
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】駐車検出装置は、表示パターンが描かれた複数の駐車マスを含む検出対象エリアを撮影する撮影手段と、空車状態の検出対象エリアの画像に対してエッジ抽出処理を施して基準画像データを生成する基準データ生成手段と、対象画像に対してエッジ抽出処理を施して対象画像データを生成する対象データ生成手段と、表示パターンの位置を中心として基準画像データを所定範囲でシフトさせ、その各位置において基準画像データと対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得る相関率分布算出手段と、相関率分布の特徴に基づいて駐車の有無を判定する判定手段と、を備えている。
【解決手段】駐車検出装置は、表示パターンが描かれた複数の駐車マスを含む検出対象エリアを撮影する撮影手段と、空車状態の検出対象エリアの画像に対してエッジ抽出処理を施して基準画像データを生成する基準データ生成手段と、対象画像に対してエッジ抽出処理を施して対象画像データを生成する対象データ生成手段と、表示パターンの位置を中心として基準画像データを所定範囲でシフトさせ、その各位置において基準画像データと対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得る相関率分布算出手段と、相関率分布の特徴に基づいて駐車の有無を判定する判定手段と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車検出装置、駐車検出方法および駐車検出プログラムに関する。さらに詳しくは、高速道路のサービスエリアなど、多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を画像処理により正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムに関する。
【背景技術】
【0002】
従来の車両検出方法として、車両検出対象領域を俯瞰撮影した画像の各駐車マスに対応する画像領域から輪郭(エッジ)を抽出し、そのエッジ量の多寡に基づいて駐車と空車とを判定する車両検出方法が知られている(例えば、特許文献1を参照)。この方法によれば、複雑な形状を有する車両から抽出されるエッジの量と、空車状態の駐車マスから抽出されるエッジの量とに差が生じるため、駐車状況を検出することができる。
しかしながら、エッジ量の多寡に基づいて駐車と空車とを判定する場合、駐車マスに「バス」、「トラック」などの文字や、車椅子の図形で知られる国際シンボルマークなどの図形等の表示パターンが表示されていると、これら表示パターンのエッジも抽出されてしまうという問題があった。
【0003】
また、駐車場全体の混雑状態を判別するシステムとして、予め用意しておいた空車、混雑、満車などの混雑状況を表す画像のエッジをぼかし処理したテンプレート画像と、カメラから取り込んだ画像のエッジを同じくぼかし処理した対象画像全体との相関をとり、その相関値から混雑状態を判定する混雑状況判定装置が知られている(例えば、特許文献2を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−66490号公報
【特許文献2】特開2001−283218号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記従来例のように、予め用意しておいたテンプレート画像とカメラから取り込んだ対象画像との相関やエッジ量の相違に基づいて駐車状況の判定をしても、駐車マスに文字や図形の表示パターンが描かれている場合には、非駐車時に表示パターンのエッジが抽出されてしまうため、非駐車時と駐車時とで相関率等に大差がなくなる場合があり、誤判定が生じるという問題があった。
また、対象となる駐車マスに他の車両の影や建造物の影など外乱となる要素が存在する場合、これら外乱となる要素からもエッジが抽出されてしまう。このため、例えば、駐車がなくても表示パターンに影がかかっているときの画像と、駐車した車両が表示パターンの一部を覆っているときの画像とでは、前記テンプレート画像との相関値に大差がなくなり、空車であっても影がかかっているような場合には駐車があると誤判定してしまうという問題があった。
【0006】
本発明は、上記問題の解決を図るため、駐車場を撮影した画像において位置や形状の時間的変化が少ない表示パターンに着目する。また、カメラから取り込んだ対象画像と基準とする画像との位置関係により相関率が異なることに着目する。これによって、駐車マスに他の車両の影や建造物の影などが存在したり、駐車した車両により表示パターンの一部が覆われたりしたときにも、駐車マスごとに駐車の有無を正確に判定することが可能な駐車検出装置、駐車検出方法および駐車検出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、以下の通りである。
1.表示パターンが描かれた複数の駐車マスを撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出装置であって、
前記複数の駐車マスを含む検出対象エリアを撮影する撮影手段と、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成手段と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成手段と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成手段により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出手段と、
前記相関率分布算出手段により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定手段と、
を備えることを特徴とする。
2.上記1.において、前記判定手段は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定することを特徴とする。
3.上記1.または2.において、前記判定手段は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定することを特徴とする。
4.上記1.ないし3.において、前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成手段は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成手段は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施すことを特徴とする。
5.表示パターンが描かれた複数の駐車マスを撮影手段により撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出方法であって、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成工程と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成工程と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成工程により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出工程と、
前記相関率分布算出工程により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定工程と、
を備えることを特徴とする。
6.上記5.において、前記判定工程は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定することを特徴とする。
7.上記5.または6.において、前記判定工程は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定することを特徴とする。
8.上記5.ないし7.において、前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成工程は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成工程は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施すことを特徴とする。
9.表示パターンが描かれた複数の駐車マスを撮影手段により撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出プログラムであって、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成機能と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成機能と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成機能により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出機能と、
前記相関率分布算出機能により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定機能と、
を備えることを特徴とする。
10.上記9.において、前記判定機能は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定することを特徴とする。
11.上記9.または10.において、前記判定機能は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定することを特徴とする。
12.上記9.ないし11.において、前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成機能は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成機能は、前記基準データ生成機能により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施すことを特徴とする。
【発明の効果】
【0008】
本発明の駐車検出装置によると、基準データ生成手段により、あらかじめ、複数の駐車マスが空車状態である駐車場の検出対象エリアを撮影した基準画像が取得され、該基準画像に対してエッジ抽出処理を施して基準画像データが生成されるため、その基準画像データには、「バス」、「トラック」などの表示パターンのエッジが抽出される。その後、対象データ生成手段により、前記と同じ検出対象エリアを撮影した対象画像に対してエッジ抽出処理を施して対象画像データが生成される。そして、相関率分布算出手段により、前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得ると、その相関率分布の形状は、駐車がない場合とある場合とでは大きく異なることが見出される。したがって、判定手段により、前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、その特徴点および特徴量のうちの1または2以上に基づいて駐車の有無を判定することができる。これによって、駐車マスに他の車両の影や建造物の影などが存在したり、駐車した車両により表示パターンの一部が覆われたりした場合にも、抽出されたエッジの量や相関率の大きさ等から判定する従来の方法に比べて、判定の精度を大幅に向上させることが可能となる。
【0009】
前記判定手段は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定すれば、最大値となる点を中心とする相関率分布の突出程度を含めて判定をすることができる。相関率分布の形状には、影などの有無に関わらず駐車がない場合には最大値となる点が突出するという特徴が見出されるため、駐車の有無を容易に判定することが可能となる。
【0010】
前記判定手段は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置(中心位置)から所定の範囲内にない場合には駐車ありと判定すれば、相関率分布の形状には、影などの有無に関わらず駐車がない場合には前記中心位置近傍に最大値となる点があり、駐車がある場合には前記中心位置から離れて最大値となる点が存在するという特徴が見出されるため、駐車の有無を容易に判定することができる。
【0011】
前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、前記基準データ生成手段は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、前記対象データ生成手段は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施す場合には、表示パターンのエッジ方向とは異なる影などのエッジは強く抽出されないため、屋外駐車場などで強い影が生じる場合であっても、表示パターンのエッジ情報に基づいた駐車有無の検出精度をさらに向上させることができる。
【0012】
