
駐車支援装置
【課題】 自車が路側施設へ進入したとき自動的に駐車支援機能を起動できる駐車支援装置を提供する。
【解決手段】 自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援機能103と、自車周辺の路面を撮像する車両周辺撮像装置200と、車両周辺撮像装置200の撮像画像から得られた情報に基づいて、自車が路側施設に進入したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設に進入したと判定された場合、駐車支援機能103を起動する駐車支援切換機能101と、を備える。
【解決手段】 自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援機能103と、自車周辺の路面を撮像する車両周辺撮像装置200と、車両周辺撮像装置200の撮像画像から得られた情報に基づいて、自車が路側施設に進入したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設に進入したと判定された場合、駐車支援機能103を起動する駐車支援切換機能101と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車支援装置に関する。
【背景技術】
【0002】
特許文献1には、自動車が駐車禁止エリアに存在するか否か、車道の道路端を所定の車速以下で走行しているか否か等の情報に基づいて、運転者の縦列駐車意図を判定し、自動的に駐車支援機能を起動する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−76586号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術にあっては、道路端に設置された縦列駐車枠に対する駐車支援を対象としているため、路側の駐車場、高速道のサービスエリアにおける駐車場等、路側施設への進入時には駐車支援機能が起動しないという問題があった。
本発明の目的は、自車が路側施設へ進入したとき自動的に駐車支援機能を起動できる駐車支援装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明では、自車周辺の路面を撮像する撮像手段の撮像画像から得られた情報に基づいて、自車が路側施設に進入したか否かを判定し、自車が路側施設に進入したと判定された場合、駐車支援手段を起動する。
【発明の効果】
【0006】
本発明によれば、自車が路側施設へ進入したとき自動的に駐車支援機能を起動できる。
【図面の簡単な説明】
【0007】
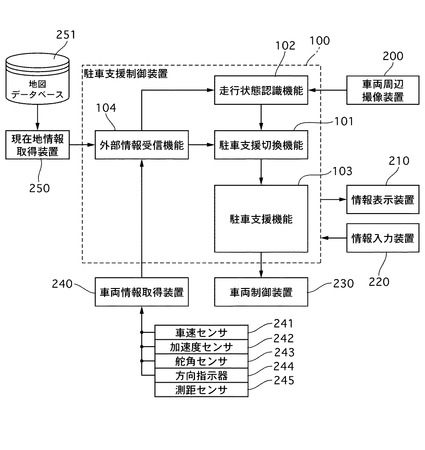
【図1】実施例1の駐車支援装置の構成図である。
【図2】実施例1の車両周辺撮像装置200の構成図である。
【図3】実施例1の駐車支援機能103の構成図である。
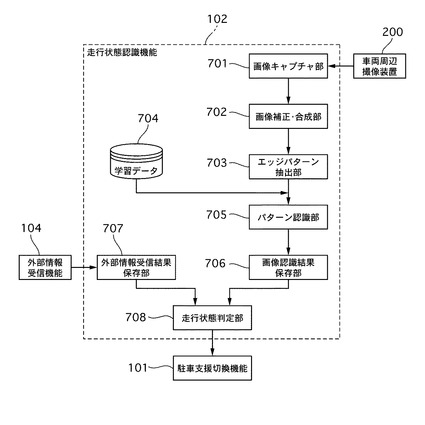
【図4】実施例1の走行状態認識機能102の構成図である。
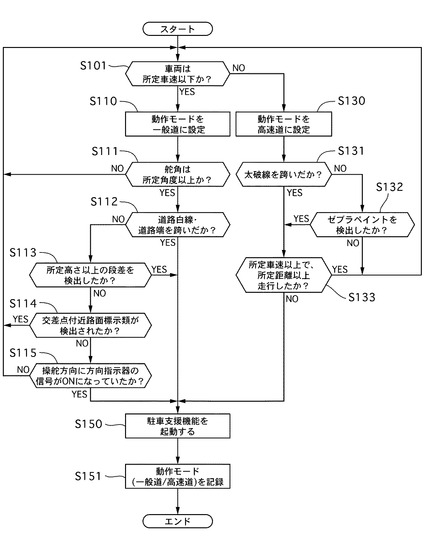
【図5】実施例1の駐車支援制御装置100における駐車支援起動処理の流れを示すフローチャートである。
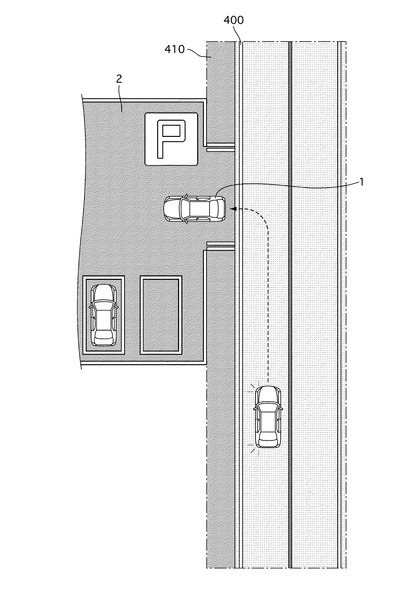
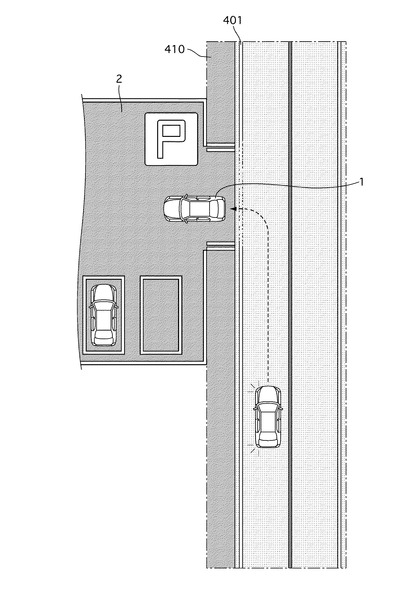
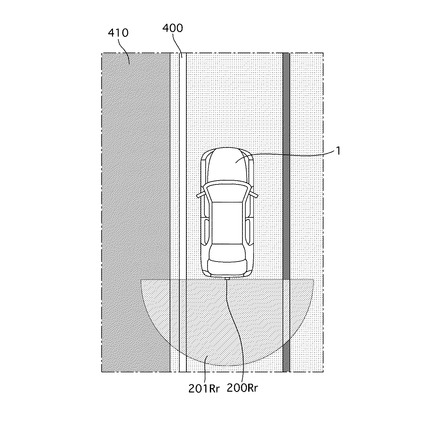
【図6】自車1が一般道から路側施設2へ進入する際、道路白線400を跨ぐ例である。
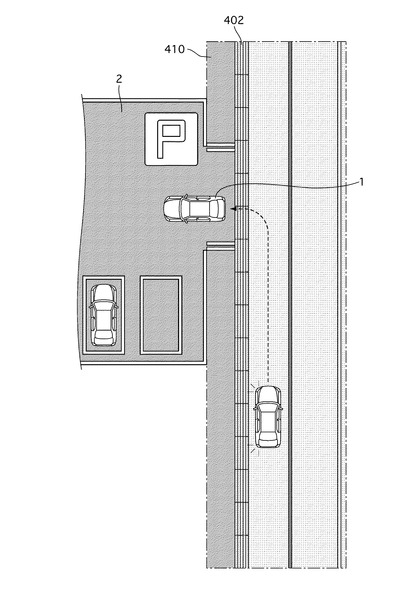
【図7】自車1が一般道から路側施設2へ進入する際、側溝402を跨ぐ例である。
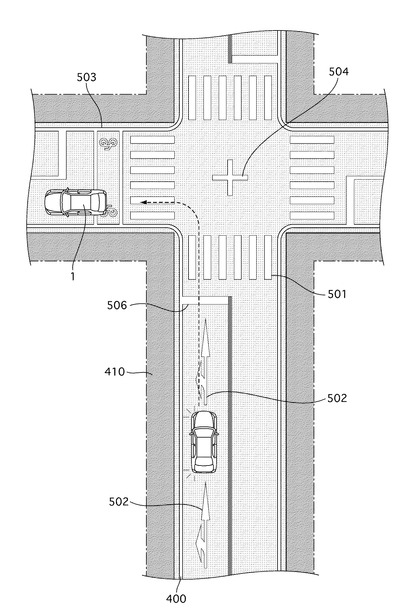
【図8】交差点付近路面標示類の具体例である。
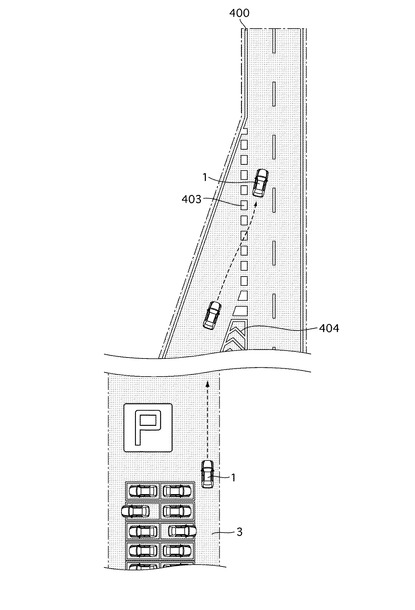
【図9】自車1が高速道のサービスエリアまたはパーキングエリアに進入する際、太破線403を跨ぐ例である。
【図10】実施例1の駐車支援制御装置100における駐車支援終了処理の流れを示すフローチャートである。
【図11】自車1が一般道の路側施設2から退出し車道へ入る際、道路白線400を跨ぐ例である。
【図12】自車1が高速道のサービスエリアまたはパーキングエリアから退出し本線へ入る際、太破線403を跨ぐ例である。
【図13】自車1が一般道から路側施設2へ進入する際、劣化した道路白線400を跨ぐ例である。
【図14】自車1が交差点を左折する例である。
【図15】実施例2の駐車支援装置の構成図である。
【図16】他の実施例の車両周辺撮像装置の構成図である。
【発明を実施するための形態】
【0008】
以下、本発明の駐車支援装置を実施するための形態を、図面に示す実施例に基づいて説明する。
【実施例1】
【0009】
まず、構成を説明する。
〔全体構成〕
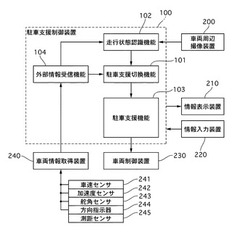
図1は、実施例1の駐車支援装置の構成図であり、駐車支援装置は、駐車支援制御装置100と、車両周辺撮像装置(撮像手段)200と、情報表示装置210と、情報入力装置220と、車両制御装置230と、車両情報取得装置(車両情報取得手段)240とを有する。
駐車支援制御装置100は、駐車支援切換機能(駐車支援起動手段,駐車支援終了手段)101と、走行状態認識機能(走行状態判定手段)102と、駐車支援機能(駐車支援手段)103と、外部情報受信機能104とを有する。
駐車支援切換機能101は、走行状態認識機能102からの情報と、外部情報受信機能104からの情報に基づいて、駐車支援機能103を起動または終了させるための機能を備える。
走行状態認識機能102は、外部情報受信機能104から得られた情報と車両周辺撮像装置200から得られた映像から自車の走行状態を認識する機能を備える。
駐車支援機能103は、駐車スペースの探索を行うための機能、運転者からの情報入力と運転者への情報提供を行うためのインターフェース機能、目標駐車位置までの経路計算機能および車両を目標駐車位置まで誘導するための車両制御信号を出力する機能を備え、運転者への駐車ガイドまたは自動駐車を実施する。駐車支援機能103の詳細については後述する。
外部情報受信機能104は、車両に搭載された各種センサの情報を受信する機能を備える。
【0010】
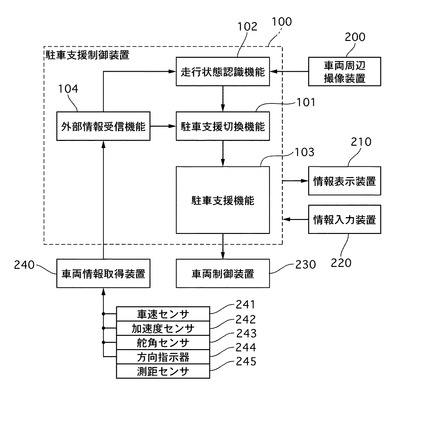
車両周辺撮像装置200は、自車が走行する車線を含む範囲を映像として捉えることができる撮像装置である。図2に示すように、車両周辺撮像装置200は、車両の前後左右に取り付けられた4つの撮像装置200Fr(前),200Rr(後),200R(右),200L(左)から構成される。図2において、201Frは前方撮像装置200Frの撮像範囲、201Rrは後方撮像装置200Rrの撮像範囲、201Rは右側撮像装置200Rの撮像範囲、201Lは左側撮像装置200Lの撮像範囲であり、車両周辺撮像装置200は、自車近傍の路面を360°の範囲で撮像可能である。
情報表示装置210は、駐車支援制御装置100から運転者への操作案内や各種情報提供のために利用される。
情報入力装置220は、運転者からの指示や操作を受け付ける機能を備える。
車両制御装置230は、駐車支援制御装置100における駐車支援機能103からの出力結果に基づいて、車両を制御するための機能を備える。具体的には、目標駐車位置へ車両を誘導するためのステアリング制御やエンジン出力制御、ブレーキ制御などの車両制御を行う装置である。
車両情報取得装置240は、車両に搭載された各種センサから車両情報を取得する機能を備える。具体的には、車両の対地速度を計測するための車速センサ241、車両に作用する加速度を三次元的に計測可能な加速度センサ242、ステアリングホイールの舵角(タイヤ切れ角でもよい)を計測する舵角センサ243、運転者が右左折する際に用いる方向指示器244、車両周辺の障害物などを検出するために用いられる超音波センサなど、距離を計測するための測距センサ245からの情報を取得できる。前述した各種センサからの情報以外にも、車両ネットワークに接続されているセンサや装置であれば、それら全ての情報を取得できるものとする。
【0011】
〔駐車支援機能の構成〕
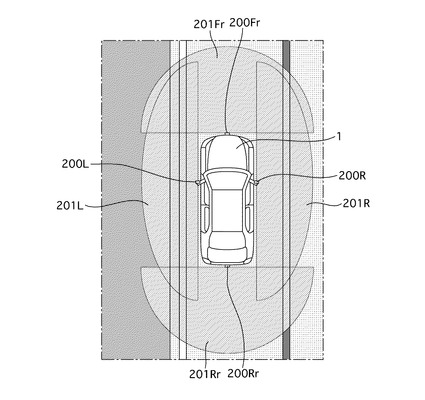
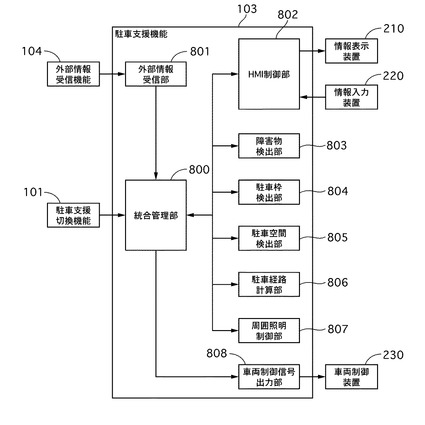
図3は、実施例1の駐車支援機能103の構成図であり、駐車支援機能103は、統合管理部800および複数の単体機能部で構成されている。駐車支援切換機能101からの信号を統合管理部800で受け取ることで、駐車支援を開始または終了する。駐車支援を開始する場合は、外部情報受信部801によって車両に搭載された各種センサの情報を受信し、統合管理部800にて駐車支援に必要な処理を選択して各単体機能を実行する。目標駐車位置へ自車を誘導しステアリングや車速等の車両制御をするための信号は、車両制御信号出力部808から出力される。
駐車支援機能103における単体機能は、上述した外部情報受信部801、車両制御信号出力部808に加え、HMI制御部802、障害物検出部803、駐車枠検出部804、駐車空間検出部805、駐車経路計算部806、周囲照明制御部807で構成される。
HMI制御部802は、運転者への情報提供や、運転者からの操作を受け付ける機能を備える。
障害物検出部803は、自車の周辺および目標駐車位置周辺に存在する障害物や構造物、人物を検出する機能を備える。
駐車枠検出部804は、車両周辺撮像装置200で得られた画像から駐車枠を検出する機能を備える。
駐車空間検出部805は、車両に搭載された測距センサ245から得られた情報と、駐車枠検出部804で得られた情報から、自車が駐車可能な空間を検出する機能を備える。
