
高周波センサ装置
【課題】放射パターンの制御が容易なアンテナを備えた高周波センサ装置を提供すること。
【解決手段】送信波を発生する送信部と、前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記受信波を検知する受信部と、前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置を提供する。
【解決手段】送信波を発生する送信部と、前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記受信波を検知する受信部と、前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、高周波を用いた高周波センサ装置に関する。
【背景技術】
【0002】
例えば水洗便器などの洗浄を自動化する場合、赤外線センサなどを用いる方法がある。この場合、一定時間以上使用者が便器の前に留まっていることを検知し、その後に使用者が便器を離れたことを検知して、一定量の洗浄水を流すようにする。しかしながら、この方法では用足しの有無や小便の量にかかわらず一定の洗浄水を流すことになり無駄が生ずる場合もある。
【0003】
便器を実際に使用していることを検知して洗浄水を流すには、ドップラー効果を利用することが考えられる。すなわち、電波や音波が移動物体に当り反射すると、反射波の周波数がドップラーシフトする。この反射波と送信波の周波数の差分周波数スペクトラムを求めることにより移動物体が検知される。さらに、この差分に相当するドップラー周波数は物体の移動速度に比例する。従って、尿や洗浄水といったボール面を流れる液流などに向けて送信波を放射することにより、使用状態に応じて適切に洗浄水を供給できる。
【0004】
送信波として電波を用いる場合、センサを構成するアンテナの放射方向を液流に向けて精度よく制御することが重要である。すなわち、液流以外の移動物体を検知して洗浄水を流すことなどを防止することが好ましい。
【0005】
本発明者らは、マイクロ波を利用したドップラーセンサを搭載した便器洗浄装置を開示した(特許文献1)。
【特許文献1】特許第3740696号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は、放射パターンの制御が容易なアンテナを備えた高周波センサ装置を提供する。
【課題を解決するための手段】
【0007】
本発明の一態様によれば、送信波を発生する送信部と、前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記受信波を検知する受信部と、前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置が提供される。
【0008】
また、本発明の他の一態様によれば、送信波を発生する送信部と、前記送信波を放射する送信アンテナと、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信する受信アンテナと、前記受信波を検知する受信部と、前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、を備え、前記送信アンテナと前記受信アンテナの少なくともいずれかは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置が提供される。
【発明の効果】
【0009】
本発明により、放射パターンの制御が容易なアンテナを備えた高周波センサ装置が提供される。すなわち、アンテナのゲインが最大ゲインから3dB以内の範囲を局在させることにより、近距離において、検知したい方向すなわち電波ビームを傾けた(走査した)方向とは異なる方向にある物体を誤検知しないようにすることができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照しつつ、本発明の実施の形態について説明する。
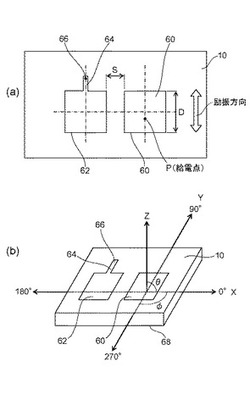
図1は、本発明の実施の形態にかかる高周波センサ20を説明するための模式図であり、同図(a)及び(b)はそのブロック図、同図(c)は水平放射パターンにおける等ゲイン線、同図(d)は放射パターンを表す模式図である。
図1(a)に表した具体例の場合、送信部12に接続されたアンテナ10からは、例えば、10.525GHzの周波数を有する送信波T1が放射される。移動物体からの反射波T2は、アンテナ10を経由して受信部14に入力される。アンテナ10は、図1(a)に表したように送信側と受信側とを共通としてもよく、または、図1(b)に表したように、送信部12にはアンテナ10aを接続し、受信部14にはアンテナ10bを接続してもよい。
【0011】
送信波の一部と受信波とは、差分検出部16にそれぞれ入力されその差分のドップラー周波数近傍の出力信号が出力される。すなわち、ドップラー周波数ΔF(Hz)は、下記の式(1)により表すことができる。
【0012】
ΔF=Fs−Fb=2×Fs×v/c 式(1)
但し、Fs:送信周波数(Hz)
Fb:反射周波数(Hz)
v:物体の移動速度(m/s)
c:光速(=300×106m/s)
高周波センサ20を液流に向けると、式(1)で表されるように、その流速vに比例した周波数ΔFを含む出力信号を得ることができる。出力信号は周波数スペクトラムを有し、スペクトラムのピークに対応するピーク周波数と液流の流速vとの間には相関関係がある。従って、ドップラー周波数ΔFを測定することにより流速vを求めることができる。なお、日本においては、人体を検知する目的には10.525GHzまたは24.15GHzの周波数が使用できる。
【0013】
本発明の具体例にかかる高周波センサ20を構成するアンテナ10からの水平放射パターンは、例えば、図1(c)のようになる。アンテナの給電点を通るZ軸と直交するXY面内において、アンテナ10のゲイン(利得)の最大点をQとする。図1(c)においては、ゲインが最大値から3dB低下する領域を実線で表し、10dB低下する領域を破線で表している。Y軸はアンテナ10の給電点を通り励振方向と平行であるが、3dBゲイン低下領域をY軸に関して走査すべき一方の側(図では左側)に位置制御すると、液流を正確に検知することができる。図1(d)は、アンテナの水平放射パターンである。アンテナに関しては、後に詳細に説明する。
【0014】
図2は、本発明の具体例にかかる高周波センサ20を備えた小便器の構成を例示する模式図である。
小便器22の内部には、高周波センサ20と、機能部24が収められている。小便器22の上方には、小便器22のボール部内空間を洗浄するための水を供給する給水部30及び洗浄水吐出口32が設けられている。ボール部内空間の下方には排水口34が設けられている。
【0015】
図3は、機能部24の構成を例示するブロック図である。
差分検出部16の出力信号はアンプ40により増幅され、FFT(Fast Fourier Transform)演算部42に入力される。FFT演算部42により、差分検出部16の出力信号の
周波数スペクトラムをリアルタイムで得ることができる。FFT演算部42の出力は、流量
演算部44に入力され、周波数スペクトラムから流量に換算されることもできる。
【0016】
コントローラ46は、流量演算部44で演算された流量などをもとに、他の装置を作動させる。洗浄水供給バルブ36はコントローラ46の指示により開閉する。電解水生成部60は、コントローラ46により、例えば、1日に1回電解水を流すことにより排水管における尿石形成を防止する。外部インタフェース52は、尿量などの情報を外部に伝送する。
【0017】
以下、高周波センサ20の構成要素であるアンテナ10について詳細に説明する。
【0018】
図4は、本発明の高周波センサ20を構成するアンテナ10にかかる第1具体例を表し、同図(a)は模式平面図、同図(b)は模式斜視図である。
本具体例において、パッチ電極を有する給電素子60の励振方向に対して横方向に、パッチ電極を有する無給電素子62が配置されている。このアンテナ10は、給電素子60及び無給電素子62がそれぞれ平面パターンを有するパッチアンテナに属する。アンテナ10の主面はXY座標で表され、水平面内においてX軸からの角度をφで表す。また、この主面と垂直な方向をZ軸とし、垂直面において、Z軸からの角度をθで表す。Y軸は、励振方向に対して平行であり、X軸、Y軸、Z軸、φ及びθに関するこれらの定義は、本願明細書においてすべて同一とする。
【0019】
給電素子60の中心を通り、Y軸の負方向における位置Pが送信波の励振部と接続される給電点とされる。給電素子60は矩形状の導電体の薄膜であり励振方向の一辺の長さDは約λg/2(但しλgは波長)とする。また、無給電素子62の中心線上で、励振方向に平行かつY軸正方向には伝送線路64が設けられており、その終端は導通孔66を介して接地68へ接続されている。すなわち、伝送線路64は終端短絡とされている。
【0020】
図5は、無給電素子62をより詳細に表し、同図(a)はその模式平面図、同図(b)は同図(a)のAA’に沿った模式断面図である。
無給電素子62と給電素子60との形状は伝送線路64以外の領域においてほぼ等しいものとすることができる。
または、無給電素子62のサイズを給電素子60のサイズよりも少し小さくしてもよい。すなわち、励振周波数は無給電素子62の一辺の長さにより決まるため、無給電素子62を給電素子60よりも小さくすることで、周波数を高く設定することができる。そうすると、無給電素子62の位相を給電素子60に対して遅らせることが可能となり、伝送線路の長さを調整しなくてもアンテナから放射される電波の方向を曲げることが可能となる。
この具体例の場合、給電点Pの横方向、かつY軸負方向の位置が整合点P’となる。伝送線路64の終端から0.3mmの位置にφ0.3mmの導通孔66が設けられており、また伝送線路64の長さをLとする。
【0021】
このアンテナは、例えば、誘電体の両面を銅板で挟んだガラスエポキシ基板などを用いて形成できる。図5(b)においては、比誘電率(εr)が3.5、tanδが0.004、誘電体厚みが0.75mmの場合を表した。このような基板により構成される伝送線路、すなわちマイクロストリップラインの波長及び特性インピーダンスはεr、誘電体厚み、マイクロストリップラインの導体幅及び厚みの関数となる。
【0022】
図6は、伝送線路64の長さLを変化させた場合、無給電素子62の整合点P’における振幅(Magnitude:dB)、位相(度)及び無給電素子62のアンテナゲイン(アンテ
ナ利得:dB)のシミュレーション結果を表すグラフ図である。
Lが伝送線路の4分の1波長である4.8mm近傍において、整合点P’における振幅 が最小となり、位相がプラスからマイナスに急激に変化する。アンテナゲインは約6d
Bと最大となっている。また、位相はLが約8.1mmにおいてマイナスからプラスへと
転じる。これよりLが大きい8.3mm近傍においてアンテナゲインはマイナス10dBとなり最低となる。なお、位相がプラスである場合は無給電素子62は導波器として作用し、マイナスである場合は反射器として作用する。
【0023】
図7は、アンテナ整合点P’において高周波回路パラメータであるSパラメータのうち
、反射係数であるS11をシミュレーションで求めた結果を表し、同図(a)はS11の振幅(Mag.;dB)、同図(b)はS11の位相(deg)の周波数特性をそれぞれ表す。
周波数11.05GHzにおいて、伝送線路長が4.7mmの場合に位相は0度となり、3.77mmの場合に位相は110度、5.32mmの場合に位相はマイナス110度となる。
【0024】
図8は、整合点P’の位相が0乃至140度である無給電素子66を、全体のアンテナゲインが最大となる素子間スペースS(mm)に配置したゲイン(dB)と、最大放射強度が得られる放射角度θ(度)との関係を表すグラフ図である。
例えば、整合点P’の位相が110度の場合、素子間スペースSが2.2mmにおいて全体アンテナゲインが最大である7.15dBとなることを示している。このとき、角度θはほぼ27度となる。
【0025】
図9は、H面(φが0−180°である垂直断面)におけるアンテナゲインのθ依存性を、それぞれの整合点P’の位相に対して求めたシミュレーション結果を表すグラフ図である。
放射パターンは、メインビームと、これよりゲインの小さいサイドローブ(不要電波)とを含む。ここで、メインビームのゲインのピークより3dB低下した角度領域を半値角と呼ぶことにする。液流を精度よく検知するためには、メインビームのゲインが高く、メインビームとサイドローブとのゲイン差が大きく、かつ3dB利得低下する半値角範囲が0度よりも走査方向側に局在することが好ましい。
【0026】
すなわち、アンテナのゲインが最大ゲインから3dB以内となる半値角範囲が、パッチ電極を含む平面に対して垂直であり給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように無給電素子が配置されていることが特徴とされる。
【0027】
整合点位相P’が大きくなるに従い、ゲインは増加するが、半値角が0度を越えるようになる。従って、整合点位相は120度以下、90度以上が好ましい。例えば、整合点位相が110度の場合、アンテナゲインは約マイナス19dB,半値角範囲はマイナス65乃至マイナス5度、メインビームとサイドローブとのゲイン差が11dBとなり、高周波センサとしての機能を備えることが可能となる。
【0028】
図10は、位相を0乃至140度と変化させ、素子間スペースSを1乃至5mmと変化させた場合の水平放射パターン(XY面)を表している。整合点P’のそれぞれの位相に対してアンテナゲインが最大となる素子間スペースS、最大放射強度となる放射角度θが図10の右端の1列の例示するように得られる。3dB利得低下領域が、給電点Pを含む水平面(XY面)内の軸に関して、走査したい一方の側(図10においては左側とする)に位置制御される様に、素子間スペースS,整合点P’位相を選択決定することができる。この結果、検知したい液流の領域に応じて高周波センサを動作させることが可能となる。
【0029】
図11は、第1具体例において、整合点P’の位相が90乃至130度である無給電素子62を、全体のアンテナゲインが最大となる素子間スペースS(mm)で配置したゲイン(dB)と、最大放射強度が得られる放射角度θ(度)との関係を表すグラフ図である。
【0030】
この変形例のアンテナ10は、例えば、アルミナのようなセラミック材料を用いることにより形成できる。この場合、比誘電率を9.5、tanδを0.001、厚みを1mmとしてシミュレーションを行っている。Lが4.4mmの場合、アンテナゲインは5.5dBと最大となり、このとき最大放射強度が得られる角度は30度である。
【0031】
図12は、この具体例において、H面におけるアンテナゲイン(dB)のθ(度)依存性を、それぞれの整合点P’の位相に対して求めたシミュレーション結果を表すグラフ図である。
整合点位相P’が大きくなるに従い、ゲインは増加するが、半値角が0度を越えるようになる。従って、整合点位相は120度以下、90度以上が好ましい。例えば、整合点位相が120度の場合、アンテナゲインは約マイナス21dB,半値角範囲はマイナス62乃至マイナス2度、メインビームとサイドローブとのゲイン差が11dBとなり、高周波センサとしての機能を満たす。
【0032】
図13は、アンテナ10の第2具体例の模式平面図である。なお、以下のアンテナの具体例において図4と同様の構成要素には同一番号、同一記号を伏して詳細な説明を省略する。
第2具体例においては、無給電素子62は励振方向に沿って給電素子60と隣り合って配置されている。このアンテナ10は、図5(b)と同様の材料を用いて形成することができる。終端短絡の伝送線路は、励振方向と平行な部分を有している。記伝送線路の一端は、無給電素子62の励振方向と直交する端辺の略中央付近に接続されている。また、後に詳述するように、伝送線路の他端は、高周波信号の通過と遮断とのいずれかを選択可能なスイッチの入力端子に接続することができる。この場合、スイッチのオン状態において無給電素子62は、導波器及び反射器のいずれか一方として作用し、スイッチのオフ状態において、無給電素子62は、導波器及び反射器のいずれか他方として作用する。
図14は、整合点P’の位相が60乃至110度である無給電素子66を、全体のアンテナゲインが最大となる素子間スペースS(mm)に配置したゲイン(dB)と、最大放射強度が得られる放射角度θ(度)との関係を表すグラフ図である。
素子間スペースSが1.0mmの場合、アンテナゲインが6.92dBと最大となり、最大放射角度が約42度となる。
【0033】
図15は、E面(φが90−270°である断面)におけるアンテナゲインのθ依存性を、それぞれの整合点P’の位相に対して求めたシミュレーション結果を表すグラフ図である。
整合点位相P’が大きくなるに従い、ゲインは増加するが、半値角が0度を越えるようになる。従って、整合点位相は110度以下、90度以上が好ましい。例えば、整合点位相が110度の場合、アンテナゲインはほぼマイナス19dB,半値角範囲はプラス2乃至プラス80度、メインビームとサイドローブとのゲイン差が10dBとなり、高周波センサとしての機能を備えることが可能となる。
【0034】
図16は、整合点の位相を0乃至150度と変化させ、素子間スペースSを変化させた場合の水平放射パターンを表す。
それぞれの位相においてアンテナゲインが最大となる素子間スペースSと、最大放射強度が得られる放射角度θが本図の右端のように得られる。3dB利得低下領域が、給電点Pを含む水平面のX軸に関して、走査したい一方の側(図16においては上側とする)に位置制御される様に、素子間スペースS,整合点P’位相を選択決定することができる。この結果、検知したい液流の領域に応じて高周波センサを動作させることが可能となる。
【0035】
図17は、アンテナ10の第3具体例を表し、同図(a)は模式平面図、同図(b)は模式斜視図である。
本具体例においては、給電素子60と隣り合い励振方向に対して横方向の位置に無給電素子62及び63が配置されている。かつ、無給電素子62の終端短絡伝送線路64の電気長はλg/4より短いので整合点の位相はプラス、無給電素子63の終端短絡伝送線路65の電気長はλg/4より長いので整合点の位相はマイナスである。
【0036】
図18は、無給電素子62における整合点位相を110度に固定し、無給電素子63の位相をマイナス180度から0度と変化した場合、全体のアンテナゲインが最大となる素子間スペースSとゲイン、最大放射強度が得られる放射角度θとの関係を表すグラフ図である。素子間スペースが3.4mmの場合、アンテナゲインは7.5dBの最大値となる。また、このとき最大放射強度となる角度は39度である。
【0037】
図19は、本具体例において無給電素子62を110度、無給電素子63の位相を0度、マイナス90度、マイナス180度とした場合のH面におけるゲインのθ依存性を表すグラフ図である。
0度とマイナス90度において、メインビームの放射パターンに大きな変化を生じていない。マイナス90度からマイナス180に変化すると、メインビームのピーク位置がサイドローブに少し接近し、サイドローブゲインを約3dB抑圧できる。
【0038】
図20は、無給電素子62の位相を110度と固定し、無給電素子の位相をマイナス180乃至0度と変化させ、かつ素子間スペースSを変化させた場合の水平放射パターンを表す。アンテナゲインが最大となる素子間スペースS、最大放射強度となる角度θが本図右端のように得られる。本図において、3dB利得低下領域が一方の側(左側)に制御され、液流が走査したい側で検知できる。
【0039】
図21は、無給電素子62の位相を80乃至130度と変化させ、無給電素子63の位相を0度またはマイナス180度とした場合の、H面におけるゲインのθ依存性である。無給電素子63の位相は、マイナス180度のほうがサイドローブを4乃至6dB抑圧できるので好ましい。また無給電素子62の位相を120度以下とすると半値角を0度よりも走査方向側とできる。
【0040】
図22は、図21のように位相を変化させた場合の水平放射パターンである。アンテナゲインが最大となる素子間スペースSと、最大放射強度となる放射角度θが本図右端の様に得られ、3dB利得低下領域を一方の側(左側)に制御し液流を走査したい側で検知できることを表している。
図23は、無給電素子62の位相を0度とし、無給電素子63の位相をマイナス180度とした場合のH面における電波ビームのゲインのθ依存性を表す。メインビームとサイドローブとのゲイン差が約4dBと小さいが、半値角を0度より離して走査方向側とするのが容易である。
【0041】
図24は、無給電素子62の位相を140、150、160度とし、無給電素子63の位相を0度とした場合のH面におけるゲインのθ依存性を表す。無給電素子62の位相を140及び150度とすることにより、3dB利得低下領域を一方の側(左側)に制御し液流を走査したい側で検知できる。この場合、サイドローブとメインビームが連続し広がった放射パターンとなる。
【0042】
図25は、図17に例示された第3具体例の第1変形例であり、同図(a)は伝送線路64の特性インピーダンスが80オームであり、かつ無給電素子62の位相は110度(伝送線路の長さLは3.8mm)、無給電素子63の位相はマイナス110度(伝送線路の長さLは5.3mm)であるアンテナ10の模式平面図、同図(b)はゲインのθ依存性を表す。
また、図26は、第3具体例の第2変形例であり、同図(a)は伝送線路64の特性インピーダンスが50オームであり、かつ無給電素子62の位相は110度、63の位相はマイナス110度であるアンテナ10の模式平面図、同図(b)はゲインのθ依存性を表す。メインビームのゲインは共にマイナス19dB,ゲインが最大となる角度θは共にマイナス35度である。第2変形例の方がサイドローブを約1dB抑圧できている。
【0043】
図27は、第3具体例の第3変形例である。特性インピーダンスを80オームとし、無給電素子の励振方向と直交する一方の辺と整合点P’との距離2.3mmと等しい切り込みを他方の辺に設け、伝送線路64を長くする。図27(b)に例示されるゲインのθ依存性は図20に例示された第1変形例とほぼ同様となる。
【0044】
図28は、アンテナ10の第4具体例を表し、同図(a)は模式平面図、同図(b)はゲインのφ依存性である。第3具体例において無給電素子62及び63における伝送線路64は、X軸に関して給電素子60の給電点Pとは反対側に設けられている。本第4具体例において、伝送線路64はX軸に関して給電点Pと同一側に配置される。図28(b)において、太線で著す本第4具体例と細線で表す第3具体例とのゲインのφ依存性における相違は小さい。
【0045】
次に、終端解放伝送線路を用いた場合について説明する。
【0046】
図29は、アンテナ10の第5具体例であり、伝送線路74の終端を開放としたアンテナ10の模式平面図である。終端開放の伝送線路は電気長がλg/2で位相が0度である。本図において、無給電素子72における伝送線路74の電気長をλg/2より短く、無給電素子73における伝送線路74の電気長をλg/2より長く設定する。無給電素子72,73及び給電素子60の励振方向に沿う長さDをλg/2とする。
【0047】
図30は、無給電素子72,73を表し、同図(a)は模式平面図、同図(b)はBB’に沿った模式断面図である。深さが0.74mmである導通孔77の先端は接地68とは接続されずに開放(オープン)とする。なお、アンテナ10を構成する基板は第1具体例と同様とできるので説明を省略する。
【0048】
図31は、終端開放の伝送線路の長さLOを変化させた場合、無給電素子72及び73の整合点P’における振幅(dB)、位相(度)、無給電素子のアンテナゲイン(dB)をシミュレーションにより求めたグラフ図である。LOが7.6mmにおいて位相が0度となり、破線で表すアンテナゲインはLOが2.4乃至4.3mmの範囲でマイナスとなり、3.4mm近傍において最小値となる。
【0049】
図32は、整合点P’における反射係数S11のシミュレーション結果を表し、同図(a)はS11振幅、同図(b)は位相の周波数特性を表す。11.05GHzにおいて、終端開放の伝送線路長が7.55mmで位相は0度となり、6.64mmで位相が110度、8.14mmで位相がマイナス110度となる。
【0050】
図33は、最大放射強度が得られる放射角度θにおけるゲインの角度φ依存性を表すグラフ図である。無給電素子に接続される伝送線路が終端短絡(ショート)である場合を細線で、終端開放(オープン)である場合を太線でそれぞれ表す。細線で表す終端短絡伝送線路のほうが角度φに対して対称とできる。
【0051】
