
高い効率を有する、機械的に駆動されるボスレス式の船舶推進装置
高い効率を有する、機械的に駆動されるボスレス式の船舶推進装置において、該船舶推進装置が、1つのリング内に複数の翼(10)を備えた少なくとも1つのロータを有しており、リングギヤを備えた該ロータが、回転運動を伝達するためのピニオン(2)を備えた軸(1)を介して船舶機関に結合されており、該ロータがノズル(8)内に配置されており、該ロータの回転する翼(10)が、個々に角度調節可能に形成されていて、1回転毎に局所的な流れ条件、特にノズル(8)内の流入条件に合わせた翼の角度位置の連続的な調整を可能にしていることを特徴とする、機械的に駆動されるボスレス式の船舶推進装置。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、高い効率を有する、機械的に駆動されるボスレス式の船舶推進装置(Schiffspropulsor)に関する。
【0002】
船舶用の推進機構は、種々様々な構成で、たとえば船舶プロペラの形で知られている。慣用の固定ピッチプロペラには、プロペラが中央部にボスを必要とし、このボスにプロペラブレードが取り付けられているという欠点がある。可変ピッチプロペラ、すなわち運転中にプロペラ翼をその角度位置(ピッチ角)に関して変えることのできるプロペラのボスは特に大型となる。
【0003】
さらに、公知の船舶プロペラは主としてツインスクリュにおいて軸受け台および駆動シャフトを必要とするが、これらの軸受け台および駆動シャフトは渦流を発生させ、ひいては抵抗を発生させる。この抵抗はできるだけ小さく保持されなければならない。
【0004】
良好な推進効率を達成することは、久しく以前より存在する課題である。しかしこれまで、システム「プロペラ−船舶」の75%を超える効率を達成することはできなかった。なぜならば、プロペラブレードの回転時におけるチップヴォルテックスキャビテーション(Spitzenwirbelkavitation)と呼ばれる翼端渦キャビテーションの影響も考慮されなければならないからである。
【0005】
これらの不都合を有する上記プロペラの他に、リム・ドライブ・スラスタも知られている。リム・ドライブ・スラスタは、外側で駆動されるリングから内側へ向けられた翼を備えたアウタロータである。最新のリムドライブは一般に電気的に駆動され、電気的なリングモータを有している。これにより、極めてコンパクトな構造が得られる。このようなコンパクトな構造は、特にこのような装置を船首噴流ラダー(Bugstrahlruder)として設計することを可能にする。公知の電気的なリムドライブは、一見すると魅了的ではあるが、しかし比較的悪い効率を有している。なぜならば、電気エネルギの発生の個別効率およびその回転エネルギへの変換が悪い全体効率を生ぜしめるからである。
【0006】
本発明の課題は、調節不可能な翼を備えた、多種多様に使用される電気的なリムドライブよりも著しく良好な効率を有する推進装置を提供することである。1例が、ロールスロイス社(Firma Rolls Royce)の構成を示すhttp://www.marinelog.comに公開されている、雑誌「marinelog」からの論文により示されている。
【0007】
リムドライブの使用により、船舶付属物(Schiffsanhaenge)が不要となることに基づき、既に船舶の船尾抵抗の低減が達成可能となる。しかし、回転エネルギを電気的なエネルギへ変換しかつ再び回転エネルギへ戻し変換することを必要とする機械の悪い効率は常に存在している。したがって、本発明の枠内では、船舶推進装置のために、クラシカルなリングギヤ/ピニオン装置を備えた機械的な駆動装置を使用することが提案される。すなわち、既に、クラシカルな形式のプロペラ駆動装置と比較して、かなりの効率向上および船尾抵抗の著しい改善を得ることができる。
【0008】
推進装置に設けられた翼が角度調節可能に形成されていて、これらの翼のために、推進装置における局所的な流れ条件に合わせた角度位置の連続的な調整が行われると、効率の一層の著しい改善が得られる。局所的な流れ条件に合わせた角度位置(ピッチ)の調整は、それぞれ個々の翼のために別個に、かつ周方向における翼位置に関連して行われる。すなわち、1回転の間に常時、翼位置が変化するわけである。このことはガイドスライダおよびガイドレールを用いて行われる。これらのガイドスライダおよびガイドレールの形状は船舶の伴流域に関連している。このような新規でかつ発明性のある構成により、推進装置の効率を再度著しく向上させることができる。なぜならば、推進装置における水の種々異なる流れ条件を考慮することができるからである。こうして、推進装置における水の加速は、流入条件とは無関係に、つまり流入条件の影響を受けることなしに、最適化されて行われ得る。このことは、発生させられた推力に有利に作用する。同様のことは、船舶の周りを流れる水の流れ方向への推進装置の傾きが調節される場合にも有利に作用する。
【0009】
本発明の構成では、局所的な流れ条件に合わせた翼の角度位置の調整が機械的に、特にガイドレール、スライドレールおよびガイドスライダによって行われるようになっている。ガイドスライダおよびガイドレールの使用により、角度位置のための頑丈でかつ信頼性の良い機械的な解決手段が得られる。この場合、たとえばフォイト・シュナイダー(Voith-Schneider)駆動装置により、メカニズムによって高い運転信頼性が達成され得ることが知られている。ガイドレールの形状は船舶の伴流域に関連していて、局所的な流れ特性に相応して、推進装置の高い効率を達成しかつ僅かなキャビテーションを達成するために設計される。
