
駐車支援装置
【課題】車止めや溝といった地面の凹凸の位置までの距離を簡単な構成で検出可能な駐車支援装置を提供する。
【解決手段】本発明は、車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向又は鉛直下方向の少なくとも一方の方向に向けて光ビームを送信し、光ビームが地面によって反射された反射波を受信する送受信手段1と、送受信手段1が受信した反射波の強度の変化に基づいて、所定角度に基づく車両後方所定距離に、地面の凹凸部を検出する検出手段2と、検出手段2検出結果に基づく報知及び車両制御の少なくとも一方を行う支援手段3とを備える。
【解決手段】本発明は、車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向又は鉛直下方向の少なくとも一方の方向に向けて光ビームを送信し、光ビームが地面によって反射された反射波を受信する送受信手段1と、送受信手段1が受信した反射波の強度の変化に基づいて、所定角度に基づく車両後方所定距離に、地面の凹凸部を検出する検出手段2と、検出手段2検出結果に基づく報知及び車両制御の少なくとも一方を行う支援手段3とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は駐車支援装置に係り、より詳細には、車両の後退中に、車両後方の地面上の車止めや段差のような地面の凹凸部を検出して駐車支援を行う駐車支援装置に関する。
【背景技術】
【0002】
近年、様々な車両用の駐車支援技術が開発されている。例えば、下記の特許文献1には、駐車位置に前向き駐車した状態から後退走行する際に、車両後方の障害物までの距離を超音波センサで測定し、カメラで自車周囲に着いての空間情報を演算し、退場方法をモニタ及びスピーカを通じて報知する技術が開示されている。
【0003】
また、下記の特許文献2には、超音波ソナーの送信部から送信された超音波の反射波を受信部が受信し、送信時間と受信時間との時間差から障害物までの距離を算出する駐車支援装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−12987号公報
【特許文献2】特開2010−264945号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記の特許文献1及び2においては、超音波センサ(超音波ソナー)を使用して車両後方の障害物までの距離を測定している。超音波センサでは、送信部から送信された超音波の反射波を受信部が受信し、送信時間と受信時間との時間差から障害物までの距離を算出する。このため、これらの従来技術においては、障害物までの距離を測定するために、高精度で時間差を測定することが必要であり、高価な装置が必要であった。
【0006】
そこで、本発明は、車止めや段差といった地面の凹凸の位置までの距離を簡単な構成で検出可能な駐車支援装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記の目的を達成するため、本発明の駐車支援装置は、車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向及び鉛直下方向の少なくとも一方の方向に向けて送信波を送信し、前記送信波が地面によって反射された反射波を受信する送受信手段と、
前記送受信手段が受信した前記反射波の強度の変化に基づいて、前記所定角度に基づく車両後方所定距離に、前記地面の凹凸部を検出する検出手段と、前記検出手段の検出結果に基づく報知及び車両制御の少なくとも一方を行う支援手段と、を備えている。
【0008】
このように構成された本発明の駐車支援装置によれば、鉛直線に対して車両後方へ所定角度を成す斜め下方向及び鉛直下方向の少なくとも一方の方向に向けて送信波を送信し、その反射波の変化で地面の凹凸部を検出する。このため、地面の凹凸部が検出されたときには、送受信手段からその凹凸部までの車両後方距離が、その所定角度に基づいて決まっている。すなわち、送受信手段の取り付け位置の地面からの高さをH、所定角度をθとすれば、送受信手段から凹凸部までの水平距離Lは、下記の(1)式で表される。
L=H・tanθ ・・・(1)
【0009】
このように、本発明の駐車支援装置では、従来の超音波ソナーのように送信時間と受信時間との時間差から障害物までの距離を算出する必要がなく、車止めや溝の段差のような地面の凹凸の位置までの距離を簡単な構成で検出することができる。
【0010】
また、本発明において好ましくは、前記送受信手段は、鉛直線に対して車両後方へ所定角度を成す平面内で、前記送信波を車幅方向に走査する。
これにより、送受信手段の真後ろだけでなく、車幅方向の所定の範囲内で、地面の凹凸部を検出することができる。
【0011】
また、本発明において好ましくは、前記送受信手段は、前記所定角度を変化させながら、前記送信波を送信する。
これにより、車両を後退させながら、一旦検出した地面の凹凸部を継続して追跡することができる。
【0012】
また、本発明において好ましくは、前記検出手段は、車両の後退中に、前記反射波の強度が上昇した場合に前記地面の凸部を検出し、前記反射の強度が低下した場合に前記地面の凹部を検出し、
前記支援手段は、前記検出手段が前記地面の凸部を検出した場合と凹部を検出した場合とで異なる報知及び車両制御の少なくとも一方を行う。
【0013】
これにより、反射波の強度変化に基づいて、容易に地面の凸部と凹部とを区別することができ、この区別に基づいて、的確な報知や運転支援を行うことができる。
【0014】
また、本発明において好ましくは、前記検出手段は、車両の後退中に、前記反射強度が一旦上昇した後、低下した場合に、前記地面上の車止めを検出する。
これにより、車止めを容易に検出することができる。
【0015】
また、本発明において好ましくは、前記送受信手段は、第1の所定角度で第1送信波を送信し、前記第1送信波が地面によって反射された第1反射波を受信する第1送受信手段と、前記第1の所定角度より小さい第2の所定角度で第2送信波を送信し、前記第2送信波が地面によって反射された第2反射波を受信する第2送受信手段とを備え、前記検出手段は、前記第1及び第2反射波の強度が同一方向に変化した場合に、前記地面の凹凸部を検出する。
【0016】
このように、第1及び第2送受信手段を設け、前記第1及び第2反射波の強度が同一方向に変化した場合に、前記地面の凹凸部を検出することにより、凹凸部の誤検出を防止することができる。
【0017】
