
高炉への装入物の装入及び堆積方法、並びに高炉の操業方法
【課題】鉄鋼石やコークスの堆積プロフィール測定をシュータの一旋回毎に行うことで、実際の堆積プロフィールを理論堆積プロフィールにより近づけて最適な高炉の操業を行う。
【解決手段】高炉の内部に鉄鋼石やコークス等の装入物を装入し、堆積させる方法であって、シュータの旋回中、もしくは一回の旋回毎に、検出媒体で堆積物の表面を走査して堆積プロフィールを測定しながら装入物を装入する。また、測定した堆積プロフィールを、予め求めた理論堆積プロフィールと比較し、理論堆積プロフィールからの誤差を修正するようにシュータを制御して新たな装入物を装入する。そして、このような装入方法を用いて高炉を操業する。
【解決手段】高炉の内部に鉄鋼石やコークス等の装入物を装入し、堆積させる方法であって、シュータの旋回中、もしくは一回の旋回毎に、検出媒体で堆積物の表面を走査して堆積プロフィールを測定しながら装入物を装入する。また、測定した堆積プロフィールを、予め求めた理論堆積プロフィールと比較し、理論堆積プロフィールからの誤差を修正するようにシュータを制御して新たな装入物を装入する。そして、このような装入方法を用いて高炉を操業する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、高炉に装入される鉄鉱石やコークス等の装入物の堆積プロフィールを制御する技術に関する。
【背景技術】
【0002】
鉄鉱石を溶解する高炉では、通常、炉頂から大ベル(ベル式装入装置)やシュータ(ベルレス式装入装置)により鉄鉱石とコークスとを交互に装入して層状に堆積させ、炉頂部でのこれら装入物の堆積プロフィールが蟻地獄の如き逆錘状になるように堆積して操作を行う。
【0003】
ところで、高炉を安定して操業するための重要な要因の1つに、炉内のガス流の分布がある。このガス流の分布は、鉄鉱石やコークスの堆積状況と密接な関係があり、通常は、実験によりガス流の分布が最適となる堆積状態、即ち堆積物の傾斜面の角度や、鉄鉱石の堆積層とコークスの堆積層との層厚比等が最適となるような理論堆積プロフィールを求め、実際の堆積状態が理論堆積プロフィールと合致するように大ベルやシュータの動作を制御している。
【0004】
理論堆積プロフィールと合致するように堆積されているかを確認にするために、検出媒体としてマイクロ波を用い、マイクロ波を鉄鋼石またはコークスの堆積表面に向けて送信し、鉄鉱石またはコークスの表面で反射された反射マイクロ波を受信して堆積プロフィールを求めることが行われている。
【0005】
例えば、特許文献1では、図8に示すように、高炉6の内部に挿入されるランス1の先端開口近傍にアンテナ2を通じて、マイクロ波送受信手段3からのマイクロ波を炉内の装入物7(鉄鉱石7aまたはコークス7b)に向けて送信し、装入物7の表面で反射されたマイクロ波をアンテナ2で受信してマイクロ波送受信手段3で検波し、送信と受信との時間差から装入物7の表面までの距離を求めている。その際、ランス1を炉壁5と炉心(破線4で示す)とを結ぶ線に沿って往復させることにより、装入物7の堆積プロフィールを求めている。そして、このような測定を、鉄鉱石7a及びコークス7bの各々が理論堆積プロフィールに合わせて所定の厚さとなるように堆積した都度行い、鉄鉱石7a及びコークス7bの各堆積層の厚さが装入毎に変動しないように、ムーバブルアーマ9の移動速度や移動範囲を制御している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平7−34107号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
実際の堆積プロフィールを理論堆積プロフィールにより近づけるためは、測定頻度を増すことが必要であるが、特許文献1に記載の方法では、鉄鉱石7aやコークス7bの装入の際にランス1が障害物になるため、鉄鉱石7aまたはコークル7bを装入している間はランス1を炉外に引き抜く必要があり、一回の装入が完了するまではそれぞれの堆積プロフィールを測定することができない。また、ランス1の往復にも時間がかかるため、迅速な測定ができない。そのため、理論堆積プロフィールとの乖離が大きくなるのが現実である。
【0008】
また、鉄鉱石7aやコークス7bを交互に装入する手段として、上記のベル式の他に炉頂にシュータを用い、シュータの旋回により鉄鉱石7aやコークス7bを炉内に装入し、堆積させる方式も知られている(図1参照)。このシュータを用いる方式でもマイクロ波測定装置を炉頂近傍に装着し、マイクロ波で鉄鋼石7aやコークス7bの堆積表面を走査して堆積プロフィールを測定することができるが、従来のマイクロ波測定装置では堆積表面の走査に時間がかかり、測定頻度において改善の余地がある。
【0009】
そこで本発明は、鉄鋼石やコークスの堆積プロフィール測定をシュータの一旋回毎に行うことで、実際の堆積プロフィールを理論堆積プロフィールにより近づけたり、鉄鉱石とコークスとの層厚比を計算して理論堆積プロフィールを最適化して最適な高炉操業を行うことを目的とする。
【課題を解決するための手段】
【0010】
上記の目的を達成するために本発明は、下記の高炉への装入物の装入及び堆積方法、並びに高炉の操業方法を提供する。
(1)高炉の内部に鉄鋼石やコークス等の装入物を装入し、堆積させる方法であって、
シュータの旋回中、もしくは一回の旋回毎に、検出媒体で堆積物の表面を走査して堆積プロフィールを測定しながら装入物を装入することを特徴とする高炉への装入物の装入及び堆積方法。
(2)堆積プロフィールを測定し、予め求めた理論堆積プロフィールと比較し、理論堆積プロフィールからの誤差を修正するようにシュータを制御して新たな装入物を装入することを特徴とする上記(1)記載の高炉への装入物の装入及び堆積方法。
(3)装入物の表面全面にわたり検出媒体を走査させて堆積プロフィールを測定することを特徴とする上記(1)または(2)記載の高炉への装入物の装入及び堆積方法。
(4)検出媒体がマイクロ波であることを特徴とする上記(1)〜(3)の何れか1項に記載の高炉への装入物の装入及び堆積方法。
(5)上記(1)〜(4)の何れか1項に記載の方法により高炉内に装入物を装入し、堆積させて高炉を操業することを特徴とする高炉の操業方法。
【発明の効果】
【0011】
本発明によれば、鉄鋼石やコークスの堆積プロフィールの測定をシュータによる装入と同時に、もしくは装入の都度行うことができ、例えば理論堆積プロフィールに合致するように装入し堆積させる場合には、理論堆積プロフィールとの誤差を極力無くして鉄鉱石やコークスを堆積して最適な高炉操業を行うことができる。
【図面の簡単な説明】
【0012】
【図1】本発明の堆積プロフィールの測定方法を示す断面図である。
【図2】本発明の堆積プロフィールの測定方法を実現するための測定装置を示す図である。
【図3】図1に示す測定部を上面からみた断面図である。
【図4】測定部の第2例を示す側断面図である。
