
駐車ブレーキ装置
【課題】駐車ブレーキ装置において、動的駐車制御中に後輪のロック解除が検知されたときの駐車ブレーキの作動応答性を向上する。
【解決手段】駐車ブレーキ装置7の制御装置41において、ダイナミックパーキング制御部59は、車両1の走行中に駐車ブレーキ9,11が作動している状態において後輪3,5のロック作動が検知されれば、コントロールケーブル17,19のストロークを解除側に戻すことで駐車ブレーキ9,11をケーブルのストロークが所定ストローク量Bにとなるように解除し、後輪3,5のロック解除が検知されれば、所定の荷重値Pとなるように駐車ブレーキ9,11を作動させるようにアクチュエータ13を制御する。所定ストローク量Bは、ケーブルのストロークがない初期位置から駐車ブレーキ9,11の作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である解除完了ストローク量Aよりも、作動側に増加した量である。
【解決手段】駐車ブレーキ装置7の制御装置41において、ダイナミックパーキング制御部59は、車両1の走行中に駐車ブレーキ9,11が作動している状態において後輪3,5のロック作動が検知されれば、コントロールケーブル17,19のストロークを解除側に戻すことで駐車ブレーキ9,11をケーブルのストロークが所定ストローク量Bにとなるように解除し、後輪3,5のロック解除が検知されれば、所定の荷重値Pとなるように駐車ブレーキ9,11を作動させるようにアクチュエータ13を制御する。所定ストローク量Bは、ケーブルのストロークがない初期位置から駐車ブレーキ9,11の作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である解除完了ストローク量Aよりも、作動側に増加した量である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車ブレーキの作動、解除の制御を行う駐車ブレーキ装置に関する。
【背景技術】
【0002】
駐車ブレーキ装置は、車両の状態の検出信号又はスイッチの操作に基づいて電動モータを駆動することで、駐車ブレーキを作動又は解除する。
【0003】
車両の走行中に駐車ブレーキ装置を作動させることで、車両を制動する動的駐車ブレーキ制御が知られている。この制御では、駐車ブレーキが完全に作動すれば、車輪がロックしてしまい、車体の走行姿勢にブレが生じてしまう。この場合、運転者はハンドル操作により走行姿勢を立て直さなければならず、運転操作が難しくなる。
動的駐車ブレーキ制御中に車輪のロックを回避するようにした装置として、例えば下記に挙げる特許文献1がある。
特許文献1に記載の駐車ブレーキ装置は、車両の走行中に駐車ブレーキが作用させられる場合に、駐車ブレーキの作用力を、車輪のスリップ状態が適正状態になるように制御することを目的としている。駐車ブレーキ装置では、左右のブレーキ22,24には、電動モータ30がケーブル32,イコライザ64を介して接続されるため、ブレーキ22,24の作用力は同じになる。この場合において、スリップ率の大きい方の車輪に基づいて左右両方のブレーキ22,24の作用力が共通に制御されるため、左右両輪12,14のスリップ率が過大になることを良好に回避することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−67916号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の車両ロック回避制御において、一般に、車輪のロック状態を解除するときに、駐車ブレーキが完全に解除される状態に対応するストロークまでアクチュエータを戻すことが行われている。この場合、再び駐車ブレーキを作動させるときに車輪を制動させるまでに時間がかかり、所定の制動距離で停車できないことが懸念される。
【0006】
本発明の課題は、駐車ブレーキ装置において、動的駐車制御中に後輪のロック解除が検知されたときの駐車ブレーキの作動応答性を向上することにある。
【課題を解決するための手段】
【0007】
以下に、課題を解決するための手段として複数の態様を説明する。これら態様は、必要に応じて任意に組み合せることができる。
【0008】
本発明の一見地に係る駐車ブレーキ装置は、駐車ブレーキと、駆動部と、ケーブルと、制御部とを備えている。
駆動部は、駐車ブレーキを作動・解除する。
ケーブルは、駐車ブレーキと駆動部を接続する。
制御部は、駆動部を制御する。制御部は、ロック検知手段と、動的駐車制御手段とを有している。
ロック検知手段は、後輪のロック作動及びロック解除を検知する。
動的駐車制御手段は、車両の走行中に駐車ブレーキが作動している状態において後輪のロック作動が検知されれば、ケーブルのストロークを解除側に戻すことで駐車ブレーキをケーブルのストロークが所定ストローク量にとなるように解除する。動的駐車制御手段は、後輪のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキを作動させるように駆動部を制御する。
所定ストローク量は、ケーブルのストロークがない初期位置から駐車ブレーキの作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である解除完了ストローク量よりも、作動側に増加した量である。
この装置では、動的駐車制御手段は、車両の走行中に駐車ブレーキが作動している状態において後輪のロック作動が検知されれば、駆動部を以下のように制御する。
駆動部は、ケーブルのストロークを解除側に戻すことで、駐車ブレーキを、ケーブルのストロークが所定ストローク量にとなるように解除する。
駆動部は、後輪のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキを作動させる。
以上の制御動作により、走行中の動的駐車制御において、後輪がロックされたときには駐車ブレーキを解除することでロック回避が行われる。そして、その結果として後輪のロック解除がなされれば、駐車ブレーキが再作動させられる。
この装置では、所定ストローク量は、解除完了ストローク量よりも、作動側に増加した量である。したがって、後輪のロック解除が検知された後に引かれるケーブルのストロークを短くでき、ひいては駐車ブレーキの荷重が所定の荷重値に達するまでの時間が短縮される。
以上のように、駐車ブレーキの作動応答性が向上するので、車体の走行姿勢を安定させた状態で所定の制動距離で停止することができる。
【0009】
動的駐車制御手段は、駆動部を制御して、後輪のロック作動が検知されればケーブルのストロークを所定ストローク量となるように維持して後輪がロック解除になるのを待ち、後輪のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキを作動させるように駆動部を制御してもよい。
【0010】
所定ストローク量は、後輪をロック解除可能とするとともに、車両が法定制動距離以下で停止できる量であってもよい。
【0011】
所定ストローク量は、常温時におけるストローク量に比べて所定量だけ増加した量であり、低温時においても車両が法定制動距離以下で停止できる量であってもよい。
この装置では、低温時には常温時に比べてケーブルの荷重効率が低下してそのためにケーブルを引き始めてから駐車ブレーキが所定の荷重値に達するまでの時間が常温時に比べて長くなるという問題に対処できる。つまり、低温時には常温時よりも、後輪のロック解除が検知された後に引かれるケーブルのストロークを短くでき、ひいては低温時のケーブル効率の低下にもかかわらず、駐車ブレーキの荷重が所定の荷重値に達するまでの時間を常温時と同じ程度にできる。その結果、低温時においても車体の走行姿勢を安定させた状態で所定の制動距離で停止することができる。
【0012】
動的駐車制御手段は、低温時と常温時との温度におけるケーブルの荷重効率に応じて、法定制動距離以下で停止できるように制御してもよい。
【発明の効果】
【0013】
本発明に係る駐車ブレーキ装置では、動的駐車制御中に後輪のロック解除が検知されたときの駐車ブレーキの作動応答性が向上する。
【図面の簡単な説明】
【0014】
【図1】電動駐車ブレーキ装置を搭載した車両の概略構成図。
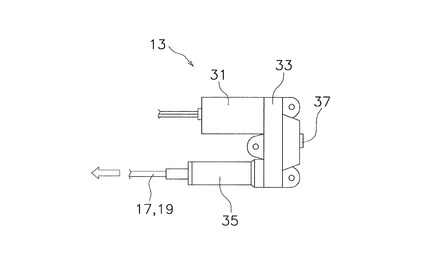
【図2】アクチュエータの構成図
【図3】ブレーキコントローラのブロック図
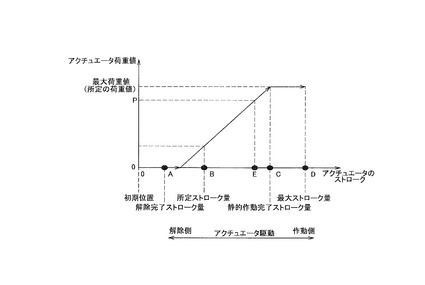
【図4】アクチュエータ特性線図
【図5】ダイナミックパーキング制御のフローチャート。
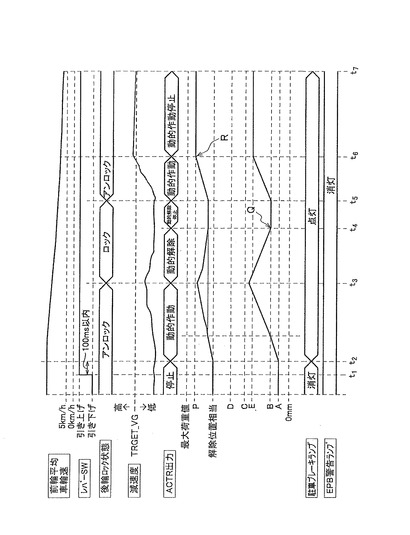
【図6】ダイナミックパーキング制御のタイミングチャート。
【図7】図6の部分拡大図。
【図8】他の実施形態において図7に対応する図。
【発明を実施するための形態】
【0015】
(1)駐車ブレーキ装置
図1を用いて、駐車ブレーキ装置の概略構成を説明する。図1は、電動駐車ブレーキ装置を搭載した車両の概略構成図である。
図1において、車両1は、前輪及び後輪を有し、車両1の左右の後輪3、5を制動するための駐車ブレーキ装置7を有している。駐車ブレーキ装置7は、例えば、駐車ブレーキ9,11と、アクチュエータ13と、ブレーキコントローラ15と、2本のコントロールケーブル17,19とを有している。
【0016】
駐車ブレーキ9,11は、後輪3、5を制動するための装置である。駐車ブレーキ9,11は周知なものであるので図示はしないが、例えば、ブレーキドラムと、ブレーキドラムの内周面を押し付けるブレーキシューと、ブレーキシューを戻し方向に付勢するリターンスプリングと、コントロールケーブル17、19で作動するパーキングレバーとで構成されている。