また、本発明において好ましくは、前記送受信手段は、第1の所定角度で第1送信波を送信し、前記第1送信波が地面によって反射された第1反射波を受信する第1送受信手段と、前記第1の所定角度より小さい第2の所定角度で第2送信波を送信し、前記第2送信波が地面によって反射された第2反射波を受信する第2送受信手段とを備え、前記検出手段は、車両の後退中に、先ず、前記第1送受信手段が前記第1反射波を受信することによって、前記第1の所定角度に基づく車両後方の第1の所定距離に、前記地面の凹凸部を検出し、次に、前記第2送受信手段が前記第2反射波を受信することによって、前記第2の所定角度に基づく車両後方の第1の所定距離よりも車両に近い第2の所定距離に、前記地面の凹凸部を検出する。
【0018】
このように、第1及び第2光ビームを照射しながら車両を後退させることによって、先ず、第1の所定距離に車止めが検出され、次いで、第2の所定距離に車止めが検出される。したがって、複数の光ビームの検出タイミングによって、車両と車止めの接近度を検出することができる。
【発明の効果】
【0019】
本発明の駐車支援装置によれば、車止めや段差といった地面の凹凸の位置までの距離を簡単な構成で検出することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態による駐車支援装置の構成を示すブロック図である。
【図2】車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向に向けて光ビームを送信する様子を示す模式図である。
【図3】(a)は、光ビームの出射角度と凸部までの距離との関係を示す模式図であり、(b)は、凸部を検出するときの反射波強度の時間変化を示すグラフであり、(c)は、車両と凸部との位置関係の表示例である。
【図4】(a)は、光ビームの出射角度と凹部までの距離との関係を示す模式図であり、(b)は、凹部を検出するときの反射波強度の時間変化を示すグラフであり、(c)は、車両と凹部との位置関係の表示例である。
【図5】(a)〜(d)は、本発明の第2実施形態の駐車支援装置により、車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向に向けて光ビームを送信する様子を示す模式図である。
【図6】第2実施形態の駐車支援装置の動作例を説明するフローチャートである。
【図7】(a)〜(c)は、第2実施液体の駐車支援装置による駐車支援の表示画面例である。
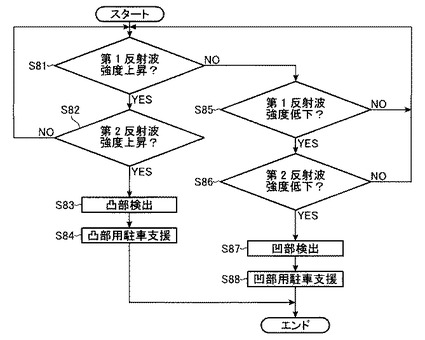
【図8】第3実施形態の駐車支援装置の動作例を説明するフローチャートである。
【発明を実施するための形態】
【0021】
以下、添付の図面を参照して、本発明の駐車支援装置の実施形態を説明する。
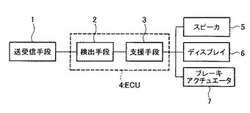
図1のブロック図を参照して、第1実施形態による駐車支援装置の構成を説明する。第1実施形態による駐車支援装置は、車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向又は鉛直下方向の少なくとも一方の方向に向けて、送信波として光ビームを送信し、光ビームが地面によって反射された反射波を受信する送受信手段1と、送受信手段1が受信した反射波の強度の変化に基づいて、所定角度に基づく車両後方所定距離に、地面の凹凸部を検出する検出手段2と、検出手段2の検出結果の報知、及び前記検出結果に基づく車両制御の少なくとも一方を行う支援手段3と、を備えている。
【0022】
送受信手段1は、例えば、車両の後端に、車幅方向の中央付近に1つだけ配置してもよいし、車両の後端に、車幅方向に沿って2つ以上配置してもよい。例えば、一対の送受信手段を、車両後端の車幅方向の両端付近に取り付けてもよい。
【0023】
なお、送受信手段1は、必ずしも車両の後端に配置される必要はないが、車両後方の地面に向かって送信波を送信可能な位置に配置されることが望ましい。また、送受信手段1は、送信手段と受信手段とが一体であってもよいし、送信手段と受信手段とが離間して設けられていてもよい。
【0024】
送受信手段1は、光ビームBを、鉛直線に対して車両後方へ所定角度を成す平面内で車幅方向に走査する横方向スキャン式光センサで構成するとよい。また、送受信手段1は、光ビームBを車幅方向にスキャンするとともに、光ビームBの上下方向を定める所定角度を所定の範囲内(例えば、0°〜80°)で変化させながら光ビームBを送信する2次元スキャン式光(レーザ)センサであってもよい。また、送受信手段1は、光ビームBを車幅方向にはスキャンせずに、光ビームBの上下方向を定める所定角度を所定の範囲内(例えば、0°〜80°)で変化させながら、光ビームBを送信する縦方向スキャン式光センサであってもよい。
【0025】
送受信手段1は、所定角度が可変である場合、一旦捕捉した地面の凹凸を追跡するように、車両の後退とともに所定角度を変化させてもよい。例えば、反射波強度のベースラインに対する上昇に基づいて地面の凸部を検出した場合には、反射波強度が高くなった状態が維持されるように、所定角度を変化させるとよい。これにより、凸部の位置を継続的に検出することができる。
【0026】
また、例えば、反射波強度のベースラインに対する低下に基づいて地面の凹部を検出した場合には、反射波強度が低くなった状態が維持されるように、所定角度を変化させるとよい。これにより、凹部を継続的に検出することができる。
【0027】
なお、検出手段2及び支援手段3は、車載ECU(electric control unit:電子制御装置)4における処理機能に相当する。これらの処理機能は、コンピュータにおいて所定のプログラムを実行することによって実現してもよいし、マイクロチップによって実現してもよい。
【0028】
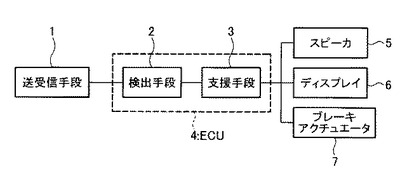
図2に、車両Cの後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向に向けて送信される光ビームBを示す。図2に示す例では、光ビームBは、地面に配置された車止め8を照射している。
【0029】
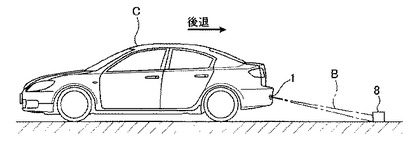
図3(a)を参照して、光ビームを車両後方斜め下方向に照射して地面上の車止め8を検出するときに、その車止め8までの距離を求められることを説明する。図3(a)は、光ビームBの鉛直方向に対する出射角度θと車止め8までの距離Lとの関係を示す。図3(a)に示すように、送受信手段1が地面からの高さHの位置に配置されている場合、送受信手段1から車止め8までの水平距離Lは、下記の(1)式で表される。
L=H・tanθ ・・・(1)
なお、光ビームを鉛直下方向に照射するとき、所定角度θ=0である。この場合、検出された車止め8は、送受信手段1の真下に位置する。