【図5】図4に示す測定部の反射板周辺を示す一部切欠斜視図である。
【図6】図4に示す測定部の反射板の傾斜角度を変更する機構を示す図である。
【図7】図1の部分拡大図であり、本発明に従い堆積プロフィールを測定する手順を説明するための図である。
【図8】従来の堆積プロフィールの測定方法を示す断面図である。
【発明を実施するための形態】
【0013】
以下、本発明に関して図面を参照して詳細に説明する。
【0014】
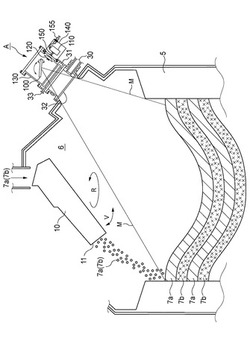
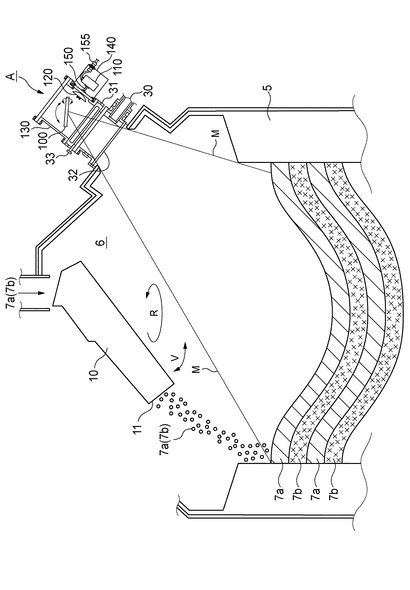
図1は、本発明に係る堆積プロフィールの測定方法を説明するための図であり、図8に従い高炉の断面に沿って示している。
【0015】
高炉6の炉頂には、鉄鉱石7aやコークス7bを装入するためのシュータ10が配設されており、シュータ10は矢印Rで示すように水平方向への旋回、及び矢印Vで示すように振り子運動を組み合わせた動きにより投下口11から鉄鉱石7aやコークス7bを炉内の所定位置に装入する。また、鉄鉱石7aやコークス7bの堆積プロフィールを測定するためのマイクロ波測定装置の測定部Aが炉外、例えばシュータ10の側部の炉外に装着される。
【0016】
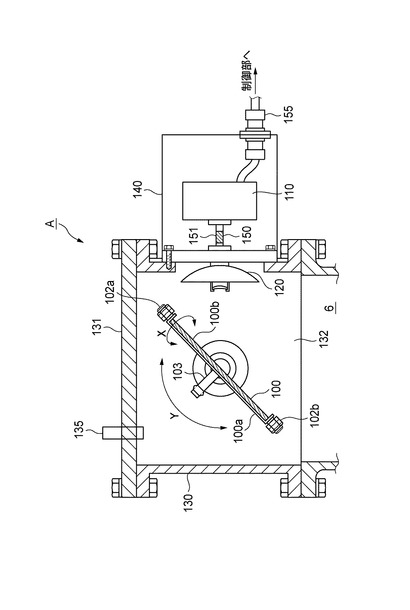
測定部Aは、図2にその周辺を示す拡大図、図3にその上面断面図に示すように、円板状の反射板100と、マイクロ波送受信手段110に連結するアンテナ120とを対向配置して第1の容器130に収容して構成されており、炉壁5の頂部近傍の適所に設けられた開口に装着される。また、反射板100の下にはセラミックスフィルタ31を介してバルブ30が設けられており、プロフィール計測時にはバルブ30を開き、保守点検時にはバルブ30を閉めるようになっている。更に、バルブ30と開口2との間にフィルタ32を設け、炉内からの高温ガスの流入や粉塵の侵入を防止している。また、窒素ガス取入れ口33から窒素ガスを供給して、プロフィール測定時に測定部Aの内部を炉内より高圧にして粉塵の侵入を防止する。
【0017】
アンテナ120は、取り付けのための奥行きが短かいことから、パラボラアンテナが好ましい。
【0018】
第1の容器130は略円筒状で、その上面は上蓋131で閉塞されており、下面132は開口しており、図示は省略されるセラミックフィルタ31やフィルタ32を介在させて、炉壁5の開口と重なるように装着される。また、窒素ガス取り入れ口135を設け、窒素ガスが供給される。
【0019】
また、第1の容器130の周壁にはアンテナ120が取り付けられており、アンテナ120の背面を覆うように第2の容器140が装着されている。この第2の容器140には、マイクロ波送受信手段110が収容され、マイクロ波送受信手段110とアンテナ120とは導波管150により連結されている。導波管150は、誘電材料からなる栓部材151により閉塞されており、アンテナ120のマイクロ波の送受信を行うための開口(図示せず)を通じてガスや粉塵が流入しないようにしてある。また、マイクロ波送受信手段110は、コネクタ155を介して外部の制御部(図示せず)に繋がっており、電力の供給やマイクロ波の送受信の制御、検波信号の処理等が制御部を通じて行われる。
【0020】
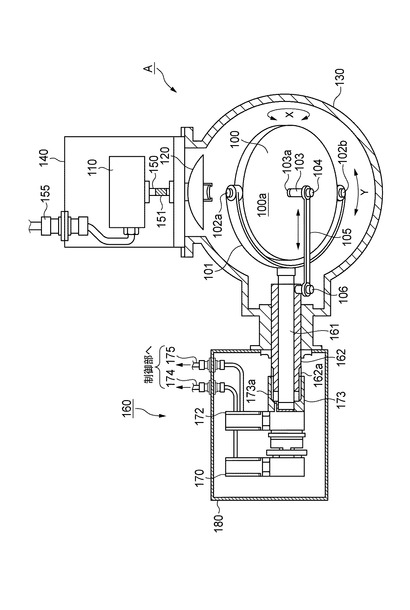
更に、第1の容器130の周壁には、アンテナ120と直交する位置に、反射板100の角度を制御するための角度可変機構160が装着されている。反射板100は第1の容器130の中央部に配置されており、その直径両端が半円環の支持アーム101の両端に設けられた軸受102a,102bにより支持されている。支持アーム101は、角度可変機構160の内軸161に直結している。内軸161は、第1のモータ170により回転駆動され、それに伴って反射板100は矢印X方向に回動する。
【0021】
また、反射板100のアンテナ対向面とは反対側の裏面100aの中心部には、棒状片103の先端103aが固着されている。この棒状片103は、第1の球面滑り軸受104を介して連結棒105に接続しており、連結棒105の他端は第2の球面滑り軸受106を介して、内軸161と同軸に配設された外軸162の先端部に接続している。
【0022】
外軸162には、第2の球面滑り軸受106とは他端の外周面に雄ネジ162aが形成されており、内軸161上に取り付けられた第2のモータ172により回転駆動される雌ネジ部材173の内周面に形成された雌ネジ173aと螺合している。そして、第2のモータ172を駆動すると、雌ネジ部材173が回転して外軸162が反射板100に接近または離間するように図中の左右方向に移動し、それに伴って連結棒105が図中の左右方向に移動する。連結棒105の動きは軸受102a,102bを支点として第1の球面滑り軸受104を円運動させる。反射板100は軸受102a,102bにより図中左右方向への移動が規制されているため、第1の球面滑り軸受104の動きに連動して棒状片103の先端103aが円運動することにより、反射板100は図中の上下方向、即ち矢印Y方向に回動する。
【0023】
尚、図示は省略するが、第2のモータ172を内軸161上に取り付けず、第1のモータ170と第2のモータ172の回転差で雌ネジ部材173を回転させることもできる。
【0024】
このように構成される角度可変機構160において、内軸161と外軸162とを協働すると、内軸161の回転により反射板100を矢印X方向に所定角度で傾斜させ、それと同時に外軸162を回転して棒状片103の先端103aを円運動させて矢印Y方向への回動を付加することができ、反射板100を任意の方向に傾斜させることができる。
【0025】
また、角度可変機構160は、第1のモータ170、第2のモータ172、内軸161及び外軸162の一部、更に雌ネジ部材173は第3の容器180に収容され、第1の容器130に取り付けられている。更に、第1のモータ170はコネクタ174を通じて、第2のモータ172はコネクタ175を通じて外部の制御部に接続されており、電力供給や回転の制御が制御部を通じて行われる。
【0026】
装入物7の堆積プロフィールを測定するには、マイクロ波送受信手段110で発振されたマイクロ波Mをアンテナ120から発射し、反射波100で反射して開口2を通じて装入物7に向けて送信する。そして、装入物7の表面で反射されたマイクロ波Mを反射板100で反射してアンテナ120へと導き、マイクロ波送受信手段110で受信し、受信信号を外部の制御部に送り、ビート波の周波数によりアンテナ120から装入物7の表面までの距離を求める。
【0027】
尚、高炉内では人体に有害な一酸化炭素ガスが発生しており、測定部Aの気密性は安全上の重要課題であるが、フィルタ32やセラミックスフィルタ31により2重の気密構造とするとともに、第1の容器に反射板100及びアンテナ120を収容し、第2の容器にマイクロ波送受信手段110を収容するとともにアンテナ120との連結に用いる導波管150を栓部材155で閉塞し、更に角度可変機構160を第3の容器180に収容しているため、測定部Aを通じて一酸化炭素ガスが外部に漏洩することがない。
