
駐車車両管理システム
【課題】小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することが可能な駐車車両管理システムを提供する。
【解決手段】駐車場に進入してきた車両B1に搭載された車載器20の固有番号を、まず、駐車場に進入した時に取得し、その後、駐車スペースに停車した時に取得する。そして、駐車スペース停車時にこれら2つの固有番号が一致するか否かを判断し、これらの固有番号が一致した際には、この固有番号により識別される車両が駐車スペースに駐車されたと判断する。
【解決手段】駐車場に進入してきた車両B1に搭載された車載器20の固有番号を、まず、駐車場に進入した時に取得し、その後、駐車スペースに停車した時に取得する。そして、駐車スペース停車時にこれら2つの固有番号が一致するか否かを判断し、これらの固有番号が一致した際には、この固有番号により識別される車両が駐車スペースに駐車されたと判断する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば駐車場内に進入してきた車両を管理する駐車車両管理システムに関する。
【背景技術】
【0002】
現在、街中ではコインパーキング等、小規模駐車場が増加している。一般に、小規模駐車場では、駐車スペース毎に車止めが設置されており、駐車スペースに車両を駐車するとこの車止めが上がるようになっている。そして、出庫する際には、搭乗者は、精算機まで出向き、自分の車両が止まっている駐車スペースの番号を清算機に入力し、紙幣又はクレジットカードにより決済を行う。これにより、車止めが倒れ、出庫が許可されることとなる。
【0003】
上記のように、一般的な小規模駐車場では、搭乗者は、精算機まで出向いて決済をする必要があるため手間がかかる。そこで、DSRC(Dedicated Short Range Communication)等の無線通信を利用して(例えば、特許文献1参照)、駐車場内の車両を管理するシステムが求められている。
【0004】
しかしながら、現在の小規模駐車場では、場所の制約から、入口ゲート及び出口ゲートから成る従来のETC(Electronic Toll Collection)ゲートのような構造を有するシステムを採用することは不可能である。また、DSRCのような狭域無線通信を駐車場内に発射し、電波範囲に車両が侵入した際に課金処理を行おうとしても、構造物により電波が反射等されることにより電波が漏れ、駐車場付近を通過する車両に対して誤課金を起こすおそれがある。これに対し、電波の反射を抑えるために電波吸収体を構造物に貼る等のことも可能であるが、電波吸収体は高価である上、施工工事が必要となるため、経済的に得策ではない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−110153号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のように、小規模駐車場では、DSRC等の無線通信を利用して、駐車場内の車両を管理する駐車車両管理システムが求められている。
【0007】
この発明は上記事情によりなされたもので、その目的は、小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することが可能な駐車車両管理システムを提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係る駐車車両管理システムは、車両が駐車可能な駐車スペースを複数有する駐車場に対して狭域通信の電波を送信することで、前記電波を受信可能な位置に存在する車両に搭載された車載器の固有番号を読み取る狭域通信部と、前記複数の駐車スペース毎に設置され、前記駐車スペースに車両が停車されたことを感知すると感知信号を生成する車止め装置と、予め設定された周期で前記狭域通信部に前記固有番号を読み取らせる第1の通信制御と、前記感知信号に応じて前記狭域通信部に前記固有番号を読み取らせる第2の通信制御とを行う通信制御部と、前記第1の通信制御に応じて前記狭域通信部により読み取られた第1の固有番号を記憶する記憶部と、前記第2の通信制御に応じて前記狭域通信部により第2の固有番号が読み取られた際に、前記記憶部に記憶された前記第1の固有番号と、前記第2の固有番号とが一致するか否かを判断し、前記第1及び第2の固有番号が一致する場合、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断する判断部とを具備することを特徴とする。
【0009】
上記構成による駐車車両管理システムでは、駐車場に進入してきた車両に搭載された車載器の固有番号を、まず、駐車場に進入した時に取得し、その後、駐車スペースに停車した時に取得する。そして、駐車スペース停車時にこれら2つの固有番号が一致するか否かを判断し、これらの固有番号が一致した際には、この固有番号により識別される車両が駐車スペースに駐車されたと判断する。これにより、駐車場に進入し、駐車した車両を正確に判別することが可能となる。
【発明の効果】
【0010】
この発明によれば、小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することが可能な駐車車両管理システムを提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施形態に係る駐車車両管理システムの構成を示す図である。
【図2】図1の駐車車両管理システムと車載器との構成を示すブロック図である。
【図3】図2のCPUの機能構成を示すブロック図である。
【図4】車両が駐車スペースに駐車したことを判断する際の図2のCPUの処理を示すフローチャートである。
【図5】車両が出庫する際の図2のCPUの処理を示すフローチャートである。
【図6】図5のフローチャートを具体的に説明するための駐車車両管理システムの図である。
【図7】車両が駐車スペースに駐車したことを判断する際の図2のCPUのその他の処理を示すフローチャートである。
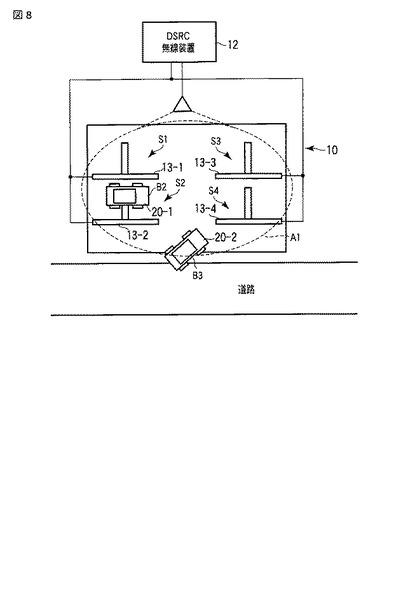
【図8】図7のフローチャートを具体的に説明するための駐車車両管理システムの図である。
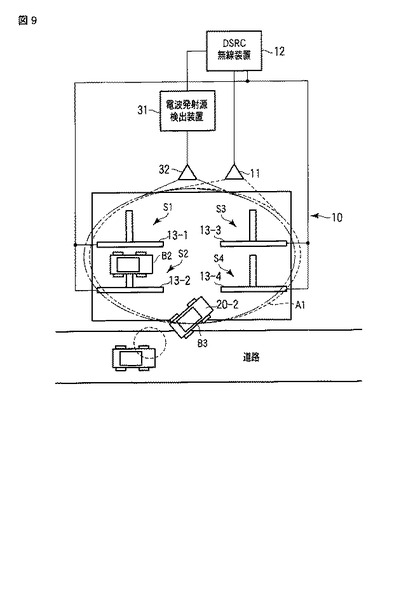
【図9】本発明の第2の実施形態に係わる駐車車両管理システムの構成を示す模式図である。
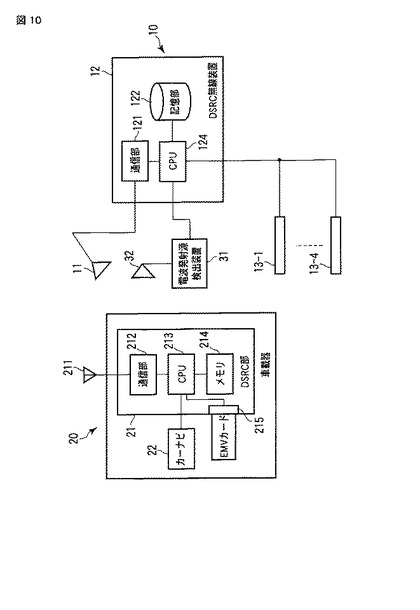
【図10】図9の駐車車両管理システムと車載器との構成を示すブロック図である。
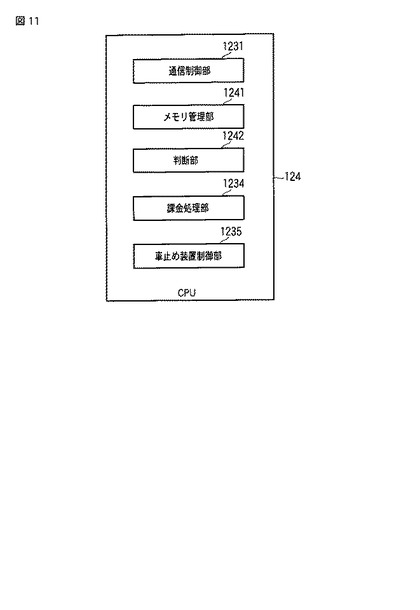
【図11】図10のCPUの機能構成を示すブロック図である。
【図12】車両が駐車スペースに駐車したことを判断する際の図10のCPUの処理を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、図面を参照しながら本発明に係る駐車車両管理システムの実施の形態について詳細に説明する。
【0013】
[第1の実施形態]
図1は、本発明の第1の実施形態に係る駐車車両管理システム10の構成を示す模式図である。図1に示されるように、駐車車両管理システム10は駐車スペースS1〜S4を備える駐車場に設置される。駐車車両管理システム10は、駐車場内又は駐車場近傍に設置されるDSRC(Dedicated Short Range Communication)アンテナ11と、DSRC無線装置12と、駐車スペースS1〜S4毎に設置される車止め装置13−1〜13−4を具備する。また、車両にはDSRCによる通信が可能な車載器20が搭載されている。
【0014】
図2は、本発明の第1の実施形態に係る駐車車両管理システム10と車載器20との概略構成を示すブロック図である。
【0015】
車止め装置13−1〜13−4は、例えば金属センサ等からなる車両センサと、車止め器とを備える。車両センサは、車両が車止め器を跨いで停車されると、車両を感知するように設置される。車止め装置13−1〜13−4は、車両センサにより車両の存在が感知されると、感知信号をDSRC無線装置12へ出力する。車止め装置13−1〜13−4は、車両センサにより車両の存在が感知されてから一定の時間が経過すると、車止め器を上げ、車両が出庫できないようにする。なお、車止め装置13−1〜13−4は、DSRC無線装置12からの指示に応じて車止め器を上げるようにしても良い。また、車止め装置13−1〜13−4は、DSRC無線装置12からの解除信号に応じ、車止め器を解除し、車両が出庫できるようにする。
【0016】
DSRCアンテナ11は、DSRC無線装置12の指示に応じて駐車場にDSRC(狭域通信)の電波を発信することで、駐車場内にDSRCの電波圏である通信エリアA1を形成する。
【0017】
DSRC無線装置12は、通信部121、記憶部122及びCPU(Central Processing Unit)123を備える。
【0018】
通信部121は、CPU123の制御に従い、DSRCアンテナ11を介して通信エリアA1に進入してきた車載器20と通信する。
【0019】
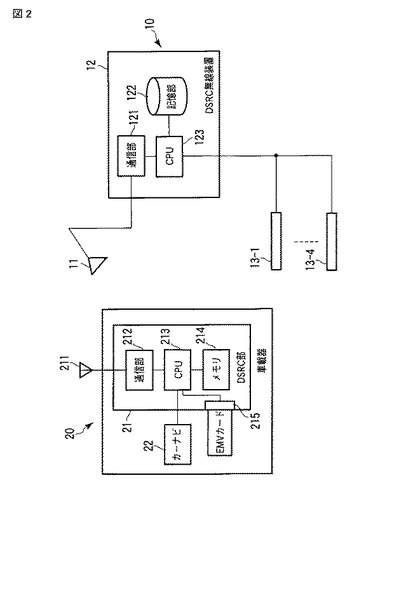
CPU123は、DSRC無線装置12の動作を制御するものである。図3は、本発明の第1の実施形態に係るCPU123の機能構成を示すブロック図である。図3におけるCPU123は、通信制御部1231、メモリ管理部1232、判断部1233、課金処理部1234及び車止め装置制御部1235を備える。
【0020】
通信制御部1231は、通信部121に対して第1及び第2の制御を行う。第1の制御は、DSRCアンテナ11から予め設定された周期で通信要求信号(ポーリング信号)が送信されるように通信部121を制御するものである。また、第2の制御は、車止め装置13−1〜13−4から感知信号を受信した場合に、DSRCアンテナ11から通信要求信号が送信されるように通信部121を制御するものである。
【0021】
メモリ管理部1232は、記憶部122を管理するものである。すなわち、メモリ管理部1232は、第1の制御により取得された第1の固有番号と、第2の制御により取得された第2の固有番号とを記憶部122に記憶させる。また、メモリ管理部1232は、所定の場合に、記憶部122に記憶された第1及び第2の固有番号を消去する。また、メモリ管理部1232は、感知信号を出力してきた車止め装置の識別番号を記憶部122に記憶させる。
