
骨矯正のための方法、部材、システムおよびプログラム
【課題】本発明は、骨を処置するための方法およびシステムを提供する。
【解決手段】本発明のシステムは、対象となる骨の現状の骨モデルを得ることと、該骨の処置の目的となる目的骨モデルを取得することと、骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置(例えば、必要な補助部材)を決定することと、該処置を用いて該骨を手術することを包含することを特徴とする。本発明はまた、このような方法を実現するためのコンピュータプログラムを提供する。
【解決手段】本発明のシステムは、対象となる骨の現状の骨モデルを得ることと、該骨の処置の目的となる目的骨モデルを取得することと、骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置(例えば、必要な補助部材)を決定することと、該処置を用いて該骨を手術することを包含することを特徴とする。本発明はまた、このような方法を実現するためのコンピュータプログラムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、骨折等により変形した骨を正常に矯正する際に好適に用いられる骨切断補助部材等に関するものである。
【背景技術】
【0002】
以下の記載内容には、本発明の理解に有用と思われる情報が含まれている。ここに提供されている情報がいずれも本発明に対する従来技術であると認めるものでもなければ、明示的または暗黙的に参照した出版物がいずれも本発明に対する従来技術であると認めるものでもない。
【0003】
従来、骨折変形治癒に対しては二次元画像であるX線、CT(コンピュータ断層撮影)、透視画像を用いて術前計画および骨切、矯正手術が行われていたが、変形が三次元的であるため、術前に三次元骨切・矯正手術を正確にシミュレーションすることは困難であった。そのため、実際の手術でも不適切な部位で骨切りされること、矯正が不十分であることなどの欠点が多いのが現状である。
【0004】
【先行技術文献】
【特許文献】
【0005】
【特許文献1】英国特許出願公開第2164859号公報
【特許文献2】米国特許第5021056号公報公報
【特許文献3】特表平9−512189号公報公報
【特許文献4】特開平7−95996号公報公報
【特許文献5】特表2000−507846号公報公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、直接三次元データを用いて骨モデルを作成すること、および正常な形状に代表される目的骨モデルと、処置の対象となる骨モデル(例えば、変形治癒した骨)との差分を直接手術において利用することで、予想外に正確かつ良好な変形骨の治癒が見出されたことによって達成された。本発明では、三次元的に正確な矯正をシミュレーションし、必要に応じてそれを実現するための補助部材を設計することにより、従来では考えられなかった正確な矯正骨切手術を可能とすることが見出された。
【0007】
より詳細には、本発明は、Screw Displacement−Axis法またはアファイン変換法などの数学的方法を利用することによって、正常な形状に代表される目的骨モデルと、処置の対象となる骨モデル(例えば、変形治癒した骨)との差分を計算し、その差分を、例えば、回転、移植片の挿入、切除などによって補正することを1つの特徴とする。目的骨モデルと、骨モデルとから、直接に回転、挿入、切除などを計算し、その処置を実行することによって、数週間から数ヶ月後も、変形していた骨がほぼ正常に治癒した状態が保たれていることが本発明において予想外に実証された。したがって、本発明は、簡便で、かつ、より正確な身体の手術法を提供する。本発明によって、実質的に1回の切断動作によって変形骨などの異常骨を正常形状にもたらす技術が提供される。
【0008】
したがって、本発明は、以下を提供する。
1.骨を処置するための方法であって、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)上記骨の処置の目的となる目的骨モデルを取得する工程;
C)骨モデルと目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する工程;
D)決定された上記処置を用いて上記骨を手術する工程、
を包含する、方法。
2.上記処置は、補助部材を用いる、項目1に記載の方法。
3.上記骨モデルおよび上記目的骨モデルからなる群より選択される少なくとも1つは、直接三次元データを取得することによって取得される、項目1に記載の方法。
4.上記決定工程は、上記骨の三次元方向すべてのパラメータを直接または間接的に使用する、項目1に記載の方法。
5.上記決定工程は、上記骨の回転軸を考慮する、項目1に記載の方法。
6.上記回転軸の決定は、Screw Displacement−Axis法を利用する、項目5に記載の方法。
7.上記処置方法は、骨の回転、切除、移植片の挿入および骨の延長からなる群より選択される少なくとも1つの処置を含む、項目1に記載の方法。
8.上記補助部材は、テンプレート補助部材を含む、項目2に記載の方法。
9.上記テンプレート補助部材は、配置されるべき位置を示す位置決め部、骨切断すべき切断面指示部、ならびに位置判断補助部材の取り付け位置を指示する取付位置指示部からなる群より選択される少なくとも1つの要素を備える、項目8に記載の方法。
10.上記テンプレート補助部材は、配置されるべき位置を示す位置決め部、骨切断すべき切断面指示部、位置判断補助部材の取り付け位置を指示する取付位置指示部をすべて備える、項目8に記載の方法。
11.上記補助部材は、創外固定器を含む、項目2に記載の方法。
12.上記手術工程は、
A)上記骨を少なくとも1つの部位において切断する工程:
B)i)骨の回転が必要な場合、回転を行うこと;
ii)骨の移植片の挿入が必要な場合、上記移植片の挿入を行うこと;および
iii)骨片の切除が必要な場合、上記骨片の切除を行うこと;
からなる群より選択される少なくとも1つの骨処置工程を行う工程;
C)上記切断された骨を接合する工程、
を包含する、項目1に記載の方法。
13.上記骨処置工程における骨の回転、移植片の挿入および骨の切除は、Screw
Displacement−Axis法またはアファイン変換法によって規定される、項目12に記載の方法。
14.上記骨の切断は、テンプレート補助部材によって規定される、項目12に記載の方法。
15.上記骨の回転は、テンプレート補助部材上の回転軸を規定する少なくとも1対の開口部を通る矯正補助部材を平行にする工程を包含する、項目12に記載の方法。
16.上記挿入される移植片は、Screw
Displacement−Axis法またはアファイン変換法によって規定され製造されたものである、項目12に記載の方法。
17.上記手術方法において、上記骨切断工程は、上記骨をある位置で近位側の骨片および遠位側の骨片に切断する工程を含み、上記骨は、近位側または遠位側のいずれかが固定される、項目12に記載の方法。
18.上記目的骨モデルは、近位側または遠位側の部分に基づく、項目1に記載の方法。
19.上記処置工程は、骨の延長を含み、上記骨の延長は仮骨延長法によって行われる、項目1に記載の方法。
20.上記骨は、四肢のものを含む、項目1に記載の方法。
21.上記骨は、変形治癒したものである、項目1に記載の方法。
22.上記処置において移植片が挿入され、上記移植片は、天然骨または人工骨である、項目1に記載の方法。
23.上記天然骨は、自家骨、同種骨および異種骨からなる群より選択される、項目22に記載の方法。
24.上記移植片は、自家骨である、項目22に記載の方法。
25.上記移植片は、人工骨である、項目22に記載の方法。
26.上記人工骨は、リン酸カルシウムを含む、項目25に記載の方法。
27.上記リン酸カルシウムは、ハイドロキシアパタイトを含む、項目26に記載の方法。
28.手術後に、矯正が適切であるかどうか確認する工程をさらに包含する、項目1に記載の方法。
29.手術後に、矯正された骨を固定する工程をさらに包含する、項目1に記載の方法。
30.上記目的骨モデルは、上記骨モデルの骨の対称となる組のパートナーに基づいて規定される、項目1に記載の方法。
31.上記目的骨モデルは、上記骨を有する患者の標準に基づいて規定される、項目1に記載の方法。
32.上記処置は回転を含み、上記回転は、1つの回転軸のみの周りの回転である、項目1に記載の方法。
33.骨の処置をシミュレーションするための方法であって、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)上記骨の処置の目的となる目的骨モデルを取得する工程;
C)骨モデルと目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する工程;および
D)上記骨モデルに基づく模型を作製し、決定された上記処置に基づいて処置のシミュレーションを行う工程、
を包含する、方法。
34.骨を処置するために使用される骨処置キットであって、
A)配置されるべき位置を示す位置決め部および切断すべき切断面指示部が付され、かつ、回転のための矯正補助部材を挿入するための少なくとも1つの開口部を備える、テンプレート補助部材と、
B)矯正位置判断補助部材と
を備える、キット。
35.上記開口部は、少なくとも2つ含まれる、項目34に記載の骨処置キット。
36.上記矯正位置判断補助部材は、平行移動補助機能を有するワイヤである、項目34に記載の骨処置キット。
37.上記ワイヤは、ステンレス製である、項目36に記載の骨処置キット。
38.上記矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能からなる群より選択される少なくとも1つの機能を有する、項目34に記載の骨処置キット。
39.矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能の両方を備える、項目34に記載の骨処置キット。
40.さらに、手術後に骨を固定するための固定補助部材を備える、項目34に記載の骨処置キット。
41.骨を切断分割し、正常位置関係に矯正するためのテンプレート補助部材であって、
A)骨を所定位置に位置決めして取り付けるための位置決め部と、
B)上記骨の適切な切断面を示す切断面指示部と、
C)上記骨の切断片にそれぞれ取り付けられ互いの位置関係から各骨片が正常位置関係にあるか否かの判断を可能ならしめる位置判断補助部材の、上記切断片への取付位置を示す取付位置指示部と
を備えていることを特徴とするテンプレート補助部材。
42.上記取付位置指示部が、上記位置判断補助部材を各骨片に取り付けるための取付穴の穿孔位置および穿孔角度を示すガイド孔である、項目41に記載のテンプレート補助部材。
43.上記位置決め部が骨の表面特徴部分に嵌合する嵌合面である、項目41に記載のテンプレート補助部材。
44.切断面指示部が、切断面に沿って設けられたスリットである、項目41に記載のテンプレート補助部材。
45.骨を切断分割し、正常位置関係に矯正するための補助部材であって、各切断された骨片に設定した所定取付位置にそれぞれ取り付けられ、取付後の互いの位置関係から上記骨片同士が正常位置関係にあるか否かの判断を可能ならしめるものであることを特徴とする、矯正位置判断補助部材。
46.互いに直接連結し、または中間部材を介して互いに連結されることにより、正常位置関係であることを示すようにしている項目45に記載の矯正位置判断補助部材。
47.上記正常位置関係のときに、上記各骨片に取り付けた矯正位置判断補助部材にそれぞれ係り合う係合部を具備したものであることを特徴とする、項目45に記載の矯正位置判断補助部材。
48.骨を処置するために使用される移植片であって、上記移植片は、上記骨の処置の目的となる目的骨モデルと対象となる上記骨の現状の骨モデルとのほぼ差分である、移植片。
49.上記移植片は、Screw Displacement−Axis法またはアファイン変換法によって規定される、項目48に記載の移植片。
50.骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)上記骨の処置の目的となる目的骨モデルを取得する手段;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する手段;および
D)上記処置を用いて上記骨を手術する手段、
を備える、システム。
51.上記決定手段は、補助部材を決定する手段である、項目50に記載のシステム。
52.骨の処置をシミュレーションするためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)上記骨の処置の目的となる目的骨モデルを取得する手段;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する手段;および
D)決定された上記処置に基づいて上記骨の手術をシミュレーションする手段、
を備える、システム。
53.上記シミュレーション手段は、補助部材を用いる、項目52に記載のシステム。
54.骨の処置を決定する処理をコンピュータに実行させるためのプログラムであって、
上記処理は、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)上記骨の処置の目的となる目的骨モデルを取得する工程;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する工程
を包含する、プログラム。
55.上記骨に対して施されるべき処置を決定する工程は、上記処置に必要な補助部材を決定する工程を包含する、項目54に記載のプログラム。
56.上記骨モデルおよび上記目的骨モデルのそれぞれは、3次元モデルによって表現されている、項目54に記載のプログラム。
57.上記工程C)は、
C1)上記骨モデルから近位側骨片モデルと遠位側骨片モデルとを定義する工程;
C2)上記近位側骨片モデルに対する上記遠位側骨片モデルの相対的な移動の方向および量を決定する工程;および
C3)上記骨モデルの切断面を決定する工程
を包含する、項目54に記載のプログラム。
58.上記工程C)は、
C4)上記近位側骨片モデルに対する上記遠位側骨片モデルの相対的な移動の方向および量と上記骨モデルの切断面とに基づいて、上記補助部材を表すモデルを生成する工程
をさらに包含する、項目57に記載のプログラム。
59.上記工程C2)は、
C21)上記骨モデルの近位側を上記目的骨モデルの近位側にマッチングさせるために必要な上記近位側骨片モデルの移動の方向および量を表す近位側移動情報を算出する工程;
C22)上記骨モデルの遠位側を上記目的骨モデルの遠位側にマッチングさせるために必要な上記遠位側骨片モデルの移動の方向および量を表す遠位側移動情報を算出する工程;および
C23)上記近位側移動情報と上記遠位側移動情報との差分に基づいて、上記近位側骨片モデルに対する上記遠位側骨片モデルの相対的な移動の方向および量を表す相対的移動情報を算出する工程
を包含する、項目57に記載のプログラム。
60.上記近位側移動情報は、アファイン変換法の表記に従って第1のマトリックスによって表され、上記遠位側移動情報は、アファイン変換法の表記に従って第2のマトリックスによって表され、
上記工程C23)は、
上記第1のマトリックスと上記第2のマトリックスとの差分をとることにより、相対的マトリックスを算出する工程;および
上記相対的マトリックスをScrew Displacement−Axis法の表記に変換する工程
を包含する、項目59に記載のプログラム。
61.上記相対的移動情報は、Screw
Displacement−Axis法の表記に従って、軸線Lと、上記軸線Lの周りの回転量φと、上記軸線Lに沿った移動量tとによって表され、
上記工程C3)は、
上記軸線Lが上記骨モデルの長軸にほぼ平行である場合には、上記軸線Lに垂直な面を上記骨モデルの切断面として決定し、上記軸線Lが上記骨モデルの長軸にほぼ垂直である場合には、上記軸線Lに平行な面を上記骨モデルの切断面として決定する工程
を包含する、項目59に記載のプログラム。
62.上記工程C4)において、上記補助部材を表すモデルとして、テンプレート補助部材を表すモデル、位置確認補助部材を表すモデルおよび移植片を表すモデルのうちの少なくとも1つが生成される、項目58に記載のプログラム。
63.コンピュータを用いて、骨の処置を決定する方法であって、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)上記骨の処置の目的となる目的骨モデルを取得する工程;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する工程
を包含する方法。
64.骨の処置を決定する装置であって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)上記骨の処置の目的となる目的骨モデルを取得する手段;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する手段
を備えた装置。
【0009】
本発明は、骨折等により異常態様に変形した骨を切断分割し、分割された骨片の位置関係を変えて略正常な態様での位置関係である正常位置関係に矯正する場合に用いられるものであって、各骨片に設定した所定取付位置にそれぞれ取り付けられ、取付後の互いの位置関係から前記骨片同士が正常位置関係にあるか否かの判断を可能ならしめる矯正位置判断補助部材、および前記骨の所定位置に位置決めして取り付けるための位置決め部と、前記骨の適切な切断面を示す切断面指示部と、前記矯正位置判断補助部材の当該各骨片への取付位置を示す取付位置指示部とを備えている骨切断補助部材に係るものである。
【発明の効果】
【0010】
このようなものであれば、前記切断面や取付位置指示部を、CTやMRIで取り込んだ骨の立体モデルを利用した施術シミュレーションにより適切に設定しておくことにより、特殊な技術や勘、経験等を必要とすることなく、確実かつ正確な骨切および適切な矯正の施術が容易に可能となる。
【0011】
前記取付位置指示部の具体的実施態様としては、前記判断補助部材を各骨片に取り付けるための取付穴の穿孔位置および穿孔角度を示すガイド孔を挙げることができる。
【0012】
前記位置決め部の具体的実施態様としては、骨の表面特徴部分に嵌合する嵌合面を挙げることができる。
【0013】
前記切断面指示部の具体的実施態様としては、切断面に沿って設けられたスリットを挙げることができる。
【0014】
矯正位置判断補助部材の具体的実施態様としては、骨に突き刺すことが可能な鋭利先端部を有したロッドを挙げることができる。
【0015】
また、より確実に正常位置関係を判断できるようにするには、各骨片に取り付けられた矯正位置判断補助部材同士が、互いに連結し、又は中間部材を介して互いに連結されることにより、正常位置関係であることを示すようにしているものが好ましい。
【0016】
特に矯正位置判断補助部材がロッドの場合の好ましい中間部材としては、複数の差し込み孔を有したブロック体であり、前記正常位置関係のときに前記各骨片に取り付けた各ロッドを前記差し込み孔に挿入できるように構成したものを挙げることができる。
【0017】
以下に、本発明の好ましい実施形態を示すが、当業者は本発明の説明および当該分野における周知慣用技術からその実施形態などを適宜実施することができ、本発明が奏する作用および効果を容易に理解することが認識されるべきである。
【図面の簡単な説明】
【0018】
【図1】図1は、本発明の一実施形態における骨切断補助部材を示す正面図である。
【図2】図2は、同実施形態における骨切断補助部材を示す背面図である。
【図3】図3は、同実施形態におけるロッドを示す側面図である。
【図4】図4は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図5】図5は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図6】図6は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図7】図7は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図8】図8は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図9】図9は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図10】図10は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図11】図11は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図12】図12は、同実施形態におけるブロック体の製造方法を説明するための説明図である。
【図13】図13は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図14】図14は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
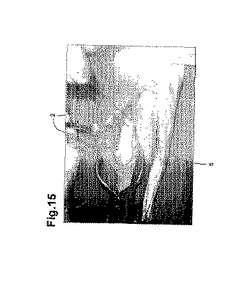
【図15】図15は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図16】図16は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図17】図17は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図18】図18は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行った後の骨の状態を示す状態説明図である。
【図19】図19は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う前の骨の状態を示す状態説明図である。
【図20】図20は、本発明の他の実施形態における骨の矯正位置を求めるシミュレーションを説明するためのシミュレーション説明図である。
【図21】図21は、術前コンピュータシミュレーションの例を示す。
【図22】図22Aは、両側前腕のCTあるいはMRI画像の二次元データを示す。図22Bは、対象骨をセミオートマティックにマーキングして抽出する手順例を示す。図22Cは、セグメント化したモデルを示す。図22Dは、作成した三次元骨表面モデル例を示す。
【図23】図23は、最適な骨切の部位と矯正量とを決定した例を示す。
【図24】図24は、シミュレーションで得られた変形部位、変形量やコンピューター画像を参考にしながら手術例を示す。
【図25】図25は、CTデータを元に、骨切部位および矯正量を決定した例を示す。図25Aは、骨切部位、矯正量の決定を示す。図25Bは、骨切ガイドおよび整復ガイドの設計を示す。図25Cは、光造形モデルを示す。
【図26】図26は、実施例1のA群およびB群の手術結果をまとめた表を示す。
【図27】図27は、実施例2の患者の罹患部を示すレントゲン写真を示す(左は正面図、右は側面図である)。
【図28】図28は、ギプス内での過伸展変形の進行を示す。
【図29】図29は、実施例2の患者の最初の処置後2年での様子を示す。
【図30】図30は、実施例2の患者の過伸展、内反変形の後遺症の様子を示す。
【図31】図31は、実施例2の患者において、MRIから作製した三次元モデルを用いて手術をした例を示す。
【図32】図32は、実施例2における光造形の様子を示す図を示す。
【図33】図33は、実施例2の患者の骨変形治癒手術の術中の写真を示す。
【図34】図34は、ボーンソーで行った骨切の様子を示す。
【図35】図35は、骨切を行った後の様子を示す。
【図36】図36は、余分な骨片の切り出しを示す。
【図37】図37は、実施例2における骨の矯正の様子を示す。
【図38】図38は、実施例2における術後すぐのレントゲン写真である。
【図39】図39は、実施例2における術後すぐの肘の可動域を示す。
【図40】図40は、実施例2における術後すぐの外観写真である。
【図41】図41は、実施例2における術後1年でのレントゲン写真である。
【図42】図42は、実施例2における患者の外観を示す。
【図43】図43は、実施例3における21歳男性で前腕骨折変形治癒をした患者の患部を示す。
【図44】図44は、実施例3における患者の前腕の彎曲および前腕回外障害を示す。
【図45】図45は、実施例3におけるコンピュータシミュレーションを示す。
【図46】図46は、実施例3におけるテンプレート補助部材の設計を示す。
【図47】図47は、実施例3における変形治癒部の展開を示す。
【図48】図48は、実施例3におけるテンプレート補助部材の装着を示す。
【図49】図49は、実施例3における骨切を示す。
【図50】図50は、実施例3におけるテンプレート除去を示す。
【図51】図51は、実施例3における矯正ガイドによる矯正を示す。
【図52】図52は、実施例3における矯正の結果のレントゲン図を示す。
【図53】図53は、実施例3における移植片の移植を示す。
【図54】図54は、実施例3におけるテンプレートでの骨および移植片の固定を示す。
【図55】図55は、実施例3におけるキルシュナーワイヤーの患者からの除去を示す。
【図56】図56は、実施例3における術後すぐの患者のレントゲンを示す。
【図57】図57は、実施例3における術後9ヶ月の患者のレントゲンを示す。
【図58】図58は、実施例3における術後1年1月の患者のレントゲンを示す。
【図59】図59は、実施例3における術後1年1月の患者の外見を示す。
【図60】図60は、実施例4の左橈骨遠位端骨折変形治癒した48歳女性患者を示す。
【図61】図61は、実施例4における患者の外観上の変形と左手関節の可動域障害の様子を示す。
【図62】図62は、実施例4における骨の3次元シミュレーションを示す。
【図63】図63は、実施例4において設計した骨切テンプレートを示す。
【図64】図64は、実施例4における光造形モデルを示す。
【図65】図65は、実施例4における変形治癒部の展開を示す。
【図66】図66は、実施例4におけるキルシュナーワイヤー固定を示す。
【図67】図67は、実施例4における矯正を示す。
【図68】図68は、実施例4において使用したハイドロキシアパタイト材料のCAD整形を示す。
【図69】図69は、実施例4の術後レントゲンを示す。
【図70】図70は、実施例4の術後4ヶ月でのレントゲンを示す。
【図71】図71は、実施例4の術後4ヶ月の患者の外観を示す。
【図72】図72は、実施例5の橈骨遠位端骨折変型治癒の67歳女性患者を示す。
【図73】図73は、実施例5の患者の外観を示す。
【図74】図74は、実施例5の患者の障害の様子を示す。
【図75】図75は、実施例5の骨切三次元シミュレーションを示す。
【図76】図76は、実施例5の骨切テンプレートの設計を示す。
【図77】図77は、実施例5の矯正ガイドの設計を示す。
【図78】図78は、実施例5の矯正のモデルを示す。
【図79】図79は、実施例5の変形部の展開を示す。
【図80】図80は、実施例5のテンプレートの装着を示す。
【図81】図81は、実施例5のテンプレートの装着の続きを示す。
【図82】図82は、実施例5の骨切を示す。
【図83】図83は、実施例5での骨移植を示す。
【図84】図84は、実施例5の骨移植の続きを示す。
【図85】図85は、実施例5のテンプレート固定後のレントゲンを示す。
【図86】図86は、実施例5の術後4ヶ月のレントゲンを示す。
【図87】図87は、実施例5の正常手関節の画像を示す。
【図88】図88は、実施例6の患者を示す。この患者は、バイク事故で橈骨遠位端骨折をしている。
【図89】図89は、実施例6の患者の手関節部での変形を示す。
【図90】図90は、実施例6の患者の回旋障害を示す。
【図91】図91は、実施例6の患者の処置シミュレーションを示す。
【図92】図92は、実施例6の患者の処置シミュレーションにおける変形軸の求め方を示す。
【図93】図93は、実施例6における延長骨切になる様子を示す。
【図94】図94は、実施例6における矯正前後の様子を示す。
【図95】図95は、実施例6におけるテンプレートの設計を示す。
【図96】図96は、実施例6における矯正ガイドの設計を示す。
【図97】図97は、実施例6における光造形モデル作製を示す。
【図98】図98は、実施例6における変形治癒部の展開を示す。
【図99】図99は、実施例6におけるテンプレートの骨への固定を示す。
【図100】図100は、実施例6における骨切(左)および矯正用ガイドでの固定(右)を示す。
【図101】図101は、実施例6における移植片の成型を示す。
【図102】図102は、実施例6における移植片の挿入(左)および固定(右)を示す。
【図103】図103は、実施例6における術直後のレントゲンを示す。
【図104】図104は、実施例6における術後9ヶ月でのレントゲンを示す。
【図105】図105は、実施例6における術後1年での外観を示す。
【図106】図106は、実施例6における術後1年での可動域障害の回復を示す。
【図107】図107は、実施例7における患者の骨(13歳男児、左橈骨骨幹部骨折変形治癒)を示す。
【図108】図108は、実施例7における患者の回外障害を示す。
【図109】図109は、実施例7における骨切シミュレーションを示す。
【図110】図110は、実施例7における回旋矯正計画を示す。
【図111】図111は、実施例7における回旋骨切用のガイド設計を示す。
【図112】図112は、実施例7における回旋骨切用のガイド設計の続きを示す。
【図113】図113は、実施例7における回旋骨切用のガイド設計の続きを示す。
【図114】図114は、実施例7における回旋骨切用のガイド設計の続きを示す。
【図115】図115は、実施例7における骨切モデルのコンピュータ上での外観を示す。
【図116】図116は、実施例7における光造形モデル作製を示す。
【図117】図117は、実施例7における骨切部の展開を示す。
【図118】図118は、実施例7におけるテンプレートの固定を示す。
【図119】図119は、実施例7において、テンプレートを除去した後の状態を示す。
【図120】図120は、実施例7における矯正用ガイドを付与した後のレントゲンを示す。
【図121】図121は、実施例7におけるテンプレートの固定を示す。
【図122】図122は、実施例7における術直後のレントゲンを示す。
【図123】図123は、実施例7における術後6ヶ月でのレントゲンを示す。
【図124】図124は、実施例8における患者の症状を示す。
【図125】図125は、実施例8における患者のレントゲンを示す。
【図126】図126は、実施例8における骨切シミュレーションを示す。
【図127】図127は、実施例8におけるテンプレート設計を示す。
【図128】図128は、実施例8における矯正ガイドの設計を示す。
【図129】図129は、実施例8における矯正ガイドの設計の続きである。
【図130】図130は、実施例8における骨切設計を示す。
【図131】図131は、実施例8における光造形モデルを示す。
【図132】図132は、実施例8において使用した矯正用ガイドを示す。
【図133】図133は、実施例8における変形骨の展開を示す。
【図134】図134は、実施例8におけるテンプレートの装着を示す。
【図135】図135は、実施例8における骨切を示す。
【図136】図136は、実施例8における楔状の骨部分の切除を示す。
【図137】図137は、実施例8における骨切除後の整復を示す。
【図138】図138は、実施例8における術後の矯正の状況を示す。
【図139】図139は、実施例8における術後すぐ、2ヶ月および6ヶ月での矯正の様子を示す。
【図140】図140は、実施例9における骨遠位端骨折7歳男児患者を示す。
【図141】図141は、実施例9における患者の骨転位の進行を示す。
【図142】図142は、実施例9における術後1ヶ月での手術の様子を示す。
【図143】図143は、実施例9における受傷後8ヶ月でのレントゲンを示す。
【図144】図144は、実施例9における受傷後5年でのレントゲンを示す。
【図145】図145は、実施例9における患者の外観を示す。
【図146】図146は、実施例9における患者の手関節掌屈障害を示す。
【図147】図147は、実施例9におけるシミュレーションを示す。
【図148】図148は、実施例9における骨切のモデルを示す。
【図149】図149は、実施例9において使用した創外固定器である。
【図150】図150は、実施例9において使用した創外固定器の部分である。左上は上部を示し、左下は骨を示し、右にはワイヤで固定された骨の様子が示される。
【図151】図151は、実施例9において使用した創外固定器の使用モデルである。左は矯正前であり、右は矯正後である。
【図152】図152は、実施例9における手術の様子を示す。
【図153】図153は、実施例9における手術終了直後の様子を示す。
【図154】図154は、実施例9における手術終了後のレントゲンを示す。
【図155】図155は、実施例9において延長を開始した直後を示す。
【図156】図156は、実施例9において延長が終了した直後を示す。
【図157】図157は、実施例9において延長を開始して術後2.5ヶ月経過したレントゲンである。
【図158】図158は、実施例9における術後3.5ヶ月での創外固定器除去の様子を示す。
【図159】図159は、実施例9における術後4ヶ月と術前とのレントゲンの比較を示す。
【図160】図160は、実施例9における術前と術後5ヶ月での外観の比較を示す。
【図161】図161は、実施例9における手関節の掌屈の改善を示す。また、可動域の障害がほとんどなくなったことを示す。
【図162A】図162は、実施例10における症例3の実施形態における舟状骨偽関節手術の三次元コンピューターシミュレーションである。図162Aは、同実施形態におけるコンピューター上に再構築した舟状骨の三次元表面モデルである。右側は、フレームもモデルを示し、左側は、表面モデルを示す。
【図162B】図162Bは、同実施形態における変位した舟状骨の整復をシミュレーションするために、偽関節モデル(左側)の遠位側部分および近位側部分を、反対側の正常な舟状骨モデル(右側)の鏡像に対して記録した表面画像を示す。整復されるべき変形を、ScrewDisplacement−Axis(中央)の周りの回転として示した。
【図162C】図162Cは、同実施形態における骨欠損の推定(矢尻)および螺旋挿入(矢印)のシミュレーションを示す。螺旋挿入の適切な部位および方向を、種々の角度からの透過性モードで整復舟状骨モデルを見ることによって決定した。
【図162D】図162Dは、同実施形態における骨欠損の推定(矢尻)および螺旋挿入(矢印)のシミュレーションを示す。螺旋挿入の適切な部位および方向を、種々の角度からの透過性モードで整復舟状骨モデルを見ることによって決定した。
【図163A】図163Aは、実施例10における舟状骨の光造形モデル(ハードモデル)を示す。左側は、舟状骨の偽関節モデルであり、中央は、適切な螺旋挿入による整復モデルであり、右側は、反対側の正常な舟状骨の鏡像である。
【図163B】図163Bは、推定骨欠損モデルである。
【図164A】図164Aは、実施例10における、症例7の実施形態における手術手順を示す説明図であり、手根の舟状骨偽関節を示す。
【図164B】図164Bは、同実施形態における手術手順を示す説明図であり、月状骨の背面側への回転を、三次元モデルの側面からの示した画像である。
【図164C】図164Cは、同実施形態における手術手順を示す説明図であり、偽関節部位(矢印)を、ハードモデルと比較した。
【図164D】図164Dは、同実施形態における手術手順を示す説明図であり、参照としてハードモデルを使用して、腸骨移植片を成形した。
【図164E】図164Eは、同実施形態における手術手順を示す説明図であり、参照としてハードモデルを使用して、腸骨移植片を成形した。
【図164F】図164Fは、同実施形態における手術手順を示す説明図であり、骨移植片を挿入した後、螺旋挿入の部位および方向を、ハードモデルを使用して決定した。
【図164G】図164Gは、同実施形態における手術直後のX線写真を示す。
【図164H】図164Hは、同実施形態における術後6週間での正面(AP=anteroposterior)および側方からのX線写真を示す。
【図164I】図164Iは、同実施形態における術後6週間でのAPおよび側方からのX線写真を示す。
【図165】図165は、図162の実施形態(症例3)の舟状骨変位の螺旋軸(矢印)を示す。
【図166】図166は、実施例10における症例4において、三次元画像(図167)において背面側骨棘が明らかであったが、術前(図166A)および術後(図166B)レントゲンにおいて変形性関節症変化が明らかでなかったことを示す。
【図167】図167は、実施例10における症例4の三次元画像である。
【図168】図168は、左前腕レントゲンを示す。尺骨が正常に比べて内側に湾曲している(矢印)。
【図169】図169は、正常側レントゲンを示す。
【図170】図170は、実施例11の患者が、左前腕回外が不可である写真を示す。
【図171】図171もまた、図170と同様に、患者の回内がわずかに制限されている写真を示す。
【図172】図172は、実施例11の患側の3次元モデルを示す。
【図173】図173は、実施例11の健側の鏡像モデルを示す。
【図174】図174は、実施例11の尺骨の矯正骨切の計画を示す。図174Aでは、図の左側にclosedwedge osteotomyを計画した。点は変形軸を表す。図174Bは、変形軸を通る面で骨切をし、13°の角度を持つ楔状の骨を切除した。図174Cは、変形矯正を示す。図174DおよびEは、矯正後に図の右側に出来る骨欠損に楔状の骨移植をした。
【図175】図175は、円弧でドーム状に骨切する設計を示す。図175Aに示すように、変形軸を中心にもつ適当な半径の円弧で骨切をし、図175Bに示すように、遠位の骨片を13°回旋させることにより矯正が完成することが理解される。
【図176】図176は、実施例11の骨切テンプレートおよび矯正ガイドの設計を示す。図176Aおよび図176Bは、骨切プレートをそれぞれ背側からと掌側から見たところを示す。図176Cおよび図176Dは、それぞれ、矯正用ガイドを、背側からと掌側から見たところを示す。
【図177】図177は、尺骨矯正骨切の術中写真を示す。図177Aは、尺骨変形部の展開を示す。図177Bは、骨切テンプレートを当ててキルシュナーワイヤーで固定する様子を示す。ワイヤーに13°の角度がついていることが注意されるべきである。図177Cは、骨切の後、キルシュナーワイヤーに矯正ガイドを通して矯正した。キルシュナーワイヤーは平行になっている。図177Dに示すように、この位置でプレート固定した。奥の方から切除した楔状の骨を手前に出来た骨欠損に補填した。
【図178】図178は、Closed wedgeとOpen wedgeとの組み合わせでの術後レントゲンを示す。
【図179】図179は、骨の処置を決定する処理を実行するコンピュータ1000の構成の一例を示す。
【図180】図180は、骨の処置を決定する処理の手順の一例を示す。
【図181】図181は、図180に示される工程2030を実現するための処理の手順の一例を示す。
【図182】図182は、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を決定する処理の手順の一例を示す。
【発明を実施するための形態】
【0019】
以下、本発明を説明する。本明細書の全体にわたり、単数形の表現は、特に言及しない限り、その複数形の概念をも含むことが理解されるべきである。従って、単数形の冠詞(例えば、英語の場合は「a」、「an」、「the」など)は、特に言及しない限り、その複数形の概念をも含むことが理解されるべきである。また、本明細書において使用される用語は、特に言及しない限り、当該分野で通常用いられる意味で用いられることが理解されるべきである。したがって、他に定義されない限り、本明細書中で使用される全ての専門用語および科学技術用語は、本発明の属する分野の当業者によって一般的に理解されるのと同じ意味を有する。矛盾する場合、本明細書(定義を含めて)が優先する。
【0020】
(用語の定義)
以下に本明細書において特に使用される用語の定義を列挙する。
【0021】
本明細書において、骨に関して「骨モデル」とは、処置すべき対象となる骨の現状をモデル化したものをいう。骨モデルは、通常、三次元表示される。
【0022】
本明細書において、「目的骨モデル」とは、本発明の処置方法において、処置の目的となる像をいい、処置後にあるべき形状の像をいう。目的骨モデルとしては、例えば、正常な骨のモデルが挙げられるがそれらに限定されない。目的骨モデルは、通常、三次元表示され、通常、骨モデルと同じ表示方法が用いられる。目的骨モデルは、すでにあるモデルを取得してきてもよく、手動で作成することもできるが、通常は、コンピュータを用いて作成される。
【0023】
本明細書において「三次元表示」は、通常直交系表示を用いて行われるが、三次元を表示することができる系であれば任意の系を用いることができる。
【0024】
本明細書において「骨」とは、脊椎動物の支持器官であって、内骨格の個々の構成要素をいう。脊椎動物の骨は、円口類および軟骨魚類を除いて主に骨組織からなる。本明細書では、「骨」には、軟骨が含まれる。本明細書において、脊椎動物の骨格の大部分を形づくる硬い結合組織を特に区別するときは、「硬骨」と呼ぶ。なお、本明細書では、骨が例示されているが、骨以外の他の身体の一部であっても同様に処置を設計し、実施することができることが理解される。
【0025】
本明細書において対象とする骨は、通常異常骨であることが多く、代表的には、骨折を経由した骨が挙げられる。骨折には、完全骨折、不完全骨折があり、皮膚の損傷を伴う開放骨折、閉鎖骨折などがあり、それから治癒した異常骨はすべて対象となり得る。骨折後は、通常6週間〜6ヶ月で治癒するが、その間間隙には、新たな骨が形成されるか、または変形して骨が治癒する。一次治癒した場合は、骨折片同士がぴったり接合し、従って、変形しにくいことから、本発明の対象とはほとんどならないが、ぴったり接合せず、従って、骨折端が刺激され軟骨性の仮骨が徐々に接合する場合は、「二次治癒」といい、変形して治癒することが多く、本発明の対象となることが多い。
【0026】
本明細書において骨を「処置すべき方法」とは、骨の処置において、目的骨モデルへと導くために、骨モデルを有する対象となる骨に施すべき方法(例えば、切断、挿入および/または切除、平行移動、回転など)およびそれに必要な補助部材(例えば、テンプレート補助部材、矯正補助部材、挿入されるべき移植片などの補助部材)の形状をいう。
【0027】
本明細書において「補助部材」とは、本発明の骨の手術において使用される部材をいう。補助部材としては、例えば、テンプレート補助部材、移植片、矯正位置判断補助部材、固定補助部材、矯正補助部材、平行移動補助部材などが挙げられるがそれらに限定されない。
【0028】
本明細書において、骨に関する三次元方向の「パラメータ」とは、使用する三次元表示において、各次元を表示する要素をいい、例えば、正規直交系で空間を表現したときに、x、yおよびz軸に関する各々の要素(例えば、ベクトルなど)をいう。x、yおよびz軸で表現される空間は、代替的に、回転軸、回転角度および距離で表すことができる。
【0029】
本明細書において「回転軸」とは、点群の対称要素の一つであり、ある剛体(例えば、骨)を回転させるとき、その剛体の回転中に動かない点の集合(すなわち、直線)をいう。従って、ある直線を軸として、構造全体を一定角度、回転させても、回転前の構造と一致するとき、この軸を回転軸ということができる。本発明の手術方法では、特に、目的骨モデルにいたるために、骨モデルから回転すべき場合の「回転軸」を指す。
【0030】
本明細書において「螺旋変位(screw
displacement)」とは、ある軸の周りの剛体の回転に、その軸に沿っての並進が伴われているような変位をいう。
【0031】
本明細書において、「Screw Displacement−Axis」とは、「螺旋変位軸」または「螺旋軸」ともいい、空間群の対称要素の一つであり、螺旋変位の回転軸をいう。従って、ある直線を軸として、構造全体を一定角度、回転させた後に、その軸に平行なある並進操作を行ない、そのような操作をひき続き行ったとき、元の構造と一致する場合、この軸を螺旋軸という。この回転軸を用いた処置を「Screw
Displacement−Axis(螺旋変位軸)」法という。Screw Displacement−Axis法では、回転軸のベクトル表示およびそのベクトルの移動距離などを用いて変位を表示することができる。Screw
Displacement−Axis法は、物体移動の表記の一つの方法であり、幾何学では用いられているが、外科手術に用いられた例はない。
【0032】
本明細書において「アファイン変換法」とは、「アフィン変換法」とも呼ばれ、線形空間の線形変換に原点を移動する並進を加える変位の表示法をいう。アファイン変換法では、変位は、通常線形変換と定ベクトルとの和で示される。詳細には、http://mailsrv.nara-edu.ac.jp/~asait/open_gl/linear.htmなどを参酌することができる。
平面の場合に平行移動と回転の合成をして、点の座標を指定すれば、もとの座標系では
【0033】
【数1】

【0034】
のようになるが、平行移動、回転などは座標系の移動と解釈する方が理解しやすい。実際、もとの座標系の単位ベクトルを{e1,e2}とすれば、
【0035】
【数2】
【0036】
のように計算ができる。この結果は次のような解釈ができる。
【0037】
【数3】
【0038】
アファイン空間の座標系を(x軸上の単位ベクトル、y軸上の単位ベクトル、原点の位置)
の組によって与えておけば、先の計算結果から、点の移動が、座標系の移動と理解することができることがわかる。
【0039】
本明細書において骨の「処置」とは、骨に対して物理的に作用を与えることをいい、例えば、回転、切除、切断、移植片の挿入、延長、固定などをいうがそれらに限定されない。
【0040】
本明細書において「移植片」(グラフト)とは、身体の特定部位に挿入されるべき同種または異種の組織、細胞群または人工物(例えば、リン酸カルシウム構造体)であって、身体への挿入後その一部となるものをいう。移植片としては、例えば、骨(例えば、天然骨(例えば、自家骨、同種骨、異種骨など)の一部、リン酸カルシウム(例えば、ハイドロキシアパタイト)の構造体などが挙げられるがそれらに限定されない。従って、「移植片」には、ある部分の欠損部に差し込んで欠損を補うために用いられるものすべてが包含される。移植片は、好ましくは、免疫拒絶反応を起こさないものが使用される。移植片としては、そのドナー(donor)の種類によって、自己(自家)移植片(autograft)、同種移植片(同種異系移植片)(allograft)、異種移植片(例えば、ヒトに対するサンゴなど)が挙げられるがそれらに限定されない。
【0041】
本明細書において「自己移植片」(骨、組織、細胞、臓器など)または自家移植片(骨、組織、細胞、臓器など)とは、ある個体についていうとき、その個体に由来する移植片(骨、組織、細胞、臓器など)をいう。本明細書において「自己移植片」(骨、組織、細胞、臓器など)というときは、広義には遺伝的に同じ他個体(例えば一卵性双生児)からの移植片(骨、組織、細胞、臓器など)をも含み得る。本明細書では、このような「自己」との表現は、「被験体に由来する」と交換可能に使用される。従って、本明細書では、ある「被験体に由来しない」との表現は、「自己ではない(すなわち、非自己)」と同一の意味を有する。
【0042】
本明細書において「同種移植片」(同種異系移植片)(骨、組織、細胞、臓器など)とは、同種であっても遺伝的には異なる他個体から移植される移植片(骨、組織、細胞、臓器など)をいう。遺伝的に異なることから、同種異系移植片(骨、組織、細胞、臓器など)は、移植された個体(レシピエント)において免疫反応を惹起し得る。そのような移植片の例としては、親由来の移植片(骨、組織、細胞、臓器など)などが挙げられるがそれらに限定されない。
