
高度算出装置及びナビゲーション装置
【課題】 DSRCによる情報受信に連動させて、地図データベースから絶対的な高度を取得可能にする。
【解決手段】 ナビゲーション装置1が記憶する地図データベース20には、有料道路のETC装置が併設された料金所の位置における緯度、経度及び高度の値が含ませてある。ナビゲーション装置1は、位置検出処理部6で3Dジャイロセンサー4で検出した内容及び車両側接続コネクタ5を通じて車両から取り出した車速パルス信号等を用いて現在の位置における高度を算出可能にしている。また、ナビゲーション装置1はETC信号受信機3でETC信号を受信した場合、受信した場所から近傍となる料金所を地図データベース20から特定し、その特定した料金所の高度の値を絶対的な高度として取得し、算出した高度を絶対的な高度に基づき補正する。
【解決手段】 ナビゲーション装置1が記憶する地図データベース20には、有料道路のETC装置が併設された料金所の位置における緯度、経度及び高度の値が含ませてある。ナビゲーション装置1は、位置検出処理部6で3Dジャイロセンサー4で検出した内容及び車両側接続コネクタ5を通じて車両から取り出した車速パルス信号等を用いて現在の位置における高度を算出可能にしている。また、ナビゲーション装置1はETC信号受信機3でETC信号を受信した場合、受信した場所から近傍となる料金所を地図データベース20から特定し、その特定した料金所の高度の値を絶対的な高度として取得し、算出した高度を絶対的な高度に基づき補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、所定場所を通過する毎に絶対高度となる値を取得して、算出した高度を絶対高度に基づき補正する高度算出装置、及び該高度算出装置で得られた高度を用いて良好なマップマッチング処理を実現したナビゲーション装置に関する。
【背景技術】
【0002】
従来、車両等に搭載されて目的地までのルート案内を行うナビゲーション装置が普及している。ナビゲーション装置は一般に、GPS(Global Positioning System)を利用して位置情報を受信すると共に、ナビゲーション装置に設けた方位センサー及び車両から取得する車軸パルス等に基づき現在の車両位置を算出し、目的地までの道順を表示するものである。算出した現在の車両位置を地図上に表示する際、算出誤差等が原因となって地図上の道路位置に、算出した車両位置が一致しないことがあるが、このような場合は車両位置が妥当な道路上に載るようにマップマッチング処理が行われる。
【0003】
近時、マップマッチング処理の精度を高めるために、車両の二次元的な位置(緯度、経度)に加えて車両位置の高度を求める機能を設け、その求めた高度も利用してマップマッチング処理を行うナビゲーション装置も存在する。例えば、高架道路及び高架下の道路が併行する場所でマップマッチングを行う場合、車両位置の高度を利用して上下のいずれの道路にマップマッチングをさせるか特定することが可能となり、また、車両位置の高度に基づきマップマッチング処理自体を行うか否かの判断を行うこともできる。
【0004】
高度を利用したマップマッチング処理を行うには、ナビゲーション装置は直接的に絶対的な高度を求めることはできないので、GPSから取得できる高度情報に依存するか、又は3Dジャイロ等のセンサーを利用して高度算出を行うことになる。
【0005】
なお、下記の特許文献1では、DSRC(Dedicated Short Range Communication:専用狭域通信)により、DSRCで送信される高度情報を含む位置情報を受信してマップマッチング処理に利用するようにした現在位置算出装置が開示されている。
【特許文献1】特開2001−289653号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
高精度なマップマッチング処理のため、ナビゲーション装置がGPSから高度情報を取得する場合、車両の位置特定に対して現状のGPSから取得できる高度情報は、情報のバラツキが大きく精度的に不充分であるため、安定して高精度なマップマッチング処理が行えないと云う問題がある。
【0007】
また、ナビゲーション装置に3Dジャイロ等のセンサーを設けて高度を求めるには、水平方向に対する車両進行方向の傾斜角(車両ピッチ角)をセンサーで検出すると共に、車両の移動した距離を算出し、検出した傾斜角及び算出した移動距離に基づき三角関数を利用して高度を算出することになる。各センサーでの検出には必ず検出誤差が含まれ、また、算出処理段階でも桁数の切り上げ等に伴う算出誤差が生じることから、算出された高度には検出誤差及び算出誤差が必ず蓄積され、絶対的な高度に対して誤差を含むと云う問題がある。
【0008】
さらに、ナビゲーション装置は絶対的な高度を取得する手段が無いので、求めた高度が絶対的な高度に対し、どれ位の誤差が含まれるかを把握できず、求めた高度のキャリブレーション(補正)を正確に行えないと云う問題がある。即ち、高度に対する現状のキャリブレーション処理としては、地図データ中の特定場所に対して絶対的な高度の値を予め含ませておき、マップマッチングした位置に高度の値があれば、その高度の値を利用してキャリブレーションを行う方式となっている。そのため、本来ならマップマッチング前に得ておくべき正確な高度をマップマッチング後に得ることになり、キャリブレーション精度を向上できないと共に、高精度のマップマッチング処理も行えないと云う問題がある。
【0009】
さらにまた、特許文献1に係る現在位置算出装置を用いるには、先ずDSRCで通信を行う道路に設置されるインフラ側の機器に、その機器が設置された個所の高度情報を送信できる機能を設ける必要があるため、インフラを含めた大がかりな仕様変更が必要となりナビゲーション装置側の仕様変更のみでは容易に導入できないと云う問題がある。
【0010】
本発明は、斯かる事情に鑑みてなされたものであり、DSRCで情報を発信する場所の絶対的な高度を地図データに含ませて、DSRCから情報を受信した位置に連携して地図データ中の絶対的な高度を利用できるようにすることで、インフラ側の機器仕様を変更することなく、算出した高度のキャリブレーションを正確に行えるようにした高度算出装置を提供することを目的とする。
また、本発明は、キャリブレーションを行った場合、その高度を基準値にして高度算出を行うことで高精度な高度算出を可能にした高度算出装置を提供することを目的とする。
【0011】
さらに、本発明は、複数回のキャリブレーションを行った場合、算出される高度の誤差を求められるようにした高度算出装置を提供することを目的とする。
さらにまた、本発明は、高度算出装置が算出した高度又はキャリブレーションされた高度を利用して従来に比べて高精度なマップマッチング処理を実現可能にしたナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するために第1発明に係る高度算出装置は、移動距離を算出する移動距離算出手段と、移動方向の水平線に対する傾斜角を検出する傾斜角検出手段と、前記移動距離算出手段が算出した移動距離及び前記傾斜角検出手段が検出した傾斜角に基づき高度を算出する高度算出手段とを備える高度算出装置において、専用狭域通信で送信される情報を受信することが可能な場所に対応付けて該場所の高度を有する地図データベースと、専用狭域通信を通じて情報を受信する受信手段と、前記受信手段が情報を受信した場合、受信した場所の高度を前記地図データベースより特定する特定手段と、該特定手段が特定した高度に基づいて前記高度算出手段が算出した高度を補正する高度補正手段とを備えることを特徴とする。
【0013】
第1発明にあっては、専用狭域通信で送信される情報を受信可能な場所に対応付けて、その場所の高度を有する地図データベースを準備すると共に、専用狭域通信は通信可能な数十m単位の狭い範囲内に位置しなければ情報を受信できないと云う特性を利用して、専用狭域通信を通じて情報を受信することに伴い専用狭域通信の場所及びその高度を地図データベースから特定して取得できるようになる。その結果、取得した絶対的な高度に基づいて、その場所に対して算出した高度を正確に補正することが可能になる。また、本発明では、既存のインフラ設備を利用するので、専用狭域通信を行う設備仕様を変更する必要もなく、導入が容易である。
【0014】
