
駐車支援装置及び駐車支援方法
【課題】駐車場の設計態様などの影響を受けることなく、任意の駐車目標スペースを駐車支援の対象として設定することができる駐車支援装置を提供する。
【解決手段】自車両の周囲の俯瞰画像に、自車両に対して所定位置に配置された仮駐車設定枠が重畳された設定情報を生成し、ディスプレイに提示する設定情報提示機能と、仮駐車設定枠の自車両に対する位置を変更し、変更された仮駐車設定枠の位置を含む設定指令を受け付ける設定指令取得機能と、自車両に対する位置が設定された仮駐車設定枠に対応する駐車スペースを、自車両を駐車する駐車目標スペースとして設定する駐車目標スペース設定機能と、設定された駐車目標スペースに自車両を誘導する車両誘導機能と、を実行する制御装置10を備える。
【解決手段】自車両の周囲の俯瞰画像に、自車両に対して所定位置に配置された仮駐車設定枠が重畳された設定情報を生成し、ディスプレイに提示する設定情報提示機能と、仮駐車設定枠の自車両に対する位置を変更し、変更された仮駐車設定枠の位置を含む設定指令を受け付ける設定指令取得機能と、自車両に対する位置が設定された仮駐車設定枠に対応する駐車スペースを、自車両を駐車する駐車目標スペースとして設定する駐車目標スペース設定機能と、設定された駐車目標スペースに自車両を誘導する車両誘導機能と、を実行する制御装置10を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両の周囲の映像を運転者に提示して駐車を支援する駐車支援装置及び駐車支援方法に関する。
【背景技術】
【0002】
この種の装置に関し、自車両を所定位置に停車させたときに、ドライバが選択した駐車モードに応じた駐車目標スペースを仮設定してドライバに提示するものが知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−201363号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では自車両の位置と設定可能な駐車目標スペースとの位置関係が固定されているので、駐車場の一番奥まった場所では壁等の障害物により車両両の動きが制限されるため、周囲の二面が壁に囲まれている角の駐車スペースを駐車目標スペースとして設定することができない場合があるという問題がある。
【0005】
本発明が解決しようとする課題は、壁や障害物によって自車両の動きが制限される駐車スペースであっても、自車両を駐車させる駐車目標スペースとして設定することができる駐車支援装置を提供することである。
【課題を解決するための手段】
【0006】
本発明は、自車両周囲の俯瞰画像に、自車両に対して所定位置に配置された仮駐車設定枠が重畳された設定情報を生成し、自車両に対する位置が変更された仮駐車設定枠の位置を含む設定指令を受け付け、自車両に対する位置が設定された仮駐車設定枠が示す駐車スペースを、自車両を駐車する駐車目標スペースとして設定することにより、上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、自車両に対する仮駐車設定枠の位置を変更することができるので、駐車場の奥まった場所のように、壁や障害物によって自車両の動きが制限されるような駐車スペースであっても、自車両を駐車する駐車目標スペースとして設定することができる。この結果、駐車支援の機能を利用できる機会を増やすことができ、装置の利便性を向上させることができる。
【図面の簡単な説明】
【0008】
【図1】本発明を適用した実施形態に係る駐車支援システムの構成を示すブロック図である。
【図2】本発明を適用した実施形態に係る駐車支援システムによる駐車支援処理の全体の処理手順を示すフローチャートである。
【図3】本発明を適用した実施形態に係る駐車支援システムによる駐車目標スペースの設定処理の処理手順を示すフローチャートである。
【図4】本発明を適用した本実施形態に係る駐車支援システムのカメラの配置の一例を示す図である。
【図5】本実施形態に係る駐車支援システムにおける運転支援処理時にディスプレイに示される情報の一例を示す図である。
【図6】本実施形態に係る駐車支援システムにおける仮駐車設定枠の表示の一例を説明するための図である。
【図7】本実施形態に係る駐車支援システムにおける仮駐車設定枠の表示の他の例を説明するための図である。
【図8】本実施形態に係る駐車支援システムにおける駐車目標スペースの設定時にディスプレイに示される設定情報の一例を示す図である。
【図9】壁に沿う駐車スペースを駐車目標スペースとして設定する場合の操作を説明するための図である。
【図10】壁に沿う駐車スペースを駐車目標スペースとして設定する場合の操作を説明するための第2の図である。
【図11】壁に沿う駐車スペースを駐車目標スペースとして設定する場合の操作を説明するための第3の図である。
【図12】本実施形態に係る駐車支援システムにおける駐車目標スペースの設定時にディスプレイに示される情報の他の例を示す図である。
【図13】仮駐車設定枠の位置の変更時に提示される設定情報の一例を示す図である。
【図14】本発明を適用した実施形態に係る駐車支援システムによる駐車モード選択処理の処理手順を示すフローチャートである。
【図15】本実施形態における駐車モードを説明するための図である。
【図16】本実施形態に係る駐車支援システムにおける駐車モード選択処理時にディスプレイに示される情報の一例を示す図である。
【図17】本実施形態に係る駐車支援システムにおける駐車モードと入力操作とを予め対応づけた対応情報の一例を図である。
【図18】本実施形態に係る駐車支援システムにおける、ステアリングの操舵角に対応する入力補助情報の一例を示す図である。
【図19】本実施形態に係る駐車支援システムにおける、ステアリングの操舵角に対応する入力補助情報の他の例を示す図である。
【図20】本実施形態に係る駐車支援システムにおける、ステアリングの操舵角の時間変化を説明するための図である。
【図21】本実施形態に係る駐車支援システムにおける、駐車モードの選択時における入力補助情報の一例を示す図である。
【図22】本発明を適用した本実施形態に係る駐車支援システムにおいて、並列駐車を行う場合の誘導情報を示す図である。
【図23】本発明を適用した本実施形態に係る駐車支援システムにおいて、縦列駐車を行う場合の誘導情報を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に基づいて説明する。本実施形態では、本発明に係る駐車支援装置を、駐車支援装置を備えた車載の駐車支援システムに適用した場合を例にして説明する。本実施形態の駐車支援装置は、車両に搭載され、ドライバが設定した仮駐車設定枠に対応する駐車スペースに、ドライバが希望する駐車モード(並列駐車、縦列駐車、斜め駐車)で自車両を誘導する装置である。
【0010】
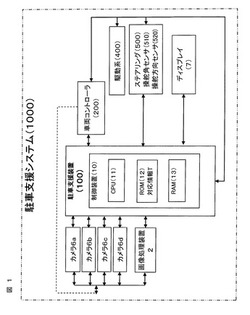
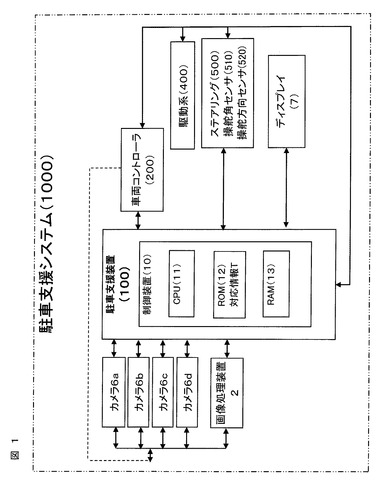
図1は、本実施形態に係る駐車支援装置100を備える駐車支援システム1000のブロック構成を示す図である。
【0011】
図1に示すように、本実施形態の駐車支援システム1000は、カメラ6a〜6dと、画像処理装置2と、駐車支援装置100と、車両コントローラ200と、ディスプレイ7と、車両の駆動系400と、ステアリング500と、を備えている。
【0012】
図1に示すように、本実施形態の駐車支援装置100の制御装置10は、駐車モードに対応し、自車両に対する位置が可変な仮駐車設定枠が重畳された設定情報をディスプレイ7に提示し、自車両を移動させた後に、仮駐車設定枠の自車両に対する位置を含む設定指令を受け付け、設定された仮駐車設定枠に対応する駐車目標スペースに自車両を誘導するためのプログラムが格納されたROM(Read Only Memory)12と、このROM12に格納されたプログラムを実行することで、駐車支援装置100として機能する動作回路としてのCPU(Central Processing Unit)11と、アクセス可能な記憶装置として機能するRAM(Random Access Memory)13と、を備えている。
【0013】
駐車支援装置100は、駐車支援コントロールユニットを備えることができる。駐車支援コントロールユニットは、AT/CVTコントロールユニットからのシフトレンジ情報、ABSコントロールユニットからの車輪速情報、舵角センサコントロールユニットからの舵角情報、ECMからのエンジン回転数情報等に基づいて、EPSコントロールユニットへの自動転舵に関する指示情報、メータコントロールユニットへの警告等の指示情報等を演算し、出力する。駐車支援の内容及び手法は特に限定されず、出願時において知られた手法を適宜に適用することができる。
【0014】
また、駆動系400は、駐車支援を実施するための車両の駆動機構群であり、駐車支援装置100から取得した制御指令信号に基づく駆動により、自車両を駐車目標スペースへ誘導する。例えば、駆動系400に含まれるEPSモータは、駐車支援装置100から取得した制御指令信号に基づいてステアリング500が備えるパワーステアリング機構を駆動して自車両を駐車目標スペースへ誘導する。
【0015】
本実施形態の駐車支援装置100は、図1に示す駐車支援システム1000の各構成及び他の車載装置と情報の授受を行うことができるようにCAN(Controller Area Network)その他の車載LANによって接続されている。
【0016】
本実施形態に係る駐車支援装置100の制御装置10は、設定情報提示機能と、設定指令取得機能と、駐車目標スペース設定機能と、駐車モード選択機能と、車両誘導機能とを実現するためのソフトウェアと、上述したハードウェアの協働により各機能を実行することができる。また、駐車支援装置100の制御装置10は、駐車モード選択機能を実現するために、操舵方向取得機能、操舵角取得機能、選択操作検出機能、及び駐車モード取得機能を実現させるソフトウェアを実行する。
【0017】
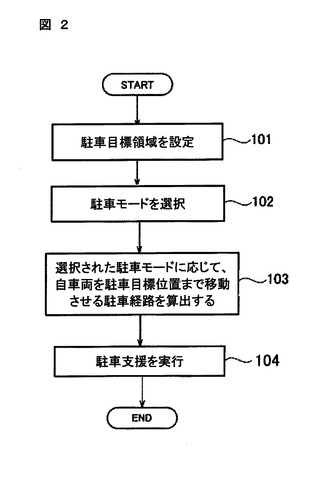
本実施形態に係る駐車支援システム1000は、図2のフローチャートに示すように、駐車支援処理を実行する。駐車支援装置100が起動すると、図2に示す駐車支援処理が開始する。駐車支援装置100の起動は、先述したように、駐車支援装置100の起動スイッチが操作されたことをトリガとしてもよい。
【0018】
具体的に、本実施形態に係る駐車支援装置100の制御装置10は、ステップ101において駐車目標スペースを設定し、ステップ102において駐車モードを選択し、ステップ103において選択された駐車モードに応じて自車両を駐車目標スペースまで移動させる駐車経路を算出する。そして、ステップ104において駐車支援を実行する。
【0019】
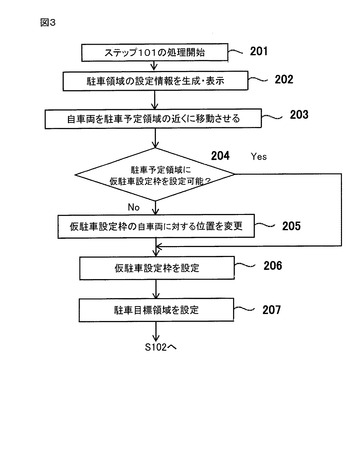
以下、本発明の本実施形態に係る駐車支援装置100が実現する、設定情報提示機能と、設定指令取得機能と、駐車目標スペース設定機能とによる駐車目標スペースの設定処理を、図3のフローチャートに基づいて説明する。
【0020】
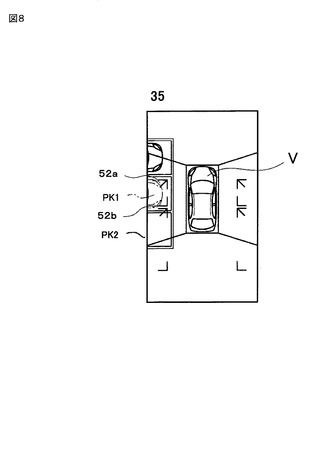
まず、ステップ201において、駐車目標スペースの設定処理が開始されると、ステップ202に進む。ステップ202において、駐車支援装置100は設定情報提示機能を実行する。具体的に、駐車支援装置100の制御装置10は、駐車目標スペースの設定を補助するために用いられる設定情報35を生成し、ディスプレイ7に提示する。
【0021】
ちなみに、本実施形態の設定情報35において、「駐車スペース」は自車両を駐車させることができる選択可能な場所であり、「駐車目標スペース」は、駐車スペースのうち自車両を駐車させることを希望する場所であり、「仮駐車設定枠」は、ドライバが希望する駐車目標スペースを指し示すためのポインタとして機能するマークである。複数の「駐車スペース」のうち、「仮駐車設定枠」を重畳させるなど、仮駐車設定枠の位置と対応づけることにより指し示された「駐車スペース」が、「駐車目標スペース」として設定される。
【0022】
特に限定されないが、本実施形態の駐車支援装置100は、自車両に搭載されたカメラ6a〜6dの撮像画像に基づく自車両周囲の俯瞰画像と駐車スペースとを含む設定情報と、自車両を駐車目標スペースへ誘導する際に撮像された自車両周囲の監視映像とをディスプレイ7に提示する。本実施形態の「設定情報」は、カメラ6a〜6dの撮像画像に基づいて生成された複数の自車両の周囲の駐車スペースを含む俯瞰画像に、自車両に対する位置が変更可能な仮駐車設定枠が重畳された画像情報である。
【0023】
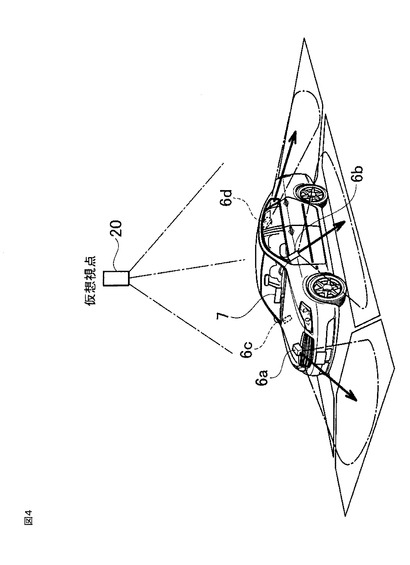
図4は、図1に示すカメラ6a〜6dを自車両に搭載する場合の配置例を示す図である。図4に示す例では、車両のフロントグリル部にカメラ6aを配置し、リアバンパ近傍にカメラ6dを配置し、左右のドアミラーの下部にカメラ6b、6cを配置している。カメラ6a〜6dは視野角の広い広角カメラを使用する。画像処理装置2は、カメラ6a〜6dの撮像画像の視点変換をし、仮想視点20から見た俯瞰画像を生成する。画像処理装置2により行われる画像処理は、例えば「鈴木政康・知野見聡・高野照久,俯瞰ビューシステムの開発,自動車技術会学術講演会前刷集,116-07(2007-10), 17-22.」などに記載された方法を用いればよい。