【0043】
本明細書において「異種移植片」(骨、組織、細胞、臓器など)とは、異種個体から移植される移植片(骨、組織、細胞、臓器など)をいう。従って、例えば、ヒトがレシピエントである場合、ブタからの移植片(骨、組織、細胞、臓器など)、サンゴ成分などは、異種移植片(骨、組織、細胞、臓器など)という。
【0044】
本明細書において「人工」移植片(骨、組織、細胞、臓器など)とは、天然の生物に由来しない部分(例えば、人工のリン酸カルシウムを含む構造体)を有する移植片をいう。人工移植片が人工骨の場合、リン酸カルシウムを含むことが好ましい。より好ましくはこのリン酸カルシウムはハイドロキシアパタイトを含む。
【0045】
本明細書において「レシピエント」(受容者)とは、移植片(骨、組織、細胞、臓器など)または移植体(骨、組織、細胞、臓器など)を受け取る個体をいい、「宿主」とも呼ばれる。これに対し、移植片(骨、組織、細胞、臓器など)または移植体(骨、組織、細胞、臓器など)を提供する個体は、「ドナー」(供与者)という。
【0046】
本明細書において「被験体(患者)」とは、本発明の処置が適用される生物をいい、「患者」ともいわれる。患者または被験体は好ましくは、ヒトであり得る。
【0047】
本発明において使用される移植片は、同系由来(自己(自家)由来)でも、同種異系由来(他個体(他家)由来)でも、異種由来でもよい。拒絶反応が考えられることから、自己由来の細胞が好ましいが、拒絶反応が問題でない場合同種異系由来であってもよい。また、拒絶反応を起こすものも必要に応じて拒絶反応を解消する処置を行うことにより利用することができる。拒絶反応を回避する手順は当該分野において公知であり、例えば、新外科学体系、第12巻、臓器移植(心臓移植・肺移植
技術的、倫理的整備から実施に向けて)(改訂第3版)、中山書店に記載されている。そのような方法としては、例えば、免疫抑制剤、ステロイド剤の使用などの方法が挙げられる。拒絶反応を予防する免疫抑制剤は、現在、「シクロスポリン」(サンディミュン(登録商標)/ネオーラル(登録商標))、「タクロリムス」(プログラフ)、「アザチオプリン」(イムラン)、「ステロイドホルモン」(プレドニン、メチルプレドニン)、「T細胞抗体」(OKT3、ATG)があり、予防的免疫抑制療法として世界の多くの施設で行われている方法は、「シクロスポリン、アザチオプリン、ステロイドホルモン」の3剤併用である。免疫抑制剤は、本発明の移植片と同時期に投与されることが望ましいが、必ずしも必要ではない。従って、免疫抑制効果が達成される限り免疫抑制剤は本発明の方法の前または後にも投与され得る。
【0048】
本明細書において「補強」とは、意図される生体の部分の機能を改善させることをいう。
【0049】
本明細書において、骨の「切断」とは、骨を2以上の部分に分けるような処置を行うことをいう。代表的には、骨の切断は、骨切デバイス(例えば、ボーンソーなど)を用いて行われる。本明細書において、骨の切断が行われる部分は、「骨切り部」とも称される。
【0050】
本明細書において、骨の「回転」は、骨の処置の際に使用される用語であり、骨を2以上の部分に分けた後にそれぞれの部分を互いに対してある回転軸を中心に回転させることをいう。本発明において、例えば、処置されるべき骨に取り付けられたテンプレート補助部材上にある回転軸を規定する一対の(例えば、遠位側の部分と近位側の部分の組にある)孔を平行にすることによって回転が実施され得る。本明細書では、骨の回転は、0°の回転であり得る。
【0051】
本明細書において、骨の「切除」は、骨の一部をその骨から取り除くことをいう。代表的には、骨の切断を行った後、さらに少なくとも1箇所切断を別の場所において行うことによって切除が行われるがそれに限定されない。
【0052】
本明細書において、骨の「延長」とは、骨を少なくともある次元(代表的には、骨の長軸方向)に向けて長さを長くする行為をいう。骨の延長は、代表的には、仮骨延長法によって行われ得る。仮骨延長法とは、創外固定器を用いて徐々に骨切り部を延長するものである。より具体的には、骨切り部に生じた仮骨を引き伸ばすことにより、骨延長を実現する最適の引き伸ばし速度は一日に1mm程度とされている。この速度で数十日かけて目的の長さまで骨延長を行った後、そのまま創外固定器による固定を続けて仮骨の骨成熟を待つ。皮膚や筋肉、神経組織なども張力をかけ続けると伸びていくことから、骨と軟部組織の両者をともに延長すると、脚延長が可能になる。創外固定器には単支柱型のものと、リング型のものとがある。手術により創外固定器をつけた後、毎日フレームの位置を少しずつ変更することにより、骨の位置を精密に移動、コントロールすることができる。
【0053】
本明細書において、骨の「固定」とは、ある骨の処置を行った後に、その処置の状態を実質的に保持させる行為をいう。骨の固定は、一般的に対象となる骨のみで行われ得る。
【0054】
本明細書において「テンプレート補助部材」または「テンプレート」とは、本発明の処置方法において使用され、骨の切断面、回転軸、平行移動距離などの処置を具体的に指し示すための補助部材をいう。テンプレート補助部材は、代表的に、骨を所定位置に位置決めして取り付けるための位置決め部と、骨の適切な切断面を示す切断面指示部と、骨の切断片にそれぞれ取り付けられ互いの位置関係から各骨片が正常位置関係にあるか否かの判断を可能とする位置判断補助部材の、切断片への取付位置を示す取付位置指示部とを備える。従って、テンプレート補助部材は、骨切断補助部材を包含する。
【0055】
本明細書において「近位」とは、骨などにおいて2箇所の部分を比較する場合、心臓に近い方をいう。
【0056】
本明細書において「遠位」とは、骨などにおいて2箇所の部分を比較する場合、心臓から遠い方をいう。
【0057】
本明細書において「変形治癒」(malunion)とは、骨折などの骨の障害が起こった後に、治癒したときに、その治癒状態が正常な状態または形状とは異なる(変形している)ものをいう。
【0058】
本明細書において、「対称となる組のパートナー」とは、対称物が存在する骨(例えば、四肢)などの組において、一方の組の対称に相当するパートナーをいう。
【0059】
本明細書において「標準」とは、ある集団において、正常となる範囲内に入る存在をいう。代表的には、標準は、ある集団を統計学的処理した場合に平均から±1偏差以内に収まる範囲をいう。本発明では、標準としては、代替的に、対となる骨がある場合、処置されるべき骨の相手方の骨を標準として採用することができる。
【0060】
本明細書において「キット」とは、ある目的のために使用されるべき部材、装置などの組をいう。そのようなキットは、例えば、各種補助部材(例えば、テンプレート補助部材、位置判断補助部材、平行移動補助部材、矯正補助部材、矯正位置判断補助部材など)を備える。キットには、部材をどのように使用するかを記載した指示書が備えられていてもよい。
【0061】
本明細書において「指示書」は、本発明の装置、部材、キットなどを使用する方法または手術方法などを、医師、医療従事者、患者など使用する人が理解できるように記載したものである。この指示書は、本発明の装置、部材、キット、手術方法などを指示する文言が記載されている。この指示書は、本発明が実施される国の監督官庁(例えば、日本であれば厚生労働省、米国であれば食品医薬品局(FDA)など)が規定した様式に従って作成され、その監督官庁により承認を受けた旨が明記される。指示書は、いわゆる添付文書(package
insert)であり、通常は紙媒体で提供されるが、それに限定されず、例えば、電子媒体(例えば、インターネットで提供されるホームページ(ウェブサイト)、PDF形態の電子書類、電子メール)のような形態でも提供され得る。
【0062】
本明細書において「位置決め部」とは、本発明の補助部材を用いて処置される際にその補助部材が骨のどこに配置されるべきかを示す部分をいう。そのような位置決め部は、補助部材を物理的に削ること、または染料などでその補助部材を標識することによって表示することができる。
【0063】
本明細書において「切断面指示部」とは、本発明の補助部材を用いて手術を行う際に骨をどこで切断すべきかを示す部分をいう。そのような切断面指示部は、補助部材においてスリット状に開口部を作製すること、染料などでその補助部材を標識することなどによって表示することができる。
【0064】
本明細書において回転のための「開口部」は、「孔」と交換可能に用いられ、処置が確実に行われるようにするために補助部材(例えば、テンプレート補助部材)に付され、矯正補助部材が配置可能なような形状をしている。
【0065】
本明細書において「補助部材」は、どのような材質によっても作製することができ、例えば、金属(例えば、ステンレス、チタンなど)、プラスチック、生体適合性高分子、生分解性高分子などを用いることができる。
【0066】
本明細書において「補助部材」は、種々の形態があり、例えば、テンプレート補助部材、矯正位置判断補助部材、矯正補助部材、骨切断補助部材、平行移動補助部材などが挙げられるがそれらに限定されない。
【0067】
本明細書において「矯正位置判断補助部材」とは、矯正すべき位置を判断するための任意の補助部材をいう。
【0068】
本明細書において「矯正補助部材」とは、矯正処置を行う際に使用される補助部材をいう。矯正補助部材は、通常テンプレート補助部材とともに用いられるがそれに限定されない。
【0069】
本明細書において「平行移動補助部材」とは、平行移動を補助するための補助部材をいう。
【0070】
本明細書において「生体適合性」とは、毒性および免疫学的拒絶能がないために生体内で障害なく存在することができる性質をいう。
【0071】
本明細書において「生体適合性高分子」とは、生体適合性のよい高分子をいい、具体的には、生体内に残存しても毒性を生じないことをいう。ある高分子がそのような生体適合性を有しているかどうかを判定する方法は、本明細書においては、ラット、ウサギ、イヌ等の実験動物皮下への埋植試験等の試験法を使用する。この試験法では、皮下埋植試験の結果、比較的急性の免疫反応やアレルギー反応等が起き、腫れたり、発赤もしくは発熱したりする場合には肉眼的に生体適合性が低いことが解る。さらに生体適合性ポリマーを動物の血管に移植した場合など、特定の患部に移植した場合には、数日から数ヶ月後に、移植箇所を観察し、組織の生着の有無、移植した生体適合性ポリマー周辺の炎症、癒着、血液凝固による血栓形成などの程度を観察して、生体適合性の判定を行う。この他、移植部位の組織切片を作成してヘマトキシリン・エオシン染色その他の染色法にて細胞を染色・観察し、生体適合性の低さの指標としては免疫系を担当する顆粒性の細胞が多く侵入しているかどうか、もしくは従来組織と移植した生体適合性ポリマーとの間に両者を隔てる瘢痕組織の形成が認められるか否かを判定する。
【0072】
本明細書において「生分解性」とは、物質について言及するとき、生体内で,あるいは微生物の作用により分解される性質をいう。生分解性の高分子は、例えば、加水分解により,水,二酸化炭素、メタンなどに分解され得る。本明細書では、生分解性であるかどうかを判定する方法は、生分解性の一部である生体吸収性に関しては、ラット、ウサギ、イヌなど実験動物への数日間から数年間にわたる埋植試験、微生物による分解の試験に関しては、シート状の高分子の土壌中での数日間から数年間にわたる埋入・崩壊試験などの方法を使用する。
【0073】
本明細書において「ワイヤ」は、どのような材質によっても作製することができ、例えば、金属(例えば、ステンレス、チタンなど)、プラスチックなどを用いることができる。
【0074】
本明細書において「モデルを取得する手段」は、対象物の三次元モデルを得ることができる限りどのような手段を用いてもよく、例えば、CCDカメラ、光学カメラ、レントゲン撮影、CT、MRI(磁気共鳴像)などの手段を用いることができるがそれらに限定されない。
【0075】
本明細書において「骨モデルを取得する手段」は、対象物の三次元モデルを取得することができる限りどのような手段を用いてもよく、例えば、コンピュータグラフィクスなどのソフトウェアを用いることができるがそれに限定されない。
【0076】
本明細書において「骨に対して施されるべき処置に必要な補助部材を決定する」とは、処置されるべき骨に対して、本発明に基づいて決定されるべき処置に必要な補助部材を決定することをいう。この決定のためには、三次元モデルの数学的処理を行うことができる任意の手段を用いることができる。
【0077】
本明細書において「手術する手段」は、当業者が骨の手術に通常用いる任意の手段を用いることができ、例えば、骨ノミ(および槌(例えば、木槌または金槌))、電動または気動の骨鋸などを使用することができるがそれらに限定されない。
【0078】
以下、本発明の実施形態を、図面を必要に応じて参照して説明する。以下に提供される実施形態は、本発明のよりよい理解のために提供されるものであり、本発明の範囲は以下の記載に限定されるべきでないことが理解される。従って、当業者は、本明細書中の記載を参酌して、本発明の範囲内で適宜改変を行うことができることは明らかである。
【0079】
図1〜図3は、本実施形態に係るテンプレート補助部材である骨切断補助部材1および矯正位置判断補助部材2たるロッド2を示している。これら骨切断補助部材1およびロッド2は、例えば骨折変形治癒における矯正骨切術の際に対にして用いられるものである。
【0080】
詳述すれば、前記骨切断補助部材1は、図1および図2に示すように、予めコンピュータ上に取得または作成した立体三次元モデルデータに基づき、光造形などのラピッドプロトタイピングで作成した樹脂製ブロック状のもので、骨の所定位置に位置決めして取り付けるための位置決め部たる嵌合面11(示さず)と、前記骨を分割切断し矯正する場合に必要な切断面を示す切断面指示部たるスリット12と、前記ロッド2の取付位置を設定するための取付位置設定部たるガイド孔13とを備えている。
【0081】
前記嵌合面11は、骨の表面特徴部分に嵌合するように形成されたものである
スリット12は、前記切断面に沿って設けられたものである。しかしてその切断面は、当該切断面で骨を近位側および遠位側に分割切断し、前記遠位側骨片を移動又は/および回転させた場合の矯正後骨形状と、正常骨の骨形状とが最も近似する部位に設けてある。
【0082】
ガイド孔13は、前述したように、前記ロッド2の取付位置を設定するためのもので、このガイド孔13がロッド位置決め機能を十分果たす長さを有するように、骨切断補助部材1の厚みを設定している。
【0083】
ロッド2は、図3に示すように、例えば先端部を尖らせて骨に突き刺すことが可能なように構成したある程度のしなりを有する金属製のもので、前記ガイド孔13よりわずかに細い(例えば、0.1〜0.2mm)の径を有してなり、そのガイド孔13に挿通させて骨に突き刺すことにより、当該骨に取付穴を形成しつつ所望の位置に所望の姿勢で取り付けられるようにしてある。本実施形態では、ロッド2をそれぞれ装着した各骨片を移動させ一方のロッド2と他方のロッド2とが例えば平行といった所定位置関係になった際に、骨片同士が正常位置関係にあると判断できるように構成している。より具体的には、図4に示すように、各ロッド2を差し込み可能な係合部たる貫通差し込み孔31を有した中間部材たるブロック体3を設け、前記各差し込み孔31にロッド2がそれぞれ差し込み可能となった位置において骨片同士が正常位置関係にあると判断できるようにしている。
【0084】
次にこの骨切断補助部材1の製造方法について以下に述べる。この骨切断補助部材1は、前述したようにコンピュータ上に取得または作成した立体三次元モデルM1(図11)のデータに基づき、光造形などのラピッドプロトタイピングで作成される。
【0085】
まず図5に示すように、CT、MRI等で得たデータ等からコンピュータにより骨の三次元表面骨モデルM2を作成するとともに正常骨の三次元表面骨モデルMTを作成し、それぞれの近位側を重ね合わせる。なお、本実施形態では腕部分であるため、正常骨モデルMTを、健側の骨モデルの鏡像を用いて生成している。もちろん正常骨モデルの生成にあたって、過去の正常な時のデータを用いてもよいし、その他にも種々方法が考えられる。
【0086】
次に前記骨モデルM2において、矯正のために必要な切断面Pおよびその切断面Pで分割された遠位側骨片モデルM21の移動量を設定し、図6に示すように矯正後の骨モデルM2aを決定する。その設定方法とは概略的には、矯正後の骨モデルM2aと前記正常骨モデルMTとの形状差が最も小さくなるように前記切断面Pおよびその切断面Pで分割された遠位側骨片モデルM21の移動量を演算するものである
具体的に説明する。本実施形態では、「ICPアルゴリズム(iterative
closest point
algorithm)」と称される表面マッチング手法を用いている。これは、図7に示すように、適宣設定した仮想の変形軸線Lに直交する面で骨モデルM2を近位側骨片モデルM22と遠位側骨片モデルM21に分割するとともに、その遠位側骨片モデルM21を前記変形軸線Lに平行に直線移動および/又は変形軸線L周りに回転移動させ、移動させた後の矯正後骨モデルM2aと前記正常骨モデルMTとの違いを、例えば対応する表面位置データの二乗をとることにより数値化し、それが最小値となるようにするものである
しかして前記変形軸線Lを定めるにあたっては物体の移動の表記方法の一つであるScrew
Displacement−Axis法を用いる。これは図8に原理を示すように物体をある軸を中心にφ回転させて、その軸に平行にt移動させれば、どのような位置にでも移動可能であり、そのような軸が1つの移動に対して空間上でただ1つ存在するというものである。変形している骨を矯正しようとするとき、骨をある位置で切断して正常な位置に移動させればいいので、その時のScrew
Displacement−Axisを求める。変形骨の近位側と遠位側の特徴的な形状を、それぞれ正常骨のそれとマッチングさせることにより、変形した部分をどれだけ移動させれば矯正できるかわかるので、そのときのScrew
Displacement−Axisを計算させることが出来る。臨床に使う場合は平行移動成分が1mm以内で無視出来る場合が多く回転成分だけを考えればいいので、Screw
Displacement−Axis=変形の軸と考えてよい。
【0087】
さて、前記図5に示す本実施形態のように変形軸線Lが骨の長軸に平行か平行に近い場合は、変形軸線Lが骨の中心に一番近い位置で骨を変形軸線Lに垂直な平面で切断して、遠位骨片を変形軸線L周りに回転させてやれば矯正が可能で骨の接触面積も最大になるのでこれが至適な切断面として設定することができる。
【0088】
なお、変形軸線Lは骨の形態によって異なるのは言うまでもない。例えば、図20に示すように、骨の長軸に垂直に近い変形軸線Lを中心に骨を切断して回転させるシミュレーション結果となる場合もある。この場合は骨欠損が出来るので、この部に楔状の骨移植あるいは骨補填材料を挿入することにより矯正が可能である。
【0089】
その他、骨を一部切除しなければならない場合もあるが、多くの場合でScrew
Displacement−Axis(=変形軸線L)を用いた矯正シミュレーションは、有用な方法である。
【0090】
一方、必ずしも前記シミュレーションが利用できるとは限らず、たとえば変形軸線Lが関節内を通る場合などでは、関節に骨切を入れないと矯正骨切が不能であるために、この方法が使えない場合もある。その場合は、適宜、術者が骨切をしやすいところで切断してシミュレーションすることになる。
【0091】
本論に戻って、次に、図9に示すように、矯正後の骨モデルM2aにおける骨片モデルM21、M22にそれぞれロッドモデルMRを例えばそれらが互いに平行になるように取り付け、その状態から図10に示すように、矯正前の各骨片モデルM21、M22、すなわち骨モデルM2に対するロッドモデルMRの取付位置を算出する。
【0092】
そして図11に示すように、前述のごとく決定された切断面Pを含むように、骨モデルM1の表面特徴部分に嵌合する嵌合面を有した骨切断補助部材1の立体三次元モデルM1を生成する。このとき前記切断面Pに対応する部位にはスリットを形成しておき、ロッドモデルMRに対応する部位にはガイド孔を形成しておく。
【0093】
このようにして、嵌合面、スリット、ガイド孔を有した骨切断補助部材モデルM1を生成し、そのモデルデータに基づいて、実際の骨切断補助部材1を作成する。
【0094】
一方、図12に示すように、矯正後の骨モデルM2aにおける骨片モデルM21、M22にそれぞれロッドモデルMRを取り付けた状態で、それらロッドモデルMRを貫通させる差し込み孔を有したブロック体3モデルM3をコンピュータ上で生成する。そして、骨切断補助部材1同様、その立体三次元モデルデータM3に基づいて、光造形などのラピッドプロトタイピングで実際のブロック体3を作成する。
【0095】
このようにして形成した骨切断補助部材1、ブロック体3等を用いて施術する方法について説明する。
【0096】
まず図13に示すように、患部を切開し、骨5の所要部分を露出させる。
【0097】
次に図14に示すように、骨切断補助部材1を、その嵌合面と骨5の表面特徴部分とを嵌め合わせて密着固定することにより、一意的に位置決めして取り付ける。そしてガイド孔13からロッド2を挿入し、その先端部を骨5に突き刺し取り付ける。
【0098】
次にスリット12に沿ってのこぎり等の切断治具を動かし、骨5を切断分離した後、図15に示すように、骨切断補助部材1をロッド2を残して取り外す。
【0099】
次に図16に示すように、遠位側骨片および付随する組織を、各ロッド2の反先端部が前記ブロック体3の対応する差し込み孔31にそれぞれ挿入可能な位置まで動かし、実際に挿入する。このことにより、骨片が正常位置関係となる。
【0100】
最後に図17に示すようにその状態でプレートや螺旋、その他の固定器具を用いて、各骨片を互いに連結する。
【0101】
このように構成した本実施形態によれば、骨切断補助部材1およびロッド2を用いることにより、この種の矯正骨切手術において、予めコンピュータシミュレートにより算出された適切な切断面に沿って骨を切断でき、さらに切断後の骨片をコンピュータシミュレートにより算出された適切な位置に移動させることが容易にできる。したがって、従来のように医師の経験や勘、技術に頼ることなく、確実かつ容易な矯正骨切手術が可能となる。具体的には、矯正前、図19のレントゲン写真に示す骨が、図18に示すように見事に矯正されている。
【0102】
なお、本発明は上記実施形態に限られるものではない。
【0103】
例えば、各骨片にそれぞれ1本のロッドを差し込むようにしても構わないし、3本以上でももちろんよい。さらに矯正位置判断補助部材はロッドに限られず、他の部材でもよい。例えば施術部位によっては挟み込んで固定するようなものの方が好適な場合もあり得る。
【0104】
また、スリットは1つに限られず複数でも構わない。骨を3以上に分割したり、あるいは部分的に切除したりしなければならない場合もあるからである。
【0105】
その他本発明の補助部材は、上記図示例に限られず、その趣旨を逸脱しない範囲で種々変形が可能である。
【0106】
あるいは、以下のような手順を用いても良い。
(1)まず変形骨の近位部分を正常骨の近位部分にマッチングさせてその位置情報(アファイン変換で言うところのマトリックス)を求める。
(2)次に遠位部分同士をマッチングさせて、そのマトリックスを求める。マッチングの際にICPアルゴリズムを用いる(用いなくても可)。
(3)そして、近位と遠位のマトリックスの差分を求める。これを我々は「relative
matrix」と呼んでいる。
(4)relative matrix(行列式)をScrew displacement−axis表記に変換する。こうすることによってscrew displacement−axis(回転軸)とそれ周りの回転量(そしてscrew displacement−axisに沿った平行移動量)が求まる。
screw axisがわかれば、それが骨の長軸に平行か垂直かによって、rotational osteotomyにするかclosed/open wedge osteotomyにするかを決めて骨の切断面を設定する。このような例は、実施例12に示されている。
【0107】
(手術法)
次に、具体的な手術法を詳細に説明する。
【0108】
1つの局面において、本発明は、骨を処置(例えば、外科的手術)するための方法を提供する。この方法は、A)処置の対象となる骨を表す骨モデルを取得する工程;B)該骨の処置の目的となる目的骨モデルを取得する工程;C)骨モデルと目的骨モデルとに基づいて、処置を決定する(例えば、該骨に対して施されるべき処置に必要な補助部材を決定する)工程;D)決定された処置手順(例えば、補助部材を用いる)を用いて該骨を手術する工程、を包含する。本発明の方法では、従来試行錯誤で可能な範囲の手術を繰り返し行い、それにより徐々に変形治癒骨などを矯正していたのに対して、原理的に1回の処置(例えば、切断、挿入および回転など)を行うことによって、ほぼ正常形状に完治させることができるということが予想外に見出された。
【0109】
ここで、処置の対象となる骨を表す骨モデルを取得する工程は、任意の画像撮影手段および必要に応じてそれにより得たデータの格納手段および/または処理手段を使用することによって実現することができる。そのような撮影手段としては、例えば、光学撮影器機(カメラなど)、CT、MRI撮影器機をあげることができるがそれらに限定されない。格納手段および/または処理手段としては、例えば、CT、MRIなどのデータを骨から抽出して表面モデルを取得または作成するソフトウェアなどを実装したコンピュータなどを挙げることができるがそれらに限定されない。表面モデルは、代表的には、VTK、STLなどの形式で保存され得るがそれに限定されない。このような表面モデルを作成するソフトウェアとしては、例えば、Virtual
Place M(阪大機能画像教室において開発、販売は医用画像研究所から行われている)、Mimics(Materialise,ベルギー)、ZviewTM(Zview、Inc.Huntington
Beach,CA,USA)、Realize(Mayo Clinic)を用いることができるが、それらに限定されない。
【0110】
骨の処置の目的となる目的骨モデルを取得する工程は、任意の作画手段を利用することによって実現することができる。そのような作画は、手動による作画を利用しても良いが、通常は、モデルとなる対象(例えば、1対の骨(例えば、四肢)であれば、処置すべき骨の相手方の骨)の画像を導入するか、またはコンピュータ作画(例えば、CADなどのソフトウェア)あるいは保存された正常骨のモデルなどを用いることによって実現することができる。
【0111】
骨モデルと目的骨モデルとに基づいて、処置すべき方法を決定する工程は、通常、骨に対して施されるべき処置に必要な補助部材を決定することを包含する。そのような技術は、モデル処理をすることができる任意の手段を用いることにより実現されるが、そのような手段としては、例えば、画像処理ソフトウェアが実装されたコンピュータなどを挙げることができるがそれらに限定されない。そのようなソフトウェアは、例えば、表面マッチング、移動情報を導出、テンプレート作成などの機能を含み得る。ここでは、必要に応じて、表面モデルに関してコンピュータ上で位置情報の操作および管理を行うプログラム(例えば、「VTK」というオープンソース(http://public.kitware.com/VTK/)を用いて容易に作成することができる)を使用することができる。
【0112】
表面マッチングは、例えば、ICP(Iterative
closest point)アルゴリズムなどのマッチングに適切なアルゴリズムを用いることができるがそれに限定されない。表面マッチングでは、2つのモデル(目的骨モデルおよび骨モデル)を正確にマッチングさせることを試みる。表面モデルに関してコンピュータ上で位置情報の操作および管理を行うプログラムを用いる場合は、必要に応じて操作の際にある程度手動でマッチングさせた後、上記アルゴリズムを用いてマッチングさせる。変形している場合は、原理的にパーフェクトマッチングはないことから、任意の閾値(例えば、1mm)以上離れているところを無視した形でそれ以内に近接するところのみを有効にするように処置することができる。しかし、誤差が大きいことがしばしばあることから、アルゴリズムに頼らず、目視でマニュアルで近接させてもよい。
【0113】
移動情報の導出は、2つの位置情報(目的骨モデルおよび骨モデル)から相対的な移動情報を導き出すことによって算出することができる。処置すべき骨の近位と遠位とを目的骨モデル(例えば、健側の鏡像)とマッチングさせており、その2つの位置情報から相対的な変形情報を求めることができる。ここでは、Screw
Displacement−Axis(回転軸)およびその回転軸の周囲をどれだけ回転して平行移動すべきかを計算することができる。螺旋変位の代わりに、任意の座標軸上での移動情報をアファイン変換を用いて表現することもできる。
【0114】
実際のテンプレートのモデルの作成には、通常、ブーリアン演算を用いることができる。作成したモデルの保存には、STL形式(光造形などにおいて用いられる形式であり、三角形のポリゴンを張り巡らせた表面モデルとして表現される)を用いることができるがそれに限定されない。ブーリアン演算とは、3Dグラフィックのモデリング技法のひとつ。集合演算と呼ばれる演算によるモデリングを行う。重なった複数のモデルをひとつの塊にする(和)、重なったモデルを削り取る(差)、重なった部分だけを取り出す(積)といった演算処理を施したモデリングを行うことができる。form・Z(autodessysから販売)などで採用されており、このようなソフトウェア、またはMagics
RP(Materialise)などを用いることができるがそれに限定されない。工業用のソフトウェアであり、従来は、変形骨の処置には用いられていない。
【0115】
好ましい実施形態において、本発明の骨の処置方法における、処置方法の決定(通常、骨に対して施されるべき処置に必要な補助部材の決定)では、骨の三次元方向すべてのパラメータを直接または間接的に使用する。従来の技術では、二次元方向を考慮することが通常であり、三次元方向を考慮した例はない。本発明では、三次元方向のパラメータを考慮することにより、より正確な手術および良好な術後経過を達成することができたという意味においてその有用性は高い。
【0116】
1つの好ましい実施形態において、本発明の骨の処置方法における、骨に対して施されるべき処置に必要な補助部材を決定する工程では、骨の回転軸を決定する工程を包含する。
【0117】
ここで、骨の回転軸は、好ましくは、処置すべき骨が変形した骨である場合に、骨モデルを遠位側と近位側とに分け、目的骨モデルと遠位側または近位側のいずれか一方を重ね合わせて比較したときに、重ね合わせなかった方(遠位側を基準にした場合は近位側、近位側を基準にした場合は遠位側)を回転させることによって目的骨モデルへともたらすことができるかを算出することによって求めることができる。そのような回転軸は、例えば、螺旋変位法などを用いることによって求めることができ、実際の算出には手動計算を行っても良いが、通常は、螺旋変位法を実行するプログラムを実装したコンピュータを用いて行うことができる。
【0118】
従って、好ましい実施形態では、本発明では、回転軸は、螺旋変位法(Screw
Displacement−Axis法)を利用することによって決定される。螺旋法は、例えば、S.Ohwovoriole
and B.Roth:“An
extension of screw theory,”Journal of Mechanical Design,Vol.103,pp.725〜735,Oct.1981などに記載されている。螺旋法を用いれば、実質的に1回の切断および必要に応じて骨の回転、切除、延長および移植片の挿入からなる群より選択される少なくとも1つの処置を行うことによって骨の矯正を行うことができる。この矯正によって、数ヶ月から1年またはそれ以上経過した後も、術後経過が順調であったことが本発明によって初めて予想外に実証された。従って、本発明は、従来技術からは予想できなかった単純かつ効率的な骨の矯正手術法を提供することになる。
【0119】
従って、好ましい実施形態において、本発明の方法は、骨の回転、切除、移植片の挿入および延長からなる群より選択される少なくとも1つの処置を含む。骨の回転、切除、移植片の挿入、延長などの処置は、変形の度合い(すなわち、目的骨モデルと骨モデルとの差分)によって当業者が容易に決定することができる。そのような差分は、当該分野において周知の任意の数学的手法を用いて算出することができる。骨の回転、切除、移植片の挿入、延長などの処置は、それぞれ1度ずつ行うことが好ましい。従来技術では、回転、切除、挿入、移植などを1度のみで済ませることができた例は存在しない。従って、本発明は、従来不可能であった、単純性を達成したことになる。
【0120】
好ましい実施形態において、本発明の方法において、テンプレート補助部材が使用される。従来、変形骨などの異常骨の治療を行うときは、目視によりおおよその切断を行い、おおよその接合をおこなっていたが、テンプレート補助部材を使用することによって、単純に正確な矯正処置を行うことが可能となった。ここで使用されるテンプレート補助部材は、本明細書において別の場所において説明されるような、コンピュータ支援画像作成法などによってモデルを作成し、そのモデルに基づいて、光造形などの任意の成型方法により素材(例えば、金属、プラスチック、セラミックなど)を成型することによって作製することができる。
【0121】
光造形とは、液状の紫外線硬化樹脂(紫外線に反応し、硬化する液体)を光造形装置の紫外線レーザーを使用して硬化させ、積層することで3Dのデーターとほぼ同一の精密な立体物を、短時間で作成する技術である。
【0122】
具体的には、例えば、CADでデザインされた三次元モデルのデータをSTL形式で出力し、三次元モデルを、0.1〜0.2mmピッチにスライスして、光造形用の等高線データに変換する。この等高線データに基づき、半導体レーザーがタンク内樹脂液の表面に断面形状を描き、レーザー光線が当たった部分は化学反応を起こし、固体に硬化させる。1つの層が形成されると、形成された造形品を乗せている基板がスライスピッチ分沈み込み、その上に次の断面部分がレーザースキャンにより形成され、積層される。連続的に薄い断面体が積層されていくことにより、液面下に三次元モデルが形成され、その後、洗浄等の後処理が施され、完成する。このようなサービスは、種々提供されており、例えば、ダイセル化学グループのPLAMOS、木田工業、CMETなど数多くの提供業者からサービスを受けることができる。
【0123】
本明細書において用いられるテンプレート補助部材は、配置されるべき位置を示す位置決め部、骨の適切な切断面を示す切断面指示部、ならびに位置判断補助部材の取り付け位置を指示する取付位置指示部からなる群より選択される少なくとも1つの要素を備えることが好ましい。このうち、少なくとも骨切断すべき切断面指示部が、備えられていることが好ましい。切断する位置が容易に判別でき、正確に骨を切断することができるからである。より好ましくは、位置判断補助部材の取り付け位置を指示する取付位置指示部を備えていることが有利である。切断した後の移動をスムーズに実現し、より正確に行うことができるからである。ここで、位置決め部は、物理的にテンプレートを削ることまたは標識物(例えば、染色)などで標識することによって容易に作製することができるがそれに限定されない。切断面指示部もまた、物理的にテンプレートを削ることまたは標識物(例えば、染色)などで標識することによって容易に作製することができるがそれに限定されない。好ましくは、物理的にスリットが入っていることが有利である。骨切鋸などの切断手段をより容易に操作することができるからである。位置判断補助部材の取り付け位置を指示する取付位置指示部もまた、物理的にテンプレートを削ることまたは標識物(例えば、染色)などで標識することによって容易に作製することができるがそれに限定されない。そのような取付位置指示部は、開口部であることが好ましい。矯正位置判断補助部材がワイヤであることが好ましいからである。
【0124】
より好ましくは、本発明において使用されるテンプレート補助部材は、配置されるべき位置を示す位置決め部、骨切のための切断面指示部(好ましくは、スリット)、位置判断補助部材の取り付け位置を指示する取付位置指示部(好ましくは、開口部(または孔))をすべて備える。これらすべてを備えることによって、テンプレートの配置、骨切、矯正を一つの補助部材によって達成することができるからである。
【0125】
本発明の処置方法において、手術工程は、A)骨を少なくとも1つの部位において切断する工程:B)i)骨の回転が必要な場合、回転を行うこと;ii)骨の移植片の挿入が必要な場合、前記移植片の挿入を行うこと;およびiii)骨片の切除が必要な場合、前記骨片の切除を行うことからなる群より選択される少なくとも1つの骨処置工程を行う工程;C)前記切断された骨を接合する工程を包含する。
【0126】
ここで、骨を切断する工程は、任意の切断手段を用いて行うことができる。好ましくは、補助部材(例えば、本発明のテンプレート補助部材)を用いることができる。切断の回数は制限されないが、好ましくは1回のみであり得る。1回のみの切断およびその後の処置によって異常骨の矯正が本発明によって可能である。
【0127】
骨処置工程は、任意の手段および医師または他の医療従事者の手を用いて行うことができる。好ましくは補助部材(例えば、本発明のテンプレート補助部材)を用いることができる。骨処置の各々の工程(すなわち、回転、挿入または切除)を行う回数は限定されないが、好ましくは各々1回のみであり得る。1回のみの各々の骨処置によって異常骨を処置することが本発明によって達成され、単純で正確な異常骨の矯正が可能になった。また、挿入されるべき移植片もまた、コンピュータによって設計することができる。コンピュータによって設計された移植片は、実際に3D切削、NC加工などの任意の成型方法により素材(例えば、金属、プラスチック、セラミックなど)を成型することによって作製することができる。そのような切削には、ローランドDGの3D切削機(MDX−20などのMDXシリーズ、PNC−3200など)などの市販の切削機を用いることができる。
【0128】
より好ましい実施形態では、本発明の方法では、骨処理工程には骨の回転が含まれ、その回転は、1つの回転軸のみの周りの回転であることが有利である。回転軸の周りの回転に注目して異常骨を治癒させる手法は従来になかった。また、回転を手術に取り入れることによって変形を矯正することができるとは予想されておらず、むしろ、回転によって単純でしかも正確な矯正を行うことができることが実証されており、本発明の方法は、種々の骨の矯正に有用である。
【0129】
切断された骨を接合する工程もまた、当該分野において周知の任意の手段を用いて実施することができる。骨接合は、プレート、スクリュー、ワイヤー、髄内釘などの内固定材料により行われ、骨欠損部には、リン酸カルシウムを補填したり、骨移植を行うことができる。例えば、補填は、リン酸カルシウム(例えば、ハイドロキシアパタイト)、βTCP、リン酸カルシウムペーストのような生体適合性の材料を用いて行うことができる。あるいは、骨欠損部は、骨移植により補填され得る。
【0130】
骨を接合した後は、その状態を長期間保持することが好ましい。矯正した状態が保持され、矯正効果が確実なものとなるからである。また、必要に応じて、接合せずに、あるいは切断した後に骨を延長してもよい。そのような延長は、仮骨延長法を用いることができる。
【0131】
好ましい実施形態において、本発明の方法において用いられる骨処置工程における回転、挿入および切除は、Screw
Displacement−Axis法またはアファイン変換法によって規定される。このような数学的手法によって計算された差分を回転、挿入、切除、延長などに反映させて手術することのみで、骨矯正が可能となり、かつ、その効果が本発明において初めて1年以上も保持され得ることが実証されたことは、驚くべき事実といえる。上記変換法によって規定された差分を忠実に実行するには、好ましくはテンプレート補助部材を用いることが有利である。テンプレート補助部材を用いることによって、術者は、テンプレート上の指示線に従って手術(例えば、切断、回転など)を行えばよい。このような手術は、従来まったくの経験によりマニュアルで行わざるを得なかった外科領域において画期的な方法をもたらしたといえる。
【0132】
1つの実施形態において骨の切断は、テンプレート補助部材によって規定されるがそれに限定されない。切断後にテンプレート補助部材を取り付けても良い。
【0133】
1つの実施形態において骨の矯正は、代表的には、テンプレート上の変形量を規定する少なくとも1対の開口部を通る矯正補助部材を平行にする工程を包含する。従って、この場合、テンプレートは、矯正補助部材を平行にすることによって目的の回転が達成されるように設計される。そのような設計は、例えば、Screw
Displacement−Axis法またはアファイン変換法によって行うことができる。
【0134】
本発明の処置方法において挿入される移植片は、Screw
Displacement−Axis法またはアファイン変換法によって規定され製造されたものであることが好ましい。このような方法によって、骨モデルと目的骨モデルとの差分をとることができ、その差分から移植片のモデルを生成することができる。生成されたモデルに基づき、例えば3D切削によって実際の移植片を成型することができる。
【0135】
本発明の手術方法の好ましい実施形態において、処置されるべき骨は、近位側または遠位側のいずれかが固定される。目的骨モデルは、近位側または遠位側の部分に基づいて作成されることが好ましい。いずれかの部分は通常ほぼ正常の形状をしていることが多いからである。
【0136】
本発明が対象とする骨は、四肢のものであることが通常であるが、それに限定されず、本発明では、任意の骨を対象とすることができ、人体であれば、人体内に存在する200個程度の骨すべてが対象であり、例えば、長骨(long
bone;例えば、四肢)、短骨(short bone)、扁平骨(flat bone;胸骨、肋骨、肩甲骨、腸骨など)、種子骨(sesamoid bone;膝蓋骨)、不規則骨(irregular bone;顔面頭蓋、椎骨)などが挙げられるがそれらに限定されない。長骨(例えば、四肢)の矯正が本発明の矯正において適切である。本発明の治療対象は、代表的に変形治癒した骨である。
【0137】
1つの実施形態において本発明の処置方法では、移植片が挿入される場合、そのような移植片は、天然骨または人工骨によって製造することができる。天然骨としては、自家骨、同種骨および異種骨などを挙げることができるがそれに限定されない。自家骨であることが好ましい。そのような場合、自家骨としては、腸骨などを用いることができる。自家骨の入手が困難な場合、同種骨を用いる。同種骨は、例えば、骨銀行などから得ることができる。
【0138】
人工骨を使用する場合は、生体適合性である限りどのような材質のものを用いてもよいが、好ましくは、骨に適合していることが有利であり、さらに好ましくは骨の一部となることが有利である。あるいは、生分解性の材料を用いることもできる。生分解性のものを用いる場合は、急速に分解せず、徐々に分解(例えば、数ヶ月)するものが用いられ得る。好ましい材質としては、骨親和性のあるボーンセラミック、リン酸カルシウム、より好ましくは特にハイドロキシアパタイトを用いることができる。そのような人工骨としては、例えば、ネオボーン(NEOBONE;MMT
Co.LTD、大阪)などを挙げることができるがそれに限定されない。
【0139】
好ましい実施形態において、本発明では、手術後に、矯正が適切であるかどうか確認する工程をさらに包含する。そのような矯正の確認は、当該分野において周知の任意の手段を用いて実施することができる。そのような手段は、例えば、本発明の矯正位置判断補助部材を用いることができる。あるいは、矯正後にレントゲン写真などを撮り、モデルを取得した後、目的骨モデルと骨モデルとを比較し差分を判定することによって矯正の確認を行うことができる。このようなモデル比較は、当該分野において公知の任意のプログラムを用いて実施することができる。
【0140】
本発明において使用する目的骨モデルは、骨モデルの骨の対称となる組のパートナーに基づいて規定される。この場合、骨は対称となるべき一対の組を構成する。そのような骨としては、例えば、四肢の骨などが挙げられるがそれらに限定されない。
【0141】
あるいは、本発明において使用する目的骨モデルは、骨を有する患者の標準に基づいて規定され得る。標準は、患者の集合を調査し、統計学的に処理した後に、平均±1標準偏差によって求めることができるがそれに限定されない。
【0142】
(シミュレーション)
別の局面において、本発明は、骨の処置(例えば、外科的手術)をシミュレーションするための方法を提供する。この方法は、A)処置の対象となる骨を表す骨モデルを取得する工程;B)該骨の処置の目的となる目的骨モデルを取得する工程;C)骨モデルと目的骨モデルとに基づいて、処置を決定する(例えば、前記骨に対して施されるべき処置に必要な補助部材を決定する)工程;D)決定された処置手順(例えば、補助部材を用いる)に基づいて処置のシミュレーションする工程、を包含する。本発明の方法では、従来試行錯誤で可能な範囲の手術を繰り返し行い、それにより徐々に変形治癒骨などを矯正していたのに対して、行われるべき処置をシミュレーションすることができ、初心者であっても、なおいっそう簡便に習熟することができるようになった。ここで、本発明のシミュレーションにおいて包含されるいずれの工程も上記(手術法)に記載される任意の形態を用いることができる。
【0143】
なお、シミュレーションの際には、実際に骨モデルの模型(例えば、ハイドロキシアパタイトなどで)を作製し、必要に応じて補助部材を作製し、決定された手順に従って、手術シミュレーションを行うことが可能である。
【0144】
(処置キット)
さらに別の局面において、本発明は、骨を処置するために使用される骨処置キットを提供する。このキットは、A)配置されるべき位置を示す位置決め部および切断すべき切断面指示部が付され、かつ、矯正のための矯正補助部材を挿入するための少なくとも1つの開口部を備える、テンプレート補助部材と、B)位置判断補助部材とを備える。ここで、使用されるテンプレート補助部材は、本明細書において他の場所において詳述された任意の形態を使用することができる。位置判断補助部材もまた、上述の任意の形態を使用することができる。
【0145】
好ましくは、テンプレートに含まれる開口部は、少なくとも2つ含まれる。2つあることによって、平行かどうかの判断が容易となるからである。さらに好ましくは、開口部は3つ、さらに好ましくは4つ含む。4つ開口部を含むことによって、さらに平行かどうかの判断が目視によって容易になるからである。矯正位置判断補助部材は、平行移動補助部材を備え、ワイヤであることが好ましいがそれに限定されない。ワイヤの材質はどのようなものでも良いが、ステンレス製であることが好ましい。
【0146】
好ましい実施形態において、矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能からなる群より選択される少なくとも1つの機能を有する。あるいは、矯正位置判断補助部材は、複数存在し、その各々が、平行移動補助機能および回転補助機能を有していても良い。
【0147】
本発明のキットは、好ましくは、平行移動のための平行移動補助機能および回転のための回転補助機能の両方を備えることが有利である。平行移動補助機能は、ワイヤのような長手軸方向に伸びる部材にしるしを施すことによって達成することができる。回転補助機能もまた、同様に、ワイヤのような直線状のものを利用することによって達成することができる。
【0148】
本発明のキットは、好ましくは、手術後に骨を固定するための固定補助部材をさらに備える。そのような固定補助部材は、任意のものを使用することができ、例えば、創外固定器などの従来使用されているものを使用しても良い。