なお、専用狭域通信を行うインフラ側の設備としては、高速道路及び有料道路等の料金徴収用に設置されたETC(Electronic Toll Collection)装置を利用することが好適である。なぜなら、ETC装置から送信される電波は簡単な受信機で受信可能であると共に、ナビゲーション装置用の地図データにおいても高度情報は都市圏の高速道路及び有料道路を中心に具備され始めていることからである。
【0015】
また、第2発明に係る高度算出装置は、前記高度算出手段は、前記高度補正手段が高度を補正した場合、補正した高度を基準値にして該基準値に対する高度を算出するようにしてあることを特徴とする。
【0016】
第2発明にあっては、高度を補正した場合、以降の高度算出処理に対して補正した高度を基準値にし、その基準値からの高度を算出するので、補正前に算出されていた高度に含まれる誤差が全てキャンセルされ、補正後の高度算出処理に対し補正前に蓄積されていた誤差が影響しなくなり、補正後に算出される高度の精度を良好にできる。なお、高度の補正に関しては、算出した高度を地図データから特定した絶対的な高度に置き換えるように補正することが、以降の高度算出処理の精度を高めることから好適である。
【0017】
さらに、第3発明に係る高度算出装置は、前記高度補正手段が複数回の補正を行った場合、前記移動距離算出手段は補正を行った場所間の補正間移動距離を算出するようにしてあり、補正した高度及び補正を行った場所に対して前記高度算出手段が算出した高度の差を算出する高度差算出手段と、該高度差算出手段が算出した高度の差及び前記補正間移動距離に基づき所定距離に対する誤差を算出する誤差算出手段と、該誤差算出手段が算出した誤差に基づいて、前記高度補正手段が補正を行ってから前記高度算出手段が算出する高度を修正する高度修正手段とを備えることを特徴とする。
【0018】
第3発明にあっては、複数回補正を行った場合、前回補正を行った場所から今回補正を行った場所までの区間(移動距離)内で今回の補正を行う場所に対して算出した高度に含まれる誤差を求めるので、所定の移動距離に対して誤差が生じる割合を求めることができ、高度算出に対する誤差の傾向を把握できるようになる。さらに、算出された高度を把握した誤差の傾向を利用して修正することで、高度算出に伴う誤差による影響を低減でき、高精度な高度算出を実現できる。
【0019】
第4発明に係るナビゲーション装置は、位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、前記いずれかの高度算出装置と、該高度算出装置の前記高度算出手段が算出した高度又は前記高度補正手段が補正した高度に基づいてマップマッチング処理を行うか否かを判断する判断手段とを備えることを特徴とする。
【0020】
第4発明にあっては、高度算出装置が算出した信頼性の高い高度又は補正した絶対的な高度を用いてマップマッチング処理の判断を行うので、従来に比べて高精度にマップマッチング処理の適否を判断できる。例えば、道路に隣接した立体駐車場内の上階に車両が位置する場合、高度算出装置は立体駐車場の上階に応じた高度を算出するため、ナビゲーション装置は、算出された高度が道路に比べて高いことから、道路上に車両位置をマップマッチングさせないことを判断でき、マップマッチング処理の判断に対する信頼性を向上できる。
【0021】
第5発明に係るナビゲーション装置は、位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、前記いずれかの高度算出装置と、高度に差がある複数の道路が近接する場所で前記マップマッチング手段がマップマッチング処理を行う場合、前記高度算出装置の前記高度算出手段が算出した高度又は前記高度補正手段が補正した高度に基づいてマップマッチング先の道路を特定する手段とを備えることを特徴とする。
【0022】
第5発明にあっては、高度算出装置が算出した信頼性の高い高度又は補正した絶対的な高度を用いてマップマッチング先の道路を特定するので、従来に比べて高精度にマップマッチング処理を行える。即ち、高度に差がある複数の道路が近接する場所でマップマッチング処理を行う場合、高度算出装置から得られた高度によりいずれの道路にマップマッチングを行うかを良好に特定できるようになり、高架道路と地表の道路が併行する場合などに対して正確なマップマッチング処理を実現できる。なお、マップマッチング先の対象となる複数の道路に関しては、地図データの有料道路、高速道路等に対して付されているは高度情報を利用することが好適であり、地図データに含まれる道路種別の情報も利用して、マップマッチング先の道路種類を把握することが好ましい。
【発明の効果】
【0023】
第1発明にあっては、専用狭域通信で送信される情報を受信することを利用して、地図データベースから絶対的な高度を取得できると共に、取得した絶対的な高度に基づいて、算出した高度を正確に補正できる。
第2発明にあっては、高度を補正した場合、以降の高度算出処理に対して補正した高度を基準値にし、その基準値からの高度を算出するので、補正後に算出される高度の精度を向上できる。
【0024】
第3発明にあっては、複数回補正を行った場合、補正を行った区間の距離における今回の補正場所に対して算出した高度の誤差を求められるので、所定の移動距離に対する算出高度の誤差傾向を把握でき、さらに、算出された高度を把握した誤差の傾向を利用して修正することで、高精度な高度を得られる。
【0025】
第4発明にあっては、高度算出装置が算出した信頼性の高い高度又は補正した絶対的な高度を用いてマップマッチング処理の判断を行うので、従来に比べて高精度にマップマッチング処理の適否を判断できる。
第5発明にあっては、高度算出装置が算出した信頼性の高い高度又は補正した絶対的な高度を用いてマップマッチング先の道路を特定するので、従来に比べて高精度にマップマッチング処理を行える。
【発明を実施するための最良の形態】
【0026】
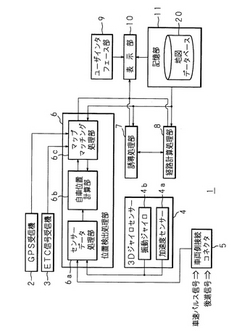
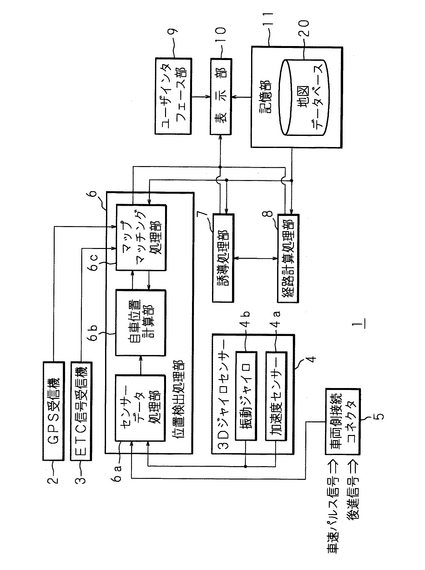
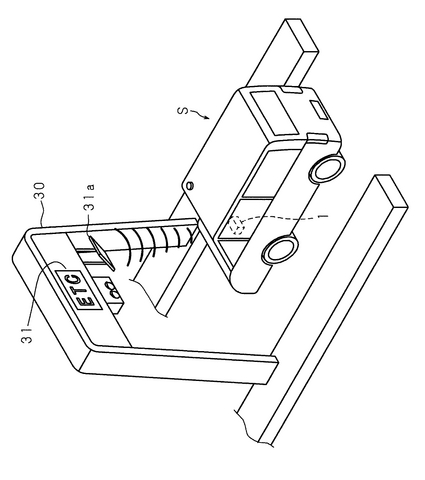
図1は、本発明の実施形態に係るナビゲーション装置1の主要な構成を示すブロック図である。本実施形態のナビゲーション装置1は高度算出機能を具備した車載用の装置であり、図2に示すようにETC装置31を備えた料金所30が設けられた位置の絶対的な高度をナビゲーション装置1が備える地図データベース20に予め含ませておき、ETC装置から送信される情報の受信に伴い地図データベース20から現在の場所の絶対的な高度を取得し、その取得した絶対的な高度に基づいて算出した高度をキャリブレーション(補正)することを特徴としている。
【0027】
ナビゲーション装置1は、各種受信機2、3、3Dジャイロセンサー4、車両側接続コネクタ5、位置検出処理部6、誘導処理部7、経路計算処理部8、ユーザインタフェース部9、表示部10、及び記憶部11を備え、GPS(Global Positioning System)を利用して人工衛星から発せられる電波を受信して現在の位置を検出し、検出した位置及びセンサーの検出結果等に基づき現在位置を算出して目的地への誘導処理を行う。
【0028】
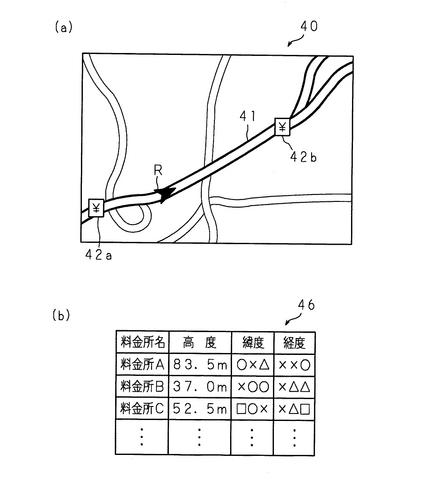
記憶部11は、本実施形態ではハードディスク装置を適用しており、このハードディスク装置に地図データベース20を記憶させている。地図データベース20には、図3(a)に示すような地図40を表示部10に表示させるための地図データに加えて、地図40に含まれる道路を表すリンク及び各道路の交差点を表すノードに係る二次元的な位置情報のデータ等が含まれている。さらに、本実施形態の地図データベース20は、地図40上の有料道路41でアイコン42a、42bで示されるETC装置31を具備する料金所(図2参照)の二次元的な場所(緯度経度)及び高度の値を有するテーブルも含んでいる。
【0029】
図3(b)は、地図データベース20に含まれる各料金所A、B、C等の位置及び高度の値を有する料金所位置テーブル46を示している。料金所位置テーブル46は、各料金所A、B、C等の場所(緯度経度)に高度(絶対的な高度)を対応付けたものであり、絶対的な高度には各料金所A、B、C等に対して厳密に測定された値を用いている。
【0030】
また、図1に示すナビゲーション装置1のGPS受信機2は、GPSの電波を受信する位置情報受信手段に相当し、位置検出処理部6内のマップマッチング処理6cと接続されて、受信した電波が含む位置情報(緯度経度データ)をマップマッチング処理部6cへ伝送する。
【0031】