図34は、終端短絡または終端開放の伝送線路を有する無給電素子を、給電素子と隣り合うように励振方向に対して横方向に配置したアンテナ10の水平放射パターンを表す図である。
【0052】
図35は、位相が110度及びマイナス110度となる終端短絡及び終端開放伝送線路の構成を表す模式平面図である。
また、図36は、図35に表したそれぞれの伝送線路を備えた無給電素子のE面におけるゲインのθ依存性を表す。終端短絡且つ位相マイナス110度の伝送線路を有する無給電素子が一番高いゲインを有する。終端開放かつ位相110度の伝送線路を有する無給電素子のゲインが最も低い。
【0053】
また図33に例示されるように終端開放伝送線路を用いるとφが240乃至330度の間の範囲でゲインが充分には低下しない。また、図34に例示されるように、終端開放伝送線路を用いると放射パターンがこの角度(φ)近傍で曲がり(すなわち膨らみ)を生じている。この曲がりが生じると、3dB利得低下領域の制御が十分にできない場合がある。しかし、この曲がりは給電素子と無給電素子との励振方向に沿う相対位置をずらすことにより改善できる。
【0054】
図37は、アンテナ10の第6具体例の模式平面図である。終端開放伝送線路74を有する無給電素子72及び73は、給電素子60に対して励振方向かつ給電点とは反対方向に距離Gだけずらして配置されている。この場合は、無給電素子72と73とを同一にGだけずらしているが、同一でなくとも良い。図38に例示されるゲインの角度φ依存性は、図33の終端短絡伝送線路と同様にゲインを減衰させることができる。
【0055】
図39は、水平放射パターンの回転を説明するための模式図である。図39(a)に表した具体例の場合、終端開放伝送線路を有する無給電素子74は、給電素子60に対してずらして配置されておらず、両者の中心をむすぶ直線は、励振方向に対して垂直とされている。その場合の水平放射パターンを見ると、最大ゲインはθ=30度、φ=210度である。つまり、φ=180度の方向からみて30度も回転している。
【0056】
これに対して、図39(b)に表した具体例の場合、終端開放伝送線路を有する無給電素子74は、給電素子60に対してずらして配置されている。すなわち、無給電素子74は、その伝送線路が接続されている方向に向かってずらされている。このようにすると、放射パターンのφ方向の回転を抑制できる。具体的には、図39(b)に表した具体例の場合、最大ゲインはθ=27度、φ=180度であり、図39(a)において見られた水平放射パターンの回転が抑制されている。この場合、無給電素子74をずらし量は、λg/4以内に抑えることが望ましい。
【0057】
一方、水平放射パターンの回転を抑制するもうひとつの方法として、伝送線路を短絡する方法を挙げることができる。
図39(c)は、無給電素子74を給電素子60に対してずらすことなく、その伝送線路の終端を接地した具体例を表す。その結果、放射パターンの最大ゲインはθ=36度、φ=186度となり、図39(a)に表した具体例(φ=210度)と比べて、φ=180度の方向に24度も戻ったことが分かる。
【0058】
図40は、アンテナ10の第7具体例の模式平面図であり、同図(a)は給電点Pと同方向に2個の終端開放伝送線路74が延在する場合、同図(b)は互いに反対方向に延在する場合を表す模式平面図である。また、図40(c)は、ゲインの角度φ依存性を表すグラフ図であり、実線は図40(a)、破線は同図(b)であり、共にφ依存性を変化させることができている。これは、放射パターンの回転を制御できることを表している。
【0059】
図41は、第8具体例を表す模式平面図である。励振方向に沿って、給電素子60をはさんで対称位置に無給電素子62及び63が配置されている。本具体例においては、無給電素子62及び63に、終端短絡伝送線路64が設けられている。
【0060】
図42は、一方の無給電素子62の位相を110度に固定し、他方の無給電素子63の位相を0乃至マイナス180度と変化させた場合におけるアンテナゲインが最大となる素子間スペースS、及び最大放射強度となる角度θを表すグラフ図である。
素子間スペースSが1.3mmの時アンテナゲインが最大となり、最大放射強度となる角度θは63度となることが分かる。
【0061】
図43は、一方の無給電素子62の位相を110度とし、他方の無給電素子63の位相を0、マイナス90、マイナス180度とした場合のE面におけるゲインのθ依存性である。
図44は、素子間スペースSを変化させた場合の水平放射パターンを表す。
無給電素子63の位相を0からマイナス180度まで変化させるにしたがって、サイドローブが低下することが分かる。ただし、メインローブの半値幅はやや拡がる傾向にあり、無給電素子63の位相がマイナス90度付近においてもっとも良好な特性が得られているといえる。
【0062】
次に、伝送線路に高周波スイッチを接続することにより、放射パターンを切り替える具体例について説明する。
図45は、第9具体例を表し、同図(a)は模式平面図、同図(b)は模式底面図である。
本具体例においては、終端短絡伝送線路64と接地68との間に高周波スイッチ100を設けることにより電波ビームの放射パターンを切り替えることができる。伝送線路64は、導通孔66を介して高周波スイッチ100に接続される。高周波スイッチ100は、例えば、GaAsからなるダイオードまたはFETとする。本図はFETを用いた具体例を表し、ゲート電極を伝送線路64から分離できるのでFET電源回路が容易になる。ゲート電極は基板裏面の引き出し電極102に接続され、供給電圧によりオン−オフを制御を行う。
【0063】
図46及び図47は、無給電素子から伝送線路への接続構造の2つの具体例を表す。
すなわち、図46に表した具体例においては、無給電素子62に終端短絡伝送線路64の一方の端部が接続されており、他方の端部が導通孔66へと接続される。この場合には、伝送線路64はマイクロストリップラインとなる。一方、図47に表した具体例においては、無給電素子62のパターン内部に導通孔66が設けられ、基板の裏面において伝送線路64に接続される。この場合には、伝送線路64は厳密にはマイクロストリップラインではないが、その形状パラメータによってはマイクロストリップラインに近似して取り扱うことができる場合もある。
図48は、高周波スイッチ100の位置精度を改善する構造を例示する模式図であり、同図(a)は基板の裏面側を表し、同図(b)は高周波スイッチのインダクタンス成分を説明するための概念図である。
アンテナ10の励振周波数は高いので、高周波スイッチ100の位置決めには高精度が必要であり、このためにはマーカ104などを設けると良い。また、高周波スイッチ100は、寄生インダクタンスL2,L3を有し、その切替状態により寄生インダクタンスが変化する。
【0064】
図49は、高周波スイッチ100のオン−オフに伴うインダクタンスの変化を説明する模式図である。
ここで、L1は伝送線路のインダクタンスを表す。また、図49において、CASE1とCASE1'は、それぞれ高周波スイッチ100がオフ状態とオン状態の寄生インダク
タンスを表す。またここでは、高周波スイッチ100がオン状態においても接地されない。このように、高周波スイッチ100のオン−オフにより寄生容量が変化する。このような場合、例えば、CASE1(L1+L2)の状態においてアンテナ特性が最適となるように設計することができる。また、これとは逆に、CASE2(L1+L2+L3)の状態においてアンテナ特性が最適となるように設計してもよい。
【0065】
また、高周波スイッチ100がオン状態において接地される場合(CASE3’とCASE4)にも同様に、高周波スイッチ100がオフ状態(CASE3)においてアンテナ特性が最適となるように設計してもよく、または、高周波スイッチ100がオン状態(CASE4)においてアンテナ特性が最適となるように設計してもよい。
【0066】
これらいずれの場合も、高周波スイッチ100のオン−オフの切替に伴って寄生インダクタンスが変化するので、アンテナ特性を切り替えることができる。
図50は、図45に例示したアンテナ10のH面における電波ビームのゲインのθ依存性を表すグラフ図である。
高周波スイッチ100がオン状態においては、マイナス30度付近をピークとしたメインローブと、プラス50度付近をピークとしたサイドローブが表れるが、高周波スイッチ100がオフ状態に遷移すると、0度付近をピークとした単峰性のアンテナ特性が得られる。このように、高周波スイッチ100を切り替えることにより、アンテナ特性を変化させることができる。
【0067】
図51は、第10具体例を表し、同図(a)は模式平面図、同図(b)は模式断面図である。
本具体例においては、伝送線路64をRにおいて分岐し、一方は導通孔67、高周波スイッチ100a(または100b)を介し接地68と接続し、他方は導通孔66を介して接地68へ直接接続する。
【0068】
図52は、図51のアンテナの回路構成を表す図であり、整合点P’の位相を110度とする時は高周波スイッチ100a(または100b)をオンとし、マイナス90度とする時は高周波スイッチをオフとすればよいことを表す。従って、高周波スイッチ100a(または100b)のオン−オフを切り替えることにより接地への接続経路を切り替えて、アンテナ特性を変化させることができる。
図53は、図51のアンテナのH面におけるゲインのθ依存性を表すグラフ図である。
【0069】
同図において、例えば(110、−90)とは、無給電素子62の整合点P’における位相が110度で、無給電素子63の整合点P’における位相がマイナス90度であることを表す。すなわち、この時、高周波スイッチ100aはオン状態で、高周波スイッチ100bはオフ状態である。
【0070】
図53から、高周波スイッチ100a、100bがいずれもオン状態(110、110)またはオフ状態(−90、−90)においては、放射パターンは0度を中心として左右対称であるが、高周波スイッチ100a、100bの一方をオン状態、他方をオフ状態として切り替えると、放射パターンは0度を中心として反転することが分かる。すなわち、(110、−90)と(−90、110)とは、放射パターンの角度分布が反転している。従って、高周波スイッチ100a、100bを切り替えることにより、例えば、(110、110)あるいは(−90、−90)のように幅広い放射パターンを得たり、あるいは(110、−90)や(−90、110)のように局在的な放射パターンを選択することが可能となる。
図54は、第10具体例の第1変形例を表し、同図(a)は模式平面図、同図(b)は模式底面図、同図(c)はH面におけるゲインのθ依存性である。
導通孔66は、無給電素子62及び63のパターン領域内に設けられ、基板の裏面において伝送線路64が設けられる。伝送線路64と高周波スイッチ100との接続点近傍には終端短絡の伝送線路が分岐されており、高周波スイッチ100のオン−オフ切り替えにより伝送線路長を変化させ、図54(c)のようにゲインのθ依存性を制御できる。なお、図54(c)は、無給電素子62、63の位相がそれぞれ110度、マイナス90度の状態を表す。図53に表した(110、−90)の具体例と同様に、角度θのマイナス側にメインローブ、プラス側にサイドローブが表れていることが分かる。
【0071】
図55は、第10具体例の第2変形例を表し、同図(a)はその模式平面図、同図(b)はその底面拡大図である。無給電素子62及び63の裏面において、伝送線路64は導通孔66を介して高周波スイッチ100へ接続される。この接続点からは終端短絡の伝送線路が分岐されており、高周波スイッチ100のオン−オフにより伝送線路長を変化させる。
図56は、第10具体例の第1及び第2変形例の回路構成を表す模式図である。すなわち、同図(a)に表した具体例の場合には、高周波スイッチ100がオンであると無給電素子は導波器となり、オフであると反射器となるようにインダクタンスが変化する。一方、同図(b)に表した具体例の場合には、高周波スイッチ100がオフの時に無給電素子は導波器となり、オンの時は反射器となるようにインダクタンスが変化する。
【0072】
図57は、第11具体例を表し、同図(a)は模式平面図、同図(b)はゲインのθ依存性である。伝送線路64は分岐されており、一方は高周波スイッチを介して接地され、他方は直接接地される。この結果、無給電素子62、63における位相の組み合わせは、(110度、−180度)、(−180度、110度)、(−180度、-180度)、
及び(110度、110度)の4通りとなる。
図57(b)はこれらの組み合わせに対応する放射パターンをそれぞれに表すグラフ図である。例えば、(110度、110度)及び(−180度、-180度)においてはθ
=0°においてゲインが最大となる左右対称の放射パターンが得られる。また、(110度、−180度)と(−180度、110度)とは、それぞれ左右非対称で0度を中心に反転した放射パターンとなる。
【0073】
図58は、第12具体例を表し、同図(a)はその模式平面図、同図(b)はその模式底面図である。
伝送線路64の終端が導通孔66を介して接地68に短絡され、伝送線路64の中間に分岐点が設けられ導通孔67を介して高周波スイッチ100と接続されている。無給電素子62と63は、給電素子60をはさんで励振方向に対して横方向に配置されている。また、無給電素子162と163は、給電素子60をはさんで励振方向に配置されている。
【0074】
このようにすると、伝送線路からスイッチ100を介して分岐した線路もすべて励振方向に対して平行に配置することができる。線路が励振方向に対して垂直になる場合には、それらの線路を給電素子60を中心として対称に形成することが望ましいが、スイッチ100の接続端子の形状に制限があるため、これが難しい場合が多い。これに対して、本具体例においては、スイッチ100において分岐した部分も含めて、全ての無給電素子の伝送線路を励振方向に対して平行に形成することができるので、対称性に優れたアンテナを実現できる。
【0075】
図59は、高周波スイッチ100a,100b、100c、100dをそれぞれにオン−オフした場合におけるゲインのθ依存性を表し、それぞれ左側はH面、右側はE面である。
これらいずれも、高周波スイッチをオンにした時の無給電素子の位相は110度であり、一方、高周波スイッチをオフにした時の無給電素子の位相はマイナス180度(図59(a))、マイナス90度(図59(b))、または0度(図59(c))とされている。サイドローブを抑制する観点からは、高周波スイッチをオフにした時に無給電素子の位相がマイナス180度のものが有利である。
【0076】
図60(a)、(b)、(c)は、図59(a)、(b)、(c)とそれぞれに対応したH面及びE面における垂直放射パターンを表しており、H面はXZ平面、E面はYZ平面である。
一方、図61は、第12具体例において無給電素子の一方を110度、他方を170度とした場合のゲインのシータ依存性を表す。図59(a)、図60(a)に表したように、無給電素子の他方の位相をマイナス180度にした場合と近似した特性が得られることが分かる。
【0077】
図62は、アンテナ10の第13具体例を表す模式図である。
導通孔66を介して高周波スイッチ100が基板裏面の終端短絡伝送線路に接続される。本図において、基板裏面には励振方向に対して横方向に延在する終端短絡伝送線路が設けられている。このようにするとアンテナ10を全体として小型化できる。
【0078】
次に、位相が同一の複数の無給電素子を設けた具体例について説明する。
図63は、アンテナ10の第14具体例の模式平面図である。本具体例においては、無給電素子62及び63は同一位相とする。無給電素子62及び63の位相が同一であり、160乃至マイナス160度まで変化させた場合、各給電素子−無給電素子間スペースSに対するゲイン変化率を(表1)に、最大放射強度方向(θ、φ)を(表2)に表す。
【0079】
【表1】

【表2】
無給電素子の位相が170度から180度までの範囲は、図6に例示されるようにアンテナゲインがマイナスとなる領域である。本具体例におけるように、導波器−導波器として作用する無給電素子62及び63によっても放射パターンが制御可能である。
図64は、本具体例の放射パターンを表す模式図である。
【0080】
図65は、第15具体例の模式平面図である。
また、図66は、本具体例の放射パターンを表す模式図である。
【0081】
本具体例においては、無給電素子62及び63の位相を同一とし、給電素子60をはさんで励振方向に沿って配置されている。無給電素子62及び63の位相を変化させた場合、給電素子−無給電素子間スペースにおけるゲイン変化率を(表3)に、最大放射強度方向(θ、φ)を(表4)に表す。
【0082】
【表3】
【表4】
次に、励振方向に対して平行に配置され、スイッチにより伝送線路の位相を切り替え可能な無給電素子162、163を配置することにより、より均一なビームが得られることを説明する。
図67は、第16具体例を表し、同図(a)、(b)、(c)、(d)は無給電素子162及び163と給電素子60との励振方向距離をそれぞれに変化させた場合の水平放射パターン、同図(e)はゲインのθ依存性をそれぞれ表す。
伝送線路は終端開放とし、長さを7.1mmとすることにより無給電素子162の位相は90度とする。CASE1は、無給電素子162が、0.8mmのスペース(間隔)S1だけ給電素子60から離れ、給電素子60の中心に関して給電点の反対側に配置される。CASE2〜4は、無給電素子163が、給電素子60の中心に関して給電点側に配置され、スペースS2がそれぞれ0.8、0.6、0.4mmの場合である。
【0083】
この場合、図67(e)に表すゲインにおいて、破線で表すCASE2のほうが太い実線で表すCASE1よりもゲインが約1dB高い。CASE1においてS1=0.8mm、CASE2においてS2=0.8mmとスペースは同一であっても、均一にビームが放射されないことを意味している。S2=0.6mmであるCASE3において、ゲインをほぼCASE1と等しくできておりCASE1に対してY軸逆方向にほぼ均一な放射パターンが得られている。S2=0.4mmであるCASE4においては、ゲインがますます低下して、図67(d)の様にCASE1とは異なった水平放射パターンとなる。すなわち、給電素子60をはさんでペア状に配置された無給電素子において、伝送線路の長さをスイッチにより変化させ、放射パターンを切り替える場合、スペースを変えることによりより均一な放射パターンにできる。例えば、給電素子60の中心より給電点側に配置する無給電素子163とのスペースS2を反対側の無給電素子162とのスペースS1より小さくすることにより、均一なビームにできる。
【0084】
図68は、終端短絡の場合のアンテナ10の模式平面図である。
給電素子60の給電点Pがパッチ電極の中心からみて無給電素子163の側に設けられている。そして、この場合、給電素子60と無給電素子162とのスペース(間隔)S1よりも、給電素子60と無給電素子163とのスペースS2を小さくすることにより、放射パターンを対称な形態に近づけることができる。
【0085】
またこの具体例において、S1>S2とし、スイッチを切り替えることにより、一方の無給電素子を導波器とし、他方を反射器とし均一なビームにできる。図67(e)に例示されるように、ゲインが最大となるθはE面においてプラス、マイナス両側において約60度であり、図4に例示される第1具体例よりも大きくできる。このアンテナ10からの大きな放射角度θを有するビームにより、より広範囲な場所にいる人間の存在を精度良く検知できる。この結果、自動ドアなどにおけるセンサとしても有用である。
【0086】
次に、伝送線路が接続された無給電素子の小型化を実現できる構造について説明する。
【0087】
整合点の位相がマイナスである反射器として作用する無給電素子62における伝送線路は、導波器の場合より長くなることが多い。長い伝送線路が励振方向に延在するとアンテナが大型化する。そこで、導波器として作用させる伝送線路は励振方向に沿って直線状に配置し、反射器として作用させる伝送線路は伝送線路の終端側を屈曲させることによりアンテナの小型化を図ることができる。
【0088】
まず、図69は、比較例にかかるアンテナを説明する図であり、同図(a)は導波器として作用する幅が0.6mm、長さが3.8mmである伝送線路が直線状に延在したCASE1の模式図、同図(b)はこの伝送線路を屈曲したCASE2の模式図、同図(c)はゲインのφ依存性を表す。
無給電素子162と給電素子60とのスペースはいずれも2.2mmとし、終端短絡伝送線路により無給電素子62の位相は110度となる。アンテナゲインが最大となるのは、図69(a)においてθ=27度、φ=183度であるのに対し、同図(b)においてθ=30度、φ=174度とビームが回転し、サイドローブもより大きくなる。
【0089】
図70は、アンテナの第17具体例を表す。図70(a)は無給電素子62に幅0.6mm、長さ3.8mmである終端短絡伝送線路が、無給電素子63に幅0.6mm、長さ8.1mmである終端短絡伝送線路がそれぞれ直線状に延在するCASE3の場合の模式図である。また、図70(b)は屈曲したCASE4の場合の模式図、同図(c)はゲインのφ依存性である。
導波器としての無給電素子62の位相は110度、反射器としての無給電素子63の位相はマイナス180度とし、スペースは2.4mmとする。また、反射器として作用する無給電素子63の伝送線路は、導波器として作用する無給電素子62の伝送線路の長さである3.8mmにおいて約90度に屈曲させる。
【0090】
ゲインが最大となるのは、図70(a)において、θ=30度、φ=180度であるのに対し、同図(b)において、θ=30度、φ=186度である。図70(c)に例示されるように、ゲインのφ依存性は殆ど一致し、ビームの回転を抑制できることを表している。
【0091】
図71は、第17具体例の第1変形例を表し、無給電素子63の伝送線路の長さを5.1mmとし位相をマイナス90度とした場合を表す。図71(a)は伝送線路が直線状に延在するCASE5、同図(b)は屈曲したCASE6を表す。アンテナゲインが最大となるのは、図71(a)においてθ=39度、φ=180度、同図(b)においてθ=39度、φ=180度である。また。図70(c)に例示されるようにゲインのφ依存性は殆ど一致し、ビームの回転を抑制できることを表している。
【0092】
図72は、第17具体例の第2変形例を表し、同図(a)は模式平面図、同図(b)、(c)、(d)、(e)は水平放射パターン、同図(f)はゲインのφ依存性である。無給電素子62及び63が給電素子60を挟んで励振方向と直交する方向に配置され、給電素子60と無給電素子62、63とのスペースはいずれも2.4mmとした。また、無給電素子162及び163が給電素子60を挟んで励振方向に沿って平行方向に配置されている。給電素子60と無給電素子162とのスペースは0.8mm、給電素子60と無給電素子163とのスペースは0.7mmとした。
【0093】
伝送線路の終端は導通孔66により接地されており、分岐点の導通孔67により高周波スイッチ100へ接続される。高周波スイッチ100がオンの場合は分岐点で接地となり、オフの場合は伝送線路の終端66で接地となる。無給電素子62の導通孔67aに裏面で接続される高周波スイッチ100a(SW1)、及び無給電素子63の導通孔67bに裏面で接続される高周波スイッチ100b(SW2)はオン状態で位相が110度、オフ状態でマイナス180度となるよう伝送線路の長さを決める。また、導通孔67cに裏面で接続される高周波スイッチ100c(SW3)、及び導通孔67dに裏面で接続される高周波スイッチ100d(SW4)はオン状態で90度、オフ状態でマイナス180度となるように伝送線路の長さを決める。
【0094】
図72(b)は高周波スイッチ100aのみがオンであるCASE1、同図(c)は100bのみがオンであるCASE2,同図(d)は100cのみがオンであるCASE3、同図(e)は100dのみがオンであるCASE4の場合の水平放射パターンを表す。また、図72(f)はH面におけるゲインのφ依存性をCASE1及びCASE2について表し、同図(g)はE面におけるゲインのφ依存性をCASE3及びCASE4について表す。
高周波スイッチ100を切り替えることにより、水平面内の放射パターンを制御できることが分かる。本具体例も、人感センサや自動ドアに用いる高周波センサとして適している。また、導通孔67が設けられる分岐点において、伝送線路はほぼ90度に屈曲されている。従って、図58に表した具体例と比較して、励振方向に沿う長さを縮小しアンテナの小型化を容易にする。この場合、屈曲によるビームの回転も抑制できる。
【0095】
図72に表した具体例においては、一本の伝送線路の途中に高周波スイッチが設けられ、位相を可変にしている。