【0028】
更に、バルブ30を閉じることにより、高炉を気密にした状態で、測定部Aを高炉から分離でき、測定部Aの保守作業を安全に行うことができる。
【0029】
反射板100の角度可変機構として、図4〜図6に示す構成にすることもできる。尚、図4〜図6において、図1〜図3に示した部材と同一の部材には同一の符号を付してある。
【0030】
図4は全体構成を側断面図であるが、図示されるように、ガイドパイプ200の一端にアンテナ120が取り付けられており、アンテナ120にはマイクロ波送受信手段110が接続しており、制御部にてマイクロ波の送受信が制御される。尚、アンテナ120とマイクロ波送受信手段110とを接続する導波管150は、栓部材151で閉塞されており、マイクロ波送受信手段110は第2の容器140に収容され、密封されている。
【0031】
また、ガイドパイプ200の中央部には、炉の開口に対面する面が切欠して開口部210が形成されており、この開口部210の内部に円板状の反射板100が収容される。また、ガイドパイプ200の開口210は、第1の容器130で包囲されており、第1の容器130が、炉の開口に対面する側が開口しており、図示は省略されるバルブ30、セラミックフィルタ31、フィルタ32を介在させて、炉の開口2に接続される(図1参照)。また、第1の容器130の開口は、炉内からの粉塵がガイドパイプ200の内部に流入しないように、フィルタ220で閉塞されていている。
【0032】
反射板100は、図5に示すように、その直径両端から突出する支軸190が設けられており、支軸190がガイドパイプ200に固定されている。それにより、反射板100は、支軸190を中心にして矢印Pに示すように回動する。
【0033】
また、反射100の裏面100aの中心Cには所定の角度θ(例えば45°)で棒状片230が固定されている。この棒状片230には第1の球面滑りヒンジ240を介して第1の連結棒232が接続され、更に第1の連結棒232には第2の球面滑りヒンジ241を介して第2の連結棒233が接続されている。
【0034】
ガイドパイプ200の他端は端面201で閉塞しており、端面201には第2の連結棒233を挿通可能な開口が開けられ、この開口から第2の連結棒233が外部に延出している。そして、端面201の外側には、第2の連結棒233をガイドパイプの軸線に沿って矢印H方向に移動させるための連結棒駆動手段235が取り付けられている。この連結棒駆動手段235は、例えばモータ236とラックギア237とで構成することができる。
【0035】
図6(A)に示すように、第2の連結棒233を矢印Ha方向に移動させると、第1の連結棒232も同方向に移動して第1の球面滑りヒンジ240を介して棒状片230が支軸190を中心にして矢印L方向に傾倒する。それに伴い、図6(B)に示すように反射板100が矢印Paで示す方向に回動する。このとき、第1の球面滑りヒンジ240は、図5(A)に示す当初の位置よりも図中左下方向に若干降下し、図6(B)に示すように第1の連結棒232も第1の球面滑りヒンジ240の端部が若干降下する。そこで、第2の球面滑りヒンジ241によりこの第1の連結棒232の降下を吸収する。
【0036】
また、図示は省略するが、この状態から第2の連結棒233を矢印Haとは反対側に移動させると、反射板100が矢印Paとは反対側に回動する。
【0037】
上記の第2の連結棒233の移動に伴う反射板100の矢印P方向への回動により、アンテナ120から送信され反射板100で反射されたマイクロ波Mは、図中の左右方向に送られる。
【0038】
また、ガイドパイプ200は、アンテナ120及びマイクロ波送受信手段110を収容する第2の容器140ごと、その軸線を中心に矢印Q方向に回転可能に構成されており、それに伴い反射板100も同じように回動し、マイクロ波Mは紙面と垂直な方向に送られる。ガイドパイプ200の回転は、端面201の外側に設けたモータ205で行うことができ、モータ205の回転軸はガイドパイプ200の軸線の延長線上に設けられている。また、モータ205は、連結棒駆動手段235とともに容器208に収容される。
【0039】
このように、第2の連結棒233の移動と、ガイドパイプ200の回転により、マイクロ波Mを二次元方向に走査できる。
【0040】
また、第1の容器130の両側には支持部材260,261が配設される。支持部材260,261は、ガイドパイプ200の外周に軸受を嵌合してガイドパイプ200を回動自在に支持し、更にシール部材で容器内部の機密性を維持する。尚、シール部材は耐熱性を有することが望ましい。第1の容器130の内部は、測定時に炉の開口を通じて炉内と同じガス圧になり、かなりの高圧となる。そこで、支持部材260,261で圧力を分担して受けることで、第1の容器130を保護するができ、ガイドパイプ200の抜け防止装置を別途設ける必要もなくなる。
【0041】
更に、第1の容器130には、窒素ガス取り入れ口135から窒素ガスを流入させることができ、内部を観察できるように窓137を設けることができる。
【0042】
また、ガイドパイプ200にも窒素ガス取り入れ口136a,136bを設け、ガイドパイプ200の内部に窒素ガスを流入させてもよい。
【0043】
上記において、ガイドパイプ200を第1の容器130のアンテナ側壁面130aで分割するとともに、アンテナ側の部分を第1の容器130に溶接等により接合し、第1の容器130からガイドパイプ200の端面201までの部分を回転可能にすることもでき、その場合、アンテナ側の部分を保持する支持部材261を省略することができる。
【0044】
また、図示は省略するが、アンテナ120に、マイクロ波の送受信に影響を与えない程度の小孔を開け、窒素ガス取り入れ口136aをアンテナ120の背面(マイクロ波送受信手段側の面)の近傍に設けることにより、窒素ガスがアンテナ120の小孔を通じてガイドパイプ200の内部を第1の容器130へと流入するとともに、アンテナ120の裏面の粉塵を除去することができる。
【0045】
更に、反射板100にも同様の小孔を開けることで、窒素ガス取り入れ口136aからの窒素ガスが反射板100の裏面側へも流通するとともに、窒素ガス取り入れ口136bからの窒素ガスがアンテナ側へも流通するようになり、ガイドパイプ200の全域にわたり窒素ガスがより流通しやすくなる。
【0046】
上記の測定部Aによれば、角度可変機構により反射板100の角度を連続的に変化させることにより、マイクロ波Mを装入物7の全面にわたり2次元に走査させることができる。そして、走査の位置情報と、装入物7の表面までの距離とを2次元的にマップ化することにより、装入物7の全面の堆積プロフィールが一度の走査で正確に得られる。
【0047】