【0030】
このように、検出手段2が車止め8を検出する際に、車止め8までの水平距離Lが、所定角度θの関数として求められる。これにより、従来の超音波ソナーのように送信時間と受信時間との時間差から障害物までの距離を算出する必要がなく、車止めや溝の段差のような地面の凹凸の位置までの距離を簡単な構成で検出することができる。そして、超音波ソナーのような高価な機器を使用する必要がないため、コストの低減を図ることが出来る。
【0031】
さらに、検出手段2は、車両Cの後退中に、反射波の強度が上昇した場合に、車止め8のような地面の凸部を検出する。なお、車止めに限らず、地面が一段高くなっている段差も同様に検出される。また、本実施形態では、検出手段1は、車両の後退中に、反射強度が一旦上昇した後、低下した場合に、地面上の車止めを検出する。
【0032】
図3(b)を参照して、車止め8の検出を説明する。図3(b)のグラフの横軸は時間を表し、縦軸は反射波強度を表し、グラフ中の線Iは、反射波強度の時間変化を表す。線Iで示すように、時刻t1に反射波強度がベースラインから一旦上昇し、その後、時刻t2に反射波強度がベースラインまで低下している。この反射強度の変化に基づいて、検出手段2は車止め8を検出する。
【0033】
図3(c)を参照して、車止め8を検出した場合の、支援手段3による駐車支援の一例を説明する。図3(c)は、運転席から表示可能な位置に配置されたディスプレイ6の表示画面Dにおける車両車止め8との位置関係の表示例である。また、表示画面Dにはまた、車両後端及び後輪位置をそれぞれ示すラインが表示されている。表示画面D上の車止め8の表示位置は、車両の後退距離に従って、車両後端ラインに接近するように移動させるとよい。車両の後退距離は、例えば、車輪の回転角度に基づいて算出される。これにより、運転者は、車両と車止め8との位置関係を確認しながら車両を後退させることができる。
【0034】
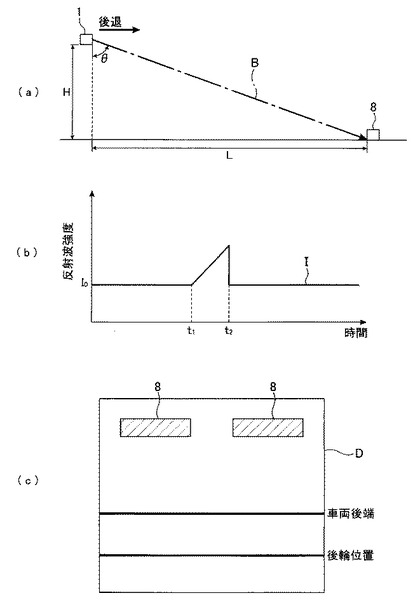
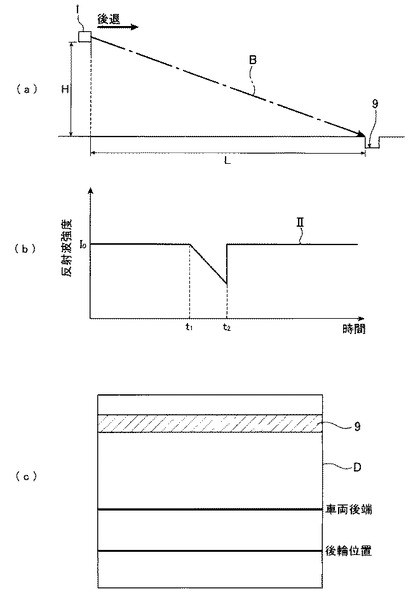
次に、図4(a)を参照して、光ビームを車両後方斜め下方向に照射して地面の溝9を検出するときに、その溝9までの距離を求められることを説明する。図4(a)は、光ビームBの鉛直方向に対する出射角度θと溝9までの距離Lとの関係を示す。図4(a)に示すように、送受信手段1が地面からの高さHの位置に配置されている場合、送受信手段1から溝9までの水平距離Lは、下記の(1)式で表される。
L=H・tanθ ・・・(1)
【0035】
したがって、検出手段2が溝9を検出する際にも、溝9までの水平距離Lが、所定角度θの関数として求められる。
なお、光ビームを鉛直下方向に照射するとき、所定角度θ=0である。この場合、検出された溝9は、送受信手段1の真下に位置する。
【0036】
さらに、検出手段2は、車両Cの後退中に、反射波の強度が低下した場合に溝のように一段低くなる段差のような地面の凹部を検出する。なお、溝に限らず、地面が一段低くなっている段差も同様に検出される。
【0037】
図4(b)を参照して、溝9の検出を説明する。図4(b)のグラフの横軸は時間を表し、縦軸は反射波強度を表し、グラフ中の線IIは、反射波強度の時間変化を表す。線IIで示すように、時刻t1に反射波強度がベースラインから一旦低下し、その後、時刻t2に反射波強度がベースラインまで上昇している。この反射強度の変化に基づいて、検出手段2は溝9を検出する。
【0038】
図4(c)を参照して、車止め8を検出した場合の、支援手段3による駐車支援の一例を説明する。図3(c)は、運転席から表示可能な位置に配置されたディスプレイ6の表示画面Dにおける車両と溝9との位置関係の表示例である。また、表示画面Dにはまた、車両後端及び後輪位置をそれぞれ示すラインが表示されている。表示画面D上の溝9の表示位置は、車両の後退距離に従って、ラインに接近するように移動させるとよい。車両の後退距離は、例えば、車輪の回転角度に基づいて算出される。これにより、運転者は、車両と溝9との位置関係を確認しながら車両を後退させることができる。
【0039】
なお、表示画面Dにおいては、運転者が車止め8と溝9とを区別できるように、これらの形状や色彩を互いに異なるものとして表示するとよい。また、支援手段3は、スピーカ5により音声、チャイム又はブザーで運転者に、車止め8や溝9を報知してもよい。また、支援手段3は、後輪が車止め8又は溝9の直前となる位置で車両を停止させるように、ブレーキアクチュエータ7を制御してもよい。
【0040】
次に、本発明の駐車支援装置の第2実施形態を説明する。
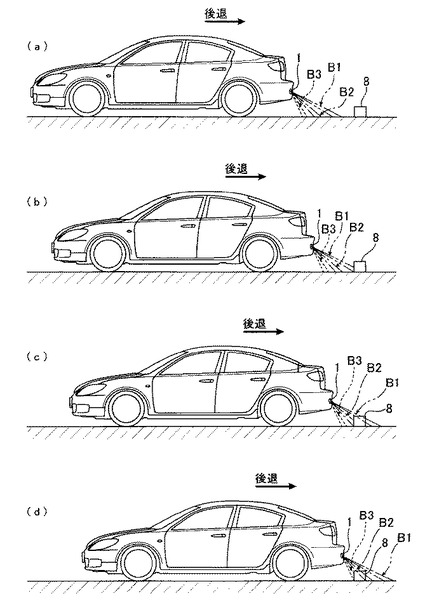
第2実施形態による駐車支援装置の構成は、図1に示した第1実施形態のものと基本的に同じである。ただし、第2実施形態では、図5(a)に示すように、送受信手段1が、鉛直線に対して車両後方へ3つの所定角度を成す斜め下方向に向けてそれぞれ送信波を送信する。
【0041】
第1の所定角度θ1(例えば60°)の第1光ビームB1は、車両後方の遠距離に位置する凹凸を検出するために照射される。第1の所定角度θ1よりも小さな第2の所定角度θ2(例えば45°)の第2光ビームB2は、車両後方の中距離に位置する凹凸を検出するために照射される。そして、第2の所定角度θ2よりも小さな第3の所定角度θ3(例えば30°)の第3光ビームB3は、車両後方の近距離に位置する凹凸を検出するために照射される。なお、第3の所定角度θ3は、θ3=0°でもよい。その場合、第3光ビームB3は、送受信装置1の真下に向かって照射される。
【0042】
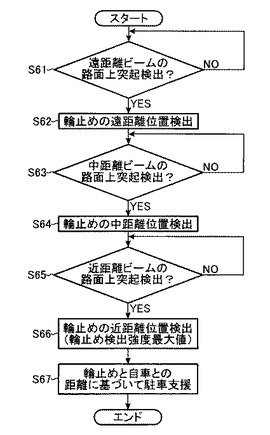
次に、図5、及び図6のフローチャートを参照して、第2実施形態による駐車支援装置の動作例を説明する。
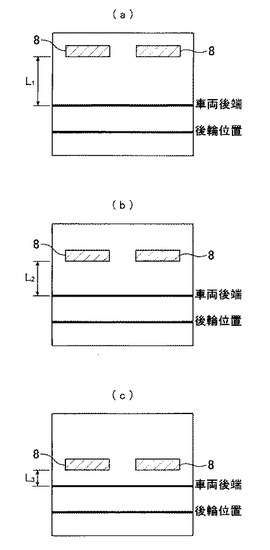
図5(b)に示すように、車両が後退して、時刻t1に、遠距離ビームである第1光ビームB1が車止め8に届くと、第1光ビームB1の反射波強度が上昇して、車止め(輪止め)8が検出される(S61)。車止め8の位置までの距離L1は、第1光ビームB1の第1の所定確度θ1に基づいて検出される(S62)。送受信手段1が、地面から高さHの位置に取り付けられている場合、距離L1は、L1=H・tanθ1として求められる。図7(a)に、距離L1の位置に検出された車止め8の表示例を示す。
【0043】
