
高所狭隘部点検装置
【課題】高所延伸部材から張り出した電磁石の張り出し手段であるサーボモータの電源が喪失した場合であっても電磁石を元の位置に戻すことができ、高所延伸部材を下部まで下げることができる高所狭隘部点検装置を提供することである。
【解決手段】歯車装置24は、サーボモータ23の回転力により、高所延伸部材20の上端近傍に備えられた電磁石22を高所狭隘部の構造物側に張り出し、構造物29に接触させ、電磁石22は通電により、高所延伸部材20を高所狭隘部の構造物に固定する。そして、電磁石22のサーボモータ23の電源喪失時には、第1のワイヤ25は歯車装置24の歯車の係合を機械的に外し、その後に、第2のワイヤ26は高所狭隘部の構造物29側に張り出した電磁石22を高所延伸部材20の元の位置に戻す。そして、高所延伸部材20を下部まで下げる。
【解決手段】歯車装置24は、サーボモータ23の回転力により、高所延伸部材20の上端近傍に備えられた電磁石22を高所狭隘部の構造物側に張り出し、構造物29に接触させ、電磁石22は通電により、高所延伸部材20を高所狭隘部の構造物に固定する。そして、電磁石22のサーボモータ23の電源喪失時には、第1のワイヤ25は歯車装置24の歯車の係合を機械的に外し、その後に、第2のワイヤ26は高所狭隘部の構造物29側に張り出した電磁石22を高所延伸部材20の元の位置に戻す。そして、高所延伸部材20を下部まで下げる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、構造物の狭隘部の空間に高所に向かって延伸する高所延伸部材を延伸させて狭隘部にある検査対象物を点検する高所狭隘部点検装置に関する。
【背景技術】
【0002】
原子力発電所では、原子炉圧力容器(RPV)の下部に接続しているドレン配管を定期的に点検している。このドレン配管のベンド部(第1エルボ)は、炉水の流入方向が変化する変流部位であり直線部分よりも配管内面における流体条件が厳しいため、その点検が重要である。
【0003】
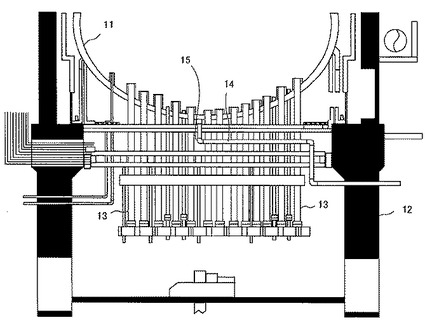
図8は原子炉圧力容器ドレン配管のベンド部の周囲の概略縦断面図である。原子力発電所の原子炉圧力容器(RPV)11の下側にはペデスタル12が設けられ、このペデスタル12内には、原子炉圧力容器11に固定された百数十個の制御棒駆動機構(CRD)ハウジング13が林立している。また、ペデスタル12内には原子炉圧力容器ドレン配管14が設けられ、この原子炉圧力容器ドレン配管14のベンド部(第1エルボ)15はペデスタル12のほぼ中心部に位置している。
【0004】
このような原子炉圧力容器ドレン配管のベンド部の点検に当たっては、CRDハウジング同士の間隔やCRD操作用のケーブル同士の間隔が狭く、また、周囲の雰囲気線量が高いため、人手により直接点検することは極めて困難である。
【0005】
狭隘部に位置する検査対象物を検査するものとして、伸縮可能な棒状の支持部材の上端に、放射線検出器が長手方向に沿って列状に配列された放射線検出部を接続し、垂直下方から、この放射線検出部を検査対象物に接近させ、狭隘部に位置する検査対象物を広い範囲で撮像できるようにしたものがある(例えば、特許文献1参照)。この特許文献1のものでは、支持部材を延伸(伸張)して放射線検出部を上昇させるので、その上方(上端近傍)での揺れがあると撮像画像にぶれが生じる。
【0006】
そこで、出願人は、高所に向かって延伸する高所延伸部材を周囲の構造物に電磁石で吸着固定し、周囲の構造物に荷重をかけることなく、狭隘部に存在する対象物をぶれなく撮像可能にした高所延伸部材の固定構造およびその固定方法を開発し、特願2010−22510号として特許出願した。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−47441号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特願2010−22510号のものでは、周囲の構造物に荷重をかけることなく、狭隘部に存在する対象物をぶれなく撮像できるので優れたものであるが、電磁石を高所延伸部材から周囲の構造物に向けて張り出し吸着固定するので、万一、電磁石の張り出し手段であるサーボモータの電源が故障して電磁石を元の位置に戻せなくなった場合に、高所延伸部材を下げようとすると張り出した電磁石が周囲の構造物と干渉し、高所延伸部材を下げることができなくなる恐れがある。
【0009】
本発明の目的は、高所延伸部材から張り出した電磁石の張り出し手段であるサーボモータの電源が喪失した場合であっても電磁石を元の位置に戻すことができ、高所延伸部材を下部まで下げることができる高所狭隘部点検装置を提供することである。
【課題を解決するための手段】
【0010】
請求項1の発明に係る高所狭隘部点検装置は、構造物の狭隘部の空間に高所に向かって延伸する高所延伸部材を延伸させて狭隘部にある検査対象物を点検する高所狭隘部点検装置において、前記高所延伸部材の上端近傍に備えられ高所延伸部材を高所狭隘部の構造物に固定する電磁石と、サーボモータの回転力により前記電磁石を高所狭隘部の構造物側に張り出し前記構造物に接触させる歯車装置と、前記歯車装置の歯車の係合を機械的に外す第1のワイヤと、高所狭隘部の構造物側に張り出した前記電磁石を前記高所延伸部材の元の位置に戻す第2のワイヤとを備えたことを特徴とする。
【0011】
請求項2の発明に係る高所狭隘部点検装置は、請求項1の発明において、前記歯車装置は、前記サーボモータの回転軸に取り付けられたピニオンと、先端部に前記電磁石が取り付けられ前記ピニオンと係合し前記ピニオンが回転したとき前記電磁石を高所狭隘部の構造物側に張り出すラックとを備え、前記第1のワイヤは前記サーボモータの取付位置を引き下げて前記ピニオンと前記ラックとの係合を外すことを特徴とする。
【0012】
請求項3の発明に係る高所狭隘部点検装置は、請求項1の発明において、前記歯車装置は、前記サーボモータの回転軸に取り付けられたウォームギアと、前記ウォームギアに係合し前記電磁石が軸の径方向に突出して取り付けられた回転軸を回転させ前記電磁石を高所狭隘部の構造物側に張り出すウォームホイールとを備え、前記第1のワイヤは前記回転軸の位置をずらせて前記ウォームギアと前記ウォームホイールとの係合を外すことを特徴とする。
【発明の効果】
【0013】
請求項1の発明によれば、電磁石を高所狭隘部の構造物側に張り出し構造物に接触させる歯車装置の歯車の係合を第1のワイヤで機械的に外し、電磁石を第2のワイヤで高所延伸部材の元の位置に戻すので、電磁石の張り出し手段であるサーボモータの電源が喪失した場合であっても電磁石を元の位置に戻すことができ、高所延伸部材を下部まで下げることができる。
【0014】
請求項2の発明によれば、第1のワイヤは、サーボモータの取付位置を引き下げてサーボモータの回転軸に取り付けられたピニオンと、電磁石を高所狭隘部の構造物側に張り出すラックとの係合を外すので、第2のワイヤによりラックを自由に移動できる状態を形成でき、サーボモータが動かない場合であっても、電磁石を元の位置に戻すことができる。
【0015】