本発明では、堆積プロフィールの測定を、シュータ10の旋回中、もしくは旋回毎に行うことができる。
【0048】
図7は図1の部分拡大図であるが、鉄鉱石7aの堆積を例示して説明する。予め堆積している鉄鉱石7aの堆積プロフィールをP0とすると、シュータ10をV方向への回転角度θ1にて旋回させると、新たな鉄鋼石7aが堆積プロフィールP0の上に、シュータ10の回転角度θ1に応じた位置を起点として堆積され、このときの堆積プロフィールを測定部Aで測定してその堆積プロフィールP1を得る。次いで、シュータ10をV方向への回転角度θ2にて新たに旋回させると、新たな鉄鉱石7aが堆積プロフィールP1の上に、シュータ10の回転角度θ2に応じた位置を起点として堆積され、そのときの堆積プロフィールを測定部Aで測定してその堆積プロフィールP2を得る。このようなシュータ10の旋回及び測定部Aによる測定を繰り返すことにより、最終的に鉄鉱石7aの堆積プロフィールPnが得られる。このとき、シュータ10の旋回毎に理論堆積プロフィールと比較しながら、実際のシュータ10の旋回様式(V方向への回転角度)を制御することができる。
【0049】
上記において、シュータ10は筒状体であることから、測定部Aからのマイクロ波Mがシュータ10に当たる確率は低く、測定に支障は実質的に無い。マイクロ波Mに当たったとしても、瞬間的であり、しかも、シュータ10は鉄鋼石7aやコークス7bよりも炉頂側に位置するため、検出される反射マイクロ波は特定の位置に現れて堆積プロフィールと区別することができる。また、シュータ10を旋回させたときの検出パターンを測定しておき、堆積プロフィールから除去するように処理してもよい。
【0050】
あるいは、測定部Aをシュータ10の旋回位置よりも下方(炉底側)に配置することにより、シュータ10で邪魔されることなくマイクロ波Mの送受信を行うこともできる。
【0051】
また、シュータ10が障害になることを防ぐために、シュータ10の1旋回毎に堆積プロフィールを測定してもよい。
【0052】
上記において測定時間を短くするには、測定部Aにおいてマイクロ波Mの走査時間を短縮するにはモータ170、172、205、235の回転数を高めればよく、シュータ10が1旋回する間に測定を完了することができる。一般的な高炉ではシュータ10の旋回速度は8rpm程度であり、1旋回に要する時間は7.5秒程度であるが、測定部Aではこのような短時間での測定に十分対応できる。そのため、シュータ10の1旋回毎に鉄鉱石7aまたはコークス7bの堆積プロフィールを測定することができ、予め求めた理論堆積プロフィールとの誤差がある場合でも、新たな装入の際に迅速、かつ正確に修正することができる。
【0053】
従来は、鉄鉱石7aまたはコークス7bをある程度厚く堆積させてから堆積プロフィールを測定していたため、理論堆積プロフィールに合致するように新たな装入の際に修正することは困難であったが、本発明によればシュータ10の旋回中、もしくは回の旋回に伴う少ない堆積量毎に堆積プロフィールを測定できるため、理論堆積プロフィールに合致させることが容易になる。
【0054】
また、信号処理はFMCW方式が一般的であるが、このFMCW方式ではスイープ期間と信号処理期間とで構成されており、スイープ期間はマイクロ波送受信信手段110の発振器の周波数をスイープし、そのスイープ期間にビート信号をサンプリングしてサンプリングデータを求め、信号処理期間でサンプリングデータをFET処理してビート信号の周波数スペクトルが最大となる周波数を求め、その周波数を距離換算して測定距離値を得ている。そのため、スイープ期間と信号処理期間とをシーケンシャル処理すると処理時間がかかるため、スイープ期間の制御に割り込み処理を施してサンプリングデータを取り込むバッファにトグルバッファを採用して時間短縮を行うことが好ましい。これにより、サンプリングデータをトグルバッファの一方に取り込んでスイープ期間の処理と、一つ前のスイープ期間でのサンプリングデータの取り込みが完了しているもう一方のサンプリングデータを使用してバックグランドの信号処理を行うことができ、結果としてスイープ期間の処理と、信号処理期間の処理とを見かけ上同時に行なわれ処理時間を短縮することができる。そのため、上記の測定部Aによるマイクロ波Mの走査と相俟って、堆積プロフィールの測定をより迅速に行う
【0055】
尚、理論堆積プロフィールは、従来と同様に炉内のガス流の分布が最適となる堆積状態を実験的に求めることができる。
【0056】
また、上記においては、検出媒体にマイクロ波を用いたが、電子ビーム等であってもよい。
【0057】
上記は理論堆積プロフィールと合致するようにシュータ10を制御して鉄鉱石7aやコークス7bを装入し、堆積させることを目的としたものである。しかしながら、理論堆積プロフィールの通りに堆積させても、鉄鉱石7aやコークス7bが堆積した傾斜面から滑落することがある。これは、理論堆積プロフィールを作製する際に想定した鉄鋼石7aやコークス7bの粒径や水分量等の性状が、実際に装入される鉄鉱石7aやコークス7bの性状と異なることが主な理由と考えられる。
【0058】
本発明によれば、実際の堆積プロフィールをシュータ10の旋回と同時に、もしくは旋回毎に測定できるため、実際に堆積した鉄鋼石7aやコークス7bが滑落した場合に、その堆積状態を即座に検知して理論堆積プロフィールにフィードバックすることができる。このように、本発明によれば、理論堆積プロフィールを検証することも可能である。
【符号の説明】
【0059】
A 測定部
10 シュータ
100 反射板
101 支持アーム
104 第1の球面滑り軸受
105 連結棒
106 第2の球面滑り軸受
110 マイクロ波送受信手段
120 アンテナ
130 第1の容器
140 第2の容器
150 導波管
151 栓部材
160 角度可変機構
161 内軸
162 外軸
170 第1のモータ
172 第2のモータ
180 第3の容器
190 支軸
200 ガイドパイプ
210 開口部
220 フィルタ
230 棒状片
232 第1の連結棒
233 第2の連結棒
240 第1の球面滑りヒンジ
241 第2の球面滑りヒンジ
260,261 支持部材
【技術分野】
【0001】
本発明は、高炉に装入される鉄鉱石やコークス等の装入物の堆積プロフィールを制御する技術に関する。
【背景技術】
【0002】
鉄鉱石を溶解する高炉では、通常、炉頂から大ベル(ベル式装入装置)やシュータ(ベルレス式装入装置)により鉄鉱石とコークスとを交互に装入して層状に堆積させ、炉頂部でのこれら装入物の堆積プロフィールが蟻地獄の如き逆錘状になるように堆積して操作を行う。
【0003】
ところで、高炉を安定して操業するための重要な要因の1つに、炉内のガス流の分布がある。このガス流の分布は、鉄鉱石やコークスの堆積状況と密接な関係があり、通常は、実験によりガス流の分布が最適となる堆積状態、即ち堆積物の傾斜面の角度や、鉄鉱石の堆積層とコークスの堆積層との層厚比等が最適となるような理論堆積プロフィールを求め、実際の堆積状態が理論堆積プロフィールと合致するように大ベルやシュータの動作を制御している。
