
駐車支援装置
【課題】運転者が自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断することができる駐車支援装置を提供する。
【解決手段】少なくとも自車両後方の撮像映像を取得する映像取得手段9と、この映像取得手段9が取得した撮像映像に自車両の駐車目安枠を重畳して合成映像を表示手段3に出力する画像重畳部13とを備え、画像重畳部13に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
【解決手段】少なくとも自車両後方の撮像映像を取得する映像取得手段9と、この映像取得手段9が取得した撮像映像に自車両の駐車目安枠を重畳して合成映像を表示手段3に出力する画像重畳部13とを備え、画像重畳部13に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は運転者の縦列駐車を支援する駐車支援装置に関する。
【背景技術】
【0002】
従来、運転者が並列駐車をする場合に、駐車スペースを検出して駐車開始前に駐車の可否や切り返し回数を表示する駐車支援装置がある(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−154765号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の駐車支援装置では、駐車スペースや、駐車の可否、自車両の切り返し回数の判定結果が表示されるが、駐車スペースの検出精度や運転者の運転技量のバラツキの問題のため、運転者は、駐車の可否や難易度を直感的に判断することができなかった。
【0005】
本発明は、従来の問題を解決するためになされたもので、運転者が自車両の切り返しの有無を含めた駐車の可否を直感的に判断することができる駐車支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために本発明は、画像重畳手段に重畳される自車両の駐車目安枠が、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
【発明の効果】
【0007】
本発明によれば、運転者が自車両の切り返しの有無を含めた駐車の可否を直感的に判断することができるという効果を奏する。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態における駐車支援装置の構成を示すブロック図
【図2】同図1の要部である記憶手段に記憶される第1の目安枠をイメージで説明する図
【図3】同図1の要部である判定部による駐車スペース検出をイメージで説明する図
【図4】同図1の要部である駐車支援装置による駐車支援処理を説明するフローチャート図
【図5】同図1の要部である判定部による駐車スペース検出処理を説明するフローチャート図
【図6】同図1の要部である画像重畳部が重畳する駐車目安枠をイメージで説明する図
【図7】同図1の要部である表示手段に表示される駐車目安枠の第1の表示例を説明する図
【図8】同図1の要部である表示手段に表示される駐車目安枠の第2の表示例を説明する図
【図9】同図1の要部である表示手段に表示される駐車目安枠の第3の表示例を説明する図
【図10】同図1の要部である画像重畳部が重畳する駐車目安枠と駐車スペースの第1の関係をイメージで説明する図
【図11】同図1の要部である画像重畳部が重畳する駐車目安枠と駐車スペースの第2の関係をイメージで説明する図
【図12】同図1の要部である画像重畳部が重畳する駐車目安枠と駐車スペースの第3の関係をイメージで説明する図
【図13】同図1の要部である表示手段に俯瞰視点で表示される駐車目安枠と駐車スペースの表示例を説明する図
【発明を実施するための形態】
【0009】
以下、本発明の実施形態の駐車支援装置について図面を参照しながら説明する。
【0010】
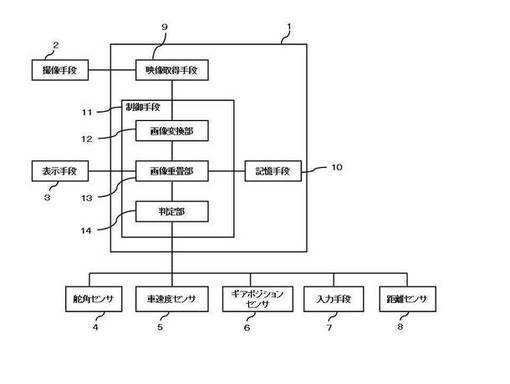
図1は本発明の実施形態の駐車支援装置の構成を示すブロック図である。
【0011】
図1において、駐車支援装置1は、撮像手段2、表示手段3、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8とそれぞれ接続する。なお、撮像手段2、表示手段3、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8は駐車支援装置1に含まれてもよい。
【0012】
駐車支援装置1は、映像取得手段9と、記憶手段10と、制御手段11とを有する。駐車支援装置1は、撮像手段2と、表示手段3と、舵角センサ4と、車速度センサ5と、ギアポジションセンサ6と、入力手段7と、距離センサ8と接続する。駐車支援装置1は、舵角センサ4と、車速度センサ5と、ギアポジションセンサ6と、入力手段7と、距離センサ8からの入力信号に基づいて撮像手段2から入力された自車両周囲の撮像映像から合成映像を作成して表示手段3に出力する。
【0013】
撮像手段2は少なくとも1つ以上のカメラを有して自車両の周囲を撮像する。撮像手段2は、所定時間毎に撮像した撮像映像を駐車支援装置1に入力する。
【0014】
表示手段3は、例えばナビゲーション装置やリアシートのディスプレイで構成される。表示手段3は、駐車支援装置1から入力された合成映像を表示する。
【0015】
舵角センサ4と、車速度センサ5と、ギアポジションセンサ6と、入力手段7と、距離センサ8は、それぞれハンドルの切れ角を示す舵角信号、自車両の車速を示す車速度信号、シフトレバーの状態を示すシフトレバー状態信号、ユーザの指示命令を示す入力信号、障害物までの距離を示す距離信号を駐車支援装置1に出力する。入力手段7は、例えばタッチパネルやリモコン、スイッチ、操作ボタンで構成される。入力手段7は、タッチパネルで構成される場合、表示手段3に設けられてもよい。距離センサ8は、例えばソナーや赤外線センサで構成され、自車両のコーナ部に設けられる。
【0016】
映像取得手段9は、揮発性メモリで構成される。例えばビデオメモリやRAM(Random Access Memory)で構成される。映像取得手段9は撮像手段2と接続する。映像取得手段9は、撮像手段2から入力された撮像映像によって得られる映像データを一時記憶する。映像取得手段9に記憶された映像データは、制御手段11に読み出される。
【0017】
記憶手段10は、不揮発性メモリで構成される。例えばフラッシュメモリやROM(Read Only Memory)で構成される。記憶手段10は、自車両の画像データ、自車両の駐車目安枠の画像データ等の各種画像データや制御手段10の各種プログラム、車幅やタイヤの最大切れ角等の自車両に固有なデータを記憶する。記憶手段10が記憶
する自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とから構成される。
【0018】
第1の目安枠の大きさは、自車両の大きさである。なお、第1の目安枠の車両進行方向と車幅方向に所定のマージンを持たせてもよい。
【0019】
次に、第2の目安枠について図面を用いて説明する。
【0020】
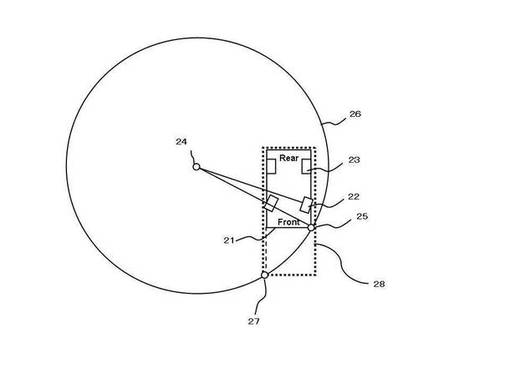