【0149】
(シミュレーションキットまたはシステム)
別の局面において、本発明は、骨の処置(例えば、外科的手術)をシミュレーションするためキットまたはシステムを提供する。この方法は、A)処置の対象となる骨を表す骨モデルを取得する手段;B)前記骨の処置の目的となる目的骨モデルを取得する手段;C)骨モデルと目的骨モデルとに基づいて、処置を決定する(例えば、前記骨に対して施されるべき処置に必要な補助部材を決定する)手段;D)決定された処置手順(例えば、補助部材を用いる)に基づいて処置のシミュレーションする手段、を備える。本発明のキットでは、あるいは、骨モデル模型、必要に応じて補助部材、および決定された処置を示した指示書を含んでいてもよい。従来試行錯誤で可能な範囲の手術を繰り返し行い、それにより徐々に変形治癒骨などを矯正していたのに対して、行われるべき処置をシミュレーションすることができ、初心者であっても、なおいっそう簡便に習熟することができるようになった。ここで、本発明のシミュレーションにおいて包含されるいずれの手段も上記(処置キット)に記載される任意の形態を用いることができる。
【0150】
なお、シミュレーションの際には、実際に骨モデルの模型(例えば、ハイドロキシアパタイトなどで)を作製し、必要に応じて補助部材を作製し、決定された手順に従って、手術シミュレーションを行うことが可能である。
【0151】
(移植片)
別の局面において、本発明は、骨を処置するために使用される移植片を提供する。このような移植片は、該骨の処置の目的となる目的骨モデルと対象となる前記骨の現状の骨モデルとのほぼ差分である形状をしている。そのような差分の形状の実現は、任意の成型方法によって達成され、例えば、3D切削、RP、NC加工などが挙げられるがそれらに限定されない。3D切削が好ましい。実質的に任意の形状が作製可能であるからである。好ましくは、本発明の移植片の形状は、Screw
Displacement−Axis法またはアファイン変換法によって規定された目的骨モデルおよび骨モデルとの差分によって決定される。
【0152】
(処置システム)
別の局面において、本発明は、骨を処置するためのシステムを提供する。このシステムは、A)処置の対象となる骨を表す骨モデルを取得する手段;B)前記骨の処置の目的となる目的骨モデルを取得する手段;C)骨モデルと目的骨モデルとに基づいて、前記骨に対して施されるべき処置を決定する手段(例えば、前記骨に対して施されるべき処置に必要な補助部材を決定する);D)決定された処理手順(例えば、補助部材を用いる)を用いて前記骨を手術する、を備える。
【0153】
ここで、骨モデルを得る手段、目的骨モデルを得る手段、処置すべき形状および方法を決定する手段および処置すべき形状および方法に基づいて手術する手段は、上記(手術法)において説明したような任意の手段を用いることができる。
【0154】
(シミュレーションシステム)
別の局面において、本発明は、骨の処置(例えば、外科的手術)をシミュレーションするためのシステムを提供する。このシステムは、A)処置の対象となる骨を表す骨モデルを取得する手段;B)前記骨の処置の目的となる目的骨モデルを取得する手段;C)骨モデルと目的骨モデルとに基づいて、処置を決定する(例えば、前記骨に対して施されるべき処置に必要な補助部材を決定する)手段;D)決定された処置手順(例えば、補助部材を用いる)に基づいて処置のシミュレーションを実行させる手段を備える。本発明のシステムでは、従来試行錯誤で可能な範囲の手術を繰り返し行い、それにより徐々に変形治癒骨などを矯正していたのに対して、行われるべき処置をシミュレーションすることができ、初心者であっても、なおいっそう簡便に習熟することができるようになった。ここで、本発明のシミュレーションにおいて包含されるいずれの手段も上記(処置システム)に記載される任意の形態を用いることができる。
【0155】
なお、シミュレーションの際には、実際に骨モデルの模型(例えば、ハイドロキシアパタイトなどで)を作製し、必要に応じて補助部材を作製し、決定された手順に従って、手術シミュレーションを行うことが可能である。
【0156】
(コンピュータプログラム)
別の局面において、本発明は、骨の処置を決定する処理をコンピュータに実行させるためのプログラムを提供する。この処理は、A)処置の対象となる骨を表す骨モデルを取得する工程;B)骨の処置の目的となる目的骨を表す目的骨モデルを取得する工程;C)骨モデルと目的骨モデルとに基づいて、骨に対して施されるべき処置を決定する工程を包含する。本発明のプログラムは、所望の目的(例えば、骨の矯正)を達成するために、骨に対して施されるべき処置(例えば、骨の切断、骨片の移動など)を決定することができる。これにより、比較的経験の浅い医師でも、適切な処置を行うことが可能になる。
【0157】
コンピュータが骨の処置を決定する処理を実現するプログラムを実行することにより、そのコンピュータは骨の処置を決定する方法を提供する。また、コンピュータが骨の処置を決定する処理を実現するプログラムを実行することにより、そのコンピュータは、骨の処置を決定する装置として機能する。
【0158】
以上の説明は、骨を例示して説明してきたが、本発明は、骨以外の身体部分(例えば、皮膚などの軟部分)であっても実施することができることが当業者には理解される。
【0159】
以下に、実施例に基づいて本発明を説明するが、以下の実施例は、例示の目的のみに提供される。従って、本発明の範囲は、実施例のみに限定されるものではなく、特許請求の範囲によってのみ限定される。
【実施例】
【0160】
以下の実施例において、ヒトを対象とする場合、厚生労働省または等価の政府当局の基準に従い、事前に同意(インフォームドコンセント)を得た上で実験を行った。
【0161】
(実施例1:テンプレート補助部材の作製およびその応用)
この実施例では、実際の変形骨をモデルに、術前コンピューターシミュレーション(図21)を行ってテンプレート補助部材を作製した。前腕骨折変形治癒では橈尺骨の変形程度が回内回外制限(回内とは、手掌が下向きになるよう前腕を回転させることをいい、回外とは、手掌が上向きになるように前腕を回転させる(頂戴の形をする)ことをいう)の大きな要因であり、出来る限り正確な矯正が望ましい。本発明者らは、CTまたはMRIの三次元画像を用いた術前コンピューターシミュレーションにより正確な矯正骨切を行った。その方法と結果を以下に説明する。
【0162】
症例は6例、全員男性で12−31歳、平均19.2歳である。矯正骨切の対象となった変形は橈骨骨幹部5例、橈骨遠位部1例で、受傷から矯正骨切術までの期間は平均11.6ヶ月、レントゲン上の術前変形角度は22.8°で、術前前腕可動域は回内62°、回外25°に制限されていた。平均追跡期間は6.6ヶ月であった。
【0163】
(モデル作成)
これらの症例において、両側前腕のCTあるいはMRI画像の二次元データ(図22A)から専用のソフトウェアを用いて、対象骨をセミオートマティックにマーキングして抽出し(図22B)、セグメント化して(図22C)三次元骨表面モデルを作成した(図22D)。
【0164】
患側前腕骨モデルを健側の鏡像の近位と遠位にそれぞれ重ね合わせることにより変形の回旋軸、変形量を計算し、最適な骨切の部位と矯正量を決定した(例えば、図23)。
【0165】
第一の3例はシミュレーションで得られた変形部位、変形量やコンピューター画像を参考にしながら手術を行った。これをA群とした(図24)。
【0166】
第二の3例ではCTデータを元に、骨切部位および矯正量を決定し(図25A)、変形癒合部位の骨表面に密着し、骨切スリットと矯正時に平行になるようなK−wireを刺入できるガイドホールを持つ骨切テンプレートをコンピューター上で設計した(図25B)。また、K−wireを通して整復位を保持するためのガイドも設計し、光造形技術で実際のモデルとして作成して手術に使用した(図25C)。これをB群とした。
【0167】
(結果)
両群とも年齢、手術までの期間、術前の変形程度はほぼ同じであった。術後レントゲンでの変形角度はA群が9.3°と不十分であったのに対して、B群では0.3°とほぼ完全に矯正できていた。回内外可動域はA群が術前73°が術後146°に、B群は術後6ヶ月経過した1例のみの評価であるが術前120°が、術後180°に改善した。結果を図26にまとめる。
【0168】
(実施例2:8歳児、上腕骨顆上骨折のClosing
Wedge Osteotomy症例)
本実施例では、Closing Wedge Osteotomy法が本発明において適用され得ることを実証する。小児の代表的な肘関節周囲骨折として、上腕骨顆上骨折を起こした8歳男児患者を例に本発明の方法により手術を施した。なお、この症例は、内反肘変型を残しやすいことで知られている。図27に罹患部を示すレントゲン写真を示す(左は正面図、右は側面図である)。
【0169】
この患者の最初の処置でのギプス内での過伸展変形の進行を図28に示す。適切な処置を施さなかったことから、背屈方向に回転している様子がわかる。
【0170】
この患者の最初の処置後2年での様子を図29に示す。内反過伸展変形を残し骨癒合後2年経っても自然矯正が十分でない様子がわかる。図29の左の正面レントゲンでは肘は10度程度内反(前腕が少し内側に向いている。正常では数度から10度程度外反している)しており、図29の右の側面レントゲンでは上腕骨遠位部は上腕骨の軸に対して約20度背屈している。正常では20度程度の前屈している。
【0171】
過伸展、内反変形の後遺症の様子を図30に示す。図30の左上では、屈曲障害を生じており、90°までしか曲がらない様子が示されている。正常では130−140°曲がるとされる。図30の左下では、過伸展変形されており、30°過伸展する様子が示されている。正常では10°程度伸展する。図30右では、内反肘変形する様子が示されている。
【0172】
(MRIモデルを用いた矯正骨切シミュレーション)
この患者に対してMRIから作製した三次元モデルを用いて手術を行った(図31を参照)。目的骨モデルとしての健側の鏡像にマッチングさせることにより、変形の軸と角度を求めた。変形の軸を頂点にもつ楔状の骨を切除して骨切部を閉じることにより変形を正確に矯正できる。なお、この骨切の方向や角度を術者が手術中に目視で正確に行うことは不可能である。
【0173】
マッチングの方法としてはマニュアルで合わせる方法、さらにICP
アルゴリズム(iterative closest point
algorithm)を用いてコンピューターで合わせる方法がある。
【0174】
(光造形)
マッチングに基づいて作製したテンプレートのモデルをもとに、光造形モデルを作製した。モデルをSTL形式で記述した。このSTL形式(3次元CADのデータの形式の一つである。三次元三角パッチの集合として表現される形式である。STLは、「Stadard
Triangulation Language」(標準三角パッチ言語)の略である。STL形式は、特に光造形における標準ファイルフォーマットとして使用されている。)のデザインを0.1mmスライスの断面データに変換した。このスライスデータに基づき、ガルバノメーターミラーを介したLD励起UV固体レーザーを光硬化性樹脂表面に走査して硬化させ、0.1mm厚で積層して3次元立体モデルを作成した。モデルは洗浄後、ポストキュア装置で完全に硬化させた。光造形装置はシーメット(株)Rapid
Meister 3000を用いた。
【0175】
光造形の様子を示す図を図32に示す。
【0176】
(手術)
次に、作製したテンプレートをもとに骨変形治癒手術を行った。その術中の写真を図33に示す。左肘の外側を見ている。写真の右下が肩、左上が手である。テンプレートガイドは上腕骨の外顆にフィットした。図33左上では、術部(腕)を開いた直後の様子が示されている。開いた後にテンプレートおよびワイヤを設置した後の様子が図33右下に示されている。
【0177】
テンプレートなどを設置後、骨切をおこなった。骨切はボーンソーによって行った(図34)。骨切を行った後の様子を図35に示す。示されるように、本発明の方法を用いる場合、マニュアルでは不可能な、正確な骨切が一回で可能であることが理解される。
【0178】
骨切の後、余分な骨片を切り出した。その様子は、図36に示す。骨片切除の後、ワイヤーが平行になるように矯正した(図37)。術後すぐのレントゲン写真を図38に示す。Kワイヤーによる固定の様子が示される。示されるように本発明の処置により良好な矯正・固定が得られている。図38左は、外反5°であることが示され、図38右では、上腕骨の前傾20°であることが示されている。術直後の肘の可動域は、屈曲、伸展とも正常化した。術中でも屈曲は130°、伸展は10°であることが示された(図39)。術直後の外観を図40に示す。これらの値はほぼ正常であることから、本発明の処置方法では、単純な方法によって、ほぼ正常な機能を回復するという効果を奏することが実証された。
【0179】
また、術後1年でのレントゲン写真を図41に、患者の外観を図42に示す。示されるように、驚くべきことに術後1年でも正常な状態が保たれているろころか、むしろ、術後の凸凹もなくなりほぼ正常に復元したことがわかる。
【0180】
本実施例では、切除および回転が必要な例を示した。
【0181】
このような効果は、従来技術からは予測できなかったことであり、本発明は医療上の有用性が高いことが実証され、理解される。
【0182】
(実施例3:21歳男性 左前腕骨折変形治癒のOpening Wedge Osteotomy症例)
実施例3では、Opening Wedge Osteotomy法が本発明において適用可能なことを実証する。症例として、21歳男性で前腕骨折変形治癒をした患者を用いた。この患者は、特に橈骨の変形が強かった(図43)。前腕骨折は若年男児から青年期に多い骨折であり、ギプスで治療すると変型治癒を起こすことが多いとされている。
【0183】
この患者は、図44に示すように、変形と前腕の回外(頂戴の形をする)の制限を訴えた。回外は約40°に制限されていた(正常80−90°)。
【0184】
コンピュータ処理を行ったところ、変形軸周りに30°回旋させることにより健側にマッチングすることがシミュレーションでわかった(図45)。この情報を下にテンプレート補助部材を設計したところ、図46左に示すように、黄色のブロックから骨と先に作製した直方体、円柱を引き算(Boolean
−ブーリアン− 演算)することにより変形治癒部の特徴的な骨表面にフィットして、骨切面やワイヤーを刺入することのできるテンプレートが設計できることが判明した(図46右)。これと同様にして矯正用のガイドも同様に設計した。
【0185】
(手術)
このテンプレートを用いて患者を処置した。まず、図47に示すように、変形治癒部の展開した。展開した後、図48に示すように、骨切り用テンプレートを変形治癒部にあてて、完全にフィットすることを確認後、キルシュナーワイヤー(整形外科で汎用されるステンレス製ワイヤー)を刺入して固定した。次に、図49に示すように、テンプレートのスリット通りに骨切した。次に、図50に示すように、骨切の完了し、テンプレートの除去した。
【0186】
(矯正)
次に、図51に示すように、矯正用ガイドをワイヤーに通して矯正した。骨切部を開いた。術野のみを見ると一見矯正ができているのかどうかわからない(表面が極端に前方凸に見える)が、術中レントゲン透視を見ると正確に矯正されていることが確認できた(図52)。
【0187】
次いで、図53に示すように、腸骨(腰骨)を楔状に整形し移植した。この後、テンプレートで骨および移植骨をチタンプレートおよびネジで固定した(図54)。この後、キルシュナーワイヤーを除去した(図55)。術後レントゲンを撮影すると、図56に示すように、良好な矯正が得られたことがわかる。
【0188】
(術後経過)
この患者について、術後9ヶ月の経過を観察した。図57に示すように、橈骨の変型はほぼ正常に矯正された位置で骨癒合していた。この後、術後1年1月で抜釘を行った(図58)。このとき、外見上の変型は消失し、前腕の回旋障害も正常化していた(図59左)。回外は90°まで可能となっていた(図59中)。もちろん回内も正常であった(図59右)。
【0189】
(実施例4:48歳女性、左橈骨遠位端骨折変形治癒の症例)
次に、比較的中堅の年齢の女性でも治療可能であることを実証する。患者として、48歳女性であって、左橈骨遠位端骨折変形治癒した患者を採用した。
【0190】
この患者は、図60に示すように、左橈骨遠位端骨折変形治癒しており、図60左に側面像を示す。関節面が背屈している様子がわかる。点線が関節面の傾きが示されており、20°程度背屈していることがわかる。図60中下のように、正常の側面像正常では点線のように10°〜20°掌屈している。図60中上に、患側の正面像を示す。橈骨の短縮と関節面の傾きが減少していた。線は約10°(正常20〜30°)であり。また矢印で示すように約4mm短縮していた。図60に健側を裏表逆にしたものを参照に示す。線は関節の傾きであり、その角度は25°であった。
【0191】
この患者が罹患している橈骨遠位端骨折は、中高年の女性に代表的な骨折で、変型治癒しやすい。骨癒合は良好なので、多少の変型治癒は放置されることも多いが、50歳以下の若年者や高齢でも活動的な患者の場合は、可動域障害や運動時の痛みを訴えることが多い。
【0192】
この患者は、図61に示すように、外観上の変形と左手関節の可動域障害がある。このような状態は、橈骨遠位の変型はフォークを凸面から見ているようなのでフォーク状変型と呼ばれる。図61右に示すように、掌屈は約35°に制限されている。正常値は60〜80°である。この患者は、運動時の手関節痛も訴えた。
【0193】
(3次元シミュレーション)
次に、この患者の骨の3次元シミュレーションを行った(図62)。その結果、30°の骨切(open
wedge osteotomy)が必要であることが算出された。その計算結果から、骨切テンプレート、矯正用ガイドおよび移植骨の設計も行った(図63)。図64には、これらテンプレートなどを光造形モデルで作製する様子を示す。
【0194】
(手術)
このテンプレートなどを用いて、実際に上記患者の手術を行った。図65左に、変形治癒部の展開を示す。図65右に示すように、作製したテンプレートをフィットさせた。この後、図66左に示すように、キルシュナーワイヤーで固定し、図66右に示すように、ボーンソーで骨切した。この症例では矯正用ガイドとして樹脂を傷つけないようにステンレス製のガイド(筒とスリット)を用意した。図67に示すように、このガイドを使用して、変形は矯正された。移植片には、ハイドロキシアパタイトを術前にCADを用いて整形して使用した(図68)。このような人工移植片は、手術の簡易化、正確性に寄与する。
【0195】
次に、テンプレートで固定した後の術後レントゲンを撮影した(図69)。示されるように、矯正は良好であり、図69中に健側のレントゲンを裏表逆にしたものを示すように、比べてみるとほぼ健側通りに矯正できていることがわかった。
【0196】
次に、術後4ヶ月での様子を図70に示す。写真から明らかなように、矯正は保たれていた。人工骨と周囲の骨は癒合しつつある様子がわかる。
【0197】
術後4ヶ月の患者の様子を図71に示す。制限されていた左手関節の掌屈は80°まで改善していた。外見上の変型、手関節痛は消失し、患者の満足度は高かった。
【0198】
従って、本発明の手術法は、患者の満足するように外見および運動性を回復する効果を奏することができることが実証された。
【0199】
(実施例5:67歳女性、橈骨遠位端骨折変形治癒の症例)
同様の橈骨遠位端骨折変型治癒をさらに高齢の患者(67歳女性)を用いて実証した。図72の下側にある2枚の写真には、健側を裏表逆に写したものを示している。正面像での変型はそれほどでもないが側面像では関節面が背側に向いているのがわかる。図73に、この患者の外観上の変型を示す。運動性障害は、図74に示す。示されるように、左手の回内障害(左上)、手関節の掌屈障害(右下)を呈している。この患者はこのほかにも神経障害による手のしびれを訴えた。このような症例では、変型により神経障害を生じることがある。
【0200】
(シミュレーション)
この患者からモデルを取り、図75のように、骨切の3次元シミュレーションを行った。示されるような軸に回転させることで矯正が可能であることが判明した。このモデルに基づいて、骨切テンプレートを設計し(図76)、続いて、矯正ガイドを設計した(図77)。この矯正方法による矯正の完成予想を図78に示す。
【0201】
(手術)
次に、このテンプレートなどを用いて上記患者の手術を行った。図79に示すように、変型部の展開を行い、図80〜図81に示すようにテンプレートを設置した。その後、骨切を行い、図82に示すように骨切を完成させた。
【0202】
次に、この患者に骨移植を行った。この患者では自家骨移植(自分の腸骨)を用いた(図83)。高齢で骨癒合能力に劣ると考えられるために、より骨癒合に有利な自家骨を使用した。骨移植の様子は、図83〜図84に示す。チタンプレートで固定後にレントゲンを撮影した様子を図85に示す。
【0203】
次に、術後4ヶ月のレントゲンを図86に示す。示される写真から明らかなように、矯正の喪失なく骨癒合していた。しびれ、疼痛は改善し、手関節可動域は掌屈65°、背屈64°、回内80°、回外90°と正常化していた。図87は正常の手関節正面像を示す。
【0204】
このように本発明の方法は、高齢者の変形骨矯正にも効果があることが実証された。従って、従来はあきらめていた比較的中高年の世代にも矯正サービスを提供することができることが判明したことになる。
【0205】
(実施例6:バイク事故で橈骨遠位端骨折受傷後、前医で保存治療を受けて変形治癒した症例−Opening
Wedge Osteotomy
延長を伴う場合)
次に、延長を伴う場合でも本発明が有効であることを実証する。症例として、22歳男性でバイク事故で橈骨遠位端骨折受傷後、前医で保存治療を受けて変形治癒した患者を採用した(図88)。この患者は、手関節部での変形し(図89)、右前腕に回旋障害がある(図90)。回外は正常だが、回内は50°に制限されている(図90)。また、手関節部の運動時痛を訴えた。
【0206】
(シミュレーション)
次に、この患者の処置シミュレーションを行った(図91)。橈骨の3Dモデルを健側の鏡像とマッチングする。遠位部で短縮を伴いながら、関節面が傾いているのがわかる。そうすることにより変形の軸を求める(図92)。この軸は骨から距離があるので、延長しながらの矯正になる。このように変形軸が骨より離れているときは延長骨切になる(あるいは短縮骨切になるときもある)(図93)。図94に矯正前後の様子を示す。図94斜線部(左図では重複の左側、右図では重複の右側)が矯正前、縦線部(左図では重複の右側、右図では重複の左側)が矯正後である。
【0207】
この情報を下に、骨切テンプレートの設計を行った(図95)。次に、図96に示すような矯正用のガイドを設計した。斜線部が骨移植の予定形状である。このようなガイドなどは、光造形モデルで作製した(図97)。
【0208】
(手術)
このテンプレートなどを用いて上記患者を処置した。図98に示すように、まず変形治癒部の展開した。その後、テンプレートをフィットさせてキルシュナーワイヤーで固定した(図99)。次に、図100に示すように、ボーンソーで骨切して、キルシュナーワイヤーが平行になるように骨切部を開いて矯正用ガイドでワイヤーを固定した。図101に示すように、移植骨(腸骨)を予測される欠損部を参考に整形した。図102左に示すように、移植骨を挿入し、次いで、図102右に示すように、チタンプレートで固定した。術直後の様子を図103に示す。骨切部周囲は術前にできていた仮骨で少し不整に見えるが関節面の位置や傾きは正常になっている。
【0209】
術後の経過は順調であり、術後9ヶ月には、図104に示すように、骨癒合が得られて移植骨周囲もリモデリング(骨改変)が進み良好な矯正が得られた(矢印)。外観上も変形はきれいに矯正された(図105)。可動域障害も完全に正常化していた(図106)。
【0210】
(実施例7:13歳男児、左橈骨骨幹部骨折変形治癒のRotational
Osteotomy症例)
次に、Rotational Osteotomyを用いて処置が可能であるかどうかを検証した。この症例としては、13歳 男児であって左橈骨骨幹部骨折変形治癒した患者を採用した(図107)。橈骨の骨幹部に約30°の変型を認めた。左前腕の回外障害を認めた(図108)。回内は60°、回外はマイナス20°に制限されていた。回内とは手のひらが下を向くように前腕を回旋させることをいい、回外とは手のひらが上を向くように(頂戴の手をする)前腕を回旋させることをいう。正常では回内、回外とも80から90°可能である。図109に示すように、本症例は、レントゲンでは一見単純な角状変形に見えるが、3Dで計測するとスライドのように斜めの軸を中心にした45°の回旋変形であることがわかる。
【0211】
そこで、図110に示すように、one planeでの骨切とその面に沿った回旋矯正を計画した。これによりレントゲン上の角状変形も矯正されることになる。
【0212】
次に、回旋骨切用の第一のガイド設計を行った。まず、骨切面を設定し、そして、変形軸が骨の中心に一番近いところで、変形軸に垂直な面を骨切面として設定した(図111)。次に、図112に示すように、矯正した状態で平行な4本の円柱を設定した。その後、図113左に示すように、矯正した状態をもとの変形した状態にもどした。円柱もねじれた位置になっていた。図113右に示すように、この状態で骨にブロックをあてて、骨と骨切面、円柱モデルを引いた(ブーリアン演算)。その後、図114に示すように、このテンプレート通りに骨切して、ねじれの位置のワイヤー(円柱ワイヤー)を平行にすれば、矯正が完成する。図114右には、ワイヤーを平行に保つためのガイドが示される。
【0213】
図115に、骨切モデルのコンピューター上での概観を示す。孔(開口部)およびスリットが良くわかる。このモデルを、図116に示すような光造形モデルで作製した。
【0214】
(手術)
このテンプレートを用いて、図117に示すように、骨切部を展開した。次に、テンプレートを固定した。ワイヤーは2本ずつ、ねじれた位置に入っている(図118)。次に、図119に示すように、骨切を終え、テンプレートを除去した。その後、矯正用ガイドで矯正してレントゲン確認した(図120)。回旋だけで、レントゲン状の角度変形も良く矯正されていることがわかる。次に、チタンプレートでの固定の様子がわかる(図121)。術直後のレントゲンを撮影すると、図122に示すようによく矯正固定されている。術後6ヶ月のレントゲンを見ると、図123に示されるように、矯正位を保ったまま、良好な骨癒合が得られていることが判明した。臨床上も回内、回外はそれぞれ70°にまで改善した。従って、本発明は、延長が必要な場合でも効果を奏することが実証された。
【0215】
(実施例8:健側と比較できない症例、両側罹患例)
次に、本実施例では、健側と比較できない症例(両側罹患例)でもうまくいくことを立証する。両側に変形があったり、変形の程度が強くて完全な矯正を目指さない場合などはコンピューター上のモデルをマニュアルで骨切、矯正して、適切な矯正をシミュレーションできる。勿論そのシミュレーションに基づいたテンプレートも作製できる。この場合はscrew
axisの原理を使わなくても良いことが実証される。
【0216】
患者として、図124に示すような患者を採用した。この患者では、図124に示すように、両側の内反肘を有しており、このような場合には健側にマッチングして変形軸を求めることはできない(図125にレントゲンを示す)。
【0217】
この患者に関して、図126に示すように、任意に骨切の面や矯正方向、矯正量を決めてプランを立てた。この症例では変型軸を図の二つの平面の交線にさだめて、それに30°の骨切をすることにした。
【0218】
この情報を下に、テンプレートの設計を行った(図127)。また、矯正ガイドの設計も行った(図128および図129)。次に、切断面のデザインなどを検討した(図130)。このモデルをもとに、図131に示すように、光造形によって、テンプレートを作製し、図132にのような矯正用ガイドを作製した。
【0219】
(手術)
次に、このテンプレートなどを用いて外科手術を行った。まず、骨切部の展開を行った(図133)。図134には、テンプレートのフィッティングを行っている様子が示されている。次に、図135に示すように、骨切を行った。その後、図136に示すように、楔状の骨を取り出した。図137には、整復の様子を示す。
【0220】
術後の経過は、図138に示すように、予定通りの矯正が可能であった。矯正前と矯正後の位置情報さえあればscrew
axisを用いなくてもテンプレートを用いた骨切が可能であることが実証された。図139に示すように、この患者は手術での矯正は完璧であった。なお、図139右に示すように、内固定力の不足から若干の転位(ずれ)が生じ、骨癒合完成時に軽度の変型を残したがその変形は、機能的にもほとんど問題ない程度であった。
【0221】
(実施例9:創外固定器を利用する例)
コンピューターシミュレーションを応用したIlizalov創外固定器を用いた前腕変形緩徐矯正法を本発明に応用した。この実施例では、7歳男児であって橈骨遠位端骨折(小児の代表的な前腕骨折の一つ)である患者を対象とした(図140)。示されるように、転位は少ない。その後図141に示すように、転位の進行し、ギプス内で変型が進行した。図141右の側面像でよくわかる。
【0222】
外傷後1ヶ月で手術を行った(図142)。しかし、術後8ヶ月でレントゲン上変形が出現した(図143)。骨端線(成長軟骨)障害による橈骨の成長障害であった。術後5年には、図144に示すように、極端な橈骨の短縮、関節面の傾きが異常になっていた。図144左に、手関節正面像を、図144右に側面像を示す。正面では橈骨の短縮が起こり関節面が正常と逆に傾いている。側面では関節面が背側を向いている。図144中下は健側の正面像である。外見上の変形は、図145に示す。
【0223】
この患者は、図146に示すように、手関節掌屈障害(図146右)を有していた。
【0224】
(シミュレーション)
次に、この患者の情報から、手術法をシミュレーションした(図147)。示されるように、図147のような軸に橈骨の斜線の部分を40°回転させればほぼ正常な位置に橈骨関節面を移動できることがわかった。
【0225】
実際には斜線の部分を正常な位置に持っていって、その際の位置情報を変換することでscrew
axisが求まる(図148)。しかし、これだけの骨延長は一期的な手術では不可能である。そこで、Ilizalov(イリザロフ)創外固定器を用いた緩徐矯正法を用いることにした(図149)。
【0226】
CTデータから患児の前腕骨実物大の光造形モデルを作製して模擬手術を行った(図150)。橈骨はワイヤーを通して2つのリングに固定される。リングは3本の支柱で固定されるが、その内の2本にはヒンジを介在させる。2つのヒンジを通る線が先に示した変形軸に一致するようにした。2つのリングの間で橈骨を骨切する。
【0227】
図151に示すように、もう一本の支柱はナットで延長できるようにして、最初は二つのリングを40°傾け、ナットを回していけば変形軸周りに緩徐に矯正と延長が行えるようにした。図151は、矯正終了後の様子を示す。実際には骨切部が1日1mmずつ位延長すると仮骨が形成されて延長部は骨で埋まっていく。
【0228】
(手術)
上記方法を用いて、図152に示すように実際の手術を行った。図153には、手術終了直後の写真を示す。次に、手術終了時のレントゲンを撮影した(図154)。比較的良好である。実施1週間後に、延長を開始した(図155)。延長部にうっすらと骨が形成されていることがわかる。
【0229】
次に、延長終了後、仮骨の骨量が十分になるのを待った(図156)。延長終了は、術後2.5ヶ月であった(図157)。図158に示すように、術後3.5ヶ月で創外固定除去した。矯正は良好であった。
【0230】
次に、術後4ヶ月で術前のレントゲンとの比較した(図159)。外観についても術前後を比較した(図160)。図161に示すように、この患者は、手関節の掌屈は改善(右上)し、他の可動域の悪化もほとんどなかった(図161)。
【0231】
このように、本発明の方法は、テンプレートなしでも行えることが明らかになった。ここで、イリザロフ法と、本発明の方法との相違は、本発明では、目的骨モデルと骨モデルとの三次元モデルの差分を利用していることがある。また、イリザロフによる変形矯正も二次元画像をもとに、健側との差から矯正しているものであるから、本発明の方法の利点は、三次元情報に基づき正確であること、および三次元の視覚化ができること、三次元の立体モデル(例えば、光造形モデル)で模擬手術をして、本当に手術を行うことができることなどが利点として挙げられる。本発明のような三次元データを直接利用する手術法でも、良好な結果が得られたということは、本発明によって初めて実証された。
【0232】
(実施例10:舟状骨偽関節の症例)
本発明者らは、三次元画像を使用して変形した舟状骨偽関節の手術をシミュレーションするための技術を開発し、臨床例8例に応用した。両側手関節のCTデータから舟状骨の表面モデルをコンピューター上で再構築し、偽関節モデルの遠位部と近位部を反対側の舟状骨モデルの鏡像とマッチングさせて予測骨欠損、スクリュー刺入の適切な部位および方向をシミュレーションした。次いで、CADデータに基づいてその骨の原寸大の光造形モデルを作製した。実際の手術では、整復、骨移植およびスクリュー挿入を、このモデルをガイドとして使用した。全症例で、良好な骨癒合と有意な臨床症状の改善が得られ、術後のSL角およびRL角は正常化した。三次元コンピューターシミュレーションが、舟状骨偽関節の正確な整復・固定および正常な手骨配列の維持に有用であることがわかった。
(序説)
舟状骨の偽関節において、遠位部は通常掌側に回転し、近位部は背側に回転する。その結果、舟状骨の掌屈変形が起こり、DISIパターンと呼ばれる手根不安定症が生じる。この変形を治療しないで放置すると、まず橈骨舟状骨関節から変形性関節症が始まり、最終的には手根中央関節へと進展する。
【0233】
このように変形性関節症が進行する主な原因は、舟状骨偽関節が変形した結果生じる関節面の不適合と手根不安定症であると考えられている。異常な手根配列を矯正し、舟状骨を正常な解剖学的形状に整復し、手関節症に進展するのを予防する目的で1970年代以来、掌側凸の楔状骨移植が推奨されてきた。1984年に、Fernandezは正面および側面の単純X線写真を使用した術前計画を報告した(Fernandez
DL,J Hand
Surg 1984;9A:733−7.)。彼の方法は二次元情報に基づいた簡便な方法ではあるが、実際の舟状骨偽関節は複雑な三次元的変形をしている。従来記載されているように、通常の変形パターンは、種々の程度の短縮、屈曲、尺屈および近位部に対する遠位部の回内である。舟状骨は変形癒合することもあるが、変形治癒すると手関節の可動範囲は減少し、橈骨手根関節機能が損なわれる。
【0234】
一方、最近10年間のCT装置およびコンピューター技術の進歩はめざましく、三次元モデルを使用した整形外科学手術シミュレーションが可能になってきた。本発明者らは、舟状骨の偽関節手術をシミュレーションするために、CTデータを用いて手根骨の三次元モデルを作製してきたが、本実施例では三次元画像を用いて変形した舟状骨偽関節の整復をシミュレーションする試みと8症例への臨床応用を示す。
【0235】
(症例および方法)
平均年齢24.3(18〜42歳)歳の8名の患者に対して三次元コンピューターシミュレーションを行ってから手術を行い、6ヶ月間以上追跡調査した(表1)。
【0236】
【表1】
【0237】
7名が男性、1名が女性であり、2例は右側、6例は左側の受傷であった。受傷から手術までの期間は、平均28(3〜110)ヶ月であった。4例は、骨折の初期治療を受けておらず、2例は初診時の見逃しで、1例は患者個人の意志で初期治療を中断した。
【0238】
全症例で偽関節の部位は中央1/3であり、術前の単純X線写真では変形性関節症の所見を認めなかった。全症例とも術前は患肢の使用時に中程度の痛みを訴えた。
【0239】
(CTデータを使用した舟状骨偽関節手術のための三次元シミュレーション)
患者をうつ伏せにし、両手を頭上に挙げて0.625〜1.0mmスライスで両手関節のCTスキャン画像(General
Electrics,High Speed AdvanceまたはLightSpeed
Ultra 16)を撮影し、DICOM(Digital
Imaging and
Communications in Medicine)データとして保存した。手関節を中間位に保持するために、放射線透過性材料でできた副木を撮影中装着した。舟状骨の輪郭は、画像解析ソフトウェア(Virtual
Place M(登録商標),Medical
Imaging Laboratory,Tokyo)を使用して半自動的にセグメント化し、Marching
Cubesアルゴリズムをもちいて骨皮質表面を三次元構築し、骨表面モデルを作成した。舟状骨の3次元モデルを、独自に開発したコンピュータープログラムを使用して可視化した(図162A)。
【0240】
グラフィックワークステーションを使用して、偽関節モデルの遠位部および近位部を、表面位置合わせの最も進んだ方法の1つであるICPアルゴリズムを使用して反対側の舟状骨モデルの鏡像モデルにマッチングさせた。この方法では、三次元表面モデルおよび三次元の点のセットを、手動で大まかにマッチングさせた初期位置から計算を始め、各三次元点から表面までの距離の合計が最小になるパラメータを導き出すことによって位置合わせする。偽関節モデルの近位部および遠位部を、それぞれ、健側の舟状骨の鏡像の近位部および遠位部に位置合わせした。そして、近位部に対する遠位部の回転を、Screw
Displacement−Axis法を使用して計算した。このようにして、本発明者らは、変形した舟状骨偽関節の整復をシミュレーションした(図162B)。
【0241】
予測される骨欠損を、市販のコンピューターソフトウェア(Magics
RP(登録商標),Materialise,Belgium)のブーリアン演算によって、反対側の正常舟状骨の鏡像から整復した偽関節モデルを差し引くことにより計算した。スクリュー挿入の適切な部位および方向も同様に、コンピューターモニター上でスクリュー挿入を試行した後に、モデルを半透明にするかまたは整復した偽関節モデルの横断面を可視化することにより、シミュレーションした(図162C、162D)。
【0242】
実際の手術においてコンピューターシミュレーションを容易に再現するために、骨(変形したままの舟状骨偽関節モデル、正常舟状骨の鏡像モデル、スクリュー挿入をシミュレーションした整復後の偽関節モデルおよび予測される骨移植片モデル)の原寸大の光造形モデル(ハードモデル)を、CADデータに基づいて作製し、術中にガイドとして使用した(図163A、163B)。このハードモデルを、0.01mmの正確度でエポキシ樹脂から作製した(CMET
co.,ltd.,Yokohama,Japan)。
【0243】
(手術手順)
掌側アプローチにより手術を行った;橈骨手根関節の関節包を、長軸方向に切開して舟状骨の掌表面を露出し、偽関節部位をハードモデルと比較した(図164A〜164C)。手関節を伸展することによって、偽関節となっている舟状骨の掌側骨皮質の輪郭を、整復を模した光造形モデルの形にマッチングさせるようにしながら整復を行った。偽関節部位の硬化骨を出血が確認できるまで切除した。次に腸骨から移植骨を採取した。実際の骨移植片は、術中に切除した硬化骨の分だけシミュレーションで計算した骨欠損より大きいということを考慮して、骨欠損部の形状を再現したハードモデルよりやや大きめに移植骨片を成形した(図164D,164E)。この移植片をトリミングして、骨欠損部に挿入した後、ハードモデルのスクリュー刺入方向、刺入位置を参考にして直径1.2mmの試しのキルシュナーワイヤーをシミュレーションした適切な部位および方向へ刺入した(図164F)。エックス線透視を用いてキルシュナーワイヤーの位置を確認した後、スクリュー挿入の間に舟状骨の整復がゆるまないように、直径1.0〜1.2mmの第2のキルシュナーワイヤーを、第1のワイヤーに沿って挿入した。引き続き、最初のキルシュナーワイヤーを抜去して、double
threaded screw(ねじ山を2つ有するスクリュー)をこの抜去した孔に挿入して内固定を行った(図164G)。
【0244】
手関節を術後4週間固定し、X線写真上骨が癒合したことが確認されるまで、手関節副木を装着した(図164H、164I)。
【0245】
(X線写真評価)
手根配列を評価するために、橈骨舟状骨角(RLA)、舟状骨月状骨角(SLA)および有頭骨月状骨角(CLA)を、術前、術後、最終調査時に測定した。骨折線が消失し、骨梁の連続性を確認できれば“骨癒合”と見なした。また、術前および最終追跡時に関節症性変化を評価した。関節症性変化は、関節裂隙がわずかに狭くなるか、そして/または橈側の茎状突起の尖鋭化が存在した場合に“軽度”と分類し、手根中央関節の関節裂隙の狭小化があれば“中程度”と分類した。術後のX線写真で舟状骨の長軸方向に沿ってスクリューが挿入されていれば“スクリュー刺入が適切”と見なした。
【0246】
(臨床評価)
Cooneyらによる評価系を採用した(Cooney
WP.,Linscheid RL.,Dobyns JH.,Wood MB.,J Hand
Surg 1988;13A:635−650)。各症例の疼痛、機能、手関節可動範囲、および握力(範囲は、0〜25点)に対して正常値のパーセントで点数をつけ、4つのカテゴリーの点数を加算した。満足のいく点数は、合計65点以上である。X線写真の結果は、点数に含めなかった。
【0247】
(結果)
(術前三次元解析)
舟状骨遠位部は近位部に対して掌側に39.7°(18.7°〜73.9°)回転していた。全ての症例において、舟状骨遠位部が近位部に対して回転するScrew
Displacement Axisは、有頭骨の頭部を貫通して尺背側から橈掌側方向に走っていた(図165)。予測される骨欠損は、掌側に基部、背側が先端をもつプリズム状の形状で、前側の厚みが平均5.5mm(3.8〜7.3mm)、深さが平均9.7mm(7.5〜12.1mm)、および幅が平均10.7mm(9.1〜12.8mm)であった(表2)。
【0248】
【表2】
【0249】
スクリュー挿入に適切な部位は舟状骨結節の中心に対してわずかに尺側かつ背側であった。術中に、光造形モデルは非常に役立ち、本発明者らにとって良好な手術ガイドとなった。このハードモデルを使用して、本発明者らは術前計画に従って偽関節を整復し、移植片を置き、スクリューを挿入することが可能であった。
【0250】
(X線写真結果)
全ての症例において、平均術後9.6週(8〜12週)までに、良好な骨癒合が得られた。SL角、RL角およびCL角の平均は、術前でそれぞれ、69.4°、−6.0°、−3.8°であったが、術後ではそれぞれ49.1°、2.8°、3.9°であった(表1)。反対側の正常手関節の平均SL角、RL角およびCL角は、それぞれ、49.9°、5.0°および8.6°であった(表1)。X線像のパラメーターは、最終追跡時にも変化なかった。術後のX線像に、進行性の変形性関節症は認められなかった。全ての症例において、術前に計画したとおりにスクリューが適切に挿入されていた。
【0251】
(臨床結果)
術後の手関節の点数は、65〜100点、平均は89点であった。屈伸可動域は、平均138°(範囲は、115〜160°)であり、橈尺可動域は、平均64°(範囲は、50〜75°)であった。握力は、健側の80〜100%であり、平均は90%であった(表1)。1症例(症例4)は、最終追跡時に良好な骨癒合が見られたにも拘わらず、手関節伸展時の疼痛および可動域制限を訴えた。この症例では、三次元モデルで舟状骨背側の骨棘を認めたが、単純X線写真においては明らかではなかった(図166A〜166B、図167)。この骨棘が本例の臨床成績が65点とやや劣るである原因であると考えられた。他の症例では、最終追跡調査において手関節の疼痛や機能障害を認めなかった。
【0252】
(考察)
変形した舟状骨偽関節の治療は、現在もなお難しい。しっかりとした骨癒合と正常な手根配列を維持することが、良好な術後機能を達成するために重要であり、従来より解剖学的整復の重要性が強調されてきた。舟状骨骨折が変形治癒した患者では解剖学的に癒合した患者より、変形性関節症および手関節機能障害の発生率が高い。関節にかかる応力変化と関節面の不適合性により、橈骨手根関節が変形性関節症に進行しやすくなると考えられる。Tsuyuguchiらは舟状骨偽関節の手術を受けた患者群を検討し、術後のSL角が増大してDISI変形を示した患者より、術後手根配列が正常であった患者の機能成績が有意に良好であったと報告した(Tsuyuguchi
Y,Murase T,Hidaka N,Ohno H,Kawai H,J
Hand Surg
1995;20B:194−200.)。Amadioらは、舟状骨骨折治療の成功の条件として骨癒合が得られたというだけで不十分で、舟状骨の解剖学的な整復が重要であると報告した(Amadio
PC.,Berquist TH.,Smith DK.,Ilstrup DM.,Cooney WP.,Linscheid
RL.,J Hand
Surg 1989;14A:679−687)。また、屍体標本を用いたシミュレーション研究では、舟状骨の掌屈変形に比例して手関節伸展は減少し、舟状骨の30°の掌屈変形で手関節伸展は0°になった(Burgress
RC,The effect
of simulated
scaphoid malunion on wrist motion.J
Hand Surg
1987;12A,774−6)。
【0253】
これらの研究知見を総合的に考えると、舟状骨偽関節を治療する際には出来る限り解剖学的に正確な整復を行うことが望ましい。
【0254】
1970年に、Fiskは舟状骨の掌屈変形を矯正するために、外側アプローチで掌側凸の楔状骨移植片を橈骨茎状突起から採取することを提唱した(Fisk
GR.,Ann R.,Surg
Engl 1970;46:63−76)。Fernandezらは、Fiskの手術方法を改良し、掌側アプローチで楔状または台形状の腸骨移植片を挿入して内固定することを推奨した(Fernandez
DL.,J Hand
Surg 1984;9A:733−737)。彼らは移植片のサイズを正面および側面のX線写真を用いて計画した。Nakamuraら(Nakamura
R.,Hori M.,Horii
E.,Miura T.,J Hand Surg 1987;12A:1000−1005)およびTomanioら(Tomanio
MM,King J,Pizillo
M., J
Hand Surg
2000;25A:322−329)は、キルシュナーワイヤーを月状骨に刺入して、DISI変形を矯正した際に発生する舟状骨の欠損部に前側楔状骨移植片を充填した。
【0255】
術前の単純X線写真を使用するFernandezの方法は簡便ではあるが、三次元的に複雑な変形をしている舟状骨偽関節の手術計画を2次元画像を頼りに行うことは無理がある。舟状骨偽関節の手術を計画するには、三次元情報を用いて変形を評価することが合理的である。
【0256】
1991年に、Nakamuraらは、舟状骨骨折の変形の評価と変形パターンを2種類のカテゴリー(掌側型および背側型)に分類するのに三次元CTが有用であると報告した(Nakamura
R.,Imaeda T.,Miura T.,Scaphoid malunion.,J Bone
Joint Surg[Bg]1991;73B:134−137)。Moritomoらは、骨折部位と、変形パターン、DISI変形の発生、橈骨手根関節における関節接触領域の変化との関係を三次元モデルを用いてさらに調査し、舟状骨偽関節の変形メカニズムを明らかにした。これらの研究者は、三次元画像または三次元モデルを使用して、骨折パターンおよび骨片の転位を定性的に可視化した。
【0257】