【0010】
それぞれ個々の翼の角度位置の調節が偏心体伝動装置によって行われると、高い運転信頼性が得られる。偏心体伝動装置は特に頑丈であり、そして多くの機械タイプにおいて、たとえばストローク高さ調節機構を備えたプレスにおいてテストされている。
【0011】
本発明の別の構成では、局所的な流れ条件に合わせた翼の角度位置の連続的な調整が、電気的な作動モータにより行われる。電気的な作動モータ、特にこの構成では永久励磁されるリングモータとして形成された電気的な作動モータは、やはり高い運転信頼性を有していると同時に、その旋回速度が角度位置に関連して閉ループ式に制御されて調節され得るという利点を持っている。
【0012】
翼の調節範囲は、前進推動から後進推動への切換が行われ得るように設計されている。
【0013】
駆動装置自体のためには、外側に位置する外歯付きリングギヤを有するロータが選択されると極めて有利である。この場合、外歯付きリングギヤの歯数とピニオンの歯数とは、当該推進装置と船舶機関との間に伝動装置が必要とならないように設定されている。このような手段によっても、駆動装置の効率を著しく向上させることができるので、船舶駆動装置の、これまで未到達の高い効率が得られる。
【0014】
本発明のさらに別の構成では、推進装置が複式推進装置もしくはツイン推動装置として構成されている。すなわち、2つの推進装置が相並んで位置して設けられている。これにより、船舶の流出特性の極めて有利な改善が得られる。なぜならば、流れが船尾に当たるようになるからである。
【0015】
駆動軸の傾きを流入の方向に適合させることができる。その結果、機関は低く設置されることになり、これにより船舶の質量重心は下方へ移動し、このことは船舶の安定性にとって有利に作用する。
【0016】
本発明のさらに別の構成では、当該推進装置が、水の流れ方向で相前後して位置する、互いに逆回転する2つのロータを有している。こうして、推進装置から流出する水噴流がもはや回転を有しなくなり、すなわち水噴流の回転エネルギが推進のために利用されることが得られるので有利である。特に単純な構成では、前側のロータの噴流中に位置する第2のロータが不要にされ、その代わりに、回転しない静翼環(ステータ)が使用される。この静翼環の翼は、たとえば推進方向の変化または浅瀬域におけるグラウンドエフェクトによる流入の変化に合わせた角度位置の全般的な調整を可能にする。
【0017】
二重反転式(kontrarotierend)のプロペラブレードを有する船舶駆動装置は、一般に専門家からは推奨されない。なぜならば、この場合、高いキャビテーション危険を甘受しなければならないからである。しかし、このキャビテーションはチップヴォルテックスキャビテーションと呼ばれる翼端渦キャビテーションであり、そして本発明による推進装置は外側半径に、相応するプロペラブレードチップ(翼先端)を有しないので、本発明の構成では、相応するキャビテーション危険を懸念する必要はない。すなわち、水を加速するエレメントの、効率を改善する二重反転式の配置を問題なく採用することができる。この場合、回転しない静翼環を使用することも可能である。もちろん、回転しない静翼環は、回転するロータと同様の極めて良好な効率を生ぜしめるわけではない。外歯付きリングギヤにおける翼根元の取付け部は、翼の迎え角が変化した場合にギャップ形成を回避し、ひいてはキャビテーションを回避するために、球形に形成されている。
【0018】
慣用の船舶プロペラと比較して、流体動力学的な改善のためには、ノズルが、船底に少なくとも部分的に組み込まれており、駆動軸も、少なくとも部分的に船舶の二重底に配置されている。こうして、船尾範囲における船舶下側の特に抵抗の少ない構成が得られる。このような構成はシステム「船舶−船舶駆動装置」の効率の一層の改善のために寄与する。
【0019】
システム「推進装置−船舶」の一層の改善のためには、推進装置の回転数および翼位置が、推進装置へ流入する流れの、船舶抵抗に及ぼす影響に関して最適化される。このためには、船舶のトリム位置および積込み状態ならびに別の影響因子、たとえば船底等に付着した動植物による汚れ(Bewuchs)および水中船舶の状態を一緒に関係付けることができる。こうして、推進装置の外部に存在しかつ同じく高率に影響を与える影響因子も一緒に考慮される。制御装置は不揮発性メモリを有している。この不揮発性メモリ内には、比較条件、特にトリム位置および積込み状態が取り込まれる。不揮発性メモリの内容を推進装置に関する船舶運転のベースとすることができる。
【0020】
以下に、本発明の実施形態を図面につき詳しく説明する。
【図面の簡単な説明】
【0021】
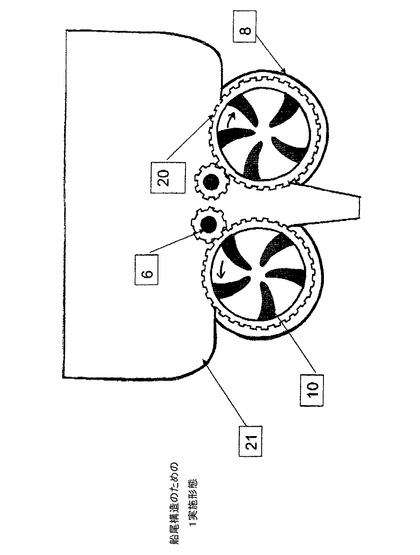
【図1】船尾構造のための1実施形態を示す概略図である。
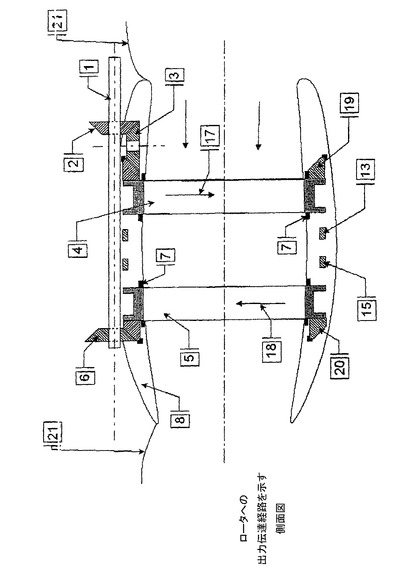
【図2】ロータへの出力伝達経路を示す側面図である。
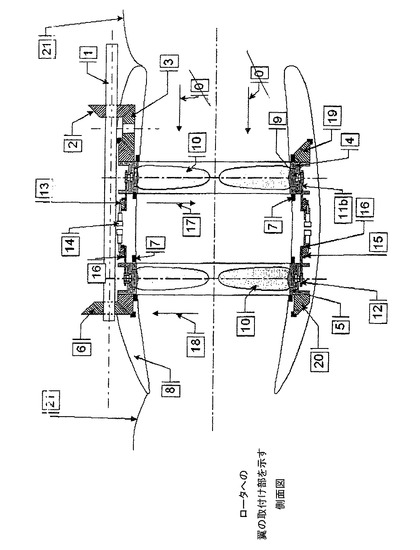
【図3】ロータへの翼の取付け部を示す側面図である。
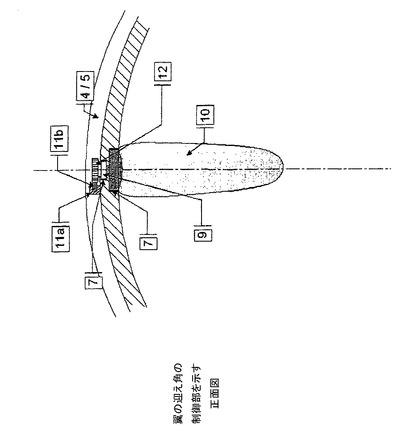