一方、図73は、伝送線路を2本に分けた具体例を表し、同図(a)は表面側の模式図、同図(b)は裏面側の模式図である。すなわち、図73(a)はパッチ電極側を表し、パッチ電極から伝送線路が励振方向に延在し、途中で屈曲して、その終端が導通孔66により接地されている。一方、図73(b)は接地68である裏面を表し、パッチ電極領域内の一点から導通孔166を介して接続され励振方向に対して略平行に延在する伝送線路164と、この伝送線路164に接続された高周波スイッチ100と、が設けられている。この場合にも、裏面の伝送線路164のストライプ状導体の長さ以上の位置において、表側の伝送線路のストライプ状導体が屈曲される。この結果、高周波スイッチ100をオンとしたとき導波器として、オフとしたとき反射器として作用させ、無給電素子62の位相を変化させることができる。
【0096】
以上説明した具体例においては、水平放射パターンにおける最大放射方向がXまたはY軸(励振方向に対して平行)となる様にパッチ電極はほぼ十字状に配置される。
次に、パッチ電極の配置を変えることにより最大放射方向を斜めに向ける具体例について説明する。
図74は、比較例を表し、同図(a)は模式平面図、同図(b)は水平放射パターン、同図(c)はゲインのθ依存性である。図74(a)のように無給電素子62を励振方向に0.2mmずらし、励振方向に平行なその一辺が給電素子60の平行な一辺とは対向する部分を有さない場合を表す。このようにずらすと、図73(b)のようにビームを曲げることはできるが、幅0.6mmの伝送線路の長さLを変えて位相を調整しても、無給電素子62を導波器として作用させることが困難である。すなわち、L=4.7mmとし位相を0度とすると最大放射強度はθ=36度、φ=297度となる。また、L=4.2mmとし位相を90度とすると最大放射強度はθ=45度、φ=117度となる。しかし図73(c)に例示するようにサイドローブを十分に減衰させるのが困難であり、センサとして好適なビーム放射パターンが得られない。
【0097】
図75は、アンテナの第18具体例を表し、同図(a)は模式平面図、同図(b)及び(c)は水平放射パターン、同図(d)はゲインのθ依存性を表す。給電素子60のひとつの角部を図75(a)に例示するような原点(0,0)となるようなXY座標を用い、無給電素子62のひとつの角部の座標を(x、y)と表す。無給電素子62には、図75(a)のように長さLである伝送線路が接続されている。図75(b)は無給電素子62の角部座標が(−0.2,−1)であり位相が90度の場合、同図(c)は角部座標が(−0.2,−0.5)の場合の水平放射パターンである。位相が110度であるとサイドローブをメインビームより約8dB低下でき、ゲインが最大となるφも120度とでき、斜め方向へのビーム制御が可能となる。
【0098】
図76は、第18具体例において無給電素子62の位相が90度の場合の水平放射パターンを表す。左側はx=−1、すなわちスペースがX軸方向に1mmの場合であり、下方に向かって対向する部分が多くなることを表している。また、中央はx=−0.5,その右側はx=−0.2の場合である。最も右側は、それぞれのy座標においてゲインが最大となるx座標と放射パターンを表す。X軸方向のスペースを小さくする方が、またY方向で対向部分を大きくする方がサイドローブを小さくできる。また、y座標を固定した場合、ゲインが最大となるx座標は変化する。
【0099】
図77は、第18具体例において無給電素子62の位相が110度の場合の水平放射パターンを表す。図76と同様に、左側からx座標が−1、−0.5,−0.2の順であり、それぞれの列において下方に向って給電素子60との対向部分が多くなる。この場合にも、X軸方向スペースが小さく、Y軸に沿う対向部分が大きくなるに従いサイドローブを小さくできる。
【0100】
図78は、アンテナの第18具体例において位相が110度であり、無給電素子62の角部座標が、(−0.2,−0.5)及び(−1.1、−2.5)の場合のゲインのφ依存性を表す。ビームの放射方向を、最大放射強度ではなく半値角のビーム幅の中心値にて設定することにより、人間などの被検知物を精度よく検知することができる。例えば、最大放射強度で放射強度を135度と設定すると、半値角の範囲は75乃至225度となる。一方、半値角のビーム幅の中心値を120度と設定すると半値角の範囲が65乃至205度となりより精度の高い検知ができる。
【0101】
図79は、第19具体例を表し、同図(a)は模式平面図、同図(b)、(c)、(d)、(e)は水平放射パターン、同図(f)はゲインのφ依存性を表す。図79(a)に例示されるように、給電素子を中心として千鳥格子状あるいはX字状に4個の無給電素子が配置される。無給電素子には伝送線路が設けられ、その途中には導通孔が設けられる。伝送線路のストライプ状導体は線路の途中に導通孔を介して基板の裏面の高周波スイッチと接続される。高周波スイッチのオン−オフにより無給電素子の位相を変えることができる。
また、無給電素子と給電素子とはY軸に対して平行な一辺において対向する部分を有し、X軸に平行な他の一辺において対向する部分を有さない。Y軸に対して平行であり対向する部分は、図76及び図77に例示される水平放射パターンのシミュレーション結果よりゼロより大きく4分の1波長より短いことが好ましい。給電素子は励振方向に平行な辺において2分の1波長の長さとされるので、4分の1波長より短い対向部分であれば無給電素子は重なり合わない。破線で表す高周波スイッチSW1,SW2,SW3、SW4は、基板の裏面にそれぞれ配置される。
【0102】
図79(b)は、SW1のみをオンとし他をオフとするCASE1,同図(c)はスイッチ2のみオンとするCASE2,同図(d)はSW3のみをオンとするCASE3,同図(e)はSW4のみをオンとするCASE4の水平放射パターンをそれぞれに表し、同図(f)はそれぞれCASEのゲインのφ依存性を表す。
放射パターンにおけるゲインの最大値となるφ方向は、CASE1で60度、CASE2で120度、CASE3で240度、CASE4で300度であり、Y軸に関してほぼ左右対称にできる。また、ゲインが3dB低下するφ方向半値角は、図79(f)に表すようにほぼ均一とできる。
スイッチを順次切り替えて、CASE1〜4を順次繰り返すことにより、これら4方向を順次スキャンできる。
【0103】
第18及び第19具体例において、無給電素子と給電素子とはY軸に対して平行な一辺において対向部分を有した。しかし本発明はこれに限定されず、X軸に対して平行な一辺において対向部分を有していても良い。
【0104】
図80は、アンテナの第20具体例を表し、同図(a)は1つの無給電素子の場合の模
式平面図、同図(b)は水平放射パターン、同図(c)はφが105度のゲインのθ依存性である。図80(a)に表すように、給電素子60と無給電素子62とは励振方向、すなわちY軸方向に0.2mm離間している。また、励振方向に対して直交する無給電素子の一辺と給電素子の一辺とは対向部分を2.5mm有している。無給電素子62には整合点における位相が110度となるよう長さが3.7mmの終端を短絡した伝送線路が接続されている。また、図80(b)のように、水平放射パターンはφが約105方向に向かって広がっている。さらに、図80(c)のように、φ=105°の面内において最0大放射強度が得られる角度θは39度、メインビームの半値角幅は10乃至80度、サイドローブはメインビームより約9dB低下させることができ、走査方向に局在するメインビームの放射量を多くし、メインビームとサイドローブの差を3dB以上確保できる。
【0105】
図81は、アンテナの第21具体例を表す模式平面図である。給電素子を中心として千鳥格子状あるいはX字状に4個の無給電素子が配置される。この無給電素子は第19具体例と同様の形状をそれぞれに有している。無給電素子と給電素子とはX軸に対して平行な一辺において対向する部分を有し、Y軸に平行な他の一辺において対向する部分を有さない。X軸に平行な対向部分は、第19具体例と同様に、ゼロより大きく4分の1波長より短いことが好ましい。本具体例においても、破線で表す基板裏面に設けられた高周波スイッチSW1、SW2、SW3、SW4を順次切り替えて、4方向を順次スキャンすることができる。
【0106】
図82は、比較例を表し、同図(a)は模式平面図及び水平放射パターン、同図(b)はゲインのφ依存性を表す。図82(a)に表したように、4つの無給電素子を十字状に配置した場合、同図(b)に表したようにY軸方向における半値角は90度であるが、X軸方向における半値角は約150度と大きい。ビームをX軸のプラスまたはマイナス方向に曲げようとする場合、検知範囲が広すぎて、例えば、斜め方向の人を誤って検知する可能性がある。また、例えば、図74(b)に例示するようにサイドローブを低減できずセンサに適したビームを得ることが困難である。
これに対して、第19及び第21具体例においては、φ方向における半値角の幅を揃えることができる。この結果、誤り無く人体などの被検知物を検知できるのでセンサとして適している。この応用として、例えば、人感センサ、自動ドアなどの開閉を制御するセンサ、手の動きを検知するセンサなどに用いると非接触スイッチとでき、機器のリモートコントロールなどに有用である。
【0107】
図83は、アンテナの第22具体例を表し、図83(a)は模式平面図、図83(b)は高周波スイッチ近傍の部分拡大図である。アンテナは、基板210の略中心に給電素子220と、給電素子220を中心にX字型に配置された無給電素子230と、を有している。給電素子220及び無給電素子230は、基板210の一方の主面に設けられたパッチ電極を有する。基板210の他方の主面、すなわちパッチ電極の裏面側は接地電極とする。
【0108】
給電素子220は、図83(a)における左右対称軸上の中間点よりずれた点を給電点Pとする。無給電素子230は、230a、230b、230c、230dを含む。励振方向と90度をなす無給電素子230の略中央には伝送線路240(240a、240b、240c、240dを含む)が励振方向と平行方向にかつ互いに逆向きに延在している。伝送線路240の終端には高周波スイッチ260が接続されており、それぞれの高周波スイッチ260は電気的にオンまたはオフに制御可能となっている。高周波スイッチ260は、260a(SW1)、260b(SW2)、260c(SW3)、260d(SW4)を含む。
【0109】
4つの高周波スイッチ260のうちいずれかひとつをオフ(開放状態)とし、他をオン(短絡状態)とすることにより電波ビームを必要な方向に精度良く制御できる。4つの高周波スイッチ260を順番にオフとして行くと、電波ビームの方向をこの順番に変えて行くことができ、物体の移動速度がドップラー信号により検知できる。
【0110】
本実施形態において、高周波スイッチ260は接地電極側(裏面側)ではなくパッチ電極側に設けられ、高周波スイッチ260を制御するための電圧は同じ側に配置された制御線242を介して供給される。この場合、制御線242のパターン幅を例えば0.1〜0.5mm程度に細く、かつ短くし無給電素子230の位相に影響を与えないようにし、所定の方向、所定の角度に電波ビームを放射できるようにする。
次に、高周波スイッチ260の作用について説明する。図83(b)の拡大図において、高周波スイッチ260aとして、例えばHEMT(High Electron Mobility Transistor)やGaAs MESFET(Metal Semiconductor Field Effect Transistor)を用いると、ゲート端子263aに印加する制御電圧によりソース端子262a及びドレイン端子261a間をオンまたはオフに切替えることができる。
【0111】
伝送線路240aの終端部は、ドレイン端子261aに接続され、ソース端子262aは基板210の導電パターン218及びスルーホール219を介して基板210の裏面である接地電極に接続される。ゲート端子263aは制御線242aを介して基板210の端部の制御端子に接続される。
【0112】
ゲート端子263aをゲート電圧により制御しソース端子262a及びドレイン端子261a間を導通とし高周波スイッチ260aをオンとすると、伝送線路240aは終端短絡線路として作用する。一方、ゲート電圧を制御しドレイン端子261a及びソース端子262a間を非導通とし高周波スイッチ260aをオフとすると、伝送線路240aは長さJの終端開放線路として作用する。
【0113】
本実施形態において、4つ高周波スイッチ260のうちいずれかひとつをオフとし位相がプラスかつ利得がプラスである導波器とし、他の3つをオンとし利得がゼロまたはマイナスである反射器とすることにより電波ビームの放射方向を制御し、オフとする高周波スイッチ260を順番に遷移させることにより電波ビームのスキャンが可能となる。
【0114】
図84は、このアンテナから放射された電波ビームの基板210と平行な面内における放射パターンを表す模式図である。SW1のみをオフとすると約20〜70度の方向に、SW2のみをオフとすると約110〜160度の方向に、SW3のみをオフとすると約200〜250度の方向に、SW4のみをオフとすると約290〜340度の方向に電波ビームを照射できる。
【0115】
図85は、このようなアンテナを備えた高周波センサ装置により照明装置を制御する応用例を説明する模式図である。部屋280において、上方にはライト284(284a、284b、284c、284d)が配置され、入口には壁スイッチ282が配置されている。高周波センサ装置のアンテナは、図83のパッチ電極面を下方(床面)に向けて配置される。部屋280は、ライト1(284a)が配置される照明領域A(280a)、ライト2(284b)が配置される照明領域B(280b)、ライト3(284c)が配置される照明領域C(280c)、ライト4(284d)が配置される照明領域D(280d)を含む。
【0116】
次に、部屋280の中の人体の位置を検知し、照明領域を使用者の意思に応じて変更する作用について説明する。図86はこの作用を説明するタイミングチャートである。まず、壁スイッチ282を時間T1でオンとし、すべてのライトは点灯するものとする。アンテナの高周波スイッチ260がSW1、SW2、SW3、SW4の順序にオフ状態とされ、電波ビームが照明領域A、照明領域B,照明領域C,照明領域Dの順序でスキャンされる。
【0117】
ここで検知範囲として、検知距離が長い第1検知範囲及び短い第2検知範囲を設定する。長い検知距離の第1検知範囲において人体を検知すると、短い検知距離である第2検知範囲に切り替える。第2検知範囲では所定のドップラー周波数(例えば、70Hz)以上の動きを人体検知と処理する。図86に表す電波ビーム及び検知信号はこの第2検知範囲に切り替わった場合とする。T2から始まる2回目のスキャンで照明領域Aにおいてのみ人体を検知すると照明領域Aの反対側である照明領域Cのライト3が消灯する。続いてT4から始まる4回目のスキャンで照明領域Aにおいてのみ再び人体を検知するとライト2及びライト4が消灯し、ライト1のみが点灯状態を継続し照明領域Aのみを照らす。さらにT8から始まる8回目のスキャンで照明領域Bにおいてのみ人体を検知すると、照明領域Bの反対側である照明領域Dが消灯を継続しライト2及びライト3が点灯する。
【0118】
このような照明装置の制御方法と比較して、電気による通過/遮断を選択する壁スイッチを用いる方法では人が存在する領域や人の意思に応じて照明領域を変更することは困難である。また、熱感知式センサを用いる方法ではそれぞれの照明領域の壁に必要量を設置してそれぞれの照明領域における人の存在に応じて点灯/消灯状態を切り替えることができる。しかしながら、センサ検知エリア内に人が存在すれば必ず点灯状態となるため、人が存在する照明領域では点灯/消灯状態を人の意思で切り替えることができない。さらに、赤外線リモコンを用いる方法では、どこの照明領域のライトを点灯するかの選択手段を備えれば人の意思によりそれぞれの照明領域における点灯/非点灯状態を切り替えることができる。しかしながら、リモコンを常に携帯するか、近くに置いておく必要が有り、複数の人が広範囲に存在する部屋ではリモコンも複数必要となり実用的とは言えない。
【0119】
これに対して第22具体例のアンテナを備えた高周波センサ装置によれば、部屋内における照明領域を使用者の意思に応じて容易に変更することができる。すなわち、所定の早さ以上で手などを動かすことにより、使用者の意思に応じて確実に照明領域を制御できる。
【0120】
図87は、照明領域を使用者の位置に応じて変更する他の例を説明するタイミングチャートである。この場合、壁スイッチ282を時間T1でオンとし、ライト284をすべて消灯とする。T2から始まる2回目のスキャンで照明領域Aのみに人体を検知すると、照明領域Aの反対側である照明領域C以外の照明領域Aのライト1、照明領域Bのライト2、照明領域Dのライト4が点灯する。続いてT4から始まる4回目のスキャンで再び照明領域Aのみに人体を検知すると、照明領域Aのライト1が点灯を継続し、照明領域Bのライト2及び照明領域Dのライト4は消灯する。さらに、T8から始まる8回目のスキャンにより照明領域Bにのみ人体を検知すると、照明領域Bの反対側である照明領域Dのランプ4は消灯を継続し、ライト1、ライト2、ライト3は点灯する。この例では、時間T3までは消灯している部屋280のライトが人の動きに応じて点灯し、点灯状態が変化するので部屋280を外部から監視でき、例えばセキュリティー上有効である。
【0121】
本発明は、これらに限定されない。高周波センサを構成するアンテナ、送信部、受信部、差分検出器、給電素子、無給電素子、伝送線路、高周波スイッチなどの材質、形状、サイズに関して各種設計変更を行ったものであっても、本発明の主旨を逸脱しない限り本発明の範囲に包含される。
【0122】
また、無給電素子の形状は、必ずしも給電素子の形状と同一でなくても、無給電素子とスイッチを接続する伝送線路の長さを調整すれば、無給電素子の整合点においてスイッチをON/OFFしたときに使用周波数に対し所定の位相を得ることができる。そして、その無給電素子を給電素子から所定の間隔を設けて配置すれば、所定の方向へ人体検知に適した鋭い電波ビームを放射することができる。
例えば、スイッチがオン状態の時に無給電素子が接地され、オフ状態の時にフローティングにされる場合について説明すると、スイッチがオン状態において高周波をアース電極へ逃がすための線路は、無給電素子と伝送線路との接続点からスイッチ内部の電流路を介してアース電極に至る線路である。そして、この線路の線路長は、スイッチがON状態の時に、高周波の基板上での波長λgの2分の1の整数倍の長さであることが望ましい。
一方、スイッチがオフ状態であるとき、無給電素子と伝送線路との接続点からスイッチ内線路の終端に至るまでの伝送線路の線路長は、波長λgの2分の1の整数倍であることが望ましい。
【0123】
しかしながら、伝送線路が介在するとセンサ装置の小型化を図りにくい。給電素子と無給電素子の位置関係により位相量は変化し、無給電素子は給電素子から離れるほど反射器側に作用する。従って、伝送線路を極力短くして小型化を図りたい場合は、図88(a)に表したように、励振方向と直交する無給電素子の端辺の略中央部に直接、スイッチの片端を接続し、整合点における位相が使用周波数に対し所定の位相が得られるよう、無給電素子の形状を給電素子の形状に比べて励振方向と平行する辺の長さLを短く調整する。図88(b)は、無給電素子のスイッチの接続部の拡大図である。この無給電素子を所定の間隔を設け給電素子の周囲に配置すれば、スイッチが開放状態のときは無給電素子は導波器として作用し、短絡状態のときは無給電素子からの電波の放射量が減少(ゲインが0dB以下)し、所定の方向へ人体検知に適した鋭い電波ビームを放射することができる。
【0124】
また、本実施形態の高周波センサは、図2に例示したような小用便器のみならず、腰掛便器や、その他、トイレ、洗面所、浴室、キッチンをはじめとして、各種の用途において設けることができる。
【0125】
さらに、人感センサ、自動ドアセンサ、非接触スイッチ、非接触型の入力インタフェースなどにも応用が可能である。例えば、図68や図79などに関して前述したように、複数の無給電素子をスイッチで順次切り替えて複数の方向をスキャンできるアンテナを用いると、人間の手の動きなどを検知できる。つまり、アンテナで空間をスキャンし、手などの動きを検知し、その方向や速度に応じて、情報を入力したり機器をリモート操作できる。例えば、ドアの前に立った人間が、手を下から上に振った場合に高周波センサがこの動作を検知し、ドアを自動的に開かせることが可能である。
【0126】
図89(a)に表したアンテナは、給電素子60と、この給電素子60を中心として対称な位置に所定の間隔を設けて励振方向と平行な給電素子60の端辺と対向するように設けられた2つの無給電素子62、63と、が配置されている。無給電素子62、63には(図示しない)伝送線路を介して高周波信号を通過または遮断が選択可能なスイッチSW1・SW2が接続され、無給電素子62、63の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。そして、SW1をON、SW2をOFFにしたとき、図89(b)及び(c)に表したように、メインビームはφ≒180°、θ≒−30°の方向に、サイドローブはφ≒0°、θ≒+50°の方向に放射される。一方、SW1をOFF、SW2をONにしたときは、図89(d)に表したように、メインビームはφ≒0°、θ≒+30°の方向に、サイドローブはφ≒180°、θ≒−50°の方向に放射される。
【0127】
電波ビームをφ方向(基板面に対して水平方向)にスキャンし、n番目に放射されるメインビームの最大放射強度の方向が φ(n)M の時、メインビームよりもゲインの小さいサイドローブが φ(n)S の方向に放射される。 φ(n)S は、略 φ(n)M+[180°] の方向であり、メインビームの放射角度(基板面に対して垂直方向)を θ(n)M 、サイドローブの放射角度を θ(n)S とすると、 θ(n)M<θ(n)S となる。
【0128】
次に、(n+1) 番目に放射されるメインビームの最大放射強度の方向を φ(n)M±[180°] に設定すると、メインビームの放射方向は n 番目に放射されるサイドローブの方向と略一致することになる。すなわち、(n+1)番目に放射されるメインビームの最大放射強度の方向を φ(n+1)M とすると、 φ(n+1)M≒φ(n)S となる。このとき、メインビームの放射角度を θ(n+1)M とすると、 θ(n+1)M <θ(n)S となり放射角度は異なる状態となる。このため、メインビームの放射方向を2方向に切り替えて手が接近する方向に応じて何らかの機能を動作させる非接触スイッチとして使用する場合、メインビームとサイドローブの方向が同じだと手が接近する角度によっては誤検知する可能性がある。
【0129】
図90(a)に表したアンテナは、給電素子60と、この給電素子60を中心として対称な位置に所定の間隔を設けて給電素子60の励振方向と平行する端辺と一部が対向するように設けられた2つの無給電素子62、63と、が配置されている。無給電素子62、63には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2が接続され、無給電素子62、63の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0130】
そして、SW1をON、SW2をOFFにしたとき、図90(b)に表したように、メインビームはφ≒120°、サイドローブはφ≒300°の方向に放射される。一方、SW1をOFF、SW2をONにしたときは、図90(c)に表したように、メインビームはφ≒60°、サイドローブはφ≒240°の方向に放射される。
【0131】
図91(a)に表したアンテナは、給電素子60と、給電素子60の励振方向と平行する端辺と対向する位置および給電素子60の励振方向と直交する端辺と対向する位置に所定の間隔で設けられた2つの無給電素子62、63と、が配置されている。無給電素子62、63には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2が接続され、無給電素子62、63の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0132】
そして、SW1をON、SW2をOFFにしたとき、図91(b)に表したように、メインビームはφ≒180°、サイドローブはφ≒0°の方向に放射される。一方、SW1をOFF、SW2をONにしたときは、図91(c)に表したように、メインビームはφ≒90°、サイドローブはφ≒270°の方向に放射される。
【0133】
