
駐車支援装置
【課題】運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供すること。
【解決手段】本発明による駐車支援装置1は、車両の周辺の駐車空間を検出する検出手段bと、駐車空間に基づいて初期停車位置を決定し初期停車位置への案内を行う案内手段jと、車両の位置を検出する位置検出手段aと、位置が所定の領域に存在する場合に検出手段bに駐車空間を検出することを開始させる開始処理を行う開始手段dを含むことを特徴とする。
【解決手段】本発明による駐車支援装置1は、車両の周辺の駐車空間を検出する検出手段bと、駐車空間に基づいて初期停車位置を決定し初期停車位置への案内を行う案内手段jと、車両の位置を検出する位置検出手段aと、位置が所定の領域に存在する場合に検出手段bに駐車空間を検出することを開始させる開始処理を行う開始手段dを含むことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置に関する。
【背景技術】
【0002】
従来、車両のシフト位置がリバースに操作される等の条件が成立した場合に、現在の車両位置と自動的又は手動により設定された目標駐車位置との位置関係に基づいて、車両の目標経路を演算しモニタに表示する、駐車支援装置が知られている。さらに最近では、駐車空間の検出及び認識に基づいて自動的に設定された目標駐車位置へ駐車するにあたっての後退運転の始点となる初期停車位置を決定し、車両の現在位置から初期停車位置までの経路を自動操舵等の車両制御や初期位置案内画像等の表示により案内する、所謂初期停車位置案内制御を実行する例えば特許文献1に記載があるような駐車支援装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−190463号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したような駐車支援装置においては、初期停車位置案内制御を選択的に起動して初期停車位置案内機能を選択する機能開始スイッチを有しているが、この機能開始スイッチにオンに基づいて常時起動していると、運転者が駐車する意思を有していないにも係わらず、車両の周辺に位置する駐車空間が検出され認識されて目標駐車位置が自動的に決定され、自動的に決定された初期停車位置への案内が自動的に行われてしまうことを招き、運転者が煩わしさを感じて駐車支援装置としての商品性の低下を招く。
【0005】
また、運転者が真に駐車する意思を有していて、運転者が初期停車位置案内制御を積極的に利用する意思を有している場合には、運転者が所望する駐車空間に接近したタイミングで、機能開始スイッチをオンとする必要が生じるため、このタイミングにおいても、運転者が煩わしさを感じて駐車支援装置としての商品性の低下を招く。
【0006】
本発明は、上記問題に鑑み、運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の問題を解決するため、本発明による駐車支援装置は、
車両の周辺の駐車空間を検出する検出手段と、
前記駐車空間に基づいて初期停車位置を決定し前記初期停車位置への案内を行う案内手段と、
前記車両の位置を検出する位置検出手段と、
前記位置が所定の領域に存在する場合に前記検出手段に前記駐車空間を検出することを開始させる開始処理を行う開始手段を含むことを特徴とする。
【0008】
前記駐車支援装置によれば、前記車両が前記所定の領域内にあって運転者が真に駐車する意思を有している場合に、運転者が所望する駐車空間に接近したタイミングで、前記検出手段が前記駐車空間を検出することを前記開始手段により開始して、これに伴って認識された前記駐車空間に基づいて、前記案内手段が前記初期停車位置を決定し前記初期停車位置への案内を行うこととなる。
【0009】
このため、運転者に前記案内手段の案内の開始すなわち初期停車位置案内機能の開始の選択を別途のスイッチ操作に基づいて選択させることを伴うことなく、初期停車位置への案内を行うことができ、運転者が煩わしさを感じることを回避することができる。これにより、前記駐車支援装置の商品性を高めることができる。
【0010】
また、前記駐車支援装置においては、前記案内手段に基づく前記初期停車位置案内機能を必要に応じて選択的に起動することができるので、常時起動することに伴って、運転者が駐車する意思を有していない場合に、車両の周辺に位置する駐車空間が検出され認識され目標駐車位置が自動的に設定され、自動的に決定された初期停車位置への案内が自動的に行われてしまうことを防止することができる。これにより、運転者が煩わしさを感じて駐車支援装置としての商品性の低下を招くことを防止することができる。
【0011】
なお、前記駐車支援装置において、
前記車両の速度を検出する速度検出手段を含み、
前記所定の領域が商業地域又は住宅密集地であり、前記速度が所定値以下である場合に、前記開始手段が前記開始処理を行うことが好ましい。
【0012】
前記駐車支援装置によれば、前記車両が商業地域又は住宅密集地において走行している場合の前記検出手段の前記検出の開始のトリガを適切に設定することができる。
【0013】
あるいは、前記駐車支援装置において、
前記所定の領域が駐車場である場合に、前記開始手段が前記開始処理を行うこととしてもよい。
【0014】
前記駐車支援装置によれば、前記車両が前記駐車場近傍を走行している場合の前記検出手段の前記検出の開始のトリガを適切に設定することができる。
【発明の効果】
【0015】