以上は、本発明が装置として実現される場合について説明したが、かかる装置を実現する方法やプログラム、当該プログラムを記録した媒体としても発明は実現可能である。また、以上のような駐車検出装置は単独で実現される場合もあるし、ある方法に適用され、あるいは同方法が他の機器に組み込まれた状態で利用されることもあるなど、上記に示す駐車検出装置に限らず、各種の態様を含むものである。したがって、本発明思想は、プログラム、ソフトウェアおよびハードウェアに、適宜変更可能である。
発明の思想の具現化例として上記装置を制御するためのソフトウェアとなる場合には、かかるプログラム、ソフトウェア、あるいはソフトウェアを記録した記録媒体上においても存在し、利用される。
【0013】
また、プログラム、ソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよく、今後開発されるいかなる記録媒体においても全く同様に考えることができる。一次複製品、二次複製品などの複製段階についても同等である。その他、供給装置として通信回線を利用して行う場合でも本発明が利用されていることにはかわりない。さらに、一部がソフトウェアであって、一部がハードウェアで実現されている場合においても発明の思想において全く異なるものではなく、一部を記録媒体上に記憶しておいて必要に応じて適宜読み込まれるような形態であってもよい。
【図面の簡単な説明】
【0014】
【図1】本実施形態にかかる駐車検出装置を示す概略ブロック図である。
【図2】本実施形態にかかる基準画像データ生成処理のフローチャートを示す図である。
【図3】本実施形態にかかる駐車検出処理のフローチャートを示す図である。
【図4】検出対象エリアとカメラの配置を模式的に示す平面図である。
【図5】検出対象エリアを撮影した画像の例を模式的に示す図である。
【図6】基準画像データの生成を説明するための説明図である。
【図7】判定対象用として撮影した画像の例を模式的に示す図である。
【図8】検索範囲と処理領域の例を模式的に示す図である。
【図9】検索範囲と処理領域の例を模式的に示す図である。
【図10】検索範囲と処理領域の例を模式的に示す図である。
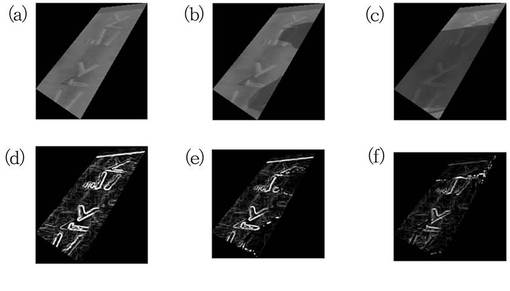
【図11】表示パターンを含む画像領域の例を示す図であって、(a)〜(c)は撮影画像、(d)〜(f)はエッジ抽出処理画像をそれぞれ示す。
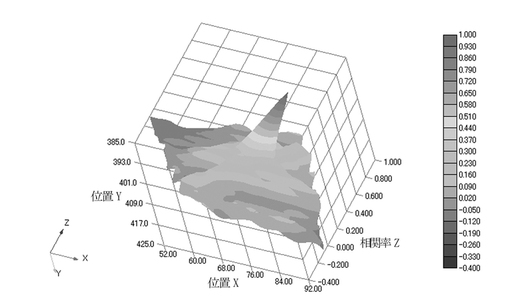
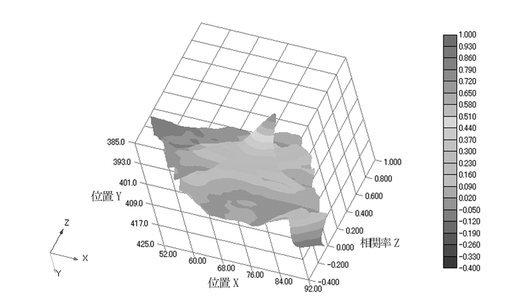
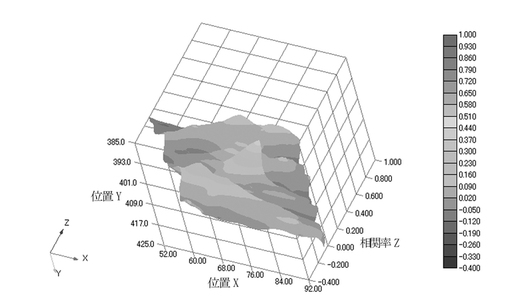
【図12】基準画像データを所定範囲でシフトさせ、その各位置の基準画像データと対象画像データとの相関率の分布を表わす相関率分布図であって、駐車マスに駐車がなく、かつ影がない場合の相関率分布を示すグラフである。
【図13】図12と同様の相関率分布図であって、駐車マスに駐車がなく、かつ小さな影がかかっている場合の相関率分布を示すグラフである。
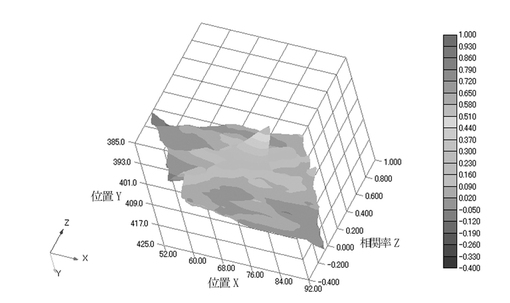
【図14】図12と同様の相関率分布図であって、駐車マスに駐車がなく、かつ駐車マスに中半影がかかっている場合の相関率分布を示すグラフである。
【図15】図12と同様の相関率分布図であって、駐車マスに駐車がなく、かつ大きな影がかかっている場合の相関率分布を示すグラフである。
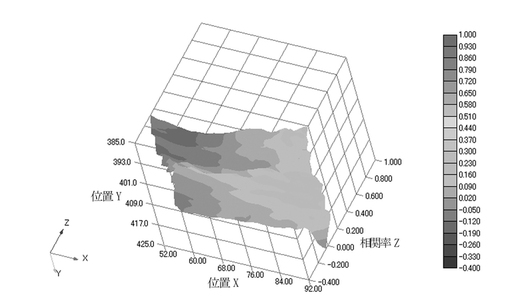
【図16】図12と同様の相関率分布図であって、駐車マスに駐車がある場合の相関率分布を示すグラフである。
【図17】相関率が最大となる点を通る1次元の相関率分布を表わす相関率分布図である。
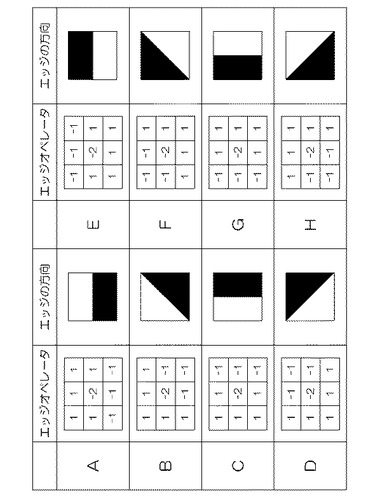
【図18】Prewittフィルタの例として、8種類のエッジオペレータとそれらに対応するエッジ方向を示す図である。
【発明を実施するための形態】
【0015】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)駐車検出装置の構成:
(2)駐車検出処理:
(2−1)基準画像データ生成処理:
(2−2)駐車検出処理:
【0016】
(1)駐車検出装置の構成:
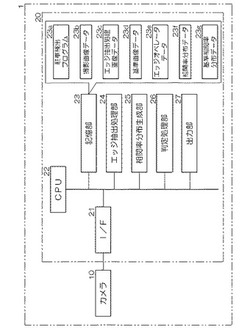
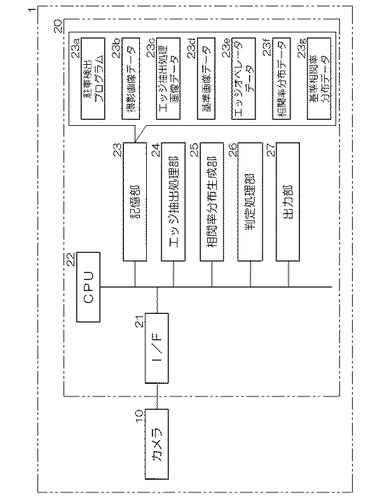
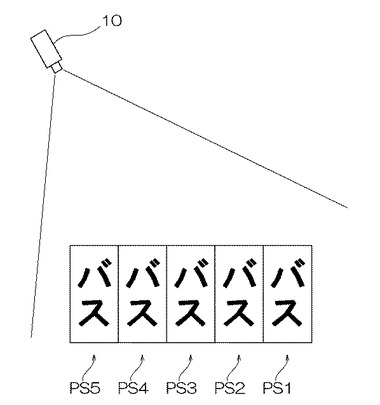
図1は、本実施形態にかかる駐車検出装置の概略構成を示している。同図において、駐車検出装置1は、カメラ10と制御部20とから構成されている。カメラ10は、所定の表示パターンを有する複数の駐車マスを含む検出対象エリアを撮影した画像を制御部20に出力する。制御部20は、カメラ10から取得した画像を処理することによって、各駐車マスの駐車の有無を検出するように構成される。
【0017】
制御部20は、主要な構成として、インターフェース(I/F)21、CPU22、記憶部23、エッジ抽出処理部24、相関率分布生成部25、判定処理部26、および出力部27を備えている。
カメラ10により撮影された画像は、I/F21を介して制御部20に取り込まれる。
CPU22は、記憶部23に記憶された駐車検出プログラム23aを実行し、各部を制御するとともに所定の演算処理を実行する。
【0018】
記憶部23は、プログラムおよびデータを格納可能な記憶媒体である。記憶部23には、駐車検出処理の全体を制御するための駐車検出プログラム23aが格納されている。また、その駐車検出処理の過程で使用される撮影画像データ23b、エッジ抽出処理画像データ23c、基準画像データ23d、エッジオペレータデータ23e、および相関率分布データ23fが格納される。さらに、駐車有無の判定基準となる基準相関率分布データ23gが格納されている。
【0019】
上記撮影画像データ23bは、検出対象エリアを撮影した画像データを格納するために用いられる領域である。
上記エッジ抽出処理画像データ23cは、前記撮影画像データ23bに対して、エッジ抽出処理を施した画像データ(対象画像データ)を格納するために用いられる領域である。
上記基準画像データ23dは、検出対象エリア内の駐車マスが空車状態であるときに撮影した画像(基準画像)に対してエッジ抽出処理を施した画像データ(基準画像データ)を格納するために用いられる領域である。
上記エッジオペレータデータ23eは、前記エッジ抽出処理にPrewittフィルタを用いる場合に、基準画像のエッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータを格納するために用いられる領域である。
上記相関率分布データ23fは、前記基準画像データを所定範囲でシフトさせ、その各位置における基準画像データと前記対象画像データとの相関率の分布を、相関率分布として格納するために用いられる領域である。
上記基準相関率分布データ23gには、駐車の有無を判定するための基準となる相関率分布データがあらかじめ格納されている。基準となる相関率分布の特徴点や特徴量のデータが格納されていてもよい。
【0020】
以下のエッジ抽出処理部24、相関率分布生成部25および判定処理部26は、本駐車検出装置1の中心的な画像処理および演算処理を実行するように構成されている。これら各部は、前記駐車検出プログラム23aの一部として備えられてもよい。
【0021】
エッジ抽出処理部24は、検出対象エリアを撮影した画像(撮影画像データ23b)に対して、次の2つのエッジ抽出処理を行うように構成される。
第1のエッジ抽出処理は、あらかじめ検出対象エリア内の駐車マスが空車状態であるときに撮影した画像すなわち基準画像に対するエッジ抽出処理である。このエッジ抽出処理が施された基準画像データは、基準画像データ23dに格納される。基準画像データには、駐車マスに描かれた表示パターンのエッジが抽出されている。
第2のエッジ抽出処理は、駐車の有無を検出するに際して撮影した画像すなわち対象画像に対するエッジ抽出処理である。このエッジ抽出処理が施された対象画像データは、エッジ抽出処理画像データ23cに格納される。
【0022】
上記第1のエッジ抽出処理および第2のエッジ抽出処理の方法はとくに限定されるものではなく、適宜のエッジ抽出フィルタを使用して行うことができる。例えば、PrewittフィルタやSobelフィルタなどの1次微分フィルタが使用されてもよいし、ラプラシアンフィルタなどの2次微分フィルタなどが用いられてもよい。
【0023】
相関率分布生成部25は、前記表示パターンの位置を基準として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得る。上記「表示パターンの位置」とは、基準画像データ上で前記表示パターンのある画像領域の位置(以下、「中心位置」という。)を意図し、具体的には、後述する画像領域IRの位置を例示することができる。駐車マスごとに相関率分布を得るために、上記中心位置(画像領域IR)は駐車マスごとに設定されることが好ましい。
また、上記所定範囲は、生成する相関率分布の特徴を把握することが可能な範囲である限りとくに限定されず、例えば、±15画素、±20画素などとすることができる。この範囲で、必要な細分化程度に応じて1または2以上の画素単位で、基準画像をシフトさせ、その各位置において前記対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得ることができる。上記各位置には、上記中心位置すなわち基準画像データをシフトさせない位置を含む。
【0024】
相関率分布生成部25は、基準画像データをシフトさせた上記位置ごとに、基準画像データと対象画像データとの相関率を算出する。相関率は、例えば、両画像データ間の2次元相互相関演算を実行することにより算出することができる。
基準画像データの各位置は、直交する軸X、Yからなる座標で表わすことができる。基準画像データは、そのX軸方向およびY軸方向に、それぞれ上記画素単位で、上記範囲内でシフトされることとなる。相関率分布生成部25は、上記各位置(X、Y)における相関率(Z)を求め、各位置と関連付けて相関率分布データ23fに格納する。この各位置における相関率の分布(相関率分布)をグラフ化して表わしたものを、相関率分布図と呼ぶ(例えば、図12)。また、相関率分布は、上記各位置の座標面において相関率が最大となる点を通る直線上の相関率の分布としてもよい(例えば、図17)。
なお、本実施形態では、基準画像データをシフトさせて相関率分布を得ているが、対象画像データをシフトさせることによっても同等の相関率分布を得ることができるのは言うまでもない。例えば、上記中心位置に対応する対象画像データ上の位置を中心として、上記所定範囲で対象画像データをシフトさせ、その各位置において、対象画像データと基準画像データとの相関率を算出してもよい。
【0025】
判定処理部26は、相関率分布生成部25により得られた相関率分布から特徴点を抽出し、またはその相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する。この特徴点や特徴量は、上記相関率分布(相関率分布図の形状)の特徴を表わすものであれば、とくに限定されない。例えば、特徴点として、相関率の最大(ピーク)点、極大点、極小点、最小点などの値・位置などが挙げられる。また、特徴量として、各特徴点の値の差や比率、各特徴点の間の距離、傾き、ピーク点を中心とする凸部の幅・高さ(突出程度)、平均値などが挙げられる。得られた相関率分布の特徴点や特徴量と、基準相関率分布データ23gに格納されている基準値との比較や、得られた相関率分布と基準相関率分布との類似度などにより、各駐車マスに車両が駐車しているか否かを判定することができる。判定処理部26による判定結果を判定結果データとして記憶部23に記憶させるようにしてもよい。
出力部27は、判定処理部26による判定結果等を出力する。出力された判定結果データは、駐車場管理システム等に送られて管理されたり、駐車場の駐車状況を示す表示板等に反映されたりすることができる。
【0026】
本実施形態の駐車検出装置においては、前記撮影手段はカメラ10によって構成される。前記基準データ生成手段は、主としてエッジ抽出処理(第1のエッジ抽出処理)部24によって構成される。前記対象データ生成手段は、主としてエッジ抽出処理(第2のエッジ抽出処理)部24によって構成される。前記相関率分布算出手段は、主として相関率分布生成部25によって構成される。前記判定手段は、主として判定処理部26によって構成される。
【0027】
(2)駐車検出処理:
本実施形態における駐車検出処理では、上述の構成において、最初に基準画像から基準画像データを生成し、次に、それを一定範囲でシフトさせつつ、対象画像から生成された対象画像データとの相関率を求め、得られた相関率分布を基に駐車状況を検出する駐車検出処理を実行する。
【0028】
(2−1)基準画像データ生成処理:
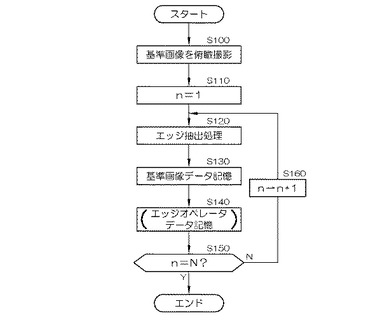
基準画像データ生成処理は、例えば、図2に示すようなフローチャートに従って実行することができる。
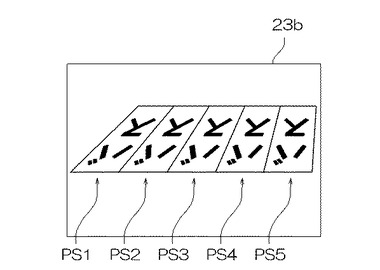