図92(a)に表したアンテナは、給電素子60と、この給電素子60の励振方向と平行する端辺と対向する位置および給電素子60の励振方向と平行する端辺と一部が対向する位置に所定の間隔で設けられた2つの無給電素子62、63と、が配置されている。無給電素子62、63には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2が接続され、無給電素子62、63の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0134】
そして、SW1をON、SW2をOFFにしたとき、図92(b)に表したように、メインビームはφ≒180°、サイドローブはφ≒0°の方向に放射される。一方、SW1
をOFF、SW2をONにしたときは、図92(c)に表したように、メインビームはφ≒60°、サイドローブはφ≒240°の方向に放射される。
【0135】
図93(a)に表したアンテナは、給電素子60と、この給電素子60の励振方向と平行する端辺と対向する位置および給電素子60の励振方向と直交する端辺と対向する位置に所定の間隔を設け、3つの無給電素子62、63、72が配置されている。無給電素子62、63、72には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2・SW3が接続され、無給電素子62、63、72の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0136】
そして、SW1とSW2をON、SW3をOFFにしたとき、図93(b)に表したように、メインビームはφ≒130°、サイドローブはφ≒310°の方向に放射される。一方、SW1をOFF、SW2とSW3をONにしたときは、図93(c)に表したように、メインビームはφ≒50°、サイドローブはφ≒230°の方向に放射される。
【0137】
図94(a)に表したアンテナは、給電素子60と、この給電素子60を中心として対称な位置に所定の間隔を設けて給電素子60の励振方向と平行する端辺と一部が対向するように3つの無給電素子62、63、72が配置されている。無給電素子62、63、72には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2・SW3が接続され、無給電素子62、63、72の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0138】
そして、SW1とSW2をON、SW3をOFFにしたとき、図94(b)に表したように、メインビームはφ≒180°、サイドローブはφ≒0°の方向に放射される。一方
、SW1とSW3をON、SW2をOFFにしたときは、図94(c)に表したように、メインビームはφ≒90°、サイドローブはφ≒270°の方向に放射される。
【0139】
このように、本発明の高周波センサ装置を非接触スイッチに用い、2方向に電波ビームをスキャンする場合、前に電波のメインビームが放射され最大放射強度が得られる方向を φ(n) 、次に電波ビームが放射され最大放射強度が得られる方向を φ(n+1) とすると、φ(n+1) が φ(n)±[180°] と異なる方向に電波ビームを切り替えることが望ましく、特に、 φ(n+1) は φ(n)±[90°] 〜 φ(n)±[135°] が好ましい。そうすれば、前に放射されるサイドローブと次に放射されるメインビームの方向が異なる(前に放射されるサイドローブの半値角と次に放射されるメインビームの半値角が重ならない)ため手が接近する角度の影響を受けなくなるため誤検知を防止できる。
【0140】
また、高周波センサ装置を非接触スイッチに用いた時、方向を識別する単純なON/OFFスイッチとして使用する場合は電波スキャンを常時、継続して人体や手の接近する方向を検知すれば良い。
【0141】
しかし、人体や手の接近方向を識別しさらにそのときの移動状態(移動速度や移動時間、移動距離、静止時間等)を用いてアナログ的に物理量(流量、温度、回転数、回転角度等)を変化させたい場合、電波ビームをスキャンし人体や手の接近方向を早期に確定したら、接近方向に対し電波ビームを固定することが重要である。
【0142】
例えば、高周波センサ装置を壁面に設置したとき、人の手が接近する速度は、遅い人で50Hz(1周期:20ミリ秒)、速い人でも300Hz程度である。従って、電波ビームをスキャンする速度は、50Hz以上の動きを正確に検知できる20ミリ秒以下が好ましい。そうすれば、早期に効率良く手が接近する方向を検知でき、検知エリア内における移動状態を認識できる。特に、人の手が高周波センサ装置に接近する移動速度の違いを利用し、アナログ的に物理量を変化させる場合、効果的である。
【0143】
そのとき人の手が移動する距離は一般的に30〜50cm程度であるため、スイッチの操作性や誤検知防止を考慮すると、検知エリアは高周波センサ装置から半径50cm前後が好ましい。
【0144】
図95は、電波ビームを2方向にスキャンしたときのタイミングチャートである。ここで、SW1をONした時とSW2をONした時とでは電波ビームの方向が異なる。本実施例では1スキャンしたときに、SW1がON状態にて手の接近を検知し確定した場合を例示している。ドップラー信号が所定のしきい値を越えたことにより手の接近方向を確定したら、その方向に電波ビームを固定しその方向での手の移動状態を認識できる。本実施例では、手が検知エリア内に進入し手の接近方向が確定してから停止するまでの期間、外部に判定信号を出力している。従って、この判定信号を使えば単純なON/OFFスイッチとしても使用できるし、パルス信号の出力時間からアナログ的に物理量を変化させるスイ
ッチとしても使用できる。
【0145】
図96は、図95に表した実施例の変形例を表す。本変型例においては、ドップラー信号が所定のしきい値を越えたことにより検知エリア内に手が進入したことを検知した時にスキャン速度よりも短いパルス信号を判定信号として外部に出力し、さらに手の接近方向が確定され電波ビームをその方向に固定してからドップラー信号が所定の周波数以下(例えば、20〜30Hz以下)になるまでの期間、ドップラー信号の1周期に対し1つパルス信号を判定信号として出力している。このように、検知エリア内に進入した直後の手の移動速度や移動時間・距離に応じた判定信号を利用すれば、アナログ的に物理量を変化させることができる。
【0146】
図97も、図95に表した実施例の変形例を表す。本変型例においては、ドップラー信号が所定のしきい値を越えたことにより検知エリア内に手が進入したことを検知した時からドップラー信号が所定の周波数以下になるまでの期間における平均周波数を周期に換算したときの長さを有するパルス信号を、手がセンサから離れていく状態(電圧の振幅値は大→小、周波数は低→高)を認識した後に判定信号として出力している。これによりスイッチ操作しようとしていない使用者の手がセンサ前方にて素早く通り過ぎる場合があったとしても誤動作を防止できる。また、手が接近する動作において接近する速度、即ち周波数が殆ど変化しないまま電圧の振幅値が小→大→小に変化した場合にパルス信号を出力しないようにすれば同様に誤動作を防止できる。
【0147】
図98及び図99は、電波ビームを4方向にスキャンした場合のタイミングチャートである。
SW1をONした時のメインビームの放射方向は0°サイドローブの放射方向は180°で、SW2をONした時のメインビームの放射方向は90°サイドローブの放射方向は270°で、SW3をONした時のメインビームの放射方向は180°サイドローブの放射方向は0°で、SW4をONした時のメインビームの放射方向は270°サイドローブの放射方向は90°である。
【0148】
図98においては、SW1をONした時にドップラー信号の電圧振幅値が予め設定された閾値を超えた場合、1スキャン(4方向に電波ビームを切り替え)のドップラー信号の結果をもとに人体や手の接近方向を確定している。それに対して、図99においては、SW3をONした時にドップラー信号の電圧振幅値が予め設定された閾値を超えた場合、1スキャンのドップラー信号の結果だけでなくSW1をONにした時のドップラー信号の状態をもとに人体や手の接近方向を確定している。
【0149】
このように、順次複数の方向へ電波ビームを放射するもので、且つ初めにメインビームが放射される方向と後にサイドローブが放射される方向が重なるような電波ビームを切り替えるセンサの場合、いずれかの方向で人体や手を検知したら人体検知したメインビームの放射方向とは反対側のメインビームのドップラー信号の状態とを比較し接近方向を確定すれば、サイドローブの影響による誤検知を防止できる。
【0150】
さらに、電波ビームをスキャン中に人体を検知したら、即座に人体検知したメインビームの放射方向とは反対側の方向にメインビームを放射するよう切り替えれば、より短時間で接近方向を確定でき、効率良く移動状態を認識できる。
【0151】
また例えば、自動券売機や各種の入力端末において、「はい」と「いいえ」の二択に対して、高周波センサが利用者の首の動きをモニタし、利用者が首を縦に振ったら「はい」、首を横に振ったら「いいえ」のように非接触式に入力することが可能となる。
【図面の簡単な説明】
【0152】
【図1】本発明の具体例にかかる高周波センサを説明する図である。
【図2】本具体例にかかる高周波センサを備えた小便器の構成を表す図である。
【図3】図2の小便器の機能図である。
【図4】高周波センサを構成するアンテナの第1具体例である。
【図5】無給電素子の構造を表す図である。
【図6】無給電素子の特性を表すグラフ図である。
【図7】無給電素子の整合点におけるS11を表すグラフ図である。
【図8】素子間スペースと、最大ゲイン及びθとの関係を表すグラフ図である。
【図9】第1具体例のゲインのθ依存性を表すグラフ図である。
【図10】第1具体例の放射パターンである。
【図11】第1具体例の変形例における素子間スペースと、最大ゲイン及びθとの関 係を表すグラフ図である。
【図12】変形例におけるゲインのθ依存性を表すグラフ図である。
【図13】アンテナの第2具体例の模式平面図である。
【図14】第2具体例における素子間スペースと、最大ゲイン及びθとの関係を表す グラフ図である。
【図15】第2具体例におけるゲインのθ依存性である。
【図16】第2具体例における水平放射パターンである。
【図17】アンテナの第3具体例である。
【図18】第3具体例における素子間スペースと、最大ゲイン及びθとの関係を表す グラフ図である。
【図19】第3具体例におけるゲインのθ依存性である。
【図20】第3具体例における水平放射パターンである。
【図21】ゲインのθ依存性である。
【図22】図21に対応する水平放射パターンである。
【図23】ゲインのθ依存性の他の例である。
【図24】ゲインのθ依存性の他の例である。
【図25】第3具体例の第1変形例である。
【図26】第3具体例の第2変形例である。
【図27】第3具体例の第3変形例である。
【図28】アンテナの第4具体例である。
【図29】アンテナの第5具体例である。
【図30】終端開放伝送線路を有する無給電素子の構造を表す図である。
【図31】終端開放伝送線路を有する無給電素子の特性を表すグラフ図である。
【図32】終端開放伝送線路を有する無給電素子の整合点におけるS11を表すグラ フ図である。
【図33】ゲインのφ依存性を表すグラフ図である。
【図34】水平放射パターンの比較を表す図である。
【図35】終端開放または短絡線路の構成の比較を表す図である。
【図36】図35の構成におけるゲインのθ依存性を比較するグラフ図である。
【図37】アンテナの第6具体例の模式平面図である。
【図38】第6具体例のゲインのφ依存性である。
【図39】水平放射パターンである。
【図40】アンテナの第7具体例である。
【図41】アンテナの第8具体例である。
【図42】第8具体例における素子間スペースと、最大ゲイン及びθとの関係を表す グラフ図である。
【図43】第8具体例におけるゲインのθ依存性である。
【図44】第8具体例における水平放射パターンである
【図45】第9具体例である。
【図46】伝送線路の接続構造である。
【図47】伝送線路の他の接続構造である。
【図48】高周波スイッチの固定方法を表す図である。
【図49】高周波スイッチのインダクタンスを説明する図である。
【図50】ゲインのθ依存性である。
【図51】アンテナの第10具体例である。
【図52】分岐点を設けた回路の構成を表す図である。
【図53】図52におけるゲインのθ依存性を表すグラフ図である。
【図54】第10具体例の第1変形例である。
【図55】第10具体例の第2変形例である。
【図56】回路構成の例である。
【図57】アンテナの第11具体例である。
【図58】アンテナの第12具体例である。
【図59】第12具体例におけるゲインのθ依存性である。
【図60】図59に対応する垂直放射パターンである。
【図61】ゲインのθ依存性の他の例である。
【図62】アンテナの第13具体例である。
【図63】アンテナの第14具体例である。
【図64】第14具体例の水平放射パターンである。
【図65】アンテナの第15具体例である。
【図66】第15具体例の水平放射パターンである。
【図67】アンテナの第16具体例である。
【図68】スペースの異なるアンテナの模式平面図である。
【図69】比較例のアンテナを説明する図である。
【図70】アンテナの第17具体例である。
【図71】第17具体例の第1変形例である。
【図72】第17具体例の第2変形例である。
【図73】伝送線路を2本別に設けた場合の模式図である。
【図74】比較例のアンテナを説明する図である。
【図75】アンテナの第18具体例である。
【図76】無給電素子位相が90度の第18具体例である。
【図77】無給電素子位相が110度の第18具体例である。
【図78】第18具体例のゲインのφ依存性である。
【図79】アンテナの第19具体例である。
【図80】アンテナの第20具体例である。
【図81】アンテナの第21具体例である。
【図82】比較例のアンテナを説明する図である。
【図83】アンテナの第22具体例である。
【図84】図83のアンテナの電波ビームの放射パターンである。
【図85】図83のアンテナを備えた高周波センサ装置により制御される照明装置を説明する図である。
【図86】図85の照明装置の作用を説明するタイミングチャートである。
【図87】図85の照明装置の作用を説明する他のタイミングチャートである。
【図88】給電素子と無給電素子とスイッチの配置を例示する模式図である。
【図89】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図90】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図91】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図92】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図93】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図94】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図95】電波ビームを2方向にスキャンしたときのタイミングチャートである。
【図96】図95に表した実施例の変形例を表すタイミングチャートである。
【図97】図95に表した実施例の変形例を表すタイミングチャートである。
【図98】電波ビームを4方向にスキャンした場合のタイミングチャートである。
【図99】電波ビームを4方向にスキャンした場合のタイミングチャートである。
【符号の説明】
【0153】
10 アンテナ、12 送信部、14 受信部、16 差分検出器、20 高周波センサ装置、60 給電素子、62、63、72、73 無給電素子、64、74 伝送線路、66、67、77 導通孔、100 高周波スイッチ、102 引き出し電極
【技術分野】
【0001】
本発明は、高周波を用いた高周波センサ装置に関する。
【背景技術】
【0002】
例えば水洗便器などの洗浄を自動化する場合、赤外線センサなどを用いる方法がある。この場合、一定時間以上使用者が便器の前に留まっていることを検知し、その後に使用者が便器を離れたことを検知して、一定量の洗浄水を流すようにする。しかしながら、この方法では用足しの有無や小便の量にかかわらず一定の洗浄水を流すことになり無駄が生ずる場合もある。
【0003】
便器を実際に使用していることを検知して洗浄水を流すには、ドップラー効果を利用することが考えられる。すなわち、電波や音波が移動物体に当り反射すると、反射波の周波数がドップラーシフトする。この反射波と送信波の周波数の差分周波数スペクトラムを求めることにより移動物体が検知される。さらに、この差分に相当するドップラー周波数は物体の移動速度に比例する。従って、尿や洗浄水といったボール面を流れる液流などに向けて送信波を放射することにより、使用状態に応じて適切に洗浄水を供給できる。
【0004】
送信波として電波を用いる場合、センサを構成するアンテナの放射方向を液流に向けて精度よく制御することが重要である。すなわち、液流以外の移動物体を検知して洗浄水を流すことなどを防止することが好ましい。
【0005】
本発明者らは、マイクロ波を利用したドップラーセンサを搭載した便器洗浄装置を開示した(特許文献1)。
【特許文献1】特許第3740696号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は、放射パターンの制御が容易なアンテナを備えた高周波センサ装置を提供する。
【課題を解決するための手段】
【0007】
本発明の一態様によれば、送信波を発生する送信部と、前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記受信波を検知する受信部と、前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置が提供される。
【0008】
また、本発明の他の一態様によれば、送信波を発生する送信部と、前記送信波を放射する送信アンテナと、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信する受信アンテナと、前記受信波を検知する受信部と、前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、を備え、前記送信アンテナと前記受信アンテナの少なくともいずれかは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置が提供される。
【発明の効果】
【0009】
本発明により、放射パターンの制御が容易なアンテナを備えた高周波センサ装置が提供される。すなわち、アンテナのゲインが最大ゲインから3dB以内の範囲を局在させることにより、近距離において、検知したい方向すなわち電波ビームを傾けた(走査した)方向とは異なる方向にある物体を誤検知しないようにすることができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照しつつ、本発明の実施の形態について説明する。
図1は、本発明の実施の形態にかかる高周波センサ20を説明するための模式図であり、同図(a)及び(b)はそのブロック図、同図(c)は水平放射パターンにおける等ゲイン線、同図(d)は放射パターンを表す模式図である。
図1(a)に表した具体例の場合、送信部12に接続されたアンテナ10からは、例えば、10.525GHzの周波数を有する送信波T1が放射される。移動物体からの反射波T2は、アンテナ10を経由して受信部14に入力される。アンテナ10は、図1(a)に表したように送信側と受信側とを共通としてもよく、または、図1(b)に表したように、送信部12にはアンテナ10aを接続し、受信部14にはアンテナ10bを接続してもよい。
【0011】
送信波の一部と受信波とは、差分検出部16にそれぞれ入力されその差分のドップラー周波数近傍の出力信号が出力される。すなわち、ドップラー周波数ΔF(Hz)は、下記の式(1)により表すことができる。
【0012】
ΔF=Fs−Fb=2×Fs×v/c 式(1)
但し、Fs:送信周波数(Hz)
Fb:反射周波数(Hz)
v:物体の移動速度(m/s)
c:光速(=300×106m/s)
高周波センサ20を液流に向けると、式(1)で表されるように、その流速vに比例した周波数ΔFを含む出力信号を得ることができる。出力信号は周波数スペクトラムを有し、スペクトラムのピークに対応するピーク周波数と液流の流速vとの間には相関関係がある。従って、ドップラー周波数ΔFを測定することにより流速vを求めることができる。なお、日本においては、人体を検知する目的には10.525GHzまたは24.15GHzの周波数が使用できる。
【0013】
本発明の具体例にかかる高周波センサ20を構成するアンテナ10からの水平放射パターンは、例えば、図1(c)のようになる。アンテナの給電点を通るZ軸と直交するXY面内において、アンテナ10のゲイン(利得)の最大点をQとする。図1(c)においては、ゲインが最大値から3dB低下する領域を実線で表し、10dB低下する領域を破線で表している。Y軸はアンテナ10の給電点を通り励振方向と平行であるが、3dBゲイン低下領域をY軸に関して走査すべき一方の側(図では左側)に位置制御すると、液流を正確に検知することができる。図1(d)は、アンテナの水平放射パターンである。アンテナに関しては、後に詳細に説明する。
【0014】
図2は、本発明の具体例にかかる高周波センサ20を備えた小便器の構成を例示する模式図である。
小便器22の内部には、高周波センサ20と、機能部24が収められている。小便器22の上方には、小便器22のボール部内空間を洗浄するための水を供給する給水部30及び洗浄水吐出口32が設けられている。ボール部内空間の下方には排水口34が設けられている。
【0015】
図3は、機能部24の構成を例示するブロック図である。
差分検出部16の出力信号はアンプ40により増幅され、FFT(Fast Fourier Transform)演算部42に入力される。FFT演算部42により、差分検出部16の出力信号の
周波数スペクトラムをリアルタイムで得ることができる。FFT演算部42の出力は、流量
演算部44に入力され、周波数スペクトラムから流量に換算されることもできる。
【0016】
コントローラ46は、流量演算部44で演算された流量などをもとに、他の装置を作動させる。洗浄水供給バルブ36はコントローラ46の指示により開閉する。電解水生成部60は、コントローラ46により、例えば、1日に1回電解水を流すことにより排水管における尿石形成を防止する。外部インタフェース52は、尿量などの情報を外部に伝送する。
【0017】
以下、高周波センサ20の構成要素であるアンテナ10について詳細に説明する。
【0018】
図4は、本発明の高周波センサ20を構成するアンテナ10にかかる第1具体例を表し、同図(a)は模式平面図、同図(b)は模式斜視図である。
本具体例において、パッチ電極を有する給電素子60の励振方向に対して横方向に、パッチ電極を有する無給電素子62が配置されている。このアンテナ10は、給電素子60及び無給電素子62がそれぞれ平面パターンを有するパッチアンテナに属する。アンテナ10の主面はXY座標で表され、水平面内においてX軸からの角度をφで表す。また、この主面と垂直な方向をZ軸とし、垂直面において、Z軸からの角度をθで表す。Y軸は、励振方向に対して平行であり、X軸、Y軸、Z軸、φ及びθに関するこれらの定義は、本願明細書においてすべて同一とする。
【0019】
給電素子60の中心を通り、Y軸の負方向における位置Pが送信波の励振部と接続される給電点とされる。給電素子60は矩形状の導電体の薄膜であり励振方向の一辺の長さDは約λg/2(但しλgは波長)とする。また、無給電素子62の中心線上で、励振方向に平行かつY軸正方向には伝送線路64が設けられており、その終端は導通孔66を介して接地68へ接続されている。すなわち、伝送線路64は終端短絡とされている。
【0020】
図5は、無給電素子62をより詳細に表し、同図(a)はその模式平面図、同図(b)は同図(a)のAA’に沿った模式断面図である。
無給電素子62と給電素子60との形状は伝送線路64以外の領域においてほぼ等しいものとすることができる。
または、無給電素子62のサイズを給電素子60のサイズよりも少し小さくしてもよい。すなわち、励振周波数は無給電素子62の一辺の長さにより決まるため、無給電素子62を給電素子60よりも小さくすることで、周波数を高く設定することができる。そうすると、無給電素子62の位相を給電素子60に対して遅らせることが可能となり、伝送線路の長さを調整しなくてもアンテナから放射される電波の方向を曲げることが可能となる。
この具体例の場合、給電点Pの横方向、かつY軸負方向の位置が整合点P’となる。伝送線路64の終端から0.3mmの位置にφ0.3mmの導通孔66が設けられており、また伝送線路64の長さをLとする。