図2は、記憶手段に記憶される第1の目安枠をイメージで説明する図である。自車両21のハンドルを切った側と逆側(図2では自車両の左側)の前輪タイヤ22の最大切れ角、および、前輪タイヤ22と後輪タイヤ23の距離とから自車両の回転中心である支点24が算出される。25は、自車両21のハンドルを切った側と逆側のフロント先端である。26は、フロント先端25における支点24を回転中心とした予想軌跡である。27は、ハンドルを切った側(図2では自車両の右側)の自車両21の側面から自車両21の進行方向に点線を引いたときの予想軌跡26との交点である。ハンドルを切った側の自車両21の後端から交点27までの長さが第2の目安枠の車両進行方向の長さである。第2の目安枠の幅方向の長さは、自車両の車幅の長さである。なお、第2の目安枠の車両進行方向と車幅方向に所定のマージンを持たせてもよい。
【0021】
制御手段11は、例えばASIC(Application Specific Integrated Circuit)やVLSI(Very Large Scale Integration)、CPU(Central Processing Unit)で構成される。制御手段11は、映像変換部12と画像重畳部13と判定部14とを有する。制御手段11は、表示手段3、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8、映像取得手段9、記憶手段10と接続する。制御手段11は、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8からの入力信号に基づいて駐車支援処理の開始、駐車支援のための映像作成等の各種処理を行う。
【0022】
映像変換部12は、映像取得手段9と接続し、映像取得手段9から入力された撮像映像に画像処理を施して表示手段3に表示可能な映像信号に変換する。
【0023】
画像重畳部13は、表示手段3、記憶手段10、映像変換部12と接続する。画像重畳部13は、映像変換部12が変換した映像信号に記憶手段10から読み出した駐車目安枠の画像データを重畳した合成映像を作成する。画像重畳部13は、所定時間毎に作成したこの合成映像を映像として表示手段3に出力する。
【0024】
判定部14は、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8、画像重畳部13と接続する。判定部14は、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8からの入力信号に基づいて自車両の状態を検出する。判定部14は、この検出結果に基づいて画像重畳部13に対して駐車目安枠や駐車スペースの重畳や表示手段3への合成映像の出力等の命令を行う。例えば、判定部14は、距離センサ8から障害物までの距離の情報を得て駐車スペースの有無を判定する。
【0025】
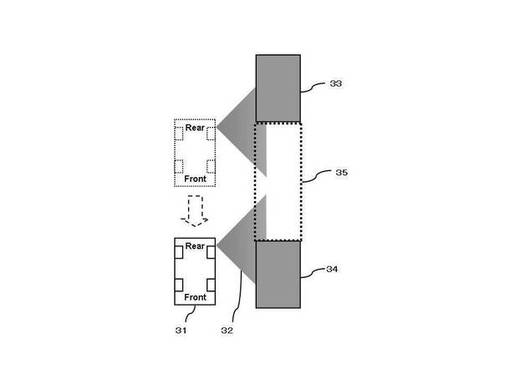
図3は、判定部による駐車スペース検出をイメージで説明する図である。
【0026】
図3に示すように、リアコーナに距離センサ8を取り付けた自車両31がフロント方向に移動すると、距離センサ8の検出範囲32も移動する。これにより、距離センサ8は、
自車両31から駐車車両33、34までの距離を検出する。また、駐車車両33および駐車車両34の間は空きスペース35であるので、この空きスペース35の区間について、距離センサ8は、自車両31から空きスペース35のさらに先(図3の紙面右方向)の障害物までの距離を検出する。判定部14は、距離センサ8が検出したこれらの距離情報から空きスペース35が駐車スペースであると判定する。
【0027】
次に、駐車支援装置1による駐車支援処理について説明する。
【0028】
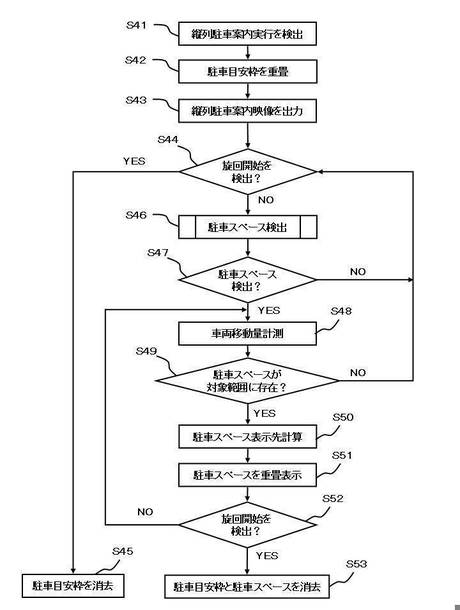
図4は、駐車支援装置による駐車支援処理を説明するフローチャート図である。
【0029】
まず、ステップS41に示すように、判定部14は、入力手段7から縦列駐車案内の実行指示を検出する。
【0030】
次に、ステップS42に示すように、画像重畳部13は、判定部14からの命令に基づいて、映像変換部12から読み込んだ映像信号に対して記憶手段10から読み込んだ駐車目安枠の画像データを重畳して合成映像を作成する。
【0031】
次に、ステップS43に示すように、画像重畳部13は、ステップS42で作成した合成映像を縦列駐車案内用に表示手段3に出力する。表示手段3は、この合成映像を表示する。
【0032】
次に、ステップS44に示すように、判定部14は、自車両が旋回を開始したか否かを検出する。判定部14は、舵角センサ4から入力された舵角量が所定の閾値以上であった場合に旋回していると判定する。
【0033】
ステップS44でYESの場合、ステップS45に示すように、画像重畳部13は、判定部14の命令に基づいて、駐車目安枠を消去する。そして、画像重畳部13は、映像変換部12から読み込んだ映像信号に駐車目安枠を重畳せずに表示手段3に出力する。
【0034】
一方、ステップS44でNOの場合、ステップS46に示すように、判定部14は、後述の駐車スペース検出処理を行う。
【0035】
次に、ステップS47に示すように、判定部14は、駐車スペースを検出したか否かを判定する。
【0036】
ステップS47でNOの場合、判定部14は、再度ステップS44の処理を行う。
【0037】
ステップS47でYESの場合、ステップS48に示すように、判定部14は、車速度センサ5から入力された車速度の情報に基づいて自車両の移動量を計測する。
【0038】
次に、ステップS49に示すように、判定部14は、ステップS47で検出した駐車スペースが縦列駐車の対象範囲内に存在するか否かを判定する。判定部14は、ステップS48で計測した自車両の移動量が所定値以上となった場合に駐車スペースが縦列駐車の対象範囲外に移動したと判定する。
【0039】
ステップS49でNOの場合、判定部14は、再度ステップS44の処理を行う。
【0040】
ステップS49でYESの場合、ステップS50に示すように、判定部14は、ステップS48で検出した自車両の移動量や距離センサ8から得られた障害物の距離情報に基づいて駐車スペースの表示先を計算する。
【0041】
次に、ステップS51に示すように、画像重畳部13は、映像変換部12から読み込んだ映像信号に判定部14の命令により駐車スペースを重畳して合成映像を作成する。そして、画像重畳部13は、この合成映像を縦列駐車案内用に表示手段3に出力する。
【0042】
次に、ステップS52に示すように、判定部14は、自車両が旋回を開始したか否かを検出する。判定部14は、舵角センサ4から入力された舵角量が所定の閾値以上であった場合に旋回していると判定する。
【0043】
ステップS52でNOの場合、判定部14は、再度ステップS48の処理を行う。
【0044】
ステップS52でYESの場合、ステップS53に示すように、画像重畳部13は、判定部14の命令に基づいて、駐車目安枠と駐車スペースを消去する。そして、画像重畳部13は、映像変換部12から読み込んだ映像信号に駐車目安枠と駐車スペースを重畳せずに表示手段3に出力する。
【0045】
次に、ステップS46の駐車スペース検出処理を説明する。
【0046】
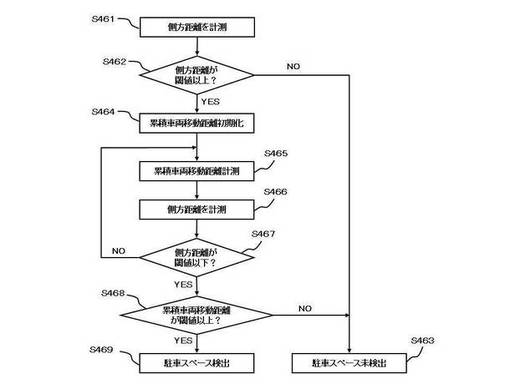
図5は、判定部による駐車スペース検出処理を説明するフローチャート図である。
【0047】
ステップS461に示すように、判定部14は、距離センサ8から入力された距離情報に基づいて自車両から自車両側方に位置する障害物までの側方距離を検出する。