ETC信号受信機3は、専用狭域通信を行う図2のETC装置31の送信アンテナ31から送信される情報(ETC信号)を受信するものである。なお、本実施形態のETC信号受信機3は、一般的な有料道路の料金徴収に係る情報送受に対応したプロトコルを具備する必要はなく(もちろん具備していてもよいが)、単に送信アンテナ31から送信される情報を受信できる構造となっている。また、ETC信号受信機3も、GPS受信機2と同様に位置検出処理部6内のマップマッチング処理6cと接続されており、ETC装置31から情報を受信した場合、受信した旨をマップマッチング処理部6cへ通知する処理を行う。
【0032】
3Dジャイロセンサー4は、車両の姿勢及び走行状態等を検出するものであり、加速度センサー4a及び振動ジャイロ4bを組み合わせて構成されており、位置検出処理部6内のセンサーデータ処理部6aと接続されて、検出した内容をセンサーデータ処理部6aへ伝送する。
【0033】
また、車両側接続コネクタ5は、車両に設けられた信号取出用コネクタ(図示せず)と接続されるものである。車両に設けられた信号取出用コネクタは、車両に具備された車軸の回転具合を検出するセンサーと繋がれており、このセンサーが出力する車速パルス信号を取り出せるようにしてり、さらに車両のトランスミッションのギアセレクタがリバース状態であることを検出するセンサーとも繋がれ、このセンサーが出力する後進信号も取り出せるようにしている。車両側接続コネクタ5は車両の信号取出用コネクタと接続され、信号取出用コネクタから取り出された車速パルス信号及び後退信号をセンサーデータ処理部6aへ伝送できるように配線されている。
【0034】
また、ナビゲーション装置1の位置検出処理部6は、現在の位置(車両位置)を所要の時間間隔(例えば、3秒間隔)で算出する処理を行うものであり、センサーデータ処理部6a、自車位置計算部6b、及びマップマッチング処理部6cを具備している。
【0035】
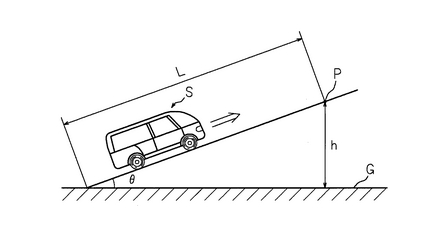
センサーデータ処理部6aは、3Dジャイロセンサー4から送られてくる内容に基づき、車両の左右の旋回角度を算出すると共に、図4に示すように車両の進行方向(移動方向)の水平線Gに対する傾斜角θを算出する処理を行う。また、センサーデータ処理部6aは、車両側接続コネクタ5より送られてくる車速バルス信号の数に応じて車両Sの移動距離Lを算出する処理を行う。なお、センサーデータ処理部6aは、車両側接続コネクタ5より送られてくる後進信号により車両が後進中であることも判断している。
【0036】
また、自車位置計算部6bは自立航法により車両Sの位置を算出するものであり、センサーデータ処理部6aが3Dジャイロセンサー4からの検出内容及び車速パルス信号より求めた値に基づき二次元的な現在の位置を求め、さらに本実施形態ではセンサーデータ処理部6aが求めた傾斜角及び移動距離より車両Sが位置する場所の高度を算出する処理も行う。例えば、図4に示すように車両Sが傾斜した道路を位置Pまで移動したとき、自車位置計算部6bは、傾斜角θの三角関数(sinθ、θの値によってはtanθ)に移動距離Lを乗じて、水平線Gに対する位置Pの高度hを求める。
【0037】
なお、自車位置計算部6bで求められる高度hは、3Dジャイロセンサー4での検出誤差、車速パルス信号に含まれる誤差、センサーデータ処理部6a及び自車位置計算部6bでの算出における桁数切り捨て等に伴う誤差が蓄積されて、絶対的な高度と合致せず、蓄積誤差を含んだ値になっている。
【0038】
さらに、自車位置計算部6bは、後述するようにマップマッチング処理部6cから絶対的な高度が伝送されてくると、その絶対的な高度に基づいて算出した高度をキャリブレーション(補正)する処理を行う。具体的な補正処理としては、算出した高度を絶対的な高度に置き換える処理を行い、絶対的な高度に置き換える補正を行った後は、絶対的な高度を基準値にして、その基準値に対する高度(以下、高度差と称す)を算出し、基準値に算出した高度差を加えた値を、その場所における高度にしている。このように補正後は、基準値に対する高度差を算出することで、高度差として算出された値だけに蓄積誤差が含まれることになり、高度全体に蓄積誤差が含まれる割合を抑えて高精度な高度が得る。
【0039】
また、マップマッチング処理部6cは、GPS受信機2から伝送されてくる緯度経度データ(位置情報)及び自車位置計算部6bで自立航法により得られた位置に基づき、現在の二次元的な車両位置(緯度経度)を算出する処理を行い、この算出した二次元的な車両位置を地図データベースに含まれる地図上の道路に合致させるマップマッチング処理を行う。
【0040】
さらに、本実施形態のマップマッチング処理部6cは、ETC信号受信機3からETC信号を受信した旨を受けると、算出した二次元的な車両位置の近傍で直近となる料金所を地図データベース20から検索する処理を行う。検索の具体的な処理内容は、ETC信号の受信したときにマップマッチング処理部6cが算出している車両位置の緯度経度を中心にETC信号が受信できる範囲内に料金所の緯度経度が含まれるか否かを判定し、範囲内に料金所が含まれる場合、その料金所が有する絶対的な高度を図3(b)に示す料金所位置テーブル46から特定してマップマッチング処理部6cは絶対的な高度を取得する。
【0041】
また、マップマッチング処理部6cは取得した絶対的な高度を自車位置計算部6bへ送る処理を行い、それに伴い、自車位置計算部6bは、算出した高度の補正処理を行う。なお、マップマッチング処理部6cは、直近の料金所を地図データベース20から検索する場合、図2のETC装置31の送信アンテナ31aから送信される情報を受信できる距離範囲内に該当する料金所が無いときは、通常の状態でETC信号を受信していないとみなし、絶対的な高度を取得する処理を行わない。
【0042】
一方、図1のナビゲーション装置1における誘導処理部7は、位置検出処理部6で求められた車両の位置からユーザにより設定された目的地への誘導に係る処理を地図データベース20を用いて行うものである。また、経路計算処理部8は、誘導処理部7で行われた処理内容及び地図データベース20を用いて目的地への経路計算を行う。さらに、ユーザインタフェース部9は目的地の設定、メニューの選択等に対するユーザの操作を受け付けるものであり、表示部10は図3(a)に示す地図40を算出された車両の位置及び目的地への経路等と共に表示するものであり、ユーザの操作に応じて適宜メニュー等も表示する。
【0043】
なお、図1のナビゲーション装置1では、誘導処理部7及び経路計算処理部8を除いた部分(ETC信号受信機、3Dジャイロセンサー4、車両側接続コネクタ5,位置検出処理部6等)が、車両Sの位置の高度を算出する処理に関連することになり、この高度を算出する処理に関連する部分が高度算出装置に該当する。そのため、ナビゲーション装置1は、高度算出装置を内蔵した形態になっている。また、高度算出装置に係る部分をまとめてナビゲーション装置用の部品ユニットの形態にすることも可能である。
【0044】
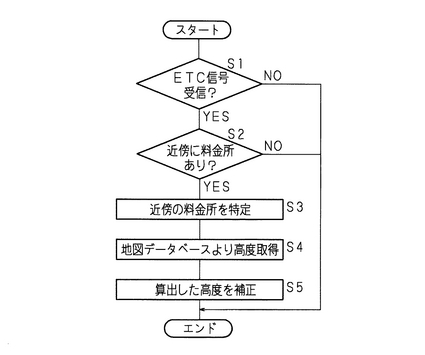
図5は、上述した構成のナビゲーション装置1による高度補正に係る一連の処理手順を示すフローチャートである。以下、このフローチャートに従って本実施形態のナビゲーション装置1の高度補正に係る処理の流れを説明する。
【0045】
先ず、ナビゲーション装置1の高度算出装置に該当する部分は、ETC信号を受信したか否かを判断し(S1)、ETC信号を受信していない場合(S1:NO)、高度補正に係る処理を終了する。また、ETC信号を受信した場合(S1:YES)、受信した位置の近傍となる範囲に料金所があるか否かを地図データベース20を検索して判断する(S2)。近傍となる範囲に料金所が無い場合(S2:NO)、高度補正に係る処理を終了する。
【0046】
また、近傍となる範囲に料金所がある場合(S2:YES)、その近傍(直近)の料金所を特定し(S3)、地図データベース20より絶対的な高度を取得し(S4)、取得した絶対的な高度に基づき自車位置計算部6bが算出した高度を補正する(S5)。
【0047】
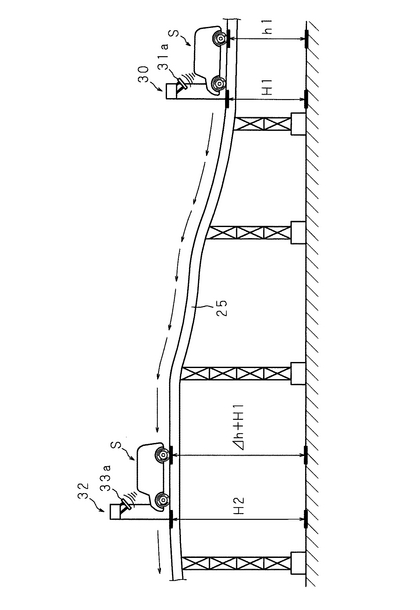
よって、図6に示すような高架の有料道路25を、上述した処理を行うナビゲーション装置1を搭載した車両Sが走行する場合、1つ目の料金所30に到達して送信アンテナ31aからETC信号を受信すると、料金所30に到達した時点で算出した高度h1を地図データベース20から取得した絶対高度H1に置き換える補正を行うので、ナビゲーション装置1は正確な高度(絶対高度H1)を容易に得られる。