最初に、カメラ10によって検出対象エリアとなる駐車場を所定の高さから俯瞰撮影した画像を取得する(ステップS100)。このとき撮影する画像(基準画像)は、各駐車マスが空車状態の検出対象エリアの画像である。図4は、このようにして撮影される検出対象エリアの例を模式的に示す図であり、図5は、撮影した画像の例を模式的に示す図である。本実施形態においては、図4および5に示すように、検出対象エリアに5つの駐車マスPS1〜PS5が含まれており、各駐車マスPS1〜PS5には、表示パターンとして、「バス」という文字がそれぞれ表示されている場合を例示する。なお、ステップS100により取得する画像は、各駐車マスの表示パターンが明瞭に撮影されているとともに、各駐車マスに他の車両や建造物等の影が写り込んでいないことが好ましい。
【0029】
次に、ステップS110において、変数nを"1"に初期化する。変数nは、最大値をNとする整数であり、Nは駐車検出処理にて駐車と空車とが判定される駐車マスの数である。本実施形態において、この変数nの値は各駐車マスにそれぞれ対応しており、変数nの値に応じて、これに対応する駐車マス毎の基準画像データ23dが生成される。
【0030】
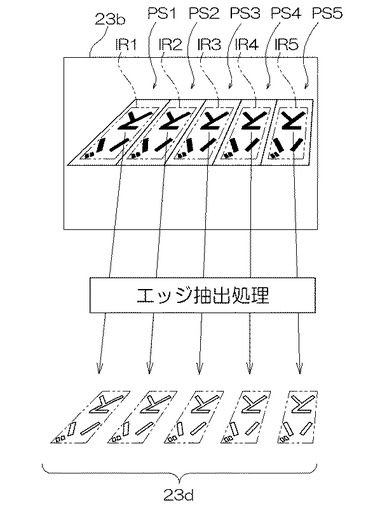
ステップS120では、撮影画像データ23bの所定の画像領域IRに対して、所定のエッジ抽出フィルタを用いてエッジ抽出処理を実行する。それぞれの駐車マスの駐車の有無を検出するために用いる画像領域IRを撮影画像内のどの領域とするかは特に限定されず、駐車マスの枠や表示パターンの態様に応じて適宜に設定されればよい。例えば、図6に示すように、撮影画像の各駐車マス内の表示パターン部を切り出すように、駐車マス毎に画像領域IRを設定することができる。設定された画像領域IRの位置は、前記「表示パターンの位置」(中心位置)となる。そして、n番目の駐車マスPSnの「バス」という表示パターンを含む画像領域IRnに対して、エッジ抽出処理を実行することができる。
【0031】
なお、エッジ抽出処理が施された画像領域IRに対して、2値化処理をさらに施すようにして、所定値以上のエッジ強さのみを抽出したエッジ抽出処理画像としてもよい。また、輝度値の変化が小さく、注目画素のエッジ方向が明確でない場合は、当該画素に対応する位置にはエッジ抽出処理を適用しないようにすることもできる。後述する対象画像の処理についても同様である。
【0032】
ステップS130では、上記のようにして各画像領域IRに対してエッジ抽出処理を施した画像データを、基準画像データ23dとして記憶する。ステップS140は、各画像領域IRに対するエッジ抽出処理にPrewittフィルタを使用し、かつそのエッジ抽出処理において画素毎に一致度が最も高かったエッジオペレータを対象画像のエッジ抽出処理に用いる場合に必要なステップであり、上記エッジオペレータを画像領域IRごとにエッジオペレータデータ23eとして記憶する。
【0033】
ステップS150においては、変数nが最大値Nに達しているか否か、すなわち、すべての駐車マスについての基準画像データ23dを生成したか否かを判別する。変数nが最大値Nに達していなければ、ステップS160において変数nをインクリメントしてステップS120以降の処理を繰り返し、他の駐車マスについて基準画像データ23dを生成する処理を実行する。変数nが最大値Nに達していれば、基準画像データ生成処理を終了する。
【0034】
(2−2)駐車検出処理:
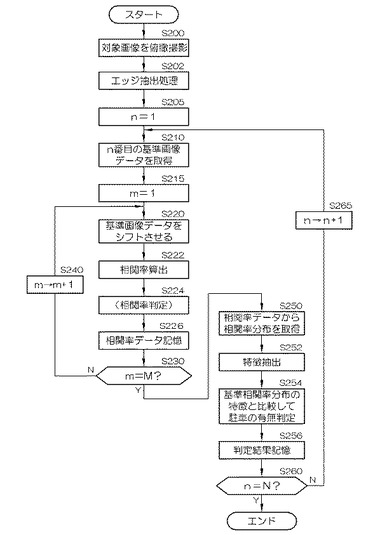
駐車検出処理は、上記ステップS120〜S140において生成・記憶された基準画像データを用いて、例えば、図3に示すようなフローチャートに従って実行することができる。
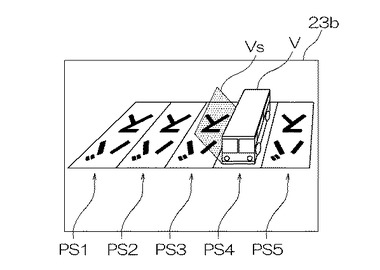
先ず、カメラ10によって駐車の有無の検出対象エリアとなる駐車場を俯瞰撮影する(ステップS200)。図7は、このようにして撮影される画像(対象画像)の例を模式的に示す図である。同図は、駐車マスPS4には車両Vが駐車しており、他の駐車マスPS1〜3およびPS5には駐車する車両がない状態を表わしている。また、駐車マスPS3には、隣接する駐車マスPS4に駐車中の車両Vの影Vsがかかっている状態を示している。
【0035】
ステップS202では、ステップS200で取得された対象画像(撮影画像データ23b)に対して、所定のエッジ抽出フィルタを用いてエッジ抽出処理を実行する。これにより生成された対象画像データは、エッジ抽出処理画像データ23cに格納される。対象画像のエッジ抽出処理は、次のステップS205以下で対象とする駐車マスの番号(n)の値が定まった後に、n番目の駐車マスPSnに対応する画像領域ごと(例えば、後述する検索領域SRごと、または処理領域PRごと)に行ってもよい。
【0036】
次に、ステップS205において、検出処理の対象となる駐車マスの番号を示す変数nを"1"に初期化する。そして、ステップS210では、検出処理の対象となるn番目の駐車マスに対応するn番目の基準画像データを取得する。
【0037】
ステップS215では、変数mを"1"に初期化する。この変数mは、最大値をMとする整数である。本駐車検出処理においては、前記基準画像データ生成処理において設定された図6に示す画像領域IRの位置を中心位置として、その画像領域IRの基準画像データを所定範囲でシフトさせる。上記所定の範囲は、後述する検索範囲SRに相当する。変数mは、この検索範囲SRに相当する範囲内で、画像領域IRの基準画像データをシフトさせる制御のために使用される。
ステップS220は、上記変数mの値に応じて、画像領域IRの基準画像データをシフトさせるステップである。
【0038】
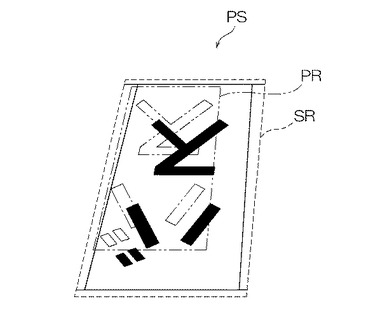
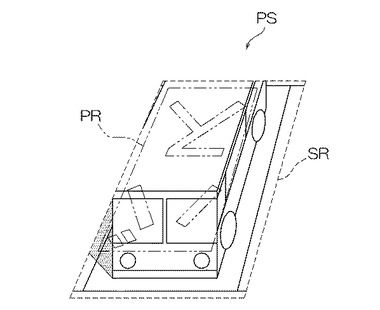
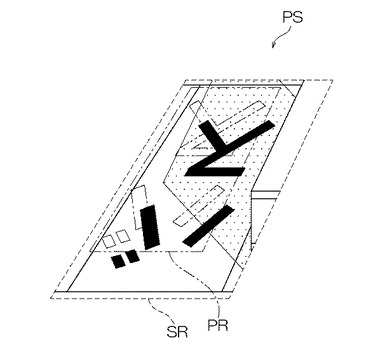
上記において画像領域IRをシフトさせた位置に対応する対象画像データ上の画像領域を、図8に示すように処理領域PRとする。そうすると、シフトされた基準画像データと、対象画像データとの相関率の算出は、この処理領域PRを対象として行うことができる。処理領域PRは前記画像領域IRと同じ大きさであり、検索範囲SRは、画像領域IRの設定位置を中心として、所定画素の範囲(例えば、(±20)画素×(±20)画素の範囲)でシフトさせることが可能なように設定される。
具体的には、図7〜9に示すように、画像領域IRよりも広く設定された検索範囲SRの範囲で、画像領域IRの基準画像データを順次シフトさせ、その各位置に対応する処理領域PRが設定される。そして、各位置において、シフトされた基準画像データと、対象画像データ(処理領域PR)と、の相関率を算出するようにすることができる。
【0039】
基準画像および対象画像のエッジ抽出の例を、図11に示す。図11(a)〜(c)は、それぞれ同一の駐車マスを撮影した画像であり、(a)には、表示パターンである「バス」の文字が明瞭に撮影されており、車両の影や建造物の影は写り込んでいない。この(a)を基準画像とすることができる。そして(a)の画像に対してエッジ抽出処理を施したものが(d)であり、表示パターンのエッジが抽出されている。この(d)は、基準画像データの例とすることができる。
一方、(b)および(c)は、隣の駐車マスの車両の強い影が写り込んだ場合の対象画像の例である。これらの対象画像に対してそれぞれエッジ抽出処理を施すことにより生成された対象画像データの例が、図11(e)および(f)である。車両や建物などの影がない場合や影が弱い場合には、前記(d)と同程度に表示パターンのエッジが抽出された対象画像データを得ることができる。
【0040】
図3に戻り、ステップS222では、シフトされた画像領域IRの基準画像データと、処理領域PRの対象画像データと、の2次元相互相関演算を実行して相関率を算出する。
図8は、検索範囲SRに含まれる検出対象の駐車マスPSが空車状態である場合を示す。また、図9は、駐車マスPSに車両Vが駐車している場合を示し、図10は、駐車マスPSが空車状態であるが他の車両等の影がかかっている場合を示す。これらの各条件によって、上記で算出される相関率の値は異なり、また基準画像データをシフトさせた位置によっても相関率の値は大きく異なる。
【0041】
ステップS224は、上記で算出された相関率に基づいて駐車の有無を判定するステップとして設けることができる。例えば、算出された相関率が所定の値よりも大きく、その駐車マスに明らかに駐車がないと判定する場合などには、その駐車マスについては以下の処理を省略して次の駐車マスの処理に移るようにするなど、適宜の処理をすることができる。
【0042】
ステップS226では、そのときの変数mの値と関連付けて、ステップS222で算出された相関率を記憶する。そして、ステップS230において、変数mが最大値Mに達しているか否か、すなわち、検索範囲SR内のすべての位置に対して相関率算出処理を実行したか否かを判別する。変数mが最大値Mに達していない場合は、変数mをインクリメントして(ステップS240)、ステップS220以降の処理を繰り返し、検索範囲SRの他の位置について同様の各処理を実行する。変数mが最大値Mに達している場合には、次のステップS250に進む。
【0043】
ステップS250では、変数mの値と関連付けて記憶されているすべての相関率を取得する。前記のとおり、変数mは、検索範囲SR内で設定された処理領域PR(すなわちシフトされた画像領域IR)の位置に対応する。したがって、その各位置で算出された相関率の分布を相関率分布として得ることができ、この相関率分布を相関率分布データ23fに格納する。
【0044】
ステップS252において、上記相関率分布の特徴点を抽出し、特徴量を算出する。そして、ステップS254において、あらかじめ基準相関率分布データ23gに格納されている基準となる相関率分布と比較する。基準相関率分布データ23gには、駐車の有無や影の有無・程度などによって異なる相関率分布、またはその相関率分布の特徴点、特徴量、それらに基づく駐車有無の判定基準などが格納されている。したがって、相関率分布データ23fの特徴と基準相関率分布データ23gの特徴とを比較することにより、駐車の有無を判定することができる。その判定結果を、ステップS256において記憶する。
【0045】
ステップS260においては、変数nが最大値Nに達しているか否か、すなわち、すべての駐車マスについての駐車の有無を判定したか否かを判別する。変数nが最大値Nに達している場合には、変数nをインクリメントし(ステップS265)、ステップS210以降の処理を繰り返して他の駐車マスについての駐車の有無を判定する。変数nが最大値Nに達している場合には、駐車検出処理を終了する。なお、通常、駐車場の駐車状況は常時監視されていることが好ましく、したがって、この駐車検出処理を繰り返し実行することが好ましい。
【0046】
以上のように、本実施形態においては、基準データ生成工程(ステップS100〜S160)を備えている。また、対象データ生成工程(ステップS200〜S202)、相関率分布算出工程(ステップS210〜S240)、判定工程(ステップS250〜S260)を備えている。
【0047】
前記ステップS250以下において処理される相関率分布およびその特徴に基づく判定について、具体的に説明する。
ステップS250によって得られる相関率分布をグラフ化すると、例えば、図12〜図16に示すような相関率分布図として表わすことができる。この相関率分布図は、シフトされた画像領域IRの各位置をX軸およびY軸の座標で表わし、その各位置で算出された相関率をつないでZ軸方向の等高図として表わしたものである。X軸およびY軸の目盛りは画素を単位としている。図12を例に説明すると、前記中心位置(X=72、Y=405)近傍において、相関率Zが最大値(ピーク)となっている。そして、その中心位置を中心にX軸方向およびY軸方向に±20画素の範囲(X=52〜92、Y=385〜425)で画像領域IRの基準画像データがシフトされるに伴い、相関率Zが低くなっている。
【0048】
図12は駐車マスに駐車がなく且つ影がない場合、図13は駐車マスに駐車がなく且つ駐車マスの一部に影がある場合、図14は駐車マスに駐車がなく且つ駐車マスの中半に影がかかっている場合、図15は駐車マスに駐車がなく且つ駐車マスに大きな影がかかっている場合、図16は駐車マスに駐車した車両がある場合、の相関率分布の例を表わす。
試験例では、上記図12〜16の場合に、相関率のピーク値はそれぞれ1.0、0.8、0.35、0.6、0.28となった。駐車がないときの相関率は、駐車があるときに較べて高いものの、その駐車マスにかかる影の大きさや形によっては低い値となり(0.35)、駐車があるときの相関率(0.28)と大差がなくなる場合があることが分かる。その他、駐車マスの表示パターンとそこに駐車した車両の一部が重なるときと、駐車はないが隣の駐車マスの車両の影があるときなど、相関率に大差がなくなる場合もある。このように、たんに相関率(ピーク値など)に基づいて駐車の有無を判定する方法では、正確な判定が難しい場合がある。
【0049】