【0048】
次に、ステップS462に示すように、判定部14は、側方距離が所定の閾値以上であるか否かを判定する。判定部14は、側方距離が所定の閾値以上のとき駐車スペース開始位置を横切ったと判定する。
【0049】
ステップS462でNOの場合、ステップS463に示すように、判定部14は、駐車スペース未検出と判定する。
【0050】
一方、ステップS462でYESの場合、ステップS464に示すように、判定部14は、自車両の移動距離の累積を初期化する。
【0051】
次に、ステップS465に示すように、判定部14は、車速度センサ5から入力された車速度の情報に基づいて自車両の移動距離の累積を計測する。
【0052】
次に、ステップS466に示すように、判定部14は、距離センサ8から入力された距離情報に基づいて自車両から自車両側方に位置する障害物までの側方距離を検出する。
【0053】
次に、ステップS467に示すように、判定部14は、側方距離が所定の閾値以下であるか否かを判定する。判定部14は、側方距離が所定の閾値以下のとき駐車スペース終了位置を横切ったと判定する。
【0054】
ステップS467でNOの場合、判定部14は、再度ステップS465の処理を行う。
【0055】
一方、ステップS467でYESの場合、ステップS468に示すように、判定部14は、自車両の移動距離の累積が所定の閾値以上であるか否か判定する。
【0056】
ステップS468でNOの場合、ステップS463に示すように、判定部14は、駐車スペース未検出と判定する。
【0057】
一方、ステップS468でYESの場合、ステップS469に示すように、判定部14は、駐車スペースを検出したと判定する。
【0058】
次に、画像重畳部13が重畳する駐車目安枠について説明する。
【0059】
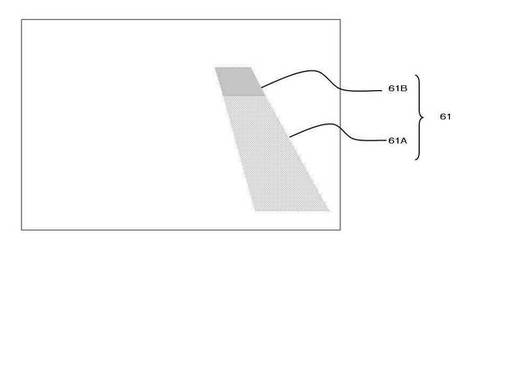
図6は、画像重畳部が重畳する駐車目安枠をイメージで説明する図である。
【0060】
図6に示すように、駐車目安枠61は、駐車可能な限界領域を示す第1の目安枠61Aと、この第1の目安枠61Aから自車両の進行方向側に延出して駐車の際にシフトレバーの操作による自車両の切り返しが必要な領域を示す第2の目安枠61Bとから構成される。第1の目安枠61Aと第2の目安枠61Bは互いに色分けして重畳される。
【0061】
図6において、自車両の左後方に縦列駐車を行う場合、画像重畳部13は、判定部14の命令に従い、映像変換部12から読み込んだ自車両後方の映像信号にこの駐車目安枠61を重畳して表示手段3に出力する。また、自車両の右前方に縦列駐車を行う場合、画像重畳部13は、判定部14の命令に従い、映像変換部12から読み込んだ自車両前方の映像信号にこの駐車目安枠61を重畳して表示手段3に出力する。なお、自車両の右後方または左前方に縦列駐車を行う場合、画像重畳部13が重畳する駐車目安枠は、表示手段3の中心線に対して図6の駐車目安枠61と左右対称に表示されるような形状である。
【0062】
次に、表示手段3への駐車目安枠の表示例について説明する。
【0063】
図7〜9は、表示手段に表示される駐車目安枠の第1〜第3の表示例を説明する図である。
【0064】
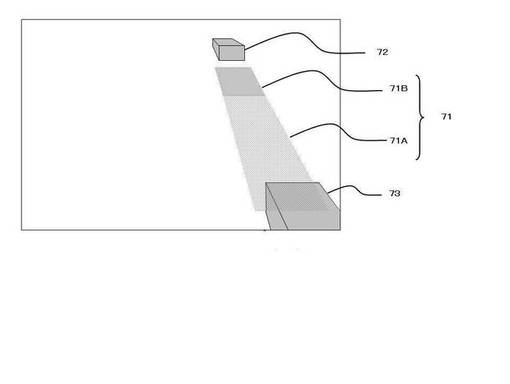
図7に示すように、表示手段3には、駐車目安枠71と駐車車両72、73が表示されている。駐車目安枠71は、第1の目安枠71Aと第2の目安枠71Bとで構成される。自車両が移動した場合、駐車車両72、73等の背景映像(映像変換部12から読み込まれた映像信号)部分は移動するが駐車目安枠71の表示位置は固定である。図8、図9においても以上の関係は同様なので符号のみを変えて詳細な説明を省略する。
【0065】
図7に示すように、第1の目安枠71Aの駐車車両73側端部が駐車車両73の端部付近に表示されたとき、第2の目安枠71Bは、駐車車両72の端部に達しておらず離れている。このとき、運転者は自車両の切り返し無しで駐車車両72、73の間に駐車できることがわかる。したがって、運転者はシフトレバーの操作無しにハンドルの操作のみで駐車車両72、73の間に駐車できることがわかる。また、第2の目安枠71Bと駐車車両72の端部との間の距離が離れているほど、運転者はシフトレバーの操作による自車両の切り返し無しの駐車が容易であることを理解することができる。
【0066】
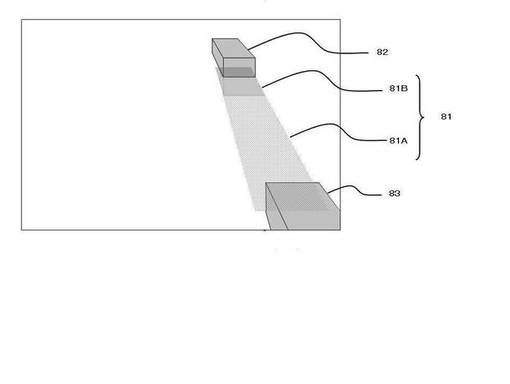
図8に示すように、表示手段3には、駐車目安枠81と駐車車両82、83が表示されている。
【0067】
図8に示すように、第1の目安枠81Aの駐車車両83側端部が駐車車両83の端部付近に表示されたとき、駐車車両82の端部は、第2の目安枠81Bに達しており、第1の目安枠81Aには達していない。このとき、運転者は切り返せば駐車車両82、83の間に駐車できることがわかる。したがって、運転者はシフトレバーとハンドルの操作によって駐車車両82、83の間に駐車できることがわかる。
【0068】
また、運転者は、駐車車両82の端部が第2の目安枠81Bの駐車車両82側に位置す
るほど駐車の際にシフトレバーの操作による自車両の切り返しが容易であり、駐車車両82の端部が第1の目安枠81A側に位置するほど駐車の際にシフトレバーの操作による自車両の切り返しやハンドル操作が難しくなることを理解することができる。
【0069】
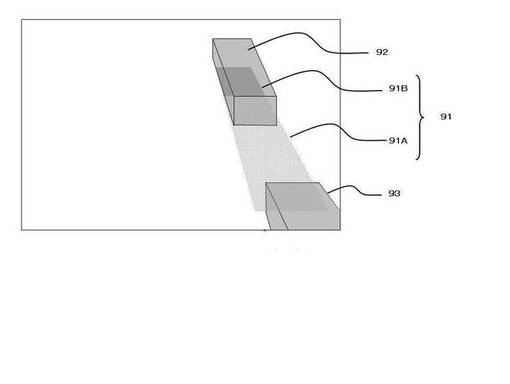
図9に示すように、表示手段3には、駐車目安枠91と駐車車両92、93が表示されている。
【0070】
図9に示すように、第1の目安枠91Aの駐車車両93側端部が駐車車両93の端部付近に表示されたとき、駐車車両92の端部は、第2の目安線91Bに加え、第1の目安枠91Aに達している。このとき、運転者は、駐車車両92、93の間に駐車できないことがわかる。したがって、運転者はシフトレバーとハンドルを操作しても駐車車両92、93の間に駐車できないことがわかる。
【0071】
以上のように、画像重畳部13が映像変換部12から読み込んだ映像信号に第1の目安枠と第2の目安枠で構成される駐車目安枠を重畳して合成映像を作成し、表示手段3に出力するので、運転者は、自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断することができる。
【0072】
また、駐車目安枠と駐車車両の重なりの大きさや、駐車目安枠と駐車車両の重なっていない領域の大きさによって運転者は自車両の切り返し駐車や自車両の切り返し無しの駐車の難易度を容易に判断することができる。
【0073】
また、第1の目安枠と第2の目安枠とは色分けされているので、互いの境界付近に駐車車両の端部が重なっている場合に、運転者は駐車の可否を容易に判断することができる。なお、第1の目安枠と第2の目安枠は枠内まで色で塗りつぶされた場合に運転者は、第1の目安枠と第2の目安枠の領域に駐車車両が重なっているか否かを最も容易に判断することができる。
【0074】
次に、画像重畳部13が重畳する駐車目安枠と駐車スペースについて説明する。
【0075】
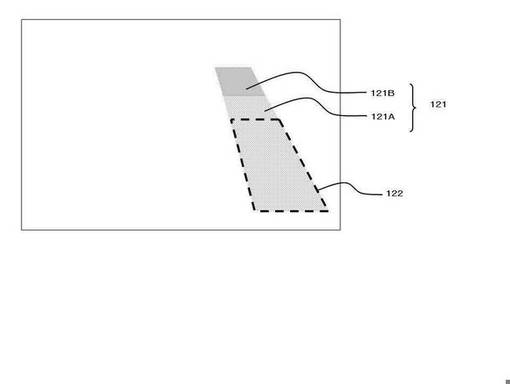
図10〜図12は、画像重畳部が重畳する駐車目安枠と駐車スペースの第1〜第3の関係をイメージで説明する図である。
【0076】
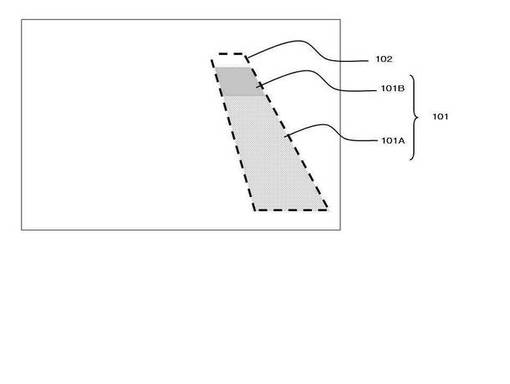