【0024】
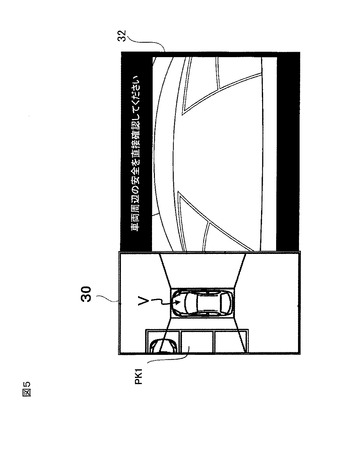
図5は、ディスプレイ7に出力される、自車両周囲の俯瞰画像(トップビュー)30と自車両周囲の監視映像(ノーマルビュー)32との表示例を示す図である。図5に示すように、図4の仮想視点20に視点変換された俯瞰画像(トップビュー)30をディスプレイ7の画面の左側に表示し、カメラ6a〜6dで撮像された監視画像(ノーマルビュー)32を画面の右側に表示している。ディスプレイ7の画面の左側に表示した俯瞰画像(トップビュー)30には駐車スペースPK1を示す画像が含まれている。
【0025】
制御装置10は、この俯瞰画像30に自車両に対する位置が変更可能な仮駐車設定枠の表示を重畳した設定情報35を生成する。仮駐車設定枠は、自車両に対する位置が可変ではあるが、自車両に対して所定の位置関係を有する場所に示される。例えば、仮駐車設定枠の表示は、自車両の前方、自車両の中央、又は時車両の後方の位置に表示することができる。画像の重畳処理の手法は特に限定されず、予めメモリなどに格納されている仮駐車設定枠の画像を読み込んで、コンピュータグラフィクスのスーパーインポーズの手法を用いて行うことができる。仮駐車設定枠は、駐車モードごとに設定しておくことが好ましいので、各仮駐車設定枠は駐車モードに応じて識別可能なように異なる形状又は異なる色とすることができる。
【0026】
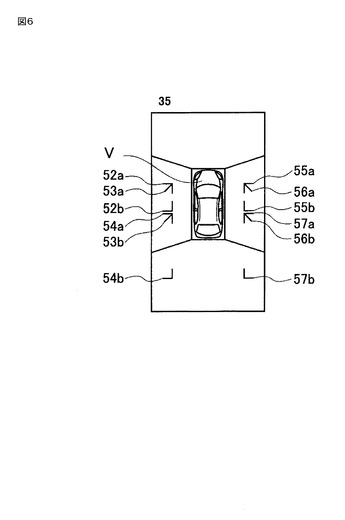
図6及び図7は、仮駐車設定枠を含む設定情報35の表示例を示す図である。図6に示すように、本実施形態では自車両Vの位置を示すコンピュータグラフィックス画像を中心部に配置し、その左右に鉤型の図形により仮駐車設定枠の位置を表示する。図6に示す仮駐車設定枠として表示されるマーク52a及びマーク52bの2つの鉤型は左側の並列駐車に対応する駐車スペースを示す。また、マーク53a及びマーク53bの2つの斜め向きの線分は、左側の斜め駐車に対応する駐車スペースを示す。さらに、マーク54a及びマーク54bの2つの鉤型は、左側の縦列駐車に対応する駐車スペースを示す。同様に、マーク55a及びマーク55bは右側の並列駐車に対応する駐車スペースを示し、マーク56a及びマーク56bは右側の斜め駐車に対応する駐車スペースを示し、マーク57a及びマーク57bは右側の縦列駐車に対応する駐車スペースを示す。
【0027】
本実施形態では、左側の並列駐車に対応する仮駐車設定枠のマーク52a、52bは、カメラ6cが設置されているドアミラーの位置を基準に対称な位置に表示される。このようにマーク52a、52bを表示することによって、カメラ6cの位置に近く、またカメラ6cから等距離に仮駐車設定枠を表示することになるので、カメラ6cの映像を俯瞰映像に変換した際に生じる映像の歪みの影響を最小限に抑えることができる。マーク53a、53b、右側のマーク55a、55b、561,56bについても同様である。
【0028】
左側の縦列駐車に対応する仮駐車設定枠のマーク54a、54bは自車両の後方に描画する。縦列駐車の駐車軌道を表示するにあたり、共通の俯瞰映像内に駐車目標スペースと切り返し位置とを同時に表示するためである。切り返し位置を俯瞰映像内に表示することにより、ドライバは縦列駐車をする際に自車両をどこまで進めればよいかを画像で確認できるので、操作性を高めることができる。
【0029】
仮駐車設定枠を示すマークの態様は限定されず、上述した映像の歪みの影響を低減させる観点から、各駐車モードに対応する仮駐車設定枠を示す各対のマークの中心が、すべて自車両のドアミラーの設置位置となるようにマークを設定することができる。
【0030】
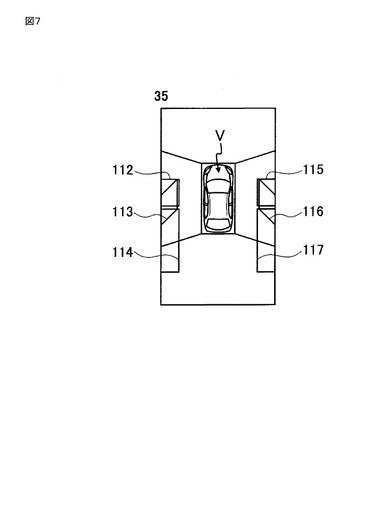
また、図7に示すように、仮駐車設定枠を駐車スペースの形状に応じた矩形の図形で表示することができる。図7では、矩形マーク112は左側の並列駐車に対応する駐車スペースを示し、平行四辺形のマーク113は左側の斜め駐車に対応する駐車スペースを示し、矩形マーク112よりも大きい矩形マーク114は左側の縦列駐車に対応する駐車スペースを示す。左側の各マークも同様である。
【0031】
制御装置10は、生成した設定情報35をディスプレイ7に提示する。本実施形態のディスプレイ7は、タッチパネルディスプレイなどの情報の入力を受け付ける機能を有する。例えば、ディスプレイ7は、仮駐車設定枠の位置の変更及び指定を含む設定指令を受け付け、制御装置10へ出力することができる。ディスプレイ7としてはカーナビゲーションシステムのモニタを用いることができる。
【0032】
図3に戻り、続くステップ203〜205において、制御装置10は設定指令取得機能を実行する。
【0033】
ステップ203において、設定情報35を用いて仮駐車設定枠の位置を設定するため、自車両を駐車したい駐車スペースの近くに移動させる。具体的に、ドライバは、ディスプレイ7に表示された設定情報35を見ながら駐車したい駐車スペースに仮駐車設定枠がほぼ一致するように自車両を移動させる。例えば、図8に示す、自車両の左側の駐車スペースPK1に自車両を並列駐車する場合には、設定情報35に示された仮駐車設定枠52a、52bが目的の駐車目標スペースPK1とほぼ一致するように自車両を移動させる。
【0034】
続くステップ204において、自車両を移動させた後において、設定情報35に含まれる仮駐車設定枠52a,52bが駐車スペースを指示できるか否かを判断する。この判断は、ドライバが設定情報35を見ながら判断して次のステップに進んでもよいし、制御装置10が設定情報35の画像データに基づいて判断して次のステップに進んでもよい。図6に示すように、仮駐車設定枠52a,52bが自車両のミラー近傍の位置に設けられている場合であっても、図8に示す例のように駐車スペースの周辺に壁などの障害物が存在しなければ、車両の位置を変えれば仮駐車設定枠52a,52bを駐車スペースPK1,PK2に重畳させて、駐車スペースを指し示すことができる。
【0035】
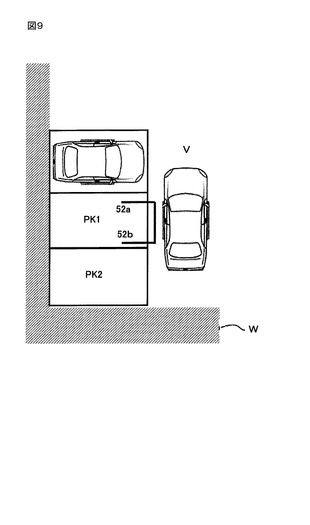
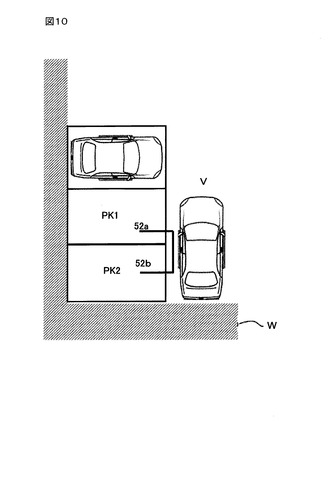
ところが、図9、図10に示すように、駐車スペースが駐車場の一番奥まった場所にあり、周囲二面が壁に囲まれている駐車スペースに自車両を駐車しようとする場合は、壁などの障害物によって自車両の動きが制限される場合がある。仮駐車設定枠52a,52bが自車両のミラー近傍の位置に設けられている場合であっても車両後方から壁Wまでの距離が十分であれば、図9に示すように駐車スペースPK1に仮駐車設定枠52a,52bを重畳させて駐車スペースを指示することができるが、車両後方から壁Wまでの距離が十分にないと、自車両の動きが壁Wに妨げられ、図10に示すように、駐車スペースPK2に仮駐車設定枠52a,52bを重畳させることができない。
【0036】
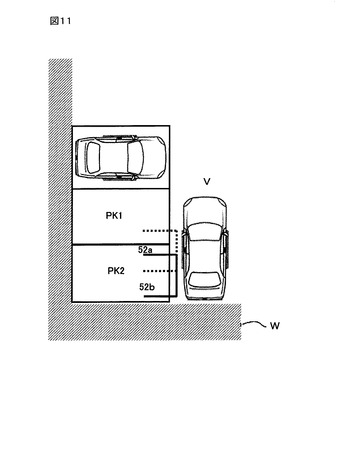
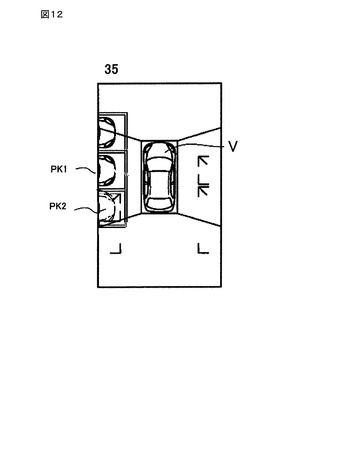
この問題を解決するために、本実施形態の駐車支援装置100は、ステップ205において、仮駐車設定枠52a,52bの自車両に対する位置の変更を含む設定指令を受け付ける。設定指令はドライバが入力してもよいし、制御装置10が設定情報35の画像情報に基づいて自動的に選択し、指令をインプットしてもよい。具体的には、図11に示すように、自車両のミラー近傍の位置に設けられていた仮駐車設定枠52a,52bの位置(図中において破線で表示)を、自車両の後方の位置(図中において実線で表示)に変更する。図11に示すように、自車両に対する位置が変更された実線で示す仮駐車設定枠52a,52bを駐車スペースPK2に重畳させることができる。ドライバが自車両を移動させて、仮駐車設定枠52a,52bを駐車スペースPK2に重畳させたときの設定情報35の表示例を図12に示す。なお、仮駐車設定枠52a,52bの設定入力の手法は特に限定されず、タッチパネル式のディスプレイ7に表示された複数の仮駐車設定枠から任意のものを選択して入力してもよいし、運転席周辺に設けられたスイッチを操作することにより任意の仮駐車設定枠を選択してもよい。この場合は、スイッチの操作と選択される仮駐車設定枠とを予め対応づけておくことが好ましい。
【0037】
特に限定されないが、本実施形態の駐車支援装置100は、仮駐車設定枠を目的の駐車スペースに重畳させるために自車両を移動させたときに、自車両の後方端から障害物(例えば図9〜11の壁W)までの距離が所定距離未満である場合に、仮駐車設定枠52a,52bの自車両に対する位置を含む設定指令を受け付けることができる。自車両の後方端から障害物までの距離は、ソナーなどの一般的に用いられる測距センサを利用することができる。
【0038】
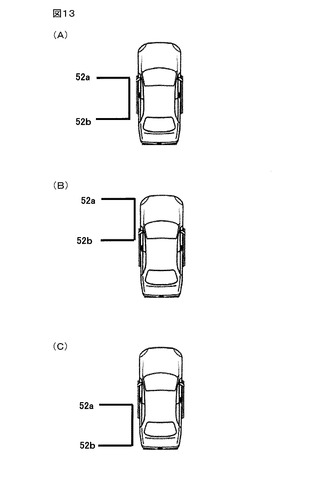
この場合において、本実施形態の駐車支援装置100は、自車両の後方端から障害物までの距離が所定距離未満である場合には、図13(a)〜(c)に示すように、自車両に対する位置が異なる仮駐車設定枠52a,52bの候補をディスプレイ7に表示して、自車両に対する仮駐車設定枠52a,52bの位置を仮駐車設定枠52a,52bの候補から一つの仮駐車設定枠52a,52bを選択することにより、自車両に対する仮駐車設定枠52a,52bの位置を変更し、変更後の仮駐車設定枠52a,52bの位置を含む設定指令を受け付けることができる。
【0039】
もちろん、本実施形態の駐車支援装置100は、ディスプレイ7に表示された自車両に対する位置が異なる仮駐車設定枠52a,52bの候補から、駐車目標スペースを指し示すことができる仮駐車設定枠を選択することにより、仮駐車設定枠52a,52bの自車両の位置を変更することができる。
【0040】
続くステップ206において、ドライバが仮駐車設定枠52a,52bの位置を積極的に確定する情報を入力し(所定のスイッチ入力などをする)、又はドライバが仮駐車設定枠52a,52bの位置を所定時間以上変更しなかった場合には、制御装置10は仮駐車設定枠52a,52bの位置が確定されたと判断して、仮駐車設定枠52a,52bの位置の設定の完了を認識する。
【0041】
続くステップ207において、本実施形態の駐車支援装置100は、自車両に対する位置が設定された仮駐車設定枠52a,52bに対応する(仮駐車設定枠52a,52bが重畳された)駐車スペースPK1又はPK2を、自車両を駐車する駐車目標スペースとして設定し、図2のステップ102の駐車モードの選択処理へ移行する。
【0042】
このように、本実施形態の駐車支援装置100は、駐車時に自車両を移動させた後に、仮駐車設定枠52a,52bの自車両に対する位置を含む設定指令を受け付けて、自車両に対する仮駐車設定枠52a,52bの位置を変更(再設定)できるので、駐車場の一番奥まった場所のように、壁等の障害物によって自車両の動きが制限される駐車スペースであっても、駐車目標スペースとして設定することができる。この結果、駐車支援機能を利用できる駐車スペースが増えるので、利便性を向上することができる。
【0043】
また、予め設定情報において仮駐車設定枠目標位置52a、52bと目的の駐車目標スペースPK1との位置を合わせて駐車開始位置を指定し、この駐車開始位置を始点とした駐車経路を算出するので、画像を解析することにより駐車開始位置を認識する必要が無い。このため、演算負荷を減らして、CPUの負荷を低減することができる。
【0044】
なお、本実施形態の駐車目標スペースの設定において、左側並列駐車の仮駐車設定枠52a,52bの設定を例に説明したが、図6、図7に示す他の仮駐車設定枠においても同様の手法を適用することができる。
【0045】
続いて、駐車支援装置100の駐車モード選択機能について説明する。図2のフローチャートに戻り、ステップ102における駐車モードの選択処理において、ドライバはステアリング500を操作することにより、右側並列駐車モードと、左側並列駐車モードと、右側縦列駐車モードと、左側縦列駐車モードと、右側斜め駐車モードと、左側斜め駐車モードの六つの駐車モードの中から自車両と駐車目標スペースとの位置関係に合致した駐車モードを選択する選択情報を入力する。そして、駐車支援装置100は、左右の並列駐車及び左右の縦列駐車を含む複数の駐車モードからいずれか一つの駐車モードを選択する駐車モードの選択情報を取得する。以下に、駐車モード選択機能を実現するための、操舵方向取得機能、操舵角取得機能、選択操作検出機能、及び駐車モード取得機能について説明する。
【0046】
図1に示すように、本実施形態のステアリング500は、操舵角センサ510と、操舵方向センサ520とを有する。操舵角センサ510はステアリング500の操舵角を検出し、駐車支援装置100へ出力する。操舵方向センサ520は車両のステアリング500の操舵方向(右又は左)を検出し、駐車支援装置100へ出力する。ステアリング500の操舵角及び操舵方向は車両コントローラ200を介して駐車支援装置100へ出力してもよい。制御装置10は、操舵角センサ510からステアリング500の操舵角を取得し、操舵方向センサ520からステアリング500の操舵方向を取得する。本実施形態のステアリング500は車両の操舵装置としても機能する。
【0047】
