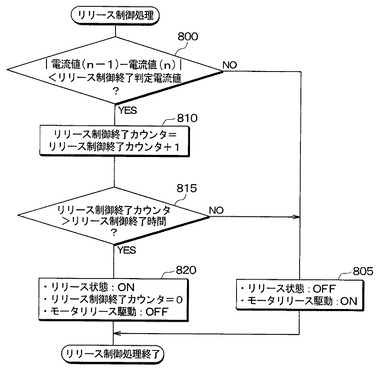
【図20】リリース制御処理の詳細を示したフローチャートである。
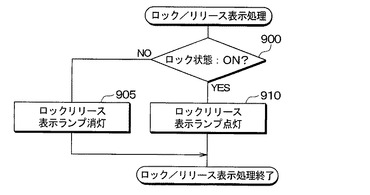
【図21】ロック・リリース表示処理の詳細を示したフローチャートである。
【図22】ブレーキ失陥時の処置を説明するためのタイミングチャートである。
【図23】ブレーキ失陥時の処置として、M/C圧に対してストロークに基づく減速度[G]が出ていない場合のタイミングチャートである。
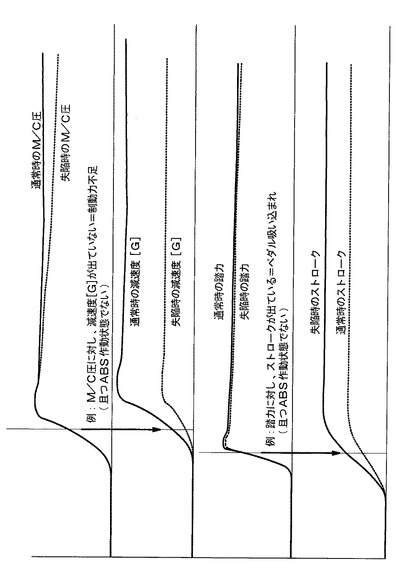
【図24】ブレーキ失陥時の処置として、踏力に対してストロークが出ている場合のタイミングチャートである。
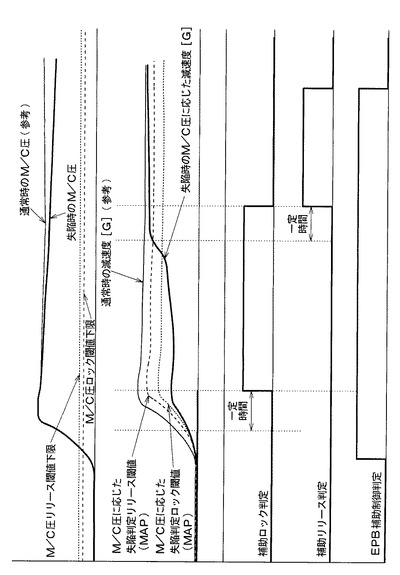
【図25】負圧低下状態のときの処置を説明するためのタイミングチャートである。
【図26】負圧低下状態のときにEPB補助制御を行った場合のタイミングチャートである。
【図27】負圧低下状態のときにEPB補助制御を行った場合のタイミングチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0018】
(第1実施形態)
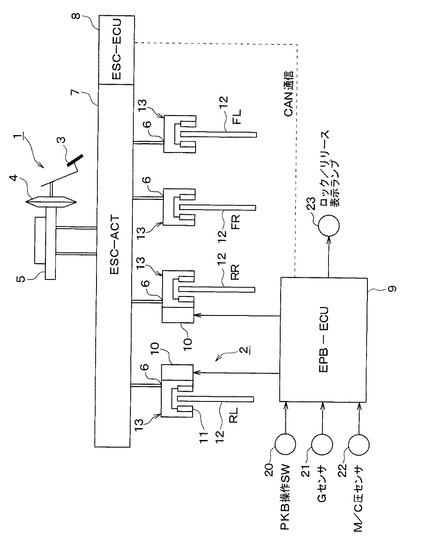
本発明の第1実施形態について説明する。本実施形態では、後輪系にディスクブレーキタイプのEPBを適用している車両用ブレーキシステムを例に挙げて説明する。図1は、本実施形態にかかる駐車ブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。また、図2は、ブレーキシステムに備えられる後輪系のブレーキ機構の断面模式図である。以下、これらの図を参照して説明する。
【0019】
図1に示すように、ブレーキシステムは、ドライバの踏力に基づいてブレーキ力を発生させるサービスブレーキ1と駐車時に車両の移動を規制するためのEPB2とが備えられている。
【0020】
サービスブレーキ1は、ドライバによるブレーキペダル3の踏み込みに応じた踏力を倍力装置4にて倍力したのち、この倍力された踏力に応じたブレーキ液圧をマスタシリンダ(以下、M/Cという)5内に発生させ、このブレーキ液圧を各車輪のブレーキ機構に備えられたホイールシリンダ(以下、W/Cという)6に伝えることでブレーキ力を発生させる。倍力装置2は、エンジン負圧に基づいて踏力を倍力し、その力でプッシュロッドを介してM/Cピストンを押圧することでM/C圧を発生させている。また、M/C5とW/C6との間にブレーキ液圧制御用のアクチュエータ7が備えられており、サービスブレーキ1により発生させるブレーキ力を調整し、車両の安全性を向上させるための各種制御(例えば、アンチスキッド制御等)を行える構造とされている。本明細書では、これらサービスブレーキ1とアクチュエータ7を含めたドライバのブレーキ操作に基づいて主に制動力を発生させる装置を主制動装置と呼ぶことにする。
【0021】
アクチュエータ7を用いた各種制御は、ESC(Electronic Stability Control)−ECU8にて実行される。例えば、ESC−ECU8からアクチュエータ7に備えられる図示しない各種制御弁やポンプ駆動用のモータを制御するための制御電流を出力することにより、アクチュエータ7に備えられる油圧回路を制御し、W/C6に伝えられるW/C圧を制御する。これにより、車輪スリップの回避などを行い、車両の安全性を向上させる。例えば、アクチュエータ7は、各車輪毎に、W/C6に対してM/C5内に発生させられたブレーキ液圧もしくはポンプ駆動により発生させられたブレーキ液圧が加えられることを制御する増圧制御弁や、各W/C6内のブレーキ液をリザーバに供給することでW/C圧を減少させる減圧制御弁等を備えており、W/C圧を増圧・保持・減圧制御できる構成とされている。このアクチュエータ7の構成に関しては、従来より周知となっているため、ここでは詳細については省略する。
【0022】
一方、EPB2は、モータ10にてブレーキ機構を制御することでブレーキ力を発生させるものであり、モータ10の駆動を制御するEPB制御装置(以下、EPB−ECUという)9を有して構成されている。
【0023】
ブレーキ機構は、本実施形態のブレーキシステムにおいてブレーキ力を発生させる機械的構造であり、前輪系のブレーキ機構はサービスブレーキ1の操作によってブレーキ力を発生させる構造とされているが、後輪系のブレーキ機構は、サービスブレーキ1の操作とEPB2の操作の双方に対してブレーキ力を発生させる共用の構造とされている。前輪系のブレーキ機構は、後輪系のブレーキ機構に対して、EPB2の操作に基づいてブレーキ力を発生させる機構をなくした従来から一般的に用いられているブレーキ機構であるため、ここでは説明を省略し、以下の説明では後輪系のブレーキ機構について説明する。
【0024】
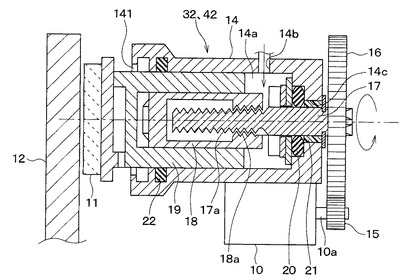
後輪系のブレーキ機構では、サービスブレーキ1を作動させたときだけでなくEPB2を作動させたときにも、図2に示す摩擦材であるブレーキパッド11を押圧し、ブレーキパッド11によって被摩擦材であるブレーキディスク12を挟み込むことにより、ブレーキパッド11とブレーキディスク12との間に摩擦力を発生させ、ブレーキ力を発生させる。
【0025】
EPB2の加圧機構はモータ10、平歯車15、平歯車16、回転軸17、推進軸18により構成される。そしてこの加圧機構により駐車ブレーキ力を発生させる。具体的には、ブレーキ機構は、図1に示すキャリパ13内において、図2に示すようにブレーキパッド11を押圧するためのW/C6のボディ14に直接固定されているモータ10を回転させるとにより、モータ10の駆動軸10aに備えられた平歯車15を回転させ、平歯車15に噛合わされた平歯車16にモータ10の回転力を伝えることによりブレーキパッド11を移動させ、EPB2によるブレーキ力を発生させる。
【0026】
キャリパ13内には、W/C6およびブレーキパッド11に加えて、ブレーキパッド11に挟み込まれるようにしてブレーキディスク12の端面の一部が収容されている。W/C6は、シリンダ状のボディ14の中空部14a内に通路14bを通じてブレーキ液圧を導入することで、ブレーキ液収容室である中空部14a内にW/C圧を発生させられるようになっており、中空部14a内に回転軸17、推進軸18、ピストン19などを備えて構成されている。ボディ14は有底シリンダ状でその底面はブレーキパッド11と反対側に位置し、開口部がブレーキパッド11側に位置するように設けられている。このボディ14の開口部はピストン19で塞がれている。
【0027】
回転軸17は、一端がボディ14に形成された挿入孔14cを通じて平歯車16に連結され、平歯車16が回動させられると、平歯車16の回動に伴って回動させられる。この回転軸17における平歯車16と連結された端部とは反対側の端部において、回転軸17の外周面には雄ネジ溝17aが形成されている。一方、回転軸17の他端は、挿入孔14cに挿入されることで軸支されている。具体的には、挿入孔14cには、Oリング20と共に軸受け21が備えられており、Oリング20にて回転軸17と挿入孔14cの内壁面との間を通じてブレーキ液が漏れ出さないようにされながら、軸受け21により回転軸17の他端を軸支持している。
【0028】
推進軸18は、中空状の筒部材にて構成され、内壁面に回転軸17の雄ネジ溝17aと螺合する雌ネジ溝18aが形成されている。この推進軸18は、例えば回転防止用のキーを備えた円柱状もしくは多角柱状に構成されることで、回転軸17が回動しても回転軸17の回動中心を中心として回動させられない構造になっている。このため、回転軸17が回動させられると、雄ネジ溝17aと雌ネジ溝18aとの噛合いにより、回転軸17の回転力を回転軸17の軸方向に推進軸18を移動させる力に変換する。推進軸18は、モータ10の駆動が停止されると、雄ネジ溝17aと雌ネジ溝18aとの噛合いによる摩擦力により同じ位置で止まるようになっており、目標ブレーキ力になったときにモータ10の駆動を停止すれば、その位置に推進軸18を保持することができる。
【0029】
ピストン19は、推進軸18の外周を囲むように配置されるもので、有底の円筒部材もしくは多角筒部材にて構成され、外周面がボディ14に形成された中空部14aの内壁面と接するように配置されている。ピストン19の外周面とボディ14の内壁面との間のブレーキ液洩れが生じないように、ボディ14の内壁面にシール部材22が備えられ、ピストン19の端面にW/C圧を付与できる構造とされている。また、ピストン19は、回転軸17が回転しても回転軸17の回動中心を中心として回動させられないように、推進軸18に回転防止用のキーが備えられる場合にはそのキーが摺動するキー溝が備えられ、推進軸18が多角柱状とされる場合にはそれと対応する形状の多角筒状とされる。
【0030】
このピストン19の先端にブレーキパッド11が配置され、ピストン19の移動に伴ってブレーキパッド11を紙面左右方向に移動させるようになっている。具体的には、ピストン19は、その外周面がボディ14の中空部14aの内壁面に接して、推進軸18の移動に伴って紙面左方向に移動可能で、かつ、ピストン19の端部(ブレーキパッド11が配置された端部と反対側の端部)にW/C圧が付与されることで推進軸18から独立して紙面左方向に移動可能な構成とされている。そして、推進軸18が初期位置(モータ10が回転させられる前の状態)のときに、中空部14a内のブレーキ液圧が付与されていない状態(W/C圧=0)であれば、図示しないリターンスプリングもしくは中空部14a内の負圧によりピストン19が紙面右方向に移動させられ、ブレーキパッド11をブレーキディスク12から離間させられるようになっている。また、モータ10が回転させられて推進軸18が初期位置から紙面左方向に移動させられているときにW/C圧が0になると、移動した推進軸18によってピストン19の紙面右方向への移動が規制され、ブレーキパッド11がその場所で保持される。
【0031】
このように構成されたブレーキ機構では、サービスブレーキ1が操作されると、それにより発生させられたW/C圧に基づいてピストン19が紙面左方向に移動させられることでブレーキパッド11がブレーキディスク12に押圧され、ブレーキ力を発生させる。また、EPB2が操作されると、モータ10が駆動されることで平歯車15が回転させられ、それに伴って平歯車16および回転軸17が回転させられるため、雄ネジ溝17aおよび雌ネジ溝18aの噛合いに基づいて推進軸18がブレーキディスク12側(紙面左方向)に移動させられる。そして、それに伴ってピストン19も同方向に移動させられることでブレーキパッド11がブレーキディスク12に押圧され、ブレーキ力を発生させる。このため、サービスブレーキ1の操作とEPB2の操作の双方に対してブレーキ力を発生させる共用のブレーキ機構とすることが可能となる。
【0032】
また、サービスブレーキ1が作動されることでW/C圧が発生させられている状態でEPB2が操作されると、W/C圧によってピストン19が既に紙面左方向に移動させられているため、推進軸18に掛かる負荷が軽減される。このため、推進軸18がピストン19に当接するまではモータ10はほぼ無負荷状態で駆動される。そして、推進軸18がピストン19に当接するとピストン19を紙面左方向の押す押圧力が加えられ、EPB2によるブレーキ力が発生させられるようになっている。
【0033】
EPB−ECU9は、CPU、ROM、RAM、I/Oなどを備えた周知のマイクロコンピュータによって構成され、ROMなどに記憶されたプログラムにしたがってモータ10の回転を制御することにより駐車ブレーキ制御を行うものである。このEPB−ECU9が本発明の駐車ブレーキ制御装置に相当する。EPB−ECU9は、例えば車室内のインストルメントパネル(図示せず)に備えられた操作スイッチ(SW)20の操作状態に応じた信号や、車両の前後方向の加速度を検出するGセンサ21およびM/C圧センサ22の検出信号を入力し、操作SW20の操作状態や車両の前後方向のGセンサ値およびM/C圧に応じてモータ10を駆動する。さらに、EPB−ECU9は、インストルメントパネルに備えられたロック/リリース表示ランプ23に対してモータ10の駆動状態に応じて、ロック中であるかリリース中であるかを示す信号を出力する。
【0034】
具体的には、EPB−ECU9は、モータ10に流される電流(モータ電流)をモータ10の上流側もしくは下流側で検出するモータ電流検出、ロック制御を終了させるときの目標モータ電流(目標電流値)を演算する目標モータ電流演算、モータ電流が目標モータ電流に達したか否かの判定、操作SW20の操作状態に基づくモータ10の制御など、ロック・リリース制御を実行するための各種機能部を有している。このEPB−ECU9により操作SW20の状態やモータ電流に基づいてモータ10を正回転や逆回転させたりモータ10の回転を停止させることで、EPB2をロック・リリースする制御を行う。また、EPB−ECU9は、ESC−ECU8との間でCAN通信などによって通信を行っており、ESC−ECU8からサービスブレーキ1やアクチュエータ7を含めた主制動装置の故障情報やエンジン負圧が低下しているという情報および各種ブレーキ情報、例えばブレーキペダル3のストローク量(もしくはストローク変化量)や踏力の情報を取得し、その情報に基づいてEPB2を駆動する。これにより、ブレーキ失陥時や負圧低下状態の際にその故障の形態に応じた駐車ブレーキ力を発生させると共に、駐車ブレーキ力を制御するというEPB補助制御を行う。
【0035】
続いて、上記のように構成されたブレーキシステムを用いてEPB−ECU9が上記各種機能部および図示しない内蔵のROMに記憶されたプログラムに従って実行する駐車ブレーキ制御について説明する。図3は、駐車ブレーキ制御処理の詳細を示したフローチャートである。
【0036】
まず、ステップ100において時間計測用カウンタやフラグリセットなどの一般的な初期化処理を行ったのち、ステップ105に進み、時間tが経過したか否かを判定する。ここでいう時間tは、制御周期を規定するものである。つまり、初期化処理が終了してからの時間もしくは前回本ステップで肯定判定されたときからの経過時間が時間tが経過するまで繰り返し本ステップでの判定が行われるようにすることで、時間tが経過するごとに駐車ブレーキ制御が実行されるようにしている。
【0037】
続く、ステップ110では、車両駆動中であるか否かを判定する。すなわち、車両を駆動できる状態になっているか否かを判定しており、例えばイグニッションスイッチがオンされていているか否かに基づいて判定している。ここで肯定判定されれば駐車ブレーキ力を制御する可能性があることからステップ115以降の処理に進み、否定判定されると処理を終了する。
【0038】
ステップ115では、EPB補助制御判定処理として、EPB補助制御を実行するか否かやEPB補助制御をどのように実行するかについて判定する。具体的には、ブレーキ失陥時に主制動装置では目標制動力が発生させられないときに、EPB補助制御をONとし、EPB2のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPB2による制動力を解除もしくは減少させるときにEPB2をリリース動作させる補助リリース制御を行う。このEPB補助制御判定処理によって、補助ロック制御を実行することを示す補助ロックONや補助リリース制御を実行することを示す補助リリースONが設定されると共に、ブレーキ失陥や負圧低下状態といった故障の形態に応じた補助ロック制御のパターンが設定される。
【0039】
そして、ステップ115でのEPB補助制御判定処理が完了すると、ステップ120に進み、EPB制御許可の状態であるか否かを判定する。EPB制御許可の状態とは、EPB2がシステムとして動ける状態になっていることを意味している。例えば、EPB−ECU9は、イニシャルチェックなどによってEPB制御許可の状態であるか否かをチェックして、それを示すフラグをセットしていることから、そのフラグに基づき本判定を行っている。ここで肯定判定されるとステップ125以降に進み、否定判定されるとそのまま処理を終了する。
【0040】
ステップ125では、EPB補助制御がONされているか否かを判定する。ここで、肯定判定されるとステップ130以降に進んでEPB補助制御を実行するための各処理を行い、否定判定されると通常のロック・リリース制御の実行に関わる各処理を行う。
【0041】
ステップ130では、補助ロックがONされているか否か、つまり補助ロック制御を実行するか否かを判定する。そして、肯定判定されるとステップ135に進んで補助ロック制御処理を実行する。また、否定判定されるとステップ140に進んで補助リリースがONされている否か、つまり補助リリース制御を実行するか否かを判定する。そして、肯定判定されるとステップ145に進んで補助リリース制御を実行し、ここでも否定判定されれば既に補助ロック制御もしくは補助リリース制御が一旦終了している状態等であるため、ステップ180に進む。
【0042】
ステップ150では、操作SW20がONされてロック要求が出されているか否かを判定する。操作SW20がONの状態とはドライバがEPB2を作動させてロック状態にしようとしていることを意味している。このため、本ステップで肯定判定されればステップ155に進み、ロック状態になっているか否かをロック状態フラグFLOCKがオンしているか否かに基づいて判定する。ロック状態フラグFLOCKとは、EPB2を作動させてロック状態になったときにオンされるフラグであり、このロック状態フラグFLOCKがオンになっているときには既にEPB2の作動が完了して所望のブレーキ力が発生させられている状態となる。したがって、ここで否定判定された場合には、ステップ160のロック制御処理に進み、肯定判定された場合には既にロック制御処理が完了しているためステップ180に進む。
【0043】
一方、ステップ150で否定判定された場合にはステップ165に進み、操作SW20がオンからオフに切替えられてリリース要求ありの状態か否かを判定する。操作SW20がオンからオフに切替えられた状態とはドライバがEPB2を作動させてロック状態からリリース状態にしようとしていることを意味している。このため、本ステップで肯定判定されればステップ170に進み、リリース状態フラグFRELがオンしているか否かを判定する。リリース状態フラグFRELとは、EPB2を作動させてリリース状態、つまりEPB2によるブレーキ力を解除した状態になったときにオンされるフラグであり、このリリース状態フラグFRELがオンになっているときには既にEPB2の作動が完了してブレーキ力が解除させられている状態となる。したがって、ここで否定判定された場合にのみステップ175のリリース制御処理に進み、肯定判定された場合には既にリリース制御処理が完了しているためステップ180に進む。
【0044】
そして、補助ロック制御処理や補助リリース制御処理、もしくはロック制御処理やリリース制御処理が終了したのち、ステップ180におけるロック・リリース表示処理を行う。このような処理によって駐車ブレーキ制御処理が実行される。以下、この駐車ブレーキ制御処理の各部の詳細について説明する。
【0045】
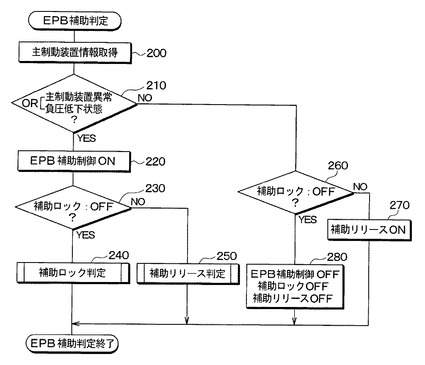
まず、図3のステップ115に示したEPB補助制御判定の処理について説明する。EPB補助制御判定の処理では、EPB補助制御を実行するか否かやEPB補助制御をどのように実行するかについて判定する。図4は、このEPB補助制御判定の詳細を示したフローチャートである。
【0046】
この図に示すように、ステップ200では、主制動装置情報、すなわち主制動装置が正常であるか故障しているかという故障情報を取得する。この処理は、EPB−ECU9がESC−ECU8との間で行っている通信に基づいて行われる。そして、ステップ210では、主制動装置に異常が発生しているか、もしくは負圧低下状態になっているか否かを判定する。主制動装置の異常とは、サービスブレーキ1に含まれる二つの配管系統の異常やアクチュエータ7の異常もしくは倍力装置4の異常により、主制動装置によって目標制動力が発生させられない状況になっていることを意味する。配管系統の異常には、一方の配管系統のみが異常となっている片系統失陥と両方の配管系統が異常となっている両系統失陥がある。また、負圧低下状態とは、エンジンストップなどにより倍力装置4が用いているエンジン負圧が低下して踏力の増加が十分に行えない状態を意味しており、この場合にも主制動装置によって目標制動力が発生させられない状況となる。