【0048】
また、料金所30を通過すると、絶対高度H1を基準値にして、その基準値からの高度差Δhをナビゲーション装置1の自車位置計算部6bが算出する。よって、料金所30通過後の車両Sの位置の高度はΔh+H1となり、検出及び計算に係る蓄積誤差が含まれるのは高度差Δhの部分だけなので、車両位置の高度(Δh+H1)中における誤差含有率が抑えられ、一度、補正を行うとトータルで算出される高度(Δh+H1)は従来に比べて精度の良い値になっている。
【0049】
さらに、2つ目の料金所32に車両Sが到達すると、送信アンテナ33aから送信されるETC信号の受信に伴い料金所32の絶対高度H2をナビゲーション装置1が取得し、それまで算出していた高度(Δh+H1)を絶対高度H2に置き換える補正を行い、蓄積誤差を払拭(リセット)する。以降、2つ目の料金所32を通過すると、上記と同様に、絶対高度H2を基準値にして、その基準値からの差となる高度差Δhを算出し、車両位置の高度をΔh+H2として求める。その結果、車両Sに搭載されたナビゲーション装置1は、ETC装置が併設された料金所の通過毎に絶対高度を取得して蓄積誤差をリセットし、また、リセットした後は再度算出を始めるので蓄積される誤差の程度も従来に比べて低減され、高精度の高度算出を実現している。
【0050】
なお、本実施形態のナビゲーション装置1の高度算出部分は、上述した形態に限定されるものではなく、種々の変形例の適用が可能である。例えば、図6に示すように料金所30、32を通過して複数回補正を行う場合、先ず1つ目の料金所30から2つ目の料金所32までの移動距離(補正間移動距離)を車速パルス信号に基づき求めると共に、2つ目の料金所32で取得した絶対高度H2と2つ目の料金所32に到達したときに算出していた高度(Δh+H1)との差(H2−(Δh+H1))を自車位置計算部6bで算出し、求めた補正間移動距離に対する差の割合をナビゲーション装置1の高度算出に係る誤差として算出するようにしてもよい。
【0051】
このように算出した誤差は、ナビゲーション装置1の高度算出の際に生じる移動距離に対する誤差傾向を判断するものとして利用できる。また、この誤差を算出した後は、移動距離に応じて誤差がキャンセルされる指数を自車位置計算部6bで随時求め、この指数を用いてナビゲーション装置1が算出した高度を修正することで、料金所の通過後でナビゲーション装置1が算出する高度の精度を向上させられる。
【0052】
さらに、上述の説明では、ETC装置を備えた料金所で絶対高度を取得するようにしたが、今後、料金所以外の箇所でDSRCにより車両へ向けて情報が送信されるようなインフラが整えば、DSRCにより情報を送信する場所の絶対的な高度を測定し、その測定した高度を測定した場所(緯度経度)に対応付けて含ませた地図データベースを作成し、この地図データベースをナビゲーション装置1の記憶部11に記憶させてもよい。このようにすることで、料金所以外のDSRCで情報を送信する場所でも高度の補正処理を行えるようになり、ナビゲーション装置1で得られる高度の精度を一層高められる。
【0053】
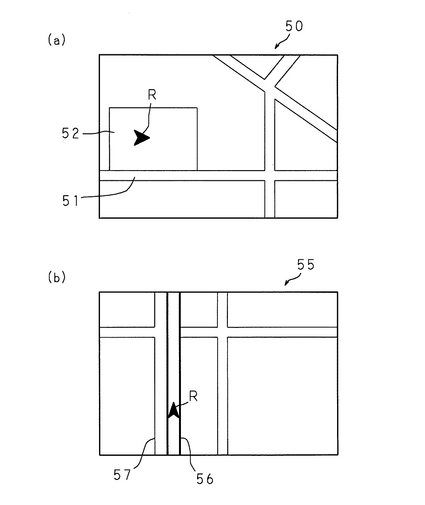
また、地図データベースに含まれる各種道路に対しても高度の情報(値)を付与することで、ナビゲーション装置1が算出(修正も含む)又は補正により得た高度をマップマッチング処理に適宜利用してもよい。例えば、図7(a)に示す地図50上の道路51に対して高度が付与されているとした場合、ナビゲーション装置1が算出した二次元的な車両を示す位置Rが道路51に面したエリア52内であったとする。
【0054】
この場合、マップマッチング処理を行うとすれば、車両を示す位置Rを道路51に合致させることになるが、マップマッチング処理を行う際に、位置Rにおけるナビゲーション装置1が得ている高度とマップマッチング先となる道路51の高度をナビゲーション装置1の位置検出処理部6で比較し、両高度が所定の値(例えば、3m又は5m等)のレベルを越えて相異すれば、マップマッチング処理を行わないと判断し、算出した位置Rをエリア52内に留まらせるようにする。このような処理を行うことで、例えば、車両が道路に面した立体駐車場内の1階より上の階に位置するときは、誤ったマップマッチング処理を防止でき、現実の車両位置を反映した表示形態を確保できる。
【0055】
さらに、図7(b)に示す地図55における高架道路56と高架下の道路57とが併行(近接)している場所でマップマッチング処理を行う場合でも、各道路56、57の少なくともいずれか一方に高度の情報(値)が付与されているとき、マップマッチング先の特定にナビゲーション装置1が算出(修正も含む)又は補正により得た高度を利用できる。
【0056】
具体的には、各道路56、57の両方に高度が付与されていれば、ナビゲーション装置1が得た高度と各道路56、57の高度とをナビゲーション装置1の位置検出処理部6で比較し、差が少ない方をマップマッチング先として特定できる。また、各道路56、57の片方のみに高度が付与されていれば、その高度とナビゲーション装置1が得た高度とが同等であれば、高度が付与された方の道路をマップマッチング先にでき、両高度が同等でなければ、高度が付与されていない方の道路をマップマッチング先として特定でき、マップマッチング精度の向上にも貢献できる。
【図面の簡単な説明】
【0057】
【図1】本発明の実施形態に係るナビゲーション装置のブロック図である。
【図2】ETC装置を備えた料金所を本実施形態のナビゲーション装置を搭載した車両が通過する状態を示す斜視図である。
【図3】(a)は地図データベースに含まれる地図の一例を示す概略図であり、(b)は料金所の高度を含む料金所位置テーブルを示す図表である。
【図4】移動する車両に対する傾斜角及び移動距離等を示す概略図である。
【図5】算出した高度の補正に係る一連の処理手順を示すフローチャートである。
【図6】高架の有料道路を車両が通過する場合に得られるナビゲーション装置が得る高度を示す概略図である。
【図7】(a)は、マップマッチング処理を行わない一例を表す地図の概略図であり、(b)は近接する複数の道路からマップマッチング先を特定する一例を表す地図の概略図である。
【符号の説明】
【0058】
1 ナビゲーション装置
2 GPS受信機
3 ETC信号受信機
4 3Dジャイロセンサー
4a 加速度センサー
4b 振動ジャイロ
5 車両側接続コネクタ
6 位置検出処理部
6a センサーデータ処理部
6b 自車位置計算部
6c マップマッチング処理部
20 地図データベース
30、32 料金所
31 ETC装置
31a、33a 送信アンテナ
40、50、55 地図
41、51、56、57 道路
S 車両
θ 傾斜角
【技術分野】
【0001】
本発明は、所定場所を通過する毎に絶対高度となる値を取得して、算出した高度を絶対高度に基づき補正する高度算出装置、及び該高度算出装置で得られた高度を用いて良好なマップマッチング処理を実現したナビゲーション装置に関する。
【背景技術】
【0002】
従来、車両等に搭載されて目的地までのルート案内を行うナビゲーション装置が普及している。ナビゲーション装置は一般に、GPS(Global Positioning System)を利用して位置情報を受信すると共に、ナビゲーション装置に設けた方位センサー及び車両から取得する車軸パルス等に基づき現在の車両位置を算出し、目的地までの道順を表示するものである。算出した現在の車両位置を地図上に表示する際、算出誤差等が原因となって地図上の道路位置に、算出した車両位置が一致しないことがあるが、このような場合は車両位置が妥当な道路上に載るようにマップマッチング処理が行われる。
【0003】
近時、マップマッチング処理の精度を高めるために、車両の二次元的な位置(緯度、経度)に加えて車両位置の高度を求める機能を設け、その求めた高度も利用してマップマッチング処理を行うナビゲーション装置も存在する。例えば、高架道路及び高架下の道路が併行する場所でマップマッチングを行う場合、車両位置の高度を利用して上下のいずれの道路にマップマッチングをさせるか特定することが可能となり、また、車両位置の高度に基づきマップマッチング処理自体を行うか否かの判断を行うこともできる。
【0004】
高度を利用したマップマッチング処理を行うには、ナビゲーション装置は直接的に絶対的な高度を求めることはできないので、GPSから取得できる高度情報に依存するか、又は3Dジャイロ等のセンサーを利用して高度算出を行うことになる。