次に、駐車支援装置100の選択操作検出機能について説明する。本実施形態の駐車支援装置100の制御装置10は、取得した操舵方向及び操舵角に基づいて、ステアリング500が右方向又は左方向に操舵された後に中立位置に戻される操作を、ドライバが駐車モードを選択するために行った「駐車モード選択操作」として検出する。駐車支援装置100は、検出された「駐車モード選択操作」に基づいて、次に説明する駐車モードの選択情報を取得する。
【0048】
なお、この「駐車モード選択操作」の検出は、本実施形態の駐車支援装置100が起動した後に行うことができる。駐車支援装置100の起動は、図示しない起動命令の受付けが割りつけられたスイッチを操作することにより、実行することができる。
【0049】
このように、本実施形態の駐車支援装置100は、起動命令を受け付けた後に行われたステアリング500に対する操作を、駐車モードの選択のために行われる操作であると認識する。言い換えると、本実施形態の駐車支援装置100は、起動命令を受け付ける前に行われたステアリング500に対する操作を、駐車モードの選択のために行われる操作ではない(車両を操舵するために行われる操作である)と認識する。これにより、駐車支援装置100が起動していない場合には、ステアリング500は車両の操舵装置として機能する。
【0050】
本実施形態の駐車支援装置100の制御装置10は、上述した駐車モード選択操作が検出された場合には、駐車モード選択操作における操舵方向と一致する方向であって、操舵角に対応づけられた駐車モードの選択情報を取得する。選択情報は、駐車モードが自車両に対して右側の駐車スペースへの駐車であるのか又は自車両に対して左側の駐車スペースへの駐車であるのかという情報と、操舵角に対応づけられた並列駐車であるのか、縦列駐車であるのか、又は斜め駐車であるのかという駐車モードを特定する情報とを含む。
【0051】
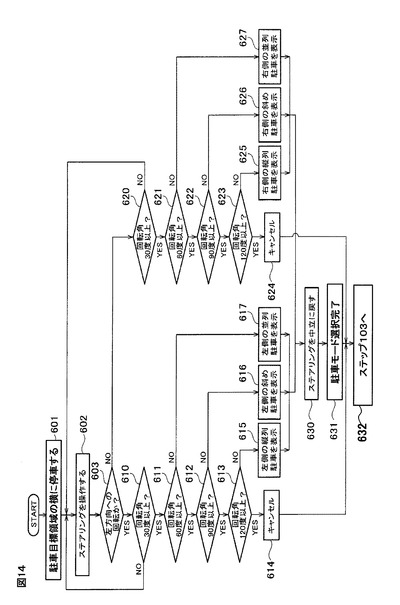
次に、図2のフローチャートにおける駐車モード選択処理(102)の具体的な内容を、図14のフローチャートに基づいて説明する。
【0052】
図14に示すように、まず、ステップS601において、駐車支援装置100の起動スイッチが操作され、先述した仮駐車設定枠の位置を設定するために自車両を駐車目標スペースの横に停車し、続くステップS602において、ドライバはステアリング500を操作する。駐車支援装置100は、ステップ602においてされたステアリング500の操作のうち、ステアリング500が右方向又は左方向に操舵された後に中立位置に戻される操作を、駐車モード選択操作として検出する。さらに、以下の処理において、駐車支援装置100は駐車モード選択操作に基づいて駐車モードの選択情報を取得する。
【0053】
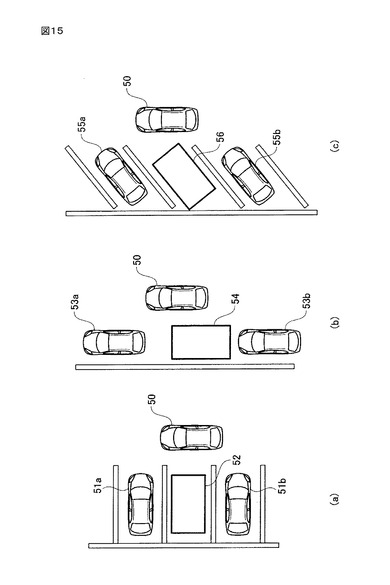
本実施形態における駐車モードとは、図15に示すように、並列駐車モードと、縦列駐車モードと、斜め駐車モードとを含む。図15(a)に示すように、並列駐車では、自車両50と駐車車両(又は駐車スペース)51a、51bとのなす角度は略直角であり、自車両50を駐車する駐車目標スペース52は駐車車両51a、51bと並列する。図15(b)に示すように、縦列駐車では自車両50と駐車車両(又は駐車スペース)53a、53bとは略平行であり、自車両50を駐車する駐車目標スペース54は駐車車両53a、53bと縦列する。図15(c)に示すように、斜め駐車では自車両50と駐車車両55a、55bが所定の角度をなし、自車両50を駐車する駐車目標スペース56は駐車車両55a、55bと斜めに並列する。図15(a)〜図15(c)に示す駐車モードには、駐車目標スペースが自車両に対して右側に存在する場合と左側に存在する場合とがそれぞれある。
【0054】
駐車モードの選択操作が行われる際に、駐車支援装置100は、ステアリング500の操作を補助する入力補助情報を作成し、ディスプレイ7に提示する。特に限定されないが、本実施形態の駐車支援装置100は、自車両に搭載されたカメラ6a〜6d(図4参照)の撮像画像に基づく自車両周囲の俯瞰画像と駐車スペースとを示す入力補助情報と、自車両を駐車目標スペースへ誘導する際に撮像された自車両周囲の監視映像とをディスプレイ7に提示する。
【0055】
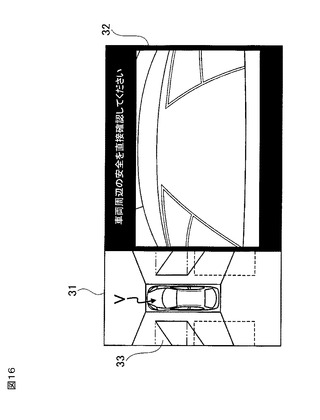
図16は、ディスプレイ7に出力される、自車両周囲の俯瞰画像(トップビュー)を含む入力補助情報31と自車両周囲の監視映像(ノーマルビュー)32との表示例を示す図である。入力補助情報31は駐車スペース33を含む。図16に示すように、図4の仮想視点20に視点変換された俯瞰画像(トップビュー)31をディスプレイ7の画面の左側に表示し、カメラ6a〜6dで撮像された監視画像(ノーマルビュー)32を画面の右側に表示している。
【0056】
ディスプレイ7の画面の左側に表示した入力補助情報31は、生成された自車両周囲の俯瞰画像(トップビュー)に各駐車モードを示す画像を重畳させて表示している。ここで行われる画像の重畳処理はコンピュータグラフィクスのスーパーインポーズの手法を用いて行うことができる。後に詳述するが、駐車モードの選択入力を補助するために、同図に示す入力補助情報31をステアリング500の動きに応じて変化させることができる。
【0057】
駐車支援機能の起動後、ドライバが駐車支援システム1000に対するステアリング500の操舵を開始する。ステップS602では、駐車支援装置100は、取得した操舵方向及び操舵角に基づいて、ドライバが行うステアリング500の操舵の中からステアリングが右方向又は左方向に操舵された後に中立位置に戻される操作を駐車モード選択操作として検出する。なお、駐車モードの選択を行う際においては、ステアリング500が略中立状態から操舵されると仮定する。
【0058】
ステップS603以降、駐車モード選択操作の内容に基づいて駐車モードの選択情報を特定する。ステアリング500の駐車モード選択操作の内容と駐車モードの内容とは予め対応づけられて、ROM12に記憶されている。
【0059】
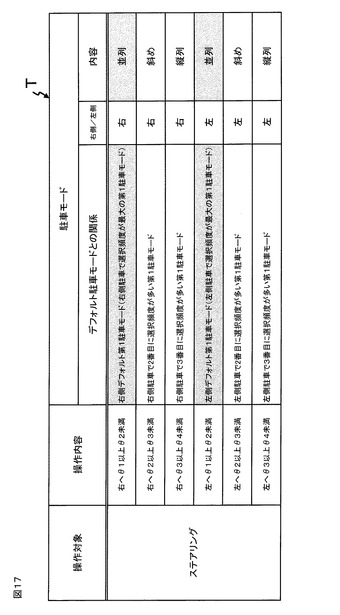
図17は、ステアリング500の操作内容(駐車モード選択操作の内容)と、駐車モードの内容とを対応づけた対応情報Tの一例を示す図である。図17に示すように、対応情報Tにおいて、ステアリング500の操舵方向(右側又は左側)と、ステアリング500の操舵角(θに基づく操舵角の値域)とが予め対応づけられている。本実施形態の対応情報Tにおいて、θは0度<θ1<θ2<θ3<θ4の関係を有する。なお、θ1〜θ4の値は特に限定されず、任意に設定することができる。また、θ1〜θ2、θ2〜θ3、θ3〜θ4の値域の幅は均一でなくてもよい。
【0060】
また、本実施形態においては、ステアリング500の操舵角が、このステアリング500の中立位置に近い側から順番に駐車頻度の高い駐車モードが対応づけられている。具体的に、中立位置を基準(0度)とする最も小さい角度(θ1以上θ2未満)と対応づけられた左右の並列駐車は、日本国で駐車される際に選択される確率が最も高い駐車頻度の高い駐車モードである。
【0061】
このように、駐車頻度の高い駐車モードを中立位置から近い角度に対応づけることにより、小さい操作領域で利用頻度の高い並列駐車の駐車パターンを選択することができる。この結果、操作負荷の少ない駐車支援装置100を提供することができる。
【0062】
駐車頻度の高い駐車モードは各国、各地域又は各経済領域において異なるので、国、地域又は経済領域ごとに対応情報Tを定義することが好ましい。たとえば、欧州においては、統計的に並列駐車を行うよりも縦列駐車を行う頻度が高い。このため、欧州において販売する駐車支援装置100の対応情報Tにおいては、中立位置を基準(0度)とする最も小さい角度(θ1以上θ2未満)と左右の縦列駐車を対応づけることが好ましい。これにより、欧州において、ステアリング500を大きく動かさなくても利用頻度の高い縦列駐車の駐車パターンを選択できる駐車支援装置100を提供できる。
【0063】
以下、具体的な駐車モードの選択処理を説明する。ステップS603において、制御装置10は、ステアリング500が左側に操舵されたか否かを操舵方向センサ520から取得した操舵方向に基づいて判断する。制御装置10は、ステアリング500が左側に操舵された場合にはステップS610へ進み、右側へ操舵された場合にはステップS620へ進む。
【0064】
以下に説明するステップS603〜S617に示すように、左側にステアリング500を回転させたときには左側の駐車モードが選択され、右側にステアリング500を回転させたときには右側の駐車モードが選択される。
【0065】
まず、ステアリング500が左側へ操舵された場合の処理を説明する。ステップS610ではステアリング500の操舵角が30度以上であるか否かが判定され、30度未満の場合にはステップS602へ戻り、30度以上の場合にはステップS611へ進む。
【0066】
所定のステアリング500の操舵角の各値域に各駐車モードが対応づけられているので、ドライバが操作したステアリング500の操舵角が所定の操舵角域に含まれる場合には、その所定の操舵角域に対応した駐車モードをドライバが選択した駐車モードとして特定することができる。
【0067】
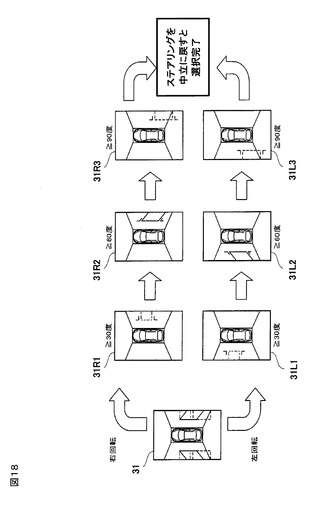
ここで、ステップS610〜S617の処理においては、ステアリング500の操舵角に応じた入力補助情報31(図16参照)がディスプレイ7の表示領域の左側に提示される。具体的なステアリング500の操舵角に応じた入力補助情報31の各例を図18に示す。
【0068】
ステップS611ではステアリング500の操舵角が60度以上であるか否かが判定され、60度未満の場合、即ちステアリング500の操舵角が30度以上60度未満である場合にはステップS617へ進み、ドライバが左側の並列駐車を選択していると判断する。この場合において、駐車支援装置100はドライバのステアリング操作に対応する駐車モードの選択候補が左側の並列駐車であることを知らせるため、図18に示す入力補助情報31L1をディスプレイ7に表示する。
【0069】
同様に、ステアリング500の操舵角が60度以上90度未満である場合にはステップS616に進み、ドライバが左側の斜め駐車を選択していると判断する。この場合において、駐車支援装置100はドライバのステアリング操作に対応する駐車モードの選択候補が左側の斜め駐車であることを知らせるため、図18に示す入力補助情報31L2をディスプレイ7に表示する。
【0070】
さらに、ステアリング500の操舵角が90度以上120度未満である場合にはステップS615に進み、ドライバが左側の縦列駐車を選択していると判断する。この場合において、駐車支援装置100はドライバのステアリング操作に対応する駐車モードの選択候補が左側の縦列駐車であることを知らせるため、図8に示す入力補助情報31L3をディスプレイ7に表示する。尚、ステアリング500の操舵角が120度以上になった場合にはステップS614に進んで駐車モードの選択をキャンセルしたと判断して駐車モードの選択処理を終了する。
【0071】
一方、ステップS603においてステアリング500が右側に操舵された場合には、ステップS620へ進み、ステップS620からステップS627において左側に操舵された場合と同様の処理が行われる。ステップS627においては、図18に示す入力補助情報31R1をディスプレイ7に表示し、ステップS626においては、図18に示す入力補助情報31R2をディスプレイ7に表示し、ステップS625においては、図18に示す入力補助情報31R3をディスプレイ7に表示する。
【0072】
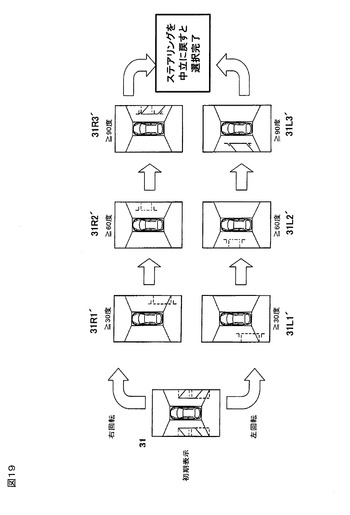
なお、図19は、縦列駐車の駐車モードが左右30度〜60度の操舵角と対応づけられ、並列駐車の駐車モードが左右60度〜90度の操舵角と対応づけられ、斜め駐車の駐車モードが左右90度〜120度の操舵角と対応づけられた場合の入力補助情報31R1´〜31R3´、31L1´〜31L3´の例を示す図である。
【0073】
続いて、駐車モードが選択され、ステップS630においてステアリング500が中立位置(初期位置)に戻された場合にはステップS631に進み、選択された駐車モードの選択処理を完了する。本実施形態の駐車支援装置100は、ステップS631で選択が完了した駐車モードの選択情報に基づく駐車支援を行うため、図2のステップ103へ移行する。
【0074】
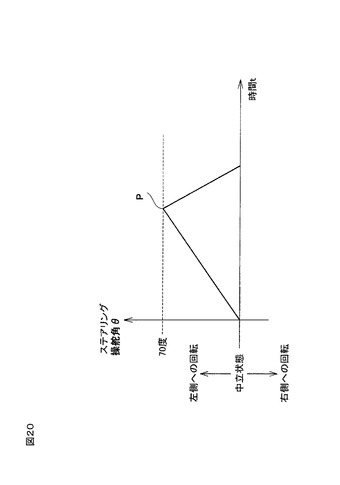
本実施形態の駐車支援装置100は、ステアリング500の経時的な操舵角の変化に基づいてステアリング500が中立位置(初期位置)に戻されたことを認識する。図20は、駐車モードの選択操作時におけるステアリング500の操舵角の時間変化を示す図である。横軸はステアリング500の回転(操舵)が開始してからの時間であり、縦軸はステアリング500の操舵角である。また、中立位置からステアリング500を左側に操舵したときを正の回転、右側に操舵したときを負の回転とした。図20に示すように、ステアリング500を左方向に70度まで回転させてから中立位置に戻しているので、図20に示した場合を例にすると、初期表示される入力補助情報31が同31L1、31L2に変化し、入力補助情報31L2のときに中立位置に戻されて駐車モードの選択が完了する。本実施形態では、中立位置に戻したときに駐車モードの選択が完了するように設定したが、ステアリング500を逆方向に回転操作したタイミング、すなわち図20のポイントPのタイミングで駐車モードの選択が完了したと判断してもよい。