本発明によれば、運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明に係る駐車支援装置の一実施形態を示すブロック図である。
【図2】本発明に係る駐車支援装置の一実施形態の制御内容を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について、添付図面を参照しながら説明する。
【実施例】
【0018】
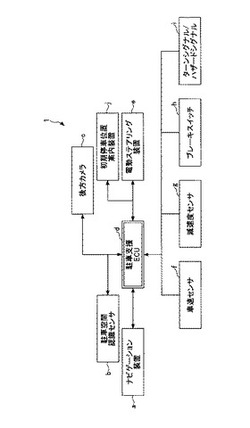
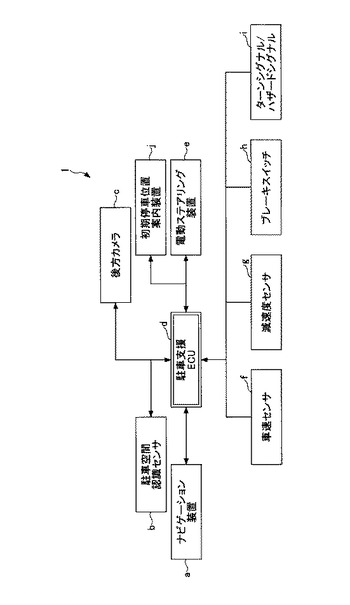
図1は、本実施例の駐車支援装置1の一実施形態を示すブロック図である。
【0019】
図1に示すように、駐車支援装置1は、ナビゲーション装置aと、駐車空間認識センサbと、後方カメラcと、駐車支援ECUd(Electronic Control Unit)と、電動ステアリング装置eと、車速センサfと、減速度センサgと、ブレーキスイッチhと、ターンシグナル/ハザードシグナルiと、初期停車位置案内装置jとを含む。
【0020】
ナビゲーション装置aと、駐車支援ECUdと、初期停車位置案内装置jと、電動ステアリング装置eは、CAN(Controller Area Network)等の通信規格を介して相互に接続される。
【0021】
駐車支援ECUdは、例えばCPU、ROM、RAMおよびそれらを接続するデータバスと入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが所定の処理を行うものであり、以下に述べる処理を行う開始手段を構成するものである。
【0022】
駐車空間認識センサbは、例えば車両の適宜の箇所に設けられて車両の周辺に位置する駐車空間を検出して認識する超音波センサ又は画像センサであって、認識結果を駐車支援ECUdに出力するものであって、検出手段を構成する。
【0023】
後方カメラcは、例えばCCDカメラあるいはCMOSカメラであり、例えば車両室内のルーフ下面に、後方に光軸が合致するように配設され、車両の後側方の路面及び駐車場の駐車空間を車両の側方を含んで広範囲に撮像して、撮像された画像データを駐車支援ECUdに検出結果として出力するものである。
【0024】
車速センサfは、車両の速度を検出する速度検出手段を構成し、車速センサfが検出した速度は、駐車支援ECUdに送信される。
【0025】
減速度センサgは、車両の減速度を検出するものであって、検出した減速度は駐車支援ECUdに送信される。
【0026】
ブレーキスイッチhは、図示しないブレーキペダルに設けられた例えばリミットスイッチであり、運転者によるブレーキペダルの踏み込みの有無すなわちブレーキ作動の有無を検出して、検出結果は駐車支援ECUdに送信される。
【0027】
ターンシグナル/ハザードシグナルiは、右左折用のターンシグナル、警告用のハザードシグナルのいずれかがオンされているか否かを検出する例えばボディECUであって、検出結果を駐車支援ECUdに送信するものである。
【0028】
電動ステアリング装置eは、例えばEPSECUとEPSにより構成され、EPSECUは、CPU、ROM、RAMおよびそれらを相互に接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、以下に述べる処理を行う。
【0029】
EPSECUは、EPS内部のここでは図示しないステアリングシャフトに設けられたトーションバーを用いたトルクセンサにより、運転者のステアリングホイールの操作力を検出しこの操作力に応じて、又は、駐車支援ECUdの操舵角指令に基づいて、EPSの図示しない電動モータを駆動して操舵力を発生させて車輪を操舵して、運転者の操作力のアシスト又は駐車運転時の支援を行うものである。
【0030】
ナビゲーション装置aは、例えばカーナビゲーションECUであって、CPU、ROM、RAMおよびそれらを相互に接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが所定の処理を行うものであり、以下に述べる処理を行うものである。
【0031】
ナビゲーション装置aは、図示しないGPSアンテナが受信した、地球上空に打ち上げられた複数の衛星からの電波をもとに、例えば三角測量の原理で車両の位置の経度と緯度を測定して車両の位置を検出する。
【0032】
これとともに、ナビゲーション装置aは、図示しないヨーレートセンサの出力に基づいて、車両のヨーレートを検出し、さらに、図示しないEPS内部に備えられたステアリングセンサの出力に基づいて電動ステアリング装置eが検出した操舵角を、CANを介して検出して自律航法により車両の位置を演算して、GPSアンテナの複数の衛星からの電波の受信による三角測量の原理による車両の位置の検出ができない場合の車両の位置情報を補完する。つまり、ナビゲーション装置aは車両の位置を検出する位置検出手段を構成する。
【0033】
さらに、ナビゲーション装置aは、図示しないタッチパネルにより入力された目的地と現在の車両の位置から、目的地に至る推奨経路を図示しないデータベースが含む探索用の地図情報からダイクストラ法等の適宜の手段により探索する。ナビゲーション装置aは、探索された推奨経路と、データベースが含む表示用の地図情報とを重ね合わせて図示しないディスプレイにより表示する。
【0034】
さらに、ナビゲーション装置aは、検出された車両の位置が前述したデータベースが含む位置情報又は属性との参照に基づいて所定の領域(商業地域又は住宅密集地、駐車場)に存在するか否かを判定して判定結果を、CANを介して駐車支援ECUdに送信するとともに、CANを介して駐車支援ECUdに送信する。