【0021】
このアンテナは、例えば、誘電体の両面を銅板で挟んだガラスエポキシ基板などを用いて形成できる。図5(b)においては、比誘電率(εr)が3.5、tanδが0.004、誘電体厚みが0.75mmの場合を表した。このような基板により構成される伝送線路、すなわちマイクロストリップラインの波長及び特性インピーダンスはεr、誘電体厚み、マイクロストリップラインの導体幅及び厚みの関数となる。
【0022】
図6は、伝送線路64の長さLを変化させた場合、無給電素子62の整合点P’における振幅(Magnitude:dB)、位相(度)及び無給電素子62のアンテナゲイン(アンテ
ナ利得:dB)のシミュレーション結果を表すグラフ図である。
Lが伝送線路の4分の1波長である4.8mm近傍において、整合点P’における振幅 が最小となり、位相がプラスからマイナスに急激に変化する。アンテナゲインは約6d
Bと最大となっている。また、位相はLが約8.1mmにおいてマイナスからプラスへと
転じる。これよりLが大きい8.3mm近傍においてアンテナゲインはマイナス10dBとなり最低となる。なお、位相がプラスである場合は無給電素子62は導波器として作用し、マイナスである場合は反射器として作用する。
【0023】
図7は、アンテナ整合点P’において高周波回路パラメータであるSパラメータのうち
、反射係数であるS11をシミュレーションで求めた結果を表し、同図(a)はS11の振幅(Mag.;dB)、同図(b)はS11の位相(deg)の周波数特性をそれぞれ表す。
周波数11.05GHzにおいて、伝送線路長が4.7mmの場合に位相は0度となり、3.77mmの場合に位相は110度、5.32mmの場合に位相はマイナス110度となる。
【0024】
図8は、整合点P’の位相が0乃至140度である無給電素子66を、全体のアンテナゲインが最大となる素子間スペースS(mm)に配置したゲイン(dB)と、最大放射強度が得られる放射角度θ(度)との関係を表すグラフ図である。
例えば、整合点P’の位相が110度の場合、素子間スペースSが2.2mmにおいて全体アンテナゲインが最大である7.15dBとなることを示している。このとき、角度θはほぼ27度となる。
【0025】
図9は、H面(φが0−180°である垂直断面)におけるアンテナゲインのθ依存性を、それぞれの整合点P’の位相に対して求めたシミュレーション結果を表すグラフ図である。
放射パターンは、メインビームと、これよりゲインの小さいサイドローブ(不要電波)とを含む。ここで、メインビームのゲインのピークより3dB低下した角度領域を半値角と呼ぶことにする。液流を精度よく検知するためには、メインビームのゲインが高く、メインビームとサイドローブとのゲイン差が大きく、かつ3dB利得低下する半値角範囲が0度よりも走査方向側に局在することが好ましい。
【0026】
すなわち、アンテナのゲインが最大ゲインから3dB以内となる半値角範囲が、パッチ電極を含む平面に対して垂直であり給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように無給電素子が配置されていることが特徴とされる。
【0027】
整合点位相P’が大きくなるに従い、ゲインは増加するが、半値角が0度を越えるようになる。従って、整合点位相は120度以下、90度以上が好ましい。例えば、整合点位相が110度の場合、アンテナゲインは約マイナス19dB,半値角範囲はマイナス65乃至マイナス5度、メインビームとサイドローブとのゲイン差が11dBとなり、高周波センサとしての機能を備えることが可能となる。
【0028】
図10は、位相を0乃至140度と変化させ、素子間スペースSを1乃至5mmと変化させた場合の水平放射パターン(XY面)を表している。整合点P’のそれぞれの位相に対してアンテナゲインが最大となる素子間スペースS、最大放射強度となる放射角度θが図10の右端の1列の例示するように得られる。3dB利得低下領域が、給電点Pを含む水平面(XY面)内の軸に関して、走査したい一方の側(図10においては左側とする)に位置制御される様に、素子間スペースS,整合点P’位相を選択決定することができる。この結果、検知したい液流の領域に応じて高周波センサを動作させることが可能となる。
【0029】
図11は、第1具体例において、整合点P’の位相が90乃至130度である無給電素子62を、全体のアンテナゲインが最大となる素子間スペースS(mm)で配置したゲイン(dB)と、最大放射強度が得られる放射角度θ(度)との関係を表すグラフ図である。
【0030】
この変形例のアンテナ10は、例えば、アルミナのようなセラミック材料を用いることにより形成できる。この場合、比誘電率を9.5、tanδを0.001、厚みを1mmとしてシミュレーションを行っている。Lが4.4mmの場合、アンテナゲインは5.5dBと最大となり、このとき最大放射強度が得られる角度は30度である。
【0031】
図12は、この具体例において、H面におけるアンテナゲイン(dB)のθ(度)依存性を、それぞれの整合点P’の位相に対して求めたシミュレーション結果を表すグラフ図である。
整合点位相P’が大きくなるに従い、ゲインは増加するが、半値角が0度を越えるようになる。従って、整合点位相は120度以下、90度以上が好ましい。例えば、整合点位相が120度の場合、アンテナゲインは約マイナス21dB,半値角範囲はマイナス62乃至マイナス2度、メインビームとサイドローブとのゲイン差が11dBとなり、高周波センサとしての機能を満たす。
【0032】
図13は、アンテナ10の第2具体例の模式平面図である。なお、以下のアンテナの具体例において図4と同様の構成要素には同一番号、同一記号を伏して詳細な説明を省略する。
第2具体例においては、無給電素子62は励振方向に沿って給電素子60と隣り合って配置されている。このアンテナ10は、図5(b)と同様の材料を用いて形成することができる。終端短絡の伝送線路は、励振方向と平行な部分を有している。記伝送線路の一端は、無給電素子62の励振方向と直交する端辺の略中央付近に接続されている。また、後に詳述するように、伝送線路の他端は、高周波信号の通過と遮断とのいずれかを選択可能なスイッチの入力端子に接続することができる。この場合、スイッチのオン状態において無給電素子62は、導波器及び反射器のいずれか一方として作用し、スイッチのオフ状態において、無給電素子62は、導波器及び反射器のいずれか他方として作用する。
図14は、整合点P’の位相が60乃至110度である無給電素子66を、全体のアンテナゲインが最大となる素子間スペースS(mm)に配置したゲイン(dB)と、最大放射強度が得られる放射角度θ(度)との関係を表すグラフ図である。
素子間スペースSが1.0mmの場合、アンテナゲインが6.92dBと最大となり、最大放射角度が約42度となる。
【0033】
図15は、E面(φが90−270°である断面)におけるアンテナゲインのθ依存性を、それぞれの整合点P’の位相に対して求めたシミュレーション結果を表すグラフ図である。
整合点位相P’が大きくなるに従い、ゲインは増加するが、半値角が0度を越えるようになる。従って、整合点位相は110度以下、90度以上が好ましい。例えば、整合点位相が110度の場合、アンテナゲインはほぼマイナス19dB,半値角範囲はプラス2乃至プラス80度、メインビームとサイドローブとのゲイン差が10dBとなり、高周波センサとしての機能を備えることが可能となる。
【0034】
図16は、整合点の位相を0乃至150度と変化させ、素子間スペースSを変化させた場合の水平放射パターンを表す。
それぞれの位相においてアンテナゲインが最大となる素子間スペースSと、最大放射強度が得られる放射角度θが本図の右端のように得られる。3dB利得低下領域が、給電点Pを含む水平面のX軸に関して、走査したい一方の側(図16においては上側とする)に位置制御される様に、素子間スペースS,整合点P’位相を選択決定することができる。この結果、検知したい液流の領域に応じて高周波センサを動作させることが可能となる。
【0035】
図17は、アンテナ10の第3具体例を表し、同図(a)は模式平面図、同図(b)は模式斜視図である。
本具体例においては、給電素子60と隣り合い励振方向に対して横方向の位置に無給電素子62及び63が配置されている。かつ、無給電素子62の終端短絡伝送線路64の電気長はλg/4より短いので整合点の位相はプラス、無給電素子63の終端短絡伝送線路65の電気長はλg/4より長いので整合点の位相はマイナスである。
【0036】
図18は、無給電素子62における整合点位相を110度に固定し、無給電素子63の位相をマイナス180度から0度と変化した場合、全体のアンテナゲインが最大となる素子間スペースSとゲイン、最大放射強度が得られる放射角度θとの関係を表すグラフ図である。素子間スペースが3.4mmの場合、アンテナゲインは7.5dBの最大値となる。また、このとき最大放射強度となる角度は39度である。
【0037】
図19は、本具体例において無給電素子62を110度、無給電素子63の位相を0度、マイナス90度、マイナス180度とした場合のH面におけるゲインのθ依存性を表すグラフ図である。
0度とマイナス90度において、メインビームの放射パターンに大きな変化を生じていない。マイナス90度からマイナス180に変化すると、メインビームのピーク位置がサイドローブに少し接近し、サイドローブゲインを約3dB抑圧できる。
【0038】
図20は、無給電素子62の位相を110度と固定し、無給電素子の位相をマイナス180乃至0度と変化させ、かつ素子間スペースSを変化させた場合の水平放射パターンを表す。アンテナゲインが最大となる素子間スペースS、最大放射強度となる角度θが本図右端のように得られる。本図において、3dB利得低下領域が一方の側(左側)に制御され、液流が走査したい側で検知できる。
【0039】
図21は、無給電素子62の位相を80乃至130度と変化させ、無給電素子63の位相を0度またはマイナス180度とした場合の、H面におけるゲインのθ依存性である。無給電素子63の位相は、マイナス180度のほうがサイドローブを4乃至6dB抑圧できるので好ましい。また無給電素子62の位相を120度以下とすると半値角を0度よりも走査方向側とできる。
【0040】
図22は、図21のように位相を変化させた場合の水平放射パターンである。アンテナゲインが最大となる素子間スペースSと、最大放射強度となる放射角度θが本図右端の様に得られ、3dB利得低下領域を一方の側(左側)に制御し液流を走査したい側で検知できることを表している。
図23は、無給電素子62の位相を0度とし、無給電素子63の位相をマイナス180度とした場合のH面における電波ビームのゲインのθ依存性を表す。メインビームとサイドローブとのゲイン差が約4dBと小さいが、半値角を0度より離して走査方向側とするのが容易である。
【0041】
図24は、無給電素子62の位相を140、150、160度とし、無給電素子63の位相を0度とした場合のH面におけるゲインのθ依存性を表す。無給電素子62の位相を140及び150度とすることにより、3dB利得低下領域を一方の側(左側)に制御し液流を走査したい側で検知できる。この場合、サイドローブとメインビームが連続し広がった放射パターンとなる。
【0042】
図25は、図17に例示された第3具体例の第1変形例であり、同図(a)は伝送線路64の特性インピーダンスが80オームであり、かつ無給電素子62の位相は110度(伝送線路の長さLは3.8mm)、無給電素子63の位相はマイナス110度(伝送線路の長さLは5.3mm)であるアンテナ10の模式平面図、同図(b)はゲインのθ依存性を表す。
また、図26は、第3具体例の第2変形例であり、同図(a)は伝送線路64の特性インピーダンスが50オームであり、かつ無給電素子62の位相は110度、63の位相はマイナス110度であるアンテナ10の模式平面図、同図(b)はゲインのθ依存性を表す。メインビームのゲインは共にマイナス19dB,ゲインが最大となる角度θは共にマイナス35度である。第2変形例の方がサイドローブを約1dB抑圧できている。
【0043】
図27は、第3具体例の第3変形例である。特性インピーダンスを80オームとし、無給電素子の励振方向と直交する一方の辺と整合点P’との距離2.3mmと等しい切り込みを他方の辺に設け、伝送線路64を長くする。図27(b)に例示されるゲインのθ依存性は図20に例示された第1変形例とほぼ同様となる。
【0044】
図28は、アンテナ10の第4具体例を表し、同図(a)は模式平面図、同図(b)はゲインのφ依存性である。第3具体例において無給電素子62及び63における伝送線路64は、X軸に関して給電素子60の給電点Pとは反対側に設けられている。本第4具体例において、伝送線路64はX軸に関して給電点Pと同一側に配置される。図28(b)において、太線で著す本第4具体例と細線で表す第3具体例とのゲインのφ依存性における相違は小さい。
【0045】
次に、終端解放伝送線路を用いた場合について説明する。
【0046】
図29は、アンテナ10の第5具体例であり、伝送線路74の終端を開放としたアンテナ10の模式平面図である。終端開放の伝送線路は電気長がλg/2で位相が0度である。本図において、無給電素子72における伝送線路74の電気長をλg/2より短く、無給電素子73における伝送線路74の電気長をλg/2より長く設定する。無給電素子72,73及び給電素子60の励振方向に沿う長さDをλg/2とする。
【0047】
図30は、無給電素子72,73を表し、同図(a)は模式平面図、同図(b)はBB’に沿った模式断面図である。深さが0.74mmである導通孔77の先端は接地68とは接続されずに開放(オープン)とする。なお、アンテナ10を構成する基板は第1具体例と同様とできるので説明を省略する。
【0048】
図31は、終端開放の伝送線路の長さLOを変化させた場合、無給電素子72及び73の整合点P’における振幅(dB)、位相(度)、無給電素子のアンテナゲイン(dB)をシミュレーションにより求めたグラフ図である。LOが7.6mmにおいて位相が0度となり、破線で表すアンテナゲインはLOが2.4乃至4.3mmの範囲でマイナスとなり、3.4mm近傍において最小値となる。
【0049】
図32は、整合点P’における反射係数S11のシミュレーション結果を表し、同図(a)はS11振幅、同図(b)は位相の周波数特性を表す。11.05GHzにおいて、終端開放の伝送線路長が7.55mmで位相は0度となり、6.64mmで位相が110度、8.14mmで位相がマイナス110度となる。
【0050】
図33は、最大放射強度が得られる放射角度θにおけるゲインの角度φ依存性を表すグラフ図である。無給電素子に接続される伝送線路が終端短絡(ショート)である場合を細線で、終端開放(オープン)である場合を太線でそれぞれ表す。細線で表す終端短絡伝送線路のほうが角度φに対して対称とできる。
【0051】
図34は、終端短絡または終端開放の伝送線路を有する無給電素子を、給電素子と隣り合うように励振方向に対して横方向に配置したアンテナ10の水平放射パターンを表す図である。
【0052】
図35は、位相が110度及びマイナス110度となる終端短絡及び終端開放伝送線路の構成を表す模式平面図である。
また、図36は、図35に表したそれぞれの伝送線路を備えた無給電素子のE面におけるゲインのθ依存性を表す。終端短絡且つ位相マイナス110度の伝送線路を有する無給電素子が一番高いゲインを有する。終端開放かつ位相110度の伝送線路を有する無給電素子のゲインが最も低い。
【0053】
また図33に例示されるように終端開放伝送線路を用いるとφが240乃至330度の間の範囲でゲインが充分には低下しない。また、図34に例示されるように、終端開放伝送線路を用いると放射パターンがこの角度(φ)近傍で曲がり(すなわち膨らみ)を生じている。この曲がりが生じると、3dB利得低下領域の制御が十分にできない場合がある。しかし、この曲がりは給電素子と無給電素子との励振方向に沿う相対位置をずらすことにより改善できる。
【0054】
図37は、アンテナ10の第6具体例の模式平面図である。終端開放伝送線路74を有する無給電素子72及び73は、給電素子60に対して励振方向かつ給電点とは反対方向に距離Gだけずらして配置されている。この場合は、無給電素子72と73とを同一にGだけずらしているが、同一でなくとも良い。図38に例示されるゲインの角度φ依存性は、図33の終端短絡伝送線路と同様にゲインを減衰させることができる。
【0055】
図39は、水平放射パターンの回転を説明するための模式図である。図39(a)に表した具体例の場合、終端開放伝送線路を有する無給電素子74は、給電素子60に対してずらして配置されておらず、両者の中心をむすぶ直線は、励振方向に対して垂直とされている。その場合の水平放射パターンを見ると、最大ゲインはθ=30度、φ=210度である。つまり、φ=180度の方向からみて30度も回転している。
【0056】
これに対して、図39(b)に表した具体例の場合、終端開放伝送線路を有する無給電素子74は、給電素子60に対してずらして配置されている。すなわち、無給電素子74は、その伝送線路が接続されている方向に向かってずらされている。このようにすると、放射パターンのφ方向の回転を抑制できる。具体的には、図39(b)に表した具体例の場合、最大ゲインはθ=27度、φ=180度であり、図39(a)において見られた水平放射パターンの回転が抑制されている。この場合、無給電素子74をずらし量は、λg/4以内に抑えることが望ましい。
【0057】
一方、水平放射パターンの回転を抑制するもうひとつの方法として、伝送線路を短絡する方法を挙げることができる。
図39(c)は、無給電素子74を給電素子60に対してずらすことなく、その伝送線路の終端を接地した具体例を表す。その結果、放射パターンの最大ゲインはθ=36度、φ=186度となり、図39(a)に表した具体例(φ=210度)と比べて、φ=180度の方向に24度も戻ったことが分かる。
【0058】
図40は、アンテナ10の第7具体例の模式平面図であり、同図(a)は給電点Pと同方向に2個の終端開放伝送線路74が延在する場合、同図(b)は互いに反対方向に延在する場合を表す模式平面図である。また、図40(c)は、ゲインの角度φ依存性を表すグラフ図であり、実線は図40(a)、破線は同図(b)であり、共にφ依存性を変化させることができている。これは、放射パターンの回転を制御できることを表している。
【0059】
図41は、第8具体例を表す模式平面図である。励振方向に沿って、給電素子60をはさんで対称位置に無給電素子62及び63が配置されている。本具体例においては、無給電素子62及び63に、終端短絡伝送線路64が設けられている。
【0060】
図42は、一方の無給電素子62の位相を110度に固定し、他方の無給電素子63の位相を0乃至マイナス180度と変化させた場合におけるアンテナゲインが最大となる素子間スペースS、及び最大放射強度となる角度θを表すグラフ図である。
素子間スペースSが1.3mmの時アンテナゲインが最大となり、最大放射強度となる角度θは63度となることが分かる。
【0061】
図43は、一方の無給電素子62の位相を110度とし、他方の無給電素子63の位相を0、マイナス90、マイナス180度とした場合のE面におけるゲインのθ依存性である。
図44は、素子間スペースSを変化させた場合の水平放射パターンを表す。
無給電素子63の位相を0からマイナス180度まで変化させるにしたがって、サイドローブが低下することが分かる。ただし、メインローブの半値幅はやや拡がる傾向にあり、無給電素子63の位相がマイナス90度付近においてもっとも良好な特性が得られているといえる。
【0062】
次に、伝送線路に高周波スイッチを接続することにより、放射パターンを切り替える具体例について説明する。
図45は、第9具体例を表し、同図(a)は模式平面図、同図(b)は模式底面図である。
本具体例においては、終端短絡伝送線路64と接地68との間に高周波スイッチ100を設けることにより電波ビームの放射パターンを切り替えることができる。伝送線路64は、導通孔66を介して高周波スイッチ100に接続される。高周波スイッチ100は、例えば、GaAsからなるダイオードまたはFETとする。本図はFETを用いた具体例を表し、ゲート電極を伝送線路64から分離できるのでFET電源回路が容易になる。ゲート電極は基板裏面の引き出し電極102に接続され、供給電圧によりオン−オフを制御を行う。
【0063】
図46及び図47は、無給電素子から伝送線路への接続構造の2つの具体例を表す。
すなわち、図46に表した具体例においては、無給電素子62に終端短絡伝送線路64の一方の端部が接続されており、他方の端部が導通孔66へと接続される。この場合には、伝送線路64はマイクロストリップラインとなる。一方、図47に表した具体例においては、無給電素子62のパターン内部に導通孔66が設けられ、基板の裏面において伝送線路64に接続される。この場合には、伝送線路64は厳密にはマイクロストリップラインではないが、その形状パラメータによってはマイクロストリップラインに近似して取り扱うことができる場合もある。
図48は、高周波スイッチ100の位置精度を改善する構造を例示する模式図であり、同図(a)は基板の裏面側を表し、同図(b)は高周波スイッチのインダクタンス成分を説明するための概念図である。
アンテナ10の励振周波数は高いので、高周波スイッチ100の位置決めには高精度が必要であり、このためにはマーカ104などを設けると良い。また、高周波スイッチ100は、寄生インダクタンスL2,L3を有し、その切替状態により寄生インダクタンスが変化する。
【0064】
図49は、高周波スイッチ100のオン−オフに伴うインダクタンスの変化を説明する模式図である。
ここで、L1は伝送線路のインダクタンスを表す。また、図49において、CASE1とCASE1'は、それぞれ高周波スイッチ100がオフ状態とオン状態の寄生インダク
タンスを表す。またここでは、高周波スイッチ100がオン状態においても接地されない。このように、高周波スイッチ100のオン−オフにより寄生容量が変化する。このような場合、例えば、CASE1(L1+L2)の状態においてアンテナ特性が最適となるように設計することができる。また、これとは逆に、CASE2(L1+L2+L3)の状態においてアンテナ特性が最適となるように設計してもよい。
【0065】
また、高周波スイッチ100がオン状態において接地される場合(CASE3’とCASE4)にも同様に、高周波スイッチ100がオフ状態(CASE3)においてアンテナ特性が最適となるように設計してもよく、または、高周波スイッチ100がオン状態(CASE4)においてアンテナ特性が最適となるように設計してもよい。
【0066】
これらいずれの場合も、高周波スイッチ100のオン−オフの切替に伴って寄生インダクタンスが変化するので、アンテナ特性を切り替えることができる。
図50は、図45に例示したアンテナ10のH面における電波ビームのゲインのθ依存性を表すグラフ図である。
高周波スイッチ100がオン状態においては、マイナス30度付近をピークとしたメインローブと、プラス50度付近をピークとしたサイドローブが表れるが、高周波スイッチ100がオフ状態に遷移すると、0度付近をピークとした単峰性のアンテナ特性が得られる。このように、高周波スイッチ100を切り替えることにより、アンテナ特性を変化させることができる。
【0067】
図51は、第10具体例を表し、同図(a)は模式平面図、同図(b)は模式断面図である。
本具体例においては、伝送線路64をRにおいて分岐し、一方は導通孔67、高周波スイッチ100a(または100b)を介し接地68と接続し、他方は導通孔66を介して接地68へ直接接続する。
【0068】
図52は、図51のアンテナの回路構成を表す図であり、整合点P’の位相を110度とする時は高周波スイッチ100a(または100b)をオンとし、マイナス90度とする時は高周波スイッチをオフとすればよいことを表す。従って、高周波スイッチ100a(または100b)のオン−オフを切り替えることにより接地への接続経路を切り替えて、アンテナ特性を変化させることができる。
図53は、図51のアンテナのH面におけるゲインのθ依存性を表すグラフ図である。
【0069】
同図において、例えば(110、−90)とは、無給電素子62の整合点P’における位相が110度で、無給電素子63の整合点P’における位相がマイナス90度であることを表す。すなわち、この時、高周波スイッチ100aはオン状態で、高周波スイッチ100bはオフ状態である。
【0070】
