
騒音測定装置、騒音測定システム、騒音測定方法および音線解析装置
【課題】構造物や特徴的な地形等の基準を利用せずとも、騒音測定地点を簡単かつ正確に同定することのできる騒音測定装置を提供する。
【解決手段】騒音測定システム3の固定局2は、第1衛星測位装置21と第1記録部22を有し、移動局1は、騒音計11、第2衛星測位装置12および第2記録部11を有する。第1衛星測位装置21は、地球上の所定の基準点に固定され、この基準点を経時的に測位して基準点データを得る。第1記録部22は、基準点データを時刻と対応づけて記録する。第2衛星測位装置12は、固定局2の第1衛星測位装置21が上記基準点を測位して基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて、騒音計11の位置を測位する。第2記録部11は、騒音計11によって測定された騒音レベルを第2衛星測位装置12によって測位された騒音計11の位置および時刻と対応づけて記録する。
【解決手段】騒音測定システム3の固定局2は、第1衛星測位装置21と第1記録部22を有し、移動局1は、騒音計11、第2衛星測位装置12および第2記録部11を有する。第1衛星測位装置21は、地球上の所定の基準点に固定され、この基準点を経時的に測位して基準点データを得る。第1記録部22は、基準点データを時刻と対応づけて記録する。第2衛星測位装置12は、固定局2の第1衛星測位装置21が上記基準点を測位して基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて、騒音計11の位置を測位する。第2記録部11は、騒音計11によって測定された騒音レベルを第2衛星測位装置12によって測位された騒音計11の位置および時刻と対応づけて記録する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、騒音レベルを測定し、測定された騒音レベルのデータをその騒音レベルの測定地点の位置情報と対応づけて記録あるいは表示する騒音測定装置、騒音測定システムおよび騒音測定方法に関する。
また、高所音源の騒音に対する定性的な寄与を、音線理論式によりシミュレーションして予測する音線解析装置に関する。
【背景技術】
【0002】
工場や事業場等の騒音の発生源から発生する騒音が、その騒音の発生源の周囲の環境に与える影響を調査する目的で、環境モニタリングが実施されている。この環境モニタリングにおいては、工場や事業場の周囲に複数箇所設定された所定の騒音測定地点で、例えば数カ月毎等定期的に、騒音レベルの測定が行われる。
【0003】
このような環境モニタリングでは、通常は、上記所定の騒音測定地点に騒音測定装置を永続的に固定して騒音レベルの測定を行うのではなく、数カ月毎等の騒音レベルの測定を行う度に、所定の騒音測定地点に騒音測定装置を設置し、騒音レベルの測定が終了したら騒音測定装置はその都度撤去している。
そのため、各騒音測定地点について長期間にわたって経時的に騒音レベルの測定を行うためには、前回騒音レベルの測定を行った騒音測定地点と同じ地点に騒音測定装置を配置する必要がある。しかし、環境モニタリングにおける騒音測定地点の多くは、工場や事業場等の敷地外の道路上等であるため、騒音測定地点の目印として測量鋲等を設置することができない場合が多い。このため、環境モニタリングにおける騒音レベルの測定では、騒音測定地点の周囲にある構造物や特徴的な地形等を基準として、地図を参照しながら目視で騒音測定地点のおおよその位置を決定し、その位置に騒音測定装置を配置することが行われている。
【0004】
しかし、騒音測定地点の位置を決定する際の基準として利用される構造物は、長期間にわたって環境モニタリングを実施する間には解体・撤去される場合もあり、この場合には、騒音測定地点の位置を決定する際の基準が失われることとなってしまう。また、構造物や特徴的な地形等を基準として騒音測定地点のおおよその位置を決定して騒音測定装置を配置しても、騒音測定地点の位置には、どうしても毎回ばらつきが生じてしまう。さらに、騒音測定地点の周囲に構造物や特徴的な地形等が無い場合には、騒音測定地点を同定することが難しかった。
【0005】
一方、例えば発電所の敷地内に設置してある煙突等のように、高所から発生する音が施設境界あるいは近隣民家の騒音に対する定性的な寄与を把握する場合、従来は音線理論式による数値シミュレーション予測(音線解析による騒音予測)を行っている。このような音線解析の予測パラメータは、煙突出口付近の近接騒音実測値と、音波伝播経路における風速分布推定値および空気温度推測値である。
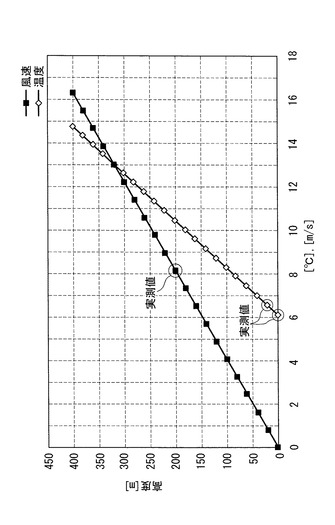
風速の推定値は、例えば図9に示すように、煙突出口付近(例えば高度200m)の実測値を用い、地上0mを風速0m/sとする1次の近似式により、空間の風速分布を推定したものである。
温度の推定値は、例えば図9に示すように、地上高30mおよび地上1mの2地点で測定した実測値を用い、1次の近似式により空間の温度分布を推定したものである。
【0006】
騒音レベルの測定を、騒音測定装置の位置と関連づけて実施する騒音測定装置として、例えば特許文献1、2に記載のものがある。
しかし、特許文献1、2に記載の騒音測定装置は、騒音レベルと、測定対象とされる騒音の発生源から騒音測定装置までの距離とを測定し、これらを対応づけて記録あるいは表示するものである。したがって、この騒音測定装置を上記の工場や事業場等の周囲における騒音環境の環境モニタリングの用途に用いる場合、騒音測定装置が位置している騒音測定地点を同定するには、騒音測定装置からの距離を測定する対象物として、構造物や特徴的な地形等の基準が必要とされることに変わりはない。そして、この基準となる構造物や特徴的な地形等から騒音測定装置までの距離を測定し、この距離を参考にして、騒音測定地点を決定することになる。
【0007】
また、高所音源の騒音に対する定性的な寄与について、音線理論式を用いたシミュレーションで予測する音線解析装置に関する公知文献は見当たらない。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平7−75086号公報
【特許文献2】特開平7−190848号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
このように、従来の騒音測定装置およびこれを利用した騒音測定方法では、騒音測定装置の位置を定量的に把握できないために、騒音測定地点を正確に定めにくかった。
また、騒音レベルの測定を実施する度に騒音測定装置を設置し、測定が終了するとその都度騒音測定装置を撤去するので、長期間にわたって経時的に騒音レベルの測定を行う場合、騒音測定地点の位置が変化してしまう問題があった。このため、騒音レベルの測定後にデータを見直したときに、騒音データと騒音測定地点の位置情報の整合が取れない場合があった。
【0010】
そして、高所から発生する音の音線解析による騒音予測は、音波伝播経路の空気温度および風速分布として推定値が使用されている。しかし、空気温度および風速分布の推定精度は未検証であり、したがって、音線解析による音波伝播予測の推定精度についても未検証であるから、騒音予測の精度をより一層向上させることが望まれる。
本発明は、このような事情に鑑みてなされたものであって、構造物や特徴的な地形等の基準を利用せずとも、騒音測定地点を簡単かつ正確に同定することのできる騒音測定装置の提供を目的とする。
さらに、本発明は、高所から発生する音の音線解析(騒音予測)についても、温度及び風速の実測値を利用できるようにして、精度の高い予測を可能にした音線解析装置の提供を目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するために、本発明は以下の手段を採用する。
【0012】
本発明の第1の態様に係る騒音測定装置は、騒音レベルを測定する騒音計と、前記騒音計の位置を測位する衛星測位装置と、前記騒音計によって測定された騒音レベルを該騒音レベルが測定されたと同時に前記衛星測位装置によって測位された前記騒音計の位置と対応づけて記録および/または表示する記録表示部とを備えている。
【0013】
この騒音測定装置によれば、衛星測位装置によって騒音計の位置が測位されるので、騒音計の位置を定量的に把握することができる。したがって、構造物や特徴的な地形等の基準を利用せずとも、騒音測定装置による騒音測定地点を簡単かつ正確に同定することができる。特に、予め定められている騒音測定地点に騒音測定装置を搬入して騒音レベルを測定する場合に、構造物や特徴的な地形等の基準を利用せずとも、騒音測定装置を騒音測定地点に正確に設置して騒音レベルを測定することが簡単にできる。
【0014】
本発明の第2の態様に係る騒音測定システムは、地球上の所定の基準点に固定された第1衛星測位装置と、該第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データを時刻と対応づけて記録する第1記録部とを有する固定局と、騒音レベルを測定する騒音計と、前記固定局の前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて前記騒音計の位置を測位する第2衛星測位装置と、前記騒音計によって測定された騒音レベルを該騒音レベルが測定されたと同時に前記第2衛星測位装置によって測位された前記騒音計の位置および該騒音レベルが測定された時刻と対応づけて記録する第2記録部とを有する移動局とを備えている。
【0015】
この騒音測定システムによれば、まず騒音レベルの測定が終了した後、固定局の第1記録部に記録されたデータと、移動局の第2記録部に記録されたデータとを回収し、第1記録部に時刻と対応づけて記録された基準点データが各時刻において含む誤差を算出することによって、第2記録部に騒音レベルおよび時刻と対応づけて記録された騒音計の位置を、同時刻における基準点データの誤差を用いて補正することができる。
【0016】
これは、固定局の第1衛星測位装置が前記所定の基準点を測位して基準点データを得るのに用いる人工衛星と、移動局の第2衛星測位装置が騒音計の位置を測位するのに用いる人工衛星が共通しているために、各時刻に第2衛星測位装置によって測位された騒音計の位置が含む測位誤差は、基準点データが同時刻において含む測位誤差と等しいからである。よって、基準点データが各時刻において含む誤差を算出してこれを用いれば、第2衛星測位装置によって測位された騒音計の位置を補正することができる。
【0017】
ここで、騒音計の位置の補正は、騒音の測定中に実施されるのではなく、騒音の測定が終了した後、固定局の第1記録部に記録されたデータと、移動局の第2記録部に記録されたデータとを回収して行われる。このため、騒音の測定中には、固定局と移動局との間でデータの送受信等を行う必要がないので、固定局と移動局との間を無線あるいは有線によって接続する必要がない。したがって、固定局と移動局に送信機や受信機等の機器を備える必要が無く、騒音測定システムを簡素かつ安価に構成することができる。
【0018】
ここで、固定局の第1衛星測位装置が前記所定の基準点を測位して得られる基準点データが各時刻において含む誤差は、次のようにして算出できる。
すなわち、第1衛星測位装置が固定される前記所定の基準点は、地球上における座標が既知である点とする。これにより、この既知の座標に対する、各時刻における基準点データの差を、基準点データが各時刻において含む誤差として算出できる。
あるいは、第1衛星測位装置が固定される前記所定の基準点は、地球上における座標が不明な点であってもよい。この場合には、固定局の第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データの平均値を算出する。そして、この基準点データの平均値に対する、各時刻における前記基準点データの偏差を、該基準点データが各時刻において含む誤差として算出できる。
【0019】
本発明の第3の態様に係る騒音測定システムは、地球上の所定の基準点に固定された第1衛星測位装置と、該第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データの誤差を送信する送信機とを有する固定局と、騒音レベルを測定する騒音計と、前記固定局の前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて前記騒音計の位置を測位する第2衛星測位装置と、前記固定局の前記送信機から送信された前記基準点データの誤差を受信する受信機と、前記第2衛星測位装置によって測位された前記騒音計の位置を前記受信機によって受信された前記基準点データの誤差を用いて補正する補正部と、前記騒音計によって測定された騒音レベルを前記補正部によって補正された前記騒音計の位置と対応づけて記録および/または表示する記録表示部とを有する移動局とを備えている。
【0020】
本発明の第2の態様または第3の態様に係る騒音測定システムにおいては、前記第1衛星測位装置と前記第2衛星測位装置は、前記人工衛星からの信号に含まれる該人工衛星の軌道情報を用いて、前記所定の基準点と前記騒音計の位置を測位するのに用いる前記人工衛星を選択し、これにより、前記第2衛星測位装置は、前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いることが可能とされていることが好ましい。
【0021】
本発明の第2の態様に係る騒音測定システムにおいては、前記第1衛星測位装置が固定された前記所定の基準点の地球上における座標は既知であり、前記基準点データの誤差は、既知の前記座標に対する、各時刻における前記基準点データの差であることが好ましい。
【0022】