駐車経路計算部806は、自車の現在位置から目標駐車位置までの誘導経路を計算する機能を備える。
周囲照明制御部807は、自車周辺が暗い場合にサイドミラーなどに取り付けられた補助照明を点灯させる機能を備える。
【0012】
〔走行状態認識機能の構成〕
図4は、実施例1の走行状態認識機能102の構成図であり、走行状態認識機能102は、画像キャプチャ部701と、画像補正・合成部702と、エッジパターン抽出部703と、学習データ704と、パターン認識部705と、画像認識結果保存部706と、外部情報受信結果保存部707と、走行状態判定部708とを備える。
画像キャプチャ部701は、車両周辺撮像装置200の各撮像装置200Fr,200Rr,200R,200Lで撮像された前後左右の画像を内部のメモリに保存する。
画像補正・合成部702は、画像キャプチャ部701に取り込まれた前後左右の画像に対して歪みの補正と視点変換を行う。さらに車両上方の視点から見下ろした状態の画像(トップビュー画像)として画像の合成を行う。
エッジパターン抽出部703は、トップビュー画像からエッジパターンを抽出する。
学習データ704は、あらかじめ認識対象のエッジパターンがデータベース化されたものである。
パターン認識部705は、抽出されたエッジパターンと学習データ704を照合し、自車の周辺に存在する道路白線や交差点付近路面標示類といった道路上のペイントと、歩道や側溝といった道路上の構造物を認識する。
画像認識結果保存部706は、画像から認識された情報を内部メモリに所定時間分蓄積する。
外部情報受信結果保存部707は、外部情報受信機能104で得られたセンサ類の情報を内部メモリに所定時間分蓄積する。つまり、過去の任意の時刻における各センサの値を読み込むことができる。
走行状態判定部708は、画像認識結果保存部706のデータと、外部情報受信結果保存部707のデータとに基づいて、駐車支援切換機能101に対する最終的な結果として、駐車支援起動または終了の情報を出力する。なお、駐車支援起動または終了の情報出力に関する詳細については後述する。
【0013】
〔駐車支援起動処理〕
図5は、実施例1の駐車支援制御装置100における駐車支援起動処理の流れを示すフローチャートで、以下、各ステップについて説明する。この処理は、イグニッションスイッチON時または車両の発進時に実行される。
ステップS101では、車速センサ241からの情報に基づいて、現在の車速が所定車速(例えば、40km/h)以下であるか否かを判定する。YESの場合にはステップS110へ移行し、NOの場合にはステップS130へ移行する。
ステップS110では、動作モードを「一般道モード」に設定し、ステップS111へ移行する。
ステップS111では、舵角センサ243の情報を取得し、舵角センサ243から得られた舵角が所定角度以上であるか否かを判定する。YESの場合にはステップS112へ移行し、NOの場合にはステップS101へ移行する。ここで、所定角度は、一般道を走行中に路側に設置された駐車場へ進入するときに想定される舵角の最小値とする。
ステップS112では、車両周辺撮像装置200から取得した画像から、走行状態認識機能102によって路面にペイントされた車道と歩道とを区分する線(例えば、図6に示すような車道と歩道410とを区分する道路白線400)または道路端(例えば、図7に示すような道路端にある車道と歩道410との間に配置された側溝402)を検出し、自車1が道路白線400または道路端を跨いだか否かを判定する。YESの場合にはステップS150へ移行し、NOの場合にはステップS113へ移行する。
【0014】
ステップS113では、加速度センサ242からの情報に基づいて、所定高さ以上の段差を検出したか否かを判定する。YESの場合にはステップS150へ移行し、NOの場合にはステップS114へ移行する。ここで、所定高さは、自車が車道から歩道へ乗り上げたと判断できる高さとする。
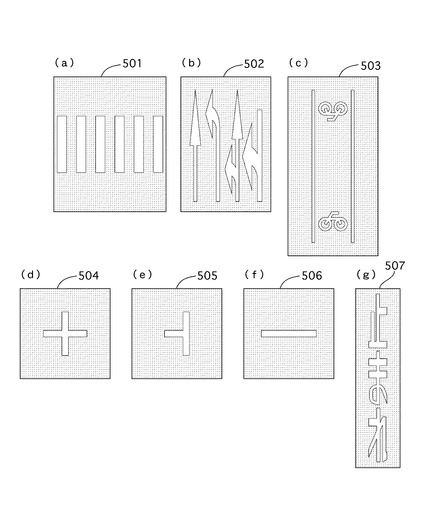
ステップS114では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって交差点付近路面標示類が検出されたか否かを判定する。YESの場合にはステップS101へ移行し、NOの場合にはステップS115へ移行する。ここで、交差点付近路面標示類とは、交差点付近に存在する可能性の高い道路標識(道路上にペイントされた標識)である。例えば、図8に示すような横断歩道501、矢印502、自転車横断帯503、十字504、T字505、停止線506、「止まれ」の文字507、などである。
ステップS115では、ステップS111で得られた舵角センサ243の情報と、方向指示器244の出力結果に基づいて、操舵方向と同じ方向に方向指示器244の信号がONになっていたか否かを判定する。YESの場合にはステップS150へ移行し、NOの場合にはステップS101へ移行する。
【0015】
ステップS130では、動作モードを「高速道モード」に設定し、ステップS131へ移行する。
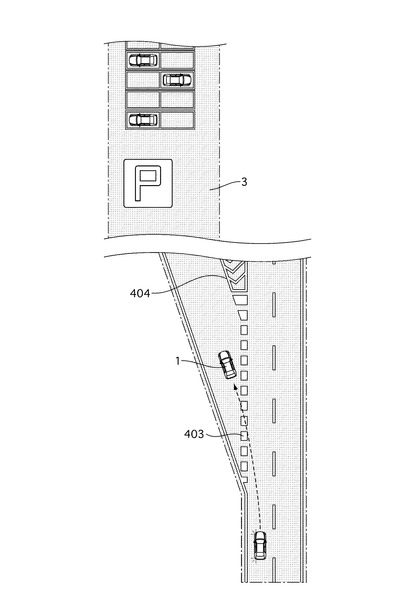
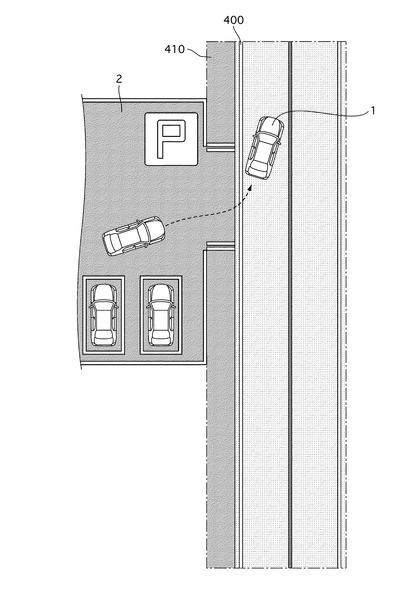
ステップS131では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって路面にペイントされた太破線を検出し、自車が太破線を跨いだか否かを判定する。YESの場合には、ステップS133へ移行し、NOの場合にはステップS132へ移行する。図9に示すように、太破線403は、高速道における本線からサービスエリアまたはパーキングエリア3、インターチェンジ、ジャンクション等に分岐する分岐部分にペイントされている。なお、サービスエリアまたはパーキングエリア3も高速道の本線に対する路側施設であるが、実施例1では、一般道の路側施設を路側施設と称し、高速道の路側施設をサービスエリアまたはパーキングエリアと称する。
ステップS132では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって路面にペイントされたゼブラ帯(ゼブラペイント)が検出され、かつ、その検出方向が、舵角センサ243から得られる操舵方向と逆側(左方向に操舵した場合は自車の右側、右方向に操舵した場合は自車の左側)であるか否かを判定する。YESの場合にはステップS133へ移行し、NOの場合にはステップS101へ移行する。
ステップS133では、ステップS131で自車が太破線を跨いだことを判定した直後、またはステップS132でゼブラ帯が検出された直後から、所定車速(例えば、40km/h)以上で所定距離(例えば、300m)以上走行したか否かを判定する。この判定には、例えば、ステップS131またはステップS132の判定直後からの走行距離の積算値と平均速度とを用いることができる。YESの場合にはステップS101へ移行し、NOの場合にはステップS150へ移行する。
ステップS150では、駐車支援機能103を起動し、ステップS151へ移行する。
ステップS151では、現在の動作モード(一般道/高速道)を記憶し、本制御を終了する。
【0016】
〔駐車支援終了処理〕
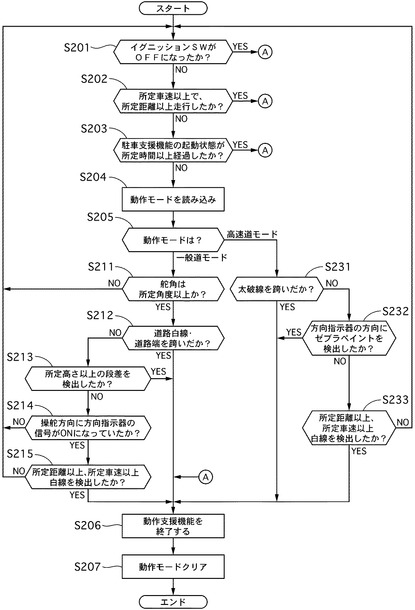
図10は、実施例1の駐車支援制御装置100における駐車支援終了処理の流れを示すフローチャートで、以下、各ステップについて説明する。この処理は、駐車支援機能103の起動後に実行される。
ステップS201では、システムとして駐車支援機能103が起動してから自車のイグニッションスイッチがOFFになったか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS202へ移行する。イグニッションスイッチがOFFになっていた場合、駐車支援機能103が起動してから駐車が完了したことを意味する。逆に、イグニッションスイッチがOFFになっていない場合、駐車支援機能103が起動してから駐車を完了せず、路側施設または高速道におけるサービスエリアまたはパーキングエリアの内部を走行中であることを意味する。
ステップS202では、所定車速(例えば、50km/h)以上で所定距離(例えば、100m)以上走行したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS203へ移行する。駐車支援機能103が起動してから所定車速以上の速度で所定距離以上走行した場合、駐車が完了したと予想できるからである。
ステップS203では、駐車支援機能103の起動状態が所定時間(例えば、5分)以上継続したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS204へ移行する。駐車支援機能103の起動状態が所定時間継続した場合、路側施設または高速道におけるサービスエリアまたはパーキングエリアへ進入した後、駐車支援による駐車を完了せずに停車し、エンジンを切らない状態で時間が経過したと予想できるからである。
ステップS204では、駐車支援機能103が起動された直後にメモリへ記憶された(ステップS151)動作モード(一般道/高速道)を読み込み、ステップS205へ移行する。
ステップS205では、ステップS204で読み込まれた動作モードが、「一般道モード」か「高速道モード」かを判定する。一般道モードの場合はステップS211へ移行し、高速道モードの場合はステップS231へ移行する。
【0017】
ステップS211では、舵角センサ243の情報を取得し、舵角センサ243から得られた舵角が所定角度以上であるか否かを判定する。YESの場合にはステップS212へ移行し、NOの場合にはステップS201へ移行する。ここで、所定角度は、路側施設から車道に退出するときに想定される舵角の最小値とする。
ステップS212では、車両周辺撮像装置200から取得した画像から、走行状態認識機能102によって路面にペイントされた車道と歩道とを区分する線(例えば、図11に示すような道路白線400)または道路端(例えば、図7に示したような道路端にある側溝402)を検出し、自車1が道路白線400または道路端を跨いだか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS213へ移行する。