【0035】
駐車支援ECUdは、ナビゲーション装置aが送信した車両の位置が駐車場に存在するか否かの判定結果を取得して、車両の位置が駐車場に存在する場合には、駐車空間認識センサbによる駐車空間の検出を開始させる開始処理を行う。
【0036】
同様に、駐車支援ECUdは、ナビゲーション装置aが送信した車両の位置が商業地域又は住宅密集地に存在するか否かの判定結果と、車速センサfから車両の速度を取得して、車両の位置が商業地域又は住宅密集地に存在して、車両の速度が一定車速以下である場合には、駐車空間認識センサbによる駐車空間の検出を開始させる開始処理を行う。
【0037】
車両の位置が駐車場に存在する場合に、駐車空間認識センサbによる駐車空間の検出が開始されると、初期停車位置案内装置jは検出され認識された駐車空間に基づいて初期停車位置を決定し、現在の車両の位置から初期停車位置への案内を図示しないディスプレイによる画像表示又はスピーカによる音声により行う。
【0038】
車両の位置が商業地域又は住宅密集地に存在する場合には、駐車空間認識センサbによる駐車空間の検出が開始された後、駐車支援ECUdは、ブレーキ作動中であるか否か、直近の減速度の履歴が一定値以上であるか否かと、ターンシグナル又はハザードシグナルがオンであるか否かを判定して、これらが全て肯定である場合に運転者に駐車の意思があるとみなして、初期停車位置案内装置jは検出され認識された駐車空間に基づいて初期停車位置を決定し、現在の車両の位置から初期停車位置への案内を図示しないディスプレイによる画像表示又はスピーカによる音声により行う。
【0039】
車両が初期停車位置に停止して初期停車位置案内制御が終了した後は、駐車支援ECUdが駐車支援制御を開始して、後方カメラcの検出結果に基づいて、初期停車位置から目標駐車位置までの後退軌道を算出して、後退軌道を車両がトレースするように操舵角を演算して、操舵角の指令をステアリング装置eに対してCANを介して送信して、操舵角制御を行う。
【0040】
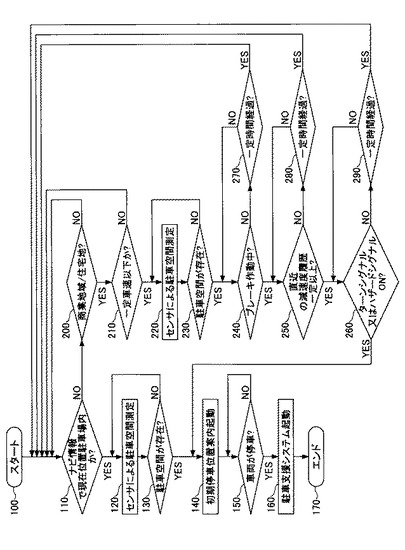
以下、本実施例の駐車支援装置1の制御内容すなわちアルゴリズムを、フローチャートを用いて詳細に説明する。図2は、本実施例の駐車支援装置1の制御内容を示すフローチャートである。
【0041】
図2に示すスタート100において、駐車支援装置1は制御を開始して、ステップ110において、駐車支援ECUdは、ナビゲーション装置aからの情報に基づいて、車両の現在の位置が駐車場内か否かを判定し、肯定であればステップ120にすすみ、否定であればステップ200にすすむ。
【0042】
ステップ120において、駐車支援ECUdは駐車空間認識センサbによる駐車空間の測定つまり検出を開始させ、ステップ130において、駐車支援ECUdは駐車空間が存在して認識したか否かを判定して、肯定であればステップ140にすすみ、否定であればステップ120の手前に戻る。
【0043】
ステップ140において、駐車支援ECUdは初期停車位置案内装置jに初期停車位置案内制御を起動させて、ステップ150において、駐車支援ECUdは、車両の速度から車両が初期停車位置に停車したか否かを判定し、肯定であればステップ160にすすみ、否定であれば、ステップ150の手前に戻る。ステップ160において、駐車支援ECUdは、初期停車位置から目標駐車位置までの後退軌道を算出して、後退軌道を車両がトレースするように操舵角を演算して、操舵角の指令をステアリング装置eに対してCANを介して送信して、操舵角制御を行う、一連の駐車支援システムを起動する。
【0044】
ステップ200において、駐車支援ECUdは車両の位置が商業地域又は住宅密集地に存在するか否かを判定し、肯定であればステップ210にすすみ、否定であれば、ステップ110の手前に戻る。
【0045】
ステップ210において、駐車支援ECUdは車両の速度が一定車速以下であるか否かを判定し、肯定である場合にはステップ220にすすみ、否定である場合には、ステップ110の手前に戻る。
【0046】
ステップ220において、駐車支援ECUdは駐車空間認識センサbによる車両の周辺の駐車空間の測定つまり検出を開始して、ステップ230にすすみ、ステップ230において駐車空間が存在して認識したか否かを判定して、肯定であれば、ステップ240にすすみ、否定であればステップ220の手前に戻る。
【0047】
ステップ240において、駐車支援ECUdは、ブレーキスイッチhからの検出結果に基づいて、ブレーキ作動中であるか否かを判定し、肯定であればステップ250にすすみ、否定であればステップ270にすすみ、ステップ270において、駐車支援ECUdはステップ240終了後から一定時間経過したか否かを判定して、肯定である場合には、ステップ110の手前に戻り、否定である場合にはステップ240の手前に戻る。
【0048】
ステップ250において、駐車支援ECUdは、減速度センサgからの検出結果に基づいて、直近の減速度履歴が一定値以上であるか否かを判定し、肯定であればステップ260にすすみ、否定であればステップ280にすすみ、ステップ280において、駐車支援ECUdはステップ250終了後から一定時間経過したか否かを判定して、肯定である場合には、ステップ110の手前に戻り、否定である場合にはステップ250の手前に戻る。
【0049】