請求項3の発明によれば、第1のワイヤは、電磁石が軸の径方向に突出して取り付けられたウォームホイールの回転軸の位置をずらせて、ウォームホイールとサーボモータのウォームギアとの係合を外すので、第2のワイヤによりウォームホイールの回転軸を自由に回転させる状態を形成でき、サーボモータが動かない場合であっても、電磁石を元の位置に戻すことができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る高所狭隘部点検装置の概略構成図。
【図2】本発明の実施形態に係る高所狭隘部点検装置の歯車装置がピニオン及びラックである場合における電磁石を構造物に付着させる手順の一例を示す手順図。
【図3】図2に示した第1のワイヤ及び第2のワイヤを用いて構造物側に張り出していた電磁石を高所延伸部材側の元の位置に収納する手順の一例を示す手順図。
【図4】図3に示した歯車装置がピニオン及びラックである場合のサーボモータと歯車装置との係合を外す過程の説明図。
【図5】本発明の実施形態に係る高所狭隘部点検装置の歯車装置がウォームギア及びウォームホイールである場合における電磁石を構造物に付着させる手順の一例を示す手順図。
【図6】図5に示した第1のワイヤ及び第2のワイヤを用いて構造物側に張り出していた電磁石を高所延伸部材側の元の位置に収納する手順の一例を示す手順図。
【図7】図5に示した歯車装置がウォームギア及びウォームホイールである場合のサーボモータと歯車装置との係合を外す過程の説明図。
【図8】原子炉圧力容器ドレン配管のベンド部の周囲の概略縦断面図。
【発明を実施するための形態】
【0017】
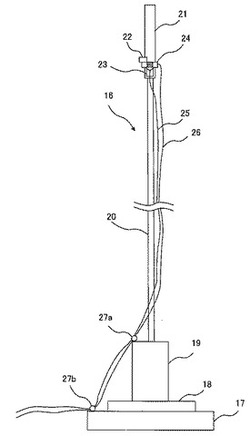
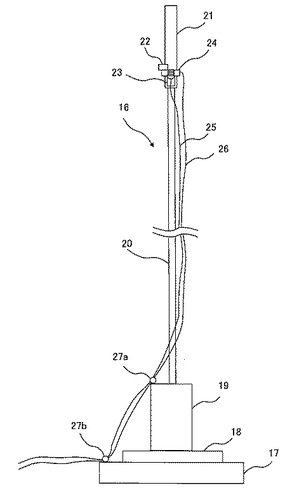
以下、本発明の実施形態を説明する。図1は本発明の実施形態に係る高所狭隘部点検装置の概略構成図である。高所狭隘部点検装置16は、台座部17に水平方向駆動部18を搭載するとともに水平方向駆動部18に上下方向駆動部19を搭載して構成される。台座部17は図示省略の車輪により検査対象物の下部に移動し、その箇所で固定される。水平方向駆動部18は図示省略の縦横方向のレール上を移動して、縦横の水平方向の位置決めを行うものである。また、上下方向駆動部19は高所延伸部材(シャフト)20を搭載し、高所延伸部材20を上下方向に伸縮させるものである。高所延伸部材20の先端部にはセンサ搭載部21が取り付けられ、このセンサ搭載部21に撮像装置が搭載される。例えば、ガンマ線照射手段またはガンマ線センサが搭載される。
【0018】
高所延伸部材20の上端近傍、例えば、センサ搭載部21の下部には、高所延伸部材20を高所狭隘部の構造物に固定する電磁石22が設けられている。電磁石22は、電磁石22の張り出し手段であるサーボモータ23の回転力が歯車装置24に伝達されて高所狭隘部の構造物側に張り出すようになっている。そして、電磁石22は高所狭隘部の構造物に接触して、電源が投入されると構造物に付着する。なお、図1では、歯車装置24がピニオン及びラックである場合を示している。また、サーボモータ23や歯車装置24はセンサ搭載部21の下部に設けられている場合を示している。
【0019】
また、歯車装置24の歯車の係合を機械的に外す第1のワイヤ25と、高所狭隘部の構造物側に張り出した電磁石22を高所延伸部材20側の元の位置に戻す第2のワイヤ26とが設けられている。第1のワイヤ25及び第2のワイヤ26は、電磁石22の張り出し手段であるサーボモータ23の電源が喪失したときに引っ張って操作される。まず、第1のワイヤ25を引っ張ってサーボモータ23と歯車装置24との係合を外し、その状態で、第2のワイヤ26を引っ張って電磁石22を高所延伸部材20側の元の位置に戻す。
【0020】
図1では、第1のワイヤ25及び第2のワイヤ26は剥き出し状態で高所延伸部材20に沿わせて上下方向駆動部19の滑車27a及び台座部17の滑車27bを経由して引き出されているが、高所延伸部材20に沿って案内管を設けて、第1のワイヤ25及び第2のワイヤ26を案内管を通して引き出すようにしてもよい。案内管を設けた場合には、第1のワイヤ25や第2のワイヤ26が狭隘部の構造物に引っ掛かることがなくなる。
【0021】
図2は、本発明の実施形態に係る高所狭隘部点検装置を構造物に付着させる手順の一例を示す手順図である。この一例では、歯車装置24がピニオン及びラックであり、点検対象物28が原子炉圧力容器のドレン配管ベンド部(第1エルボ)である場合を示している。
【0022】
図2(a)に示すように、高所延伸部材20の先端部にはセンサ搭載部21が取り付けられ、センサ搭載部21の下部には、電磁石22、サーボモータ23、歯車装置24が搭載されている。歯車装置24は、サーボモータ23の回転軸に取り付けられたピニオン30と、このピニオン30に係合するラック31とから構成されている。
【0023】
また、第1のワイヤ25がサーボモータ23に取り付けられ、第2のワイヤ26が歯車装置24に取り付けられている。このような高所延伸部材20を上方(矢印A1方向)に延伸させる。つまり、高所延伸部材20に取り付けられたセンサ搭載部21が点検対象物28の位置になるまで延伸させる。
【0024】
センサ搭載部21が点検対象物28の位置になると、図2(b)に示すように、電磁石22と高所狭隘部の構造物29との位置合わせを行い、サーボモータ23の回転軸に取り付けられた歯車装置24のピニオン30を回転させて、歯車装置24のラック31を駆動する。これにより、図2(c)の矢印A2に示すように、ラック31に取り付けられた電磁石22が構造物29側に張り出す。そして、図2(d)に示すように、電磁石22を構造物29に接触させ、図2(e)に示すように、電磁石22に電源を供給して磁力を発生させる。これにより、電磁石22は構造物29に付着し、高所延伸部材20は高所狭隘部の構造物29に固定される。
【0025】
このようにして、センサ搭載部21を先端部に取り付けた高所延伸部材20は、高所狭隘部の構造物29に周囲の構造物に荷重をかけることなく固定されるので、センサ搭載部21の撮像装置は狭隘部に存在する点検対象物28をぶれなく撮像できる。
【0026】
点検対象物28の撮像が終了すると、図2(a)〜図2(e)の逆の手順を行い、高所延伸部材20を下方に縮退させる。すなわち、電磁石22に供給する電源を停止して構造物29への付着を解除し、サーボモータ23を逆回転させてピニオン30を逆回転させ、ラック31を逆方向に移動させる。これにより、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する。そして、高所延伸部材20を下方に縮退させる。
【0027】
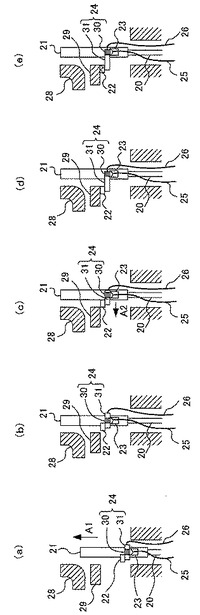
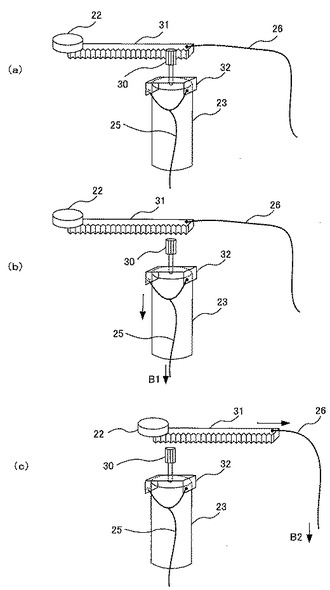
図3は、第1のワイヤ25及び第2のワイヤ26を用いて構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する手順の一例を示す手順図である。第1のワイヤ25及び第2のワイヤ26を用いるのは、高所延伸部材20を下方に縮退させる際にサーボモータ23の電源が喪失して、サーボモータ23により、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納することができなくなった場合である。