【0047】
なお、倍力装置4の負圧については周知のように負圧センサによって検出されているため、その負圧レベルが所定の閾値以下になったときに負圧低下状態とすることができる。また、配管系統の異常については、車輪速度センサの検出信号を用いて演算される車輪スリップ率の情報に基づいて検出できる。例えば、主制動装置にてブレーキが掛けられても失陥している配管系統の車輪では車輪速度が低下しない。このため、推定車体速度と車輪速度との比較に基づき、ブレーキ時に推定車体速度に対して車輪速度が低下していない系統があれば、その系統については失陥していると判定できる。このような負圧低下状態や主制動装置の異常について、ESC−ECU8で検出していることから、EPB−ECU9がその情報を取得することで、本ステップの判定を行っている。
【0048】
そして、ステップ210で肯定判定されるような状況はEPB補助制御が必要な状況であることから、ステップ220に進み、EPB補助制御が実行中であることを示すべく、EPB補助制御をONに設定する。そして、ステップ230に進み、補助ロックがOFFの状態であるか否かを判定する。これにより、補助ロック制御に切替える状態であるか補助リリース制御に切替える状態であるかを判定している。ここで肯定判定されればステップ240に進んで補助ロック判定処理を実行し、否定判定されればステップ250に進んで補助リリース判定処理を実行する。
【0049】
一方、ステップ210で否定判定されるとステップ260に進み、補助ロックがOFFの状態であるか否かを判定する。ここで否定判定されると、ステップ270に進んで補助リリースONを設定し、上記したステップ145において補助リリース制御処理が行えるようにして処理を終了する。また、ここで肯定判定されると、ステップ280に進んでEPB補助制御をOFF、補助ロックをOFF、補助リリースをOFFとして処理を終了する。
【0050】
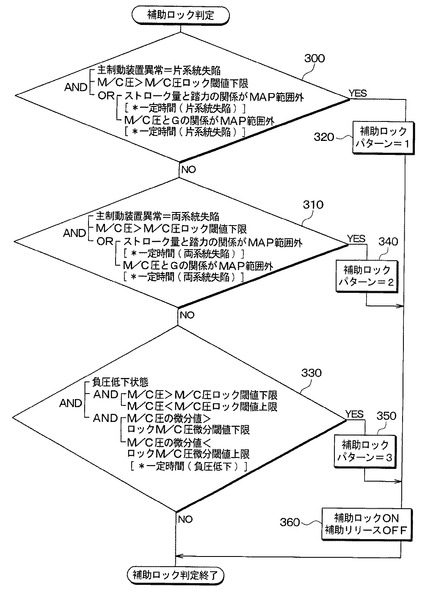
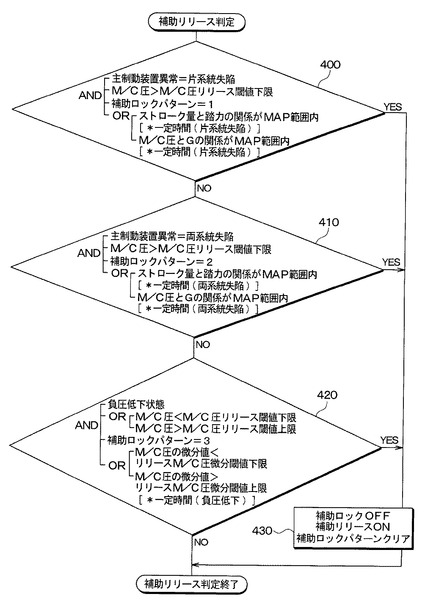
図5は、上記ステップ240における補助ロック判定処理の詳細を示したフローチャートである。また、図6は、上記ステップ250の補助リリース判定処理の詳細を示したフローチャートである。
【0051】
図5に示す補助ロック判定処理では、主制動装置の異常の形態を特定すると共に、その異常の形態に応じた補助ロック制御のパターンを設定する。まず、ステップ300では、片系統失陥に該当しているか否かを判定する。ここでは、ESC−ECU8から取得した情報が主制動装置の異常が片系統失陥であることを示していて、かつ、M/C圧がM/C圧ロック閾値下限よりも大きく、かつ、ストローク量と踏力の関係がマップの範囲外もしくはM/C圧と減速度[G]との関係がマップの範囲外であるか否かを判定している。これら各条件は、主制動装置の異常が片系統失陥時の補助ロックが必要となる場合を示す条件である。
【0052】
ここで、M/C圧の比較対象となるM/C圧ロック閾値下限とは、ドライバがブレーキペダル3を踏み込んでいることを表す閾値である。ブレーキ失陥が生じていても、踏み込み初期時にはM/C圧が通常時と同様に発生することから、M/C圧をM/C圧ロック閾値下限と比較することで、ブレーキペダル3が踏み込まれていることを確認できる。
【0053】
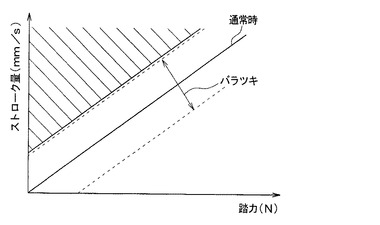
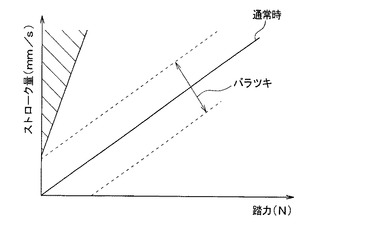
また、ストローク量と踏力の関係を示すマップとは、主制動装置が片系統失陥となった場合に想定されるストローク量と踏力の関係を示すマップである。図7は、このマップの一例を示した図である。主制動装置が正常に機能している通常時には、ストローク量と踏力の関係が図中実線で示したような関係となる。この関係は、予めストローク量とそのストローク量から見込める踏力との関係を実験などによって調べておくことによって求めることができる。
【0054】
しかしながら、片系統失陥時には、ストローク量が大きくなっても所望の踏力が得られない状態になる。このため、ストローク量と踏力の関係が通常時の関係に対してバラツキを加味した範囲外、例えば図中破線で示した範囲外となるとき、つまり図7中の斜線領域で示したストローク量に対して踏力が得られていない範囲内に含まれるとき、片系統失陥が発生していると判定する。ここでは、ノイズを除去するために、一定時間この関係が続いた場合に、片系統失陥において補助ロックが必要になる場合と判定するようにしている。
【0055】
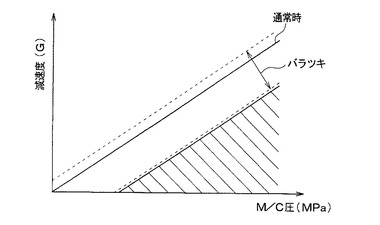
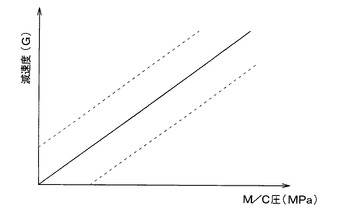
同様に、M/C圧と減速度[G]の関係を示すマップとは、主制動装置が片系統失陥となった場合に想定されるM/C圧と減速度[G]の関係を示すマップである。図8は、このマップの一例を示した図である。主制動装置が正常に機能している通常時には、M/C圧と減速度[G]の関係が図中実線で示したような関係となる。この関係も、予めM/C圧とそのM/C圧から見込める減速度[G]踏力との関係を実験などによって調べておくことによって求めることができる。
【0056】
しかしながら、片系統失陥時には、M/C圧が大きくなっても所望の減速度[G]が得られない状態になる。このため、M/C圧と減速度[G]の関係が通常時の関係に対してバラツキを加味した範囲外、例えば図中破線で示した範囲外となるとき、つまり図8中の斜線領域で示したM/C圧に対して減速度[G]が得られていない範囲内に含まれるとき、片系統失陥が発生していると判定する。ここでは、ノイズを除去するために、一定時間この関係が続いた場合に、片系統失陥において補助ロックが必要になる場合と判定するようにしている。
【0057】
なお、図7および図8ではバラツキを加味した範囲を超える範囲を斜線領域で示したが、片系統失陥時に想定されるストローク量と踏力との関係やM/C圧と減速度[G]との関係として想定される範囲を予め求めておき、その範囲に含まれる場合に片系統失陥が発生したと判定するようにしても良い。
【0058】
そして、ステップ300で否定判定されるとステップ310に進み、肯定判定されるとステップ320に進む。
【0059】
ステップ310では、ステップ300と同様の処理を両系統失陥に該当しているか否かを判定する。ここでも、ESC−ECU8から取得した情報が主制動装置の異常が両系統失陥であることを示していて、かつ、M/C圧がM/C圧ロック閾値下限よりも大きく、かつ、ストローク量と踏力の関係がマップの範囲外もしくはM/C圧と減速度[G]との関係がマップの範囲外であるか否かを判定している。これら各条件は、主制動装置の異常が両系統失陥時の補助ロックが必要となる場合を示す条件である。
【0060】
ここでのストローク量と踏力の関係を示すマップは、主制動装置が両系統失陥となった場合に想定されるストローク量と踏力の関係を示すマップである。図9は、このマップの一例を示した図である。図7に示した片系統失陥時と同様、両系統失陥時には、ストローク量が大きくなっても所望の踏力が得られない状態になる。このため、図9中の斜線領域で示した両系統失陥時に想定されるストローク量に対して踏力が得られていない範囲内に含まれるとき、両系統失陥が発生していると判定する。両系統失陥の場合には、片系統失陥の場合よりも、よりストローク量に対して得られる踏力が小さくなるようなマップとしてある。この場合にも、ノイズを除去するために、一定時間この関係が続いた場合に、両系統失陥において補助ロックが必要になる場合と判定するようにしている。
【0061】
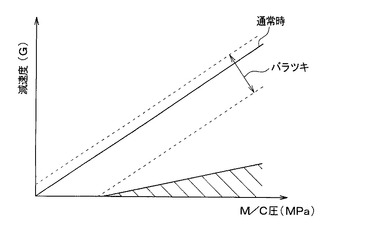
同様に、M/C圧と減速度[G]の関係を示すマップは、主制動装置が両系統失陥となった場合に想定されるM/C圧と減速度[G]の関係を示すマップである。図10は、このマップの一例を示した図である。図8に示した片系統失陥時と同様、両系統失陥時には、M/C圧が大きくなっても所望の減速度[G]が得られない状態になる。このため、図10中の斜線領域で示した両系統失陥時に想定されるM/C圧に対して減速度[G]が得られていない範囲内に含まれるとき、両系統失陥が発生していると判定する。両系統失陥の場合には、片系統失陥の場合よりも、よりM/C圧に対して得られる減速度[G]が小さくなるようなマップとしてある。この場合にも、ノイズを除去するために、一定時間この関係が続いた場合に、両系統失陥において補助ロックが必要になる場合と判定するようにしている。
【0062】
そして、ステップ310で否定判定されるとステップ330に進み、肯定判定されるとステップ340に進む。
【0063】
ステップ330では、負圧低下状態に該当しているか否かを判定する。ここでは、ESC−ECU8から取得した情報が負圧低下状態であることを示していて、かつ、M/C圧がM/C圧ロック閾値下限からM/C圧ロック閾値上限の範囲内にあり、さらに、M/C圧の微分値がロックM/C圧微分下限からロックM/C圧微分上限の範囲内にあるか否かを判定している。これら各条件は、負圧低下状態の時に補助ロックが必要となる場合を示す条件である。M/C圧の比較対象となるM/C圧ロック閾値上限も、ドライバがブレーキペダル3を踏み込んでいることを表す閾値である。また、M/C圧の微分値の比較対照となるロックM/C圧微分下限やロックM/C圧微分上限も、ドライバがブレーキペダル3を踏み込んでいることを表す閾値である。
【0064】
ここで、負圧低下時には、ブレーキペダル3が踏み込み難くなるため、M/C圧は発生させ難くなる状態となる。このため、負圧低下時にブレーキペダル3が踏み込まれた場合には、M/C圧がM/C圧ロック閾値下限からM/C圧ロック閾値上限の範囲内に含まれることになる。同様に、M/C圧の微分値についても、ロックM/C圧微分下限からロックM/C圧微分上限の範囲内に含まれる。そして、ノイズを除去するために、一定時間この関係が続いた場合に、負圧低下状態において補助ロックが必要になる場合と判定するようにしている。
【0065】
そして、ステップ330で否定判定された場合には、補助ロックが必要な場合ではないため、そのまま処理を終了し、肯定判定されるとステップ350に進む。
【0066】
このようにして、ステップ300、310、330において片系統失陥や両系統失陥および負圧低下状態の際に補助ロックが必要になる場合が判定されると、それぞれステップ320、340、350に進み、各異常の形態に応じた補助ロック制御を行うための補助ロックパターンが設定される。すなわち、片系統失陥の場合には補助ロックパターン1、両系統失陥の場合には補助ロックパターン2、負圧低下状態の場合には補助ロックパターン3が設定される。その後、ステップ360に進み、補助ロック制御を実行すべく、補助ロックをONにすると共に、補助リリースをOFFにする。これにより、補助ロック判定処理が完了する。
【0067】
図6に示す補助リリース判定処理では、主制動装置の異常の形態を特定すると共に、補助ロック制御によりストローク量と踏力の関係やM/C圧と減速度[G]の関係などが正常時の状態になったときに、補助リリース制御が実行されるようにする。
【0068】
まず、ステップ400では、片系統失陥時の補助ロック制御が実行された後に補助リリース制御に切替える条件を満たすか否かを判定する。ここでは、ESC−ECU8から取得した情報が主制動装置の異常が片系統失陥であることを示していて、かつ、M/C圧がM/C圧リリース閾値下限よりも大きく、補助ロックパターン1が設定されているときに、さらに、ストローク量と踏力の関係がマップの範囲内もしくはM/C圧と減速度[G]との関係がマップの範囲内であるか否かを判定している。
【0069】
ここで、M/C圧の比較対象となるM/C圧リリース閾値下限とは、ドライバがブレーキペダル3を踏み込んでいることを表す閾値であり、M/C圧ロック閾値下限と同じ値であっても良いし、異なる値であっても良い。補助リリース制御は補助ロック制御によって上記関係が正常時の状態になったときに実行されるものであり、ブレーキ操作が行われていることが前提となる。このため、M/C圧をM/C圧リリース閾値下限と比較することで、ブレーキペダル3が踏み込まれていることを確認している。
【0070】
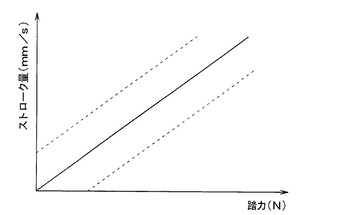
また、ストローク量と踏力の関係を示すマップとは、主制動装置が正常のときに想定されるストローク量と踏力の関係の一例を示すマップである。図11は、このマップの一例を示した図である。主制動装置が正常に機能している通常時には、ストローク量と踏力の関係が図中実線で示したような関係となり、バラツキを加味しても破線で示した範囲内となる。このため、片系統失陥時に補助ロック制御が行われることによってストローク量と踏力の関係が図11に示す範囲内に含まれるようになったとき、補助リリース制御に切り替える条件を満たしたと判定する。ここでは、ノイズを除去するために、一定時間この関係が続いた場合に、片系統失陥において補助リリースが必要になる場合と判定するようにしている。
【0071】
同様に、M/C圧と減速度[G]の関係を示すマップとは、主制動装置が正常のときに想定されるM/C圧と減速度[G]の関係の一例を示すマップである。図12は、このマップの一例を示した図である。主制動装置が正常に機能している通常時には、M/C圧と減速度[G]の関係が図中実線で示したような関係となり、バラツキを加味しても破線で示した範囲内となる。このため、片系統失陥時に補助ロック制御が行われることによってM/C圧と減速度[G]の関係が図12に示す範囲内に含まれるようになったとき、補助リリース制御に切り替える条件を満たしたと判定する。ここでは、ノイズを除去するために、一定時間この関係が続いた場合に、片系統失陥において補助リリースが必要になる場合と判定するようにしている。
【0072】
そして、ステップ400で否定判定されるとステップ410に進み、肯定判定されるとステップ430に進む。
【0073】
ステップ410では、両系統失陥時の補助ロック制御が実行された後に補助リリース制御に切替える条件を満たすか否かを判定する。条件としては、ステップ400の各種条件とほぼ同様であるが、補助ロックパターン1ではなく補助ロックパターン2が設定されていることという条件のみ異なっている。両系統失陥時も、ストローク量と踏力の関係やM/C圧と減速度[G]の関係について、主制動装置が正常に機能している通常時の関係になったときに、補助ロック制御から補助リリース制御に切り替えることになる。このため、本ステップでも、上記各関係が図11や図12のマップに示す関係になると、補助リリース制御に切り替える条件を満たしたと判定する。ここでも、ノイズを除去するために、一定時間この関係が続いた場合に、両系統失陥において補助リリースが必要になる場合と判定するようにしている。
【0074】
そして、ステップ410で否定判定されるとステップ420に進み、肯定判定されるとステップ430に進む。
【0075】
ステップ420では、負圧低下状態で補助ロック制御が実行された後に補助リリース制御に切替える条件を満たすか否かを判定する。ここでは、ESC−ECU8から取得した情報が負圧低下状態であることを示していて、かつ、M/C圧がM/C圧リリース閾値下限より下もしくはM/C圧リリース閾値上限より上、または、M/C圧の微分値がリリースM/C圧微分下限より下もしくはリリースM/C圧微分上限より上であるか否かを判定している。これら各条件は、負圧低下状態の時に補助リリースが必要となる場合を示す条件である。M/C圧の比較対象となるM/C圧リリース閾値上限も、ドライバがブレーキペダル3を踏み込んでいることを表す閾値であり、M/C圧ロック閾値上限と同じ値であっても良いし、異なる値であっても良い。また、M/C圧の微分値の比較対象となるリリースM/C圧微分下限やリリースM/C圧微分上限も、ドライバがブレーキペダル3を踏み込んでいることを表す閾値である。これらリリースM/C圧微分下限やリリースM/C圧微分上限も、ロックM/C圧微分下限やロックM/C圧微分上限と同じ値であっても良いし、異なる値であっても良い。
【0076】
負圧低下時には、ブレーキペダル3が踏み込み難くなるため、M/C圧が発生させ難くなるが、補助ロック制御によって所望のM/C圧が発生させられた状態になると、補助リリース制御に切替えても良い。このため、M/C圧がM/C圧リリース閾値下限より下もしくはM/C圧リリース閾値上限より上になる。同様に、M/C圧の微分値についても、リリースM/C圧微分下限より下もしくはリリースM/C圧微分上限より上になる。そして、ノイズを除去するために、一定時間この関係が続いた場合に、負圧低下状態において補助リリースが必要になる場合と判定するようにしている。
【0077】
このステップ420で否定判定された場合には、補助リリースが必要な場合ではないため、そのまま処理を終了し、肯定判定されるとステップ430に進む。
【0078】
このようにして、ステップ400〜420において片系統失陥や両系統失陥および負圧低下状態の際に補助ロック制御から補助リリース制御に切り替える場合が判定されると、ステップ430に進み、補助リリース制御を実行すべく、補助ロックをOFFにすると共に、補助リリースをONにし、補助ロックパターンをクリアする。これにより、補助リリース判定処理が完了する。また、このようにして図4中のステップ240、250に示した補助ロック判定処理や補助リリース判定処理が完了し、図3中のステップ115に示したEPB補助判定が完了する。
【0079】
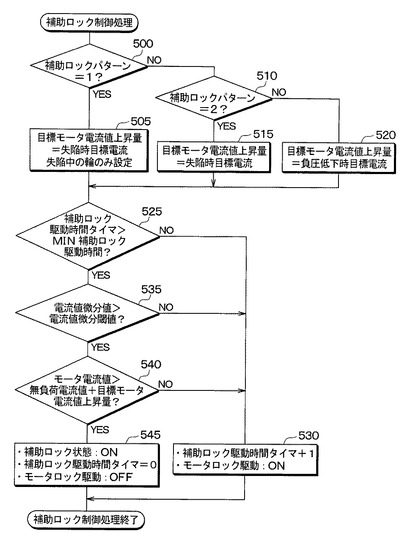
次に、図3のステップ135に示した補助ロック制御処理について説明する。補助ロック制御処理では、上記した補助ロック判定処理において、主制動装置の異常により補助ロックが必要と判定されたときに、設定された補助ロックパターンの内容(補助ロックパターン1〜3)に応じた駐車ブレーキ力を発生させる。図13は、補助ロック制御処理の詳細を示したフローチャートである。
【0080】
まず、ステップ500では、補助ロックパターン1が設定されているか否かを判定する。上記したステップ320で補助ロックパターン1が設定されていれば肯定判定され、他のパターンが設定されていれば否定判定される。ここで肯定判定されるとステップ505に進み、目標モータ電流値上昇量を失陥時目標電流に設定する。これについては、失陥中の輪に対してのみ設定し、失陥中の輪に対して、失陥中ではない輪と比較して駐車ブレーキ力による制動力加算が行われるようにする。
【0081】
目標モータ電流値上昇量とは、目標制動力に対応するモータ電流の上昇量、具体的には無負荷電流値からのモータ電流の上昇量である。モータ10に流されるモータ電流は、モータ10に加えられる負荷に応じて変動する。本実施形態の場合には、モータ10に加えられる負荷はブレーキパッド11をブレーキディスク12に押し付けている押圧力に相当し、モータ電流が発生させた押圧力と対応した値となる。したがって、無負荷電流値に対して目標モータ電流値上昇量を加算した値が目標制動力を発生させるために必要な目標モータ電流となる。このため、補助ロック制御により失陥時目標電流を目標モータ電流上昇量に設定し、無負荷電流値に対して足し合わせることで、片系統失陥時に対応した駐車ブレーキ力が発生させられるような目標モータ電流を設定することができる。
【0082】
一方、ステップ500で否定判定されるとステップ510に進み、補助ロックパターン2が設定されているか否かを判定する。上記したステップ340で補助ロックパターン2が設定されていれば肯定判定され、上記したステップ350で補助ロックパターン3が設定されていれば否定判定される。ここで肯定判定されるとステップ515に進み、目標モータ電流上昇量として失陥時目標電流を設定する。この場合には、両系統失陥になっていることから、両系統の輪に対して設定する。このように、補助ロック制御により失陥時目標電流を目標モータ電流上昇量に設定することで、両系統失陥時に対応した駐車ブレーキ力が発生させられるような目標モータ電流を設定することができる。