続いて、図5(c)に示すように、車両が更に後退して、時刻t2に、中距離ビームである第2光ビームB2が車止め8に届くと、第2光ビームB2の反射波強度が上昇して、車止め8が検出される(S63)。車止め8の位置までの距離L2は、第2光ビームB2の第2の所定確度θ2に基づいて検出される(S64)。即ち、距離L2は、L2=H・tanθ2として求められる。図7(b)に、距離L2の位置に検出された車止め8の表示例を示す。
【0044】
続いて、図5(d)に示すように、車両が更に後退して、時刻t3に、近距離ビームである第3光ビームB3が車止め8に届くと、第3光ビームB3の反射波強度が上昇して、車止め8が検出される(S65)。車止め8の位置までの距離L3は、第3光ビームB3の第3の所定確度θ3に基づいて検出される(S66)。即ち、距離L3は、L3=H・tanθ3として求められる。図7(c)に、距離L3の位置に検出された車止め8の表示例を示す。
【0045】
このように、第1〜第3光ビームB1〜B3を照射しながら車両を後退させることによって、先ず、時刻t1に距離L1に車止め8が検出され、次いで、時刻t2に距離L2に車止め8が検出され、次いで、時刻t3に、距離L3に車止め8が検出される。したがって、3つの光ビームの検出タイミングによって、車両(のタイヤ)と車止めの接近度が順次に検出される。
【0046】
第3光ビームB3の反射波強度に基づいて車止め8が検出された後は、支援手段3は、ディスプレイ6に、その車止め8の位置までの距離L3から車両の後退距離を減じた位置に車止め8を逐次表示させるとよい(S67)。
【0047】
次に、本発明の駐車支援装置の第3実施形態を説明する。
第3実施形態による駐車支援装置の構成は、図1に示した第1実施形態のものと基本的に同じである。ただし、第3実施形態では、送受信手段1は、第1の所定角度θ1で第1光ビームを送信し、第1光ビームが地面によって反射された第1反射波を受信する第1送受信手段と、第1の所定角度θ1より小さい第2の所定角度θ2で第2光ビームB2を送信し、第2光ビームB2が地面によって反射された第2反射波を受信する第2送受信手段とから構成されている。
【0048】
なお、第1及び第2送受信手段は、一体に形成されてもよいし、互いに離間して配置されてもよい。また、第1受信手段が第2受信手段を兼ねてもよい。
【0049】
次に、図8のフローチャートを参照して、第3実施形態による駐車支援装置の動作例を説明する。
車両が後退して、第1光ビームB1の反射波強度及び第2光ビームB2の反射強度が共に上昇する方向に変化した場合(S81で「yes」かつS82で「yes」の場合)、検出手段2は、地面の凸部を検出する(S83)。このように、第1及び第2反射波の強度が共に上昇した場合に地面の凸部を検出することにより、凸部の誤検出が防止される。
【0050】
そして、支援手段3は、凸部用の駐車支援を行う(S84)。凸部用の駐車支援としては、例えば、凸部までの距離が所定距離以下になったときに、スピーカ5で接触予告報知をするとよい。また、ディスプレイ6に図3(c)に示したような表示を行って、車両と凸部との位置関係を運転者に知らせてもよい。また、凸部までの距離が所定距離以下になったときに、ブレーキアクチュエータ7を制御して、車両を停止させてもよい。
【0051】
また、車両が後退して、第1光ビームB1の反射波強度及び第2光ビームB2の反射強度が共に低下する方向に変化した場合(S85で「yes」かつS86で「yes」の場合)、検出手段2は、地面の凹部を検出する(S87)。このように、第1及び第2反射波の強度が共に低下した場合に地面の凹部を検出することにより、凹部の誤検出が防止される。
【0052】
そして、支援手段3は、凹部用の駐車支援を行う(S88)。凹部用の駐車支援としては、例えば、凹部までの距離が所定距離以下になったときに、スピーカ5で警報音を発生させ、運転者に後輪が凹部に落下する危険性を報知するとよい。また、ディスプレイ6に図4(c)に示したような表示を行って、車両と凹部との位置関係を運転者に知らせてもよい。また、凹部までの距離が所定距離以下になったときに、ブレーキアクチュエータ7を制御して、車両を停止させてもよい。
【0053】
上述の実施形態においては、本発明を特定の条件で構成した例について説明したが、本発明は種々の変更及び組み合わせを行うことができ、これに限定されるものではない。例えば、上述の実施形態では、送信波が光ビームである例について説明したが、本発明では、送信波は光ビームに限定されず、例えば、マイクロ波のような指向性を有する電波を使用してもよい。
【符号の説明】
【0054】
1 送受信手段
2 検出手段
3 支援手段
4 ECU
5 スピーカ
6 ディスプレイ
7 ブレーキアクチュエータ
8 車止め
9 溝
【技術分野】
【0001】
本発明は駐車支援装置に係り、より詳細には、車両の後退中に、車両後方の地面上の車止めや段差のような地面の凹凸部を検出して駐車支援を行う駐車支援装置に関する。
【背景技術】
【0002】
近年、様々な車両用の駐車支援技術が開発されている。例えば、下記の特許文献1には、駐車位置に前向き駐車した状態から後退走行する際に、車両後方の障害物までの距離を超音波センサで測定し、カメラで自車周囲に着いての空間情報を演算し、退場方法をモニタ及びスピーカを通じて報知する技術が開示されている。
【0003】
また、下記の特許文献2には、超音波ソナーの送信部から送信された超音波の反射波を受信部が受信し、送信時間と受信時間との時間差から障害物までの距離を算出する駐車支援装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−12987号公報
【特許文献2】特開2010−264945号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記の特許文献1及び2においては、超音波センサ(超音波ソナー)を使用して車両後方の障害物までの距離を測定している。超音波センサでは、送信部から送信された超音波の反射波を受信部が受信し、送信時間と受信時間との時間差から障害物までの距離を算出する。このため、これらの従来技術においては、障害物までの距離を測定するために、高精度で時間差を測定することが必要であり、高価な装置が必要であった。
【0006】
そこで、本発明は、車止めや段差といった地面の凹凸の位置までの距離を簡単な構成で検出可能な駐車支援装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記の目的を達成するため、本発明の駐車支援装置は、車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向及び鉛直下方向の少なくとも一方の方向に向けて送信波を送信し、前記送信波が地面によって反射された反射波を受信する送受信手段と、