あるいは、本発明の第2の態様に係る騒音測定システムにおいては、前記基準点データの誤差は、前記第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた前記基準点データの平均値に対する、各時刻における前記基準点データの偏差であることが好ましい。
【0023】
この騒音測定システムによれば、固定局の送信機は、基準点データの、所定の基準点の既知の座標に対する差を、基準点データの誤差として算出する。あるいは、固定局の送信機は、第1衛星測位装置によって前記所定の基準点を経時的に測位することによって得られた基準点データの平均値を算出し、この基準点データの平均値に対する、各時刻における基準点データの偏差を、基準点データの誤差として算出する。固定局の送信機は、この基準点データの誤差を送信する。
そして、移動局では、受信機によって基準点データの誤差が受信される。さらに、補正部によって、第2衛星測位装置によって測位された騒音計の位置を、同時刻における基準点データの偏差を用いて補正することができる。
【0024】
これは、固定局の第1衛星測位装置が前記所定の基準点を測位して基準点データを得るのに用いる人工衛星と、移動局の第2衛星測位装置が騒音計の位置を測位するのに用いる人工衛星が共通しているために、各時刻に第2衛星測位装置によって測位された騒音計の位置が含む測定誤差は、同時刻における基準点データに含まれる測位誤差、すなわち基準点データの偏差と等しいからである。よって、各時刻における基準点データの偏差を算出してこれを用いれば、第2衛星測位装置によって測位された騒音計の位置を補正することができる。
【0025】
ここで、固定局の送信機と移動局の受信機との間における基準点データの送受信は、電磁波等を利用して無線で行われてもよく、あるいは有線で行われてもよい。基準点データの送受信が無線で行われる場合には、固定局の位置に影響を受けることなく移動局の移動を行いやすくなる。
【0026】
本発明の第4の態様に係る騒音測定方法は、上記第2の態様に係る騒音測定システムを用いた騒音測定方法であって、前記第1衛星測位装置が固定された前記所定の基準点の地球上における座標は既知であり、既知の前記座標に対する、各時刻における前記基準点データの差を、該基準点データが各時刻において含む誤差として算出し、前記移動局の前記第2衛星測位装置によって測位され、前記第2記録部に前記騒音レベルおよび時刻と対応づけて記録された前記騒音計の位置を、同時刻における前記基準点データの誤差を用いて補正するものである。
【0027】
あるいは、本発明の第4の態様に係る騒音測定方法は、上記第2の態様に係る騒音測定システムを用いた騒音測定方法であって、前記固定局の前記第1衛星測位装置によって前記所定の基準点を経時的に測位して得られ、前記第1記録部に時刻と対応づけて記録された前記基準点データの平均値を算出し、前記基準点データの平均値に対する、各時刻における前記基準点データの偏差を、該基準点データが各時刻において含む誤差として算出し、前記移動局の前記第2衛星測位装置によって測位され、前記第2記録部に前記騒音レベルおよび時刻と対応づけて記録された前記騒音計の位置を、同時刻における前記基準点データの誤差を用いて補正するものである。
【0028】
この騒音測定方法によれば、騒音測定システムによる騒音の測定が終了した後、移動局の第2記録部に記録された騒音計の位置を、固定局の第1記録部に記録された基準点データが含む誤差を用いて補正することが簡単にできる。
【0029】
本発明の第5の態様に係る音線解析装置は、騒音レベルを測定する騒音計と、前記騒音計の位置を測位する衛星測位装置と、空気温度を測定する温度センサと、風況を測定する風況検出センサと、前記騒音計、前記衛星測位装置、前記温度センサおよび前記風況検出センサで取得した測定値を送信する送信装置とが設けられて空中に無動力で浮揚可能な浮揚体部と、前記送信装置から送信された測定値を受信する受信装置と、前記受信装置で受信した測定値に基づいて音線理論式による数値シミュレーションを行う音線解析部とを備えている。
【0030】
この音線解析装置によれば、騒音を出さない浮揚体部が高所に浮揚することで、高所から発生する音の騒音レベルの実測値を測定するとともに、実測値を測定した高所の測定位置(騒音計の位置)を衛星測位装置により測位して知ることができる。さらに、浮揚体部は、高所の騒音レベル測定位置における空気温度や風況(風速や風向)の実測値を取得できるので、音線解析部においては、高所における騒音レベルだけでなく、音波伝播経路の空気温度や風速分布についても実測値を用い、高精度の音線解析を行うことができる。
【0031】
本発明の第6の態様に係る音線解析装置は、高所音源の位置を測位する衛星測位装置と、空気温度を測定する温度センサと、風況を測定する風況検出センサと、前記衛星測位装置、前記温度センサおよび前記風況検出センサで取得した測定値を送信する送信装置とが設けられて空中に無動力で浮揚可能な浮揚体部と、前記送信装置から送信された測定値を受信する受信装置と、前記受信装置で受信した測定値および前記高所音源の騒音実測値に基づいて音線理論式による数値シミュレーションを行う音線解析部とを備えている。
【0032】
この音線解析装置によれば、騒音を出さない浮揚体部が高所に浮揚することで、従来と同様にして高所から発生する音の近接騒音実測値を測定した高所測定位置について、近傍位置を衛星測位装置により測位して知ることができる。さらに、浮揚体部は、近接騒音実測値の測定位置近傍における空気温度や風況(風速や風向)の実測値を取得できるので、音線解析部においては、高所における騒音レベルだけでなく、音波伝播経路の空気温度や風速分布についても実測値を用い、高精度の音線解析を行うことができる。
【発明の効果】
【0033】
上述した本発明の騒音測定装置、騒音測定システム、騒音測定方法および音線解析装置によれば、衛星測位装置によって騒音計の位置が測位されるので、騒音計の位置を定量的に把握することができる。したがって、構造物や特徴的な地形等の基準を利用せずとも、騒音測定地点を簡単かつ正確に同定することができる。特に、予め定められている騒音測定地点に騒音測定装置を搬入して騒音レベルを測定する場合に、構造物や特徴的な地形等の基準を利用せずとも、騒音測定装置を騒音測定地点に正確に設置して騒音レベルを測定することが簡単にできる。
【0034】
また、高所の音源から発生する音の音線解析による騒音予測を行う音線解析装置は、音波伝播経路の空気温度および風速分布として実測値を使用できるようになるので、推定精度未検証の問題を解消して騒音予測精度を向上させることが可能になる。
さらに、温度及び風速の実測値から音線解析装置が予測した騒音の予測結果を、実際の音圧レベル実測値と比較することにより、音線解析装置による騒音予測精度の検証が可能になる。
【図面の簡単な説明】
【0035】
【図1】本発明の第1実施形態に係る騒音測定装置を示す概略図である。
【図2】本発明の第2実施形態に係る騒音測定システムおよび騒音測定方法を示す概略図である。
【図3】本発明の第3実施形態に係る騒音測定システムを示す概略図である。
【図4】本発明の第4実施形態に係る音線解析装置を示す概略図である。
【図5】本発明の第5実施形態に係る音線解析装置を示す概略図である。
【図6】温度及び風速が一様である場合の音線特性例を示す平面図である。
【図7】温度及び風速が一様である場合の音線特性例を示す側面図である。
【図8】温度及び風速が一様でない場合の音線特性例を示す側面図である。
【図9】音波伝播経路の空気温度および風速分布について、1次の近似式より得られる推定値の一例を示す図である。
【発明を実施するための形態】
【0036】
以下に、本発明に係る騒音測定装置、騒音測定システム、騒音測定方法および音線解析装置の実施形態について、図面を参照して説明する。
【0037】
[第1実施形態]
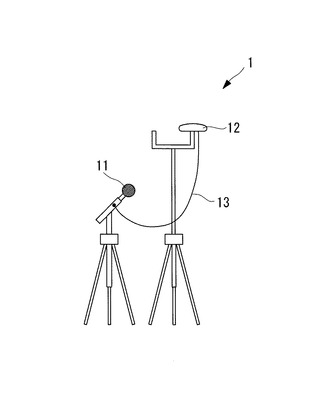
図1に示すように、本実施形態に係る騒音測定装置1は、騒音レベルを測定する騒音計11と、GPS(Global Positioning System)装置(衛星測位装置)12と、騒音計11に一体化された記録表示部とを備えている。
GPS装置12は、ケーブル13で騒音計11に接続されている。騒音計11とGPS装置12とは、それぞれ三脚に固定されている。GPS装置12が騒音計11の位置を測位できるように、騒音計11を固定する三脚と、GPS装置12を固定する三脚とは、互いに近接して配置される。
【0038】
GPS装置12としては、GPSアンテナおよびGPS受信機を備えた汎用のGPSユニットが用いられる。これに代えて、より精度の高いDGPS(Differential Global Positioning System)方式のGPSユニットを用いてもよい。
【0039】
騒音計11に一体化された記録表示部(不図示)では、騒音計11によって測定された騒音レベルを、この騒音レベルが測定されたと同時にGPS装置12によって測位された騒音計11の位置と対応づけて記録する。つまり、騒音計11によって騒音レベルが測定されるのと同時に、GPS装置12によって騒音計11の位置(経度、緯度および標高)が測位される。そして、この騒音レベルと騒音計11の位置とが記録表示部によって対応づけて記録される。
記録表示部は、LCD(Liquid Crystal Display)等からなるディスプレイを備えており、騒音計11によって測定された騒音レベルと、GPS装置12によって測位された騒音計11の位置とが対応付けられて表示される。
【0040】
第1実施形態に係る騒音測定装置1によれば、GPS装置12によって騒音計の位置が測位されるので、騒音計11の位置を定量的に把握することができる。すなわち、騒音計11の位置を、経度、緯度および標高の数値として把握することができる。
したがって、構造物や特徴的な地形等の基準を利用せずとも、騒音測定装置1による騒音測定地点を簡単かつ正確に同定することができる。特に、予め決められている騒音測定地点に騒音測定装置1を搬入して騒音を測定する場合には、構造物や特徴的な地形等の基準となる目印を利用せずとも、記録表示部に表示される騒音計11の位置を確認しながら騒音測定装置1を騒音測定地点に正確に設置して、騒音レベルを簡単に測定することができる。
【0041】
[第2実施形態]
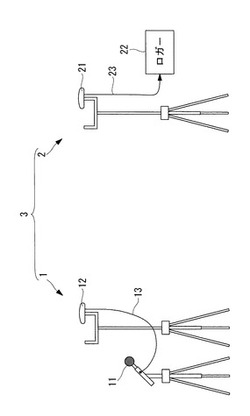
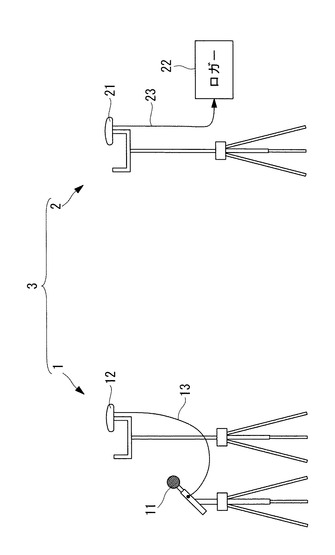
図2に示すように、第2実施形態に係る騒音測定システム3は、座標(経度、緯度および標高)が既知の地点上に固定される固定局2と、第1実施形態の騒音測定装置1とほぼ同様の構成を有している移動局1とを備えている。
【0042】
固定局2は、第1GPS装置(第1衛星測位装置)21とロガー(第1記録部)22とを有している。第1GPS装置21は、三脚に固定されている。騒音測定システム3による騒音の測定中、第1GPS装置21を固定する三脚は、経度、緯度および標高が既知の地点上に据え付けて動かない状態を保つようにする。これにより、騒音測定システム3による騒音の測定中、第1GPS装置21は、地球上の所定の基準点(経度X、緯度Y、標高Z)に固定された状態が保たれる。第1GPS装置21は、ケーブル23でロガー22に接続されている。
【0043】
移動局1は、騒音レベルを測定する騒音計11と、第2GPS装置(第2衛星測位装置)12とを有している。また、移動局1は、第1実施形態の騒音測定装置1の記録表示部に代えて、騒音計11に一体化された第2記録部(不図示)を有している。
第2GPS装置12は、ケーブル13で騒音計11に接続されている。騒音計11とGPS装置12とは、それぞれ三脚に固定されている。そして、第2GPS装置12が騒音計11の位置を測位できるように、騒音計11を固定する三脚と、第2GPS装置12を固定する三脚とは、互いに近接して配置される。
【0044】
固定局2の第1GPS装置21および移動局1のGPS装置12としては、それぞれGPSアンテナおよびGPS受信機を備えた汎用のGPSユニットが用いられるが、これに代えて、より精度の高いDGPS方式のGPSユニットを用いてもよい。
【0045】
固定局2の第1GPS装置21は、前記所定の基準点(経度X、緯度Y、標高Z)を経時的に測位する。所定の基準点の座標は不変であるが、第1GPS装置21によって所定の基準点を測位して得られる基準点データは測位誤差を含んでおり、時系列で微妙に変動するデータとなる。この誤差を含む基準点データ(経度X’、緯度Y’、標高Z’)を時刻と対応づけて出力する。ロガー22は、第1GPS装置21から出力された基準点データを時刻と対応づけて記録する。
【0046】
移動局1の第2GPS装置12は、固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いたのと同じGPS衛星(人工衛星)からの信号を用いて、騒音計11の位置(緯度および経度)を測位する。
【0047】
移動局1の第2GPS装置12が騒音計11の位置を測位する際に、固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いたのと同じGPS衛星からの信号を用いるのは、次の理由による。
地球上を周回するGPS衛星は、現在31基程度あり、地球上の一地点で7基程度のGPS装置からの電波を受信可能となっている。通常のGPS装置は、この7基程度のGPS衛星のうち電波強度の強い4基程度を選択し、この電波強度の強い4基程度のGPS衛星からの電波を利用して測位を行うようになっている。
【0048】
ここで、地球上の同一地点において、2台のGPS装置で測位を行った場合、各GPS装置が測位に用いる4基程度のGPS衛星は一致するとは限らない。そして、2台のGPS装置が測位に用いるGPS衛星が一致しない場合、これら2台のGPS装置の測位結果の間には、数mから数十m程度の誤差が生じることが知られている。これは、測位に用いるGPS衛星が異なると、当然そのGPS衛星の位置は異なるため、異なる位置にあるGPS衛星を基準として三角測量を行った結果も異なってくるためである。