【0083】
なお、失陥時目標電流(=目標モータ電流値上昇量)の演算については、片系統失陥時と両系統失陥時の両方で共通の演算手法を用いることができる。例えば、数式1に基づいて演算することができる。ただし、数式1中の必要制動トルク(1輪分)[Nm]については数式2より求めている。
【0084】
(数1)
失陥時目標電流[A]=(必要制動トルク(1輪分)[Nm]/(2×パッドμ×制動有効半径[m]/1000)×制動トルク変換効率[%]×軸力電流変換係数[N→A]
(数2)
必要制動トルク(1輪分)[Nm]=(失陥時目標減速度[G]−出力されている減速度[G])×タイヤ径[m]×車重[kg]/2
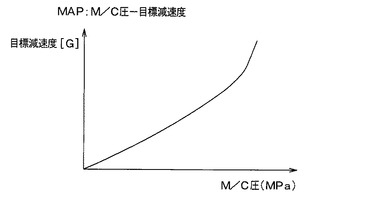
なお、パッドμ(ブレーキパッドの摩擦係数)、制動有効半径、軸力電流変換係数は、車両固有値である。制動トルク変換効率は、温度可変の車両適合値である。また、失陥時目標減速度については、図14に示すM/C圧(MPa)と目標減速度[G]の関係を示したマップより求めている。このマップは、M/C圧が大きくなるほど目標減速度が大きくなる関係を示している。このマップも、車両適合値である。失陥時目標減速度は失陥が発生していないときに本来得られるであろう減速度であり、失陥時目標減速度と出力されている減速度との偏差が失陥により得られなくなった減速度分となる。この得られなくなった減速度分を駐車ブレーキ力として発生させるように、必要制動力トルクを算出している。
【0085】
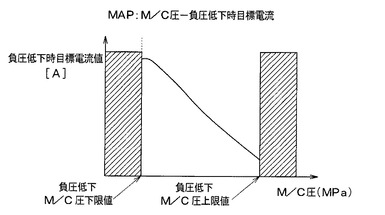
さらに、ステップ510で否定判定されるとステップ520に進み、目標モータ電流上昇量として負圧低下時目標電流を設定する。この場合には、負圧低下の影響が全輪に発生しているため、EPB2が備えられている全輪に対して設定する。このように、補助ロック制御により負圧低下時目標電流を目標モータ電流上昇量に設定することで、負圧低下状態に対応した駐車ブレーキ力が発生させられるように目標モータ電流を設定することができる。
【0086】
なお、負圧低下時目標電流(=目標モータ電流値上昇量)については、図15に示すM/C圧(MPa)と負圧低下時目標電流値[A]との関係を用いて算出している。このマップは、M/C圧が大きくなるほど負圧低下時目標電流値を小さくしていく関係を示している。このマップも車両適合値である。負圧低下時にも一定の減速度が得られるようにしたいことから、M/C圧に対応して負圧低下時目標電流値を設定しており、M/C圧が小さいほど負圧低下時目標電流値を大きくし、駐車ブレーキ力による制動力の加算量が大きくなるようにしている。
【0087】
そして、ステップ525に進み、補助ロック駆動時間タイマが予め決められた最小(MIN)補助ロック駆動時間を超えているか否かを判定する。補助ロック駆動時間タイマとは、補助ロック制御が開始されてからの経過時間を計測するタイマであり、補助ロック制御処理開始と同時に計測を始める。最小補助ロック駆動時間とは、補助ロック制御に掛かると想定される最小時間であり、モータ10の回転速度などに応じて決められる。補助ロック制御の初期時には、突入電流が発生し得るが、突入電流が目標モータ電流に達すると、所望の駐車ブレーキ力が発生していないのに発生させられたと誤判定されることになる。このため、補助ロック駆動時間タイマが最小補助ロック駆動時間を超えるまでの期間をマスクして、上記の誤判定が生じないようにしている。
【0088】
ここで否定判定されればステップ530に進んで補助ロック駆動時間タイマを1つインクリメントし、モータロック駆動をONにする。これにより、補助ロック駆動時間が少なくとも最小補助ロック駆動時間を超えるまでの期間中は補助ロック制御を行うためにモータ10が正回転させられる。これにより、モータ10の正回転に伴って平歯車15が駆動され、平歯車16および回転軸17が回転し、雄ネジ溝17aおよび雌ネジ溝18aの噛合いに基づいて推進軸18がブレーキディスク12側に移動させられ、それに伴ってピストン19も同方向に移動させられることでブレーキパッド11がブレーキディスク12側に移動させられる。
【0089】
一方、ステップ525で肯定判定されると、ステップ535に進み、モータ電流を時間に対して微分した電流値微分値を演算する。例えば、今回と前回の制御周期の際に得られたモータ電流の差を電流値微分値とする。そして、この電流値微分値が電流値微分閾値よりも大きいか否かを判定する。
【0090】
モータ電流は、モータ10に加えられる負荷に応じて変動する。例えば、本実施形態の場合にはモータ10に加えられる負荷はブレーキパッド11をブレーキディスク12に押し付けている押圧力に相当するため、モータ電流が発生させた押圧力と対応した値となる。このため、モータ10が無負荷状態のときには、モータ電流が無負荷電流値となり、モータ10に対して負荷が加えられると、モータ電流が上昇し始める。
【0091】
したがって、モータ電流を時間に対して微分した電流値微分値を求めることで、モータ電流の変化を検知することができ、電流値微分値を電流値微分閾値と比較することで、モータ電流の上昇し始めを検知することができる。なお、電流値微分閾値は、ノイズ的なモータ電流の変動を除外しつつ、モータ電流が上昇し始めたと想定される値に設定される。したがって、ステップ535で肯定判定されるとステップ540に進み、否定判定されるとステップ530に進んで上記した処理を行う。
【0092】
ステップ540では、モータ電流が無負荷電流値に目標モータ電流値上昇量を加算した値、つまり目標モータ電流を超えたか否かを判定する。上記したように、モータ電流はモータ10に加えられる負荷に応じて変動し、本実施形態の場合にはモータ10に加えられる負荷はブレーキパッド11をブレーキディスク12に押し付けている押圧力に相当するため、モータ電流が発生させた押圧力と対応した値となる。このため、モータ電流が目標モータ電流を超えていれば発生させた押圧力により所望の駐車ブレーキ力を発生させられた状態、つまりEPB2によりブレーキパッド11の摩擦面がブレーキディスク12の内壁面にある程度の力で押さえ付けられた状態となる。したがって、本ステップで肯定判定されるまではステップ530の処理を繰り返し、肯定判定されるとステップ545に進む。
【0093】
そして、ステップ545において、補助ロック動作が完了したことを意味する補助ロック状態をONすると共に補助ロック駆動時間タイマを0にし、補助ロック保持動作としてモータロック駆動をOFF(停止)する。これにより、モータ10の回転が停止され、回転軸17の回転が停止させられて、雄ネジ溝17aと雌ネジ溝18aとの噛合いによる摩擦力により、推進軸18が同じ位置に保持されるため、その時に発生させた駐車ブレーキ力が保持される。これにより、駐車中の車両の移動が規制される。このようにして、補助ロック制御処理が完了する。
【0094】
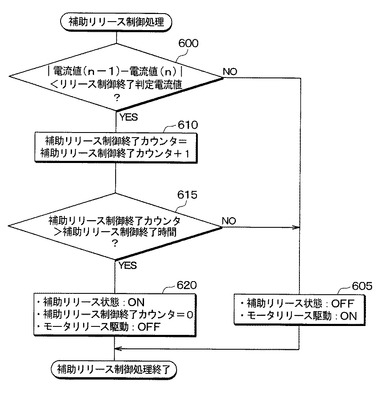
次に、図3のステップ145に示した補助リリース制御処理について説明する。補助リリース制御処理では、上記した補助リリース判定処理において、補助ロック制御時にEPB2が発生させた駐車ブレーキ力を解除させる。図16は、補助リリース制御処理の詳細を示したフローチャートである。
【0095】
まず、ステップ600では、前回の制御周期のときに検出されたモータ電流の電流値(n-1)と今回の制御周期のときに検出されたモータ電流の電流値(n)の差の絶対値|電流値(n-1)−電流値(n)|がリリース制御終了判定電流値未満になっているか否かを判定する。
【0096】
上述したように、モータ電流は、モータ10に加えられる負荷に応じて変動し、ブレーキパッド11をブレーキディスク12に押し付けている押圧力がなくなると、モータ電流が無負荷電流値で一定となり、変動が無くなる。このため、リリース制御終了判定電流値をモータ10に対する負荷がなくなったと想定される電流変化量に設定しておき、絶対値|電流値(n-1)−電流値(n)|がリリース制御終了判定電流値未満になると、ブレーキパッド11がブレーキディスク12から離れてモータ10に対する負荷が無くなったと判定する。
【0097】
したがって、ステップ600で否定判定されれば、ステップ605に進んで補助リリース状態をOFFにすると共に、モータリリース駆動をON、つまりモータ10を逆回転させる。これにより、モータ10の逆回転に伴って、ブレーキパッド11がブレーキディスク12から離れる方向に移動させられる。
【0098】
また、ステップ600で肯定判定されると、ステップ610に進んで補助リリース制御終了カウンタをインクリメントしたのち、ステップ615に進んでリリース制御終了カウンタが補助リリース制御終了時間を超えたか否かを判定する。
【0099】
補助リリース制御終了時間は、モータ10への負荷が無くなったタイミング、ブレーキパッド11がブレーキディスク12から離れたタイミングから補助リリース制御を継続する時間であり、補助ロック制御時にモータ10によってブレーキパッド11を移動させた量が多いほど長くなる。
【0100】
ここで、補助リリース制御終了カウンタが補助リリース制御終了時間を超えていない状態であれば、まだ補助リリース制御が継続されることになるため、ステップ605の処理を実行する。そして、補助リリース制御終了カウンタが補助リリース制御終了時間を超えると、ステップ620に進み、補助リリース状態をONすると共に補助リリース制御終了カウンタを0にし、モータリリース駆動をOFFにする。したがって、モータ10の回転が停止され、ブレーキパッド11がブレーキディスク12から離れた状態のままで保持される。このようにして、補助リリース制御処理が完了する。
【0101】
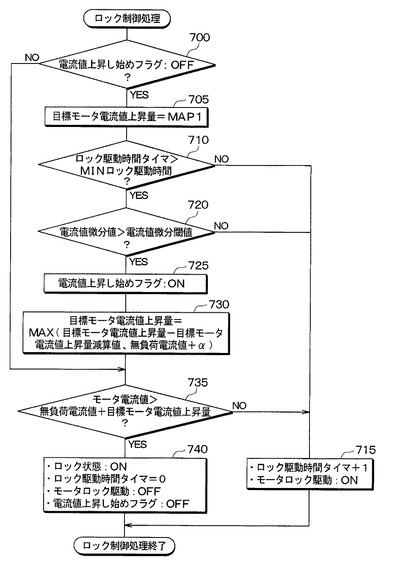
次に、図3のステップ160に示したロック制御処理について説明する。ロック制御処理では、ドライバによるEPB2の作動要求、つまり操作スイッチ20の操作に対応してモータ10を回転させることによりEPB2を作動させ、EPB2にて所望の駐車ブレーキ力を発生させられる位置でモータ10の回転を停止し、この状態を維持するという処理を行う。図17にロック制御処理の詳細を示したフローチャートを示し、この図を参照してロック制御処理について説明する。
【0102】
まず、ステップ700では、電流値上昇し始めフラグがOFFになっているか否かを判定する。電流値上昇し始めフラグとは、モータ電流が上昇し始めたときにONされるフラグであり、後述するステップ725でONされるまではOFFになっている。ここで肯定判定されればステップ705に進む。
【0103】
ステップ705では、ロック動作による駐車ブレーキ力を発生させるための目標モータ電流値上昇量を設定する。ここでいう目標モータ電流値上昇量も、モータ電流の上昇量、具体的には無負荷電流値からのモータ電流の上昇量であり、無負荷電流値に対して目標モータ電流値上昇量を加算した値が目標制動力を発生させるために必要な目標モータ電流となる。このときの目標モータ電流値上昇量は、駐車維持のために最低限必要なブレーキ力に対応するW/C圧を発生させるモータ電流の上昇量以上に設定されれば良い。
【0104】
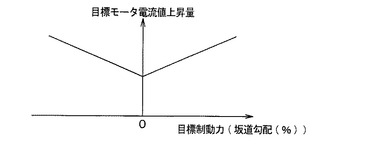
ここでは、目標制動力に対応するW/C圧と目標モータ電流値上昇量の関係をマップ化しておき、そのマップを用いて、目標制動力に対応する目標モータ電流値上昇量を取得している。図18は、その一例を示したマップであり、目標制動力に対応するW/C圧の大きさに比例して目標モータ電流値上昇量が大きくなるようなマップとしてある。なお、目標制動力は、車両の停車維持に必要な制動力であり、坂路勾配に応じて決まる値であることから、坂路勾配に比例して目標モータ電流値上昇量が大きくなるようなマップであっても良い。坂路勾配は、Gセンサ21の値として表されることから、Gセンサ21の値に基づいて目標モータ電流値上昇量を設定すれば良い。
【0105】
続いて、ステップ710に進み、ロック駆動時間タイマが予め決められた最小(MIN)ロック駆動時間を超えているか否かを判定する。ロック駆動時間タイマとは、ロック制御が開始されてからの経過時間を計測するカウンタであり、ロック制御処理開始と同時にカウントを始める。最小ロック駆動時間とは、ロック制御に掛かると想定される最小時間のことであり、モータ10の回転速度などに応じて予め決まる値である。後述するステップ735のように、モータ電流が無負荷電流値に対して目標モータ電流値上昇量を足した値に到達した時にEPB2が発生させたブレーキ力が所望の値に到達した、もしくは近づいたと判定するが、モータ10への電流供給初期時の突入電流などによりモータ電流がその値を超えることもあり得る。このため、ロック駆動時間タイマを最小ロック駆動時間と比較することで、制御初期時をマスクでき、突入電流などによる誤判定を防止することが可能となる。
【0106】
したがって、ロック駆動時間タイマが最小時間を超えていない状態であれば、まだロック制御が継続されることになるため、ステップ715に進んでロック駆動時間タイマをインクリメントし、モータロック駆動をON、つまりモータ10を正回転させる。これにより、モータ10の正回転に伴ってブレーキパッド11がブレーキディスク12側に移動させられ、EPB2によるロック動作が行われていく。
【0107】
一方、ステップ710で肯定判定されると、ステップ720に進み、モータ電流を時間に対して微分した電流値微分値を演算する。例えば、今回と前回の制御周期の際に得られたモータ電流の差を電流値微分値とする。そして、この電流値微分値が電流値微分閾値よりも大きいか否かを判定する。この処理は、補助ロック制御処理における図13のステップ535の処理と同様である。
【0108】
そして、ステップ720で肯定判定されると、ステップ725でモータ電流が上昇し始めたことを示す電流値上昇し始めフラグをONし、ステップ730に進む。また、ステップ720で否定判定された場合には、まだモータ10に負荷が掛かっていないため、再びステップ715の処理を実行する。
【0109】
続く、ステップ730では、サービスブレーキ1によって発生させられているブレーキ力分を考慮した処理として、目標モータ電流値上昇量の補正を行う。すなわち、サービスブレーキ1によってブレーキ力が発生させられている場合、目標モータ電流値上昇量を小さくする補正を行い、そのブレーキ力の大きさに応じて目標モータ電流値上昇量を小さくする目標モータ電流値上昇量の目標モータ電流値上昇量減算値を求め、ステップ705で求められた目標モータ電流値上昇量から目標モータ電流値上昇量減算値を差し引いた値を演算する。
【0110】
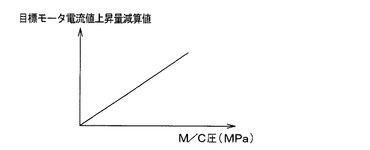
本実施形態では、M/C圧に対応する目標モータ電流値上昇量減算値の値をマップ化しておき、そのマップに基づき、M/C圧センサ22で検出したM/C圧と対応する値を抽出することにより目標モータ電流値上昇量減算値を求めている。図19は、その一例を示したマップであり、M/C圧と目標モータ電流値上昇量減算値の関係を示したマップである。この図に示すように、M/C圧の大きさ、つまりドライバによるブレーキペダル3の踏込み(踏力)の大きさに比例して目標モータ電流値上昇量減算値が大きくなるようなマップとしてある。このため、本実施形態の場合、検出したM/C圧と対応する目標モータ電流値上昇量減算値を図19に示すマップから読み出し、目標モータ電流値上昇量から目標モータ電流値上昇量減算値を差し引くことにより、目標モータ電流値上昇量を求めている。
【0111】
ただし、目標モータ電流値上昇量が零以下になるのは好ましくない。このため、ステップ730では、目標モータ電流値上昇量から目標モータ電流値上昇量減算値を差し引いた値と、無負荷電流値に対して所定値α(正の定数)を足した値とのいずれか大きい方(MAX(目標モータ電流値上昇量−目標モータ電流値上昇量減算値, 無負荷電流値+α))を目標モータ電流値上昇量としている。
【0112】
この後、ステップ735に進み、モータ電流が無負荷電流値に対して目標モータ電流値上昇量分を加算した値、つまり目標モータ電流を超えたか否かを判定する。モータ電流が無負荷電流値に対して目標モータ電流値上昇量分を加算した値を超えると、発生させた押圧力により所望の駐車ブレーキ力を発生させられた状態、つまりEPB2によりブレーキパッド11の摩擦面がブレーキディスク12の内壁面にある程度の力で押さえ付けられた状態となる。したがって、本ステップで肯定判定されるまではステップ715の処理を繰り返し、肯定判定されるとステップ740に進む。
【0113】
そして、ステップ740において、ロックが完了したことを示すべくロック状態をONすると共にロック駆動時間タイマを0にし、モータロック駆動をOFF(停止)する。これにより、モータ10の回転が停止され、その時に発生させたブレーキ力が保持される。これにより、駐車中の車両の移動が規制される。さらに、また、電流値上昇し始めフラグをOFFする。このようにして、ロック制御処理が完了する。
【0114】
次に、図3のステップ175に示したリリース制御処理について説明する。リリース制御処理では、モータ10を回転させることによりEPB2を作動させ、EPB−ECU9にて発生させられている駐車ブレーキ力を解除するという処理を行う。図20にリリース制御処理の詳細を示したフローチャートを示し、この図を参照してリリース制御処理について説明する。
【0115】
まず、ステップ800では、前回の制御周期のときに検出されたモータ電流の電流値(n-1)と今回の制御周期のときに検出されたモータ電流の電流値(n)の差の絶対値|電流値(n-1)−電流値(n)|がリリース制御終了判定電流値未満になっているか否かを判定する。この処理は、上記した補助リリース制御処理における図16のステップ600の処理と同様である。
【0116】
このステップ800で否定判定されれば、ステップ805に進んでリリース状態をOFFにすると共に、モータリリース駆動をON、つまりモータ10を逆回転させる。これにより、モータ10の逆回転に伴って、ブレーキパッド11がブレーキディスク12から離れる方向に移動させられる。また、ステップ800で肯定判定されると、ステップ810に進んでリリース制御終了カウンタをインクリメントしたのち、ステップ815に進んでリリース制御終了カウンタがリリース制御終了時間を超えたか否かを判定する。
【0117】
リリース制御終了時間は、モータ10への負荷が無くなったタイミング、ブレーキパッド11がブレーキディスク12から離れたタイミングからリリース制御を継続する時間であり、ロック制御時にモータ10によってブレーキパッド11を移動させた量が多いほど長くなる。この処理は、上記した補助リリース制御処理における図16のステップ615の処理と同様である。
【0118】
ここで、リリース制御終了カウンタがリリース制御終了時間を超えていない状態であれば、まだリリース制御が継続されることになるため、ステップ805の処理を実行する。そして、リリース制御終了カウンタがリリース制御終了時間を超えると、ステップ820に進み、リリース状態をONすると共にリリース制御終了カウンタを0にし、モータリリース駆動をOFFにする。したがって、モータ10の回転が停止され、ブレーキパッド11がブレーキディスク12から離れた状態のままで保持される。このようにして、リリース制御処理が完了する。
【0119】
最後に、図3のステップ180に示したロック・リリース表示処理について説明する。ロック・リリース表示処理では、ロック状態もしくはリリース状態についての表示を行う。図21にロック・リリース表示処理の詳細を示したフローチャートを示し、この図を参照してロック・リリース表示処理について説明する。
【0120】