前記送受信手段が受信した前記反射波の強度の変化に基づいて、前記所定角度に基づく車両後方所定距離に、前記地面の凹凸部を検出する検出手段と、前記検出手段の検出結果に基づく報知及び車両制御の少なくとも一方を行う支援手段と、を備えている。
【0008】
このように構成された本発明の駐車支援装置によれば、鉛直線に対して車両後方へ所定角度を成す斜め下方向及び鉛直下方向の少なくとも一方の方向に向けて送信波を送信し、その反射波の変化で地面の凹凸部を検出する。このため、地面の凹凸部が検出されたときには、送受信手段からその凹凸部までの車両後方距離が、その所定角度に基づいて決まっている。すなわち、送受信手段の取り付け位置の地面からの高さをH、所定角度をθとすれば、送受信手段から凹凸部までの水平距離Lは、下記の(1)式で表される。
L=H・tanθ ・・・(1)
【0009】
このように、本発明の駐車支援装置では、従来の超音波ソナーのように送信時間と受信時間との時間差から障害物までの距離を算出する必要がなく、車止めや溝の段差のような地面の凹凸の位置までの距離を簡単な構成で検出することができる。
【0010】
また、本発明において好ましくは、前記送受信手段は、鉛直線に対して車両後方へ所定角度を成す平面内で、前記送信波を車幅方向に走査する。
これにより、送受信手段の真後ろだけでなく、車幅方向の所定の範囲内で、地面の凹凸部を検出することができる。
【0011】
また、本発明において好ましくは、前記送受信手段は、前記所定角度を変化させながら、前記送信波を送信する。
これにより、車両を後退させながら、一旦検出した地面の凹凸部を継続して追跡することができる。
【0012】
また、本発明において好ましくは、前記検出手段は、車両の後退中に、前記反射波の強度が上昇した場合に前記地面の凸部を検出し、前記反射の強度が低下した場合に前記地面の凹部を検出し、
前記支援手段は、前記検出手段が前記地面の凸部を検出した場合と凹部を検出した場合とで異なる報知及び車両制御の少なくとも一方を行う。
【0013】
これにより、反射波の強度変化に基づいて、容易に地面の凸部と凹部とを区別することができ、この区別に基づいて、的確な報知や運転支援を行うことができる。
【0014】
また、本発明において好ましくは、前記検出手段は、車両の後退中に、前記反射強度が一旦上昇した後、低下した場合に、前記地面上の車止めを検出する。
これにより、車止めを容易に検出することができる。
【0015】
また、本発明において好ましくは、前記送受信手段は、第1の所定角度で第1送信波を送信し、前記第1送信波が地面によって反射された第1反射波を受信する第1送受信手段と、前記第1の所定角度より小さい第2の所定角度で第2送信波を送信し、前記第2送信波が地面によって反射された第2反射波を受信する第2送受信手段とを備え、前記検出手段は、前記第1及び第2反射波の強度が同一方向に変化した場合に、前記地面の凹凸部を検出する。
【0016】
このように、第1及び第2送受信手段を設け、前記第1及び第2反射波の強度が同一方向に変化した場合に、前記地面の凹凸部を検出することにより、凹凸部の誤検出を防止することができる。
【0017】
また、本発明において好ましくは、前記送受信手段は、第1の所定角度で第1送信波を送信し、前記第1送信波が地面によって反射された第1反射波を受信する第1送受信手段と、前記第1の所定角度より小さい第2の所定角度で第2送信波を送信し、前記第2送信波が地面によって反射された第2反射波を受信する第2送受信手段とを備え、前記検出手段は、車両の後退中に、先ず、前記第1送受信手段が前記第1反射波を受信することによって、前記第1の所定角度に基づく車両後方の第1の所定距離に、前記地面の凹凸部を検出し、次に、前記第2送受信手段が前記第2反射波を受信することによって、前記第2の所定角度に基づく車両後方の第1の所定距離よりも車両に近い第2の所定距離に、前記地面の凹凸部を検出する。
【0018】
このように、第1及び第2光ビームを照射しながら車両を後退させることによって、先ず、第1の所定距離に車止めが検出され、次いで、第2の所定距離に車止めが検出される。したがって、複数の光ビームの検出タイミングによって、車両と車止めの接近度を検出することができる。
【発明の効果】
【0019】
本発明の駐車支援装置によれば、車止めや段差といった地面の凹凸の位置までの距離を簡単な構成で検出することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態による駐車支援装置の構成を示すブロック図である。
【図2】車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向に向けて光ビームを送信する様子を示す模式図である。
【図3】(a)は、光ビームの出射角度と凸部までの距離との関係を示す模式図であり、(b)は、凸部を検出するときの反射波強度の時間変化を示すグラフであり、(c)は、車両と凸部との位置関係の表示例である。
【図4】(a)は、光ビームの出射角度と凹部までの距離との関係を示す模式図であり、(b)は、凹部を検出するときの反射波強度の時間変化を示すグラフであり、(c)は、車両と凹部との位置関係の表示例である。
【図5】(a)〜(d)は、本発明の第2実施形態の駐車支援装置により、車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向に向けて光ビームを送信する様子を示す模式図である。
【図6】第2実施形態の駐車支援装置の動作例を説明するフローチャートである。
【図7】(a)〜(c)は、第2実施液体の駐車支援装置による駐車支援の表示画面例である。
【図8】第3実施形態の駐車支援装置の動作例を説明するフローチャートである。
【発明を実施するための形態】
【0021】
以下、添付の図面を参照して、本発明の駐車支援装置の実施形態を説明する。
図1のブロック図を参照して、第1実施形態による駐車支援装置の構成を説明する。第1実施形態による駐車支援装置は、車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向又は鉛直下方向の少なくとも一方の方向に向けて、送信波として光ビームを送信し、光ビームが地面によって反射された反射波を受信する送受信手段1と、送受信手段1が受信した反射波の強度の変化に基づいて、所定角度に基づく車両後方所定距離に、地面の凹凸部を検出する検出手段2と、検出手段2の検出結果の報知、及び前記検出結果に基づく車両制御の少なくとも一方を行う支援手段3と、を備えている。
【0022】
送受信手段1は、例えば、車両の後端に、車幅方向の中央付近に1つだけ配置してもよいし、車両の後端に、車幅方向に沿って2つ以上配置してもよい。例えば、一対の送受信手段を、車両後端の車幅方向の両端付近に取り付けてもよい。