【0022】
判断部1233は、車止め装置13−1〜13−4からの感知信号に従って第2の固有番号が取得された場合、この第2の固有番号と、記憶部122に記憶されている第1の固有番号とが一致するか否かを判断する。そして、一致する場合には、この固有番号により識別される車両が駐車スペースに駐車したと判断する。
【0023】
また、判断部1233は、出庫に際して車載器20が起動され、起動された車載器20から、通信要求信号に応じた第3の固有番号を取得した場合、駐車スペースに駐車したと判断された車両の第2の固有番号と、この第3の固有番号とが一致するか否かを判断する。
【0024】
課金処理部1234は、判断部1233により第2の固有番号と第3の固有番号とが一致すると判断された場合、第2の固有番号を取得した時刻と、第3の固有番号を取得した時刻とから車両の駐車時間を算出する。課金処理部1234は、算出した駐車時間から駐車料金を算出する。課金処理部1234は、駐車料金等の情報を通信部121を介して車載器20へ提供し、車両の搭乗者に車両内で駐車料金の決済を行わせる。このとき、課金処理部1234は、EMVに準じた決済が可能なように処理を行ってもよい。
【0025】
車止め装置制御部1235は、DSRC無線装置12を介した駐車料金の決済が完了すると、車止め装置13−1〜13−4に対して、決済が完了した車両の車止め器を解除するように解除信号を出力する。
【0026】
車載器20は、例えば有料道路のETC(Electronic Toll Collection)システム等に用いられている車載器である。ETCシステムでは、5.8GHzアクティブ方式の双方向通信DSRCが使われている。
【0027】
車載器20は、DSRC部21と、カーナビゲーション部22とを備える。DSRC部21とカーナビゲーション部22とは、通信ケーブルで接続される。DSRC部21は、アンテナ211、通信部212、CPU213、メモリ214及びカードインタフェース215を有する。
【0028】
通信部212は、通信エリアA1に進入すると、アンテナ211を介してDSRC無線装置12と無線通信を行う。
【0029】
メモリ214は、車載器20の車載器IDを記憶している。カードインタフェース215には、例えばEMVカードが挿入される。カードインタフェース215は、挿入されたEMVカードのカード番号を読み取る。このカード番号は、メモリ214へ出力されて記憶される。ここで、EMVカードとは、EMVに準拠した決済を行うことが可能なクレジットカードのことである。
【0030】
CPU213は、DSRC無線装置12から通信要求信号を受け取ると、メモリ214から車載器ID又はカード番号のいずれかを車載器20の固有番号として読み出す。CPU213は、読み出した固有番号をアンテナ211から送信するように、通信部213を制御する。
【0031】
また、CPU213は、車載器20が起動された場合、起動信号をDSRC無線装置12へ通知する。また、CPU213は、駐車料金等の情報をDSRC無線装置12から受信すると、駐車料金等の情報をカーナビゲーション22へ出力する。
【0032】
カーナビゲーション22は、表示部及び音声出力部等の案内部を備えており、DSRC部21から受け取った情報を表示部に表示させ、又は、音声出力部から音声で搭乗者へ通知する。
【0033】
次に、以上のように構成された駐車車両管理システム10による駐車車両判断動作及び駐車料金の課金動作を、CPU123の処理手順に従い説明する。
【0034】
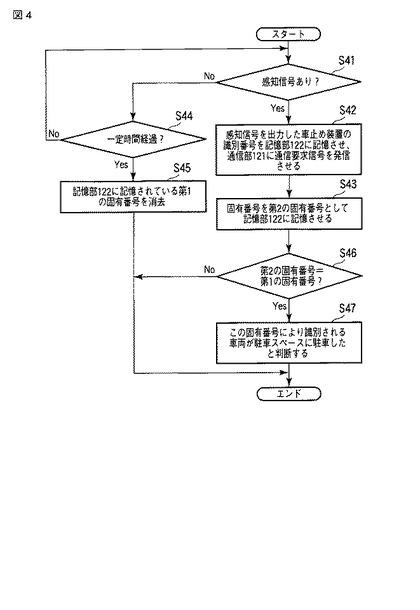
図4は、本発明の第1の実施形態に係る駐車車両管理システム10において、車両が駐車したことを判断する際のCPU123の処理を示すフローチャートである。
【0035】
CPU123は、通信部121に常に通信要求信号を発信させるようにしており(通信制御部1231による第1の制御)、駐車場への車両の進入を常時監視している。CPU123は、この通信要求信号に応じて返ってきた固有番号を第1の固有番号として記憶部122へ記憶する。
【0036】
CPU123は、車止め装置13−1〜13−4からの感知信号があるか否かを判断する(ステップS41)。CPU123は、車止め装置13−1〜13−4からの感知信号がある場合(ステップS41のYes)、感知信号を出力した車止め装置の識別番号を記憶部122に記憶させ、通信部121に通信要求信号を発信させる(通信制御部1231による第2の制御)(ステップS42)。CPU123は、この通信要求信号に応じて返ってきた固有番号を第2の固有番号として記憶部122に記憶させる(ステップS43)。
【0037】
車止め装置13−1〜13−4からの感知信号が無い場合には(ステップS41のNo)、一定の期間が経過したか否かを判断する(ステップS44)。一定の期間が経過した場合(ステップS44のYes)、記憶部122に記憶されている第1の固有番号を消去し(ステップS45)、処理を終了させる。一定の期間が経過していない場合(ステップS44のNo)、感知信号を受信するまでステップS41の処理を繰り返す。
【0038】
続いて、CPU123は、ステップS43で返ってきた第2の固有番号と、記憶部122に記憶された第1の固有番号とが一致するか否かを判断する(ステップS46)。CPU123は、第1の固有番号と第2の固有番号とが一致する場合(ステップS46のYes)、この固有番号により識別される車両が駐車スペースに駐車したと判断し(ステップS47)、処理を終了する。CPU123は、第1の固有番号と第2の固有番号とが不一致である場合(ステップS46のNo)、処理を終了する。
【0039】
図1において、車載器20を搭載した車両B1が駐車場に形成される通信エリアA1に進入し、駐車スペースS1に停車する場合について具体的に説明する。車載器20は、DSRCアンテナ11からの通信要求信号を受け、自己の固有番号N1をDSRC無線装置12へ送信する。CPU123は、この固有番号N1を第1の固有番号として記憶部122に記憶させる。
【0040】
駐車スペースS1に設置された車止め装置13−1は、車両B1が駐車スペースS1に停車した場合、車両センサにより車両B1を感知し、感知信号をDSRC無線装置12へ出力する。CPU123は、感知信号を受信すると、車止め装置13−1の識別番号を記憶部122に記憶させ、通信部121に通信要求信号を発信させる。車載器20は、DSRCアンテナ11からの通信要求信号を受信すると、固有番号N1をDSRC無線装置12へ送信する。そして、CPU123は、この固有番号N1を第2の固有番号として記憶部122に記憶させる。
【0041】
CPU123は、記憶部122に記憶された第1の固有番号と、取得された第2の固有番号とを比較する。CPU123は、第1の固有番号と第2の固有番号とが共に固有番号N1で一致しているため、車両B1が、車止め装置13−1が設置されている駐車スペースS1に駐車されたと判断する。
【0042】
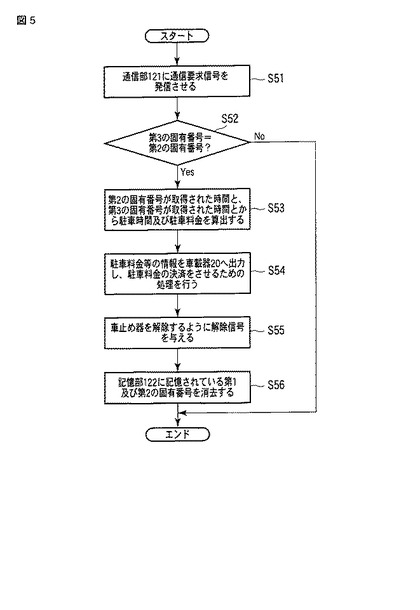
図5は、本発明の第1の実施形態に係る駐車車両管理システム10において、車両が出庫する際のCPU123の処理を示すフローチャートである。
【0043】
CPU123は、通信部121に通信要求信号を発信させる(通信制御部1231による第1の制御)(ステップS51)。CPU123は、起動された車載器20から通信要求信号に応じて取得された第3の固有番号と、駐車したと判断された車両の第2の固有番号とが一致するか否かを判断する(ステップS52)。第3の固有番号と第2の固有番号とが一致する場合(ステップS52のYes)、第2の固有番号が取得された時間と、第3の固有番号が取得された時間とから駐車時間及び駐車料金を算出する(ステップS53)。
【0044】
CPU123は、駐車料金等の情報を車載器20へ出力し、車両B1の搭乗者に駐車料金の決済をさせるための処理を行う(ステップS54)。CPU123は、決済が完了すると、車止め装置13−1〜13−4のうち車両B1が駐車している駐車スペースに設けられた車止め装置に対して、車止め器を解除するように解除信号を与える(ステップS55)。CPU123は、解除信号を出力した後、記憶部122に記憶されている第1及び第2の固有番号を消去する(ステップS56)。
【0045】
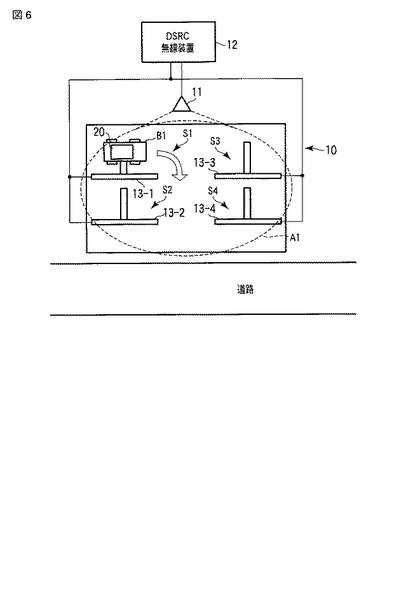
図6において、車載器20を搭載した車両B1が駐車スペースS1から出庫する場合を具体的に説明する。まず、搭乗者は、車両B1に乗り込み、車両B1のエンジンを起動させる。これにより、車載器20は起動される。
【0046】
起動した車載器20は、通信要求信号を受けると、自己の固有番号N1をDSRC無線装置12へ送信する。CPU123は、この固有番号N1を第3の固有番号として取得する。
【0047】
CPU123は、駐車されている車両B1の第2の固有番号を記憶部122から読み出し、この第2の固有番号と、取得された第3の固有番号とを比較する。CPU123は、第2の固有番号と第3の固有番号とが共に固有番号N1で一致しているため、第2の固有番号の取得時刻と、第3の固有番号の取得時刻とから駐車時間を算出し、この駐車時間から駐車料金を算出する。そして、CPU123は、駐車料金等の情報を車載器20へ通知し、車両B1の搭乗者に駐車料金の決済をさせるための処理を行う。
【0048】
CPU123は、決済が完了すると、車止め装置13−1に対して、車止め器を解除するように解除信号を与える。CPU123は、解除信号を出力した後、記憶部122に第1及び第2の固有番号として記憶されている固有番号N1を消去する。
【0049】
以上のように、上記第1の実施形態では、駐車スペースに駐車した際に取得される第2の固有番号と、通信エリアA1に進入したときに取得された第1の固有番号とを、車両が駐車ペースに停車したときに比較する。そして、第1及び第2の固有番号が一致した場合には、この固有番号により識別される車両が駐車スペースに駐車されたと判断するようにしている。これにより、駐車場に進入し、駐車した車両を正確に判別することが可能となる。つまり、図1のように車両B1の後ろを走る車両の固有番号が、反射等により生じた通信スポットA2に進入したことにより第1の固有番号として読み取られた場合であっても、この車両の固有番号は、車両が道路を通過してしまうため、第2の固有番号として読み取られることはない。すなわち、駐車場付近を通過するのみの車両を誤って駐車したと判断することはない。