Belsoleらは、正常舟状骨と骨折した舟状骨のコンピューター画像を重ね合わせることによって、変形角度と骨欠損の容積を計算したところ、遠位部に対して近位部が伸展、橈位、回外していたことを報告した(Belsole
RJ.,Hilbelink DR.,Llewellyn JA.,Dale
M.,Greene TL.,Rayhack JM.,J Hand Surg
1991;16A:899−906)。骨欠損量は、舟状骨体積の6%〜15%で、骨欠損部の形状は掌側に基部を持つプリズム状であった。本発明者らが本実施例において使用した三次元技術は、基本的には、Belsoleらが用いた基本技術を利用するものであるが、本発明者らは治療目的で計算結果を使用したのに対し、Belsoleらは、舟状骨偽関節の病理的機構を理解するためにその計算結果を用いた。しかも、骨欠損部を求める手法については全く記載していない。また、スクリュー挿入などのシミュレーションは行っていないなど、本発明を示唆するものではない。従って、本発明は、Belsoleらの記載からは自明ではないといえる。
【0258】
本発明者らの方法では、変形は、三次元的に、かつ正確に測定することができた。舟状骨偽関節の近位部に対する遠位部の変位量を、screw
axisの周りの回転として表し、三次元画像で可視化した。さらに、本発明者らは、推定骨欠損、スクリュー挿入の最適部位および方向も術前に前もって知ることができた。推定骨欠損は、形が三角形であり、その基部は掌側に面しており、幅は、4〜7mmであった。術前シミュレーションの結果を実際の手術に反映させるために、光造形により作製した原寸大のプラスチックモデルをガイドとして使用した。このガイドは、術中オリエンテーションの獲得、変形した偽関節の整復、骨移植片の成形、および適切なスクリュー挿入位置、方向の決定に有用であることがわかった。7例の術後X線像の手根配列は良好であった。臨床結果は、1例(この例は、三次元画像上でわずかな変形性関節症が認められた)を除いて、優または良であった。
【0259】
三次元画像を使用する別の利点は、単純X線写真では検出できない小さな骨棘のような微妙な形態学的変化を見ることができることである。本研究で、1例の三次元画像で単純X線写真ではわからない背側の骨棘が認められた。この症例はレントゲン上のDISI変形が手術で十分に矯正されたにも関わらず、術後持続的な手関節痛を訴えた。症状が遺残したのは、その症例が術前、すでに橈骨手根関節に変形性関節症を発症していたためと考えられる。
【0260】
三次元コンピューターシミュレーションは、良好な臨床結果を得るために、舟状骨偽関節の正確な矯正の達成および正常な手根骨の配置の維持に有用であることが分かった。
(実施例11:Closed wedge osteotmyとopen
wedge osteotomyの組み合わせの実施例)
本実施例では、15才女性を症例として用いてClosed
wedgeとOpen wedgeとの組み合わせでも本発明がうまくいくことを実証した。この患者は、7歳時に左前腕骨折を受傷した。前腕の回外制限を訴えて受診した。図168は、左前腕レントゲンを示し、尺骨が正常に比べて内側に湾曲している(矢印)。図169は、正常側レントゲンを示す。図170に示すように、この患者は、左前腕回外は不可であった。図171に示すように、患者の回内はわずかに制限されていた。
(3次元コンピューターシミュレーション)
上記実施例に記載されるように三次元コンピュータシミュレーションを行った。その結果、尺骨の変形軸(screw
axis)は尺骨にほぼ垂直で骨の中心を通っていた。尺骨の遠位部分はこの軸周りに13°橈屈変形していた。橈骨の変形軸は橈骨の長軸に平行に近い。橈骨の遠位部分は、この軸周りに46°回内変形していた。図172は、患側の3次元モデルと橈骨を示す。尺骨の変形軸が黒棒で示される。図173は、健側の鏡像モデルを示す。
(尺骨の矯正骨切の計画)
次に、上記実施例に記載されるように、矯正骨切の計画を行った。変形軸が骨の中を通り、骨軸に垂直に近いときは図のようにclosde
wedgeとopen wedgeを組み合わせたように計画した。その計画図を図174に示す。図174Aでは、図の左側にclosed wedge osteotomyを計画した。点は変形軸を真横から見ているところである。図174Bは、変形軸を通る面で骨切をし、13°の角度を持つ黄色の楔状の骨を切除した。図174Cは、変形矯正を示す。図174DおよびEは、矯正後に図の右側に出来る骨欠損に楔状の骨移植をした。
【0261】
本実施例の症例では実施しなかったが、このような症例では図のように変形軸を中心に持つ円弧でドーム状に骨切して、回旋させても結果として同様の変形矯正が可能である。その模式図は、図175に示す。図175Aに示すように、変形軸を中心にもつ適当な半径の円弧で骨切をし、図175Bに示すように、遠位の骨片を13°回旋させることにより矯正が完成することが理解される。
【0262】
(骨切テンプレートおよび矯正ガイドの設計)
橈骨は実施例7の橈骨と同様に回旋骨切の計画としてテンプレートを設計した。その模式図を図176に示す。図176Aおよび図176Bは、骨切現プレートをそれぞれ背側からと掌側から見たところを示す。図176Cおよび図176Dは、それぞれ、矯正用ガイドを、背側からと掌側から見たところを示す。
【0263】
図177は、尺骨矯正骨切の術中写真を示す。図177Aは、尺骨変形部の展開を示す。図177Bは、骨切テンプレートを当ててキルシュナーワイヤーで固定する様子を示す。ワイヤーに13°の角度がついていることが注意されるべきである。図177Cは、骨切の後、キルシュナーワイヤーに矯正ガイドを通して矯正した。キルシュナーワイヤーは平行になっている。図177Dに示すように、この位置でプレート固定した。奥の方から切除した楔状の骨を手前に出来た骨欠損に補填した。
【0264】
(結果)
図178に示すように、Closed wedgeとOpen wedgeとの組み合わせでも、術後レントゲンおよびシミュレーション通りに矯正が可能であった。
【0265】
(実施例12:コンピュータおよびコンピュータプログラム)
図179は、骨の処置を決定する処理を実行するコンピュータ1000の構成の一例を示す。
【0266】
コンピュータ1000は、CPU1010と、メモリ1020と、入力インタフェース1030と、出力インタフェース1040と、ユーザインタフェース1050と、バス1060とを含む。
【0267】
CPU1010は、プログラムを実行する。
【0268】
メモリ1020には、プログラムやそのプログラムの実行に必要なデータが格納されている。
【0269】
入力インタフェース1030は、CT装置やMRI装置などの画像撮像装置(外部装置)からデータを受け取るためのインタフェースとして機能する。
【0270】
出力インタフェース1040は、樹脂ブロック成型装置などの補助部材成型装置(外部装置)にデータを出力するためのインタフェースとして機能する。
【0271】
ユーザインタフェース1050は、ユーザとのインタラクションを制御するためのインタフェースとして機能する。ユーザインタフェース1050には、キーボードやマウスなどの入力機器および表示装置や印刷装置などの出力機器が接続され得る。
【0272】
バス1060は、CPU1010、メモリ1020、入力インタフェース1030、出力インタフェース1040およびユーザインタフェース1050を相互に接続するために使用される。
【0273】
図180は、骨の処置を決定する処理の手順の一例を示す。この処理は、プログラムの形式で提供される。そのプログラムは、CPU1010によって実行される。
【0274】
工程2010:処置の対象となる骨を表す骨モデルが取得される。
【0275】
骨モデルは、骨の立体構造を表す3次元データによって表現され得る。処置の対象となる骨は典型的には罹患骨であるがこれに限定されない。骨モデルの取得は、例えば、CT装置やMRI装置などの画像撮像装置から出力されるデータを入力インタフェース1030を介して受け取り、その受け取ったデータから骨を表すデータを抽出し、その抽出されたデータに基づいて骨の表面モデルを生成することによって達成される。しかし、骨モデルの取得の態様はこれに限定されない。骨モデルは、任意の態様で取得され得る。例えば、任意のタイプの記録媒体に記録された骨の表面モデルを読み出すことによって骨モデルを取得するようにしてもよいし、メモリ1020に予め格納された骨の表面モデルを読み出すことによって骨モデルを取得するようにしてもよい。
【0276】
工程2020:骨の処置の目的となる目的骨を表す目的骨モデルが取得される。
【0277】
目的骨モデルは、目的骨の立体構造を表す3次元データによって表現され得る。目的骨は典型的には正常骨であるがこれに限定されない。目的骨モデルの取得は、例えば、健側の骨モデルの鏡像を用いて骨の表面モデルを生成することによって達成される。しかし、目的骨モデルの取得の態様はこれに限定されない。目的骨モデルは、任意の態様で取得され得る。例えば、任意のタイプの記録媒体に記録された目的骨の表面モデルを読み出すことによって目的骨モデルを取得するようにしてもよいし、メモリ1020に予め格納された目的骨の表面モデルを読み出すことによって目的骨モデルを取得するようにしてもよい。また、ユーザ(例えば、術者)が任意に作製したモデルを目的骨モデルとしてもよい。
【0278】
なお、工程2010、2020において、骨の表面モデルを生成するソフトウェアとしては、例えば、市販のVirtual
Place M(医用画像研究所、東京)、Mimics(Materalise,ベルギー)、ZviewTM(Zview
Inc.,Huntington Beach,CA.,USA)、Realize(Mayo Clinic)を使用することができるが、これらに限定されない。骨の表面モデルは、VTK、STLなどの形式でメモリ1020に格納され得る。
【0279】
工程2030:骨モデルと目的骨モデルとに基づいて、骨に対して施されるべき処置が決定される。
【0280】
骨に対して施されるべき処置は、例えば、その骨をある切断面に沿って切断することと、その骨を切断することによって得られる近位側骨片および遠位置側骨片の一方の骨片をある方向にある量だけ移動させることとを包含する。この場合、骨に対して施されるべき処置の決定は、骨モデルの切断面を決定することと、その骨モデルをその切断面に沿って切断することによって得られる近位側骨片モデルおよび遠位置側骨片モデルのうちの一方の骨片モデルの移動の方向および量を決定こととによって達成される。
【0281】
骨に対して施されるべき処置は、補助部材を必要とする処置であってもよいし、補助部材を必要としない処置であってもよい。骨に対して施されるべき処置が補助部材を必要とする処置である場合には、骨に対して施されるべき処置を決定する工程はその処置に必要な補助部材を決定する工程を包含する。その処置に必要な補助部材は、例えば、テンプレート補助部材、位置確認補助部材および移植片のうちの少なくとも1つであり得る。その処置に必要な補助部材として創外固定器を使用してもよい。
【0282】
このように、CPU1010が骨の処置を決定する処理を実現するプログラムを実行することにより、コンピュータ1000は、骨の処置を決定する方法を提供し得る。
【0283】
また、CPU1010が骨の処置を決定する処理を実現するプログラムを実行することにより、コンピュータ1000は、骨の処置を決定する装置として機能し得る。工程2010〜2030の機能をソフトウェアによって実現する例を示したが、本発明はこれに限定されない。工程2010〜2030の機能をハードウェア(例えば、回路、ボード、半導体チップなど)によって実現してもよいし、ソフトウェアとハードウェアとの組み合わせによって実現してもよい。従って、A)処置の対象となる骨を表す骨モデルを取得する手段;B)骨の処置の目的となる目的骨モデルを取得する手段;C)骨モデルと目的骨モデルとに基づいて、骨に対して施されるべき処置を決定する手段を備えている限り、そのような装置は本発明の範囲内というべきである。
【0284】
骨の処置を決定する処理を実現するプログラムは、任意の形態でユーザに提供され得る。例えば、そのプログラムを記録した記録媒体を配布する形態でそのプログラムをユーザに提供してもよいし、ネットワークを介してサーバから端末装置にそのプログラムをダウンロードする形態でそのプログラムをユーザに提供してもよい。そのプログラムの提供は、有償であるか無償であるかを問わない。そのプログラムを記録する記録媒体としては、フレキシブルディスク、MOディスク、DVDなどの任意の記録媒体が使用され得る。ネットワークとしては、インターネットなどの任意のネットワークが使用され得る。
【0285】
図181は、図180に示される工程2030を実現するための処理の手順の一例を示す。この処理は、プログラムの形式で提供される。そのプログラムは、CPU1010によって実行される。
【0286】
工程2040:骨モデルから近位側骨片モデルと遠位側骨片モデルとが定義される。
【0287】
例えば、骨モデルの近位側を目的骨モデルの近位側に重ね合わせ、骨モデルの近位側と目的骨モデルの近位側とが所定の距離(例えば、1mm)以上離れている部分を無視する。これにより、骨モデルの近位側と目的骨モデルの近位側とが所定の距離(例えば、1mm)以内の誤差でマッチングしている骨モデルの部分が骨モデルの「近位側骨片モデル」として定義される。
【0288】
また、骨モデルの遠位側を目的骨モデルの遠位側に重ね合わせ、骨モデルの遠位側と目的骨モデルの遠位側とが所定の距離(例えば、1mm)以上離れている部分を無視する。これにより、骨モデルの遠位側と目的骨モデルの遠位側とが所定の距離(例えば、1mm)以内の誤差でマッチングしている骨モデルの部分が骨モデルの「遠位側骨片モデル」として定義される。
【0289】
骨モデルの近位側と目的骨モデルの近位側との重ね合わせ(または、骨モデルの遠位側と目的骨モデルの遠位側との重ね合わせ)は、例えば、表面モデルの位置情報を操作し、管理するプログラムを用いて行うことができる。このようなプログラムは、例えば、VTK(The
Visualization ToolKit)というオープンソース(http://public.kitware.com/VTK/)をベースに容易に作成することができる。
【0290】
2つのモデルを正確にマッチングさせるには、例えば、ICP(iterative
closest point)アルゴリズムと呼ばれる表面マッチング手法を採用したプログラムが用いられる。骨モデルと目的骨モデルとに対してこのプログラムを実行する際には、両者が所定の距離(例えば、1mm)以上離れているところを無視し、両者が所定の距離より近づいているところだけを有効にするようにプログラムのパラメータを設定することが好ましい。骨が変形している部分では骨モデルと目的骨モデルとはぴったりとはマッチングしないからである。
【0291】
工程2050:近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量が決定される。
【0292】
近位側骨片モデルに対する遠位側骨片モデルの相対的な移動は、例えば、Screw
Displacement−Axis法に従って表記される。
【0293】
Screw Displacement−Axis法の原理とは、物体をある軸を中心にφ回転させて、その軸に平行にt移動させれば、どのような位置にでも移動可能であり、そのような軸が1つの移動に対して空間上でただ1つ存在するというものである(図8参照)。従って、1つの軸とその軸の周りの回転量φとその軸に沿った移動量tとを決定することによって、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動を表記することができる。実際に臨床に用いる場合には、その軸に沿った移動量tは1mm以内と小さいため無視できる場合が多い。このような場合には、その軸の周りの回転量φのみを考慮すればよい。
【0294】
あるいは、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動をアファイン変換法に従って表記するようにしてもよい。
【0295】
工程2060:骨モデルの切断面が決定される。
【0296】
骨モデルの切断面の決定は、プログラムを実行することによりコンピュータ1000によってなされてもよいし、ユーザ(例えば、医師)の指示に従ってなされてもよい。このような指示は、例えば、ユーザがマウスを操作することによってユーザインタフェース1050を介してCPU1010に入力される。指示の態様は問わない。例えば、3次元グラフィックスにおいて周知の任意の態様で、ユーザは、骨モデルに対する切断面の位置をコンピュータ1000に指示することができる。
【0297】
あるいは、骨モデルの切断面の1以上の候補を骨モデルおよび目的骨モデルとともに表示装置に表示し、その切断面の候補のうちの1つをユーザが選択することを許可する(または、その切断面の候補をユーザが修正することを許可する)ことにより、ユーザが骨モデルの切断面を指示することをコンピュータ1000が支援するようにしてもよい。そのような切断面の候補の表示は、例えば、ユーザによる指示の履歴をメモリ1020に格納しておくことによって達成され得る。
【0298】
例えば、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動が、Screw
Displacement−Axis法の表記に従って、軸線Lと、軸線Lの周りの回転量φと、軸線Lに沿った移動量tとによって表されていると仮定する。この場合には、軸線Lが骨モデルの長軸にほぼ平行かほぼ垂直かに応じて、骨モデルの切断面を決定することが好ましい。骨モデルの切断面の決定は、プログラムを実行することによりコンピュータ1000によってなされてもよいし、ユーザ(例えば、医師)の指示に従ってなされてもよいし、コンピュータ1000の支援の下にユーザ(例えば、医師)の指示に従ってなされてもよい。
【0299】
例えば、軸線Lが骨モデルの長軸にほぼ平行である場合には、Rotational
Osteotomyを採用することとし、軸線Lに垂直な面を骨モデルの切断面として決定することが好ましい。例えば、軸線Lが骨モデルの長軸にほぼ垂直である場合には、Closed/Operation
Wedge Osteotomyを採用することとし、軸線Lに平行な面を骨モデルの切断面として決定することが好ましい。
【0300】
あるいは、軸線Lが骨モデルの長軸にほぼ平行かほぼ垂直かに応じて、骨モデルの切断面の1以上の候補を骨モデルおよび目的骨モデルとともに表示装置に表示するようにしてもよい。このような骨モデルの切断面の候補を表示することによりユーザが骨モデルの切断面を決定することを容易にすることができる。例えば、軸線Lが骨モデルの長軸にほぼ平行である場合には、Rotational
Osteotomyを採用することとし、軸線Lに垂直な1以上の面を骨モデルの切断面の候補として表示装置に表示するようにしてもよい。例えば、軸線Lが骨モデルの長軸にほぼ垂直である場合には、Closed/Operation
Wedge Osteotomyを採用することとし、軸線Lに平行な1以上の面を骨モデルの切断面の候補として表示装置に表示するようにしてもよい。
【0301】
このように、工程2040において近位側骨片モデルと遠位側骨片モデルとを定義し、工程2050において近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量(距離)を決定し、工程2060において骨モデルの切断面を決定することにより、骨に対して施されるべき処置(骨の切断、骨片の移動など)を決定することが可能となる。
【0302】
工程2070:近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量と骨モデルの切断面とに基づいて、補助部材を表すモデル(補助部材モデル)が生成される。なお、骨に対して施されるべき処置に補助部材が必要とされない場合には、工程2070は省略され得る。
【0303】
補助部材モデルは、補助部材の立体構造を表す3次元データによって表現され得る。補助部材モデルは、STLなどの形式でメモリ1020に格納され得る。ここで、STL形式は、光造形などのラピッドプロトタイピングでは一般的に用いられる形式であり、三角形のポリゴンを張り巡らせた表面モデルとして表現される。補助部材モデルは、出力インタフェース1040を介して補助部材成型装置に出力される。補助部材成型装置は、光造形などの任意の成型方法により素材(例えば、金属、プラスチック、セラミックなど)を成型することによって、補助部材モデルに対応する補助部材を作成する。
【0304】
補助部材モデルは、例えば、テンプレート補助部材を表すモデル(テンプレート補助部材モデル)であり得る。テンプレート補助部材モデルは、骨モデルと嵌合するための嵌合面と、骨モデルの切断面をガイドするための切断面ガイドと、複数のロッドをそれぞれ表す複数のモデル(複数のロッドモデル)を骨モデルに挿入することをそれぞれガイドするための複数の挿入ガイドとを含む。このようなテンプレート補助部材モデルの一例は、罹患骨切断補助部材三次元モデルM1として図11に示されている。あるいは、テンプレート補助部材モデルは、嵌合面と切断面ガイドと複数の挿入ガイドのうちの少なくとも1つを含んでいてもよい。
【0305】
切断面ガイドは、切断面に対応する位置に形成されたスリットであることが好ましい。複数の挿入ガイドは、複数のロッドモデルを挿入可能に形成された複数のガイド孔であることが好ましく、近位側骨片モデルと遠位側骨片モデルとが正常な位置関係にある場合に複数のロッドモデルが実質的に平行になるように形成された複数のガイド孔であることが好ましい。
【0306】
例えば、切断面を含むようにテンプレート補助部材の初期モデルを生成しておき、この初期モデルと骨モデルとに対してブーリアン演算(初期モデルと骨モデルとの重なり部分を初期モデルから取り除く差演算)を行うことによって、嵌合面を有するテンプレート補助部材モデルが生成され得る。
【0307】
例えば、切断面を含むようにテンプレート補助部材の初期モデルを生成しておき、この初期モデルと切断面とに対してブーリアン演算(初期モデルと切断面との重なり部分を初期モデルから取り除く差演算)を行うことによって、切断面に対応する位置に形成されたスリットを有するテンプレート補助部材モデルが生成され得る。
【0308】
例えば、切断面を含むようにテンプレート補助部材の初期モデルを生成しておき、この初期モデルと複数のロッドモデルとに対してブーリアン演算(初期モデルと複数のロッドモデルとの重なり部分を初期モデルから取り除く差演算)を行うことによって、複数のロッドモデルを挿入可能に形成された複数のガイド孔を有するテンプレート補助部材モデルが生成され得る。
【0309】
このように、テンプレート補助部材の初期モデルと所定のモデル(骨モデルまたは切断面または複数のロッドモデル)とに対してブーリアン演算を行うことにより、嵌合面、スリットおよび複数のガイド孔のうちの少なくとも1つを有するテンプレート補助部材モデルを生成することができる。このようなブーリアン演算は、3次元グラフィックスのモデリング技法の1つである。ブーリアン演算を実行するソフトウェアとしては、例えば、市販のMagics
RP(Materialise)を使用することができるがこれに限定されない。テンプレートの初期モデルの生成は、ユーザからの指示に従って手動で行ってもよいし、ユーザからの指示に従って半自動で行ってもよい(例えば、ユーザによって指定された領域を嵌合面として含む一定の厚さの初期モデルを生成するなど)。
【0310】
補助部材モデルは、例えば、位置確認補助部材を表すモデル(位置確認補助部材モデル)であり得る。位置確認補助部材モデルは、骨モデルを目的骨モデルに矯正した後に、近位側骨片モデルと遠位側骨片モデルとが正常な位置関係にあることを確認するために使用される。位置確認補助部材モデルは、例えば、近位側骨片モデルと遠位側骨片モデルとが正常な位置関係にある場合に複数のロッドモデルが実質的に平行になるように形成された複数のガイド孔を有している。このような位置確認補助部材モデルの一例は、三次元ブロック体モデルM3として図12に示されている。
【0311】
例えば、骨モデルおよび目的骨モデルから離れた位置に位置確認補助部材の初期モデルを生成しておき、この初期モデルと複数のロッドモデルとに対してブーリアン演算(初期モデルと複数のロッドモデルとの重なり部分を初期モデルから取り除く差演算)を行うことによって、複数のロッドモデルを挿入可能に形成された複数のガイド孔を有する位置確認補助部材モデルが生成され得る。
【0312】
補助部材モデルは、例えば、移植片を表すモデル(移植片モデル)であり得る。例えば、移植片モデルは、骨モデルと目的骨モデルとの差分をとることによって生成され得る。
【0313】
なお、工程2070において、補助部材モデルを生成する代わりに、補助部材の使用方法を決定するようにしてもよい。例えば、補助部材として創外固定器が使用される場合には、創外固定器の使用方法(例えば、創外固定器の軸の位置、ヒンジの位置)を決定するようにすればよい。
【0314】
図182は、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を決定する処理の手順の一例を示す。この処理は、図181に示される工程2050を実現するための処理の一例である。この処理は、プログラムの形式で提供される。そのプログラムは、CPU1010によって実行される。
【0315】
工程2052:骨モデルの近位側を目的骨モデルの近位側にマッチングさせるために必要な近位側骨片モデルの移動の方向および量を表す近位側移動情報が算出される。
【0316】
近位側移動情報は、例えば、骨モデルの近位側骨片モデルを目的骨モデルの対応する部分にマッチングさせることによって算出され得る。このようなマッチングは、例えば、上述したICP(iterative
closest point)アルゴリズムと呼ばれる表面マッチング手法を採用したプログラムが用いて行うことができる。近位側移動情報は、例えば、アファイン変換法の表記に従ってマトリックス(以下、「第1のマトリックス」という)によって表される。
【0317】
工程2054:骨モデルの遠位側を目的骨モデルの遠位側にマッチングさせるために必要な遠位側骨片モデルの移動の方向および量を表す遠位側移動情報が算出される。
【0318】
遠位側移動情報は、例えば、骨モデルの遠位側骨片モデルを目的骨モデルの対応する部分にマッチングさせることによって算出され得る。このようなマッチングは、例えば、上述したICP(iterative
closest point)アルゴリズムと呼ばれる表面マッチング手法を採用したプログラムが用いて行うことができる。遠位側移動情報は、例えば、アファイン変換法の表記に従ってマトリックス(以下、「第2のマトリックス」という)によって表される。
【0319】
工程2056:近位側移動情報と遠位側移動情報との差分に基づいて、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を表す相対的移動情報が算出される。
【0320】
例えば、近位側移動情報がアファイン変換法の表記に従って第1のマトリックスによって表されており、遠位側移動情報がアファイン変換法の表記に従って第2のマトリックスによって表されている場合には、相対的移動情報は、第1のマトリックスと第2のマトリックスとの差分をとることにより相対的マトリックスを算出し、その相対的マトリックスをScrew
Displacement−Axis法の表記(すなわち、軸線L、軸線Lの周りの回転量φ、軸線Lに沿った移動量t)に変換することによって算出され得る。
【0321】
ここで、相対的マトリックスは、アファイン変換法の表記に従って、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を表したものである。軸線L、軸線Lの周りの回転量φ、軸線Lに沿った移動量tは、Screw
Displacement−Axis法の表記に従って、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を表したものである。従って、相対的マトリックスをScrew
Displacement−Axis法の表記に変換することは、アファイン変換法の表記による相対的移動情報をScrew
Displacement−Axis法の表記による相対的移動情報に変換することを意味する。このような相対的移動情報の変換は、1つの空間における物体の移動を異なる座標系で表現することと等価である。
【0322】
このようにして、本発明のプログラムによれば、所望の目的(例えば、骨の矯正)を達成するために、骨に対して施されるべき処置(例えば、骨の切断、骨片の移動など)を決定することができる。これにより、比較的経験の浅い医師でも、適切な処置を行うことが可能になる。
【0323】
以上のように、本発明の好ましい実施形態および実施例を用いて本発明を例示してきたが、本発明は、特許請求の範囲によってのみその範囲が解釈されるべきであることが理解される。本明細書において引用した特許、特許出願および文献は、その内容自体が具体的に本明細書に記載されているのと同様にその内容が本明細書に対する参考として援用されるべきであることが理解される。
【産業上の利用可能性】
【0324】
以上に詳述したように本発明は、矯正骨切手術に用いることにより、その確実性、容易性を従来に比べ格段に向上させ、この分野における技術の多大な発展に寄与しうるものである。
【技術分野】
【0001】
本発明は、骨折等により変形した骨を正常に矯正する際に好適に用いられる骨切断補助部材等に関するものである。
【背景技術】
【0002】
以下の記載内容には、本発明の理解に有用と思われる情報が含まれている。ここに提供されている情報がいずれも本発明に対する従来技術であると認めるものでもなければ、明示的または暗黙的に参照した出版物がいずれも本発明に対する従来技術であると認めるものでもない。
【0003】
従来、骨折変形治癒に対しては二次元画像であるX線、CT(コンピュータ断層撮影)、透視画像を用いて術前計画および骨切、矯正手術が行われていたが、変形が三次元的であるため、術前に三次元骨切・矯正手術を正確にシミュレーションすることは困難であった。そのため、実際の手術でも不適切な部位で骨切りされること、矯正が不十分であることなどの欠点が多いのが現状である。
【0004】
【先行技術文献】
【特許文献】
【0005】
【特許文献1】英国特許出願公開第2164859号公報
【特許文献2】米国特許第5021056号公報公報
【特許文献3】特表平9−512189号公報公報
【特許文献4】特開平7−95996号公報公報
【特許文献5】特表2000−507846号公報公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、直接三次元データを用いて骨モデルを作成すること、および正常な形状に代表される目的骨モデルと、処置の対象となる骨モデル(例えば、変形治癒した骨)との差分を直接手術において利用することで、予想外に正確かつ良好な変形骨の治癒が見出されたことによって達成された。本発明では、三次元的に正確な矯正をシミュレーションし、必要に応じてそれを実現するための補助部材を設計することにより、従来では考えられなかった正確な矯正骨切手術を可能とすることが見出された。
【0007】
より詳細には、本発明は、Screw Displacement−Axis法またはアファイン変換法などの数学的方法を利用することによって、正常な形状に代表される目的骨モデルと、処置の対象となる骨モデル(例えば、変形治癒した骨)との差分を計算し、その差分を、例えば、回転、移植片の挿入、切除などによって補正することを1つの特徴とする。目的骨モデルと、骨モデルとから、直接に回転、挿入、切除などを計算し、その処置を実行することによって、数週間から数ヶ月後も、変形していた骨がほぼ正常に治癒した状態が保たれていることが本発明において予想外に実証された。したがって、本発明は、簡便で、かつ、より正確な身体の手術法を提供する。本発明によって、実質的に1回の切断動作によって変形骨などの異常骨を正常形状にもたらす技術が提供される。
【0008】
したがって、本発明は、以下を提供する。
1.骨を処置するための方法であって、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)上記骨の処置の目的となる目的骨モデルを取得する工程;
C)骨モデルと目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する工程;
D)決定された上記処置を用いて上記骨を手術する工程、
を包含する、方法。
2.上記処置は、補助部材を用いる、項目1に記載の方法。
3.上記骨モデルおよび上記目的骨モデルからなる群より選択される少なくとも1つは、直接三次元データを取得することによって取得される、項目1に記載の方法。
4.上記決定工程は、上記骨の三次元方向すべてのパラメータを直接または間接的に使用する、項目1に記載の方法。
5.上記決定工程は、上記骨の回転軸を考慮する、項目1に記載の方法。
6.上記回転軸の決定は、Screw Displacement−Axis法を利用する、項目5に記載の方法。
7.上記処置方法は、骨の回転、切除、移植片の挿入および骨の延長からなる群より選択される少なくとも1つの処置を含む、項目1に記載の方法。
8.上記補助部材は、テンプレート補助部材を含む、項目2に記載の方法。
9.上記テンプレート補助部材は、配置されるべき位置を示す位置決め部、骨切断すべき切断面指示部、ならびに位置判断補助部材の取り付け位置を指示する取付位置指示部からなる群より選択される少なくとも1つの要素を備える、項目8に記載の方法。
10.上記テンプレート補助部材は、配置されるべき位置を示す位置決め部、骨切断すべき切断面指示部、位置判断補助部材の取り付け位置を指示する取付位置指示部をすべて備える、項目8に記載の方法。
11.上記補助部材は、創外固定器を含む、項目2に記載の方法。
12.上記手術工程は、
A)上記骨を少なくとも1つの部位において切断する工程:
B)i)骨の回転が必要な場合、回転を行うこと;
ii)骨の移植片の挿入が必要な場合、上記移植片の挿入を行うこと;および
iii)骨片の切除が必要な場合、上記骨片の切除を行うこと;
からなる群より選択される少なくとも1つの骨処置工程を行う工程;
C)上記切断された骨を接合する工程、
を包含する、項目1に記載の方法。
13.上記骨処置工程における骨の回転、移植片の挿入および骨の切除は、Screw
Displacement−Axis法またはアファイン変換法によって規定される、項目12に記載の方法。
14.上記骨の切断は、テンプレート補助部材によって規定される、項目12に記載の方法。
15.上記骨の回転は、テンプレート補助部材上の回転軸を規定する少なくとも1対の開口部を通る矯正補助部材を平行にする工程を包含する、項目12に記載の方法。
16.上記挿入される移植片は、Screw
Displacement−Axis法またはアファイン変換法によって規定され製造されたものである、項目12に記載の方法。
17.上記手術方法において、上記骨切断工程は、上記骨をある位置で近位側の骨片および遠位側の骨片に切断する工程を含み、上記骨は、近位側または遠位側のいずれかが固定される、項目12に記載の方法。
18.上記目的骨モデルは、近位側または遠位側の部分に基づく、項目1に記載の方法。
19.上記処置工程は、骨の延長を含み、上記骨の延長は仮骨延長法によって行われる、項目1に記載の方法。
20.上記骨は、四肢のものを含む、項目1に記載の方法。
21.上記骨は、変形治癒したものである、項目1に記載の方法。
22.上記処置において移植片が挿入され、上記移植片は、天然骨または人工骨である、項目1に記載の方法。
23.上記天然骨は、自家骨、同種骨および異種骨からなる群より選択される、項目22に記載の方法。
24.上記移植片は、自家骨である、項目22に記載の方法。
25.上記移植片は、人工骨である、項目22に記載の方法。
26.上記人工骨は、リン酸カルシウムを含む、項目25に記載の方法。
27.上記リン酸カルシウムは、ハイドロキシアパタイトを含む、項目26に記載の方法。
28.手術後に、矯正が適切であるかどうか確認する工程をさらに包含する、項目1に記載の方法。
29.手術後に、矯正された骨を固定する工程をさらに包含する、項目1に記載の方法。
30.上記目的骨モデルは、上記骨モデルの骨の対称となる組のパートナーに基づいて規定される、項目1に記載の方法。
31.上記目的骨モデルは、上記骨を有する患者の標準に基づいて規定される、項目1に記載の方法。
32.上記処置は回転を含み、上記回転は、1つの回転軸のみの周りの回転である、項目1に記載の方法。
33.骨の処置をシミュレーションするための方法であって、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)上記骨の処置の目的となる目的骨モデルを取得する工程;
C)骨モデルと目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する工程;および
D)上記骨モデルに基づく模型を作製し、決定された上記処置に基づいて処置のシミュレーションを行う工程、
を包含する、方法。
34.骨を処置するために使用される骨処置キットであって、
A)配置されるべき位置を示す位置決め部および切断すべき切断面指示部が付され、かつ、回転のための矯正補助部材を挿入するための少なくとも1つの開口部を備える、テンプレート補助部材と、
B)矯正位置判断補助部材と
を備える、キット。
35.上記開口部は、少なくとも2つ含まれる、項目34に記載の骨処置キット。
36.上記矯正位置判断補助部材は、平行移動補助機能を有するワイヤである、項目34に記載の骨処置キット。
37.上記ワイヤは、ステンレス製である、項目36に記載の骨処置キット。
38.上記矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能からなる群より選択される少なくとも1つの機能を有する、項目34に記載の骨処置キット。
39.矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能の両方を備える、項目34に記載の骨処置キット。
40.さらに、手術後に骨を固定するための固定補助部材を備える、項目34に記載の骨処置キット。
41.骨を切断分割し、正常位置関係に矯正するためのテンプレート補助部材であって、
A)骨を所定位置に位置決めして取り付けるための位置決め部と、
B)上記骨の適切な切断面を示す切断面指示部と、
C)上記骨の切断片にそれぞれ取り付けられ互いの位置関係から各骨片が正常位置関係にあるか否かの判断を可能ならしめる位置判断補助部材の、上記切断片への取付位置を示す取付位置指示部と
を備えていることを特徴とするテンプレート補助部材。
42.上記取付位置指示部が、上記位置判断補助部材を各骨片に取り付けるための取付穴の穿孔位置および穿孔角度を示すガイド孔である、項目41に記載のテンプレート補助部材。
43.上記位置決め部が骨の表面特徴部分に嵌合する嵌合面である、項目41に記載のテンプレート補助部材。
44.切断面指示部が、切断面に沿って設けられたスリットである、項目41に記載のテンプレート補助部材。
45.骨を切断分割し、正常位置関係に矯正するための補助部材であって、各切断された骨片に設定した所定取付位置にそれぞれ取り付けられ、取付後の互いの位置関係から上記骨片同士が正常位置関係にあるか否かの判断を可能ならしめるものであることを特徴とする、矯正位置判断補助部材。
46.互いに直接連結し、または中間部材を介して互いに連結されることにより、正常位置関係であることを示すようにしている項目45に記載の矯正位置判断補助部材。
47.上記正常位置関係のときに、上記各骨片に取り付けた矯正位置判断補助部材にそれぞれ係り合う係合部を具備したものであることを特徴とする、項目45に記載の矯正位置判断補助部材。
48.骨を処置するために使用される移植片であって、上記移植片は、上記骨の処置の目的となる目的骨モデルと対象となる上記骨の現状の骨モデルとのほぼ差分である、移植片。
49.上記移植片は、Screw Displacement−Axis法またはアファイン変換法によって規定される、項目48に記載の移植片。
50.骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)上記骨の処置の目的となる目的骨モデルを取得する手段;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する手段;および
D)上記処置を用いて上記骨を手術する手段、
を備える、システム。
51.上記決定手段は、補助部材を決定する手段である、項目50に記載のシステム。
52.骨の処置をシミュレーションするためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)上記骨の処置の目的となる目的骨モデルを取得する手段;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する手段;および
D)決定された上記処置に基づいて上記骨の手術をシミュレーションする手段、
を備える、システム。
53.上記シミュレーション手段は、補助部材を用いる、項目52に記載のシステム。
54.骨の処置を決定する処理をコンピュータに実行させるためのプログラムであって、
上記処理は、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)上記骨の処置の目的となる目的骨モデルを取得する工程;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する工程
を包含する、プログラム。
55.上記骨に対して施されるべき処置を決定する工程は、上記処置に必要な補助部材を決定する工程を包含する、項目54に記載のプログラム。
56.上記骨モデルおよび上記目的骨モデルのそれぞれは、3次元モデルによって表現されている、項目54に記載のプログラム。
57.上記工程C)は、
C1)上記骨モデルから近位側骨片モデルと遠位側骨片モデルとを定義する工程;
C2)上記近位側骨片モデルに対する上記遠位側骨片モデルの相対的な移動の方向および量を決定する工程;および
C3)上記骨モデルの切断面を決定する工程
を包含する、項目54に記載のプログラム。
58.上記工程C)は、
C4)上記近位側骨片モデルに対する上記遠位側骨片モデルの相対的な移動の方向および量と上記骨モデルの切断面とに基づいて、上記補助部材を表すモデルを生成する工程
をさらに包含する、項目57に記載のプログラム。
59.上記工程C2)は、
C21)上記骨モデルの近位側を上記目的骨モデルの近位側にマッチングさせるために必要な上記近位側骨片モデルの移動の方向および量を表す近位側移動情報を算出する工程;
C22)上記骨モデルの遠位側を上記目的骨モデルの遠位側にマッチングさせるために必要な上記遠位側骨片モデルの移動の方向および量を表す遠位側移動情報を算出する工程;および
C23)上記近位側移動情報と上記遠位側移動情報との差分に基づいて、上記近位側骨片モデルに対する上記遠位側骨片モデルの相対的な移動の方向および量を表す相対的移動情報を算出する工程
を包含する、項目57に記載のプログラム。
60.上記近位側移動情報は、アファイン変換法の表記に従って第1のマトリックスによって表され、上記遠位側移動情報は、アファイン変換法の表記に従って第2のマトリックスによって表され、
上記工程C23)は、
上記第1のマトリックスと上記第2のマトリックスとの差分をとることにより、相対的マトリックスを算出する工程;および
上記相対的マトリックスをScrew Displacement−Axis法の表記に変換する工程
を包含する、項目59に記載のプログラム。
61.上記相対的移動情報は、Screw
Displacement−Axis法の表記に従って、軸線Lと、上記軸線Lの周りの回転量φと、上記軸線Lに沿った移動量tとによって表され、
上記工程C3)は、
上記軸線Lが上記骨モデルの長軸にほぼ平行である場合には、上記軸線Lに垂直な面を上記骨モデルの切断面として決定し、上記軸線Lが上記骨モデルの長軸にほぼ垂直である場合には、上記軸線Lに平行な面を上記骨モデルの切断面として決定する工程
を包含する、項目59に記載のプログラム。
62.上記工程C4)において、上記補助部材を表すモデルとして、テンプレート補助部材を表すモデル、位置確認補助部材を表すモデルおよび移植片を表すモデルのうちの少なくとも1つが生成される、項目58に記載のプログラム。
63.コンピュータを用いて、骨の処置を決定する方法であって、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)上記骨の処置の目的となる目的骨モデルを取得する工程;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する工程
を包含する方法。
64.骨の処置を決定する装置であって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)上記骨の処置の目的となる目的骨モデルを取得する手段;
C)上記骨モデルと上記目的骨モデルとに基づいて、上記骨に対して施されるべき処置を決定する手段
を備えた装置。
【0009】
本発明は、骨折等により異常態様に変形した骨を切断分割し、分割された骨片の位置関係を変えて略正常な態様での位置関係である正常位置関係に矯正する場合に用いられるものであって、各骨片に設定した所定取付位置にそれぞれ取り付けられ、取付後の互いの位置関係から前記骨片同士が正常位置関係にあるか否かの判断を可能ならしめる矯正位置判断補助部材、および前記骨の所定位置に位置決めして取り付けるための位置決め部と、前記骨の適切な切断面を示す切断面指示部と、前記矯正位置判断補助部材の当該各骨片への取付位置を示す取付位置指示部とを備えている骨切断補助部材に係るものである。
【発明の効果】
【0010】
このようなものであれば、前記切断面や取付位置指示部を、CTやMRIで取り込んだ骨の立体モデルを利用した施術シミュレーションにより適切に設定しておくことにより、特殊な技術や勘、経験等を必要とすることなく、確実かつ正確な骨切および適切な矯正の施術が容易に可能となる。
【0011】
前記取付位置指示部の具体的実施態様としては、前記判断補助部材を各骨片に取り付けるための取付穴の穿孔位置および穿孔角度を示すガイド孔を挙げることができる。
【0012】
前記位置決め部の具体的実施態様としては、骨の表面特徴部分に嵌合する嵌合面を挙げることができる。
【0013】
前記切断面指示部の具体的実施態様としては、切断面に沿って設けられたスリットを挙げることができる。
【0014】
矯正位置判断補助部材の具体的実施態様としては、骨に突き刺すことが可能な鋭利先端部を有したロッドを挙げることができる。
【0015】
また、より確実に正常位置関係を判断できるようにするには、各骨片に取り付けられた矯正位置判断補助部材同士が、互いに連結し、又は中間部材を介して互いに連結されることにより、正常位置関係であることを示すようにしているものが好ましい。
【0016】
特に矯正位置判断補助部材がロッドの場合の好ましい中間部材としては、複数の差し込み孔を有したブロック体であり、前記正常位置関係のときに前記各骨片に取り付けた各ロッドを前記差し込み孔に挿入できるように構成したものを挙げることができる。
【0017】
以下に、本発明の好ましい実施形態を示すが、当業者は本発明の説明および当該分野における周知慣用技術からその実施形態などを適宜実施することができ、本発明が奏する作用および効果を容易に理解することが認識されるべきである。
【図面の簡単な説明】
【0018】
【図1】図1は、本発明の一実施形態における骨切断補助部材を示す正面図である。
【図2】図2は、同実施形態における骨切断補助部材を示す背面図である。
【図3】図3は、同実施形態におけるロッドを示す側面図である。