ステップ900では、ロック状態がONされているか否かを判定する。ここで否定判定されればステップ905に進んでロック・リリース表示ランプ23を消灯させ、肯定判定されればステップ910に進んでロック・リリース表示ランプ23を点灯する。このように、ロック状態がONされておりロック状態のときであればロック・リリース表示ランプ23を点灯し、リリース状態がON、つまりリリース状態もしくはリリース制御が開始された状態のときにはロック・リリース表示ランプ23を消灯する。これにより、ドライバにロック状態であるか否かを認識させることが可能となる。このようにして、ロック・リリース表示処理が完了し、これに伴って駐車ブレーキ制御処理が完了する。
【0121】
続いて、本実施形態にかかる駐車ブレーキ制御処理の作動について、図22〜図27に示すタイミングチャートを参照して説明する。
【0122】
図22は、ブレーキ失陥時の処置を説明するためのタイミングチャートである。ブレーキ失陥時にブレーキ失陥が発生していない通常時と同様の踏力を発生させようとした場合、M/C圧が発生させられず反力が得られないため、ブレーキ失陥時の方が通常時と比較してストロークが大きくなる。また、ブレーキ失陥時にも、通常時と同様の踏力を発生させるまでブレーキペダル3を踏み込めば、通常時に近いM/C圧を発生させられるが、M/C圧が発生していたとしても、通常時と比較してブレーキ失陥時の方が得られる減速度[G]が小さくなる。また、M/C圧についても、ブレーキペダルの踏み込み初期時には通常時とブレーキ失陥時との間のM/C圧の差は小さいが、時間経過に伴って徐々に差が広がっていく。
【0123】
図23は、ブレーキ失陥時の処置として、M/C圧に対して減速度[G]が出ていない場合、つまり制動力不足の場合にEPB補助制御を行ったときのタイミングチャートである。この図において、図8の斜線領域で示したM/C圧に対して減速度[G]が得られていない範囲をM/C圧に応じた失陥判定ロック閾値として表してある。また、図12において主制動装置が正常のときに想定されるM/C圧と減速度[G]の範囲をM/C圧に応じた失陥判定リリース閾値として表してある。
【0124】
この図に示されるように、ブレーキ失陥時には、EPB補助制御判定においてEPB補助制御がONと判定される。そして、ブレーキ失陥時にM/C圧ロック閾値下限を超えており、かつ、得られているM/C圧に応じた減速度[G]がM/C圧に応じた失陥判定ロック閾値を下回っている状態が一定時間継続すると、補助ロック判定により補助ロックがONされる。そして、補助ロック制御によってM/C圧に対する減速度[G]が回復し、得られているM/C圧に応じた減速度[G]がM/C圧に応じた失陥判定リリース閾値を上回っている状態が一定時間継続すると、補助リリース判定により補助リリースがONされる。このように、EPB2のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPB2による制動力を解除もしくは減少させるときにEPB2をリリース動作させる補助リリース制御を行っている。これにより、ブレーキ失陥時にも、M/C圧に応じた所望の減速度[G]が得られるようにすることが可能となる。
【0125】
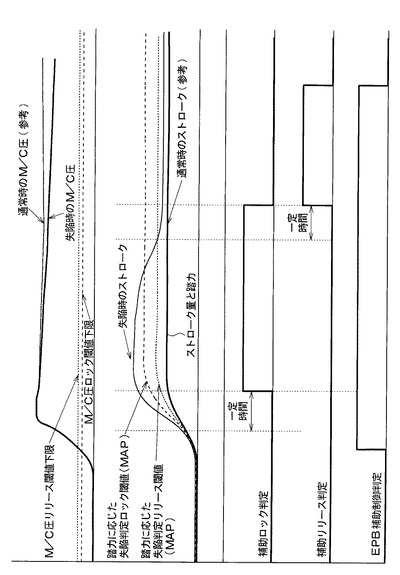
図24は、ブレーキ失陥時の処置として、踏力に対してストロークが出ている場合、つまりブレーキペダル3が吸い込まれている場合にEPB補助制御を行ったときのタイミングチャートである。この図において、図7の斜線領域で示したストローク量に対して踏力が得られていない範囲を踏力に応じた失陥判定ロック閾値として表してある。また、図11において主制動装置が正常のときに想定されるストローク量と踏力の範囲を踏力に応じた失陥判定リリース閾値として表してある。
【0126】
この図に示されるように、ブレーキ失陥時には、EPB補助制御判定においてEPB補助制御がONと判定される。そして、ブレーキ失陥時にM/C圧ロック閾値下限を超えており、かつ、得られている踏力に応じたストロークが踏力に応じた失陥判定ロック閾値を上回っている状態が一定時間継続すると、補助ロック判定により補助ロックがONされる。そして、補助ロック制御後踏力に対するストロークが戻った時、得られている踏力にストロークが踏力に応じた失陥判定リリース閾値を下回っている状態が一定時間継続すると、補助リリース判定により補助リリースがONされる。このようにすることで、ブレーキ失陥時にも、ブレーキペダル3が吸い込まれることを抑制でき、踏力に応じた所望のストロークが得られるようにすることが可能となる。
【0127】
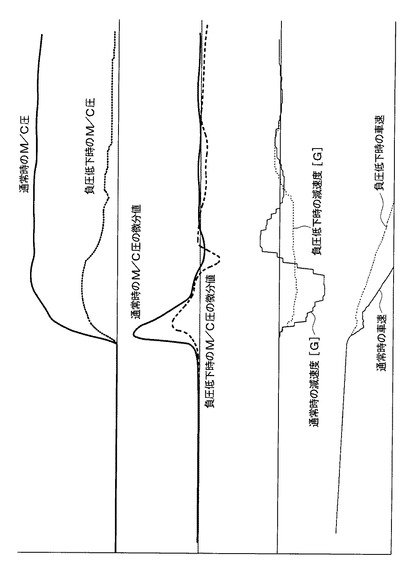
図25は、負圧低下状態のときの処置を説明するためのタイミングチャートである。負圧低下状態の際には、負圧低下状態になっていない通常時と同様の踏力でブレーキペダル3を踏み込んだとしても、発生させられるM/C圧は通常時と比較して小さくなる。同様に、負圧低下状態のときには、通常時と比較して、M/C圧の微分値も小さくなる。そして、負圧低下状態のときには発生させられるM/C圧が小さくなることから、負圧低下状態のときに得られる減速度[G]も通常時と比較して小さくなる。したがって、負圧低下状態のときには、通常時と比較して車速の低下が遅く、制動距離が長くなる。
【0128】
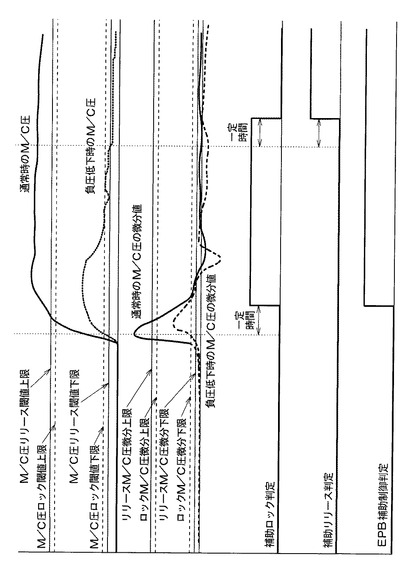
図26および図27は、負圧低下状態のときにEPB補助制御を行った場合のタイミングチャートである。
【0129】
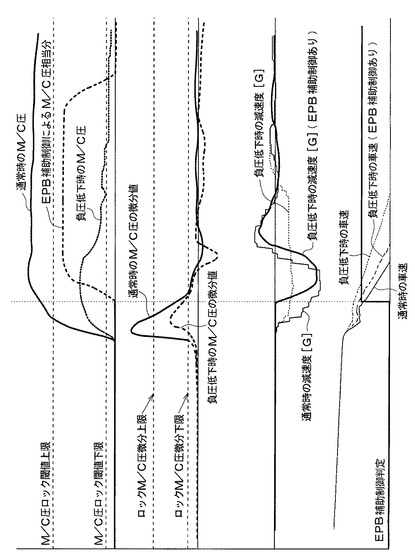
図26に示されるように、負圧低下状態のときには、EPB補助制御判定においてEPB補助制御がONと判定される。そして、負圧低下状態においてM/C圧がM/C圧ロック閾値下限からM/C圧ロック閾値上限の範囲内で、かつ、M/C圧の微分値がロックM/C圧微分下限からロックM/C圧微分上限の範囲内である状態が一定時間継続すると、補助ロック判定により補助ロックがONされる。そして、補助ロック制御が実行されることにより、図27に示すように通常時と負圧低下状態のときのM/C圧の差分相当の制動力が発生させられ、負圧低下状態であっても所望の減速度[G]を発生させることが可能となる。
【0130】
その後、M/C圧がM/C圧リリース閾値下限以下もしくはM/C圧リリース閾値上限以上、または、M/C圧の微分値がリリースM/C圧微分下限以下もしくはリリースM/C圧微分上限以上の状態が一定時間継続すると、補助リリース判定により補助リリースがONされる。このように、EPB2のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPB2による制動力を解除もしくは減少させるときにEPB2をリリース動作させる補助リリース制御を行っている。これにより、負圧低下状態のときにも、所望の減速度[G]が得られるようにすることが可能となる。
【0131】
以上説明したように、本実施形態では、主制動装置の異常もしくは負圧低下状態のときに、EPB2のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPB2による制動力を解除もしくは減少させるときにEPB2をリリース動作させる補助リリース制御を行っている。そして、補助ロック判定にて判定された失陥の形態に対応して、補助ロック制御を行う車輪と該補助ロック制御により発生させる駐車ブレーキ力を設定するようにしている。したがって、主制動装置の異常もしくは負圧低下状態のときにも、的確に所望の制動力が発生させられる。また、所望の制動力を発生させられることから、所望の減速度[G]が得られるようにすることが可能となる。
【0132】
また、ブレーキ失陥が片系統のみの場合、その系統の車輪の制動力が不足することになるため、それに起因したヨーが発生し得る。しかしながら、EPB2によって駐車ブレーキ力を発生させることで、失陥した系統の車輪にも制動力を発生させることが可能となり、失陥した系統の車輪に不足している制動力を補って、ヨーの発生を抑制する方向に制動力を作用させることが可能となる。これにより、より車両の安定性を確保しつつ、制動を行うことが可能となる。
【0133】
(他の実施形態)
上記実施形態では、図5のステップ300やステップ310において、ストローク量と踏力の関係がマップの範囲外であるか否かの判定とM/C圧と減速度[G]との関係がマップの範囲外であるか否かの判定の両方を行い、いずれか一方で肯定判定された場合にブレーキ失陥と判定されるようにしている。また、図6のステップ400、410においても、同様の判定を行っている。これら各ステップについては、各条件の一方のみを判定するような形態としても構わない。勿論、両方の判定を行うことにより、より的確な制御が行えることになるが、仮に、ストローク量と踏力との関係について判定しないようにするのであれば、高価なストロークセンサが必要なくなるという効果も得られる。
【0134】
また、図5のステップ300やステップ310において、ブレーキ失陥については、M/C圧と減速度[G]の関係を示したマップを利用して、正常範囲外の状態が一定時間経過した場合に検出されるようにしている。しかしながら、これ以外の方法によってブレーキ失陥を検出することもできる。例えば、異なる系統の車輪速センサの出力を比較することで、車輪速出力の減少が緩やかな系統を片系統失陥と判定するようにしても良い。また、制動中にもかかわらず車輪速センサの出力から全車輪の車輪速度に差が無い状態でGセンサ21で検出される減速度[G]が一定以上の値にならない状態が一定時間継続したときに両系統失陥と判定するようにしても良い。
【0135】
また、上記実施形態では、ブレーキ失陥時および負圧低下状態の際に補助ロック制御および補助リリース制御を実行するようにしたが、ブレーキ失陥のときにのみ、もしくは、負圧低下状態のときにのみ実行するようにしても良い。
【0136】
また、上記実施形態では、本発明が適用される車両用ブレーキシステムの一例を挙げて説明したが、車両用ブレーキシステムに備えられる各部については適宜変更可能である。
【0137】
例えば、上記実施形態では、M/C圧センサ22によってM/C圧を検出するようにしているが、ABS制御等の作動時でなければW/C圧もM/C圧と等しい値であることから、W/C圧センサの圧力を検出するようにしても良い。つまり、車両用ブレーキシステムに備えられる配管の圧力検出を行えるものの圧力検出値を用いて、ブレーキ失陥や負圧低下状態の判定を行うようにしても良い。
【0138】
また、上記実施形態では、ブレーキ操作部材としてブレーキペダル3を用いた車両用ブレーキシステムについて説明したが、ブレーキレバーなどの他のブレーキ操作部材が用いられる場合についても本発明を適用することができる。すなわち、ブレーキ操作部材の操作力がエンジン負圧を利用した倍力装置4によって倍力され、それに基づいてW/C圧を発生させる車両用ブレーキシステムであれば、上記実施形態に挙げた構成のものでなくても良い。
【0139】
なお、各図中に示したステップは、各種処理を実行する手段に対応するものである。例えば、EPB−ECU9のうち上記ステップ115〜145の処理を実行する部分が補助制御手段、ステップ135の処理を実行する部分が補助ロック制御処理手段、ステップ145の処理を実行する部分が補助リリース制御処理手段、ステップ210の処理を実行する部分が異常判定手段、ステップ240の処理を実行する部分が補助ロック判定手段、ステップ250の処理を実行する部分が補助リリース判定手段に相当している。
【符号の説明】
【0140】
1…サービスブレーキ、2…EPB、3…ブレーキペダル、4…倍力装置、5…M/C、7…アクチュエータ、8…ESC−ECU、9…EPB−ECU、10…モータ、11…ブレーキパッド、12…ブレーキディスク、13…キャリパ、20…操作SW、21…Gセンサ、22…M/C圧センサ
【技術分野】
【0001】
本発明は、サービスブレーキと電動パーキングブレーキ(以下、EPB(Electric parking brake)という)とを有する車両用ブレーキシステムに適用される駐車ブレーキ制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、車両走行中にサービスブレーキの故障時に、EPBのスイッチ操作を行うことで、EPBを動作させて制動力を発生させ、所望の減速度を得るようにする場合において、スイッチの操作時間に基づいてEPBの反応時間を早くしたり、遅くしたりする制御を行う駐車ブレーキ制御装置が提案されている。また、特許文献2において、サービスブレーキでのブレーキ失陥時に、EPBで制動力を発生させることで、所望の減速度を得るようにする駐車ブレーキ制御装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−162013号公報
【特許文献2】特開2005−343248号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のように、EPBの操作スイッチが操作されることを前提としてEPBを作動させるものでは、緊急時に操作スイッチを操作するのが難しかったり、操作遅れが生じるなど、的確にEPBを作動させられない可能性がある。また、特許文献2では、ブレーキ失陥時にEPBによって制動力を発生させることが開示されているものの、具体的にどのように作動させるかについては何ら開示がされていない。
【0005】
本発明は上記点に鑑みて、ブレーキ失陥などの異常時にEPBを作動させることにより、的確に所望の制動力が発生させられる駐車ブレーキ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明では、駐車ブレーキ装置(2)を制御して駐車ブレーキ力を発生させる補助ロック制御および該駐車ブレーキ力を解除する補助リリース制御を実行することで、主制動装置が発生させる制動力と駐車ブレーキ力とにより、ブレーキ操作部材(3)の操作量に応じた目標制動力を発生させる補助制御を実行する補助制御手段(115〜145)を有し、補助制御手段(115〜145)は、主制動装置の異常が発生しているか否かを判定する異常判定手段(210)と、異常判定手段(210)によって異常が判定されたときに、当該異常が2系統のうちの片方の系統が失陥する片系統失陥であるか、2系統の両方が失陥する両系統失陥であるかを判定すると共に、駐車ブレーキ装置(2)を制御して駐車ブレーキ力を発生させる補助ロック制御を実行するか否かを判定する補助ロック判定手段(240)と、補助ロック制御後に、補助ロック制御によって発生させた駐車ブレーキ力を解除する補助リリース制御を実行するか否かを判定する補助リリース判定手段(250)と、補助ロック判定手段(240)にて判定された失陥の形態に対応して、補助ロック制御を行う車輪と該補助ロック制御により発生させる駐車ブレーキ力を設定する補助ロック制御処理手段(135)と、補助リリース判定手段(250)の判定に基づいて、補助ロック制御により発生させた駐車ブレーキ力を解除する補助リリース制御を実行する補助リリース制御処理手段(145)と、を有していることを特徴としている。
【0007】
このように、主制動装置の異常のときに、駐車ブレーキ装置(2)のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、駐車ブレーキ装置(2)による制動力を解除するときに駐車ブレーキ装置(2)をリリース動作させる補助リリース制御を行っている。そして、補助ロック判定手段(240)にて判定された失陥の形態に対応して、補助ロック制御を行う車輪と該補助ロック制御により発生させる駐車ブレーキ力を設定するようにしている。したがって、主制動装置の異常のときにも、的確に所望の制動力を発生させることが可能となる。
【0008】
請求項2に記載の発明では、補助ロック制御処理手段(135)は、補助ロック判定手段(240)にて判定された失陥が片系統失陥のときには、失陥が検出された系統の車輪に備えられる駐車ブレーキ装置(2)にて発生させる駐車ブレーキ力のみを設定し、補助ロック判定手段(240)にて判定された失陥が両系統失陥のときには、両系統の車輪に備えられる駐車ブレーキ装置(2)にて発生させる駐車ブレーキ力を設定することを特徴としている。
【0009】
このように、失陥が検出された車輪に備えられる駐車ブレーキ装置(2)にて駐車ブレーキ力を発生させることにより、失陥した系統の車輪に不足している制動力を補って、ヨーの発生を抑制する方向に制動力を作用させることが可能となる。これにより、より車両の安定性を確保しつつ、制動を行うことが可能となる。
【0010】
例えば、請求項3に記載したように、補助ロック判定手段(240)は、ブレーキ操作部材(3)のストローク量と操作力との関係、または、マスタシリンダ圧と車両に発生している減速度との関係が、片系統失陥が発生していない通常時に想定される関係から定められた所定範囲外であるか、もしくは、両系統失陥が発生していない通常時に想定される関係から定められた所定範囲外であるかを判定することで、片系統失陥および両系統失陥の判定を行うことができる。
【0011】
また、請求項4に記載したように、補助リリース判定手段(250)は、ブレーキ操作部材(3)のストローク量と操作力との関係、または、マスタシリンダ圧と車両に発生している減速度との関係が、片系統失陥が発生していない通常時に想定される関係から定められた所定範囲内になったとき、もしくは、両系統失陥が発生していない通常時に想定される関係から定められた所定範囲内になったときに、補助リリース制御を実行することを判定することができる。
【0012】
請求項5に記載の発明では、異常判定手段(210)は、倍力装置(4)が用いているエンジン負圧が低下している負圧低下状態になっているか否かについても異常の1つとして判定し、補助ロック判定手段(240)は、異常判定手段(210)によって負圧低下状態になっていることが判定されたときに、マスタシリンダ圧が所定のロック閾値下限からロック閾値上限の範囲内であり、かつ、マスタシリンダ圧の微分値が所定のロック微分閾値下限からロック微分閾値上限の範囲内であると、補助ロック制御を実行することを判定することを特徴としている。
【0013】
このように、負圧低下状態のときにも、駐車ブレーキ装置(2)のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、駐車ブレーキ装置(2)による制動力を解除するときに駐車ブレーキ装置(2)をリリース動作させる補助リリース制御を行っている。したがって、負圧低下状態のときにも、的確に所望の制動力を発生させることが可能となる。
【0014】
この場合、請求項6に記載したように、補助リリース判定手段(250)は、マスタシリンダ圧が所定のロック閾値下限より下もしくはロック閾値上限より上になり、かつ、マスタシリンダ圧の微分値が所定のロック微分閾値下限より下もしくはロック微分閾値上限より上になったときに、補助リリース制御を実行することを判定することができる。
【0015】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態にかかる駐車ブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。
【図2】ブレーキシステムに備えられる後輪系のブレーキ機構の断面模式図である。
【図3】駐車ブレーキ制御処理の詳細を示したフローチャートである。
【図4】EPB補助制御判定の詳細を示したフローチャートである。
【図5】補助ロック判定処理の詳細を示したフローチャートである。
【図6】補助リリース判定処理の詳細を示したフローチャートである。
【図7】主制動装置が片系統失陥となった場合に想定されるストローク量と踏力の関係の一例を示すマップである。
【図8】主制動装置が片系統失陥となった場合に想定されるM/C圧と減速度[G]の関係の一例を示すマップである。
【図9】主制動装置が両系統失陥となった場合に想定されるストローク量と踏力の関係の一例を示すマップである。
【図10】主制動装置が両系統失陥となった場合に想定されるM/C圧と減速度[G]の関係の一例を示すマップである。
【図11】主制動装置が正常のときに想定されるストローク量と踏力の関係の一例を示すマップである。
【図12】主制動装置が正常のときに想定されるM/C圧と減速度[G]の関係の一例を示すマップである。