【0075】
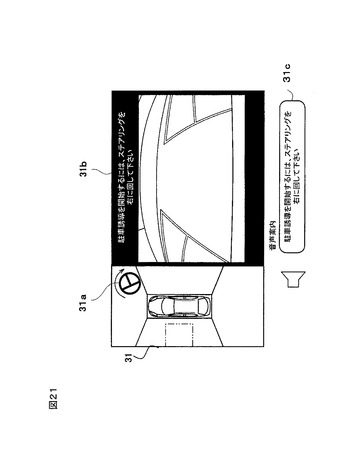
また、本実施形態の駐車支援装置100は、駐車モードの選択操作時においてステアリング500を中立位置に戻すことを促すための画面表示または音声案内を行うことができる。図21は、左側の並列駐車モードを選択した場合の入力補助情報31及び音声案内の一例を示したものである。図21に示すよう右側に回転するステアリング500のアイコン31aを入力補助情報31の一部としてディスプレイ7に表示し、ステアリングを右側に回転することをドライバに示唆することができる。またステアリングを右に回転操作することを促すテキスト表示31bを入力補助情報31の一部としてディスプレイ7に表示し、ステアリングを右側に回転することをドライバに示唆することができる。または、ステアリングを右に回転操作することを促すテキスト31cを入力補助情報31の一部として、車載のスピーカーを介し音声出力し、ステアリングを右側に回転することをドライバに示唆することができる。
【0076】
さらに本実施形態の駐車支援装置100は、完了した駐車モードの選択操作に基づく駐車モードを認識した場合には、その旨をドライバに知らせるためにチャイムを鳴らす、又はディスプレイ7に「駐車モードが選択されました」などの表示をすることができる。これにより、ドライバは、自身の操作により駐車モードの選択が完了したことを認識することができる。
【0077】
以下に、上述した駐車モードの選択処理におけるドライバの操作の流れを説明する。1駐車モードの選択処理が開始されると、ディスプレイ7に入力補助情報31が表示される。ドライバは、入力補助情報31を見ながら図16に示すように駐車目標スペースの横に自車両を停車させ、ステアリング500を操舵して駐車目標スペースの駐車モードを選択する。ドライバは、ディスプレイ7に表示された入力補助情報31を見ながら駐車モードの選択操作を実行する。ドライバがステアリング500を右側に操舵して30度以上になったときには入力補助情報31R1に示すように右側の並列駐車を表現する画像が表示され、ステアリング500を右側に操舵して60度以上になったときには入力補助情報31R2に示すように右側の斜め駐車を表現する画像が表示され、右側に操舵して90度以上になったときには入力補助情報31R3に示すように右側の縦列駐車を表現する画像が表示される。このようにディスプレイ7に順次切り替えて表示される入力補助情報31を確認しながら、ドライバは目的とする駐車モードと画面に表示された入力補助情報31が一致したところでステアリング500を中立方向(基準位置)へ戻す。ステアリング500の回転操作後に、ステアリング500が中立位置に戻される回転操作がされたときに、駐車モードの選択操作が完了する。駐車支援装置100は、ステアリング500が中立位置に戻される回転操作がされる前に回転操作がされたステアリング500の操舵角に応じた駐車モードが選択されたことを認識する。
【0078】
なお、ステアリング500を回転し過ぎて、ドライバが希望する駐車モードではない駐車モードに対応する操舵領域まで操舵してしまった場合には、中立位置に戻した後に再度ステアリング500を回転させることにより、先の駐車モード選択操作をキャンセルし、後の駐車モード選択操作に基づいて駐車モードの選択情報を取得することができる。
【0079】
ステアリング500が左側に操舵された場合も同様であり、図19に示す入力補助情報31R1´〜31R3´、31L1´〜31L3´がディスプレイ7に表示される場合も同様である。なお、駐車モードの選択が完了したことを認識する情報としては、上述したステアリング500が中立位置に戻されたことに限定されず、駐車支援切替スイッチ620への入力信号を駐車モードの選択が完了したことを認識する情報として定義することもできる。
【0080】
本実施形態の駐車モードの選択処理によれば、自車両を基準とする駐車目標スペースの存在する方向(選択される駐車モードの左右方向)とステアリング500の回転方向とが一致するので、ドライバは駐車モードを選択する際に自車両を駐車したい方向(右又は左)にステアリング500を回転させればよいため、右側又は左側の駐車モードを直感的に選択することができる。特に、運転に不慣れなドライバは、自車両を右側に駐車させたい場合には右側にステアリング500を回転させるのが自然であるので、駐車させたい駐車スペースの方にステアリング500を動かすことにより駐車モードを選択できる本実施形態の選択操作を理解しやすい。この結果、運転に不慣れなドライバであっても、左右を間違えることなく目的の駐車モードを選択することができる。
【0081】
駐車支援装置100は、受信(取得)した駐車目標スペースの位置及び駐車モードの選択情報に基づいて、自車両の駐車モードの具体的な内容を決定する。特に限定されないが、駐車支援装置100は、駐車目標スペースの位置及び駐車モードの選択情報を取得した後に、ドライバがブレーキペダルの踏圧を緩め、所定のブレーキ踏圧が解除された場合に、取得した駐車目標スペースの位置及び駐車モードの選択情報に基づく駐車支援処理の実行を決定する。そして、駐車支援装置100は、決定した駐車モードの選択情報に応じた駐車モードで自車両を駐車目標スペースに誘導する。
【0082】
再び図2に戻り、駐車支援装置100の車両誘導機能について説明する。続くステップS103において、駐車支援装置100は、駐車支援コントロールユニットを起動して、自車両の位置と駐車目標スペースの位置との位置関係に基づいて駐車経路を計算する。この駐車経路は並列駐車、縦列駐車、斜め駐車のそれぞれに対応した経路を1種類ずつメモリ(ROM)に記憶しておき、ステップS101で選択された駐車モードに対応した経路を読み込み、駐車支援処理開始時における自車両の位置と駐車目標スペースの位置との位置関係に基づいて駐車経路を計算する。特に限定されないが、駐車支援コントロールユニットは、切り返し位置までの曲線と切り返し位置から駐車目標スペースまでの曲線とを、駐車経路として算出する。
【0083】
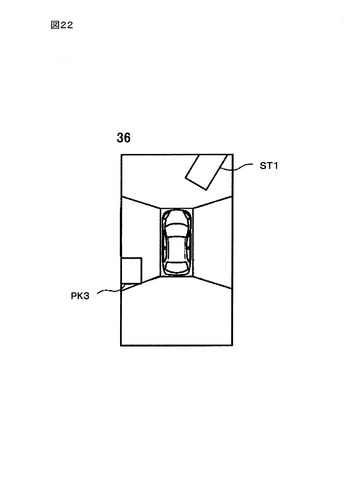
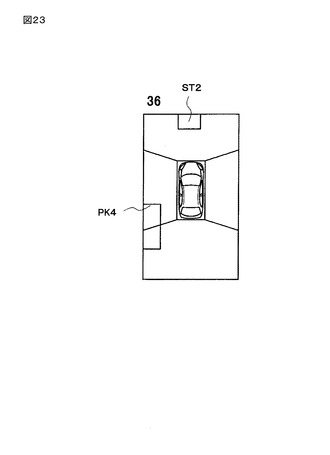
さらに、ステップS104において、駐車支援装置100は、算出した駐車経路に基づいて自車両を駐車目標スペースへ誘導する。自車両を誘導する際に、左側並列駐車の場合は、図22に示すように自車両前方の切り返し位置ST1と、駐車目標スペースPK3とを示す誘導情報36を提示し、左側縦列駐車の場合は、図23に示すように自車両前方の切り返し位置ST2と、駐車目標スペースPK4とを示す誘導情報36を提示して、自車両の動きをドライバに示すことができる。
【0084】
本実施形態の駐車支援装置100は、自車両が駐車経路に沿って移動するように、ステアリング500の操舵を制御する。駐車支援装置100は、計算された駐車経路に自車両の移動軌跡が一致するようにステアリング500の操舵角センサ510と操舵方向センサ520との出力値をフィードバックしながらEPSモータなどの車両の駆動系400への指令信号を演算し、この指令信号を駆動系400又は駆動系400を制御する車両コントローラ200へ送出する。もちろん、算出した駐車経路をディスプレイ7などに表示し、自車両の移動軌跡が駐車経路と一致するようにステアリング500の操舵量、ステアリング500転舵のタイミング、ブレーキ又はアクセルの操作タイミングを指示することにより運転支援を行うこともできる。
【0085】
自車両が駐車目標スペースに駐車すると、本実施形態に係る駐車支援装置100による駐車支援処理は終了する。
【0086】
以上のように構成され、動作する本実施形態の駐車支援装置100は、以下の効果を奏する。
【0087】
本発明の本実施形態の駐車支援装置100によれば、自車両に対する仮駐車設定枠の位置を変更することができるので、駐車場の一番奥まった場所のように、壁等の障害物によって車両の動きが制限されるような駐車スペースであっても、駐車目標スペースとして設定することができる。具体的に、駐車場の一番奥まった場所に設けられ、周囲の二面が壁に囲まれているような駐車スペースであっても駐車目標スペースとして設定することができる。この結果、駐車支援の機能を利用できる機会を増やすことができ、装置の利便性を向上させることができる。本発明の駐車支援方法によっても同様の動作により、同様の効果を奏する。
【0088】
自車両を移動させた際における、自車両の後方端から障害物までの距離が所定距離未満である場合、つまり、駐車場の設計態様などの影響を受けて仮駐車設定枠を目的とする駐車スペースに駐車出来ない場合に、仮駐車設定枠の自車両に対する位置を含む設定指令を受け付けるので、駐車支援の機能を利用できる機会を増やすことができ、装置の利便性を向上させることができる。
【0089】
自車両に対する位置が異なる仮駐車設定枠の候補をディスプレイ7に表示させて、仮駐車設定枠の候補から一つの仮駐車設定枠を選択することにより、自車両に対する仮駐車設定枠の位置を変更するので、仮駐車設定枠の位置変更操作を容易にすることができ、装置の利便性を向上させることができる。
【0090】
並列駐車及び縦列駐車を含む複数の駐車モードからいずれか一つの駐車モードを選択する駐車モードの選択情報を取得し、選択された駐車モードで自車両を誘導するので、実際の状況に応じて要求される駐車操作に即した支援を行うことができる。
【0091】
本発明の本実施形態の駐車モード選択装置10によれば、ステアリング500が右方向又は左方向に操舵された後に中立位置に戻される駐車モード選択操作が検出された場合には、操舵方向と一致する方向であって、操舵角に対応づけられた駐車モードの選択情報を受け付けるので、駐車モードの選択の操作を分かりやすいものとすることができる。本実施形態の駐車支援装置100によれば、駐車モードを選択する際のステアリング500の操作方向を、自車両を基準とした目的の駐車スペースの位置と一致させるので、ドライバは自車両と駐車しようとする駐車スペースとの位置関係から駐車モードを選択する際のステアリング500の操作方向を直感的に把握することができるため、駐車モードの選択操作をドライバに分かりやすいものとすることができる。この結果、運転に不慣れなドライバであっても目的の駐車モードを正確に選択することができる。
【0092】
なお、以上説明したすべての実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。
【0093】
例えば、本実施形態では、駐車モード選択手段としてステアリング500を例にして説明するが、駐車モードの選択情報の入力には、ディスプレイ7のタッチパネルを用いることができる。また、スイッチの入力信号に各駐車モードを割りつけて、スイッチの入力操作に基づいて駐車モードを判断することができる。
【0094】
本明細書では、本発明に係る駐車支援装置の一態様として車両に搭載された駐車支援装置100を備える駐車支援システム1000を例にして説明するが、本発明はこれに限定されるものではない。
【0095】
本明細書では、本発明に係る駐車支援装置の一態様として、設定情報提示機能と、設定指令取得機能と、駐車目標スペース設定機能と、駐車モード選択機能と、車両誘導機能とを実行する制御装置10を備える駐車支援装置100を説明するがこれに限定されるものではない。また、本実施形態の駐車支援装置100は、駐車モード選択機能を実行するために、操舵方向取得機能と、操舵角取得機能と、選択操作検出機能と、駐車モード取得機能と、を備えることができるが、これに限定されるものではない。
【符号の説明】
【0096】
1000…駐車支援システム
100…駐車支援装置
10…制御装置
11…CPU,12…ROM,13…RAM
2…画像処理装置
6a〜6d…カメラ
7…ディスプレイ
200…車両コントローラ
400…駆動系
500…ステアリング
510…操舵角センサ
520…操舵方向センサ
【技術分野】
【0001】
本発明は、自車両の周囲の映像を運転者に提示して駐車を支援する駐車支援装置及び駐車支援方法に関する。
【背景技術】
【0002】
この種の装置に関し、自車両を所定位置に停車させたときに、ドライバが選択した駐車モードに応じた駐車目標スペースを仮設定してドライバに提示するものが知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−201363号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では自車両の位置と設定可能な駐車目標スペースとの位置関係が固定されているので、駐車場の一番奥まった場所では壁等の障害物により車両両の動きが制限されるため、周囲の二面が壁に囲まれている角の駐車スペースを駐車目標スペースとして設定することができない場合があるという問題がある。
【0005】
本発明が解決しようとする課題は、壁や障害物によって自車両の動きが制限される駐車スペースであっても、自車両を駐車させる駐車目標スペースとして設定することができる駐車支援装置を提供することである。
【課題を解決するための手段】
【0006】