【0050】
したがって、本発明に係る駐車車両管理システムによれば、小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することができる。
【0051】
なお、上記第1の実施形態では、判断部1233は、第1の固有番号と第2の固有番号とが一致した場合に、その固有番号により識別される車両が駐車場内に駐車したと判断していたが、これに限定される訳ではない。例えば、判断部1233は、第1の固有番号と第2の固有番号とが一致すると判断し、かつ、この判断後の第1の制御により、一致すると判断した固有番号と同一の固有番号が検出されない場合に、この固有番号により識別される車両が駐車スペースに駐車したと判断するようにしてもよい。このとき、判断部1233は、第1の固有番号と第2の固有番号とが一致したと判断した場合であっても、この判断後の第1の制御により、一致したと判断した固有番号と同一の固有番号が取得された場合には、この固有番号により識別される車両は駐車したとは判断しない。
【0052】
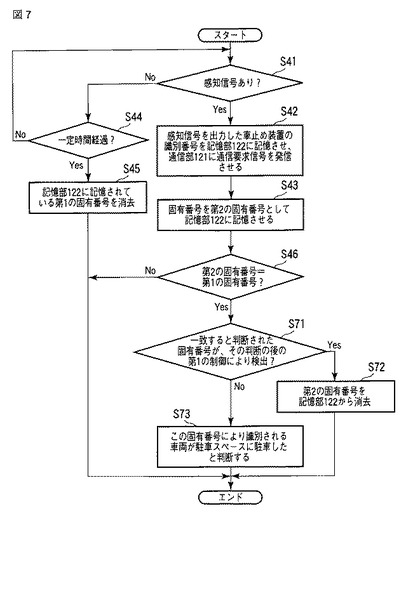
図7は、本発明の第1の実施形態に係る駐車車両管理システムにおいて、車両が駐車したことを判断する際のCPU123のその他の処理を示すフローチャートである。なお、図7におけるステップS46までは、図4におけるフローチャートと同様のものである。
【0053】
CPU123は、第1の固有番号と第2の固有番号とが一致する場合(ステップS46のYes)、ステップS46で一致すると判断された固有番号が、その判断の後に第1の制御により取得された第1の固有番号と一致するか否かを判断する(ステップS71)。ステップS46で一致すると判断された固有番号と、その判断の後に第1の制御により取得された第1の固有番号とが一致する場合(ステップS71のYes)、ステップS43で記憶された第2の固有番号を記憶部122から消去し(ステップS72)、処理をステップS41から繰り返す。ステップS46で一致すると判断された固有番号と同一の固有番号が、その判断の後に第1の制御により取得されない場合(ステップS71のNo)、この固有番号により識別される車両が駐車場に駐車したと判断し(ステップS73)、処理を終了する。
【0054】
図8において、車載器20−1を搭載した車両B2が駐車スペースS2に停車しようとしている際に、車載器20−2を搭載した車両B3が駐車場内に存在する場合について具体的に説明する。
【0055】
まず、車載器20−1の固有番号N2と、車載器20−2の固有番号N3とは、通信エリアA1への進入時に第1の固有番号として記憶部122に記憶される。
【0056】
駐車スペースS2に設置された車止め装置13−2は、車両センサにより停車した車両B2を感知し、感知信号をDSRC無線装置12へ出力する。CPU123は、感知信号を受信すると、車止め装置13−2の識別番号を記憶部122に記憶させ、第2の制御により通信部121から通信要求信号を発信させる。
【0057】
車載器20−1,20−2は、DSRCアンテナ11からの通信要求信号を受信すると、固有番号N2,N3をそれぞれDSRC無線装置12へ送信する。CPU123は、この固有番号N2,N3を第2の固有番号として記憶部122へ記憶する。そして、CPU123は、第1の固有番号と、第2の固有番号とが一致するか否かを判断する。ここでは、第1の固有番号として記憶されている固有番号N2,N3は、第2の固有番号として記憶されている固有番号N2,N3と一致する。
【0058】
CPU123は、第1の固有番号として記憶されている固有番号N2,N3と、第2の固有番号として記憶されている固有番号N2,N3とが一致すると判断した後、その判断後の第1の制御により取得される第1の固有番号の有無を確認する。ここで、車載器20−1の動作は、車両B2が駐車スペースS2に停車しエンジンを停止した際に停止する。一方、車載器20−2は、車両B2が停車した後も、継続して動作している。つまり、一致判断後の第1の制御では、車載器20−2の固有番号N3のみしか取得されない。CPU123は、一致判断後の第1の制御で取得されなかった固有番号N2の車両B2が駐車スペースS2に駐車されたと判断し、一致判断後の第1の制御で取得された固有番号N3を第2の固有番号から消去する。
【0059】
これにより、1台の車両が駐車スペースに駐車した際に、その周囲に別の車両が存在していても、正確に駐車した車両を判断することが可能となる。
【0060】
[第2の実施形態]
図9は、本発明の第2の実施形態に係わる駐車車両管理システム30の構成を示す模式図である。図9において図1と共通する部分には同じ符号を付して示している。駐車車両管理システム30は、駐車場内又は駐車場近傍に設置されるDSRCアンテナ11と、DSRC無線装置12と、駐車スペース毎に設置される車止め装置13−1〜13−4と、電波発射源検出装置31と、受信アンテナ32とを具備する。
【0061】
図10は、本発明の第2の実施形態に係る駐車車両管理システム30と車載器20との概略構成を示すブロック図である。
【0062】
受信アンテナ32は、DSRCアンテナ11とほぼ同じ範囲(図9における一点鎖線部分)で車載器20から常に発信されるDSRCの電波を受信することが可能である。
【0063】
電波発射源検出装置31は、受信アンテナ32により受信された電波から、車載器20の駐車場内における位置情報を取得する。電波発射源検出装置31は、取得した位置情報をDSRC無線装置12へ出力する。
【0064】
図11は、本発明の第1の実施形態に係るCPU124の機能構成を示すブロック図である。図11におけるCPU124は、通信制御部1231、メモリ管理部1241、判断部1242、課金処理部1234及び車止め装置制御部1235を備える。
【0065】
メモリ管理部1241は、記憶部122を管理するものである。すなわち、メモリ管理部1241は、第1の制御により取得された第1の固有番号と、第2の制御により取得された第2の固有番号とを記憶部122に記憶させる。また、メモリ管理部1241は、所定の場合に、記憶部122に記憶された第1及び第2の固有番号を消去する。また、メモリ管理部1241は、感知信号を出力した車止め装置の識別番号を記憶部122に記憶させる。また、メモリ管理部1241は、車両の位置情報を記憶部122に記憶させる。
【0066】
判断部1242は、車止め装置13−1〜13−4からの感知信号に従って第2の固有番号が取得された場合、この第2の固有番号と、記憶部122に記憶されている第1の固有番号とが一致するか否かを判断する。そして、第1及び第2の固有番号が一致した場合、記憶部122に記憶されている位置情報を参照し、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが一致するか否かを判断する。判断部1242は、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが一致する場合、この固有番号により識別される車両が駐車スペースに駐車したと判断する。
【0067】
また、判断部1242は、出庫に際して車載器20が起動され、起動された車載器20から、通信要求信号に応じた第3の固有番号を取得した場合、駐車スペースに停車したと判断された車両の第2の固有番号と、この第3の固有番号とが一致するか否かを判断する。判断部1242は、第2の固有番号と第3の固有番号とが一致する場合、第2の固有番号を取得した時刻と、第3の固有番号を取得した時刻とから車両の駐車時間を算出する。
【0068】
次に、以上のように構成された駐車車両管理システム30による駐車車両判断動作を、CPU124の処理手順に従い説明する。
【0069】
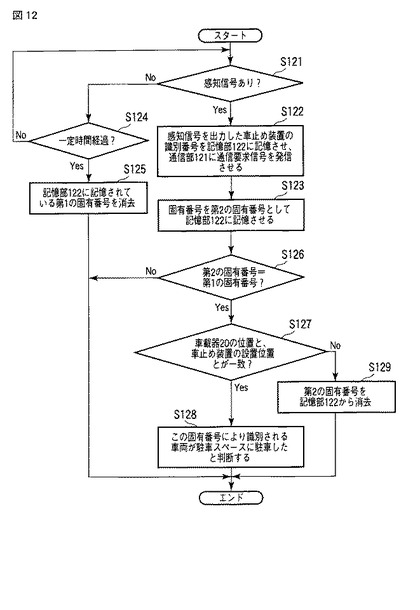
図12は、本発明の第2の実施形態に係る駐車車両管理システム30において、車両が駐車したことを判断する際のCPU124の処理を示すフローチャートである。
【0070】
CPU124は、通信部121に常に通信要求信号を発信させるようにしており(通信制御部1231による第1の制御)、駐車場への車両の進入を常時監視している。CPU124は、この通信要求信号に応じて返ってきた固有番号を第1の固有番号として記憶部122へ記憶する。電波発射源検出装置31は、受信アンテナ32により受信された電波から車載器20の駐車場内における位置情報を取得し、この位置情報をDSRC無線装置12へ出力する。CPU124は、記憶部122に記憶された位置情報を、電波発射源検出装置31からの位置情報により逐次更新する。
【0071】
CPU124は、車止め装置13−1〜13−4からの感知信号があるか否かを判断する(ステップS121)。CPU124は、車止め装置13−1〜13−4からの感知信号がある場合(ステップS121のYes)、感知信号を出力した車止め装置の識別番号を記憶部122に記憶させ、通信部121に通信要求信号を発信させる(通信制御部1231による第2の制御)(ステップS122)。CPU124は、この通信要求信号に応じて返ってきた固有番号を第2の固有番号として記憶部122に記憶させる(ステップS123)。
【0072】
車止め装置13−1〜13−4からの感知信号が無い場合には(ステップS121のNo)、一定の期間が経過したか否かを判断する(ステップS124)。CPU124は、一定の期間が経過した場合(ステップS124のYes)、記憶部122に記憶されている第1の固有番号を消去し(ステップS125)、処理を終了させる。一定の期間が経過していない場合(ステップS124のNo)、感知信号を受信するまでステップS121の処理を繰り返す。
【0073】