【図4】翼の迎え角の制御部を示す正面図である。
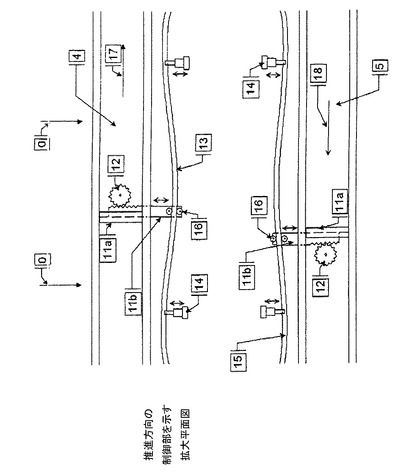
【図5】推進方向の制御部を示す拡大平面図である。
【0022】
図1には、特に好都合な流れを形成する船尾構造が示されている。符号21は船底を示しており、符号20はロータの外歯付きリングギヤを示している。符号10はロータの翼を示しており、符号8はノズルを示している。ノズル8内で各ロータが回転する。両ロータの間には、キール延長部、すなわち「力材」が下方に向かって延びていてよい。
【0023】
場合によっては使用される、ピニオンおよび外歯付きリングギヤのためのクリーニング装置、たとえば特に長期間の湾内停泊時間の後にピニオンおよび外歯付きリングギヤを清浄にするために使用され得る高圧クリーニングノズルは図示されていない。
【0024】
図2には、ロータへの出力伝達経路の詳細図が示されている。符号1は、両ロータのための駆動軸を示しており、符号2は、駆動軸1に設けられた、第1のロータのための出力を伝達するためのピニオン2を示しており、符号3は回転方向を変えるための歯車を示している。符号4は第1のロータを示しており、符号5は第2のロータを示している。符号6は、駆動軸1に設けられた、第2のロータのための出力を伝達するためのピニオンを示しており、符号8はノズルを示している。両ロータはこのノズル8内で回転する。符号7はロータのための軸受けを示しており、この場合、ロータの回転方向は符号17,18で示されている。符号20は後側のロータのための外歯付きリングギヤを示しており、符号19は前側のロータのための外歯付きリングギヤを示している。二重反転式(kontrarotierend)の構造が選択されるのではなく、1つのステータが使用される場合には、後側のロータのための外歯付きリングギヤ20を不要にすることができる。
【0025】
図3には、ロータへの翼の結合部が側面図で示されている。符号10は個々の翼を示している。図3からは、真ん中のボスが必要とされないことも判る。このことは流れ特性を改善すると共に、ノズルの中央における開いた通流部を可能にする。翼位置の制御はガイドスライダを介して行われる。これらのガイドスライダはロータに固定されている。すなわち、ガイドスライダはロータと一緒に回転する。符号13,15はガイドスライダ11bのためのガイドレールを示している(図5参照)。この場合、各ロータが、唯一つのガイドレールを有するだけでよいことが特に有利である。ガイドレールの設計は船舶の伴流域(Nachstromfeld)に関連している。ロータの回転方向は符号17,18で示されており、この場合、二重反転式の構造が選択されるのではなく、1つのステータが使用される場合には、後側のロータの回転方向は不要となる。符号19により、前側のロータのための外歯付きリングギヤが示されており、符号20により、後側のロータのための外歯付きリングギヤが示されている。二重反転式の構造が使用されない場合には、もちろん後側のロータのための外歯付きリングギヤを不要にすることができる。
【0026】
図4には、個々の翼の迎え角の制御部が拡大正面図で示されている。翼10は軸受け7内で、その回転に関して歯車12により駆動されて回転する。
【0027】
図5には、翼の制御部の細部が示されている。符号11bにより、スライドレール11aに沿って往復運動するガイドスライダが示されている。符号「4/5」は第1のロータもしくは第2のロータを示している。符号「13」もしくは「15」により、既に説明したような、翼の迎え角の制御のためのガイドレールが示されている。符号「16」により、ガイドレールにガイドスライダを拘束定するためのローラが示されている。
【0028】
本発明による推進装置の特別な利点は、推進方向の無段式の制御が可能となることである。平面図で見て、水の流入方向は符号「0」で示されており、前側のロータの回転方向は符号「17」で、後側のロータの回転方向は符号「18」でそれぞれ示されている。
【0029】
図5に示されているように、2つのガイドレールシステム13,15が設けられており、これらのガイドレールシステムはアクチュエータ14を用いて、軸方向で互いに接近する方向または互いに離れる方向に変位させられる。このことは、各翼の根部に結合されている歯車12の角度位置の変化を生ぜしめる。その結果、翼ピッチの変化がもたらされる。これにより、推進方向は無段式に制御可能となる。すなわち、駆動装置は、駆動軸の回転方向を切り換えることなしに、推進の方向を前進方向から後進方向へ変えることができる。こうして、各ロータの運転点を主機械の最適な運転点に適合させることができる。
【0030】
要約すると、図示の実施形態では、公知先行技術に比べて以下に挙げる利点が得られる:
1回転する間に翼の迎え角を局所的な流れ特性に正確にかつ常時適合させることによりキャビテーションが減じられる。
【0031】
駆動出力を2つのロータに分割することに基づき、つまり推進負荷度を二等分することに基づき、高い効率が得られる。
【0032】
逆向き回転原理(二重反転原理)を使用し、第2のロータにより一層多くの推進を発生させるために第1のロータの旋回流エネルギを利用することにより、汎用の二重反転式のプロペラの不都合なしに高い効率が得られる。
【0033】
プロペラボスが不要にされているので、コンベンショナルな可変ピッチプロペラと比べてロータ翼の迎え角の簡単な機械的制御が得られる。