そこで、相関率分布図の形状に着目すると、駐車がない場合(図12〜15)には、駐車マスにかかる影の度合いによって相関率の高さは変化するが、前記中心位置であるXY座標上の中心付近に突出したピークが存在する。これに対して、駐車がある場合(図16)には、突出したピークがなく、最大値が中心位置付近ではなく、変化がなだらかとなる。このように、駐車がある場合とない場合とでは、相関率分布の形状に明らかな相違が生じる。したがって、相関率分布の特徴(特徴点、特徴量)を抽出し、その特徴に基づいて駐車の有無の判定を行うことにより、判定精度を向上させることができる。判定に用いる相関率分布の特徴は、例えば、ピーク点や極小点の値および位置、ピーク点を中心とした分布の傾斜、ピーク点と極小点との距離、ピーク点と極小点と値の差、相関率の平均値など、またはそれらの2つ以上を組み合わせて、適宜に設定しておくことができる。
例えば、相関率が最大値となる点が前記中心位置(X=72、Y=405)から所定の範囲内にない場合には駐車ありと判定することができる。また、ピーク点が周囲から突出しているか否かによって駐車の有無を判定することもできる。例えば、ピーク点から最も近い変曲点または極小点の値を裾野値として抽出し、ピーク点の値とその裾野値との差、またはピーク点の値に対する裾野値の比率が、所定の条件である場合には駐車なしと判定することができる。
図12〜16に示した例に限らず、種々の条件で駐車があるときとないときの相関率分布をあらかじめ取得して、その特徴の相違点に基づいて駐車有無の判定を行うことが可能である。
【0050】
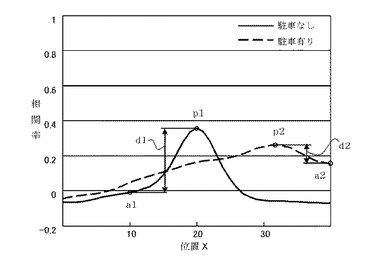
相関率分布の特徴抽出とそれに基づく判定の処理を簡易にするために、XY座標上の直線であって、相関率分布上のピーク点の位置を通る直線上の相関率の分布を1次元の相関率分布として切り出し、その特徴に基づいて判定を行うようにしてもよい。
図17は、駐車マスに駐車がないとき(実線)と、駐車マスに駐車があるとき(破線)の相関率分布の例を表わす。実線は、前記図14に示した相関率分布において、相関率のピーク点を通りX軸に平行な直線上の相関率の分布を表わす。横軸の目盛りは、相関率のピーク点を0としたものである。図17に示す破線は、図16に示した相関率分布について、相関率のピーク点を通りX軸に平行な直線上の相関率の分布を表わす。前記のとおり、駐車はないが隣の駐車マスの車両の影があるときなどと、駐車した車両の一部が表示パターンを覆ったときなどとは、相関率の差が小さくなるが、1次元の相関率分布の形状においては明らかに相違することが分かる。
【0051】
図17の1次元の相関率分布図から明らかなように、駐車がないときにはピーク点p1が中央(X=20)近傍にあり、その突出程度が大きい。これに対して、駐車があるときには、ピーク点p2が中央から離れて存在し、ピーク点を中心とする傾斜がなだらかになっている。このような特徴を抽出することにより、前記図12〜16に例示した相関率分布の特徴に基づく判断と同様に、駐車の有無を判定することができる。
例えば、図17において、ピーク点(p1、p2)が前記中心位置(X=20)から所定の範囲内にない場合には駐車ありと判定することができる。また、ピーク点p1、p2にそれぞれ最も近い極小点a1、a2の値を裾野値とする。そして、ピーク点の値(p1、p2とする)と裾野値(a1、a2とする)との差(d1またはd2)が所定値を超える場合には、駐車なしと判定することができる。また、ピーク点の値に対する裾野値の比(a1/p1、またはa2/p2)が所定値よりも小さい場合には、駐車なしと判定することもできる。図17の実線と破線とを比べると、ピーク点の値と裾野値との差は、ピーク点の値の差の4倍程度と大きく、たんに相関率の大きさを比べるよりも正確に判定することが可能である。
【0052】
以上に示した相関率分布は、基準画像および対象画像に対してPrewittフィルタを用いてエッジ抽出処理を行った例であるが、使用するエッジ抽出フィルタの種類などによって得られる相関率分布の形状は大幅には変わらない。したがって、他のエッジ抽出フィルタを用いて処理を行った場合も、相関率分布を取得することにより同様の効果を得ることができる。
屋外駐車場など、車両や建物などの強い影が駐車マスに生じる場合には、以下に説明するように、Prewittフィルタを使用し、さらに、表示パターンが撮影されている基準画像のエッジ情報を用いて対象画像のエッジ抽出を行うようにすることができる。それによって生成された対象画像データを用いて前記同様に相関率分布を求めれば、影などの影響を低減してより検出精度を向上させることが可能である。
【0053】
Prewittフィルタは、例えば図18のA〜Hに示すように3×3のマトリックスにより構成され、それぞれ画素のエッジの方向に対応している。このPrewittフィルタを用いるエッジ抽出処理では、画像の各画素について、3×3の各マトリックスの中央の値を輝度値に乗じるとともに、周囲の値を当該画素の周囲の各画素の輝度値にそれぞれ乗じ、それらの和(積和値)を算出する。マトリックス内の各数値は、当該画素のエッジの方向と各エッジオペレータに対応するエッジの方向との一致度を求めるための値であり、方向が一致する場合に、当該エッジオペレータを用いて算出した積和値が他のエッジオペレータを用いて算出した積和値よりも大きな値となるように重み付けされている。これにより、エッジオペレータ毎に求められた積和値のうち最大となった積和値を当該画素におけるエッジの強さとして、エッジ抽出処理画像を生成することができる。
【0054】
具体的には、まず、基準画像のエッジ抽出処理(前記ステップS120)において画素ごとに最も一致度が高かったエッジオペレータを、エッジオペレータデータとしてさらに記憶する(前記ステップS140)。
そして、対象画像のエッジ抽出処理(前記ステップS120)において、画素毎にステップS140で記憶された前記エッジオペレータを作用させることにより対象画像に対するエッジ抽出処理を行い、対象画像データを生成する。これによって、基準画像のエッジの方向と同じ方向のエッジは明瞭に抽出され、異なる方向のエッジは強く抽出されない対象画像データを得ることができる。基準画像には表示パターンが表れているため、対象画像上に表示パターンが表れている場合には、そのエッジを効果的に抽出することができる。また、基準画像にはなく対象画像上にのみ存在する他の車の影などのエッジは、強く抽出されないこととなる。
【0055】
再び図11に掲げた駐車マスの画像を参照すると、同図(a)は、表示パターンである「バス」の文字が明瞭に撮影された基準画像の例であり、同図(d)は、その基準画像に対してPrewittフィルタを用いてエッジ抽出処理を施した基準画像データである。このエッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータを記憶しておく。
同図(b)および(c)は車両の影がある対象画像の例であるが、このような影が強く写り込んでいる場合には、対象画像のエッジ抽出処理(前記ステップS202)において、上記ステップS140で記憶されたエッジオペレータを画素毎に作用させることができる。これによって影のエッジが軽減された対象画像データが得られる。表示パターンのエッジ方向と一致するエッジオペレータが適用されるため、エッジ方向が異なる影のエッジは抽出されにくいからである。そして、このエッジ抽出処理により生成された対象画像データを用いて、前記同様に、基準画像データと対象画像データとの相関率を算出し、相関率分布を生成すればよい。
【0056】
なお、基準画像のエッジ方向を抽出し、そのエッジ方向に一致するエッジを対象画像から抽出することが可能である限り、マトリックスの種類や構成は上記Prewittフィルタに限定されるものではなく、画像のエッジ方向の細分化の程度などに応じて、適宜設定されてもよい。
【0057】
また、以上の実施形態においては、駐車検出対象エリアに含まれる駐車マスが5つである例を示したが、駐車マスの数は特に限定されない。駐車検出対象エリアに含まれる駐車マスの数が多いような場合、処理速度を勘案して、複数の制御部を用いて並列処理を実行するようにしてもよい。また、より広大な駐車場の駐車検出をする際には、複数のカメラにより複数の駐車検出対象エリアを撮影した画像について、順次駐車検出処理を実施するようにしたり、複数の駐車検出装置により複数の駐車検出対象エリアの駐車検出をするようにしたりしてもよい。
【0058】
本発明においては、以上に記載した実施形態に限られず、目的、用途に応じて本発明の範囲内で種々変更した実施形態とすることが可能である。
【符号の説明】
【0059】
1;駐車検出装置、10;カメラ、20;制御部、21;インターフェース(I/F)、22;CPU、23;記憶部、23a;駐車検出プログラム、23b;撮影画像データ、23c;エッジ抽出処理画像データ(対象画像データ)、23d;基準画像データ、23e;エッジオペレータデータ、23f;相関率分布データ、23g;基準相関率分布データ、24;エッジ抽出処理部、25;相関率分布生成部、26;判定処理部、27;出力部、IR;画像領域、PR;処理領域、PS;駐車マス、SR;検索範囲、V;車両、Vs;影。
【技術分野】
【0001】
本発明は、駐車検出装置、駐車検出方法および駐車検出プログラムに関する。さらに詳しくは、高速道路のサービスエリアなど、多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を画像処理により正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムに関する。
【背景技術】
【0002】
従来の車両検出方法として、車両検出対象領域を俯瞰撮影した画像の各駐車マスに対応する画像領域から輪郭(エッジ)を抽出し、そのエッジ量の多寡に基づいて駐車と空車とを判定する車両検出方法が知られている(例えば、特許文献1を参照)。この方法によれば、複雑な形状を有する車両から抽出されるエッジの量と、空車状態の駐車マスから抽出されるエッジの量とに差が生じるため、駐車状況を検出することができる。
しかしながら、エッジ量の多寡に基づいて駐車と空車とを判定する場合、駐車マスに「バス」、「トラック」などの文字や、車椅子の図形で知られる国際シンボルマークなどの図形等の表示パターンが表示されていると、これら表示パターンのエッジも抽出されてしまうという問題があった。
【0003】
また、駐車場全体の混雑状態を判別するシステムとして、予め用意しておいた空車、混雑、満車などの混雑状況を表す画像のエッジをぼかし処理したテンプレート画像と、カメラから取り込んだ画像のエッジを同じくぼかし処理した対象画像全体との相関をとり、その相関値から混雑状態を判定する混雑状況判定装置が知られている(例えば、特許文献2を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−66490号公報
【特許文献2】特開2001−283218号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記従来例のように、予め用意しておいたテンプレート画像とカメラから取り込んだ対象画像との相関やエッジ量の相違に基づいて駐車状況の判定をしても、駐車マスに文字や図形の表示パターンが描かれている場合には、非駐車時に表示パターンのエッジが抽出されてしまうため、非駐車時と駐車時とで相関率等に大差がなくなる場合があり、誤判定が生じるという問題があった。
また、対象となる駐車マスに他の車両の影や建造物の影など外乱となる要素が存在する場合、これら外乱となる要素からもエッジが抽出されてしまう。このため、例えば、駐車がなくても表示パターンに影がかかっているときの画像と、駐車した車両が表示パターンの一部を覆っているときの画像とでは、前記テンプレート画像との相関値に大差がなくなり、空車であっても影がかかっているような場合には駐車があると誤判定してしまうという問題があった。
【0006】
本発明は、上記問題の解決を図るため、駐車場を撮影した画像において位置や形状の時間的変化が少ない表示パターンに着目する。また、カメラから取り込んだ対象画像と基準とする画像との位置関係により相関率が異なることに着目する。これによって、駐車マスに他の車両の影や建造物の影などが存在したり、駐車した車両により表示パターンの一部が覆われたりしたときにも、駐車マスごとに駐車の有無を正確に判定することが可能な駐車検出装置、駐車検出方法および駐車検出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、以下の通りである。
1.表示パターンが描かれた複数の駐車マスを撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出装置であって、
前記複数の駐車マスを含む検出対象エリアを撮影する撮影手段と、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成手段と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成手段と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成手段により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出手段と、
前記相関率分布算出手段により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定手段と、
を備えることを特徴とする。
2.上記1.において、前記判定手段は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定することを特徴とする。