続いて、CPU124は、ステップS123で返ってきた第2の固有番号と、記憶部122に記憶された第1の固有番号とが一致するか否かを判断する(ステップS126)。CPU124は、第1の固有番号と第2の固有番号とが一致する場合(ステップS126のYes)、記憶部122に記憶されている位置情報を参照し、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが一致するか否かを判断する(ステップS127)。CPU124は、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが一致する場合(ステップS127のYes)、一致すると判断された固有番号により識別される車両が駐車スペースに駐車したと判断し(ステップS128)、処理を終了する。CPU124は、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが不一致である場合(ステップS127のNo)、一致すると判断された固有番号を第2の固有番号から消去し(ステップS129)、処理を終了する。
【0074】
図9において、車載器20−1を搭載した車両B2が駐車スペースS2に停車しようとしている際に、車載器20−2を搭載した車両B3が駐車場内に存在する場合について具体的に説明する。
【0075】
まず、車載器20−1の固有番号N2と、車載器20−2の固有番号N3とは、通信エリアA1への進入時に第1の固有番号として記憶部122に記憶される。
【0076】
駐車スペースS2に設置された車止め装置13−2は、車両センサにより停車した車両B2を感知し、感知信号をDSRC無線装置12へ出力する。CPU124は、感知信号を受信すると、車止め装置13−2の識別番号を記憶部122に記憶させ、第2の制御により通信部121から通信要求信号を発信させる。
【0077】
車載器20−1,20−2は、DSRCアンテナ11からの通信要求信号を受信すると、固有番号N2,N3をそれぞれDSRC無線装置12へ送信する。CPU124は、この固有番号N2,N3を第2の固有番号として記憶部122へ記憶する。そして、CPU124は、第1の固有番号と、第2の固有番号とが一致するか否かを判断する。ここでは、第1の固有番号として記憶されている固有番号N2,N3は、第2の固有番号として記憶されている固有番号N2,N3と一致する。
【0078】
CPU124は、第1の固有番号として記憶されている固有番号N2,N3と、第2の固有番号として記憶されている固有番号N2,N3とが一致すると判断した場合、記憶部122に記憶されている位置情報を参照し、第2の固有番号を返してきた車載器20−1,20−2の位置と、記憶部122に記憶された車止め装置13−2の設置位置とが一致するか否かを判断する。CPU124は、第2の固有番号を返してきた車載器20−1の位置と、記憶部122に記憶された車止め装置13−2の設置位置とが一致するため、車両B2が駐車スペースS2に駐車したと判断する。一方、CPU124は、第2の固有番号を返してきた車載器20−2の位置は、車止め装置13−2の設置位置とは異なるため、固有番号N3を第2の固有番号から消去する。
【0079】
なお、CPU124による駐車料金の課金動作は、第1の実施形態におけるCPU123による動作と同一である。
【0080】
以上のように、上記第2の実施形態では、電波発射源検出装置31により、電波を発信した車載器の位置情報を取得する。DSRC無線装置12は、第1の固有番号と第2の固有番号とが一致した場合、この位置情報を参照し、第2の固有番号が取得された際の車両の位置と、車止め装置の設置位置とを比較する。そして、DSRC無線装置12は、第2の固有番号が取得された際の車両の位置と、車止め装置の設置位置とが一致する場合、一致したと判断した固有番号により識別される車両が駐車場内に駐車されたと判断するようにしている。これにより、1台の車両が駐車スペースに駐車した際に、その周囲に別の車両が存在していても、正確に駐車した車両を判断することが可能となる。
【0081】
また、上記第2の実施形態でも、第1の実施形態と同様の課金処理を行うようにしている。これにより、駐車したと判断した車両に対してのみ駐車料金を請求することが可能となる。
【0082】
したがって、本発明に係る駐車車両管理システムによれば、小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することができる。
【0083】
[その他の実施形態]
なお、この発明は上記各実施形態に限定されるものではない。例えば上記各実施形態では、CPU123,124は、第1及び第2の固有番号が一致する場合、一致した固有番号により識別される車両が駐車場に駐車されたと判断していた。しかしながら、これに限定される訳ではない。例えば、CPU123,124は、一致した固有番号により識別される車両が駐車場に駐車されたと判断した後、その車両に対して「いっらっしゃいませ」等のコメントを発信するようにしても構わない。
【0084】
また、上記各実施形態では、CPU123,124は、第2の固有番号と第3の固有番号とが一致する場合に、第2の固有番号を取得した時刻と、第3の固有番号を取得した時刻とから駐車時間を算出し、この駐車時間に基づいて駐車料金を算出していた。しかしながら、これに限定される訳ではない。例えば、CPU123,124は、駐車料金が一定金額である場合には、第2の固有番号と第3の固有番号とが一致した場合に、一定の駐車料金を課するようにしても構わない。
【0085】
また、搭乗者に対して、駐車スペースの番号を入力させる旨の指示信号をさらに発信させるようにしても良い。これにより、CPU123,124は、車両の駐車位置をより正確に把握することが可能となり、課金処理の確実性が向上することとなる。
【0086】
また、上記各実施形態では、出庫に際して車載器20が起動され、起動された車載器20が通信要求信号に応じて出力した固有番号を第3の固有番号とする例について説明した。しかしながら、上記各実施形態はこれに限定される訳ではない。例えば、車載器20は、起動の際に起動信号を出力し、通信制御部1231は、車載器20からの起動信号を受信した場合に、DSRCアンテナ11から通信要求信号が送信されるように通信部121を制御する第3の制御を行うようにしても構わない。
【0087】
また、上記各実施形態では、駐車場内にDSRCアンテナ11が1台のみ設置されている場合について説明したが、駐車場内に複数のDSRCアンテナが設置され、複数のDSRCアンテナにより通信エリアを形成するようにしても同様に実施可能である。
【0088】
さらに、この発明は、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0089】
10…駐車車両管理システム
11…DSRCアンテナ
12…DSRC無線装置
121…通信部
122…記憶部
123,124…CPU
1231…通信制御部
1232,1241…メモリ管理部
1233,1242…判断部
1234…課金処理部
1235…車止め装置制御部
13−1〜13−4…車止め装置
20…車載器
21…DSRC部
211…アンテナ
212…通信部
213…CPU
214…メモリ
215…カードインタフェース
22…カーナビゲーション
31…電波発射源検出装置
32…受信アンテナ
A1,A2…無線エリア
B1,B2,B3…車両
S1〜S4…駐車スペース
【技術分野】
【0001】
この発明は、例えば駐車場内に進入してきた車両を管理する駐車車両管理システムに関する。
【背景技術】
【0002】
現在、街中ではコインパーキング等、小規模駐車場が増加している。一般に、小規模駐車場では、駐車スペース毎に車止めが設置されており、駐車スペースに車両を駐車するとこの車止めが上がるようになっている。そして、出庫する際には、搭乗者は、精算機まで出向き、自分の車両が止まっている駐車スペースの番号を清算機に入力し、紙幣又はクレジットカードにより決済を行う。これにより、車止めが倒れ、出庫が許可されることとなる。
【0003】
上記のように、一般的な小規模駐車場では、搭乗者は、精算機まで出向いて決済をする必要があるため手間がかかる。そこで、DSRC(Dedicated Short Range Communication)等の無線通信を利用して(例えば、特許文献1参照)、駐車場内の車両を管理するシステムが求められている。
【0004】
しかしながら、現在の小規模駐車場では、場所の制約から、入口ゲート及び出口ゲートから成る従来のETC(Electronic Toll Collection)ゲートのような構造を有するシステムを採用することは不可能である。また、DSRCのような狭域無線通信を駐車場内に発射し、電波範囲に車両が侵入した際に課金処理を行おうとしても、構造物により電波が反射等されることにより電波が漏れ、駐車場付近を通過する車両に対して誤課金を起こすおそれがある。これに対し、電波の反射を抑えるために電波吸収体を構造物に貼る等のことも可能であるが、電波吸収体は高価である上、施工工事が必要となるため、経済的に得策ではない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−110153号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のように、小規模駐車場では、DSRC等の無線通信を利用して、駐車場内の車両を管理する駐車車両管理システムが求められている。
【0007】
この発明は上記事情によりなされたもので、その目的は、小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することが可能な駐車車両管理システムを提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係る駐車車両管理システムは、車両が駐車可能な駐車スペースを複数有する駐車場に対して狭域通信の電波を送信することで、前記電波を受信可能な位置に存在する車両に搭載された車載器の固有番号を読み取る狭域通信部と、前記複数の駐車スペース毎に設置され、前記駐車スペースに車両が停車されたことを感知すると感知信号を生成する車止め装置と、予め設定された周期で前記狭域通信部に前記固有番号を読み取らせる第1の通信制御と、前記感知信号に応じて前記狭域通信部に前記固有番号を読み取らせる第2の通信制御とを行う通信制御部と、前記第1の通信制御に応じて前記狭域通信部により読み取られた第1の固有番号を記憶する記憶部と、前記第2の通信制御に応じて前記狭域通信部により第2の固有番号が読み取られた際に、前記記憶部に記憶された前記第1の固有番号と、前記第2の固有番号とが一致するか否かを判断し、前記第1及び第2の固有番号が一致する場合、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断する判断部とを具備することを特徴とする。