【0023】
なお、送受信手段1は、必ずしも車両の後端に配置される必要はないが、車両後方の地面に向かって送信波を送信可能な位置に配置されることが望ましい。また、送受信手段1は、送信手段と受信手段とが一体であってもよいし、送信手段と受信手段とが離間して設けられていてもよい。
【0024】
送受信手段1は、光ビームBを、鉛直線に対して車両後方へ所定角度を成す平面内で車幅方向に走査する横方向スキャン式光センサで構成するとよい。また、送受信手段1は、光ビームBを車幅方向にスキャンするとともに、光ビームBの上下方向を定める所定角度を所定の範囲内(例えば、0°〜80°)で変化させながら光ビームBを送信する2次元スキャン式光(レーザ)センサであってもよい。また、送受信手段1は、光ビームBを車幅方向にはスキャンせずに、光ビームBの上下方向を定める所定角度を所定の範囲内(例えば、0°〜80°)で変化させながら、光ビームBを送信する縦方向スキャン式光センサであってもよい。
【0025】
送受信手段1は、所定角度が可変である場合、一旦捕捉した地面の凹凸を追跡するように、車両の後退とともに所定角度を変化させてもよい。例えば、反射波強度のベースラインに対する上昇に基づいて地面の凸部を検出した場合には、反射波強度が高くなった状態が維持されるように、所定角度を変化させるとよい。これにより、凸部の位置を継続的に検出することができる。
【0026】
また、例えば、反射波強度のベースラインに対する低下に基づいて地面の凹部を検出した場合には、反射波強度が低くなった状態が維持されるように、所定角度を変化させるとよい。これにより、凹部を継続的に検出することができる。
【0027】
なお、検出手段2及び支援手段3は、車載ECU(electric control unit:電子制御装置)4における処理機能に相当する。これらの処理機能は、コンピュータにおいて所定のプログラムを実行することによって実現してもよいし、マイクロチップによって実現してもよい。
【0028】
図2に、車両Cの後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向に向けて送信される光ビームBを示す。図2に示す例では、光ビームBは、地面に配置された車止め8を照射している。
【0029】
図3(a)を参照して、光ビームを車両後方斜め下方向に照射して地面上の車止め8を検出するときに、その車止め8までの距離を求められることを説明する。図3(a)は、光ビームBの鉛直方向に対する出射角度θと車止め8までの距離Lとの関係を示す。図3(a)に示すように、送受信手段1が地面からの高さHの位置に配置されている場合、送受信手段1から車止め8までの水平距離Lは、下記の(1)式で表される。
L=H・tanθ ・・・(1)
なお、光ビームを鉛直下方向に照射するとき、所定角度θ=0である。この場合、検出された車止め8は、送受信手段1の真下に位置する。
【0030】
このように、検出手段2が車止め8を検出する際に、車止め8までの水平距離Lが、所定角度θの関数として求められる。これにより、従来の超音波ソナーのように送信時間と受信時間との時間差から障害物までの距離を算出する必要がなく、車止めや溝の段差のような地面の凹凸の位置までの距離を簡単な構成で検出することができる。そして、超音波ソナーのような高価な機器を使用する必要がないため、コストの低減を図ることが出来る。
【0031】
さらに、検出手段2は、車両Cの後退中に、反射波の強度が上昇した場合に、車止め8のような地面の凸部を検出する。なお、車止めに限らず、地面が一段高くなっている段差も同様に検出される。また、本実施形態では、検出手段1は、車両の後退中に、反射強度が一旦上昇した後、低下した場合に、地面上の車止めを検出する。
【0032】
図3(b)を参照して、車止め8の検出を説明する。図3(b)のグラフの横軸は時間を表し、縦軸は反射波強度を表し、グラフ中の線Iは、反射波強度の時間変化を表す。線Iで示すように、時刻t1に反射波強度がベースラインから一旦上昇し、その後、時刻t2に反射波強度がベースラインまで低下している。この反射強度の変化に基づいて、検出手段2は車止め8を検出する。
【0033】
図3(c)を参照して、車止め8を検出した場合の、支援手段3による駐車支援の一例を説明する。図3(c)は、運転席から表示可能な位置に配置されたディスプレイ6の表示画面Dにおける車両車止め8との位置関係の表示例である。また、表示画面Dにはまた、車両後端及び後輪位置をそれぞれ示すラインが表示されている。表示画面D上の車止め8の表示位置は、車両の後退距離に従って、車両後端ラインに接近するように移動させるとよい。車両の後退距離は、例えば、車輪の回転角度に基づいて算出される。これにより、運転者は、車両と車止め8との位置関係を確認しながら車両を後退させることができる。
【0034】
次に、図4(a)を参照して、光ビームを車両後方斜め下方向に照射して地面の溝9を検出するときに、その溝9までの距離を求められることを説明する。図4(a)は、光ビームBの鉛直方向に対する出射角度θと溝9までの距離Lとの関係を示す。図4(a)に示すように、送受信手段1が地面からの高さHの位置に配置されている場合、送受信手段1から溝9までの水平距離Lは、下記の(1)式で表される。
L=H・tanθ ・・・(1)
【0035】
したがって、検出手段2が溝9を検出する際にも、溝9までの水平距離Lが、所定角度θの関数として求められる。
なお、光ビームを鉛直下方向に照射するとき、所定角度θ=0である。この場合、検出された溝9は、送受信手段1の真下に位置する。
【0036】
さらに、検出手段2は、車両Cの後退中に、反射波の強度が低下した場合に溝のように一段低くなる段差のような地面の凹部を検出する。なお、溝に限らず、地面が一段低くなっている段差も同様に検出される。
【0037】
図4(b)を参照して、溝9の検出を説明する。図4(b)のグラフの横軸は時間を表し、縦軸は反射波強度を表し、グラフ中の線IIは、反射波強度の時間変化を表す。線IIで示すように、時刻t1に反射波強度がベースラインから一旦低下し、その後、時刻t2に反射波強度がベースラインまで上昇している。この反射強度の変化に基づいて、検出手段2は溝9を検出する。
【0038】
図4(c)を参照して、車止め8を検出した場合の、支援手段3による駐車支援の一例を説明する。図3(c)は、運転席から表示可能な位置に配置されたディスプレイ6の表示画面Dにおける車両と溝9との位置関係の表示例である。また、表示画面Dにはまた、車両後端及び後輪位置をそれぞれ示すラインが表示されている。表示画面D上の溝9の表示位置は、車両の後退距離に従って、ラインに接近するように移動させるとよい。車両の後退距離は、例えば、車輪の回転角度に基づいて算出される。これにより、運転者は、車両と溝9との位置関係を確認しながら車両を後退させることができる。