【図4】図4は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図5】図5は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図6】図6は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図7】図7は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図8】図8は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図9】図9は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図10】図10は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図11】図11は、同実施形態における骨切断補助部材の製造方法を説明するための説明図である。
【図12】図12は、同実施形態におけるブロック体の製造方法を説明するための説明図である。
【図13】図13は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図14】図14は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図15】図15は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図16】図16は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図17】図17は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う手順を示す手順説明図である。
【図18】図18は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行った後の骨の状態を示す状態説明図である。
【図19】図19は、同実施形態における骨切断補助部材等を用いて矯正骨切手術を行う前の骨の状態を示す状態説明図である。
【図20】図20は、本発明の他の実施形態における骨の矯正位置を求めるシミュレーションを説明するためのシミュレーション説明図である。
【図21】図21は、術前コンピュータシミュレーションの例を示す。
【図22】図22Aは、両側前腕のCTあるいはMRI画像の二次元データを示す。図22Bは、対象骨をセミオートマティックにマーキングして抽出する手順例を示す。図22Cは、セグメント化したモデルを示す。図22Dは、作成した三次元骨表面モデル例を示す。
【図23】図23は、最適な骨切の部位と矯正量とを決定した例を示す。
【図24】図24は、シミュレーションで得られた変形部位、変形量やコンピューター画像を参考にしながら手術例を示す。
【図25】図25は、CTデータを元に、骨切部位および矯正量を決定した例を示す。図25Aは、骨切部位、矯正量の決定を示す。図25Bは、骨切ガイドおよび整復ガイドの設計を示す。図25Cは、光造形モデルを示す。
【図26】図26は、実施例1のA群およびB群の手術結果をまとめた表を示す。
【図27】図27は、実施例2の患者の罹患部を示すレントゲン写真を示す(左は正面図、右は側面図である)。
【図28】図28は、ギプス内での過伸展変形の進行を示す。
【図29】図29は、実施例2の患者の最初の処置後2年での様子を示す。
【図30】図30は、実施例2の患者の過伸展、内反変形の後遺症の様子を示す。
【図31】図31は、実施例2の患者において、MRIから作製した三次元モデルを用いて手術をした例を示す。
【図32】図32は、実施例2における光造形の様子を示す図を示す。
【図33】図33は、実施例2の患者の骨変形治癒手術の術中の写真を示す。
【図34】図34は、ボーンソーで行った骨切の様子を示す。
【図35】図35は、骨切を行った後の様子を示す。
【図36】図36は、余分な骨片の切り出しを示す。
【図37】図37は、実施例2における骨の矯正の様子を示す。
【図38】図38は、実施例2における術後すぐのレントゲン写真である。
【図39】図39は、実施例2における術後すぐの肘の可動域を示す。
【図40】図40は、実施例2における術後すぐの外観写真である。
【図41】図41は、実施例2における術後1年でのレントゲン写真である。
【図42】図42は、実施例2における患者の外観を示す。
【図43】図43は、実施例3における21歳男性で前腕骨折変形治癒をした患者の患部を示す。
【図44】図44は、実施例3における患者の前腕の彎曲および前腕回外障害を示す。
【図45】図45は、実施例3におけるコンピュータシミュレーションを示す。
【図46】図46は、実施例3におけるテンプレート補助部材の設計を示す。
【図47】図47は、実施例3における変形治癒部の展開を示す。
【図48】図48は、実施例3におけるテンプレート補助部材の装着を示す。
【図49】図49は、実施例3における骨切を示す。
【図50】図50は、実施例3におけるテンプレート除去を示す。
【図51】図51は、実施例3における矯正ガイドによる矯正を示す。
【図52】図52は、実施例3における矯正の結果のレントゲン図を示す。
【図53】図53は、実施例3における移植片の移植を示す。
【図54】図54は、実施例3におけるテンプレートでの骨および移植片の固定を示す。
【図55】図55は、実施例3におけるキルシュナーワイヤーの患者からの除去を示す。
【図56】図56は、実施例3における術後すぐの患者のレントゲンを示す。
【図57】図57は、実施例3における術後9ヶ月の患者のレントゲンを示す。
【図58】図58は、実施例3における術後1年1月の患者のレントゲンを示す。
【図59】図59は、実施例3における術後1年1月の患者の外見を示す。
【図60】図60は、実施例4の左橈骨遠位端骨折変形治癒した48歳女性患者を示す。
【図61】図61は、実施例4における患者の外観上の変形と左手関節の可動域障害の様子を示す。
【図62】図62は、実施例4における骨の3次元シミュレーションを示す。
【図63】図63は、実施例4において設計した骨切テンプレートを示す。
【図64】図64は、実施例4における光造形モデルを示す。
【図65】図65は、実施例4における変形治癒部の展開を示す。
【図66】図66は、実施例4におけるキルシュナーワイヤー固定を示す。
【図67】図67は、実施例4における矯正を示す。
【図68】図68は、実施例4において使用したハイドロキシアパタイト材料のCAD整形を示す。
【図69】図69は、実施例4の術後レントゲンを示す。
【図70】図70は、実施例4の術後4ヶ月でのレントゲンを示す。
【図71】図71は、実施例4の術後4ヶ月の患者の外観を示す。
【図72】図72は、実施例5の橈骨遠位端骨折変型治癒の67歳女性患者を示す。
【図73】図73は、実施例5の患者の外観を示す。
【図74】図74は、実施例5の患者の障害の様子を示す。
【図75】図75は、実施例5の骨切三次元シミュレーションを示す。
【図76】図76は、実施例5の骨切テンプレートの設計を示す。
【図77】図77は、実施例5の矯正ガイドの設計を示す。
【図78】図78は、実施例5の矯正のモデルを示す。
【図79】図79は、実施例5の変形部の展開を示す。
【図80】図80は、実施例5のテンプレートの装着を示す。
【図81】図81は、実施例5のテンプレートの装着の続きを示す。
【図82】図82は、実施例5の骨切を示す。
【図83】図83は、実施例5での骨移植を示す。
【図84】図84は、実施例5の骨移植の続きを示す。
【図85】図85は、実施例5のテンプレート固定後のレントゲンを示す。
【図86】図86は、実施例5の術後4ヶ月のレントゲンを示す。
【図87】図87は、実施例5の正常手関節の画像を示す。
【図88】図88は、実施例6の患者を示す。この患者は、バイク事故で橈骨遠位端骨折をしている。
【図89】図89は、実施例6の患者の手関節部での変形を示す。
【図90】図90は、実施例6の患者の回旋障害を示す。
【図91】図91は、実施例6の患者の処置シミュレーションを示す。
【図92】図92は、実施例6の患者の処置シミュレーションにおける変形軸の求め方を示す。
【図93】図93は、実施例6における延長骨切になる様子を示す。
【図94】図94は、実施例6における矯正前後の様子を示す。
【図95】図95は、実施例6におけるテンプレートの設計を示す。
【図96】図96は、実施例6における矯正ガイドの設計を示す。
【図97】図97は、実施例6における光造形モデル作製を示す。
【図98】図98は、実施例6における変形治癒部の展開を示す。
【図99】図99は、実施例6におけるテンプレートの骨への固定を示す。
【図100】図100は、実施例6における骨切(左)および矯正用ガイドでの固定(右)を示す。
【図101】図101は、実施例6における移植片の成型を示す。
【図102】図102は、実施例6における移植片の挿入(左)および固定(右)を示す。
【図103】図103は、実施例6における術直後のレントゲンを示す。
【図104】図104は、実施例6における術後9ヶ月でのレントゲンを示す。
【図105】図105は、実施例6における術後1年での外観を示す。
【図106】図106は、実施例6における術後1年での可動域障害の回復を示す。
【図107】図107は、実施例7における患者の骨(13歳男児、左橈骨骨幹部骨折変形治癒)を示す。
【図108】図108は、実施例7における患者の回外障害を示す。
【図109】図109は、実施例7における骨切シミュレーションを示す。
【図110】図110は、実施例7における回旋矯正計画を示す。
【図111】図111は、実施例7における回旋骨切用のガイド設計を示す。
【図112】図112は、実施例7における回旋骨切用のガイド設計の続きを示す。
【図113】図113は、実施例7における回旋骨切用のガイド設計の続きを示す。
【図114】図114は、実施例7における回旋骨切用のガイド設計の続きを示す。
【図115】図115は、実施例7における骨切モデルのコンピュータ上での外観を示す。
【図116】図116は、実施例7における光造形モデル作製を示す。
【図117】図117は、実施例7における骨切部の展開を示す。
【図118】図118は、実施例7におけるテンプレートの固定を示す。
【図119】図119は、実施例7において、テンプレートを除去した後の状態を示す。
【図120】図120は、実施例7における矯正用ガイドを付与した後のレントゲンを示す。
【図121】図121は、実施例7におけるテンプレートの固定を示す。
【図122】図122は、実施例7における術直後のレントゲンを示す。
【図123】図123は、実施例7における術後6ヶ月でのレントゲンを示す。
【図124】図124は、実施例8における患者の症状を示す。
【図125】図125は、実施例8における患者のレントゲンを示す。
【図126】図126は、実施例8における骨切シミュレーションを示す。
【図127】図127は、実施例8におけるテンプレート設計を示す。
【図128】図128は、実施例8における矯正ガイドの設計を示す。
【図129】図129は、実施例8における矯正ガイドの設計の続きである。
【図130】図130は、実施例8における骨切設計を示す。
【図131】図131は、実施例8における光造形モデルを示す。
【図132】図132は、実施例8において使用した矯正用ガイドを示す。
【図133】図133は、実施例8における変形骨の展開を示す。
【図134】図134は、実施例8におけるテンプレートの装着を示す。
【図135】図135は、実施例8における骨切を示す。
【図136】図136は、実施例8における楔状の骨部分の切除を示す。
【図137】図137は、実施例8における骨切除後の整復を示す。
【図138】図138は、実施例8における術後の矯正の状況を示す。
【図139】図139は、実施例8における術後すぐ、2ヶ月および6ヶ月での矯正の様子を示す。
【図140】図140は、実施例9における骨遠位端骨折7歳男児患者を示す。
【図141】図141は、実施例9における患者の骨転位の進行を示す。
【図142】図142は、実施例9における術後1ヶ月での手術の様子を示す。
【図143】図143は、実施例9における受傷後8ヶ月でのレントゲンを示す。
【図144】図144は、実施例9における受傷後5年でのレントゲンを示す。
【図145】図145は、実施例9における患者の外観を示す。
【図146】図146は、実施例9における患者の手関節掌屈障害を示す。
【図147】図147は、実施例9におけるシミュレーションを示す。
【図148】図148は、実施例9における骨切のモデルを示す。
【図149】図149は、実施例9において使用した創外固定器である。
【図150】図150は、実施例9において使用した創外固定器の部分である。左上は上部を示し、左下は骨を示し、右にはワイヤで固定された骨の様子が示される。
【図151】図151は、実施例9において使用した創外固定器の使用モデルである。左は矯正前であり、右は矯正後である。
【図152】図152は、実施例9における手術の様子を示す。
【図153】図153は、実施例9における手術終了直後の様子を示す。
【図154】図154は、実施例9における手術終了後のレントゲンを示す。
【図155】図155は、実施例9において延長を開始した直後を示す。
【図156】図156は、実施例9において延長が終了した直後を示す。
【図157】図157は、実施例9において延長を開始して術後2.5ヶ月経過したレントゲンである。
【図158】図158は、実施例9における術後3.5ヶ月での創外固定器除去の様子を示す。
【図159】図159は、実施例9における術後4ヶ月と術前とのレントゲンの比較を示す。
【図160】図160は、実施例9における術前と術後5ヶ月での外観の比較を示す。
【図161】図161は、実施例9における手関節の掌屈の改善を示す。また、可動域の障害がほとんどなくなったことを示す。
【図162A】図162は、実施例10における症例3の実施形態における舟状骨偽関節手術の三次元コンピューターシミュレーションである。図162Aは、同実施形態におけるコンピューター上に再構築した舟状骨の三次元表面モデルである。右側は、フレームもモデルを示し、左側は、表面モデルを示す。
【図162B】図162Bは、同実施形態における変位した舟状骨の整復をシミュレーションするために、偽関節モデル(左側)の遠位側部分および近位側部分を、反対側の正常な舟状骨モデル(右側)の鏡像に対して記録した表面画像を示す。整復されるべき変形を、ScrewDisplacement−Axis(中央)の周りの回転として示した。
【図162C】図162Cは、同実施形態における骨欠損の推定(矢尻)および螺旋挿入(矢印)のシミュレーションを示す。螺旋挿入の適切な部位および方向を、種々の角度からの透過性モードで整復舟状骨モデルを見ることによって決定した。
【図162D】図162Dは、同実施形態における骨欠損の推定(矢尻)および螺旋挿入(矢印)のシミュレーションを示す。螺旋挿入の適切な部位および方向を、種々の角度からの透過性モードで整復舟状骨モデルを見ることによって決定した。
【図163A】図163Aは、実施例10における舟状骨の光造形モデル(ハードモデル)を示す。左側は、舟状骨の偽関節モデルであり、中央は、適切な螺旋挿入による整復モデルであり、右側は、反対側の正常な舟状骨の鏡像である。
【図163B】図163Bは、推定骨欠損モデルである。
【図164A】図164Aは、実施例10における、症例7の実施形態における手術手順を示す説明図であり、手根の舟状骨偽関節を示す。
【図164B】図164Bは、同実施形態における手術手順を示す説明図であり、月状骨の背面側への回転を、三次元モデルの側面からの示した画像である。
【図164C】図164Cは、同実施形態における手術手順を示す説明図であり、偽関節部位(矢印)を、ハードモデルと比較した。
【図164D】図164Dは、同実施形態における手術手順を示す説明図であり、参照としてハードモデルを使用して、腸骨移植片を成形した。
【図164E】図164Eは、同実施形態における手術手順を示す説明図であり、参照としてハードモデルを使用して、腸骨移植片を成形した。
【図164F】図164Fは、同実施形態における手術手順を示す説明図であり、骨移植片を挿入した後、螺旋挿入の部位および方向を、ハードモデルを使用して決定した。
【図164G】図164Gは、同実施形態における手術直後のX線写真を示す。
【図164H】図164Hは、同実施形態における術後6週間での正面(AP=anteroposterior)および側方からのX線写真を示す。
【図164I】図164Iは、同実施形態における術後6週間でのAPおよび側方からのX線写真を示す。
【図165】図165は、図162の実施形態(症例3)の舟状骨変位の螺旋軸(矢印)を示す。
【図166】図166は、実施例10における症例4において、三次元画像(図167)において背面側骨棘が明らかであったが、術前(図166A)および術後(図166B)レントゲンにおいて変形性関節症変化が明らかでなかったことを示す。
【図167】図167は、実施例10における症例4の三次元画像である。
【図168】図168は、左前腕レントゲンを示す。尺骨が正常に比べて内側に湾曲している(矢印)。
【図169】図169は、正常側レントゲンを示す。
【図170】図170は、実施例11の患者が、左前腕回外が不可である写真を示す。
【図171】図171もまた、図170と同様に、患者の回内がわずかに制限されている写真を示す。
【図172】図172は、実施例11の患側の3次元モデルを示す。
【図173】図173は、実施例11の健側の鏡像モデルを示す。
【図174】図174は、実施例11の尺骨の矯正骨切の計画を示す。図174Aでは、図の左側にclosedwedge osteotomyを計画した。点は変形軸を表す。図174Bは、変形軸を通る面で骨切をし、13°の角度を持つ楔状の骨を切除した。図174Cは、変形矯正を示す。図174DおよびEは、矯正後に図の右側に出来る骨欠損に楔状の骨移植をした。
【図175】図175は、円弧でドーム状に骨切する設計を示す。図175Aに示すように、変形軸を中心にもつ適当な半径の円弧で骨切をし、図175Bに示すように、遠位の骨片を13°回旋させることにより矯正が完成することが理解される。
【図176】図176は、実施例11の骨切テンプレートおよび矯正ガイドの設計を示す。図176Aおよび図176Bは、骨切プレートをそれぞれ背側からと掌側から見たところを示す。図176Cおよび図176Dは、それぞれ、矯正用ガイドを、背側からと掌側から見たところを示す。
【図177】図177は、尺骨矯正骨切の術中写真を示す。図177Aは、尺骨変形部の展開を示す。図177Bは、骨切テンプレートを当ててキルシュナーワイヤーで固定する様子を示す。ワイヤーに13°の角度がついていることが注意されるべきである。図177Cは、骨切の後、キルシュナーワイヤーに矯正ガイドを通して矯正した。キルシュナーワイヤーは平行になっている。図177Dに示すように、この位置でプレート固定した。奥の方から切除した楔状の骨を手前に出来た骨欠損に補填した。
【図178】図178は、Closed wedgeとOpen wedgeとの組み合わせでの術後レントゲンを示す。
【図179】図179は、骨の処置を決定する処理を実行するコンピュータ1000の構成の一例を示す。
【図180】図180は、骨の処置を決定する処理の手順の一例を示す。
【図181】図181は、図180に示される工程2030を実現するための処理の手順の一例を示す。
【図182】図182は、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を決定する処理の手順の一例を示す。
【発明を実施するための形態】
【0019】
以下、本発明を説明する。本明細書の全体にわたり、単数形の表現は、特に言及しない限り、その複数形の概念をも含むことが理解されるべきである。従って、単数形の冠詞(例えば、英語の場合は「a」、「an」、「the」など)は、特に言及しない限り、その複数形の概念をも含むことが理解されるべきである。また、本明細書において使用される用語は、特に言及しない限り、当該分野で通常用いられる意味で用いられることが理解されるべきである。したがって、他に定義されない限り、本明細書中で使用される全ての専門用語および科学技術用語は、本発明の属する分野の当業者によって一般的に理解されるのと同じ意味を有する。矛盾する場合、本明細書(定義を含めて)が優先する。
【0020】
(用語の定義)
以下に本明細書において特に使用される用語の定義を列挙する。
【0021】
本明細書において、骨に関して「骨モデル」とは、処置すべき対象となる骨の現状をモデル化したものをいう。骨モデルは、通常、三次元表示される。
【0022】
本明細書において、「目的骨モデル」とは、本発明の処置方法において、処置の目的となる像をいい、処置後にあるべき形状の像をいう。目的骨モデルとしては、例えば、正常な骨のモデルが挙げられるがそれらに限定されない。目的骨モデルは、通常、三次元表示され、通常、骨モデルと同じ表示方法が用いられる。目的骨モデルは、すでにあるモデルを取得してきてもよく、手動で作成することもできるが、通常は、コンピュータを用いて作成される。
【0023】
本明細書において「三次元表示」は、通常直交系表示を用いて行われるが、三次元を表示することができる系であれば任意の系を用いることができる。
【0024】
本明細書において「骨」とは、脊椎動物の支持器官であって、内骨格の個々の構成要素をいう。脊椎動物の骨は、円口類および軟骨魚類を除いて主に骨組織からなる。本明細書では、「骨」には、軟骨が含まれる。本明細書において、脊椎動物の骨格の大部分を形づくる硬い結合組織を特に区別するときは、「硬骨」と呼ぶ。なお、本明細書では、骨が例示されているが、骨以外の他の身体の一部であっても同様に処置を設計し、実施することができることが理解される。
【0025】
本明細書において対象とする骨は、通常異常骨であることが多く、代表的には、骨折を経由した骨が挙げられる。骨折には、完全骨折、不完全骨折があり、皮膚の損傷を伴う開放骨折、閉鎖骨折などがあり、それから治癒した異常骨はすべて対象となり得る。骨折後は、通常6週間〜6ヶ月で治癒するが、その間間隙には、新たな骨が形成されるか、または変形して骨が治癒する。一次治癒した場合は、骨折片同士がぴったり接合し、従って、変形しにくいことから、本発明の対象とはほとんどならないが、ぴったり接合せず、従って、骨折端が刺激され軟骨性の仮骨が徐々に接合する場合は、「二次治癒」といい、変形して治癒することが多く、本発明の対象となることが多い。
【0026】
本明細書において骨を「処置すべき方法」とは、骨の処置において、目的骨モデルへと導くために、骨モデルを有する対象となる骨に施すべき方法(例えば、切断、挿入および/または切除、平行移動、回転など)およびそれに必要な補助部材(例えば、テンプレート補助部材、矯正補助部材、挿入されるべき移植片などの補助部材)の形状をいう。
【0027】
本明細書において「補助部材」とは、本発明の骨の手術において使用される部材をいう。補助部材としては、例えば、テンプレート補助部材、移植片、矯正位置判断補助部材、固定補助部材、矯正補助部材、平行移動補助部材などが挙げられるがそれらに限定されない。
【0028】
本明細書において、骨に関する三次元方向の「パラメータ」とは、使用する三次元表示において、各次元を表示する要素をいい、例えば、正規直交系で空間を表現したときに、x、yおよびz軸に関する各々の要素(例えば、ベクトルなど)をいう。x、yおよびz軸で表現される空間は、代替的に、回転軸、回転角度および距離で表すことができる。
【0029】
本明細書において「回転軸」とは、点群の対称要素の一つであり、ある剛体(例えば、骨)を回転させるとき、その剛体の回転中に動かない点の集合(すなわち、直線)をいう。従って、ある直線を軸として、構造全体を一定角度、回転させても、回転前の構造と一致するとき、この軸を回転軸ということができる。本発明の手術方法では、特に、目的骨モデルにいたるために、骨モデルから回転すべき場合の「回転軸」を指す。
【0030】
本明細書において「螺旋変位(screw
displacement)」とは、ある軸の周りの剛体の回転に、その軸に沿っての並進が伴われているような変位をいう。
【0031】
本明細書において、「Screw Displacement−Axis」とは、「螺旋変位軸」または「螺旋軸」ともいい、空間群の対称要素の一つであり、螺旋変位の回転軸をいう。従って、ある直線を軸として、構造全体を一定角度、回転させた後に、その軸に平行なある並進操作を行ない、そのような操作をひき続き行ったとき、元の構造と一致する場合、この軸を螺旋軸という。この回転軸を用いた処置を「Screw
Displacement−Axis(螺旋変位軸)」法という。Screw Displacement−Axis法では、回転軸のベクトル表示およびそのベクトルの移動距離などを用いて変位を表示することができる。Screw
Displacement−Axis法は、物体移動の表記の一つの方法であり、幾何学では用いられているが、外科手術に用いられた例はない。
【0032】
本明細書において「アファイン変換法」とは、「アフィン変換法」とも呼ばれ、線形空間の線形変換に原点を移動する並進を加える変位の表示法をいう。アファイン変換法では、変位は、通常線形変換と定ベクトルとの和で示される。詳細には、http://mailsrv.nara-edu.ac.jp/~asait/open_gl/linear.htmなどを参酌することができる。
平面の場合に平行移動と回転の合成をして、点の座標を指定すれば、もとの座標系では
【0033】
【数1】
【0034】
のようになるが、平行移動、回転などは座標系の移動と解釈する方が理解しやすい。実際、もとの座標系の単位ベクトルを{e1,e2}とすれば、
【0035】
【数2】
【0036】
のように計算ができる。この結果は次のような解釈ができる。
【0037】
【数3】
【0038】
アファイン空間の座標系を(x軸上の単位ベクトル、y軸上の単位ベクトル、原点の位置)
の組によって与えておけば、先の計算結果から、点の移動が、座標系の移動と理解することができることがわかる。
【0039】
本明細書において骨の「処置」とは、骨に対して物理的に作用を与えることをいい、例えば、回転、切除、切断、移植片の挿入、延長、固定などをいうがそれらに限定されない。
【0040】
本明細書において「移植片」(グラフト)とは、身体の特定部位に挿入されるべき同種または異種の組織、細胞群または人工物(例えば、リン酸カルシウム構造体)であって、身体への挿入後その一部となるものをいう。移植片としては、例えば、骨(例えば、天然骨(例えば、自家骨、同種骨、異種骨など)の一部、リン酸カルシウム(例えば、ハイドロキシアパタイト)の構造体などが挙げられるがそれらに限定されない。従って、「移植片」には、ある部分の欠損部に差し込んで欠損を補うために用いられるものすべてが包含される。移植片は、好ましくは、免疫拒絶反応を起こさないものが使用される。移植片としては、そのドナー(donor)の種類によって、自己(自家)移植片(autograft)、同種移植片(同種異系移植片)(allograft)、異種移植片(例えば、ヒトに対するサンゴなど)が挙げられるがそれらに限定されない。
【0041】
本明細書において「自己移植片」(骨、組織、細胞、臓器など)または自家移植片(骨、組織、細胞、臓器など)とは、ある個体についていうとき、その個体に由来する移植片(骨、組織、細胞、臓器など)をいう。本明細書において「自己移植片」(骨、組織、細胞、臓器など)というときは、広義には遺伝的に同じ他個体(例えば一卵性双生児)からの移植片(骨、組織、細胞、臓器など)をも含み得る。本明細書では、このような「自己」との表現は、「被験体に由来する」と交換可能に使用される。従って、本明細書では、ある「被験体に由来しない」との表現は、「自己ではない(すなわち、非自己)」と同一の意味を有する。
【0042】
本明細書において「同種移植片」(同種異系移植片)(骨、組織、細胞、臓器など)とは、同種であっても遺伝的には異なる他個体から移植される移植片(骨、組織、細胞、臓器など)をいう。遺伝的に異なることから、同種異系移植片(骨、組織、細胞、臓器など)は、移植された個体(レシピエント)において免疫反応を惹起し得る。そのような移植片の例としては、親由来の移植片(骨、組織、細胞、臓器など)などが挙げられるがそれらに限定されない。
【0043】
本明細書において「異種移植片」(骨、組織、細胞、臓器など)とは、異種個体から移植される移植片(骨、組織、細胞、臓器など)をいう。従って、例えば、ヒトがレシピエントである場合、ブタからの移植片(骨、組織、細胞、臓器など)、サンゴ成分などは、異種移植片(骨、組織、細胞、臓器など)という。
【0044】
本明細書において「人工」移植片(骨、組織、細胞、臓器など)とは、天然の生物に由来しない部分(例えば、人工のリン酸カルシウムを含む構造体)を有する移植片をいう。人工移植片が人工骨の場合、リン酸カルシウムを含むことが好ましい。より好ましくはこのリン酸カルシウムはハイドロキシアパタイトを含む。
【0045】
本明細書において「レシピエント」(受容者)とは、移植片(骨、組織、細胞、臓器など)または移植体(骨、組織、細胞、臓器など)を受け取る個体をいい、「宿主」とも呼ばれる。これに対し、移植片(骨、組織、細胞、臓器など)または移植体(骨、組織、細胞、臓器など)を提供する個体は、「ドナー」(供与者)という。
【0046】
本明細書において「被験体(患者)」とは、本発明の処置が適用される生物をいい、「患者」ともいわれる。患者または被験体は好ましくは、ヒトであり得る。
【0047】
本発明において使用される移植片は、同系由来(自己(自家)由来)でも、同種異系由来(他個体(他家)由来)でも、異種由来でもよい。拒絶反応が考えられることから、自己由来の細胞が好ましいが、拒絶反応が問題でない場合同種異系由来であってもよい。また、拒絶反応を起こすものも必要に応じて拒絶反応を解消する処置を行うことにより利用することができる。拒絶反応を回避する手順は当該分野において公知であり、例えば、新外科学体系、第12巻、臓器移植(心臓移植・肺移植
技術的、倫理的整備から実施に向けて)(改訂第3版)、中山書店に記載されている。そのような方法としては、例えば、免疫抑制剤、ステロイド剤の使用などの方法が挙げられる。拒絶反応を予防する免疫抑制剤は、現在、「シクロスポリン」(サンディミュン(登録商標)/ネオーラル(登録商標))、「タクロリムス」(プログラフ)、「アザチオプリン」(イムラン)、「ステロイドホルモン」(プレドニン、メチルプレドニン)、「T細胞抗体」(OKT3、ATG)があり、予防的免疫抑制療法として世界の多くの施設で行われている方法は、「シクロスポリン、アザチオプリン、ステロイドホルモン」の3剤併用である。免疫抑制剤は、本発明の移植片と同時期に投与されることが望ましいが、必ずしも必要ではない。従って、免疫抑制効果が達成される限り免疫抑制剤は本発明の方法の前または後にも投与され得る。
【0048】
本明細書において「補強」とは、意図される生体の部分の機能を改善させることをいう。
【0049】
本明細書において、骨の「切断」とは、骨を2以上の部分に分けるような処置を行うことをいう。代表的には、骨の切断は、骨切デバイス(例えば、ボーンソーなど)を用いて行われる。本明細書において、骨の切断が行われる部分は、「骨切り部」とも称される。
【0050】
本明細書において、骨の「回転」は、骨の処置の際に使用される用語であり、骨を2以上の部分に分けた後にそれぞれの部分を互いに対してある回転軸を中心に回転させることをいう。本発明において、例えば、処置されるべき骨に取り付けられたテンプレート補助部材上にある回転軸を規定する一対の(例えば、遠位側の部分と近位側の部分の組にある)孔を平行にすることによって回転が実施され得る。本明細書では、骨の回転は、0°の回転であり得る。
【0051】
本明細書において、骨の「切除」は、骨の一部をその骨から取り除くことをいう。代表的には、骨の切断を行った後、さらに少なくとも1箇所切断を別の場所において行うことによって切除が行われるがそれに限定されない。
【0052】
本明細書において、骨の「延長」とは、骨を少なくともある次元(代表的には、骨の長軸方向)に向けて長さを長くする行為をいう。骨の延長は、代表的には、仮骨延長法によって行われ得る。仮骨延長法とは、創外固定器を用いて徐々に骨切り部を延長するものである。より具体的には、骨切り部に生じた仮骨を引き伸ばすことにより、骨延長を実現する最適の引き伸ばし速度は一日に1mm程度とされている。この速度で数十日かけて目的の長さまで骨延長を行った後、そのまま創外固定器による固定を続けて仮骨の骨成熟を待つ。皮膚や筋肉、神経組織なども張力をかけ続けると伸びていくことから、骨と軟部組織の両者をともに延長すると、脚延長が可能になる。創外固定器には単支柱型のものと、リング型のものとがある。手術により創外固定器をつけた後、毎日フレームの位置を少しずつ変更することにより、骨の位置を精密に移動、コントロールすることができる。
【0053】
本明細書において、骨の「固定」とは、ある骨の処置を行った後に、その処置の状態を実質的に保持させる行為をいう。骨の固定は、一般的に対象となる骨のみで行われ得る。
【0054】
本明細書において「テンプレート補助部材」または「テンプレート」とは、本発明の処置方法において使用され、骨の切断面、回転軸、平行移動距離などの処置を具体的に指し示すための補助部材をいう。テンプレート補助部材は、代表的に、骨を所定位置に位置決めして取り付けるための位置決め部と、骨の適切な切断面を示す切断面指示部と、骨の切断片にそれぞれ取り付けられ互いの位置関係から各骨片が正常位置関係にあるか否かの判断を可能とする位置判断補助部材の、切断片への取付位置を示す取付位置指示部とを備える。従って、テンプレート補助部材は、骨切断補助部材を包含する。
【0055】
本明細書において「近位」とは、骨などにおいて2箇所の部分を比較する場合、心臓に近い方をいう。
【0056】
本明細書において「遠位」とは、骨などにおいて2箇所の部分を比較する場合、心臓から遠い方をいう。
【0057】
本明細書において「変形治癒」(malunion)とは、骨折などの骨の障害が起こった後に、治癒したときに、その治癒状態が正常な状態または形状とは異なる(変形している)ものをいう。
【0058】
本明細書において、「対称となる組のパートナー」とは、対称物が存在する骨(例えば、四肢)などの組において、一方の組の対称に相当するパートナーをいう。
【0059】
本明細書において「標準」とは、ある集団において、正常となる範囲内に入る存在をいう。代表的には、標準は、ある集団を統計学的処理した場合に平均から±1偏差以内に収まる範囲をいう。本発明では、標準としては、代替的に、対となる骨がある場合、処置されるべき骨の相手方の骨を標準として採用することができる。
【0060】
本明細書において「キット」とは、ある目的のために使用されるべき部材、装置などの組をいう。そのようなキットは、例えば、各種補助部材(例えば、テンプレート補助部材、位置判断補助部材、平行移動補助部材、矯正補助部材、矯正位置判断補助部材など)を備える。キットには、部材をどのように使用するかを記載した指示書が備えられていてもよい。
【0061】
本明細書において「指示書」は、本発明の装置、部材、キットなどを使用する方法または手術方法などを、医師、医療従事者、患者など使用する人が理解できるように記載したものである。この指示書は、本発明の装置、部材、キット、手術方法などを指示する文言が記載されている。この指示書は、本発明が実施される国の監督官庁(例えば、日本であれば厚生労働省、米国であれば食品医薬品局(FDA)など)が規定した様式に従って作成され、その監督官庁により承認を受けた旨が明記される。指示書は、いわゆる添付文書(package
insert)であり、通常は紙媒体で提供されるが、それに限定されず、例えば、電子媒体(例えば、インターネットで提供されるホームページ(ウェブサイト)、PDF形態の電子書類、電子メール)のような形態でも提供され得る。
【0062】
本明細書において「位置決め部」とは、本発明の補助部材を用いて処置される際にその補助部材が骨のどこに配置されるべきかを示す部分をいう。そのような位置決め部は、補助部材を物理的に削ること、または染料などでその補助部材を標識することによって表示することができる。
【0063】
本明細書において「切断面指示部」とは、本発明の補助部材を用いて手術を行う際に骨をどこで切断すべきかを示す部分をいう。そのような切断面指示部は、補助部材においてスリット状に開口部を作製すること、染料などでその補助部材を標識することなどによって表示することができる。
【0064】
本明細書において回転のための「開口部」は、「孔」と交換可能に用いられ、処置が確実に行われるようにするために補助部材(例えば、テンプレート補助部材)に付され、矯正補助部材が配置可能なような形状をしている。
【0065】
本明細書において「補助部材」は、どのような材質によっても作製することができ、例えば、金属(例えば、ステンレス、チタンなど)、プラスチック、生体適合性高分子、生分解性高分子などを用いることができる。
【0066】
本明細書において「補助部材」は、種々の形態があり、例えば、テンプレート補助部材、矯正位置判断補助部材、矯正補助部材、骨切断補助部材、平行移動補助部材などが挙げられるがそれらに限定されない。
【0067】
本明細書において「矯正位置判断補助部材」とは、矯正すべき位置を判断するための任意の補助部材をいう。
【0068】
本明細書において「矯正補助部材」とは、矯正処置を行う際に使用される補助部材をいう。矯正補助部材は、通常テンプレート補助部材とともに用いられるがそれに限定されない。
【0069】
本明細書において「平行移動補助部材」とは、平行移動を補助するための補助部材をいう。
【0070】
本明細書において「生体適合性」とは、毒性および免疫学的拒絶能がないために生体内で障害なく存在することができる性質をいう。
【0071】
本明細書において「生体適合性高分子」とは、生体適合性のよい高分子をいい、具体的には、生体内に残存しても毒性を生じないことをいう。ある高分子がそのような生体適合性を有しているかどうかを判定する方法は、本明細書においては、ラット、ウサギ、イヌ等の実験動物皮下への埋植試験等の試験法を使用する。この試験法では、皮下埋植試験の結果、比較的急性の免疫反応やアレルギー反応等が起き、腫れたり、発赤もしくは発熱したりする場合には肉眼的に生体適合性が低いことが解る。さらに生体適合性ポリマーを動物の血管に移植した場合など、特定の患部に移植した場合には、数日から数ヶ月後に、移植箇所を観察し、組織の生着の有無、移植した生体適合性ポリマー周辺の炎症、癒着、血液凝固による血栓形成などの程度を観察して、生体適合性の判定を行う。この他、移植部位の組織切片を作成してヘマトキシリン・エオシン染色その他の染色法にて細胞を染色・観察し、生体適合性の低さの指標としては免疫系を担当する顆粒性の細胞が多く侵入しているかどうか、もしくは従来組織と移植した生体適合性ポリマーとの間に両者を隔てる瘢痕組織の形成が認められるか否かを判定する。
【0072】
本明細書において「生分解性」とは、物質について言及するとき、生体内で,あるいは微生物の作用により分解される性質をいう。生分解性の高分子は、例えば、加水分解により,水,二酸化炭素、メタンなどに分解され得る。本明細書では、生分解性であるかどうかを判定する方法は、生分解性の一部である生体吸収性に関しては、ラット、ウサギ、イヌなど実験動物への数日間から数年間にわたる埋植試験、微生物による分解の試験に関しては、シート状の高分子の土壌中での数日間から数年間にわたる埋入・崩壊試験などの方法を使用する。
【0073】
本明細書において「ワイヤ」は、どのような材質によっても作製することができ、例えば、金属(例えば、ステンレス、チタンなど)、プラスチックなどを用いることができる。
【0074】
本明細書において「モデルを取得する手段」は、対象物の三次元モデルを得ることができる限りどのような手段を用いてもよく、例えば、CCDカメラ、光学カメラ、レントゲン撮影、CT、MRI(磁気共鳴像)などの手段を用いることができるがそれらに限定されない。
【0075】
本明細書において「骨モデルを取得する手段」は、対象物の三次元モデルを取得することができる限りどのような手段を用いてもよく、例えば、コンピュータグラフィクスなどのソフトウェアを用いることができるがそれに限定されない。
【0076】
本明細書において「骨に対して施されるべき処置に必要な補助部材を決定する」とは、処置されるべき骨に対して、本発明に基づいて決定されるべき処置に必要な補助部材を決定することをいう。この決定のためには、三次元モデルの数学的処理を行うことができる任意の手段を用いることができる。
【0077】
本明細書において「手術する手段」は、当業者が骨の手術に通常用いる任意の手段を用いることができ、例えば、骨ノミ(および槌(例えば、木槌または金槌))、電動または気動の骨鋸などを使用することができるがそれらに限定されない。
【0078】
以下、本発明の実施形態を、図面を必要に応じて参照して説明する。以下に提供される実施形態は、本発明のよりよい理解のために提供されるものであり、本発明の範囲は以下の記載に限定されるべきでないことが理解される。従って、当業者は、本明細書中の記載を参酌して、本発明の範囲内で適宜改変を行うことができることは明らかである。
【0079】
図1〜図3は、本実施形態に係るテンプレート補助部材である骨切断補助部材1および矯正位置判断補助部材2たるロッド2を示している。これら骨切断補助部材1およびロッド2は、例えば骨折変形治癒における矯正骨切術の際に対にして用いられるものである。
【0080】
詳述すれば、前記骨切断補助部材1は、図1および図2に示すように、予めコンピュータ上に取得または作成した立体三次元モデルデータに基づき、光造形などのラピッドプロトタイピングで作成した樹脂製ブロック状のもので、骨の所定位置に位置決めして取り付けるための位置決め部たる嵌合面11(示さず)と、前記骨を分割切断し矯正する場合に必要な切断面を示す切断面指示部たるスリット12と、前記ロッド2の取付位置を設定するための取付位置設定部たるガイド孔13とを備えている。
【0081】
前記嵌合面11は、骨の表面特徴部分に嵌合するように形成されたものである
スリット12は、前記切断面に沿って設けられたものである。しかしてその切断面は、当該切断面で骨を近位側および遠位側に分割切断し、前記遠位側骨片を移動又は/および回転させた場合の矯正後骨形状と、正常骨の骨形状とが最も近似する部位に設けてある。
【0082】
ガイド孔13は、前述したように、前記ロッド2の取付位置を設定するためのもので、このガイド孔13がロッド位置決め機能を十分果たす長さを有するように、骨切断補助部材1の厚みを設定している。
【0083】
ロッド2は、図3に示すように、例えば先端部を尖らせて骨に突き刺すことが可能なように構成したある程度のしなりを有する金属製のもので、前記ガイド孔13よりわずかに細い(例えば、0.1〜0.2mm)の径を有してなり、そのガイド孔13に挿通させて骨に突き刺すことにより、当該骨に取付穴を形成しつつ所望の位置に所望の姿勢で取り付けられるようにしてある。本実施形態では、ロッド2をそれぞれ装着した各骨片を移動させ一方のロッド2と他方のロッド2とが例えば平行といった所定位置関係になった際に、骨片同士が正常位置関係にあると判断できるように構成している。より具体的には、図4に示すように、各ロッド2を差し込み可能な係合部たる貫通差し込み孔31を有した中間部材たるブロック体3を設け、前記各差し込み孔31にロッド2がそれぞれ差し込み可能となった位置において骨片同士が正常位置関係にあると判断できるようにしている。
【0084】
次にこの骨切断補助部材1の製造方法について以下に述べる。この骨切断補助部材1は、前述したようにコンピュータ上に取得または作成した立体三次元モデルM1(図11)のデータに基づき、光造形などのラピッドプロトタイピングで作成される。
【0085】
まず図5に示すように、CT、MRI等で得たデータ等からコンピュータにより骨の三次元表面骨モデルM2を作成するとともに正常骨の三次元表面骨モデルMTを作成し、それぞれの近位側を重ね合わせる。なお、本実施形態では腕部分であるため、正常骨モデルMTを、健側の骨モデルの鏡像を用いて生成している。もちろん正常骨モデルの生成にあたって、過去の正常な時のデータを用いてもよいし、その他にも種々方法が考えられる。
【0086】
次に前記骨モデルM2において、矯正のために必要な切断面Pおよびその切断面Pで分割された遠位側骨片モデルM21の移動量を設定し、図6に示すように矯正後の骨モデルM2aを決定する。その設定方法とは概略的には、矯正後の骨モデルM2aと前記正常骨モデルMTとの形状差が最も小さくなるように前記切断面Pおよびその切断面Pで分割された遠位側骨片モデルM21の移動量を演算するものである
具体的に説明する。本実施形態では、「ICPアルゴリズム(iterative
closest point
algorithm)」と称される表面マッチング手法を用いている。これは、図7に示すように、適宣設定した仮想の変形軸線Lに直交する面で骨モデルM2を近位側骨片モデルM22と遠位側骨片モデルM21に分割するとともに、その遠位側骨片モデルM21を前記変形軸線Lに平行に直線移動および/又は変形軸線L周りに回転移動させ、移動させた後の矯正後骨モデルM2aと前記正常骨モデルMTとの違いを、例えば対応する表面位置データの二乗をとることにより数値化し、それが最小値となるようにするものである
しかして前記変形軸線Lを定めるにあたっては物体の移動の表記方法の一つであるScrew
Displacement−Axis法を用いる。これは図8に原理を示すように物体をある軸を中心にφ回転させて、その軸に平行にt移動させれば、どのような位置にでも移動可能であり、そのような軸が1つの移動に対して空間上でただ1つ存在するというものである。変形している骨を矯正しようとするとき、骨をある位置で切断して正常な位置に移動させればいいので、その時のScrew
Displacement−Axisを求める。変形骨の近位側と遠位側の特徴的な形状を、それぞれ正常骨のそれとマッチングさせることにより、変形した部分をどれだけ移動させれば矯正できるかわかるので、そのときのScrew
Displacement−Axisを計算させることが出来る。臨床に使う場合は平行移動成分が1mm以内で無視出来る場合が多く回転成分だけを考えればいいので、Screw
Displacement−Axis=変形の軸と考えてよい。
【0087】
さて、前記図5に示す本実施形態のように変形軸線Lが骨の長軸に平行か平行に近い場合は、変形軸線Lが骨の中心に一番近い位置で骨を変形軸線Lに垂直な平面で切断して、遠位骨片を変形軸線L周りに回転させてやれば矯正が可能で骨の接触面積も最大になるのでこれが至適な切断面として設定することができる。
【0088】
なお、変形軸線Lは骨の形態によって異なるのは言うまでもない。例えば、図20に示すように、骨の長軸に垂直に近い変形軸線Lを中心に骨を切断して回転させるシミュレーション結果となる場合もある。この場合は骨欠損が出来るので、この部に楔状の骨移植あるいは骨補填材料を挿入することにより矯正が可能である。
【0089】
その他、骨を一部切除しなければならない場合もあるが、多くの場合でScrew
Displacement−Axis(=変形軸線L)を用いた矯正シミュレーションは、有用な方法である。
【0090】
一方、必ずしも前記シミュレーションが利用できるとは限らず、たとえば変形軸線Lが関節内を通る場合などでは、関節に骨切を入れないと矯正骨切が不能であるために、この方法が使えない場合もある。その場合は、適宜、術者が骨切をしやすいところで切断してシミュレーションすることになる。
【0091】
本論に戻って、次に、図9に示すように、矯正後の骨モデルM2aにおける骨片モデルM21、M22にそれぞれロッドモデルMRを例えばそれらが互いに平行になるように取り付け、その状態から図10に示すように、矯正前の各骨片モデルM21、M22、すなわち骨モデルM2に対するロッドモデルMRの取付位置を算出する。
【0092】