図10に示すように、駐車目安枠101は、駐車可能な限界領域を示す第1の目安枠101Aと、この第1の目安枠101Aから自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠101Bとから構成される。第1の目安枠101Aと第2の目安枠101Bは互いに色分けして重畳される。また、ステップS46で検出された駐車スペース102は、枠を点線にして重畳される。なお、駐車スペース102は、駐車目安枠101と表示形態が区別できれば枠を点線にする形態以外の形態で重畳されてもよい。
【0077】
図10において、画像重畳部13により重畳される駐車目安枠101の位置は固定である。一方、画像重畳部13により重畳される駐車スペース102の位置は可変である。駐車スペース102は、自車両の前進方向への移動に伴って上方に移動し、後退方向への移動に伴って下方に移動する。判定部14は、ギアポジションセンサ6と車速度センサ5からの入力に基づいて、それぞれ駐車スペース102の移動方向、移動速度について画像重畳部13に命令する。
【0078】
図10において、自車両の左後方に縦列駐車を行う場合、画像重畳部13は、判定部14の命令に従い、映像変換部12から読み込んだ自車両後方の映像信号にこの駐車目安枠
101と駐車スペース102を重畳して表示手段3に出力する。また、自車両の右前方に縦列駐車を行う場合、画像重畳部13は、判定部14の命令に従い、映像変換部12から読み込んだ自車両前方の映像信号にこの駐車目安枠101と駐車スペース102を重畳して表示手段3に出力する。なお、自車両の右後方または左前方に縦列駐車を行う場合、画像重畳部13が重畳する駐車目安枠と駐車スペースは、表示手段3の中心線に対して図10の駐車目安枠101、駐車スペース102と左右対称に表示されるような形状である。図11、図12においても以上の関係は符合が異なるのみで同様であるので詳細な説明を省略する。
【0079】
図10において、判定部14は、第1の目安枠101Aと第2の目安枠101Bがともに駐車スペース102の枠内に収まったことを検出する。このとき、判定部14は、自車両の切り返し無しで駐車スペース102内に駐車できると判定する。換言すると、判定部14は、駐車スペース102が駐車目安枠101よりも大きいことを検出した場合に自車両を切り返さずに駐車可能と判定する。したがって、運転者はシフトレバーの操作無しにハンドルの操作のみで自車両を駐車スペース102に駐車できることがわかる。
【0080】
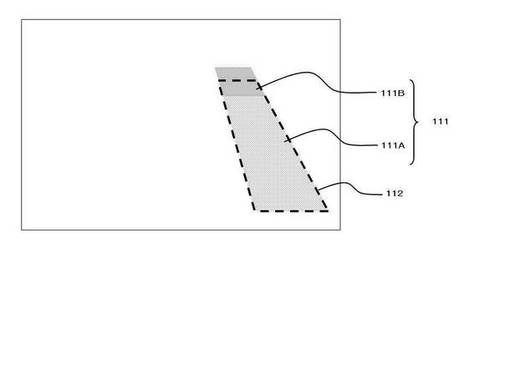
図11において、判定部14は、駐車スペース112に第1の目安枠111Aが収まっているが第2の目安枠111Bがはみ出していることを検出する。このとき、判定部14は、自車両を切り返せば駐車スペース102内に駐車できると判定する。換言すると、判定部14は、駐車スペース112が第1の目安枠111Aよりも大きいが駐車目安枠111よりも小さいことを検出した場合に自車両を切り返せば駐車可能と判定する。したがって、運転者はシフトレバーとハンドルの操作によって自車両を駐車スペース112に駐車できることがわかる。
【0081】
図12において、判定部14は、駐車スペース122から第1の目安枠121Aがはみ出していることを検出する。このとき、判定部14は、駐車スペース122内に駐車できないと判定する。換言すると、判定部14は、駐車スペース122が第1の目安枠121Aよりも小さいことを検出した場合に駐車不可と判定する。したがって、運転者はシフトレバーとハンドルを操作しても自車両を駐車スペース122に駐車できないことがわかる。
【0082】
以上のように、画像重畳部13が映像変換部12から読み込んだ映像信号に駐車目安枠と駐車スペースとを重畳して合成映像を作成し、この合成映像に基づいて判定部14が自車両の切り返しの有無を含めた駐車の可否を判定する。この判定結果を表示手段3に出力することにより、運転者が運転に集中している場合にも運転者に切り返しの有無を含めた駐車の可否を認識させることができる。なお、この場合、判定結果は表示手段3とともにまたは表示手段3に代えて、図示しない音声出力手段に出力してもよい。
【0083】
なお、本実施の形態では映像変換部12が変換する映像は、視点変換を行った映像でもよい。例えば、映像変換部12は、映像取得手段9から得た映像を俯瞰視点の映像に変換してもよい。
【0084】
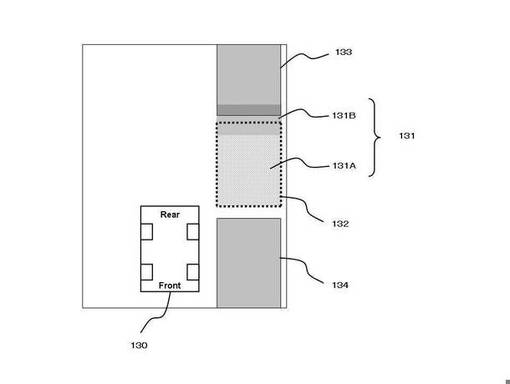
図13は、表示手段に俯瞰視点で表示される駐車目安枠と駐車スペースの表示例を説明する図である。
【0085】
図13に示すように、自車両130が左後方にハンドルを切って縦列駐車する場合、表示手段3には、駐車目安枠131と駐車スペース132とが表示されている。駐車スペース132は、駐車車両133、134の間に表示されている。運転者は、駐車スペース132が第1の目安枠131Aをはみ出し、第2の目安枠131Bの一部に重なっているのでシフトレバーを操作して自車両130を切り返せばハンドル操作によって自車両130
を駐車車両133、134の間に駐車可能であることがわかる。
【0086】
また、運転者は、駐車スペース132が表示されていない場合でも、駐車車両133が第1の目安枠131Aには重なっておらず、第2の目安枠131Bの一部に重なっていることがわかるので、シフトレバーを操作して自車両130を切り返せばハンドル操作によって駐車車両133、134の間に自車両130を駐車可能であることがわかる。また、運転者は、第2の目安枠131Bと駐車車両133との重なっている部分が多いほどシフトレバーを操作しての自車両130の切り返し、ハンドル操作の条件が厳しいことがわかる。このように、第2の目安枠131Bと駐車車両133との重なりの大きさや重なっていない領域の大きさによって運転者はシフトレバーの操作によって自車両130を切り返しハンドル操作を行って駐車する切り返し駐車の難易度を容易に判断することができる。また、第1の目安枠131Aと第2の目安枠131Bとは色分けされているので、互いの境界付近に駐車スペース132の枠線や駐車車両133の端部が重なっている場合に、運転者は駐車の可否を容易に判断することができる。
【産業上の利用可能性】
【0087】
本発明の駐車支援装置は、縦列駐車時に運転者が自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断するものとして有用である。
【符号の説明】
【0088】
1 駐車支援装置
2 撮像手段
3 表示手段
9 映像取得手段
13 画像重畳部
【技術分野】
【0001】
本発明は運転者の縦列駐車を支援する駐車支援装置に関する。
【背景技術】
【0002】
従来、運転者が並列駐車をする場合に、駐車スペースを検出して駐車開始前に駐車の可否や切り返し回数を表示する駐車支援装置がある(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−154765号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の駐車支援装置では、駐車スペースや、駐車の可否、自車両の切り返し回数の判定結果が表示されるが、駐車スペースの検出精度や運転者の運転技量のバラツキの問題のため、運転者は、駐車の可否や難易度を直感的に判断することができなかった。
【0005】