しかし、2台のGPS装置が測位に用いるGPS衛星が一致しているならば、このような誤差は生じない。このため、移動局1の第2GPS装置12が騒音計11の位置を測位する際には、固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いたのと同じGPS衛星からの信号を用いるようにしている。
【0049】
各GPS衛星は、それぞれ所定の公転周期で所定の軌道を周回している。そこで、固定局2の第1GPS装置21と移動局1の第2GPS装置12は、これらのGPS衛星のうち、各時刻においてどのGPS衛星からの信号を受信することができるかを計算して判定する機能を、それぞれ内蔵している。具体的には、次の通りである。
各GPS衛星は、約6日毎に更新される全GPS衛星の概略の軌道情報(アルマナックデータ)と、約90分毎に更新されるそのGPS衛星自身の詳細な軌道情報(エフェメリスデータ)を含む信号を、30秒周期で地上に向けて電波で送信している。固定局2の第1GPS装置21と移動局1の第2GPS装置12とは、これら概略の軌道情報と詳細な軌道情報とを用いて、測位時における各GPS衛星の軌道を計算し、互いに同じGPS衛星からの信号を用いて測位を行うようにする。これによって、移動局1の第2GPS装置12が騒音計11の位置を測位するのに用いるGPS衛星の信号と、同時刻に固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いるGPS衛星の信号とは、同じものとなっている。
【0050】
移動局1の騒音計11に一体化された第2記録部は、騒音計11によって測定された騒音レベルを、この騒音レベルが測定されたと同時に第2GPS装置12によって測位された騒音計11の位置、およびこの騒音レベルが測定された時刻と対応づけて記録する。
ここで、固定局2の第1GPS装置21および移動局1の第2GPS装置12が受信するGPS衛星からの信号には、GPS衛星に搭載された原子時計からの時刻のデータが含まれている。この時刻のデータを利用して、第1GPS装置21および第2GPS装置12が保有し出力する時刻は、常に正確に保たれる。この結果、固定局2のロガー22が基準点データと対応づけて記録する時刻と、移動局1の第2記録部が騒音レベルおよび騒音計11の位置と対応づけて記録する時刻とは、常に正確であり、互いに同期がとれた状態となっている。
【0051】
本騒音測定システム3を用いた騒音の測定が終了したら、まず、固定局2のロガー22に記録されたデータと、移動局1の第2記録部に記録されたデータとを回収する。そして、固定局2の第1GPS装置21によって経時的に測位され、ロガー22に時刻と対応づけて記録された各時刻における基準点データ(経度X’、緯度Y’、標高Z’)の、所定の基準点の既知の座標(経度X、緯度Y、標高Z)に対する差(ΔX=X’−X,ΔY=Y’−Y,ΔZ=Z’−Z)を、各時刻において基準点データが含む誤差として算出する。さらに、移動局1の第2GPS装置12によって測位され、第2記録部に騒音レベルおよび時刻と対応づけて記録された騒音計11の位置を、同時刻における基準点データの誤差(ΔX,ΔY,ΔZ)を用いて補正する。
【0052】
あるいは、固定局2は、経度、緯度および標高が既知の地点上に固定されるのではなく、経度、緯度および標高が不明の地点上に固定されていてもよい。
この場合は、本騒音測定システム3を用いた騒音の測定が終了したら、まず、固定局2のロガー22に記録されたデータと、移動局1の第2記録部に記録されたデータとを回収する。そして、固定局2の第1GPS装置21によって経時的に測位され、ロガー22に時刻と対応づけて記録された基準点データ(経度X’、緯度Y’、標高Z’)の平均値(X,Y,Z)を算出し、この基準点データの平均値に対する、各時刻における基準点データの偏差(ΔX=X’−X,ΔY=Y’−Y,ΔZ=Z’−Z)を、各時刻において基準点データが含む誤差として算出する。さらに、移動局1の第2GPS装置12によって測位され、第2記録部に騒音レベルおよび時刻と対応づけて記録された騒音計11の位置を、同時刻における基準点データの誤差(ΔX,ΔY,ΔZ)を用いて補正する。
【0053】
第2実施形態に係る騒音測定システム3によれば、第1実施形態に係る騒音測定装置1と同様の効果が得られる。
また、第2実施形態に係る騒音測定システム3によれば、上記のように、騒音の測定が終了した後、固定局2のロガー22に記録されたデータと、移動局1の第2記録部に記録されたデータとを回収し、ロガー22に記録された基準点データが各時刻において含む誤差を算出し、第2記録部に騒音レベルおよび時刻と対応づけて記録された騒音計の位置を、同時刻において基準点データが含む誤差を用いて補正することができる。
【0054】
これは、固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いるGPS衛星と、移動局1の第2GPS装置12が騒音計11の位置を測位するのに用いるGPS衛星が共通しているために、各時刻に第2GPS装置12によって測位された騒音計11の位置が含む測位誤差は、同時刻において基準点データが含む測位誤差と等しいからである。よって、各時刻における基準点データの誤差を算出してこれを用いれば、第2GPS装置12によって測位された騒音計の位置を補正することができる。
【0055】
ここで、騒音計11の位置の補正は、騒音の測定中に実施されるのではなく、騒音の測定が終了した後、固定局2のロガー22に記録されたデータと、移動局1の第2記録部に記録されたデータとを回収して行われる。このため、騒音の測定中には、固定局2と移動局1との間でデータの送受信等を行う必要がないので、固定局2と移動局1との間を無線あるいは有線によって接続する必要がない。したがって、固定局2と移動局1に送信機や受信機等の機器を備える必要が無く、騒音計の位置を高い精度で測位することのできる騒音測定システム3を簡素かつ安価に構成することができる。
【0056】
[第3実施形態]
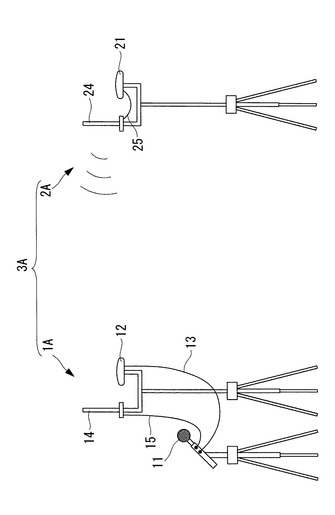
図3に示すように、第3実施形態に係る騒音測定システム3Aは、第2実施形態に係る騒音測定システム3と同様に、移動局1Aと、座標(経度、緯度および標高)が既知の地点上に固定される固定局2Aとを備えている。
【0057】
本実施形態の固定局2Aは、第1GPS装置(第1衛星測位装置)21と送信機24とを有している。第1GPS装置21と送信機24とは、三脚に固定されている。騒音測定システム3Aによる騒音の測定中、第1GPS装置21を固定する三脚は、経度、緯度および標高が既知の地点上に据え付けて動かない状態を保つようにする。これにより、騒音測定システム3Aによる騒音の測定中において、第1GPS装置21は、地球上の所定の基準点(経度X、緯度Y、標高Z)に固定された状態が保たれる。送信機24は、ケーブル25で第1GPS装置21に接続されている。
【0058】
移動局1Aは、騒音レベルを測定する騒音計11と、第2GPS装置(第2衛星測位装置)12と、受信機14とを有している。また、移動局1Aは、第2実施形態の騒音測定システム3の移動局1の第2記録部に代えて、騒音計11に一体化された図示しない補正部および記録表示部を有している。第2GPS装置12は、ケーブル13で騒音計11に接続され、受信機14は、ケーブル15で騒音計11に接続されている。
騒音計11は一方の三脚に固定され、GPS装置12と受信機14とは他方の三脚に固定されている。そして、第2GPS装置12が騒音計11の位置を測位できるように、騒音計11を固定する三脚と、第2GPS装置12を固定する三脚とは、互いに近接して配置される。
【0059】
固定局2Aの第1GPS装置21および移動局1AのGPS装置12としては、それぞれGPSアンテナおよびGPS受信機を備えた汎用のGPSユニットが用いられるが、これに代えて、より精度の高いDGPS方式のGPSユニットを用いてもよい。
【0060】
固定局2Aの第1GPS装置21は、前記所定の基準点(経度X、緯度Y、標高Z)を経時的に測位する。所定の基準点の座標は不変であるが、第1GPS装置21によって所定の基準点を測位して得られる基準点データは測位誤差を含んでおり、時系列で微妙に変動するデータとなる。この誤差を含む基準点データ(経度X’、緯度Y’、標高Z’)を時刻と対応づけて出力する。
【0061】
固定局2Aの送信機24は、第1GPS装置21によって所定の基準点を経時的に測位して得られた、各時刻における基準点データ(経度X’、緯度Y’、標高Z’)の、所定の基準点の既知の座標(経度X、緯度Y、標高Z)に対する差(ΔX=X’−X,ΔY=Y’−Y,ΔZ=Z’−Z)を、基準点データの誤差として算出し、送信する。
【0062】
あるいは、固定局2Aは、経度、緯度および標高が既知の地点上に固定されるのではなく、経度、緯度および標高が不明の地点上に固定されていてもよい。
この場合は、第1GPS装置21によって経時的に測位された基準点データ(経度X’、緯度Y’、標高Z’)の平均値(X,Y,Z)を算出し、この基準点データの平均値に対する、各時刻における基準点データの偏差(ΔX=X’−X,ΔY=Y’−Y,ΔZ=Z’−Z)を、基準点データの誤差として算出して、送信する。
【0063】
移動局1Aの第2GPS装置12は、固定局2Aの第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いたのと同じGPS衛星からの信号を用いて、騒音計11の位置(経度、緯度および標高)を測位する。
移動局1Aの第2GPS装置12が騒音計11の位置を測位するのに用いるGPS衛星の信号と、同時刻に固定局2Aの第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いるGPS衛星の信号とが、同じものとなる仕組みは、第2実施形態に示したとおりである。
【0064】
移動局1Aの受信機14は、固定局2Aの送信機24から送信された基準点データの誤差を受信する。
騒音計に一体化された補正部は、第2GPS装置12によって測位された騒音計の位置11を、同時刻に受信機14によって受信された基準点データの誤差(ΔX,ΔY,ΔZ)を用いて、補正する。
【0065】
騒音計11に一体化された記録表示部は、騒音計11によって測定された騒音レベルを、この騒音レベルが測定されたと同時にGPS装置12によって測位され、補正部によって補正された騒音計11の位置と対応づけて記録する。つまり、騒音計11によって騒音レベルが測定されると同時に、GPS装置12によって騒音計11の位置(経度、緯度および標高)が測位される。そして、この騒音レベルと補正済みの騒音計11の位置とが記録表示部によって対応づけて記録される。記録表示部は、LCD(Liquid Crystal Display)等からなるディスプレイを備えており、騒音計11によって測定された騒音レベルと、GPS装置12によって測位された騒音計11の位置とが対応付けられて表示される。
【0066】
第3実施形態に係る騒音測定システム3Aによれば、第1実施形態に係る騒音測定装置1と同様の効果が得られる。
また、第3実施形態に係る騒音測定システム3Aによれば、固定局2Aの送信機24は、基準点データの誤差を算出して、送信する。そして、移動局1Aでは、受信機14によって基準点データの誤差が受信される。さらに、補正部によって、第2GPS装置12によって測位された騒音計11の位置を、同時刻における基準点データの誤差を用いて補正することができる。
【0067】
これは、固定局2Aの第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いるGPS衛星と、移動局1Aの第2GPS装置12が騒音計11の位置を測位するのに用いるGPS衛星とが共通しているために、各時刻に第2GPS装置12によって測位された騒音計11の位置が含む測定誤差は、同時刻における基準点データに含まれる測位誤差と等しいからである。よって、各時刻における基準点データの偏差を算出してこれを用いれば、第2GPS装置12によって測位された騒音計11の位置を補正することができる。
【0068】
ここで、固定局の送信機と移動局の受信機との間における基準点データの送受信は、電磁波等を利用して無線で行われてもよく、あるいは有線で行われてもよい。基準点データの送受信が無線で行われる場合には、固定局の位置に影響を受けることなく移動局の移動を行いやすくなる。
【0069】
[第4実施形態]
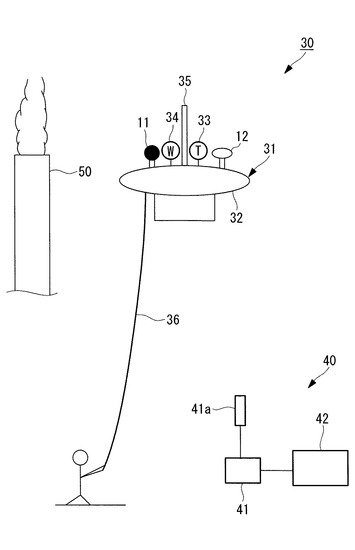
図4に示す第4実施形態に係る音線解析装置30は、例えば煙突50のような高所から発生する音について、音線解析により騒音予測を行う装置である。すなわち、音線解析装置30は、高所音源の騒音に対する定性的な寄与について、公知の音線理論式によりシミュレーションして予測する装置である。なお、以下の説明において、上述した各実施形態と同様の部分には同じ符号を付し、その詳細な説明は省略する。
【0070】
ここで、音線理論(音線密度)について簡単に説明する。
音波は、波面の垂線方向に伝達していくことが知られており、例えば点音源から放射される音波は、音源を中心に球面状に伝達していく。この音波の伝達方向を示したものが音線と呼ばれており、音圧は音線の密度に比例する。したがって、音線を追跡することにより、空間の音圧分布を予測することが可能となる。
【0071】
本実施形態の音線解析装置30は、空中に無動力で浮揚可能な浮揚体部31と、音線理論式による数値シミュレーションを行う音線解析部40とを備えている。