ステップ260において、駐車支援ECUdは、ターンシグナル/ハザードシグナルiからの検出結果に基づいて、ターンシグナル又はハザードシグナルブレーキがオンであるか否かを判定し、肯定であればステップ140にすすみ、否定であればステップ290にすすみ、ステップ290において、駐車支援ECUdはステップ260終了後から一定時間経過したか否かを判定して、肯定である場合には、ステップ110の手前に戻り、否定である場合にはステップ260の手前に戻る。
【0050】
スタート100からエンド170までの処理は所定の周期で繰り返し実行される。
【0051】
以上述べた制御内容により実現される本実施例の駐車支援装置1によれば、以下のような作用効果を得ることができる。すなわち、本実施例の駐車支援装置1によれば、車両が駐車場あるいは商業地域又は住宅密集地により定義される所定の領域内にあって運転者が真に駐車する意思を有している場合において、運転者が所望する駐車空間に接近したタイミングで、駐車支援ECUdにより、駐車空間認識センサbに駐車空間を検出することを開始させることができる。この検出の開始に基づいて認識された駐車空間に基づいて、初期停車位置案内装置jが初期停車位置を決定し、初期停車位置への車両の移動を促す初期停車位置案内制御を車両の運転者に対して行うことが開始される。
【0052】
このように、初期停車位置案内制御を自動的に実行することができるため、運転者に初期停車位置案内制御の開始を別途のスイッチ操作に基づいて選択させることをなくすことができる。このため、運転中から駐車に亘る一連の操作において、運転者が煩わしさを感じることを回避することができる。これにより、本実施例の駐車支援装置1においては商品性を高めることができる。
【0053】
さらに、本実施例の駐車支援装置1においては、初期停車位置案内装置jに基づく初期停車位置案内機能を運転者が駐車の意思を有している場合においてのみ必要に応じて選択的に起動することができる。このため、駐車空間認識センサb及び初期停車位置案内装置jが常時起動されている状態が継続されることを無くすことができる。
【0054】
これにより、運転者が駐車する意思を有していない場合に、車両の周辺に位置する駐車空間が駐車空間認識センサbにより検出され認識されて、初期停車位置案内装置jにより目標駐車位置が自動的に設定され、自動的に決定された初期停車位置への案内が自動的に行われてしまうことを防止することができる。このため、本実施例の駐車支援装置1においては、運転者が煩わしさを感じることを回避して、商品性を高めることができる。
【0055】
また、本実施例の駐車支援装置1においては、車両の速度を検出する速度検出手段として車速センサfを含み、所定の領域が商業地域又は住宅密集地であり、速度が所定値つまり一定車速以下である場合に、駐車支援ECUdにより、駐車空間認識センサb及び初期停車位置案内装置jの開始処理を行っているので、さらに以下のような有利な作用効果を得ることができる。
【0056】
つまり、車両が商業地域又は住宅密集地において走行している場合において、駐車空間認識センサbの検出の開始のトリガとして、通常車両において取得している車速を用いることにより、より汎用性の高いトリガを適切に設定することができる。さらに、ブレーキ作動中であるか否かと、直近の減速度履歴が一定値以上であるか否かと、ターンシグナル又はハザードシグナルがオンであるか否かの判定要素を加えて、運転者の駐車の意思を確認しているので、より運転者の意思を尊重した、初期停車位置案内制御の開始を実現することができる。
【0057】
さらに、本実施例の駐車支援装置1においては、所定の領域が駐車場である場合に、駐車支援ECUdが初期停車位置案内制御の開始処理を行っているので、これも、車両が駐車場近傍を走行している場合の、初期停車位置案内制御の開始のトリガを適切に設定することができる。
【0058】
以上本発明の好ましい実施例について詳細に説明したが、本発明は上述した実施例に制限されることなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形および置換を加えることができる。
【0059】
例えば、本実施例の駐車支援装置1においては、初期停車位置案内制御の開始処理を駐車支援ECUdが行っているが、これを初期停車位置案内制御装置jが行うこととしてもよいし、初期停車位置案内制御装置jを駐車支援ECUdが含む処理ルーチンの一つとして設定してもよい。
【産業上の利用可能性】
【0060】
本発明は、駐車支援装置に関するものであり、比較的簡単なロジックの追加によって運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供することができるので、乗用車、トラック、バス等の様々な車両に適用して有益なものである。
【符号の説明】
【0061】
1 駐車支援装置
a ナビゲーション装置(位置検出手段)
b 駐車空間認識センサ(検出手段)
c 後方カメラ
d 駐車支援ECU(開始手段)
e 電動ステアリング装置
f 車速センサ(速度検出手段)
g 減速度センサ
h ブレーキスイッチ
i ターンシグナル/ハザードシグナル
j 初期停車位置案内装置(案内手段)
【技術分野】
【0001】
本発明は、運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置に関する。
【背景技術】
【0002】