【0005】
なお、下記の特許文献1では、DSRC(Dedicated Short Range Communication:専用狭域通信)により、DSRCで送信される高度情報を含む位置情報を受信してマップマッチング処理に利用するようにした現在位置算出装置が開示されている。
【特許文献1】特開2001−289653号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
高精度なマップマッチング処理のため、ナビゲーション装置がGPSから高度情報を取得する場合、車両の位置特定に対して現状のGPSから取得できる高度情報は、情報のバラツキが大きく精度的に不充分であるため、安定して高精度なマップマッチング処理が行えないと云う問題がある。
【0007】
また、ナビゲーション装置に3Dジャイロ等のセンサーを設けて高度を求めるには、水平方向に対する車両進行方向の傾斜角(車両ピッチ角)をセンサーで検出すると共に、車両の移動した距離を算出し、検出した傾斜角及び算出した移動距離に基づき三角関数を利用して高度を算出することになる。各センサーでの検出には必ず検出誤差が含まれ、また、算出処理段階でも桁数の切り上げ等に伴う算出誤差が生じることから、算出された高度には検出誤差及び算出誤差が必ず蓄積され、絶対的な高度に対して誤差を含むと云う問題がある。
【0008】
さらに、ナビゲーション装置は絶対的な高度を取得する手段が無いので、求めた高度が絶対的な高度に対し、どれ位の誤差が含まれるかを把握できず、求めた高度のキャリブレーション(補正)を正確に行えないと云う問題がある。即ち、高度に対する現状のキャリブレーション処理としては、地図データ中の特定場所に対して絶対的な高度の値を予め含ませておき、マップマッチングした位置に高度の値があれば、その高度の値を利用してキャリブレーションを行う方式となっている。そのため、本来ならマップマッチング前に得ておくべき正確な高度をマップマッチング後に得ることになり、キャリブレーション精度を向上できないと共に、高精度のマップマッチング処理も行えないと云う問題がある。
【0009】
さらにまた、特許文献1に係る現在位置算出装置を用いるには、先ずDSRCで通信を行う道路に設置されるインフラ側の機器に、その機器が設置された個所の高度情報を送信できる機能を設ける必要があるため、インフラを含めた大がかりな仕様変更が必要となりナビゲーション装置側の仕様変更のみでは容易に導入できないと云う問題がある。
【0010】
本発明は、斯かる事情に鑑みてなされたものであり、DSRCで情報を発信する場所の絶対的な高度を地図データに含ませて、DSRCから情報を受信した位置に連携して地図データ中の絶対的な高度を利用できるようにすることで、インフラ側の機器仕様を変更することなく、算出した高度のキャリブレーションを正確に行えるようにした高度算出装置を提供することを目的とする。
また、本発明は、キャリブレーションを行った場合、その高度を基準値にして高度算出を行うことで高精度な高度算出を可能にした高度算出装置を提供することを目的とする。
【0011】
さらに、本発明は、複数回のキャリブレーションを行った場合、算出される高度の誤差を求められるようにした高度算出装置を提供することを目的とする。
さらにまた、本発明は、高度算出装置が算出した高度又はキャリブレーションされた高度を利用して従来に比べて高精度なマップマッチング処理を実現可能にしたナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記課題を解決するために第1発明に係る高度算出装置は、移動距離を算出する移動距離算出手段と、移動方向の水平線に対する傾斜角を検出する傾斜角検出手段と、前記移動距離算出手段が算出した移動距離及び前記傾斜角検出手段が検出した傾斜角に基づき高度を算出する高度算出手段とを備える高度算出装置において、専用狭域通信で送信される情報を受信することが可能な場所に対応付けて該場所の高度を有する地図データベースと、専用狭域通信を通じて情報を受信する受信手段と、前記受信手段が情報を受信した場合、受信した場所の高度を前記地図データベースより特定する特定手段と、該特定手段が特定した高度に基づいて前記高度算出手段が算出した高度を補正する高度補正手段とを備えることを特徴とする。
【0013】
第1発明にあっては、専用狭域通信で送信される情報を受信可能な場所に対応付けて、その場所の高度を有する地図データベースを準備すると共に、専用狭域通信は通信可能な数十m単位の狭い範囲内に位置しなければ情報を受信できないと云う特性を利用して、専用狭域通信を通じて情報を受信することに伴い専用狭域通信の場所及びその高度を地図データベースから特定して取得できるようになる。その結果、取得した絶対的な高度に基づいて、その場所に対して算出した高度を正確に補正することが可能になる。また、本発明では、既存のインフラ設備を利用するので、専用狭域通信を行う設備仕様を変更する必要もなく、導入が容易である。
【0014】
なお、専用狭域通信を行うインフラ側の設備としては、高速道路及び有料道路等の料金徴収用に設置されたETC(Electronic Toll Collection)装置を利用することが好適である。なぜなら、ETC装置から送信される電波は簡単な受信機で受信可能であると共に、ナビゲーション装置用の地図データにおいても高度情報は都市圏の高速道路及び有料道路を中心に具備され始めていることからである。
【0015】
また、第2発明に係る高度算出装置は、前記高度算出手段は、前記高度補正手段が高度を補正した場合、補正した高度を基準値にして該基準値に対する高度を算出するようにしてあることを特徴とする。
【0016】
第2発明にあっては、高度を補正した場合、以降の高度算出処理に対して補正した高度を基準値にし、その基準値からの高度を算出するので、補正前に算出されていた高度に含まれる誤差が全てキャンセルされ、補正後の高度算出処理に対し補正前に蓄積されていた誤差が影響しなくなり、補正後に算出される高度の精度を良好にできる。なお、高度の補正に関しては、算出した高度を地図データから特定した絶対的な高度に置き換えるように補正することが、以降の高度算出処理の精度を高めることから好適である。
【0017】
さらに、第3発明に係る高度算出装置は、前記高度補正手段が複数回の補正を行った場合、前記移動距離算出手段は補正を行った場所間の補正間移動距離を算出するようにしてあり、補正した高度及び補正を行った場所に対して前記高度算出手段が算出した高度の差を算出する高度差算出手段と、該高度差算出手段が算出した高度の差及び前記補正間移動距離に基づき所定距離に対する誤差を算出する誤差算出手段と、該誤差算出手段が算出した誤差に基づいて、前記高度補正手段が補正を行ってから前記高度算出手段が算出する高度を修正する高度修正手段とを備えることを特徴とする。
【0018】
第3発明にあっては、複数回補正を行った場合、前回補正を行った場所から今回補正を行った場所までの区間(移動距離)内で今回の補正を行う場所に対して算出した高度に含まれる誤差を求めるので、所定の移動距離に対して誤差が生じる割合を求めることができ、高度算出に対する誤差の傾向を把握できるようになる。さらに、算出された高度を把握した誤差の傾向を利用して修正することで、高度算出に伴う誤差による影響を低減でき、高精度な高度算出を実現できる。
【0019】
第4発明に係るナビゲーション装置は、位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、前記いずれかの高度算出装置と、該高度算出装置の前記高度算出手段が算出した高度又は前記高度補正手段が補正した高度に基づいてマップマッチング処理を行うか否かを判断する判断手段とを備えることを特徴とする。
【0020】
第4発明にあっては、高度算出装置が算出した信頼性の高い高度又は補正した絶対的な高度を用いてマップマッチング処理の判断を行うので、従来に比べて高精度にマップマッチング処理の適否を判断できる。例えば、道路に隣接した立体駐車場内の上階に車両が位置する場合、高度算出装置は立体駐車場の上階に応じた高度を算出するため、ナビゲーション装置は、算出された高度が道路に比べて高いことから、道路上に車両位置をマップマッチングさせないことを判断でき、マップマッチング処理の判断に対する信頼性を向上できる。
【0021】