【0034】
1回転の間に翼の迎え角を連続的に調整することにより、スキュー形状を備えた翼形状の使用が不要となる。これにより、翼ジオメトリ(翼幾何学的形状)のための製造コストの削減が達成される。
【0035】
推進方向の正確な制御による船舶の高い操作可能性が得られる。
【0036】
駆動装置1つ当たり2つのロータを使用することに基づき、高い冗長性が得られる。
【0037】
駆動軸が船体内に位置するので、駆動軸の高い損傷防止性が得られる。同じことはロータにも云える。なぜならば、ロータも、船体内に組み込まれたノズル内に位置するからである。
【0038】
もちろん、駆動装置は、固定ピッチプロペラを備えたプロペラ駆動装置よりも複雑な構造を有しているが、しかし本発明による駆動装置のメカニズムは、フォイト・シュナイダー駆動装置と同レベルにコントロール可能である。しかも、効率はフォイト・シュナイダー駆動装置に比べてはるかに高く、かつ有利な構成の相並んで配置された2つの推進装置を備えた構成では、船舶の良好な直進航行も得られる。この場合、両推進装置の互いに異なる推進調節により旋回運動を助成することも可能となる。
【技術分野】
【0001】
本発明は、高い効率を有する、機械的に駆動されるボスレス式の船舶推進装置(Schiffspropulsor)に関する。
【0002】
船舶用の推進機構は、種々様々な構成で、たとえば船舶プロペラの形で知られている。慣用の固定ピッチプロペラには、プロペラが中央部にボスを必要とし、このボスにプロペラブレードが取り付けられているという欠点がある。可変ピッチプロペラ、すなわち運転中にプロペラ翼をその角度位置(ピッチ角)に関して変えることのできるプロペラのボスは特に大型となる。
【0003】
さらに、公知の船舶プロペラは主としてツインスクリュにおいて軸受け台および駆動シャフトを必要とするが、これらの軸受け台および駆動シャフトは渦流を発生させ、ひいては抵抗を発生させる。この抵抗はできるだけ小さく保持されなければならない。
【0004】
良好な推進効率を達成することは、久しく以前より存在する課題である。しかしこれまで、システム「プロペラ−船舶」の75%を超える効率を達成することはできなかった。なぜならば、プロペラブレードの回転時におけるチップヴォルテックスキャビテーション(Spitzenwirbelkavitation)と呼ばれる翼端渦キャビテーションの影響も考慮されなければならないからである。
【0005】
これらの不都合を有する上記プロペラの他に、リム・ドライブ・スラスタも知られている。リム・ドライブ・スラスタは、外側で駆動されるリングから内側へ向けられた翼を備えたアウタロータである。最新のリムドライブは一般に電気的に駆動され、電気的なリングモータを有している。これにより、極めてコンパクトな構造が得られる。このようなコンパクトな構造は、特にこのような装置を船首噴流ラダー(Bugstrahlruder)として設計することを可能にする。公知の電気的なリムドライブは、一見すると魅了的ではあるが、しかし比較的悪い効率を有している。なぜならば、電気エネルギの発生の個別効率およびその回転エネルギへの変換が悪い全体効率を生ぜしめるからである。
【0006】
本発明の課題は、調節不可能な翼を備えた、多種多様に使用される電気的なリムドライブよりも著しく良好な効率を有する推進装置を提供することである。1例が、ロールスロイス社(Firma Rolls Royce)の構成を示すhttp://www.marinelog.comに公開されている、雑誌「marinelog」からの論文により示されている。
【0007】
リムドライブの使用により、船舶付属物(Schiffsanhaenge)が不要となることに基づき、既に船舶の船尾抵抗の低減が達成可能となる。しかし、回転エネルギを電気的なエネルギへ変換しかつ再び回転エネルギへ戻し変換することを必要とする機械の悪い効率は常に存在している。したがって、本発明の枠内では、船舶推進装置のために、クラシカルなリングギヤ/ピニオン装置を備えた機械的な駆動装置を使用することが提案される。すなわち、既に、クラシカルな形式のプロペラ駆動装置と比較して、かなりの効率向上および船尾抵抗の著しい改善を得ることができる。
【0008】
推進装置に設けられた翼が角度調節可能に形成されていて、これらの翼のために、推進装置における局所的な流れ条件に合わせた角度位置の連続的な調整が行われると、効率の一層の著しい改善が得られる。局所的な流れ条件に合わせた角度位置(ピッチ)の調整は、それぞれ個々の翼のために別個に、かつ周方向における翼位置に関連して行われる。すなわち、1回転の間に常時、翼位置が変化するわけである。このことはガイドスライダおよびガイドレールを用いて行われる。これらのガイドスライダおよびガイドレールの形状は船舶の伴流域に関連している。このような新規でかつ発明性のある構成により、推進装置の効率を再度著しく向上させることができる。なぜならば、推進装置における水の種々異なる流れ条件を考慮することができるからである。こうして、推進装置における水の加速は、流入条件とは無関係に、つまり流入条件の影響を受けることなしに、最適化されて行われ得る。このことは、発生させられた推力に有利に作用する。同様のことは、船舶の周りを流れる水の流れ方向への推進装置の傾きが調節される場合にも有利に作用する。
【0009】