従来、車両のシフト位置がリバースに操作される等の条件が成立した場合に、現在の車両位置と自動的又は手動により設定された目標駐車位置との位置関係に基づいて、車両の目標経路を演算しモニタに表示する、駐車支援装置が知られている。さらに最近では、駐車空間の検出及び認識に基づいて自動的に設定された目標駐車位置へ駐車するにあたっての後退運転の始点となる初期停車位置を決定し、車両の現在位置から初期停車位置までの経路を自動操舵等の車両制御や初期位置案内画像等の表示により案内する、所謂初期停車位置案内制御を実行する例えば特許文献1に記載があるような駐車支援装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−190463号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したような駐車支援装置においては、初期停車位置案内制御を選択的に起動して初期停車位置案内機能を選択する機能開始スイッチを有しているが、この機能開始スイッチにオンに基づいて常時起動していると、運転者が駐車する意思を有していないにも係わらず、車両の周辺に位置する駐車空間が検出され認識されて目標駐車位置が自動的に決定され、自動的に決定された初期停車位置への案内が自動的に行われてしまうことを招き、運転者が煩わしさを感じて駐車支援装置としての商品性の低下を招く。
【0005】
また、運転者が真に駐車する意思を有していて、運転者が初期停車位置案内制御を積極的に利用する意思を有している場合には、運転者が所望する駐車空間に接近したタイミングで、機能開始スイッチをオンとする必要が生じるため、このタイミングにおいても、運転者が煩わしさを感じて駐車支援装置としての商品性の低下を招く。
【0006】
本発明は、上記問題に鑑み、運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の問題を解決するため、本発明による駐車支援装置は、
車両の周辺の駐車空間を検出する検出手段と、
前記駐車空間に基づいて初期停車位置を決定し前記初期停車位置への案内を行う案内手段と、
前記車両の位置を検出する位置検出手段と、
前記位置が所定の領域に存在する場合に前記検出手段に前記駐車空間を検出することを開始させる開始処理を行う開始手段を含むことを特徴とする。
【0008】
前記駐車支援装置によれば、前記車両が前記所定の領域内にあって運転者が真に駐車する意思を有している場合に、運転者が所望する駐車空間に接近したタイミングで、前記検出手段が前記駐車空間を検出することを前記開始手段により開始して、これに伴って認識された前記駐車空間に基づいて、前記案内手段が前記初期停車位置を決定し前記初期停車位置への案内を行うこととなる。
【0009】
このため、運転者に前記案内手段の案内の開始すなわち初期停車位置案内機能の開始の選択を別途のスイッチ操作に基づいて選択させることを伴うことなく、初期停車位置への案内を行うことができ、運転者が煩わしさを感じることを回避することができる。これにより、前記駐車支援装置の商品性を高めることができる。
【0010】
また、前記駐車支援装置においては、前記案内手段に基づく前記初期停車位置案内機能を必要に応じて選択的に起動することができるので、常時起動することに伴って、運転者が駐車する意思を有していない場合に、車両の周辺に位置する駐車空間が検出され認識され目標駐車位置が自動的に設定され、自動的に決定された初期停車位置への案内が自動的に行われてしまうことを防止することができる。これにより、運転者が煩わしさを感じて駐車支援装置としての商品性の低下を招くことを防止することができる。
【0011】
なお、前記駐車支援装置において、
前記車両の速度を検出する速度検出手段を含み、
前記所定の領域が商業地域又は住宅密集地であり、前記速度が所定値以下である場合に、前記開始手段が前記開始処理を行うことが好ましい。
【0012】
前記駐車支援装置によれば、前記車両が商業地域又は住宅密集地において走行している場合の前記検出手段の前記検出の開始のトリガを適切に設定することができる。
【0013】
あるいは、前記駐車支援装置において、
前記所定の領域が駐車場である場合に、前記開始手段が前記開始処理を行うこととしてもよい。
【0014】
前記駐車支援装置によれば、前記車両が前記駐車場近傍を走行している場合の前記検出手段の前記検出の開始のトリガを適切に設定することができる。
【発明の効果】
【0015】
本発明によれば、運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明に係る駐車支援装置の一実施形態を示すブロック図である。
【図2】本発明に係る駐車支援装置の一実施形態の制御内容を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について、添付図面を参照しながら説明する。
【実施例】
【0018】
図1は、本実施例の駐車支援装置1の一実施形態を示すブロック図である。
【0019】
図1に示すように、駐車支援装置1は、ナビゲーション装置aと、駐車空間認識センサbと、後方カメラcと、駐車支援ECUd(Electronic Control Unit)と、電動ステアリング装置eと、車速センサfと、減速度センサgと、ブレーキスイッチhと、ターンシグナル/ハザードシグナルiと、初期停車位置案内装置jとを含む。
【0020】
ナビゲーション装置aと、駐車支援ECUdと、初期停車位置案内装置jと、電動ステアリング装置eは、CAN(Controller Area Network)等の通信規格を介して相互に接続される。
【0021】
駐車支援ECUdは、例えばCPU、ROM、RAMおよびそれらを接続するデータバスと入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが所定の処理を行うものであり、以下に述べる処理を行う開始手段を構成するものである。