第5発明に係るナビゲーション装置は、位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、前記いずれかの高度算出装置と、高度に差がある複数の道路が近接する場所で前記マップマッチング手段がマップマッチング処理を行う場合、前記高度算出装置の前記高度算出手段が算出した高度又は前記高度補正手段が補正した高度に基づいてマップマッチング先の道路を特定する手段とを備えることを特徴とする。
【0022】
第5発明にあっては、高度算出装置が算出した信頼性の高い高度又は補正した絶対的な高度を用いてマップマッチング先の道路を特定するので、従来に比べて高精度にマップマッチング処理を行える。即ち、高度に差がある複数の道路が近接する場所でマップマッチング処理を行う場合、高度算出装置から得られた高度によりいずれの道路にマップマッチングを行うかを良好に特定できるようになり、高架道路と地表の道路が併行する場合などに対して正確なマップマッチング処理を実現できる。なお、マップマッチング先の対象となる複数の道路に関しては、地図データの有料道路、高速道路等に対して付されているは高度情報を利用することが好適であり、地図データに含まれる道路種別の情報も利用して、マップマッチング先の道路種類を把握することが好ましい。
【発明の効果】
【0023】
第1発明にあっては、専用狭域通信で送信される情報を受信することを利用して、地図データベースから絶対的な高度を取得できると共に、取得した絶対的な高度に基づいて、算出した高度を正確に補正できる。
第2発明にあっては、高度を補正した場合、以降の高度算出処理に対して補正した高度を基準値にし、その基準値からの高度を算出するので、補正後に算出される高度の精度を向上できる。
【0024】
第3発明にあっては、複数回補正を行った場合、補正を行った区間の距離における今回の補正場所に対して算出した高度の誤差を求められるので、所定の移動距離に対する算出高度の誤差傾向を把握でき、さらに、算出された高度を把握した誤差の傾向を利用して修正することで、高精度な高度を得られる。
【0025】
第4発明にあっては、高度算出装置が算出した信頼性の高い高度又は補正した絶対的な高度を用いてマップマッチング処理の判断を行うので、従来に比べて高精度にマップマッチング処理の適否を判断できる。
第5発明にあっては、高度算出装置が算出した信頼性の高い高度又は補正した絶対的な高度を用いてマップマッチング先の道路を特定するので、従来に比べて高精度にマップマッチング処理を行える。
【発明を実施するための最良の形態】
【0026】
図1は、本発明の実施形態に係るナビゲーション装置1の主要な構成を示すブロック図である。本実施形態のナビゲーション装置1は高度算出機能を具備した車載用の装置であり、図2に示すようにETC装置31を備えた料金所30が設けられた位置の絶対的な高度をナビゲーション装置1が備える地図データベース20に予め含ませておき、ETC装置から送信される情報の受信に伴い地図データベース20から現在の場所の絶対的な高度を取得し、その取得した絶対的な高度に基づいて算出した高度をキャリブレーション(補正)することを特徴としている。
【0027】
ナビゲーション装置1は、各種受信機2、3、3Dジャイロセンサー4、車両側接続コネクタ5、位置検出処理部6、誘導処理部7、経路計算処理部8、ユーザインタフェース部9、表示部10、及び記憶部11を備え、GPS(Global Positioning System)を利用して人工衛星から発せられる電波を受信して現在の位置を検出し、検出した位置及びセンサーの検出結果等に基づき現在位置を算出して目的地への誘導処理を行う。
【0028】
記憶部11は、本実施形態ではハードディスク装置を適用しており、このハードディスク装置に地図データベース20を記憶させている。地図データベース20には、図3(a)に示すような地図40を表示部10に表示させるための地図データに加えて、地図40に含まれる道路を表すリンク及び各道路の交差点を表すノードに係る二次元的な位置情報のデータ等が含まれている。さらに、本実施形態の地図データベース20は、地図40上の有料道路41でアイコン42a、42bで示されるETC装置31を具備する料金所(図2参照)の二次元的な場所(緯度経度)及び高度の値を有するテーブルも含んでいる。
【0029】
図3(b)は、地図データベース20に含まれる各料金所A、B、C等の位置及び高度の値を有する料金所位置テーブル46を示している。料金所位置テーブル46は、各料金所A、B、C等の場所(緯度経度)に高度(絶対的な高度)を対応付けたものであり、絶対的な高度には各料金所A、B、C等に対して厳密に測定された値を用いている。
【0030】
また、図1に示すナビゲーション装置1のGPS受信機2は、GPSの電波を受信する位置情報受信手段に相当し、位置検出処理部6内のマップマッチング処理6cと接続されて、受信した電波が含む位置情報(緯度経度データ)をマップマッチング処理部6cへ伝送する。
【0031】
ETC信号受信機3は、専用狭域通信を行う図2のETC装置31の送信アンテナ31から送信される情報(ETC信号)を受信するものである。なお、本実施形態のETC信号受信機3は、一般的な有料道路の料金徴収に係る情報送受に対応したプロトコルを具備する必要はなく(もちろん具備していてもよいが)、単に送信アンテナ31から送信される情報を受信できる構造となっている。また、ETC信号受信機3も、GPS受信機2と同様に位置検出処理部6内のマップマッチング処理6cと接続されており、ETC装置31から情報を受信した場合、受信した旨をマップマッチング処理部6cへ通知する処理を行う。
【0032】
3Dジャイロセンサー4は、車両の姿勢及び走行状態等を検出するものであり、加速度センサー4a及び振動ジャイロ4bを組み合わせて構成されており、位置検出処理部6内のセンサーデータ処理部6aと接続されて、検出した内容をセンサーデータ処理部6aへ伝送する。
【0033】
また、車両側接続コネクタ5は、車両に設けられた信号取出用コネクタ(図示せず)と接続されるものである。車両に設けられた信号取出用コネクタは、車両に具備された車軸の回転具合を検出するセンサーと繋がれており、このセンサーが出力する車速パルス信号を取り出せるようにしてり、さらに車両のトランスミッションのギアセレクタがリバース状態であることを検出するセンサーとも繋がれ、このセンサーが出力する後進信号も取り出せるようにしている。車両側接続コネクタ5は車両の信号取出用コネクタと接続され、信号取出用コネクタから取り出された車速パルス信号及び後退信号をセンサーデータ処理部6aへ伝送できるように配線されている。
【0034】
また、ナビゲーション装置1の位置検出処理部6は、現在の位置(車両位置)を所要の時間間隔(例えば、3秒間隔)で算出する処理を行うものであり、センサーデータ処理部6a、自車位置計算部6b、及びマップマッチング処理部6cを具備している。
【0035】
センサーデータ処理部6aは、3Dジャイロセンサー4から送られてくる内容に基づき、車両の左右の旋回角度を算出すると共に、図4に示すように車両の進行方向(移動方向)の水平線Gに対する傾斜角θを算出する処理を行う。また、センサーデータ処理部6aは、車両側接続コネクタ5より送られてくる車速バルス信号の数に応じて車両Sの移動距離Lを算出する処理を行う。なお、センサーデータ処理部6aは、車両側接続コネクタ5より送られてくる後進信号により車両が後進中であることも判断している。
【0036】
また、自車位置計算部6bは自立航法により車両Sの位置を算出するものであり、センサーデータ処理部6aが3Dジャイロセンサー4からの検出内容及び車速パルス信号より求めた値に基づき二次元的な現在の位置を求め、さらに本実施形態ではセンサーデータ処理部6aが求めた傾斜角及び移動距離より車両Sが位置する場所の高度を算出する処理も行う。例えば、図4に示すように車両Sが傾斜した道路を位置Pまで移動したとき、自車位置計算部6bは、傾斜角θの三角関数(sinθ、θの値によってはtanθ)に移動距離Lを乗じて、水平線Gに対する位置Pの高度hを求める。
【0037】
なお、自車位置計算部6bで求められる高度hは、3Dジャイロセンサー4での検出誤差、車速パルス信号に含まれる誤差、センサーデータ処理部6a及び自車位置計算部6bでの算出における桁数切り捨て等に伴う誤差が蓄積されて、絶対的な高度と合致せず、蓄積誤差を含んだ値になっている。
【0038】