【0004】
理論堆積プロフィールと合致するように堆積されているかを確認にするために、検出媒体としてマイクロ波を用い、マイクロ波を鉄鋼石またはコークスの堆積表面に向けて送信し、鉄鉱石またはコークスの表面で反射された反射マイクロ波を受信して堆積プロフィールを求めることが行われている。
【0005】
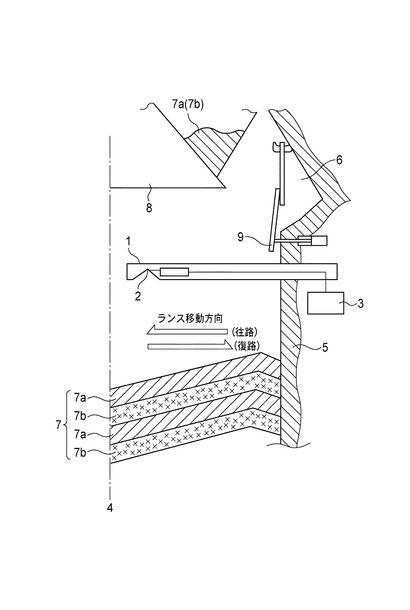
例えば、特許文献1では、図8に示すように、高炉6の内部に挿入されるランス1の先端開口近傍にアンテナ2を通じて、マイクロ波送受信手段3からのマイクロ波を炉内の装入物7(鉄鉱石7aまたはコークス7b)に向けて送信し、装入物7の表面で反射されたマイクロ波をアンテナ2で受信してマイクロ波送受信手段3で検波し、送信と受信との時間差から装入物7の表面までの距離を求めている。その際、ランス1を炉壁5と炉心(破線4で示す)とを結ぶ線に沿って往復させることにより、装入物7の堆積プロフィールを求めている。そして、このような測定を、鉄鉱石7a及びコークス7bの各々が理論堆積プロフィールに合わせて所定の厚さとなるように堆積した都度行い、鉄鉱石7a及びコークス7bの各堆積層の厚さが装入毎に変動しないように、ムーバブルアーマ9の移動速度や移動範囲を制御している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平7−34107号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
実際の堆積プロフィールを理論堆積プロフィールにより近づけるためは、測定頻度を増すことが必要であるが、特許文献1に記載の方法では、鉄鉱石7aやコークス7bの装入の際にランス1が障害物になるため、鉄鉱石7aまたはコークル7bを装入している間はランス1を炉外に引き抜く必要があり、一回の装入が完了するまではそれぞれの堆積プロフィールを測定することができない。また、ランス1の往復にも時間がかかるため、迅速な測定ができない。そのため、理論堆積プロフィールとの乖離が大きくなるのが現実である。
【0008】
また、鉄鉱石7aやコークス7bを交互に装入する手段として、上記のベル式の他に炉頂にシュータを用い、シュータの旋回により鉄鉱石7aやコークス7bを炉内に装入し、堆積させる方式も知られている(図1参照)。このシュータを用いる方式でもマイクロ波測定装置を炉頂近傍に装着し、マイクロ波で鉄鋼石7aやコークス7bの堆積表面を走査して堆積プロフィールを測定することができるが、従来のマイクロ波測定装置では堆積表面の走査に時間がかかり、測定頻度において改善の余地がある。
【0009】
そこで本発明は、鉄鋼石やコークスの堆積プロフィール測定をシュータの一旋回毎に行うことで、実際の堆積プロフィールを理論堆積プロフィールにより近づけたり、鉄鉱石とコークスとの層厚比を計算して理論堆積プロフィールを最適化して最適な高炉操業を行うことを目的とする。
【課題を解決するための手段】
【0010】
上記の目的を達成するために本発明は、下記の高炉への装入物の装入及び堆積方法、並びに高炉の操業方法を提供する。
(1)高炉の内部に鉄鋼石やコークス等の装入物を装入し、堆積させる方法であって、
シュータの旋回中、もしくは一回の旋回毎に、検出媒体で堆積物の表面を走査して堆積プロフィールを測定しながら装入物を装入することを特徴とする高炉への装入物の装入及び堆積方法。
(2)堆積プロフィールを測定し、予め求めた理論堆積プロフィールと比較し、理論堆積プロフィールからの誤差を修正するようにシュータを制御して新たな装入物を装入することを特徴とする上記(1)記載の高炉への装入物の装入及び堆積方法。
(3)装入物の表面全面にわたり検出媒体を走査させて堆積プロフィールを測定することを特徴とする上記(1)または(2)記載の高炉への装入物の装入及び堆積方法。
(4)検出媒体がマイクロ波であることを特徴とする上記(1)〜(3)の何れか1項に記載の高炉への装入物の装入及び堆積方法。
(5)上記(1)〜(4)の何れか1項に記載の方法により高炉内に装入物を装入し、堆積させて高炉を操業することを特徴とする高炉の操業方法。
【発明の効果】
【0011】
本発明によれば、鉄鋼石やコークスの堆積プロフィールの測定をシュータによる装入と同時に、もしくは装入の都度行うことができ、例えば理論堆積プロフィールに合致するように装入し堆積させる場合には、理論堆積プロフィールとの誤差を極力無くして鉄鉱石やコークスを堆積して最適な高炉操業を行うことができる。
【図面の簡単な説明】
【0012】
【図1】本発明の堆積プロフィールの測定方法を示す断面図である。
【図2】本発明の堆積プロフィールの測定方法を実現するための測定装置を示す図である。
【図3】図1に示す測定部を上面からみた断面図である。
【図4】測定部の第2例を示す側断面図である。
【図5】図4に示す測定部の反射板周辺を示す一部切欠斜視図である。
【図6】図4に示す測定部の反射板の傾斜角度を変更する機構を示す図である。
【図7】図1の部分拡大図であり、本発明に従い堆積プロフィールを測定する手順を説明するための図である。
【図8】従来の堆積プロフィールの測定方法を示す断面図である。
【発明を実施するための形態】
【0013】
以下、本発明に関して図面を参照して詳細に説明する。
【0014】
図1は、本発明に係る堆積プロフィールの測定方法を説明するための図であり、図8に従い高炉の断面に沿って示している。
【0015】
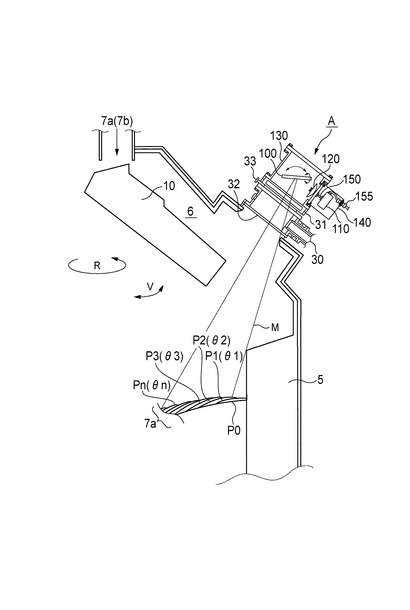
高炉6の炉頂には、鉄鉱石7aやコークス7bを装入するためのシュータ10が配設されており、シュータ10は矢印Rで示すように水平方向への旋回、及び矢印Vで示すように振り子運動を組み合わせた動きにより投下口11から鉄鉱石7aやコークス7bを炉内の所定位置に装入する。また、鉄鉱石7aやコークス7bの堆積プロフィールを測定するためのマイクロ波測定装置の測定部Aが炉外、例えばシュータ10の側部の炉外に装着される。
【0016】
測定部Aは、図2にその周辺を示す拡大図、図3にその上面断面図に示すように、円板状の反射板100と、マイクロ波送受信手段110に連結するアンテナ120とを対向配置して第1の容器130に収容して構成されており、炉壁5の頂部近傍の適所に設けられた開口に装着される。また、反射板100の下にはセラミックスフィルタ31を介してバルブ30が設けられており、プロフィール計測時にはバルブ30を開き、保守点検時にはバルブ30を閉めるようになっている。更に、バルブ30と開口2との間にフィルタ32を設け、炉内からの高温ガスの流入や粉塵の侵入を防止している。また、窒素ガス取入れ口33から窒素ガスを供給して、プロフィール測定時に測定部Aの内部を炉内より高圧にして粉塵の侵入を防止する。
【0017】