本発明は、自車両周囲の俯瞰画像に、自車両に対して所定位置に配置された仮駐車設定枠が重畳された設定情報を生成し、自車両に対する位置が変更された仮駐車設定枠の位置を含む設定指令を受け付け、自車両に対する位置が設定された仮駐車設定枠が示す駐車スペースを、自車両を駐車する駐車目標スペースとして設定することにより、上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、自車両に対する仮駐車設定枠の位置を変更することができるので、駐車場の奥まった場所のように、壁や障害物によって自車両の動きが制限されるような駐車スペースであっても、自車両を駐車する駐車目標スペースとして設定することができる。この結果、駐車支援の機能を利用できる機会を増やすことができ、装置の利便性を向上させることができる。
【図面の簡単な説明】
【0008】
【図1】本発明を適用した実施形態に係る駐車支援システムの構成を示すブロック図である。
【図2】本発明を適用した実施形態に係る駐車支援システムによる駐車支援処理の全体の処理手順を示すフローチャートである。
【図3】本発明を適用した実施形態に係る駐車支援システムによる駐車目標スペースの設定処理の処理手順を示すフローチャートである。
【図4】本発明を適用した本実施形態に係る駐車支援システムのカメラの配置の一例を示す図である。
【図5】本実施形態に係る駐車支援システムにおける運転支援処理時にディスプレイに示される情報の一例を示す図である。
【図6】本実施形態に係る駐車支援システムにおける仮駐車設定枠の表示の一例を説明するための図である。
【図7】本実施形態に係る駐車支援システムにおける仮駐車設定枠の表示の他の例を説明するための図である。
【図8】本実施形態に係る駐車支援システムにおける駐車目標スペースの設定時にディスプレイに示される設定情報の一例を示す図である。
【図9】壁に沿う駐車スペースを駐車目標スペースとして設定する場合の操作を説明するための図である。
【図10】壁に沿う駐車スペースを駐車目標スペースとして設定する場合の操作を説明するための第2の図である。
【図11】壁に沿う駐車スペースを駐車目標スペースとして設定する場合の操作を説明するための第3の図である。
【図12】本実施形態に係る駐車支援システムにおける駐車目標スペースの設定時にディスプレイに示される情報の他の例を示す図である。
【図13】仮駐車設定枠の位置の変更時に提示される設定情報の一例を示す図である。
【図14】本発明を適用した実施形態に係る駐車支援システムによる駐車モード選択処理の処理手順を示すフローチャートである。
【図15】本実施形態における駐車モードを説明するための図である。
【図16】本実施形態に係る駐車支援システムにおける駐車モード選択処理時にディスプレイに示される情報の一例を示す図である。
【図17】本実施形態に係る駐車支援システムにおける駐車モードと入力操作とを予め対応づけた対応情報の一例を図である。
【図18】本実施形態に係る駐車支援システムにおける、ステアリングの操舵角に対応する入力補助情報の一例を示す図である。
【図19】本実施形態に係る駐車支援システムにおける、ステアリングの操舵角に対応する入力補助情報の他の例を示す図である。
【図20】本実施形態に係る駐車支援システムにおける、ステアリングの操舵角の時間変化を説明するための図である。
【図21】本実施形態に係る駐車支援システムにおける、駐車モードの選択時における入力補助情報の一例を示す図である。
【図22】本発明を適用した本実施形態に係る駐車支援システムにおいて、並列駐車を行う場合の誘導情報を示す図である。
【図23】本発明を適用した本実施形態に係る駐車支援システムにおいて、縦列駐車を行う場合の誘導情報を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に基づいて説明する。本実施形態では、本発明に係る駐車支援装置を、駐車支援装置を備えた車載の駐車支援システムに適用した場合を例にして説明する。本実施形態の駐車支援装置は、車両に搭載され、ドライバが設定した仮駐車設定枠に対応する駐車スペースに、ドライバが希望する駐車モード(並列駐車、縦列駐車、斜め駐車)で自車両を誘導する装置である。
【0010】
図1は、本実施形態に係る駐車支援装置100を備える駐車支援システム1000のブロック構成を示す図である。
【0011】
図1に示すように、本実施形態の駐車支援システム1000は、カメラ6a〜6dと、画像処理装置2と、駐車支援装置100と、車両コントローラ200と、ディスプレイ7と、車両の駆動系400と、ステアリング500と、を備えている。
【0012】
図1に示すように、本実施形態の駐車支援装置100の制御装置10は、駐車モードに対応し、自車両に対する位置が可変な仮駐車設定枠が重畳された設定情報をディスプレイ7に提示し、自車両を移動させた後に、仮駐車設定枠の自車両に対する位置を含む設定指令を受け付け、設定された仮駐車設定枠に対応する駐車目標スペースに自車両を誘導するためのプログラムが格納されたROM(Read Only Memory)12と、このROM12に格納されたプログラムを実行することで、駐車支援装置100として機能する動作回路としてのCPU(Central Processing Unit)11と、アクセス可能な記憶装置として機能するRAM(Random Access Memory)13と、を備えている。
【0013】
駐車支援装置100は、駐車支援コントロールユニットを備えることができる。駐車支援コントロールユニットは、AT/CVTコントロールユニットからのシフトレンジ情報、ABSコントロールユニットからの車輪速情報、舵角センサコントロールユニットからの舵角情報、ECMからのエンジン回転数情報等に基づいて、EPSコントロールユニットへの自動転舵に関する指示情報、メータコントロールユニットへの警告等の指示情報等を演算し、出力する。駐車支援の内容及び手法は特に限定されず、出願時において知られた手法を適宜に適用することができる。
【0014】
また、駆動系400は、駐車支援を実施するための車両の駆動機構群であり、駐車支援装置100から取得した制御指令信号に基づく駆動により、自車両を駐車目標スペースへ誘導する。例えば、駆動系400に含まれるEPSモータは、駐車支援装置100から取得した制御指令信号に基づいてステアリング500が備えるパワーステアリング機構を駆動して自車両を駐車目標スペースへ誘導する。
【0015】
本実施形態の駐車支援装置100は、図1に示す駐車支援システム1000の各構成及び他の車載装置と情報の授受を行うことができるようにCAN(Controller Area Network)その他の車載LANによって接続されている。
【0016】
本実施形態に係る駐車支援装置100の制御装置10は、設定情報提示機能と、設定指令取得機能と、駐車目標スペース設定機能と、駐車モード選択機能と、車両誘導機能とを実現するためのソフトウェアと、上述したハードウェアの協働により各機能を実行することができる。また、駐車支援装置100の制御装置10は、駐車モード選択機能を実現するために、操舵方向取得機能、操舵角取得機能、選択操作検出機能、及び駐車モード取得機能を実現させるソフトウェアを実行する。
【0017】
本実施形態に係る駐車支援システム1000は、図2のフローチャートに示すように、駐車支援処理を実行する。駐車支援装置100が起動すると、図2に示す駐車支援処理が開始する。駐車支援装置100の起動は、先述したように、駐車支援装置100の起動スイッチが操作されたことをトリガとしてもよい。
【0018】
具体的に、本実施形態に係る駐車支援装置100の制御装置10は、ステップ101において駐車目標スペースを設定し、ステップ102において駐車モードを選択し、ステップ103において選択された駐車モードに応じて自車両を駐車目標スペースまで移動させる駐車経路を算出する。そして、ステップ104において駐車支援を実行する。
【0019】
以下、本発明の本実施形態に係る駐車支援装置100が実現する、設定情報提示機能と、設定指令取得機能と、駐車目標スペース設定機能とによる駐車目標スペースの設定処理を、図3のフローチャートに基づいて説明する。
【0020】
まず、ステップ201において、駐車目標スペースの設定処理が開始されると、ステップ202に進む。ステップ202において、駐車支援装置100は設定情報提示機能を実行する。具体的に、駐車支援装置100の制御装置10は、駐車目標スペースの設定を補助するために用いられる設定情報35を生成し、ディスプレイ7に提示する。
【0021】
ちなみに、本実施形態の設定情報35において、「駐車スペース」は自車両を駐車させることができる選択可能な場所であり、「駐車目標スペース」は、駐車スペースのうち自車両を駐車させることを希望する場所であり、「仮駐車設定枠」は、ドライバが希望する駐車目標スペースを指し示すためのポインタとして機能するマークである。複数の「駐車スペース」のうち、「仮駐車設定枠」を重畳させるなど、仮駐車設定枠の位置と対応づけることにより指し示された「駐車スペース」が、「駐車目標スペース」として設定される。
【0022】
特に限定されないが、本実施形態の駐車支援装置100は、自車両に搭載されたカメラ6a〜6dの撮像画像に基づく自車両周囲の俯瞰画像と駐車スペースとを含む設定情報と、自車両を駐車目標スペースへ誘導する際に撮像された自車両周囲の監視映像とをディスプレイ7に提示する。本実施形態の「設定情報」は、カメラ6a〜6dの撮像画像に基づいて生成された複数の自車両の周囲の駐車スペースを含む俯瞰画像に、自車両に対する位置が変更可能な仮駐車設定枠が重畳された画像情報である。
【0023】
図4は、図1に示すカメラ6a〜6dを自車両に搭載する場合の配置例を示す図である。図4に示す例では、車両のフロントグリル部にカメラ6aを配置し、リアバンパ近傍にカメラ6dを配置し、左右のドアミラーの下部にカメラ6b、6cを配置している。カメラ6a〜6dは視野角の広い広角カメラを使用する。画像処理装置2は、カメラ6a〜6dの撮像画像の視点変換をし、仮想視点20から見た俯瞰画像を生成する。画像処理装置2により行われる画像処理は、例えば「鈴木政康・知野見聡・高野照久,俯瞰ビューシステムの開発,自動車技術会学術講演会前刷集,116-07(2007-10), 17-22.」などに記載された方法を用いればよい。
【0024】
図5は、ディスプレイ7に出力される、自車両周囲の俯瞰画像(トップビュー)30と自車両周囲の監視映像(ノーマルビュー)32との表示例を示す図である。図5に示すように、図4の仮想視点20に視点変換された俯瞰画像(トップビュー)30をディスプレイ7の画面の左側に表示し、カメラ6a〜6dで撮像された監視画像(ノーマルビュー)32を画面の右側に表示している。ディスプレイ7の画面の左側に表示した俯瞰画像(トップビュー)30には駐車スペースPK1を示す画像が含まれている。
【0025】
制御装置10は、この俯瞰画像30に自車両に対する位置が変更可能な仮駐車設定枠の表示を重畳した設定情報35を生成する。仮駐車設定枠は、自車両に対する位置が可変ではあるが、自車両に対して所定の位置関係を有する場所に示される。例えば、仮駐車設定枠の表示は、自車両の前方、自車両の中央、又は時車両の後方の位置に表示することができる。画像の重畳処理の手法は特に限定されず、予めメモリなどに格納されている仮駐車設定枠の画像を読み込んで、コンピュータグラフィクスのスーパーインポーズの手法を用いて行うことができる。仮駐車設定枠は、駐車モードごとに設定しておくことが好ましいので、各仮駐車設定枠は駐車モードに応じて識別可能なように異なる形状又は異なる色とすることができる。
【0026】
図6及び図7は、仮駐車設定枠を含む設定情報35の表示例を示す図である。図6に示すように、本実施形態では自車両Vの位置を示すコンピュータグラフィックス画像を中心部に配置し、その左右に鉤型の図形により仮駐車設定枠の位置を表示する。図6に示す仮駐車設定枠として表示されるマーク52a及びマーク52bの2つの鉤型は左側の並列駐車に対応する駐車スペースを示す。また、マーク53a及びマーク53bの2つの斜め向きの線分は、左側の斜め駐車に対応する駐車スペースを示す。さらに、マーク54a及びマーク54bの2つの鉤型は、左側の縦列駐車に対応する駐車スペースを示す。同様に、マーク55a及びマーク55bは右側の並列駐車に対応する駐車スペースを示し、マーク56a及びマーク56bは右側の斜め駐車に対応する駐車スペースを示し、マーク57a及びマーク57bは右側の縦列駐車に対応する駐車スペースを示す。
【0027】
本実施形態では、左側の並列駐車に対応する仮駐車設定枠のマーク52a、52bは、カメラ6cが設置されているドアミラーの位置を基準に対称な位置に表示される。このようにマーク52a、52bを表示することによって、カメラ6cの位置に近く、またカメラ6cから等距離に仮駐車設定枠を表示することになるので、カメラ6cの映像を俯瞰映像に変換した際に生じる映像の歪みの影響を最小限に抑えることができる。マーク53a、53b、右側のマーク55a、55b、561,56bについても同様である。
【0028】
左側の縦列駐車に対応する仮駐車設定枠のマーク54a、54bは自車両の後方に描画する。縦列駐車の駐車軌道を表示するにあたり、共通の俯瞰映像内に駐車目標スペースと切り返し位置とを同時に表示するためである。切り返し位置を俯瞰映像内に表示することにより、ドライバは縦列駐車をする際に自車両をどこまで進めればよいかを画像で確認できるので、操作性を高めることができる。
【0029】