さらに、自車位置計算部6bは、後述するようにマップマッチング処理部6cから絶対的な高度が伝送されてくると、その絶対的な高度に基づいて算出した高度をキャリブレーション(補正)する処理を行う。具体的な補正処理としては、算出した高度を絶対的な高度に置き換える処理を行い、絶対的な高度に置き換える補正を行った後は、絶対的な高度を基準値にして、その基準値に対する高度(以下、高度差と称す)を算出し、基準値に算出した高度差を加えた値を、その場所における高度にしている。このように補正後は、基準値に対する高度差を算出することで、高度差として算出された値だけに蓄積誤差が含まれることになり、高度全体に蓄積誤差が含まれる割合を抑えて高精度な高度が得る。
【0039】
また、マップマッチング処理部6cは、GPS受信機2から伝送されてくる緯度経度データ(位置情報)及び自車位置計算部6bで自立航法により得られた位置に基づき、現在の二次元的な車両位置(緯度経度)を算出する処理を行い、この算出した二次元的な車両位置を地図データベースに含まれる地図上の道路に合致させるマップマッチング処理を行う。
【0040】
さらに、本実施形態のマップマッチング処理部6cは、ETC信号受信機3からETC信号を受信した旨を受けると、算出した二次元的な車両位置の近傍で直近となる料金所を地図データベース20から検索する処理を行う。検索の具体的な処理内容は、ETC信号の受信したときにマップマッチング処理部6cが算出している車両位置の緯度経度を中心にETC信号が受信できる範囲内に料金所の緯度経度が含まれるか否かを判定し、範囲内に料金所が含まれる場合、その料金所が有する絶対的な高度を図3(b)に示す料金所位置テーブル46から特定してマップマッチング処理部6cは絶対的な高度を取得する。
【0041】
また、マップマッチング処理部6cは取得した絶対的な高度を自車位置計算部6bへ送る処理を行い、それに伴い、自車位置計算部6bは、算出した高度の補正処理を行う。なお、マップマッチング処理部6cは、直近の料金所を地図データベース20から検索する場合、図2のETC装置31の送信アンテナ31aから送信される情報を受信できる距離範囲内に該当する料金所が無いときは、通常の状態でETC信号を受信していないとみなし、絶対的な高度を取得する処理を行わない。
【0042】
一方、図1のナビゲーション装置1における誘導処理部7は、位置検出処理部6で求められた車両の位置からユーザにより設定された目的地への誘導に係る処理を地図データベース20を用いて行うものである。また、経路計算処理部8は、誘導処理部7で行われた処理内容及び地図データベース20を用いて目的地への経路計算を行う。さらに、ユーザインタフェース部9は目的地の設定、メニューの選択等に対するユーザの操作を受け付けるものであり、表示部10は図3(a)に示す地図40を算出された車両の位置及び目的地への経路等と共に表示するものであり、ユーザの操作に応じて適宜メニュー等も表示する。
【0043】
なお、図1のナビゲーション装置1では、誘導処理部7及び経路計算処理部8を除いた部分(ETC信号受信機、3Dジャイロセンサー4、車両側接続コネクタ5,位置検出処理部6等)が、車両Sの位置の高度を算出する処理に関連することになり、この高度を算出する処理に関連する部分が高度算出装置に該当する。そのため、ナビゲーション装置1は、高度算出装置を内蔵した形態になっている。また、高度算出装置に係る部分をまとめてナビゲーション装置用の部品ユニットの形態にすることも可能である。
【0044】
図5は、上述した構成のナビゲーション装置1による高度補正に係る一連の処理手順を示すフローチャートである。以下、このフローチャートに従って本実施形態のナビゲーション装置1の高度補正に係る処理の流れを説明する。
【0045】
先ず、ナビゲーション装置1の高度算出装置に該当する部分は、ETC信号を受信したか否かを判断し(S1)、ETC信号を受信していない場合(S1:NO)、高度補正に係る処理を終了する。また、ETC信号を受信した場合(S1:YES)、受信した位置の近傍となる範囲に料金所があるか否かを地図データベース20を検索して判断する(S2)。近傍となる範囲に料金所が無い場合(S2:NO)、高度補正に係る処理を終了する。
【0046】
また、近傍となる範囲に料金所がある場合(S2:YES)、その近傍(直近)の料金所を特定し(S3)、地図データベース20より絶対的な高度を取得し(S4)、取得した絶対的な高度に基づき自車位置計算部6bが算出した高度を補正する(S5)。
【0047】
よって、図6に示すような高架の有料道路25を、上述した処理を行うナビゲーション装置1を搭載した車両Sが走行する場合、1つ目の料金所30に到達して送信アンテナ31aからETC信号を受信すると、料金所30に到達した時点で算出した高度h1を地図データベース20から取得した絶対高度H1に置き換える補正を行うので、ナビゲーション装置1は正確な高度(絶対高度H1)を容易に得られる。
【0048】
また、料金所30を通過すると、絶対高度H1を基準値にして、その基準値からの高度差Δhをナビゲーション装置1の自車位置計算部6bが算出する。よって、料金所30通過後の車両Sの位置の高度はΔh+H1となり、検出及び計算に係る蓄積誤差が含まれるのは高度差Δhの部分だけなので、車両位置の高度(Δh+H1)中における誤差含有率が抑えられ、一度、補正を行うとトータルで算出される高度(Δh+H1)は従来に比べて精度の良い値になっている。
【0049】
さらに、2つ目の料金所32に車両Sが到達すると、送信アンテナ33aから送信されるETC信号の受信に伴い料金所32の絶対高度H2をナビゲーション装置1が取得し、それまで算出していた高度(Δh+H1)を絶対高度H2に置き換える補正を行い、蓄積誤差を払拭(リセット)する。以降、2つ目の料金所32を通過すると、上記と同様に、絶対高度H2を基準値にして、その基準値からの差となる高度差Δhを算出し、車両位置の高度をΔh+H2として求める。その結果、車両Sに搭載されたナビゲーション装置1は、ETC装置が併設された料金所の通過毎に絶対高度を取得して蓄積誤差をリセットし、また、リセットした後は再度算出を始めるので蓄積される誤差の程度も従来に比べて低減され、高精度の高度算出を実現している。
【0050】
なお、本実施形態のナビゲーション装置1の高度算出部分は、上述した形態に限定されるものではなく、種々の変形例の適用が可能である。例えば、図6に示すように料金所30、32を通過して複数回補正を行う場合、先ず1つ目の料金所30から2つ目の料金所32までの移動距離(補正間移動距離)を車速パルス信号に基づき求めると共に、2つ目の料金所32で取得した絶対高度H2と2つ目の料金所32に到達したときに算出していた高度(Δh+H1)との差(H2−(Δh+H1))を自車位置計算部6bで算出し、求めた補正間移動距離に対する差の割合をナビゲーション装置1の高度算出に係る誤差として算出するようにしてもよい。
【0051】
このように算出した誤差は、ナビゲーション装置1の高度算出の際に生じる移動距離に対する誤差傾向を判断するものとして利用できる。また、この誤差を算出した後は、移動距離に応じて誤差がキャンセルされる指数を自車位置計算部6bで随時求め、この指数を用いてナビゲーション装置1が算出した高度を修正することで、料金所の通過後でナビゲーション装置1が算出する高度の精度を向上させられる。
【0052】
さらに、上述の説明では、ETC装置を備えた料金所で絶対高度を取得するようにしたが、今後、料金所以外の箇所でDSRCにより車両へ向けて情報が送信されるようなインフラが整えば、DSRCにより情報を送信する場所の絶対的な高度を測定し、その測定した高度を測定した場所(緯度経度)に対応付けて含ませた地図データベースを作成し、この地図データベースをナビゲーション装置1の記憶部11に記憶させてもよい。このようにすることで、料金所以外のDSRCで情報を送信する場所でも高度の補正処理を行えるようになり、ナビゲーション装置1で得られる高度の精度を一層高められる。
【0053】
また、地図データベースに含まれる各種道路に対しても高度の情報(値)を付与することで、ナビゲーション装置1が算出(修正も含む)又は補正により得た高度をマップマッチング処理に適宜利用してもよい。例えば、図7(a)に示す地図50上の道路51に対して高度が付与されているとした場合、ナビゲーション装置1が算出した二次元的な車両を示す位置Rが道路51に面したエリア52内であったとする。
【0054】
この場合、マップマッチング処理を行うとすれば、車両を示す位置Rを道路51に合致させることになるが、マップマッチング処理を行う際に、位置Rにおけるナビゲーション装置1が得ている高度とマップマッチング先となる道路51の高度をナビゲーション装置1の位置検出処理部6で比較し、両高度が所定の値(例えば、3m又は5m等)のレベルを越えて相異すれば、マップマッチング処理を行わないと判断し、算出した位置Rをエリア52内に留まらせるようにする。このような処理を行うことで、例えば、車両が道路に面した立体駐車場内の1階より上の階に位置するときは、誤ったマップマッチング処理を防止でき、現実の車両位置を反映した表示形態を確保できる。