アンテナ120は、取り付けのための奥行きが短かいことから、パラボラアンテナが好ましい。
【0018】
第1の容器130は略円筒状で、その上面は上蓋131で閉塞されており、下面132は開口しており、図示は省略されるセラミックフィルタ31やフィルタ32を介在させて、炉壁5の開口と重なるように装着される。また、窒素ガス取り入れ口135を設け、窒素ガスが供給される。
【0019】
また、第1の容器130の周壁にはアンテナ120が取り付けられており、アンテナ120の背面を覆うように第2の容器140が装着されている。この第2の容器140には、マイクロ波送受信手段110が収容され、マイクロ波送受信手段110とアンテナ120とは導波管150により連結されている。導波管150は、誘電材料からなる栓部材151により閉塞されており、アンテナ120のマイクロ波の送受信を行うための開口(図示せず)を通じてガスや粉塵が流入しないようにしてある。また、マイクロ波送受信手段110は、コネクタ155を介して外部の制御部(図示せず)に繋がっており、電力の供給やマイクロ波の送受信の制御、検波信号の処理等が制御部を通じて行われる。
【0020】
更に、第1の容器130の周壁には、アンテナ120と直交する位置に、反射板100の角度を制御するための角度可変機構160が装着されている。反射板100は第1の容器130の中央部に配置されており、その直径両端が半円環の支持アーム101の両端に設けられた軸受102a,102bにより支持されている。支持アーム101は、角度可変機構160の内軸161に直結している。内軸161は、第1のモータ170により回転駆動され、それに伴って反射板100は矢印X方向に回動する。
【0021】
また、反射板100のアンテナ対向面とは反対側の裏面100aの中心部には、棒状片103の先端103aが固着されている。この棒状片103は、第1の球面滑り軸受104を介して連結棒105に接続しており、連結棒105の他端は第2の球面滑り軸受106を介して、内軸161と同軸に配設された外軸162の先端部に接続している。
【0022】
外軸162には、第2の球面滑り軸受106とは他端の外周面に雄ネジ162aが形成されており、内軸161上に取り付けられた第2のモータ172により回転駆動される雌ネジ部材173の内周面に形成された雌ネジ173aと螺合している。そして、第2のモータ172を駆動すると、雌ネジ部材173が回転して外軸162が反射板100に接近または離間するように図中の左右方向に移動し、それに伴って連結棒105が図中の左右方向に移動する。連結棒105の動きは軸受102a,102bを支点として第1の球面滑り軸受104を円運動させる。反射板100は軸受102a,102bにより図中左右方向への移動が規制されているため、第1の球面滑り軸受104の動きに連動して棒状片103の先端103aが円運動することにより、反射板100は図中の上下方向、即ち矢印Y方向に回動する。
【0023】
尚、図示は省略するが、第2のモータ172を内軸161上に取り付けず、第1のモータ170と第2のモータ172の回転差で雌ネジ部材173を回転させることもできる。
【0024】
このように構成される角度可変機構160において、内軸161と外軸162とを協働すると、内軸161の回転により反射板100を矢印X方向に所定角度で傾斜させ、それと同時に外軸162を回転して棒状片103の先端103aを円運動させて矢印Y方向への回動を付加することができ、反射板100を任意の方向に傾斜させることができる。
【0025】
また、角度可変機構160は、第1のモータ170、第2のモータ172、内軸161及び外軸162の一部、更に雌ネジ部材173は第3の容器180に収容され、第1の容器130に取り付けられている。更に、第1のモータ170はコネクタ174を通じて、第2のモータ172はコネクタ175を通じて外部の制御部に接続されており、電力供給や回転の制御が制御部を通じて行われる。
【0026】
装入物7の堆積プロフィールを測定するには、マイクロ波送受信手段110で発振されたマイクロ波Mをアンテナ120から発射し、反射波100で反射して開口2を通じて装入物7に向けて送信する。そして、装入物7の表面で反射されたマイクロ波Mを反射板100で反射してアンテナ120へと導き、マイクロ波送受信手段110で受信し、受信信号を外部の制御部に送り、ビート波の周波数によりアンテナ120から装入物7の表面までの距離を求める。
【0027】
尚、高炉内では人体に有害な一酸化炭素ガスが発生しており、測定部Aの気密性は安全上の重要課題であるが、フィルタ32やセラミックスフィルタ31により2重の気密構造とするとともに、第1の容器に反射板100及びアンテナ120を収容し、第2の容器にマイクロ波送受信手段110を収容するとともにアンテナ120との連結に用いる導波管150を栓部材155で閉塞し、更に角度可変機構160を第3の容器180に収容しているため、測定部Aを通じて一酸化炭素ガスが外部に漏洩することがない。
【0028】
更に、バルブ30を閉じることにより、高炉を気密にした状態で、測定部Aを高炉から分離でき、測定部Aの保守作業を安全に行うことができる。
【0029】
反射板100の角度可変機構として、図4〜図6に示す構成にすることもできる。尚、図4〜図6において、図1〜図3に示した部材と同一の部材には同一の符号を付してある。
【0030】
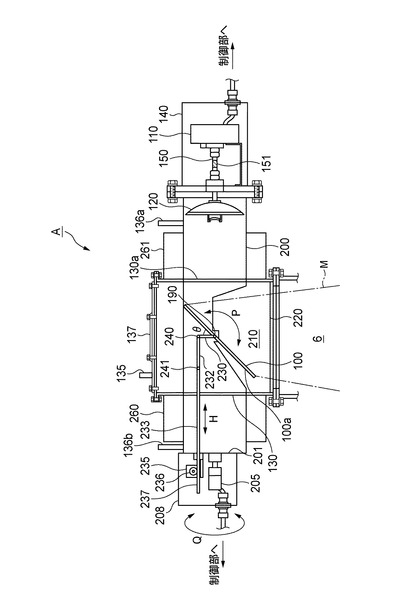
図4は全体構成を側断面図であるが、図示されるように、ガイドパイプ200の一端にアンテナ120が取り付けられており、アンテナ120にはマイクロ波送受信手段110が接続しており、制御部にてマイクロ波の送受信が制御される。尚、アンテナ120とマイクロ波送受信手段110とを接続する導波管150は、栓部材151で閉塞されており、マイクロ波送受信手段110は第2の容器140に収容され、密封されている。
【0031】
また、ガイドパイプ200の中央部には、炉の開口に対面する面が切欠して開口部210が形成されており、この開口部210の内部に円板状の反射板100が収容される。また、ガイドパイプ200の開口210は、第1の容器130で包囲されており、第1の容器130が、炉の開口に対面する側が開口しており、図示は省略されるバルブ30、セラミックフィルタ31、フィルタ32を介在させて、炉の開口2に接続される(図1参照)。また、第1の容器130の開口は、炉内からの粉塵がガイドパイプ200の内部に流入しないように、フィルタ220で閉塞されていている。
【0032】
反射板100は、図5に示すように、その直径両端から突出する支軸190が設けられており、支軸190がガイドパイプ200に固定されている。それにより、反射板100は、支軸190を中心にして矢印Pに示すように回動する。
【0033】
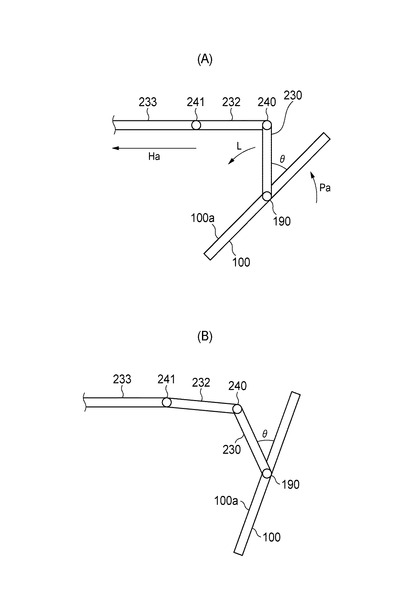