そして図11に示すように、前述のごとく決定された切断面Pを含むように、骨モデルM1の表面特徴部分に嵌合する嵌合面を有した骨切断補助部材1の立体三次元モデルM1を生成する。このとき前記切断面Pに対応する部位にはスリットを形成しておき、ロッドモデルMRに対応する部位にはガイド孔を形成しておく。
【0093】
このようにして、嵌合面、スリット、ガイド孔を有した骨切断補助部材モデルM1を生成し、そのモデルデータに基づいて、実際の骨切断補助部材1を作成する。
【0094】
一方、図12に示すように、矯正後の骨モデルM2aにおける骨片モデルM21、M22にそれぞれロッドモデルMRを取り付けた状態で、それらロッドモデルMRを貫通させる差し込み孔を有したブロック体3モデルM3をコンピュータ上で生成する。そして、骨切断補助部材1同様、その立体三次元モデルデータM3に基づいて、光造形などのラピッドプロトタイピングで実際のブロック体3を作成する。
【0095】
このようにして形成した骨切断補助部材1、ブロック体3等を用いて施術する方法について説明する。
【0096】
まず図13に示すように、患部を切開し、骨5の所要部分を露出させる。
【0097】
次に図14に示すように、骨切断補助部材1を、その嵌合面と骨5の表面特徴部分とを嵌め合わせて密着固定することにより、一意的に位置決めして取り付ける。そしてガイド孔13からロッド2を挿入し、その先端部を骨5に突き刺し取り付ける。
【0098】
次にスリット12に沿ってのこぎり等の切断治具を動かし、骨5を切断分離した後、図15に示すように、骨切断補助部材1をロッド2を残して取り外す。
【0099】
次に図16に示すように、遠位側骨片および付随する組織を、各ロッド2の反先端部が前記ブロック体3の対応する差し込み孔31にそれぞれ挿入可能な位置まで動かし、実際に挿入する。このことにより、骨片が正常位置関係となる。
【0100】
最後に図17に示すようにその状態でプレートや螺旋、その他の固定器具を用いて、各骨片を互いに連結する。
【0101】
このように構成した本実施形態によれば、骨切断補助部材1およびロッド2を用いることにより、この種の矯正骨切手術において、予めコンピュータシミュレートにより算出された適切な切断面に沿って骨を切断でき、さらに切断後の骨片をコンピュータシミュレートにより算出された適切な位置に移動させることが容易にできる。したがって、従来のように医師の経験や勘、技術に頼ることなく、確実かつ容易な矯正骨切手術が可能となる。具体的には、矯正前、図19のレントゲン写真に示す骨が、図18に示すように見事に矯正されている。
【0102】
なお、本発明は上記実施形態に限られるものではない。
【0103】
例えば、各骨片にそれぞれ1本のロッドを差し込むようにしても構わないし、3本以上でももちろんよい。さらに矯正位置判断補助部材はロッドに限られず、他の部材でもよい。例えば施術部位によっては挟み込んで固定するようなものの方が好適な場合もあり得る。
【0104】
また、スリットは1つに限られず複数でも構わない。骨を3以上に分割したり、あるいは部分的に切除したりしなければならない場合もあるからである。
【0105】
その他本発明の補助部材は、上記図示例に限られず、その趣旨を逸脱しない範囲で種々変形が可能である。
【0106】
あるいは、以下のような手順を用いても良い。
(1)まず変形骨の近位部分を正常骨の近位部分にマッチングさせてその位置情報(アファイン変換で言うところのマトリックス)を求める。
(2)次に遠位部分同士をマッチングさせて、そのマトリックスを求める。マッチングの際にICPアルゴリズムを用いる(用いなくても可)。
(3)そして、近位と遠位のマトリックスの差分を求める。これを我々は「relative
matrix」と呼んでいる。
(4)relative matrix(行列式)をScrew displacement−axis表記に変換する。こうすることによってscrew displacement−axis(回転軸)とそれ周りの回転量(そしてscrew displacement−axisに沿った平行移動量)が求まる。
screw axisがわかれば、それが骨の長軸に平行か垂直かによって、rotational osteotomyにするかclosed/open wedge osteotomyにするかを決めて骨の切断面を設定する。このような例は、実施例12に示されている。
【0107】
(手術法)
次に、具体的な手術法を詳細に説明する。
【0108】
1つの局面において、本発明は、骨を処置(例えば、外科的手術)するための方法を提供する。この方法は、A)処置の対象となる骨を表す骨モデルを取得する工程;B)該骨の処置の目的となる目的骨モデルを取得する工程;C)骨モデルと目的骨モデルとに基づいて、処置を決定する(例えば、該骨に対して施されるべき処置に必要な補助部材を決定する)工程;D)決定された処置手順(例えば、補助部材を用いる)を用いて該骨を手術する工程、を包含する。本発明の方法では、従来試行錯誤で可能な範囲の手術を繰り返し行い、それにより徐々に変形治癒骨などを矯正していたのに対して、原理的に1回の処置(例えば、切断、挿入および回転など)を行うことによって、ほぼ正常形状に完治させることができるということが予想外に見出された。
【0109】
ここで、処置の対象となる骨を表す骨モデルを取得する工程は、任意の画像撮影手段および必要に応じてそれにより得たデータの格納手段および/または処理手段を使用することによって実現することができる。そのような撮影手段としては、例えば、光学撮影器機(カメラなど)、CT、MRI撮影器機をあげることができるがそれらに限定されない。格納手段および/または処理手段としては、例えば、CT、MRIなどのデータを骨から抽出して表面モデルを取得または作成するソフトウェアなどを実装したコンピュータなどを挙げることができるがそれらに限定されない。表面モデルは、代表的には、VTK、STLなどの形式で保存され得るがそれに限定されない。このような表面モデルを作成するソフトウェアとしては、例えば、Virtual
Place M(阪大機能画像教室において開発、販売は医用画像研究所から行われている)、Mimics(Materialise,ベルギー)、ZviewTM(Zview、Inc.Huntington
Beach,CA,USA)、Realize(Mayo Clinic)を用いることができるが、それらに限定されない。
【0110】
骨の処置の目的となる目的骨モデルを取得する工程は、任意の作画手段を利用することによって実現することができる。そのような作画は、手動による作画を利用しても良いが、通常は、モデルとなる対象(例えば、1対の骨(例えば、四肢)であれば、処置すべき骨の相手方の骨)の画像を導入するか、またはコンピュータ作画(例えば、CADなどのソフトウェア)あるいは保存された正常骨のモデルなどを用いることによって実現することができる。
【0111】
骨モデルと目的骨モデルとに基づいて、処置すべき方法を決定する工程は、通常、骨に対して施されるべき処置に必要な補助部材を決定することを包含する。そのような技術は、モデル処理をすることができる任意の手段を用いることにより実現されるが、そのような手段としては、例えば、画像処理ソフトウェアが実装されたコンピュータなどを挙げることができるがそれらに限定されない。そのようなソフトウェアは、例えば、表面マッチング、移動情報を導出、テンプレート作成などの機能を含み得る。ここでは、必要に応じて、表面モデルに関してコンピュータ上で位置情報の操作および管理を行うプログラム(例えば、「VTK」というオープンソース(http://public.kitware.com/VTK/)を用いて容易に作成することができる)を使用することができる。
【0112】
表面マッチングは、例えば、ICP(Iterative
closest point)アルゴリズムなどのマッチングに適切なアルゴリズムを用いることができるがそれに限定されない。表面マッチングでは、2つのモデル(目的骨モデルおよび骨モデル)を正確にマッチングさせることを試みる。表面モデルに関してコンピュータ上で位置情報の操作および管理を行うプログラムを用いる場合は、必要に応じて操作の際にある程度手動でマッチングさせた後、上記アルゴリズムを用いてマッチングさせる。変形している場合は、原理的にパーフェクトマッチングはないことから、任意の閾値(例えば、1mm)以上離れているところを無視した形でそれ以内に近接するところのみを有効にするように処置することができる。しかし、誤差が大きいことがしばしばあることから、アルゴリズムに頼らず、目視でマニュアルで近接させてもよい。
【0113】
移動情報の導出は、2つの位置情報(目的骨モデルおよび骨モデル)から相対的な移動情報を導き出すことによって算出することができる。処置すべき骨の近位と遠位とを目的骨モデル(例えば、健側の鏡像)とマッチングさせており、その2つの位置情報から相対的な変形情報を求めることができる。ここでは、Screw
Displacement−Axis(回転軸)およびその回転軸の周囲をどれだけ回転して平行移動すべきかを計算することができる。螺旋変位の代わりに、任意の座標軸上での移動情報をアファイン変換を用いて表現することもできる。
【0114】
実際のテンプレートのモデルの作成には、通常、ブーリアン演算を用いることができる。作成したモデルの保存には、STL形式(光造形などにおいて用いられる形式であり、三角形のポリゴンを張り巡らせた表面モデルとして表現される)を用いることができるがそれに限定されない。ブーリアン演算とは、3Dグラフィックのモデリング技法のひとつ。集合演算と呼ばれる演算によるモデリングを行う。重なった複数のモデルをひとつの塊にする(和)、重なったモデルを削り取る(差)、重なった部分だけを取り出す(積)といった演算処理を施したモデリングを行うことができる。form・Z(autodessysから販売)などで採用されており、このようなソフトウェア、またはMagics
RP(Materialise)などを用いることができるがそれに限定されない。工業用のソフトウェアであり、従来は、変形骨の処置には用いられていない。
【0115】
好ましい実施形態において、本発明の骨の処置方法における、処置方法の決定(通常、骨に対して施されるべき処置に必要な補助部材の決定)では、骨の三次元方向すべてのパラメータを直接または間接的に使用する。従来の技術では、二次元方向を考慮することが通常であり、三次元方向を考慮した例はない。本発明では、三次元方向のパラメータを考慮することにより、より正確な手術および良好な術後経過を達成することができたという意味においてその有用性は高い。
【0116】
1つの好ましい実施形態において、本発明の骨の処置方法における、骨に対して施されるべき処置に必要な補助部材を決定する工程では、骨の回転軸を決定する工程を包含する。
【0117】
ここで、骨の回転軸は、好ましくは、処置すべき骨が変形した骨である場合に、骨モデルを遠位側と近位側とに分け、目的骨モデルと遠位側または近位側のいずれか一方を重ね合わせて比較したときに、重ね合わせなかった方(遠位側を基準にした場合は近位側、近位側を基準にした場合は遠位側)を回転させることによって目的骨モデルへともたらすことができるかを算出することによって求めることができる。そのような回転軸は、例えば、螺旋変位法などを用いることによって求めることができ、実際の算出には手動計算を行っても良いが、通常は、螺旋変位法を実行するプログラムを実装したコンピュータを用いて行うことができる。
【0118】
従って、好ましい実施形態では、本発明では、回転軸は、螺旋変位法(Screw
Displacement−Axis法)を利用することによって決定される。螺旋法は、例えば、S.Ohwovoriole
and B.Roth:“An
extension of screw theory,”Journal of Mechanical Design,Vol.103,pp.725〜735,Oct.1981などに記載されている。螺旋法を用いれば、実質的に1回の切断および必要に応じて骨の回転、切除、延長および移植片の挿入からなる群より選択される少なくとも1つの処置を行うことによって骨の矯正を行うことができる。この矯正によって、数ヶ月から1年またはそれ以上経過した後も、術後経過が順調であったことが本発明によって初めて予想外に実証された。従って、本発明は、従来技術からは予想できなかった単純かつ効率的な骨の矯正手術法を提供することになる。
【0119】
従って、好ましい実施形態において、本発明の方法は、骨の回転、切除、移植片の挿入および延長からなる群より選択される少なくとも1つの処置を含む。骨の回転、切除、移植片の挿入、延長などの処置は、変形の度合い(すなわち、目的骨モデルと骨モデルとの差分)によって当業者が容易に決定することができる。そのような差分は、当該分野において周知の任意の数学的手法を用いて算出することができる。骨の回転、切除、移植片の挿入、延長などの処置は、それぞれ1度ずつ行うことが好ましい。従来技術では、回転、切除、挿入、移植などを1度のみで済ませることができた例は存在しない。従って、本発明は、従来不可能であった、単純性を達成したことになる。
【0120】
好ましい実施形態において、本発明の方法において、テンプレート補助部材が使用される。従来、変形骨などの異常骨の治療を行うときは、目視によりおおよその切断を行い、おおよその接合をおこなっていたが、テンプレート補助部材を使用することによって、単純に正確な矯正処置を行うことが可能となった。ここで使用されるテンプレート補助部材は、本明細書において別の場所において説明されるような、コンピュータ支援画像作成法などによってモデルを作成し、そのモデルに基づいて、光造形などの任意の成型方法により素材(例えば、金属、プラスチック、セラミックなど)を成型することによって作製することができる。
【0121】
光造形とは、液状の紫外線硬化樹脂(紫外線に反応し、硬化する液体)を光造形装置の紫外線レーザーを使用して硬化させ、積層することで3Dのデーターとほぼ同一の精密な立体物を、短時間で作成する技術である。
【0122】
具体的には、例えば、CADでデザインされた三次元モデルのデータをSTL形式で出力し、三次元モデルを、0.1〜0.2mmピッチにスライスして、光造形用の等高線データに変換する。この等高線データに基づき、半導体レーザーがタンク内樹脂液の表面に断面形状を描き、レーザー光線が当たった部分は化学反応を起こし、固体に硬化させる。1つの層が形成されると、形成された造形品を乗せている基板がスライスピッチ分沈み込み、その上に次の断面部分がレーザースキャンにより形成され、積層される。連続的に薄い断面体が積層されていくことにより、液面下に三次元モデルが形成され、その後、洗浄等の後処理が施され、完成する。このようなサービスは、種々提供されており、例えば、ダイセル化学グループのPLAMOS、木田工業、CMETなど数多くの提供業者からサービスを受けることができる。
【0123】
本明細書において用いられるテンプレート補助部材は、配置されるべき位置を示す位置決め部、骨の適切な切断面を示す切断面指示部、ならびに位置判断補助部材の取り付け位置を指示する取付位置指示部からなる群より選択される少なくとも1つの要素を備えることが好ましい。このうち、少なくとも骨切断すべき切断面指示部が、備えられていることが好ましい。切断する位置が容易に判別でき、正確に骨を切断することができるからである。より好ましくは、位置判断補助部材の取り付け位置を指示する取付位置指示部を備えていることが有利である。切断した後の移動をスムーズに実現し、より正確に行うことができるからである。ここで、位置決め部は、物理的にテンプレートを削ることまたは標識物(例えば、染色)などで標識することによって容易に作製することができるがそれに限定されない。切断面指示部もまた、物理的にテンプレートを削ることまたは標識物(例えば、染色)などで標識することによって容易に作製することができるがそれに限定されない。好ましくは、物理的にスリットが入っていることが有利である。骨切鋸などの切断手段をより容易に操作することができるからである。位置判断補助部材の取り付け位置を指示する取付位置指示部もまた、物理的にテンプレートを削ることまたは標識物(例えば、染色)などで標識することによって容易に作製することができるがそれに限定されない。そのような取付位置指示部は、開口部であることが好ましい。矯正位置判断補助部材がワイヤであることが好ましいからである。
【0124】
より好ましくは、本発明において使用されるテンプレート補助部材は、配置されるべき位置を示す位置決め部、骨切のための切断面指示部(好ましくは、スリット)、位置判断補助部材の取り付け位置を指示する取付位置指示部(好ましくは、開口部(または孔))をすべて備える。これらすべてを備えることによって、テンプレートの配置、骨切、矯正を一つの補助部材によって達成することができるからである。
【0125】
本発明の処置方法において、手術工程は、A)骨を少なくとも1つの部位において切断する工程:B)i)骨の回転が必要な場合、回転を行うこと;ii)骨の移植片の挿入が必要な場合、前記移植片の挿入を行うこと;およびiii)骨片の切除が必要な場合、前記骨片の切除を行うことからなる群より選択される少なくとも1つの骨処置工程を行う工程;C)前記切断された骨を接合する工程を包含する。
【0126】
ここで、骨を切断する工程は、任意の切断手段を用いて行うことができる。好ましくは、補助部材(例えば、本発明のテンプレート補助部材)を用いることができる。切断の回数は制限されないが、好ましくは1回のみであり得る。1回のみの切断およびその後の処置によって異常骨の矯正が本発明によって可能である。
【0127】
骨処置工程は、任意の手段および医師または他の医療従事者の手を用いて行うことができる。好ましくは補助部材(例えば、本発明のテンプレート補助部材)を用いることができる。骨処置の各々の工程(すなわち、回転、挿入または切除)を行う回数は限定されないが、好ましくは各々1回のみであり得る。1回のみの各々の骨処置によって異常骨を処置することが本発明によって達成され、単純で正確な異常骨の矯正が可能になった。また、挿入されるべき移植片もまた、コンピュータによって設計することができる。コンピュータによって設計された移植片は、実際に3D切削、NC加工などの任意の成型方法により素材(例えば、金属、プラスチック、セラミックなど)を成型することによって作製することができる。そのような切削には、ローランドDGの3D切削機(MDX−20などのMDXシリーズ、PNC−3200など)などの市販の切削機を用いることができる。
【0128】
より好ましい実施形態では、本発明の方法では、骨処理工程には骨の回転が含まれ、その回転は、1つの回転軸のみの周りの回転であることが有利である。回転軸の周りの回転に注目して異常骨を治癒させる手法は従来になかった。また、回転を手術に取り入れることによって変形を矯正することができるとは予想されておらず、むしろ、回転によって単純でしかも正確な矯正を行うことができることが実証されており、本発明の方法は、種々の骨の矯正に有用である。
【0129】
切断された骨を接合する工程もまた、当該分野において周知の任意の手段を用いて実施することができる。骨接合は、プレート、スクリュー、ワイヤー、髄内釘などの内固定材料により行われ、骨欠損部には、リン酸カルシウムを補填したり、骨移植を行うことができる。例えば、補填は、リン酸カルシウム(例えば、ハイドロキシアパタイト)、βTCP、リン酸カルシウムペーストのような生体適合性の材料を用いて行うことができる。あるいは、骨欠損部は、骨移植により補填され得る。
【0130】
骨を接合した後は、その状態を長期間保持することが好ましい。矯正した状態が保持され、矯正効果が確実なものとなるからである。また、必要に応じて、接合せずに、あるいは切断した後に骨を延長してもよい。そのような延長は、仮骨延長法を用いることができる。
【0131】
好ましい実施形態において、本発明の方法において用いられる骨処置工程における回転、挿入および切除は、Screw
Displacement−Axis法またはアファイン変換法によって規定される。このような数学的手法によって計算された差分を回転、挿入、切除、延長などに反映させて手術することのみで、骨矯正が可能となり、かつ、その効果が本発明において初めて1年以上も保持され得ることが実証されたことは、驚くべき事実といえる。上記変換法によって規定された差分を忠実に実行するには、好ましくはテンプレート補助部材を用いることが有利である。テンプレート補助部材を用いることによって、術者は、テンプレート上の指示線に従って手術(例えば、切断、回転など)を行えばよい。このような手術は、従来まったくの経験によりマニュアルで行わざるを得なかった外科領域において画期的な方法をもたらしたといえる。
【0132】
1つの実施形態において骨の切断は、テンプレート補助部材によって規定されるがそれに限定されない。切断後にテンプレート補助部材を取り付けても良い。
【0133】
1つの実施形態において骨の矯正は、代表的には、テンプレート上の変形量を規定する少なくとも1対の開口部を通る矯正補助部材を平行にする工程を包含する。従って、この場合、テンプレートは、矯正補助部材を平行にすることによって目的の回転が達成されるように設計される。そのような設計は、例えば、Screw
Displacement−Axis法またはアファイン変換法によって行うことができる。
【0134】
本発明の処置方法において挿入される移植片は、Screw
Displacement−Axis法またはアファイン変換法によって規定され製造されたものであることが好ましい。このような方法によって、骨モデルと目的骨モデルとの差分をとることができ、その差分から移植片のモデルを生成することができる。生成されたモデルに基づき、例えば3D切削によって実際の移植片を成型することができる。
【0135】
本発明の手術方法の好ましい実施形態において、処置されるべき骨は、近位側または遠位側のいずれかが固定される。目的骨モデルは、近位側または遠位側の部分に基づいて作成されることが好ましい。いずれかの部分は通常ほぼ正常の形状をしていることが多いからである。
【0136】
本発明が対象とする骨は、四肢のものであることが通常であるが、それに限定されず、本発明では、任意の骨を対象とすることができ、人体であれば、人体内に存在する200個程度の骨すべてが対象であり、例えば、長骨(long
bone;例えば、四肢)、短骨(short bone)、扁平骨(flat bone;胸骨、肋骨、肩甲骨、腸骨など)、種子骨(sesamoid bone;膝蓋骨)、不規則骨(irregular bone;顔面頭蓋、椎骨)などが挙げられるがそれらに限定されない。長骨(例えば、四肢)の矯正が本発明の矯正において適切である。本発明の治療対象は、代表的に変形治癒した骨である。
【0137】
1つの実施形態において本発明の処置方法では、移植片が挿入される場合、そのような移植片は、天然骨または人工骨によって製造することができる。天然骨としては、自家骨、同種骨および異種骨などを挙げることができるがそれに限定されない。自家骨であることが好ましい。そのような場合、自家骨としては、腸骨などを用いることができる。自家骨の入手が困難な場合、同種骨を用いる。同種骨は、例えば、骨銀行などから得ることができる。
【0138】
人工骨を使用する場合は、生体適合性である限りどのような材質のものを用いてもよいが、好ましくは、骨に適合していることが有利であり、さらに好ましくは骨の一部となることが有利である。あるいは、生分解性の材料を用いることもできる。生分解性のものを用いる場合は、急速に分解せず、徐々に分解(例えば、数ヶ月)するものが用いられ得る。好ましい材質としては、骨親和性のあるボーンセラミック、リン酸カルシウム、より好ましくは特にハイドロキシアパタイトを用いることができる。そのような人工骨としては、例えば、ネオボーン(NEOBONE;MMT
Co.LTD、大阪)などを挙げることができるがそれに限定されない。
【0139】
好ましい実施形態において、本発明では、手術後に、矯正が適切であるかどうか確認する工程をさらに包含する。そのような矯正の確認は、当該分野において周知の任意の手段を用いて実施することができる。そのような手段は、例えば、本発明の矯正位置判断補助部材を用いることができる。あるいは、矯正後にレントゲン写真などを撮り、モデルを取得した後、目的骨モデルと骨モデルとを比較し差分を判定することによって矯正の確認を行うことができる。このようなモデル比較は、当該分野において公知の任意のプログラムを用いて実施することができる。
【0140】
本発明において使用する目的骨モデルは、骨モデルの骨の対称となる組のパートナーに基づいて規定される。この場合、骨は対称となるべき一対の組を構成する。そのような骨としては、例えば、四肢の骨などが挙げられるがそれらに限定されない。
【0141】
あるいは、本発明において使用する目的骨モデルは、骨を有する患者の標準に基づいて規定され得る。標準は、患者の集合を調査し、統計学的に処理した後に、平均±1標準偏差によって求めることができるがそれに限定されない。
【0142】
(シミュレーション)
別の局面において、本発明は、骨の処置(例えば、外科的手術)をシミュレーションするための方法を提供する。この方法は、A)処置の対象となる骨を表す骨モデルを取得する工程;B)該骨の処置の目的となる目的骨モデルを取得する工程;C)骨モデルと目的骨モデルとに基づいて、処置を決定する(例えば、前記骨に対して施されるべき処置に必要な補助部材を決定する)工程;D)決定された処置手順(例えば、補助部材を用いる)に基づいて処置のシミュレーションする工程、を包含する。本発明の方法では、従来試行錯誤で可能な範囲の手術を繰り返し行い、それにより徐々に変形治癒骨などを矯正していたのに対して、行われるべき処置をシミュレーションすることができ、初心者であっても、なおいっそう簡便に習熟することができるようになった。ここで、本発明のシミュレーションにおいて包含されるいずれの工程も上記(手術法)に記載される任意の形態を用いることができる。
【0143】
なお、シミュレーションの際には、実際に骨モデルの模型(例えば、ハイドロキシアパタイトなどで)を作製し、必要に応じて補助部材を作製し、決定された手順に従って、手術シミュレーションを行うことが可能である。
【0144】
(処置キット)
さらに別の局面において、本発明は、骨を処置するために使用される骨処置キットを提供する。このキットは、A)配置されるべき位置を示す位置決め部および切断すべき切断面指示部が付され、かつ、矯正のための矯正補助部材を挿入するための少なくとも1つの開口部を備える、テンプレート補助部材と、B)位置判断補助部材とを備える。ここで、使用されるテンプレート補助部材は、本明細書において他の場所において詳述された任意の形態を使用することができる。位置判断補助部材もまた、上述の任意の形態を使用することができる。
【0145】
好ましくは、テンプレートに含まれる開口部は、少なくとも2つ含まれる。2つあることによって、平行かどうかの判断が容易となるからである。さらに好ましくは、開口部は3つ、さらに好ましくは4つ含む。4つ開口部を含むことによって、さらに平行かどうかの判断が目視によって容易になるからである。矯正位置判断補助部材は、平行移動補助部材を備え、ワイヤであることが好ましいがそれに限定されない。ワイヤの材質はどのようなものでも良いが、ステンレス製であることが好ましい。
【0146】
好ましい実施形態において、矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能からなる群より選択される少なくとも1つの機能を有する。あるいは、矯正位置判断補助部材は、複数存在し、その各々が、平行移動補助機能および回転補助機能を有していても良い。
【0147】
本発明のキットは、好ましくは、平行移動のための平行移動補助機能および回転のための回転補助機能の両方を備えることが有利である。平行移動補助機能は、ワイヤのような長手軸方向に伸びる部材にしるしを施すことによって達成することができる。回転補助機能もまた、同様に、ワイヤのような直線状のものを利用することによって達成することができる。
【0148】
本発明のキットは、好ましくは、手術後に骨を固定するための固定補助部材をさらに備える。そのような固定補助部材は、任意のものを使用することができ、例えば、創外固定器などの従来使用されているものを使用しても良い。
【0149】
(シミュレーションキットまたはシステム)
別の局面において、本発明は、骨の処置(例えば、外科的手術)をシミュレーションするためキットまたはシステムを提供する。この方法は、A)処置の対象となる骨を表す骨モデルを取得する手段;B)前記骨の処置の目的となる目的骨モデルを取得する手段;C)骨モデルと目的骨モデルとに基づいて、処置を決定する(例えば、前記骨に対して施されるべき処置に必要な補助部材を決定する)手段;D)決定された処置手順(例えば、補助部材を用いる)に基づいて処置のシミュレーションする手段、を備える。本発明のキットでは、あるいは、骨モデル模型、必要に応じて補助部材、および決定された処置を示した指示書を含んでいてもよい。従来試行錯誤で可能な範囲の手術を繰り返し行い、それにより徐々に変形治癒骨などを矯正していたのに対して、行われるべき処置をシミュレーションすることができ、初心者であっても、なおいっそう簡便に習熟することができるようになった。ここで、本発明のシミュレーションにおいて包含されるいずれの手段も上記(処置キット)に記載される任意の形態を用いることができる。
【0150】
なお、シミュレーションの際には、実際に骨モデルの模型(例えば、ハイドロキシアパタイトなどで)を作製し、必要に応じて補助部材を作製し、決定された手順に従って、手術シミュレーションを行うことが可能である。
【0151】
(移植片)
別の局面において、本発明は、骨を処置するために使用される移植片を提供する。このような移植片は、該骨の処置の目的となる目的骨モデルと対象となる前記骨の現状の骨モデルとのほぼ差分である形状をしている。そのような差分の形状の実現は、任意の成型方法によって達成され、例えば、3D切削、RP、NC加工などが挙げられるがそれらに限定されない。3D切削が好ましい。実質的に任意の形状が作製可能であるからである。好ましくは、本発明の移植片の形状は、Screw
Displacement−Axis法またはアファイン変換法によって規定された目的骨モデルおよび骨モデルとの差分によって決定される。
【0152】
(処置システム)
別の局面において、本発明は、骨を処置するためのシステムを提供する。このシステムは、A)処置の対象となる骨を表す骨モデルを取得する手段;B)前記骨の処置の目的となる目的骨モデルを取得する手段;C)骨モデルと目的骨モデルとに基づいて、前記骨に対して施されるべき処置を決定する手段(例えば、前記骨に対して施されるべき処置に必要な補助部材を決定する);D)決定された処理手順(例えば、補助部材を用いる)を用いて前記骨を手術する、を備える。
【0153】
ここで、骨モデルを得る手段、目的骨モデルを得る手段、処置すべき形状および方法を決定する手段および処置すべき形状および方法に基づいて手術する手段は、上記(手術法)において説明したような任意の手段を用いることができる。
【0154】
(シミュレーションシステム)
別の局面において、本発明は、骨の処置(例えば、外科的手術)をシミュレーションするためのシステムを提供する。このシステムは、A)処置の対象となる骨を表す骨モデルを取得する手段;B)前記骨の処置の目的となる目的骨モデルを取得する手段;C)骨モデルと目的骨モデルとに基づいて、処置を決定する(例えば、前記骨に対して施されるべき処置に必要な補助部材を決定する)手段;D)決定された処置手順(例えば、補助部材を用いる)に基づいて処置のシミュレーションを実行させる手段を備える。本発明のシステムでは、従来試行錯誤で可能な範囲の手術を繰り返し行い、それにより徐々に変形治癒骨などを矯正していたのに対して、行われるべき処置をシミュレーションすることができ、初心者であっても、なおいっそう簡便に習熟することができるようになった。ここで、本発明のシミュレーションにおいて包含されるいずれの手段も上記(処置システム)に記載される任意の形態を用いることができる。
【0155】
なお、シミュレーションの際には、実際に骨モデルの模型(例えば、ハイドロキシアパタイトなどで)を作製し、必要に応じて補助部材を作製し、決定された手順に従って、手術シミュレーションを行うことが可能である。
【0156】
(コンピュータプログラム)
別の局面において、本発明は、骨の処置を決定する処理をコンピュータに実行させるためのプログラムを提供する。この処理は、A)処置の対象となる骨を表す骨モデルを取得する工程;B)骨の処置の目的となる目的骨を表す目的骨モデルを取得する工程;C)骨モデルと目的骨モデルとに基づいて、骨に対して施されるべき処置を決定する工程を包含する。本発明のプログラムは、所望の目的(例えば、骨の矯正)を達成するために、骨に対して施されるべき処置(例えば、骨の切断、骨片の移動など)を決定することができる。これにより、比較的経験の浅い医師でも、適切な処置を行うことが可能になる。
【0157】
コンピュータが骨の処置を決定する処理を実現するプログラムを実行することにより、そのコンピュータは骨の処置を決定する方法を提供する。また、コンピュータが骨の処置を決定する処理を実現するプログラムを実行することにより、そのコンピュータは、骨の処置を決定する装置として機能する。
【0158】
以上の説明は、骨を例示して説明してきたが、本発明は、骨以外の身体部分(例えば、皮膚などの軟部分)であっても実施することができることが当業者には理解される。
【0159】
以下に、実施例に基づいて本発明を説明するが、以下の実施例は、例示の目的のみに提供される。従って、本発明の範囲は、実施例のみに限定されるものではなく、特許請求の範囲によってのみ限定される。
【実施例】
【0160】
以下の実施例において、ヒトを対象とする場合、厚生労働省または等価の政府当局の基準に従い、事前に同意(インフォームドコンセント)を得た上で実験を行った。
【0161】
(実施例1:テンプレート補助部材の作製およびその応用)
この実施例では、実際の変形骨をモデルに、術前コンピューターシミュレーション(図21)を行ってテンプレート補助部材を作製した。前腕骨折変形治癒では橈尺骨の変形程度が回内回外制限(回内とは、手掌が下向きになるよう前腕を回転させることをいい、回外とは、手掌が上向きになるように前腕を回転させる(頂戴の形をする)ことをいう)の大きな要因であり、出来る限り正確な矯正が望ましい。本発明者らは、CTまたはMRIの三次元画像を用いた術前コンピューターシミュレーションにより正確な矯正骨切を行った。その方法と結果を以下に説明する。
【0162】
症例は6例、全員男性で12−31歳、平均19.2歳である。矯正骨切の対象となった変形は橈骨骨幹部5例、橈骨遠位部1例で、受傷から矯正骨切術までの期間は平均11.6ヶ月、レントゲン上の術前変形角度は22.8°で、術前前腕可動域は回内62°、回外25°に制限されていた。平均追跡期間は6.6ヶ月であった。
【0163】
(モデル作成)
これらの症例において、両側前腕のCTあるいはMRI画像の二次元データ(図22A)から専用のソフトウェアを用いて、対象骨をセミオートマティックにマーキングして抽出し(図22B)、セグメント化して(図22C)三次元骨表面モデルを作成した(図22D)。
【0164】
患側前腕骨モデルを健側の鏡像の近位と遠位にそれぞれ重ね合わせることにより変形の回旋軸、変形量を計算し、最適な骨切の部位と矯正量を決定した(例えば、図23)。
【0165】
第一の3例はシミュレーションで得られた変形部位、変形量やコンピューター画像を参考にしながら手術を行った。これをA群とした(図24)。
【0166】
第二の3例ではCTデータを元に、骨切部位および矯正量を決定し(図25A)、変形癒合部位の骨表面に密着し、骨切スリットと矯正時に平行になるようなK−wireを刺入できるガイドホールを持つ骨切テンプレートをコンピューター上で設計した(図25B)。また、K−wireを通して整復位を保持するためのガイドも設計し、光造形技術で実際のモデルとして作成して手術に使用した(図25C)。これをB群とした。
【0167】
(結果)
両群とも年齢、手術までの期間、術前の変形程度はほぼ同じであった。術後レントゲンでの変形角度はA群が9.3°と不十分であったのに対して、B群では0.3°とほぼ完全に矯正できていた。回内外可動域はA群が術前73°が術後146°に、B群は術後6ヶ月経過した1例のみの評価であるが術前120°が、術後180°に改善した。結果を図26にまとめる。
【0168】
(実施例2:8歳児、上腕骨顆上骨折のClosing
Wedge Osteotomy症例)
本実施例では、Closing Wedge Osteotomy法が本発明において適用され得ることを実証する。小児の代表的な肘関節周囲骨折として、上腕骨顆上骨折を起こした8歳男児患者を例に本発明の方法により手術を施した。なお、この症例は、内反肘変型を残しやすいことで知られている。図27に罹患部を示すレントゲン写真を示す(左は正面図、右は側面図である)。
【0169】
この患者の最初の処置でのギプス内での過伸展変形の進行を図28に示す。適切な処置を施さなかったことから、背屈方向に回転している様子がわかる。
【0170】
この患者の最初の処置後2年での様子を図29に示す。内反過伸展変形を残し骨癒合後2年経っても自然矯正が十分でない様子がわかる。図29の左の正面レントゲンでは肘は10度程度内反(前腕が少し内側に向いている。正常では数度から10度程度外反している)しており、図29の右の側面レントゲンでは上腕骨遠位部は上腕骨の軸に対して約20度背屈している。正常では20度程度の前屈している。
【0171】
過伸展、内反変形の後遺症の様子を図30に示す。図30の左上では、屈曲障害を生じており、90°までしか曲がらない様子が示されている。正常では130−140°曲がるとされる。図30の左下では、過伸展変形されており、30°過伸展する様子が示されている。正常では10°程度伸展する。図30右では、内反肘変形する様子が示されている。
【0172】
(MRIモデルを用いた矯正骨切シミュレーション)
この患者に対してMRIから作製した三次元モデルを用いて手術を行った(図31を参照)。目的骨モデルとしての健側の鏡像にマッチングさせることにより、変形の軸と角度を求めた。変形の軸を頂点にもつ楔状の骨を切除して骨切部を閉じることにより変形を正確に矯正できる。なお、この骨切の方向や角度を術者が手術中に目視で正確に行うことは不可能である。
【0173】
マッチングの方法としてはマニュアルで合わせる方法、さらにICP
アルゴリズム(iterative closest point
algorithm)を用いてコンピューターで合わせる方法がある。
【0174】
(光造形)
マッチングに基づいて作製したテンプレートのモデルをもとに、光造形モデルを作製した。モデルをSTL形式で記述した。このSTL形式(3次元CADのデータの形式の一つである。三次元三角パッチの集合として表現される形式である。STLは、「Stadard
Triangulation Language」(標準三角パッチ言語)の略である。STL形式は、特に光造形における標準ファイルフォーマットとして使用されている。)のデザインを0.1mmスライスの断面データに変換した。このスライスデータに基づき、ガルバノメーターミラーを介したLD励起UV固体レーザーを光硬化性樹脂表面に走査して硬化させ、0.1mm厚で積層して3次元立体モデルを作成した。モデルは洗浄後、ポストキュア装置で完全に硬化させた。光造形装置はシーメット(株)Rapid
Meister 3000を用いた。
【0175】
光造形の様子を示す図を図32に示す。
【0176】
(手術)
次に、作製したテンプレートをもとに骨変形治癒手術を行った。その術中の写真を図33に示す。左肘の外側を見ている。写真の右下が肩、左上が手である。テンプレートガイドは上腕骨の外顆にフィットした。図33左上では、術部(腕)を開いた直後の様子が示されている。開いた後にテンプレートおよびワイヤを設置した後の様子が図33右下に示されている。
【0177】
テンプレートなどを設置後、骨切をおこなった。骨切はボーンソーによって行った(図34)。骨切を行った後の様子を図35に示す。示されるように、本発明の方法を用いる場合、マニュアルでは不可能な、正確な骨切が一回で可能であることが理解される。
【0178】
骨切の後、余分な骨片を切り出した。その様子は、図36に示す。骨片切除の後、ワイヤーが平行になるように矯正した(図37)。術後すぐのレントゲン写真を図38に示す。Kワイヤーによる固定の様子が示される。示されるように本発明の処置により良好な矯正・固定が得られている。図38左は、外反5°であることが示され、図38右では、上腕骨の前傾20°であることが示されている。術直後の肘の可動域は、屈曲、伸展とも正常化した。術中でも屈曲は130°、伸展は10°であることが示された(図39)。術直後の外観を図40に示す。これらの値はほぼ正常であることから、本発明の処置方法では、単純な方法によって、ほぼ正常な機能を回復するという効果を奏することが実証された。
【0179】
また、術後1年でのレントゲン写真を図41に、患者の外観を図42に示す。示されるように、驚くべきことに術後1年でも正常な状態が保たれているろころか、むしろ、術後の凸凹もなくなりほぼ正常に復元したことがわかる。
【0180】
本実施例では、切除および回転が必要な例を示した。
【0181】
このような効果は、従来技術からは予測できなかったことであり、本発明は医療上の有用性が高いことが実証され、理解される。
【0182】
(実施例3:21歳男性 左前腕骨折変形治癒のOpening Wedge Osteotomy症例)
実施例3では、Opening Wedge Osteotomy法が本発明において適用可能なことを実証する。症例として、21歳男性で前腕骨折変形治癒をした患者を用いた。この患者は、特に橈骨の変形が強かった(図43)。前腕骨折は若年男児から青年期に多い骨折であり、ギプスで治療すると変型治癒を起こすことが多いとされている。
【0183】
この患者は、図44に示すように、変形と前腕の回外(頂戴の形をする)の制限を訴えた。回外は約40°に制限されていた(正常80−90°)。
【0184】
コンピュータ処理を行ったところ、変形軸周りに30°回旋させることにより健側にマッチングすることがシミュレーションでわかった(図45)。この情報を下にテンプレート補助部材を設計したところ、図46左に示すように、黄色のブロックから骨と先に作製した直方体、円柱を引き算(Boolean
−ブーリアン− 演算)することにより変形治癒部の特徴的な骨表面にフィットして、骨切面やワイヤーを刺入することのできるテンプレートが設計できることが判明した(図46右)。これと同様にして矯正用のガイドも同様に設計した。
【0185】
(手術)
このテンプレートを用いて患者を処置した。まず、図47に示すように、変形治癒部の展開した。展開した後、図48に示すように、骨切り用テンプレートを変形治癒部にあてて、完全にフィットすることを確認後、キルシュナーワイヤー(整形外科で汎用されるステンレス製ワイヤー)を刺入して固定した。次に、図49に示すように、テンプレートのスリット通りに骨切した。次に、図50に示すように、骨切の完了し、テンプレートの除去した。
【0186】
(矯正)
次に、図51に示すように、矯正用ガイドをワイヤーに通して矯正した。骨切部を開いた。術野のみを見ると一見矯正ができているのかどうかわからない(表面が極端に前方凸に見える)が、術中レントゲン透視を見ると正確に矯正されていることが確認できた(図52)。
【0187】
次いで、図53に示すように、腸骨(腰骨)を楔状に整形し移植した。この後、テンプレートで骨および移植骨をチタンプレートおよびネジで固定した(図54)。この後、キルシュナーワイヤーを除去した(図55)。術後レントゲンを撮影すると、図56に示すように、良好な矯正が得られたことがわかる。
【0188】
(術後経過)
この患者について、術後9ヶ月の経過を観察した。図57に示すように、橈骨の変型はほぼ正常に矯正された位置で骨癒合していた。この後、術後1年1月で抜釘を行った(図58)。このとき、外見上の変型は消失し、前腕の回旋障害も正常化していた(図59左)。回外は90°まで可能となっていた(図59中)。もちろん回内も正常であった(図59右)。
【0189】
(実施例4:48歳女性、左橈骨遠位端骨折変形治癒の症例)
次に、比較的中堅の年齢の女性でも治療可能であることを実証する。患者として、48歳女性であって、左橈骨遠位端骨折変形治癒した患者を採用した。
【0190】
この患者は、図60に示すように、左橈骨遠位端骨折変形治癒しており、図60左に側面像を示す。関節面が背屈している様子がわかる。点線が関節面の傾きが示されており、20°程度背屈していることがわかる。図60中下のように、正常の側面像正常では点線のように10°〜20°掌屈している。図60中上に、患側の正面像を示す。橈骨の短縮と関節面の傾きが減少していた。線は約10°(正常20〜30°)であり。また矢印で示すように約4mm短縮していた。図60に健側を裏表逆にしたものを参照に示す。線は関節の傾きであり、その角度は25°であった。
【0191】
この患者が罹患している橈骨遠位端骨折は、中高年の女性に代表的な骨折で、変型治癒しやすい。骨癒合は良好なので、多少の変型治癒は放置されることも多いが、50歳以下の若年者や高齢でも活動的な患者の場合は、可動域障害や運動時の痛みを訴えることが多い。
【0192】
この患者は、図61に示すように、外観上の変形と左手関節の可動域障害がある。このような状態は、橈骨遠位の変型はフォークを凸面から見ているようなのでフォーク状変型と呼ばれる。図61右に示すように、掌屈は約35°に制限されている。正常値は60〜80°である。この患者は、運動時の手関節痛も訴えた。
【0193】
(3次元シミュレーション)
次に、この患者の骨の3次元シミュレーションを行った(図62)。その結果、30°の骨切(open
wedge osteotomy)が必要であることが算出された。その計算結果から、骨切テンプレート、矯正用ガイドおよび移植骨の設計も行った(図63)。図64には、これらテンプレートなどを光造形モデルで作製する様子を示す。
【0194】
(手術)
このテンプレートなどを用いて、実際に上記患者の手術を行った。図65左に、変形治癒部の展開を示す。図65右に示すように、作製したテンプレートをフィットさせた。この後、図66左に示すように、キルシュナーワイヤーで固定し、図66右に示すように、ボーンソーで骨切した。この症例では矯正用ガイドとして樹脂を傷つけないようにステンレス製のガイド(筒とスリット)を用意した。図67に示すように、このガイドを使用して、変形は矯正された。移植片には、ハイドロキシアパタイトを術前にCADを用いて整形して使用した(図68)。このような人工移植片は、手術の簡易化、正確性に寄与する。
【0195】
次に、テンプレートで固定した後の術後レントゲンを撮影した(図69)。示されるように、矯正は良好であり、図69中に健側のレントゲンを裏表逆にしたものを示すように、比べてみるとほぼ健側通りに矯正できていることがわかった。
【0196】
次に、術後4ヶ月での様子を図70に示す。写真から明らかなように、矯正は保たれていた。人工骨と周囲の骨は癒合しつつある様子がわかる。
【0197】
術後4ヶ月の患者の様子を図71に示す。制限されていた左手関節の掌屈は80°まで改善していた。外見上の変型、手関節痛は消失し、患者の満足度は高かった。
【0198】
従って、本発明の手術法は、患者の満足するように外見および運動性を回復する効果を奏することができることが実証された。
【0199】
(実施例5:67歳女性、橈骨遠位端骨折変形治癒の症例)
同様の橈骨遠位端骨折変型治癒をさらに高齢の患者(67歳女性)を用いて実証した。図72の下側にある2枚の写真には、健側を裏表逆に写したものを示している。正面像での変型はそれほどでもないが側面像では関節面が背側に向いているのがわかる。図73に、この患者の外観上の変型を示す。運動性障害は、図74に示す。示されるように、左手の回内障害(左上)、手関節の掌屈障害(右下)を呈している。この患者はこのほかにも神経障害による手のしびれを訴えた。このような症例では、変型により神経障害を生じることがある。