浮揚体部31は、例えばヘリウムガスのように空気より軽い気体を充填して空中に浮揚可能なバルーン32を本体とし、エンジンや電動機等のような運転騒音を自ら発することはない。このバルーン32には、騒音レベルを測定する騒音計11と、騒音計11の位置を測位するGPS装置12と、周囲の空気温度を測定する温度センサ33と、風況を測定する風況検出センサ34と、騒音計11、GPS装置12、温度センサ33および風況検出センサ34で取得した測定値を送信する送信装置35とが設けられている。
【0072】
また、バルーン32の適所には、騒音計11、GPS装置12、温度センサ33、風況検出センサ34および送信装置35に必要な電源として、図示しないバッテリが搭載されている。
このバルーン32は、例えばケーブル36により支持されて所望の高度まで浮揚可能であり、高所の音源となる煙突50の上端出口付近まで浮揚して、音源近傍における各種データ(騒音レベル、空気温度、風速や風向等の実測値)を取得する。このデータ取得と同時に、データ取得を行った音源近傍位置について、GPS装置12により測位した位置データの座標(経度、緯度及び標高)が時刻とともに取得される。
【0073】
こうして取得された各種データは、送信装置35により位置データおよび時刻とともに音線解析部40の受信装置41に送信される。なお、図中の符号41aは、受信装置41の受信アンテナを示している。
受信装置41が受信した各種データおよび位置データは、音線理論式による数値シミュレーションを行う音線解析演算部42に入力される。すなわち、音線解析部40は、送信装置35から送信された測定値を受信する受信装置41と、受信装置41で受信した測定値に基づいて音線理論式による数値シミュレーションを行う音線解析演算部42とを備えている。なお、音線解析演算部42には、図示は省略したものの、各種操作を行うためのスイッチ類や入力装置や、LCD等のディスプレイからなる記録表示部等が適宜設けられている。
【0074】
この音線解析装置30は、騒音を出さない浮揚体部31が高所に浮揚することで、高所から発生する音の騒音レベルについて、騒音計11により実測値を正確に測定することができる。そして、この騒音実測値の取得と同時に、実測値を測定した高所の測定位置、すなわち騒音計11の位置GPS装置12により測位して知ることができる。
【0075】
さらに、浮揚体部31は、騒音レベルの実測値を取得した高所において、騒音レベル測定位置とほぼ同じ位置における空気温度とともに、風速や風向の実測値も取得することができる。この結果、音線解析部40の音線解析演算部42においては、高所における騒音レベルだけでなく、高所の音源から騒音予測位置に至る音波伝播経路の空気温度や風速分布についても、実測値を用いた高精度の音線解析を行うことができる。換言すれば、温度や風速を計測する際に騒音レベルを同時に計測すれば、騒音レベル評価点における騒音レベルを定量的に評価する騒音予測が可能になる。
【0076】
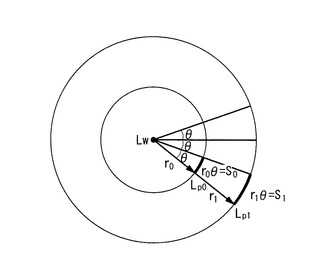
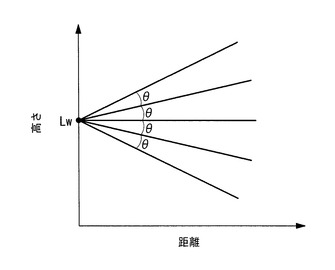
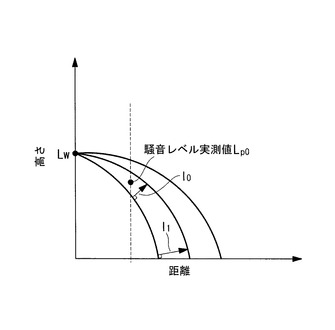
以下、図6〜図8を参照して騒音予測を具体的に説明する。なお、図6は温度及び風速が一様である場合の音線特性例を示す平面図、図7は温度及び風速が一様である場合の音線特性例を示す側面図、図8は温度及び風速が一様でない場合の音線特性例を示す側面図であり、音線理論式により空気温度や風速分布から求められたものである。
この場合、音響パワーレベルLWの音源があり、全方位に一様に放射した場合の距離r0およびr1における音圧レベルLp0およびLp1は、下記の数式(1)および(2)により求められる。
【数1】

【数2】
【0077】
ここで、nは音源から等角度θで放射される音線の本数、S0およびS1は音線1本当りの通過面積を表す。
また、面積S0およびS1は、音響放射を2次元として考えた場合、下記の数式(3)および(4)のようになる。
【数3】
【数4】
【0078】
数式(3)および(4)を数式(1)および(2)に代入すると、下記の数式(1)′および(2)′のようになる。
【数5】
【数6】
【0079】
温度、風速を計測する際に同時計測した騒音レベルをLp0とし、騒音評価点の騒音レベルをLp1とすれば、数式(1)′および(2)′より、騒音評価点の騒音レベルをLp1は下記の数式(5)となる。したがって、数式(5)により、騒音評価点の騒音予測が可能となる。
【数7】
【0080】
上記のr0θおよびr1θは、図8においてl0およびl1に相当するので、騒音レベルの実測値Lp0と実測点付近の音線間距離l0および騒音評価点付近の音線間距離l1を求めることにより、騒音評価点の騒音レベルLp1の予測が可能となる。なお、図8においては、破線で示す距離の位置で空気温度、風速および音圧レベルが計測されたものとする。
したがって、高所の音源から発生する音の音線解析による騒音予測を行う音線解析装置30は、音波伝播経路の空気温度および風速分布として実測値を使用できるようになるので、推定精度未検証の問題を解消して騒音予測精度を向上させることが可能になる。さらに、温度及び風速の実測値から音線解析装置が予測した騒音の予測結果を、実際に計測した音圧レベル実測値と比較することにより、音線解析装置による騒音予測精度の検証が可能になる。
【0081】
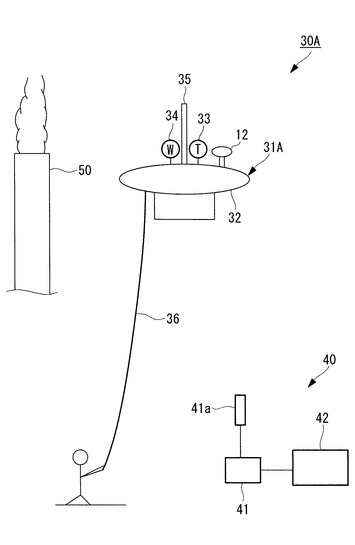
[第5実施形態]
図5に示す第5実施形態に係る音線解析装置30Aは、上述した第4実施形態の音線解析装置30と同様に、例えば煙突50のような高所から発生する音について、音線解析により騒音予測を行う装置である。すなわち、音線解析装置30Aは、高所音源の騒音に対する定性的な寄与について、公知の音線理論式によりシミュレーションして予測する装置である。なお、以下の説明において、上述した各実施形態と同様の部分には同じ符号を付し、その詳細な説明は省略する。
この音線解析装置30Aは、上述した音線解析装置30と異なり、騒音計11を備えていない。
【0082】
すなわち、本実施形態の音線解析装置30Aは、高所音源の位置を測位するGPS装置12と、空気温度を測定する温度センサ33と、風況を測定する風況検出センサ34と、GPS装置12、温度センサ33および風況検出センサ34で取得した測定値を送信する送信装置35とが設けられた浮揚体部31Aを備えている。この浮揚体部31Aは、空中に無動力で浮揚可能なバルーン32を本体とし、ケーブル36により支持されている。
一方、音線解析部40は、上述した第4実施形態と実質的に同様であり、送信装置35から送信された測定値を受信する受信装置41と、受信装置41で受信した測定値および高所音源の騒音実測値に基づいて音線理論式による数値シミュレーションを行う音線解析演算部42とを備えている。
【0083】
このように構成された音線解析装置30Aは、騒音を出さない浮揚体部31Aが高所に浮揚することで、従来と同様にして高所から発生する音の近接騒音実測値を測定した高所測定位置について、その近傍位置をGPS装置12により測位して知ることができる。
すなわち、この音線解析装置30Aは、騒音計11を備えていないので、騒音計11による騒音実測値に代えて、従来と同様の手法で近接騒音実測値を測定し、この実測値を音線解析部40に入力して音線解析を実施する。
【0084】
さらに、浮揚体部31Aは、近接騒音実測値の測定位置近傍において空気温度や風速および風向の実測値を取得できるので、この計測値が入力される音線解析部40では、上述した第4実施形態と同様にして、高所における騒音レベルだけでなく、音波伝播経路の空気温度や風速分布についても実測値を用いて高精度の音線解析を行うことができる。
したがって、高所の音源から発生する音の音線解析による騒音予測を行う音線解析装置30Aは、音波伝播経路の空気温度および風速分布として実測値を使用できるようになるので、推定精度未検証の問題を解消して騒音予測精度を向上させることが可能になる。さらに、温度及び風速の実測値から音線解析装置が予測した騒音の予測結果を、実際に計測した音圧レベル実測値と比較することにより、音線解析装置による騒音予測精度の検証が可能になる。
【0085】
以上、本発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。例えば、上記衛星測位装置としては、GPSを利用したもののほか、ロシアにより構築中のGLONASS、欧州等により構築中のガリレオ、日本により計画中の準天頂システム等を利用したものが考えられる。
【符号の説明】
【0086】
1 騒音測定装置(移動局)
2,2A 固定局
3,3A 騒音測定システム
11 騒音計、記録表示部、第2記録部、補正部
12 衛星測位装置(第2衛星測位装置)
14 受信機
21 第1衛星測位装置
22 第1記録部(ロガー)
24 送信機
30,30A 音線解析装置
31,31A 浮揚体部
32 バルーン
33 温度センサ
34 風況センサ
35 送信装置
40 音線解析部
41 受信装置
42 音線解析演算部
【技術分野】
【0001】
本発明は、騒音レベルを測定し、測定された騒音レベルのデータをその騒音レベルの測定地点の位置情報と対応づけて記録あるいは表示する騒音測定装置、騒音測定システムおよび騒音測定方法に関する。
また、高所音源の騒音に対する定性的な寄与を、音線理論式によりシミュレーションして予測する音線解析装置に関する。
【背景技術】
【0002】
工場や事業場等の騒音の発生源から発生する騒音が、その騒音の発生源の周囲の環境に与える影響を調査する目的で、環境モニタリングが実施されている。この環境モニタリングにおいては、工場や事業場の周囲に複数箇所設定された所定の騒音測定地点で、例えば数カ月毎等定期的に、騒音レベルの測定が行われる。
【0003】
このような環境モニタリングでは、通常は、上記所定の騒音測定地点に騒音測定装置を永続的に固定して騒音レベルの測定を行うのではなく、数カ月毎等の騒音レベルの測定を行う度に、所定の騒音測定地点に騒音測定装置を設置し、騒音レベルの測定が終了したら騒音測定装置はその都度撤去している。
そのため、各騒音測定地点について長期間にわたって経時的に騒音レベルの測定を行うためには、前回騒音レベルの測定を行った騒音測定地点と同じ地点に騒音測定装置を配置する必要がある。しかし、環境モニタリングにおける騒音測定地点の多くは、工場や事業場等の敷地外の道路上等であるため、騒音測定地点の目印として測量鋲等を設置することができない場合が多い。このため、環境モニタリングにおける騒音レベルの測定では、騒音測定地点の周囲にある構造物や特徴的な地形等を基準として、地図を参照しながら目視で騒音測定地点のおおよその位置を決定し、その位置に騒音測定装置を配置することが行われている。
【0004】
しかし、騒音測定地点の位置を決定する際の基準として利用される構造物は、長期間にわたって環境モニタリングを実施する間には解体・撤去される場合もあり、この場合には、騒音測定地点の位置を決定する際の基準が失われることとなってしまう。また、構造物や特徴的な地形等を基準として騒音測定地点のおおよその位置を決定して騒音測定装置を配置しても、騒音測定地点の位置には、どうしても毎回ばらつきが生じてしまう。さらに、騒音測定地点の周囲に構造物や特徴的な地形等が無い場合には、騒音測定地点を同定することが難しかった。
【0005】
一方、例えば発電所の敷地内に設置してある煙突等のように、高所から発生する音が施設境界あるいは近隣民家の騒音に対する定性的な寄与を把握する場合、従来は音線理論式による数値シミュレーション予測(音線解析による騒音予測)を行っている。このような音線解析の予測パラメータは、煙突出口付近の近接騒音実測値と、音波伝播経路における風速分布推定値および空気温度推測値である。
風速の推定値は、例えば図9に示すように、煙突出口付近(例えば高度200m)の実測値を用い、地上0mを風速0m/sとする1次の近似式により、空間の風速分布を推定したものである。
温度の推定値は、例えば図9に示すように、地上高30mおよび地上1mの2地点で測定した実測値を用い、1次の近似式により空間の温度分布を推定したものである。
【0006】
騒音レベルの測定を、騒音測定装置の位置と関連づけて実施する騒音測定装置として、例えば特許文献1、2に記載のものがある。
しかし、特許文献1、2に記載の騒音測定装置は、騒音レベルと、測定対象とされる騒音の発生源から騒音測定装置までの距離とを測定し、これらを対応づけて記録あるいは表示するものである。したがって、この騒音測定装置を上記の工場や事業場等の周囲における騒音環境の環境モニタリングの用途に用いる場合、騒音測定装置が位置している騒音測定地点を同定するには、騒音測定装置からの距離を測定する対象物として、構造物や特徴的な地形等の基準が必要とされることに変わりはない。そして、この基準となる構造物や特徴的な地形等から騒音測定装置までの距離を測定し、この距離を参考にして、騒音測定地点を決定することになる。
【0007】
また、高所音源の騒音に対する定性的な寄与について、音線理論式を用いたシミュレーションで予測する音線解析装置に関する公知文献は見当たらない。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平7−75086号公報
【特許文献2】特開平7−190848号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
このように、従来の騒音測定装置およびこれを利用した騒音測定方法では、騒音測定装置の位置を定量的に把握できないために、騒音測定地点を正確に定めにくかった。