【0022】
駐車空間認識センサbは、例えば車両の適宜の箇所に設けられて車両の周辺に位置する駐車空間を検出して認識する超音波センサ又は画像センサであって、認識結果を駐車支援ECUdに出力するものであって、検出手段を構成する。
【0023】
後方カメラcは、例えばCCDカメラあるいはCMOSカメラであり、例えば車両室内のルーフ下面に、後方に光軸が合致するように配設され、車両の後側方の路面及び駐車場の駐車空間を車両の側方を含んで広範囲に撮像して、撮像された画像データを駐車支援ECUdに検出結果として出力するものである。
【0024】
車速センサfは、車両の速度を検出する速度検出手段を構成し、車速センサfが検出した速度は、駐車支援ECUdに送信される。
【0025】
減速度センサgは、車両の減速度を検出するものであって、検出した減速度は駐車支援ECUdに送信される。
【0026】
ブレーキスイッチhは、図示しないブレーキペダルに設けられた例えばリミットスイッチであり、運転者によるブレーキペダルの踏み込みの有無すなわちブレーキ作動の有無を検出して、検出結果は駐車支援ECUdに送信される。
【0027】
ターンシグナル/ハザードシグナルiは、右左折用のターンシグナル、警告用のハザードシグナルのいずれかがオンされているか否かを検出する例えばボディECUであって、検出結果を駐車支援ECUdに送信するものである。
【0028】
電動ステアリング装置eは、例えばEPSECUとEPSにより構成され、EPSECUは、CPU、ROM、RAMおよびそれらを相互に接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、以下に述べる処理を行う。
【0029】
EPSECUは、EPS内部のここでは図示しないステアリングシャフトに設けられたトーションバーを用いたトルクセンサにより、運転者のステアリングホイールの操作力を検出しこの操作力に応じて、又は、駐車支援ECUdの操舵角指令に基づいて、EPSの図示しない電動モータを駆動して操舵力を発生させて車輪を操舵して、運転者の操作力のアシスト又は駐車運転時の支援を行うものである。
【0030】
ナビゲーション装置aは、例えばカーナビゲーションECUであって、CPU、ROM、RAMおよびそれらを相互に接続するデータバス及び入出力インターフェースから構成され、ROMに格納されたプログラムに従い、CPUが所定の処理を行うものであり、以下に述べる処理を行うものである。
【0031】
ナビゲーション装置aは、図示しないGPSアンテナが受信した、地球上空に打ち上げられた複数の衛星からの電波をもとに、例えば三角測量の原理で車両の位置の経度と緯度を測定して車両の位置を検出する。
【0032】
これとともに、ナビゲーション装置aは、図示しないヨーレートセンサの出力に基づいて、車両のヨーレートを検出し、さらに、図示しないEPS内部に備えられたステアリングセンサの出力に基づいて電動ステアリング装置eが検出した操舵角を、CANを介して検出して自律航法により車両の位置を演算して、GPSアンテナの複数の衛星からの電波の受信による三角測量の原理による車両の位置の検出ができない場合の車両の位置情報を補完する。つまり、ナビゲーション装置aは車両の位置を検出する位置検出手段を構成する。
【0033】
さらに、ナビゲーション装置aは、図示しないタッチパネルにより入力された目的地と現在の車両の位置から、目的地に至る推奨経路を図示しないデータベースが含む探索用の地図情報からダイクストラ法等の適宜の手段により探索する。ナビゲーション装置aは、探索された推奨経路と、データベースが含む表示用の地図情報とを重ね合わせて図示しないディスプレイにより表示する。
【0034】
さらに、ナビゲーション装置aは、検出された車両の位置が前述したデータベースが含む位置情報又は属性との参照に基づいて所定の領域(商業地域又は住宅密集地、駐車場)に存在するか否かを判定して判定結果を、CANを介して駐車支援ECUdに送信するとともに、CANを介して駐車支援ECUdに送信する。
【0035】
駐車支援ECUdは、ナビゲーション装置aが送信した車両の位置が駐車場に存在するか否かの判定結果を取得して、車両の位置が駐車場に存在する場合には、駐車空間認識センサbによる駐車空間の検出を開始させる開始処理を行う。
【0036】
同様に、駐車支援ECUdは、ナビゲーション装置aが送信した車両の位置が商業地域又は住宅密集地に存在するか否かの判定結果と、車速センサfから車両の速度を取得して、車両の位置が商業地域又は住宅密集地に存在して、車両の速度が一定車速以下である場合には、駐車空間認識センサbによる駐車空間の検出を開始させる開始処理を行う。
【0037】
車両の位置が駐車場に存在する場合に、駐車空間認識センサbによる駐車空間の検出が開始されると、初期停車位置案内装置jは検出され認識された駐車空間に基づいて初期停車位置を決定し、現在の車両の位置から初期停車位置への案内を図示しないディスプレイによる画像表示又はスピーカによる音声により行う。
【0038】
車両の位置が商業地域又は住宅密集地に存在する場合には、駐車空間認識センサbによる駐車空間の検出が開始された後、駐車支援ECUdは、ブレーキ作動中であるか否か、直近の減速度の履歴が一定値以上であるか否かと、ターンシグナル又はハザードシグナルがオンであるか否かを判定して、これらが全て肯定である場合に運転者に駐車の意思があるとみなして、初期停車位置案内装置jは検出され認識された駐車空間に基づいて初期停車位置を決定し、現在の車両の位置から初期停車位置への案内を図示しないディスプレイによる画像表示又はスピーカによる音声により行う。