【0200】
(シミュレーション)
この患者からモデルを取り、図75のように、骨切の3次元シミュレーションを行った。示されるような軸に回転させることで矯正が可能であることが判明した。このモデルに基づいて、骨切テンプレートを設計し(図76)、続いて、矯正ガイドを設計した(図77)。この矯正方法による矯正の完成予想を図78に示す。
【0201】
(手術)
次に、このテンプレートなどを用いて上記患者の手術を行った。図79に示すように、変型部の展開を行い、図80〜図81に示すようにテンプレートを設置した。その後、骨切を行い、図82に示すように骨切を完成させた。
【0202】
次に、この患者に骨移植を行った。この患者では自家骨移植(自分の腸骨)を用いた(図83)。高齢で骨癒合能力に劣ると考えられるために、より骨癒合に有利な自家骨を使用した。骨移植の様子は、図83〜図84に示す。チタンプレートで固定後にレントゲンを撮影した様子を図85に示す。
【0203】
次に、術後4ヶ月のレントゲンを図86に示す。示される写真から明らかなように、矯正の喪失なく骨癒合していた。しびれ、疼痛は改善し、手関節可動域は掌屈65°、背屈64°、回内80°、回外90°と正常化していた。図87は正常の手関節正面像を示す。
【0204】
このように本発明の方法は、高齢者の変形骨矯正にも効果があることが実証された。従って、従来はあきらめていた比較的中高年の世代にも矯正サービスを提供することができることが判明したことになる。
【0205】
(実施例6:バイク事故で橈骨遠位端骨折受傷後、前医で保存治療を受けて変形治癒した症例−Opening
Wedge Osteotomy
延長を伴う場合)
次に、延長を伴う場合でも本発明が有効であることを実証する。症例として、22歳男性でバイク事故で橈骨遠位端骨折受傷後、前医で保存治療を受けて変形治癒した患者を採用した(図88)。この患者は、手関節部での変形し(図89)、右前腕に回旋障害がある(図90)。回外は正常だが、回内は50°に制限されている(図90)。また、手関節部の運動時痛を訴えた。
【0206】
(シミュレーション)
次に、この患者の処置シミュレーションを行った(図91)。橈骨の3Dモデルを健側の鏡像とマッチングする。遠位部で短縮を伴いながら、関節面が傾いているのがわかる。そうすることにより変形の軸を求める(図92)。この軸は骨から距離があるので、延長しながらの矯正になる。このように変形軸が骨より離れているときは延長骨切になる(あるいは短縮骨切になるときもある)(図93)。図94に矯正前後の様子を示す。図94斜線部(左図では重複の左側、右図では重複の右側)が矯正前、縦線部(左図では重複の右側、右図では重複の左側)が矯正後である。
【0207】
この情報を下に、骨切テンプレートの設計を行った(図95)。次に、図96に示すような矯正用のガイドを設計した。斜線部が骨移植の予定形状である。このようなガイドなどは、光造形モデルで作製した(図97)。
【0208】
(手術)
このテンプレートなどを用いて上記患者を処置した。図98に示すように、まず変形治癒部の展開した。その後、テンプレートをフィットさせてキルシュナーワイヤーで固定した(図99)。次に、図100に示すように、ボーンソーで骨切して、キルシュナーワイヤーが平行になるように骨切部を開いて矯正用ガイドでワイヤーを固定した。図101に示すように、移植骨(腸骨)を予測される欠損部を参考に整形した。図102左に示すように、移植骨を挿入し、次いで、図102右に示すように、チタンプレートで固定した。術直後の様子を図103に示す。骨切部周囲は術前にできていた仮骨で少し不整に見えるが関節面の位置や傾きは正常になっている。
【0209】
術後の経過は順調であり、術後9ヶ月には、図104に示すように、骨癒合が得られて移植骨周囲もリモデリング(骨改変)が進み良好な矯正が得られた(矢印)。外観上も変形はきれいに矯正された(図105)。可動域障害も完全に正常化していた(図106)。
【0210】
(実施例7:13歳男児、左橈骨骨幹部骨折変形治癒のRotational
Osteotomy症例)
次に、Rotational Osteotomyを用いて処置が可能であるかどうかを検証した。この症例としては、13歳 男児であって左橈骨骨幹部骨折変形治癒した患者を採用した(図107)。橈骨の骨幹部に約30°の変型を認めた。左前腕の回外障害を認めた(図108)。回内は60°、回外はマイナス20°に制限されていた。回内とは手のひらが下を向くように前腕を回旋させることをいい、回外とは手のひらが上を向くように(頂戴の手をする)前腕を回旋させることをいう。正常では回内、回外とも80から90°可能である。図109に示すように、本症例は、レントゲンでは一見単純な角状変形に見えるが、3Dで計測するとスライドのように斜めの軸を中心にした45°の回旋変形であることがわかる。
【0211】
そこで、図110に示すように、one planeでの骨切とその面に沿った回旋矯正を計画した。これによりレントゲン上の角状変形も矯正されることになる。
【0212】
次に、回旋骨切用の第一のガイド設計を行った。まず、骨切面を設定し、そして、変形軸が骨の中心に一番近いところで、変形軸に垂直な面を骨切面として設定した(図111)。次に、図112に示すように、矯正した状態で平行な4本の円柱を設定した。その後、図113左に示すように、矯正した状態をもとの変形した状態にもどした。円柱もねじれた位置になっていた。図113右に示すように、この状態で骨にブロックをあてて、骨と骨切面、円柱モデルを引いた(ブーリアン演算)。その後、図114に示すように、このテンプレート通りに骨切して、ねじれの位置のワイヤー(円柱ワイヤー)を平行にすれば、矯正が完成する。図114右には、ワイヤーを平行に保つためのガイドが示される。
【0213】
図115に、骨切モデルのコンピューター上での概観を示す。孔(開口部)およびスリットが良くわかる。このモデルを、図116に示すような光造形モデルで作製した。
【0214】
(手術)
このテンプレートを用いて、図117に示すように、骨切部を展開した。次に、テンプレートを固定した。ワイヤーは2本ずつ、ねじれた位置に入っている(図118)。次に、図119に示すように、骨切を終え、テンプレートを除去した。その後、矯正用ガイドで矯正してレントゲン確認した(図120)。回旋だけで、レントゲン状の角度変形も良く矯正されていることがわかる。次に、チタンプレートでの固定の様子がわかる(図121)。術直後のレントゲンを撮影すると、図122に示すようによく矯正固定されている。術後6ヶ月のレントゲンを見ると、図123に示されるように、矯正位を保ったまま、良好な骨癒合が得られていることが判明した。臨床上も回内、回外はそれぞれ70°にまで改善した。従って、本発明は、延長が必要な場合でも効果を奏することが実証された。
【0215】
(実施例8:健側と比較できない症例、両側罹患例)
次に、本実施例では、健側と比較できない症例(両側罹患例)でもうまくいくことを立証する。両側に変形があったり、変形の程度が強くて完全な矯正を目指さない場合などはコンピューター上のモデルをマニュアルで骨切、矯正して、適切な矯正をシミュレーションできる。勿論そのシミュレーションに基づいたテンプレートも作製できる。この場合はscrew
axisの原理を使わなくても良いことが実証される。
【0216】
患者として、図124に示すような患者を採用した。この患者では、図124に示すように、両側の内反肘を有しており、このような場合には健側にマッチングして変形軸を求めることはできない(図125にレントゲンを示す)。
【0217】
この患者に関して、図126に示すように、任意に骨切の面や矯正方向、矯正量を決めてプランを立てた。この症例では変型軸を図の二つの平面の交線にさだめて、それに30°の骨切をすることにした。
【0218】
この情報を下に、テンプレートの設計を行った(図127)。また、矯正ガイドの設計も行った(図128および図129)。次に、切断面のデザインなどを検討した(図130)。このモデルをもとに、図131に示すように、光造形によって、テンプレートを作製し、図132にのような矯正用ガイドを作製した。
【0219】
(手術)
次に、このテンプレートなどを用いて外科手術を行った。まず、骨切部の展開を行った(図133)。図134には、テンプレートのフィッティングを行っている様子が示されている。次に、図135に示すように、骨切を行った。その後、図136に示すように、楔状の骨を取り出した。図137には、整復の様子を示す。
【0220】
術後の経過は、図138に示すように、予定通りの矯正が可能であった。矯正前と矯正後の位置情報さえあればscrew
axisを用いなくてもテンプレートを用いた骨切が可能であることが実証された。図139に示すように、この患者は手術での矯正は完璧であった。なお、図139右に示すように、内固定力の不足から若干の転位(ずれ)が生じ、骨癒合完成時に軽度の変型を残したがその変形は、機能的にもほとんど問題ない程度であった。
【0221】
(実施例9:創外固定器を利用する例)
コンピューターシミュレーションを応用したIlizalov創外固定器を用いた前腕変形緩徐矯正法を本発明に応用した。この実施例では、7歳男児であって橈骨遠位端骨折(小児の代表的な前腕骨折の一つ)である患者を対象とした(図140)。示されるように、転位は少ない。その後図141に示すように、転位の進行し、ギプス内で変型が進行した。図141右の側面像でよくわかる。
【0222】
外傷後1ヶ月で手術を行った(図142)。しかし、術後8ヶ月でレントゲン上変形が出現した(図143)。骨端線(成長軟骨)障害による橈骨の成長障害であった。術後5年には、図144に示すように、極端な橈骨の短縮、関節面の傾きが異常になっていた。図144左に、手関節正面像を、図144右に側面像を示す。正面では橈骨の短縮が起こり関節面が正常と逆に傾いている。側面では関節面が背側を向いている。図144中下は健側の正面像である。外見上の変形は、図145に示す。
【0223】
この患者は、図146に示すように、手関節掌屈障害(図146右)を有していた。
【0224】
(シミュレーション)
次に、この患者の情報から、手術法をシミュレーションした(図147)。示されるように、図147のような軸に橈骨の斜線の部分を40°回転させればほぼ正常な位置に橈骨関節面を移動できることがわかった。
【0225】
実際には斜線の部分を正常な位置に持っていって、その際の位置情報を変換することでscrew
axisが求まる(図148)。しかし、これだけの骨延長は一期的な手術では不可能である。そこで、Ilizalov(イリザロフ)創外固定器を用いた緩徐矯正法を用いることにした(図149)。
【0226】
CTデータから患児の前腕骨実物大の光造形モデルを作製して模擬手術を行った(図150)。橈骨はワイヤーを通して2つのリングに固定される。リングは3本の支柱で固定されるが、その内の2本にはヒンジを介在させる。2つのヒンジを通る線が先に示した変形軸に一致するようにした。2つのリングの間で橈骨を骨切する。
【0227】
図151に示すように、もう一本の支柱はナットで延長できるようにして、最初は二つのリングを40°傾け、ナットを回していけば変形軸周りに緩徐に矯正と延長が行えるようにした。図151は、矯正終了後の様子を示す。実際には骨切部が1日1mmずつ位延長すると仮骨が形成されて延長部は骨で埋まっていく。
【0228】
(手術)
上記方法を用いて、図152に示すように実際の手術を行った。図153には、手術終了直後の写真を示す。次に、手術終了時のレントゲンを撮影した(図154)。比較的良好である。実施1週間後に、延長を開始した(図155)。延長部にうっすらと骨が形成されていることがわかる。
【0229】
次に、延長終了後、仮骨の骨量が十分になるのを待った(図156)。延長終了は、術後2.5ヶ月であった(図157)。図158に示すように、術後3.5ヶ月で創外固定除去した。矯正は良好であった。
【0230】
次に、術後4ヶ月で術前のレントゲンとの比較した(図159)。外観についても術前後を比較した(図160)。図161に示すように、この患者は、手関節の掌屈は改善(右上)し、他の可動域の悪化もほとんどなかった(図161)。
【0231】
このように、本発明の方法は、テンプレートなしでも行えることが明らかになった。ここで、イリザロフ法と、本発明の方法との相違は、本発明では、目的骨モデルと骨モデルとの三次元モデルの差分を利用していることがある。また、イリザロフによる変形矯正も二次元画像をもとに、健側との差から矯正しているものであるから、本発明の方法の利点は、三次元情報に基づき正確であること、および三次元の視覚化ができること、三次元の立体モデル(例えば、光造形モデル)で模擬手術をして、本当に手術を行うことができることなどが利点として挙げられる。本発明のような三次元データを直接利用する手術法でも、良好な結果が得られたということは、本発明によって初めて実証された。
【0232】
(実施例10:舟状骨偽関節の症例)
本発明者らは、三次元画像を使用して変形した舟状骨偽関節の手術をシミュレーションするための技術を開発し、臨床例8例に応用した。両側手関節のCTデータから舟状骨の表面モデルをコンピューター上で再構築し、偽関節モデルの遠位部と近位部を反対側の舟状骨モデルの鏡像とマッチングさせて予測骨欠損、スクリュー刺入の適切な部位および方向をシミュレーションした。次いで、CADデータに基づいてその骨の原寸大の光造形モデルを作製した。実際の手術では、整復、骨移植およびスクリュー挿入を、このモデルをガイドとして使用した。全症例で、良好な骨癒合と有意な臨床症状の改善が得られ、術後のSL角およびRL角は正常化した。三次元コンピューターシミュレーションが、舟状骨偽関節の正確な整復・固定および正常な手骨配列の維持に有用であることがわかった。
(序説)
舟状骨の偽関節において、遠位部は通常掌側に回転し、近位部は背側に回転する。その結果、舟状骨の掌屈変形が起こり、DISIパターンと呼ばれる手根不安定症が生じる。この変形を治療しないで放置すると、まず橈骨舟状骨関節から変形性関節症が始まり、最終的には手根中央関節へと進展する。
【0233】
このように変形性関節症が進行する主な原因は、舟状骨偽関節が変形した結果生じる関節面の不適合と手根不安定症であると考えられている。異常な手根配列を矯正し、舟状骨を正常な解剖学的形状に整復し、手関節症に進展するのを予防する目的で1970年代以来、掌側凸の楔状骨移植が推奨されてきた。1984年に、Fernandezは正面および側面の単純X線写真を使用した術前計画を報告した(Fernandez
DL,J Hand
Surg 1984;9A:733−7.)。彼の方法は二次元情報に基づいた簡便な方法ではあるが、実際の舟状骨偽関節は複雑な三次元的変形をしている。従来記載されているように、通常の変形パターンは、種々の程度の短縮、屈曲、尺屈および近位部に対する遠位部の回内である。舟状骨は変形癒合することもあるが、変形治癒すると手関節の可動範囲は減少し、橈骨手根関節機能が損なわれる。
【0234】
一方、最近10年間のCT装置およびコンピューター技術の進歩はめざましく、三次元モデルを使用した整形外科学手術シミュレーションが可能になってきた。本発明者らは、舟状骨の偽関節手術をシミュレーションするために、CTデータを用いて手根骨の三次元モデルを作製してきたが、本実施例では三次元画像を用いて変形した舟状骨偽関節の整復をシミュレーションする試みと8症例への臨床応用を示す。
【0235】
(症例および方法)
平均年齢24.3(18〜42歳)歳の8名の患者に対して三次元コンピューターシミュレーションを行ってから手術を行い、6ヶ月間以上追跡調査した(表1)。
【0236】
【表1】
【0237】
7名が男性、1名が女性であり、2例は右側、6例は左側の受傷であった。受傷から手術までの期間は、平均28(3〜110)ヶ月であった。4例は、骨折の初期治療を受けておらず、2例は初診時の見逃しで、1例は患者個人の意志で初期治療を中断した。
【0238】
全症例で偽関節の部位は中央1/3であり、術前の単純X線写真では変形性関節症の所見を認めなかった。全症例とも術前は患肢の使用時に中程度の痛みを訴えた。
【0239】
(CTデータを使用した舟状骨偽関節手術のための三次元シミュレーション)
患者をうつ伏せにし、両手を頭上に挙げて0.625〜1.0mmスライスで両手関節のCTスキャン画像(General
Electrics,High Speed AdvanceまたはLightSpeed
Ultra 16)を撮影し、DICOM(Digital
Imaging and
Communications in Medicine)データとして保存した。手関節を中間位に保持するために、放射線透過性材料でできた副木を撮影中装着した。舟状骨の輪郭は、画像解析ソフトウェア(Virtual
Place M(登録商標),Medical
Imaging Laboratory,Tokyo)を使用して半自動的にセグメント化し、Marching
Cubesアルゴリズムをもちいて骨皮質表面を三次元構築し、骨表面モデルを作成した。舟状骨の3次元モデルを、独自に開発したコンピュータープログラムを使用して可視化した(図162A)。
【0240】
グラフィックワークステーションを使用して、偽関節モデルの遠位部および近位部を、表面位置合わせの最も進んだ方法の1つであるICPアルゴリズムを使用して反対側の舟状骨モデルの鏡像モデルにマッチングさせた。この方法では、三次元表面モデルおよび三次元の点のセットを、手動で大まかにマッチングさせた初期位置から計算を始め、各三次元点から表面までの距離の合計が最小になるパラメータを導き出すことによって位置合わせする。偽関節モデルの近位部および遠位部を、それぞれ、健側の舟状骨の鏡像の近位部および遠位部に位置合わせした。そして、近位部に対する遠位部の回転を、Screw
Displacement−Axis法を使用して計算した。このようにして、本発明者らは、変形した舟状骨偽関節の整復をシミュレーションした(図162B)。
【0241】
予測される骨欠損を、市販のコンピューターソフトウェア(Magics
RP(登録商標),Materialise,Belgium)のブーリアン演算によって、反対側の正常舟状骨の鏡像から整復した偽関節モデルを差し引くことにより計算した。スクリュー挿入の適切な部位および方向も同様に、コンピューターモニター上でスクリュー挿入を試行した後に、モデルを半透明にするかまたは整復した偽関節モデルの横断面を可視化することにより、シミュレーションした(図162C、162D)。
【0242】
実際の手術においてコンピューターシミュレーションを容易に再現するために、骨(変形したままの舟状骨偽関節モデル、正常舟状骨の鏡像モデル、スクリュー挿入をシミュレーションした整復後の偽関節モデルおよび予測される骨移植片モデル)の原寸大の光造形モデル(ハードモデル)を、CADデータに基づいて作製し、術中にガイドとして使用した(図163A、163B)。このハードモデルを、0.01mmの正確度でエポキシ樹脂から作製した(CMET
co.,ltd.,Yokohama,Japan)。
【0243】
(手術手順)
掌側アプローチにより手術を行った;橈骨手根関節の関節包を、長軸方向に切開して舟状骨の掌表面を露出し、偽関節部位をハードモデルと比較した(図164A〜164C)。手関節を伸展することによって、偽関節となっている舟状骨の掌側骨皮質の輪郭を、整復を模した光造形モデルの形にマッチングさせるようにしながら整復を行った。偽関節部位の硬化骨を出血が確認できるまで切除した。次に腸骨から移植骨を採取した。実際の骨移植片は、術中に切除した硬化骨の分だけシミュレーションで計算した骨欠損より大きいということを考慮して、骨欠損部の形状を再現したハードモデルよりやや大きめに移植骨片を成形した(図164D,164E)。この移植片をトリミングして、骨欠損部に挿入した後、ハードモデルのスクリュー刺入方向、刺入位置を参考にして直径1.2mmの試しのキルシュナーワイヤーをシミュレーションした適切な部位および方向へ刺入した(図164F)。エックス線透視を用いてキルシュナーワイヤーの位置を確認した後、スクリュー挿入の間に舟状骨の整復がゆるまないように、直径1.0〜1.2mmの第2のキルシュナーワイヤーを、第1のワイヤーに沿って挿入した。引き続き、最初のキルシュナーワイヤーを抜去して、double
threaded screw(ねじ山を2つ有するスクリュー)をこの抜去した孔に挿入して内固定を行った(図164G)。
【0244】
手関節を術後4週間固定し、X線写真上骨が癒合したことが確認されるまで、手関節副木を装着した(図164H、164I)。
【0245】
(X線写真評価)
手根配列を評価するために、橈骨舟状骨角(RLA)、舟状骨月状骨角(SLA)および有頭骨月状骨角(CLA)を、術前、術後、最終調査時に測定した。骨折線が消失し、骨梁の連続性を確認できれば“骨癒合”と見なした。また、術前および最終追跡時に関節症性変化を評価した。関節症性変化は、関節裂隙がわずかに狭くなるか、そして/または橈側の茎状突起の尖鋭化が存在した場合に“軽度”と分類し、手根中央関節の関節裂隙の狭小化があれば“中程度”と分類した。術後のX線写真で舟状骨の長軸方向に沿ってスクリューが挿入されていれば“スクリュー刺入が適切”と見なした。
【0246】
(臨床評価)
Cooneyらによる評価系を採用した(Cooney
WP.,Linscheid RL.,Dobyns JH.,Wood MB.,J Hand
Surg 1988;13A:635−650)。各症例の疼痛、機能、手関節可動範囲、および握力(範囲は、0〜25点)に対して正常値のパーセントで点数をつけ、4つのカテゴリーの点数を加算した。満足のいく点数は、合計65点以上である。X線写真の結果は、点数に含めなかった。
【0247】
(結果)
(術前三次元解析)
舟状骨遠位部は近位部に対して掌側に39.7°(18.7°〜73.9°)回転していた。全ての症例において、舟状骨遠位部が近位部に対して回転するScrew
Displacement Axisは、有頭骨の頭部を貫通して尺背側から橈掌側方向に走っていた(図165)。予測される骨欠損は、掌側に基部、背側が先端をもつプリズム状の形状で、前側の厚みが平均5.5mm(3.8〜7.3mm)、深さが平均9.7mm(7.5〜12.1mm)、および幅が平均10.7mm(9.1〜12.8mm)であった(表2)。
【0248】
【表2】
【0249】
スクリュー挿入に適切な部位は舟状骨結節の中心に対してわずかに尺側かつ背側であった。術中に、光造形モデルは非常に役立ち、本発明者らにとって良好な手術ガイドとなった。このハードモデルを使用して、本発明者らは術前計画に従って偽関節を整復し、移植片を置き、スクリューを挿入することが可能であった。
【0250】
(X線写真結果)
全ての症例において、平均術後9.6週(8〜12週)までに、良好な骨癒合が得られた。SL角、RL角およびCL角の平均は、術前でそれぞれ、69.4°、−6.0°、−3.8°であったが、術後ではそれぞれ49.1°、2.8°、3.9°であった(表1)。反対側の正常手関節の平均SL角、RL角およびCL角は、それぞれ、49.9°、5.0°および8.6°であった(表1)。X線像のパラメーターは、最終追跡時にも変化なかった。術後のX線像に、進行性の変形性関節症は認められなかった。全ての症例において、術前に計画したとおりにスクリューが適切に挿入されていた。
【0251】
(臨床結果)
術後の手関節の点数は、65〜100点、平均は89点であった。屈伸可動域は、平均138°(範囲は、115〜160°)であり、橈尺可動域は、平均64°(範囲は、50〜75°)であった。握力は、健側の80〜100%であり、平均は90%であった(表1)。1症例(症例4)は、最終追跡時に良好な骨癒合が見られたにも拘わらず、手関節伸展時の疼痛および可動域制限を訴えた。この症例では、三次元モデルで舟状骨背側の骨棘を認めたが、単純X線写真においては明らかではなかった(図166A〜166B、図167)。この骨棘が本例の臨床成績が65点とやや劣るである原因であると考えられた。他の症例では、最終追跡調査において手関節の疼痛や機能障害を認めなかった。
【0252】
(考察)
変形した舟状骨偽関節の治療は、現在もなお難しい。しっかりとした骨癒合と正常な手根配列を維持することが、良好な術後機能を達成するために重要であり、従来より解剖学的整復の重要性が強調されてきた。舟状骨骨折が変形治癒した患者では解剖学的に癒合した患者より、変形性関節症および手関節機能障害の発生率が高い。関節にかかる応力変化と関節面の不適合性により、橈骨手根関節が変形性関節症に進行しやすくなると考えられる。Tsuyuguchiらは舟状骨偽関節の手術を受けた患者群を検討し、術後のSL角が増大してDISI変形を示した患者より、術後手根配列が正常であった患者の機能成績が有意に良好であったと報告した(Tsuyuguchi
Y,Murase T,Hidaka N,Ohno H,Kawai H,J
Hand Surg
1995;20B:194−200.)。Amadioらは、舟状骨骨折治療の成功の条件として骨癒合が得られたというだけで不十分で、舟状骨の解剖学的な整復が重要であると報告した(Amadio
PC.,Berquist TH.,Smith DK.,Ilstrup DM.,Cooney WP.,Linscheid
RL.,J Hand
Surg 1989;14A:679−687)。また、屍体標本を用いたシミュレーション研究では、舟状骨の掌屈変形に比例して手関節伸展は減少し、舟状骨の30°の掌屈変形で手関節伸展は0°になった(Burgress
RC,The effect
of simulated
scaphoid malunion on wrist motion.J
Hand Surg
1987;12A,774−6)。
【0253】
これらの研究知見を総合的に考えると、舟状骨偽関節を治療する際には出来る限り解剖学的に正確な整復を行うことが望ましい。
【0254】
1970年に、Fiskは舟状骨の掌屈変形を矯正するために、外側アプローチで掌側凸の楔状骨移植片を橈骨茎状突起から採取することを提唱した(Fisk
GR.,Ann R.,Surg
Engl 1970;46:63−76)。Fernandezらは、Fiskの手術方法を改良し、掌側アプローチで楔状または台形状の腸骨移植片を挿入して内固定することを推奨した(Fernandez
DL.,J Hand
Surg 1984;9A:733−737)。彼らは移植片のサイズを正面および側面のX線写真を用いて計画した。Nakamuraら(Nakamura
R.,Hori M.,Horii
E.,Miura T.,J Hand Surg 1987;12A:1000−1005)およびTomanioら(Tomanio
MM,King J,Pizillo
M., J
Hand Surg
2000;25A:322−329)は、キルシュナーワイヤーを月状骨に刺入して、DISI変形を矯正した際に発生する舟状骨の欠損部に前側楔状骨移植片を充填した。
【0255】
術前の単純X線写真を使用するFernandezの方法は簡便ではあるが、三次元的に複雑な変形をしている舟状骨偽関節の手術計画を2次元画像を頼りに行うことは無理がある。舟状骨偽関節の手術を計画するには、三次元情報を用いて変形を評価することが合理的である。
【0256】
1991年に、Nakamuraらは、舟状骨骨折の変形の評価と変形パターンを2種類のカテゴリー(掌側型および背側型)に分類するのに三次元CTが有用であると報告した(Nakamura
R.,Imaeda T.,Miura T.,Scaphoid malunion.,J Bone
Joint Surg[Bg]1991;73B:134−137)。Moritomoらは、骨折部位と、変形パターン、DISI変形の発生、橈骨手根関節における関節接触領域の変化との関係を三次元モデルを用いてさらに調査し、舟状骨偽関節の変形メカニズムを明らかにした。これらの研究者は、三次元画像または三次元モデルを使用して、骨折パターンおよび骨片の転位を定性的に可視化した。
【0257】
Belsoleらは、正常舟状骨と骨折した舟状骨のコンピューター画像を重ね合わせることによって、変形角度と骨欠損の容積を計算したところ、遠位部に対して近位部が伸展、橈位、回外していたことを報告した(Belsole
RJ.,Hilbelink DR.,Llewellyn JA.,Dale
M.,Greene TL.,Rayhack JM.,J Hand Surg
1991;16A:899−906)。骨欠損量は、舟状骨体積の6%〜15%で、骨欠損部の形状は掌側に基部を持つプリズム状であった。本発明者らが本実施例において使用した三次元技術は、基本的には、Belsoleらが用いた基本技術を利用するものであるが、本発明者らは治療目的で計算結果を使用したのに対し、Belsoleらは、舟状骨偽関節の病理的機構を理解するためにその計算結果を用いた。しかも、骨欠損部を求める手法については全く記載していない。また、スクリュー挿入などのシミュレーションは行っていないなど、本発明を示唆するものではない。従って、本発明は、Belsoleらの記載からは自明ではないといえる。
【0258】
本発明者らの方法では、変形は、三次元的に、かつ正確に測定することができた。舟状骨偽関節の近位部に対する遠位部の変位量を、screw
axisの周りの回転として表し、三次元画像で可視化した。さらに、本発明者らは、推定骨欠損、スクリュー挿入の最適部位および方向も術前に前もって知ることができた。推定骨欠損は、形が三角形であり、その基部は掌側に面しており、幅は、4〜7mmであった。術前シミュレーションの結果を実際の手術に反映させるために、光造形により作製した原寸大のプラスチックモデルをガイドとして使用した。このガイドは、術中オリエンテーションの獲得、変形した偽関節の整復、骨移植片の成形、および適切なスクリュー挿入位置、方向の決定に有用であることがわかった。7例の術後X線像の手根配列は良好であった。臨床結果は、1例(この例は、三次元画像上でわずかな変形性関節症が認められた)を除いて、優または良であった。
【0259】
三次元画像を使用する別の利点は、単純X線写真では検出できない小さな骨棘のような微妙な形態学的変化を見ることができることである。本研究で、1例の三次元画像で単純X線写真ではわからない背側の骨棘が認められた。この症例はレントゲン上のDISI変形が手術で十分に矯正されたにも関わらず、術後持続的な手関節痛を訴えた。症状が遺残したのは、その症例が術前、すでに橈骨手根関節に変形性関節症を発症していたためと考えられる。
【0260】
三次元コンピューターシミュレーションは、良好な臨床結果を得るために、舟状骨偽関節の正確な矯正の達成および正常な手根骨の配置の維持に有用であることが分かった。
(実施例11:Closed wedge osteotmyとopen
wedge osteotomyの組み合わせの実施例)
本実施例では、15才女性を症例として用いてClosed
wedgeとOpen wedgeとの組み合わせでも本発明がうまくいくことを実証した。この患者は、7歳時に左前腕骨折を受傷した。前腕の回外制限を訴えて受診した。図168は、左前腕レントゲンを示し、尺骨が正常に比べて内側に湾曲している(矢印)。図169は、正常側レントゲンを示す。図170に示すように、この患者は、左前腕回外は不可であった。図171に示すように、患者の回内はわずかに制限されていた。
(3次元コンピューターシミュレーション)
上記実施例に記載されるように三次元コンピュータシミュレーションを行った。その結果、尺骨の変形軸(screw
axis)は尺骨にほぼ垂直で骨の中心を通っていた。尺骨の遠位部分はこの軸周りに13°橈屈変形していた。橈骨の変形軸は橈骨の長軸に平行に近い。橈骨の遠位部分は、この軸周りに46°回内変形していた。図172は、患側の3次元モデルと橈骨を示す。尺骨の変形軸が黒棒で示される。図173は、健側の鏡像モデルを示す。
(尺骨の矯正骨切の計画)
次に、上記実施例に記載されるように、矯正骨切の計画を行った。変形軸が骨の中を通り、骨軸に垂直に近いときは図のようにclosde
wedgeとopen wedgeを組み合わせたように計画した。その計画図を図174に示す。図174Aでは、図の左側にclosed wedge osteotomyを計画した。点は変形軸を真横から見ているところである。図174Bは、変形軸を通る面で骨切をし、13°の角度を持つ黄色の楔状の骨を切除した。図174Cは、変形矯正を示す。図174DおよびEは、矯正後に図の右側に出来る骨欠損に楔状の骨移植をした。
【0261】
本実施例の症例では実施しなかったが、このような症例では図のように変形軸を中心に持つ円弧でドーム状に骨切して、回旋させても結果として同様の変形矯正が可能である。その模式図は、図175に示す。図175Aに示すように、変形軸を中心にもつ適当な半径の円弧で骨切をし、図175Bに示すように、遠位の骨片を13°回旋させることにより矯正が完成することが理解される。
【0262】
(骨切テンプレートおよび矯正ガイドの設計)
橈骨は実施例7の橈骨と同様に回旋骨切の計画としてテンプレートを設計した。その模式図を図176に示す。図176Aおよび図176Bは、骨切現プレートをそれぞれ背側からと掌側から見たところを示す。図176Cおよび図176Dは、それぞれ、矯正用ガイドを、背側からと掌側から見たところを示す。
【0263】
図177は、尺骨矯正骨切の術中写真を示す。図177Aは、尺骨変形部の展開を示す。図177Bは、骨切テンプレートを当ててキルシュナーワイヤーで固定する様子を示す。ワイヤーに13°の角度がついていることが注意されるべきである。図177Cは、骨切の後、キルシュナーワイヤーに矯正ガイドを通して矯正した。キルシュナーワイヤーは平行になっている。図177Dに示すように、この位置でプレート固定した。奥の方から切除した楔状の骨を手前に出来た骨欠損に補填した。
【0264】
(結果)
図178に示すように、Closed wedgeとOpen wedgeとの組み合わせでも、術後レントゲンおよびシミュレーション通りに矯正が可能であった。
【0265】
(実施例12:コンピュータおよびコンピュータプログラム)
図179は、骨の処置を決定する処理を実行するコンピュータ1000の構成の一例を示す。
【0266】
コンピュータ1000は、CPU1010と、メモリ1020と、入力インタフェース1030と、出力インタフェース1040と、ユーザインタフェース1050と、バス1060とを含む。
【0267】
CPU1010は、プログラムを実行する。
【0268】
メモリ1020には、プログラムやそのプログラムの実行に必要なデータが格納されている。
【0269】
入力インタフェース1030は、CT装置やMRI装置などの画像撮像装置(外部装置)からデータを受け取るためのインタフェースとして機能する。
【0270】
出力インタフェース1040は、樹脂ブロック成型装置などの補助部材成型装置(外部装置)にデータを出力するためのインタフェースとして機能する。
【0271】
ユーザインタフェース1050は、ユーザとのインタラクションを制御するためのインタフェースとして機能する。ユーザインタフェース1050には、キーボードやマウスなどの入力機器および表示装置や印刷装置などの出力機器が接続され得る。
【0272】
バス1060は、CPU1010、メモリ1020、入力インタフェース1030、出力インタフェース1040およびユーザインタフェース1050を相互に接続するために使用される。
【0273】
図180は、骨の処置を決定する処理の手順の一例を示す。この処理は、プログラムの形式で提供される。そのプログラムは、CPU1010によって実行される。
【0274】
工程2010:処置の対象となる骨を表す骨モデルが取得される。
【0275】
骨モデルは、骨の立体構造を表す3次元データによって表現され得る。処置の対象となる骨は典型的には罹患骨であるがこれに限定されない。骨モデルの取得は、例えば、CT装置やMRI装置などの画像撮像装置から出力されるデータを入力インタフェース1030を介して受け取り、その受け取ったデータから骨を表すデータを抽出し、その抽出されたデータに基づいて骨の表面モデルを生成することによって達成される。しかし、骨モデルの取得の態様はこれに限定されない。骨モデルは、任意の態様で取得され得る。例えば、任意のタイプの記録媒体に記録された骨の表面モデルを読み出すことによって骨モデルを取得するようにしてもよいし、メモリ1020に予め格納された骨の表面モデルを読み出すことによって骨モデルを取得するようにしてもよい。
【0276】
工程2020:骨の処置の目的となる目的骨を表す目的骨モデルが取得される。
【0277】
目的骨モデルは、目的骨の立体構造を表す3次元データによって表現され得る。目的骨は典型的には正常骨であるがこれに限定されない。目的骨モデルの取得は、例えば、健側の骨モデルの鏡像を用いて骨の表面モデルを生成することによって達成される。しかし、目的骨モデルの取得の態様はこれに限定されない。目的骨モデルは、任意の態様で取得され得る。例えば、任意のタイプの記録媒体に記録された目的骨の表面モデルを読み出すことによって目的骨モデルを取得するようにしてもよいし、メモリ1020に予め格納された目的骨の表面モデルを読み出すことによって目的骨モデルを取得するようにしてもよい。また、ユーザ(例えば、術者)が任意に作製したモデルを目的骨モデルとしてもよい。
【0278】
なお、工程2010、2020において、骨の表面モデルを生成するソフトウェアとしては、例えば、市販のVirtual
Place M(医用画像研究所、東京)、Mimics(Materalise,ベルギー)、ZviewTM(Zview
Inc.,Huntington Beach,CA.,USA)、Realize(Mayo Clinic)を使用することができるが、これらに限定されない。骨の表面モデルは、VTK、STLなどの形式でメモリ1020に格納され得る。
【0279】
工程2030:骨モデルと目的骨モデルとに基づいて、骨に対して施されるべき処置が決定される。
【0280】
骨に対して施されるべき処置は、例えば、その骨をある切断面に沿って切断することと、その骨を切断することによって得られる近位側骨片および遠位置側骨片の一方の骨片をある方向にある量だけ移動させることとを包含する。この場合、骨に対して施されるべき処置の決定は、骨モデルの切断面を決定することと、その骨モデルをその切断面に沿って切断することによって得られる近位側骨片モデルおよび遠位置側骨片モデルのうちの一方の骨片モデルの移動の方向および量を決定こととによって達成される。
【0281】
骨に対して施されるべき処置は、補助部材を必要とする処置であってもよいし、補助部材を必要としない処置であってもよい。骨に対して施されるべき処置が補助部材を必要とする処置である場合には、骨に対して施されるべき処置を決定する工程はその処置に必要な補助部材を決定する工程を包含する。その処置に必要な補助部材は、例えば、テンプレート補助部材、位置確認補助部材および移植片のうちの少なくとも1つであり得る。その処置に必要な補助部材として創外固定器を使用してもよい。
【0282】
このように、CPU1010が骨の処置を決定する処理を実現するプログラムを実行することにより、コンピュータ1000は、骨の処置を決定する方法を提供し得る。
【0283】
また、CPU1010が骨の処置を決定する処理を実現するプログラムを実行することにより、コンピュータ1000は、骨の処置を決定する装置として機能し得る。工程2010〜2030の機能をソフトウェアによって実現する例を示したが、本発明はこれに限定されない。工程2010〜2030の機能をハードウェア(例えば、回路、ボード、半導体チップなど)によって実現してもよいし、ソフトウェアとハードウェアとの組み合わせによって実現してもよい。従って、A)処置の対象となる骨を表す骨モデルを取得する手段;B)骨の処置の目的となる目的骨モデルを取得する手段;C)骨モデルと目的骨モデルとに基づいて、骨に対して施されるべき処置を決定する手段を備えている限り、そのような装置は本発明の範囲内というべきである。
【0284】
骨の処置を決定する処理を実現するプログラムは、任意の形態でユーザに提供され得る。例えば、そのプログラムを記録した記録媒体を配布する形態でそのプログラムをユーザに提供してもよいし、ネットワークを介してサーバから端末装置にそのプログラムをダウンロードする形態でそのプログラムをユーザに提供してもよい。そのプログラムの提供は、有償であるか無償であるかを問わない。そのプログラムを記録する記録媒体としては、フレキシブルディスク、MOディスク、DVDなどの任意の記録媒体が使用され得る。ネットワークとしては、インターネットなどの任意のネットワークが使用され得る。
【0285】
図181は、図180に示される工程2030を実現するための処理の手順の一例を示す。この処理は、プログラムの形式で提供される。そのプログラムは、CPU1010によって実行される。
【0286】
工程2040:骨モデルから近位側骨片モデルと遠位側骨片モデルとが定義される。
【0287】
例えば、骨モデルの近位側を目的骨モデルの近位側に重ね合わせ、骨モデルの近位側と目的骨モデルの近位側とが所定の距離(例えば、1mm)以上離れている部分を無視する。これにより、骨モデルの近位側と目的骨モデルの近位側とが所定の距離(例えば、1mm)以内の誤差でマッチングしている骨モデルの部分が骨モデルの「近位側骨片モデル」として定義される。
【0288】
また、骨モデルの遠位側を目的骨モデルの遠位側に重ね合わせ、骨モデルの遠位側と目的骨モデルの遠位側とが所定の距離(例えば、1mm)以上離れている部分を無視する。これにより、骨モデルの遠位側と目的骨モデルの遠位側とが所定の距離(例えば、1mm)以内の誤差でマッチングしている骨モデルの部分が骨モデルの「遠位側骨片モデル」として定義される。
【0289】
骨モデルの近位側と目的骨モデルの近位側との重ね合わせ(または、骨モデルの遠位側と目的骨モデルの遠位側との重ね合わせ)は、例えば、表面モデルの位置情報を操作し、管理するプログラムを用いて行うことができる。このようなプログラムは、例えば、VTK(The
Visualization ToolKit)というオープンソース(http://public.kitware.com/VTK/)をベースに容易に作成することができる。
【0290】
2つのモデルを正確にマッチングさせるには、例えば、ICP(iterative
closest point)アルゴリズムと呼ばれる表面マッチング手法を採用したプログラムが用いられる。骨モデルと目的骨モデルとに対してこのプログラムを実行する際には、両者が所定の距離(例えば、1mm)以上離れているところを無視し、両者が所定の距離より近づいているところだけを有効にするようにプログラムのパラメータを設定することが好ましい。骨が変形している部分では骨モデルと目的骨モデルとはぴったりとはマッチングしないからである。
【0291】
工程2050:近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量が決定される。
【0292】
近位側骨片モデルに対する遠位側骨片モデルの相対的な移動は、例えば、Screw
Displacement−Axis法に従って表記される。
【0293】
Screw Displacement−Axis法の原理とは、物体をある軸を中心にφ回転させて、その軸に平行にt移動させれば、どのような位置にでも移動可能であり、そのような軸が1つの移動に対して空間上でただ1つ存在するというものである(図8参照)。従って、1つの軸とその軸の周りの回転量φとその軸に沿った移動量tとを決定することによって、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動を表記することができる。実際に臨床に用いる場合には、その軸に沿った移動量tは1mm以内と小さいため無視できる場合が多い。このような場合には、その軸の周りの回転量φのみを考慮すればよい。
【0294】
あるいは、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動をアファイン変換法に従って表記するようにしてもよい。
【0295】
工程2060:骨モデルの切断面が決定される。
【0296】
骨モデルの切断面の決定は、プログラムを実行することによりコンピュータ1000によってなされてもよいし、ユーザ(例えば、医師)の指示に従ってなされてもよい。このような指示は、例えば、ユーザがマウスを操作することによってユーザインタフェース1050を介してCPU1010に入力される。指示の態様は問わない。例えば、3次元グラフィックスにおいて周知の任意の態様で、ユーザは、骨モデルに対する切断面の位置をコンピュータ1000に指示することができる。
【0297】
あるいは、骨モデルの切断面の1以上の候補を骨モデルおよび目的骨モデルとともに表示装置に表示し、その切断面の候補のうちの1つをユーザが選択することを許可する(または、その切断面の候補をユーザが修正することを許可する)ことにより、ユーザが骨モデルの切断面を指示することをコンピュータ1000が支援するようにしてもよい。そのような切断面の候補の表示は、例えば、ユーザによる指示の履歴をメモリ1020に格納しておくことによって達成され得る。
【0298】
例えば、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動が、Screw
Displacement−Axis法の表記に従って、軸線Lと、軸線Lの周りの回転量φと、軸線Lに沿った移動量tとによって表されていると仮定する。この場合には、軸線Lが骨モデルの長軸にほぼ平行かほぼ垂直かに応じて、骨モデルの切断面を決定することが好ましい。骨モデルの切断面の決定は、プログラムを実行することによりコンピュータ1000によってなされてもよいし、ユーザ(例えば、医師)の指示に従ってなされてもよいし、コンピュータ1000の支援の下にユーザ(例えば、医師)の指示に従ってなされてもよい。
【0299】
例えば、軸線Lが骨モデルの長軸にほぼ平行である場合には、Rotational
Osteotomyを採用することとし、軸線Lに垂直な面を骨モデルの切断面として決定することが好ましい。例えば、軸線Lが骨モデルの長軸にほぼ垂直である場合には、Closed/Operation
Wedge Osteotomyを採用することとし、軸線Lに平行な面を骨モデルの切断面として決定することが好ましい。
【0300】
あるいは、軸線Lが骨モデルの長軸にほぼ平行かほぼ垂直かに応じて、骨モデルの切断面の1以上の候補を骨モデルおよび目的骨モデルとともに表示装置に表示するようにしてもよい。このような骨モデルの切断面の候補を表示することによりユーザが骨モデルの切断面を決定することを容易にすることができる。例えば、軸線Lが骨モデルの長軸にほぼ平行である場合には、Rotational
Osteotomyを採用することとし、軸線Lに垂直な1以上の面を骨モデルの切断面の候補として表示装置に表示するようにしてもよい。例えば、軸線Lが骨モデルの長軸にほぼ垂直である場合には、Closed/Operation
Wedge Osteotomyを採用することとし、軸線Lに平行な1以上の面を骨モデルの切断面の候補として表示装置に表示するようにしてもよい。
【0301】
このように、工程2040において近位側骨片モデルと遠位側骨片モデルとを定義し、工程2050において近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量(距離)を決定し、工程2060において骨モデルの切断面を決定することにより、骨に対して施されるべき処置(骨の切断、骨片の移動など)を決定することが可能となる。
【0302】
工程2070:近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量と骨モデルの切断面とに基づいて、補助部材を表すモデル(補助部材モデル)が生成される。なお、骨に対して施されるべき処置に補助部材が必要とされない場合には、工程2070は省略され得る。
【0303】