また、騒音レベルの測定を実施する度に騒音測定装置を設置し、測定が終了するとその都度騒音測定装置を撤去するので、長期間にわたって経時的に騒音レベルの測定を行う場合、騒音測定地点の位置が変化してしまう問題があった。このため、騒音レベルの測定後にデータを見直したときに、騒音データと騒音測定地点の位置情報の整合が取れない場合があった。
【0010】
そして、高所から発生する音の音線解析による騒音予測は、音波伝播経路の空気温度および風速分布として推定値が使用されている。しかし、空気温度および風速分布の推定精度は未検証であり、したがって、音線解析による音波伝播予測の推定精度についても未検証であるから、騒音予測の精度をより一層向上させることが望まれる。
本発明は、このような事情に鑑みてなされたものであって、構造物や特徴的な地形等の基準を利用せずとも、騒音測定地点を簡単かつ正確に同定することのできる騒音測定装置の提供を目的とする。
さらに、本発明は、高所から発生する音の音線解析(騒音予測)についても、温度及び風速の実測値を利用できるようにして、精度の高い予測を可能にした音線解析装置の提供を目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するために、本発明は以下の手段を採用する。
【0012】
本発明の第1の態様に係る騒音測定装置は、騒音レベルを測定する騒音計と、前記騒音計の位置を測位する衛星測位装置と、前記騒音計によって測定された騒音レベルを該騒音レベルが測定されたと同時に前記衛星測位装置によって測位された前記騒音計の位置と対応づけて記録および/または表示する記録表示部とを備えている。
【0013】
この騒音測定装置によれば、衛星測位装置によって騒音計の位置が測位されるので、騒音計の位置を定量的に把握することができる。したがって、構造物や特徴的な地形等の基準を利用せずとも、騒音測定装置による騒音測定地点を簡単かつ正確に同定することができる。特に、予め定められている騒音測定地点に騒音測定装置を搬入して騒音レベルを測定する場合に、構造物や特徴的な地形等の基準を利用せずとも、騒音測定装置を騒音測定地点に正確に設置して騒音レベルを測定することが簡単にできる。
【0014】
本発明の第2の態様に係る騒音測定システムは、地球上の所定の基準点に固定された第1衛星測位装置と、該第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データを時刻と対応づけて記録する第1記録部とを有する固定局と、騒音レベルを測定する騒音計と、前記固定局の前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて前記騒音計の位置を測位する第2衛星測位装置と、前記騒音計によって測定された騒音レベルを該騒音レベルが測定されたと同時に前記第2衛星測位装置によって測位された前記騒音計の位置および該騒音レベルが測定された時刻と対応づけて記録する第2記録部とを有する移動局とを備えている。
【0015】
この騒音測定システムによれば、まず騒音レベルの測定が終了した後、固定局の第1記録部に記録されたデータと、移動局の第2記録部に記録されたデータとを回収し、第1記録部に時刻と対応づけて記録された基準点データが各時刻において含む誤差を算出することによって、第2記録部に騒音レベルおよび時刻と対応づけて記録された騒音計の位置を、同時刻における基準点データの誤差を用いて補正することができる。
【0016】
これは、固定局の第1衛星測位装置が前記所定の基準点を測位して基準点データを得るのに用いる人工衛星と、移動局の第2衛星測位装置が騒音計の位置を測位するのに用いる人工衛星が共通しているために、各時刻に第2衛星測位装置によって測位された騒音計の位置が含む測位誤差は、基準点データが同時刻において含む測位誤差と等しいからである。よって、基準点データが各時刻において含む誤差を算出してこれを用いれば、第2衛星測位装置によって測位された騒音計の位置を補正することができる。
【0017】
ここで、騒音計の位置の補正は、騒音の測定中に実施されるのではなく、騒音の測定が終了した後、固定局の第1記録部に記録されたデータと、移動局の第2記録部に記録されたデータとを回収して行われる。このため、騒音の測定中には、固定局と移動局との間でデータの送受信等を行う必要がないので、固定局と移動局との間を無線あるいは有線によって接続する必要がない。したがって、固定局と移動局に送信機や受信機等の機器を備える必要が無く、騒音測定システムを簡素かつ安価に構成することができる。
【0018】
ここで、固定局の第1衛星測位装置が前記所定の基準点を測位して得られる基準点データが各時刻において含む誤差は、次のようにして算出できる。
すなわち、第1衛星測位装置が固定される前記所定の基準点は、地球上における座標が既知である点とする。これにより、この既知の座標に対する、各時刻における基準点データの差を、基準点データが各時刻において含む誤差として算出できる。
あるいは、第1衛星測位装置が固定される前記所定の基準点は、地球上における座標が不明な点であってもよい。この場合には、固定局の第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データの平均値を算出する。そして、この基準点データの平均値に対する、各時刻における前記基準点データの偏差を、該基準点データが各時刻において含む誤差として算出できる。
【0019】
本発明の第3の態様に係る騒音測定システムは、地球上の所定の基準点に固定された第1衛星測位装置と、該第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データの誤差を送信する送信機とを有する固定局と、騒音レベルを測定する騒音計と、前記固定局の前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて前記騒音計の位置を測位する第2衛星測位装置と、前記固定局の前記送信機から送信された前記基準点データの誤差を受信する受信機と、前記第2衛星測位装置によって測位された前記騒音計の位置を前記受信機によって受信された前記基準点データの誤差を用いて補正する補正部と、前記騒音計によって測定された騒音レベルを前記補正部によって補正された前記騒音計の位置と対応づけて記録および/または表示する記録表示部とを有する移動局とを備えている。
【0020】
本発明の第2の態様または第3の態様に係る騒音測定システムにおいては、前記第1衛星測位装置と前記第2衛星測位装置は、前記人工衛星からの信号に含まれる該人工衛星の軌道情報を用いて、前記所定の基準点と前記騒音計の位置を測位するのに用いる前記人工衛星を選択し、これにより、前記第2衛星測位装置は、前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いることが可能とされていることが好ましい。
【0021】
本発明の第2の態様に係る騒音測定システムにおいては、前記第1衛星測位装置が固定された前記所定の基準点の地球上における座標は既知であり、前記基準点データの誤差は、既知の前記座標に対する、各時刻における前記基準点データの差であることが好ましい。
【0022】
あるいは、本発明の第2の態様に係る騒音測定システムにおいては、前記基準点データの誤差は、前記第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた前記基準点データの平均値に対する、各時刻における前記基準点データの偏差であることが好ましい。
【0023】
この騒音測定システムによれば、固定局の送信機は、基準点データの、所定の基準点の既知の座標に対する差を、基準点データの誤差として算出する。あるいは、固定局の送信機は、第1衛星測位装置によって前記所定の基準点を経時的に測位することによって得られた基準点データの平均値を算出し、この基準点データの平均値に対する、各時刻における基準点データの偏差を、基準点データの誤差として算出する。固定局の送信機は、この基準点データの誤差を送信する。
そして、移動局では、受信機によって基準点データの誤差が受信される。さらに、補正部によって、第2衛星測位装置によって測位された騒音計の位置を、同時刻における基準点データの偏差を用いて補正することができる。
【0024】
これは、固定局の第1衛星測位装置が前記所定の基準点を測位して基準点データを得るのに用いる人工衛星と、移動局の第2衛星測位装置が騒音計の位置を測位するのに用いる人工衛星が共通しているために、各時刻に第2衛星測位装置によって測位された騒音計の位置が含む測定誤差は、同時刻における基準点データに含まれる測位誤差、すなわち基準点データの偏差と等しいからである。よって、各時刻における基準点データの偏差を算出してこれを用いれば、第2衛星測位装置によって測位された騒音計の位置を補正することができる。
【0025】
ここで、固定局の送信機と移動局の受信機との間における基準点データの送受信は、電磁波等を利用して無線で行われてもよく、あるいは有線で行われてもよい。基準点データの送受信が無線で行われる場合には、固定局の位置に影響を受けることなく移動局の移動を行いやすくなる。
【0026】
本発明の第4の態様に係る騒音測定方法は、上記第2の態様に係る騒音測定システムを用いた騒音測定方法であって、前記第1衛星測位装置が固定された前記所定の基準点の地球上における座標は既知であり、既知の前記座標に対する、各時刻における前記基準点データの差を、該基準点データが各時刻において含む誤差として算出し、前記移動局の前記第2衛星測位装置によって測位され、前記第2記録部に前記騒音レベルおよび時刻と対応づけて記録された前記騒音計の位置を、同時刻における前記基準点データの誤差を用いて補正するものである。
【0027】
あるいは、本発明の第4の態様に係る騒音測定方法は、上記第2の態様に係る騒音測定システムを用いた騒音測定方法であって、前記固定局の前記第1衛星測位装置によって前記所定の基準点を経時的に測位して得られ、前記第1記録部に時刻と対応づけて記録された前記基準点データの平均値を算出し、前記基準点データの平均値に対する、各時刻における前記基準点データの偏差を、該基準点データが各時刻において含む誤差として算出し、前記移動局の前記第2衛星測位装置によって測位され、前記第2記録部に前記騒音レベルおよび時刻と対応づけて記録された前記騒音計の位置を、同時刻における前記基準点データの誤差を用いて補正するものである。
【0028】
この騒音測定方法によれば、騒音測定システムによる騒音の測定が終了した後、移動局の第2記録部に記録された騒音計の位置を、固定局の第1記録部に記録された基準点データが含む誤差を用いて補正することが簡単にできる。
【0029】
本発明の第5の態様に係る音線解析装置は、騒音レベルを測定する騒音計と、前記騒音計の位置を測位する衛星測位装置と、空気温度を測定する温度センサと、風況を測定する風況検出センサと、前記騒音計、前記衛星測位装置、前記温度センサおよび前記風況検出センサで取得した測定値を送信する送信装置とが設けられて空中に無動力で浮揚可能な浮揚体部と、前記送信装置から送信された測定値を受信する受信装置と、前記受信装置で受信した測定値に基づいて音線理論式による数値シミュレーションを行う音線解析部とを備えている。
【0030】
この音線解析装置によれば、騒音を出さない浮揚体部が高所に浮揚することで、高所から発生する音の騒音レベルの実測値を測定するとともに、実測値を測定した高所の測定位置(騒音計の位置)を衛星測位装置により測位して知ることができる。さらに、浮揚体部は、高所の騒音レベル測定位置における空気温度や風況(風速や風向)の実測値を取得できるので、音線解析部においては、高所における騒音レベルだけでなく、音波伝播経路の空気温度や風速分布についても実測値を用い、高精度の音線解析を行うことができる。
【0031】
本発明の第6の態様に係る音線解析装置は、高所音源の位置を測位する衛星測位装置と、空気温度を測定する温度センサと、風況を測定する風況検出センサと、前記衛星測位装置、前記温度センサおよび前記風況検出センサで取得した測定値を送信する送信装置とが設けられて空中に無動力で浮揚可能な浮揚体部と、前記送信装置から送信された測定値を受信する受信装置と、前記受信装置で受信した測定値および前記高所音源の騒音実測値に基づいて音線理論式による数値シミュレーションを行う音線解析部とを備えている。
【0032】
この音線解析装置によれば、騒音を出さない浮揚体部が高所に浮揚することで、従来と同様にして高所から発生する音の近接騒音実測値を測定した高所測定位置について、近傍位置を衛星測位装置により測位して知ることができる。さらに、浮揚体部は、近接騒音実測値の測定位置近傍における空気温度や風況(風速や風向)の実測値を取得できるので、音線解析部においては、高所における騒音レベルだけでなく、音波伝播経路の空気温度や風速分布についても実測値を用い、高精度の音線解析を行うことができる。
【発明の効果】
【0033】
上述した本発明の騒音測定装置、騒音測定システム、騒音測定方法および音線解析装置によれば、衛星測位装置によって騒音計の位置が測位されるので、騒音計の位置を定量的に把握することができる。したがって、構造物や特徴的な地形等の基準を利用せずとも、騒音測定地点を簡単かつ正確に同定することができる。特に、予め定められている騒音測定地点に騒音測定装置を搬入して騒音レベルを測定する場合に、構造物や特徴的な地形等の基準を利用せずとも、騒音測定装置を騒音測定地点に正確に設置して騒音レベルを測定することが簡単にできる。
【0034】
また、高所の音源から発生する音の音線解析による騒音予測を行う音線解析装置は、音波伝播経路の空気温度および風速分布として実測値を使用できるようになるので、推定精度未検証の問題を解消して騒音予測精度を向上させることが可能になる。
さらに、温度及び風速の実測値から音線解析装置が予測した騒音の予測結果を、実際の音圧レベル実測値と比較することにより、音線解析装置による騒音予測精度の検証が可能になる。