【0028】
電磁石22に供給する電源を停止して電磁石22の構造物29への付着を解除し、その後に、サーボモータ23により、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納しようとした場合に、サーボモータ23の電源が喪失していると、サーボモータ23が動作しない。その場合には、図3(a)に示すように、第1のワイヤ25を下方(矢印B1方向)に引っ張る。第1のワイヤ25はサーボモータ23の取付位置を引き下げて、ピニオン30とラック31との係合を外す。
【0029】
サーボモータ23は、センサ搭載部21の下部の長穴にサーボモータ23から突出した突起部が挿入されて取り付けられており、通常の状態では、サーボモータ23は突起部と長穴との摩擦力により係止しており、第1のワイヤ25により摩擦力(係止力)より大きい引き下げ力が加えられると、突起部が長穴をスライドして下方に移動する。これにより、サーボモータ23の取付位置が下方に位置し、サーボモータ23の回転軸のピニオン30と、電磁石22を搭載したラック31との係合を外す。
【0030】
第1のワイヤ25により、ピニオン30とラック31との係合が外れると、ラック31は自由に移動できる状態となる。そこで、図3(b)に示すように、第2のワイヤ26を下方(矢印B2方向)に引っ張る。ラック31は、センサ搭載部21の下部に設けられた横方向の案内溝に沿ってスライドできるように案内溝に挿入されているので、第2のワイヤ26を下方に引っ張ることにより、図3(c)の矢印C1に示すように、ラック31は高所延伸部材20側に移動する。そして、図3(d)に示すように、電磁石22が元の位置まで戻ると第2のワイヤ26を下方に引っ張ることを停止する。なお、案内溝に電磁石22が元の位置まで戻ったときに、ラック31の移動を阻止するストッパを設けておく。これにより、第2のワイヤ26を過大に下方に引っ張りラック31が元の位置以上に移動することを防止できる。これにより、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する。
【0031】
このようにして、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納すると、図3(e)に示すように、高所延伸部材20を下方(矢印C2方向)に縮退させる。これにより、サーボモータ23が動かない場合であっても、電磁石22を元の位置に戻すことができ、高所延伸部材20を安全に下部まで下げることができる。
【0032】
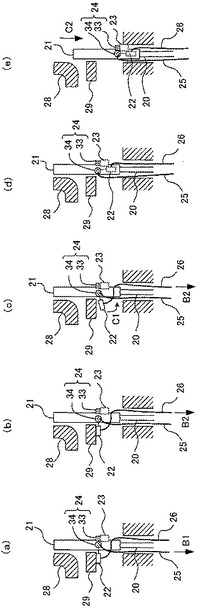
図4は、図3に示した歯車装置がピニオン及びラックである場合のサーボモータと歯車装置との係合を外す過程の説明図である。図4では、高所延伸部材20やセンサ搭載部21の図示を省略している。
【0033】
図4(a)は、電磁石22に供給する電源を停止して電磁石22の構造物29への付着を解除した状態を示している。この状態では、電磁石22は構造物29と接触しており、また、サーボモータ23の回転軸のピニオン30と、電磁石22を搭載したラック31とは係合している。サーボモータ23の上部には金具32が取り付けられており、この金具32に第1のワイヤ25が取り付けられている。また、ラック31の電磁石22を搭載下側と反対側に第2のワイヤ26が取り付けられている。
【0034】
第1のワイヤ25及び第2のワイヤ26を用いて、電磁石22を高所延伸部材20側の元の位置に戻すには、図4(b)に示すように、第1のワイヤ25を下方(矢印B1方向)に引っ張る。前述したように、サーボモータ23は、センサ搭載部21の下部の長穴にサーボモータ23から突出した突起部が挿入されて取り付けられており、通常の状態では、サーボモータ23は突起部と長穴との摩擦力により係止しており、第1のワイヤ25により、その摩擦力(係止力)より大きい引き下げ力が加えられると、突起部が長穴をスライドして下方に移動する。これにより、図4(b)に示すように、サーボモータ23の取付位置が下方に位置し、サーボモータ23の回転軸のピニオン30と、電磁石22を搭載したラック31との係合が外れる。
【0035】
そして、ピニオン30とラック31との係合が外れた後に、図4(c)に示すように、第2のワイヤ26を下方(矢印B2方向)に引っ張る。前述したように、ラック31は、センサ搭載部21の下部に設けられた横方向の案内溝に沿ってスライドできるように案内溝に挿入されているので、第2のワイヤ26を下方に引っ張ることにより、図4(c)に示すように、ラック31は高所延伸部材20側に移動し、電磁石22を元の位置に戻す。
【0036】
以上の説明は、歯車装置24がピニオン30及びラック31である場合について説明したが、歯車装置24として、サーボモータ23の回転軸に取り付けられたウォームギアと、このウォームギアに係合するウォームホイールとすることもできる。
【0037】
図5は、歯車装置24がウォームギア及びウォームホイールである場合の本発明の実施形態に係る高所狭隘部点検装置を構造物に付着させる手順の一例を示す手順図である。図2の場合と同様に、点検対象物28は原子炉圧力容器のドレン配管ベンド部(第1エルボ)である場合を示している。図2と同一要素には同一符号を付し重複する説明は省略する。
【0038】
図5(a)に示すように、高所延伸部材20の先端部にはセンサ搭載部21が取り付けられ、センサ搭載部21の下部には、電磁石22、サーボモータ23、歯車装置24が搭載されている。歯車装置24は、サーボモータ23の回転軸に取り付けられたウォームギア33と、このウォームギア33に係合するウォームホイール34とから構成されている。ウォームギア34の回転軸には電磁石22が取り付けられている。
【0039】
また、第1のワイヤ25はウォームホール34の回転軸の位置をずらす偏心カムに取り付けられ、第2のワイヤ26は電磁石22に取り付けられている。このような高所延伸部材20を矢印A1に示すように、高所延伸部材20に取り付けられたセンサ搭載部21が点検対象物28の位置になるまで上方に延伸させる。
【0040】
センサ搭載部21が点検対象物28の位置になると、図5(b)に示すように、ウォームホイール34が回転軸を中心に回転したときに、電磁石22が構造物29に接触するように、ウォームホイール34の回転軸と高所狭隘部の構造物29との位置合わせを行う。そして、図5(c)の矢印A2に示すように、サーボモータ23の回転軸に取り付けられた歯車装置24のウォームギア33を回転させて、歯車装置24のウォームホイール34を回転させる。これにより、ウォームホイール34の回転軸に取り付けられた電磁石22を構造物29側に張り出す。そして、図5(d)に示すように、電磁石22を構造物29に接触させ、図5(e)に示すように、電磁石22に電源を供給して磁力を発生させる。これにより、電磁石22は構造物29に付着し、高所延伸部材20は高所狭隘部の構造物29に固定される。