【図13】補助ロック制御処理の詳細を示したフローチャートである。
【図14】M/C圧(MPa)と目標減速度[G]の関係を示したマップである。
【図15】M/C圧(MPa)と負圧低下時目標電流値[A]との関係を示したマップである。
【図16】補助リリース制御処理の詳細を示したフローチャートである。
【図17】ロック制御処理の詳細を示したフローチャートである。
【図18】目標制動力に対応する目標モータ電流値上昇量の関係を示したマップである。
【図19】M/C圧に対応する目標モータ電流値上昇量減算値の関係を示したマップである。
【図20】リリース制御処理の詳細を示したフローチャートである。
【図21】ロック・リリース表示処理の詳細を示したフローチャートである。
【図22】ブレーキ失陥時の処置を説明するためのタイミングチャートである。
【図23】ブレーキ失陥時の処置として、M/C圧に対してストロークに基づく減速度[G]が出ていない場合のタイミングチャートである。
【図24】ブレーキ失陥時の処置として、踏力に対してストロークが出ている場合のタイミングチャートである。
【図25】負圧低下状態のときの処置を説明するためのタイミングチャートである。
【図26】負圧低下状態のときにEPB補助制御を行った場合のタイミングチャートである。
【図27】負圧低下状態のときにEPB補助制御を行った場合のタイミングチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0018】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、後輪系にディスクブレーキタイプのEPBを適用している車両用ブレーキシステムを例に挙げて説明する。図1は、本実施形態にかかる駐車ブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。また、図2は、ブレーキシステムに備えられる後輪系のブレーキ機構の断面模式図である。以下、これらの図を参照して説明する。
【0019】
図1に示すように、ブレーキシステムは、ドライバの踏力に基づいてブレーキ力を発生させるサービスブレーキ1と駐車時に車両の移動を規制するためのEPB2とが備えられている。
【0020】
サービスブレーキ1は、ドライバによるブレーキペダル3の踏み込みに応じた踏力を倍力装置4にて倍力したのち、この倍力された踏力に応じたブレーキ液圧をマスタシリンダ(以下、M/Cという)5内に発生させ、このブレーキ液圧を各車輪のブレーキ機構に備えられたホイールシリンダ(以下、W/Cという)6に伝えることでブレーキ力を発生させる。倍力装置2は、エンジン負圧に基づいて踏力を倍力し、その力でプッシュロッドを介してM/Cピストンを押圧することでM/C圧を発生させている。また、M/C5とW/C6との間にブレーキ液圧制御用のアクチュエータ7が備えられており、サービスブレーキ1により発生させるブレーキ力を調整し、車両の安全性を向上させるための各種制御(例えば、アンチスキッド制御等)を行える構造とされている。本明細書では、これらサービスブレーキ1とアクチュエータ7を含めたドライバのブレーキ操作に基づいて主に制動力を発生させる装置を主制動装置と呼ぶことにする。
【0021】
アクチュエータ7を用いた各種制御は、ESC(Electronic Stability Control)−ECU8にて実行される。例えば、ESC−ECU8からアクチュエータ7に備えられる図示しない各種制御弁やポンプ駆動用のモータを制御するための制御電流を出力することにより、アクチュエータ7に備えられる油圧回路を制御し、W/C6に伝えられるW/C圧を制御する。これにより、車輪スリップの回避などを行い、車両の安全性を向上させる。例えば、アクチュエータ7は、各車輪毎に、W/C6に対してM/C5内に発生させられたブレーキ液圧もしくはポンプ駆動により発生させられたブレーキ液圧が加えられることを制御する増圧制御弁や、各W/C6内のブレーキ液をリザーバに供給することでW/C圧を減少させる減圧制御弁等を備えており、W/C圧を増圧・保持・減圧制御できる構成とされている。このアクチュエータ7の構成に関しては、従来より周知となっているため、ここでは詳細については省略する。
【0022】
一方、EPB2は、モータ10にてブレーキ機構を制御することでブレーキ力を発生させるものであり、モータ10の駆動を制御するEPB制御装置(以下、EPB−ECUという)9を有して構成されている。
【0023】
ブレーキ機構は、本実施形態のブレーキシステムにおいてブレーキ力を発生させる機械的構造であり、前輪系のブレーキ機構はサービスブレーキ1の操作によってブレーキ力を発生させる構造とされているが、後輪系のブレーキ機構は、サービスブレーキ1の操作とEPB2の操作の双方に対してブレーキ力を発生させる共用の構造とされている。前輪系のブレーキ機構は、後輪系のブレーキ機構に対して、EPB2の操作に基づいてブレーキ力を発生させる機構をなくした従来から一般的に用いられているブレーキ機構であるため、ここでは説明を省略し、以下の説明では後輪系のブレーキ機構について説明する。
【0024】
後輪系のブレーキ機構では、サービスブレーキ1を作動させたときだけでなくEPB2を作動させたときにも、図2に示す摩擦材であるブレーキパッド11を押圧し、ブレーキパッド11によって被摩擦材であるブレーキディスク12を挟み込むことにより、ブレーキパッド11とブレーキディスク12との間に摩擦力を発生させ、ブレーキ力を発生させる。
【0025】
EPB2の加圧機構はモータ10、平歯車15、平歯車16、回転軸17、推進軸18により構成される。そしてこの加圧機構により駐車ブレーキ力を発生させる。具体的には、ブレーキ機構は、図1に示すキャリパ13内において、図2に示すようにブレーキパッド11を押圧するためのW/C6のボディ14に直接固定されているモータ10を回転させるとにより、モータ10の駆動軸10aに備えられた平歯車15を回転させ、平歯車15に噛合わされた平歯車16にモータ10の回転力を伝えることによりブレーキパッド11を移動させ、EPB2によるブレーキ力を発生させる。
【0026】
キャリパ13内には、W/C6およびブレーキパッド11に加えて、ブレーキパッド11に挟み込まれるようにしてブレーキディスク12の端面の一部が収容されている。W/C6は、シリンダ状のボディ14の中空部14a内に通路14bを通じてブレーキ液圧を導入することで、ブレーキ液収容室である中空部14a内にW/C圧を発生させられるようになっており、中空部14a内に回転軸17、推進軸18、ピストン19などを備えて構成されている。ボディ14は有底シリンダ状でその底面はブレーキパッド11と反対側に位置し、開口部がブレーキパッド11側に位置するように設けられている。このボディ14の開口部はピストン19で塞がれている。
【0027】
回転軸17は、一端がボディ14に形成された挿入孔14cを通じて平歯車16に連結され、平歯車16が回動させられると、平歯車16の回動に伴って回動させられる。この回転軸17における平歯車16と連結された端部とは反対側の端部において、回転軸17の外周面には雄ネジ溝17aが形成されている。一方、回転軸17の他端は、挿入孔14cに挿入されることで軸支されている。具体的には、挿入孔14cには、Oリング20と共に軸受け21が備えられており、Oリング20にて回転軸17と挿入孔14cの内壁面との間を通じてブレーキ液が漏れ出さないようにされながら、軸受け21により回転軸17の他端を軸支持している。
【0028】
推進軸18は、中空状の筒部材にて構成され、内壁面に回転軸17の雄ネジ溝17aと螺合する雌ネジ溝18aが形成されている。この推進軸18は、例えば回転防止用のキーを備えた円柱状もしくは多角柱状に構成されることで、回転軸17が回動しても回転軸17の回動中心を中心として回動させられない構造になっている。このため、回転軸17が回動させられると、雄ネジ溝17aと雌ネジ溝18aとの噛合いにより、回転軸17の回転力を回転軸17の軸方向に推進軸18を移動させる力に変換する。推進軸18は、モータ10の駆動が停止されると、雄ネジ溝17aと雌ネジ溝18aとの噛合いによる摩擦力により同じ位置で止まるようになっており、目標ブレーキ力になったときにモータ10の駆動を停止すれば、その位置に推進軸18を保持することができる。
【0029】
ピストン19は、推進軸18の外周を囲むように配置されるもので、有底の円筒部材もしくは多角筒部材にて構成され、外周面がボディ14に形成された中空部14aの内壁面と接するように配置されている。ピストン19の外周面とボディ14の内壁面との間のブレーキ液洩れが生じないように、ボディ14の内壁面にシール部材22が備えられ、ピストン19の端面にW/C圧を付与できる構造とされている。また、ピストン19は、回転軸17が回転しても回転軸17の回動中心を中心として回動させられないように、推進軸18に回転防止用のキーが備えられる場合にはそのキーが摺動するキー溝が備えられ、推進軸18が多角柱状とされる場合にはそれと対応する形状の多角筒状とされる。
【0030】
このピストン19の先端にブレーキパッド11が配置され、ピストン19の移動に伴ってブレーキパッド11を紙面左右方向に移動させるようになっている。具体的には、ピストン19は、その外周面がボディ14の中空部14aの内壁面に接して、推進軸18の移動に伴って紙面左方向に移動可能で、かつ、ピストン19の端部(ブレーキパッド11が配置された端部と反対側の端部)にW/C圧が付与されることで推進軸18から独立して紙面左方向に移動可能な構成とされている。そして、推進軸18が初期位置(モータ10が回転させられる前の状態)のときに、中空部14a内のブレーキ液圧が付与されていない状態(W/C圧=0)であれば、図示しないリターンスプリングもしくは中空部14a内の負圧によりピストン19が紙面右方向に移動させられ、ブレーキパッド11をブレーキディスク12から離間させられるようになっている。また、モータ10が回転させられて推進軸18が初期位置から紙面左方向に移動させられているときにW/C圧が0になると、移動した推進軸18によってピストン19の紙面右方向への移動が規制され、ブレーキパッド11がその場所で保持される。
【0031】
このように構成されたブレーキ機構では、サービスブレーキ1が操作されると、それにより発生させられたW/C圧に基づいてピストン19が紙面左方向に移動させられることでブレーキパッド11がブレーキディスク12に押圧され、ブレーキ力を発生させる。また、EPB2が操作されると、モータ10が駆動されることで平歯車15が回転させられ、それに伴って平歯車16および回転軸17が回転させられるため、雄ネジ溝17aおよび雌ネジ溝18aの噛合いに基づいて推進軸18がブレーキディスク12側(紙面左方向)に移動させられる。そして、それに伴ってピストン19も同方向に移動させられることでブレーキパッド11がブレーキディスク12に押圧され、ブレーキ力を発生させる。このため、サービスブレーキ1の操作とEPB2の操作の双方に対してブレーキ力を発生させる共用のブレーキ機構とすることが可能となる。
【0032】
また、サービスブレーキ1が作動されることでW/C圧が発生させられている状態でEPB2が操作されると、W/C圧によってピストン19が既に紙面左方向に移動させられているため、推進軸18に掛かる負荷が軽減される。このため、推進軸18がピストン19に当接するまではモータ10はほぼ無負荷状態で駆動される。そして、推進軸18がピストン19に当接するとピストン19を紙面左方向の押す押圧力が加えられ、EPB2によるブレーキ力が発生させられるようになっている。
【0033】
EPB−ECU9は、CPU、ROM、RAM、I/Oなどを備えた周知のマイクロコンピュータによって構成され、ROMなどに記憶されたプログラムにしたがってモータ10の回転を制御することにより駐車ブレーキ制御を行うものである。このEPB−ECU9が本発明の駐車ブレーキ制御装置に相当する。EPB−ECU9は、例えば車室内のインストルメントパネル(図示せず)に備えられた操作スイッチ(SW)20の操作状態に応じた信号や、車両の前後方向の加速度を検出するGセンサ21およびM/C圧センサ22の検出信号を入力し、操作SW20の操作状態や車両の前後方向のGセンサ値およびM/C圧に応じてモータ10を駆動する。さらに、EPB−ECU9は、インストルメントパネルに備えられたロック/リリース表示ランプ23に対してモータ10の駆動状態に応じて、ロック中であるかリリース中であるかを示す信号を出力する。
【0034】
具体的には、EPB−ECU9は、モータ10に流される電流(モータ電流)をモータ10の上流側もしくは下流側で検出するモータ電流検出、ロック制御を終了させるときの目標モータ電流(目標電流値)を演算する目標モータ電流演算、モータ電流が目標モータ電流に達したか否かの判定、操作SW20の操作状態に基づくモータ10の制御など、ロック・リリース制御を実行するための各種機能部を有している。このEPB−ECU9により操作SW20の状態やモータ電流に基づいてモータ10を正回転や逆回転させたりモータ10の回転を停止させることで、EPB2をロック・リリースする制御を行う。また、EPB−ECU9は、ESC−ECU8との間でCAN通信などによって通信を行っており、ESC−ECU8からサービスブレーキ1やアクチュエータ7を含めた主制動装置の故障情報やエンジン負圧が低下しているという情報および各種ブレーキ情報、例えばブレーキペダル3のストローク量(もしくはストローク変化量)や踏力の情報を取得し、その情報に基づいてEPB2を駆動する。これにより、ブレーキ失陥時や負圧低下状態の際にその故障の形態に応じた駐車ブレーキ力を発生させると共に、駐車ブレーキ力を制御するというEPB補助制御を行う。
【0035】
続いて、上記のように構成されたブレーキシステムを用いてEPB−ECU9が上記各種機能部および図示しない内蔵のROMに記憶されたプログラムに従って実行する駐車ブレーキ制御について説明する。図3は、駐車ブレーキ制御処理の詳細を示したフローチャートである。
【0036】
まず、ステップ100において時間計測用カウンタやフラグリセットなどの一般的な初期化処理を行ったのち、ステップ105に進み、時間tが経過したか否かを判定する。ここでいう時間tは、制御周期を規定するものである。つまり、初期化処理が終了してからの時間もしくは前回本ステップで肯定判定されたときからの経過時間が時間tが経過するまで繰り返し本ステップでの判定が行われるようにすることで、時間tが経過するごとに駐車ブレーキ制御が実行されるようにしている。
【0037】
続く、ステップ110では、車両駆動中であるか否かを判定する。すなわち、車両を駆動できる状態になっているか否かを判定しており、例えばイグニッションスイッチがオンされていているか否かに基づいて判定している。ここで肯定判定されれば駐車ブレーキ力を制御する可能性があることからステップ115以降の処理に進み、否定判定されると処理を終了する。
【0038】
ステップ115では、EPB補助制御判定処理として、EPB補助制御を実行するか否かやEPB補助制御をどのように実行するかについて判定する。具体的には、ブレーキ失陥時に主制動装置では目標制動力が発生させられないときに、EPB補助制御をONとし、EPB2のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPB2による制動力を解除もしくは減少させるときにEPB2をリリース動作させる補助リリース制御を行う。このEPB補助制御判定処理によって、補助ロック制御を実行することを示す補助ロックONや補助リリース制御を実行することを示す補助リリースONが設定されると共に、ブレーキ失陥や負圧低下状態といった故障の形態に応じた補助ロック制御のパターンが設定される。
【0039】
そして、ステップ115でのEPB補助制御判定処理が完了すると、ステップ120に進み、EPB制御許可の状態であるか否かを判定する。EPB制御許可の状態とは、EPB2がシステムとして動ける状態になっていることを意味している。例えば、EPB−ECU9は、イニシャルチェックなどによってEPB制御許可の状態であるか否かをチェックして、それを示すフラグをセットしていることから、そのフラグに基づき本判定を行っている。ここで肯定判定されるとステップ125以降に進み、否定判定されるとそのまま処理を終了する。
【0040】
ステップ125では、EPB補助制御がONされているか否かを判定する。ここで、肯定判定されるとステップ130以降に進んでEPB補助制御を実行するための各処理を行い、否定判定されると通常のロック・リリース制御の実行に関わる各処理を行う。
【0041】
ステップ130では、補助ロックがONされているか否か、つまり補助ロック制御を実行するか否かを判定する。そして、肯定判定されるとステップ135に進んで補助ロック制御処理を実行する。また、否定判定されるとステップ140に進んで補助リリースがONされている否か、つまり補助リリース制御を実行するか否かを判定する。そして、肯定判定されるとステップ145に進んで補助リリース制御を実行し、ここでも否定判定されれば既に補助ロック制御もしくは補助リリース制御が一旦終了している状態等であるため、ステップ180に進む。
【0042】
ステップ150では、操作SW20がONされてロック要求が出されているか否かを判定する。操作SW20がONの状態とはドライバがEPB2を作動させてロック状態にしようとしていることを意味している。このため、本ステップで肯定判定されればステップ155に進み、ロック状態になっているか否かをロック状態フラグFLOCKがオンしているか否かに基づいて判定する。ロック状態フラグFLOCKとは、EPB2を作動させてロック状態になったときにオンされるフラグであり、このロック状態フラグFLOCKがオンになっているときには既にEPB2の作動が完了して所望のブレーキ力が発生させられている状態となる。したがって、ここで否定判定された場合には、ステップ160のロック制御処理に進み、肯定判定された場合には既にロック制御処理が完了しているためステップ180に進む。
【0043】
一方、ステップ150で否定判定された場合にはステップ165に進み、操作SW20がオンからオフに切替えられてリリース要求ありの状態か否かを判定する。操作SW20がオンからオフに切替えられた状態とはドライバがEPB2を作動させてロック状態からリリース状態にしようとしていることを意味している。このため、本ステップで肯定判定されればステップ170に進み、リリース状態フラグFRELがオンしているか否かを判定する。リリース状態フラグFRELとは、EPB2を作動させてリリース状態、つまりEPB2によるブレーキ力を解除した状態になったときにオンされるフラグであり、このリリース状態フラグFRELがオンになっているときには既にEPB2の作動が完了してブレーキ力が解除させられている状態となる。したがって、ここで否定判定された場合にのみステップ175のリリース制御処理に進み、肯定判定された場合には既にリリース制御処理が完了しているためステップ180に進む。
【0044】
そして、補助ロック制御処理や補助リリース制御処理、もしくはロック制御処理やリリース制御処理が終了したのち、ステップ180におけるロック・リリース表示処理を行う。このような処理によって駐車ブレーキ制御処理が実行される。以下、この駐車ブレーキ制御処理の各部の詳細について説明する。
【0045】
まず、図3のステップ115に示したEPB補助制御判定の処理について説明する。EPB補助制御判定の処理では、EPB補助制御を実行するか否かやEPB補助制御をどのように実行するかについて判定する。図4は、このEPB補助制御判定の詳細を示したフローチャートである。
【0046】
この図に示すように、ステップ200では、主制動装置情報、すなわち主制動装置が正常であるか故障しているかという故障情報を取得する。この処理は、EPB−ECU9がESC−ECU8との間で行っている通信に基づいて行われる。そして、ステップ210では、主制動装置に異常が発生しているか、もしくは負圧低下状態になっているか否かを判定する。主制動装置の異常とは、サービスブレーキ1に含まれる二つの配管系統の異常やアクチュエータ7の異常もしくは倍力装置4の異常により、主制動装置によって目標制動力が発生させられない状況になっていることを意味する。配管系統の異常には、一方の配管系統のみが異常となっている片系統失陥と両方の配管系統が異常となっている両系統失陥がある。また、負圧低下状態とは、エンジンストップなどにより倍力装置4が用いているエンジン負圧が低下して踏力の増加が十分に行えない状態を意味しており、この場合にも主制動装置によって目標制動力が発生させられない状況となる。