本発明は、従来の問題を解決するためになされたもので、運転者が自車両の切り返しの有無を含めた駐車の可否を直感的に判断することができる駐車支援装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために本発明は、画像重畳手段に重畳される自車両の駐車目安枠が、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする。
【発明の効果】
【0007】
本発明によれば、運転者が自車両の切り返しの有無を含めた駐車の可否を直感的に判断することができるという効果を奏する。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態における駐車支援装置の構成を示すブロック図
【図2】同図1の要部である記憶手段に記憶される第1の目安枠をイメージで説明する図
【図3】同図1の要部である判定部による駐車スペース検出をイメージで説明する図
【図4】同図1の要部である駐車支援装置による駐車支援処理を説明するフローチャート図
【図5】同図1の要部である判定部による駐車スペース検出処理を説明するフローチャート図
【図6】同図1の要部である画像重畳部が重畳する駐車目安枠をイメージで説明する図
【図7】同図1の要部である表示手段に表示される駐車目安枠の第1の表示例を説明する図
【図8】同図1の要部である表示手段に表示される駐車目安枠の第2の表示例を説明する図
【図9】同図1の要部である表示手段に表示される駐車目安枠の第3の表示例を説明する図
【図10】同図1の要部である画像重畳部が重畳する駐車目安枠と駐車スペースの第1の関係をイメージで説明する図
【図11】同図1の要部である画像重畳部が重畳する駐車目安枠と駐車スペースの第2の関係をイメージで説明する図
【図12】同図1の要部である画像重畳部が重畳する駐車目安枠と駐車スペースの第3の関係をイメージで説明する図
【図13】同図1の要部である表示手段に俯瞰視点で表示される駐車目安枠と駐車スペースの表示例を説明する図
【発明を実施するための形態】
【0009】
以下、本発明の実施形態の駐車支援装置について図面を参照しながら説明する。
【0010】
図1は本発明の実施形態の駐車支援装置の構成を示すブロック図である。
【0011】
図1において、駐車支援装置1は、撮像手段2、表示手段3、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8とそれぞれ接続する。なお、撮像手段2、表示手段3、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8は駐車支援装置1に含まれてもよい。
【0012】
駐車支援装置1は、映像取得手段9と、記憶手段10と、制御手段11とを有する。駐車支援装置1は、撮像手段2と、表示手段3と、舵角センサ4と、車速度センサ5と、ギアポジションセンサ6と、入力手段7と、距離センサ8と接続する。駐車支援装置1は、舵角センサ4と、車速度センサ5と、ギアポジションセンサ6と、入力手段7と、距離センサ8からの入力信号に基づいて撮像手段2から入力された自車両周囲の撮像映像から合成映像を作成して表示手段3に出力する。
【0013】
撮像手段2は少なくとも1つ以上のカメラを有して自車両の周囲を撮像する。撮像手段2は、所定時間毎に撮像した撮像映像を駐車支援装置1に入力する。
【0014】
表示手段3は、例えばナビゲーション装置やリアシートのディスプレイで構成される。表示手段3は、駐車支援装置1から入力された合成映像を表示する。
【0015】
舵角センサ4と、車速度センサ5と、ギアポジションセンサ6と、入力手段7と、距離センサ8は、それぞれハンドルの切れ角を示す舵角信号、自車両の車速を示す車速度信号、シフトレバーの状態を示すシフトレバー状態信号、ユーザの指示命令を示す入力信号、障害物までの距離を示す距離信号を駐車支援装置1に出力する。入力手段7は、例えばタッチパネルやリモコン、スイッチ、操作ボタンで構成される。入力手段7は、タッチパネルで構成される場合、表示手段3に設けられてもよい。距離センサ8は、例えばソナーや赤外線センサで構成され、自車両のコーナ部に設けられる。
【0016】
映像取得手段9は、揮発性メモリで構成される。例えばビデオメモリやRAM(Random Access Memory)で構成される。映像取得手段9は撮像手段2と接続する。映像取得手段9は、撮像手段2から入力された撮像映像によって得られる映像データを一時記憶する。映像取得手段9に記憶された映像データは、制御手段11に読み出される。
【0017】
記憶手段10は、不揮発性メモリで構成される。例えばフラッシュメモリやROM(Read Only Memory)で構成される。記憶手段10は、自車両の画像データ、自車両の駐車目安枠の画像データ等の各種画像データや制御手段10の各種プログラム、車幅やタイヤの最大切れ角等の自車両に固有なデータを記憶する。記憶手段10が記憶
する自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とから構成される。
【0018】
第1の目安枠の大きさは、自車両の大きさである。なお、第1の目安枠の車両進行方向と車幅方向に所定のマージンを持たせてもよい。
【0019】
次に、第2の目安枠について図面を用いて説明する。
【0020】
図2は、記憶手段に記憶される第1の目安枠をイメージで説明する図である。自車両21のハンドルを切った側と逆側(図2では自車両の左側)の前輪タイヤ22の最大切れ角、および、前輪タイヤ22と後輪タイヤ23の距離とから自車両の回転中心である支点24が算出される。25は、自車両21のハンドルを切った側と逆側のフロント先端である。26は、フロント先端25における支点24を回転中心とした予想軌跡である。27は、ハンドルを切った側(図2では自車両の右側)の自車両21の側面から自車両21の進行方向に点線を引いたときの予想軌跡26との交点である。ハンドルを切った側の自車両21の後端から交点27までの長さが第2の目安枠の車両進行方向の長さである。第2の目安枠の幅方向の長さは、自車両の車幅の長さである。なお、第2の目安枠の車両進行方向と車幅方向に所定のマージンを持たせてもよい。
【0021】
制御手段11は、例えばASIC(Application Specific Integrated Circuit)やVLSI(Very Large Scale Integration)、CPU(Central Processing Unit)で構成される。制御手段11は、映像変換部12と画像重畳部13と判定部14とを有する。制御手段11は、表示手段3、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8、映像取得手段9、記憶手段10と接続する。制御手段11は、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8からの入力信号に基づいて駐車支援処理の開始、駐車支援のための映像作成等の各種処理を行う。
【0022】
映像変換部12は、映像取得手段9と接続し、映像取得手段9から入力された撮像映像に画像処理を施して表示手段3に表示可能な映像信号に変換する。
【0023】
画像重畳部13は、表示手段3、記憶手段10、映像変換部12と接続する。画像重畳部13は、映像変換部12が変換した映像信号に記憶手段10から読み出した駐車目安枠の画像データを重畳した合成映像を作成する。画像重畳部13は、所定時間毎に作成したこの合成映像を映像として表示手段3に出力する。