アクチュエータ13は、駐車ブレーキを作動・解除するための駆動部の一例である。アクチュエータ13は、運転席の近傍に設けられている。アクチュエータ13は、ブレーキコントローラ15によって自動制御されるようになっている。また、アクチュエータ13には、運転席側のインストールメントパネルあるいはハンドル側などの運転手の手が届く任意の場所に設けられているレバーSW71からの信号が入力されるようになっている。レバーSW71は、アクチュエータ13をマニュアル操作するためのものである。
制御装置41は、アクチュエータ13を制御する制御部の一例である(後述)。
【0017】
コントロールケーブル17,19は、駐車ブレーキ9、11とアクチュエータ13とを接続しているケーブルの一例である。
駐車ブレーキ装置7は、さらに、ブレーキケーブル21と、イコライザー23とを有している。ブレーキケーブル21は、アクチュエータ13から導出されており、イコライザー23の中央部分に接続されている。コントロールケーブル17,19は、一端が左右の駐車ブレーキ9、11にそれぞれ接続され、他端がイコライザー23にそれぞれ接続されている。コントロールケーブル17,19は、導管と該導管内に挿通される内索とからなっている。
【0018】
(2)アクチュエータ
図2を用いて、アクチュエータ13の構成及び機能を説明する。図2は、アクチュエータの構成図である。
【0019】
アクチュエータ13は、例えば、電動モータ31と、歯車などで構成される減速機33と、ケーブル操作部35、及び電動モータ31に装着されたパルスエンコーダなどのストロークセンサ37と、ケーブルに介装されてケーブルの張力を検出する荷重センサ38とを有している。ケーブル操作部35には、コントロールケーブル17、19が接続されている。コントロールケーブル17、19の他端は、上述したように駐車ブレーキ9、11に接続されており、コントロールケーブル17、19を引き操作すると、駐車ブレーキ9、11のブレーキシューなどの摩擦部材がブレーキドラム又はブレーキディスクに付勢されるようになっている。
【0020】
ここで、コントロールケーブル17、19を操作するとは、コントロールケーブル17、19の導管を固定して、導管に対する内索をコントロールケーブル17、19の軸方向に動かすことを意味する。コントロールケーブル17、19を操作するには、例えば、コントロールケーブルの内索の端部にボルトを接続し、ボルトに噛み合うナットを軸方向の動きを規制して回転することによって、内索を軸方向に動かすようにすることができる。この場合、ナットを電動モータ31によって正転又は逆転することによって、内索を前後に動かすことができる。あるいは、例えば、内索の端部にラックを形成し、ラックに噛み合うピニオンを回転させて内索を前後に動かすような構成でもよい。
【0021】
(3)ブレーキコントローラ
図3を用いて、ブレーキコントローラ15の機能を説明する。図3は、ブレーキコントローラのブロック図である。
ブレーキコントローラ15は、アクチュエータ13を制御し、さらに例えば駐車ブレーキランプ39を点灯、点滅、消灯する制御を行う。
ブレーキコントローラ15は、制御装置41と、モータ駆動部43と、ランプ駆動部45と、傾斜センサ47とを有している。制御装置41は、アクチュエータ13を制御する制御部の一例である。モータ駆動部43は、電動モータ31を正転、逆転の駆動制御を行う。ランプ駆動部45は、駐車ブレーキランプ39を駆動制御する。傾斜センサ47は、車両1の傾斜を検出する。
【0022】
制御装置41は、CPU,RAM,ROMからなるコンピュータであり、ソフトウェアを実行することで所望の制御を行う。制御装置41は、各種機能として、モータ制御部51と、車速判定部53と、ロック判定部55と、減速度判定部57と、ダイナミックパーキング制御部59と、スタティックパーキング制御部61と、アクセル解除制御部63とを有している。これら機能はソフトウェアで実現されてもよいし、ハードウェアで実現されてもよい。制御装置41は、記憶部65をさらに有している。
モータ制御部51は、モータ駆動部43を介して電動モータ31を制御することで、アクチュエータ13のコントロールケーブル17、19のストローク量に応じて、駐車ブレーキ9、11を最適荷重、最大荷重まで作動させる。また、モータ制御部51は、モータ駆動部43を介して電動モータ31制御することで、電動モータ31を逆転させて解除を行う。車速判定部53は車両1の速度を判定する。
ロック判定部55は、車両1の後輪3,5のロックの判定を行う。ロック判定部55は、車輪速センサ77と車速センサ79からの信号に基づいてロック判定を行っている。したがって、ロック判定部55、車輪速センサ77及び車速センサ79によって、後輪のロック作動及びロック解除を検知するロック検知手段が構成されている。
減速度判定部57は、車両1の減速の度合いを判定する。
【0023】
ダイナミックパーキング制御部59は、動的駐車制御手段の一例であり、アクチュエータ13を以下のように制御する。アクチュエータ13は、車両1の走行中に駐車ブレーキ9、11が作動している状態において後輪3、5のロック作動が検知されれば、コントロールケーブル17、19のストロークを解除側に戻すことで駐車ブレーキ9、11を、コントロールケーブル17、19のストロークが所定ストローク量B(後述)にとなるように解除する。アクチュエータ13は、後輪3、5のロック解除が検知されれば、所定の荷重値を発生するように駐車ブレーキ9、11を作動させる。
なお、ダイナミックパーキング制御部59が上記の制御を行うのは車両1の速度が所定速度(例えば、5km/h)を超えている場合である。車両1が所定速度以下の場合は、スタティックパーキング制御部61が車両1を停止するまで制動をかける。
【0024】
アクセル解除制御部63は、車両1の停止状態から走行する場合にアクセルを踏んだ場合の信号を受けて駐車ブレーキ9、11を自動的に解除の制御を行う。
記憶部65は、各種制御を実行させるためのプログラムを格納しているROM、及び各種の信号やデータを一時的に格納するRAMからなる。
【0025】
ブレーキコントローラ15には、図3に示すように、以下の信号が入出されるようになっている。
・運転手による手動操作によるレバーSW71からの作動信号/解除信号
・イグニッションスイッチ73からのオン信号、オフ信号
・アクセルの踏み込みに応じたスロットル開度センサ75からの信号
・後輪3、5にそれぞれ取り付けられている車輪速センサ77からの車輪速の信号
・車速センサ79からの車両1の速度信号
・サービスブレーキのブレーキスイッチ81からのブレーキのオン信号、オフ信号
・各シフトポジションの位置を検出するATポジションセンサ83からの、P(パーキング)ポジション、N(ニュートラル)ポジション、D(ドライブ)ポジション、R(リバース)ポジションの各信号
・エンジン回転数センサ85からのエンジンの回転数の信号
【0026】
なお、図3に示す各部には、イグニッションスイッチ73のオン、オフに関わらずバッテリから電源が供給されている。
【0027】
(4)アクチュエータ駆動の静的特性
図4を用いて、アクチュエータ駆動の静的特性を説明する。図4は、アクチュエータ特性線図である。図4では、横軸がアクチュエータのストロークであり、縦軸がアクチュエータの荷重値である。
【0028】
初期位置からアクチュエータの駆動が大きくなっていくときに、アクチュエータ荷重値は0が続く。解除完了ストローク量Aは、ケーブルのストロークがない初期位置から駐車ブレーキの作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である。解除完了ストローク量Aでは、アクチュエータ荷重値は0である。アクチュエータのストロークが解除完了ストローク量Aよりわずかに大きくなると、それ以降はアクチュエータ荷重値は線形に変化する。解除ストローク量よりわずかに大きい位置に所定ストローク量Bが設定されている。所定ストローク量Bは、解除完了ストローク量Aよりも、作動側に増加した量である。
【0029】
静的作動完了ストローク量Cに達するときには、アクチュエータ荷重値は最大荷重値となる。なお、静的作動完了ストローク量Cよりも小さいストローク量であって、最大荷重値よりも小さい荷重値として、後述する所定の荷重値P(ストローク量としてはストローク量Eに対応)を設定して、静的制御における目標荷重値としてもよい。
【0030】
(5)ダイナミックパーキング制御のフローチャート
図5を用いて、ダイナミックパーキング制御のフローチャートを説明する。図5はダイナミックパーキング制御のフローチャートである。
【0031】
ダイナミックパーキング制御は、例えば低μ路走行中に後輪3、5のロックの危険性が大となったときにコントロールケーブル17、19の引き作動を解除し、ロックの危険性が無くなると引き作動を行う制御である。ダイナミックパーキング制御では、低μ路においても車両が法定距離内で停止可能なことが必要条件となっている。低μ路のμは例えば0.2であり、車両が未積載状態である。
ダイナミックパーキング制御は、制御装置41のダイナミックパーキング制御部59、車速判定部53、ロック判定部55、減速度判定部57などにて主に行われる。
なお、ダイナミックパーキング制御は、運転手がレバーSW71を引き上げることで制御が開始されるものであり、車速が所定速度以下になればスタティックパーキング制御に移行するようにしてもよい。
【0032】
ステップS1では、ダイナミックパーキング制御部59は、複数の装置の異常状態が全てOFFになっているか否かを判断する。異常状態が1つでもONであれば、プロセスは元に戻る。
ステップS2では、ダイナミックパーキング制御部59は、動的作動制御の開始が指示されたか否かを判断する。具体的には、ダイナミックパーキング制御部59は、走行中に運転手がレバーSW71を引き上げてアクチュエータ13のコントロールケーブル17、19の引き作動を行ったか否かを判断する。このとき、車速判定部53が車速センサ79からの信号にて車速を判定しており、ダイナミックパーキング制御部59は、車速判定部53から送られてきた速度判定結果に基づいて、車速が所定速度を超えていれば、動的作動制御を開始する(ステップS2の「Yes」)。なお、この実施形態では、予め定められた速度は、5km/hであるが、数値は任意に設定できる。