【0009】
上記構成による駐車車両管理システムでは、駐車場に進入してきた車両に搭載された車載器の固有番号を、まず、駐車場に進入した時に取得し、その後、駐車スペースに停車した時に取得する。そして、駐車スペース停車時にこれら2つの固有番号が一致するか否かを判断し、これらの固有番号が一致した際には、この固有番号により識別される車両が駐車スペースに駐車されたと判断する。これにより、駐車場に進入し、駐車した車両を正確に判別することが可能となる。
【発明の効果】
【0010】
この発明によれば、小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することが可能な駐車車両管理システムを提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施形態に係る駐車車両管理システムの構成を示す図である。
【図2】図1の駐車車両管理システムと車載器との構成を示すブロック図である。
【図3】図2のCPUの機能構成を示すブロック図である。
【図4】車両が駐車スペースに駐車したことを判断する際の図2のCPUの処理を示すフローチャートである。
【図5】車両が出庫する際の図2のCPUの処理を示すフローチャートである。
【図6】図5のフローチャートを具体的に説明するための駐車車両管理システムの図である。
【図7】車両が駐車スペースに駐車したことを判断する際の図2のCPUのその他の処理を示すフローチャートである。
【図8】図7のフローチャートを具体的に説明するための駐車車両管理システムの図である。
【図9】本発明の第2の実施形態に係わる駐車車両管理システムの構成を示す模式図である。
【図10】図9の駐車車両管理システムと車載器との構成を示すブロック図である。
【図11】図10のCPUの機能構成を示すブロック図である。
【図12】車両が駐車スペースに駐車したことを判断する際の図10のCPUの処理を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、図面を参照しながら本発明に係る駐車車両管理システムの実施の形態について詳細に説明する。
【0013】
[第1の実施形態]
図1は、本発明の第1の実施形態に係る駐車車両管理システム10の構成を示す模式図である。図1に示されるように、駐車車両管理システム10は駐車スペースS1〜S4を備える駐車場に設置される。駐車車両管理システム10は、駐車場内又は駐車場近傍に設置されるDSRC(Dedicated Short Range Communication)アンテナ11と、DSRC無線装置12と、駐車スペースS1〜S4毎に設置される車止め装置13−1〜13−4を具備する。また、車両にはDSRCによる通信が可能な車載器20が搭載されている。
【0014】
図2は、本発明の第1の実施形態に係る駐車車両管理システム10と車載器20との概略構成を示すブロック図である。
【0015】
車止め装置13−1〜13−4は、例えば金属センサ等からなる車両センサと、車止め器とを備える。車両センサは、車両が車止め器を跨いで停車されると、車両を感知するように設置される。車止め装置13−1〜13−4は、車両センサにより車両の存在が感知されると、感知信号をDSRC無線装置12へ出力する。車止め装置13−1〜13−4は、車両センサにより車両の存在が感知されてから一定の時間が経過すると、車止め器を上げ、車両が出庫できないようにする。なお、車止め装置13−1〜13−4は、DSRC無線装置12からの指示に応じて車止め器を上げるようにしても良い。また、車止め装置13−1〜13−4は、DSRC無線装置12からの解除信号に応じ、車止め器を解除し、車両が出庫できるようにする。
【0016】
DSRCアンテナ11は、DSRC無線装置12の指示に応じて駐車場にDSRC(狭域通信)の電波を発信することで、駐車場内にDSRCの電波圏である通信エリアA1を形成する。
【0017】
DSRC無線装置12は、通信部121、記憶部122及びCPU(Central Processing Unit)123を備える。
【0018】
通信部121は、CPU123の制御に従い、DSRCアンテナ11を介して通信エリアA1に進入してきた車載器20と通信する。
【0019】
CPU123は、DSRC無線装置12の動作を制御するものである。図3は、本発明の第1の実施形態に係るCPU123の機能構成を示すブロック図である。図3におけるCPU123は、通信制御部1231、メモリ管理部1232、判断部1233、課金処理部1234及び車止め装置制御部1235を備える。
【0020】
通信制御部1231は、通信部121に対して第1及び第2の制御を行う。第1の制御は、DSRCアンテナ11から予め設定された周期で通信要求信号(ポーリング信号)が送信されるように通信部121を制御するものである。また、第2の制御は、車止め装置13−1〜13−4から感知信号を受信した場合に、DSRCアンテナ11から通信要求信号が送信されるように通信部121を制御するものである。
【0021】
メモリ管理部1232は、記憶部122を管理するものである。すなわち、メモリ管理部1232は、第1の制御により取得された第1の固有番号と、第2の制御により取得された第2の固有番号とを記憶部122に記憶させる。また、メモリ管理部1232は、所定の場合に、記憶部122に記憶された第1及び第2の固有番号を消去する。また、メモリ管理部1232は、感知信号を出力してきた車止め装置の識別番号を記憶部122に記憶させる。
【0022】
判断部1233は、車止め装置13−1〜13−4からの感知信号に従って第2の固有番号が取得された場合、この第2の固有番号と、記憶部122に記憶されている第1の固有番号とが一致するか否かを判断する。そして、一致する場合には、この固有番号により識別される車両が駐車スペースに駐車したと判断する。
【0023】
また、判断部1233は、出庫に際して車載器20が起動され、起動された車載器20から、通信要求信号に応じた第3の固有番号を取得した場合、駐車スペースに駐車したと判断された車両の第2の固有番号と、この第3の固有番号とが一致するか否かを判断する。
【0024】
課金処理部1234は、判断部1233により第2の固有番号と第3の固有番号とが一致すると判断された場合、第2の固有番号を取得した時刻と、第3の固有番号を取得した時刻とから車両の駐車時間を算出する。課金処理部1234は、算出した駐車時間から駐車料金を算出する。課金処理部1234は、駐車料金等の情報を通信部121を介して車載器20へ提供し、車両の搭乗者に車両内で駐車料金の決済を行わせる。このとき、課金処理部1234は、EMVに準じた決済が可能なように処理を行ってもよい。
【0025】
車止め装置制御部1235は、DSRC無線装置12を介した駐車料金の決済が完了すると、車止め装置13−1〜13−4に対して、決済が完了した車両の車止め器を解除するように解除信号を出力する。
【0026】
車載器20は、例えば有料道路のETC(Electronic Toll Collection)システム等に用いられている車載器である。ETCシステムでは、5.8GHzアクティブ方式の双方向通信DSRCが使われている。
【0027】
車載器20は、DSRC部21と、カーナビゲーション部22とを備える。DSRC部21とカーナビゲーション部22とは、通信ケーブルで接続される。DSRC部21は、アンテナ211、通信部212、CPU213、メモリ214及びカードインタフェース215を有する。
【0028】
通信部212は、通信エリアA1に進入すると、アンテナ211を介してDSRC無線装置12と無線通信を行う。
【0029】
メモリ214は、車載器20の車載器IDを記憶している。カードインタフェース215には、例えばEMVカードが挿入される。カードインタフェース215は、挿入されたEMVカードのカード番号を読み取る。このカード番号は、メモリ214へ出力されて記憶される。ここで、EMVカードとは、EMVに準拠した決済を行うことが可能なクレジットカードのことである。
【0030】
CPU213は、DSRC無線装置12から通信要求信号を受け取ると、メモリ214から車載器ID又はカード番号のいずれかを車載器20の固有番号として読み出す。CPU213は、読み出した固有番号をアンテナ211から送信するように、通信部213を制御する。
【0031】
また、CPU213は、車載器20が起動された場合、起動信号をDSRC無線装置12へ通知する。また、CPU213は、駐車料金等の情報をDSRC無線装置12から受信すると、駐車料金等の情報をカーナビゲーション22へ出力する。
【0032】
カーナビゲーション22は、表示部及び音声出力部等の案内部を備えており、DSRC部21から受け取った情報を表示部に表示させ、又は、音声出力部から音声で搭乗者へ通知する。
【0033】
次に、以上のように構成された駐車車両管理システム10による駐車車両判断動作及び駐車料金の課金動作を、CPU123の処理手順に従い説明する。
【0034】
図4は、本発明の第1の実施形態に係る駐車車両管理システム10において、車両が駐車したことを判断する際のCPU123の処理を示すフローチャートである。
【0035】
CPU123は、通信部121に常に通信要求信号を発信させるようにしており(通信制御部1231による第1の制御)、駐車場への車両の進入を常時監視している。CPU123は、この通信要求信号に応じて返ってきた固有番号を第1の固有番号として記憶部122へ記憶する。
【0036】
CPU123は、車止め装置13−1〜13−4からの感知信号があるか否かを判断する(ステップS41)。CPU123は、車止め装置13−1〜13−4からの感知信号がある場合(ステップS41のYes)、感知信号を出力した車止め装置の識別番号を記憶部122に記憶させ、通信部121に通信要求信号を発信させる(通信制御部1231による第2の制御)(ステップS42)。CPU123は、この通信要求信号に応じて返ってきた固有番号を第2の固有番号として記憶部122に記憶させる(ステップS43)。
【0037】