【図面の簡単な説明】
【0035】
【図1】本発明の第1実施形態に係る騒音測定装置を示す概略図である。
【図2】本発明の第2実施形態に係る騒音測定システムおよび騒音測定方法を示す概略図である。
【図3】本発明の第3実施形態に係る騒音測定システムを示す概略図である。
【図4】本発明の第4実施形態に係る音線解析装置を示す概略図である。
【図5】本発明の第5実施形態に係る音線解析装置を示す概略図である。
【図6】温度及び風速が一様である場合の音線特性例を示す平面図である。
【図7】温度及び風速が一様である場合の音線特性例を示す側面図である。
【図8】温度及び風速が一様でない場合の音線特性例を示す側面図である。
【図9】音波伝播経路の空気温度および風速分布について、1次の近似式より得られる推定値の一例を示す図である。
【発明を実施するための形態】
【0036】
以下に、本発明に係る騒音測定装置、騒音測定システム、騒音測定方法および音線解析装置の実施形態について、図面を参照して説明する。
【0037】
[第1実施形態]
図1に示すように、本実施形態に係る騒音測定装置1は、騒音レベルを測定する騒音計11と、GPS(Global Positioning System)装置(衛星測位装置)12と、騒音計11に一体化された記録表示部とを備えている。
GPS装置12は、ケーブル13で騒音計11に接続されている。騒音計11とGPS装置12とは、それぞれ三脚に固定されている。GPS装置12が騒音計11の位置を測位できるように、騒音計11を固定する三脚と、GPS装置12を固定する三脚とは、互いに近接して配置される。
【0038】
GPS装置12としては、GPSアンテナおよびGPS受信機を備えた汎用のGPSユニットが用いられる。これに代えて、より精度の高いDGPS(Differential Global Positioning System)方式のGPSユニットを用いてもよい。
【0039】
騒音計11に一体化された記録表示部(不図示)では、騒音計11によって測定された騒音レベルを、この騒音レベルが測定されたと同時にGPS装置12によって測位された騒音計11の位置と対応づけて記録する。つまり、騒音計11によって騒音レベルが測定されるのと同時に、GPS装置12によって騒音計11の位置(経度、緯度および標高)が測位される。そして、この騒音レベルと騒音計11の位置とが記録表示部によって対応づけて記録される。
記録表示部は、LCD(Liquid Crystal Display)等からなるディスプレイを備えており、騒音計11によって測定された騒音レベルと、GPS装置12によって測位された騒音計11の位置とが対応付けられて表示される。
【0040】
第1実施形態に係る騒音測定装置1によれば、GPS装置12によって騒音計の位置が測位されるので、騒音計11の位置を定量的に把握することができる。すなわち、騒音計11の位置を、経度、緯度および標高の数値として把握することができる。
したがって、構造物や特徴的な地形等の基準を利用せずとも、騒音測定装置1による騒音測定地点を簡単かつ正確に同定することができる。特に、予め決められている騒音測定地点に騒音測定装置1を搬入して騒音を測定する場合には、構造物や特徴的な地形等の基準となる目印を利用せずとも、記録表示部に表示される騒音計11の位置を確認しながら騒音測定装置1を騒音測定地点に正確に設置して、騒音レベルを簡単に測定することができる。
【0041】
[第2実施形態]
図2に示すように、第2実施形態に係る騒音測定システム3は、座標(経度、緯度および標高)が既知の地点上に固定される固定局2と、第1実施形態の騒音測定装置1とほぼ同様の構成を有している移動局1とを備えている。
【0042】
固定局2は、第1GPS装置(第1衛星測位装置)21とロガー(第1記録部)22とを有している。第1GPS装置21は、三脚に固定されている。騒音測定システム3による騒音の測定中、第1GPS装置21を固定する三脚は、経度、緯度および標高が既知の地点上に据え付けて動かない状態を保つようにする。これにより、騒音測定システム3による騒音の測定中、第1GPS装置21は、地球上の所定の基準点(経度X、緯度Y、標高Z)に固定された状態が保たれる。第1GPS装置21は、ケーブル23でロガー22に接続されている。
【0043】
移動局1は、騒音レベルを測定する騒音計11と、第2GPS装置(第2衛星測位装置)12とを有している。また、移動局1は、第1実施形態の騒音測定装置1の記録表示部に代えて、騒音計11に一体化された第2記録部(不図示)を有している。
第2GPS装置12は、ケーブル13で騒音計11に接続されている。騒音計11とGPS装置12とは、それぞれ三脚に固定されている。そして、第2GPS装置12が騒音計11の位置を測位できるように、騒音計11を固定する三脚と、第2GPS装置12を固定する三脚とは、互いに近接して配置される。
【0044】
固定局2の第1GPS装置21および移動局1のGPS装置12としては、それぞれGPSアンテナおよびGPS受信機を備えた汎用のGPSユニットが用いられるが、これに代えて、より精度の高いDGPS方式のGPSユニットを用いてもよい。
【0045】
固定局2の第1GPS装置21は、前記所定の基準点(経度X、緯度Y、標高Z)を経時的に測位する。所定の基準点の座標は不変であるが、第1GPS装置21によって所定の基準点を測位して得られる基準点データは測位誤差を含んでおり、時系列で微妙に変動するデータとなる。この誤差を含む基準点データ(経度X’、緯度Y’、標高Z’)を時刻と対応づけて出力する。ロガー22は、第1GPS装置21から出力された基準点データを時刻と対応づけて記録する。
【0046】
移動局1の第2GPS装置12は、固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いたのと同じGPS衛星(人工衛星)からの信号を用いて、騒音計11の位置(緯度および経度)を測位する。
【0047】
移動局1の第2GPS装置12が騒音計11の位置を測位する際に、固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いたのと同じGPS衛星からの信号を用いるのは、次の理由による。
地球上を周回するGPS衛星は、現在31基程度あり、地球上の一地点で7基程度のGPS装置からの電波を受信可能となっている。通常のGPS装置は、この7基程度のGPS衛星のうち電波強度の強い4基程度を選択し、この電波強度の強い4基程度のGPS衛星からの電波を利用して測位を行うようになっている。
【0048】
ここで、地球上の同一地点において、2台のGPS装置で測位を行った場合、各GPS装置が測位に用いる4基程度のGPS衛星は一致するとは限らない。そして、2台のGPS装置が測位に用いるGPS衛星が一致しない場合、これら2台のGPS装置の測位結果の間には、数mから数十m程度の誤差が生じることが知られている。これは、測位に用いるGPS衛星が異なると、当然そのGPS衛星の位置は異なるため、異なる位置にあるGPS衛星を基準として三角測量を行った結果も異なってくるためである。
しかし、2台のGPS装置が測位に用いるGPS衛星が一致しているならば、このような誤差は生じない。このため、移動局1の第2GPS装置12が騒音計11の位置を測位する際には、固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いたのと同じGPS衛星からの信号を用いるようにしている。
【0049】
各GPS衛星は、それぞれ所定の公転周期で所定の軌道を周回している。そこで、固定局2の第1GPS装置21と移動局1の第2GPS装置12は、これらのGPS衛星のうち、各時刻においてどのGPS衛星からの信号を受信することができるかを計算して判定する機能を、それぞれ内蔵している。具体的には、次の通りである。
各GPS衛星は、約6日毎に更新される全GPS衛星の概略の軌道情報(アルマナックデータ)と、約90分毎に更新されるそのGPS衛星自身の詳細な軌道情報(エフェメリスデータ)を含む信号を、30秒周期で地上に向けて電波で送信している。固定局2の第1GPS装置21と移動局1の第2GPS装置12とは、これら概略の軌道情報と詳細な軌道情報とを用いて、測位時における各GPS衛星の軌道を計算し、互いに同じGPS衛星からの信号を用いて測位を行うようにする。これによって、移動局1の第2GPS装置12が騒音計11の位置を測位するのに用いるGPS衛星の信号と、同時刻に固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いるGPS衛星の信号とは、同じものとなっている。
【0050】
移動局1の騒音計11に一体化された第2記録部は、騒音計11によって測定された騒音レベルを、この騒音レベルが測定されたと同時に第2GPS装置12によって測位された騒音計11の位置、およびこの騒音レベルが測定された時刻と対応づけて記録する。
ここで、固定局2の第1GPS装置21および移動局1の第2GPS装置12が受信するGPS衛星からの信号には、GPS衛星に搭載された原子時計からの時刻のデータが含まれている。この時刻のデータを利用して、第1GPS装置21および第2GPS装置12が保有し出力する時刻は、常に正確に保たれる。この結果、固定局2のロガー22が基準点データと対応づけて記録する時刻と、移動局1の第2記録部が騒音レベルおよび騒音計11の位置と対応づけて記録する時刻とは、常に正確であり、互いに同期がとれた状態となっている。
【0051】
本騒音測定システム3を用いた騒音の測定が終了したら、まず、固定局2のロガー22に記録されたデータと、移動局1の第2記録部に記録されたデータとを回収する。そして、固定局2の第1GPS装置21によって経時的に測位され、ロガー22に時刻と対応づけて記録された各時刻における基準点データ(経度X’、緯度Y’、標高Z’)の、所定の基準点の既知の座標(経度X、緯度Y、標高Z)に対する差(ΔX=X’−X,ΔY=Y’−Y,ΔZ=Z’−Z)を、各時刻において基準点データが含む誤差として算出する。さらに、移動局1の第2GPS装置12によって測位され、第2記録部に騒音レベルおよび時刻と対応づけて記録された騒音計11の位置を、同時刻における基準点データの誤差(ΔX,ΔY,ΔZ)を用いて補正する。
【0052】
あるいは、固定局2は、経度、緯度および標高が既知の地点上に固定されるのではなく、経度、緯度および標高が不明の地点上に固定されていてもよい。
この場合は、本騒音測定システム3を用いた騒音の測定が終了したら、まず、固定局2のロガー22に記録されたデータと、移動局1の第2記録部に記録されたデータとを回収する。そして、固定局2の第1GPS装置21によって経時的に測位され、ロガー22に時刻と対応づけて記録された基準点データ(経度X’、緯度Y’、標高Z’)の平均値(X,Y,Z)を算出し、この基準点データの平均値に対する、各時刻における基準点データの偏差(ΔX=X’−X,ΔY=Y’−Y,ΔZ=Z’−Z)を、各時刻において基準点データが含む誤差として算出する。さらに、移動局1の第2GPS装置12によって測位され、第2記録部に騒音レベルおよび時刻と対応づけて記録された騒音計11の位置を、同時刻における基準点データの誤差(ΔX,ΔY,ΔZ)を用いて補正する。
【0053】
第2実施形態に係る騒音測定システム3によれば、第1実施形態に係る騒音測定装置1と同様の効果が得られる。
また、第2実施形態に係る騒音測定システム3によれば、上記のように、騒音の測定が終了した後、固定局2のロガー22に記録されたデータと、移動局1の第2記録部に記録されたデータとを回収し、ロガー22に記録された基準点データが各時刻において含む誤差を算出し、第2記録部に騒音レベルおよび時刻と対応づけて記録された騒音計の位置を、同時刻において基準点データが含む誤差を用いて補正することができる。
【0054】
これは、固定局2の第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いるGPS衛星と、移動局1の第2GPS装置12が騒音計11の位置を測位するのに用いるGPS衛星が共通しているために、各時刻に第2GPS装置12によって測位された騒音計11の位置が含む測位誤差は、同時刻において基準点データが含む測位誤差と等しいからである。よって、各時刻における基準点データの誤差を算出してこれを用いれば、第2GPS装置12によって測位された騒音計の位置を補正することができる。
【0055】
ここで、騒音計11の位置の補正は、騒音の測定中に実施されるのではなく、騒音の測定が終了した後、固定局2のロガー22に記録されたデータと、移動局1の第2記録部に記録されたデータとを回収して行われる。このため、騒音の測定中には、固定局2と移動局1との間でデータの送受信等を行う必要がないので、固定局2と移動局1との間を無線あるいは有線によって接続する必要がない。したがって、固定局2と移動局1に送信機や受信機等の機器を備える必要が無く、騒音計の位置を高い精度で測位することのできる騒音測定システム3を簡素かつ安価に構成することができる。
【0056】
[第3実施形態]
図3に示すように、第3実施形態に係る騒音測定システム3Aは、第2実施形態に係る騒音測定システム3と同様に、移動局1Aと、座標(経度、緯度および標高)が既知の地点上に固定される固定局2Aとを備えている。
【0057】
本実施形態の固定局2Aは、第1GPS装置(第1衛星測位装置)21と送信機24とを有している。第1GPS装置21と送信機24とは、三脚に固定されている。騒音測定システム3Aによる騒音の測定中、第1GPS装置21を固定する三脚は、経度、緯度および標高が既知の地点上に据え付けて動かない状態を保つようにする。これにより、騒音測定システム3Aによる騒音の測定中において、第1GPS装置21は、地球上の所定の基準点(経度X、緯度Y、標高Z)に固定された状態が保たれる。送信機24は、ケーブル25で第1GPS装置21に接続されている。