【0041】
このようにして、センサ搭載部21を先端部に取り付けた高所延伸部材20は、高所狭隘部の構造物29に周囲の構造物に荷重をかけることなく固定されるので、センサ搭載部21の撮像装置は狭隘部に存在する点検対象物28をぶれなく撮像できる。
【0042】
点検対象物28の撮像が終了すると、図5(a)〜図5(e)の逆の手順を行い、高所延伸部材20を下方に縮退させる。すなわち、電磁石22に供給する電源を停止して構造物29への付着を解除し、サーボモータ23を逆回転させてウォームギア33によりウォームホイール34を逆回転させる。これにより、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する。そして、高所延伸部材20を下方に縮退させる。
【0043】
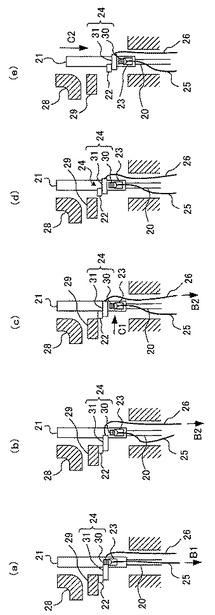
図6は、歯車装置24がウォームギア33及びウォームホイール34である場合の第1のワイヤ25及び第2のワイヤ26を用いて構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する手順の一例を示す手順図である。
【0044】
電磁石22に供給する電源を停止して電磁石22の構造物29への付着を解除し、図6(a)に示すように、第1のワイヤ25を下方(矢印B1)に引っ張る。第1のワイヤ25は、ウォームホール34の回転軸の位置をずらす偏心カムに取り付けられているので、第1のワイヤ25を下方に引っ張ることで偏心カムが回転し、ウォームホール34の回転軸の位置がずれる。これにより、ウォームギア33とウォームホイール34との係合が外れる。
【0045】
第1のワイヤ25により、ウォームギア33とウォームホイール34との係合が外れると、ウォームホイール34は自由に回転できる状態となる。そこで、図6(b)に示すように、第2のワイヤ26を下方(矢印B2方向)に引っ張る。
【0046】
第2のワイヤ26は電磁石22に取り付けられているので、第2のワイヤ26を下方に引っ張ることにより、図6(c)に示すように、電磁石22はウォームホイール34の回転軸を中心に回転し、高所延伸部材20側に移動する。そして、図6(d)に示すように、電磁石22が元の位置まで戻ると第2のワイヤ26を下方に引っ張ることを停止する。これにより、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する。
【0047】
このようにして、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納すると、図6(e)に示すように、高所延伸部材20を下方(矢印C2方向)に縮退させる。これにより、サーボモータ23が動かない場合であっても、電磁石22を元の位置に戻すことができ、高所延伸部材20を安全に下部まで下げることができる。
【0048】
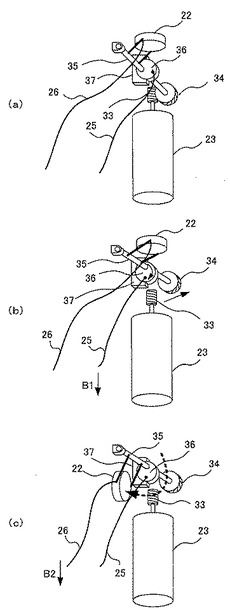
図7は、図6に示した歯車装置がウォームギア及びウォームホイールである場合のサーボモータと歯車装置との係合を外す過程の説明図である。図7では、高所延伸部材20やセンサ搭載部21の図示を省略している。
【0049】
図7(a)は、電磁石22に供給する電源を停止して電磁石22の構造物29への付着を解除した状態を示している。この状態では、電磁石22は構造物29と接触しており、また、サーボモータ23の回転軸のウォームギア33と、回転軸35に電磁石22を搭載したウォームホイール34とは係合している。
【0050】
ウォームホイール34の回転軸35には偏心カム36が取り付けられており、この偏心カム36は偏心カム支持部37の支持面を摺動する。また、ウォームホイール34の回転軸35は、偏心カム36の貫通孔に回転自在に支持されている。また、電磁石22はウォームホイール34の回転軸35に取り付けられており、ウォームホイール34の回転軸35を中心にして回転し、構造物29の側に張り出したり高所延伸部材20側の元の位置に戻ったりする。そして、第1のワイヤ25は偏心カム36に取り付けられており、第2のワイヤ26は電磁石22に取り付けられている。
【0051】
第1のワイヤ25及び第2のワイヤ26を用いて、電磁石22を高所延伸部材20側の元の位置に戻すには、図7(b)に示すように、第1のワイヤ25を下方(矢印B1方向)に引っ張る。これにより、偏心カム36が偏心カム支持部37の支持面を摺動し、ウォームホイール34の回転軸35の位置がずれる。従って、サーボモータ23の回転軸のウォームギア33と、回転軸35に電磁石22を搭載したウォームホイール34との係合が外れる。
【0052】
そして、ウォームギア33とウォームホイール34との係合が外れた後に、図7(c)に示すように、第2のワイヤ26を下方(矢印B2方向)に引っ張る。前述したように、ウォームホイール34の回転軸35は、偏心カム36の貫通孔に回転自在に支持されているので、第2のワイヤ26を下方(矢印B2方向)に引っ張ると、図7(c)に示すように、電磁石22はウォームホイール34の回転軸35の回転に伴って高所延伸部材20側に移動し電磁石22を元の位置に戻す。
【0053】
以上述べたように、本発明の実施形態では、電磁石22を収納するために第1のワイヤ25と第2のワイヤ26とを備え、第1のワイヤ25を下部から引くことにより、サーボモータ23と電磁石22との間に介在する歯車機構24の噛み合わせを外し、その後に、第2のワイヤ26を下部から引くことにより、電磁石22を初期の元の位置まで引き込む。従って、サーボモータ23の電源が喪失した場合であっても、電磁石22を元の位置まで引き込むことができるので、高所延伸部材20を安全に下部まで下げることができる。
【符号の説明】
【0054】
11…原子炉圧力容器(RPV)、12…ペデスタル、13…制御棒駆動機構(CRD)ハウジング、14…原子炉圧力容器ドレン配管、15…ベンド部(第1エルボ)、16…高所狭隘部点検装置、17…台座部、18…水平方向駆動部、19…上下方向駆動部、20…高所延伸部材、21…センサ搭載部、22…電磁石、23…サーボモータ、24…歯車装置、25…第1のワイヤ、26…第2のワイヤ、27…滑車、28…点検対象物、29…構造物、30…ピニオン、31…ラック、32…金具、33…ウォームギア、34…ウォームホイール、35…ウォームホイールの回転軸、36…偏心カム、37…偏心カム支持部
【技術分野】
【0001】
本発明は、構造物の狭隘部の空間に高所に向かって延伸する高所延伸部材を延伸させて狭隘部にある検査対象物を点検する高所狭隘部点検装置に関する。
【背景技術】
【0002】
原子力発電所では、原子炉圧力容器(RPV)の下部に接続しているドレン配管を定期的に点検している。このドレン配管のベンド部(第1エルボ)は、炉水の流入方向が変化する変流部位であり直線部分よりも配管内面における流体条件が厳しいため、その点検が重要である。
【0003】