【0047】
なお、倍力装置4の負圧については周知のように負圧センサによって検出されているため、その負圧レベルが所定の閾値以下になったときに負圧低下状態とすることができる。また、配管系統の異常については、車輪速度センサの検出信号を用いて演算される車輪スリップ率の情報に基づいて検出できる。例えば、主制動装置にてブレーキが掛けられても失陥している配管系統の車輪では車輪速度が低下しない。このため、推定車体速度と車輪速度との比較に基づき、ブレーキ時に推定車体速度に対して車輪速度が低下していない系統があれば、その系統については失陥していると判定できる。このような負圧低下状態や主制動装置の異常について、ESC−ECU8で検出していることから、EPB−ECU9がその情報を取得することで、本ステップの判定を行っている。
【0048】
そして、ステップ210で肯定判定されるような状況はEPB補助制御が必要な状況であることから、ステップ220に進み、EPB補助制御が実行中であることを示すべく、EPB補助制御をONに設定する。そして、ステップ230に進み、補助ロックがOFFの状態であるか否かを判定する。これにより、補助ロック制御に切替える状態であるか補助リリース制御に切替える状態であるかを判定している。ここで肯定判定されればステップ240に進んで補助ロック判定処理を実行し、否定判定されればステップ250に進んで補助リリース判定処理を実行する。
【0049】
一方、ステップ210で否定判定されるとステップ260に進み、補助ロックがOFFの状態であるか否かを判定する。ここで否定判定されると、ステップ270に進んで補助リリースONを設定し、上記したステップ145において補助リリース制御処理が行えるようにして処理を終了する。また、ここで肯定判定されると、ステップ280に進んでEPB補助制御をOFF、補助ロックをOFF、補助リリースをOFFとして処理を終了する。
【0050】
図5は、上記ステップ240における補助ロック判定処理の詳細を示したフローチャートである。また、図6は、上記ステップ250の補助リリース判定処理の詳細を示したフローチャートである。
【0051】
図5に示す補助ロック判定処理では、主制動装置の異常の形態を特定すると共に、その異常の形態に応じた補助ロック制御のパターンを設定する。まず、ステップ300では、片系統失陥に該当しているか否かを判定する。ここでは、ESC−ECU8から取得した情報が主制動装置の異常が片系統失陥であることを示していて、かつ、M/C圧がM/C圧ロック閾値下限よりも大きく、かつ、ストローク量と踏力の関係がマップの範囲外もしくはM/C圧と減速度[G]との関係がマップの範囲外であるか否かを判定している。これら各条件は、主制動装置の異常が片系統失陥時の補助ロックが必要となる場合を示す条件である。
【0052】
ここで、M/C圧の比較対象となるM/C圧ロック閾値下限とは、ドライバがブレーキペダル3を踏み込んでいることを表す閾値である。ブレーキ失陥が生じていても、踏み込み初期時にはM/C圧が通常時と同様に発生することから、M/C圧をM/C圧ロック閾値下限と比較することで、ブレーキペダル3が踏み込まれていることを確認できる。
【0053】
また、ストローク量と踏力の関係を示すマップとは、主制動装置が片系統失陥となった場合に想定されるストローク量と踏力の関係を示すマップである。図7は、このマップの一例を示した図である。主制動装置が正常に機能している通常時には、ストローク量と踏力の関係が図中実線で示したような関係となる。この関係は、予めストローク量とそのストローク量から見込める踏力との関係を実験などによって調べておくことによって求めることができる。
【0054】
しかしながら、片系統失陥時には、ストローク量が大きくなっても所望の踏力が得られない状態になる。このため、ストローク量と踏力の関係が通常時の関係に対してバラツキを加味した範囲外、例えば図中破線で示した範囲外となるとき、つまり図7中の斜線領域で示したストローク量に対して踏力が得られていない範囲内に含まれるとき、片系統失陥が発生していると判定する。ここでは、ノイズを除去するために、一定時間この関係が続いた場合に、片系統失陥において補助ロックが必要になる場合と判定するようにしている。
【0055】
同様に、M/C圧と減速度[G]の関係を示すマップとは、主制動装置が片系統失陥となった場合に想定されるM/C圧と減速度[G]の関係を示すマップである。図8は、このマップの一例を示した図である。主制動装置が正常に機能している通常時には、M/C圧と減速度[G]の関係が図中実線で示したような関係となる。この関係も、予めM/C圧とそのM/C圧から見込める減速度[G]踏力との関係を実験などによって調べておくことによって求めることができる。
【0056】
しかしながら、片系統失陥時には、M/C圧が大きくなっても所望の減速度[G]が得られない状態になる。このため、M/C圧と減速度[G]の関係が通常時の関係に対してバラツキを加味した範囲外、例えば図中破線で示した範囲外となるとき、つまり図8中の斜線領域で示したM/C圧に対して減速度[G]が得られていない範囲内に含まれるとき、片系統失陥が発生していると判定する。ここでは、ノイズを除去するために、一定時間この関係が続いた場合に、片系統失陥において補助ロックが必要になる場合と判定するようにしている。
【0057】
なお、図7および図8ではバラツキを加味した範囲を超える範囲を斜線領域で示したが、片系統失陥時に想定されるストローク量と踏力との関係やM/C圧と減速度[G]との関係として想定される範囲を予め求めておき、その範囲に含まれる場合に片系統失陥が発生したと判定するようにしても良い。
【0058】
そして、ステップ300で否定判定されるとステップ310に進み、肯定判定されるとステップ320に進む。
【0059】
ステップ310では、ステップ300と同様の処理を両系統失陥に該当しているか否かを判定する。ここでも、ESC−ECU8から取得した情報が主制動装置の異常が両系統失陥であることを示していて、かつ、M/C圧がM/C圧ロック閾値下限よりも大きく、かつ、ストローク量と踏力の関係がマップの範囲外もしくはM/C圧と減速度[G]との関係がマップの範囲外であるか否かを判定している。これら各条件は、主制動装置の異常が両系統失陥時の補助ロックが必要となる場合を示す条件である。
【0060】
ここでのストローク量と踏力の関係を示すマップは、主制動装置が両系統失陥となった場合に想定されるストローク量と踏力の関係を示すマップである。図9は、このマップの一例を示した図である。図7に示した片系統失陥時と同様、両系統失陥時には、ストローク量が大きくなっても所望の踏力が得られない状態になる。このため、図9中の斜線領域で示した両系統失陥時に想定されるストローク量に対して踏力が得られていない範囲内に含まれるとき、両系統失陥が発生していると判定する。両系統失陥の場合には、片系統失陥の場合よりも、よりストローク量に対して得られる踏力が小さくなるようなマップとしてある。この場合にも、ノイズを除去するために、一定時間この関係が続いた場合に、両系統失陥において補助ロックが必要になる場合と判定するようにしている。
【0061】
同様に、M/C圧と減速度[G]の関係を示すマップは、主制動装置が両系統失陥となった場合に想定されるM/C圧と減速度[G]の関係を示すマップである。図10は、このマップの一例を示した図である。図8に示した片系統失陥時と同様、両系統失陥時には、M/C圧が大きくなっても所望の減速度[G]が得られない状態になる。このため、図10中の斜線領域で示した両系統失陥時に想定されるM/C圧に対して減速度[G]が得られていない範囲内に含まれるとき、両系統失陥が発生していると判定する。両系統失陥の場合には、片系統失陥の場合よりも、よりM/C圧に対して得られる減速度[G]が小さくなるようなマップとしてある。この場合にも、ノイズを除去するために、一定時間この関係が続いた場合に、両系統失陥において補助ロックが必要になる場合と判定するようにしている。
【0062】
そして、ステップ310で否定判定されるとステップ330に進み、肯定判定されるとステップ340に進む。
【0063】
ステップ330では、負圧低下状態に該当しているか否かを判定する。ここでは、ESC−ECU8から取得した情報が負圧低下状態であることを示していて、かつ、M/C圧がM/C圧ロック閾値下限からM/C圧ロック閾値上限の範囲内にあり、さらに、M/C圧の微分値がロックM/C圧微分下限からロックM/C圧微分上限の範囲内にあるか否かを判定している。これら各条件は、負圧低下状態の時に補助ロックが必要となる場合を示す条件である。M/C圧の比較対象となるM/C圧ロック閾値上限も、ドライバがブレーキペダル3を踏み込んでいることを表す閾値である。また、M/C圧の微分値の比較対照となるロックM/C圧微分下限やロックM/C圧微分上限も、ドライバがブレーキペダル3を踏み込んでいることを表す閾値である。
【0064】
ここで、負圧低下時には、ブレーキペダル3が踏み込み難くなるため、M/C圧は発生させ難くなる状態となる。このため、負圧低下時にブレーキペダル3が踏み込まれた場合には、M/C圧がM/C圧ロック閾値下限からM/C圧ロック閾値上限の範囲内に含まれることになる。同様に、M/C圧の微分値についても、ロックM/C圧微分下限からロックM/C圧微分上限の範囲内に含まれる。そして、ノイズを除去するために、一定時間この関係が続いた場合に、負圧低下状態において補助ロックが必要になる場合と判定するようにしている。
【0065】
そして、ステップ330で否定判定された場合には、補助ロックが必要な場合ではないため、そのまま処理を終了し、肯定判定されるとステップ350に進む。
【0066】
このようにして、ステップ300、310、330において片系統失陥や両系統失陥および負圧低下状態の際に補助ロックが必要になる場合が判定されると、それぞれステップ320、340、350に進み、各異常の形態に応じた補助ロック制御を行うための補助ロックパターンが設定される。すなわち、片系統失陥の場合には補助ロックパターン1、両系統失陥の場合には補助ロックパターン2、負圧低下状態の場合には補助ロックパターン3が設定される。その後、ステップ360に進み、補助ロック制御を実行すべく、補助ロックをONにすると共に、補助リリースをOFFにする。これにより、補助ロック判定処理が完了する。
【0067】
図6に示す補助リリース判定処理では、主制動装置の異常の形態を特定すると共に、補助ロック制御によりストローク量と踏力の関係やM/C圧と減速度[G]の関係などが正常時の状態になったときに、補助リリース制御が実行されるようにする。
【0068】
まず、ステップ400では、片系統失陥時の補助ロック制御が実行された後に補助リリース制御に切替える条件を満たすか否かを判定する。ここでは、ESC−ECU8から取得した情報が主制動装置の異常が片系統失陥であることを示していて、かつ、M/C圧がM/C圧リリース閾値下限よりも大きく、補助ロックパターン1が設定されているときに、さらに、ストローク量と踏力の関係がマップの範囲内もしくはM/C圧と減速度[G]との関係がマップの範囲内であるか否かを判定している。
【0069】
ここで、M/C圧の比較対象となるM/C圧リリース閾値下限とは、ドライバがブレーキペダル3を踏み込んでいることを表す閾値であり、M/C圧ロック閾値下限と同じ値であっても良いし、異なる値であっても良い。補助リリース制御は補助ロック制御によって上記関係が正常時の状態になったときに実行されるものであり、ブレーキ操作が行われていることが前提となる。このため、M/C圧をM/C圧リリース閾値下限と比較することで、ブレーキペダル3が踏み込まれていることを確認している。
【0070】
また、ストローク量と踏力の関係を示すマップとは、主制動装置が正常のときに想定されるストローク量と踏力の関係の一例を示すマップである。図11は、このマップの一例を示した図である。主制動装置が正常に機能している通常時には、ストローク量と踏力の関係が図中実線で示したような関係となり、バラツキを加味しても破線で示した範囲内となる。このため、片系統失陥時に補助ロック制御が行われることによってストローク量と踏力の関係が図11に示す範囲内に含まれるようになったとき、補助リリース制御に切り替える条件を満たしたと判定する。ここでは、ノイズを除去するために、一定時間この関係が続いた場合に、片系統失陥において補助リリースが必要になる場合と判定するようにしている。
【0071】
同様に、M/C圧と減速度[G]の関係を示すマップとは、主制動装置が正常のときに想定されるM/C圧と減速度[G]の関係の一例を示すマップである。図12は、このマップの一例を示した図である。主制動装置が正常に機能している通常時には、M/C圧と減速度[G]の関係が図中実線で示したような関係となり、バラツキを加味しても破線で示した範囲内となる。このため、片系統失陥時に補助ロック制御が行われることによってM/C圧と減速度[G]の関係が図12に示す範囲内に含まれるようになったとき、補助リリース制御に切り替える条件を満たしたと判定する。ここでは、ノイズを除去するために、一定時間この関係が続いた場合に、片系統失陥において補助リリースが必要になる場合と判定するようにしている。
【0072】
そして、ステップ400で否定判定されるとステップ410に進み、肯定判定されるとステップ430に進む。
【0073】
ステップ410では、両系統失陥時の補助ロック制御が実行された後に補助リリース制御に切替える条件を満たすか否かを判定する。条件としては、ステップ400の各種条件とほぼ同様であるが、補助ロックパターン1ではなく補助ロックパターン2が設定されていることという条件のみ異なっている。両系統失陥時も、ストローク量と踏力の関係やM/C圧と減速度[G]の関係について、主制動装置が正常に機能している通常時の関係になったときに、補助ロック制御から補助リリース制御に切り替えることになる。このため、本ステップでも、上記各関係が図11や図12のマップに示す関係になると、補助リリース制御に切り替える条件を満たしたと判定する。ここでも、ノイズを除去するために、一定時間この関係が続いた場合に、両系統失陥において補助リリースが必要になる場合と判定するようにしている。
【0074】
そして、ステップ410で否定判定されるとステップ420に進み、肯定判定されるとステップ430に進む。
【0075】
ステップ420では、負圧低下状態で補助ロック制御が実行された後に補助リリース制御に切替える条件を満たすか否かを判定する。ここでは、ESC−ECU8から取得した情報が負圧低下状態であることを示していて、かつ、M/C圧がM/C圧リリース閾値下限より下もしくはM/C圧リリース閾値上限より上、または、M/C圧の微分値がリリースM/C圧微分下限より下もしくはリリースM/C圧微分上限より上であるか否かを判定している。これら各条件は、負圧低下状態の時に補助リリースが必要となる場合を示す条件である。M/C圧の比較対象となるM/C圧リリース閾値上限も、ドライバがブレーキペダル3を踏み込んでいることを表す閾値であり、M/C圧ロック閾値上限と同じ値であっても良いし、異なる値であっても良い。また、M/C圧の微分値の比較対象となるリリースM/C圧微分下限やリリースM/C圧微分上限も、ドライバがブレーキペダル3を踏み込んでいることを表す閾値である。これらリリースM/C圧微分下限やリリースM/C圧微分上限も、ロックM/C圧微分下限やロックM/C圧微分上限と同じ値であっても良いし、異なる値であっても良い。
【0076】
負圧低下時には、ブレーキペダル3が踏み込み難くなるため、M/C圧が発生させ難くなるが、補助ロック制御によって所望のM/C圧が発生させられた状態になると、補助リリース制御に切替えても良い。このため、M/C圧がM/C圧リリース閾値下限より下もしくはM/C圧リリース閾値上限より上になる。同様に、M/C圧の微分値についても、リリースM/C圧微分下限より下もしくはリリースM/C圧微分上限より上になる。そして、ノイズを除去するために、一定時間この関係が続いた場合に、負圧低下状態において補助リリースが必要になる場合と判定するようにしている。
【0077】
このステップ420で否定判定された場合には、補助リリースが必要な場合ではないため、そのまま処理を終了し、肯定判定されるとステップ430に進む。
【0078】
このようにして、ステップ400〜420において片系統失陥や両系統失陥および負圧低下状態の際に補助ロック制御から補助リリース制御に切り替える場合が判定されると、ステップ430に進み、補助リリース制御を実行すべく、補助ロックをOFFにすると共に、補助リリースをONにし、補助ロックパターンをクリアする。これにより、補助リリース判定処理が完了する。また、このようにして図4中のステップ240、250に示した補助ロック判定処理や補助リリース判定処理が完了し、図3中のステップ115に示したEPB補助判定が完了する。
【0079】
次に、図3のステップ135に示した補助ロック制御処理について説明する。補助ロック制御処理では、上記した補助ロック判定処理において、主制動装置の異常により補助ロックが必要と判定されたときに、設定された補助ロックパターンの内容(補助ロックパターン1〜3)に応じた駐車ブレーキ力を発生させる。図13は、補助ロック制御処理の詳細を示したフローチャートである。
【0080】
まず、ステップ500では、補助ロックパターン1が設定されているか否かを判定する。上記したステップ320で補助ロックパターン1が設定されていれば肯定判定され、他のパターンが設定されていれば否定判定される。ここで肯定判定されるとステップ505に進み、目標モータ電流値上昇量を失陥時目標電流に設定する。これについては、失陥中の輪に対してのみ設定し、失陥中の輪に対して、失陥中ではない輪と比較して駐車ブレーキ力による制動力加算が行われるようにする。
【0081】
目標モータ電流値上昇量とは、目標制動力に対応するモータ電流の上昇量、具体的には無負荷電流値からのモータ電流の上昇量である。モータ10に流されるモータ電流は、モータ10に加えられる負荷に応じて変動する。本実施形態の場合には、モータ10に加えられる負荷はブレーキパッド11をブレーキディスク12に押し付けている押圧力に相当し、モータ電流が発生させた押圧力と対応した値となる。したがって、無負荷電流値に対して目標モータ電流値上昇量を加算した値が目標制動力を発生させるために必要な目標モータ電流となる。このため、補助ロック制御により失陥時目標電流を目標モータ電流上昇量に設定し、無負荷電流値に対して足し合わせることで、片系統失陥時に対応した駐車ブレーキ力が発生させられるような目標モータ電流を設定することができる。
【0082】
一方、ステップ500で否定判定されるとステップ510に進み、補助ロックパターン2が設定されているか否かを判定する。上記したステップ340で補助ロックパターン2が設定されていれば肯定判定され、上記したステップ350で補助ロックパターン3が設定されていれば否定判定される。ここで肯定判定されるとステップ515に進み、目標モータ電流上昇量として失陥時目標電流を設定する。この場合には、両系統失陥になっていることから、両系統の輪に対して設定する。このように、補助ロック制御により失陥時目標電流を目標モータ電流上昇量に設定することで、両系統失陥時に対応した駐車ブレーキ力が発生させられるような目標モータ電流を設定することができる。
【0083】
なお、失陥時目標電流(=目標モータ電流値上昇量)の演算については、片系統失陥時と両系統失陥時の両方で共通の演算手法を用いることができる。例えば、数式1に基づいて演算することができる。ただし、数式1中の必要制動トルク(1輪分)[Nm]については数式2より求めている。
【0084】
(数1)
失陥時目標電流[A]=(必要制動トルク(1輪分)[Nm]/(2×パッドμ×制動有効半径[m]/1000)×制動トルク変換効率[%]×軸力電流変換係数[N→A]
(数2)