【0033】
ステップS3では、ダイナミックパーキング制御部59は、動的作動制御の中止が指示されたか否かを判断する。動的作動制御の中止の指示とは、動的作動制御中にレバーSW71が下げされたことの通知である。ステップS3で「Yes」であればプロセスはステップS9に移行して、動作作動制御中止処理が行われる。
【0034】
ステップS4では、ダイナミックパーキング制御部59は、動的作動制御の終了が指示されたか否かを判断する。動的作動制御の終了の指示とは、走行状態が停止状態に切り替わったことの通知である。ステップS4で「Yes」であればプロセスはステップS10に移行して、動的作動制御終了処理が行われる。
【0035】
ステップS5では、ダイナミックパーキング制御部59は、異常状態が全てOFFであるか否かを判断する。「No」であればプロセスはステップS11に移行して、動的制御のフェールセーフ処理が行われる。
【0036】
ステップS6では、ダイナミックパーキング制御部59は、動的アクチュエータ解除許可が出されているか否かを判断する。この許可は、例えば、後輪3、5のロック判定結果でアンロック状態からロック状態に切り替わったことの通知である。後輪3、5のロック判定は、車速が所定速度を超えている場合において、ロック判定部55が車速と後輪車輪速とを比較することで行われる。より具体的には、後輪ロック判定は、前輪車輪速と後輪車輪速の差があるしきい値(閾値)を超えた場合に「ロック状態」と判定するものであり、制御装置41のロック判定部55が、車輪速センサ77と車速センサ79からの信号に基づいてロック状態を判定する。
【0037】
推定車体速とは、右、左前輪車輪速の平均値であり、左右の車輪速が違う場合が想定されることから、平均値を採っている。また、後車輪速は、後右、左車輪速のセレクトローとし、左右の後輪のうち減速度が大きい方のセレクトローのデータを用いている。なお、車速や後輪の車輪速は、例えば、10msec毎にサンプリングを行ってデータを得ている。
【0038】
ステップS6で「Yes」であればプロセスはステップS12に移行し、アクチュエータ解除動作が行われる。つまり、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、コントロールケーブル17,19を戻し作動する。つまり、アクチュエータ13の荷重及びストローク量は小さくなっていく。ステップS12が終了すると、プロセスはステップS8に移行する。
なお、アクチュエータの解除動作は、アクチュエータ13のストロークが所定ストローク量B(後述)に達したときに完了する。つまり、ダイナミックパーキング制御部59は、戻し作動においては、ストロークセンサ37からの検出値に基づいてアクチュエータ13の解除を完了する。
【0039】
ステップS7では、ダイナミックパーキング制御部59は、動的アクチュエータ作動許可が出されているか否かを判断する。この許可とは、後輪3、5のロック判定結果でロック状態からアンロック状態に切り替わったことの通知である。すなわち、ダイナミックパーキング制御部59は、ロック判定部55から送られてきたロック判定結果に基づいて上記判断を行う。
ステップS7で「Yes」であればプロセスはステップS13に移行して、アクチュエータ作動が行われる。つまり、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、コントロールケーブル17,19を引き作動する。つまり、アクチュエータ13の荷重及びストロークは大きくなっていく。ステップS13が終了すれば、プロセスはステップS8に移行する。
【0040】
ステップS8では、ダイナミックパーキング制御部59は、動的アクチュエータ作動停止許可が出されたか否かを判断する。動的アクチュエータ停止許可とは、動的作動制御中にアクチュエータのストロークが所定ストローク量B以下になったことの通知である。つまり、ダイナミックパーキング制御部59は、ストロークセンサ37から上記状態になったときの検出信号を受信すれば、動的アクチュエータ作動停止許可が出されたと判断する。
ステップS8で「Yes」であれば、プロセスはステップS14に移行してアクチュエータ停止が行われる。つまり、ダイナミックパーキング制御部59が動的作動制御を停止する。ステップS14が終了すると、プロセスはステップS3に戻る。
なお、ダイナミックパーキング制御部59が動的作動制御を実際に停止するのは、アクチュエータ13の荷重値が所定の荷重値Pに達したときである。荷重値Pは、動的制御において法定制動距離までに停止可能な荷重値であり、最大荷重値とすることもできるし、路面状態のμに応じて、図4のように最大荷重値よりも小さい値とすることもできる。このときに、駐車ブレーキ9,11は、コントロールケーブルの操作によるタイムラグにより、荷重値Pよりもわずかに小さい荷重値となっている。つまり、ダイナミックパーキング制御部59は、荷重センサ38からの検出値に基づいてアクチュエータ停止を行う。なお、一例であるが、駐車ブレーキ9,11の所定ストローク量Bにおける荷重値は、低μ路における未積載のトラックにおいて約200Nである。
【0041】
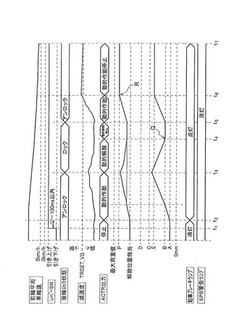
(6)ダイナミックパーキング制御のタイミングチャート
図6を用いて、ダイナミックパーキング制御を説明する。図6は、ダイナミックパーキング制御のタイミングチャートである。
図6では、車速が所定速度を超えているときに運転手がレバーSW71を下げ状態から引き上げて駐車ブレーキ9,11の引き作動(引き操作)を開始してから動的解除と動的作動停止の過程が主に示されている。
【0042】
初期段階では、車両1は所定速度を超えた速度で走行しており、後輪3,5は、パーキングレーキの制御を行っておらず、アンロック状態である。アクチュエータ出力は停止状態であり、アクチュエータストロークは解除完了ストローク量Aであり、アクチュエータ荷重値は解除位置相当である。
【0043】
時刻t1で運転手がレバーSW71を引き上げることで、ダイナミックパーキング制御指示が受け付けられる。具体的には、レバーSW71から作動信号が制御装置41に送信される。
【0044】
そして、時刻t2で、ダイナミックパーキング制御が開始される。つまり、ダイナミックパーキング制御部59が、モータ駆動部43を介してアクチュエータ13を制御することで、電動モータ31を停止状態から起動させる(図5のステップS2の「Yes」に対応)。これにより、コントロールケーブル17、19が引き作動させられ、アクチュエータ13のストローク及び荷重が増加していく。このときに、駐車ブレーキ9、11の荷重も増加していく。また、駐車ブレーキランプ39が点灯する。
【0045】
ダイナミックパーキング制御では、コントロールケーブル17、19が引き作動され、コントロールケーブル17、19により後輪3、5に制動がかかることで後輪3,5の減速度が大きくなる。減速度が大きくなると、後輪3、5のロック近傍に近づくためロックの危険性が大となる。そして、時刻t3で、ロック判定部55が後輪のロック状態を検知すると(図5のステップS6の「Yes」に対応)、一旦ダイナミックパーキング制御を停止しようとして、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、電動モータ31を逆転させてコントロールケーブル17、19の解除(戻し作動)を行う(図5のステップS12に対応)。以後、アクチュエータ13のストローク量及び荷重が減少していき、それに伴い駐車ブレーキ9、11の制動荷重も減少していく。
【0046】
時刻t4でアクチュエータ13のストロークが所定ストローク量B以下になると(図6及び図7のQ点)、ストロークセンサ37がそのことを検出し(図5のステップS8の「Yes」に対応)、その検出結果に基づいてダイナミックパーキング制御部59がアクチュエータ13を停止して、動的解除を終了する。つまり、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、電動モータ31の回転を停止させる。その結果、時刻t4〜t5までは、アクチュエータ13のストローク及び荷重は一定に維持されており、動的解除停止が維持されている。言い換えると、ダイナミックパーキング制御部59は、後輪3、5のロック作動が検知されればコントロールケーブル17、19のストロークを所定ストローク量Bとなるように維持して後輪3、5がロック解除になるのを待ち、後輪3、5のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキ9、11を作動させるようにアクチュエータ13を制御する。
ここで、重要なのは、動的解除が停止させられる基準となるアクチュエータ13のストローク量は、従来の解除完了ストローク量Aより大きい所定ストローク量Bである点である。所定ストローク量Bが、後輪3、5をロック解除可能とするとともに、車両1が法定制動距離以下で停止できる量である。
【0047】
時刻t5で後輪のアンロックが検出されると(図5のステップS7に対応)、ダイナミックパーキング制御部59は、その検出結果に基づいて2回目の動的作動を行う(図5のステップS13に対応)。具体的には、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、電動モータ31を駆動してコントロールケーブル17、19の引き作動させる(図5のステップS13に対応)。これにより、コントロールケーブル17、19が引き作動させられ、アクチュエータのストローク及び荷重が増加していき、それに伴い駐車ブレーキ9、11の制動荷重も増加していく。
【0048】
このようにして、コントロールケーブル17、19の戻し作動である解除と、引き作動である作動とを繰り返していくと、車体速度が徐々に低下していく。最後には、通常作動移行閾値である所定速度以下になり、上述した通常のスタティックパーキング制御が行われて、車体が停止する。