【0039】
なお、表示画面Dにおいては、運転者が車止め8と溝9とを区別できるように、これらの形状や色彩を互いに異なるものとして表示するとよい。また、支援手段3は、スピーカ5により音声、チャイム又はブザーで運転者に、車止め8や溝9を報知してもよい。また、支援手段3は、後輪が車止め8又は溝9の直前となる位置で車両を停止させるように、ブレーキアクチュエータ7を制御してもよい。
【0040】
次に、本発明の駐車支援装置の第2実施形態を説明する。
第2実施形態による駐車支援装置の構成は、図1に示した第1実施形態のものと基本的に同じである。ただし、第2実施形態では、図5(a)に示すように、送受信手段1が、鉛直線に対して車両後方へ3つの所定角度を成す斜め下方向に向けてそれぞれ送信波を送信する。
【0041】
第1の所定角度θ1(例えば60°)の第1光ビームB1は、車両後方の遠距離に位置する凹凸を検出するために照射される。第1の所定角度θ1よりも小さな第2の所定角度θ2(例えば45°)の第2光ビームB2は、車両後方の中距離に位置する凹凸を検出するために照射される。そして、第2の所定角度θ2よりも小さな第3の所定角度θ3(例えば30°)の第3光ビームB3は、車両後方の近距離に位置する凹凸を検出するために照射される。なお、第3の所定角度θ3は、θ3=0°でもよい。その場合、第3光ビームB3は、送受信装置1の真下に向かって照射される。
【0042】
次に、図5、及び図6のフローチャートを参照して、第2実施形態による駐車支援装置の動作例を説明する。
図5(b)に示すように、車両が後退して、時刻t1に、遠距離ビームである第1光ビームB1が車止め8に届くと、第1光ビームB1の反射波強度が上昇して、車止め(輪止め)8が検出される(S61)。車止め8の位置までの距離L1は、第1光ビームB1の第1の所定確度θ1に基づいて検出される(S62)。送受信手段1が、地面から高さHの位置に取り付けられている場合、距離L1は、L1=H・tanθ1として求められる。図7(a)に、距離L1の位置に検出された車止め8の表示例を示す。
【0043】
続いて、図5(c)に示すように、車両が更に後退して、時刻t2に、中距離ビームである第2光ビームB2が車止め8に届くと、第2光ビームB2の反射波強度が上昇して、車止め8が検出される(S63)。車止め8の位置までの距離L2は、第2光ビームB2の第2の所定確度θ2に基づいて検出される(S64)。即ち、距離L2は、L2=H・tanθ2として求められる。図7(b)に、距離L2の位置に検出された車止め8の表示例を示す。
【0044】
続いて、図5(d)に示すように、車両が更に後退して、時刻t3に、近距離ビームである第3光ビームB3が車止め8に届くと、第3光ビームB3の反射波強度が上昇して、車止め8が検出される(S65)。車止め8の位置までの距離L3は、第3光ビームB3の第3の所定確度θ3に基づいて検出される(S66)。即ち、距離L3は、L3=H・tanθ3として求められる。図7(c)に、距離L3の位置に検出された車止め8の表示例を示す。
【0045】
このように、第1〜第3光ビームB1〜B3を照射しながら車両を後退させることによって、先ず、時刻t1に距離L1に車止め8が検出され、次いで、時刻t2に距離L2に車止め8が検出され、次いで、時刻t3に、距離L3に車止め8が検出される。したがって、3つの光ビームの検出タイミングによって、車両(のタイヤ)と車止めの接近度が順次に検出される。
【0046】
第3光ビームB3の反射波強度に基づいて車止め8が検出された後は、支援手段3は、ディスプレイ6に、その車止め8の位置までの距離L3から車両の後退距離を減じた位置に車止め8を逐次表示させるとよい(S67)。
【0047】
次に、本発明の駐車支援装置の第3実施形態を説明する。
第3実施形態による駐車支援装置の構成は、図1に示した第1実施形態のものと基本的に同じである。ただし、第3実施形態では、送受信手段1は、第1の所定角度θ1で第1光ビームを送信し、第1光ビームが地面によって反射された第1反射波を受信する第1送受信手段と、第1の所定角度θ1より小さい第2の所定角度θ2で第2光ビームB2を送信し、第2光ビームB2が地面によって反射された第2反射波を受信する第2送受信手段とから構成されている。
【0048】
なお、第1及び第2送受信手段は、一体に形成されてもよいし、互いに離間して配置されてもよい。また、第1受信手段が第2受信手段を兼ねてもよい。
【0049】
次に、図8のフローチャートを参照して、第3実施形態による駐車支援装置の動作例を説明する。
車両が後退して、第1光ビームB1の反射波強度及び第2光ビームB2の反射強度が共に上昇する方向に変化した場合(S81で「yes」かつS82で「yes」の場合)、検出手段2は、地面の凸部を検出する(S83)。このように、第1及び第2反射波の強度が共に上昇した場合に地面の凸部を検出することにより、凸部の誤検出が防止される。
【0050】
そして、支援手段3は、凸部用の駐車支援を行う(S84)。凸部用の駐車支援としては、例えば、凸部までの距離が所定距離以下になったときに、スピーカ5で接触予告報知をするとよい。また、ディスプレイ6に図3(c)に示したような表示を行って、車両と凸部との位置関係を運転者に知らせてもよい。また、凸部までの距離が所定距離以下になったときに、ブレーキアクチュエータ7を制御して、車両を停止させてもよい。
【0051】
また、車両が後退して、第1光ビームB1の反射波強度及び第2光ビームB2の反射強度が共に低下する方向に変化した場合(S85で「yes」かつS86で「yes」の場合)、検出手段2は、地面の凹部を検出する(S87)。このように、第1及び第2反射波の強度が共に低下した場合に地面の凹部を検出することにより、凹部の誤検出が防止される。
【0052】
そして、支援手段3は、凹部用の駐車支援を行う(S88)。凹部用の駐車支援としては、例えば、凹部までの距離が所定距離以下になったときに、スピーカ5で警報音を発生させ、運転者に後輪が凹部に落下する危険性を報知するとよい。また、ディスプレイ6に図4(c)に示したような表示を行って、車両と凹部との位置関係を運転者に知らせてもよい。また、凹部までの距離が所定距離以下になったときに、ブレーキアクチュエータ7を制御して、車両を停止させてもよい。
【0053】
上述の実施形態においては、本発明を特定の条件で構成した例について説明したが、本発明は種々の変更及び組み合わせを行うことができ、これに限定されるものではない。例えば、上述の実施形態では、送信波が光ビームである例について説明したが、本発明では、送信波は光ビームに限定されず、例えば、マイクロ波のような指向性を有する電波を使用してもよい。