ステップS213では、加速度センサ242からの情報に基づいて、所定高さ以上の段差を検出したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS214へ移行する。所定高さは、自車が歩道から車道へ降りたと判断できる高さとする。
ステップS214では、ステップS211で得られた舵角センサ243の情報と、方向指示器244の出力結果に基づいて、操舵方向と同じ方向に方向指示器244の信号がONになっていたか否かを判定する。YESの場合にはステップS215へ移行し、NOの場合にはステップS201へ移行する。
ステップS215では、所定車速(例えば、10km/h)以上で、かつ、所定距離(例えば、30m)以上の間、自車が走行している道路白線を検出したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS201へ移行する。
ステップS231では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって路面にペイントされた太破線を検出し、自車が太破線を跨いだか否かを判定する。YESの場合には、ステップS206へ移行し、NOの場合にはステップS232へ移行する。図12に示すように、太破線403は、図9に示した分岐部分の他に、サービスエリアやパーキングエリア3から本線に合流する合流部分にもペイントされている。
ステップS232では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって路面にペイントされたゼブラ帯(ゼブラペイント)が検出され、かつ、その検出方向が、舵角センサ243から得られる操舵方向と逆側(左方向に操舵した場合は自車の右側、右方向に操舵した場合は自車の左側)であるか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS233へ移行する。
ステップS233では、所定車速(例えば、50km/h)以上の速度で、所定距離(例えば、100m)以上の距離を走行した間に道路白線を検出したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS201へ移行する。
ステップS216では、駐車支援機能103を終了し、ステップS207へ移行する。
ステップS207では、動作モードをクリアし、本制御を終了する。
【0018】
次に、作用を説明する。
〔駐車支援作用〕
上記特許文献に記載の駐車支援装置では、道路端に設置された縦列駐車枠に対する駐車支援を対象としたものであるため、路外の駐車場、高速道のサービスエリアにおける駐車場等、路側施設への進入時には駐車支援機能が自動で起動せず、運転者は駐車支援機能を起動させるためのスイッチ操作を強いられる。また、上記特許文献に記載の発明では、路側施設から退出し車道へ入る際も、駐車支援機能は自動的に終了しないため、運転者は駐車支援機能を終了させるスイッチ操作が必要である。
これに対し、実施例1の駐車支援制御装置100は、車両周辺撮像装置200の撮像画像から得られた路面情報(道路白線、道路端、交差点付近路面標示類、太破線、ゼブラ帯)に基づいて、自車が路側施設に進入したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設に進入したと判定された場合、駐車支援機能103を起動する駐車支援切換機能101とを備える。このため、路側施設への進入時、運転者の手を煩わせることなく、自動的に駐車支援機能103を起動できる。また、駐車支援切換機能101は、車両周辺撮像装置200の撮像画像から得られた情報(道路白線、道路端、太破線、ゼブラ帯)に基づいて、自車が路側施設から退出したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設から退出したと判定された場合、駐車支援機能103を終了するため、路側施設からの退出時、運転者の手を煩わせることなく、自動的に駐車支援機能103を終了できる。
ここで、実施例1では、車両周辺撮像装置200を車両の前後左右に取り付けた4つの撮像装置200Fr(前),200Rr(後),200R(右),200L(左)から構成したため、自車近傍の全周を撮像可能であり、道路白線や交差点付近路面標示類といった道路上の構造物の認識精度を高めることができる。
【0019】
また、走行状態認識機能102では、車両周辺撮像装置200からの情報だけでなく車両情報取得装置240から取得した車両情報(車速、走行距離、走行時間、舵角、方向指示器244の信号、段差の有無)も用いているため、自車が路側施設、サービスエリアまたはパーキングエリアへ進入したか否か、および自車の路側施設、サービスエリアまたはパーキングエリアから退出したか否かを精度よく判断でき、適切なタイミングで駐車支援機能103を起動および終了できる。また、車両情報取得装置240は、標準的に車両に装備された各種センサの情報のみを使用して路側施設に対する走行状態(路側施設への進入または路側施設からの退出)を判定しているため、特別な装置の追加が不要であり、導入コストを低く抑えることができる。
さらに、駐車支援機能103の起動および終了判定を行うに当たり、動作モードを「一般道モード」と「高速道モード」とに区分し、両モードに対応した路面および車両情報に基づいて駐車支援機能103の起動および終了判定を行っている。つまり、一般道と高速道とでは、路面情報(道路構造物やペイントの種類)、走行状態(段差の有無、車速)等が異なるため、動作モードを「一般道モード」と「高速道モード」とに区分することで、路側施設への進入または路側施設からの退出を精度よく判定できる。
【0020】
以下、実施例1の駐車支援起動処理の各ステップにおける作用について説明する。
(一般道走行時)
ステップS111で、舵角が所定角度以上である場合には、自車が路側施設へ進入したか、交差点を右左折したか、あるいは急カーブを走行中であるかのいずれかである。そこで、ステップS112へと進み、自車が路面にペイントされた道路白線または道路端を跨いだか否かを判定する。自車が道路白線または道路端を跨いだ場合には、路側施設へ進入したと判定できるため、駐車支援機能103を起動する。
一方、ステップS112で自車が道路白線または道路端を跨いだと判定しなかった場合には、ステップS113へと進み、所定高さ以上の段差を検出したか否かを判定する。例えば、図13の例のように、道路白線がかすれている場合や汚れている場合(劣化した道路白線401の場合)は、車両周辺撮像装置200で得られた画像から道路白線を跨いだことを認識できないことがある。そこで、画像から道路白線400を跨いだことを認識できない場合、自車1が歩道410に乗り上げる際の段差を検出することで、車道から路側施設2へ進入したことを判断でき、適切なタイミングで駐車支援機能103を起動できる。ステップS112における段差判定は、車道と歩道との間に道路白線が存在しない場合にも有効である。
ステップS113で段差が検出されなかった場合には、ステップS114へと進み、自車が一般道を走行しているとき、交差点付近路面標示類を検出したか否かを判定する。図14に示す例のように、交差点を左折した場合、交差点付近路面標示類として、矢印502、横断歩道501、停止線506、十字504、自転車横断帯503が検出される。このように、交差点付近道路の少なくとも1つが検出された場合、自車1は交差点を右左折した可能性が高いため、駐車支援機能103は起動しない。これにより、路側施設進入の誤判定を防止でき、不要な駐車支援機能103の起動を抑制できる。
ステップS114で交差点付近路面標示類が検出されなかった場合、ステップS114へと進み、操舵方向と同じ方向に方向指示器244の信号がONになっているか否かを判定する。交差点を右左折していない状態で、操舵方向と同方向に方向指示器244がONとなった場合、自車が路側施設へ進入した可能性が高いため、この場合は駐車支援機能103を起動する。よって、道路白線や道路端が検出されず、歩道の段差がない場合であっても、路側施設への進入を判断でき、適切なタイミングで駐車支援機能103を起動できる。逆に、ステップS114で方向指示器244がOFFになっている場合には、舵角が所定角度以上となる交差点以外の急カーブを走行したと判断できるため、この場合は駐車支援機能103を起動しない。
【0021】
(高速道走行時)
ステップS131で自車が太破線を跨いだと判定した場合には、図9に示したように、サービスエリアまたはパーキングエリア3に進入したか、あるいはインターチェンジまたはジャンクションに進入した可能性がある。そこで、ステップS133へと進み、自車が40km/h以上の速度で300m以上の距離を走行していない場合、自車1が本線からサービスエリアまたはパーキングエリア3へ進入した可能性が高いため、駐車支援機能103を起動する。よって、自車が本線からサービスエリアまたはパーキングエリア3に進入したとき、適切なタイミングで駐車支援機能103を起動できる。一方、ステップS133で自車が40km/h以上の速度で300m以上の距離を走行した場合には、自車がインターチェンジまたはジャンクションに進入した可能性が高いため、この場合は駐車支援機能103を起動しない。
ステップS131で自車が太破線を跨いでいないと判定した場合には、ステップS132へと進み、ゼブラ帯の検出方向と操舵方向とを比較する。図9に示すように、ゼブラ帯404は太破線403よりも前方に配置されているため、太破線403を跨いだことが検出されずゼブラ帯404を検出した場合、太破線403がかすれていた等の理由により、太破線403を跨いだことを認識できなかった可能性が高い。よって、ゼブラ帯404の検出方向が操舵方向と逆である場合、太破線403を跨いだことを検出できなかったときでも、本線からサービスエリアまたはパーキングエリア3への進入を判断でき、適切なタイミングで駐車支援機能103を起動できる。