【0024】
判定部14は、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8、画像重畳部13と接続する。判定部14は、舵角センサ4、車速度センサ5、ギアポジションセンサ6、入力手段7、距離センサ8からの入力信号に基づいて自車両の状態を検出する。判定部14は、この検出結果に基づいて画像重畳部13に対して駐車目安枠や駐車スペースの重畳や表示手段3への合成映像の出力等の命令を行う。例えば、判定部14は、距離センサ8から障害物までの距離の情報を得て駐車スペースの有無を判定する。
【0025】
図3は、判定部による駐車スペース検出をイメージで説明する図である。
【0026】
図3に示すように、リアコーナに距離センサ8を取り付けた自車両31がフロント方向に移動すると、距離センサ8の検出範囲32も移動する。これにより、距離センサ8は、
自車両31から駐車車両33、34までの距離を検出する。また、駐車車両33および駐車車両34の間は空きスペース35であるので、この空きスペース35の区間について、距離センサ8は、自車両31から空きスペース35のさらに先(図3の紙面右方向)の障害物までの距離を検出する。判定部14は、距離センサ8が検出したこれらの距離情報から空きスペース35が駐車スペースであると判定する。
【0027】
次に、駐車支援装置1による駐車支援処理について説明する。
【0028】
図4は、駐車支援装置による駐車支援処理を説明するフローチャート図である。
【0029】
まず、ステップS41に示すように、判定部14は、入力手段7から縦列駐車案内の実行指示を検出する。
【0030】
次に、ステップS42に示すように、画像重畳部13は、判定部14からの命令に基づいて、映像変換部12から読み込んだ映像信号に対して記憶手段10から読み込んだ駐車目安枠の画像データを重畳して合成映像を作成する。
【0031】
次に、ステップS43に示すように、画像重畳部13は、ステップS42で作成した合成映像を縦列駐車案内用に表示手段3に出力する。表示手段3は、この合成映像を表示する。
【0032】
次に、ステップS44に示すように、判定部14は、自車両が旋回を開始したか否かを検出する。判定部14は、舵角センサ4から入力された舵角量が所定の閾値以上であった場合に旋回していると判定する。
【0033】
ステップS44でYESの場合、ステップS45に示すように、画像重畳部13は、判定部14の命令に基づいて、駐車目安枠を消去する。そして、画像重畳部13は、映像変換部12から読み込んだ映像信号に駐車目安枠を重畳せずに表示手段3に出力する。
【0034】
一方、ステップS44でNOの場合、ステップS46に示すように、判定部14は、後述の駐車スペース検出処理を行う。
【0035】
次に、ステップS47に示すように、判定部14は、駐車スペースを検出したか否かを判定する。
【0036】
ステップS47でNOの場合、判定部14は、再度ステップS44の処理を行う。
【0037】
ステップS47でYESの場合、ステップS48に示すように、判定部14は、車速度センサ5から入力された車速度の情報に基づいて自車両の移動量を計測する。
【0038】
次に、ステップS49に示すように、判定部14は、ステップS47で検出した駐車スペースが縦列駐車の対象範囲内に存在するか否かを判定する。判定部14は、ステップS48で計測した自車両の移動量が所定値以上となった場合に駐車スペースが縦列駐車の対象範囲外に移動したと判定する。
【0039】
ステップS49でNOの場合、判定部14は、再度ステップS44の処理を行う。
【0040】
ステップS49でYESの場合、ステップS50に示すように、判定部14は、ステップS48で検出した自車両の移動量や距離センサ8から得られた障害物の距離情報に基づいて駐車スペースの表示先を計算する。
【0041】
次に、ステップS51に示すように、画像重畳部13は、映像変換部12から読み込んだ映像信号に判定部14の命令により駐車スペースを重畳して合成映像を作成する。そして、画像重畳部13は、この合成映像を縦列駐車案内用に表示手段3に出力する。
【0042】
次に、ステップS52に示すように、判定部14は、自車両が旋回を開始したか否かを検出する。判定部14は、舵角センサ4から入力された舵角量が所定の閾値以上であった場合に旋回していると判定する。
【0043】
ステップS52でNOの場合、判定部14は、再度ステップS48の処理を行う。
【0044】
ステップS52でYESの場合、ステップS53に示すように、画像重畳部13は、判定部14の命令に基づいて、駐車目安枠と駐車スペースを消去する。そして、画像重畳部13は、映像変換部12から読み込んだ映像信号に駐車目安枠と駐車スペースを重畳せずに表示手段3に出力する。
【0045】
次に、ステップS46の駐車スペース検出処理を説明する。
【0046】
図5は、判定部による駐車スペース検出処理を説明するフローチャート図である。
【0047】
ステップS461に示すように、判定部14は、距離センサ8から入力された距離情報に基づいて自車両から自車両側方に位置する障害物までの側方距離を検出する。
【0048】
次に、ステップS462に示すように、判定部14は、側方距離が所定の閾値以上であるか否かを判定する。判定部14は、側方距離が所定の閾値以上のとき駐車スペース開始位置を横切ったと判定する。
【0049】
ステップS462でNOの場合、ステップS463に示すように、判定部14は、駐車スペース未検出と判定する。
【0050】
一方、ステップS462でYESの場合、ステップS464に示すように、判定部14は、自車両の移動距離の累積を初期化する。
【0051】
次に、ステップS465に示すように、判定部14は、車速度センサ5から入力された車速度の情報に基づいて自車両の移動距離の累積を計測する。
【0052】
次に、ステップS466に示すように、判定部14は、距離センサ8から入力された距離情報に基づいて自車両から自車両側方に位置する障害物までの側方距離を検出する。
【0053】
次に、ステップS467に示すように、判定部14は、側方距離が所定の閾値以下であるか否かを判定する。判定部14は、側方距離が所定の閾値以下のとき駐車スペース終了位置を横切ったと判定する。
【0054】
ステップS467でNOの場合、判定部14は、再度ステップS465の処理を行う。
【0055】
一方、ステップS467でYESの場合、ステップS468に示すように、判定部14は、自車両の移動距離の累積が所定の閾値以上であるか否か判定する。
【0056】
ステップS468でNOの場合、ステップS463に示すように、判定部14は、駐車スペース未検出と判定する。
【0057】
一方、ステップS468でYESの場合、ステップS469に示すように、判定部14は、駐車スペースを検出したと判定する。
【0058】
次に、画像重畳部13が重畳する駐車目安枠について説明する。
【0059】
図6は、画像重畳部が重畳する駐車目安枠をイメージで説明する図である。
【0060】
図6に示すように、駐車目安枠61は、駐車可能な限界領域を示す第1の目安枠61Aと、この第1の目安枠61Aから自車両の進行方向側に延出して駐車の際にシフトレバーの操作による自車両の切り返しが必要な領域を示す第2の目安枠61Bとから構成される。第1の目安枠61Aと第2の目安枠61Bは互いに色分けして重畳される。