【符号の説明】
【0054】
1 送受信手段
2 検出手段
3 支援手段
4 ECU
5 スピーカ
6 ディスプレイ
7 ブレーキアクチュエータ
8 車止め
9 溝
【特許請求の範囲】
【請求項1】
車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向及び鉛直下方向の少なくとも一方の方向に向けて送信波を送信し、前記送信波が地面によって反射された反射波を受信する送受信手段と、
前記送受信手段が受信した前記反射波の強度の変化に基づいて、前記所定角度に基づく車両後方所定距離に、前記地面の凹凸部を検出する検出手段と、
前記検出手段の検出結果に基づく報知及び車両制御の少なくとも一方を行う支援手段と、
を備えることを特徴とする駐車支援装置。
【請求項2】
前記送受信手段は、鉛直線に対して車両後方へ所定角度を成す平面内で、前記送信波を車幅方向に走査する
ことを特徴とする、請求項1記載の駐車支援装置。
【請求項3】
前記送受信手段は、前記所定角度を変化させながら、前記送信波を送信する
ことを特徴とする、請求項1又は2記載の駐車支援装置。
【請求項4】
前記検出手段は、車両の後退中に、前記反射波の強度が上昇した場合に前記地面の凸部を検出し、前記反射の強度が低下した場合に前記地面の凹部を検出し、
前記支援手段は、前記検出手段が前記地面の凸部を検出した場合と凹部を検出した場合とで異なる報知及び車両制御の少なくとも一方を行う
ことを特徴とする、請求項1〜3の何れか一項に記載の駐車支援装置。
【請求項5】
前記検出手段は、車両の後退中に、前記反射強度が一旦上昇した後、低下した場合に、前記地面上の車止めを検出する
ことを特徴とする、請求項1〜4の何れか一項に記載の駐車支援装置。
【請求項6】
前記送受信手段は、第1の所定角度で第1送信波を送信し、前記第1送信波が地面によって反射された第1反射波を受信する第1送受信手段と、前記第1の所定角度より小さい第2の所定角度で第2送信波を送信し、前記第2送信波が地面によって反射された第2反射波を受信する第2送受信手段とを備え、
前記検出手段は、前記第1及び第2反射波の強度が同一方向に変化した場合に、前記地面の凹凸部を検出する
ことを特徴とする、請求項1〜5の何れか一項に記載の駐車支援装置。
【請求項7】
前記送受信手段は、第1の所定角度で第1送信波を送信し、前記第1送信波が地面によって反射された第1反射波を受信する第1送受信手段と、前記第1の所定角度より小さい第2の所定角度で第2送信波を送信し、前記第2送信波が地面によって反射された第2反射波を受信する第2送受信手段とを備え、
前記検出手段は、車両の後退中に、先ず、前記第1送受信手段が前記第1反射波を受信することによって、前記第1の所定角度に基づく車両後方の第1の所定距離に、前記地面の凹凸部を検出し、次に、前記第2送受信手段が前記第2反射波を受信することによって、前記第2の所定角度に基づく車両後方の第1の所定距離よりも車両に近い第2の所定距離に、前記地面の凹凸部を検出する
ことを特徴とする請求項1〜5の何れか一項に記載の駐車支援装置。
【請求項1】
車両の後退中に、鉛直線に対して車両後方へ所定角度を成す斜め下方向及び鉛直下方向の少なくとも一方の方向に向けて送信波を送信し、前記送信波が地面によって反射された反射波を受信する送受信手段と、
前記送受信手段が受信した前記反射波の強度の変化に基づいて、前記所定角度に基づく車両後方所定距離に、前記地面の凹凸部を検出する検出手段と、
前記検出手段の検出結果に基づく報知及び車両制御の少なくとも一方を行う支援手段と、
を備えることを特徴とする駐車支援装置。
【請求項2】
前記送受信手段は、鉛直線に対して車両後方へ所定角度を成す平面内で、前記送信波を車幅方向に走査する
ことを特徴とする、請求項1記載の駐車支援装置。
【請求項3】
前記送受信手段は、前記所定角度を変化させながら、前記送信波を送信する
ことを特徴とする、請求項1又は2記載の駐車支援装置。
【請求項4】
前記検出手段は、車両の後退中に、前記反射波の強度が上昇した場合に前記地面の凸部を検出し、前記反射の強度が低下した場合に前記地面の凹部を検出し、
前記支援手段は、前記検出手段が前記地面の凸部を検出した場合と凹部を検出した場合とで異なる報知及び車両制御の少なくとも一方を行う
ことを特徴とする、請求項1〜3の何れか一項に記載の駐車支援装置。
【請求項5】
前記検出手段は、車両の後退中に、前記反射強度が一旦上昇した後、低下した場合に、前記地面上の車止めを検出する
ことを特徴とする、請求項1〜4の何れか一項に記載の駐車支援装置。
【請求項6】
前記送受信手段は、第1の所定角度で第1送信波を送信し、前記第1送信波が地面によって反射された第1反射波を受信する第1送受信手段と、前記第1の所定角度より小さい第2の所定角度で第2送信波を送信し、前記第2送信波が地面によって反射された第2反射波を受信する第2送受信手段とを備え、
前記検出手段は、前記第1及び第2反射波の強度が同一方向に変化した場合に、前記地面の凹凸部を検出する
ことを特徴とする、請求項1〜5の何れか一項に記載の駐車支援装置。
【請求項7】
前記送受信手段は、第1の所定角度で第1送信波を送信し、前記第1送信波が地面によって反射された第1反射波を受信する第1送受信手段と、前記第1の所定角度より小さい第2の所定角度で第2送信波を送信し、前記第2送信波が地面によって反射された第2反射波を受信する第2送受信手段とを備え、
前記検出手段は、車両の後退中に、先ず、前記第1送受信手段が前記第1反射波を受信することによって、前記第1の所定角度に基づく車両後方の第1の所定距離に、前記地面の凹凸部を検出し、次に、前記第2送受信手段が前記第2反射波を受信することによって、前記第2の所定角度に基づく車両後方の第1の所定距離よりも車両に近い第2の所定距離に、前記地面の凹凸部を検出する
ことを特徴とする請求項1〜5の何れか一項に記載の駐車支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−75619(P2013−75619A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−217094(P2011−217094)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000003137)マツダ株式会社 (6,115)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000003137)マツダ株式会社 (6,115)
[ Back to top ]