【0039】
車両が初期停車位置に停止して初期停車位置案内制御が終了した後は、駐車支援ECUdが駐車支援制御を開始して、後方カメラcの検出結果に基づいて、初期停車位置から目標駐車位置までの後退軌道を算出して、後退軌道を車両がトレースするように操舵角を演算して、操舵角の指令をステアリング装置eに対してCANを介して送信して、操舵角制御を行う。
【0040】
以下、本実施例の駐車支援装置1の制御内容すなわちアルゴリズムを、フローチャートを用いて詳細に説明する。図2は、本実施例の駐車支援装置1の制御内容を示すフローチャートである。
【0041】
図2に示すスタート100において、駐車支援装置1は制御を開始して、ステップ110において、駐車支援ECUdは、ナビゲーション装置aからの情報に基づいて、車両の現在の位置が駐車場内か否かを判定し、肯定であればステップ120にすすみ、否定であればステップ200にすすむ。
【0042】
ステップ120において、駐車支援ECUdは駐車空間認識センサbによる駐車空間の測定つまり検出を開始させ、ステップ130において、駐車支援ECUdは駐車空間が存在して認識したか否かを判定して、肯定であればステップ140にすすみ、否定であればステップ120の手前に戻る。
【0043】
ステップ140において、駐車支援ECUdは初期停車位置案内装置jに初期停車位置案内制御を起動させて、ステップ150において、駐車支援ECUdは、車両の速度から車両が初期停車位置に停車したか否かを判定し、肯定であればステップ160にすすみ、否定であれば、ステップ150の手前に戻る。ステップ160において、駐車支援ECUdは、初期停車位置から目標駐車位置までの後退軌道を算出して、後退軌道を車両がトレースするように操舵角を演算して、操舵角の指令をステアリング装置eに対してCANを介して送信して、操舵角制御を行う、一連の駐車支援システムを起動する。
【0044】
ステップ200において、駐車支援ECUdは車両の位置が商業地域又は住宅密集地に存在するか否かを判定し、肯定であればステップ210にすすみ、否定であれば、ステップ110の手前に戻る。
【0045】
ステップ210において、駐車支援ECUdは車両の速度が一定車速以下であるか否かを判定し、肯定である場合にはステップ220にすすみ、否定である場合には、ステップ110の手前に戻る。
【0046】
ステップ220において、駐車支援ECUdは駐車空間認識センサbによる車両の周辺の駐車空間の測定つまり検出を開始して、ステップ230にすすみ、ステップ230において駐車空間が存在して認識したか否かを判定して、肯定であれば、ステップ240にすすみ、否定であればステップ220の手前に戻る。
【0047】
ステップ240において、駐車支援ECUdは、ブレーキスイッチhからの検出結果に基づいて、ブレーキ作動中であるか否かを判定し、肯定であればステップ250にすすみ、否定であればステップ270にすすみ、ステップ270において、駐車支援ECUdはステップ240終了後から一定時間経過したか否かを判定して、肯定である場合には、ステップ110の手前に戻り、否定である場合にはステップ240の手前に戻る。
【0048】
ステップ250において、駐車支援ECUdは、減速度センサgからの検出結果に基づいて、直近の減速度履歴が一定値以上であるか否かを判定し、肯定であればステップ260にすすみ、否定であればステップ280にすすみ、ステップ280において、駐車支援ECUdはステップ250終了後から一定時間経過したか否かを判定して、肯定である場合には、ステップ110の手前に戻り、否定である場合にはステップ250の手前に戻る。
【0049】
ステップ260において、駐車支援ECUdは、ターンシグナル/ハザードシグナルiからの検出結果に基づいて、ターンシグナル又はハザードシグナルブレーキがオンであるか否かを判定し、肯定であればステップ140にすすみ、否定であればステップ290にすすみ、ステップ290において、駐車支援ECUdはステップ260終了後から一定時間経過したか否かを判定して、肯定である場合には、ステップ110の手前に戻り、否定である場合にはステップ260の手前に戻る。
【0050】
スタート100からエンド170までの処理は所定の周期で繰り返し実行される。
【0051】
以上述べた制御内容により実現される本実施例の駐車支援装置1によれば、以下のような作用効果を得ることができる。すなわち、本実施例の駐車支援装置1によれば、車両が駐車場あるいは商業地域又は住宅密集地により定義される所定の領域内にあって運転者が真に駐車する意思を有している場合において、運転者が所望する駐車空間に接近したタイミングで、駐車支援ECUdにより、駐車空間認識センサbに駐車空間を検出することを開始させることができる。この検出の開始に基づいて認識された駐車空間に基づいて、初期停車位置案内装置jが初期停車位置を決定し、初期停車位置への車両の移動を促す初期停車位置案内制御を車両の運転者に対して行うことが開始される。
【0052】
このように、初期停車位置案内制御を自動的に実行することができるため、運転者に初期停車位置案内制御の開始を別途のスイッチ操作に基づいて選択させることをなくすことができる。このため、運転中から駐車に亘る一連の操作において、運転者が煩わしさを感じることを回避することができる。これにより、本実施例の駐車支援装置1においては商品性を高めることができる。
【0053】