必要制動トルク(1輪分)[Nm]=(失陥時目標減速度[G]−出力されている減速度[G])×タイヤ径[m]×車重[kg]/2
なお、パッドμ(ブレーキパッドの摩擦係数)、制動有効半径、軸力電流変換係数は、車両固有値である。制動トルク変換効率は、温度可変の車両適合値である。また、失陥時目標減速度については、図14に示すM/C圧(MPa)と目標減速度[G]の関係を示したマップより求めている。このマップは、M/C圧が大きくなるほど目標減速度が大きくなる関係を示している。このマップも、車両適合値である。失陥時目標減速度は失陥が発生していないときに本来得られるであろう減速度であり、失陥時目標減速度と出力されている減速度との偏差が失陥により得られなくなった減速度分となる。この得られなくなった減速度分を駐車ブレーキ力として発生させるように、必要制動力トルクを算出している。
【0085】
さらに、ステップ510で否定判定されるとステップ520に進み、目標モータ電流上昇量として負圧低下時目標電流を設定する。この場合には、負圧低下の影響が全輪に発生しているため、EPB2が備えられている全輪に対して設定する。このように、補助ロック制御により負圧低下時目標電流を目標モータ電流上昇量に設定することで、負圧低下状態に対応した駐車ブレーキ力が発生させられるように目標モータ電流を設定することができる。
【0086】
なお、負圧低下時目標電流(=目標モータ電流値上昇量)については、図15に示すM/C圧(MPa)と負圧低下時目標電流値[A]との関係を用いて算出している。このマップは、M/C圧が大きくなるほど負圧低下時目標電流値を小さくしていく関係を示している。このマップも車両適合値である。負圧低下時にも一定の減速度が得られるようにしたいことから、M/C圧に対応して負圧低下時目標電流値を設定しており、M/C圧が小さいほど負圧低下時目標電流値を大きくし、駐車ブレーキ力による制動力の加算量が大きくなるようにしている。
【0087】
そして、ステップ525に進み、補助ロック駆動時間タイマが予め決められた最小(MIN)補助ロック駆動時間を超えているか否かを判定する。補助ロック駆動時間タイマとは、補助ロック制御が開始されてからの経過時間を計測するタイマであり、補助ロック制御処理開始と同時に計測を始める。最小補助ロック駆動時間とは、補助ロック制御に掛かると想定される最小時間であり、モータ10の回転速度などに応じて決められる。補助ロック制御の初期時には、突入電流が発生し得るが、突入電流が目標モータ電流に達すると、所望の駐車ブレーキ力が発生していないのに発生させられたと誤判定されることになる。このため、補助ロック駆動時間タイマが最小補助ロック駆動時間を超えるまでの期間をマスクして、上記の誤判定が生じないようにしている。
【0088】
ここで否定判定されればステップ530に進んで補助ロック駆動時間タイマを1つインクリメントし、モータロック駆動をONにする。これにより、補助ロック駆動時間が少なくとも最小補助ロック駆動時間を超えるまでの期間中は補助ロック制御を行うためにモータ10が正回転させられる。これにより、モータ10の正回転に伴って平歯車15が駆動され、平歯車16および回転軸17が回転し、雄ネジ溝17aおよび雌ネジ溝18aの噛合いに基づいて推進軸18がブレーキディスク12側に移動させられ、それに伴ってピストン19も同方向に移動させられることでブレーキパッド11がブレーキディスク12側に移動させられる。
【0089】
一方、ステップ525で肯定判定されると、ステップ535に進み、モータ電流を時間に対して微分した電流値微分値を演算する。例えば、今回と前回の制御周期の際に得られたモータ電流の差を電流値微分値とする。そして、この電流値微分値が電流値微分閾値よりも大きいか否かを判定する。
【0090】
モータ電流は、モータ10に加えられる負荷に応じて変動する。例えば、本実施形態の場合にはモータ10に加えられる負荷はブレーキパッド11をブレーキディスク12に押し付けている押圧力に相当するため、モータ電流が発生させた押圧力と対応した値となる。このため、モータ10が無負荷状態のときには、モータ電流が無負荷電流値となり、モータ10に対して負荷が加えられると、モータ電流が上昇し始める。
【0091】
したがって、モータ電流を時間に対して微分した電流値微分値を求めることで、モータ電流の変化を検知することができ、電流値微分値を電流値微分閾値と比較することで、モータ電流の上昇し始めを検知することができる。なお、電流値微分閾値は、ノイズ的なモータ電流の変動を除外しつつ、モータ電流が上昇し始めたと想定される値に設定される。したがって、ステップ535で肯定判定されるとステップ540に進み、否定判定されるとステップ530に進んで上記した処理を行う。
【0092】
ステップ540では、モータ電流が無負荷電流値に目標モータ電流値上昇量を加算した値、つまり目標モータ電流を超えたか否かを判定する。上記したように、モータ電流はモータ10に加えられる負荷に応じて変動し、本実施形態の場合にはモータ10に加えられる負荷はブレーキパッド11をブレーキディスク12に押し付けている押圧力に相当するため、モータ電流が発生させた押圧力と対応した値となる。このため、モータ電流が目標モータ電流を超えていれば発生させた押圧力により所望の駐車ブレーキ力を発生させられた状態、つまりEPB2によりブレーキパッド11の摩擦面がブレーキディスク12の内壁面にある程度の力で押さえ付けられた状態となる。したがって、本ステップで肯定判定されるまではステップ530の処理を繰り返し、肯定判定されるとステップ545に進む。
【0093】
そして、ステップ545において、補助ロック動作が完了したことを意味する補助ロック状態をONすると共に補助ロック駆動時間タイマを0にし、補助ロック保持動作としてモータロック駆動をOFF(停止)する。これにより、モータ10の回転が停止され、回転軸17の回転が停止させられて、雄ネジ溝17aと雌ネジ溝18aとの噛合いによる摩擦力により、推進軸18が同じ位置に保持されるため、その時に発生させた駐車ブレーキ力が保持される。これにより、駐車中の車両の移動が規制される。このようにして、補助ロック制御処理が完了する。
【0094】
次に、図3のステップ145に示した補助リリース制御処理について説明する。補助リリース制御処理では、上記した補助リリース判定処理において、補助ロック制御時にEPB2が発生させた駐車ブレーキ力を解除させる。図16は、補助リリース制御処理の詳細を示したフローチャートである。
【0095】
まず、ステップ600では、前回の制御周期のときに検出されたモータ電流の電流値(n-1)と今回の制御周期のときに検出されたモータ電流の電流値(n)の差の絶対値|電流値(n-1)−電流値(n)|がリリース制御終了判定電流値未満になっているか否かを判定する。
【0096】
上述したように、モータ電流は、モータ10に加えられる負荷に応じて変動し、ブレーキパッド11をブレーキディスク12に押し付けている押圧力がなくなると、モータ電流が無負荷電流値で一定となり、変動が無くなる。このため、リリース制御終了判定電流値をモータ10に対する負荷がなくなったと想定される電流変化量に設定しておき、絶対値|電流値(n-1)−電流値(n)|がリリース制御終了判定電流値未満になると、ブレーキパッド11がブレーキディスク12から離れてモータ10に対する負荷が無くなったと判定する。
【0097】
したがって、ステップ600で否定判定されれば、ステップ605に進んで補助リリース状態をOFFにすると共に、モータリリース駆動をON、つまりモータ10を逆回転させる。これにより、モータ10の逆回転に伴って、ブレーキパッド11がブレーキディスク12から離れる方向に移動させられる。
【0098】
また、ステップ600で肯定判定されると、ステップ610に進んで補助リリース制御終了カウンタをインクリメントしたのち、ステップ615に進んでリリース制御終了カウンタが補助リリース制御終了時間を超えたか否かを判定する。
【0099】
補助リリース制御終了時間は、モータ10への負荷が無くなったタイミング、ブレーキパッド11がブレーキディスク12から離れたタイミングから補助リリース制御を継続する時間であり、補助ロック制御時にモータ10によってブレーキパッド11を移動させた量が多いほど長くなる。
【0100】
ここで、補助リリース制御終了カウンタが補助リリース制御終了時間を超えていない状態であれば、まだ補助リリース制御が継続されることになるため、ステップ605の処理を実行する。そして、補助リリース制御終了カウンタが補助リリース制御終了時間を超えると、ステップ620に進み、補助リリース状態をONすると共に補助リリース制御終了カウンタを0にし、モータリリース駆動をOFFにする。したがって、モータ10の回転が停止され、ブレーキパッド11がブレーキディスク12から離れた状態のままで保持される。このようにして、補助リリース制御処理が完了する。
【0101】
次に、図3のステップ160に示したロック制御処理について説明する。ロック制御処理では、ドライバによるEPB2の作動要求、つまり操作スイッチ20の操作に対応してモータ10を回転させることによりEPB2を作動させ、EPB2にて所望の駐車ブレーキ力を発生させられる位置でモータ10の回転を停止し、この状態を維持するという処理を行う。図17にロック制御処理の詳細を示したフローチャートを示し、この図を参照してロック制御処理について説明する。
【0102】
まず、ステップ700では、電流値上昇し始めフラグがOFFになっているか否かを判定する。電流値上昇し始めフラグとは、モータ電流が上昇し始めたときにONされるフラグであり、後述するステップ725でONされるまではOFFになっている。ここで肯定判定されればステップ705に進む。
【0103】
ステップ705では、ロック動作による駐車ブレーキ力を発生させるための目標モータ電流値上昇量を設定する。ここでいう目標モータ電流値上昇量も、モータ電流の上昇量、具体的には無負荷電流値からのモータ電流の上昇量であり、無負荷電流値に対して目標モータ電流値上昇量を加算した値が目標制動力を発生させるために必要な目標モータ電流となる。このときの目標モータ電流値上昇量は、駐車維持のために最低限必要なブレーキ力に対応するW/C圧を発生させるモータ電流の上昇量以上に設定されれば良い。
【0104】
ここでは、目標制動力に対応するW/C圧と目標モータ電流値上昇量の関係をマップ化しておき、そのマップを用いて、目標制動力に対応する目標モータ電流値上昇量を取得している。図18は、その一例を示したマップであり、目標制動力に対応するW/C圧の大きさに比例して目標モータ電流値上昇量が大きくなるようなマップとしてある。なお、目標制動力は、車両の停車維持に必要な制動力であり、坂路勾配に応じて決まる値であることから、坂路勾配に比例して目標モータ電流値上昇量が大きくなるようなマップであっても良い。坂路勾配は、Gセンサ21の値として表されることから、Gセンサ21の値に基づいて目標モータ電流値上昇量を設定すれば良い。
【0105】
続いて、ステップ710に進み、ロック駆動時間タイマが予め決められた最小(MIN)ロック駆動時間を超えているか否かを判定する。ロック駆動時間タイマとは、ロック制御が開始されてからの経過時間を計測するカウンタであり、ロック制御処理開始と同時にカウントを始める。最小ロック駆動時間とは、ロック制御に掛かると想定される最小時間のことであり、モータ10の回転速度などに応じて予め決まる値である。後述するステップ735のように、モータ電流が無負荷電流値に対して目標モータ電流値上昇量を足した値に到達した時にEPB2が発生させたブレーキ力が所望の値に到達した、もしくは近づいたと判定するが、モータ10への電流供給初期時の突入電流などによりモータ電流がその値を超えることもあり得る。このため、ロック駆動時間タイマを最小ロック駆動時間と比較することで、制御初期時をマスクでき、突入電流などによる誤判定を防止することが可能となる。
【0106】
したがって、ロック駆動時間タイマが最小時間を超えていない状態であれば、まだロック制御が継続されることになるため、ステップ715に進んでロック駆動時間タイマをインクリメントし、モータロック駆動をON、つまりモータ10を正回転させる。これにより、モータ10の正回転に伴ってブレーキパッド11がブレーキディスク12側に移動させられ、EPB2によるロック動作が行われていく。
【0107】
一方、ステップ710で肯定判定されると、ステップ720に進み、モータ電流を時間に対して微分した電流値微分値を演算する。例えば、今回と前回の制御周期の際に得られたモータ電流の差を電流値微分値とする。そして、この電流値微分値が電流値微分閾値よりも大きいか否かを判定する。この処理は、補助ロック制御処理における図13のステップ535の処理と同様である。
【0108】
そして、ステップ720で肯定判定されると、ステップ725でモータ電流が上昇し始めたことを示す電流値上昇し始めフラグをONし、ステップ730に進む。また、ステップ720で否定判定された場合には、まだモータ10に負荷が掛かっていないため、再びステップ715の処理を実行する。
【0109】
続く、ステップ730では、サービスブレーキ1によって発生させられているブレーキ力分を考慮した処理として、目標モータ電流値上昇量の補正を行う。すなわち、サービスブレーキ1によってブレーキ力が発生させられている場合、目標モータ電流値上昇量を小さくする補正を行い、そのブレーキ力の大きさに応じて目標モータ電流値上昇量を小さくする目標モータ電流値上昇量の目標モータ電流値上昇量減算値を求め、ステップ705で求められた目標モータ電流値上昇量から目標モータ電流値上昇量減算値を差し引いた値を演算する。
【0110】
本実施形態では、M/C圧に対応する目標モータ電流値上昇量減算値の値をマップ化しておき、そのマップに基づき、M/C圧センサ22で検出したM/C圧と対応する値を抽出することにより目標モータ電流値上昇量減算値を求めている。図19は、その一例を示したマップであり、M/C圧と目標モータ電流値上昇量減算値の関係を示したマップである。この図に示すように、M/C圧の大きさ、つまりドライバによるブレーキペダル3の踏込み(踏力)の大きさに比例して目標モータ電流値上昇量減算値が大きくなるようなマップとしてある。このため、本実施形態の場合、検出したM/C圧と対応する目標モータ電流値上昇量減算値を図19に示すマップから読み出し、目標モータ電流値上昇量から目標モータ電流値上昇量減算値を差し引くことにより、目標モータ電流値上昇量を求めている。
【0111】
ただし、目標モータ電流値上昇量が零以下になるのは好ましくない。このため、ステップ730では、目標モータ電流値上昇量から目標モータ電流値上昇量減算値を差し引いた値と、無負荷電流値に対して所定値α(正の定数)を足した値とのいずれか大きい方(MAX(目標モータ電流値上昇量−目標モータ電流値上昇量減算値, 無負荷電流値+α))を目標モータ電流値上昇量としている。
【0112】
この後、ステップ735に進み、モータ電流が無負荷電流値に対して目標モータ電流値上昇量分を加算した値、つまり目標モータ電流を超えたか否かを判定する。モータ電流が無負荷電流値に対して目標モータ電流値上昇量分を加算した値を超えると、発生させた押圧力により所望の駐車ブレーキ力を発生させられた状態、つまりEPB2によりブレーキパッド11の摩擦面がブレーキディスク12の内壁面にある程度の力で押さえ付けられた状態となる。したがって、本ステップで肯定判定されるまではステップ715の処理を繰り返し、肯定判定されるとステップ740に進む。
【0113】
そして、ステップ740において、ロックが完了したことを示すべくロック状態をONすると共にロック駆動時間タイマを0にし、モータロック駆動をOFF(停止)する。これにより、モータ10の回転が停止され、その時に発生させたブレーキ力が保持される。これにより、駐車中の車両の移動が規制される。さらに、また、電流値上昇し始めフラグをOFFする。このようにして、ロック制御処理が完了する。
【0114】
次に、図3のステップ175に示したリリース制御処理について説明する。リリース制御処理では、モータ10を回転させることによりEPB2を作動させ、EPB−ECU9にて発生させられている駐車ブレーキ力を解除するという処理を行う。図20にリリース制御処理の詳細を示したフローチャートを示し、この図を参照してリリース制御処理について説明する。
【0115】
まず、ステップ800では、前回の制御周期のときに検出されたモータ電流の電流値(n-1)と今回の制御周期のときに検出されたモータ電流の電流値(n)の差の絶対値|電流値(n-1)−電流値(n)|がリリース制御終了判定電流値未満になっているか否かを判定する。この処理は、上記した補助リリース制御処理における図16のステップ600の処理と同様である。
【0116】
このステップ800で否定判定されれば、ステップ805に進んでリリース状態をOFFにすると共に、モータリリース駆動をON、つまりモータ10を逆回転させる。これにより、モータ10の逆回転に伴って、ブレーキパッド11がブレーキディスク12から離れる方向に移動させられる。また、ステップ800で肯定判定されると、ステップ810に進んでリリース制御終了カウンタをインクリメントしたのち、ステップ815に進んでリリース制御終了カウンタがリリース制御終了時間を超えたか否かを判定する。
【0117】
リリース制御終了時間は、モータ10への負荷が無くなったタイミング、ブレーキパッド11がブレーキディスク12から離れたタイミングからリリース制御を継続する時間であり、ロック制御時にモータ10によってブレーキパッド11を移動させた量が多いほど長くなる。この処理は、上記した補助リリース制御処理における図16のステップ615の処理と同様である。
【0118】
ここで、リリース制御終了カウンタがリリース制御終了時間を超えていない状態であれば、まだリリース制御が継続されることになるため、ステップ805の処理を実行する。そして、リリース制御終了カウンタがリリース制御終了時間を超えると、ステップ820に進み、リリース状態をONすると共にリリース制御終了カウンタを0にし、モータリリース駆動をOFFにする。したがって、モータ10の回転が停止され、ブレーキパッド11がブレーキディスク12から離れた状態のままで保持される。このようにして、リリース制御処理が完了する。
【0119】
最後に、図3のステップ180に示したロック・リリース表示処理について説明する。ロック・リリース表示処理では、ロック状態もしくはリリース状態についての表示を行う。図21にロック・リリース表示処理の詳細を示したフローチャートを示し、この図を参照してロック・リリース表示処理について説明する。
【0120】
ステップ900では、ロック状態がONされているか否かを判定する。ここで否定判定されればステップ905に進んでロック・リリース表示ランプ23を消灯させ、肯定判定されればステップ910に進んでロック・リリース表示ランプ23を点灯する。このように、ロック状態がONされておりロック状態のときであればロック・リリース表示ランプ23を点灯し、リリース状態がON、つまりリリース状態もしくはリリース制御が開始された状態のときにはロック・リリース表示ランプ23を消灯する。これにより、ドライバにロック状態であるか否かを認識させることが可能となる。このようにして、ロック・リリース表示処理が完了し、これに伴って駐車ブレーキ制御処理が完了する。
【0121】
続いて、本実施形態にかかる駐車ブレーキ制御処理の作動について、図22〜図27に示すタイミングチャートを参照して説明する。
【0122】
図22は、ブレーキ失陥時の処置を説明するためのタイミングチャートである。ブレーキ失陥時にブレーキ失陥が発生していない通常時と同様の踏力を発生させようとした場合、M/C圧が発生させられず反力が得られないため、ブレーキ失陥時の方が通常時と比較してストロークが大きくなる。また、ブレーキ失陥時にも、通常時と同様の踏力を発生させるまでブレーキペダル3を踏み込めば、通常時に近いM/C圧を発生させられるが、M/C圧が発生していたとしても、通常時と比較してブレーキ失陥時の方が得られる減速度[G]が小さくなる。また、M/C圧についても、ブレーキペダルの踏み込み初期時には通常時とブレーキ失陥時との間のM/C圧の差は小さいが、時間経過に伴って徐々に差が広がっていく。
【0123】