図8は原子炉圧力容器ドレン配管のベンド部の周囲の概略縦断面図である。原子力発電所の原子炉圧力容器(RPV)11の下側にはペデスタル12が設けられ、このペデスタル12内には、原子炉圧力容器11に固定された百数十個の制御棒駆動機構(CRD)ハウジング13が林立している。また、ペデスタル12内には原子炉圧力容器ドレン配管14が設けられ、この原子炉圧力容器ドレン配管14のベンド部(第1エルボ)15はペデスタル12のほぼ中心部に位置している。
【0004】
このような原子炉圧力容器ドレン配管のベンド部の点検に当たっては、CRDハウジング同士の間隔やCRD操作用のケーブル同士の間隔が狭く、また、周囲の雰囲気線量が高いため、人手により直接点検することは極めて困難である。
【0005】
狭隘部に位置する検査対象物を検査するものとして、伸縮可能な棒状の支持部材の上端に、放射線検出器が長手方向に沿って列状に配列された放射線検出部を接続し、垂直下方から、この放射線検出部を検査対象物に接近させ、狭隘部に位置する検査対象物を広い範囲で撮像できるようにしたものがある(例えば、特許文献1参照)。この特許文献1のものでは、支持部材を延伸(伸張)して放射線検出部を上昇させるので、その上方(上端近傍)での揺れがあると撮像画像にぶれが生じる。
【0006】
そこで、出願人は、高所に向かって延伸する高所延伸部材を周囲の構造物に電磁石で吸着固定し、周囲の構造物に荷重をかけることなく、狭隘部に存在する対象物をぶれなく撮像可能にした高所延伸部材の固定構造およびその固定方法を開発し、特願2010−22510号として特許出願した。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−47441号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特願2010−22510号のものでは、周囲の構造物に荷重をかけることなく、狭隘部に存在する対象物をぶれなく撮像できるので優れたものであるが、電磁石を高所延伸部材から周囲の構造物に向けて張り出し吸着固定するので、万一、電磁石の張り出し手段であるサーボモータの電源が故障して電磁石を元の位置に戻せなくなった場合に、高所延伸部材を下げようとすると張り出した電磁石が周囲の構造物と干渉し、高所延伸部材を下げることができなくなる恐れがある。
【0009】
本発明の目的は、高所延伸部材から張り出した電磁石の張り出し手段であるサーボモータの電源が喪失した場合であっても電磁石を元の位置に戻すことができ、高所延伸部材を下部まで下げることができる高所狭隘部点検装置を提供することである。
【課題を解決するための手段】
【0010】
請求項1の発明に係る高所狭隘部点検装置は、構造物の狭隘部の空間に高所に向かって延伸する高所延伸部材を延伸させて狭隘部にある検査対象物を点検する高所狭隘部点検装置において、前記高所延伸部材の上端近傍に備えられ高所延伸部材を高所狭隘部の構造物に固定する電磁石と、サーボモータの回転力により前記電磁石を高所狭隘部の構造物側に張り出し前記構造物に接触させる歯車装置と、前記歯車装置の歯車の係合を機械的に外す第1のワイヤと、高所狭隘部の構造物側に張り出した前記電磁石を前記高所延伸部材の元の位置に戻す第2のワイヤとを備えたことを特徴とする。
【0011】
請求項2の発明に係る高所狭隘部点検装置は、請求項1の発明において、前記歯車装置は、前記サーボモータの回転軸に取り付けられたピニオンと、先端部に前記電磁石が取り付けられ前記ピニオンと係合し前記ピニオンが回転したとき前記電磁石を高所狭隘部の構造物側に張り出すラックとを備え、前記第1のワイヤは前記サーボモータの取付位置を引き下げて前記ピニオンと前記ラックとの係合を外すことを特徴とする。
【0012】
請求項3の発明に係る高所狭隘部点検装置は、請求項1の発明において、前記歯車装置は、前記サーボモータの回転軸に取り付けられたウォームギアと、前記ウォームギアに係合し前記電磁石が軸の径方向に突出して取り付けられた回転軸を回転させ前記電磁石を高所狭隘部の構造物側に張り出すウォームホイールとを備え、前記第1のワイヤは前記回転軸の位置をずらせて前記ウォームギアと前記ウォームホイールとの係合を外すことを特徴とする。
【発明の効果】
【0013】
請求項1の発明によれば、電磁石を高所狭隘部の構造物側に張り出し構造物に接触させる歯車装置の歯車の係合を第1のワイヤで機械的に外し、電磁石を第2のワイヤで高所延伸部材の元の位置に戻すので、電磁石の張り出し手段であるサーボモータの電源が喪失した場合であっても電磁石を元の位置に戻すことができ、高所延伸部材を下部まで下げることができる。
【0014】
請求項2の発明によれば、第1のワイヤは、サーボモータの取付位置を引き下げてサーボモータの回転軸に取り付けられたピニオンと、電磁石を高所狭隘部の構造物側に張り出すラックとの係合を外すので、第2のワイヤによりラックを自由に移動できる状態を形成でき、サーボモータが動かない場合であっても、電磁石を元の位置に戻すことができる。
【0015】
請求項3の発明によれば、第1のワイヤは、電磁石が軸の径方向に突出して取り付けられたウォームホイールの回転軸の位置をずらせて、ウォームホイールとサーボモータのウォームギアとの係合を外すので、第2のワイヤによりウォームホイールの回転軸を自由に回転させる状態を形成でき、サーボモータが動かない場合であっても、電磁石を元の位置に戻すことができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る高所狭隘部点検装置の概略構成図。
【図2】本発明の実施形態に係る高所狭隘部点検装置の歯車装置がピニオン及びラックである場合における電磁石を構造物に付着させる手順の一例を示す手順図。
【図3】図2に示した第1のワイヤ及び第2のワイヤを用いて構造物側に張り出していた電磁石を高所延伸部材側の元の位置に収納する手順の一例を示す手順図。
【図4】図3に示した歯車装置がピニオン及びラックである場合のサーボモータと歯車装置との係合を外す過程の説明図。
【図5】本発明の実施形態に係る高所狭隘部点検装置の歯車装置がウォームギア及びウォームホイールである場合における電磁石を構造物に付着させる手順の一例を示す手順図。
【図6】図5に示した第1のワイヤ及び第2のワイヤを用いて構造物側に張り出していた電磁石を高所延伸部材側の元の位置に収納する手順の一例を示す手順図。
【図7】図5に示した歯車装置がウォームギア及びウォームホイールである場合のサーボモータと歯車装置との係合を外す過程の説明図。
【図8】原子炉圧力容器ドレン配管のベンド部の周囲の概略縦断面図。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態を説明する。図1は本発明の実施形態に係る高所狭隘部点検装置の概略構成図である。高所狭隘部点検装置16は、台座部17に水平方向駆動部18を搭載するとともに水平方向駆動部18に上下方向駆動部19を搭載して構成される。台座部17は図示省略の車輪により検査対象物の下部に移動し、その箇所で固定される。水平方向駆動部18は図示省略の縦横方向のレール上を移動して、縦横の水平方向の位置決めを行うものである。また、上下方向駆動部19は高所延伸部材(シャフト)20を搭載し、高所延伸部材20を上下方向に伸縮させるものである。高所延伸部材20の先端部にはセンサ搭載部21が取り付けられ、このセンサ搭載部21に撮像装置が搭載される。例えば、ガンマ線照射手段またはガンマ線センサが搭載される。