【0049】
図6では、時刻t6で、動的作動が停止される(図5のステップS13に対応)。また、アンロック状態が終了する。
なお、電動モータ31はアクチュエータ13が所定の荷重値Pになるまで(図6及び図7のR点)、つまり駐車ブレーキ9、11の荷重が所定の荷重値になるまで、引き作動を行って、アクチュエータ13及び駐車ブレーキ9、11の荷重値は、時刻t6以後は一定となっている。
【0050】
以上に述べたダイナミックパーキング制御では、後輪3、5のロックの可能性があるときは、ロックの回避を優先することで、後輪3、5をロックさせずに車両1を停止させることができる。
特に、コントロールケーブル17、19の戻し作動であるブレーキ解除と、コントロールケーブル17、19の引き作動であるブレーキ作動とが繰り返して実行されるので、後輪3、5をロックさせずにスムーズに車両1を停止させることができる。なお、この制御は、車速が所定速度以下になるまで繰り返して行われる。
【0051】
(7)作用効果の説明
ロック検知手段は、後輪のロック作動及びロック解除を検知する。動的駐車制御手段は、車両の走行中に駐車ブレーキが作動している状態において後輪のロック作動が検知されれば、ケーブルのストロークを解除側に戻すことで駐車ブレーキをケーブルのストロークが所定ストローク量にとなるように解除し、後輪のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキを作動させるように駆動部を制御する。本実施形態では、ロック判定部55、車輪速センサ77及び車速センサ79がロック検知手段の一例として示されており、ダイナミックパーキング制御部59が動的駐車制御手段の一例として示されており、アクチュエータ13が駆動部の一例としている。動的駐車制御手段を実現するソフトウェア・ハードウェアは特に限定されない。駆動部の構成及び機能は本実施形態に限定されない。
【0052】
解除完了ストローク量は、ケーブルのストロークがない初期位置から駐車ブレーキの作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である。所定ストローク量は、解除完了ストローク量よりも、作動側に増加した量である。本実施形態では、解除完了ストローク量Aが解除完了ストローク量の一例として示されており、所定ストローク量Bが所定ストローク量の一例として示されている。所定ストローク量Bは、本実施形態の図6及び図7の位置に限定されず、法定制動距離以下に停止するという条件を満たせば、解除完了ストローク量Aに近接していてもよい。
以上の構成により、後輪のロック解除が検知された後に引かれるケーブルのストロークを短くでき、ひいては駐車ブレーキの荷重が所定の荷重値に達するまでの時間が短縮される。この結果、駐車ブレーキの作動応答性が向上するので、車体の走行姿勢を安定させた状態で所定の制動距離で停止することができる。本実施形態では、後輪3、5のロック解除が検知された後に引かれるコントロールケーブル17、19のストロークを短くでき、ひいては駐車ブレーキ9、11の荷重が所定の荷重値に達するまでの時間が短縮される。
【0053】
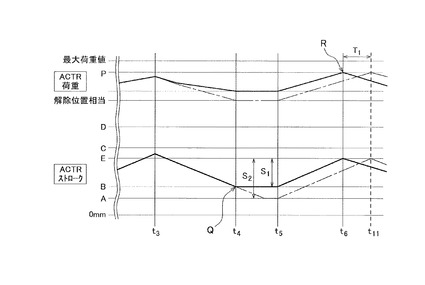
図7を用いて、上記の効果を本実施形態に即してさらに具体的に説明する。図7は、図6の部分拡大図である。従来の特性が一点鎖線で示され、本実施形態の特性が実線で示されている。
従来であれば解除完了ストローク量Aまでコントロールケーブルを戻していたので、アクチュエータ出力が動的解除停止から動的作動になるまでに必要なアクチュエータのストローク量がS2であった。それに対して、本実施形態では、所定ストローク量Bまでしかコントロールケーブルを戻さないので、アクチュエータ出力が動的解除停止から動的作動までに必要なアクチュエータのストローク量がS1になっている。S1はS2より短いので、アクチュエータ出力が動的解除停止から動的作動に戻るまで(つまり、アクチュエータ荷重が解除位置相当から所定の荷重値Pに戻るまで)の時間が短くなる。本実施形態では、従来に比べて上記時間がT1だけ短くなっている。つまり、駐車ブレーキ9、11の荷重が所定の荷重値に戻るまでの時間も短くなっている。
以上のように、駐車ブレーキ9、11の作動応答性が向上するので、車体の走行姿勢を安定させた状態で所定の制動距離で停止することができる。
【0054】
(8)所定ストローク量Bの設定
所定ストローク量Bの値は、例えば、記憶部65に保存されている。ダイナミックパーキング制御部59は、記憶部65から所定ストローク量Bの値を読み出して利用する。
所定ストローク量Bの値は、動的作動法規で規定される制動距離以内で停止可能であって、かつ、動的解除後の動的作動が効率良く行われるものであれば、適宜変更可能である。所定ストローク量Bは、出荷後は固定であってもよいし、各種条件に応じて自動的に変更されてもよい。
【0055】
寒冷地における低温時(例えば、マイナス30度)には、コントロールケーブルの荷重効率が低下してそのためにコントロールケーブルを引き始めてから駐車ブレーキが所定の荷重値に達するまでの時間が、常温時に比べて長くなることがある。これに対処するために、所定ストローク量Bは、寒冷地の低温時においても車両が法定制動距離以下で停止できる量に設定されていることが望まれる。
図8を用いて、上記の場合の所定ストローク量の設定を説明する。図8は、他の実施形態において図7に対応する図である。この図では、常温用に設定される特性を破線で示し、低温用に設定される特性を二点鎖線で示す。
以下の説明では、常温時の所定ストローク量B1(例えば、前記実施形態の所定ストローク量Bに対応)と、低温時の所定ストローク量B2が用いられる。常温時であれば所定ストローク量B1までコントロールケーブルを戻しているので、アクチュエータ出力が動的解除停止から動的作動になるまでに必要なアクチュエータのストローク量がS3である。それに対して、低温時には、所定ストローク量B2までしかコントロールケーブルを戻さないので、アクチュエータ出力が動的解除停止から動的作動までに必要なアクチュエータのストローク量がS4になっている。低温時の所定ストローク量は、常温時におけるストローク量に比べて前記所定量だけ増加した量であることから、S4はS3より短いので、アクチュエータ出力が動的解除停止から動的作動に戻るまで(つまり、アクチュエータ荷重が解除位置相当から所定の荷重値Pに戻るまで)の時間が短くなっている。本実施形態では、従来に比べて上記時間がT2だけ短くなっている。そのため、低温時の荷重効率の低下にもかかわらず、駐車ブレーキが所定の荷重値に達するタイミングは常温時と同じ程度になる。この結果、低温時においても常温時と同様に車体の走行姿勢を安定させた状態で所定の制動距離で停止できる。
【0056】
ダイナミックパーキング制御部59は、温度に関わらず常に所定ストローク量B2までコントロールケーブルを戻すようにしてもよい。
また、ダイナミックパーキング制御部59は、低温時と常温時との温度におけるコントロールケーブルの荷重効率に応じて、法定制動距離以下で停止できるように制御できるようになっていてもよい。つまり、常温時及び低温時の両方においてロックされずに法定制動距離までに停止可能なストローク量B(常温で法定制動距離までに停止可能であればストローク量B2とする)を設定しても良いし、常温時には所定ストローク量B1が設定値として用いられ、低温時にはそれより長い所定ストローク量B2が温度に応じてダイナミックパーキング制御部59によって選択的に設定値として用いられてもよい。
以上に述べたように低温時に温度補償を行うことで、ケーブルの荷重効率の低下問題を解消できる。つまり、ケーブルを引き始めてから駐車ブレーキが所定の荷重値に達するまでの時間を十分に短縮できる。
【0057】
(9)他の実施形態
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組み合せ可能である。
【産業上の利用可能性】
【0058】
本発明は、駐車ブレーキの作動、解除の制御を行う駐車ブレーキ装置に広く適用できる。
【符号の説明】
【0059】
1 車両
3 後輪
5 後輪
7 駐車ブレーキ装置
9 駐車ブレーキ
11 駐車ブレーキ
13 アクチュエータ
15 ブレーキコントローラ
17 コントロールケーブル
19 コントロールケーブル
31 電動モータ
37 ストロークセンサ
38 荷重センサ
41 制御装置
47 傾斜センサ
51 モータ制御部
53 車速判定部
55 ロック判定部
57 減速度判定部
59 ダイナミックパーキング制御部
61 スタティックパーキング制御部
65 記憶部
71 レバーSW
77 車輪速センサ
79 車速センサ
【技術分野】
【0001】
本発明は、駐車ブレーキの作動、解除の制御を行う駐車ブレーキ装置に関する。
【背景技術】
【0002】
駐車ブレーキ装置は、車両の状態の検出信号又はスイッチの操作に基づいて電動モータを駆動することで、駐車ブレーキを作動又は解除する。
【0003】
車両の走行中に駐車ブレーキ装置を作動させることで、車両を制動する動的駐車ブレーキ制御が知られている。この制御では、駐車ブレーキが完全に作動すれば、車輪がロックしてしまい、車体の走行姿勢にブレが生じてしまう。この場合、運転者はハンドル操作により走行姿勢を立て直さなければならず、運転操作が難しくなる。
動的駐車ブレーキ制御中に車輪のロックを回避するようにした装置として、例えば下記に挙げる特許文献1がある。