【0022】
以下、実施例1の駐車支援終了処理の各ステップにおける作用について説明する。
(一般道走行時)
ステップS211で、舵角が所定角度以上である場合には、自車が路側施設から車道へ退出した可能性があるが、未だ路側施設を走行中である場合も想定される。そこで、ステップS212へと進み、自車が路面にペイントされた道路白線または道路端を跨いだか否かを判定する。自車が道路白線または道路端を跨いだ場合は、路側施設から退出したと判定できるため、駐車支援機能103を終了する。これにより、自車が路側施設から車道へ退出したとき、適切なタイミングで駐車支援機能103を終了できる。
一方、ステップS212で自車が道路白線または道路端を跨いだと判定しなかった場合には、ステップS213へと進み、所定高さ以上の段差を検出したか否かを判定する。自車が歩道から車道へ降りる際の段差を検出することで、道路白線や道路端が検出できなかった場合でも、路側施設からの退出を判断でき、適切なタイミングで駐車支援機能103を終了できる。
ステップS213で段差が検出されなかった場合には、ステップS214へと進み、操舵方向と同じ方向に方向指示器244の信号がONになっているか否かを判定する。操舵方向と同じ方向に方向指示器244の信号がONになっている場合、自車が路側施設から退出した可能性が高いため、道路白線が検出されず、かつ、歩道の段差がない場合であっても、路側施設からの退出を判断でき、適切なタイミングで駐車支援機能103を終了できる。
一方、ステップS214で方向指示器244がOFFになっている場合には、路側施設から退出した可能性が低いため、この場合はステップS215へと進み、所定車速以上で、かつ、所定距離以上の間、自車が走行している道路白線を検出したか否かを判定する。一般的に、路側施設は広さが限られており、走行速度も低くなる。したがって、所定車速以上の速度で所定距離以上の距離を走行した場合、路側施設から退出して一般道を走行していると判断できる。これにより、適切なタイミングで駐車支援機能103を終了できる。
【0023】
(高速道走行時)
ステップS231で自車が太破線を跨いだと判定した場合には、図12に示したように、サービスエリアまたはパーキングエリア3から退出した可能性が高いため、駐車支援機能103を終了する。よって、適切なタイミングで駐車支援機能103を終了できる。一方、ステップS231で自車が太破線を跨いだと判定しなかった場合、ステップS232へと進み、ゼブラ帯の検出方向と操舵方向とを比較する。ゼブラ帯の検出方向と操舵方向とが逆である場合、サービスエリアまたはパーキングエリアから退出した可能性が高いと判断できるため、駐車支援機能103を終了する。よって、太破線のペイントのかすれや悪天候等の理由で太破線を跨いだことを認識できない場合であっても、サービスエリアまたはパーキングエリアから退出したとき、適切なタイミングで駐車支援機能103を終了できる。
ステップS232でゼブラ帯が検出されなかった場合、ステップS233へと進み、所定車速以上の速度で、所定距離以上の距離を走行した間に道路白線を検出した場合には、駐車支援機能103を終了する。所定車速以上の速度で所定距離以上の距離を走行した場合、自車はサービスエリアまたはパーキングエリアから退出し、そのときに検出される道路白線は、本線の白線であると判断できる。よって、ゼブラ帯が検出されなかった場合であっても、適切なタイミングで駐車支援機能103を終了できる。
【0024】
次に、効果を説明する。
実施例1の駐車支援装置では、以下に列挙する効果を奏する。
(1) 自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援機能103と、自車周辺の路面を撮像する車両周辺撮像装置200と、車両周辺撮像装置200の撮像画像から得られた情報に基づいて、自車が路側施設に進入したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設に進入したと判定された場合、駐車支援機能103を起動する駐車支援切換機能101と、を備えた。これにより、これにより、自車が路側施設、サービスエリアまたはパーキングエリアへ進入したとき運転者の手を煩わせることなく自動的に駐車支援機能103を起動できる。
【0025】
(2) 自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援機能103と、自車周辺の路面を撮像する車両周辺撮像装置200と、車両周辺撮像装置200の撮像画像から得られた情報に基づいて、自車が路側施設から退出したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設から退出したと判定された場合、駐車支援機能103を終了する駐車支援切換機能101と、を備えた。これにより、自車が路側施設、サービスエリアまたはパーキングエリアから退出したとき運転者の手を煩わせることなく自動的に駐車支援機能103を終了できる。
【0026】
(3) 車両情報を取得する車両情報取得装置240を備え、走行状態認識機能102は、車両情報取得装置240で得られた車両情報に基づいて、自車が路側施設へ進入したことを判定する。これにより、自車が路側施設、サービスエリアまたはパーキングエリアへ進入したか否かを精度よく判断でき、適切なタイミングで駐車支援機能103を起動できる。
【0027】
(4) 車両情報を取得する車両情報取得装置240を備え、走行状態認識機能102は、車両情報取得装置240で得られた車両情報に基づいて、自車が路側施設から退出したことを判定する。これにより、自車が路側施設、サービスエリアまたはパーキングエリアから退出したか否かを精度よく判断でき、適切なタイミングで駐車支援機能103を終了できる。
【実施例2】
【0028】
まず、構成を説明する。なお、実施例1と同一の構成については、図示ならびに説明を省略し、実施例1と異なる部分についてのみ説明する。
〔全体構成〕
図15は、実施例2の駐車支援装置の構成図であり、実施例2の駐車支援装置は、図1に示した実施例1の構成に加え、現在値情報取得装置250と、地図データベース251とを有する。
現在値情報取得装置250は、GPSの情報と地図データベース251から自車の現在値を特定する機能を備える。地図データベース251には自車が走行している道路の種別(高速道か一般道かなど)も含まれる。さらに、駐車場の位置情報を含んでもよい。
実施例2の外部情報受信機能104は、車両に搭載された各種センサの情報を受信する機能に加え、現在値情報取得装置250からの情報を取得する機能を備える。
【0029】
〔駐車支援起動処理〕
実施例2の駐車支援起動処理の流れは、図5のステップS101とステップS133の処理のみが実施例1と異なるため、図5を用いて異なるステップのみを説明する。
ステップS101では、現在値情報取得装置250と地図データベース251からの情報に基づいて、自車が走行している道路の種別が一般道であるか高速道であるかを判定する。一般道である場合にはステップS110へ移行し、高速道である場合にはステップS130へ移行する。
ステップS133では、現在値情報取得装置250と地図データベース251からの情報に基づいて、自車が走行している分岐部分の先所定距離(例えば、300m)以内にサービスエリアまたはパーキングエリアが存在するか否かを判定する。サービスエリアまたはパーキングエリアが存在する場合にはステップS150へ移行し、インターチェンジまたはジャンクションが存在する場合はステップS101へ移行する。
【0030】
次に、作用を説明する。
実施例2では、現在値情報取得装置250と地図データベース251によって得られる情報に基づいて道路の種別を特定しているため、実施例1と比較して、動作モードの判定精度が向上する。
また、現在値情報取得装置250と地図データベース251によって得られる情報に基づいて自車が走行している分岐部分の種別を判断しているため、精度よくサービスエリアまたはパーキングエリアであるか否かを判断できる。
なお、他の作用効果は実施例1と同様であるため、説明を省略する。
【0031】
(他の実施例)
以上、本発明を実施するための形態を、実施例に基づいて説明したが、本発明の具体的な構成は、実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
撮像手段は、少なくとも自車が走行している路面の道路白線や道路端が撮像範囲に入っていれば、どのような撮像形態であってもよい。例えば、図16に示すように、車両の後方のみに後方撮像装置200Rrを取り付けた構成としてもよい。
駐車支援手段は、運転者への駐車ガイドまたは自動駐車の一方のみを実施するものでもよい。
【符号の説明】
【0032】
101 駐車支援切換機能(駐車支援起動手段,駐車支援終了手段)
102 走行状態認識機能(走行状態判定手段)
103 駐車支援機能(駐車支援手段)
200 車両周辺撮像装置(撮像手段)
240 車両情報取得装置(車両情報取得手段)
【技術分野】
【0001】
本発明は、駐車支援装置に関する。
【背景技術】
【0002】
特許文献1には、自動車が駐車禁止エリアに存在するか否か、車道の道路端を所定の車速以下で走行しているか否か等の情報に基づいて、運転者の縦列駐車意図を判定し、自動的に駐車支援機能を起動する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−76586号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術にあっては、道路端に設置された縦列駐車枠に対する駐車支援を対象としているため、路側の駐車場、高速道のサービスエリアにおける駐車場等、路側施設への進入時には駐車支援機能が起動しないという問題があった。