さらに、本実施例の駐車支援装置1においては、初期停車位置案内装置jに基づく初期停車位置案内機能を運転者が駐車の意思を有している場合においてのみ必要に応じて選択的に起動することができる。このため、駐車空間認識センサb及び初期停車位置案内装置jが常時起動されている状態が継続されることを無くすことができる。
【0054】
これにより、運転者が駐車する意思を有していない場合に、車両の周辺に位置する駐車空間が駐車空間認識センサbにより検出され認識されて、初期停車位置案内装置jにより目標駐車位置が自動的に設定され、自動的に決定された初期停車位置への案内が自動的に行われてしまうことを防止することができる。このため、本実施例の駐車支援装置1においては、運転者が煩わしさを感じることを回避して、商品性を高めることができる。
【0055】
また、本実施例の駐車支援装置1においては、車両の速度を検出する速度検出手段として車速センサfを含み、所定の領域が商業地域又は住宅密集地であり、速度が所定値つまり一定車速以下である場合に、駐車支援ECUdにより、駐車空間認識センサb及び初期停車位置案内装置jの開始処理を行っているので、さらに以下のような有利な作用効果を得ることができる。
【0056】
つまり、車両が商業地域又は住宅密集地において走行している場合において、駐車空間認識センサbの検出の開始のトリガとして、通常車両において取得している車速を用いることにより、より汎用性の高いトリガを適切に設定することができる。さらに、ブレーキ作動中であるか否かと、直近の減速度履歴が一定値以上であるか否かと、ターンシグナル又はハザードシグナルがオンであるか否かの判定要素を加えて、運転者の駐車の意思を確認しているので、より運転者の意思を尊重した、初期停車位置案内制御の開始を実現することができる。
【0057】
さらに、本実施例の駐車支援装置1においては、所定の領域が駐車場である場合に、駐車支援ECUdが初期停車位置案内制御の開始処理を行っているので、これも、車両が駐車場近傍を走行している場合の、初期停車位置案内制御の開始のトリガを適切に設定することができる。
【0058】
以上本発明の好ましい実施例について詳細に説明したが、本発明は上述した実施例に制限されることなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形および置換を加えることができる。
【0059】
例えば、本実施例の駐車支援装置1においては、初期停車位置案内制御の開始処理を駐車支援ECUdが行っているが、これを初期停車位置案内制御装置jが行うこととしてもよいし、初期停車位置案内制御装置jを駐車支援ECUdが含む処理ルーチンの一つとして設定してもよい。
【産業上の利用可能性】
【0060】
本発明は、駐車支援装置に関するものであり、比較的簡単なロジックの追加によって運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供することができるので、乗用車、トラック、バス等の様々な車両に適用して有益なものである。
【符号の説明】
【0061】
1 駐車支援装置
a ナビゲーション装置(位置検出手段)
b 駐車空間認識センサ(検出手段)
c 後方カメラ
d 駐車支援ECU(開始手段)
e 電動ステアリング装置
f 車速センサ(速度検出手段)
g 減速度センサ
h ブレーキスイッチ
i ターンシグナル/ハザードシグナル
j 初期停車位置案内装置(案内手段)
【特許請求の範囲】
【請求項1】
車両の周辺の駐車空間を検出する検出手段と、前記駐車空間に基づいて初期停車位置を決定し前記初期停車位置への案内を行う案内手段と、前記車両の位置を検出する位置検出手段と、前記位置が所定の領域に存在する場合に前記検出手段に前記駐車空間を検出することを開始させる開始処理を行う開始手段を含むことを特徴とする駐車支援装置。
【請求項2】
前記車両の速度を検出する速度検出手段を含み、前記所定の領域が商業地域又は住宅密集地であり、前記速度が所定値以下である場合に、前記開始手段が前記開始処理を行うことを特徴とする請求項1に記載の駐車支援装置。
【請求項3】
前記所定の領域が駐車場である場合に、前記開始手段が前記開始処理を行うことを特徴とする請求項1に記載の駐車支援装置。
【請求項1】
車両の周辺の駐車空間を検出する検出手段と、前記駐車空間に基づいて初期停車位置を決定し前記初期停車位置への案内を行う案内手段と、前記車両の位置を検出する位置検出手段と、前記位置が所定の領域に存在する場合に前記検出手段に前記駐車空間を検出することを開始させる開始処理を行う開始手段を含むことを特徴とする駐車支援装置。
【請求項2】
前記車両の速度を検出する速度検出手段を含み、前記所定の領域が商業地域又は住宅密集地であり、前記速度が所定値以下である場合に、前記開始手段が前記開始処理を行うことを特徴とする請求項1に記載の駐車支援装置。
【請求項3】
前記所定の領域が駐車場である場合に、前記開始手段が前記開始処理を行うことを特徴とする請求項1に記載の駐車支援装置。
【図1】


【図2】
【図2】
【公開番号】特開2011−100184(P2011−100184A)
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願番号】特願2009−252681(P2009−252681)
【出願日】平成21年11月4日(2009.11.4)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願日】平成21年11月4日(2009.11.4)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]