【0061】
図6において、自車両の左後方に縦列駐車を行う場合、画像重畳部13は、判定部14の命令に従い、映像変換部12から読み込んだ自車両後方の映像信号にこの駐車目安枠61を重畳して表示手段3に出力する。また、自車両の右前方に縦列駐車を行う場合、画像重畳部13は、判定部14の命令に従い、映像変換部12から読み込んだ自車両前方の映像信号にこの駐車目安枠61を重畳して表示手段3に出力する。なお、自車両の右後方または左前方に縦列駐車を行う場合、画像重畳部13が重畳する駐車目安枠は、表示手段3の中心線に対して図6の駐車目安枠61と左右対称に表示されるような形状である。
【0062】
次に、表示手段3への駐車目安枠の表示例について説明する。
【0063】
図7〜9は、表示手段に表示される駐車目安枠の第1〜第3の表示例を説明する図である。
【0064】
図7に示すように、表示手段3には、駐車目安枠71と駐車車両72、73が表示されている。駐車目安枠71は、第1の目安枠71Aと第2の目安枠71Bとで構成される。自車両が移動した場合、駐車車両72、73等の背景映像(映像変換部12から読み込まれた映像信号)部分は移動するが駐車目安枠71の表示位置は固定である。図8、図9においても以上の関係は同様なので符号のみを変えて詳細な説明を省略する。
【0065】
図7に示すように、第1の目安枠71Aの駐車車両73側端部が駐車車両73の端部付近に表示されたとき、第2の目安枠71Bは、駐車車両72の端部に達しておらず離れている。このとき、運転者は自車両の切り返し無しで駐車車両72、73の間に駐車できることがわかる。したがって、運転者はシフトレバーの操作無しにハンドルの操作のみで駐車車両72、73の間に駐車できることがわかる。また、第2の目安枠71Bと駐車車両72の端部との間の距離が離れているほど、運転者はシフトレバーの操作による自車両の切り返し無しの駐車が容易であることを理解することができる。
【0066】
図8に示すように、表示手段3には、駐車目安枠81と駐車車両82、83が表示されている。
【0067】
図8に示すように、第1の目安枠81Aの駐車車両83側端部が駐車車両83の端部付近に表示されたとき、駐車車両82の端部は、第2の目安枠81Bに達しており、第1の目安枠81Aには達していない。このとき、運転者は切り返せば駐車車両82、83の間に駐車できることがわかる。したがって、運転者はシフトレバーとハンドルの操作によって駐車車両82、83の間に駐車できることがわかる。
【0068】
また、運転者は、駐車車両82の端部が第2の目安枠81Bの駐車車両82側に位置す
るほど駐車の際にシフトレバーの操作による自車両の切り返しが容易であり、駐車車両82の端部が第1の目安枠81A側に位置するほど駐車の際にシフトレバーの操作による自車両の切り返しやハンドル操作が難しくなることを理解することができる。
【0069】
図9に示すように、表示手段3には、駐車目安枠91と駐車車両92、93が表示されている。
【0070】
図9に示すように、第1の目安枠91Aの駐車車両93側端部が駐車車両93の端部付近に表示されたとき、駐車車両92の端部は、第2の目安線91Bに加え、第1の目安枠91Aに達している。このとき、運転者は、駐車車両92、93の間に駐車できないことがわかる。したがって、運転者はシフトレバーとハンドルを操作しても駐車車両92、93の間に駐車できないことがわかる。
【0071】
以上のように、画像重畳部13が映像変換部12から読み込んだ映像信号に第1の目安枠と第2の目安枠で構成される駐車目安枠を重畳して合成映像を作成し、表示手段3に出力するので、運転者は、自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断することができる。
【0072】
また、駐車目安枠と駐車車両の重なりの大きさや、駐車目安枠と駐車車両の重なっていない領域の大きさによって運転者は自車両の切り返し駐車や自車両の切り返し無しの駐車の難易度を容易に判断することができる。
【0073】
また、第1の目安枠と第2の目安枠とは色分けされているので、互いの境界付近に駐車車両の端部が重なっている場合に、運転者は駐車の可否を容易に判断することができる。なお、第1の目安枠と第2の目安枠は枠内まで色で塗りつぶされた場合に運転者は、第1の目安枠と第2の目安枠の領域に駐車車両が重なっているか否かを最も容易に判断することができる。
【0074】
次に、画像重畳部13が重畳する駐車目安枠と駐車スペースについて説明する。
【0075】
図10〜図12は、画像重畳部が重畳する駐車目安枠と駐車スペースの第1〜第3の関係をイメージで説明する図である。
【0076】
図10に示すように、駐車目安枠101は、駐車可能な限界領域を示す第1の目安枠101Aと、この第1の目安枠101Aから自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠101Bとから構成される。第1の目安枠101Aと第2の目安枠101Bは互いに色分けして重畳される。また、ステップS46で検出された駐車スペース102は、枠を点線にして重畳される。なお、駐車スペース102は、駐車目安枠101と表示形態が区別できれば枠を点線にする形態以外の形態で重畳されてもよい。
【0077】
図10において、画像重畳部13により重畳される駐車目安枠101の位置は固定である。一方、画像重畳部13により重畳される駐車スペース102の位置は可変である。駐車スペース102は、自車両の前進方向への移動に伴って上方に移動し、後退方向への移動に伴って下方に移動する。判定部14は、ギアポジションセンサ6と車速度センサ5からの入力に基づいて、それぞれ駐車スペース102の移動方向、移動速度について画像重畳部13に命令する。
【0078】
図10において、自車両の左後方に縦列駐車を行う場合、画像重畳部13は、判定部14の命令に従い、映像変換部12から読み込んだ自車両後方の映像信号にこの駐車目安枠
101と駐車スペース102を重畳して表示手段3に出力する。また、自車両の右前方に縦列駐車を行う場合、画像重畳部13は、判定部14の命令に従い、映像変換部12から読み込んだ自車両前方の映像信号にこの駐車目安枠101と駐車スペース102を重畳して表示手段3に出力する。なお、自車両の右後方または左前方に縦列駐車を行う場合、画像重畳部13が重畳する駐車目安枠と駐車スペースは、表示手段3の中心線に対して図10の駐車目安枠101、駐車スペース102と左右対称に表示されるような形状である。図11、図12においても以上の関係は符合が異なるのみで同様であるので詳細な説明を省略する。
【0079】
図10において、判定部14は、第1の目安枠101Aと第2の目安枠101Bがともに駐車スペース102の枠内に収まったことを検出する。このとき、判定部14は、自車両の切り返し無しで駐車スペース102内に駐車できると判定する。換言すると、判定部14は、駐車スペース102が駐車目安枠101よりも大きいことを検出した場合に自車両を切り返さずに駐車可能と判定する。したがって、運転者はシフトレバーの操作無しにハンドルの操作のみで自車両を駐車スペース102に駐車できることがわかる。
【0080】