図23は、ブレーキ失陥時の処置として、M/C圧に対して減速度[G]が出ていない場合、つまり制動力不足の場合にEPB補助制御を行ったときのタイミングチャートである。この図において、図8の斜線領域で示したM/C圧に対して減速度[G]が得られていない範囲をM/C圧に応じた失陥判定ロック閾値として表してある。また、図12において主制動装置が正常のときに想定されるM/C圧と減速度[G]の範囲をM/C圧に応じた失陥判定リリース閾値として表してある。
【0124】
この図に示されるように、ブレーキ失陥時には、EPB補助制御判定においてEPB補助制御がONと判定される。そして、ブレーキ失陥時にM/C圧ロック閾値下限を超えており、かつ、得られているM/C圧に応じた減速度[G]がM/C圧に応じた失陥判定ロック閾値を下回っている状態が一定時間継続すると、補助ロック判定により補助ロックがONされる。そして、補助ロック制御によってM/C圧に対する減速度[G]が回復し、得られているM/C圧に応じた減速度[G]がM/C圧に応じた失陥判定リリース閾値を上回っている状態が一定時間継続すると、補助リリース判定により補助リリースがONされる。このように、EPB2のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPB2による制動力を解除もしくは減少させるときにEPB2をリリース動作させる補助リリース制御を行っている。これにより、ブレーキ失陥時にも、M/C圧に応じた所望の減速度[G]が得られるようにすることが可能となる。
【0125】
図24は、ブレーキ失陥時の処置として、踏力に対してストロークが出ている場合、つまりブレーキペダル3が吸い込まれている場合にEPB補助制御を行ったときのタイミングチャートである。この図において、図7の斜線領域で示したストローク量に対して踏力が得られていない範囲を踏力に応じた失陥判定ロック閾値として表してある。また、図11において主制動装置が正常のときに想定されるストローク量と踏力の範囲を踏力に応じた失陥判定リリース閾値として表してある。
【0126】
この図に示されるように、ブレーキ失陥時には、EPB補助制御判定においてEPB補助制御がONと判定される。そして、ブレーキ失陥時にM/C圧ロック閾値下限を超えており、かつ、得られている踏力に応じたストロークが踏力に応じた失陥判定ロック閾値を上回っている状態が一定時間継続すると、補助ロック判定により補助ロックがONされる。そして、補助ロック制御後踏力に対するストロークが戻った時、得られている踏力にストロークが踏力に応じた失陥判定リリース閾値を下回っている状態が一定時間継続すると、補助リリース判定により補助リリースがONされる。このようにすることで、ブレーキ失陥時にも、ブレーキペダル3が吸い込まれることを抑制でき、踏力に応じた所望のストロークが得られるようにすることが可能となる。
【0127】
図25は、負圧低下状態のときの処置を説明するためのタイミングチャートである。負圧低下状態の際には、負圧低下状態になっていない通常時と同様の踏力でブレーキペダル3を踏み込んだとしても、発生させられるM/C圧は通常時と比較して小さくなる。同様に、負圧低下状態のときには、通常時と比較して、M/C圧の微分値も小さくなる。そして、負圧低下状態のときには発生させられるM/C圧が小さくなることから、負圧低下状態のときに得られる減速度[G]も通常時と比較して小さくなる。したがって、負圧低下状態のときには、通常時と比較して車速の低下が遅く、制動距離が長くなる。
【0128】
図26および図27は、負圧低下状態のときにEPB補助制御を行った場合のタイミングチャートである。
【0129】
図26に示されるように、負圧低下状態のときには、EPB補助制御判定においてEPB補助制御がONと判定される。そして、負圧低下状態においてM/C圧がM/C圧ロック閾値下限からM/C圧ロック閾値上限の範囲内で、かつ、M/C圧の微分値がロックM/C圧微分下限からロックM/C圧微分上限の範囲内である状態が一定時間継続すると、補助ロック判定により補助ロックがONされる。そして、補助ロック制御が実行されることにより、図27に示すように通常時と負圧低下状態のときのM/C圧の差分相当の制動力が発生させられ、負圧低下状態であっても所望の減速度[G]を発生させることが可能となる。
【0130】
その後、M/C圧がM/C圧リリース閾値下限以下もしくはM/C圧リリース閾値上限以上、または、M/C圧の微分値がリリースM/C圧微分下限以下もしくはリリースM/C圧微分上限以上の状態が一定時間継続すると、補助リリース判定により補助リリースがONされる。このように、EPB2のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPB2による制動力を解除もしくは減少させるときにEPB2をリリース動作させる補助リリース制御を行っている。これにより、負圧低下状態のときにも、所望の減速度[G]が得られるようにすることが可能となる。
【0131】
以上説明したように、本実施形態では、主制動装置の異常もしくは負圧低下状態のときに、EPB2のロック動作に基づいて足りない分の制動力を発生させる補助ロック制御を行ったり、EPB2による制動力を解除もしくは減少させるときにEPB2をリリース動作させる補助リリース制御を行っている。そして、補助ロック判定にて判定された失陥の形態に対応して、補助ロック制御を行う車輪と該補助ロック制御により発生させる駐車ブレーキ力を設定するようにしている。したがって、主制動装置の異常もしくは負圧低下状態のときにも、的確に所望の制動力が発生させられる。また、所望の制動力を発生させられることから、所望の減速度[G]が得られるようにすることが可能となる。
【0132】
また、ブレーキ失陥が片系統のみの場合、その系統の車輪の制動力が不足することになるため、それに起因したヨーが発生し得る。しかしながら、EPB2によって駐車ブレーキ力を発生させることで、失陥した系統の車輪にも制動力を発生させることが可能となり、失陥した系統の車輪に不足している制動力を補って、ヨーの発生を抑制する方向に制動力を作用させることが可能となる。これにより、より車両の安定性を確保しつつ、制動を行うことが可能となる。
【0133】
(他の実施形態)
上記実施形態では、図5のステップ300やステップ310において、ストローク量と踏力の関係がマップの範囲外であるか否かの判定とM/C圧と減速度[G]との関係がマップの範囲外であるか否かの判定の両方を行い、いずれか一方で肯定判定された場合にブレーキ失陥と判定されるようにしている。また、図6のステップ400、410においても、同様の判定を行っている。これら各ステップについては、各条件の一方のみを判定するような形態としても構わない。勿論、両方の判定を行うことにより、より的確な制御が行えることになるが、仮に、ストローク量と踏力との関係について判定しないようにするのであれば、高価なストロークセンサが必要なくなるという効果も得られる。
【0134】
また、図5のステップ300やステップ310において、ブレーキ失陥については、M/C圧と減速度[G]の関係を示したマップを利用して、正常範囲外の状態が一定時間経過した場合に検出されるようにしている。しかしながら、これ以外の方法によってブレーキ失陥を検出することもできる。例えば、異なる系統の車輪速センサの出力を比較することで、車輪速出力の減少が緩やかな系統を片系統失陥と判定するようにしても良い。また、制動中にもかかわらず車輪速センサの出力から全車輪の車輪速度に差が無い状態でGセンサ21で検出される減速度[G]が一定以上の値にならない状態が一定時間継続したときに両系統失陥と判定するようにしても良い。
【0135】
また、上記実施形態では、ブレーキ失陥時および負圧低下状態の際に補助ロック制御および補助リリース制御を実行するようにしたが、ブレーキ失陥のときにのみ、もしくは、負圧低下状態のときにのみ実行するようにしても良い。
【0136】
また、上記実施形態では、本発明が適用される車両用ブレーキシステムの一例を挙げて説明したが、車両用ブレーキシステムに備えられる各部については適宜変更可能である。
【0137】
例えば、上記実施形態では、M/C圧センサ22によってM/C圧を検出するようにしているが、ABS制御等の作動時でなければW/C圧もM/C圧と等しい値であることから、W/C圧センサの圧力を検出するようにしても良い。つまり、車両用ブレーキシステムに備えられる配管の圧力検出を行えるものの圧力検出値を用いて、ブレーキ失陥や負圧低下状態の判定を行うようにしても良い。
【0138】
また、上記実施形態では、ブレーキ操作部材としてブレーキペダル3を用いた車両用ブレーキシステムについて説明したが、ブレーキレバーなどの他のブレーキ操作部材が用いられる場合についても本発明を適用することができる。すなわち、ブレーキ操作部材の操作力がエンジン負圧を利用した倍力装置4によって倍力され、それに基づいてW/C圧を発生させる車両用ブレーキシステムであれば、上記実施形態に挙げた構成のものでなくても良い。
【0139】
なお、各図中に示したステップは、各種処理を実行する手段に対応するものである。例えば、EPB−ECU9のうち上記ステップ115〜145の処理を実行する部分が補助制御手段、ステップ135の処理を実行する部分が補助ロック制御処理手段、ステップ145の処理を実行する部分が補助リリース制御処理手段、ステップ210の処理を実行する部分が異常判定手段、ステップ240の処理を実行する部分が補助ロック判定手段、ステップ250の処理を実行する部分が補助リリース判定手段に相当している。
【符号の説明】
【0140】
1…サービスブレーキ、2…EPB、3…ブレーキペダル、4…倍力装置、5…M/C、7…アクチュエータ、8…ESC−ECU、9…EPB−ECU、10…モータ、11…ブレーキパッド、12…ブレーキディスク、13…キャリパ、20…操作SW、21…Gセンサ、22…M/C圧センサ
【特許請求の範囲】
【請求項1】
ブレーキ操作部材(3)の操作力を倍力装置(4)にてエンジン負圧に基づいて倍力し、この倍力した操作力に基づいてマスタシリンダ(5)内にマスタシリンダ圧を発生させると共に、該マスタシリンダ圧に基づいて、2系統のブレーキ配管それぞれに接続された各車輪のホイールシリンダ(6)にホイールシリンダ圧を発生させることで各車輪に制動力を発生させるサービスブレーキ(1)と、前記サービスブレーキ(1)のホイールシリンダ圧を制御するアクチュエータ(7)とを有する主制動装置と、
電気的に駐車ブレーキ力を発生させる駐車ブレーキ装置(2)とを有する車両用ブレーキシステムに適用され、前記駐車ブレーキ装置を制御して駐車ブレーキ力の制御を行うブレーキ制御装置であって、
前記駐車ブレーキ装置(2)を制御して駐車ブレーキ力を発生させる補助ロック制御および該駐車ブレーキ力を解除する補助リリース制御を実行することで、前記主制動装置が発生させる制動力と前記駐車ブレーキ力とにより、前記ブレーキ操作部材(3)の操作量に応じた目標制動力を発生させる補助制御を実行する補助制御手段(115〜145)を有し、
前記補助制御手段(115〜145)は、
前記主制動装置の異常が発生しているか否かを判定する異常判定手段(210)と、
前記異常判定手段(210)によって異常が判定されたときに、当該異常が2系統のうちの片方の系統が失陥する片系統失陥であるか、2系統の両方が失陥する両系統失陥であるかを判定すると共に、前記駐車ブレーキ装置(2)を制御して駐車ブレーキ力を発生させる前記補助ロック制御を実行するか否かを判定する補助ロック判定手段(240)と、
前記補助ロック制御後に、前記補助ロック制御によって発生させた前記駐車ブレーキ力を解除する前記補助リリース制御を実行するか否かを判定する補助リリース判定手段(250)と、
前記補助ロック判定手段(240)にて判定された失陥の形態に対応して、前記補助ロック制御を行う車輪と該補助ロック制御により発生させる前記駐車ブレーキ力を設定する補助ロック制御処理手段(135)と、
前記補助リリース判定手段(250)の判定に基づいて、前記補助ロック制御により発生させた前記駐車ブレーキ力を解除する前記補助リリース制御を実行する補助リリース制御処理手段(145)と、を有していることを特徴とする駐車ブレーキ制御装置。
【請求項2】
前記補助ロック制御処理手段(135)は、
前記補助ロック判定手段(240)にて判定された失陥が前記片系統失陥のときには、失陥が検出された系統の車輪に備えられる前記駐車ブレーキ装置(2)にて発生させる前記駐車ブレーキ力を設定し、
前記補助ロック判定手段(240)にて判定された失陥が前記両系統失陥のときには、両系統の車輪に備えられる前記駐車ブレーキ装置(2)にて発生させる前記駐車ブレーキ力を設定することを特徴とする請求項1に記載の駐車ブレーキ制御装置。
【請求項3】
前記補助ロック判定手段(240)は、前記ブレーキ操作部材(3)のストローク量と操作力との関係、または、前記マスタシリンダ圧と車両に発生している減速度との関係が、前記片系統失陥が発生していない通常時に想定される関係から定められた所定範囲外であるか、もしくは、前記両系統失陥が発生していない通常時に想定される関係から定められた所定範囲外であるかを判定することで、前記片系統失陥および前記両系統失陥の判定を行うことを特徴とする請求項1または2に記載の駐車ブレーキ制御装置。
【請求項4】
前記補助リリース判定手段(250)は、前記ブレーキ操作部材(3)のストローク量と操作力との関係、または、前記マスタシリンダ圧と車両に発生している減速度との関係が、前記片系統失陥が発生していない通常時に想定される関係から定められた所定範囲内になったとき、もしくは、前記両系統失陥が発生していない通常時に想定される関係から定められた所定範囲内になったときに、前記補助リリース制御を実行することを判定することを特徴とする請求項3に記載の駐車ブレーキ制御装置。
【請求項5】
前記異常判定手段(210)は、前記倍力装置(4)が用いているエンジン負圧が低下している負圧低下状態になっているか否かについても異常の1つとして判定し、
前記補助ロック判定手段(240)は、前記異常判定手段(210)によって負圧低下状態になっていることが判定されたときに、前記マスタシリンダ圧が所定のロック閾値下限からロック閾値上限の範囲内であり、かつ、前記マスタシリンダ圧の微分値が所定のロック微分閾値下限からロック微分閾値上限の範囲内であると、前記補助ロック制御を実行することを判定することを特徴とする請求項1ないし4のいずれか1つに記載の駐車ブレーキ制御装置。
【請求項6】
前記補助リリース判定手段(250)は、前記マスタシリンダ圧が所定のロック閾値下限より下もしくはロック閾値上限より上になり、かつ、前記マスタシリンダ圧の微分値が所定のロック微分閾値下限より下もしくはロック微分閾値上限より上になったときに、前記補助リリース制御を実行することを判定することを特徴とする請求項5に記載の駐車ブレーキ制御装置。
【請求項1】
ブレーキ操作部材(3)の操作力を倍力装置(4)にてエンジン負圧に基づいて倍力し、この倍力した操作力に基づいてマスタシリンダ(5)内にマスタシリンダ圧を発生させると共に、該マスタシリンダ圧に基づいて、2系統のブレーキ配管それぞれに接続された各車輪のホイールシリンダ(6)にホイールシリンダ圧を発生させることで各車輪に制動力を発生させるサービスブレーキ(1)と、前記サービスブレーキ(1)のホイールシリンダ圧を制御するアクチュエータ(7)とを有する主制動装置と、
電気的に駐車ブレーキ力を発生させる駐車ブレーキ装置(2)とを有する車両用ブレーキシステムに適用され、前記駐車ブレーキ装置を制御して駐車ブレーキ力の制御を行うブレーキ制御装置であって、
前記駐車ブレーキ装置(2)を制御して駐車ブレーキ力を発生させる補助ロック制御および該駐車ブレーキ力を解除する補助リリース制御を実行することで、前記主制動装置が発生させる制動力と前記駐車ブレーキ力とにより、前記ブレーキ操作部材(3)の操作量に応じた目標制動力を発生させる補助制御を実行する補助制御手段(115〜145)を有し、
前記補助制御手段(115〜145)は、
前記主制動装置の異常が発生しているか否かを判定する異常判定手段(210)と、
前記異常判定手段(210)によって異常が判定されたときに、当該異常が2系統のうちの片方の系統が失陥する片系統失陥であるか、2系統の両方が失陥する両系統失陥であるかを判定すると共に、前記駐車ブレーキ装置(2)を制御して駐車ブレーキ力を発生させる前記補助ロック制御を実行するか否かを判定する補助ロック判定手段(240)と、
前記補助ロック制御後に、前記補助ロック制御によって発生させた前記駐車ブレーキ力を解除する前記補助リリース制御を実行するか否かを判定する補助リリース判定手段(250)と、
前記補助ロック判定手段(240)にて判定された失陥の形態に対応して、前記補助ロック制御を行う車輪と該補助ロック制御により発生させる前記駐車ブレーキ力を設定する補助ロック制御処理手段(135)と、
前記補助リリース判定手段(250)の判定に基づいて、前記補助ロック制御により発生させた前記駐車ブレーキ力を解除する前記補助リリース制御を実行する補助リリース制御処理手段(145)と、を有していることを特徴とする駐車ブレーキ制御装置。
【請求項2】
前記補助ロック制御処理手段(135)は、
前記補助ロック判定手段(240)にて判定された失陥が前記片系統失陥のときには、失陥が検出された系統の車輪に備えられる前記駐車ブレーキ装置(2)にて発生させる前記駐車ブレーキ力を設定し、
前記補助ロック判定手段(240)にて判定された失陥が前記両系統失陥のときには、両系統の車輪に備えられる前記駐車ブレーキ装置(2)にて発生させる前記駐車ブレーキ力を設定することを特徴とする請求項1に記載の駐車ブレーキ制御装置。
【請求項3】
前記補助ロック判定手段(240)は、前記ブレーキ操作部材(3)のストローク量と操作力との関係、または、前記マスタシリンダ圧と車両に発生している減速度との関係が、前記片系統失陥が発生していない通常時に想定される関係から定められた所定範囲外であるか、もしくは、前記両系統失陥が発生していない通常時に想定される関係から定められた所定範囲外であるかを判定することで、前記片系統失陥および前記両系統失陥の判定を行うことを特徴とする請求項1または2に記載の駐車ブレーキ制御装置。
【請求項4】
前記補助リリース判定手段(250)は、前記ブレーキ操作部材(3)のストローク量と操作力との関係、または、前記マスタシリンダ圧と車両に発生している減速度との関係が、前記片系統失陥が発生していない通常時に想定される関係から定められた所定範囲内になったとき、もしくは、前記両系統失陥が発生していない通常時に想定される関係から定められた所定範囲内になったときに、前記補助リリース制御を実行することを判定することを特徴とする請求項3に記載の駐車ブレーキ制御装置。
【請求項5】
前記異常判定手段(210)は、前記倍力装置(4)が用いているエンジン負圧が低下している負圧低下状態になっているか否かについても異常の1つとして判定し、
前記補助ロック判定手段(240)は、前記異常判定手段(210)によって負圧低下状態になっていることが判定されたときに、前記マスタシリンダ圧が所定のロック閾値下限からロック閾値上限の範囲内であり、かつ、前記マスタシリンダ圧の微分値が所定のロック微分閾値下限からロック微分閾値上限の範囲内であると、前記補助ロック制御を実行することを判定することを特徴とする請求項1ないし4のいずれか1つに記載の駐車ブレーキ制御装置。
【請求項6】
前記補助リリース判定手段(250)は、前記マスタシリンダ圧が所定のロック閾値下限より下もしくはロック閾値上限より上になり、かつ、前記マスタシリンダ圧の微分値が所定のロック微分閾値下限より下もしくはロック微分閾値上限より上になったときに、前記補助リリース制御を実行することを判定することを特徴とする請求項5に記載の駐車ブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2013−71521(P2013−71521A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210643(P2011−210643)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]