3.上記1.または2.において、前記判定手段は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定することを特徴とする。
4.上記1.ないし3.において、前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成手段は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成手段は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施すことを特徴とする。
5.表示パターンが描かれた複数の駐車マスを撮影手段により撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出方法であって、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成工程と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成工程と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成工程により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出工程と、
前記相関率分布算出工程により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定工程と、
を備えることを特徴とする。
6.上記5.において、前記判定工程は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定することを特徴とする。
7.上記5.または6.において、前記判定工程は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定することを特徴とする。
8.上記5.ないし7.において、前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成工程は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成工程は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施すことを特徴とする。
9.表示パターンが描かれた複数の駐車マスを撮影手段により撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出プログラムであって、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成機能と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成機能と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成機能により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出機能と、
前記相関率分布算出機能により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定機能と、
を備えることを特徴とする。
10.上記9.において、前記判定機能は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定することを特徴とする。
11.上記9.または10.において、前記判定機能は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定することを特徴とする。
12.上記9.ないし11.において、前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成機能は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成機能は、前記基準データ生成機能により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施すことを特徴とする。
【発明の効果】
【0008】
本発明の駐車検出装置によると、基準データ生成手段により、あらかじめ、複数の駐車マスが空車状態である駐車場の検出対象エリアを撮影した基準画像が取得され、該基準画像に対してエッジ抽出処理を施して基準画像データが生成されるため、その基準画像データには、「バス」、「トラック」などの表示パターンのエッジが抽出される。その後、対象データ生成手段により、前記と同じ検出対象エリアを撮影した対象画像に対してエッジ抽出処理を施して対象画像データが生成される。そして、相関率分布算出手段により、前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得ると、その相関率分布の形状は、駐車がない場合とある場合とでは大きく異なることが見出される。したがって、判定手段により、前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、その特徴点および特徴量のうちの1または2以上に基づいて駐車の有無を判定することができる。これによって、駐車マスに他の車両の影や建造物の影などが存在したり、駐車した車両により表示パターンの一部が覆われたりした場合にも、抽出されたエッジの量や相関率の大きさ等から判定する従来の方法に比べて、判定の精度を大幅に向上させることが可能となる。
【0009】
前記判定手段は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定すれば、最大値となる点を中心とする相関率分布の突出程度を含めて判定をすることができる。相関率分布の形状には、影などの有無に関わらず駐車がない場合には最大値となる点が突出するという特徴が見出されるため、駐車の有無を容易に判定することが可能となる。
【0010】
前記判定手段は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置(中心位置)から所定の範囲内にない場合には駐車ありと判定すれば、相関率分布の形状には、影などの有無に関わらず駐車がない場合には前記中心位置近傍に最大値となる点があり、駐車がある場合には前記中心位置から離れて最大値となる点が存在するという特徴が見出されるため、駐車の有無を容易に判定することができる。
【0011】
前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、前記基準データ生成手段は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、前記対象データ生成手段は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施す場合には、表示パターンのエッジ方向とは異なる影などのエッジは強く抽出されないため、屋外駐車場などで強い影が生じる場合であっても、表示パターンのエッジ情報に基づいた駐車有無の検出精度をさらに向上させることができる。
【0012】
以上は、本発明が装置として実現される場合について説明したが、かかる装置を実現する方法やプログラム、当該プログラムを記録した媒体としても発明は実現可能である。また、以上のような駐車検出装置は単独で実現される場合もあるし、ある方法に適用され、あるいは同方法が他の機器に組み込まれた状態で利用されることもあるなど、上記に示す駐車検出装置に限らず、各種の態様を含むものである。したがって、本発明思想は、プログラム、ソフトウェアおよびハードウェアに、適宜変更可能である。
発明の思想の具現化例として上記装置を制御するためのソフトウェアとなる場合には、かかるプログラム、ソフトウェア、あるいはソフトウェアを記録した記録媒体上においても存在し、利用される。
【0013】
また、プログラム、ソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよく、今後開発されるいかなる記録媒体においても全く同様に考えることができる。一次複製品、二次複製品などの複製段階についても同等である。その他、供給装置として通信回線を利用して行う場合でも本発明が利用されていることにはかわりない。さらに、一部がソフトウェアであって、一部がハードウェアで実現されている場合においても発明の思想において全く異なるものではなく、一部を記録媒体上に記憶しておいて必要に応じて適宜読み込まれるような形態であってもよい。
【図面の簡単な説明】
【0014】
【図1】本実施形態にかかる駐車検出装置を示す概略ブロック図である。
【図2】本実施形態にかかる基準画像データ生成処理のフローチャートを示す図である。
【図3】本実施形態にかかる駐車検出処理のフローチャートを示す図である。
【図4】検出対象エリアとカメラの配置を模式的に示す平面図である。
【図5】検出対象エリアを撮影した画像の例を模式的に示す図である。
【図6】基準画像データの生成を説明するための説明図である。
【図7】判定対象用として撮影した画像の例を模式的に示す図である。
【図8】検索範囲と処理領域の例を模式的に示す図である。
【図9】検索範囲と処理領域の例を模式的に示す図である。
【図10】検索範囲と処理領域の例を模式的に示す図である。
【図11】表示パターンを含む画像領域の例を示す図であって、(a)〜(c)は撮影画像、(d)〜(f)はエッジ抽出処理画像をそれぞれ示す。
【図12】基準画像データを所定範囲でシフトさせ、その各位置の基準画像データと対象画像データとの相関率の分布を表わす相関率分布図であって、駐車マスに駐車がなく、かつ影がない場合の相関率分布を示すグラフである。
【図13】図12と同様の相関率分布図であって、駐車マスに駐車がなく、かつ小さな影がかかっている場合の相関率分布を示すグラフである。
【図14】図12と同様の相関率分布図であって、駐車マスに駐車がなく、かつ駐車マスに中半影がかかっている場合の相関率分布を示すグラフである。
【図15】図12と同様の相関率分布図であって、駐車マスに駐車がなく、かつ大きな影がかかっている場合の相関率分布を示すグラフである。
【図16】図12と同様の相関率分布図であって、駐車マスに駐車がある場合の相関率分布を示すグラフである。
【図17】相関率が最大となる点を通る1次元の相関率分布を表わす相関率分布図である。
【図18】Prewittフィルタの例として、8種類のエッジオペレータとそれらに対応するエッジ方向を示す図である。
【発明を実施するための形態】
【0015】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)駐車検出装置の構成:
(2)駐車検出処理:
(2−1)基準画像データ生成処理:
(2−2)駐車検出処理:
【0016】
(1)駐車検出装置の構成:
図1は、本実施形態にかかる駐車検出装置の概略構成を示している。同図において、駐車検出装置1は、カメラ10と制御部20とから構成されている。カメラ10は、所定の表示パターンを有する複数の駐車マスを含む検出対象エリアを撮影した画像を制御部20に出力する。制御部20は、カメラ10から取得した画像を処理することによって、各駐車マスの駐車の有無を検出するように構成される。
【0017】
制御部20は、主要な構成として、インターフェース(I/F)21、CPU22、記憶部23、エッジ抽出処理部24、相関率分布生成部25、判定処理部26、および出力部27を備えている。
カメラ10により撮影された画像は、I/F21を介して制御部20に取り込まれる。
CPU22は、記憶部23に記憶された駐車検出プログラム23aを実行し、各部を制御するとともに所定の演算処理を実行する。
【0018】
記憶部23は、プログラムおよびデータを格納可能な記憶媒体である。記憶部23には、駐車検出処理の全体を制御するための駐車検出プログラム23aが格納されている。また、その駐車検出処理の過程で使用される撮影画像データ23b、エッジ抽出処理画像データ23c、基準画像データ23d、エッジオペレータデータ23e、および相関率分布データ23fが格納される。さらに、駐車有無の判定基準となる基準相関率分布データ23gが格納されている。
【0019】
上記撮影画像データ23bは、検出対象エリアを撮影した画像データを格納するために用いられる領域である。
上記エッジ抽出処理画像データ23cは、前記撮影画像データ23bに対して、エッジ抽出処理を施した画像データ(対象画像データ)を格納するために用いられる領域である。
上記基準画像データ23dは、検出対象エリア内の駐車マスが空車状態であるときに撮影した画像(基準画像)に対してエッジ抽出処理を施した画像データ(基準画像データ)を格納するために用いられる領域である。
上記エッジオペレータデータ23eは、前記エッジ抽出処理にPrewittフィルタを用いる場合に、基準画像のエッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータを格納するために用いられる領域である。
上記相関率分布データ23fは、前記基準画像データを所定範囲でシフトさせ、その各位置における基準画像データと前記対象画像データとの相関率の分布を、相関率分布として格納するために用いられる領域である。
上記基準相関率分布データ23gには、駐車の有無を判定するための基準となる相関率分布データがあらかじめ格納されている。基準となる相関率分布の特徴点や特徴量のデータが格納されていてもよい。