図53から、高周波スイッチ100a、100bがいずれもオン状態(110、110)またはオフ状態(−90、−90)においては、放射パターンは0度を中心として左右対称であるが、高周波スイッチ100a、100bの一方をオン状態、他方をオフ状態として切り替えると、放射パターンは0度を中心として反転することが分かる。すなわち、(110、−90)と(−90、110)とは、放射パターンの角度分布が反転している。従って、高周波スイッチ100a、100bを切り替えることにより、例えば、(110、110)あるいは(−90、−90)のように幅広い放射パターンを得たり、あるいは(110、−90)や(−90、110)のように局在的な放射パターンを選択することが可能となる。
図54は、第10具体例の第1変形例を表し、同図(a)は模式平面図、同図(b)は模式底面図、同図(c)はH面におけるゲインのθ依存性である。
導通孔66は、無給電素子62及び63のパターン領域内に設けられ、基板の裏面において伝送線路64が設けられる。伝送線路64と高周波スイッチ100との接続点近傍には終端短絡の伝送線路が分岐されており、高周波スイッチ100のオン−オフ切り替えにより伝送線路長を変化させ、図54(c)のようにゲインのθ依存性を制御できる。なお、図54(c)は、無給電素子62、63の位相がそれぞれ110度、マイナス90度の状態を表す。図53に表した(110、−90)の具体例と同様に、角度θのマイナス側にメインローブ、プラス側にサイドローブが表れていることが分かる。
【0071】
図55は、第10具体例の第2変形例を表し、同図(a)はその模式平面図、同図(b)はその底面拡大図である。無給電素子62及び63の裏面において、伝送線路64は導通孔66を介して高周波スイッチ100へ接続される。この接続点からは終端短絡の伝送線路が分岐されており、高周波スイッチ100のオン−オフにより伝送線路長を変化させる。
図56は、第10具体例の第1及び第2変形例の回路構成を表す模式図である。すなわち、同図(a)に表した具体例の場合には、高周波スイッチ100がオンであると無給電素子は導波器となり、オフであると反射器となるようにインダクタンスが変化する。一方、同図(b)に表した具体例の場合には、高周波スイッチ100がオフの時に無給電素子は導波器となり、オンの時は反射器となるようにインダクタンスが変化する。
【0072】
図57は、第11具体例を表し、同図(a)は模式平面図、同図(b)はゲインのθ依存性である。伝送線路64は分岐されており、一方は高周波スイッチを介して接地され、他方は直接接地される。この結果、無給電素子62、63における位相の組み合わせは、(110度、−180度)、(−180度、110度)、(−180度、-180度)、
及び(110度、110度)の4通りとなる。
図57(b)はこれらの組み合わせに対応する放射パターンをそれぞれに表すグラフ図である。例えば、(110度、110度)及び(−180度、-180度)においてはθ
=0°においてゲインが最大となる左右対称の放射パターンが得られる。また、(110度、−180度)と(−180度、110度)とは、それぞれ左右非対称で0度を中心に反転した放射パターンとなる。
【0073】
図58は、第12具体例を表し、同図(a)はその模式平面図、同図(b)はその模式底面図である。
伝送線路64の終端が導通孔66を介して接地68に短絡され、伝送線路64の中間に分岐点が設けられ導通孔67を介して高周波スイッチ100と接続されている。無給電素子62と63は、給電素子60をはさんで励振方向に対して横方向に配置されている。また、無給電素子162と163は、給電素子60をはさんで励振方向に配置されている。
【0074】
このようにすると、伝送線路からスイッチ100を介して分岐した線路もすべて励振方向に対して平行に配置することができる。線路が励振方向に対して垂直になる場合には、それらの線路を給電素子60を中心として対称に形成することが望ましいが、スイッチ100の接続端子の形状に制限があるため、これが難しい場合が多い。これに対して、本具体例においては、スイッチ100において分岐した部分も含めて、全ての無給電素子の伝送線路を励振方向に対して平行に形成することができるので、対称性に優れたアンテナを実現できる。
【0075】
図59は、高周波スイッチ100a,100b、100c、100dをそれぞれにオン−オフした場合におけるゲインのθ依存性を表し、それぞれ左側はH面、右側はE面である。
これらいずれも、高周波スイッチをオンにした時の無給電素子の位相は110度であり、一方、高周波スイッチをオフにした時の無給電素子の位相はマイナス180度(図59(a))、マイナス90度(図59(b))、または0度(図59(c))とされている。サイドローブを抑制する観点からは、高周波スイッチをオフにした時に無給電素子の位相がマイナス180度のものが有利である。
【0076】
図60(a)、(b)、(c)は、図59(a)、(b)、(c)とそれぞれに対応したH面及びE面における垂直放射パターンを表しており、H面はXZ平面、E面はYZ平面である。
一方、図61は、第12具体例において無給電素子の一方を110度、他方を170度とした場合のゲインのシータ依存性を表す。図59(a)、図60(a)に表したように、無給電素子の他方の位相をマイナス180度にした場合と近似した特性が得られることが分かる。
【0077】
図62は、アンテナ10の第13具体例を表す模式図である。
導通孔66を介して高周波スイッチ100が基板裏面の終端短絡伝送線路に接続される。本図において、基板裏面には励振方向に対して横方向に延在する終端短絡伝送線路が設けられている。このようにするとアンテナ10を全体として小型化できる。
【0078】
次に、位相が同一の複数の無給電素子を設けた具体例について説明する。
図63は、アンテナ10の第14具体例の模式平面図である。本具体例においては、無給電素子62及び63は同一位相とする。無給電素子62及び63の位相が同一であり、160乃至マイナス160度まで変化させた場合、各給電素子−無給電素子間スペースSに対するゲイン変化率を(表1)に、最大放射強度方向(θ、φ)を(表2)に表す。
【0079】
【表1】
【表2】
無給電素子の位相が170度から180度までの範囲は、図6に例示されるようにアンテナゲインがマイナスとなる領域である。本具体例におけるように、導波器−導波器として作用する無給電素子62及び63によっても放射パターンが制御可能である。
図64は、本具体例の放射パターンを表す模式図である。
【0080】
図65は、第15具体例の模式平面図である。
また、図66は、本具体例の放射パターンを表す模式図である。
【0081】
本具体例においては、無給電素子62及び63の位相を同一とし、給電素子60をはさんで励振方向に沿って配置されている。無給電素子62及び63の位相を変化させた場合、給電素子−無給電素子間スペースにおけるゲイン変化率を(表3)に、最大放射強度方向(θ、φ)を(表4)に表す。
【0082】
【表3】
【表4】
次に、励振方向に対して平行に配置され、スイッチにより伝送線路の位相を切り替え可能な無給電素子162、163を配置することにより、より均一なビームが得られることを説明する。
図67は、第16具体例を表し、同図(a)、(b)、(c)、(d)は無給電素子162及び163と給電素子60との励振方向距離をそれぞれに変化させた場合の水平放射パターン、同図(e)はゲインのθ依存性をそれぞれ表す。
伝送線路は終端開放とし、長さを7.1mmとすることにより無給電素子162の位相は90度とする。CASE1は、無給電素子162が、0.8mmのスペース(間隔)S1だけ給電素子60から離れ、給電素子60の中心に関して給電点の反対側に配置される。CASE2〜4は、無給電素子163が、給電素子60の中心に関して給電点側に配置され、スペースS2がそれぞれ0.8、0.6、0.4mmの場合である。
【0083】
この場合、図67(e)に表すゲインにおいて、破線で表すCASE2のほうが太い実線で表すCASE1よりもゲインが約1dB高い。CASE1においてS1=0.8mm、CASE2においてS2=0.8mmとスペースは同一であっても、均一にビームが放射されないことを意味している。S2=0.6mmであるCASE3において、ゲインをほぼCASE1と等しくできておりCASE1に対してY軸逆方向にほぼ均一な放射パターンが得られている。S2=0.4mmであるCASE4においては、ゲインがますます低下して、図67(d)の様にCASE1とは異なった水平放射パターンとなる。すなわち、給電素子60をはさんでペア状に配置された無給電素子において、伝送線路の長さをスイッチにより変化させ、放射パターンを切り替える場合、スペースを変えることによりより均一な放射パターンにできる。例えば、給電素子60の中心より給電点側に配置する無給電素子163とのスペースS2を反対側の無給電素子162とのスペースS1より小さくすることにより、均一なビームにできる。
【0084】
図68は、終端短絡の場合のアンテナ10の模式平面図である。
給電素子60の給電点Pがパッチ電極の中心からみて無給電素子163の側に設けられている。そして、この場合、給電素子60と無給電素子162とのスペース(間隔)S1よりも、給電素子60と無給電素子163とのスペースS2を小さくすることにより、放射パターンを対称な形態に近づけることができる。
【0085】
またこの具体例において、S1>S2とし、スイッチを切り替えることにより、一方の無給電素子を導波器とし、他方を反射器とし均一なビームにできる。図67(e)に例示されるように、ゲインが最大となるθはE面においてプラス、マイナス両側において約60度であり、図4に例示される第1具体例よりも大きくできる。このアンテナ10からの大きな放射角度θを有するビームにより、より広範囲な場所にいる人間の存在を精度良く検知できる。この結果、自動ドアなどにおけるセンサとしても有用である。
【0086】
次に、伝送線路が接続された無給電素子の小型化を実現できる構造について説明する。
【0087】
整合点の位相がマイナスである反射器として作用する無給電素子62における伝送線路は、導波器の場合より長くなることが多い。長い伝送線路が励振方向に延在するとアンテナが大型化する。そこで、導波器として作用させる伝送線路は励振方向に沿って直線状に配置し、反射器として作用させる伝送線路は伝送線路の終端側を屈曲させることによりアンテナの小型化を図ることができる。
【0088】
まず、図69は、比較例にかかるアンテナを説明する図であり、同図(a)は導波器として作用する幅が0.6mm、長さが3.8mmである伝送線路が直線状に延在したCASE1の模式図、同図(b)はこの伝送線路を屈曲したCASE2の模式図、同図(c)はゲインのφ依存性を表す。
無給電素子162と給電素子60とのスペースはいずれも2.2mmとし、終端短絡伝送線路により無給電素子62の位相は110度となる。アンテナゲインが最大となるのは、図69(a)においてθ=27度、φ=183度であるのに対し、同図(b)においてθ=30度、φ=174度とビームが回転し、サイドローブもより大きくなる。
【0089】
図70は、アンテナの第17具体例を表す。図70(a)は無給電素子62に幅0.6mm、長さ3.8mmである終端短絡伝送線路が、無給電素子63に幅0.6mm、長さ8.1mmである終端短絡伝送線路がそれぞれ直線状に延在するCASE3の場合の模式図である。また、図70(b)は屈曲したCASE4の場合の模式図、同図(c)はゲインのφ依存性である。
導波器としての無給電素子62の位相は110度、反射器としての無給電素子63の位相はマイナス180度とし、スペースは2.4mmとする。また、反射器として作用する無給電素子63の伝送線路は、導波器として作用する無給電素子62の伝送線路の長さである3.8mmにおいて約90度に屈曲させる。
【0090】
ゲインが最大となるのは、図70(a)において、θ=30度、φ=180度であるのに対し、同図(b)において、θ=30度、φ=186度である。図70(c)に例示されるように、ゲインのφ依存性は殆ど一致し、ビームの回転を抑制できることを表している。
【0091】
図71は、第17具体例の第1変形例を表し、無給電素子63の伝送線路の長さを5.1mmとし位相をマイナス90度とした場合を表す。図71(a)は伝送線路が直線状に延在するCASE5、同図(b)は屈曲したCASE6を表す。アンテナゲインが最大となるのは、図71(a)においてθ=39度、φ=180度、同図(b)においてθ=39度、φ=180度である。また。図70(c)に例示されるようにゲインのφ依存性は殆ど一致し、ビームの回転を抑制できることを表している。
【0092】
図72は、第17具体例の第2変形例を表し、同図(a)は模式平面図、同図(b)、(c)、(d)、(e)は水平放射パターン、同図(f)はゲインのφ依存性である。無給電素子62及び63が給電素子60を挟んで励振方向と直交する方向に配置され、給電素子60と無給電素子62、63とのスペースはいずれも2.4mmとした。また、無給電素子162及び163が給電素子60を挟んで励振方向に沿って平行方向に配置されている。給電素子60と無給電素子162とのスペースは0.8mm、給電素子60と無給電素子163とのスペースは0.7mmとした。
【0093】
伝送線路の終端は導通孔66により接地されており、分岐点の導通孔67により高周波スイッチ100へ接続される。高周波スイッチ100がオンの場合は分岐点で接地となり、オフの場合は伝送線路の終端66で接地となる。無給電素子62の導通孔67aに裏面で接続される高周波スイッチ100a(SW1)、及び無給電素子63の導通孔67bに裏面で接続される高周波スイッチ100b(SW2)はオン状態で位相が110度、オフ状態でマイナス180度となるよう伝送線路の長さを決める。また、導通孔67cに裏面で接続される高周波スイッチ100c(SW3)、及び導通孔67dに裏面で接続される高周波スイッチ100d(SW4)はオン状態で90度、オフ状態でマイナス180度となるように伝送線路の長さを決める。
【0094】
図72(b)は高周波スイッチ100aのみがオンであるCASE1、同図(c)は100bのみがオンであるCASE2,同図(d)は100cのみがオンであるCASE3、同図(e)は100dのみがオンであるCASE4の場合の水平放射パターンを表す。また、図72(f)はH面におけるゲインのφ依存性をCASE1及びCASE2について表し、同図(g)はE面におけるゲインのφ依存性をCASE3及びCASE4について表す。
高周波スイッチ100を切り替えることにより、水平面内の放射パターンを制御できることが分かる。本具体例も、人感センサや自動ドアに用いる高周波センサとして適している。また、導通孔67が設けられる分岐点において、伝送線路はほぼ90度に屈曲されている。従って、図58に表した具体例と比較して、励振方向に沿う長さを縮小しアンテナの小型化を容易にする。この場合、屈曲によるビームの回転も抑制できる。
【0095】
図72に表した具体例においては、一本の伝送線路の途中に高周波スイッチが設けられ、位相を可変にしている。
一方、図73は、伝送線路を2本に分けた具体例を表し、同図(a)は表面側の模式図、同図(b)は裏面側の模式図である。すなわち、図73(a)はパッチ電極側を表し、パッチ電極から伝送線路が励振方向に延在し、途中で屈曲して、その終端が導通孔66により接地されている。一方、図73(b)は接地68である裏面を表し、パッチ電極領域内の一点から導通孔166を介して接続され励振方向に対して略平行に延在する伝送線路164と、この伝送線路164に接続された高周波スイッチ100と、が設けられている。この場合にも、裏面の伝送線路164のストライプ状導体の長さ以上の位置において、表側の伝送線路のストライプ状導体が屈曲される。この結果、高周波スイッチ100をオンとしたとき導波器として、オフとしたとき反射器として作用させ、無給電素子62の位相を変化させることができる。
【0096】
以上説明した具体例においては、水平放射パターンにおける最大放射方向がXまたはY軸(励振方向に対して平行)となる様にパッチ電極はほぼ十字状に配置される。
次に、パッチ電極の配置を変えることにより最大放射方向を斜めに向ける具体例について説明する。
図74は、比較例を表し、同図(a)は模式平面図、同図(b)は水平放射パターン、同図(c)はゲインのθ依存性である。図74(a)のように無給電素子62を励振方向に0.2mmずらし、励振方向に平行なその一辺が給電素子60の平行な一辺とは対向する部分を有さない場合を表す。このようにずらすと、図73(b)のようにビームを曲げることはできるが、幅0.6mmの伝送線路の長さLを変えて位相を調整しても、無給電素子62を導波器として作用させることが困難である。すなわち、L=4.7mmとし位相を0度とすると最大放射強度はθ=36度、φ=297度となる。また、L=4.2mmとし位相を90度とすると最大放射強度はθ=45度、φ=117度となる。しかし図73(c)に例示するようにサイドローブを十分に減衰させるのが困難であり、センサとして好適なビーム放射パターンが得られない。
【0097】
図75は、アンテナの第18具体例を表し、同図(a)は模式平面図、同図(b)及び(c)は水平放射パターン、同図(d)はゲインのθ依存性を表す。給電素子60のひとつの角部を図75(a)に例示するような原点(0,0)となるようなXY座標を用い、無給電素子62のひとつの角部の座標を(x、y)と表す。無給電素子62には、図75(a)のように長さLである伝送線路が接続されている。図75(b)は無給電素子62の角部座標が(−0.2,−1)であり位相が90度の場合、同図(c)は角部座標が(−0.2,−0.5)の場合の水平放射パターンである。位相が110度であるとサイドローブをメインビームより約8dB低下でき、ゲインが最大となるφも120度とでき、斜め方向へのビーム制御が可能となる。
【0098】
図76は、第18具体例において無給電素子62の位相が90度の場合の水平放射パターンを表す。左側はx=−1、すなわちスペースがX軸方向に1mmの場合であり、下方に向かって対向する部分が多くなることを表している。また、中央はx=−0.5,その右側はx=−0.2の場合である。最も右側は、それぞれのy座標においてゲインが最大となるx座標と放射パターンを表す。X軸方向のスペースを小さくする方が、またY方向で対向部分を大きくする方がサイドローブを小さくできる。また、y座標を固定した場合、ゲインが最大となるx座標は変化する。
【0099】
図77は、第18具体例において無給電素子62の位相が110度の場合の水平放射パターンを表す。図76と同様に、左側からx座標が−1、−0.5,−0.2の順であり、それぞれの列において下方に向って給電素子60との対向部分が多くなる。この場合にも、X軸方向スペースが小さく、Y軸に沿う対向部分が大きくなるに従いサイドローブを小さくできる。
【0100】
図78は、アンテナの第18具体例において位相が110度であり、無給電素子62の角部座標が、(−0.2,−0.5)及び(−1.1、−2.5)の場合のゲインのφ依存性を表す。ビームの放射方向を、最大放射強度ではなく半値角のビーム幅の中心値にて設定することにより、人間などの被検知物を精度よく検知することができる。例えば、最大放射強度で放射強度を135度と設定すると、半値角の範囲は75乃至225度となる。一方、半値角のビーム幅の中心値を120度と設定すると半値角の範囲が65乃至205度となりより精度の高い検知ができる。
【0101】
図79は、第19具体例を表し、同図(a)は模式平面図、同図(b)、(c)、(d)、(e)は水平放射パターン、同図(f)はゲインのφ依存性を表す。図79(a)に例示されるように、給電素子を中心として千鳥格子状あるいはX字状に4個の無給電素子が配置される。無給電素子には伝送線路が設けられ、その途中には導通孔が設けられる。伝送線路のストライプ状導体は線路の途中に導通孔を介して基板の裏面の高周波スイッチと接続される。高周波スイッチのオン−オフにより無給電素子の位相を変えることができる。
また、無給電素子と給電素子とはY軸に対して平行な一辺において対向する部分を有し、X軸に平行な他の一辺において対向する部分を有さない。Y軸に対して平行であり対向する部分は、図76及び図77に例示される水平放射パターンのシミュレーション結果よりゼロより大きく4分の1波長より短いことが好ましい。給電素子は励振方向に平行な辺において2分の1波長の長さとされるので、4分の1波長より短い対向部分であれば無給電素子は重なり合わない。破線で表す高周波スイッチSW1,SW2,SW3、SW4は、基板の裏面にそれぞれ配置される。
【0102】
図79(b)は、SW1のみをオンとし他をオフとするCASE1,同図(c)はスイッチ2のみオンとするCASE2,同図(d)はSW3のみをオンとするCASE3,同図(e)はSW4のみをオンとするCASE4の水平放射パターンをそれぞれに表し、同図(f)はそれぞれCASEのゲインのφ依存性を表す。
放射パターンにおけるゲインの最大値となるφ方向は、CASE1で60度、CASE2で120度、CASE3で240度、CASE4で300度であり、Y軸に関してほぼ左右対称にできる。また、ゲインが3dB低下するφ方向半値角は、図79(f)に表すようにほぼ均一とできる。
スイッチを順次切り替えて、CASE1〜4を順次繰り返すことにより、これら4方向を順次スキャンできる。
【0103】
第18及び第19具体例において、無給電素子と給電素子とはY軸に対して平行な一辺において対向部分を有した。しかし本発明はこれに限定されず、X軸に対して平行な一辺において対向部分を有していても良い。
【0104】
図80は、アンテナの第20具体例を表し、同図(a)は1つの無給電素子の場合の模
式平面図、同図(b)は水平放射パターン、同図(c)はφが105度のゲインのθ依存性である。図80(a)に表すように、給電素子60と無給電素子62とは励振方向、すなわちY軸方向に0.2mm離間している。また、励振方向に対して直交する無給電素子の一辺と給電素子の一辺とは対向部分を2.5mm有している。無給電素子62には整合点における位相が110度となるよう長さが3.7mmの終端を短絡した伝送線路が接続されている。また、図80(b)のように、水平放射パターンはφが約105方向に向かって広がっている。さらに、図80(c)のように、φ=105°の面内において最0大放射強度が得られる角度θは39度、メインビームの半値角幅は10乃至80度、サイドローブはメインビームより約9dB低下させることができ、走査方向に局在するメインビームの放射量を多くし、メインビームとサイドローブの差を3dB以上確保できる。
【0105】
図81は、アンテナの第21具体例を表す模式平面図である。給電素子を中心として千鳥格子状あるいはX字状に4個の無給電素子が配置される。この無給電素子は第19具体例と同様の形状をそれぞれに有している。無給電素子と給電素子とはX軸に対して平行な一辺において対向する部分を有し、Y軸に平行な他の一辺において対向する部分を有さない。X軸に平行な対向部分は、第19具体例と同様に、ゼロより大きく4分の1波長より短いことが好ましい。本具体例においても、破線で表す基板裏面に設けられた高周波スイッチSW1、SW2、SW3、SW4を順次切り替えて、4方向を順次スキャンすることができる。
【0106】
図82は、比較例を表し、同図(a)は模式平面図及び水平放射パターン、同図(b)はゲインのφ依存性を表す。図82(a)に表したように、4つの無給電素子を十字状に配置した場合、同図(b)に表したようにY軸方向における半値角は90度であるが、X軸方向における半値角は約150度と大きい。ビームをX軸のプラスまたはマイナス方向に曲げようとする場合、検知範囲が広すぎて、例えば、斜め方向の人を誤って検知する可能性がある。また、例えば、図74(b)に例示するようにサイドローブを低減できずセンサに適したビームを得ることが困難である。
これに対して、第19及び第21具体例においては、φ方向における半値角の幅を揃えることができる。この結果、誤り無く人体などの被検知物を検知できるのでセンサとして適している。この応用として、例えば、人感センサ、自動ドアなどの開閉を制御するセンサ、手の動きを検知するセンサなどに用いると非接触スイッチとでき、機器のリモートコントロールなどに有用である。
【0107】
図83は、アンテナの第22具体例を表し、図83(a)は模式平面図、図83(b)は高周波スイッチ近傍の部分拡大図である。アンテナは、基板210の略中心に給電素子220と、給電素子220を中心にX字型に配置された無給電素子230と、を有している。給電素子220及び無給電素子230は、基板210の一方の主面に設けられたパッチ電極を有する。基板210の他方の主面、すなわちパッチ電極の裏面側は接地電極とする。
【0108】