仮駐車設定枠を示すマークの態様は限定されず、上述した映像の歪みの影響を低減させる観点から、各駐車モードに対応する仮駐車設定枠を示す各対のマークの中心が、すべて自車両のドアミラーの設置位置となるようにマークを設定することができる。
【0030】
また、図7に示すように、仮駐車設定枠を駐車スペースの形状に応じた矩形の図形で表示することができる。図7では、矩形マーク112は左側の並列駐車に対応する駐車スペースを示し、平行四辺形のマーク113は左側の斜め駐車に対応する駐車スペースを示し、矩形マーク112よりも大きい矩形マーク114は左側の縦列駐車に対応する駐車スペースを示す。左側の各マークも同様である。
【0031】
制御装置10は、生成した設定情報35をディスプレイ7に提示する。本実施形態のディスプレイ7は、タッチパネルディスプレイなどの情報の入力を受け付ける機能を有する。例えば、ディスプレイ7は、仮駐車設定枠の位置の変更及び指定を含む設定指令を受け付け、制御装置10へ出力することができる。ディスプレイ7としてはカーナビゲーションシステムのモニタを用いることができる。
【0032】
図3に戻り、続くステップ203〜205において、制御装置10は設定指令取得機能を実行する。
【0033】
ステップ203において、設定情報35を用いて仮駐車設定枠の位置を設定するため、自車両を駐車したい駐車スペースの近くに移動させる。具体的に、ドライバは、ディスプレイ7に表示された設定情報35を見ながら駐車したい駐車スペースに仮駐車設定枠がほぼ一致するように自車両を移動させる。例えば、図8に示す、自車両の左側の駐車スペースPK1に自車両を並列駐車する場合には、設定情報35に示された仮駐車設定枠52a、52bが目的の駐車目標スペースPK1とほぼ一致するように自車両を移動させる。
【0034】
続くステップ204において、自車両を移動させた後において、設定情報35に含まれる仮駐車設定枠52a,52bが駐車スペースを指示できるか否かを判断する。この判断は、ドライバが設定情報35を見ながら判断して次のステップに進んでもよいし、制御装置10が設定情報35の画像データに基づいて判断して次のステップに進んでもよい。図6に示すように、仮駐車設定枠52a,52bが自車両のミラー近傍の位置に設けられている場合であっても、図8に示す例のように駐車スペースの周辺に壁などの障害物が存在しなければ、車両の位置を変えれば仮駐車設定枠52a,52bを駐車スペースPK1,PK2に重畳させて、駐車スペースを指し示すことができる。
【0035】
ところが、図9、図10に示すように、駐車スペースが駐車場の一番奥まった場所にあり、周囲二面が壁に囲まれている駐車スペースに自車両を駐車しようとする場合は、壁などの障害物によって自車両の動きが制限される場合がある。仮駐車設定枠52a,52bが自車両のミラー近傍の位置に設けられている場合であっても車両後方から壁Wまでの距離が十分であれば、図9に示すように駐車スペースPK1に仮駐車設定枠52a,52bを重畳させて駐車スペースを指示することができるが、車両後方から壁Wまでの距離が十分にないと、自車両の動きが壁Wに妨げられ、図10に示すように、駐車スペースPK2に仮駐車設定枠52a,52bを重畳させることができない。
【0036】
この問題を解決するために、本実施形態の駐車支援装置100は、ステップ205において、仮駐車設定枠52a,52bの自車両に対する位置の変更を含む設定指令を受け付ける。設定指令はドライバが入力してもよいし、制御装置10が設定情報35の画像情報に基づいて自動的に選択し、指令をインプットしてもよい。具体的には、図11に示すように、自車両のミラー近傍の位置に設けられていた仮駐車設定枠52a,52bの位置(図中において破線で表示)を、自車両の後方の位置(図中において実線で表示)に変更する。図11に示すように、自車両に対する位置が変更された実線で示す仮駐車設定枠52a,52bを駐車スペースPK2に重畳させることができる。ドライバが自車両を移動させて、仮駐車設定枠52a,52bを駐車スペースPK2に重畳させたときの設定情報35の表示例を図12に示す。なお、仮駐車設定枠52a,52bの設定入力の手法は特に限定されず、タッチパネル式のディスプレイ7に表示された複数の仮駐車設定枠から任意のものを選択して入力してもよいし、運転席周辺に設けられたスイッチを操作することにより任意の仮駐車設定枠を選択してもよい。この場合は、スイッチの操作と選択される仮駐車設定枠とを予め対応づけておくことが好ましい。
【0037】
特に限定されないが、本実施形態の駐車支援装置100は、仮駐車設定枠を目的の駐車スペースに重畳させるために自車両を移動させたときに、自車両の後方端から障害物(例えば図9〜11の壁W)までの距離が所定距離未満である場合に、仮駐車設定枠52a,52bの自車両に対する位置を含む設定指令を受け付けることができる。自車両の後方端から障害物までの距離は、ソナーなどの一般的に用いられる測距センサを利用することができる。
【0038】
この場合において、本実施形態の駐車支援装置100は、自車両の後方端から障害物までの距離が所定距離未満である場合には、図13(a)〜(c)に示すように、自車両に対する位置が異なる仮駐車設定枠52a,52bの候補をディスプレイ7に表示して、自車両に対する仮駐車設定枠52a,52bの位置を仮駐車設定枠52a,52bの候補から一つの仮駐車設定枠52a,52bを選択することにより、自車両に対する仮駐車設定枠52a,52bの位置を変更し、変更後の仮駐車設定枠52a,52bの位置を含む設定指令を受け付けることができる。
【0039】
もちろん、本実施形態の駐車支援装置100は、ディスプレイ7に表示された自車両に対する位置が異なる仮駐車設定枠52a,52bの候補から、駐車目標スペースを指し示すことができる仮駐車設定枠を選択することにより、仮駐車設定枠52a,52bの自車両の位置を変更することができる。
【0040】
続くステップ206において、ドライバが仮駐車設定枠52a,52bの位置を積極的に確定する情報を入力し(所定のスイッチ入力などをする)、又はドライバが仮駐車設定枠52a,52bの位置を所定時間以上変更しなかった場合には、制御装置10は仮駐車設定枠52a,52bの位置が確定されたと判断して、仮駐車設定枠52a,52bの位置の設定の完了を認識する。
【0041】
続くステップ207において、本実施形態の駐車支援装置100は、自車両に対する位置が設定された仮駐車設定枠52a,52bに対応する(仮駐車設定枠52a,52bが重畳された)駐車スペースPK1又はPK2を、自車両を駐車する駐車目標スペースとして設定し、図2のステップ102の駐車モードの選択処理へ移行する。
【0042】
このように、本実施形態の駐車支援装置100は、駐車時に自車両を移動させた後に、仮駐車設定枠52a,52bの自車両に対する位置を含む設定指令を受け付けて、自車両に対する仮駐車設定枠52a,52bの位置を変更(再設定)できるので、駐車場の一番奥まった場所のように、壁等の障害物によって自車両の動きが制限される駐車スペースであっても、駐車目標スペースとして設定することができる。この結果、駐車支援機能を利用できる駐車スペースが増えるので、利便性を向上することができる。
【0043】
また、予め設定情報において仮駐車設定枠目標位置52a、52bと目的の駐車目標スペースPK1との位置を合わせて駐車開始位置を指定し、この駐車開始位置を始点とした駐車経路を算出するので、画像を解析することにより駐車開始位置を認識する必要が無い。このため、演算負荷を減らして、CPUの負荷を低減することができる。
【0044】
なお、本実施形態の駐車目標スペースの設定において、左側並列駐車の仮駐車設定枠52a,52bの設定を例に説明したが、図6、図7に示す他の仮駐車設定枠においても同様の手法を適用することができる。
【0045】
続いて、駐車支援装置100の駐車モード選択機能について説明する。図2のフローチャートに戻り、ステップ102における駐車モードの選択処理において、ドライバはステアリング500を操作することにより、右側並列駐車モードと、左側並列駐車モードと、右側縦列駐車モードと、左側縦列駐車モードと、右側斜め駐車モードと、左側斜め駐車モードの六つの駐車モードの中から自車両と駐車目標スペースとの位置関係に合致した駐車モードを選択する選択情報を入力する。そして、駐車支援装置100は、左右の並列駐車及び左右の縦列駐車を含む複数の駐車モードからいずれか一つの駐車モードを選択する駐車モードの選択情報を取得する。以下に、駐車モード選択機能を実現するための、操舵方向取得機能、操舵角取得機能、選択操作検出機能、及び駐車モード取得機能について説明する。
【0046】
図1に示すように、本実施形態のステアリング500は、操舵角センサ510と、操舵方向センサ520とを有する。操舵角センサ510はステアリング500の操舵角を検出し、駐車支援装置100へ出力する。操舵方向センサ520は車両のステアリング500の操舵方向(右又は左)を検出し、駐車支援装置100へ出力する。ステアリング500の操舵角及び操舵方向は車両コントローラ200を介して駐車支援装置100へ出力してもよい。制御装置10は、操舵角センサ510からステアリング500の操舵角を取得し、操舵方向センサ520からステアリング500の操舵方向を取得する。本実施形態のステアリング500は車両の操舵装置としても機能する。
【0047】
次に、駐車支援装置100の選択操作検出機能について説明する。本実施形態の駐車支援装置100の制御装置10は、取得した操舵方向及び操舵角に基づいて、ステアリング500が右方向又は左方向に操舵された後に中立位置に戻される操作を、ドライバが駐車モードを選択するために行った「駐車モード選択操作」として検出する。駐車支援装置100は、検出された「駐車モード選択操作」に基づいて、次に説明する駐車モードの選択情報を取得する。
【0048】
なお、この「駐車モード選択操作」の検出は、本実施形態の駐車支援装置100が起動した後に行うことができる。駐車支援装置100の起動は、図示しない起動命令の受付けが割りつけられたスイッチを操作することにより、実行することができる。
【0049】
このように、本実施形態の駐車支援装置100は、起動命令を受け付けた後に行われたステアリング500に対する操作を、駐車モードの選択のために行われる操作であると認識する。言い換えると、本実施形態の駐車支援装置100は、起動命令を受け付ける前に行われたステアリング500に対する操作を、駐車モードの選択のために行われる操作ではない(車両を操舵するために行われる操作である)と認識する。これにより、駐車支援装置100が起動していない場合には、ステアリング500は車両の操舵装置として機能する。
【0050】
本実施形態の駐車支援装置100の制御装置10は、上述した駐車モード選択操作が検出された場合には、駐車モード選択操作における操舵方向と一致する方向であって、操舵角に対応づけられた駐車モードの選択情報を取得する。選択情報は、駐車モードが自車両に対して右側の駐車スペースへの駐車であるのか又は自車両に対して左側の駐車スペースへの駐車であるのかという情報と、操舵角に対応づけられた並列駐車であるのか、縦列駐車であるのか、又は斜め駐車であるのかという駐車モードを特定する情報とを含む。
【0051】
次に、図2のフローチャートにおける駐車モード選択処理(102)の具体的な内容を、図14のフローチャートに基づいて説明する。
【0052】
図14に示すように、まず、ステップS601において、駐車支援装置100の起動スイッチが操作され、先述した仮駐車設定枠の位置を設定するために自車両を駐車目標スペースの横に停車し、続くステップS602において、ドライバはステアリング500を操作する。駐車支援装置100は、ステップ602においてされたステアリング500の操作のうち、ステアリング500が右方向又は左方向に操舵された後に中立位置に戻される操作を、駐車モード選択操作として検出する。さらに、以下の処理において、駐車支援装置100は駐車モード選択操作に基づいて駐車モードの選択情報を取得する。
【0053】
本実施形態における駐車モードとは、図15に示すように、並列駐車モードと、縦列駐車モードと、斜め駐車モードとを含む。図15(a)に示すように、並列駐車では、自車両50と駐車車両(又は駐車スペース)51a、51bとのなす角度は略直角であり、自車両50を駐車する駐車目標スペース52は駐車車両51a、51bと並列する。図15(b)に示すように、縦列駐車では自車両50と駐車車両(又は駐車スペース)53a、53bとは略平行であり、自車両50を駐車する駐車目標スペース54は駐車車両53a、53bと縦列する。図15(c)に示すように、斜め駐車では自車両50と駐車車両55a、55bが所定の角度をなし、自車両50を駐車する駐車目標スペース56は駐車車両55a、55bと斜めに並列する。図15(a)〜図15(c)に示す駐車モードには、駐車目標スペースが自車両に対して右側に存在する場合と左側に存在する場合とがそれぞれある。
【0054】
駐車モードの選択操作が行われる際に、駐車支援装置100は、ステアリング500の操作を補助する入力補助情報を作成し、ディスプレイ7に提示する。特に限定されないが、本実施形態の駐車支援装置100は、自車両に搭載されたカメラ6a〜6d(図4参照)の撮像画像に基づく自車両周囲の俯瞰画像と駐車スペースとを示す入力補助情報と、自車両を駐車目標スペースへ誘導する際に撮像された自車両周囲の監視映像とをディスプレイ7に提示する。
【0055】