特許文献1に記載の駐車ブレーキ装置は、車両の走行中に駐車ブレーキが作用させられる場合に、駐車ブレーキの作用力を、車輪のスリップ状態が適正状態になるように制御することを目的としている。駐車ブレーキ装置では、左右のブレーキ22,24には、電動モータ30がケーブル32,イコライザ64を介して接続されるため、ブレーキ22,24の作用力は同じになる。この場合において、スリップ率の大きい方の車輪に基づいて左右両方のブレーキ22,24の作用力が共通に制御されるため、左右両輪12,14のスリップ率が過大になることを良好に回避することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−67916号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の車両ロック回避制御において、一般に、車輪のロック状態を解除するときに、駐車ブレーキが完全に解除される状態に対応するストロークまでアクチュエータを戻すことが行われている。この場合、再び駐車ブレーキを作動させるときに車輪を制動させるまでに時間がかかり、所定の制動距離で停車できないことが懸念される。
【0006】
本発明の課題は、駐車ブレーキ装置において、動的駐車制御中に後輪のロック解除が検知されたときの駐車ブレーキの作動応答性を向上することにある。
【課題を解決するための手段】
【0007】
以下に、課題を解決するための手段として複数の態様を説明する。これら態様は、必要に応じて任意に組み合せることができる。
【0008】
本発明の一見地に係る駐車ブレーキ装置は、駐車ブレーキと、駆動部と、ケーブルと、制御部とを備えている。
駆動部は、駐車ブレーキを作動・解除する。
ケーブルは、駐車ブレーキと駆動部を接続する。
制御部は、駆動部を制御する。制御部は、ロック検知手段と、動的駐車制御手段とを有している。
ロック検知手段は、後輪のロック作動及びロック解除を検知する。
動的駐車制御手段は、車両の走行中に駐車ブレーキが作動している状態において後輪のロック作動が検知されれば、ケーブルのストロークを解除側に戻すことで駐車ブレーキをケーブルのストロークが所定ストローク量にとなるように解除する。動的駐車制御手段は、後輪のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキを作動させるように駆動部を制御する。
所定ストローク量は、ケーブルのストロークがない初期位置から駐車ブレーキの作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である解除完了ストローク量よりも、作動側に増加した量である。
この装置では、動的駐車制御手段は、車両の走行中に駐車ブレーキが作動している状態において後輪のロック作動が検知されれば、駆動部を以下のように制御する。
駆動部は、ケーブルのストロークを解除側に戻すことで、駐車ブレーキを、ケーブルのストロークが所定ストローク量にとなるように解除する。
駆動部は、後輪のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキを作動させる。
以上の制御動作により、走行中の動的駐車制御において、後輪がロックされたときには駐車ブレーキを解除することでロック回避が行われる。そして、その結果として後輪のロック解除がなされれば、駐車ブレーキが再作動させられる。
この装置では、所定ストローク量は、解除完了ストローク量よりも、作動側に増加した量である。したがって、後輪のロック解除が検知された後に引かれるケーブルのストロークを短くでき、ひいては駐車ブレーキの荷重が所定の荷重値に達するまでの時間が短縮される。
以上のように、駐車ブレーキの作動応答性が向上するので、車体の走行姿勢を安定させた状態で所定の制動距離で停止することができる。
【0009】
動的駐車制御手段は、駆動部を制御して、後輪のロック作動が検知されればケーブルのストロークを所定ストローク量となるように維持して後輪がロック解除になるのを待ち、後輪のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキを作動させるように駆動部を制御してもよい。
【0010】
所定ストローク量は、後輪をロック解除可能とするとともに、車両が法定制動距離以下で停止できる量であってもよい。
【0011】
所定ストローク量は、常温時におけるストローク量に比べて所定量だけ増加した量であり、低温時においても車両が法定制動距離以下で停止できる量であってもよい。
この装置では、低温時には常温時に比べてケーブルの荷重効率が低下してそのためにケーブルを引き始めてから駐車ブレーキが所定の荷重値に達するまでの時間が常温時に比べて長くなるという問題に対処できる。つまり、低温時には常温時よりも、後輪のロック解除が検知された後に引かれるケーブルのストロークを短くでき、ひいては低温時のケーブル効率の低下にもかかわらず、駐車ブレーキの荷重が所定の荷重値に達するまでの時間を常温時と同じ程度にできる。その結果、低温時においても車体の走行姿勢を安定させた状態で所定の制動距離で停止することができる。
【0012】
動的駐車制御手段は、低温時と常温時との温度におけるケーブルの荷重効率に応じて、法定制動距離以下で停止できるように制御してもよい。
【発明の効果】
【0013】
本発明に係る駐車ブレーキ装置では、動的駐車制御中に後輪のロック解除が検知されたときの駐車ブレーキの作動応答性が向上する。
【図面の簡単な説明】
【0014】
【図1】電動駐車ブレーキ装置を搭載した車両の概略構成図。
【図2】アクチュエータの構成図
【図3】ブレーキコントローラのブロック図
【図4】アクチュエータ特性線図
【図5】ダイナミックパーキング制御のフローチャート。
【図6】ダイナミックパーキング制御のタイミングチャート。
【図7】図6の部分拡大図。
【図8】他の実施形態において図7に対応する図。
【発明を実施するための形態】
【0015】
(1)駐車ブレーキ装置
図1を用いて、駐車ブレーキ装置の概略構成を説明する。図1は、電動駐車ブレーキ装置を搭載した車両の概略構成図である。
図1において、車両1は、前輪及び後輪を有し、車両1の左右の後輪3、5を制動するための駐車ブレーキ装置7を有している。駐車ブレーキ装置7は、例えば、駐車ブレーキ9,11と、アクチュエータ13と、ブレーキコントローラ15と、2本のコントロールケーブル17,19とを有している。
【0016】
駐車ブレーキ9,11は、後輪3、5を制動するための装置である。駐車ブレーキ9,11は周知なものであるので図示はしないが、例えば、ブレーキドラムと、ブレーキドラムの内周面を押し付けるブレーキシューと、ブレーキシューを戻し方向に付勢するリターンスプリングと、コントロールケーブル17、19で作動するパーキングレバーとで構成されている。
アクチュエータ13は、駐車ブレーキを作動・解除するための駆動部の一例である。アクチュエータ13は、運転席の近傍に設けられている。アクチュエータ13は、ブレーキコントローラ15によって自動制御されるようになっている。また、アクチュエータ13には、運転席側のインストールメントパネルあるいはハンドル側などの運転手の手が届く任意の場所に設けられているレバーSW71からの信号が入力されるようになっている。レバーSW71は、アクチュエータ13をマニュアル操作するためのものである。
制御装置41は、アクチュエータ13を制御する制御部の一例である(後述)。
【0017】
コントロールケーブル17,19は、駐車ブレーキ9、11とアクチュエータ13とを接続しているケーブルの一例である。
駐車ブレーキ装置7は、さらに、ブレーキケーブル21と、イコライザー23とを有している。ブレーキケーブル21は、アクチュエータ13から導出されており、イコライザー23の中央部分に接続されている。コントロールケーブル17,19は、一端が左右の駐車ブレーキ9、11にそれぞれ接続され、他端がイコライザー23にそれぞれ接続されている。コントロールケーブル17,19は、導管と該導管内に挿通される内索とからなっている。
【0018】
(2)アクチュエータ
図2を用いて、アクチュエータ13の構成及び機能を説明する。図2は、アクチュエータの構成図である。
【0019】
アクチュエータ13は、例えば、電動モータ31と、歯車などで構成される減速機33と、ケーブル操作部35、及び電動モータ31に装着されたパルスエンコーダなどのストロークセンサ37と、ケーブルに介装されてケーブルの張力を検出する荷重センサ38とを有している。ケーブル操作部35には、コントロールケーブル17、19が接続されている。コントロールケーブル17、19の他端は、上述したように駐車ブレーキ9、11に接続されており、コントロールケーブル17、19を引き操作すると、駐車ブレーキ9、11のブレーキシューなどの摩擦部材がブレーキドラム又はブレーキディスクに付勢されるようになっている。
【0020】
ここで、コントロールケーブル17、19を操作するとは、コントロールケーブル17、19の導管を固定して、導管に対する内索をコントロールケーブル17、19の軸方向に動かすことを意味する。コントロールケーブル17、19を操作するには、例えば、コントロールケーブルの内索の端部にボルトを接続し、ボルトに噛み合うナットを軸方向の動きを規制して回転することによって、内索を軸方向に動かすようにすることができる。この場合、ナットを電動モータ31によって正転又は逆転することによって、内索を前後に動かすことができる。あるいは、例えば、内索の端部にラックを形成し、ラックに噛み合うピニオンを回転させて内索を前後に動かすような構成でもよい。
【0021】
(3)ブレーキコントローラ
図3を用いて、ブレーキコントローラ15の機能を説明する。図3は、ブレーキコントローラのブロック図である。
ブレーキコントローラ15は、アクチュエータ13を制御し、さらに例えば駐車ブレーキランプ39を点灯、点滅、消灯する制御を行う。
ブレーキコントローラ15は、制御装置41と、モータ駆動部43と、ランプ駆動部45と、傾斜センサ47とを有している。制御装置41は、アクチュエータ13を制御する制御部の一例である。モータ駆動部43は、電動モータ31を正転、逆転の駆動制御を行う。ランプ駆動部45は、駐車ブレーキランプ39を駆動制御する。傾斜センサ47は、車両1の傾斜を検出する。
【0022】