また、反射100の裏面100aの中心Cには所定の角度θ(例えば45°)で棒状片230が固定されている。この棒状片230には第1の球面滑りヒンジ240を介して第1の連結棒232が接続され、更に第1の連結棒232には第2の球面滑りヒンジ241を介して第2の連結棒233が接続されている。
【0034】
ガイドパイプ200の他端は端面201で閉塞しており、端面201には第2の連結棒233を挿通可能な開口が開けられ、この開口から第2の連結棒233が外部に延出している。そして、端面201の外側には、第2の連結棒233をガイドパイプの軸線に沿って矢印H方向に移動させるための連結棒駆動手段235が取り付けられている。この連結棒駆動手段235は、例えばモータ236とラックギア237とで構成することができる。
【0035】
図6(A)に示すように、第2の連結棒233を矢印Ha方向に移動させると、第1の連結棒232も同方向に移動して第1の球面滑りヒンジ240を介して棒状片230が支軸190を中心にして矢印L方向に傾倒する。それに伴い、図6(B)に示すように反射板100が矢印Paで示す方向に回動する。このとき、第1の球面滑りヒンジ240は、図5(A)に示す当初の位置よりも図中左下方向に若干降下し、図6(B)に示すように第1の連結棒232も第1の球面滑りヒンジ240の端部が若干降下する。そこで、第2の球面滑りヒンジ241によりこの第1の連結棒232の降下を吸収する。
【0036】
また、図示は省略するが、この状態から第2の連結棒233を矢印Haとは反対側に移動させると、反射板100が矢印Paとは反対側に回動する。
【0037】
上記の第2の連結棒233の移動に伴う反射板100の矢印P方向への回動により、アンテナ120から送信され反射板100で反射されたマイクロ波Mは、図中の左右方向に送られる。
【0038】
また、ガイドパイプ200は、アンテナ120及びマイクロ波送受信手段110を収容する第2の容器140ごと、その軸線を中心に矢印Q方向に回転可能に構成されており、それに伴い反射板100も同じように回動し、マイクロ波Mは紙面と垂直な方向に送られる。ガイドパイプ200の回転は、端面201の外側に設けたモータ205で行うことができ、モータ205の回転軸はガイドパイプ200の軸線の延長線上に設けられている。また、モータ205は、連結棒駆動手段235とともに容器208に収容される。
【0039】
このように、第2の連結棒233の移動と、ガイドパイプ200の回転により、マイクロ波Mを二次元方向に走査できる。
【0040】
また、第1の容器130の両側には支持部材260,261が配設される。支持部材260,261は、ガイドパイプ200の外周に軸受を嵌合してガイドパイプ200を回動自在に支持し、更にシール部材で容器内部の機密性を維持する。尚、シール部材は耐熱性を有することが望ましい。第1の容器130の内部は、測定時に炉の開口を通じて炉内と同じガス圧になり、かなりの高圧となる。そこで、支持部材260,261で圧力を分担して受けることで、第1の容器130を保護するができ、ガイドパイプ200の抜け防止装置を別途設ける必要もなくなる。
【0041】
更に、第1の容器130には、窒素ガス取り入れ口135から窒素ガスを流入させることができ、内部を観察できるように窓137を設けることができる。
【0042】
また、ガイドパイプ200にも窒素ガス取り入れ口136a,136bを設け、ガイドパイプ200の内部に窒素ガスを流入させてもよい。
【0043】
上記において、ガイドパイプ200を第1の容器130のアンテナ側壁面130aで分割するとともに、アンテナ側の部分を第1の容器130に溶接等により接合し、第1の容器130からガイドパイプ200の端面201までの部分を回転可能にすることもでき、その場合、アンテナ側の部分を保持する支持部材261を省略することができる。
【0044】
また、図示は省略するが、アンテナ120に、マイクロ波の送受信に影響を与えない程度の小孔を開け、窒素ガス取り入れ口136aをアンテナ120の背面(マイクロ波送受信手段側の面)の近傍に設けることにより、窒素ガスがアンテナ120の小孔を通じてガイドパイプ200の内部を第1の容器130へと流入するとともに、アンテナ120の裏面の粉塵を除去することができる。
【0045】
更に、反射板100にも同様の小孔を開けることで、窒素ガス取り入れ口136aからの窒素ガスが反射板100の裏面側へも流通するとともに、窒素ガス取り入れ口136bからの窒素ガスがアンテナ側へも流通するようになり、ガイドパイプ200の全域にわたり窒素ガスがより流通しやすくなる。
【0046】
上記の測定部Aによれば、角度可変機構により反射板100の角度を連続的に変化させることにより、マイクロ波Mを装入物7の全面にわたり2次元に走査させることができる。そして、走査の位置情報と、装入物7の表面までの距離とを2次元的にマップ化することにより、装入物7の全面の堆積プロフィールが一度の走査で正確に得られる。
【0047】
本発明では、堆積プロフィールの測定を、シュータ10の旋回中、もしくは旋回毎に行うことができる。
【0048】
図7は図1の部分拡大図であるが、鉄鉱石7aの堆積を例示して説明する。予め堆積している鉄鉱石7aの堆積プロフィールをP0とすると、シュータ10をV方向への回転角度θ1にて旋回させると、新たな鉄鋼石7aが堆積プロフィールP0の上に、シュータ10の回転角度θ1に応じた位置を起点として堆積され、このときの堆積プロフィールを測定部Aで測定してその堆積プロフィールP1を得る。次いで、シュータ10をV方向への回転角度θ2にて新たに旋回させると、新たな鉄鉱石7aが堆積プロフィールP1の上に、シュータ10の回転角度θ2に応じた位置を起点として堆積され、そのときの堆積プロフィールを測定部Aで測定してその堆積プロフィールP2を得る。このようなシュータ10の旋回及び測定部Aによる測定を繰り返すことにより、最終的に鉄鉱石7aの堆積プロフィールPnが得られる。このとき、シュータ10の旋回毎に理論堆積プロフィールと比較しながら、実際のシュータ10の旋回様式(V方向への回転角度)を制御することができる。
【0049】
上記において、シュータ10は筒状体であることから、測定部Aからのマイクロ波Mがシュータ10に当たる確率は低く、測定に支障は実質的に無い。マイクロ波Mに当たったとしても、瞬間的であり、しかも、シュータ10は鉄鋼石7aやコークス7bよりも炉頂側に位置するため、検出される反射マイクロ波は特定の位置に現れて堆積プロフィールと区別することができる。また、シュータ10を旋回させたときの検出パターンを測定しておき、堆積プロフィールから除去するように処理してもよい。
【0050】
あるいは、測定部Aをシュータ10の旋回位置よりも下方(炉底側)に配置することにより、シュータ10で邪魔されることなくマイクロ波Mの送受信を行うこともできる。
【0051】
また、シュータ10が障害になることを防ぐために、シュータ10の1旋回毎に堆積プロフィールを測定してもよい。
【0052】