【0018】
高所延伸部材20の上端近傍、例えば、センサ搭載部21の下部には、高所延伸部材20を高所狭隘部の構造物に固定する電磁石22が設けられている。電磁石22は、電磁石22の張り出し手段であるサーボモータ23の回転力が歯車装置24に伝達されて高所狭隘部の構造物側に張り出すようになっている。そして、電磁石22は高所狭隘部の構造物に接触して、電源が投入されると構造物に付着する。なお、図1では、歯車装置24がピニオン及びラックである場合を示している。また、サーボモータ23や歯車装置24はセンサ搭載部21の下部に設けられている場合を示している。
【0019】
また、歯車装置24の歯車の係合を機械的に外す第1のワイヤ25と、高所狭隘部の構造物側に張り出した電磁石22を高所延伸部材20側の元の位置に戻す第2のワイヤ26とが設けられている。第1のワイヤ25及び第2のワイヤ26は、電磁石22の張り出し手段であるサーボモータ23の電源が喪失したときに引っ張って操作される。まず、第1のワイヤ25を引っ張ってサーボモータ23と歯車装置24との係合を外し、その状態で、第2のワイヤ26を引っ張って電磁石22を高所延伸部材20側の元の位置に戻す。
【0020】
図1では、第1のワイヤ25及び第2のワイヤ26は剥き出し状態で高所延伸部材20に沿わせて上下方向駆動部19の滑車27a及び台座部17の滑車27bを経由して引き出されているが、高所延伸部材20に沿って案内管を設けて、第1のワイヤ25及び第2のワイヤ26を案内管を通して引き出すようにしてもよい。案内管を設けた場合には、第1のワイヤ25や第2のワイヤ26が狭隘部の構造物に引っ掛かることがなくなる。
【0021】
図2は、本発明の実施形態に係る高所狭隘部点検装置を構造物に付着させる手順の一例を示す手順図である。この一例では、歯車装置24がピニオン及びラックであり、点検対象物28が原子炉圧力容器のドレン配管ベンド部(第1エルボ)である場合を示している。
【0022】
図2(a)に示すように、高所延伸部材20の先端部にはセンサ搭載部21が取り付けられ、センサ搭載部21の下部には、電磁石22、サーボモータ23、歯車装置24が搭載されている。歯車装置24は、サーボモータ23の回転軸に取り付けられたピニオン30と、このピニオン30に係合するラック31とから構成されている。
【0023】
また、第1のワイヤ25がサーボモータ23に取り付けられ、第2のワイヤ26が歯車装置24に取り付けられている。このような高所延伸部材20を上方(矢印A1方向)に延伸させる。つまり、高所延伸部材20に取り付けられたセンサ搭載部21が点検対象物28の位置になるまで延伸させる。
【0024】
センサ搭載部21が点検対象物28の位置になると、図2(b)に示すように、電磁石22と高所狭隘部の構造物29との位置合わせを行い、サーボモータ23の回転軸に取り付けられた歯車装置24のピニオン30を回転させて、歯車装置24のラック31を駆動する。これにより、図2(c)の矢印A2に示すように、ラック31に取り付けられた電磁石22が構造物29側に張り出す。そして、図2(d)に示すように、電磁石22を構造物29に接触させ、図2(e)に示すように、電磁石22に電源を供給して磁力を発生させる。これにより、電磁石22は構造物29に付着し、高所延伸部材20は高所狭隘部の構造物29に固定される。
【0025】
このようにして、センサ搭載部21を先端部に取り付けた高所延伸部材20は、高所狭隘部の構造物29に周囲の構造物に荷重をかけることなく固定されるので、センサ搭載部21の撮像装置は狭隘部に存在する点検対象物28をぶれなく撮像できる。
【0026】
点検対象物28の撮像が終了すると、図2(a)〜図2(e)の逆の手順を行い、高所延伸部材20を下方に縮退させる。すなわち、電磁石22に供給する電源を停止して構造物29への付着を解除し、サーボモータ23を逆回転させてピニオン30を逆回転させ、ラック31を逆方向に移動させる。これにより、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する。そして、高所延伸部材20を下方に縮退させる。
【0027】
図3は、第1のワイヤ25及び第2のワイヤ26を用いて構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する手順の一例を示す手順図である。第1のワイヤ25及び第2のワイヤ26を用いるのは、高所延伸部材20を下方に縮退させる際にサーボモータ23の電源が喪失して、サーボモータ23により、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納することができなくなった場合である。
【0028】
電磁石22に供給する電源を停止して電磁石22の構造物29への付着を解除し、その後に、サーボモータ23により、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納しようとした場合に、サーボモータ23の電源が喪失していると、サーボモータ23が動作しない。その場合には、図3(a)に示すように、第1のワイヤ25を下方(矢印B1方向)に引っ張る。第1のワイヤ25はサーボモータ23の取付位置を引き下げて、ピニオン30とラック31との係合を外す。
【0029】
サーボモータ23は、センサ搭載部21の下部の長穴にサーボモータ23から突出した突起部が挿入されて取り付けられており、通常の状態では、サーボモータ23は突起部と長穴との摩擦力により係止しており、第1のワイヤ25により摩擦力(係止力)より大きい引き下げ力が加えられると、突起部が長穴をスライドして下方に移動する。これにより、サーボモータ23の取付位置が下方に位置し、サーボモータ23の回転軸のピニオン30と、電磁石22を搭載したラック31との係合を外す。
【0030】
第1のワイヤ25により、ピニオン30とラック31との係合が外れると、ラック31は自由に移動できる状態となる。そこで、図3(b)に示すように、第2のワイヤ26を下方(矢印B2方向)に引っ張る。ラック31は、センサ搭載部21の下部に設けられた横方向の案内溝に沿ってスライドできるように案内溝に挿入されているので、第2のワイヤ26を下方に引っ張ることにより、図3(c)の矢印C1に示すように、ラック31は高所延伸部材20側に移動する。そして、図3(d)に示すように、電磁石22が元の位置まで戻ると第2のワイヤ26を下方に引っ張ることを停止する。なお、案内溝に電磁石22が元の位置まで戻ったときに、ラック31の移動を阻止するストッパを設けておく。これにより、第2のワイヤ26を過大に下方に引っ張りラック31が元の位置以上に移動することを防止できる。これにより、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する。
【0031】
このようにして、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納すると、図3(e)に示すように、高所延伸部材20を下方(矢印C2方向)に縮退させる。これにより、サーボモータ23が動かない場合であっても、電磁石22を元の位置に戻すことができ、高所延伸部材20を安全に下部まで下げることができる。