制御装置41は、CPU,RAM,ROMからなるコンピュータであり、ソフトウェアを実行することで所望の制御を行う。制御装置41は、各種機能として、モータ制御部51と、車速判定部53と、ロック判定部55と、減速度判定部57と、ダイナミックパーキング制御部59と、スタティックパーキング制御部61と、アクセル解除制御部63とを有している。これら機能はソフトウェアで実現されてもよいし、ハードウェアで実現されてもよい。制御装置41は、記憶部65をさらに有している。
モータ制御部51は、モータ駆動部43を介して電動モータ31を制御することで、アクチュエータ13のコントロールケーブル17、19のストローク量に応じて、駐車ブレーキ9、11を最適荷重、最大荷重まで作動させる。また、モータ制御部51は、モータ駆動部43を介して電動モータ31制御することで、電動モータ31を逆転させて解除を行う。車速判定部53は車両1の速度を判定する。
ロック判定部55は、車両1の後輪3,5のロックの判定を行う。ロック判定部55は、車輪速センサ77と車速センサ79からの信号に基づいてロック判定を行っている。したがって、ロック判定部55、車輪速センサ77及び車速センサ79によって、後輪のロック作動及びロック解除を検知するロック検知手段が構成されている。
減速度判定部57は、車両1の減速の度合いを判定する。
【0023】
ダイナミックパーキング制御部59は、動的駐車制御手段の一例であり、アクチュエータ13を以下のように制御する。アクチュエータ13は、車両1の走行中に駐車ブレーキ9、11が作動している状態において後輪3、5のロック作動が検知されれば、コントロールケーブル17、19のストロークを解除側に戻すことで駐車ブレーキ9、11を、コントロールケーブル17、19のストロークが所定ストローク量B(後述)にとなるように解除する。アクチュエータ13は、後輪3、5のロック解除が検知されれば、所定の荷重値を発生するように駐車ブレーキ9、11を作動させる。
なお、ダイナミックパーキング制御部59が上記の制御を行うのは車両1の速度が所定速度(例えば、5km/h)を超えている場合である。車両1が所定速度以下の場合は、スタティックパーキング制御部61が車両1を停止するまで制動をかける。
【0024】
アクセル解除制御部63は、車両1の停止状態から走行する場合にアクセルを踏んだ場合の信号を受けて駐車ブレーキ9、11を自動的に解除の制御を行う。
記憶部65は、各種制御を実行させるためのプログラムを格納しているROM、及び各種の信号やデータを一時的に格納するRAMからなる。
【0025】
ブレーキコントローラ15には、図3に示すように、以下の信号が入出されるようになっている。
・運転手による手動操作によるレバーSW71からの作動信号/解除信号
・イグニッションスイッチ73からのオン信号、オフ信号
・アクセルの踏み込みに応じたスロットル開度センサ75からの信号
・後輪3、5にそれぞれ取り付けられている車輪速センサ77からの車輪速の信号
・車速センサ79からの車両1の速度信号
・サービスブレーキのブレーキスイッチ81からのブレーキのオン信号、オフ信号
・各シフトポジションの位置を検出するATポジションセンサ83からの、P(パーキング)ポジション、N(ニュートラル)ポジション、D(ドライブ)ポジション、R(リバース)ポジションの各信号
・エンジン回転数センサ85からのエンジンの回転数の信号
【0026】
なお、図3に示す各部には、イグニッションスイッチ73のオン、オフに関わらずバッテリから電源が供給されている。
【0027】
(4)アクチュエータ駆動の静的特性
図4を用いて、アクチュエータ駆動の静的特性を説明する。図4は、アクチュエータ特性線図である。図4では、横軸がアクチュエータのストロークであり、縦軸がアクチュエータの荷重値である。
【0028】
初期位置からアクチュエータの駆動が大きくなっていくときに、アクチュエータ荷重値は0が続く。解除完了ストローク量Aは、ケーブルのストロークがない初期位置から駐車ブレーキの作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である。解除完了ストローク量Aでは、アクチュエータ荷重値は0である。アクチュエータのストロークが解除完了ストローク量Aよりわずかに大きくなると、それ以降はアクチュエータ荷重値は線形に変化する。解除ストローク量よりわずかに大きい位置に所定ストローク量Bが設定されている。所定ストローク量Bは、解除完了ストローク量Aよりも、作動側に増加した量である。
【0029】
静的作動完了ストローク量Cに達するときには、アクチュエータ荷重値は最大荷重値となる。なお、静的作動完了ストローク量Cよりも小さいストローク量であって、最大荷重値よりも小さい荷重値として、後述する所定の荷重値P(ストローク量としてはストローク量Eに対応)を設定して、静的制御における目標荷重値としてもよい。
【0030】
(5)ダイナミックパーキング制御のフローチャート
図5を用いて、ダイナミックパーキング制御のフローチャートを説明する。図5はダイナミックパーキング制御のフローチャートである。
【0031】
ダイナミックパーキング制御は、例えば低μ路走行中に後輪3、5のロックの危険性が大となったときにコントロールケーブル17、19の引き作動を解除し、ロックの危険性が無くなると引き作動を行う制御である。ダイナミックパーキング制御では、低μ路においても車両が法定距離内で停止可能なことが必要条件となっている。低μ路のμは例えば0.2であり、車両が未積載状態である。
ダイナミックパーキング制御は、制御装置41のダイナミックパーキング制御部59、車速判定部53、ロック判定部55、減速度判定部57などにて主に行われる。
なお、ダイナミックパーキング制御は、運転手がレバーSW71を引き上げることで制御が開始されるものであり、車速が所定速度以下になればスタティックパーキング制御に移行するようにしてもよい。
【0032】
ステップS1では、ダイナミックパーキング制御部59は、複数の装置の異常状態が全てOFFになっているか否かを判断する。異常状態が1つでもONであれば、プロセスは元に戻る。
ステップS2では、ダイナミックパーキング制御部59は、動的作動制御の開始が指示されたか否かを判断する。具体的には、ダイナミックパーキング制御部59は、走行中に運転手がレバーSW71を引き上げてアクチュエータ13のコントロールケーブル17、19の引き作動を行ったか否かを判断する。このとき、車速判定部53が車速センサ79からの信号にて車速を判定しており、ダイナミックパーキング制御部59は、車速判定部53から送られてきた速度判定結果に基づいて、車速が所定速度を超えていれば、動的作動制御を開始する(ステップS2の「Yes」)。なお、この実施形態では、予め定められた速度は、5km/hであるが、数値は任意に設定できる。
【0033】
ステップS3では、ダイナミックパーキング制御部59は、動的作動制御の中止が指示されたか否かを判断する。動的作動制御の中止の指示とは、動的作動制御中にレバーSW71が下げされたことの通知である。ステップS3で「Yes」であればプロセスはステップS9に移行して、動作作動制御中止処理が行われる。
【0034】
ステップS4では、ダイナミックパーキング制御部59は、動的作動制御の終了が指示されたか否かを判断する。動的作動制御の終了の指示とは、走行状態が停止状態に切り替わったことの通知である。ステップS4で「Yes」であればプロセスはステップS10に移行して、動的作動制御終了処理が行われる。
【0035】
ステップS5では、ダイナミックパーキング制御部59は、異常状態が全てOFFであるか否かを判断する。「No」であればプロセスはステップS11に移行して、動的制御のフェールセーフ処理が行われる。
【0036】
ステップS6では、ダイナミックパーキング制御部59は、動的アクチュエータ解除許可が出されているか否かを判断する。この許可は、例えば、後輪3、5のロック判定結果でアンロック状態からロック状態に切り替わったことの通知である。後輪3、5のロック判定は、車速が所定速度を超えている場合において、ロック判定部55が車速と後輪車輪速とを比較することで行われる。より具体的には、後輪ロック判定は、前輪車輪速と後輪車輪速の差があるしきい値(閾値)を超えた場合に「ロック状態」と判定するものであり、制御装置41のロック判定部55が、車輪速センサ77と車速センサ79からの信号に基づいてロック状態を判定する。
【0037】
推定車体速とは、右、左前輪車輪速の平均値であり、左右の車輪速が違う場合が想定されることから、平均値を採っている。また、後車輪速は、後右、左車輪速のセレクトローとし、左右の後輪のうち減速度が大きい方のセレクトローのデータを用いている。なお、車速や後輪の車輪速は、例えば、10msec毎にサンプリングを行ってデータを得ている。
【0038】
ステップS6で「Yes」であればプロセスはステップS12に移行し、アクチュエータ解除動作が行われる。つまり、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、コントロールケーブル17,19を戻し作動する。つまり、アクチュエータ13の荷重及びストローク量は小さくなっていく。ステップS12が終了すると、プロセスはステップS8に移行する。
なお、アクチュエータの解除動作は、アクチュエータ13のストロークが所定ストローク量B(後述)に達したときに完了する。つまり、ダイナミックパーキング制御部59は、戻し作動においては、ストロークセンサ37からの検出値に基づいてアクチュエータ13の解除を完了する。
【0039】
ステップS7では、ダイナミックパーキング制御部59は、動的アクチュエータ作動許可が出されているか否かを判断する。この許可とは、後輪3、5のロック判定結果でロック状態からアンロック状態に切り替わったことの通知である。すなわち、ダイナミックパーキング制御部59は、ロック判定部55から送られてきたロック判定結果に基づいて上記判断を行う。
ステップS7で「Yes」であればプロセスはステップS13に移行して、アクチュエータ作動が行われる。つまり、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、コントロールケーブル17,19を引き作動する。つまり、アクチュエータ13の荷重及びストロークは大きくなっていく。ステップS13が終了すれば、プロセスはステップS8に移行する。