本発明の目的は、自車が路側施設へ進入したとき自動的に駐車支援機能を起動できる駐車支援装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明では、自車周辺の路面を撮像する撮像手段の撮像画像から得られた情報に基づいて、自車が路側施設に進入したか否かを判定し、自車が路側施設に進入したと判定された場合、駐車支援手段を起動する。
【発明の効果】
【0006】
本発明によれば、自車が路側施設へ進入したとき自動的に駐車支援機能を起動できる。
【図面の簡単な説明】
【0007】
【図1】実施例1の駐車支援装置の構成図である。
【図2】実施例1の車両周辺撮像装置200の構成図である。
【図3】実施例1の駐車支援機能103の構成図である。
【図4】実施例1の走行状態認識機能102の構成図である。
【図5】実施例1の駐車支援制御装置100における駐車支援起動処理の流れを示すフローチャートである。
【図6】自車1が一般道から路側施設2へ進入する際、道路白線400を跨ぐ例である。
【図7】自車1が一般道から路側施設2へ進入する際、側溝402を跨ぐ例である。
【図8】交差点付近路面標示類の具体例である。
【図9】自車1が高速道のサービスエリアまたはパーキングエリアに進入する際、太破線403を跨ぐ例である。
【図10】実施例1の駐車支援制御装置100における駐車支援終了処理の流れを示すフローチャートである。
【図11】自車1が一般道の路側施設2から退出し車道へ入る際、道路白線400を跨ぐ例である。
【図12】自車1が高速道のサービスエリアまたはパーキングエリアから退出し本線へ入る際、太破線403を跨ぐ例である。
【図13】自車1が一般道から路側施設2へ進入する際、劣化した道路白線400を跨ぐ例である。
【図14】自車1が交差点を左折する例である。
【図15】実施例2の駐車支援装置の構成図である。
【図16】他の実施例の車両周辺撮像装置の構成図である。
【発明を実施するための形態】
【0008】
以下、本発明の駐車支援装置を実施するための形態を、図面に示す実施例に基づいて説明する。
【実施例1】
【0009】
まず、構成を説明する。
〔全体構成〕
図1は、実施例1の駐車支援装置の構成図であり、駐車支援装置は、駐車支援制御装置100と、車両周辺撮像装置(撮像手段)200と、情報表示装置210と、情報入力装置220と、車両制御装置230と、車両情報取得装置(車両情報取得手段)240とを有する。
駐車支援制御装置100は、駐車支援切換機能(駐車支援起動手段,駐車支援終了手段)101と、走行状態認識機能(走行状態判定手段)102と、駐車支援機能(駐車支援手段)103と、外部情報受信機能104とを有する。
駐車支援切換機能101は、走行状態認識機能102からの情報と、外部情報受信機能104からの情報に基づいて、駐車支援機能103を起動または終了させるための機能を備える。
走行状態認識機能102は、外部情報受信機能104から得られた情報と車両周辺撮像装置200から得られた映像から自車の走行状態を認識する機能を備える。
駐車支援機能103は、駐車スペースの探索を行うための機能、運転者からの情報入力と運転者への情報提供を行うためのインターフェース機能、目標駐車位置までの経路計算機能および車両を目標駐車位置まで誘導するための車両制御信号を出力する機能を備え、運転者への駐車ガイドまたは自動駐車を実施する。駐車支援機能103の詳細については後述する。
外部情報受信機能104は、車両に搭載された各種センサの情報を受信する機能を備える。
【0010】
車両周辺撮像装置200は、自車が走行する車線を含む範囲を映像として捉えることができる撮像装置である。図2に示すように、車両周辺撮像装置200は、車両の前後左右に取り付けられた4つの撮像装置200Fr(前),200Rr(後),200R(右),200L(左)から構成される。図2において、201Frは前方撮像装置200Frの撮像範囲、201Rrは後方撮像装置200Rrの撮像範囲、201Rは右側撮像装置200Rの撮像範囲、201Lは左側撮像装置200Lの撮像範囲であり、車両周辺撮像装置200は、自車近傍の路面を360°の範囲で撮像可能である。
情報表示装置210は、駐車支援制御装置100から運転者への操作案内や各種情報提供のために利用される。
情報入力装置220は、運転者からの指示や操作を受け付ける機能を備える。
車両制御装置230は、駐車支援制御装置100における駐車支援機能103からの出力結果に基づいて、車両を制御するための機能を備える。具体的には、目標駐車位置へ車両を誘導するためのステアリング制御やエンジン出力制御、ブレーキ制御などの車両制御を行う装置である。
車両情報取得装置240は、車両に搭載された各種センサから車両情報を取得する機能を備える。具体的には、車両の対地速度を計測するための車速センサ241、車両に作用する加速度を三次元的に計測可能な加速度センサ242、ステアリングホイールの舵角(タイヤ切れ角でもよい)を計測する舵角センサ243、運転者が右左折する際に用いる方向指示器244、車両周辺の障害物などを検出するために用いられる超音波センサなど、距離を計測するための測距センサ245からの情報を取得できる。前述した各種センサからの情報以外にも、車両ネットワークに接続されているセンサや装置であれば、それら全ての情報を取得できるものとする。
【0011】
〔駐車支援機能の構成〕
図3は、実施例1の駐車支援機能103の構成図であり、駐車支援機能103は、統合管理部800および複数の単体機能部で構成されている。駐車支援切換機能101からの信号を統合管理部800で受け取ることで、駐車支援を開始または終了する。駐車支援を開始する場合は、外部情報受信部801によって車両に搭載された各種センサの情報を受信し、統合管理部800にて駐車支援に必要な処理を選択して各単体機能を実行する。目標駐車位置へ自車を誘導しステアリングや車速等の車両制御をするための信号は、車両制御信号出力部808から出力される。
駐車支援機能103における単体機能は、上述した外部情報受信部801、車両制御信号出力部808に加え、HMI制御部802、障害物検出部803、駐車枠検出部804、駐車空間検出部805、駐車経路計算部806、周囲照明制御部807で構成される。
HMI制御部802は、運転者への情報提供や、運転者からの操作を受け付ける機能を備える。
障害物検出部803は、自車の周辺および目標駐車位置周辺に存在する障害物や構造物、人物を検出する機能を備える。
駐車枠検出部804は、車両周辺撮像装置200で得られた画像から駐車枠を検出する機能を備える。
駐車空間検出部805は、車両に搭載された測距センサ245から得られた情報と、駐車枠検出部804で得られた情報から、自車が駐車可能な空間を検出する機能を備える。
駐車経路計算部806は、自車の現在位置から目標駐車位置までの誘導経路を計算する機能を備える。
周囲照明制御部807は、自車周辺が暗い場合にサイドミラーなどに取り付けられた補助照明を点灯させる機能を備える。
【0012】
〔走行状態認識機能の構成〕
図4は、実施例1の走行状態認識機能102の構成図であり、走行状態認識機能102は、画像キャプチャ部701と、画像補正・合成部702と、エッジパターン抽出部703と、学習データ704と、パターン認識部705と、画像認識結果保存部706と、外部情報受信結果保存部707と、走行状態判定部708とを備える。
画像キャプチャ部701は、車両周辺撮像装置200の各撮像装置200Fr,200Rr,200R,200Lで撮像された前後左右の画像を内部のメモリに保存する。
画像補正・合成部702は、画像キャプチャ部701に取り込まれた前後左右の画像に対して歪みの補正と視点変換を行う。さらに車両上方の視点から見下ろした状態の画像(トップビュー画像)として画像の合成を行う。
エッジパターン抽出部703は、トップビュー画像からエッジパターンを抽出する。
学習データ704は、あらかじめ認識対象のエッジパターンがデータベース化されたものである。
パターン認識部705は、抽出されたエッジパターンと学習データ704を照合し、自車の周辺に存在する道路白線や交差点付近路面標示類といった道路上のペイントと、歩道や側溝といった道路上の構造物を認識する。
画像認識結果保存部706は、画像から認識された情報を内部メモリに所定時間分蓄積する。
外部情報受信結果保存部707は、外部情報受信機能104で得られたセンサ類の情報を内部メモリに所定時間分蓄積する。つまり、過去の任意の時刻における各センサの値を読み込むことができる。
走行状態判定部708は、画像認識結果保存部706のデータと、外部情報受信結果保存部707のデータとに基づいて、駐車支援切換機能101に対する最終的な結果として、駐車支援起動または終了の情報を出力する。なお、駐車支援起動または終了の情報出力に関する詳細については後述する。
【0013】
〔駐車支援起動処理〕
図5は、実施例1の駐車支援制御装置100における駐車支援起動処理の流れを示すフローチャートで、以下、各ステップについて説明する。この処理は、イグニッションスイッチON時または車両の発進時に実行される。
ステップS101では、車速センサ241からの情報に基づいて、現在の車速が所定車速(例えば、40km/h)以下であるか否かを判定する。YESの場合にはステップS110へ移行し、NOの場合にはステップS130へ移行する。
ステップS110では、動作モードを「一般道モード」に設定し、ステップS111へ移行する。
ステップS111では、舵角センサ243の情報を取得し、舵角センサ243から得られた舵角が所定角度以上であるか否かを判定する。YESの場合にはステップS112へ移行し、NOの場合にはステップS101へ移行する。ここで、所定角度は、一般道を走行中に路側に設置された駐車場へ進入するときに想定される舵角の最小値とする。
ステップS112では、車両周辺撮像装置200から取得した画像から、走行状態認識機能102によって路面にペイントされた車道と歩道とを区分する線(例えば、図6に示すような車道と歩道410とを区分する道路白線400)または道路端(例えば、図7に示すような道路端にある車道と歩道410との間に配置された側溝402)を検出し、自車1が道路白線400または道路端を跨いだか否かを判定する。YESの場合にはステップS150へ移行し、NOの場合にはステップS113へ移行する。