本発明の構成では、局所的な流れ条件に合わせた翼の角度位置の調整が機械的に、特にガイドレール、スライドレールおよびガイドスライダによって行われるようになっている。ガイドスライダおよびガイドレールの使用により、角度位置のための頑丈でかつ信頼性の良い機械的な解決手段が得られる。この場合、たとえばフォイト・シュナイダー(Voith-Schneider)駆動装置により、メカニズムによって高い運転信頼性が達成され得ることが知られている。ガイドレールの形状は船舶の伴流域に関連していて、局所的な流れ特性に相応して、推進装置の高い効率を達成しかつ僅かなキャビテーションを達成するために設計される。
【0010】
それぞれ個々の翼の角度位置の調節が偏心体伝動装置によって行われると、高い運転信頼性が得られる。偏心体伝動装置は特に頑丈であり、そして多くの機械タイプにおいて、たとえばストローク高さ調節機構を備えたプレスにおいてテストされている。
【0011】
本発明の別の構成では、局所的な流れ条件に合わせた翼の角度位置の連続的な調整が、電気的な作動モータにより行われる。電気的な作動モータ、特にこの構成では永久励磁されるリングモータとして形成された電気的な作動モータは、やはり高い運転信頼性を有していると同時に、その旋回速度が角度位置に関連して閉ループ式に制御されて調節され得るという利点を持っている。
【0012】
翼の調節範囲は、前進推動から後進推動への切換が行われ得るように設計されている。
【0013】
駆動装置自体のためには、外側に位置する外歯付きリングギヤを有するロータが選択されると極めて有利である。この場合、外歯付きリングギヤの歯数とピニオンの歯数とは、当該推進装置と船舶機関との間に伝動装置が必要とならないように設定されている。このような手段によっても、駆動装置の効率を著しく向上させることができるので、船舶駆動装置の、これまで未到達の高い効率が得られる。
【0014】
本発明のさらに別の構成では、推進装置が複式推進装置もしくはツイン推動装置として構成されている。すなわち、2つの推進装置が相並んで位置して設けられている。これにより、船舶の流出特性の極めて有利な改善が得られる。なぜならば、流れが船尾に当たるようになるからである。
【0015】
駆動軸の傾きを流入の方向に適合させることができる。その結果、機関は低く設置されることになり、これにより船舶の質量重心は下方へ移動し、このことは船舶の安定性にとって有利に作用する。
【0016】
本発明のさらに別の構成では、当該推進装置が、水の流れ方向で相前後して位置する、互いに逆回転する2つのロータを有している。こうして、推進装置から流出する水噴流がもはや回転を有しなくなり、すなわち水噴流の回転エネルギが推進のために利用されることが得られるので有利である。特に単純な構成では、前側のロータの噴流中に位置する第2のロータが不要にされ、その代わりに、回転しない静翼環(ステータ)が使用される。この静翼環の翼は、たとえば推進方向の変化または浅瀬域におけるグラウンドエフェクトによる流入の変化に合わせた角度位置の全般的な調整を可能にする。
【0017】
二重反転式(kontrarotierend)のプロペラブレードを有する船舶駆動装置は、一般に専門家からは推奨されない。なぜならば、この場合、高いキャビテーション危険を甘受しなければならないからである。しかし、このキャビテーションはチップヴォルテックスキャビテーションと呼ばれる翼端渦キャビテーションであり、そして本発明による推進装置は外側半径に、相応するプロペラブレードチップ(翼先端)を有しないので、本発明の構成では、相応するキャビテーション危険を懸念する必要はない。すなわち、水を加速するエレメントの、効率を改善する二重反転式の配置を問題なく採用することができる。この場合、回転しない静翼環を使用することも可能である。もちろん、回転しない静翼環は、回転するロータと同様の極めて良好な効率を生ぜしめるわけではない。外歯付きリングギヤにおける翼根元の取付け部は、翼の迎え角が変化した場合にギャップ形成を回避し、ひいてはキャビテーションを回避するために、球形に形成されている。
【0018】
慣用の船舶プロペラと比較して、流体動力学的な改善のためには、ノズルが、船底に少なくとも部分的に組み込まれており、駆動軸も、少なくとも部分的に船舶の二重底に配置されている。こうして、船尾範囲における船舶下側の特に抵抗の少ない構成が得られる。このような構成はシステム「船舶−船舶駆動装置」の効率の一層の改善のために寄与する。
【0019】
システム「推進装置−船舶」の一層の改善のためには、推進装置の回転数および翼位置が、推進装置へ流入する流れの、船舶抵抗に及ぼす影響に関して最適化される。このためには、船舶のトリム位置および積込み状態ならびに別の影響因子、たとえば船底等に付着した動植物による汚れ(Bewuchs)および水中船舶の状態を一緒に関係付けることができる。こうして、推進装置の外部に存在しかつ同じく高率に影響を与える影響因子も一緒に考慮される。制御装置は不揮発性メモリを有している。この不揮発性メモリ内には、比較条件、特にトリム位置および積込み状態が取り込まれる。不揮発性メモリの内容を推進装置に関する船舶運転のベースとすることができる。
【0020】
以下に、本発明の実施形態を図面につき詳しく説明する。
【図面の簡単な説明】
【0021】
【図1】船尾構造のための1実施形態を示す概略図である。
【図2】ロータへの出力伝達経路を示す側面図である。