車止め装置13−1〜13−4からの感知信号が無い場合には(ステップS41のNo)、一定の期間が経過したか否かを判断する(ステップS44)。一定の期間が経過した場合(ステップS44のYes)、記憶部122に記憶されている第1の固有番号を消去し(ステップS45)、処理を終了させる。一定の期間が経過していない場合(ステップS44のNo)、感知信号を受信するまでステップS41の処理を繰り返す。
【0038】
続いて、CPU123は、ステップS43で返ってきた第2の固有番号と、記憶部122に記憶された第1の固有番号とが一致するか否かを判断する(ステップS46)。CPU123は、第1の固有番号と第2の固有番号とが一致する場合(ステップS46のYes)、この固有番号により識別される車両が駐車スペースに駐車したと判断し(ステップS47)、処理を終了する。CPU123は、第1の固有番号と第2の固有番号とが不一致である場合(ステップS46のNo)、処理を終了する。
【0039】
図1において、車載器20を搭載した車両B1が駐車場に形成される通信エリアA1に進入し、駐車スペースS1に停車する場合について具体的に説明する。車載器20は、DSRCアンテナ11からの通信要求信号を受け、自己の固有番号N1をDSRC無線装置12へ送信する。CPU123は、この固有番号N1を第1の固有番号として記憶部122に記憶させる。
【0040】
駐車スペースS1に設置された車止め装置13−1は、車両B1が駐車スペースS1に停車した場合、車両センサにより車両B1を感知し、感知信号をDSRC無線装置12へ出力する。CPU123は、感知信号を受信すると、車止め装置13−1の識別番号を記憶部122に記憶させ、通信部121に通信要求信号を発信させる。車載器20は、DSRCアンテナ11からの通信要求信号を受信すると、固有番号N1をDSRC無線装置12へ送信する。そして、CPU123は、この固有番号N1を第2の固有番号として記憶部122に記憶させる。
【0041】
CPU123は、記憶部122に記憶された第1の固有番号と、取得された第2の固有番号とを比較する。CPU123は、第1の固有番号と第2の固有番号とが共に固有番号N1で一致しているため、車両B1が、車止め装置13−1が設置されている駐車スペースS1に駐車されたと判断する。
【0042】
図5は、本発明の第1の実施形態に係る駐車車両管理システム10において、車両が出庫する際のCPU123の処理を示すフローチャートである。
【0043】
CPU123は、通信部121に通信要求信号を発信させる(通信制御部1231による第1の制御)(ステップS51)。CPU123は、起動された車載器20から通信要求信号に応じて取得された第3の固有番号と、駐車したと判断された車両の第2の固有番号とが一致するか否かを判断する(ステップS52)。第3の固有番号と第2の固有番号とが一致する場合(ステップS52のYes)、第2の固有番号が取得された時間と、第3の固有番号が取得された時間とから駐車時間及び駐車料金を算出する(ステップS53)。
【0044】
CPU123は、駐車料金等の情報を車載器20へ出力し、車両B1の搭乗者に駐車料金の決済をさせるための処理を行う(ステップS54)。CPU123は、決済が完了すると、車止め装置13−1〜13−4のうち車両B1が駐車している駐車スペースに設けられた車止め装置に対して、車止め器を解除するように解除信号を与える(ステップS55)。CPU123は、解除信号を出力した後、記憶部122に記憶されている第1及び第2の固有番号を消去する(ステップS56)。
【0045】
図6において、車載器20を搭載した車両B1が駐車スペースS1から出庫する場合を具体的に説明する。まず、搭乗者は、車両B1に乗り込み、車両B1のエンジンを起動させる。これにより、車載器20は起動される。
【0046】
起動した車載器20は、通信要求信号を受けると、自己の固有番号N1をDSRC無線装置12へ送信する。CPU123は、この固有番号N1を第3の固有番号として取得する。
【0047】
CPU123は、駐車されている車両B1の第2の固有番号を記憶部122から読み出し、この第2の固有番号と、取得された第3の固有番号とを比較する。CPU123は、第2の固有番号と第3の固有番号とが共に固有番号N1で一致しているため、第2の固有番号の取得時刻と、第3の固有番号の取得時刻とから駐車時間を算出し、この駐車時間から駐車料金を算出する。そして、CPU123は、駐車料金等の情報を車載器20へ通知し、車両B1の搭乗者に駐車料金の決済をさせるための処理を行う。
【0048】
CPU123は、決済が完了すると、車止め装置13−1に対して、車止め器を解除するように解除信号を与える。CPU123は、解除信号を出力した後、記憶部122に第1及び第2の固有番号として記憶されている固有番号N1を消去する。
【0049】
以上のように、上記第1の実施形態では、駐車スペースに駐車した際に取得される第2の固有番号と、通信エリアA1に進入したときに取得された第1の固有番号とを、車両が駐車ペースに停車したときに比較する。そして、第1及び第2の固有番号が一致した場合には、この固有番号により識別される車両が駐車スペースに駐車されたと判断するようにしている。これにより、駐車場に進入し、駐車した車両を正確に判別することが可能となる。つまり、図1のように車両B1の後ろを走る車両の固有番号が、反射等により生じた通信スポットA2に進入したことにより第1の固有番号として読み取られた場合であっても、この車両の固有番号は、車両が道路を通過してしまうため、第2の固有番号として読み取られることはない。すなわち、駐車場付近を通過するのみの車両を誤って駐車したと判断することはない。
【0050】
したがって、本発明に係る駐車車両管理システムによれば、小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することができる。
【0051】
なお、上記第1の実施形態では、判断部1233は、第1の固有番号と第2の固有番号とが一致した場合に、その固有番号により識別される車両が駐車場内に駐車したと判断していたが、これに限定される訳ではない。例えば、判断部1233は、第1の固有番号と第2の固有番号とが一致すると判断し、かつ、この判断後の第1の制御により、一致すると判断した固有番号と同一の固有番号が検出されない場合に、この固有番号により識別される車両が駐車スペースに駐車したと判断するようにしてもよい。このとき、判断部1233は、第1の固有番号と第2の固有番号とが一致したと判断した場合であっても、この判断後の第1の制御により、一致したと判断した固有番号と同一の固有番号が取得された場合には、この固有番号により識別される車両は駐車したとは判断しない。
【0052】
図7は、本発明の第1の実施形態に係る駐車車両管理システムにおいて、車両が駐車したことを判断する際のCPU123のその他の処理を示すフローチャートである。なお、図7におけるステップS46までは、図4におけるフローチャートと同様のものである。
【0053】
CPU123は、第1の固有番号と第2の固有番号とが一致する場合(ステップS46のYes)、ステップS46で一致すると判断された固有番号が、その判断の後に第1の制御により取得された第1の固有番号と一致するか否かを判断する(ステップS71)。ステップS46で一致すると判断された固有番号と、その判断の後に第1の制御により取得された第1の固有番号とが一致する場合(ステップS71のYes)、ステップS43で記憶された第2の固有番号を記憶部122から消去し(ステップS72)、処理をステップS41から繰り返す。ステップS46で一致すると判断された固有番号と同一の固有番号が、その判断の後に第1の制御により取得されない場合(ステップS71のNo)、この固有番号により識別される車両が駐車場に駐車したと判断し(ステップS73)、処理を終了する。
【0054】
図8において、車載器20−1を搭載した車両B2が駐車スペースS2に停車しようとしている際に、車載器20−2を搭載した車両B3が駐車場内に存在する場合について具体的に説明する。
【0055】
まず、車載器20−1の固有番号N2と、車載器20−2の固有番号N3とは、通信エリアA1への進入時に第1の固有番号として記憶部122に記憶される。
【0056】
駐車スペースS2に設置された車止め装置13−2は、車両センサにより停車した車両B2を感知し、感知信号をDSRC無線装置12へ出力する。CPU123は、感知信号を受信すると、車止め装置13−2の識別番号を記憶部122に記憶させ、第2の制御により通信部121から通信要求信号を発信させる。
【0057】
車載器20−1,20−2は、DSRCアンテナ11からの通信要求信号を受信すると、固有番号N2,N3をそれぞれDSRC無線装置12へ送信する。CPU123は、この固有番号N2,N3を第2の固有番号として記憶部122へ記憶する。そして、CPU123は、第1の固有番号と、第2の固有番号とが一致するか否かを判断する。ここでは、第1の固有番号として記憶されている固有番号N2,N3は、第2の固有番号として記憶されている固有番号N2,N3と一致する。
【0058】
CPU123は、第1の固有番号として記憶されている固有番号N2,N3と、第2の固有番号として記憶されている固有番号N2,N3とが一致すると判断した後、その判断後の第1の制御により取得される第1の固有番号の有無を確認する。ここで、車載器20−1の動作は、車両B2が駐車スペースS2に停車しエンジンを停止した際に停止する。一方、車載器20−2は、車両B2が停車した後も、継続して動作している。つまり、一致判断後の第1の制御では、車載器20−2の固有番号N3のみしか取得されない。CPU123は、一致判断後の第1の制御で取得されなかった固有番号N2の車両B2が駐車スペースS2に駐車されたと判断し、一致判断後の第1の制御で取得された固有番号N3を第2の固有番号から消去する。
【0059】
これにより、1台の車両が駐車スペースに駐車した際に、その周囲に別の車両が存在していても、正確に駐車した車両を判断することが可能となる。
【0060】
[第2の実施形態]
図9は、本発明の第2の実施形態に係わる駐車車両管理システム30の構成を示す模式図である。図9において図1と共通する部分には同じ符号を付して示している。駐車車両管理システム30は、駐車場内又は駐車場近傍に設置されるDSRCアンテナ11と、DSRC無線装置12と、駐車スペース毎に設置される車止め装置13−1〜13−4と、電波発射源検出装置31と、受信アンテナ32とを具備する。