【0014】
ステップS113では、加速度センサ242からの情報に基づいて、所定高さ以上の段差を検出したか否かを判定する。YESの場合にはステップS150へ移行し、NOの場合にはステップS114へ移行する。ここで、所定高さは、自車が車道から歩道へ乗り上げたと判断できる高さとする。
ステップS114では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって交差点付近路面標示類が検出されたか否かを判定する。YESの場合にはステップS101へ移行し、NOの場合にはステップS115へ移行する。ここで、交差点付近路面標示類とは、交差点付近に存在する可能性の高い道路標識(道路上にペイントされた標識)である。例えば、図8に示すような横断歩道501、矢印502、自転車横断帯503、十字504、T字505、停止線506、「止まれ」の文字507、などである。
ステップS115では、ステップS111で得られた舵角センサ243の情報と、方向指示器244の出力結果に基づいて、操舵方向と同じ方向に方向指示器244の信号がONになっていたか否かを判定する。YESの場合にはステップS150へ移行し、NOの場合にはステップS101へ移行する。
【0015】
ステップS130では、動作モードを「高速道モード」に設定し、ステップS131へ移行する。
ステップS131では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって路面にペイントされた太破線を検出し、自車が太破線を跨いだか否かを判定する。YESの場合には、ステップS133へ移行し、NOの場合にはステップS132へ移行する。図9に示すように、太破線403は、高速道における本線からサービスエリアまたはパーキングエリア3、インターチェンジ、ジャンクション等に分岐する分岐部分にペイントされている。なお、サービスエリアまたはパーキングエリア3も高速道の本線に対する路側施設であるが、実施例1では、一般道の路側施設を路側施設と称し、高速道の路側施設をサービスエリアまたはパーキングエリアと称する。
ステップS132では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって路面にペイントされたゼブラ帯(ゼブラペイント)が検出され、かつ、その検出方向が、舵角センサ243から得られる操舵方向と逆側(左方向に操舵した場合は自車の右側、右方向に操舵した場合は自車の左側)であるか否かを判定する。YESの場合にはステップS133へ移行し、NOの場合にはステップS101へ移行する。
ステップS133では、ステップS131で自車が太破線を跨いだことを判定した直後、またはステップS132でゼブラ帯が検出された直後から、所定車速(例えば、40km/h)以上で所定距離(例えば、300m)以上走行したか否かを判定する。この判定には、例えば、ステップS131またはステップS132の判定直後からの走行距離の積算値と平均速度とを用いることができる。YESの場合にはステップS101へ移行し、NOの場合にはステップS150へ移行する。
ステップS150では、駐車支援機能103を起動し、ステップS151へ移行する。
ステップS151では、現在の動作モード(一般道/高速道)を記憶し、本制御を終了する。
【0016】
〔駐車支援終了処理〕
図10は、実施例1の駐車支援制御装置100における駐車支援終了処理の流れを示すフローチャートで、以下、各ステップについて説明する。この処理は、駐車支援機能103の起動後に実行される。
ステップS201では、システムとして駐車支援機能103が起動してから自車のイグニッションスイッチがOFFになったか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS202へ移行する。イグニッションスイッチがOFFになっていた場合、駐車支援機能103が起動してから駐車が完了したことを意味する。逆に、イグニッションスイッチがOFFになっていない場合、駐車支援機能103が起動してから駐車を完了せず、路側施設または高速道におけるサービスエリアまたはパーキングエリアの内部を走行中であることを意味する。
ステップS202では、所定車速(例えば、50km/h)以上で所定距離(例えば、100m)以上走行したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS203へ移行する。駐車支援機能103が起動してから所定車速以上の速度で所定距離以上走行した場合、駐車が完了したと予想できるからである。
ステップS203では、駐車支援機能103の起動状態が所定時間(例えば、5分)以上継続したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS204へ移行する。駐車支援機能103の起動状態が所定時間継続した場合、路側施設または高速道におけるサービスエリアまたはパーキングエリアへ進入した後、駐車支援による駐車を完了せずに停車し、エンジンを切らない状態で時間が経過したと予想できるからである。
ステップS204では、駐車支援機能103が起動された直後にメモリへ記憶された(ステップS151)動作モード(一般道/高速道)を読み込み、ステップS205へ移行する。
ステップS205では、ステップS204で読み込まれた動作モードが、「一般道モード」か「高速道モード」かを判定する。一般道モードの場合はステップS211へ移行し、高速道モードの場合はステップS231へ移行する。
【0017】
ステップS211では、舵角センサ243の情報を取得し、舵角センサ243から得られた舵角が所定角度以上であるか否かを判定する。YESの場合にはステップS212へ移行し、NOの場合にはステップS201へ移行する。ここで、所定角度は、路側施設から車道に退出するときに想定される舵角の最小値とする。
ステップS212では、車両周辺撮像装置200から取得した画像から、走行状態認識機能102によって路面にペイントされた車道と歩道とを区分する線(例えば、図11に示すような道路白線400)または道路端(例えば、図7に示したような道路端にある側溝402)を検出し、自車1が道路白線400または道路端を跨いだか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS213へ移行する。
ステップS213では、加速度センサ242からの情報に基づいて、所定高さ以上の段差を検出したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS214へ移行する。所定高さは、自車が歩道から車道へ降りたと判断できる高さとする。
ステップS214では、ステップS211で得られた舵角センサ243の情報と、方向指示器244の出力結果に基づいて、操舵方向と同じ方向に方向指示器244の信号がONになっていたか否かを判定する。YESの場合にはステップS215へ移行し、NOの場合にはステップS201へ移行する。
ステップS215では、所定車速(例えば、10km/h)以上で、かつ、所定距離(例えば、30m)以上の間、自車が走行している道路白線を検出したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS201へ移行する。
ステップS231では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって路面にペイントされた太破線を検出し、自車が太破線を跨いだか否かを判定する。YESの場合には、ステップS206へ移行し、NOの場合にはステップS232へ移行する。図12に示すように、太破線403は、図9に示した分岐部分の他に、サービスエリアやパーキングエリア3から本線に合流する合流部分にもペイントされている。
ステップS232では、車両周辺撮像装置200から取得した画像に基づいて、走行状態認識機能102によって路面にペイントされたゼブラ帯(ゼブラペイント)が検出され、かつ、その検出方向が、舵角センサ243から得られる操舵方向と逆側(左方向に操舵した場合は自車の右側、右方向に操舵した場合は自車の左側)であるか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS233へ移行する。
ステップS233では、所定車速(例えば、50km/h)以上の速度で、所定距離(例えば、100m)以上の距離を走行した間に道路白線を検出したか否かを判定する。YESの場合にはステップS206へ移行し、NOの場合にはステップS201へ移行する。
ステップS216では、駐車支援機能103を終了し、ステップS207へ移行する。
ステップS207では、動作モードをクリアし、本制御を終了する。
【0018】
次に、作用を説明する。
〔駐車支援作用〕
上記特許文献に記載の駐車支援装置では、道路端に設置された縦列駐車枠に対する駐車支援を対象としたものであるため、路外の駐車場、高速道のサービスエリアにおける駐車場等、路側施設への進入時には駐車支援機能が自動で起動せず、運転者は駐車支援機能を起動させるためのスイッチ操作を強いられる。また、上記特許文献に記載の発明では、路側施設から退出し車道へ入る際も、駐車支援機能は自動的に終了しないため、運転者は駐車支援機能を終了させるスイッチ操作が必要である。
これに対し、実施例1の駐車支援制御装置100は、車両周辺撮像装置200の撮像画像から得られた路面情報(道路白線、道路端、交差点付近路面標示類、太破線、ゼブラ帯)に基づいて、自車が路側施設に進入したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設に進入したと判定された場合、駐車支援機能103を起動する駐車支援切換機能101とを備える。このため、路側施設への進入時、運転者の手を煩わせることなく、自動的に駐車支援機能103を起動できる。また、駐車支援切換機能101は、車両周辺撮像装置200の撮像画像から得られた情報(道路白線、道路端、太破線、ゼブラ帯)に基づいて、自車が路側施設から退出したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設から退出したと判定された場合、駐車支援機能103を終了するため、路側施設からの退出時、運転者の手を煩わせることなく、自動的に駐車支援機能103を終了できる。