給電素子220は、図83(a)における左右対称軸上の中間点よりずれた点を給電点Pとする。無給電素子230は、230a、230b、230c、230dを含む。励振方向と90度をなす無給電素子230の略中央には伝送線路240(240a、240b、240c、240dを含む)が励振方向と平行方向にかつ互いに逆向きに延在している。伝送線路240の終端には高周波スイッチ260が接続されており、それぞれの高周波スイッチ260は電気的にオンまたはオフに制御可能となっている。高周波スイッチ260は、260a(SW1)、260b(SW2)、260c(SW3)、260d(SW4)を含む。
【0109】
4つの高周波スイッチ260のうちいずれかひとつをオフ(開放状態)とし、他をオン(短絡状態)とすることにより電波ビームを必要な方向に精度良く制御できる。4つの高周波スイッチ260を順番にオフとして行くと、電波ビームの方向をこの順番に変えて行くことができ、物体の移動速度がドップラー信号により検知できる。
【0110】
本実施形態において、高周波スイッチ260は接地電極側(裏面側)ではなくパッチ電極側に設けられ、高周波スイッチ260を制御するための電圧は同じ側に配置された制御線242を介して供給される。この場合、制御線242のパターン幅を例えば0.1〜0.5mm程度に細く、かつ短くし無給電素子230の位相に影響を与えないようにし、所定の方向、所定の角度に電波ビームを放射できるようにする。
次に、高周波スイッチ260の作用について説明する。図83(b)の拡大図において、高周波スイッチ260aとして、例えばHEMT(High Electron Mobility Transistor)やGaAs MESFET(Metal Semiconductor Field Effect Transistor)を用いると、ゲート端子263aに印加する制御電圧によりソース端子262a及びドレイン端子261a間をオンまたはオフに切替えることができる。
【0111】
伝送線路240aの終端部は、ドレイン端子261aに接続され、ソース端子262aは基板210の導電パターン218及びスルーホール219を介して基板210の裏面である接地電極に接続される。ゲート端子263aは制御線242aを介して基板210の端部の制御端子に接続される。
【0112】
ゲート端子263aをゲート電圧により制御しソース端子262a及びドレイン端子261a間を導通とし高周波スイッチ260aをオンとすると、伝送線路240aは終端短絡線路として作用する。一方、ゲート電圧を制御しドレイン端子261a及びソース端子262a間を非導通とし高周波スイッチ260aをオフとすると、伝送線路240aは長さJの終端開放線路として作用する。
【0113】
本実施形態において、4つ高周波スイッチ260のうちいずれかひとつをオフとし位相がプラスかつ利得がプラスである導波器とし、他の3つをオンとし利得がゼロまたはマイナスである反射器とすることにより電波ビームの放射方向を制御し、オフとする高周波スイッチ260を順番に遷移させることにより電波ビームのスキャンが可能となる。
【0114】
図84は、このアンテナから放射された電波ビームの基板210と平行な面内における放射パターンを表す模式図である。SW1のみをオフとすると約20〜70度の方向に、SW2のみをオフとすると約110〜160度の方向に、SW3のみをオフとすると約200〜250度の方向に、SW4のみをオフとすると約290〜340度の方向に電波ビームを照射できる。
【0115】
図85は、このようなアンテナを備えた高周波センサ装置により照明装置を制御する応用例を説明する模式図である。部屋280において、上方にはライト284(284a、284b、284c、284d)が配置され、入口には壁スイッチ282が配置されている。高周波センサ装置のアンテナは、図83のパッチ電極面を下方(床面)に向けて配置される。部屋280は、ライト1(284a)が配置される照明領域A(280a)、ライト2(284b)が配置される照明領域B(280b)、ライト3(284c)が配置される照明領域C(280c)、ライト4(284d)が配置される照明領域D(280d)を含む。
【0116】
次に、部屋280の中の人体の位置を検知し、照明領域を使用者の意思に応じて変更する作用について説明する。図86はこの作用を説明するタイミングチャートである。まず、壁スイッチ282を時間T1でオンとし、すべてのライトは点灯するものとする。アンテナの高周波スイッチ260がSW1、SW2、SW3、SW4の順序にオフ状態とされ、電波ビームが照明領域A、照明領域B,照明領域C,照明領域Dの順序でスキャンされる。
【0117】
ここで検知範囲として、検知距離が長い第1検知範囲及び短い第2検知範囲を設定する。長い検知距離の第1検知範囲において人体を検知すると、短い検知距離である第2検知範囲に切り替える。第2検知範囲では所定のドップラー周波数(例えば、70Hz)以上の動きを人体検知と処理する。図86に表す電波ビーム及び検知信号はこの第2検知範囲に切り替わった場合とする。T2から始まる2回目のスキャンで照明領域Aにおいてのみ人体を検知すると照明領域Aの反対側である照明領域Cのライト3が消灯する。続いてT4から始まる4回目のスキャンで照明領域Aにおいてのみ再び人体を検知するとライト2及びライト4が消灯し、ライト1のみが点灯状態を継続し照明領域Aのみを照らす。さらにT8から始まる8回目のスキャンで照明領域Bにおいてのみ人体を検知すると、照明領域Bの反対側である照明領域Dが消灯を継続しライト2及びライト3が点灯する。
【0118】
このような照明装置の制御方法と比較して、電気による通過/遮断を選択する壁スイッチを用いる方法では人が存在する領域や人の意思に応じて照明領域を変更することは困難である。また、熱感知式センサを用いる方法ではそれぞれの照明領域の壁に必要量を設置してそれぞれの照明領域における人の存在に応じて点灯/消灯状態を切り替えることができる。しかしながら、センサ検知エリア内に人が存在すれば必ず点灯状態となるため、人が存在する照明領域では点灯/消灯状態を人の意思で切り替えることができない。さらに、赤外線リモコンを用いる方法では、どこの照明領域のライトを点灯するかの選択手段を備えれば人の意思によりそれぞれの照明領域における点灯/非点灯状態を切り替えることができる。しかしながら、リモコンを常に携帯するか、近くに置いておく必要が有り、複数の人が広範囲に存在する部屋ではリモコンも複数必要となり実用的とは言えない。
【0119】
これに対して第22具体例のアンテナを備えた高周波センサ装置によれば、部屋内における照明領域を使用者の意思に応じて容易に変更することができる。すなわち、所定の早さ以上で手などを動かすことにより、使用者の意思に応じて確実に照明領域を制御できる。
【0120】
図87は、照明領域を使用者の位置に応じて変更する他の例を説明するタイミングチャートである。この場合、壁スイッチ282を時間T1でオンとし、ライト284をすべて消灯とする。T2から始まる2回目のスキャンで照明領域Aのみに人体を検知すると、照明領域Aの反対側である照明領域C以外の照明領域Aのライト1、照明領域Bのライト2、照明領域Dのライト4が点灯する。続いてT4から始まる4回目のスキャンで再び照明領域Aのみに人体を検知すると、照明領域Aのライト1が点灯を継続し、照明領域Bのライト2及び照明領域Dのライト4は消灯する。さらに、T8から始まる8回目のスキャンにより照明領域Bにのみ人体を検知すると、照明領域Bの反対側である照明領域Dのランプ4は消灯を継続し、ライト1、ライト2、ライト3は点灯する。この例では、時間T3までは消灯している部屋280のライトが人の動きに応じて点灯し、点灯状態が変化するので部屋280を外部から監視でき、例えばセキュリティー上有効である。
【0121】
本発明は、これらに限定されない。高周波センサを構成するアンテナ、送信部、受信部、差分検出器、給電素子、無給電素子、伝送線路、高周波スイッチなどの材質、形状、サイズに関して各種設計変更を行ったものであっても、本発明の主旨を逸脱しない限り本発明の範囲に包含される。
【0122】
また、無給電素子の形状は、必ずしも給電素子の形状と同一でなくても、無給電素子とスイッチを接続する伝送線路の長さを調整すれば、無給電素子の整合点においてスイッチをON/OFFしたときに使用周波数に対し所定の位相を得ることができる。そして、その無給電素子を給電素子から所定の間隔を設けて配置すれば、所定の方向へ人体検知に適した鋭い電波ビームを放射することができる。
例えば、スイッチがオン状態の時に無給電素子が接地され、オフ状態の時にフローティングにされる場合について説明すると、スイッチがオン状態において高周波をアース電極へ逃がすための線路は、無給電素子と伝送線路との接続点からスイッチ内部の電流路を介してアース電極に至る線路である。そして、この線路の線路長は、スイッチがON状態の時に、高周波の基板上での波長λgの2分の1の整数倍の長さであることが望ましい。
一方、スイッチがオフ状態であるとき、無給電素子と伝送線路との接続点からスイッチ内線路の終端に至るまでの伝送線路の線路長は、波長λgの2分の1の整数倍であることが望ましい。
【0123】
しかしながら、伝送線路が介在するとセンサ装置の小型化を図りにくい。給電素子と無給電素子の位置関係により位相量は変化し、無給電素子は給電素子から離れるほど反射器側に作用する。従って、伝送線路を極力短くして小型化を図りたい場合は、図88(a)に表したように、励振方向と直交する無給電素子の端辺の略中央部に直接、スイッチの片端を接続し、整合点における位相が使用周波数に対し所定の位相が得られるよう、無給電素子の形状を給電素子の形状に比べて励振方向と平行する辺の長さLを短く調整する。図88(b)は、無給電素子のスイッチの接続部の拡大図である。この無給電素子を所定の間隔を設け給電素子の周囲に配置すれば、スイッチが開放状態のときは無給電素子は導波器として作用し、短絡状態のときは無給電素子からの電波の放射量が減少(ゲインが0dB以下)し、所定の方向へ人体検知に適した鋭い電波ビームを放射することができる。
【0124】
また、本実施形態の高周波センサは、図2に例示したような小用便器のみならず、腰掛便器や、その他、トイレ、洗面所、浴室、キッチンをはじめとして、各種の用途において設けることができる。
【0125】
さらに、人感センサ、自動ドアセンサ、非接触スイッチ、非接触型の入力インタフェースなどにも応用が可能である。例えば、図68や図79などに関して前述したように、複数の無給電素子をスイッチで順次切り替えて複数の方向をスキャンできるアンテナを用いると、人間の手の動きなどを検知できる。つまり、アンテナで空間をスキャンし、手などの動きを検知し、その方向や速度に応じて、情報を入力したり機器をリモート操作できる。例えば、ドアの前に立った人間が、手を下から上に振った場合に高周波センサがこの動作を検知し、ドアを自動的に開かせることが可能である。
【0126】
図89(a)に表したアンテナは、給電素子60と、この給電素子60を中心として対称な位置に所定の間隔を設けて励振方向と平行な給電素子60の端辺と対向するように設けられた2つの無給電素子62、63と、が配置されている。無給電素子62、63には(図示しない)伝送線路を介して高周波信号を通過または遮断が選択可能なスイッチSW1・SW2が接続され、無給電素子62、63の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。そして、SW1をON、SW2をOFFにしたとき、図89(b)及び(c)に表したように、メインビームはφ≒180°、θ≒−30°の方向に、サイドローブはφ≒0°、θ≒+50°の方向に放射される。一方、SW1をOFF、SW2をONにしたときは、図89(d)に表したように、メインビームはφ≒0°、θ≒+30°の方向に、サイドローブはφ≒180°、θ≒−50°の方向に放射される。
【0127】
電波ビームをφ方向(基板面に対して水平方向)にスキャンし、n番目に放射されるメインビームの最大放射強度の方向が φ(n)M の時、メインビームよりもゲインの小さいサイドローブが φ(n)S の方向に放射される。 φ(n)S は、略 φ(n)M+[180°] の方向であり、メインビームの放射角度(基板面に対して垂直方向)を θ(n)M 、サイドローブの放射角度を θ(n)S とすると、 θ(n)M<θ(n)S となる。
【0128】
次に、(n+1) 番目に放射されるメインビームの最大放射強度の方向を φ(n)M±[180°] に設定すると、メインビームの放射方向は n 番目に放射されるサイドローブの方向と略一致することになる。すなわち、(n+1)番目に放射されるメインビームの最大放射強度の方向を φ(n+1)M とすると、 φ(n+1)M≒φ(n)S となる。このとき、メインビームの放射角度を θ(n+1)M とすると、 θ(n+1)M <θ(n)S となり放射角度は異なる状態となる。このため、メインビームの放射方向を2方向に切り替えて手が接近する方向に応じて何らかの機能を動作させる非接触スイッチとして使用する場合、メインビームとサイドローブの方向が同じだと手が接近する角度によっては誤検知する可能性がある。
【0129】
図90(a)に表したアンテナは、給電素子60と、この給電素子60を中心として対称な位置に所定の間隔を設けて給電素子60の励振方向と平行する端辺と一部が対向するように設けられた2つの無給電素子62、63と、が配置されている。無給電素子62、63には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2が接続され、無給電素子62、63の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0130】
そして、SW1をON、SW2をOFFにしたとき、図90(b)に表したように、メインビームはφ≒120°、サイドローブはφ≒300°の方向に放射される。一方、SW1をOFF、SW2をONにしたときは、図90(c)に表したように、メインビームはφ≒60°、サイドローブはφ≒240°の方向に放射される。
【0131】
図91(a)に表したアンテナは、給電素子60と、給電素子60の励振方向と平行する端辺と対向する位置および給電素子60の励振方向と直交する端辺と対向する位置に所定の間隔で設けられた2つの無給電素子62、63と、が配置されている。無給電素子62、63には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2が接続され、無給電素子62、63の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0132】
そして、SW1をON、SW2をOFFにしたとき、図91(b)に表したように、メインビームはφ≒180°、サイドローブはφ≒0°の方向に放射される。一方、SW1をOFF、SW2をONにしたときは、図91(c)に表したように、メインビームはφ≒90°、サイドローブはφ≒270°の方向に放射される。
【0133】
図92(a)に表したアンテナは、給電素子60と、この給電素子60の励振方向と平行する端辺と対向する位置および給電素子60の励振方向と平行する端辺と一部が対向する位置に所定の間隔で設けられた2つの無給電素子62、63と、が配置されている。無給電素子62、63には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2が接続され、無給電素子62、63の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0134】
そして、SW1をON、SW2をOFFにしたとき、図92(b)に表したように、メインビームはφ≒180°、サイドローブはφ≒0°の方向に放射される。一方、SW1
をOFF、SW2をONにしたときは、図92(c)に表したように、メインビームはφ≒60°、サイドローブはφ≒240°の方向に放射される。
【0135】
図93(a)に表したアンテナは、給電素子60と、この給電素子60の励振方向と平行する端辺と対向する位置および給電素子60の励振方向と直交する端辺と対向する位置に所定の間隔を設け、3つの無給電素子62、63、72が配置されている。無給電素子62、63、72には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2・SW3が接続され、無給電素子62、63、72の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0136】
そして、SW1とSW2をON、SW3をOFFにしたとき、図93(b)に表したように、メインビームはφ≒130°、サイドローブはφ≒310°の方向に放射される。一方、SW1をOFF、SW2とSW3をONにしたときは、図93(c)に表したように、メインビームはφ≒50°、サイドローブはφ≒230°の方向に放射される。
【0137】
図94(a)に表したアンテナは、給電素子60と、この給電素子60を中心として対称な位置に所定の間隔を設けて給電素子60の励振方向と平行する端辺と一部が対向するように3つの無給電素子62、63、72が配置されている。無給電素子62、63、72には(図示しない)伝送線路を介し高周波信号を通過または遮断が選択可能なスイッチSW1・SW2・SW3が接続され、無給電素子62、63、72の整合点における位相は、スイッチが短絡状態のときに100degree近傍、開放状態のとき−180degree近傍となる。
【0138】
そして、SW1とSW2をON、SW3をOFFにしたとき、図94(b)に表したように、メインビームはφ≒180°、サイドローブはφ≒0°の方向に放射される。一方
、SW1とSW3をON、SW2をOFFにしたときは、図94(c)に表したように、メインビームはφ≒90°、サイドローブはφ≒270°の方向に放射される。
【0139】
このように、本発明の高周波センサ装置を非接触スイッチに用い、2方向に電波ビームをスキャンする場合、前に電波のメインビームが放射され最大放射強度が得られる方向を φ(n) 、次に電波ビームが放射され最大放射強度が得られる方向を φ(n+1) とすると、φ(n+1) が φ(n)±[180°] と異なる方向に電波ビームを切り替えることが望ましく、特に、 φ(n+1) は φ(n)±[90°] 〜 φ(n)±[135°] が好ましい。そうすれば、前に放射されるサイドローブと次に放射されるメインビームの方向が異なる(前に放射されるサイドローブの半値角と次に放射されるメインビームの半値角が重ならない)ため手が接近する角度の影響を受けなくなるため誤検知を防止できる。
【0140】
また、高周波センサ装置を非接触スイッチに用いた時、方向を識別する単純なON/OFFスイッチとして使用する場合は電波スキャンを常時、継続して人体や手の接近する方向を検知すれば良い。
【0141】
しかし、人体や手の接近方向を識別しさらにそのときの移動状態(移動速度や移動時間、移動距離、静止時間等)を用いてアナログ的に物理量(流量、温度、回転数、回転角度等)を変化させたい場合、電波ビームをスキャンし人体や手の接近方向を早期に確定したら、接近方向に対し電波ビームを固定することが重要である。
【0142】
例えば、高周波センサ装置を壁面に設置したとき、人の手が接近する速度は、遅い人で50Hz(1周期:20ミリ秒)、速い人でも300Hz程度である。従って、電波ビームをスキャンする速度は、50Hz以上の動きを正確に検知できる20ミリ秒以下が好ましい。そうすれば、早期に効率良く手が接近する方向を検知でき、検知エリア内における移動状態を認識できる。特に、人の手が高周波センサ装置に接近する移動速度の違いを利用し、アナログ的に物理量を変化させる場合、効果的である。
【0143】
そのとき人の手が移動する距離は一般的に30〜50cm程度であるため、スイッチの操作性や誤検知防止を考慮すると、検知エリアは高周波センサ装置から半径50cm前後が好ましい。
【0144】
図95は、電波ビームを2方向にスキャンしたときのタイミングチャートである。ここで、SW1をONした時とSW2をONした時とでは電波ビームの方向が異なる。本実施例では1スキャンしたときに、SW1がON状態にて手の接近を検知し確定した場合を例示している。ドップラー信号が所定のしきい値を越えたことにより手の接近方向を確定したら、その方向に電波ビームを固定しその方向での手の移動状態を認識できる。本実施例では、手が検知エリア内に進入し手の接近方向が確定してから停止するまでの期間、外部に判定信号を出力している。従って、この判定信号を使えば単純なON/OFFスイッチとしても使用できるし、パルス信号の出力時間からアナログ的に物理量を変化させるスイ
ッチとしても使用できる。
【0145】
図96は、図95に表した実施例の変形例を表す。本変型例においては、ドップラー信号が所定のしきい値を越えたことにより検知エリア内に手が進入したことを検知した時にスキャン速度よりも短いパルス信号を判定信号として外部に出力し、さらに手の接近方向が確定され電波ビームをその方向に固定してからドップラー信号が所定の周波数以下(例えば、20〜30Hz以下)になるまでの期間、ドップラー信号の1周期に対し1つパルス信号を判定信号として出力している。このように、検知エリア内に進入した直後の手の移動速度や移動時間・距離に応じた判定信号を利用すれば、アナログ的に物理量を変化させることができる。
【0146】
図97も、図95に表した実施例の変形例を表す。本変型例においては、ドップラー信号が所定のしきい値を越えたことにより検知エリア内に手が進入したことを検知した時からドップラー信号が所定の周波数以下になるまでの期間における平均周波数を周期に換算したときの長さを有するパルス信号を、手がセンサから離れていく状態(電圧の振幅値は大→小、周波数は低→高)を認識した後に判定信号として出力している。これによりスイッチ操作しようとしていない使用者の手がセンサ前方にて素早く通り過ぎる場合があったとしても誤動作を防止できる。また、手が接近する動作において接近する速度、即ち周波数が殆ど変化しないまま電圧の振幅値が小→大→小に変化した場合にパルス信号を出力しないようにすれば同様に誤動作を防止できる。
【0147】
図98及び図99は、電波ビームを4方向にスキャンした場合のタイミングチャートである。
SW1をONした時のメインビームの放射方向は0°サイドローブの放射方向は180°で、SW2をONした時のメインビームの放射方向は90°サイドローブの放射方向は270°で、SW3をONした時のメインビームの放射方向は180°サイドローブの放射方向は0°で、SW4をONした時のメインビームの放射方向は270°サイドローブの放射方向は90°である。
【0148】
図98においては、SW1をONした時にドップラー信号の電圧振幅値が予め設定された閾値を超えた場合、1スキャン(4方向に電波ビームを切り替え)のドップラー信号の結果をもとに人体や手の接近方向を確定している。それに対して、図99においては、SW3をONした時にドップラー信号の電圧振幅値が予め設定された閾値を超えた場合、1スキャンのドップラー信号の結果だけでなくSW1をONにした時のドップラー信号の状態をもとに人体や手の接近方向を確定している。
【0149】
このように、順次複数の方向へ電波ビームを放射するもので、且つ初めにメインビームが放射される方向と後にサイドローブが放射される方向が重なるような電波ビームを切り替えるセンサの場合、いずれかの方向で人体や手を検知したら人体検知したメインビームの放射方向とは反対側のメインビームのドップラー信号の状態とを比較し接近方向を確定すれば、サイドローブの影響による誤検知を防止できる。
【0150】
さらに、電波ビームをスキャン中に人体を検知したら、即座に人体検知したメインビームの放射方向とは反対側の方向にメインビームを放射するよう切り替えれば、より短時間で接近方向を確定でき、効率良く移動状態を認識できる。
【0151】
また例えば、自動券売機や各種の入力端末において、「はい」と「いいえ」の二択に対して、高周波センサが利用者の首の動きをモニタし、利用者が首を縦に振ったら「はい」、首を横に振ったら「いいえ」のように非接触式に入力することが可能となる。
【図面の簡単な説明】
【0152】
【図1】本発明の具体例にかかる高周波センサを説明する図である。
【図2】本具体例にかかる高周波センサを備えた小便器の構成を表す図である。
【図3】図2の小便器の機能図である。
【図4】高周波センサを構成するアンテナの第1具体例である。
【図5】無給電素子の構造を表す図である。
【図6】無給電素子の特性を表すグラフ図である。
【図7】無給電素子の整合点におけるS11を表すグラフ図である。
【図8】素子間スペースと、最大ゲイン及びθとの関係を表すグラフ図である。
【図9】第1具体例のゲインのθ依存性を表すグラフ図である。
【図10】第1具体例の放射パターンである。
【図11】第1具体例の変形例における素子間スペースと、最大ゲイン及びθとの関 係を表すグラフ図である。
【図12】変形例におけるゲインのθ依存性を表すグラフ図である。