上記において測定時間を短くするには、測定部Aにおいてマイクロ波Mの走査時間を短縮するにはモータ170、172、205、235の回転数を高めればよく、シュータ10が1旋回する間に測定を完了することができる。一般的な高炉ではシュータ10の旋回速度は8rpm程度であり、1旋回に要する時間は7.5秒程度であるが、測定部Aではこのような短時間での測定に十分対応できる。そのため、シュータ10の1旋回毎に鉄鉱石7aまたはコークス7bの堆積プロフィールを測定することができ、予め求めた理論堆積プロフィールとの誤差がある場合でも、新たな装入の際に迅速、かつ正確に修正することができる。
【0053】
従来は、鉄鉱石7aまたはコークス7bをある程度厚く堆積させてから堆積プロフィールを測定していたため、理論堆積プロフィールに合致するように新たな装入の際に修正することは困難であったが、本発明によればシュータ10の旋回中、もしくは回の旋回に伴う少ない堆積量毎に堆積プロフィールを測定できるため、理論堆積プロフィールに合致させることが容易になる。
【0054】
また、信号処理はFMCW方式が一般的であるが、このFMCW方式ではスイープ期間と信号処理期間とで構成されており、スイープ期間はマイクロ波送受信信手段110の発振器の周波数をスイープし、そのスイープ期間にビート信号をサンプリングしてサンプリングデータを求め、信号処理期間でサンプリングデータをFET処理してビート信号の周波数スペクトルが最大となる周波数を求め、その周波数を距離換算して測定距離値を得ている。そのため、スイープ期間と信号処理期間とをシーケンシャル処理すると処理時間がかかるため、スイープ期間の制御に割り込み処理を施してサンプリングデータを取り込むバッファにトグルバッファを採用して時間短縮を行うことが好ましい。これにより、サンプリングデータをトグルバッファの一方に取り込んでスイープ期間の処理と、一つ前のスイープ期間でのサンプリングデータの取り込みが完了しているもう一方のサンプリングデータを使用してバックグランドの信号処理を行うことができ、結果としてスイープ期間の処理と、信号処理期間の処理とを見かけ上同時に行なわれ処理時間を短縮することができる。そのため、上記の測定部Aによるマイクロ波Mの走査と相俟って、堆積プロフィールの測定をより迅速に行う
【0055】
尚、理論堆積プロフィールは、従来と同様に炉内のガス流の分布が最適となる堆積状態を実験的に求めることができる。
【0056】
また、上記においては、検出媒体にマイクロ波を用いたが、電子ビーム等であってもよい。
【0057】
上記は理論堆積プロフィールと合致するようにシュータ10を制御して鉄鉱石7aやコークス7bを装入し、堆積させることを目的としたものである。しかしながら、理論堆積プロフィールの通りに堆積させても、鉄鉱石7aやコークス7bが堆積した傾斜面から滑落することがある。これは、理論堆積プロフィールを作製する際に想定した鉄鋼石7aやコークス7bの粒径や水分量等の性状が、実際に装入される鉄鉱石7aやコークス7bの性状と異なることが主な理由と考えられる。
【0058】
本発明によれば、実際の堆積プロフィールをシュータ10の旋回と同時に、もしくは旋回毎に測定できるため、実際に堆積した鉄鋼石7aやコークス7bが滑落した場合に、その堆積状態を即座に検知して理論堆積プロフィールにフィードバックすることができる。このように、本発明によれば、理論堆積プロフィールを検証することも可能である。
【符号の説明】
【0059】
A 測定部
10 シュータ
100 反射板
101 支持アーム
104 第1の球面滑り軸受
105 連結棒
106 第2の球面滑り軸受
110 マイクロ波送受信手段
120 アンテナ
130 第1の容器
140 第2の容器
150 導波管
151 栓部材
160 角度可変機構
161 内軸
162 外軸
170 第1のモータ
172 第2のモータ
180 第3の容器
190 支軸
200 ガイドパイプ
210 開口部
220 フィルタ
230 棒状片
232 第1の連結棒
233 第2の連結棒
240 第1の球面滑りヒンジ
241 第2の球面滑りヒンジ
260,261 支持部材
【特許請求の範囲】
【請求項1】
高炉の内部に鉄鋼石やコークス等の装入物を装入し、堆積させる方法であって、
シュータの旋回中、もしくは一回の旋回毎に、検出媒体で堆積物の表面を走査して堆積プロフィールを測定しながら装入物を装入することを特徴とする高炉への装入物の装入及び堆積方法。
【請求項2】
堆積プロフィールを測定し、予め求めた理論堆積プロフィールと比較し、理論堆積プロフィールからの誤差を修正するようにシュータを制御して新たな装入物を装入することを特徴とする請求項1記載の高炉への装入物の装入及び堆積方法。
【請求項3】
装入物の表面全面にわたり検出媒体を走査させて堆積プロフィールを測定することを特徴とする請求項1または2記載の高炉への装入物の装入及び堆積方法。
【請求項4】
検出媒体がマイクロ波であることを特徴とする請求項1〜3の何れか1項に記載の高炉への装入物の装入及び堆積方法。
【請求項5】
請求項1〜4の何れか1項に記載の方法により高炉内に装入物を装入し、堆積させて高炉を操業することを特徴とする高炉の操業方法。
【請求項1】
高炉の内部に鉄鋼石やコークス等の装入物を装入し、堆積させる方法であって、
シュータの旋回中、もしくは一回の旋回毎に、検出媒体で堆積物の表面を走査して堆積プロフィールを測定しながら装入物を装入することを特徴とする高炉への装入物の装入及び堆積方法。
【請求項2】
堆積プロフィールを測定し、予め求めた理論堆積プロフィールと比較し、理論堆積プロフィールからの誤差を修正するようにシュータを制御して新たな装入物を装入することを特徴とする請求項1記載の高炉への装入物の装入及び堆積方法。
【請求項3】
装入物の表面全面にわたり検出媒体を走査させて堆積プロフィールを測定することを特徴とする請求項1または2記載の高炉への装入物の装入及び堆積方法。
【請求項4】
検出媒体がマイクロ波であることを特徴とする請求項1〜3の何れか1項に記載の高炉への装入物の装入及び堆積方法。
【請求項5】
請求項1〜4の何れか1項に記載の方法により高炉内に装入物を装入し、堆積させて高炉を操業することを特徴とする高炉の操業方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−67340(P2012−67340A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2010−211825(P2010−211825)
【出願日】平成22年9月22日(2010.9.22)
【出願人】(593207271)株式会社ワイヤーデバイス (15)
【Fターム(参考)】
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成22年9月22日(2010.9.22)
【出願人】(593207271)株式会社ワイヤーデバイス (15)
【Fターム(参考)】
[ Back to top ]