【0061】
図10は、本発明の第2の実施形態に係る駐車車両管理システム30と車載器20との概略構成を示すブロック図である。
【0062】
受信アンテナ32は、DSRCアンテナ11とほぼ同じ範囲(図9における一点鎖線部分)で車載器20から常に発信されるDSRCの電波を受信することが可能である。
【0063】
電波発射源検出装置31は、受信アンテナ32により受信された電波から、車載器20の駐車場内における位置情報を取得する。電波発射源検出装置31は、取得した位置情報をDSRC無線装置12へ出力する。
【0064】
図11は、本発明の第1の実施形態に係るCPU124の機能構成を示すブロック図である。図11におけるCPU124は、通信制御部1231、メモリ管理部1241、判断部1242、課金処理部1234及び車止め装置制御部1235を備える。
【0065】
メモリ管理部1241は、記憶部122を管理するものである。すなわち、メモリ管理部1241は、第1の制御により取得された第1の固有番号と、第2の制御により取得された第2の固有番号とを記憶部122に記憶させる。また、メモリ管理部1241は、所定の場合に、記憶部122に記憶された第1及び第2の固有番号を消去する。また、メモリ管理部1241は、感知信号を出力した車止め装置の識別番号を記憶部122に記憶させる。また、メモリ管理部1241は、車両の位置情報を記憶部122に記憶させる。
【0066】
判断部1242は、車止め装置13−1〜13−4からの感知信号に従って第2の固有番号が取得された場合、この第2の固有番号と、記憶部122に記憶されている第1の固有番号とが一致するか否かを判断する。そして、第1及び第2の固有番号が一致した場合、記憶部122に記憶されている位置情報を参照し、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが一致するか否かを判断する。判断部1242は、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが一致する場合、この固有番号により識別される車両が駐車スペースに駐車したと判断する。
【0067】
また、判断部1242は、出庫に際して車載器20が起動され、起動された車載器20から、通信要求信号に応じた第3の固有番号を取得した場合、駐車スペースに停車したと判断された車両の第2の固有番号と、この第3の固有番号とが一致するか否かを判断する。判断部1242は、第2の固有番号と第3の固有番号とが一致する場合、第2の固有番号を取得した時刻と、第3の固有番号を取得した時刻とから車両の駐車時間を算出する。
【0068】
次に、以上のように構成された駐車車両管理システム30による駐車車両判断動作を、CPU124の処理手順に従い説明する。
【0069】
図12は、本発明の第2の実施形態に係る駐車車両管理システム30において、車両が駐車したことを判断する際のCPU124の処理を示すフローチャートである。
【0070】
CPU124は、通信部121に常に通信要求信号を発信させるようにしており(通信制御部1231による第1の制御)、駐車場への車両の進入を常時監視している。CPU124は、この通信要求信号に応じて返ってきた固有番号を第1の固有番号として記憶部122へ記憶する。電波発射源検出装置31は、受信アンテナ32により受信された電波から車載器20の駐車場内における位置情報を取得し、この位置情報をDSRC無線装置12へ出力する。CPU124は、記憶部122に記憶された位置情報を、電波発射源検出装置31からの位置情報により逐次更新する。
【0071】
CPU124は、車止め装置13−1〜13−4からの感知信号があるか否かを判断する(ステップS121)。CPU124は、車止め装置13−1〜13−4からの感知信号がある場合(ステップS121のYes)、感知信号を出力した車止め装置の識別番号を記憶部122に記憶させ、通信部121に通信要求信号を発信させる(通信制御部1231による第2の制御)(ステップS122)。CPU124は、この通信要求信号に応じて返ってきた固有番号を第2の固有番号として記憶部122に記憶させる(ステップS123)。
【0072】
車止め装置13−1〜13−4からの感知信号が無い場合には(ステップS121のNo)、一定の期間が経過したか否かを判断する(ステップS124)。CPU124は、一定の期間が経過した場合(ステップS124のYes)、記憶部122に記憶されている第1の固有番号を消去し(ステップS125)、処理を終了させる。一定の期間が経過していない場合(ステップS124のNo)、感知信号を受信するまでステップS121の処理を繰り返す。
【0073】
続いて、CPU124は、ステップS123で返ってきた第2の固有番号と、記憶部122に記憶された第1の固有番号とが一致するか否かを判断する(ステップS126)。CPU124は、第1の固有番号と第2の固有番号とが一致する場合(ステップS126のYes)、記憶部122に記憶されている位置情報を参照し、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが一致するか否かを判断する(ステップS127)。CPU124は、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが一致する場合(ステップS127のYes)、一致すると判断された固有番号により識別される車両が駐車スペースに駐車したと判断し(ステップS128)、処理を終了する。CPU124は、第2の固有番号を返してきた車載器20の位置と、記憶部122に記憶された車止め装置の設置位置とが不一致である場合(ステップS127のNo)、一致すると判断された固有番号を第2の固有番号から消去し(ステップS129)、処理を終了する。
【0074】
図9において、車載器20−1を搭載した車両B2が駐車スペースS2に停車しようとしている際に、車載器20−2を搭載した車両B3が駐車場内に存在する場合について具体的に説明する。
【0075】
まず、車載器20−1の固有番号N2と、車載器20−2の固有番号N3とは、通信エリアA1への進入時に第1の固有番号として記憶部122に記憶される。
【0076】
駐車スペースS2に設置された車止め装置13−2は、車両センサにより停車した車両B2を感知し、感知信号をDSRC無線装置12へ出力する。CPU124は、感知信号を受信すると、車止め装置13−2の識別番号を記憶部122に記憶させ、第2の制御により通信部121から通信要求信号を発信させる。
【0077】
車載器20−1,20−2は、DSRCアンテナ11からの通信要求信号を受信すると、固有番号N2,N3をそれぞれDSRC無線装置12へ送信する。CPU124は、この固有番号N2,N3を第2の固有番号として記憶部122へ記憶する。そして、CPU124は、第1の固有番号と、第2の固有番号とが一致するか否かを判断する。ここでは、第1の固有番号として記憶されている固有番号N2,N3は、第2の固有番号として記憶されている固有番号N2,N3と一致する。
【0078】
CPU124は、第1の固有番号として記憶されている固有番号N2,N3と、第2の固有番号として記憶されている固有番号N2,N3とが一致すると判断した場合、記憶部122に記憶されている位置情報を参照し、第2の固有番号を返してきた車載器20−1,20−2の位置と、記憶部122に記憶された車止め装置13−2の設置位置とが一致するか否かを判断する。CPU124は、第2の固有番号を返してきた車載器20−1の位置と、記憶部122に記憶された車止め装置13−2の設置位置とが一致するため、車両B2が駐車スペースS2に駐車したと判断する。一方、CPU124は、第2の固有番号を返してきた車載器20−2の位置は、車止め装置13−2の設置位置とは異なるため、固有番号N3を第2の固有番号から消去する。
【0079】
なお、CPU124による駐車料金の課金動作は、第1の実施形態におけるCPU123による動作と同一である。
【0080】
以上のように、上記第2の実施形態では、電波発射源検出装置31により、電波を発信した車載器の位置情報を取得する。DSRC無線装置12は、第1の固有番号と第2の固有番号とが一致した場合、この位置情報を参照し、第2の固有番号が取得された際の車両の位置と、車止め装置の設置位置とを比較する。そして、DSRC無線装置12は、第2の固有番号が取得された際の車両の位置と、車止め装置の設置位置とが一致する場合、一致したと判断した固有番号により識別される車両が駐車場内に駐車されたと判断するようにしている。これにより、1台の車両が駐車スペースに駐車した際に、その周囲に別の車両が存在していても、正確に駐車した車両を判断することが可能となる。
【0081】
また、上記第2の実施形態でも、第1の実施形態と同様の課金処理を行うようにしている。これにより、駐車したと判断した車両に対してのみ駐車料金を請求することが可能となる。
【0082】
したがって、本発明に係る駐車車両管理システムによれば、小規模駐車場において、狭域無線通信を利用して、駐車場内の車両を管理することができる。
【0083】
[その他の実施形態]
なお、この発明は上記各実施形態に限定されるものではない。例えば上記各実施形態では、CPU123,124は、第1及び第2の固有番号が一致する場合、一致した固有番号により識別される車両が駐車場に駐車されたと判断していた。しかしながら、これに限定される訳ではない。例えば、CPU123,124は、一致した固有番号により識別される車両が駐車場に駐車されたと判断した後、その車両に対して「いっらっしゃいませ」等のコメントを発信するようにしても構わない。
【0084】
また、上記各実施形態では、CPU123,124は、第2の固有番号と第3の固有番号とが一致する場合に、第2の固有番号を取得した時刻と、第3の固有番号を取得した時刻とから駐車時間を算出し、この駐車時間に基づいて駐車料金を算出していた。しかしながら、これに限定される訳ではない。例えば、CPU123,124は、駐車料金が一定金額である場合には、第2の固有番号と第3の固有番号とが一致した場合に、一定の駐車料金を課するようにしても構わない。
【0085】