【0032】
図4は、図3に示した歯車装置がピニオン及びラックである場合のサーボモータと歯車装置との係合を外す過程の説明図である。図4では、高所延伸部材20やセンサ搭載部21の図示を省略している。
【0033】
図4(a)は、電磁石22に供給する電源を停止して電磁石22の構造物29への付着を解除した状態を示している。この状態では、電磁石22は構造物29と接触しており、また、サーボモータ23の回転軸のピニオン30と、電磁石22を搭載したラック31とは係合している。サーボモータ23の上部には金具32が取り付けられており、この金具32に第1のワイヤ25が取り付けられている。また、ラック31の電磁石22を搭載下側と反対側に第2のワイヤ26が取り付けられている。
【0034】
第1のワイヤ25及び第2のワイヤ26を用いて、電磁石22を高所延伸部材20側の元の位置に戻すには、図4(b)に示すように、第1のワイヤ25を下方(矢印B1方向)に引っ張る。前述したように、サーボモータ23は、センサ搭載部21の下部の長穴にサーボモータ23から突出した突起部が挿入されて取り付けられており、通常の状態では、サーボモータ23は突起部と長穴との摩擦力により係止しており、第1のワイヤ25により、その摩擦力(係止力)より大きい引き下げ力が加えられると、突起部が長穴をスライドして下方に移動する。これにより、図4(b)に示すように、サーボモータ23の取付位置が下方に位置し、サーボモータ23の回転軸のピニオン30と、電磁石22を搭載したラック31との係合が外れる。
【0035】
そして、ピニオン30とラック31との係合が外れた後に、図4(c)に示すように、第2のワイヤ26を下方(矢印B2方向)に引っ張る。前述したように、ラック31は、センサ搭載部21の下部に設けられた横方向の案内溝に沿ってスライドできるように案内溝に挿入されているので、第2のワイヤ26を下方に引っ張ることにより、図4(c)に示すように、ラック31は高所延伸部材20側に移動し、電磁石22を元の位置に戻す。
【0036】
以上の説明は、歯車装置24がピニオン30及びラック31である場合について説明したが、歯車装置24として、サーボモータ23の回転軸に取り付けられたウォームギアと、このウォームギアに係合するウォームホイールとすることもできる。
【0037】
図5は、歯車装置24がウォームギア及びウォームホイールである場合の本発明の実施形態に係る高所狭隘部点検装置を構造物に付着させる手順の一例を示す手順図である。図2の場合と同様に、点検対象物28は原子炉圧力容器のドレン配管ベンド部(第1エルボ)である場合を示している。図2と同一要素には同一符号を付し重複する説明は省略する。
【0038】
図5(a)に示すように、高所延伸部材20の先端部にはセンサ搭載部21が取り付けられ、センサ搭載部21の下部には、電磁石22、サーボモータ23、歯車装置24が搭載されている。歯車装置24は、サーボモータ23の回転軸に取り付けられたウォームギア33と、このウォームギア33に係合するウォームホイール34とから構成されている。ウォームギア34の回転軸には電磁石22が取り付けられている。
【0039】
また、第1のワイヤ25はウォームホール34の回転軸の位置をずらす偏心カムに取り付けられ、第2のワイヤ26は電磁石22に取り付けられている。このような高所延伸部材20を矢印A1に示すように、高所延伸部材20に取り付けられたセンサ搭載部21が点検対象物28の位置になるまで上方に延伸させる。
【0040】
センサ搭載部21が点検対象物28の位置になると、図5(b)に示すように、ウォームホイール34が回転軸を中心に回転したときに、電磁石22が構造物29に接触するように、ウォームホイール34の回転軸と高所狭隘部の構造物29との位置合わせを行う。そして、図5(c)の矢印A2に示すように、サーボモータ23の回転軸に取り付けられた歯車装置24のウォームギア33を回転させて、歯車装置24のウォームホイール34を回転させる。これにより、ウォームホイール34の回転軸に取り付けられた電磁石22を構造物29側に張り出す。そして、図5(d)に示すように、電磁石22を構造物29に接触させ、図5(e)に示すように、電磁石22に電源を供給して磁力を発生させる。これにより、電磁石22は構造物29に付着し、高所延伸部材20は高所狭隘部の構造物29に固定される。
【0041】
このようにして、センサ搭載部21を先端部に取り付けた高所延伸部材20は、高所狭隘部の構造物29に周囲の構造物に荷重をかけることなく固定されるので、センサ搭載部21の撮像装置は狭隘部に存在する点検対象物28をぶれなく撮像できる。
【0042】
点検対象物28の撮像が終了すると、図5(a)〜図5(e)の逆の手順を行い、高所延伸部材20を下方に縮退させる。すなわち、電磁石22に供給する電源を停止して構造物29への付着を解除し、サーボモータ23を逆回転させてウォームギア33によりウォームホイール34を逆回転させる。これにより、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する。そして、高所延伸部材20を下方に縮退させる。
【0043】
図6は、歯車装置24がウォームギア33及びウォームホイール34である場合の第1のワイヤ25及び第2のワイヤ26を用いて構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する手順の一例を示す手順図である。
【0044】
電磁石22に供給する電源を停止して電磁石22の構造物29への付着を解除し、図6(a)に示すように、第1のワイヤ25を下方(矢印B1)に引っ張る。第1のワイヤ25は、ウォームホール34の回転軸の位置をずらす偏心カムに取り付けられているので、第1のワイヤ25を下方に引っ張ることで偏心カムが回転し、ウォームホール34の回転軸の位置がずれる。これにより、ウォームギア33とウォームホイール34との係合が外れる。
【0045】
第1のワイヤ25により、ウォームギア33とウォームホイール34との係合が外れると、ウォームホイール34は自由に回転できる状態となる。そこで、図6(b)に示すように、第2のワイヤ26を下方(矢印B2方向)に引っ張る。
【0046】
第2のワイヤ26は電磁石22に取り付けられているので、第2のワイヤ26を下方に引っ張ることにより、図6(c)に示すように、電磁石22はウォームホイール34の回転軸を中心に回転し、高所延伸部材20側に移動する。そして、図6(d)に示すように、電磁石22が元の位置まで戻ると第2のワイヤ26を下方に引っ張ることを停止する。これにより、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納する。
【0047】
このようにして、構造物29側に張り出していた電磁石22を高所延伸部材20側の元の位置に収納すると、図6(e)に示すように、高所延伸部材20を下方(矢印C2方向)に縮退させる。これにより、サーボモータ23が動かない場合であっても、電磁石22を元の位置に戻すことができ、高所延伸部材20を安全に下部まで下げることができる。