【0020】
以下のエッジ抽出処理部24、相関率分布生成部25および判定処理部26は、本駐車検出装置1の中心的な画像処理および演算処理を実行するように構成されている。これら各部は、前記駐車検出プログラム23aの一部として備えられてもよい。
【0021】
エッジ抽出処理部24は、検出対象エリアを撮影した画像(撮影画像データ23b)に対して、次の2つのエッジ抽出処理を行うように構成される。
第1のエッジ抽出処理は、あらかじめ検出対象エリア内の駐車マスが空車状態であるときに撮影した画像すなわち基準画像に対するエッジ抽出処理である。このエッジ抽出処理が施された基準画像データは、基準画像データ23dに格納される。基準画像データには、駐車マスに描かれた表示パターンのエッジが抽出されている。
第2のエッジ抽出処理は、駐車の有無を検出するに際して撮影した画像すなわち対象画像に対するエッジ抽出処理である。このエッジ抽出処理が施された対象画像データは、エッジ抽出処理画像データ23cに格納される。
【0022】
上記第1のエッジ抽出処理および第2のエッジ抽出処理の方法はとくに限定されるものではなく、適宜のエッジ抽出フィルタを使用して行うことができる。例えば、PrewittフィルタやSobelフィルタなどの1次微分フィルタが使用されてもよいし、ラプラシアンフィルタなどの2次微分フィルタなどが用いられてもよい。
【0023】
相関率分布生成部25は、前記表示パターンの位置を基準として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得る。上記「表示パターンの位置」とは、基準画像データ上で前記表示パターンのある画像領域の位置(以下、「中心位置」という。)を意図し、具体的には、後述する画像領域IRの位置を例示することができる。駐車マスごとに相関率分布を得るために、上記中心位置(画像領域IR)は駐車マスごとに設定されることが好ましい。
また、上記所定範囲は、生成する相関率分布の特徴を把握することが可能な範囲である限りとくに限定されず、例えば、±15画素、±20画素などとすることができる。この範囲で、必要な細分化程度に応じて1または2以上の画素単位で、基準画像をシフトさせ、その各位置において前記対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得ることができる。上記各位置には、上記中心位置すなわち基準画像データをシフトさせない位置を含む。
【0024】
相関率分布生成部25は、基準画像データをシフトさせた上記位置ごとに、基準画像データと対象画像データとの相関率を算出する。相関率は、例えば、両画像データ間の2次元相互相関演算を実行することにより算出することができる。
基準画像データの各位置は、直交する軸X、Yからなる座標で表わすことができる。基準画像データは、そのX軸方向およびY軸方向に、それぞれ上記画素単位で、上記範囲内でシフトされることとなる。相関率分布生成部25は、上記各位置(X、Y)における相関率(Z)を求め、各位置と関連付けて相関率分布データ23fに格納する。この各位置における相関率の分布(相関率分布)をグラフ化して表わしたものを、相関率分布図と呼ぶ(例えば、図12)。また、相関率分布は、上記各位置の座標面において相関率が最大となる点を通る直線上の相関率の分布としてもよい(例えば、図17)。
なお、本実施形態では、基準画像データをシフトさせて相関率分布を得ているが、対象画像データをシフトさせることによっても同等の相関率分布を得ることができるのは言うまでもない。例えば、上記中心位置に対応する対象画像データ上の位置を中心として、上記所定範囲で対象画像データをシフトさせ、その各位置において、対象画像データと基準画像データとの相関率を算出してもよい。
【0025】
判定処理部26は、相関率分布生成部25により得られた相関率分布から特徴点を抽出し、またはその相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する。この特徴点や特徴量は、上記相関率分布(相関率分布図の形状)の特徴を表わすものであれば、とくに限定されない。例えば、特徴点として、相関率の最大(ピーク)点、極大点、極小点、最小点などの値・位置などが挙げられる。また、特徴量として、各特徴点の値の差や比率、各特徴点の間の距離、傾き、ピーク点を中心とする凸部の幅・高さ(突出程度)、平均値などが挙げられる。得られた相関率分布の特徴点や特徴量と、基準相関率分布データ23gに格納されている基準値との比較や、得られた相関率分布と基準相関率分布との類似度などにより、各駐車マスに車両が駐車しているか否かを判定することができる。判定処理部26による判定結果を判定結果データとして記憶部23に記憶させるようにしてもよい。
出力部27は、判定処理部26による判定結果等を出力する。出力された判定結果データは、駐車場管理システム等に送られて管理されたり、駐車場の駐車状況を示す表示板等に反映されたりすることができる。
【0026】
本実施形態の駐車検出装置においては、前記撮影手段はカメラ10によって構成される。前記基準データ生成手段は、主としてエッジ抽出処理(第1のエッジ抽出処理)部24によって構成される。前記対象データ生成手段は、主としてエッジ抽出処理(第2のエッジ抽出処理)部24によって構成される。前記相関率分布算出手段は、主として相関率分布生成部25によって構成される。前記判定手段は、主として判定処理部26によって構成される。
【0027】
(2)駐車検出処理:
本実施形態における駐車検出処理では、上述の構成において、最初に基準画像から基準画像データを生成し、次に、それを一定範囲でシフトさせつつ、対象画像から生成された対象画像データとの相関率を求め、得られた相関率分布を基に駐車状況を検出する駐車検出処理を実行する。
【0028】
(2−1)基準画像データ生成処理:
基準画像データ生成処理は、例えば、図2に示すようなフローチャートに従って実行することができる。
最初に、カメラ10によって検出対象エリアとなる駐車場を所定の高さから俯瞰撮影した画像を取得する(ステップS100)。このとき撮影する画像(基準画像)は、各駐車マスが空車状態の検出対象エリアの画像である。図4は、このようにして撮影される検出対象エリアの例を模式的に示す図であり、図5は、撮影した画像の例を模式的に示す図である。本実施形態においては、図4および5に示すように、検出対象エリアに5つの駐車マスPS1〜PS5が含まれており、各駐車マスPS1〜PS5には、表示パターンとして、「バス」という文字がそれぞれ表示されている場合を例示する。なお、ステップS100により取得する画像は、各駐車マスの表示パターンが明瞭に撮影されているとともに、各駐車マスに他の車両や建造物等の影が写り込んでいないことが好ましい。
【0029】
次に、ステップS110において、変数nを"1"に初期化する。変数nは、最大値をNとする整数であり、Nは駐車検出処理にて駐車と空車とが判定される駐車マスの数である。本実施形態において、この変数nの値は各駐車マスにそれぞれ対応しており、変数nの値に応じて、これに対応する駐車マス毎の基準画像データ23dが生成される。
【0030】
ステップS120では、撮影画像データ23bの所定の画像領域IRに対して、所定のエッジ抽出フィルタを用いてエッジ抽出処理を実行する。それぞれの駐車マスの駐車の有無を検出するために用いる画像領域IRを撮影画像内のどの領域とするかは特に限定されず、駐車マスの枠や表示パターンの態様に応じて適宜に設定されればよい。例えば、図6に示すように、撮影画像の各駐車マス内の表示パターン部を切り出すように、駐車マス毎に画像領域IRを設定することができる。設定された画像領域IRの位置は、前記「表示パターンの位置」(中心位置)となる。そして、n番目の駐車マスPSnの「バス」という表示パターンを含む画像領域IRnに対して、エッジ抽出処理を実行することができる。
【0031】
なお、エッジ抽出処理が施された画像領域IRに対して、2値化処理をさらに施すようにして、所定値以上のエッジ強さのみを抽出したエッジ抽出処理画像としてもよい。また、輝度値の変化が小さく、注目画素のエッジ方向が明確でない場合は、当該画素に対応する位置にはエッジ抽出処理を適用しないようにすることもできる。後述する対象画像の処理についても同様である。
【0032】
ステップS130では、上記のようにして各画像領域IRに対してエッジ抽出処理を施した画像データを、基準画像データ23dとして記憶する。ステップS140は、各画像領域IRに対するエッジ抽出処理にPrewittフィルタを使用し、かつそのエッジ抽出処理において画素毎に一致度が最も高かったエッジオペレータを対象画像のエッジ抽出処理に用いる場合に必要なステップであり、上記エッジオペレータを画像領域IRごとにエッジオペレータデータ23eとして記憶する。
【0033】
ステップS150においては、変数nが最大値Nに達しているか否か、すなわち、すべての駐車マスについての基準画像データ23dを生成したか否かを判別する。変数nが最大値Nに達していなければ、ステップS160において変数nをインクリメントしてステップS120以降の処理を繰り返し、他の駐車マスについて基準画像データ23dを生成する処理を実行する。変数nが最大値Nに達していれば、基準画像データ生成処理を終了する。
【0034】
(2−2)駐車検出処理:
駐車検出処理は、上記ステップS120〜S140において生成・記憶された基準画像データを用いて、例えば、図3に示すようなフローチャートに従って実行することができる。
先ず、カメラ10によって駐車の有無の検出対象エリアとなる駐車場を俯瞰撮影する(ステップS200)。図7は、このようにして撮影される画像(対象画像)の例を模式的に示す図である。同図は、駐車マスPS4には車両Vが駐車しており、他の駐車マスPS1〜3およびPS5には駐車する車両がない状態を表わしている。また、駐車マスPS3には、隣接する駐車マスPS4に駐車中の車両Vの影Vsがかかっている状態を示している。
【0035】
ステップS202では、ステップS200で取得された対象画像(撮影画像データ23b)に対して、所定のエッジ抽出フィルタを用いてエッジ抽出処理を実行する。これにより生成された対象画像データは、エッジ抽出処理画像データ23cに格納される。対象画像のエッジ抽出処理は、次のステップS205以下で対象とする駐車マスの番号(n)の値が定まった後に、n番目の駐車マスPSnに対応する画像領域ごと(例えば、後述する検索領域SRごと、または処理領域PRごと)に行ってもよい。
【0036】
次に、ステップS205において、検出処理の対象となる駐車マスの番号を示す変数nを"1"に初期化する。そして、ステップS210では、検出処理の対象となるn番目の駐車マスに対応するn番目の基準画像データを取得する。
【0037】
ステップS215では、変数mを"1"に初期化する。この変数mは、最大値をMとする整数である。本駐車検出処理においては、前記基準画像データ生成処理において設定された図6に示す画像領域IRの位置を中心位置として、その画像領域IRの基準画像データを所定範囲でシフトさせる。上記所定の範囲は、後述する検索範囲SRに相当する。変数mは、この検索範囲SRに相当する範囲内で、画像領域IRの基準画像データをシフトさせる制御のために使用される。
ステップS220は、上記変数mの値に応じて、画像領域IRの基準画像データをシフトさせるステップである。
【0038】
上記において画像領域IRをシフトさせた位置に対応する対象画像データ上の画像領域を、図8に示すように処理領域PRとする。そうすると、シフトされた基準画像データと、対象画像データとの相関率の算出は、この処理領域PRを対象として行うことができる。処理領域PRは前記画像領域IRと同じ大きさであり、検索範囲SRは、画像領域IRの設定位置を中心として、所定画素の範囲(例えば、(±20)画素×(±20)画素の範囲)でシフトさせることが可能なように設定される。
具体的には、図7〜9に示すように、画像領域IRよりも広く設定された検索範囲SRの範囲で、画像領域IRの基準画像データを順次シフトさせ、その各位置に対応する処理領域PRが設定される。そして、各位置において、シフトされた基準画像データと、対象画像データ(処理領域PR)と、の相関率を算出するようにすることができる。
【0039】
基準画像および対象画像のエッジ抽出の例を、図11に示す。図11(a)〜(c)は、それぞれ同一の駐車マスを撮影した画像であり、(a)には、表示パターンである「バス」の文字が明瞭に撮影されており、車両の影や建造物の影は写り込んでいない。この(a)を基準画像とすることができる。そして(a)の画像に対してエッジ抽出処理を施したものが(d)であり、表示パターンのエッジが抽出されている。この(d)は、基準画像データの例とすることができる。
一方、(b)および(c)は、隣の駐車マスの車両の強い影が写り込んだ場合の対象画像の例である。これらの対象画像に対してそれぞれエッジ抽出処理を施すことにより生成された対象画像データの例が、図11(e)および(f)である。車両や建物などの影がない場合や影が弱い場合には、前記(d)と同程度に表示パターンのエッジが抽出された対象画像データを得ることができる。
【0040】
図3に戻り、ステップS222では、シフトされた画像領域IRの基準画像データと、処理領域PRの対象画像データと、の2次元相互相関演算を実行して相関率を算出する。