【0040】
ステップS8では、ダイナミックパーキング制御部59は、動的アクチュエータ作動停止許可が出されたか否かを判断する。動的アクチュエータ停止許可とは、動的作動制御中にアクチュエータのストロークが所定ストローク量B以下になったことの通知である。つまり、ダイナミックパーキング制御部59は、ストロークセンサ37から上記状態になったときの検出信号を受信すれば、動的アクチュエータ作動停止許可が出されたと判断する。
ステップS8で「Yes」であれば、プロセスはステップS14に移行してアクチュエータ停止が行われる。つまり、ダイナミックパーキング制御部59が動的作動制御を停止する。ステップS14が終了すると、プロセスはステップS3に戻る。
なお、ダイナミックパーキング制御部59が動的作動制御を実際に停止するのは、アクチュエータ13の荷重値が所定の荷重値Pに達したときである。荷重値Pは、動的制御において法定制動距離までに停止可能な荷重値であり、最大荷重値とすることもできるし、路面状態のμに応じて、図4のように最大荷重値よりも小さい値とすることもできる。このときに、駐車ブレーキ9,11は、コントロールケーブルの操作によるタイムラグにより、荷重値Pよりもわずかに小さい荷重値となっている。つまり、ダイナミックパーキング制御部59は、荷重センサ38からの検出値に基づいてアクチュエータ停止を行う。なお、一例であるが、駐車ブレーキ9,11の所定ストローク量Bにおける荷重値は、低μ路における未積載のトラックにおいて約200Nである。
【0041】
(6)ダイナミックパーキング制御のタイミングチャート
図6を用いて、ダイナミックパーキング制御を説明する。図6は、ダイナミックパーキング制御のタイミングチャートである。
図6では、車速が所定速度を超えているときに運転手がレバーSW71を下げ状態から引き上げて駐車ブレーキ9,11の引き作動(引き操作)を開始してから動的解除と動的作動停止の過程が主に示されている。
【0042】
初期段階では、車両1は所定速度を超えた速度で走行しており、後輪3,5は、パーキングレーキの制御を行っておらず、アンロック状態である。アクチュエータ出力は停止状態であり、アクチュエータストロークは解除完了ストローク量Aであり、アクチュエータ荷重値は解除位置相当である。
【0043】
時刻t1で運転手がレバーSW71を引き上げることで、ダイナミックパーキング制御指示が受け付けられる。具体的には、レバーSW71から作動信号が制御装置41に送信される。
【0044】
そして、時刻t2で、ダイナミックパーキング制御が開始される。つまり、ダイナミックパーキング制御部59が、モータ駆動部43を介してアクチュエータ13を制御することで、電動モータ31を停止状態から起動させる(図5のステップS2の「Yes」に対応)。これにより、コントロールケーブル17、19が引き作動させられ、アクチュエータ13のストローク及び荷重が増加していく。このときに、駐車ブレーキ9、11の荷重も増加していく。また、駐車ブレーキランプ39が点灯する。
【0045】
ダイナミックパーキング制御では、コントロールケーブル17、19が引き作動され、コントロールケーブル17、19により後輪3、5に制動がかかることで後輪3,5の減速度が大きくなる。減速度が大きくなると、後輪3、5のロック近傍に近づくためロックの危険性が大となる。そして、時刻t3で、ロック判定部55が後輪のロック状態を検知すると(図5のステップS6の「Yes」に対応)、一旦ダイナミックパーキング制御を停止しようとして、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、電動モータ31を逆転させてコントロールケーブル17、19の解除(戻し作動)を行う(図5のステップS12に対応)。以後、アクチュエータ13のストローク量及び荷重が減少していき、それに伴い駐車ブレーキ9、11の制動荷重も減少していく。
【0046】
時刻t4でアクチュエータ13のストロークが所定ストローク量B以下になると(図6及び図7のQ点)、ストロークセンサ37がそのことを検出し(図5のステップS8の「Yes」に対応)、その検出結果に基づいてダイナミックパーキング制御部59がアクチュエータ13を停止して、動的解除を終了する。つまり、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、電動モータ31の回転を停止させる。その結果、時刻t4〜t5までは、アクチュエータ13のストローク及び荷重は一定に維持されており、動的解除停止が維持されている。言い換えると、ダイナミックパーキング制御部59は、後輪3、5のロック作動が検知されればコントロールケーブル17、19のストロークを所定ストローク量Bとなるように維持して後輪3、5がロック解除になるのを待ち、後輪3、5のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキ9、11を作動させるようにアクチュエータ13を制御する。
ここで、重要なのは、動的解除が停止させられる基準となるアクチュエータ13のストローク量は、従来の解除完了ストローク量Aより大きい所定ストローク量Bである点である。所定ストローク量Bが、後輪3、5をロック解除可能とするとともに、車両1が法定制動距離以下で停止できる量である。
【0047】
時刻t5で後輪のアンロックが検出されると(図5のステップS7に対応)、ダイナミックパーキング制御部59は、その検出結果に基づいて2回目の動的作動を行う(図5のステップS13に対応)。具体的には、ダイナミックパーキング制御部59は、モータ駆動部43を介してアクチュエータ13を制御することで、電動モータ31を駆動してコントロールケーブル17、19の引き作動させる(図5のステップS13に対応)。これにより、コントロールケーブル17、19が引き作動させられ、アクチュエータのストローク及び荷重が増加していき、それに伴い駐車ブレーキ9、11の制動荷重も増加していく。
【0048】
このようにして、コントロールケーブル17、19の戻し作動である解除と、引き作動である作動とを繰り返していくと、車体速度が徐々に低下していく。最後には、通常作動移行閾値である所定速度以下になり、上述した通常のスタティックパーキング制御が行われて、車体が停止する。
【0049】
図6では、時刻t6で、動的作動が停止される(図5のステップS13に対応)。また、アンロック状態が終了する。
なお、電動モータ31はアクチュエータ13が所定の荷重値Pになるまで(図6及び図7のR点)、つまり駐車ブレーキ9、11の荷重が所定の荷重値になるまで、引き作動を行って、アクチュエータ13及び駐車ブレーキ9、11の荷重値は、時刻t6以後は一定となっている。
【0050】
以上に述べたダイナミックパーキング制御では、後輪3、5のロックの可能性があるときは、ロックの回避を優先することで、後輪3、5をロックさせずに車両1を停止させることができる。
特に、コントロールケーブル17、19の戻し作動であるブレーキ解除と、コントロールケーブル17、19の引き作動であるブレーキ作動とが繰り返して実行されるので、後輪3、5をロックさせずにスムーズに車両1を停止させることができる。なお、この制御は、車速が所定速度以下になるまで繰り返して行われる。
【0051】
(7)作用効果の説明
ロック検知手段は、後輪のロック作動及びロック解除を検知する。動的駐車制御手段は、車両の走行中に駐車ブレーキが作動している状態において後輪のロック作動が検知されれば、ケーブルのストロークを解除側に戻すことで駐車ブレーキをケーブルのストロークが所定ストローク量にとなるように解除し、後輪のロック解除が検知されれば、所定の荷重値となるように駐車ブレーキを作動させるように駆動部を制御する。本実施形態では、ロック判定部55、車輪速センサ77及び車速センサ79がロック検知手段の一例として示されており、ダイナミックパーキング制御部59が動的駐車制御手段の一例として示されており、アクチュエータ13が駆動部の一例としている。動的駐車制御手段を実現するソフトウェア・ハードウェアは特に限定されない。駆動部の構成及び機能は本実施形態に限定されない。
【0052】
解除完了ストローク量は、ケーブルのストロークがない初期位置から駐車ブレーキの作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である。所定ストローク量は、解除完了ストローク量よりも、作動側に増加した量である。本実施形態では、解除完了ストローク量Aが解除完了ストローク量の一例として示されており、所定ストローク量Bが所定ストローク量の一例として示されている。所定ストローク量Bは、本実施形態の図6及び図7の位置に限定されず、法定制動距離以下に停止するという条件を満たせば、解除完了ストローク量Aに近接していてもよい。
以上の構成により、後輪のロック解除が検知された後に引かれるケーブルのストロークを短くでき、ひいては駐車ブレーキの荷重が所定の荷重値に達するまでの時間が短縮される。この結果、駐車ブレーキの作動応答性が向上するので、車体の走行姿勢を安定させた状態で所定の制動距離で停止することができる。本実施形態では、後輪3、5のロック解除が検知された後に引かれるコントロールケーブル17、19のストロークを短くでき、ひいては駐車ブレーキ9、11の荷重が所定の荷重値に達するまでの時間が短縮される。
【0053】
図7を用いて、上記の効果を本実施形態に即してさらに具体的に説明する。図7は、図6の部分拡大図である。従来の特性が一点鎖線で示され、本実施形態の特性が実線で示されている。