図11において、判定部14は、駐車スペース112に第1の目安枠111Aが収まっているが第2の目安枠111Bがはみ出していることを検出する。このとき、判定部14は、自車両を切り返せば駐車スペース102内に駐車できると判定する。換言すると、判定部14は、駐車スペース112が第1の目安枠111Aよりも大きいが駐車目安枠111よりも小さいことを検出した場合に自車両を切り返せば駐車可能と判定する。したがって、運転者はシフトレバーとハンドルの操作によって自車両を駐車スペース112に駐車できることがわかる。
【0081】
図12において、判定部14は、駐車スペース122から第1の目安枠121Aがはみ出していることを検出する。このとき、判定部14は、駐車スペース122内に駐車できないと判定する。換言すると、判定部14は、駐車スペース122が第1の目安枠121Aよりも小さいことを検出した場合に駐車不可と判定する。したがって、運転者はシフトレバーとハンドルを操作しても自車両を駐車スペース122に駐車できないことがわかる。
【0082】
以上のように、画像重畳部13が映像変換部12から読み込んだ映像信号に駐車目安枠と駐車スペースとを重畳して合成映像を作成し、この合成映像に基づいて判定部14が自車両の切り返しの有無を含めた駐車の可否を判定する。この判定結果を表示手段3に出力することにより、運転者が運転に集中している場合にも運転者に切り返しの有無を含めた駐車の可否を認識させることができる。なお、この場合、判定結果は表示手段3とともにまたは表示手段3に代えて、図示しない音声出力手段に出力してもよい。
【0083】
なお、本実施の形態では映像変換部12が変換する映像は、視点変換を行った映像でもよい。例えば、映像変換部12は、映像取得手段9から得た映像を俯瞰視点の映像に変換してもよい。
【0084】
図13は、表示手段に俯瞰視点で表示される駐車目安枠と駐車スペースの表示例を説明する図である。
【0085】
図13に示すように、自車両130が左後方にハンドルを切って縦列駐車する場合、表示手段3には、駐車目安枠131と駐車スペース132とが表示されている。駐車スペース132は、駐車車両133、134の間に表示されている。運転者は、駐車スペース132が第1の目安枠131Aをはみ出し、第2の目安枠131Bの一部に重なっているのでシフトレバーを操作して自車両130を切り返せばハンドル操作によって自車両130
を駐車車両133、134の間に駐車可能であることがわかる。
【0086】
また、運転者は、駐車スペース132が表示されていない場合でも、駐車車両133が第1の目安枠131Aには重なっておらず、第2の目安枠131Bの一部に重なっていることがわかるので、シフトレバーを操作して自車両130を切り返せばハンドル操作によって駐車車両133、134の間に自車両130を駐車可能であることがわかる。また、運転者は、第2の目安枠131Bと駐車車両133との重なっている部分が多いほどシフトレバーを操作しての自車両130の切り返し、ハンドル操作の条件が厳しいことがわかる。このように、第2の目安枠131Bと駐車車両133との重なりの大きさや重なっていない領域の大きさによって運転者はシフトレバーの操作によって自車両130を切り返しハンドル操作を行って駐車する切り返し駐車の難易度を容易に判断することができる。また、第1の目安枠131Aと第2の目安枠131Bとは色分けされているので、互いの境界付近に駐車スペース132の枠線や駐車車両133の端部が重なっている場合に、運転者は駐車の可否を容易に判断することができる。
【産業上の利用可能性】
【0087】
本発明の駐車支援装置は、縦列駐車時に運転者が自車両の切り返しの有無を含めた駐車の可否や難易度を直感的に判断するものとして有用である。
【符号の説明】
【0088】
1 駐車支援装置
2 撮像手段
3 表示手段
9 映像取得手段
13 画像重畳部
【特許請求の範囲】
【請求項1】
少なくとも自車両後方の撮像映像を取得する映像取得手段と、
この映像取得手段が取得した撮像映像に自車両の駐車目安枠を重畳した合成映像を表示手段に出力する画像重畳手段とを備え、
前記画像重畳手段に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする駐車支援装置。
【請求項2】
前記第1の目安枠と第2の目安枠は互いに色分けされることを特徴とする請求項1に記載の駐車支援装置。
【請求項3】
少なくとも自車両後方を撮像して前記映像取得手段に撮像映像を入力する撮像手段と、
前記画像重畳手段が重畳した合成映像を表示する表示手段とをさらに備えたことを特徴とする請求項1に記載の駐車支援装置。
【請求項4】
外部の距離センサから入力された障害物までの距離に基づいて駐車スペースを判定する判定手段をさらに備え、
前記画像重畳手段は、前記判定手段が判定した駐車スペースを前記駐車目安枠に重ねて重畳することを特徴とする請求項1に記載の駐車支援装置。
【請求項5】
障害物までの距離を検出してこの距離を前記判定手段に入力する距離センサをさらに備えたことを特徴とする請求項4に記載の駐車支援装置。
【請求項6】
前記判定手段は、前記駐車スペースが前記第1の目安枠よりも小さい場合に自車両を駐車不可と判定し、前記駐車スペースが前記第1の目安枠よりも大きく前記駐車枠よりも小さい場合に自車両を切り返して駐車可能と判定し、前記駐車スペースが前記駐車目安枠よりも大きい場合に自車両を切り返さずに駐車可能と判定することを特徴とする請求項4に記載の駐車支援装置。
【請求項1】
少なくとも自車両後方の撮像映像を取得する映像取得手段と、
この映像取得手段が取得した撮像映像に自車両の駐車目安枠を重畳した合成映像を表示手段に出力する画像重畳手段とを備え、
前記画像重畳手段に重畳される自車両の駐車目安枠は、駐車可能な限界領域を示す第1の目安枠と、この第1の目安枠から自車両の進行方向側に延出して駐車の際に自車両の切り返しが必要な領域を示す第2の目安枠とを有することを特徴とする駐車支援装置。
【請求項2】
前記第1の目安枠と第2の目安枠は互いに色分けされることを特徴とする請求項1に記載の駐車支援装置。
【請求項3】
少なくとも自車両後方を撮像して前記映像取得手段に撮像映像を入力する撮像手段と、
前記画像重畳手段が重畳した合成映像を表示する表示手段とをさらに備えたことを特徴とする請求項1に記載の駐車支援装置。
【請求項4】
外部の距離センサから入力された障害物までの距離に基づいて駐車スペースを判定する判定手段をさらに備え、
前記画像重畳手段は、前記判定手段が判定した駐車スペースを前記駐車目安枠に重ねて重畳することを特徴とする請求項1に記載の駐車支援装置。
【請求項5】
障害物までの距離を検出してこの距離を前記判定手段に入力する距離センサをさらに備えたことを特徴とする請求項4に記載の駐車支援装置。
【請求項6】
前記判定手段は、前記駐車スペースが前記第1の目安枠よりも小さい場合に自車両を駐車不可と判定し、前記駐車スペースが前記第1の目安枠よりも大きく前記駐車枠よりも小さい場合に自車両を切り返して駐車可能と判定し、前記駐車スペースが前記駐車目安枠よりも大きい場合に自車両を切り返さずに駐車可能と判定することを特徴とする請求項4に記載の駐車支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−91330(P2013−91330A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2010−41857(P2010−41857)
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]