図8は、検索範囲SRに含まれる検出対象の駐車マスPSが空車状態である場合を示す。また、図9は、駐車マスPSに車両Vが駐車している場合を示し、図10は、駐車マスPSが空車状態であるが他の車両等の影がかかっている場合を示す。これらの各条件によって、上記で算出される相関率の値は異なり、また基準画像データをシフトさせた位置によっても相関率の値は大きく異なる。
【0041】
ステップS224は、上記で算出された相関率に基づいて駐車の有無を判定するステップとして設けることができる。例えば、算出された相関率が所定の値よりも大きく、その駐車マスに明らかに駐車がないと判定する場合などには、その駐車マスについては以下の処理を省略して次の駐車マスの処理に移るようにするなど、適宜の処理をすることができる。
【0042】
ステップS226では、そのときの変数mの値と関連付けて、ステップS222で算出された相関率を記憶する。そして、ステップS230において、変数mが最大値Mに達しているか否か、すなわち、検索範囲SR内のすべての位置に対して相関率算出処理を実行したか否かを判別する。変数mが最大値Mに達していない場合は、変数mをインクリメントして(ステップS240)、ステップS220以降の処理を繰り返し、検索範囲SRの他の位置について同様の各処理を実行する。変数mが最大値Mに達している場合には、次のステップS250に進む。
【0043】
ステップS250では、変数mの値と関連付けて記憶されているすべての相関率を取得する。前記のとおり、変数mは、検索範囲SR内で設定された処理領域PR(すなわちシフトされた画像領域IR)の位置に対応する。したがって、その各位置で算出された相関率の分布を相関率分布として得ることができ、この相関率分布を相関率分布データ23fに格納する。
【0044】
ステップS252において、上記相関率分布の特徴点を抽出し、特徴量を算出する。そして、ステップS254において、あらかじめ基準相関率分布データ23gに格納されている基準となる相関率分布と比較する。基準相関率分布データ23gには、駐車の有無や影の有無・程度などによって異なる相関率分布、またはその相関率分布の特徴点、特徴量、それらに基づく駐車有無の判定基準などが格納されている。したがって、相関率分布データ23fの特徴と基準相関率分布データ23gの特徴とを比較することにより、駐車の有無を判定することができる。その判定結果を、ステップS256において記憶する。
【0045】
ステップS260においては、変数nが最大値Nに達しているか否か、すなわち、すべての駐車マスについての駐車の有無を判定したか否かを判別する。変数nが最大値Nに達している場合には、変数nをインクリメントし(ステップS265)、ステップS210以降の処理を繰り返して他の駐車マスについての駐車の有無を判定する。変数nが最大値Nに達している場合には、駐車検出処理を終了する。なお、通常、駐車場の駐車状況は常時監視されていることが好ましく、したがって、この駐車検出処理を繰り返し実行することが好ましい。
【0046】
以上のように、本実施形態においては、基準データ生成工程(ステップS100〜S160)を備えている。また、対象データ生成工程(ステップS200〜S202)、相関率分布算出工程(ステップS210〜S240)、判定工程(ステップS250〜S260)を備えている。
【0047】
前記ステップS250以下において処理される相関率分布およびその特徴に基づく判定について、具体的に説明する。
ステップS250によって得られる相関率分布をグラフ化すると、例えば、図12〜図16に示すような相関率分布図として表わすことができる。この相関率分布図は、シフトされた画像領域IRの各位置をX軸およびY軸の座標で表わし、その各位置で算出された相関率をつないでZ軸方向の等高図として表わしたものである。X軸およびY軸の目盛りは画素を単位としている。図12を例に説明すると、前記中心位置(X=72、Y=405)近傍において、相関率Zが最大値(ピーク)となっている。そして、その中心位置を中心にX軸方向およびY軸方向に±20画素の範囲(X=52〜92、Y=385〜425)で画像領域IRの基準画像データがシフトされるに伴い、相関率Zが低くなっている。
【0048】
図12は駐車マスに駐車がなく且つ影がない場合、図13は駐車マスに駐車がなく且つ駐車マスの一部に影がある場合、図14は駐車マスに駐車がなく且つ駐車マスの中半に影がかかっている場合、図15は駐車マスに駐車がなく且つ駐車マスに大きな影がかかっている場合、図16は駐車マスに駐車した車両がある場合、の相関率分布の例を表わす。
試験例では、上記図12〜16の場合に、相関率のピーク値はそれぞれ1.0、0.8、0.35、0.6、0.28となった。駐車がないときの相関率は、駐車があるときに較べて高いものの、その駐車マスにかかる影の大きさや形によっては低い値となり(0.35)、駐車があるときの相関率(0.28)と大差がなくなる場合があることが分かる。その他、駐車マスの表示パターンとそこに駐車した車両の一部が重なるときと、駐車はないが隣の駐車マスの車両の影があるときなど、相関率に大差がなくなる場合もある。このように、たんに相関率(ピーク値など)に基づいて駐車の有無を判定する方法では、正確な判定が難しい場合がある。
【0049】
そこで、相関率分布図の形状に着目すると、駐車がない場合(図12〜15)には、駐車マスにかかる影の度合いによって相関率の高さは変化するが、前記中心位置であるXY座標上の中心付近に突出したピークが存在する。これに対して、駐車がある場合(図16)には、突出したピークがなく、最大値が中心位置付近ではなく、変化がなだらかとなる。このように、駐車がある場合とない場合とでは、相関率分布の形状に明らかな相違が生じる。したがって、相関率分布の特徴(特徴点、特徴量)を抽出し、その特徴に基づいて駐車の有無の判定を行うことにより、判定精度を向上させることができる。判定に用いる相関率分布の特徴は、例えば、ピーク点や極小点の値および位置、ピーク点を中心とした分布の傾斜、ピーク点と極小点との距離、ピーク点と極小点と値の差、相関率の平均値など、またはそれらの2つ以上を組み合わせて、適宜に設定しておくことができる。
例えば、相関率が最大値となる点が前記中心位置(X=72、Y=405)から所定の範囲内にない場合には駐車ありと判定することができる。また、ピーク点が周囲から突出しているか否かによって駐車の有無を判定することもできる。例えば、ピーク点から最も近い変曲点または極小点の値を裾野値として抽出し、ピーク点の値とその裾野値との差、またはピーク点の値に対する裾野値の比率が、所定の条件である場合には駐車なしと判定することができる。
図12〜16に示した例に限らず、種々の条件で駐車があるときとないときの相関率分布をあらかじめ取得して、その特徴の相違点に基づいて駐車有無の判定を行うことが可能である。
【0050】
相関率分布の特徴抽出とそれに基づく判定の処理を簡易にするために、XY座標上の直線であって、相関率分布上のピーク点の位置を通る直線上の相関率の分布を1次元の相関率分布として切り出し、その特徴に基づいて判定を行うようにしてもよい。
図17は、駐車マスに駐車がないとき(実線)と、駐車マスに駐車があるとき(破線)の相関率分布の例を表わす。実線は、前記図14に示した相関率分布において、相関率のピーク点を通りX軸に平行な直線上の相関率の分布を表わす。横軸の目盛りは、相関率のピーク点を0としたものである。図17に示す破線は、図16に示した相関率分布について、相関率のピーク点を通りX軸に平行な直線上の相関率の分布を表わす。前記のとおり、駐車はないが隣の駐車マスの車両の影があるときなどと、駐車した車両の一部が表示パターンを覆ったときなどとは、相関率の差が小さくなるが、1次元の相関率分布の形状においては明らかに相違することが分かる。
【0051】
図17の1次元の相関率分布図から明らかなように、駐車がないときにはピーク点p1が中央(X=20)近傍にあり、その突出程度が大きい。これに対して、駐車があるときには、ピーク点p2が中央から離れて存在し、ピーク点を中心とする傾斜がなだらかになっている。このような特徴を抽出することにより、前記図12〜16に例示した相関率分布の特徴に基づく判断と同様に、駐車の有無を判定することができる。
例えば、図17において、ピーク点(p1、p2)が前記中心位置(X=20)から所定の範囲内にない場合には駐車ありと判定することができる。また、ピーク点p1、p2にそれぞれ最も近い極小点a1、a2の値を裾野値とする。そして、ピーク点の値(p1、p2とする)と裾野値(a1、a2とする)との差(d1またはd2)が所定値を超える場合には、駐車なしと判定することができる。また、ピーク点の値に対する裾野値の比(a1/p1、またはa2/p2)が所定値よりも小さい場合には、駐車なしと判定することもできる。図17の実線と破線とを比べると、ピーク点の値と裾野値との差は、ピーク点の値の差の4倍程度と大きく、たんに相関率の大きさを比べるよりも正確に判定することが可能である。
【0052】
以上に示した相関率分布は、基準画像および対象画像に対してPrewittフィルタを用いてエッジ抽出処理を行った例であるが、使用するエッジ抽出フィルタの種類などによって得られる相関率分布の形状は大幅には変わらない。したがって、他のエッジ抽出フィルタを用いて処理を行った場合も、相関率分布を取得することにより同様の効果を得ることができる。
屋外駐車場など、車両や建物などの強い影が駐車マスに生じる場合には、以下に説明するように、Prewittフィルタを使用し、さらに、表示パターンが撮影されている基準画像のエッジ情報を用いて対象画像のエッジ抽出を行うようにすることができる。それによって生成された対象画像データを用いて前記同様に相関率分布を求めれば、影などの影響を低減してより検出精度を向上させることが可能である。
【0053】
Prewittフィルタは、例えば図18のA〜Hに示すように3×3のマトリックスにより構成され、それぞれ画素のエッジの方向に対応している。このPrewittフィルタを用いるエッジ抽出処理では、画像の各画素について、3×3の各マトリックスの中央の値を輝度値に乗じるとともに、周囲の値を当該画素の周囲の各画素の輝度値にそれぞれ乗じ、それらの和(積和値)を算出する。マトリックス内の各数値は、当該画素のエッジの方向と各エッジオペレータに対応するエッジの方向との一致度を求めるための値であり、方向が一致する場合に、当該エッジオペレータを用いて算出した積和値が他のエッジオペレータを用いて算出した積和値よりも大きな値となるように重み付けされている。これにより、エッジオペレータ毎に求められた積和値のうち最大となった積和値を当該画素におけるエッジの強さとして、エッジ抽出処理画像を生成することができる。
【0054】
具体的には、まず、基準画像のエッジ抽出処理(前記ステップS120)において画素ごとに最も一致度が高かったエッジオペレータを、エッジオペレータデータとしてさらに記憶する(前記ステップS140)。
そして、対象画像のエッジ抽出処理(前記ステップS120)において、画素毎にステップS140で記憶された前記エッジオペレータを作用させることにより対象画像に対するエッジ抽出処理を行い、対象画像データを生成する。これによって、基準画像のエッジの方向と同じ方向のエッジは明瞭に抽出され、異なる方向のエッジは強く抽出されない対象画像データを得ることができる。基準画像には表示パターンが表れているため、対象画像上に表示パターンが表れている場合には、そのエッジを効果的に抽出することができる。また、基準画像にはなく対象画像上にのみ存在する他の車の影などのエッジは、強く抽出されないこととなる。
【0055】
再び図11に掲げた駐車マスの画像を参照すると、同図(a)は、表示パターンである「バス」の文字が明瞭に撮影された基準画像の例であり、同図(d)は、その基準画像に対してPrewittフィルタを用いてエッジ抽出処理を施した基準画像データである。このエッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータを記憶しておく。
同図(b)および(c)は車両の影がある対象画像の例であるが、このような影が強く写り込んでいる場合には、対象画像のエッジ抽出処理(前記ステップS202)において、上記ステップS140で記憶されたエッジオペレータを画素毎に作用させることができる。これによって影のエッジが軽減された対象画像データが得られる。表示パターンのエッジ方向と一致するエッジオペレータが適用されるため、エッジ方向が異なる影のエッジは抽出されにくいからである。そして、このエッジ抽出処理により生成された対象画像データを用いて、前記同様に、基準画像データと対象画像データとの相関率を算出し、相関率分布を生成すればよい。
【0056】
なお、基準画像のエッジ方向を抽出し、そのエッジ方向に一致するエッジを対象画像から抽出することが可能である限り、マトリックスの種類や構成は上記Prewittフィルタに限定されるものではなく、画像のエッジ方向の細分化の程度などに応じて、適宜設定されてもよい。
【0057】
また、以上の実施形態においては、駐車検出対象エリアに含まれる駐車マスが5つである例を示したが、駐車マスの数は特に限定されない。駐車検出対象エリアに含まれる駐車マスの数が多いような場合、処理速度を勘案して、複数の制御部を用いて並列処理を実行するようにしてもよい。また、より広大な駐車場の駐車検出をする際には、複数のカメラにより複数の駐車検出対象エリアを撮影した画像について、順次駐車検出処理を実施するようにしたり、複数の駐車検出装置により複数の駐車検出対象エリアの駐車検出をするようにしたりしてもよい。