【図13】アンテナの第2具体例の模式平面図である。
【図14】第2具体例における素子間スペースと、最大ゲイン及びθとの関係を表す グラフ図である。
【図15】第2具体例におけるゲインのθ依存性である。
【図16】第2具体例における水平放射パターンである。
【図17】アンテナの第3具体例である。
【図18】第3具体例における素子間スペースと、最大ゲイン及びθとの関係を表す グラフ図である。
【図19】第3具体例におけるゲインのθ依存性である。
【図20】第3具体例における水平放射パターンである。
【図21】ゲインのθ依存性である。
【図22】図21に対応する水平放射パターンである。
【図23】ゲインのθ依存性の他の例である。
【図24】ゲインのθ依存性の他の例である。
【図25】第3具体例の第1変形例である。
【図26】第3具体例の第2変形例である。
【図27】第3具体例の第3変形例である。
【図28】アンテナの第4具体例である。
【図29】アンテナの第5具体例である。
【図30】終端開放伝送線路を有する無給電素子の構造を表す図である。
【図31】終端開放伝送線路を有する無給電素子の特性を表すグラフ図である。
【図32】終端開放伝送線路を有する無給電素子の整合点におけるS11を表すグラ フ図である。
【図33】ゲインのφ依存性を表すグラフ図である。
【図34】水平放射パターンの比較を表す図である。
【図35】終端開放または短絡線路の構成の比較を表す図である。
【図36】図35の構成におけるゲインのθ依存性を比較するグラフ図である。
【図37】アンテナの第6具体例の模式平面図である。
【図38】第6具体例のゲインのφ依存性である。
【図39】水平放射パターンである。
【図40】アンテナの第7具体例である。
【図41】アンテナの第8具体例である。
【図42】第8具体例における素子間スペースと、最大ゲイン及びθとの関係を表す グラフ図である。
【図43】第8具体例におけるゲインのθ依存性である。
【図44】第8具体例における水平放射パターンである
【図45】第9具体例である。
【図46】伝送線路の接続構造である。
【図47】伝送線路の他の接続構造である。
【図48】高周波スイッチの固定方法を表す図である。
【図49】高周波スイッチのインダクタンスを説明する図である。
【図50】ゲインのθ依存性である。
【図51】アンテナの第10具体例である。
【図52】分岐点を設けた回路の構成を表す図である。
【図53】図52におけるゲインのθ依存性を表すグラフ図である。
【図54】第10具体例の第1変形例である。
【図55】第10具体例の第2変形例である。
【図56】回路構成の例である。
【図57】アンテナの第11具体例である。
【図58】アンテナの第12具体例である。
【図59】第12具体例におけるゲインのθ依存性である。
【図60】図59に対応する垂直放射パターンである。
【図61】ゲインのθ依存性の他の例である。
【図62】アンテナの第13具体例である。
【図63】アンテナの第14具体例である。
【図64】第14具体例の水平放射パターンである。
【図65】アンテナの第15具体例である。
【図66】第15具体例の水平放射パターンである。
【図67】アンテナの第16具体例である。
【図68】スペースの異なるアンテナの模式平面図である。
【図69】比較例のアンテナを説明する図である。
【図70】アンテナの第17具体例である。
【図71】第17具体例の第1変形例である。
【図72】第17具体例の第2変形例である。
【図73】伝送線路を2本別に設けた場合の模式図である。
【図74】比較例のアンテナを説明する図である。
【図75】アンテナの第18具体例である。
【図76】無給電素子位相が90度の第18具体例である。
【図77】無給電素子位相が110度の第18具体例である。
【図78】第18具体例のゲインのφ依存性である。
【図79】アンテナの第19具体例である。
【図80】アンテナの第20具体例である。
【図81】アンテナの第21具体例である。
【図82】比較例のアンテナを説明する図である。
【図83】アンテナの第22具体例である。
【図84】図83のアンテナの電波ビームの放射パターンである。
【図85】図83のアンテナを備えた高周波センサ装置により制御される照明装置を説明する図である。
【図86】図85の照明装置の作用を説明するタイミングチャートである。
【図87】図85の照明装置の作用を説明する他のタイミングチャートである。
【図88】給電素子と無給電素子とスイッチの配置を例示する模式図である。
【図89】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図90】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図91】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図92】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図93】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図94】給電素子60と、2つの無給電素子62、63と、を有するアンテナの具体例を表す模式図である。
【図95】電波ビームを2方向にスキャンしたときのタイミングチャートである。
【図96】図95に表した実施例の変形例を表すタイミングチャートである。
【図97】図95に表した実施例の変形例を表すタイミングチャートである。
【図98】電波ビームを4方向にスキャンした場合のタイミングチャートである。
【図99】電波ビームを4方向にスキャンした場合のタイミングチャートである。
【符号の説明】
【0153】
10 アンテナ、12 送信部、14 受信部、16 差分検出器、20 高周波センサ装置、60 給電素子、62、63、72、73 無給電素子、64、74 伝送線路、66、67、77 導通孔、100 高周波スイッチ、102 引き出し電極
【特許請求の範囲】
【請求項1】
送信波を発生する送信部と、
前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、
前記受信波を検知する受信部と、
前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、
を備え、
前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、
前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置。
【請求項2】
送信波を発生する送信部と、
前記送信波を放射する送信アンテナと、
前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信する受信アンテナと、
前記受信波を検知する受信部と、
前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、
を備え、
前記送信アンテナと前記受信アンテナの少なくともいずれかは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、
前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置。
【請求項3】
メインローブの最大ゲインとサイドローブの最大ゲインとの差が3dB以上であることを特徴とする請求項1または2に記載の高周波センサ装置。
【請求項4】
前記無給電素子は、伝送線路を有し、
前記伝送線路は、前記アンテナの励振方向に対して平行に延在する部分を含み、
前記伝送線路の一端は、前記無給電素子の励振方向と直交する端辺の略中央付近に接続され、
前記伝送線路の他端は、高周波信号の通過と遮断とのいずれかを選択可能なスイッチの入力端子に接続され、
前記スイッチのオン状態において、前記無給電素子は、導波器及び反射器のいずれか一方として作用し、
スイッチのオフ状態において、前記無給電素子は、導波器及び反射器のいずれか他方として作用することを特徴とする請求項1〜3のいずれか1つに記載の高周波センサ装置。
【請求項5】
前記伝送線路は第1及び第2の経路に分岐し、
前記第1及び第2の経路のいずれか一方にスイッチが接続され、
前記スイッチがオンまたはオフのいずれかの状態において、前記無給電素子のゲインが実質的にゼロとなることを特徴とする請求項4記載の高周波センサ装置。
【請求項6】
前記伝送線路は、前記無給電素子の位相が90度以上110度以下となる線路長を有することを特徴とする請求項4または5に記載の高周波センサ装置。
【請求項7】
前記垂直面は、前記アンテナの励振方向と平行であることを特徴とする請求項1〜6のいずれか1つに記載の高周波センサ装置。
【請求項8】
前記無給電素子の中心と前記給電素子の中心を結ぶ直線は、前記垂直面と直交することを特徴とする請求項1〜7のいずれか1つに記載の高周波センサ装置。
【請求項9】
前記無給電素子は、導波器として動作することを特徴とする請求項1〜8のいずれか1つに記載の高周波センサ装置。
【請求項1】
送信波を発生する送信部と、
前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、
前記受信波を検知する受信部と、
前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、
を備え、
前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、
前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置。
【請求項2】
送信波を発生する送信部と、
前記送信波を放射する送信アンテナと、
前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信する受信アンテナと、
前記受信波を検知する受信部と、
前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、
を備え、
前記送信アンテナと前記受信アンテナの少なくともいずれかは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、
前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置。
【請求項3】
メインローブの最大ゲインとサイドローブの最大ゲインとの差が3dB以上であることを特徴とする請求項1または2に記載の高周波センサ装置。
【請求項4】
前記無給電素子は、伝送線路を有し、
前記伝送線路は、前記アンテナの励振方向に対して平行に延在する部分を含み、
前記伝送線路の一端は、前記無給電素子の励振方向と直交する端辺の略中央付近に接続され、
前記伝送線路の他端は、高周波信号の通過と遮断とのいずれかを選択可能なスイッチの入力端子に接続され、
前記スイッチのオン状態において、前記無給電素子は、導波器及び反射器のいずれか一方として作用し、
スイッチのオフ状態において、前記無給電素子は、導波器及び反射器のいずれか他方として作用することを特徴とする請求項1〜3のいずれか1つに記載の高周波センサ装置。
【請求項5】
前記伝送線路は第1及び第2の経路に分岐し、
前記第1及び第2の経路のいずれか一方にスイッチが接続され、
前記スイッチがオンまたはオフのいずれかの状態において、前記無給電素子のゲインが実質的にゼロとなることを特徴とする請求項4記載の高周波センサ装置。
【請求項6】
前記伝送線路は、前記無給電素子の位相が90度以上110度以下となる線路長を有することを特徴とする請求項4または5に記載の高周波センサ装置。
【請求項7】
前記垂直面は、前記アンテナの励振方向と平行であることを特徴とする請求項1〜6のいずれか1つに記載の高周波センサ装置。
【請求項8】
前記無給電素子の中心と前記給電素子の中心を結ぶ直線は、前記垂直面と直交することを特徴とする請求項1〜7のいずれか1つに記載の高周波センサ装置。
【請求項9】
前記無給電素子は、導波器として動作することを特徴とする請求項1〜8のいずれか1つに記載の高周波センサ装置。
【図2】

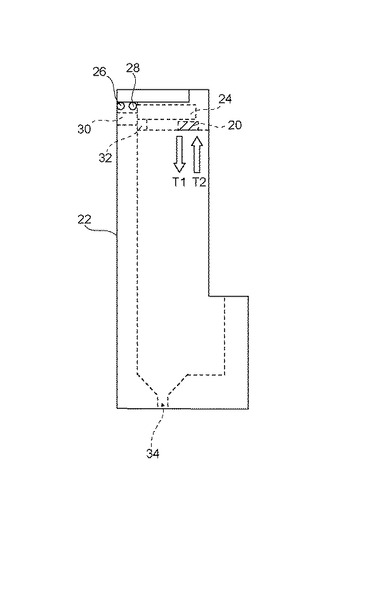
【図3】
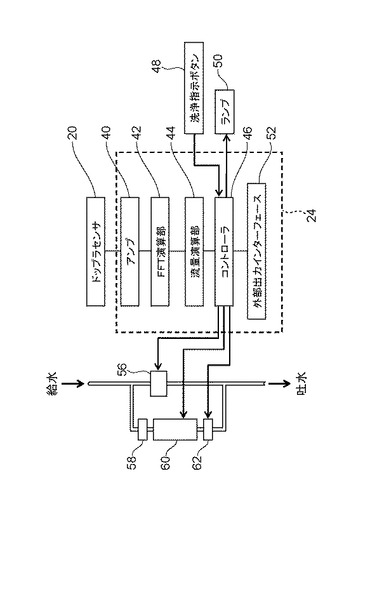
【図4】
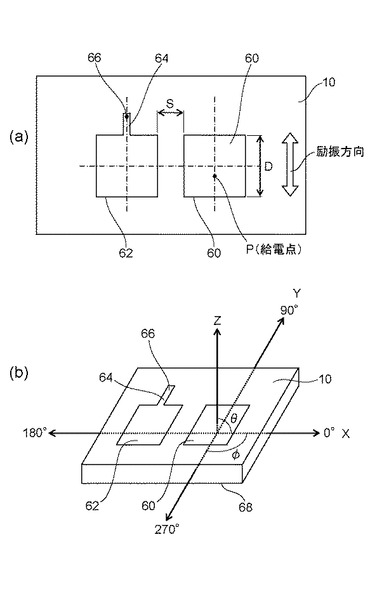
【図5】
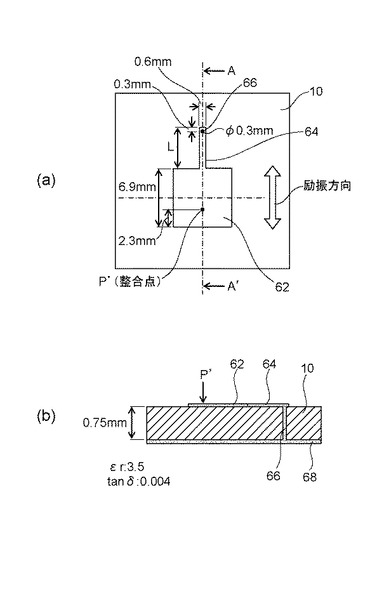
【図6】
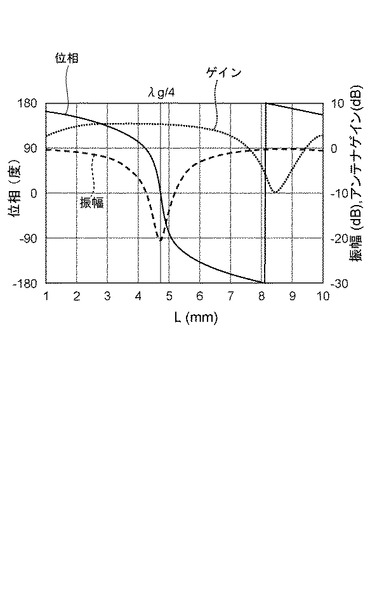
【図7】
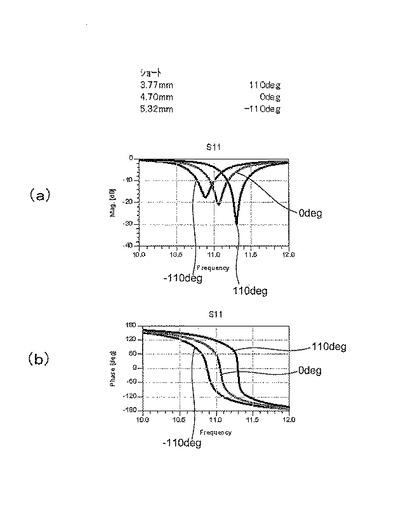
【図8】
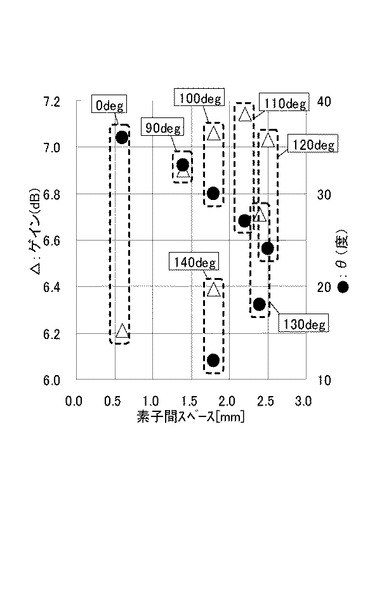
【図9】
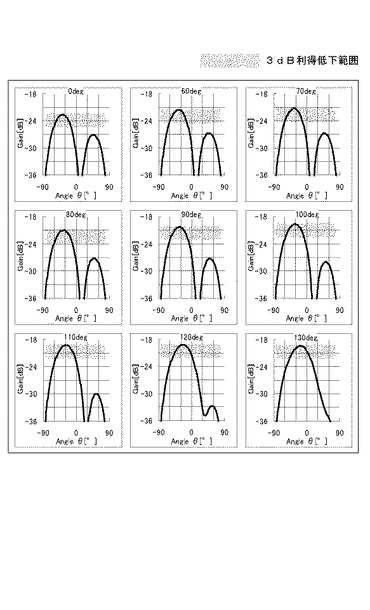
【図11】
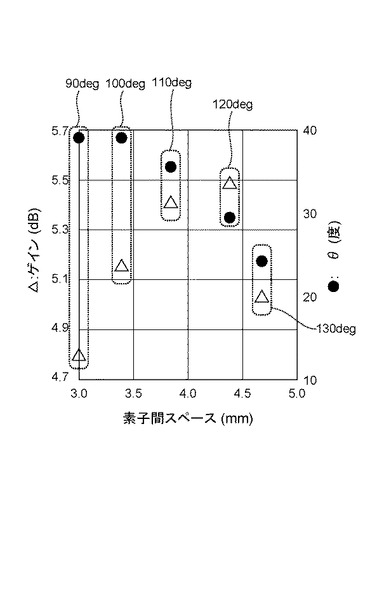
【図13】
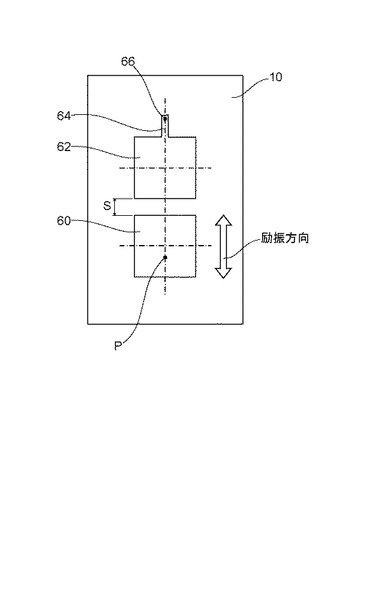
【図14】
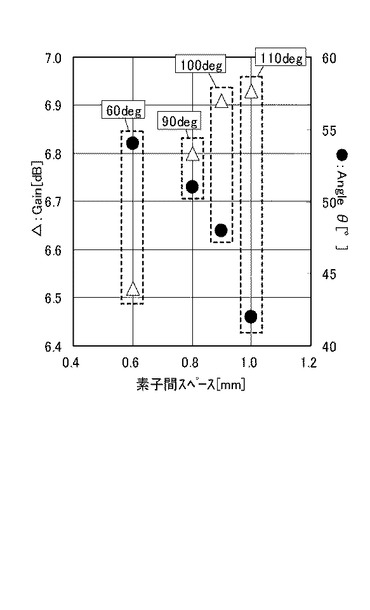
【図15】
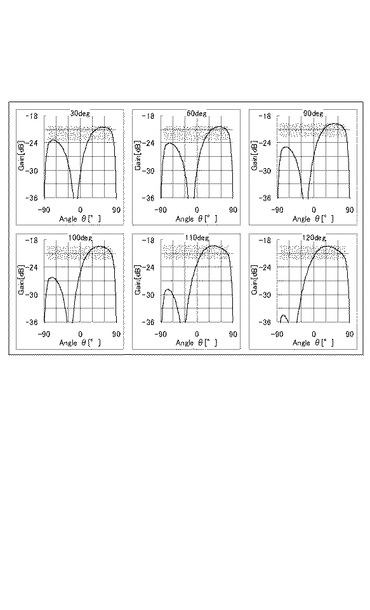
【図17】
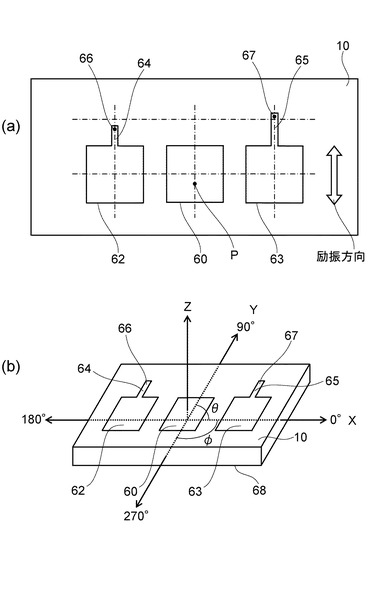
【図18】
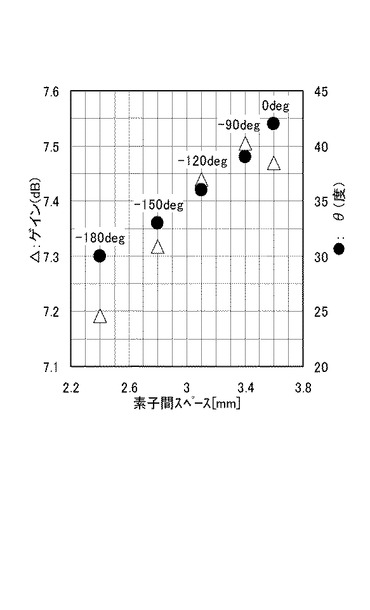
【図19】
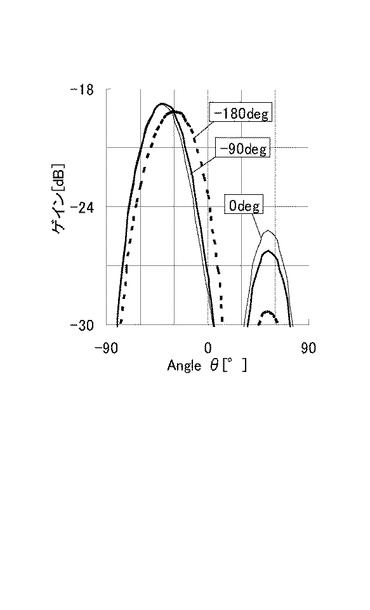
【図21】
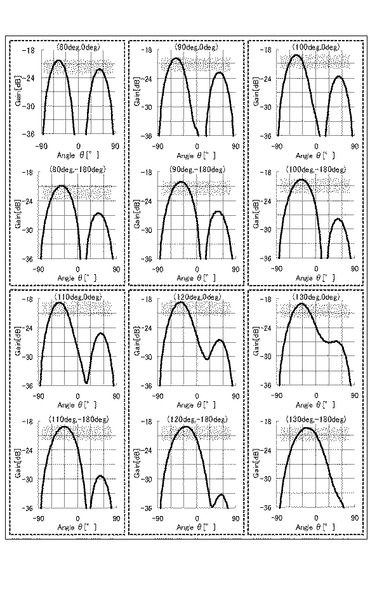
【図23】
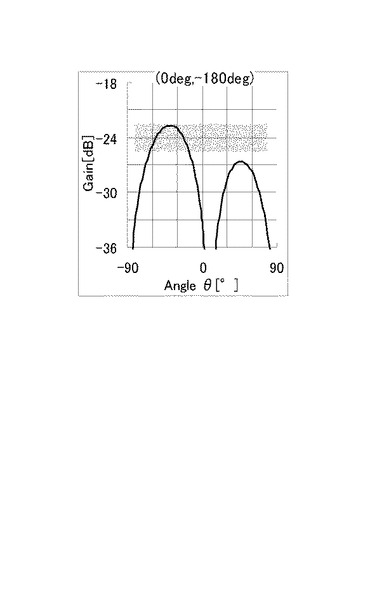
【図24】
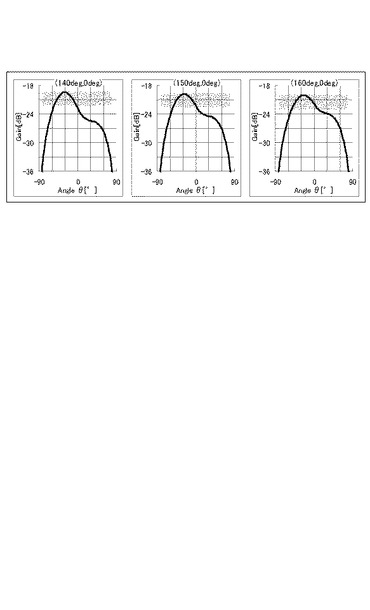
【図25】
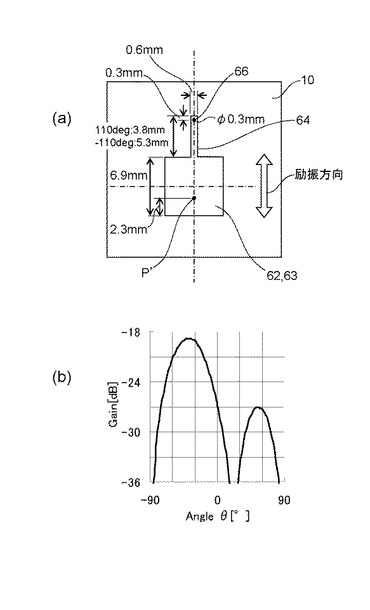
【図26】
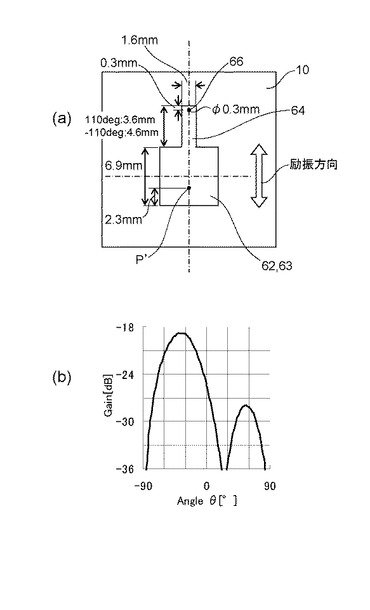
【図27】
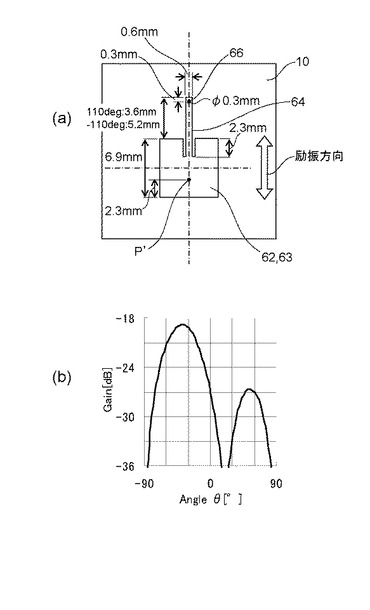
【図28】
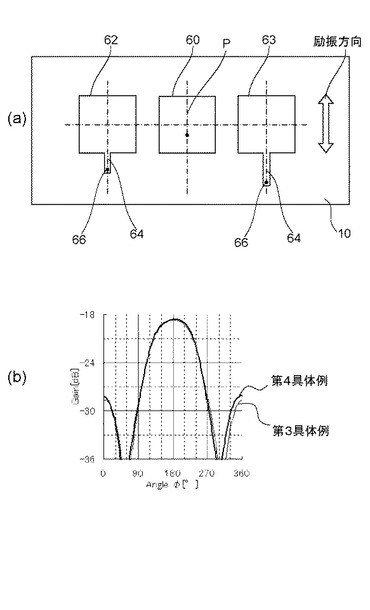
【図29】
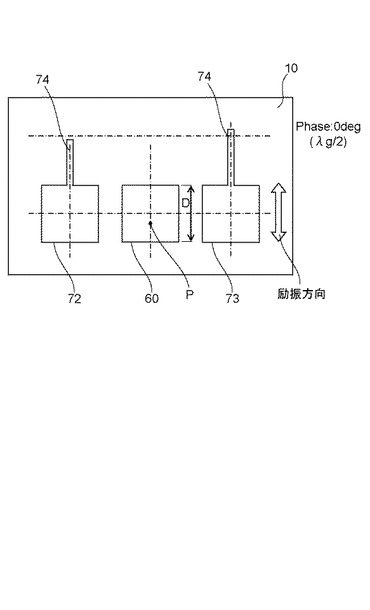
【図30】
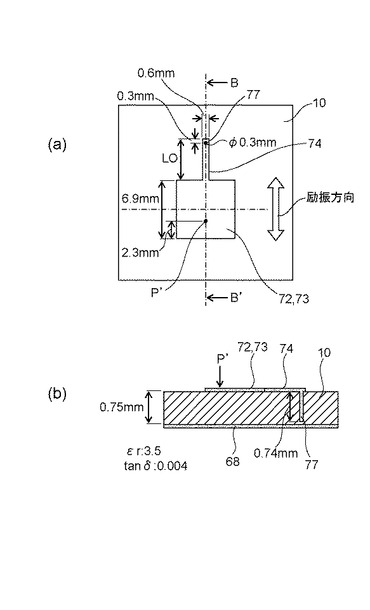
【図31】
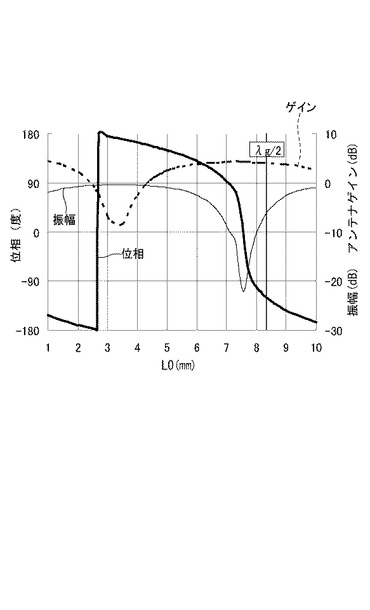
【図32】
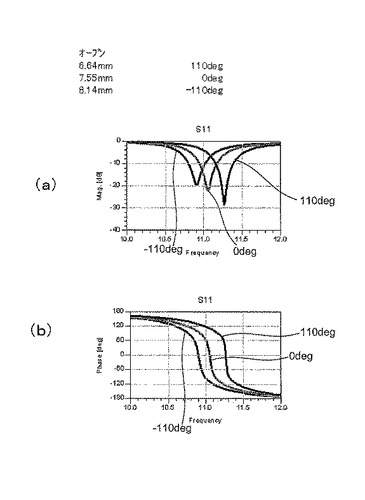
【図33】
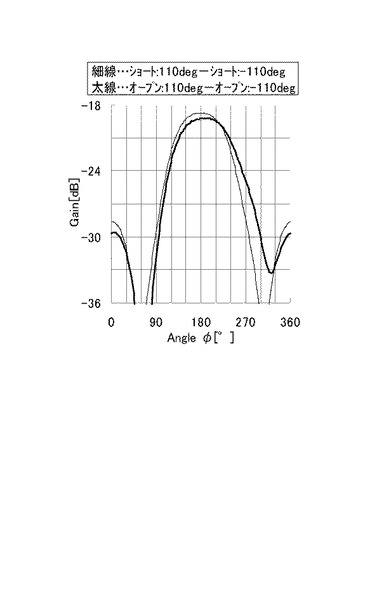
【図35】
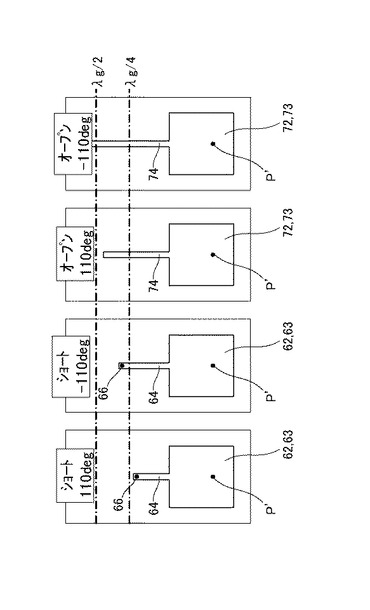
【図36】
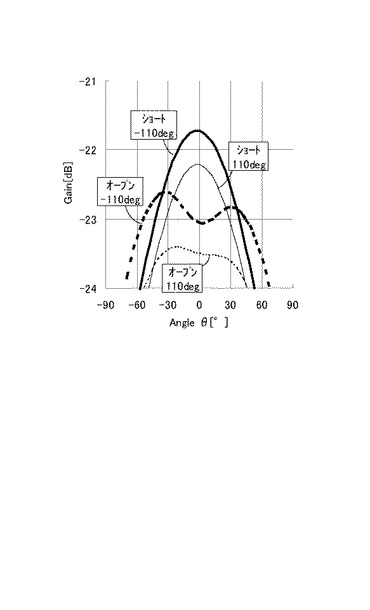
【図37】
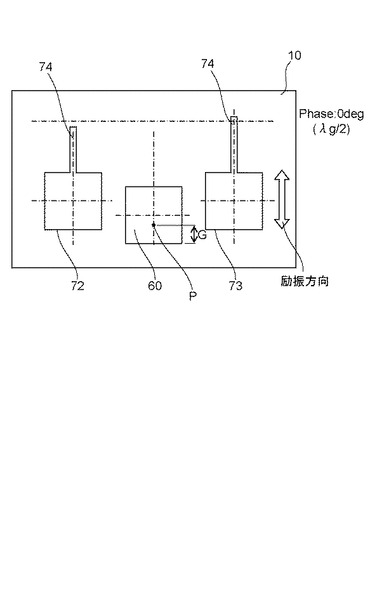
【図38】
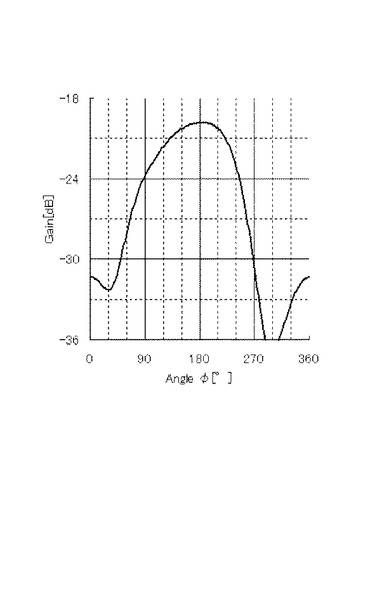
【図40】
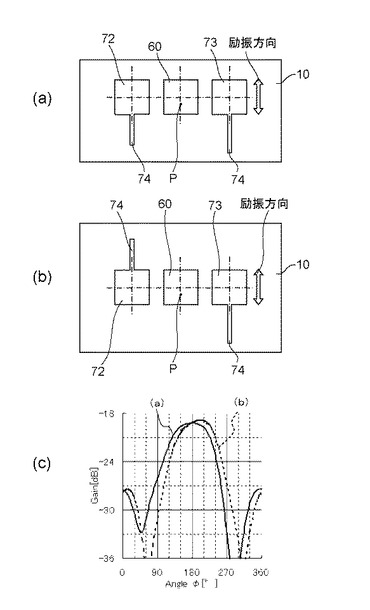
【図41】
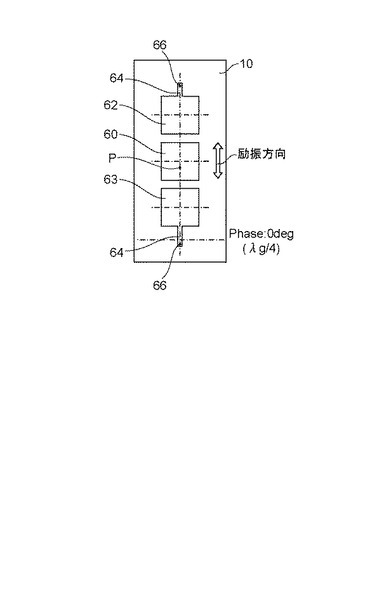
【図42】
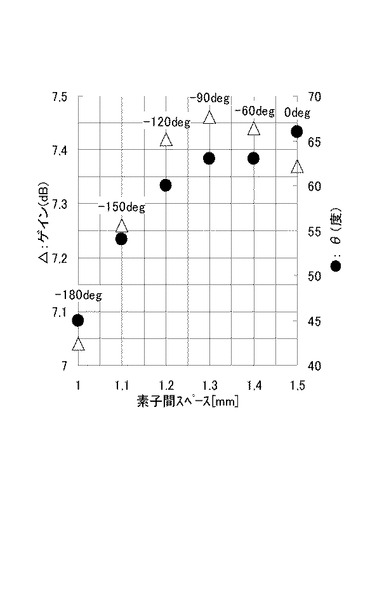
【図43】
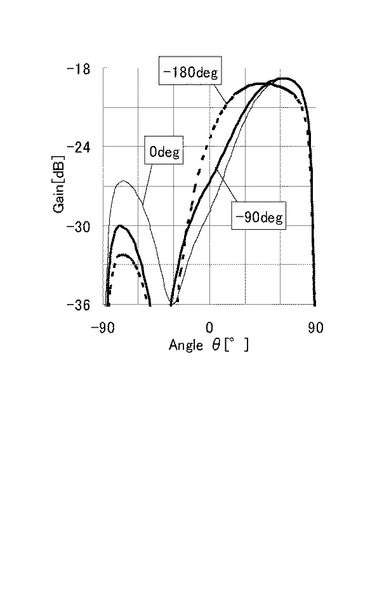
【図49】
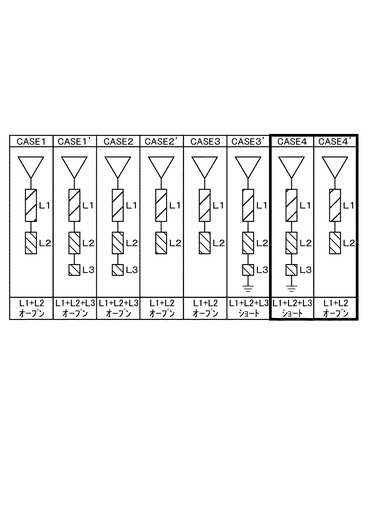
【図50】
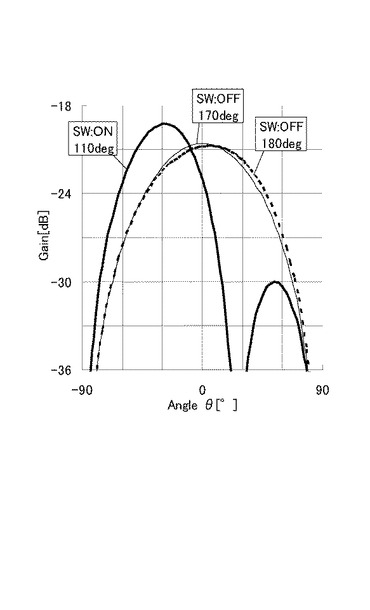
【図52】
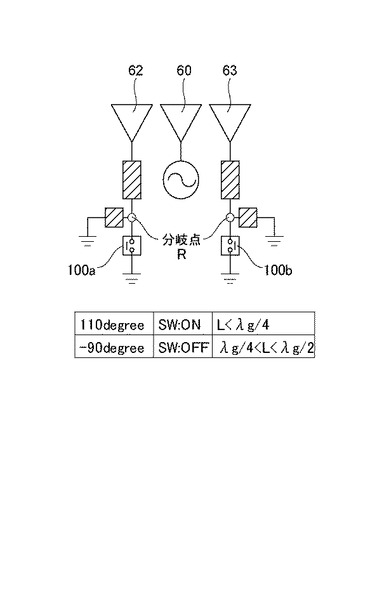
【図53】
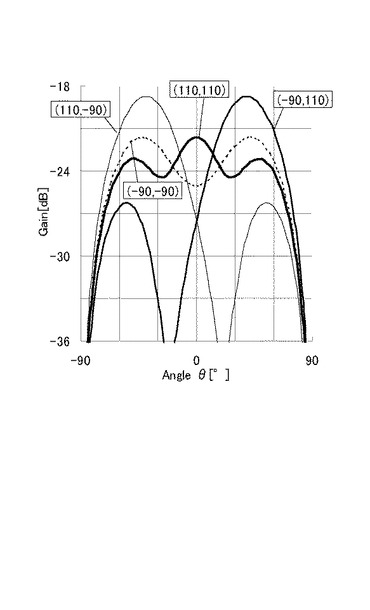
【図56】
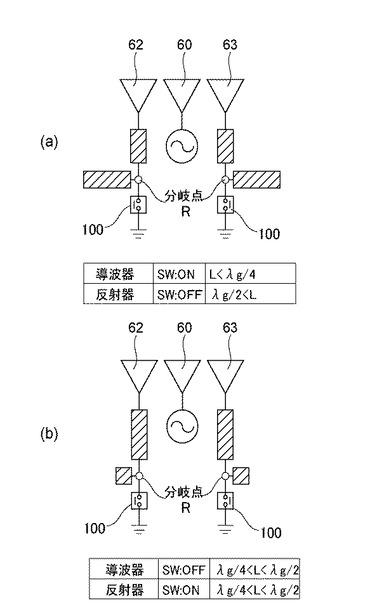
【図59】
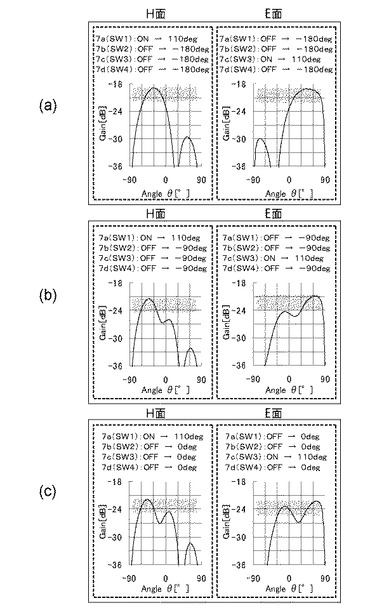
【図61】
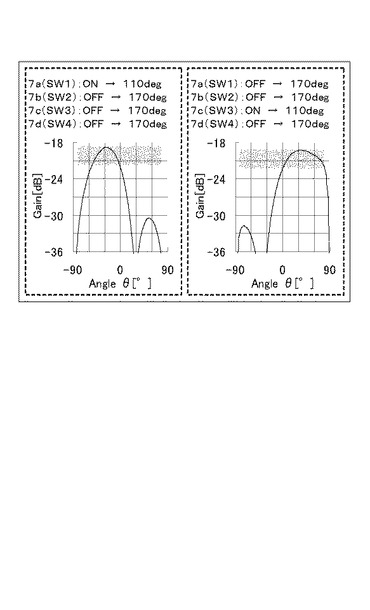
【図68】
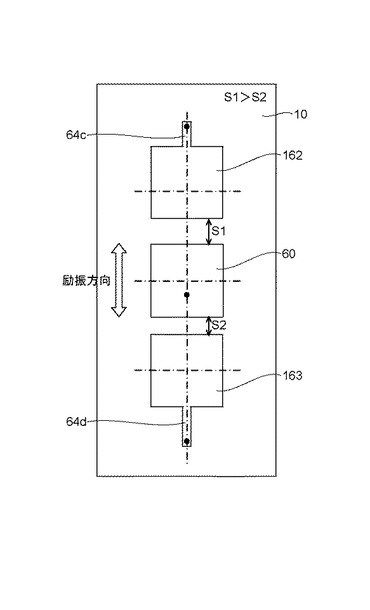
【図81】
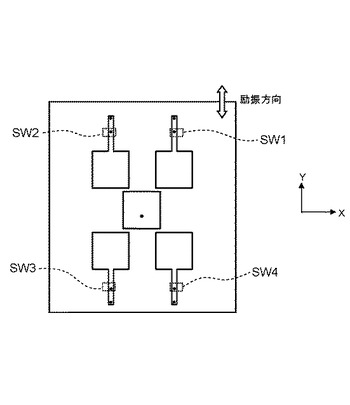
【図83】
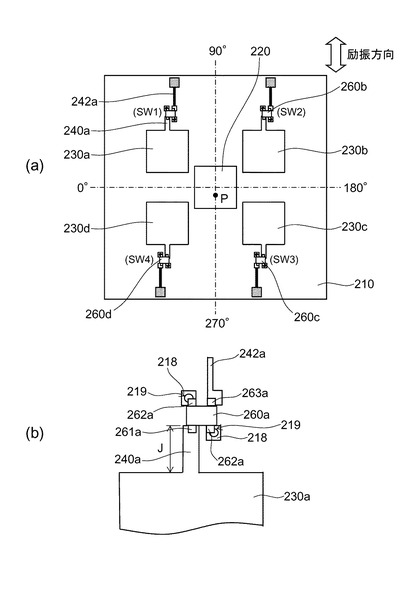
【図84】
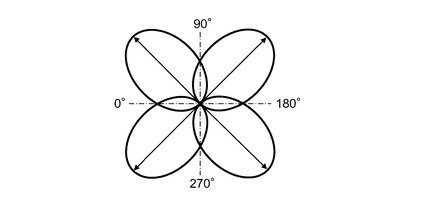
【図85】
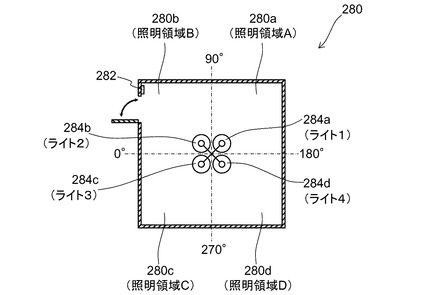
【図86】
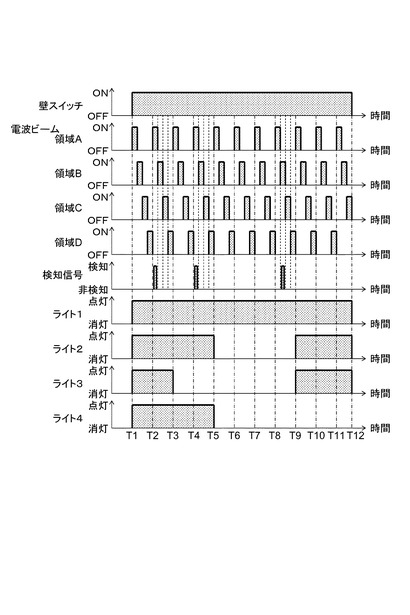
【図87】
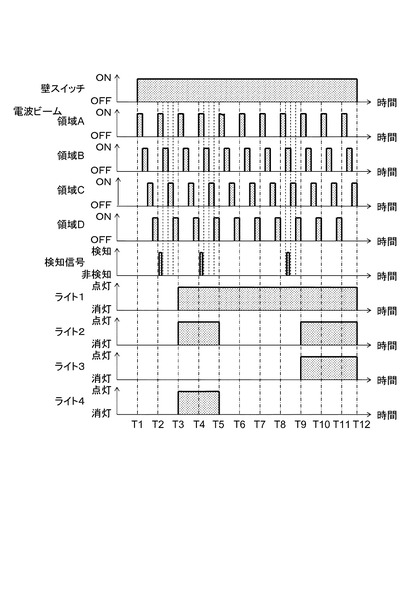
【図88】
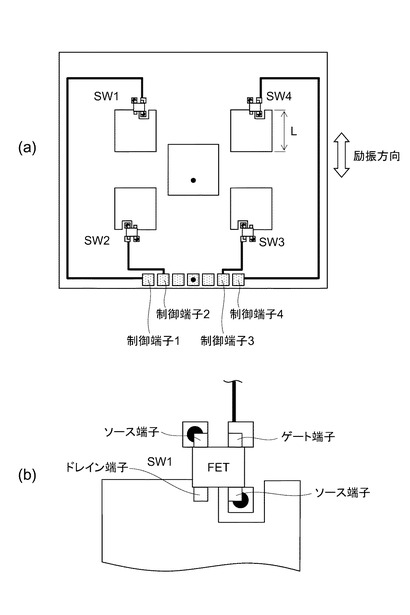
【図95】
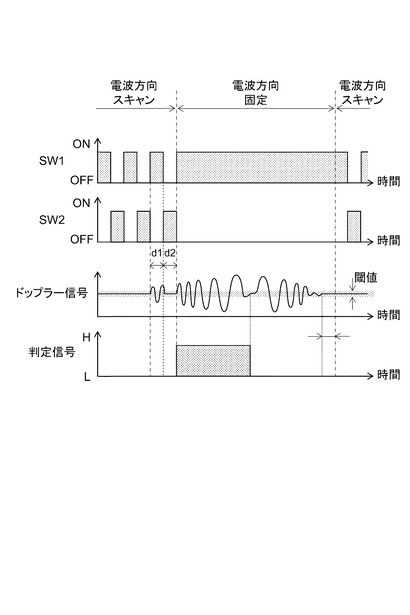
【図96】
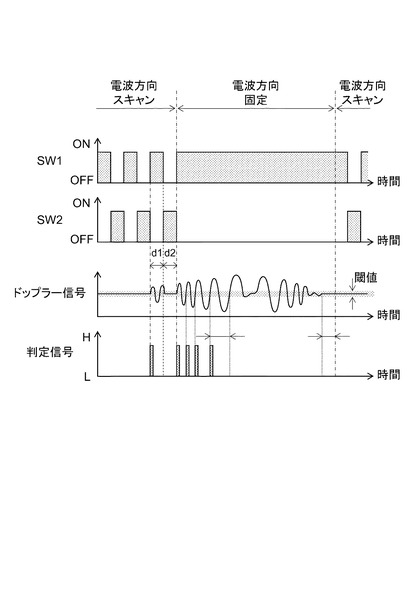
【図97】
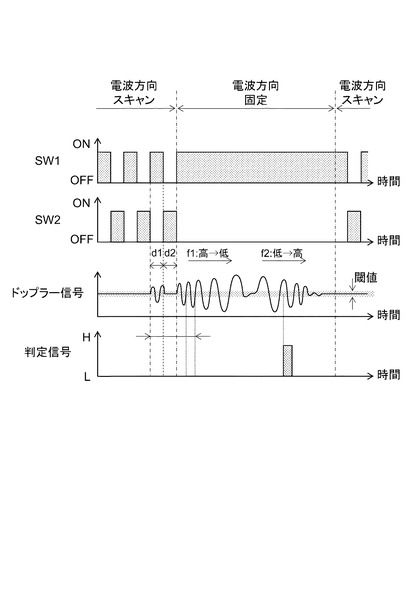
【図98】
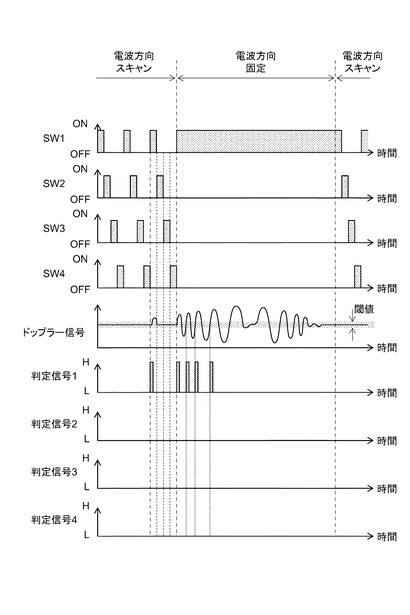
【図99】
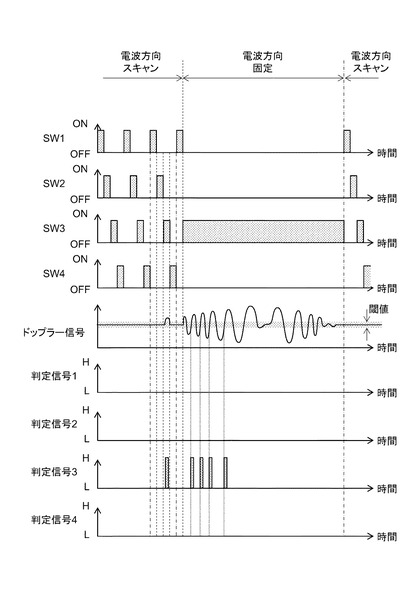
【図1】
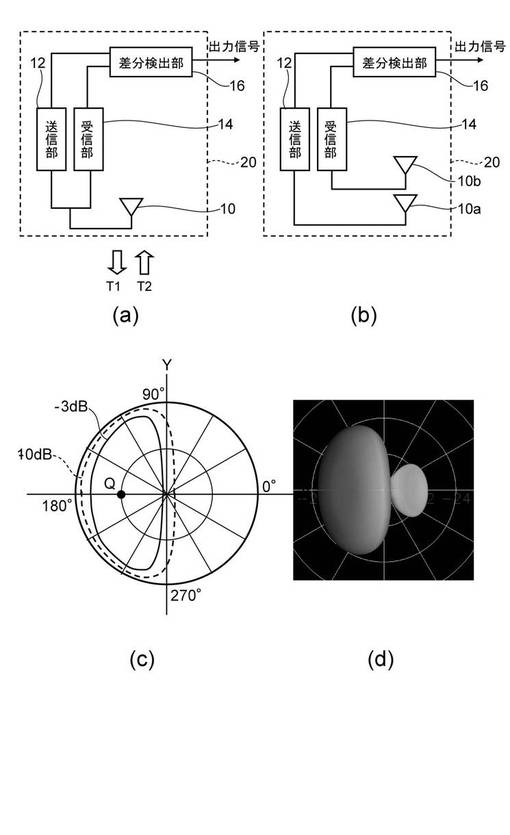
【図10】
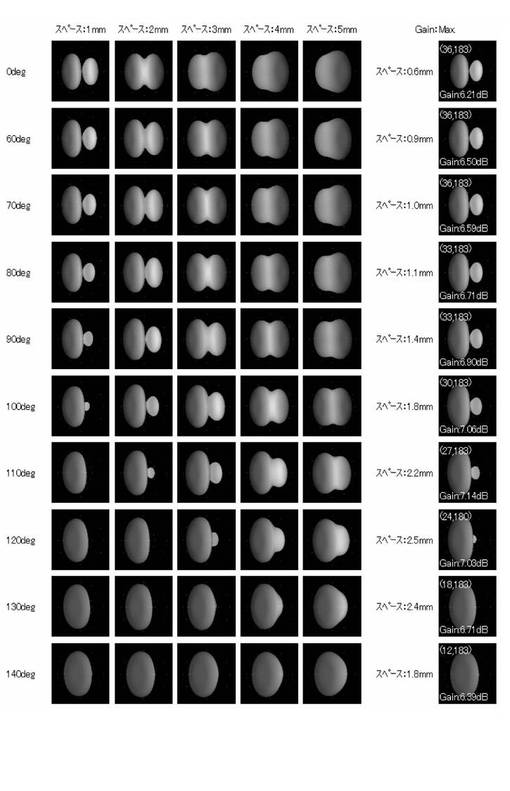
【図12】
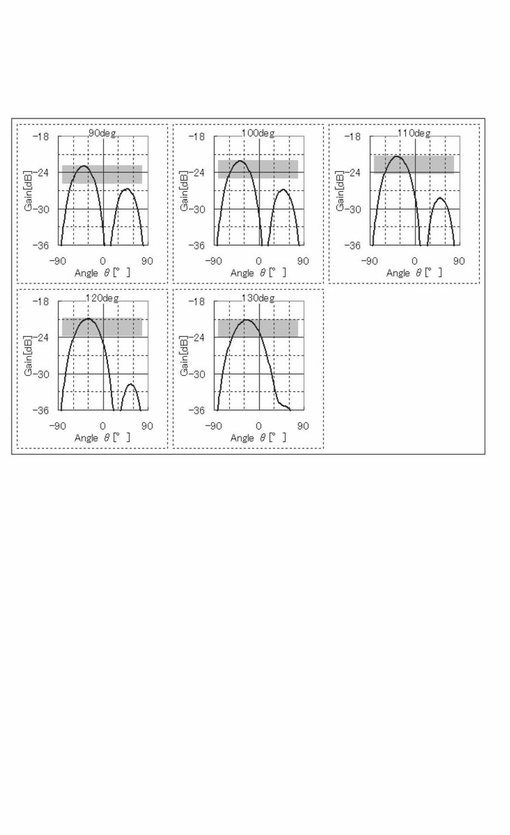
【図16】
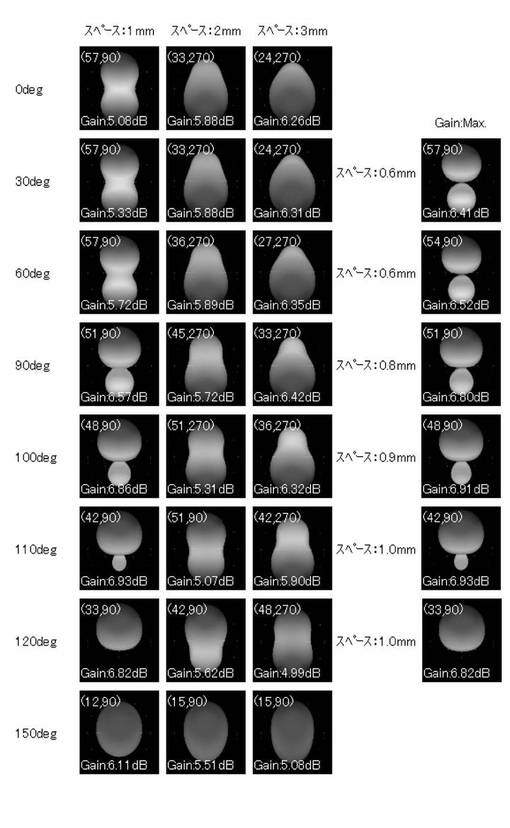
【図20】
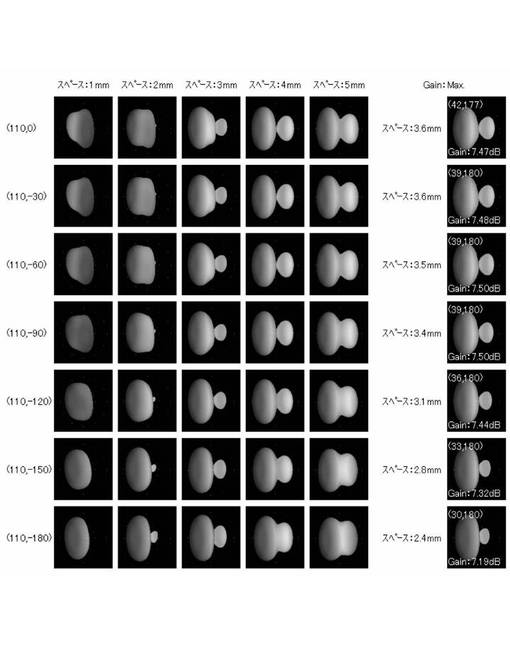
【図22】
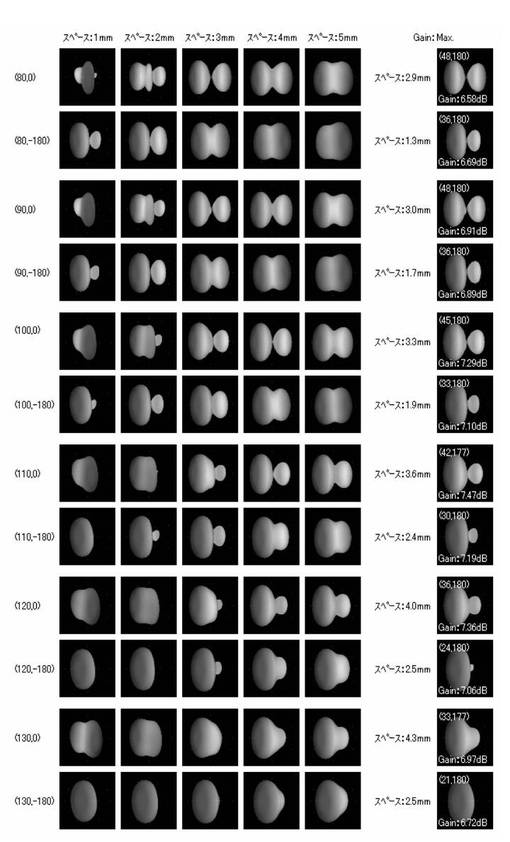
【図34】
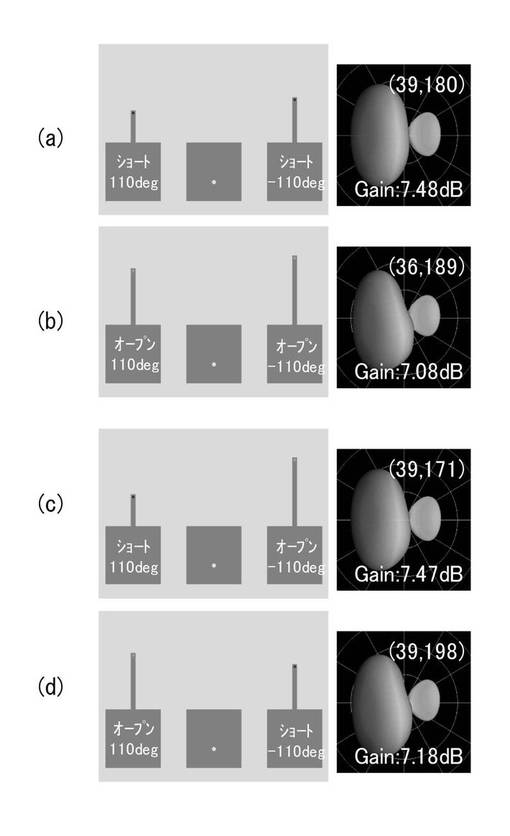
【図39】
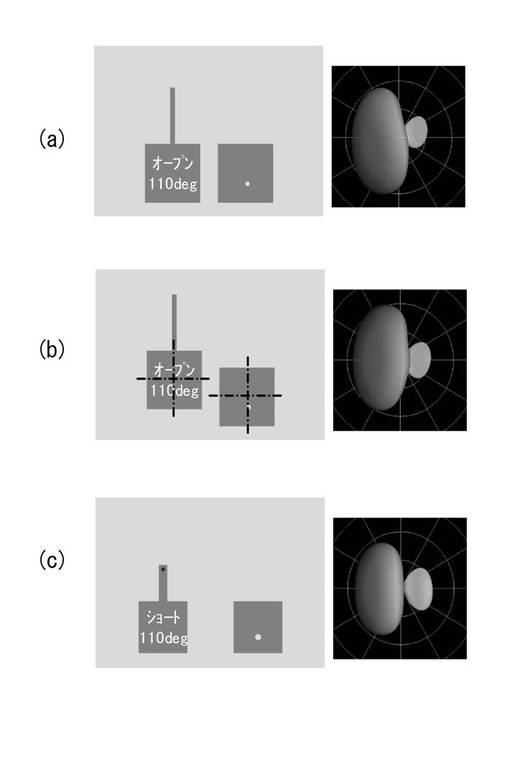
【図44】
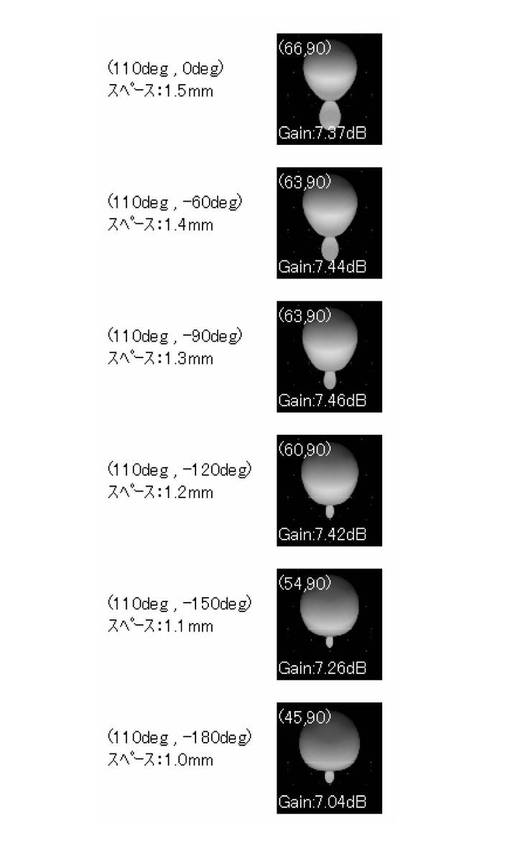
【図45】
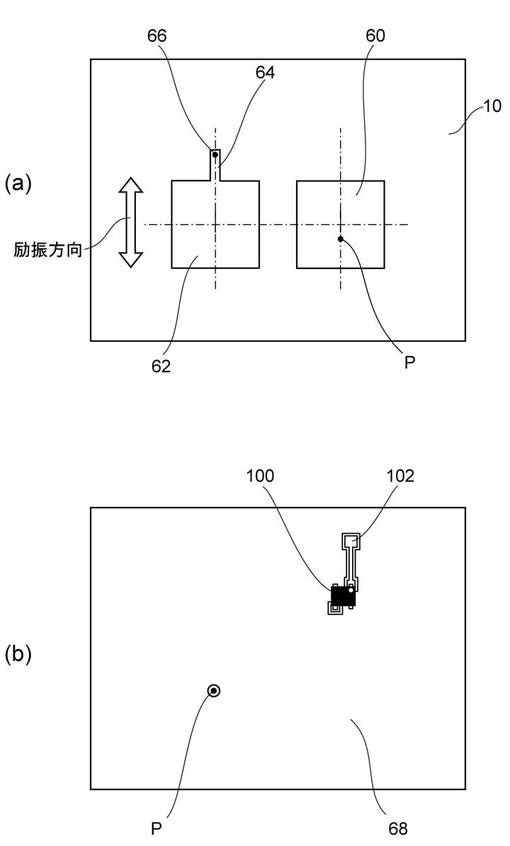
【図46】
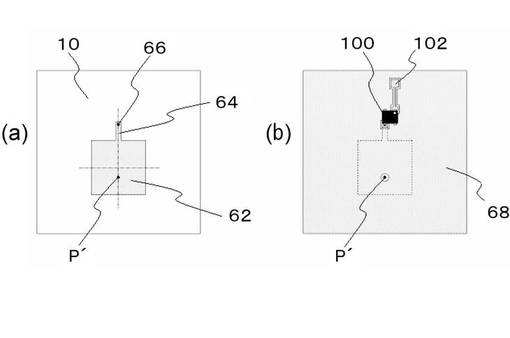
【図47】
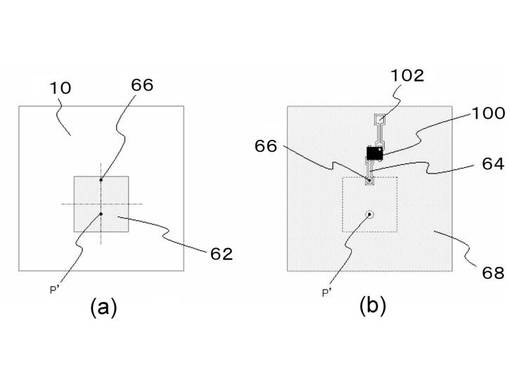
【図48】
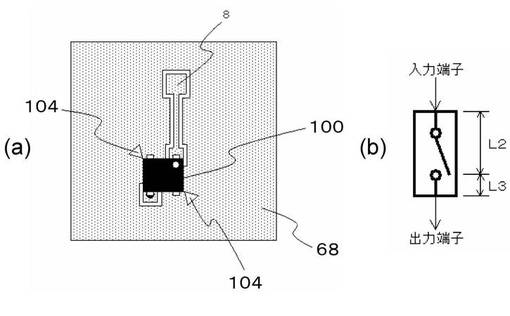
【図51】
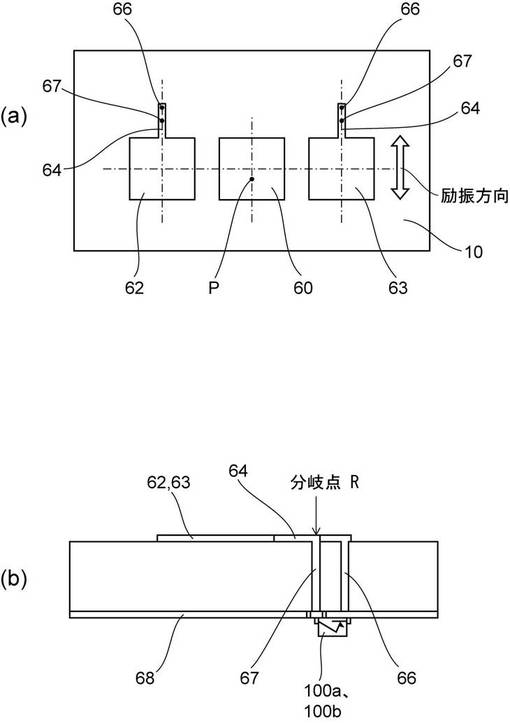
【図54】
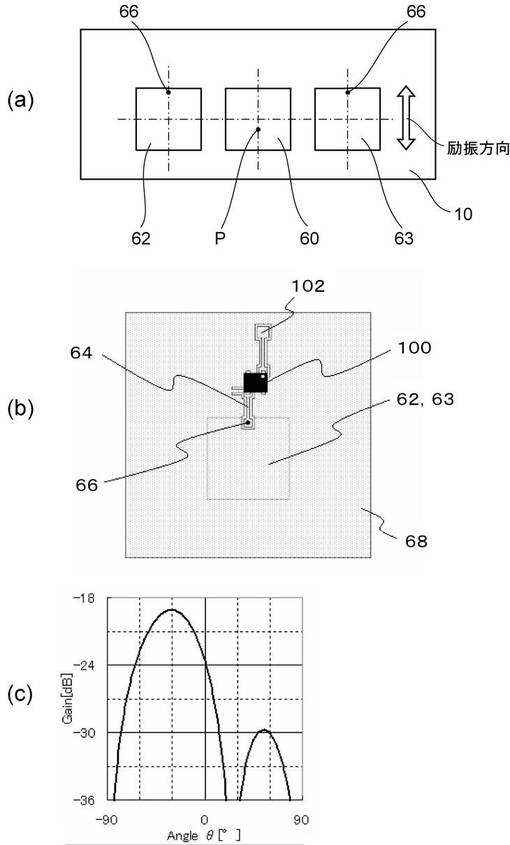
【図55】
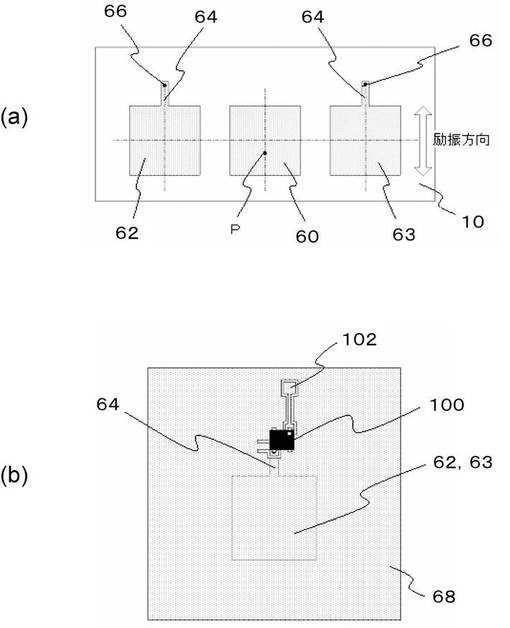
【図57】

【図58】
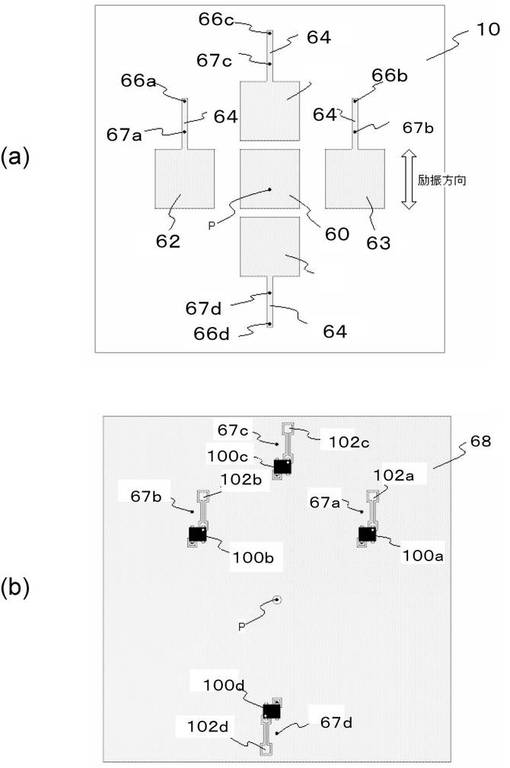
【図60】
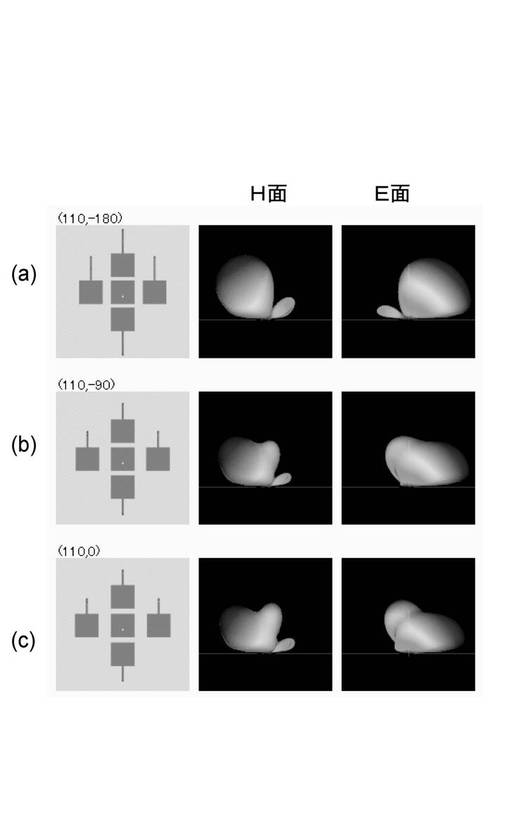
【図62】
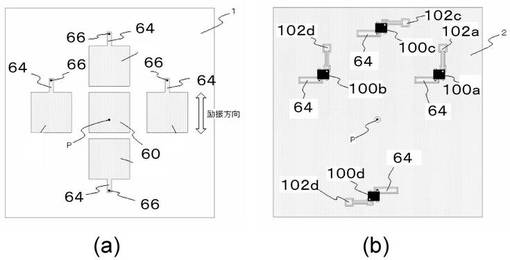
【図63】
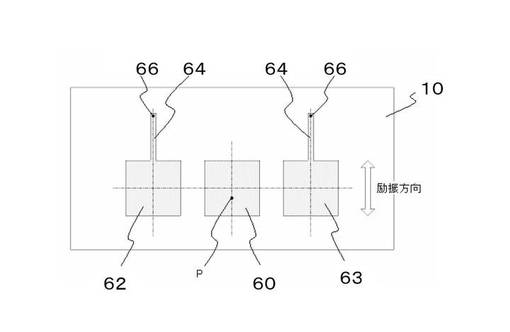
【図64】
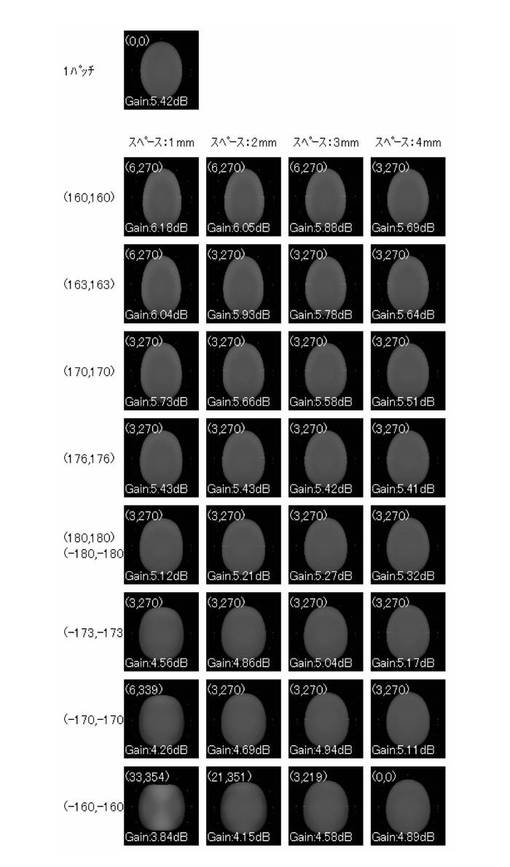
【図65】
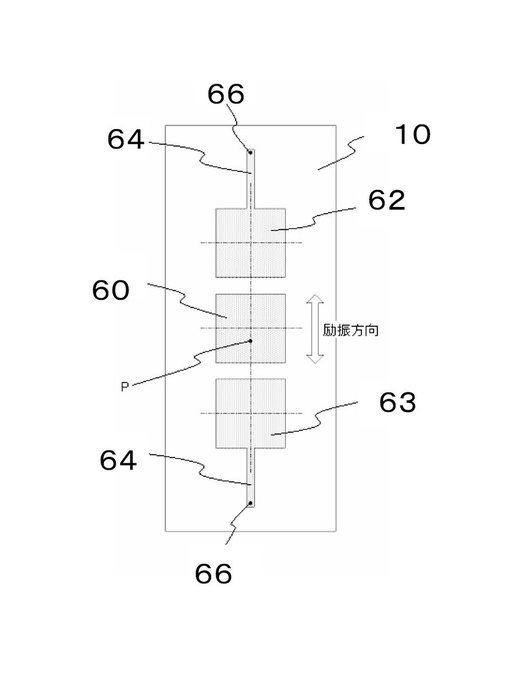
【図66】
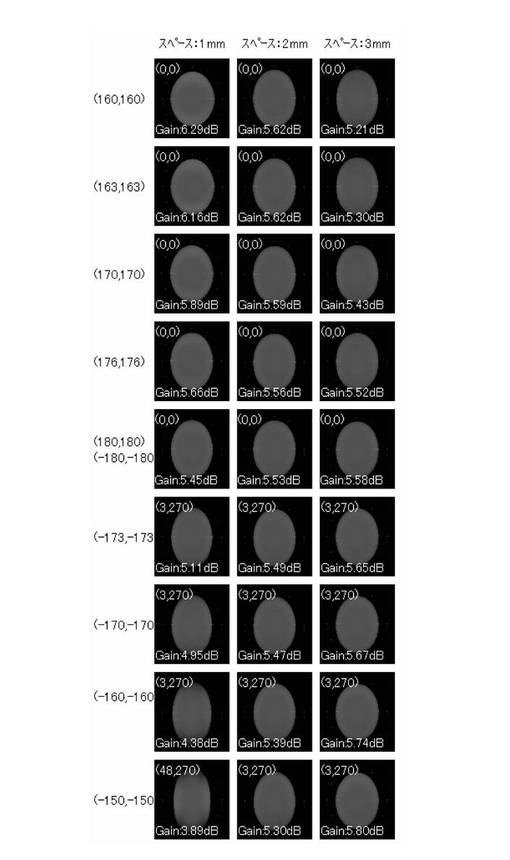
【図67】
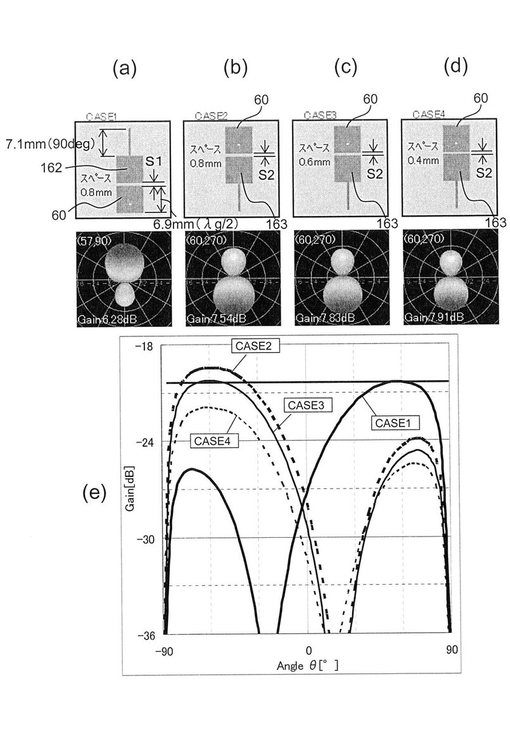
【図69】
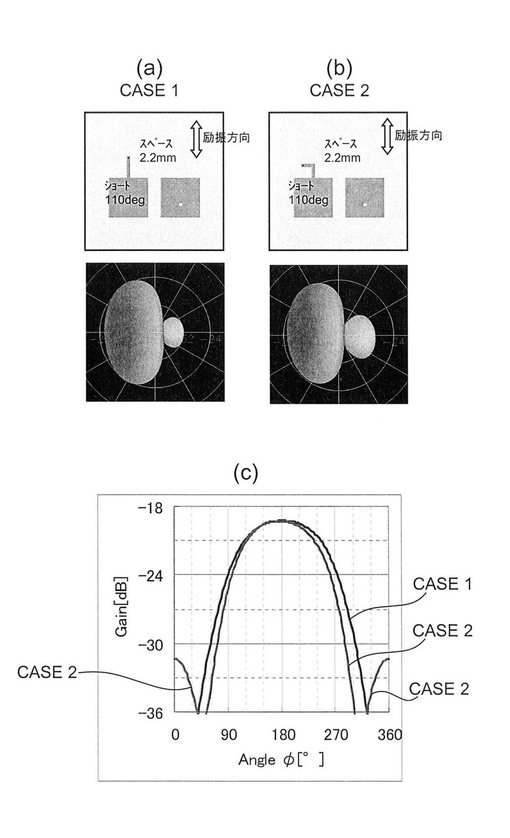
【図70】
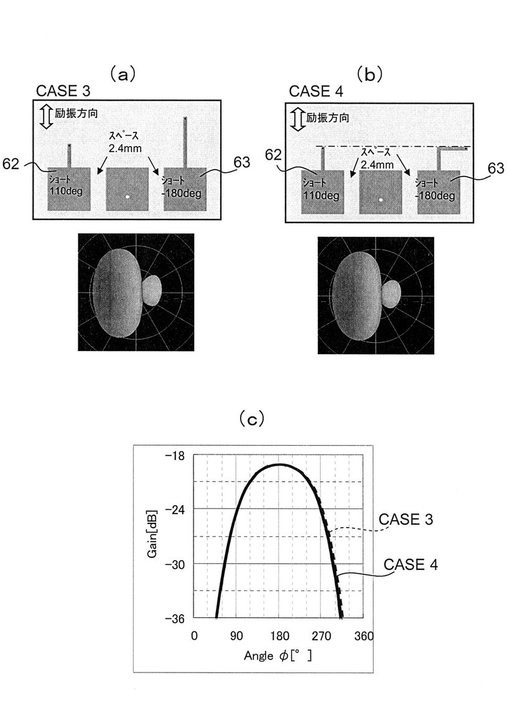
【図71】
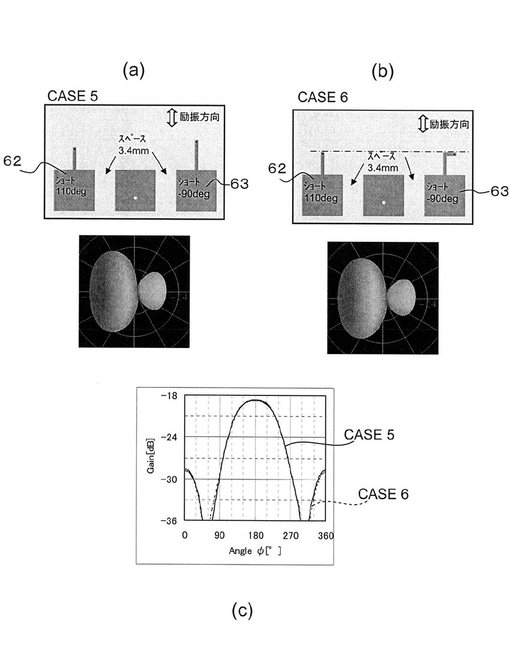
【図72】
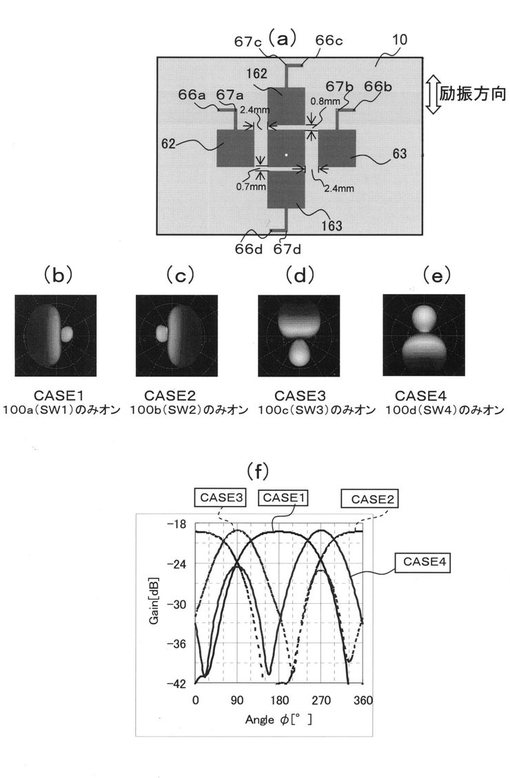
【図73】
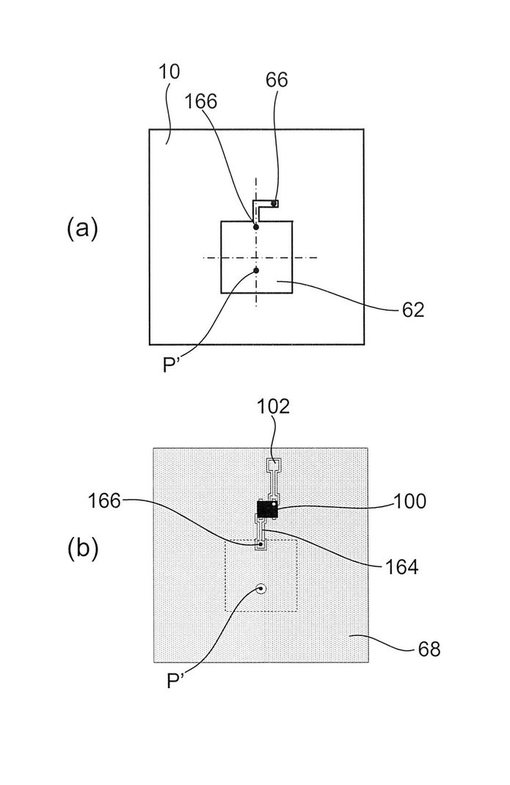
【図74】
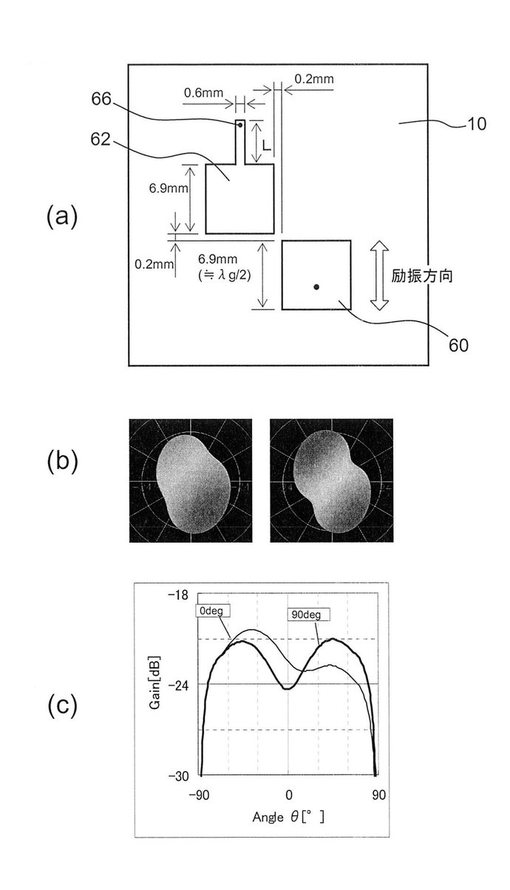
【図75】
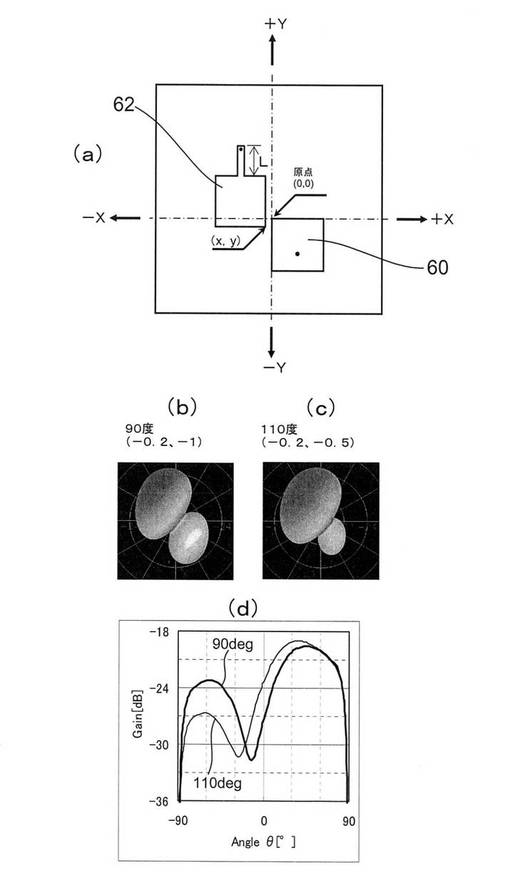
【図76】
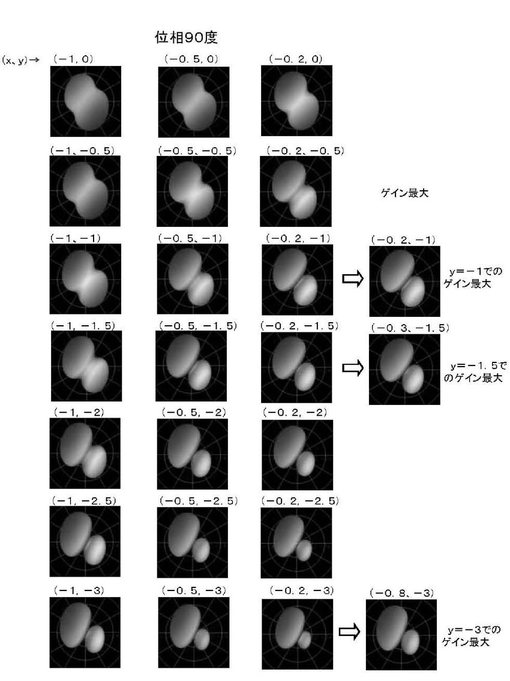
【図77】
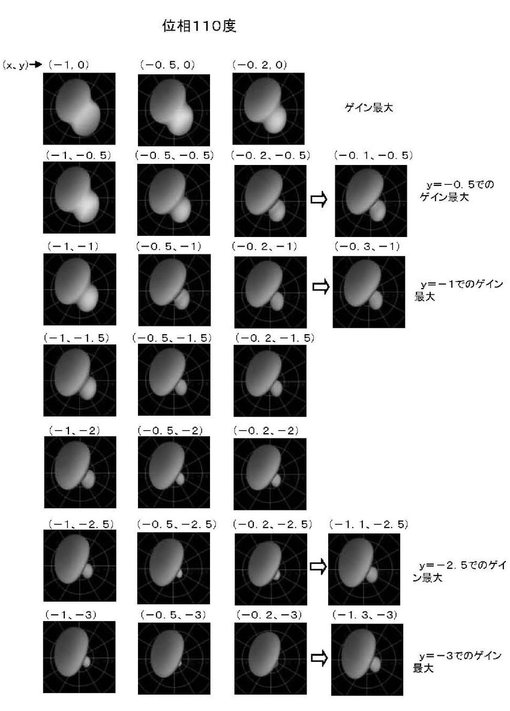
【図78】
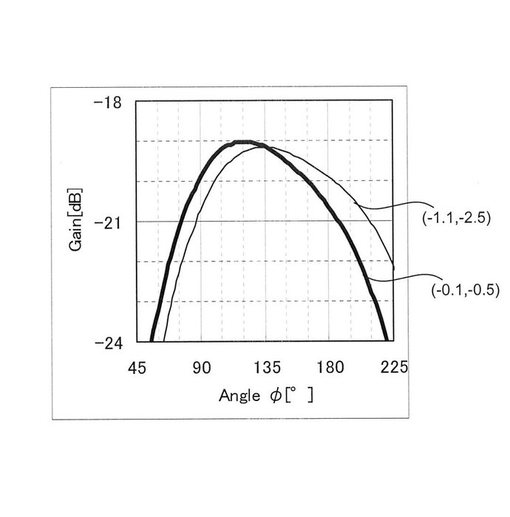
【図79】
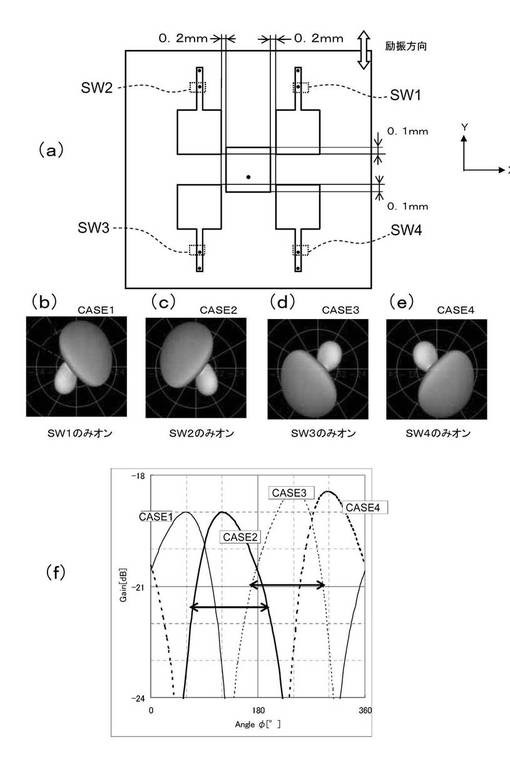
【図80】
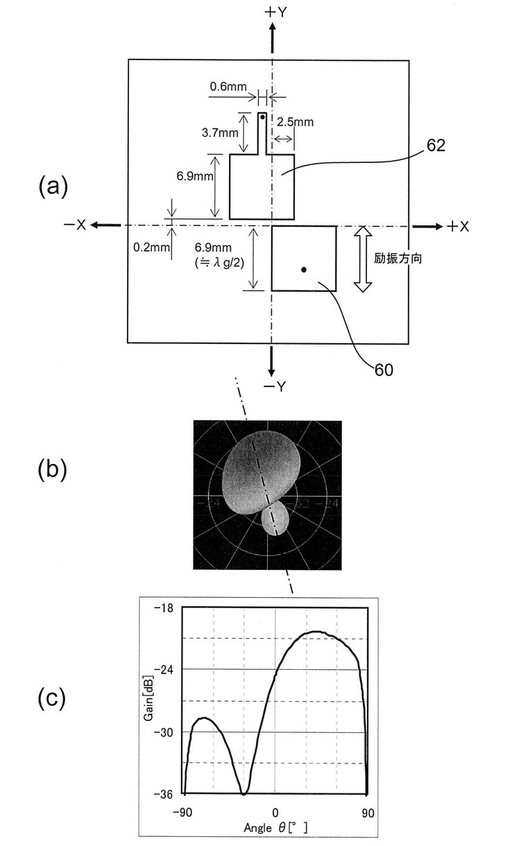
【図82】
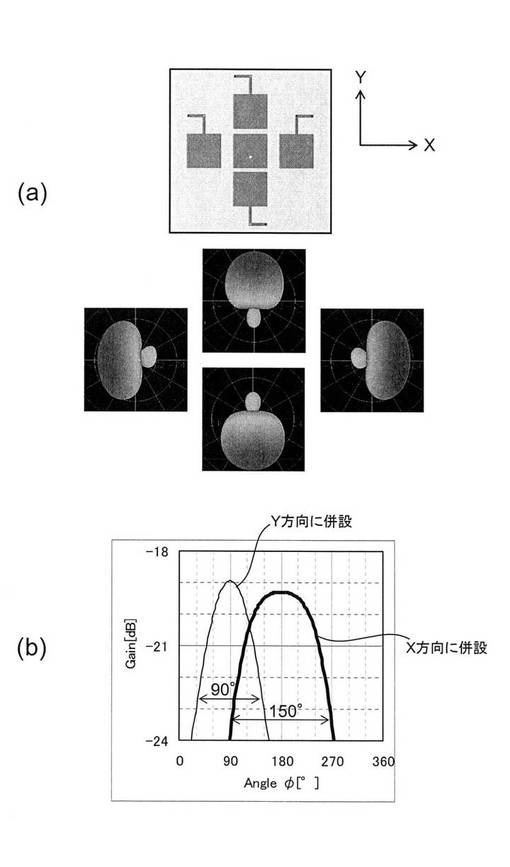
【図89】
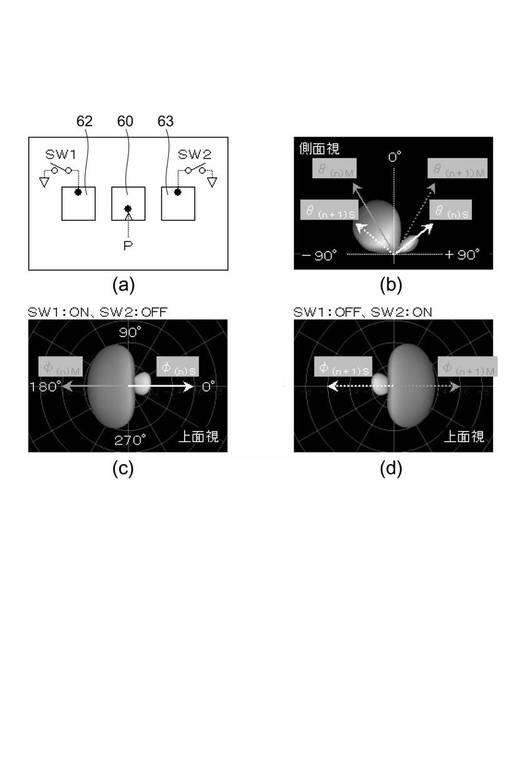
【図90】
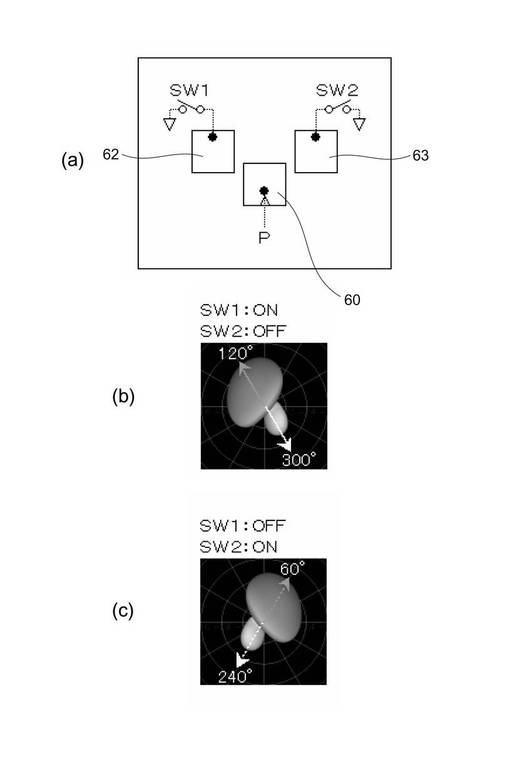
【図91】
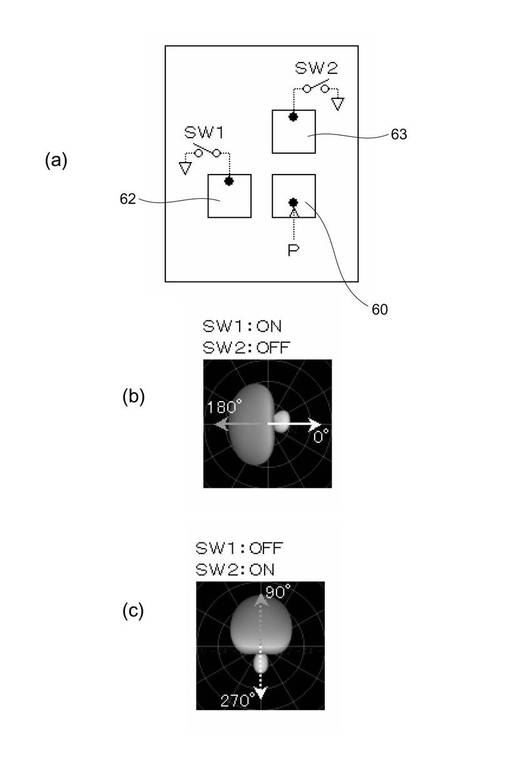
【図92】
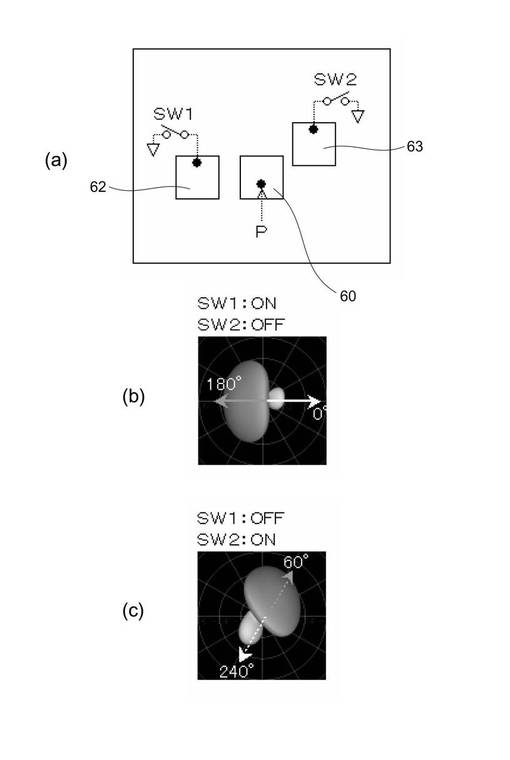
【図93】
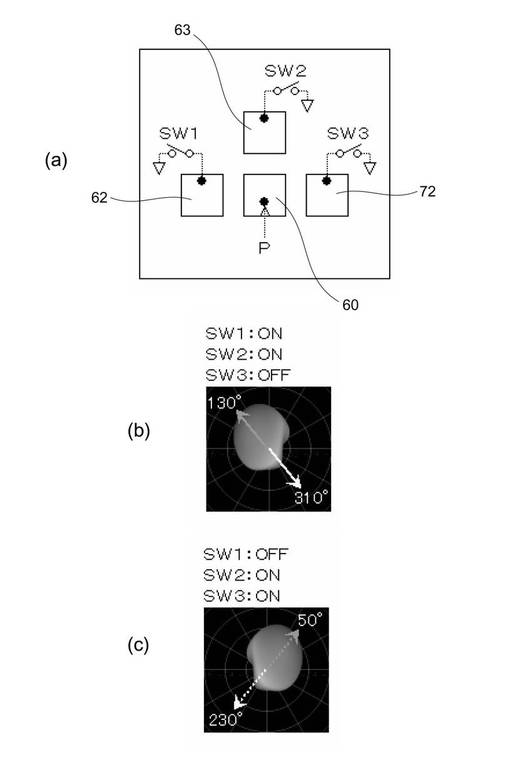
【図94】
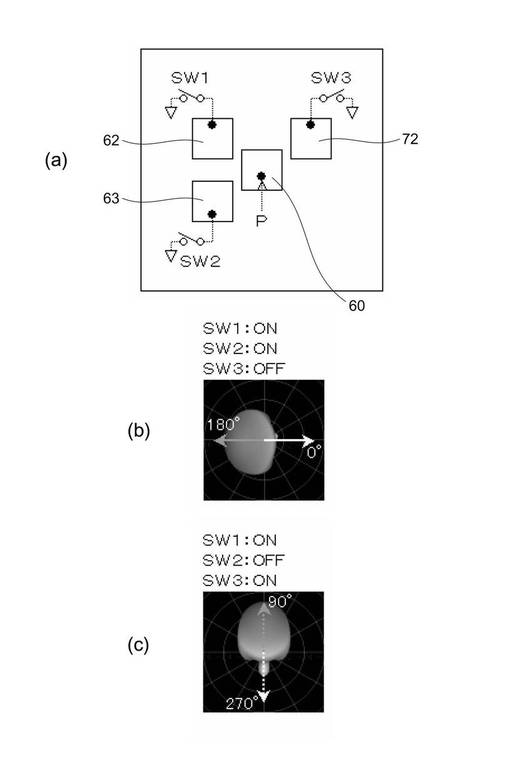
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図13】
【図14】
【図15】
【図17】
【図18】
【図19】
【図21】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図35】
【図36】
【図37】
【図38】
【図40】
【図41】
【図42】
【図43】
【図49】
【図50】
【図52】
【図53】
【図56】
【図59】
【図61】
【図68】
【図81】
【図83】
【図84】
【図85】
【図86】
【図87】
【図88】
【図95】
【図96】
【図97】
【図98】
【図99】
【図1】
【図10】
【図12】
【図16】
【図20】
【図22】
【図34】
【図39】
【図44】
【図45】
【図46】
【図47】
【図48】
【図51】
【図54】
【図55】
【図57】
【図58】
【図60】
【図62】
【図63】
【図64】
【図65】
【図66】
【図67】
【図69】
【図70】
【図71】
【図72】
【図73】
【図74】
【図75】
【図76】
【図77】
【図78】
【図79】
【図80】
【図82】
【図89】
【図90】
【図91】
【図92】
【図93】
【図94】
【公開番号】特開2008−252857(P2008−252857A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2007−183736(P2007−183736)
【出願日】平成19年7月12日(2007.7.12)
【出願人】(000010087)TOTO株式会社 (3,889)
【復代理人】
【識別番号】100146592
【弁理士】
【氏名又は名称】市川 浩
【Fターム(参考)】
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成19年7月12日(2007.7.12)
【出願人】(000010087)TOTO株式会社 (3,889)
【復代理人】
【識別番号】100146592
【弁理士】
【氏名又は名称】市川 浩
【Fターム(参考)】
[ Back to top ]