図16は、ディスプレイ7に出力される、自車両周囲の俯瞰画像(トップビュー)を含む入力補助情報31と自車両周囲の監視映像(ノーマルビュー)32との表示例を示す図である。入力補助情報31は駐車スペース33を含む。図16に示すように、図4の仮想視点20に視点変換された俯瞰画像(トップビュー)31をディスプレイ7の画面の左側に表示し、カメラ6a〜6dで撮像された監視画像(ノーマルビュー)32を画面の右側に表示している。
【0056】
ディスプレイ7の画面の左側に表示した入力補助情報31は、生成された自車両周囲の俯瞰画像(トップビュー)に各駐車モードを示す画像を重畳させて表示している。ここで行われる画像の重畳処理はコンピュータグラフィクスのスーパーインポーズの手法を用いて行うことができる。後に詳述するが、駐車モードの選択入力を補助するために、同図に示す入力補助情報31をステアリング500の動きに応じて変化させることができる。
【0057】
駐車支援機能の起動後、ドライバが駐車支援システム1000に対するステアリング500の操舵を開始する。ステップS602では、駐車支援装置100は、取得した操舵方向及び操舵角に基づいて、ドライバが行うステアリング500の操舵の中からステアリングが右方向又は左方向に操舵された後に中立位置に戻される操作を駐車モード選択操作として検出する。なお、駐車モードの選択を行う際においては、ステアリング500が略中立状態から操舵されると仮定する。
【0058】
ステップS603以降、駐車モード選択操作の内容に基づいて駐車モードの選択情報を特定する。ステアリング500の駐車モード選択操作の内容と駐車モードの内容とは予め対応づけられて、ROM12に記憶されている。
【0059】
図17は、ステアリング500の操作内容(駐車モード選択操作の内容)と、駐車モードの内容とを対応づけた対応情報Tの一例を示す図である。図17に示すように、対応情報Tにおいて、ステアリング500の操舵方向(右側又は左側)と、ステアリング500の操舵角(θに基づく操舵角の値域)とが予め対応づけられている。本実施形態の対応情報Tにおいて、θは0度<θ1<θ2<θ3<θ4の関係を有する。なお、θ1〜θ4の値は特に限定されず、任意に設定することができる。また、θ1〜θ2、θ2〜θ3、θ3〜θ4の値域の幅は均一でなくてもよい。
【0060】
また、本実施形態においては、ステアリング500の操舵角が、このステアリング500の中立位置に近い側から順番に駐車頻度の高い駐車モードが対応づけられている。具体的に、中立位置を基準(0度)とする最も小さい角度(θ1以上θ2未満)と対応づけられた左右の並列駐車は、日本国で駐車される際に選択される確率が最も高い駐車頻度の高い駐車モードである。
【0061】
このように、駐車頻度の高い駐車モードを中立位置から近い角度に対応づけることにより、小さい操作領域で利用頻度の高い並列駐車の駐車パターンを選択することができる。この結果、操作負荷の少ない駐車支援装置100を提供することができる。
【0062】
駐車頻度の高い駐車モードは各国、各地域又は各経済領域において異なるので、国、地域又は経済領域ごとに対応情報Tを定義することが好ましい。たとえば、欧州においては、統計的に並列駐車を行うよりも縦列駐車を行う頻度が高い。このため、欧州において販売する駐車支援装置100の対応情報Tにおいては、中立位置を基準(0度)とする最も小さい角度(θ1以上θ2未満)と左右の縦列駐車を対応づけることが好ましい。これにより、欧州において、ステアリング500を大きく動かさなくても利用頻度の高い縦列駐車の駐車パターンを選択できる駐車支援装置100を提供できる。
【0063】
以下、具体的な駐車モードの選択処理を説明する。ステップS603において、制御装置10は、ステアリング500が左側に操舵されたか否かを操舵方向センサ520から取得した操舵方向に基づいて判断する。制御装置10は、ステアリング500が左側に操舵された場合にはステップS610へ進み、右側へ操舵された場合にはステップS620へ進む。
【0064】
以下に説明するステップS603〜S617に示すように、左側にステアリング500を回転させたときには左側の駐車モードが選択され、右側にステアリング500を回転させたときには右側の駐車モードが選択される。
【0065】
まず、ステアリング500が左側へ操舵された場合の処理を説明する。ステップS610ではステアリング500の操舵角が30度以上であるか否かが判定され、30度未満の場合にはステップS602へ戻り、30度以上の場合にはステップS611へ進む。
【0066】
所定のステアリング500の操舵角の各値域に各駐車モードが対応づけられているので、ドライバが操作したステアリング500の操舵角が所定の操舵角域に含まれる場合には、その所定の操舵角域に対応した駐車モードをドライバが選択した駐車モードとして特定することができる。
【0067】
ここで、ステップS610〜S617の処理においては、ステアリング500の操舵角に応じた入力補助情報31(図16参照)がディスプレイ7の表示領域の左側に提示される。具体的なステアリング500の操舵角に応じた入力補助情報31の各例を図18に示す。
【0068】
ステップS611ではステアリング500の操舵角が60度以上であるか否かが判定され、60度未満の場合、即ちステアリング500の操舵角が30度以上60度未満である場合にはステップS617へ進み、ドライバが左側の並列駐車を選択していると判断する。この場合において、駐車支援装置100はドライバのステアリング操作に対応する駐車モードの選択候補が左側の並列駐車であることを知らせるため、図18に示す入力補助情報31L1をディスプレイ7に表示する。
【0069】
同様に、ステアリング500の操舵角が60度以上90度未満である場合にはステップS616に進み、ドライバが左側の斜め駐車を選択していると判断する。この場合において、駐車支援装置100はドライバのステアリング操作に対応する駐車モードの選択候補が左側の斜め駐車であることを知らせるため、図18に示す入力補助情報31L2をディスプレイ7に表示する。
【0070】
さらに、ステアリング500の操舵角が90度以上120度未満である場合にはステップS615に進み、ドライバが左側の縦列駐車を選択していると判断する。この場合において、駐車支援装置100はドライバのステアリング操作に対応する駐車モードの選択候補が左側の縦列駐車であることを知らせるため、図8に示す入力補助情報31L3をディスプレイ7に表示する。尚、ステアリング500の操舵角が120度以上になった場合にはステップS614に進んで駐車モードの選択をキャンセルしたと判断して駐車モードの選択処理を終了する。
【0071】
一方、ステップS603においてステアリング500が右側に操舵された場合には、ステップS620へ進み、ステップS620からステップS627において左側に操舵された場合と同様の処理が行われる。ステップS627においては、図18に示す入力補助情報31R1をディスプレイ7に表示し、ステップS626においては、図18に示す入力補助情報31R2をディスプレイ7に表示し、ステップS625においては、図18に示す入力補助情報31R3をディスプレイ7に表示する。
【0072】
なお、図19は、縦列駐車の駐車モードが左右30度〜60度の操舵角と対応づけられ、並列駐車の駐車モードが左右60度〜90度の操舵角と対応づけられ、斜め駐車の駐車モードが左右90度〜120度の操舵角と対応づけられた場合の入力補助情報31R1´〜31R3´、31L1´〜31L3´の例を示す図である。
【0073】
続いて、駐車モードが選択され、ステップS630においてステアリング500が中立位置(初期位置)に戻された場合にはステップS631に進み、選択された駐車モードの選択処理を完了する。本実施形態の駐車支援装置100は、ステップS631で選択が完了した駐車モードの選択情報に基づく駐車支援を行うため、図2のステップ103へ移行する。
【0074】
本実施形態の駐車支援装置100は、ステアリング500の経時的な操舵角の変化に基づいてステアリング500が中立位置(初期位置)に戻されたことを認識する。図20は、駐車モードの選択操作時におけるステアリング500の操舵角の時間変化を示す図である。横軸はステアリング500の回転(操舵)が開始してからの時間であり、縦軸はステアリング500の操舵角である。また、中立位置からステアリング500を左側に操舵したときを正の回転、右側に操舵したときを負の回転とした。図20に示すように、ステアリング500を左方向に70度まで回転させてから中立位置に戻しているので、図20に示した場合を例にすると、初期表示される入力補助情報31が同31L1、31L2に変化し、入力補助情報31L2のときに中立位置に戻されて駐車モードの選択が完了する。本実施形態では、中立位置に戻したときに駐車モードの選択が完了するように設定したが、ステアリング500を逆方向に回転操作したタイミング、すなわち図20のポイントPのタイミングで駐車モードの選択が完了したと判断してもよい。
【0075】
また、本実施形態の駐車支援装置100は、駐車モードの選択操作時においてステアリング500を中立位置に戻すことを促すための画面表示または音声案内を行うことができる。図21は、左側の並列駐車モードを選択した場合の入力補助情報31及び音声案内の一例を示したものである。図21に示すよう右側に回転するステアリング500のアイコン31aを入力補助情報31の一部としてディスプレイ7に表示し、ステアリングを右側に回転することをドライバに示唆することができる。またステアリングを右に回転操作することを促すテキスト表示31bを入力補助情報31の一部としてディスプレイ7に表示し、ステアリングを右側に回転することをドライバに示唆することができる。または、ステアリングを右に回転操作することを促すテキスト31cを入力補助情報31の一部として、車載のスピーカーを介し音声出力し、ステアリングを右側に回転することをドライバに示唆することができる。
【0076】
さらに本実施形態の駐車支援装置100は、完了した駐車モードの選択操作に基づく駐車モードを認識した場合には、その旨をドライバに知らせるためにチャイムを鳴らす、又はディスプレイ7に「駐車モードが選択されました」などの表示をすることができる。これにより、ドライバは、自身の操作により駐車モードの選択が完了したことを認識することができる。
【0077】
以下に、上述した駐車モードの選択処理におけるドライバの操作の流れを説明する。1駐車モードの選択処理が開始されると、ディスプレイ7に入力補助情報31が表示される。ドライバは、入力補助情報31を見ながら図16に示すように駐車目標スペースの横に自車両を停車させ、ステアリング500を操舵して駐車目標スペースの駐車モードを選択する。ドライバは、ディスプレイ7に表示された入力補助情報31を見ながら駐車モードの選択操作を実行する。ドライバがステアリング500を右側に操舵して30度以上になったときには入力補助情報31R1に示すように右側の並列駐車を表現する画像が表示され、ステアリング500を右側に操舵して60度以上になったときには入力補助情報31R2に示すように右側の斜め駐車を表現する画像が表示され、右側に操舵して90度以上になったときには入力補助情報31R3に示すように右側の縦列駐車を表現する画像が表示される。このようにディスプレイ7に順次切り替えて表示される入力補助情報31を確認しながら、ドライバは目的とする駐車モードと画面に表示された入力補助情報31が一致したところでステアリング500を中立方向(基準位置)へ戻す。ステアリング500の回転操作後に、ステアリング500が中立位置に戻される回転操作がされたときに、駐車モードの選択操作が完了する。駐車支援装置100は、ステアリング500が中立位置に戻される回転操作がされる前に回転操作がされたステアリング500の操舵角に応じた駐車モードが選択されたことを認識する。
【0078】
なお、ステアリング500を回転し過ぎて、ドライバが希望する駐車モードではない駐車モードに対応する操舵領域まで操舵してしまった場合には、中立位置に戻した後に再度ステアリング500を回転させることにより、先の駐車モード選択操作をキャンセルし、後の駐車モード選択操作に基づいて駐車モードの選択情報を取得することができる。
【0079】
ステアリング500が左側に操舵された場合も同様であり、図19に示す入力補助情報31R1´〜31R3´、31L1´〜31L3´がディスプレイ7に表示される場合も同様である。なお、駐車モードの選択が完了したことを認識する情報としては、上述したステアリング500が中立位置に戻されたことに限定されず、駐車支援切替スイッチ620への入力信号を駐車モードの選択が完了したことを認識する情報として定義することもできる。
【0080】
本実施形態の駐車モードの選択処理によれば、自車両を基準とする駐車目標スペースの存在する方向(選択される駐車モードの左右方向)とステアリング500の回転方向とが一致するので、ドライバは駐車モードを選択する際に自車両を駐車したい方向(右又は左)にステアリング500を回転させればよいため、右側又は左側の駐車モードを直感的に選択することができる。特に、運転に不慣れなドライバは、自車両を右側に駐車させたい場合には右側にステアリング500を回転させるのが自然であるので、駐車させたい駐車スペースの方にステアリング500を動かすことにより駐車モードを選択できる本実施形態の選択操作を理解しやすい。この結果、運転に不慣れなドライバであっても、左右を間違えることなく目的の駐車モードを選択することができる。