ここで、実施例1では、車両周辺撮像装置200を車両の前後左右に取り付けた4つの撮像装置200Fr(前),200Rr(後),200R(右),200L(左)から構成したため、自車近傍の全周を撮像可能であり、道路白線や交差点付近路面標示類といった道路上の構造物の認識精度を高めることができる。
【0019】
また、走行状態認識機能102では、車両周辺撮像装置200からの情報だけでなく車両情報取得装置240から取得した車両情報(車速、走行距離、走行時間、舵角、方向指示器244の信号、段差の有無)も用いているため、自車が路側施設、サービスエリアまたはパーキングエリアへ進入したか否か、および自車の路側施設、サービスエリアまたはパーキングエリアから退出したか否かを精度よく判断でき、適切なタイミングで駐車支援機能103を起動および終了できる。また、車両情報取得装置240は、標準的に車両に装備された各種センサの情報のみを使用して路側施設に対する走行状態(路側施設への進入または路側施設からの退出)を判定しているため、特別な装置の追加が不要であり、導入コストを低く抑えることができる。
さらに、駐車支援機能103の起動および終了判定を行うに当たり、動作モードを「一般道モード」と「高速道モード」とに区分し、両モードに対応した路面および車両情報に基づいて駐車支援機能103の起動および終了判定を行っている。つまり、一般道と高速道とでは、路面情報(道路構造物やペイントの種類)、走行状態(段差の有無、車速)等が異なるため、動作モードを「一般道モード」と「高速道モード」とに区分することで、路側施設への進入または路側施設からの退出を精度よく判定できる。
【0020】
以下、実施例1の駐車支援起動処理の各ステップにおける作用について説明する。
(一般道走行時)
ステップS111で、舵角が所定角度以上である場合には、自車が路側施設へ進入したか、交差点を右左折したか、あるいは急カーブを走行中であるかのいずれかである。そこで、ステップS112へと進み、自車が路面にペイントされた道路白線または道路端を跨いだか否かを判定する。自車が道路白線または道路端を跨いだ場合には、路側施設へ進入したと判定できるため、駐車支援機能103を起動する。
一方、ステップS112で自車が道路白線または道路端を跨いだと判定しなかった場合には、ステップS113へと進み、所定高さ以上の段差を検出したか否かを判定する。例えば、図13の例のように、道路白線がかすれている場合や汚れている場合(劣化した道路白線401の場合)は、車両周辺撮像装置200で得られた画像から道路白線を跨いだことを認識できないことがある。そこで、画像から道路白線400を跨いだことを認識できない場合、自車1が歩道410に乗り上げる際の段差を検出することで、車道から路側施設2へ進入したことを判断でき、適切なタイミングで駐車支援機能103を起動できる。ステップS112における段差判定は、車道と歩道との間に道路白線が存在しない場合にも有効である。
ステップS113で段差が検出されなかった場合には、ステップS114へと進み、自車が一般道を走行しているとき、交差点付近路面標示類を検出したか否かを判定する。図14に示す例のように、交差点を左折した場合、交差点付近路面標示類として、矢印502、横断歩道501、停止線506、十字504、自転車横断帯503が検出される。このように、交差点付近道路の少なくとも1つが検出された場合、自車1は交差点を右左折した可能性が高いため、駐車支援機能103は起動しない。これにより、路側施設進入の誤判定を防止でき、不要な駐車支援機能103の起動を抑制できる。
ステップS114で交差点付近路面標示類が検出されなかった場合、ステップS114へと進み、操舵方向と同じ方向に方向指示器244の信号がONになっているか否かを判定する。交差点を右左折していない状態で、操舵方向と同方向に方向指示器244がONとなった場合、自車が路側施設へ進入した可能性が高いため、この場合は駐車支援機能103を起動する。よって、道路白線や道路端が検出されず、歩道の段差がない場合であっても、路側施設への進入を判断でき、適切なタイミングで駐車支援機能103を起動できる。逆に、ステップS114で方向指示器244がOFFになっている場合には、舵角が所定角度以上となる交差点以外の急カーブを走行したと判断できるため、この場合は駐車支援機能103を起動しない。
【0021】
(高速道走行時)
ステップS131で自車が太破線を跨いだと判定した場合には、図9に示したように、サービスエリアまたはパーキングエリア3に進入したか、あるいはインターチェンジまたはジャンクションに進入した可能性がある。そこで、ステップS133へと進み、自車が40km/h以上の速度で300m以上の距離を走行していない場合、自車1が本線からサービスエリアまたはパーキングエリア3へ進入した可能性が高いため、駐車支援機能103を起動する。よって、自車が本線からサービスエリアまたはパーキングエリア3に進入したとき、適切なタイミングで駐車支援機能103を起動できる。一方、ステップS133で自車が40km/h以上の速度で300m以上の距離を走行した場合には、自車がインターチェンジまたはジャンクションに進入した可能性が高いため、この場合は駐車支援機能103を起動しない。
ステップS131で自車が太破線を跨いでいないと判定した場合には、ステップS132へと進み、ゼブラ帯の検出方向と操舵方向とを比較する。図9に示すように、ゼブラ帯404は太破線403よりも前方に配置されているため、太破線403を跨いだことが検出されずゼブラ帯404を検出した場合、太破線403がかすれていた等の理由により、太破線403を跨いだことを認識できなかった可能性が高い。よって、ゼブラ帯404の検出方向が操舵方向と逆である場合、太破線403を跨いだことを検出できなかったときでも、本線からサービスエリアまたはパーキングエリア3への進入を判断でき、適切なタイミングで駐車支援機能103を起動できる。
【0022】
以下、実施例1の駐車支援終了処理の各ステップにおける作用について説明する。
(一般道走行時)
ステップS211で、舵角が所定角度以上である場合には、自車が路側施設から車道へ退出した可能性があるが、未だ路側施設を走行中である場合も想定される。そこで、ステップS212へと進み、自車が路面にペイントされた道路白線または道路端を跨いだか否かを判定する。自車が道路白線または道路端を跨いだ場合は、路側施設から退出したと判定できるため、駐車支援機能103を終了する。これにより、自車が路側施設から車道へ退出したとき、適切なタイミングで駐車支援機能103を終了できる。
一方、ステップS212で自車が道路白線または道路端を跨いだと判定しなかった場合には、ステップS213へと進み、所定高さ以上の段差を検出したか否かを判定する。自車が歩道から車道へ降りる際の段差を検出することで、道路白線や道路端が検出できなかった場合でも、路側施設からの退出を判断でき、適切なタイミングで駐車支援機能103を終了できる。
ステップS213で段差が検出されなかった場合には、ステップS214へと進み、操舵方向と同じ方向に方向指示器244の信号がONになっているか否かを判定する。操舵方向と同じ方向に方向指示器244の信号がONになっている場合、自車が路側施設から退出した可能性が高いため、道路白線が検出されず、かつ、歩道の段差がない場合であっても、路側施設からの退出を判断でき、適切なタイミングで駐車支援機能103を終了できる。
一方、ステップS214で方向指示器244がOFFになっている場合には、路側施設から退出した可能性が低いため、この場合はステップS215へと進み、所定車速以上で、かつ、所定距離以上の間、自車が走行している道路白線を検出したか否かを判定する。一般的に、路側施設は広さが限られており、走行速度も低くなる。したがって、所定車速以上の速度で所定距離以上の距離を走行した場合、路側施設から退出して一般道を走行していると判断できる。これにより、適切なタイミングで駐車支援機能103を終了できる。
【0023】
(高速道走行時)
ステップS231で自車が太破線を跨いだと判定した場合には、図12に示したように、サービスエリアまたはパーキングエリア3から退出した可能性が高いため、駐車支援機能103を終了する。よって、適切なタイミングで駐車支援機能103を終了できる。一方、ステップS231で自車が太破線を跨いだと判定しなかった場合、ステップS232へと進み、ゼブラ帯の検出方向と操舵方向とを比較する。ゼブラ帯の検出方向と操舵方向とが逆である場合、サービスエリアまたはパーキングエリアから退出した可能性が高いと判断できるため、駐車支援機能103を終了する。よって、太破線のペイントのかすれや悪天候等の理由で太破線を跨いだことを認識できない場合であっても、サービスエリアまたはパーキングエリアから退出したとき、適切なタイミングで駐車支援機能103を終了できる。
ステップS232でゼブラ帯が検出されなかった場合、ステップS233へと進み、所定車速以上の速度で、所定距離以上の距離を走行した間に道路白線を検出した場合には、駐車支援機能103を終了する。所定車速以上の速度で所定距離以上の距離を走行した場合、自車はサービスエリアまたはパーキングエリアから退出し、そのときに検出される道路白線は、本線の白線であると判断できる。よって、ゼブラ帯が検出されなかった場合であっても、適切なタイミングで駐車支援機能103を終了できる。
【0024】
次に、効果を説明する。
実施例1の駐車支援装置では、以下に列挙する効果を奏する。