補助部材モデルは、補助部材の立体構造を表す3次元データによって表現され得る。補助部材モデルは、STLなどの形式でメモリ1020に格納され得る。ここで、STL形式は、光造形などのラピッドプロトタイピングでは一般的に用いられる形式であり、三角形のポリゴンを張り巡らせた表面モデルとして表現される。補助部材モデルは、出力インタフェース1040を介して補助部材成型装置に出力される。補助部材成型装置は、光造形などの任意の成型方法により素材(例えば、金属、プラスチック、セラミックなど)を成型することによって、補助部材モデルに対応する補助部材を作成する。
【0304】
補助部材モデルは、例えば、テンプレート補助部材を表すモデル(テンプレート補助部材モデル)であり得る。テンプレート補助部材モデルは、骨モデルと嵌合するための嵌合面と、骨モデルの切断面をガイドするための切断面ガイドと、複数のロッドをそれぞれ表す複数のモデル(複数のロッドモデル)を骨モデルに挿入することをそれぞれガイドするための複数の挿入ガイドとを含む。このようなテンプレート補助部材モデルの一例は、罹患骨切断補助部材三次元モデルM1として図11に示されている。あるいは、テンプレート補助部材モデルは、嵌合面と切断面ガイドと複数の挿入ガイドのうちの少なくとも1つを含んでいてもよい。
【0305】
切断面ガイドは、切断面に対応する位置に形成されたスリットであることが好ましい。複数の挿入ガイドは、複数のロッドモデルを挿入可能に形成された複数のガイド孔であることが好ましく、近位側骨片モデルと遠位側骨片モデルとが正常な位置関係にある場合に複数のロッドモデルが実質的に平行になるように形成された複数のガイド孔であることが好ましい。
【0306】
例えば、切断面を含むようにテンプレート補助部材の初期モデルを生成しておき、この初期モデルと骨モデルとに対してブーリアン演算(初期モデルと骨モデルとの重なり部分を初期モデルから取り除く差演算)を行うことによって、嵌合面を有するテンプレート補助部材モデルが生成され得る。
【0307】
例えば、切断面を含むようにテンプレート補助部材の初期モデルを生成しておき、この初期モデルと切断面とに対してブーリアン演算(初期モデルと切断面との重なり部分を初期モデルから取り除く差演算)を行うことによって、切断面に対応する位置に形成されたスリットを有するテンプレート補助部材モデルが生成され得る。
【0308】
例えば、切断面を含むようにテンプレート補助部材の初期モデルを生成しておき、この初期モデルと複数のロッドモデルとに対してブーリアン演算(初期モデルと複数のロッドモデルとの重なり部分を初期モデルから取り除く差演算)を行うことによって、複数のロッドモデルを挿入可能に形成された複数のガイド孔を有するテンプレート補助部材モデルが生成され得る。
【0309】
このように、テンプレート補助部材の初期モデルと所定のモデル(骨モデルまたは切断面または複数のロッドモデル)とに対してブーリアン演算を行うことにより、嵌合面、スリットおよび複数のガイド孔のうちの少なくとも1つを有するテンプレート補助部材モデルを生成することができる。このようなブーリアン演算は、3次元グラフィックスのモデリング技法の1つである。ブーリアン演算を実行するソフトウェアとしては、例えば、市販のMagics
RP(Materialise)を使用することができるがこれに限定されない。テンプレートの初期モデルの生成は、ユーザからの指示に従って手動で行ってもよいし、ユーザからの指示に従って半自動で行ってもよい(例えば、ユーザによって指定された領域を嵌合面として含む一定の厚さの初期モデルを生成するなど)。
【0310】
補助部材モデルは、例えば、位置確認補助部材を表すモデル(位置確認補助部材モデル)であり得る。位置確認補助部材モデルは、骨モデルを目的骨モデルに矯正した後に、近位側骨片モデルと遠位側骨片モデルとが正常な位置関係にあることを確認するために使用される。位置確認補助部材モデルは、例えば、近位側骨片モデルと遠位側骨片モデルとが正常な位置関係にある場合に複数のロッドモデルが実質的に平行になるように形成された複数のガイド孔を有している。このような位置確認補助部材モデルの一例は、三次元ブロック体モデルM3として図12に示されている。
【0311】
例えば、骨モデルおよび目的骨モデルから離れた位置に位置確認補助部材の初期モデルを生成しておき、この初期モデルと複数のロッドモデルとに対してブーリアン演算(初期モデルと複数のロッドモデルとの重なり部分を初期モデルから取り除く差演算)を行うことによって、複数のロッドモデルを挿入可能に形成された複数のガイド孔を有する位置確認補助部材モデルが生成され得る。
【0312】
補助部材モデルは、例えば、移植片を表すモデル(移植片モデル)であり得る。例えば、移植片モデルは、骨モデルと目的骨モデルとの差分をとることによって生成され得る。
【0313】
なお、工程2070において、補助部材モデルを生成する代わりに、補助部材の使用方法を決定するようにしてもよい。例えば、補助部材として創外固定器が使用される場合には、創外固定器の使用方法(例えば、創外固定器の軸の位置、ヒンジの位置)を決定するようにすればよい。
【0314】
図182は、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を決定する処理の手順の一例を示す。この処理は、図181に示される工程2050を実現するための処理の一例である。この処理は、プログラムの形式で提供される。そのプログラムは、CPU1010によって実行される。
【0315】
工程2052:骨モデルの近位側を目的骨モデルの近位側にマッチングさせるために必要な近位側骨片モデルの移動の方向および量を表す近位側移動情報が算出される。
【0316】
近位側移動情報は、例えば、骨モデルの近位側骨片モデルを目的骨モデルの対応する部分にマッチングさせることによって算出され得る。このようなマッチングは、例えば、上述したICP(iterative
closest point)アルゴリズムと呼ばれる表面マッチング手法を採用したプログラムが用いて行うことができる。近位側移動情報は、例えば、アファイン変換法の表記に従ってマトリックス(以下、「第1のマトリックス」という)によって表される。
【0317】
工程2054:骨モデルの遠位側を目的骨モデルの遠位側にマッチングさせるために必要な遠位側骨片モデルの移動の方向および量を表す遠位側移動情報が算出される。
【0318】
遠位側移動情報は、例えば、骨モデルの遠位側骨片モデルを目的骨モデルの対応する部分にマッチングさせることによって算出され得る。このようなマッチングは、例えば、上述したICP(iterative
closest point)アルゴリズムと呼ばれる表面マッチング手法を採用したプログラムが用いて行うことができる。遠位側移動情報は、例えば、アファイン変換法の表記に従ってマトリックス(以下、「第2のマトリックス」という)によって表される。
【0319】
工程2056:近位側移動情報と遠位側移動情報との差分に基づいて、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を表す相対的移動情報が算出される。
【0320】
例えば、近位側移動情報がアファイン変換法の表記に従って第1のマトリックスによって表されており、遠位側移動情報がアファイン変換法の表記に従って第2のマトリックスによって表されている場合には、相対的移動情報は、第1のマトリックスと第2のマトリックスとの差分をとることにより相対的マトリックスを算出し、その相対的マトリックスをScrew
Displacement−Axis法の表記(すなわち、軸線L、軸線Lの周りの回転量φ、軸線Lに沿った移動量t)に変換することによって算出され得る。
【0321】
ここで、相対的マトリックスは、アファイン変換法の表記に従って、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を表したものである。軸線L、軸線Lの周りの回転量φ、軸線Lに沿った移動量tは、Screw
Displacement−Axis法の表記に従って、近位側骨片モデルに対する遠位側骨片モデルの相対的な移動の方向および量を表したものである。従って、相対的マトリックスをScrew
Displacement−Axis法の表記に変換することは、アファイン変換法の表記による相対的移動情報をScrew
Displacement−Axis法の表記による相対的移動情報に変換することを意味する。このような相対的移動情報の変換は、1つの空間における物体の移動を異なる座標系で表現することと等価である。
【0322】
このようにして、本発明のプログラムによれば、所望の目的(例えば、骨の矯正)を達成するために、骨に対して施されるべき処置(例えば、骨の切断、骨片の移動など)を決定することができる。これにより、比較的経験の浅い医師でも、適切な処置を行うことが可能になる。
【0323】
以上のように、本発明の好ましい実施形態および実施例を用いて本発明を例示してきたが、本発明は、特許請求の範囲によってのみその範囲が解釈されるべきであることが理解される。本明細書において引用した特許、特許出願および文献は、その内容自体が具体的に本明細書に記載されているのと同様にその内容が本明細書に対する参考として援用されるべきであることが理解される。
【産業上の利用可能性】
【0324】
以上に詳述したように本発明は、矯正骨切手術に用いることにより、その確実性、容易性を従来に比べ格段に向上させ、この分野における技術の多大な発展に寄与しうるものである。
【特許請求の範囲】
【請求項1】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記骨モデルおよび前記目的骨モデルからなる群より選択される少なくとも1つは、直接三次元データを取得することによって取得される、システム。
【請求項2】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記決定する手段は、前記骨の三次元方向すべてのパラメータを直接または間接的に使用する、システム。
【請求項3】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記決定する手段は、前記骨の回転軸を決定する工程を包含する、システム。
【請求項4】
前記回転軸の決定は、Screw Displacement−Axis法を利用する、請求項3に記載のシステム。
【請求項5】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記骨を処理する方法は、骨の回転、切除、移植片の挿入および延長からなる群より選択される少なくとも1つの処置を含む、システム。
【請求項6】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記決定手段は、補助部材を決定する手段であり、
前記補助部材は、創外固定器を含む、システム。
【請求項7】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記手術工程は、
A)前記骨を少なくとも1つの部位において切断する工程:
B)i)骨の回転が必要な場合、回転を行うこと;
ii)骨の移植片の挿入が必要な場合、該移植片の挿入を行うこと;および
iii)骨片の切除が必要な場合、該骨片の切除を行うこと;
からなる群より選択される少なくとも1つの骨処置工程を行う工程;ならびに
C)該切断された骨を接合する工程、
を包含し、
前記骨処置工程における骨の回転、移植片の挿入および骨の切除は、Screw
Displacement−Axis法またはアファイン変換法によって規定される、システム。
【請求項8】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記手術工程は、
A)前記骨を少なくとも1つの部位において切断する工程:
B)i)骨の回転が必要な場合、回転を行うこと;
ii)骨の移植片の挿入が必要な場合、該移植片の挿入を行うこと;および
iii)骨片の切除が必要な場合、該骨片の切除を行うこと;
からなる群より選択される少なくとも1つの骨処置工程を行う工程;ならびに
C)該切断された骨を接合する工程、
を包含し、
前記挿入される移植片は、Screw Displacement−Axis法またはアファイン変換法によって規定され製造されたものである、システム。
【請求項9】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記手術工程は、
A)前記骨を少なくとも1つの部位において切断する工程:
B)i)骨の回転が必要な場合、回転を行うこと;
ii)骨の移植片の挿入が必要な場合、該移植片の挿入を行うこと;および
iii)骨片の切除が必要な場合、該骨片の切除を行うこと;
からなる群より選択される少なくとも1つの骨処置工程を行う工程;ならびに
C)該切断された骨を接合する工程、
を包含し、
前記手術方法において、前記骨切断工程は、前記骨をある位置で近位側の骨片および遠位側の骨片に切断する工程を含み、該骨は、該骨の近位側または遠位側のいずれかが固定される、システム。
【請求項10】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記目的骨モデルは、骨の近位側または遠位側の部分に基づく、システム。
【請求項11】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記処置工程は、骨の延長を含み、該骨の延長は仮骨延長法によって行われる、システム。
【請求項12】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記骨は、四肢のものを含む、システム。
【請求項13】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記骨は、変形治癒したものである、システム。
【請求項14】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記処置において移植片が挿入され、該移植片は、天然骨または人工骨である、システム。
【請求項15】
前記天然骨は、自家骨、同種骨および異種骨からなる群より選択される、請求項14に記載のシステム。
【請求項16】
前記移植片は、自家骨である、請求項14に記載のシステム。
【請求項17】
前記移植片は、人工骨である、請求項14に記載のシステム。
【請求項18】
前記人工骨は、リン酸カルシウムを含む、請求項17に記載のシステム。
【請求項19】
前記リン酸カルシウムは、ハイドロキシアパタイトを含む、請求項18に記載のシステム。
【請求項20】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
手術後に、施された処置が適切であるかどうか確認する工程をさらに包含する、システム。
【請求項21】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
手術後に、処置された骨を固定する工程をさらに包含する、システム。
【請求項22】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記目的骨モデルは、前記骨モデルの骨の対称となる組のパートナーに基づいて規定される、システム。
【請求項23】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記目的骨モデルは、処置されるべき前記骨を有する患者の標準に基づいて規定される、システム。
【請求項24】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記処置は回転を含み、該回転は、1つの回転軸のみの周りの回転である、システム。
【請求項25】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するための骨の処置に使用される骨処置キットであって、
A)骨に対して配置されるべき位置を示す位置決め部および該骨の適切な切断面を示す切断面指示部が付され、かつ、回転のための矯正補助部材を挿入するための少なくとも1つの開口部を備える、テンプレート補助部材と、
B)該骨の切断片にそれぞれ取り付けられ互いの位置関係から各骨片が矯正位置関係にあるか否かの判断を可能ならしめる矯正位置判断補助部材とを備える骨処置キット。
【請求項26】
前記開口部は、少なくとも2つ含まれる、請求項25に記載の骨処置キット。
【請求項27】
前記矯正位置判断補助部材は、平行移動補助機能を有するワイヤで構成される、請求項25に記載の骨処置キット。
【請求項28】
前記ワイヤは、ステンレス製である、請求項27に記載の骨処置キット。
【請求項29】
前記矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能からなる群より選択される少なくとも1つの機能を有する、請求項25に記載の骨処置キット。
【請求項30】
矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能の両方を備える、請求項25に記載の骨処置キット。
【請求項31】
さらに、手術後に骨を固定するための固定補助部材を備える、請求項25に記載の骨処置キット。
【請求項32】
異常態様に変形した骨を切断分割して骨片とし、正常位置関係に矯正するために使用されるテンプレート補助部材であって、
A)骨を所定位置に位置決めして取り付けるための位置決め部と、
B)該骨の適切な切断面を示す切断面指示部と、
C)該骨の切断片にそれぞれ取り付けられ互いの位置関係から各骨片が矯正位置関係にあるか否かの判断を可能ならしめる矯正位置判断補助部材の、該切断片への取付位置を示す取付位置指示部と
を備えていることを特徴とするテンプレート補助部材。
【請求項33】
前記取付位置指示部が、前記矯正位置判断補助部材を各骨片に取り付けるための取付穴の穿孔位置および穿孔角度を示すガイド孔である、請求項32に記載のテンプレート補助部材。
【請求項34】
前記位置決め部が骨の表面特徴部分に嵌合する嵌合面である、請求項32に記載のテンプレート補助部材。
【請求項35】
切断面指示部が、前記骨の切断面に沿って設けられたスリットである、請求項32に記載のテンプレート補助部材。
【請求項36】
異常態様に変形した骨を切断分割して骨片とし、正常位置関係に矯正するために使用される補助部材であって、
各切断された骨片に設定した所定取付位置にそれぞれ取り付けられ、取付後の互いの位置関係から前記骨片同士が正常位置関係にあるか否かの判断を可能ならしめるものであることを特徴とする、矯正位置判断補助部材。
【請求項37】
互いに直接連結し、または中間部材を介して互いに連結されることにより、正常位置関係であることを示すようにしている、請求項36に記載の矯正位置判断補助部材。
【請求項38】
前記正常位置関係のときに、前記各骨片に取り付けた矯正位置判断補助部材にそれぞれ係り合う係合部を具備したものであることを特徴とする、請求項36に記載の矯正位置判断補助部材。
【請求項39】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨の処置に使用される移植片であって、該移植片は、該骨の処置の目的となる目的骨モデルと対象となる該骨の現状の骨モデルとのほぼ差分である形状をしている、移植片。
【請求項40】
前記移植片は、Screw Displacement−Axis法またはアファイン変換法によって規定される、請求項39に記載の移植片。
【請求項41】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するための、骨の処置を決定する処理をコンピュータに実行させるためのプログラムであって、
該処理は、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)該骨の処置の目的となる目的骨モデルを取得する工程;
C)該骨モデルと該目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する工程
を包含し、
前記骨モデルおよび前記目的骨モデルのそれぞれは、3次元モデルによって表現されている、プログラム。
【請求項42】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するための、骨の処置を決定する処理をコンピュータに実行させるためのプログラムであって、
該処理は、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)該骨の処置の目的となる目的骨モデルを取得する工程;
C)該骨モデルと該目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する工程
を包含し、
前記工程C)は、
C1)前記骨モデルから近位側骨片モデルと遠位側骨片モデルとを定義する工程;
C2)該近位側骨片モデルに対する該遠位側骨片モデルの相対的な移動の方向および量を決定する工程;および
C3)該骨モデルの切断面を決定する工程
を包含する、プログラム。
【請求項43】
前記工程C)は、
C4)前記近位側骨片モデルに対する該遠位側骨片モデルの相対的な移動の方向および量と前記骨モデルの切断面とに基づいて、前記補助部材を表すモデルを生成する工程
をさらに包含する、請求項42に記載のプログラム。
【請求項44】
前記工程C2)は、
C21)前記骨モデルの近位側を前記目的骨モデルの近位側にマッチングさせるために必要な前記近位側骨片モデルの移動の方向および量を表す近位側移動情報を算出する工程;
C22)前記骨モデルの遠位側を前記目的骨モデルの遠位側にマッチングさせるために必要な前記遠位側骨片モデルの移動の方向および量を表す遠位側移動情報を算出する工程;および
C23)該近位側移動情報と該遠位側移動情報との差分に基づいて、該近位側骨片モデルに対する該遠位側骨片モデルの相対的な移動の方向および量を表す相対的移動情報を算出する工程
を包含する、請求項42に記載のプログラム。
【請求項45】
前記近位側移動情報は、アファイン変換法の表記に従って第1のマトリックスによって表され、前記遠位側移動情報は、アファイン変換法の表記に従って第2のマトリックスによって表され、
前記工程C23)は、
該第1のマトリックスと該第2のマトリックスとの差分をとることにより、相対的マトリックスを算出する工程;
該相対的マトリックスをScrew Displacement−Axis法の表記に変換する工程
を包含する、請求項44に記載のプログラム。
【請求項46】
前記相対的移動情報は、Screw Displacement−Axis法の表記に従って、軸線Lと、該軸線Lの周りの回転量φと、該軸線Lに沿った移動量tとによって表され、
前記工程C3)は、
該軸線Lが前記骨モデルの長軸にほぼ平行である場合には、該軸線Lに垂直な面を該骨モデルの切断面として決定し、該軸線Lが前記骨モデルの長軸にほぼ垂直である場合には、該軸線Lに平行な面を該骨モデルの切断面として決定する工程
を包含する、請求項44に記載のプログラム。
【請求項47】
前記工程C4)において、前記補助部材を表すモデルとして、テンプレート補助部材を表すモデル、矯正位置判断補助部材を表すモデルおよび移植片を表すモデルのうちの少なくとも1つが生成される、請求項43に記載のプログラム。
【請求項1】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記骨モデルおよび前記目的骨モデルからなる群より選択される少なくとも1つは、直接三次元データを取得することによって取得される、システム。
【請求項2】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記決定する手段は、前記骨の三次元方向すべてのパラメータを直接または間接的に使用する、システム。
【請求項3】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記決定する手段は、前記骨の回転軸を決定する工程を包含する、システム。
【請求項4】
前記回転軸の決定は、Screw Displacement−Axis法を利用する、請求項3に記載のシステム。
【請求項5】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記骨を処理する方法は、骨の回転、切除、移植片の挿入および延長からなる群より選択される少なくとも1つの処置を含む、システム。
【請求項6】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記決定手段は、補助部材を決定する手段であり、
前記補助部材は、創外固定器を含む、システム。
【請求項7】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記手術工程は、
A)前記骨を少なくとも1つの部位において切断する工程:
B)i)骨の回転が必要な場合、回転を行うこと;
ii)骨の移植片の挿入が必要な場合、該移植片の挿入を行うこと;および
iii)骨片の切除が必要な場合、該骨片の切除を行うこと;
からなる群より選択される少なくとも1つの骨処置工程を行う工程;ならびに
C)該切断された骨を接合する工程、
を包含し、
前記骨処置工程における骨の回転、移植片の挿入および骨の切除は、Screw
Displacement−Axis法またはアファイン変換法によって規定される、システム。
【請求項8】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記手術工程は、
A)前記骨を少なくとも1つの部位において切断する工程:
B)i)骨の回転が必要な場合、回転を行うこと;
ii)骨の移植片の挿入が必要な場合、該移植片の挿入を行うこと;および
iii)骨片の切除が必要な場合、該骨片の切除を行うこと;
からなる群より選択される少なくとも1つの骨処置工程を行う工程;ならびに
C)該切断された骨を接合する工程、
を包含し、
前記挿入される移植片は、Screw Displacement−Axis法またはアファイン変換法によって規定され製造されたものである、システム。
【請求項9】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記手術工程は、
A)前記骨を少なくとも1つの部位において切断する工程:
B)i)骨の回転が必要な場合、回転を行うこと;
ii)骨の移植片の挿入が必要な場合、該移植片の挿入を行うこと;および
iii)骨片の切除が必要な場合、該骨片の切除を行うこと;
からなる群より選択される少なくとも1つの骨処置工程を行う工程;ならびに
C)該切断された骨を接合する工程、
を包含し、
前記手術方法において、前記骨切断工程は、前記骨をある位置で近位側の骨片および遠位側の骨片に切断する工程を含み、該骨は、該骨の近位側または遠位側のいずれかが固定される、システム。
【請求項10】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記目的骨モデルは、骨の近位側または遠位側の部分に基づく、システム。
【請求項11】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記処置工程は、骨の延長を含み、該骨の延長は仮骨延長法によって行われる、システム。
【請求項12】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記骨は、四肢のものを含む、システム。
【請求項13】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記骨は、変形治癒したものである、システム。
【請求項14】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記処置において移植片が挿入され、該移植片は、天然骨または人工骨である、システム。
【請求項15】
前記天然骨は、自家骨、同種骨および異種骨からなる群より選択される、請求項14に記載のシステム。
【請求項16】
前記移植片は、自家骨である、請求項14に記載のシステム。
【請求項17】
前記移植片は、人工骨である、請求項14に記載のシステム。
【請求項18】
前記人工骨は、リン酸カルシウムを含む、請求項17に記載のシステム。
【請求項19】
前記リン酸カルシウムは、ハイドロキシアパタイトを含む、請求項18に記載のシステム。
【請求項20】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
手術後に、施された処置が適切であるかどうか確認する工程をさらに包含する、システム。
【請求項21】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
手術後に、処置された骨を固定する工程をさらに包含する、システム。
【請求項22】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記目的骨モデルは、前記骨モデルの骨の対称となる組のパートナーに基づいて規定される、システム。
【請求項23】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記目的骨モデルは、処置されるべき前記骨を有する患者の標準に基づいて規定される、システム。
【請求項24】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨を処置するためのシステムであって、
A)処置の対象となる骨を表す骨モデルを取得する手段;
B)該骨の処置の目的となる目的骨モデルを取得する手段;
C)骨モデルと目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する手段;および
D)該処置を用いて該骨を手術する手段、
を備え、
前記処置は回転を含み、該回転は、1つの回転軸のみの周りの回転である、システム。
【請求項25】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するための骨の処置に使用される骨処置キットであって、
A)骨に対して配置されるべき位置を示す位置決め部および該骨の適切な切断面を示す切断面指示部が付され、かつ、回転のための矯正補助部材を挿入するための少なくとも1つの開口部を備える、テンプレート補助部材と、
B)該骨の切断片にそれぞれ取り付けられ互いの位置関係から各骨片が矯正位置関係にあるか否かの判断を可能ならしめる矯正位置判断補助部材とを備える骨処置キット。
【請求項26】
前記開口部は、少なくとも2つ含まれる、請求項25に記載の骨処置キット。
【請求項27】
前記矯正位置判断補助部材は、平行移動補助機能を有するワイヤで構成される、請求項25に記載の骨処置キット。
【請求項28】
前記ワイヤは、ステンレス製である、請求項27に記載の骨処置キット。
【請求項29】
前記矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能からなる群より選択される少なくとも1つの機能を有する、請求項25に記載の骨処置キット。
【請求項30】
矯正位置判断補助部材は、平行移動のための平行移動補助機能および回転のための回転補助機能の両方を備える、請求項25に記載の骨処置キット。
【請求項31】
さらに、手術後に骨を固定するための固定補助部材を備える、請求項25に記載の骨処置キット。
【請求項32】
異常態様に変形した骨を切断分割して骨片とし、正常位置関係に矯正するために使用されるテンプレート補助部材であって、
A)骨を所定位置に位置決めして取り付けるための位置決め部と、
B)該骨の適切な切断面を示す切断面指示部と、
C)該骨の切断片にそれぞれ取り付けられ互いの位置関係から各骨片が矯正位置関係にあるか否かの判断を可能ならしめる矯正位置判断補助部材の、該切断片への取付位置を示す取付位置指示部と
を備えていることを特徴とするテンプレート補助部材。
【請求項33】
前記取付位置指示部が、前記矯正位置判断補助部材を各骨片に取り付けるための取付穴の穿孔位置および穿孔角度を示すガイド孔である、請求項32に記載のテンプレート補助部材。
【請求項34】
前記位置決め部が骨の表面特徴部分に嵌合する嵌合面である、請求項32に記載のテンプレート補助部材。
【請求項35】
切断面指示部が、前記骨の切断面に沿って設けられたスリットである、請求項32に記載のテンプレート補助部材。
【請求項36】
異常態様に変形した骨を切断分割して骨片とし、正常位置関係に矯正するために使用される補助部材であって、
各切断された骨片に設定した所定取付位置にそれぞれ取り付けられ、取付後の互いの位置関係から前記骨片同士が正常位置関係にあるか否かの判断を可能ならしめるものであることを特徴とする、矯正位置判断補助部材。
【請求項37】
互いに直接連結し、または中間部材を介して互いに連結されることにより、正常位置関係であることを示すようにしている、請求項36に記載の矯正位置判断補助部材。
【請求項38】
前記正常位置関係のときに、前記各骨片に取り付けた矯正位置判断補助部材にそれぞれ係り合う係合部を具備したものであることを特徴とする、請求項36に記載の矯正位置判断補助部材。
【請求項39】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するために骨の処置に使用される移植片であって、該移植片は、該骨の処置の目的となる目的骨モデルと対象となる該骨の現状の骨モデルとのほぼ差分である形状をしている、移植片。
【請求項40】
前記移植片は、Screw Displacement−Axis法またはアファイン変換法によって規定される、請求項39に記載の移植片。
【請求項41】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するための、骨の処置を決定する処理をコンピュータに実行させるためのプログラムであって、
該処理は、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)該骨の処置の目的となる目的骨モデルを取得する工程;
C)該骨モデルと該目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する工程
を包含し、
前記骨モデルおよび前記目的骨モデルのそれぞれは、3次元モデルによって表現されている、プログラム。
【請求項42】
異常態様に変形した骨を切断分割し、分割された骨の位置関係を変えて正常な態様での骨の位置関係に矯正するための、骨の処置を決定する処理をコンピュータに実行させるためのプログラムであって、
該処理は、
A)処置の対象となる骨を表す骨モデルを取得する工程;
B)該骨の処置の目的となる目的骨モデルを取得する工程;
C)該骨モデルと該目的骨モデルとに基づいて、該骨に対して施されるべき処置を決定する工程
を包含し、
前記工程C)は、
C1)前記骨モデルから近位側骨片モデルと遠位側骨片モデルとを定義する工程;
C2)該近位側骨片モデルに対する該遠位側骨片モデルの相対的な移動の方向および量を決定する工程;および
C3)該骨モデルの切断面を決定する工程
を包含する、プログラム。
【請求項43】
前記工程C)は、
C4)前記近位側骨片モデルに対する該遠位側骨片モデルの相対的な移動の方向および量と前記骨モデルの切断面とに基づいて、前記補助部材を表すモデルを生成する工程
をさらに包含する、請求項42に記載のプログラム。
【請求項44】
前記工程C2)は、
C21)前記骨モデルの近位側を前記目的骨モデルの近位側にマッチングさせるために必要な前記近位側骨片モデルの移動の方向および量を表す近位側移動情報を算出する工程;
C22)前記骨モデルの遠位側を前記目的骨モデルの遠位側にマッチングさせるために必要な前記遠位側骨片モデルの移動の方向および量を表す遠位側移動情報を算出する工程;および
C23)該近位側移動情報と該遠位側移動情報との差分に基づいて、該近位側骨片モデルに対する該遠位側骨片モデルの相対的な移動の方向および量を表す相対的移動情報を算出する工程
を包含する、請求項42に記載のプログラム。
【請求項45】
前記近位側移動情報は、アファイン変換法の表記に従って第1のマトリックスによって表され、前記遠位側移動情報は、アファイン変換法の表記に従って第2のマトリックスによって表され、
前記工程C23)は、
該第1のマトリックスと該第2のマトリックスとの差分をとることにより、相対的マトリックスを算出する工程;
該相対的マトリックスをScrew Displacement−Axis法の表記に変換する工程
を包含する、請求項44に記載のプログラム。
【請求項46】
前記相対的移動情報は、Screw Displacement−Axis法の表記に従って、軸線Lと、該軸線Lの周りの回転量φと、該軸線Lに沿った移動量tとによって表され、
前記工程C3)は、
該軸線Lが前記骨モデルの長軸にほぼ平行である場合には、該軸線Lに垂直な面を該骨モデルの切断面として決定し、該軸線Lが前記骨モデルの長軸にほぼ垂直である場合には、該軸線Lに平行な面を該骨モデルの切断面として決定する工程
を包含する、請求項44に記載のプログラム。
【請求項47】
前記工程C4)において、前記補助部材を表すモデルとして、テンプレート補助部材を表すモデル、矯正位置判断補助部材を表すモデルおよび移植片を表すモデルのうちの少なくとも1つが生成される、請求項43に記載のプログラム。
【図1】

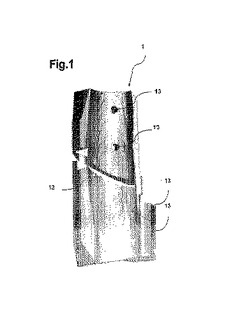
【図2】
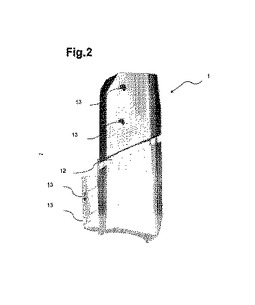
【図3】
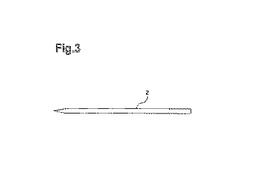
【図4】
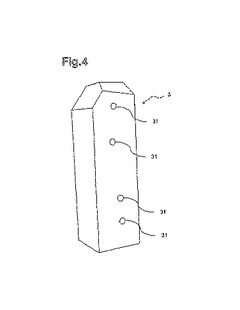
【図5】
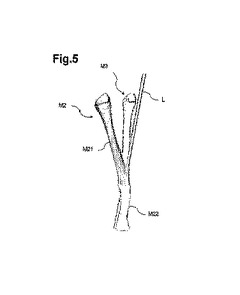
【図6】
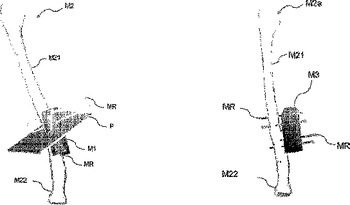
【図7】
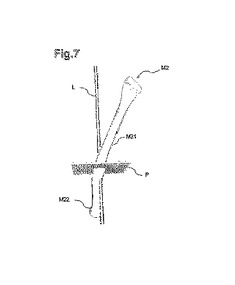
【図8】
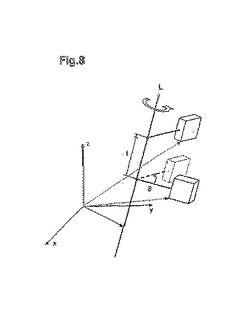
【図10】
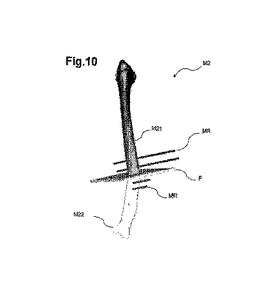
【図11】
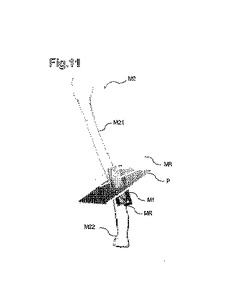
【図12】
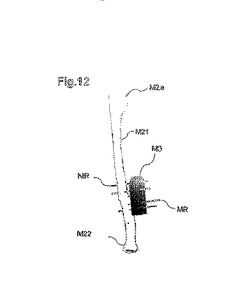
【図13】
【図14】
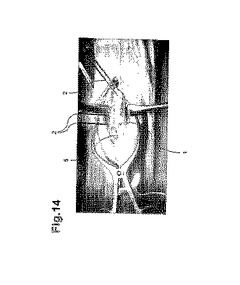
【図15】
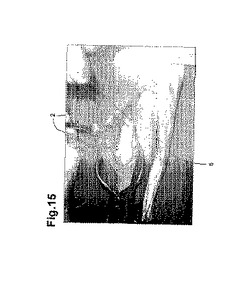
【図16】
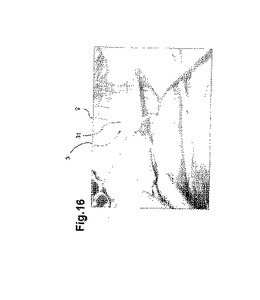
【図17】
【図18】
【図19】
【図20】
【図21】
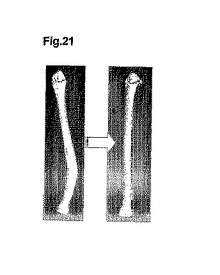
【図22】
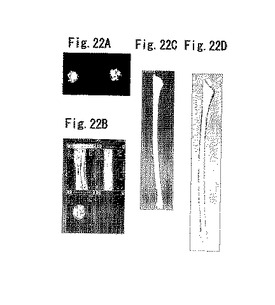
【図24】
【図26】
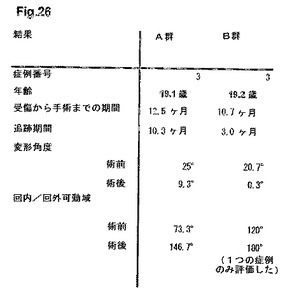
【図27】
【図28】
【図29】
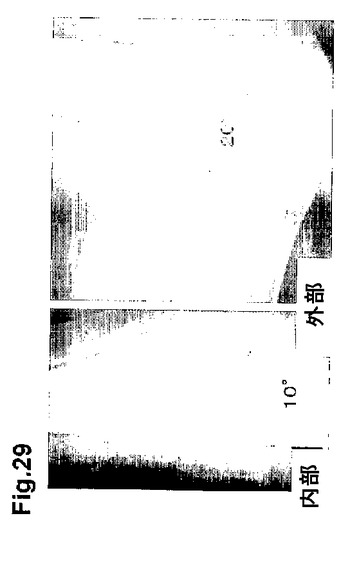
【図30】
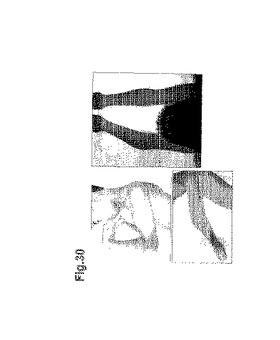
【図31】
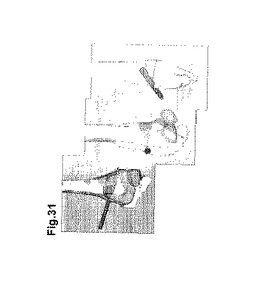
【図32】
【図33】
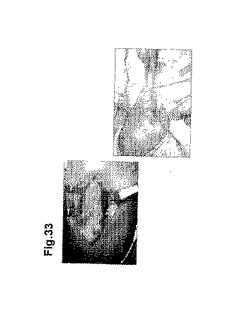
【図34】
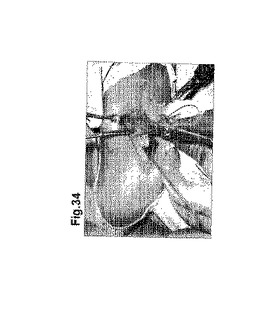
【図35】
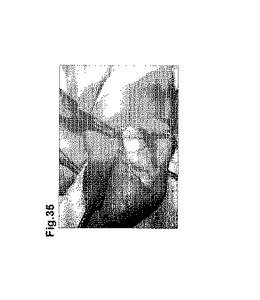
【図36】
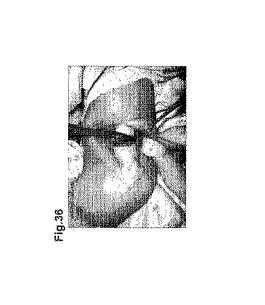
【図37】
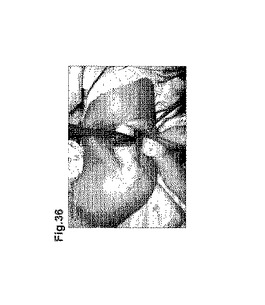
【図38】
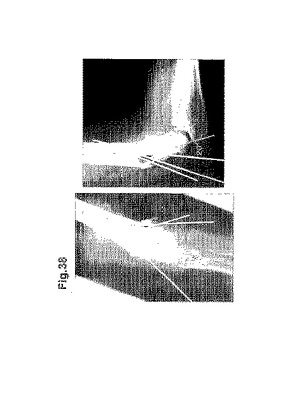
【図39】

【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
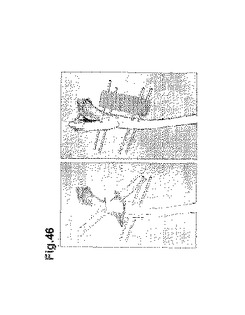
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
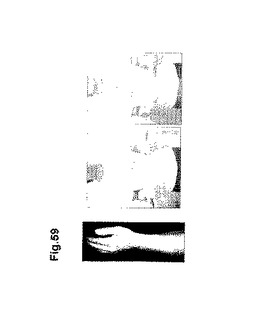
【図61】
【図62】
【図63】
【図64】
【図65】
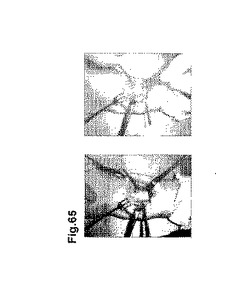
【図66】
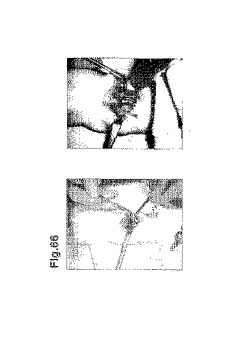
【図67】
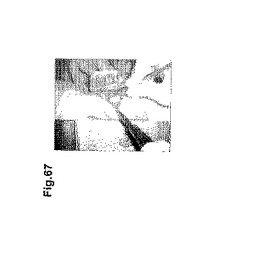
【図68】
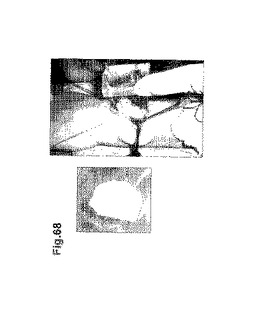
【図69】
【図70】
【図71】
【図72】
【図73】
【図74】
【図75】
【図76】
【図77】
【図78】
【図79】
【図80】
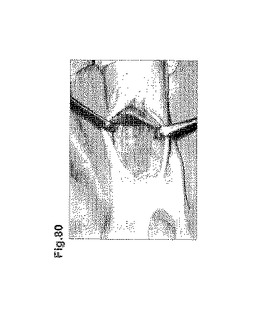
【図81】
【図82】
【図83】
【図84】

【図85】
【図86】
【図87】
【図88】
【図89】
【図90】
【図91】
【図92】
【図93】
【図94】
【図95】
【図96】
【図97】
【図98】
【図99】
【図100】
【図101】
【図102】
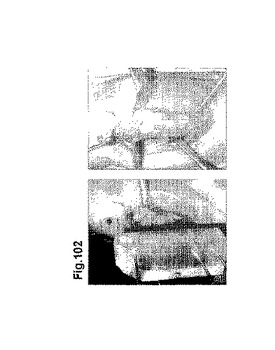
【図103】
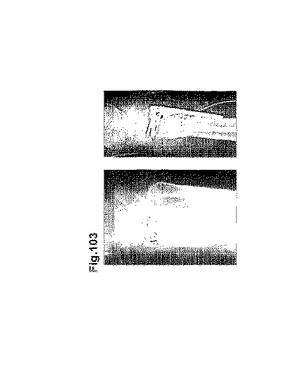
【図104】
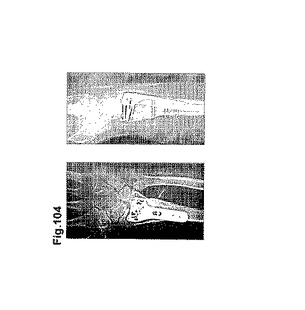
【図105】
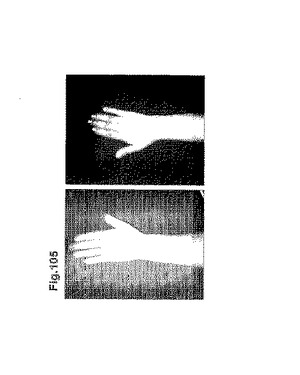
【図106】
【図107】
【図108】
【図109】
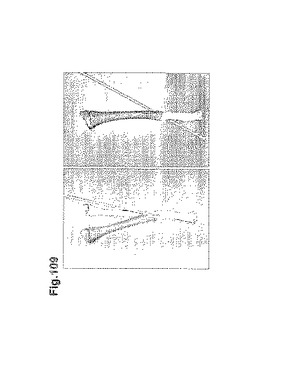
【図110】
【図111】
【図112】
【図113】
【図114】
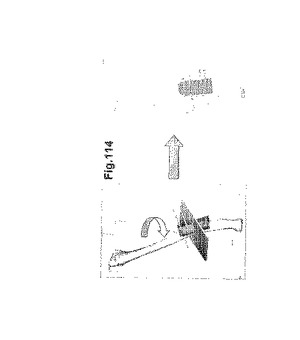
【図115】
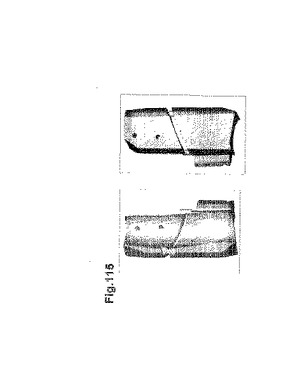
【図116】
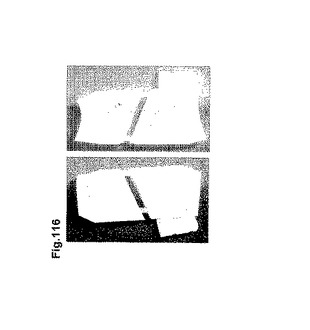
【図117】
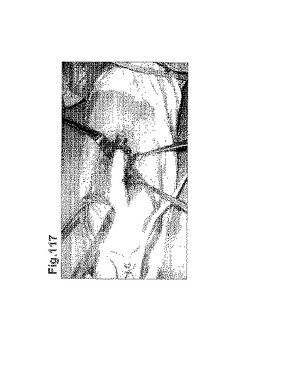
【図118】
【図119】
【図120】
【図121】
【図122】
【図123】
【図124】
【図125】
【図126】
【図127】
【図128】
【図129】
【図130】
【図131】
【図132】
【図133】
【図134】
【図135】
【図136】
【図137】
【図138】

【図139】
【図140】
【図141】
【図142】
【図143】
【図144】
【図145】
【図146】
【図147】
【図148】
【図149】
【図150】
【図151】
【図152】
【図153】
【図154】
【図155】
【図156】
【図157】
【図158】
【図159】

【図160】
【図161】
【図162】
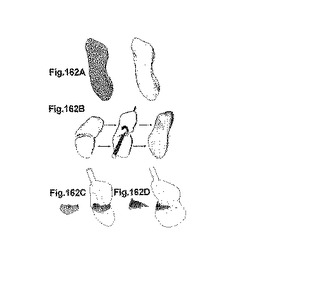
【図163】
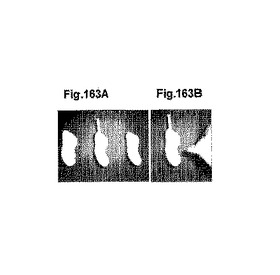
【図164】

【図165】
【図166】
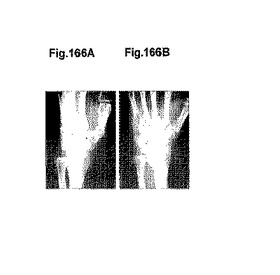
【図167】
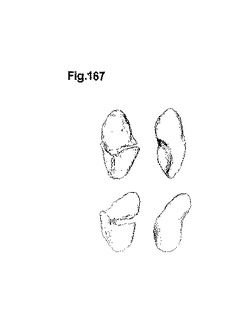
【図168】
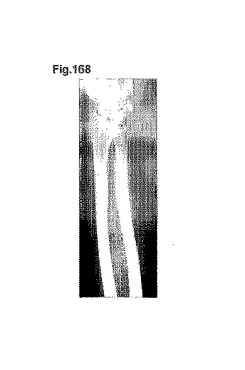
【図169】
【図170】
【図171】
【図172】
【図173】
【図174】
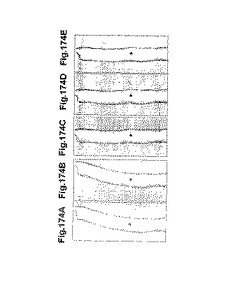
【図175】
【図176】
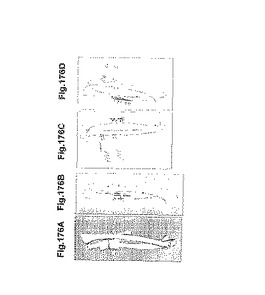
【図177】

【図178】
【図179】
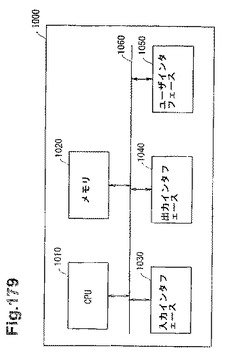
【図180】
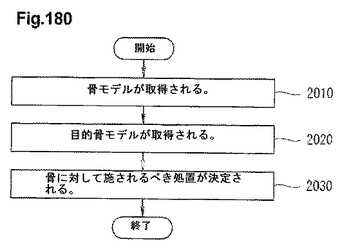
【図181】
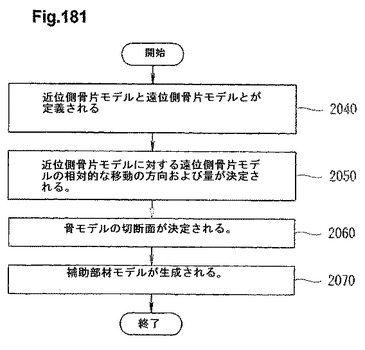
【図182】
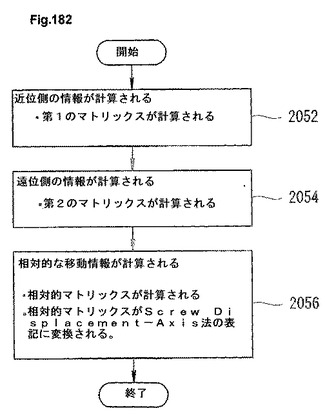
【図9】
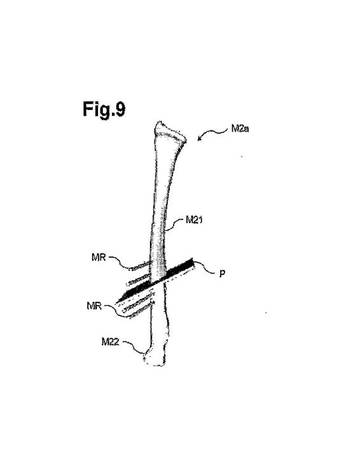
【図23】
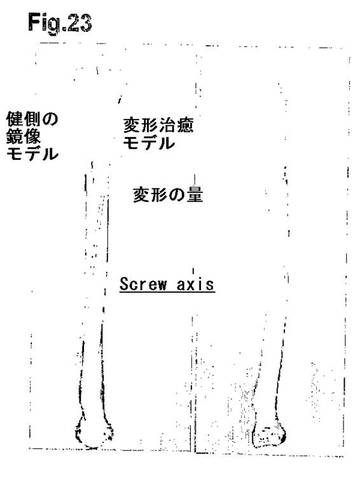
【図25】
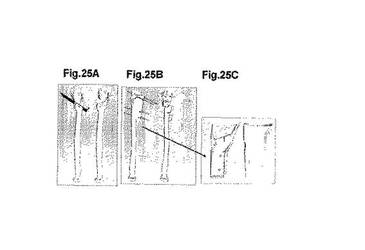
【図60】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図24】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【図57】
【図58】
【図59】
【図61】
【図62】
【図63】
【図64】
【図65】
【図66】
【図67】
【図68】
【図69】
【図70】
【図71】
【図72】
【図73】
【図74】
【図75】
【図76】
【図77】
【図78】
【図79】
【図80】
【図81】
【図82】
【図83】
【図84】
【図85】
【図86】
【図87】
【図88】
【図89】
【図90】
【図91】
【図92】
【図93】
【図94】
【図95】
【図96】
【図97】
【図98】
【図99】
【図100】
【図101】
【図102】
【図103】
【図104】
【図105】
【図106】
【図107】
【図108】
【図109】
【図110】
【図111】
【図112】
【図113】
【図114】
【図115】
【図116】
【図117】
【図118】
【図119】
【図120】
【図121】
【図122】
【図123】
【図124】
【図125】
【図126】
【図127】
【図128】
【図129】
【図130】
【図131】
【図132】
【図133】
【図134】
【図135】
【図136】
【図137】
【図138】
【図139】
【図140】
【図141】
【図142】
【図143】
【図144】
【図145】
【図146】
【図147】
【図148】
【図149】
【図150】
【図151】
【図152】
【図153】
【図154】
【図155】
【図156】
【図157】
【図158】
【図159】
【図160】
【図161】
【図162】
【図163】
【図164】
【図165】
【図166】
【図167】
【図168】
【図169】
【図170】
【図171】
【図172】
【図173】
【図174】
【図175】
【図176】
【図177】
【図178】
【図179】
【図180】
【図181】
【図182】
【図9】
【図23】
【図25】
【図60】
【公開番号】特開2011−172977(P2011−172977A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2011−104798(P2011−104798)
【出願日】平成23年5月9日(2011.5.9)
【分割の表示】特願2006−502665(P2006−502665)の分割
【原出願日】平成16年2月10日(2004.2.10)
【出願人】(505297367)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成23年5月9日(2011.5.9)
【分割の表示】特願2006−502665(P2006−502665)の分割
【原出願日】平成16年2月10日(2004.2.10)
【出願人】(505297367)
【Fターム(参考)】
[ Back to top ]