【図3】ロータへの翼の取付け部を示す側面図である。
【図4】翼の迎え角の制御部を示す正面図である。
【図5】推進方向の制御部を示す拡大平面図である。
【0022】
図1には、特に好都合な流れを形成する船尾構造が示されている。符号21は船底を示しており、符号20はロータの外歯付きリングギヤを示している。符号10はロータの翼を示しており、符号8はノズルを示している。ノズル8内で各ロータが回転する。両ロータの間には、キール延長部、すなわち「力材」が下方に向かって延びていてよい。
【0023】
場合によっては使用される、ピニオンおよび外歯付きリングギヤのためのクリーニング装置、たとえば特に長期間の湾内停泊時間の後にピニオンおよび外歯付きリングギヤを清浄にするために使用され得る高圧クリーニングノズルは図示されていない。
【0024】
図2には、ロータへの出力伝達経路の詳細図が示されている。符号1は、両ロータのための駆動軸を示しており、符号2は、駆動軸1に設けられた、第1のロータのための出力を伝達するためのピニオン2を示しており、符号3は回転方向を変えるための歯車を示している。符号4は第1のロータを示しており、符号5は第2のロータを示している。符号6は、駆動軸1に設けられた、第2のロータのための出力を伝達するためのピニオンを示しており、符号8はノズルを示している。両ロータはこのノズル8内で回転する。符号7はロータのための軸受けを示しており、この場合、ロータの回転方向は符号17,18で示されている。符号20は後側のロータのための外歯付きリングギヤを示しており、符号19は前側のロータのための外歯付きリングギヤを示している。二重反転式(kontrarotierend)の構造が選択されるのではなく、1つのステータが使用される場合には、後側のロータのための外歯付きリングギヤ20を不要にすることができる。
【0025】
図3には、ロータへの翼の結合部が側面図で示されている。符号10は個々の翼を示している。図3からは、真ん中のボスが必要とされないことも判る。このことは流れ特性を改善すると共に、ノズルの中央における開いた通流部を可能にする。翼位置の制御はガイドスライダを介して行われる。これらのガイドスライダはロータに固定されている。すなわち、ガイドスライダはロータと一緒に回転する。符号13,15はガイドスライダ11bのためのガイドレールを示している(図5参照)。この場合、各ロータが、唯一つのガイドレールを有するだけでよいことが特に有利である。ガイドレールの設計は船舶の伴流域(Nachstromfeld)に関連している。ロータの回転方向は符号17,18で示されており、この場合、二重反転式の構造が選択されるのではなく、1つのステータが使用される場合には、後側のロータの回転方向は不要となる。符号19により、前側のロータのための外歯付きリングギヤが示されており、符号20により、後側のロータのための外歯付きリングギヤが示されている。二重反転式の構造が使用されない場合には、もちろん後側のロータのための外歯付きリングギヤを不要にすることができる。
【0026】
図4には、個々の翼の迎え角の制御部が拡大正面図で示されている。翼10は軸受け7内で、その回転に関して歯車12により駆動されて回転する。
【0027】
図5には、翼の制御部の細部が示されている。符号11bにより、スライドレール11aに沿って往復運動するガイドスライダが示されている。符号「4/5」は第1のロータもしくは第2のロータを示している。符号「13」もしくは「15」により、既に説明したような、翼の迎え角の制御のためのガイドレールが示されている。符号「16」により、ガイドレールにガイドスライダを拘束定するためのローラが示されている。
【0028】
本発明による推進装置の特別な利点は、推進方向の無段式の制御が可能となることである。平面図で見て、水の流入方向は符号「0」で示されており、前側のロータの回転方向は符号「17」で、後側のロータの回転方向は符号「18」でそれぞれ示されている。
【0029】
図5に示されているように、2つのガイドレールシステム13,15が設けられており、これらのガイドレールシステムはアクチュエータ14を用いて、軸方向で互いに接近する方向または互いに離れる方向に変位させられる。このことは、各翼の根部に結合されている歯車12の角度位置の変化を生ぜしめる。その結果、翼ピッチの変化がもたらされる。これにより、推進方向は無段式に制御可能となる。すなわち、駆動装置は、駆動軸の回転方向を切り換えることなしに、推進の方向を前進方向から後進方向へ変えることができる。こうして、各ロータの運転点を主機械の最適な運転点に適合させることができる。
【0030】
要約すると、図示の実施形態では、公知先行技術に比べて以下に挙げる利点が得られる:
1回転する間に翼の迎え角を局所的な流れ特性に正確にかつ常時適合させることによりキャビテーションが減じられる。
【0031】
駆動出力を2つのロータに分割することに基づき、つまり推進負荷度を二等分することに基づき、高い効率が得られる。
【0032】
逆向き回転原理(二重反転原理)を使用し、第2のロータにより一層多くの推進を発生させるために第1のロータの旋回流エネルギを利用することにより、汎用の二重反転式のプロペラの不都合なしに高い効率が得られる。
【0033】
プロペラボスが不要にされているので、コンベンショナルな可変ピッチプロペラと比べてロータ翼の迎え角の簡単な機械的制御が得られる。
【0034】