(1) 自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援機能103と、自車周辺の路面を撮像する車両周辺撮像装置200と、車両周辺撮像装置200の撮像画像から得られた情報に基づいて、自車が路側施設に進入したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設に進入したと判定された場合、駐車支援機能103を起動する駐車支援切換機能101と、を備えた。これにより、これにより、自車が路側施設、サービスエリアまたはパーキングエリアへ進入したとき運転者の手を煩わせることなく自動的に駐車支援機能103を起動できる。
【0025】
(2) 自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援機能103と、自車周辺の路面を撮像する車両周辺撮像装置200と、車両周辺撮像装置200の撮像画像から得られた情報に基づいて、自車が路側施設から退出したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設から退出したと判定された場合、駐車支援機能103を終了する駐車支援切換機能101と、を備えた。これにより、自車が路側施設、サービスエリアまたはパーキングエリアから退出したとき運転者の手を煩わせることなく自動的に駐車支援機能103を終了できる。
【0026】
(3) 車両情報を取得する車両情報取得装置240を備え、走行状態認識機能102は、車両情報取得装置240で得られた車両情報に基づいて、自車が路側施設へ進入したことを判定する。これにより、自車が路側施設、サービスエリアまたはパーキングエリアへ進入したか否かを精度よく判断でき、適切なタイミングで駐車支援機能103を起動できる。
【0027】
(4) 車両情報を取得する車両情報取得装置240を備え、走行状態認識機能102は、車両情報取得装置240で得られた車両情報に基づいて、自車が路側施設から退出したことを判定する。これにより、自車が路側施設、サービスエリアまたはパーキングエリアから退出したか否かを精度よく判断でき、適切なタイミングで駐車支援機能103を終了できる。
【実施例2】
【0028】
まず、構成を説明する。なお、実施例1と同一の構成については、図示ならびに説明を省略し、実施例1と異なる部分についてのみ説明する。
〔全体構成〕
図15は、実施例2の駐車支援装置の構成図であり、実施例2の駐車支援装置は、図1に示した実施例1の構成に加え、現在値情報取得装置250と、地図データベース251とを有する。
現在値情報取得装置250は、GPSの情報と地図データベース251から自車の現在値を特定する機能を備える。地図データベース251には自車が走行している道路の種別(高速道か一般道かなど)も含まれる。さらに、駐車場の位置情報を含んでもよい。
実施例2の外部情報受信機能104は、車両に搭載された各種センサの情報を受信する機能に加え、現在値情報取得装置250からの情報を取得する機能を備える。
【0029】
〔駐車支援起動処理〕
実施例2の駐車支援起動処理の流れは、図5のステップS101とステップS133の処理のみが実施例1と異なるため、図5を用いて異なるステップのみを説明する。
ステップS101では、現在値情報取得装置250と地図データベース251からの情報に基づいて、自車が走行している道路の種別が一般道であるか高速道であるかを判定する。一般道である場合にはステップS110へ移行し、高速道である場合にはステップS130へ移行する。
ステップS133では、現在値情報取得装置250と地図データベース251からの情報に基づいて、自車が走行している分岐部分の先所定距離(例えば、300m)以内にサービスエリアまたはパーキングエリアが存在するか否かを判定する。サービスエリアまたはパーキングエリアが存在する場合にはステップS150へ移行し、インターチェンジまたはジャンクションが存在する場合はステップS101へ移行する。
【0030】
次に、作用を説明する。
実施例2では、現在値情報取得装置250と地図データベース251によって得られる情報に基づいて道路の種別を特定しているため、実施例1と比較して、動作モードの判定精度が向上する。
また、現在値情報取得装置250と地図データベース251によって得られる情報に基づいて自車が走行している分岐部分の種別を判断しているため、精度よくサービスエリアまたはパーキングエリアであるか否かを判断できる。
なお、他の作用効果は実施例1と同様であるため、説明を省略する。
【0031】
(他の実施例)
以上、本発明を実施するための形態を、実施例に基づいて説明したが、本発明の具体的な構成は、実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
撮像手段は、少なくとも自車が走行している路面の道路白線や道路端が撮像範囲に入っていれば、どのような撮像形態であってもよい。例えば、図16に示すように、車両の後方のみに後方撮像装置200Rrを取り付けた構成としてもよい。
駐車支援手段は、運転者への駐車ガイドまたは自動駐車の一方のみを実施するものでもよい。
【符号の説明】
【0032】
101 駐車支援切換機能(駐車支援起動手段,駐車支援終了手段)
102 走行状態認識機能(走行状態判定手段)
103 駐車支援機能(駐車支援手段)
200 車両周辺撮像装置(撮像手段)
240 車両情報取得装置(車両情報取得手段)
【特許請求の範囲】
【請求項1】
自動車の駐車を支援する駐車支援装置であって、
自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援手段と、
自車周辺の路面を撮像する撮像手段と、
前記撮像手段の撮像画像から得られた情報に基づいて、自車が路側施設に進入したことを判定する走行状態判定手段と、
前記走行状態判定手段で自車が路側施設に進入したと判定された場合、前記駐車支援手段を起動する駐車支援起動手段と、
を備えたことを特徴とする駐車支援装置。
【請求項2】
自動車の駐車を支援する駐車支援装置であって、
自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援手段と、
自車周辺の路面を撮像する撮像手段と、
前記撮像手段の撮像画像から得られた情報に基づいて、自車が路側施設から退出したことを判定する走行状態判定手段と、
前記走行状態判定手段で自車が路側施設から退出したと判定された場合、前記駐車支援手段を終了する駐車支援終了手段と、
を備えたことを特徴とする駐車支援装置。
【請求項3】
請求項1に記載の駐車支援装置において、
車両情報を取得する車両情報取得手段を備え、
前記走行状態判定手段は、前記車両情報取得手段で得られた車両情報に基づいて、自車が前記路側施設に進入したことを判定することを特徴とする駐車支援装置。
【請求項4】
請求項2に記載の駐車支援装置において、
車両情報を取得する車両情報取得手段を備え、
前記走行状態判定手段は、前記車両情報取得手段で得られた車両情報に基づいて、自車が前記路側施設から退出したことを判定することを特徴とする駐車支援装置。
【請求項5】
請求項3または請求項4に記載の駐車支援装置において、
前記車両情報として、車両の速度を検出する車速センサからの情報と、車両に作用する加速度を検出する加速度センサからの情報と、ステアリングホイールの舵角を検出する舵角センサからの情報と、運転者によって作動させられる方向指示器からの情報と、イグニッションスイッチからの情報のいずれか1つを用いることを特徴とする駐車支援装置。
【請求項1】
自動車の駐車を支援する駐車支援装置であって、
自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援手段と、
自車周辺の路面を撮像する撮像手段と、
前記撮像手段の撮像画像から得られた情報に基づいて、自車が路側施設に進入したことを判定する走行状態判定手段と、
前記走行状態判定手段で自車が路側施設に進入したと判定された場合、前記駐車支援手段を起動する駐車支援起動手段と、
を備えたことを特徴とする駐車支援装置。
【請求項2】
自動車の駐車を支援する駐車支援装置であって、
自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援手段と、
自車周辺の路面を撮像する撮像手段と、
前記撮像手段の撮像画像から得られた情報に基づいて、自車が路側施設から退出したことを判定する走行状態判定手段と、
前記走行状態判定手段で自車が路側施設から退出したと判定された場合、前記駐車支援手段を終了する駐車支援終了手段と、
を備えたことを特徴とする駐車支援装置。
【請求項3】
請求項1に記載の駐車支援装置において、
車両情報を取得する車両情報取得手段を備え、
前記走行状態判定手段は、前記車両情報取得手段で得られた車両情報に基づいて、自車が前記路側施設に進入したことを判定することを特徴とする駐車支援装置。
【請求項4】
請求項2に記載の駐車支援装置において、
車両情報を取得する車両情報取得手段を備え、
前記走行状態判定手段は、前記車両情報取得手段で得られた車両情報に基づいて、自車が前記路側施設から退出したことを判定することを特徴とする駐車支援装置。
【請求項5】
請求項3または請求項4に記載の駐車支援装置において、
前記車両情報として、車両の速度を検出する車速センサからの情報と、車両に作用する加速度を検出する加速度センサからの情報と、ステアリングホイールの舵角を検出する舵角センサからの情報と、運転者によって作動させられる方向指示器からの情報と、イグニッションスイッチからの情報のいずれか1つを用いることを特徴とする駐車支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−25895(P2011−25895A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−176444(P2009−176444)
【出願日】平成21年7月29日(2009.7.29)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月29日(2009.7.29)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]