【0081】
駐車支援装置100は、受信(取得)した駐車目標スペースの位置及び駐車モードの選択情報に基づいて、自車両の駐車モードの具体的な内容を決定する。特に限定されないが、駐車支援装置100は、駐車目標スペースの位置及び駐車モードの選択情報を取得した後に、ドライバがブレーキペダルの踏圧を緩め、所定のブレーキ踏圧が解除された場合に、取得した駐車目標スペースの位置及び駐車モードの選択情報に基づく駐車支援処理の実行を決定する。そして、駐車支援装置100は、決定した駐車モードの選択情報に応じた駐車モードで自車両を駐車目標スペースに誘導する。
【0082】
再び図2に戻り、駐車支援装置100の車両誘導機能について説明する。続くステップS103において、駐車支援装置100は、駐車支援コントロールユニットを起動して、自車両の位置と駐車目標スペースの位置との位置関係に基づいて駐車経路を計算する。この駐車経路は並列駐車、縦列駐車、斜め駐車のそれぞれに対応した経路を1種類ずつメモリ(ROM)に記憶しておき、ステップS101で選択された駐車モードに対応した経路を読み込み、駐車支援処理開始時における自車両の位置と駐車目標スペースの位置との位置関係に基づいて駐車経路を計算する。特に限定されないが、駐車支援コントロールユニットは、切り返し位置までの曲線と切り返し位置から駐車目標スペースまでの曲線とを、駐車経路として算出する。
【0083】
さらに、ステップS104において、駐車支援装置100は、算出した駐車経路に基づいて自車両を駐車目標スペースへ誘導する。自車両を誘導する際に、左側並列駐車の場合は、図22に示すように自車両前方の切り返し位置ST1と、駐車目標スペースPK3とを示す誘導情報36を提示し、左側縦列駐車の場合は、図23に示すように自車両前方の切り返し位置ST2と、駐車目標スペースPK4とを示す誘導情報36を提示して、自車両の動きをドライバに示すことができる。
【0084】
本実施形態の駐車支援装置100は、自車両が駐車経路に沿って移動するように、ステアリング500の操舵を制御する。駐車支援装置100は、計算された駐車経路に自車両の移動軌跡が一致するようにステアリング500の操舵角センサ510と操舵方向センサ520との出力値をフィードバックしながらEPSモータなどの車両の駆動系400への指令信号を演算し、この指令信号を駆動系400又は駆動系400を制御する車両コントローラ200へ送出する。もちろん、算出した駐車経路をディスプレイ7などに表示し、自車両の移動軌跡が駐車経路と一致するようにステアリング500の操舵量、ステアリング500転舵のタイミング、ブレーキ又はアクセルの操作タイミングを指示することにより運転支援を行うこともできる。
【0085】
自車両が駐車目標スペースに駐車すると、本実施形態に係る駐車支援装置100による駐車支援処理は終了する。
【0086】
以上のように構成され、動作する本実施形態の駐車支援装置100は、以下の効果を奏する。
【0087】
本発明の本実施形態の駐車支援装置100によれば、自車両に対する仮駐車設定枠の位置を変更することができるので、駐車場の一番奥まった場所のように、壁等の障害物によって車両の動きが制限されるような駐車スペースであっても、駐車目標スペースとして設定することができる。具体的に、駐車場の一番奥まった場所に設けられ、周囲の二面が壁に囲まれているような駐車スペースであっても駐車目標スペースとして設定することができる。この結果、駐車支援の機能を利用できる機会を増やすことができ、装置の利便性を向上させることができる。本発明の駐車支援方法によっても同様の動作により、同様の効果を奏する。
【0088】
自車両を移動させた際における、自車両の後方端から障害物までの距離が所定距離未満である場合、つまり、駐車場の設計態様などの影響を受けて仮駐車設定枠を目的とする駐車スペースに駐車出来ない場合に、仮駐車設定枠の自車両に対する位置を含む設定指令を受け付けるので、駐車支援の機能を利用できる機会を増やすことができ、装置の利便性を向上させることができる。
【0089】
自車両に対する位置が異なる仮駐車設定枠の候補をディスプレイ7に表示させて、仮駐車設定枠の候補から一つの仮駐車設定枠を選択することにより、自車両に対する仮駐車設定枠の位置を変更するので、仮駐車設定枠の位置変更操作を容易にすることができ、装置の利便性を向上させることができる。
【0090】
並列駐車及び縦列駐車を含む複数の駐車モードからいずれか一つの駐車モードを選択する駐車モードの選択情報を取得し、選択された駐車モードで自車両を誘導するので、実際の状況に応じて要求される駐車操作に即した支援を行うことができる。
【0091】
本発明の本実施形態の駐車モード選択装置10によれば、ステアリング500が右方向又は左方向に操舵された後に中立位置に戻される駐車モード選択操作が検出された場合には、操舵方向と一致する方向であって、操舵角に対応づけられた駐車モードの選択情報を受け付けるので、駐車モードの選択の操作を分かりやすいものとすることができる。本実施形態の駐車支援装置100によれば、駐車モードを選択する際のステアリング500の操作方向を、自車両を基準とした目的の駐車スペースの位置と一致させるので、ドライバは自車両と駐車しようとする駐車スペースとの位置関係から駐車モードを選択する際のステアリング500の操作方向を直感的に把握することができるため、駐車モードの選択操作をドライバに分かりやすいものとすることができる。この結果、運転に不慣れなドライバであっても目的の駐車モードを正確に選択することができる。
【0092】
なお、以上説明したすべての実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。
【0093】
例えば、本実施形態では、駐車モード選択手段としてステアリング500を例にして説明するが、駐車モードの選択情報の入力には、ディスプレイ7のタッチパネルを用いることができる。また、スイッチの入力信号に各駐車モードを割りつけて、スイッチの入力操作に基づいて駐車モードを判断することができる。
【0094】
本明細書では、本発明に係る駐車支援装置の一態様として車両に搭載された駐車支援装置100を備える駐車支援システム1000を例にして説明するが、本発明はこれに限定されるものではない。
【0095】
本明細書では、本発明に係る駐車支援装置の一態様として、設定情報提示機能と、設定指令取得機能と、駐車目標スペース設定機能と、駐車モード選択機能と、車両誘導機能とを実行する制御装置10を備える駐車支援装置100を説明するがこれに限定されるものではない。また、本実施形態の駐車支援装置100は、駐車モード選択機能を実行するために、操舵方向取得機能と、操舵角取得機能と、選択操作検出機能と、駐車モード取得機能と、を備えることができるが、これに限定されるものではない。
【符号の説明】
【0096】
1000…駐車支援システム
100…駐車支援装置
10…制御装置
11…CPU,12…ROM,13…RAM
2…画像処理装置
6a〜6d…カメラ
7…ディスプレイ
200…車両コントローラ
400…駆動系
500…ステアリング
510…操舵角センサ
520…操舵方向センサ
【特許請求の範囲】
【請求項1】
自車両の周囲の撮像画像に基づいて生成された複数の駐車スペースを含む俯瞰画像に、前記自車両に対して所定位置に配置された仮駐車設定枠が重畳された設定情報を生成し、ディスプレイに提示する設定情報提示手段と、
前記仮駐車設定枠の自車両に対する位置を変更し、当該変更された仮駐車設定枠の位置を含む設定指令を受け付ける設定指令取得手段と、
前記設定指令に含まれる前記仮駐車設定枠の位置に対応する駐車スペースを、前記自車両を駐車する駐車目標スペースとして設定する駐車目標スペース設定手段と、を備える駐車支援装置。
【請求項2】
前記設定指令取得手段は、前記提示された設定情報に含まれる仮駐車設定枠を一の駐車スペース又はその近傍を指示する際における、前記自車両の後方端から障害物までの距離が所定距離未満である場合に、前記仮駐車設定枠の自車両に対する位置を変更し、当該変更された仮駐車設定枠の位置を含む設定指令を受け付けることを特徴とする請求項1に記載の駐車支援装置。
【請求項3】
前記設定情報提示手段は、前記自車両に対する位置が異なる仮駐車設定枠の候補を前記ディスプレイに表示し、
前記設定指令取得手段は、前記仮駐車設定枠の候補から一つの仮駐車設定枠を選択することにより、前記自車両に対する仮駐車設定枠の位置を変更する請求項1又は2に記載の駐車支援装置。
【請求項4】
少なくとも並列駐車及び縦列駐車を含む複数の駐車モードからいずれか一つの駐車モードを選択する駐車モードの選択情報を取得する駐車モード選択手段をさらに有し、
前記車両誘導手段は、駐車目標スペース設定手段により設定された駐車目標スペースに、前記駐車モード選択手段により選択された駐車モードで前記自車両の駐車を支援する請求項1〜3の何れか一項に記載の駐車支援装置。
【請求項5】
前記駐車モード選択手段は、
前記自車両のステアリングの操舵方向を取得する操舵方向取得手段と、
前記ステアリングの操舵角を取得する操舵角取得手段と、
前記取得した操舵方向及び操舵角に基づいて、前記ステアリングが右方向又は左方向に操舵された後に中立位置に戻される操作を、駐車モード選択操作として検出する選択操作検出手段と、
前記駐車モード選択操作が検出された場合には、前記駐車モード選択操作における操舵方向と一致する方向であって、前記操舵角に対応づけられた駐車モードの選択情報を取得する駐車モード取得手段と、を備えることを特徴とする請求項4に記載の駐車支援装置。
【請求項6】
自車両の周囲の撮像画像に基づいて生成された複数の駐車スペースを含む俯瞰画像に、前記自車両に対する位置が変更可能な仮駐車設定枠が重畳された設定情報を生成するステップと、
前記設定情報において、前記自車両に対する位置が設定された前記仮駐車設定枠に対応する駐車スペースを、前記自車両を駐車する駐車目標スペースとして設定するステップと、を有する駐車支援方法。
【請求項1】
自車両の周囲の撮像画像に基づいて生成された複数の駐車スペースを含む俯瞰画像に、前記自車両に対して所定位置に配置された仮駐車設定枠が重畳された設定情報を生成し、ディスプレイに提示する設定情報提示手段と、
前記仮駐車設定枠の自車両に対する位置を変更し、当該変更された仮駐車設定枠の位置を含む設定指令を受け付ける設定指令取得手段と、
前記設定指令に含まれる前記仮駐車設定枠の位置に対応する駐車スペースを、前記自車両を駐車する駐車目標スペースとして設定する駐車目標スペース設定手段と、を備える駐車支援装置。
【請求項2】
前記設定指令取得手段は、前記提示された設定情報に含まれる仮駐車設定枠を一の駐車スペース又はその近傍を指示する際における、前記自車両の後方端から障害物までの距離が所定距離未満である場合に、前記仮駐車設定枠の自車両に対する位置を変更し、当該変更された仮駐車設定枠の位置を含む設定指令を受け付けることを特徴とする請求項1に記載の駐車支援装置。
【請求項3】
前記設定情報提示手段は、前記自車両に対する位置が異なる仮駐車設定枠の候補を前記ディスプレイに表示し、
前記設定指令取得手段は、前記仮駐車設定枠の候補から一つの仮駐車設定枠を選択することにより、前記自車両に対する仮駐車設定枠の位置を変更する請求項1又は2に記載の駐車支援装置。
【請求項4】
少なくとも並列駐車及び縦列駐車を含む複数の駐車モードからいずれか一つの駐車モードを選択する駐車モードの選択情報を取得する駐車モード選択手段をさらに有し、
前記車両誘導手段は、駐車目標スペース設定手段により設定された駐車目標スペースに、前記駐車モード選択手段により選択された駐車モードで前記自車両の駐車を支援する請求項1〜3の何れか一項に記載の駐車支援装置。
【請求項5】
前記駐車モード選択手段は、
前記自車両のステアリングの操舵方向を取得する操舵方向取得手段と、
前記ステアリングの操舵角を取得する操舵角取得手段と、
前記取得した操舵方向及び操舵角に基づいて、前記ステアリングが右方向又は左方向に操舵された後に中立位置に戻される操作を、駐車モード選択操作として検出する選択操作検出手段と、
前記駐車モード選択操作が検出された場合には、前記駐車モード選択操作における操舵方向と一致する方向であって、前記操舵角に対応づけられた駐車モードの選択情報を取得する駐車モード取得手段と、を備えることを特徴とする請求項4に記載の駐車支援装置。
【請求項6】
自車両の周囲の撮像画像に基づいて生成された複数の駐車スペースを含む俯瞰画像に、前記自車両に対する位置が変更可能な仮駐車設定枠が重畳された設定情報を生成するステップと、
前記設定情報において、前記自車両に対する位置が設定された前記仮駐車設定枠に対応する駐車スペースを、前記自車両を駐車する駐車目標スペースとして設定するステップと、を有する駐車支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2013−35327(P2013−35327A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−170733(P2011−170733)
【出願日】平成23年8月4日(2011.8.4)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月4日(2011.8.4)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]