1回転の間に翼の迎え角を連続的に調整することにより、スキュー形状を備えた翼形状の使用が不要となる。これにより、翼ジオメトリ(翼幾何学的形状)のための製造コストの削減が達成される。
【0035】
推進方向の正確な制御による船舶の高い操作可能性が得られる。
【0036】
駆動装置1つ当たり2つのロータを使用することに基づき、高い冗長性が得られる。
【0037】
駆動軸が船体内に位置するので、駆動軸の高い損傷防止性が得られる。同じことはロータにも云える。なぜならば、ロータも、船体内に組み込まれたノズル内に位置するからである。
【0038】
もちろん、駆動装置は、固定ピッチプロペラを備えたプロペラ駆動装置よりも複雑な構造を有しているが、しかし本発明による駆動装置のメカニズムは、フォイト・シュナイダー駆動装置と同レベルにコントロール可能である。しかも、効率はフォイト・シュナイダー駆動装置に比べてはるかに高く、かつ有利な構成の相並んで配置された2つの推進装置を備えた構成では、船舶の良好な直進航行も得られる。この場合、両推進装置の互いに異なる推進調節により旋回運動を助成することも可能となる。
【特許請求の範囲】
【請求項1】
高い効率を有する、機械的に駆動されるボスレス式の船舶推進装置において、該船舶推進装置が、1つのリング内に複数の翼(10)を備えた少なくとも1つのロータを有しており、リングギヤを備えた該ロータが、回転運動を伝達するためのピニオン(2)を備えた軸(1)を介して船舶機関に連結されており、該ロータがノズル(8)内に配置されており、該ロータの回転する翼(10)が、個々に角度調節可能に形成されていて、1回転毎に局所的な流れ条件、特にノズル(8)内の流入条件に合わせた翼の角度位置の連続的な調整を可能にしており、しかも有利には当該推進装置の傾きが、流れ方向に合わせて調整可能であることを特徴とする、機械的に駆動されるボスレス式の船舶推進装置。
【請求項2】
局所的な流れ条件に合わせた翼の角度位置の連続的な調整が、機械的に、特にガイドレール(13,15)とスライドレール(11a)とガイドスライダ(11b)とにより行われ、ガイドレール(13,15)の設計が、船舶の伴流分布に関連している、請求項1記載の船舶推進装置。
【請求項3】
推進方向が、ガイドレールを変位させることにより反転可能である、請求項1または2記載の船舶推進装置。
【請求項4】
局所的な流れ条件に合わせたそれぞれ個々の翼の角度位置の連続的な調整が、偏心体伝動装置により行われる、請求項1記載の船舶推進装置。
【請求項5】
局所的な流れ条件に合わせた翼の角度位置の連続的な調整が、電気的な作動モータもしくはハイドロリック式のアクチュエータにより行われる、請求項1記載の船舶推進装置。
【請求項6】
ロータが、外側に位置する外歯付きリングギヤ(19,20)を有しており、該外歯付きリングギヤ(19,20)の歯数と前記ピニオン(2,6)の歯数とは、当該推進装置と船舶機関との間に伝動装置が必要とならないように設定されている、請求項1から5までのいずれか1項記載の船舶推進装置。
【請求項7】
当該推進装置が、複式推進装置として構成されている、請求項1から6までのいずれか1項記載の船舶推進装置。
【請求項8】
当該推進装置が、水の流れ方向で相前後して位置する2つのロータを有しており、両ロータが、有利には二重反転式のロータとして構成されている、請求項1から7までのいずれか1項記載の船舶推進装置。
【請求項9】
流れ方向で1つのロータの上流側に、回転しない静翼環(ステータ)が配置されており、該静翼環の翼が、特にたとえば浅瀬域におけるグラウンドエフェクトまたは推進方向の変化による流入の変化に合わせた角度位置の、状況に応じた調整を可能にする、請求項1から7までのいずれか1項記載の船舶推進装置。
【請求項10】
ノズル(8)が、船底(21)もしくは力材に少なくとも部分的に組み込まれている、請求項1から9までのいずれか1項記載の船舶推進装置。
【請求項11】
駆動軸(1)が、少なくとも部分的に船舶の二重底またはポッドもしくは力材に配置されている、請求項1から10までのいずれか1項記載の船舶推進装置。
【請求項12】
当該推進装置が、制御装置を有しており、該制御装置は、船舶機関の最適な運転条件が達成されるようにプロペラ翼の調節を行う、請求項1から11までのいずれか1項記載の船舶推進装置。
【請求項13】
当該推進装置が、制御装置を有しており、該制御装置は、伴流域の影響を考慮し、たとえばトリム位置や船舶の積込み状態ならびに場合によっては別の影響因子を考慮して、当該推進装置の回転数および翼位置を最適化する、請求項1から12までのいずれか1項記載の船舶推進装置。
【請求項14】
運転時に角度調節可能となる翼と、機械的な駆動装置とを備えた、少なくとも部分的に船底に組み込まれた推進装置、特に複式推進装置が使用されることを特徴とする船舶。
【請求項1】
高い効率を有する、機械的に駆動されるボスレス式の船舶推進装置において、該船舶推進装置が、1つのリング内に複数の翼(10)を備えた少なくとも1つのロータを有しており、リングギヤを備えた該ロータが、回転運動を伝達するためのピニオン(2)を備えた軸(1)を介して船舶機関に連結されており、該ロータがノズル(8)内に配置されており、該ロータの回転する翼(10)が、個々に角度調節可能に形成されていて、1回転毎に局所的な流れ条件、特にノズル(8)内の流入条件に合わせた翼の角度位置の連続的な調整を可能にしており、しかも有利には当該推進装置の傾きが、流れ方向に合わせて調整可能であることを特徴とする、機械的に駆動されるボスレス式の船舶推進装置。