【0058】
移動局1Aは、騒音レベルを測定する騒音計11と、第2GPS装置(第2衛星測位装置)12と、受信機14とを有している。また、移動局1Aは、第2実施形態の騒音測定システム3の移動局1の第2記録部に代えて、騒音計11に一体化された図示しない補正部および記録表示部を有している。第2GPS装置12は、ケーブル13で騒音計11に接続され、受信機14は、ケーブル15で騒音計11に接続されている。
騒音計11は一方の三脚に固定され、GPS装置12と受信機14とは他方の三脚に固定されている。そして、第2GPS装置12が騒音計11の位置を測位できるように、騒音計11を固定する三脚と、第2GPS装置12を固定する三脚とは、互いに近接して配置される。
【0059】
固定局2Aの第1GPS装置21および移動局1AのGPS装置12としては、それぞれGPSアンテナおよびGPS受信機を備えた汎用のGPSユニットが用いられるが、これに代えて、より精度の高いDGPS方式のGPSユニットを用いてもよい。
【0060】
固定局2Aの第1GPS装置21は、前記所定の基準点(経度X、緯度Y、標高Z)を経時的に測位する。所定の基準点の座標は不変であるが、第1GPS装置21によって所定の基準点を測位して得られる基準点データは測位誤差を含んでおり、時系列で微妙に変動するデータとなる。この誤差を含む基準点データ(経度X’、緯度Y’、標高Z’)を時刻と対応づけて出力する。
【0061】
固定局2Aの送信機24は、第1GPS装置21によって所定の基準点を経時的に測位して得られた、各時刻における基準点データ(経度X’、緯度Y’、標高Z’)の、所定の基準点の既知の座標(経度X、緯度Y、標高Z)に対する差(ΔX=X’−X,ΔY=Y’−Y,ΔZ=Z’−Z)を、基準点データの誤差として算出し、送信する。
【0062】
あるいは、固定局2Aは、経度、緯度および標高が既知の地点上に固定されるのではなく、経度、緯度および標高が不明の地点上に固定されていてもよい。
この場合は、第1GPS装置21によって経時的に測位された基準点データ(経度X’、緯度Y’、標高Z’)の平均値(X,Y,Z)を算出し、この基準点データの平均値に対する、各時刻における基準点データの偏差(ΔX=X’−X,ΔY=Y’−Y,ΔZ=Z’−Z)を、基準点データの誤差として算出して、送信する。
【0063】
移動局1Aの第2GPS装置12は、固定局2Aの第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いたのと同じGPS衛星からの信号を用いて、騒音計11の位置(経度、緯度および標高)を測位する。
移動局1Aの第2GPS装置12が騒音計11の位置を測位するのに用いるGPS衛星の信号と、同時刻に固定局2Aの第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いるGPS衛星の信号とが、同じものとなる仕組みは、第2実施形態に示したとおりである。
【0064】
移動局1Aの受信機14は、固定局2Aの送信機24から送信された基準点データの誤差を受信する。
騒音計に一体化された補正部は、第2GPS装置12によって測位された騒音計の位置11を、同時刻に受信機14によって受信された基準点データの誤差(ΔX,ΔY,ΔZ)を用いて、補正する。
【0065】
騒音計11に一体化された記録表示部は、騒音計11によって測定された騒音レベルを、この騒音レベルが測定されたと同時にGPS装置12によって測位され、補正部によって補正された騒音計11の位置と対応づけて記録する。つまり、騒音計11によって騒音レベルが測定されると同時に、GPS装置12によって騒音計11の位置(経度、緯度および標高)が測位される。そして、この騒音レベルと補正済みの騒音計11の位置とが記録表示部によって対応づけて記録される。記録表示部は、LCD(Liquid Crystal Display)等からなるディスプレイを備えており、騒音計11によって測定された騒音レベルと、GPS装置12によって測位された騒音計11の位置とが対応付けられて表示される。
【0066】
第3実施形態に係る騒音測定システム3Aによれば、第1実施形態に係る騒音測定装置1と同様の効果が得られる。
また、第3実施形態に係る騒音測定システム3Aによれば、固定局2Aの送信機24は、基準点データの誤差を算出して、送信する。そして、移動局1Aでは、受信機14によって基準点データの誤差が受信される。さらに、補正部によって、第2GPS装置12によって測位された騒音計11の位置を、同時刻における基準点データの誤差を用いて補正することができる。
【0067】
これは、固定局2Aの第1GPS装置21が前記所定の基準点を測位して基準点データを得るのに用いるGPS衛星と、移動局1Aの第2GPS装置12が騒音計11の位置を測位するのに用いるGPS衛星とが共通しているために、各時刻に第2GPS装置12によって測位された騒音計11の位置が含む測定誤差は、同時刻における基準点データに含まれる測位誤差と等しいからである。よって、各時刻における基準点データの偏差を算出してこれを用いれば、第2GPS装置12によって測位された騒音計11の位置を補正することができる。
【0068】
ここで、固定局の送信機と移動局の受信機との間における基準点データの送受信は、電磁波等を利用して無線で行われてもよく、あるいは有線で行われてもよい。基準点データの送受信が無線で行われる場合には、固定局の位置に影響を受けることなく移動局の移動を行いやすくなる。
【0069】
[第4実施形態]
図4に示す第4実施形態に係る音線解析装置30は、例えば煙突50のような高所から発生する音について、音線解析により騒音予測を行う装置である。すなわち、音線解析装置30は、高所音源の騒音に対する定性的な寄与について、公知の音線理論式によりシミュレーションして予測する装置である。なお、以下の説明において、上述した各実施形態と同様の部分には同じ符号を付し、その詳細な説明は省略する。
【0070】
ここで、音線理論(音線密度)について簡単に説明する。
音波は、波面の垂線方向に伝達していくことが知られており、例えば点音源から放射される音波は、音源を中心に球面状に伝達していく。この音波の伝達方向を示したものが音線と呼ばれており、音圧は音線の密度に比例する。したがって、音線を追跡することにより、空間の音圧分布を予測することが可能となる。
【0071】
本実施形態の音線解析装置30は、空中に無動力で浮揚可能な浮揚体部31と、音線理論式による数値シミュレーションを行う音線解析部40とを備えている。
浮揚体部31は、例えばヘリウムガスのように空気より軽い気体を充填して空中に浮揚可能なバルーン32を本体とし、エンジンや電動機等のような運転騒音を自ら発することはない。このバルーン32には、騒音レベルを測定する騒音計11と、騒音計11の位置を測位するGPS装置12と、周囲の空気温度を測定する温度センサ33と、風況を測定する風況検出センサ34と、騒音計11、GPS装置12、温度センサ33および風況検出センサ34で取得した測定値を送信する送信装置35とが設けられている。
【0072】
また、バルーン32の適所には、騒音計11、GPS装置12、温度センサ33、風況検出センサ34および送信装置35に必要な電源として、図示しないバッテリが搭載されている。
このバルーン32は、例えばケーブル36により支持されて所望の高度まで浮揚可能であり、高所の音源となる煙突50の上端出口付近まで浮揚して、音源近傍における各種データ(騒音レベル、空気温度、風速や風向等の実測値)を取得する。このデータ取得と同時に、データ取得を行った音源近傍位置について、GPS装置12により測位した位置データの座標(経度、緯度及び標高)が時刻とともに取得される。
【0073】
こうして取得された各種データは、送信装置35により位置データおよび時刻とともに音線解析部40の受信装置41に送信される。なお、図中の符号41aは、受信装置41の受信アンテナを示している。
受信装置41が受信した各種データおよび位置データは、音線理論式による数値シミュレーションを行う音線解析演算部42に入力される。すなわち、音線解析部40は、送信装置35から送信された測定値を受信する受信装置41と、受信装置41で受信した測定値に基づいて音線理論式による数値シミュレーションを行う音線解析演算部42とを備えている。なお、音線解析演算部42には、図示は省略したものの、各種操作を行うためのスイッチ類や入力装置や、LCD等のディスプレイからなる記録表示部等が適宜設けられている。
【0074】
この音線解析装置30は、騒音を出さない浮揚体部31が高所に浮揚することで、高所から発生する音の騒音レベルについて、騒音計11により実測値を正確に測定することができる。そして、この騒音実測値の取得と同時に、実測値を測定した高所の測定位置、すなわち騒音計11の位置GPS装置12により測位して知ることができる。
【0075】
さらに、浮揚体部31は、騒音レベルの実測値を取得した高所において、騒音レベル測定位置とほぼ同じ位置における空気温度とともに、風速や風向の実測値も取得することができる。この結果、音線解析部40の音線解析演算部42においては、高所における騒音レベルだけでなく、高所の音源から騒音予測位置に至る音波伝播経路の空気温度や風速分布についても、実測値を用いた高精度の音線解析を行うことができる。換言すれば、温度や風速を計測する際に騒音レベルを同時に計測すれば、騒音レベル評価点における騒音レベルを定量的に評価する騒音予測が可能になる。
【0076】
以下、図6〜図8を参照して騒音予測を具体的に説明する。なお、図6は温度及び風速が一様である場合の音線特性例を示す平面図、図7は温度及び風速が一様である場合の音線特性例を示す側面図、図8は温度及び風速が一様でない場合の音線特性例を示す側面図であり、音線理論式により空気温度や風速分布から求められたものである。
この場合、音響パワーレベルLWの音源があり、全方位に一様に放射した場合の距離r0およびr1における音圧レベルLp0およびLp1は、下記の数式(1)および(2)により求められる。
【数1】
【数2】
【0077】
ここで、nは音源から等角度θで放射される音線の本数、S0およびS1は音線1本当りの通過面積を表す。
また、面積S0およびS1は、音響放射を2次元として考えた場合、下記の数式(3)および(4)のようになる。
【数3】
【数4】
【0078】
数式(3)および(4)を数式(1)および(2)に代入すると、下記の数式(1)′および(2)′のようになる。
【数5】
【数6】
【0079】
温度、風速を計測する際に同時計測した騒音レベルをLp0とし、騒音評価点の騒音レベルをLp1とすれば、数式(1)′および(2)′より、騒音評価点の騒音レベルをLp1は下記の数式(5)となる。したがって、数式(5)により、騒音評価点の騒音予測が可能となる。
【数7】
【0080】
上記のr0θおよびr1θは、図8においてl0およびl1に相当するので、騒音レベルの実測値Lp0と実測点付近の音線間距離l0および騒音評価点付近の音線間距離l1を求めることにより、騒音評価点の騒音レベルLp1の予測が可能となる。なお、図8においては、破線で示す距離の位置で空気温度、風速および音圧レベルが計測されたものとする。
したがって、高所の音源から発生する音の音線解析による騒音予測を行う音線解析装置30は、音波伝播経路の空気温度および風速分布として実測値を使用できるようになるので、推定精度未検証の問題を解消して騒音予測精度を向上させることが可能になる。さらに、温度及び風速の実測値から音線解析装置が予測した騒音の予測結果を、実際に計測した音圧レベル実測値と比較することにより、音線解析装置による騒音予測精度の検証が可能になる。
【0081】
[第5実施形態]
図5に示す第5実施形態に係る音線解析装置30Aは、上述した第4実施形態の音線解析装置30と同様に、例えば煙突50のような高所から発生する音について、音線解析により騒音予測を行う装置である。すなわち、音線解析装置30Aは、高所音源の騒音に対する定性的な寄与について、公知の音線理論式によりシミュレーションして予測する装置である。なお、以下の説明において、上述した各実施形態と同様の部分には同じ符号を付し、その詳細な説明は省略する。
この音線解析装置30Aは、上述した音線解析装置30と異なり、騒音計11を備えていない。
【0082】
すなわち、本実施形態の音線解析装置30Aは、高所音源の位置を測位するGPS装置12と、空気温度を測定する温度センサ33と、風況を測定する風況検出センサ34と、GPS装置12、温度センサ33および風況検出センサ34で取得した測定値を送信する送信装置35とが設けられた浮揚体部31Aを備えている。この浮揚体部31Aは、空中に無動力で浮揚可能なバルーン32を本体とし、ケーブル36により支持されている。
一方、音線解析部40は、上述した第4実施形態と実質的に同様であり、送信装置35から送信された測定値を受信する受信装置41と、受信装置41で受信した測定値および高所音源の騒音実測値に基づいて音線理論式による数値シミュレーションを行う音線解析演算部42とを備えている。
【0083】
このように構成された音線解析装置30Aは、騒音を出さない浮揚体部31Aが高所に浮揚することで、従来と同様にして高所から発生する音の近接騒音実測値を測定した高所測定位置について、その近傍位置をGPS装置12により測位して知ることができる。
すなわち、この音線解析装置30Aは、騒音計11を備えていないので、騒音計11による騒音実測値に代えて、従来と同様の手法で近接騒音実測値を測定し、この実測値を音線解析部40に入力して音線解析を実施する。
【0084】