【0055】
さらに、図7(b)に示す地図55における高架道路56と高架下の道路57とが併行(近接)している場所でマップマッチング処理を行う場合でも、各道路56、57の少なくともいずれか一方に高度の情報(値)が付与されているとき、マップマッチング先の特定にナビゲーション装置1が算出(修正も含む)又は補正により得た高度を利用できる。
【0056】
具体的には、各道路56、57の両方に高度が付与されていれば、ナビゲーション装置1が得た高度と各道路56、57の高度とをナビゲーション装置1の位置検出処理部6で比較し、差が少ない方をマップマッチング先として特定できる。また、各道路56、57の片方のみに高度が付与されていれば、その高度とナビゲーション装置1が得た高度とが同等であれば、高度が付与された方の道路をマップマッチング先にでき、両高度が同等でなければ、高度が付与されていない方の道路をマップマッチング先として特定でき、マップマッチング精度の向上にも貢献できる。
【図面の簡単な説明】
【0057】
【図1】本発明の実施形態に係るナビゲーション装置のブロック図である。
【図2】ETC装置を備えた料金所を本実施形態のナビゲーション装置を搭載した車両が通過する状態を示す斜視図である。
【図3】(a)は地図データベースに含まれる地図の一例を示す概略図であり、(b)は料金所の高度を含む料金所位置テーブルを示す図表である。
【図4】移動する車両に対する傾斜角及び移動距離等を示す概略図である。
【図5】算出した高度の補正に係る一連の処理手順を示すフローチャートである。
【図6】高架の有料道路を車両が通過する場合に得られるナビゲーション装置が得る高度を示す概略図である。
【図7】(a)は、マップマッチング処理を行わない一例を表す地図の概略図であり、(b)は近接する複数の道路からマップマッチング先を特定する一例を表す地図の概略図である。
【符号の説明】
【0058】
1 ナビゲーション装置
2 GPS受信機
3 ETC信号受信機
4 3Dジャイロセンサー
4a 加速度センサー
4b 振動ジャイロ
5 車両側接続コネクタ
6 位置検出処理部
6a センサーデータ処理部
6b 自車位置計算部
6c マップマッチング処理部
20 地図データベース
30、32 料金所
31 ETC装置
31a、33a 送信アンテナ
40、50、55 地図
41、51、56、57 道路
S 車両
θ 傾斜角
【特許請求の範囲】
【請求項1】
移動距離を算出する移動距離算出手段と、移動方向の水平線に対する傾斜角を検出する傾斜角検出手段と、前記移動距離算出手段が算出した移動距離及び前記傾斜角検出手段が検出した傾斜角に基づき高度を算出する高度算出手段とを備える高度算出装置において、
専用狭域通信で送信される情報を受信することが可能な場所に対応付けて該場所の高度を有する地図データベースと、
専用狭域通信を通じて情報を受信する受信手段と、
前記受信手段が情報を受信した場合、受信した場所の高度を前記地図データベースより特定する特定手段と、
該特定手段が特定した高度に基づいて前記高度算出手段が算出した高度を補正する高度補正手段と
を備えることを特徴とする高度算出装置。
【請求項2】
前記高度算出手段は、前記高度補正手段が高度を補正した場合、補正した高度を基準値にして該基準値に対する高度を算出するようにしてある請求項1に記載の高度算出装置。
【請求項3】
前記高度補正手段が複数回の補正を行った場合、前記移動距離算出手段は補正を行った場所間の補正間移動距離を算出するようにしてあり、
補正した高度及び補正を行った場所に対して前記高度算出手段が算出した高度の差を算出する高度差算出手段と、
該高度差算出手段が算出した高度の差及び前記補正間移動距離に基づき所定距離に対する誤差を算出する誤差算出手段と、
該誤差算出手段が算出した誤差に基づいて、前記高度補正手段が補正を行ってから前記高度算出手段が算出する高度を修正する高度修正手段と
を備える請求項1又は請求項2に記載の高度算出装置。
【請求項4】
位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、
請求項1乃至請求項3のいずれか1つに記載の高度算出装置と、
該高度算出装置の前記高度算出手段が算出した高度又は前記高度補正手段が補正した高度に基づいてマップマッチング処理を行うか否かを判断する判断手段と
を備えることを特徴とするナビゲーション装置。
【請求項5】
位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、
請求項1乃至請求項3のいずれか1つに記載の高度算出装置と、
高度に差がある複数の道路が近接する場所で前記マップマッチング手段がマップマッチング処理を行う場合、前記高度算出装置の前記高度算出手段が算出した高度又は前記高度補正手段が補正した高度に基づいてマップマッチング先の道路を特定する手段と
を備えることを特徴とするナビゲーション装置。
【請求項1】
移動距離を算出する移動距離算出手段と、移動方向の水平線に対する傾斜角を検出する傾斜角検出手段と、前記移動距離算出手段が算出した移動距離及び前記傾斜角検出手段が検出した傾斜角に基づき高度を算出する高度算出手段とを備える高度算出装置において、
専用狭域通信で送信される情報を受信することが可能な場所に対応付けて該場所の高度を有する地図データベースと、
専用狭域通信を通じて情報を受信する受信手段と、
前記受信手段が情報を受信した場合、受信した場所の高度を前記地図データベースより特定する特定手段と、
該特定手段が特定した高度に基づいて前記高度算出手段が算出した高度を補正する高度補正手段と
を備えることを特徴とする高度算出装置。
【請求項2】
前記高度算出手段は、前記高度補正手段が高度を補正した場合、補正した高度を基準値にして該基準値に対する高度を算出するようにしてある請求項1に記載の高度算出装置。
【請求項3】
前記高度補正手段が複数回の補正を行った場合、前記移動距離算出手段は補正を行った場所間の補正間移動距離を算出するようにしてあり、
補正した高度及び補正を行った場所に対して前記高度算出手段が算出した高度の差を算出する高度差算出手段と、
該高度差算出手段が算出した高度の差及び前記補正間移動距離に基づき所定距離に対する誤差を算出する誤差算出手段と、
該誤差算出手段が算出した誤差に基づいて、前記高度補正手段が補正を行ってから前記高度算出手段が算出する高度を修正する高度修正手段と
を備える請求項1又は請求項2に記載の高度算出装置。
【請求項4】
位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、
請求項1乃至請求項3のいずれか1つに記載の高度算出装置と、
該高度算出装置の前記高度算出手段が算出した高度又は前記高度補正手段が補正した高度に基づいてマップマッチング処理を行うか否かを判断する判断手段と
を備えることを特徴とするナビゲーション装置。
【請求項5】
位置情報を受信する位置情報受信手段と、該位置情報受信手段が受信した位置情報に基づいて算出した位置を地図上の道路に合致させるマップマッチング処理を行うマップマッチング手段とを備えるナビゲーション装置において、
請求項1乃至請求項3のいずれか1つに記載の高度算出装置と、
高度に差がある複数の道路が近接する場所で前記マップマッチング手段がマップマッチング処理を行う場合、前記高度算出装置の前記高度算出手段が算出した高度又は前記高度補正手段が補正した高度に基づいてマップマッチング先の道路を特定する手段と
を備えることを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2006−275619(P2006−275619A)
【公開日】平成18年10月12日(2006.10.12)
【国際特許分類】
【出願番号】特願2005−92147(P2005−92147)
【出願日】平成17年3月28日(2005.3.28)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成18年10月12日(2006.10.12)
【国際特許分類】
【出願日】平成17年3月28日(2005.3.28)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]