従来であれば解除完了ストローク量Aまでコントロールケーブルを戻していたので、アクチュエータ出力が動的解除停止から動的作動になるまでに必要なアクチュエータのストローク量がS2であった。それに対して、本実施形態では、所定ストローク量Bまでしかコントロールケーブルを戻さないので、アクチュエータ出力が動的解除停止から動的作動までに必要なアクチュエータのストローク量がS1になっている。S1はS2より短いので、アクチュエータ出力が動的解除停止から動的作動に戻るまで(つまり、アクチュエータ荷重が解除位置相当から所定の荷重値Pに戻るまで)の時間が短くなる。本実施形態では、従来に比べて上記時間がT1だけ短くなっている。つまり、駐車ブレーキ9、11の荷重が所定の荷重値に戻るまでの時間も短くなっている。
以上のように、駐車ブレーキ9、11の作動応答性が向上するので、車体の走行姿勢を安定させた状態で所定の制動距離で停止することができる。
【0054】
(8)所定ストローク量Bの設定
所定ストローク量Bの値は、例えば、記憶部65に保存されている。ダイナミックパーキング制御部59は、記憶部65から所定ストローク量Bの値を読み出して利用する。
所定ストローク量Bの値は、動的作動法規で規定される制動距離以内で停止可能であって、かつ、動的解除後の動的作動が効率良く行われるものであれば、適宜変更可能である。所定ストローク量Bは、出荷後は固定であってもよいし、各種条件に応じて自動的に変更されてもよい。
【0055】
寒冷地における低温時(例えば、マイナス30度)には、コントロールケーブルの荷重効率が低下してそのためにコントロールケーブルを引き始めてから駐車ブレーキが所定の荷重値に達するまでの時間が、常温時に比べて長くなることがある。これに対処するために、所定ストローク量Bは、寒冷地の低温時においても車両が法定制動距離以下で停止できる量に設定されていることが望まれる。
図8を用いて、上記の場合の所定ストローク量の設定を説明する。図8は、他の実施形態において図7に対応する図である。この図では、常温用に設定される特性を破線で示し、低温用に設定される特性を二点鎖線で示す。
以下の説明では、常温時の所定ストローク量B1(例えば、前記実施形態の所定ストローク量Bに対応)と、低温時の所定ストローク量B2が用いられる。常温時であれば所定ストローク量B1までコントロールケーブルを戻しているので、アクチュエータ出力が動的解除停止から動的作動になるまでに必要なアクチュエータのストローク量がS3である。それに対して、低温時には、所定ストローク量B2までしかコントロールケーブルを戻さないので、アクチュエータ出力が動的解除停止から動的作動までに必要なアクチュエータのストローク量がS4になっている。低温時の所定ストローク量は、常温時におけるストローク量に比べて前記所定量だけ増加した量であることから、S4はS3より短いので、アクチュエータ出力が動的解除停止から動的作動に戻るまで(つまり、アクチュエータ荷重が解除位置相当から所定の荷重値Pに戻るまで)の時間が短くなっている。本実施形態では、従来に比べて上記時間がT2だけ短くなっている。そのため、低温時の荷重効率の低下にもかかわらず、駐車ブレーキが所定の荷重値に達するタイミングは常温時と同じ程度になる。この結果、低温時においても常温時と同様に車体の走行姿勢を安定させた状態で所定の制動距離で停止できる。
【0056】
ダイナミックパーキング制御部59は、温度に関わらず常に所定ストローク量B2までコントロールケーブルを戻すようにしてもよい。
また、ダイナミックパーキング制御部59は、低温時と常温時との温度におけるコントロールケーブルの荷重効率に応じて、法定制動距離以下で停止できるように制御できるようになっていてもよい。つまり、常温時及び低温時の両方においてロックされずに法定制動距離までに停止可能なストローク量B(常温で法定制動距離までに停止可能であればストローク量B2とする)を設定しても良いし、常温時には所定ストローク量B1が設定値として用いられ、低温時にはそれより長い所定ストローク量B2が温度に応じてダイナミックパーキング制御部59によって選択的に設定値として用いられてもよい。
以上に述べたように低温時に温度補償を行うことで、ケーブルの荷重効率の低下問題を解消できる。つまり、ケーブルを引き始めてから駐車ブレーキが所定の荷重値に達するまでの時間を十分に短縮できる。
【0057】
(9)他の実施形態
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組み合せ可能である。
【産業上の利用可能性】
【0058】
本発明は、駐車ブレーキの作動、解除の制御を行う駐車ブレーキ装置に広く適用できる。
【符号の説明】
【0059】
1 車両
3 後輪
5 後輪
7 駐車ブレーキ装置
9 駐車ブレーキ
11 駐車ブレーキ
13 アクチュエータ
15 ブレーキコントローラ
17 コントロールケーブル
19 コントロールケーブル
31 電動モータ
37 ストロークセンサ
38 荷重センサ
41 制御装置
47 傾斜センサ
51 モータ制御部
53 車速判定部
55 ロック判定部
57 減速度判定部
59 ダイナミックパーキング制御部
61 スタティックパーキング制御部
65 記憶部
71 レバーSW
77 車輪速センサ
79 車速センサ
【特許請求の範囲】
【請求項1】
前輪及び後輪を有する車両の駐車ブレーキ装置であって、
駐車ブレーキと、
前記駐車ブレーキを作動・解除するための駆動部と、
前記駐車ブレーキと前記駆動部を接続するケーブルと、
前記駆動部を制御する制御部とを備え、
前記制御部は、
前記後輪のロック作動及びロック解除を検知するロック検知手段と、
前記車両の走行中に前記駐車ブレーキが作動している状態において前記後輪のロック作動が検知されれば、前記ケーブルのストロークを解除側に戻すことで前記駐車ブレーキを前記ケーブルのストロークが所定ストローク量にとなるように解除し、前記後輪のロック解除が検知されれば、所定の荷重値となるように前記駐車ブレーキを作動させるように前記駆動部を制御する動的駐車制御手段とを有し、
前記所定ストローク量は、前記ケーブルのストロークがない初期位置から前記駐車ブレーキの作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である解除完了ストローク量よりも、作動側に増加した量である、
駐車ブレーキ装置。
【請求項2】
前記動的駐車制御手段は、前記駆動部を制御して、前記後輪のロック作動が検知されれば前記ケーブルのストロークを前記所定ストローク量となるように維持して前記後輪がロック解除になるのを待ち、前記後輪のロック解除が検知されれば、前記所定の荷重値となるように駐車ブレーキを作動させるように前記駆動部を制御する、請求項1に記載の駐車ブレーキ装置
【請求項3】
前記所定ストローク量は、前記後輪をロック解除可能とするとともに、前記車両が法定制動距離以下で停止できる量である、請求項1又は2に記載の駐車ブレーキ装置。
【請求項4】
前記所定ストローク量は、常温時におけるストローク量に比べて所定量だけ増加した量であり、低温時においても前記車両が法定制動距離以下で停止できる量である、請求項1〜3のいずれかに記載の駐車ブレーキ装置。
【請求項5】
前記動的駐車制御手段は、低温時と常温時との温度における前記ケーブルの荷重効率に応じて、法定制動距離以下で停止できるように制御する、請求項1〜4のいずれかに記載の駐車ブレーキ装置。
【請求項1】
前輪及び後輪を有する車両の駐車ブレーキ装置であって、
駐車ブレーキと、
前記駐車ブレーキを作動・解除するための駆動部と、
前記駐車ブレーキと前記駆動部を接続するケーブルと、
前記駆動部を制御する制御部とを備え、
前記制御部は、
前記後輪のロック作動及びロック解除を検知するロック検知手段と、
前記車両の走行中に前記駐車ブレーキが作動している状態において前記後輪のロック作動が検知されれば、前記ケーブルのストロークを解除側に戻すことで前記駐車ブレーキを前記ケーブルのストロークが所定ストローク量にとなるように解除し、前記後輪のロック解除が検知されれば、所定の荷重値となるように前記駐車ブレーキを作動させるように前記駆動部を制御する動的駐車制御手段とを有し、
前記所定ストローク量は、前記ケーブルのストロークがない初期位置から前記駐車ブレーキの作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である解除完了ストローク量よりも、作動側に増加した量である、
駐車ブレーキ装置。
【請求項2】
前記動的駐車制御手段は、前記駆動部を制御して、前記後輪のロック作動が検知されれば前記ケーブルのストロークを前記所定ストローク量となるように維持して前記後輪がロック解除になるのを待ち、前記後輪のロック解除が検知されれば、前記所定の荷重値となるように駐車ブレーキを作動させるように前記駆動部を制御する、請求項1に記載の駐車ブレーキ装置
【請求項3】
前記所定ストローク量は、前記後輪をロック解除可能とするとともに、前記車両が法定制動距離以下で停止できる量である、請求項1又は2に記載の駐車ブレーキ装置。
【請求項4】
前記所定ストローク量は、常温時におけるストローク量に比べて所定量だけ増加した量であり、低温時においても前記車両が法定制動距離以下で停止できる量である、請求項1〜3のいずれかに記載の駐車ブレーキ装置。
【請求項5】
前記動的駐車制御手段は、低温時と常温時との温度における前記ケーブルの荷重効率に応じて、法定制動距離以下で停止できるように制御する、請求項1〜4のいずれかに記載の駐車ブレーキ装置。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−95258(P2013−95258A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239687(P2011−239687)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(390000996)株式会社ハイレックスコーポレーション (362)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(390000996)株式会社ハイレックスコーポレーション (362)
【Fターム(参考)】
[ Back to top ]