【0058】
本発明においては、以上に記載した実施形態に限られず、目的、用途に応じて本発明の範囲内で種々変更した実施形態とすることが可能である。
【符号の説明】
【0059】
1;駐車検出装置、10;カメラ、20;制御部、21;インターフェース(I/F)、22;CPU、23;記憶部、23a;駐車検出プログラム、23b;撮影画像データ、23c;エッジ抽出処理画像データ(対象画像データ)、23d;基準画像データ、23e;エッジオペレータデータ、23f;相関率分布データ、23g;基準相関率分布データ、24;エッジ抽出処理部、25;相関率分布生成部、26;判定処理部、27;出力部、IR;画像領域、PR;処理領域、PS;駐車マス、SR;検索範囲、V;車両、Vs;影。
【特許請求の範囲】
【請求項1】
表示パターンが描かれた複数の駐車マスを撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出装置であって、
前記複数の駐車マスを含む検出対象エリアを撮影する撮影手段と、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成手段と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成手段と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成手段により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出手段と、
前記相関率分布算出手段により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定手段と、
を備えることを特徴とする駐車検出装置。
【請求項2】
前記判定手段は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定する請求項1記載の駐車検出装置。
【請求項3】
前記判定手段は、前記相関率分布において前記相関率が最大値となる点が、前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定する請求項1または2に記載の駐車検出装置。
【請求項4】
前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成手段は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成手段は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施す請求項1ないし3のいずれかに記載の駐車検出装置。
【請求項5】
表示パターンが描かれた複数の駐車マスを撮影手段により撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出方法であって、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成工程と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成工程と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成工程により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出工程と、
前記相関率分布算出工程により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定工程と、
を備えることを特徴とする駐車検出方法。
【請求項6】
前記判定工程は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定する請求項5記載の駐車検出方法。
【請求項7】
前記判定工程は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定する請求項5または6に記載の駐車検出方法。
【請求項8】
前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成工程は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成工程は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施す請求項5ないし7のいずれかに記載の駐車検出方法。
【請求項9】
表示パターンが描かれた複数の駐車マスを撮影手段により撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出プログラムであって、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成機能と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成機能と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成機能により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出機能と、
前記相関率分布算出機能により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定機能と、
を備えることを特徴とする駐車検出プログラム。
【請求項10】
前記判定機能は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定する請求項9記載の駐車検出プログラム。
【請求項11】
前記判定機能は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定する請求項9または10に記載の駐車検出プログラム。
【請求項12】
前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成機能は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成機能は、前記基準データ生成機能により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施す請求項9ないし11のいずれかに記載の駐車検出プログラム。
【請求項1】
表示パターンが描かれた複数の駐車マスを撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出装置であって、
前記複数の駐車マスを含む検出対象エリアを撮影する撮影手段と、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成手段と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成手段と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成手段により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出手段と、
前記相関率分布算出手段により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定手段と、
を備えることを特徴とする駐車検出装置。
【請求項2】
前記判定手段は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定する請求項1記載の駐車検出装置。
【請求項3】
前記判定手段は、前記相関率分布において前記相関率が最大値となる点が、前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定する請求項1または2に記載の駐車検出装置。
【請求項4】
前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成手段は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成手段は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施す請求項1ないし3のいずれかに記載の駐車検出装置。
【請求項5】
表示パターンが描かれた複数の駐車マスを撮影手段により撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出方法であって、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成工程と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成工程と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成工程により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出工程と、
前記相関率分布算出工程により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定工程と、
を備えることを特徴とする駐車検出方法。
【請求項6】
前記判定工程は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定する請求項5記載の駐車検出方法。
【請求項7】
前記判定工程は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定する請求項5または6に記載の駐車検出方法。
【請求項8】
前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成工程は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成工程は、前記基準データ生成手段により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施す請求項5ないし7のいずれかに記載の駐車検出方法。
【請求項9】
表示パターンが描かれた複数の駐車マスを撮影手段により撮影し、その画像の相関に基づいて前記駐車マスのそれぞれの駐車の有無を検出する駐車検出プログラムであって、
前記撮影手段により前記複数の駐車マスが空車状態の前記検出対象エリアを撮影した基準画像を取得し、該基準画像に対してエッジ抽出処理を施した基準画像データを記憶する基準データ生成機能と、
前記撮影手段により前記検出対象エリアを撮影した対象画像を取得し、該対象画像に対してエッジ抽出処理を施した対象画像データを生成する対象データ生成機能と、
前記表示パターンの位置を中心として前記基準画像データを所定範囲でシフトさせ、その各位置において、該基準画像データと、前記対象データ生成機能により生成された前記対象画像データとの相関率を算出することにより、該各位置に対する該相関率の分布を相関率分布として得る相関率分布算出機能と、
前記相関率分布算出機能により得られた前記相関率分布から特徴点を抽出し、または該相関率分布から特徴量を算出し、該特徴点および該特徴量のうちの1または2以上に基づいて駐車の有無を判定する判定機能と、
を備えることを特徴とする駐車検出プログラム。
【請求項10】
前記判定機能は、前記相関率分布において前記相関率が最大値となる点から最も近い変曲点または極小点の値を裾野値として抽出し、該最大値と該裾野値との差、または該最大値に対する該裾野値の比率が、所定の条件である場合には駐車なしと判定する請求項9記載の駐車検出プログラム。
【請求項11】
前記判定機能は、前記相関率分布において前記相関率が最大値となる点が前記表示パターンの位置から所定の範囲内にない場合には駐車ありと判定する請求項9または10に記載の駐車検出プログラム。
【請求項12】
前記エッジ抽出処理はPrewittフィルタを用いたエッジ抽出処理であり、
前記基準データ生成機能は、前記基準画像に対する前記エッジ抽出処理において画素ごとに最も一致度が高かったエッジオペレータをさらに記憶し、
前記対象データ生成機能は、前記基準データ生成機能により記憶された前記エッジオペレータを使用することによって前記対象画像に対する前記エッジ抽出処理を施す請求項9ないし11のいずれかに記載の駐車検出プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図17】
【図18】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図17】
【図18】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−73801(P2012−73801A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−217846(P2010−217846)
【出願日】平成22年9月28日(2010.9.28)
【出願人】(000243881)名古屋電機工業株式会社 (107)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月28日(2010.9.28)
【出願人】(000243881)名古屋電機工業株式会社 (107)
【Fターム(参考)】
[ Back to top ]