【0048】
図7は、図6に示した歯車装置がウォームギア及びウォームホイールである場合のサーボモータと歯車装置との係合を外す過程の説明図である。図7では、高所延伸部材20やセンサ搭載部21の図示を省略している。
【0049】
図7(a)は、電磁石22に供給する電源を停止して電磁石22の構造物29への付着を解除した状態を示している。この状態では、電磁石22は構造物29と接触しており、また、サーボモータ23の回転軸のウォームギア33と、回転軸35に電磁石22を搭載したウォームホイール34とは係合している。
【0050】
ウォームホイール34の回転軸35には偏心カム36が取り付けられており、この偏心カム36は偏心カム支持部37の支持面を摺動する。また、ウォームホイール34の回転軸35は、偏心カム36の貫通孔に回転自在に支持されている。また、電磁石22はウォームホイール34の回転軸35に取り付けられており、ウォームホイール34の回転軸35を中心にして回転し、構造物29の側に張り出したり高所延伸部材20側の元の位置に戻ったりする。そして、第1のワイヤ25は偏心カム36に取り付けられており、第2のワイヤ26は電磁石22に取り付けられている。
【0051】
第1のワイヤ25及び第2のワイヤ26を用いて、電磁石22を高所延伸部材20側の元の位置に戻すには、図7(b)に示すように、第1のワイヤ25を下方(矢印B1方向)に引っ張る。これにより、偏心カム36が偏心カム支持部37の支持面を摺動し、ウォームホイール34の回転軸35の位置がずれる。従って、サーボモータ23の回転軸のウォームギア33と、回転軸35に電磁石22を搭載したウォームホイール34との係合が外れる。
【0052】
そして、ウォームギア33とウォームホイール34との係合が外れた後に、図7(c)に示すように、第2のワイヤ26を下方(矢印B2方向)に引っ張る。前述したように、ウォームホイール34の回転軸35は、偏心カム36の貫通孔に回転自在に支持されているので、第2のワイヤ26を下方(矢印B2方向)に引っ張ると、図7(c)に示すように、電磁石22はウォームホイール34の回転軸35の回転に伴って高所延伸部材20側に移動し電磁石22を元の位置に戻す。
【0053】
以上述べたように、本発明の実施形態では、電磁石22を収納するために第1のワイヤ25と第2のワイヤ26とを備え、第1のワイヤ25を下部から引くことにより、サーボモータ23と電磁石22との間に介在する歯車機構24の噛み合わせを外し、その後に、第2のワイヤ26を下部から引くことにより、電磁石22を初期の元の位置まで引き込む。従って、サーボモータ23の電源が喪失した場合であっても、電磁石22を元の位置まで引き込むことができるので、高所延伸部材20を安全に下部まで下げることができる。
【符号の説明】
【0054】
11…原子炉圧力容器(RPV)、12…ペデスタル、13…制御棒駆動機構(CRD)ハウジング、14…原子炉圧力容器ドレン配管、15…ベンド部(第1エルボ)、16…高所狭隘部点検装置、17…台座部、18…水平方向駆動部、19…上下方向駆動部、20…高所延伸部材、21…センサ搭載部、22…電磁石、23…サーボモータ、24…歯車装置、25…第1のワイヤ、26…第2のワイヤ、27…滑車、28…点検対象物、29…構造物、30…ピニオン、31…ラック、32…金具、33…ウォームギア、34…ウォームホイール、35…ウォームホイールの回転軸、36…偏心カム、37…偏心カム支持部
【特許請求の範囲】
【請求項1】
構造物の狭隘部の空間に高所に向かって延伸する高所延伸部材を延伸させて狭隘部にある検査対象物を点検する高所狭隘部点検装置において、
前記高所延伸部材の上端近傍に備えられ高所延伸部材を高所狭隘部の構造物に固定する電磁石と、
サーボモータの回転力により前記電磁石を高所狭隘部の構造物側に張り出し前記構造物に接触させる歯車装置と、
前記歯車装置の歯車の係合を機械的に外す第1のワイヤと、
高所狭隘部の構造物側に張り出した前記電磁石を前記高所延伸部材の元の位置に戻す第2のワイヤと、
を備えたことを特徴とする高所狭隘部点検装置。
【請求項2】
前記歯車装置は、前記サーボモータの回転軸に取り付けられたピニオンと、先端部に前記電磁石が取り付けられ前記ピニオンと係合し前記ピニオンが回転したとき前記電磁石を高所狭隘部の構造物側に張り出すラックとを備え、前記第1のワイヤは前記サーボモータの取付位置を引き下げて前記ピニオンと前記ラックとの係合を外すことを特徴とする請求項1記載の高所狭隘部点検装置。
【請求項3】
前記歯車装置は、前記サーボモータの回転軸に取り付けられたウォームギアと、前記ウォームギアに係合し前記電磁石が軸の径方向に突出して取り付けられた回転軸を回転させ前記電磁石を高所狭隘部の構造物側に張り出すウォームホイールとを備え、
前記第1のワイヤは前記ウォームホイールの回転軸の位置をずらせて前記ウォームギアと前記ウォームホイールとの係合を外すことを特徴とする請求項1記載の高所狭隘部点検装置。
【請求項1】
構造物の狭隘部の空間に高所に向かって延伸する高所延伸部材を延伸させて狭隘部にある検査対象物を点検する高所狭隘部点検装置において、
前記高所延伸部材の上端近傍に備えられ高所延伸部材を高所狭隘部の構造物に固定する電磁石と、
サーボモータの回転力により前記電磁石を高所狭隘部の構造物側に張り出し前記構造物に接触させる歯車装置と、
前記歯車装置の歯車の係合を機械的に外す第1のワイヤと、
高所狭隘部の構造物側に張り出した前記電磁石を前記高所延伸部材の元の位置に戻す第2のワイヤと、
を備えたことを特徴とする高所狭隘部点検装置。
【請求項2】
前記歯車装置は、前記サーボモータの回転軸に取り付けられたピニオンと、先端部に前記電磁石が取り付けられ前記ピニオンと係合し前記ピニオンが回転したとき前記電磁石を高所狭隘部の構造物側に張り出すラックとを備え、前記第1のワイヤは前記サーボモータの取付位置を引き下げて前記ピニオンと前記ラックとの係合を外すことを特徴とする請求項1記載の高所狭隘部点検装置。
【請求項3】
前記歯車装置は、前記サーボモータの回転軸に取り付けられたウォームギアと、前記ウォームギアに係合し前記電磁石が軸の径方向に突出して取り付けられた回転軸を回転させ前記電磁石を高所狭隘部の構造物側に張り出すウォームホイールとを備え、
前記第1のワイヤは前記ウォームホイールの回転軸の位置をずらせて前記ウォームギアと前記ウォームホイールとの係合を外すことを特徴とする請求項1記載の高所狭隘部点検装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−9220(P2013−9220A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−141460(P2011−141460)
【出願日】平成23年6月27日(2011.6.27)
【出願人】(000003687)東京電力株式会社 (2,580)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月27日(2011.6.27)
【出願人】(000003687)東京電力株式会社 (2,580)
【Fターム(参考)】
[ Back to top ]