また、搭乗者に対して、駐車スペースの番号を入力させる旨の指示信号をさらに発信させるようにしても良い。これにより、CPU123,124は、車両の駐車位置をより正確に把握することが可能となり、課金処理の確実性が向上することとなる。
【0086】
また、上記各実施形態では、出庫に際して車載器20が起動され、起動された車載器20が通信要求信号に応じて出力した固有番号を第3の固有番号とする例について説明した。しかしながら、上記各実施形態はこれに限定される訳ではない。例えば、車載器20は、起動の際に起動信号を出力し、通信制御部1231は、車載器20からの起動信号を受信した場合に、DSRCアンテナ11から通信要求信号が送信されるように通信部121を制御する第3の制御を行うようにしても構わない。
【0087】
また、上記各実施形態では、駐車場内にDSRCアンテナ11が1台のみ設置されている場合について説明したが、駐車場内に複数のDSRCアンテナが設置され、複数のDSRCアンテナにより通信エリアを形成するようにしても同様に実施可能である。
【0088】
さらに、この発明は、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0089】
10…駐車車両管理システム
11…DSRCアンテナ
12…DSRC無線装置
121…通信部
122…記憶部
123,124…CPU
1231…通信制御部
1232,1241…メモリ管理部
1233,1242…判断部
1234…課金処理部
1235…車止め装置制御部
13−1〜13−4…車止め装置
20…車載器
21…DSRC部
211…アンテナ
212…通信部
213…CPU
214…メモリ
215…カードインタフェース
22…カーナビゲーション
31…電波発射源検出装置
32…受信アンテナ
A1,A2…無線エリア
B1,B2,B3…車両
S1〜S4…駐車スペース
【特許請求の範囲】
【請求項1】
車両が駐車可能な駐車スペースを複数有する駐車場に対して狭域通信の電波を送信することで、前記電波を受信可能な位置に存在する車両に搭載された車載器の固有番号を読み取る狭域通信部と、
前記複数の駐車スペース毎に設置され、前記駐車スペースに車両が停車されたことを感知すると感知信号を生成する車止め装置と、
予め設定された周期で前記狭域通信部に前記固有番号を読み取らせる第1の通信制御と、前記感知信号に応じて前記狭域通信部に前記固有番号を読み取らせる第2の通信制御とを行う通信制御部と、
前記第1の通信制御に応じて前記狭域通信部により読み取られた第1の固有番号を記憶する記憶部と、
前記第2の通信制御に応じて前記狭域通信部により第2の固有番号が読み取られた際に、前記記憶部に記憶された前記第1の固有番号と、前記第2の固有番号とが一致するか否かを判断し、前記第1及び第2の固有番号が一致する場合、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断する判断部と
を具備することを特徴とする駐車車両管理システム。
【請求項2】
前記判断部は、前記一致した固有番号が、前記一致するとの判断の後の第1の通信制御により読み取られない場合、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断することを特徴とする請求項1記載の駐車車両管理システム。
【請求項3】
前記車載器からの電波を受信し、前記電波の発射源の位置を検出する電波発射源検出装置をさらに具備し、
前記判断部は、前記電波発信源の位置を参照し、前記第2の固有番号が読み取られた位置と、前記駐車スペースの位置とが同一である場合、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断することを特徴とする請求項1記載の駐車車両管理システム。
【請求項4】
前記記憶部は、前記第2の固有番号をさらに記憶し、
前記狭域通信部は、前記第1の通信制御に応じて、起動された前記車載器から第3の固有番号を読み取り、
前記判断部は、前記第3の固有番号が読み取られた際に、前記記憶部に記憶された前記第2の固有番号と、前記第3の固有番号とが一致するか否かを判断することを特徴とする請求項1乃至3のいずれかに記載の駐車車両管理システム。
【請求項5】
前記通信制御部は、前記車載器が起動した旨の起動信号を受信すると、前記狭域通信部に前記固有番号を読み取らせる第3の通信制御をさらに行い、
前記記憶部は、前記第2の固有番号をさらに記憶し、
前記狭域通信部は、前記第3の通信制御に応じて、前記起動した車載器から第3の固有番号を読み取り、
前記判断部は、前記第3の固有番号が読み取られた際に、前記記憶部に記憶された前記第2の固有番号と、前記第3の固有番号とが一致するか否かを判断することを特徴とする請求項1乃至3のいずれかに記載の駐車車両管理システム。
【請求項6】
前記判断部により、前記第2及び第3の固有番号が一致すると判断された場合、前記第2の固有番号の取得時刻と、前記第3の固有番号の取得時刻とから駐車時間及び駐車料金を算出し、前記車載器に対して前記駐車料金の課金処理を行う課金処理部をさらに具備することを特徴とする請求項4及び5のいずれかに記載の駐車車両管理システム。
【請求項7】
前記課金処理部は、前記車載器に対してEMVに準じた課金処理を行うことを特徴とする請求項6記載の駐車車両管理システム。
【請求項8】
前記判断部が、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断した場合、前記車止め装置を制御し、前記車両の出庫を禁止する車止め装置制御部をさらに具備することを特徴とする請求項1乃至3のいずれかに記載の駐車車両管理システム。
【請求項9】
前記車止め装置制御部は、前記課金処理が完了すると、前記車止め装置を解除して、前記車両が出庫可能なようにすることを特徴とする請求項8記載の駐車車両管理システム。
【請求項1】
車両が駐車可能な駐車スペースを複数有する駐車場に対して狭域通信の電波を送信することで、前記電波を受信可能な位置に存在する車両に搭載された車載器の固有番号を読み取る狭域通信部と、
前記複数の駐車スペース毎に設置され、前記駐車スペースに車両が停車されたことを感知すると感知信号を生成する車止め装置と、
予め設定された周期で前記狭域通信部に前記固有番号を読み取らせる第1の通信制御と、前記感知信号に応じて前記狭域通信部に前記固有番号を読み取らせる第2の通信制御とを行う通信制御部と、
前記第1の通信制御に応じて前記狭域通信部により読み取られた第1の固有番号を記憶する記憶部と、
前記第2の通信制御に応じて前記狭域通信部により第2の固有番号が読み取られた際に、前記記憶部に記憶された前記第1の固有番号と、前記第2の固有番号とが一致するか否かを判断し、前記第1及び第2の固有番号が一致する場合、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断する判断部と
を具備することを特徴とする駐車車両管理システム。
【請求項2】
前記判断部は、前記一致した固有番号が、前記一致するとの判断の後の第1の通信制御により読み取られない場合、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断することを特徴とする請求項1記載の駐車車両管理システム。
【請求項3】
前記車載器からの電波を受信し、前記電波の発射源の位置を検出する電波発射源検出装置をさらに具備し、
前記判断部は、前記電波発信源の位置を参照し、前記第2の固有番号が読み取られた位置と、前記駐車スペースの位置とが同一である場合、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断することを特徴とする請求項1記載の駐車車両管理システム。
【請求項4】
前記記憶部は、前記第2の固有番号をさらに記憶し、
前記狭域通信部は、前記第1の通信制御に応じて、起動された前記車載器から第3の固有番号を読み取り、
前記判断部は、前記第3の固有番号が読み取られた際に、前記記憶部に記憶された前記第2の固有番号と、前記第3の固有番号とが一致するか否かを判断することを特徴とする請求項1乃至3のいずれかに記載の駐車車両管理システム。
【請求項5】
前記通信制御部は、前記車載器が起動した旨の起動信号を受信すると、前記狭域通信部に前記固有番号を読み取らせる第3の通信制御をさらに行い、
前記記憶部は、前記第2の固有番号をさらに記憶し、
前記狭域通信部は、前記第3の通信制御に応じて、前記起動した車載器から第3の固有番号を読み取り、
前記判断部は、前記第3の固有番号が読み取られた際に、前記記憶部に記憶された前記第2の固有番号と、前記第3の固有番号とが一致するか否かを判断することを特徴とする請求項1乃至3のいずれかに記載の駐車車両管理システム。
【請求項6】
前記判断部により、前記第2及び第3の固有番号が一致すると判断された場合、前記第2の固有番号の取得時刻と、前記第3の固有番号の取得時刻とから駐車時間及び駐車料金を算出し、前記車載器に対して前記駐車料金の課金処理を行う課金処理部をさらに具備することを特徴とする請求項4及び5のいずれかに記載の駐車車両管理システム。
【請求項7】
前記課金処理部は、前記車載器に対してEMVに準じた課金処理を行うことを特徴とする請求項6記載の駐車車両管理システム。
【請求項8】
前記判断部が、前記一致した固有番号を有する車載器を搭載した車両が前記駐車スペースに駐車されたと判断した場合、前記車止め装置を制御し、前記車両の出庫を禁止する車止め装置制御部をさらに具備することを特徴とする請求項1乃至3のいずれかに記載の駐車車両管理システム。
【請求項9】
前記車止め装置制御部は、前記課金処理が完了すると、前記車止め装置を解除して、前記車両が出庫可能なようにすることを特徴とする請求項8記載の駐車車両管理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−175474(P2011−175474A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2010−39188(P2010−39188)
【出願日】平成22年2月24日(2010.2.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成22年2月24日(2010.2.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]