さらに、浮揚体部31Aは、近接騒音実測値の測定位置近傍において空気温度や風速および風向の実測値を取得できるので、この計測値が入力される音線解析部40では、上述した第4実施形態と同様にして、高所における騒音レベルだけでなく、音波伝播経路の空気温度や風速分布についても実測値を用いて高精度の音線解析を行うことができる。
したがって、高所の音源から発生する音の音線解析による騒音予測を行う音線解析装置30Aは、音波伝播経路の空気温度および風速分布として実測値を使用できるようになるので、推定精度未検証の問題を解消して騒音予測精度を向上させることが可能になる。さらに、温度及び風速の実測値から音線解析装置が予測した騒音の予測結果を、実際に計測した音圧レベル実測値と比較することにより、音線解析装置による騒音予測精度の検証が可能になる。
【0085】
以上、本発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。例えば、上記衛星測位装置としては、GPSを利用したもののほか、ロシアにより構築中のGLONASS、欧州等により構築中のガリレオ、日本により計画中の準天頂システム等を利用したものが考えられる。
【符号の説明】
【0086】
1 騒音測定装置(移動局)
2,2A 固定局
3,3A 騒音測定システム
11 騒音計、記録表示部、第2記録部、補正部
12 衛星測位装置(第2衛星測位装置)
14 受信機
21 第1衛星測位装置
22 第1記録部(ロガー)
24 送信機
30,30A 音線解析装置
31,31A 浮揚体部
32 バルーン
33 温度センサ
34 風況センサ
35 送信装置
40 音線解析部
41 受信装置
42 音線解析演算部
【特許請求の範囲】
【請求項1】
騒音レベルを測定する騒音計と、
前記騒音計の位置を測位する衛星測位装置と、
前記騒音計によって測定された騒音レベルを該騒音レベルが測定されたと同時に前記衛星測位装置によって測位された前記騒音計の位置と対応づけて記録および/または表示する記録表示部と
を備える騒音測定装置。
【請求項2】
地球上の所定の基準点に固定された第1衛星測位装置と、該第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データを時刻と対応づけて記録する第1記録部とを有する固定局と、
騒音レベルを測定する騒音計と、前記固定局の前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて前記騒音計の位置を測位する第2衛星測位装置と、前記騒音計によって測定された騒音レベルを該騒音レベルが測定されたと同時に前記第2衛星測位装置によって測位された前記騒音計の位置および該騒音レベルが測定された時刻と対応づけて記録する第2記録部とを有する移動局と
を備える騒音測定システム。
【請求項3】
地球上の所定の基準点に固定された第1衛星測位装置と、該第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データの誤差を送信する送信機とを有する固定局と、
騒音レベルを測定する騒音計と、前記固定局の前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて前記騒音計の位置を測位する第2衛星測位装置と、前記固定局の前記送信機から送信された前記基準点データの誤差を受信する受信機と、前記第2衛星測位装置によって測位された前記騒音計の位置を前記受信機によって受信された前記基準点データの誤差を用いて補正する補正部と、前記騒音計によって測定された騒音レベルを前記補正部によって補正された前記騒音計の位置と対応づけて記録および/または表示する記録表示部とを有する移動局と
を備える騒音測定システム。
【請求項4】
前記第1衛星測位装置と前記第2衛星測位装置は、前記人工衛星からの信号に含まれる該人工衛星の軌道情報を用いて、前記所定の基準点と前記騒音計の位置を測位するのに用いる前記人工衛星を選択し、
これにより、前記第2衛星測位装置は、前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いることが可能とされていること
を特徴とする請求項2に記載の騒音測定システム。
【請求項5】
前記第1衛星測位装置と前記第2衛星測位装置は、前記人工衛星からの信号に含まれる該人工衛星の軌道情報を用いて、前記所定の基準点と前記騒音計の位置を測位するのに用いる前記人工衛星を選択し、
これにより、前記第2衛星測位装置は、前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いることが可能とされていること
を特徴とする請求項3に記載の騒音測定システム。
【請求項6】
前記第1衛星測位装置が固定された前記所定の基準点の地球上における座標は既知であり、
前記基準点データの誤差は、既知の前記座標に対する、各時刻における前記基準点データの差であること
を特徴とする請求項3または5に記載の騒音測定システム。
【請求項7】
前記基準点データの誤差は、前記第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた前記基準点データの平均値に対する、各時刻における前記基準点データの偏差であること
を特徴とする請求項3または5に記載の騒音測定システム。
【請求項8】
請求項2または4に記載の騒音測定システムを用いた騒音測定方法であって、
前記第1衛星測位装置が固定された前記所定の基準点の地球上における座標は既知であり、
既知の前記座標に対する、各時刻における前記基準点データの差を、該基準点データが各時刻において含む誤差として算出し、
前記移動局の前記第2衛星測位装置によって測位され、前記第2記録部に前記騒音レベルおよび時刻と対応づけて記録された前記騒音計の位置を、同時刻における前記基準点データの誤差を用いて補正すること
を特徴とする騒音測定方法。
【請求項9】
請求項2または4に記載の騒音測定システムを用いた騒音測定方法であって、
前記固定局の前記第1衛星測位装置によって前記所定の基準点を経時的に測位して得られ、前記第1記録部に時刻と対応づけて記録された前記基準点データの平均値を算出し、
前記基準点データの平均値に対する、各時刻における前記基準点データの偏差を、該基準点データが各時刻において含む誤差として算出し、
前記移動局の前記第2衛星測位装置によって測位され、前記第2記録部に前記騒音レベルおよび時刻と対応づけて記録された前記騒音計の位置を、同時刻における前記基準点データの誤差を用いて補正すること
を特徴とする騒音測定方法。
【請求項10】
騒音レベルを測定する騒音計と、前記騒音計の位置を測位する衛星測位装置と、空気温度を測定する温度センサと、風況を測定する風況検出センサと、前記騒音計、前記衛星測位装置、前記温度センサおよび前記風況検出センサで取得した測定値を送信する送信装置とが設けられて空中に無動力で浮揚可能な浮揚体部と、
前記送信装置から送信された測定値を受信する受信装置と、前記受信装置で受信した測定値に基づいて音線理論式による数値シミュレーションを行う音線解析部と
を備える音線解析装置。
【請求項11】
高所音源の位置を測位する衛星測位装置と、空気温度を測定する温度センサと、風況を測定する風況検出センサと、前記衛星測位装置、前記温度センサおよび前記風況検出センサで取得した測定値を送信する送信装置とが設けられて空中に無動力で浮揚可能な浮揚体部と、
前記送信装置から送信された測定値を受信する受信装置と、前記受信装置で受信した測定値および前記高所音源の騒音実測値に基づいて音線理論式による数値シミュレーションを行う音線解析部と
を備える音線解析装置。
【請求項1】
騒音レベルを測定する騒音計と、
前記騒音計の位置を測位する衛星測位装置と、
前記騒音計によって測定された騒音レベルを該騒音レベルが測定されたと同時に前記衛星測位装置によって測位された前記騒音計の位置と対応づけて記録および/または表示する記録表示部と
を備える騒音測定装置。
【請求項2】
地球上の所定の基準点に固定された第1衛星測位装置と、該第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データを時刻と対応づけて記録する第1記録部とを有する固定局と、
騒音レベルを測定する騒音計と、前記固定局の前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて前記騒音計の位置を測位する第2衛星測位装置と、前記騒音計によって測定された騒音レベルを該騒音レベルが測定されたと同時に前記第2衛星測位装置によって測位された前記騒音計の位置および該騒音レベルが測定された時刻と対応づけて記録する第2記録部とを有する移動局と
を備える騒音測定システム。
【請求項3】
地球上の所定の基準点に固定された第1衛星測位装置と、該第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた基準点データの誤差を送信する送信機とを有する固定局と、
騒音レベルを測定する騒音計と、前記固定局の前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いて前記騒音計の位置を測位する第2衛星測位装置と、前記固定局の前記送信機から送信された前記基準点データの誤差を受信する受信機と、前記第2衛星測位装置によって測位された前記騒音計の位置を前記受信機によって受信された前記基準点データの誤差を用いて補正する補正部と、前記騒音計によって測定された騒音レベルを前記補正部によって補正された前記騒音計の位置と対応づけて記録および/または表示する記録表示部とを有する移動局と
を備える騒音測定システム。
【請求項4】
前記第1衛星測位装置と前記第2衛星測位装置は、前記人工衛星からの信号に含まれる該人工衛星の軌道情報を用いて、前記所定の基準点と前記騒音計の位置を測位するのに用いる前記人工衛星を選択し、
これにより、前記第2衛星測位装置は、前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いることが可能とされていること
を特徴とする請求項2に記載の騒音測定システム。
【請求項5】
前記第1衛星測位装置と前記第2衛星測位装置は、前記人工衛星からの信号に含まれる該人工衛星の軌道情報を用いて、前記所定の基準点と前記騒音計の位置を測位するのに用いる前記人工衛星を選択し、
これにより、前記第2衛星測位装置は、前記第1衛星測位装置が前記所定の基準点を測位して前記基準点データを得るのに用いたのと同じ人工衛星からの信号を用いることが可能とされていること
を特徴とする請求項3に記載の騒音測定システム。
【請求項6】
前記第1衛星測位装置が固定された前記所定の基準点の地球上における座標は既知であり、
前記基準点データの誤差は、既知の前記座標に対する、各時刻における前記基準点データの差であること
を特徴とする請求項3または5に記載の騒音測定システム。
【請求項7】
前記基準点データの誤差は、前記第1衛星測位装置によって前記所定の基準点を経時的に測位して得られた前記基準点データの平均値に対する、各時刻における前記基準点データの偏差であること
を特徴とする請求項3または5に記載の騒音測定システム。
【請求項8】
請求項2または4に記載の騒音測定システムを用いた騒音測定方法であって、
前記第1衛星測位装置が固定された前記所定の基準点の地球上における座標は既知であり、
既知の前記座標に対する、各時刻における前記基準点データの差を、該基準点データが各時刻において含む誤差として算出し、
前記移動局の前記第2衛星測位装置によって測位され、前記第2記録部に前記騒音レベルおよび時刻と対応づけて記録された前記騒音計の位置を、同時刻における前記基準点データの誤差を用いて補正すること
を特徴とする騒音測定方法。
【請求項9】
請求項2または4に記載の騒音測定システムを用いた騒音測定方法であって、
前記固定局の前記第1衛星測位装置によって前記所定の基準点を経時的に測位して得られ、前記第1記録部に時刻と対応づけて記録された前記基準点データの平均値を算出し、
前記基準点データの平均値に対する、各時刻における前記基準点データの偏差を、該基準点データが各時刻において含む誤差として算出し、
前記移動局の前記第2衛星測位装置によって測位され、前記第2記録部に前記騒音レベルおよび時刻と対応づけて記録された前記騒音計の位置を、同時刻における前記基準点データの誤差を用いて補正すること
を特徴とする騒音測定方法。
【請求項10】
騒音レベルを測定する騒音計と、前記騒音計の位置を測位する衛星測位装置と、空気温度を測定する温度センサと、風況を測定する風況検出センサと、前記騒音計、前記衛星測位装置、前記温度センサおよび前記風況検出センサで取得した測定値を送信する送信装置とが設けられて空中に無動力で浮揚可能な浮揚体部と、
前記送信装置から送信された測定値を受信する受信装置と、前記受信装置で受信した測定値に基づいて音線理論式による数値シミュレーションを行う音線解析部と
を備える音線解析装置。
【請求項11】
高所音源の位置を測位する衛星測位装置と、空気温度を測定する温度センサと、風況を測定する風況検出センサと、前記衛星測位装置、前記温度センサおよび前記風況検出センサで取得した測定値を送信する送信装置とが設けられて空中に無動力で浮揚可能な浮揚体部と、
前記送信装置から送信された測定値を受信する受信装置と、前記受信装置で受信した測定値および前記高所音源の騒音実測値に基づいて音線理論式による数値シミュレーションを行う音線解析部と
を備える音線解析装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−196991(P2011−196991A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−294198(P2010−294198)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]