【請求項2】
局所的な流れ条件に合わせた翼の角度位置の連続的な調整が、機械的に、特にガイドレール(13,15)とスライドレール(11a)とガイドスライダ(11b)とにより行われ、ガイドレール(13,15)の設計が、船舶の伴流分布に関連している、請求項1記載の船舶推進装置。
【請求項3】
推進方向が、ガイドレールを変位させることにより反転可能である、請求項1または2記載の船舶推進装置。
【請求項4】
局所的な流れ条件に合わせたそれぞれ個々の翼の角度位置の連続的な調整が、偏心体伝動装置により行われる、請求項1記載の船舶推進装置。
【請求項5】
局所的な流れ条件に合わせた翼の角度位置の連続的な調整が、電気的な作動モータもしくはハイドロリック式のアクチュエータにより行われる、請求項1記載の船舶推進装置。
【請求項6】
ロータが、外側に位置する外歯付きリングギヤ(19,20)を有しており、該外歯付きリングギヤ(19,20)の歯数と前記ピニオン(2,6)の歯数とは、当該推進装置と船舶機関との間に伝動装置が必要とならないように設定されている、請求項1から5までのいずれか1項記載の船舶推進装置。
【請求項7】
当該推進装置が、複式推進装置として構成されている、請求項1から6までのいずれか1項記載の船舶推進装置。
【請求項8】
当該推進装置が、水の流れ方向で相前後して位置する2つのロータを有しており、両ロータが、有利には二重反転式のロータとして構成されている、請求項1から7までのいずれか1項記載の船舶推進装置。
【請求項9】
流れ方向で1つのロータの上流側に、回転しない静翼環(ステータ)が配置されており、該静翼環の翼が、特にたとえば浅瀬域におけるグラウンドエフェクトまたは推進方向の変化による流入の変化に合わせた角度位置の、状況に応じた調整を可能にする、請求項1から7までのいずれか1項記載の船舶推進装置。
【請求項10】
ノズル(8)が、船底(21)もしくは力材に少なくとも部分的に組み込まれている、請求項1から9までのいずれか1項記載の船舶推進装置。
【請求項11】
駆動軸(1)が、少なくとも部分的に船舶の二重底またはポッドもしくは力材に配置されている、請求項1から10までのいずれか1項記載の船舶推進装置。
【請求項12】
当該推進装置が、制御装置を有しており、該制御装置は、船舶機関の最適な運転条件が達成されるようにプロペラ翼の調節を行う、請求項1から11までのいずれか1項記載の船舶推進装置。
【請求項13】
当該推進装置が、制御装置を有しており、該制御装置は、伴流域の影響を考慮し、たとえばトリム位置や船舶の積込み状態ならびに場合によっては別の影響因子を考慮して、当該推進装置の回転数および翼位置を最適化する、請求項1から12までのいずれか1項記載の船舶推進装置。
【請求項14】
運転時に角度調節可能となる翼と、機械的な駆動装置とを備えた、少なくとも部分的に船底に組み込まれた推進装置、特に複式推進装置が使用されることを特徴とする船舶。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2013−503784(P2013−503784A)
【公表日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2012−528252(P2012−528252)
【出願日】平成22年9月2日(2010.9.2)
【国際出願番号】PCT/EP2010/005387
【国際公開番号】WO2011/029550
【国際公開日】平成23年3月17日(2011.3.17)
【出願人】(510339599)
【氏名又は名称原語表記】Technische Universitaet Hamburg−Harburg
【住所又は居所原語表記】Schwarzenbergstrasse 95, D−21073 Hamburg, Germany
【出願人】(510339588)トゥーテック イノヴェイション ゲゼルシャフト ミット ベシュレンクテル ハフツング (2)
【氏名又は名称原語表記】TuTech Innovation GmbH
【住所又は居所原語表記】Harburger Schlossstrasse 6−12, D−21079 Hamburg, Germany
【公表日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成22年9月2日(2010.9.2)
【国際出願番号】PCT/EP2010/005387
【国際公開番号】WO2011/029550
【国際公開日】平成23年3月17日(2011.3.17)
【出願人】(510339599)
【氏名又は名称原語表記】Technische Universitaet Hamburg−Harburg
【住所又は居所原語表記】Schwarzenbergstrasse 95, D−21073 Hamburg, Germany
【出願人】(510339588)トゥーテック イノヴェイション ゲゼルシャフト ミット ベシュレンクテル ハフツング (2)
【氏名又は名称原語表記】TuTech Innovation GmbH
【住所又は居所原語表記】Harburger Schlossstrasse 6−12, D−21079 Hamburg, Germany
[ Back to top ]